




Stalowa podstawa robotów jednoosiowych serii KSR/KNR/KCR/KFR


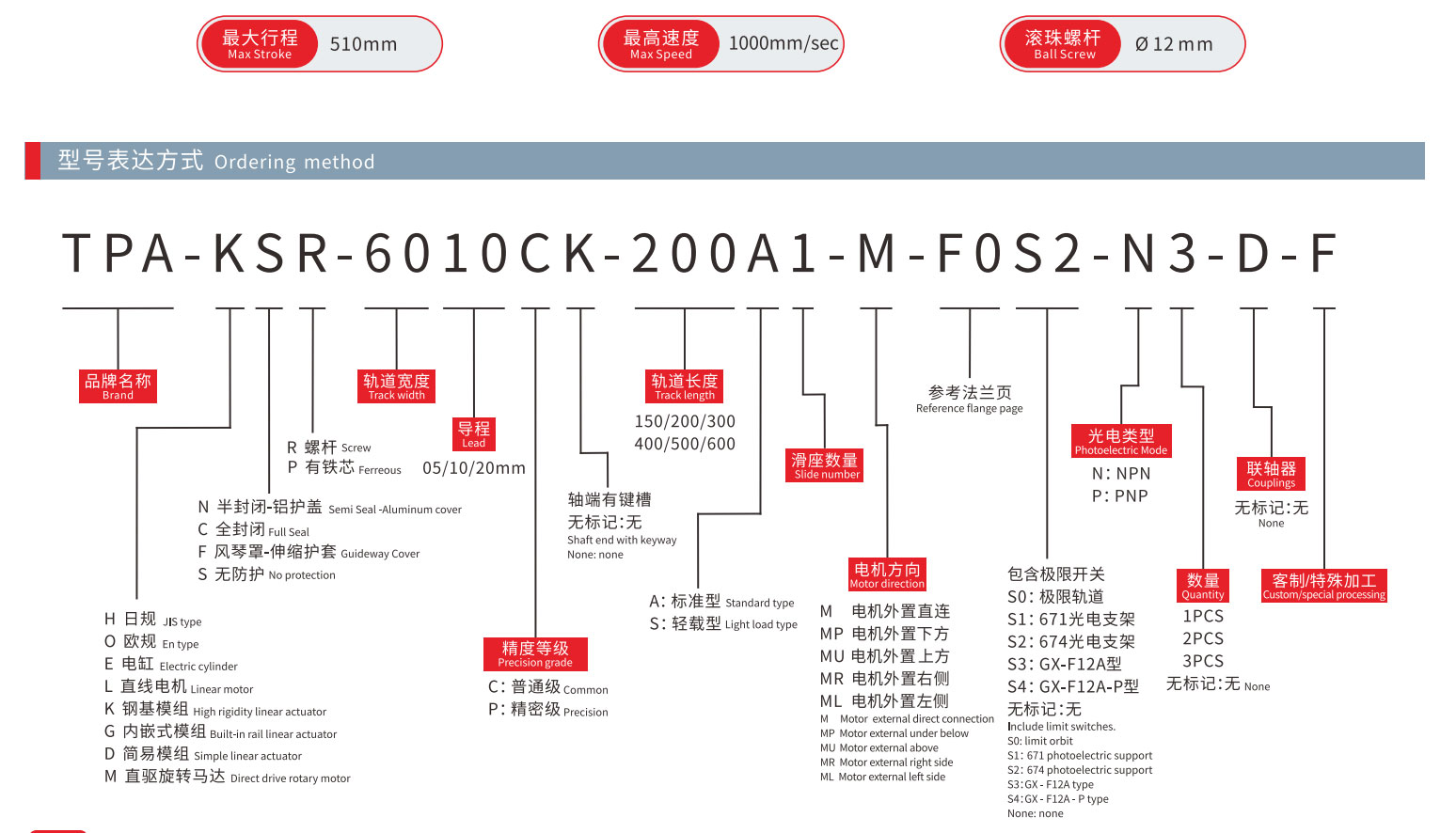
Selektor modelu
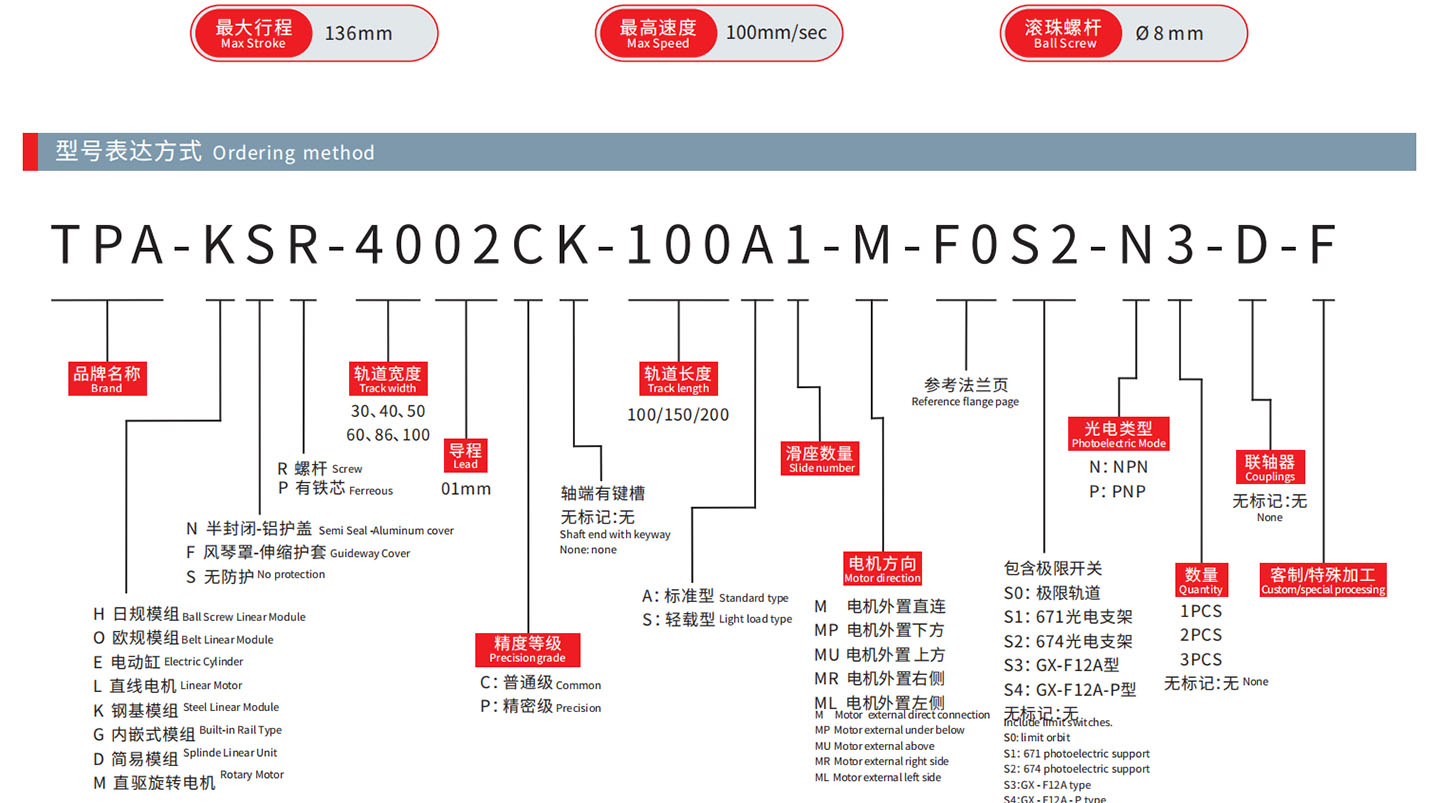
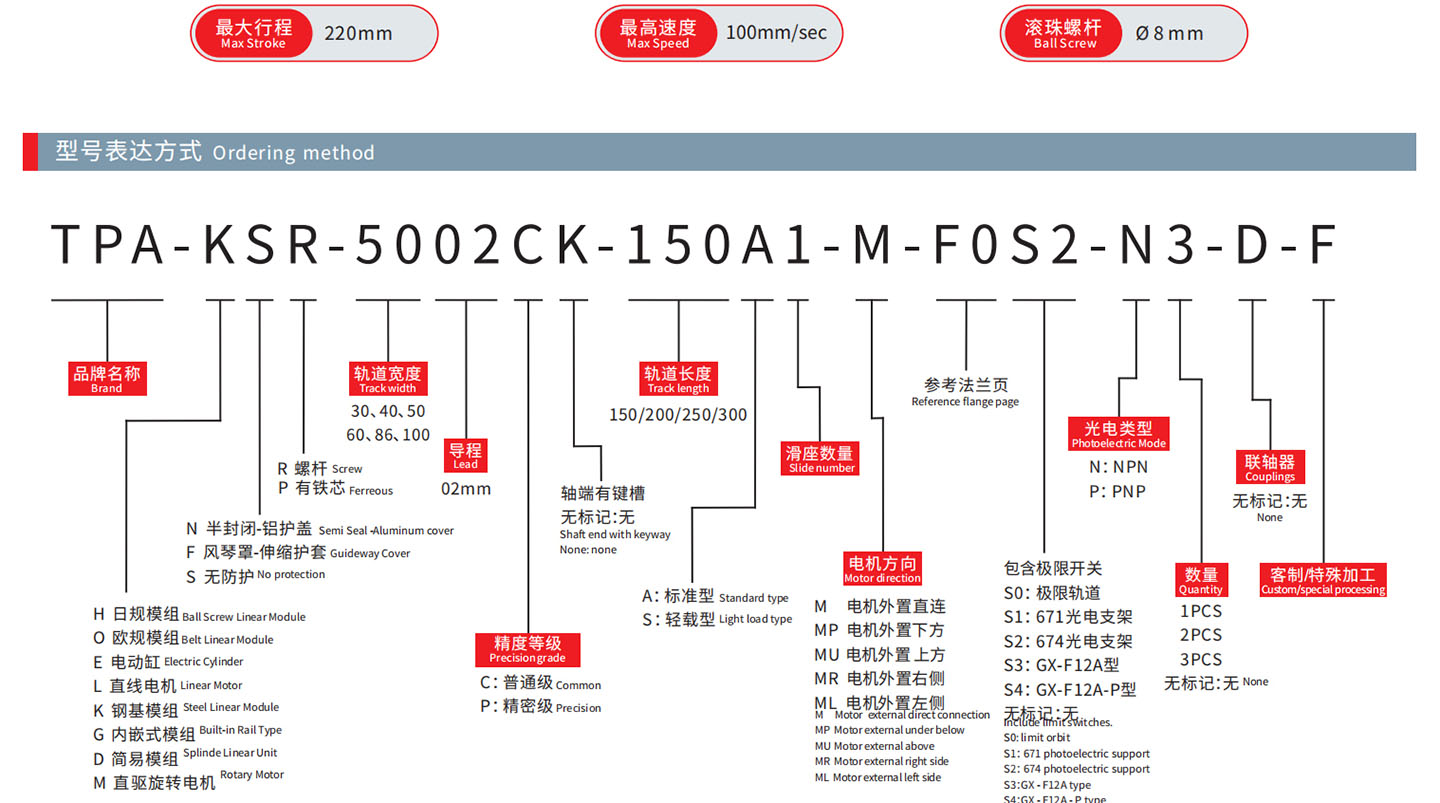
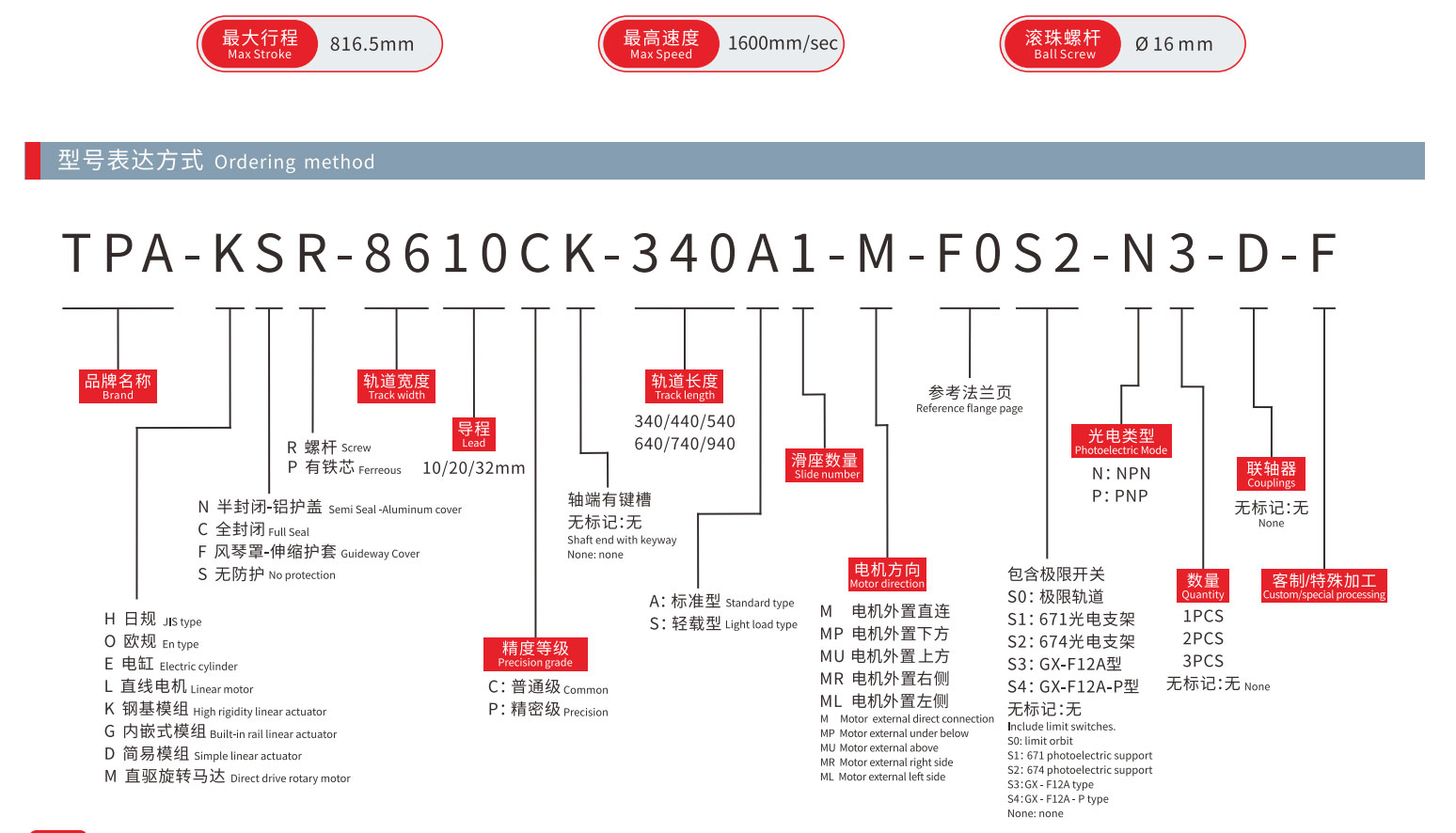
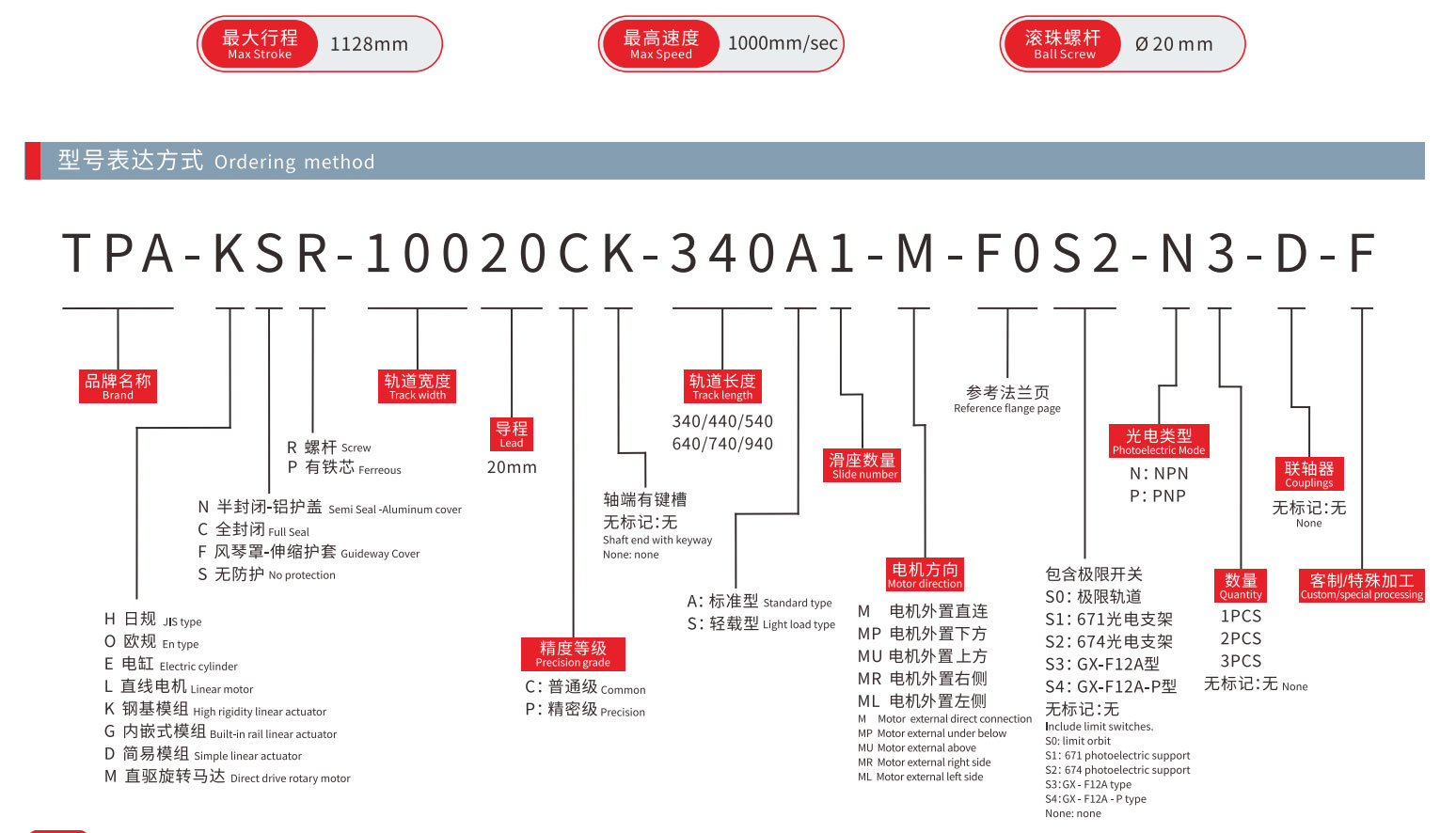
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
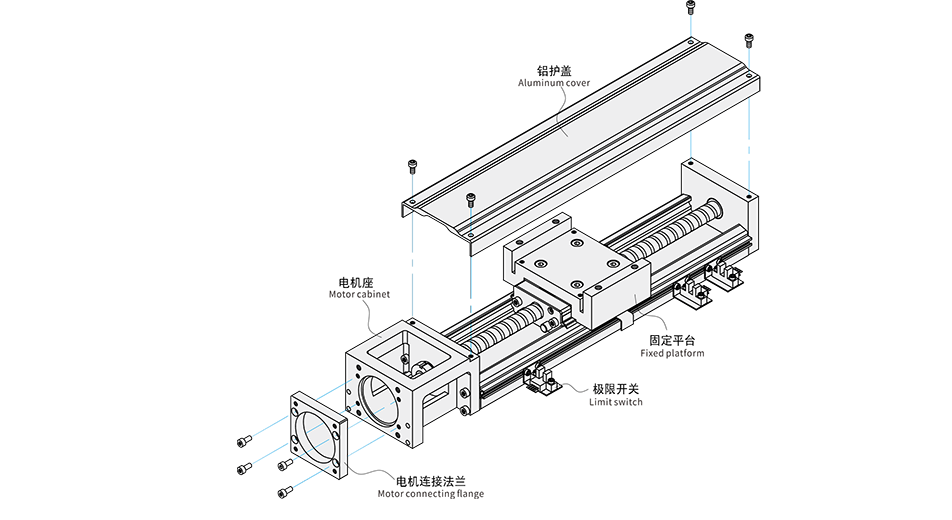
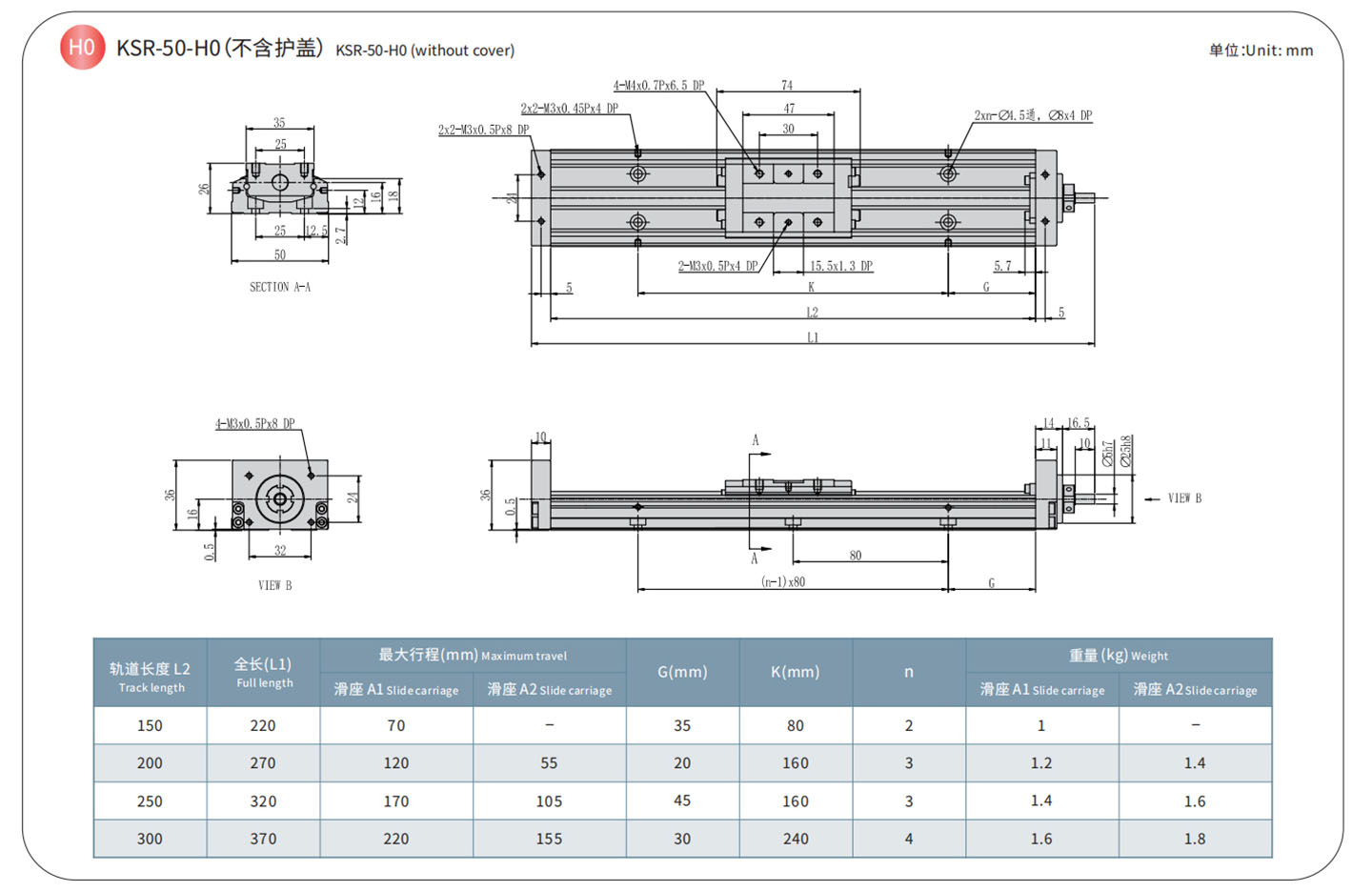
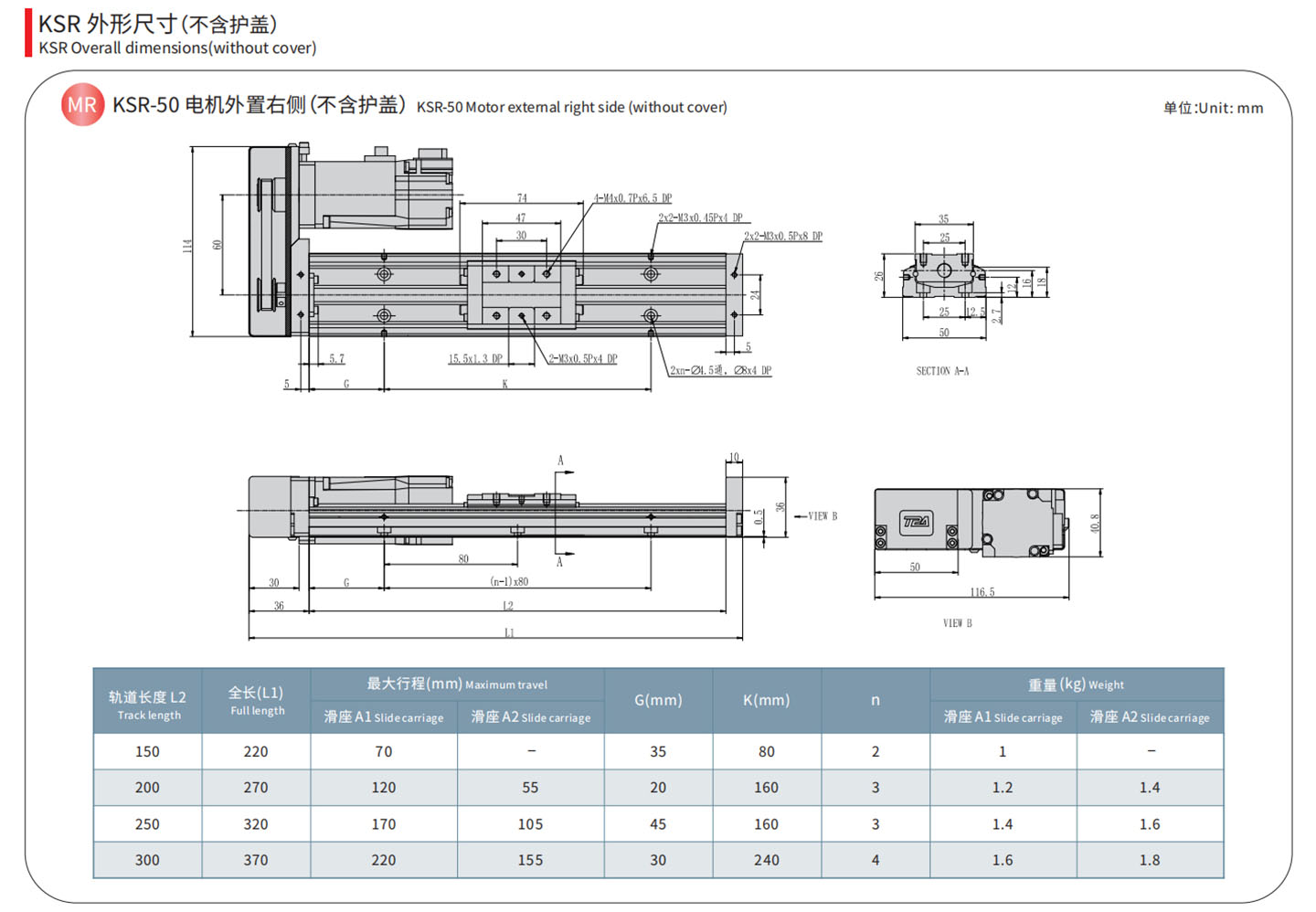
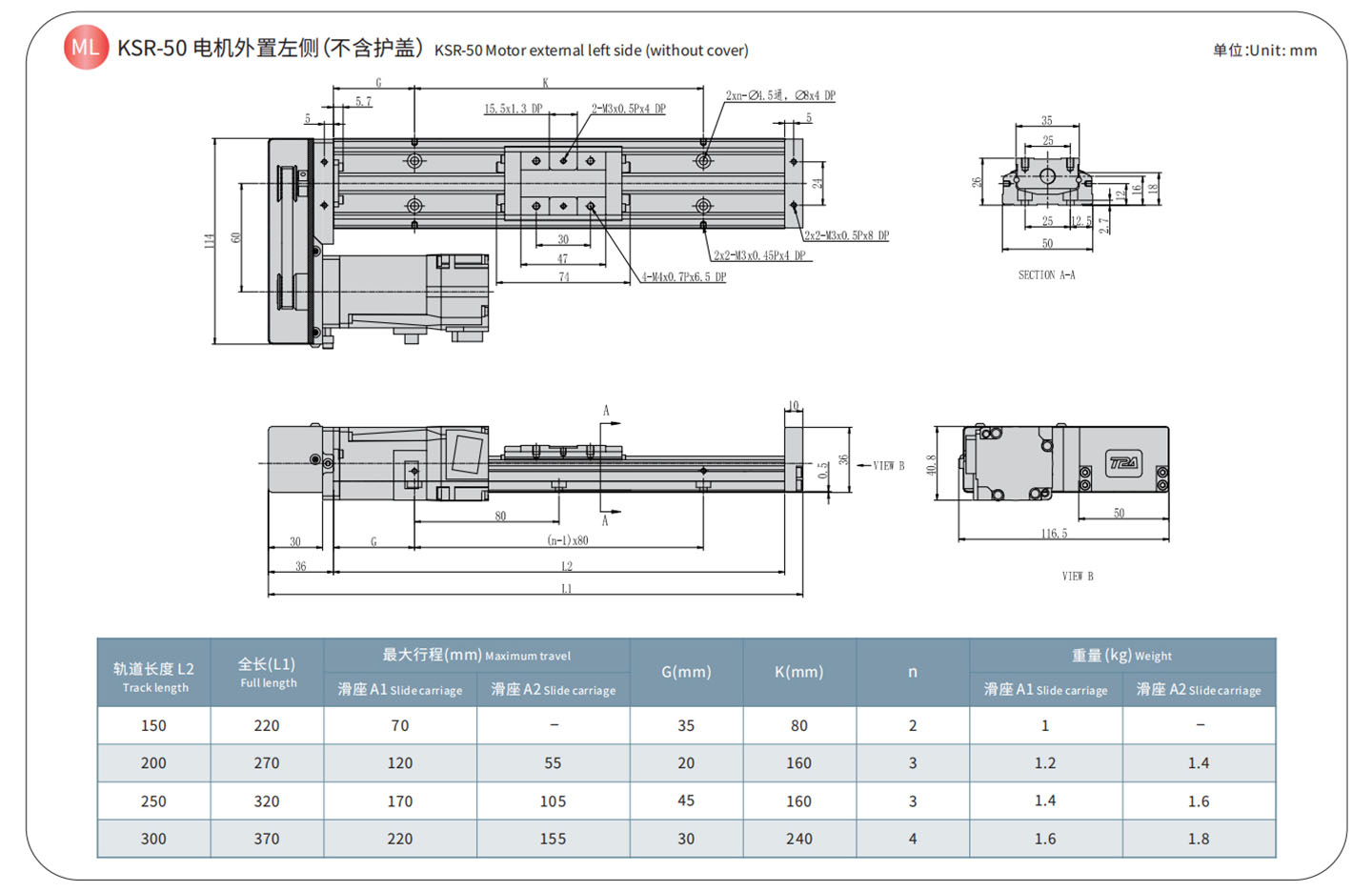
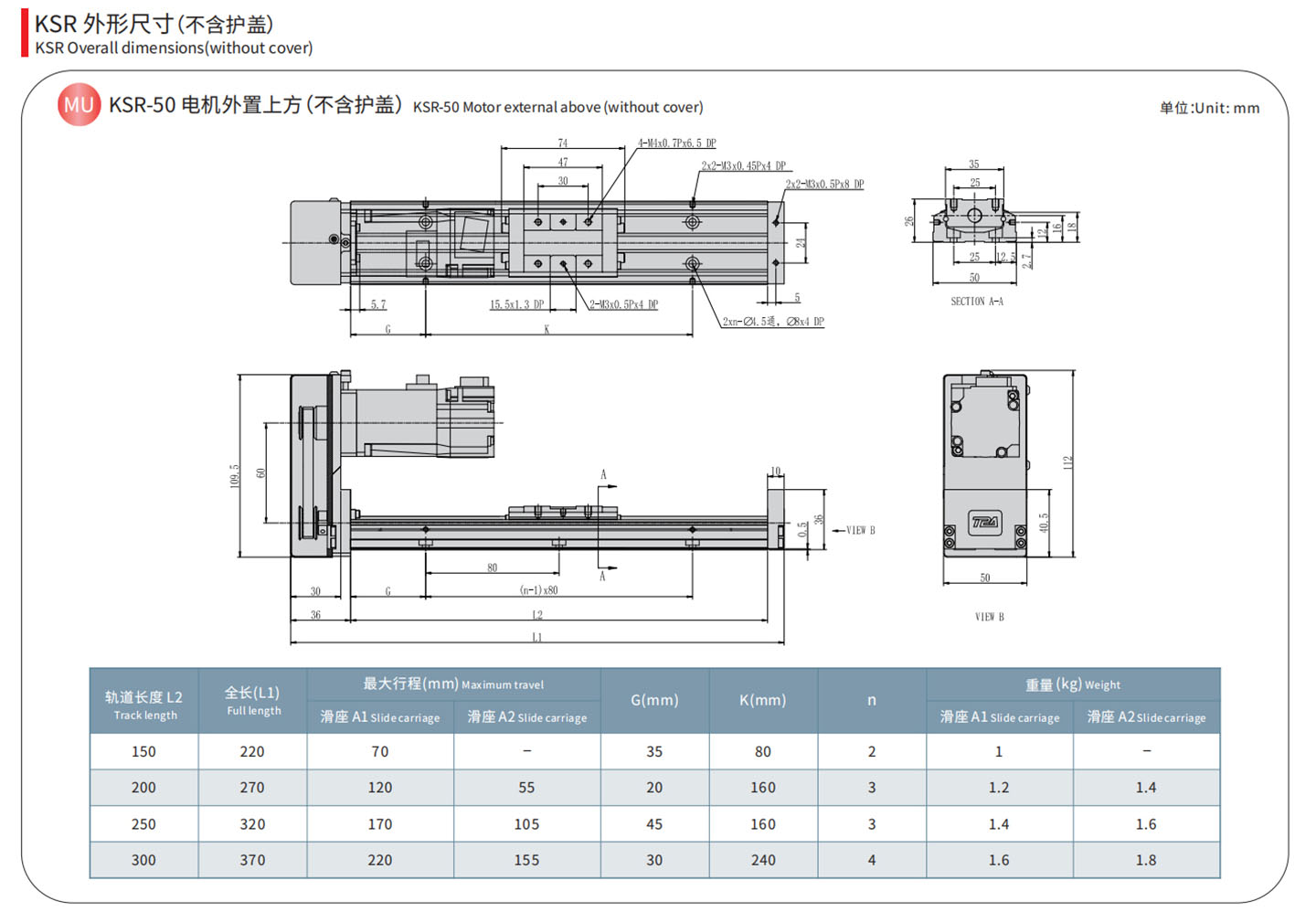
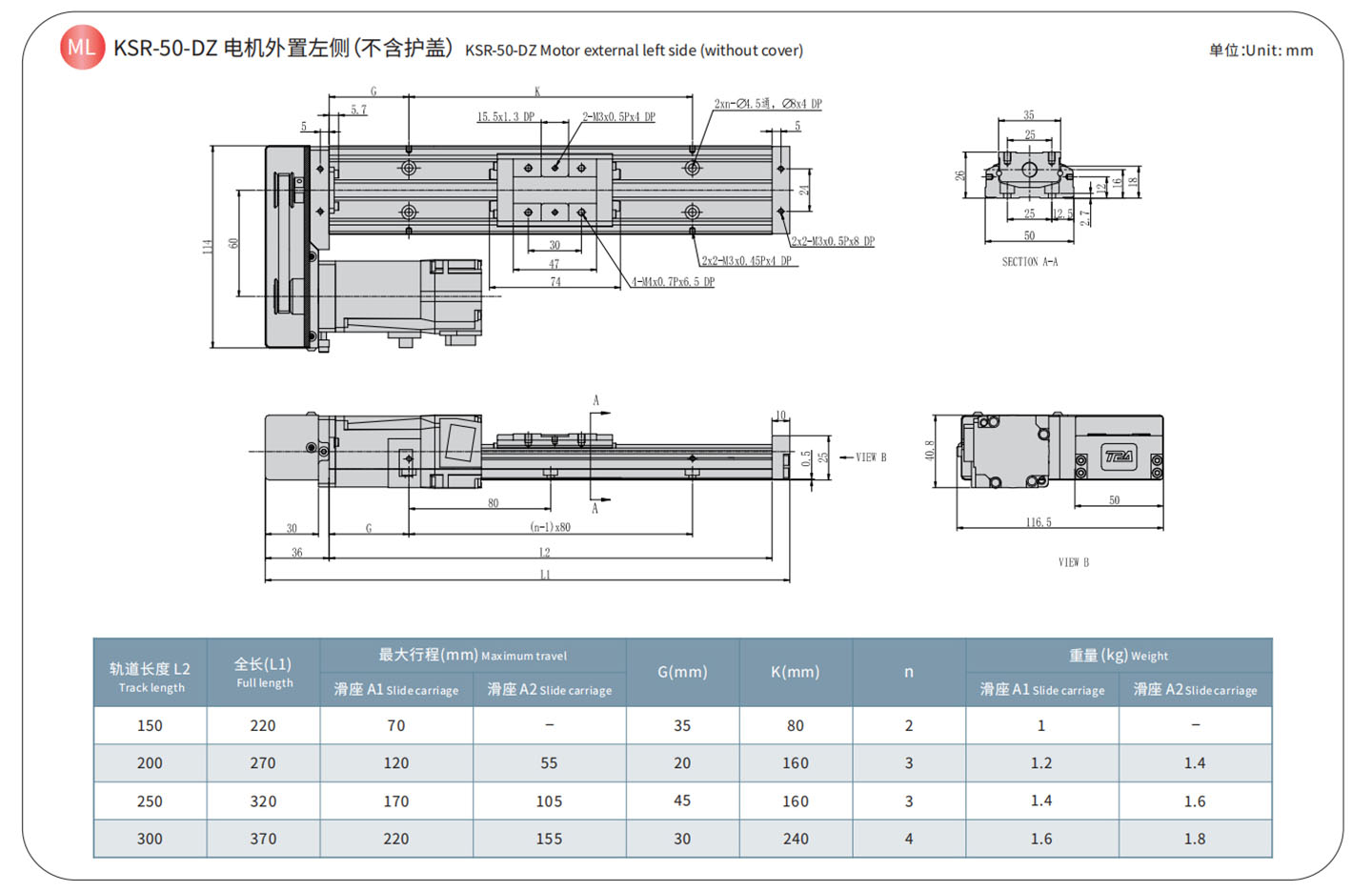
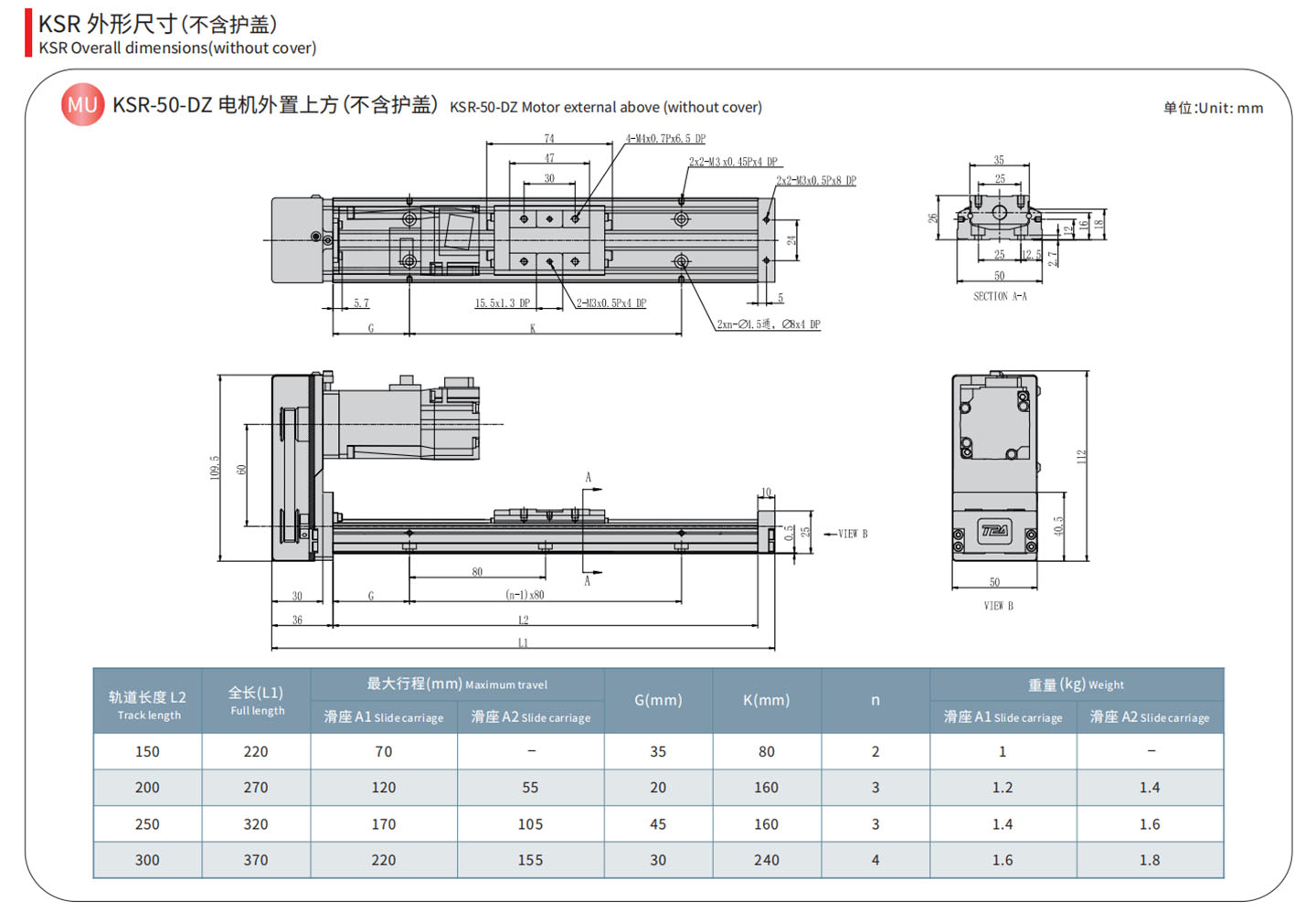
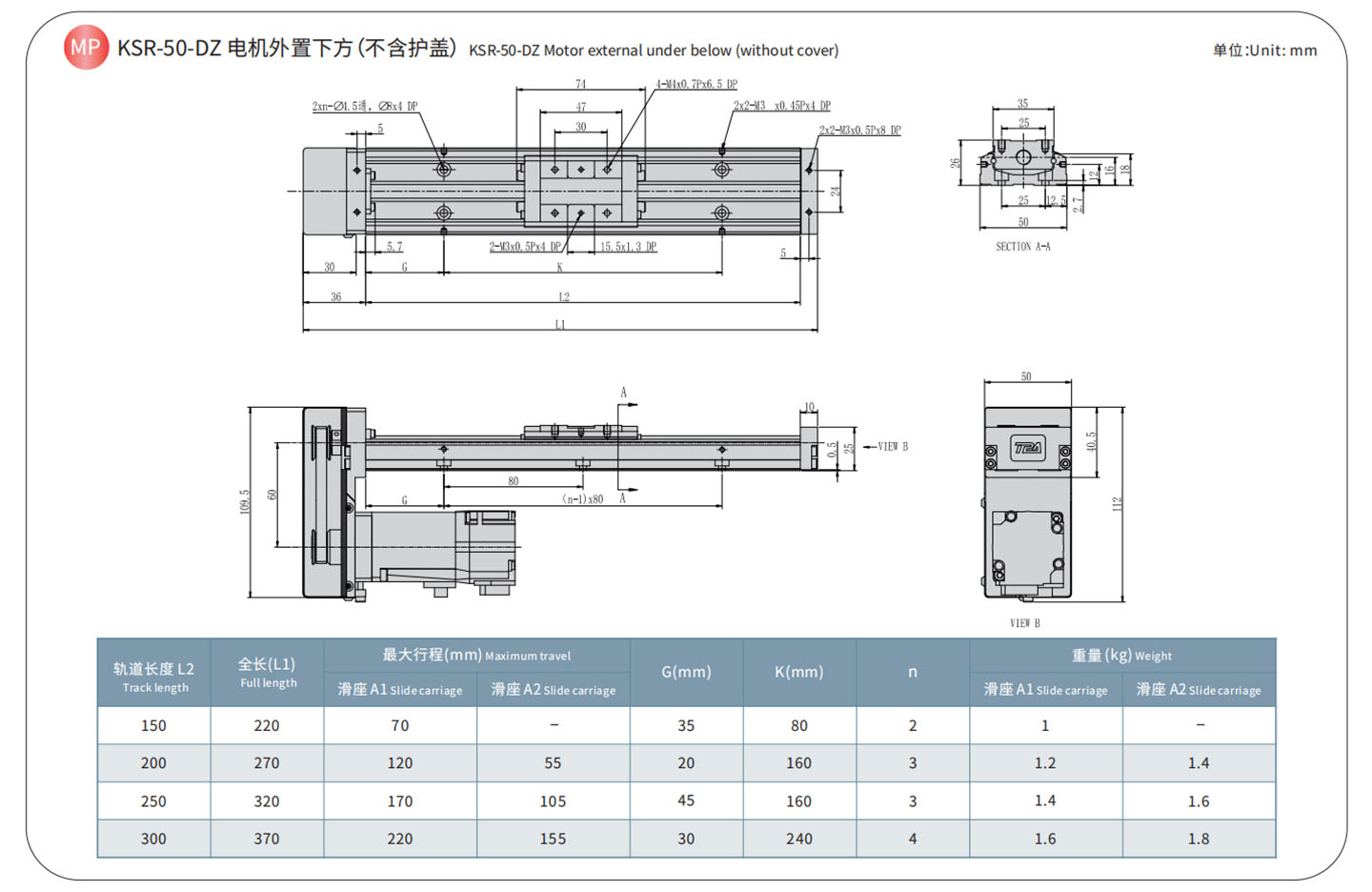
