




КСР/КНР/КЦР/КФР серија робота са једном осовином челична база


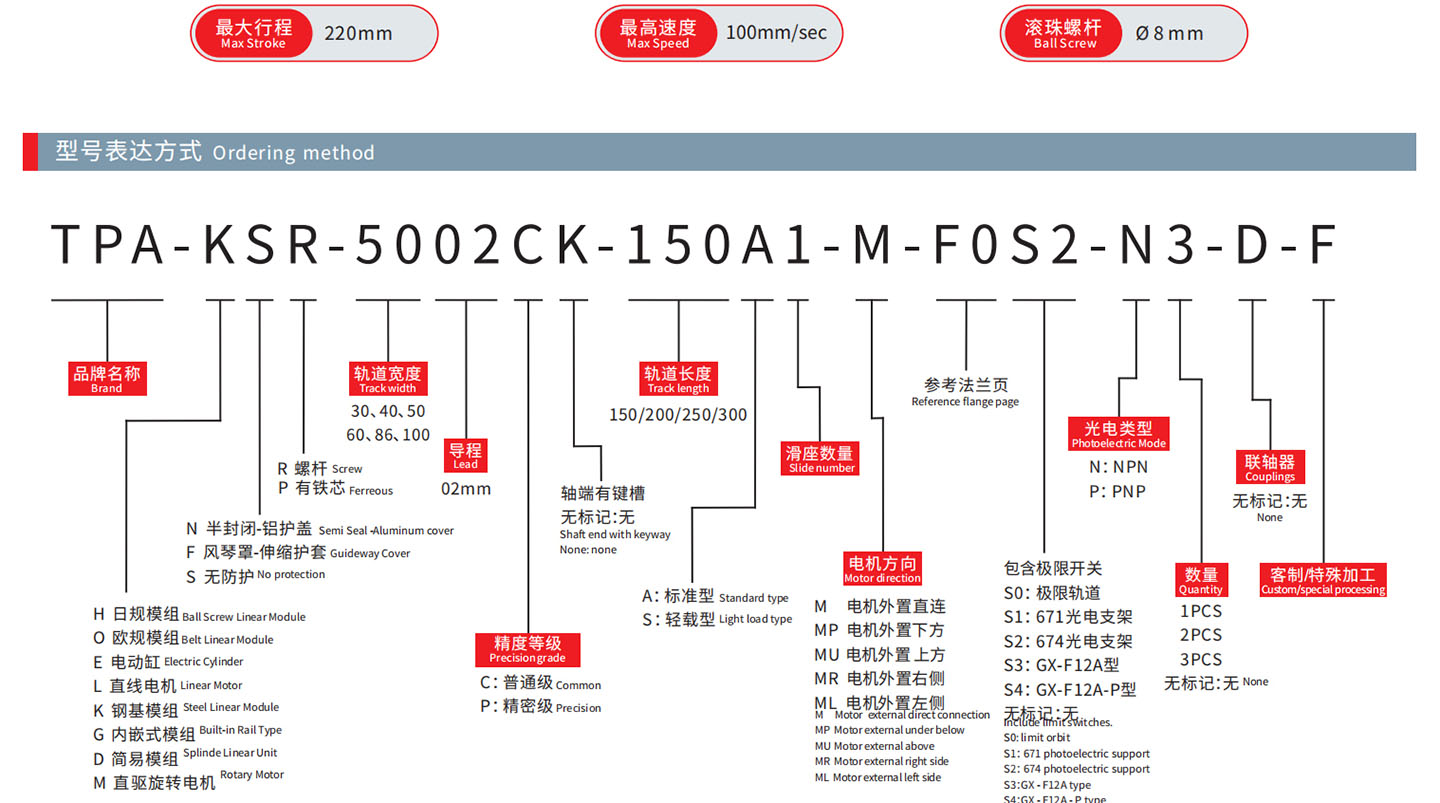
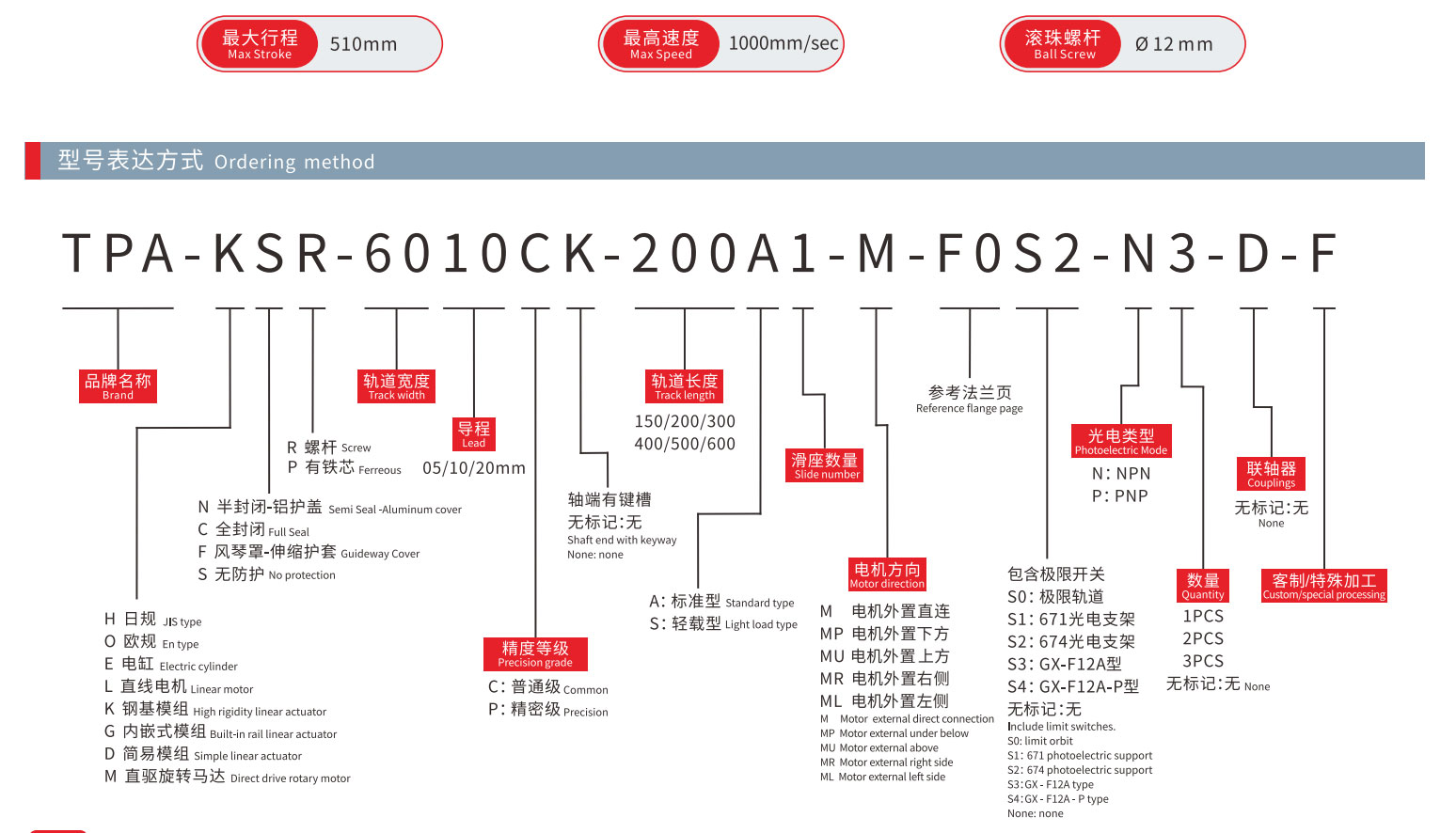
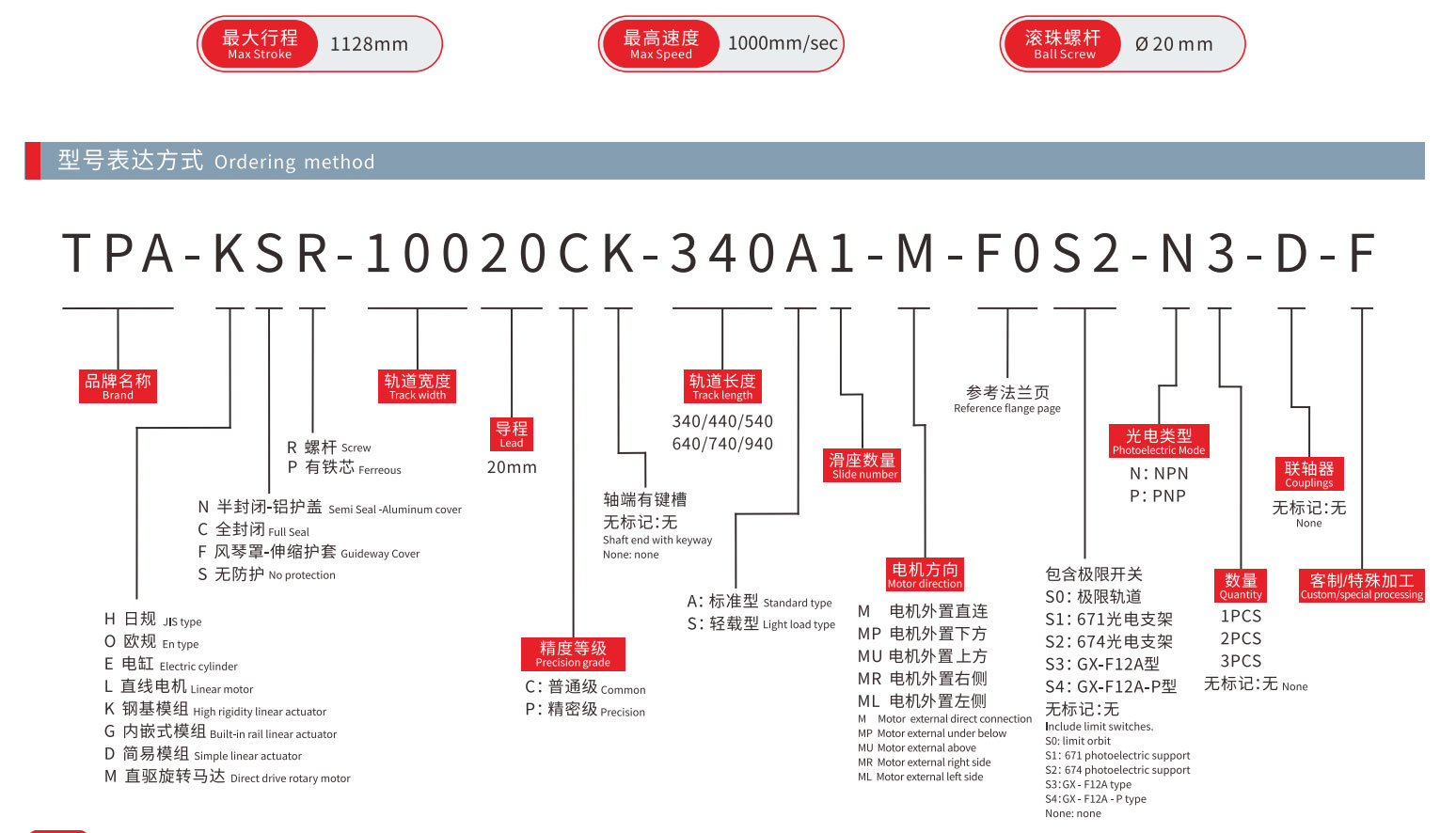
Бирач модела
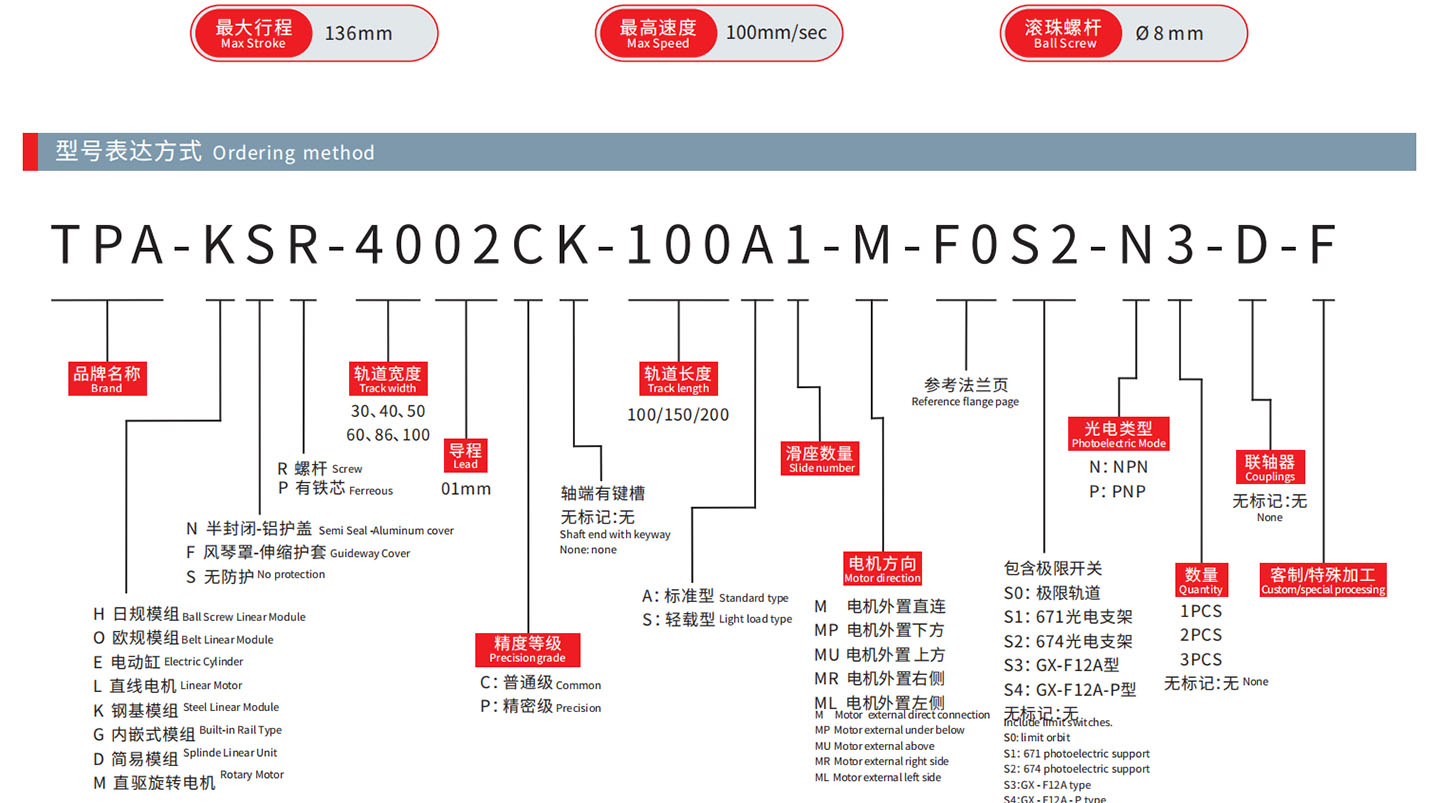
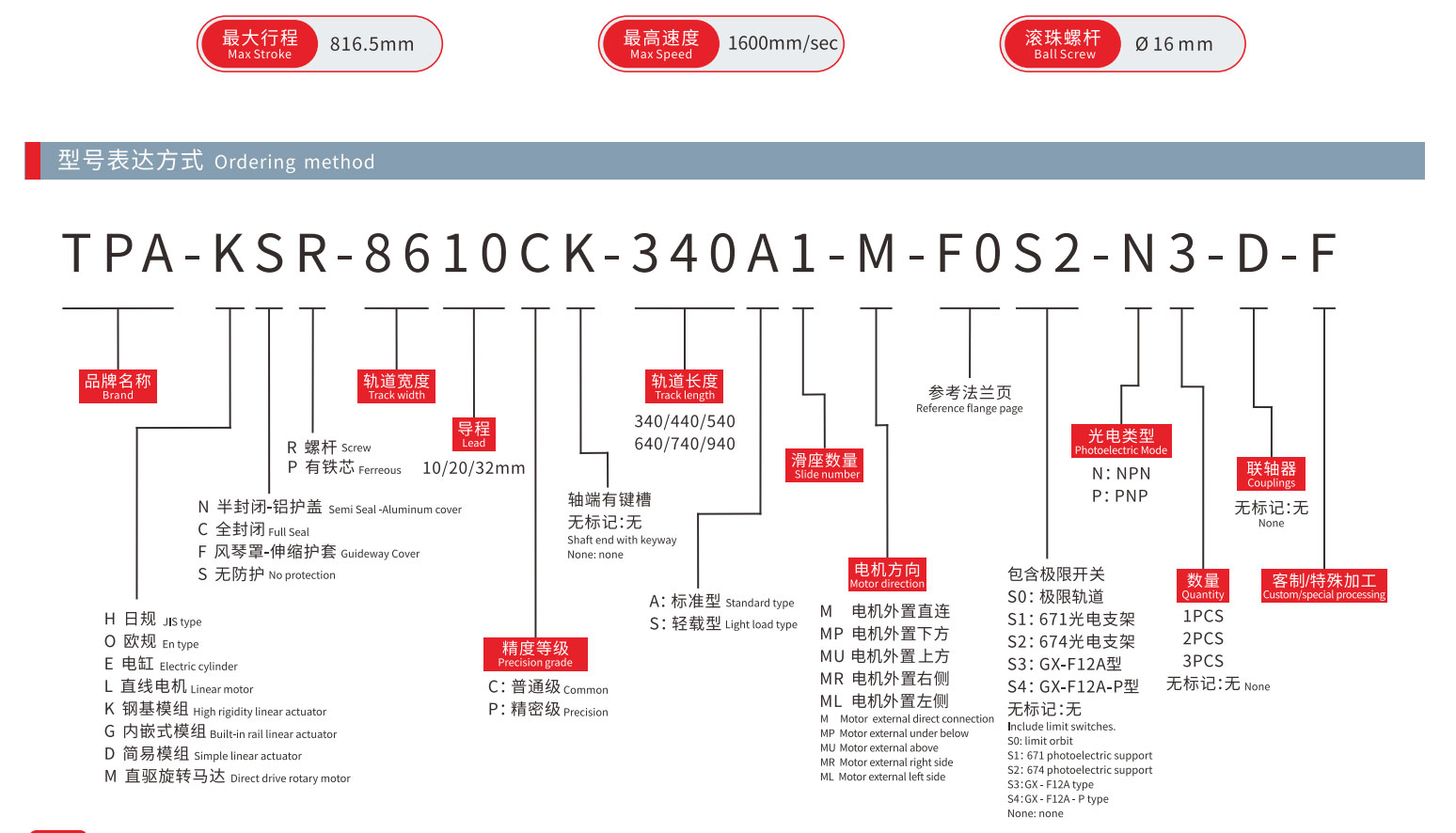
ТПА-?-???-?-???-?-??-?-?
ТПА-?-???-?-???-?-??-?-?
ТПА-?-???-?-???-?-??-?-?
ТПА-?-???-?-???-?-??-?-?
ТПА-?-???-?-???-?-??-?-?
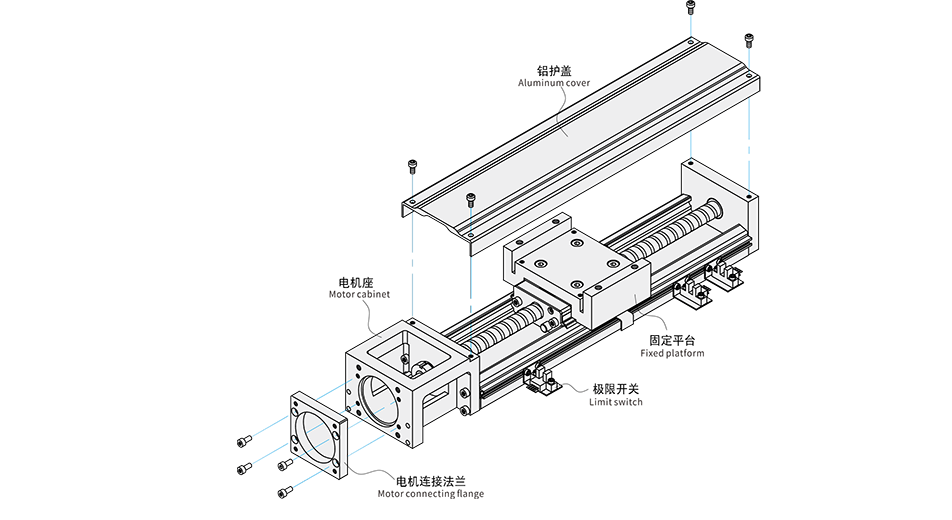
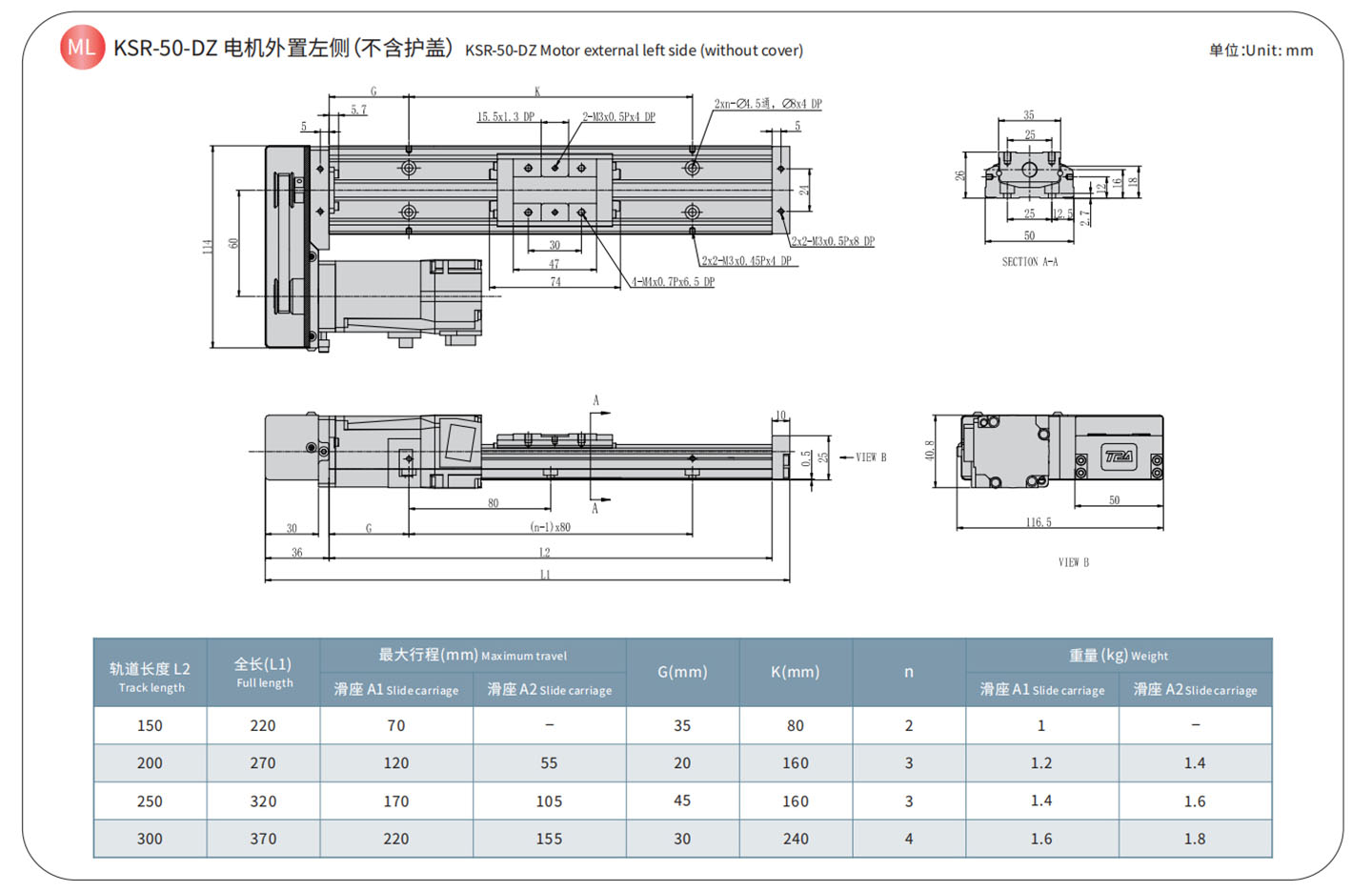
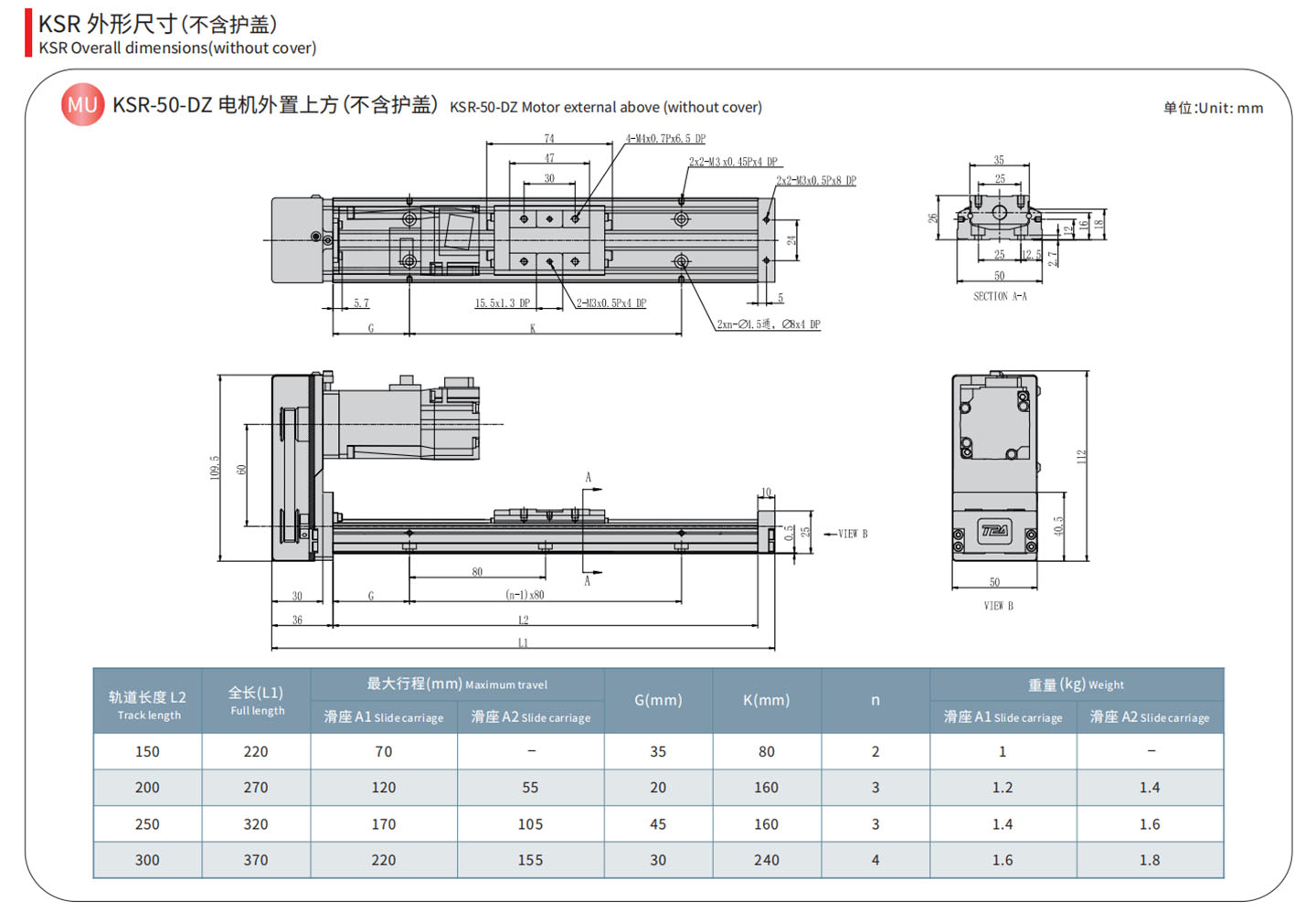
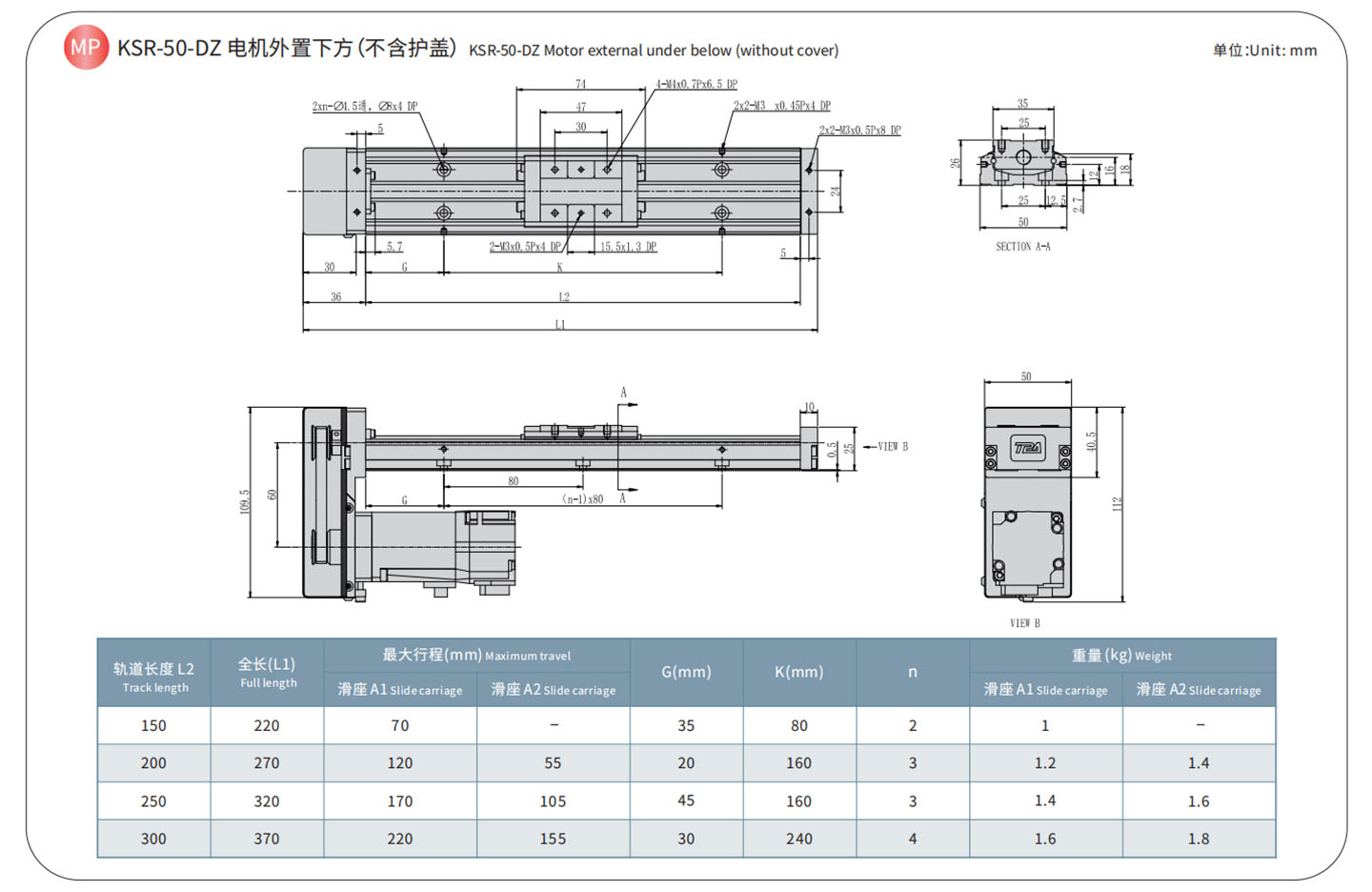
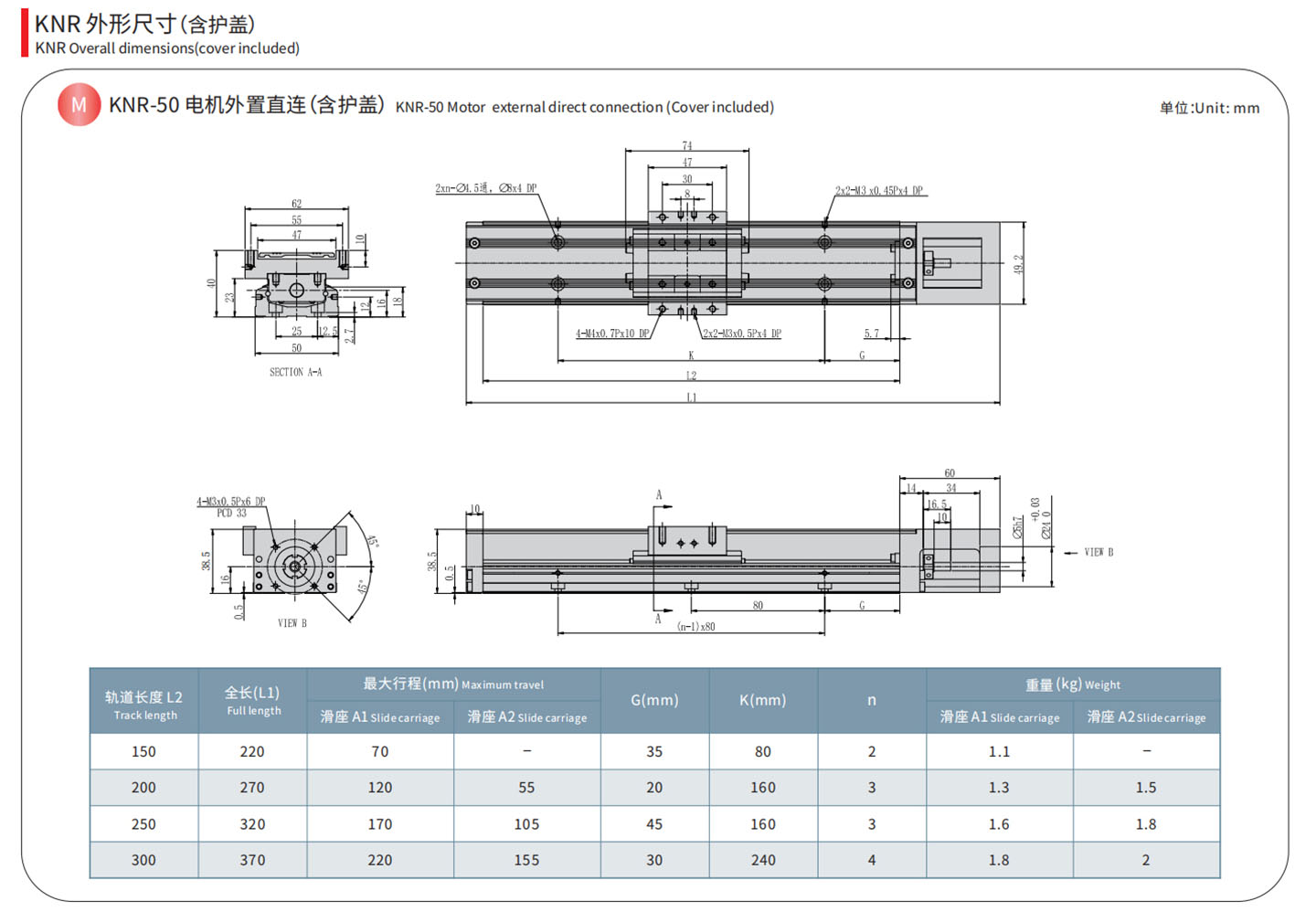
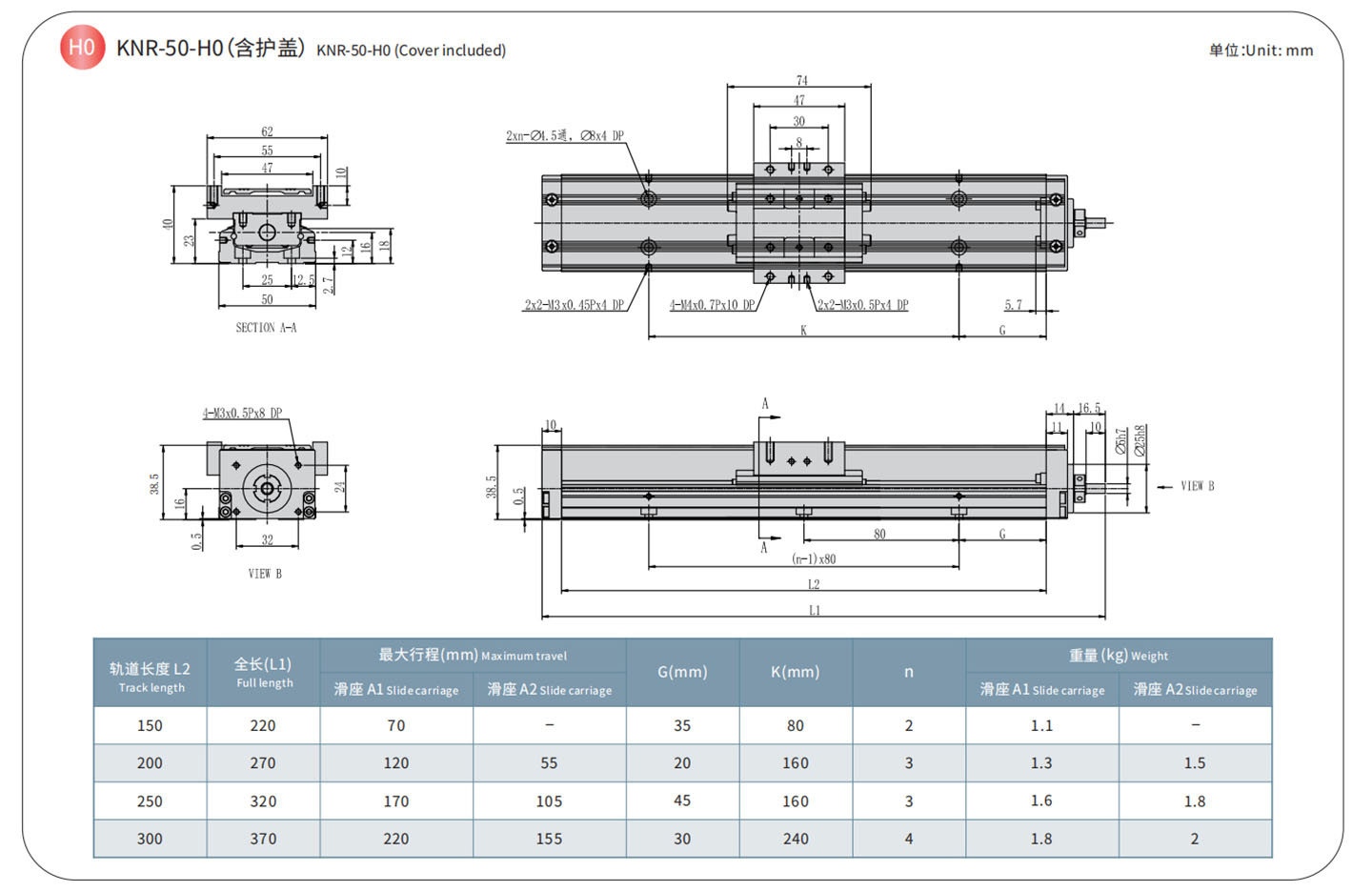
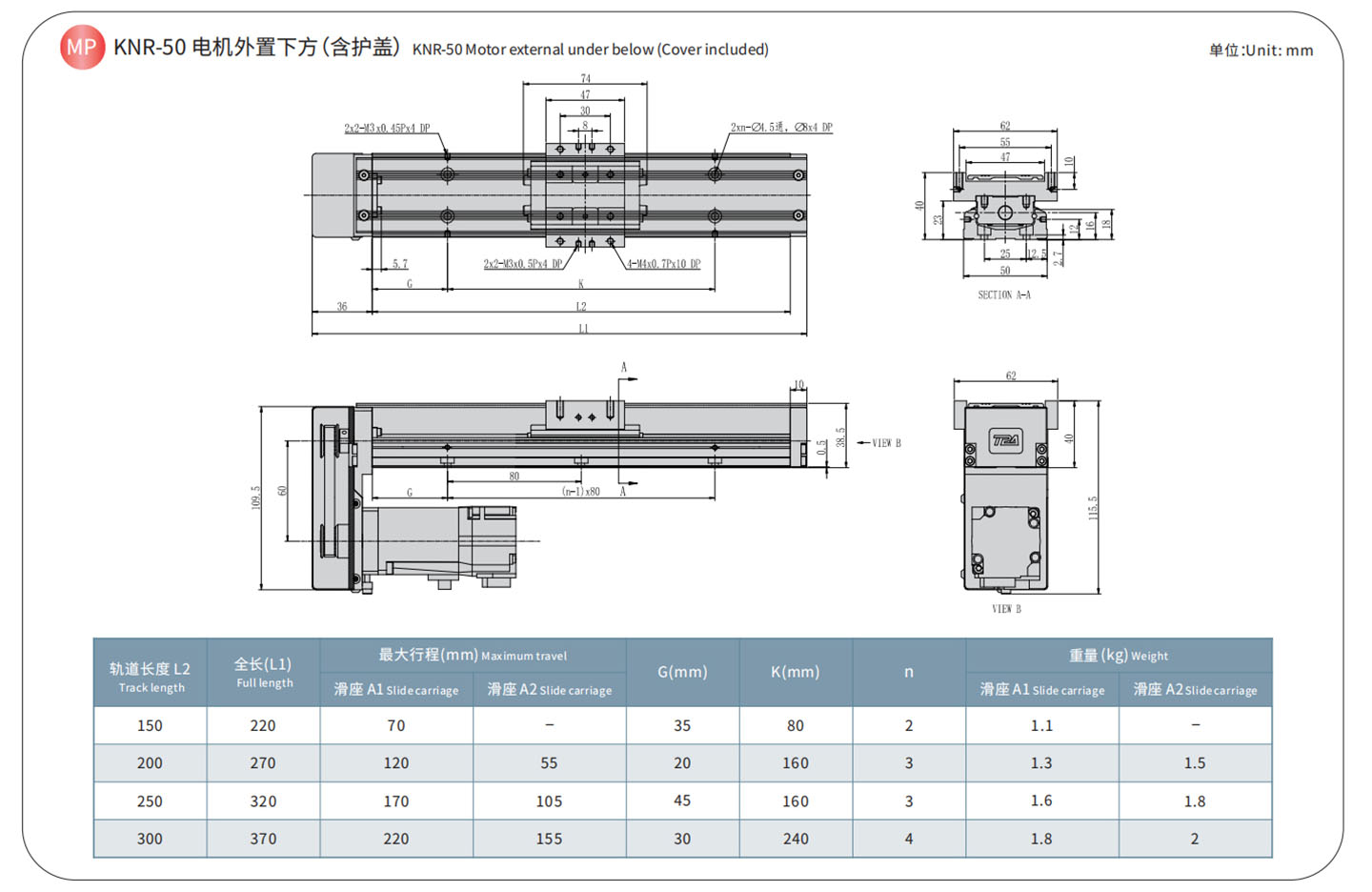
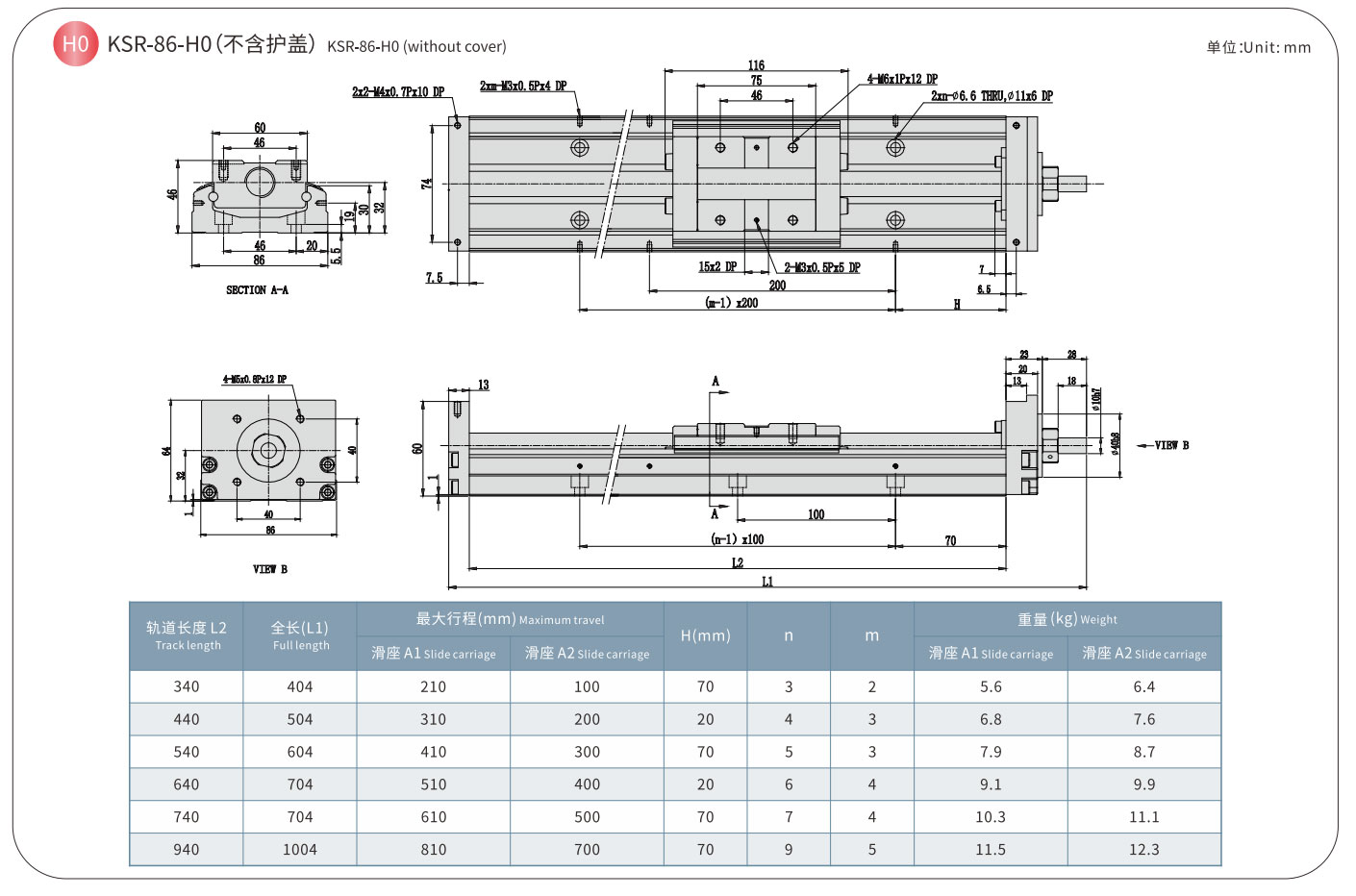
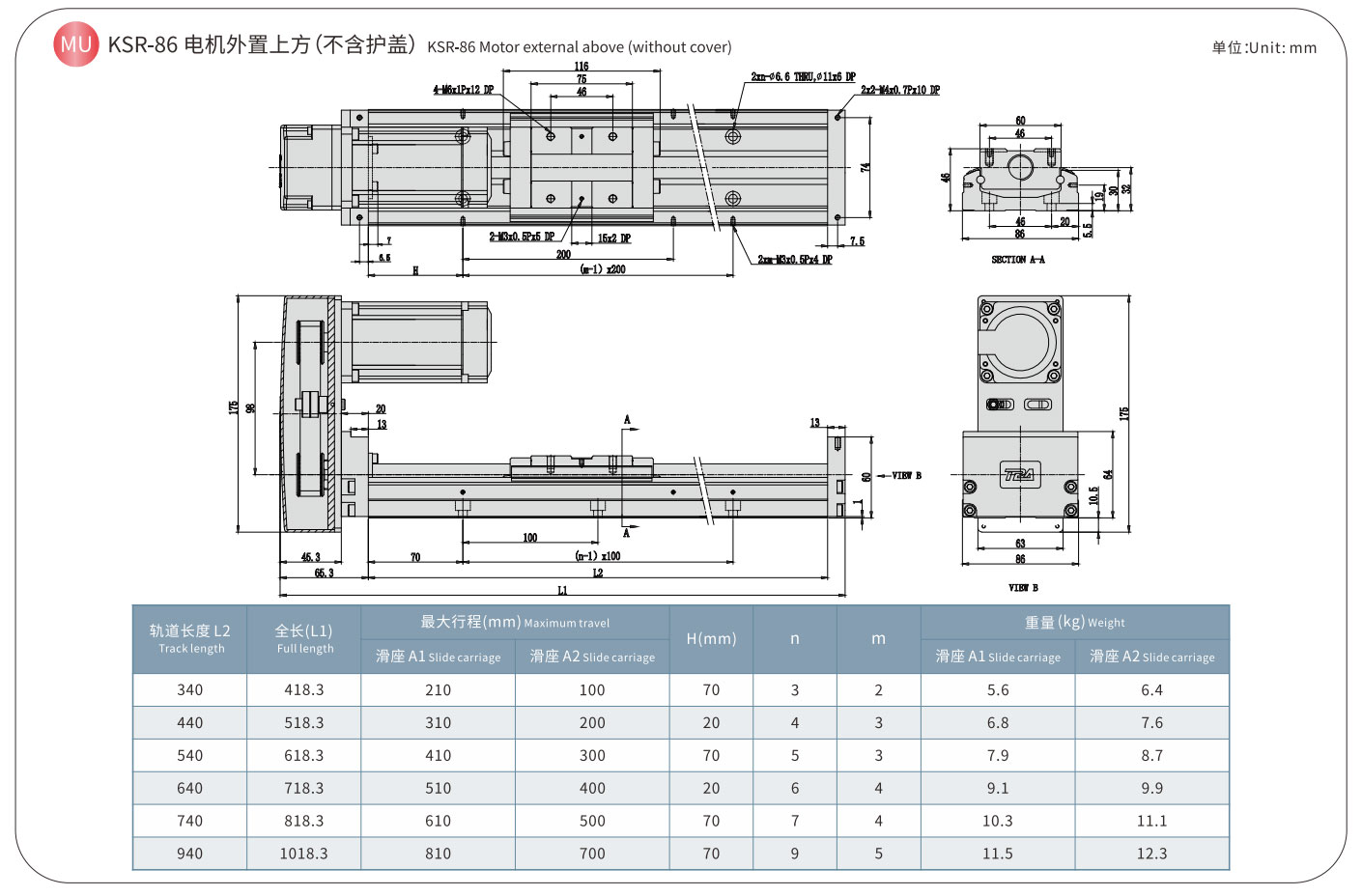
