




Mô-đun động cơ tuyến tính dòng LNP3 Loại hẹp

Bộ chọn mẫu
TPA-?-?-??-?-?-?-?-???
TPA-?-?-??-?-?-?-?-???
TPA-?-?-??-?-?-?-?-???
TPA-?-?-??-?-?-?-?-???
TPA-?-?-??-?-?-?-?-???
Động cơ tuyến tính dẫn động trực tiếp dòng LNP được TPA ROBOT phát triển độc lập vào năm 2016. Dòng LNP cho phép các nhà sản xuất thiết bị tự động hóa sử dụng động cơ tuyến tính dẫn động trực tiếp linh hoạt và dễ tích hợp để tạo thành các giai đoạn truyền động chuyển động hiệu suất cao, đáng tin cậy, nhạy cảm và chính xác .
Do động cơ tuyến tính dòng LNP hủy tiếp xúc cơ học và được điều khiển trực tiếp bằng điện từ nên tốc độ phản hồi động của toàn bộ hệ thống điều khiển vòng kín được cải thiện đáng kể. Đồng thời, do không có lỗi truyền dẫn do cấu trúc truyền động cơ học gây ra, với thang phản hồi vị trí tuyến tính (như thước cách tử, thước cách tử từ), động cơ tuyến tính dòng LNP có thể đạt được độ chính xác định vị ở mức micron và độ chính xác định vị lặp lại có thể đạt tới ± 1um.
Động cơ tuyến tính dòng LNP của chúng tôi đã được cập nhật lên thế hệ thứ hai. Giai đoạn động cơ tuyến tính dòng LNP2 có chiều cao thấp hơn, trọng lượng nhẹ hơn và độ cứng cao hơn. Nó có thể được sử dụng làm dầm cho