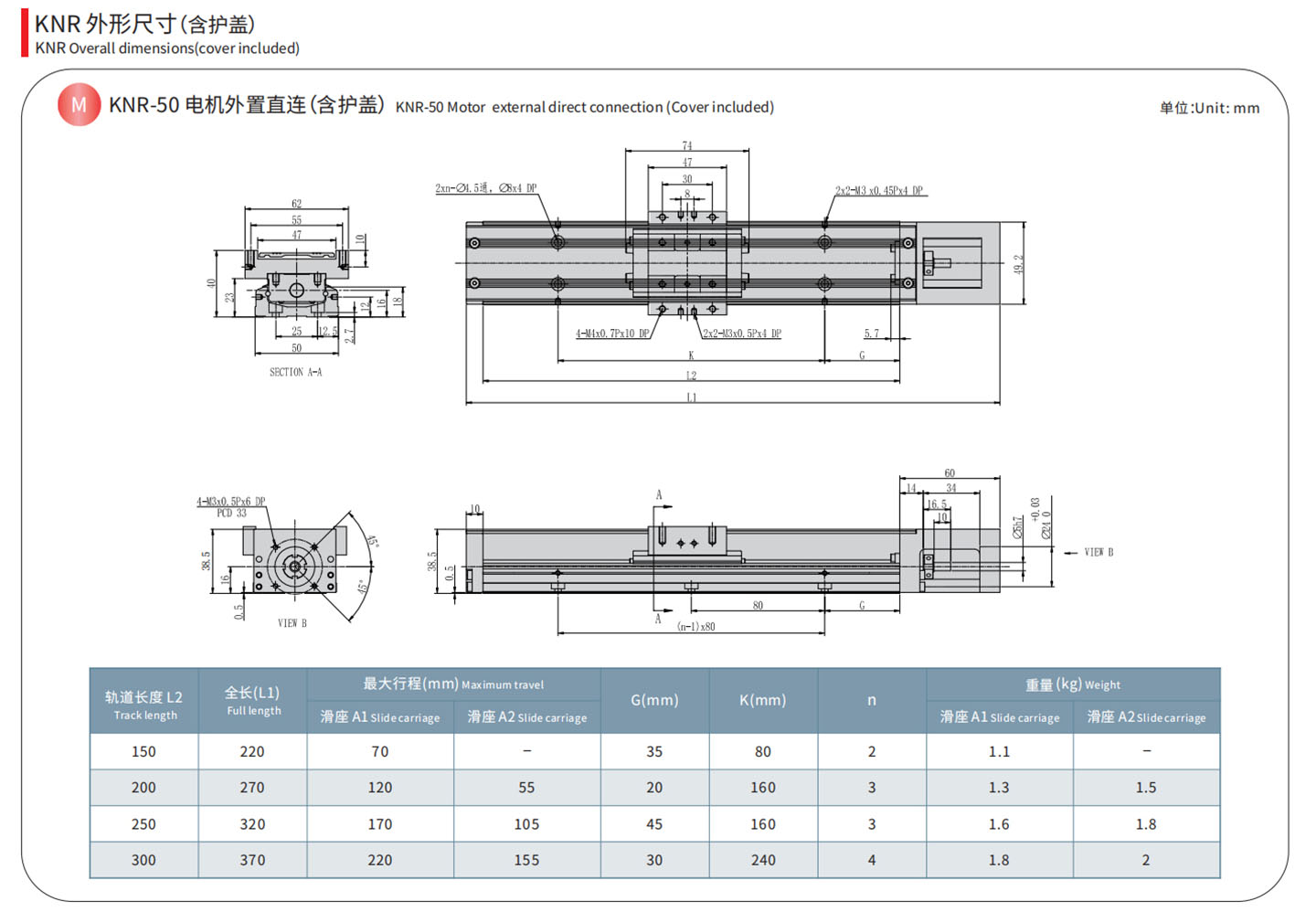
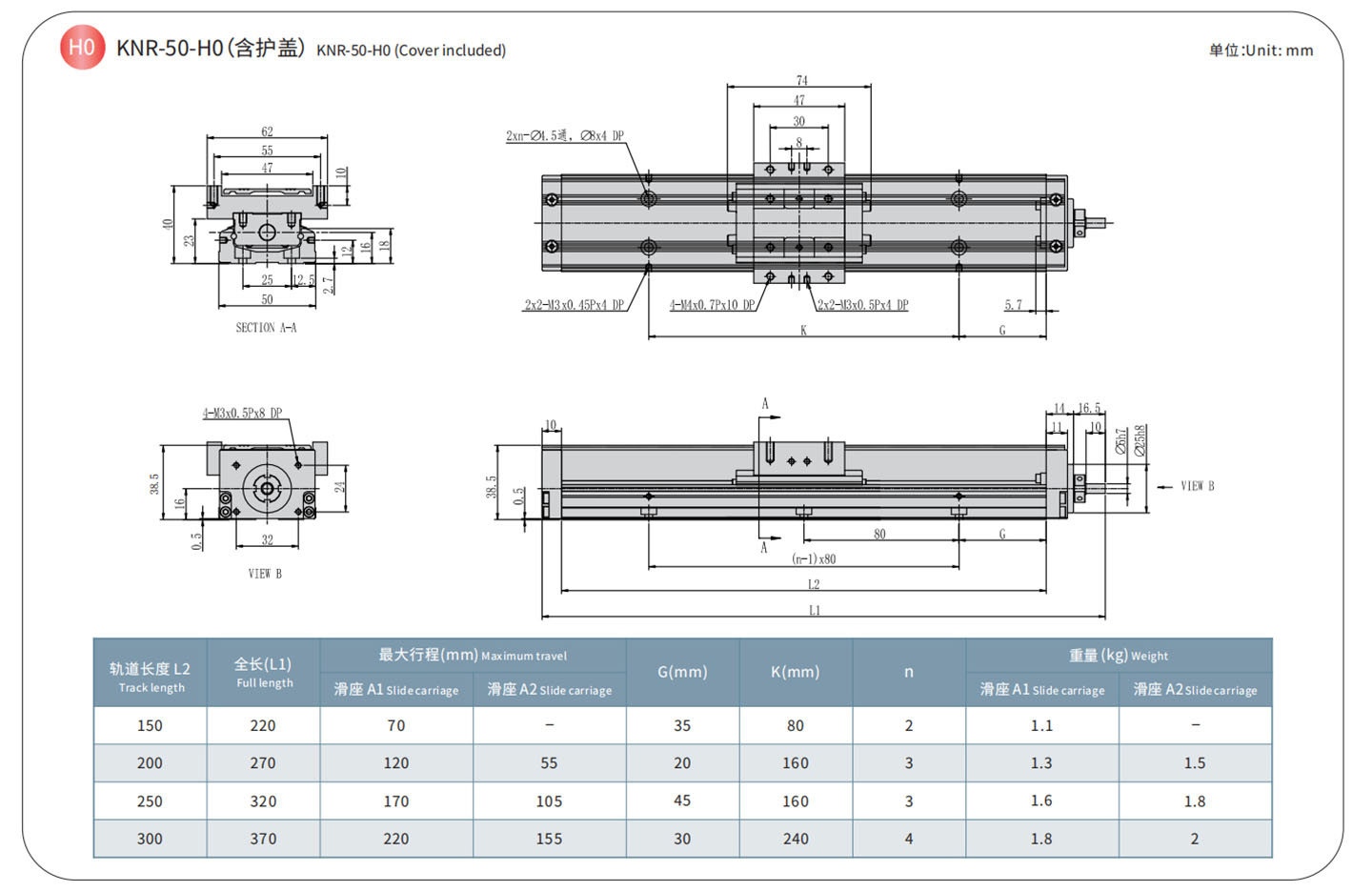
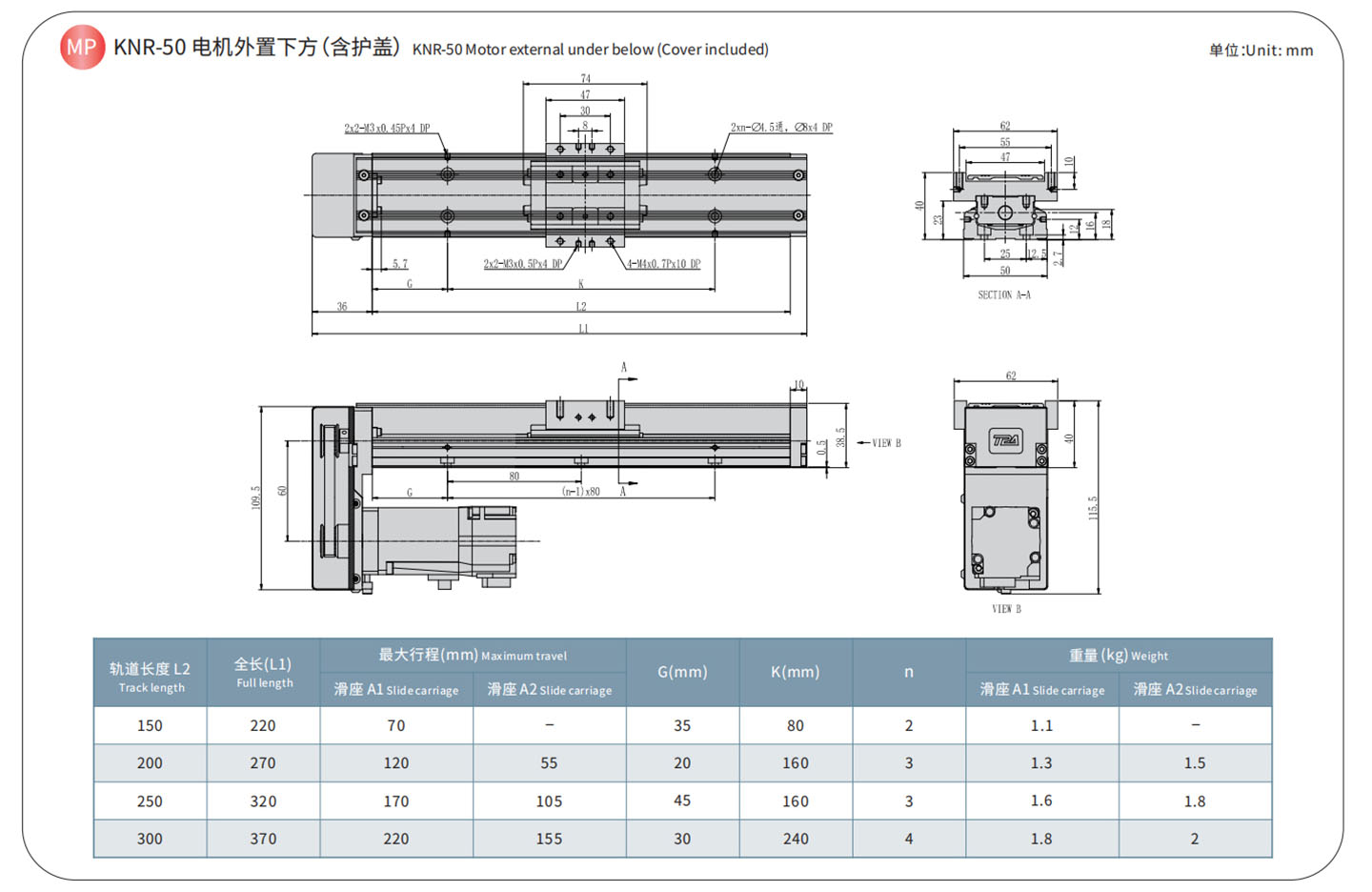
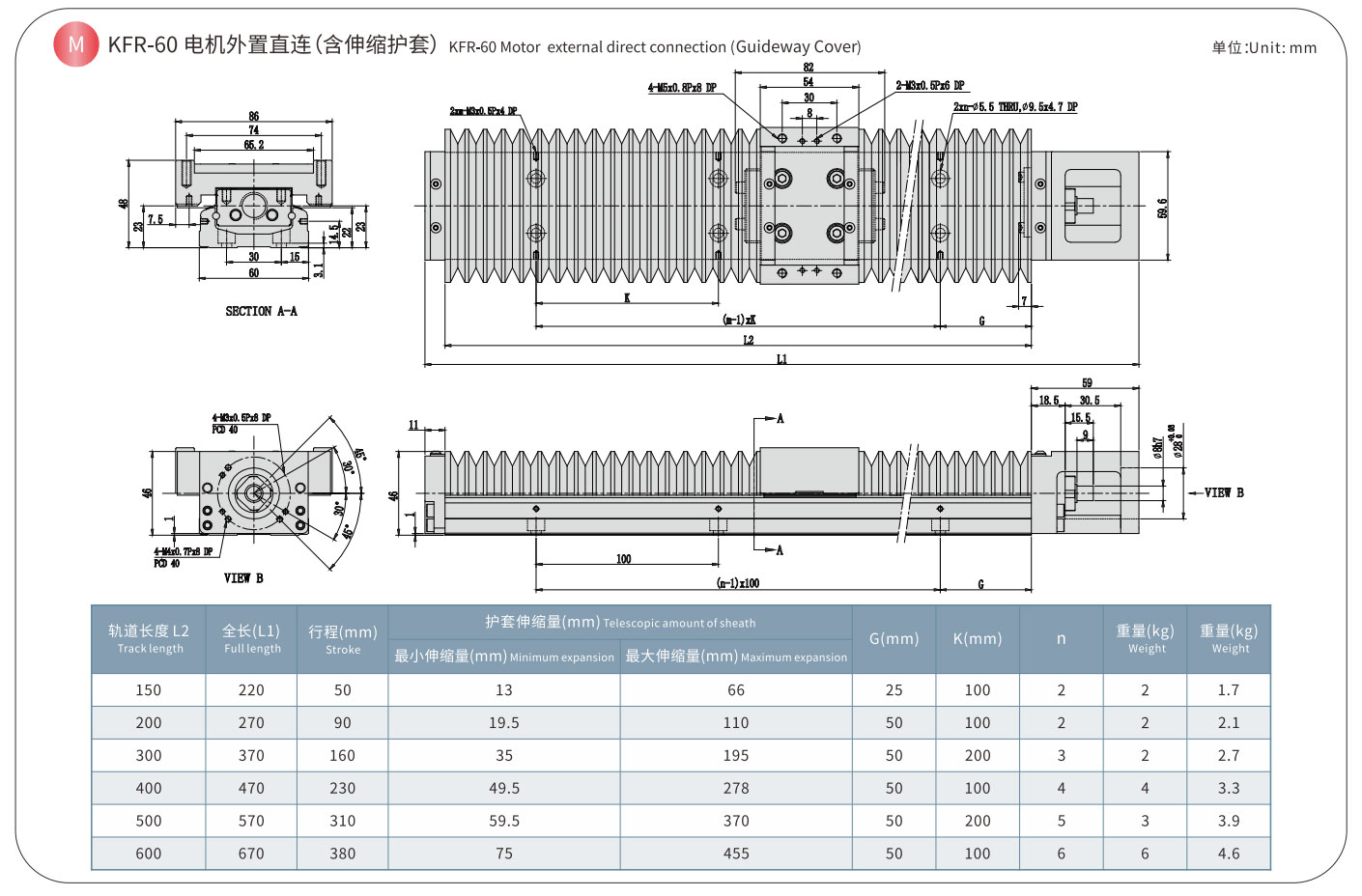
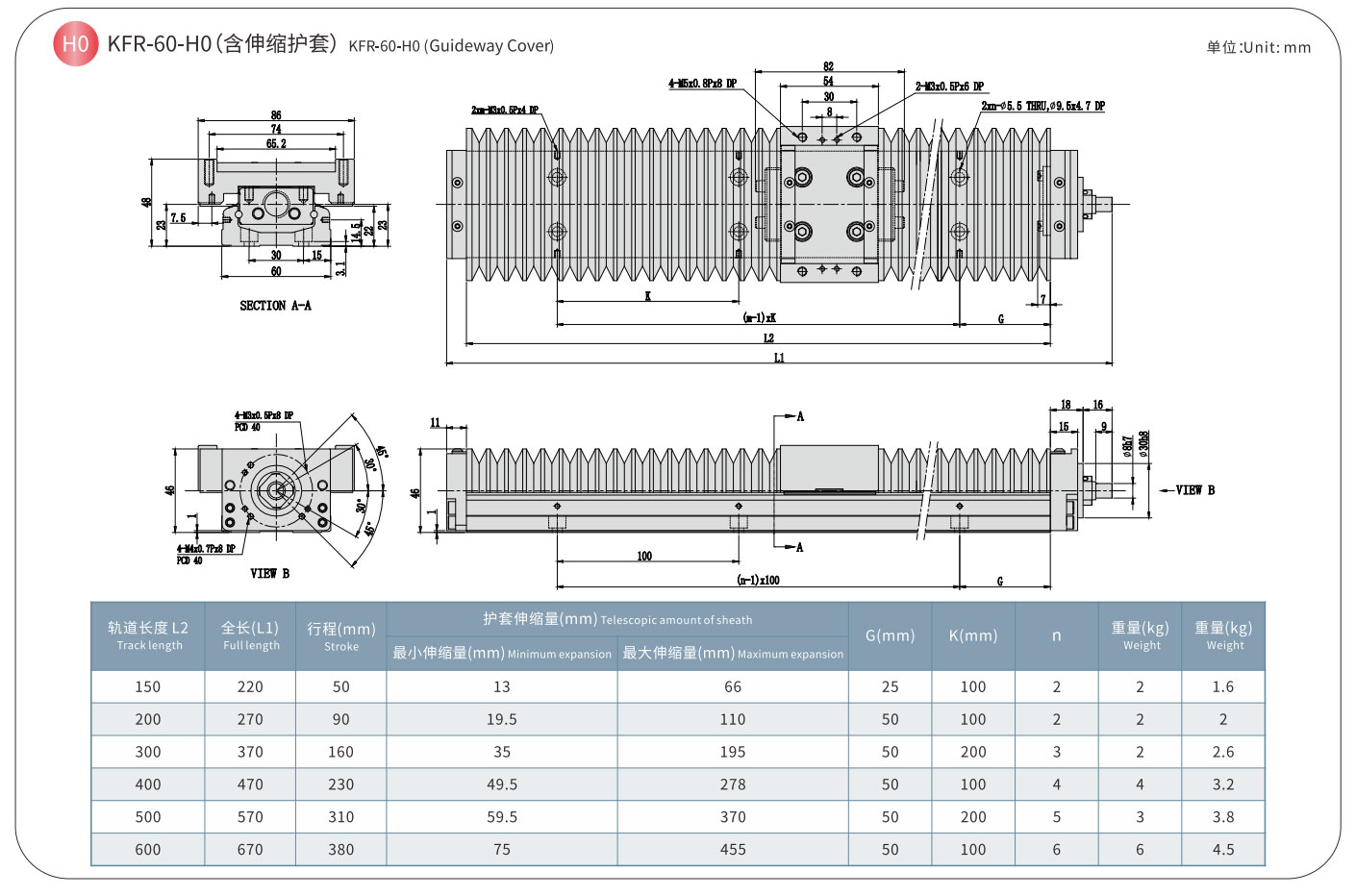
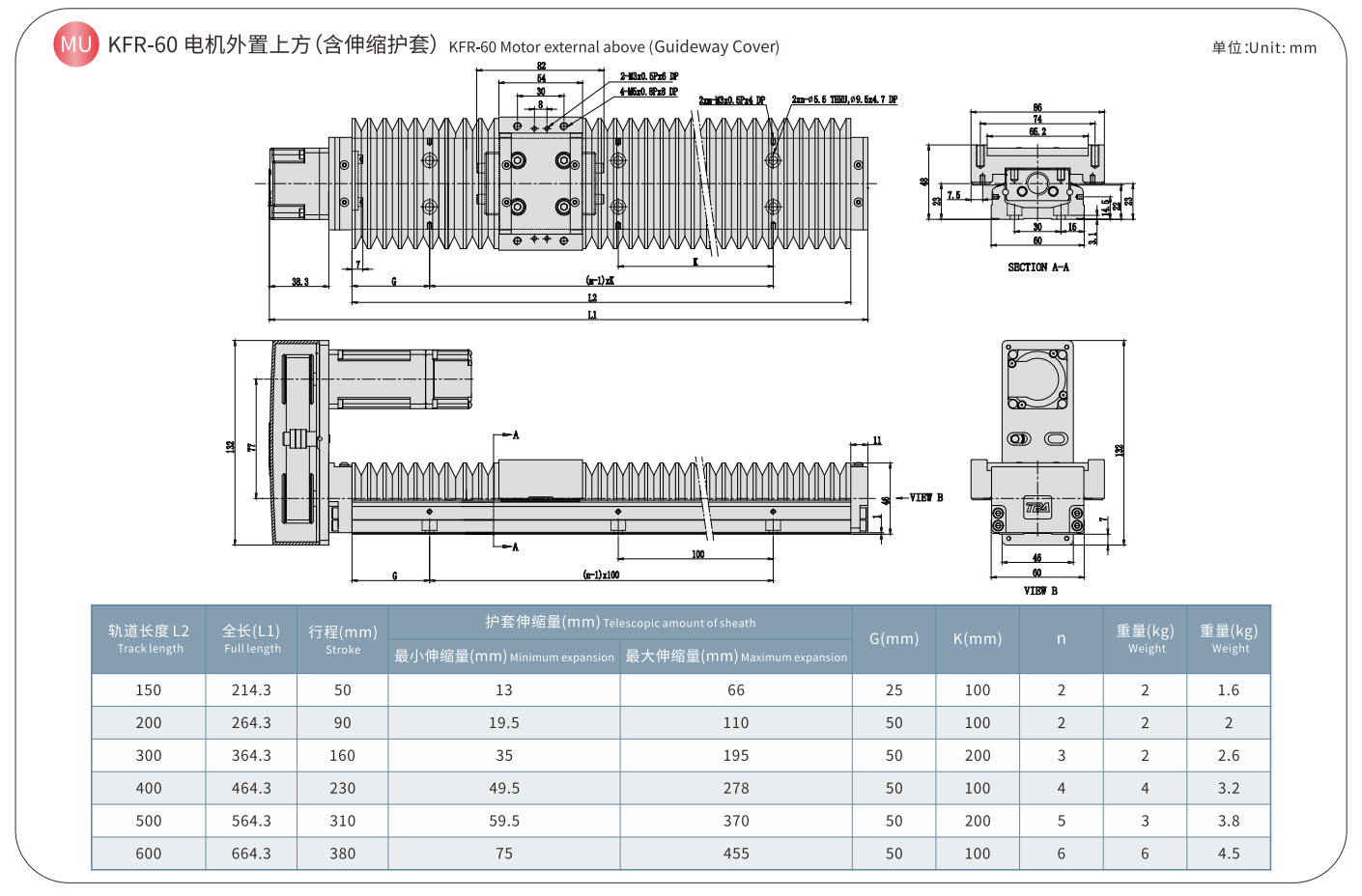
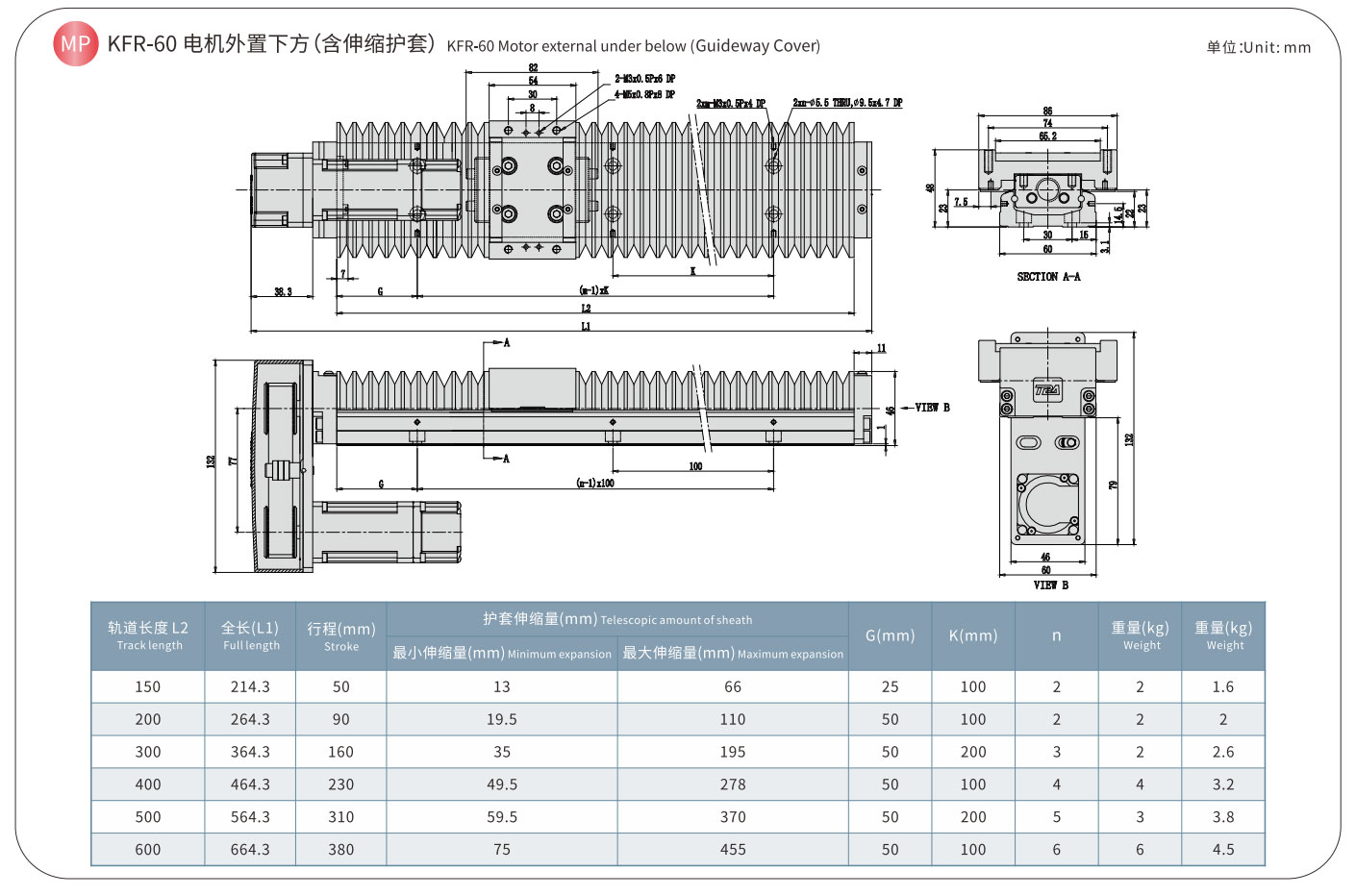
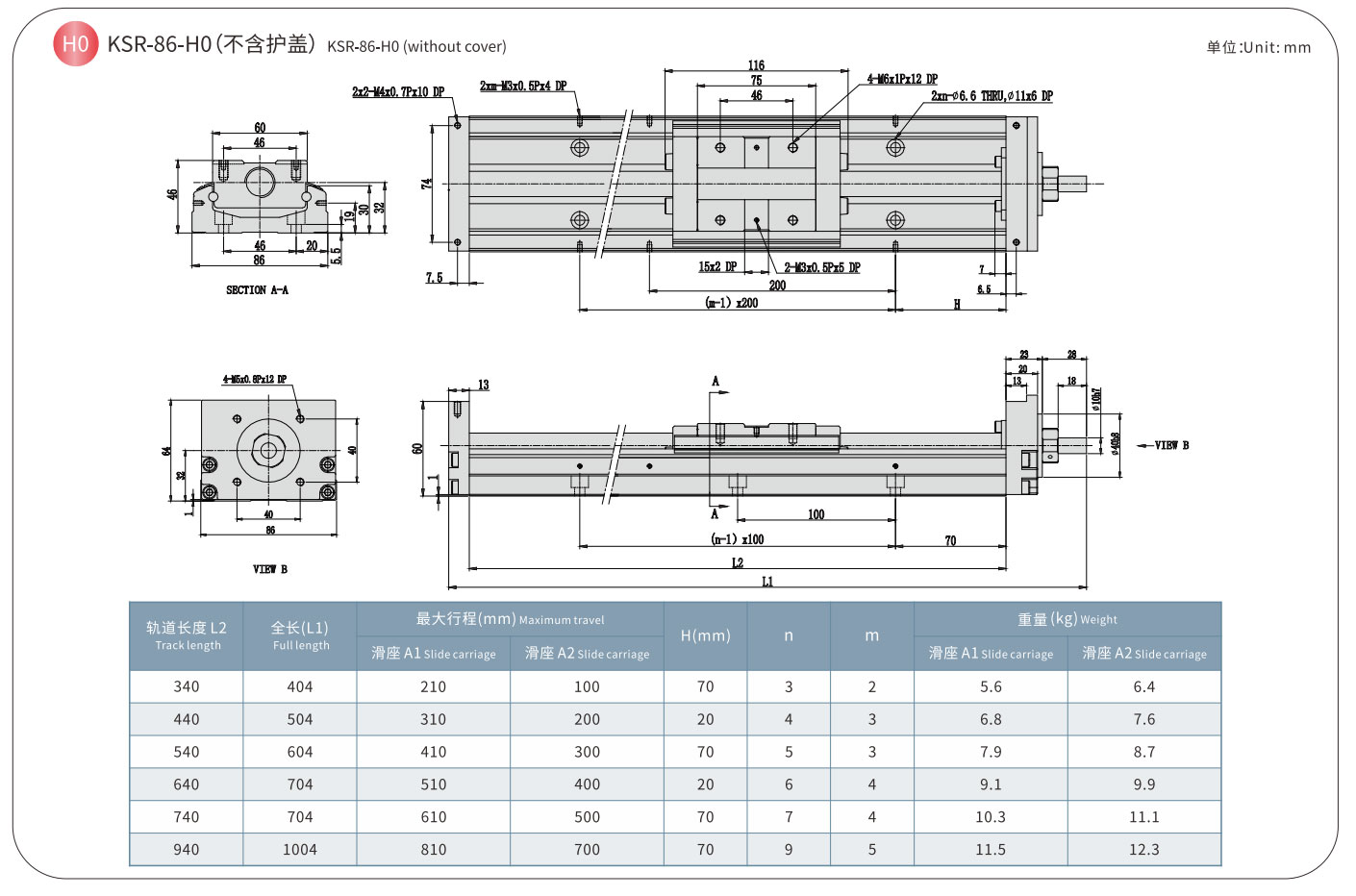
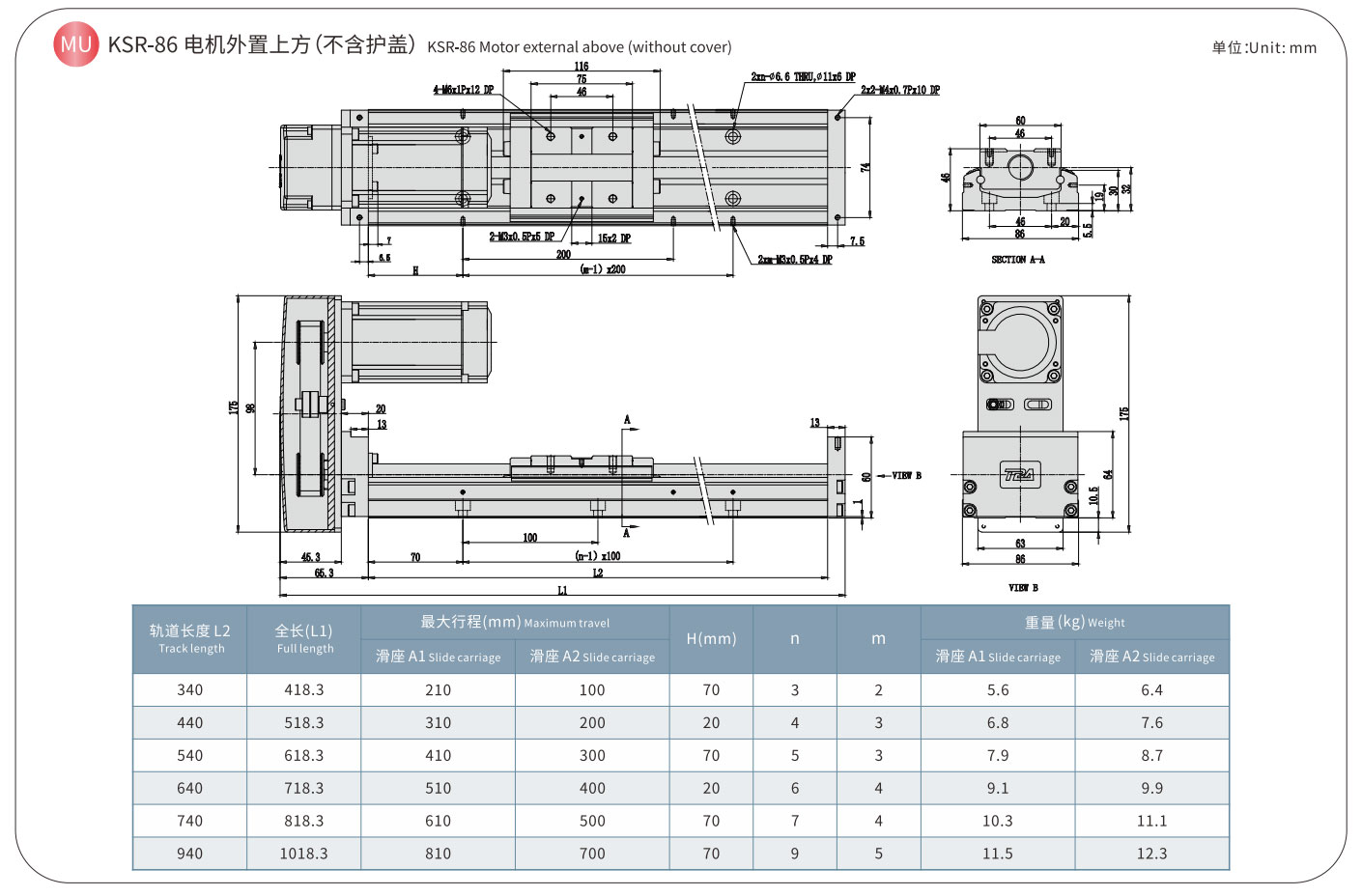
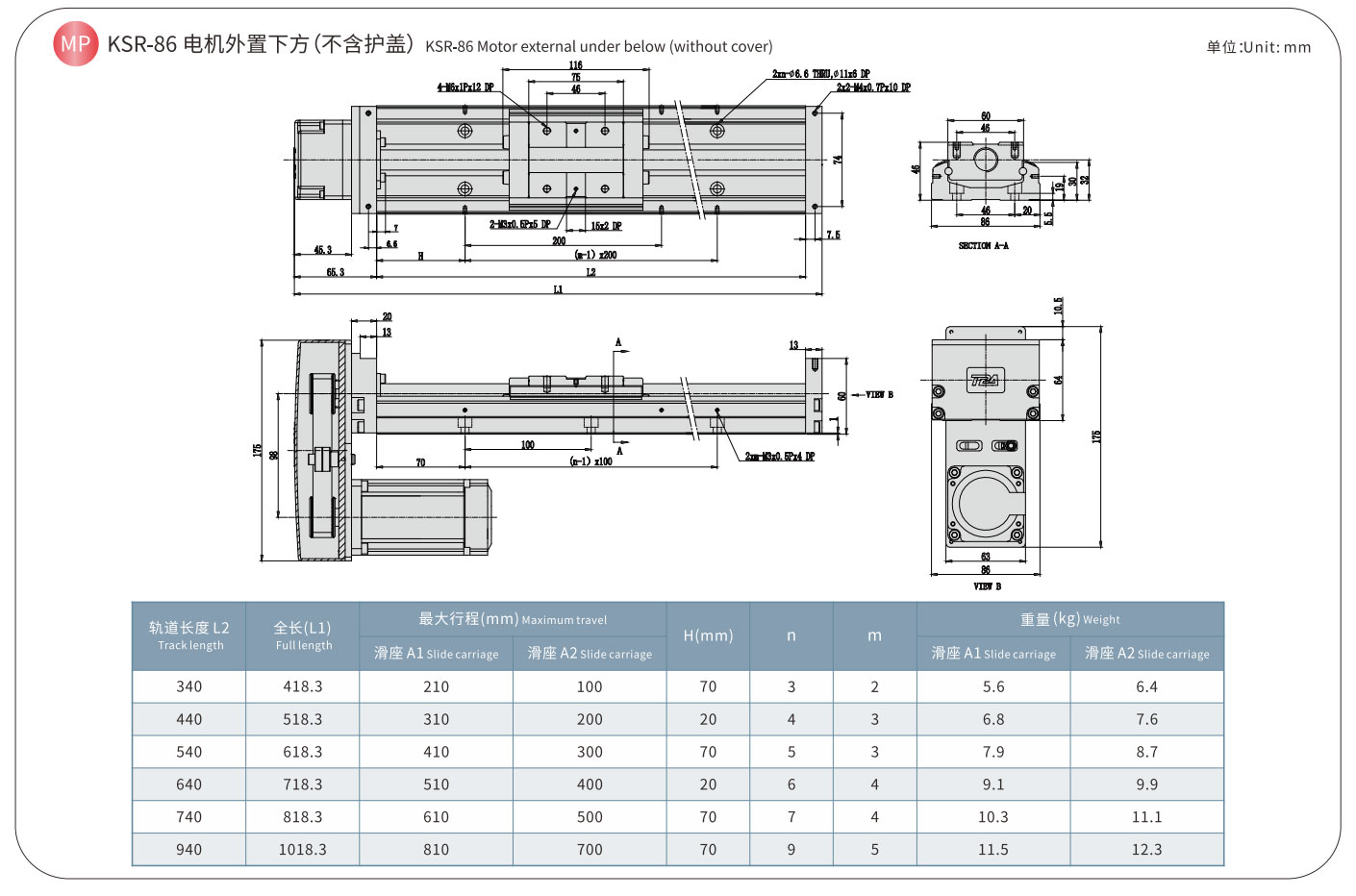
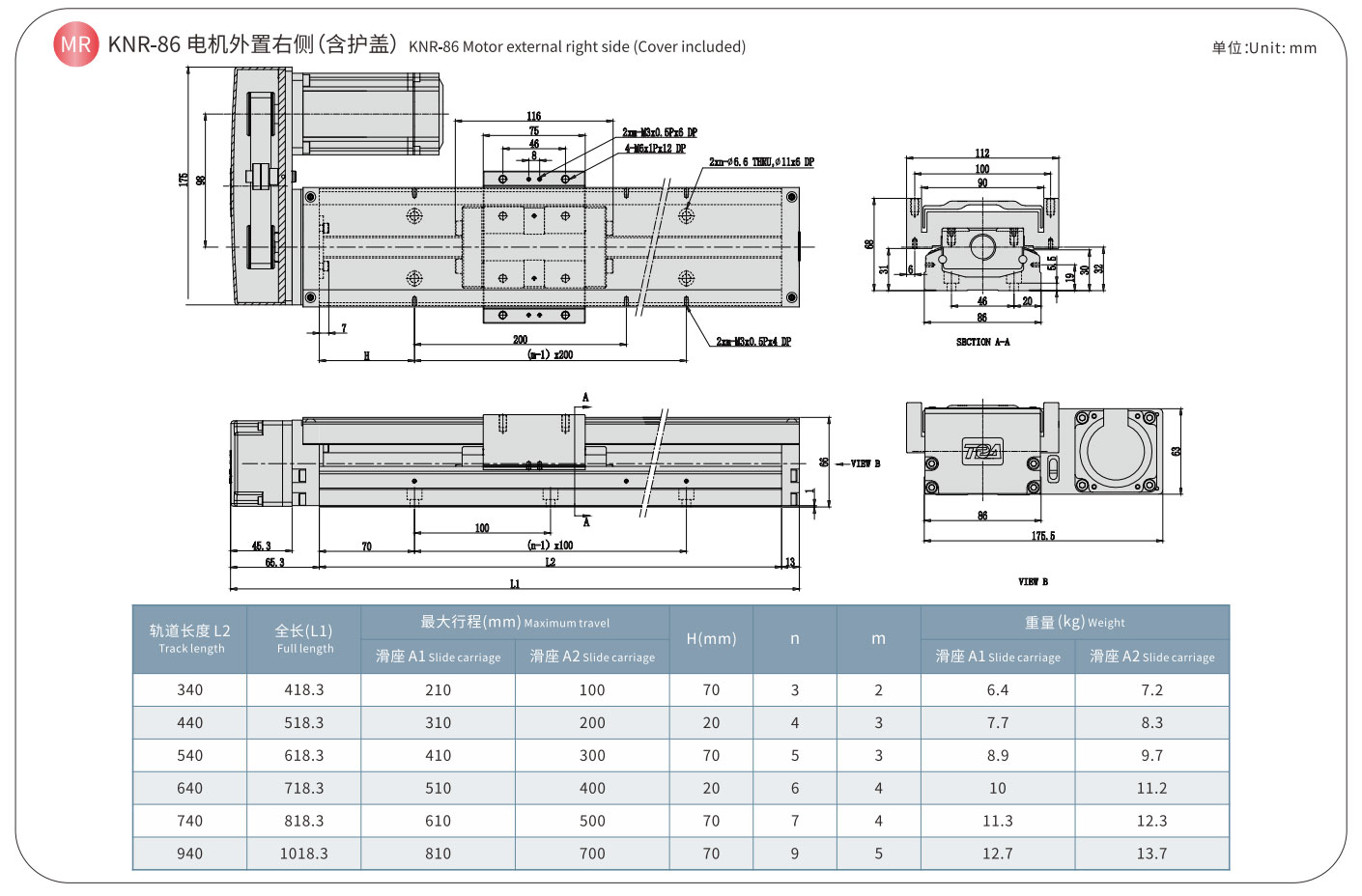
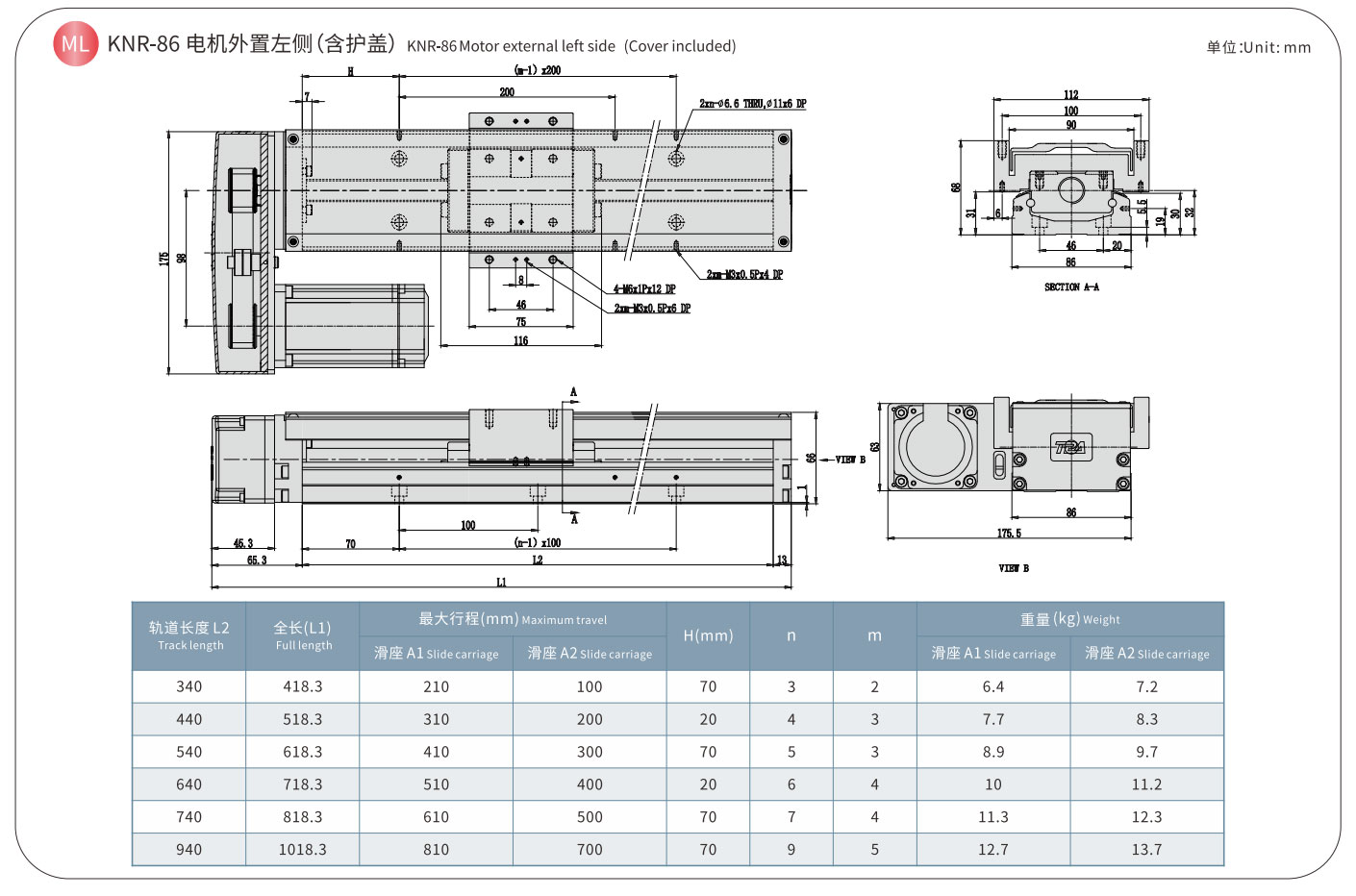
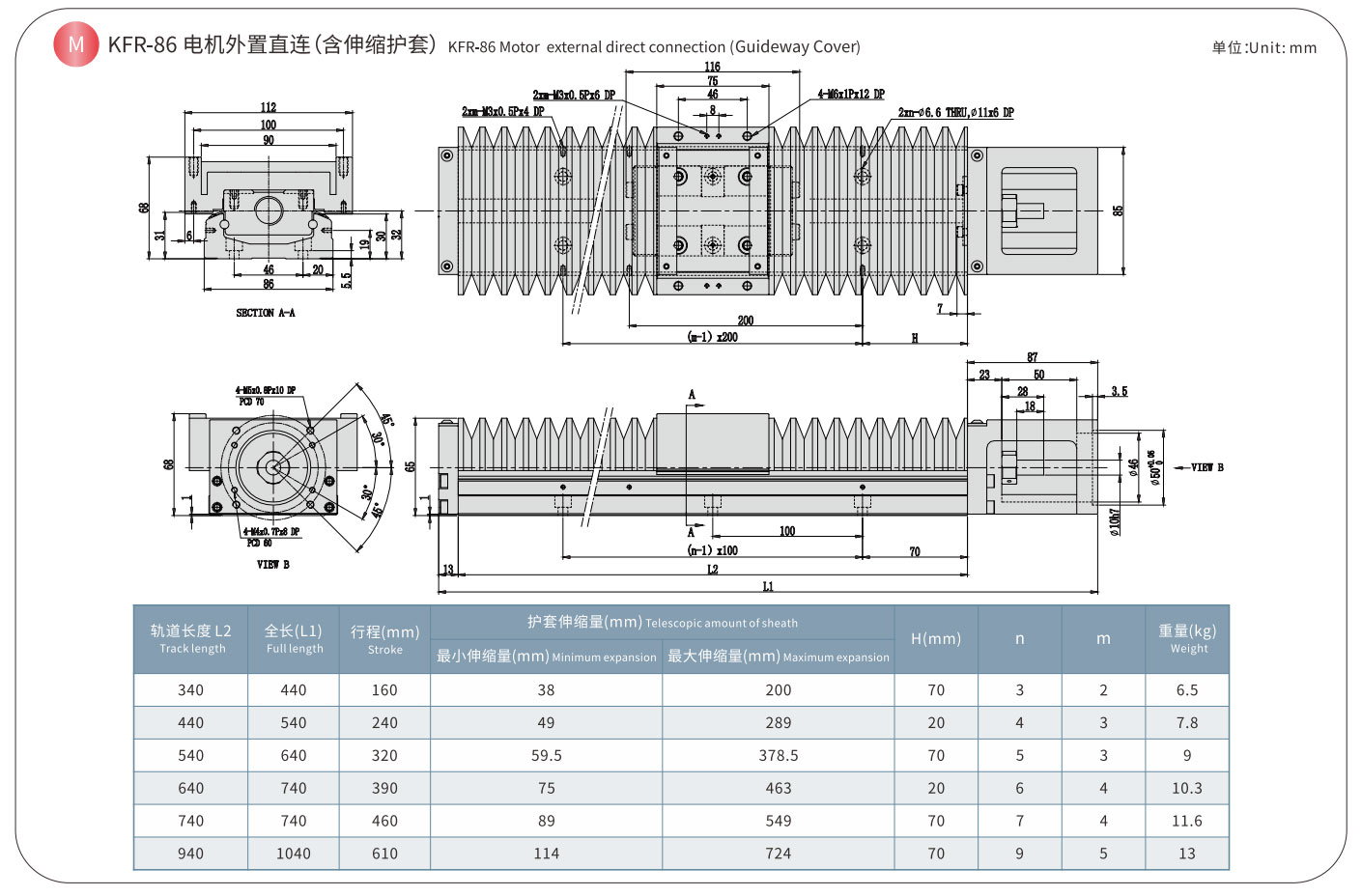
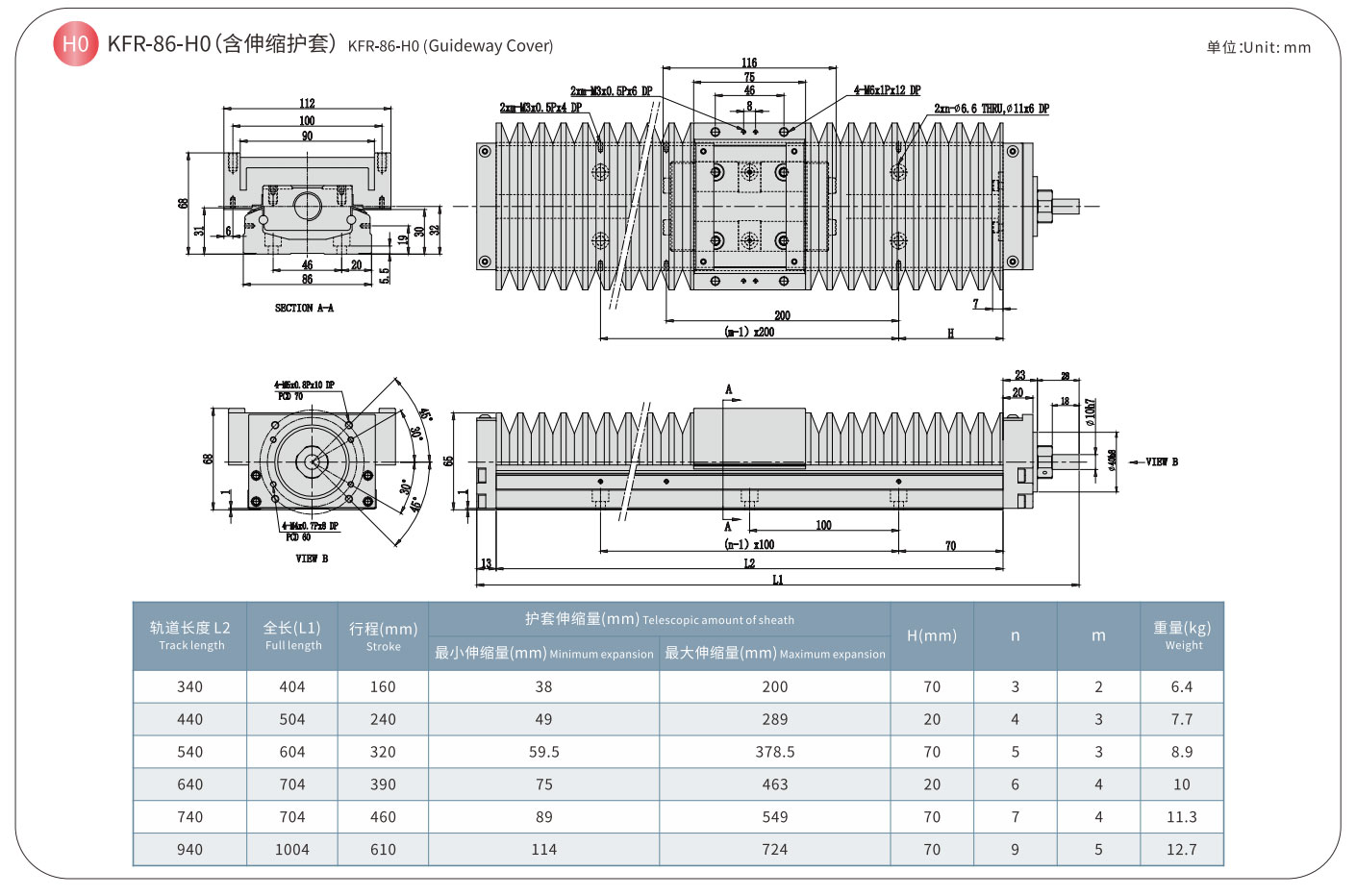
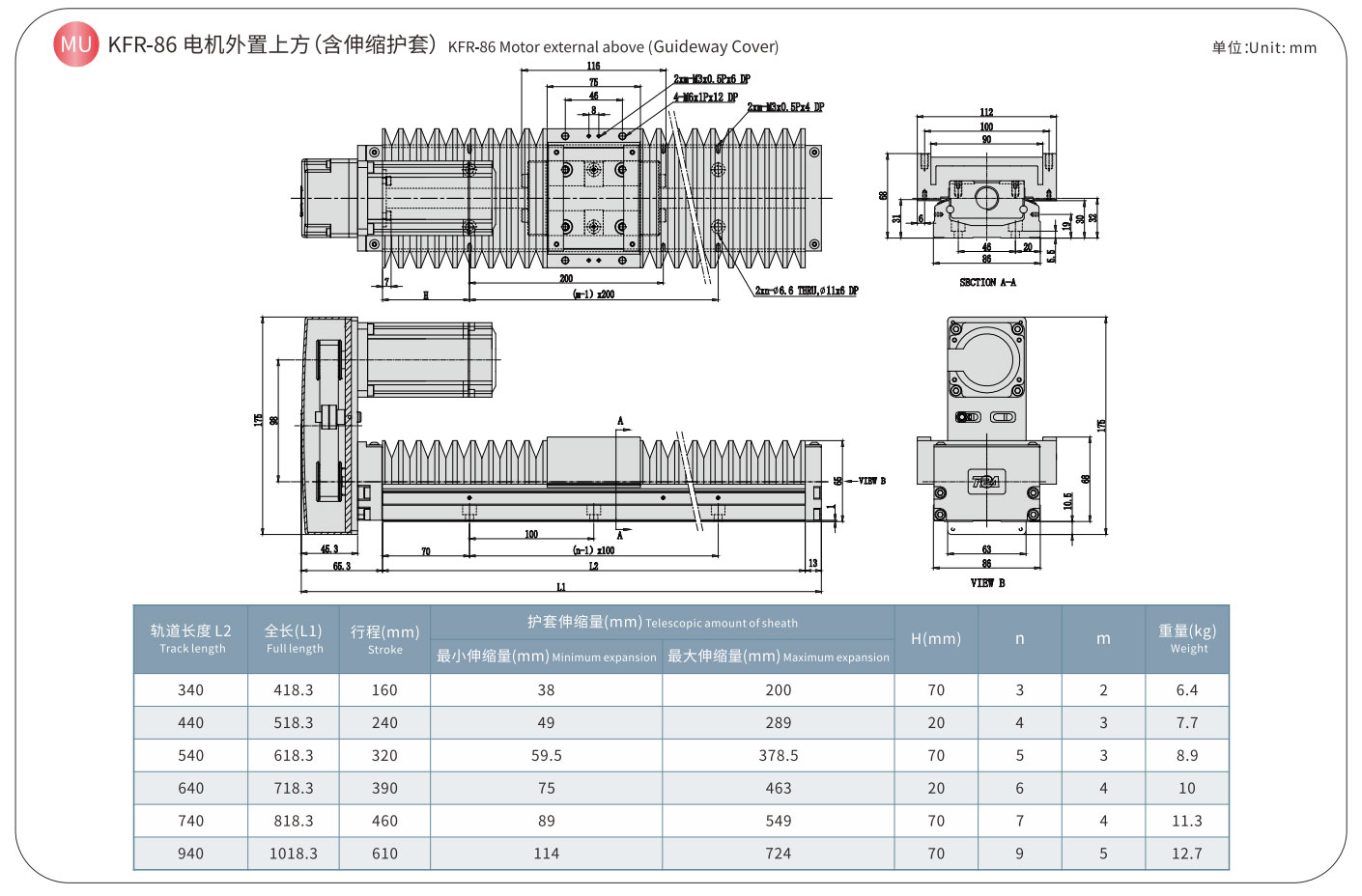