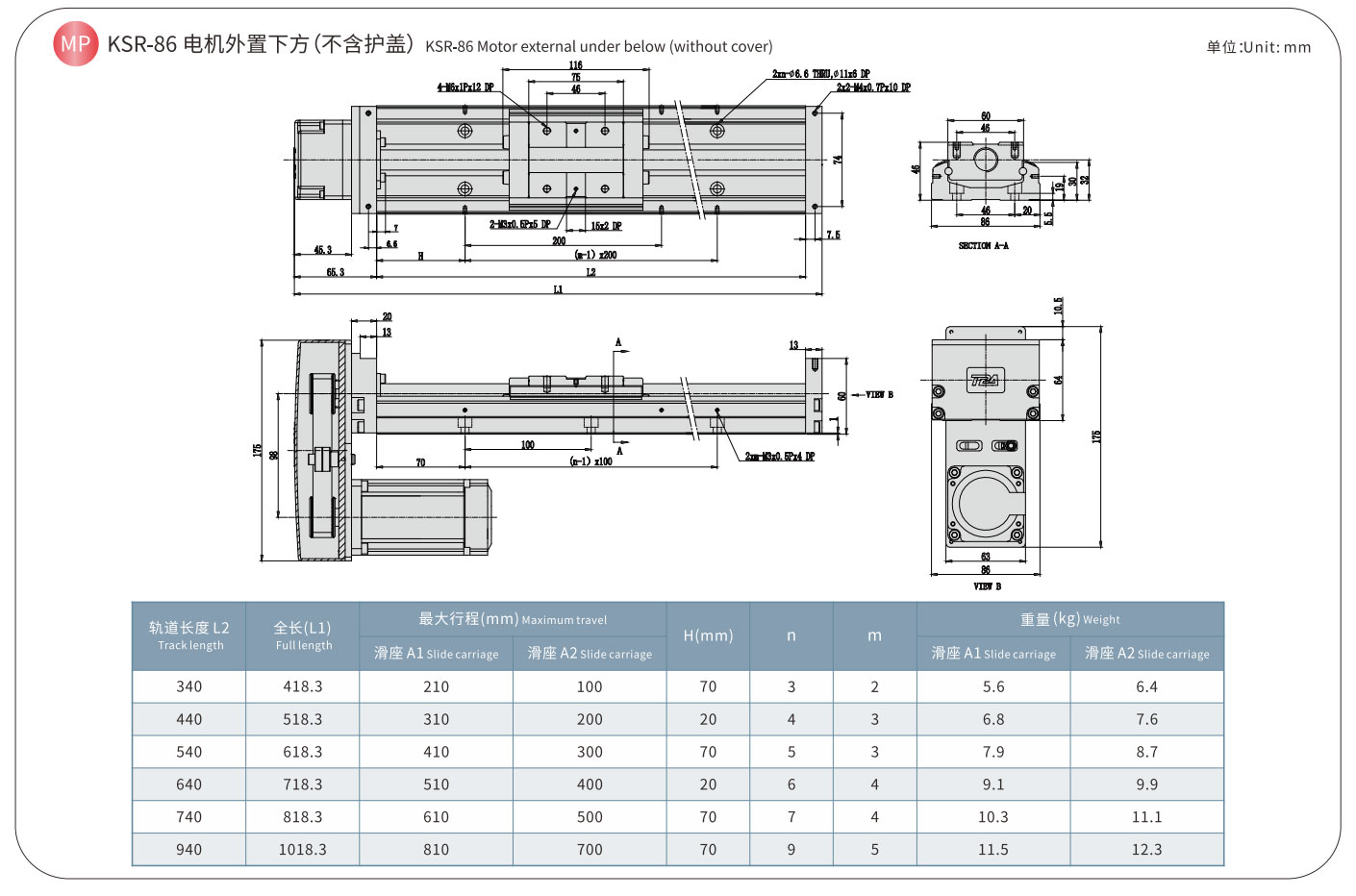
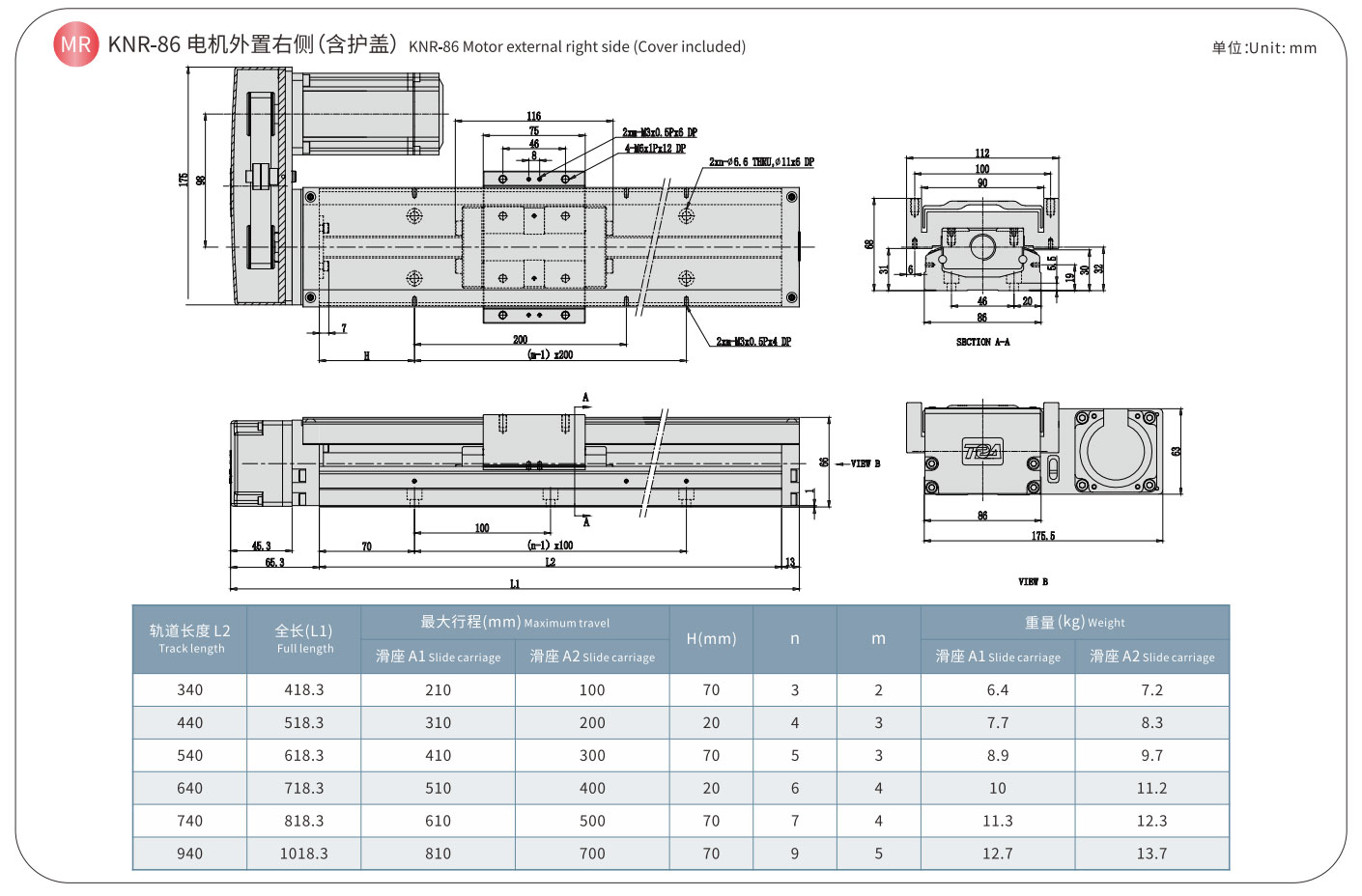
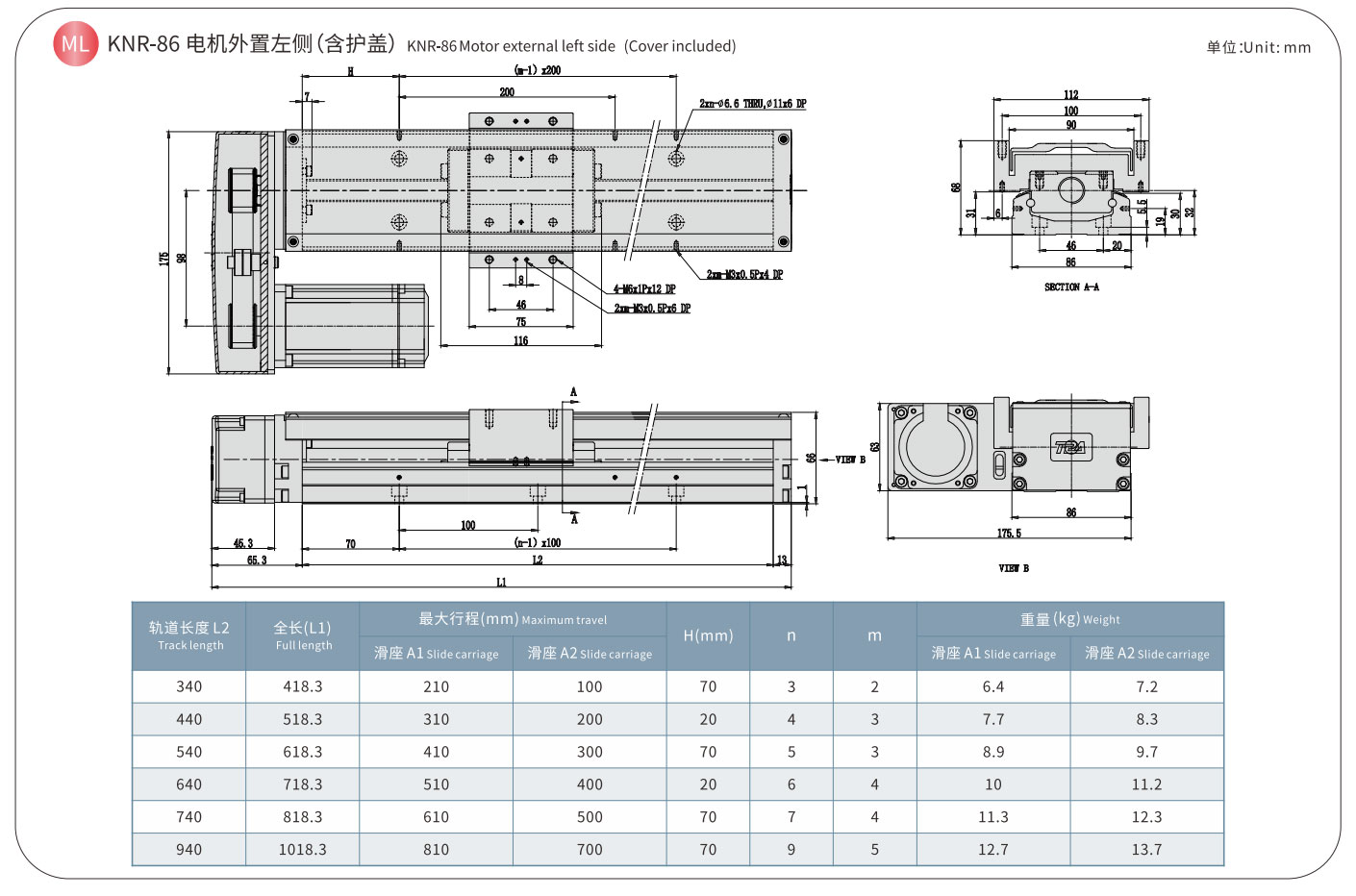
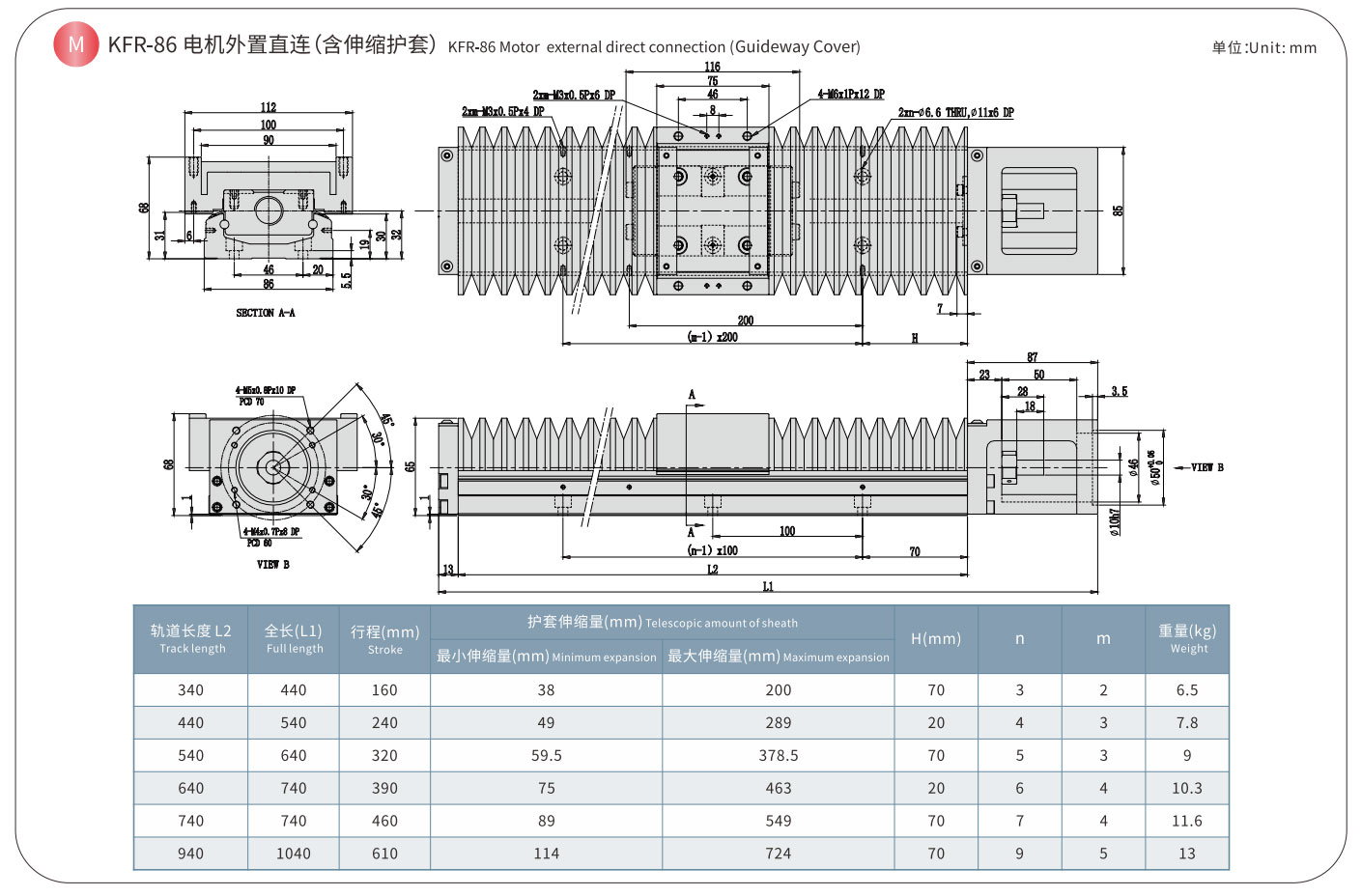
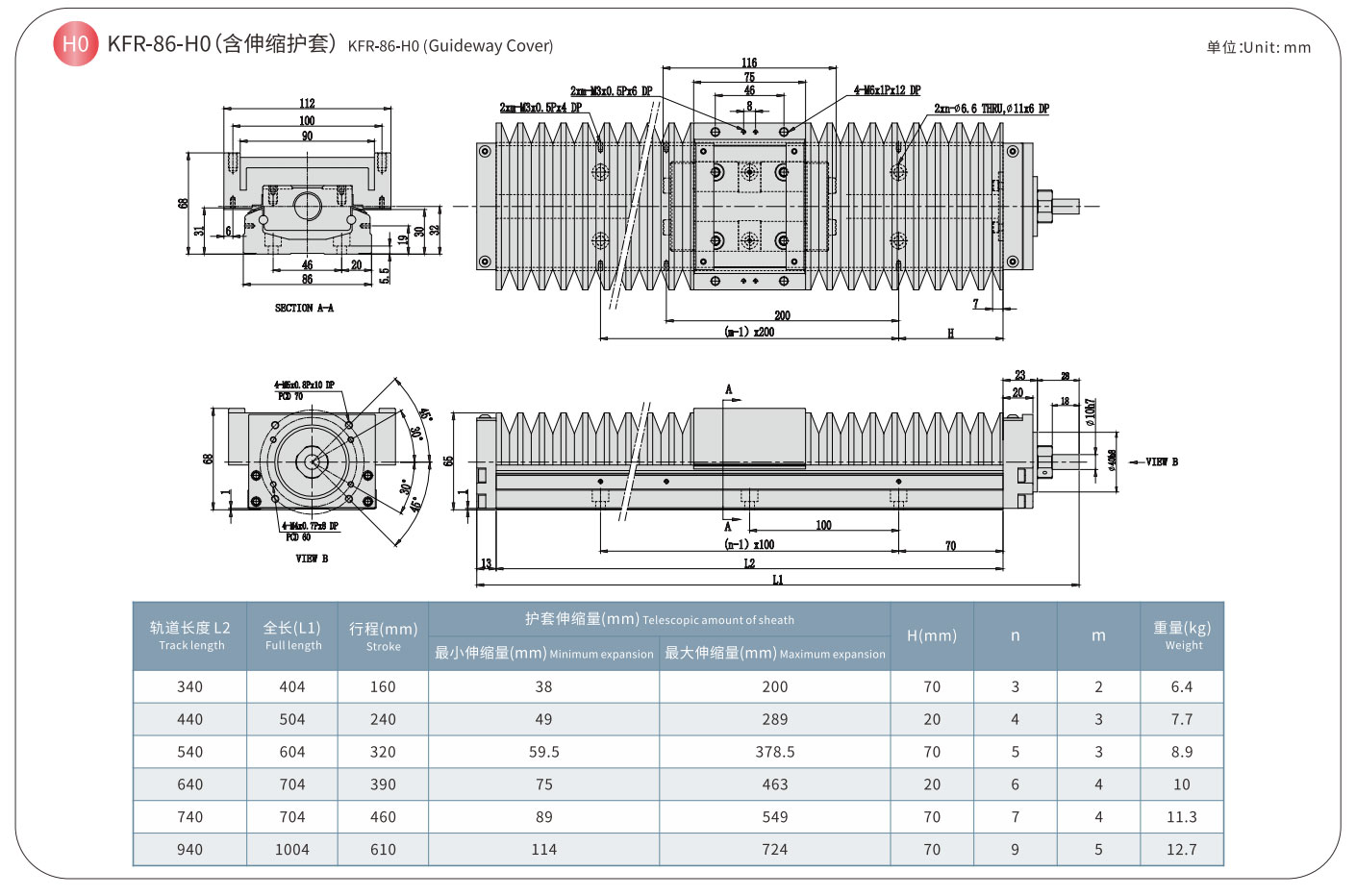
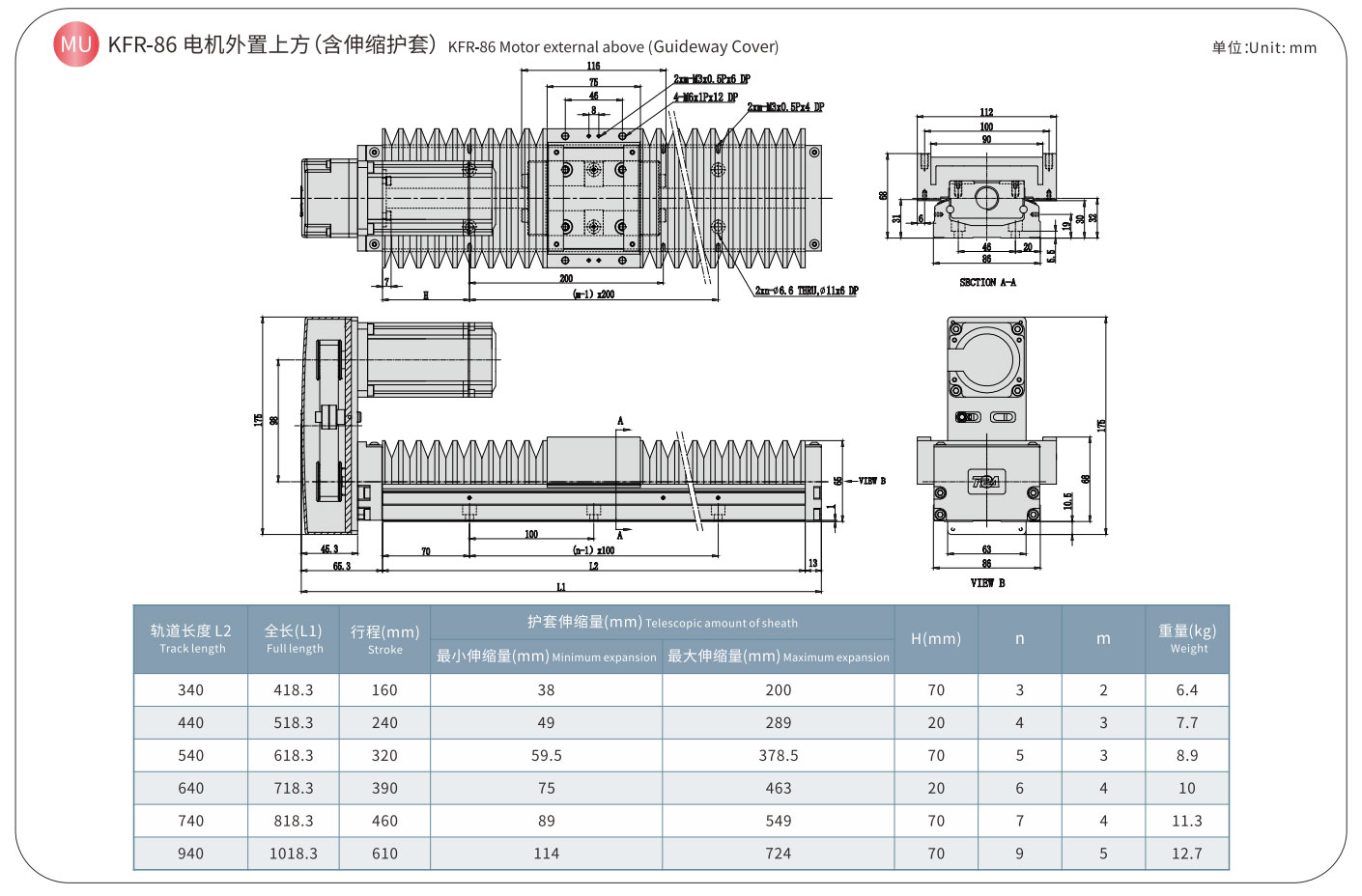
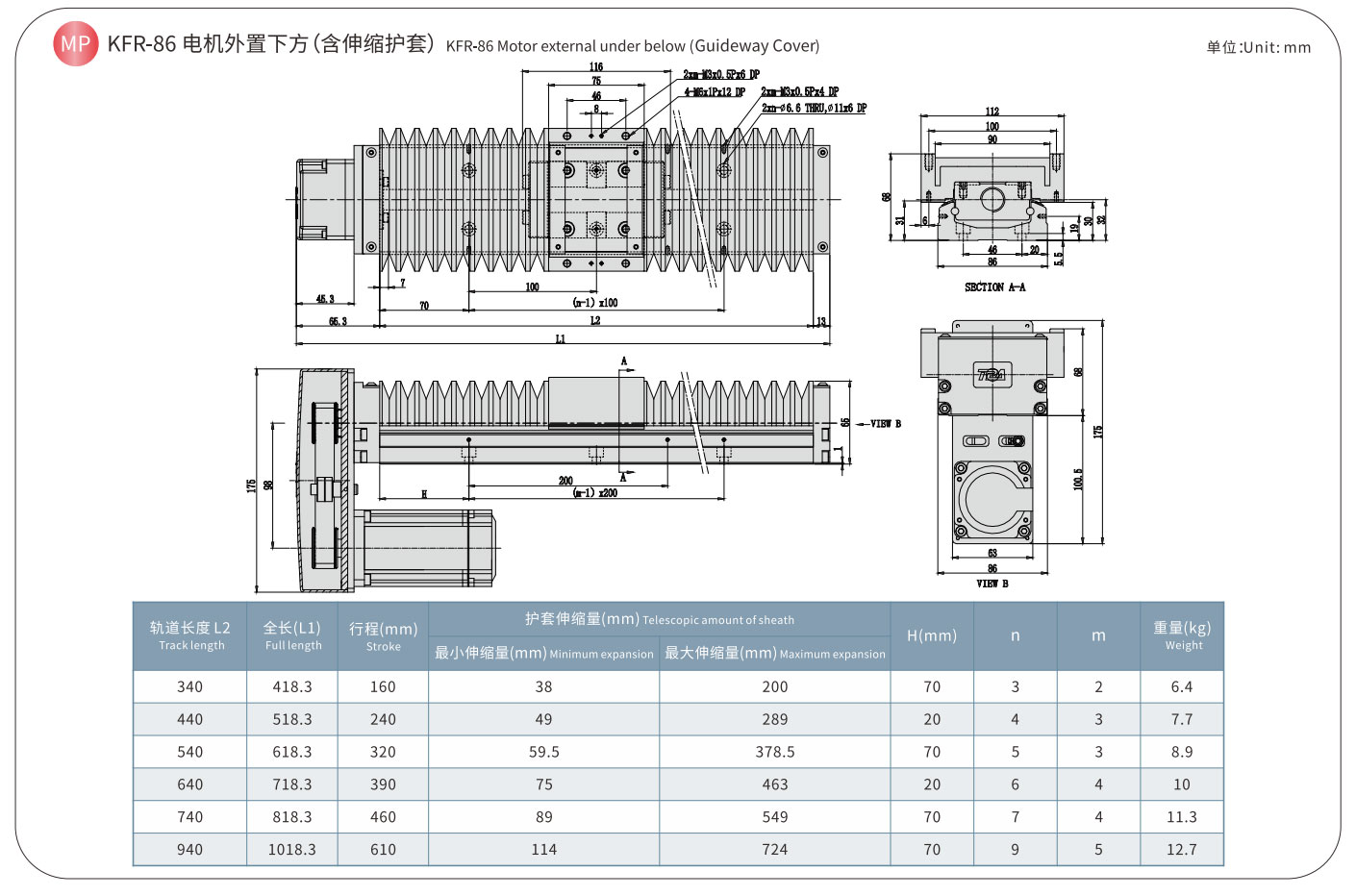
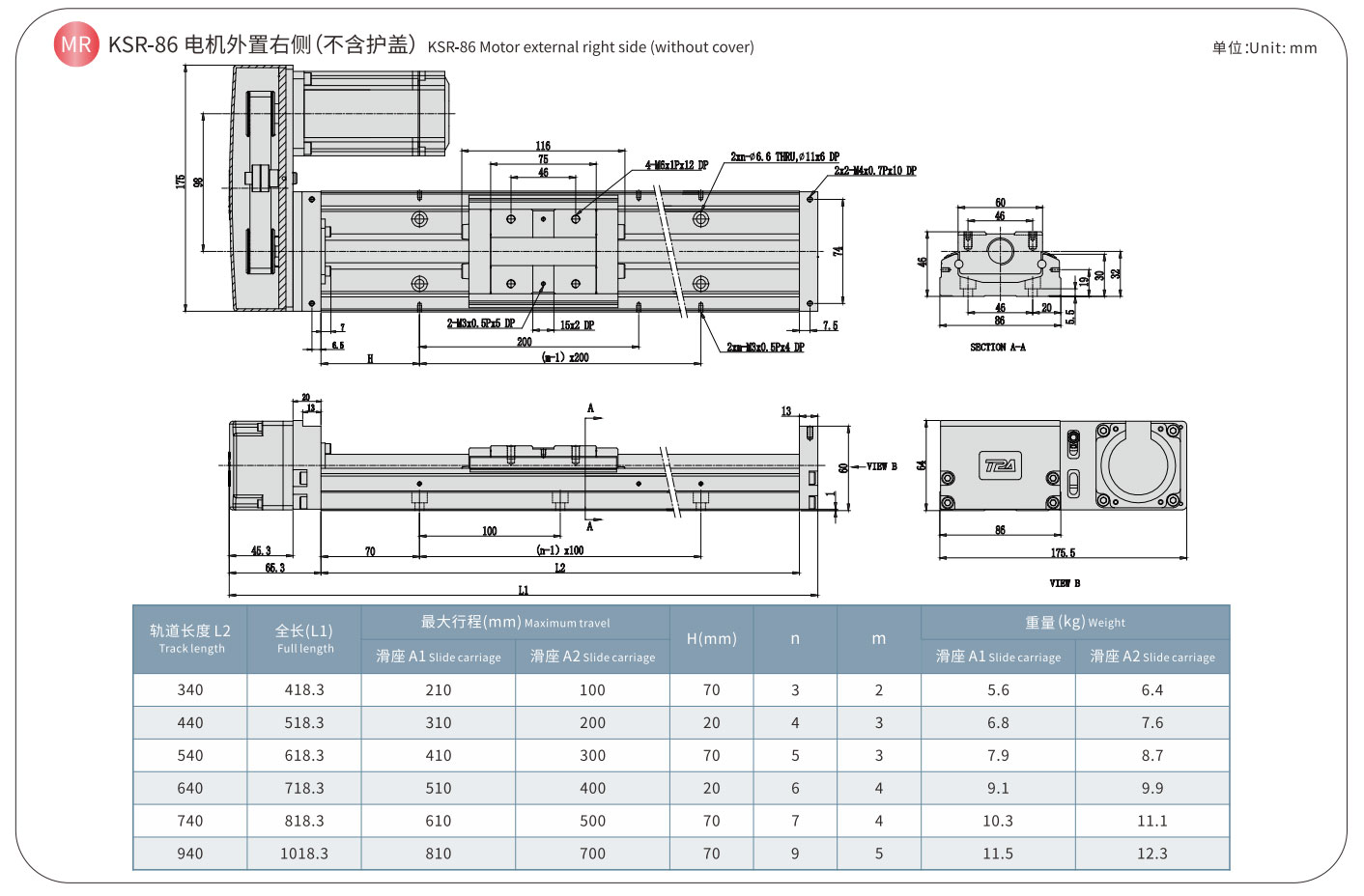
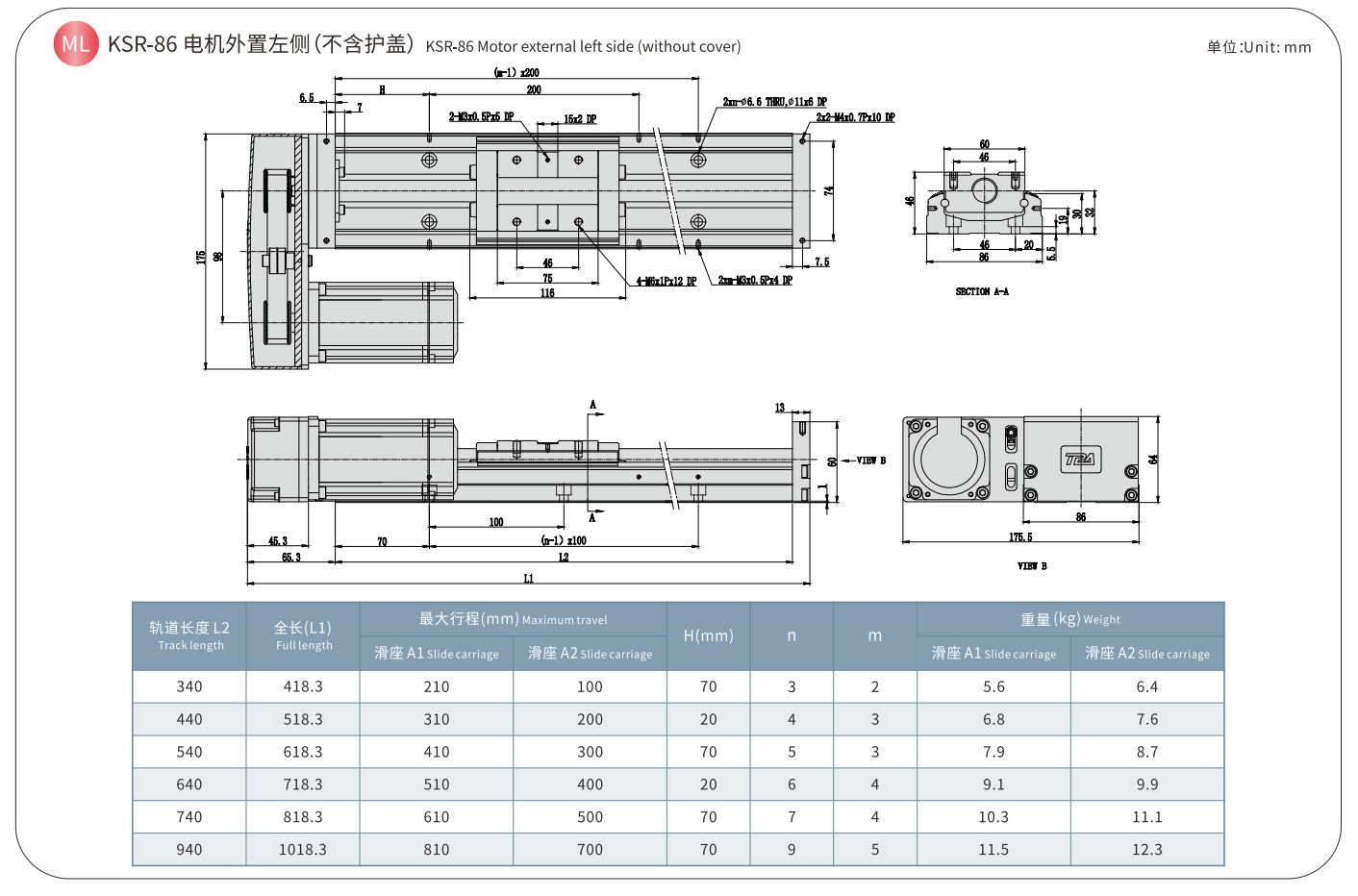
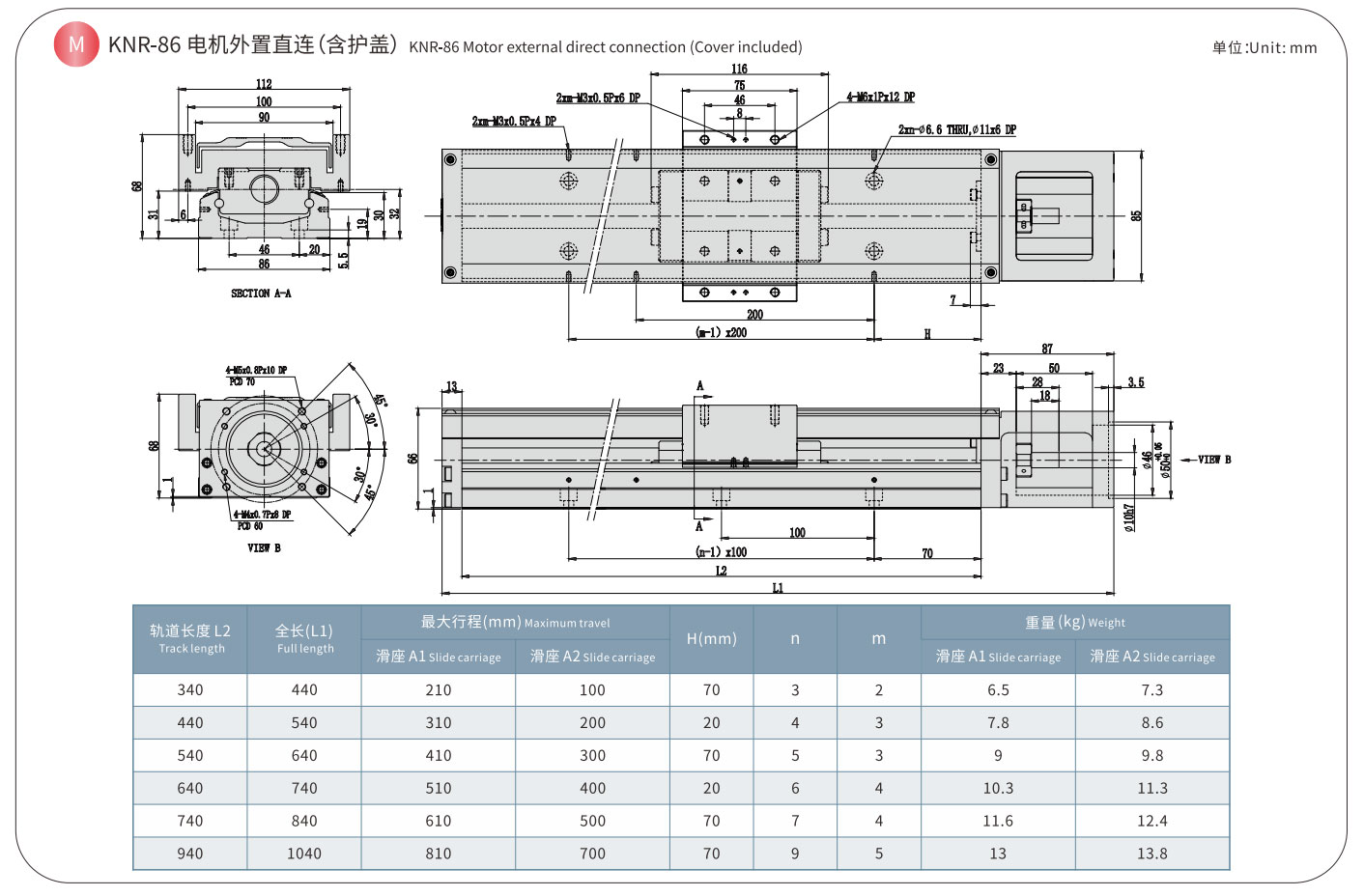
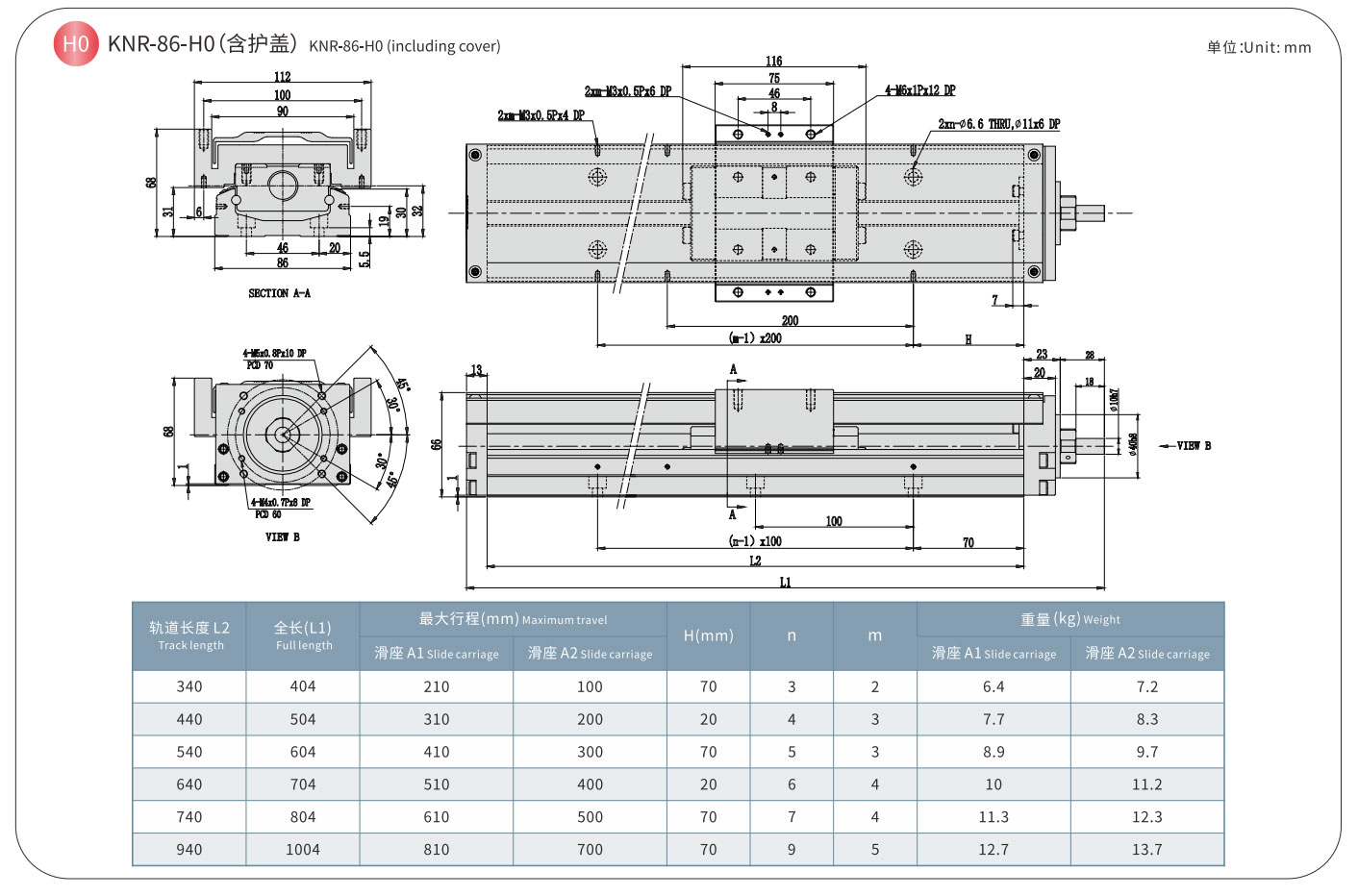
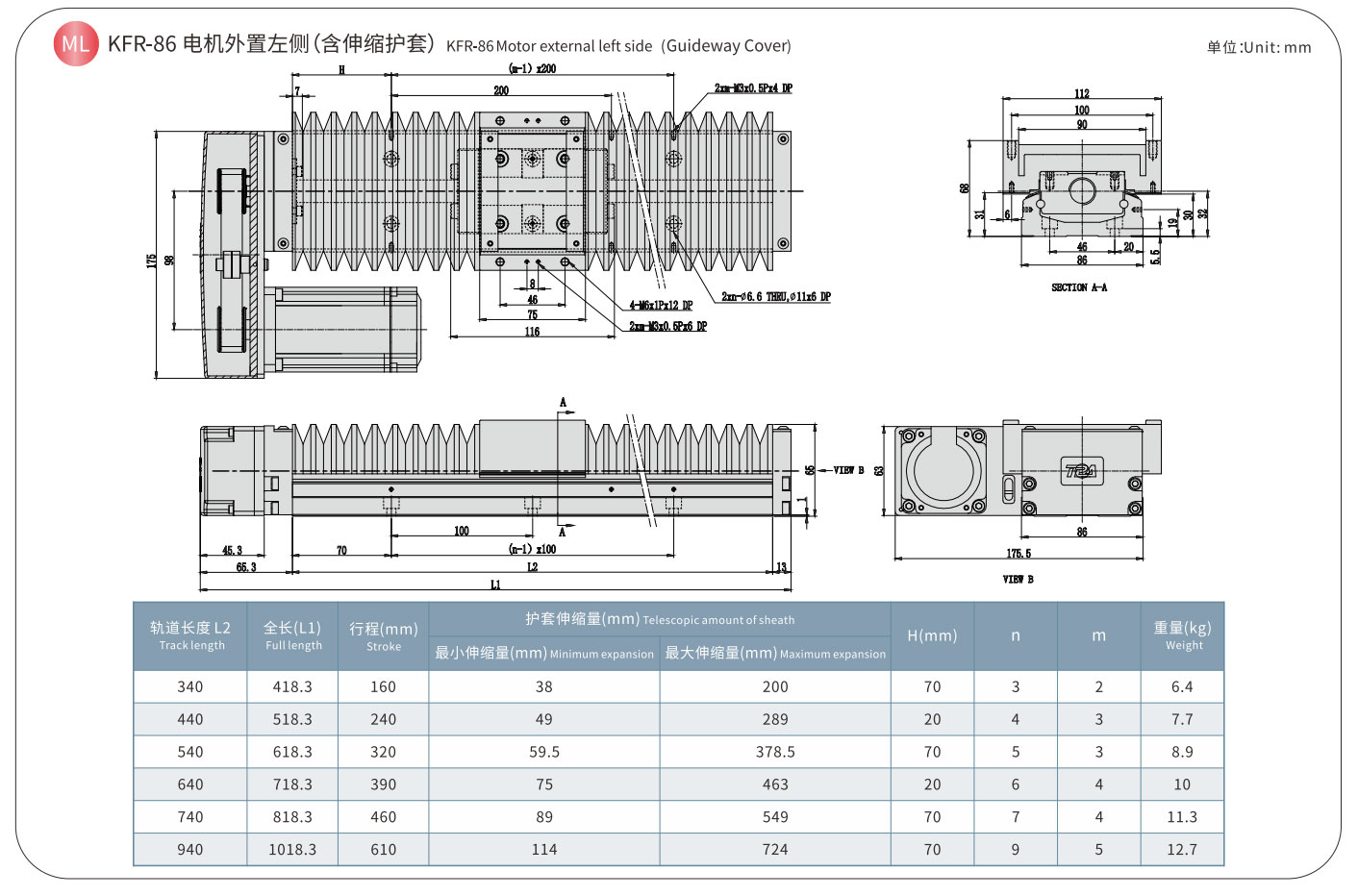
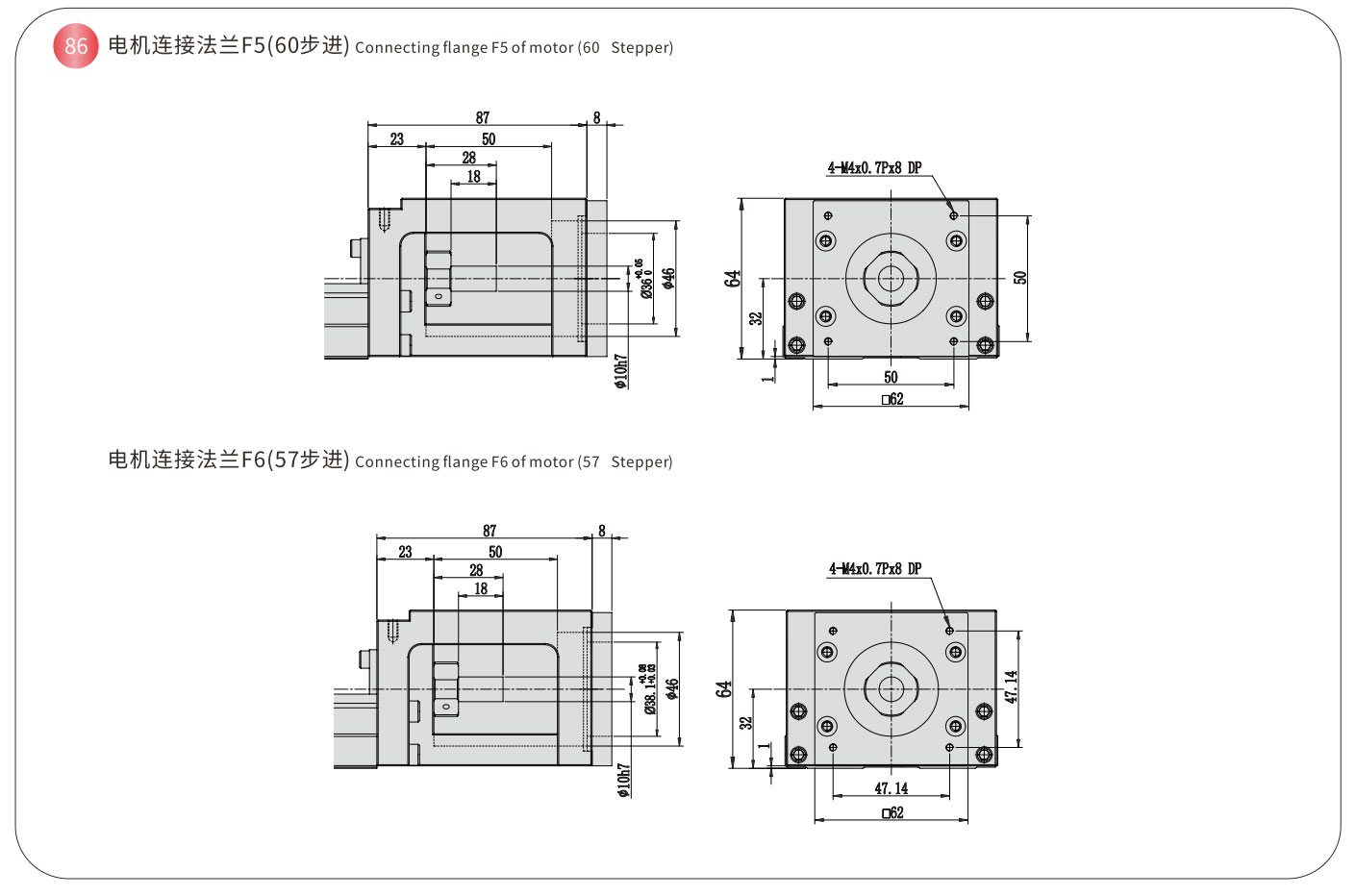
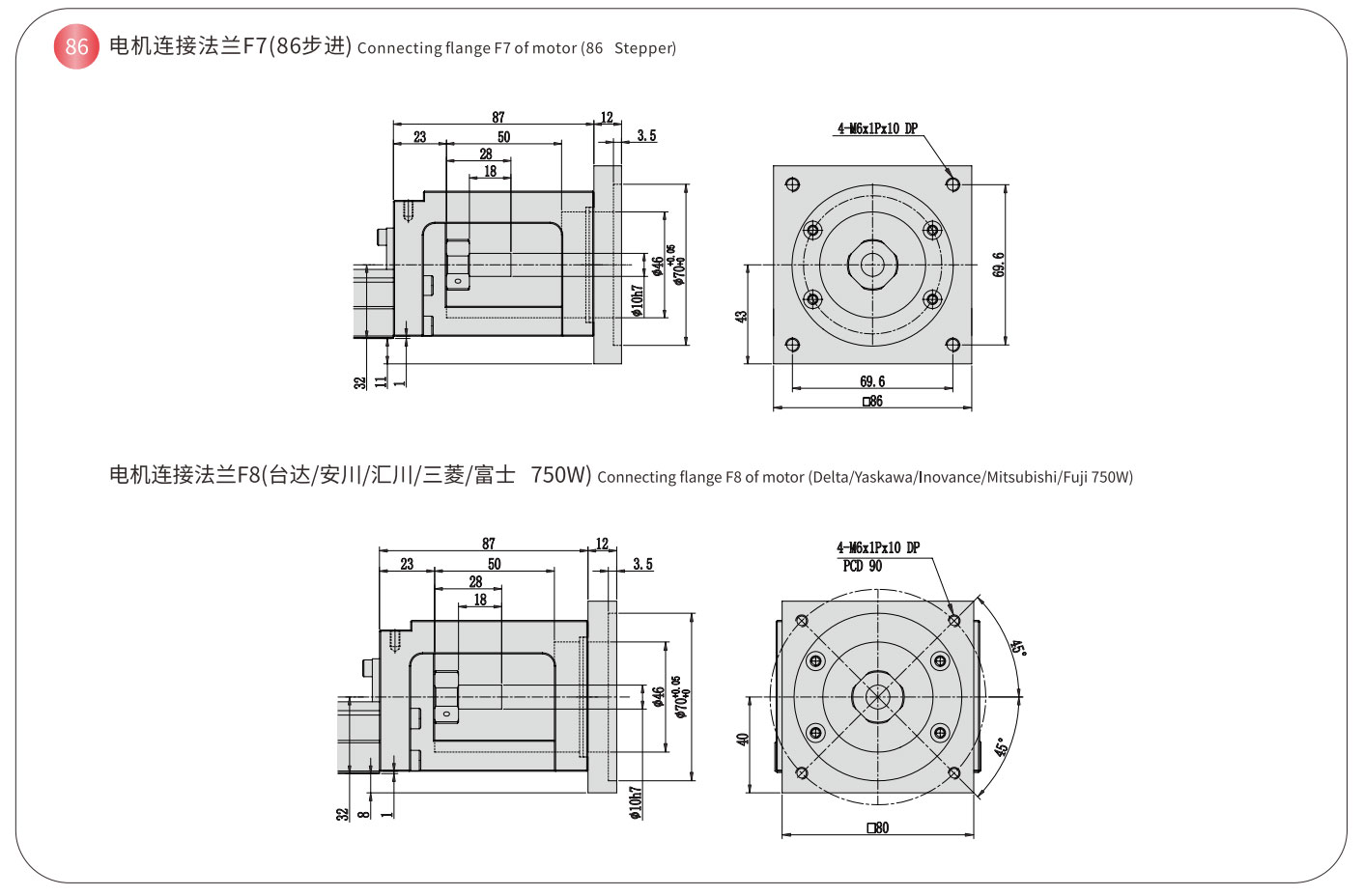
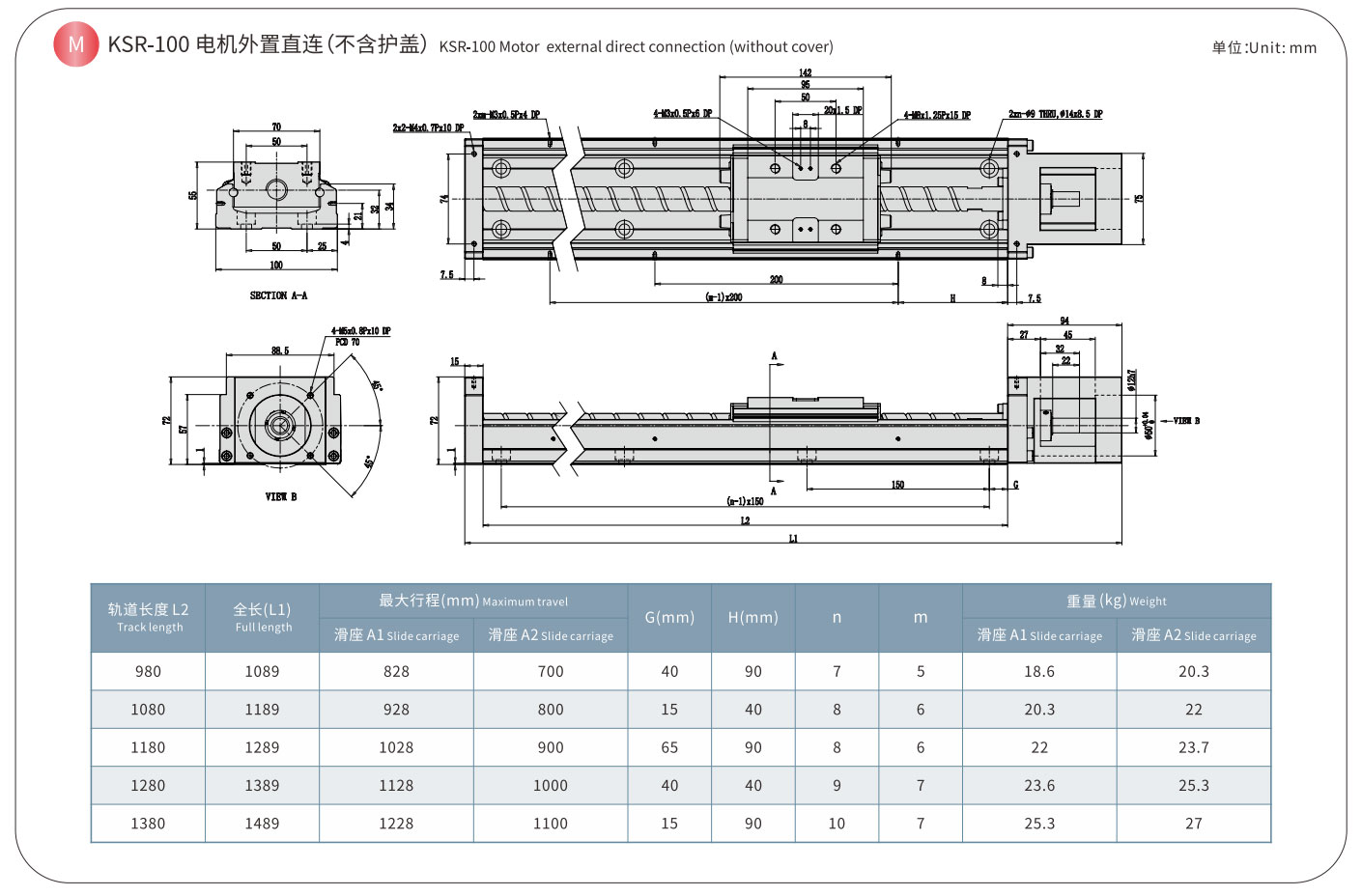
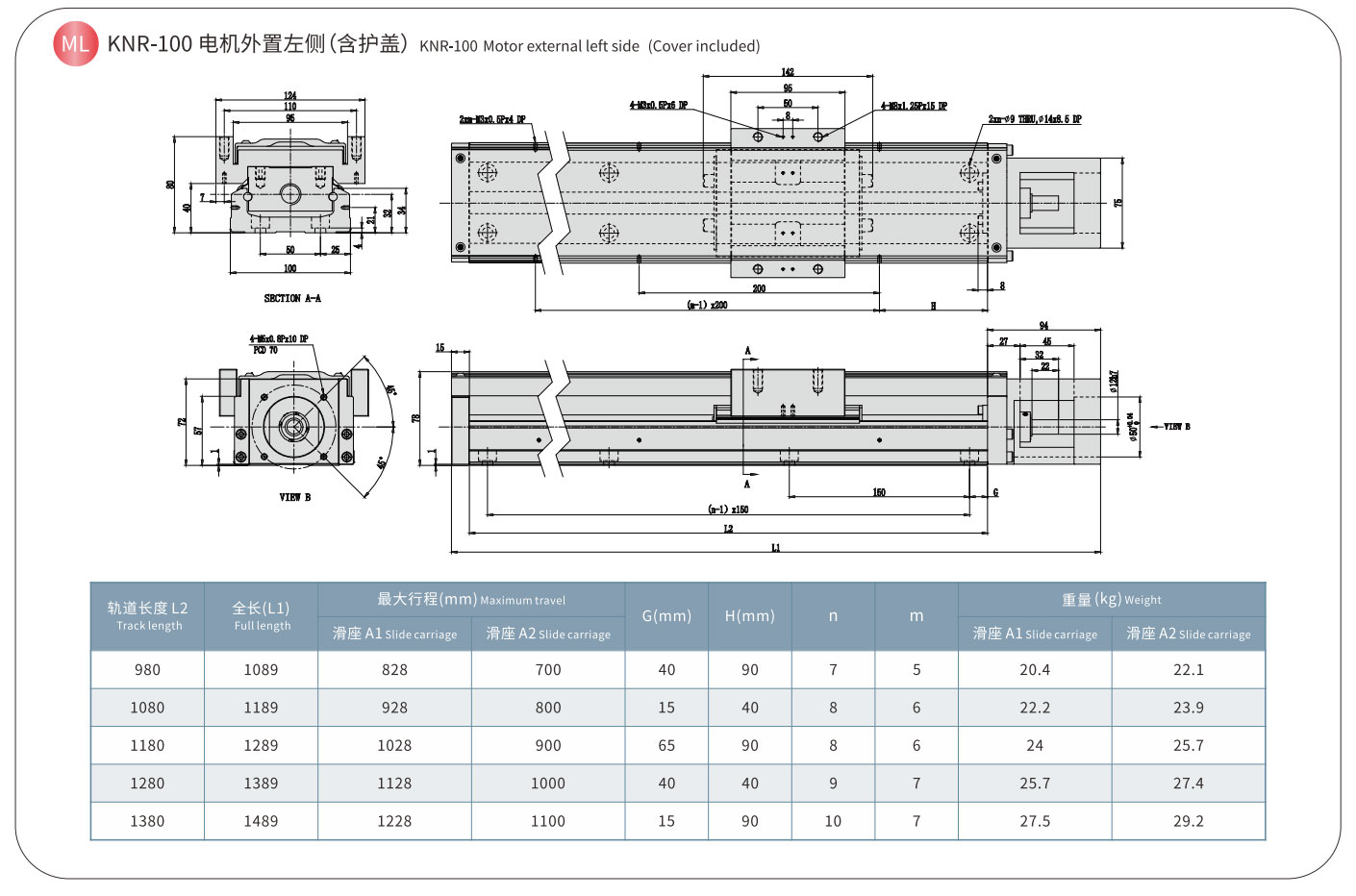
