




ONB-F Series Belt Driven Linear Module ပြင်ပ LM လမ်းညွှန်

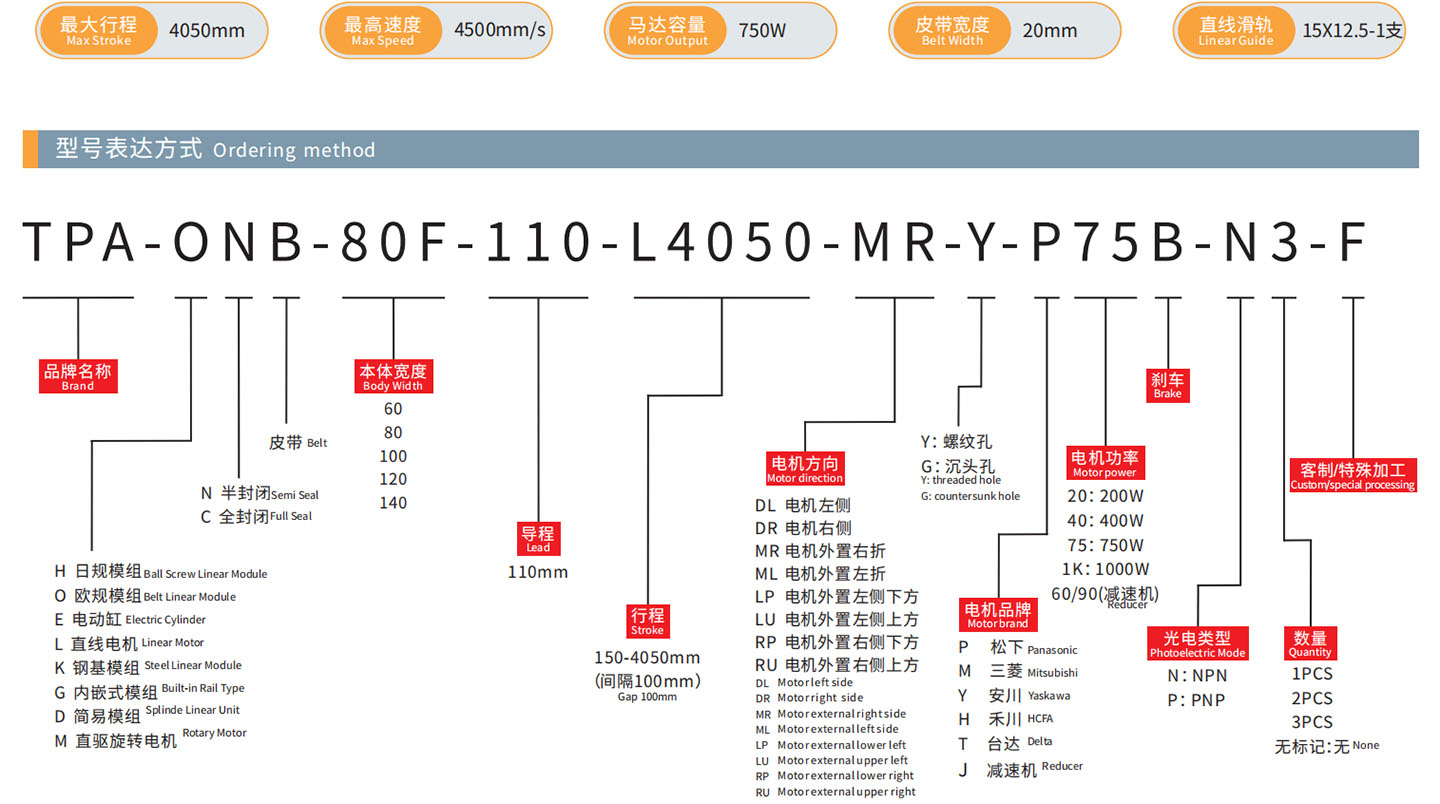
မော်ဒယ်ရွေးချယ်မှု
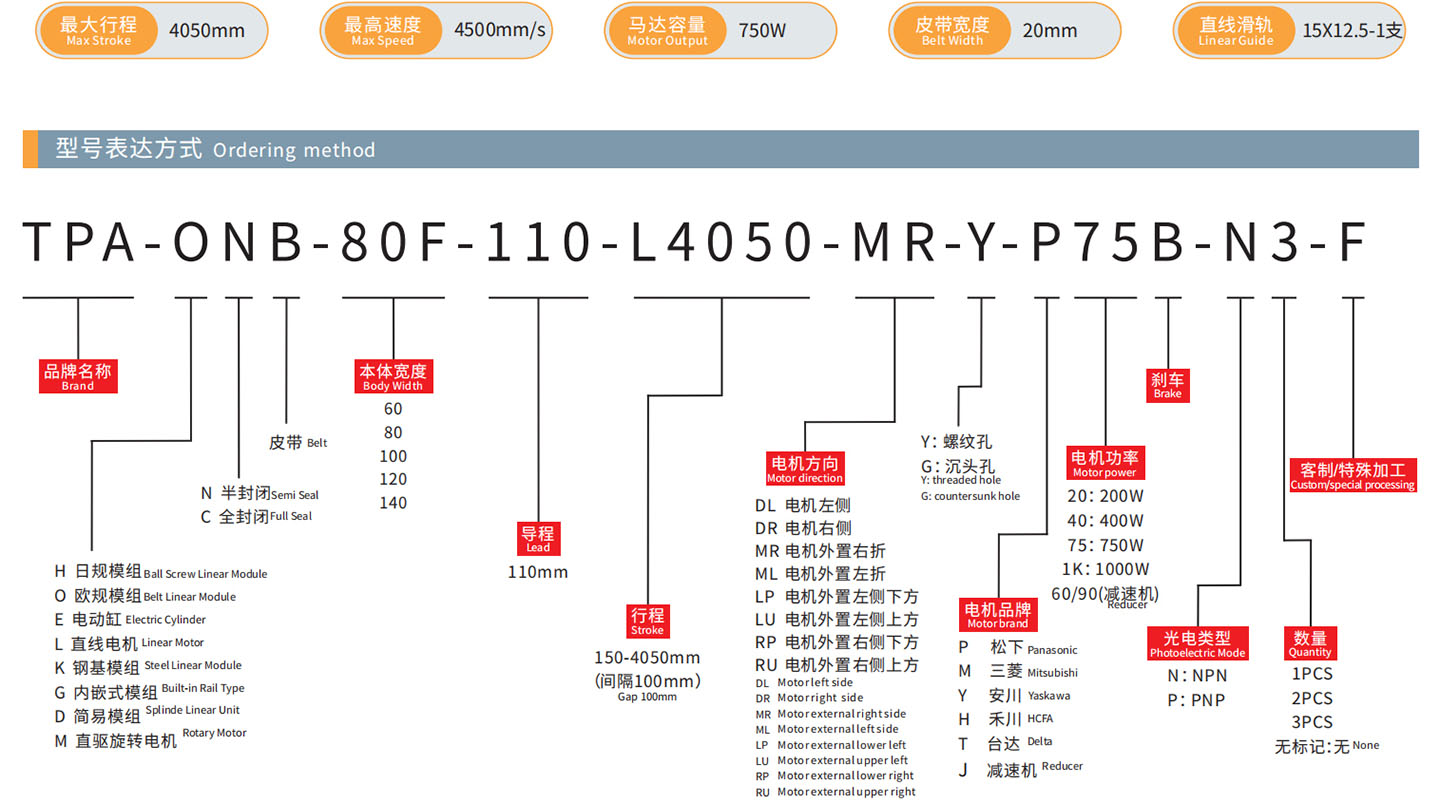
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
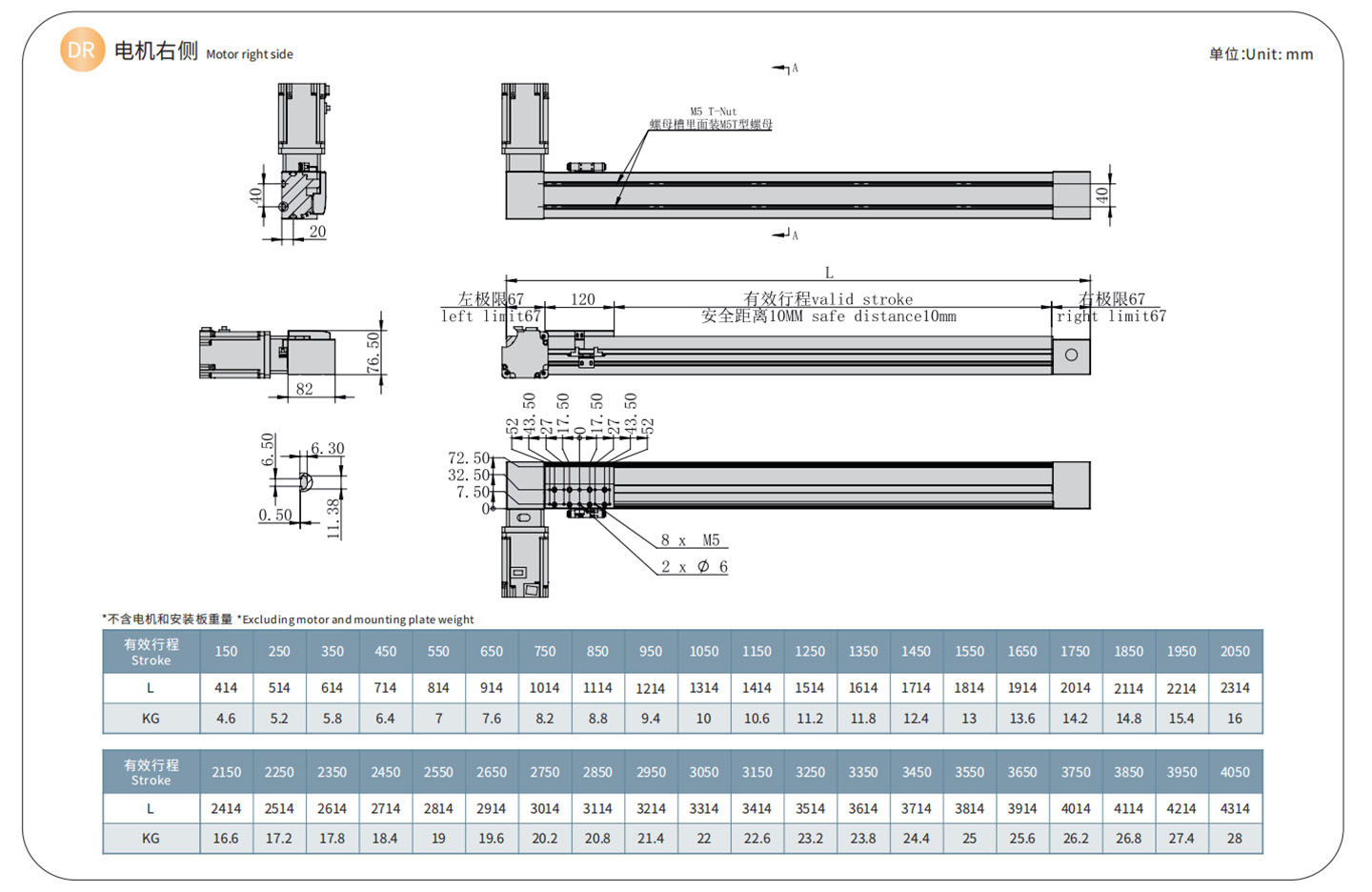
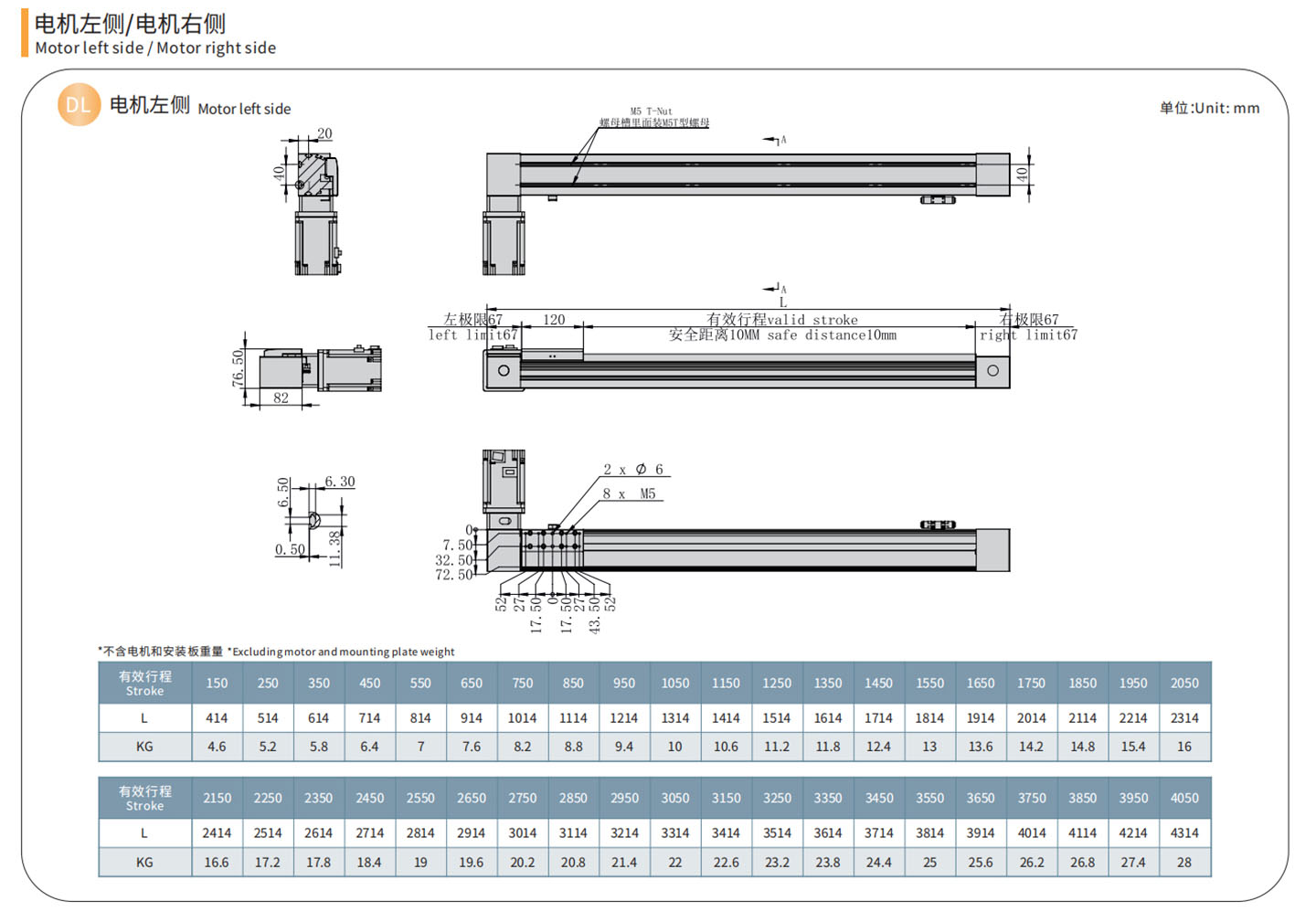
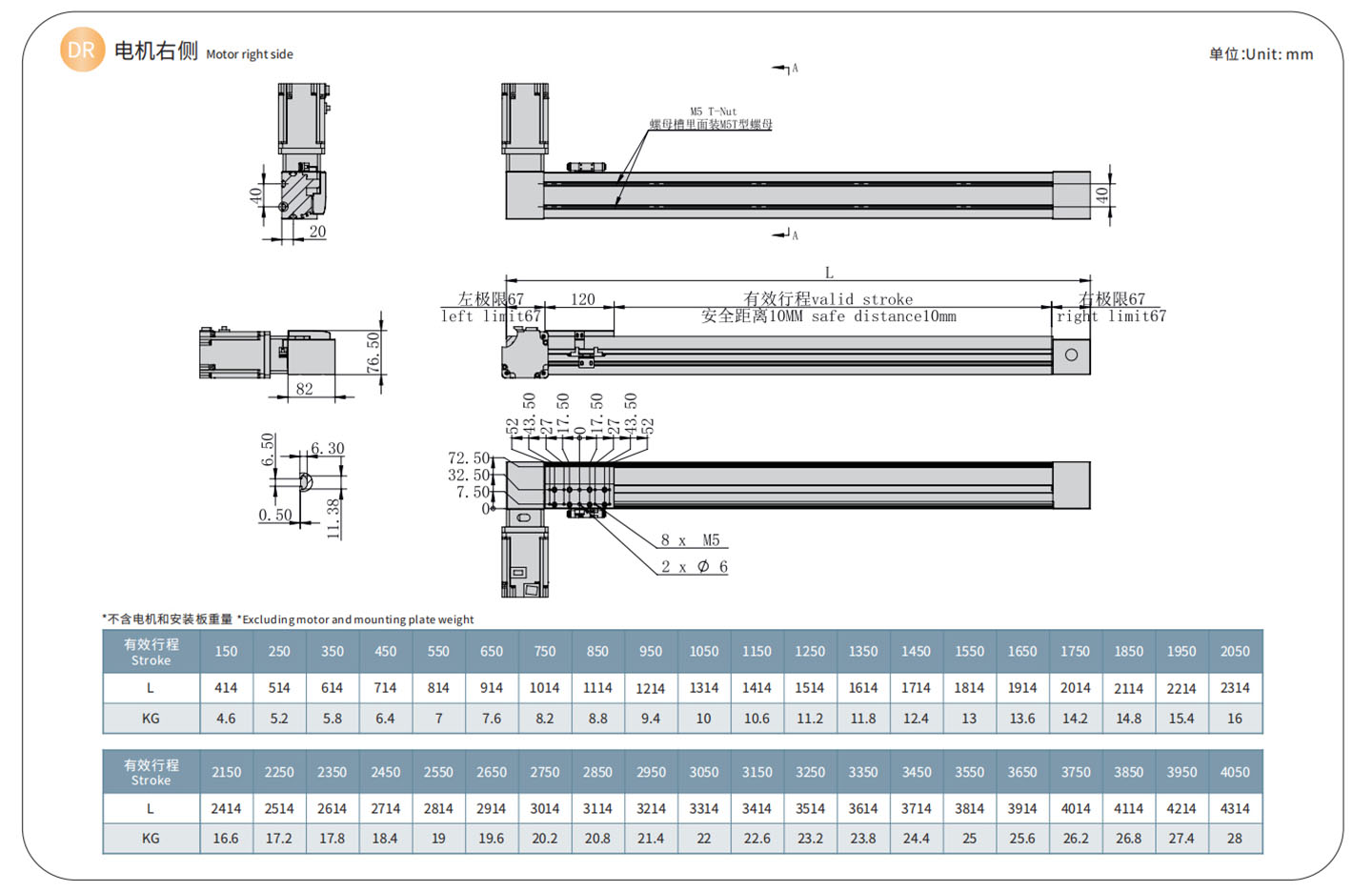