robot giàn, giảm tải cho robot kết hợp nhiều trục. Nó cũng sẽ được kết hợp thành giai đoạn chuyển động động cơ tuyến tính có độ chính xác cao, chẳng hạn như giai đoạn cầu XY đôi, giai đoạn cổng dẫn động kép, giai đoạn nổi trên không. Giai đoạn chuyển động tuyến tính này cũng sẽ được sử dụng trong máy in thạch bản, xử lý bảng điều khiển, máy kiểm tra, máy khoan PCB, thiết bị xử lý laser có độ chính xác cao, máy giải trình tự gen, máy chụp ảnh tế bào não và các thiết bị y tế khác.
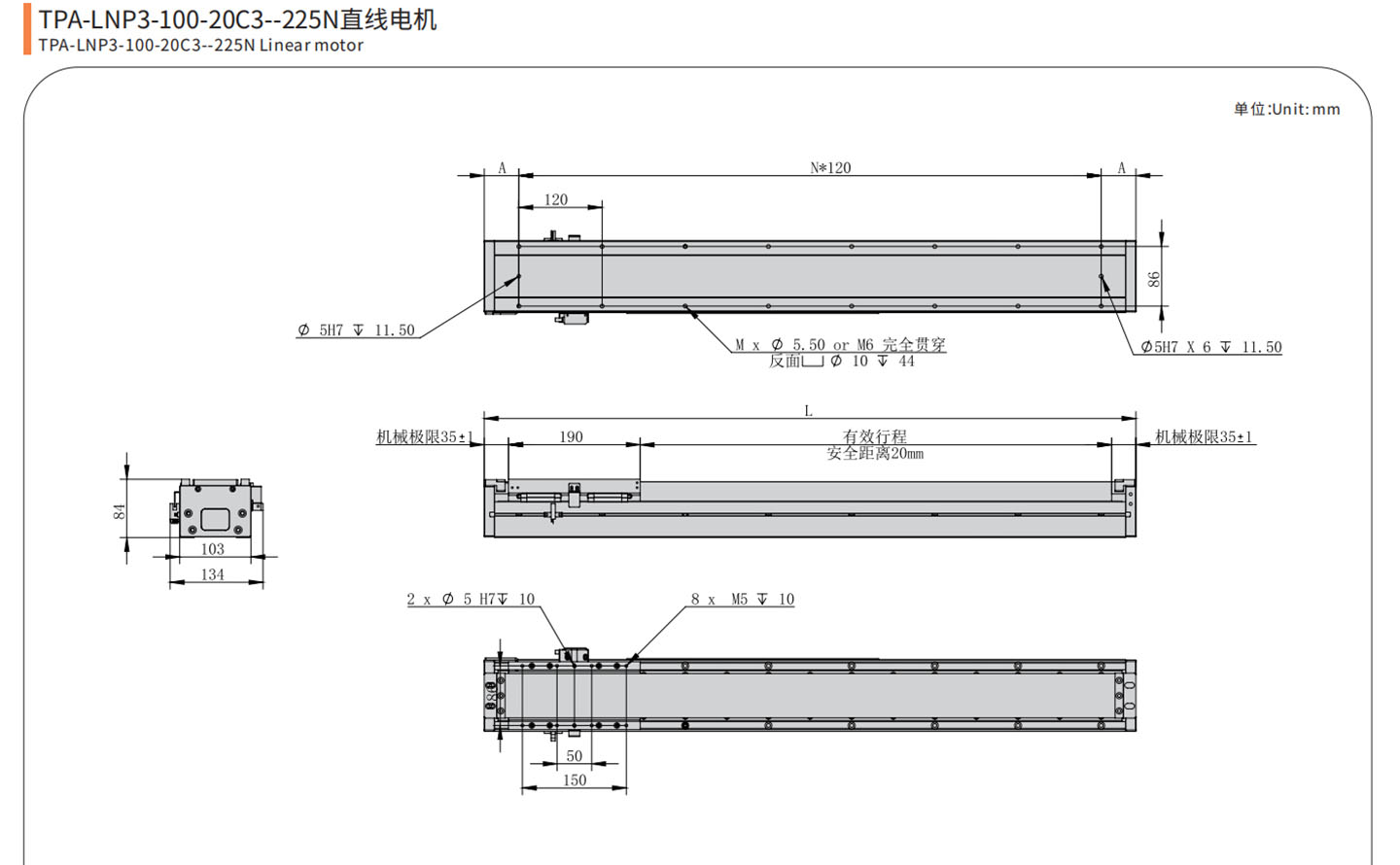
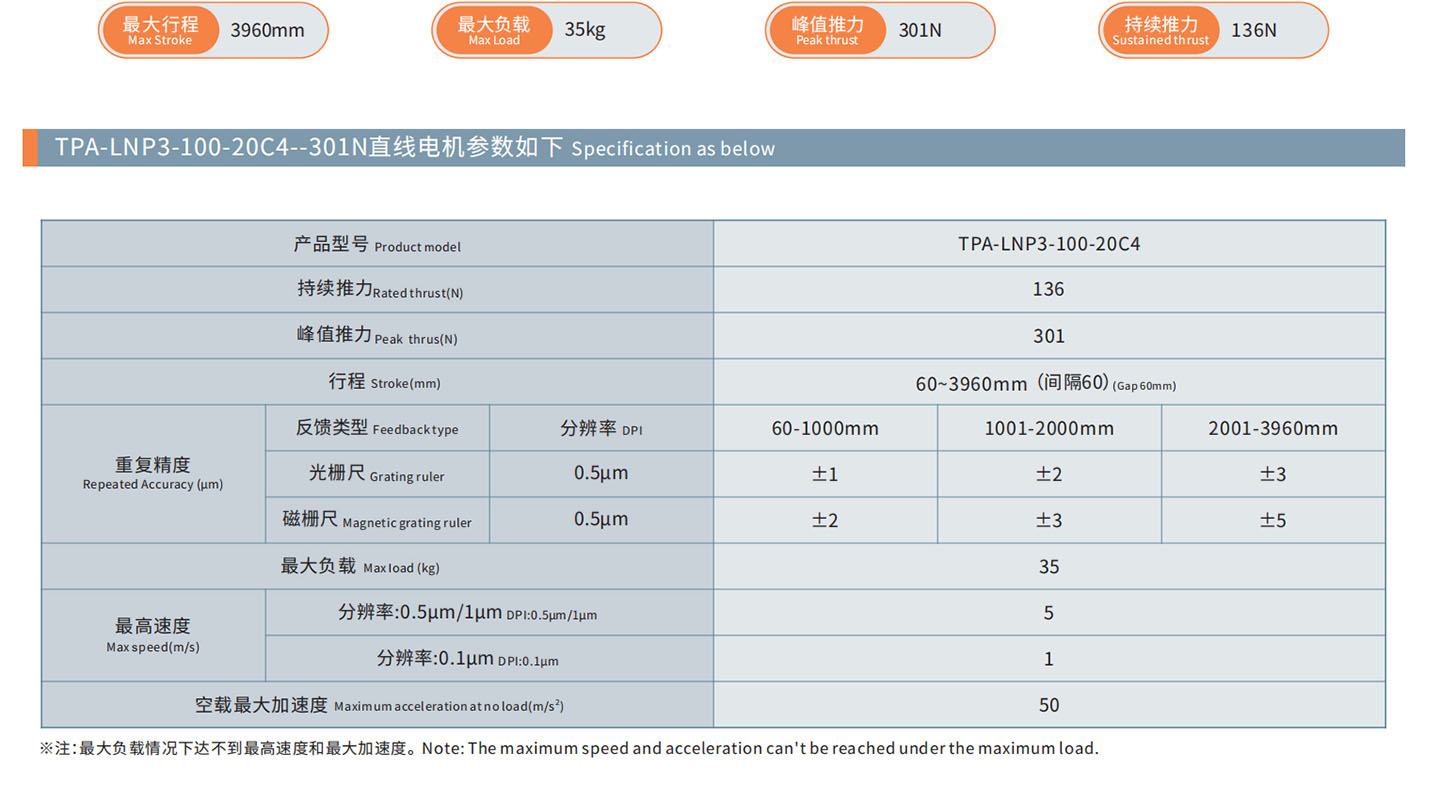
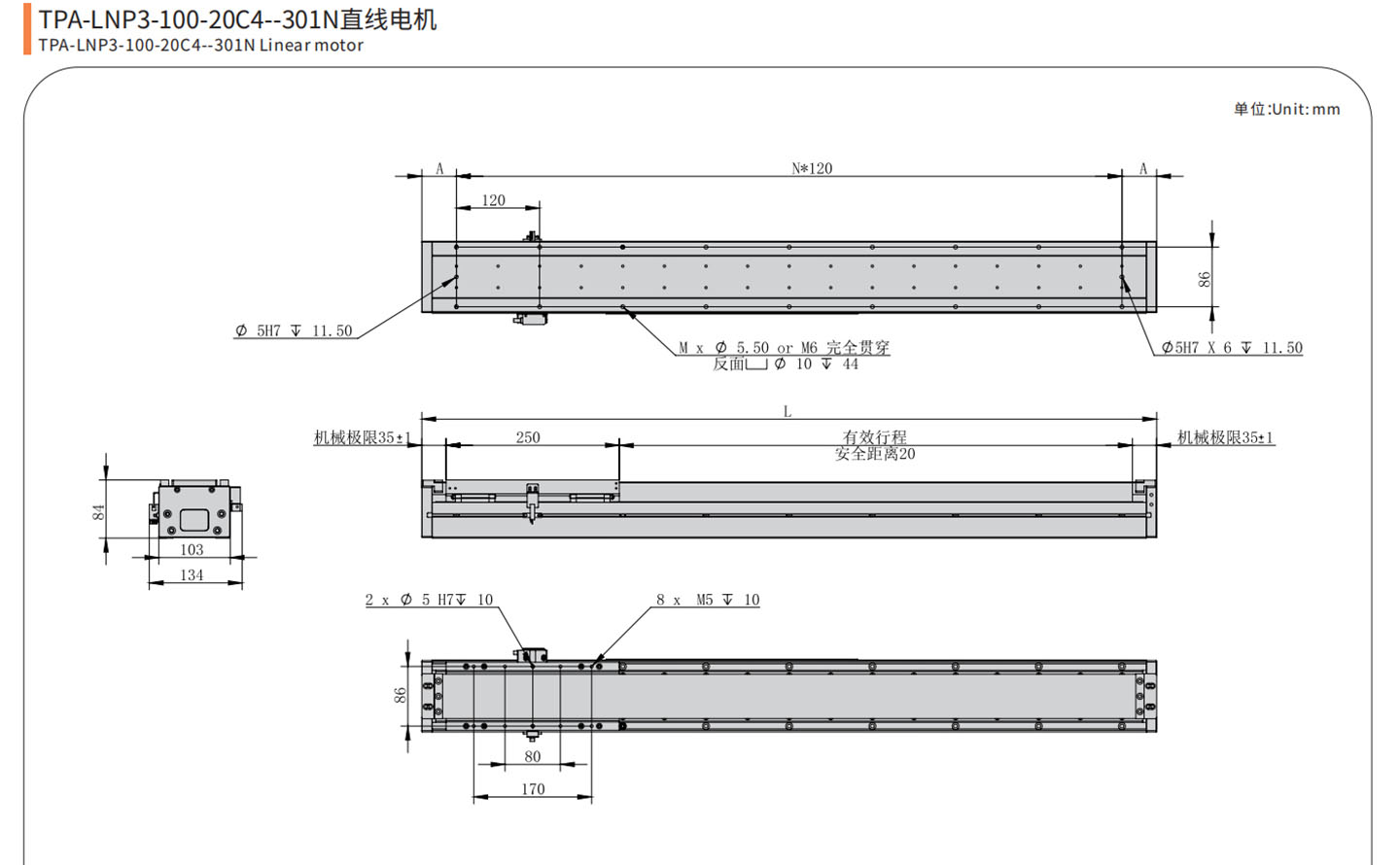
