




HNB-E Fa'asologa Fa'asologa o Fa'a'au Fa'aosoina Fa'a'osoina Fa'alava Fa'apipi'i Afa

Fa'ata'ita'iga Filifilia
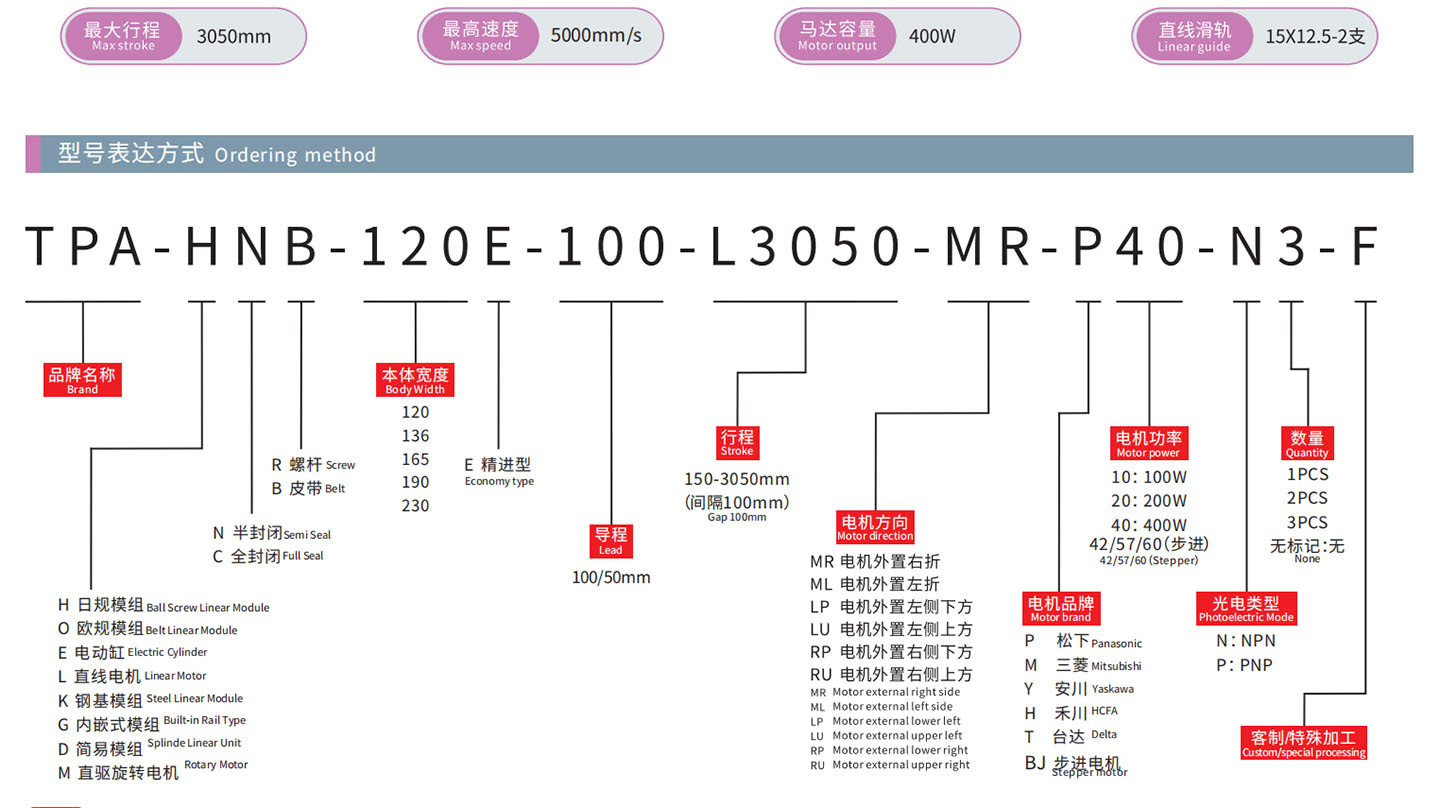
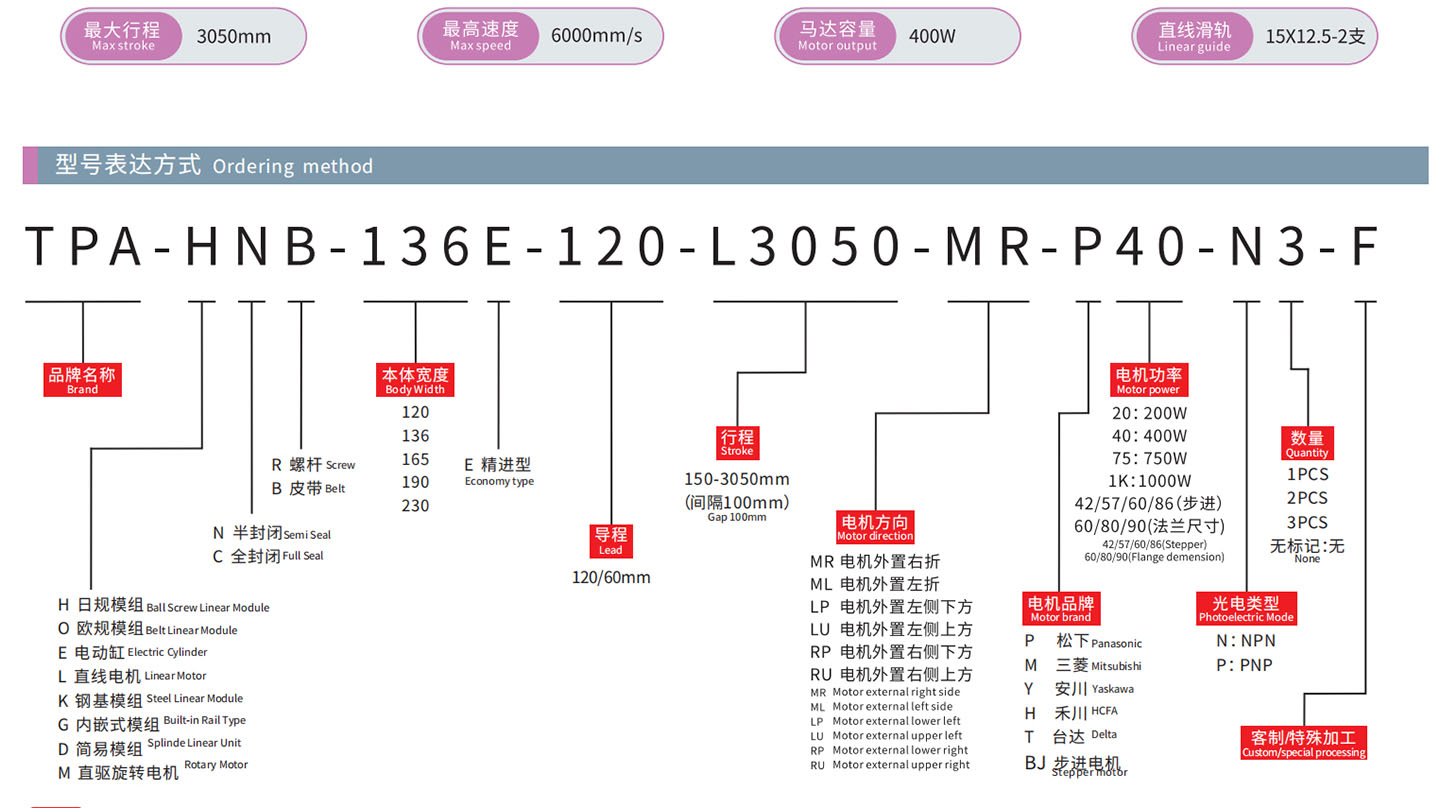
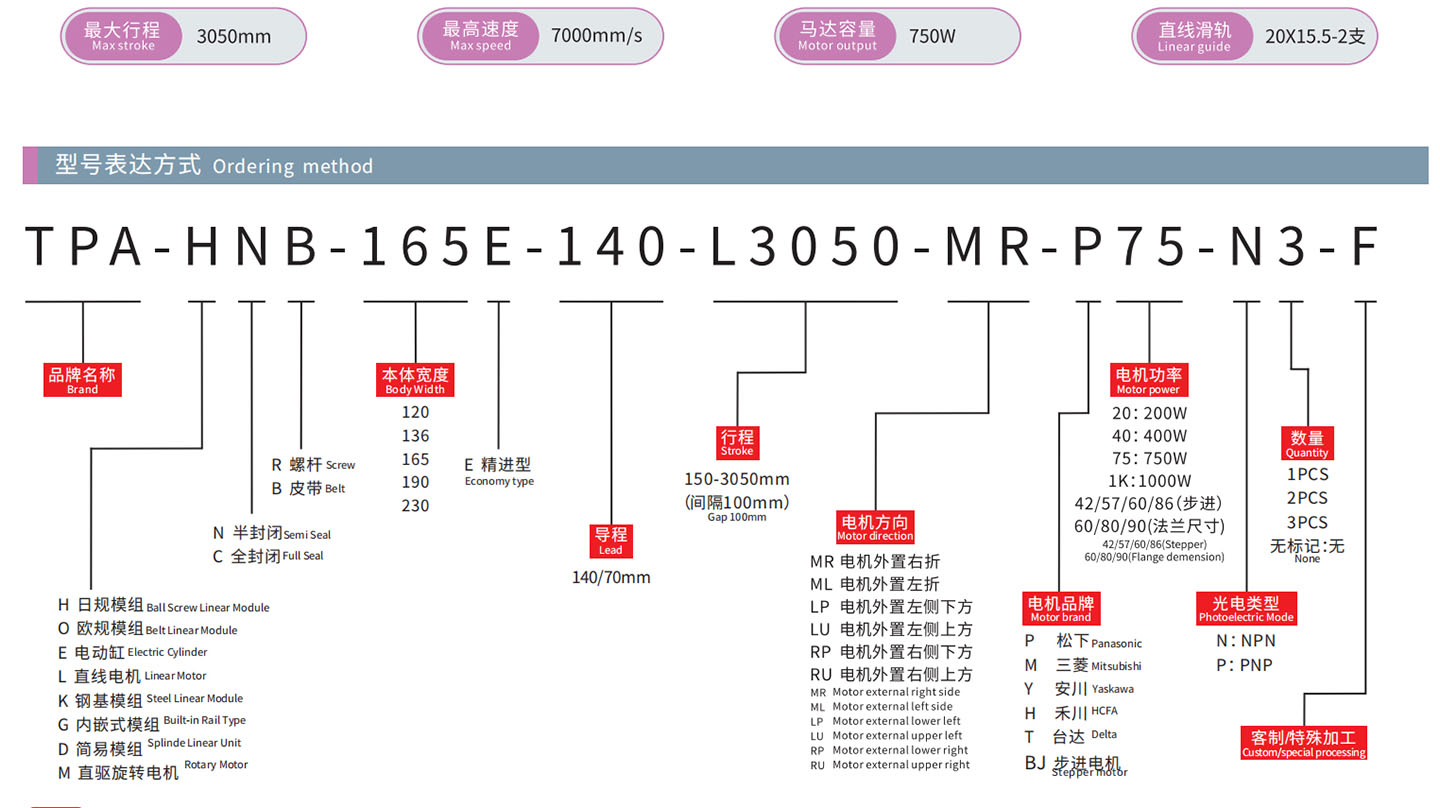
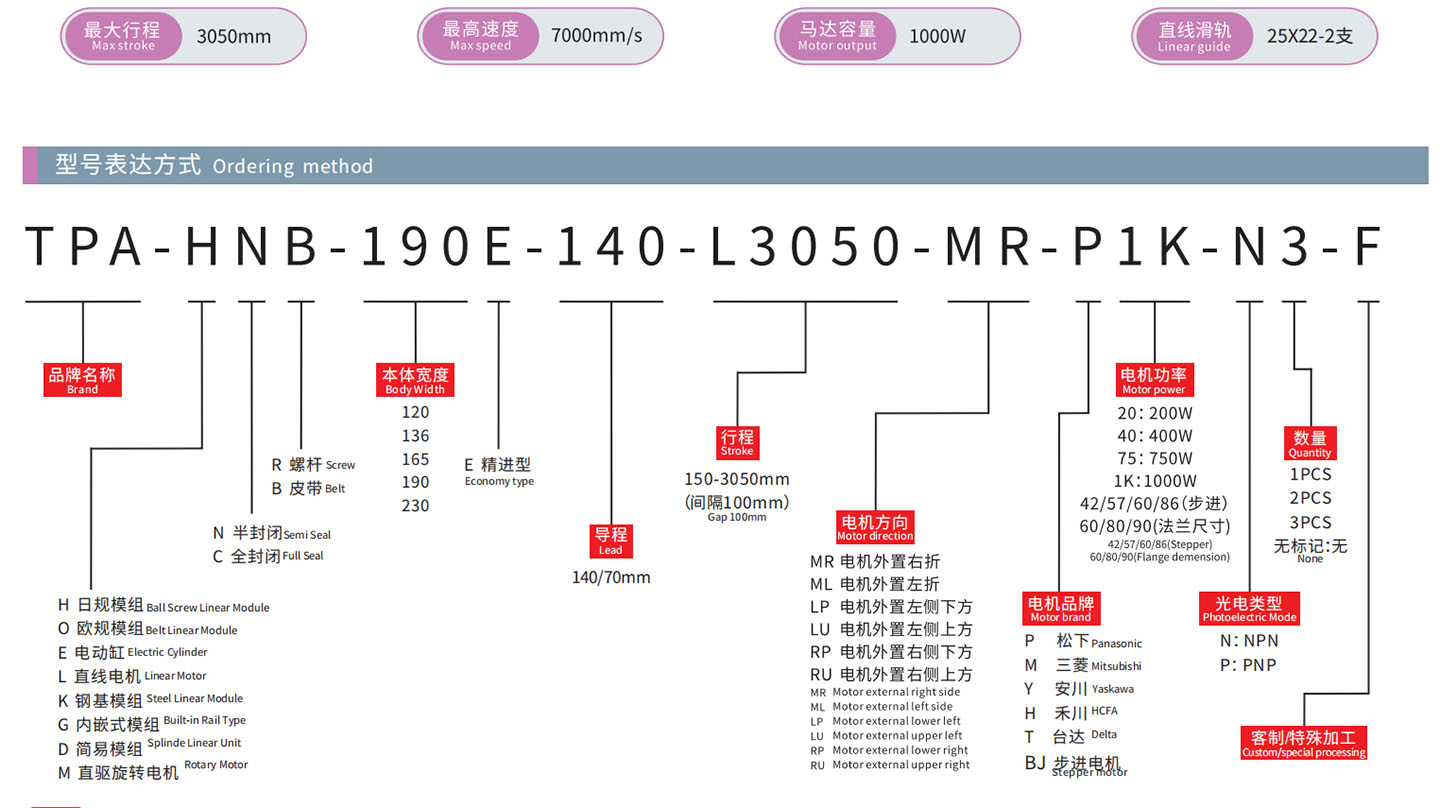
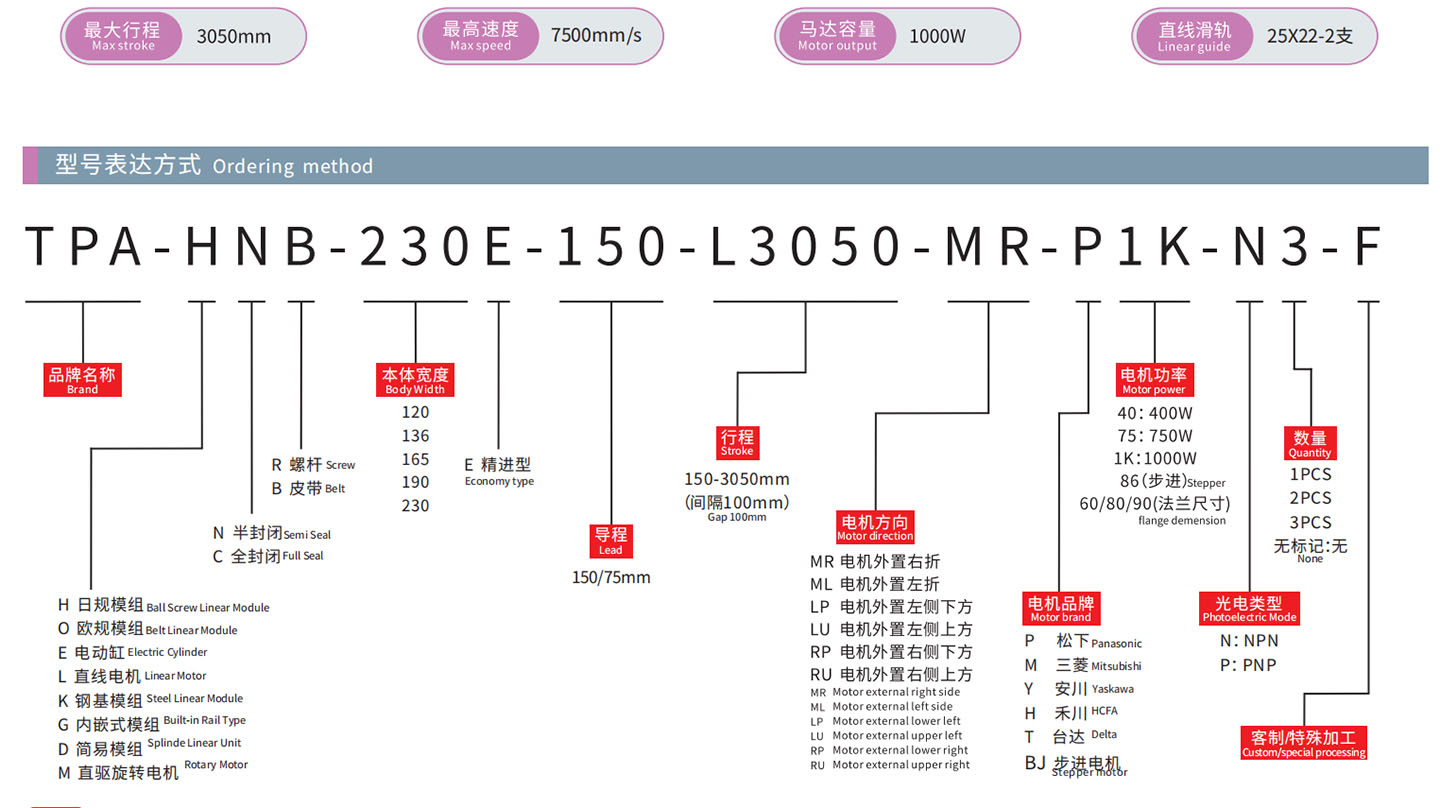
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
