




Modulu Lineari Mmexxi minn Ċinturin tas-Serje HNB Nofs magħluq


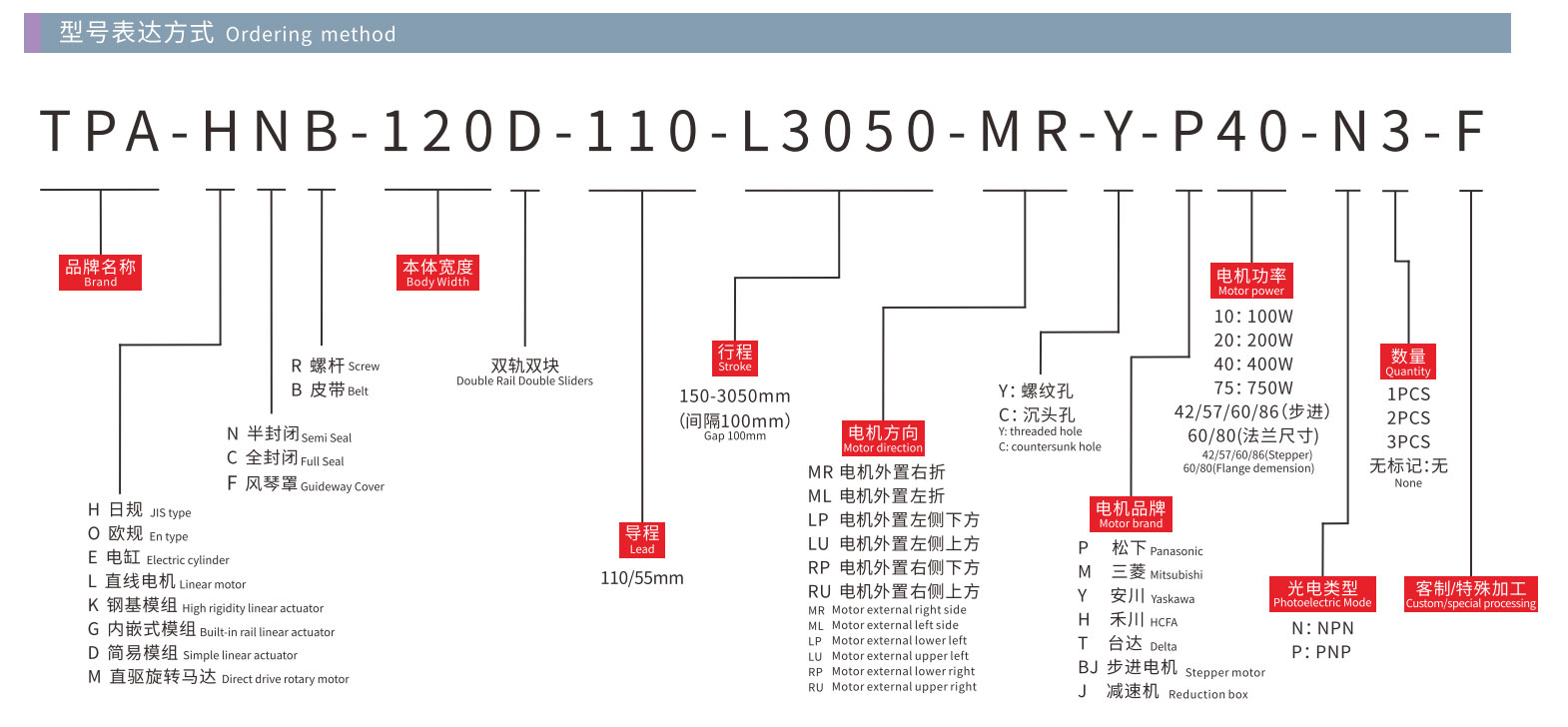
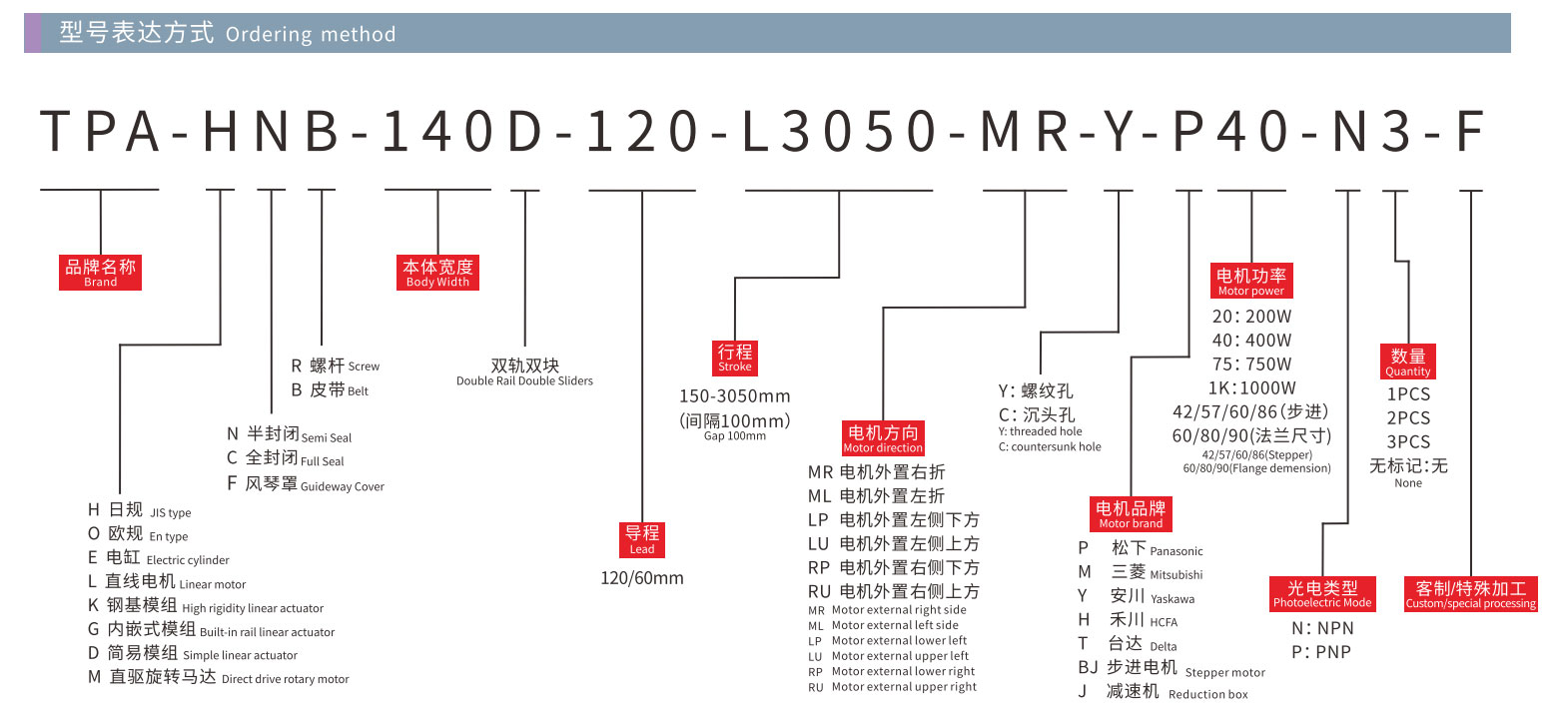
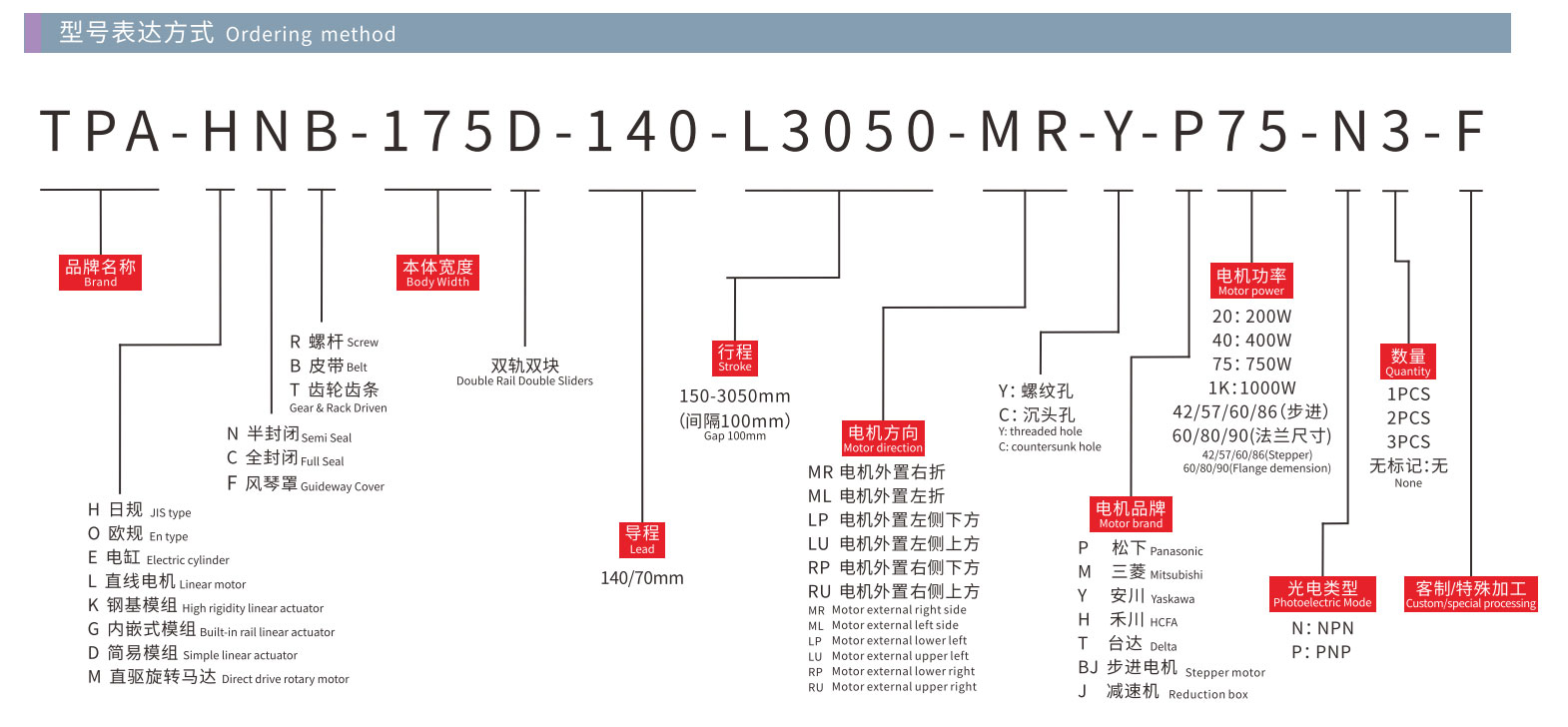
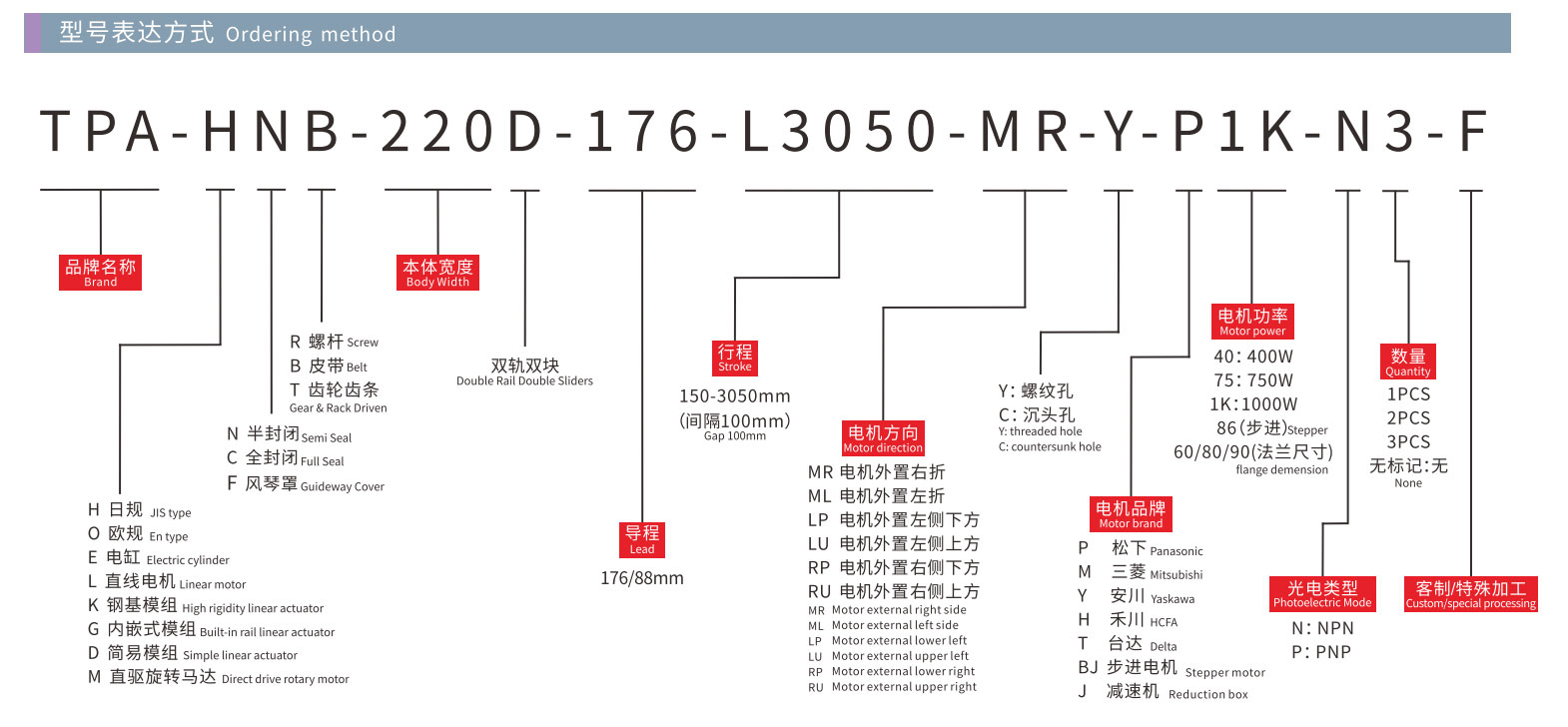
Selettur tal-Mudell
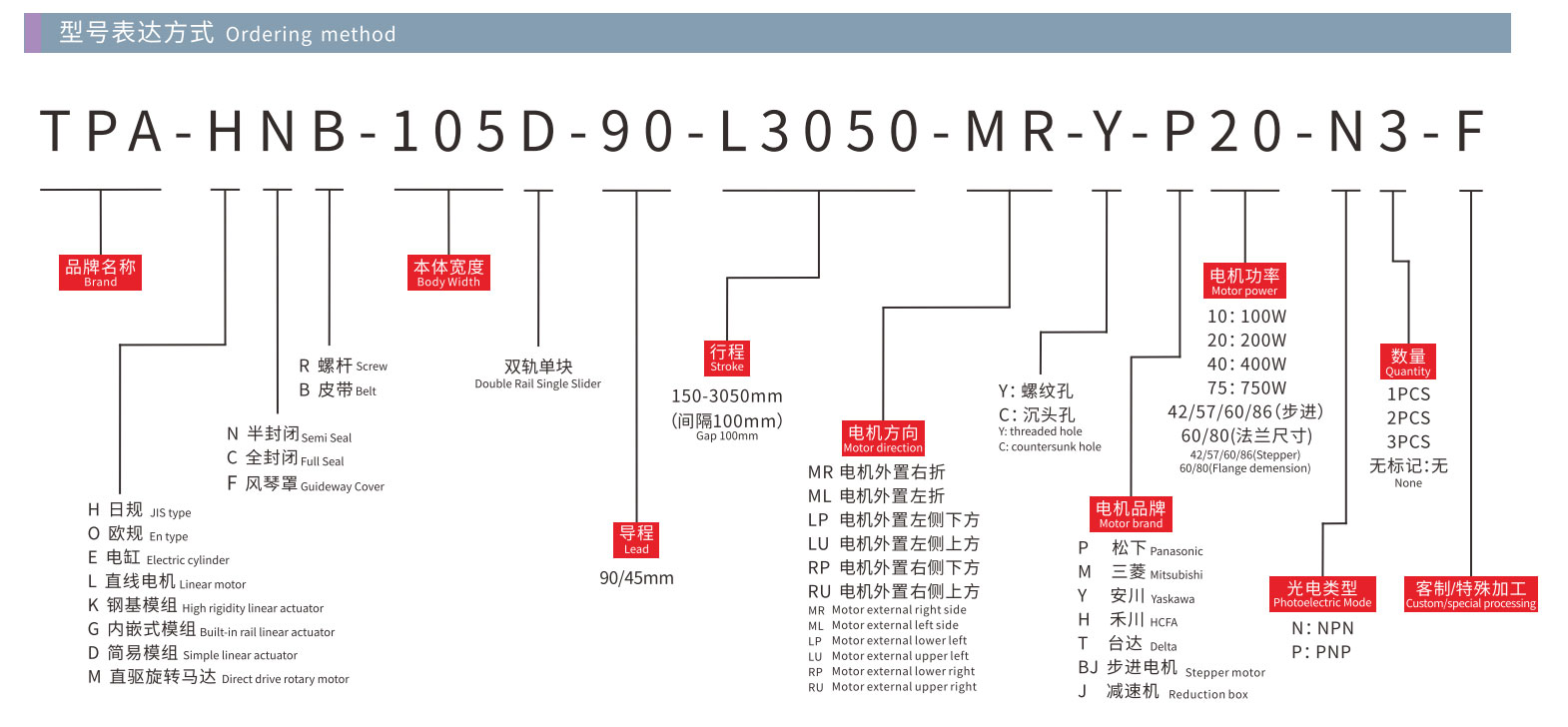
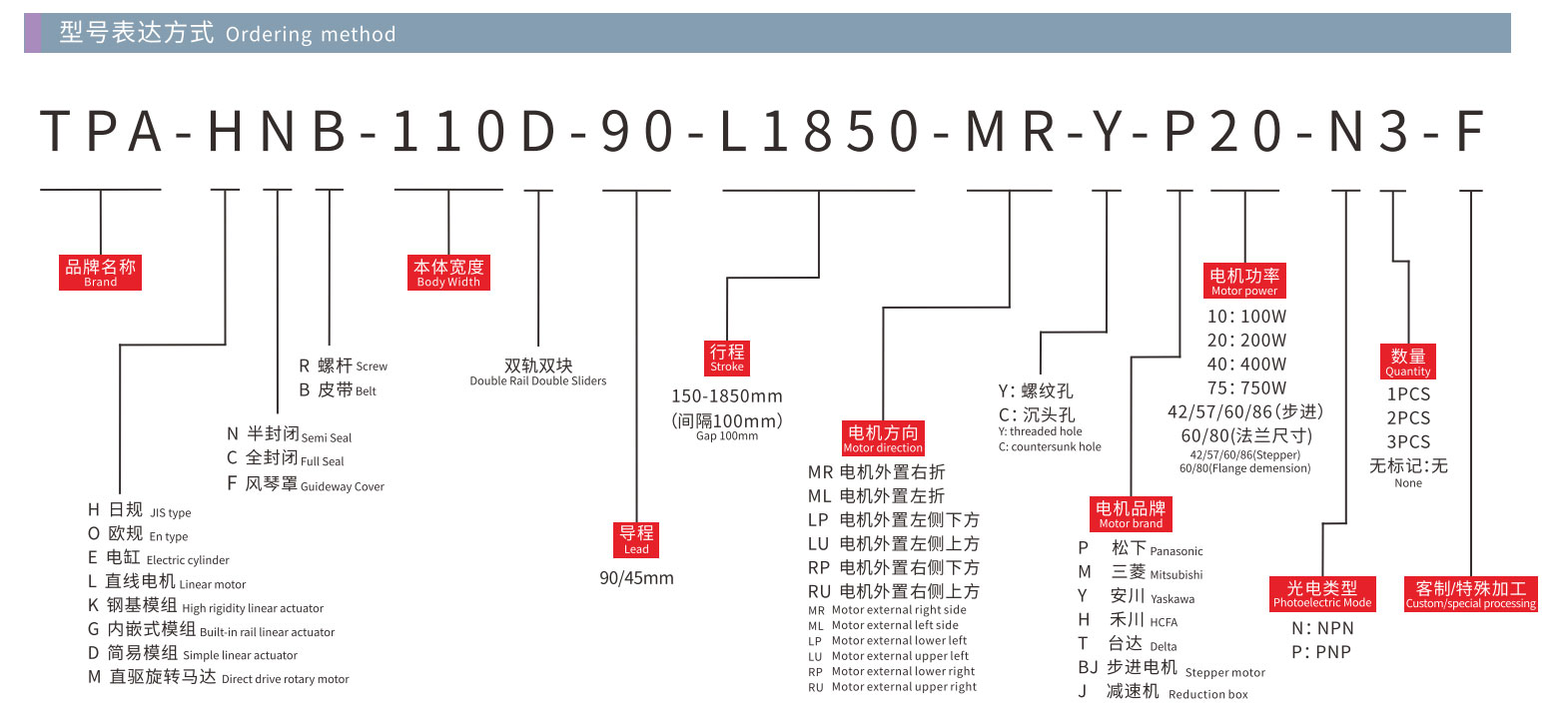
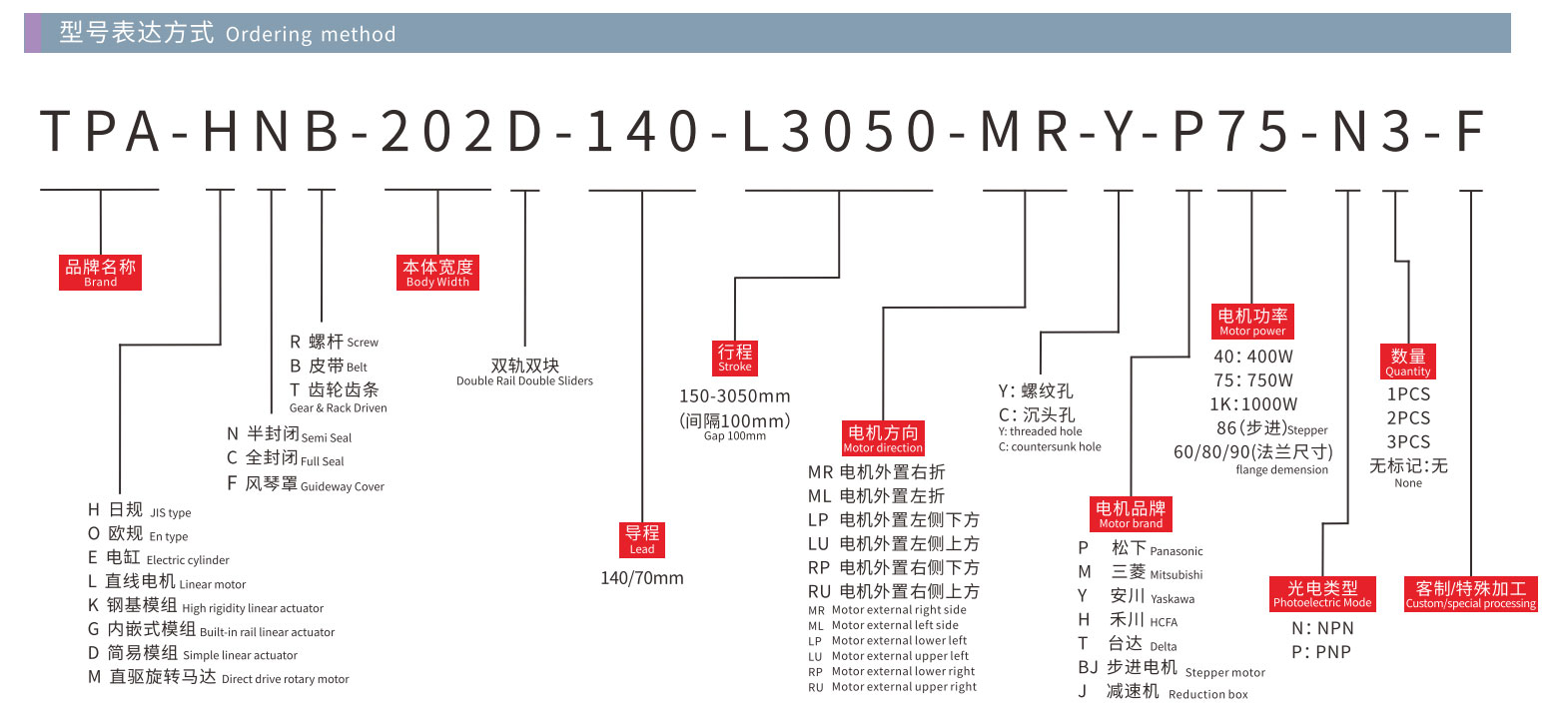
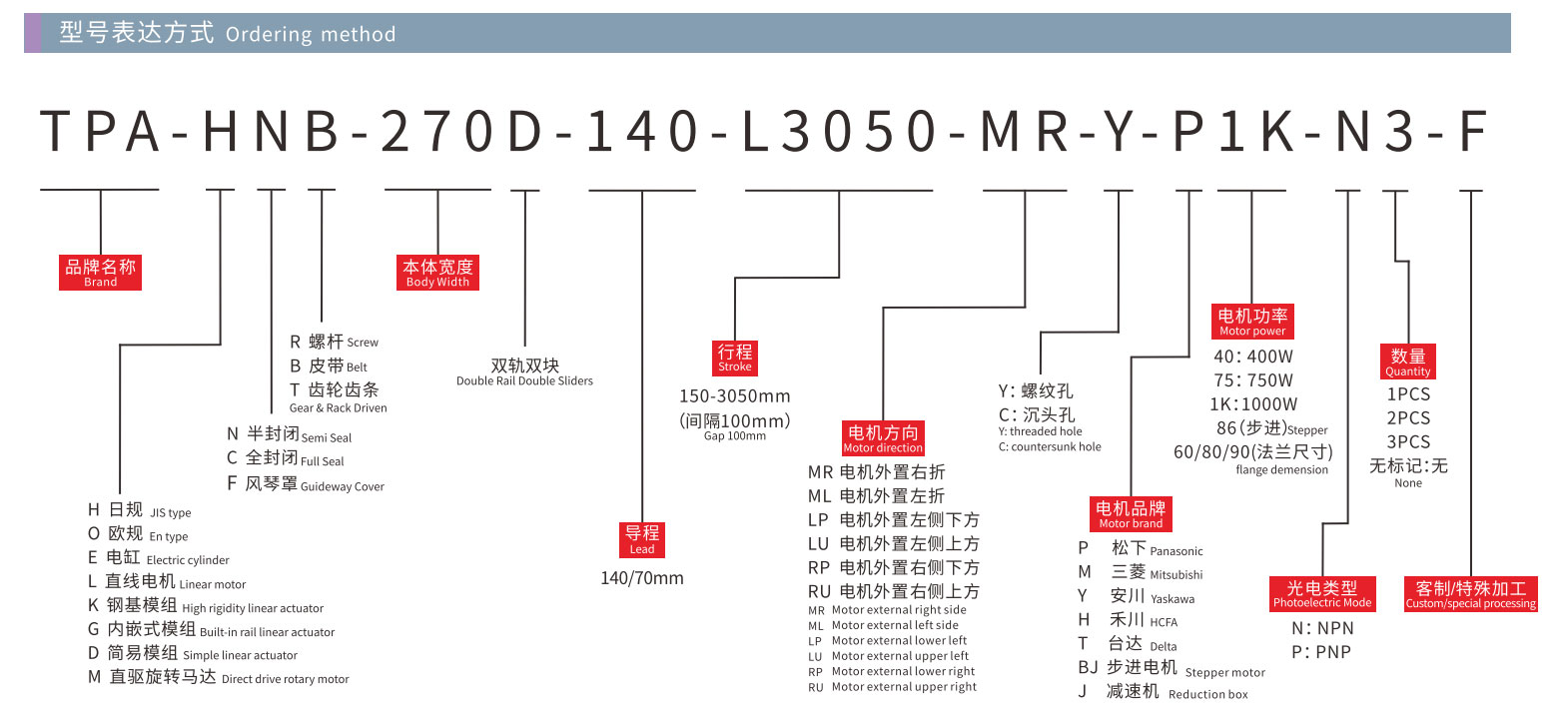
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
