




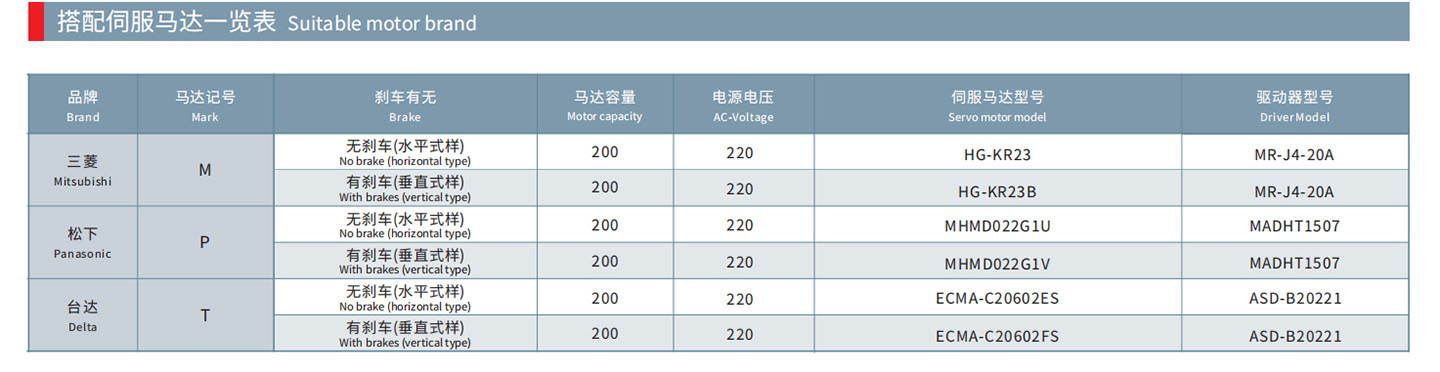
Aluminiowa podstawa robota jednoosiowego serii KNR-E

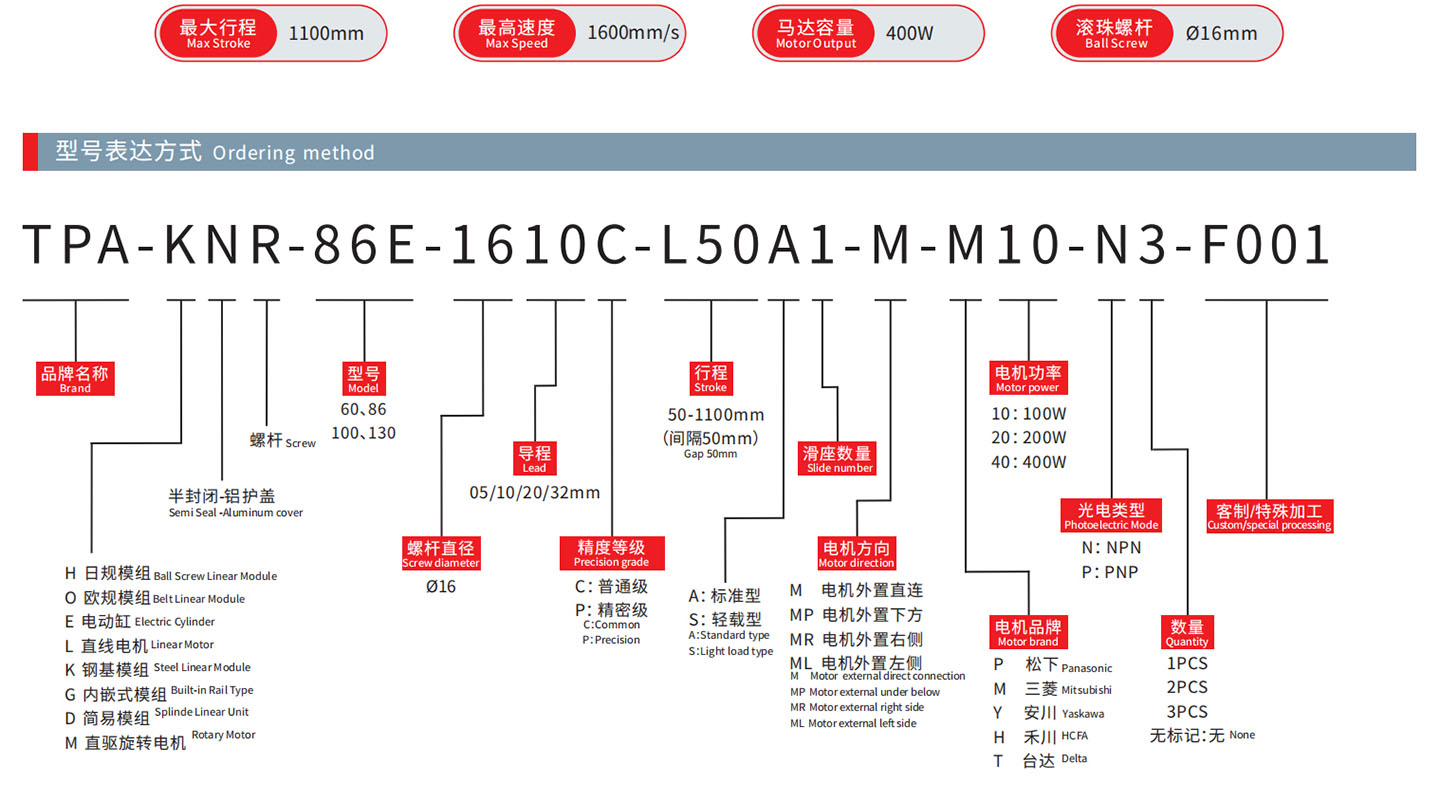
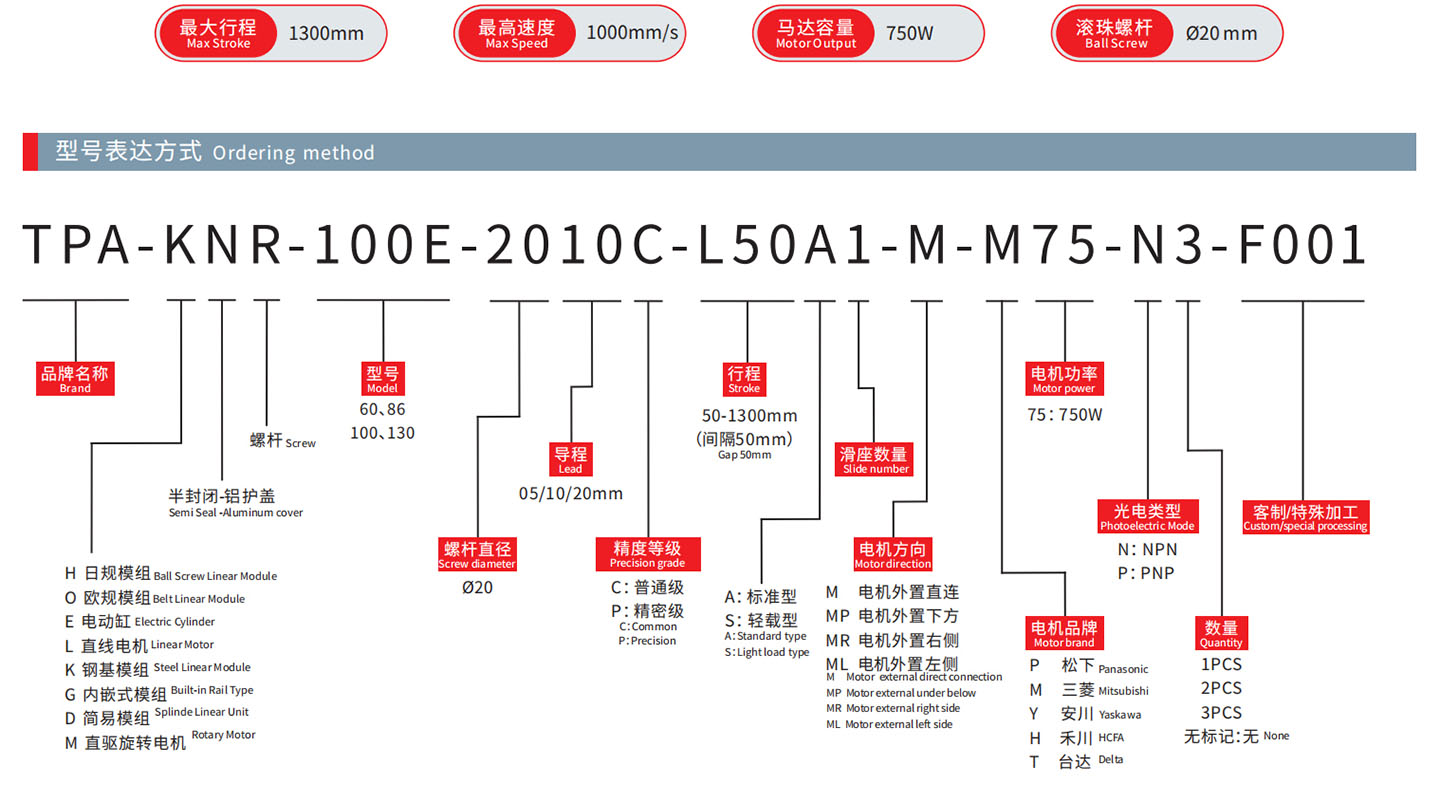
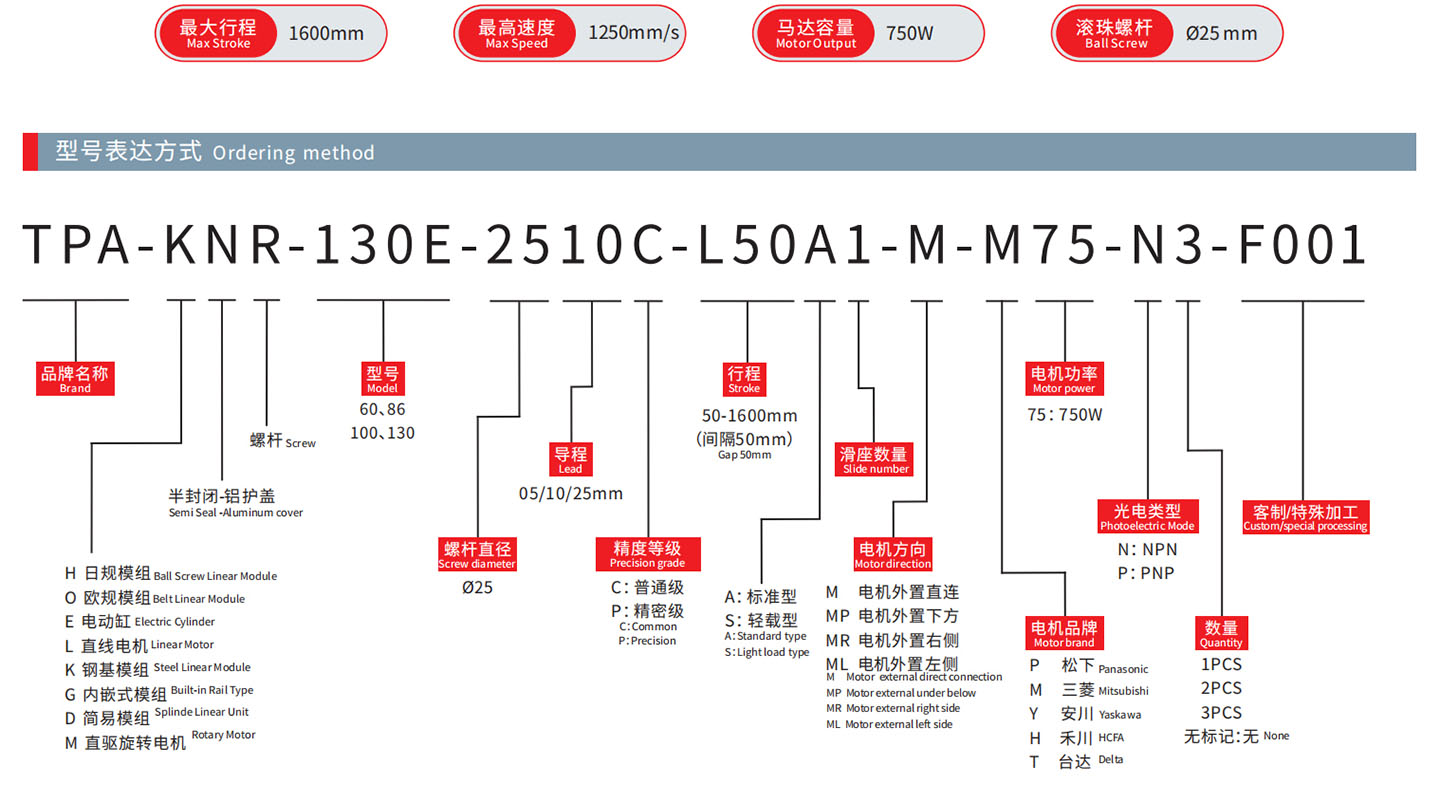
Selektor modelu
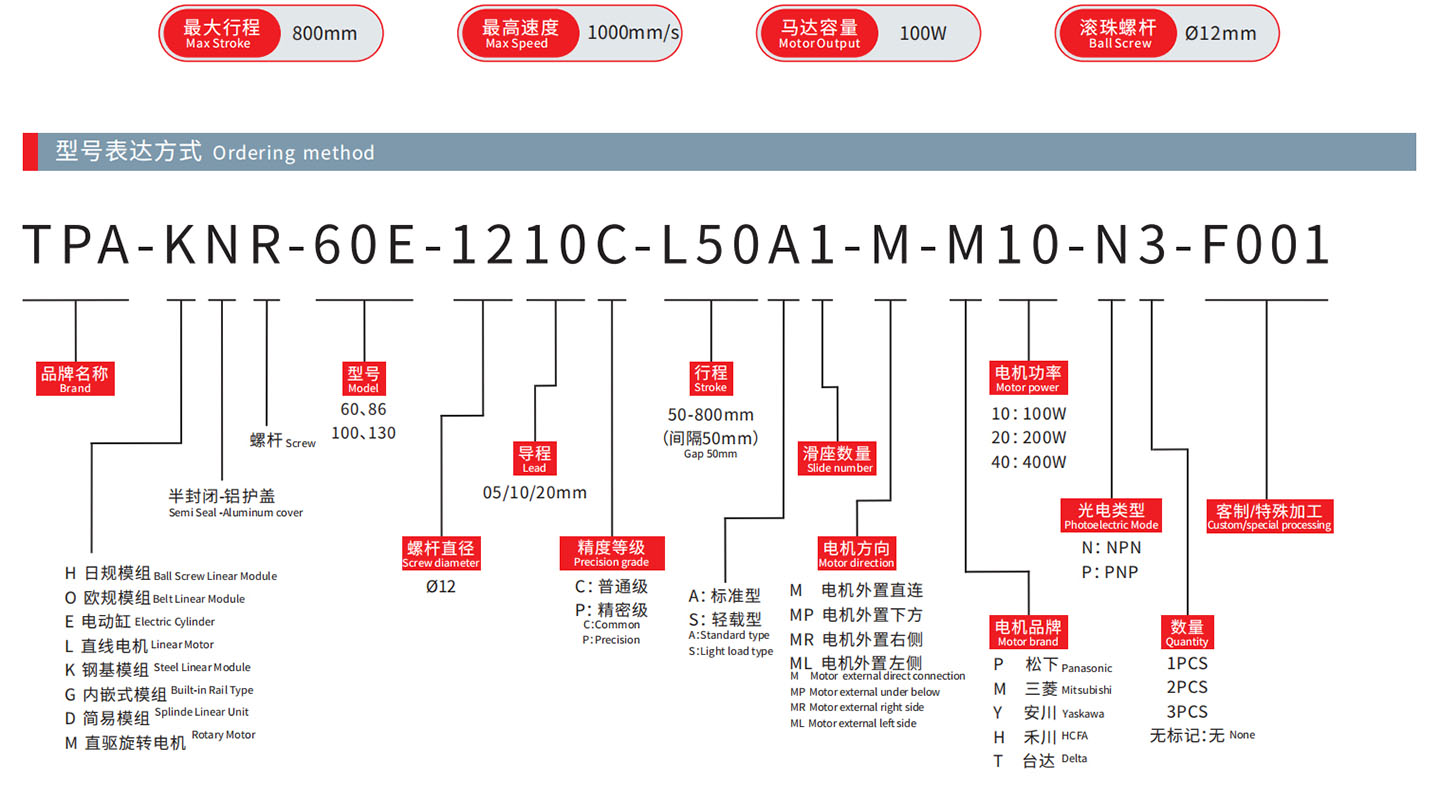
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