Једноосни робот серије КК, који је развио ТПА РОБОТ, користи делимично каљену челичну стазу у облику слова У да би се значајно повећала снага и носивост робота. Због различитих окружења, имамо три типа серије линеарних робота, КСР, КНР и КФР, у зависности од типа поклопца који се користи.
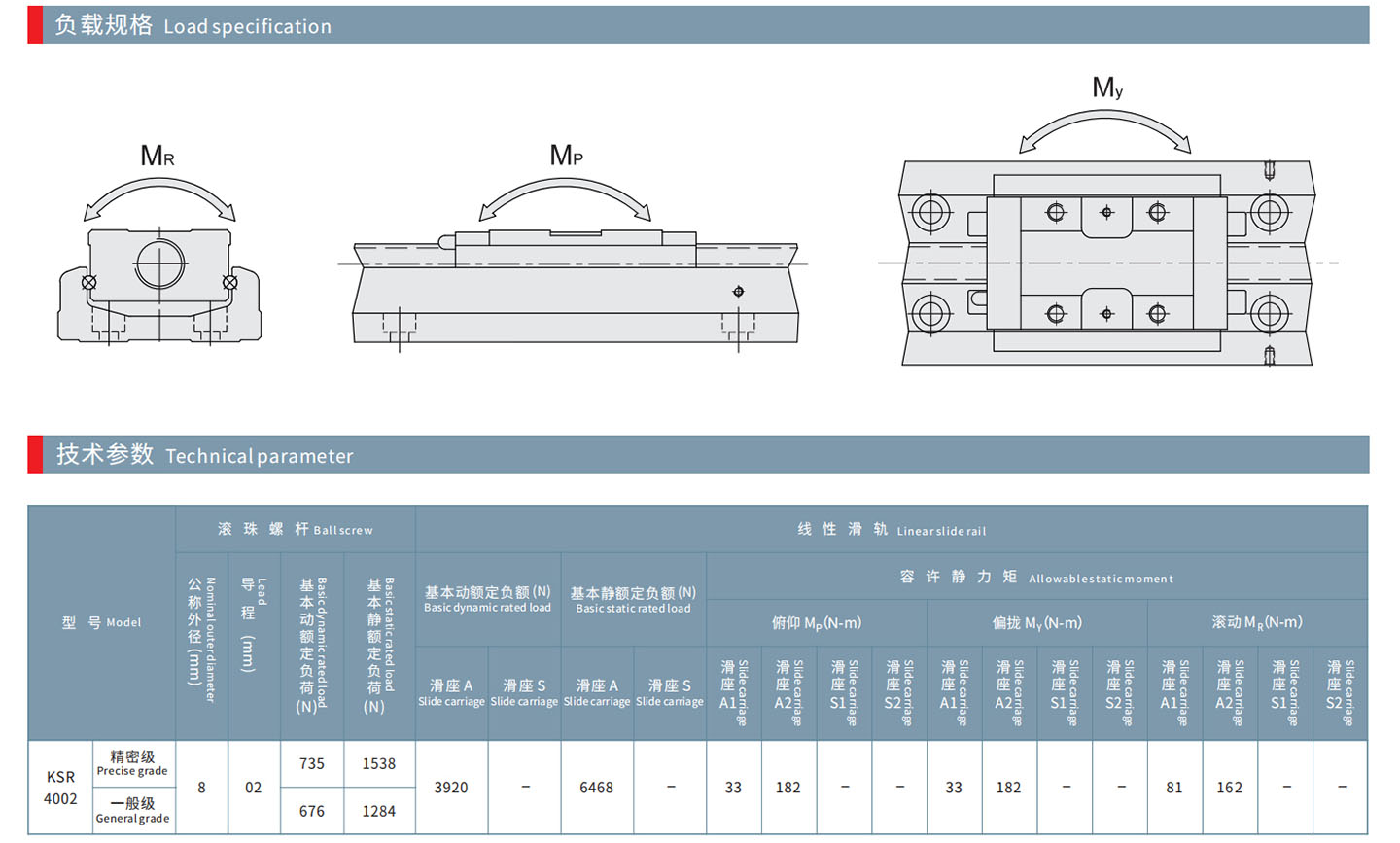
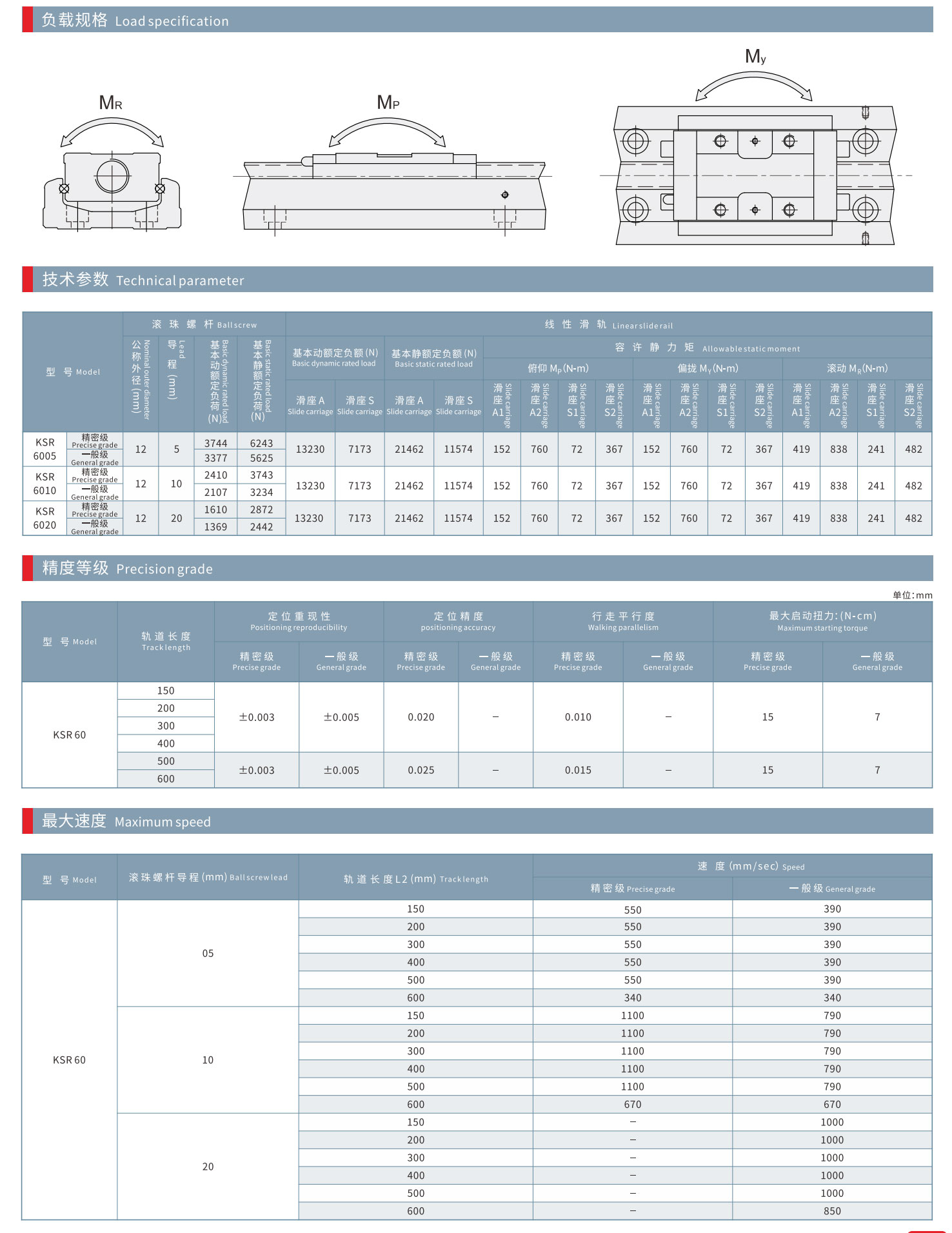
За систем повратка између шине и клизача, контактна површина између кугле и жлеба кугле има 2-редни дизајн Гоетхе зуба са контактним углом од 45 степени, што може учинити да осовинска рука робота носи једнак капацитет оптерећења у четири смера .
Истовремено, високопрецизни куглични вијак се користи као структура преноса, а стаза у облику слова У сарађује са оптимизованим дизајном, тако да робот КК осовине има неупоредиву прецизност, а његова поновљена тачност позиционирања може досећи ±0,003 мм.