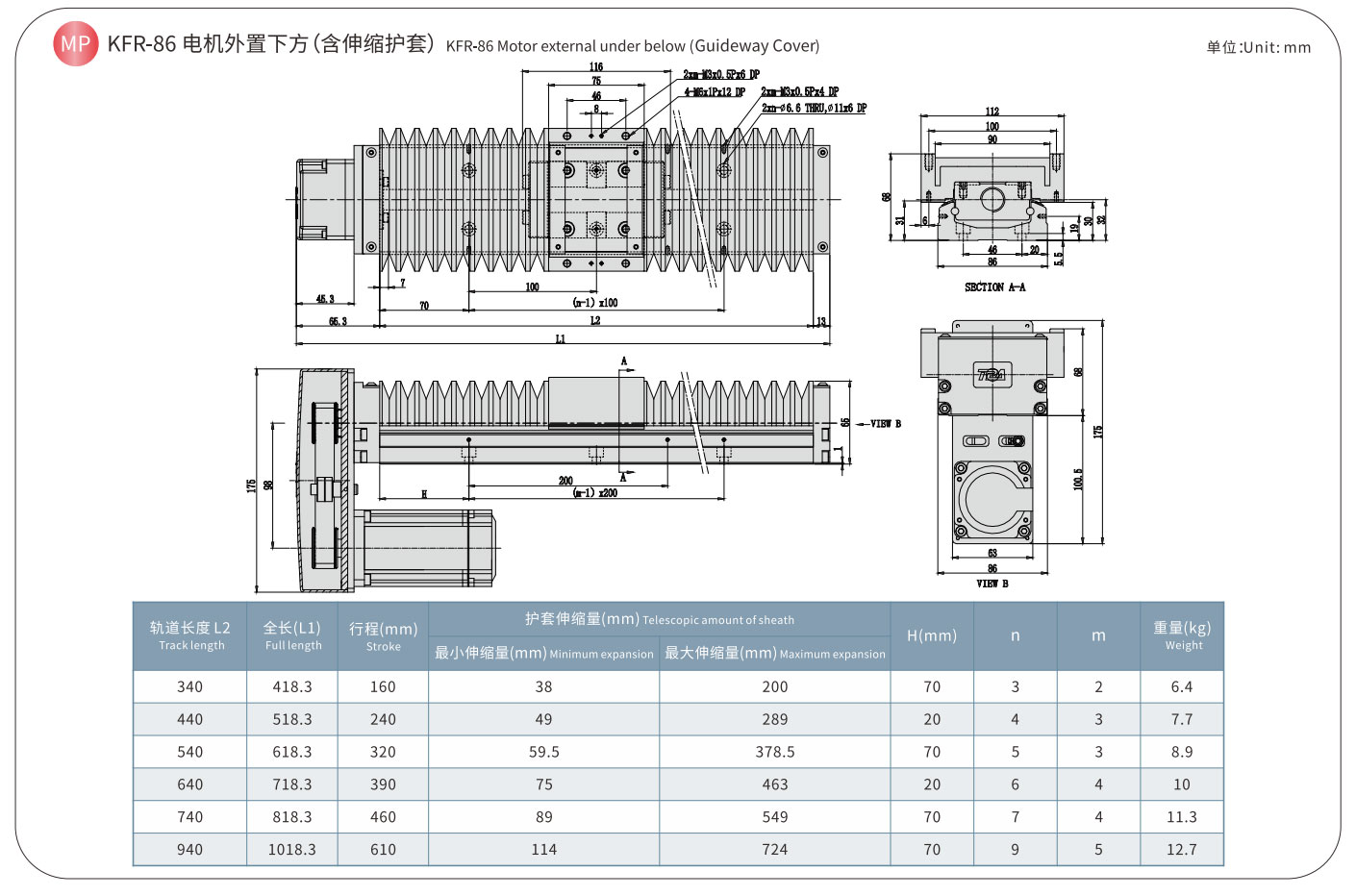
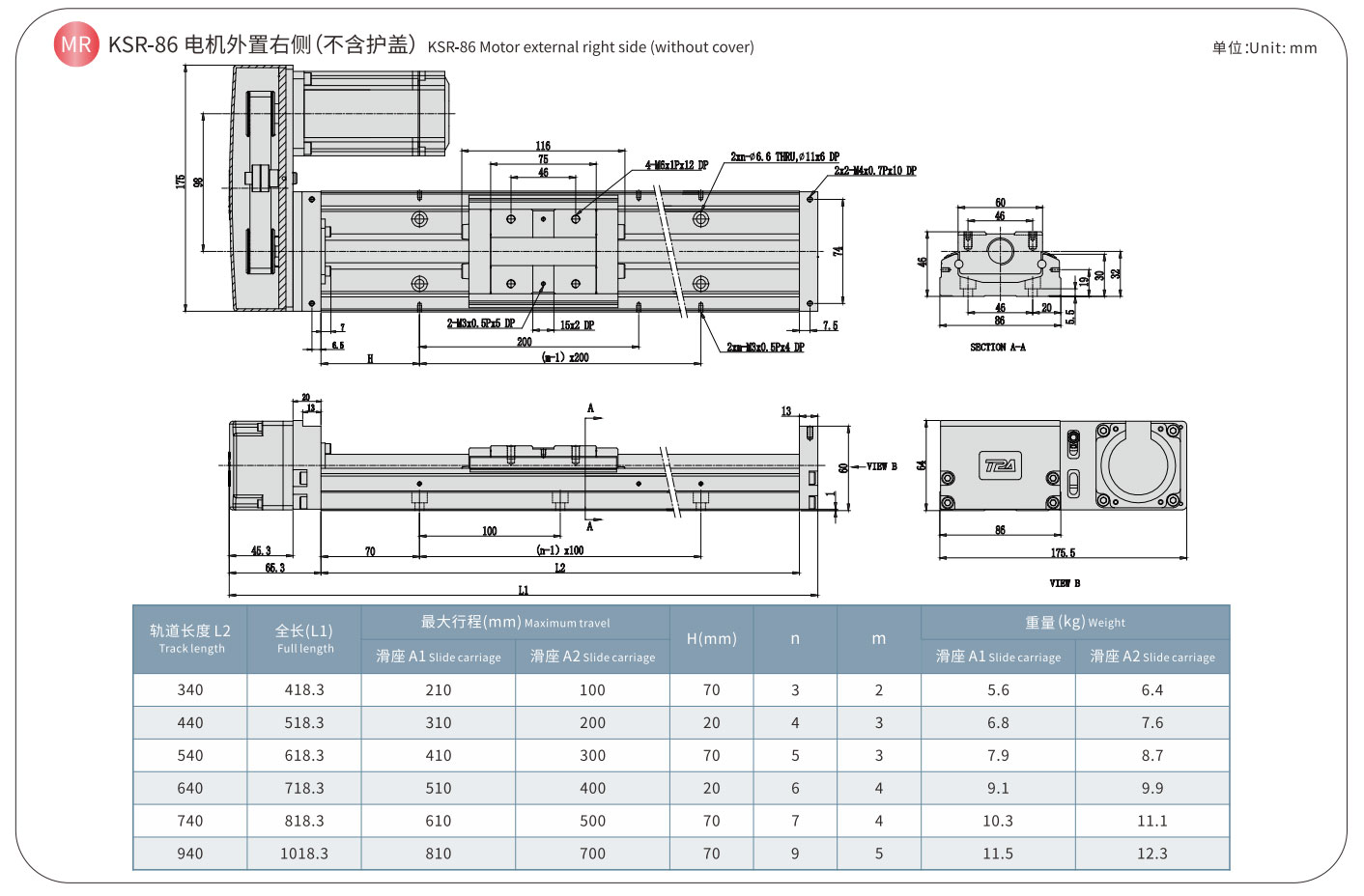
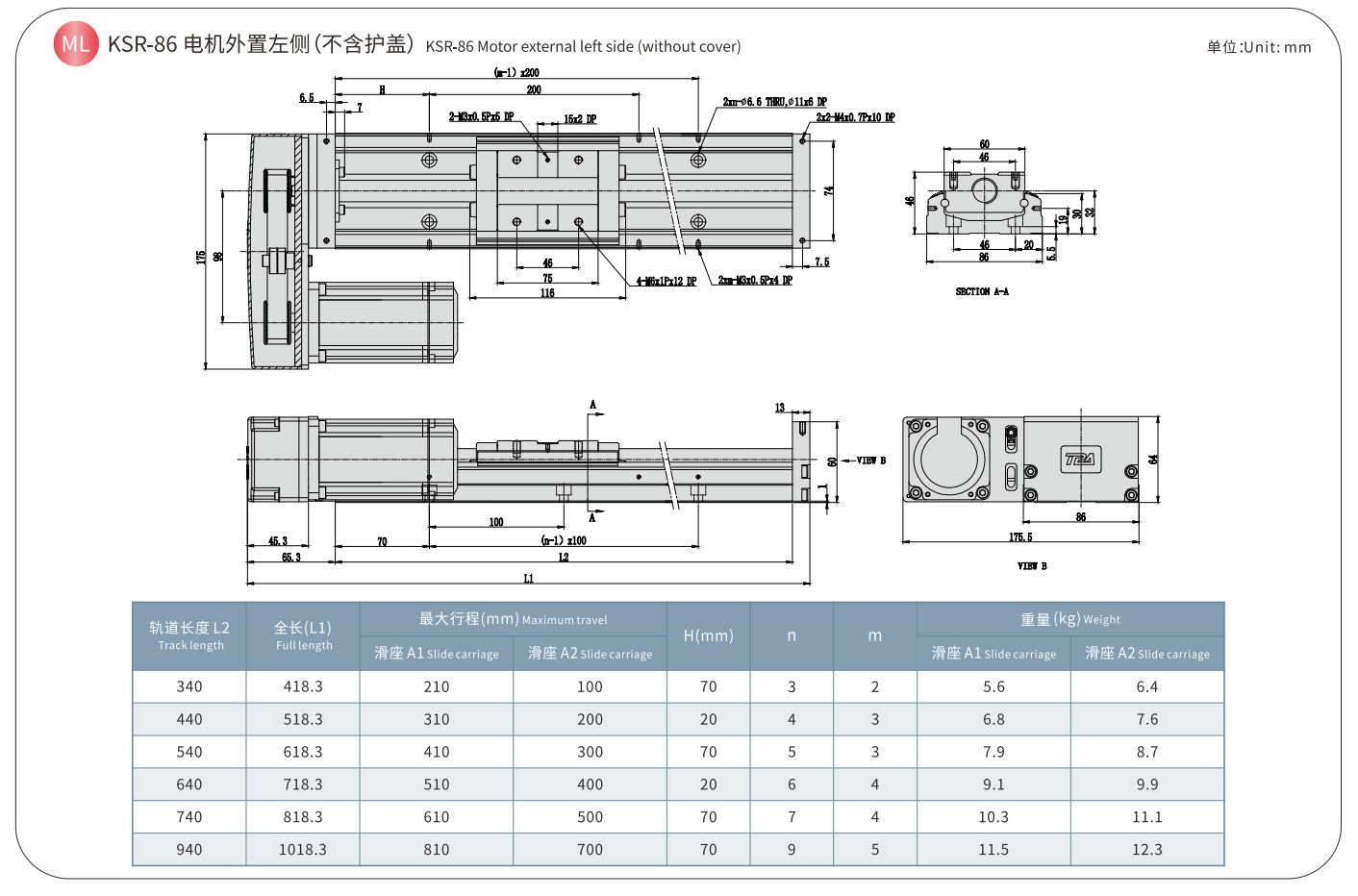
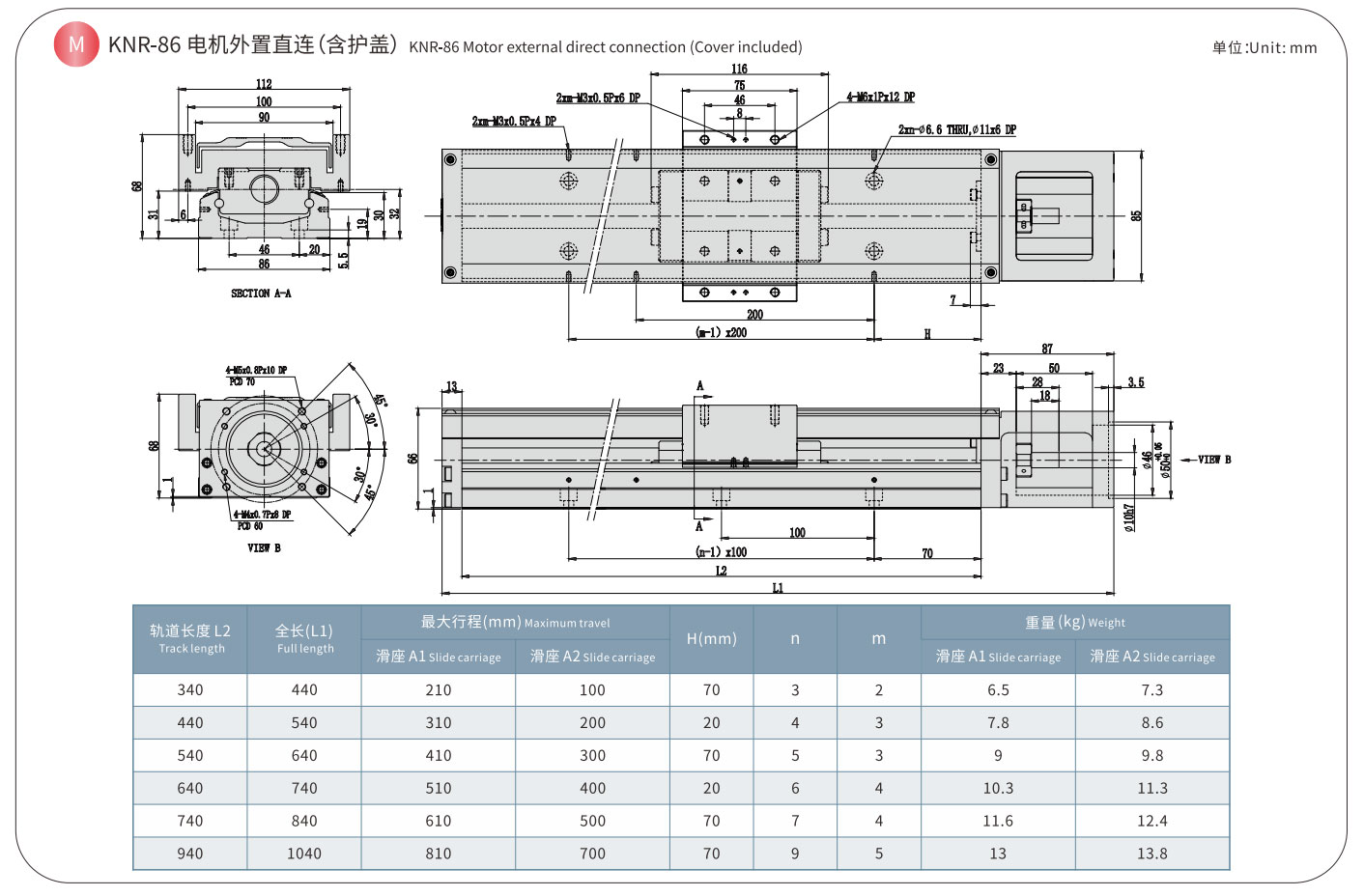
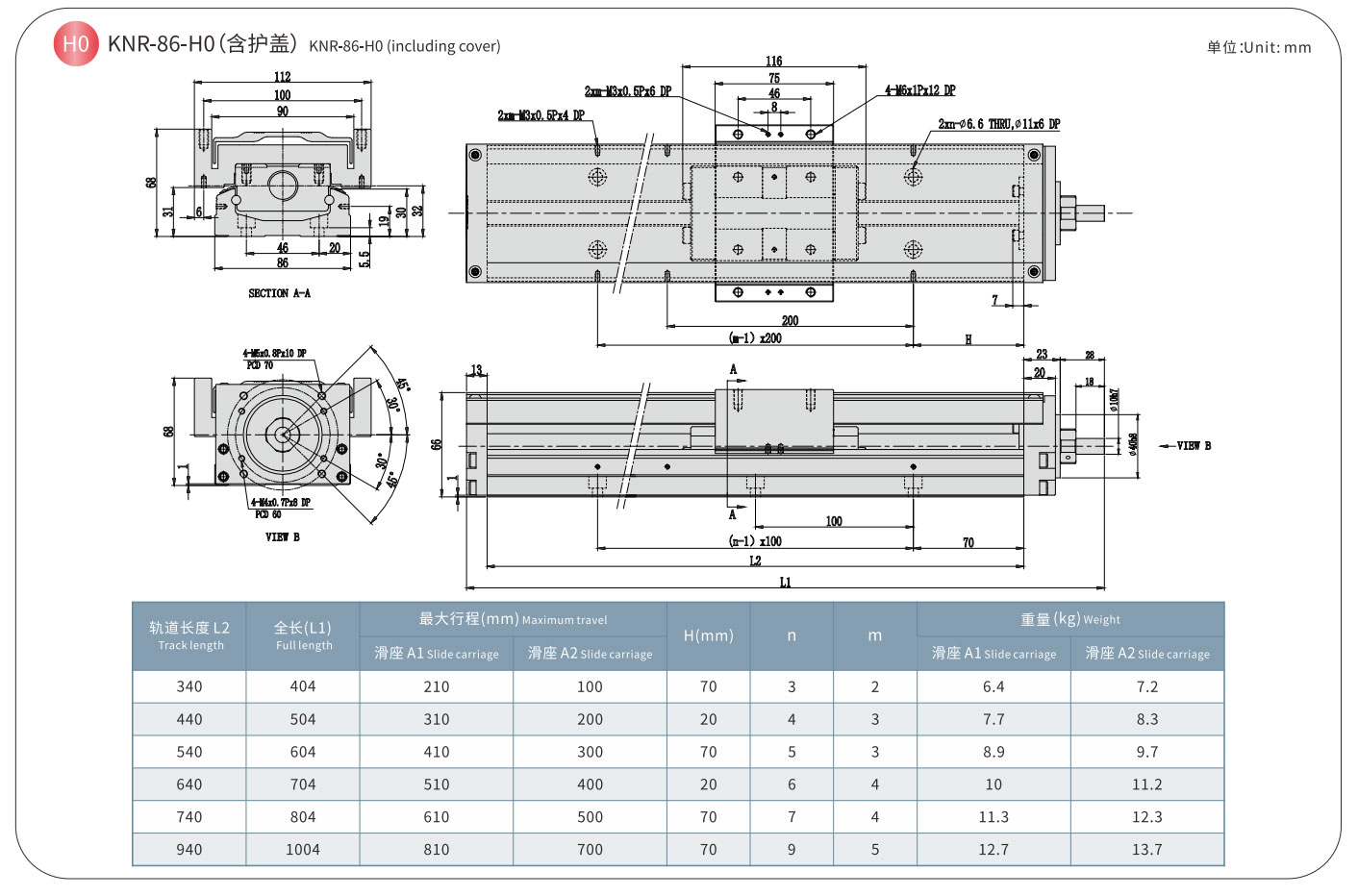
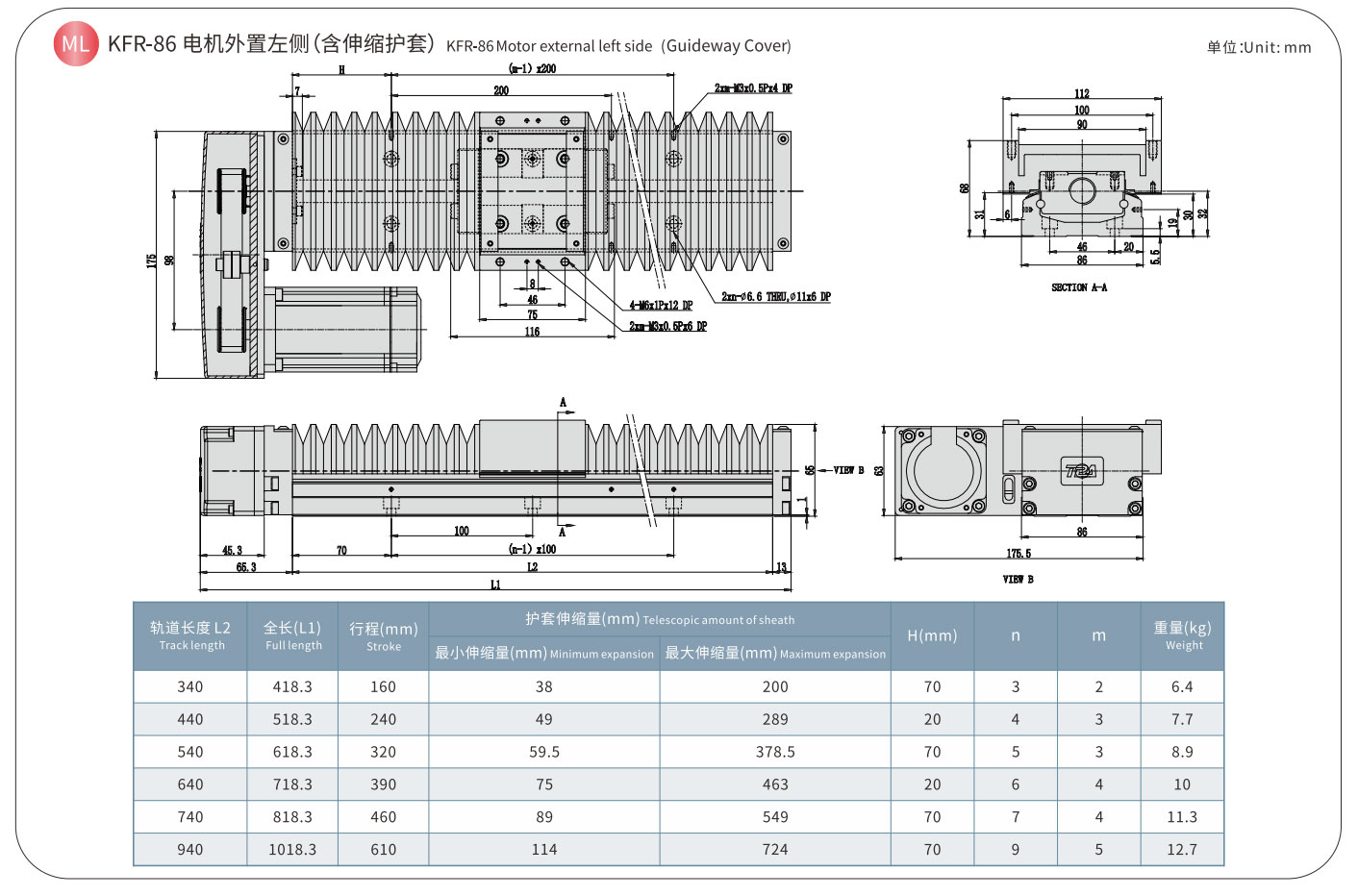
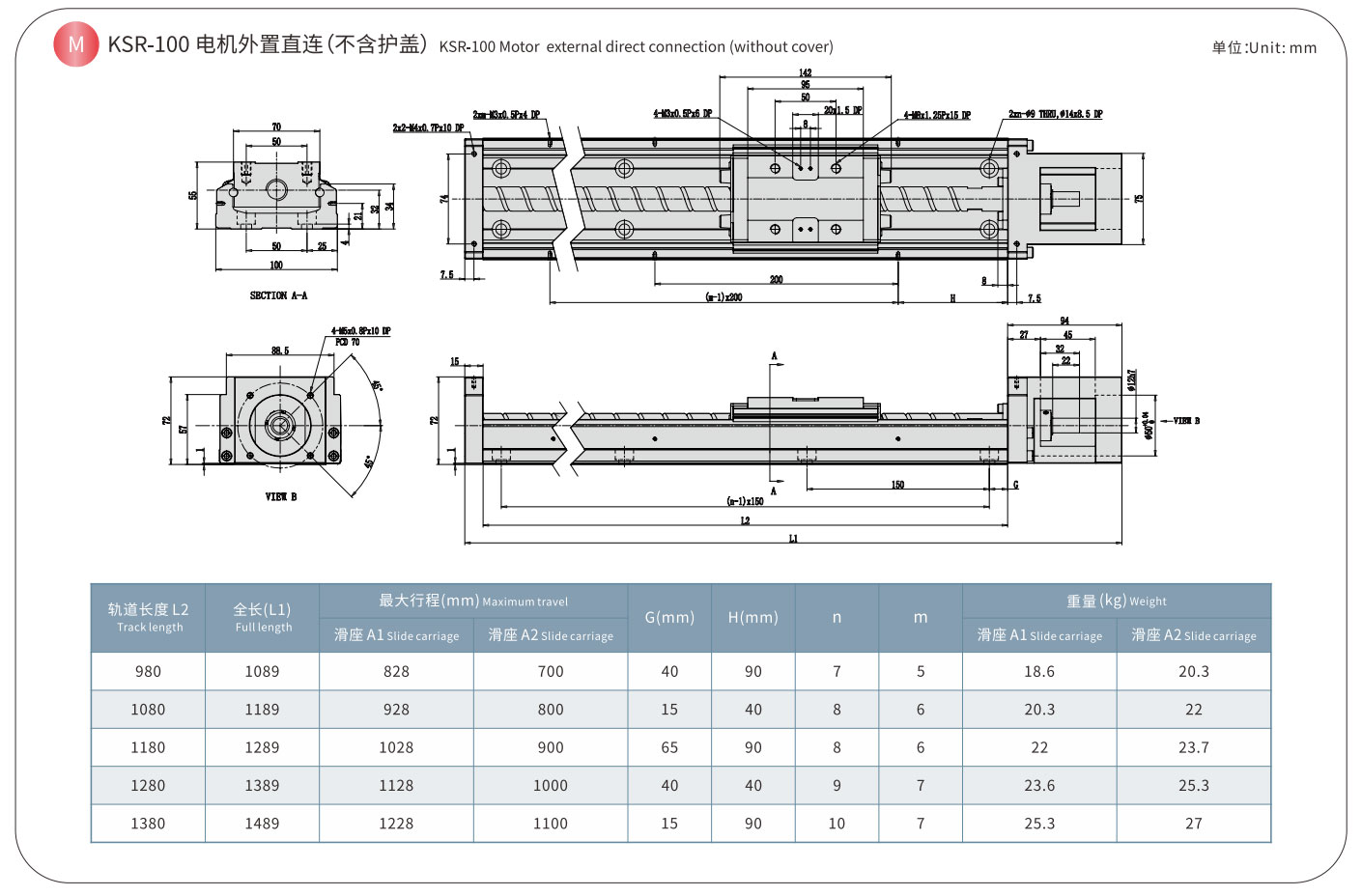
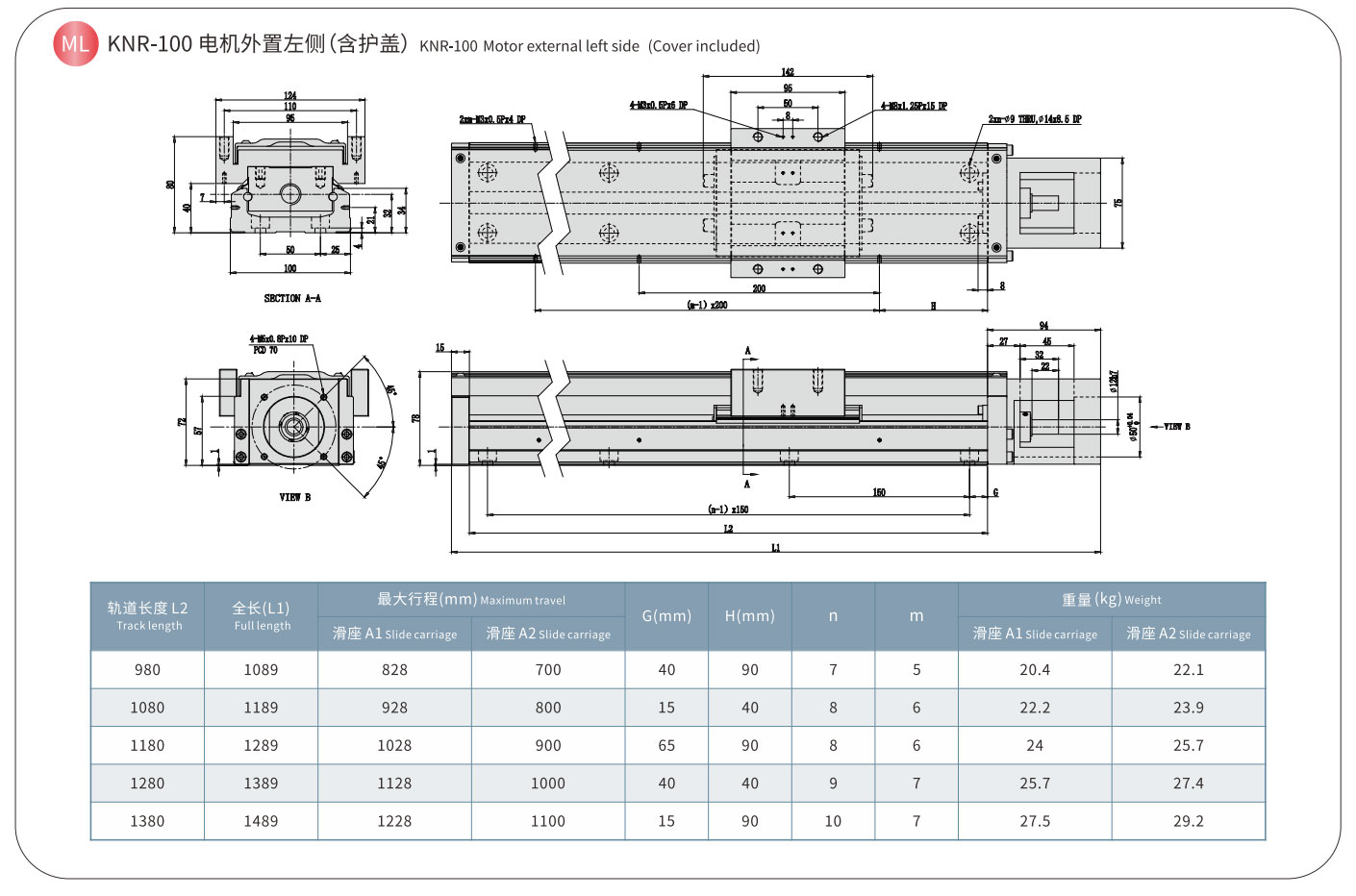
Robot jednoosiowy serii KK, opracowany przez TPA ROBOT, wykorzystuje częściowo utwardzaną stalową prowadnicę w kształcie litery U, aby znacznie zwiększyć wytrzymałość robota i nośność. Ze względu na różne środowiska, w naszej ofercie znajdują się trzy typy robotów liniowych serii KSR, KNR i KFR, w zależności od rodzaju zastosowanej osłony.