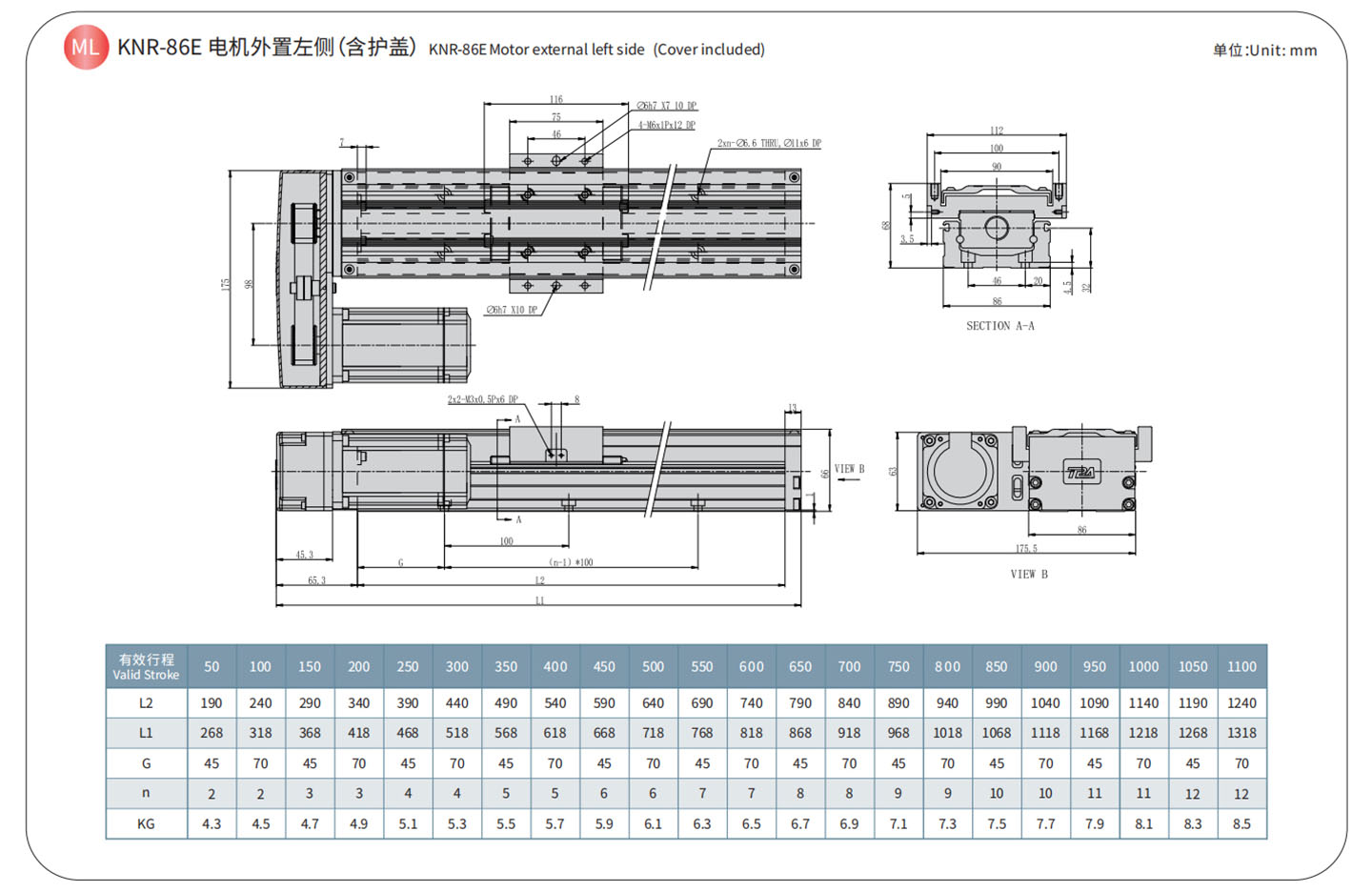
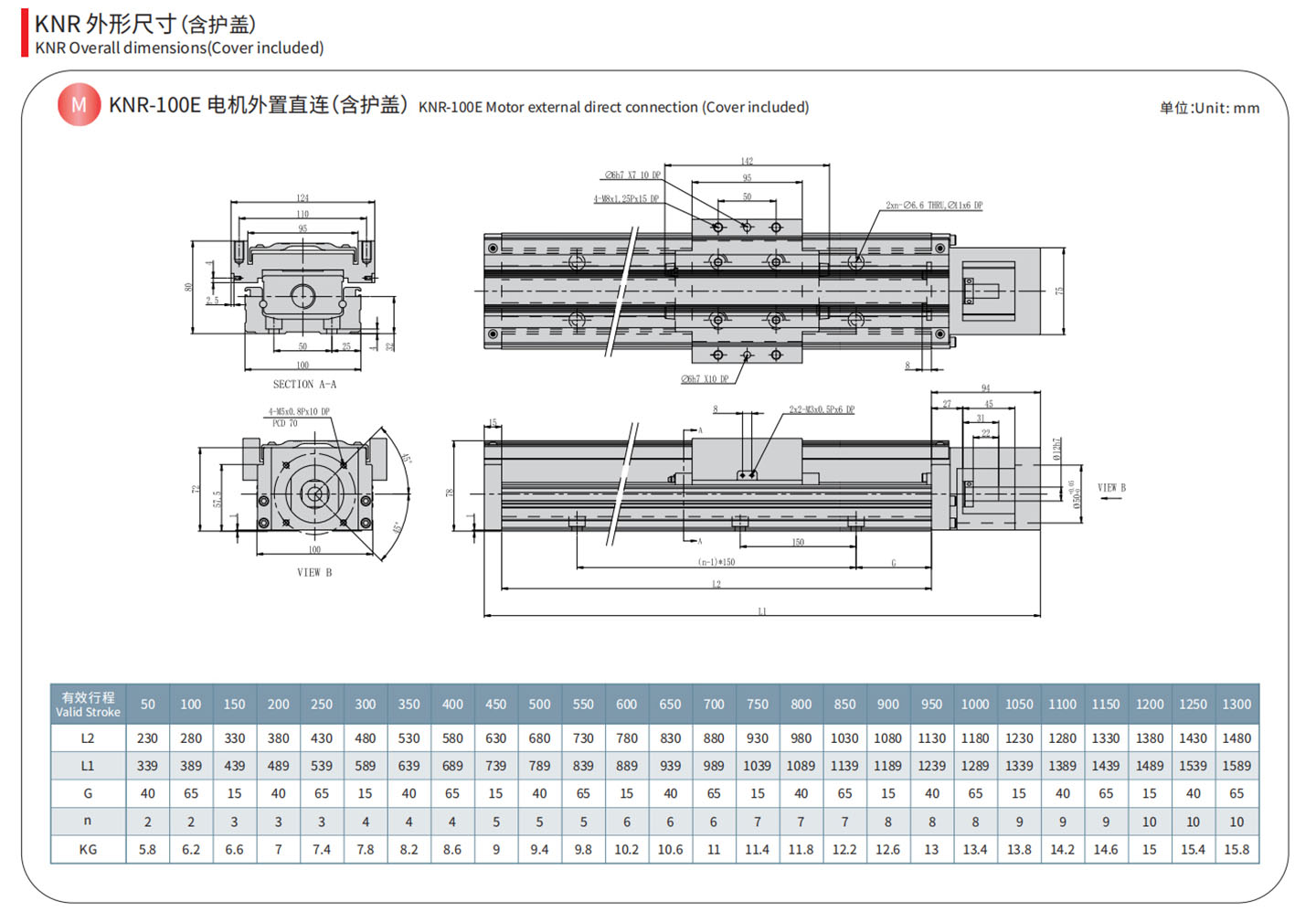
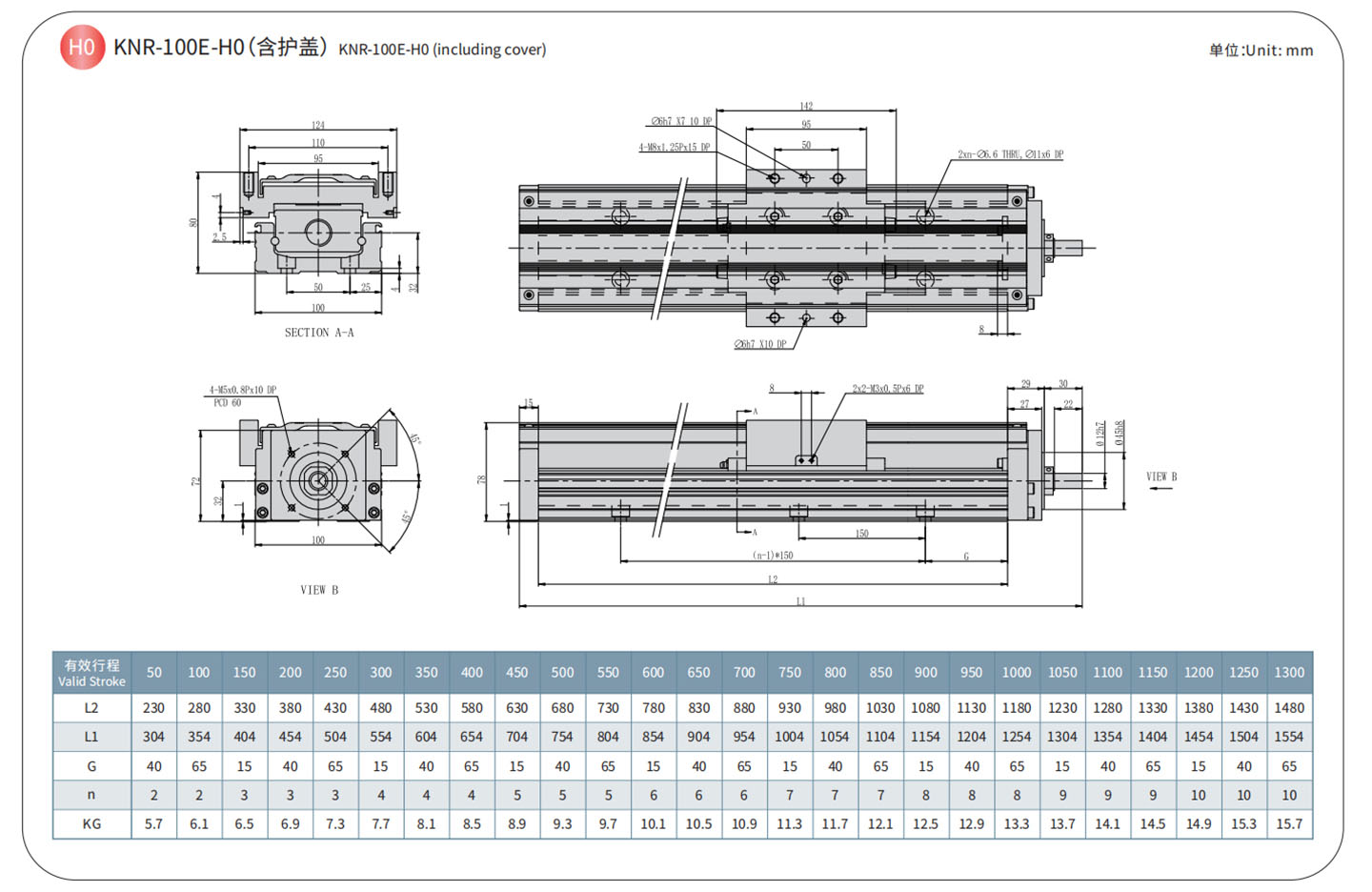
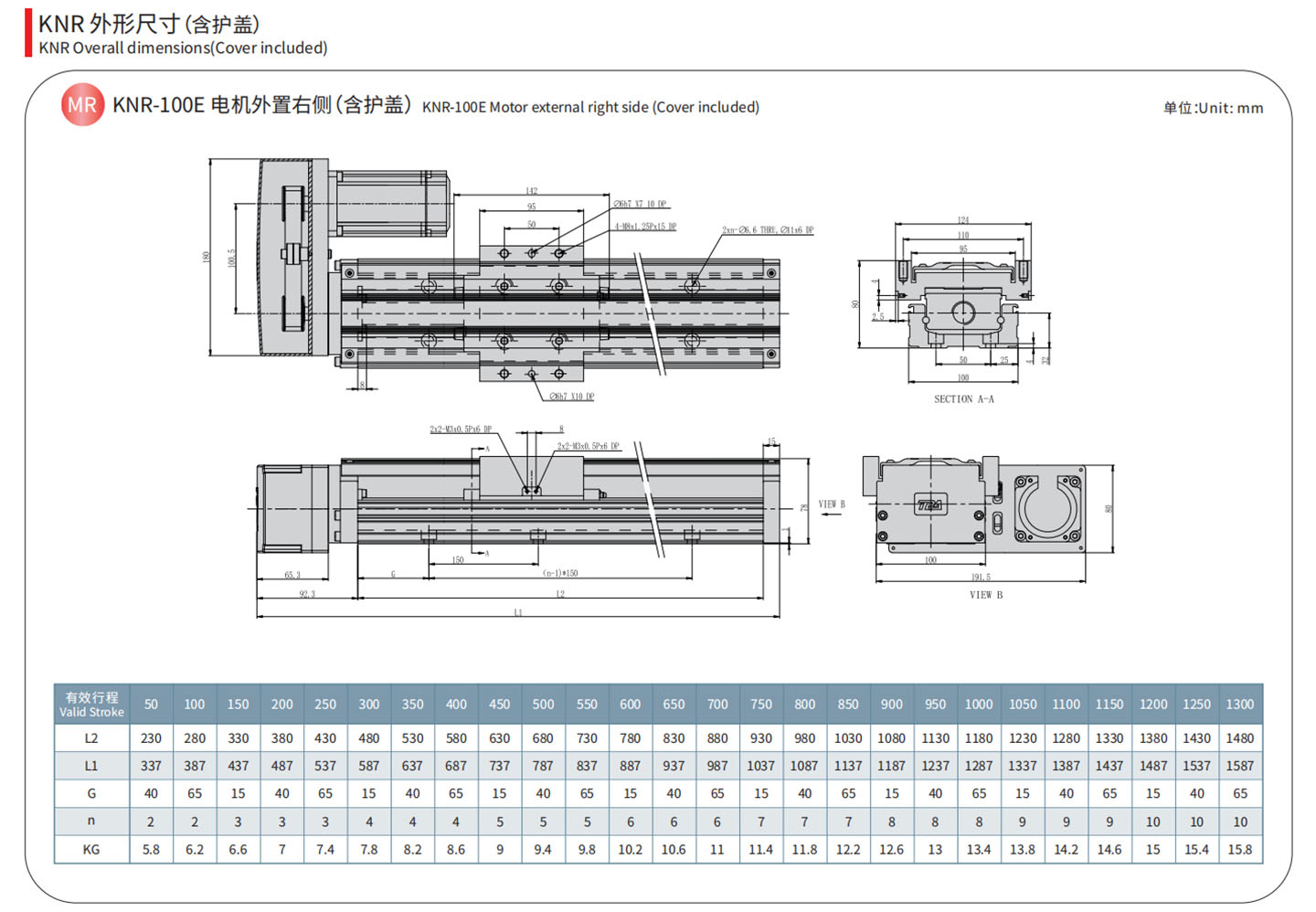
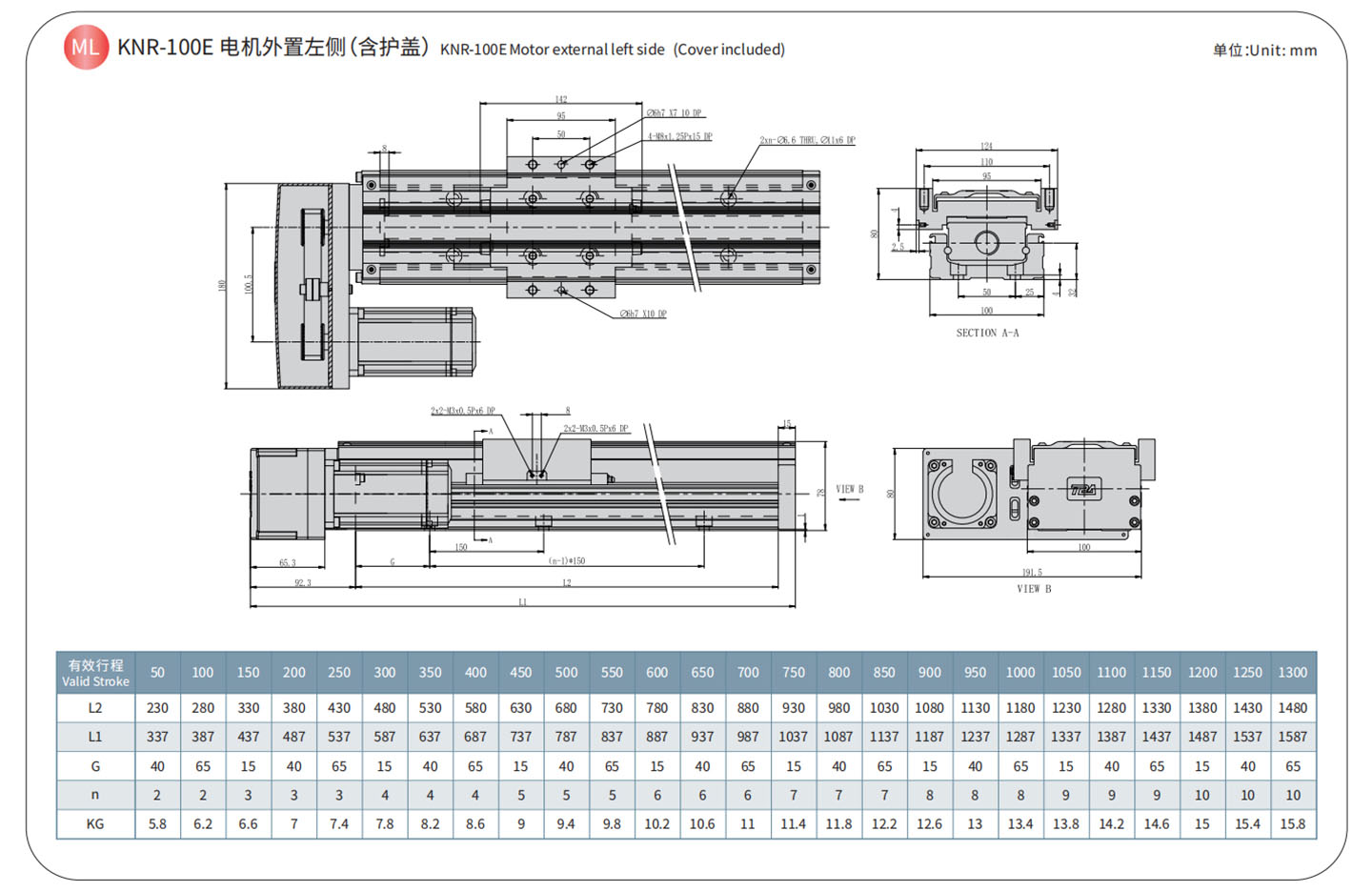
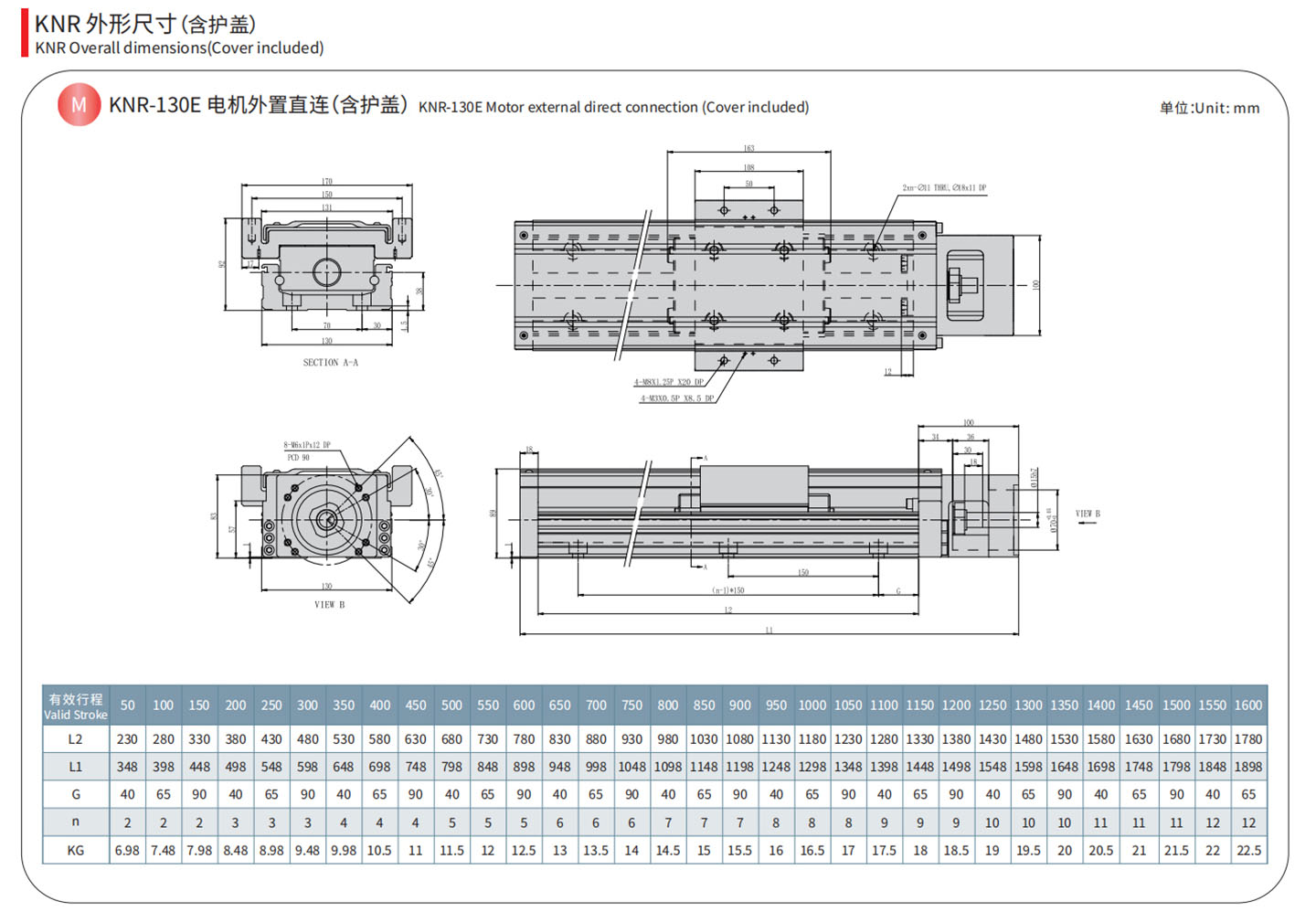
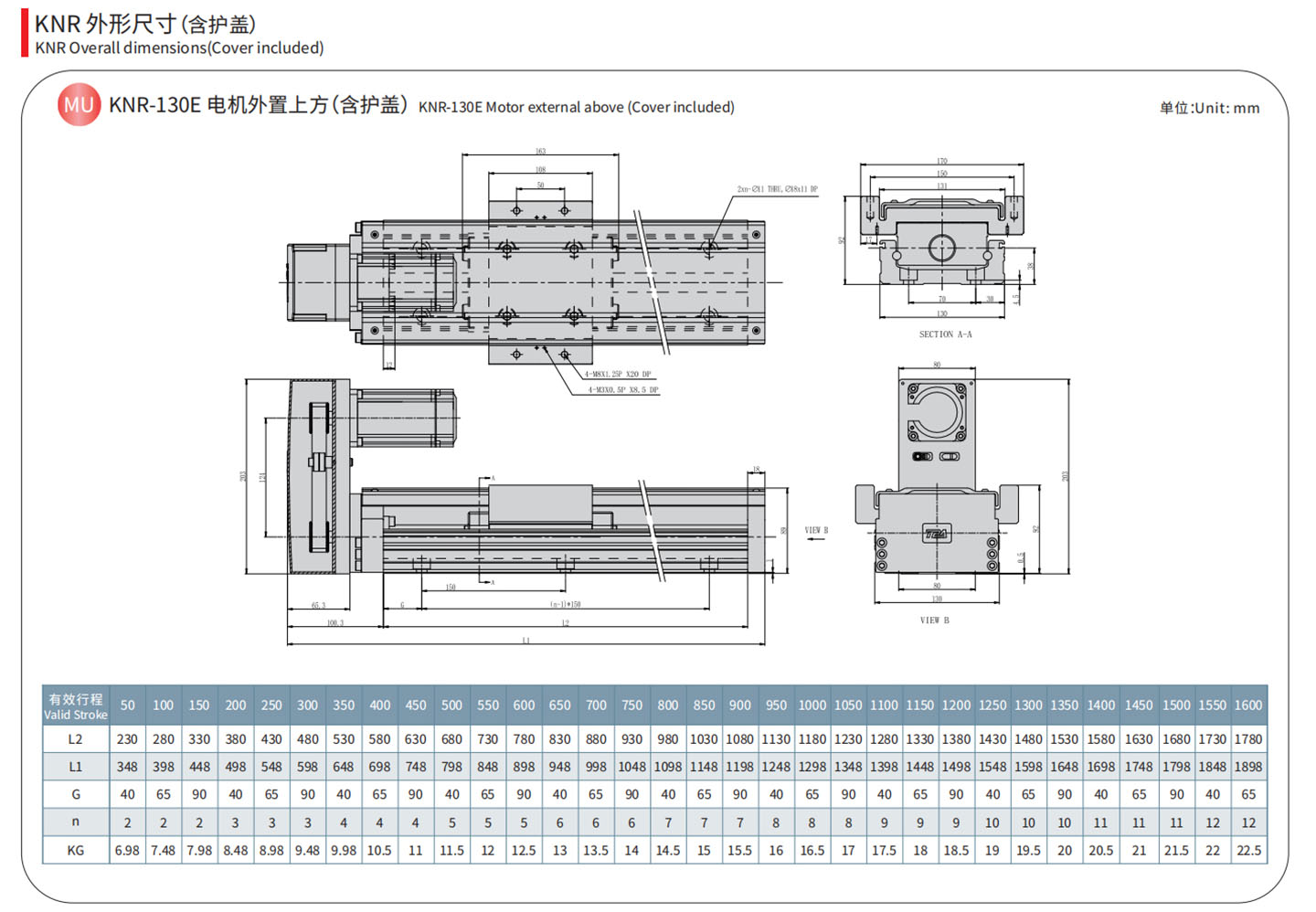
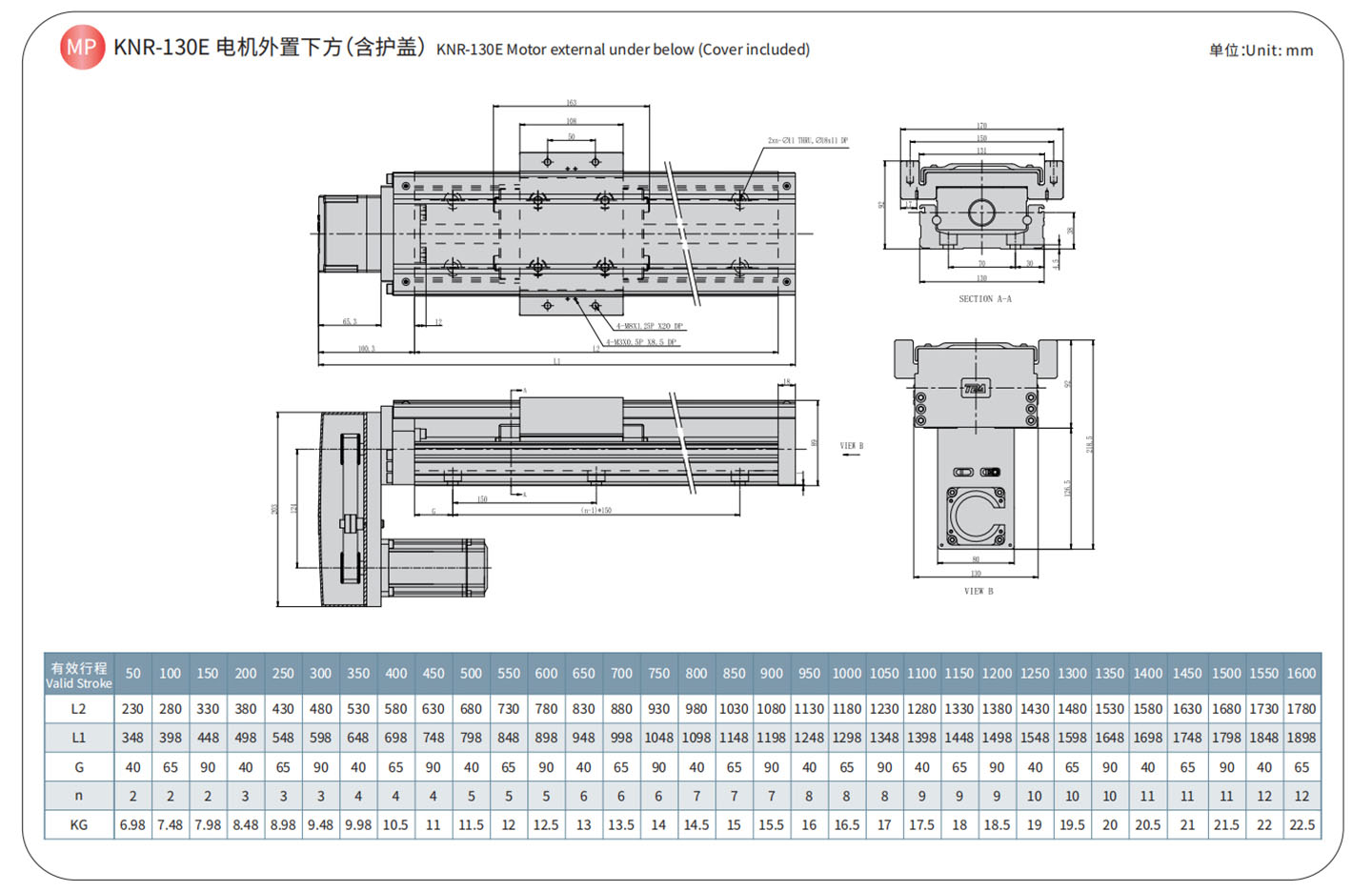