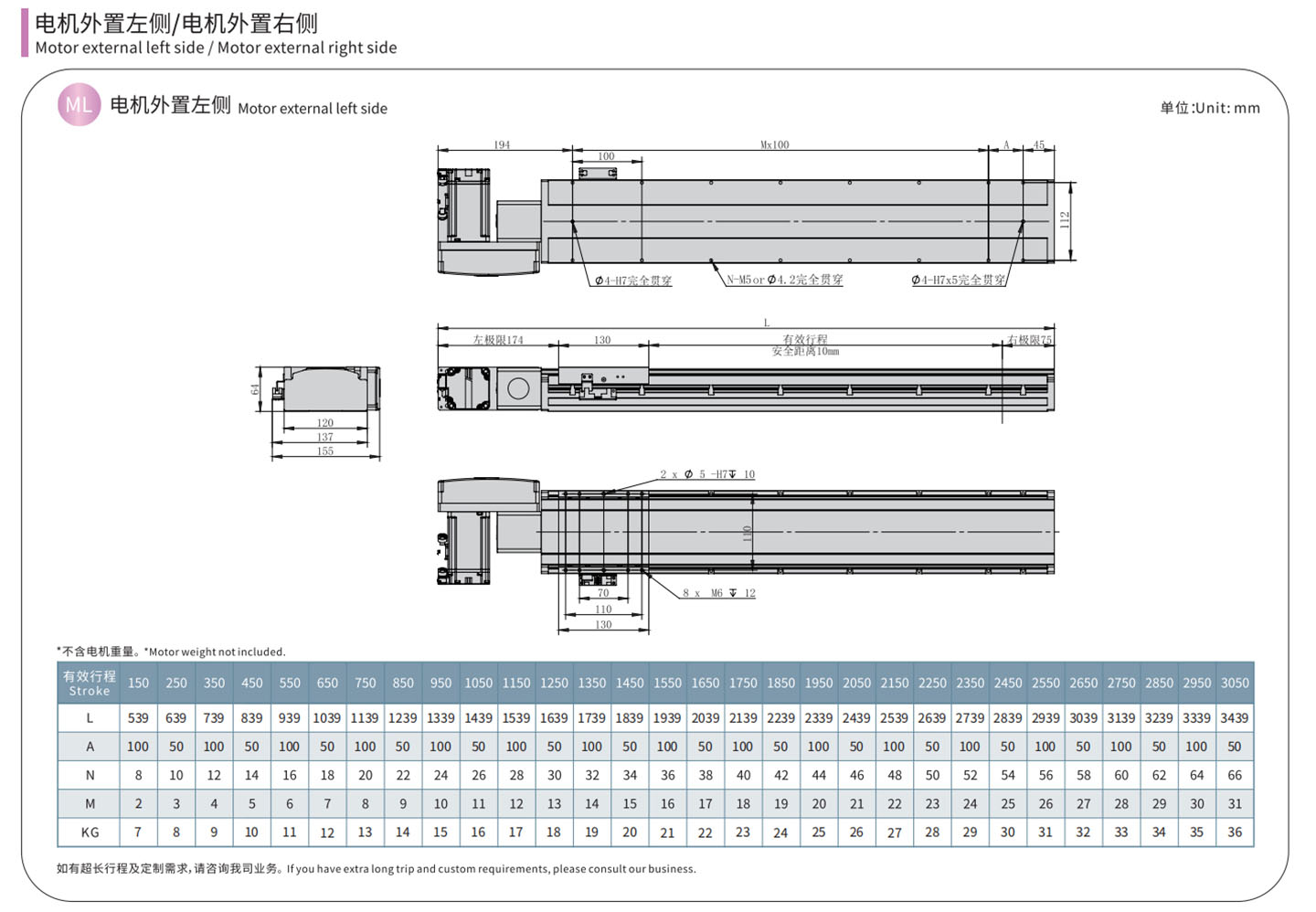
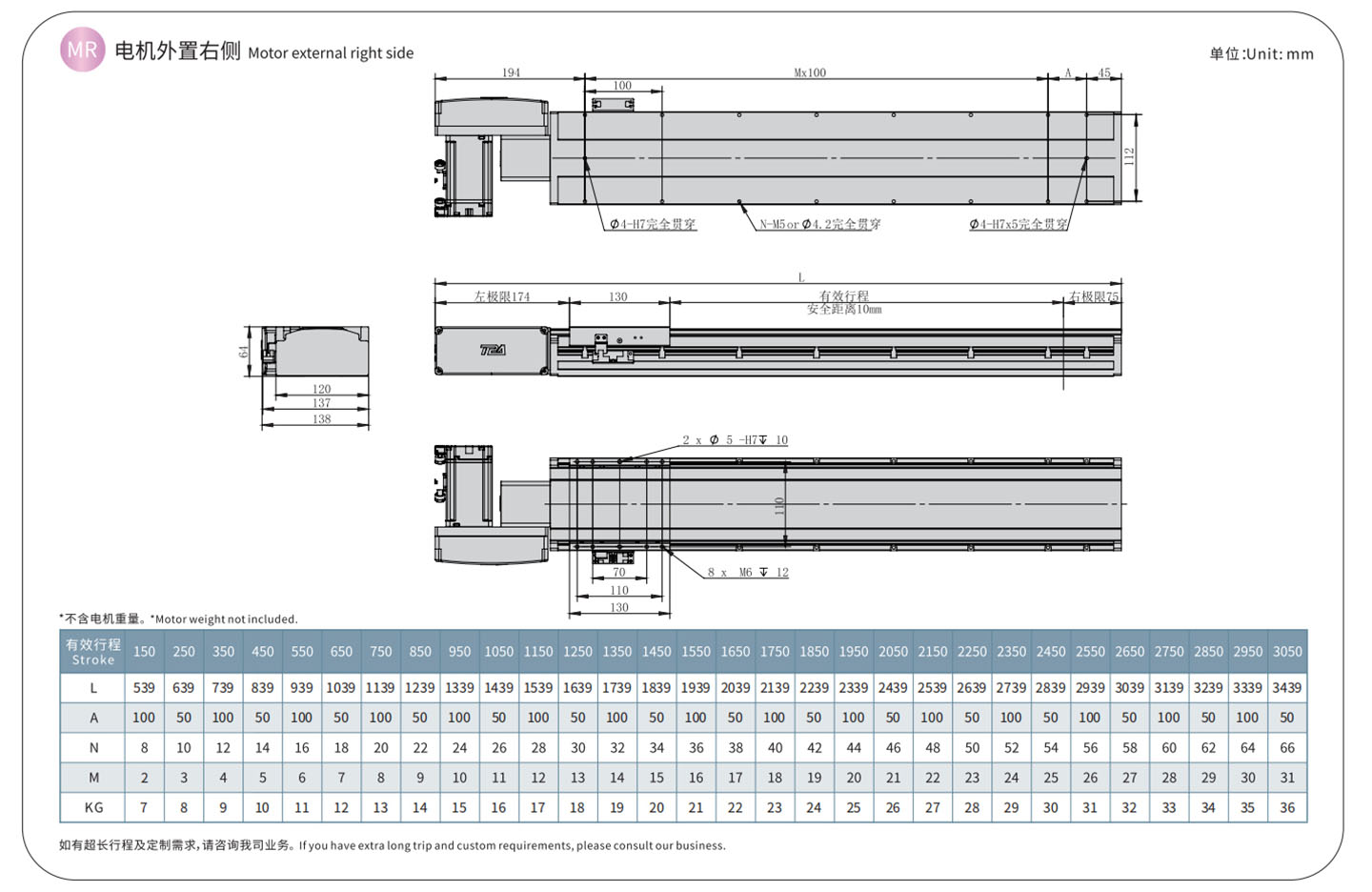
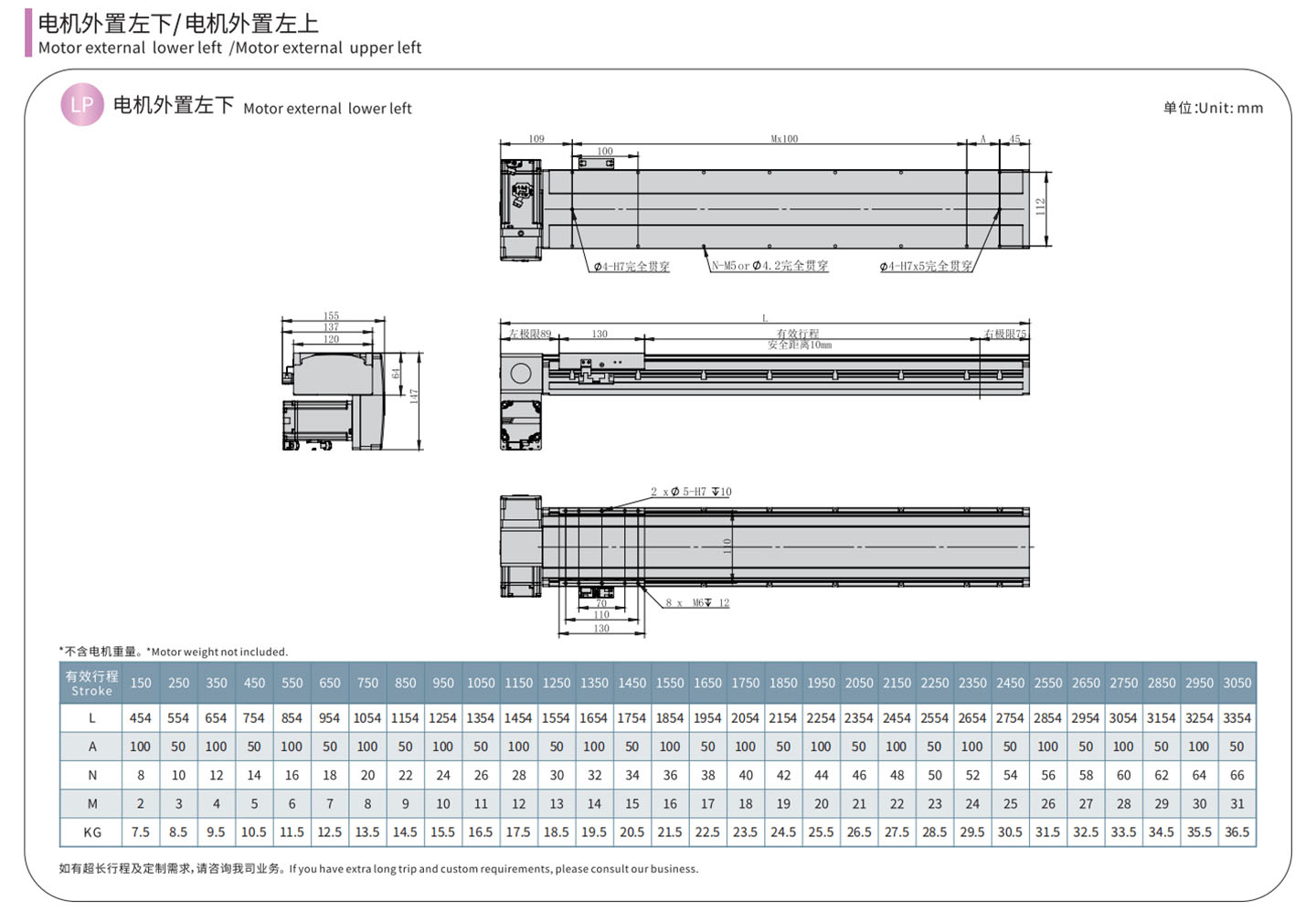
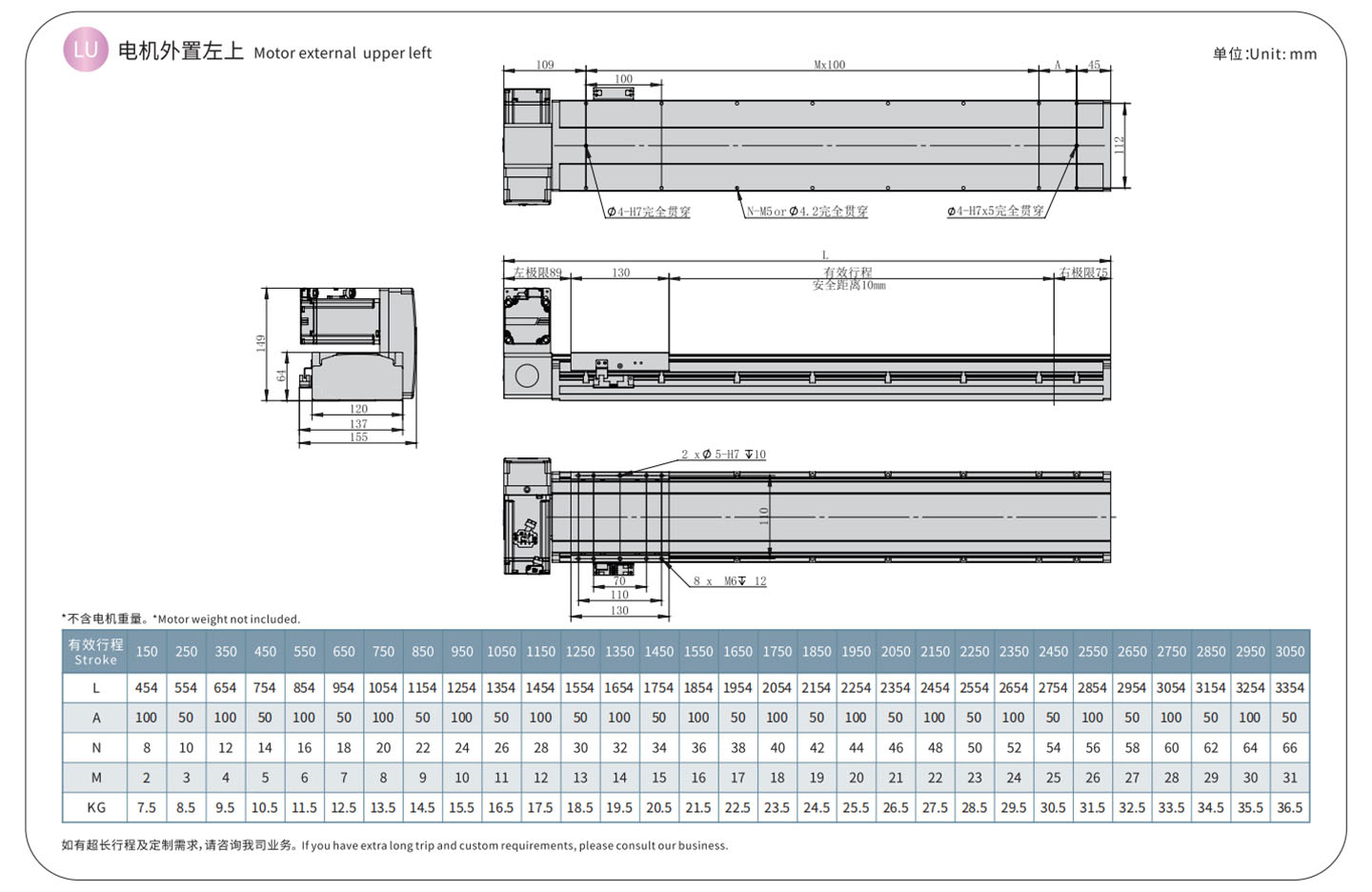
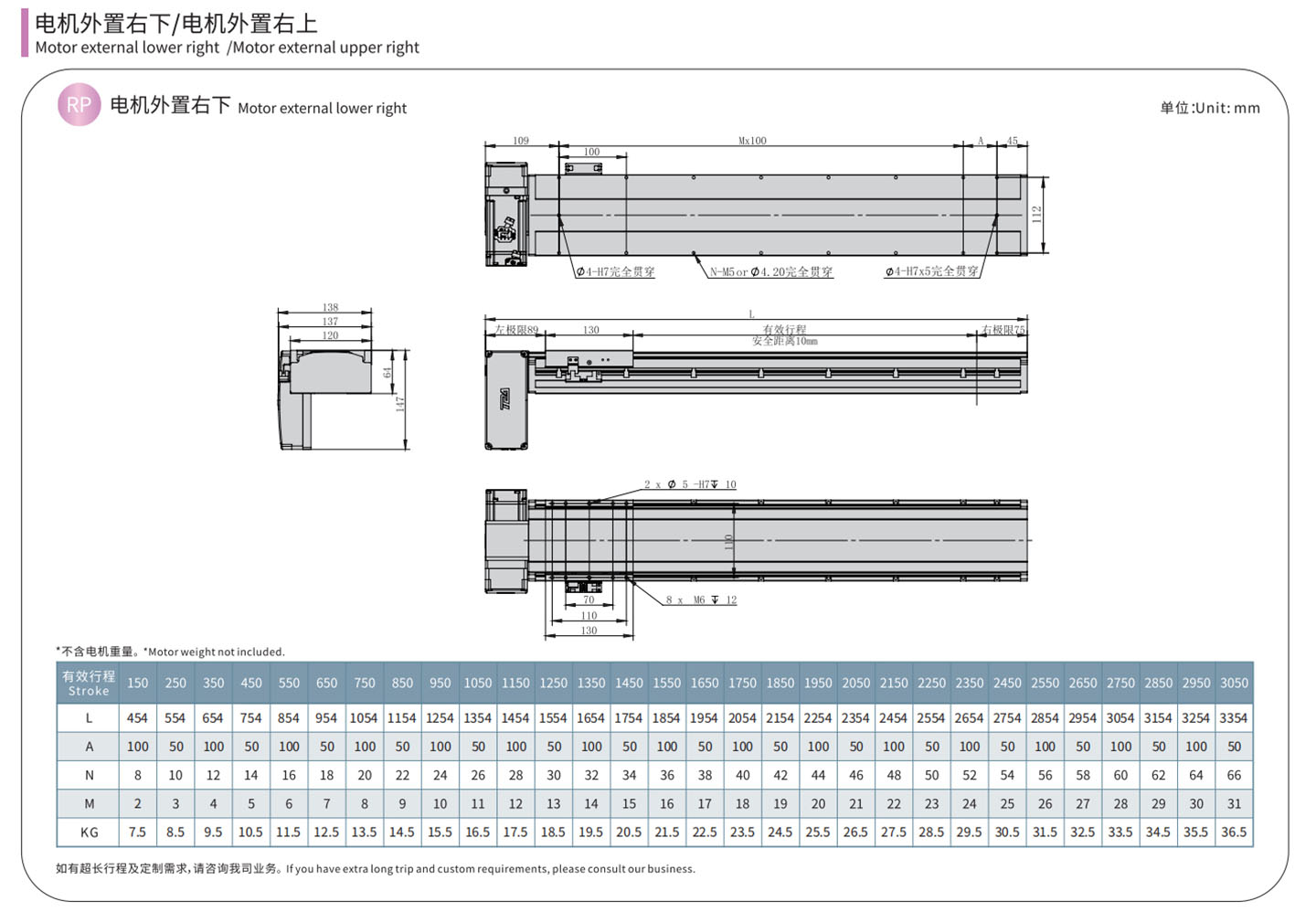
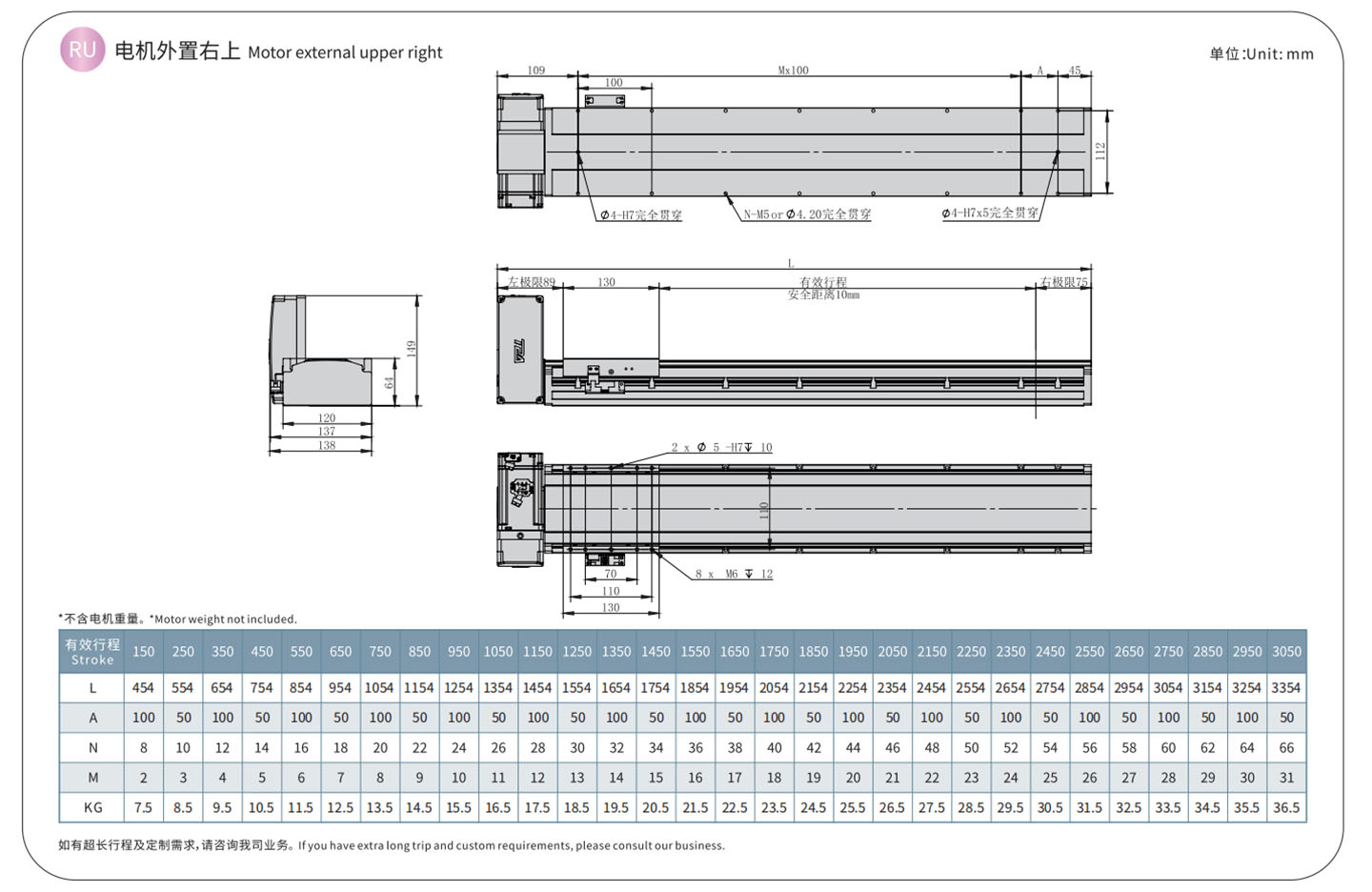
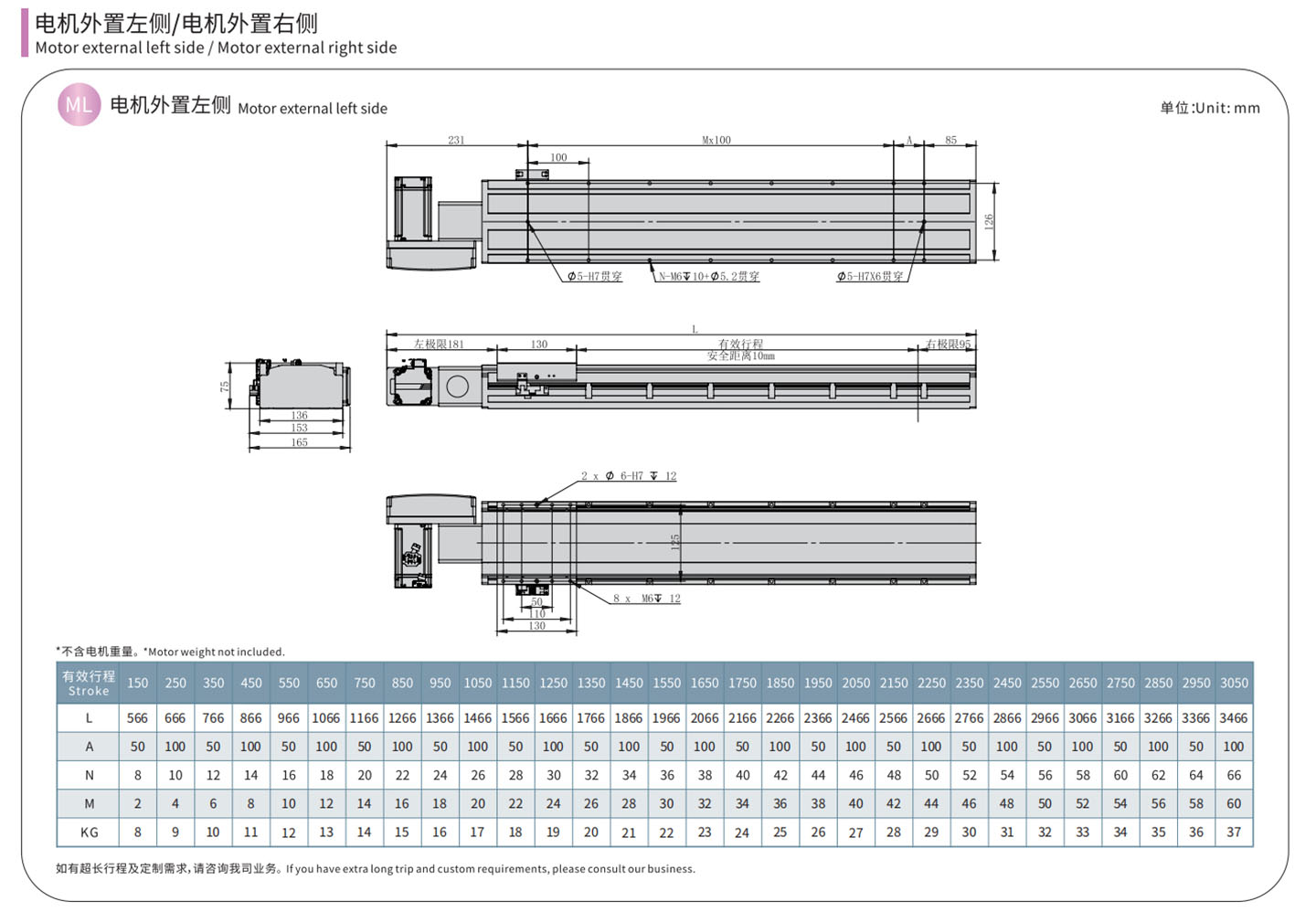
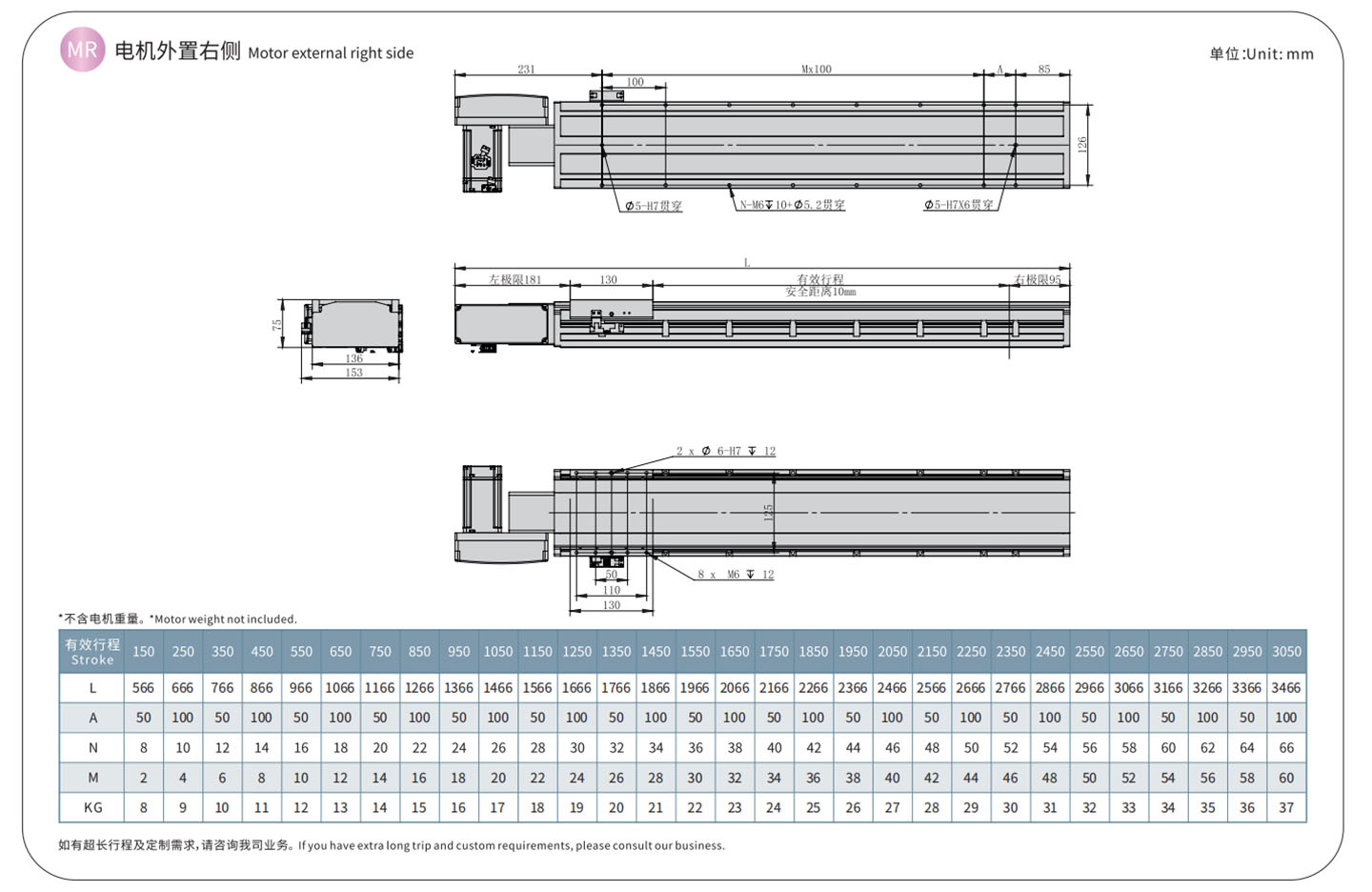
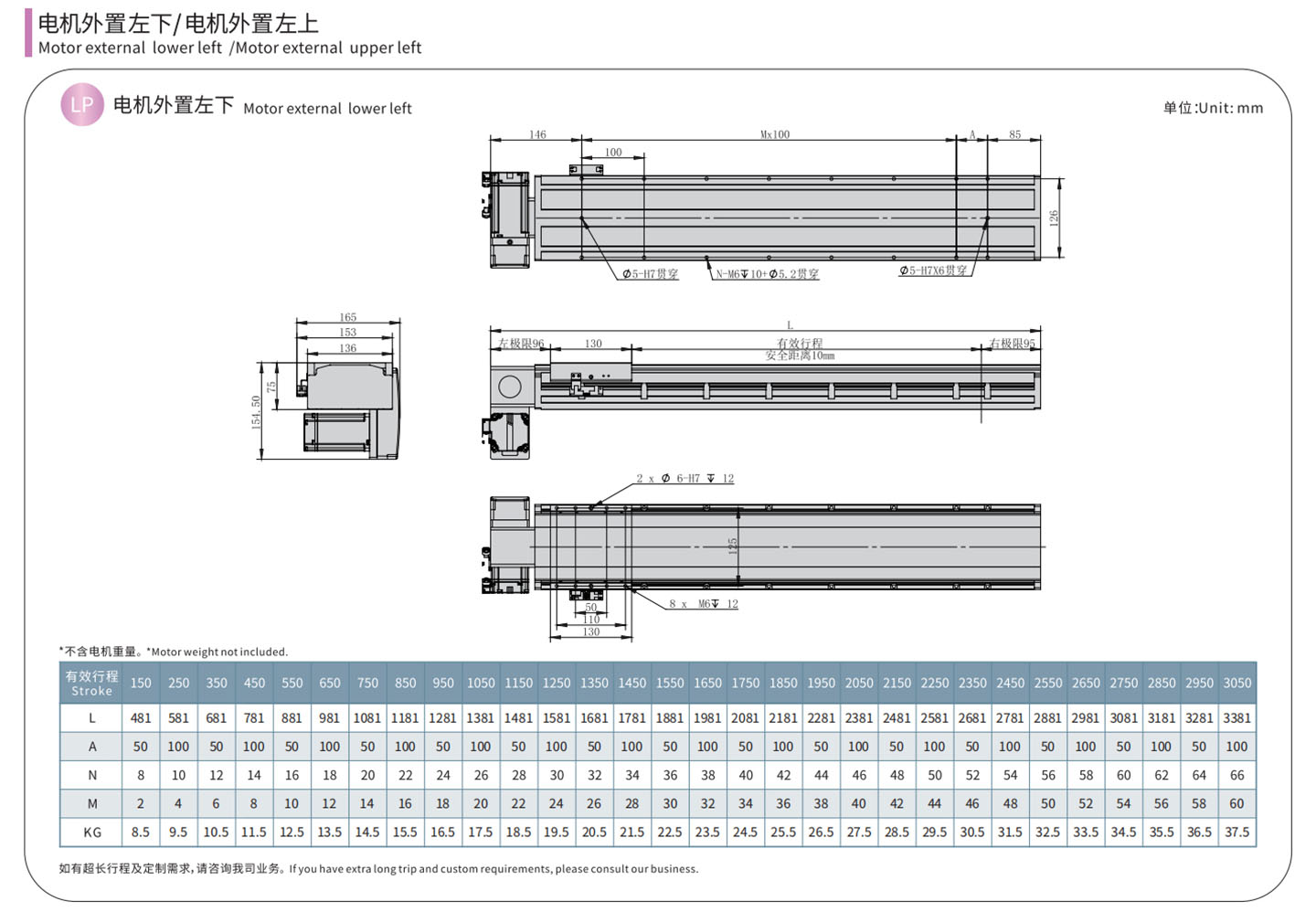
