




HCB seriýaly guşak bilen dolandyrylýan çyzykly modul doly gurşalan

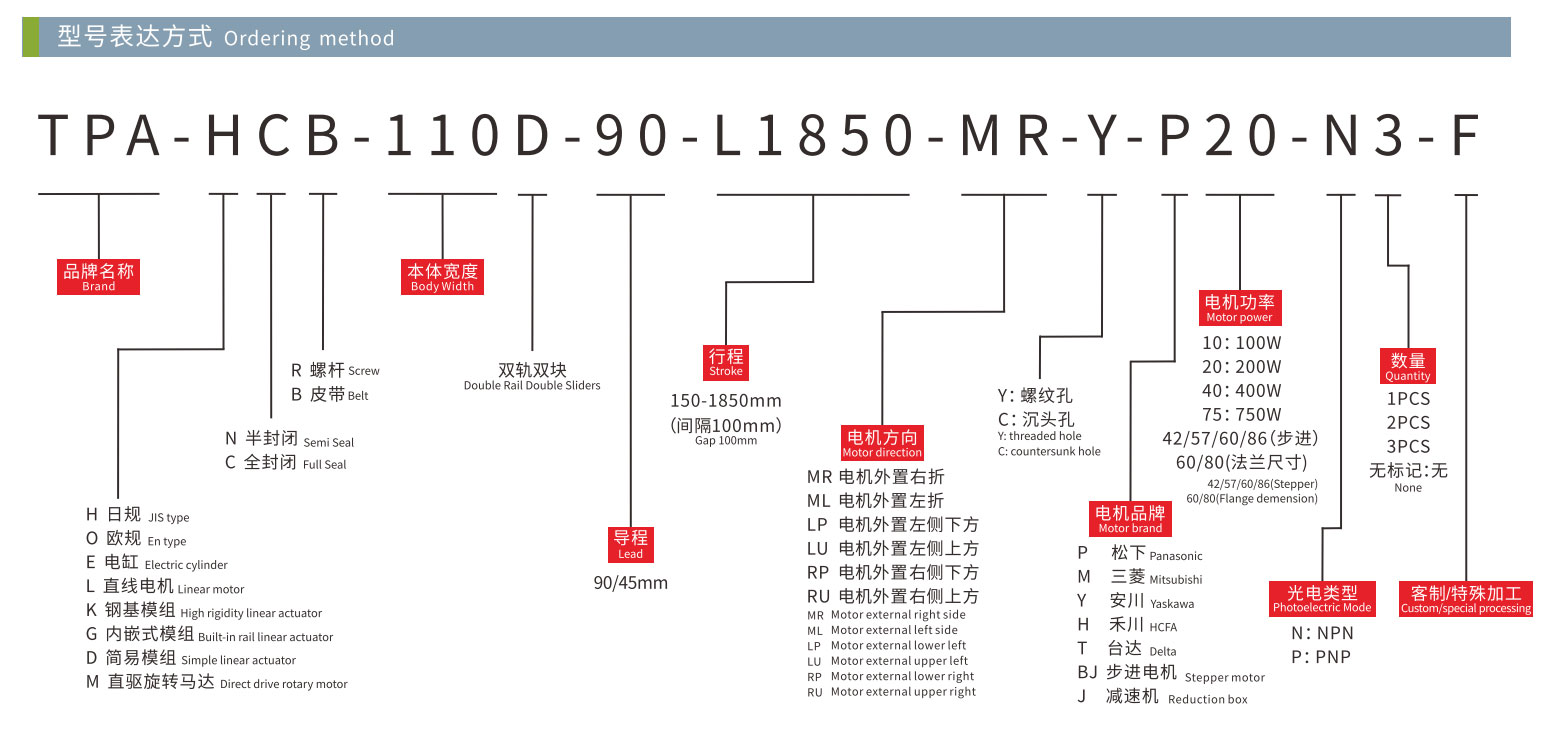
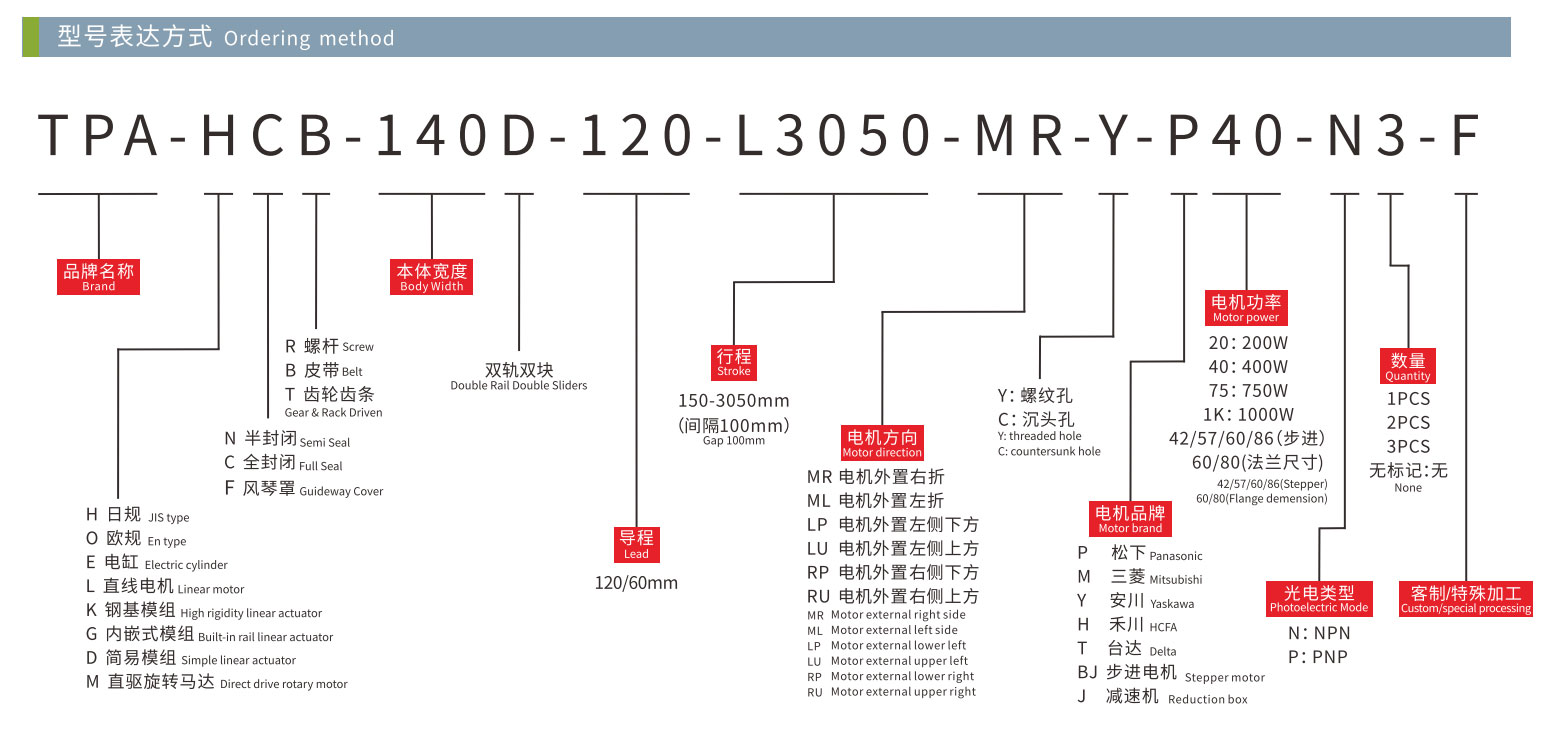
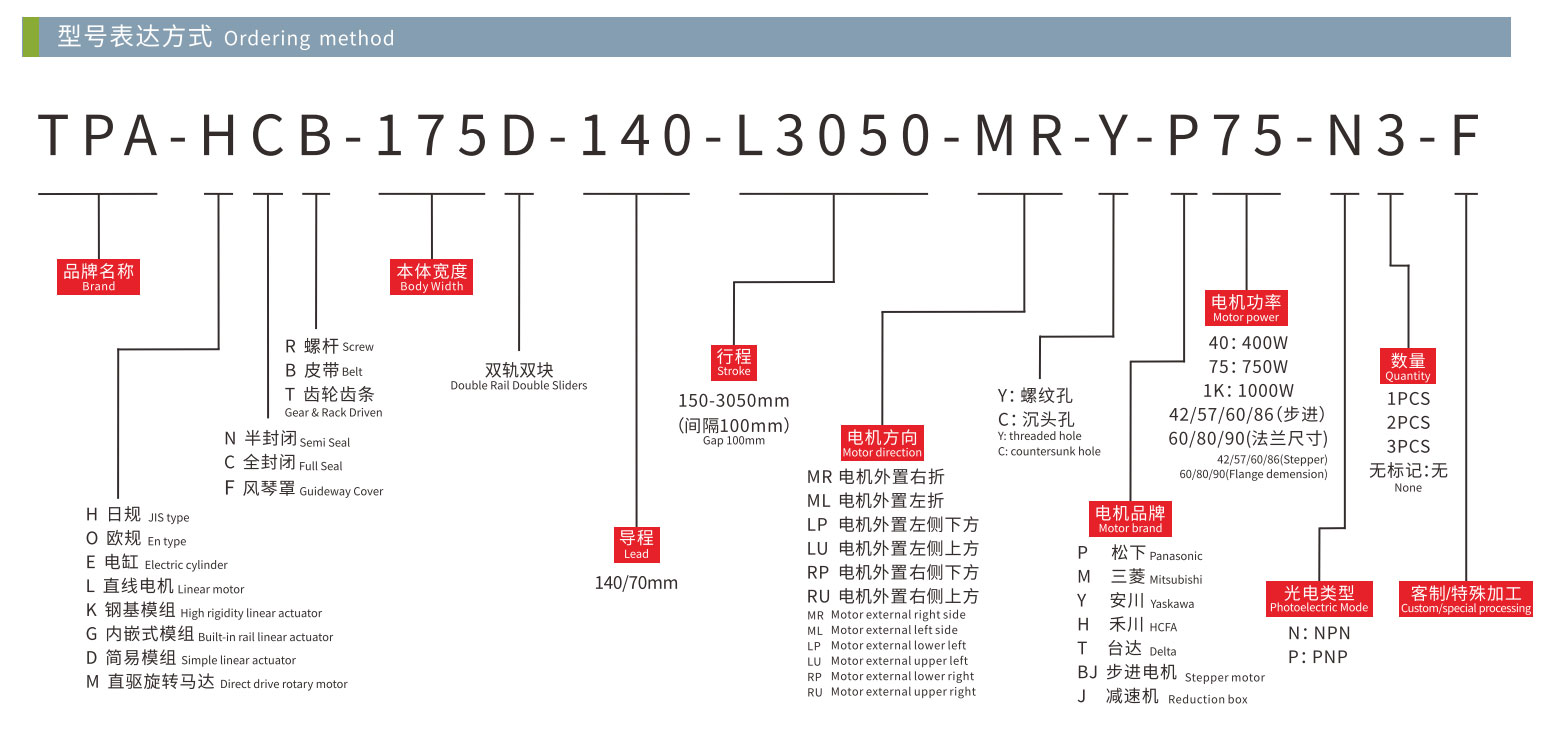
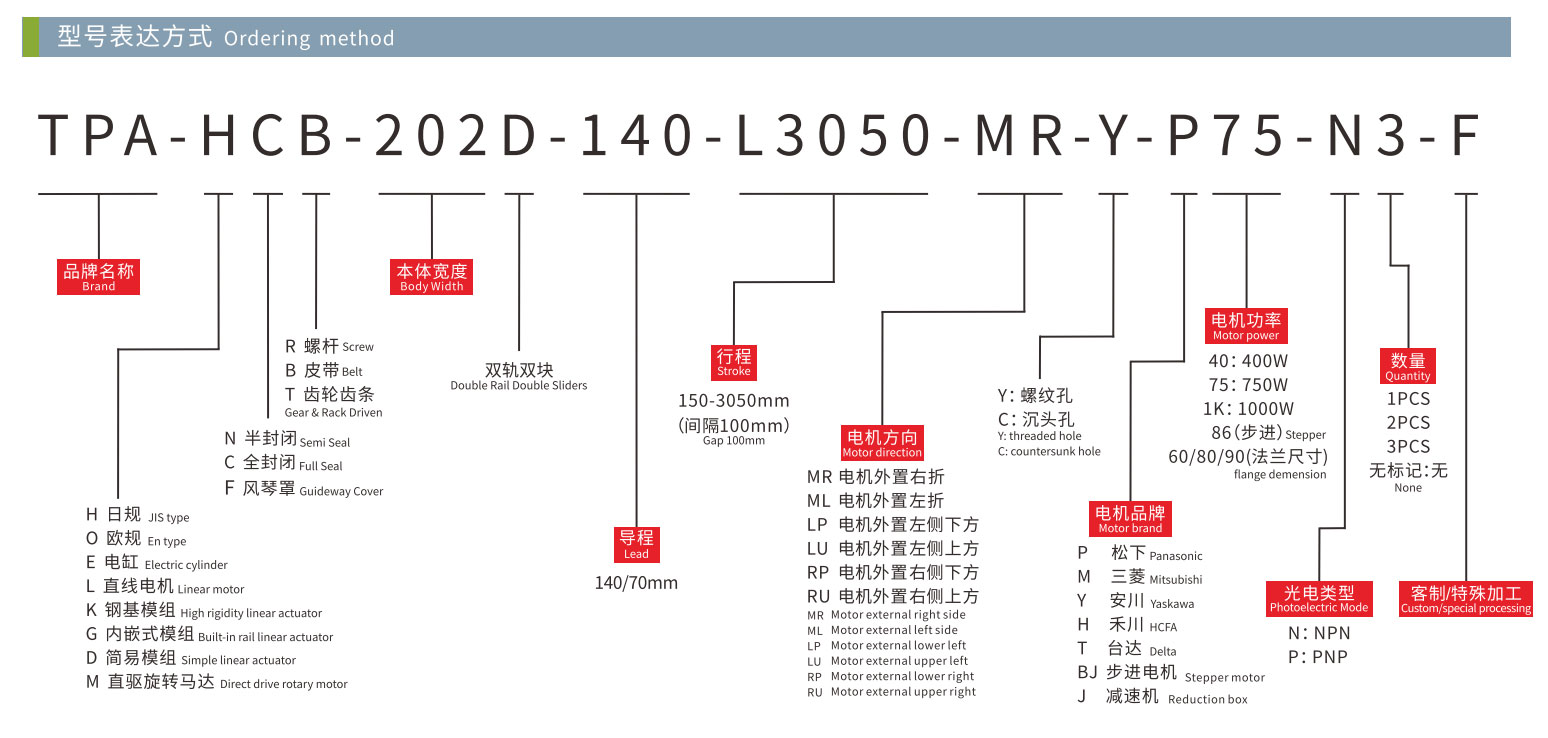
Model saýlaýjy
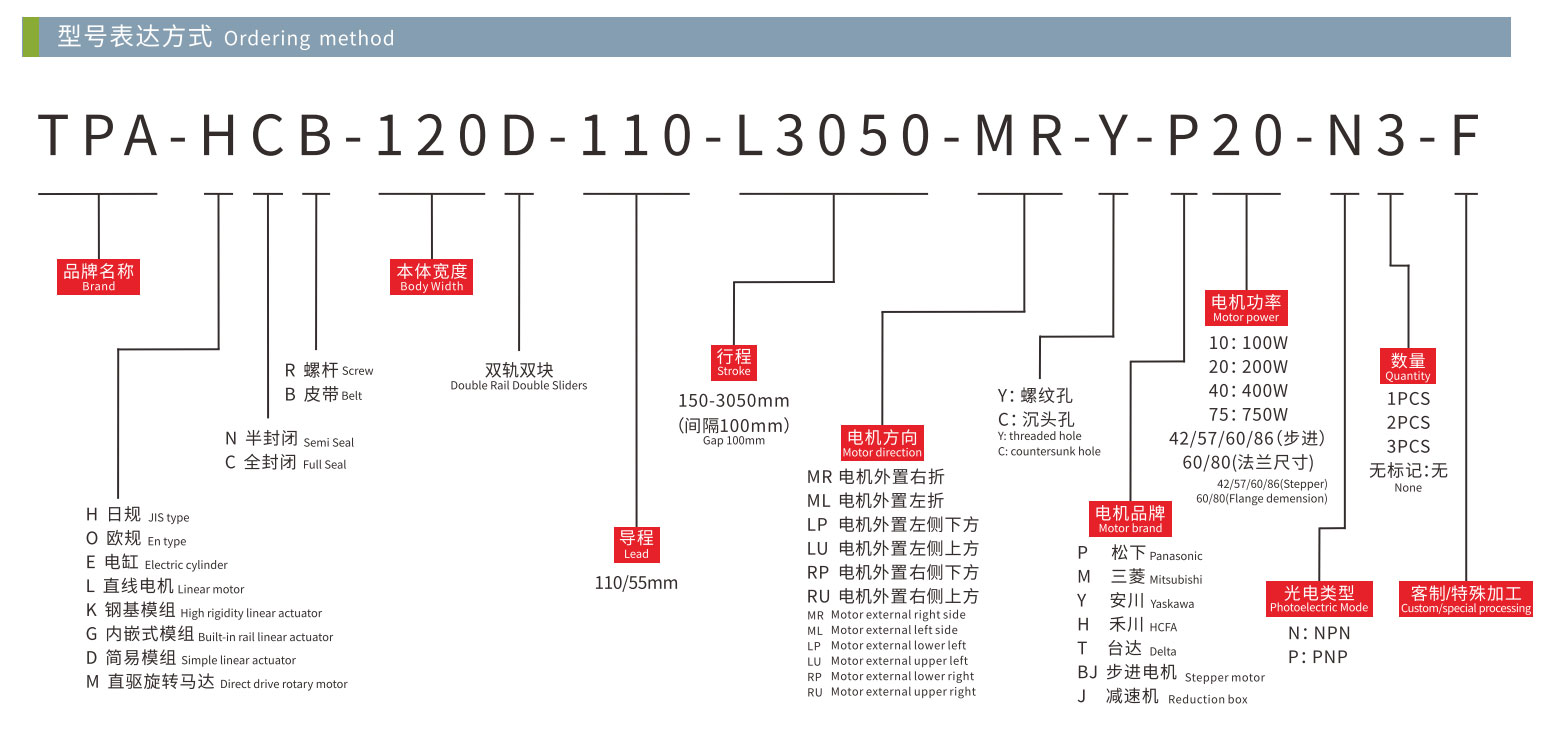
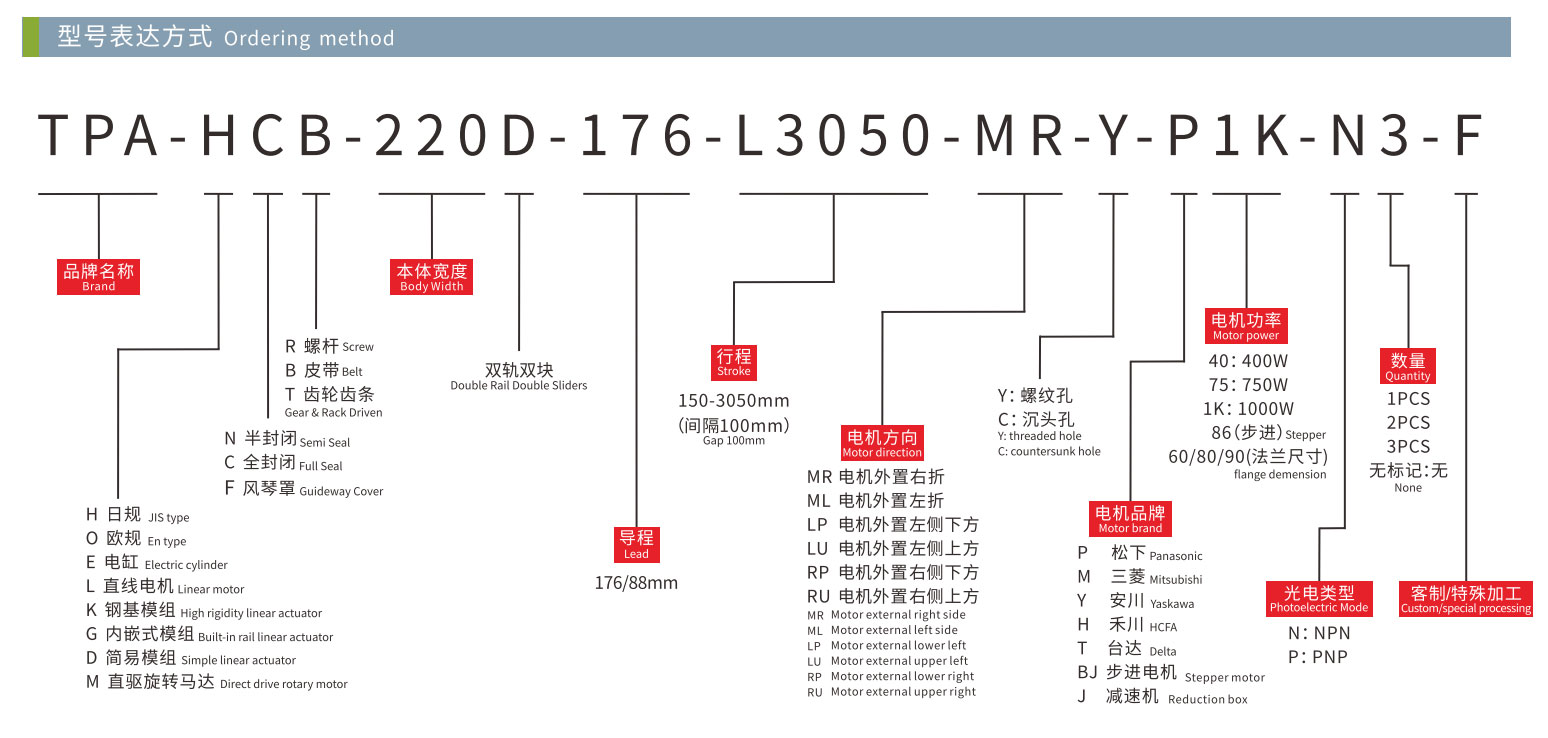
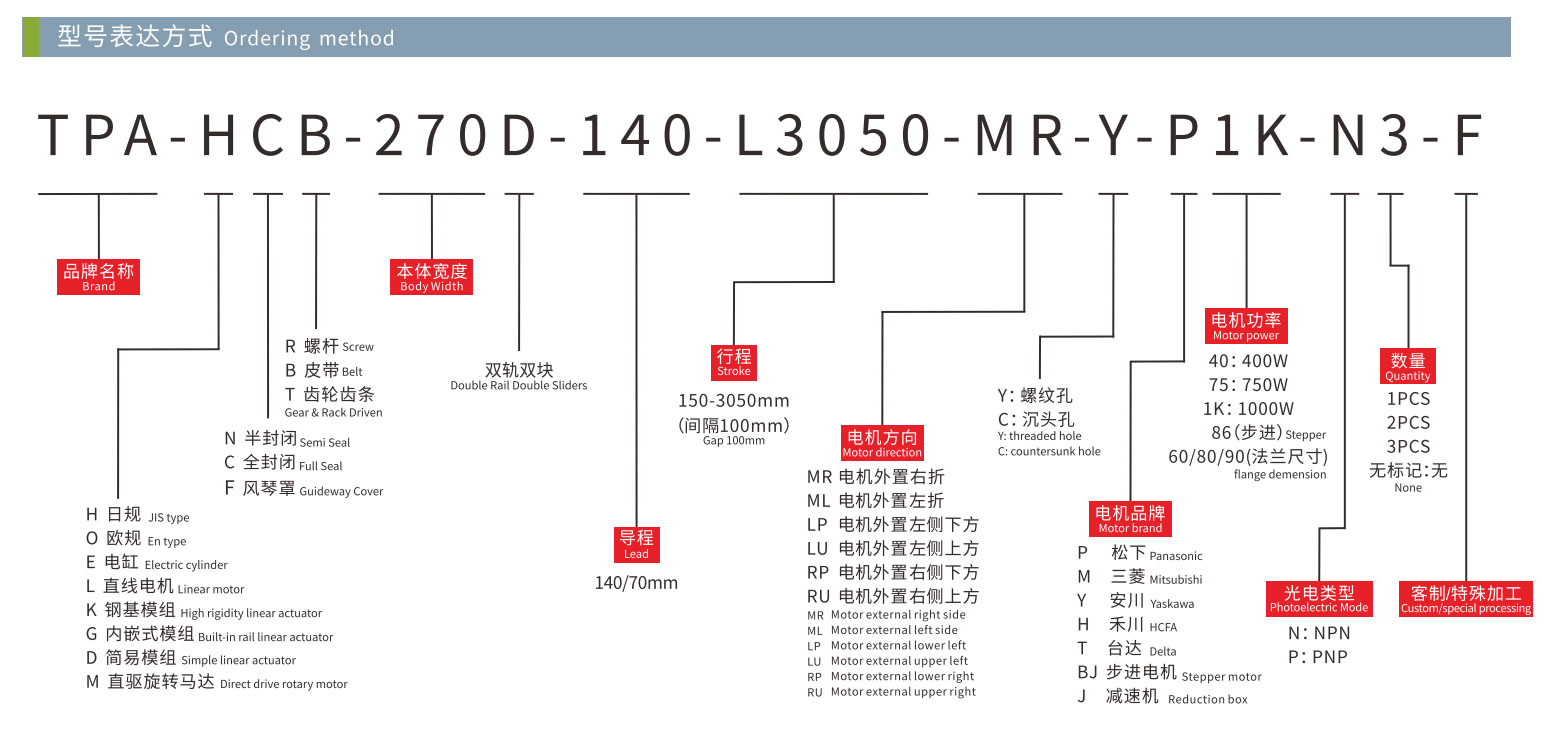
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
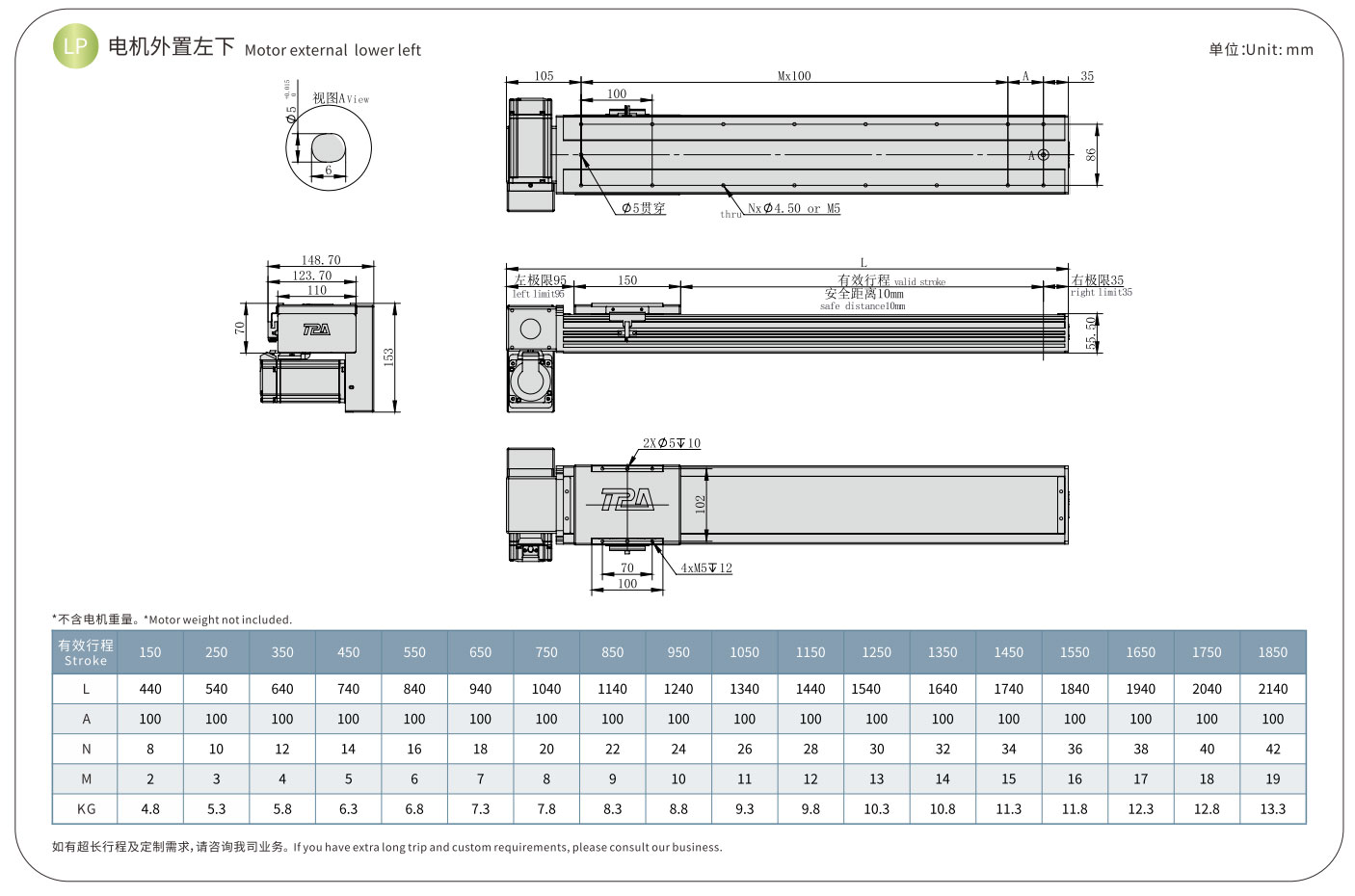
