




OCB စီးရီး Belt Driven Linear Module အပြည့်အစုံ ထည့်သွင်းထားသည်။


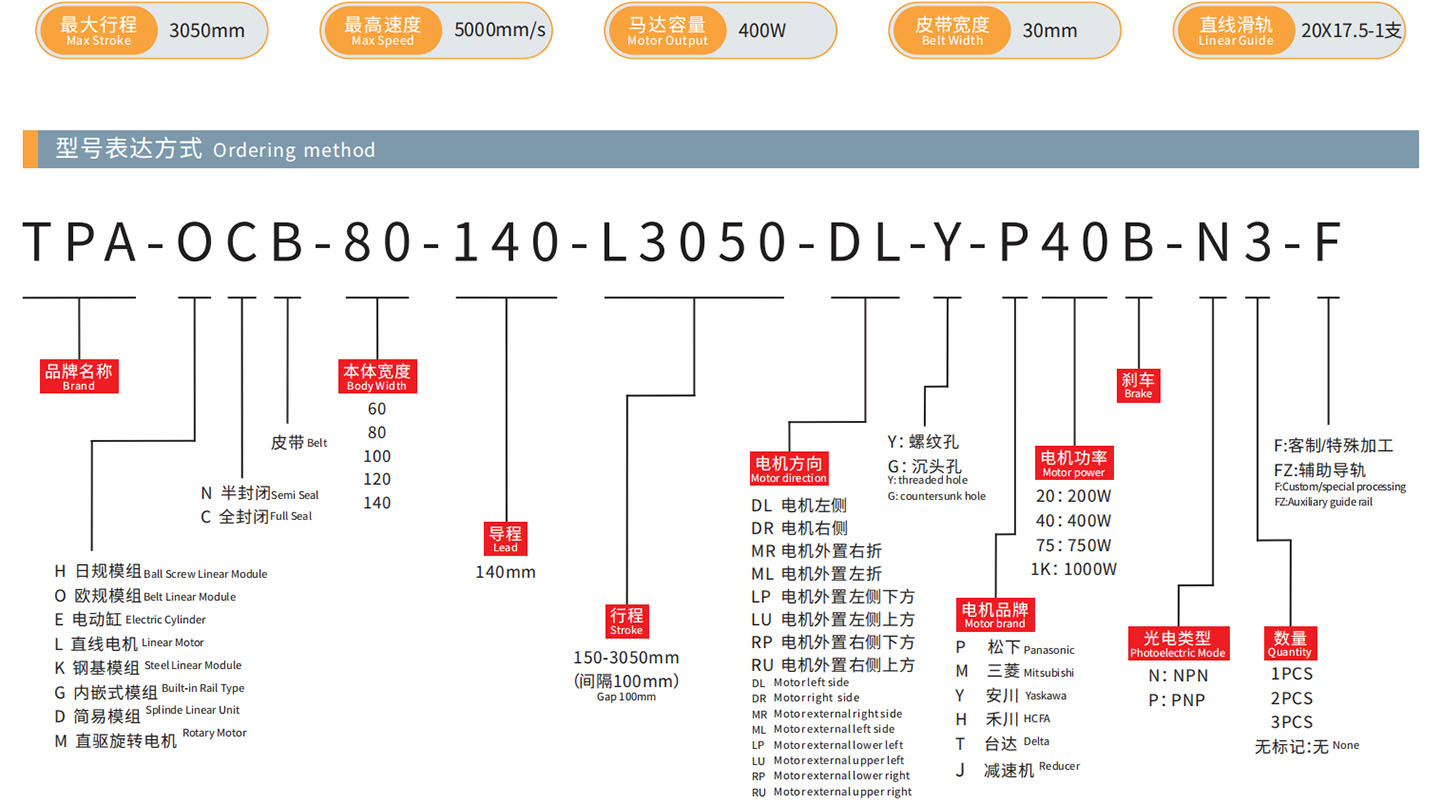
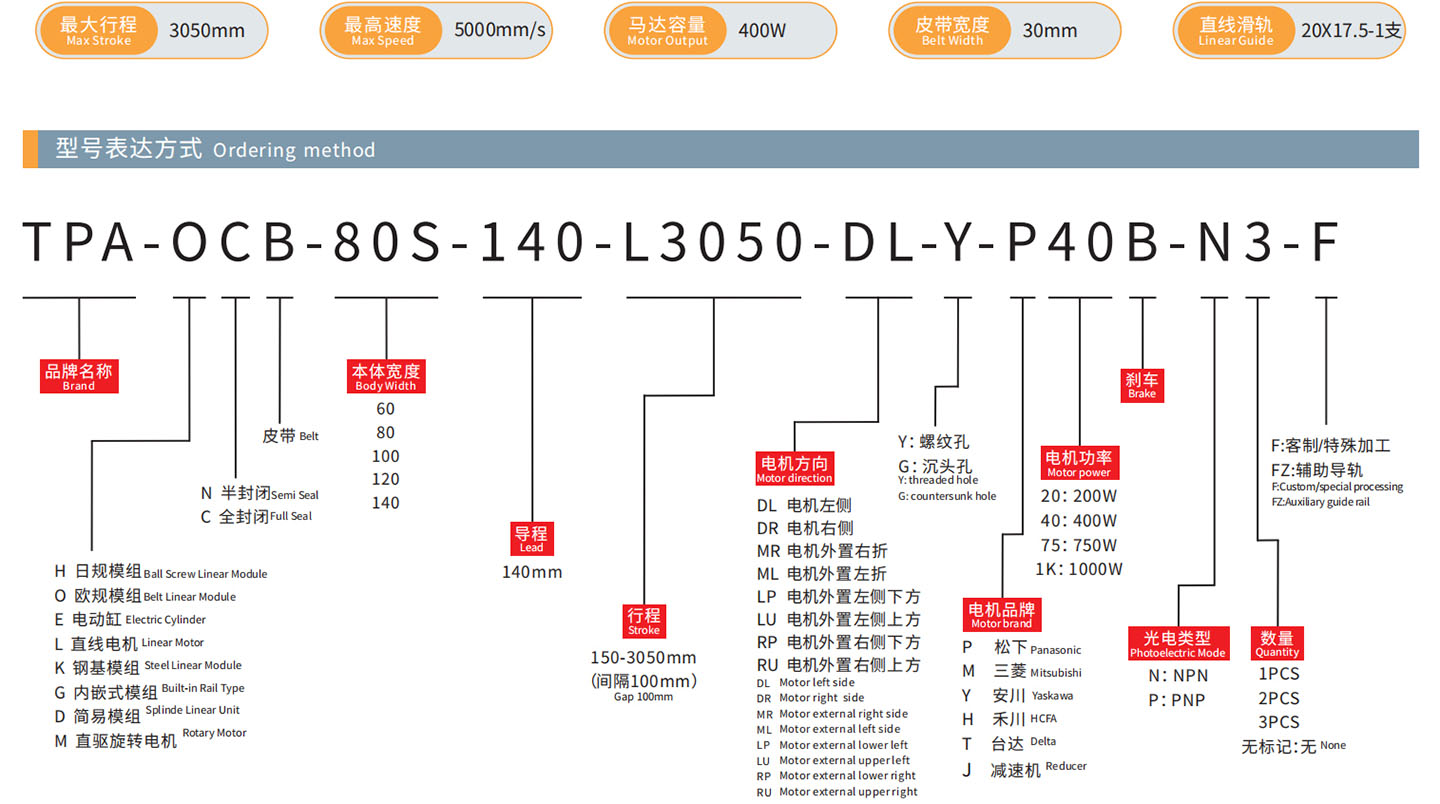
မော်ဒယ်ရွေးချယ်မှု
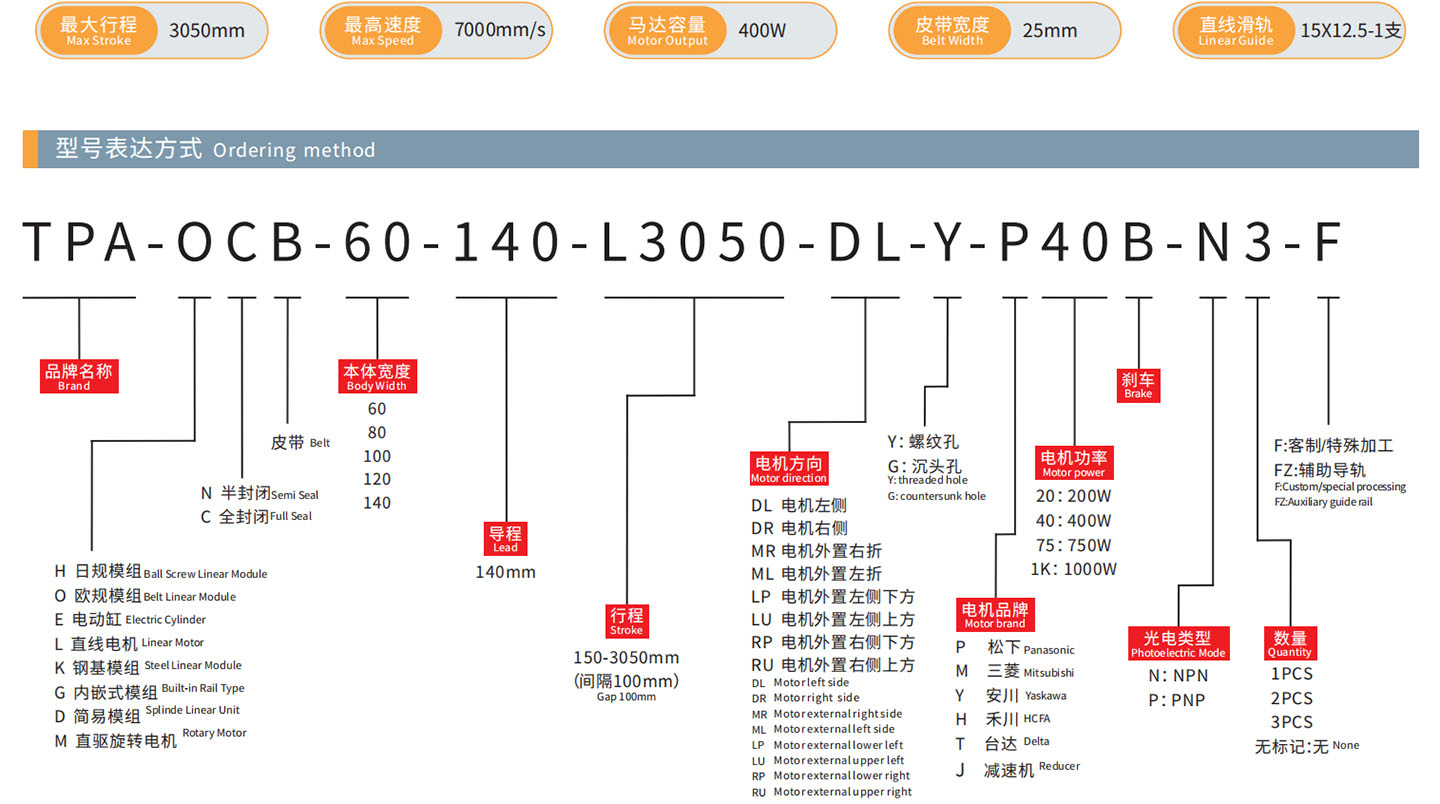
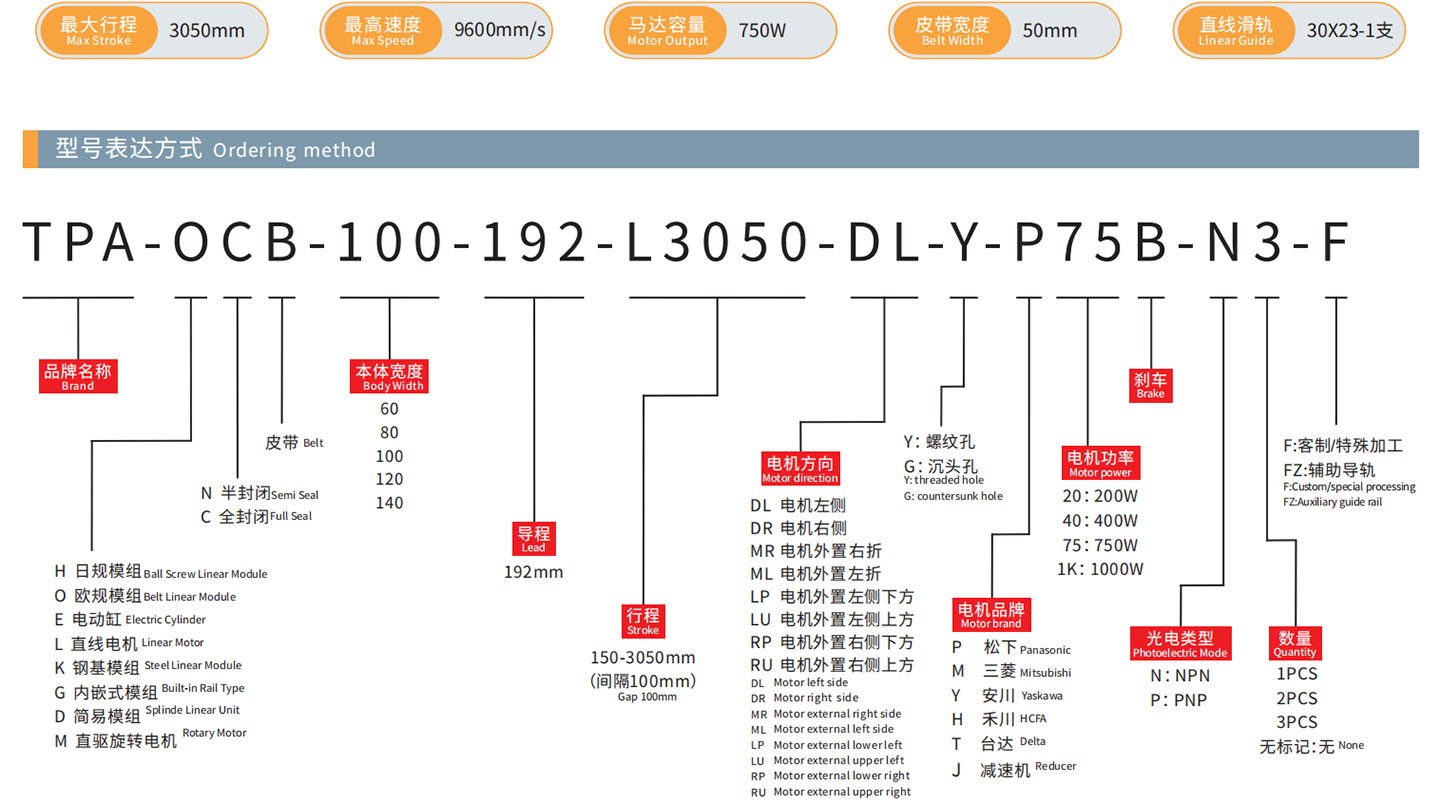
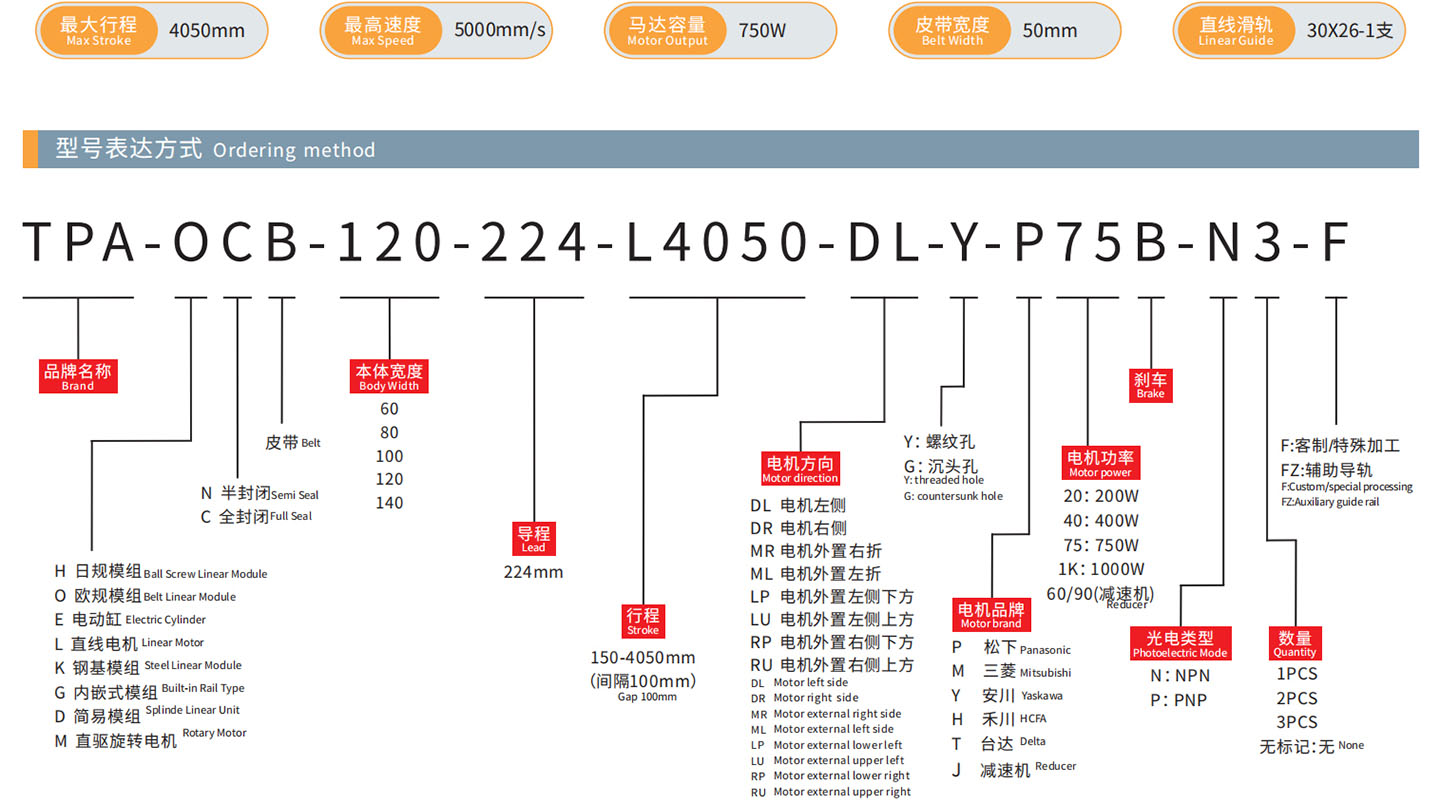
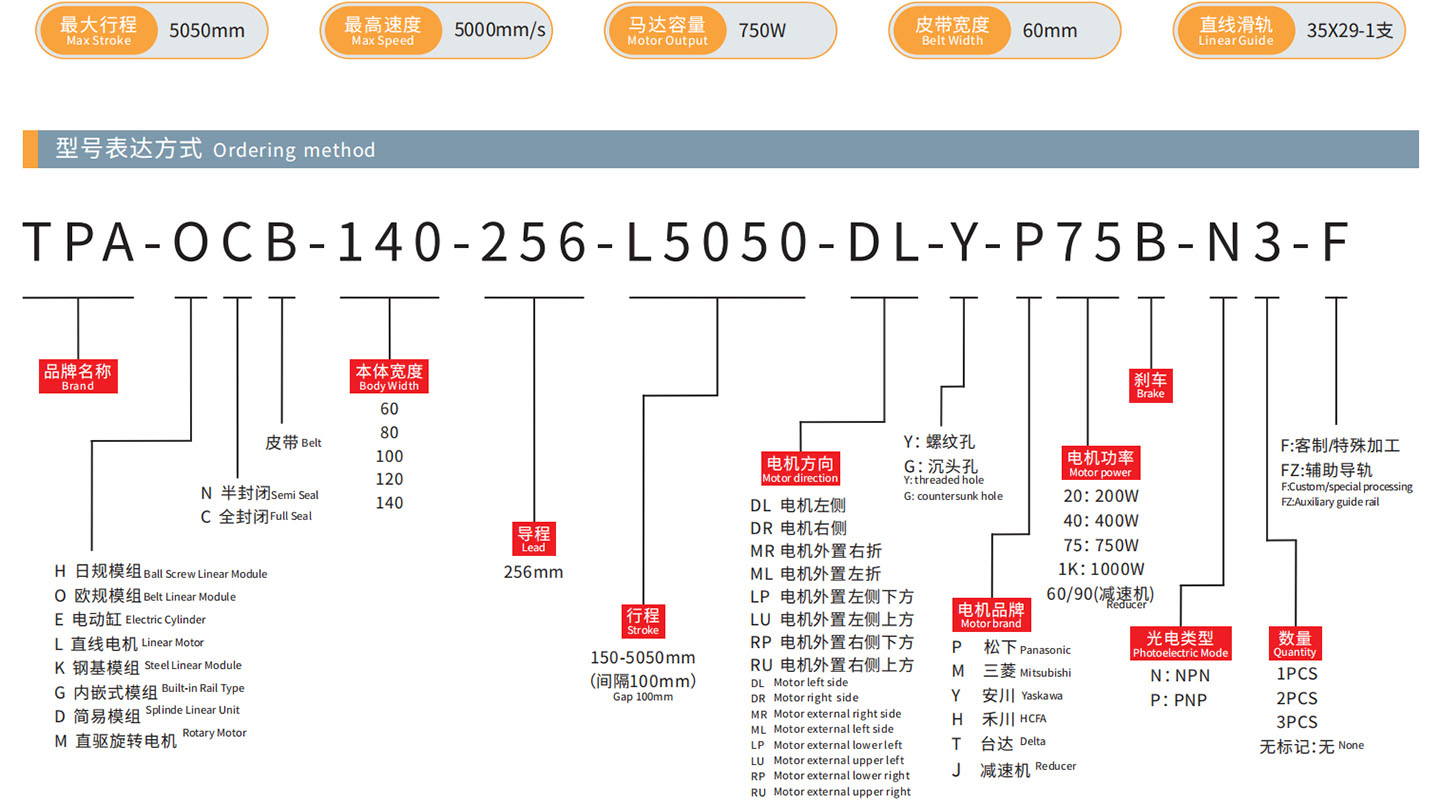
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
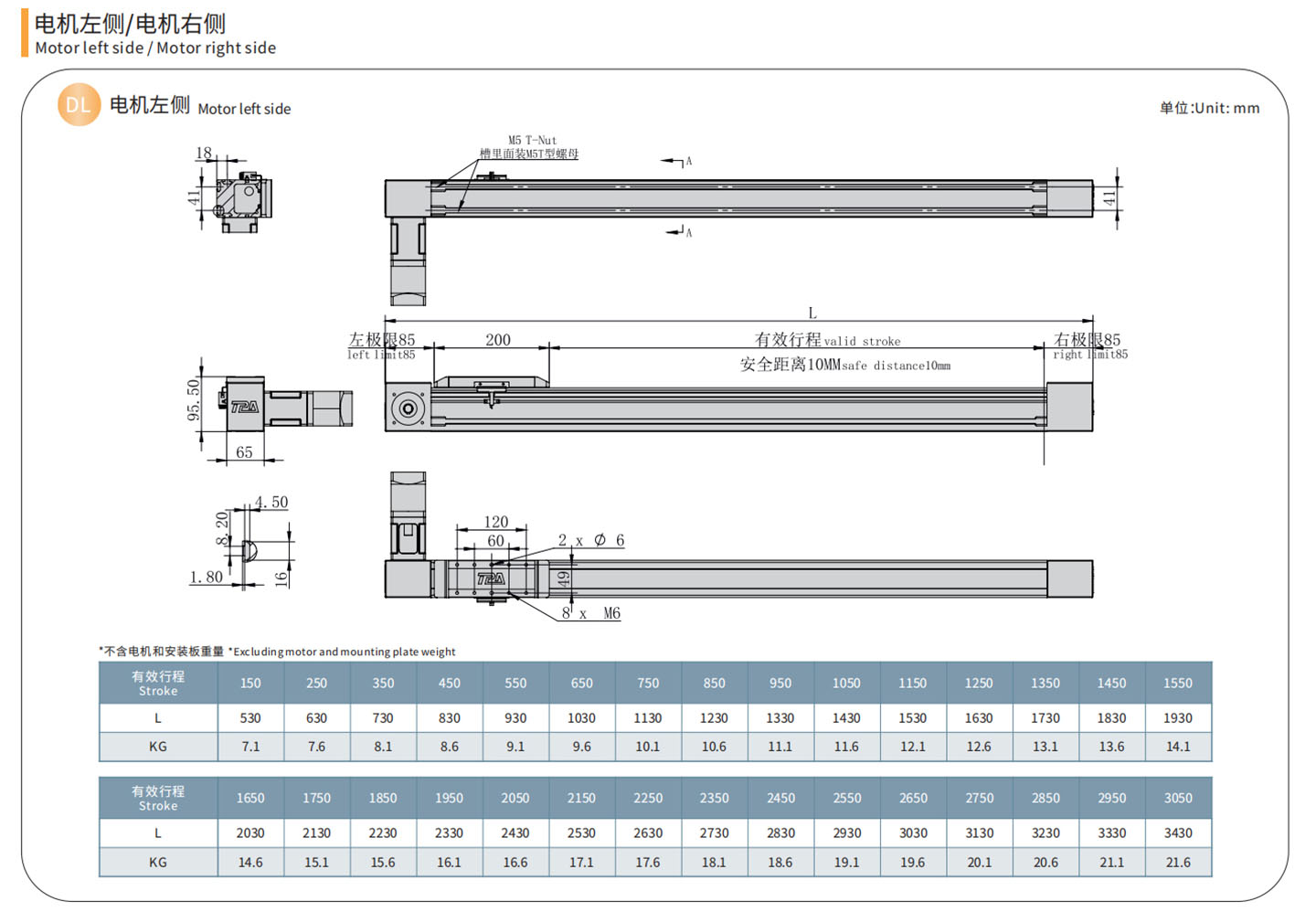
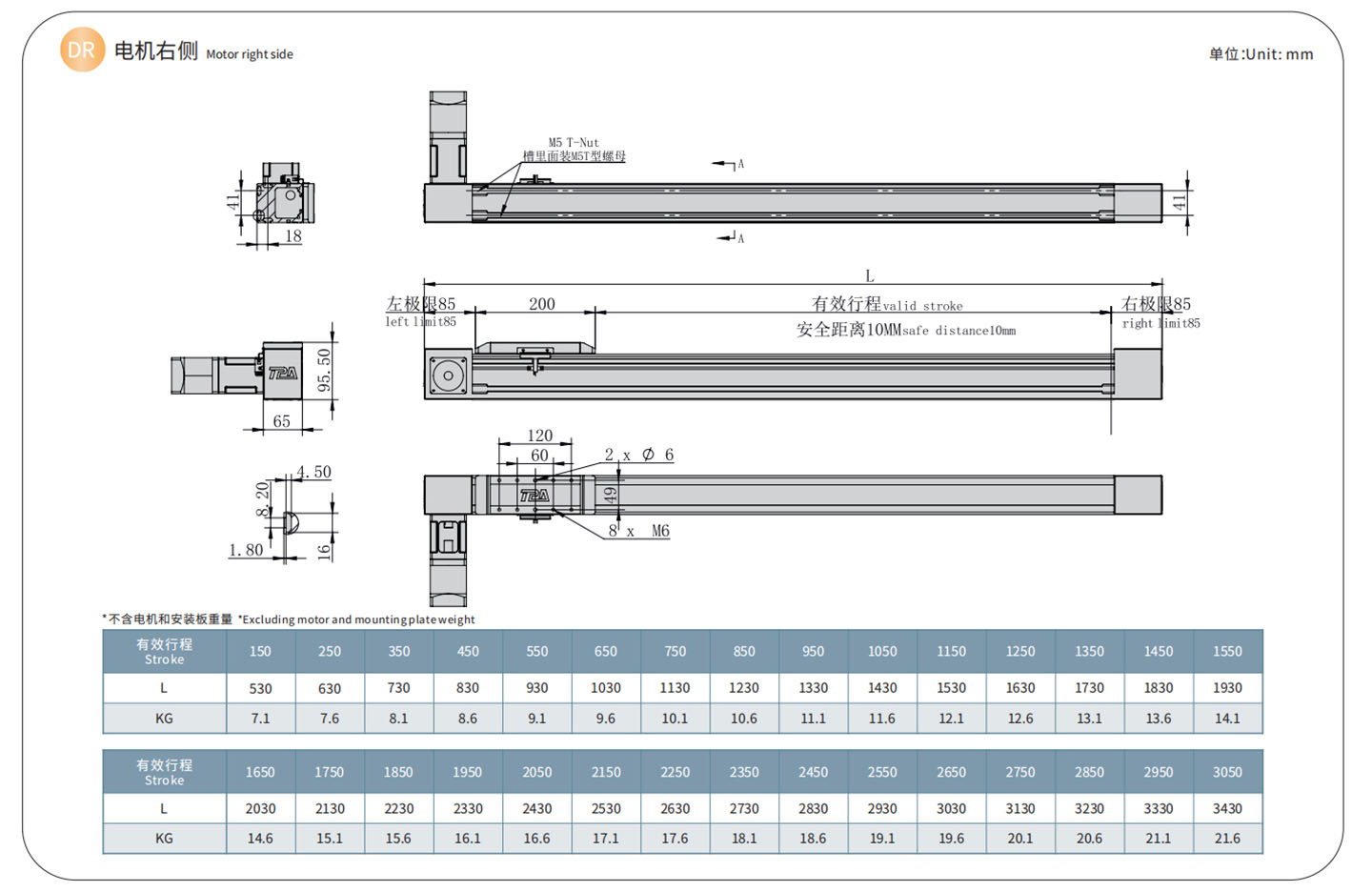