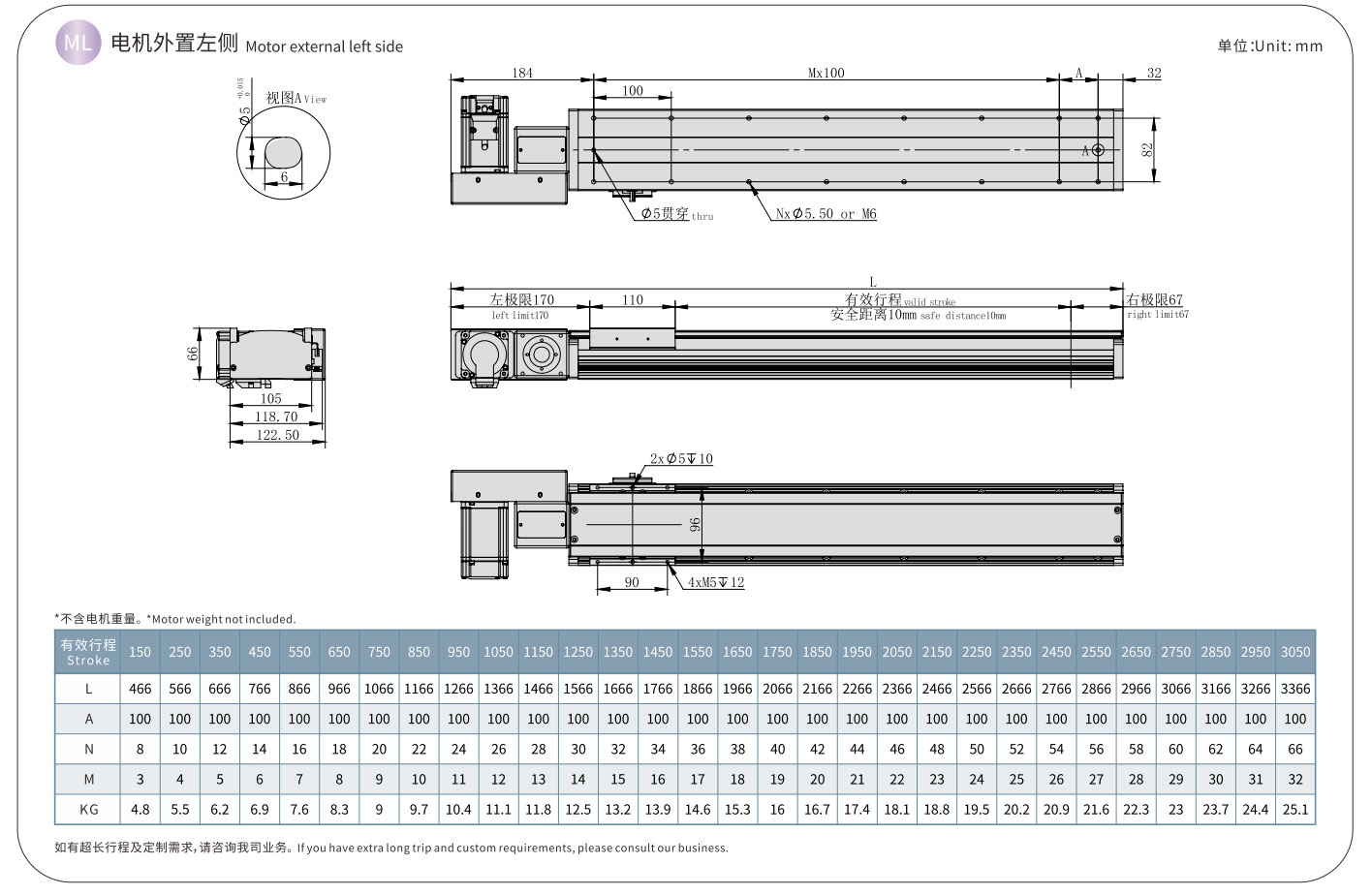
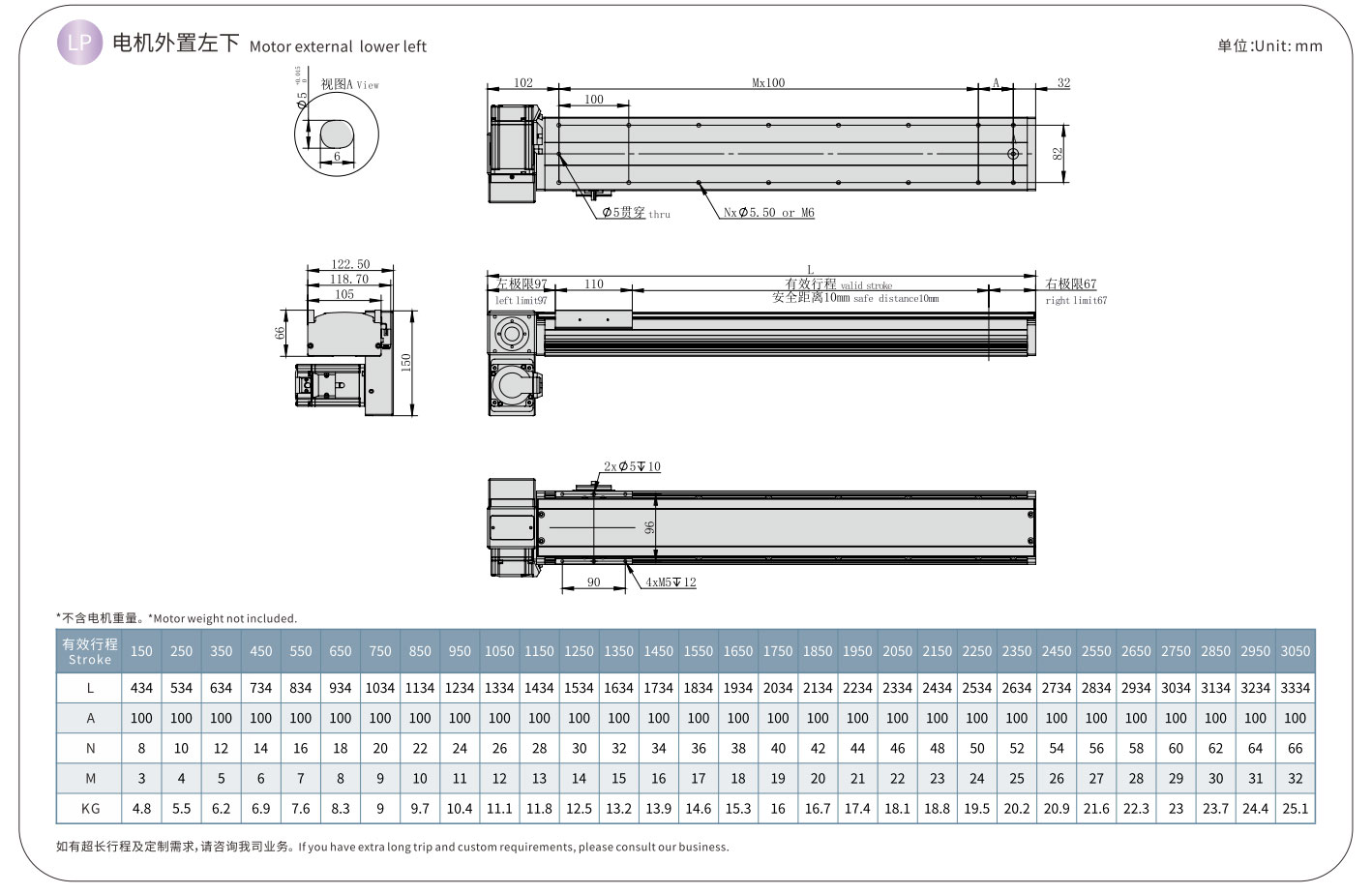
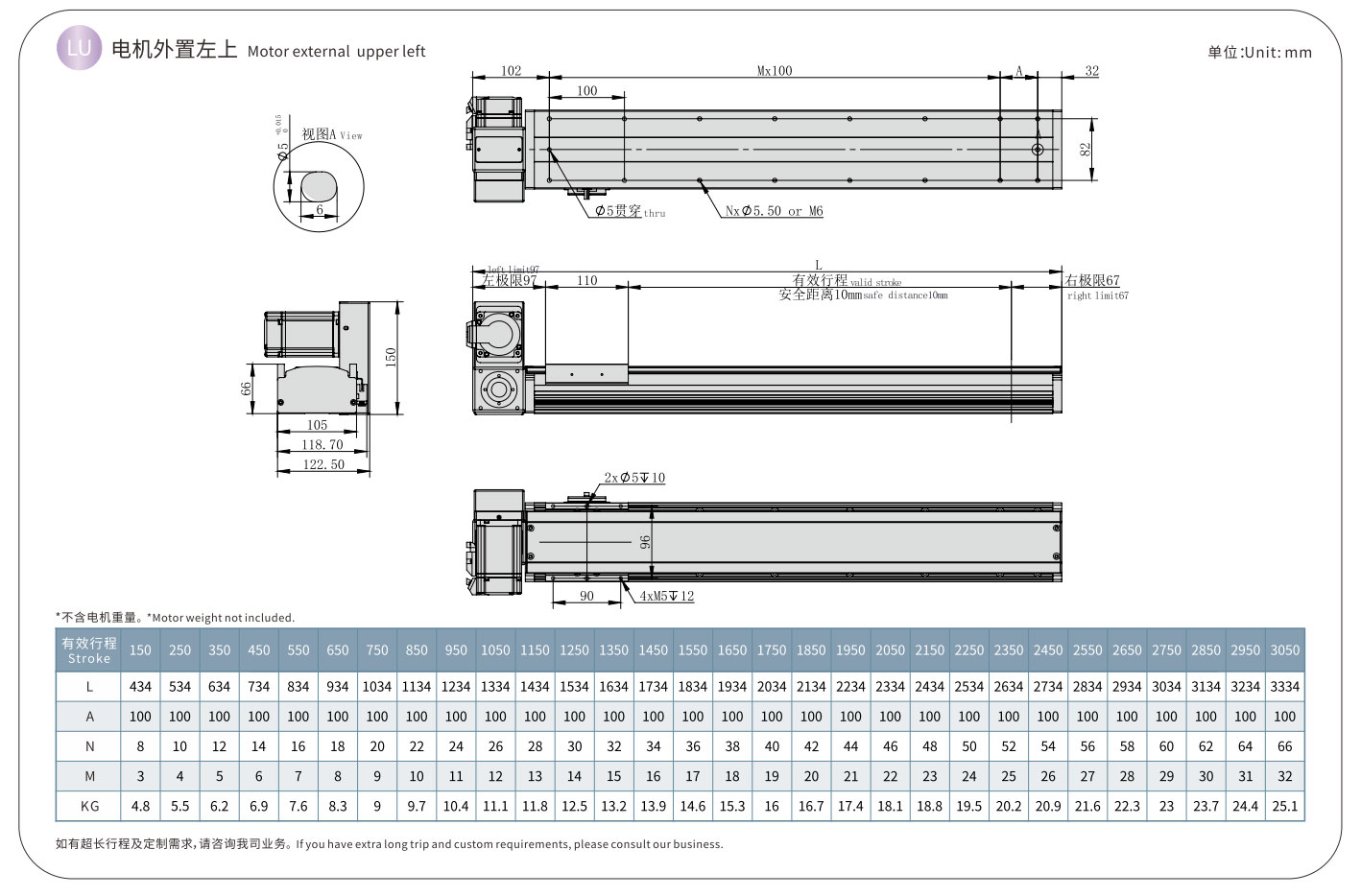
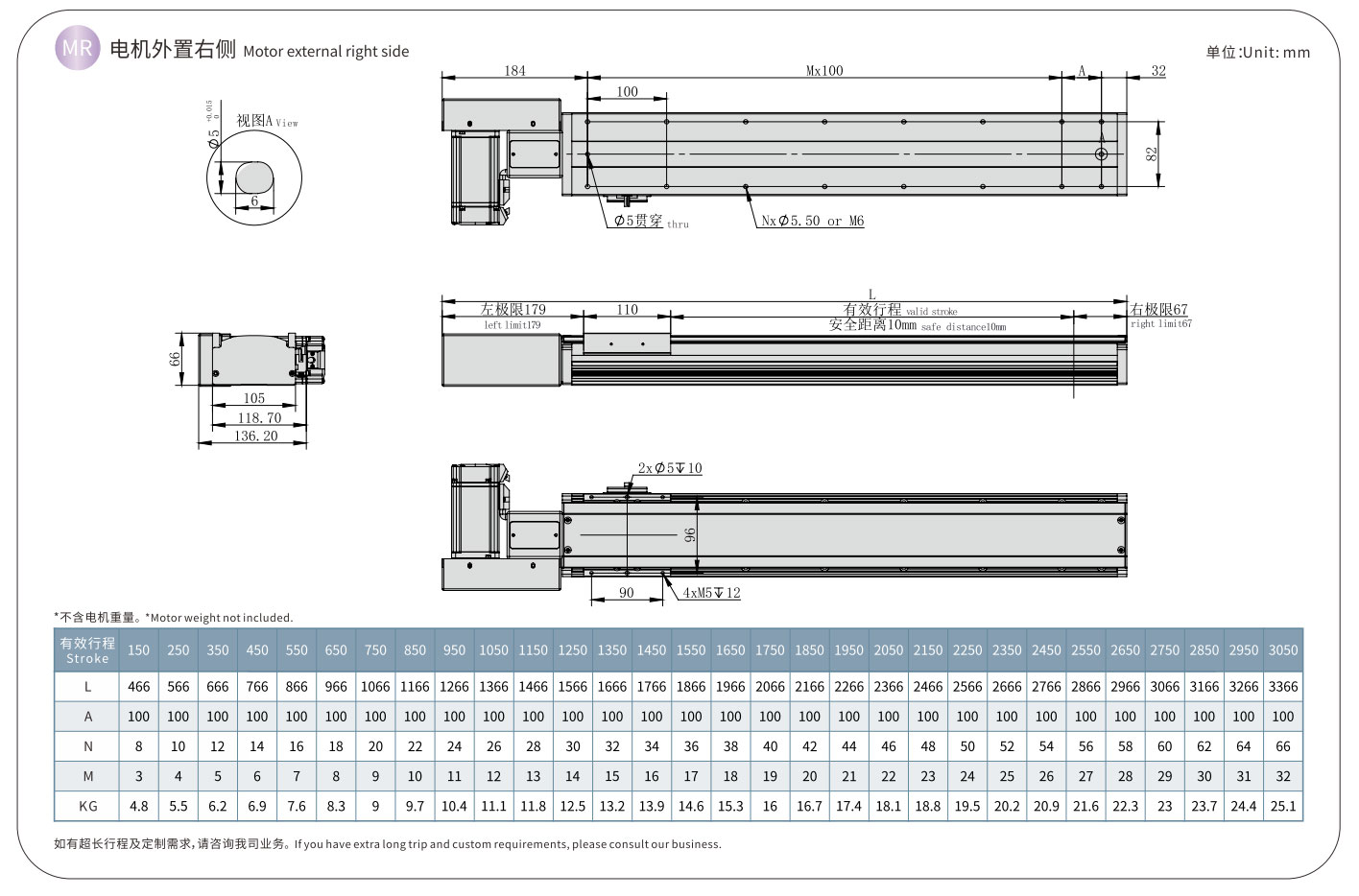
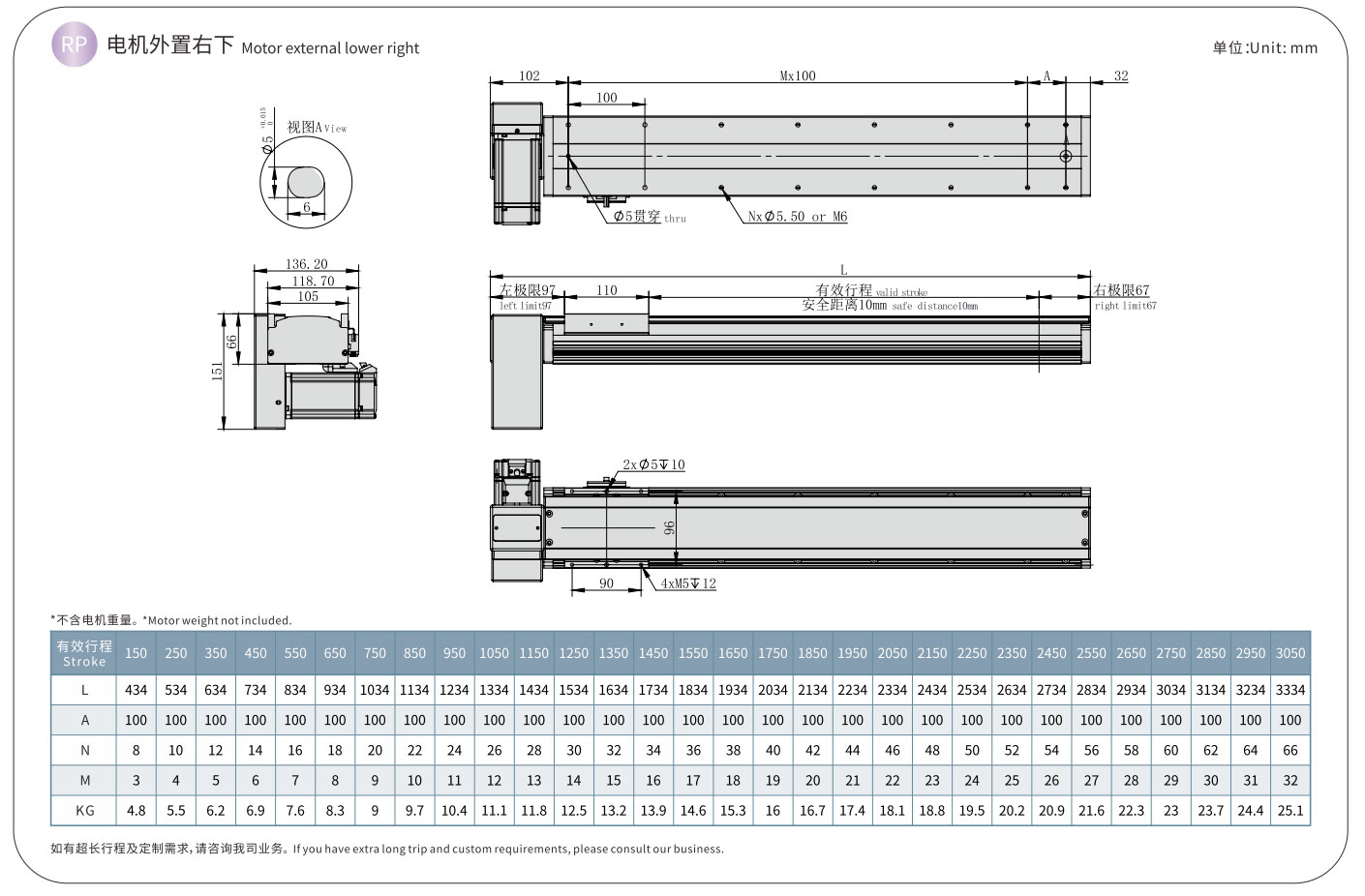
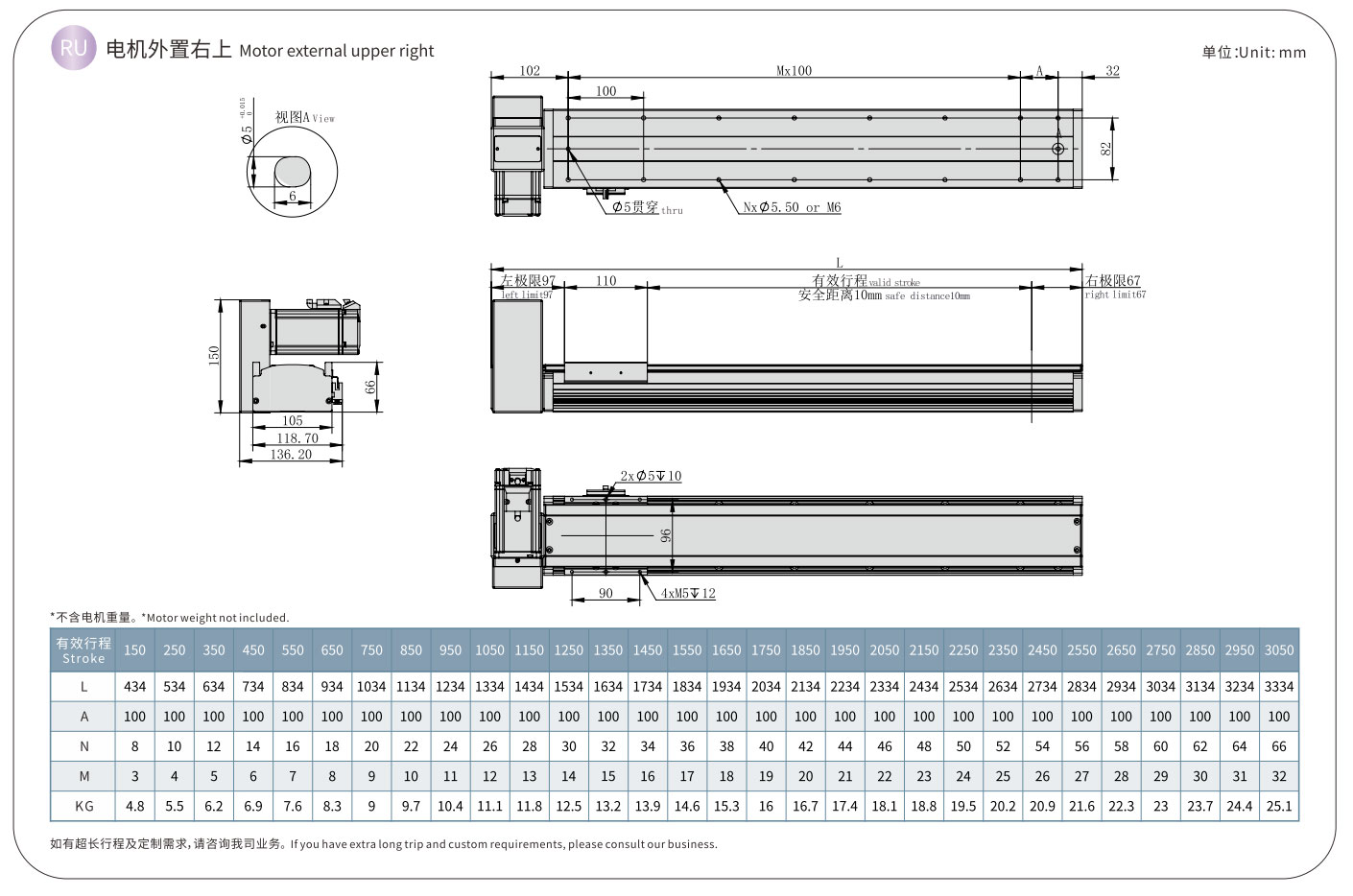
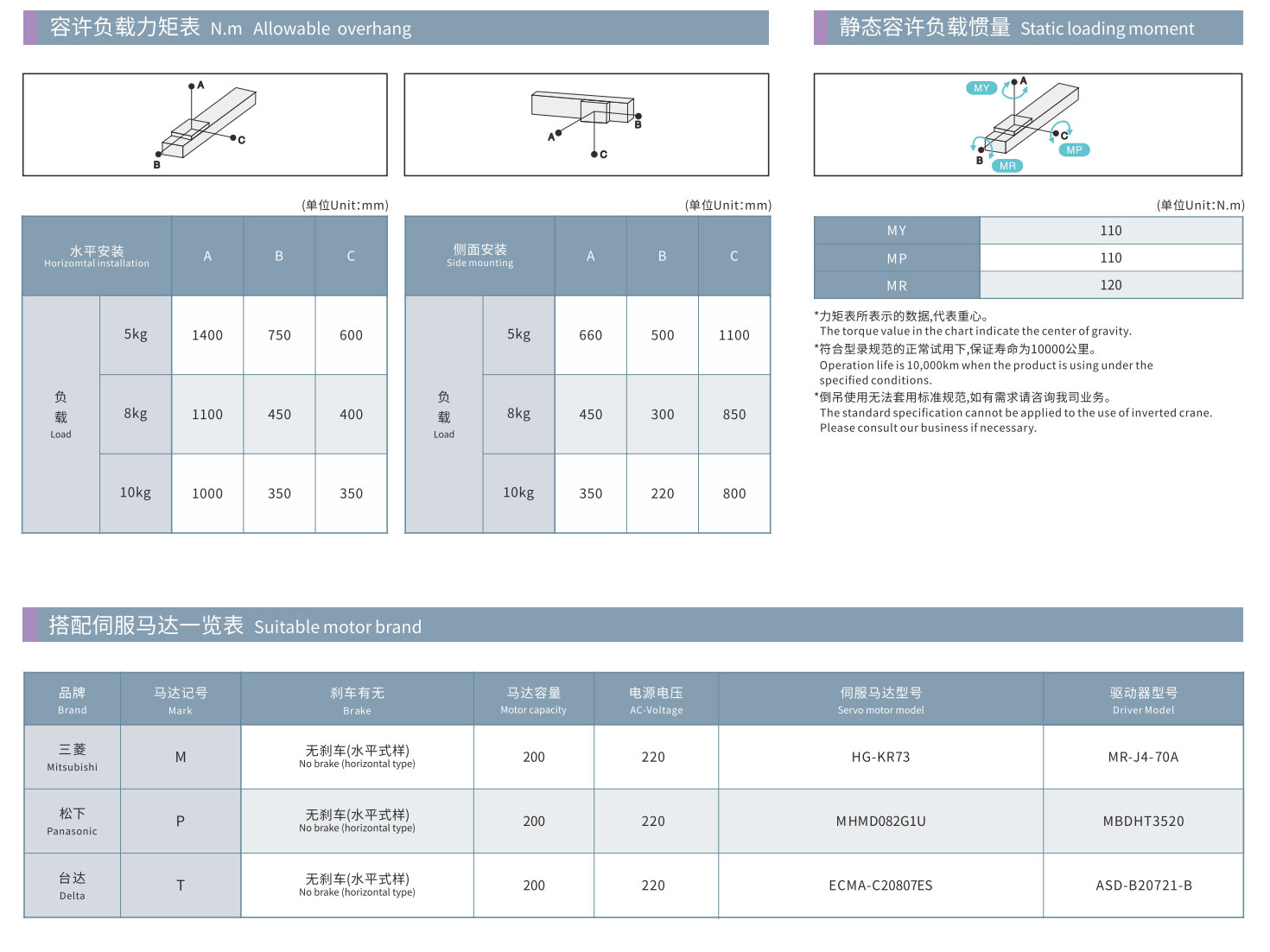
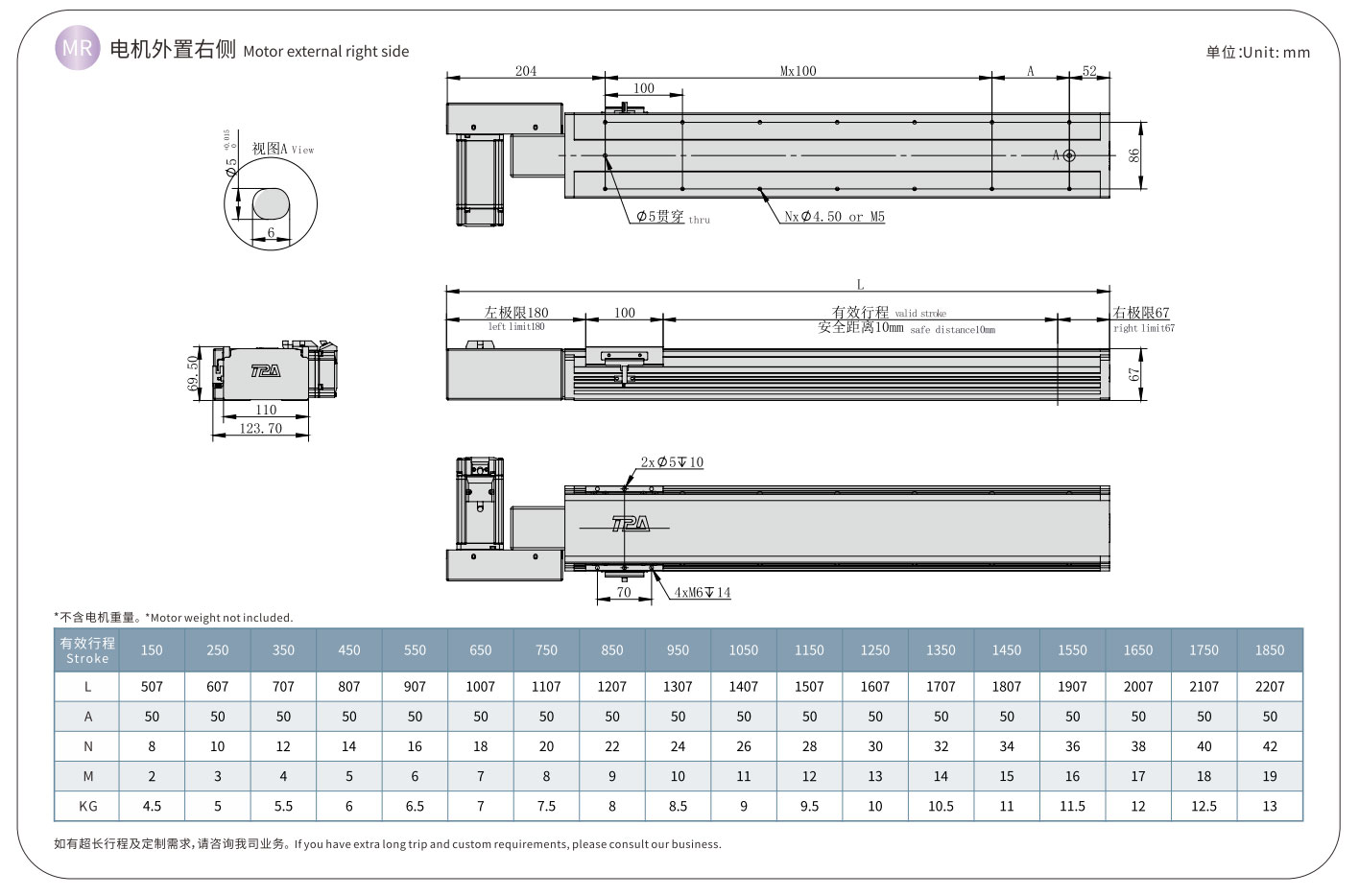
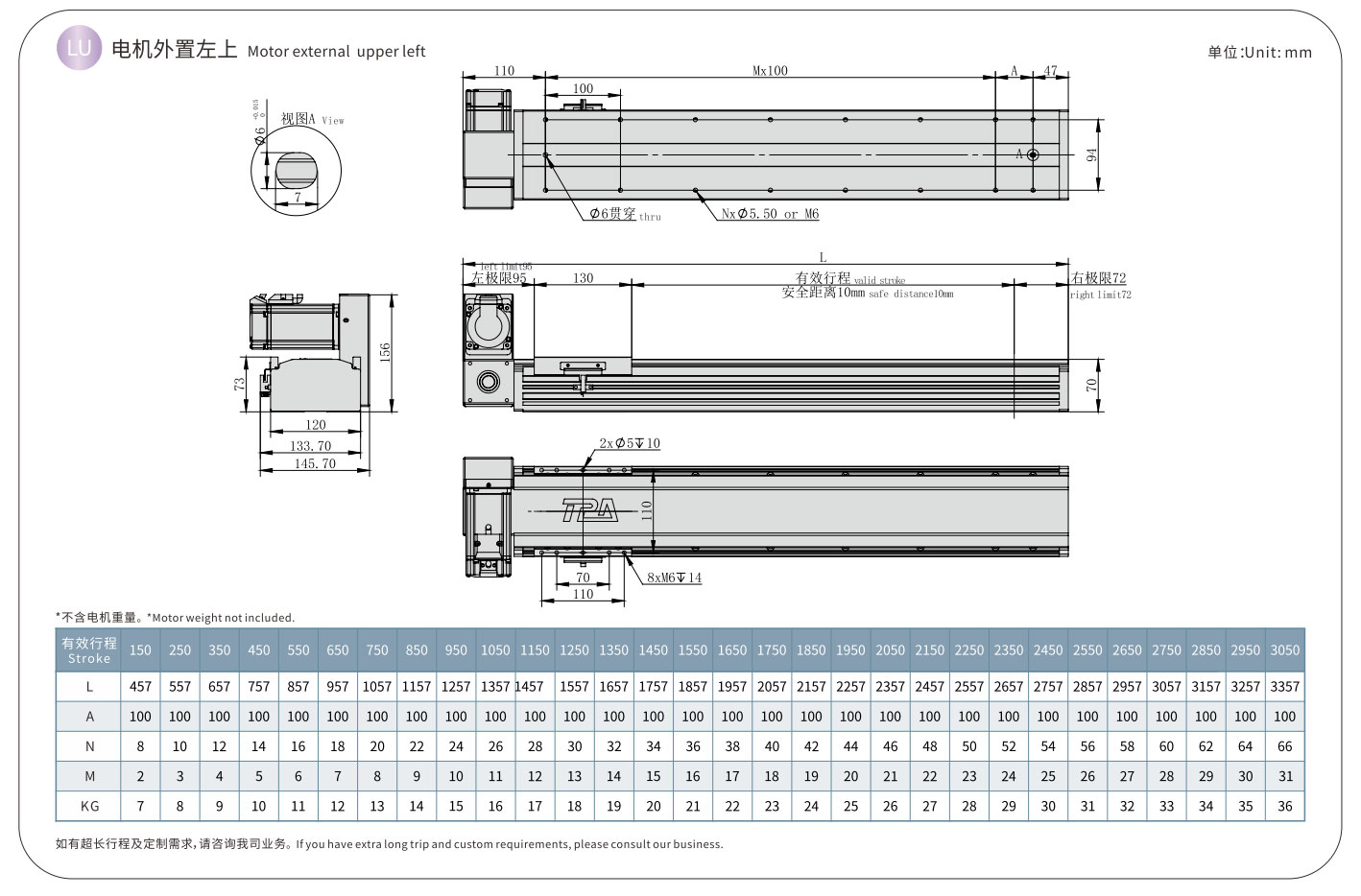
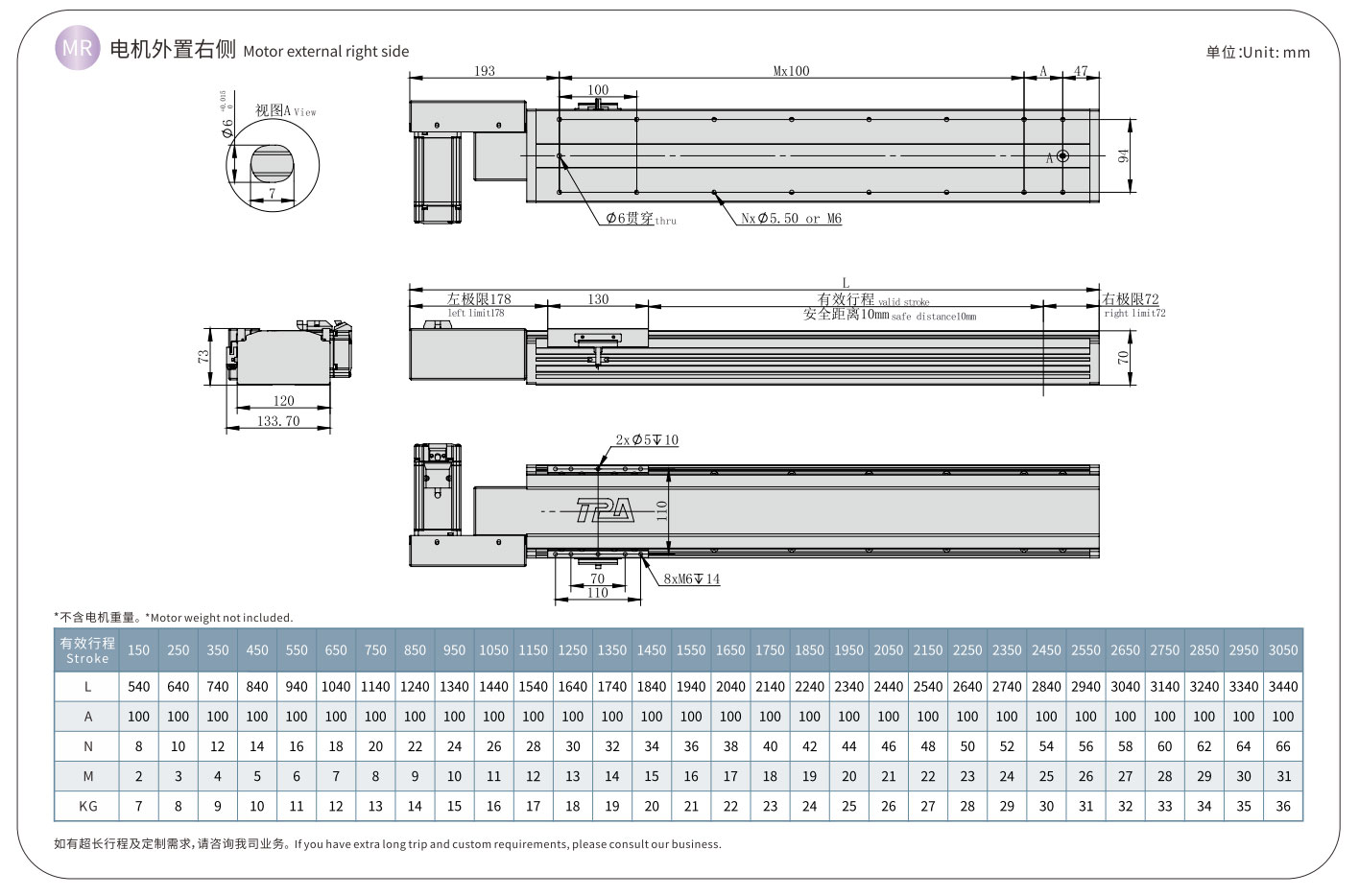
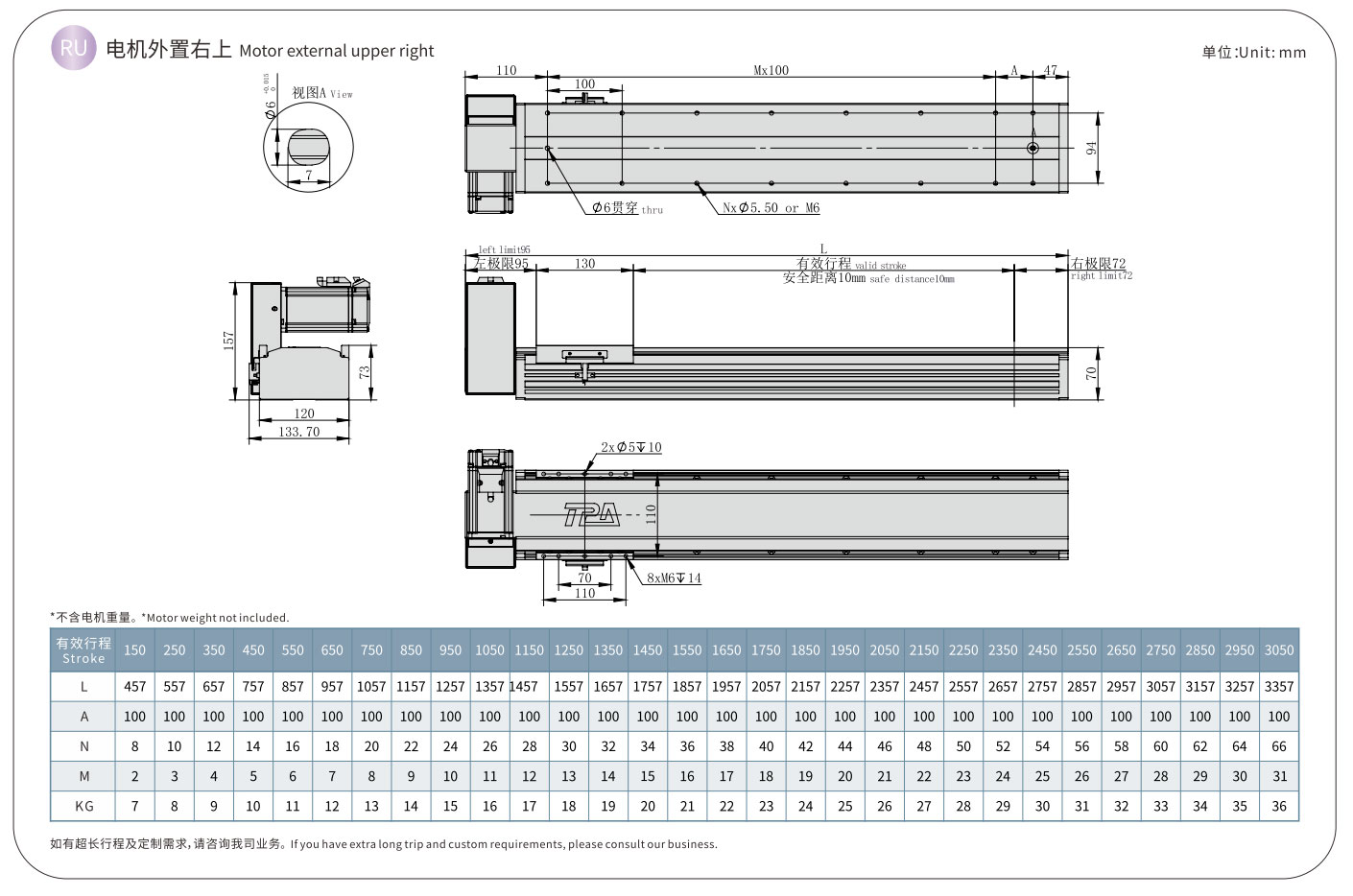
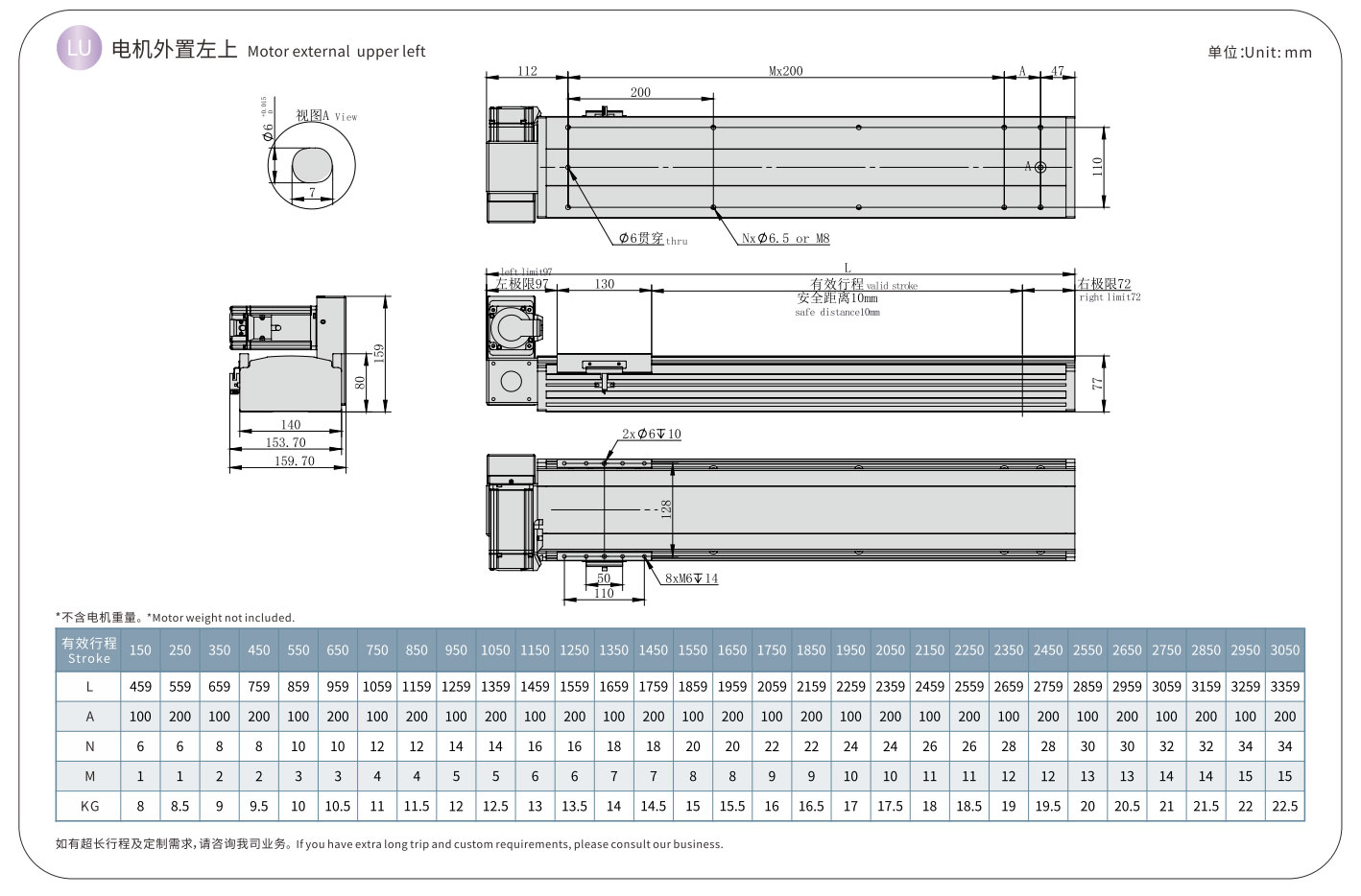