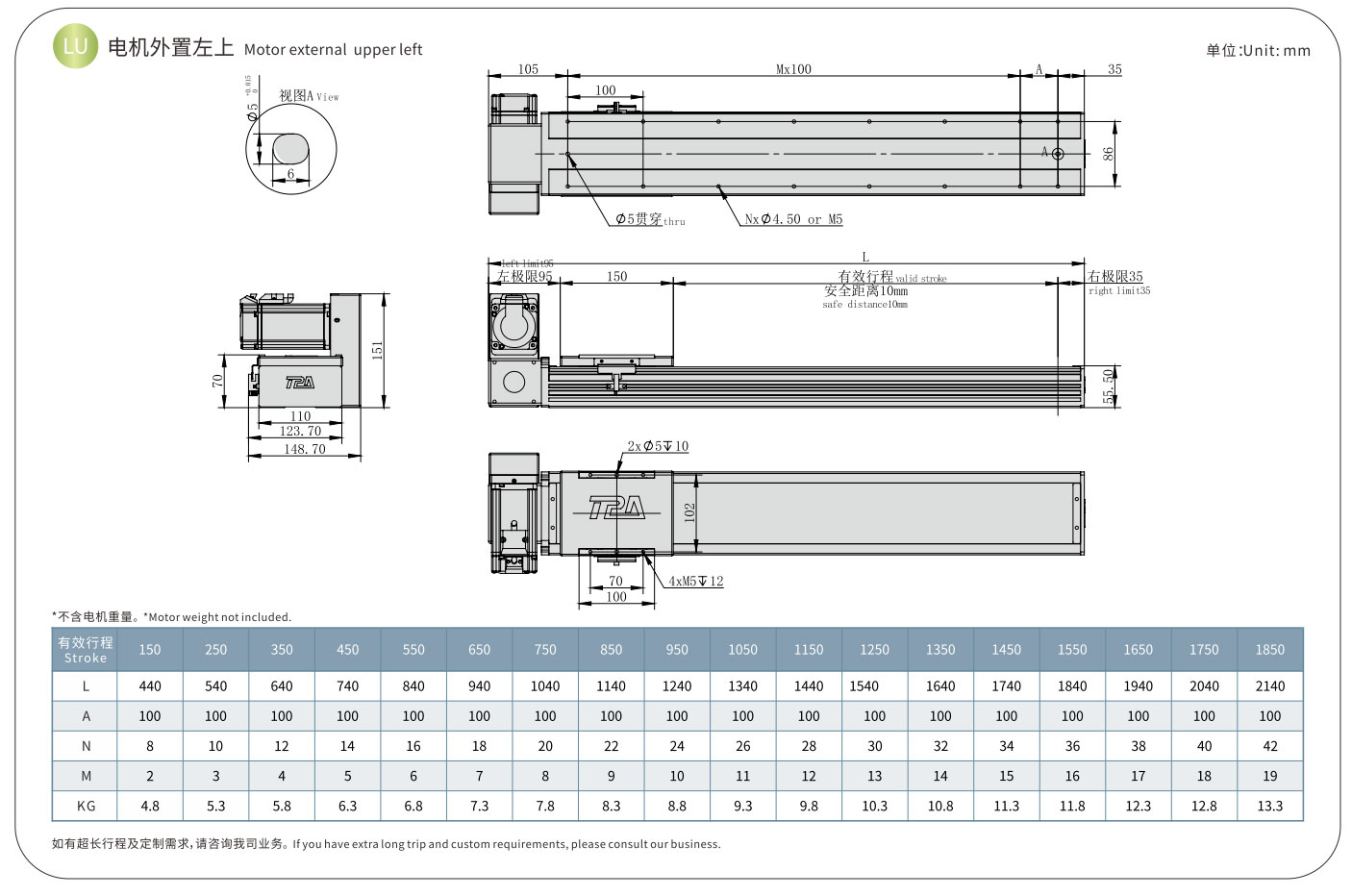
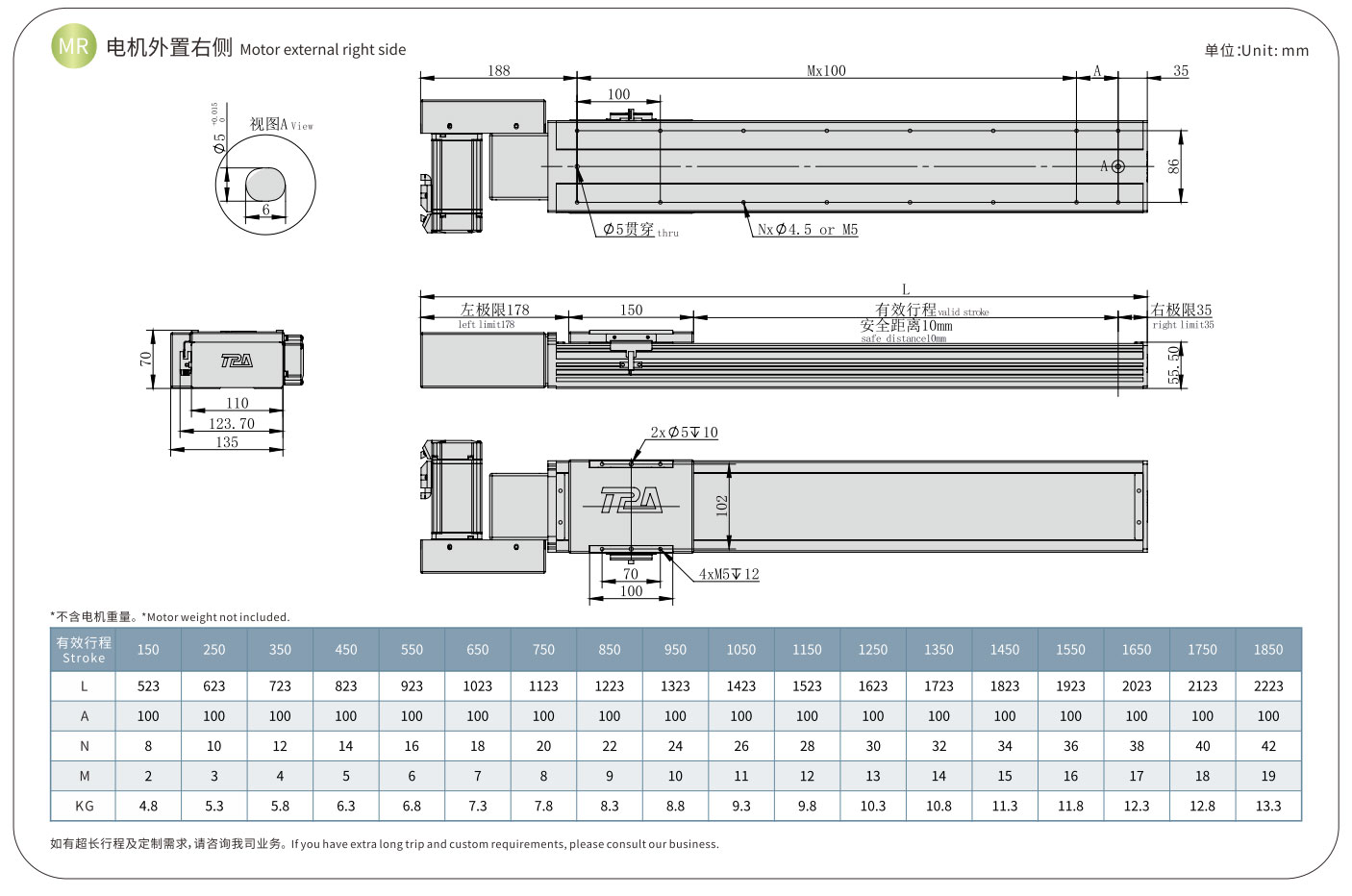
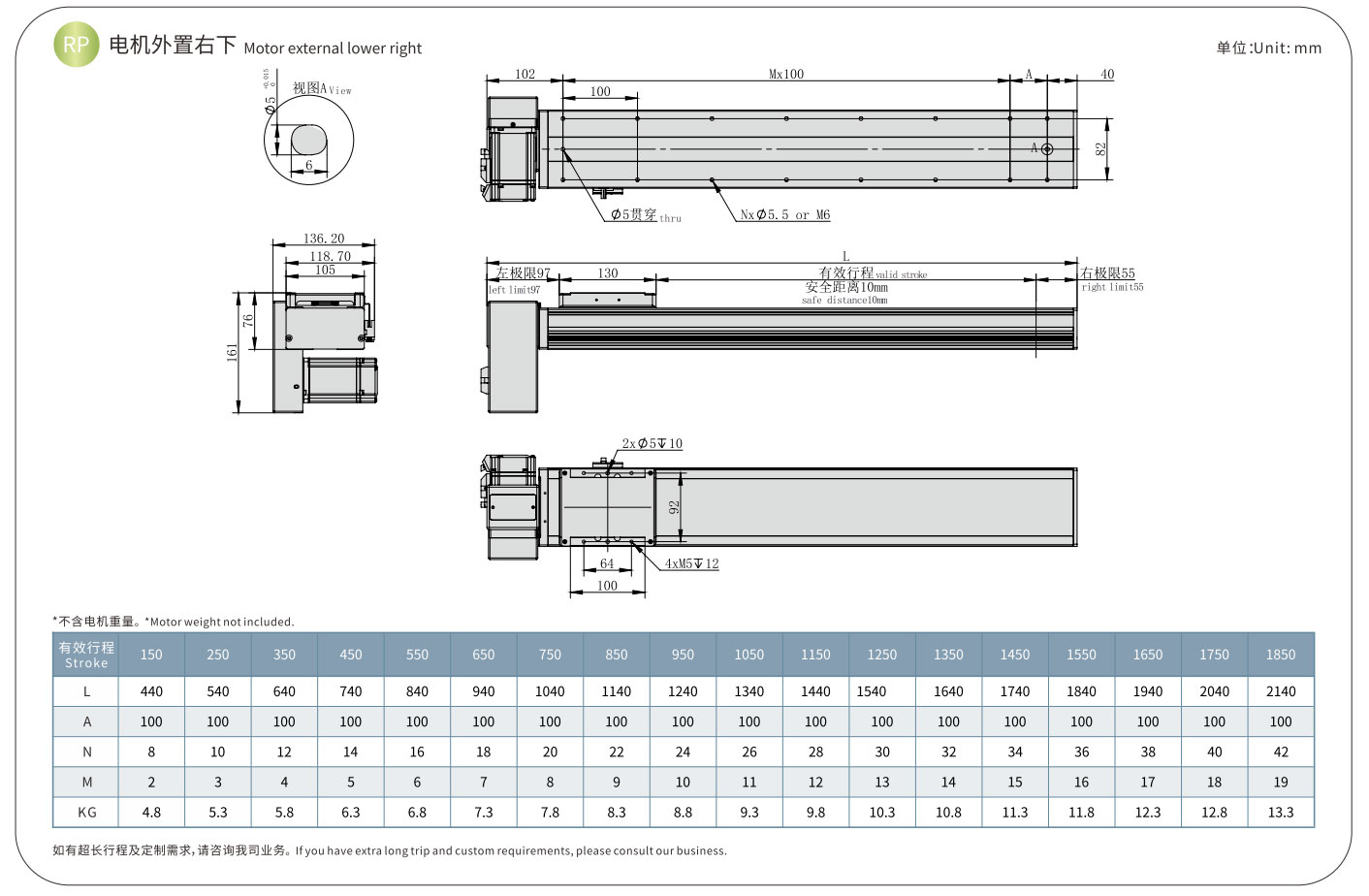
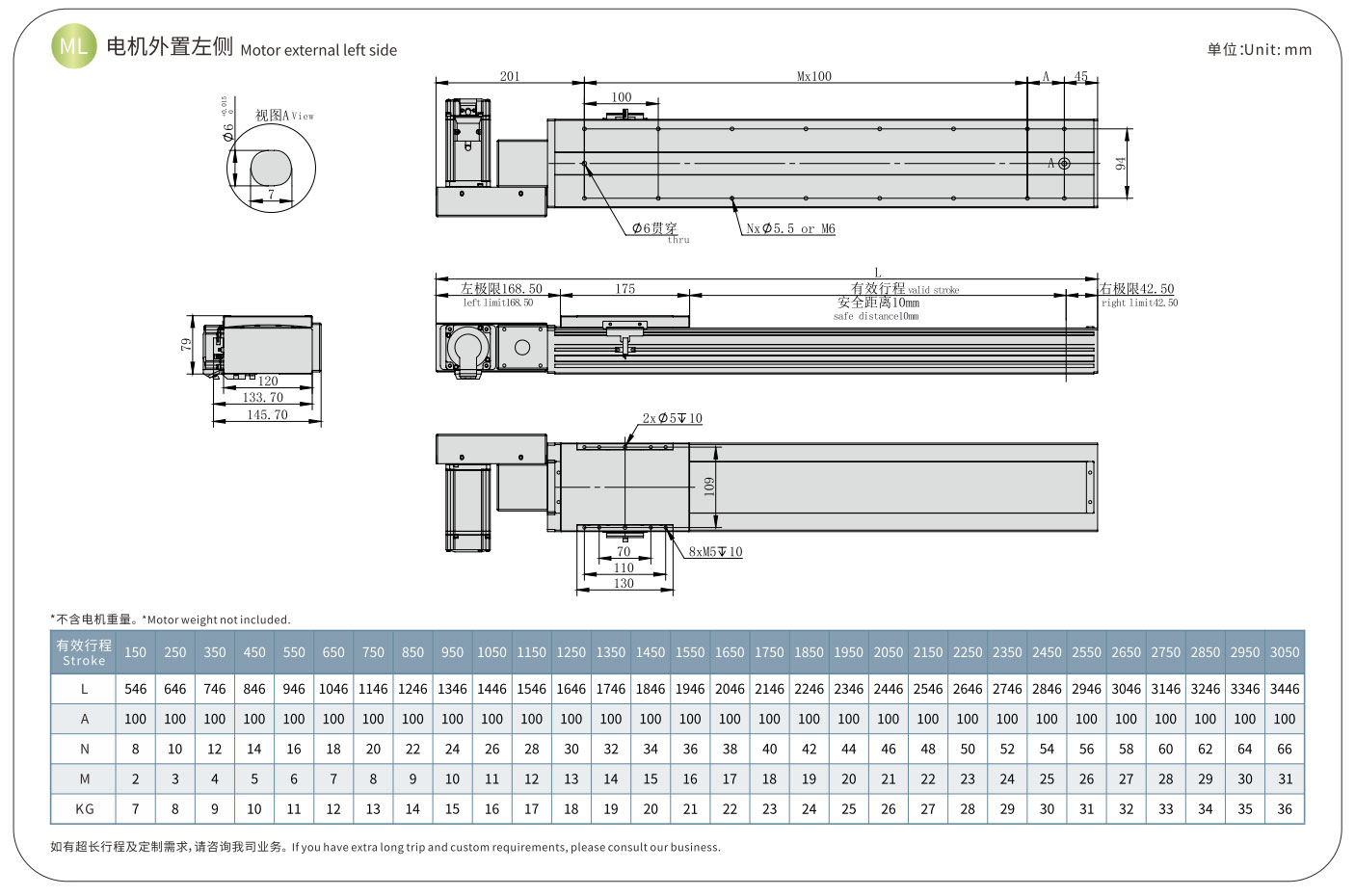
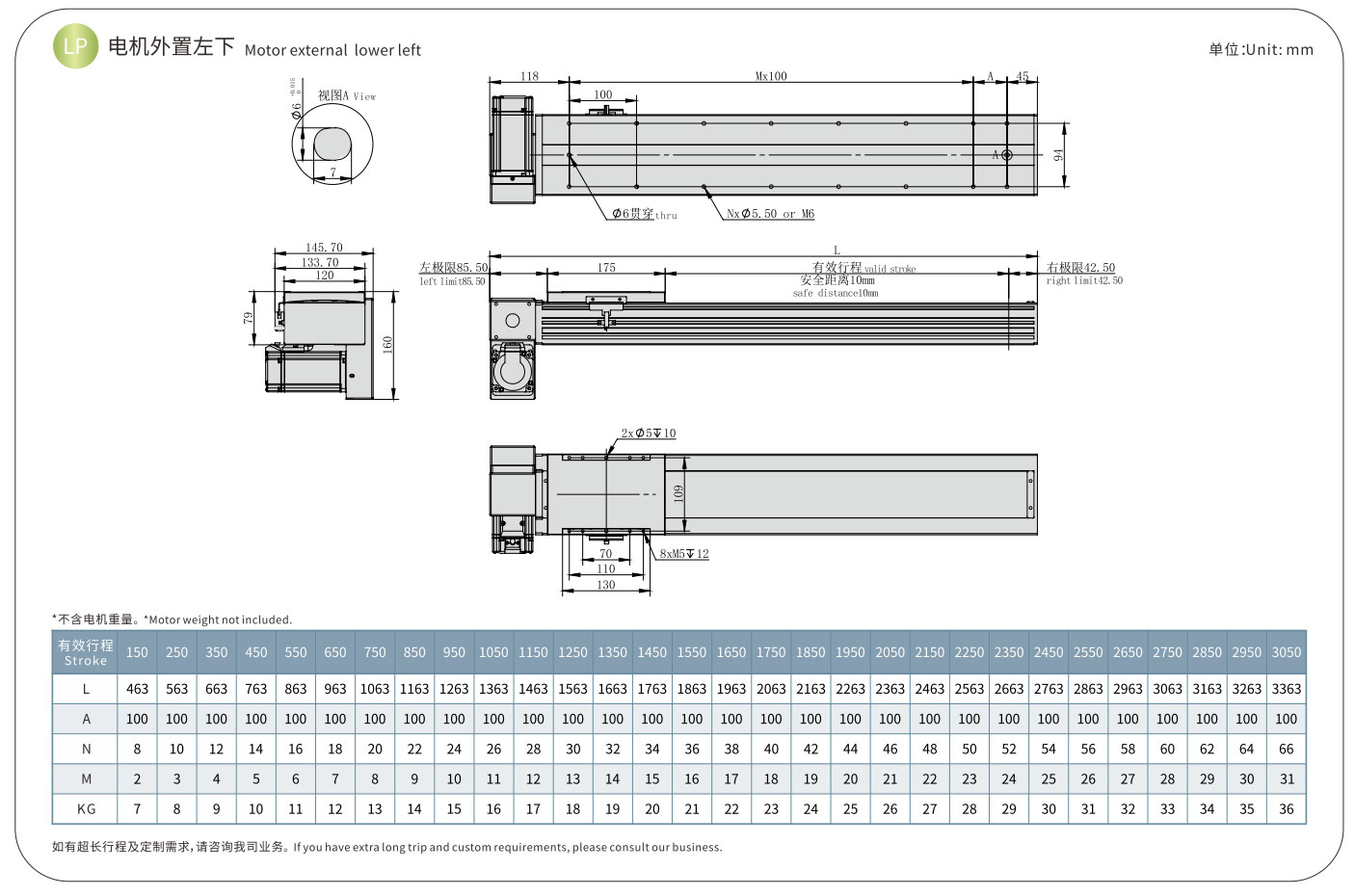
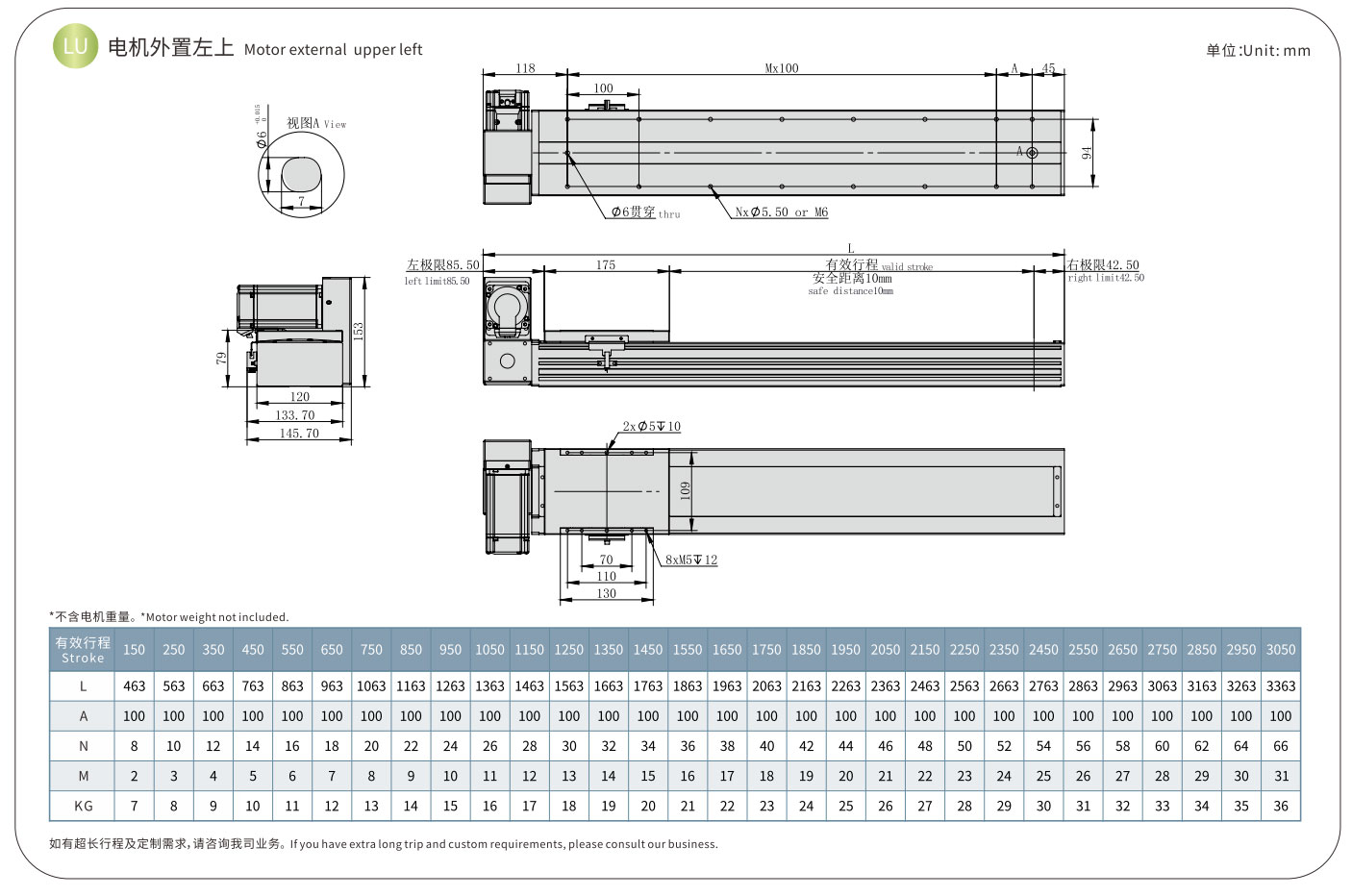
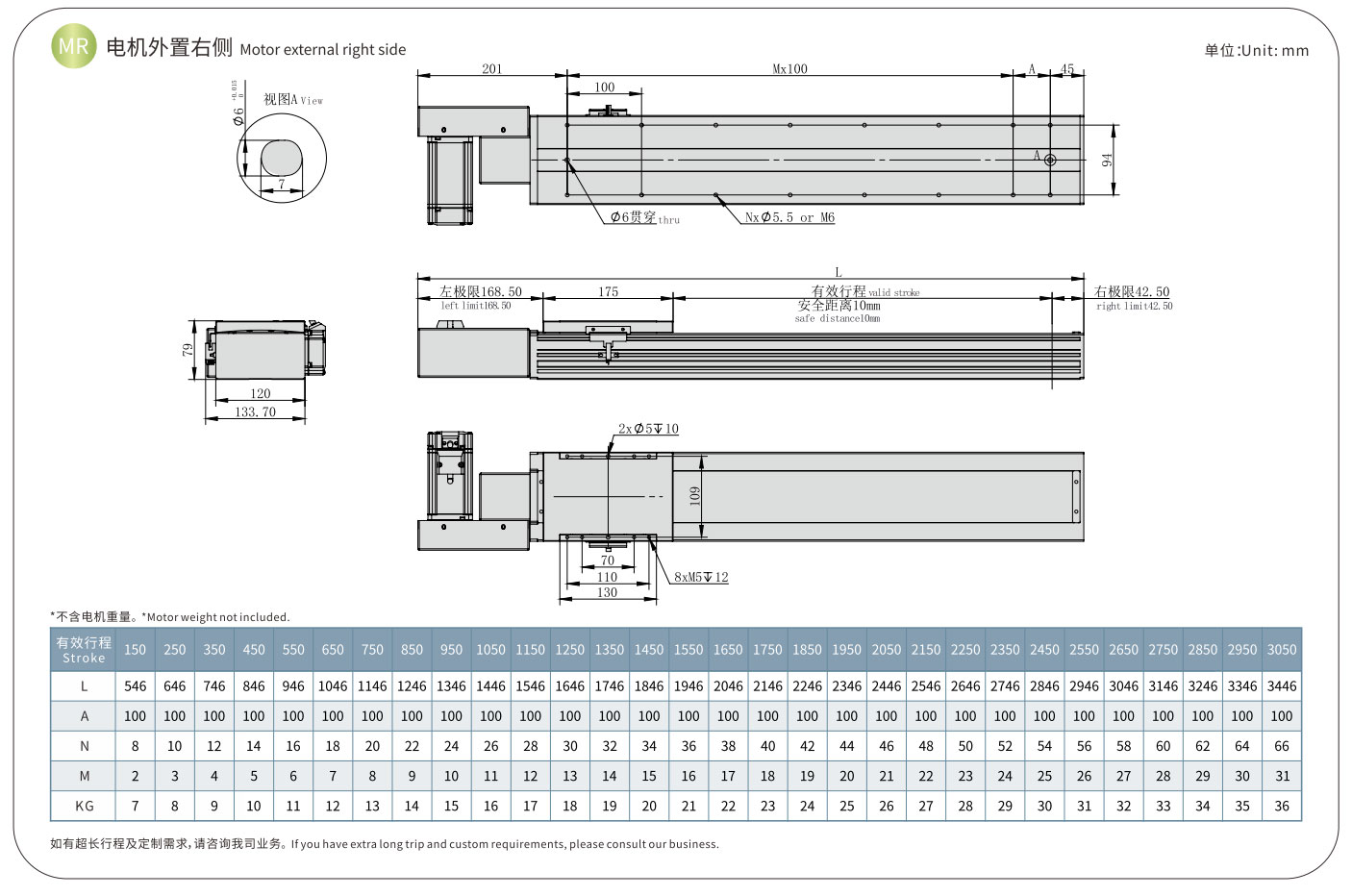
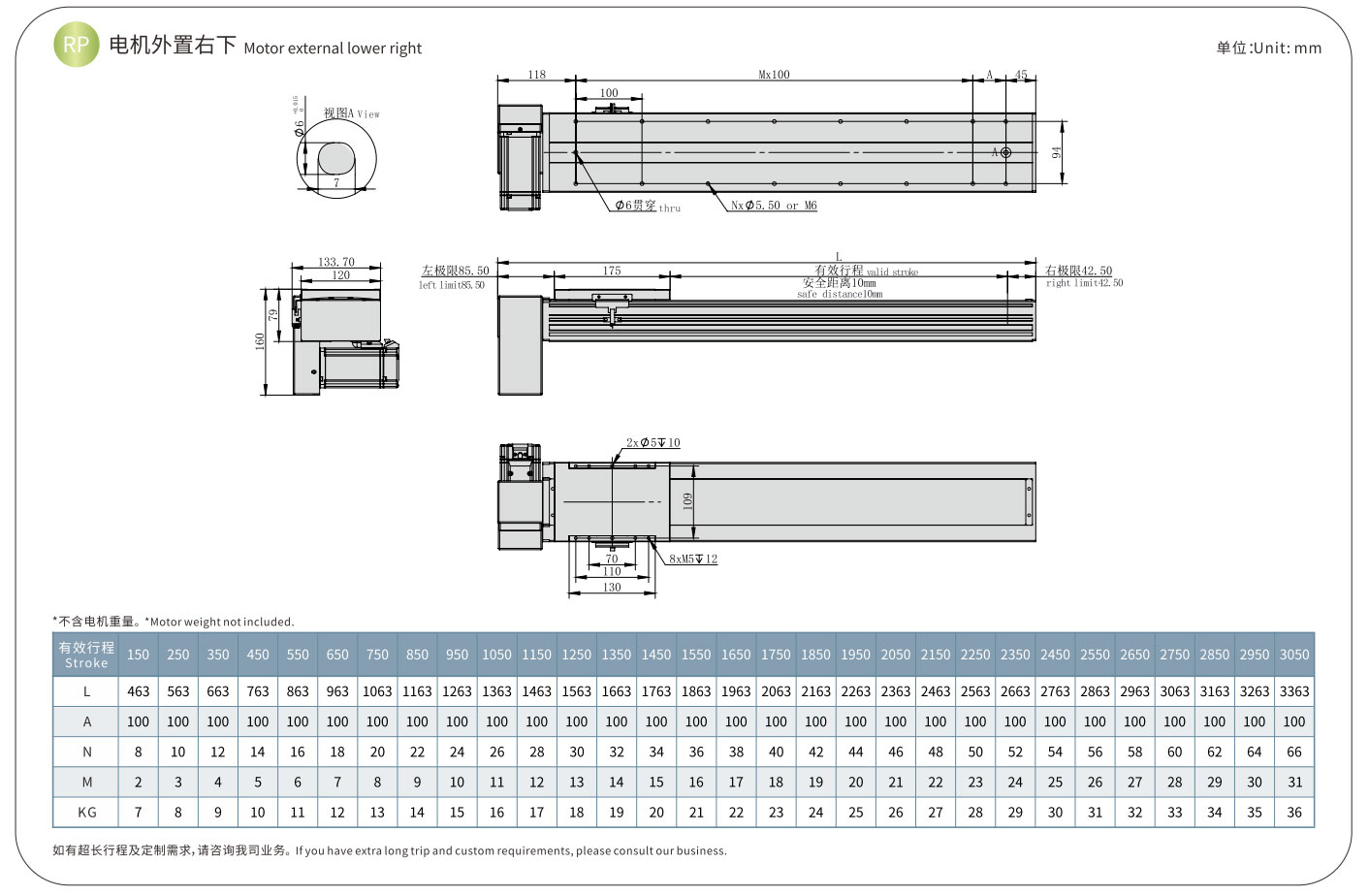
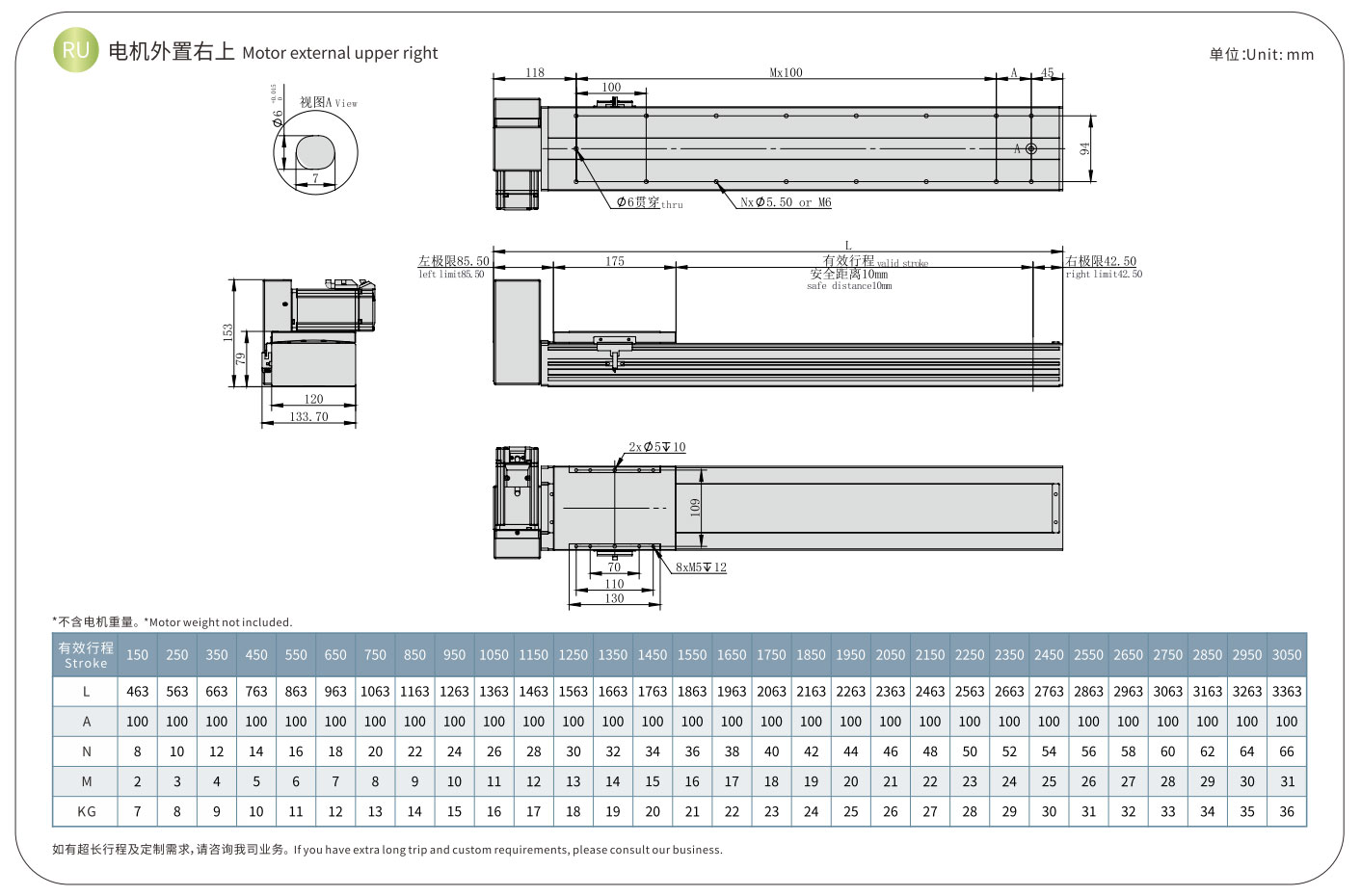
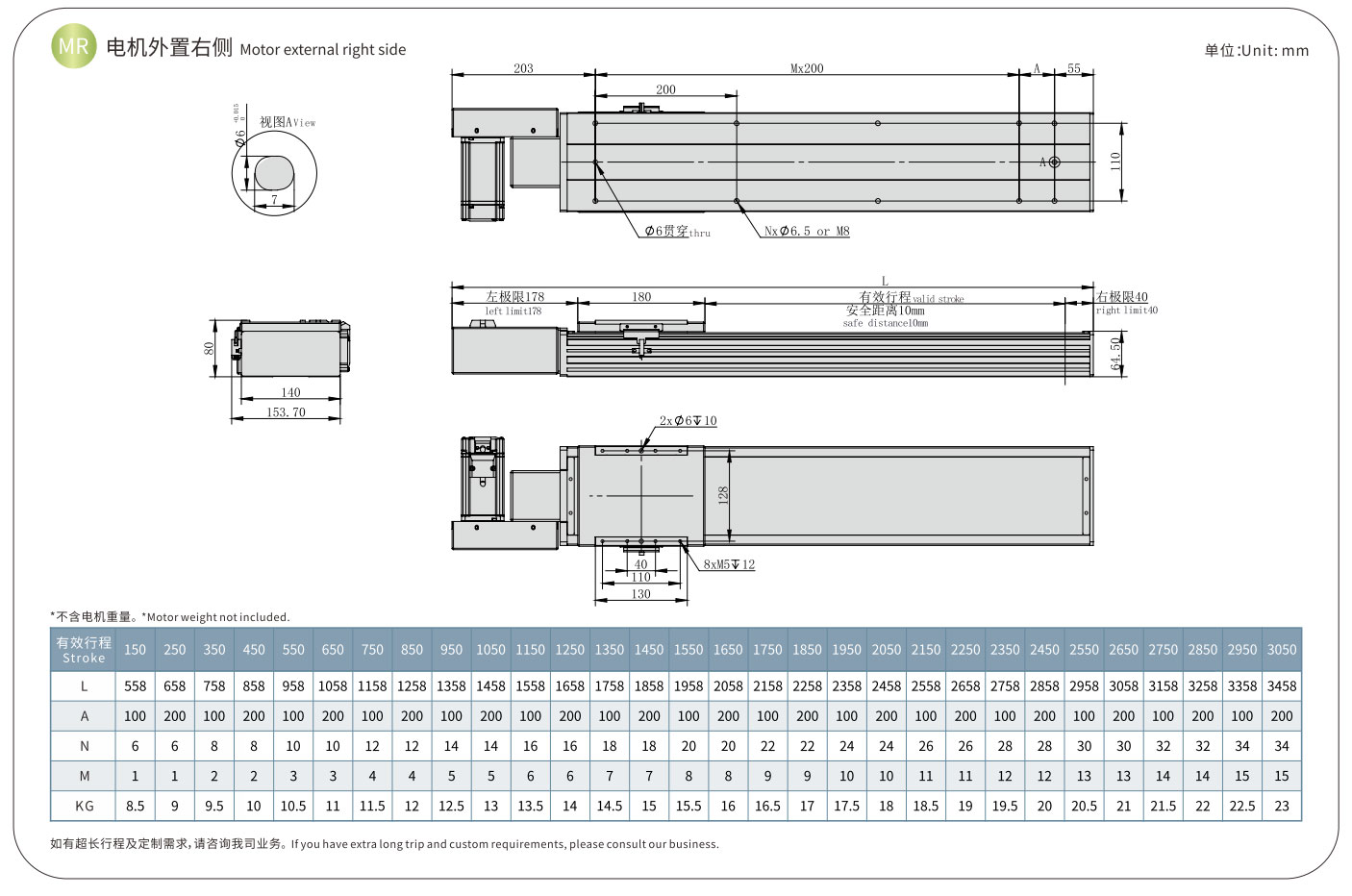
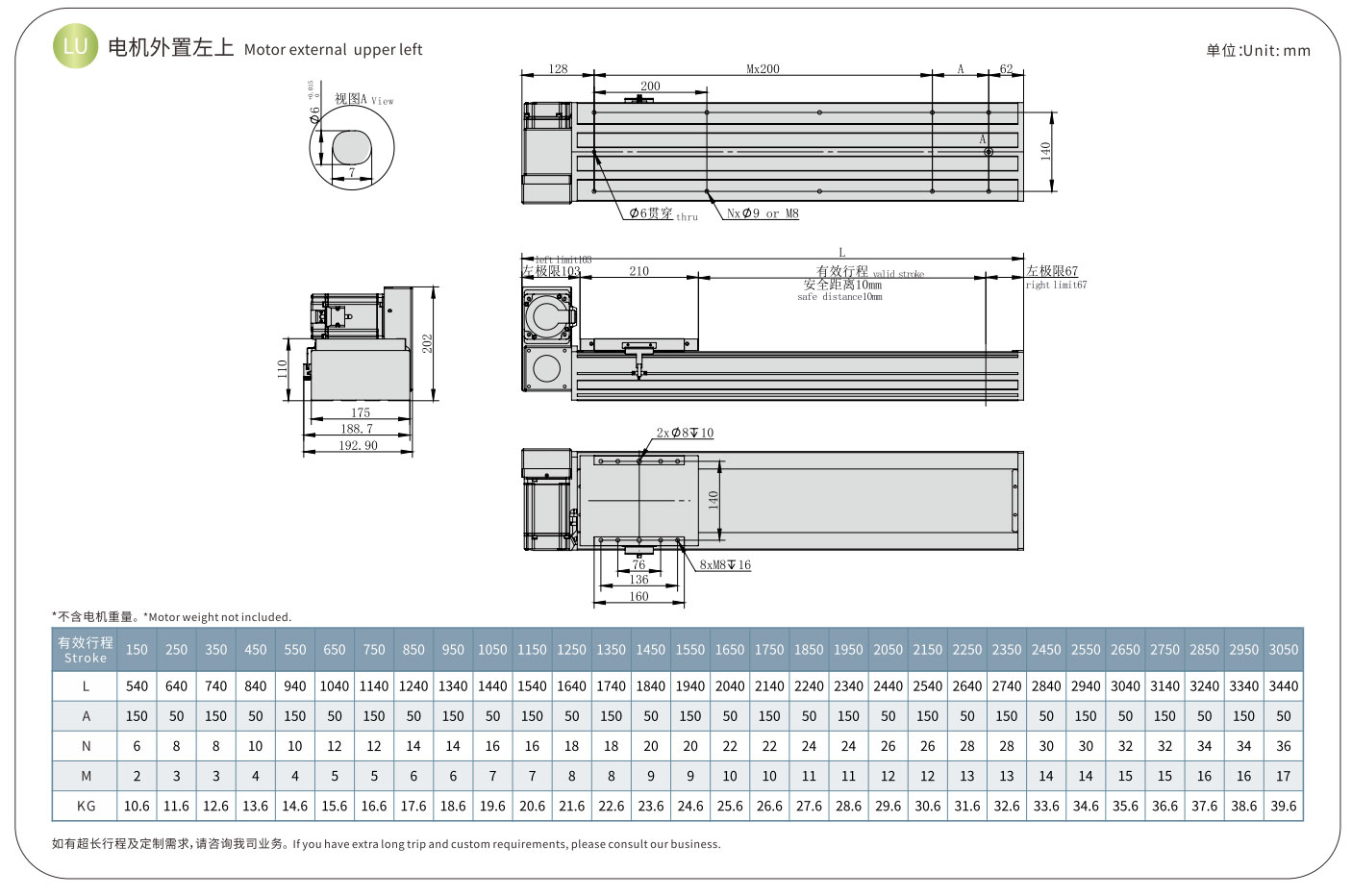
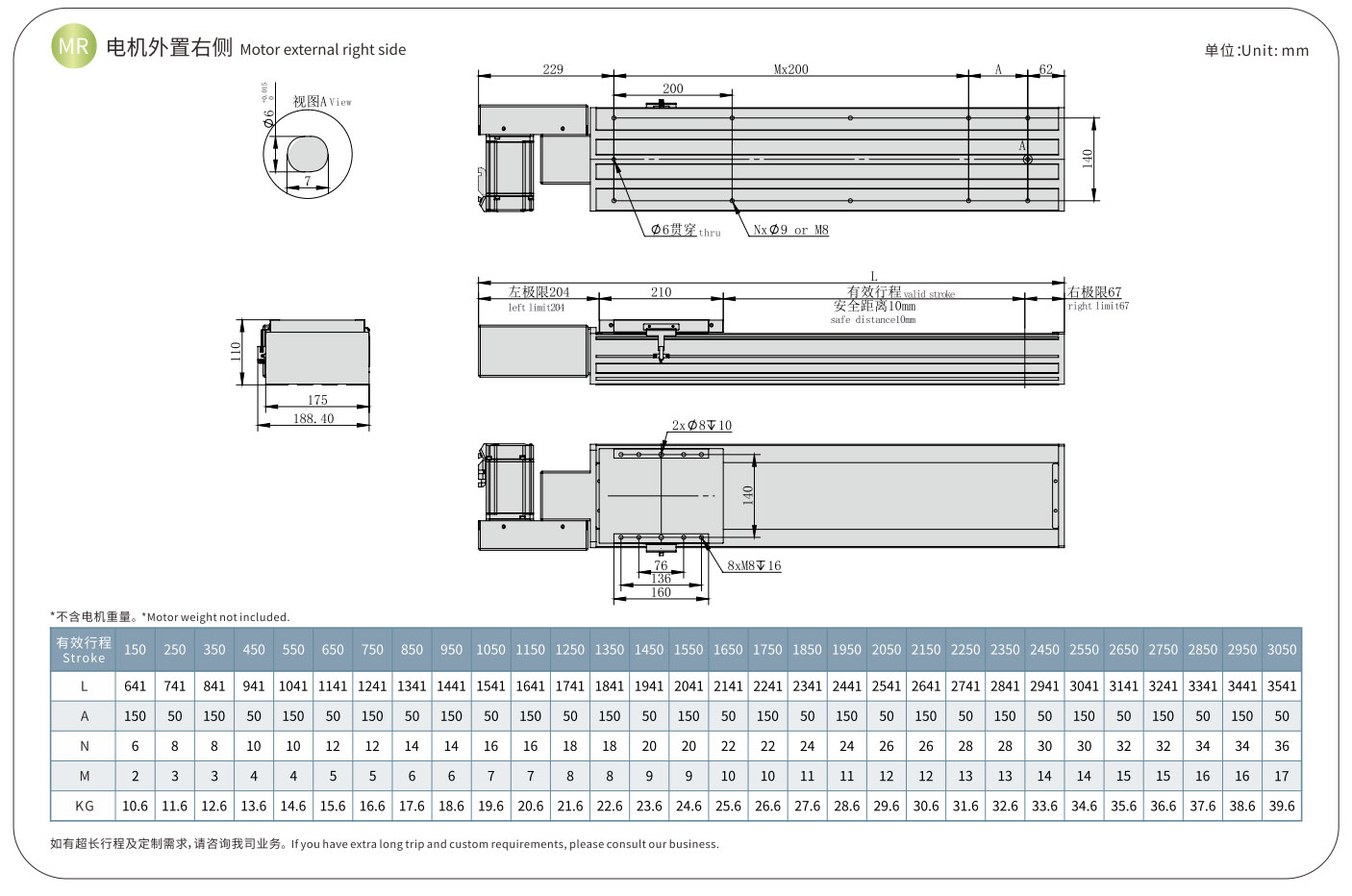