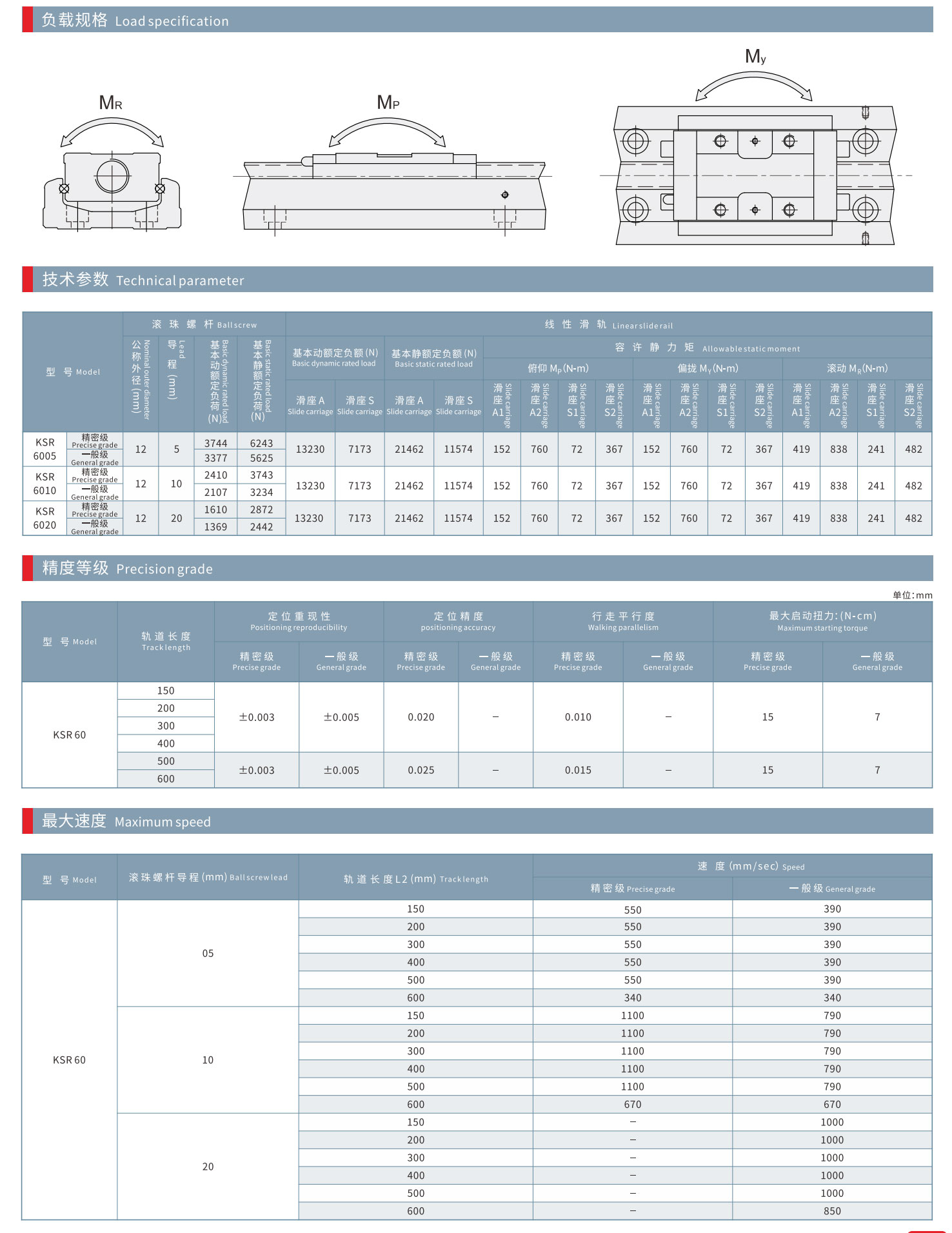
W przypadku systemu powrotnego między torem a suwakiem powierzchnia styku między kulką a rowkiem kuli przyjmuje 2-rzędową konstrukcję zębów Goethego z kątem zwilżania 45 stopni, dzięki czemu ramię robota osiowego może przenosić równą nośność w czterech kierunkach .
Jednocześnie jako konstrukcję przekładni zastosowano precyzyjną śrubę kulową, a tor w kształcie litery U współpracuje ze zoptymalizowaną konstrukcją, dzięki czemu robot osi KK ma niezrównaną precyzję, a jego powtarzalna dokładność pozycjonowania może osiągnąć ± 0,003 mm.
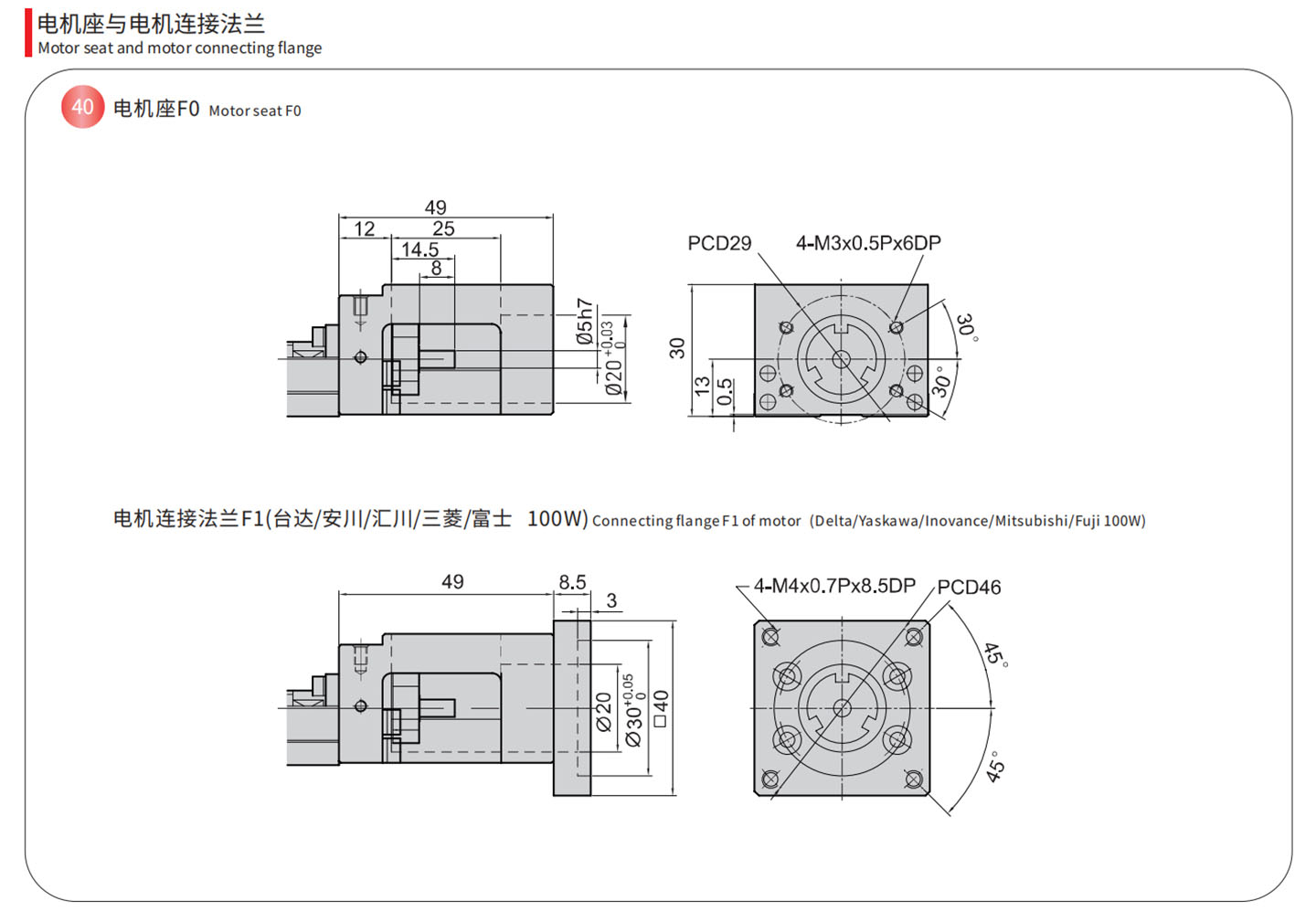
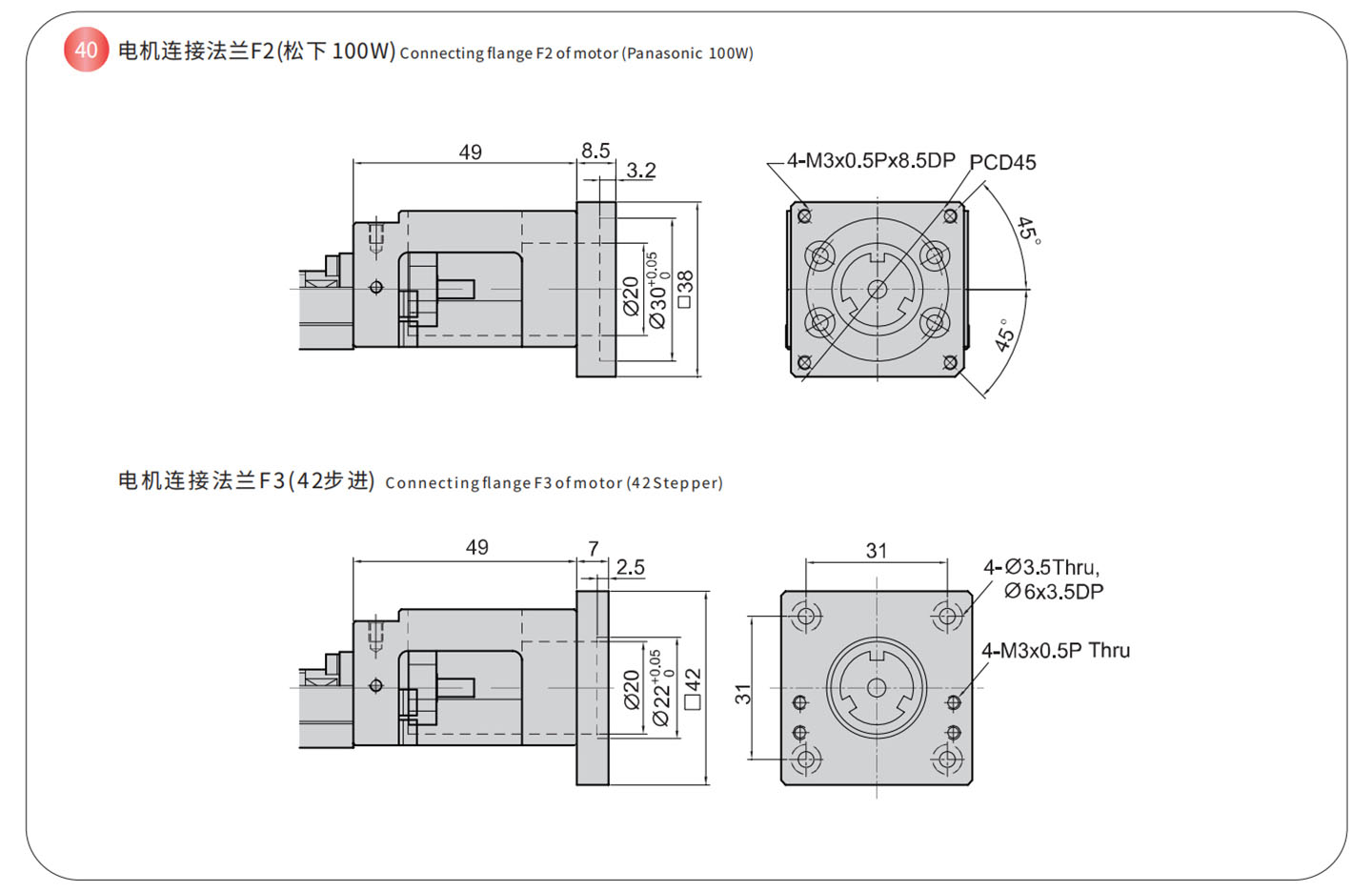
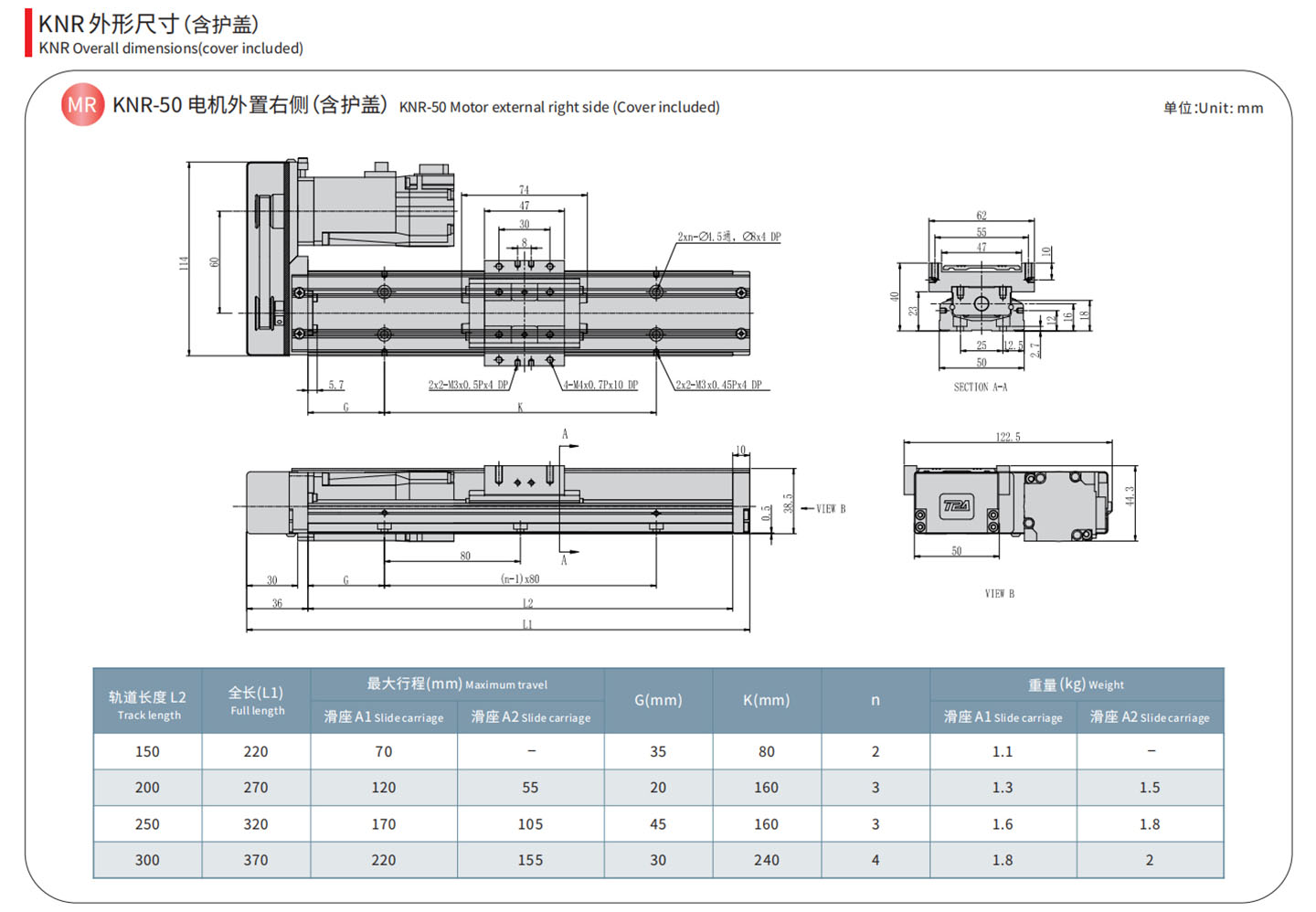
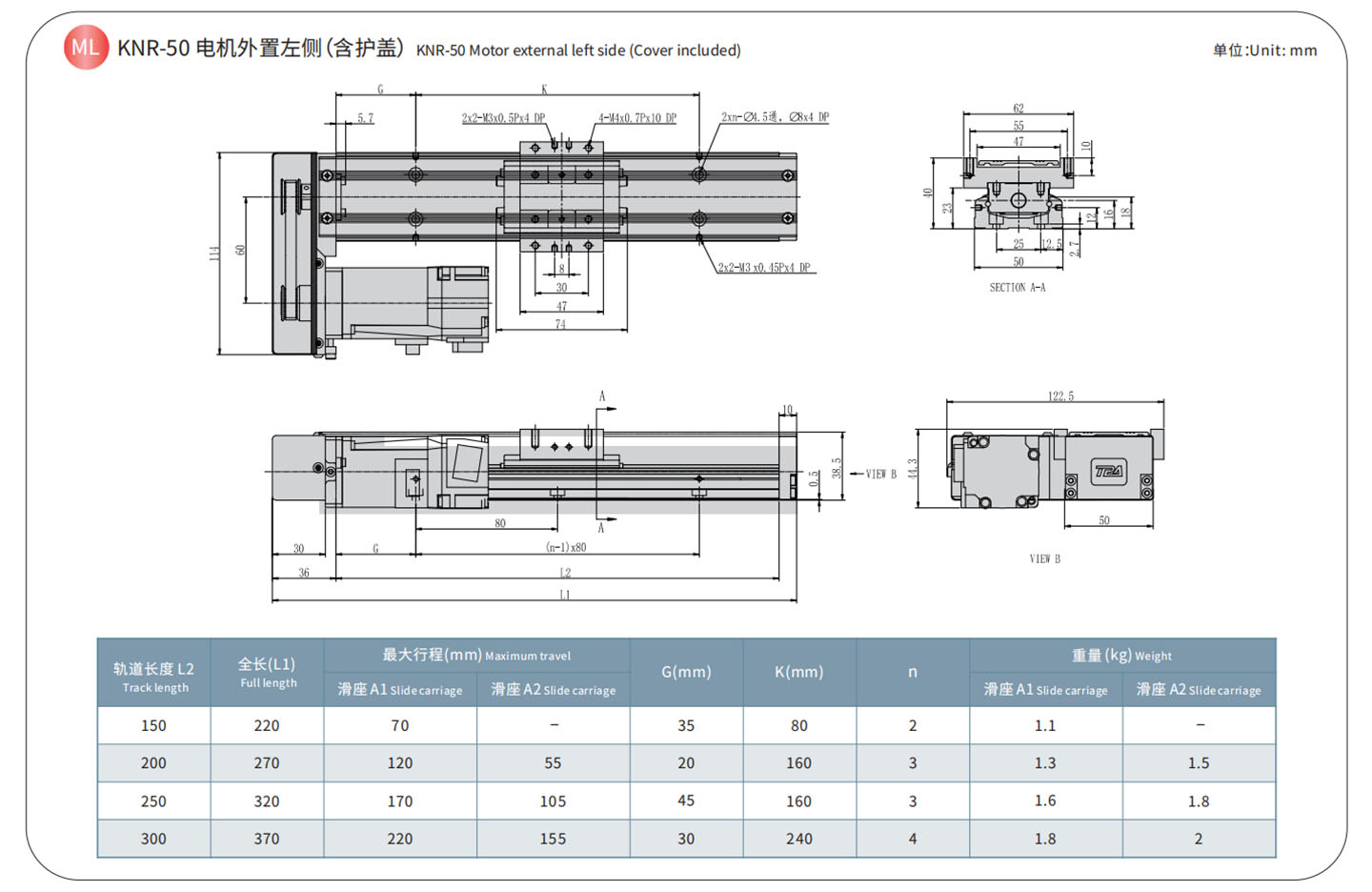
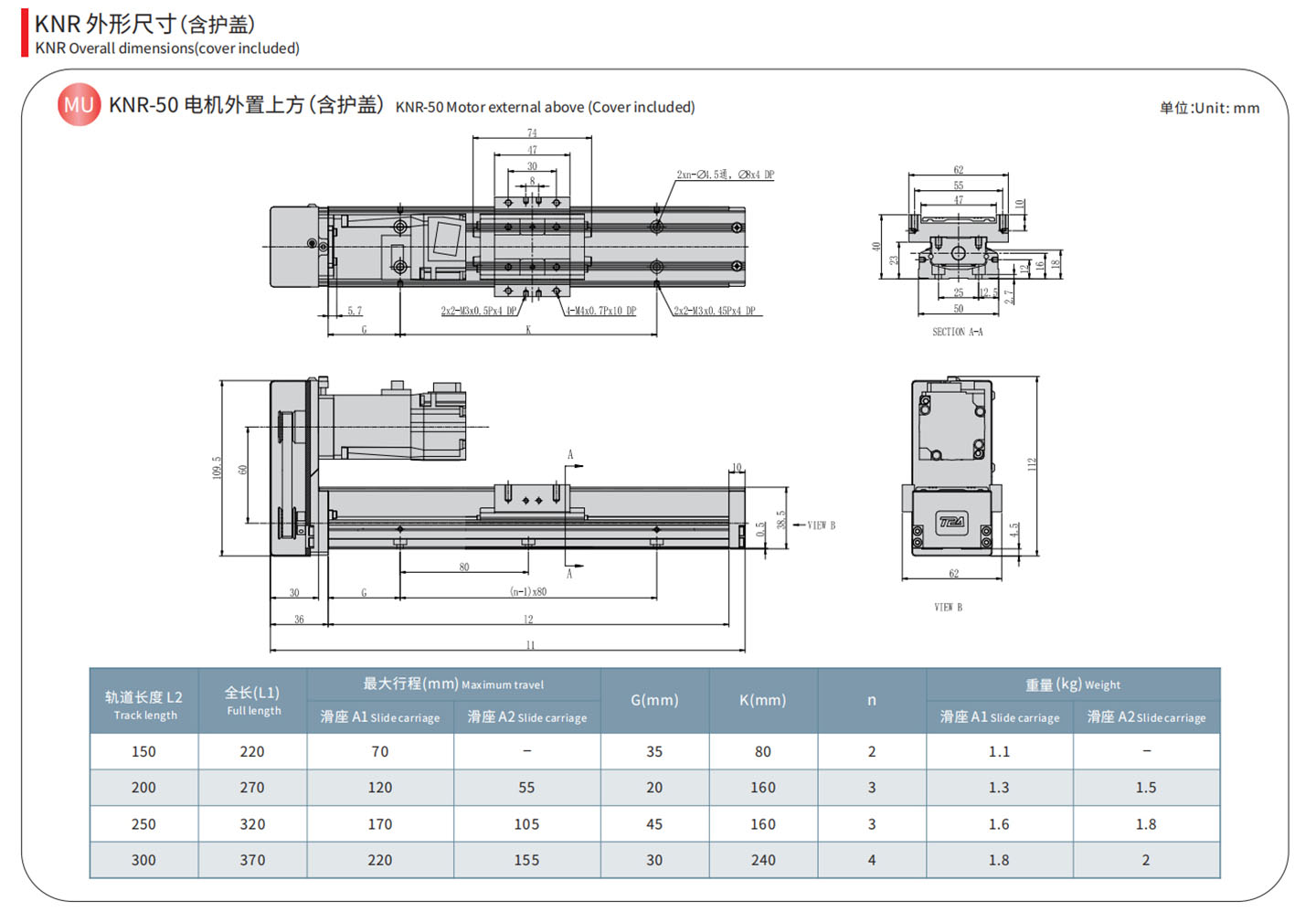
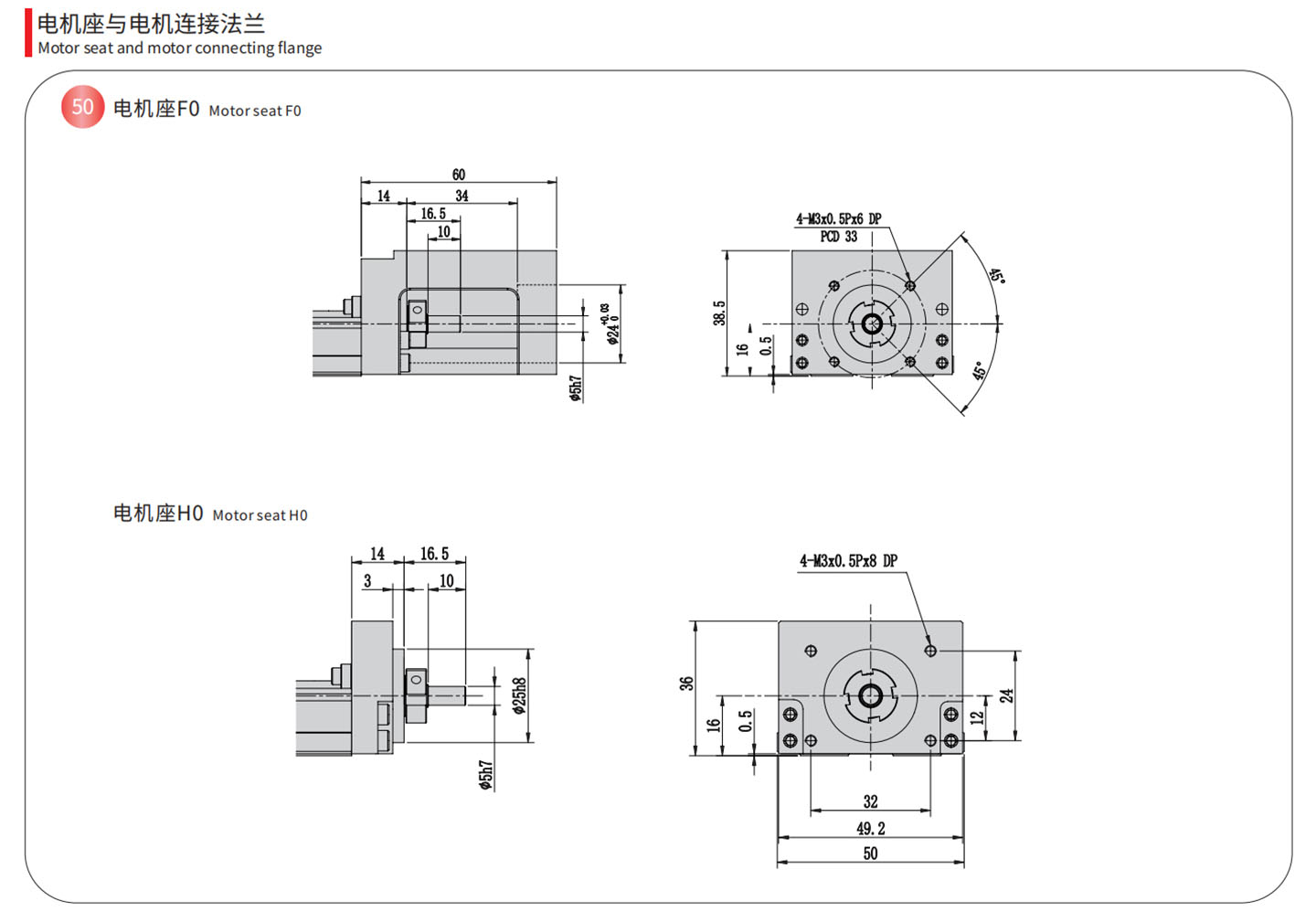
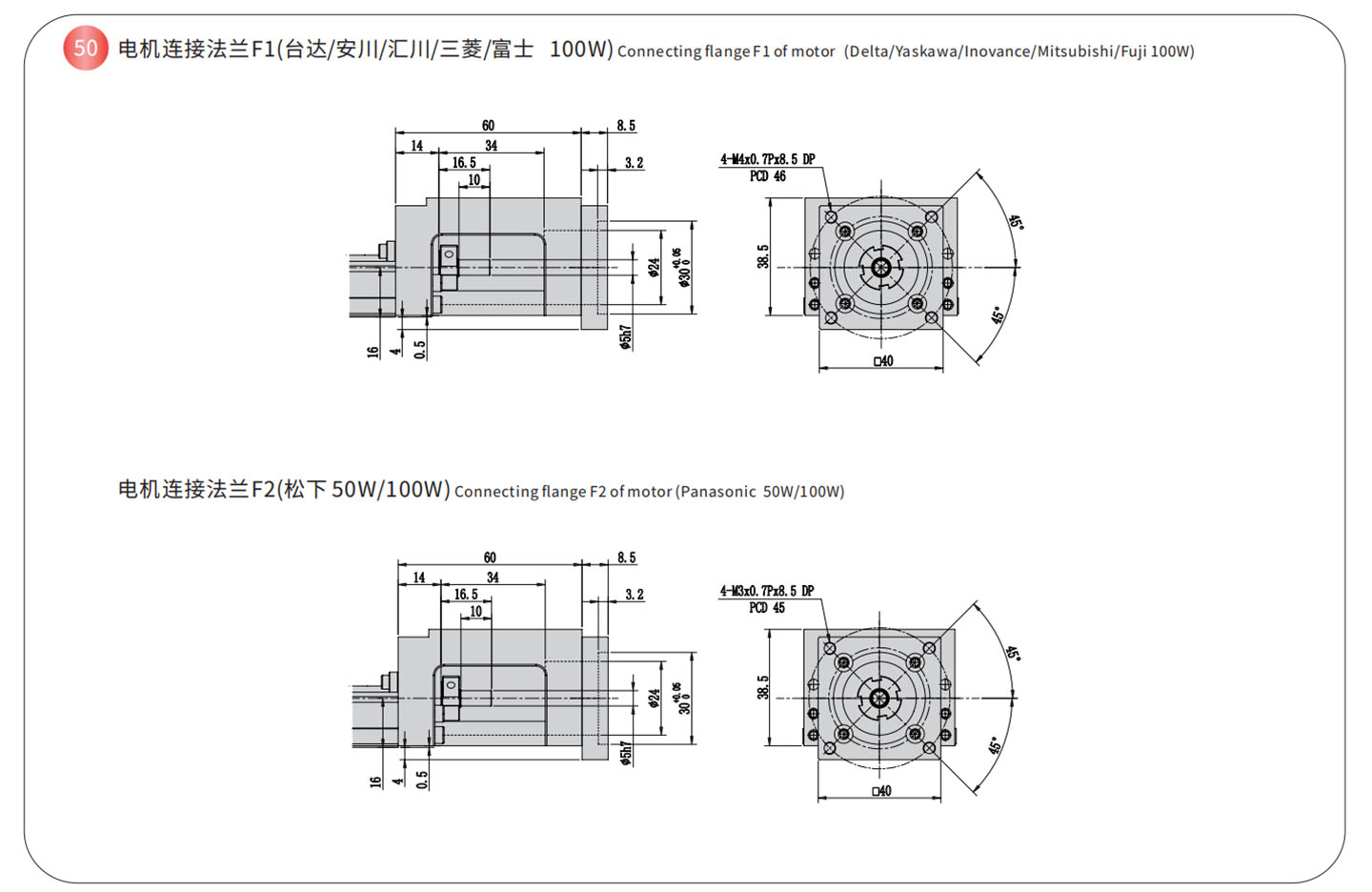
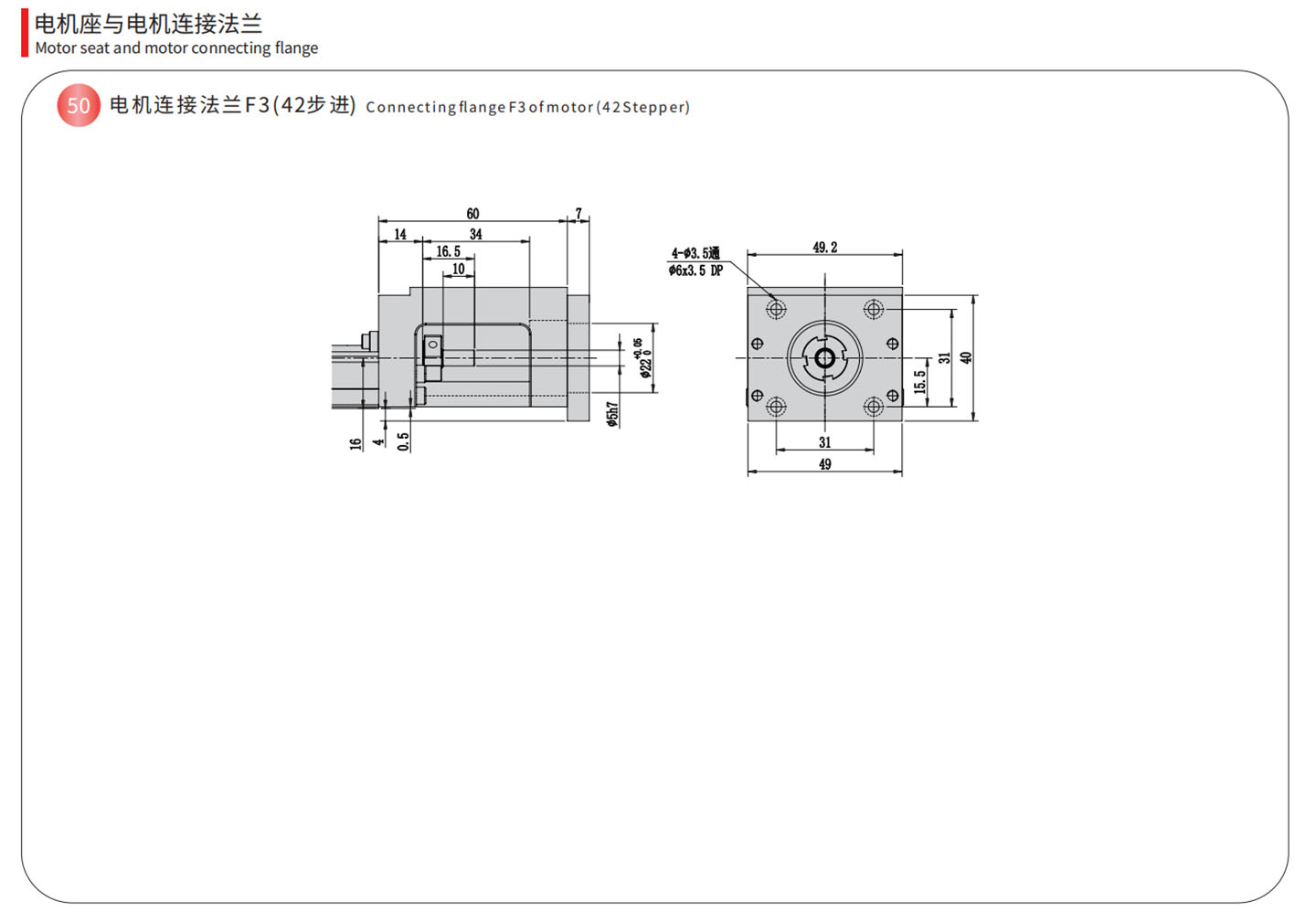
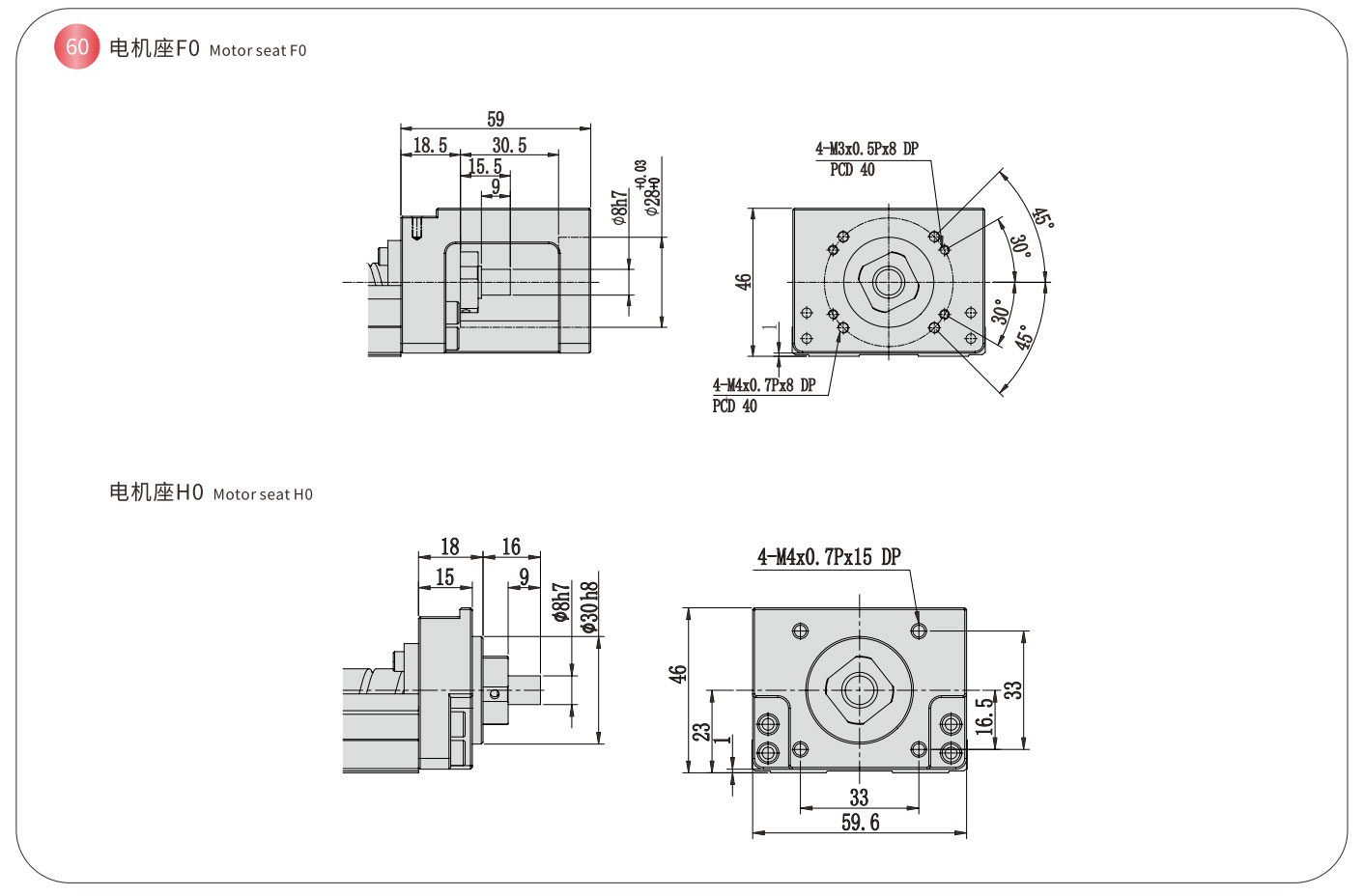
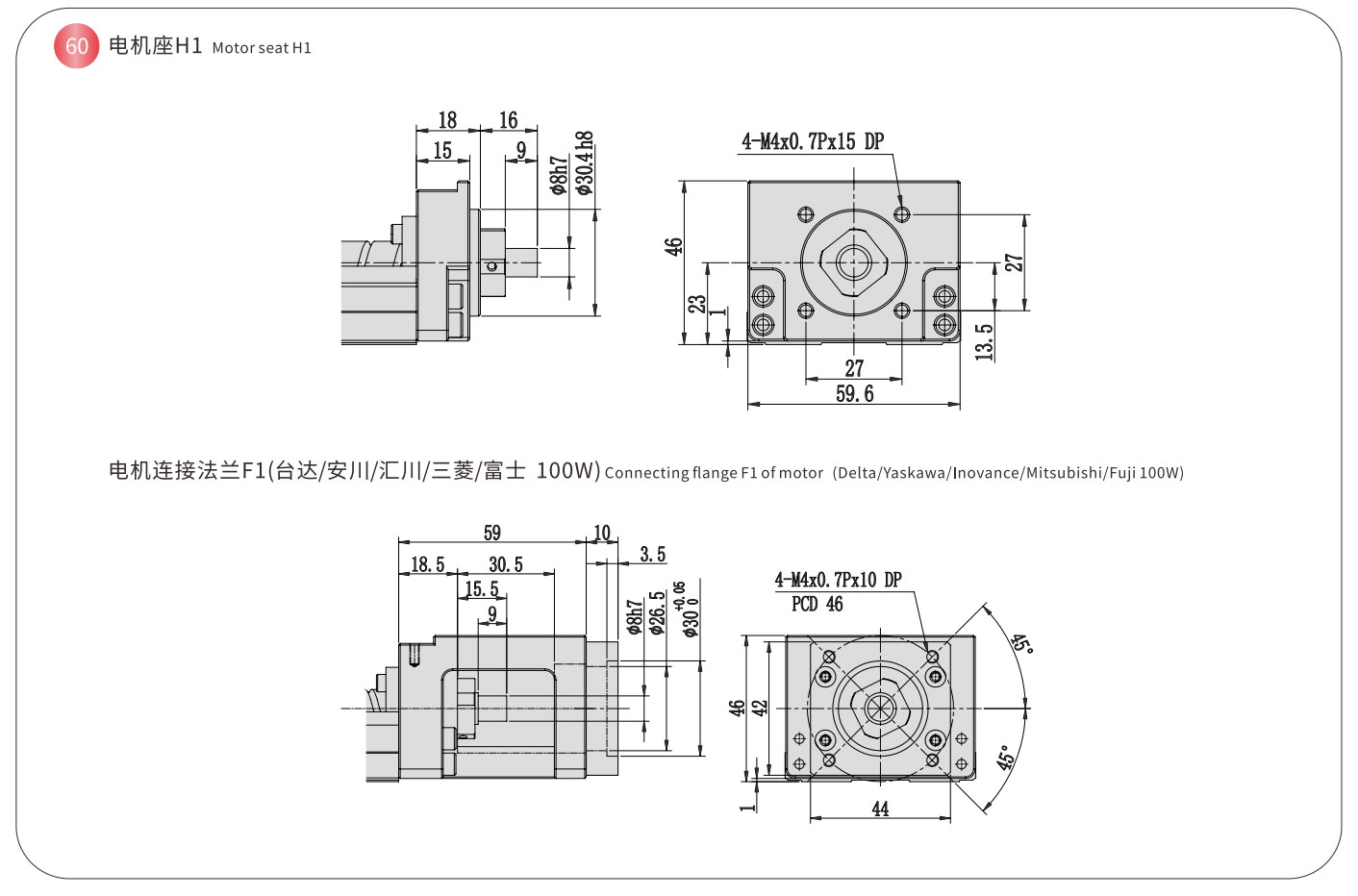
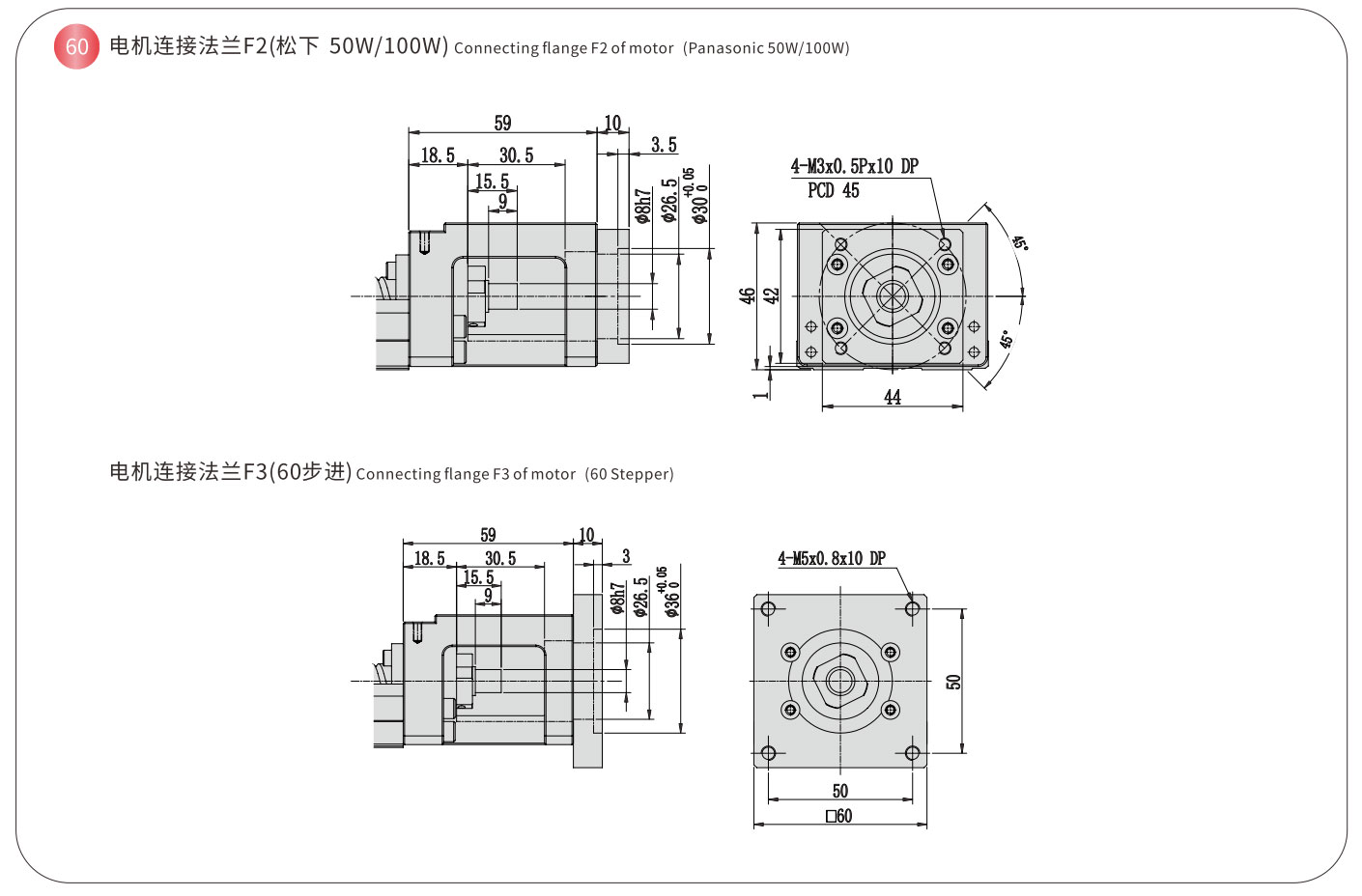