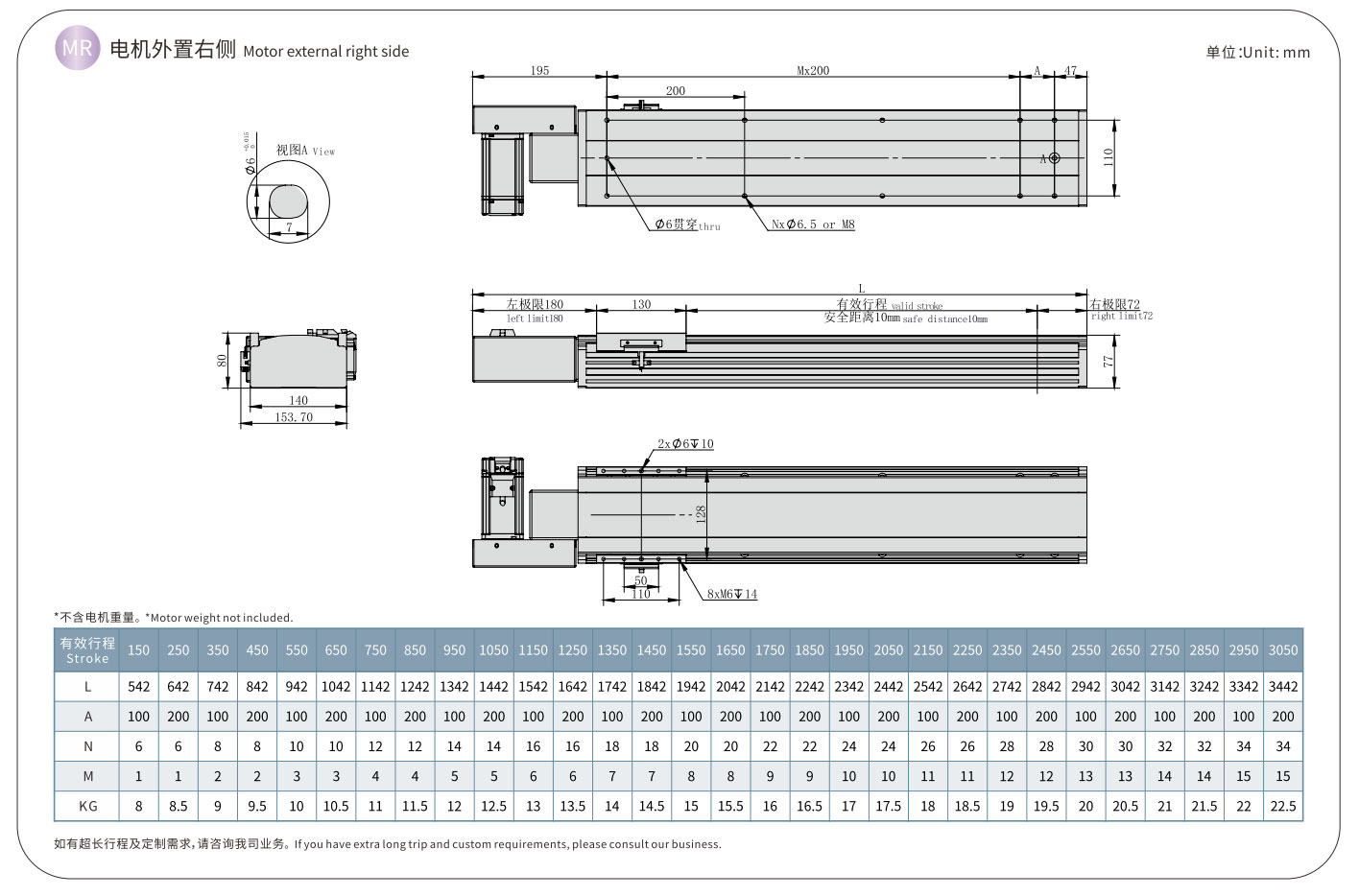
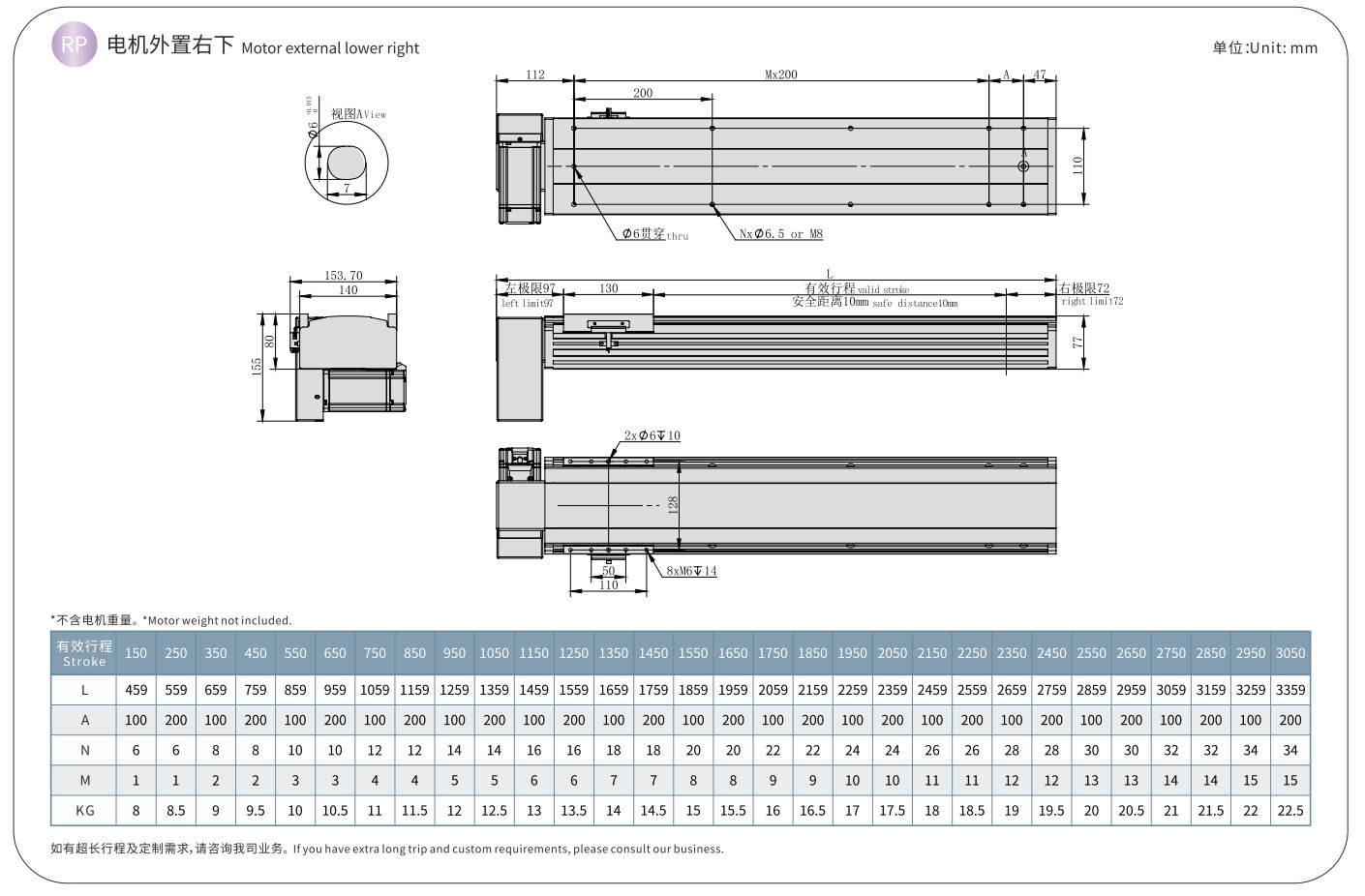
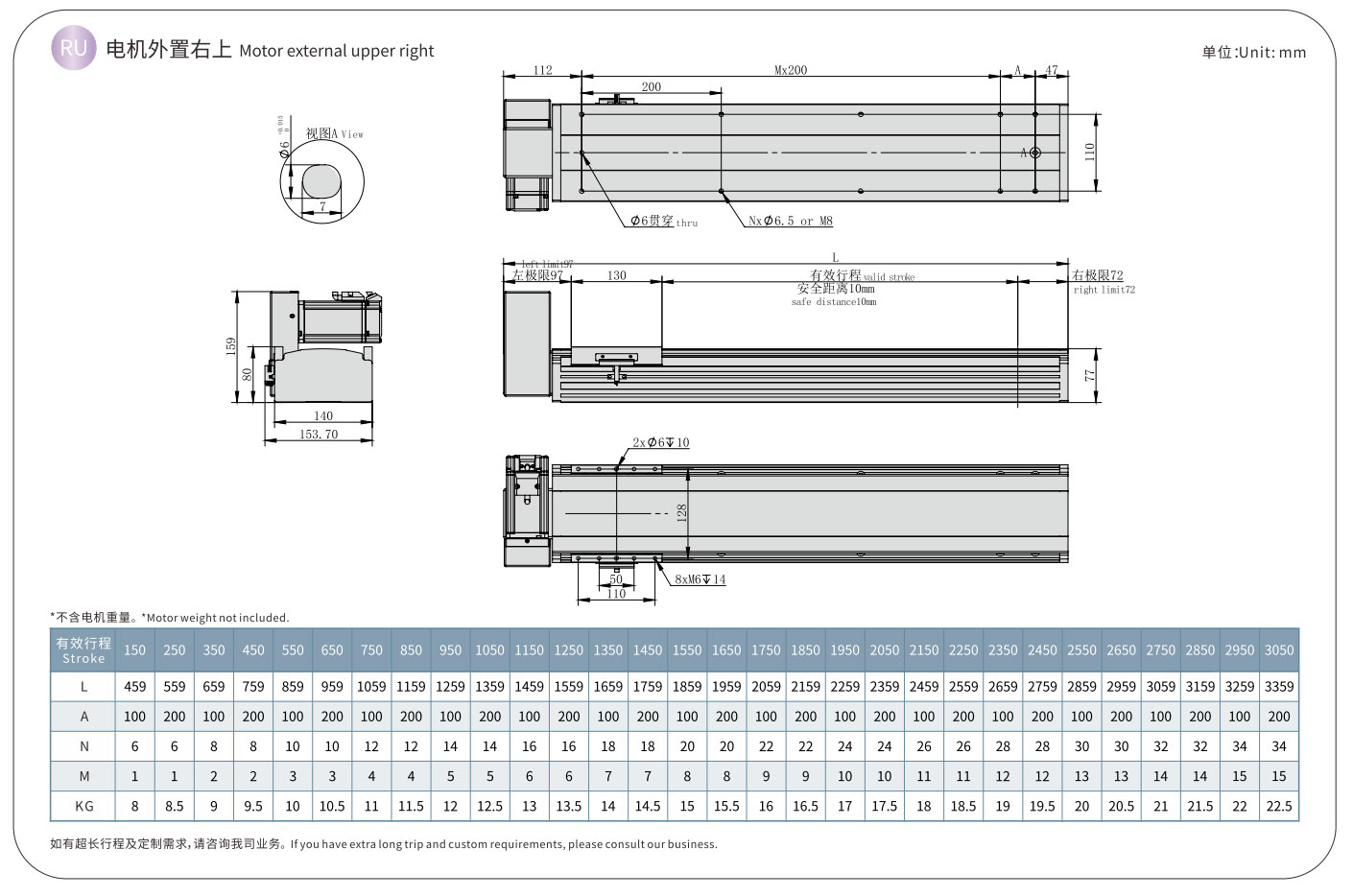
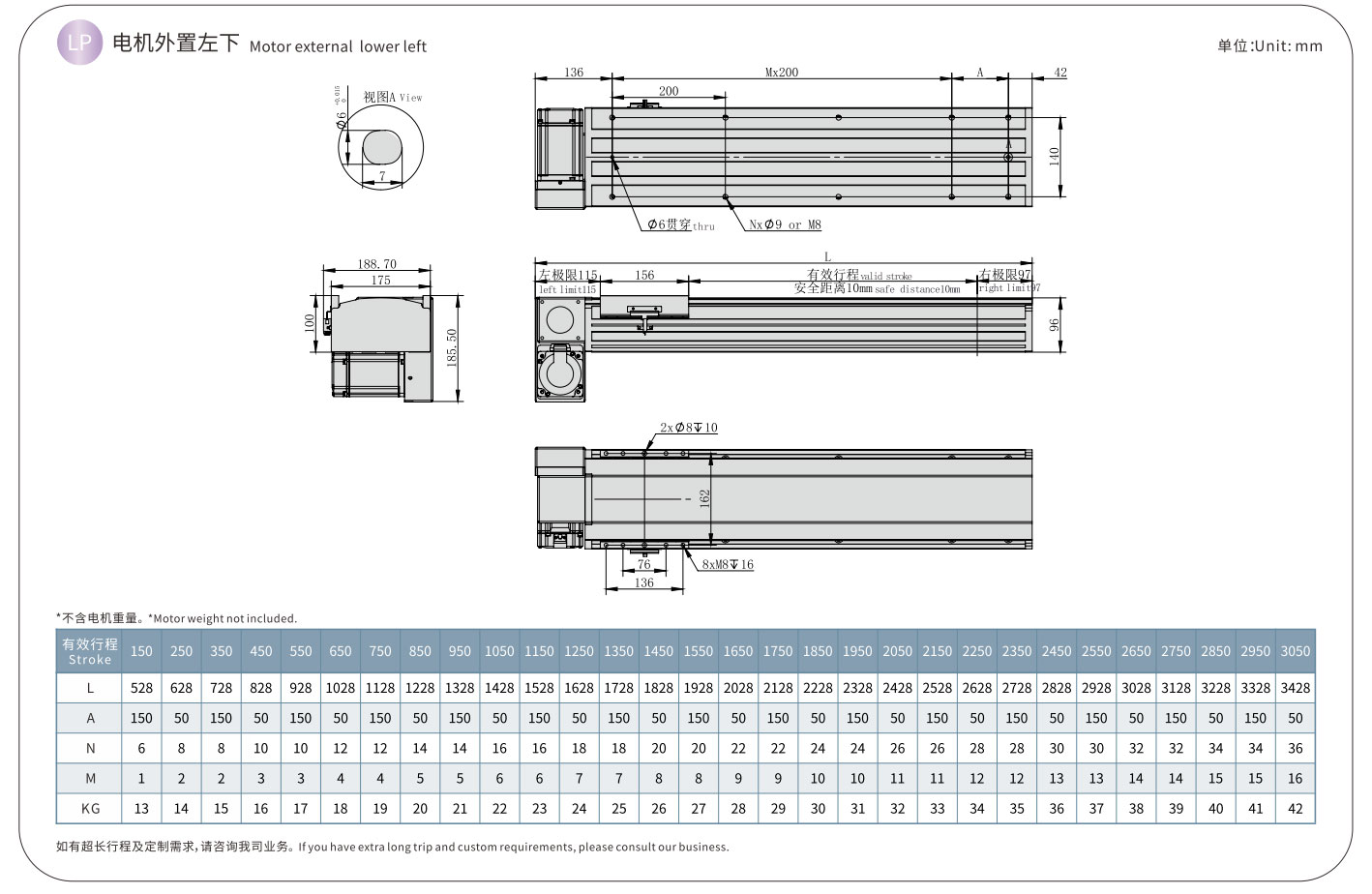
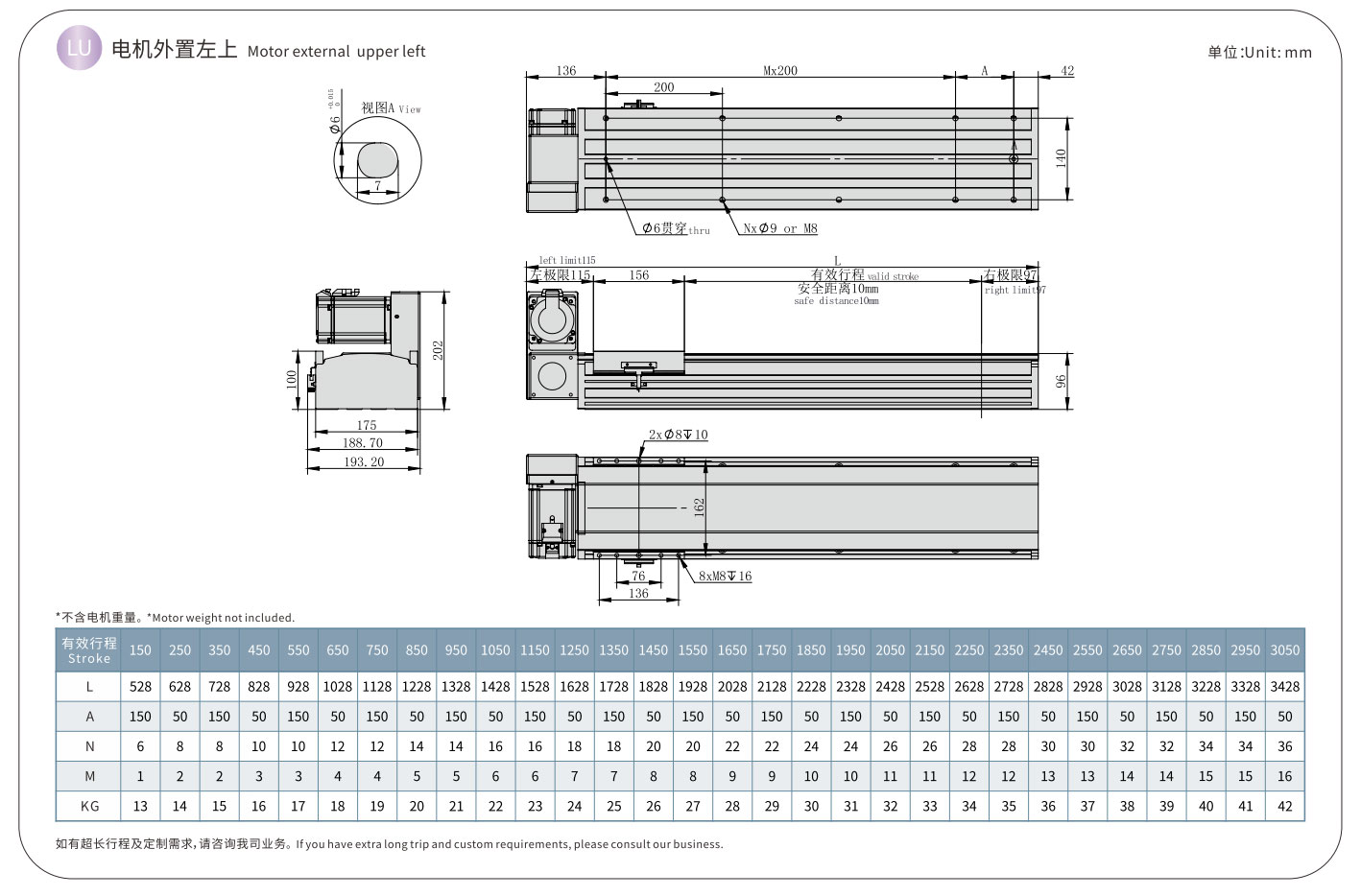
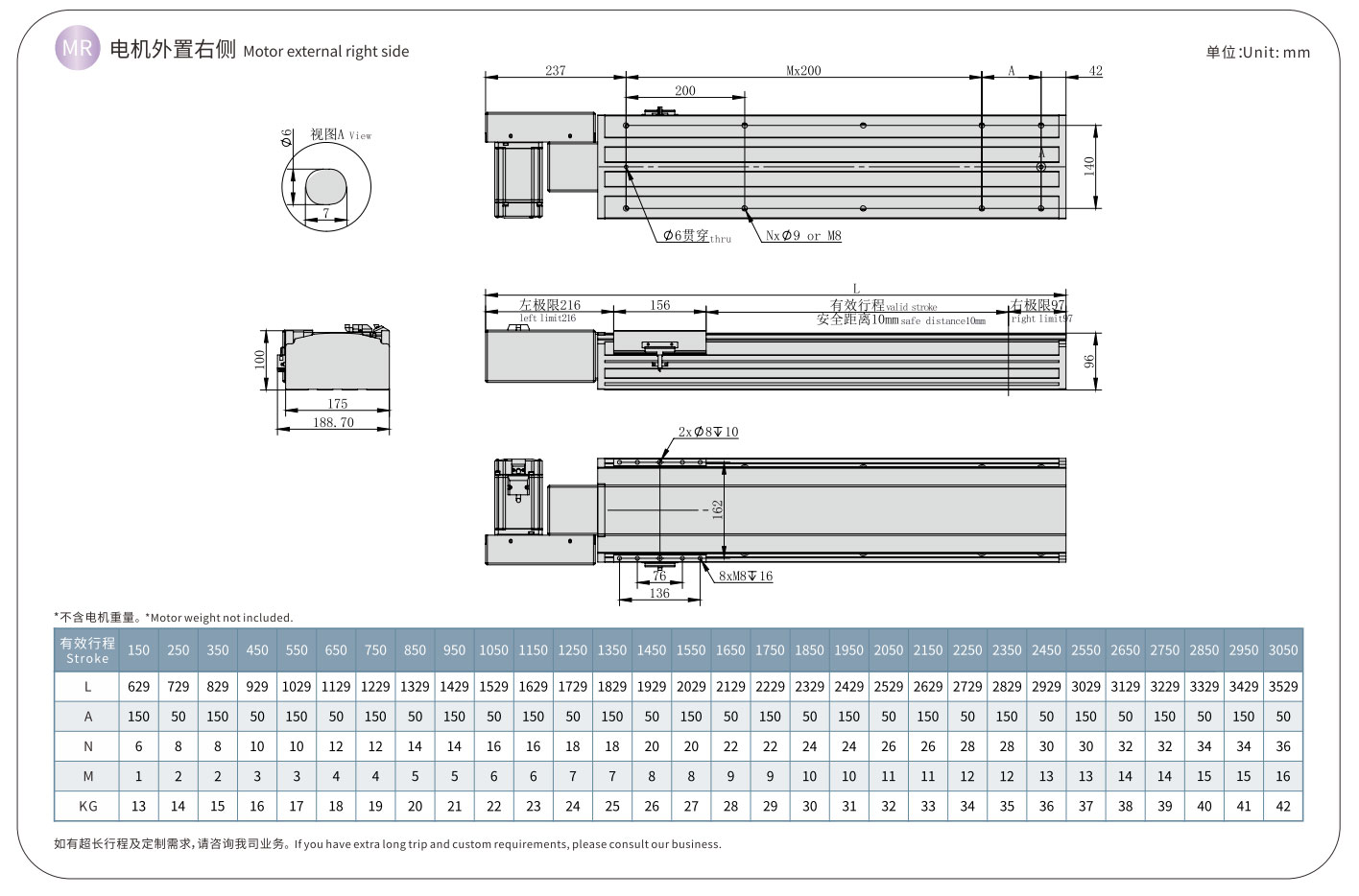
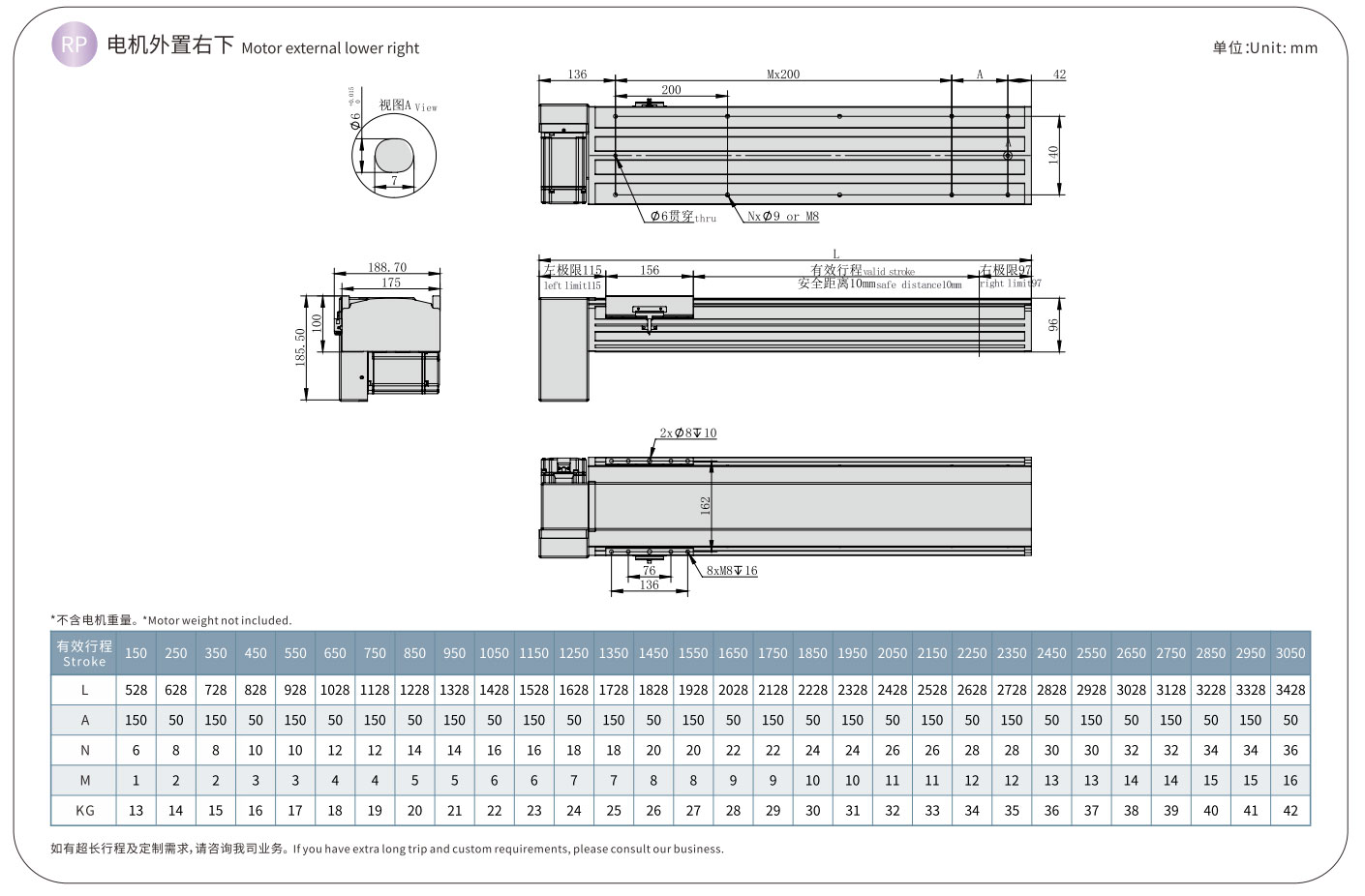
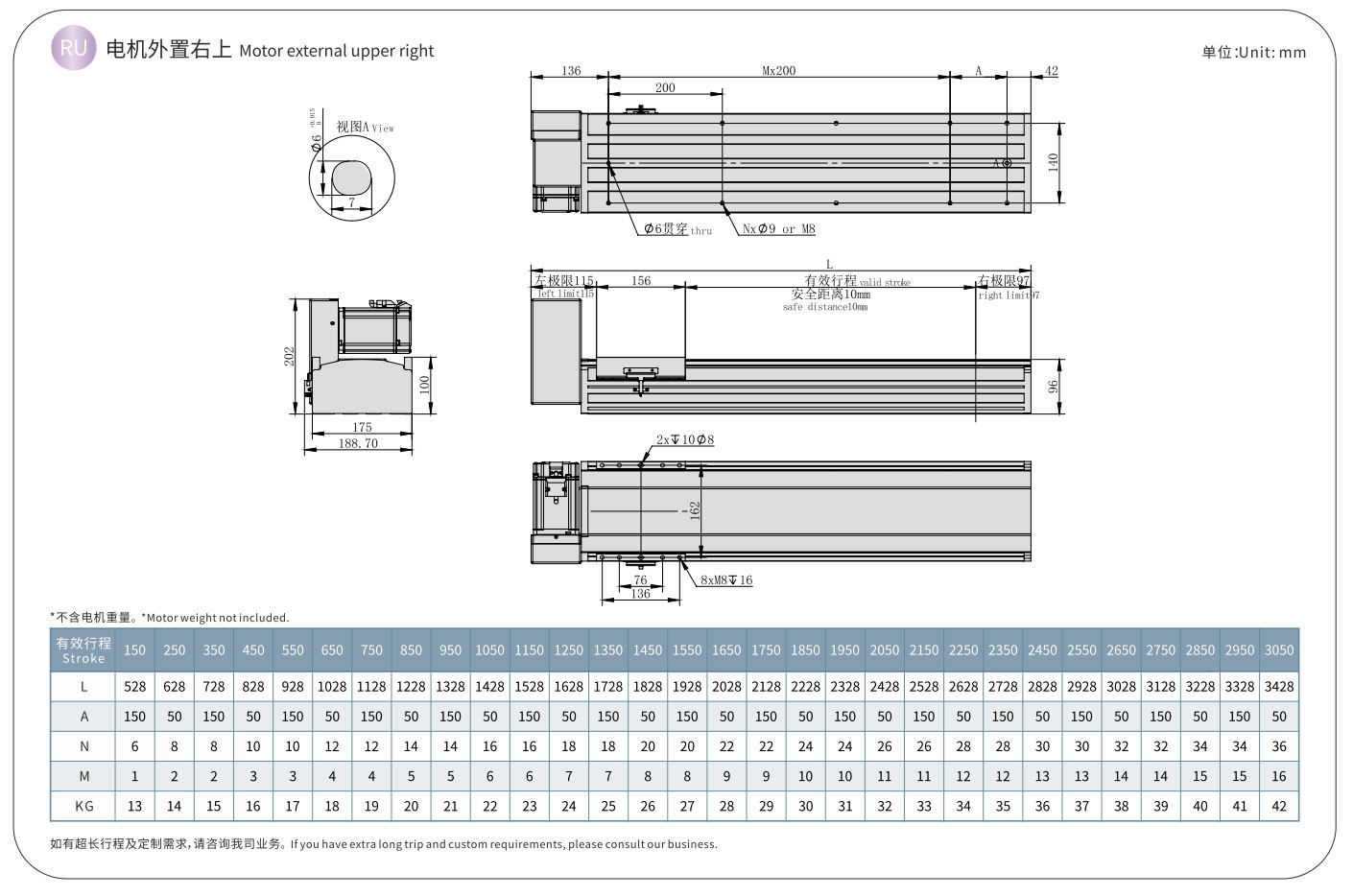
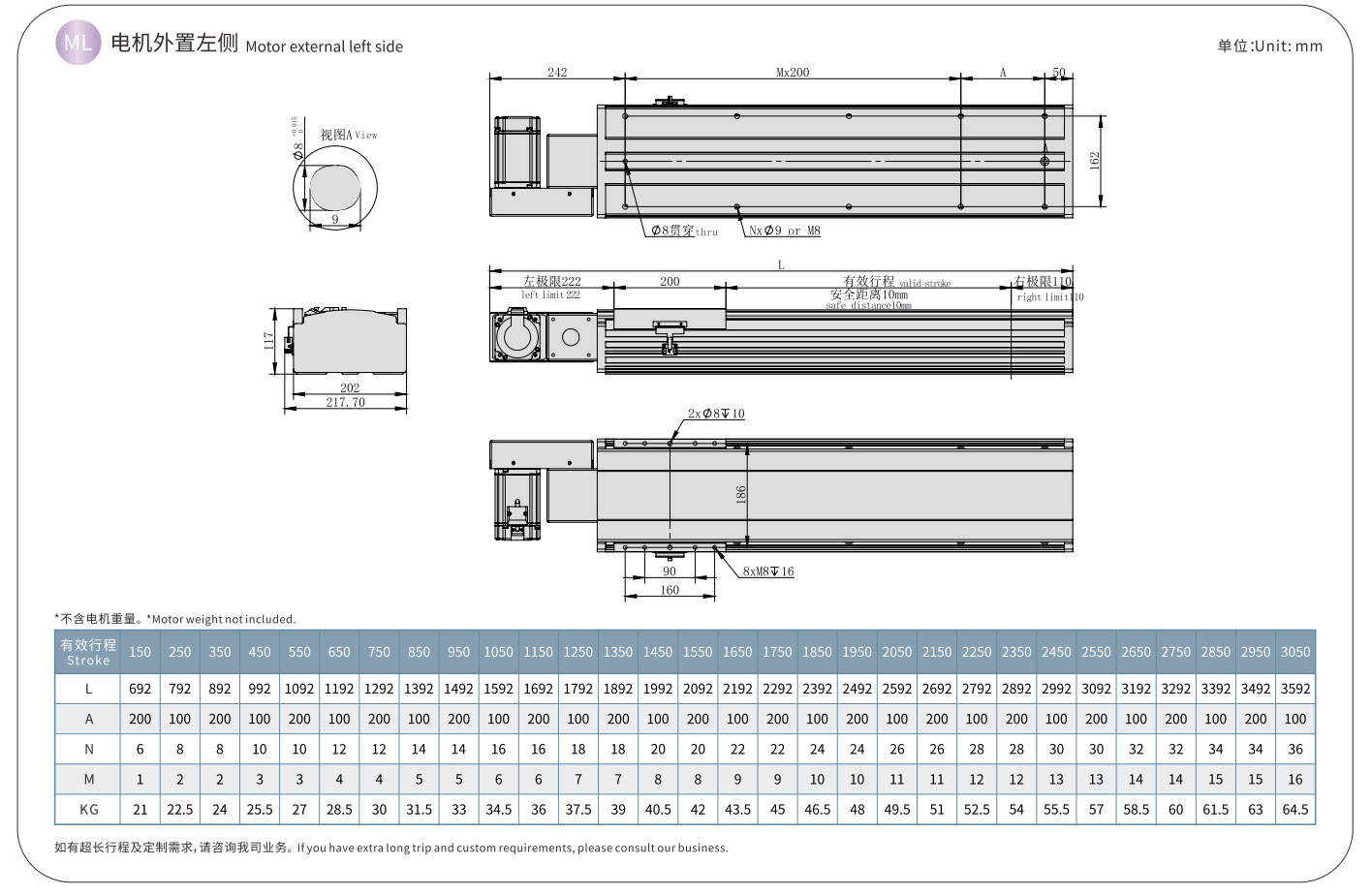
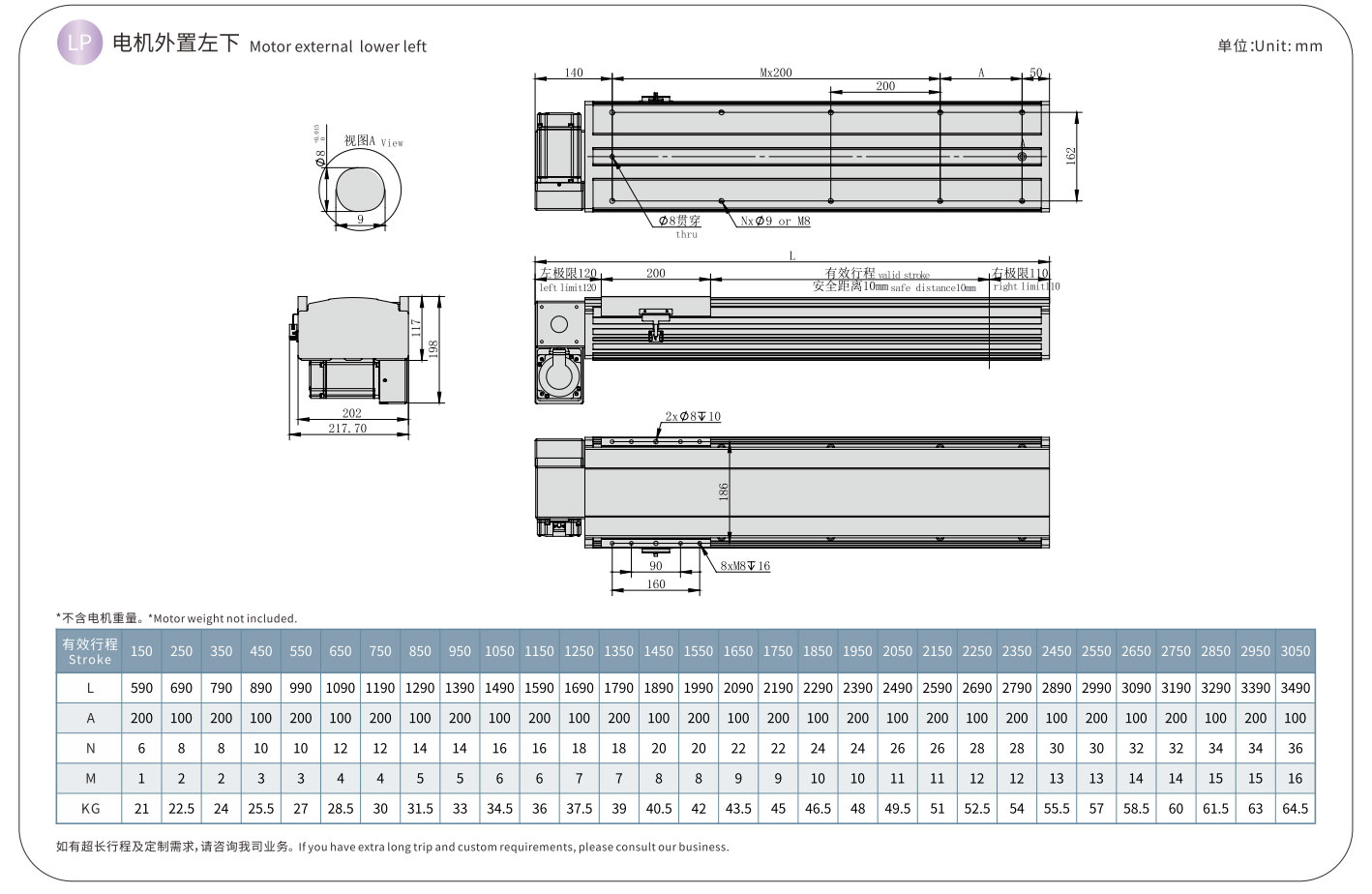
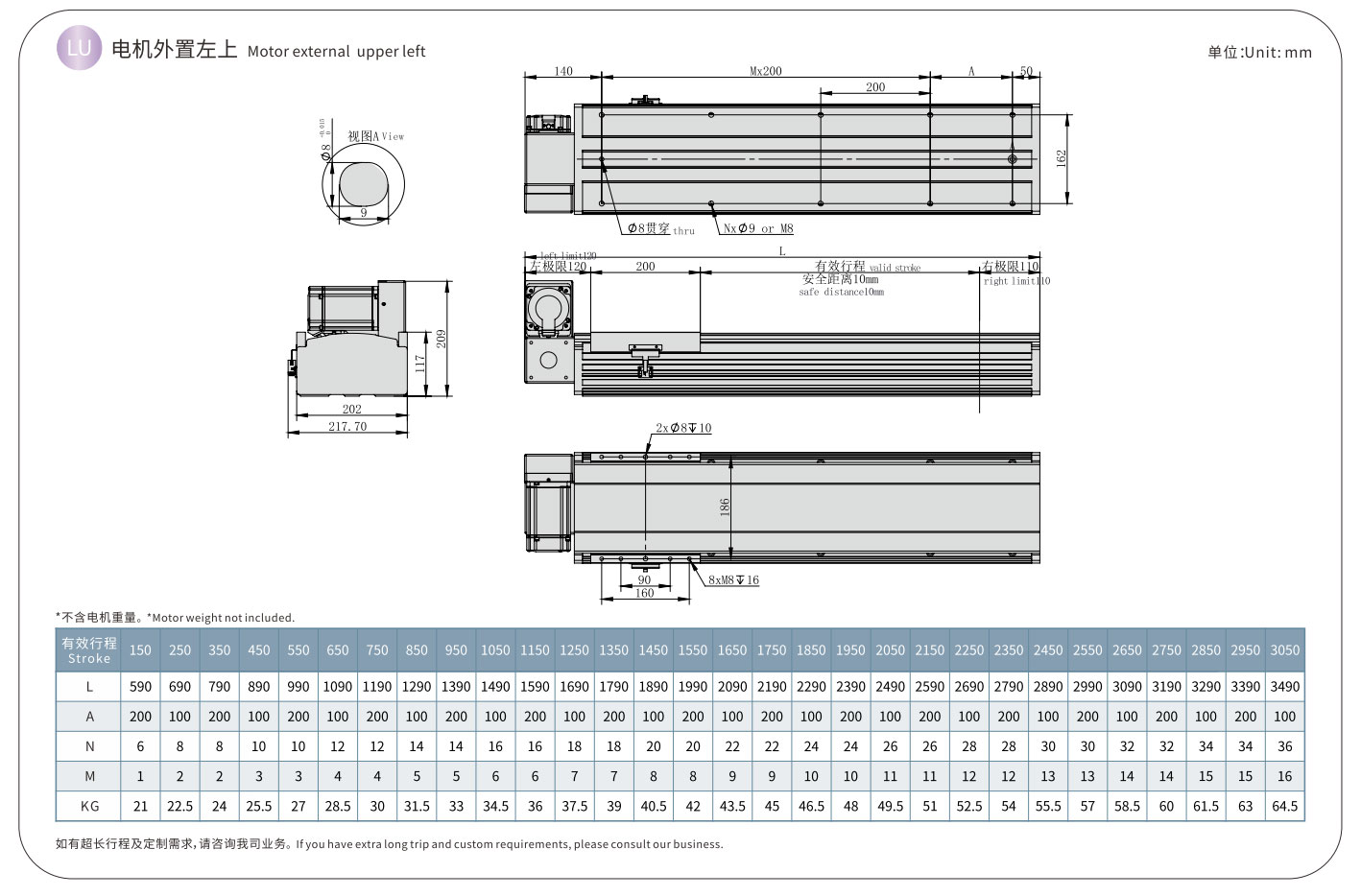
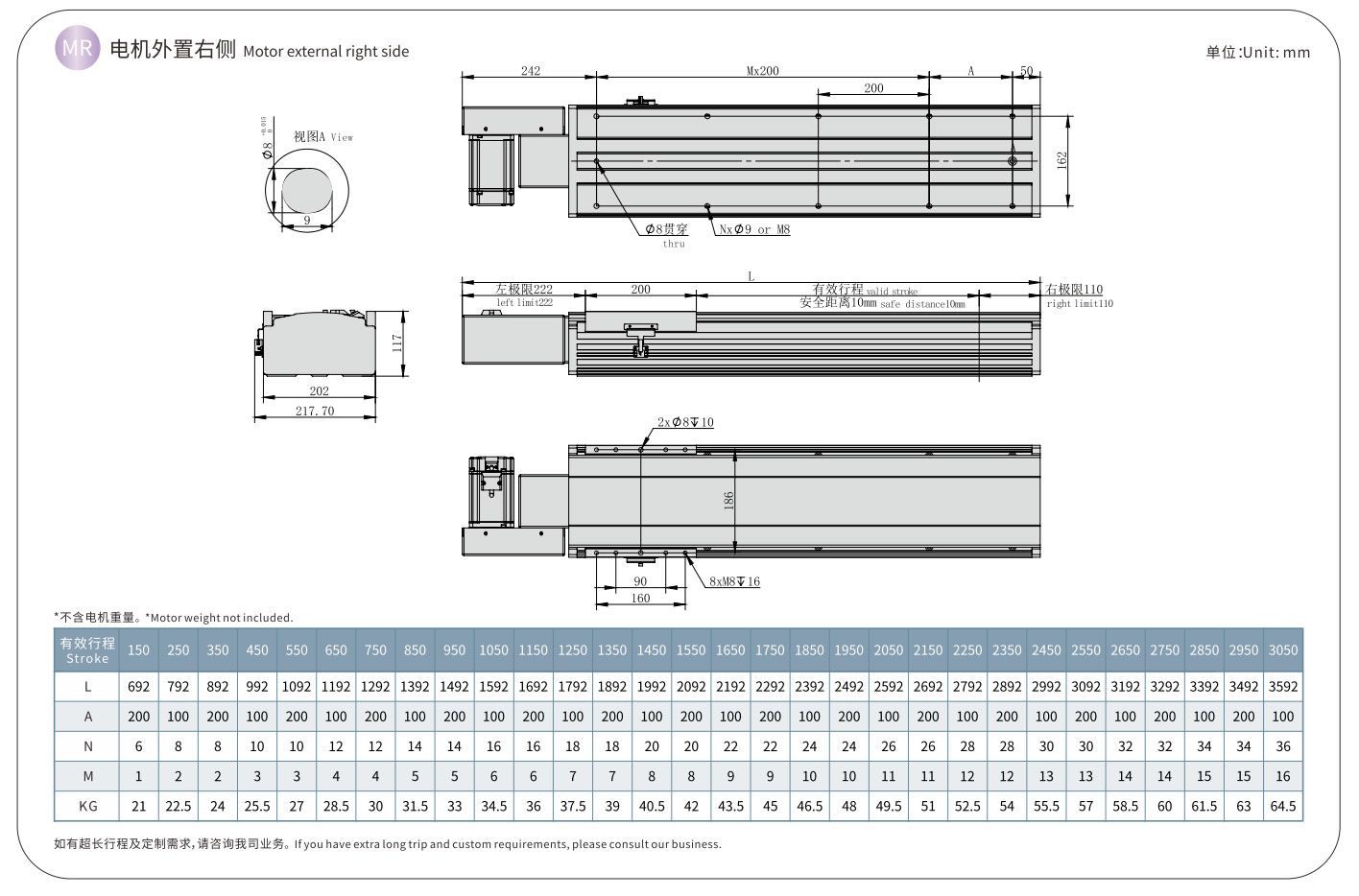