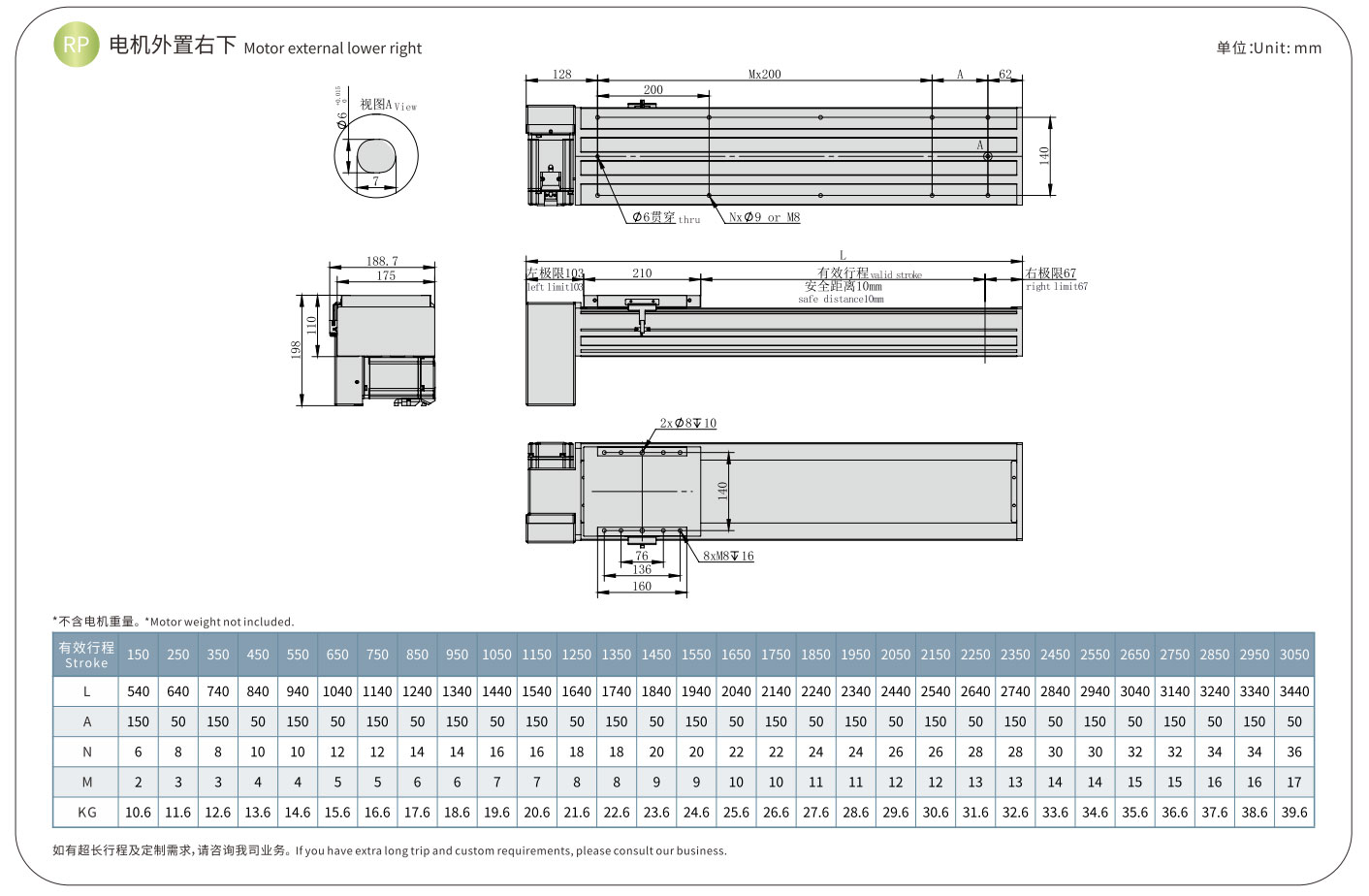
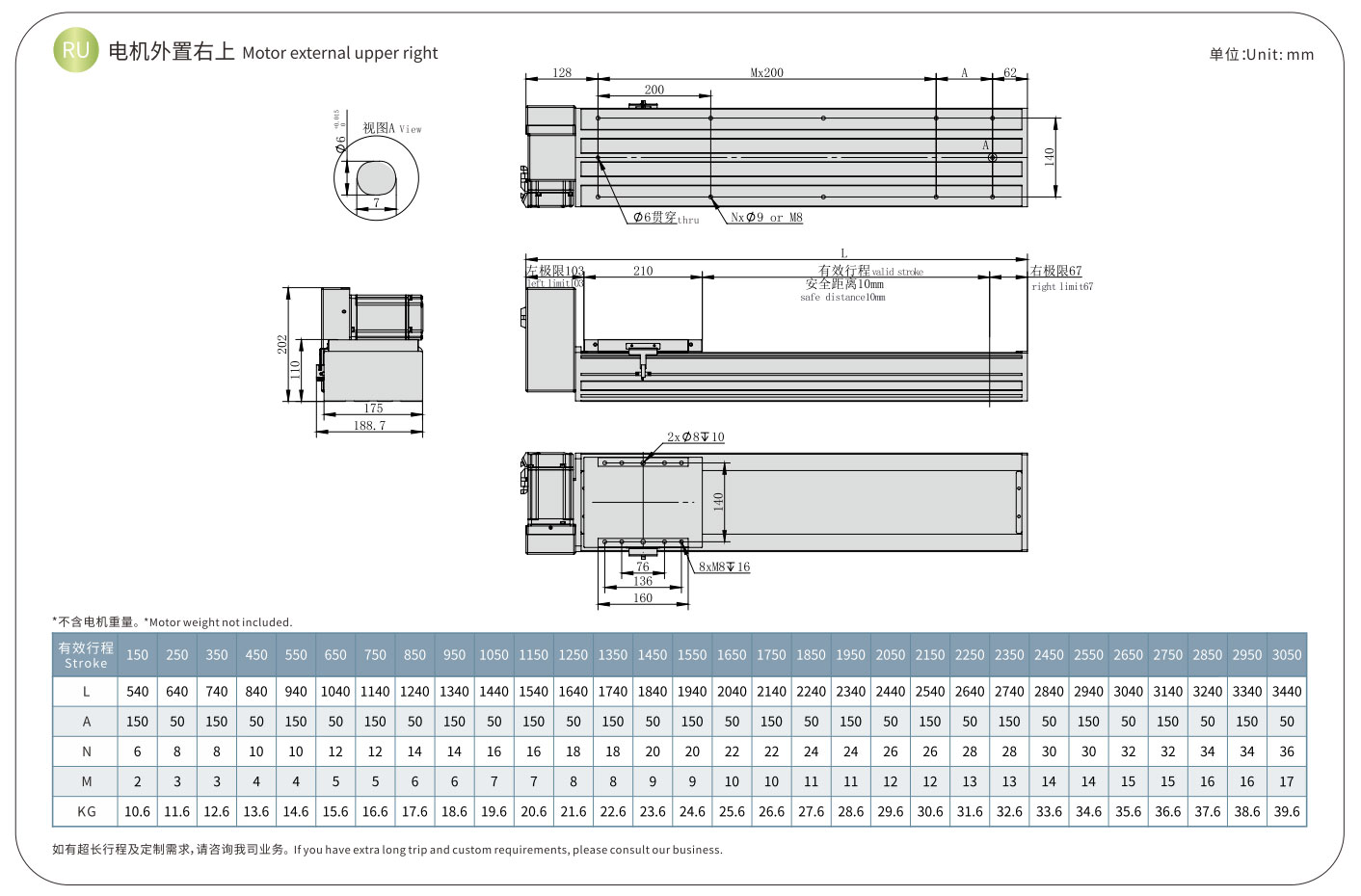
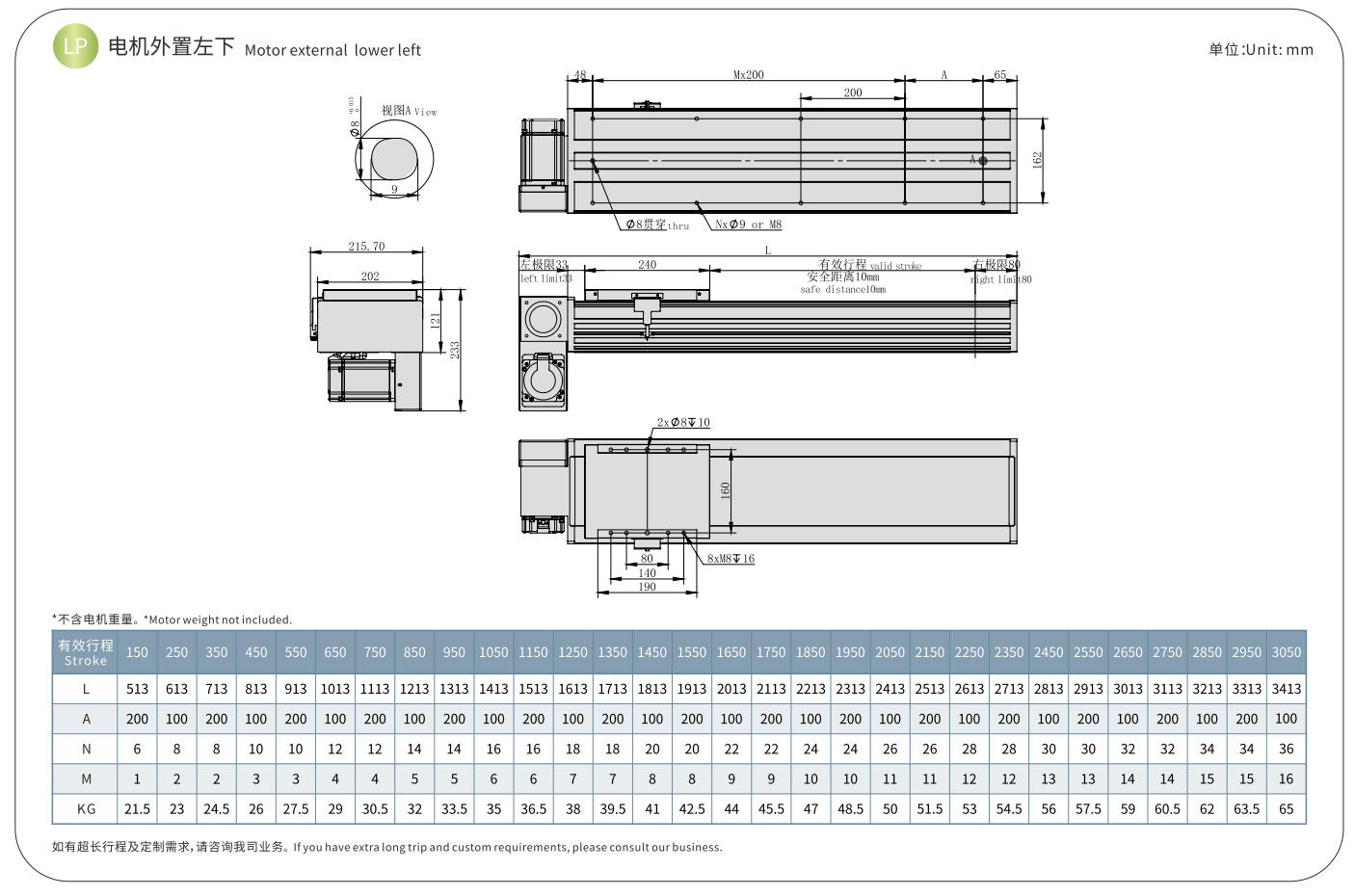
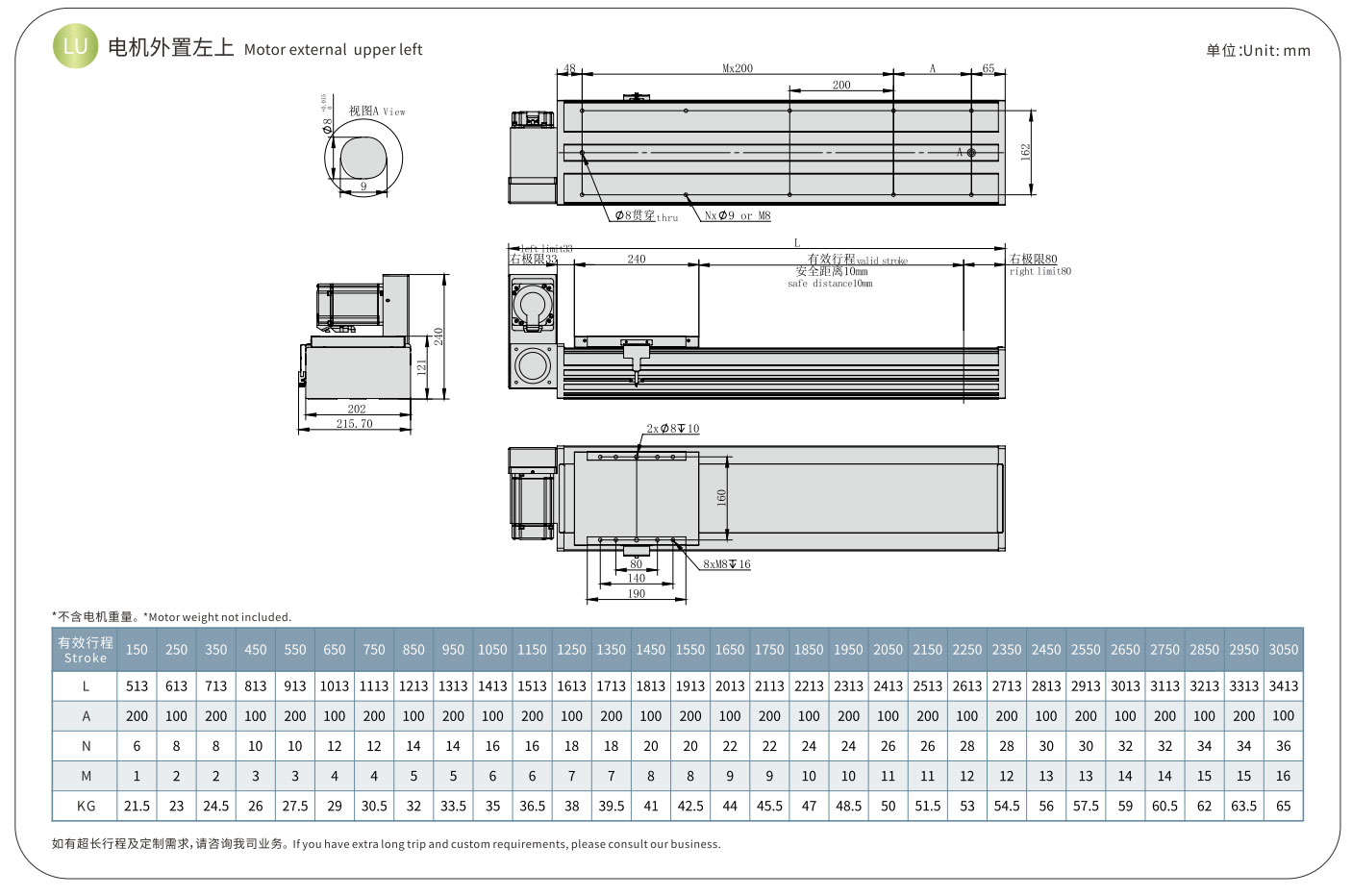
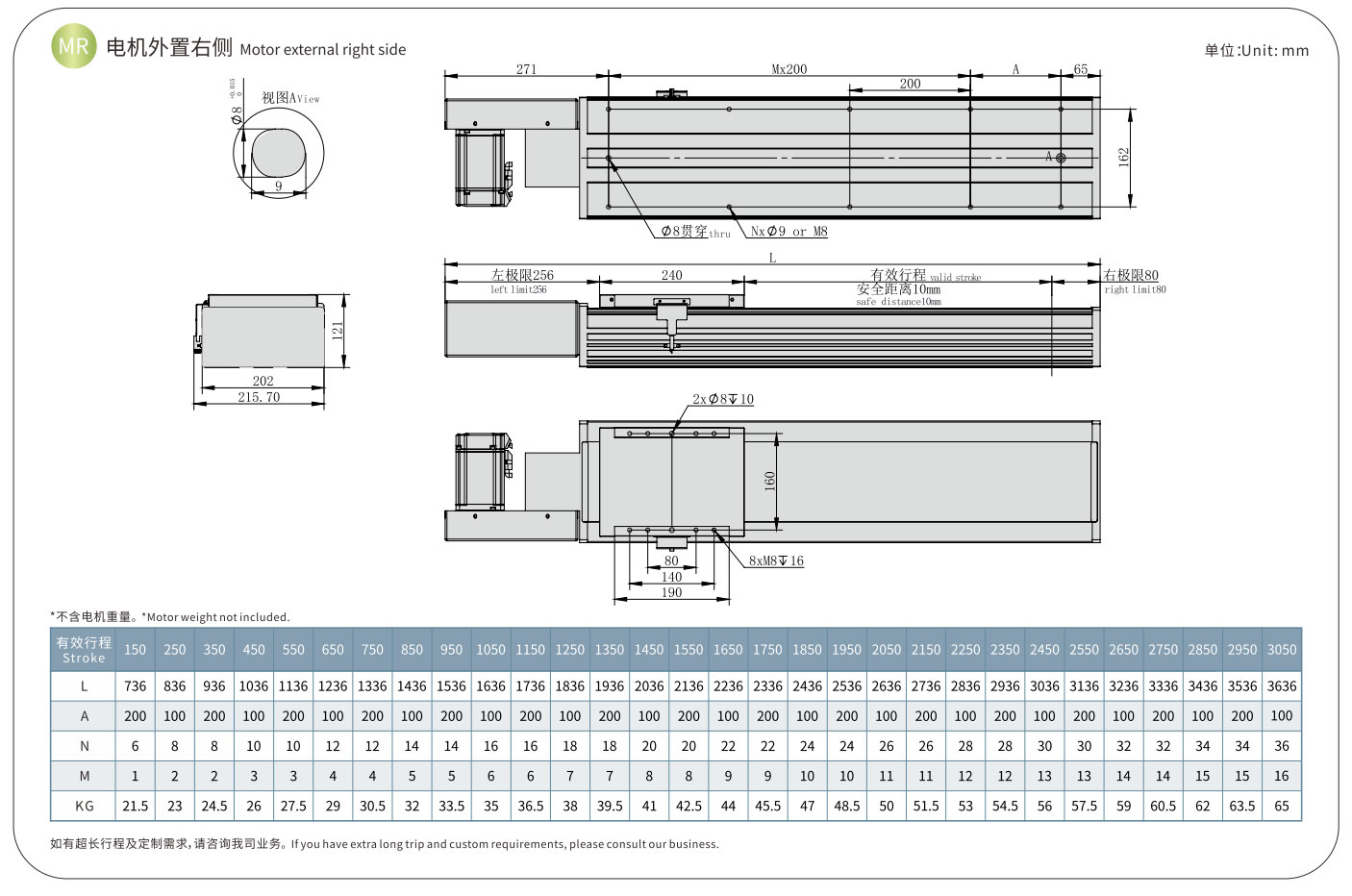
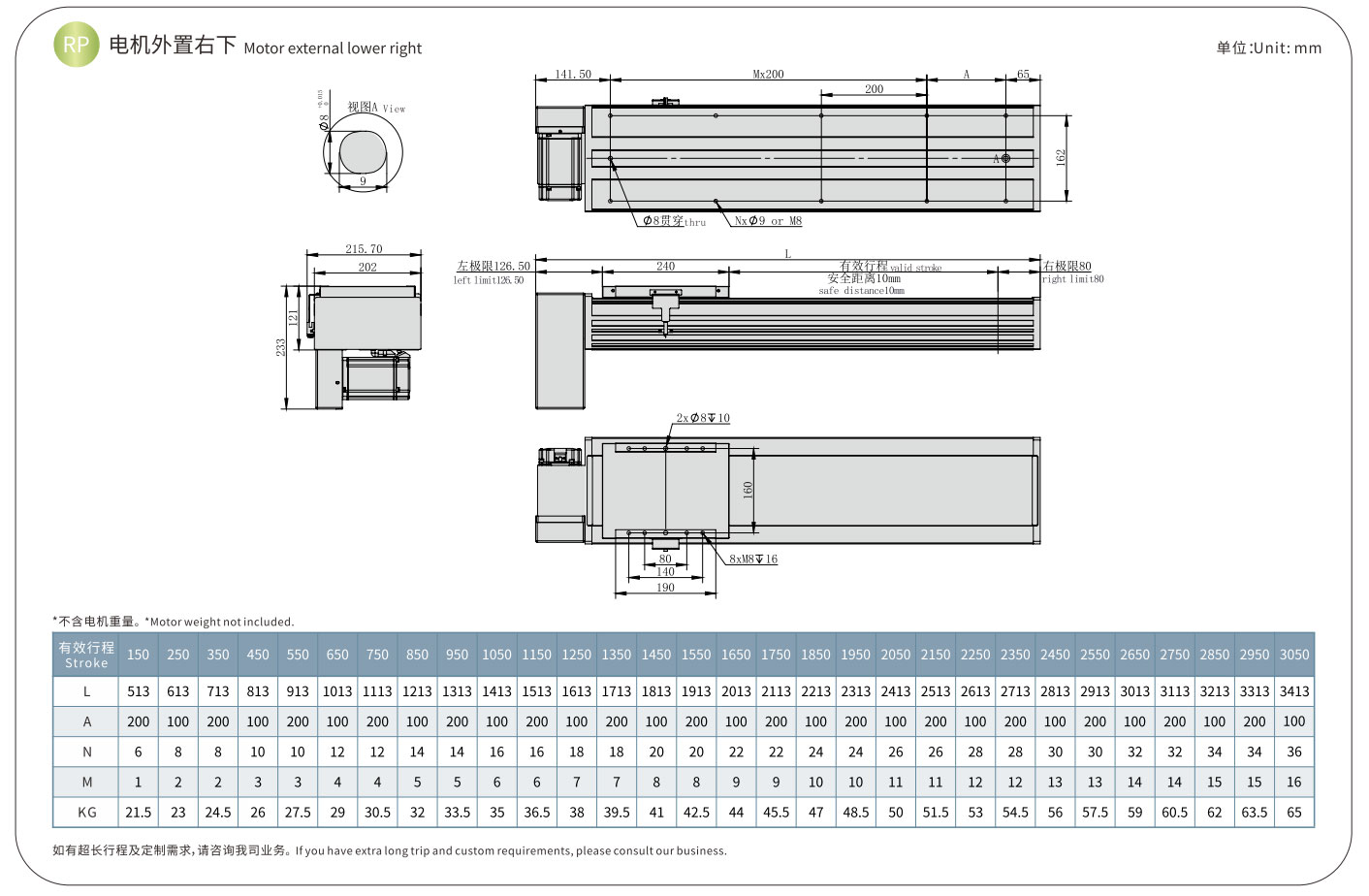
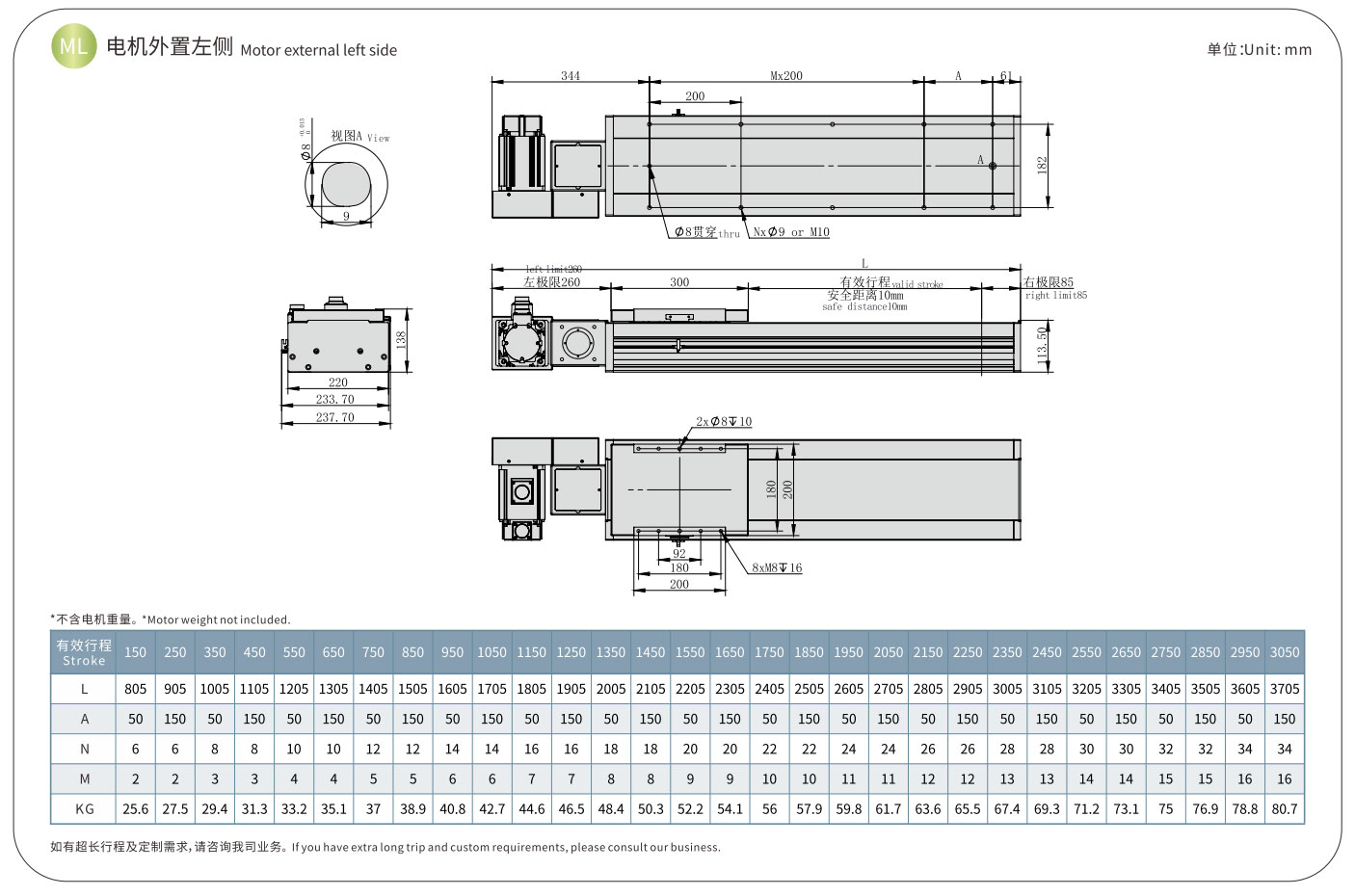
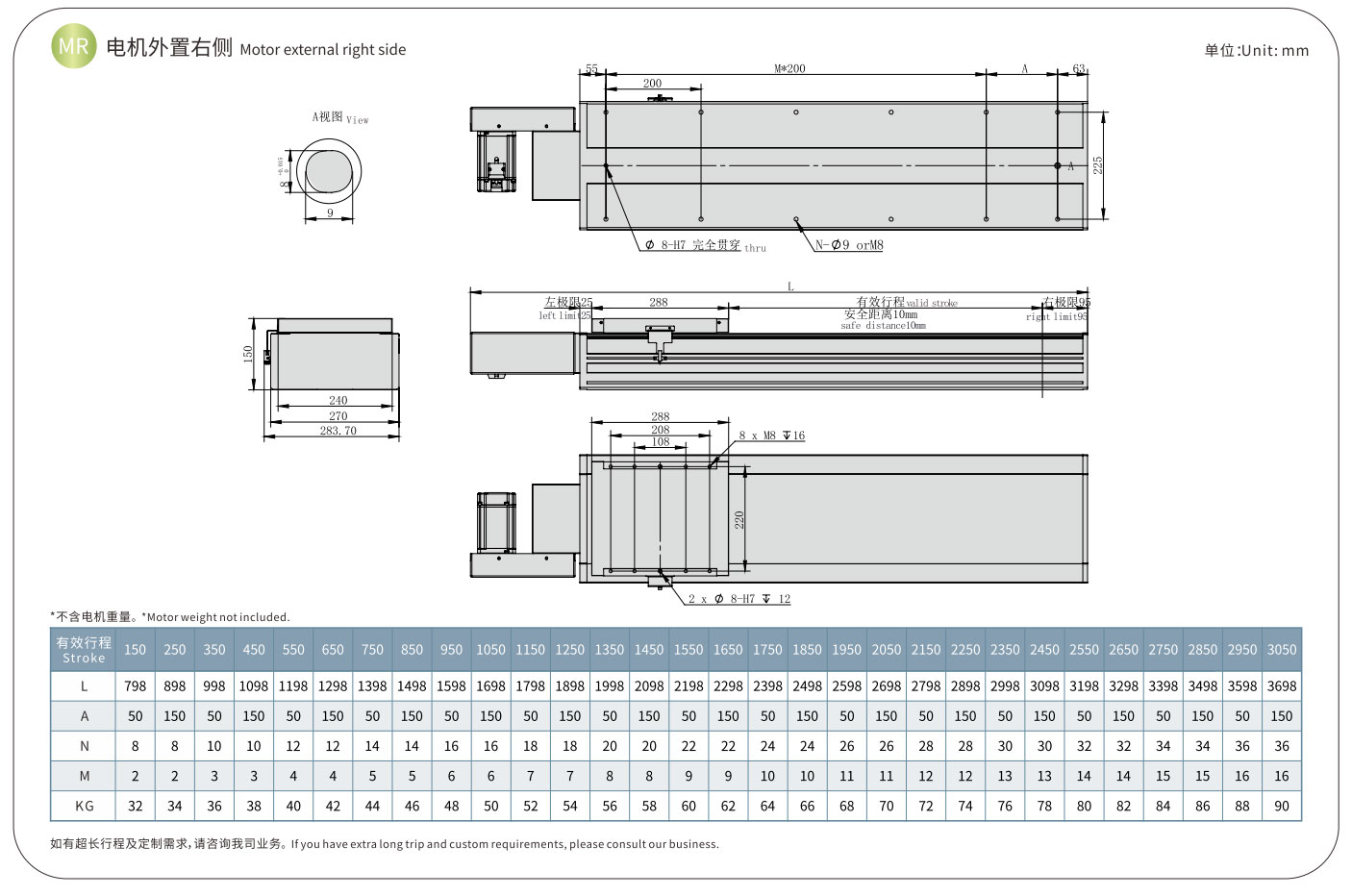
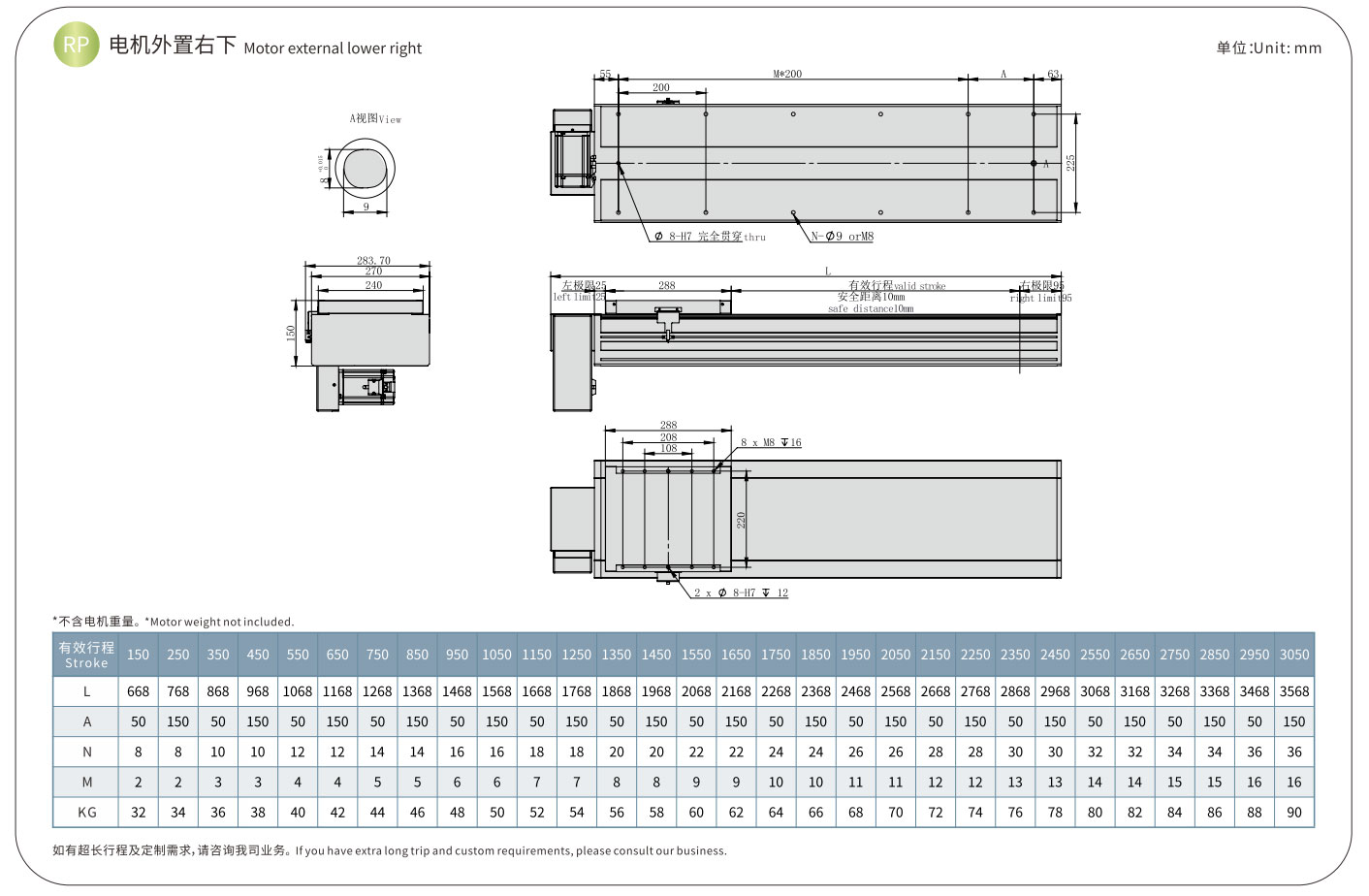
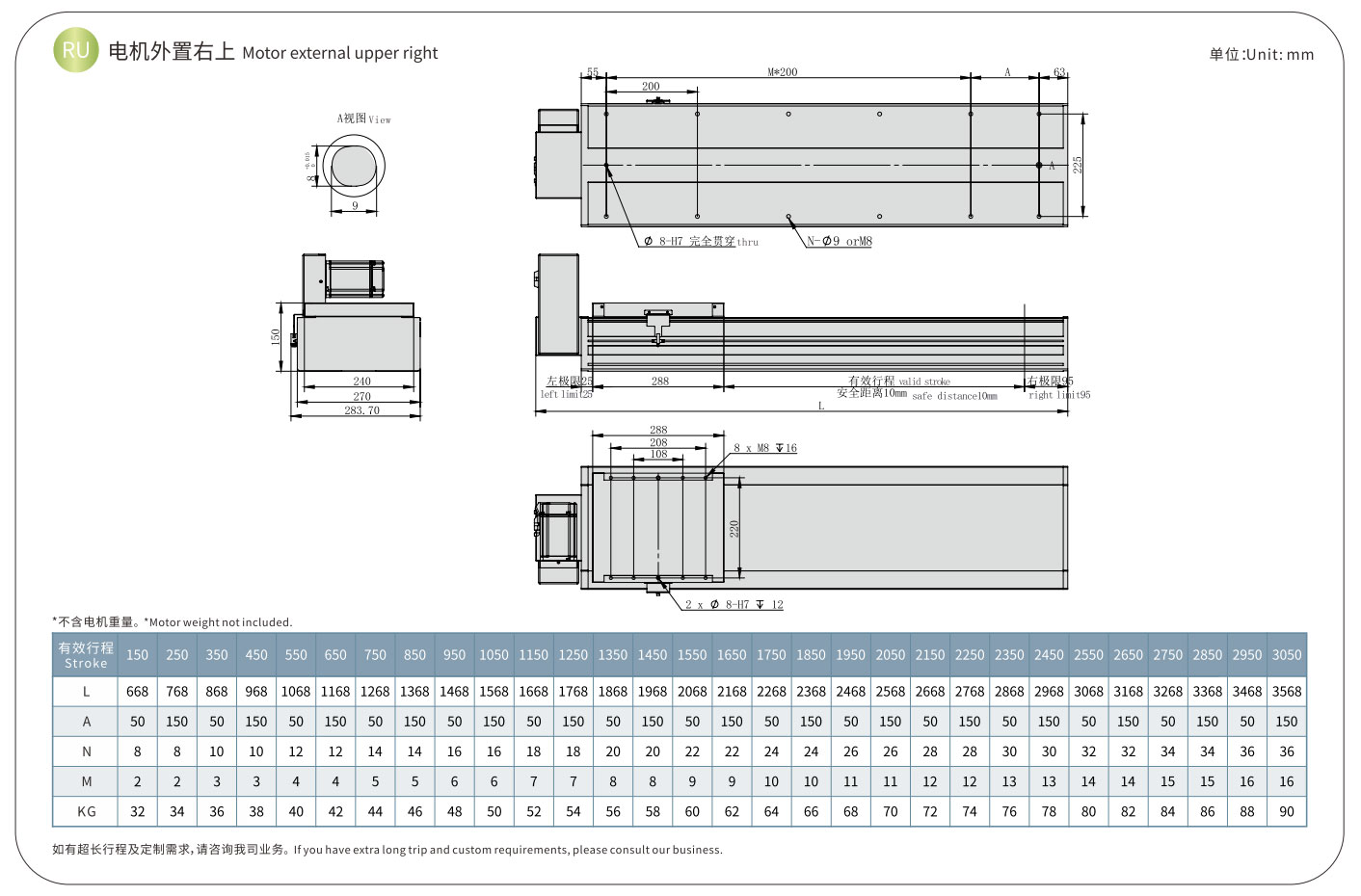