Robot jednoosiowy serii KK, opracowany przez TPA ROBOT, wykorzystuje częściowo hartowaną stalową szynę bazową w kształcie litery U, aby znacznie zwiększyć wytrzymałość robota i nośność. Ze względu na różne środowiska, w naszej ofercie znajdują się trzy typy robotów liniowych serii KSR, KNR i KFR, w zależności od rodzaju zastosowanej osłony.
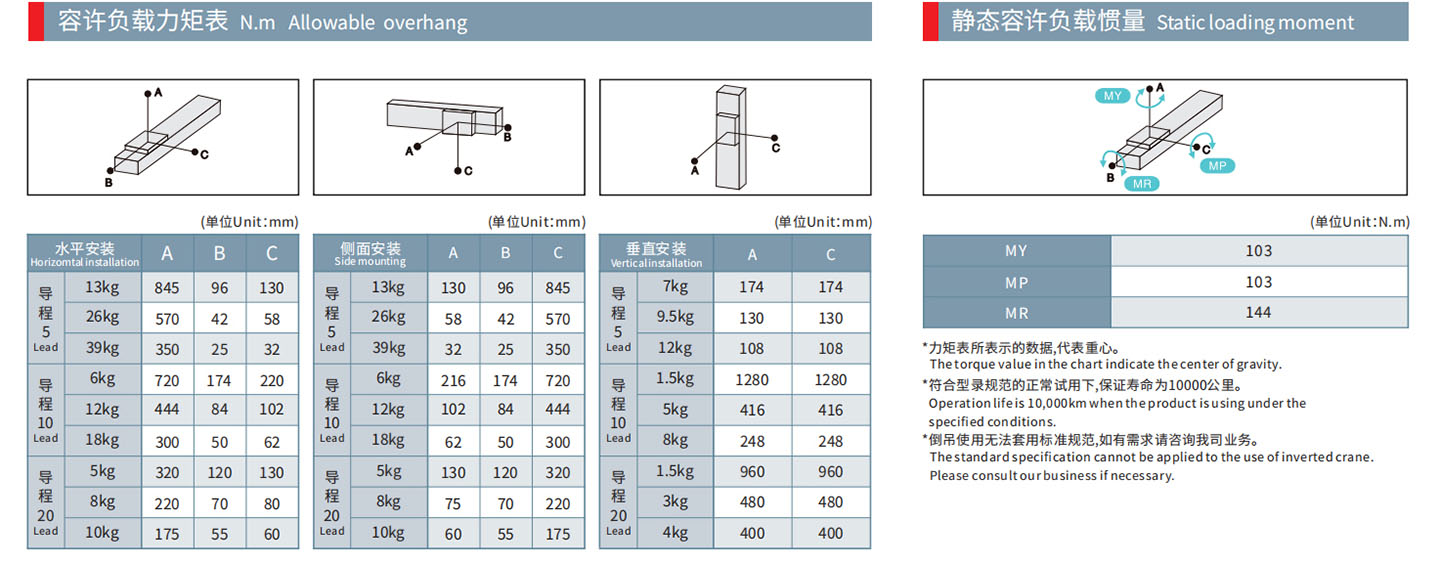
W przypadku systemu powrotnego między torem a suwakiem powierzchnia styku między kulką a rowkiem kuli przyjmuje 2-rzędową konstrukcję zębów Goethego z kątem zwilżania 45 stopni, dzięki czemu ramię robota osiowego może przenosić równą nośność w czterech kierunkach .