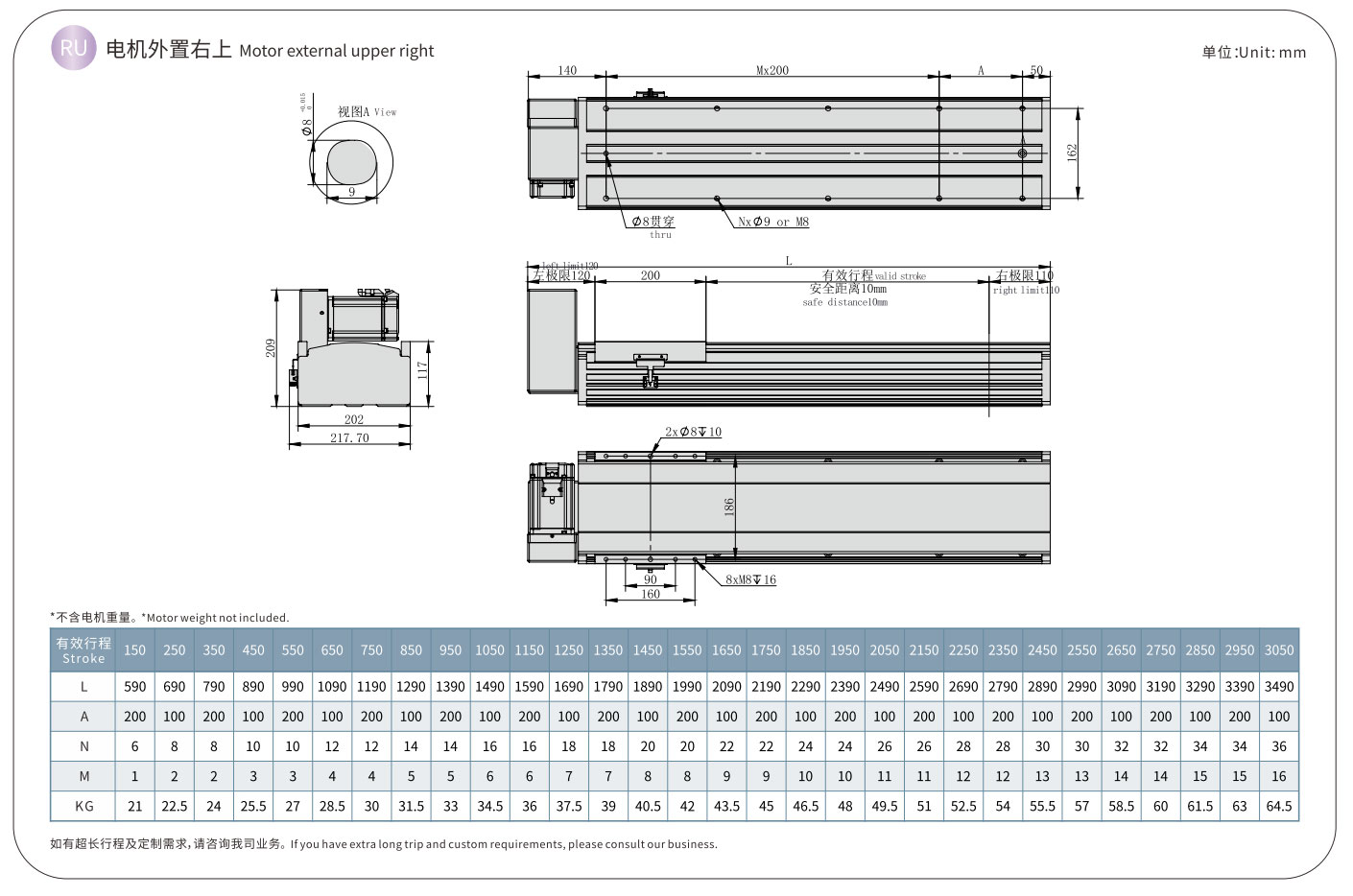
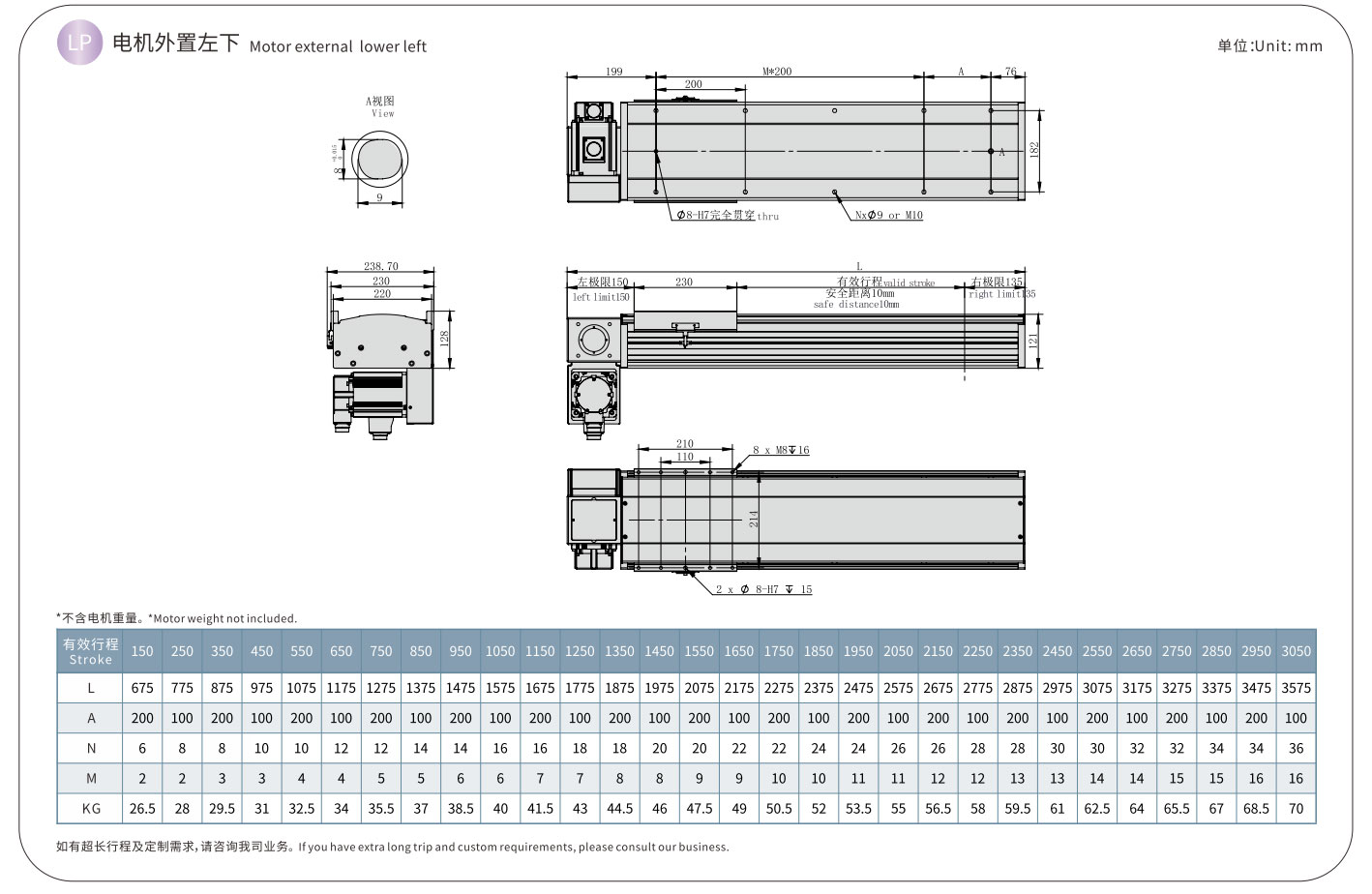
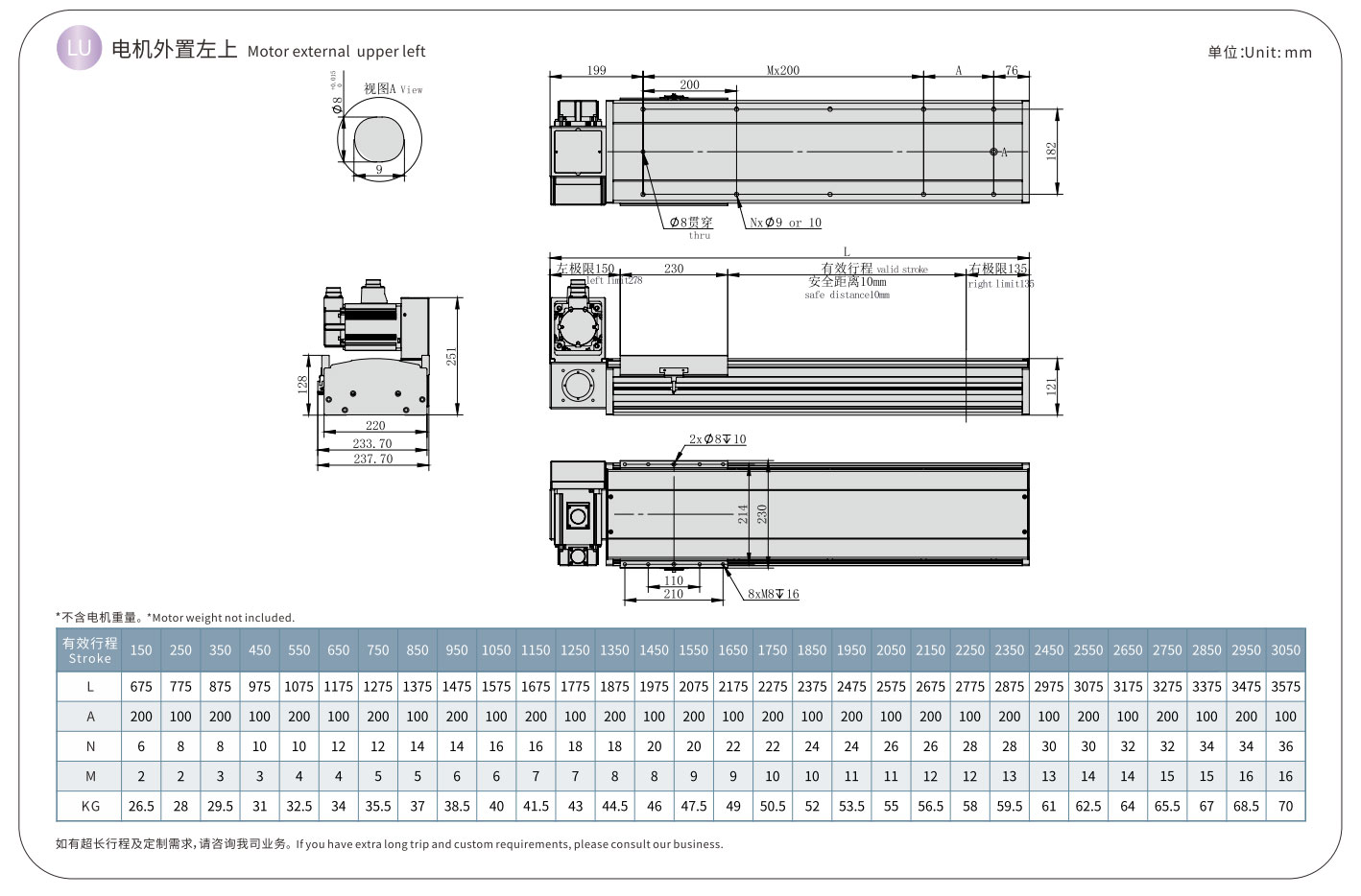
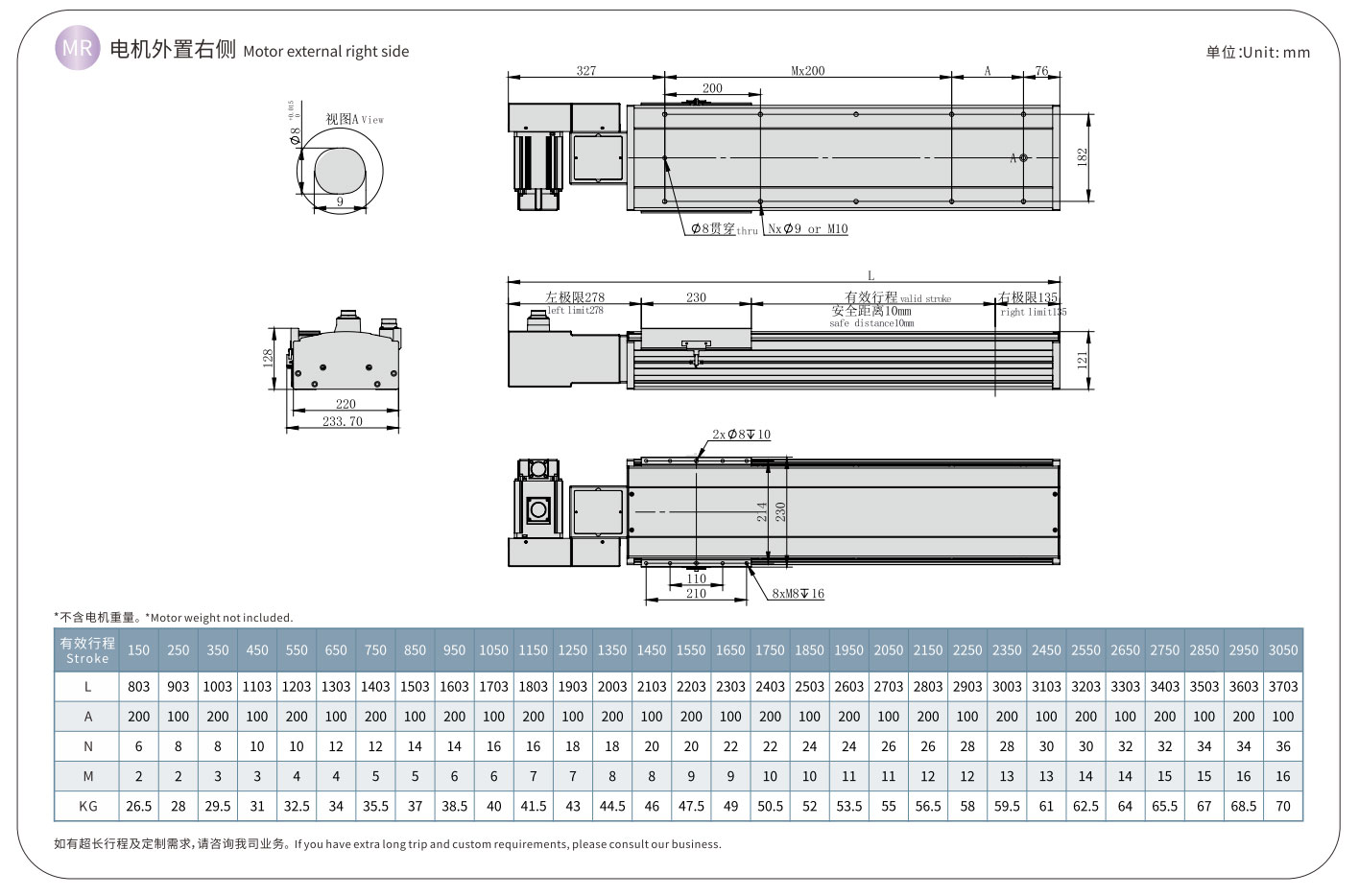
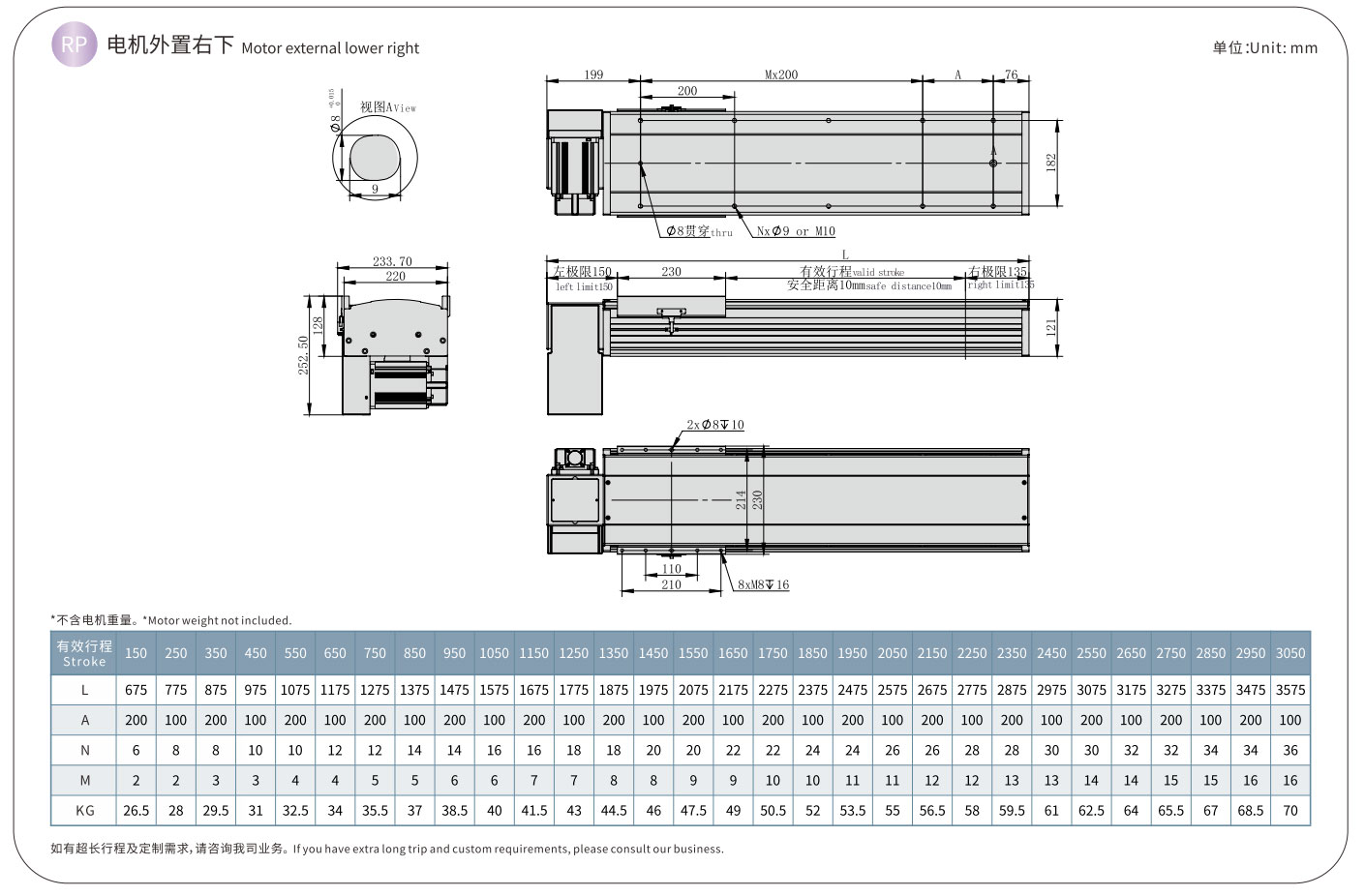
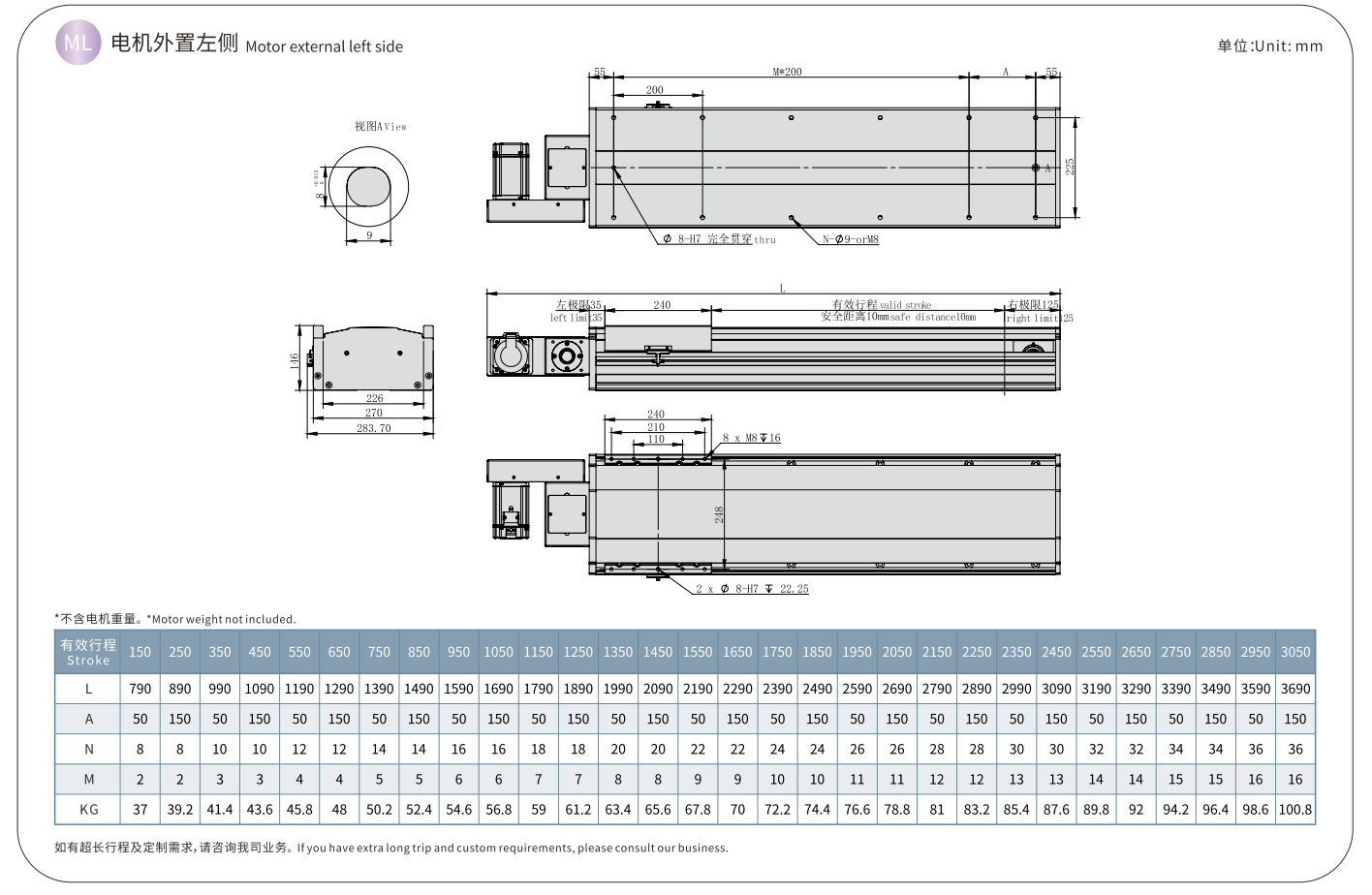
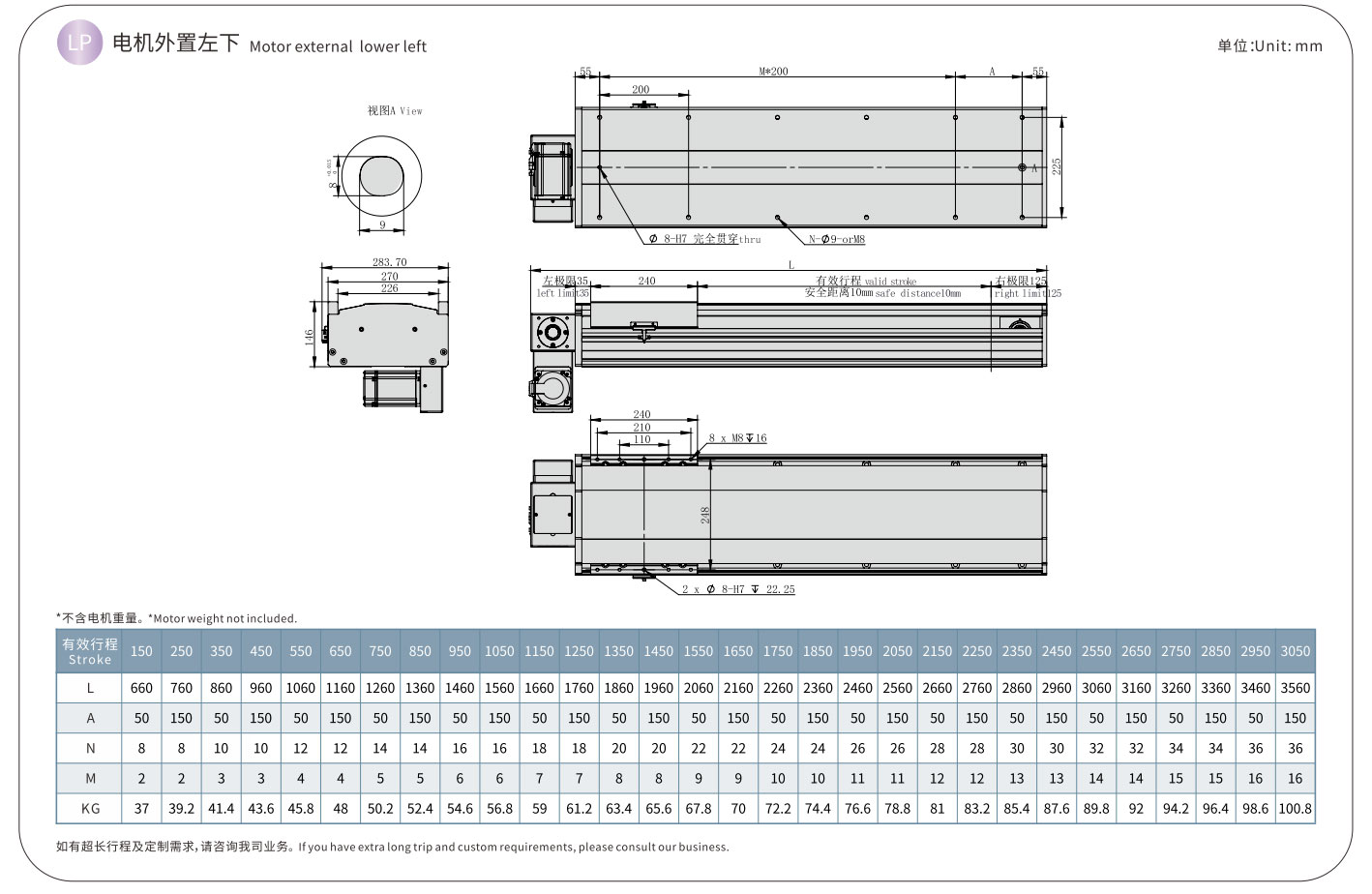
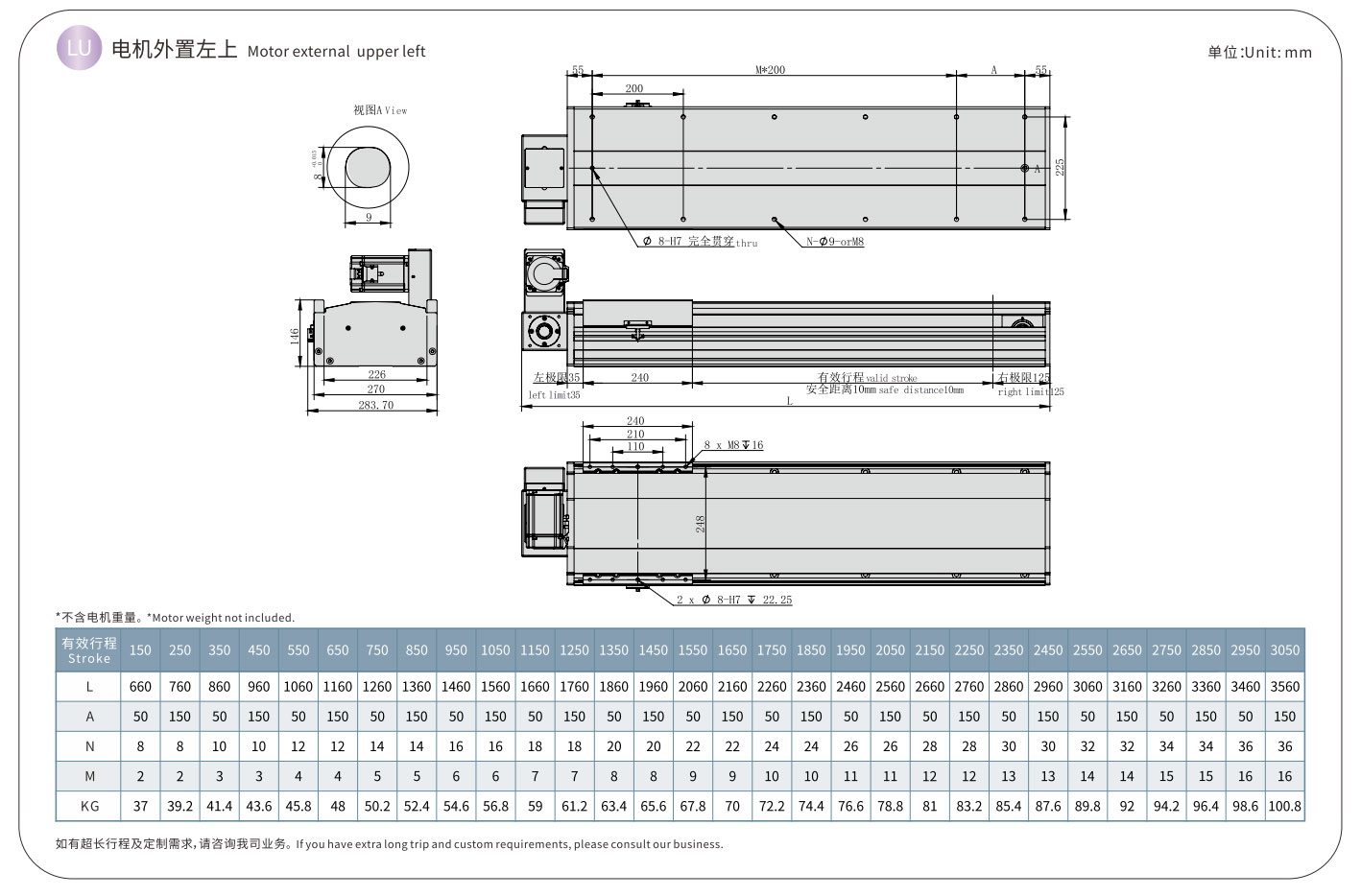
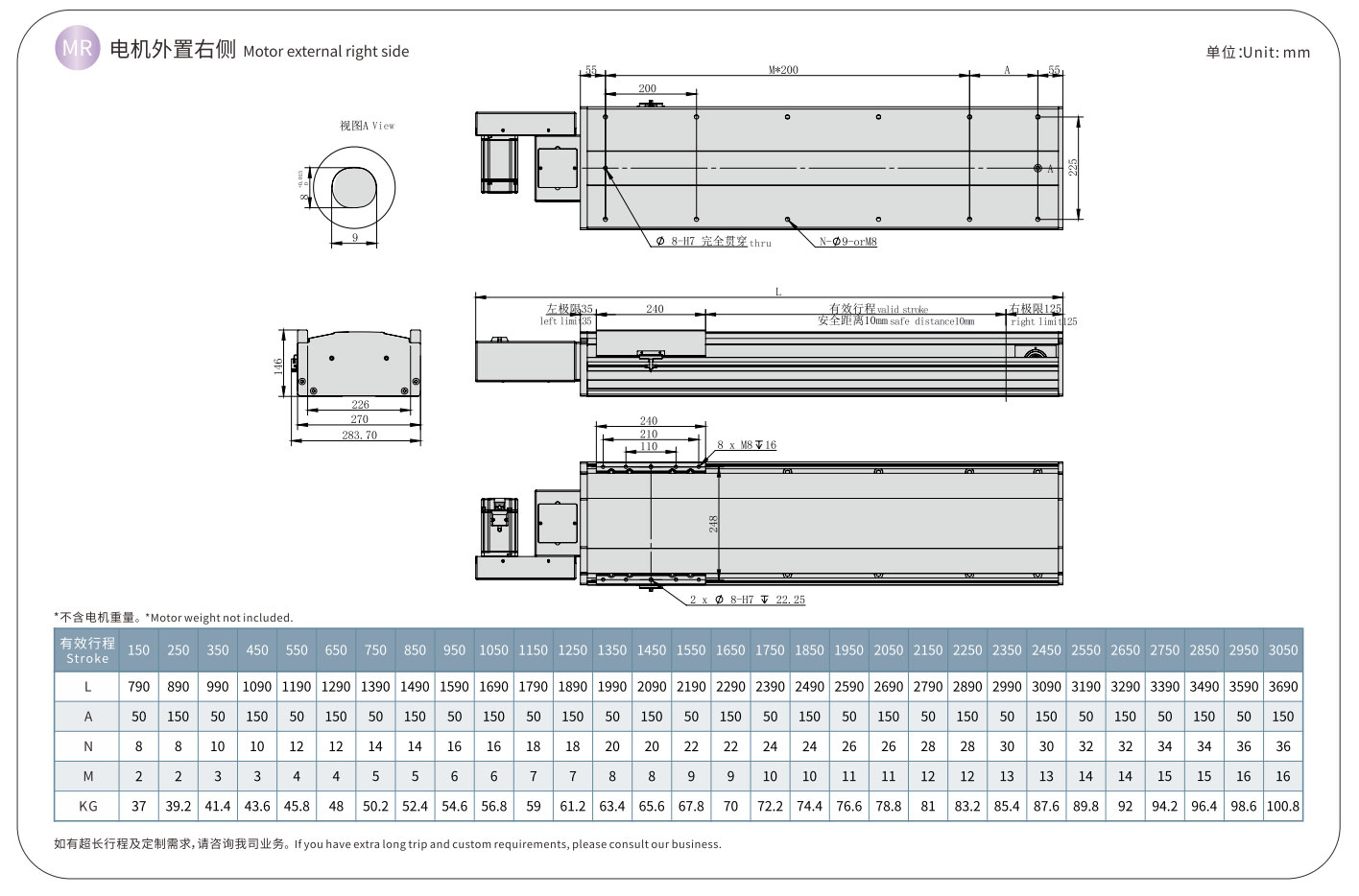
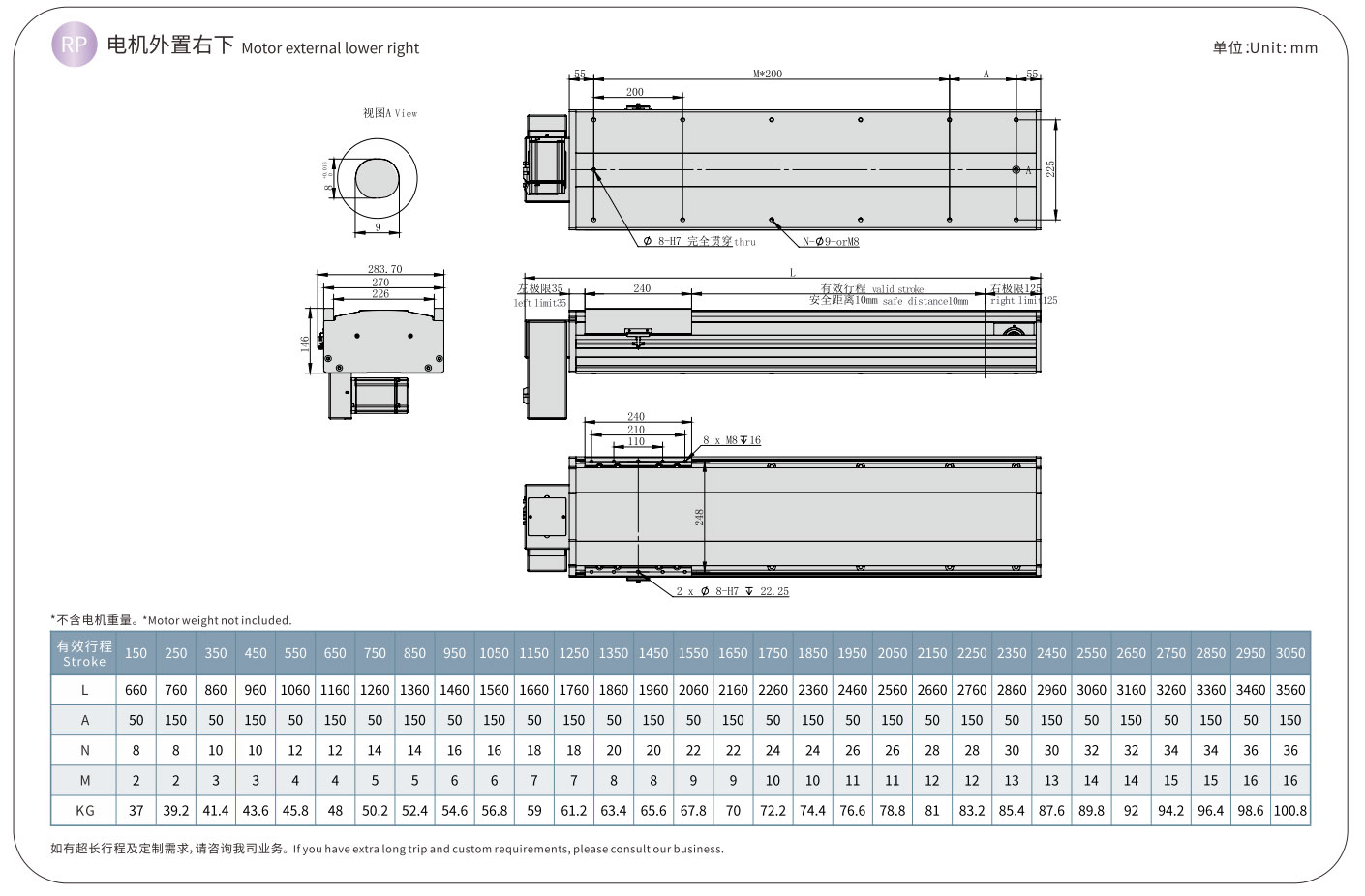
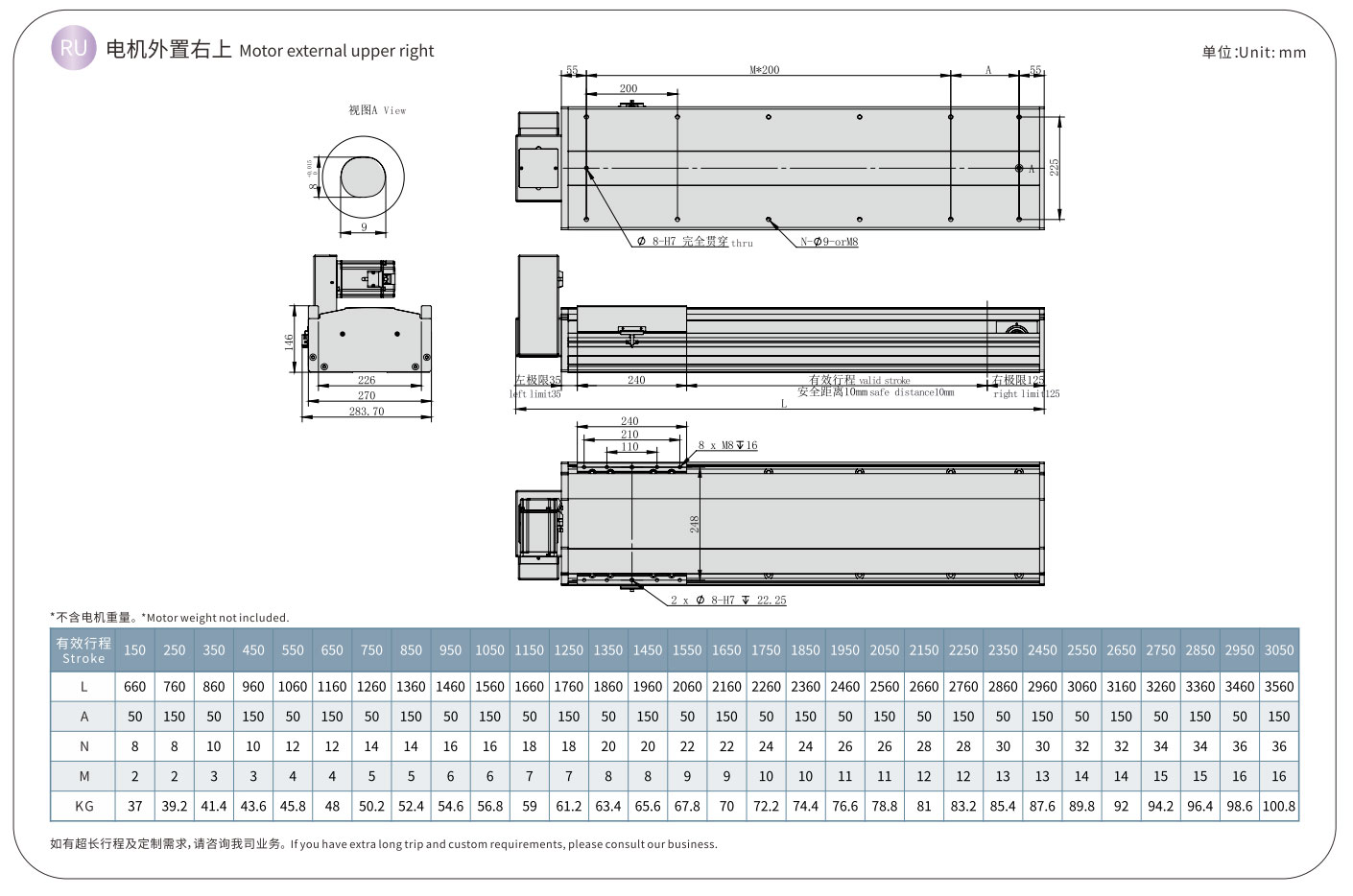
L-attwatur lineari taċ-ċinturin tas-serje HNB għandu disinn uniku semi-magħluq, żewġ binarji ta 'gwida riġidi ta' saħħa għolja, biex jipprovdu torque u veloċità ogħla, TPA ROBOT jista 'jipprovdi sa 200 tip ta' attwaturi mmexxija minn ċinturin HNB ta 'wisgħat u tulijiet differenti biex jilħqu l-klijent rekwiżiti għat-tagħbija u l-ivvjaġġar. Il-veloċità massima tista 'tilħaq 6000mm/s, u l-inġinier jista' faċilment joħloq robot Kartesjan sodisfaċenti jew robots gantry biex jissodisfaw il-ħtiġijiet ta 'awtomazzjoni ta' diversi industriji.