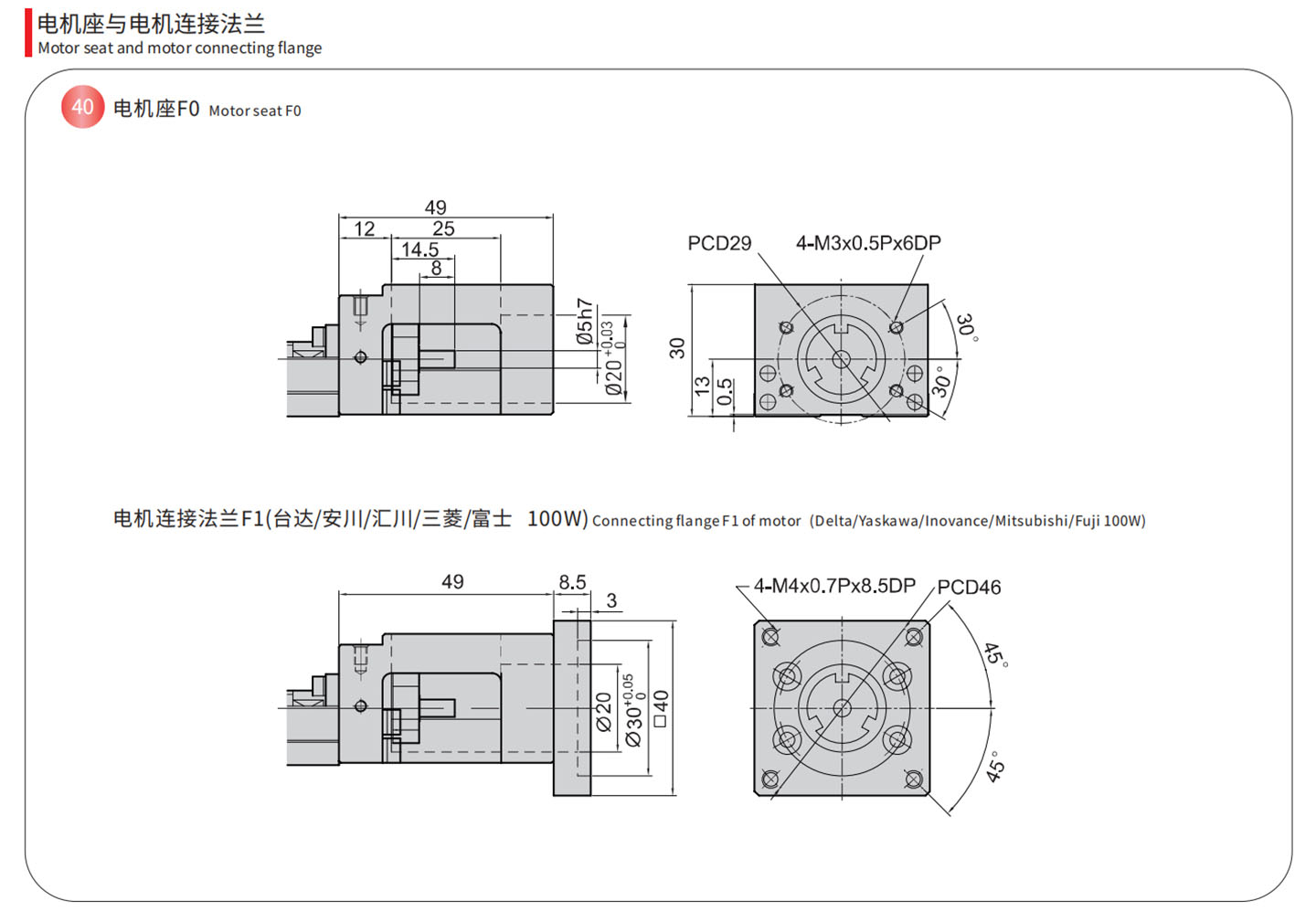
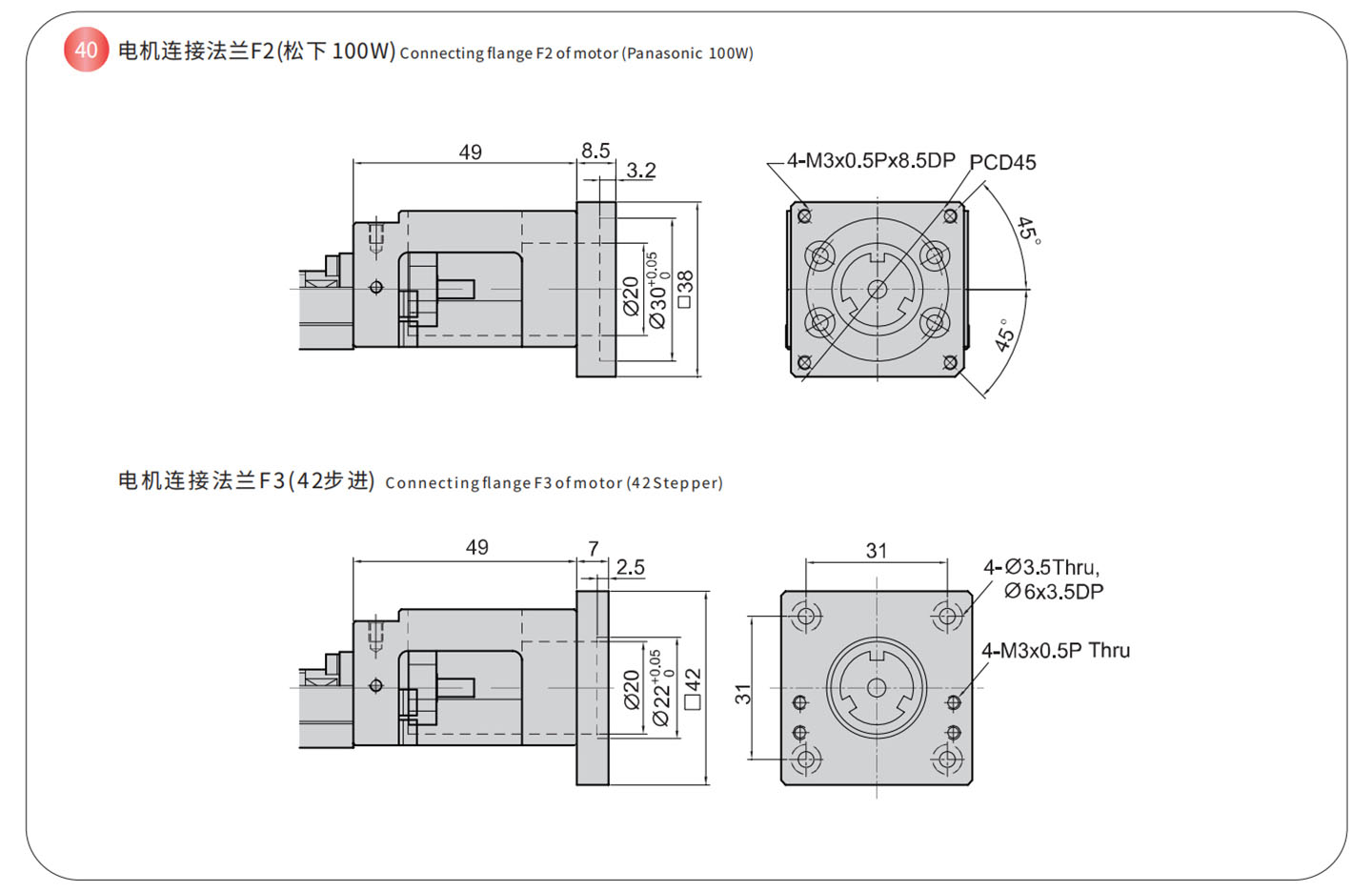
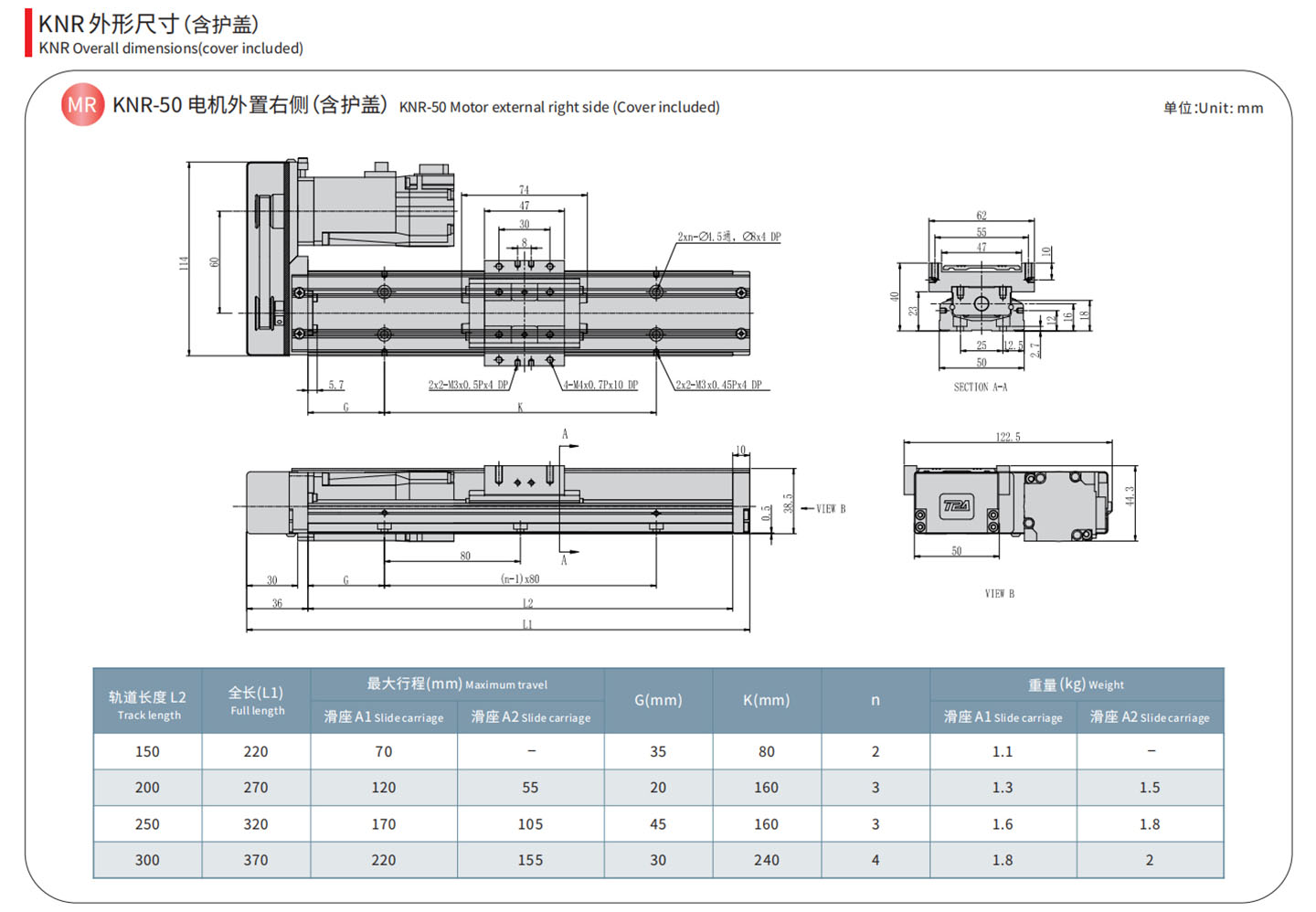
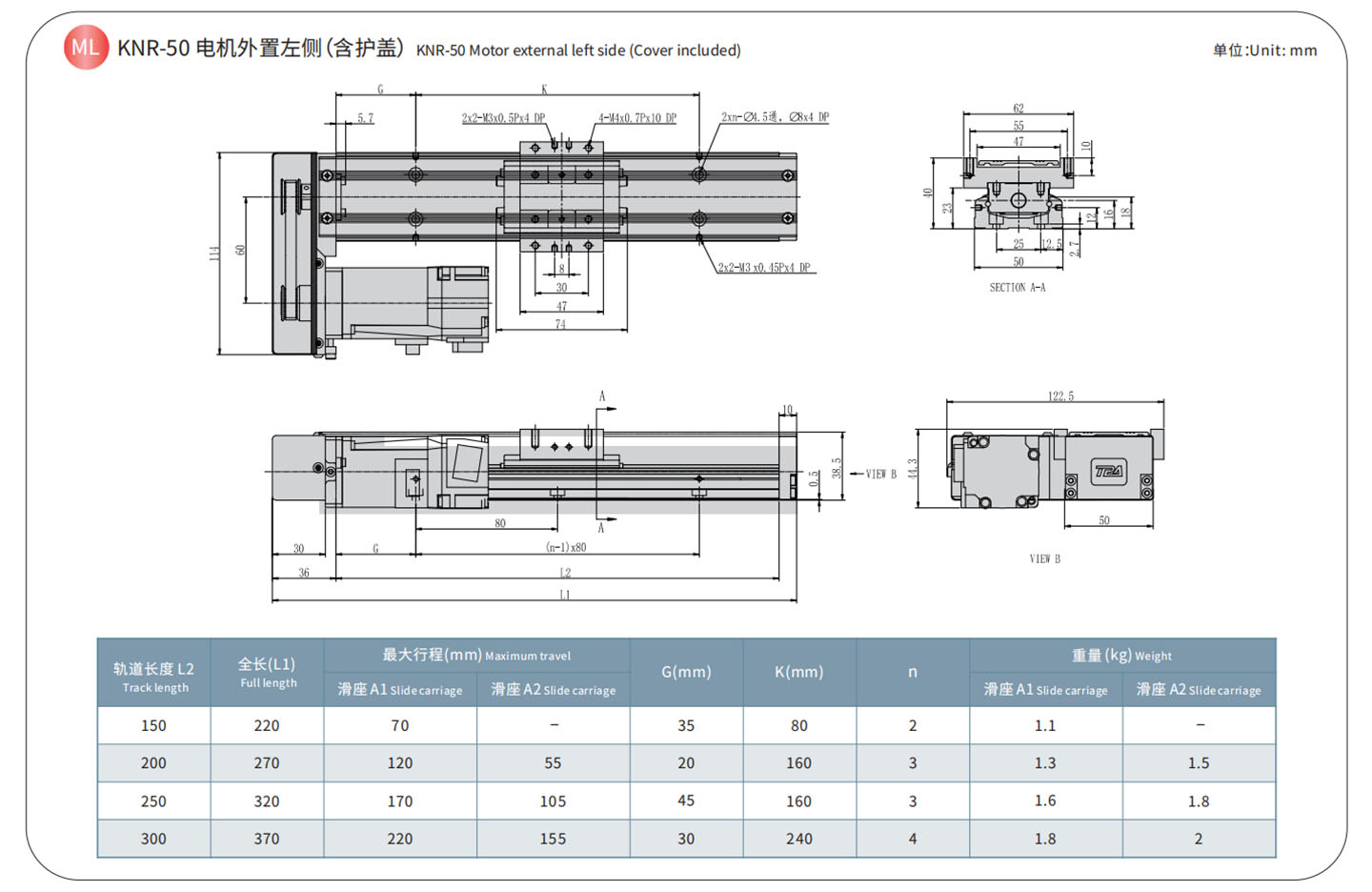
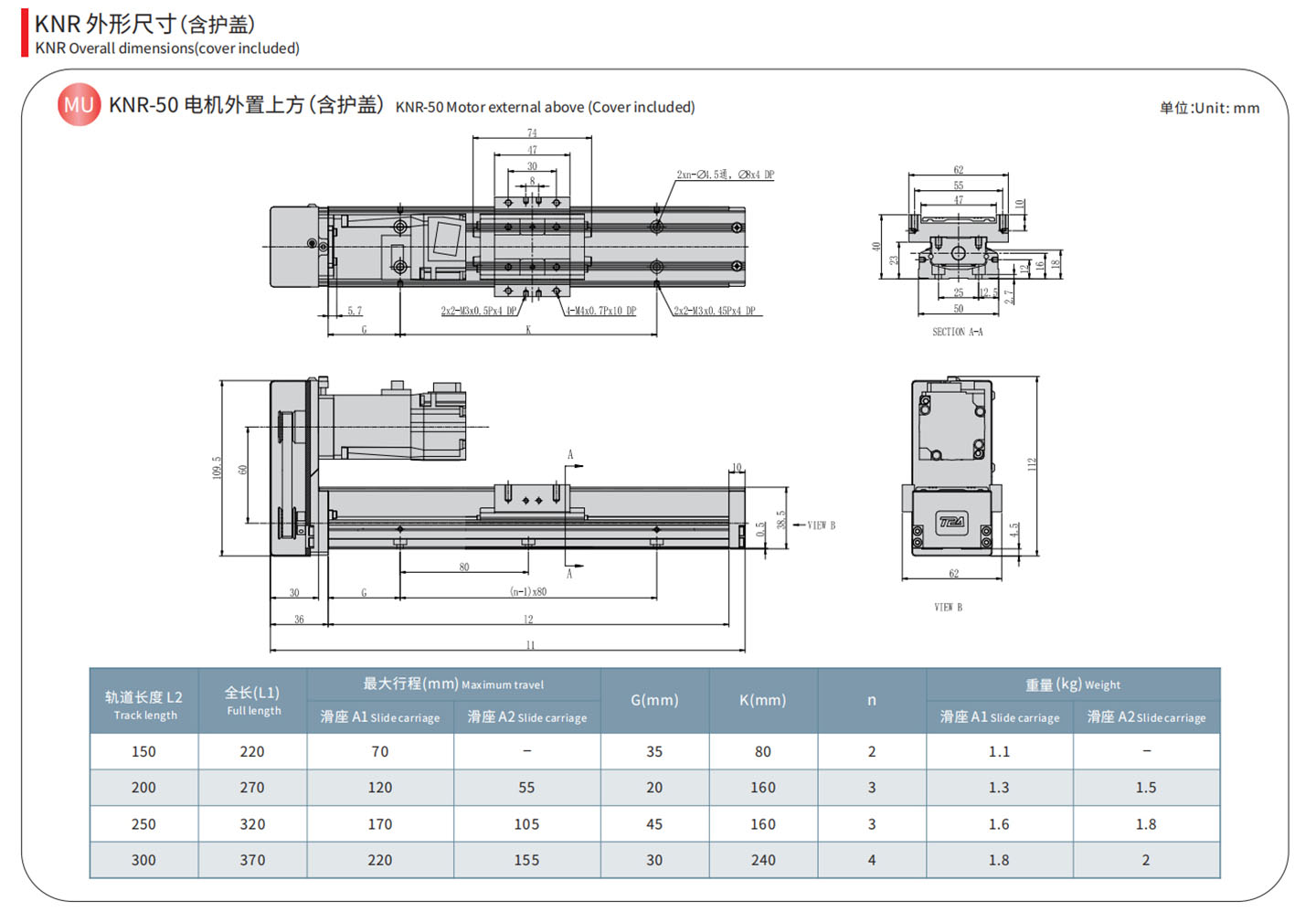
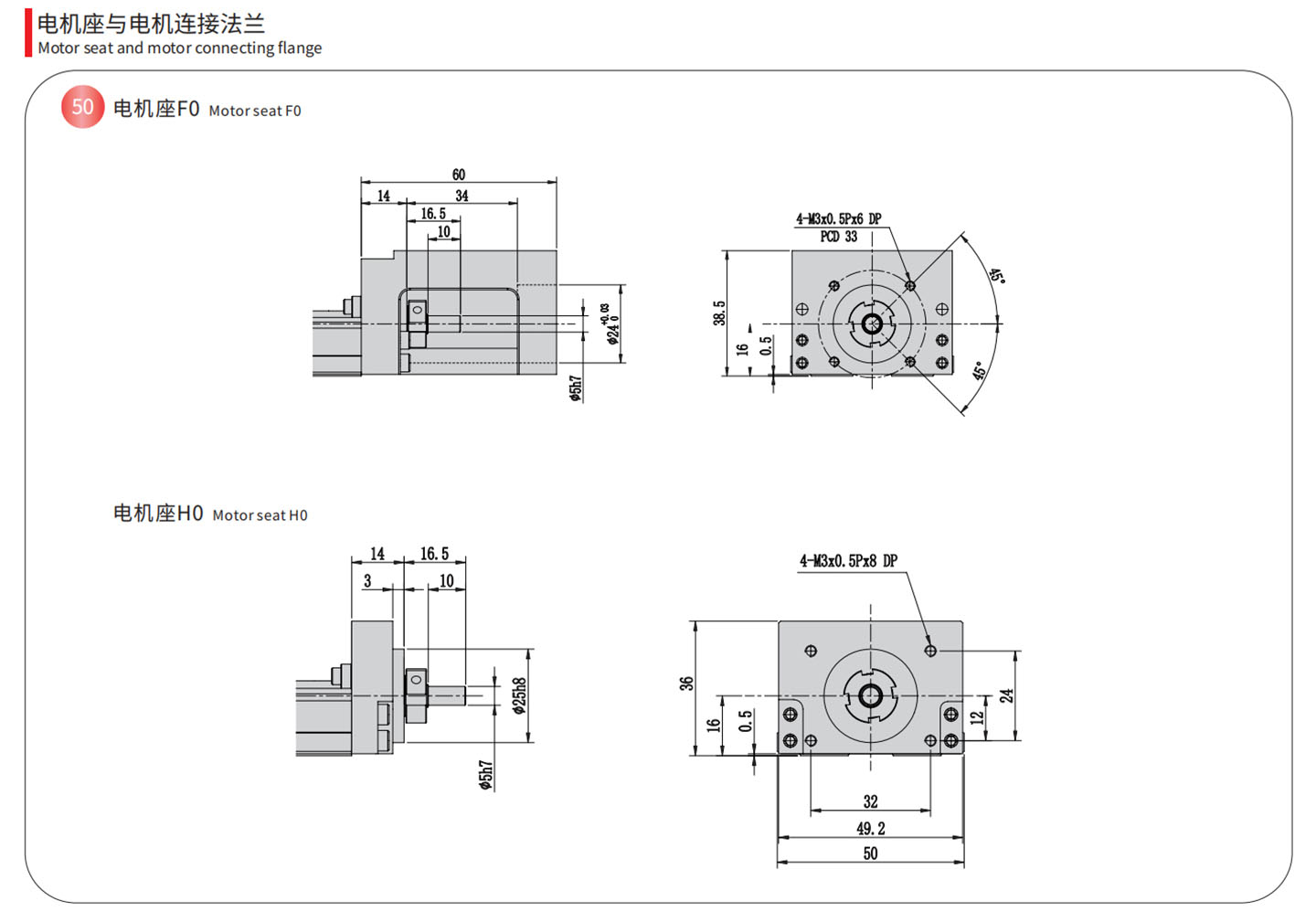
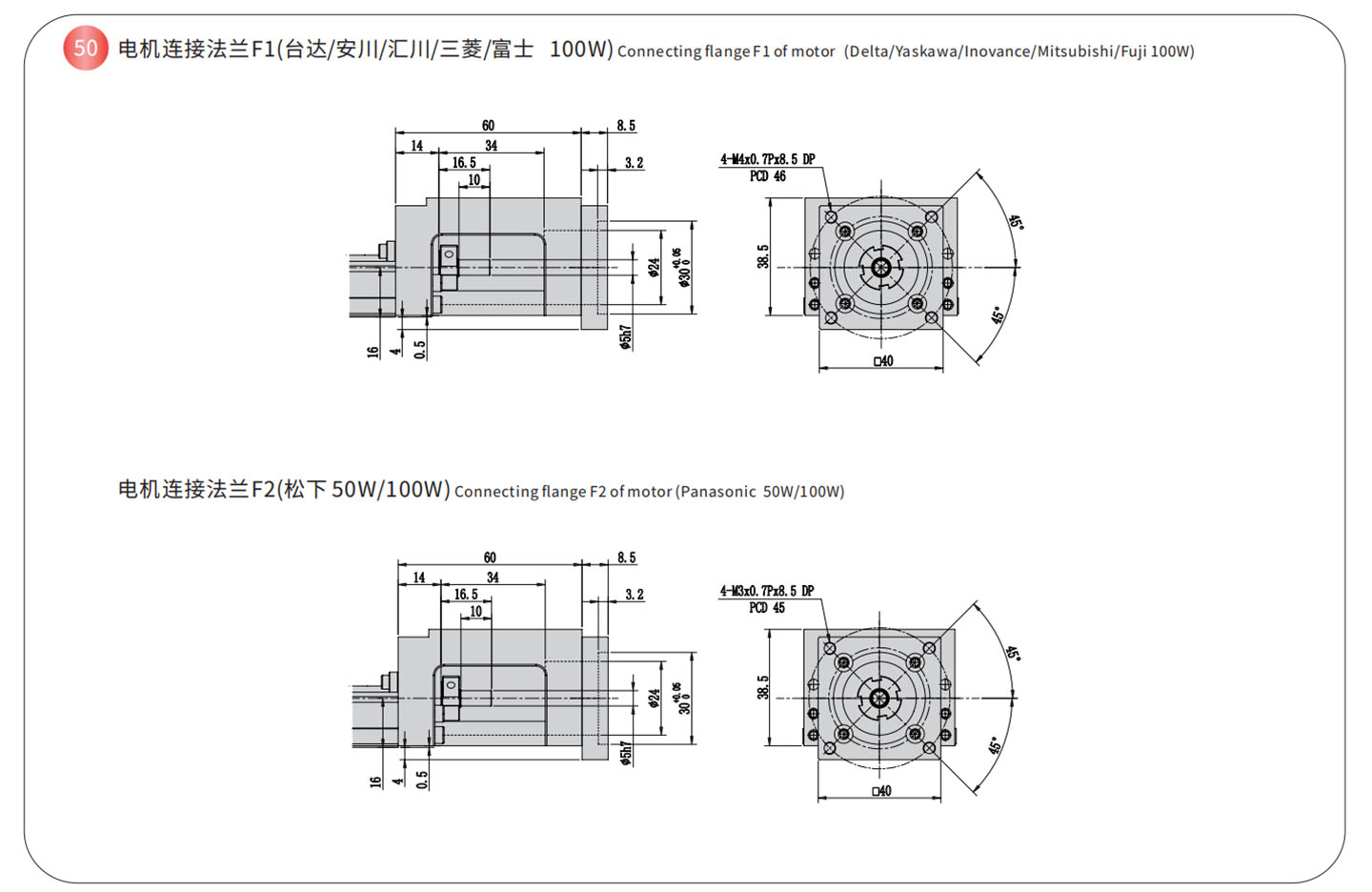
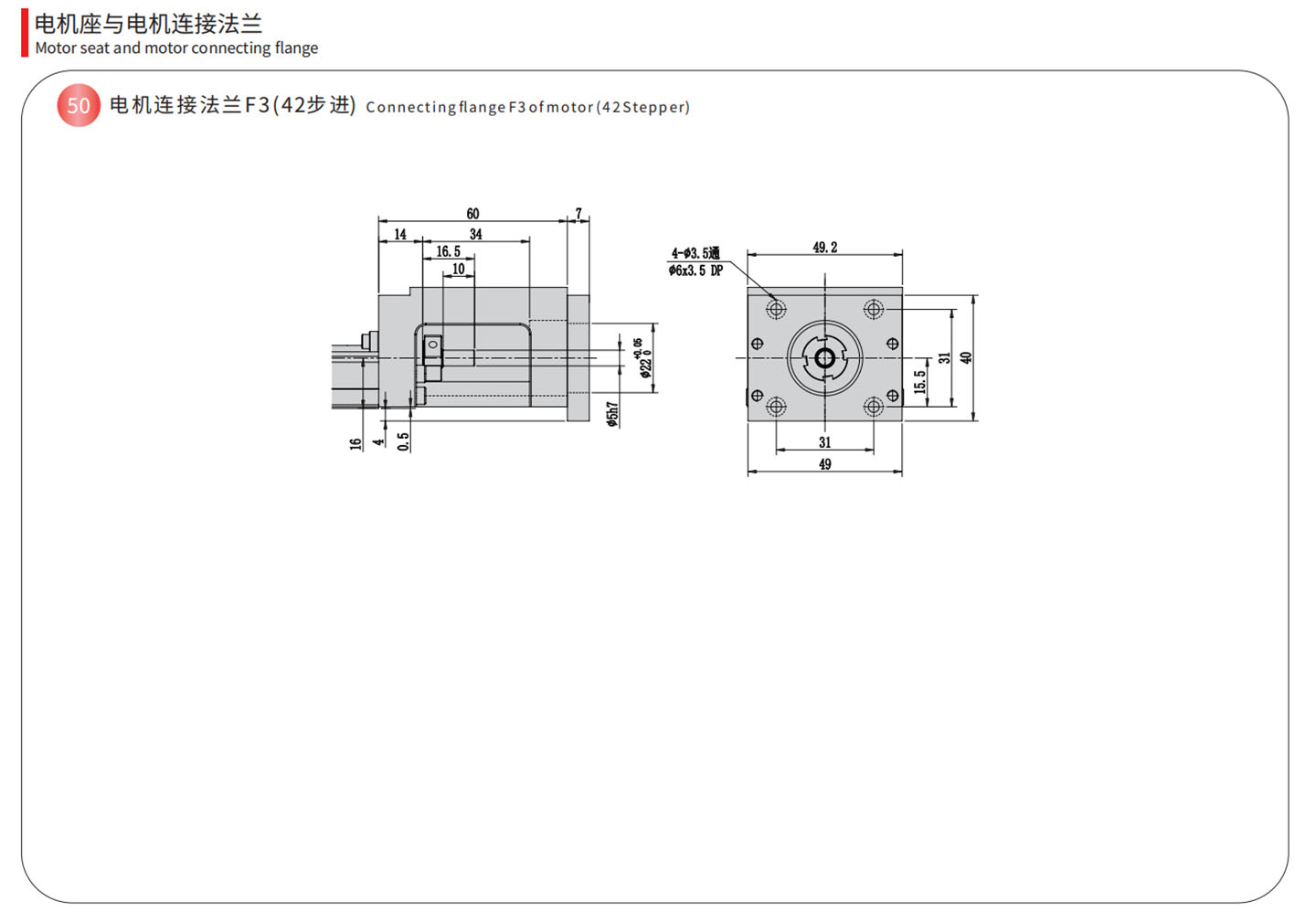
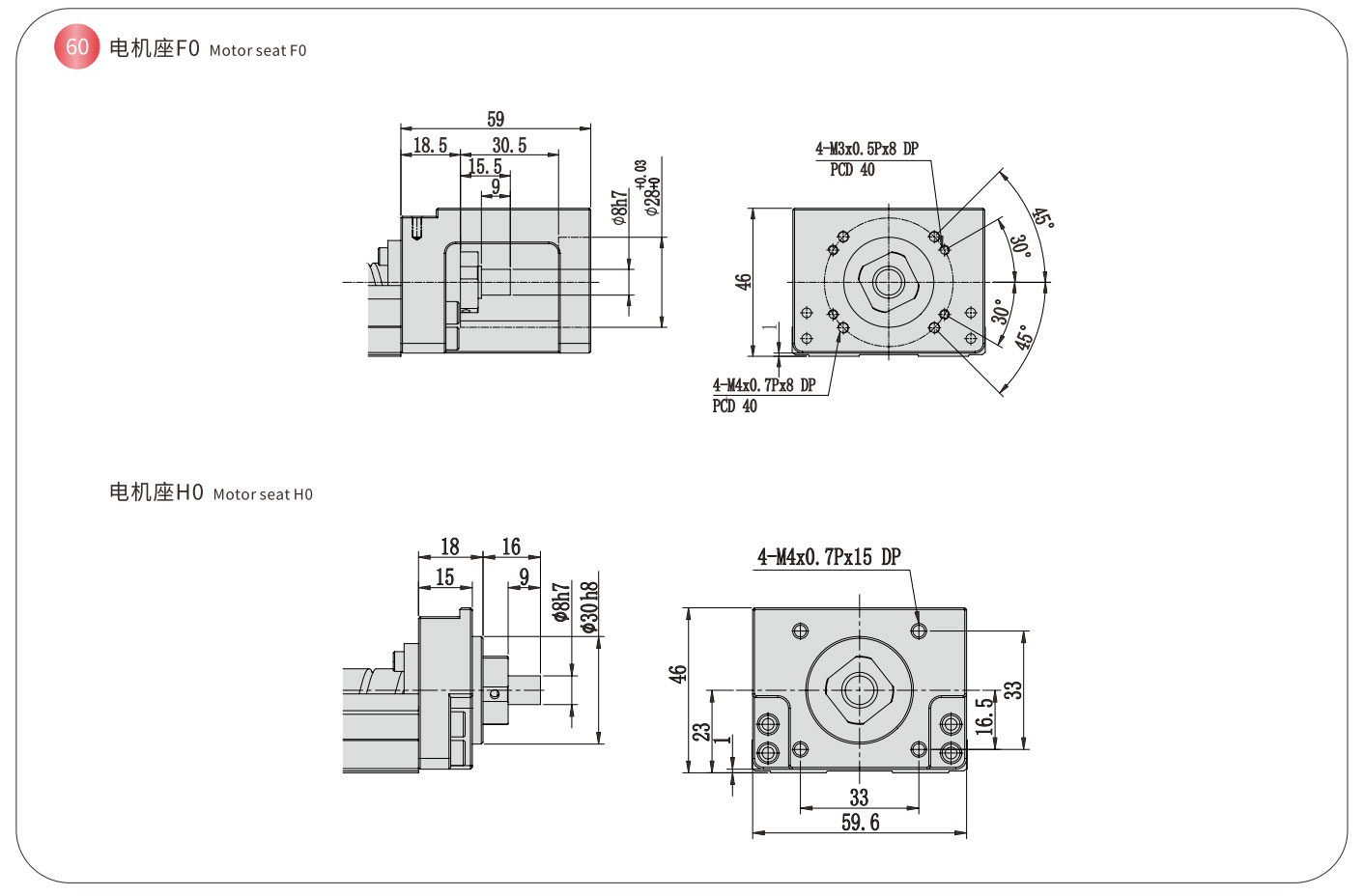
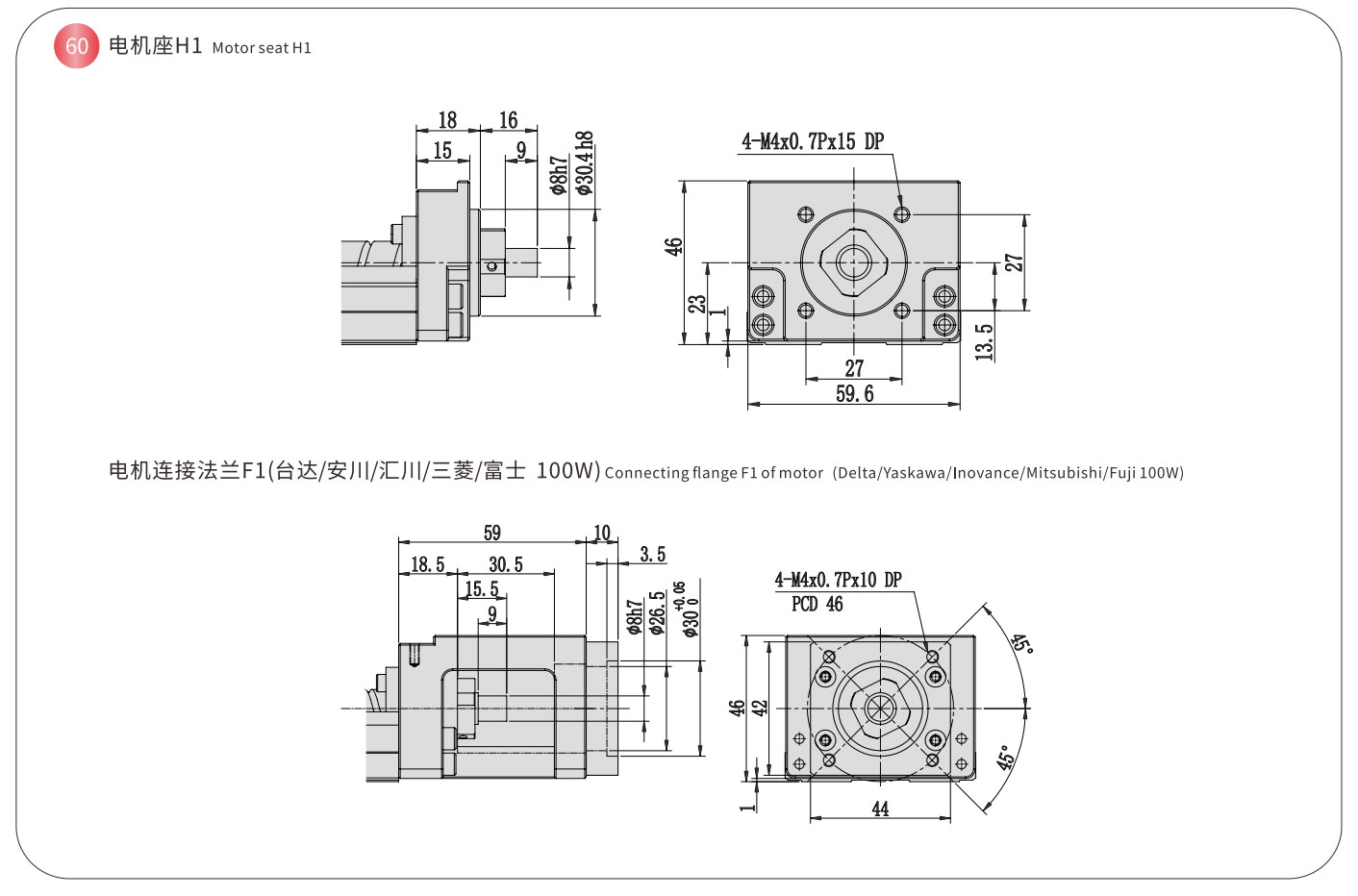
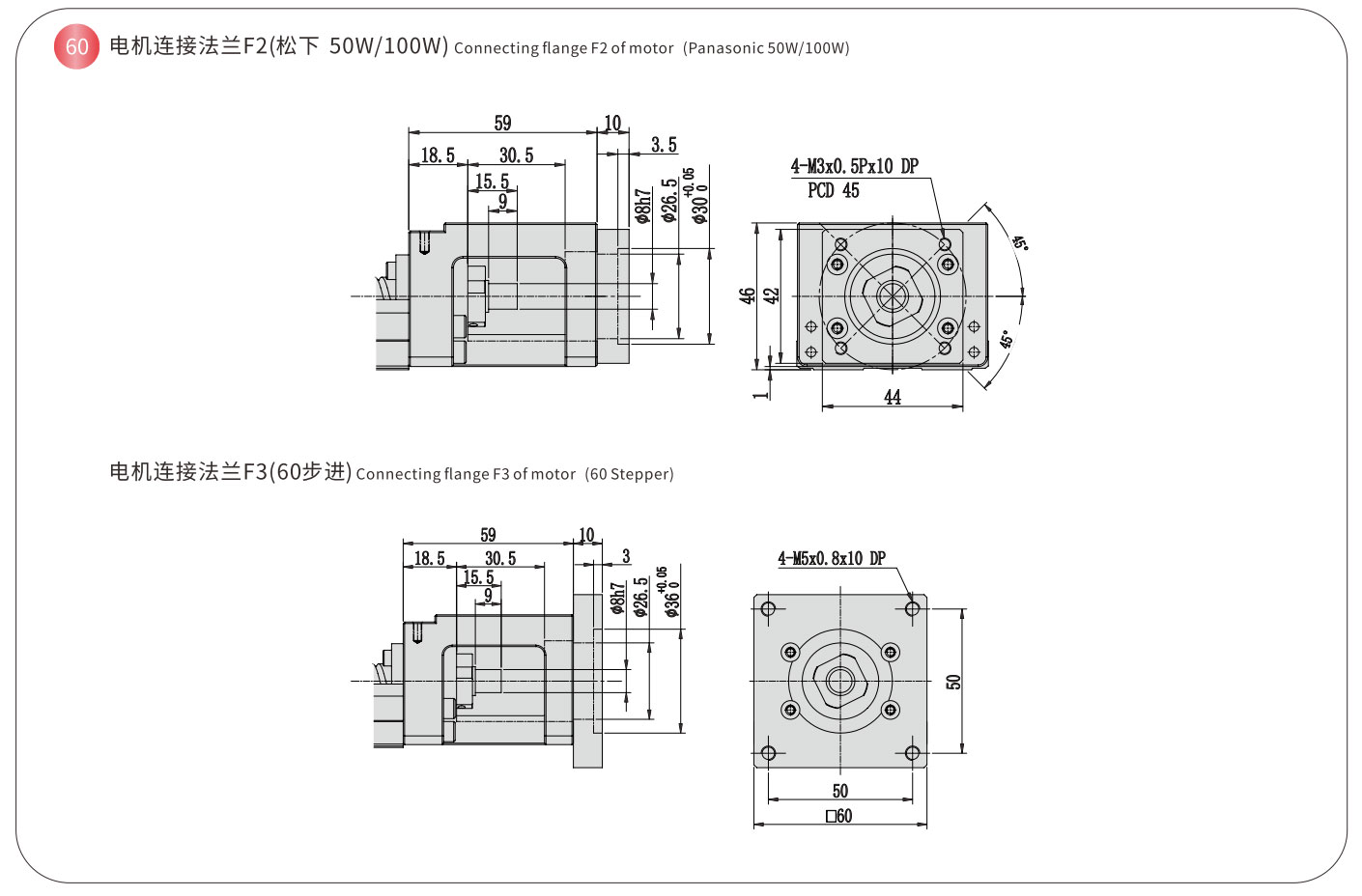
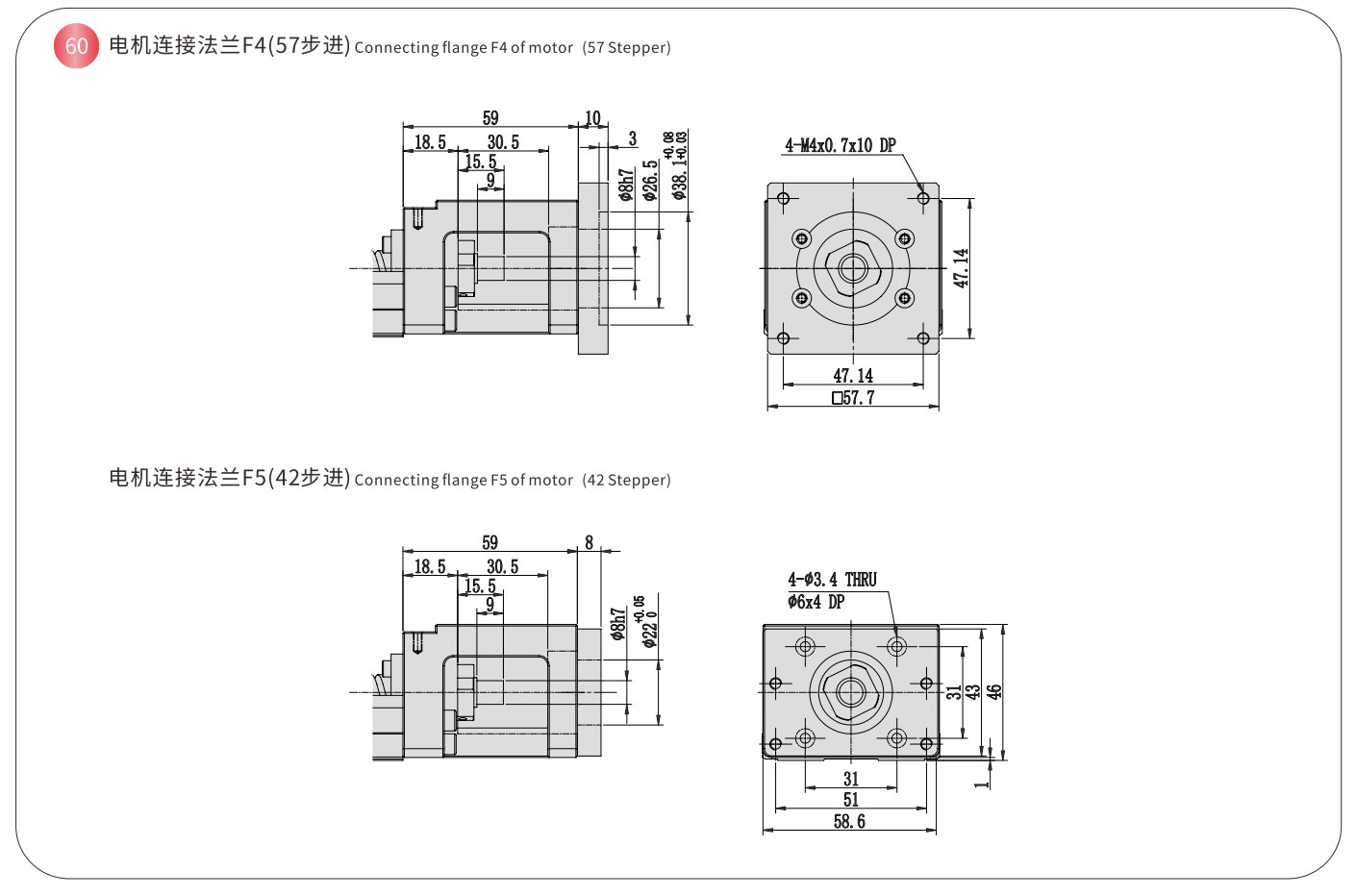
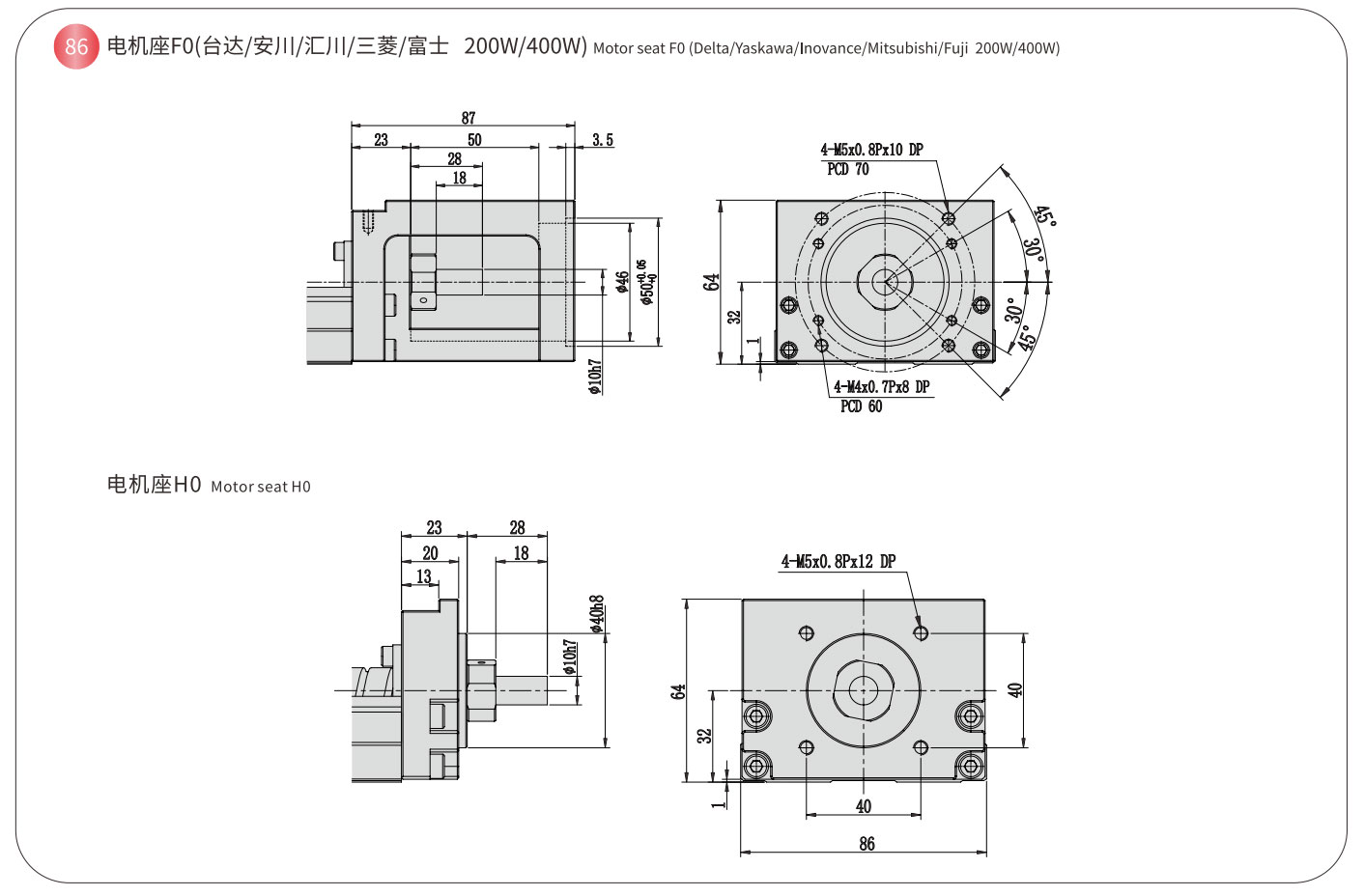
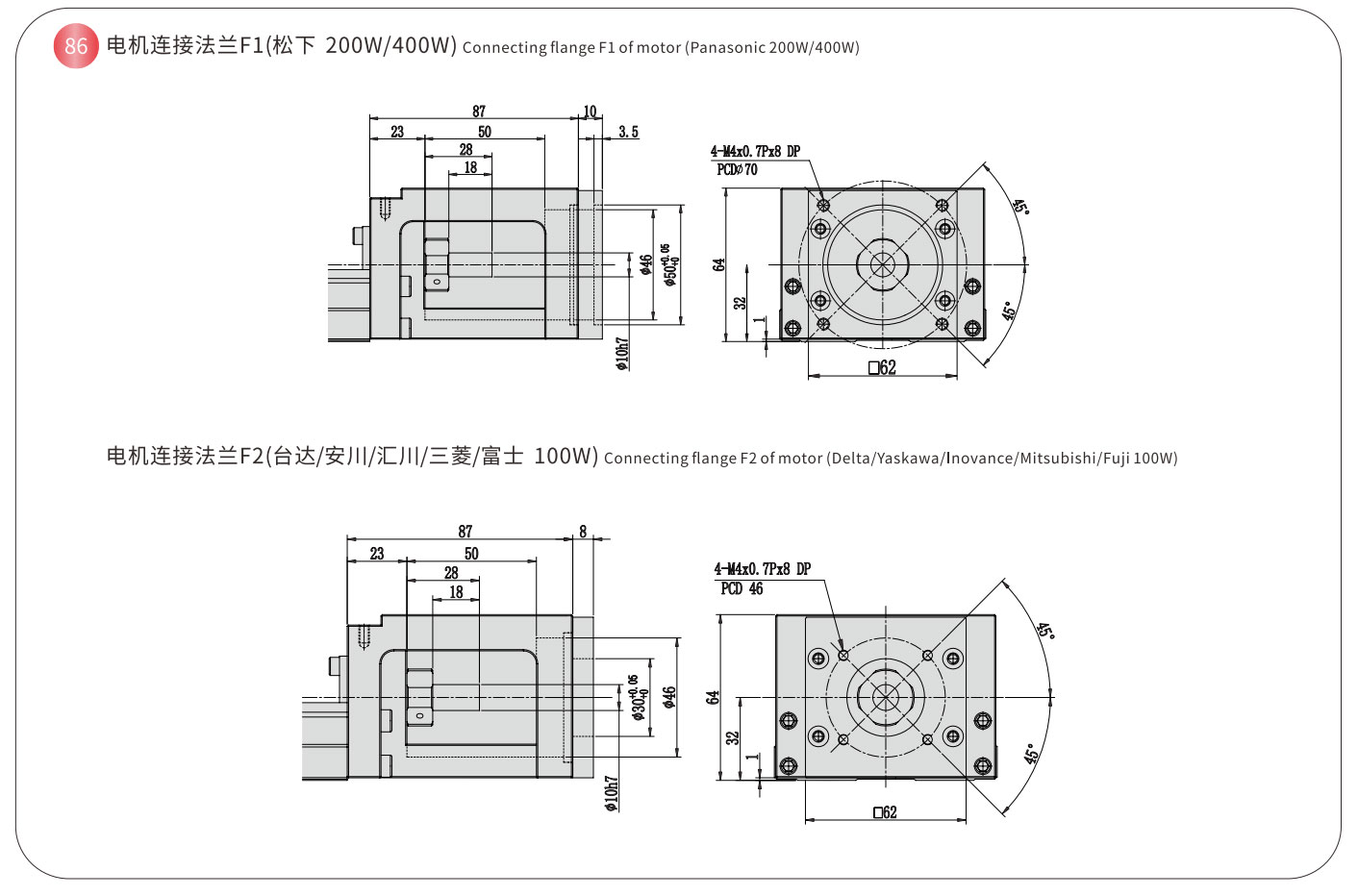
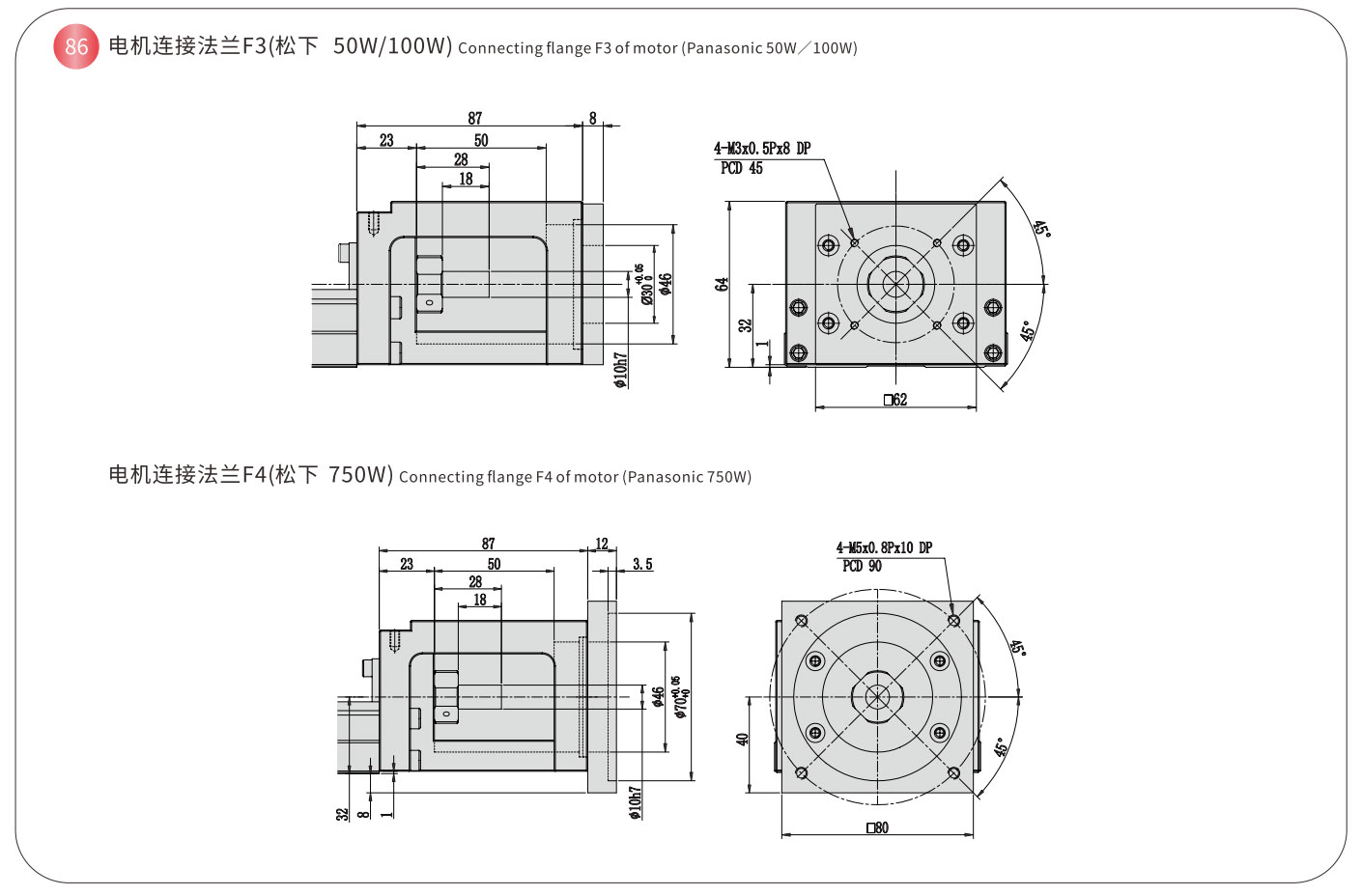
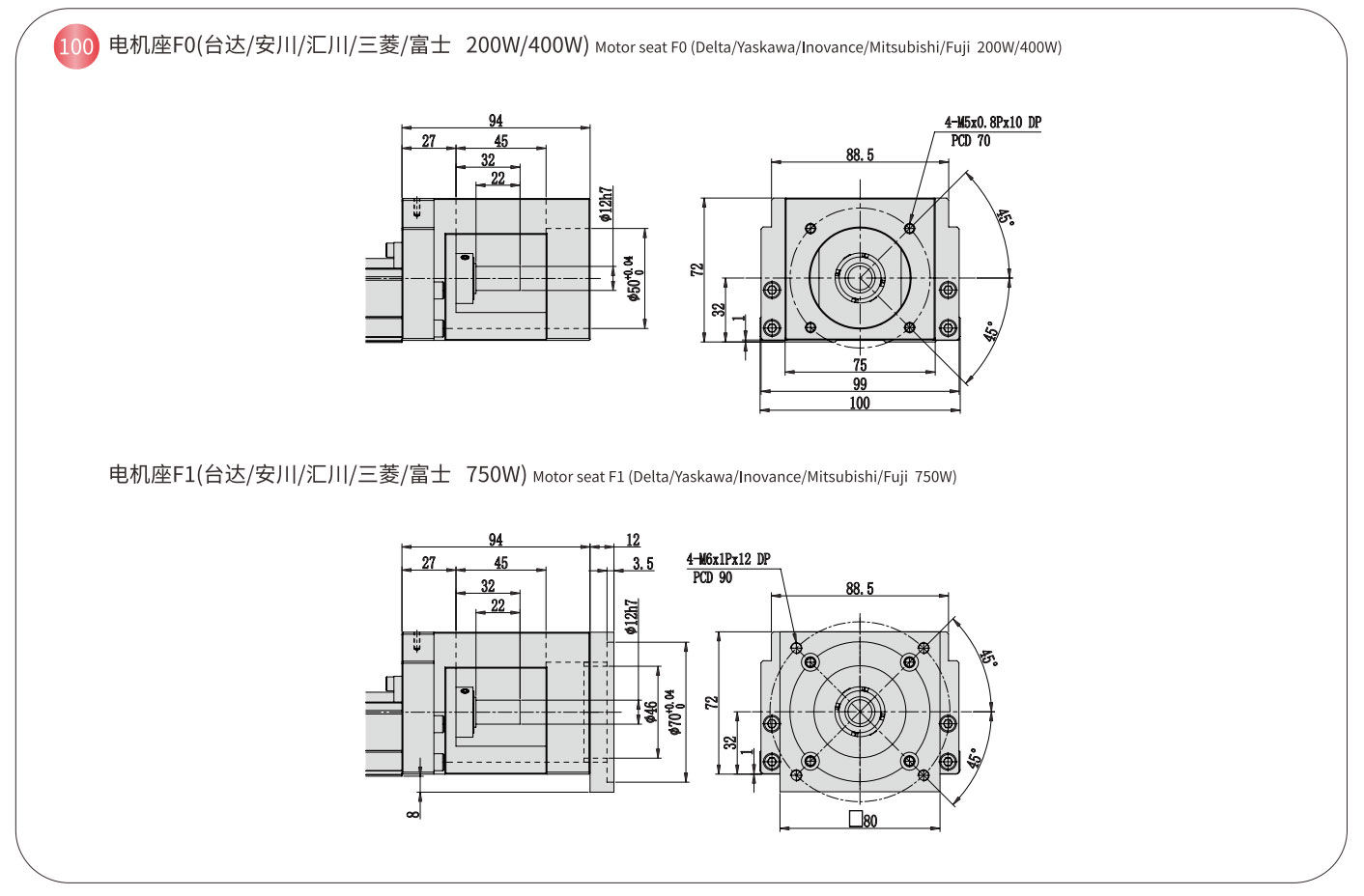
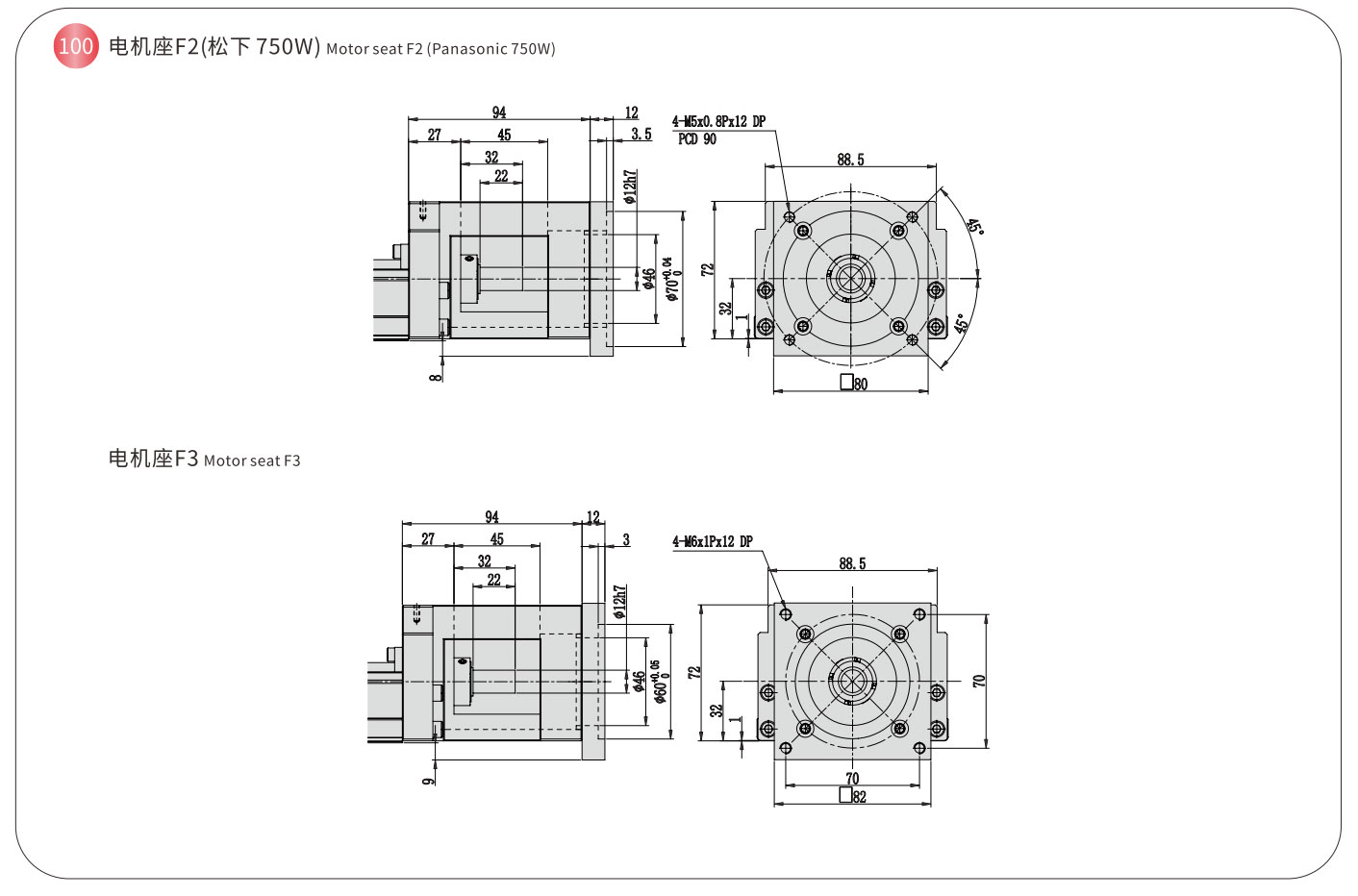
Под истим условима оптерећења, наша једноосни робот КК серија је мања по величини, обезбеђујемо стандардне рупе са навојем на челичној бази и клизачу, а наша адаптерска плоча мотора може да обезбеди до 