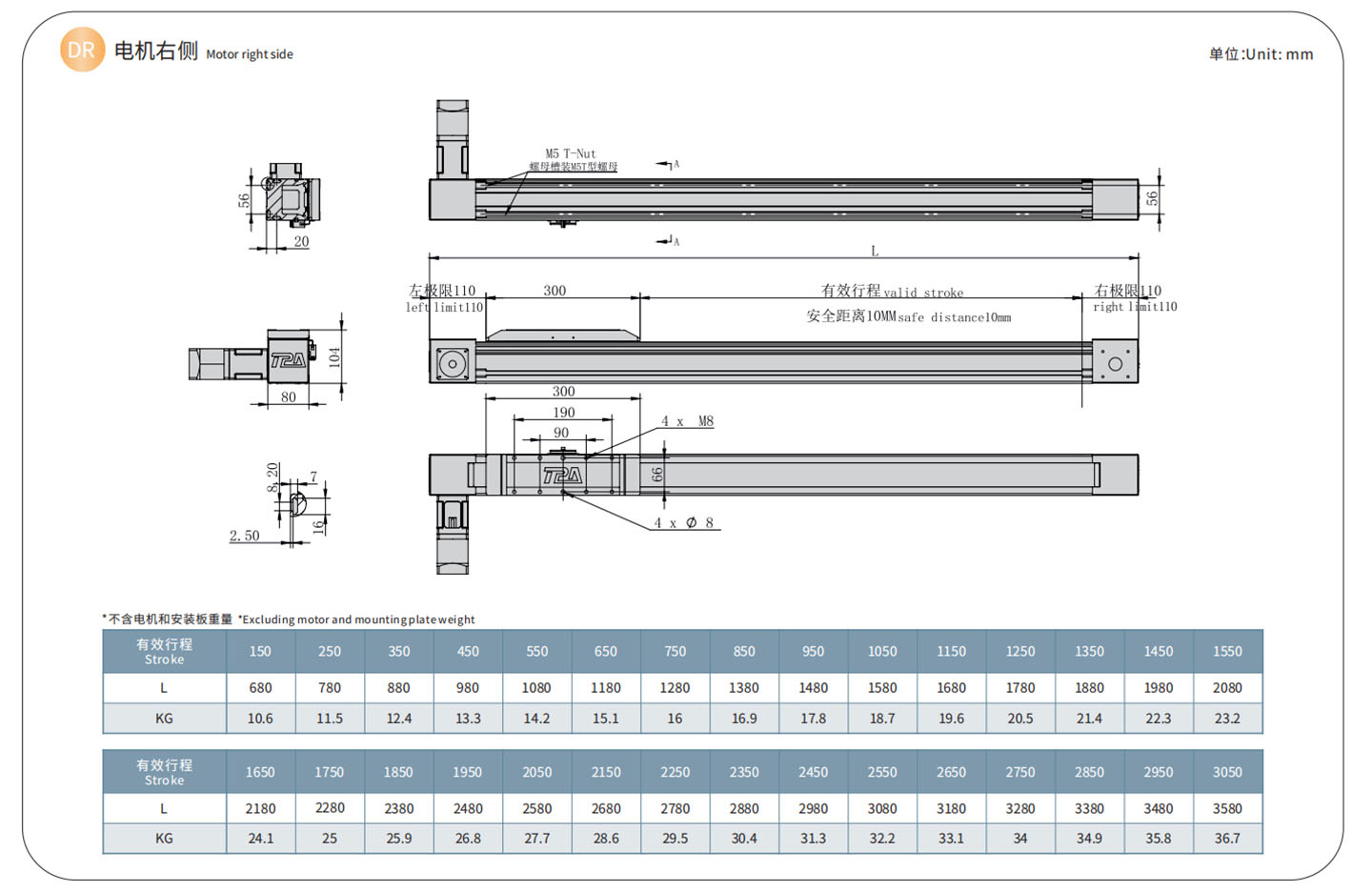
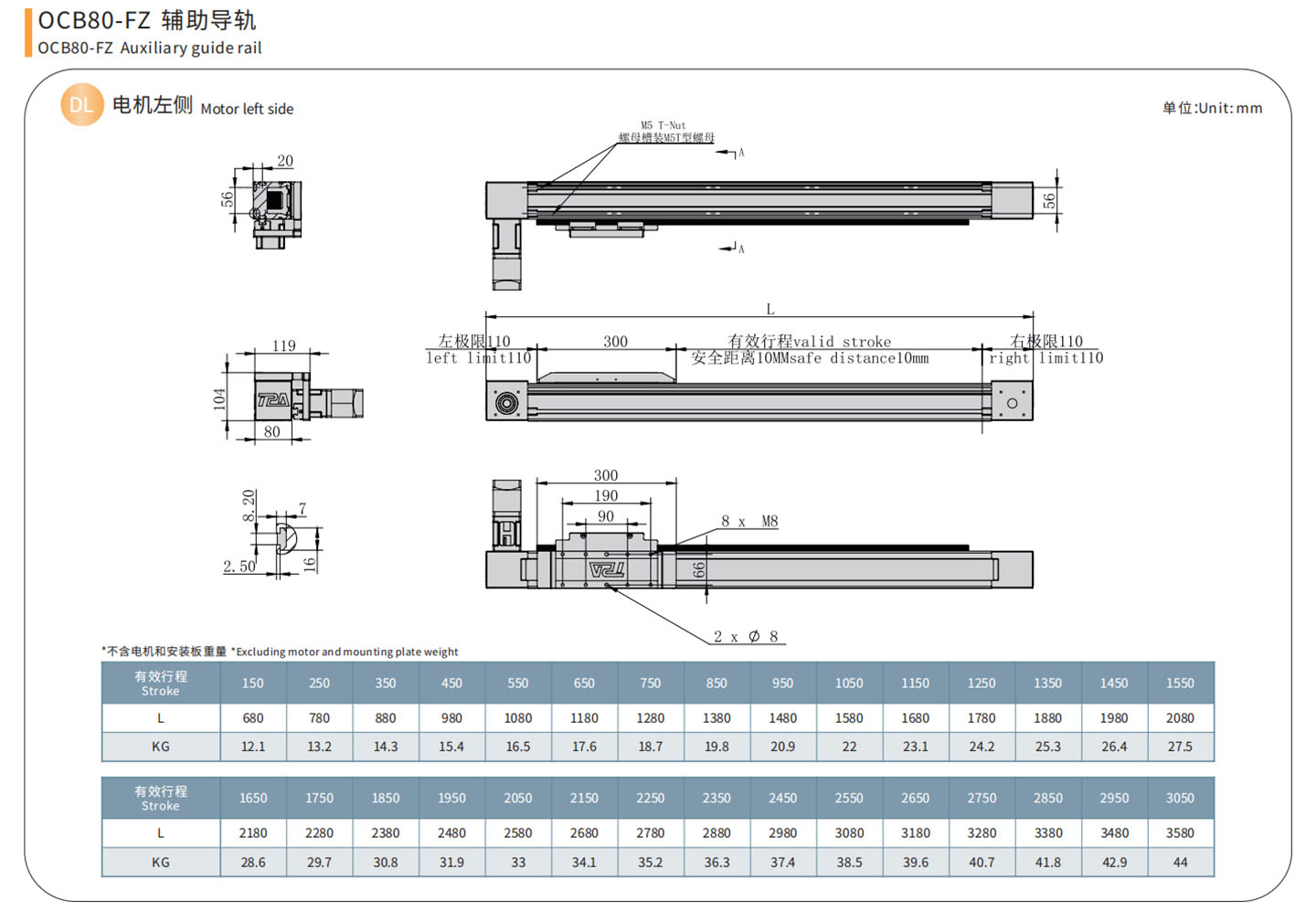
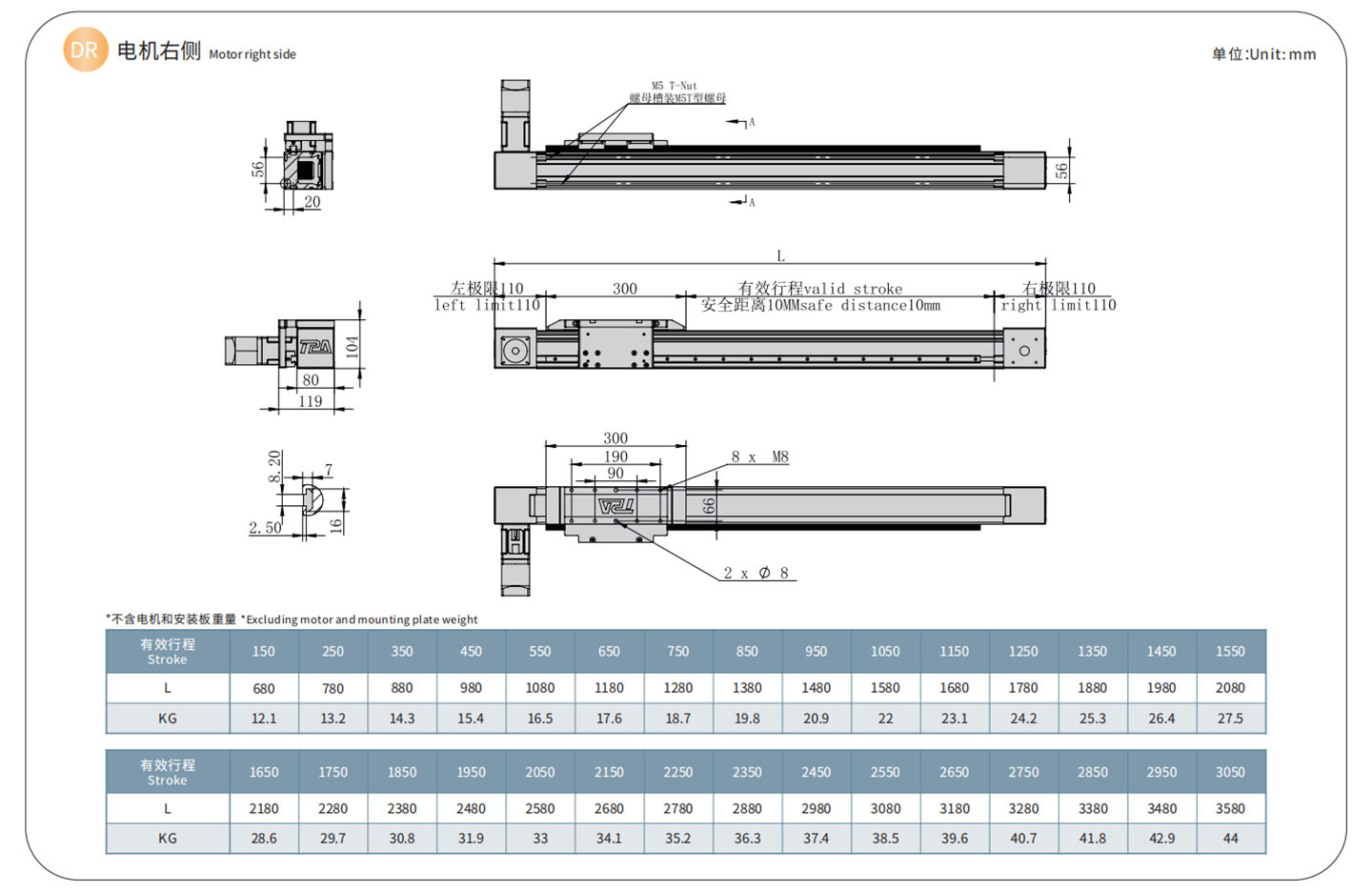
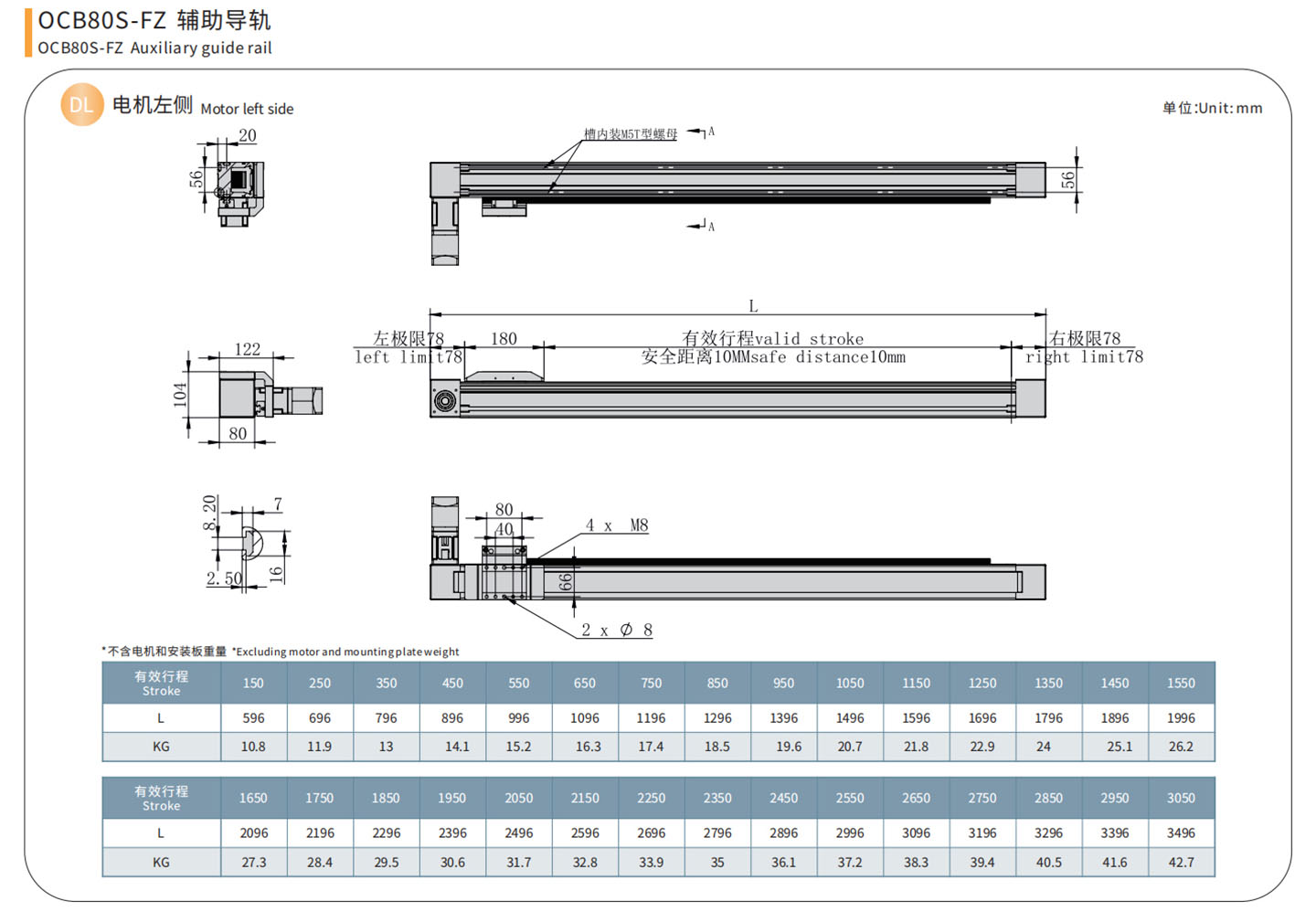
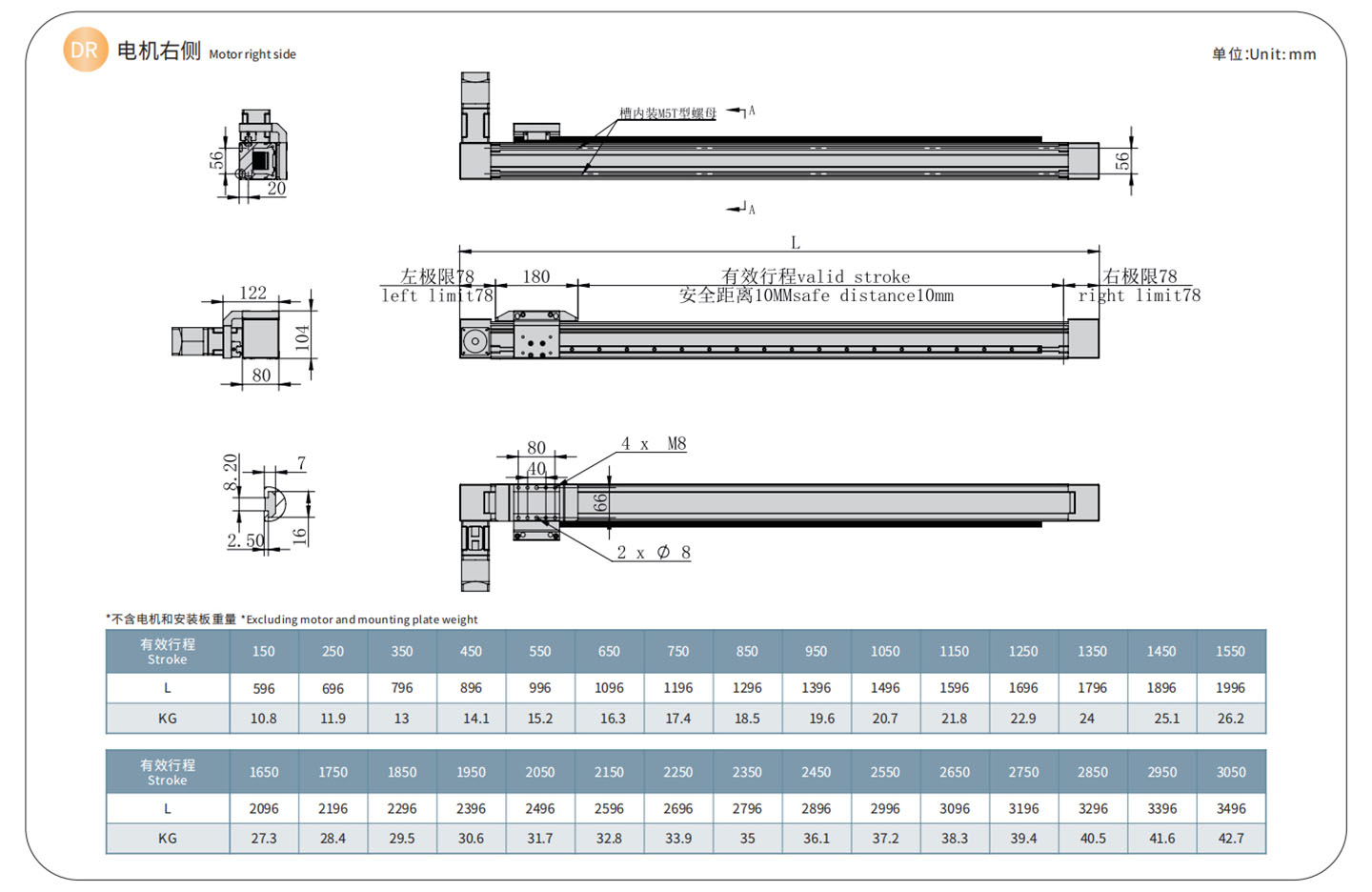
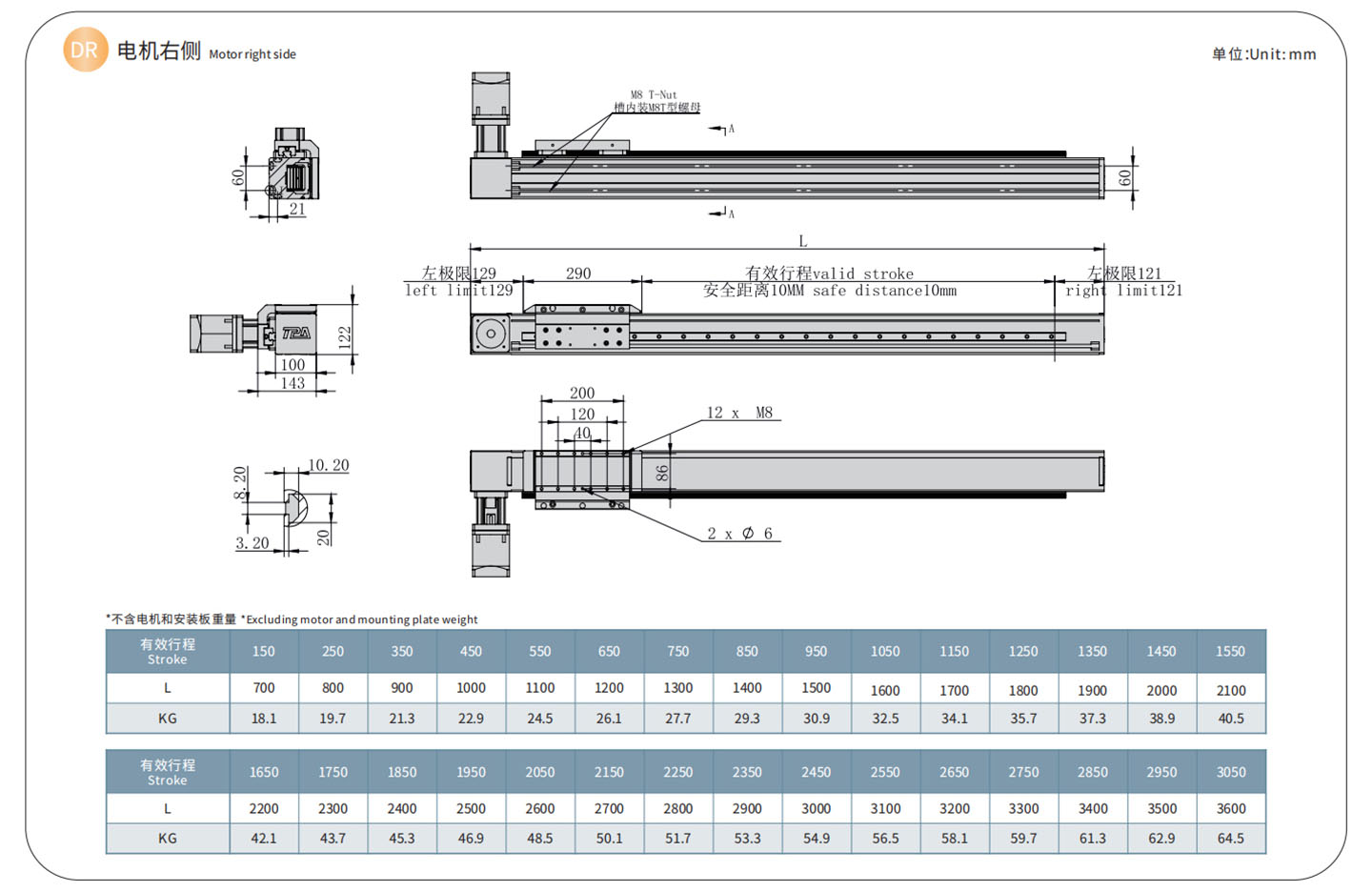
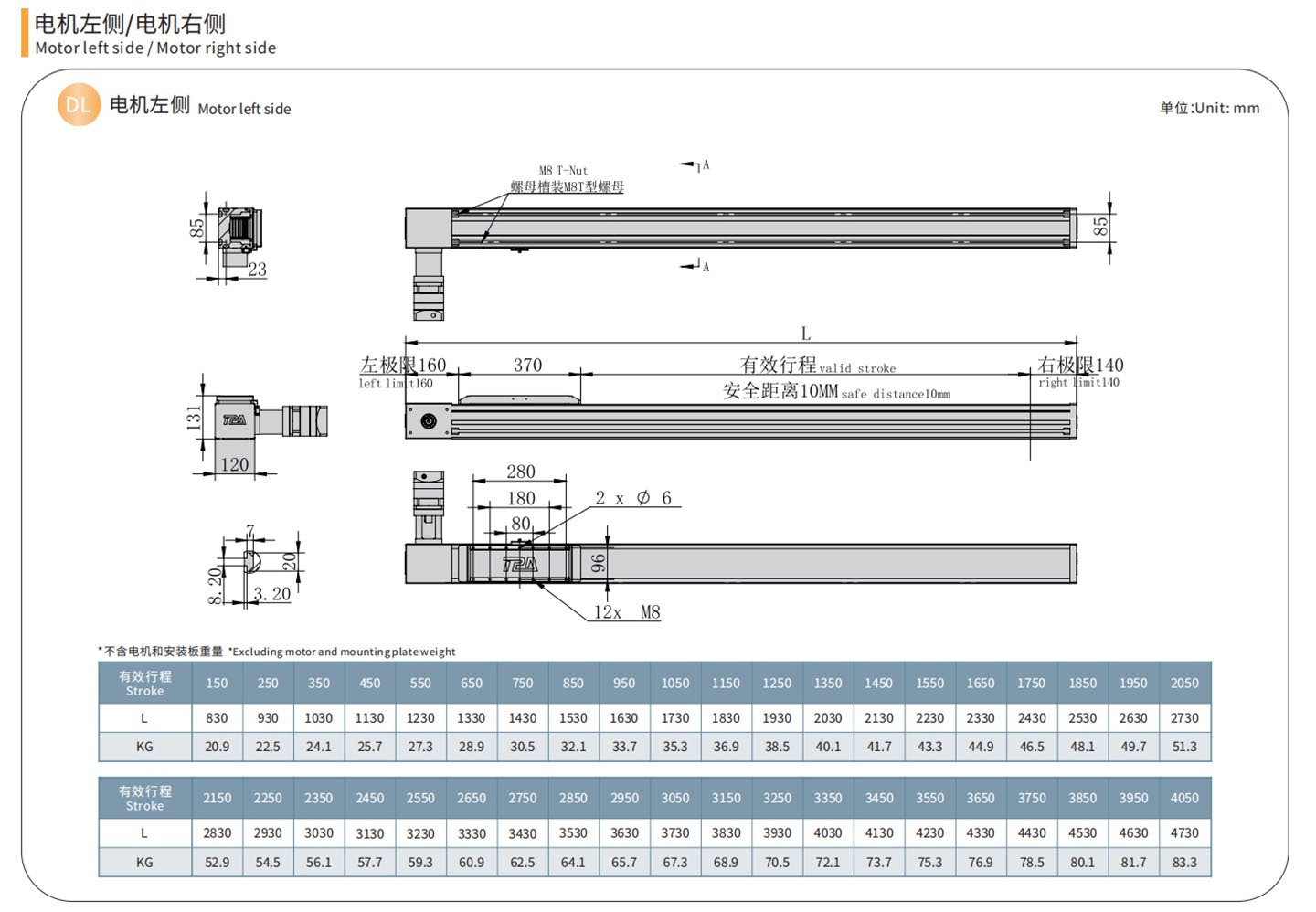
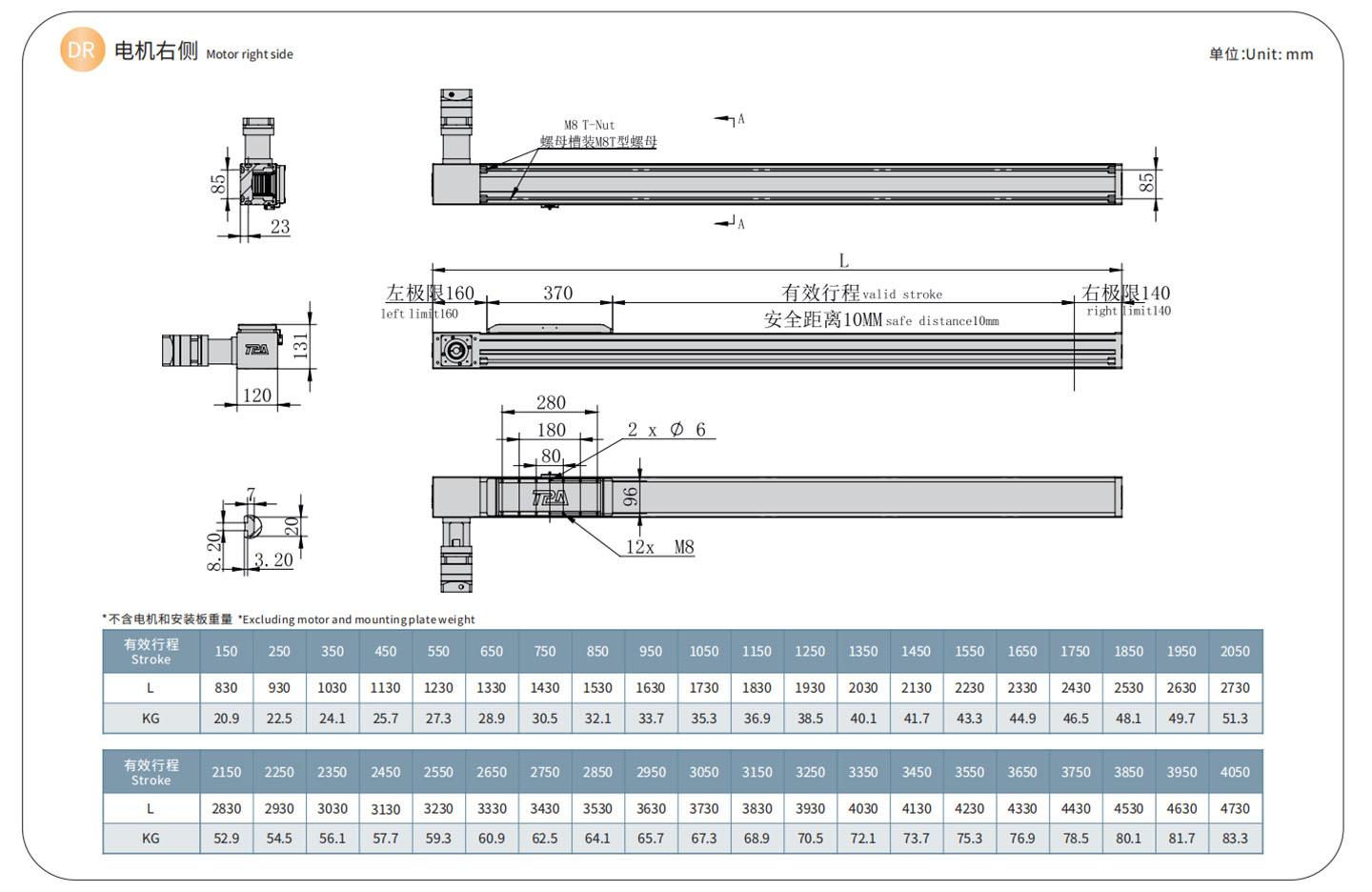
TPA OCB စီးရီးခါးပတ်အား မောင်းနှင်ထားသော linear module သည် servo motor နှင့် belt ၏ rotary motion ကို linear motion အဖြစ်သို့ ပြောင်းလဲပေးသည့် အပြည့်အ၀ အလုံပိတ်ဒီဇိုင်းဖြင့် servo motor နှင့် belt ပေါင်းစပ်ထားသော ပေါင်းစပ်ဒီဇိုင်းကို လက်ခံရရှိပြီး slider ၏ အမြန်နှုန်း၊ အနေအထားနှင့် တွန်းအားကို တိကျစွာ ထိန်းချုပ်ပြီး မြင့်မားသည်ကို သိရှိနိုင်သည်။ တိကျသောအလိုအလျောက်ထိန်းချုပ်မှု။

OCB-60

OCB-80
OCB-100
OCB-120

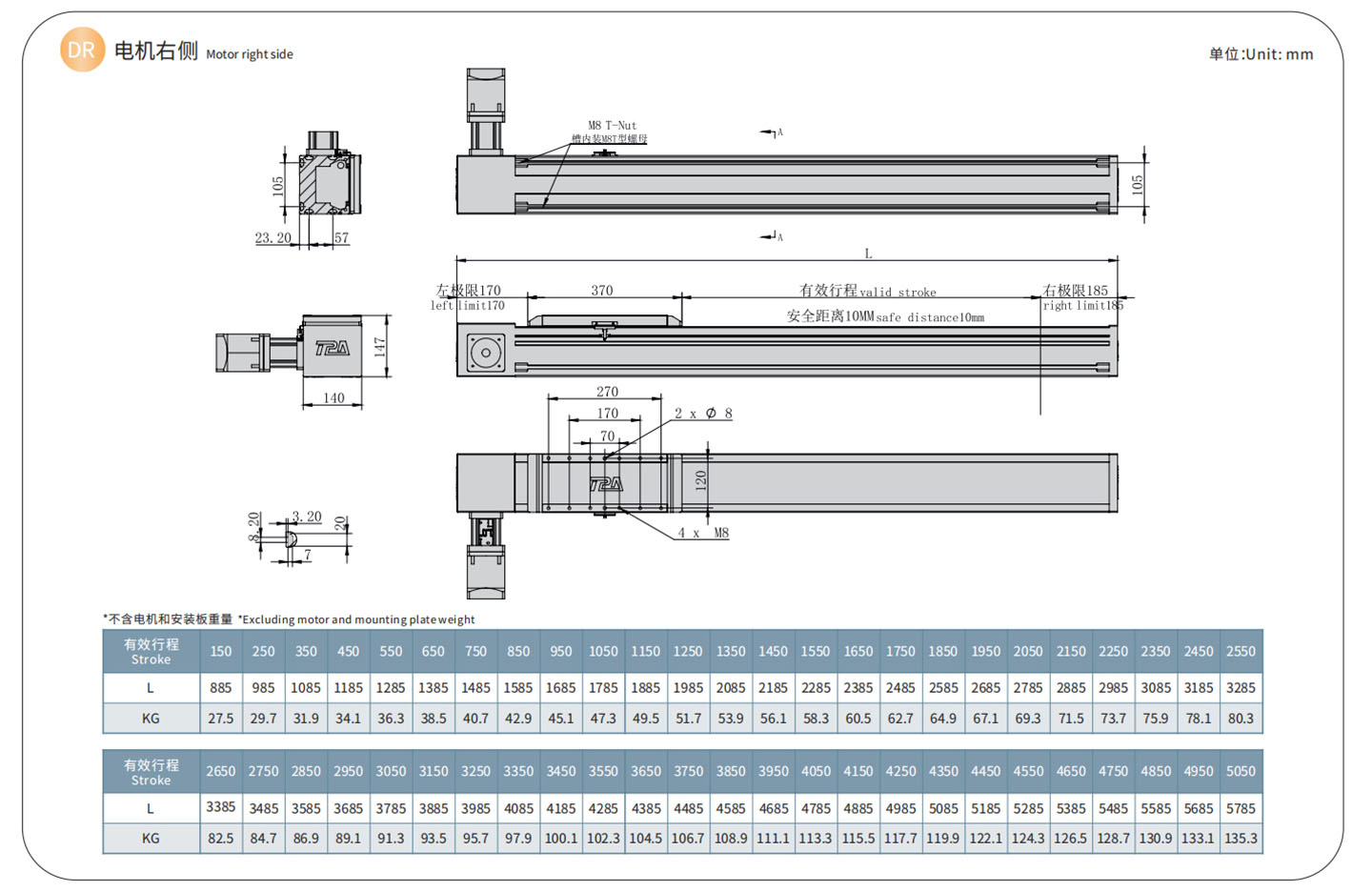
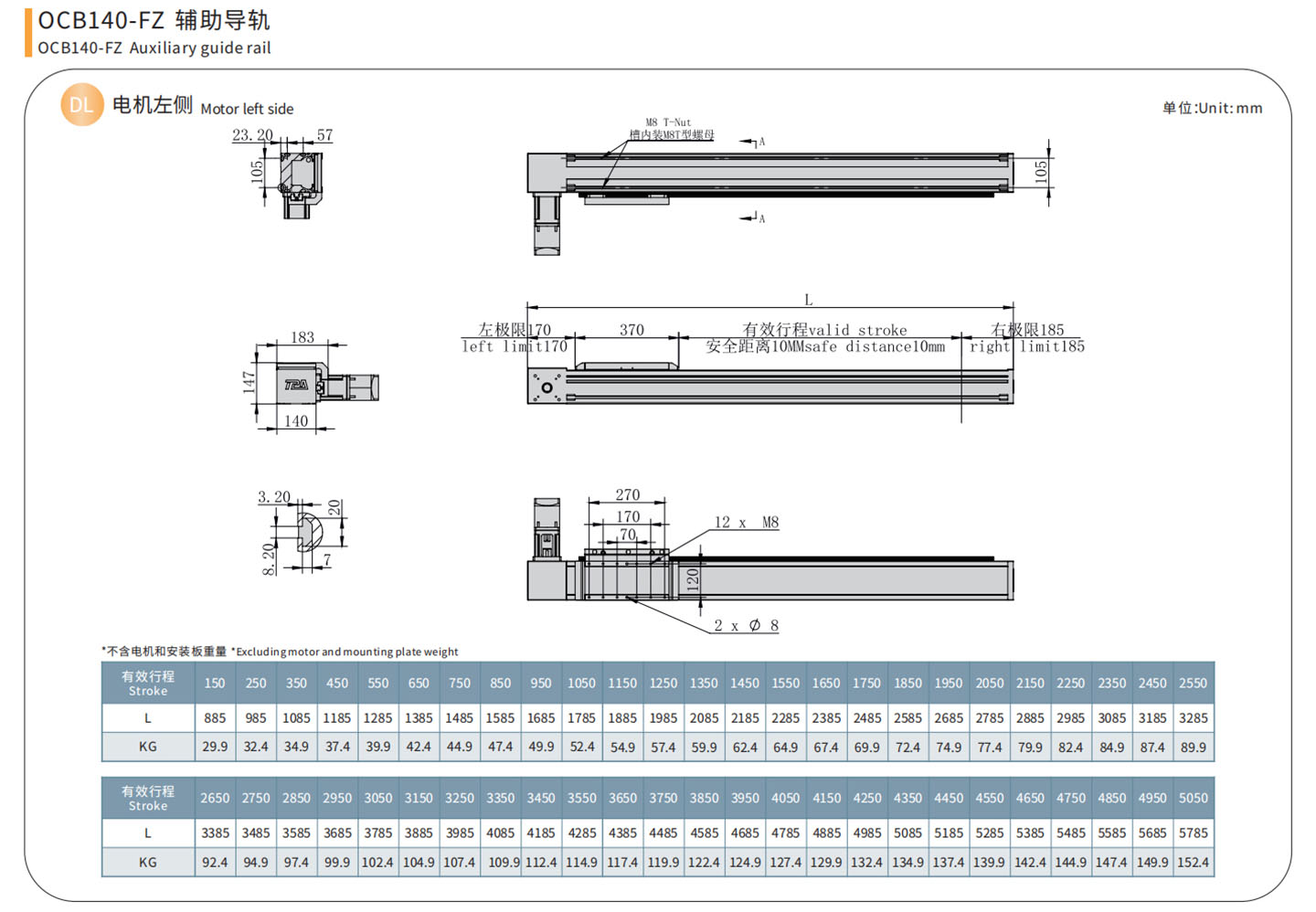
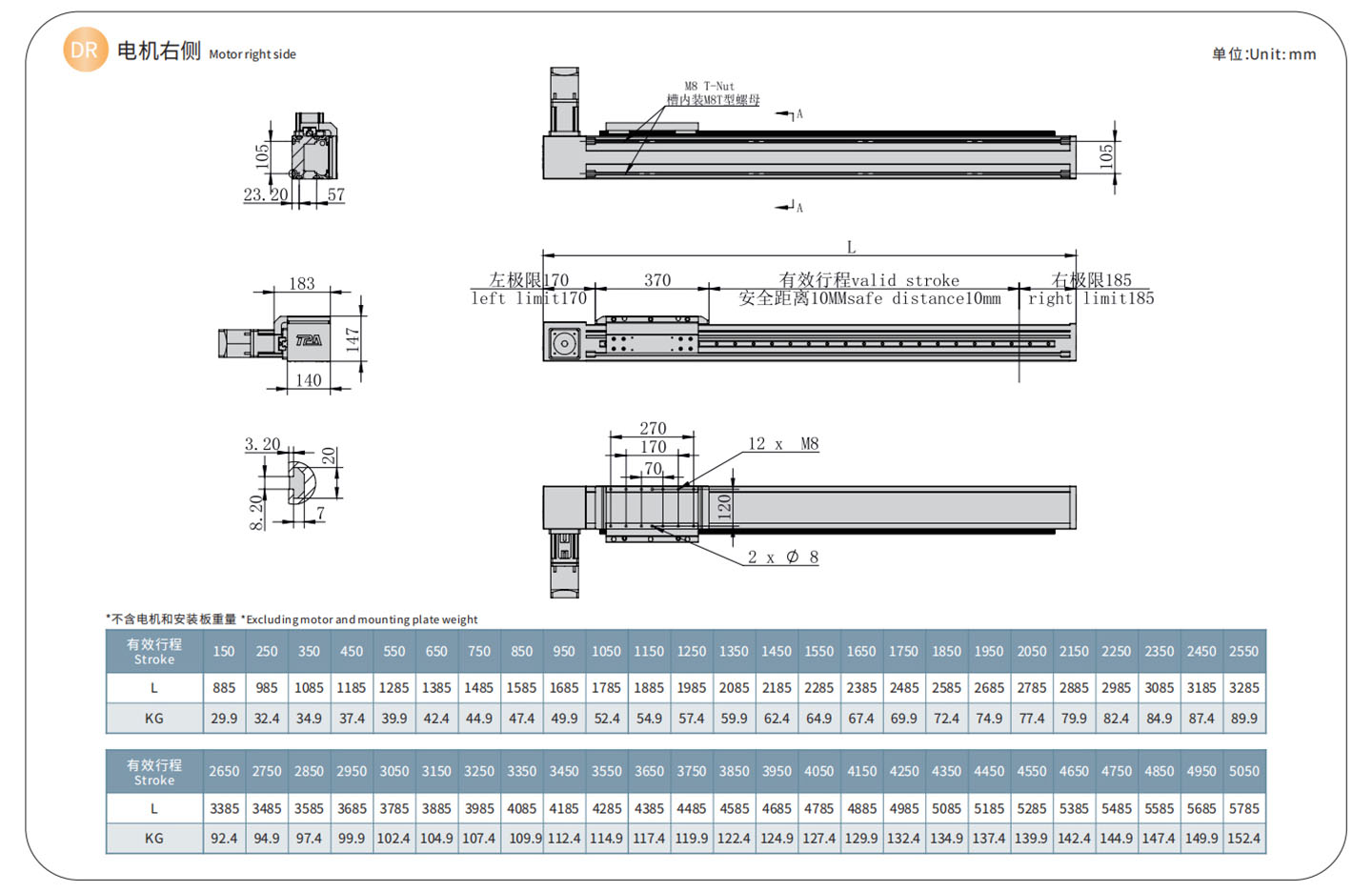
OCB-140
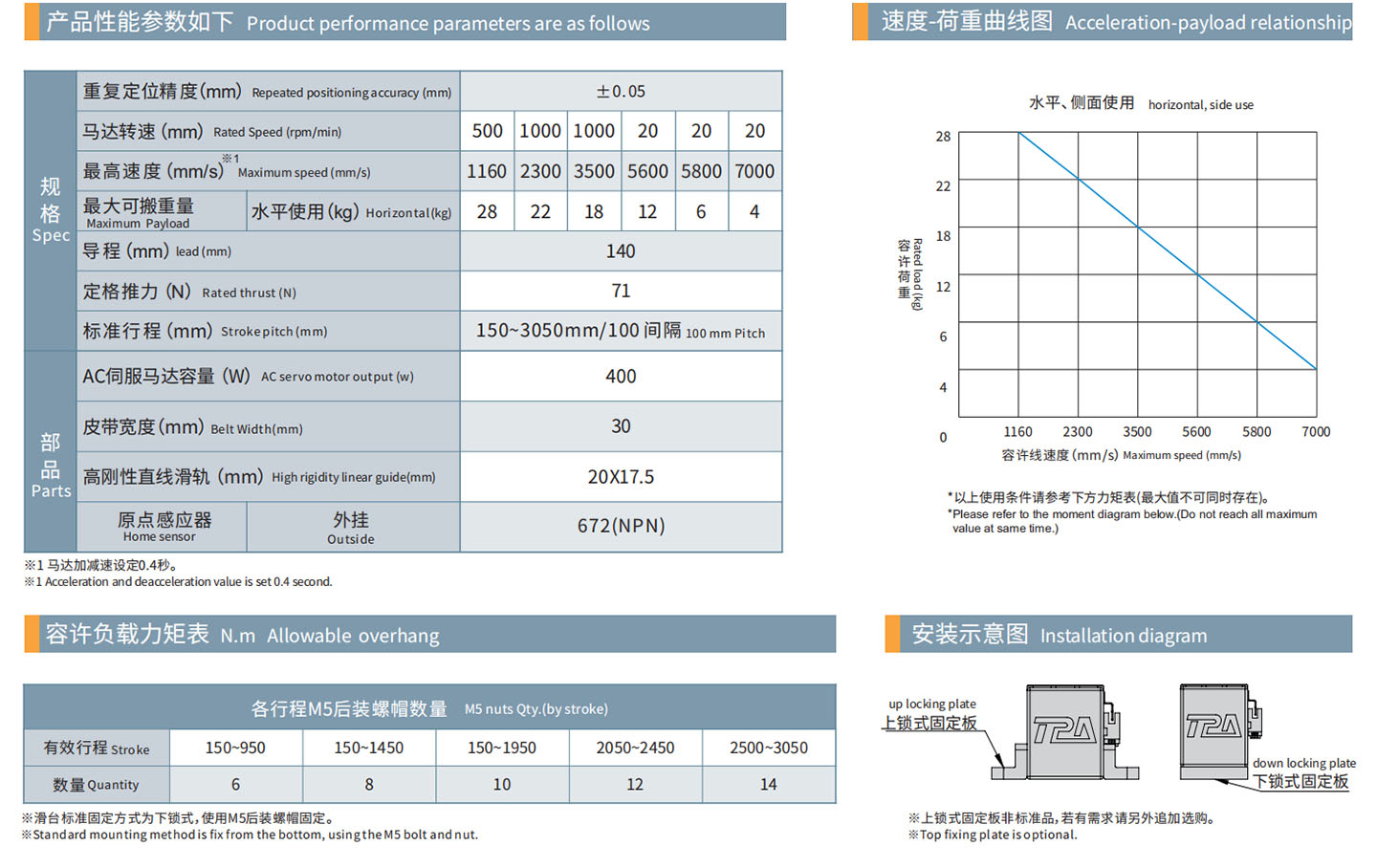