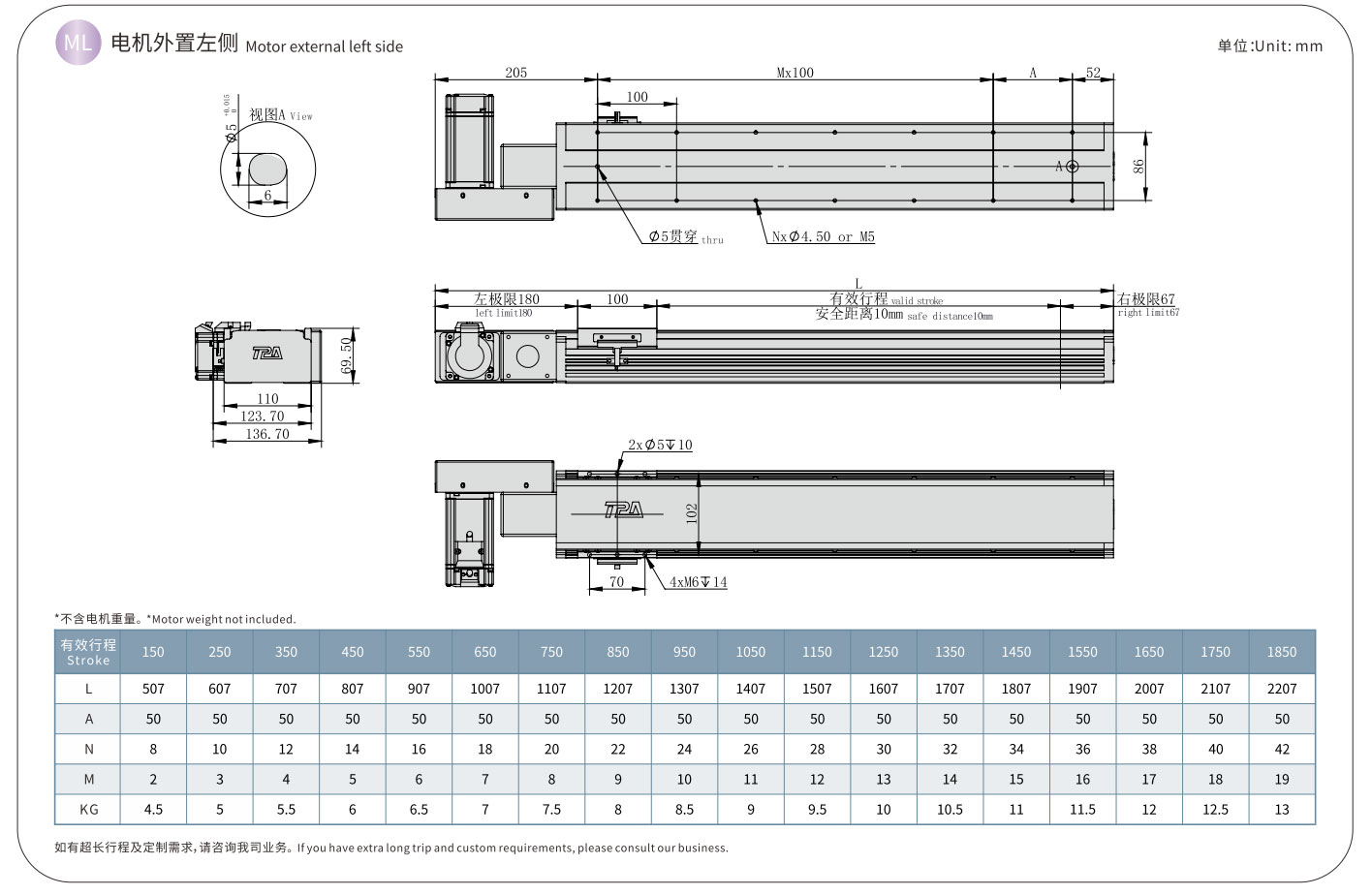
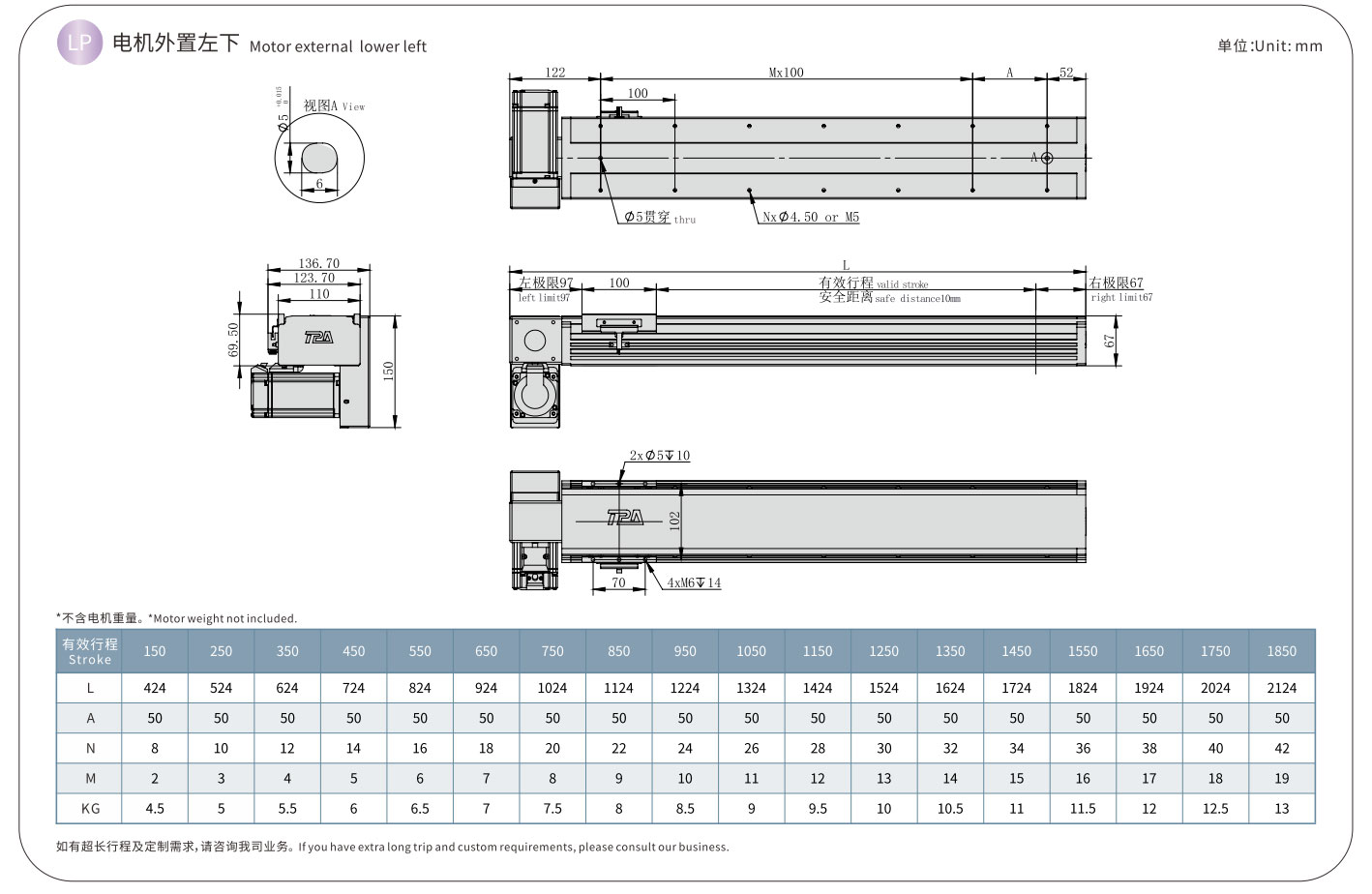
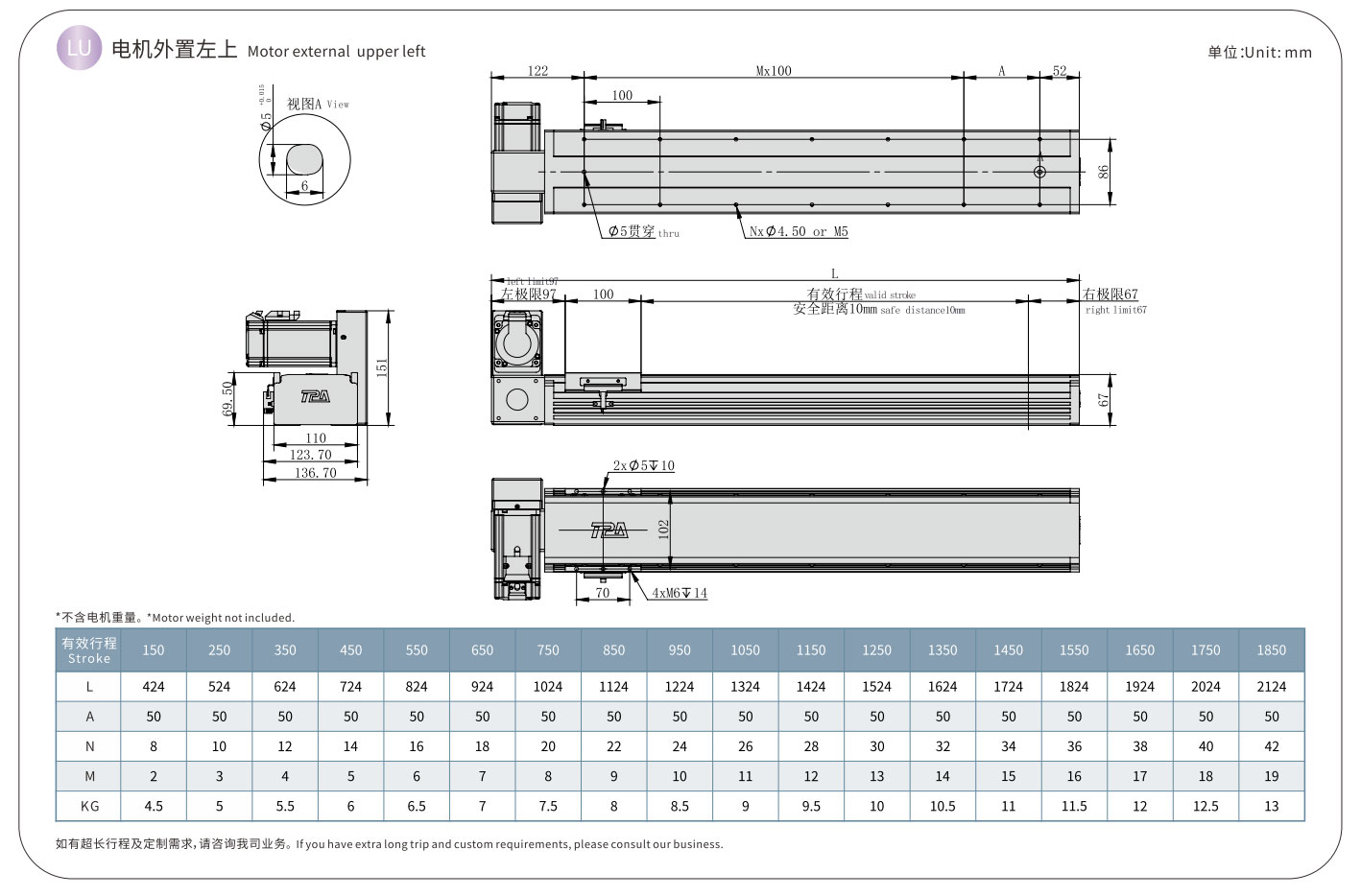
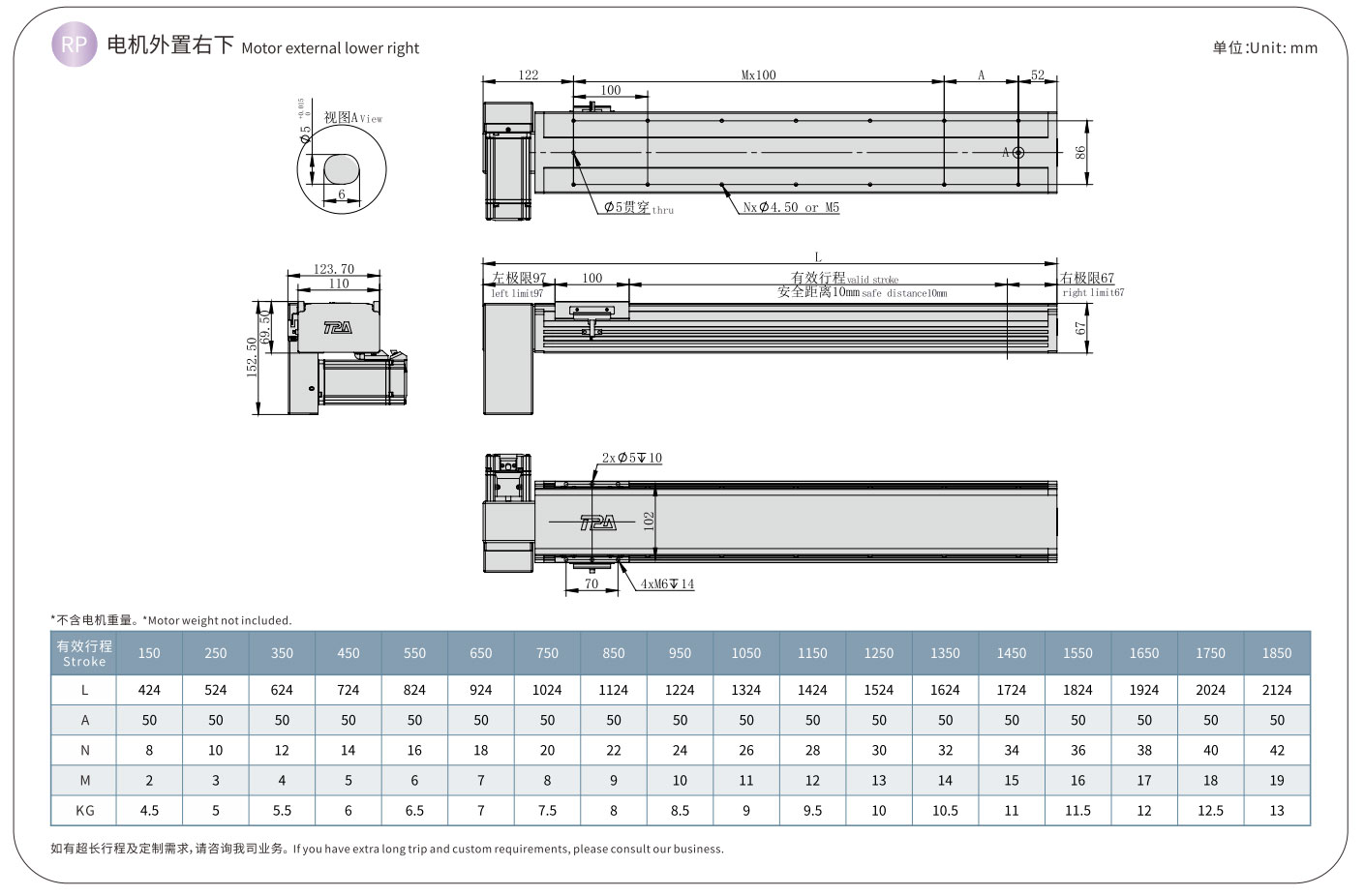
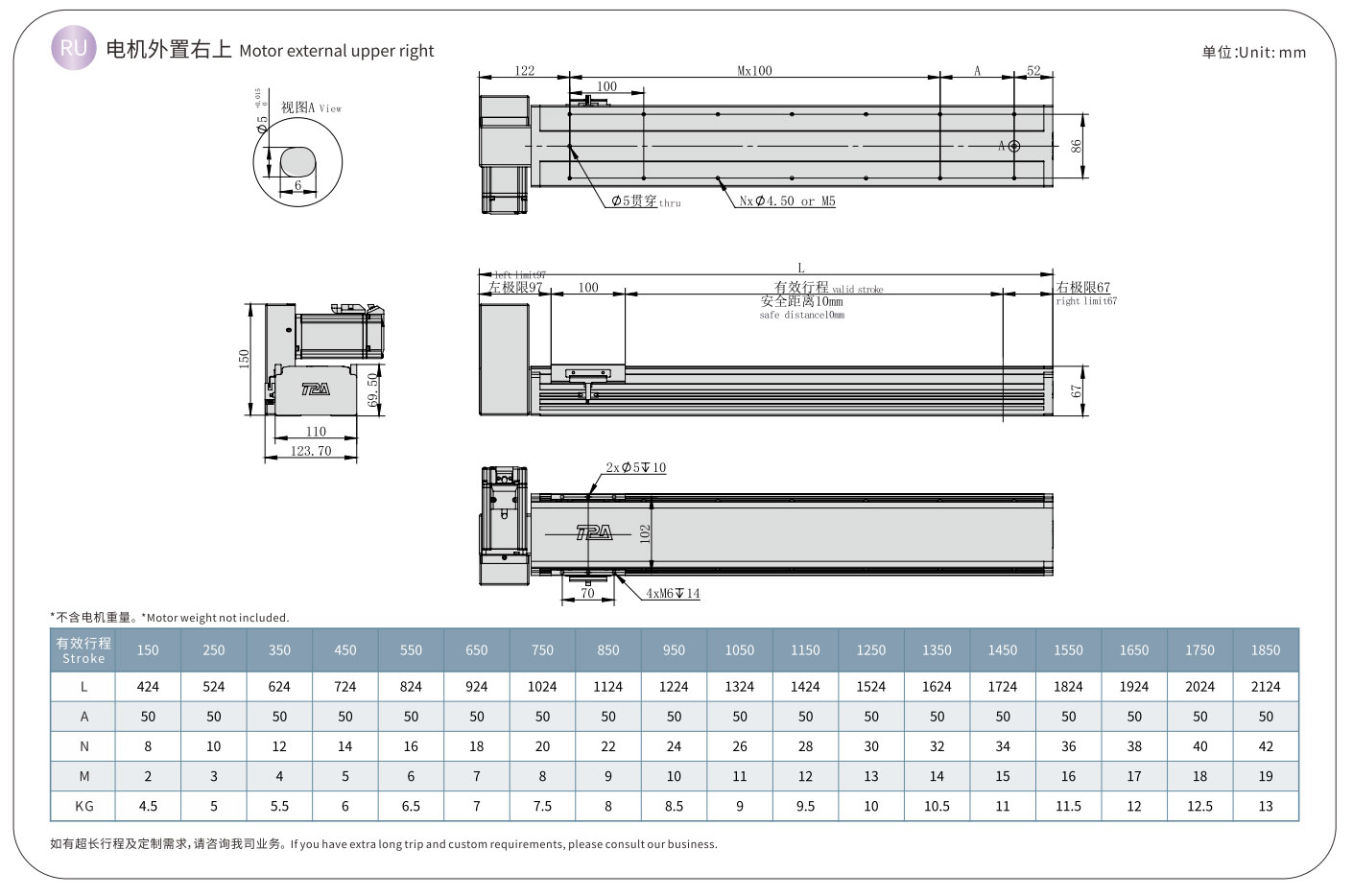
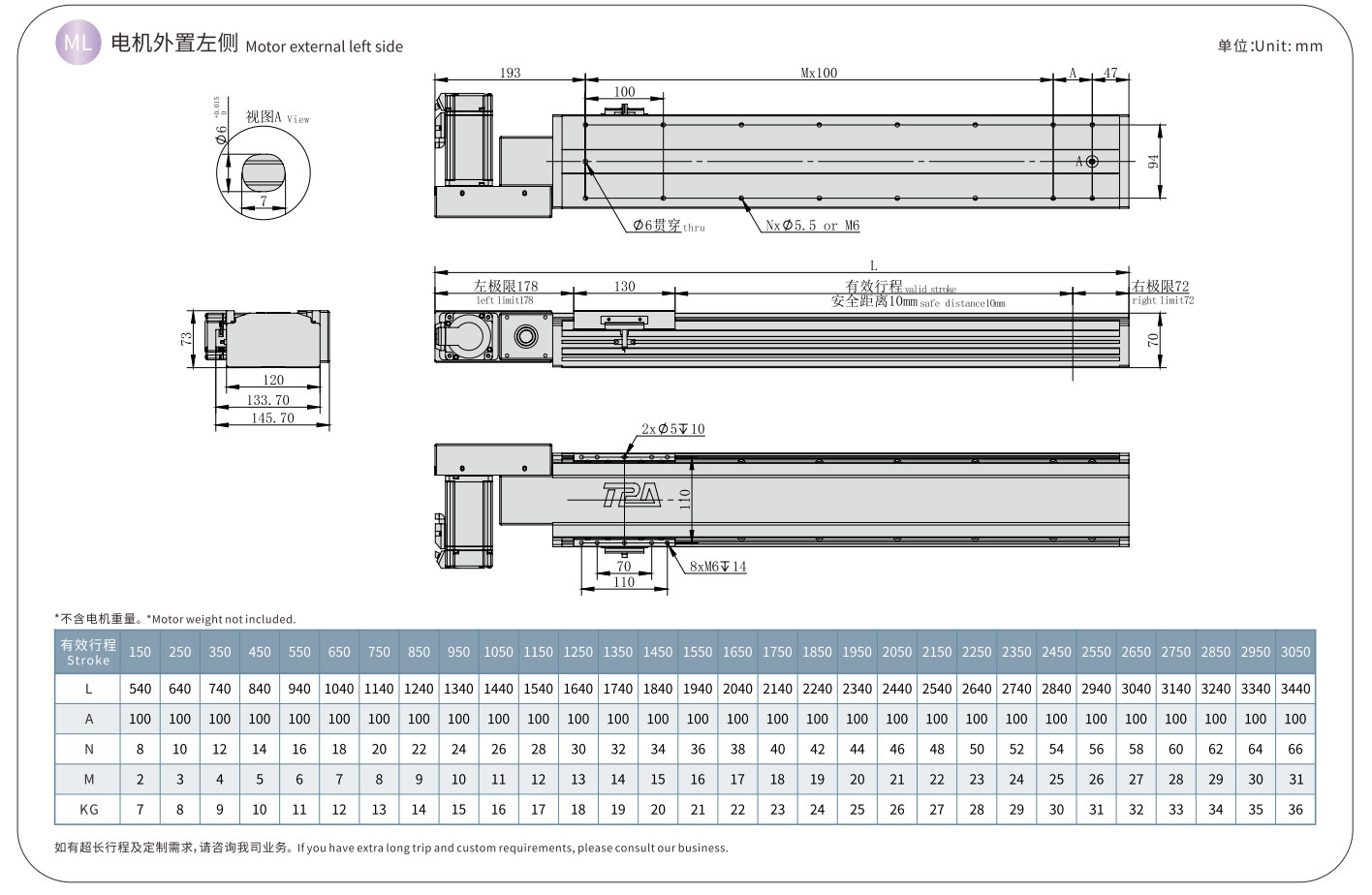
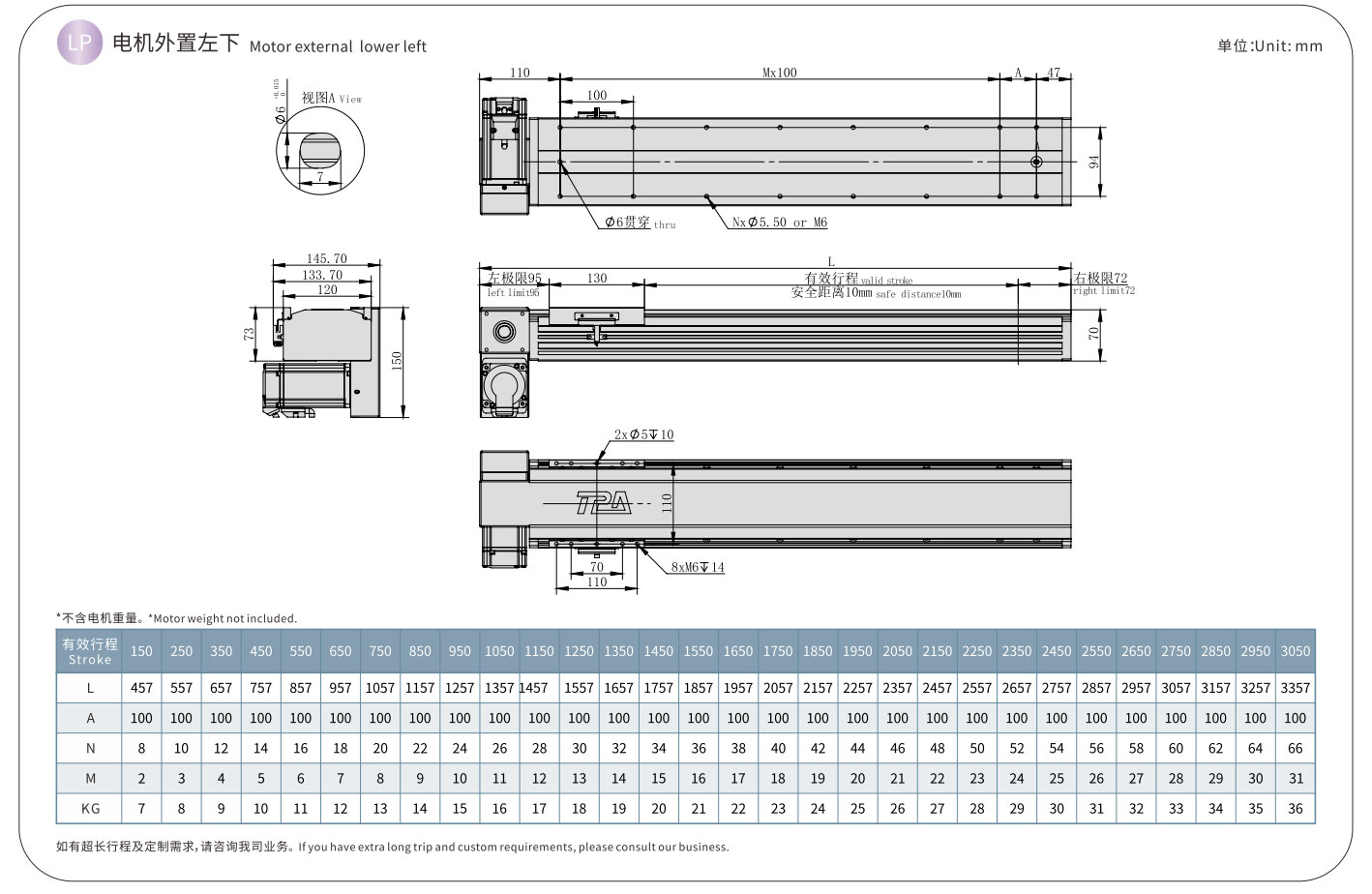
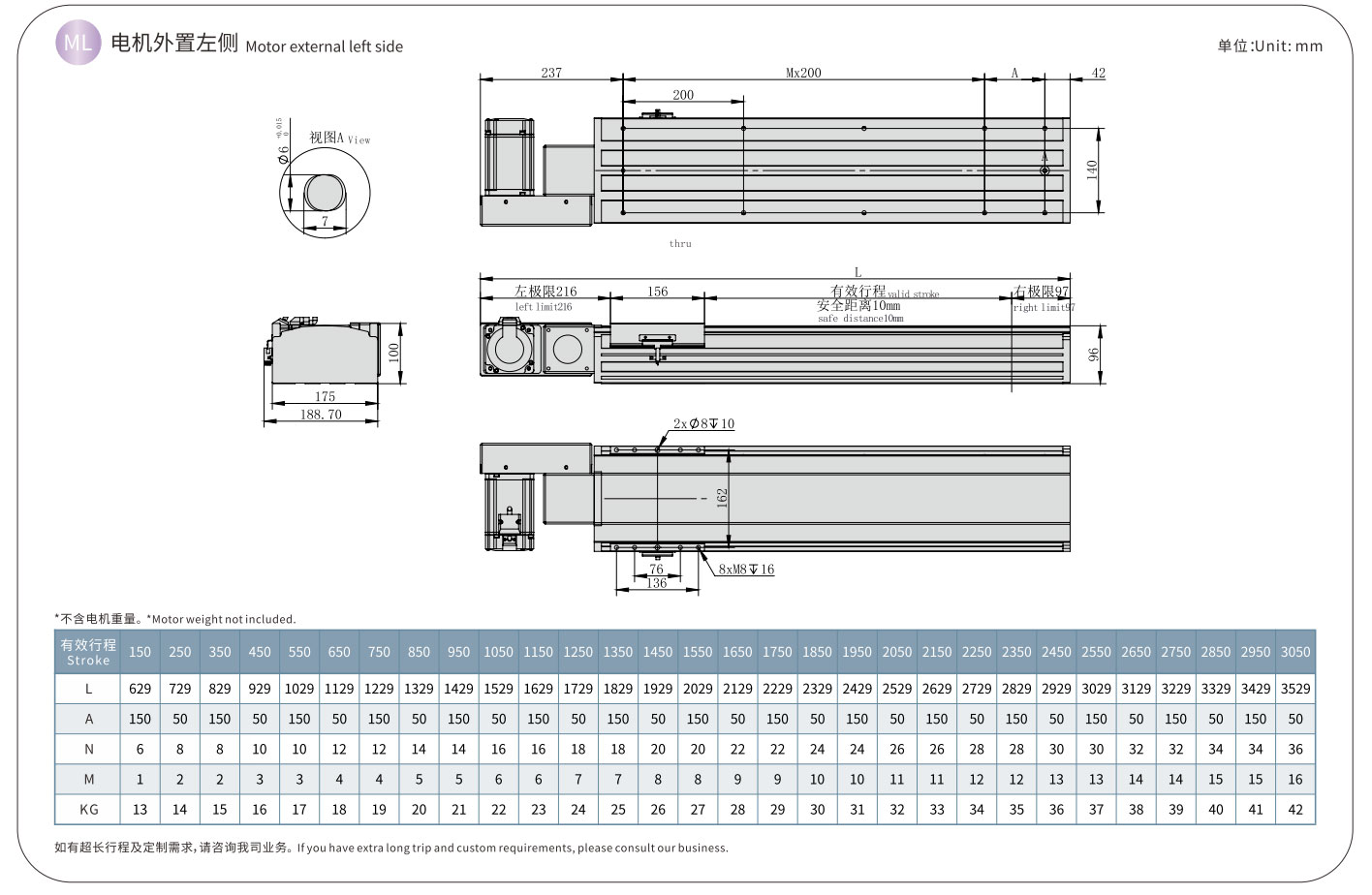
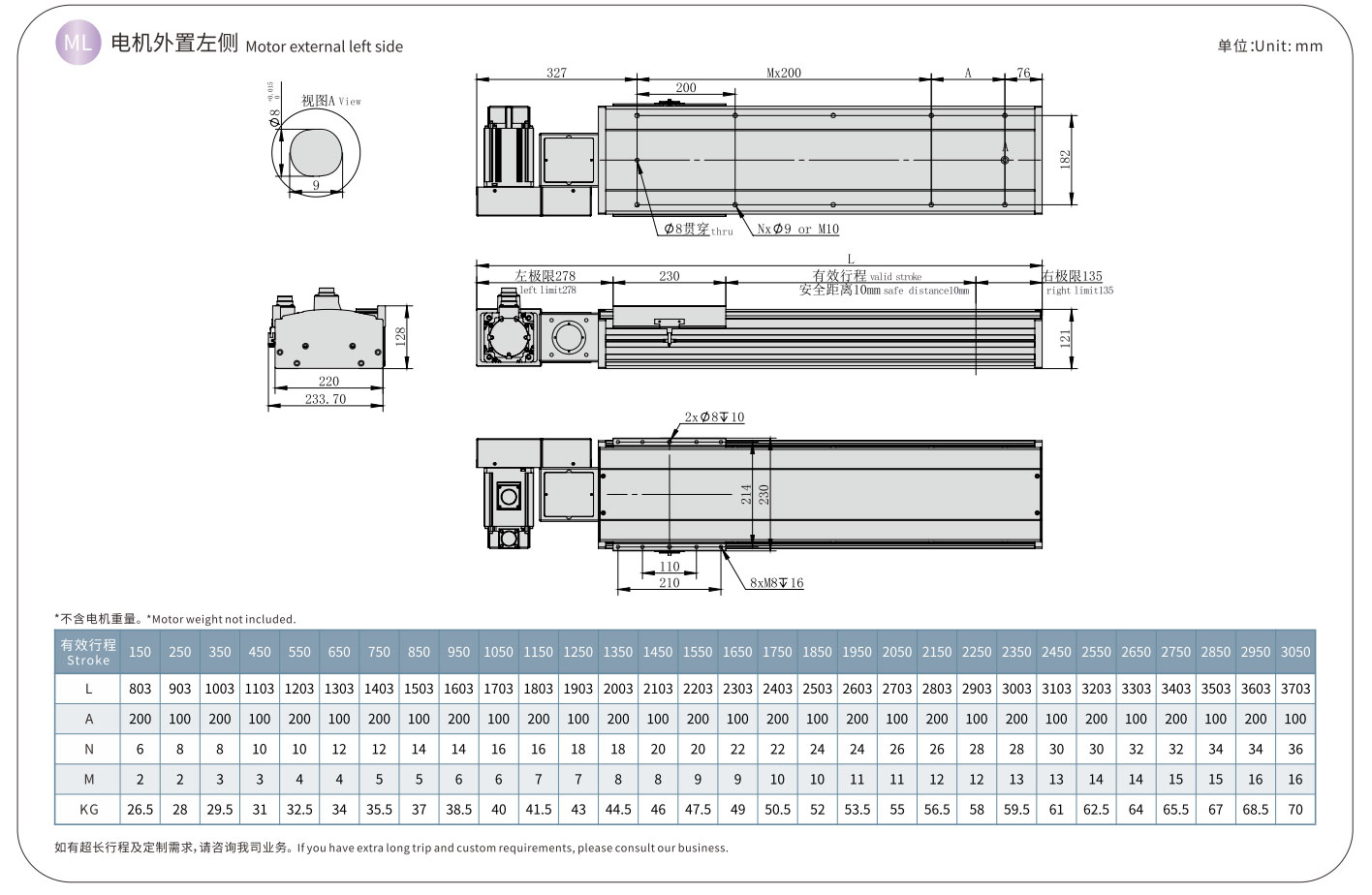
Minbarra li nipprovdu torque għoli, veloċità għolja u attwatur ta 'slajd lineari ta' stroke twil, aħna wkoll iddisinjaw b'mod għaqli l-mod li l-pjanċa tal-flanġ titqiegħed barra, li tippermetti li l-attwaturi lineari tagħna jipprovdu sa 8 metodi ta 'installazzjoni biex jadattaw għal diversi ambjenti ta' awtomazzjoni.