TPA ONB-F စီးရီးခါးပတ်အား မောင်းနှင်သော linear module သည် servo motor နှင့် belt တို့ကို semi-closed design ဖြင့်ပေါင်းစပ်ထားသော ပေါင်းစပ်ဒီဇိုင်းကို လက်ခံထားပြီး၊ ၎င်းသည် servo motor ၏ rotary motion ကို linear motion အဖြစ်သို့ ပြောင်းလဲပေးကာ slider ၏ အမြန်နှုန်း၊ အနေအထားနှင့် တွန်းအားကို တိကျစွာထိန်းချုပ်ပေးပါသည်။ နှင့် မြင့်မားသော တိကျသော အလိုအလျောက် ထိန်းချုပ်မှုကို နားလည်သည်။
Semi-closed belt-dive linear actuator သည် ခါးပတ်အကျယ်သည် ကြီးမားပြီး ပရိုဖိုင်ကို ဖွင့်ထားသည်။ အတိုင်းအတာတစ်ခုအထိ၊ မော်ဂျူးအတွင်းသို့ နိုင်ငံခြားအရာဝတ္ထုများ ဝင်ရောက်ခြင်းမှ ကာကွယ်ရန် အဖုံးပြားအစား ခါးပတ်ကို အသုံးပြုသည်။

半封闭欧规

ONB 80F
120f欧规
အင်္ဂါရပ်များ
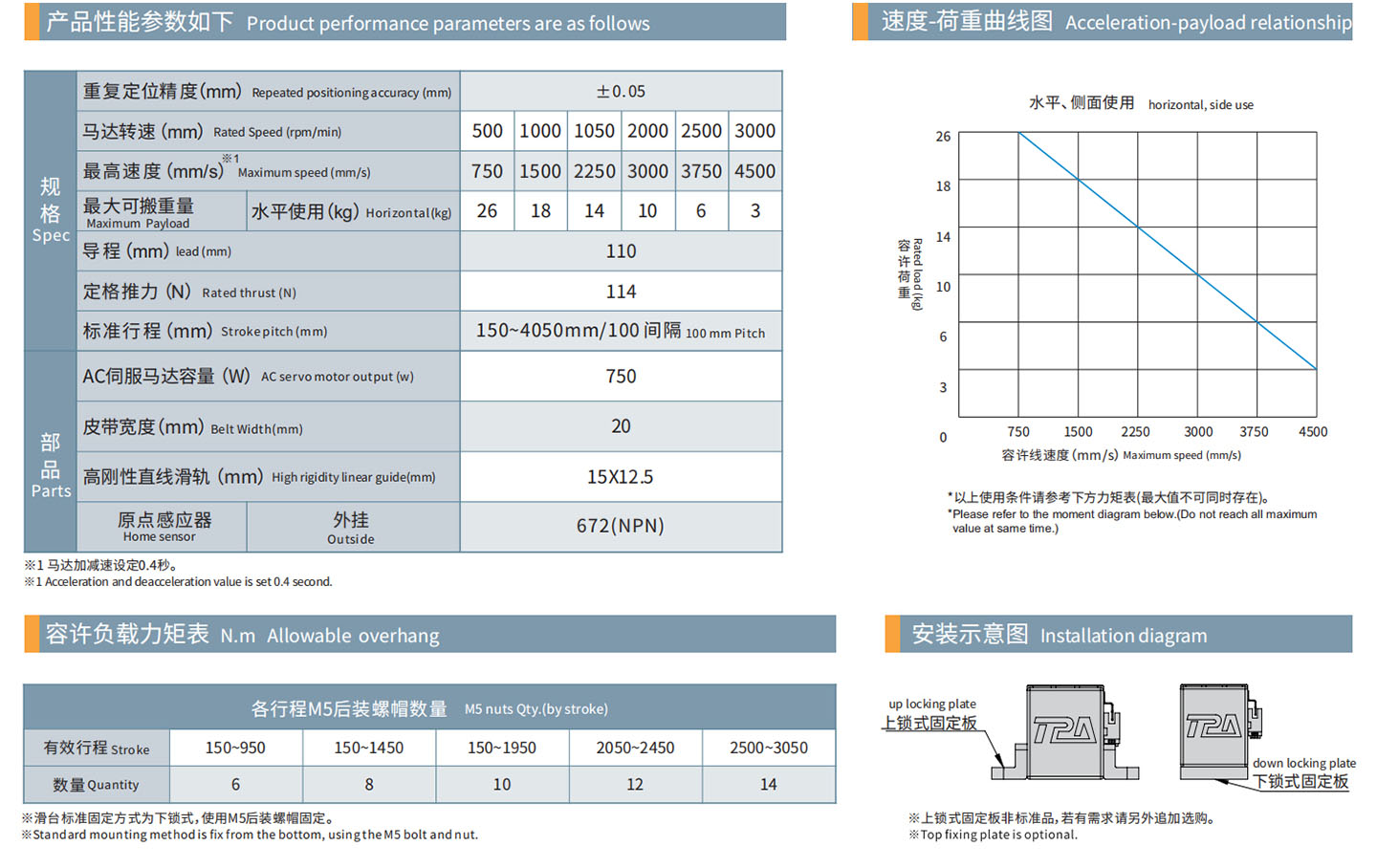