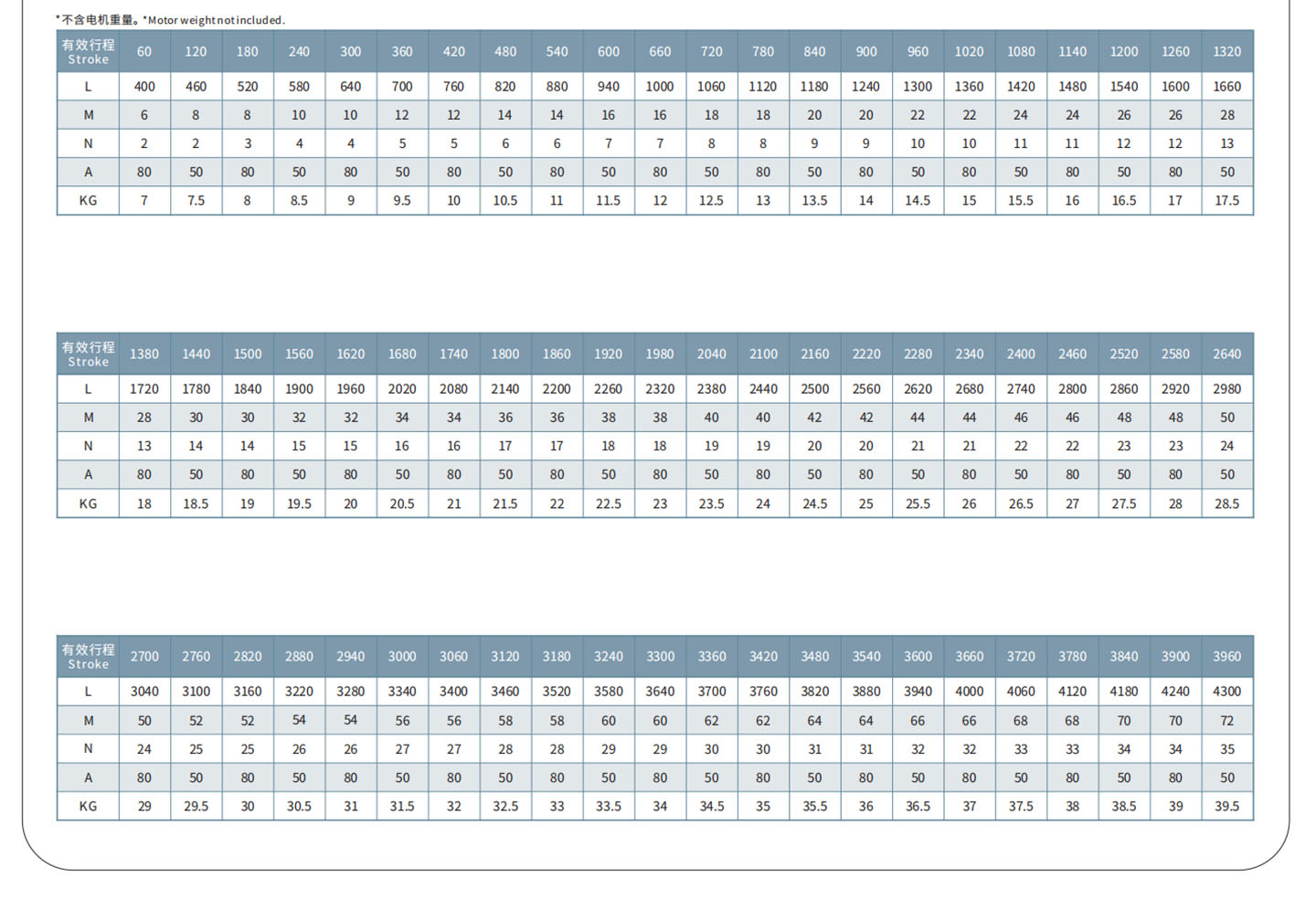
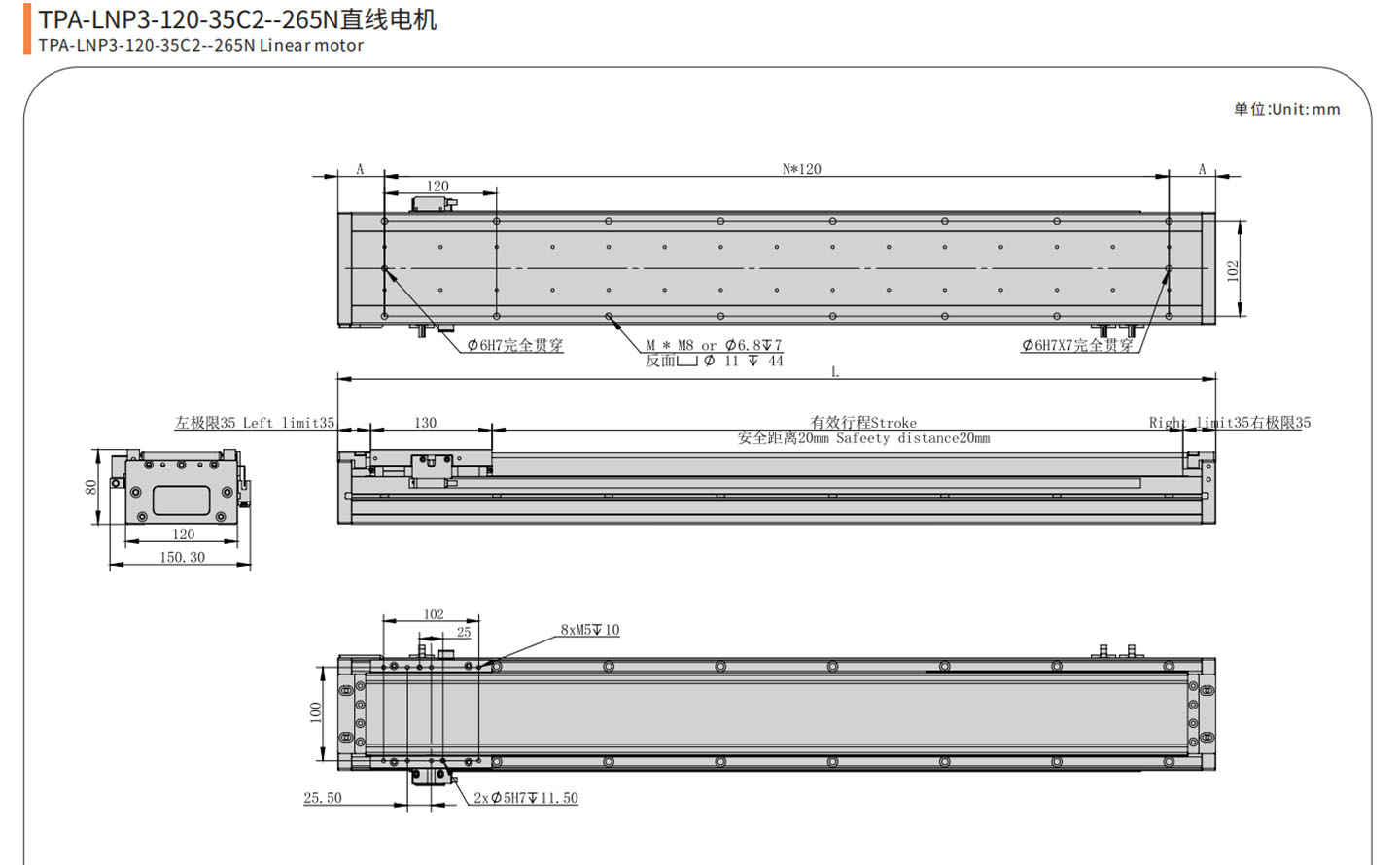
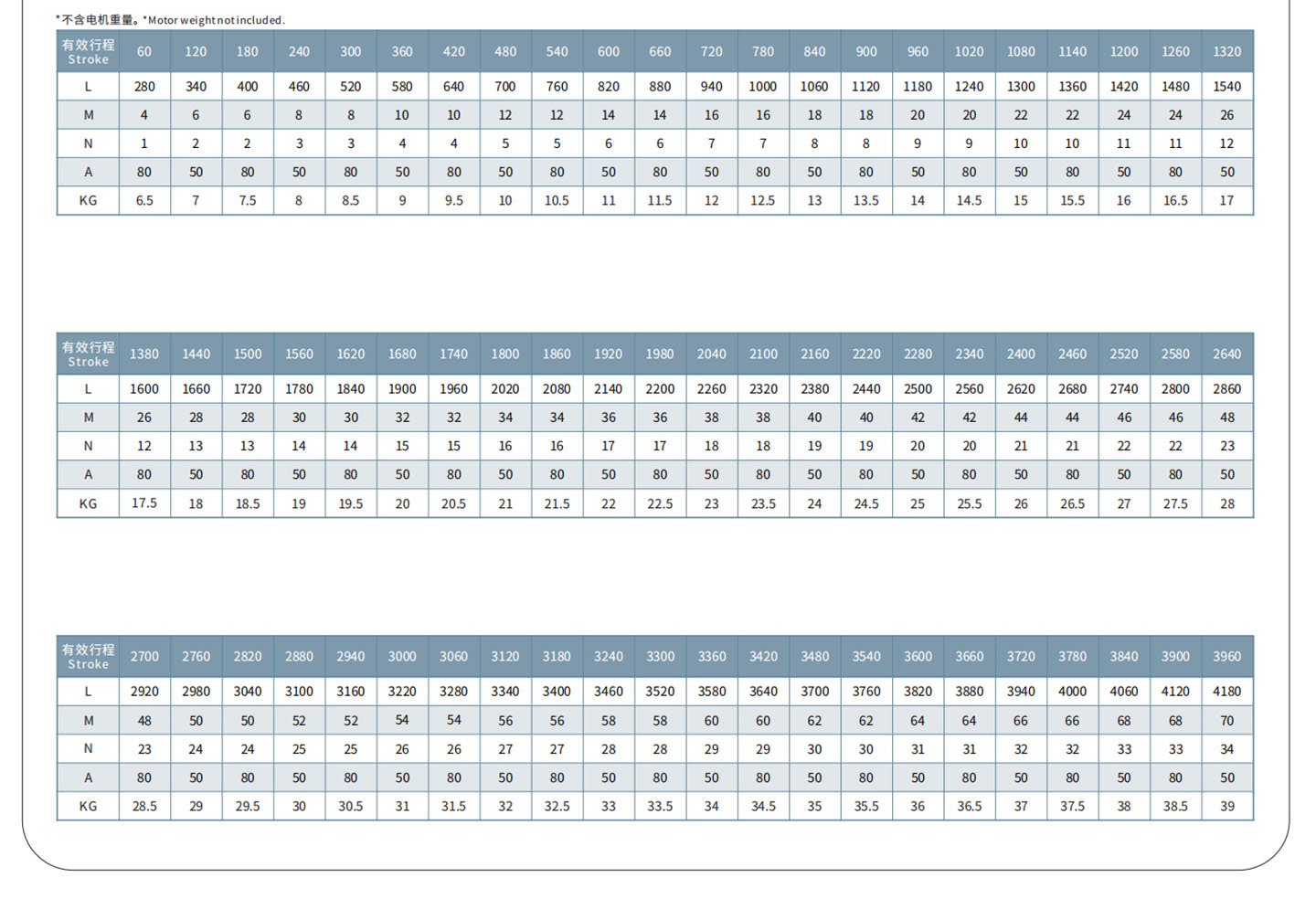
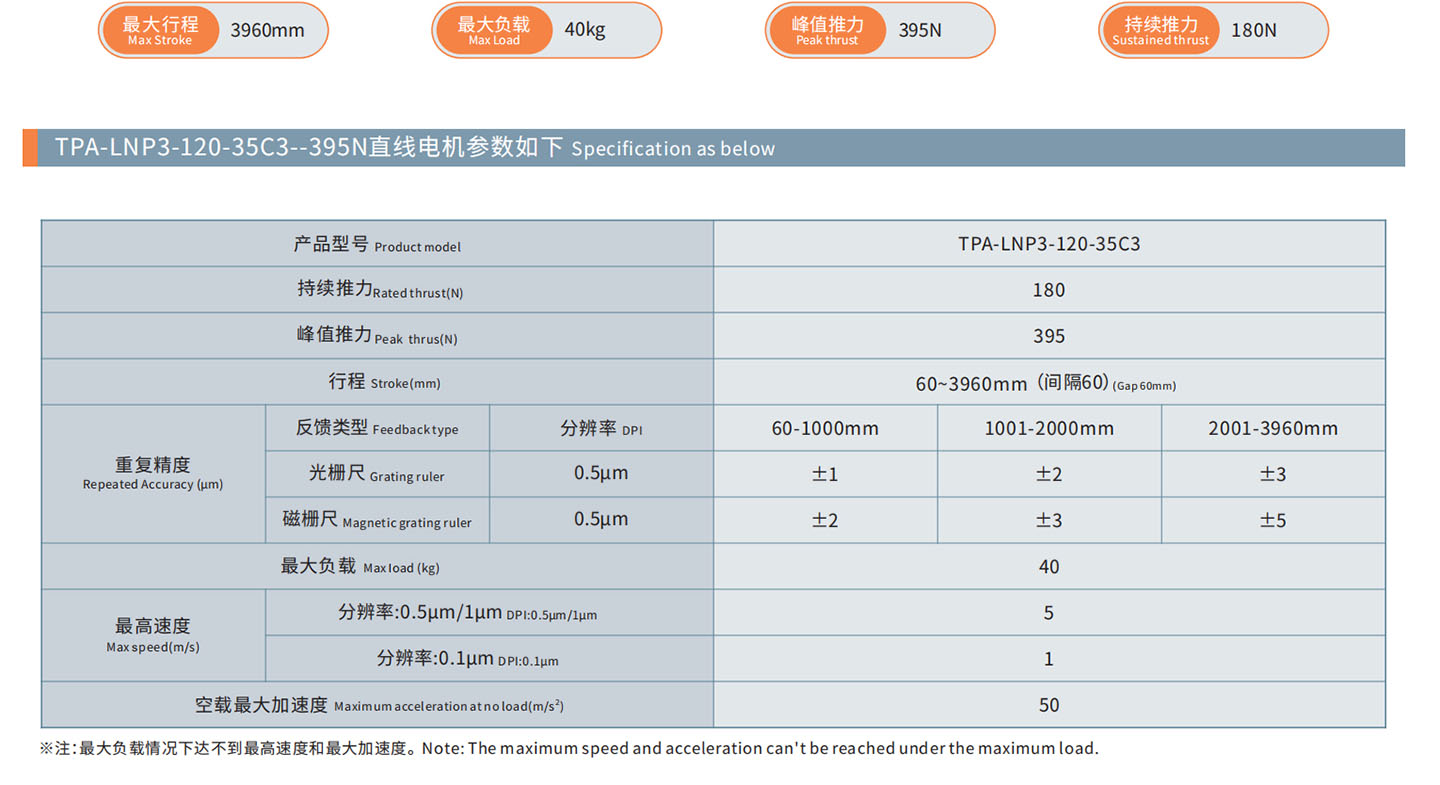
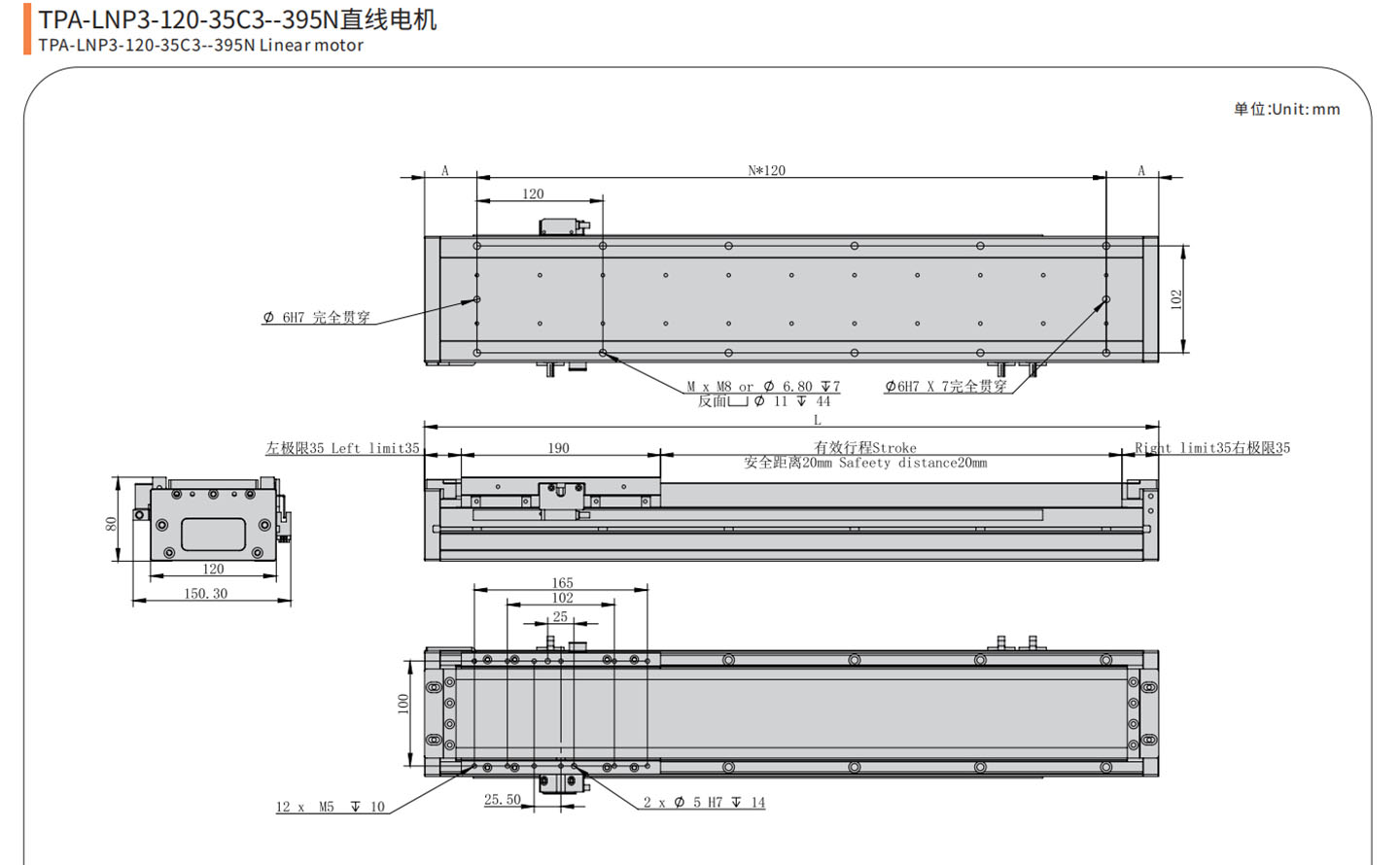
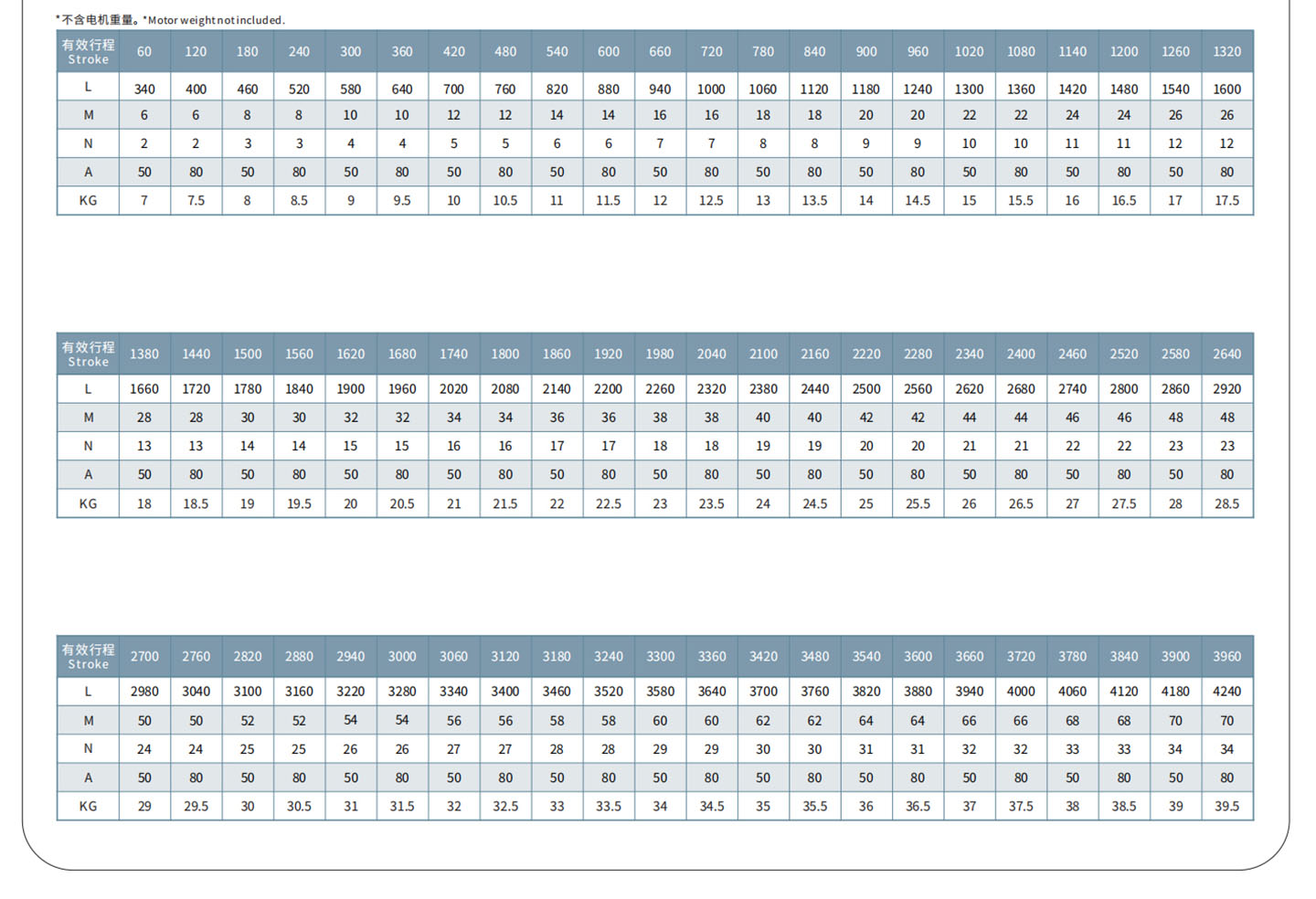
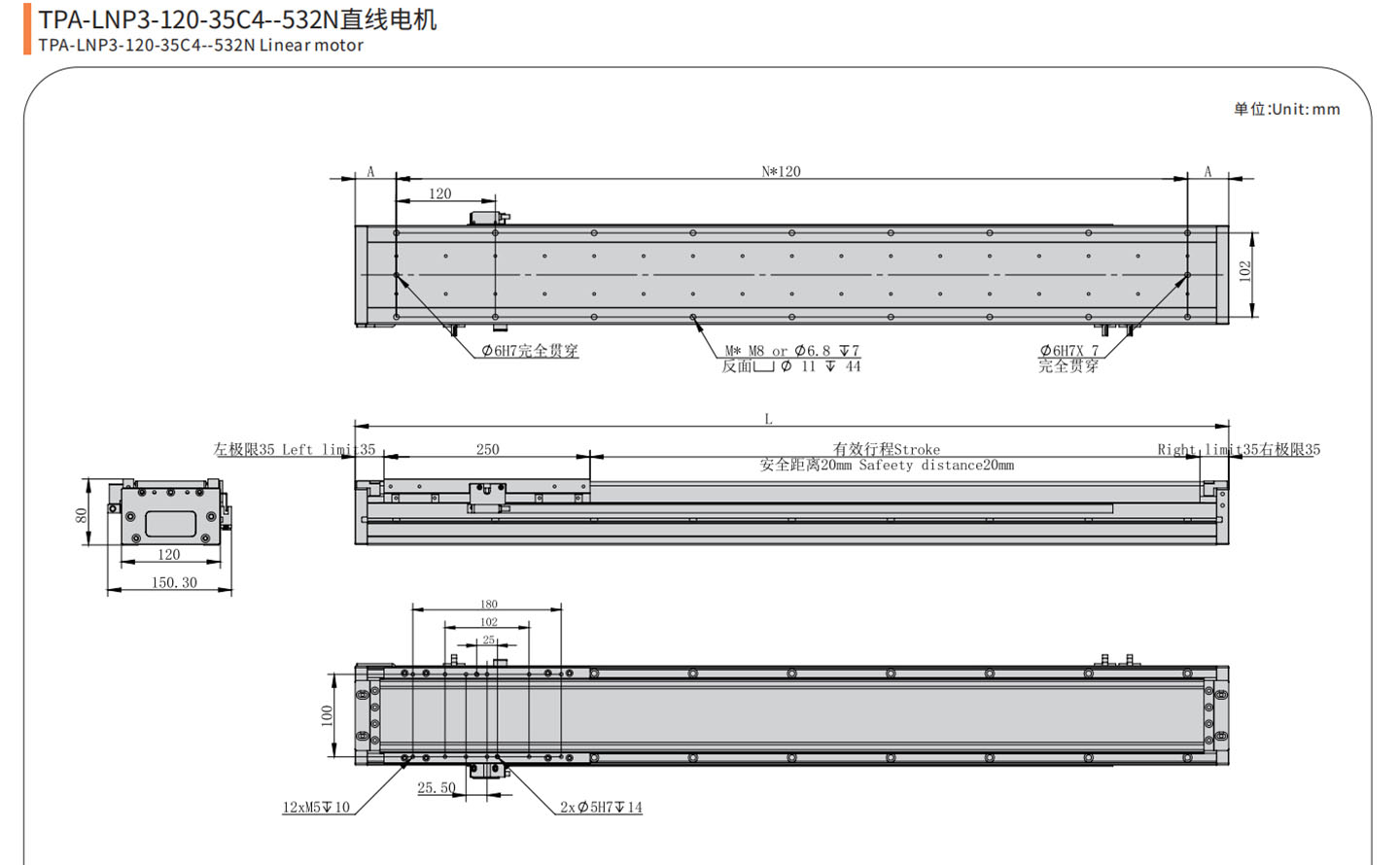
直线电机3代120带标

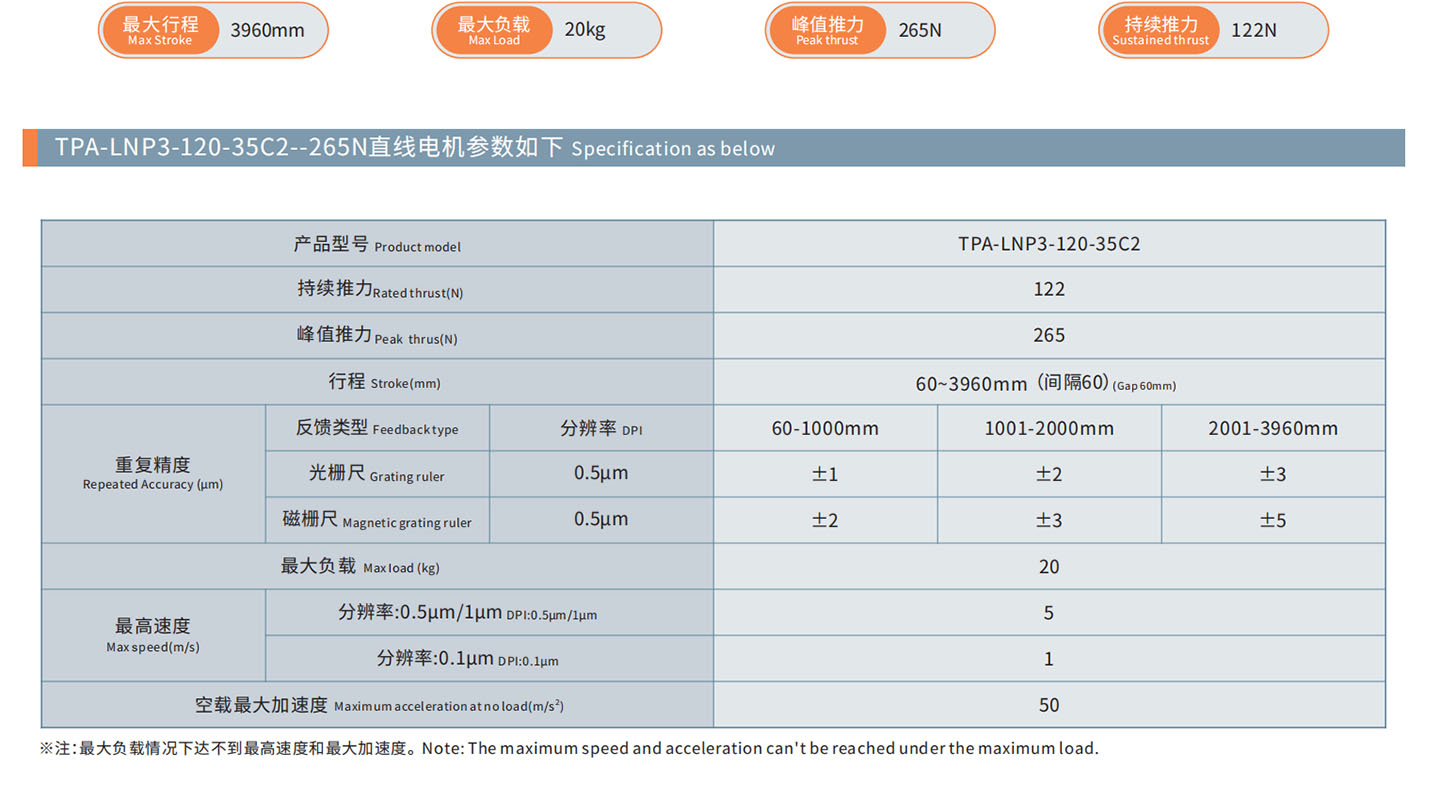
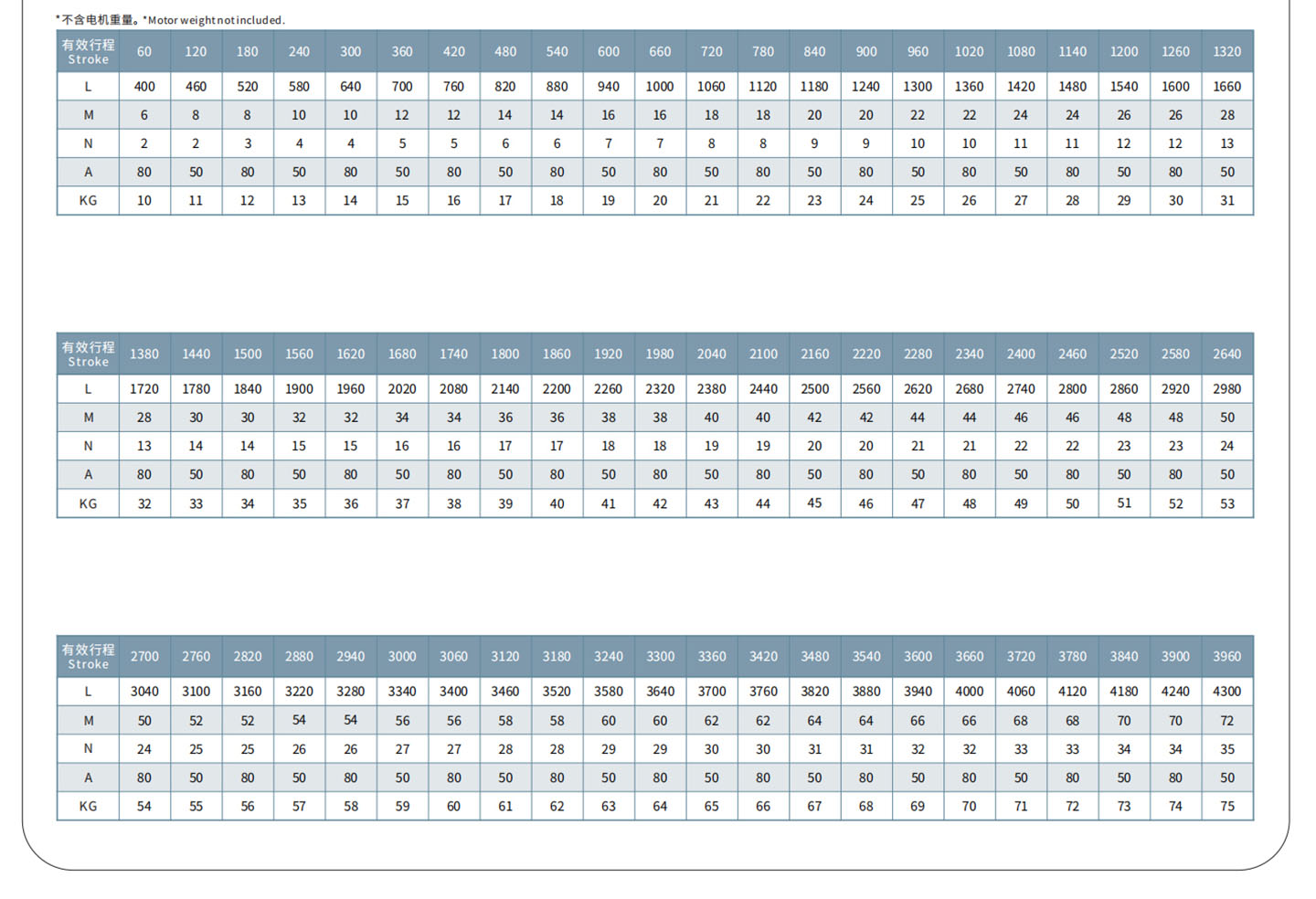
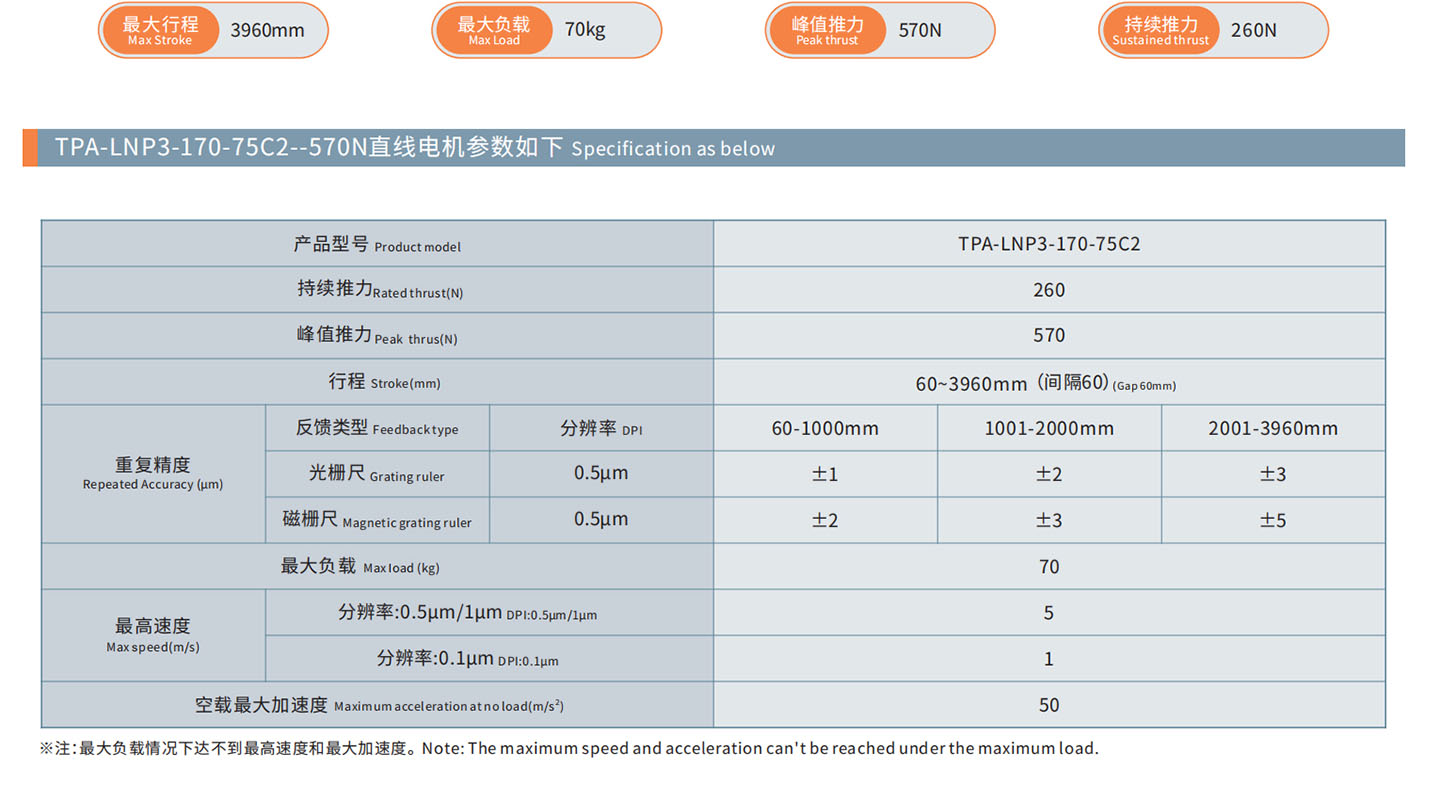
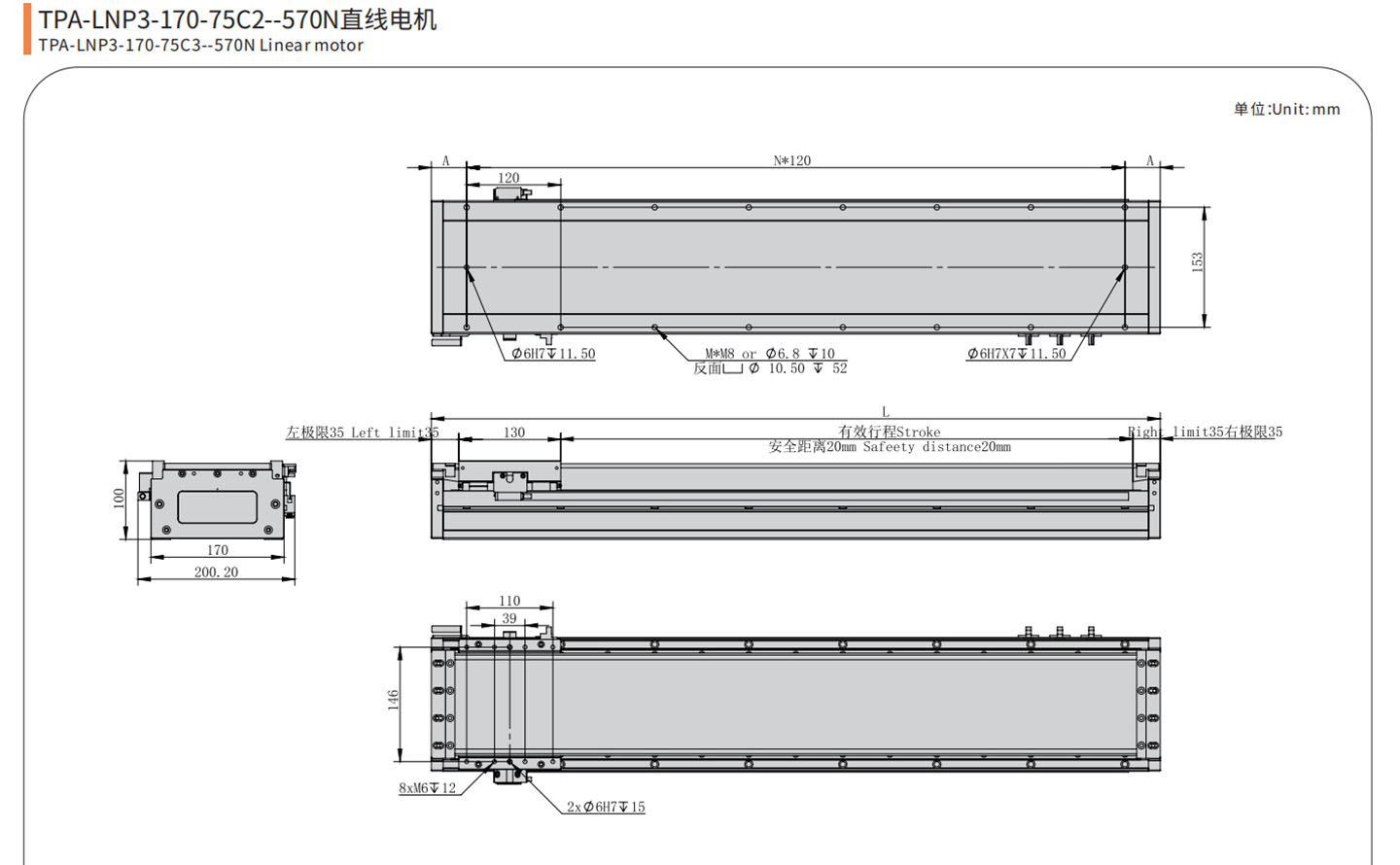
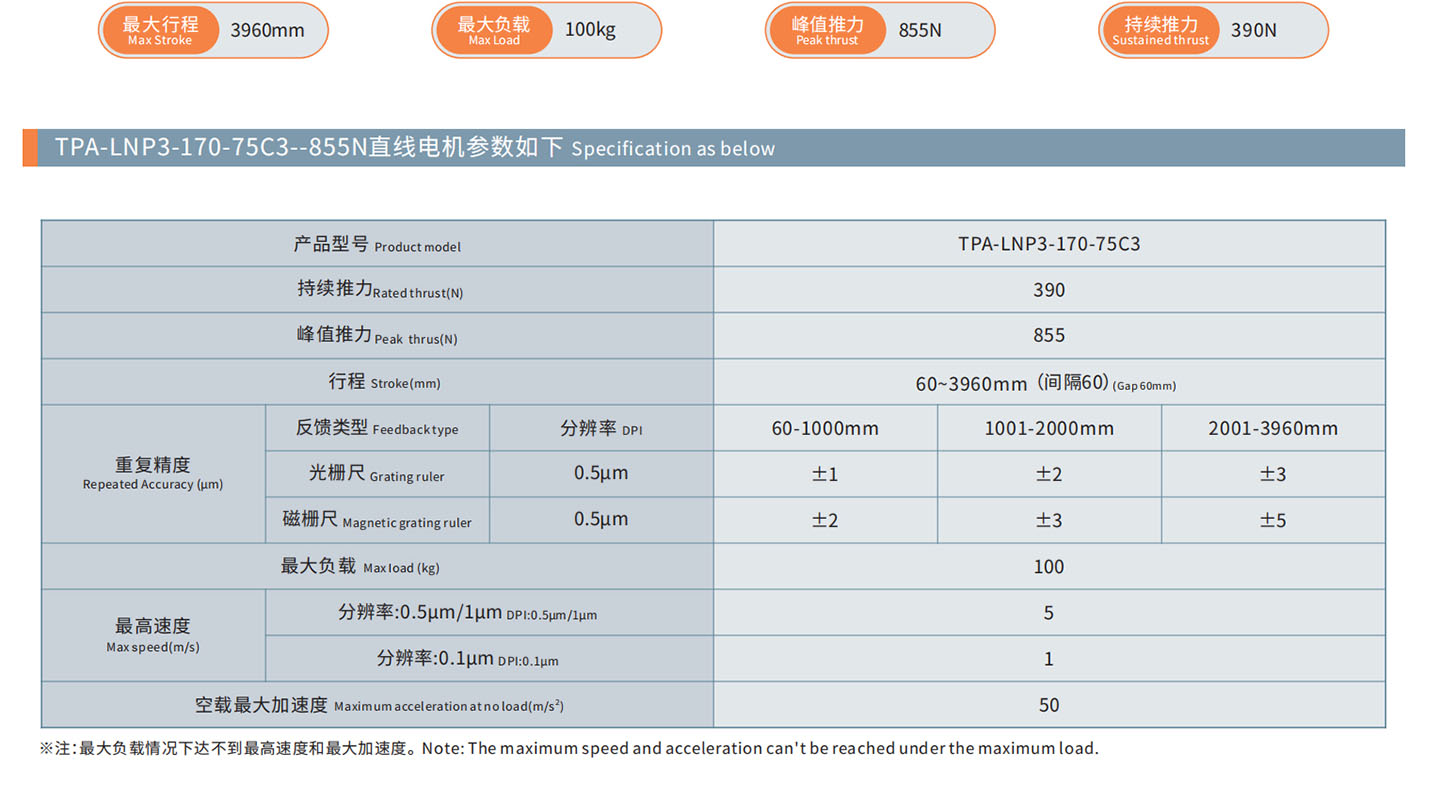
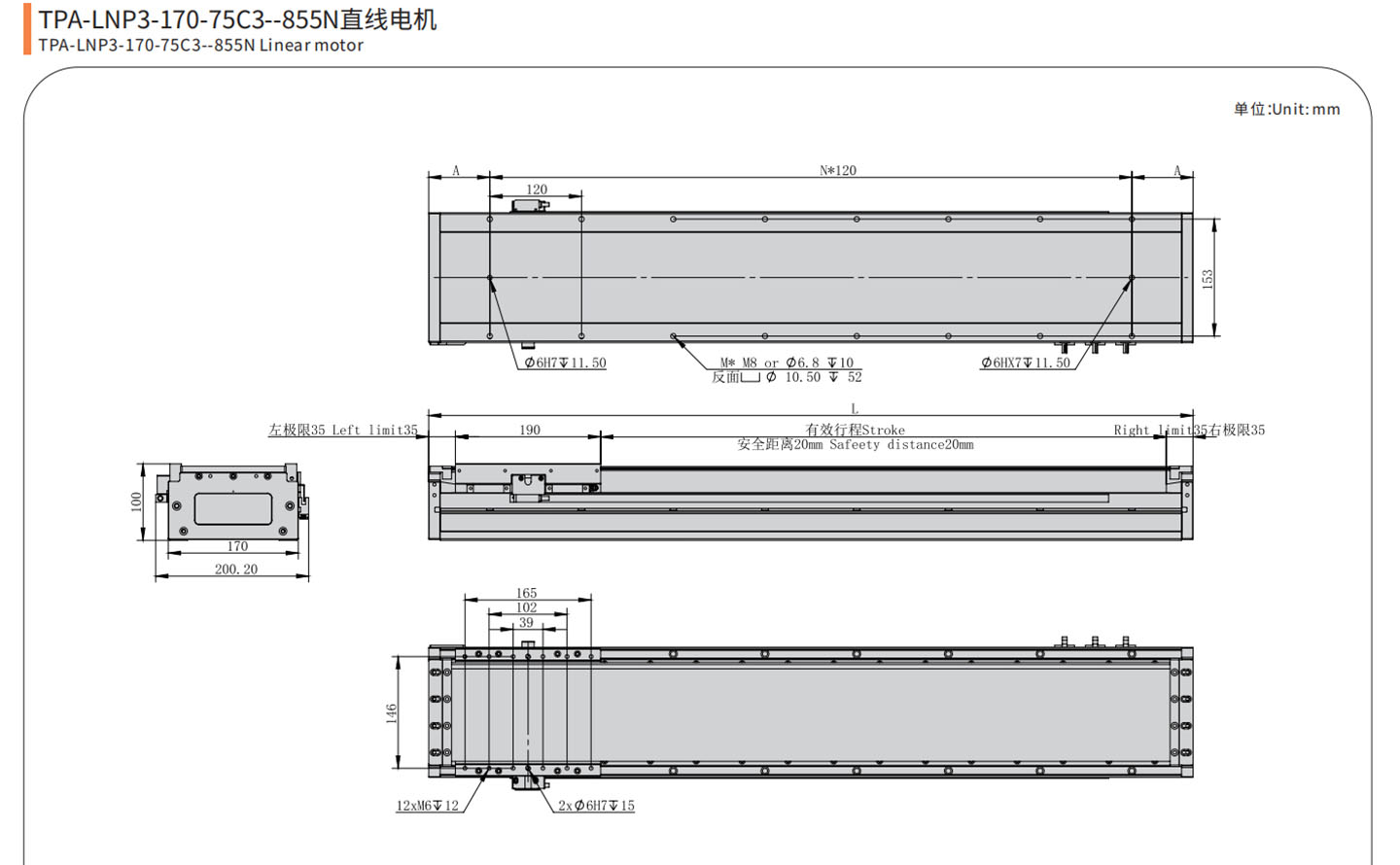
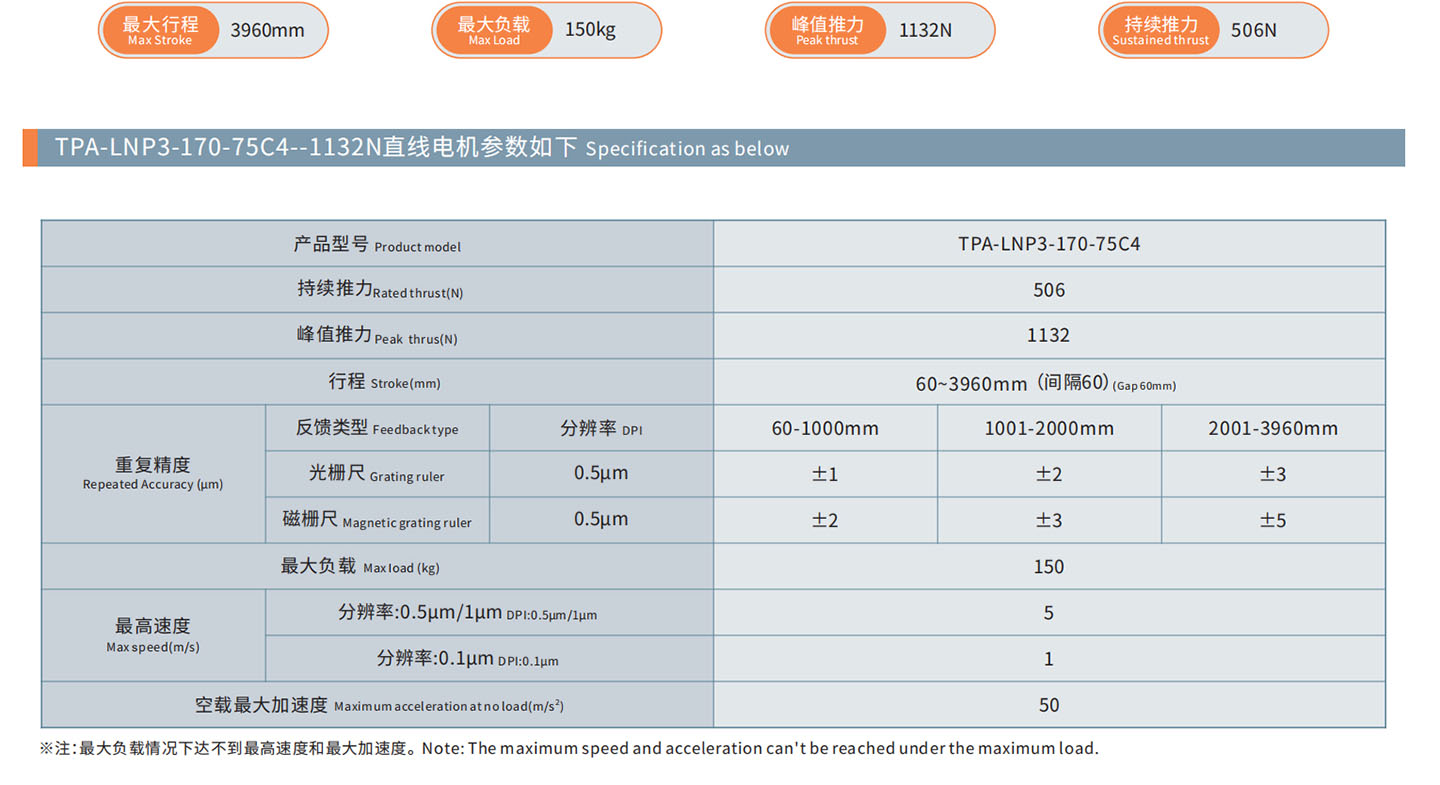