HNB-120D

HNB-140D

HNB-175D

HNB-220D
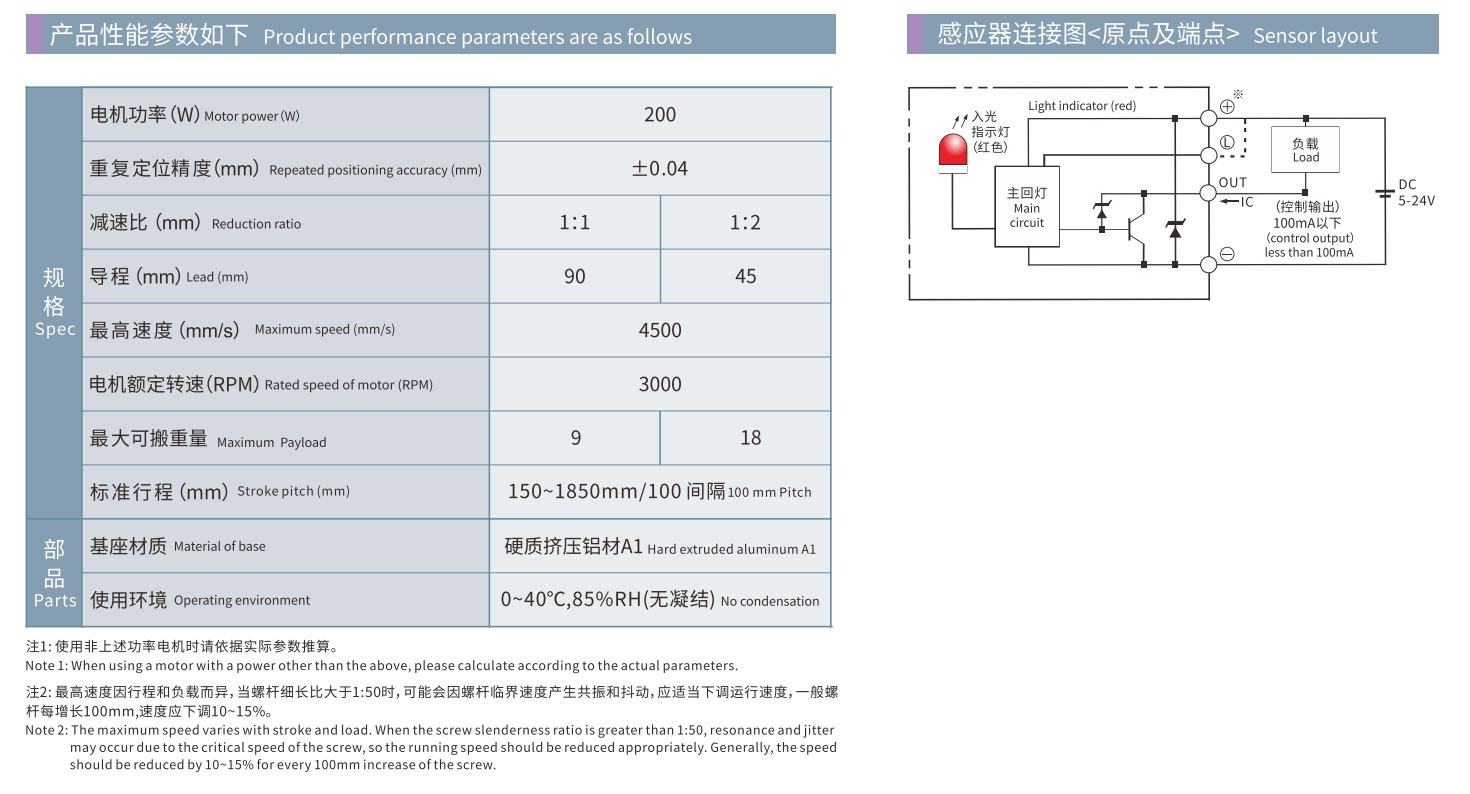
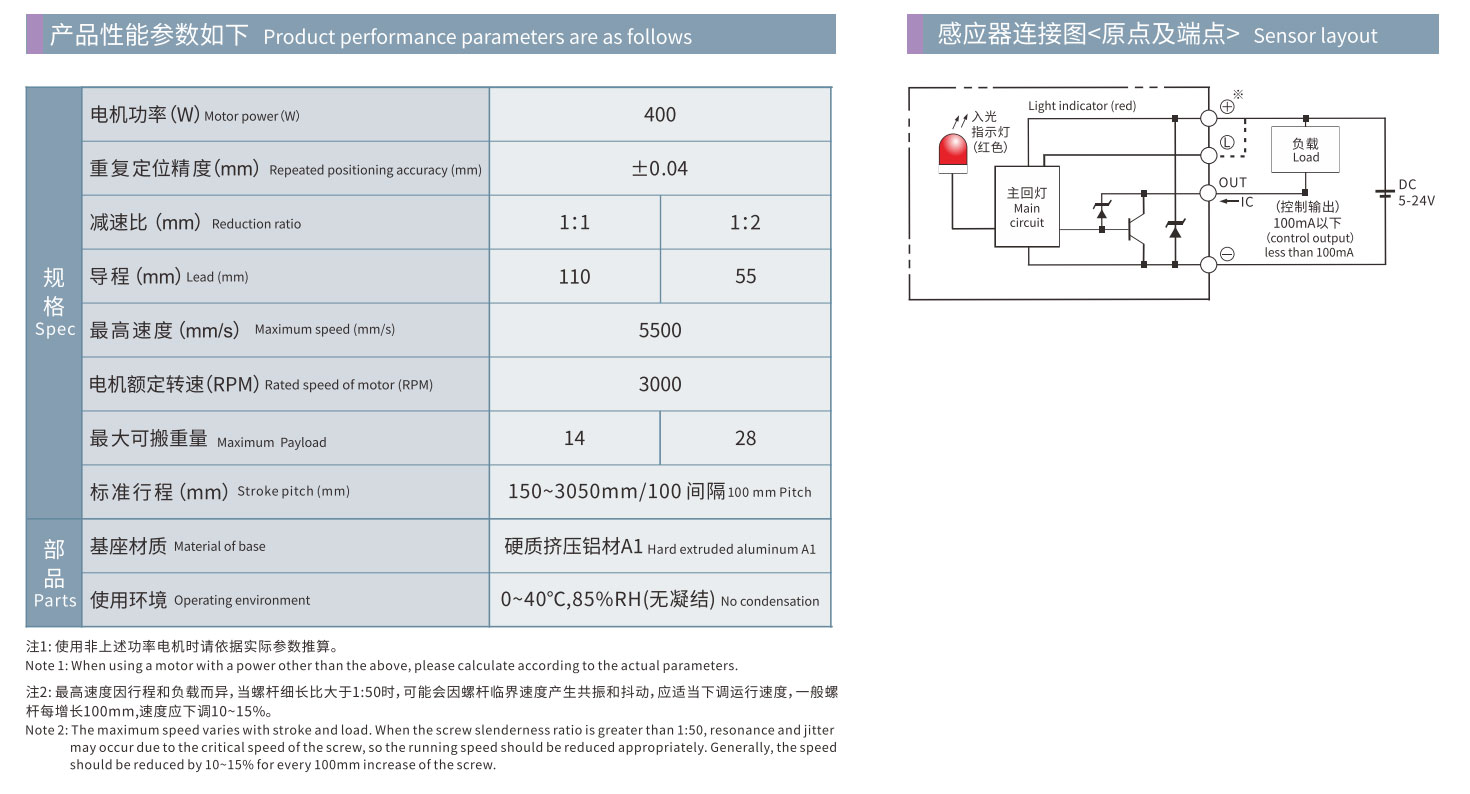
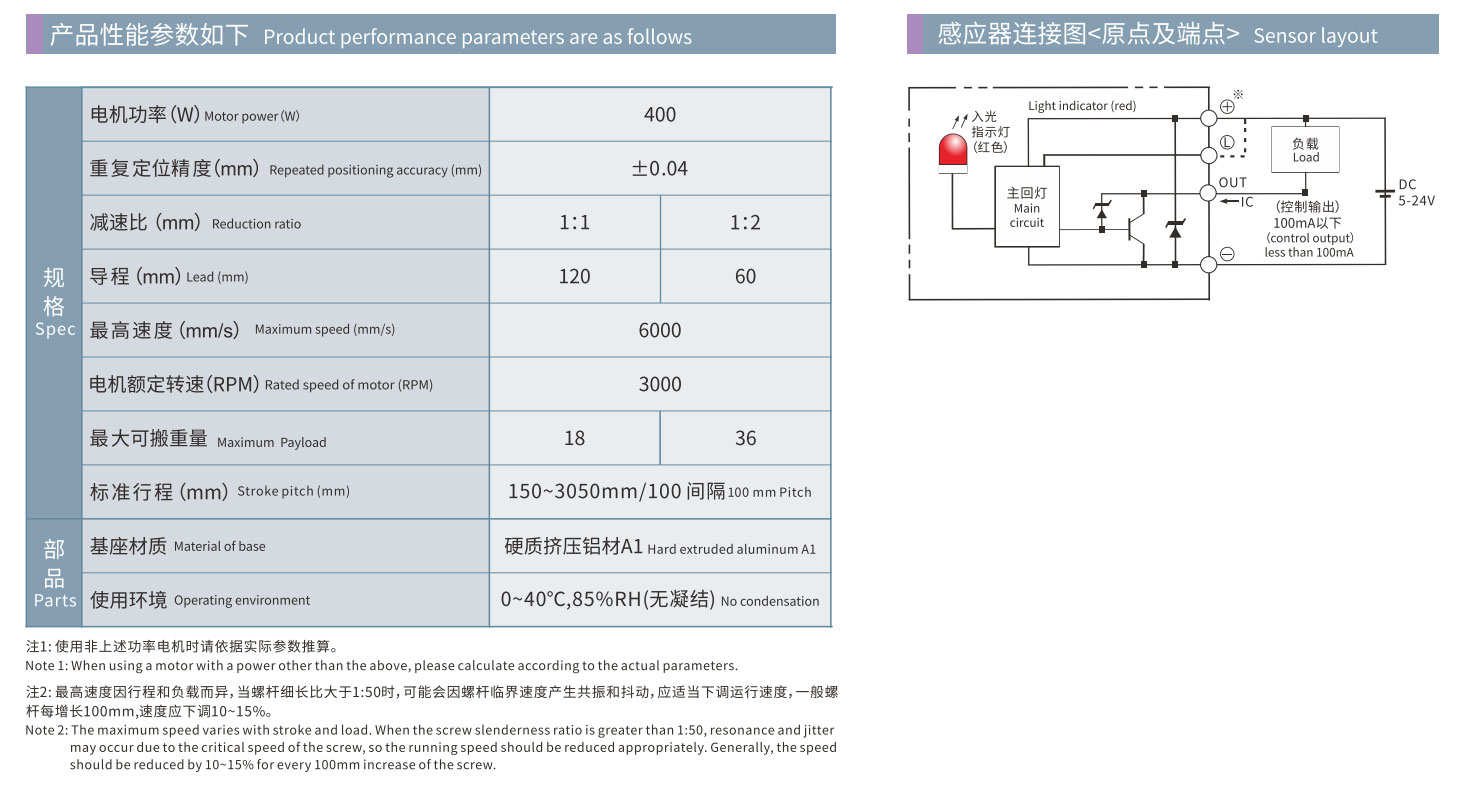
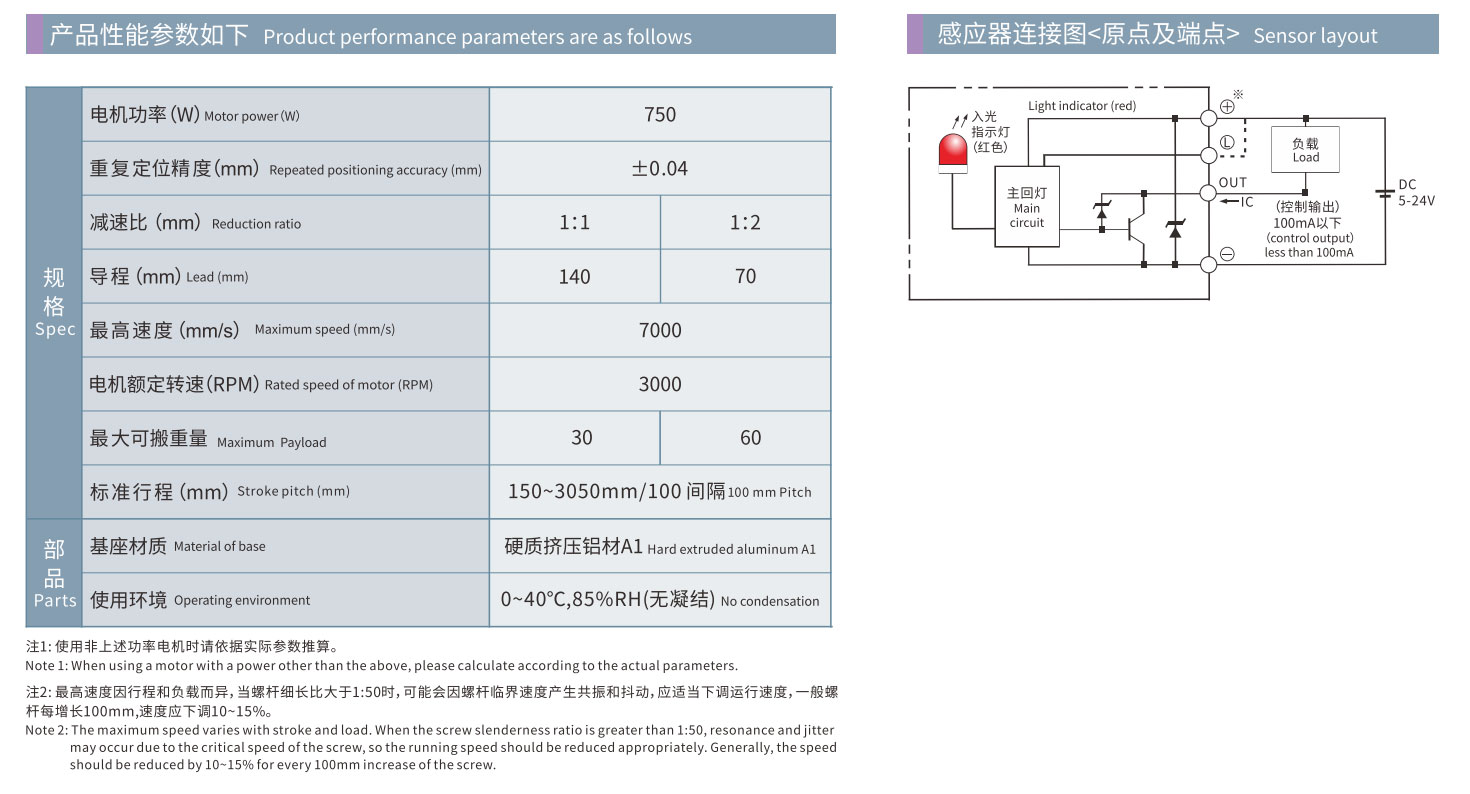
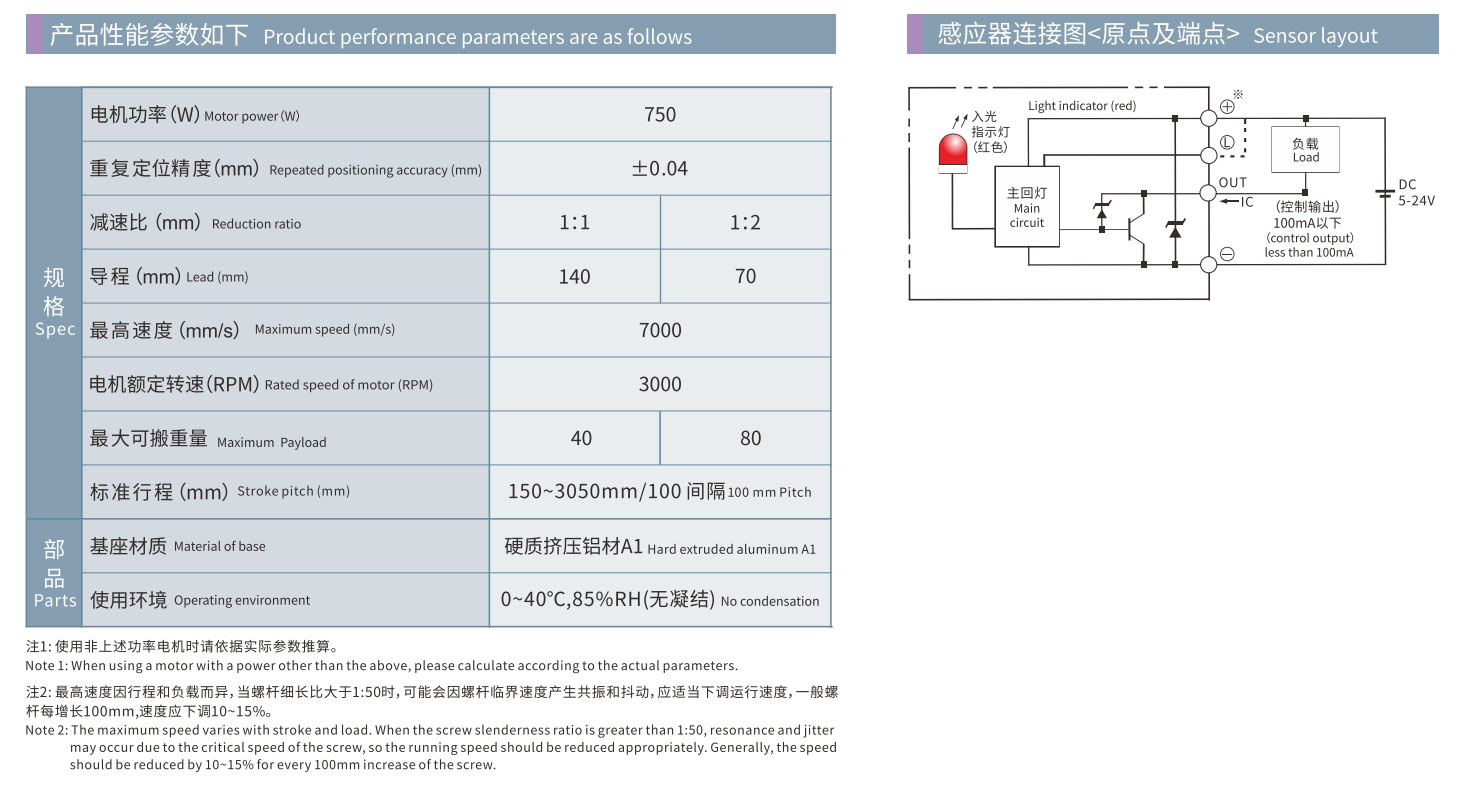
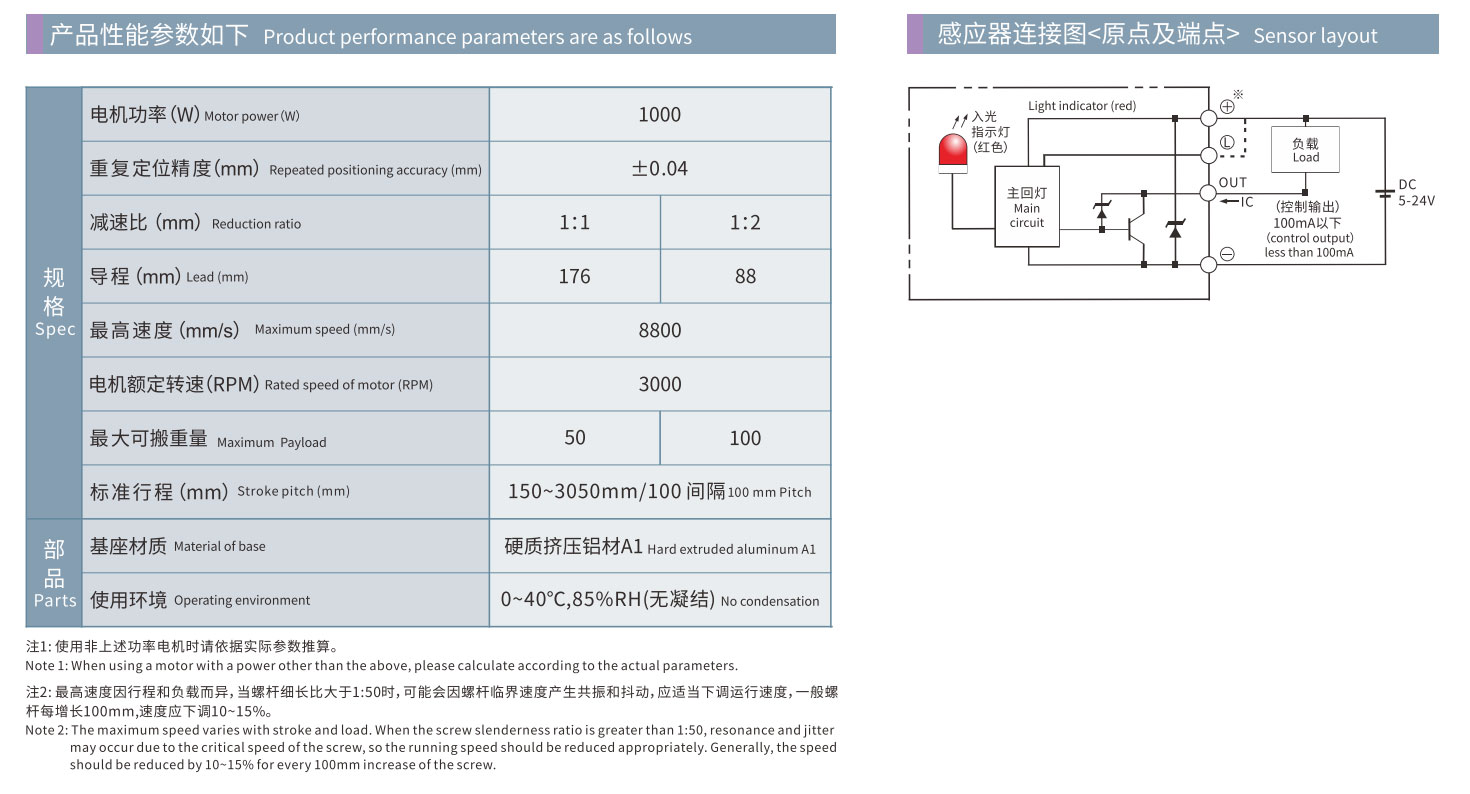
Karatteristiċi
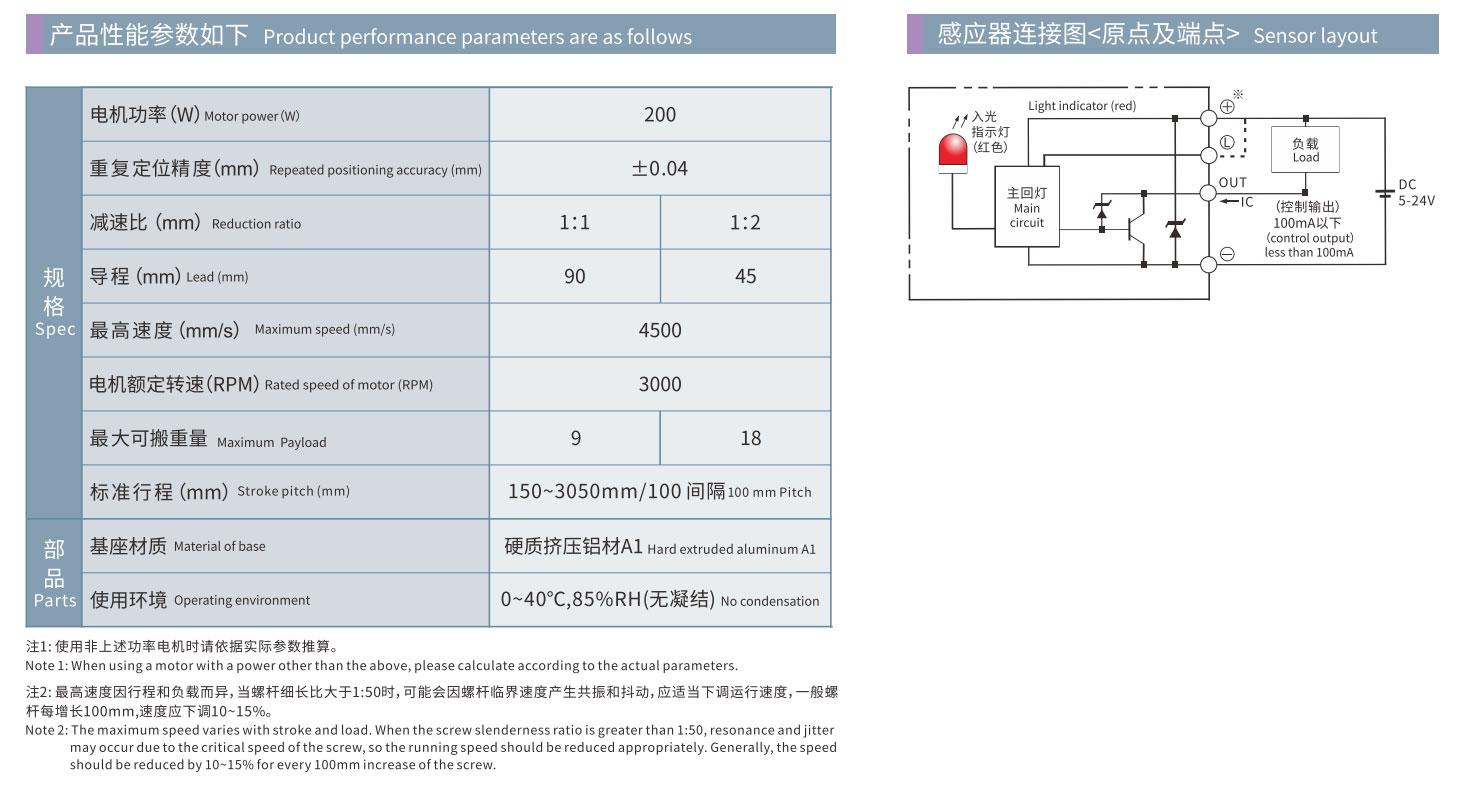
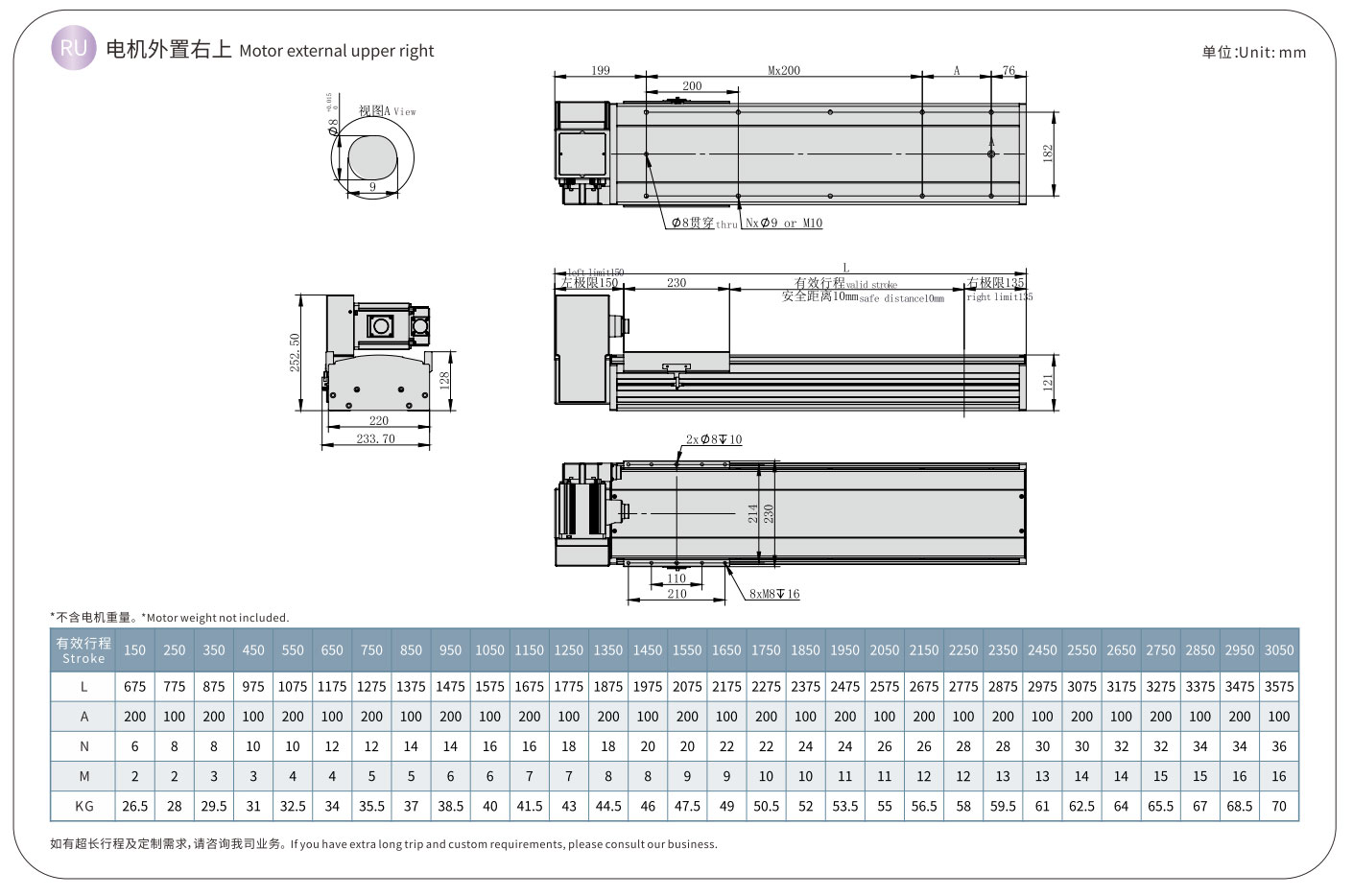
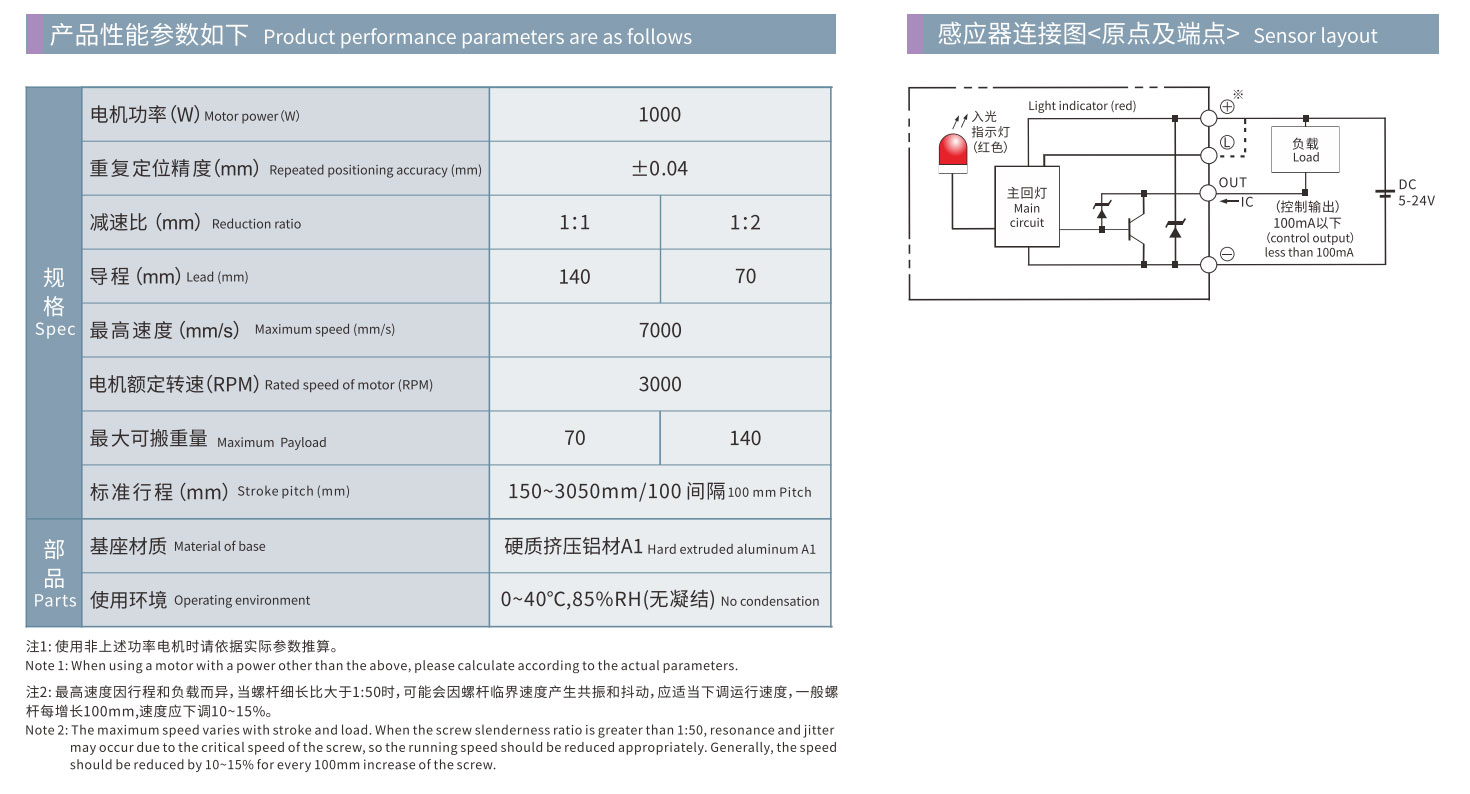
Preċiżjoni tal-Pożizzjonament Ripetuta: ± 0.04mm
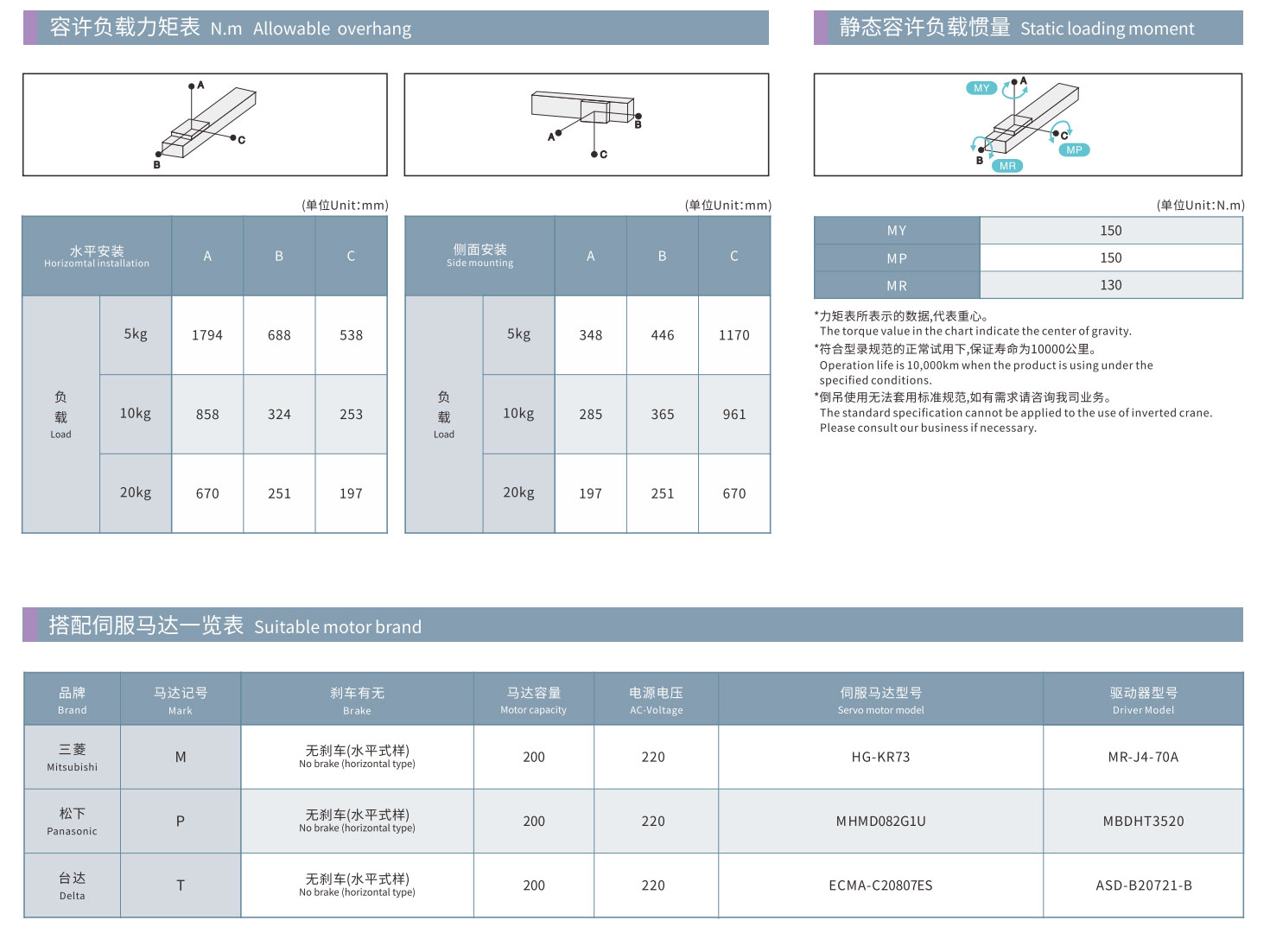
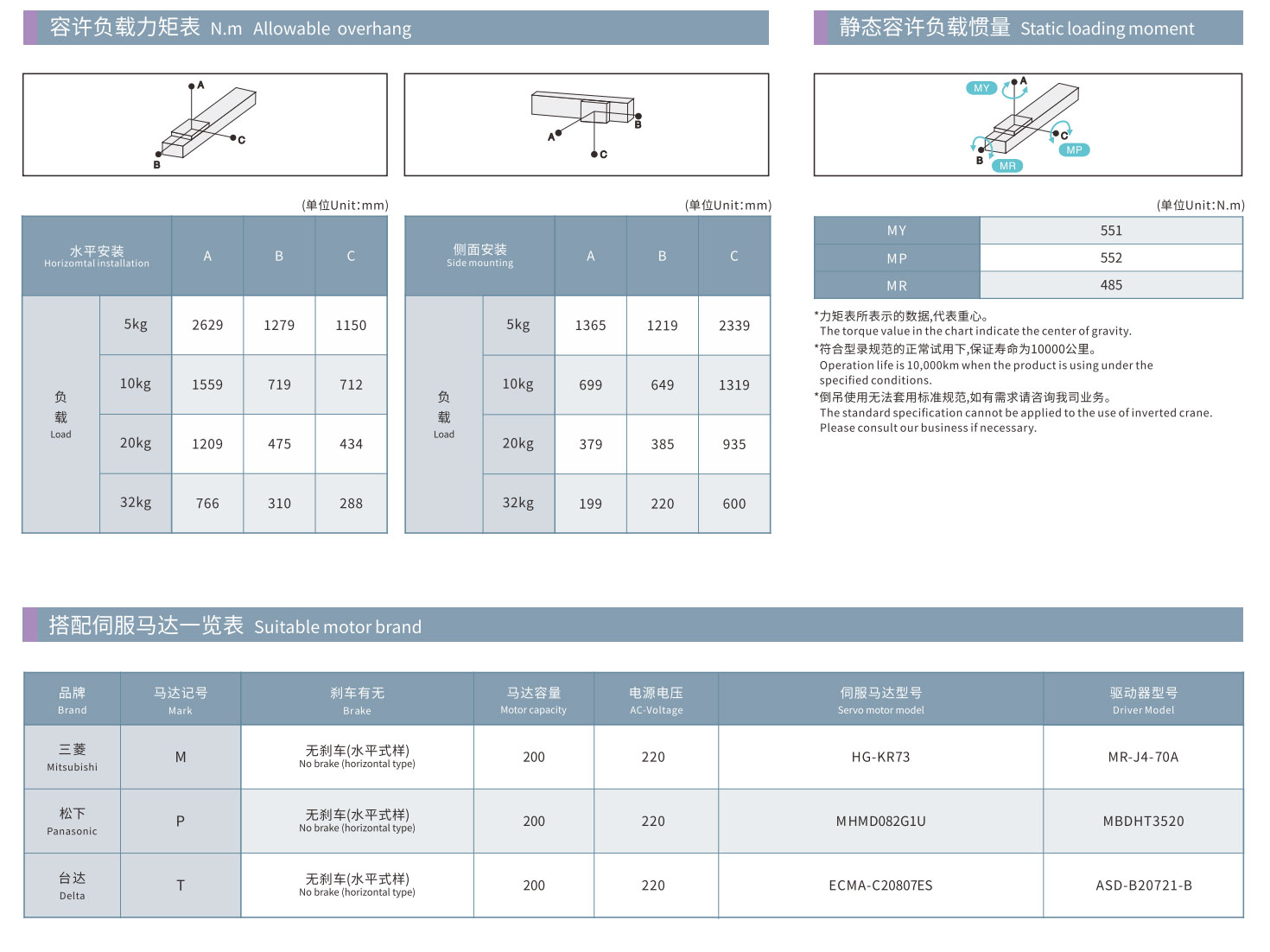
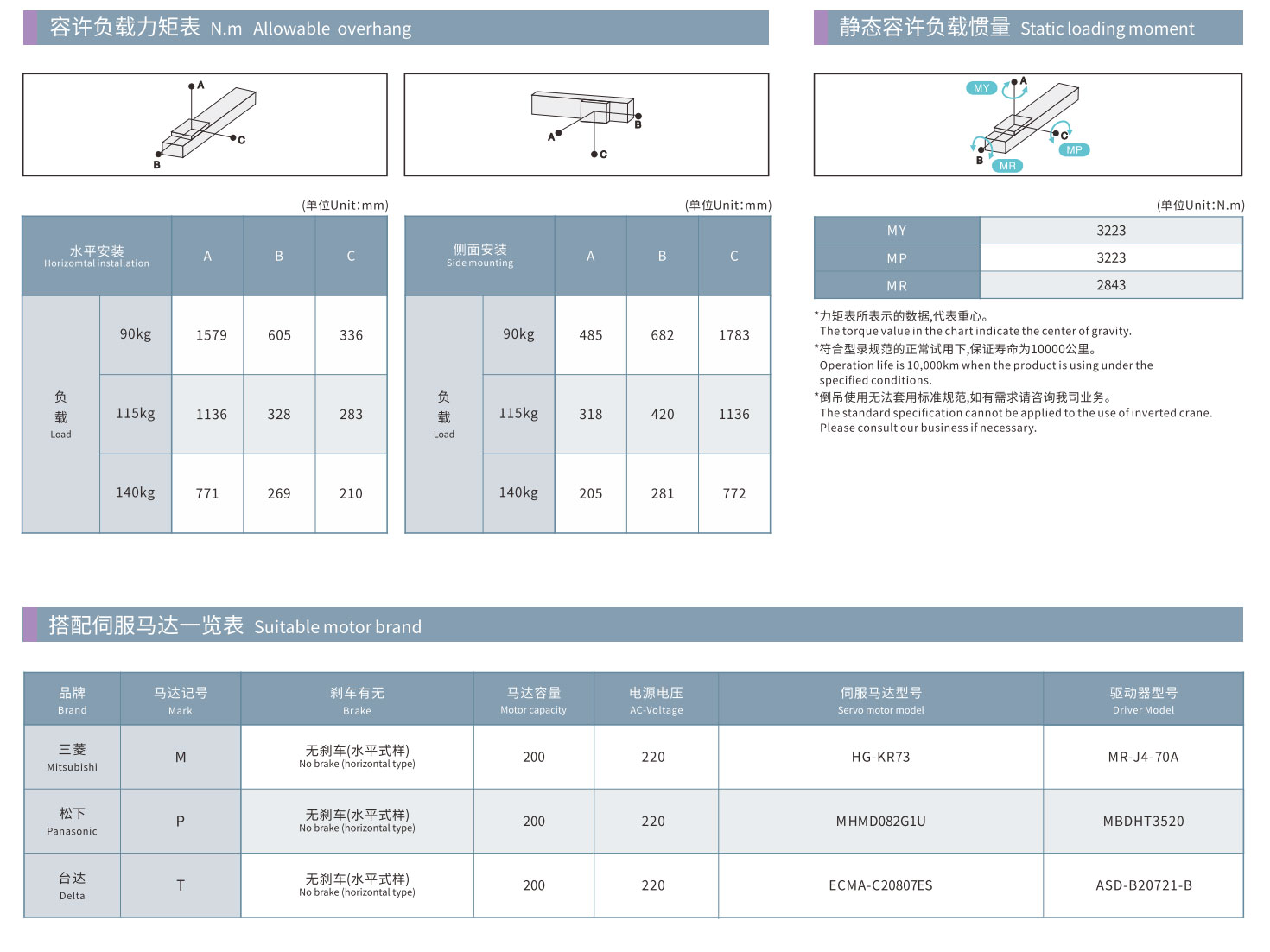
Tagħbija massima: 140kg
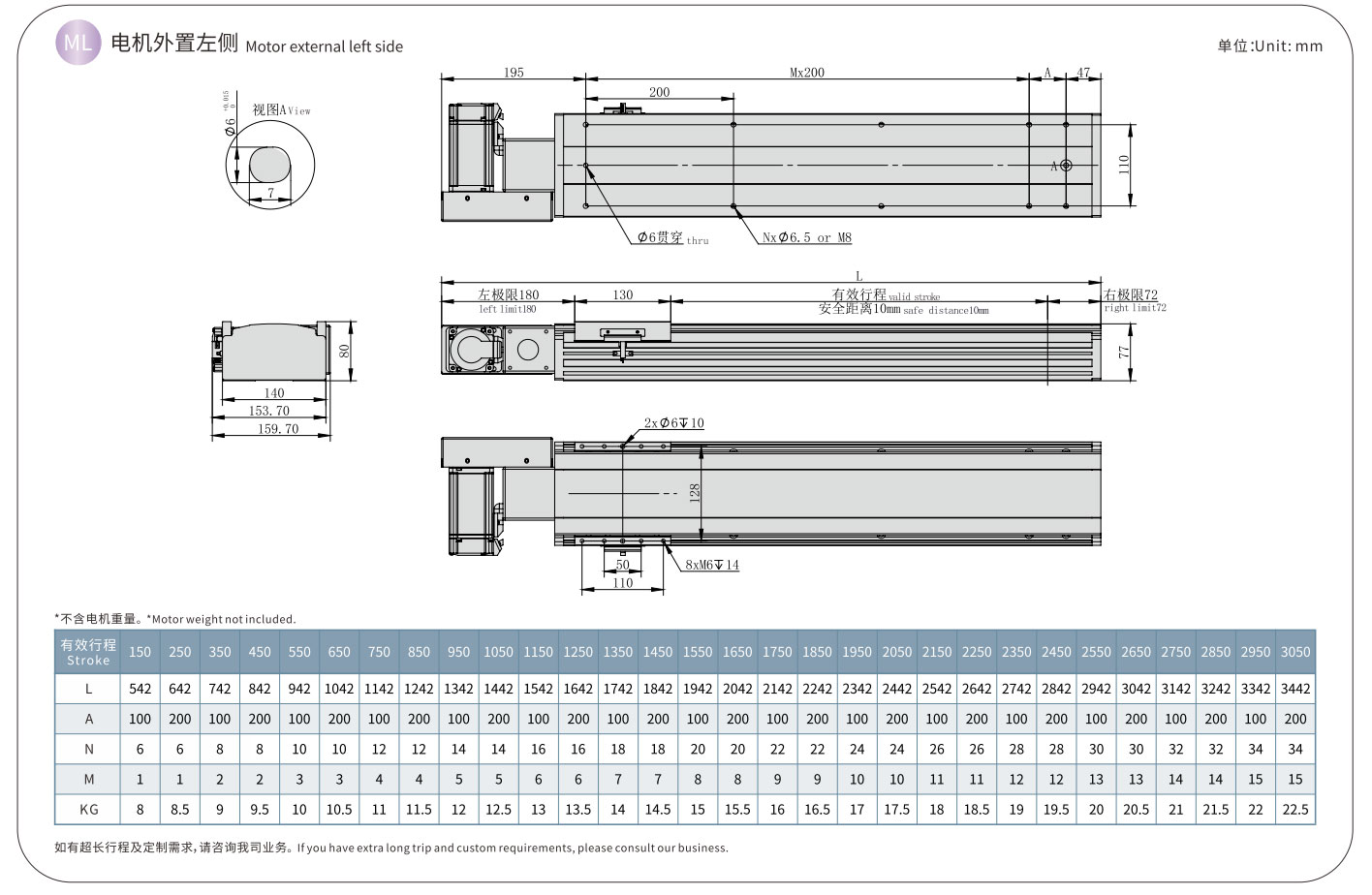
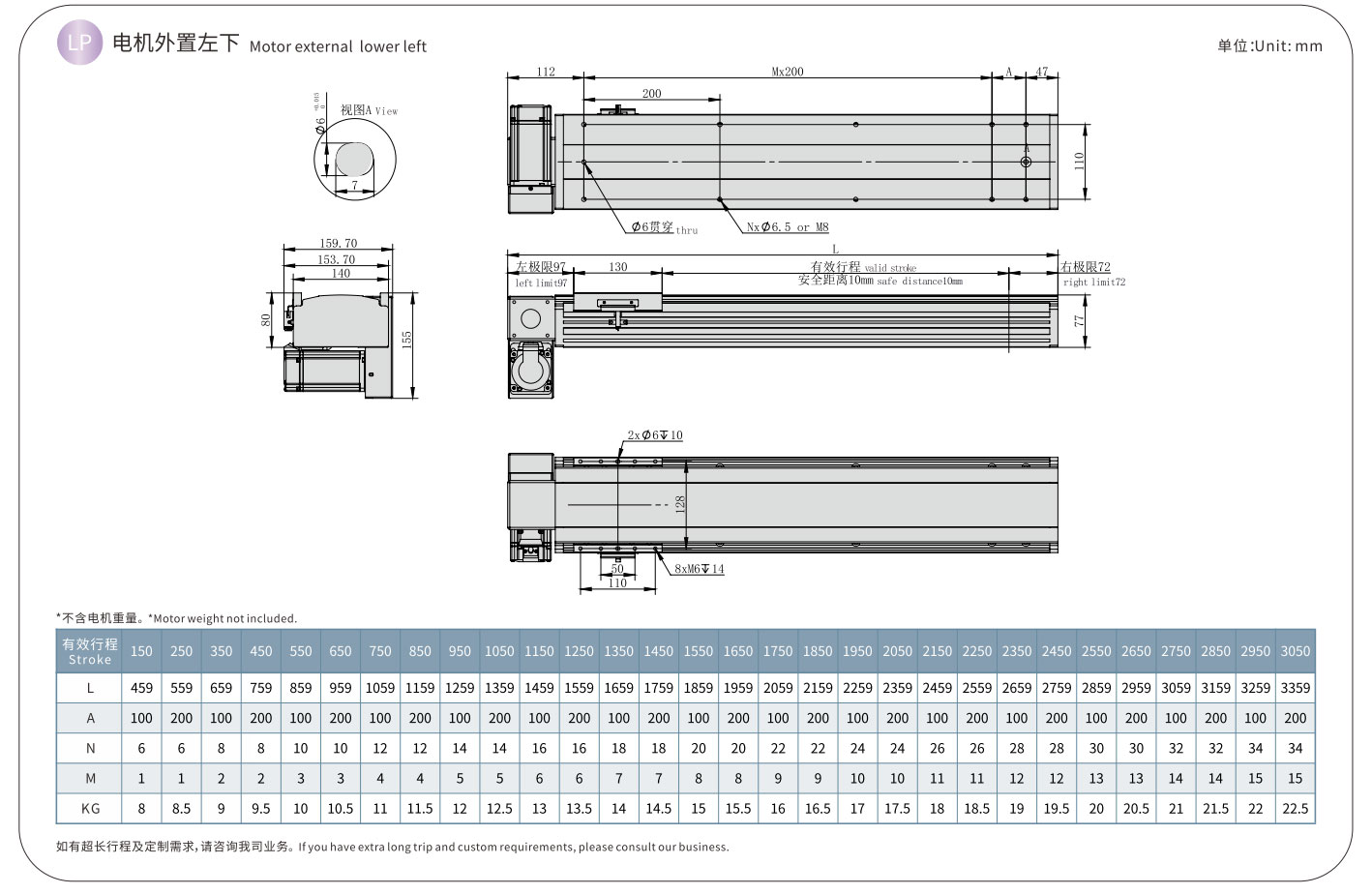
Stroke: 100 – 3050mm
Veloċità Max: 7000mm/s

1. Disinn ċatt, piż ġenerali eħfef, għoli ta 'kombinazzjoni aktar baxx u riġidità aħjar.
2. L-istruttura hija ottimizzata, il-preċiżjoni hija aħjar, u l-iżball ikkawżat mill-assemblaġġ ta 'aċċessorji multipli jitnaqqas.
3. L-assemblaġġ jiffranka l-ħin, jiffranka l-ħaddiema u konvenjenti. M'hemmx bżonn li titneħħa l-għatu tal-aluminju biex tinstalla l-akkoppjar jew il-modulu.
4. Il-manutenzjoni hija sempliċi, iż-żewġ naħat tal-modulu huma mgħammra b'toqob ta 'injezzjoni taż-żejt, u l-għatu m'għandux għalfejn jitneħħa.











Aktar prodotti

Modulu lineari misjuq taċ-ċinturin tas-serje HCB Encl bis-sħiħ...

Serje HNB-E Attwaturi Lineari Mmexxija minn Ċinturin Nofs...

Modulu Lineari Mmexxi minn Ċinturin tas-Serje ONB Nofs magħluq

Modulu Lineari Mmexxi minn Ċinturin tas-Serje ONB-F Esterni...

Modulu Lineari Mmexxi minn Ċinturin tas-Serje OCB Kompletament Encl...