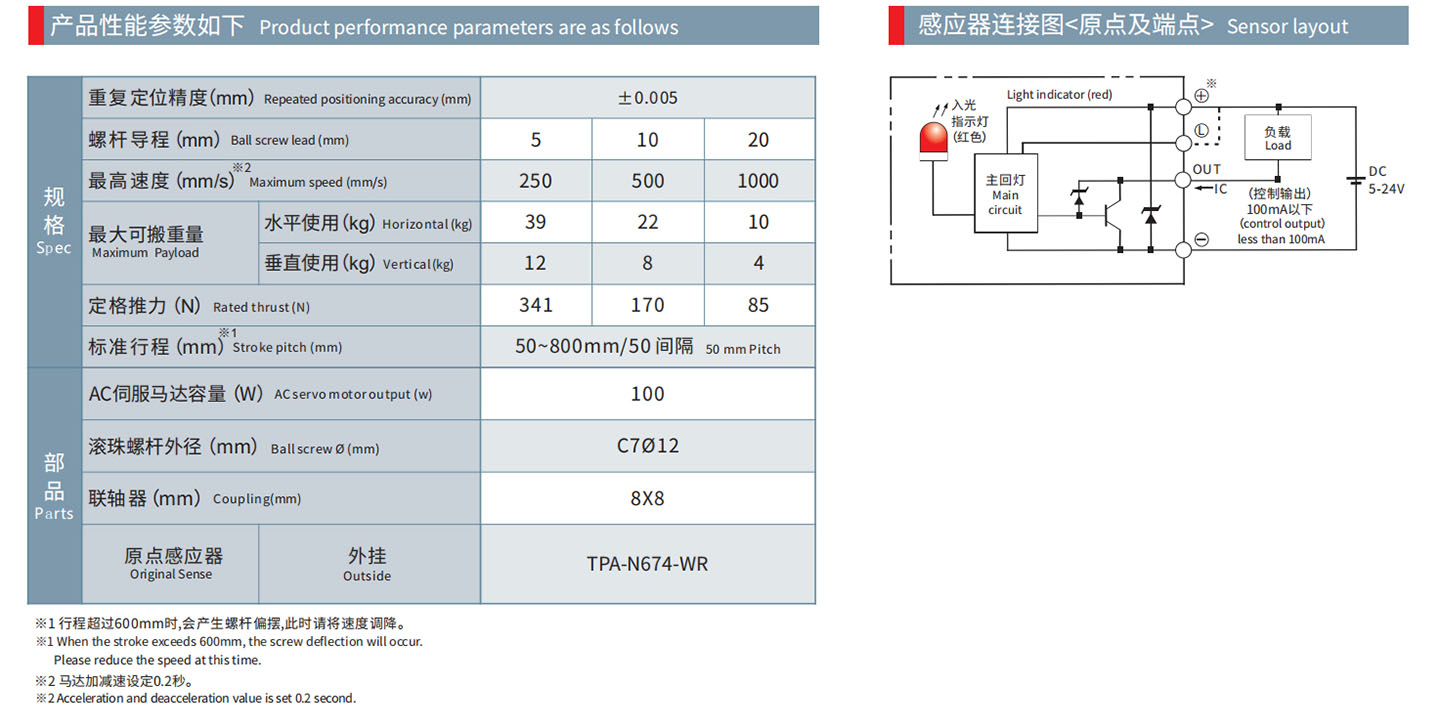
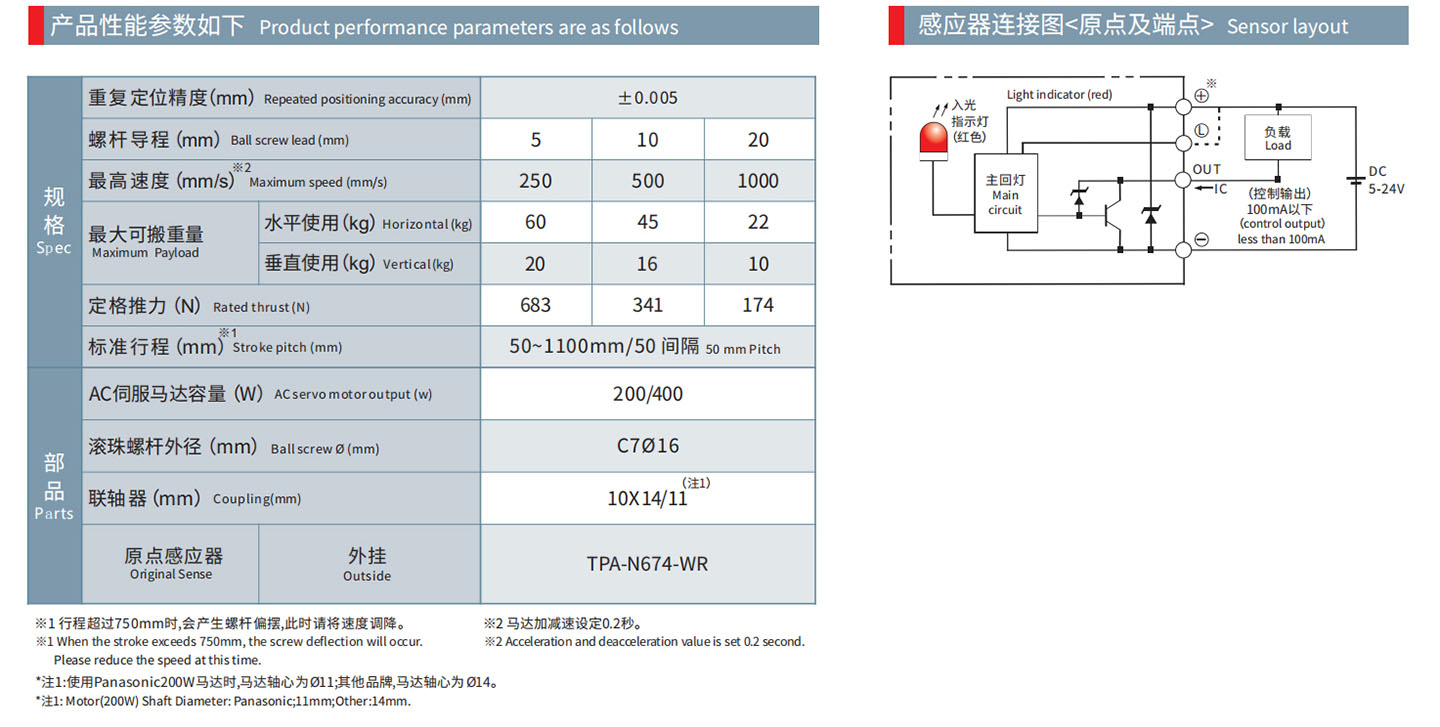
Jednocześnie jako konstrukcję przekładni zastosowano precyzyjną śrubę kulową, a tor w kształcie litery U współpracuje ze zoptymalizowaną konstrukcją, dzięki czemu robot osi KK ma niezrównaną precyzję, a jego powtarzalna dokładność pozycjonowania może osiągnąć ± 0,003 mm.
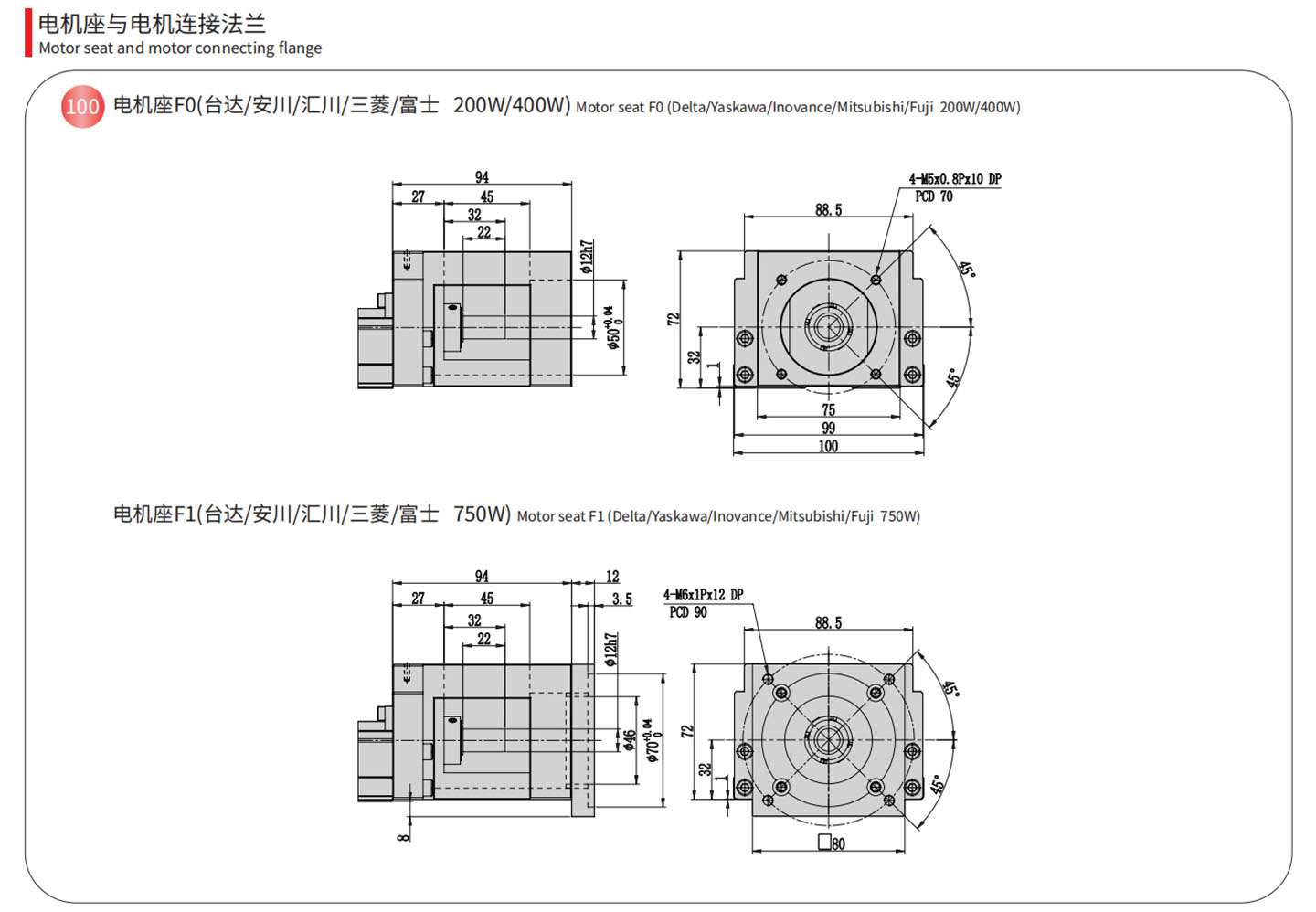
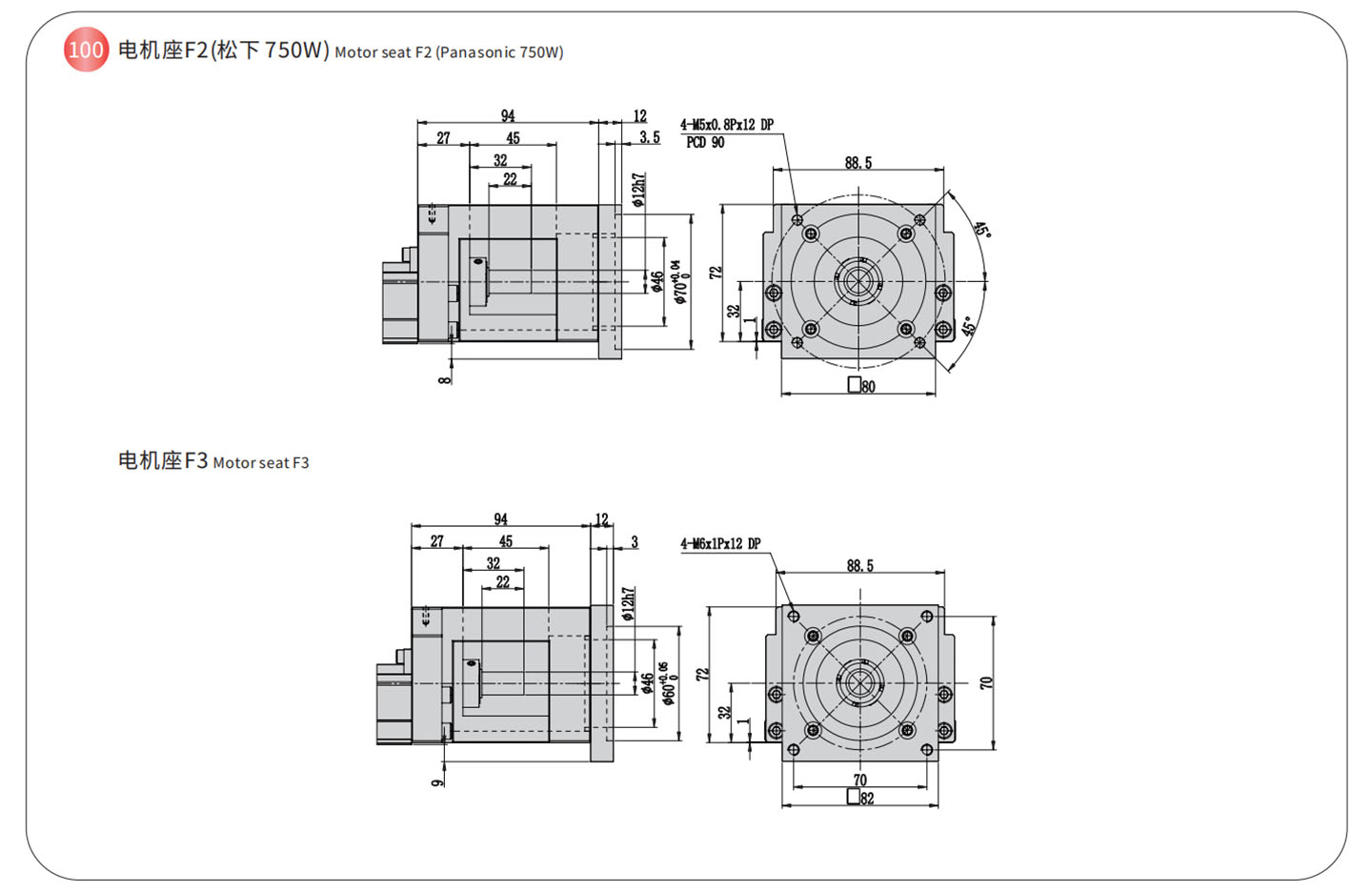
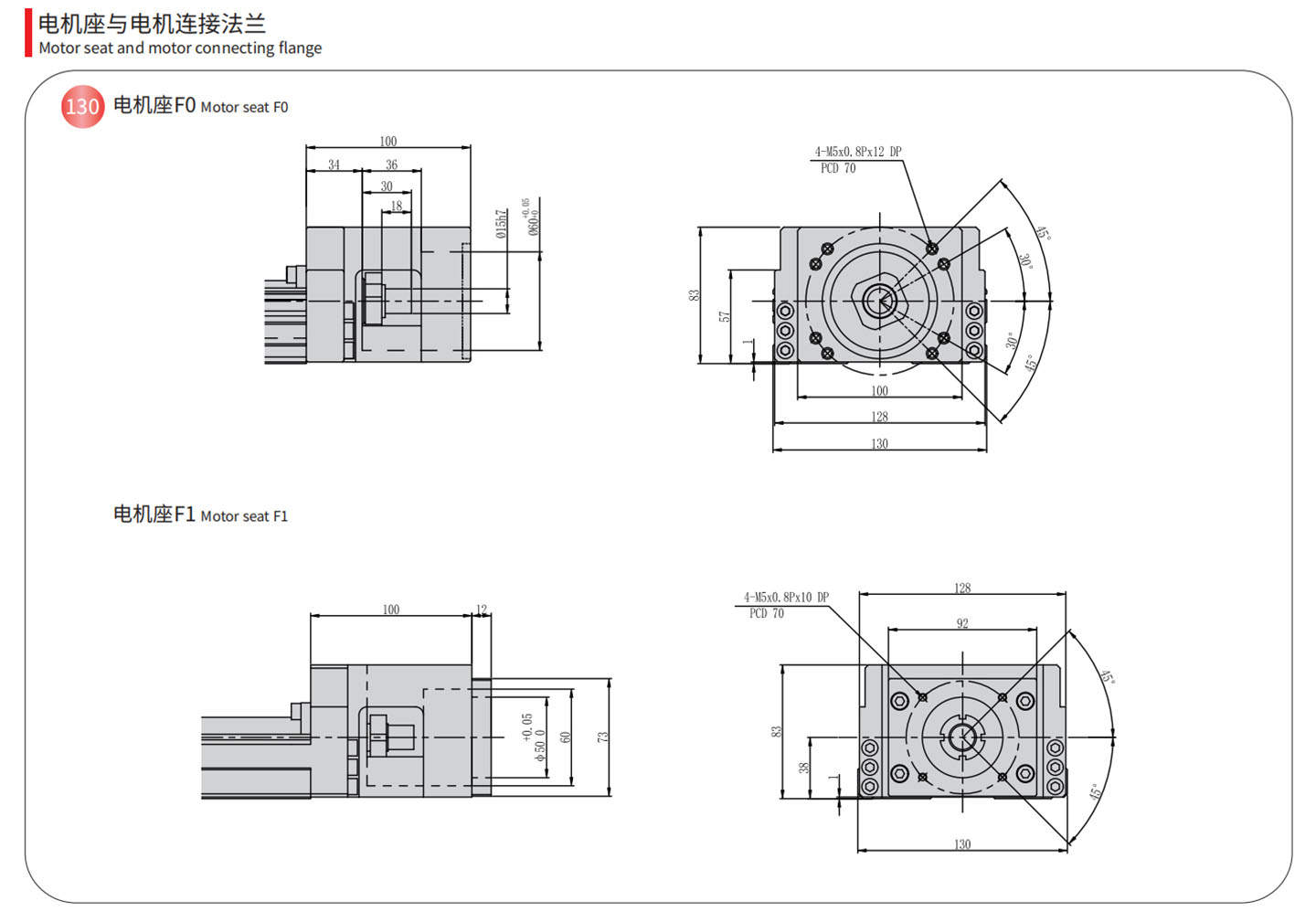