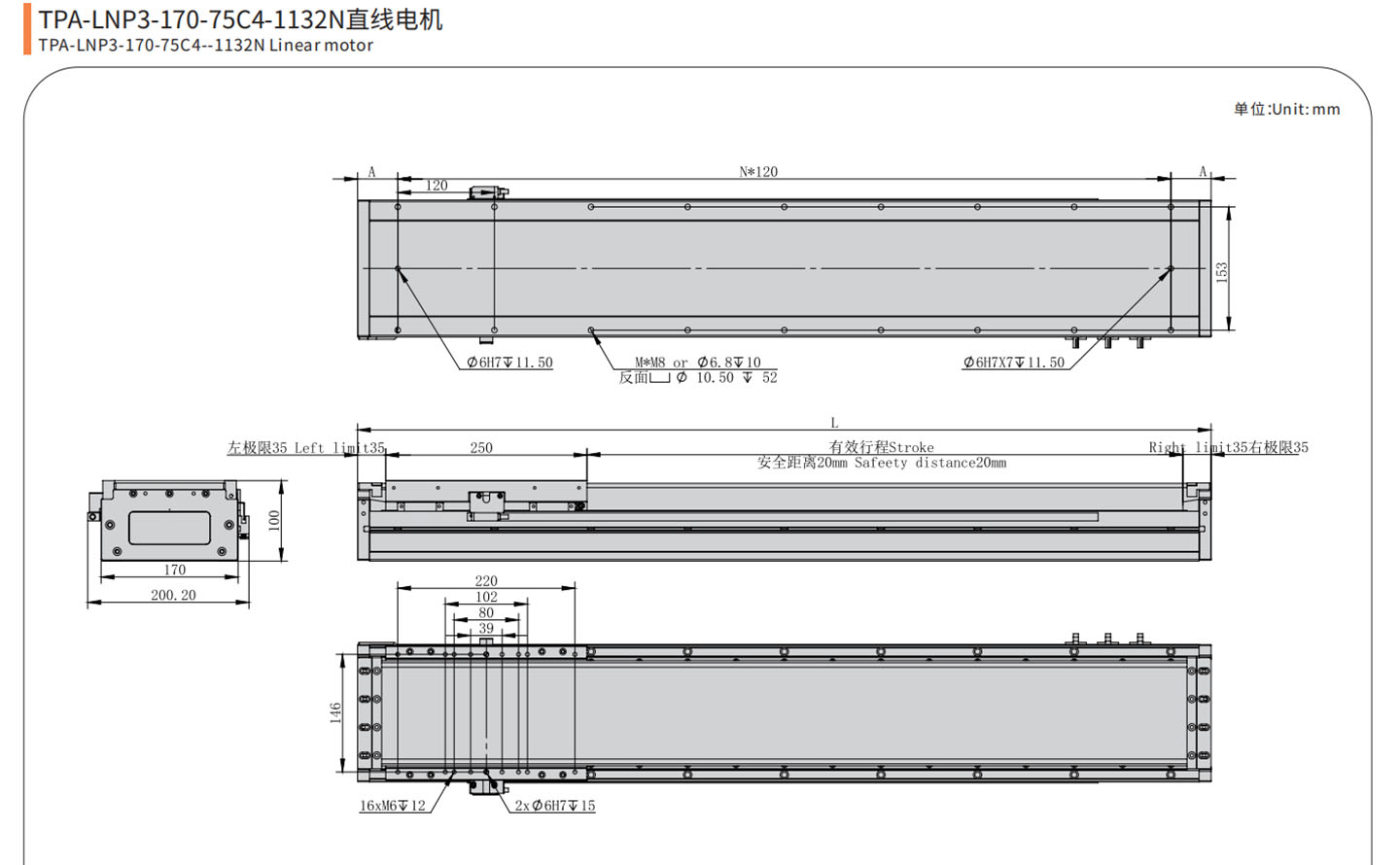
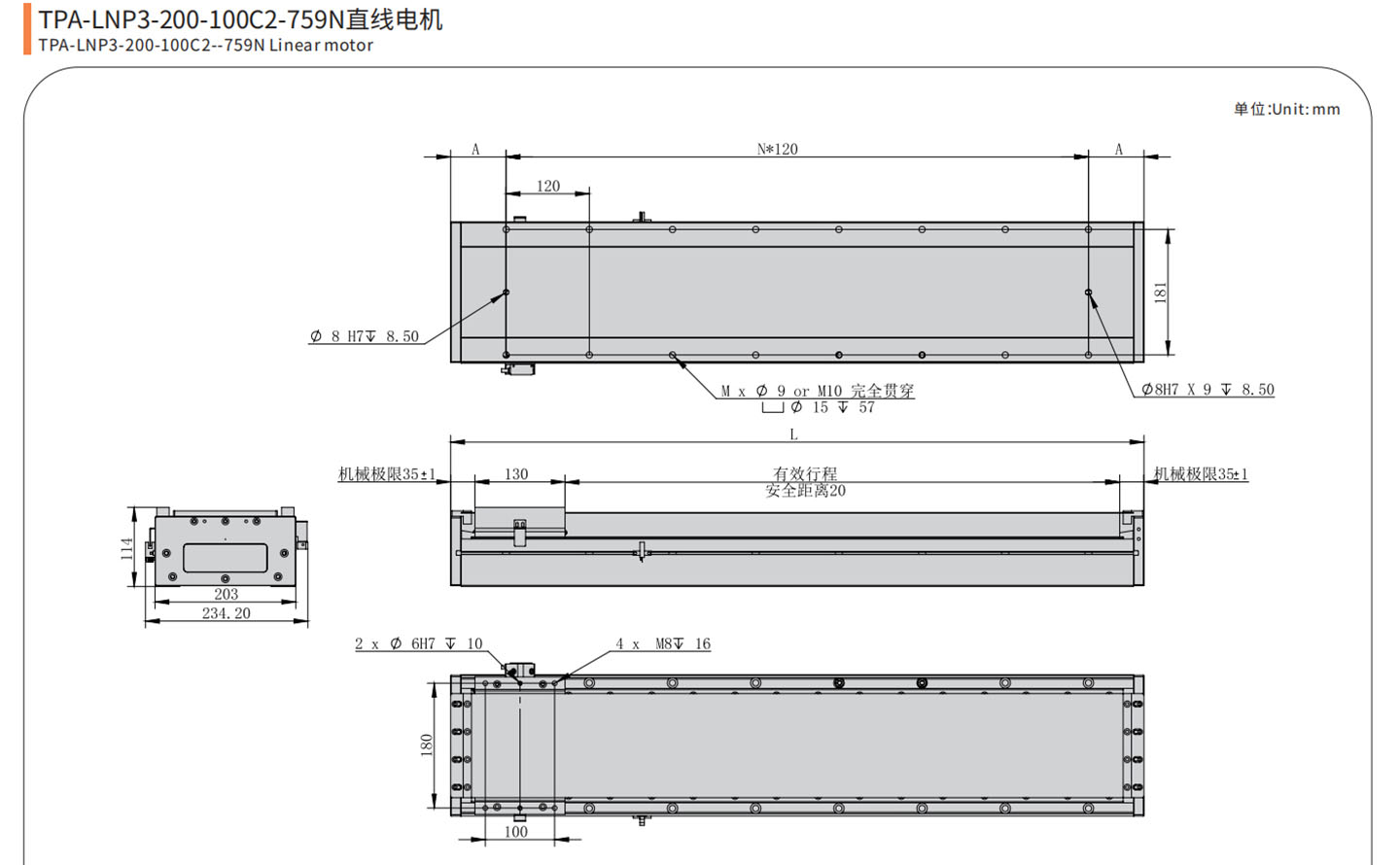
直线电机3代170带标

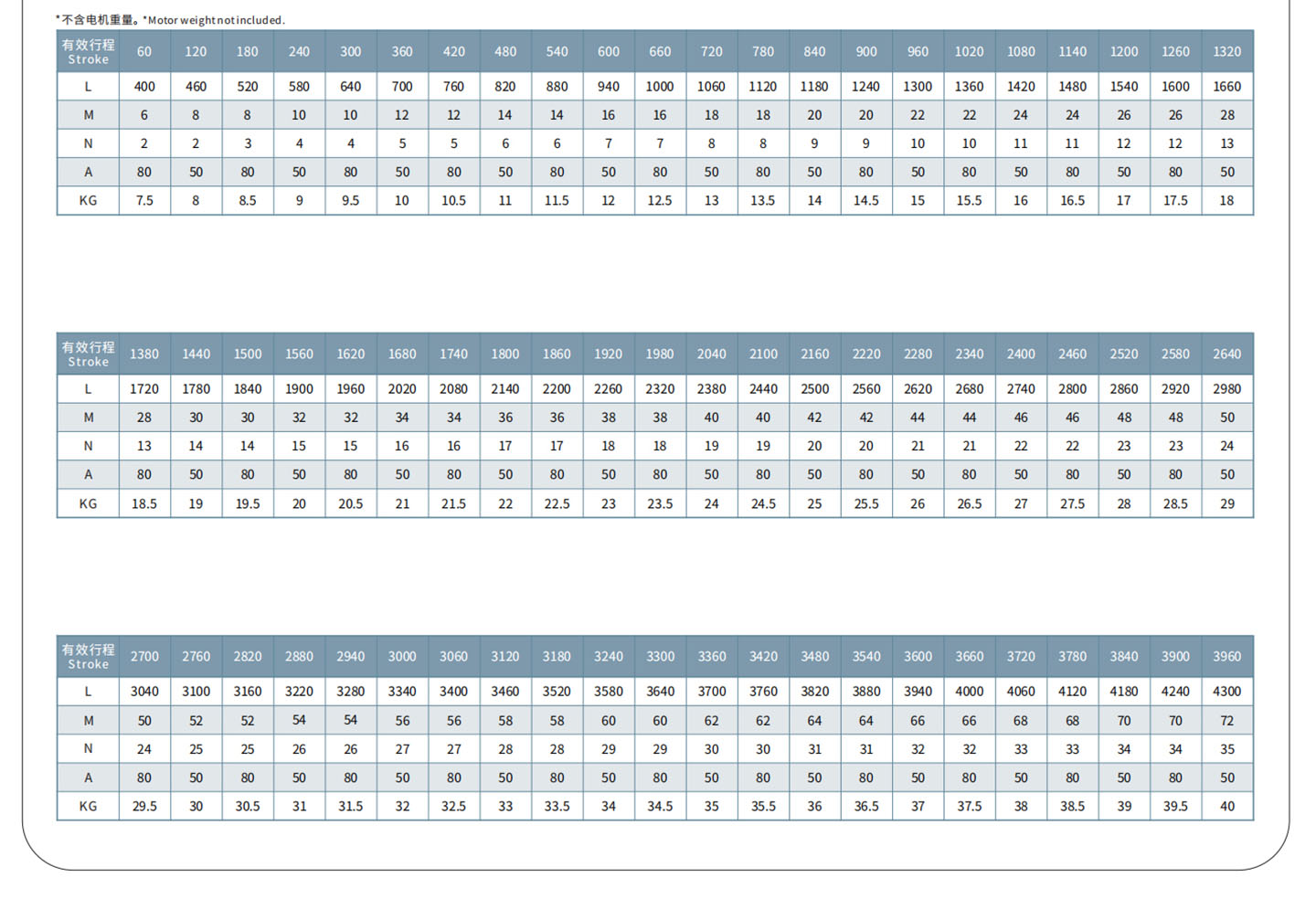
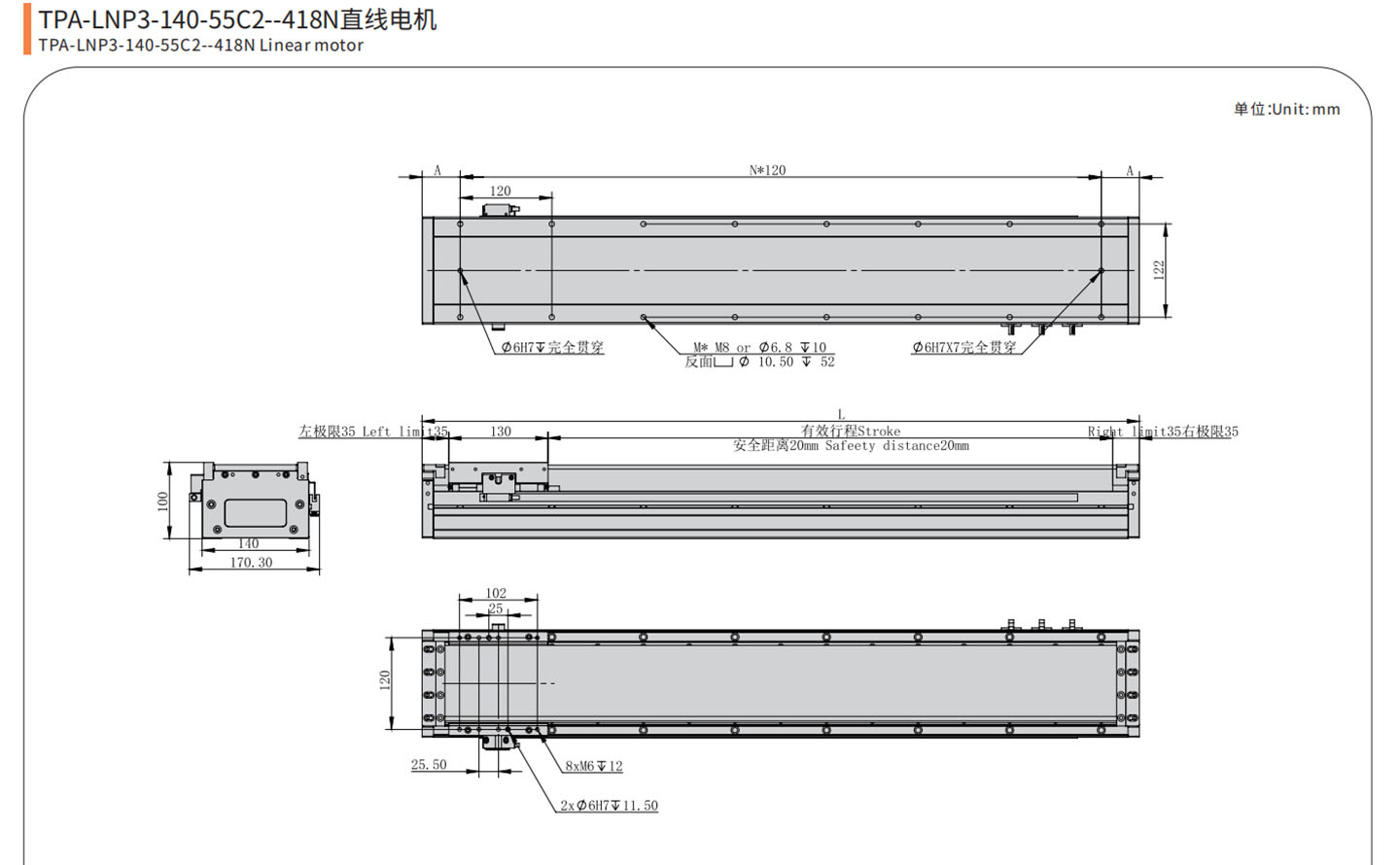
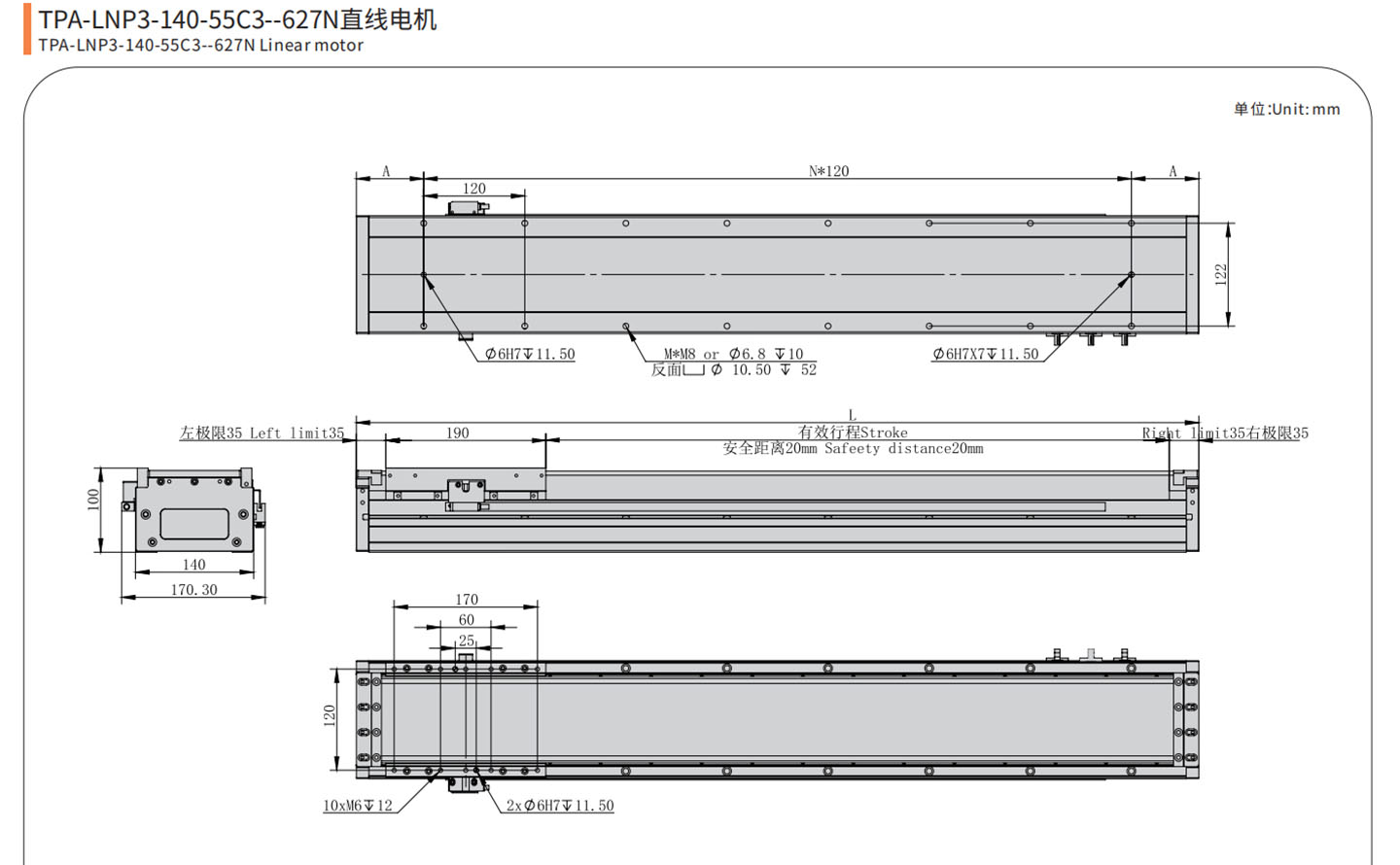
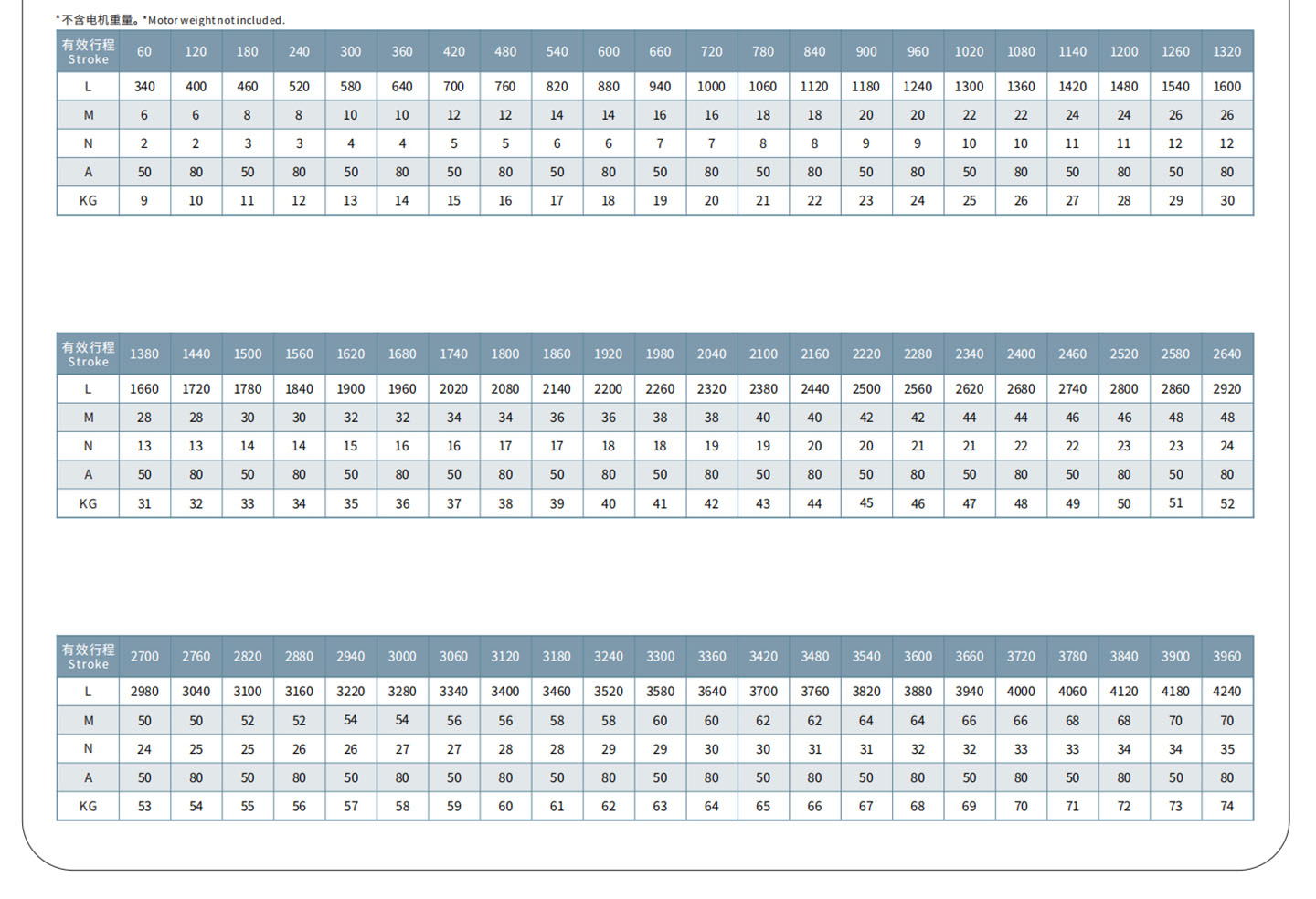
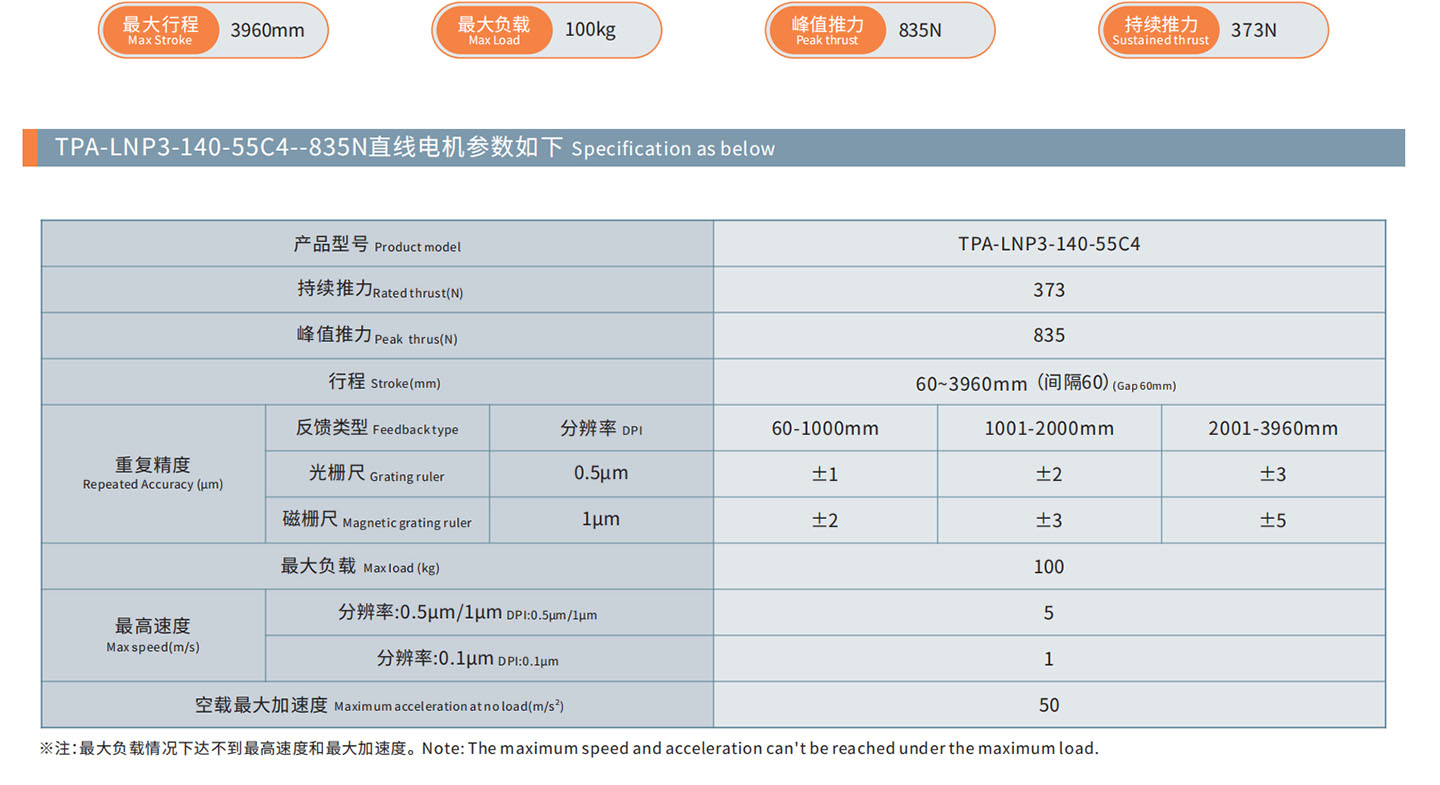
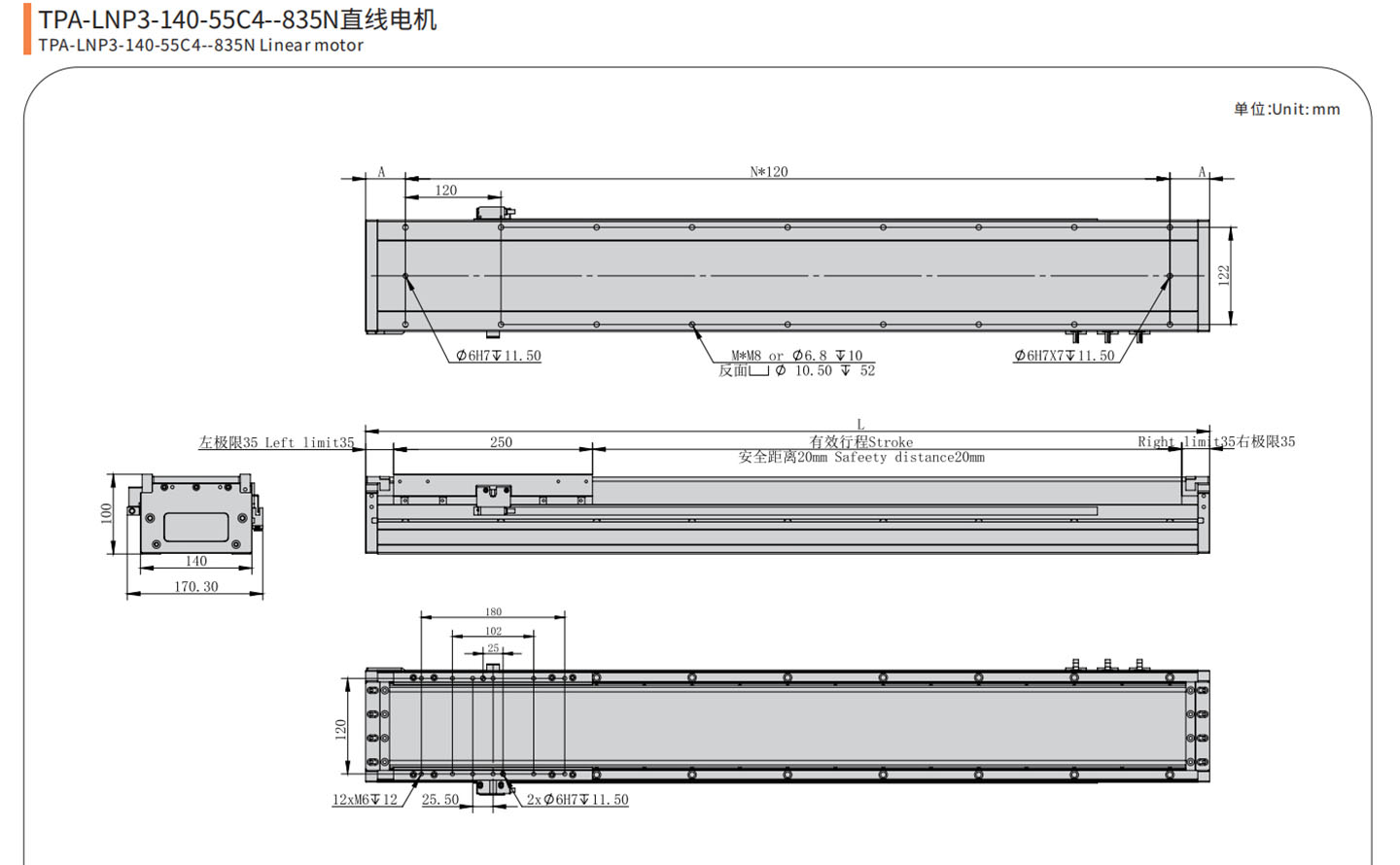
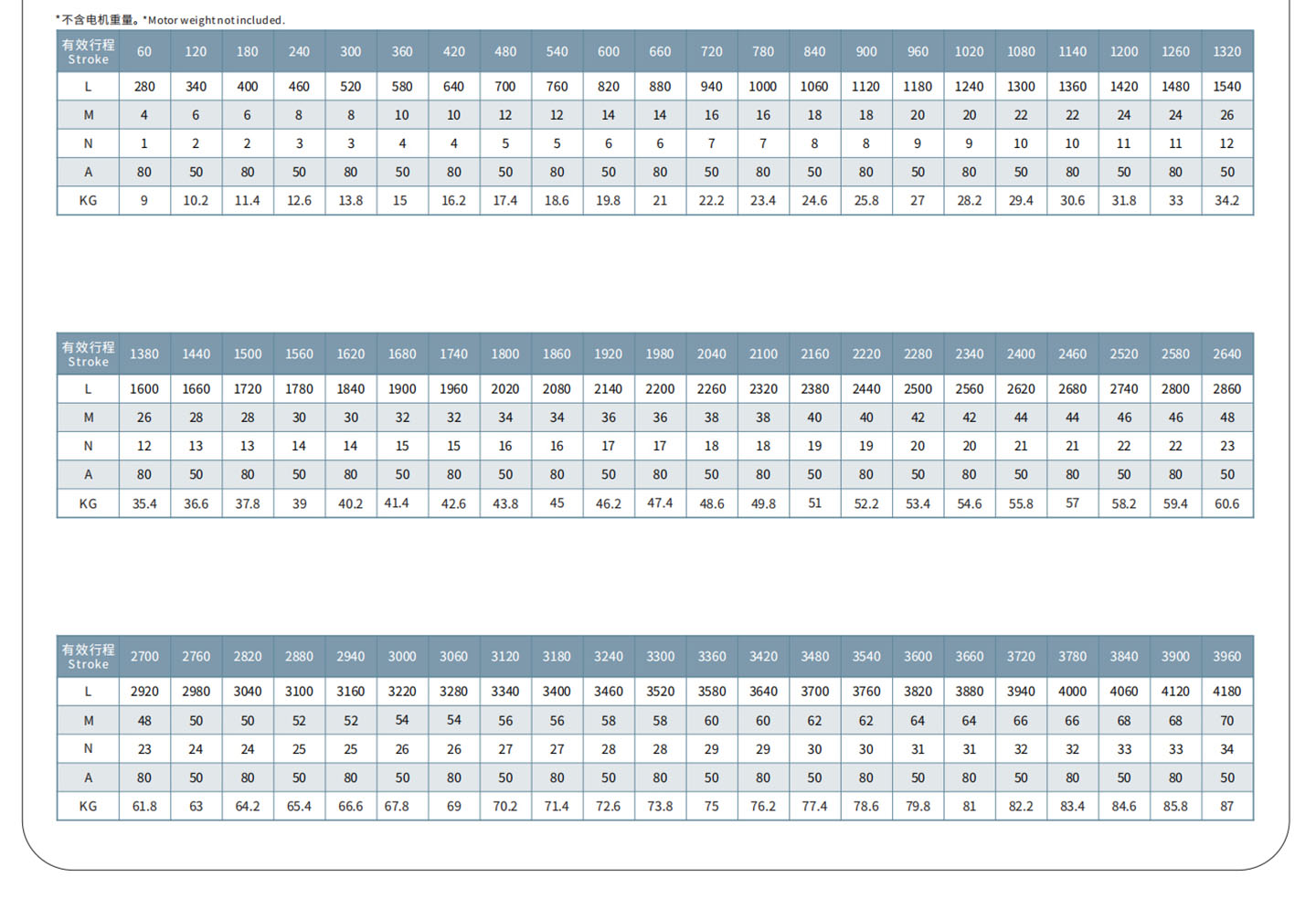
直线电机3代140带标
Đặc trưng
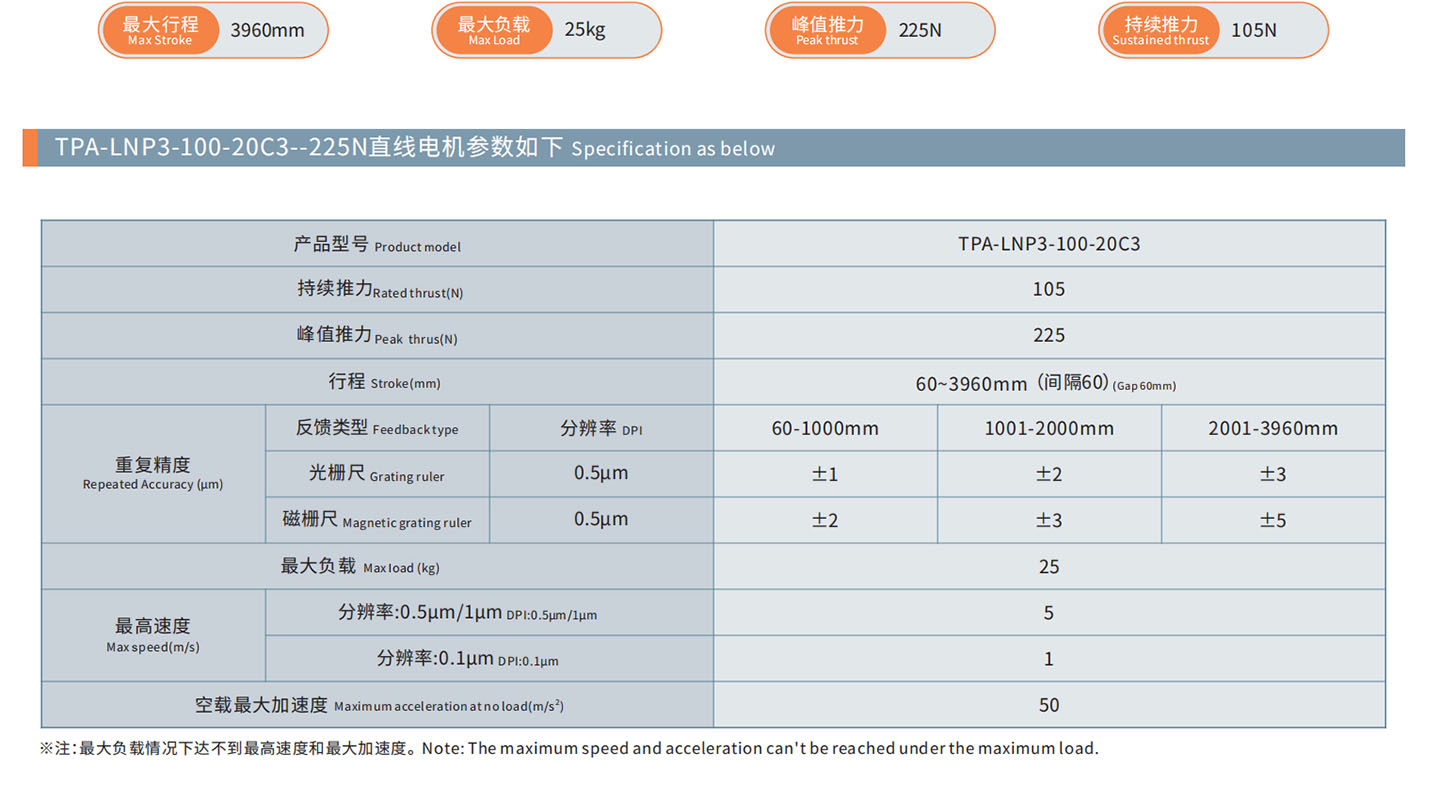
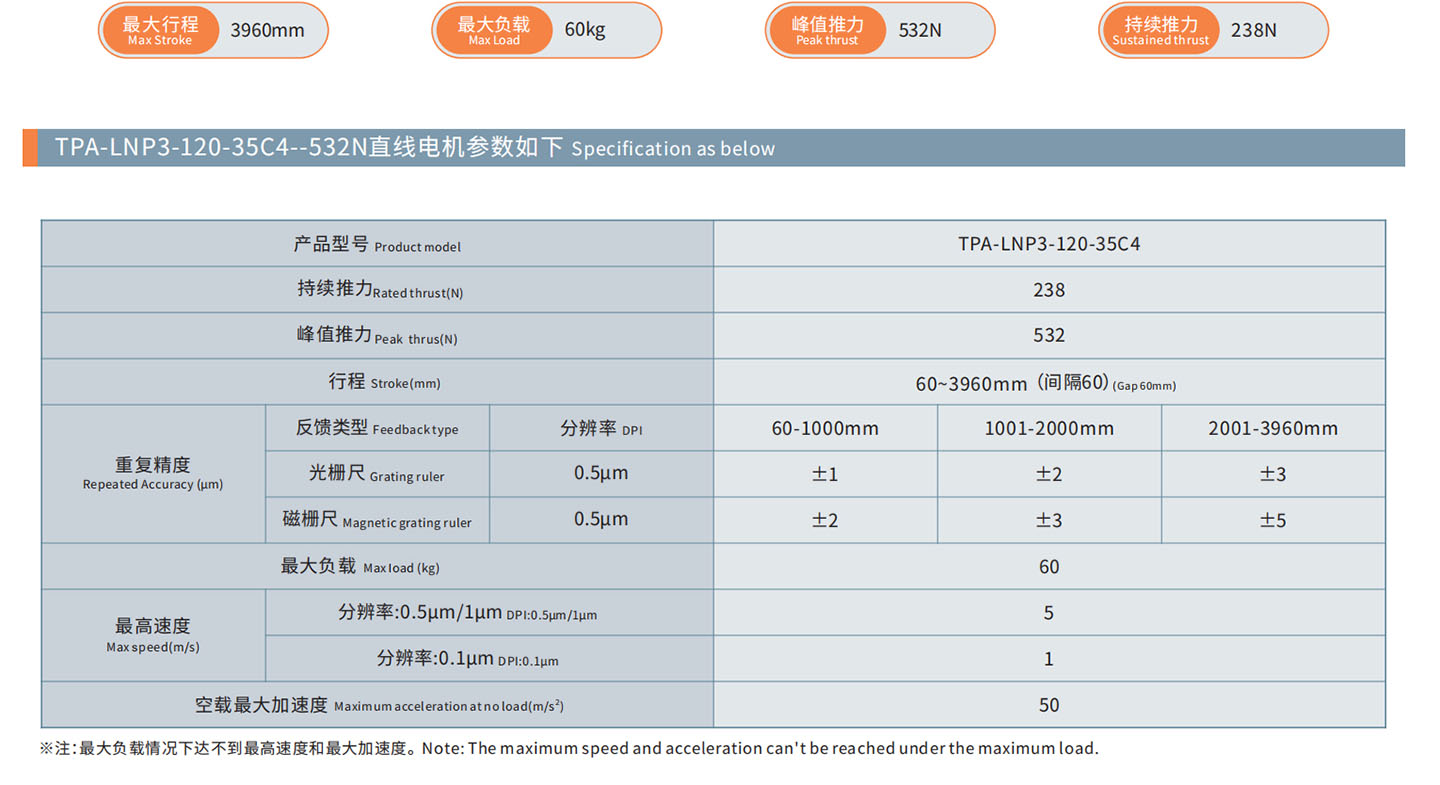
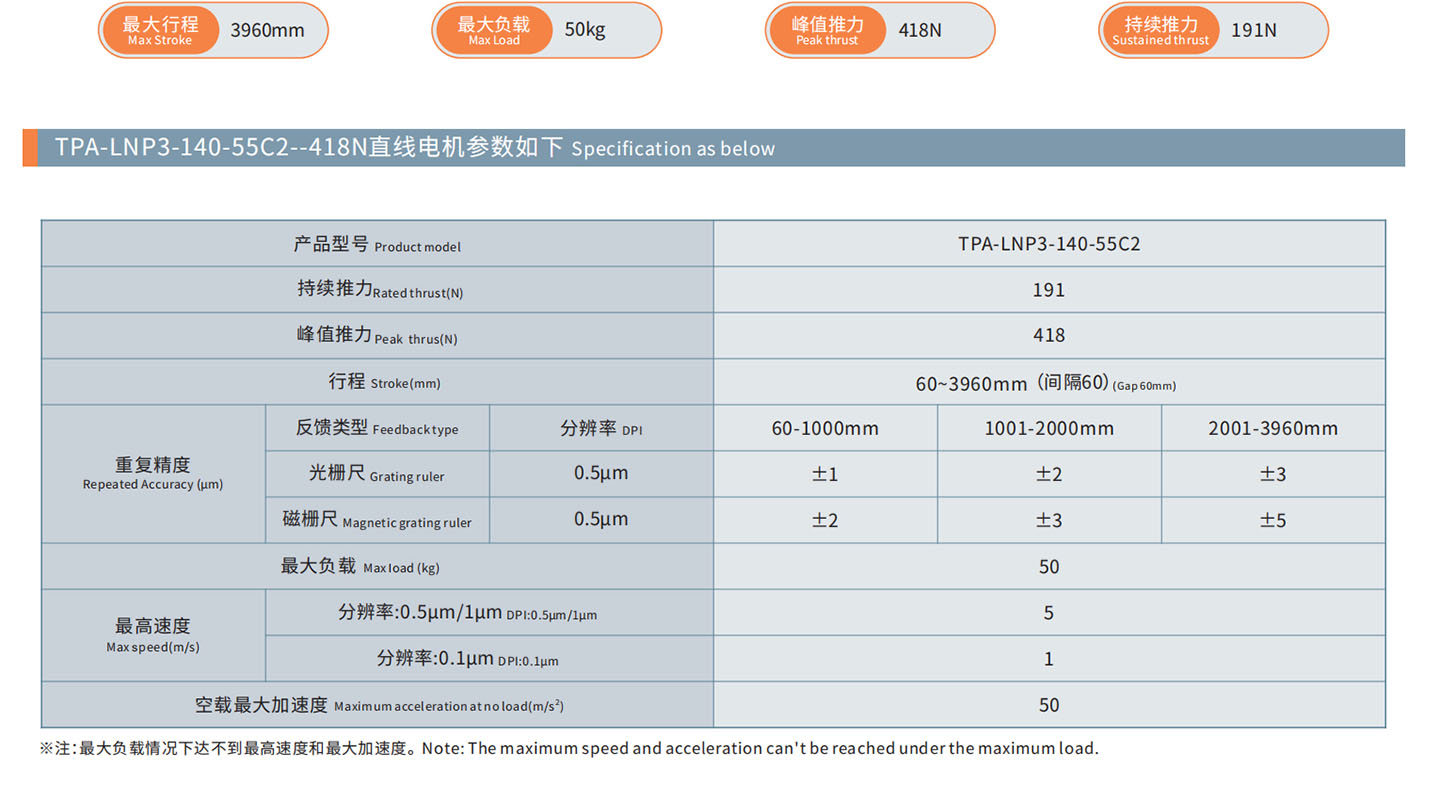
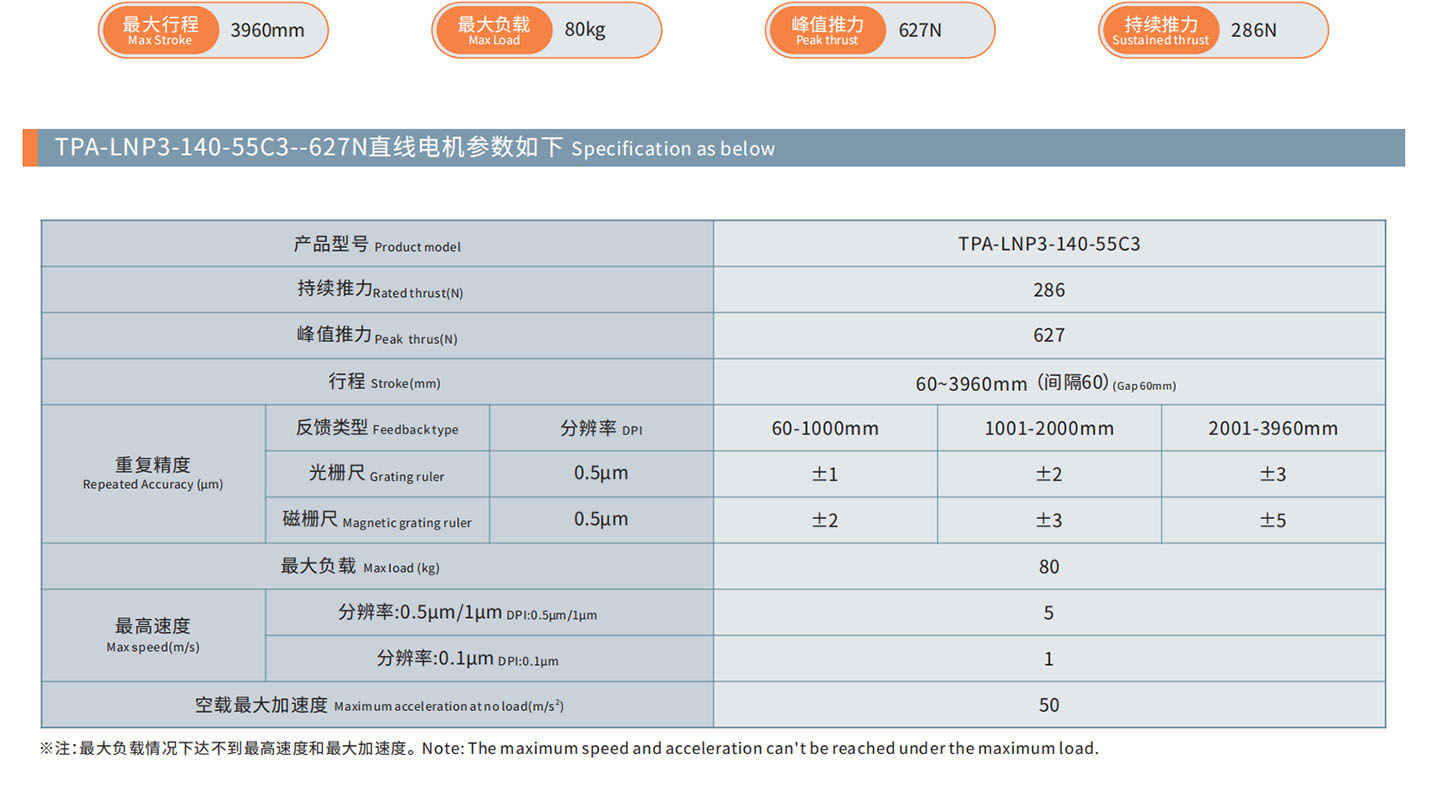
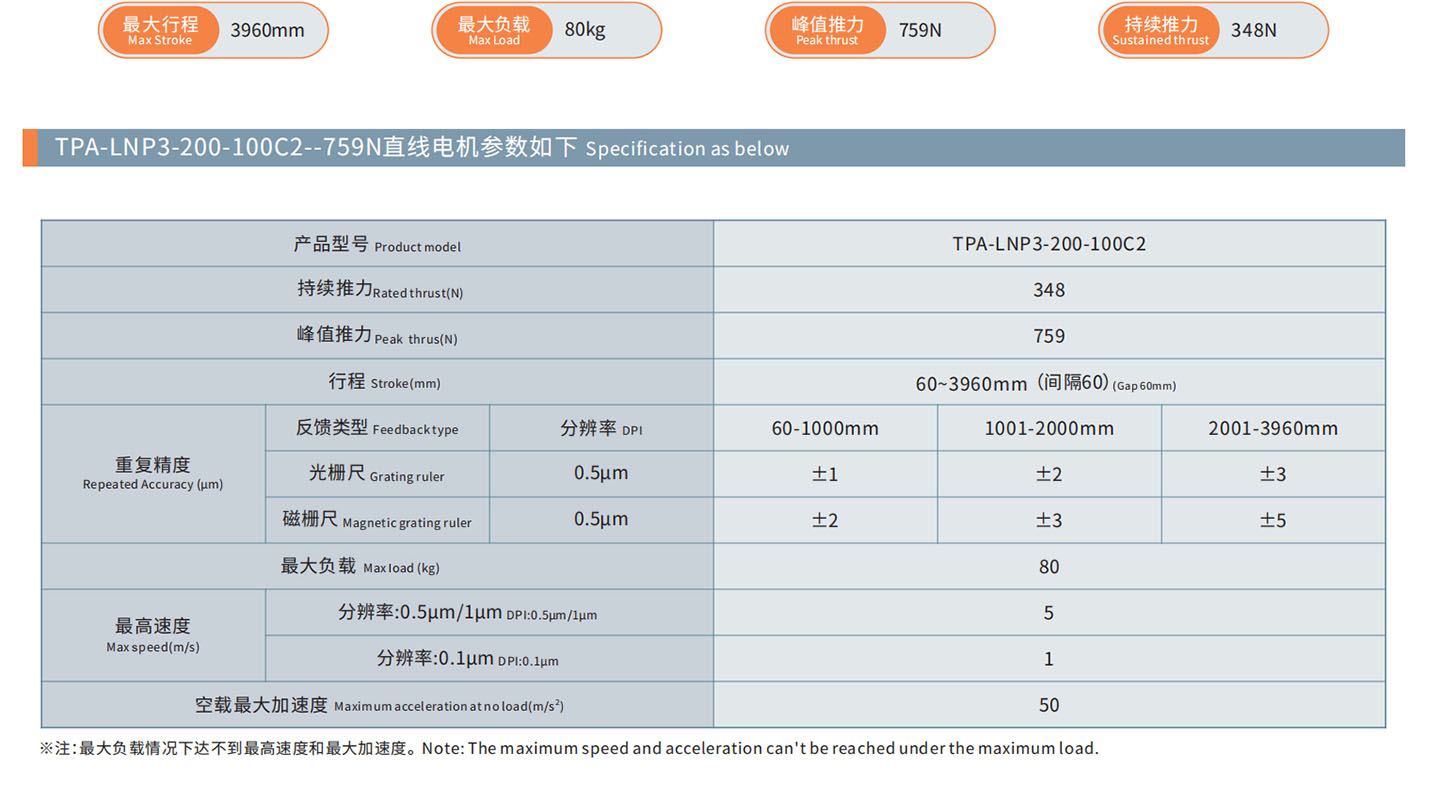
