




Целосно затворен линеарен модул управуван со појас од серијата HCB

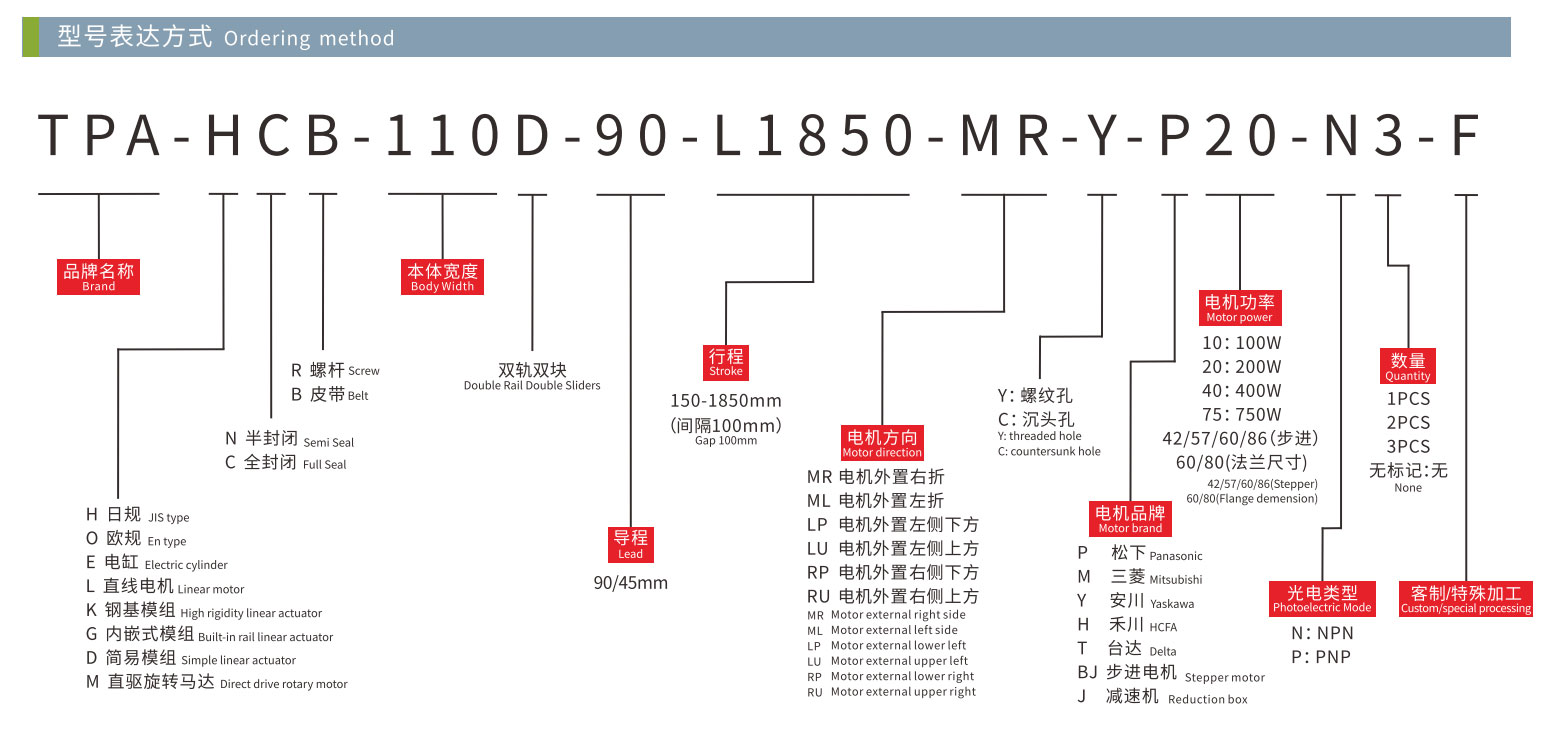
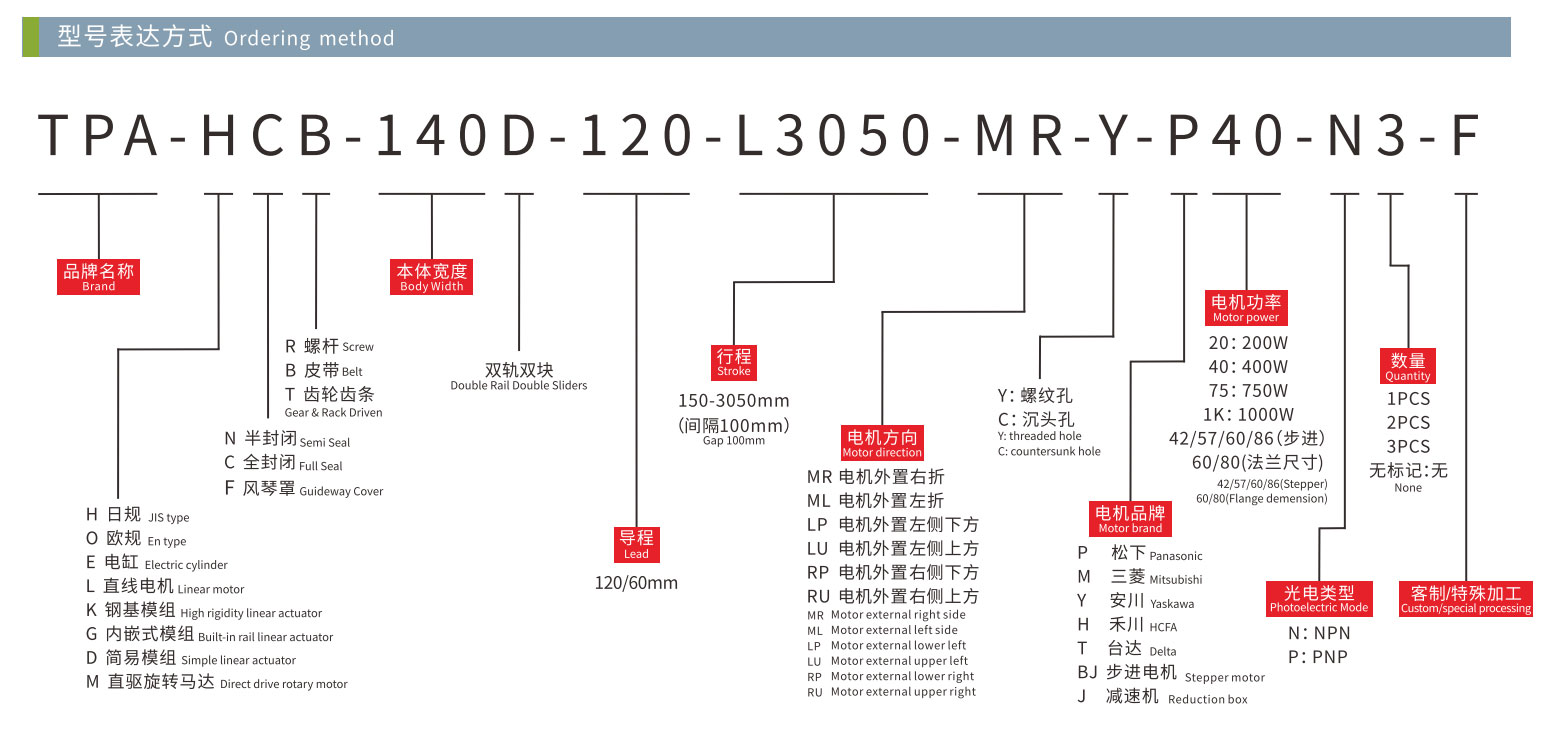
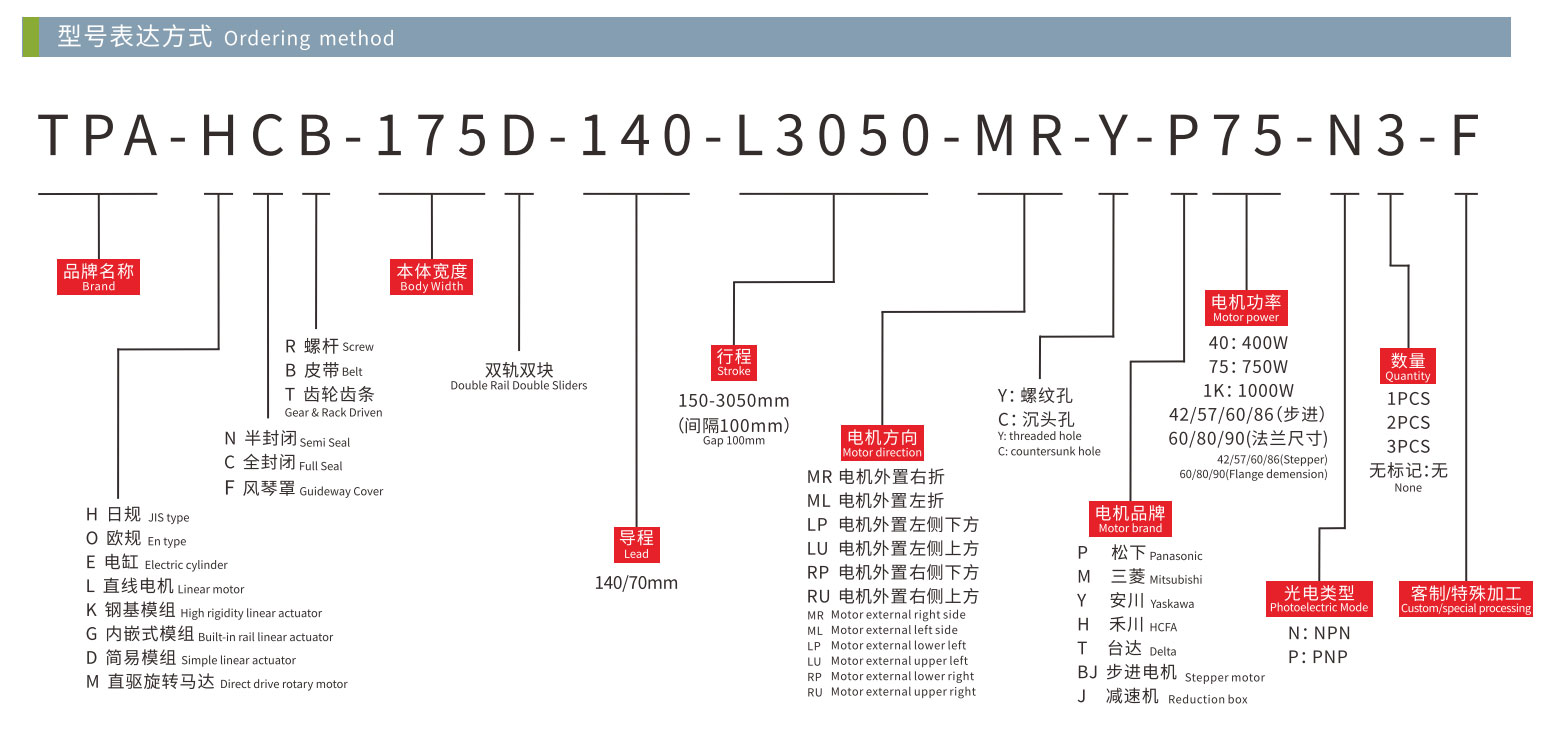