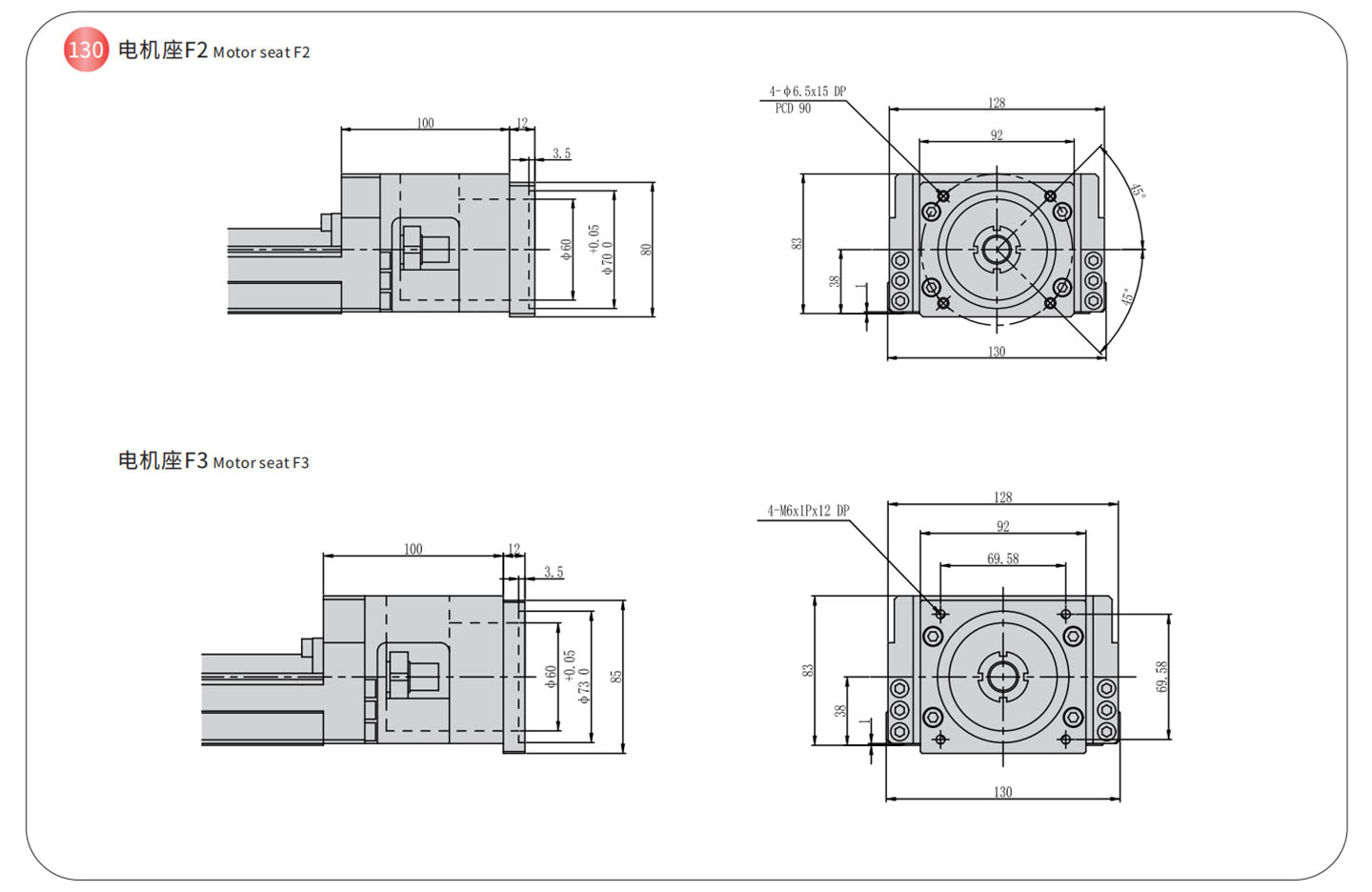
Przy tych samych warunkach obciążenia nasz robot jednoosiowy serii KK jest mniejszy, zapewniamy standardowe otwory gwintowane w stalowej podstawie i suwaku, a nasza płyta adaptera silnika może zapewnić do 8 metod instalacji silnika, co oznacza, że można go łatwo zmontować dowolny kartezjański system robotyczny. Dlatego roboty jednoosiowe serii KK są szeroko stosowane w obsłudze płytek krzemowych, automatycznym dozowaniu, przemyśle