8 метода уградње мотора, што значи да се може лако саставити било који картезијански роботски систем. Због тога се роботи са једном осовином серије КК широко користе у руковању силиконским плочицама, аутоматском дозирању, индустрији ФПД, индустрији медицинске аутоматизације, прецизним мерним инструментима, клизним столовима, индустрији координације линеарних клизних столова.

КСР-КНР-КФР-КЦР серија 2

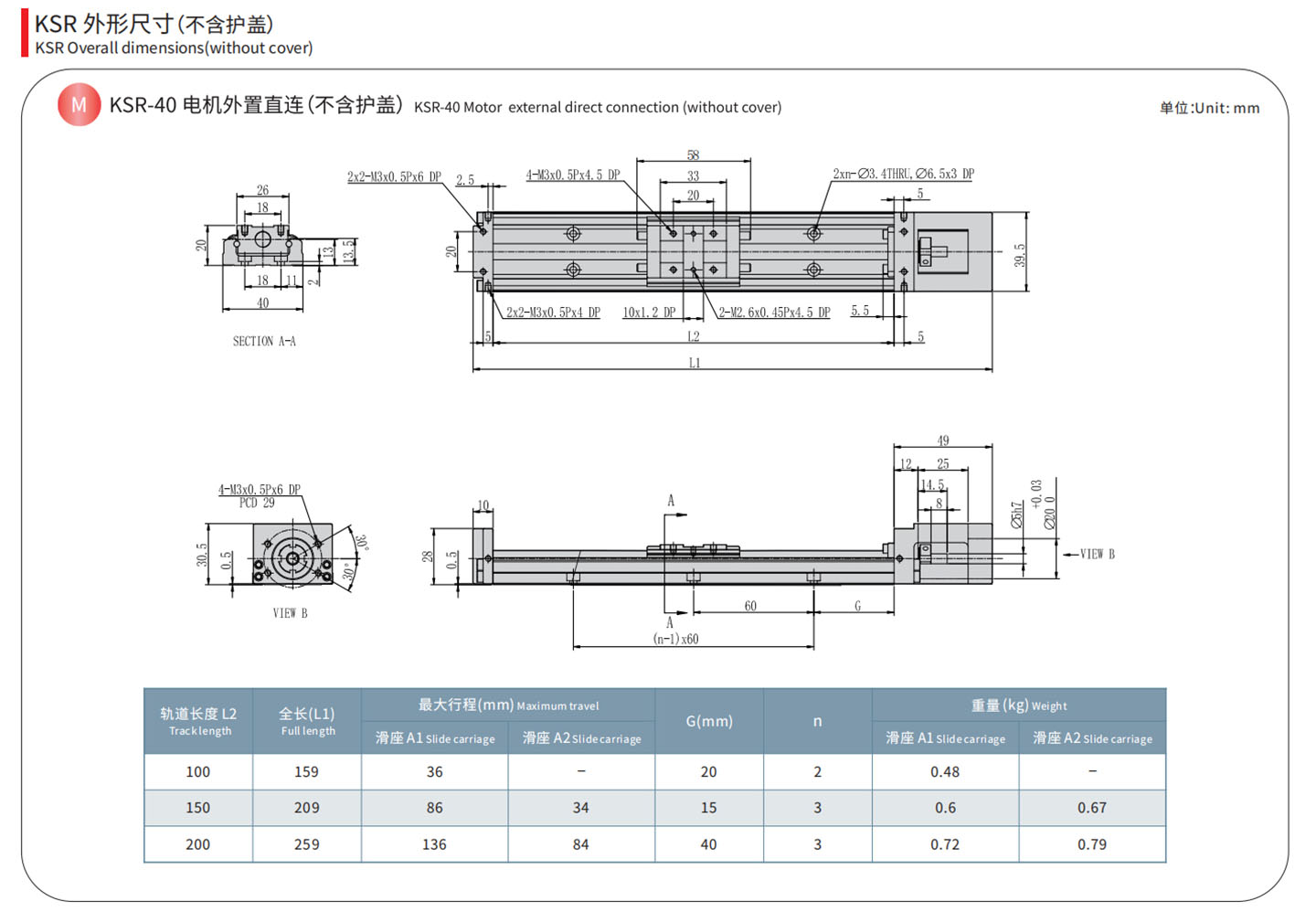
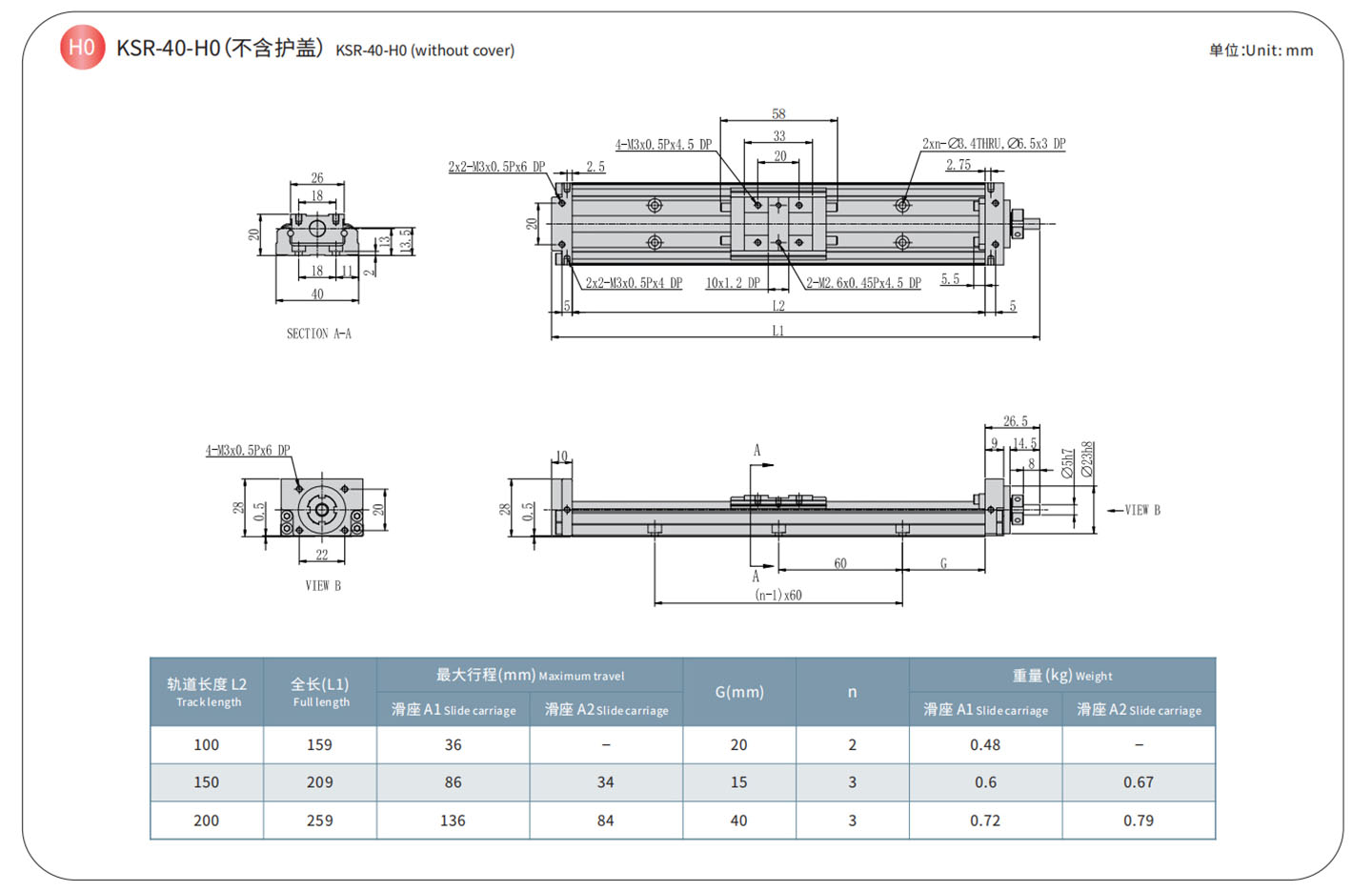
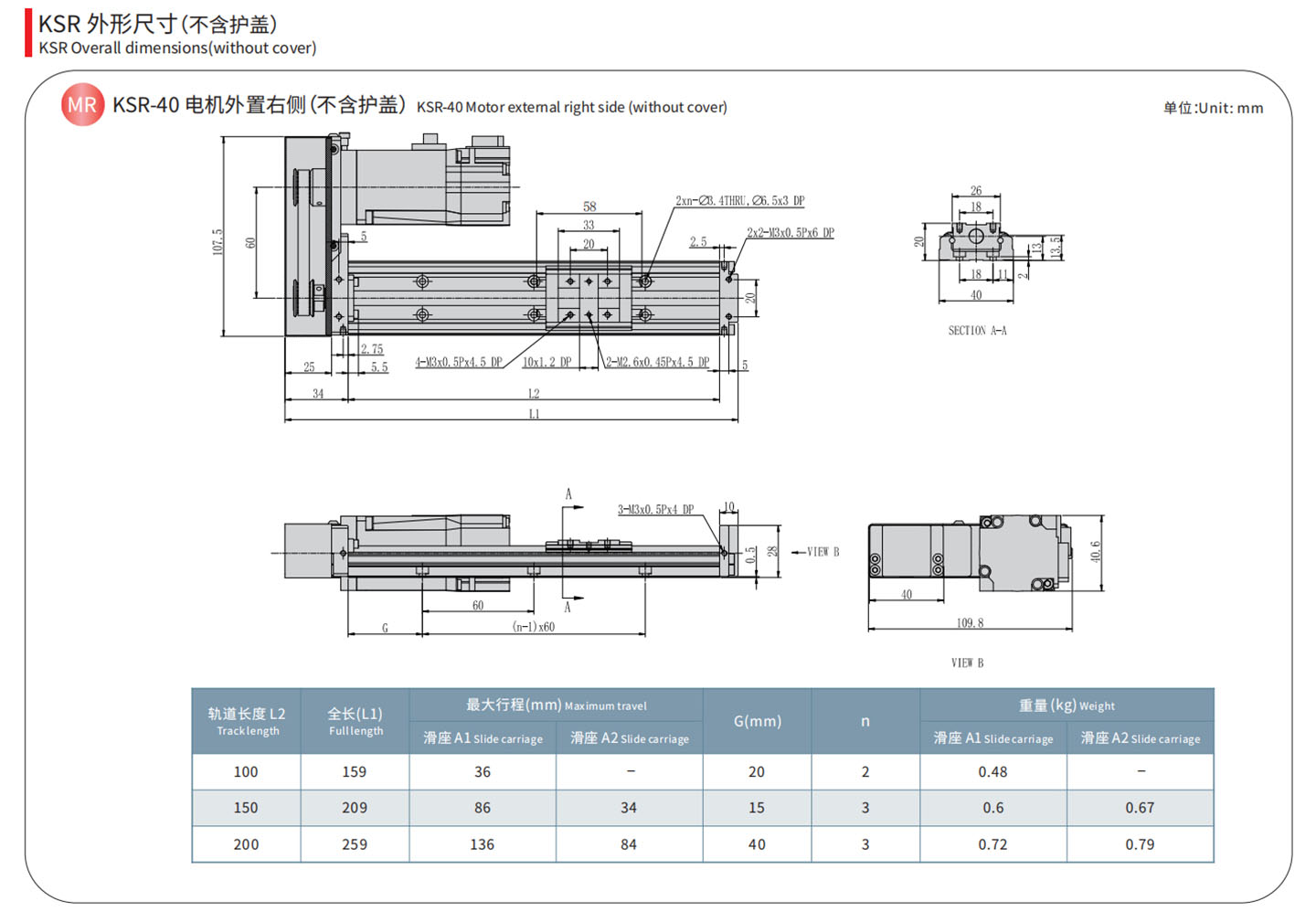
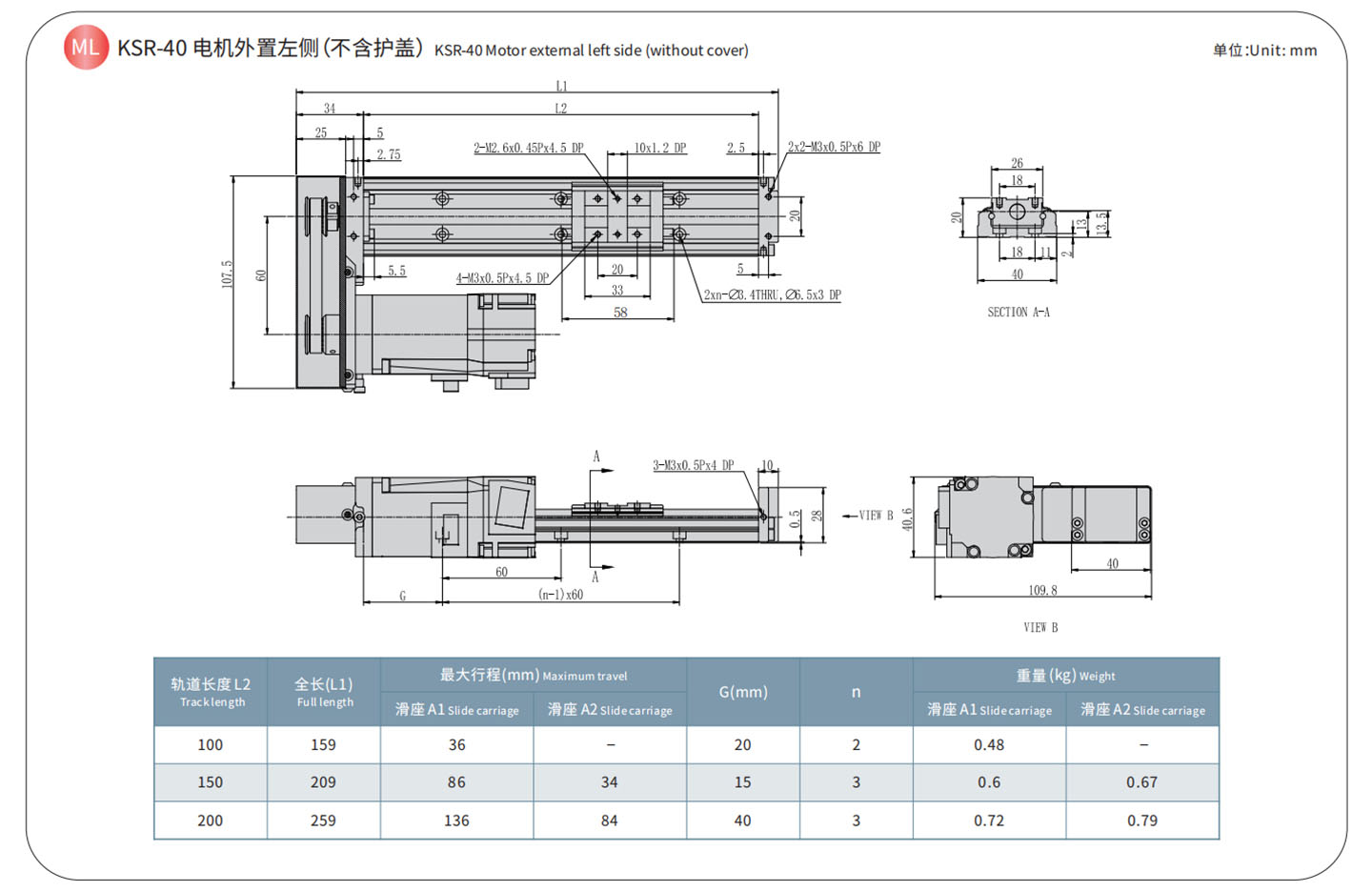
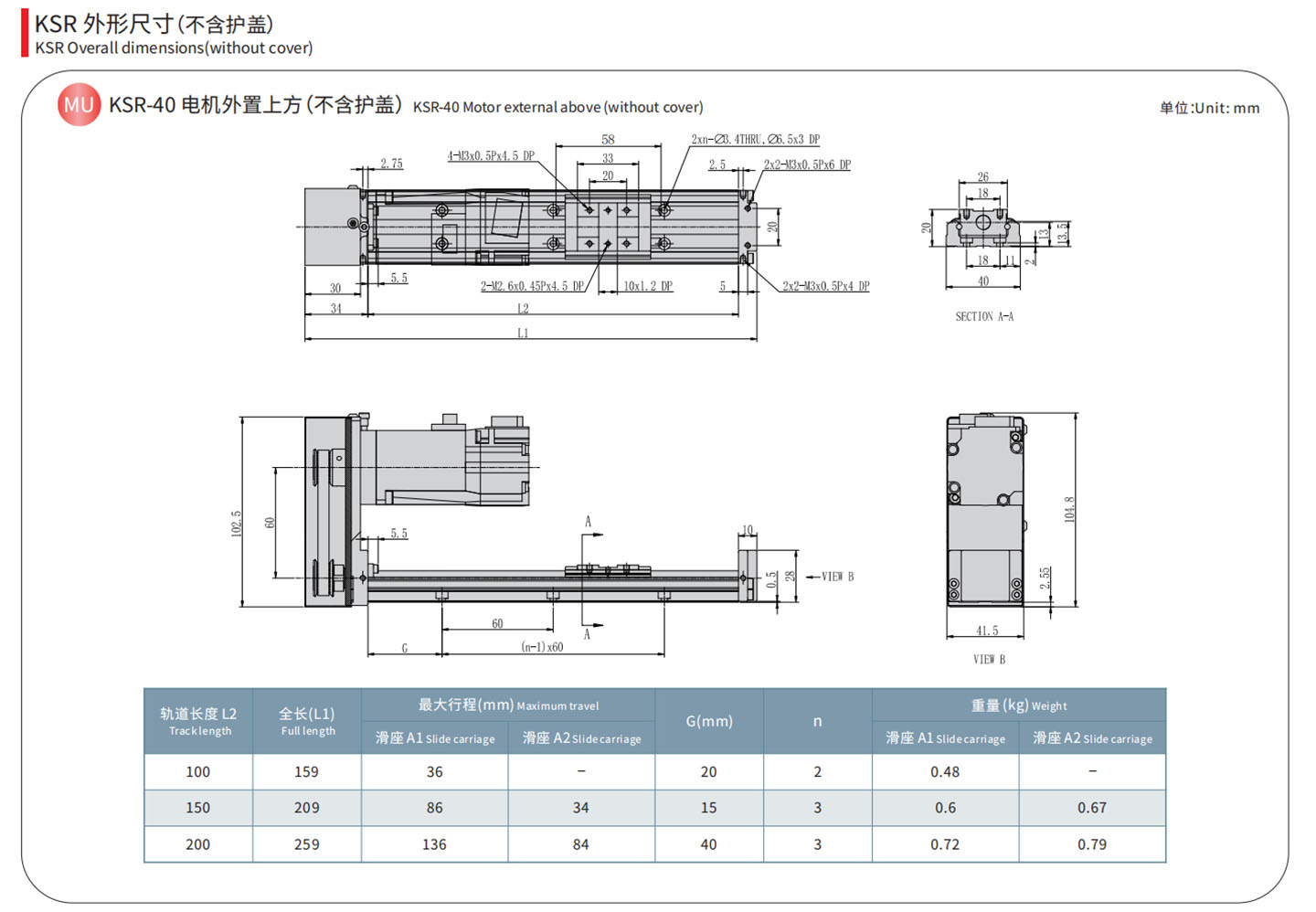
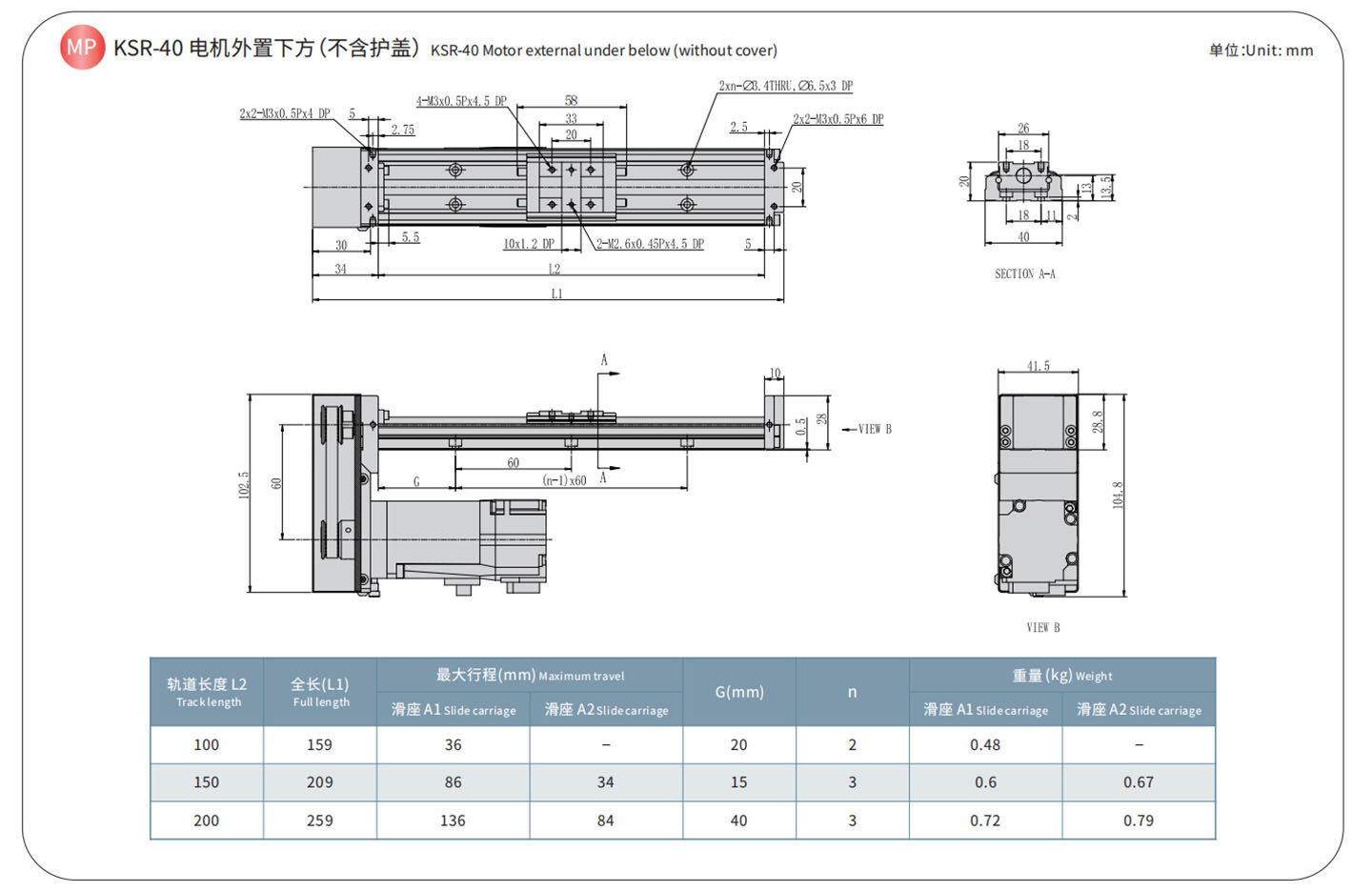
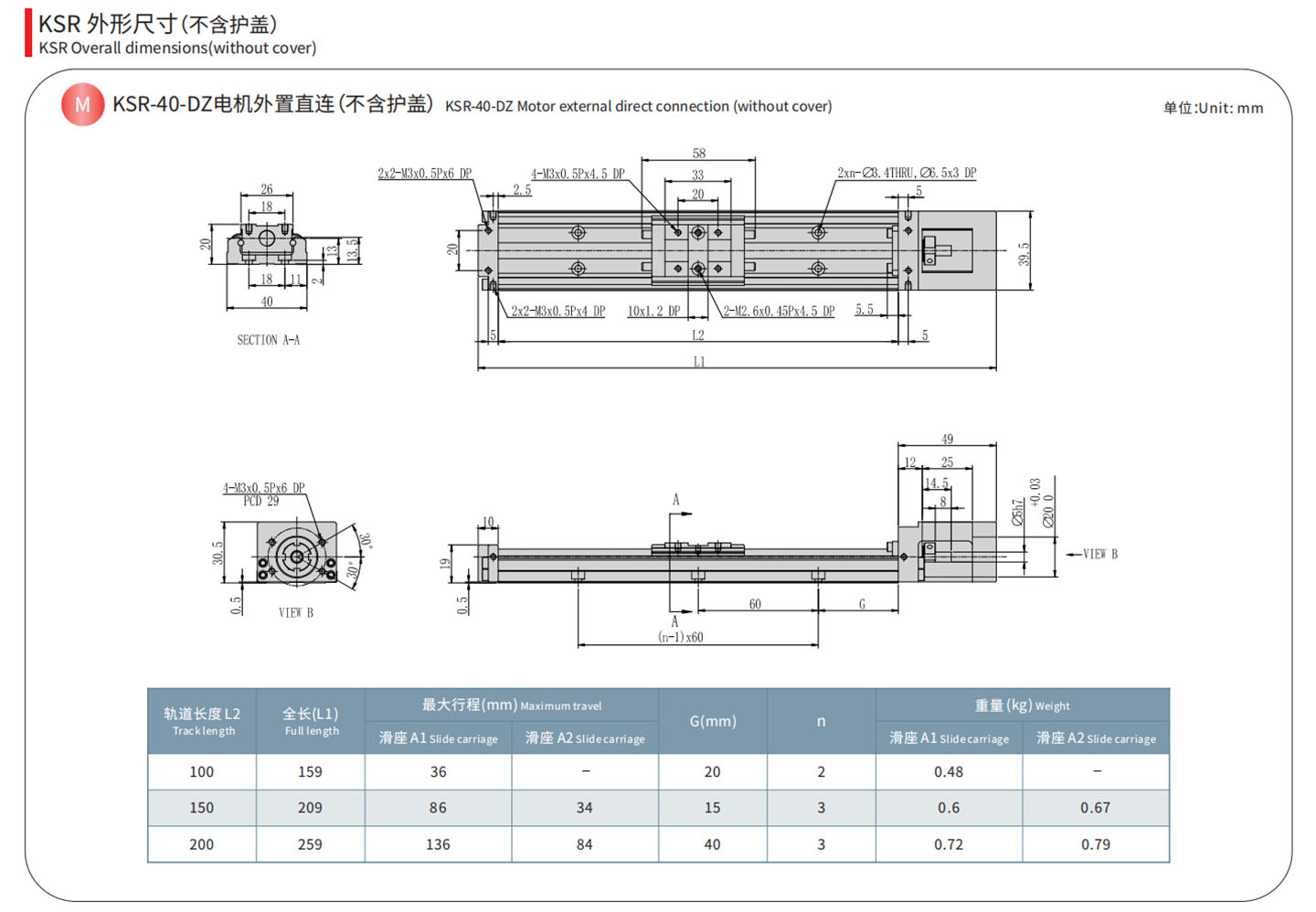
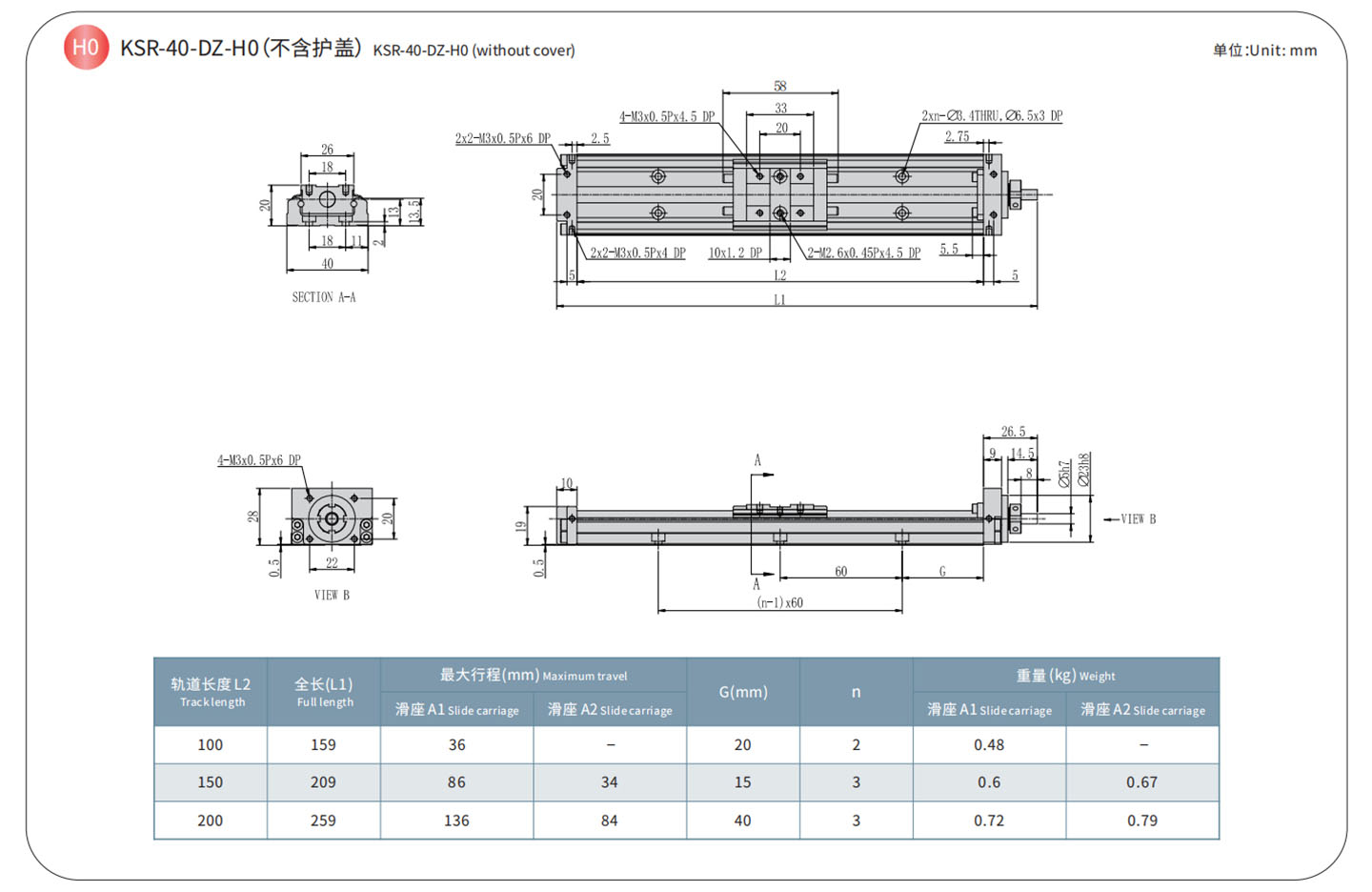
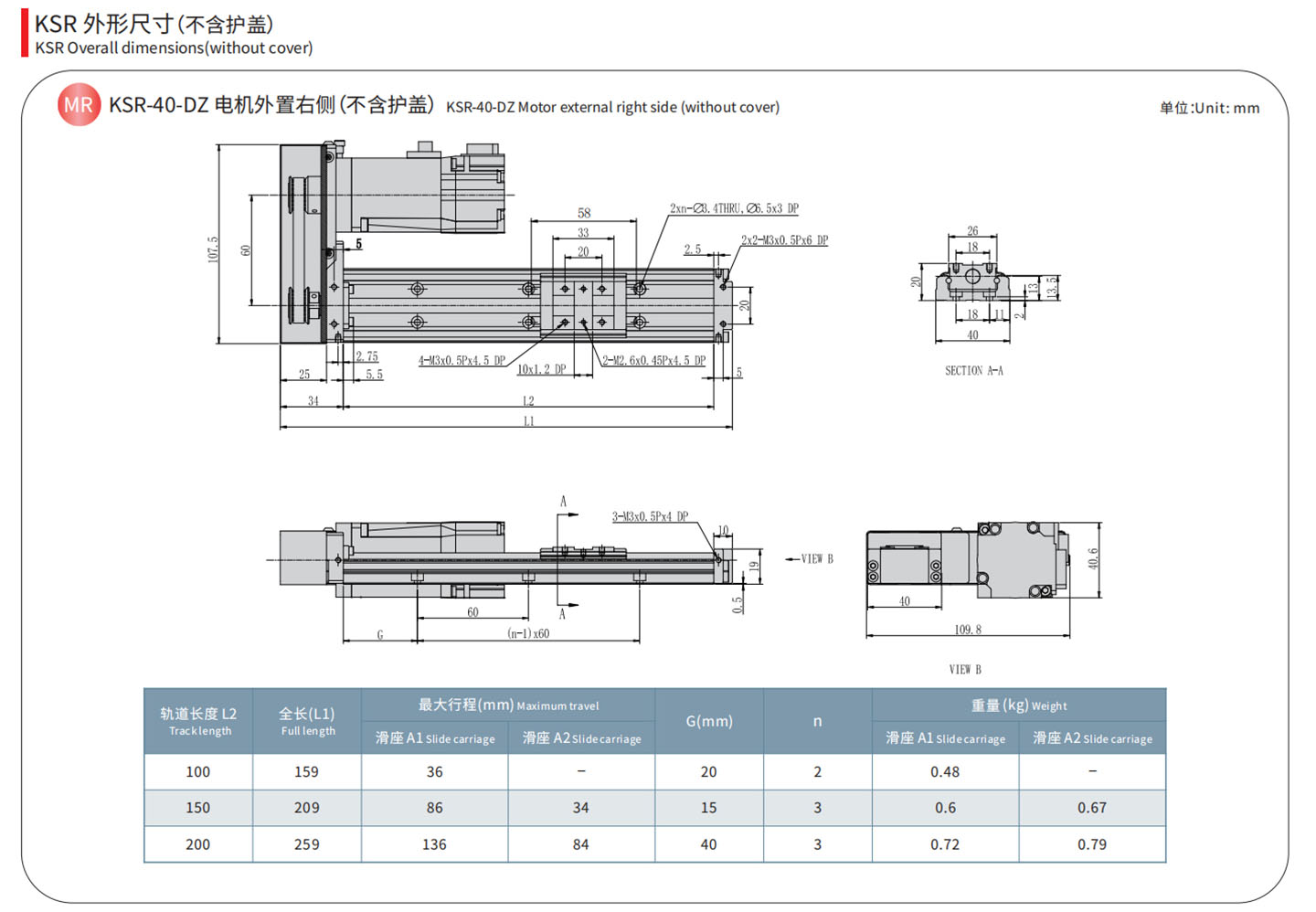
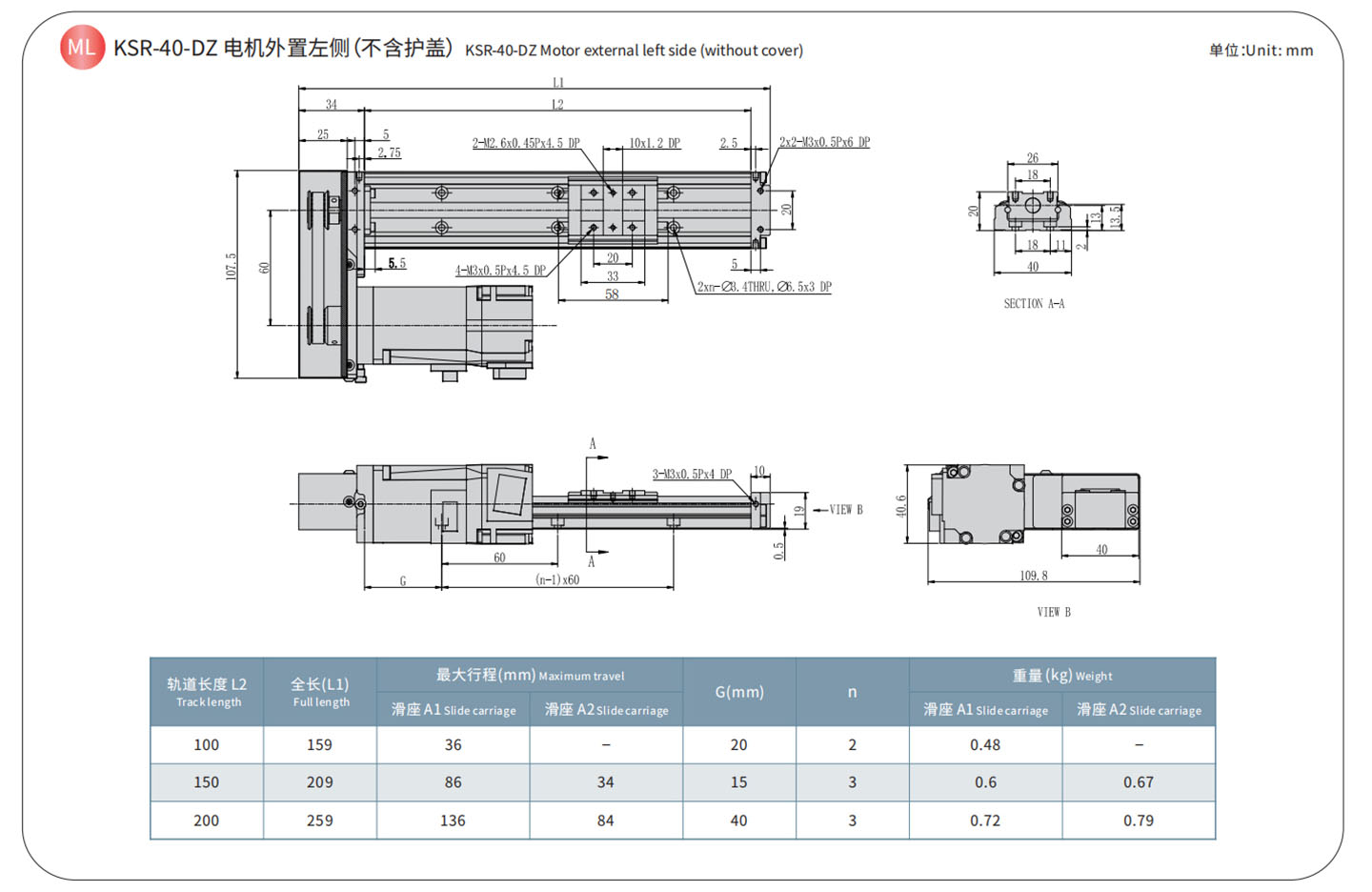
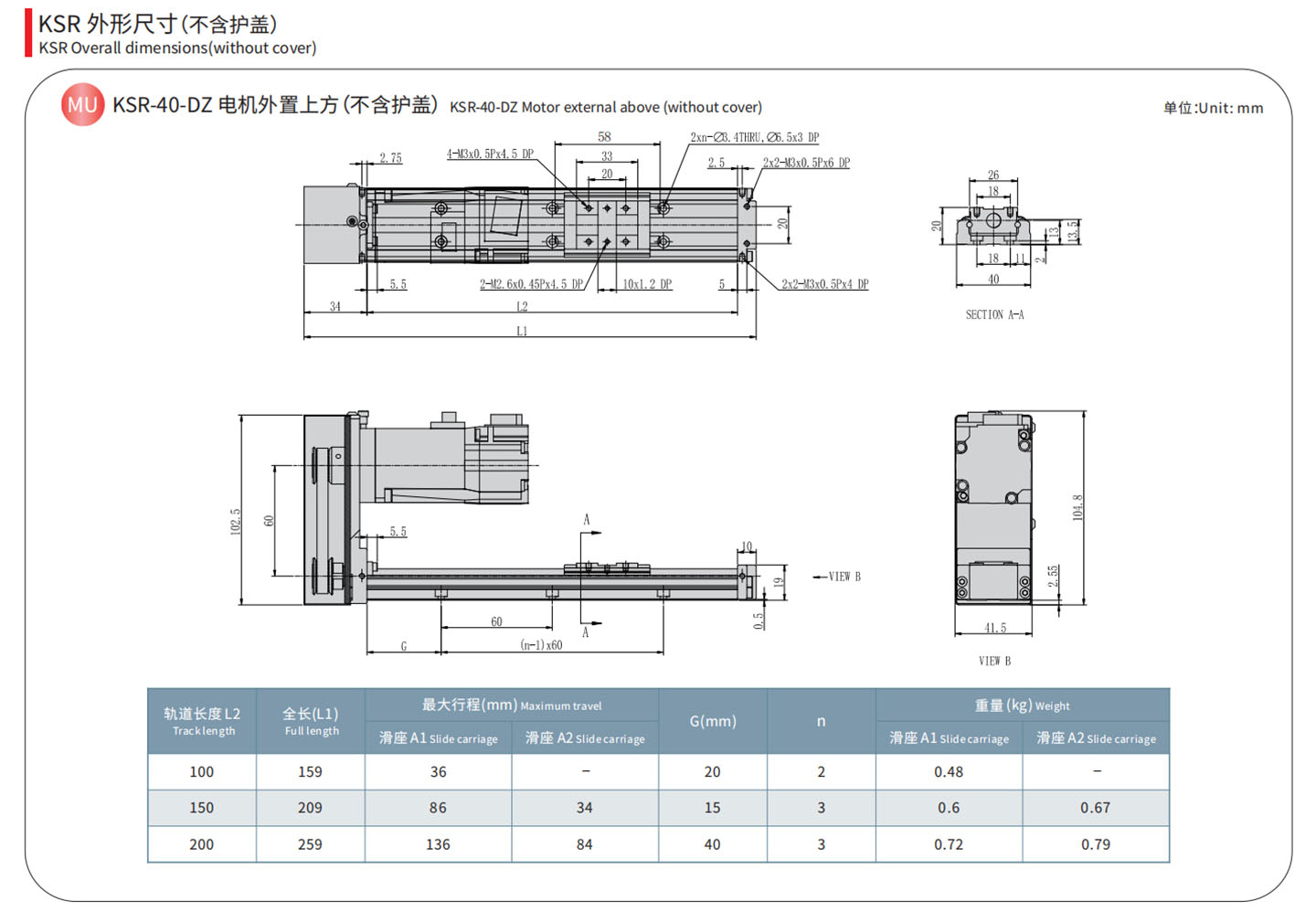
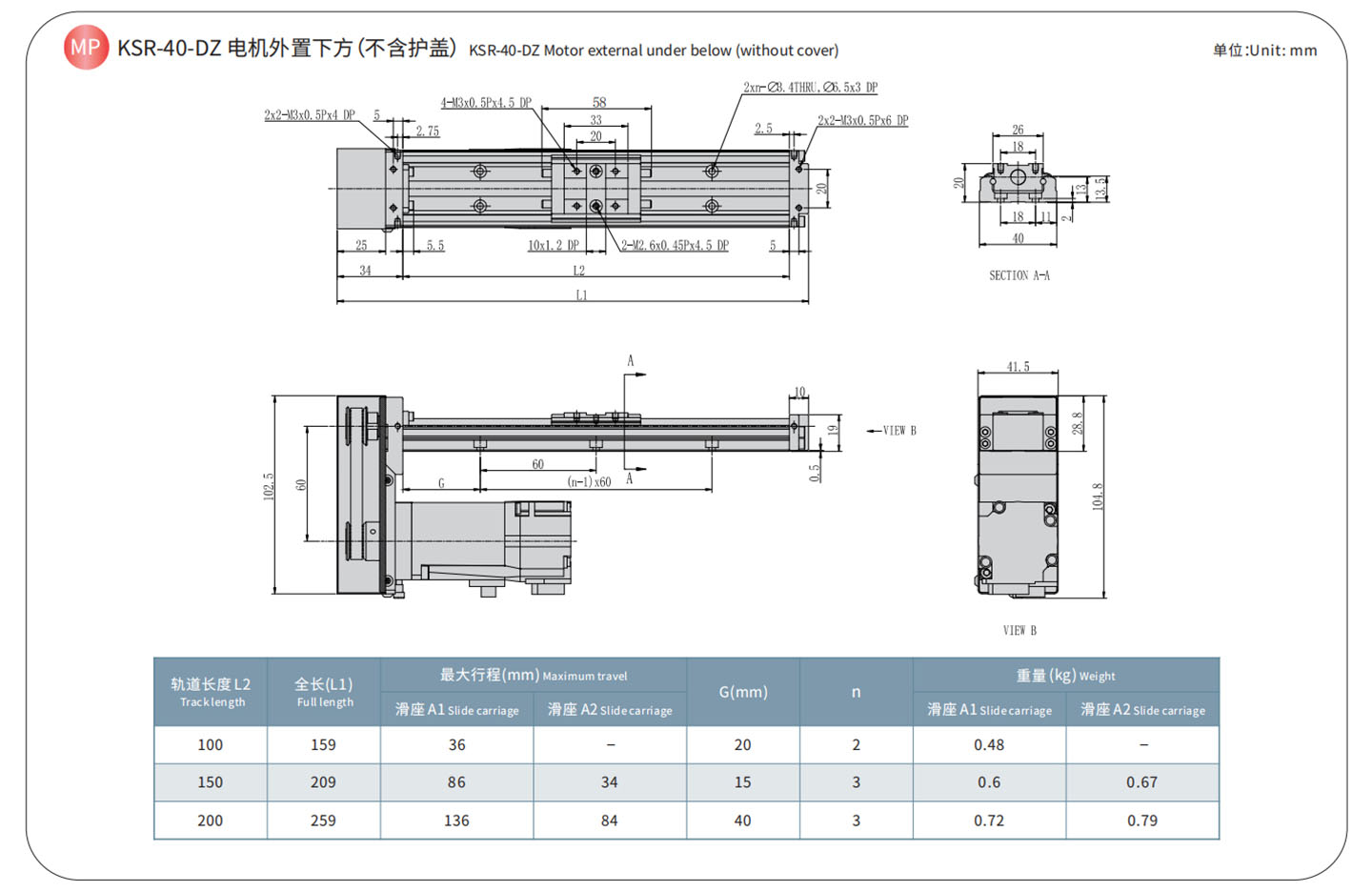