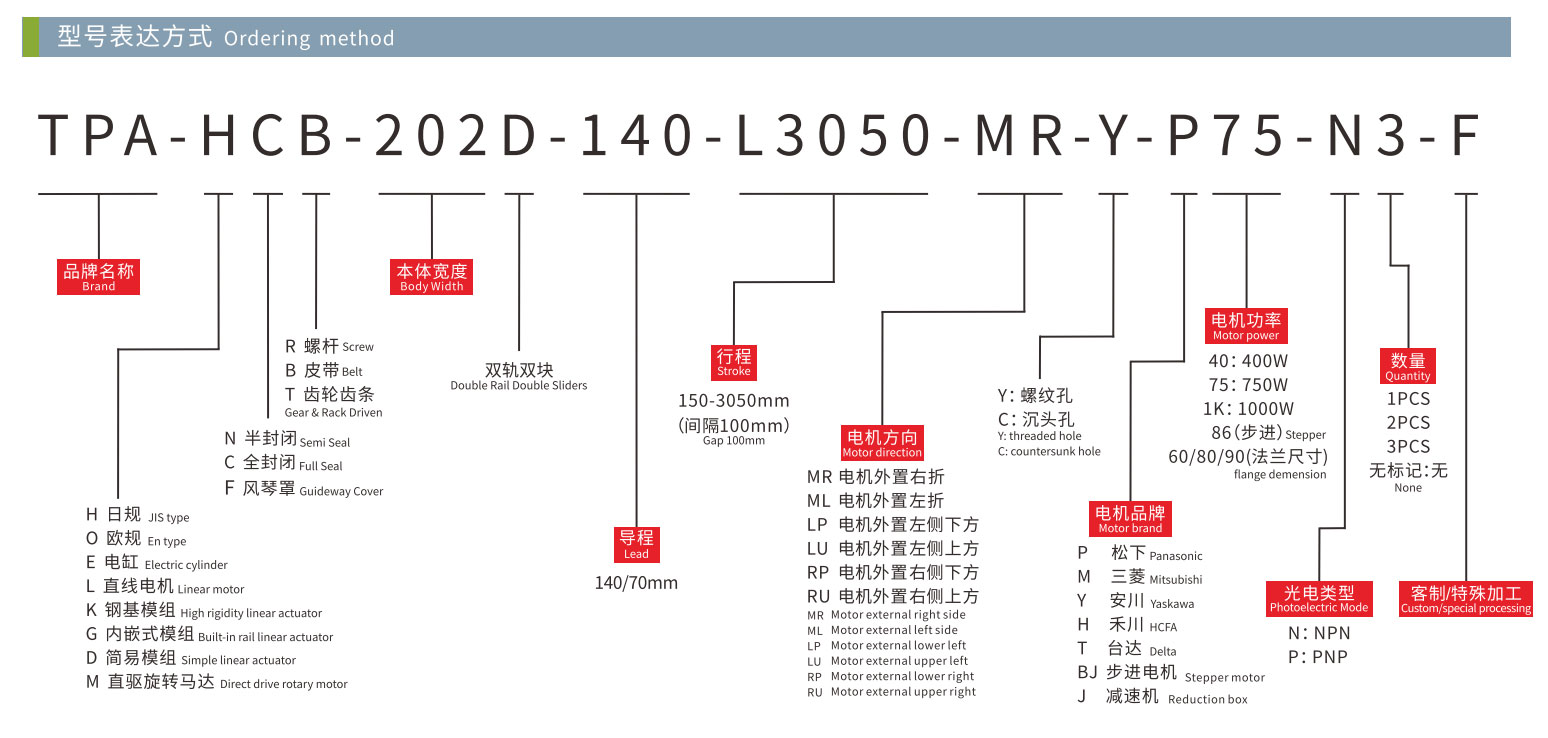
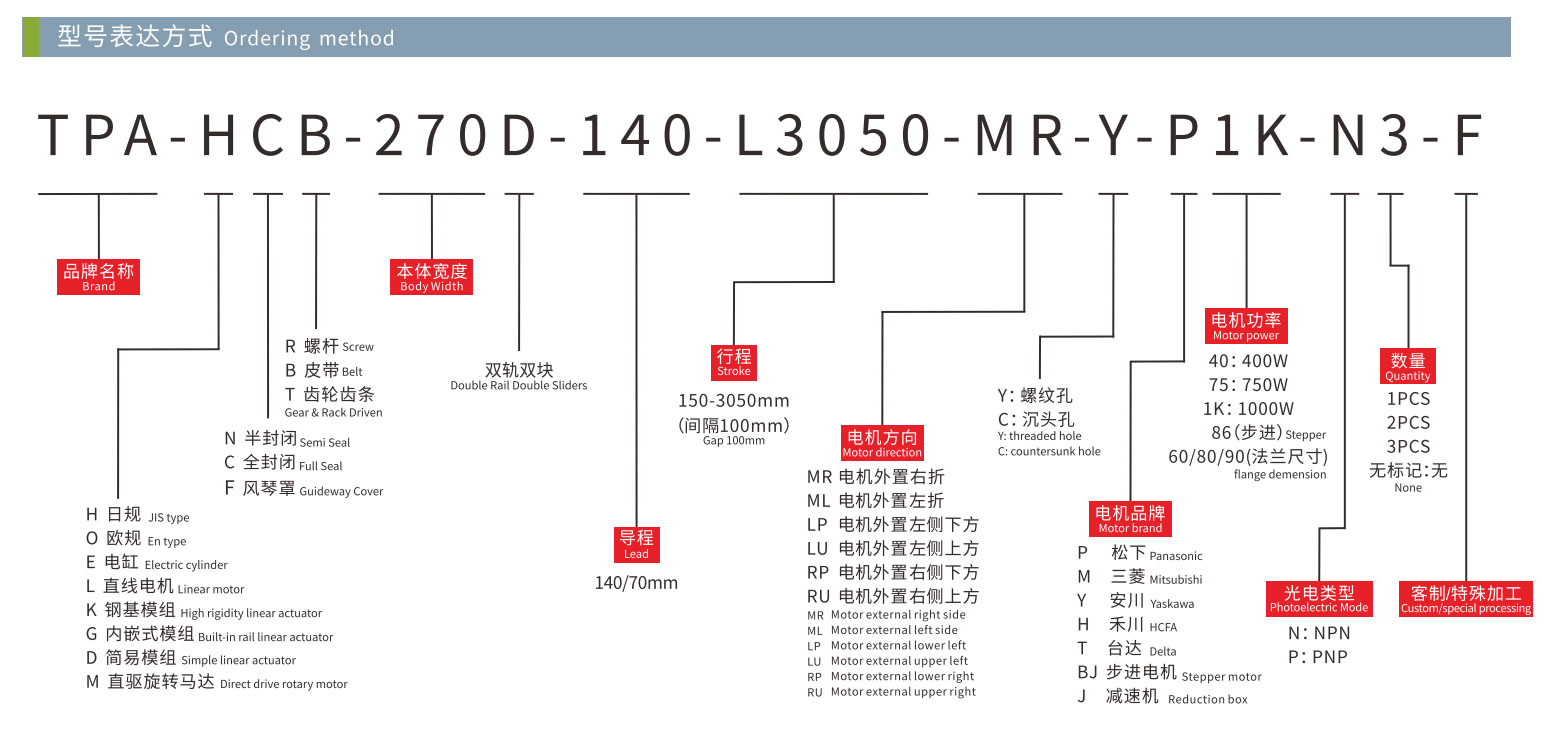