TPA ROBOT-yň nusgawy kemer bilen dolandyrylýan çyzykly hereketlendirijisi hökmünde, HCR seriýasy bilen deňeşdirilende, HCB seriýaly wagt kemeri bilen sürülýän slaýder, bu HCB seriýasynyň has uzyn urgy we has ýokary tizlikdigini aňladýar. “Servo” hereketlendirijisi bilen hereket edýän, diňe bir “servo” hereketlendirijisiniň ýokary takyklygyna eýe bolman, eýsem ýokary tizlikli we süýşýän basgançagyň ýokary berkligine-de artykmaçlyklaryna eýe. Dolandyrmak aňsat we PLC we beýleki ulgamlar bilen aňsat birikdirilip bilner. Slaýd hereketlendirijisi ýeňil agramy, kiçi göwrümi we berk berkligi bilen bitewi ekstrudirlenen alýumin profilinden ýasalýar. Gurnama ululygy we urgy talaplara laýyklykda düzülip bilner we gurnama boltlar bilen düzedilip bilner. Birnäçe ugurlaryň utgaşdyrylmagy arkaly, dürli awtomatlaşdyryş enjamlarynyň çyzykly hereket ulgamlaryna emele gelip biler, mehaniki tutawaçlar, howa gysgyçlary we beýleki gurallar bilen, ol aýratyn Kartezian robotlaryna ýa-da gantry robotlaryna öwrülip biler.