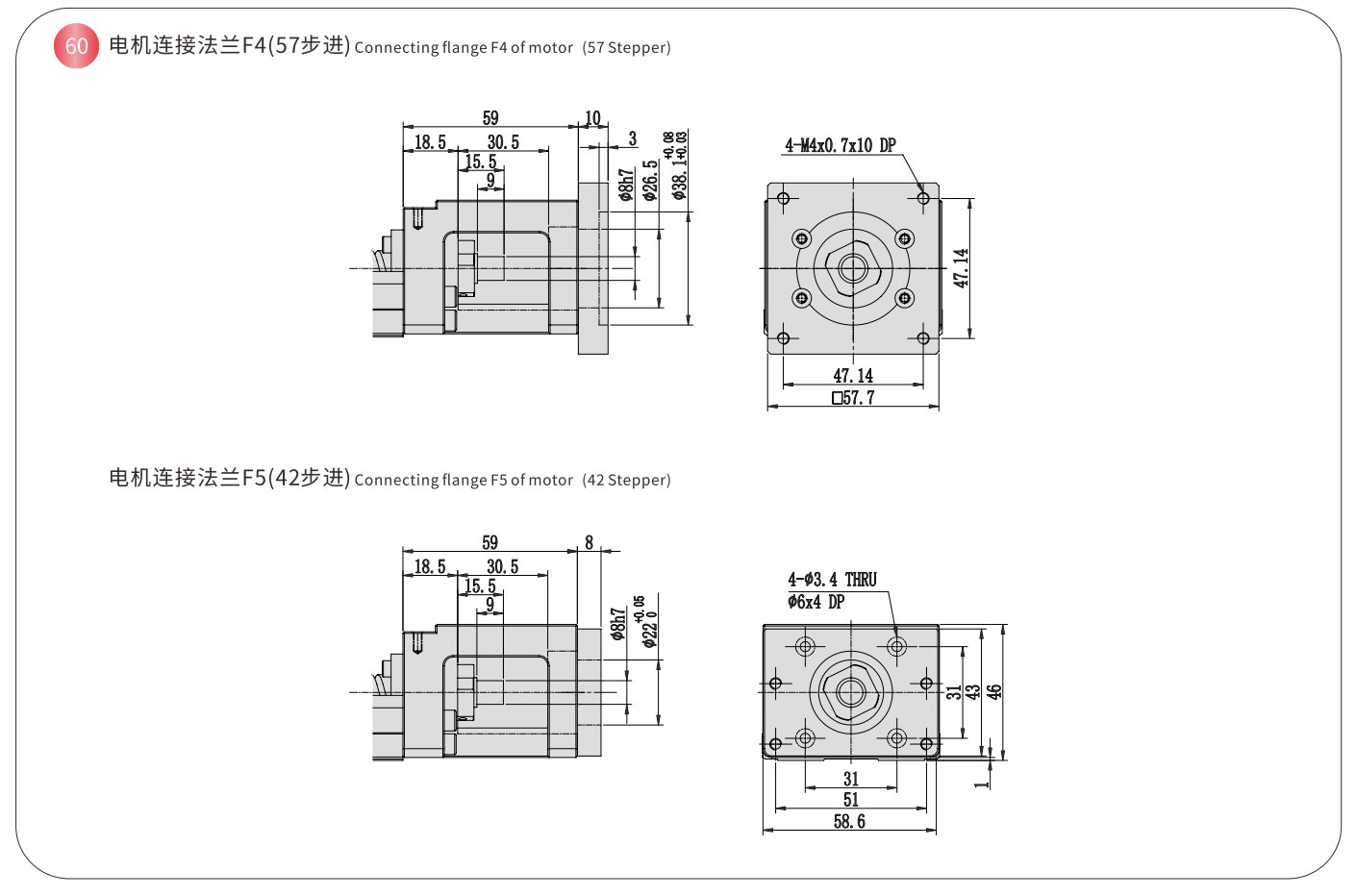
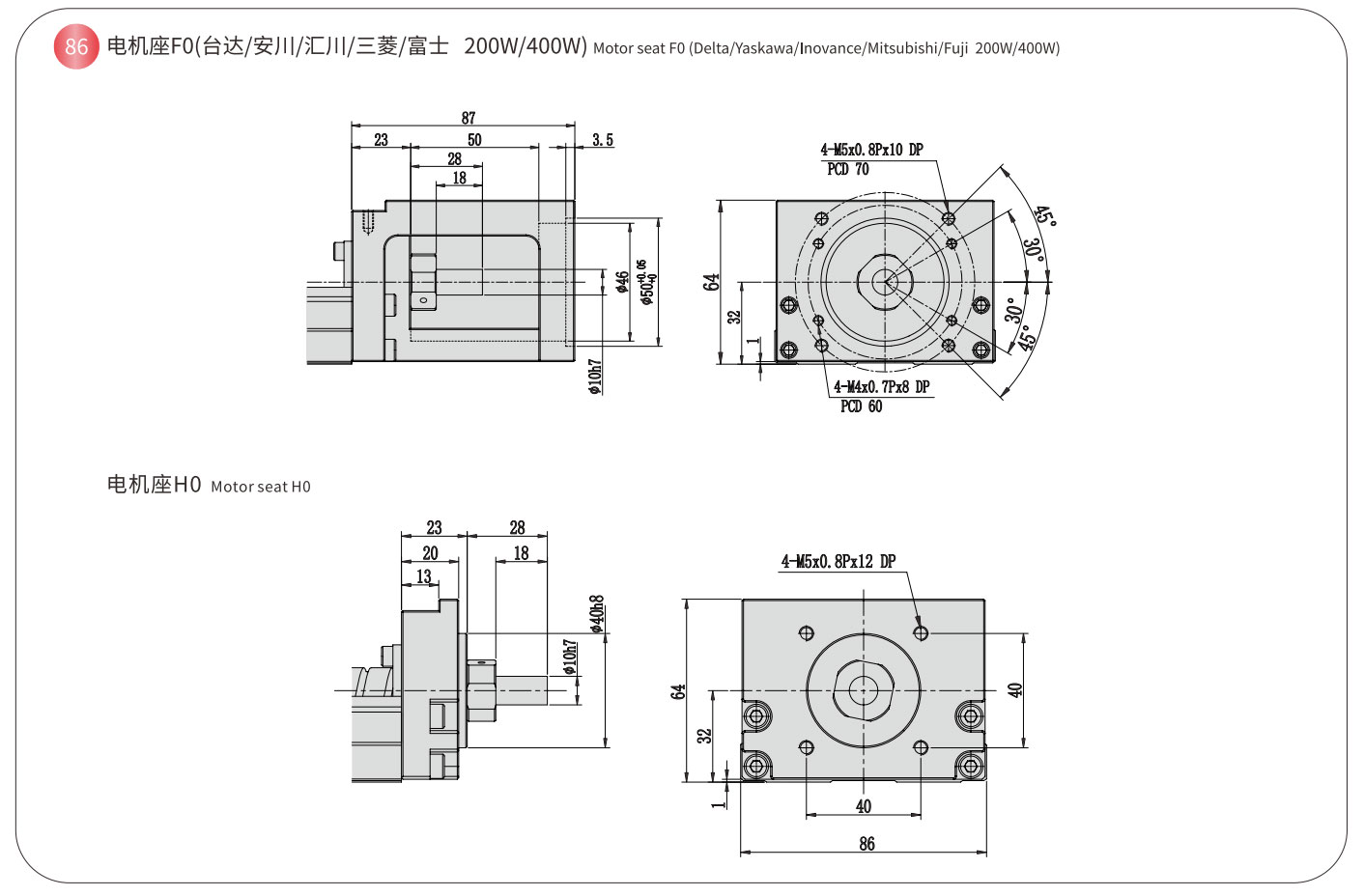
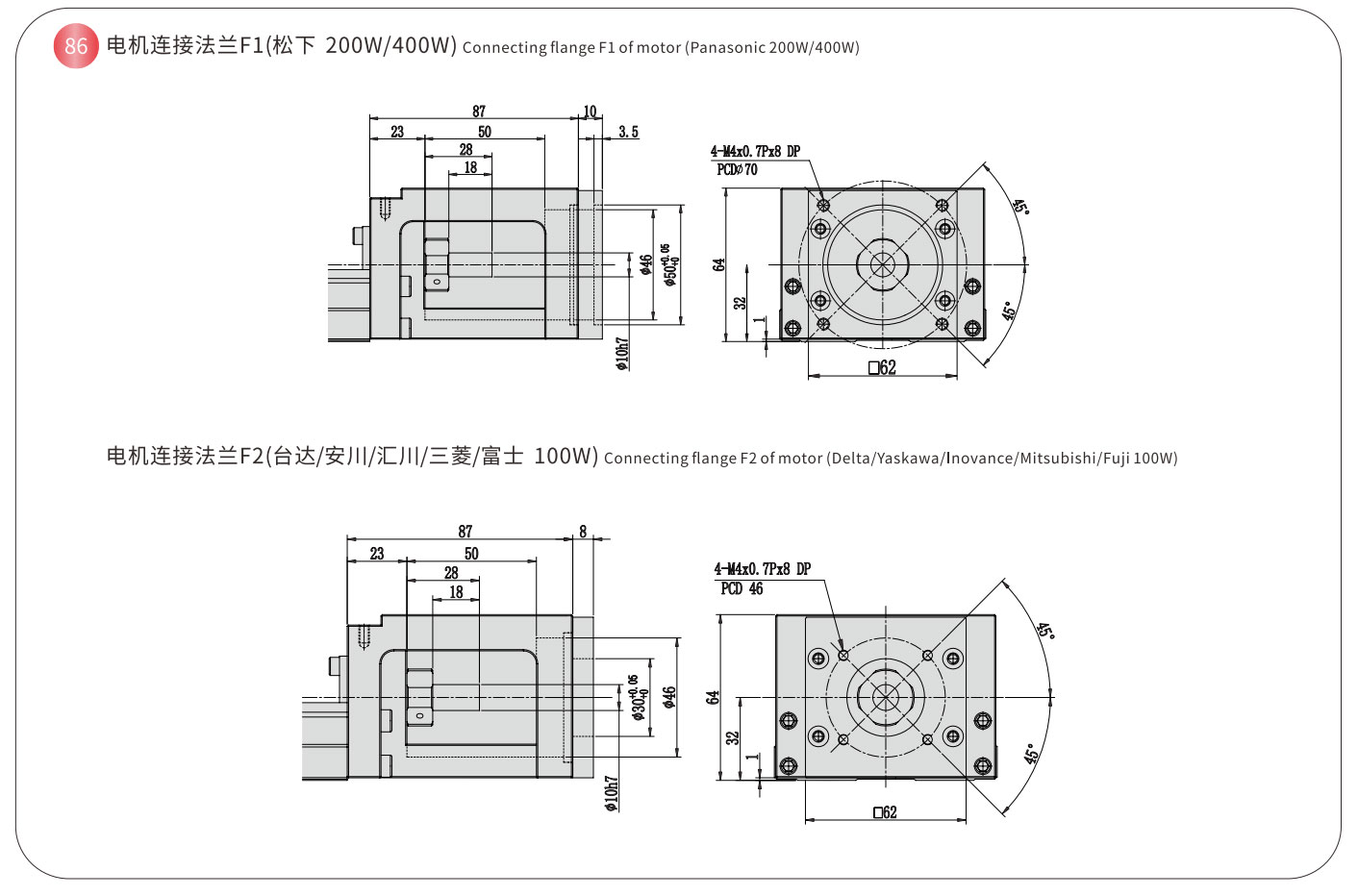
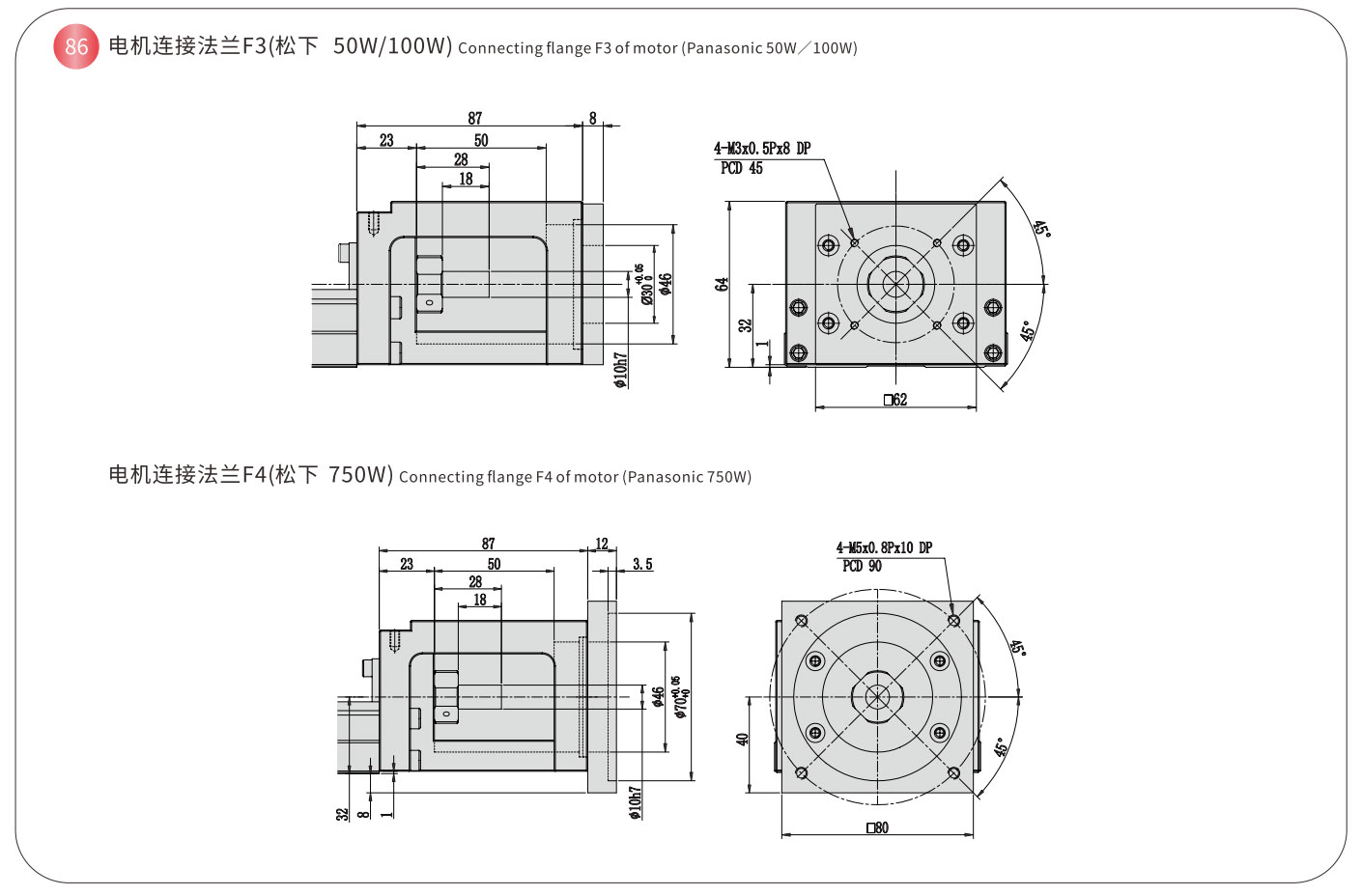
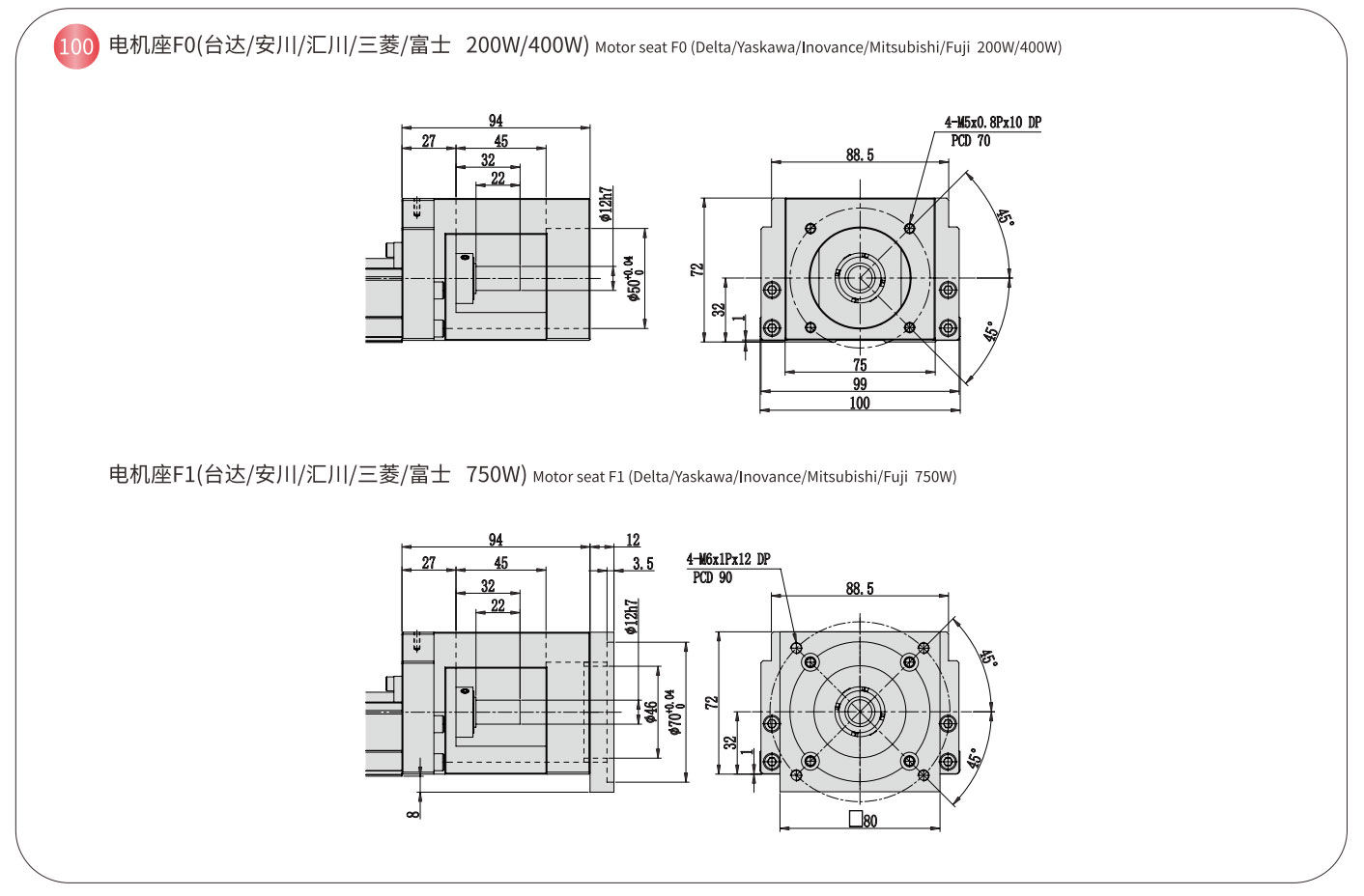
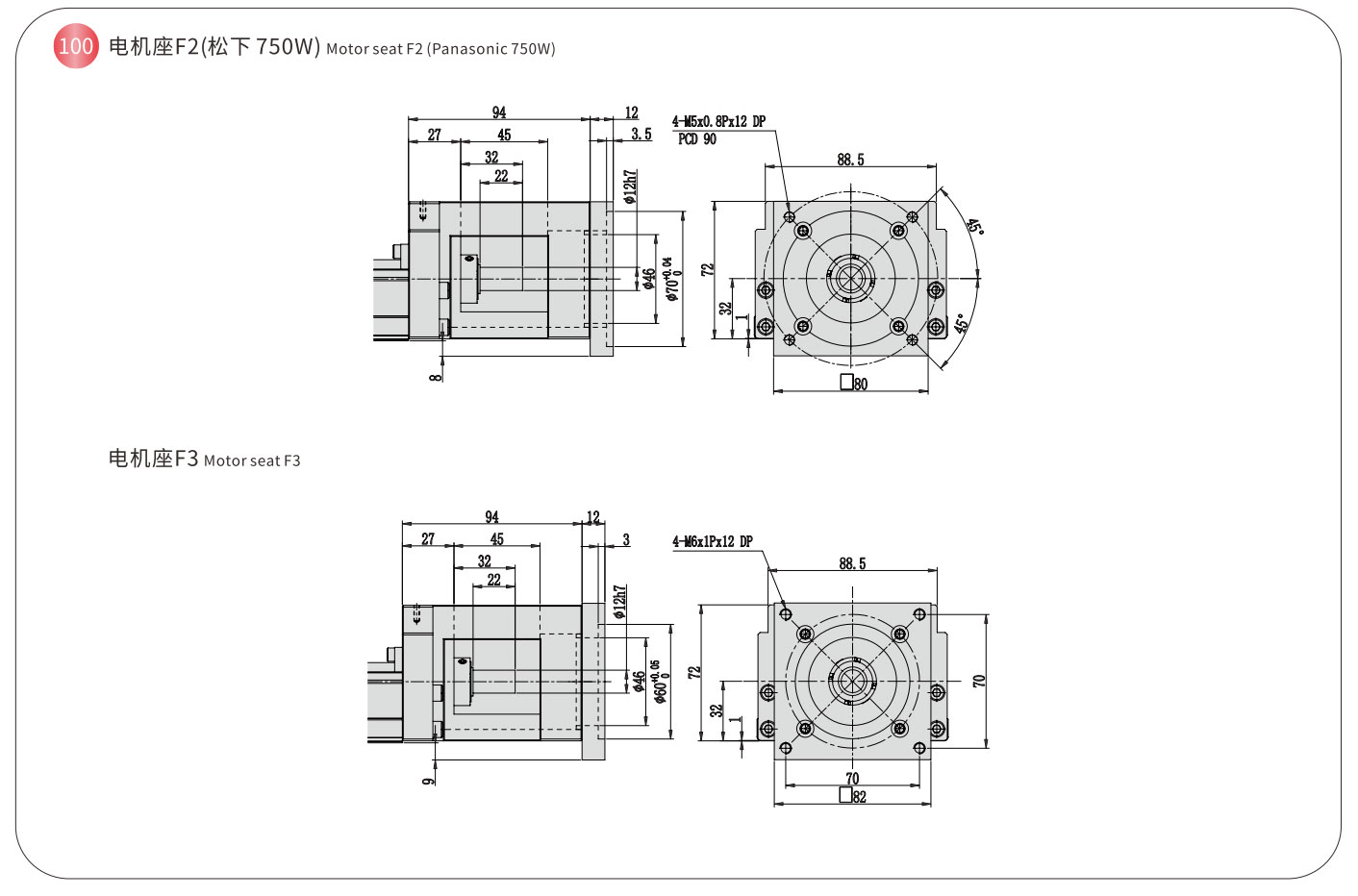
Przy tych samych warunkach obciążenia nasz robot jednoosiowy serii KK jest mniejszy, zapewniamy standardowe otwory gwintowane w stalowej podstawie i suwaku, a nasza płyta adaptera silnika może zapewnić do 8 metod instalacji silnika, co oznacza, że można go łatwo zmontować dowolny kartezjański system robotyczny. Dlatego roboty jednoosiowe serii KK są szeroko stosowane w obsłudze płytek krzemowych, automatycznym dozowaniu, przemyśle FPD, przemyśle automatyki medycznej, precyzyjnych przyrządach pomiarowych, stole przesuwnym, branży koordynacji liniowych stołów przesuwnych.

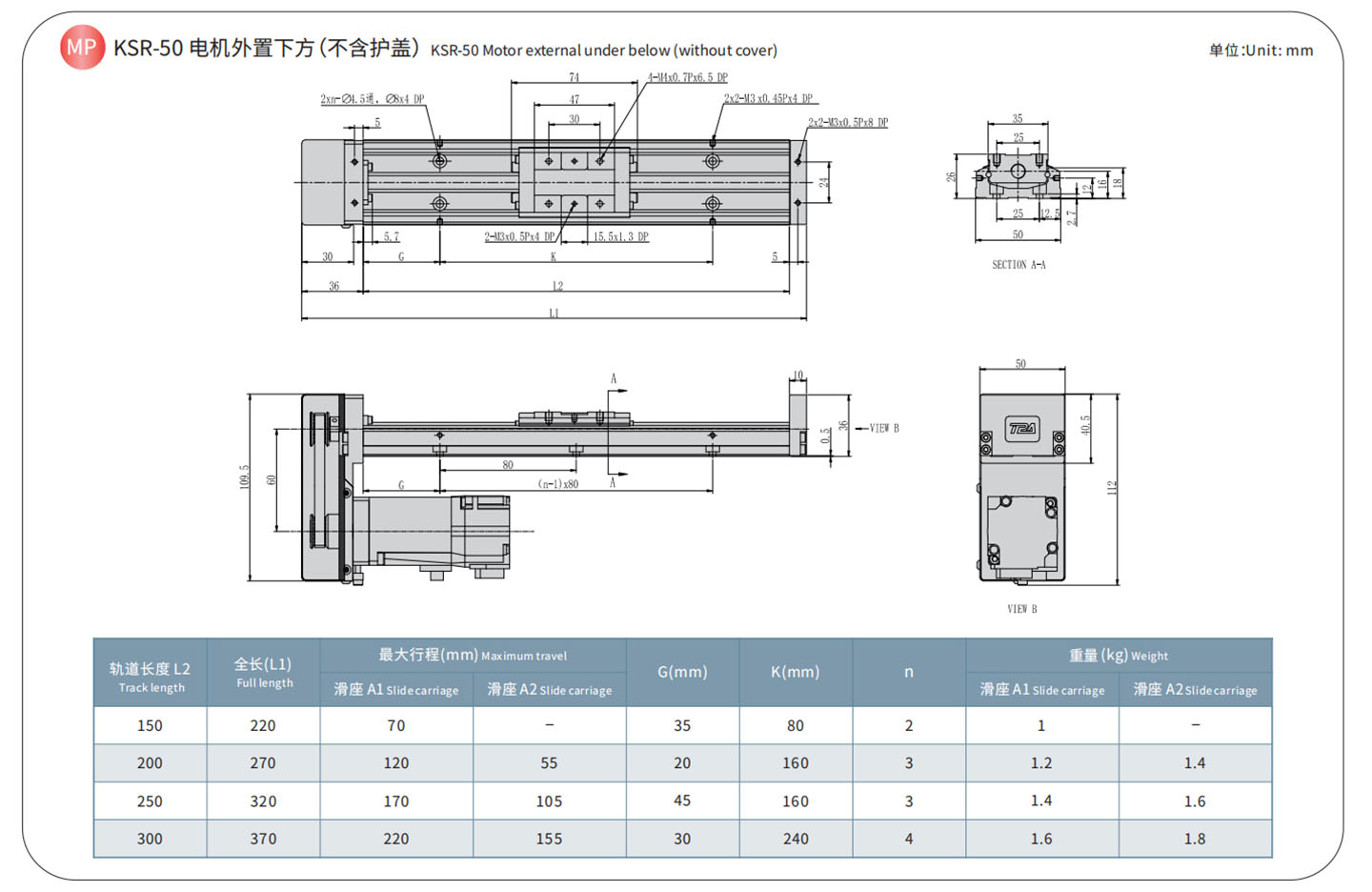
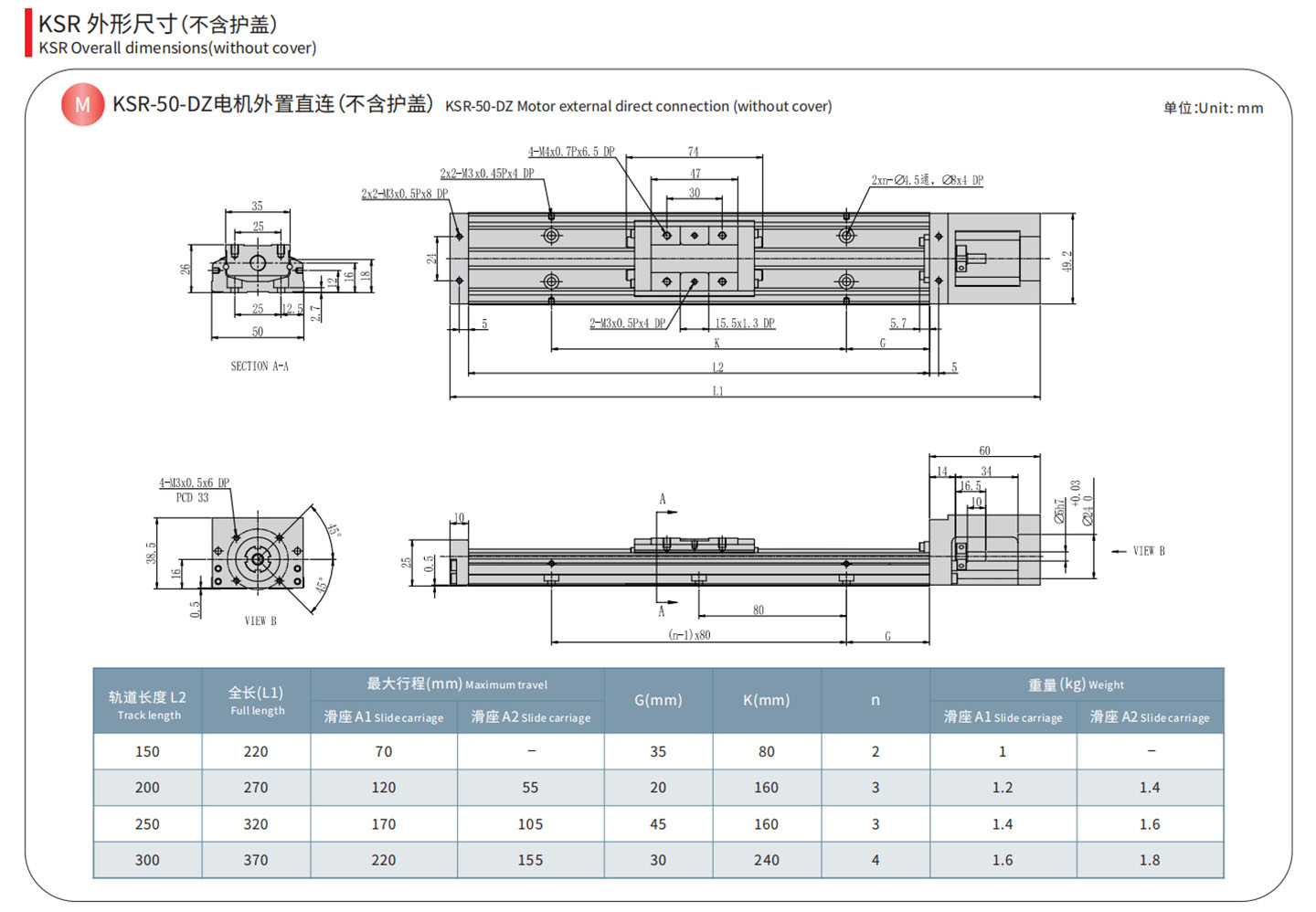
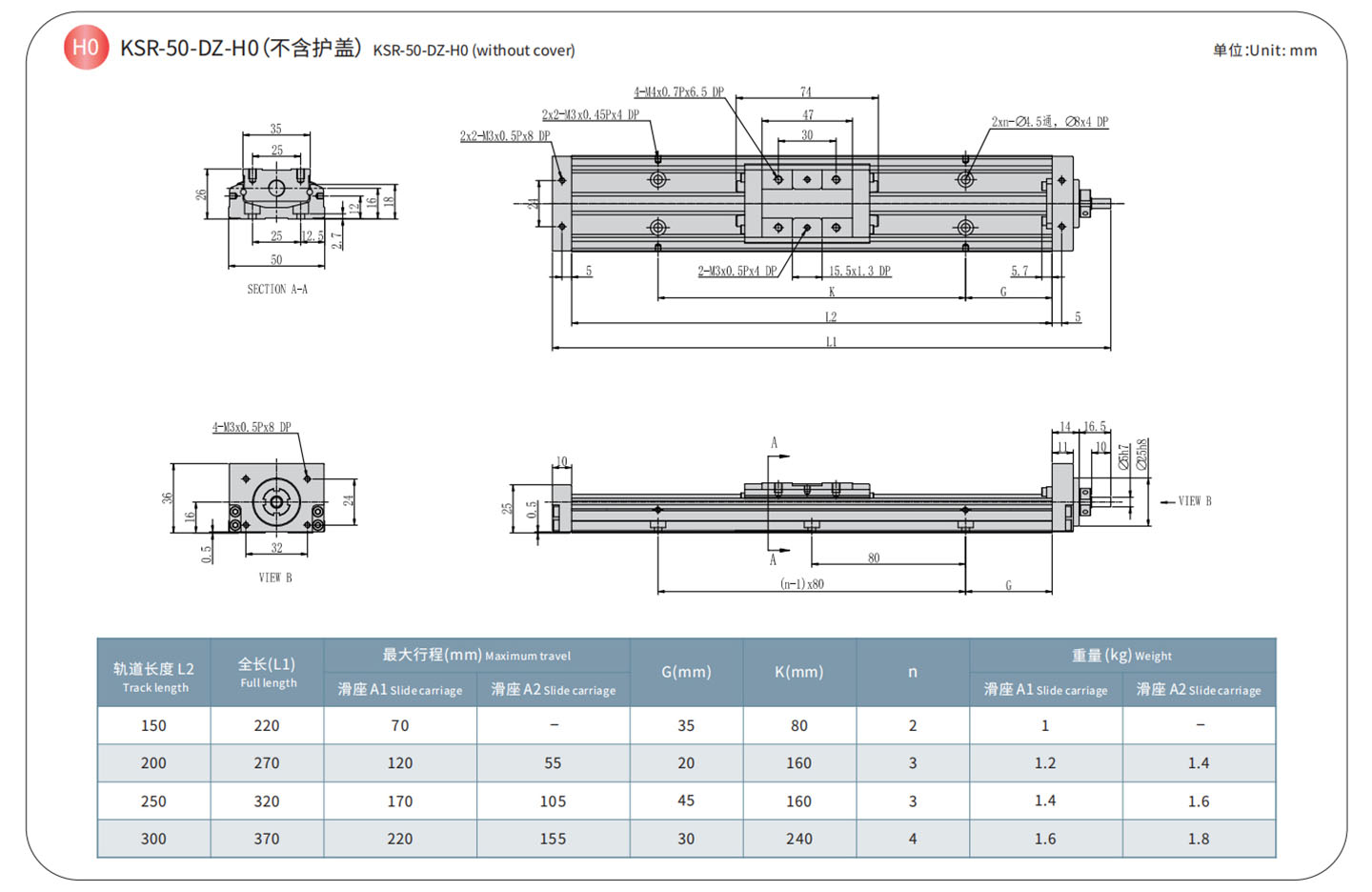
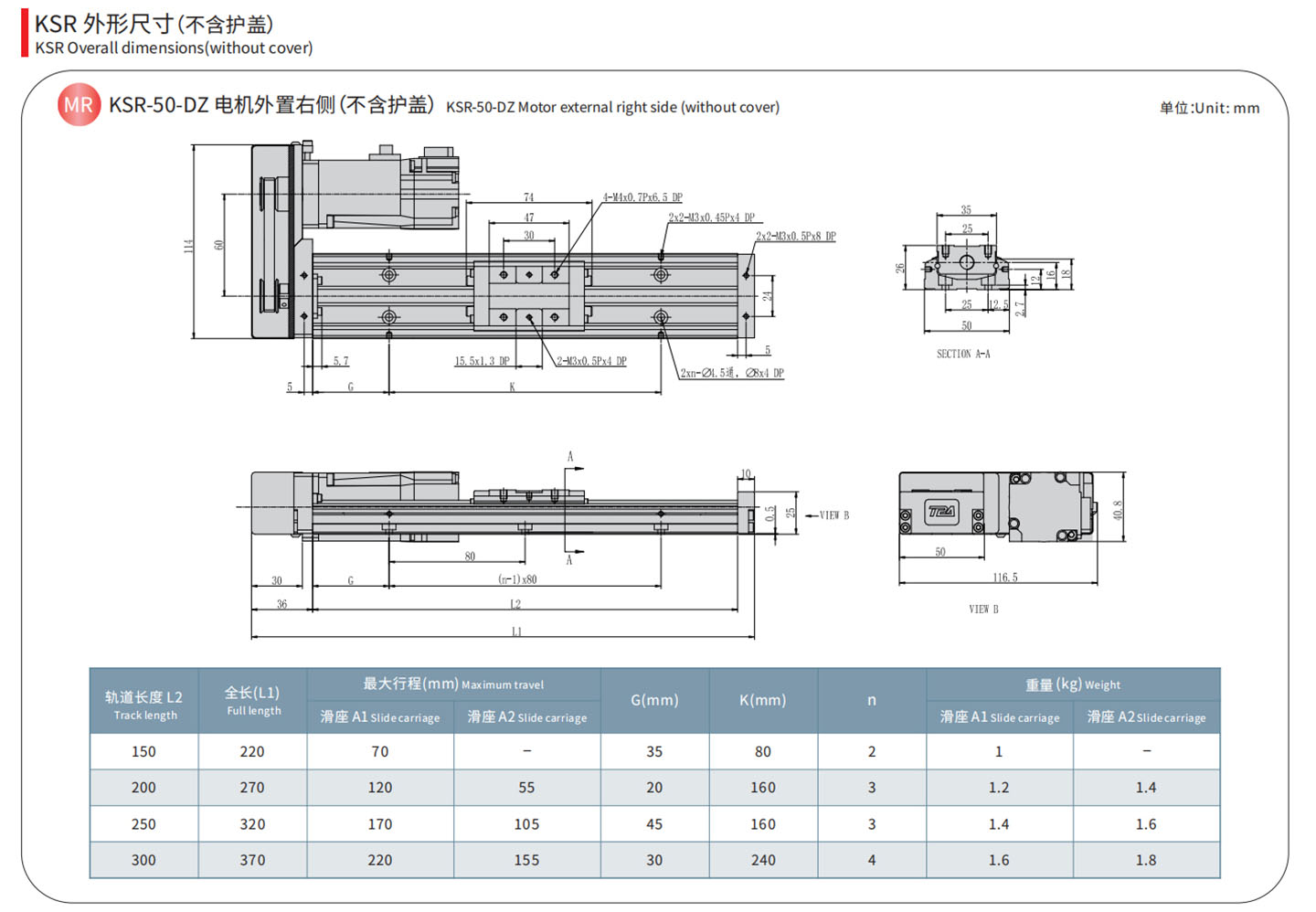
Seria KSR-KNR-KFR-KCR2

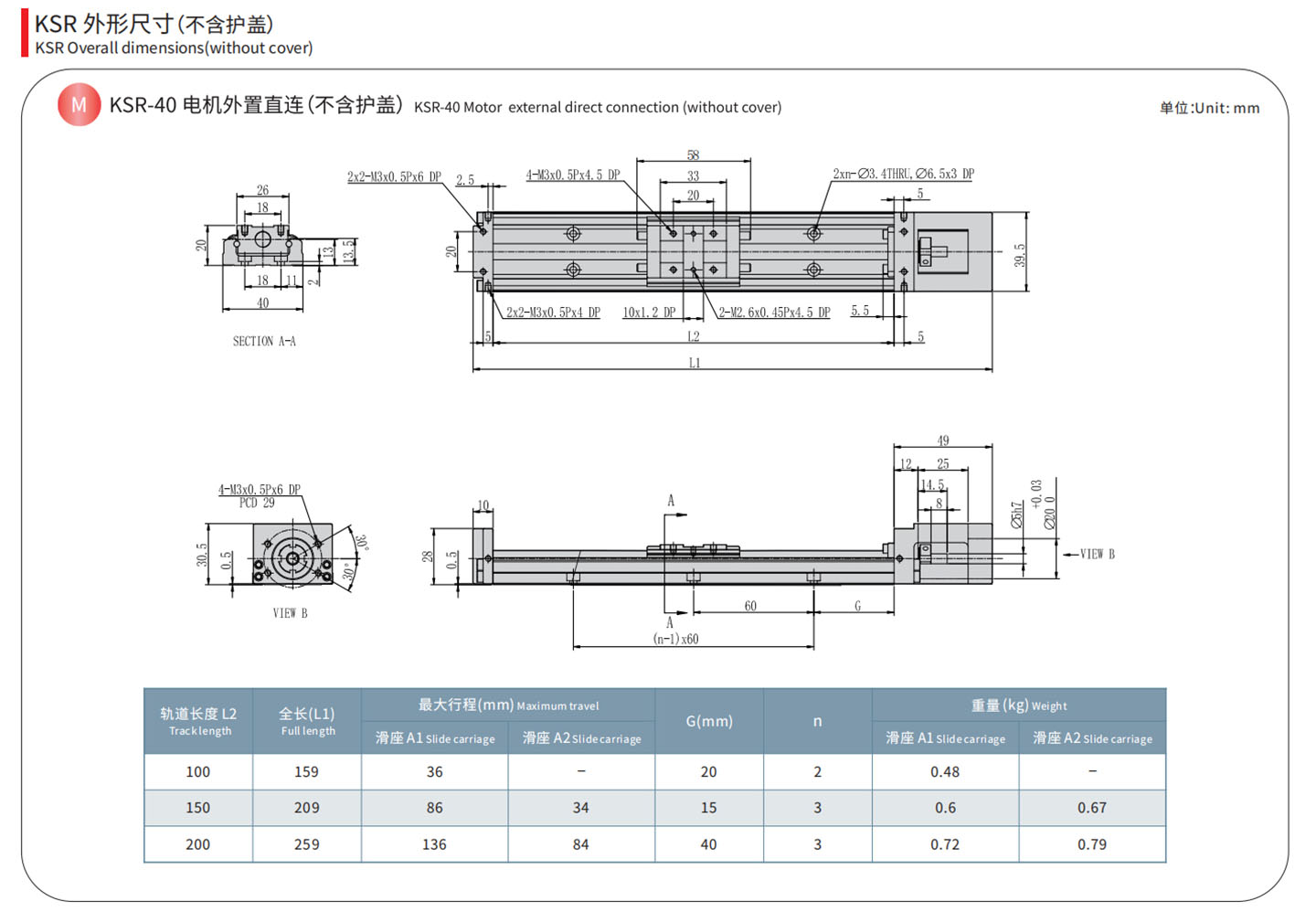