Избор на модел
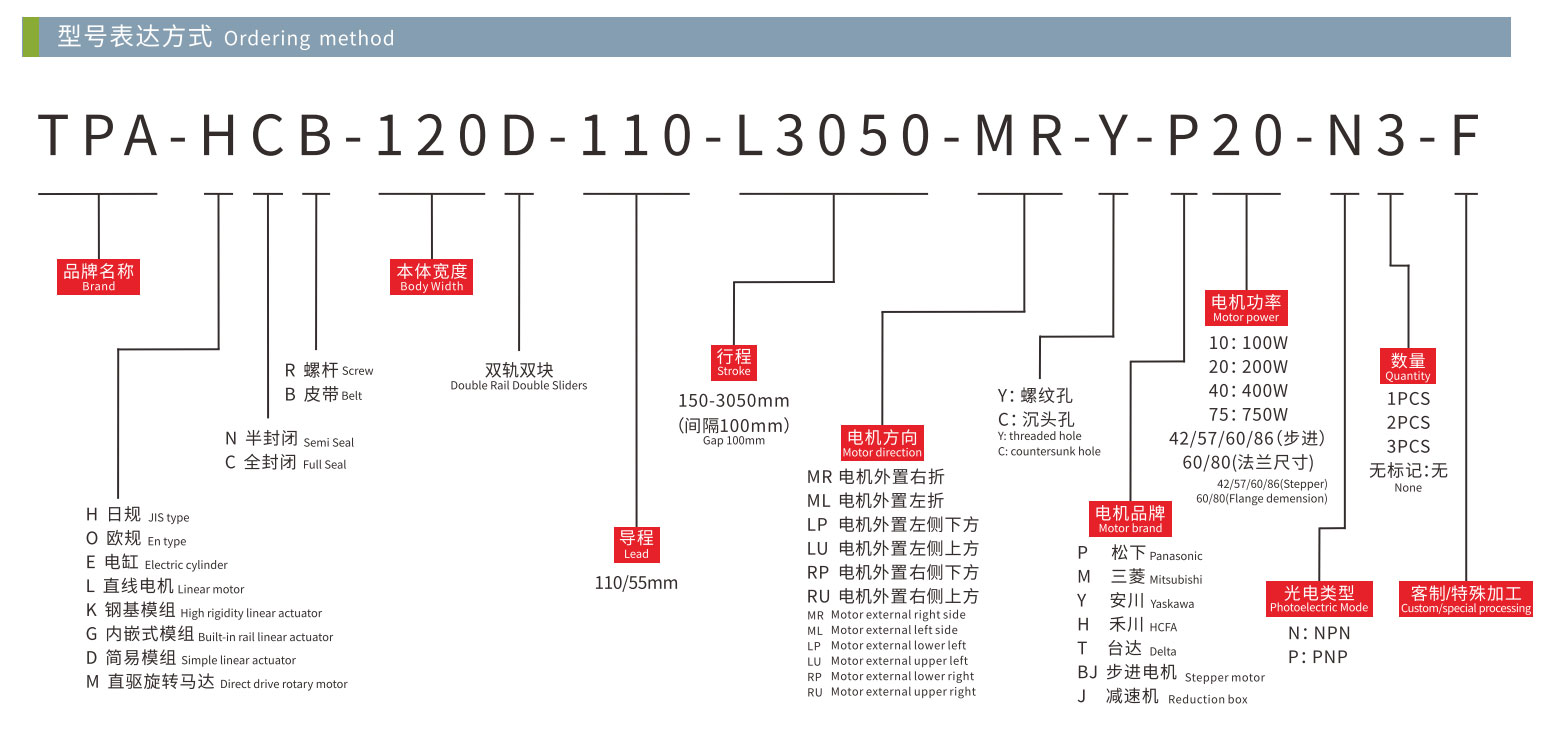
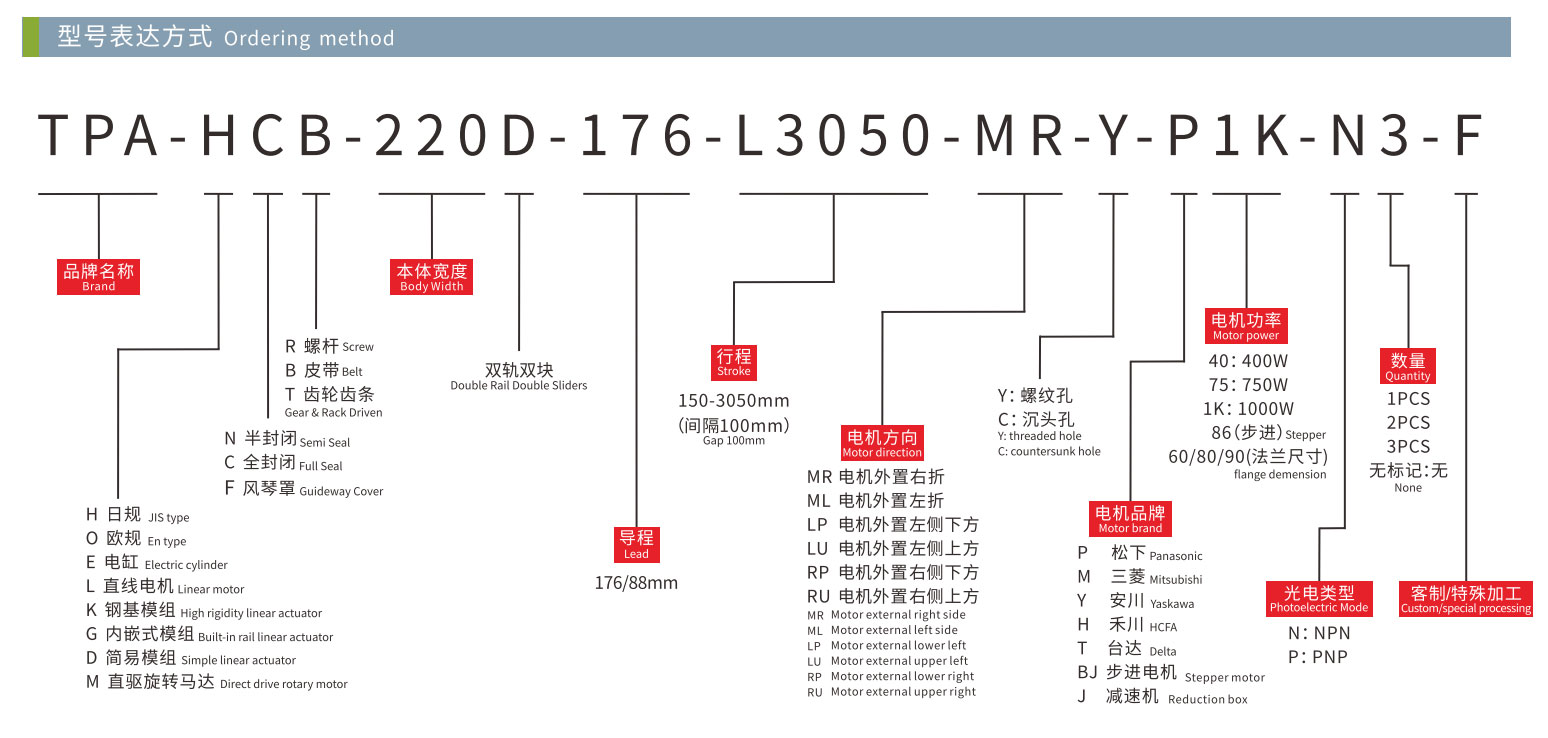