HCB65S

HCB-85D

HCB-105D

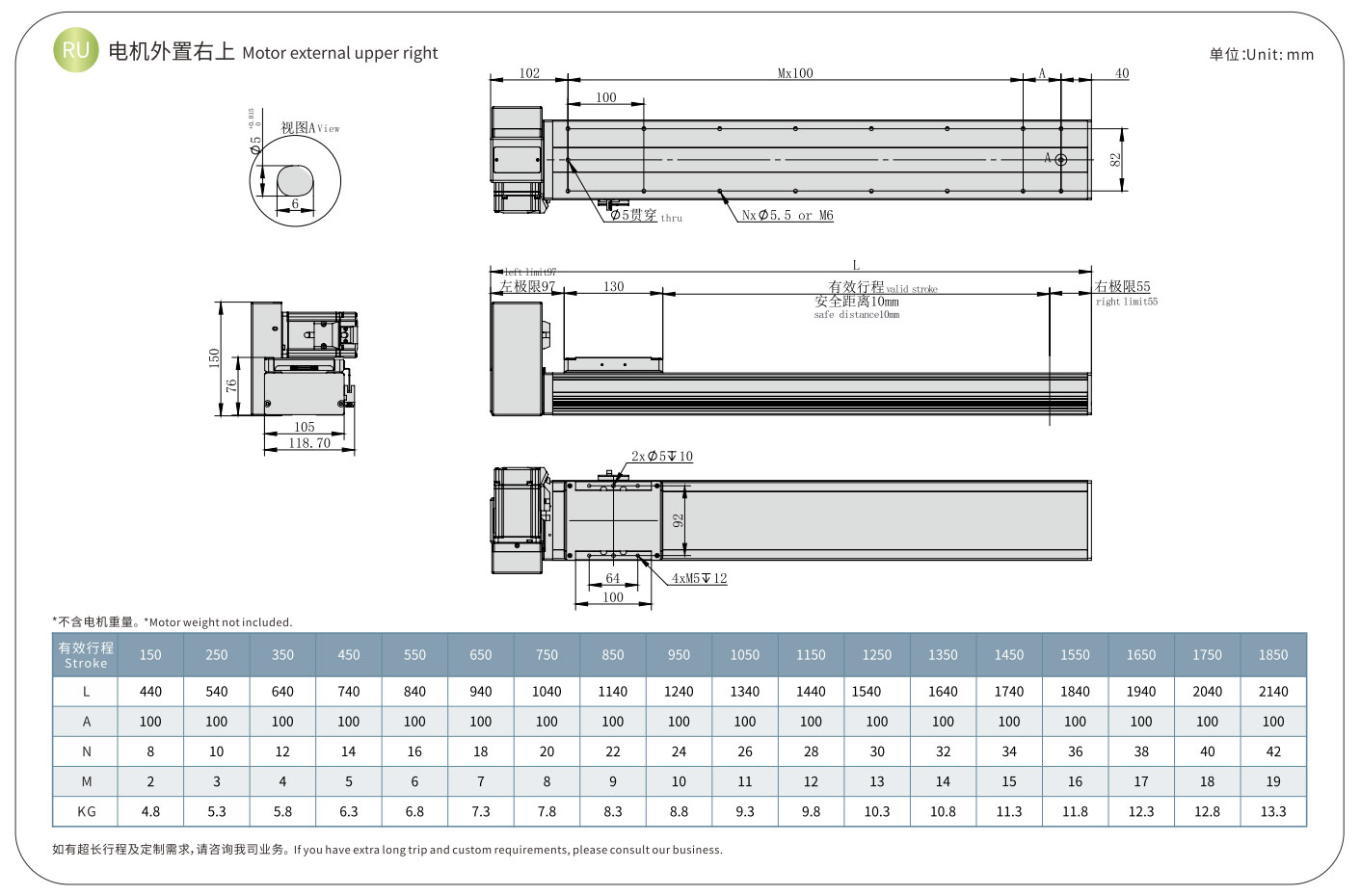
HCB-120D

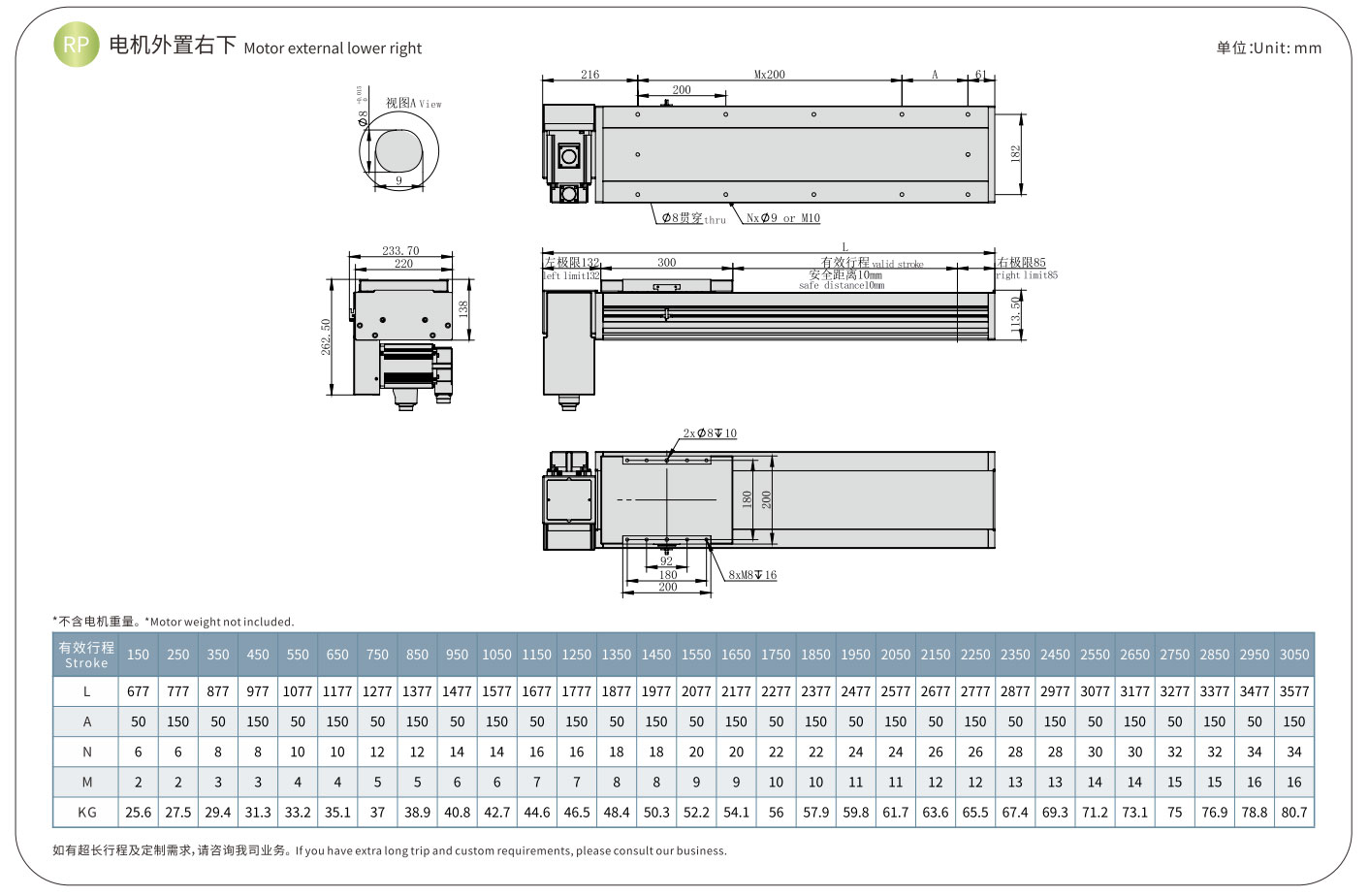
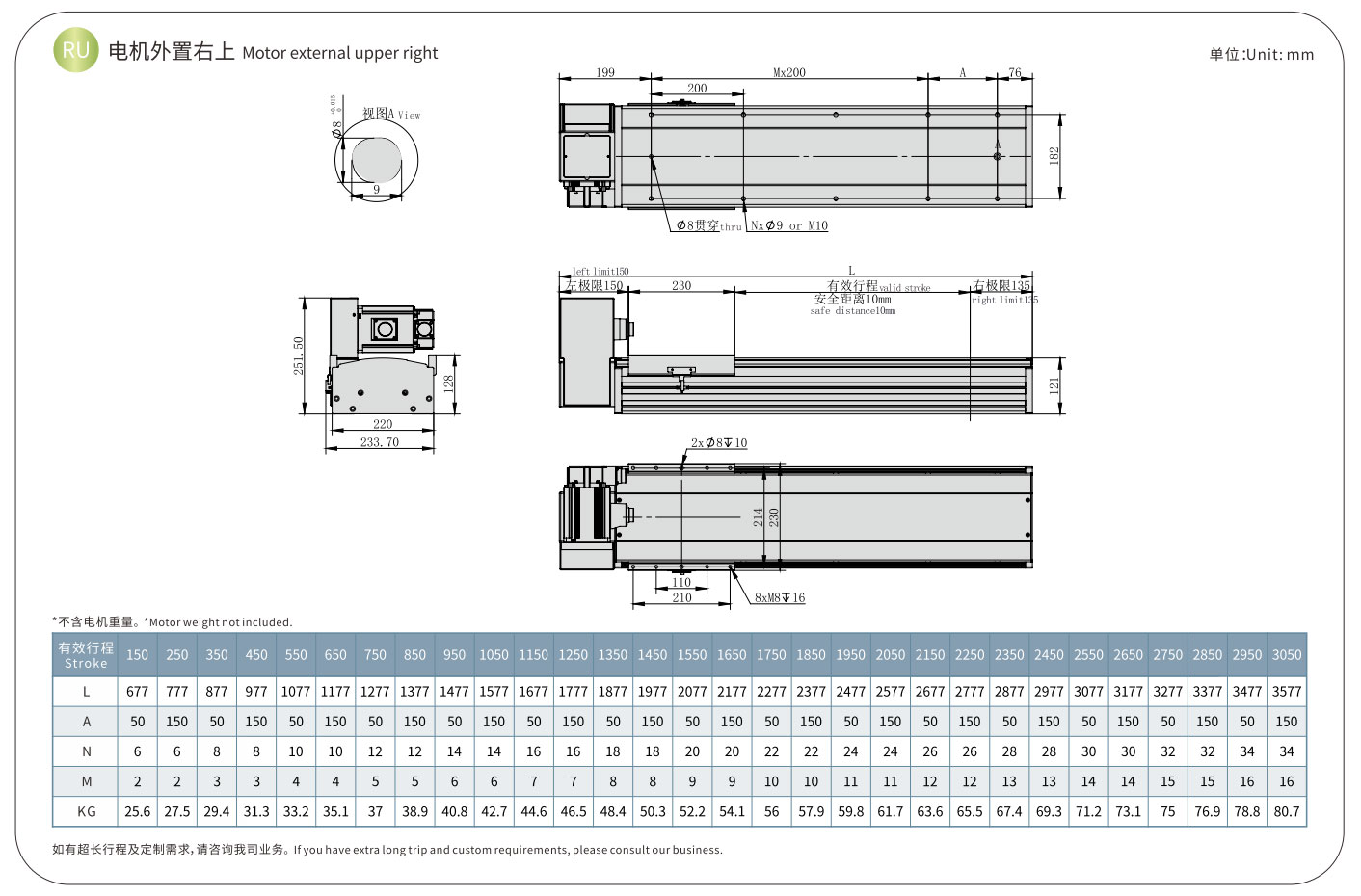
HCB-270D
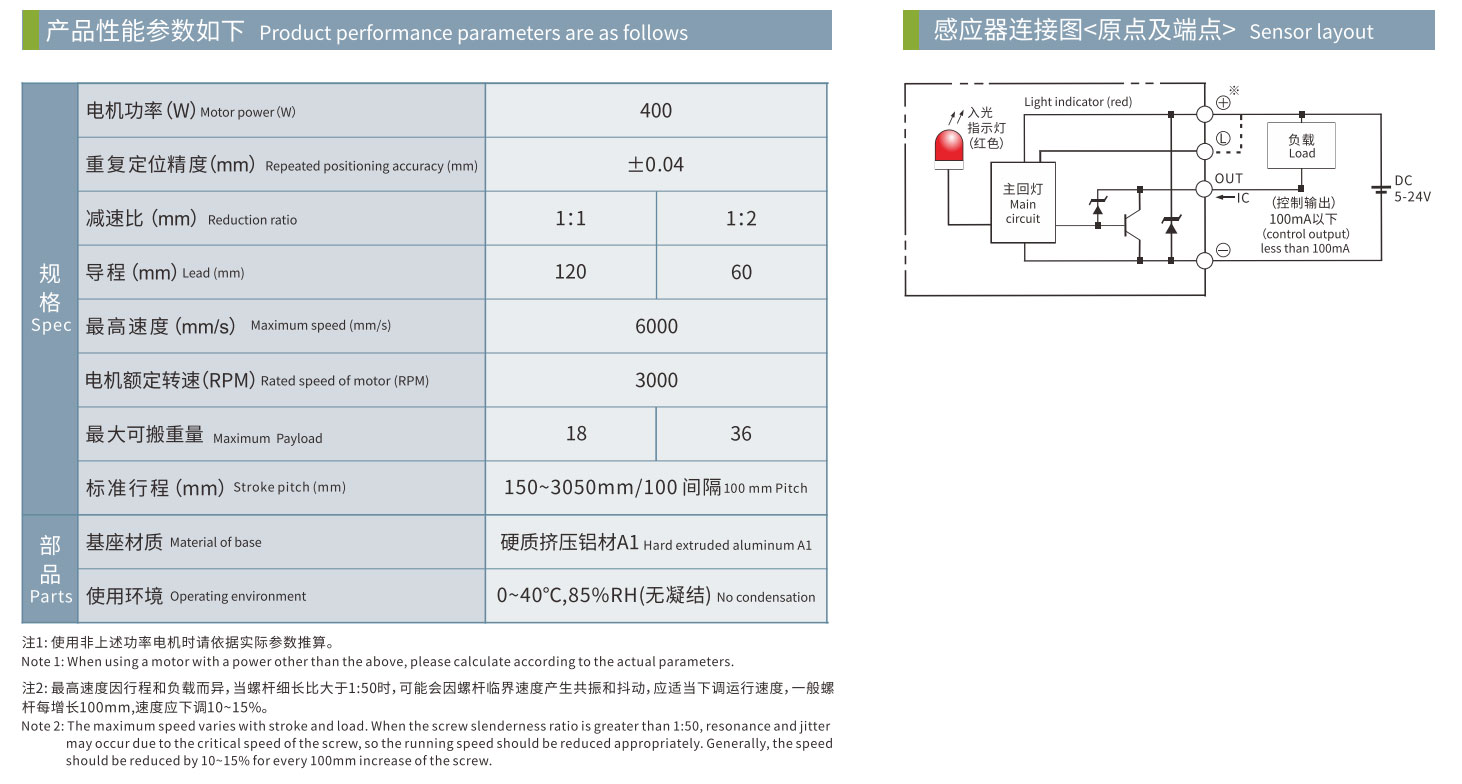
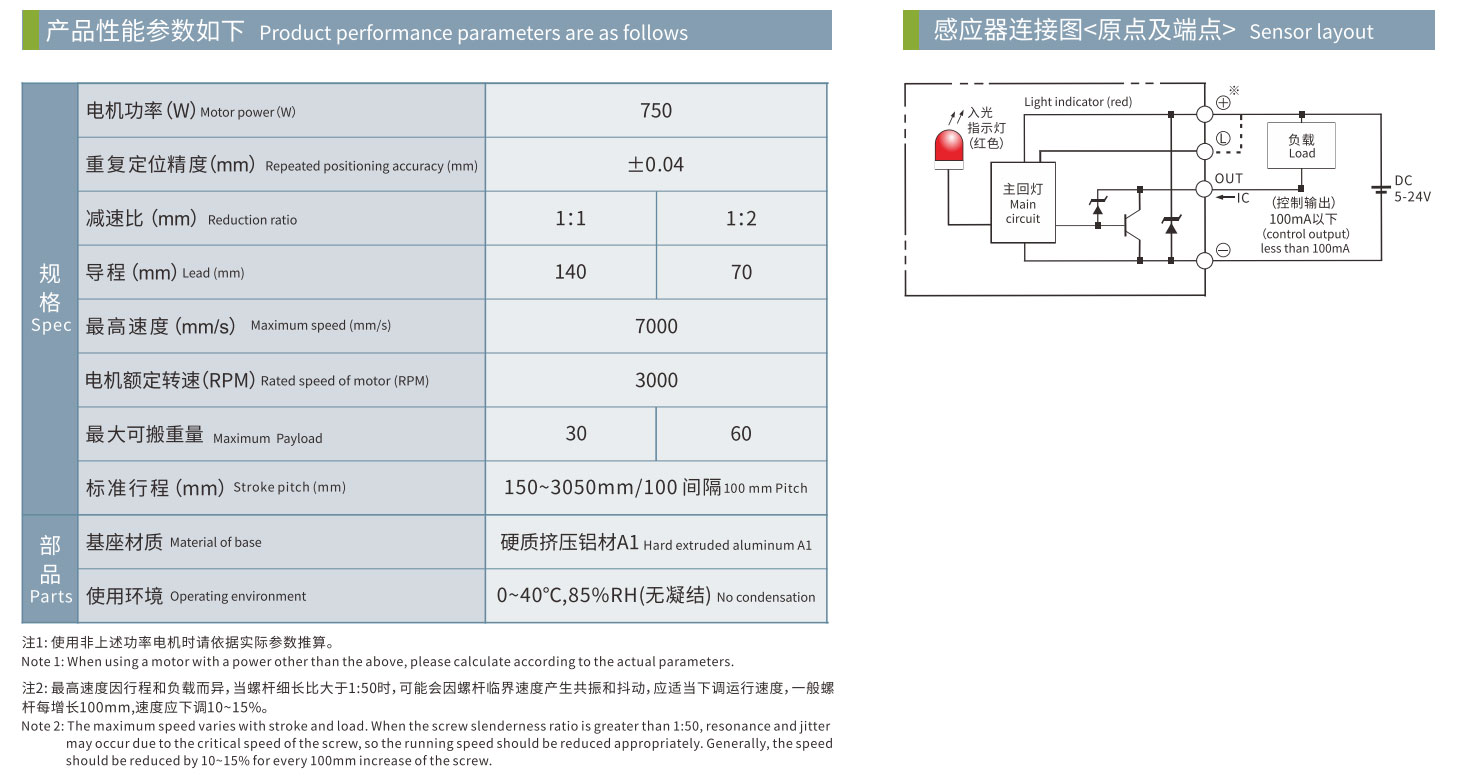
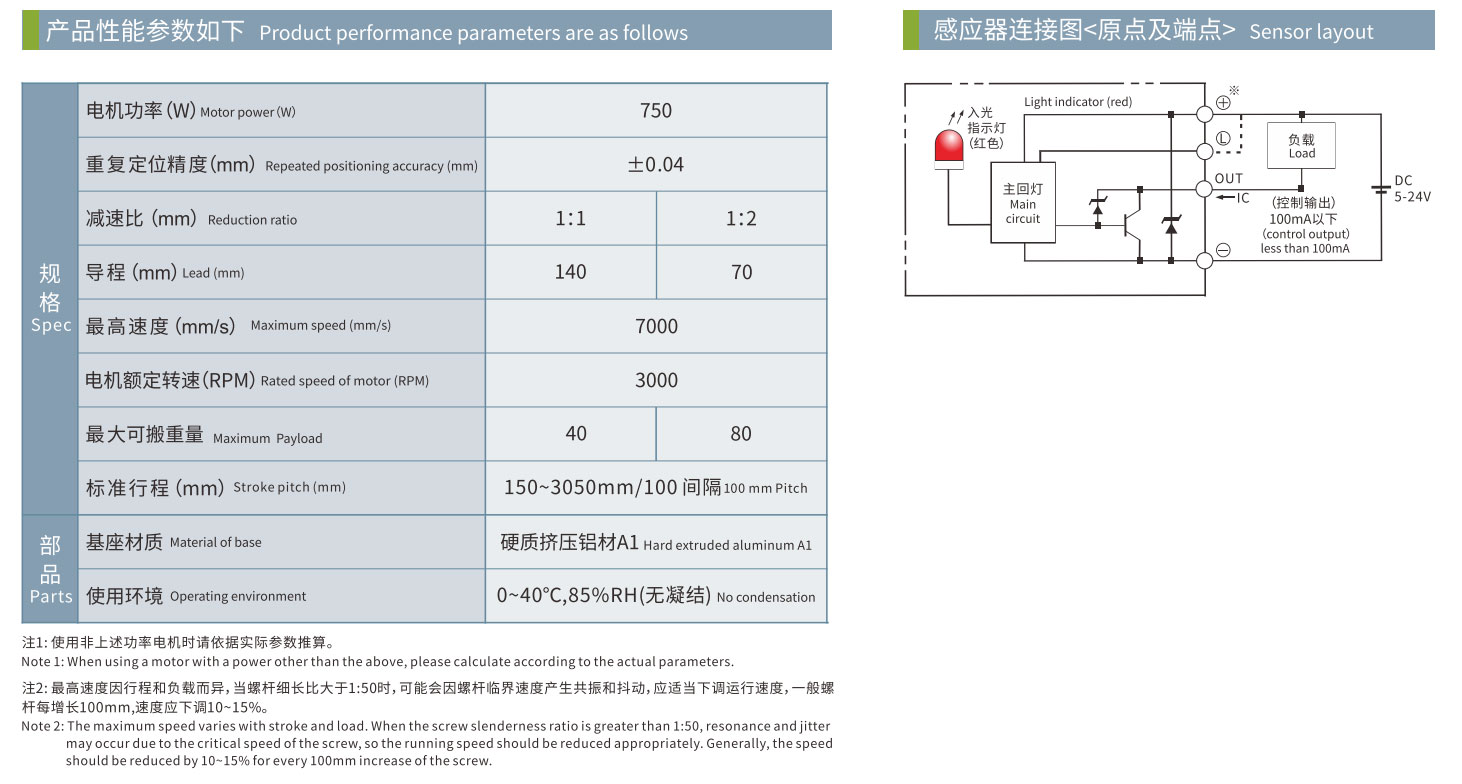
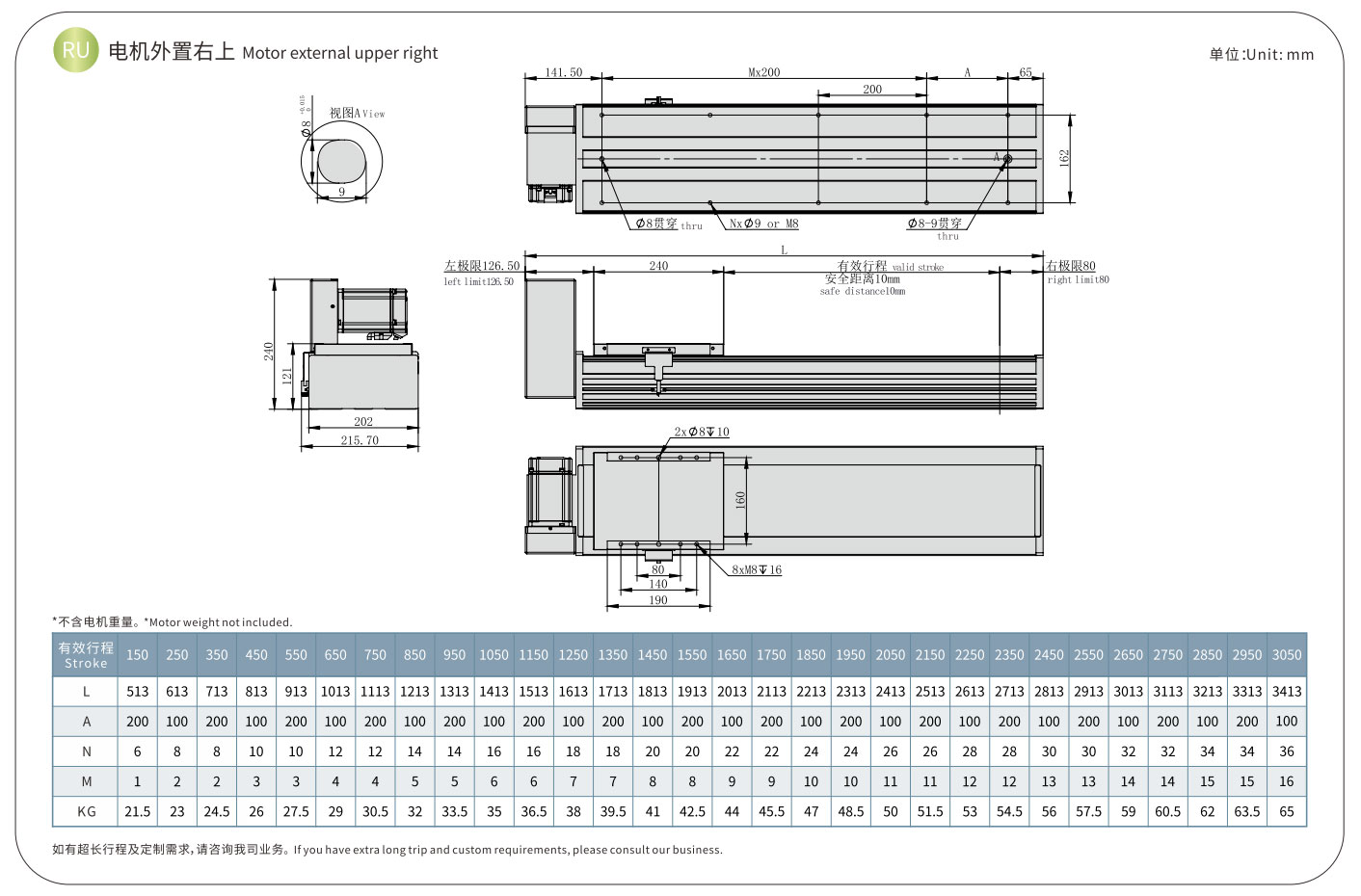
Aýratynlyklary
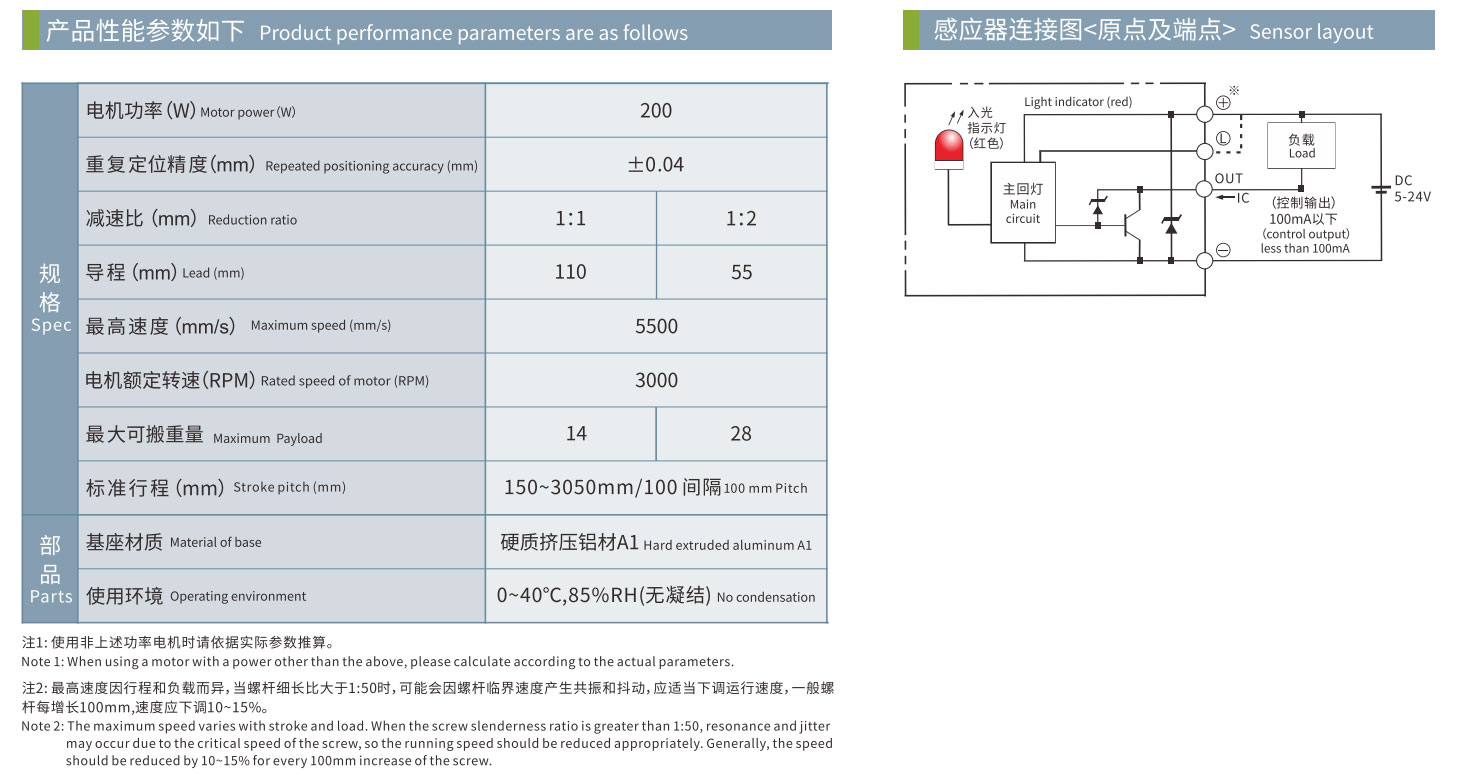
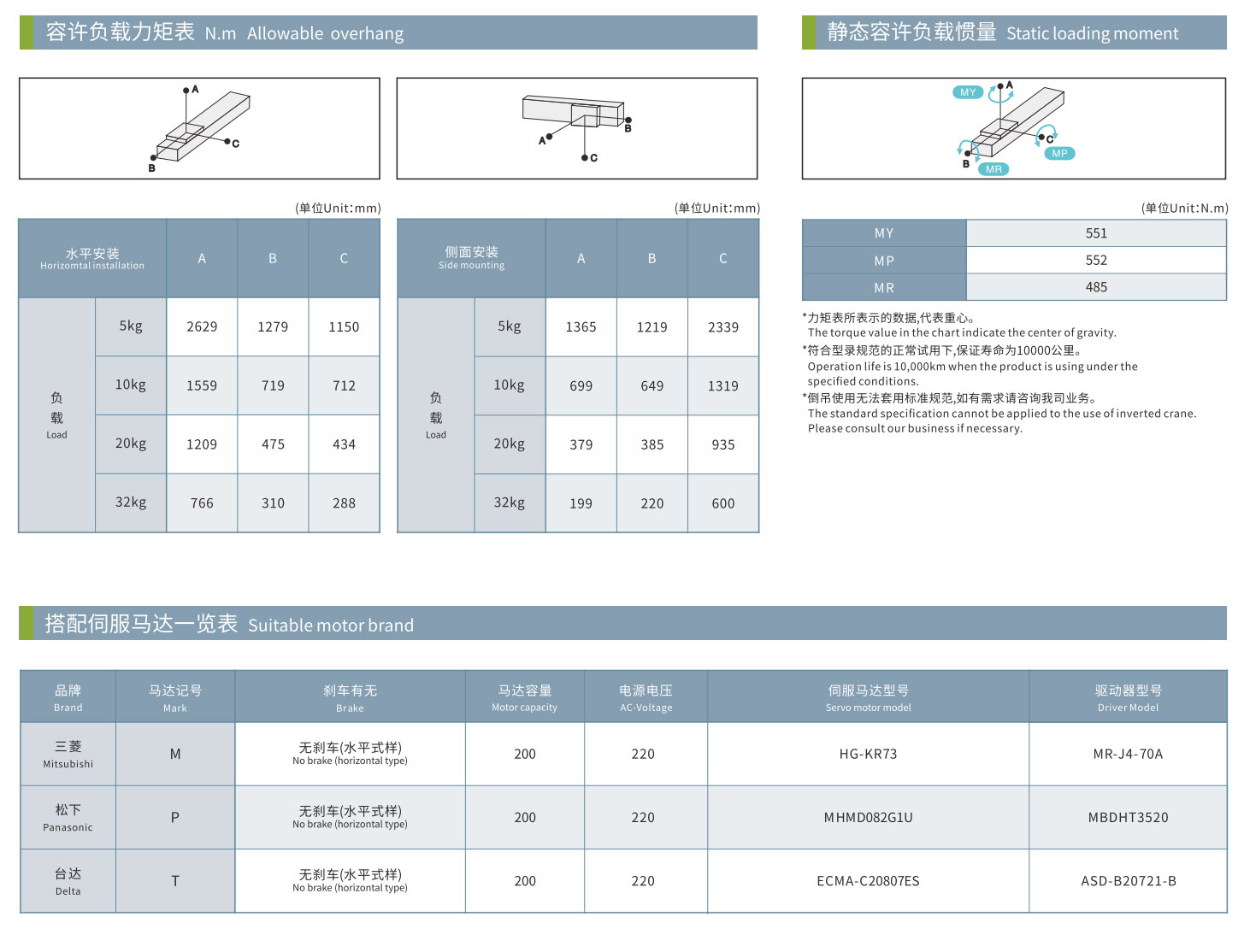
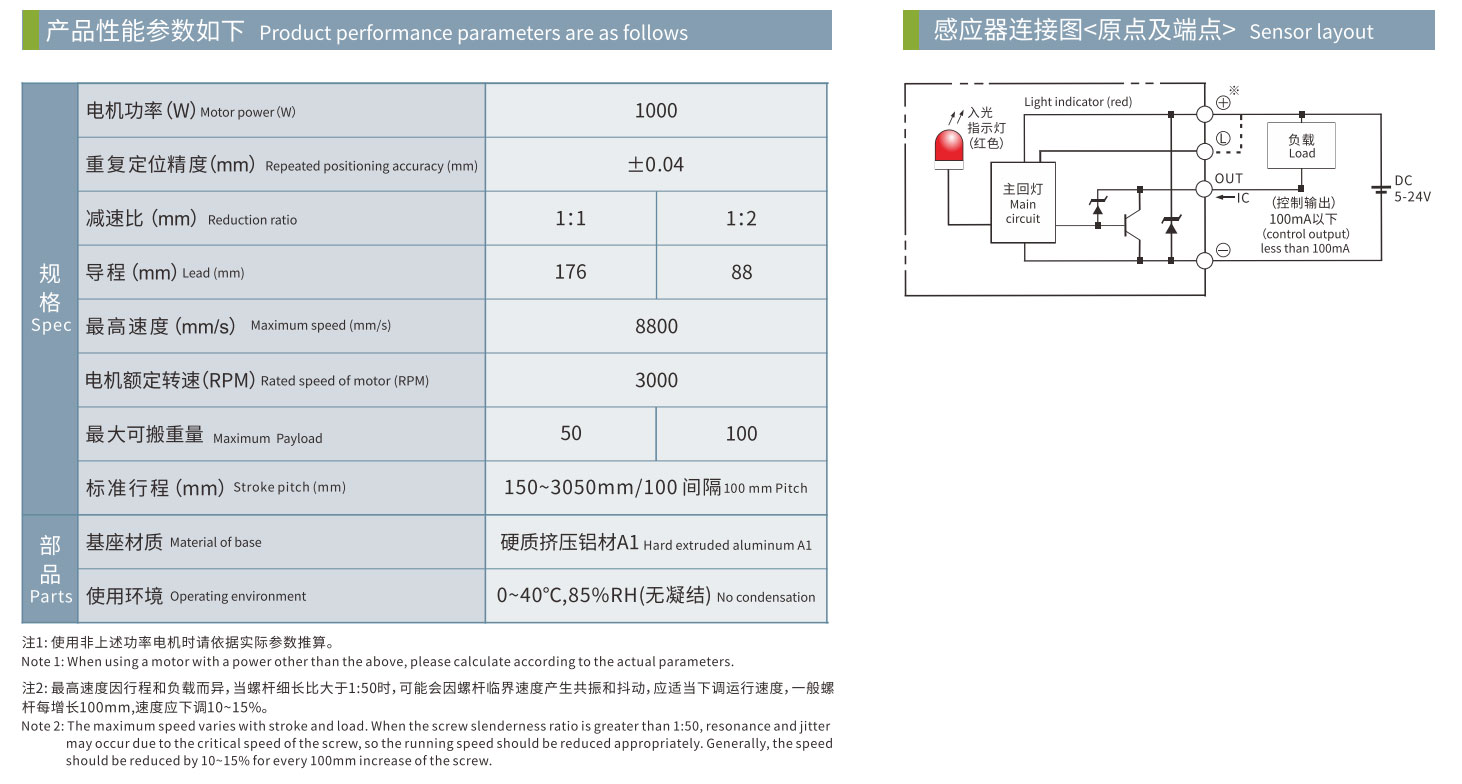
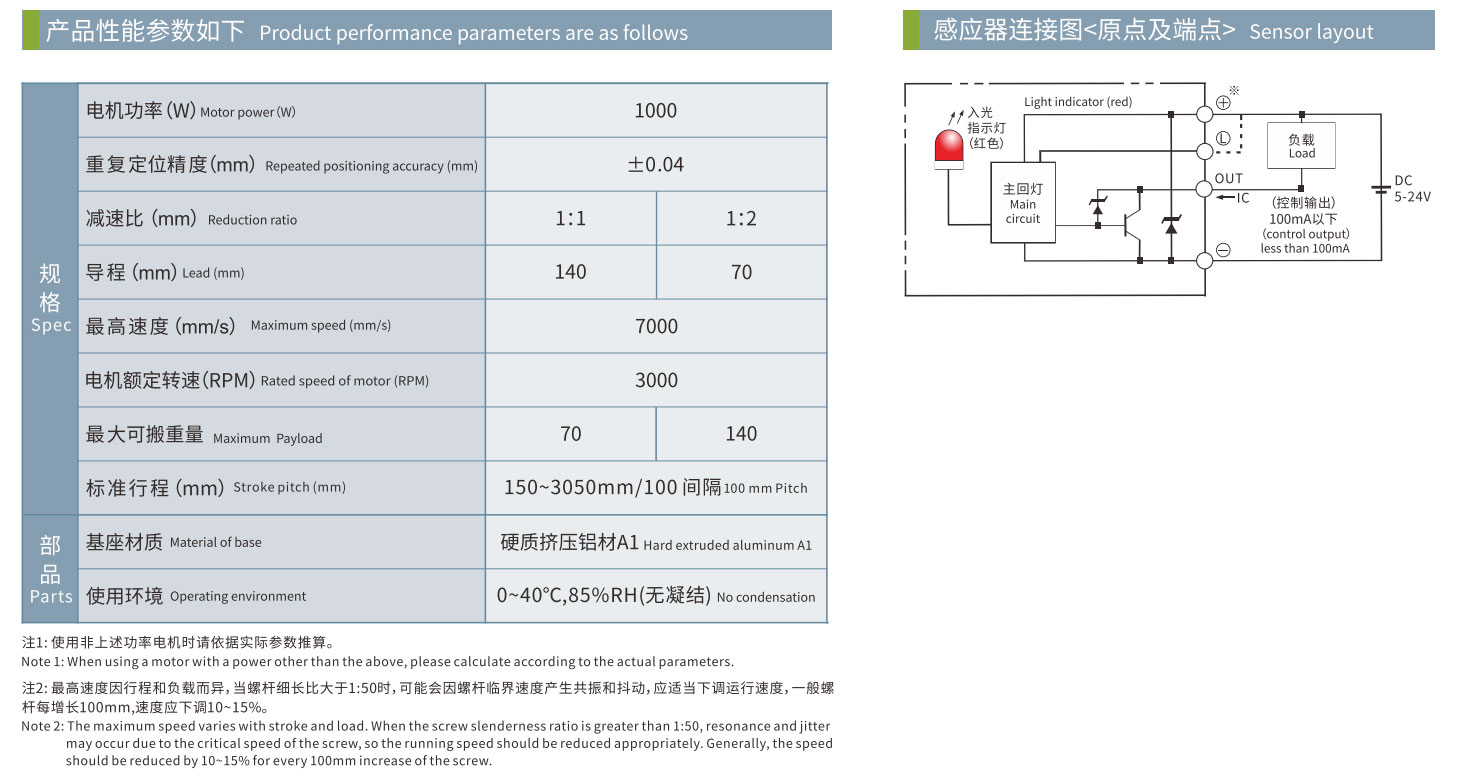
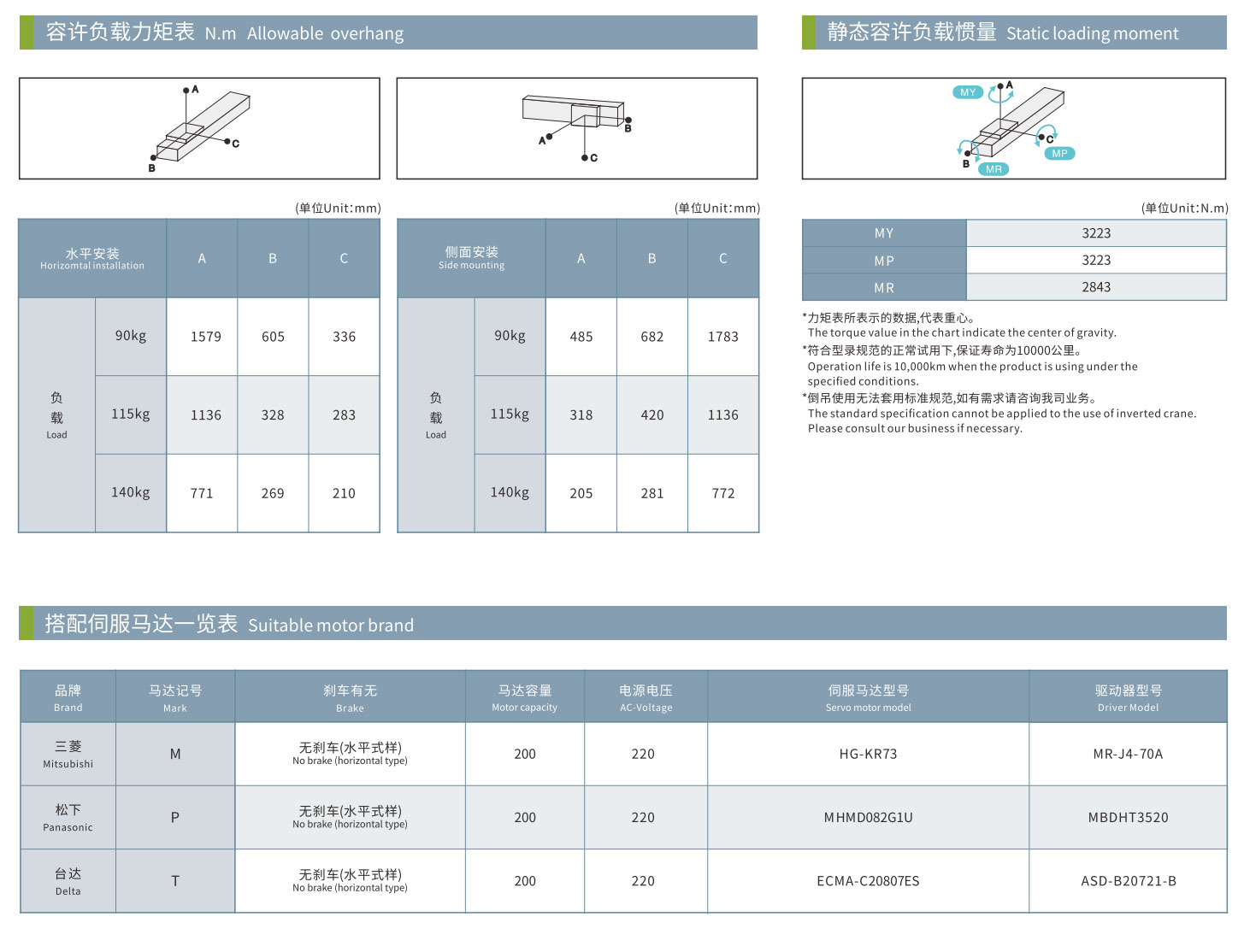
Gaýtalama ýerleşiş takyklygy: ± 0.04mm