FPD, przemyśle automatyki medycznej, precyzyjnych przyrządach pomiarowych, stole przesuwnym, branży koordynacji liniowych stołów przesuwnych.
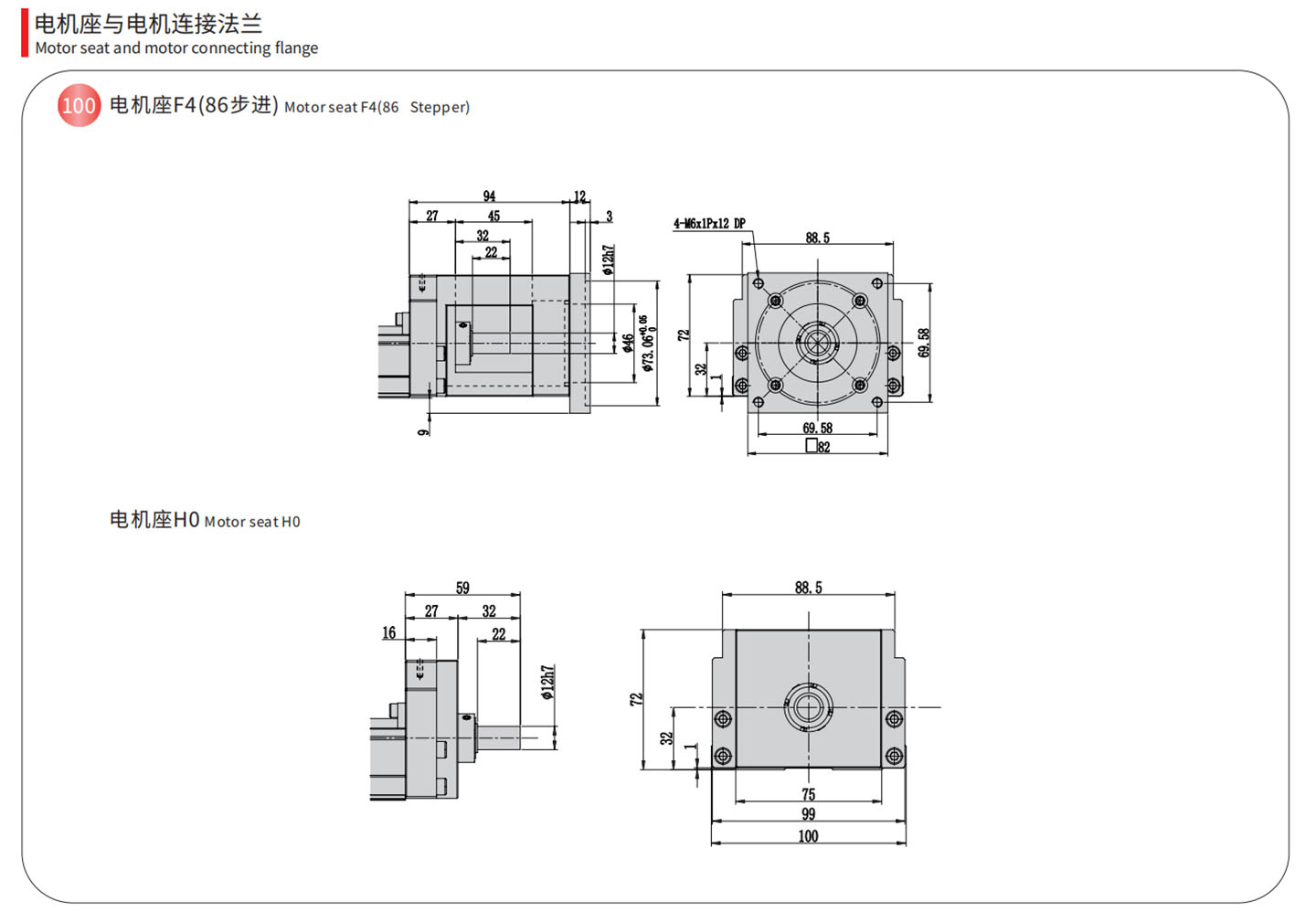
钢基铝内嵌

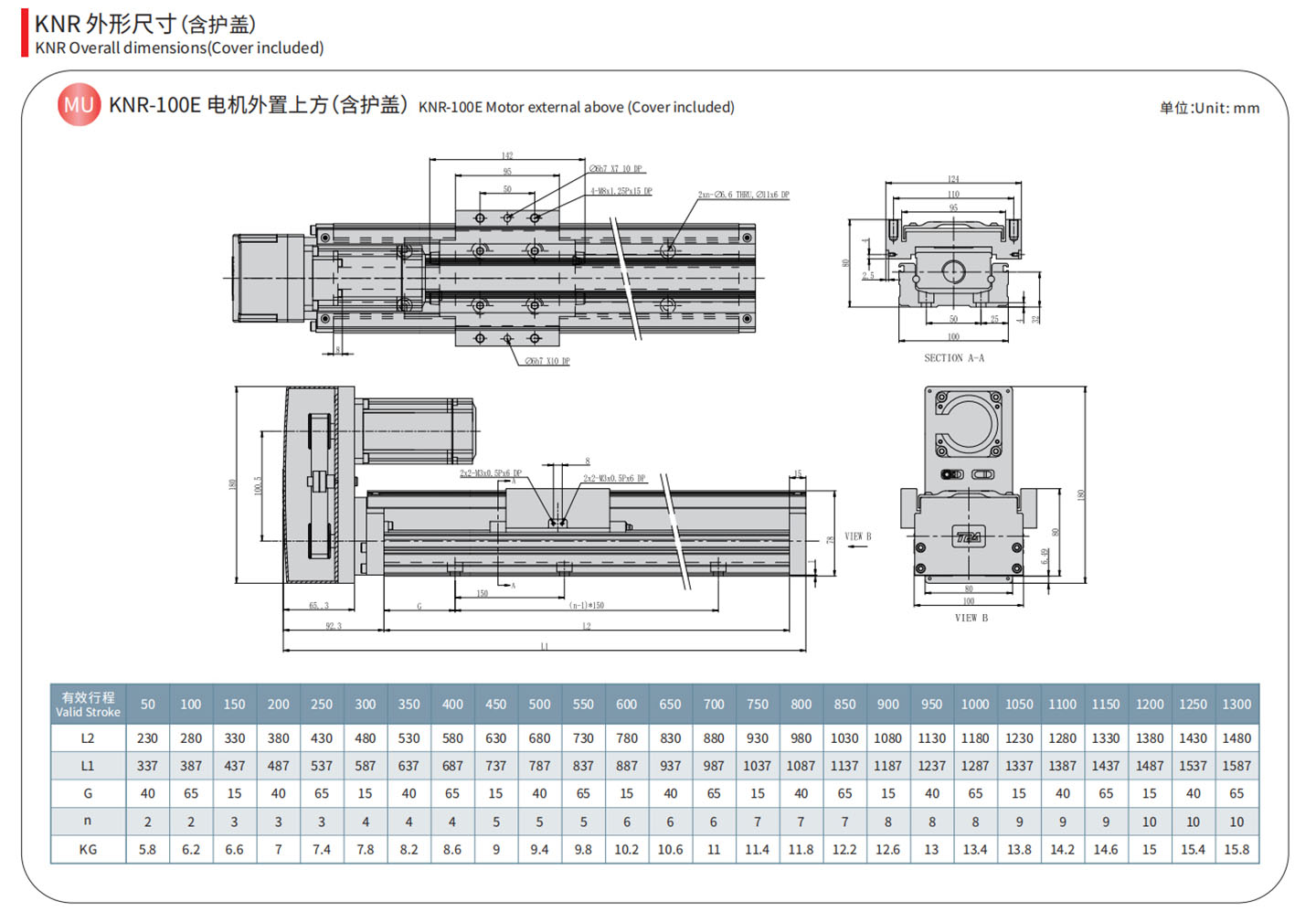
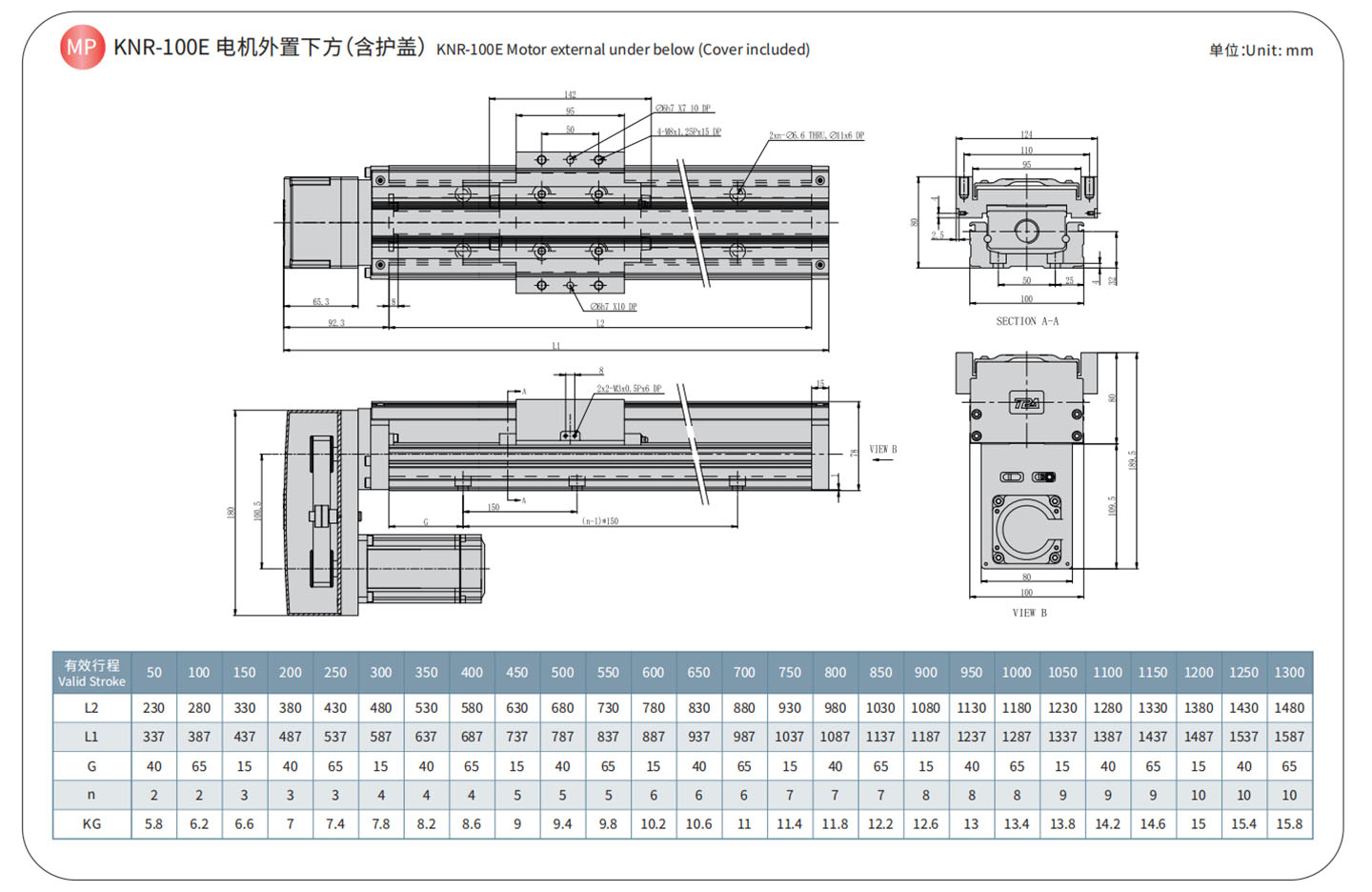
钢基铝内嵌100

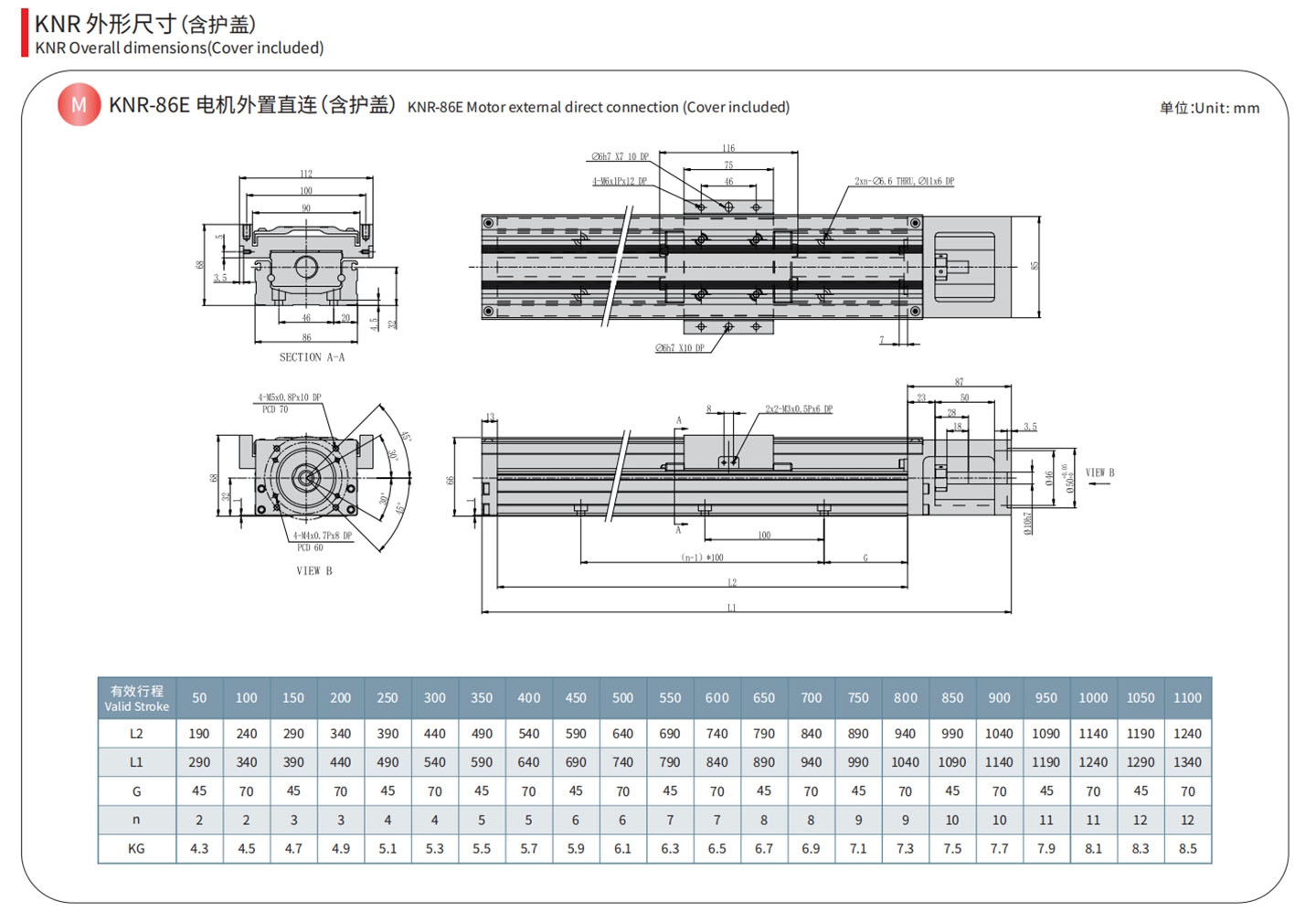
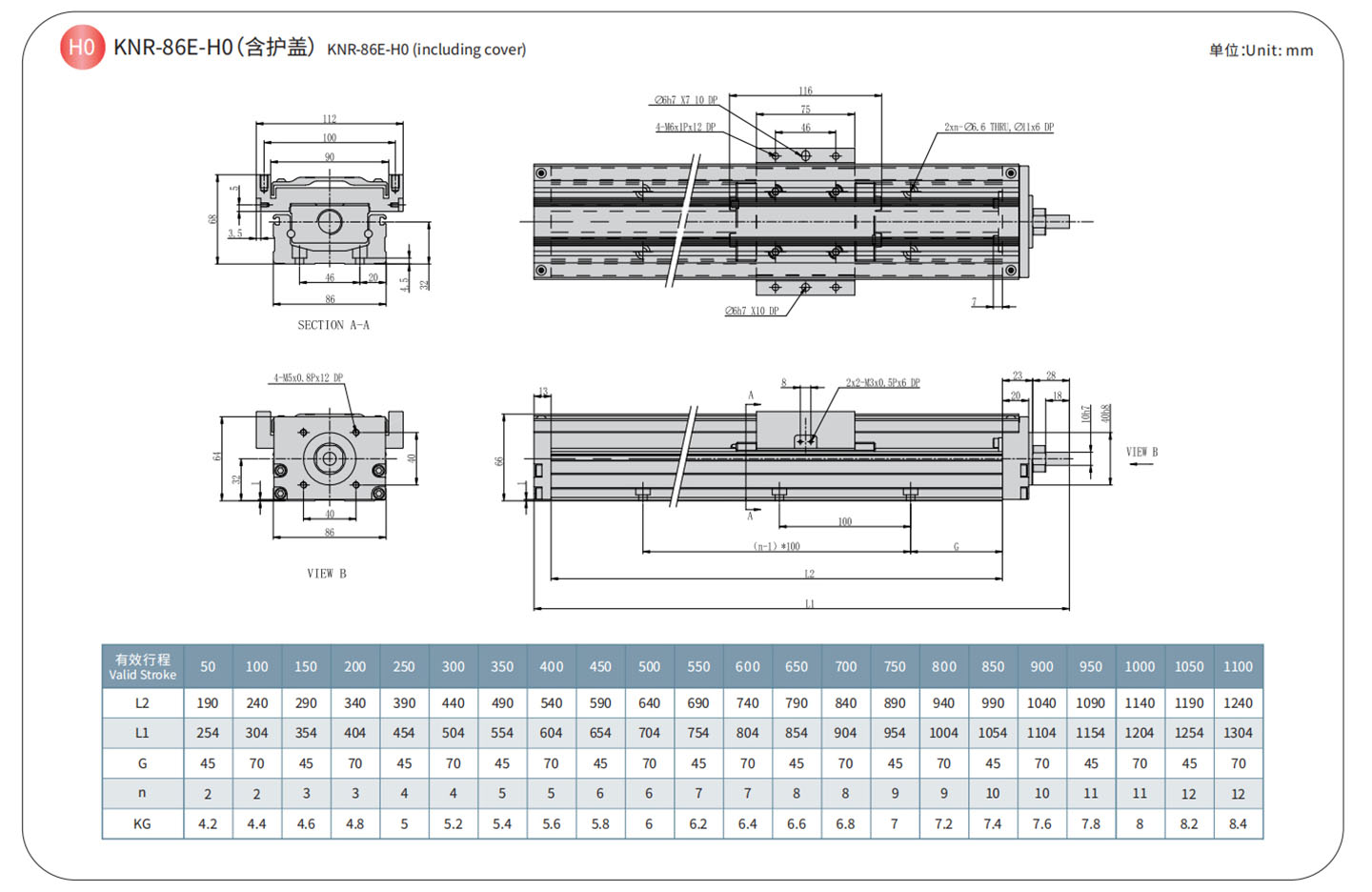
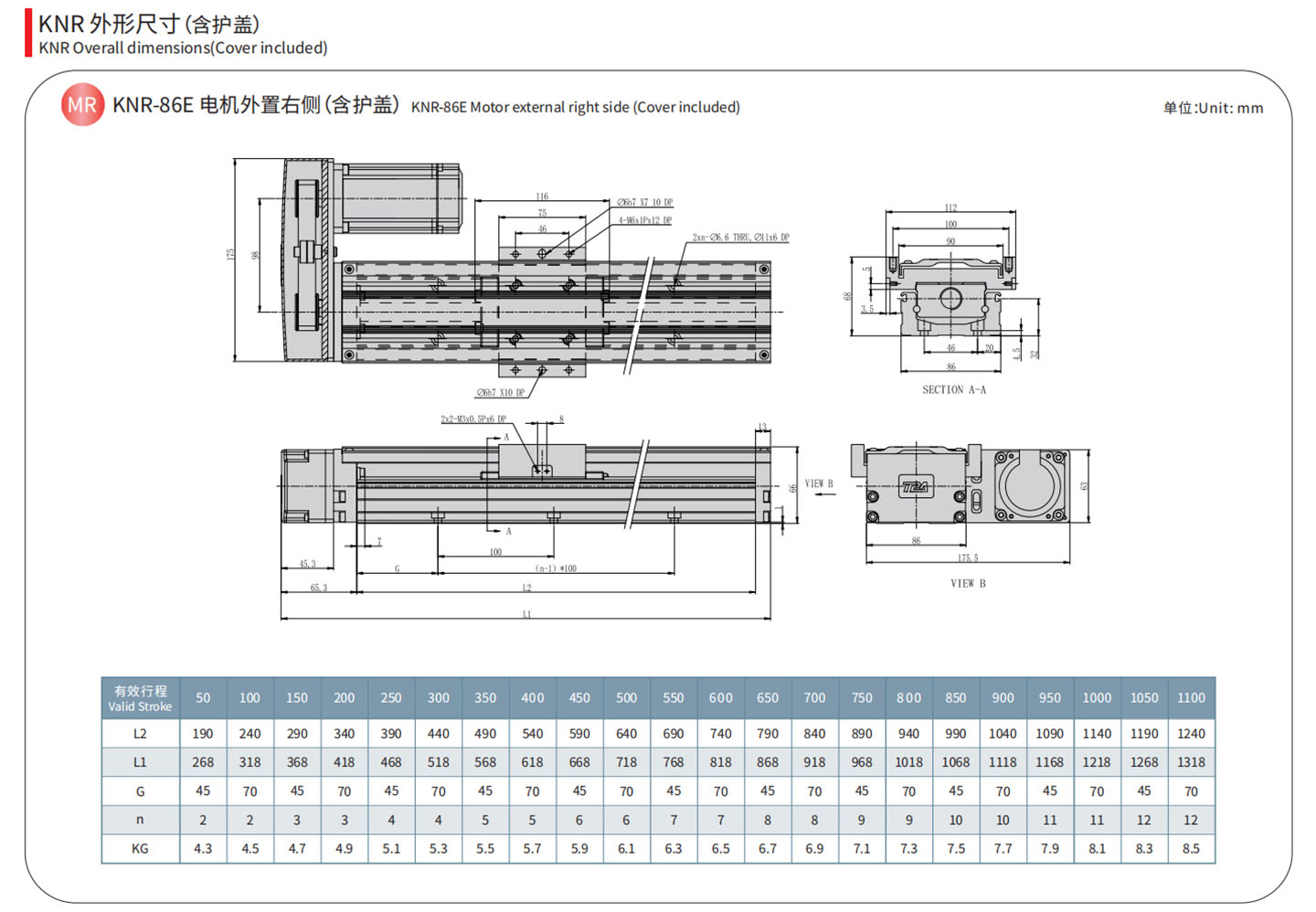
钢基铝内嵌86
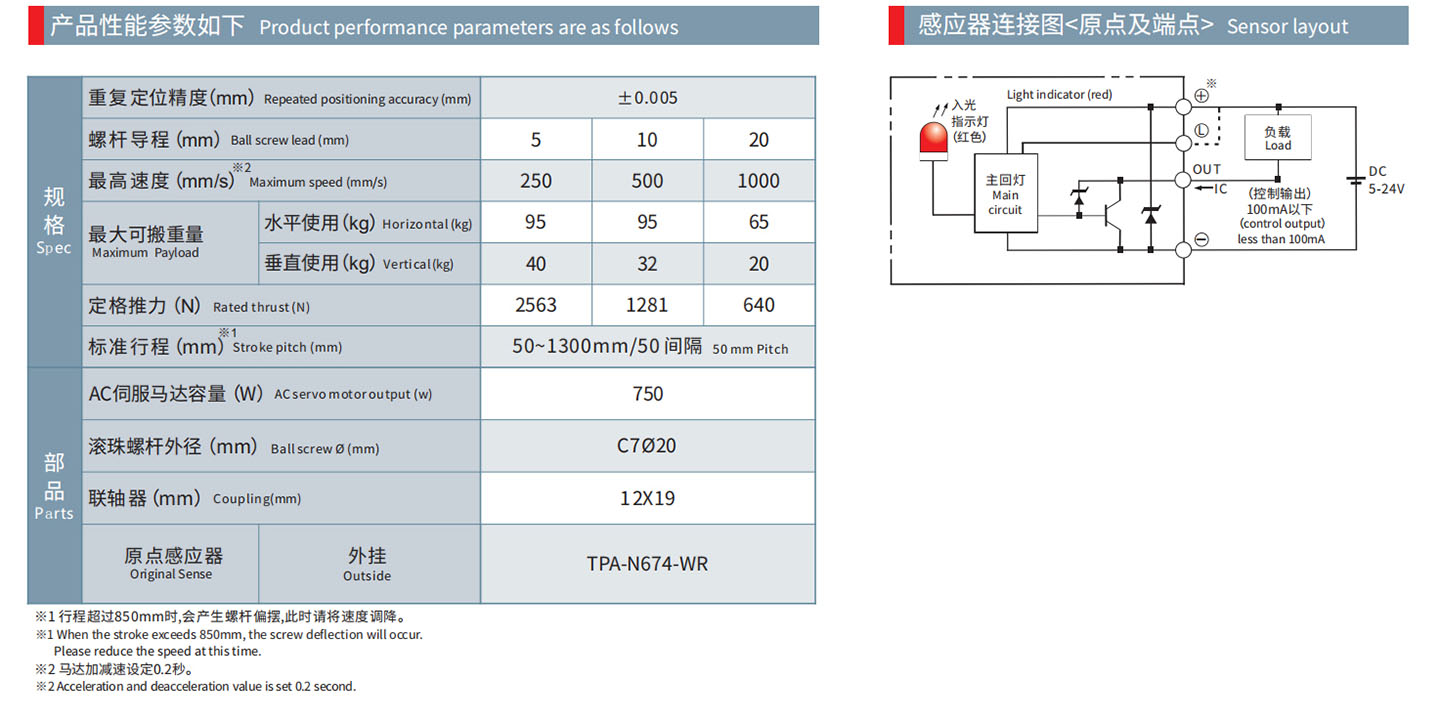
Cechy