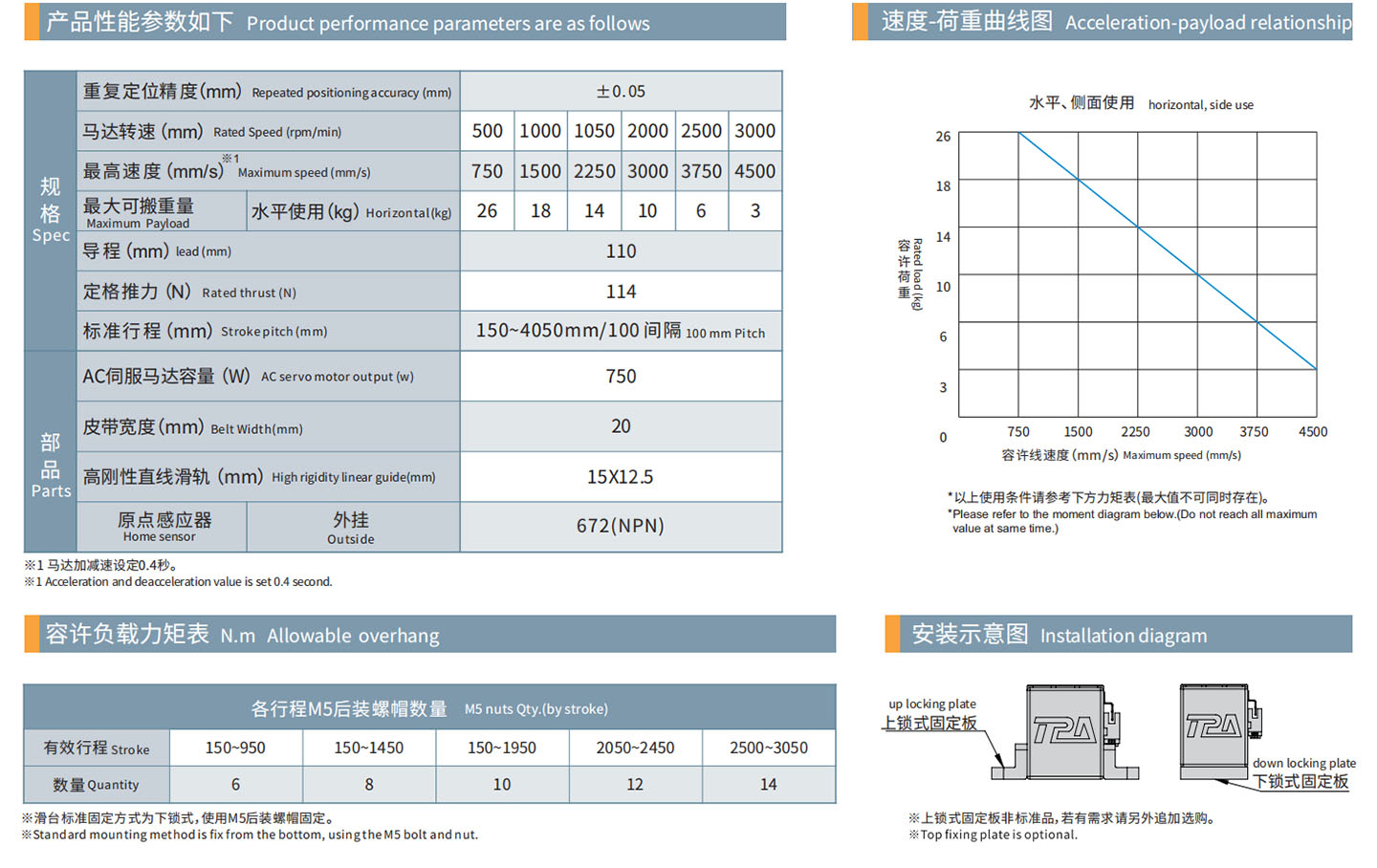
ထပ်ခါတလဲလဲ နေရာချထားခြင်း တိကျမှု- ±0.05mm
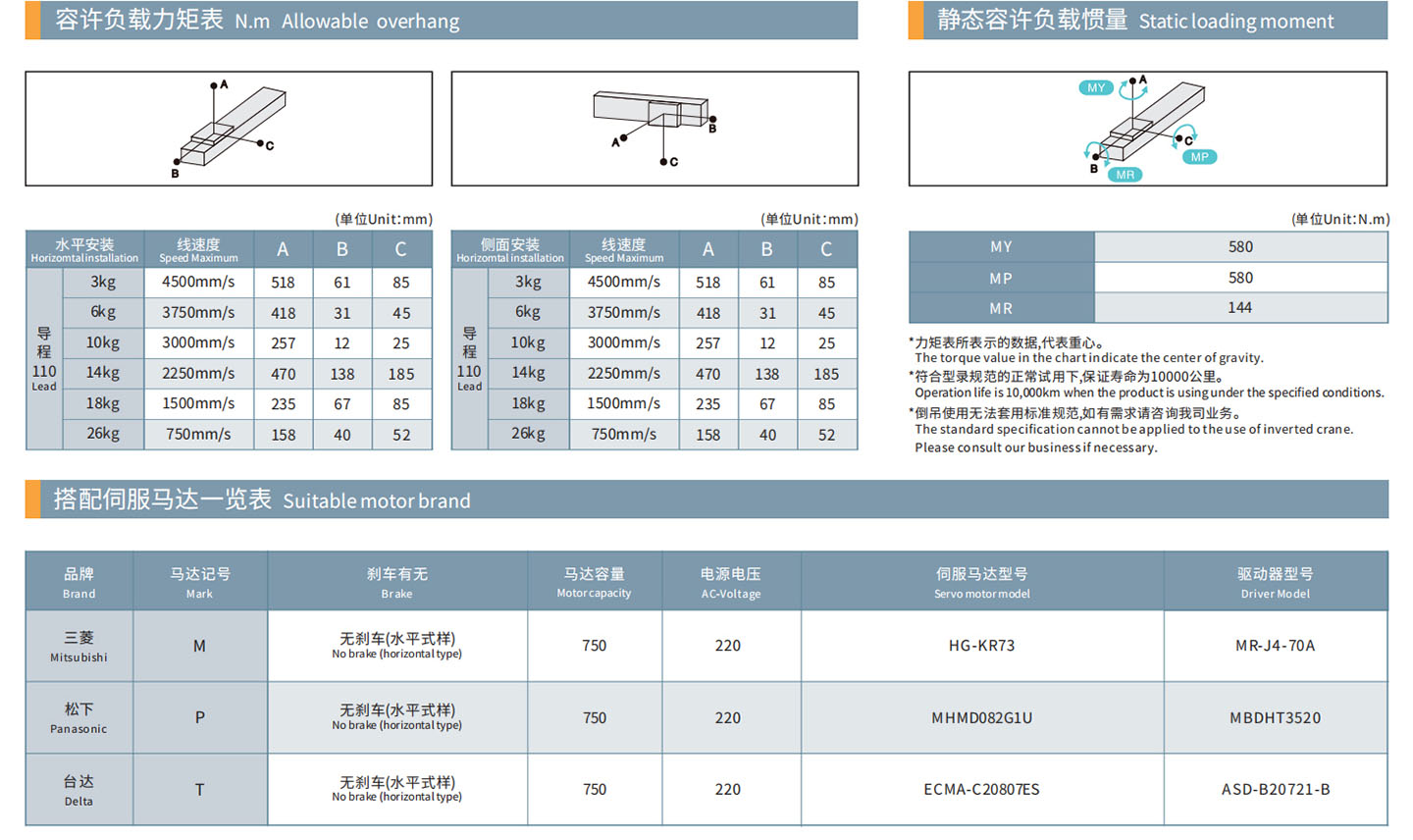
အများဆုံးပေးချေမှု (အလျားလိုက်): 230 ကီလိုဂရမ်
Max Payload (ဒေါင်လိုက်): 90 ကီလိုဂရမ်
လေဖြတ်ခြင်း- 150 မှ 5050mm
အမြင့်ဆုံးအမြန်နှုန်း- 2300mm/s
ပရိုဖိုင် ဒီဇိုင်းသည် ပရိုဖိုင်၏ တောင့်တင်းမှုနှင့် ဖွဲ့စည်းတည်ဆောက်ပုံဆိုင်ရာ တည်ငြိမ်မှုကို အတုယူရန်၊ ထုထည်ကို လျှော့ချရန်နှင့် ဝန်ပမာဏကို မြှင့်တင်ရန် finite element stress analysis ကို အသုံးပြုထားသည်။
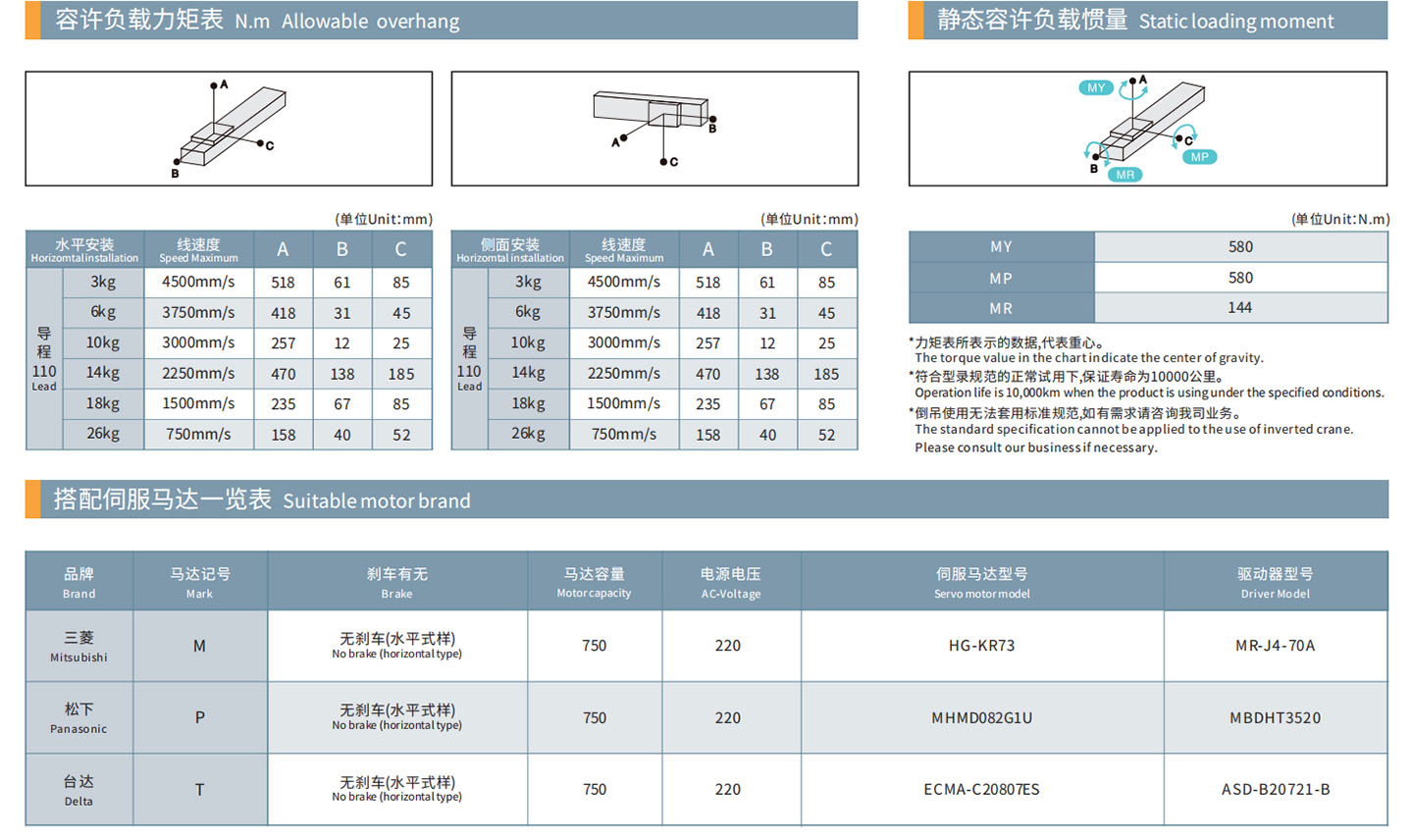
S5M နှင့် S8M စီးရီးများကို ဝန်ပိုခြင်း၊ စူပါရုန်းအား နှင့် စူပါတိကျမှုတို့နှင့်အတူ synchronous belt နှင့် synchronous wheel အတွက် အသုံးပြုပါသည်။ ဖောက်သည်သည် ဒေါင်လိုက်အသုံးပြုရန်အတွက် စက်ဝိုင်းပုံသဏ္ဍာန်သွားပုံစံ၊ အလျားလိုက် မြန်နှုန်းမြင့်ပြေးရန်အတွက် T-shaped သွားအမျိုးအစားနှင့် မြင့်မားသောအပူချိန်အတွက် ရော်ဘာအဖွင့်ခါးပတ်တို့ကို ရွေးချယ်ပေးပါသည်။
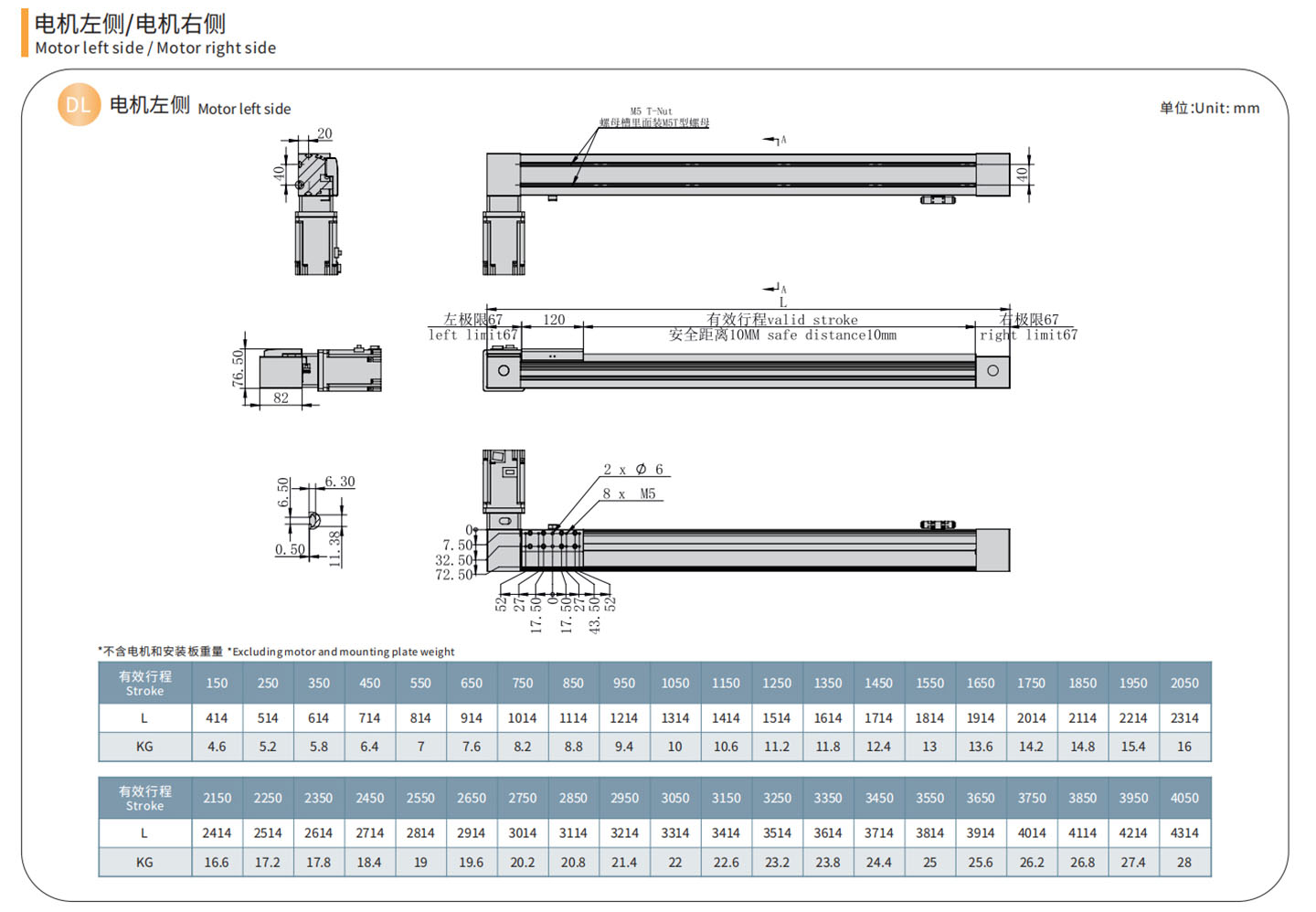
ဒေါင်လိုက်နှင့် ဘေးဘက်ဝန်များ ကြီးမားသောအခါ၊ မော်ဂျူး၏ ဘေးတိုက်အခိုက်အတန့်အား