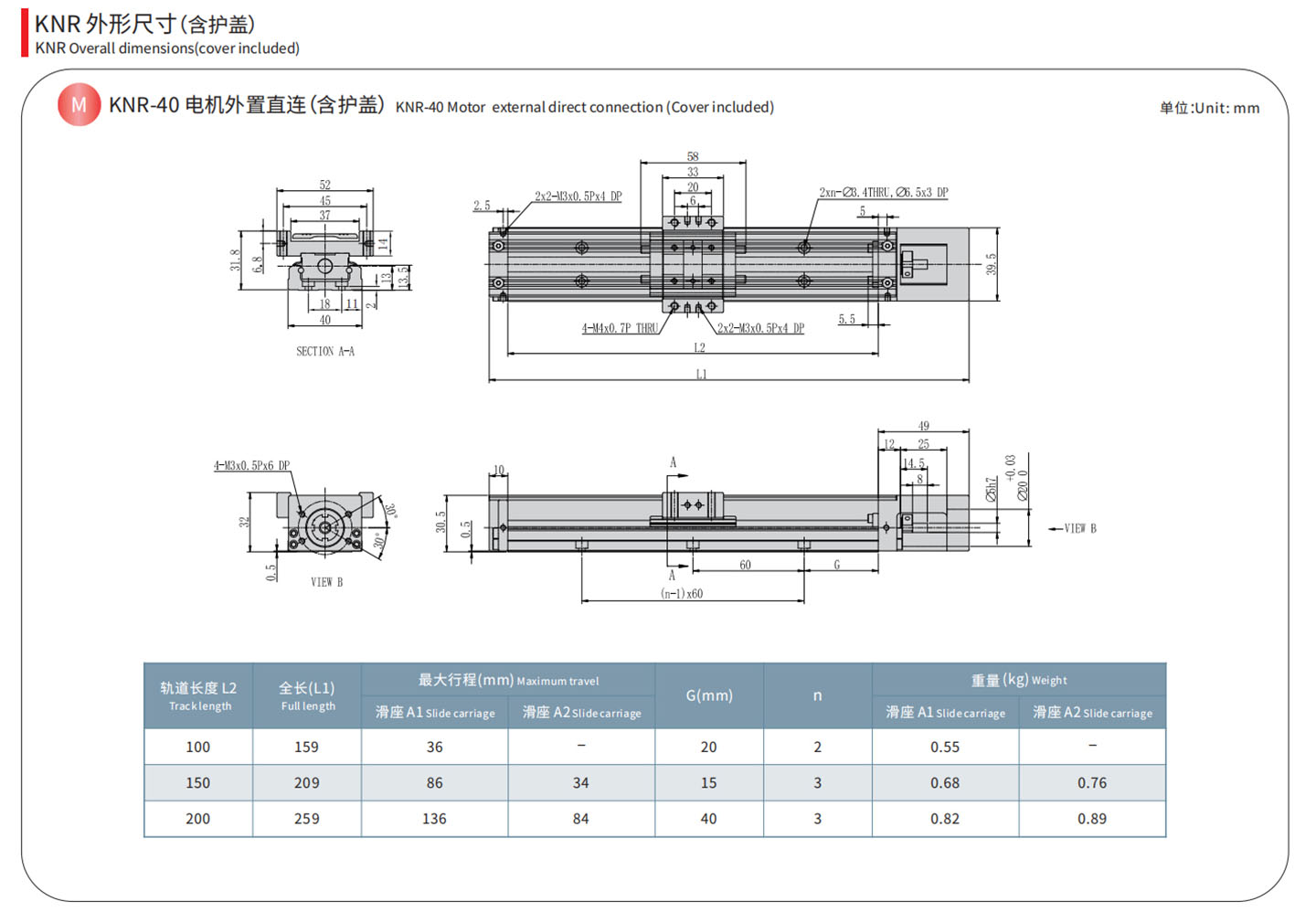
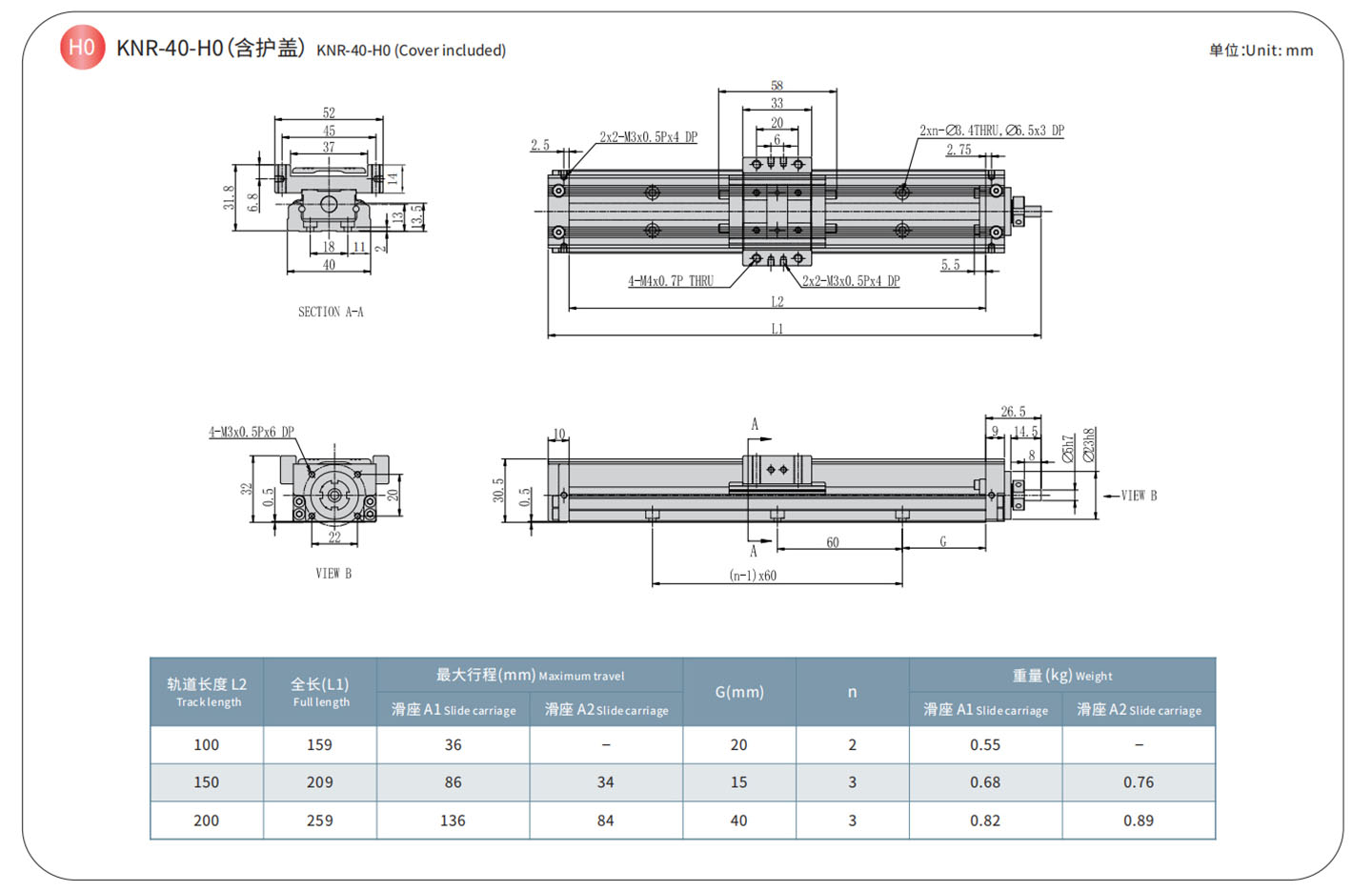
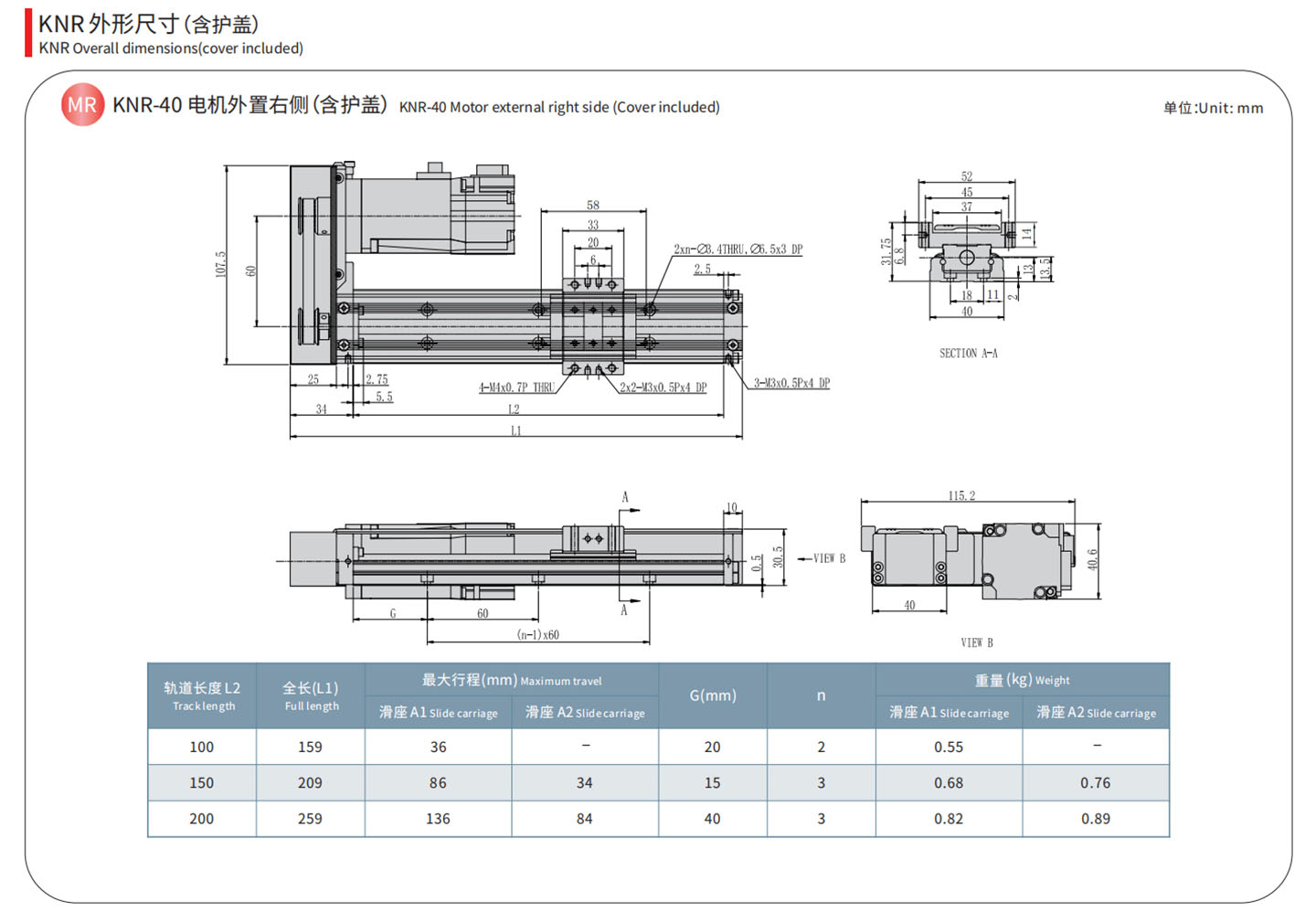
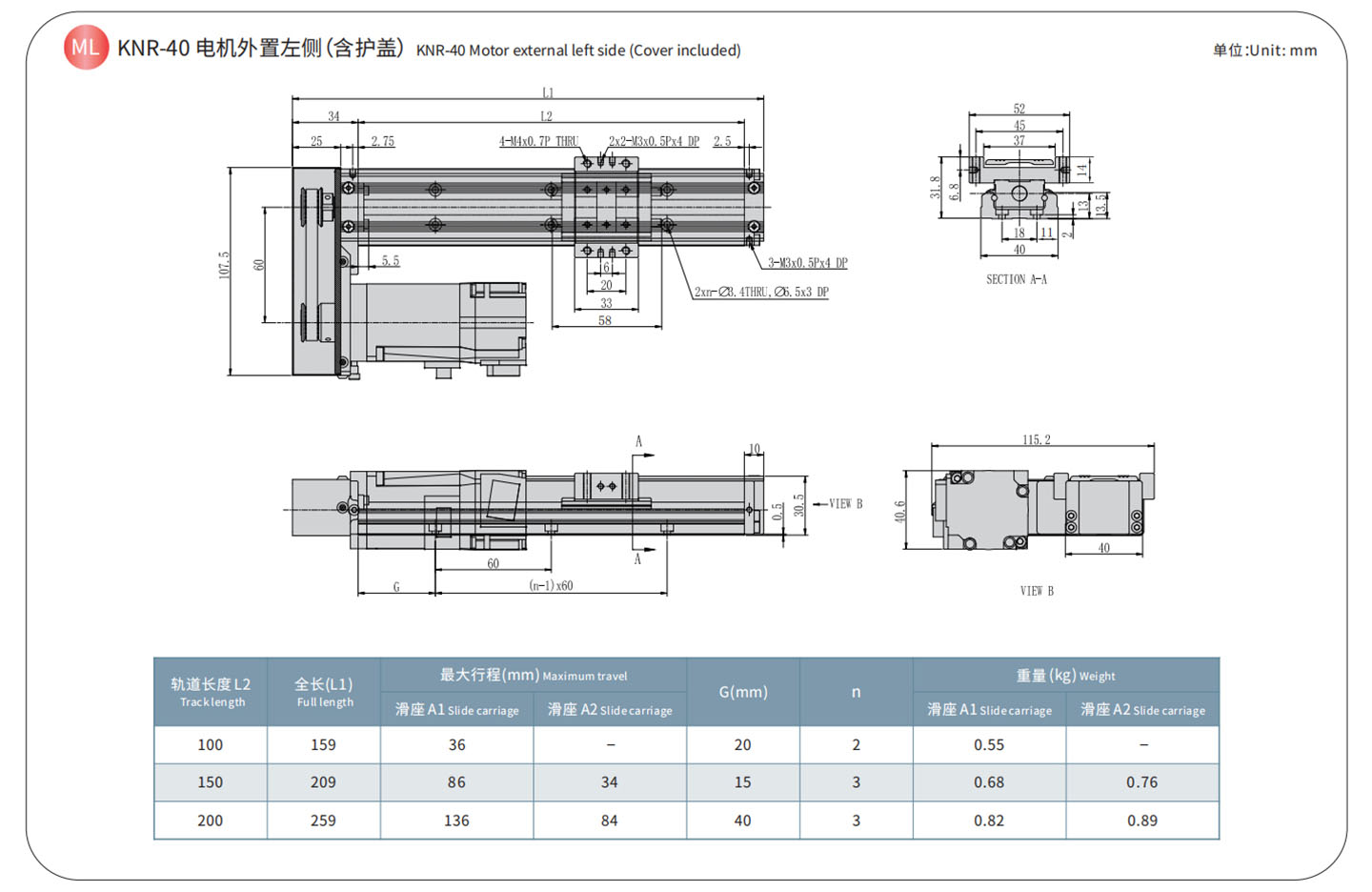
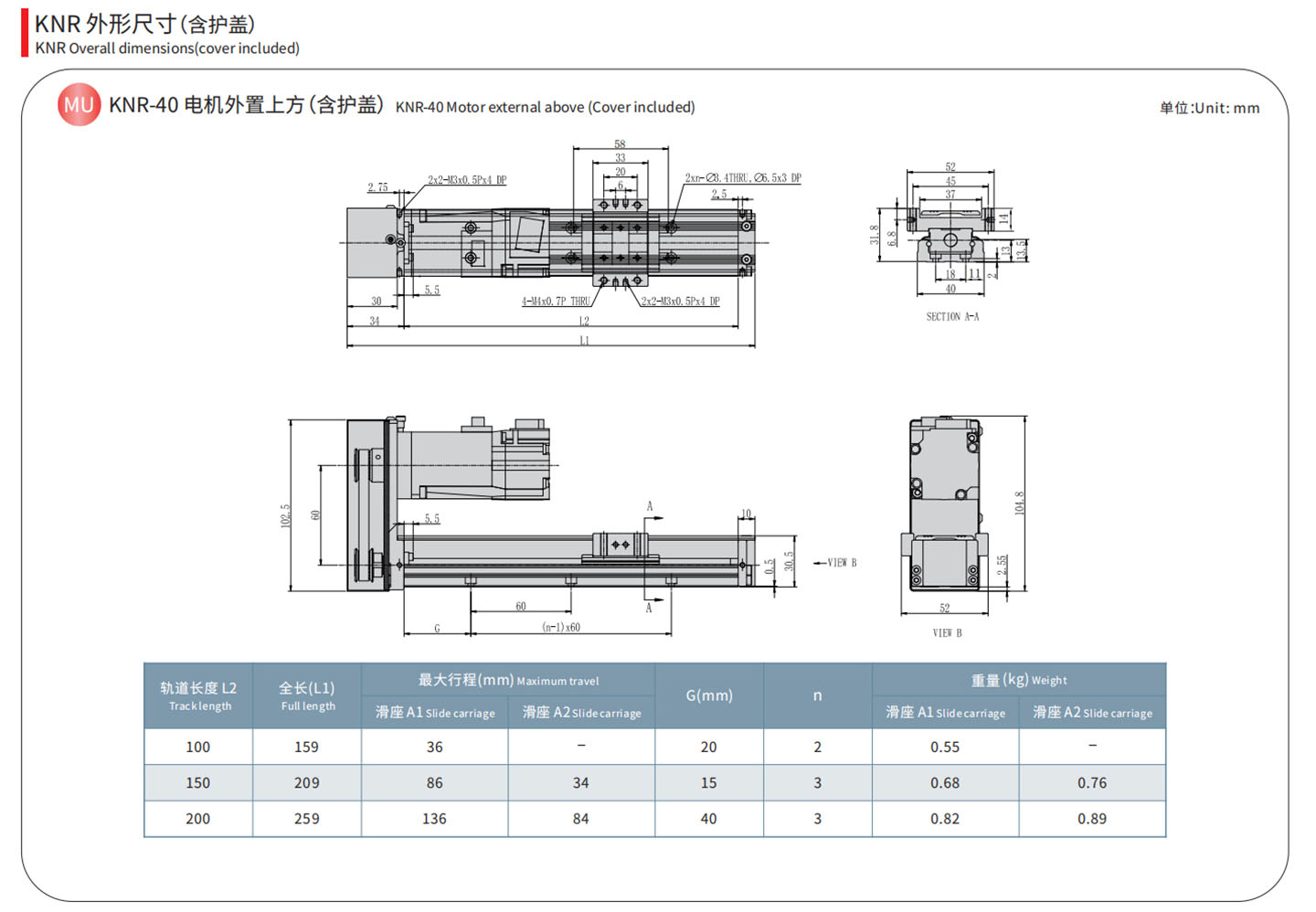
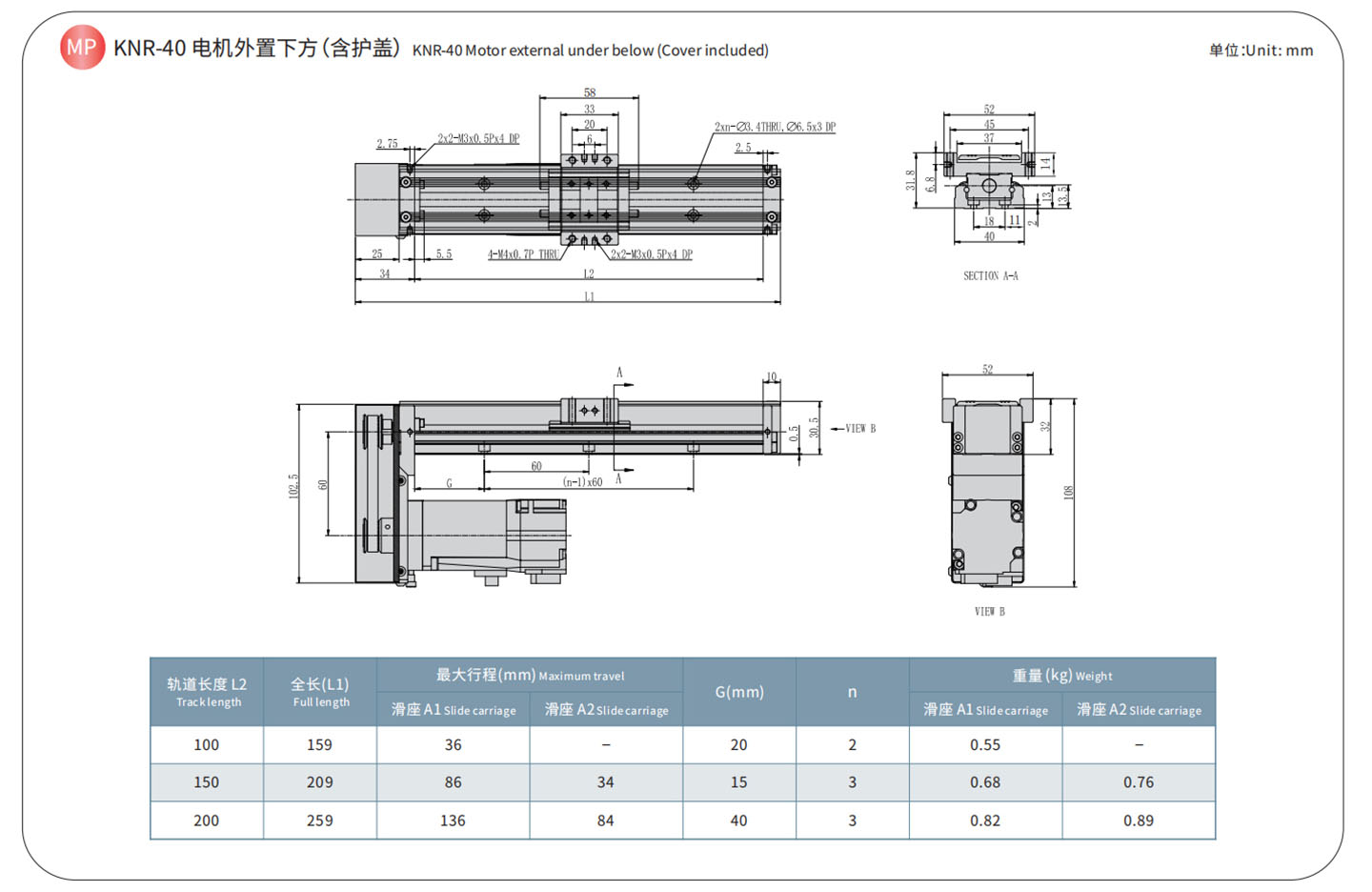
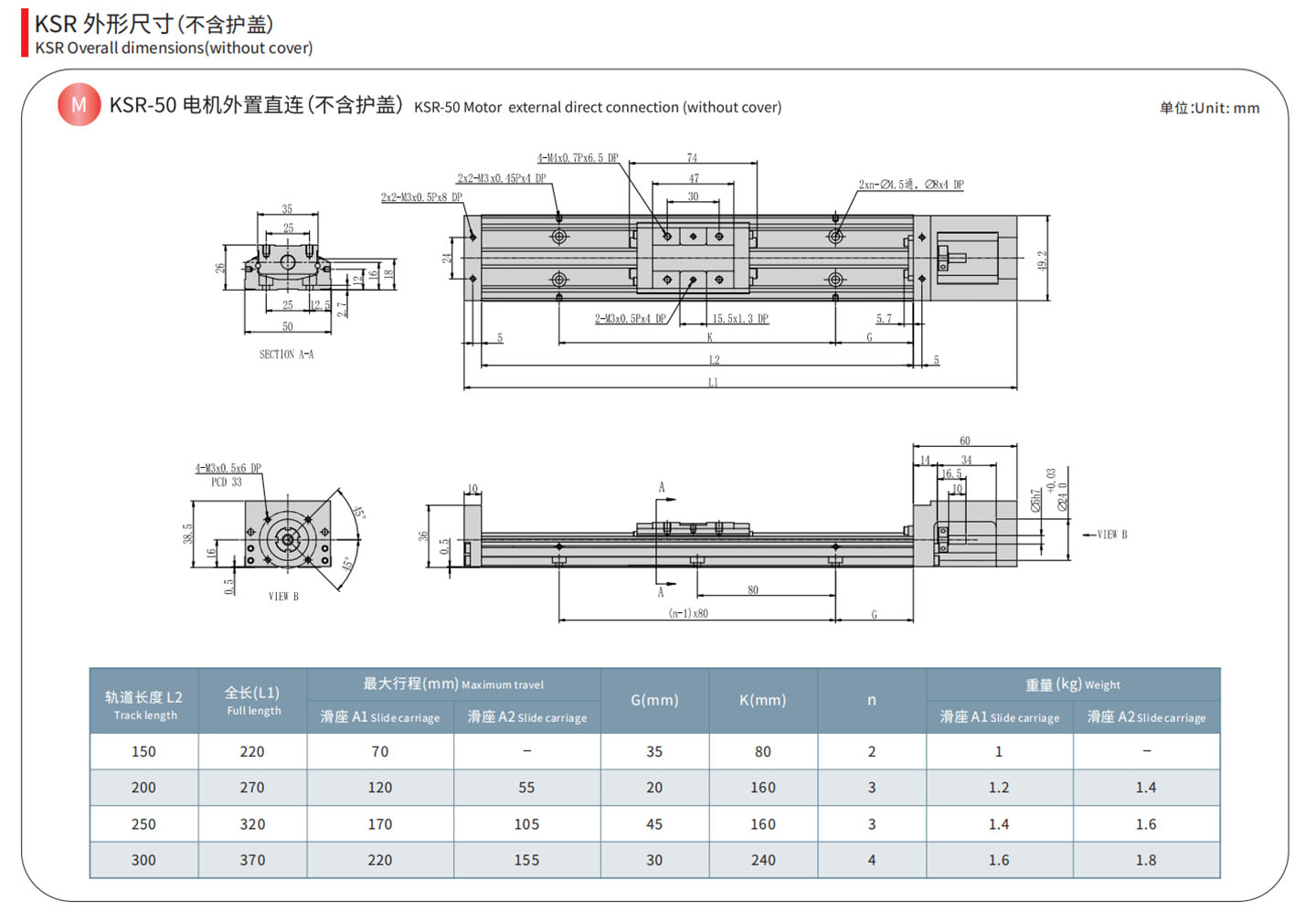
КСР-40 КНР-40

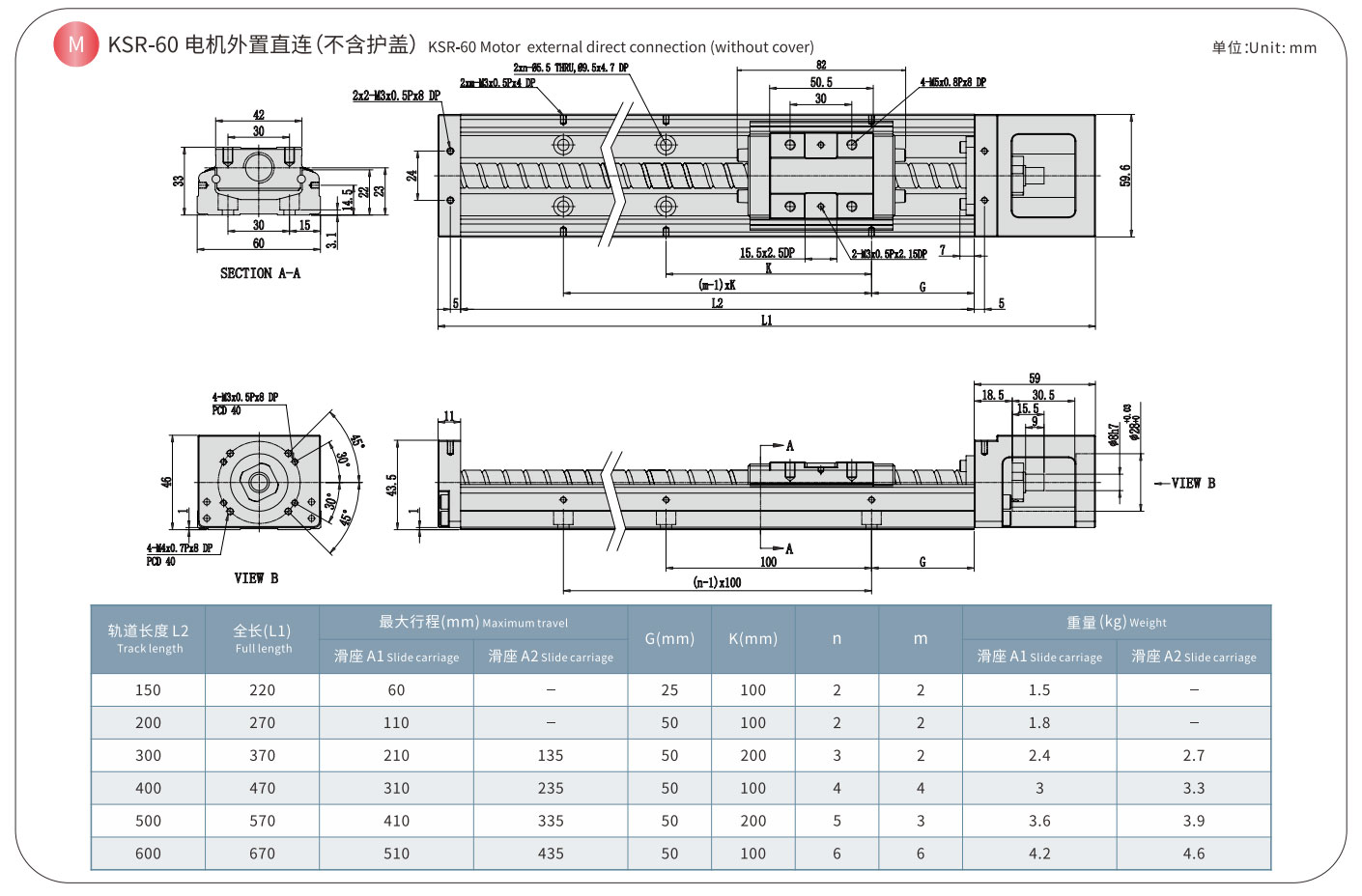
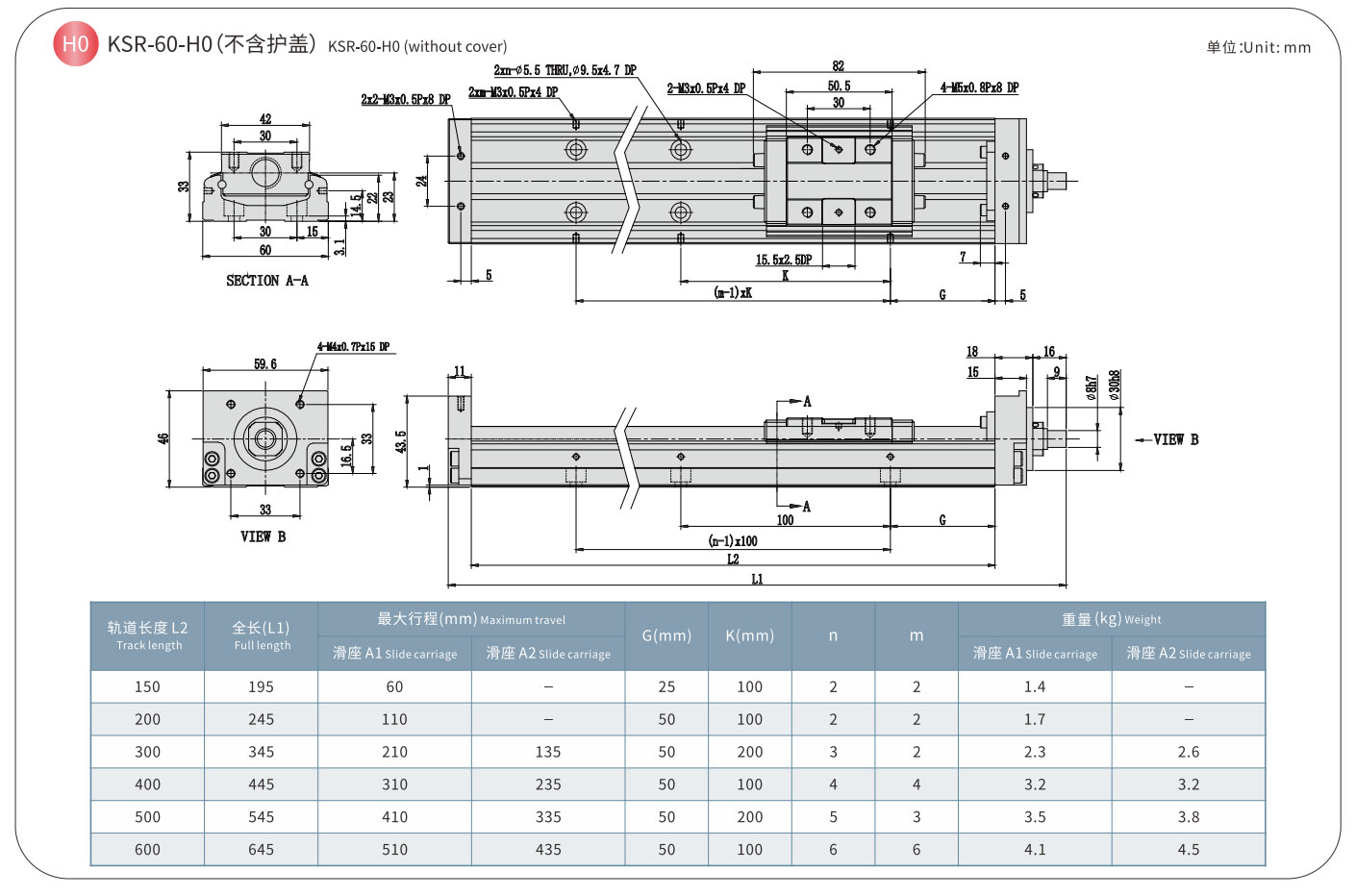
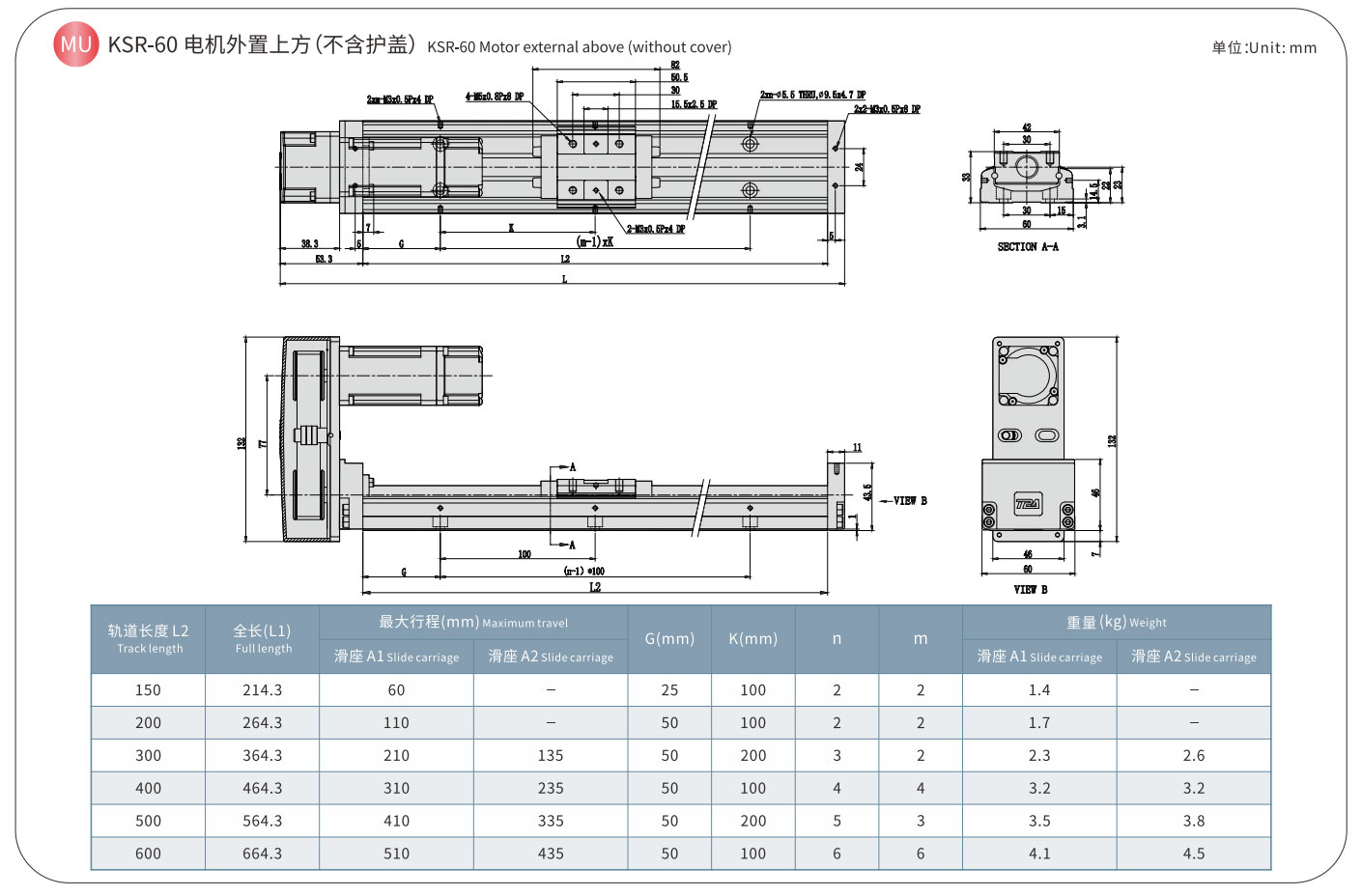
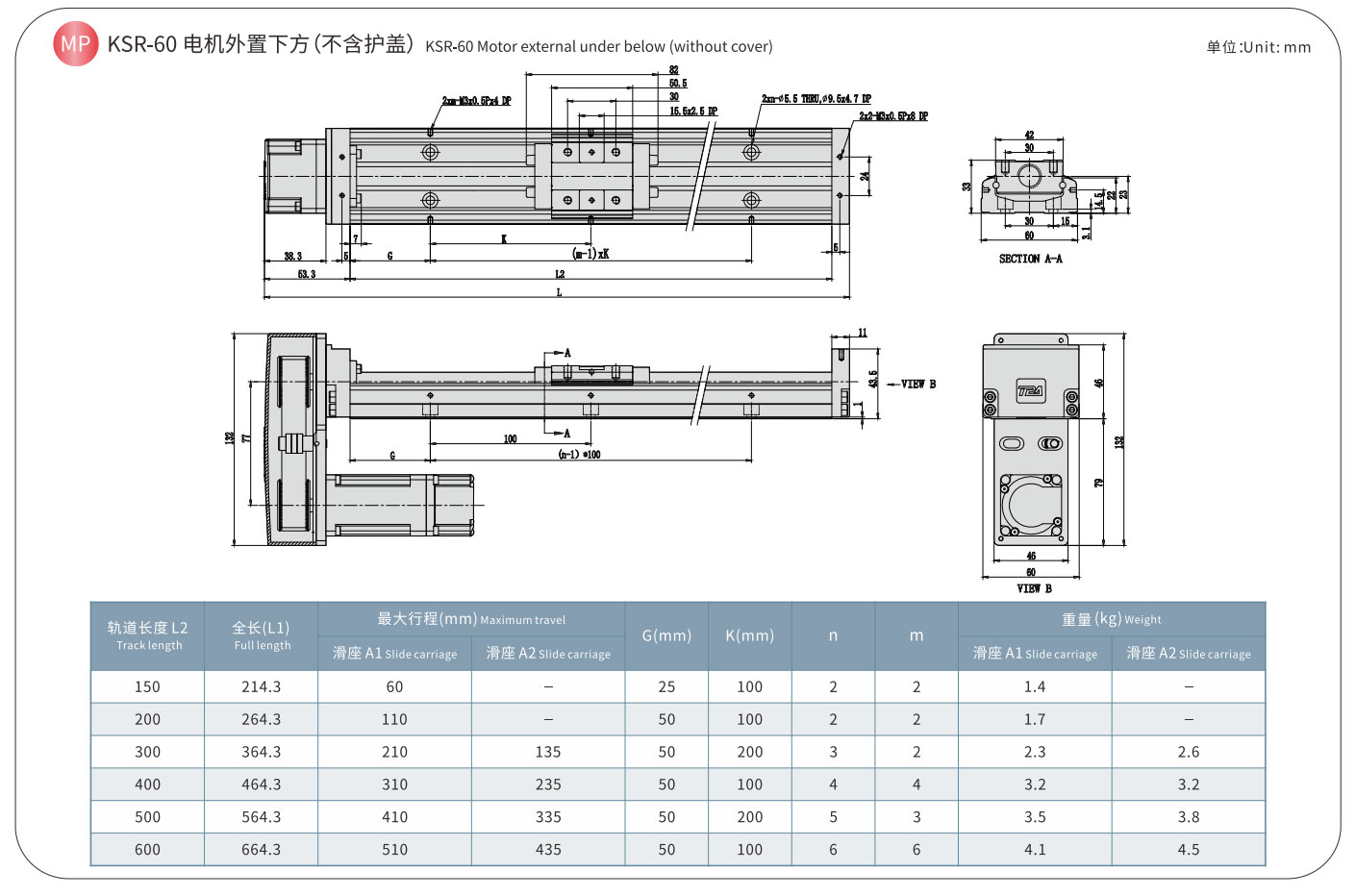
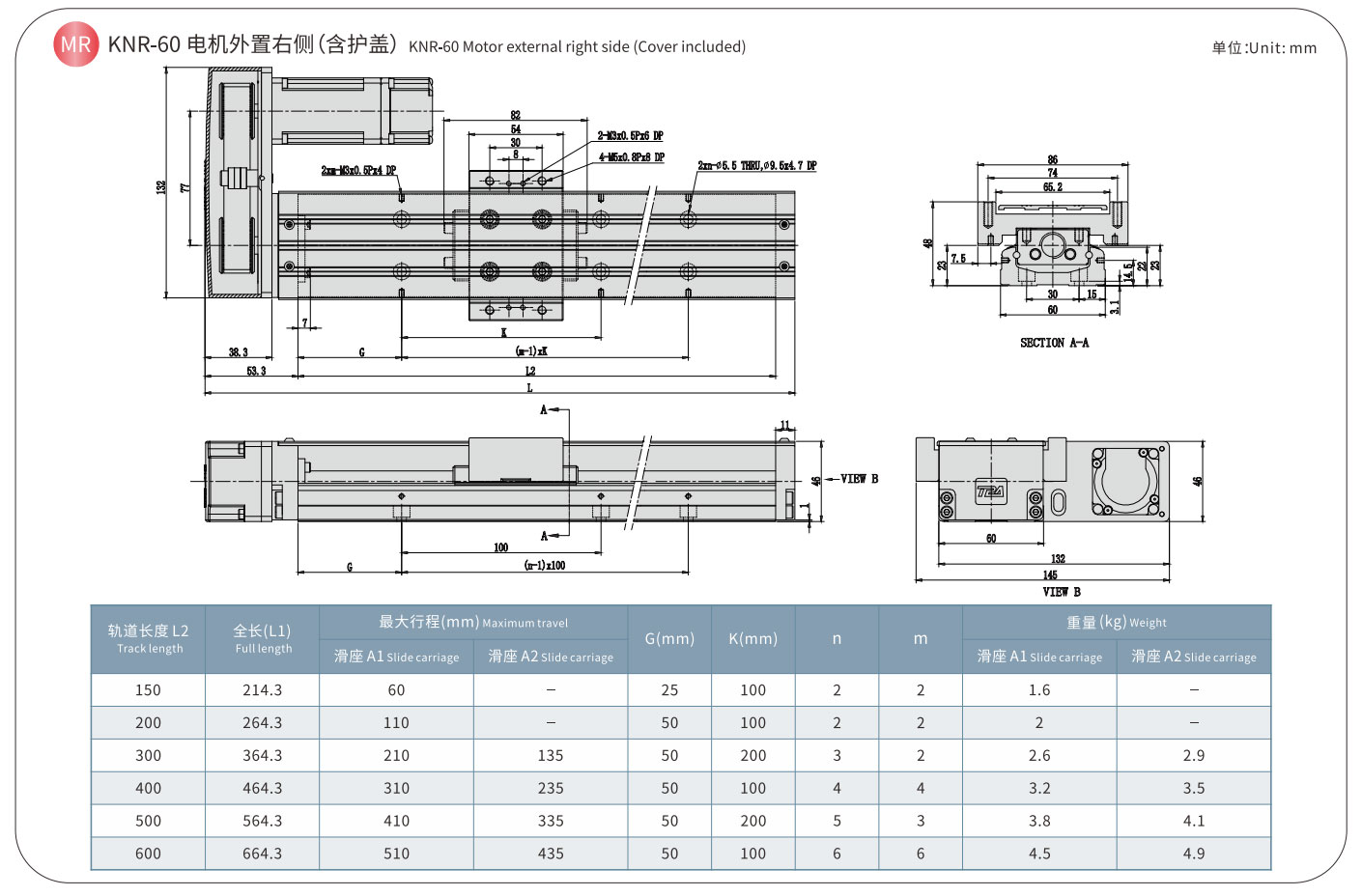
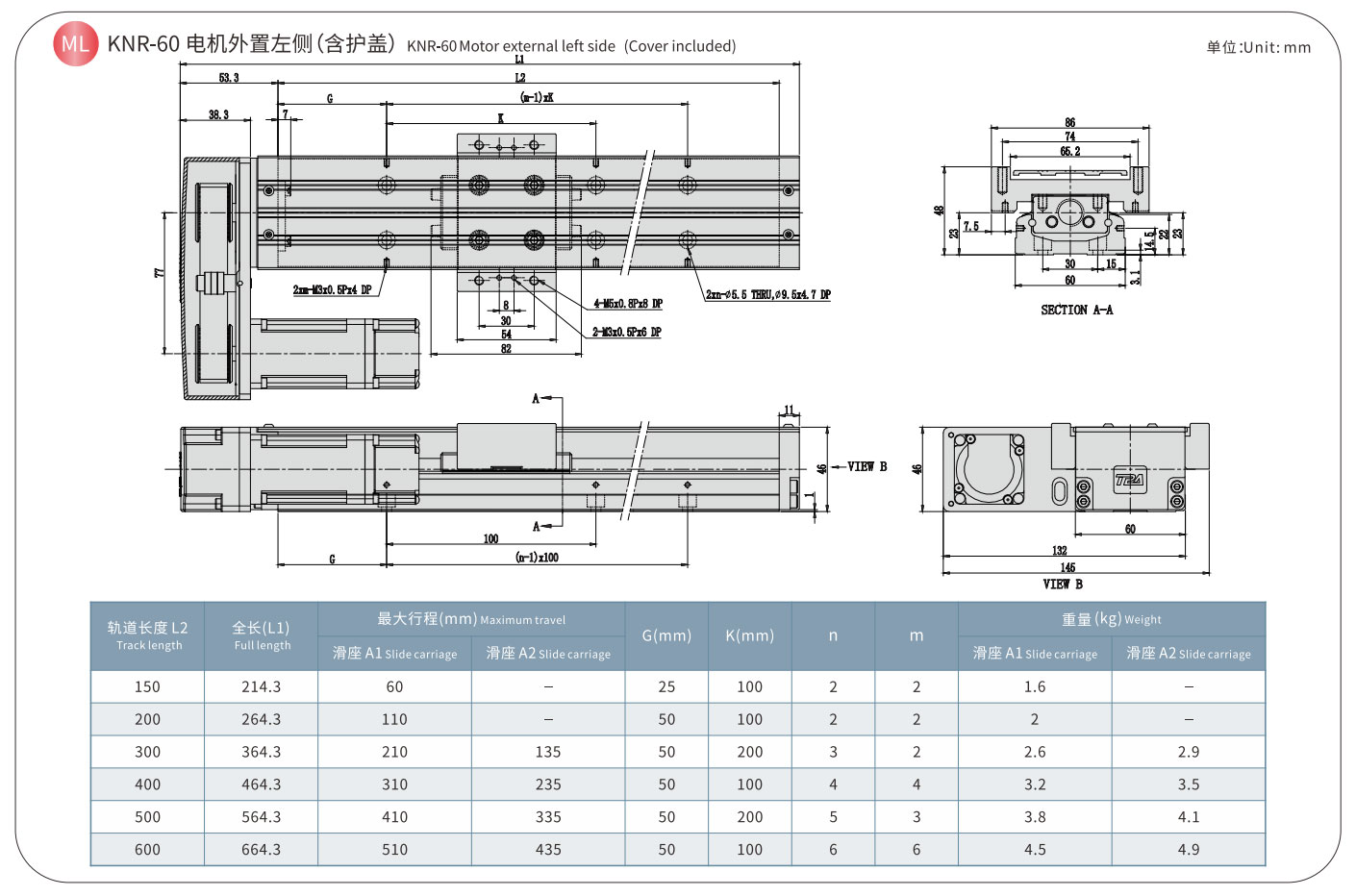
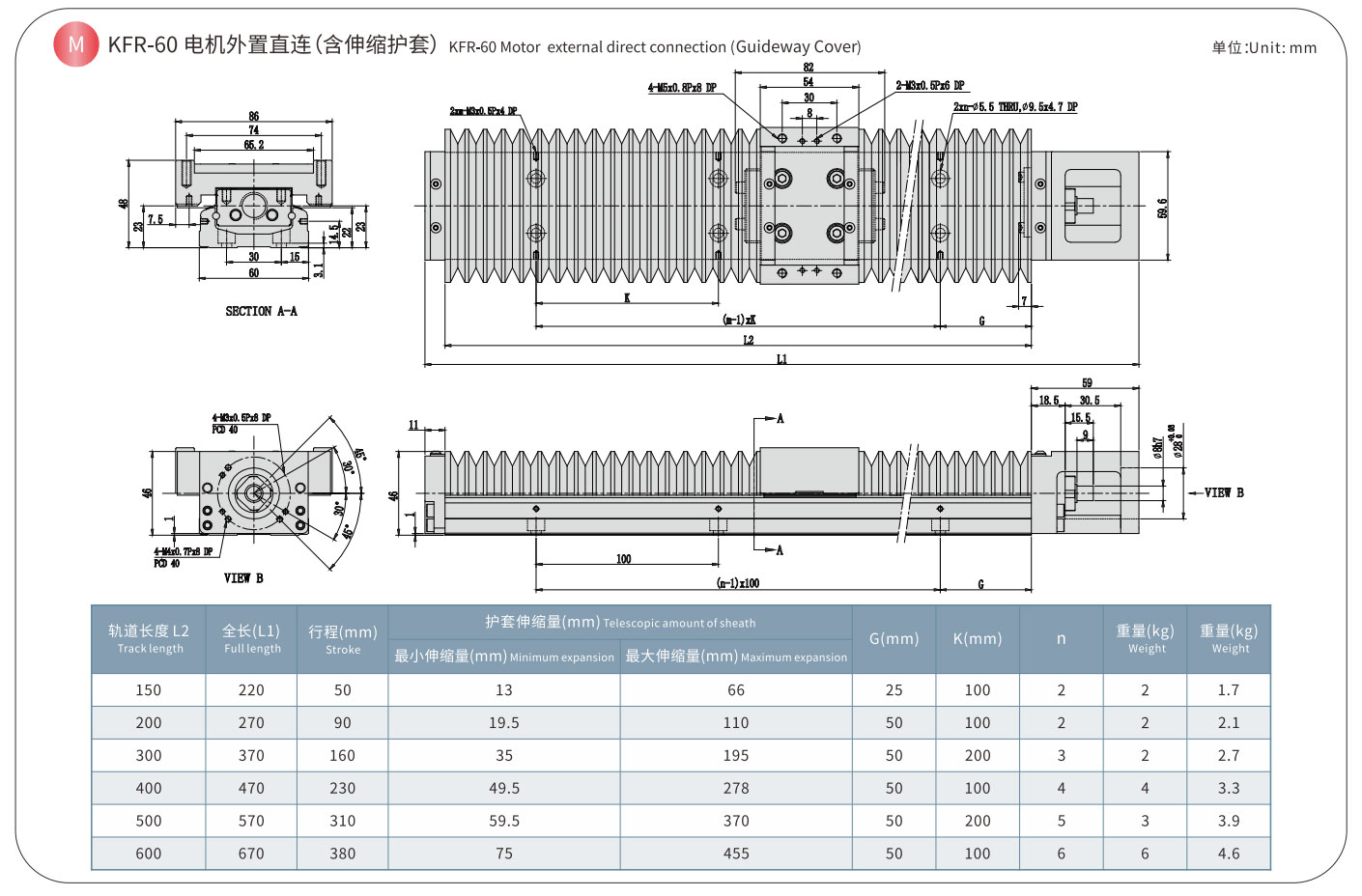
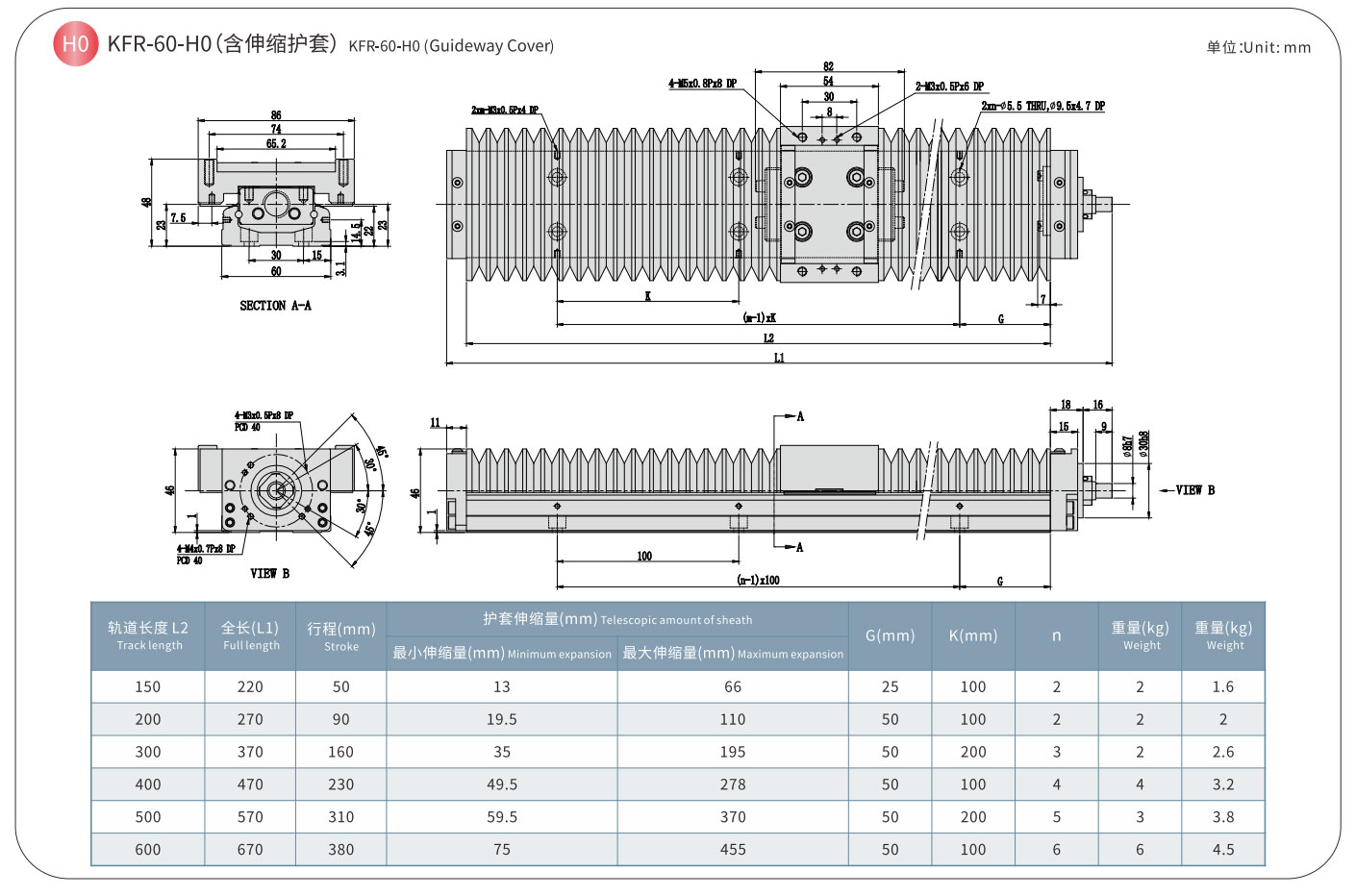
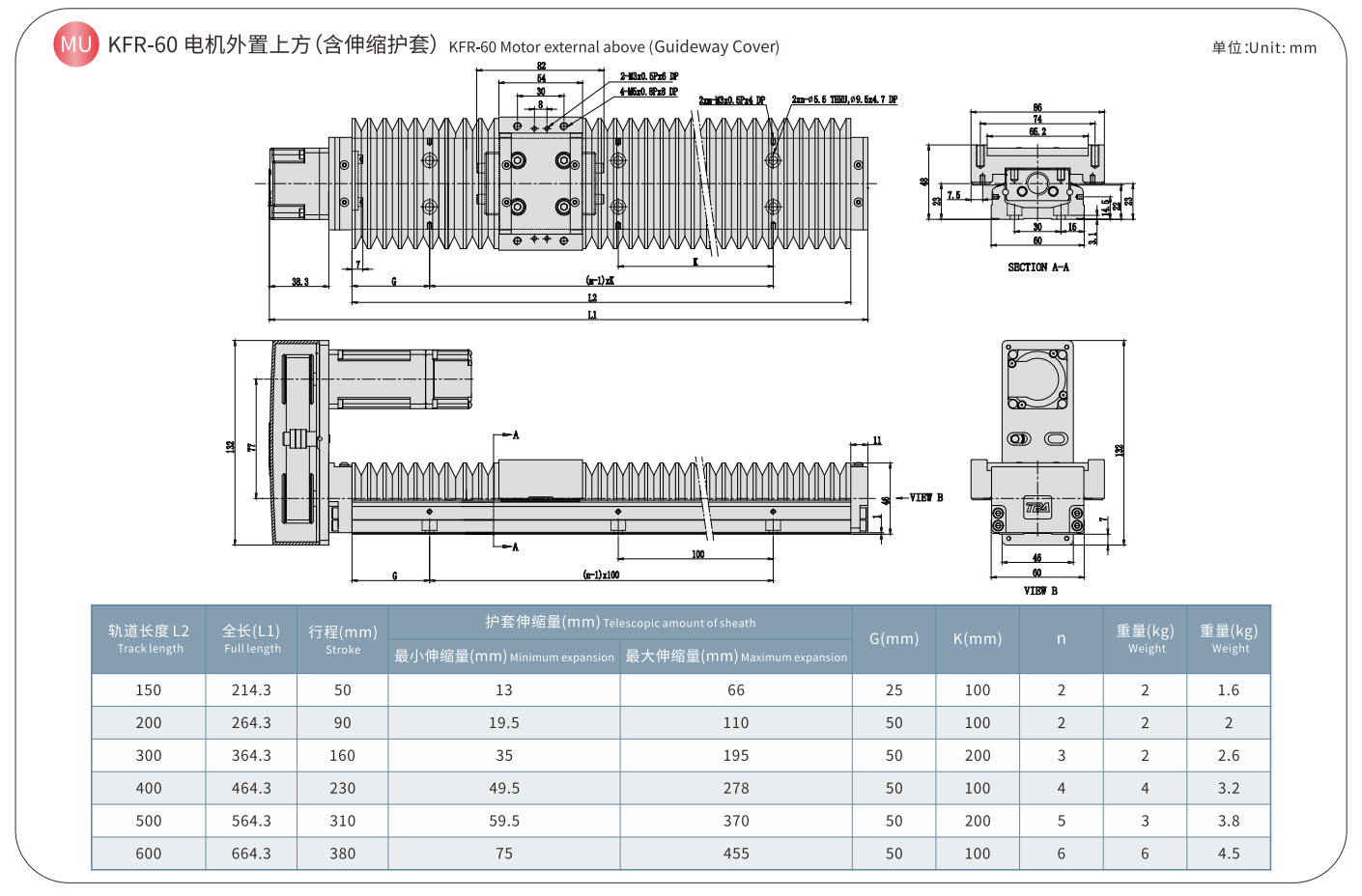
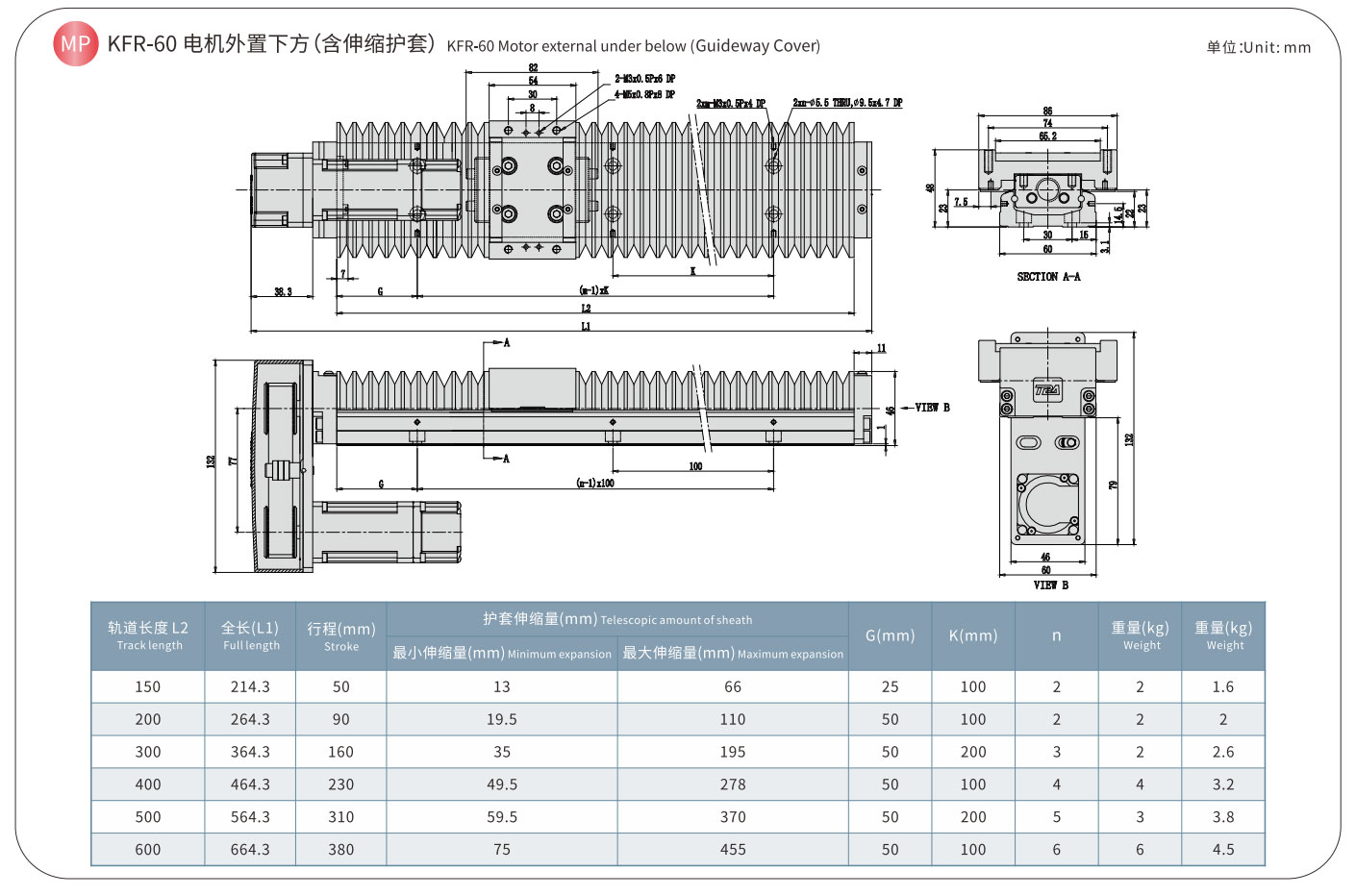
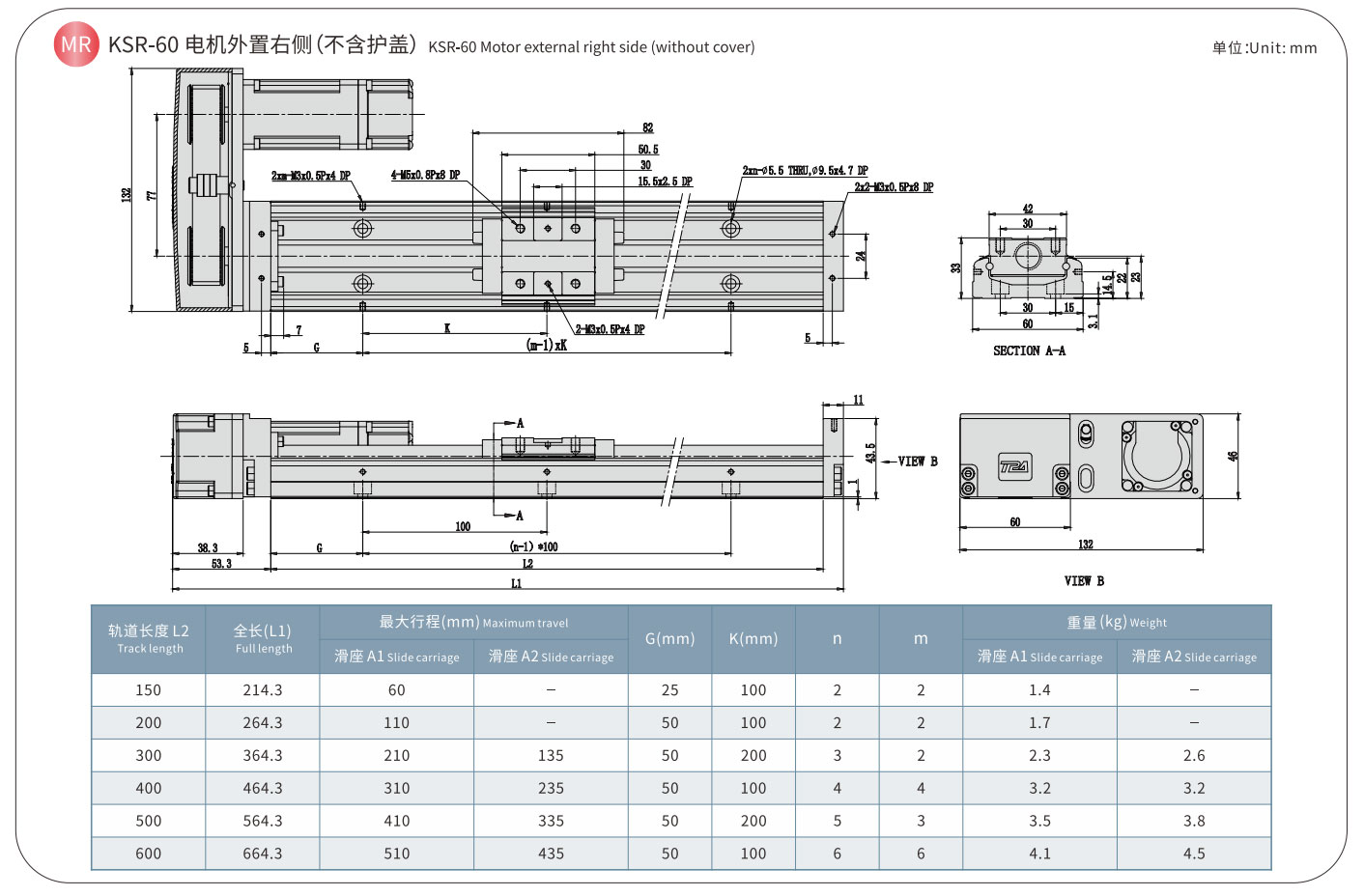
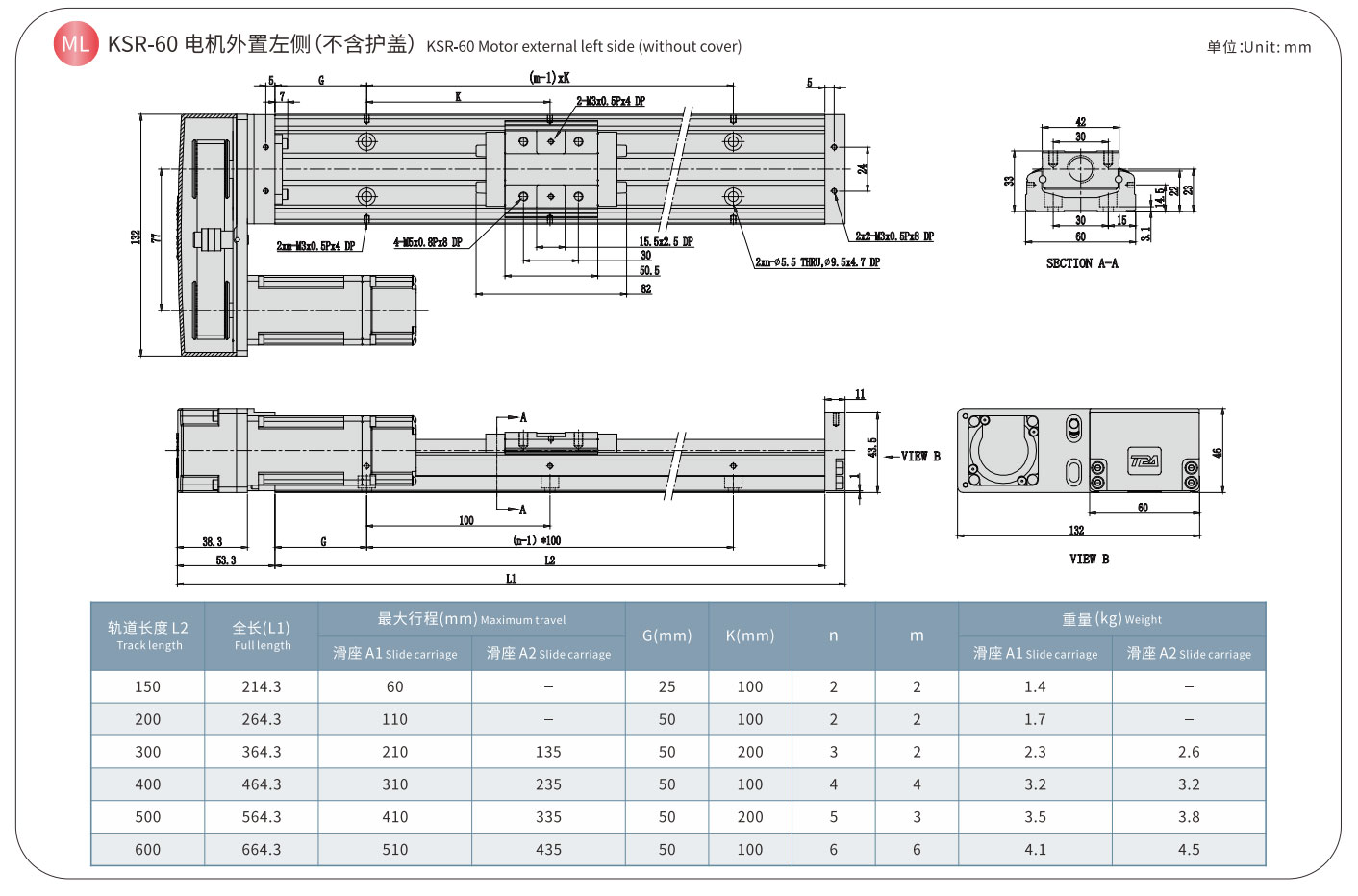
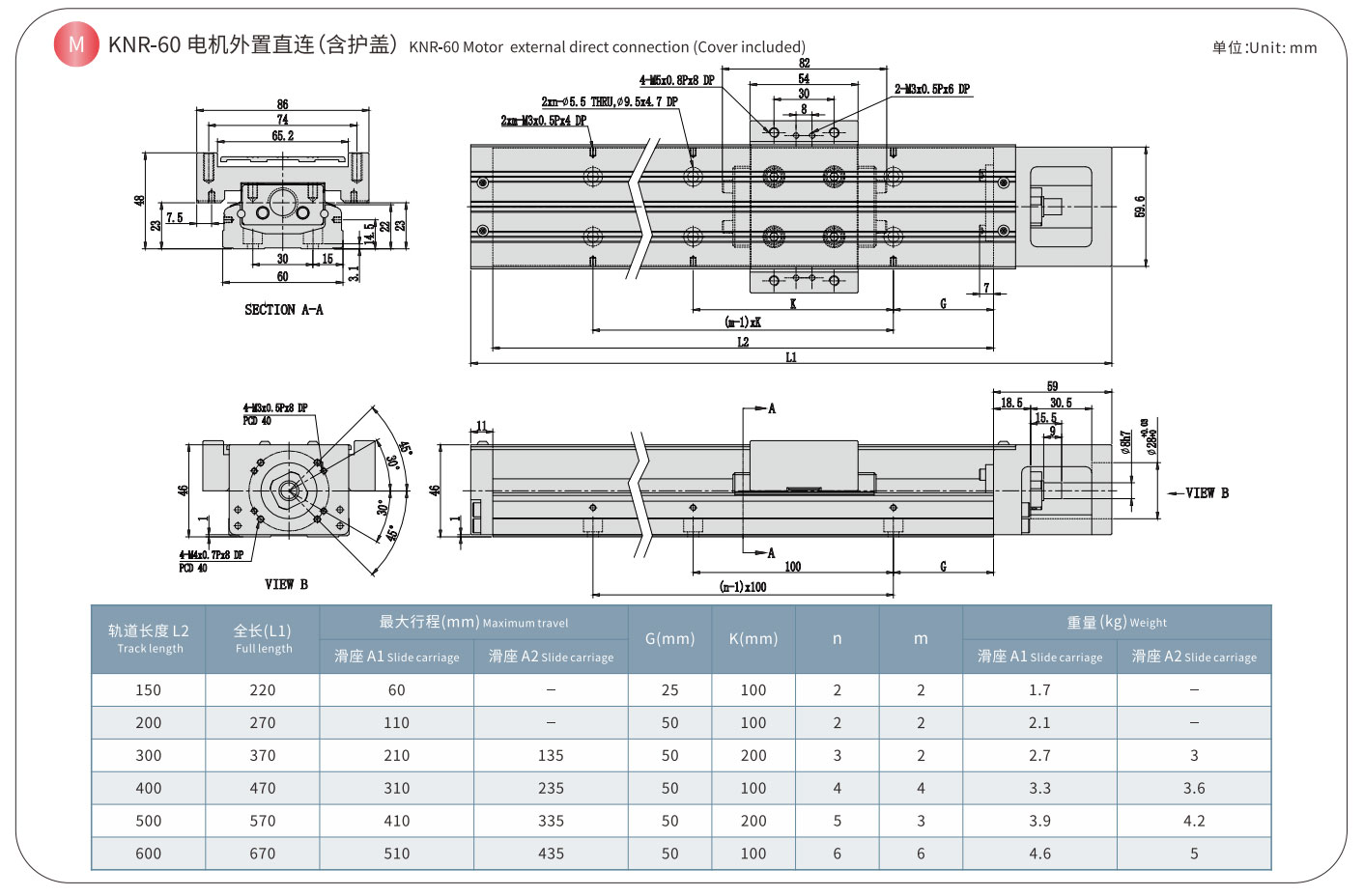
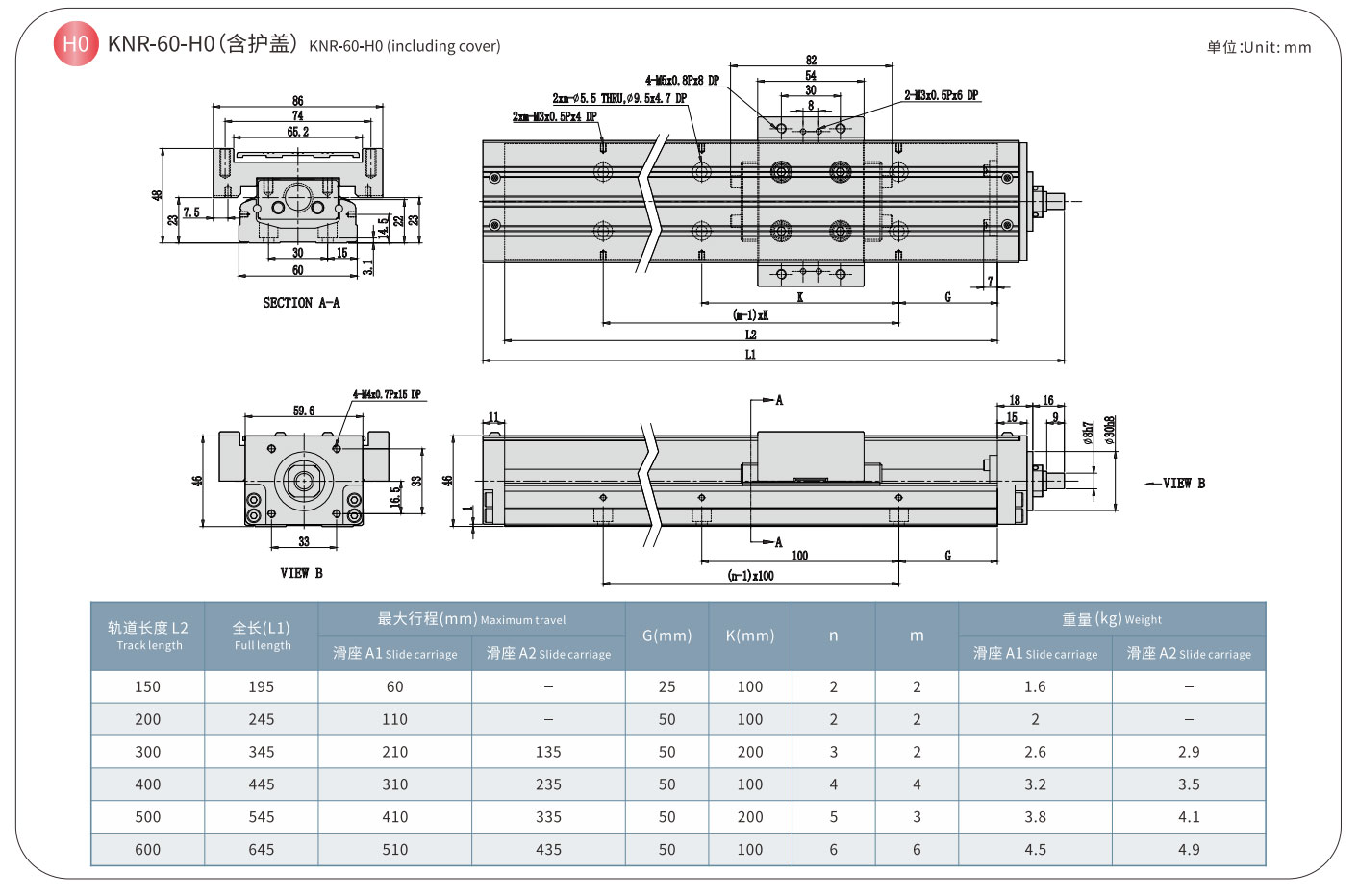
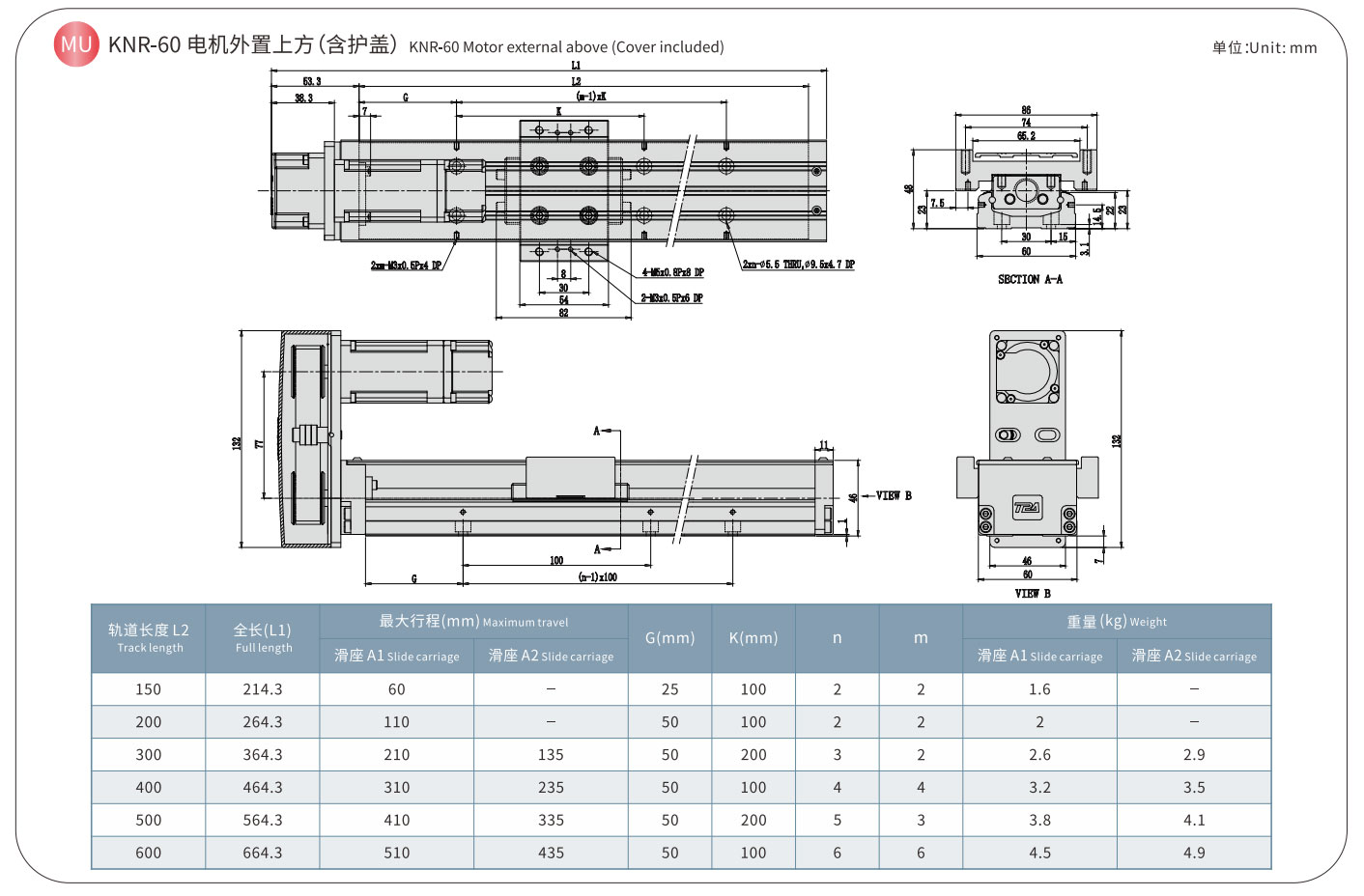