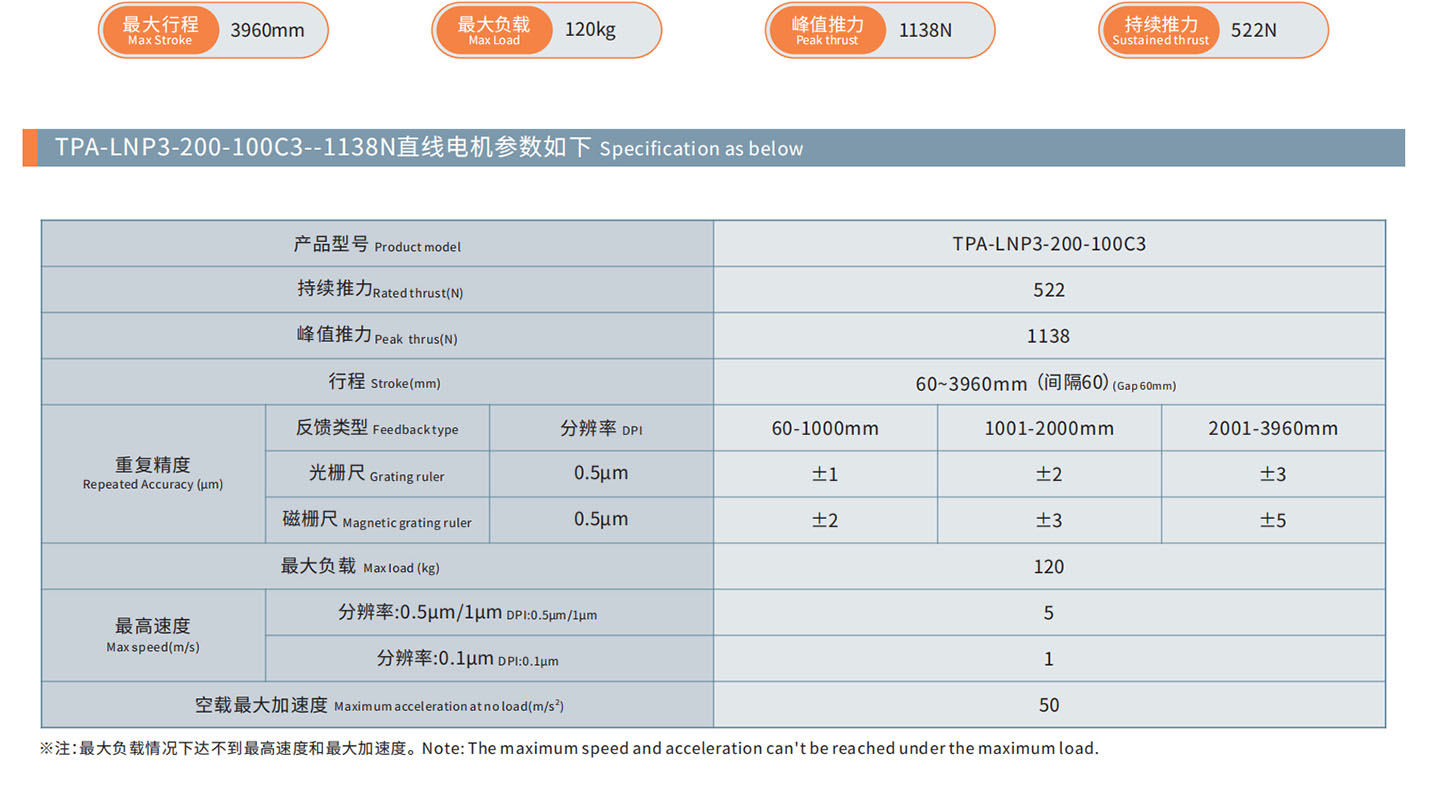
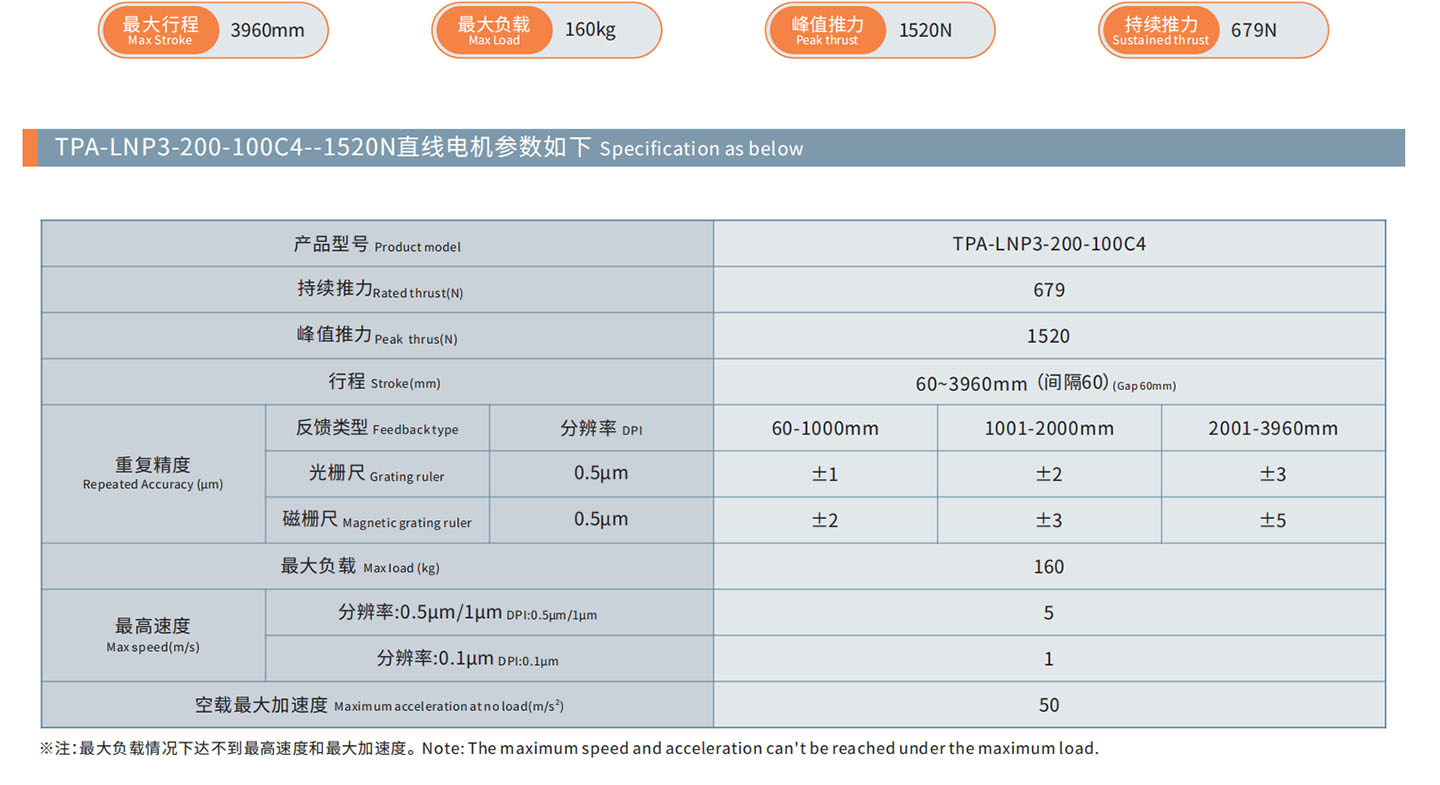
Độ chính xác định vị lặp lại: ± 0,5μm
Tải trọng tối đa: 350kg
Lực đẩy tối đa: 3220N
Lực đẩy duy trì tối đa: 1460N
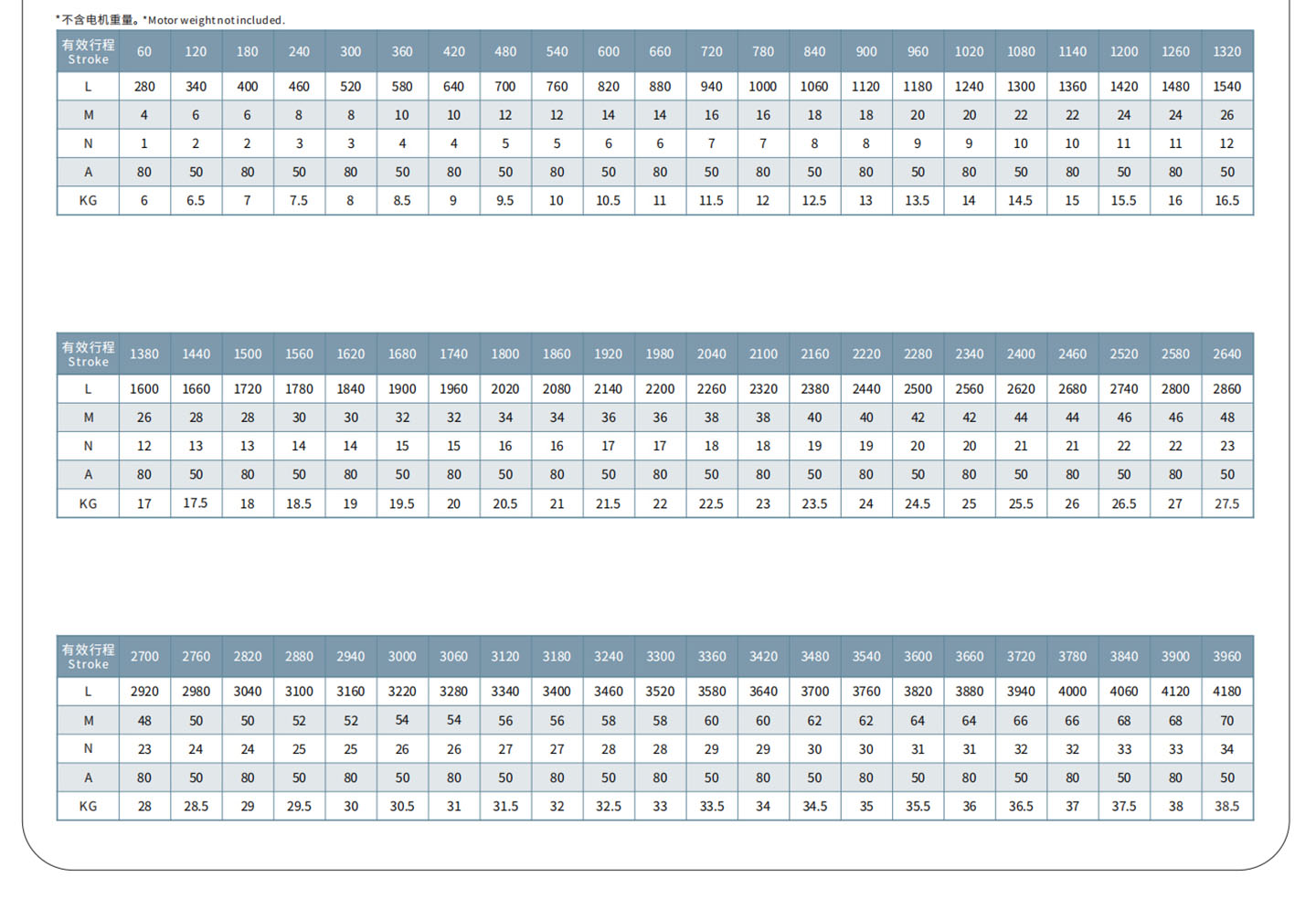
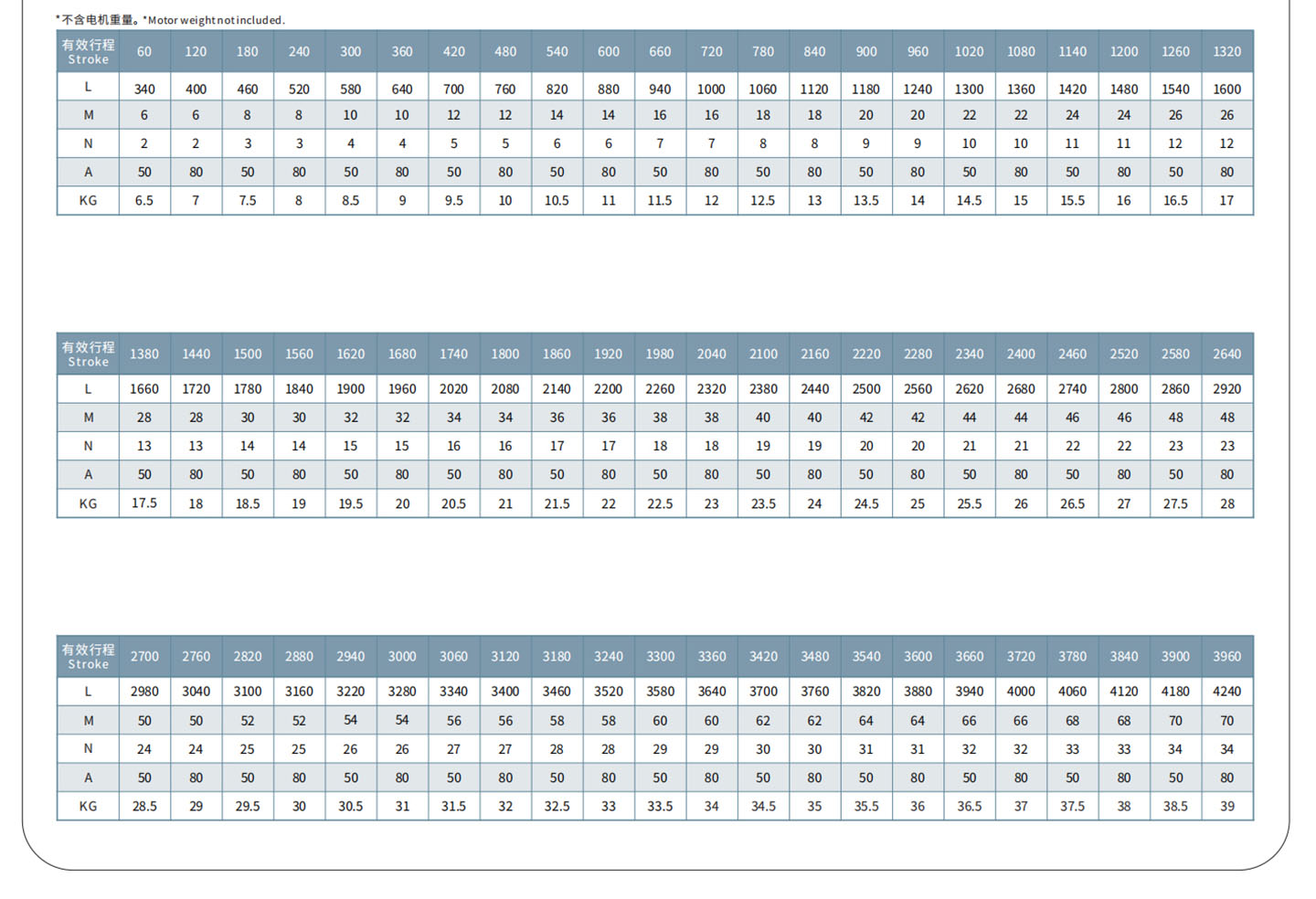
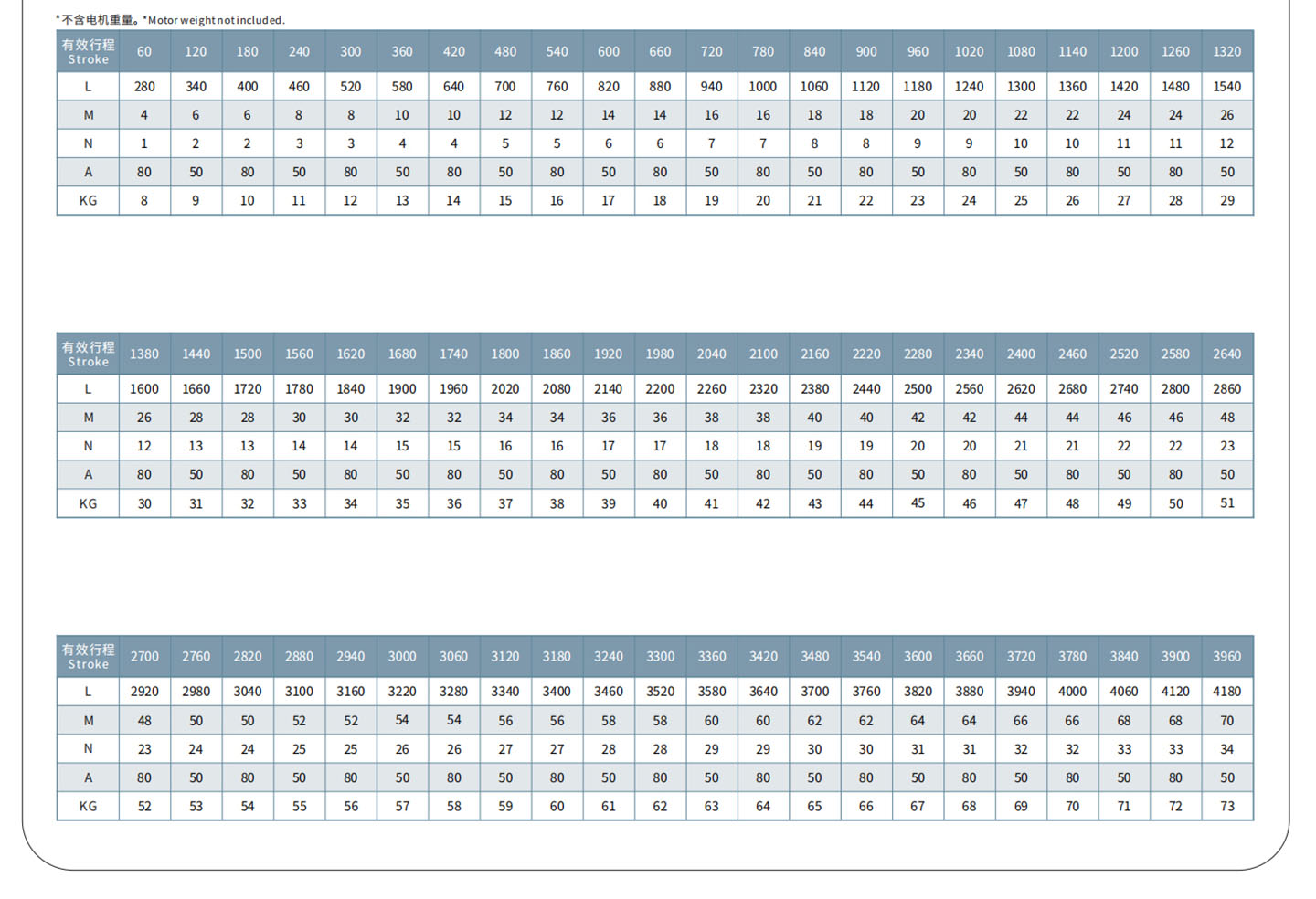
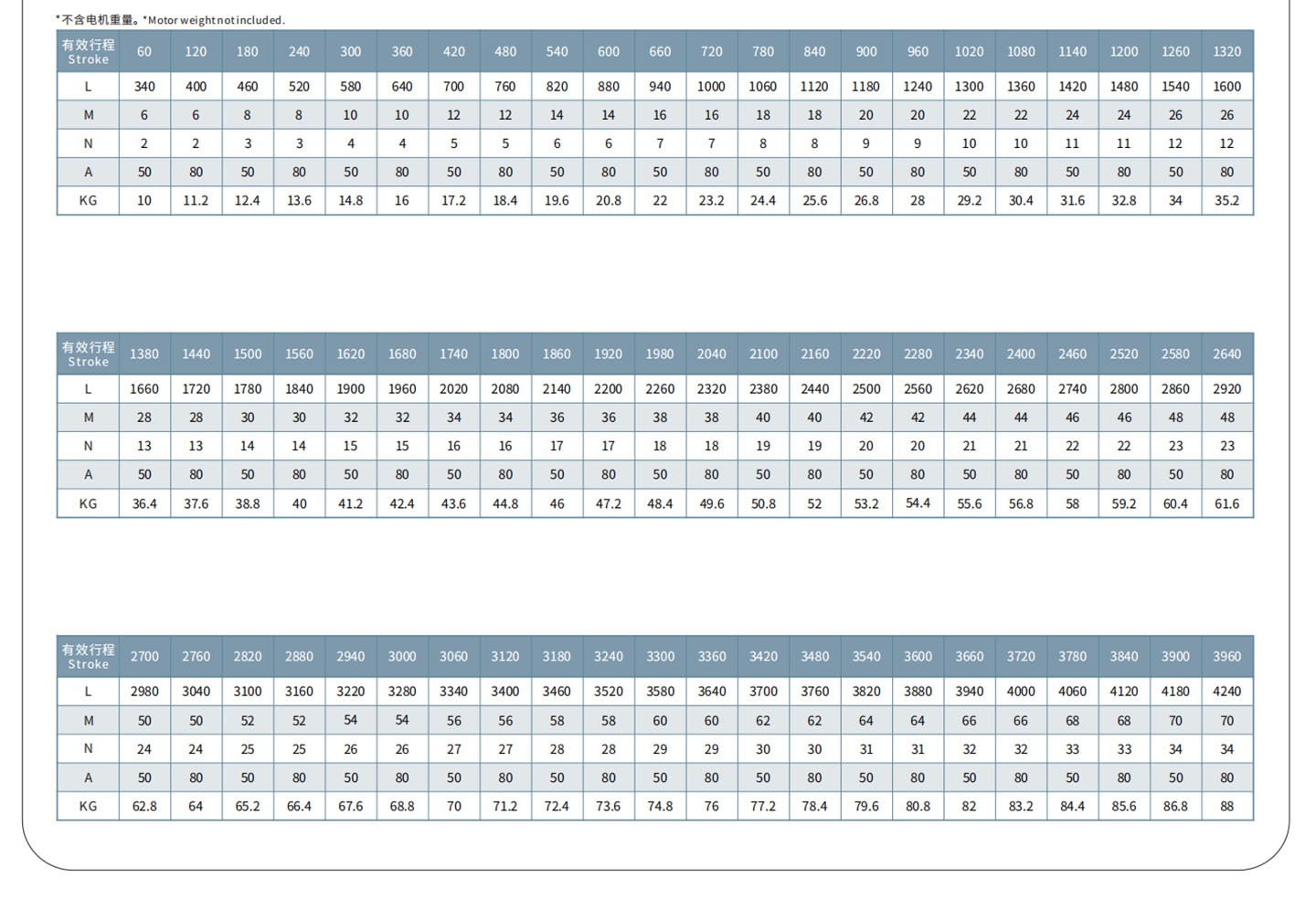
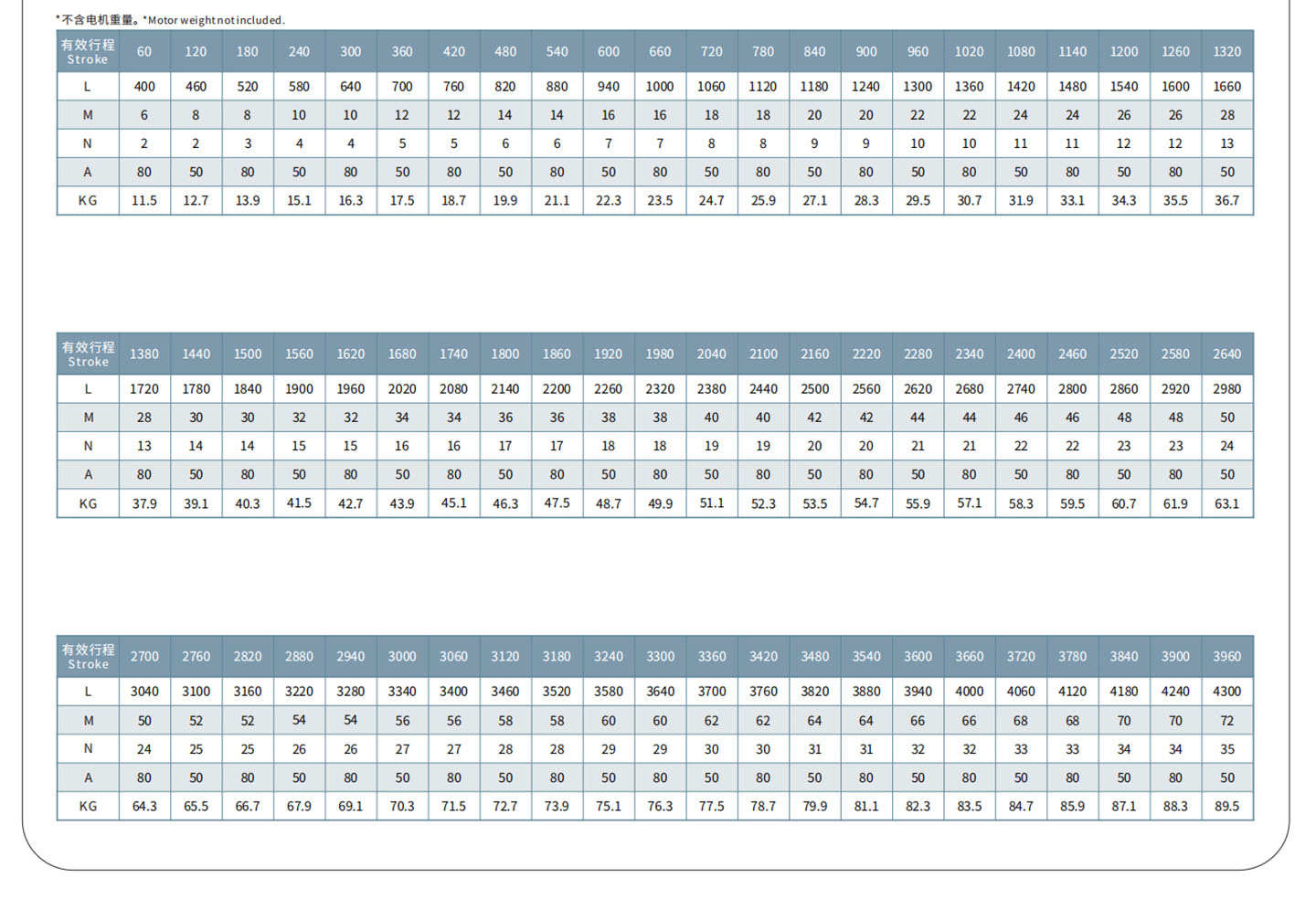
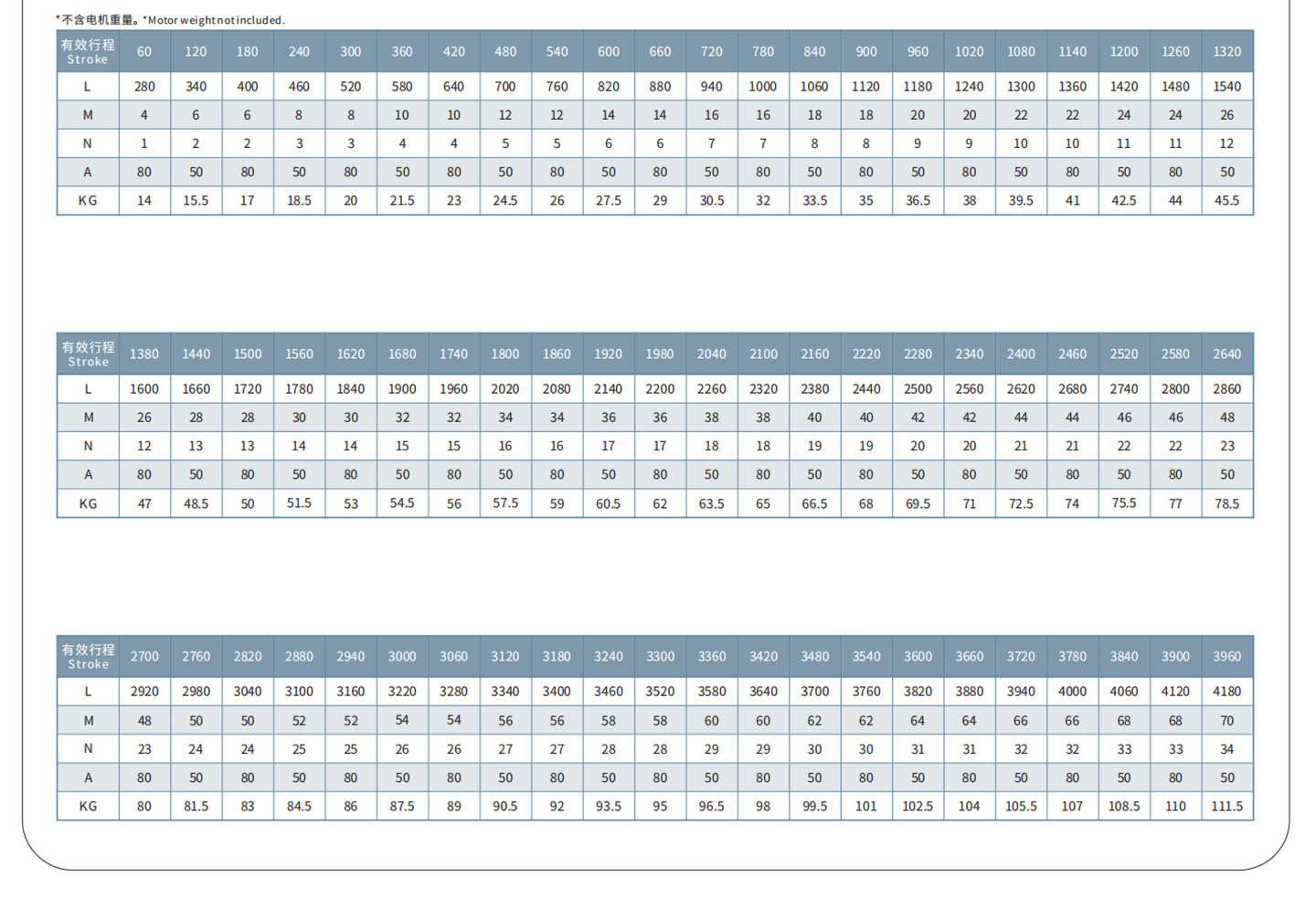
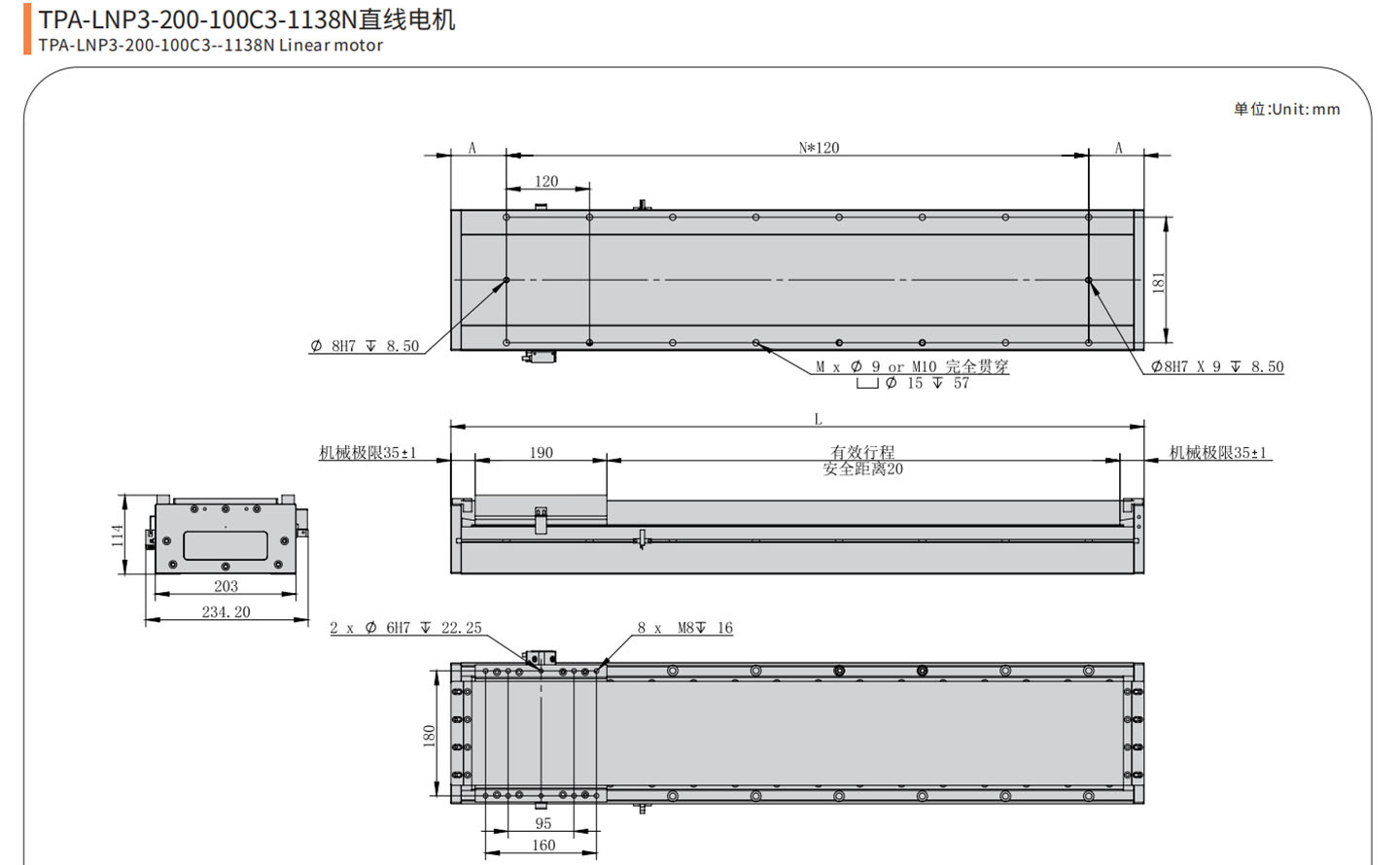
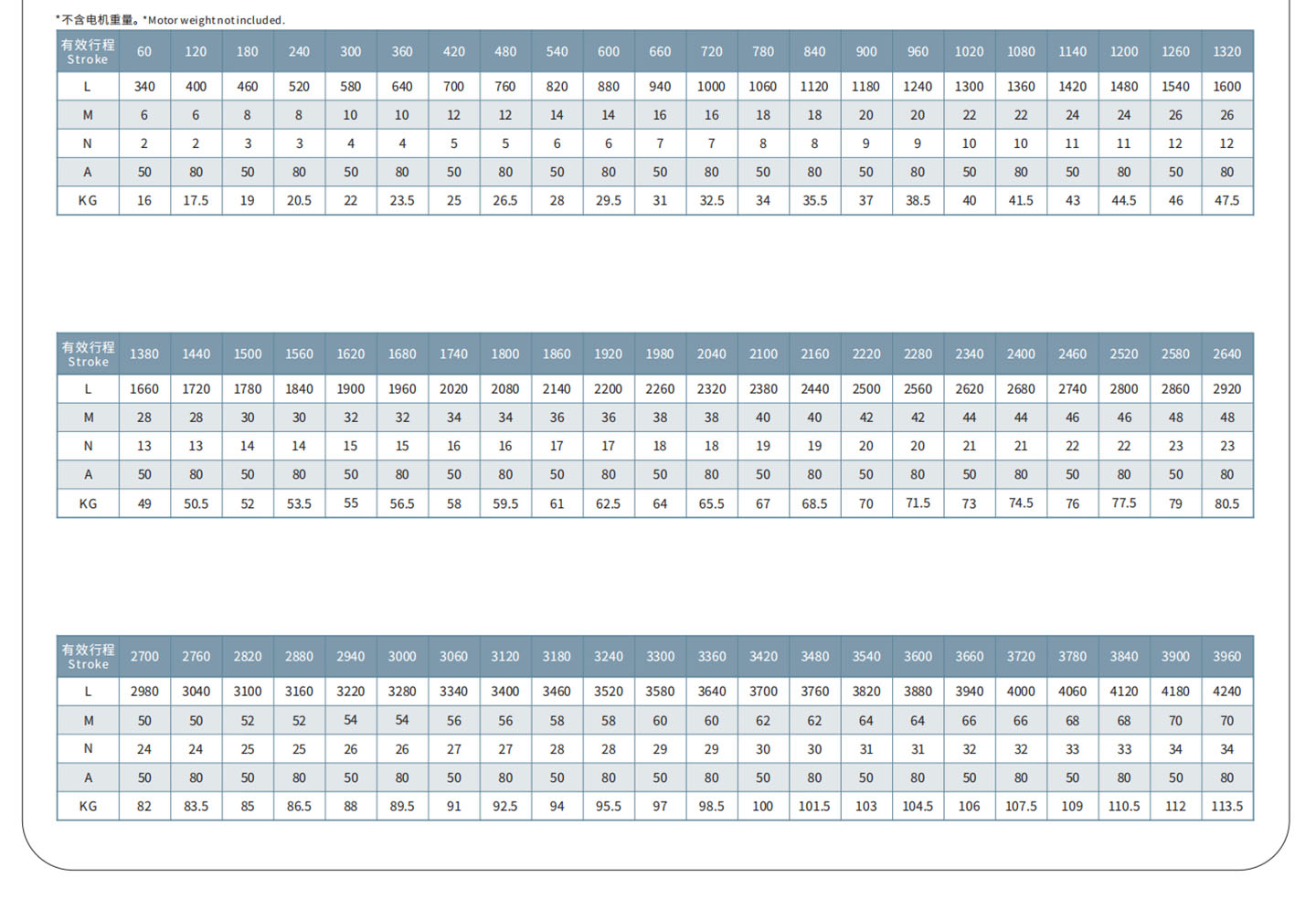
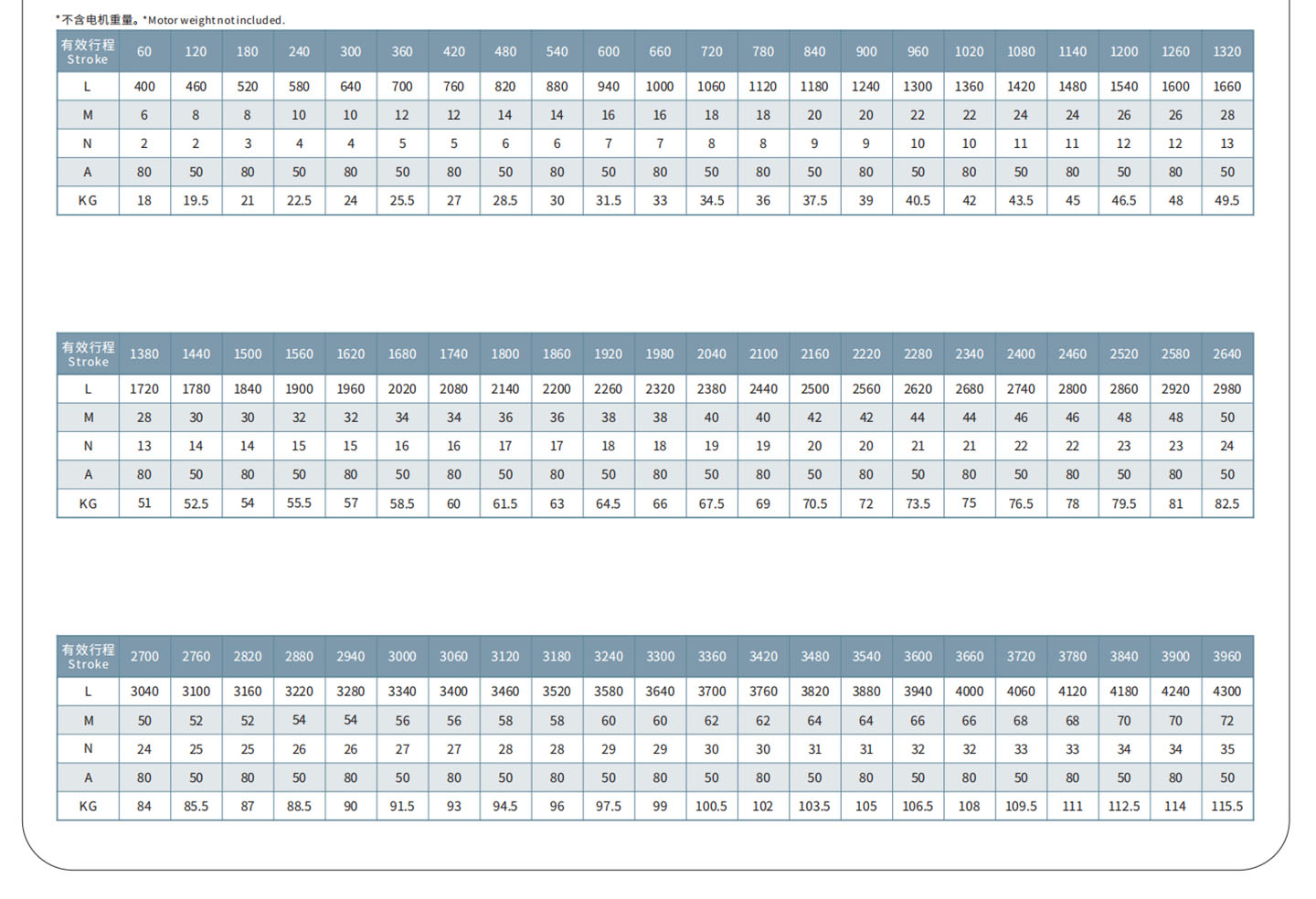
Hành trình: 60 – 5520mm