အားကောင်းစေရန် ပရိုဖိုင်၏ဘေးဘက်တွင် အရန်မီးရထားလမ်းကို တပ်ဆင်ရန် ရွေးချယ်နိုင်ပြီး မော်ဂျူး၏ ကြံ့ခိုင်မှုနှင့် အသုံးပြုနေသည့် မော်ဂျူး၏ တည်ငြိမ်မှုကိုလည်း တိုးမြှင့်နိုင်သည်။ နှင့်စစ်ဆင်ရေး။
တပ်ဆင်ရလွယ်ကူသည်၊ ပရိုဖိုင်၏ နှစ်ဖက်စလုံးကို slider nut grooves များဖြင့် ဒီဇိုင်းထုတ်ထားပြီး မည်သည့်ဘက်သုံးဘက်မဆို တပ်ဆင်နိုင်သည်။
နောက်ထပ်ထုတ်ကုန်များ

HNB-E Series Belt Driven Linear Actuators တစ်ဝက်...

ONB Series Belt Driven Linear Module တစ်ဝက်ကို ထည့်သွင်းထားသည်။

HNB Series Belt Driven Linear Module တစ်ဝက်ကို ထည့်သွင်းထားသည်။

HCB စီးရီး ခါးပတ်ကို မောင်းနှင်သော Linear Module အပြည့်အစုံ ထည့်သွင်းပါ...

OCB စီးရီး ခါးပတ်ကို မောင်းနှင်သော Linear Module အပြည့်အစုံ ထည့်သွင်းပါ...