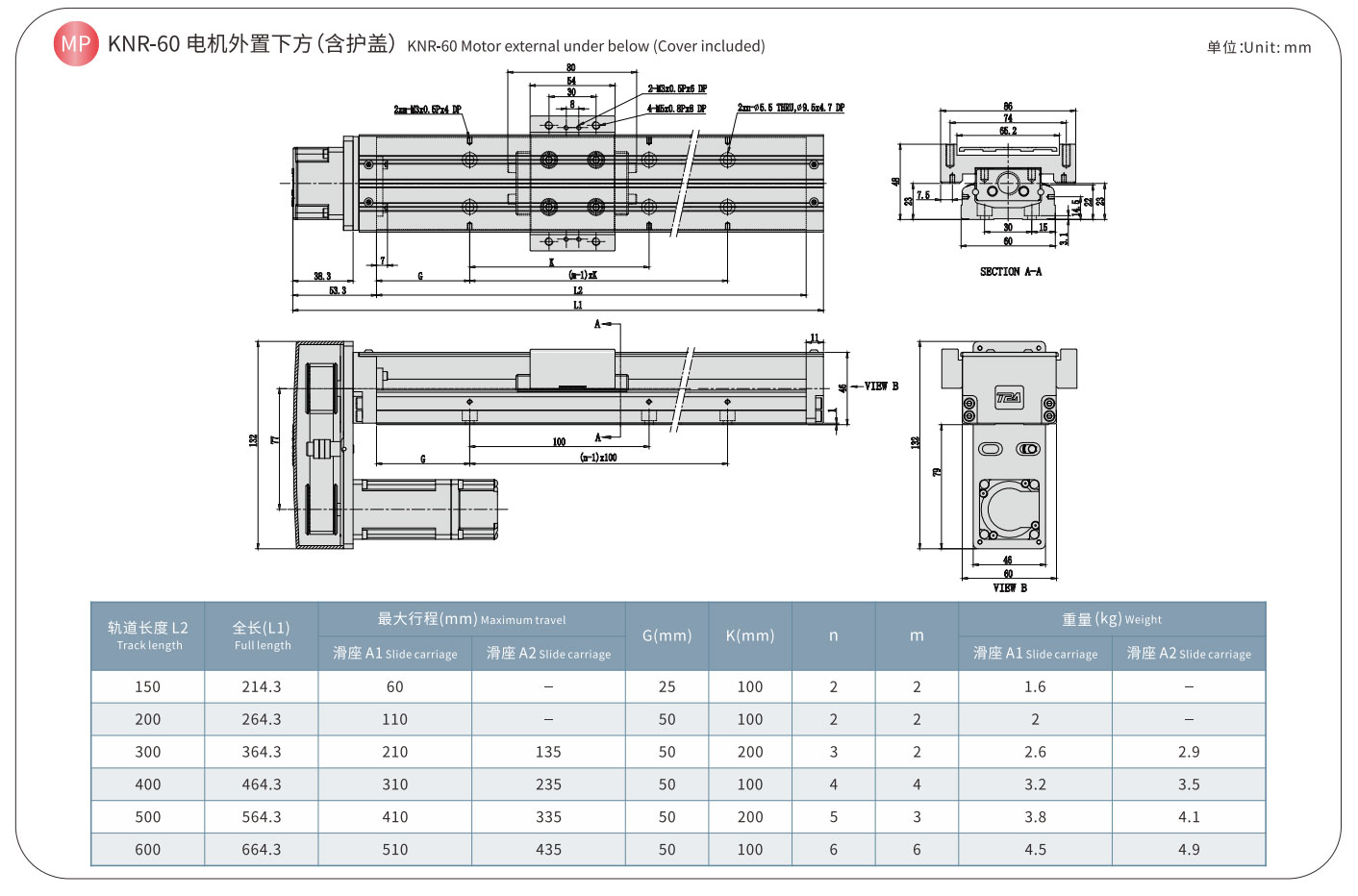
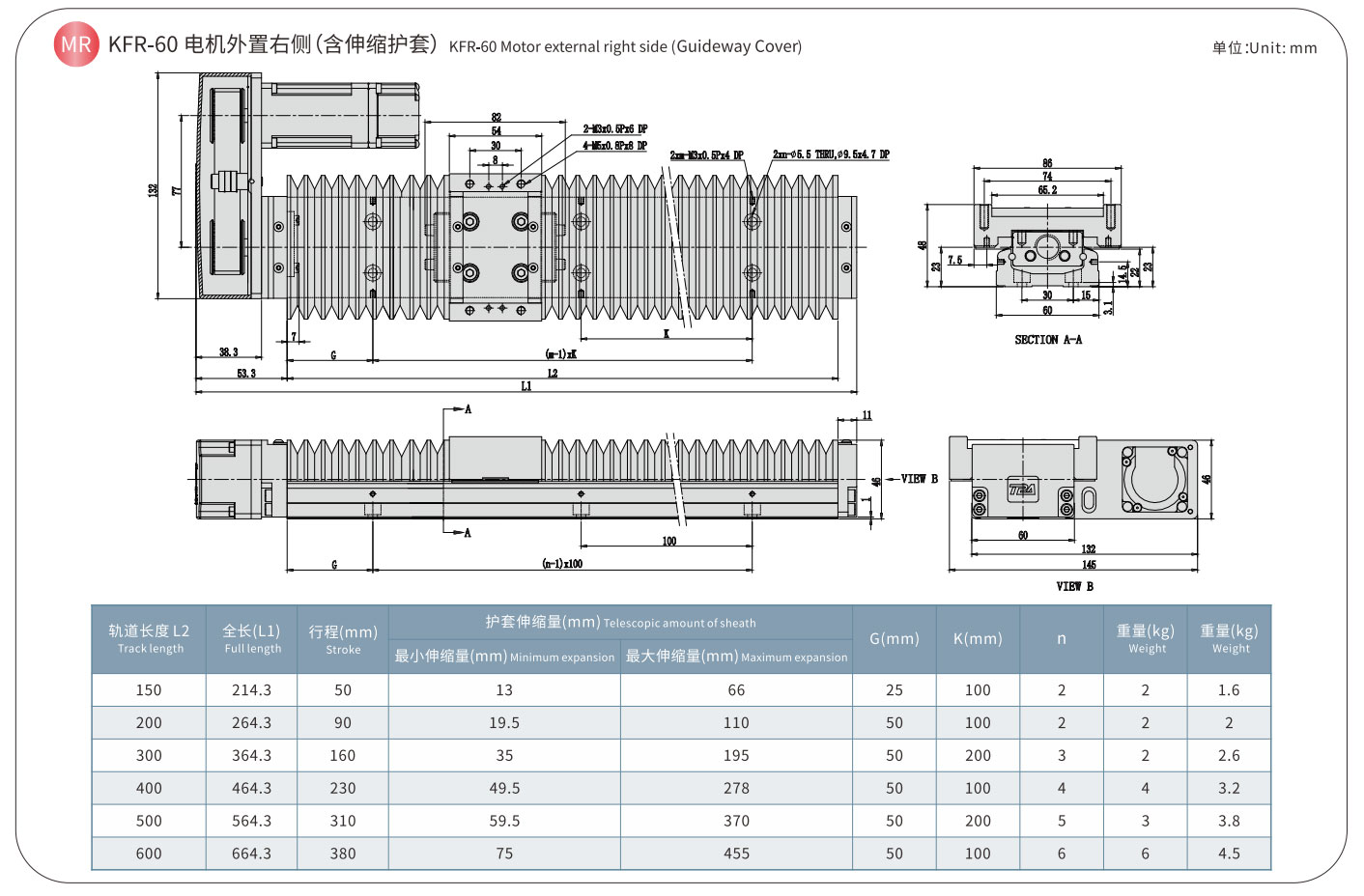
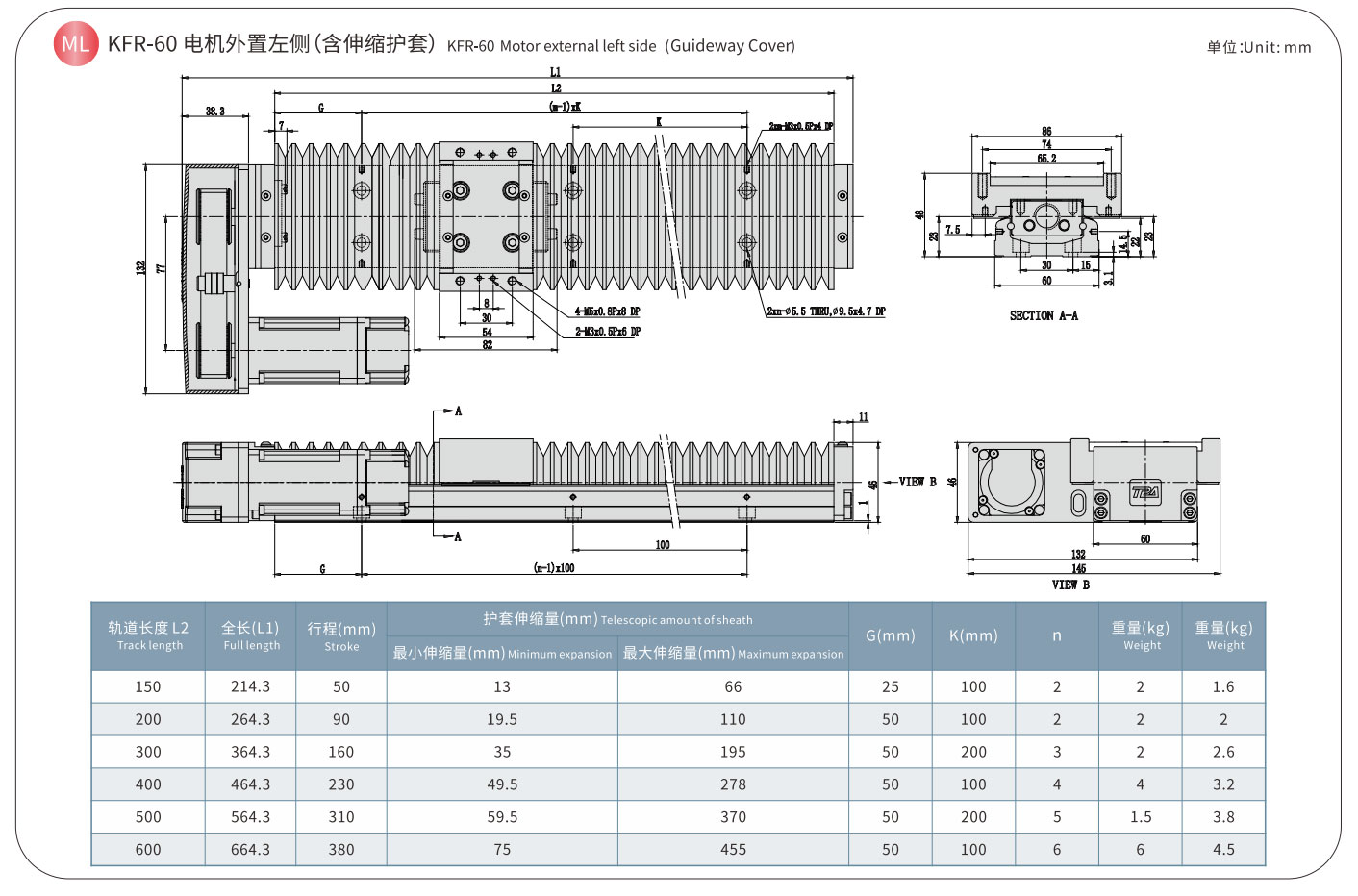
КСР-60 КНР-60 КФР-60

КСР-КНР-КФР-КЦР серија
Карактеристике
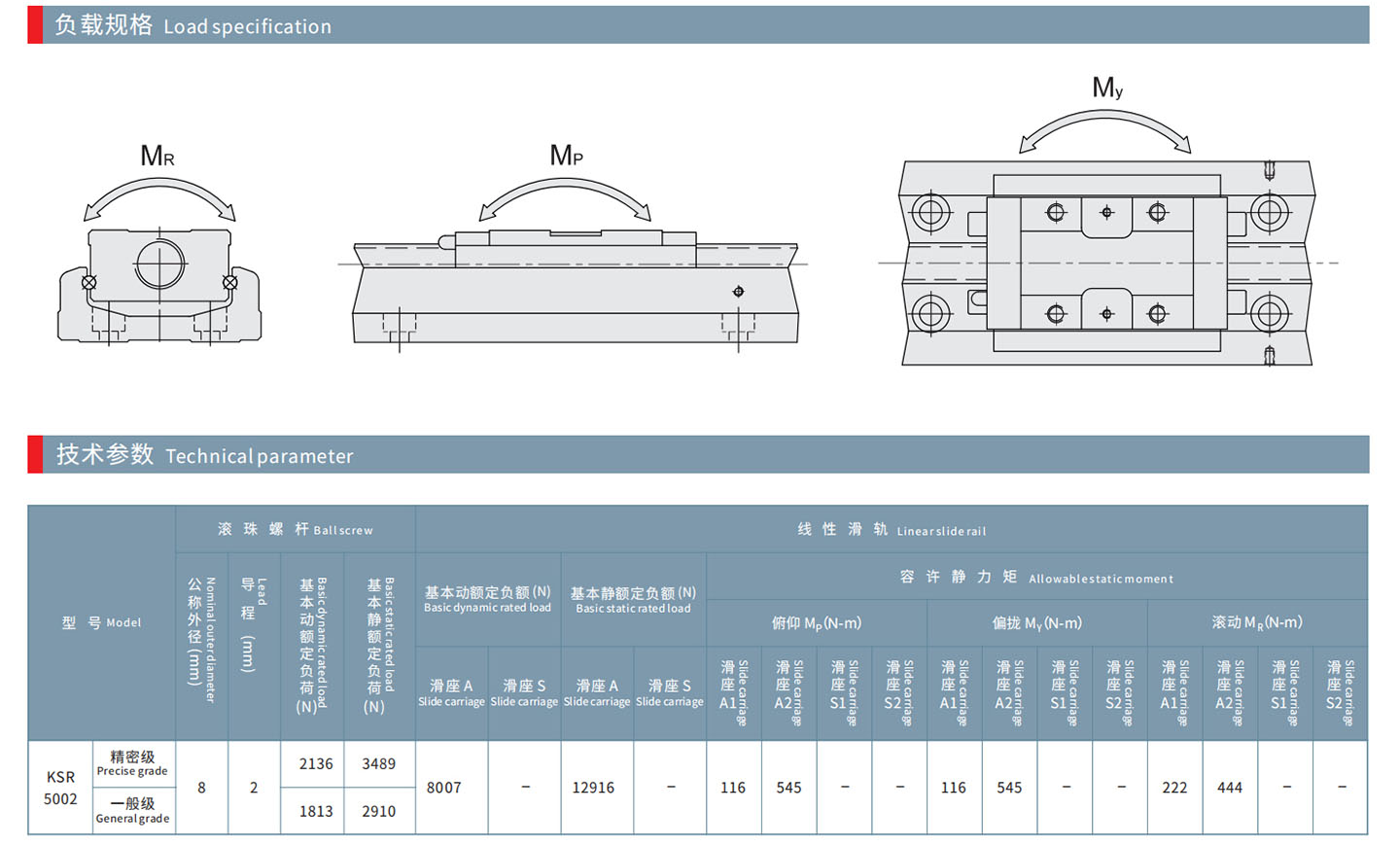
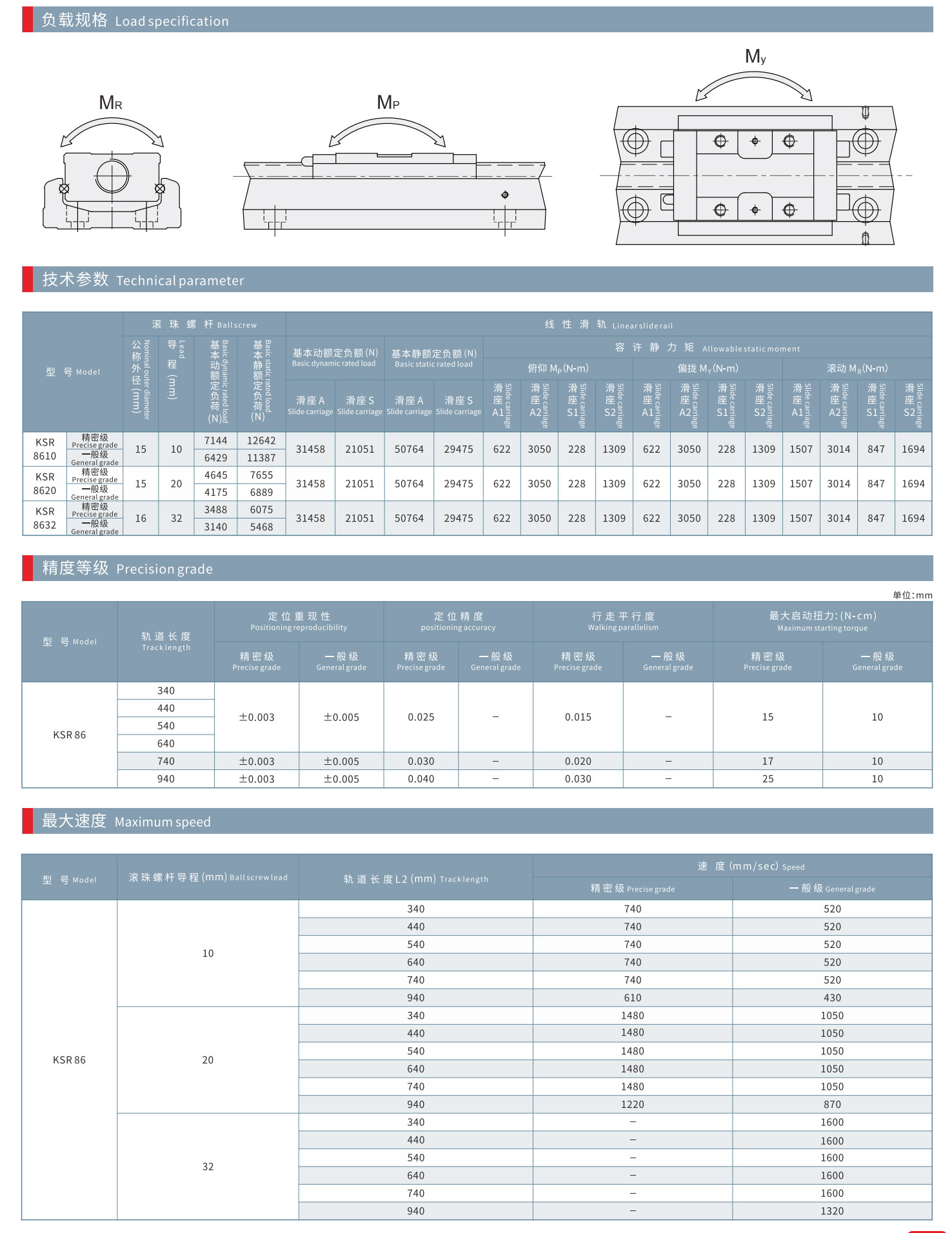
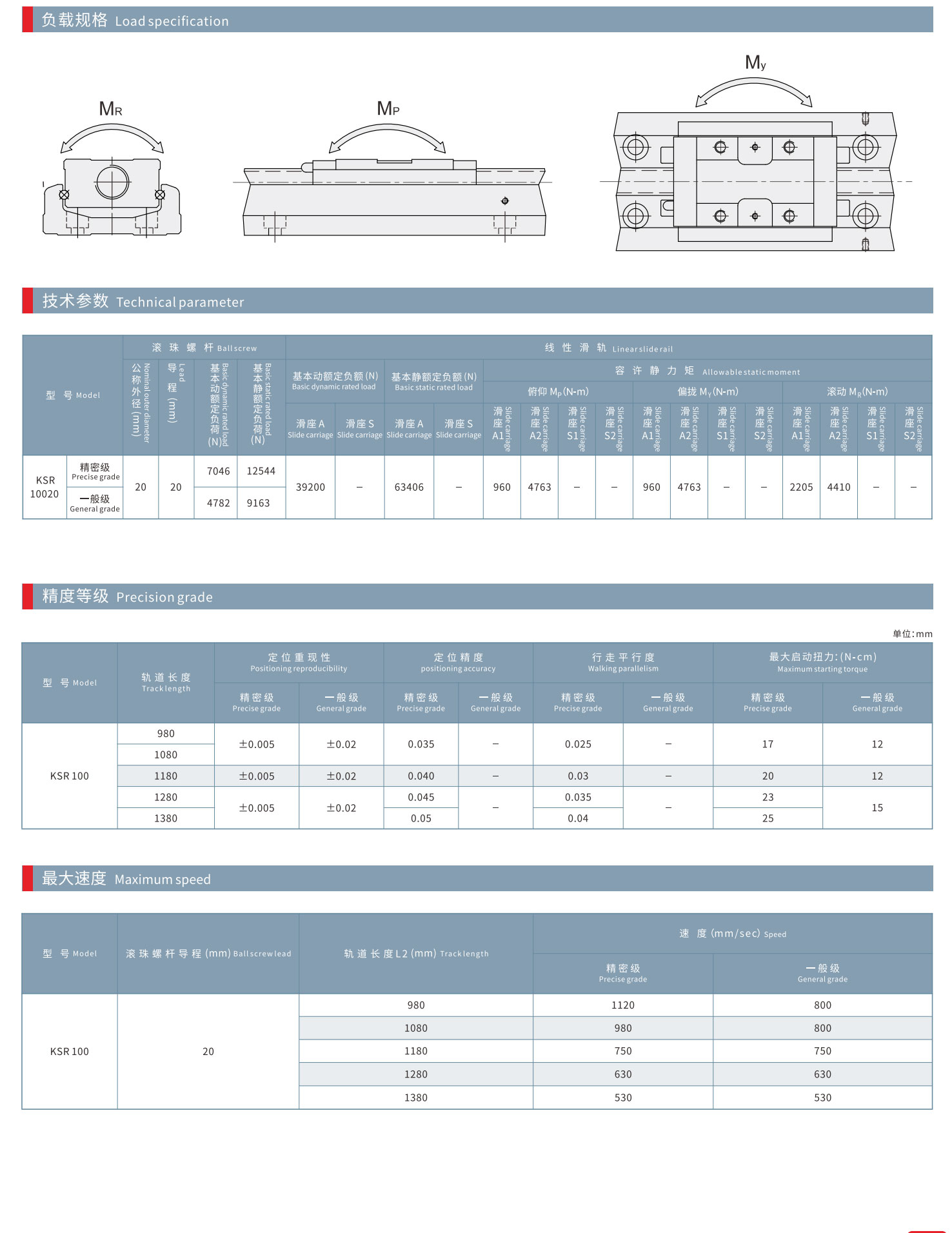
Поновљена тачност позиционирања: ±0,005 мм
Основно статичко оптерећење: 12642Н
Основно динамичко номинално оптерећење: 7144Н
Ход: 31 – 1128 мм
Максимална брзина: 1000 мм/с
Високопрецизни куглични вијак се користи као структура преноса, а шина у облику слова У је усклађена са оптимизованим дизајном. Као структура водича, како би се осигурали захтеви за тачност и крутост.
Контактна површина између куглице и жлеба перле има 2-редни Гетеов тип зуба. Дизајн има карактеристике контактног угла од 45 степени, што омогућава модулу на бази челика да издржи четири правца. Способност једнаког оптерећења.