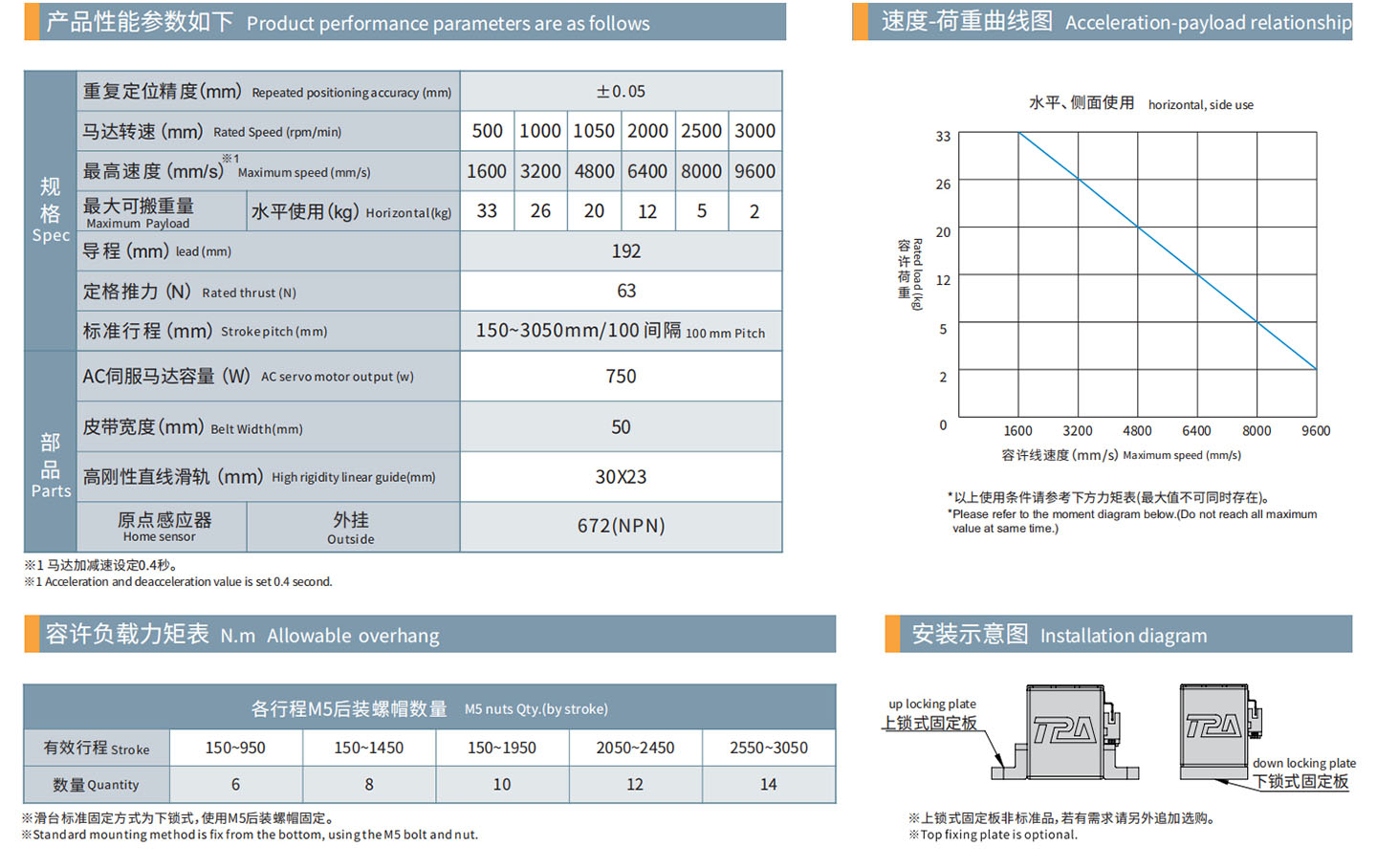
အင်္ဂါရပ်များ
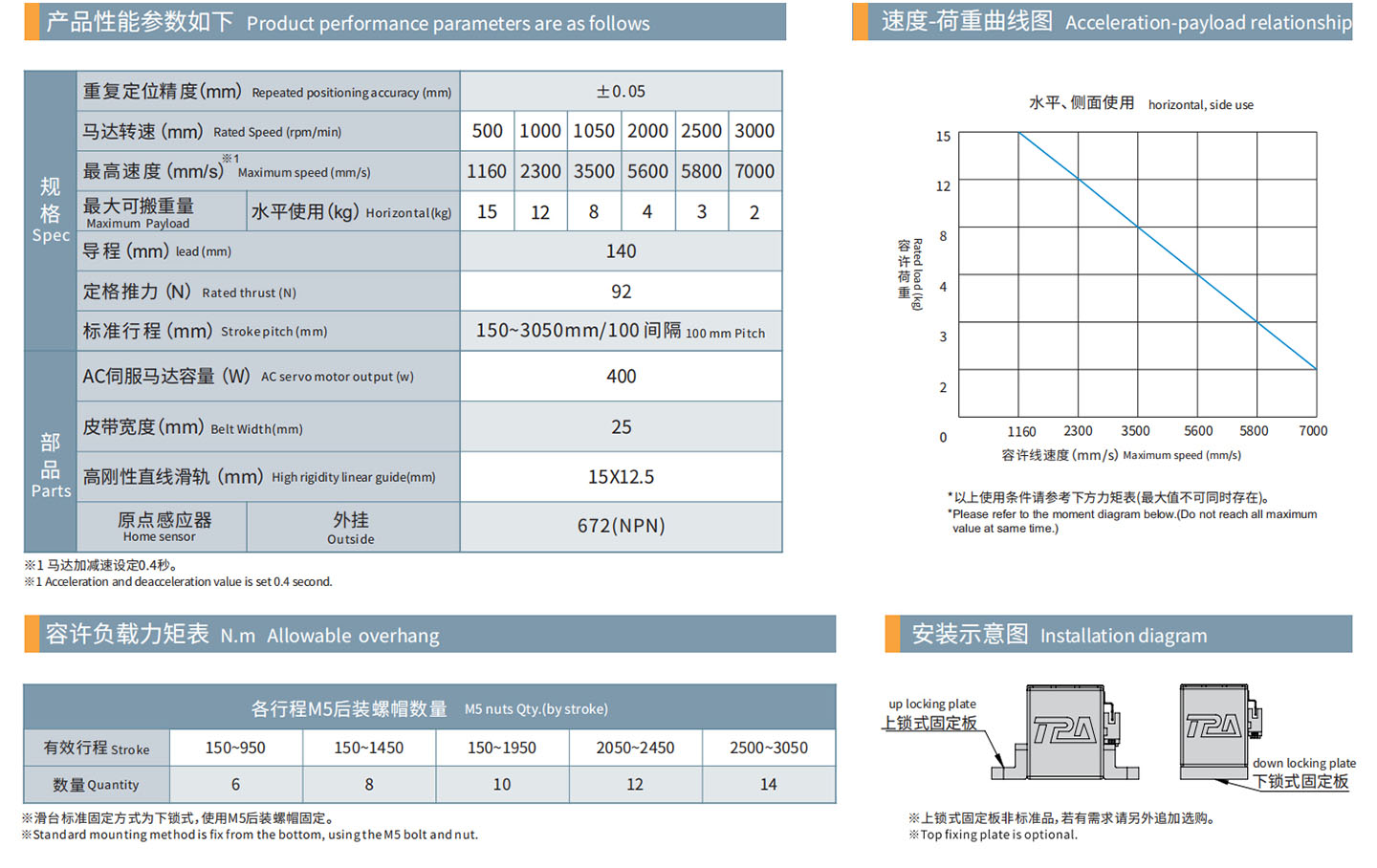
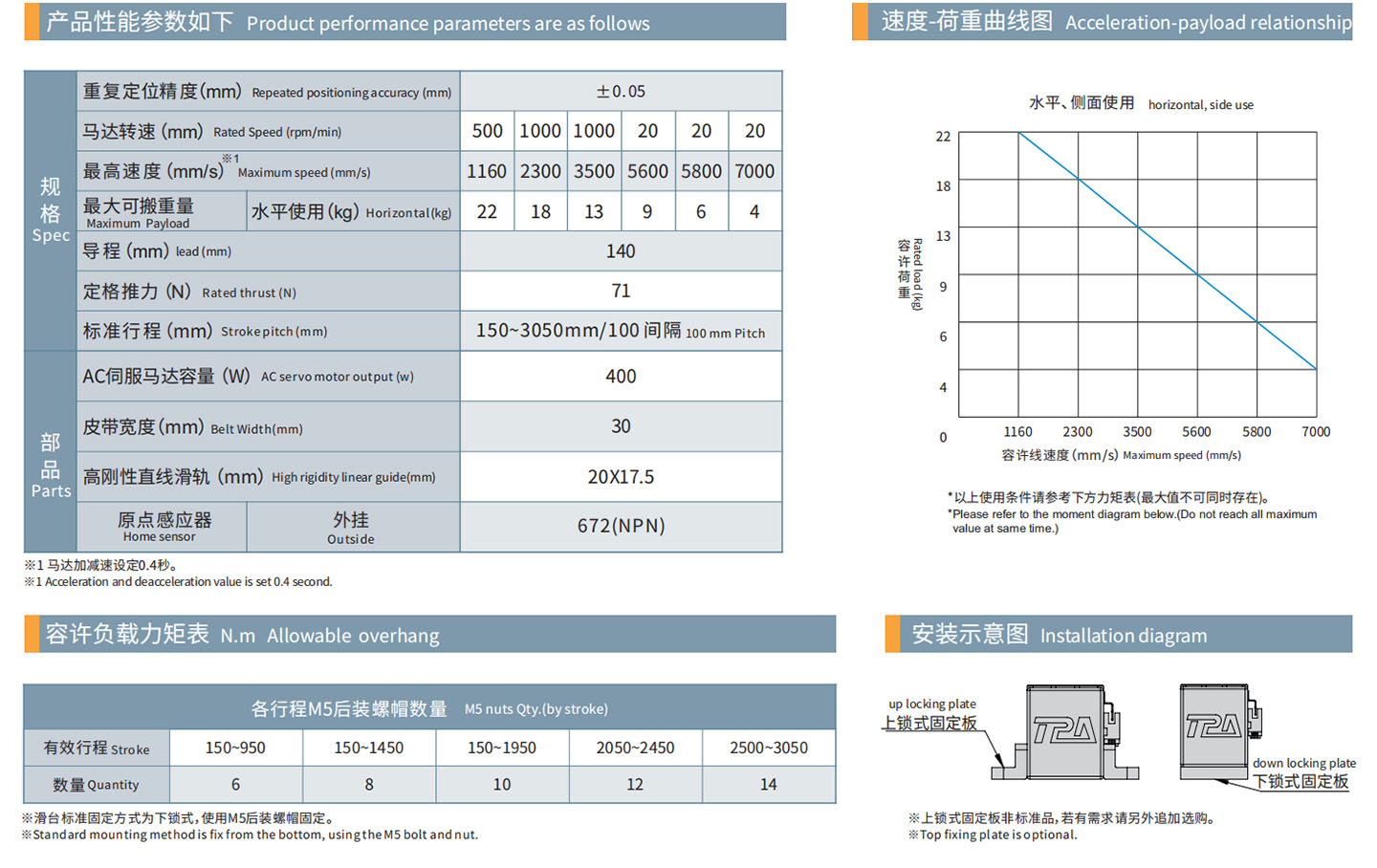
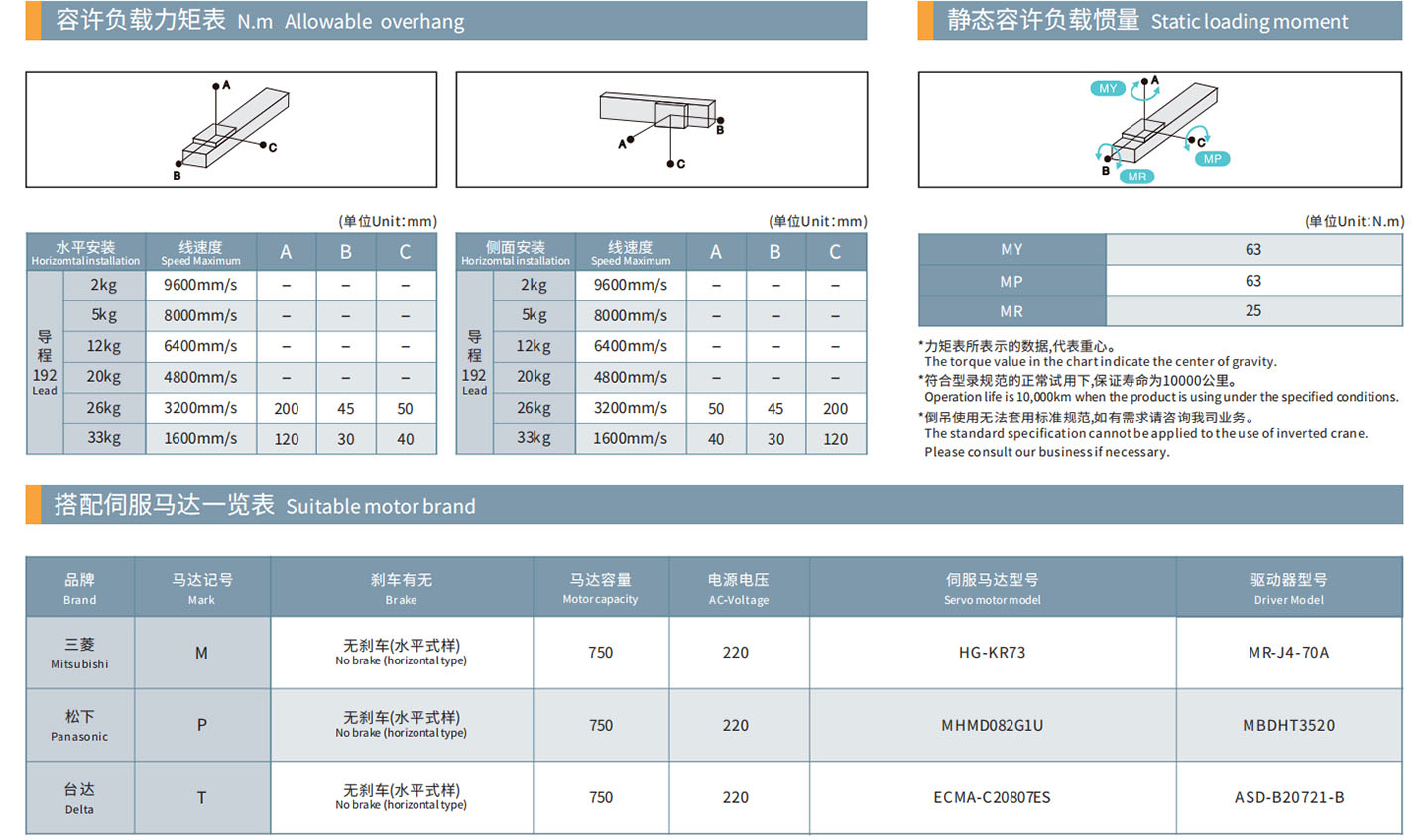
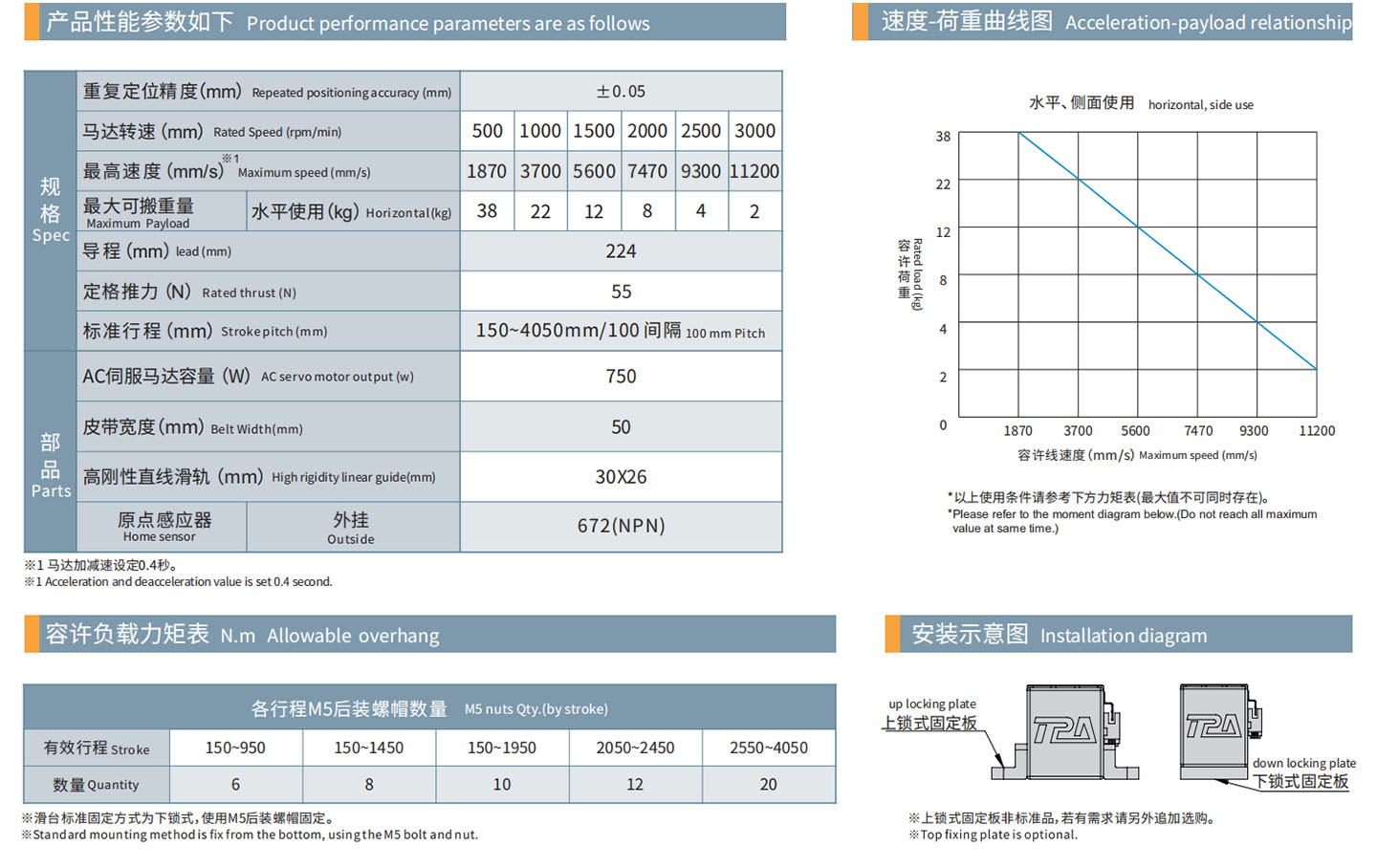
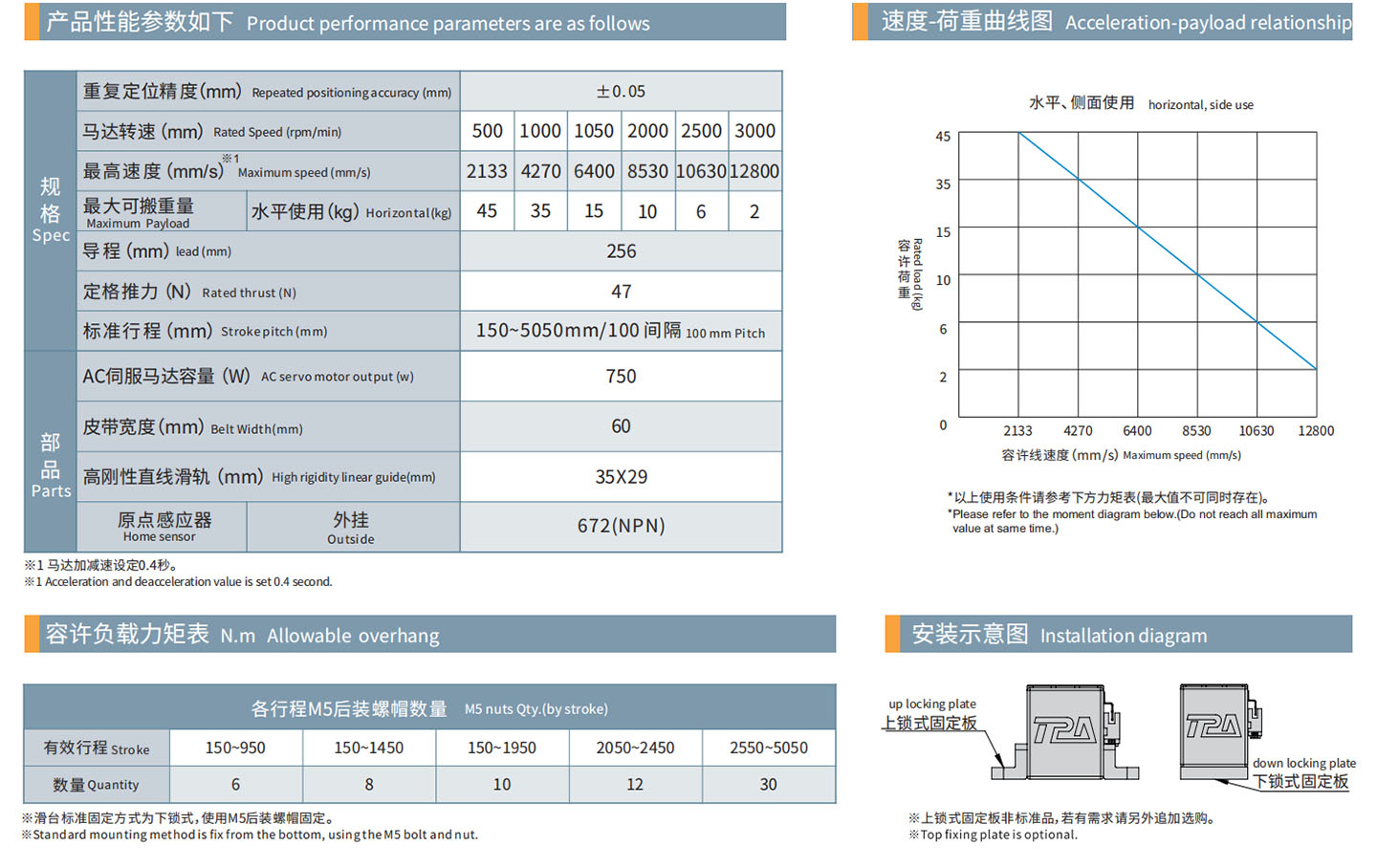
ထပ်ခါတလဲလဲ နေရာချထားခြင်း တိကျမှု- ±0.05mm
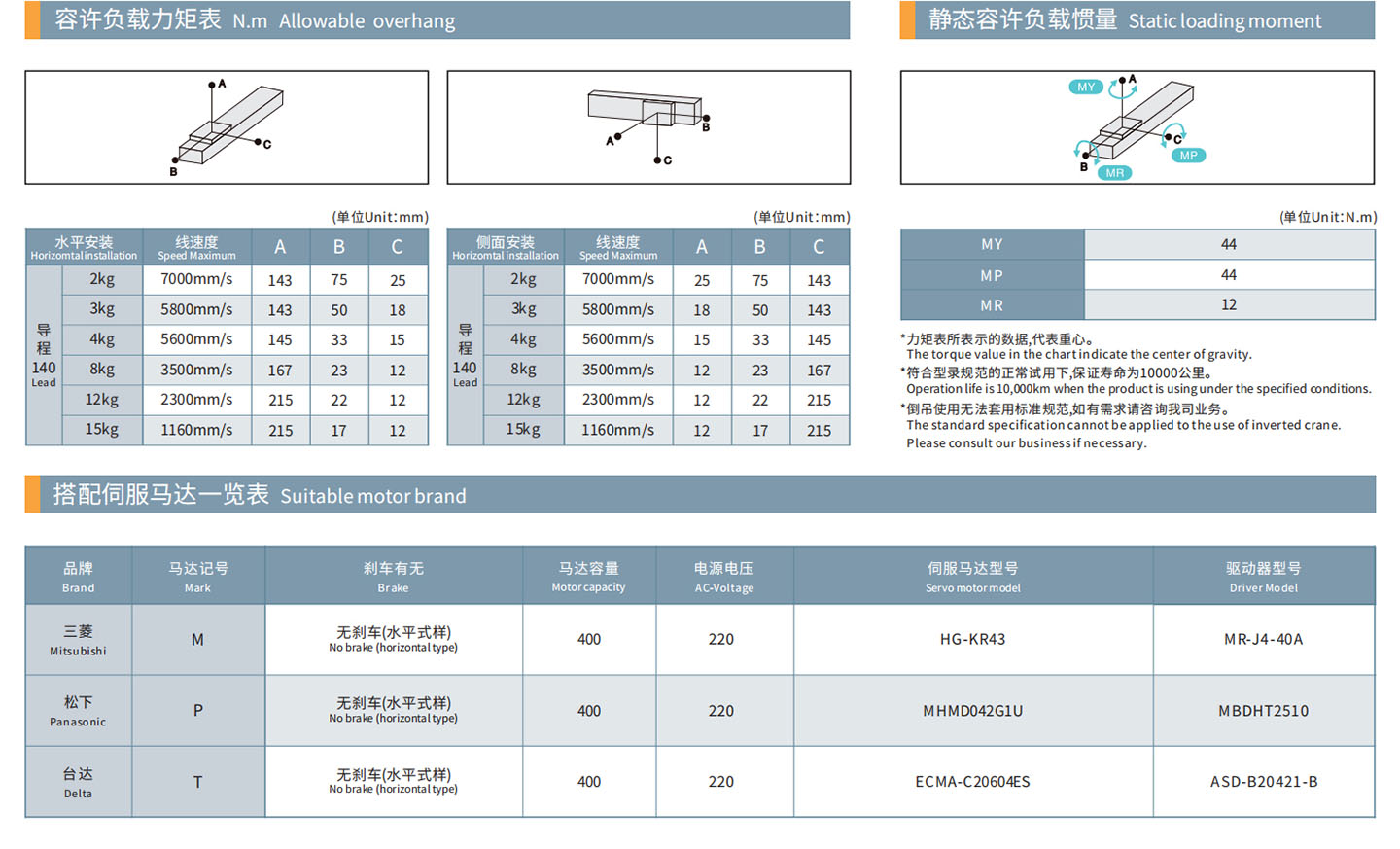
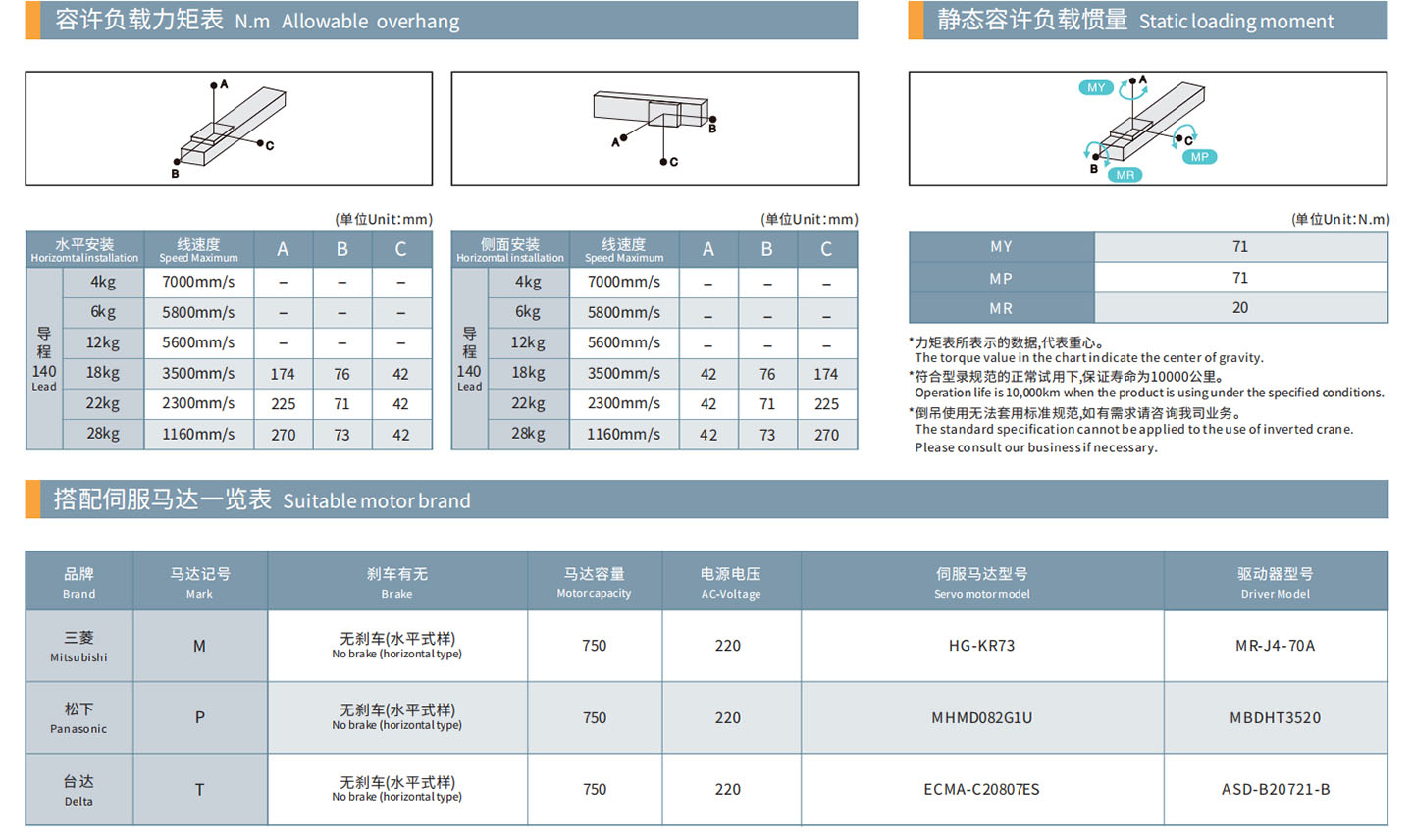
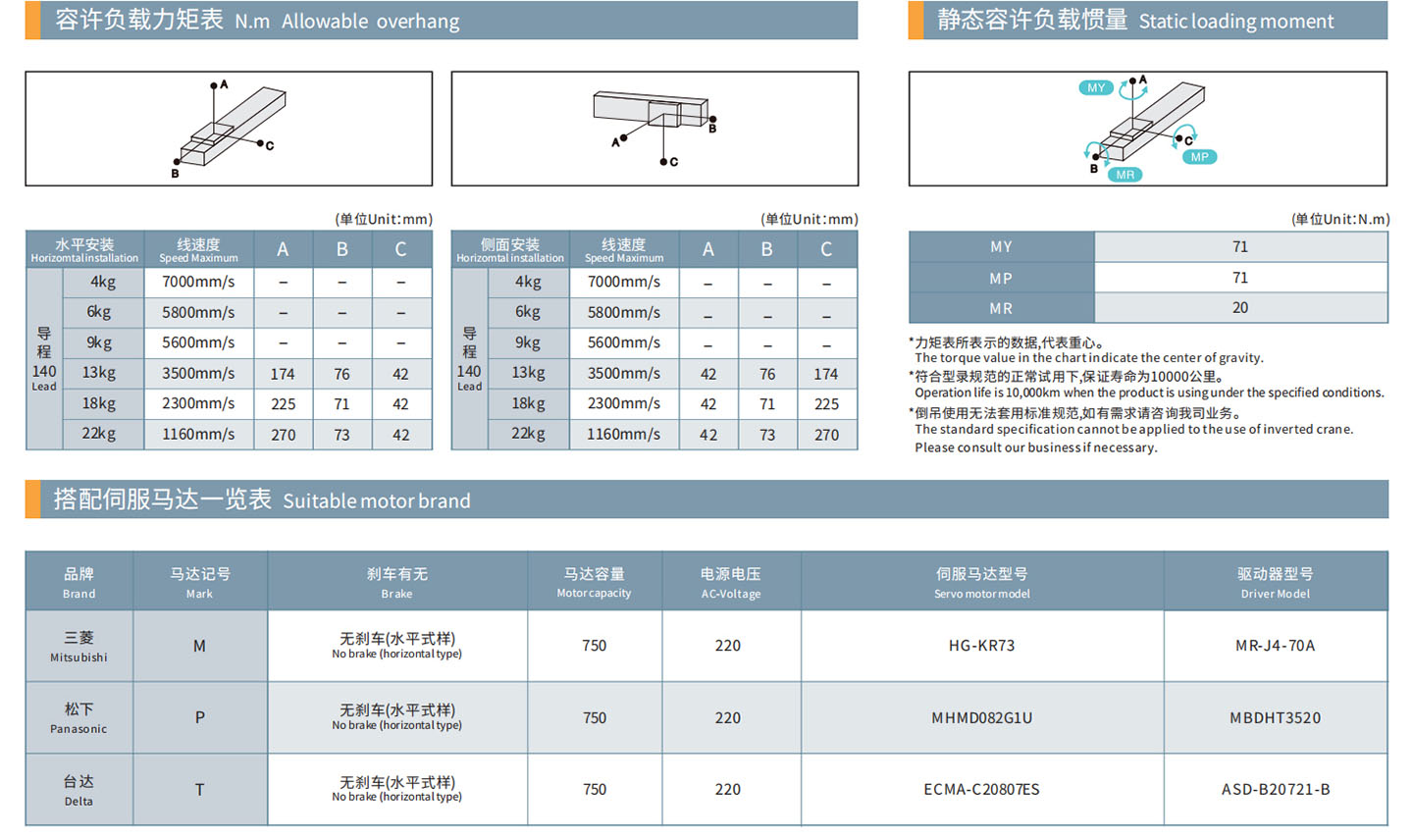
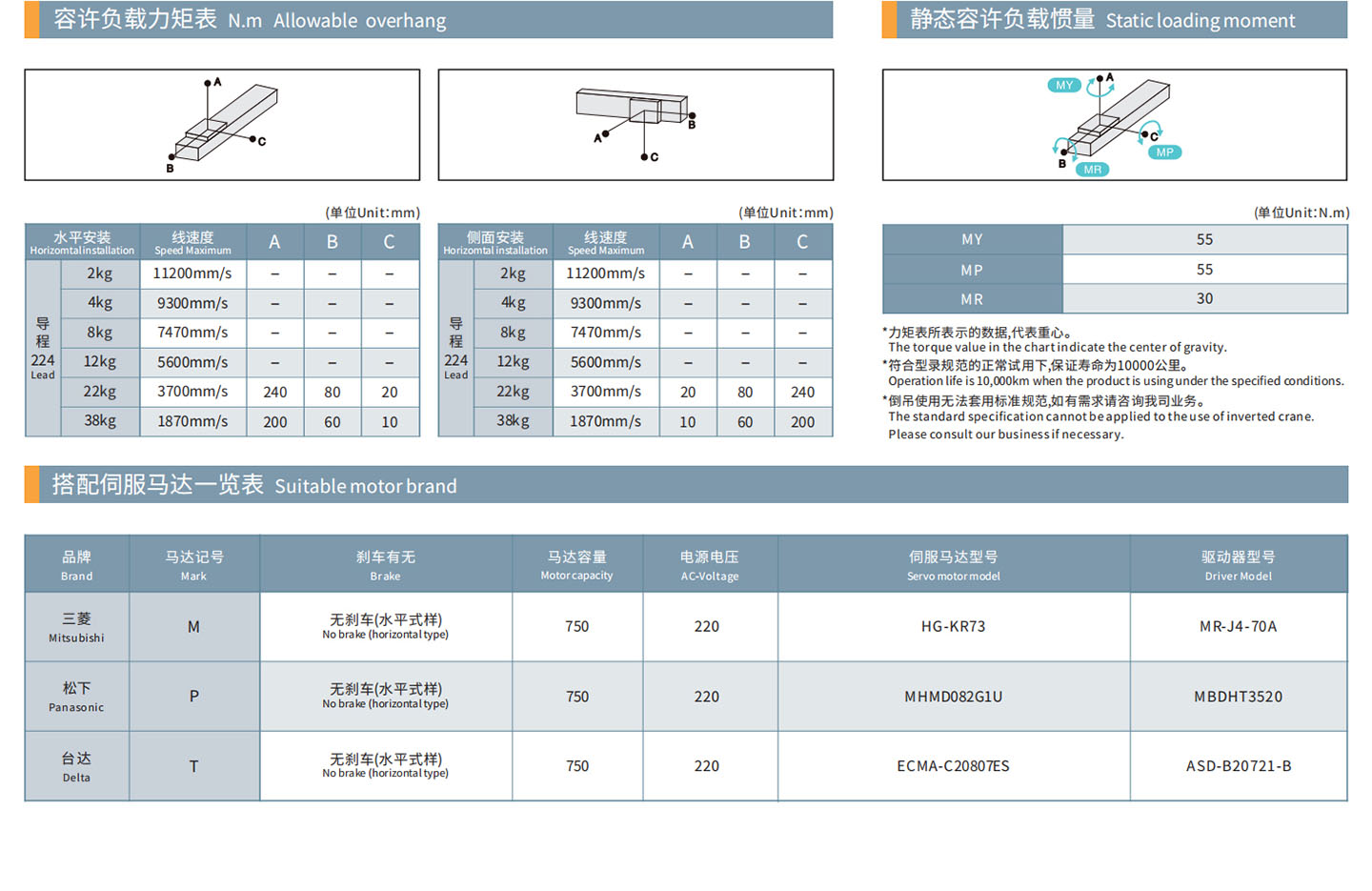