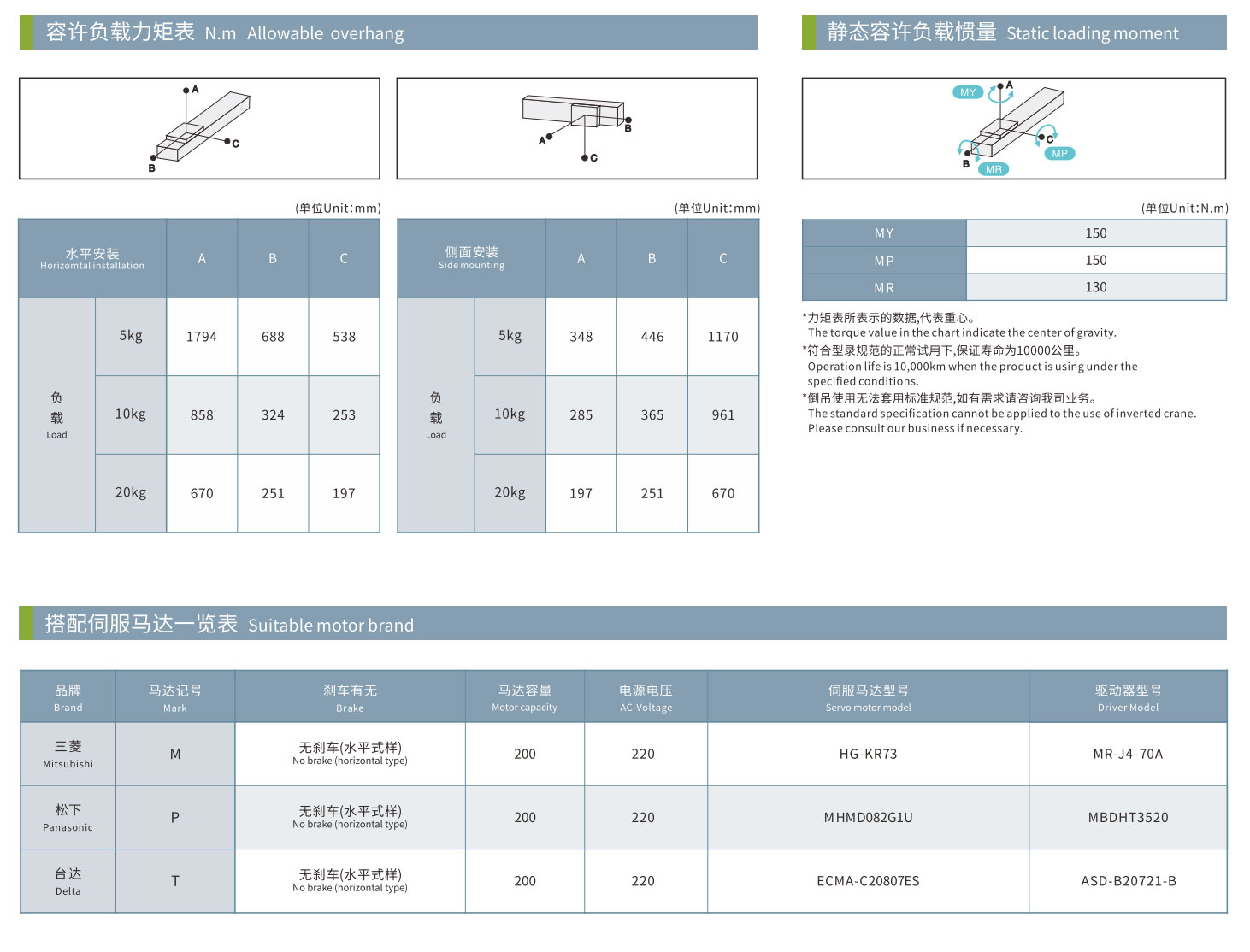
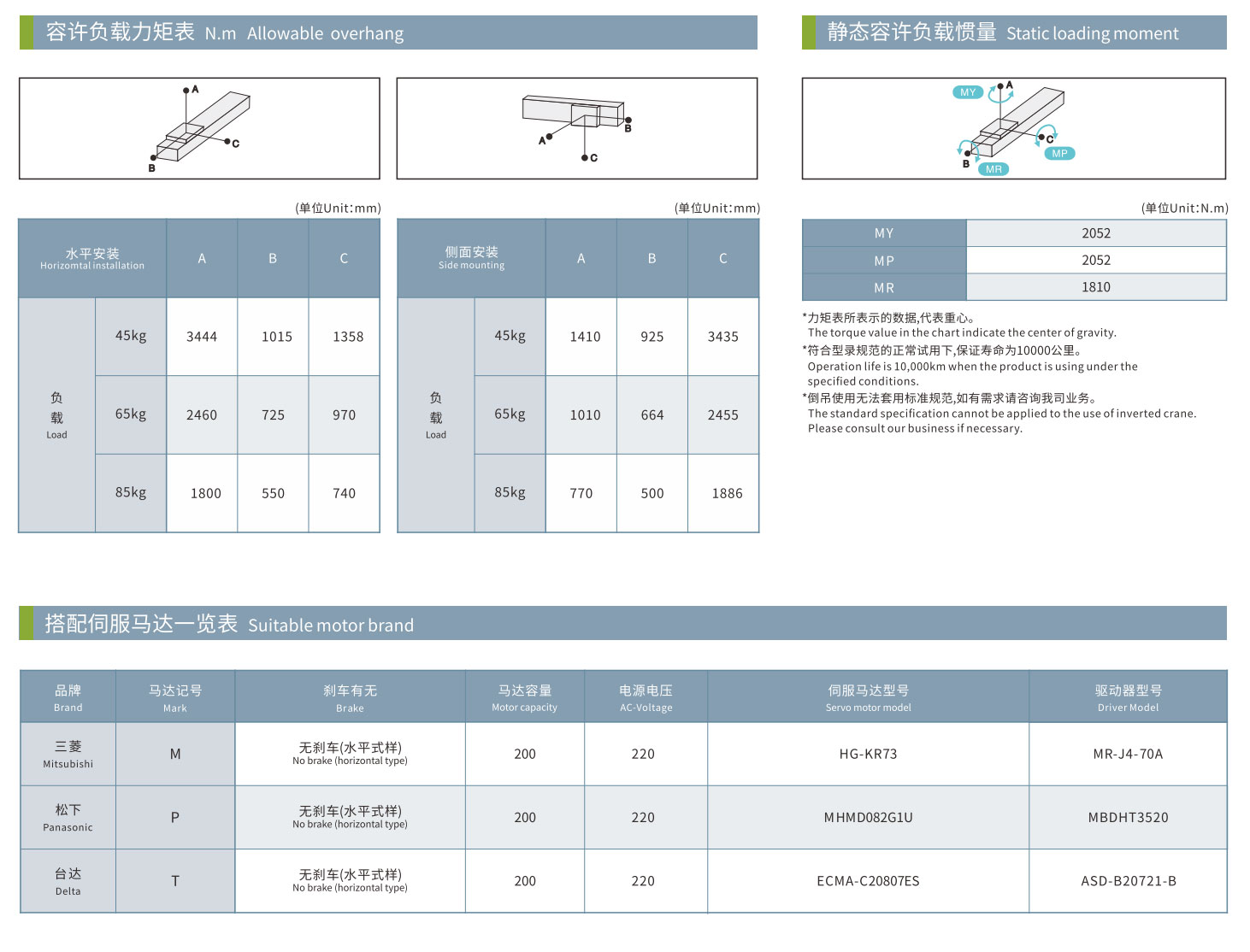
Iň ýokary ýük: 140kg
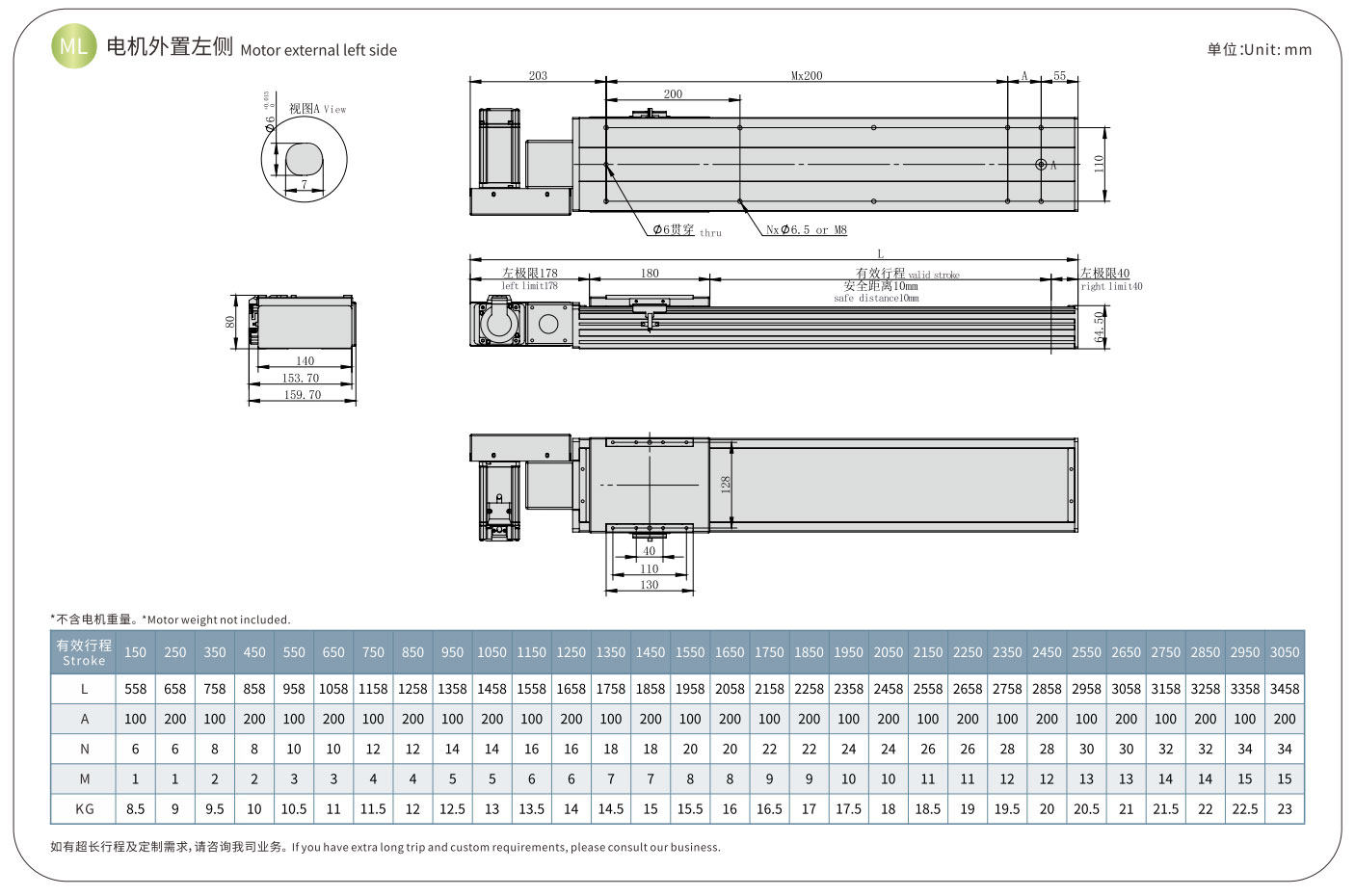
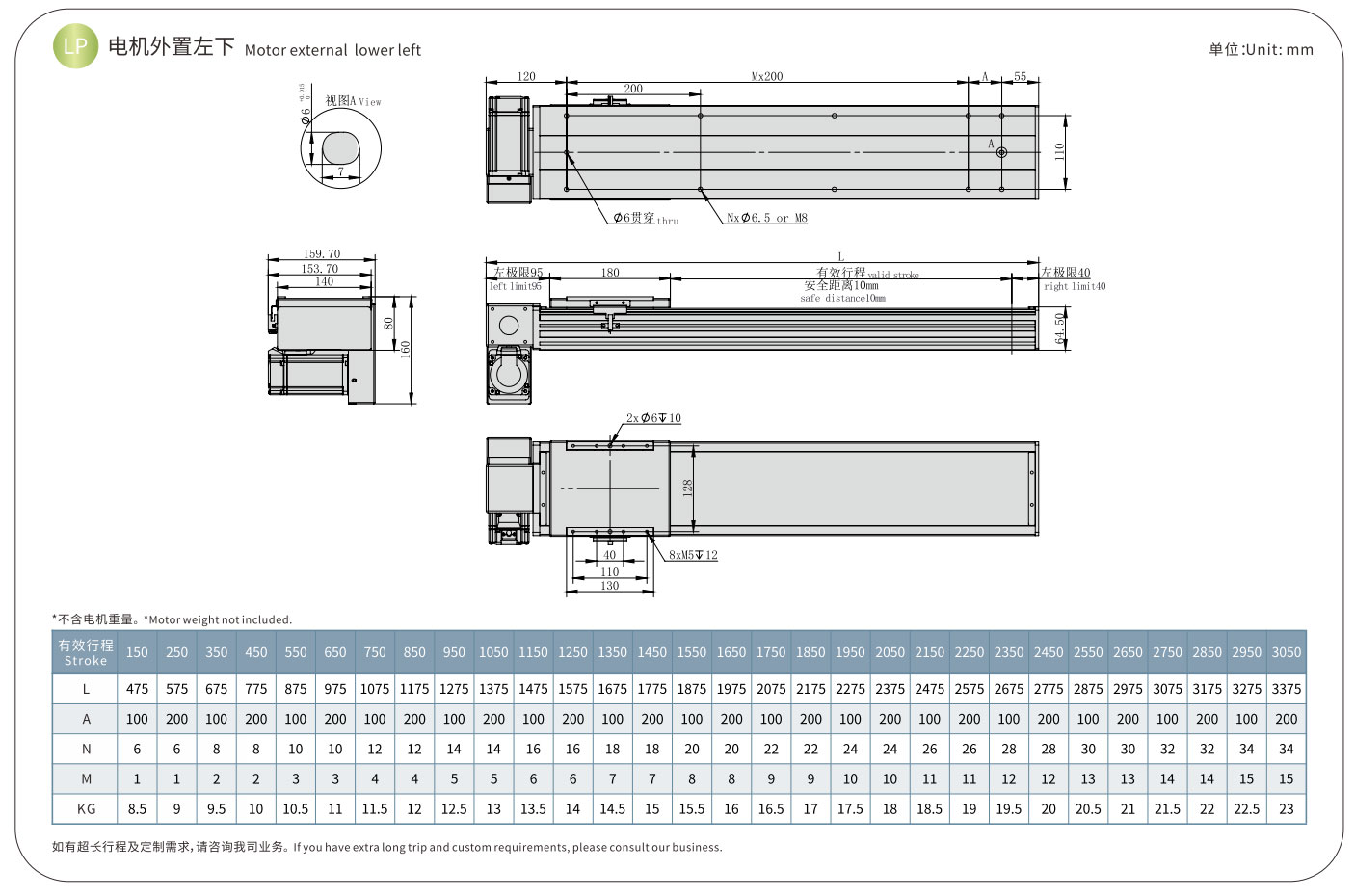
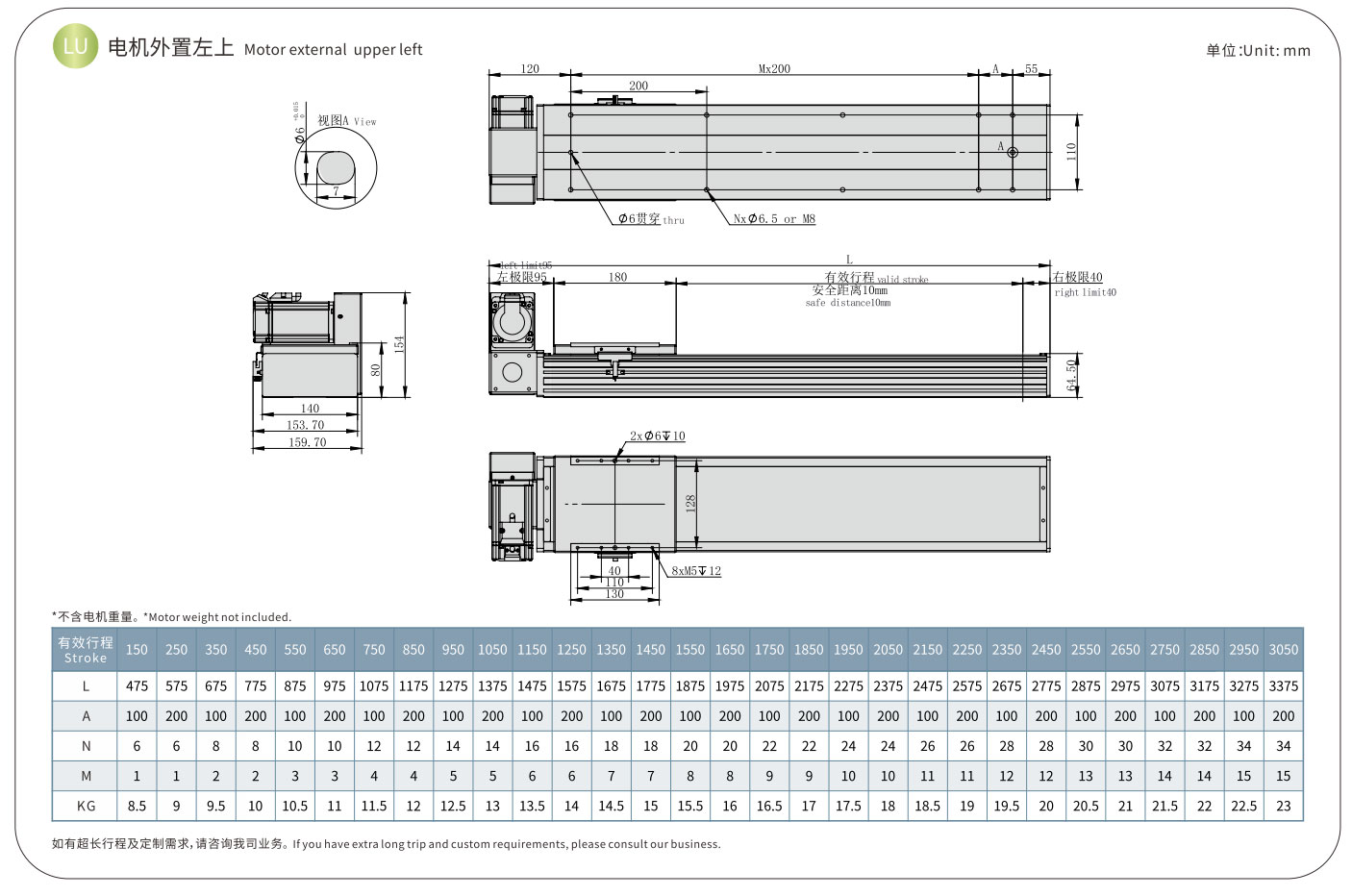
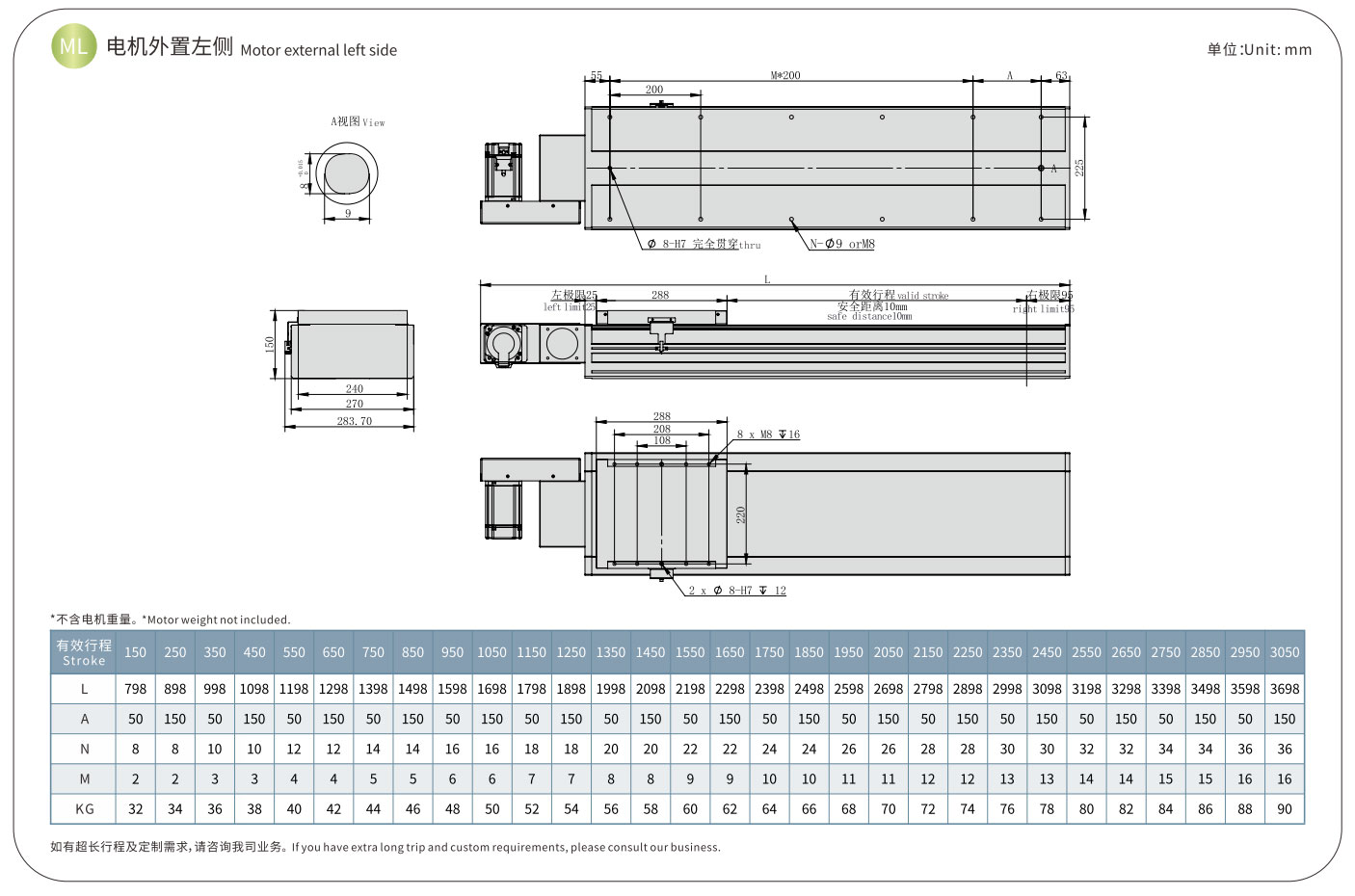
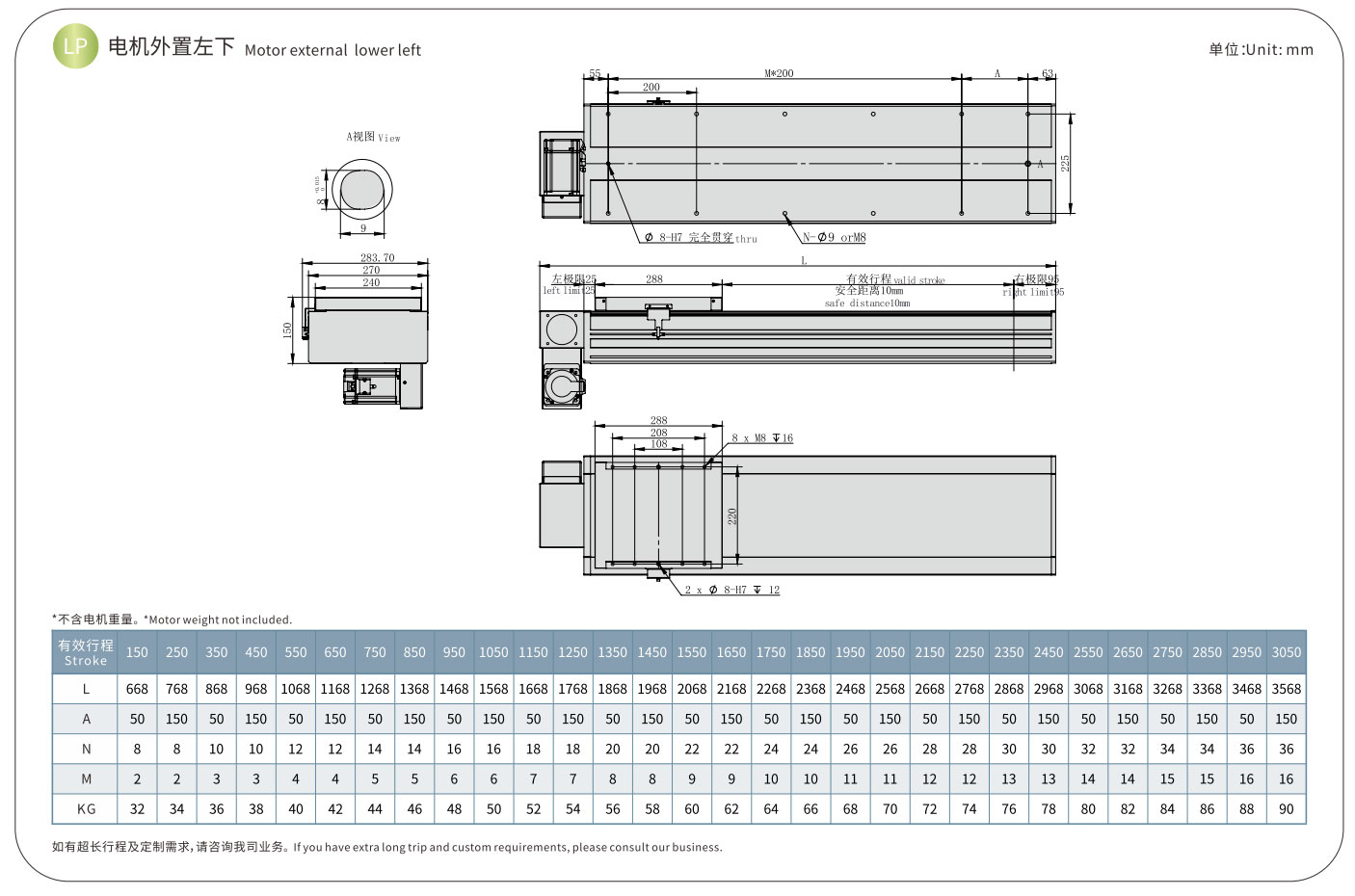
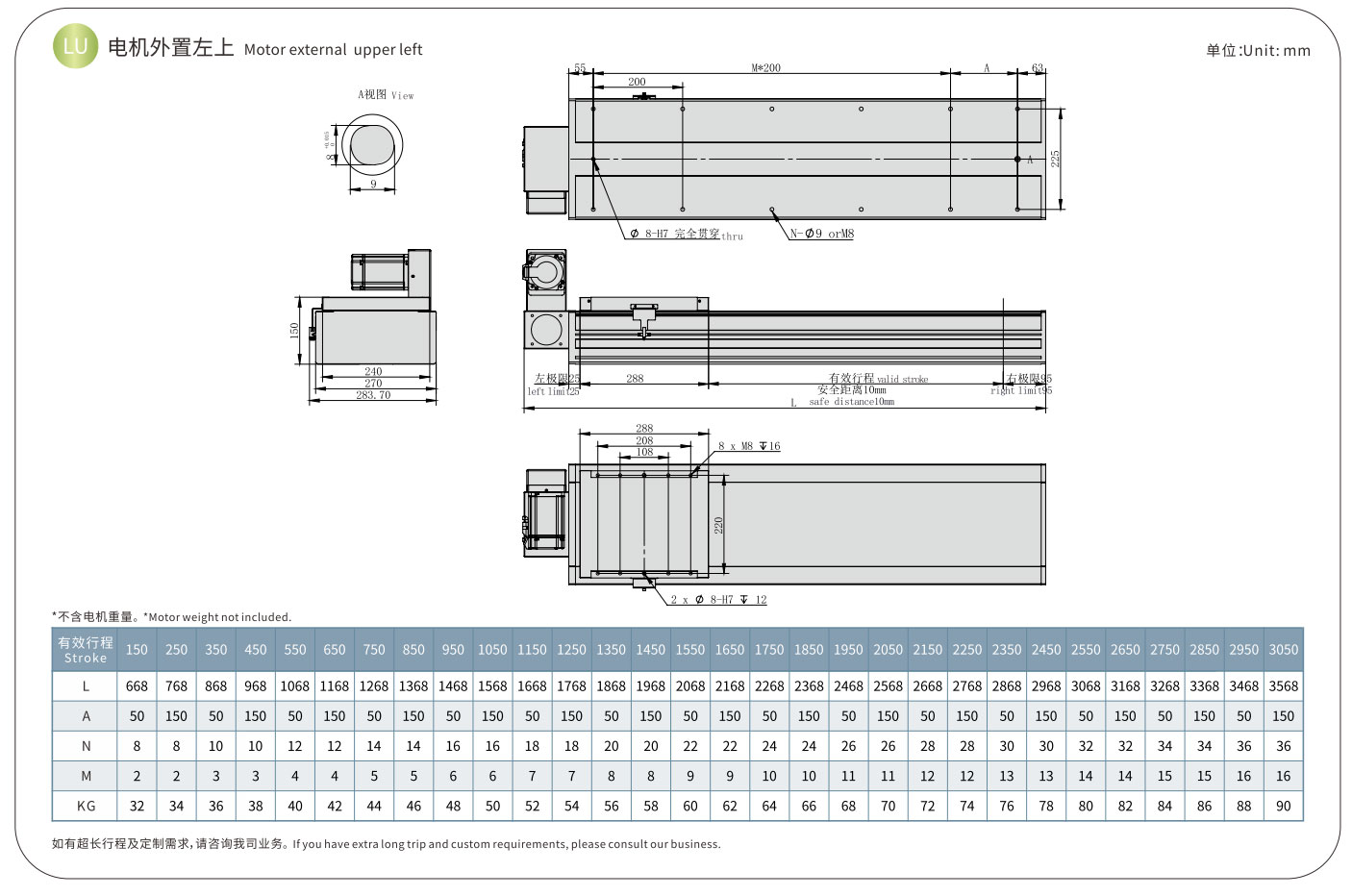
Insult: 100 - 3050mm
Iň ýokary tizlik: 7000mm / s

1. Tekiz dizaýn, umumy agramy has ýeňil, pes kombinasiýa beýikligi we has berkligi.
2. Gurluşy optimallaşdyryldy, takyklygy has gowudyr we birnäçe esbaplary ýygnamak sebäpli ýüze çykan ýalňyşlyk azalýar.
3. Gurnama wagt tygşytlaýjy, zähmeti tygşytlaýan we amatly. Baglanyş ýa-da modul gurmak üçin alýumin gapagyny aýyrmagyň zerurlygy ýok.
4. Bejeriş ýönekeý, modulyň iki tarapy hem ýag sanjylýan deşikler bilen enjamlaşdyrylan we gapagy aýyrmagyň zerurlygy ýok.







Has köp önüm

ONB seriýaly guşak bilen dolandyrylýan çyzykly modul ýarym ýapyk

OCB seriýaly guşak bilen dolandyrylýan çyzykly modul doly goşulýar ...

ONB-F seriýaly guşak bilen dolandyrylýan çyzykly modul daşarky ...

HNB-E seriýaly guşakly çyzykly hereketlendirijiler ýarym ...

HNB seriýaly guşak bilen dolandyrylýan çyzykly modul ýarym ýapyk