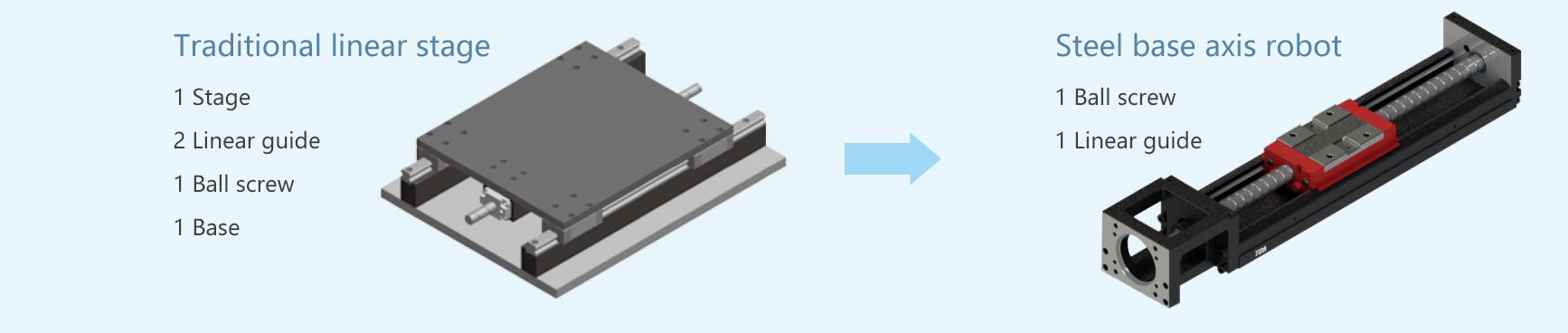
Кроз модуларни дизајн, челични основни модул интегрише куглични вијак и шину у облику слова У, што може спасити традиционалну платформу за покретање од потребе да прође кроз избор компоненти за вођење и погон, инсталацију и верификацију, велику запремину и заузимање простора. Стога, модул на бази челика може пружити карактеристике брзог избора, уградње, компактне величине, високе крутости и тако даље, што може у великој мери смањити простор и време коришћења клијента.


Више производа

Серија ХФР-Ласерско сечење З оса

ГЦРС серија са двоструким клизним уграђеним линеарним А...

Линеарни актуатори са кугличним завртњем серије ХНР Полу енц...

ГЦР серија линеарних модула са кугличним навојем Буи...

Линеарни модул са кугличним завртњем серије ХЦР потпуно затворен

КНР-Е серија робота са једном осовином од алуминијума