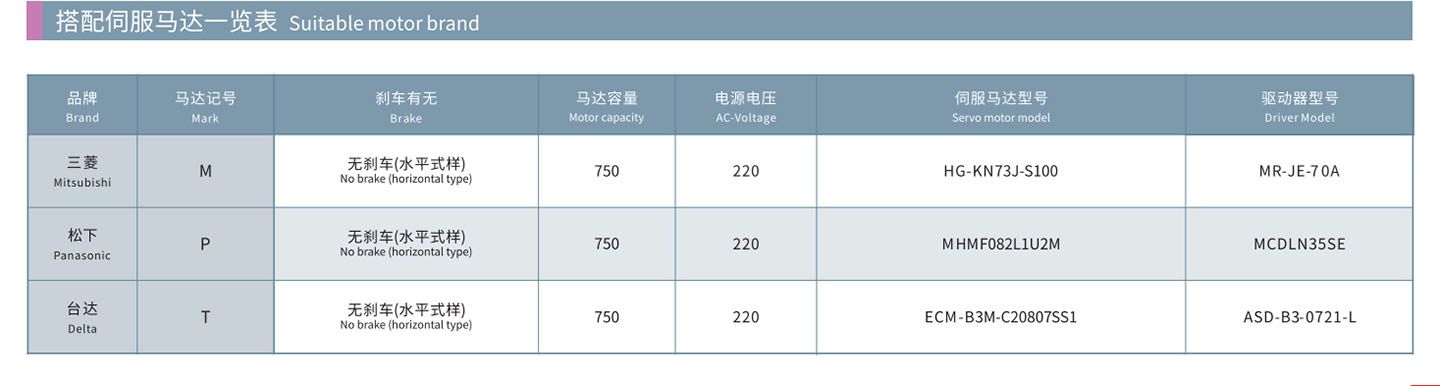
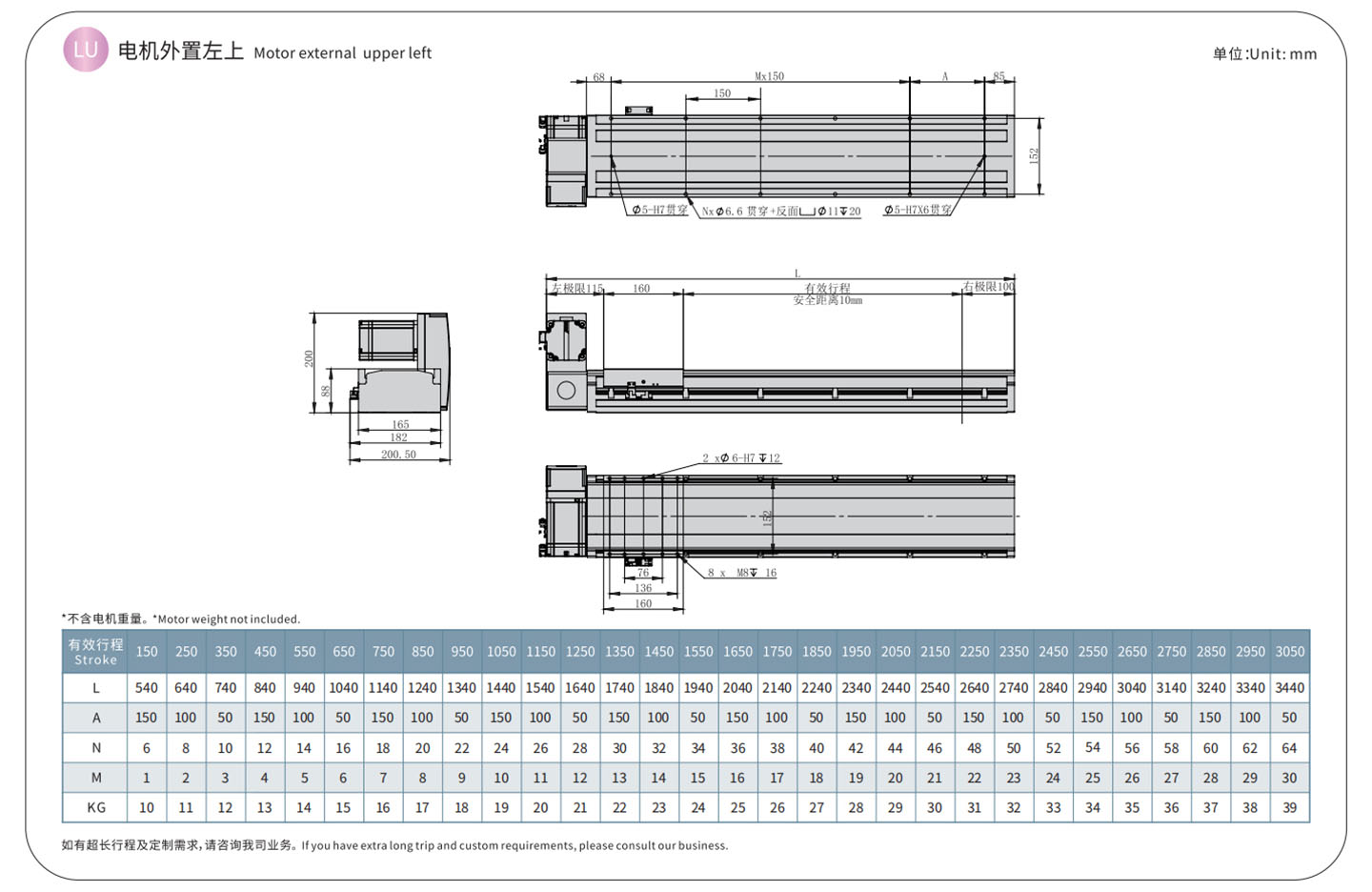
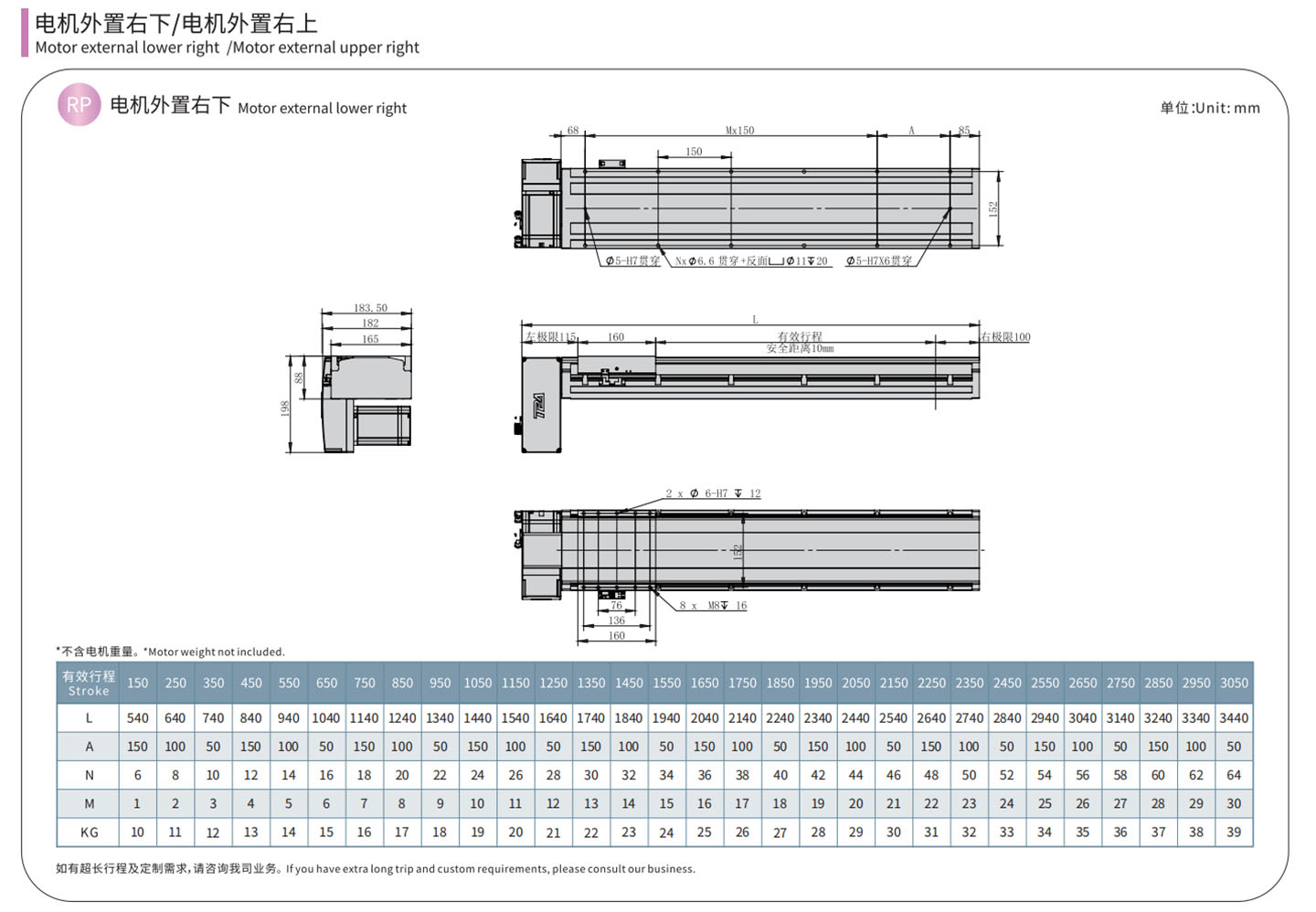
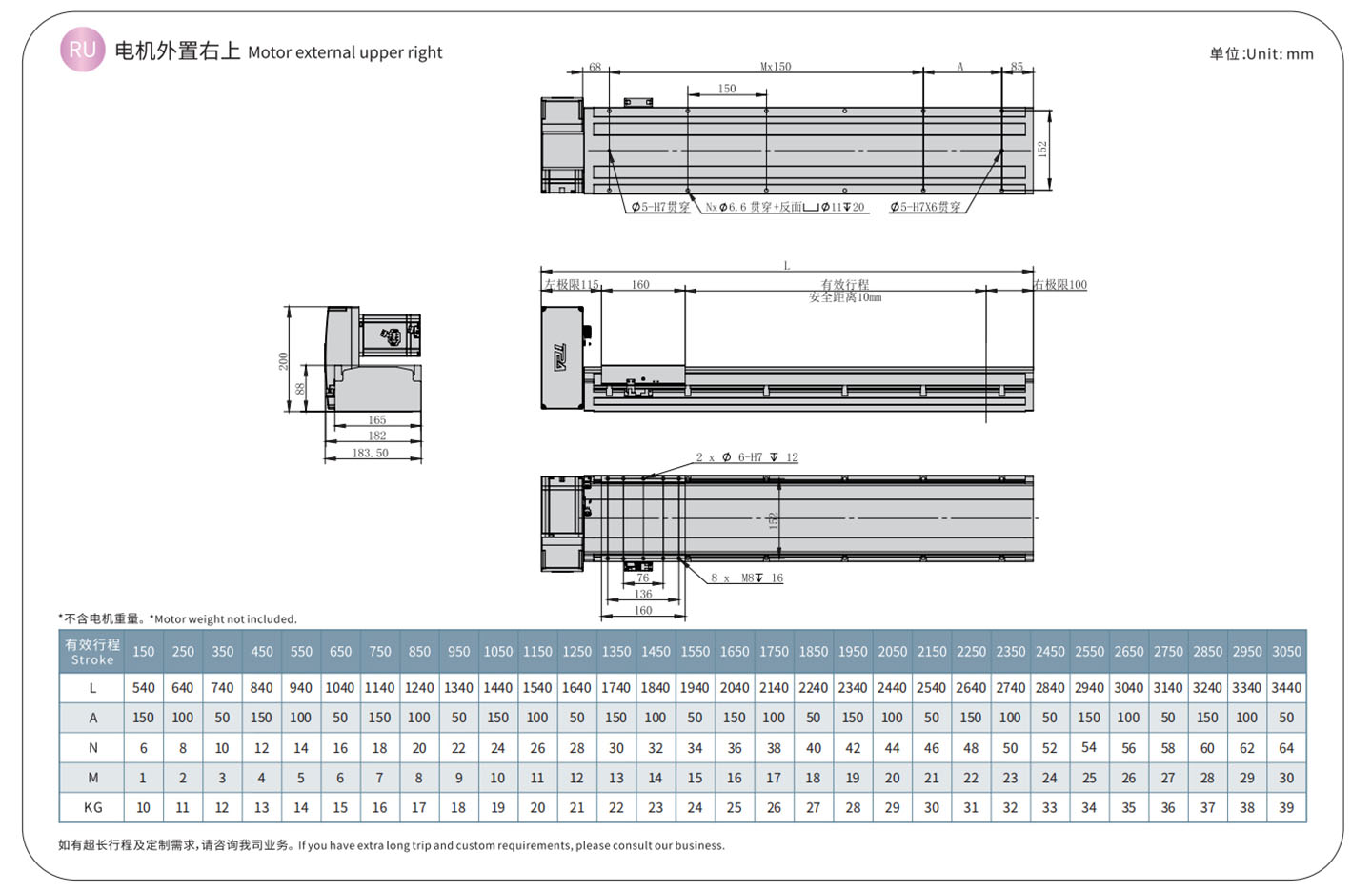
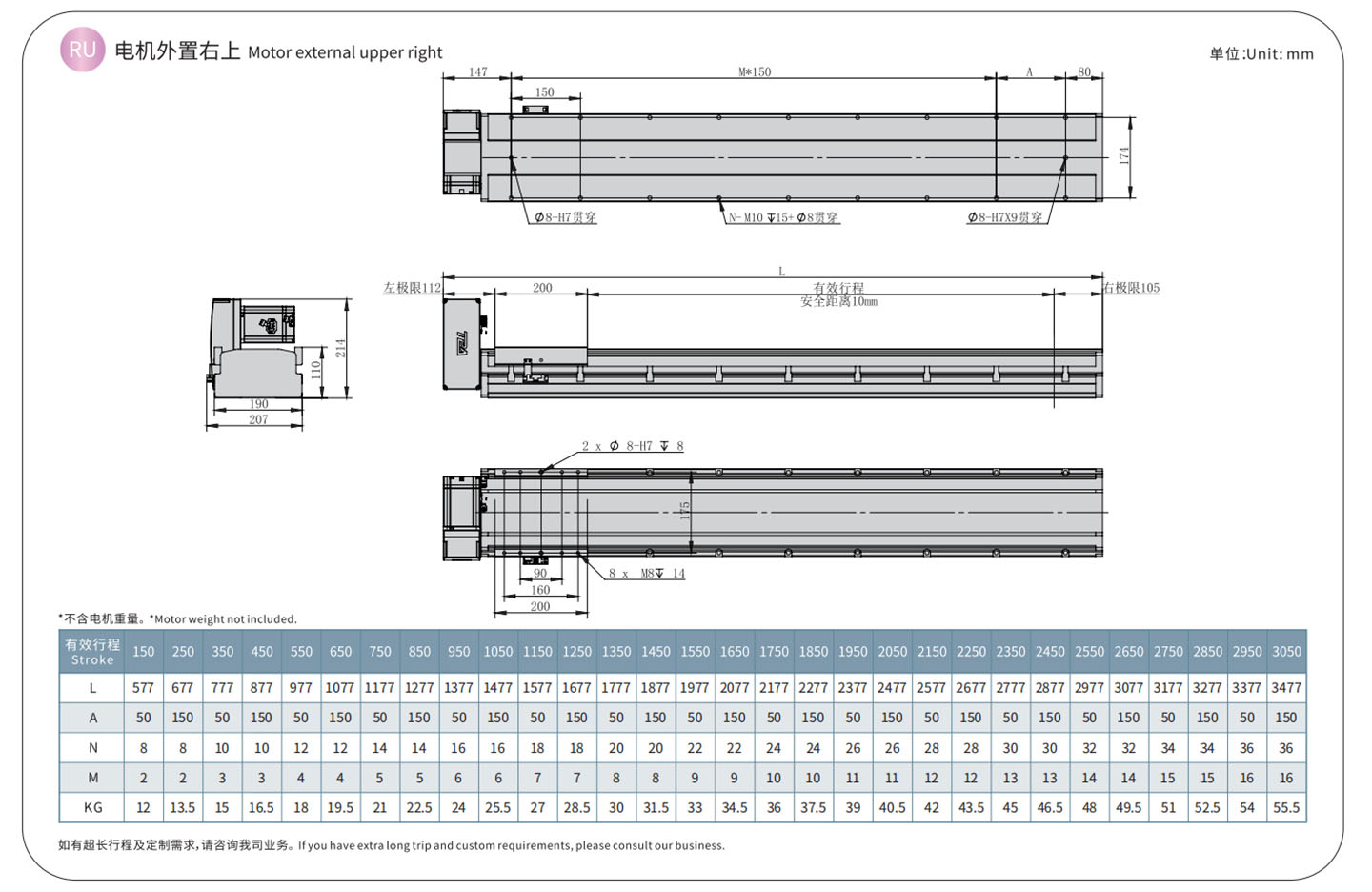
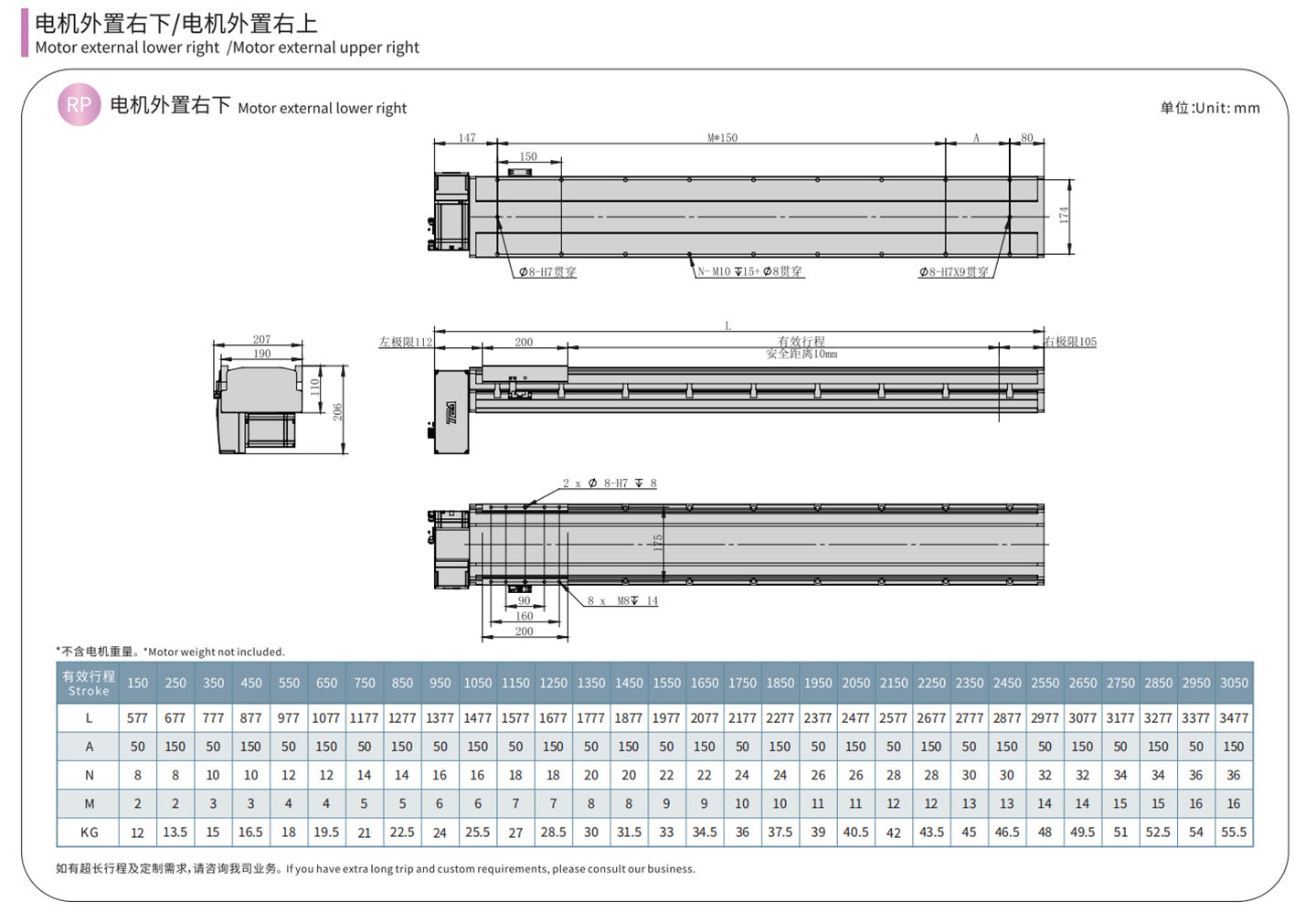
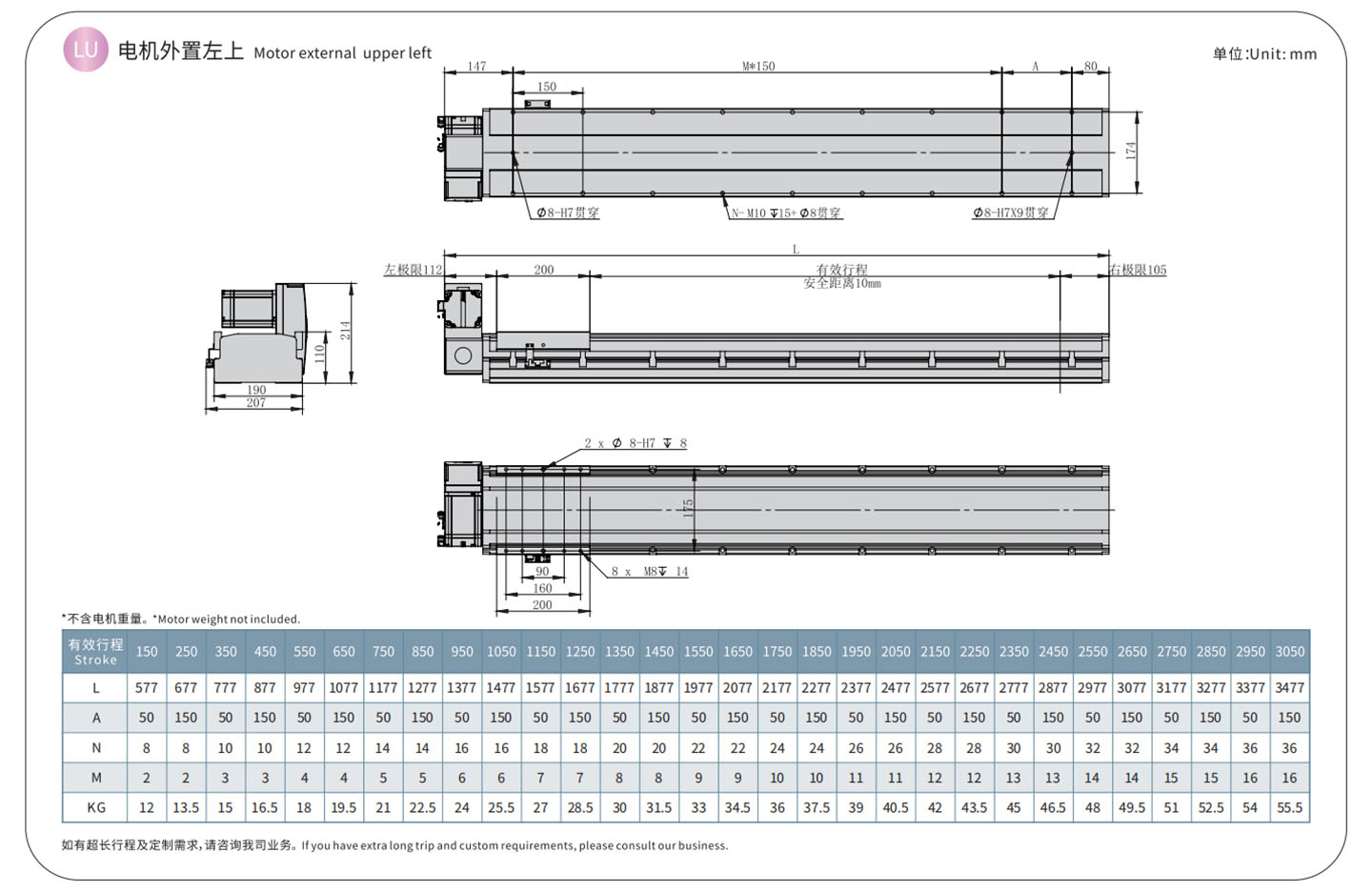
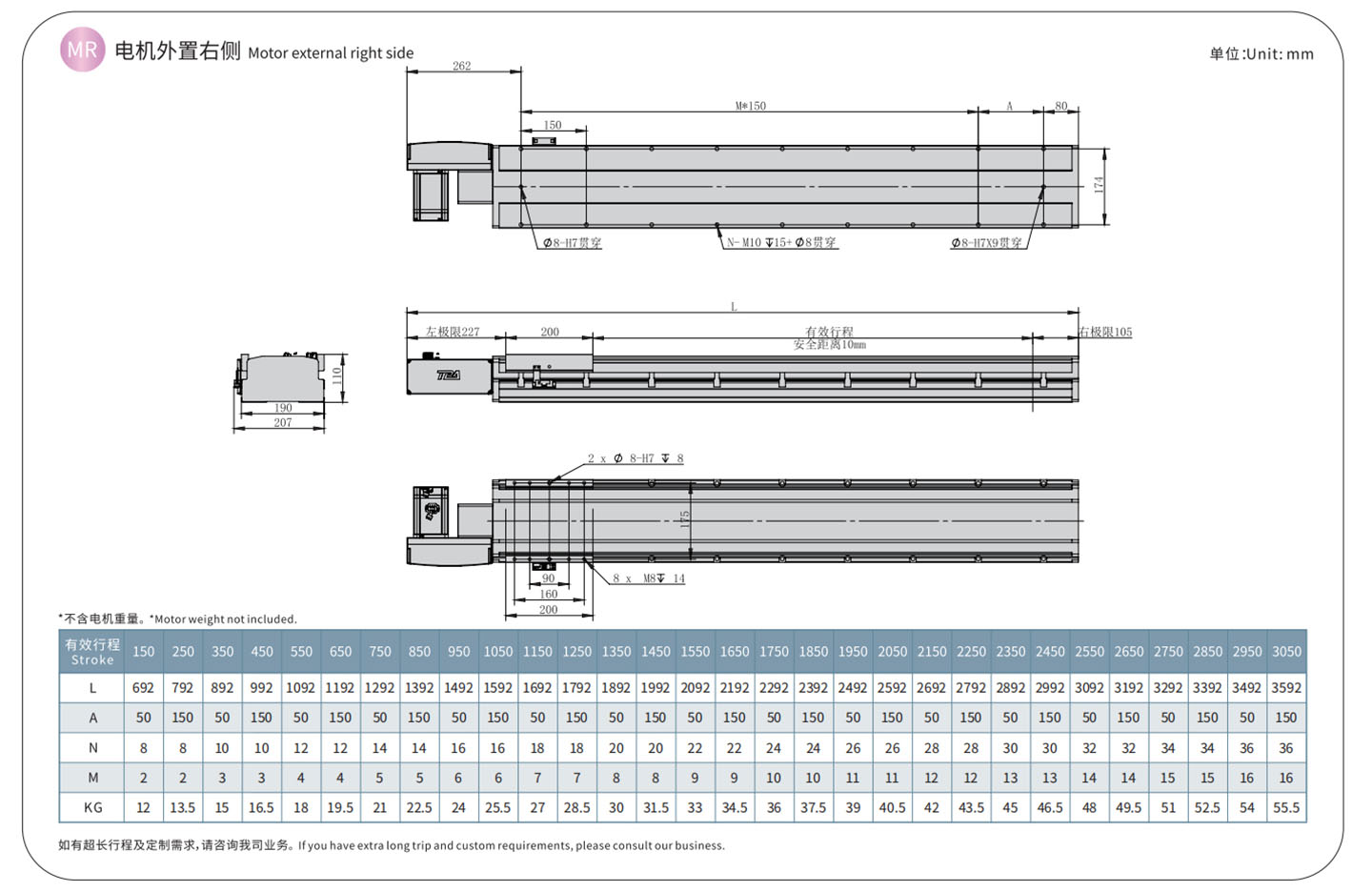
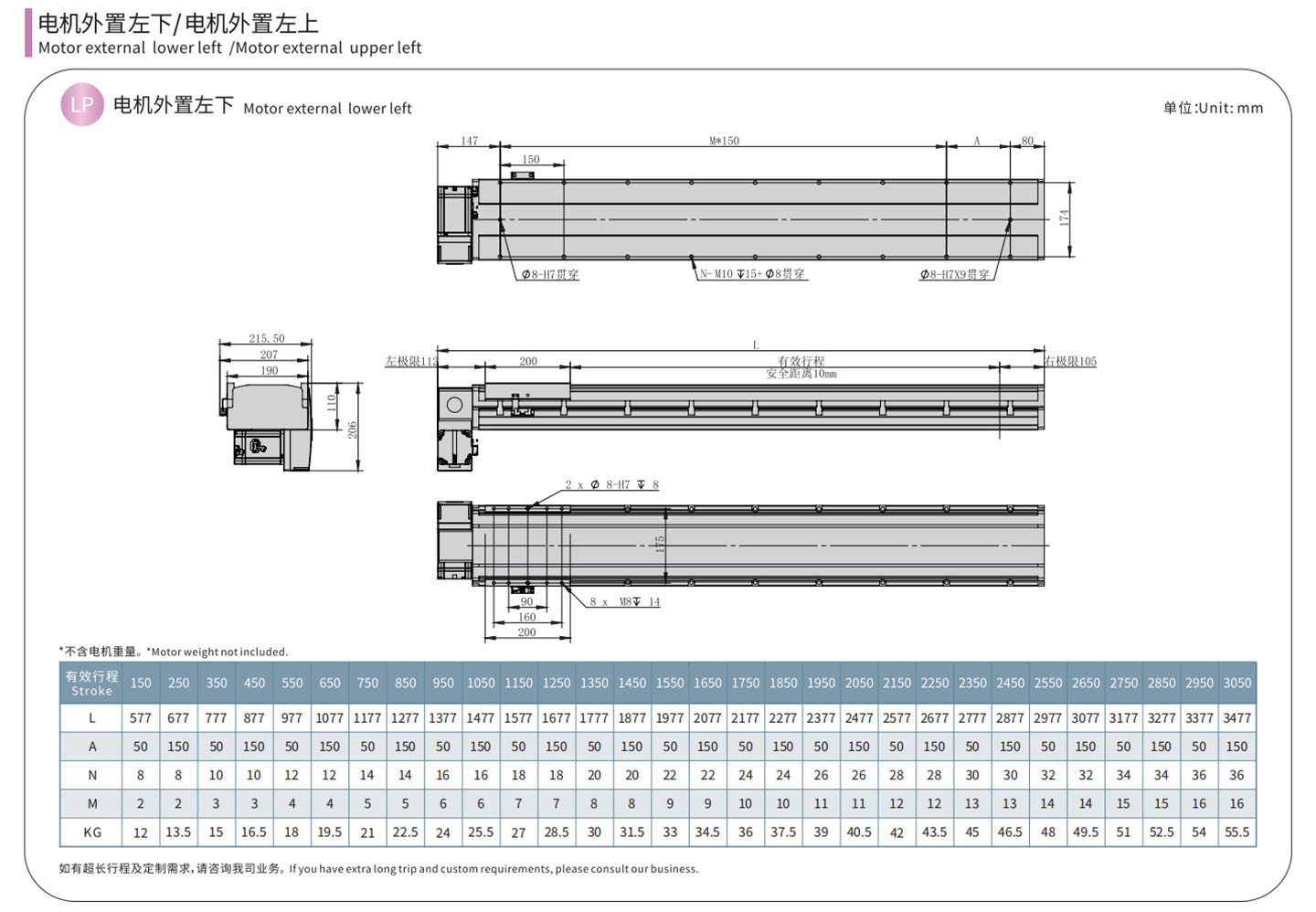