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
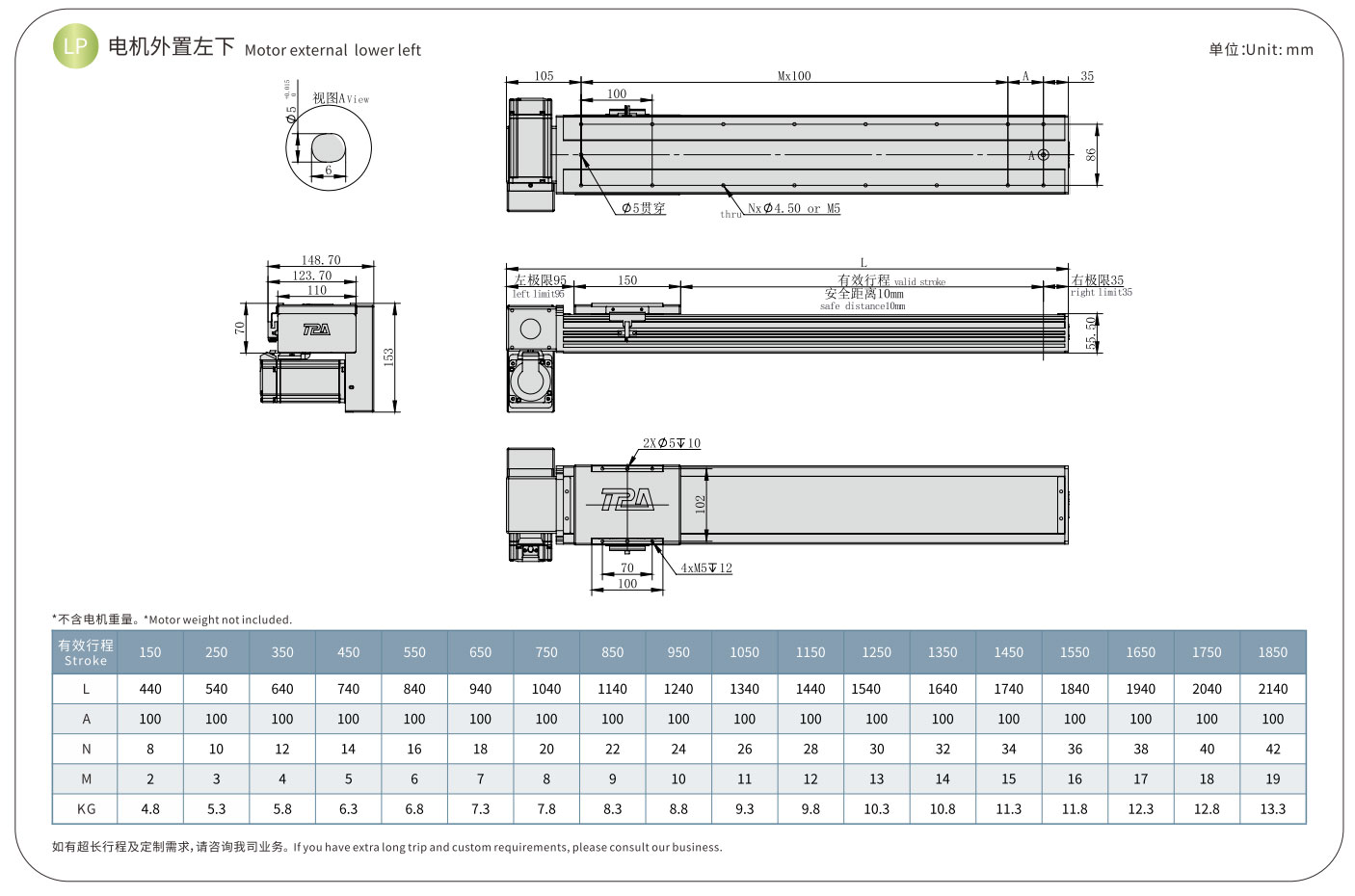
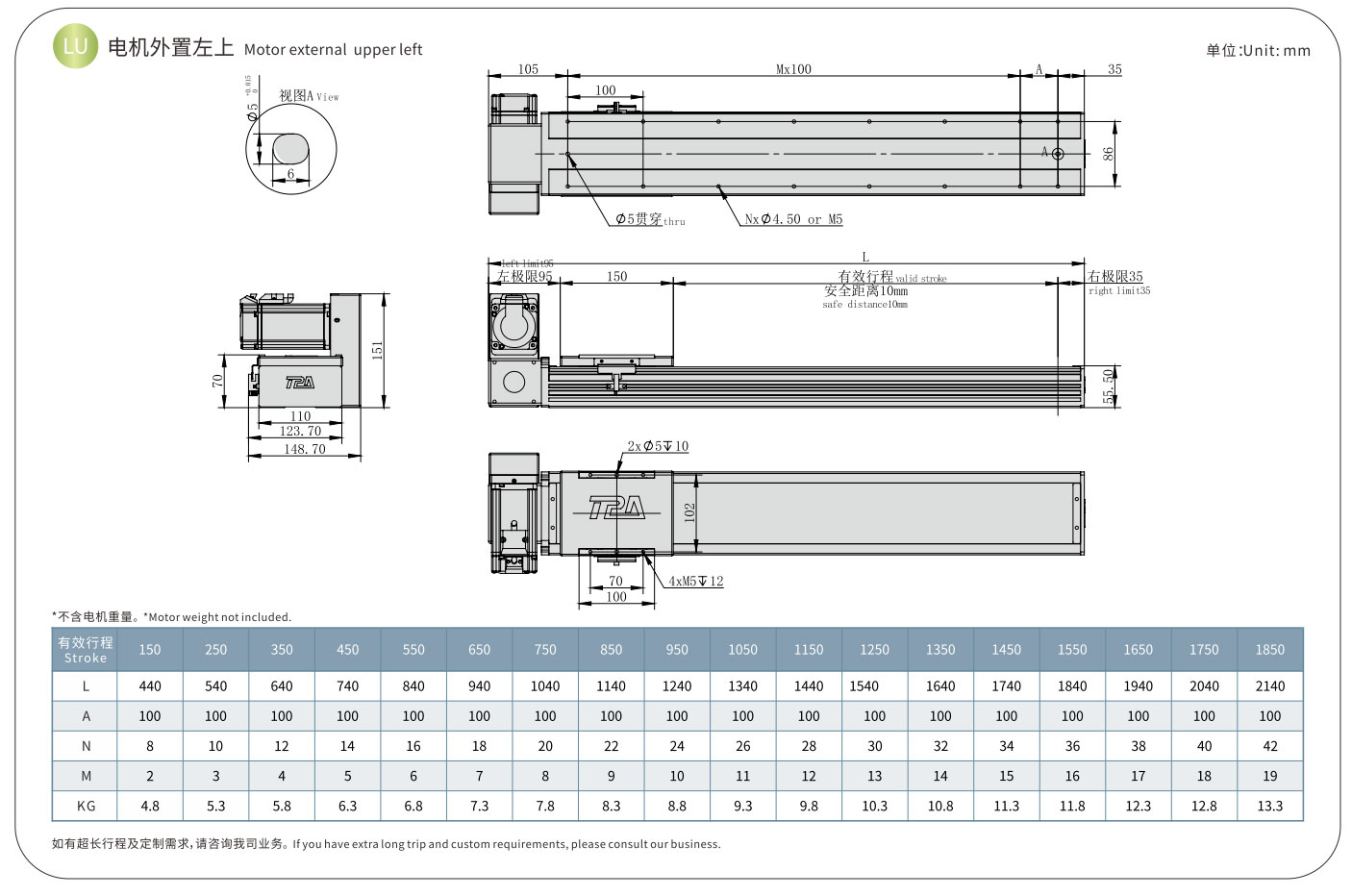
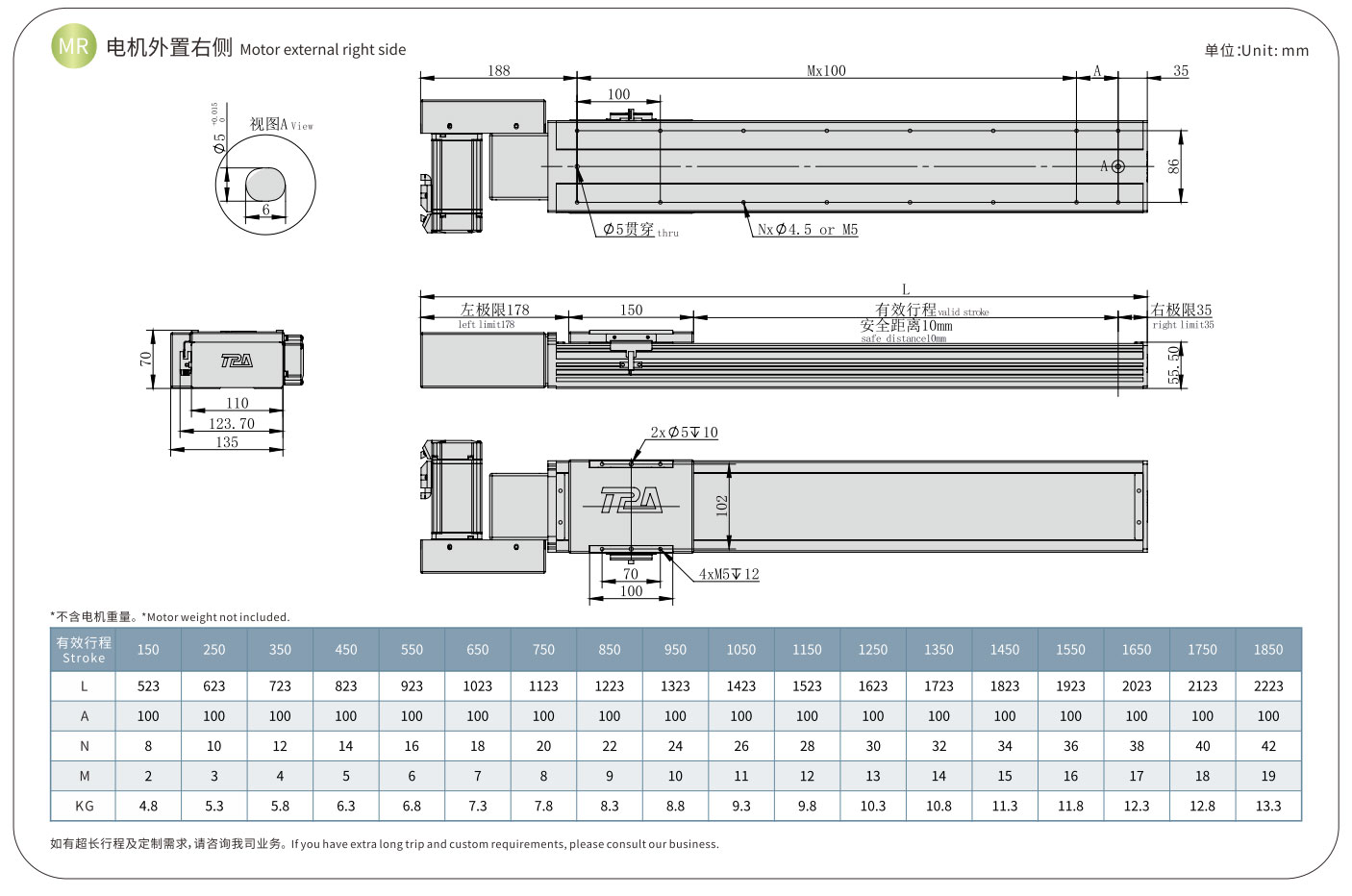