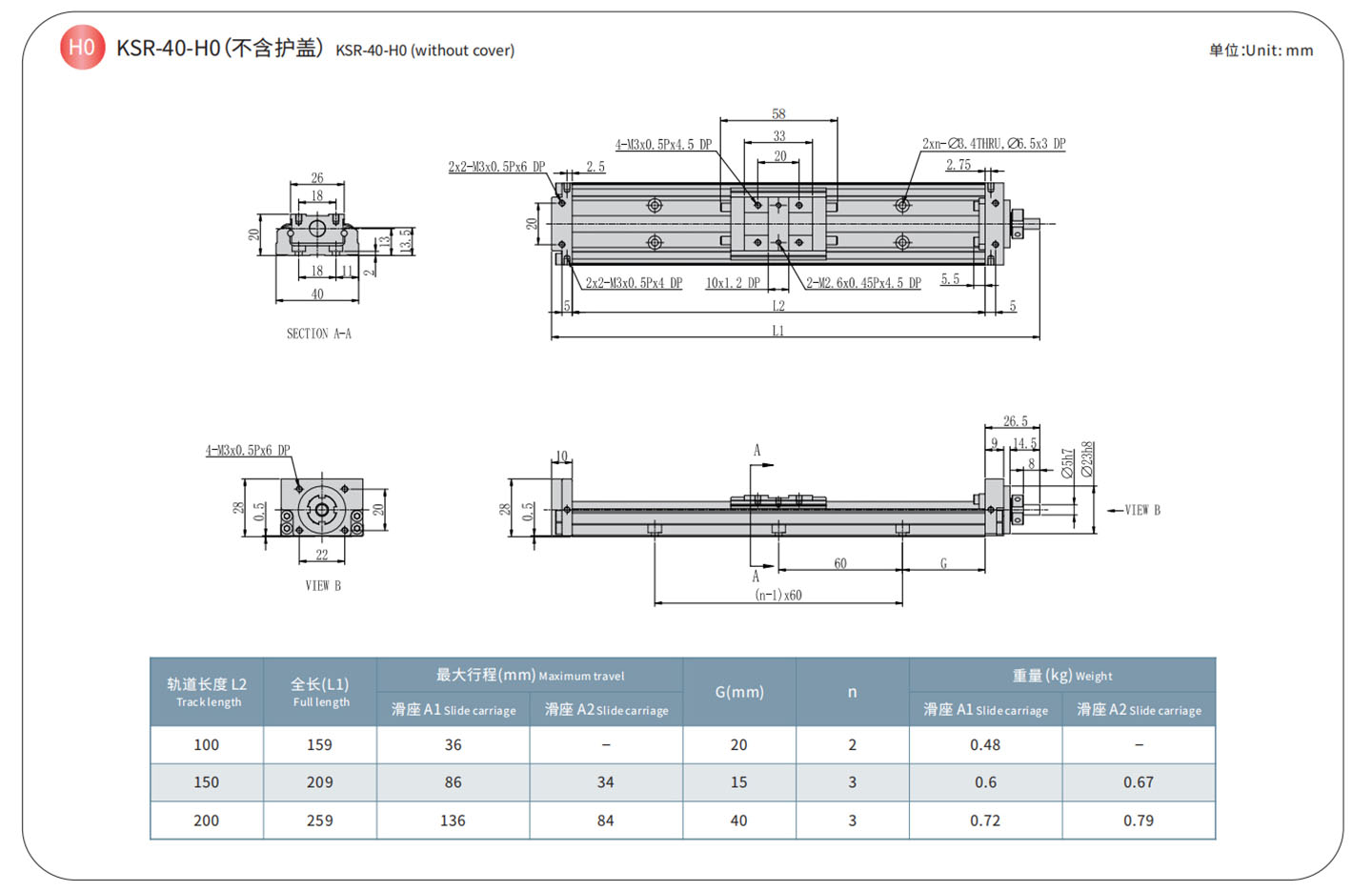
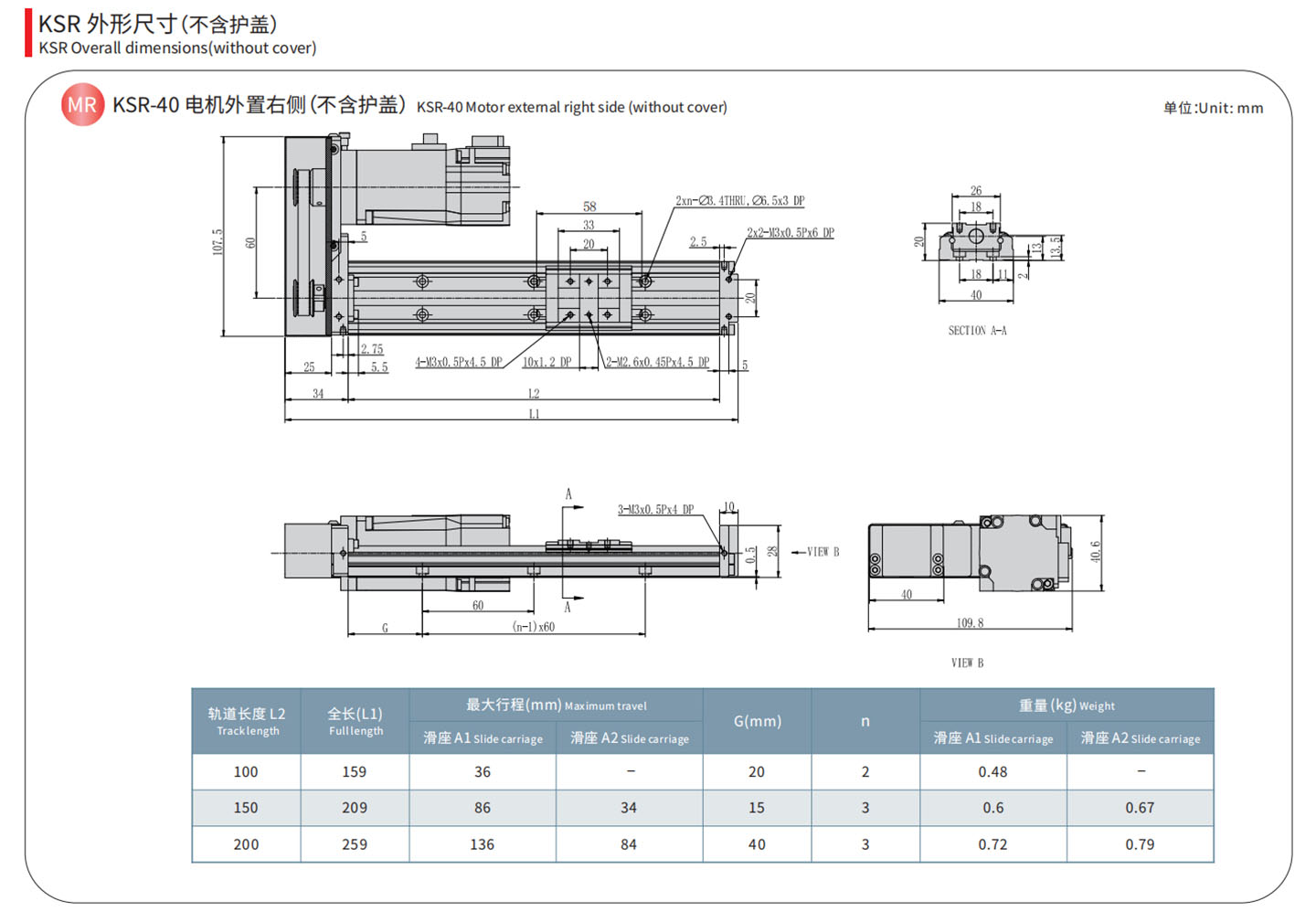
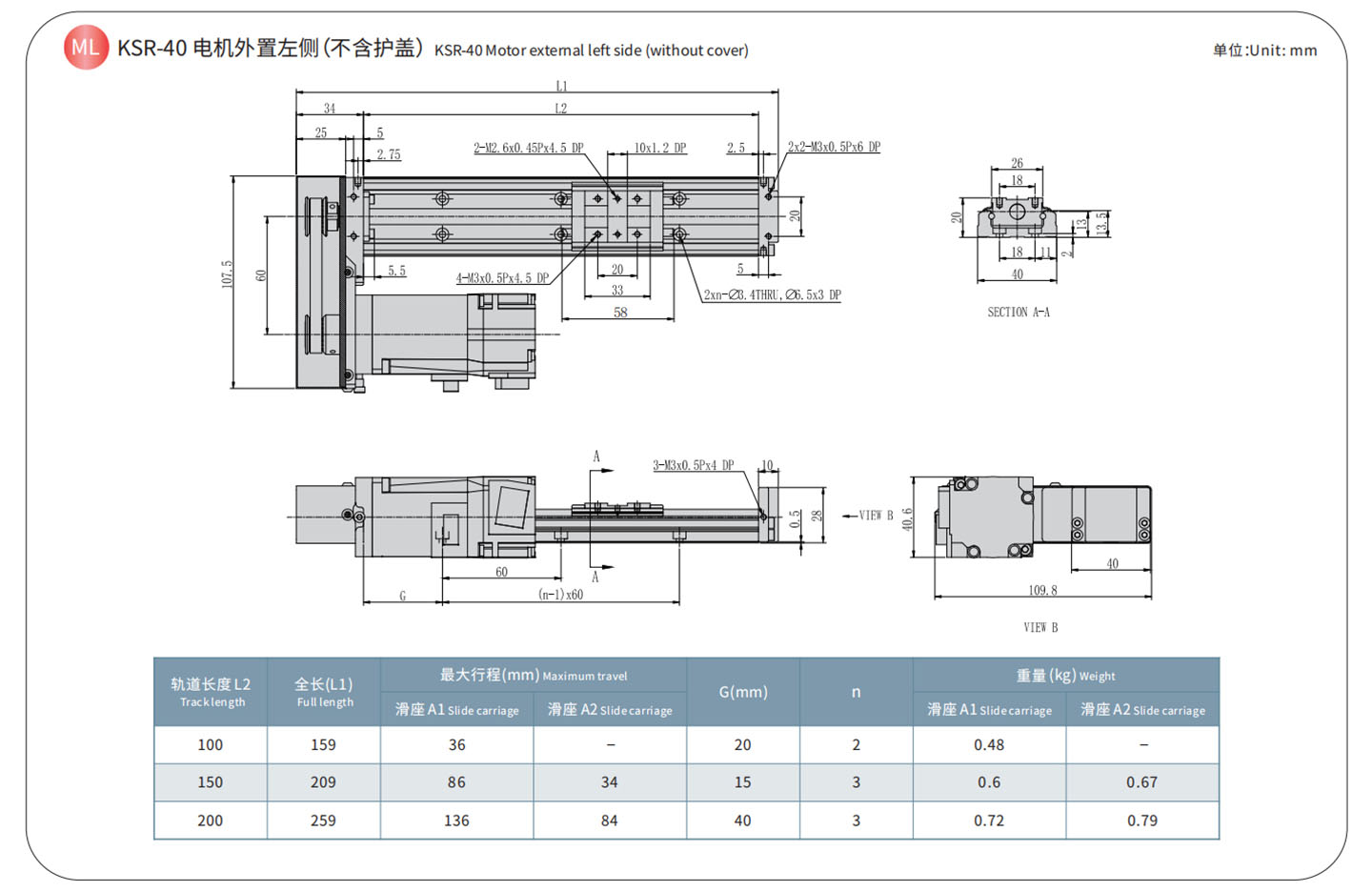
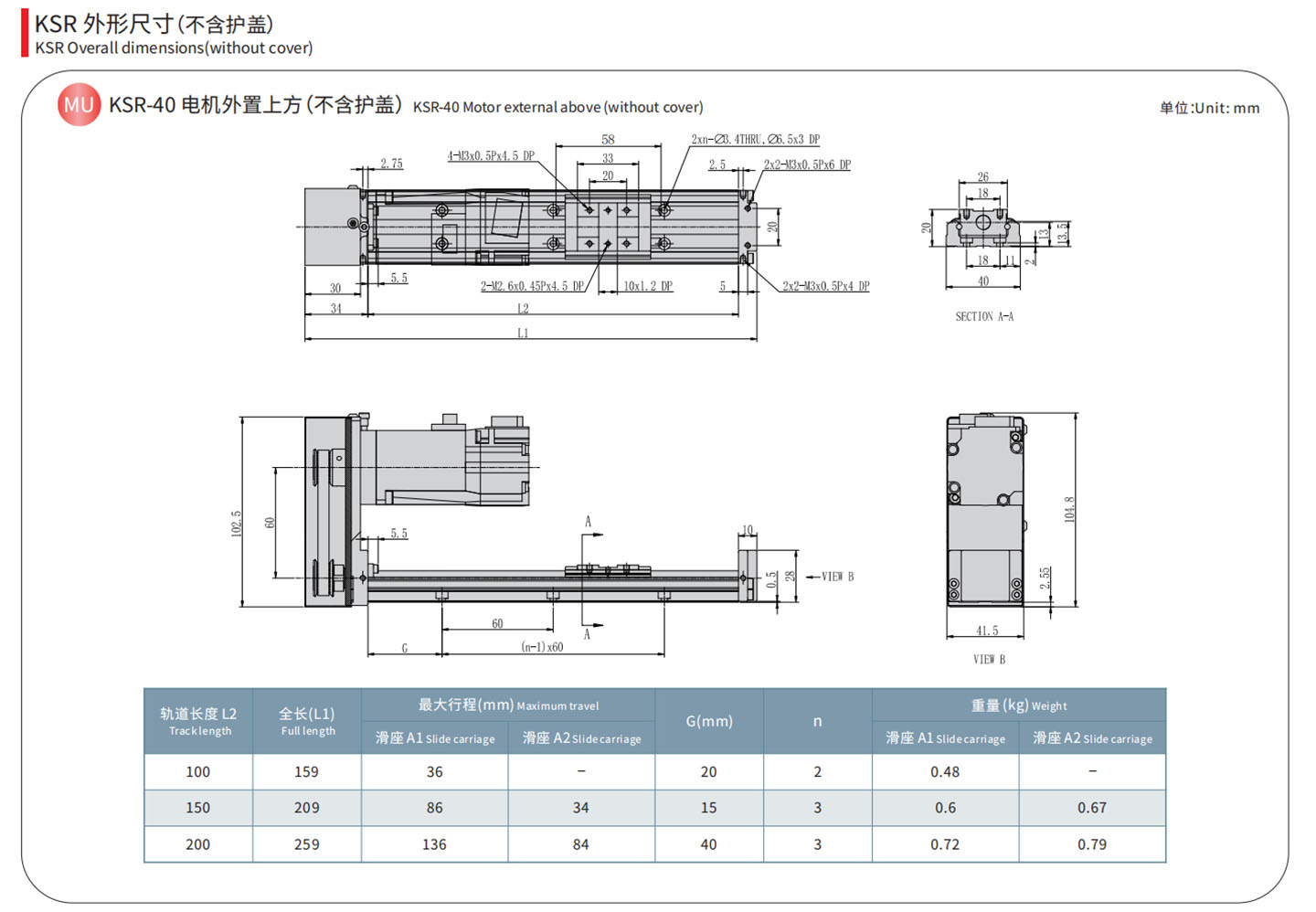
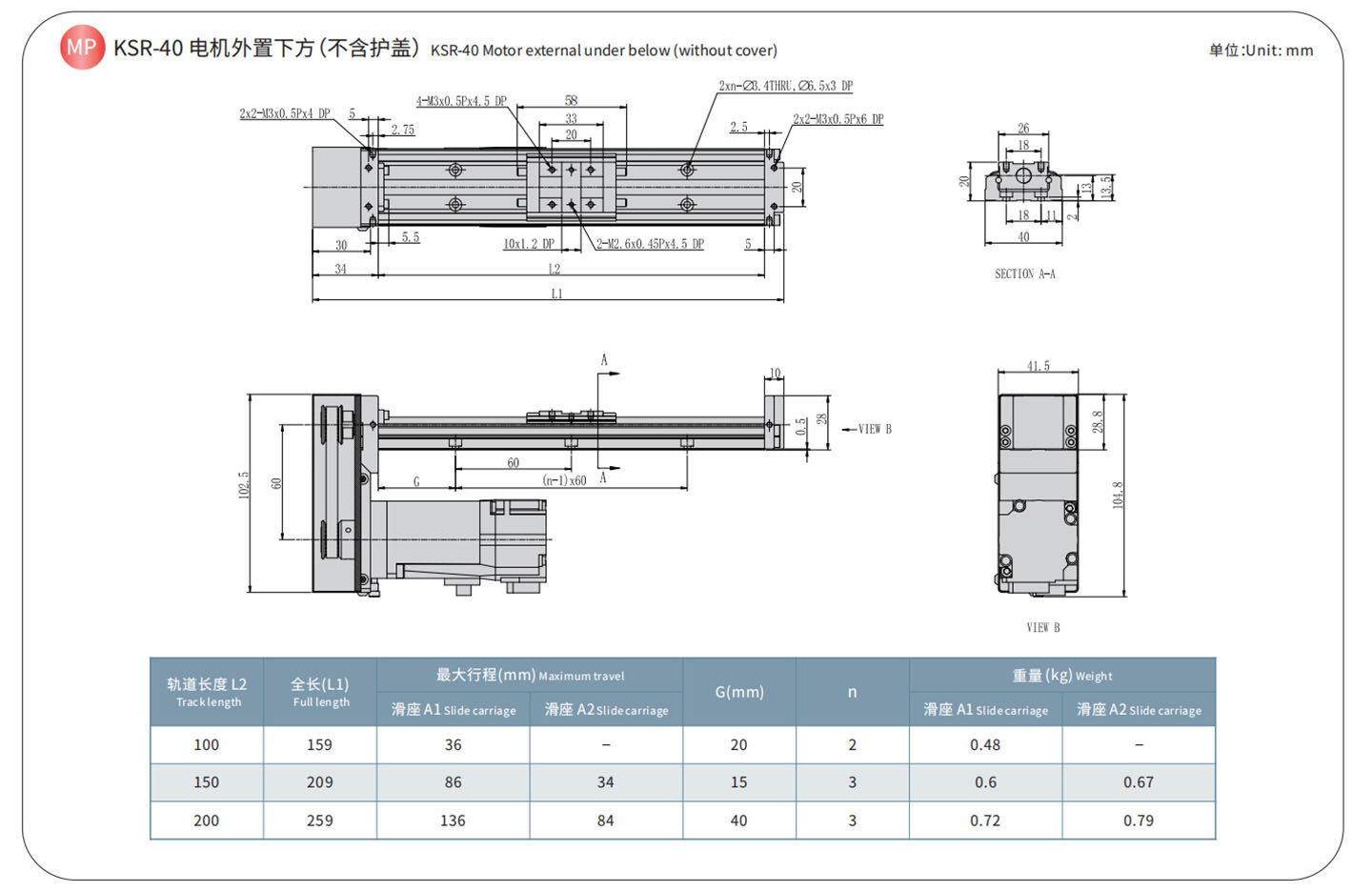
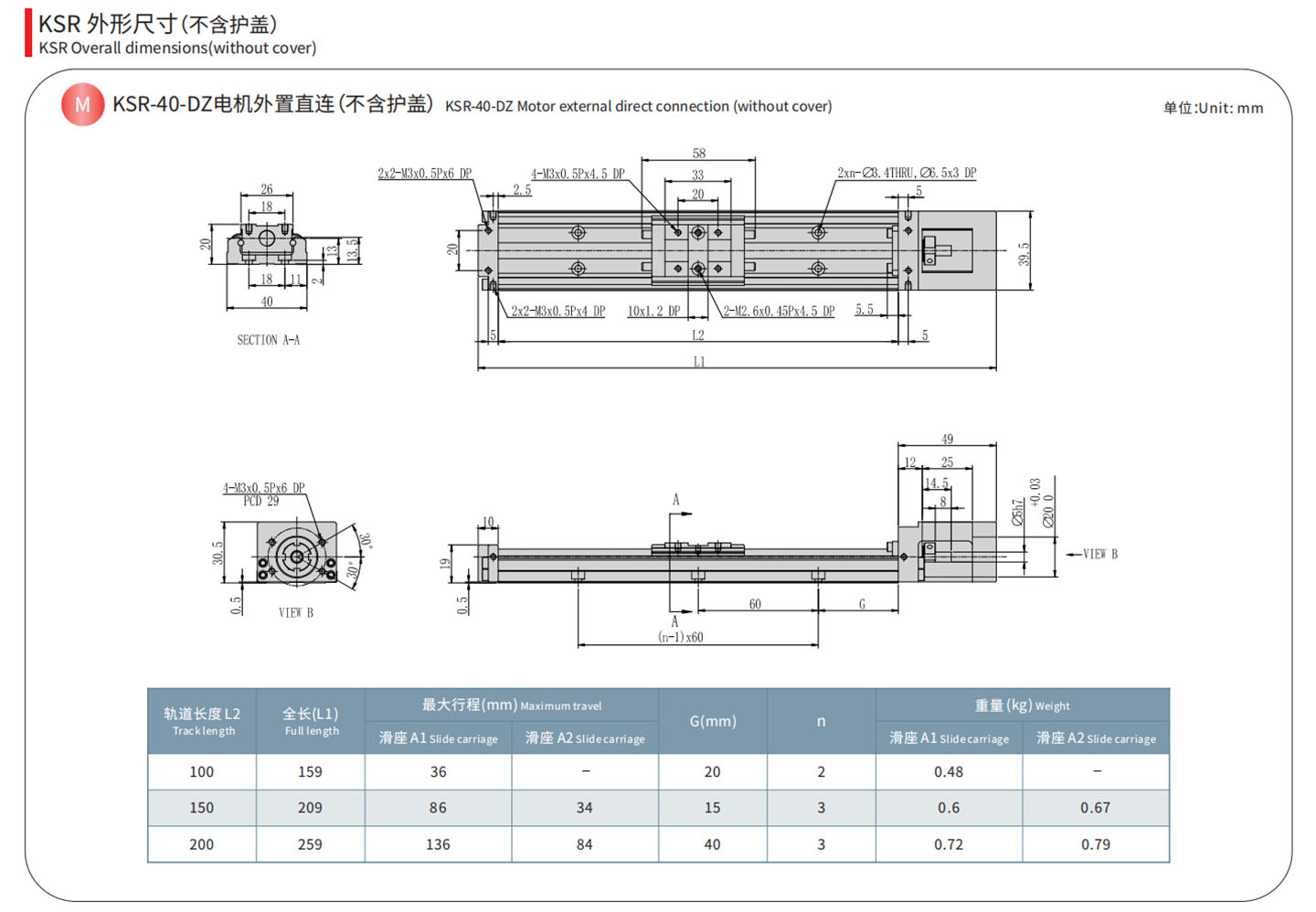
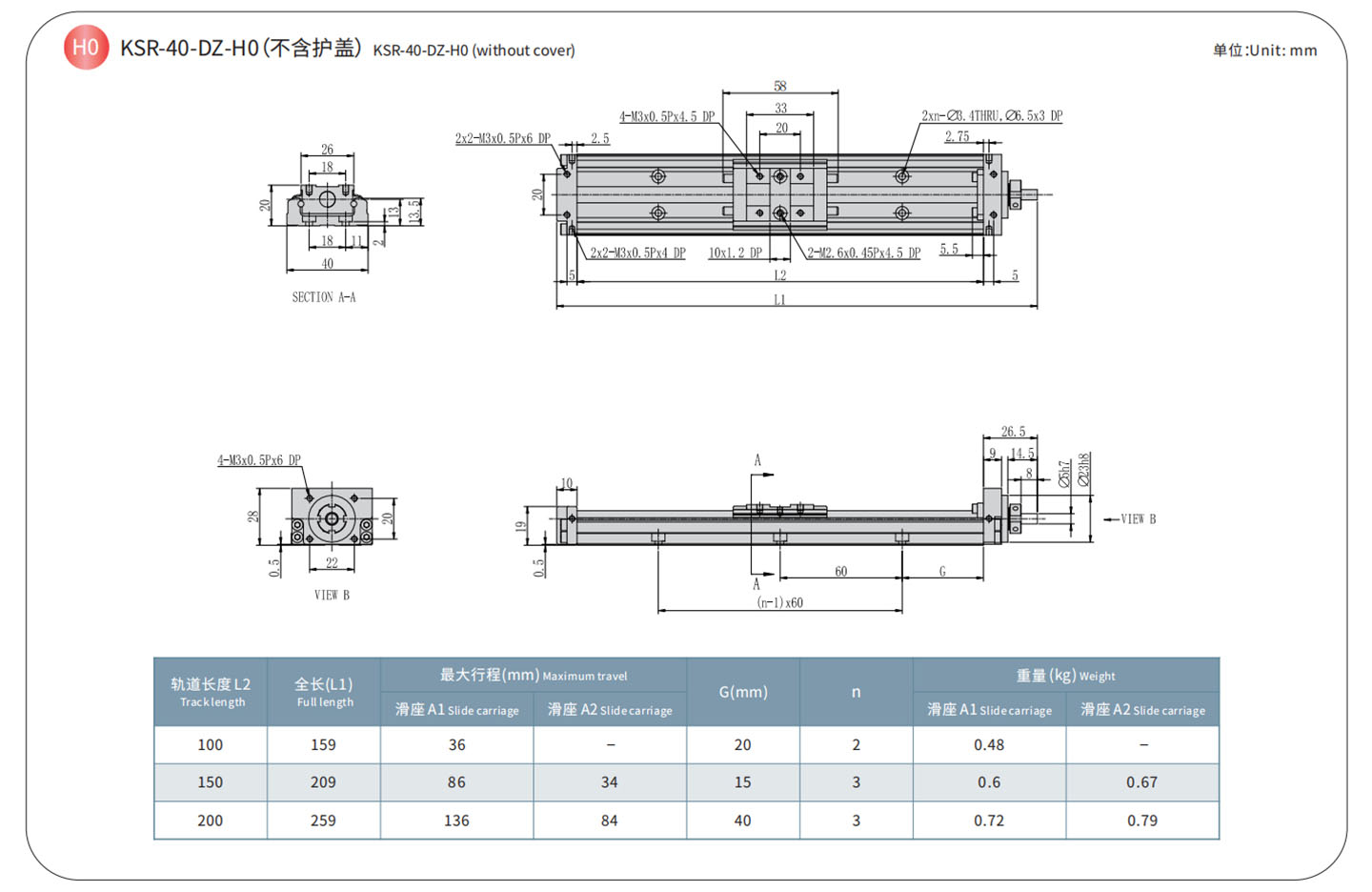
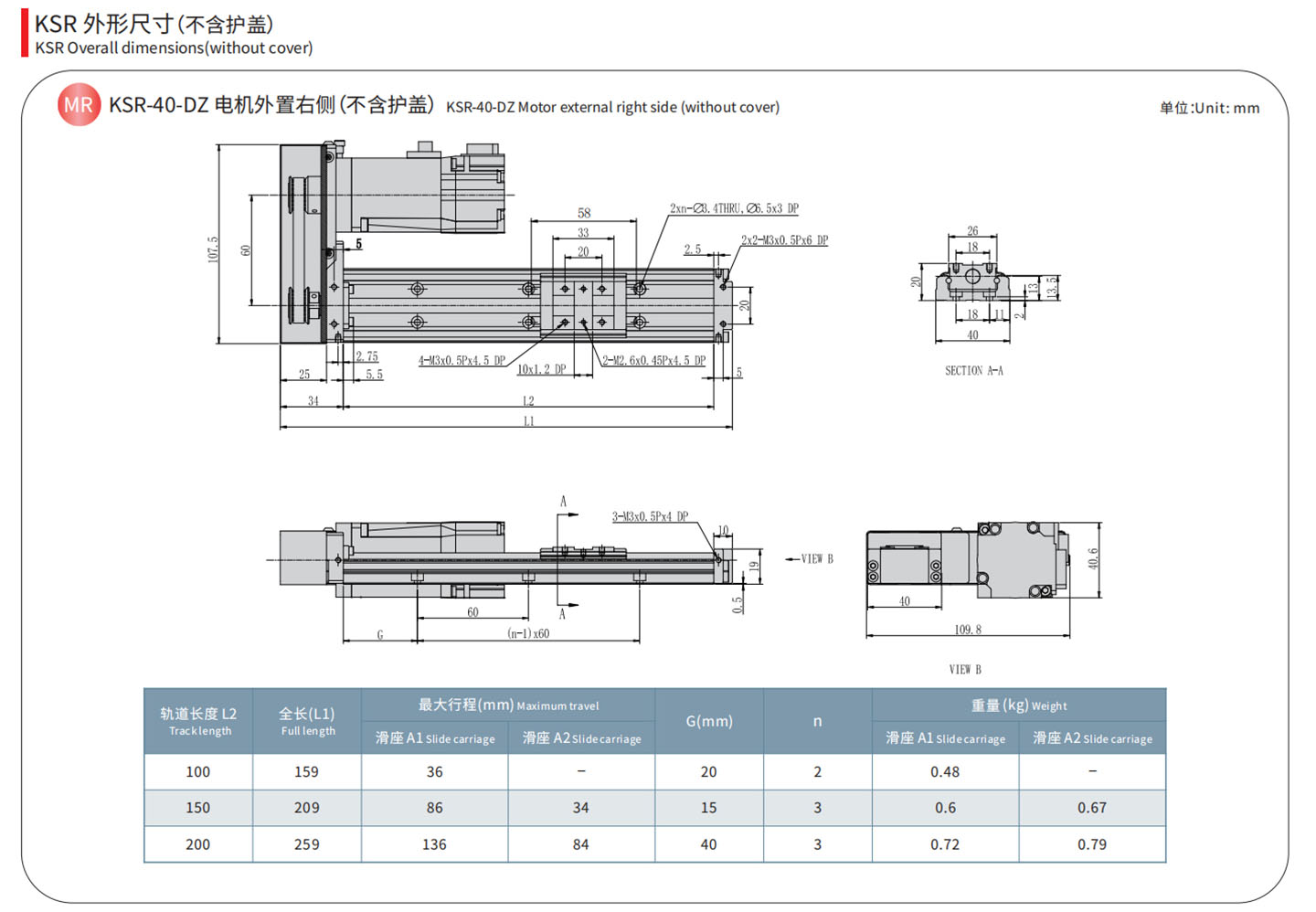
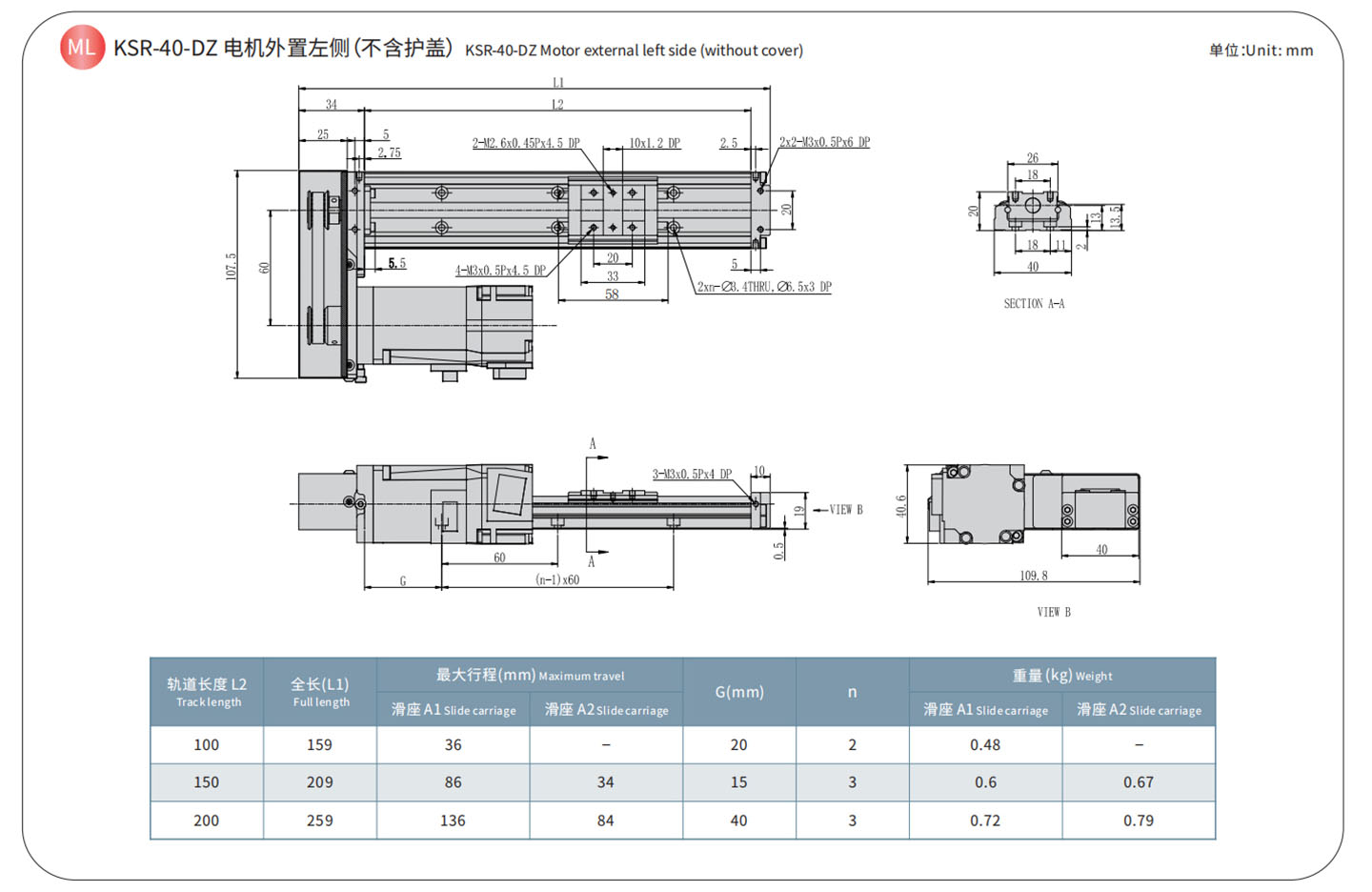
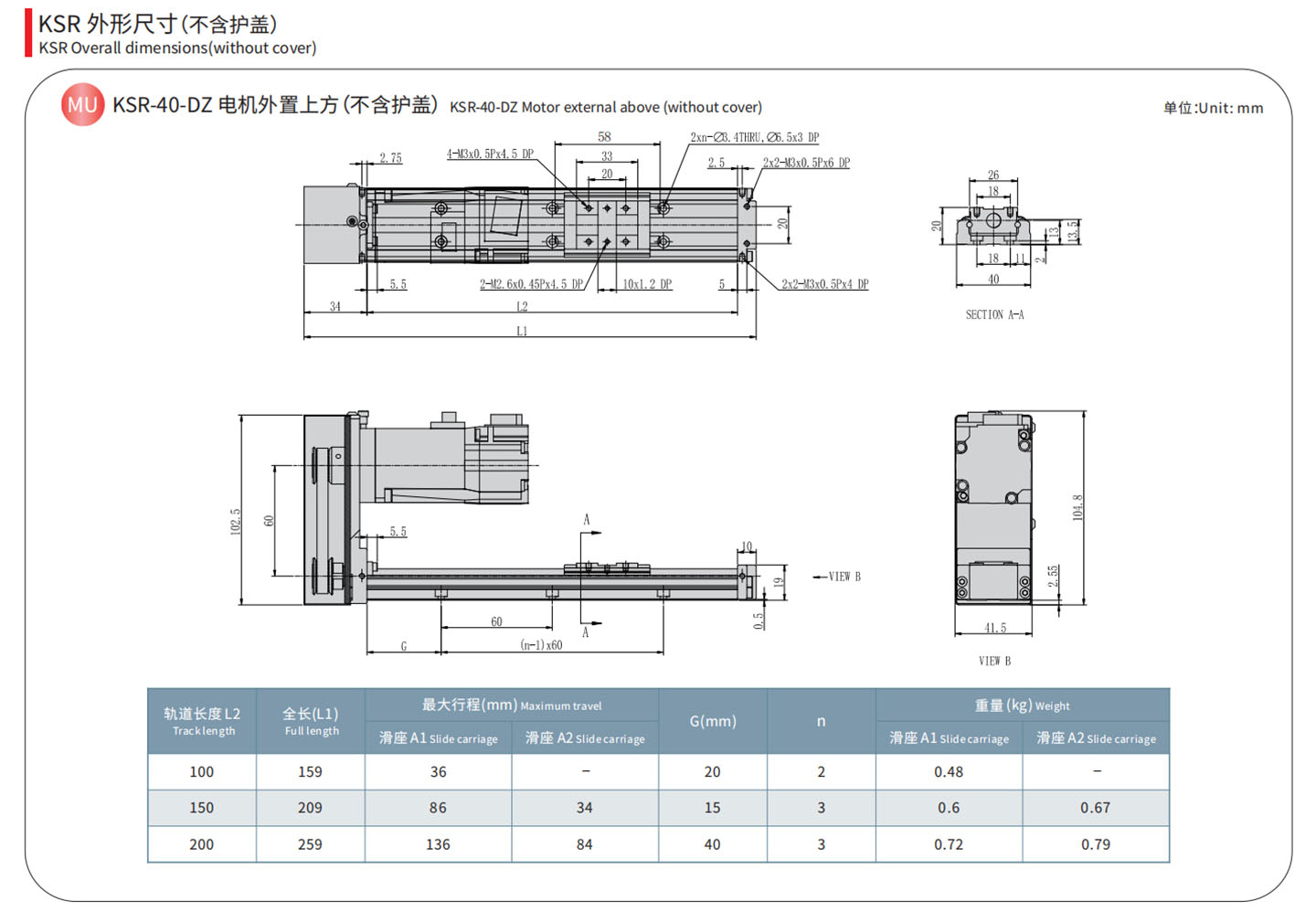
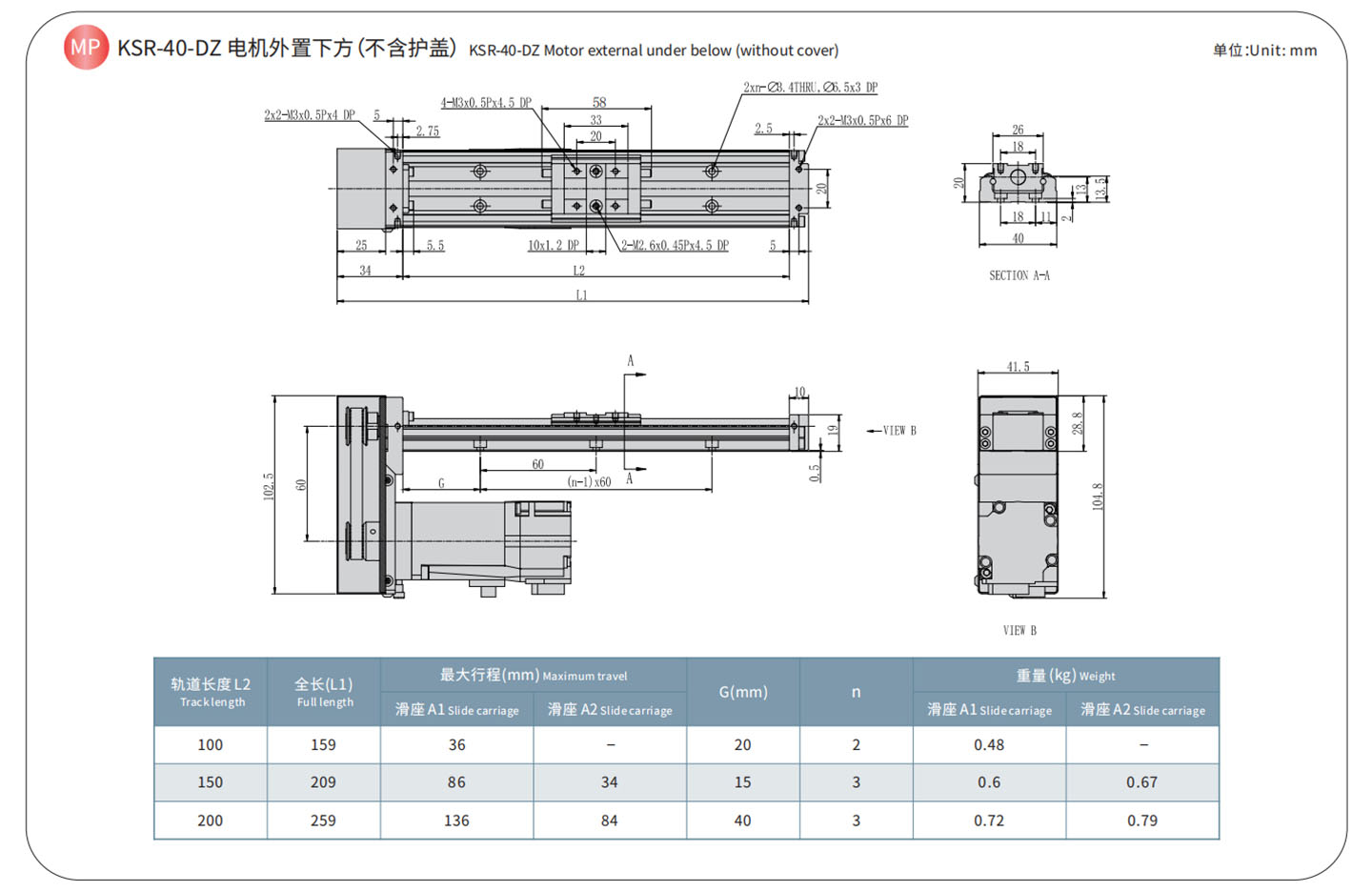
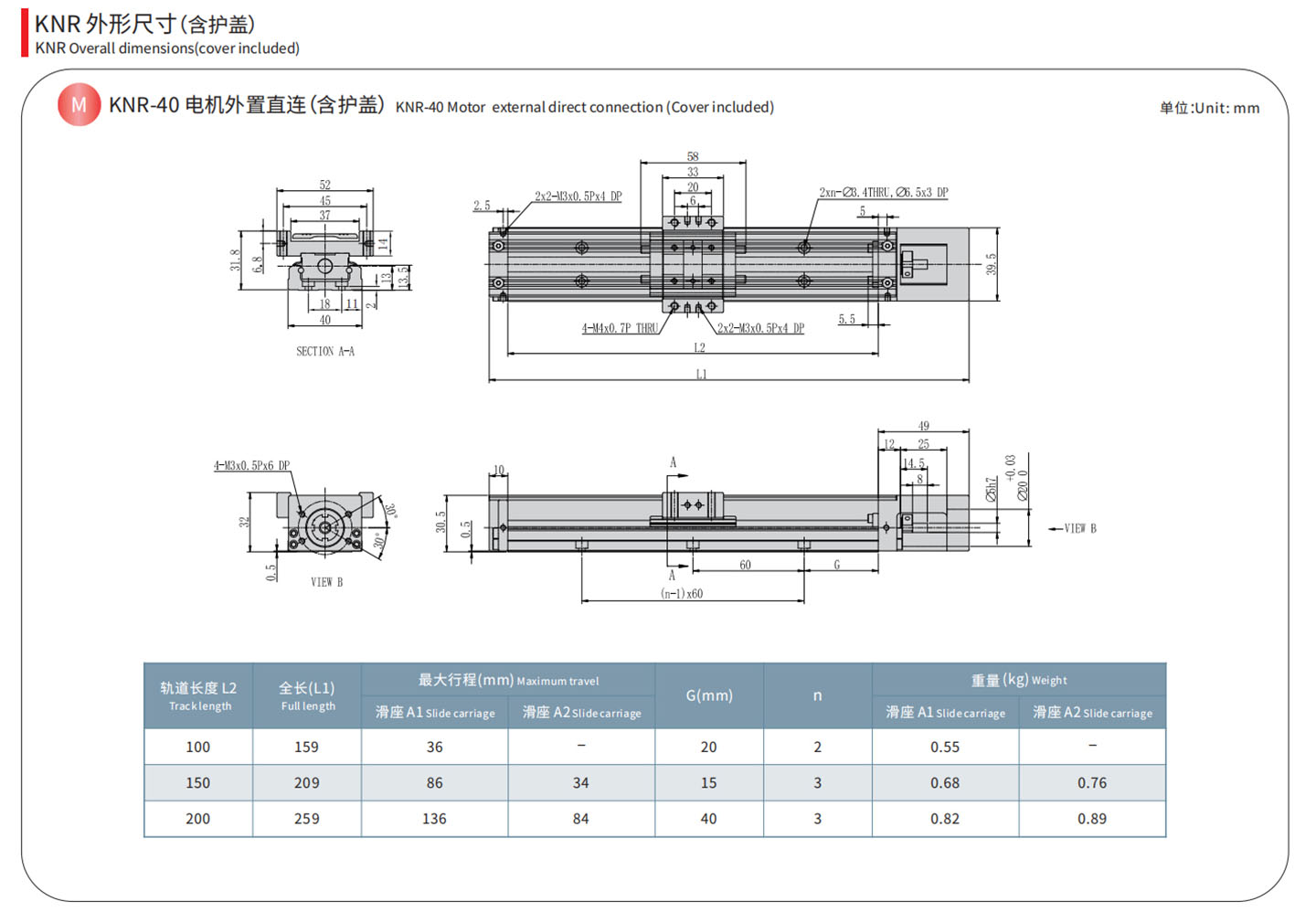
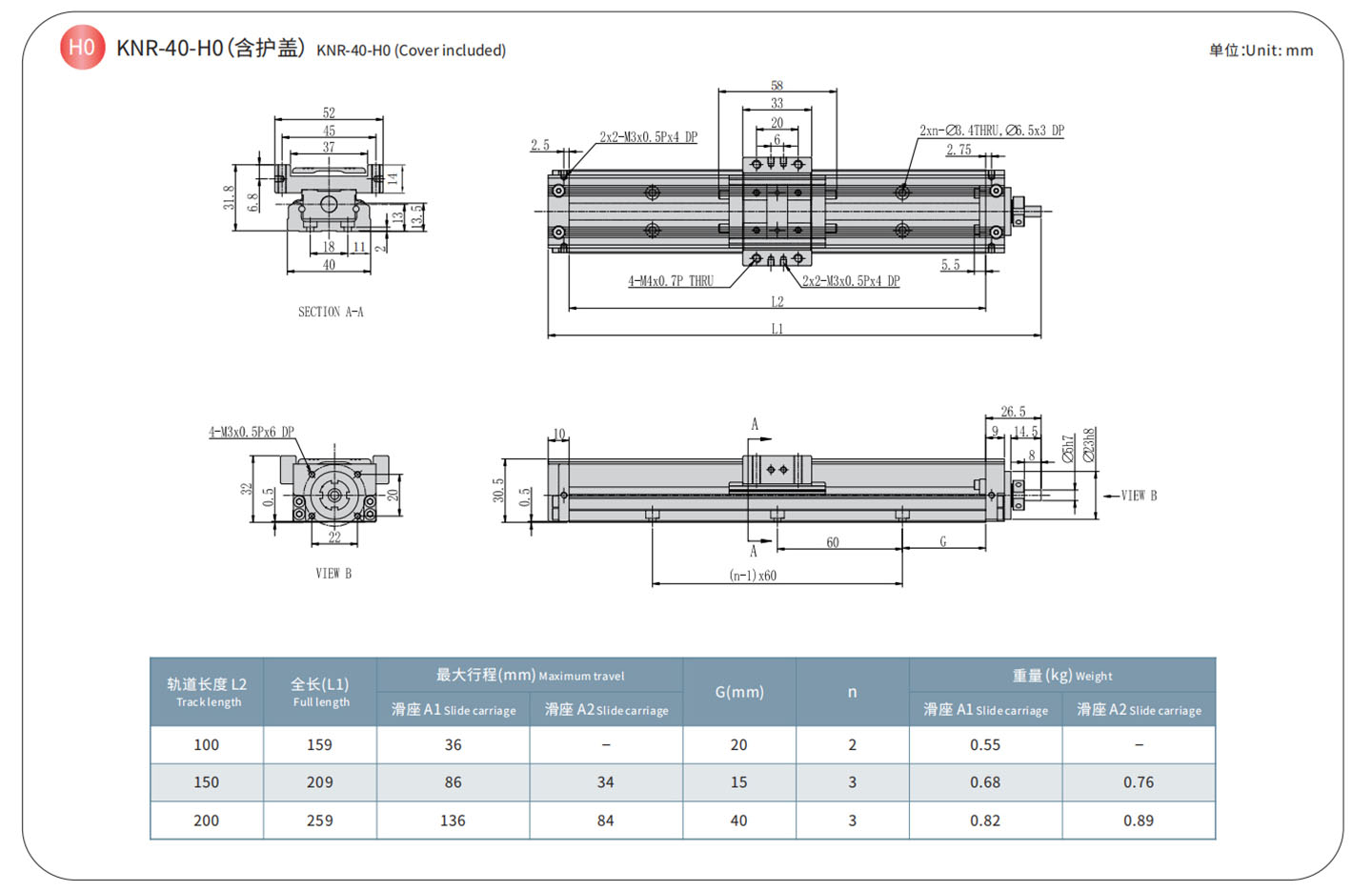
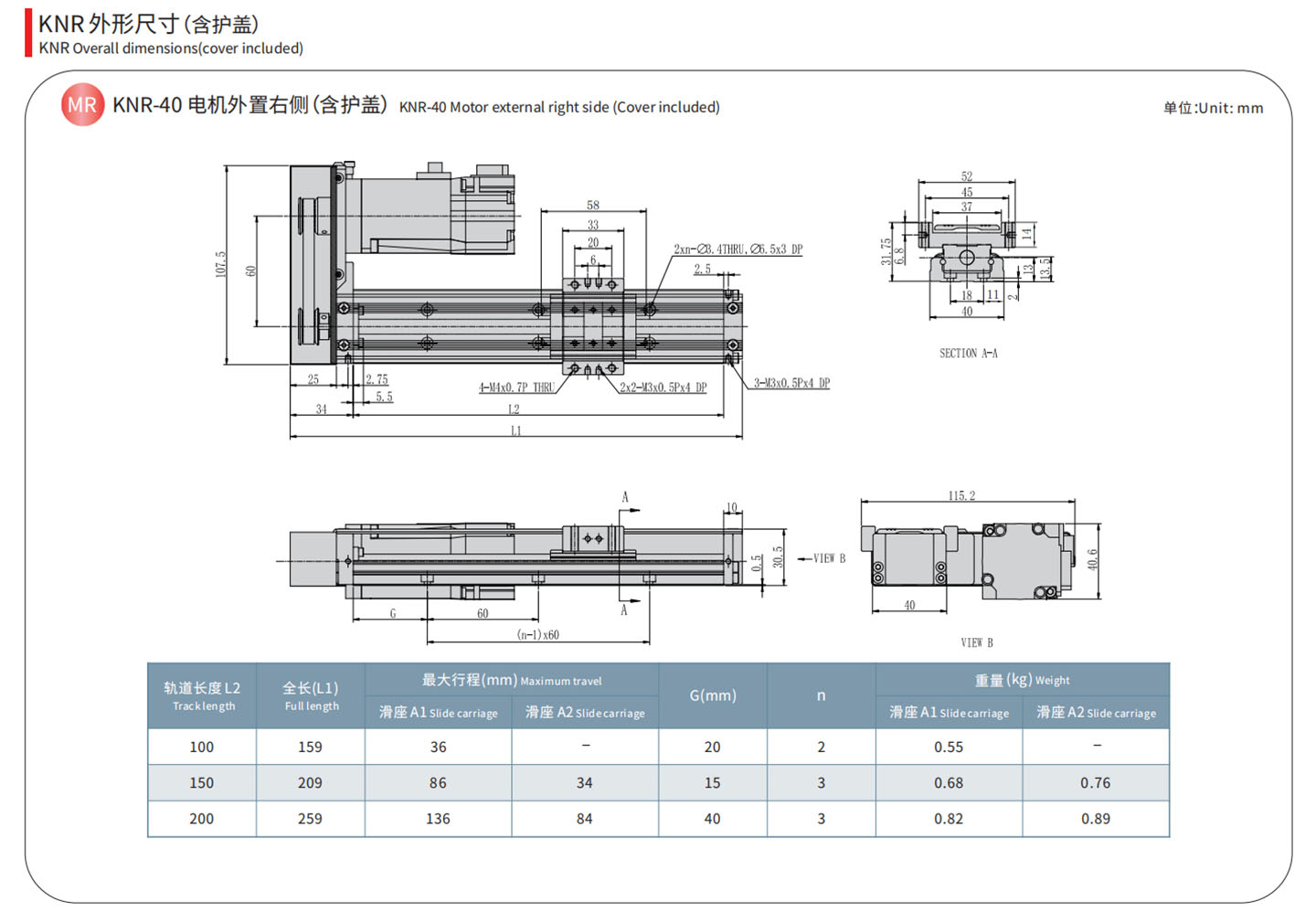
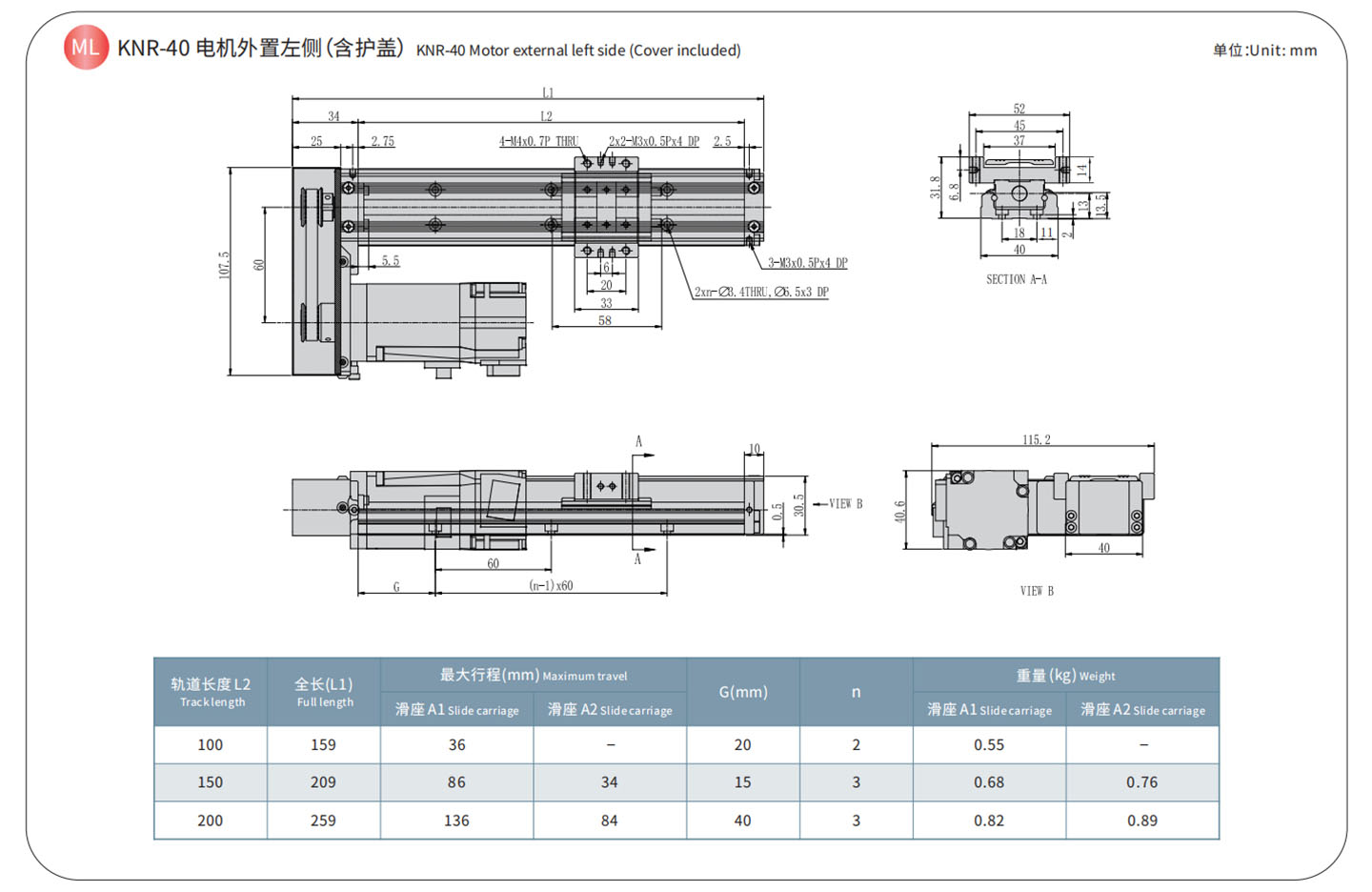
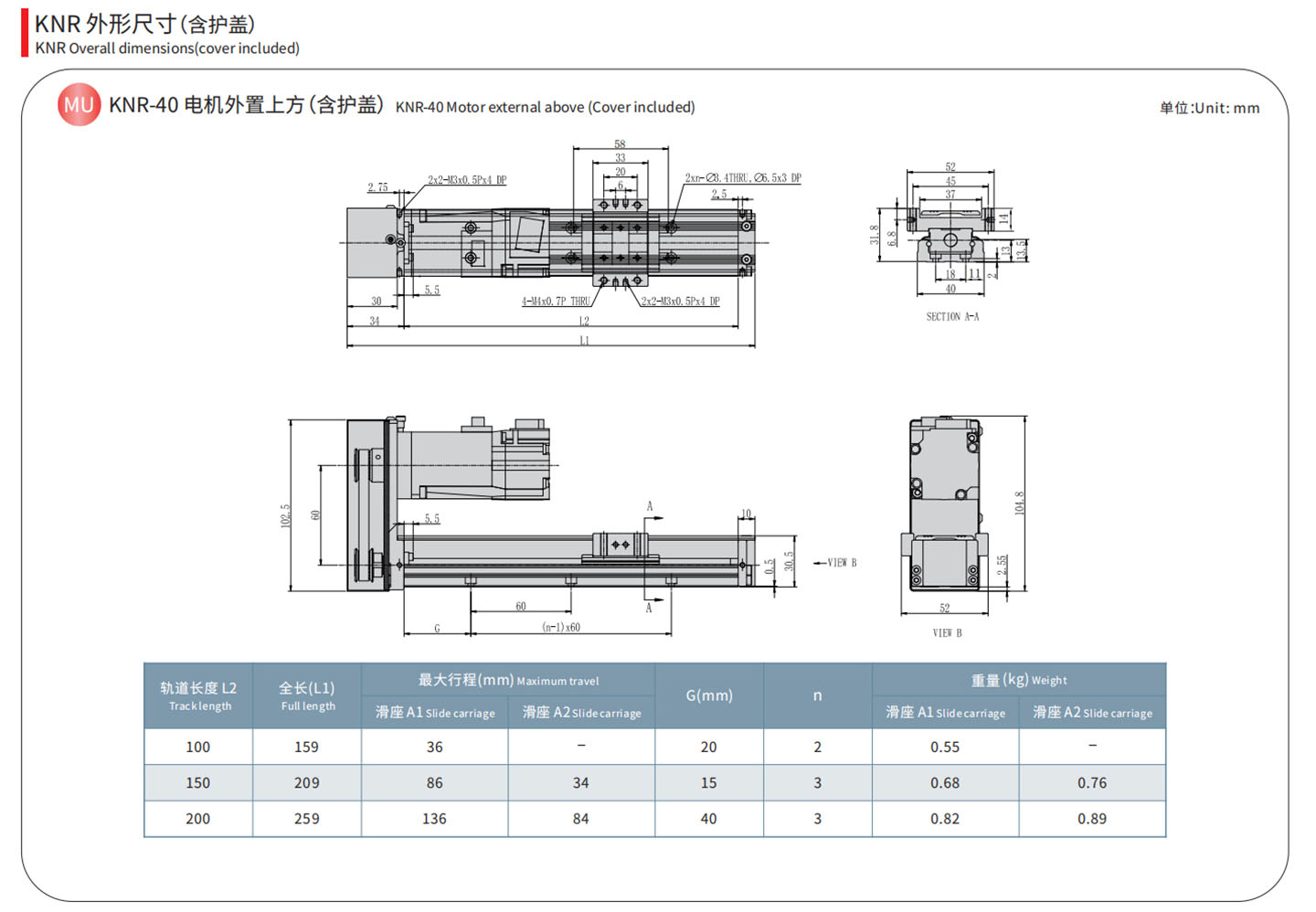
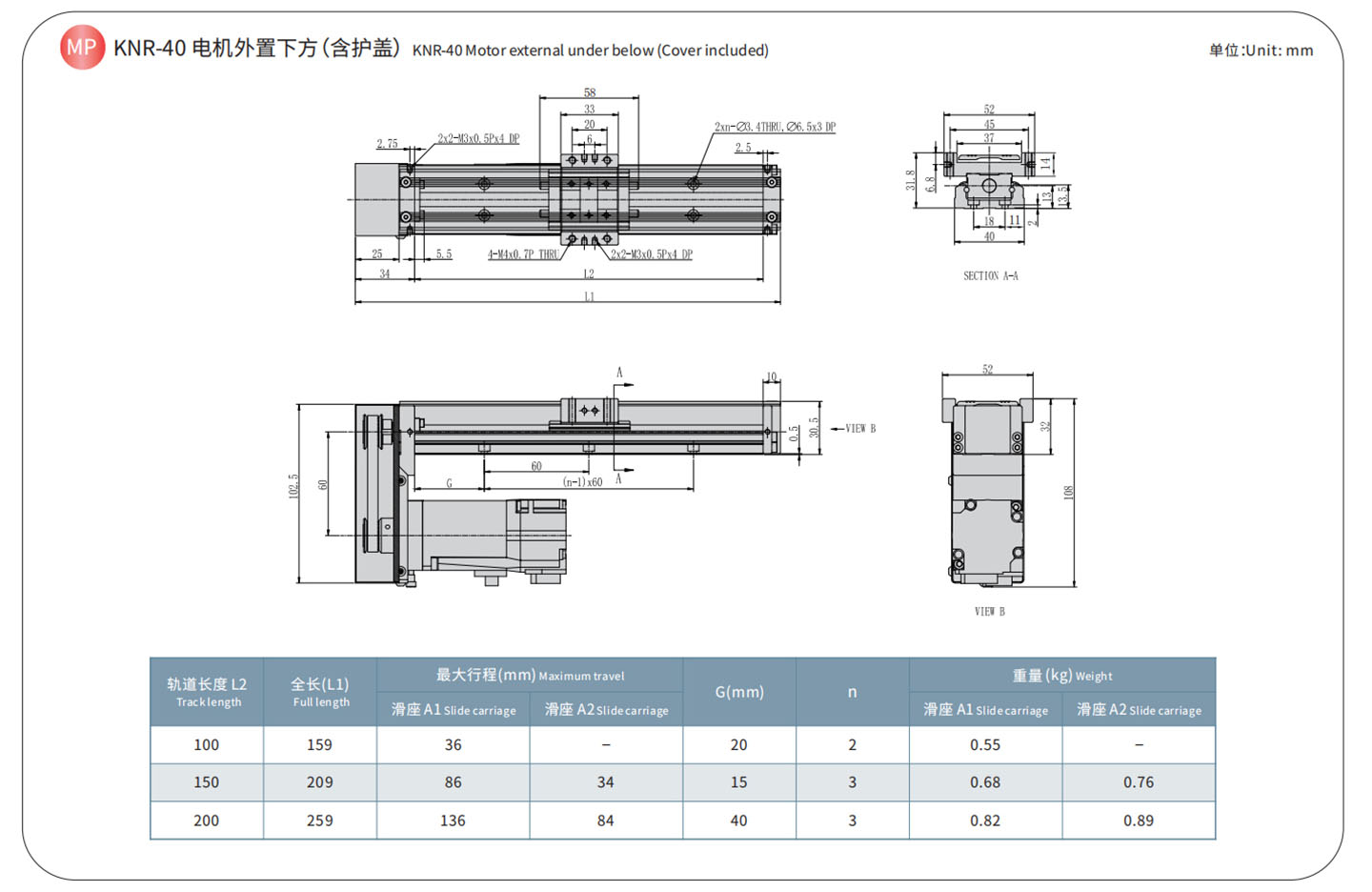
KSR-40 KNR-40

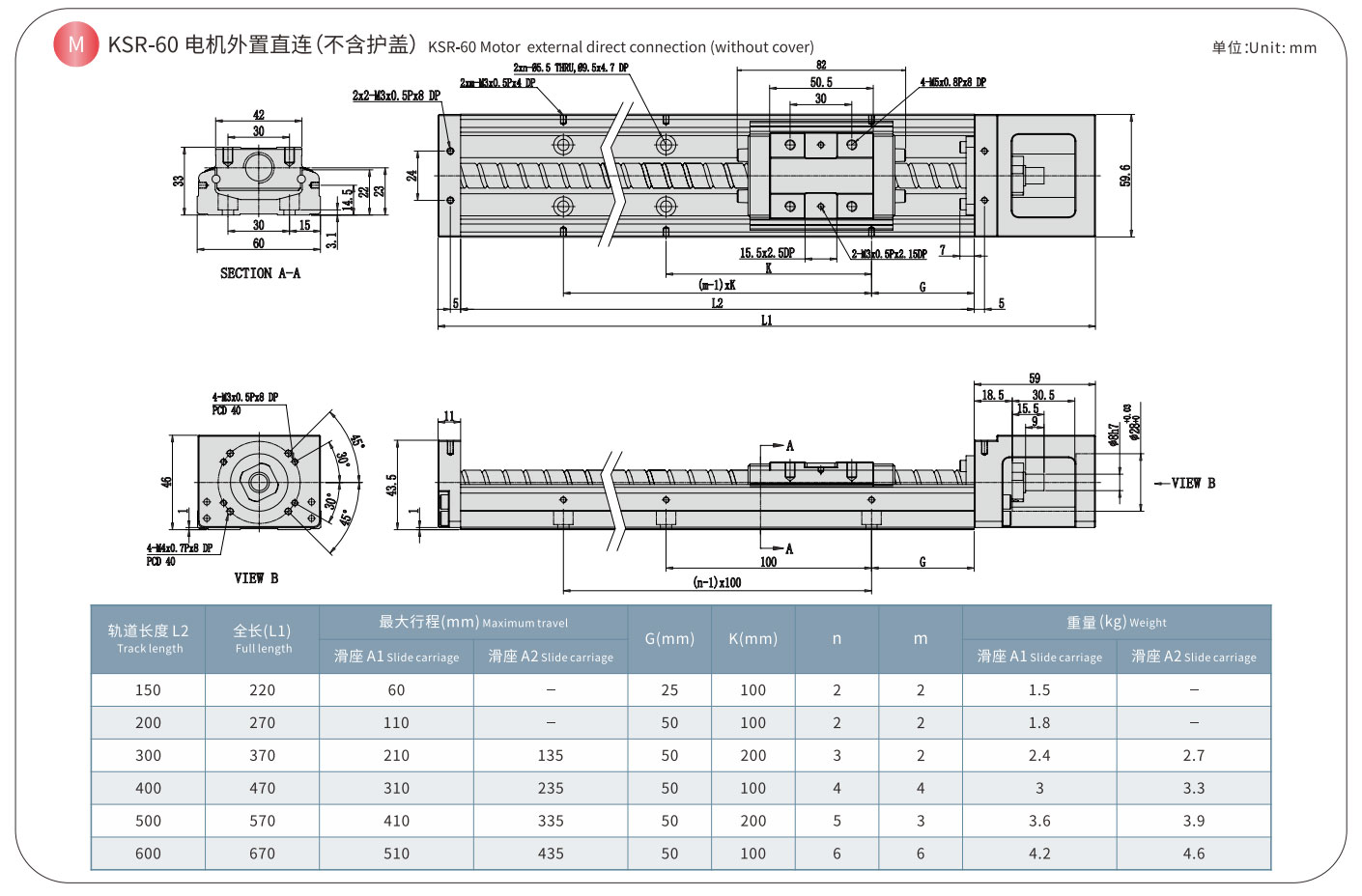
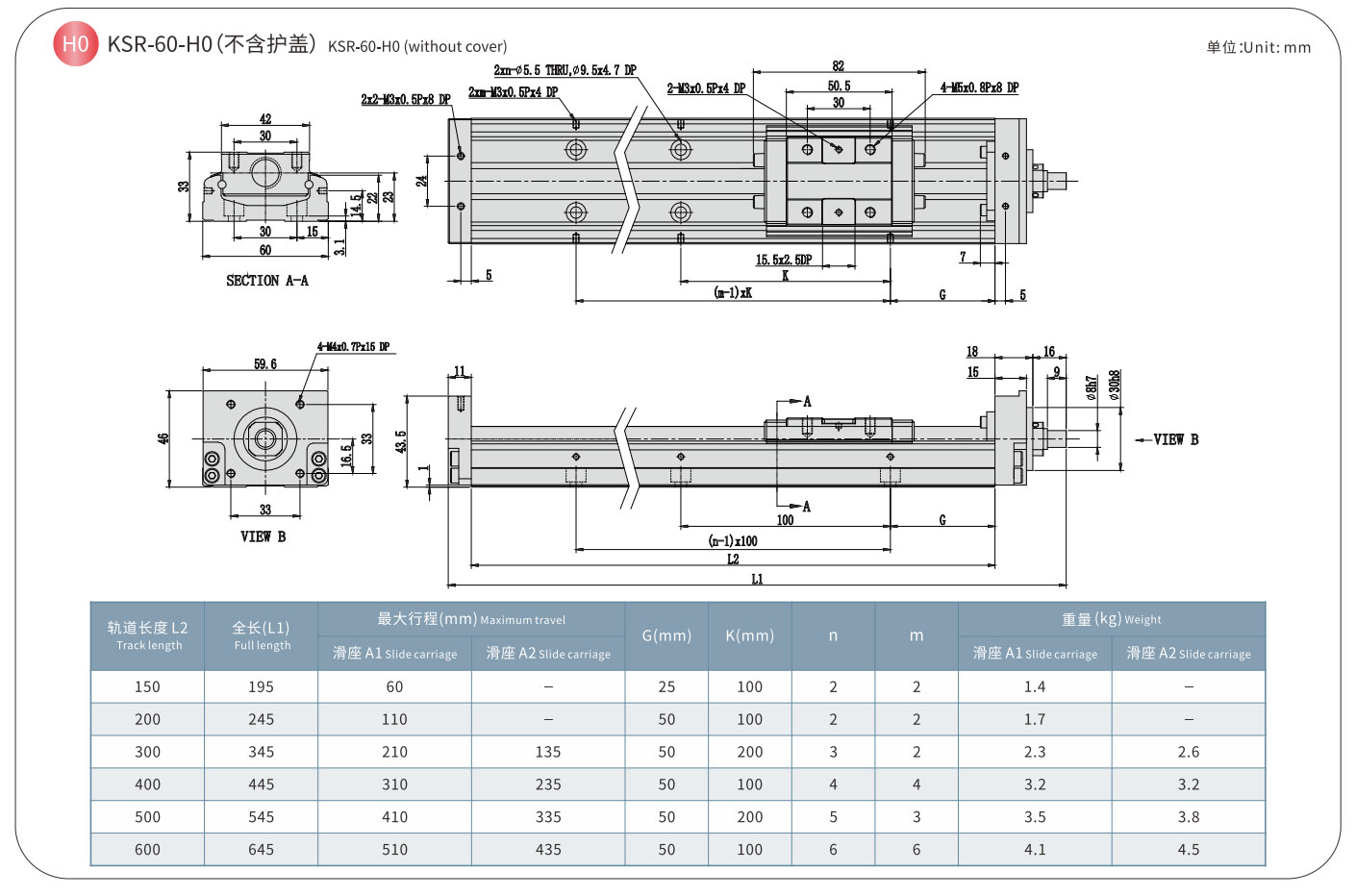
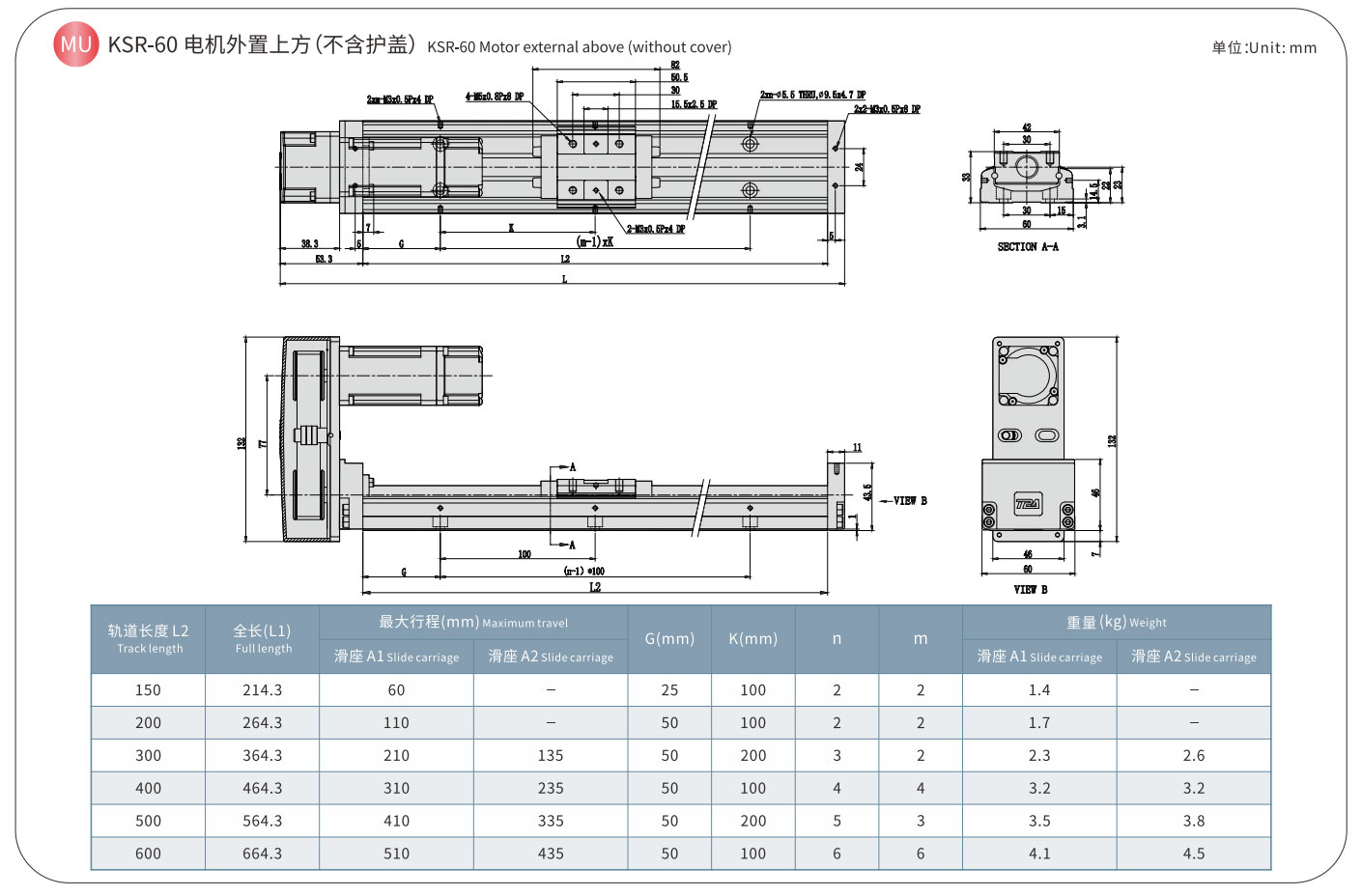
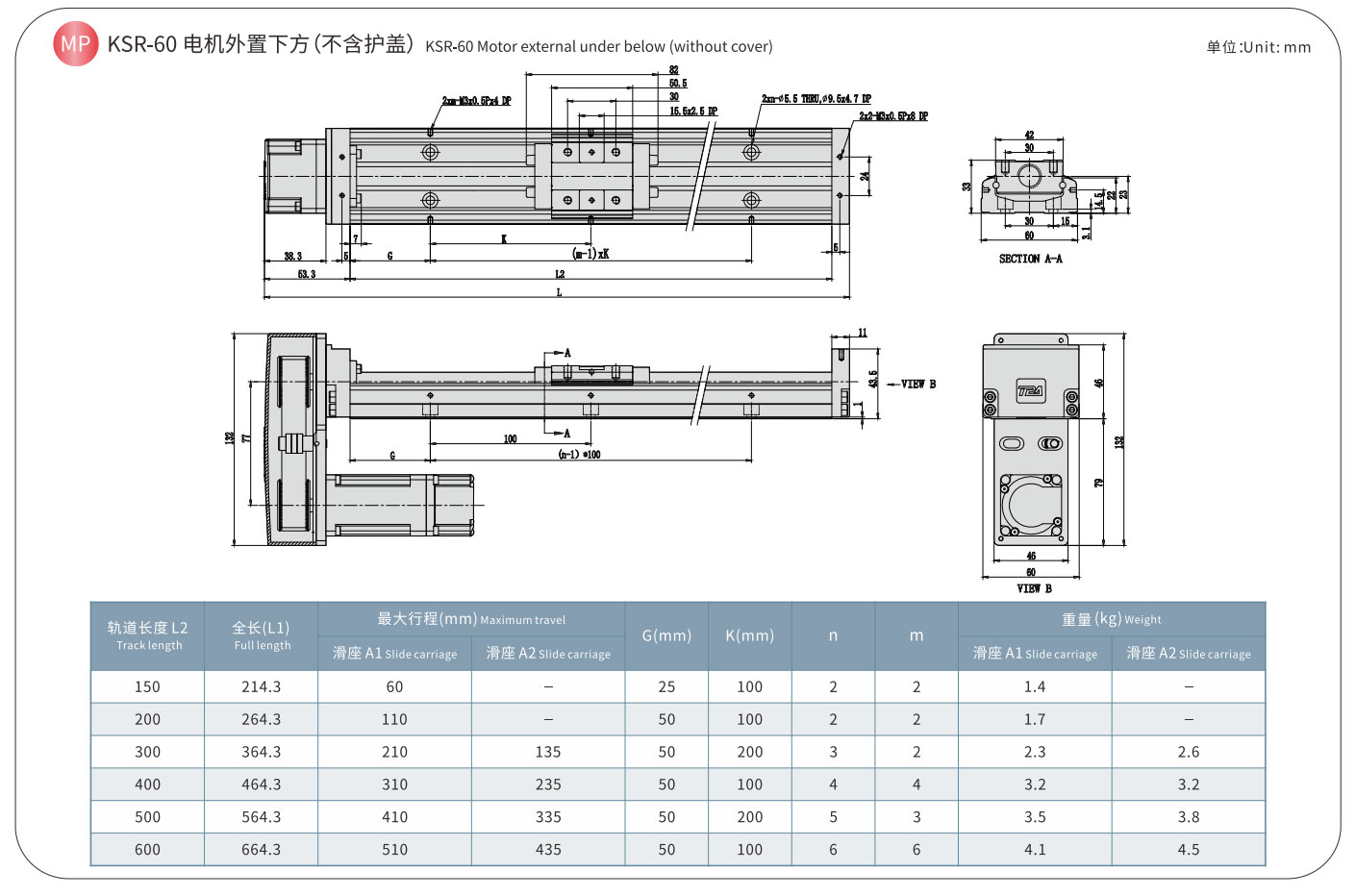
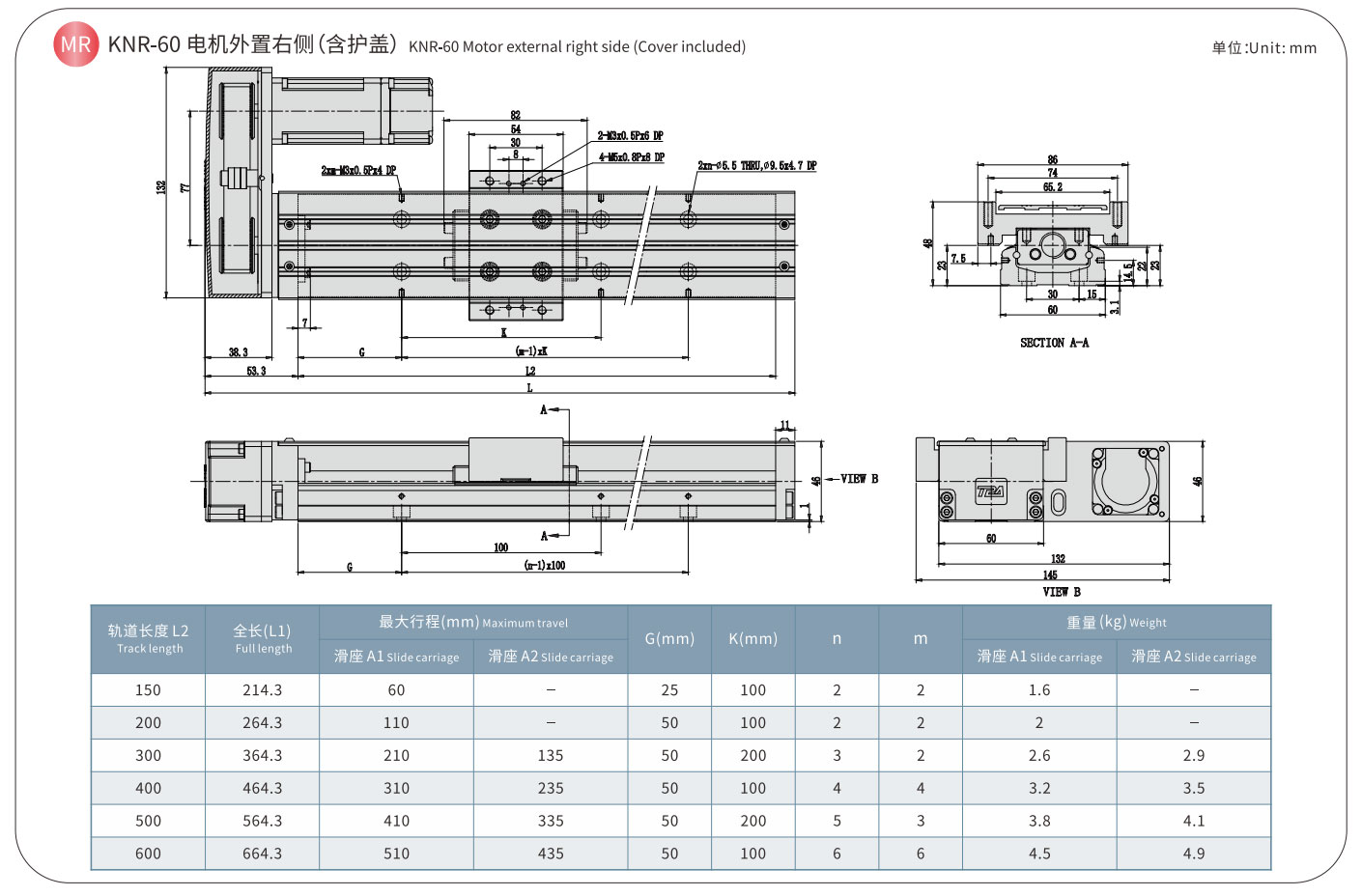
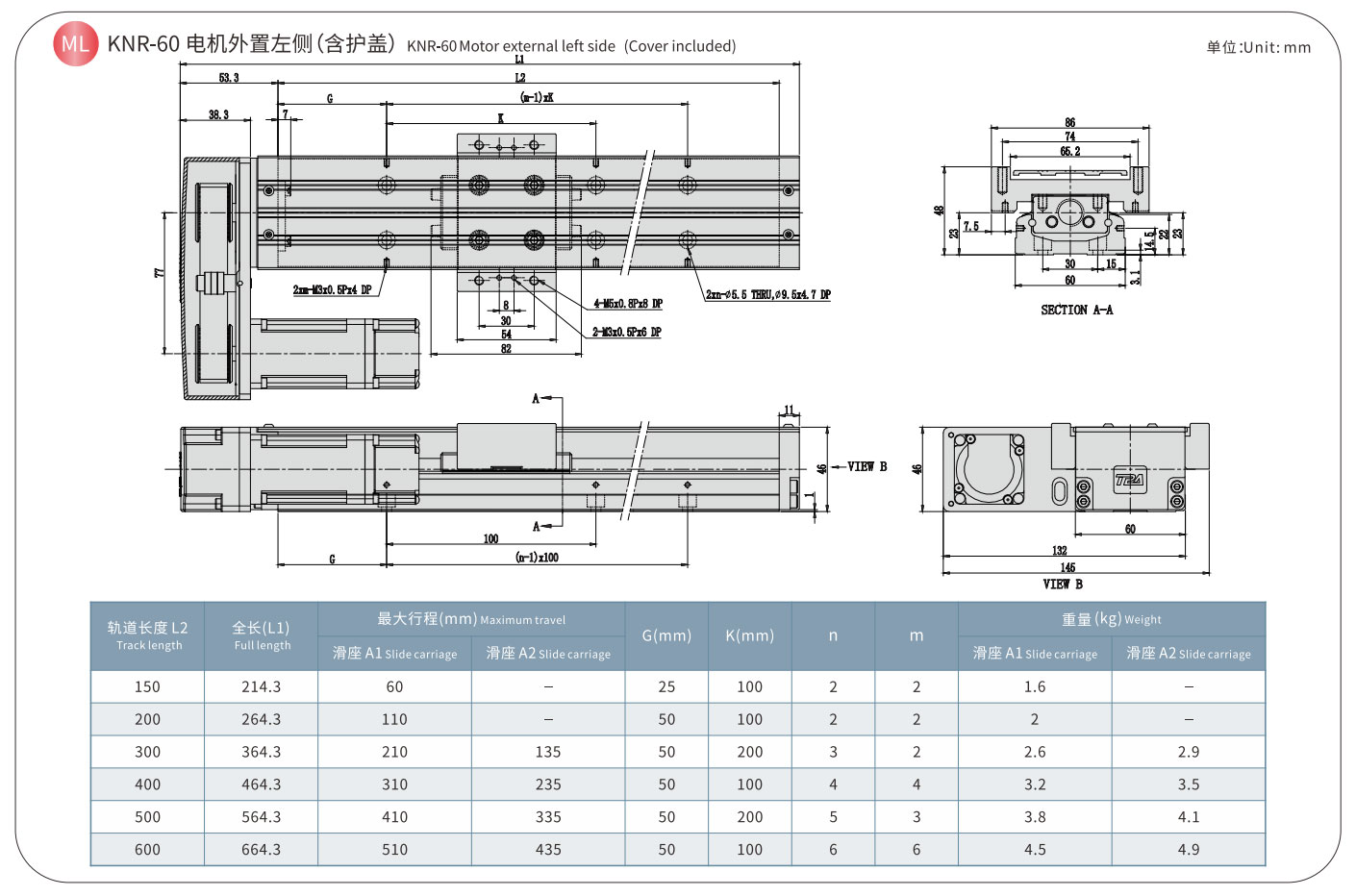
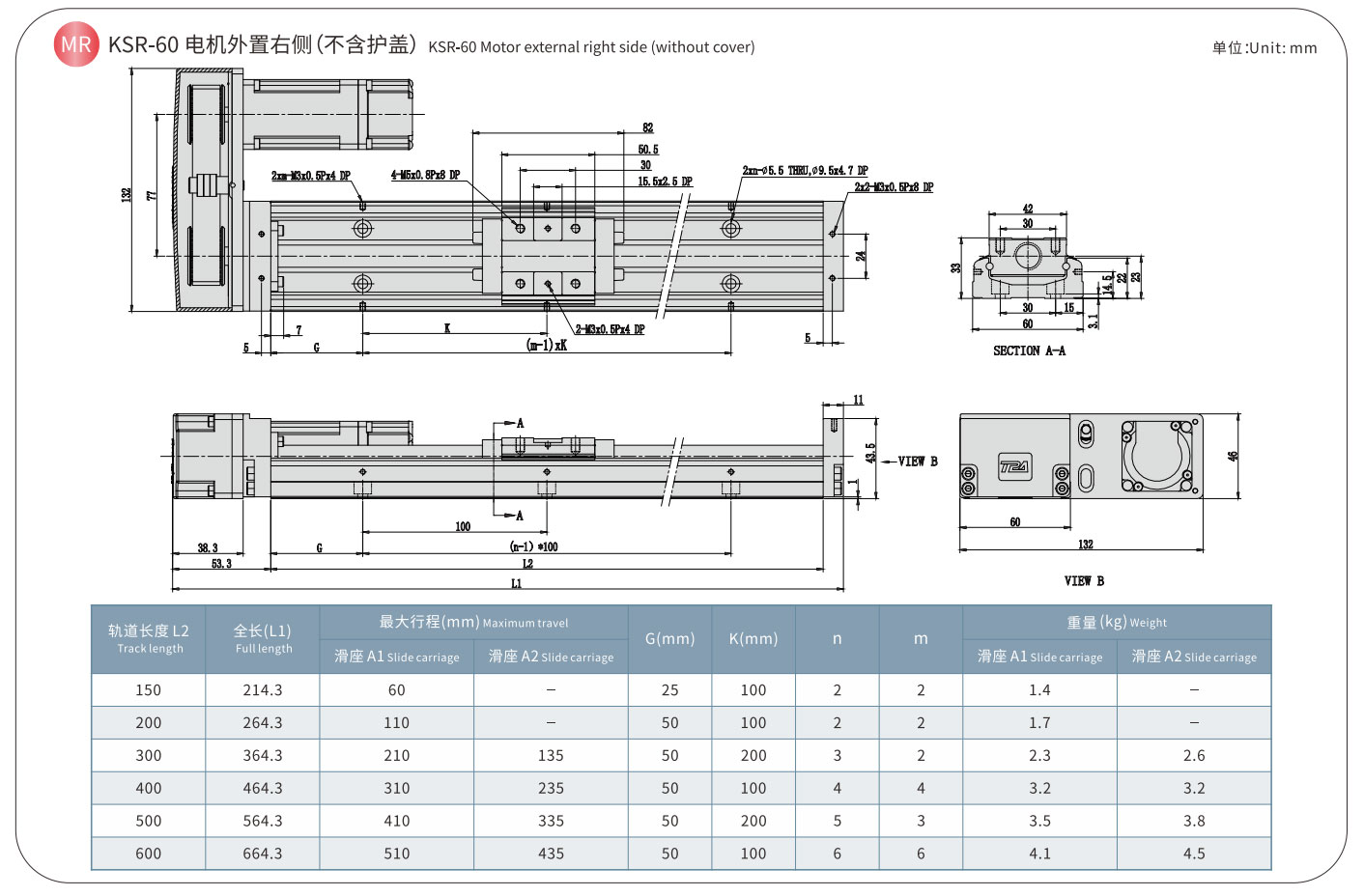
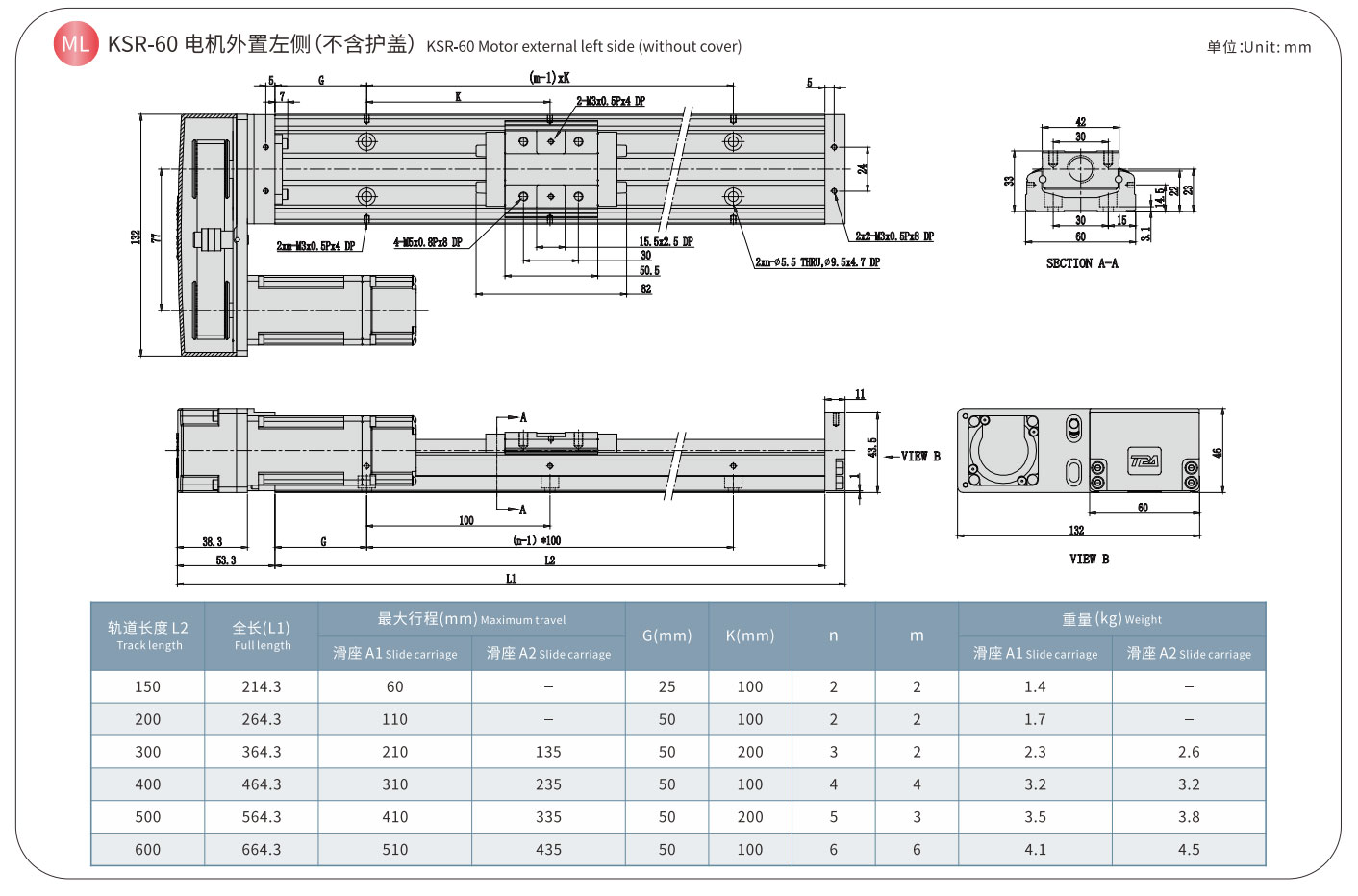