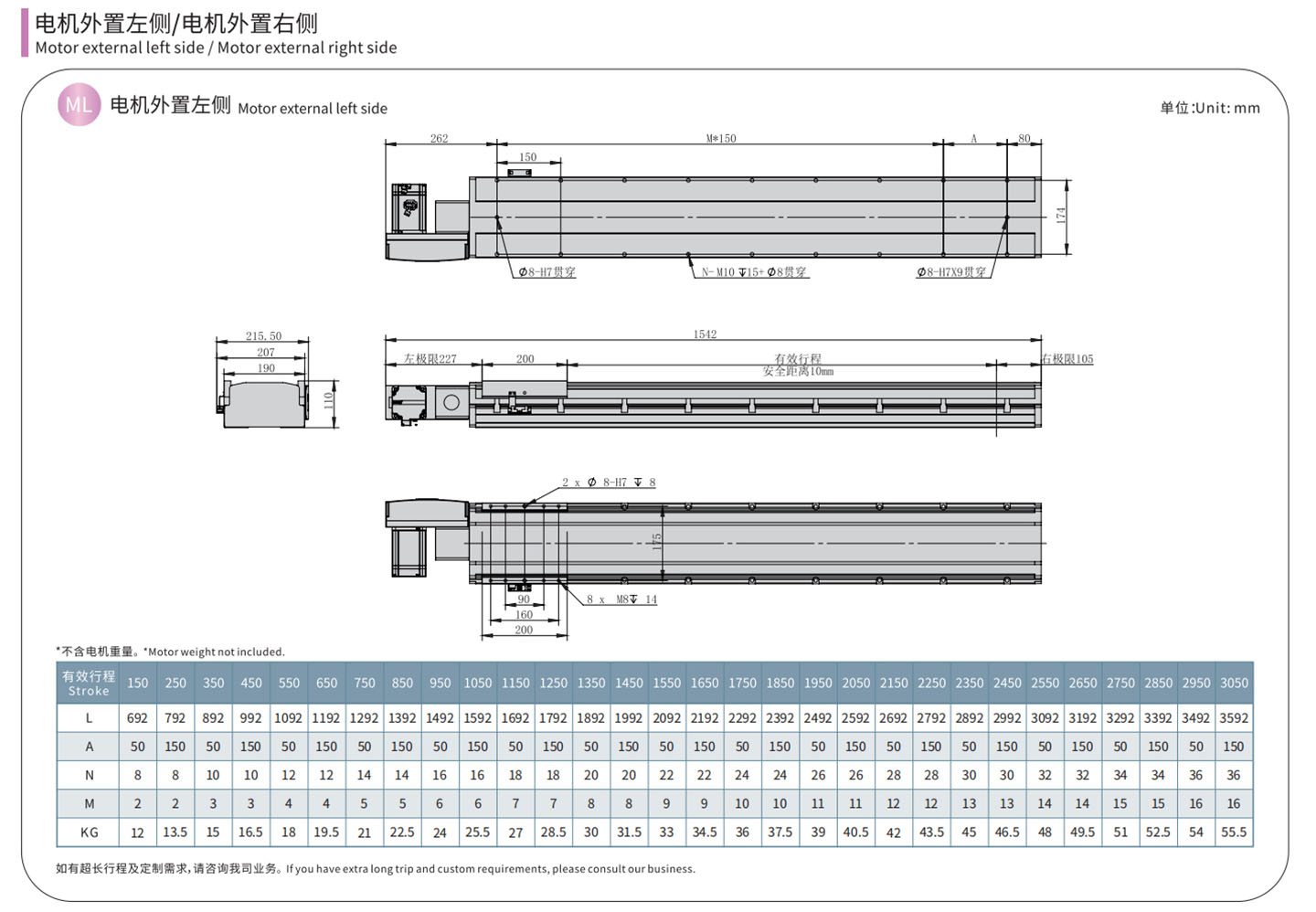
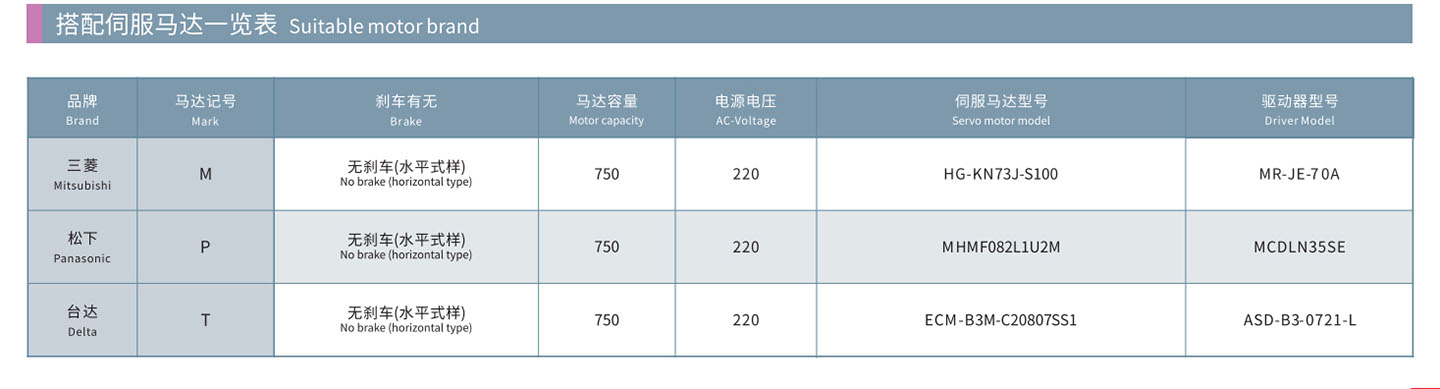
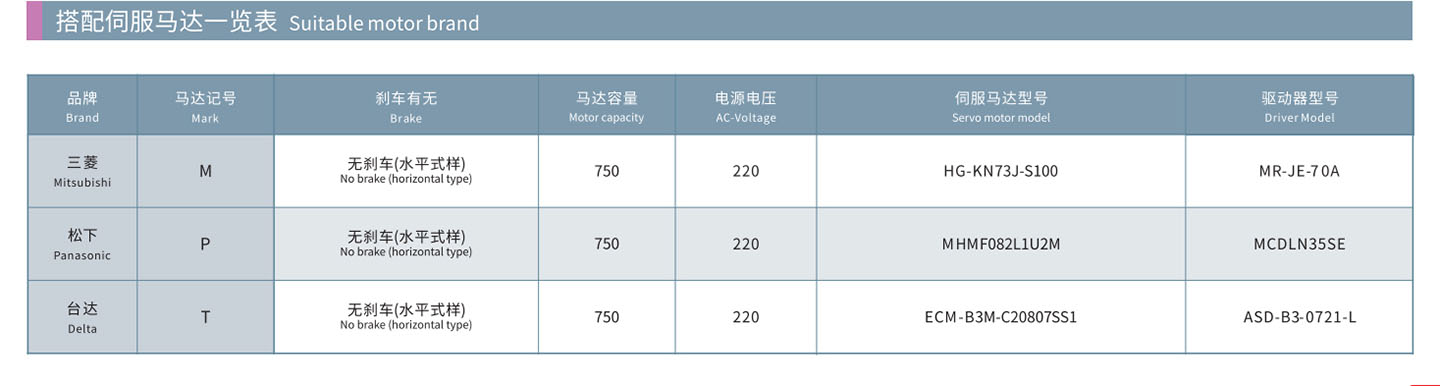
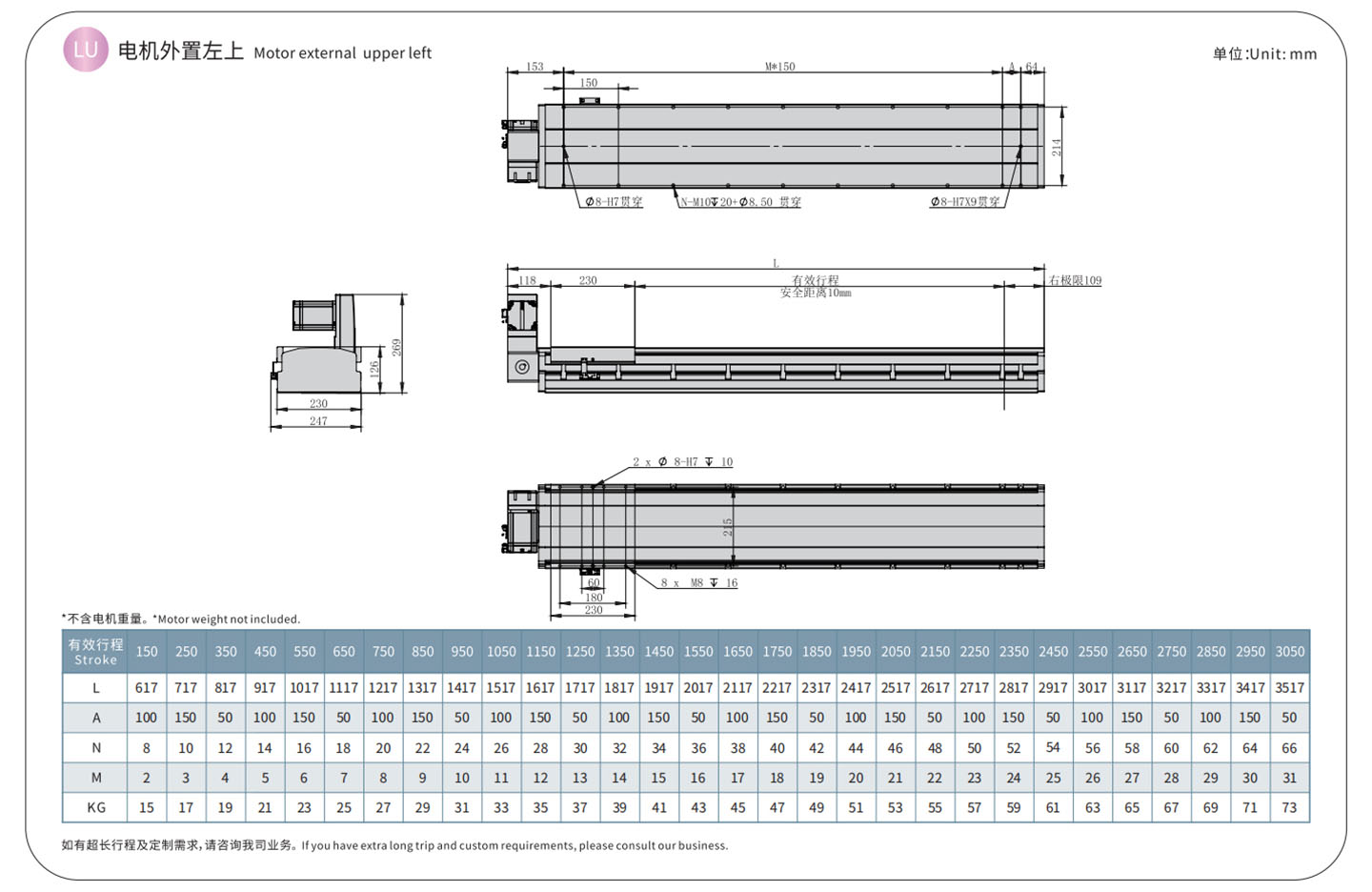
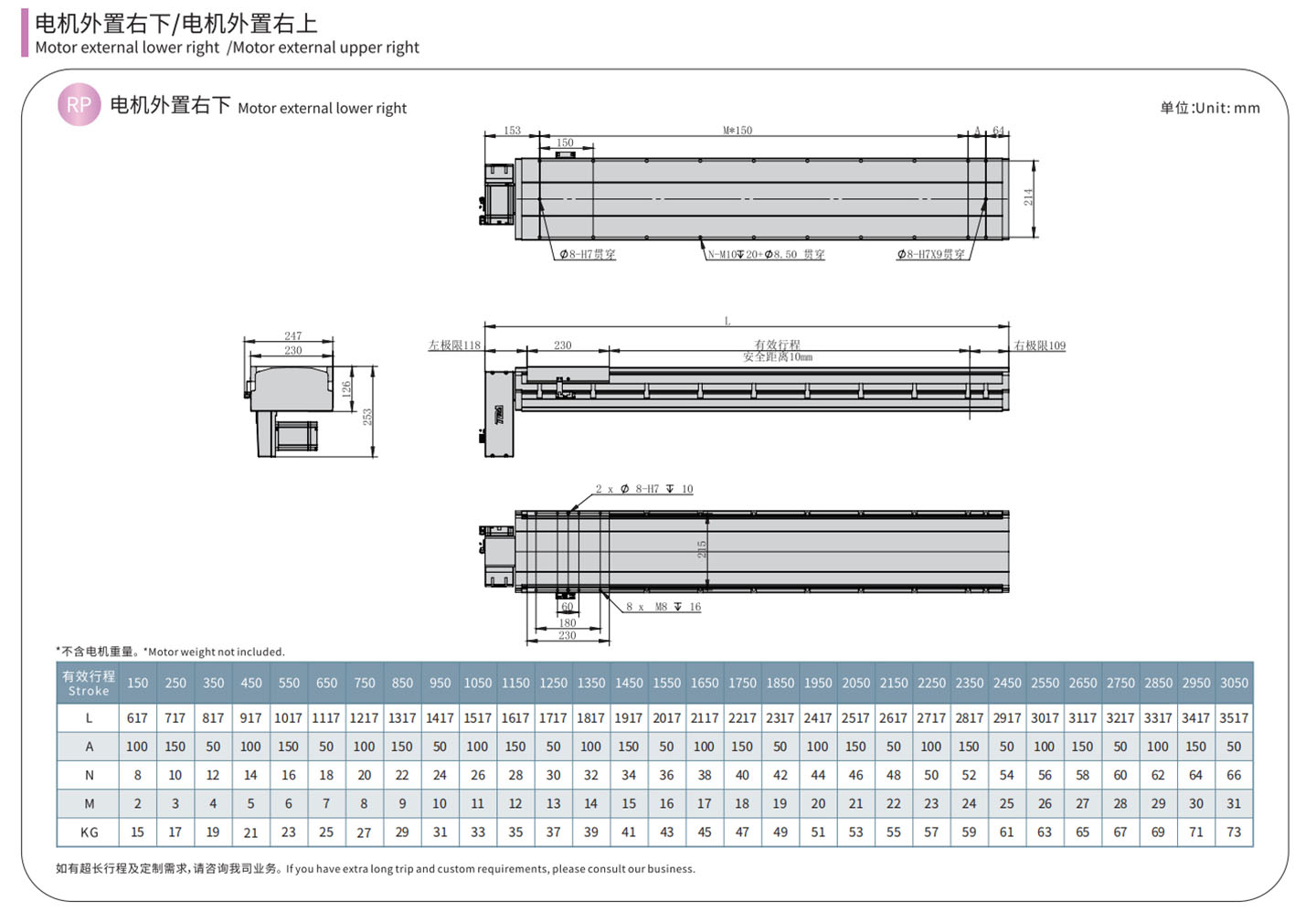
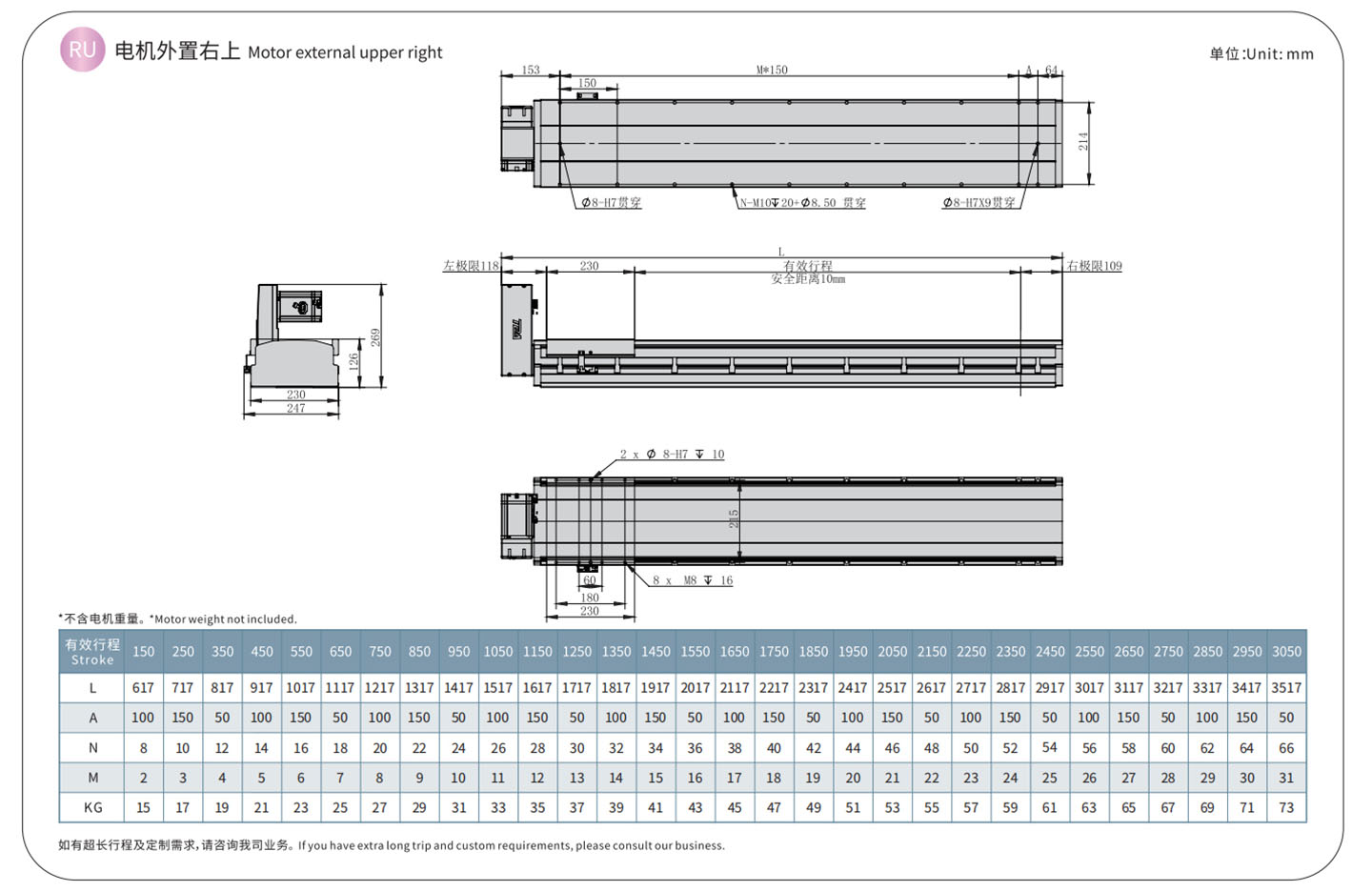
HNB faasologa fusipa'u laina actuator ei ai se mamanu semi-tapunia tulaga ese, lua maualuga-malosi auala ta'iala ma'a'a, e tu'uina atu torque maualuga ma saoasaoa, TPA ROBOT e mafai ona tuuina atu e oo atu i le 200 ituaiga HNB fusi-faatosina actuators o eseese lautele ma umi e feiloai ai tagata faatau. manaoga mo uta ma femalagaaiga. Ole saoasaoa maualuga e mafai ona oʻo ile 6000mm / s, ma e mafai e le inisinia ona faʻamalieina le Cartesian robot poʻo gantry robots e faʻafetaui ai manaʻoga otometi o pisinisi eseese.