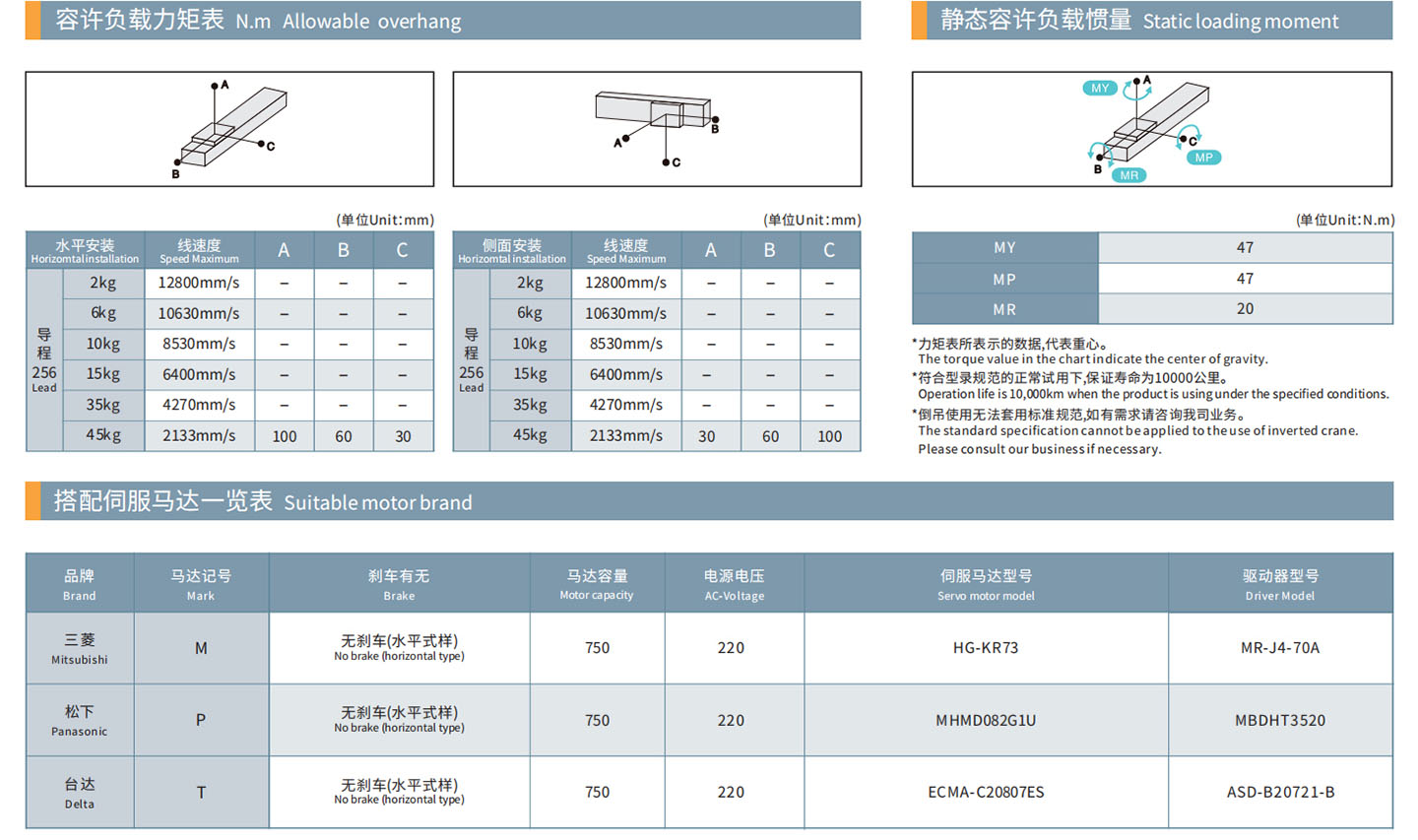
အများဆုံးပေးချေမှု (အလျားလိုက်): 220 ကီလိုဂရမ်
Max Payload (ဒေါင်လိုက်): 80 ကီလိုဂရမ်
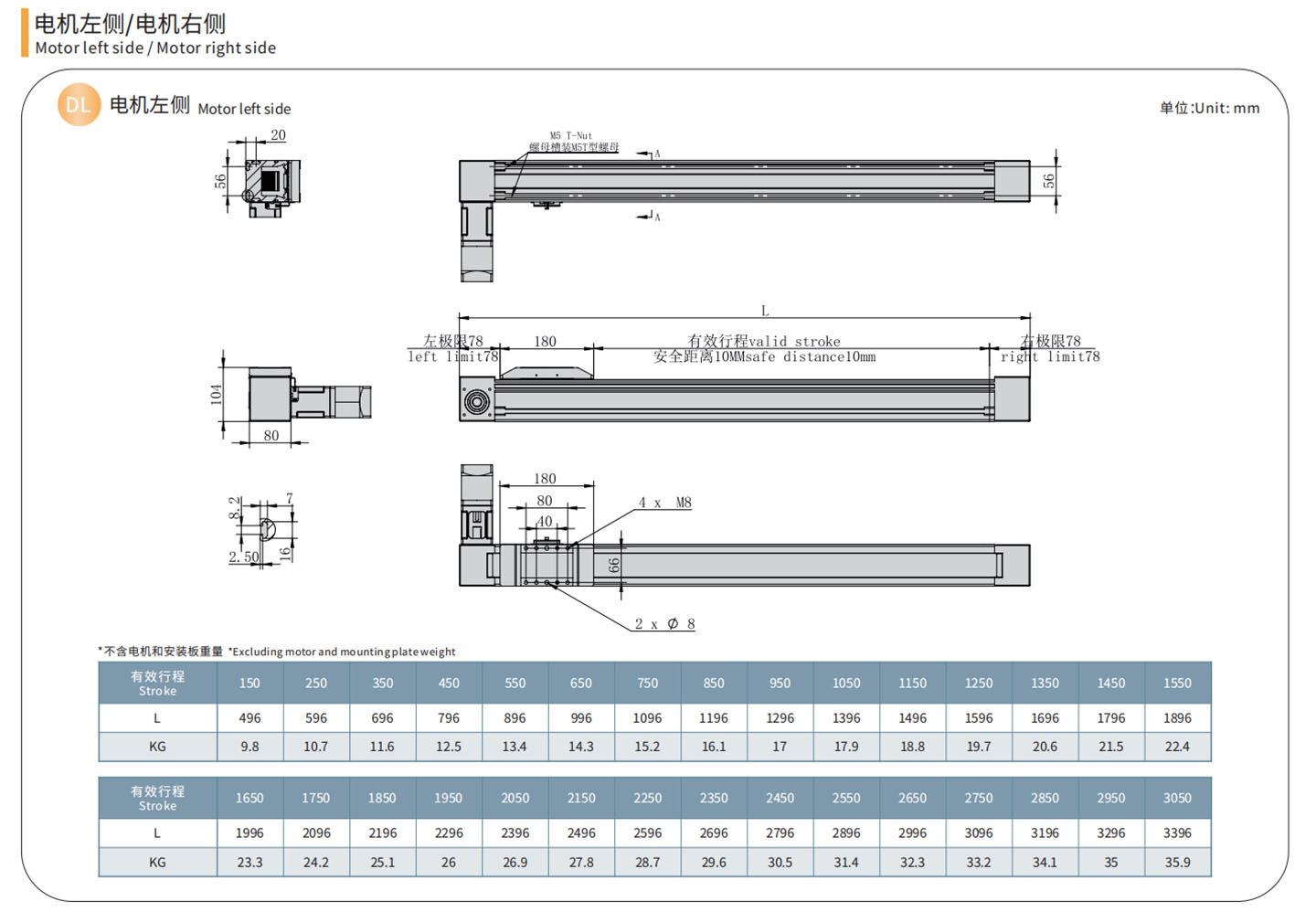
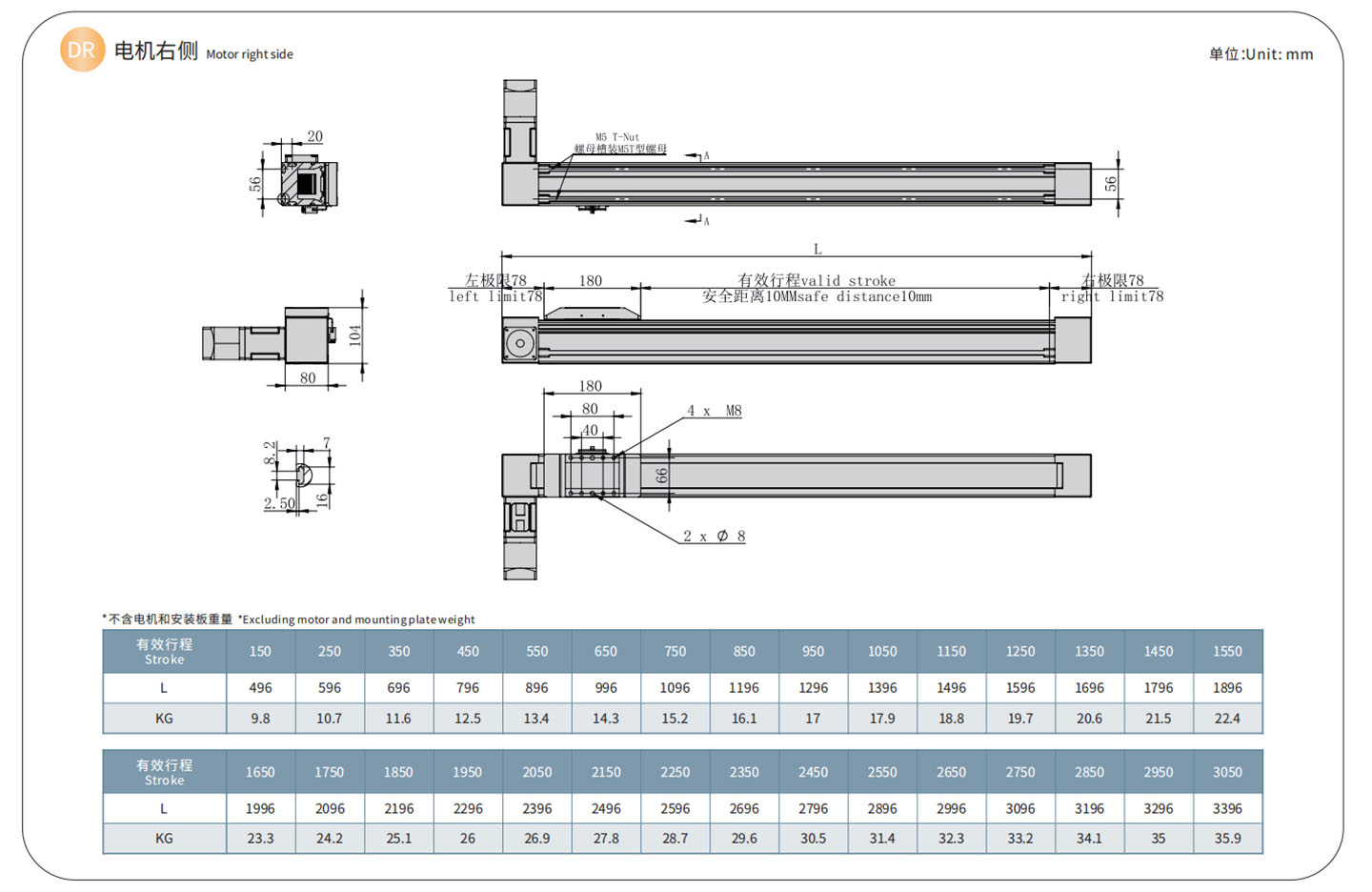
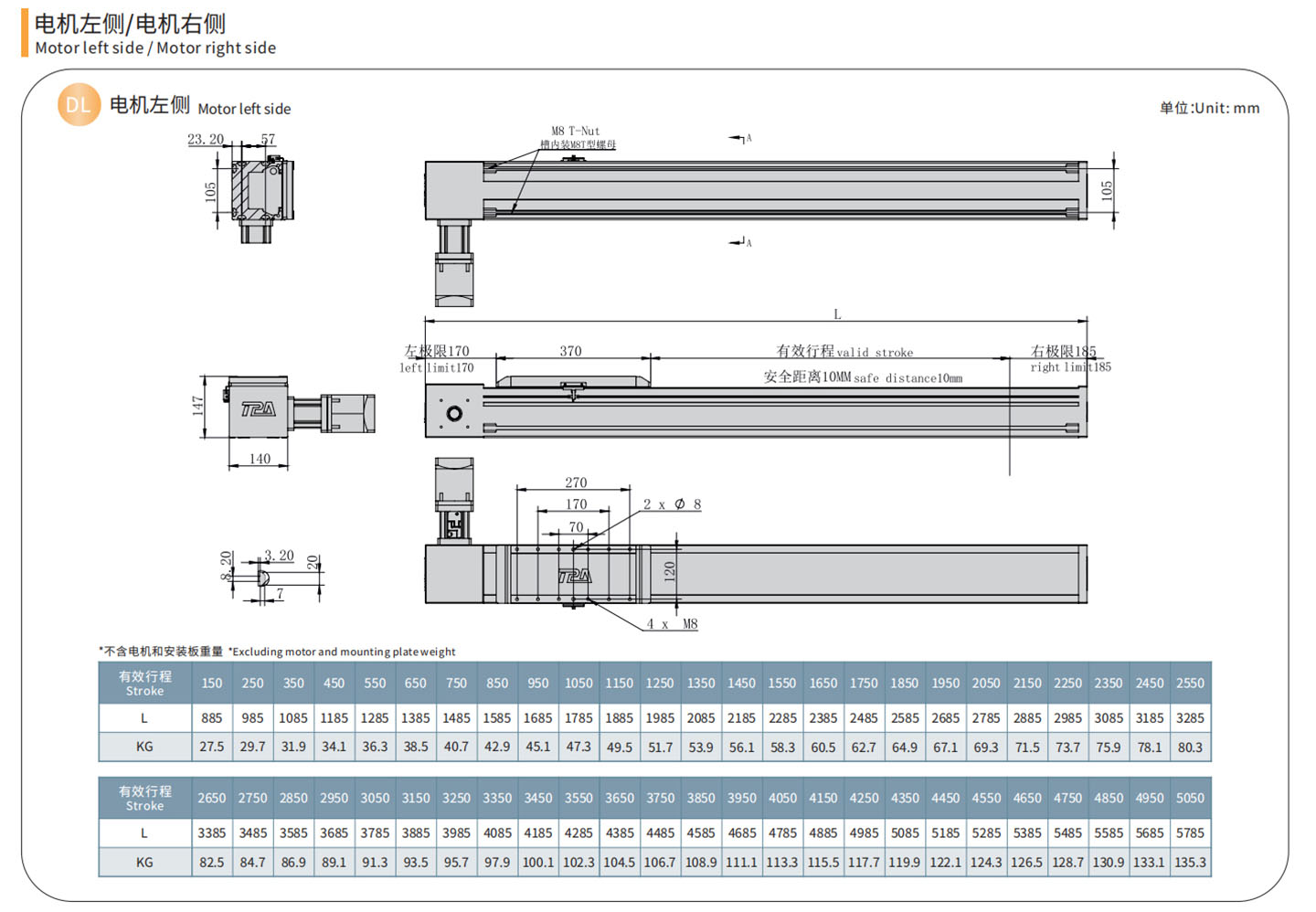
လေဖြတ်ခြင်း- 150 မှ 5050mm
အမြင့်ဆုံးအမြန်နှုန်း- 5000mm/s

ပရိုဖိုင်ဒီဇိုင်း- ပရိုဖိုင်၏ တောင့်တင်းမှုနှင့် ဖွဲ့စည်းတည်ဆောက်ပုံဆိုင်ရာ တည်ငြိမ်မှုကို အတုယူရန် ပရိုဖိုင် ဒီဇိုင်းတွင် ကန့်သတ်ဒြပ်စင် ဖိစီးမှု ခွဲခြမ်းစိတ်ဖြာမှုကို အသုံးပြုပါသည်။ ပရိုဖိုင်ကိုယ်ထည်၏ အလေးချိန်ကို လျှော့ချခြင်း၊ ခိုင်ခံ့သော အမှန်တကယ် ခံနိုင်စွမ်းအားနှင့် လူသားဆန်သော ဒီဇိုင်းဖြင့်
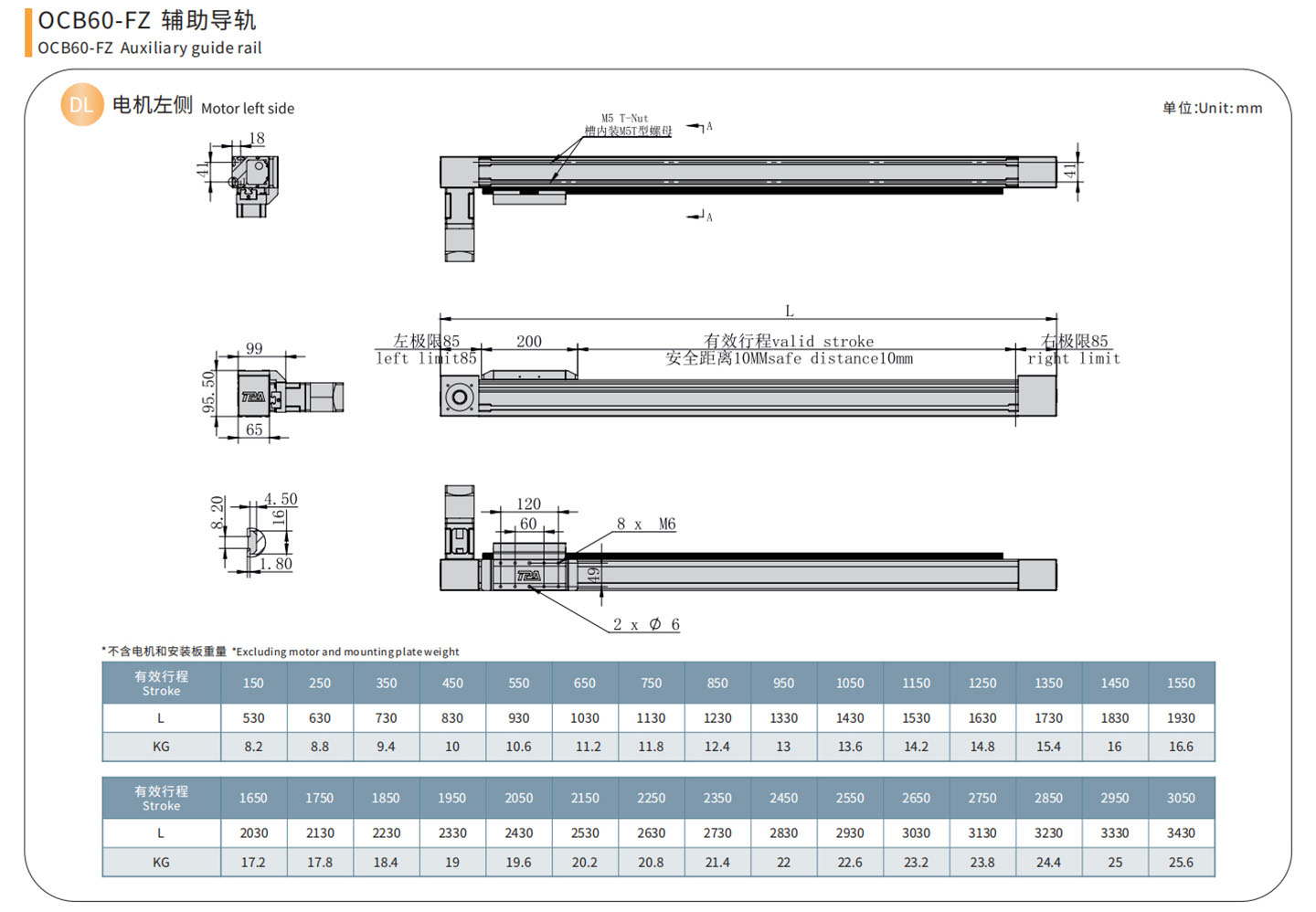
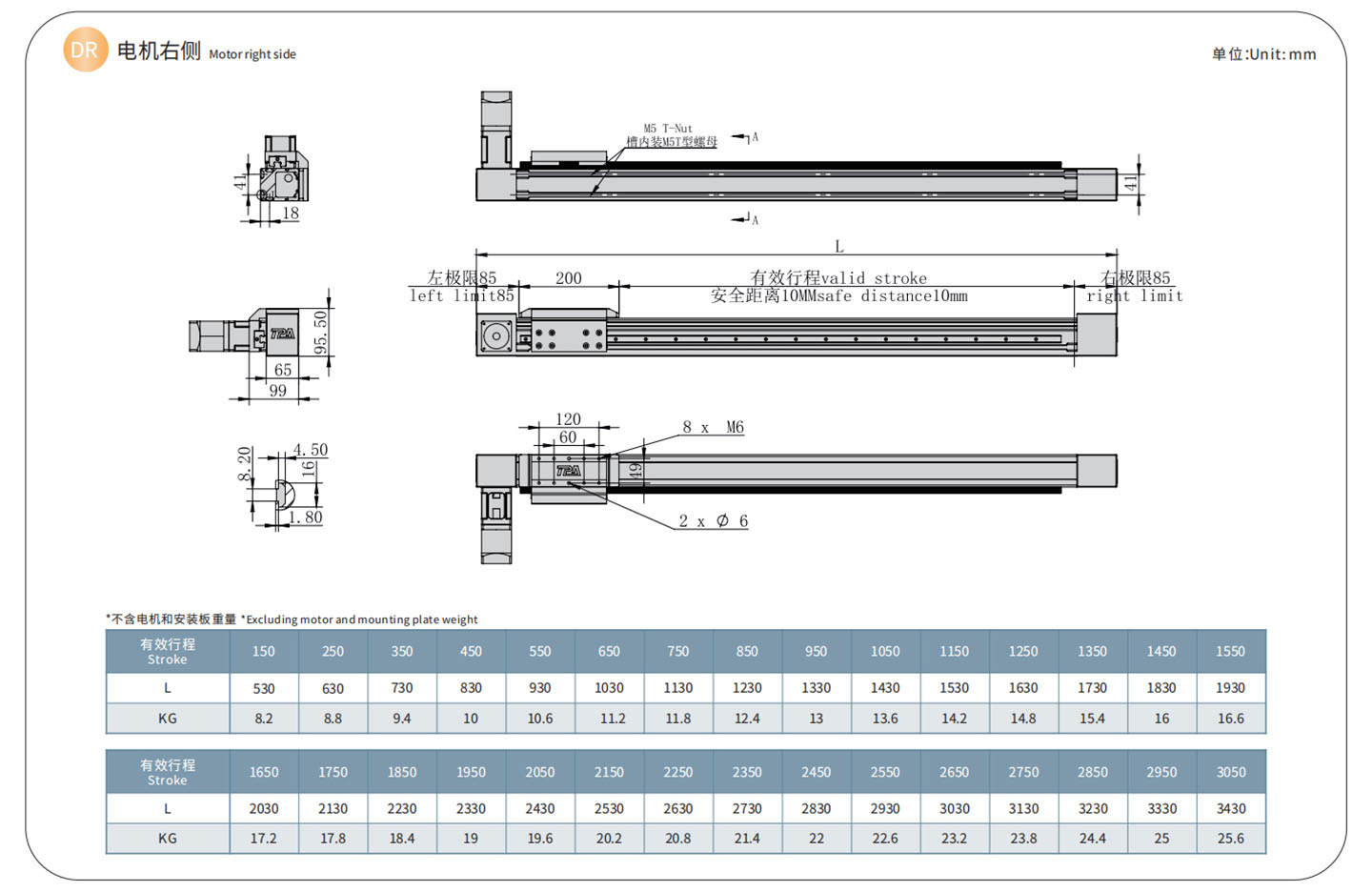
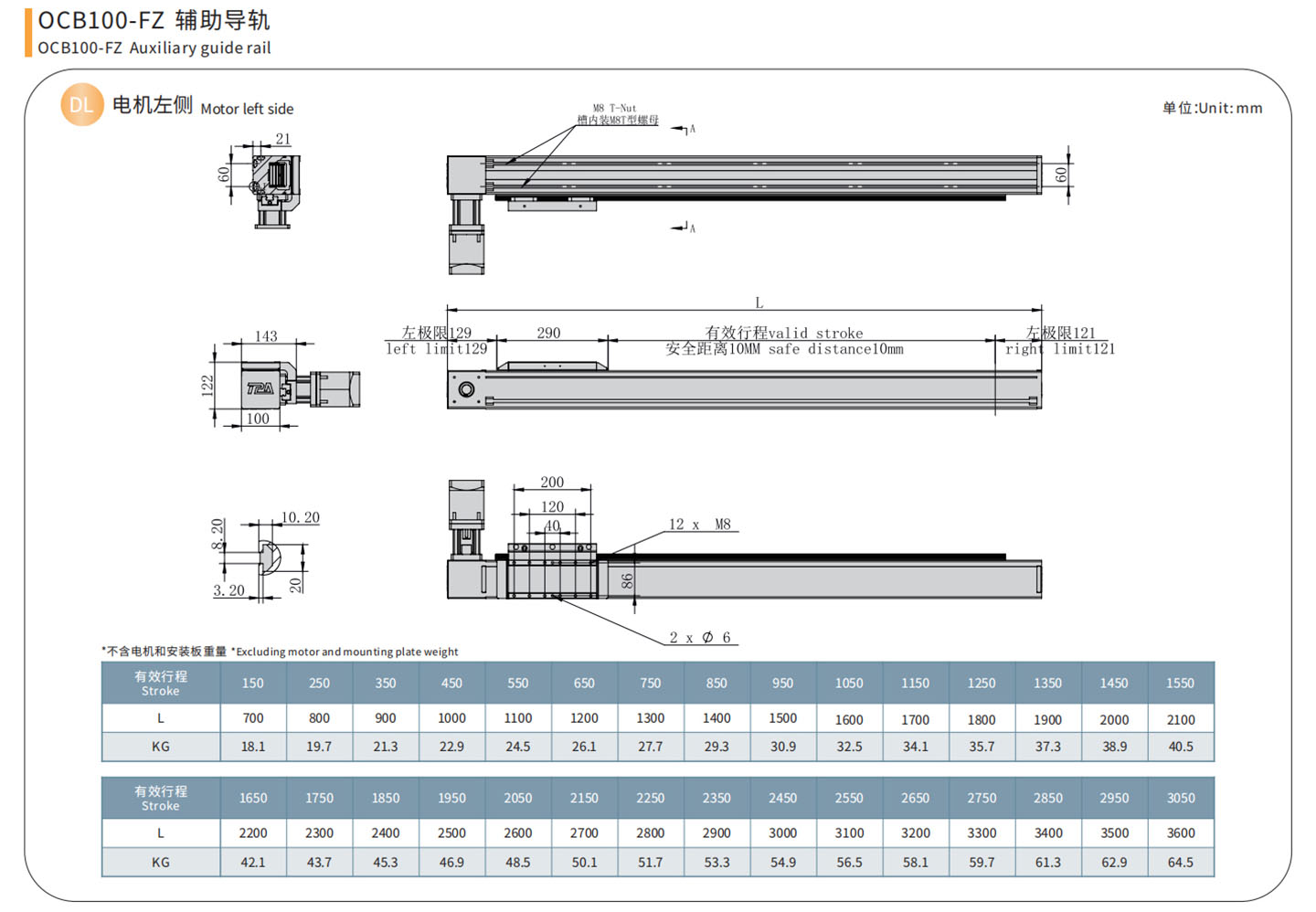
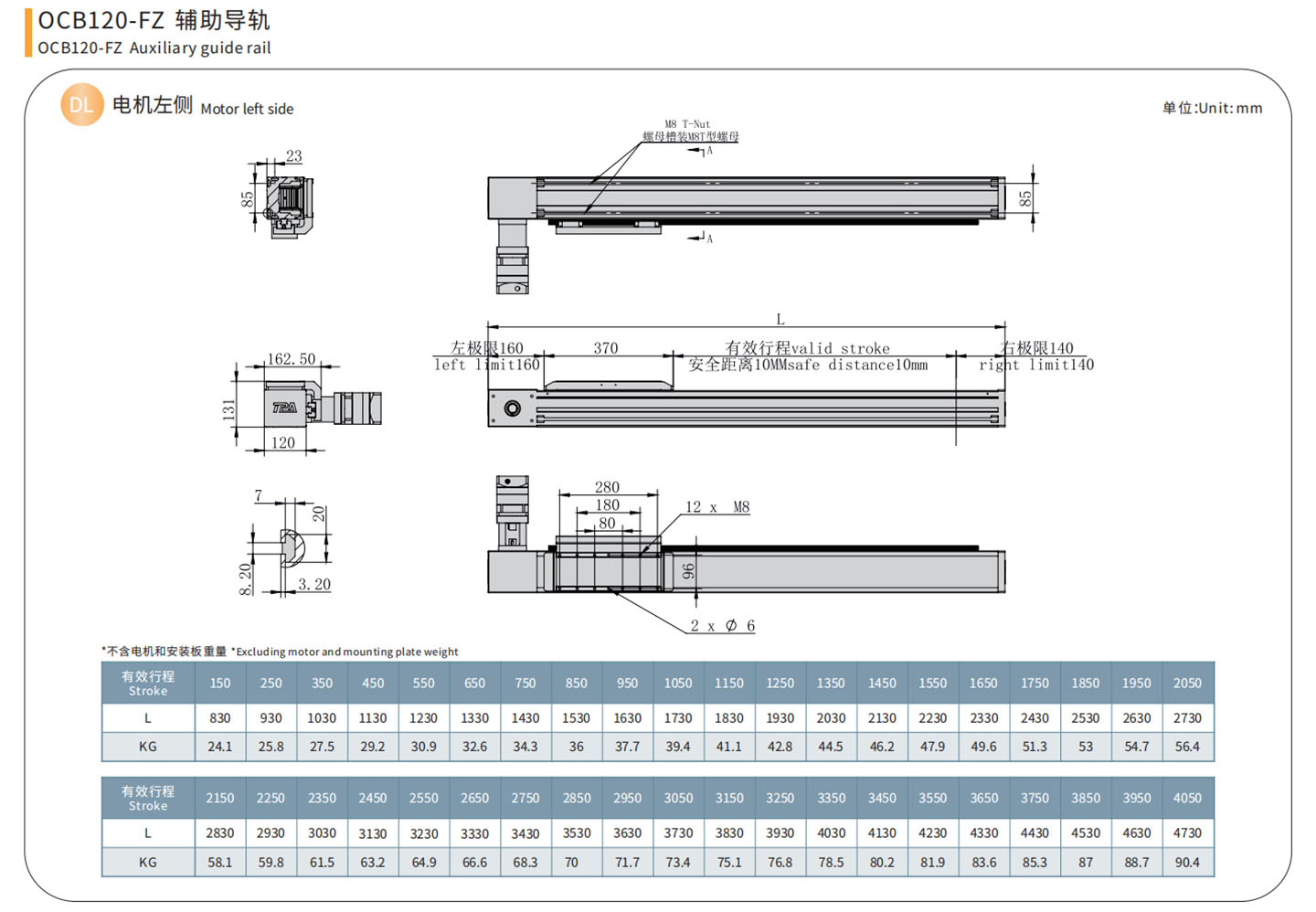
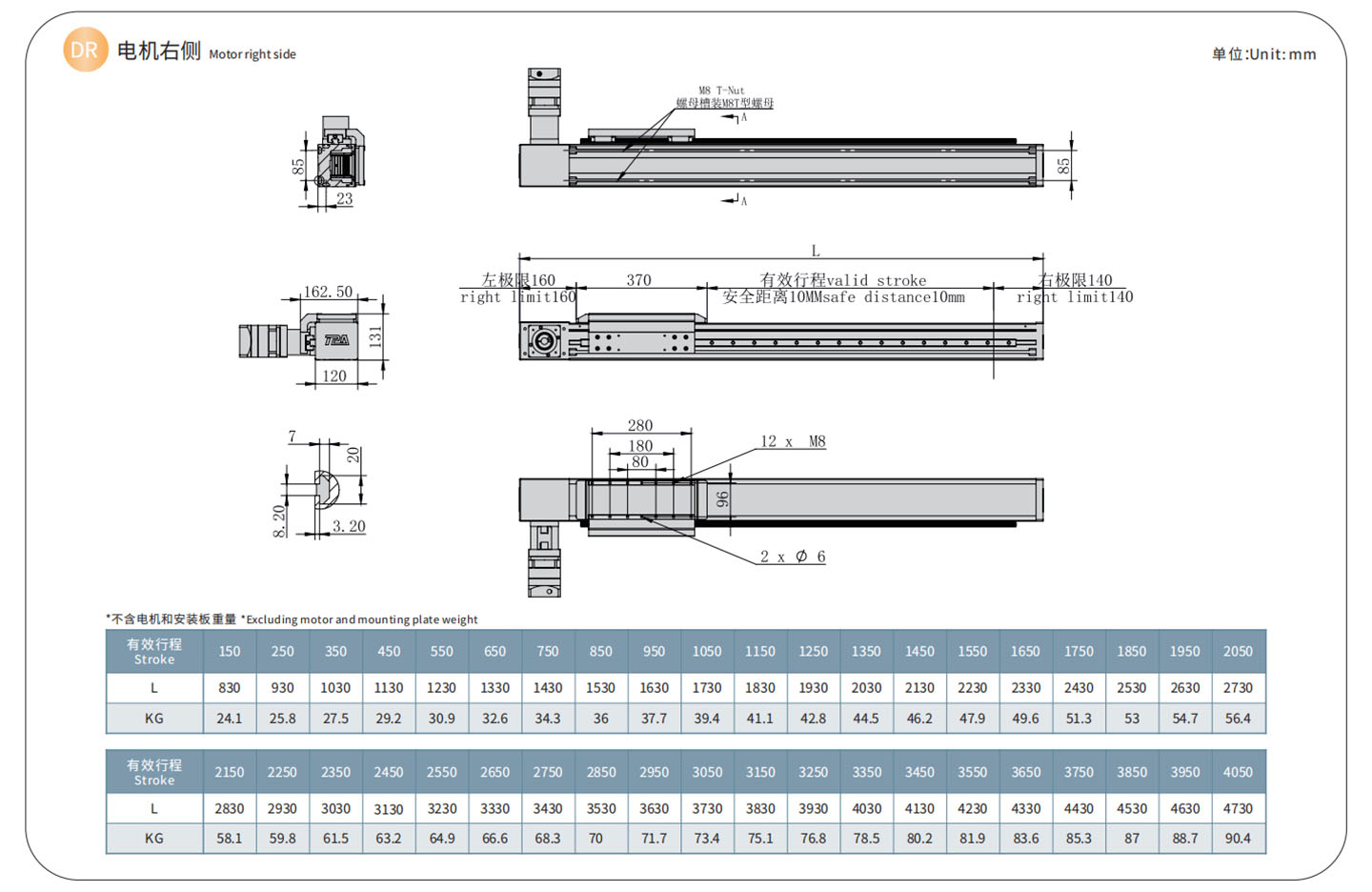
Auxiliary guide rail- ဒေါင်လိုက်နှင့် ဘေးတိုက်ဝန်များသည် ကြီးမားသောအခါ module ၏ width နှင့် structure ကိုမပြောင်းလဲဘဲ၊ lateral moment module ၏ခိုင်ခံ့အားကောင်းစေရန် module ၏ဘေးဘက်တွင် auxiliary guide rail တပ်ဆင်ထားပြီး၊ module ၏ရွေ့လျားမှုတည်ငြိမ်မှု။
ပြုပြင်ထိန်းသိမ်းမှု- slider ၏ နှစ်ဖက်စလုံးကို ဗဟိုမှ ဆီလိမ်းနိုင်ပြီး ခါးပတ်နှင့် စတီးခါးပတ်များကို ဖြုတ်ထားရန် မလိုအပ်သောကြောင့် သုံးစွဲသူများ၏ ပြုပြင်ထိန်းသိမ်းမှုကုန်ကျစရိတ်ကို လျှော့ချပေးသည်။
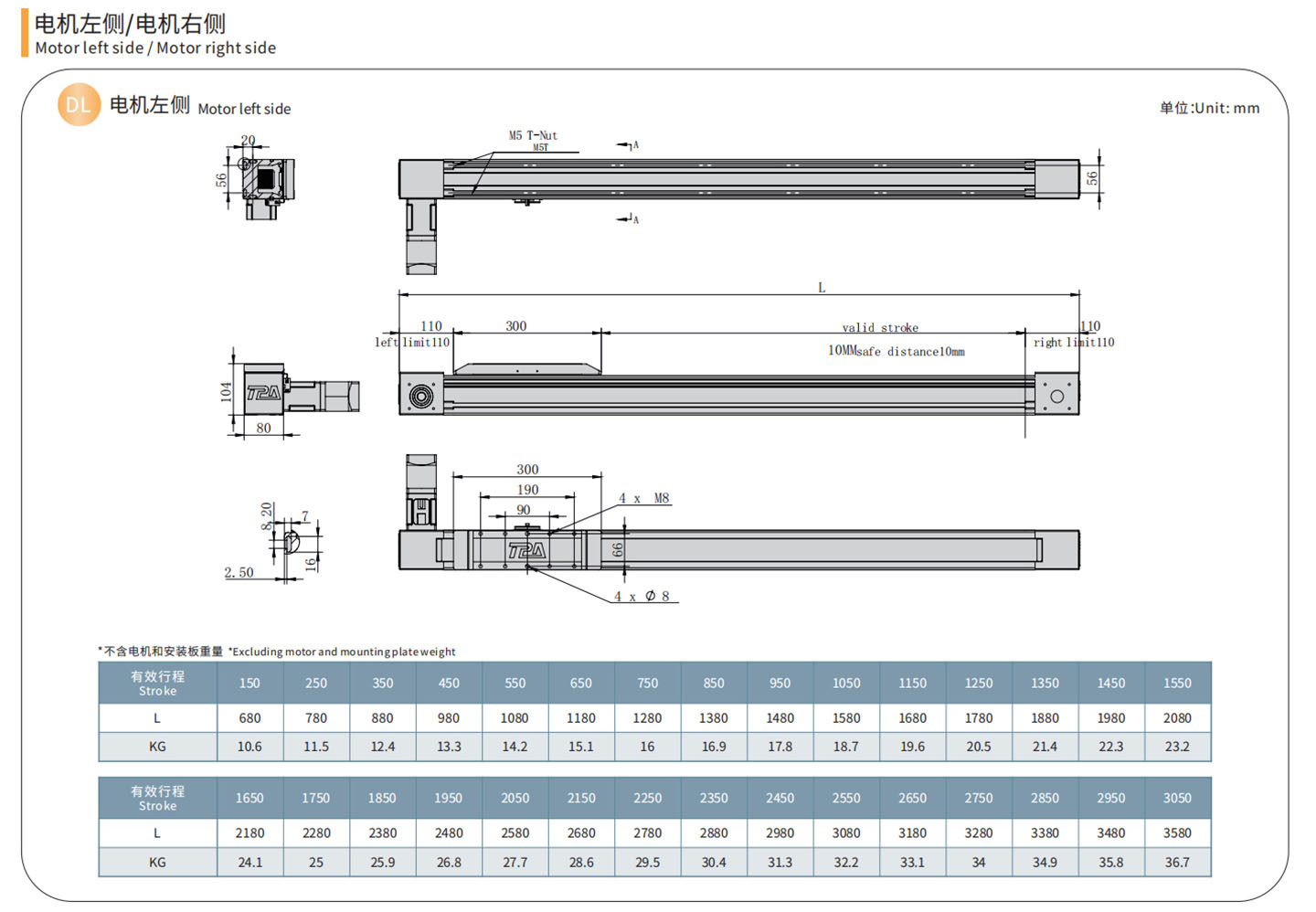
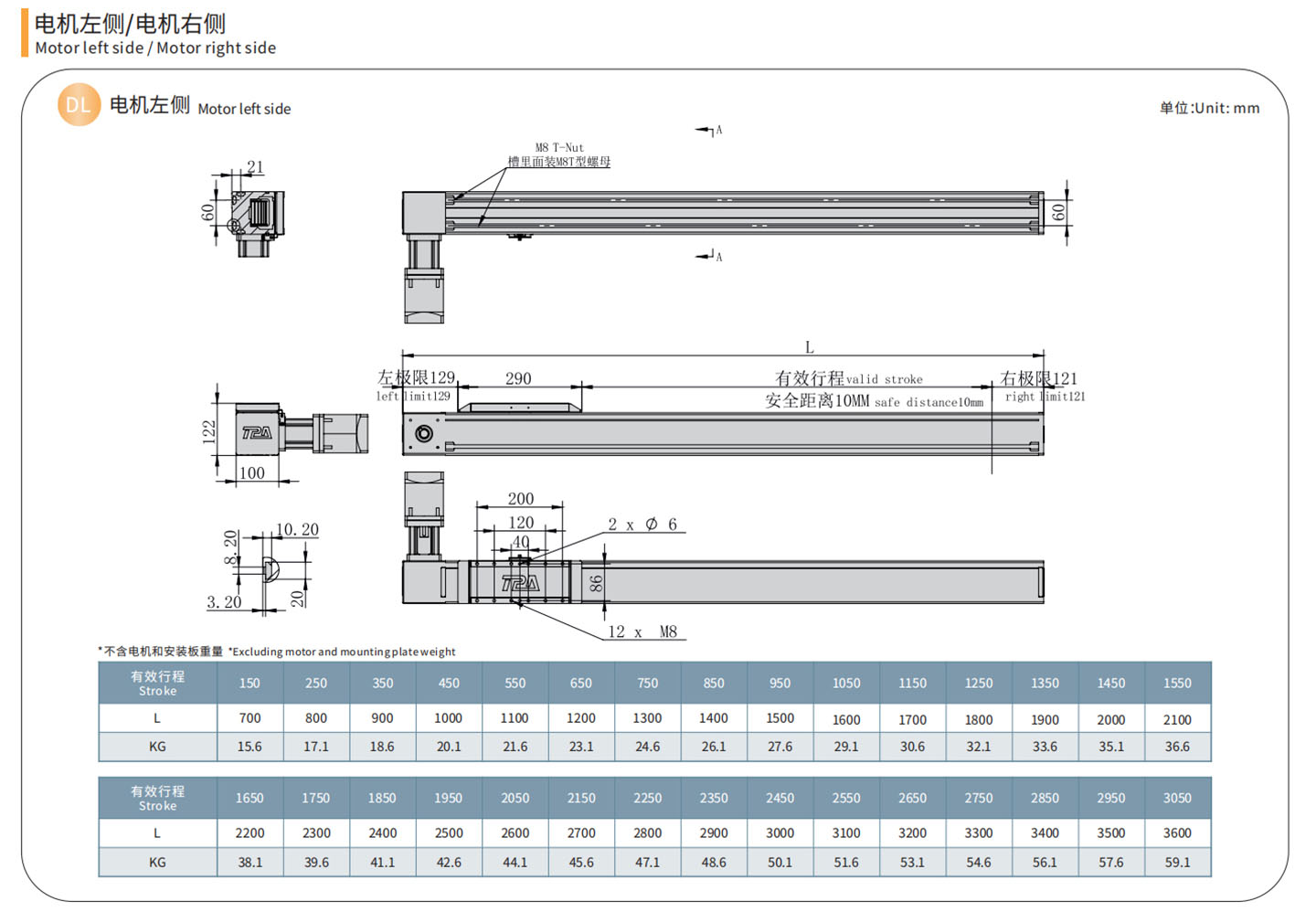
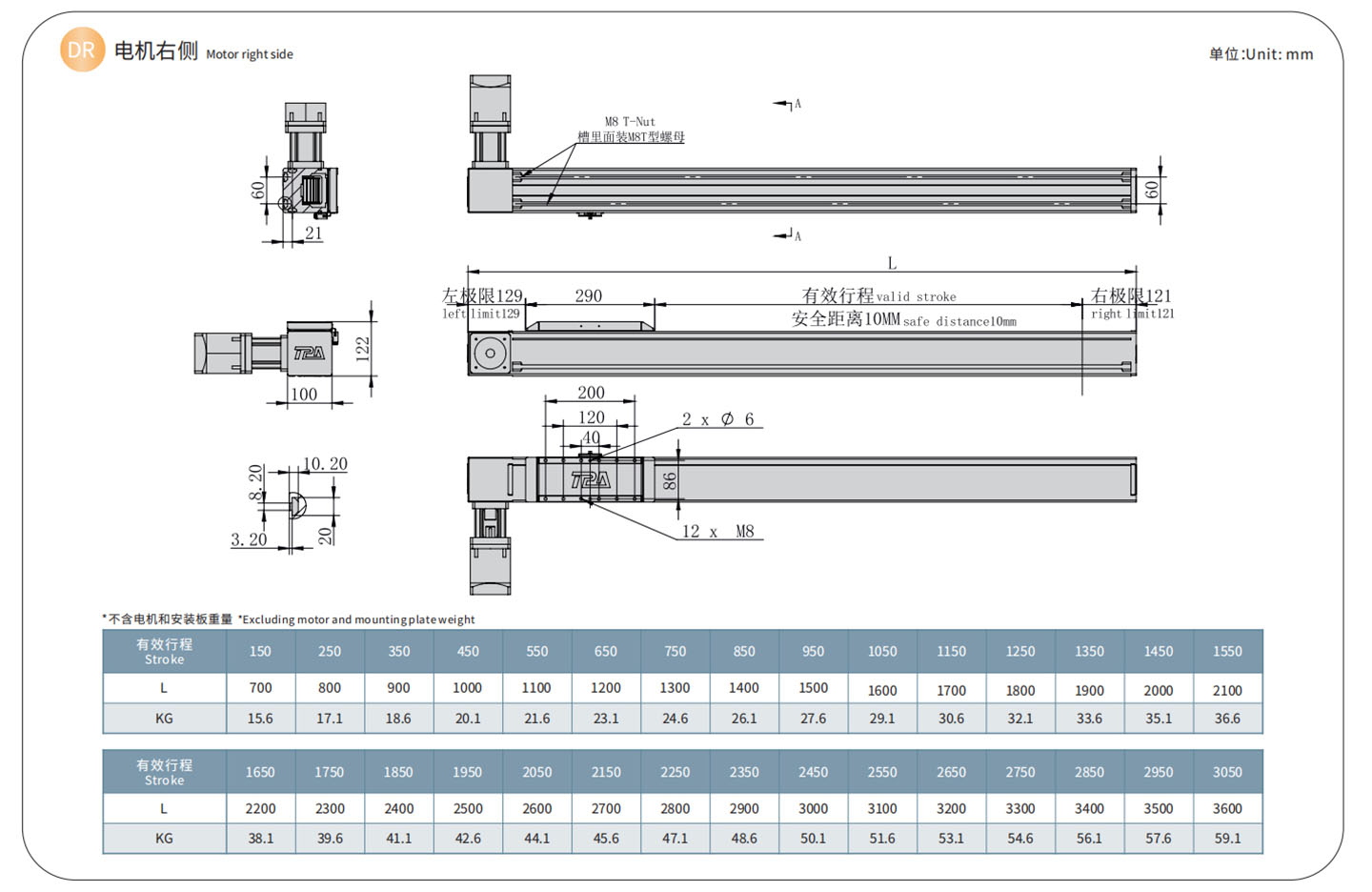
တပ်ဆင်ရန်- တပ်ဆင်ရလွယ်ကူသည်၊ actuator ၏ နှစ်ဖက်စလုံးသည် slider nut slot များဖြင့် ဒီဇိုင်းထုတ်ထားပြီး မည်သည့်ဘက်သုံးဘက်တွင်မဆို စိတ်ကြိုက်တပ်ဆင်နိုင်သည်။
နောက်ထပ်ထုတ်ကုန်များ

HNB-E Series Belt Driven Linear Actuators တစ်ဝက်...

ONB-F စီးရီး ခါးပတ်ကို မောင်းနှင်သည့် Linear Module ပြင်ပ...

ONB Series Belt Driven Linear Module တစ်ဝက်ကို ထည့်သွင်းထားသည်။

HNB Series Belt Driven Linear Module တစ်ဝက်ကို ထည့်သွင်းထားသည်။

HCB စီးရီး ခါးပတ်ကို မောင်းနှင်သော Linear Module အပြည့်အစုံ ထည့်သွင်းပါ...