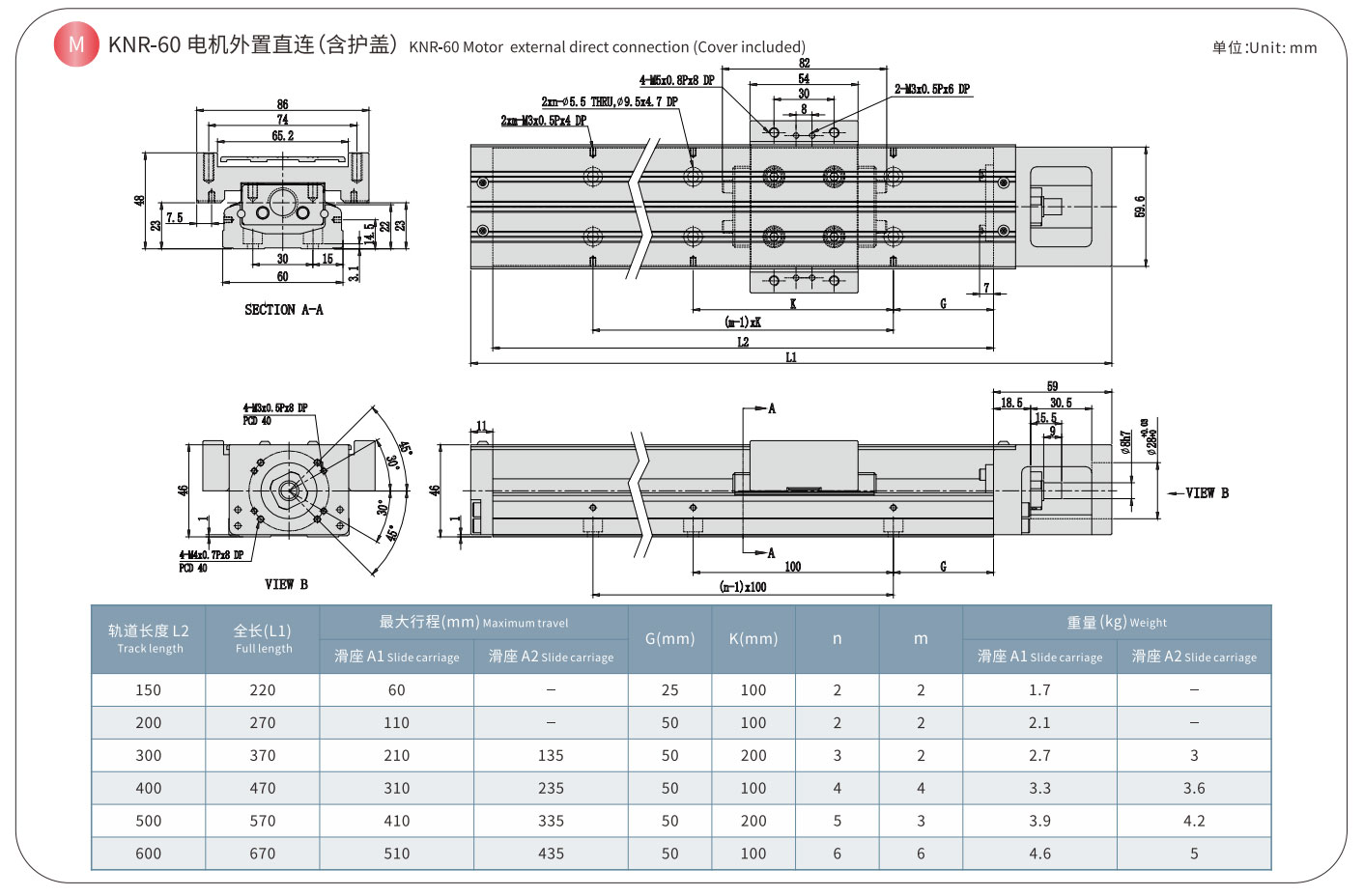
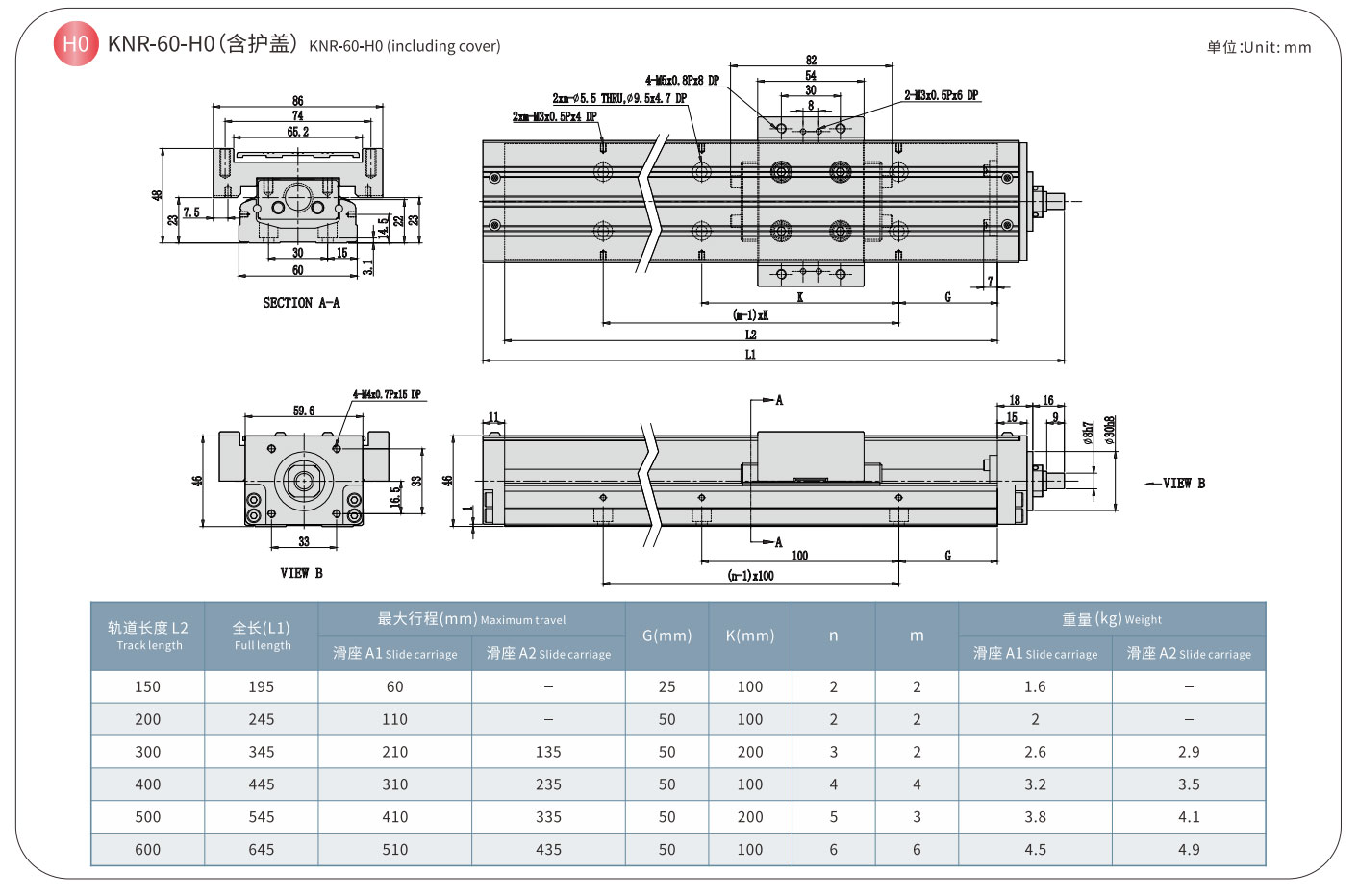
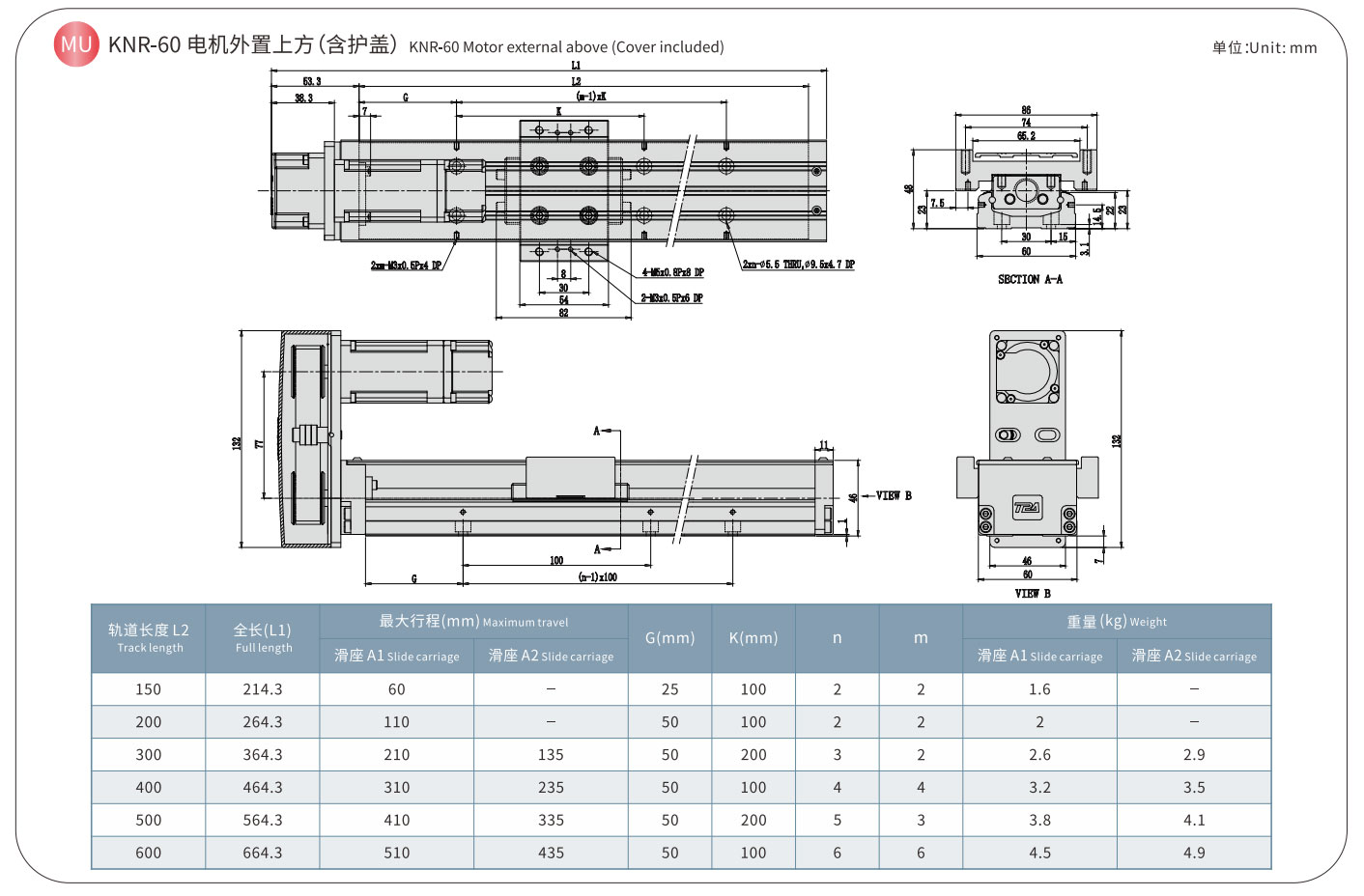
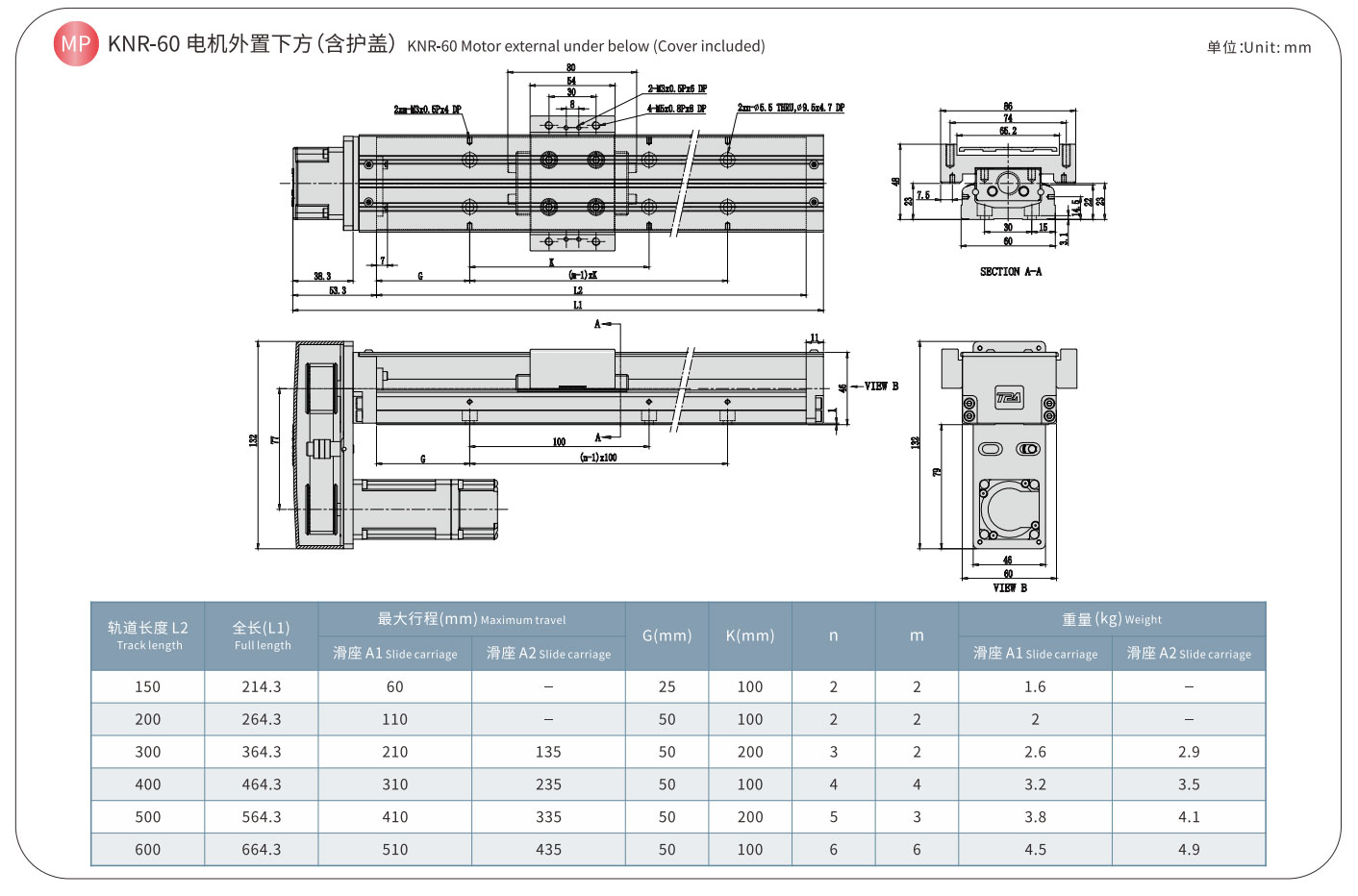
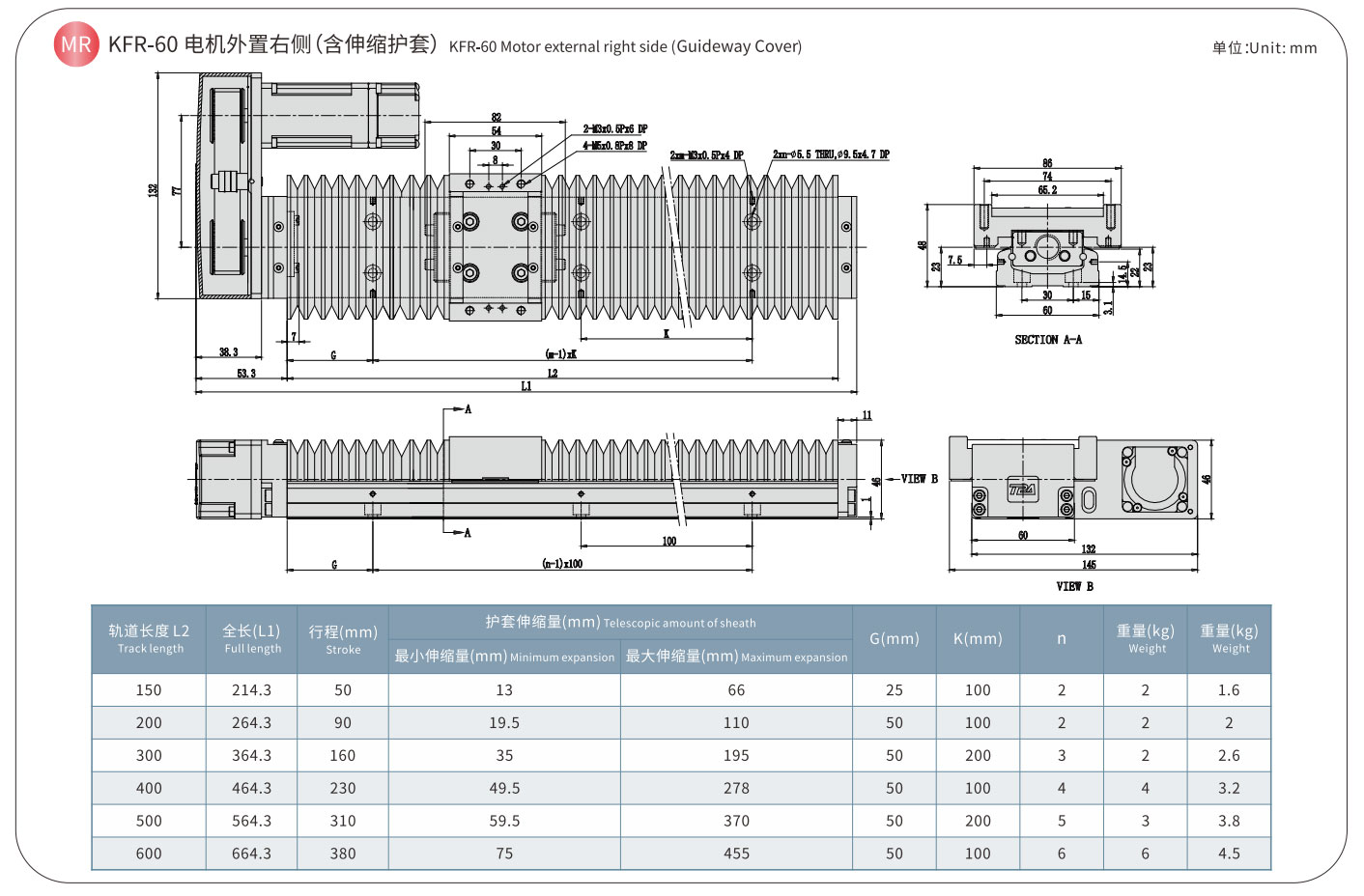
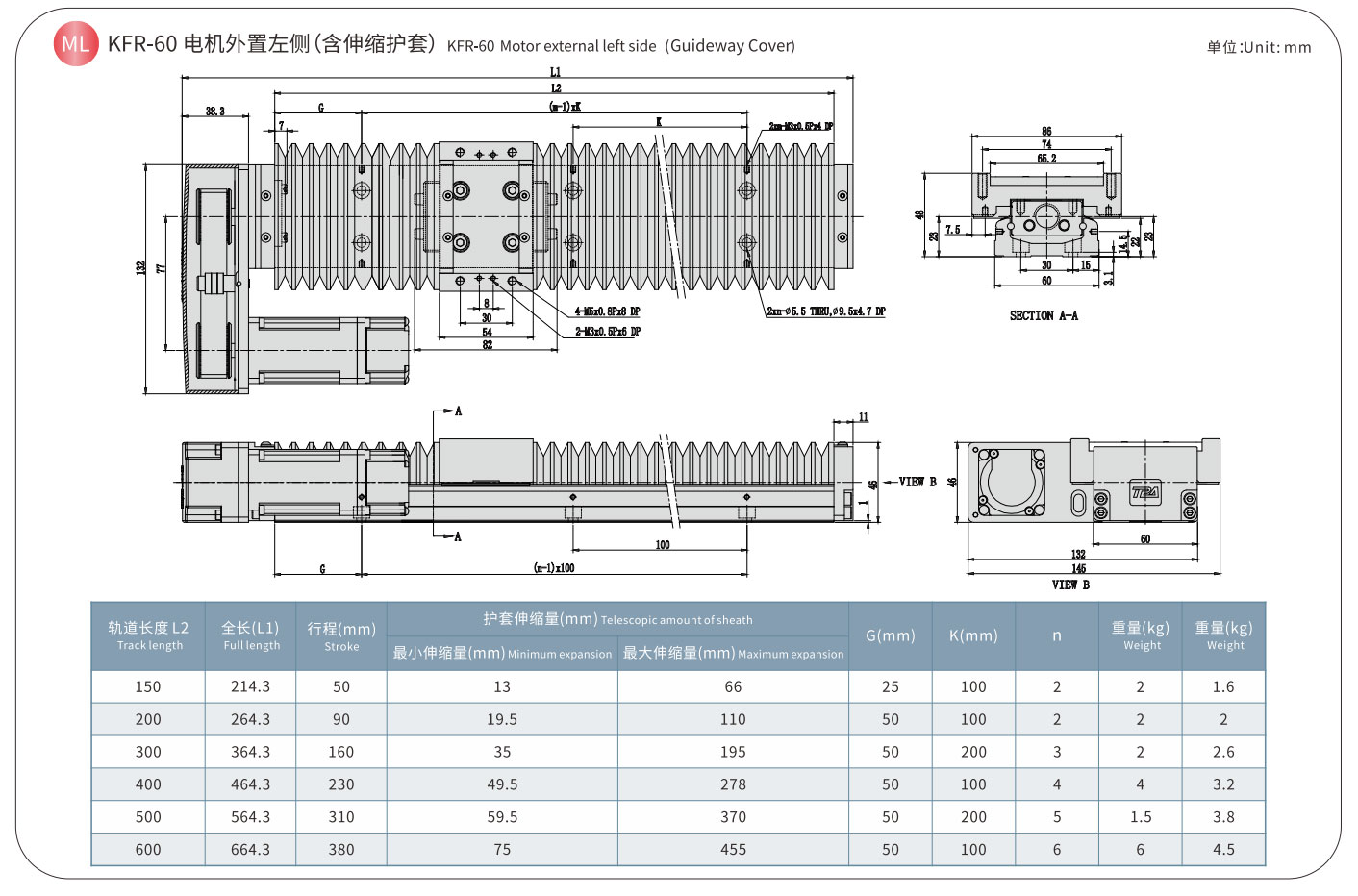
KSR-60 KNR-60 KFR-60

Seria KSR-KNR-KFR-KCR
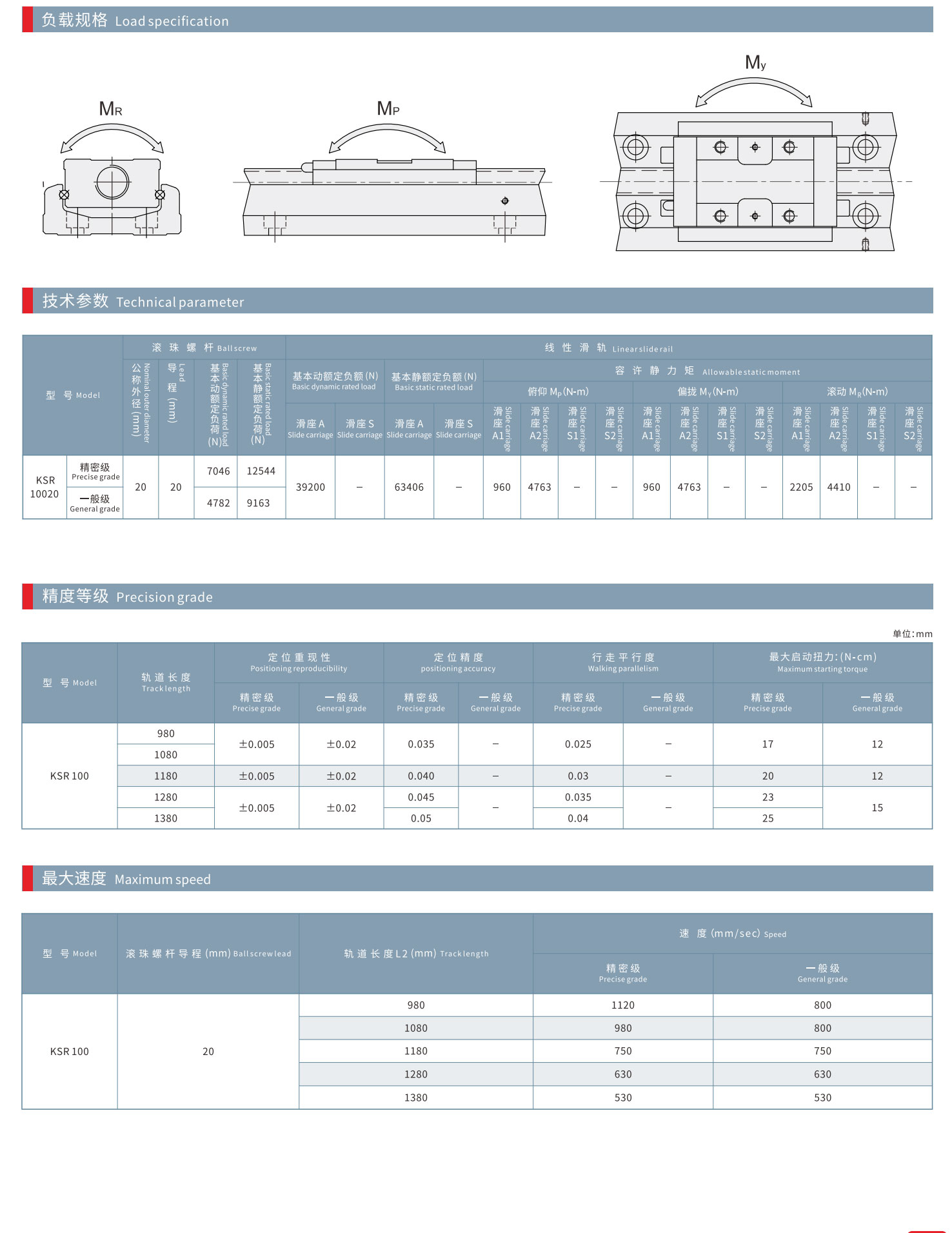
Cechy
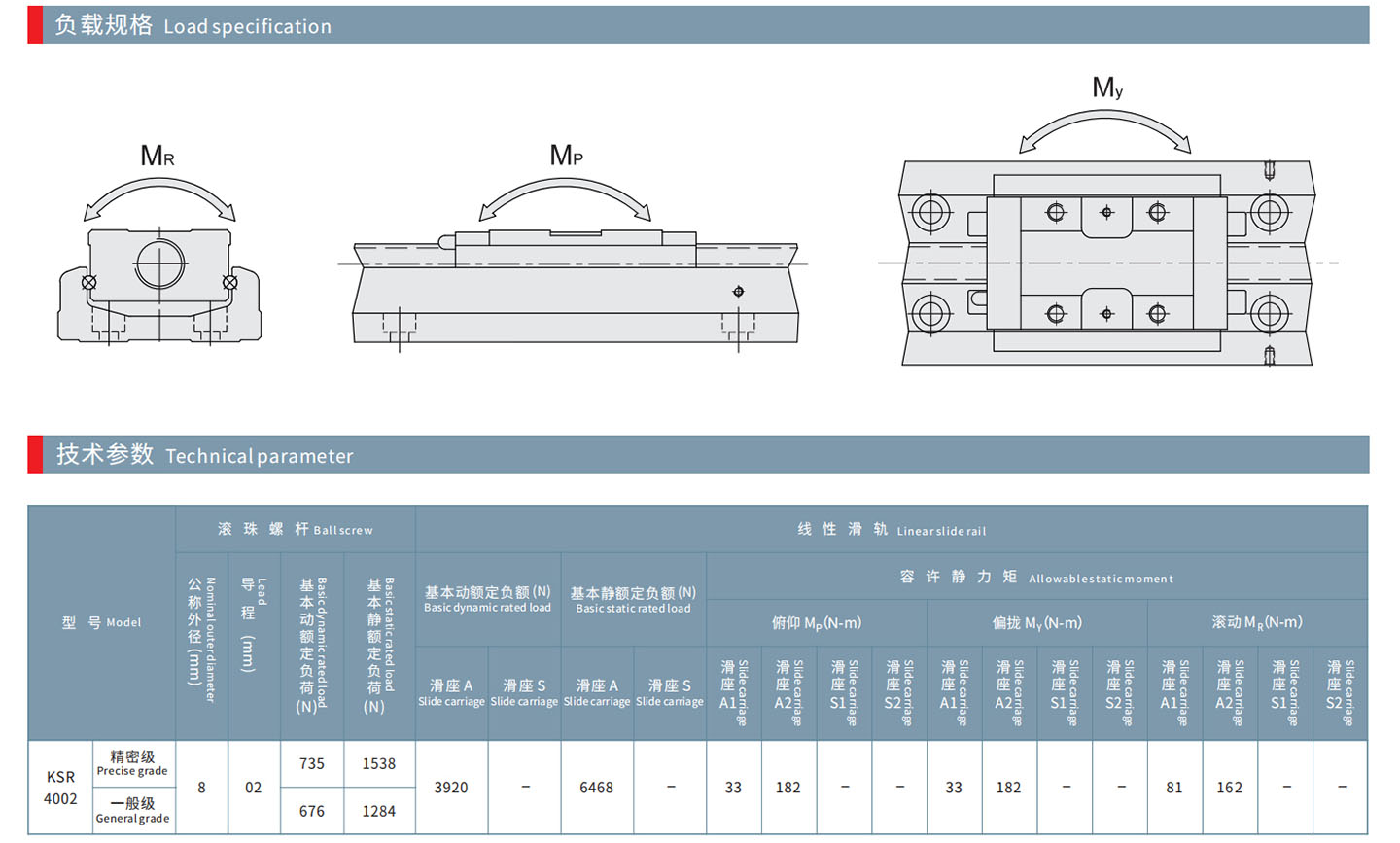
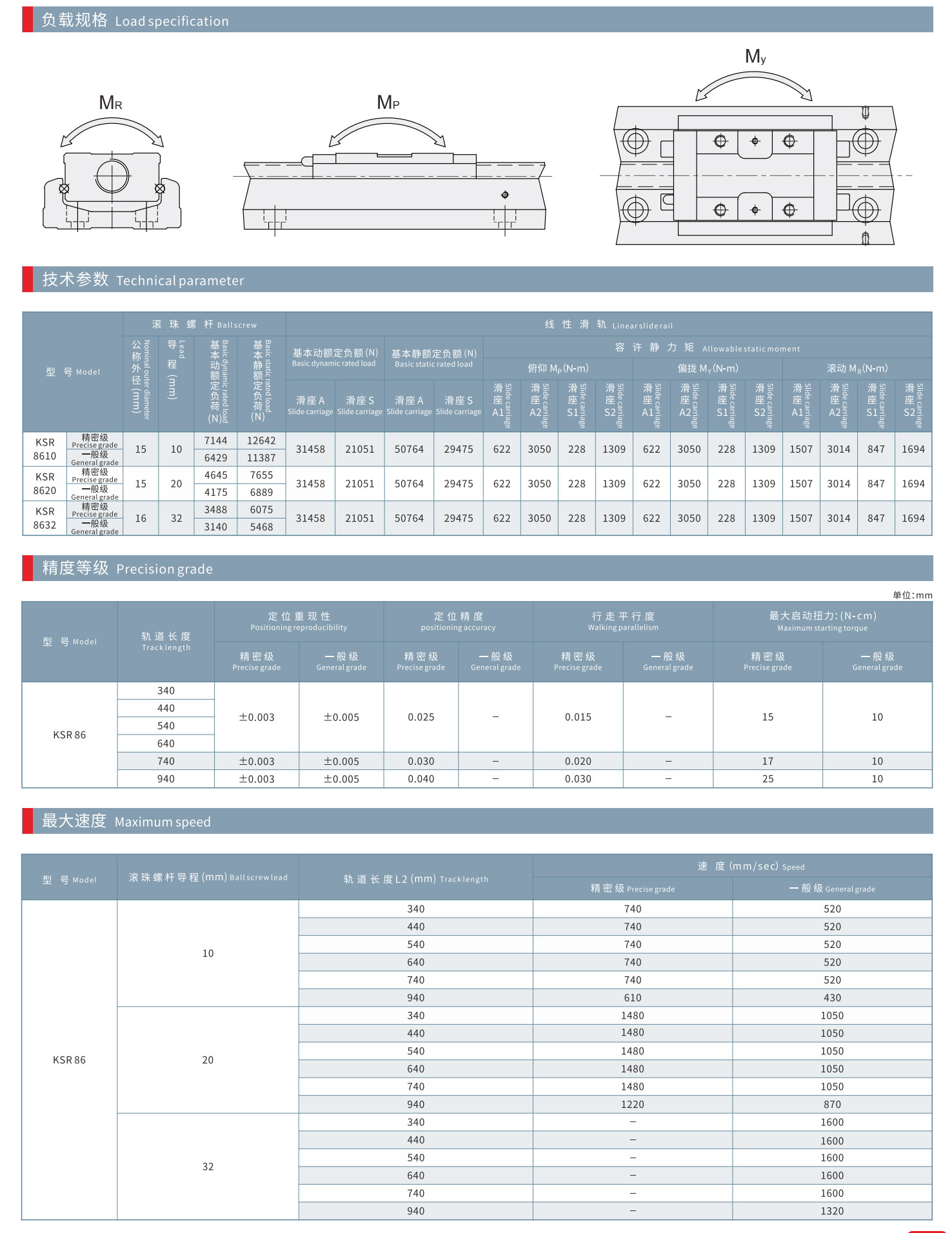
Powtarzalna dokładność pozycjonowania: ± 0,005 mm
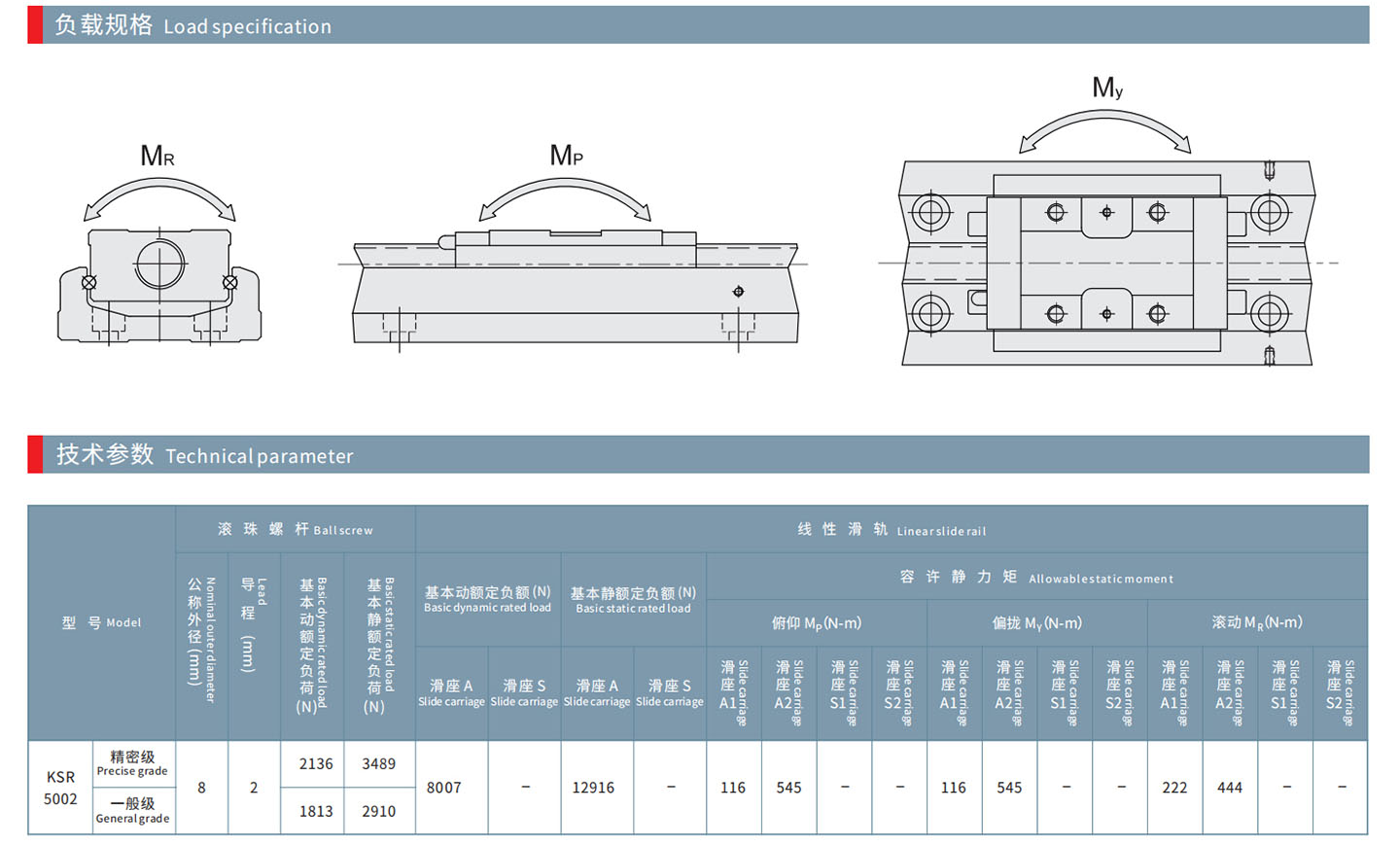
Podstawowe statyczne obciążenie znamionowe: 12642N
Podstawowe dynamiczne obciążenie znamionowe: 7144N
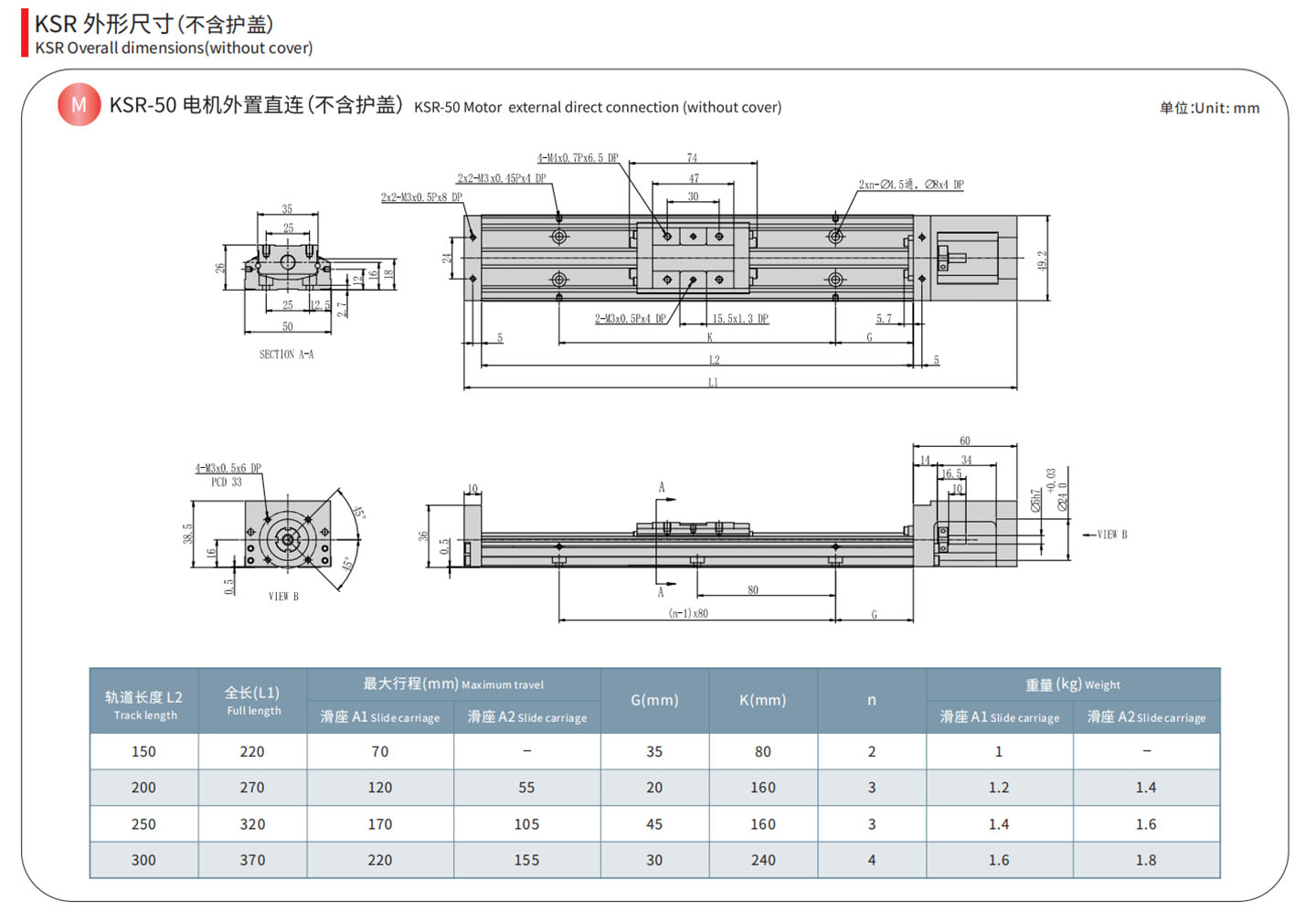
Skok: 31 – 1128 mm
Maksymalna prędkość: 1000 mm/s
Jako konstrukcję przekładni zastosowano precyzyjną śrubę kulową, a tor w kształcie litery U jest dopasowany do zoptymalizowanej konstrukcji. Jako konstrukcja prowadząca, aby zapewnić wymagania dotyczące dokładności i sztywności.