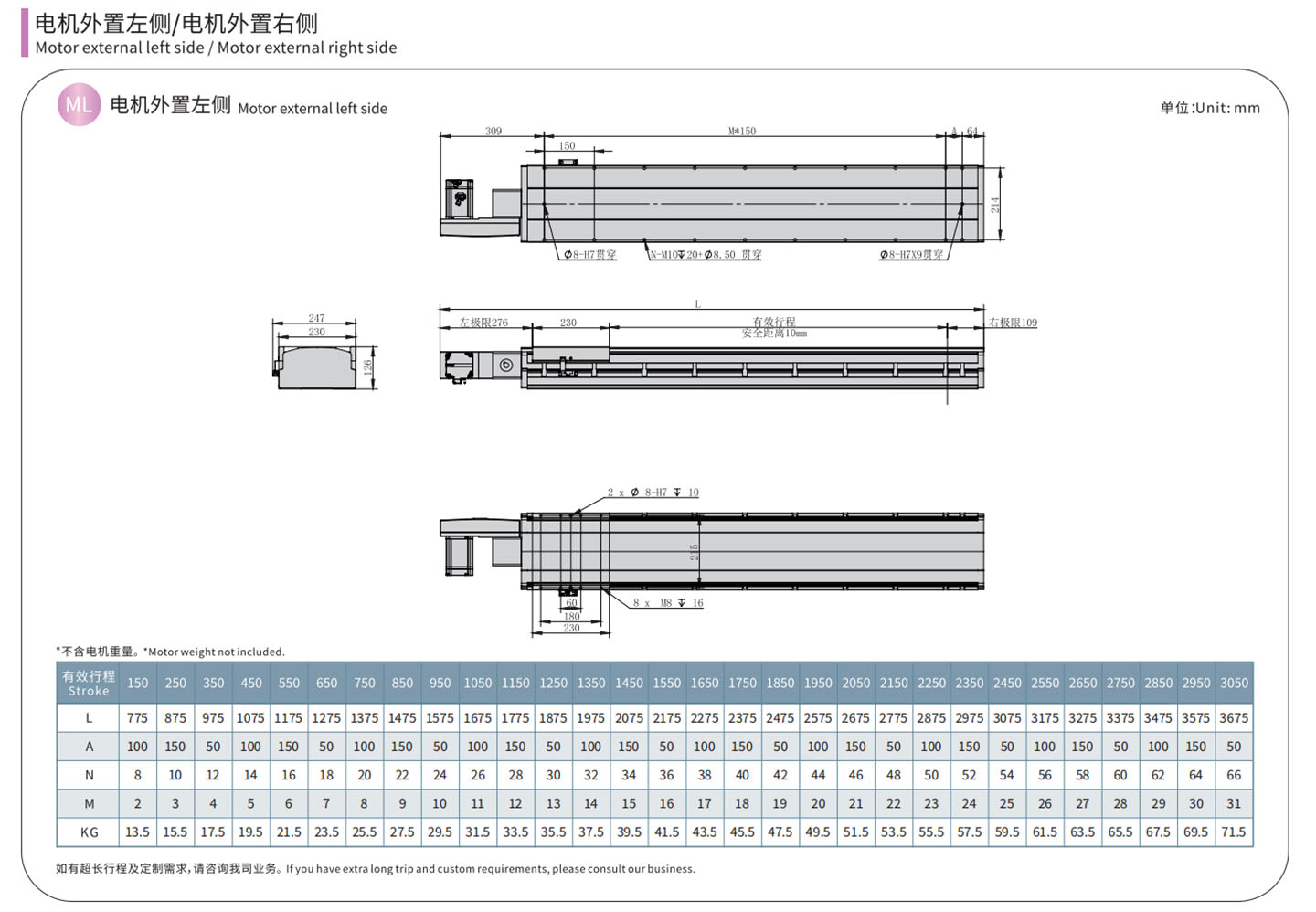
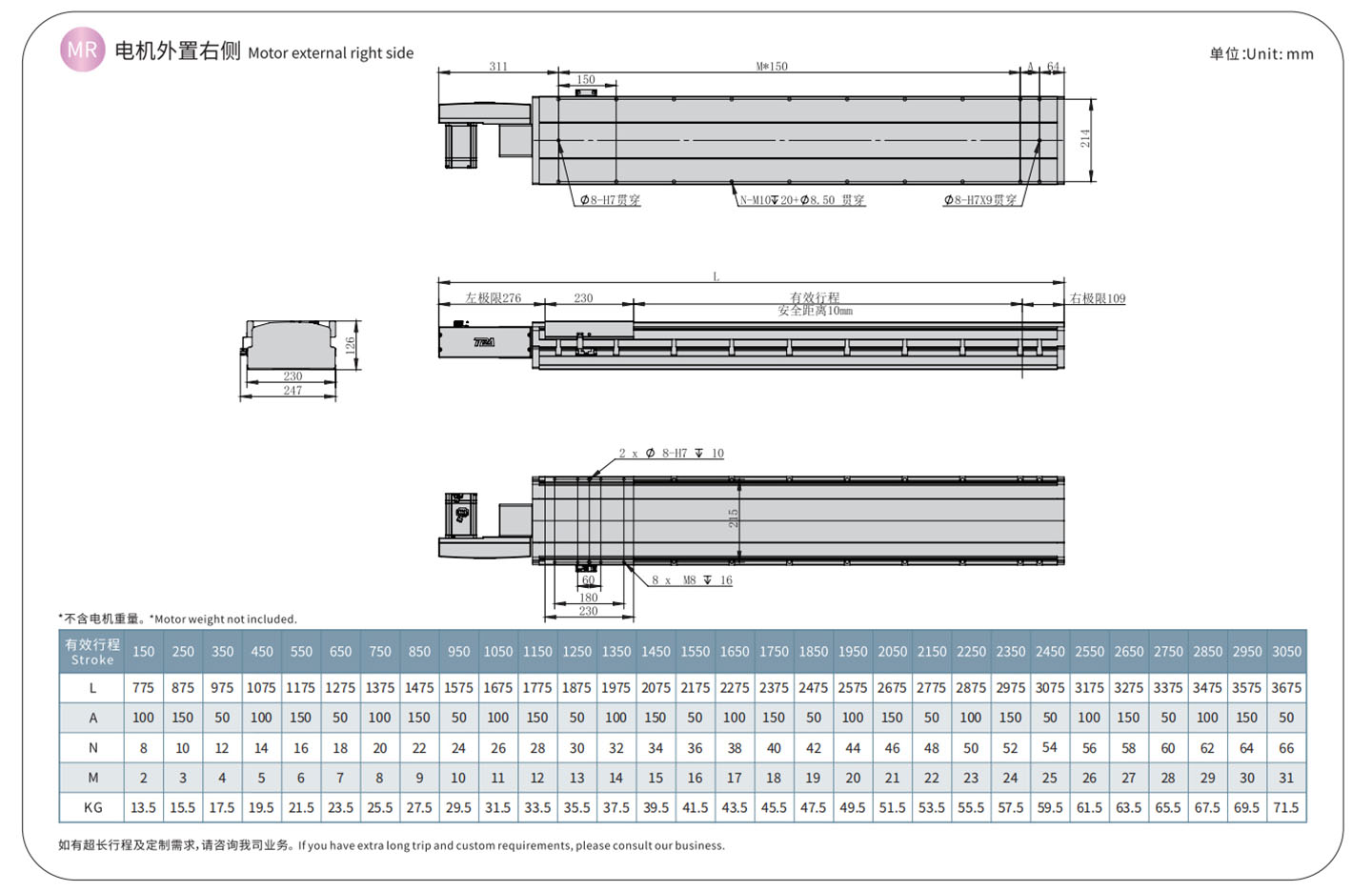
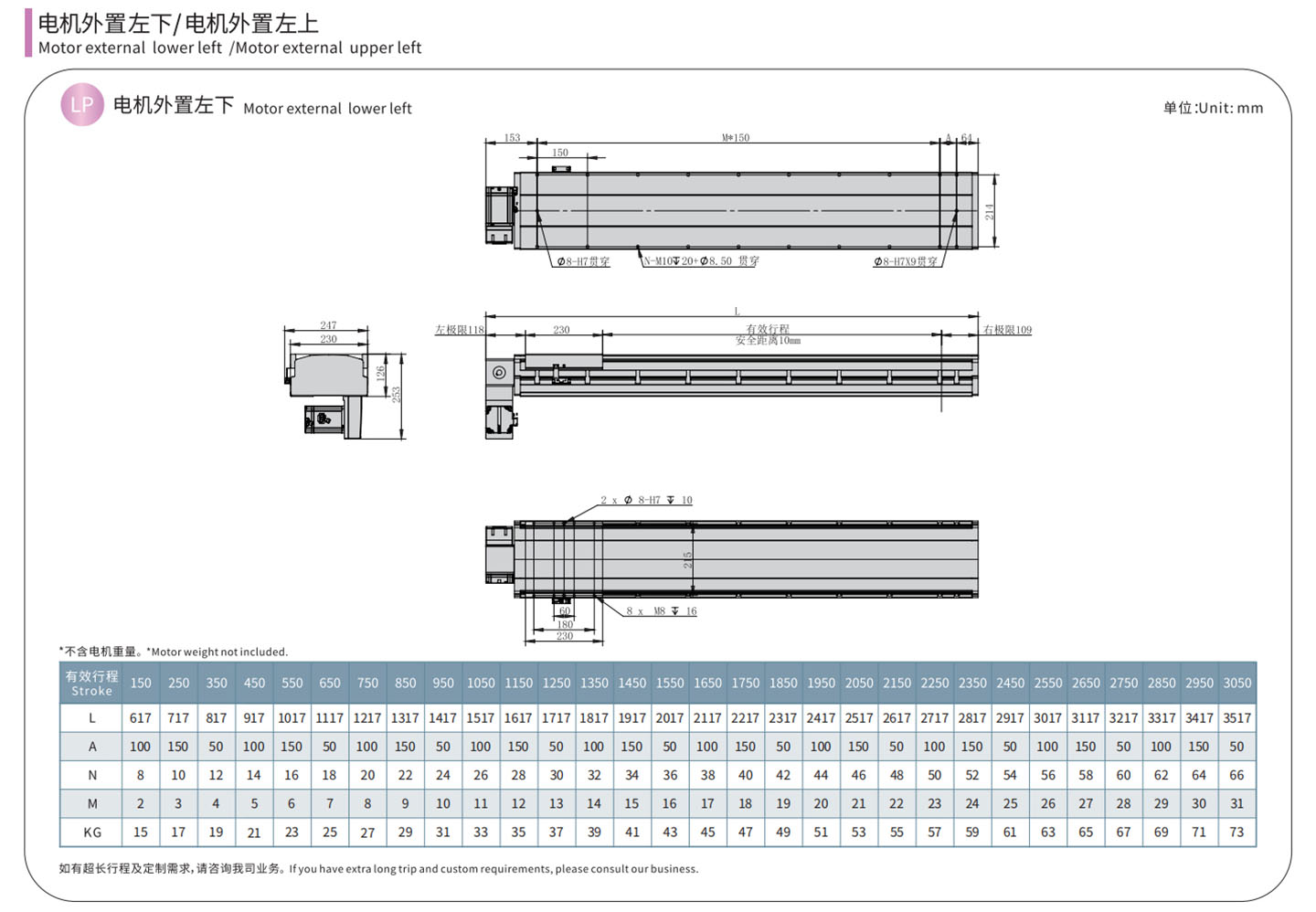
I le faʻaopoopoga i le tuʻuina atu o le maualuga, maualuga le saoasaoa, ma le umi o le stroke linear slide actuator, matou te faia foi ma le poto le auala e tuʻu ai le flange plate i fafo, lea e mafai ai e matou laina laina e tuʻuina atu i le 8 auala faʻapipiʻi e faʻafetaui i siosiomaga eseese masini.