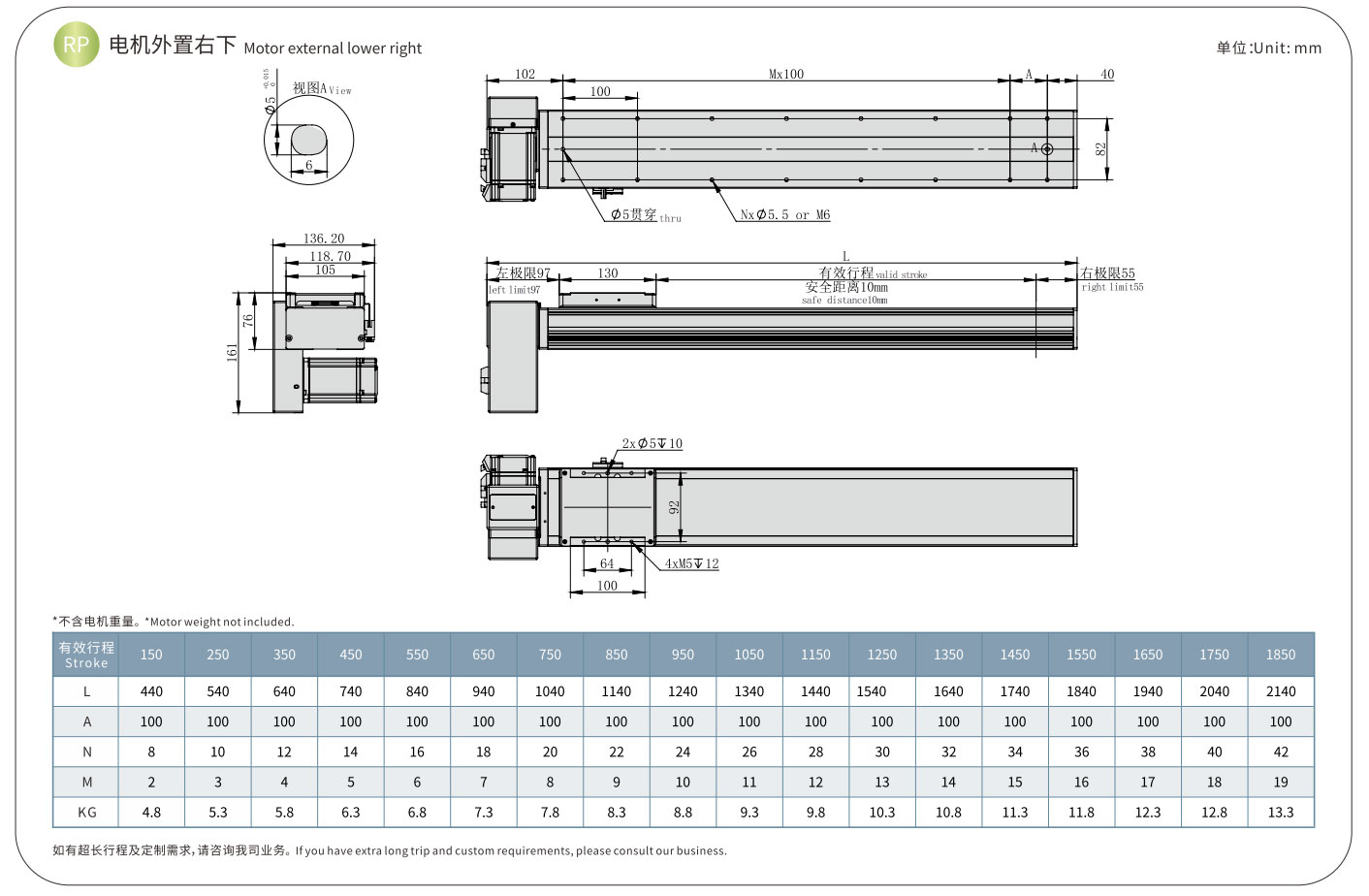
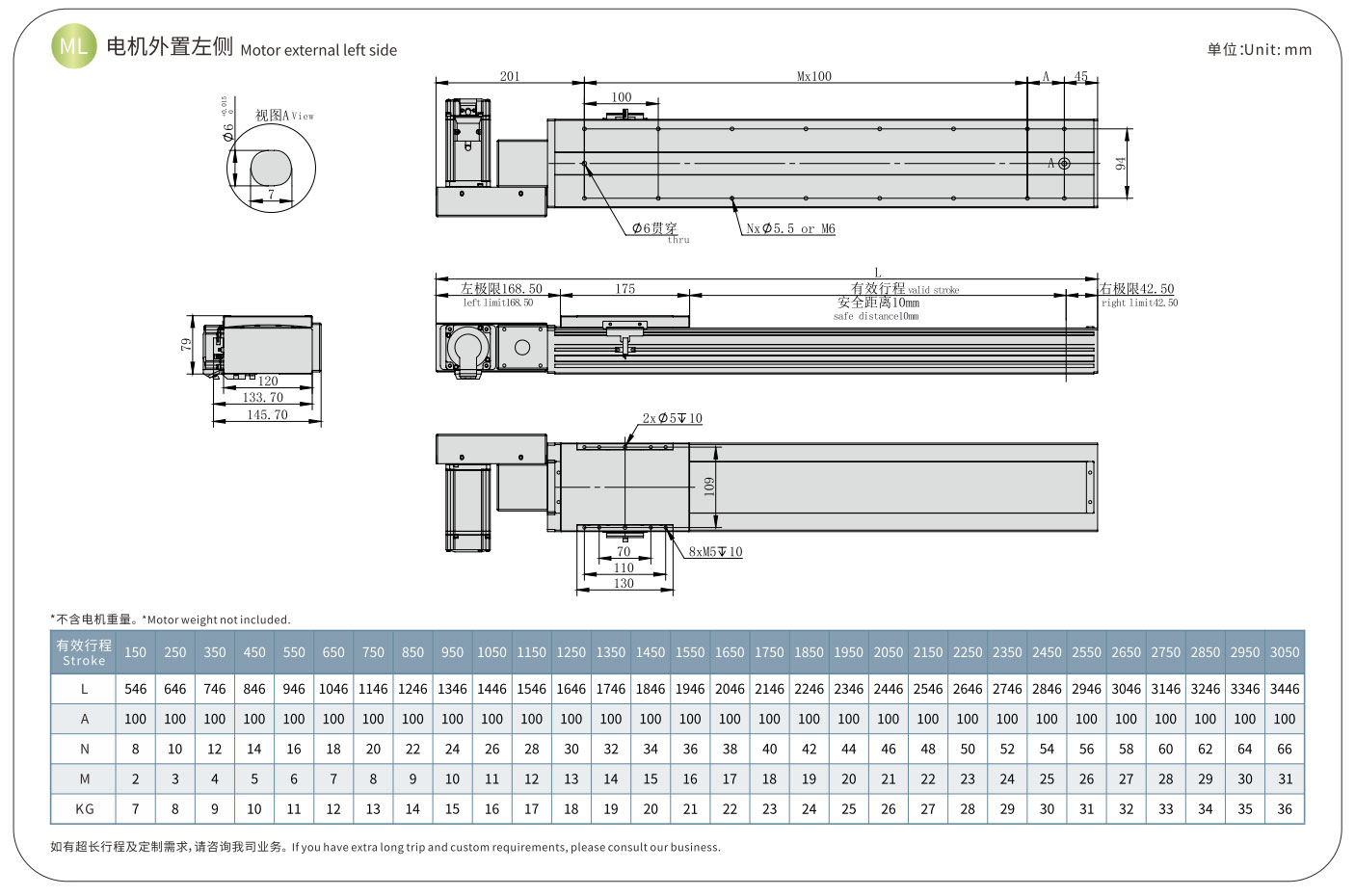