Gia tốc tối đa: 50m/s2

Động cơ tuyến tính không có bộ phận truyền động cơ học nào khác ngoại trừ ray dẫn hướng và thanh trượt, giúp giảm đáng kể mức tiêu thụ năng lượng và nâng cao độ tin cậy và ổn định khi vận hành sản phẩm.
Về mặt lý thuyết, hành trình của động cơ tuyến tính không bị giới hạn và hành trình dài hầu như không ảnh hưởng đến hiệu suất của nó.
Tốc độ có thể rất nhanh vì không có lực ly tâm hạn chế nên vật liệu thông thường có thể đạt được tốc độ cao hơn. Không có sự tiếp xúc cơ học trong quá trình chuyển động nên bộ phận chuyển động gần như im lặng.
Việc bảo trì rất đơn giản. Do các bộ phận chính của stato và động cơ không có tiếp xúc cơ học nên giảm mài mòn cho các phụ kiện bên trong rất tốt nên động cơ tuyến tính hầu như không cần bảo trì, chỉ cần thường xuyên tra dầu mỡ từ lỗ dầu đặt sẵn của chúng tôi.
Chúng tôi đã tối ưu hóa thiết kế cấu trúc của động cơ tuyến tính dòng LNP2, độ cứng của động cơ đã được cải thiện và nó có thể chịu tải lớn hơn, có thể được sử dụng làm dầm.

Thêm sản phẩm

Động cơ quay dẫn động trực tiếp
Mô-đun động cơ tuyến tính dòng LNP

Mô-đun động cơ tuyến tính phẳng dòng LNP2

Động cơ tuyến tính dòng P có lõi sắt