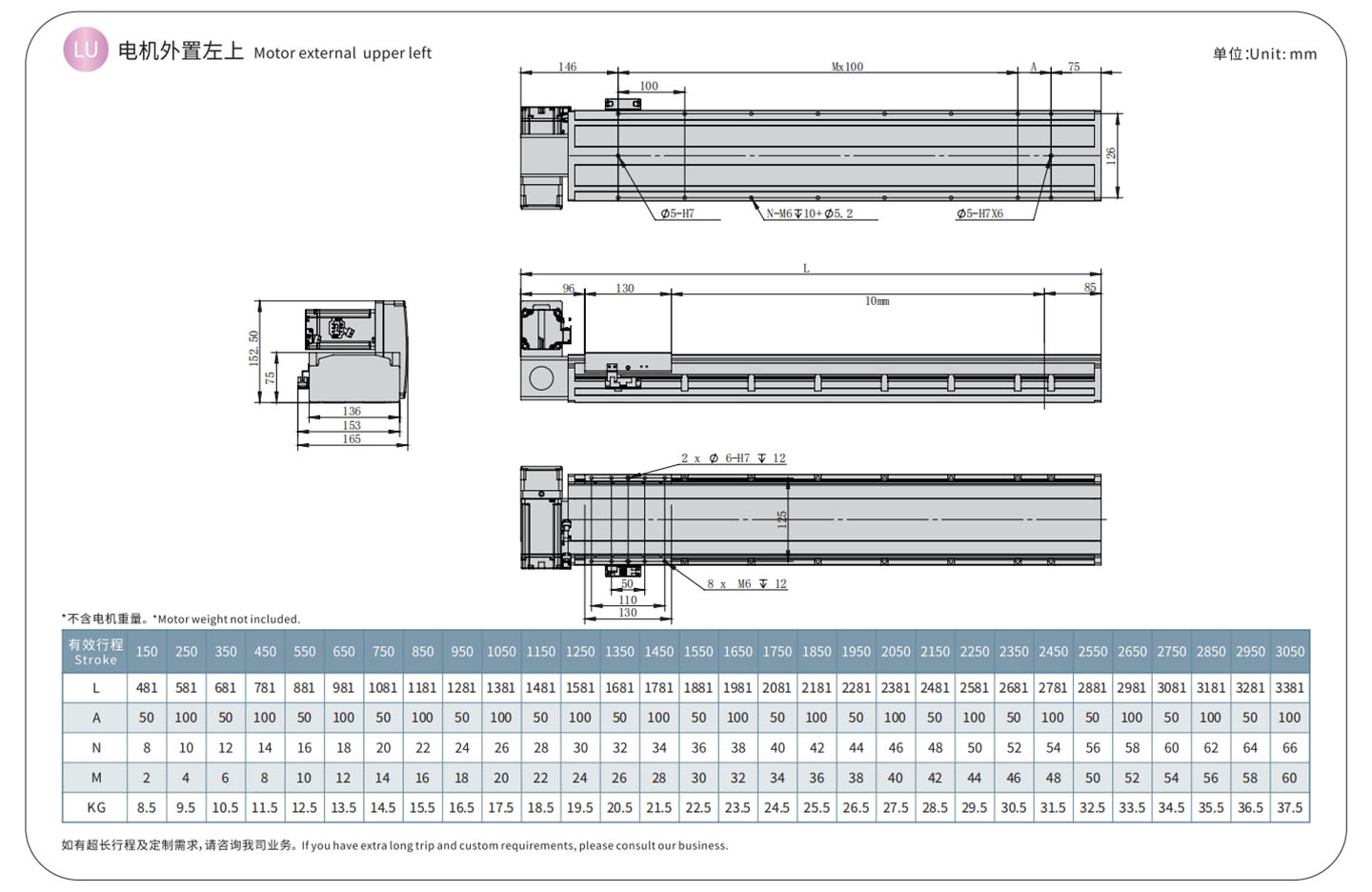
半封闭精进皮带模组165

半封闭精进皮带模组136
半封闭精进皮带模组120
Vaega
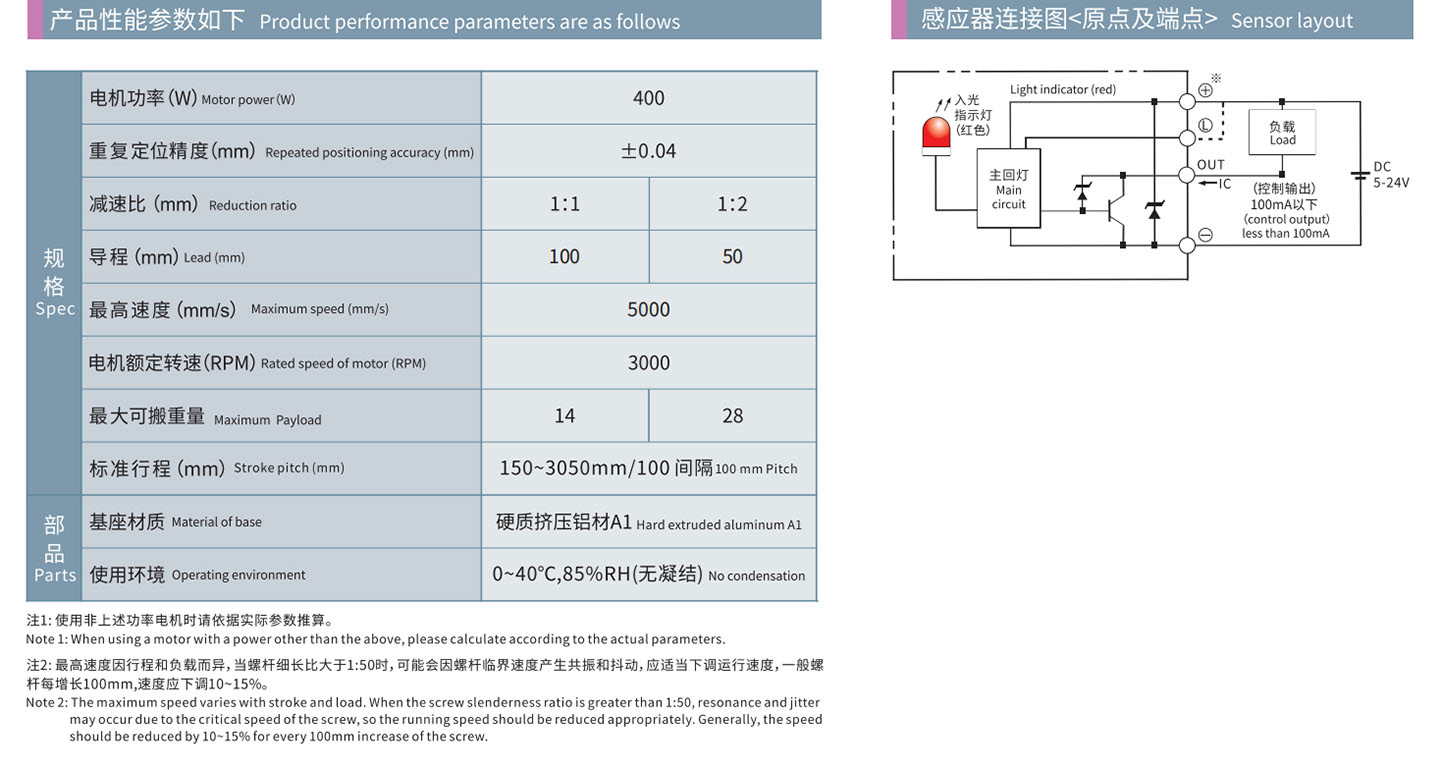
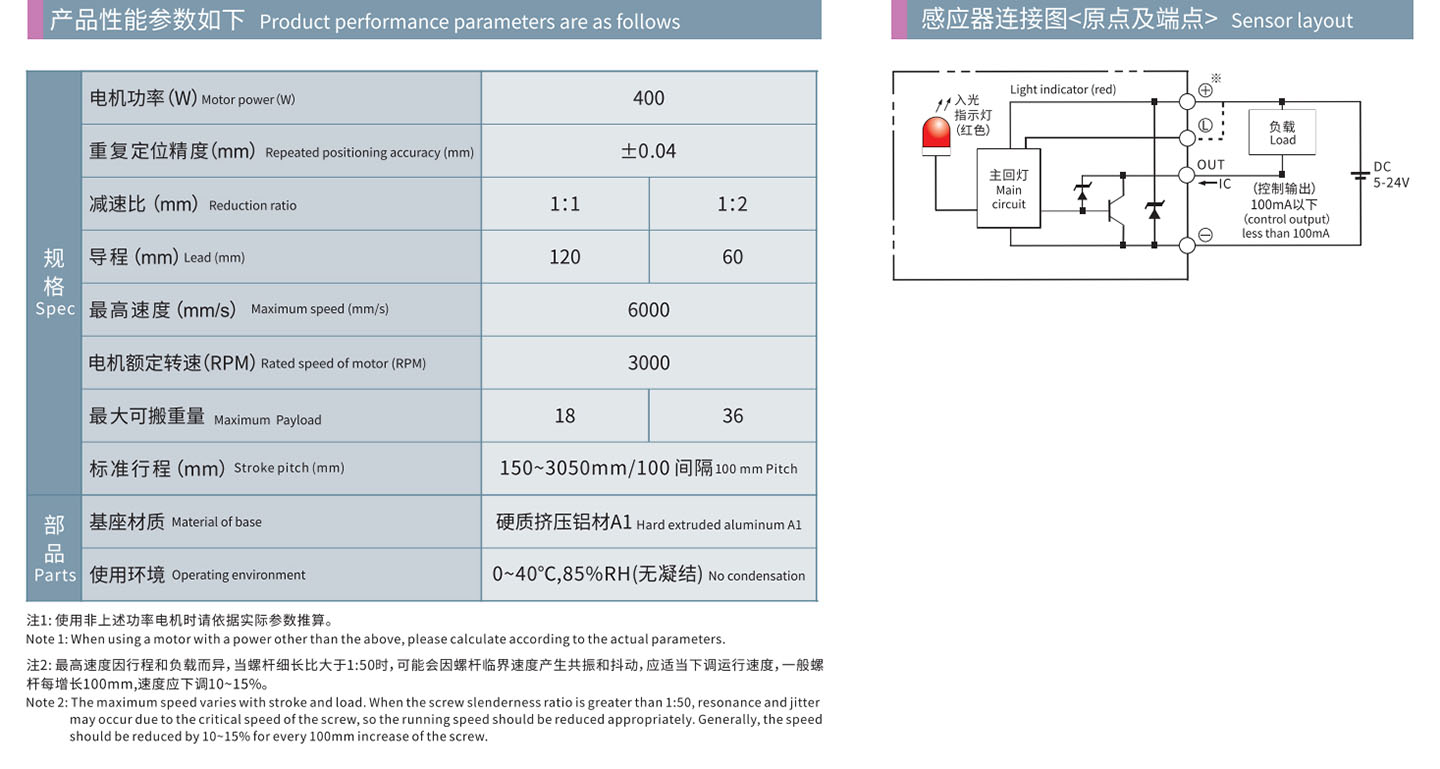
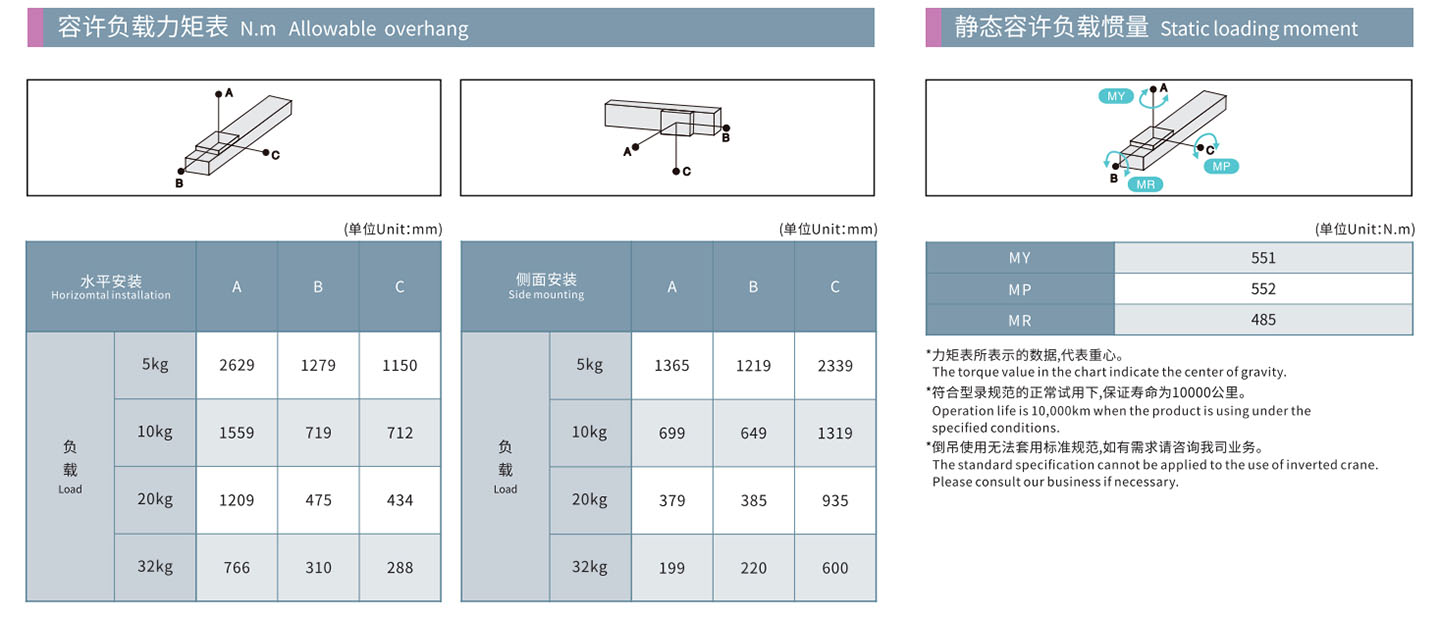
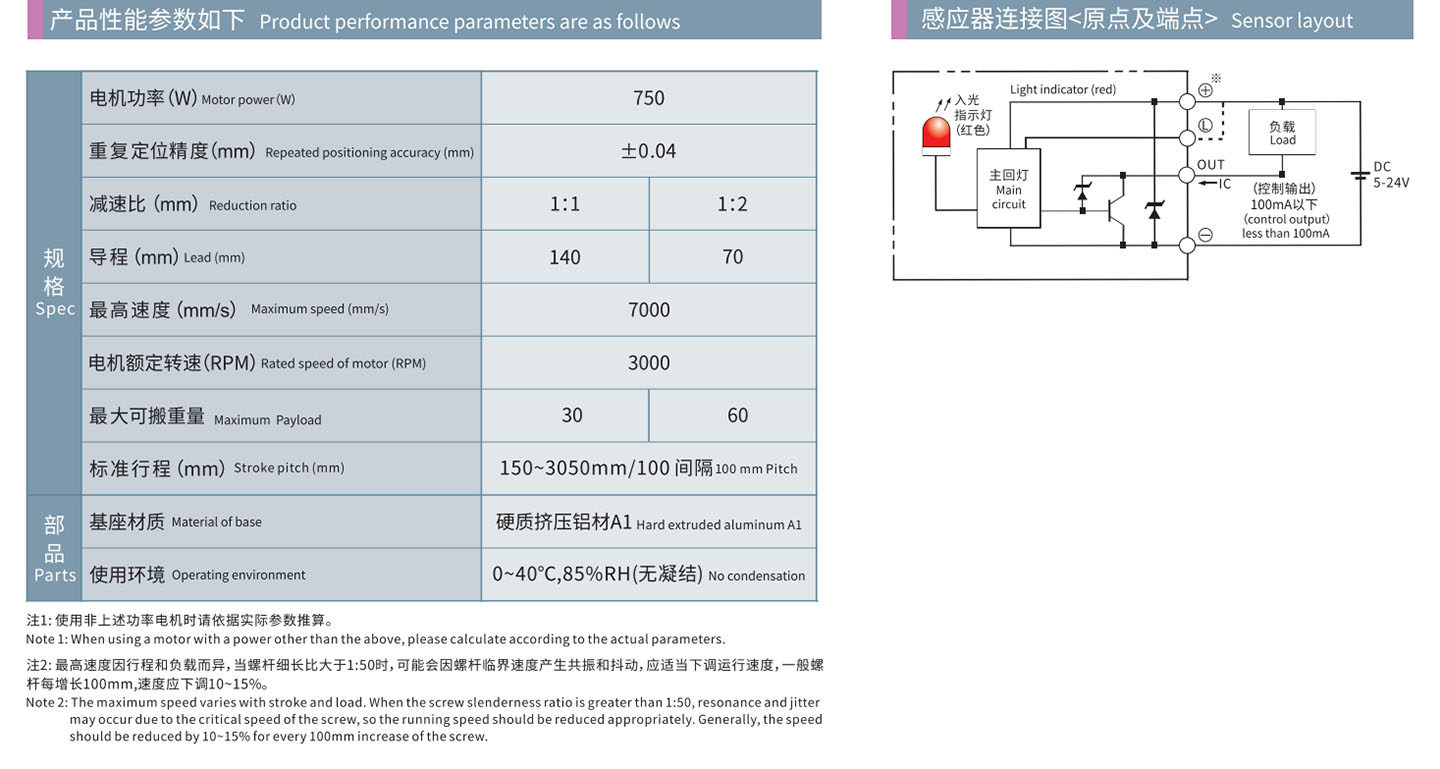
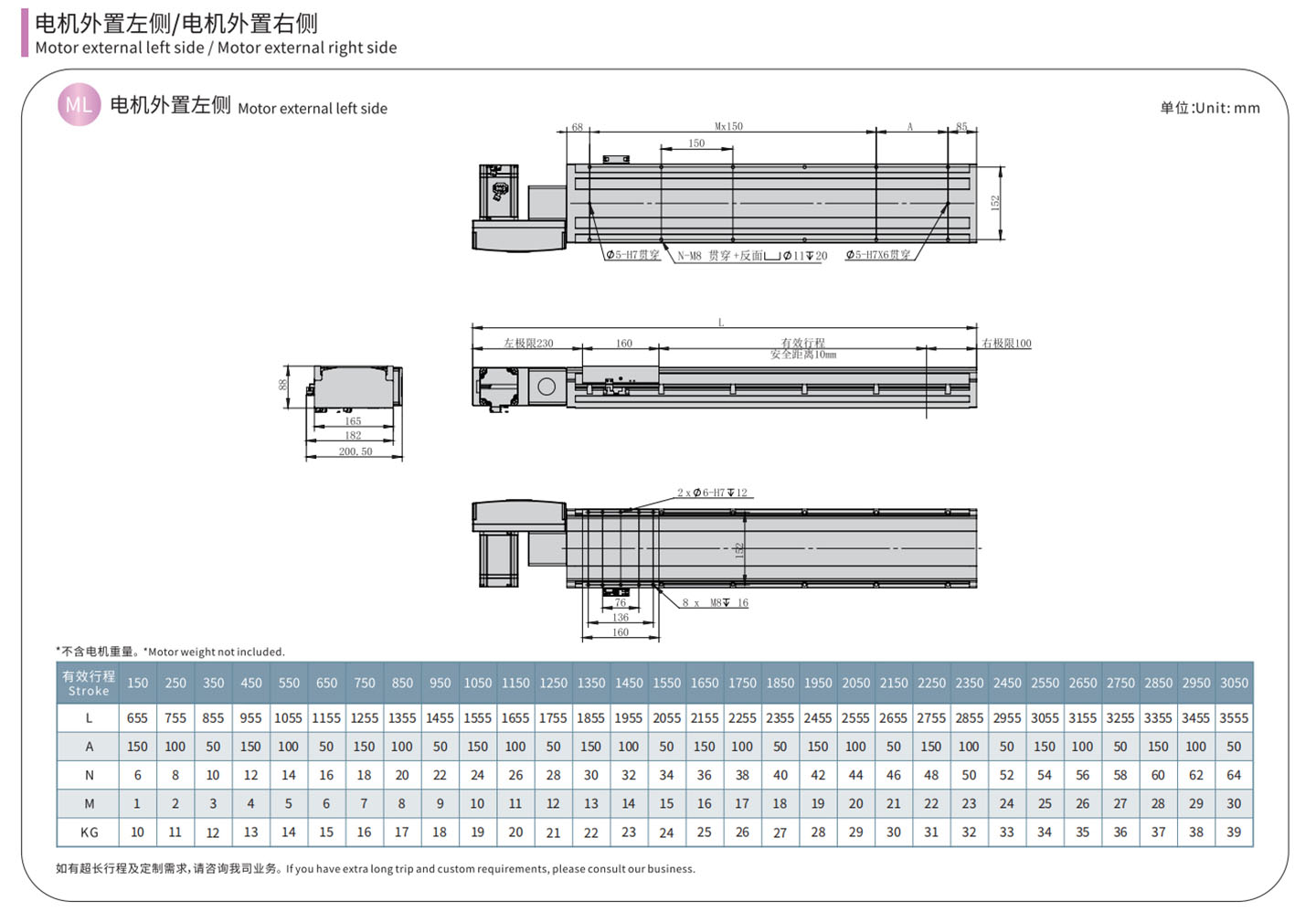
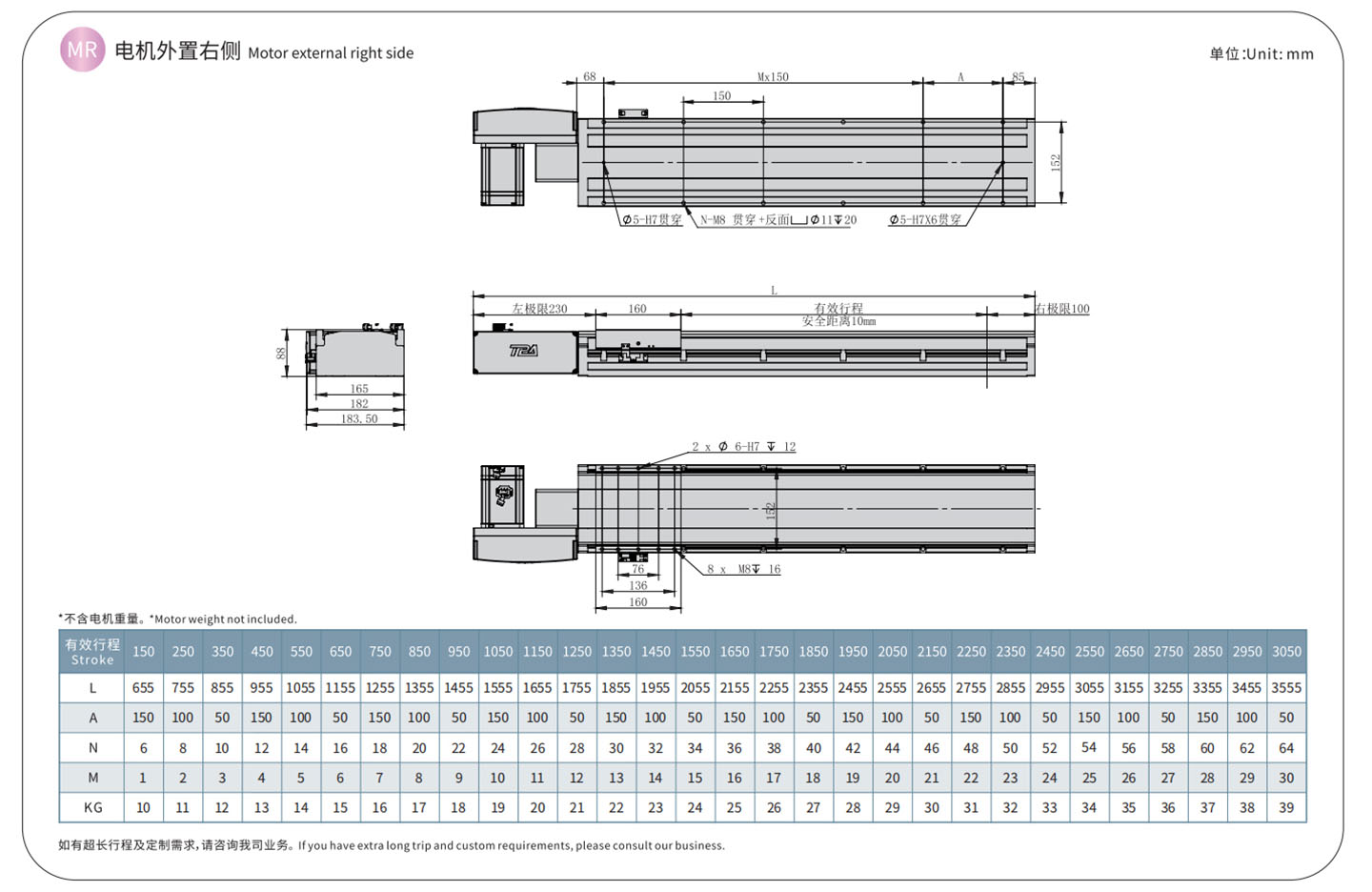
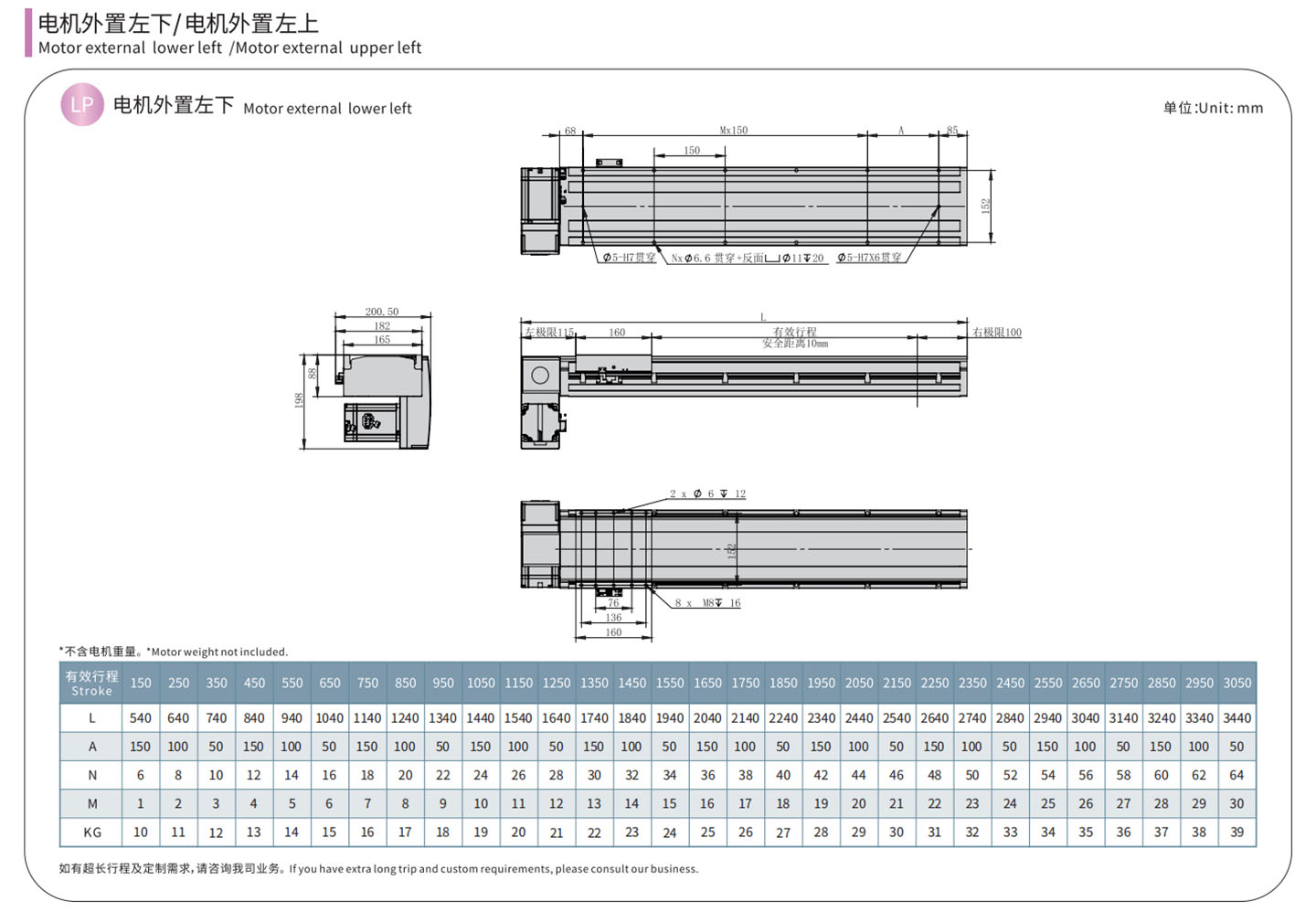
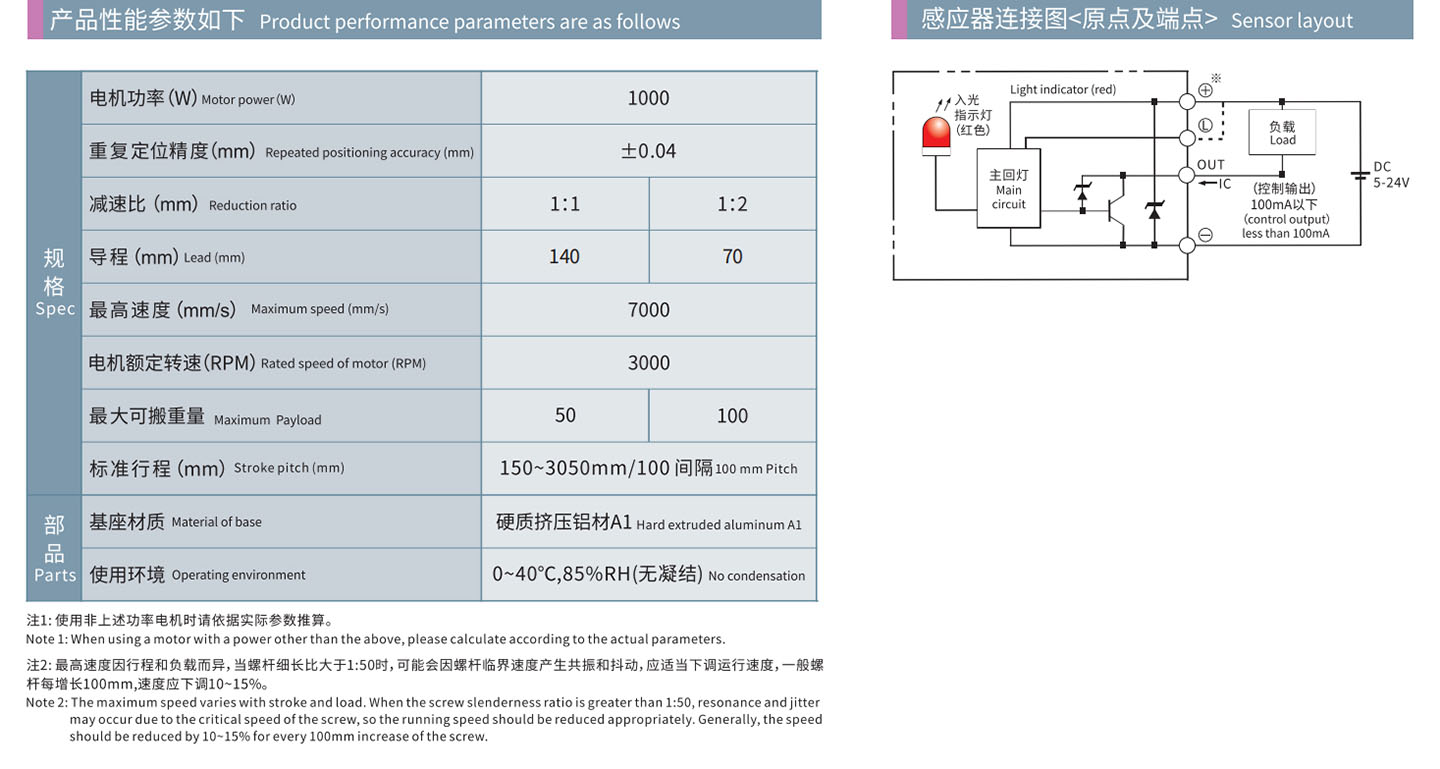
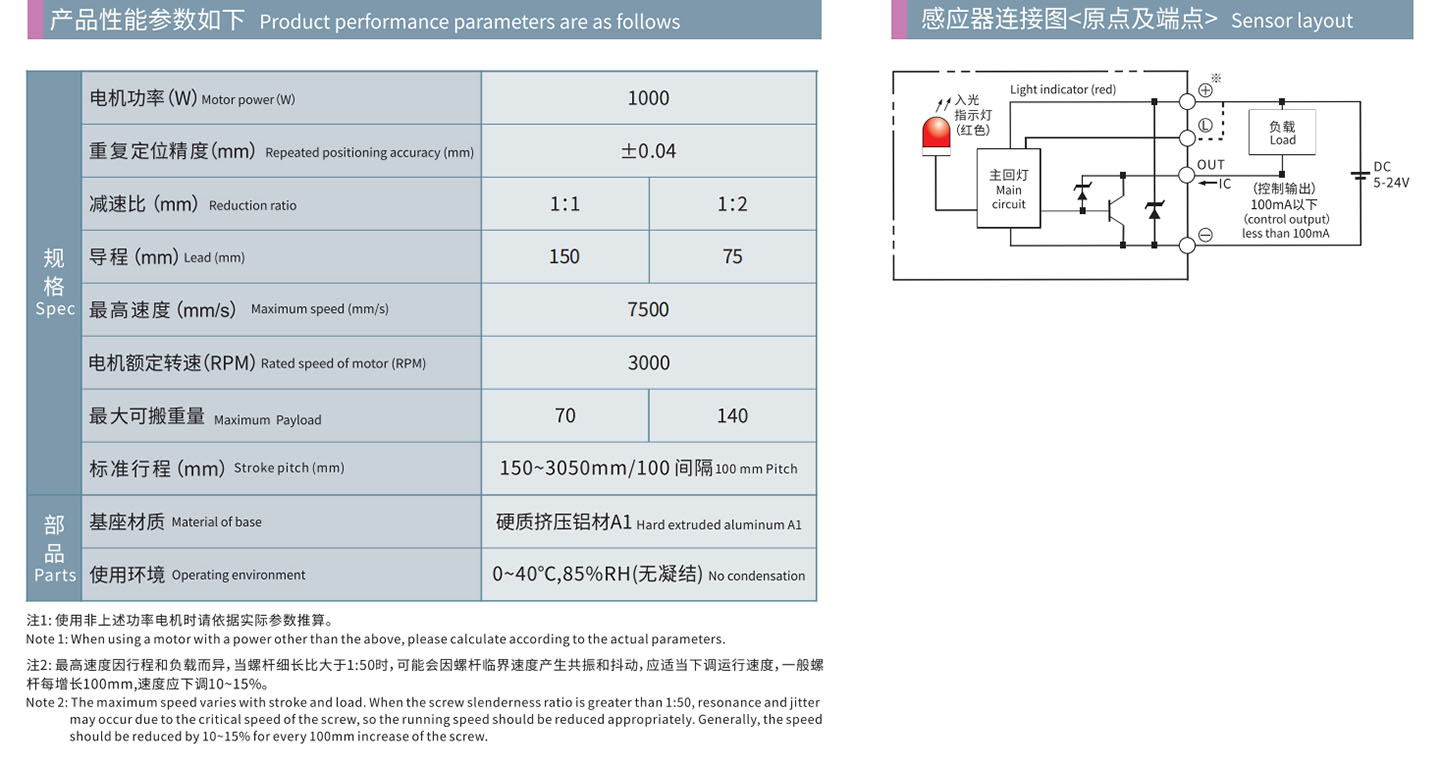
Sa'o Tulaga Fa'aauau: ±0.04mm
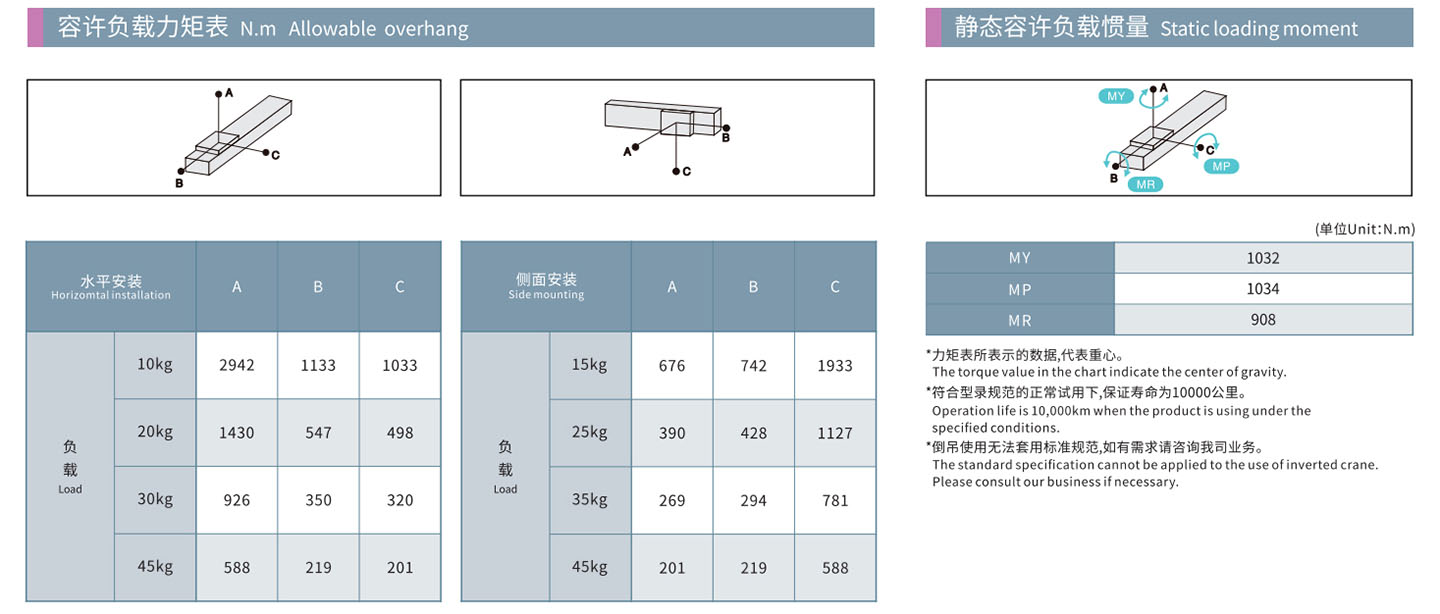
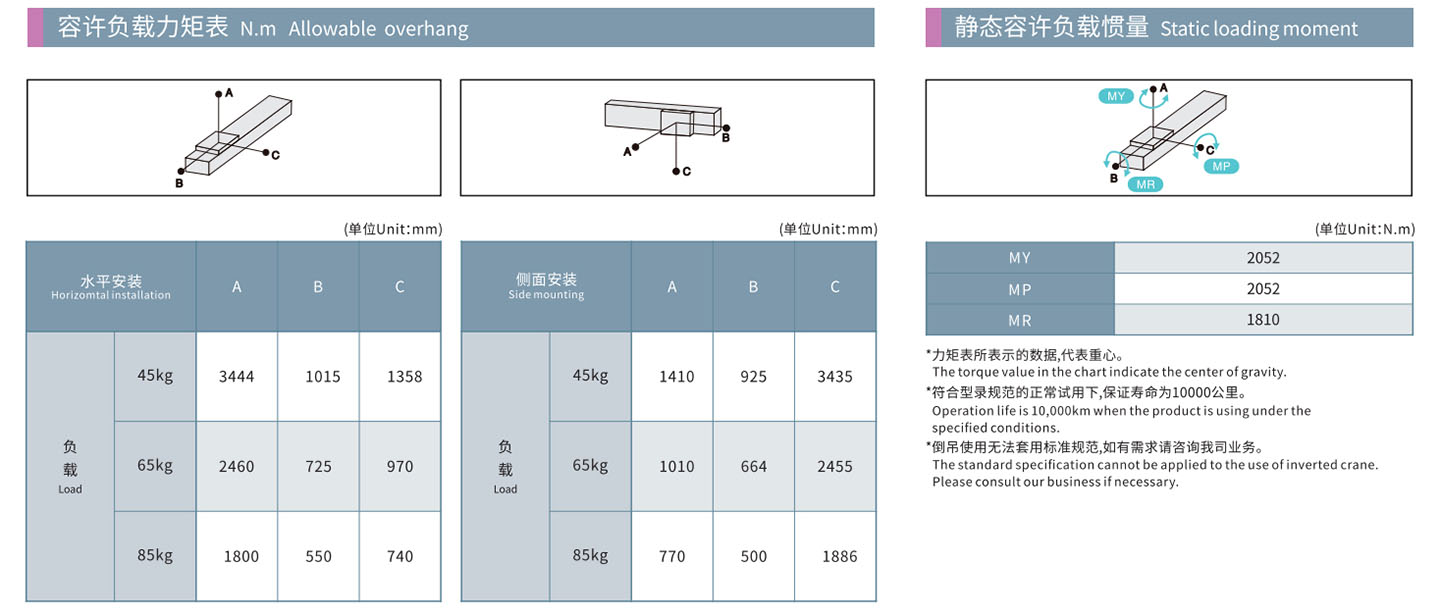
Totogi maualuga: 140kg
Ta'i: 100 – 3050mm
Max Saosaoa: 7000mm/s

1. Fuafuaga mafolafola, mama atoa le mamafa, maualalo tu'ufa'atasi maualuga ma sili atu rigidity.
2. O le fausaga e sili ona lelei, e sili atu le saʻo, ma o le mea sese e mafua mai i le faʻapipiʻiina o mea faʻaoga e faʻaitiitia.
3. O le faʻapotopotoga e faʻasaoina taimi, faʻasaoina galuega ma faigofie. E leai se manaʻoga e aveese le ufiufi alumini e faʻapipiʻi ai le soʻotaga poʻo le module.
4. O le tausiga e faigofie, o itu uma e lua o le module o loʻo faʻapipiʻiina i pu o tui suauu, ma e le manaʻomia ona aveese le ufiufi.

Tele oloa

HNB Series Belt Driven Linear Module Half Fa'apipi'i

ONB-F Fa'asologa o le fusipa'u e fa'auluina laina laina fa'aoga i fafo...

OCB Fa'asologa o le fusipa'u laina laina fa'apipi'i atoatoa...

ONB Fa'asologa o le fusipa'u fa'auluina laina fa'aoga afa fa'apipi'i

HCB Fa'asologa o le fusipa'u fa'auluina laina laina fa'apipi'i atoatoa...