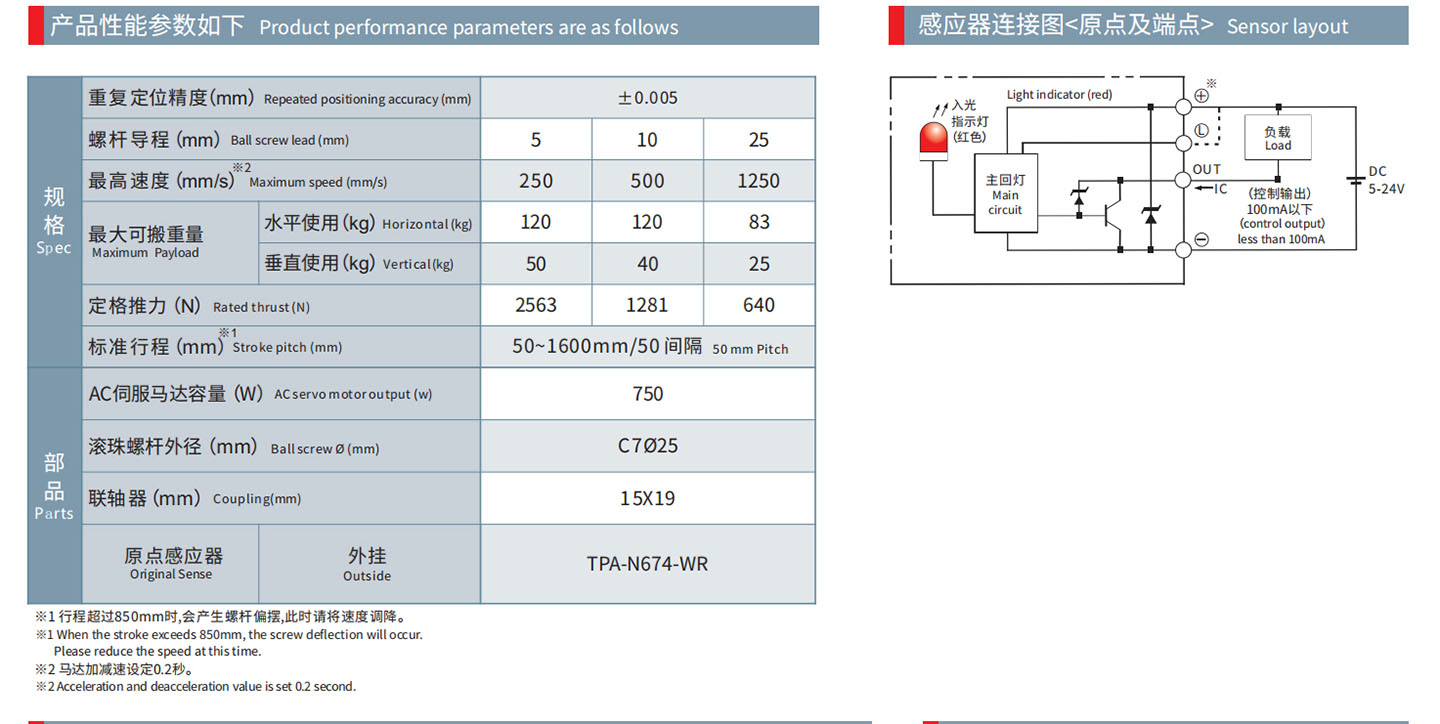
Powtarzalna dokładność pozycjonowania: ± 0,005 mm
Podstawowe statyczne obciążenie znamionowe: 12642N
Podstawowe dynamiczne obciążenie znamionowe: 7144N
Skok: 31 – 1128 mm
Maksymalna prędkość: 1000 mm/s


Więcej produktów

Seria HFR — oś Z do cięcia laserowego

Całkowicie zamknięty moduł liniowy ze śrubą kulową serii HCR

Siłowniki liniowe ze śrubą kulową serii HNR, półobudowa...

Moduł liniowy ze śrubą kulową serii HNR-E, półobudowa...