Powierzchnia styku pomiędzy kulką a rowkiem stopki ma 2-rzędowy typ zęba Goethego. Konstrukcja charakteryzuje się kątem zwilżania wynoszącym 45 stopni, dzięki czemu moduł na bazie stali wytrzymuje cztery kierunki. Możliwość równego obciążenia.
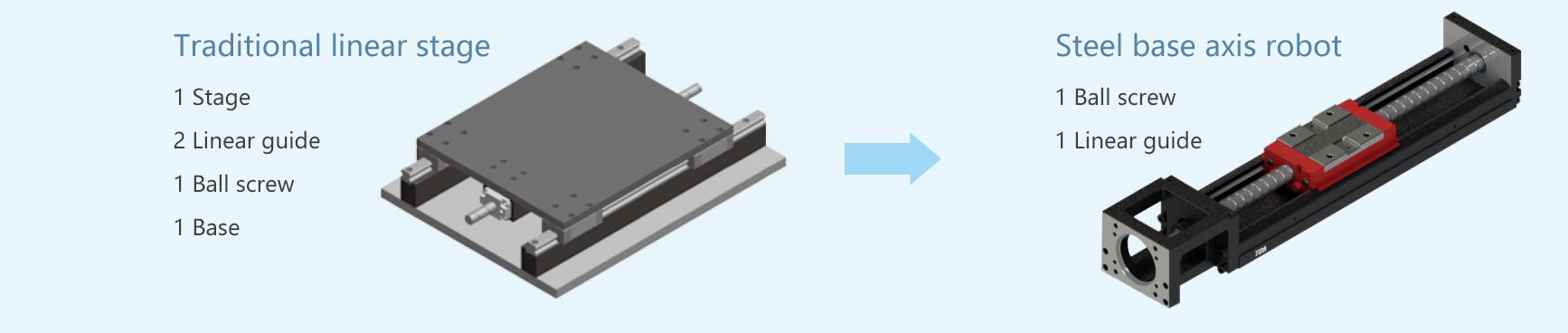
Dzięki modułowej konstrukcji stalowy moduł podstawy integruje śrubę kulową i szynę w kształcie litery U, co pozwala zaoszczędzić tradycyjnej platformie uruchamiającej konieczności konieczności wyboru elementów prowadzących i napędowych, instalacji i weryfikacji, dużej objętości i zajmowanej przestrzeni. Dlatego moduł oparty na stali może zapewnić szybki wybór, instalację, niewielkie rozmiary, wysoką sztywność itd., co może znacznie skrócić przestrzeń i czas użytkowania klienta.


Więcej produktów

Seria HFR — oś Z do cięcia laserowego

Seria GCRS Podwójna prowadnica Wbudowana szyna liniowa A...

Siłowniki liniowe ze śrubą kulową serii HNR, półobudowa...

Moduły liniowe napędzane śrubą kulową serii GCR Bui...

Całkowicie zamknięty moduł liniowy ze śrubą kulową serii HCR

Aluminiowa podstawa robota jednoosiowego serii KNR-E