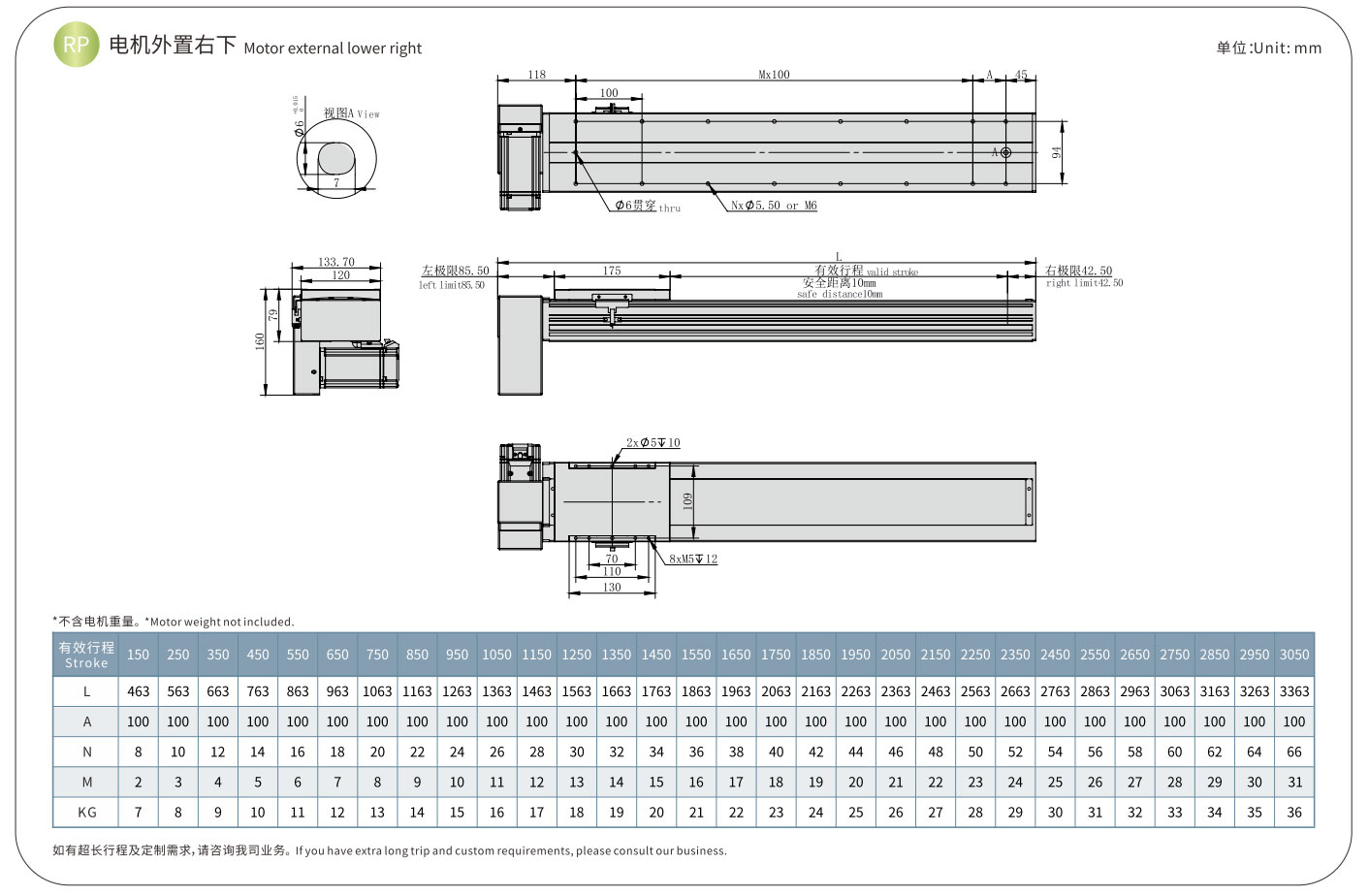
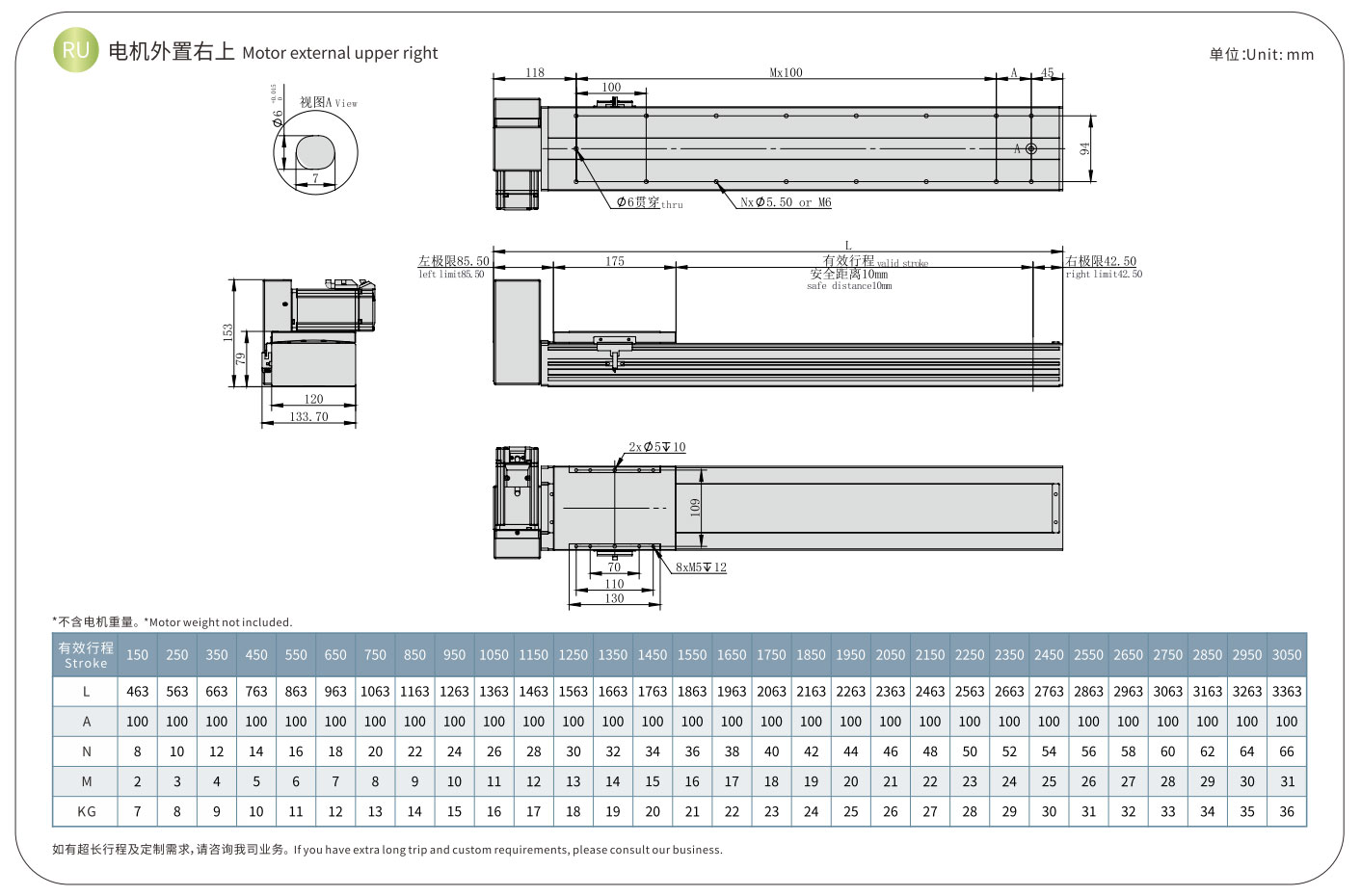
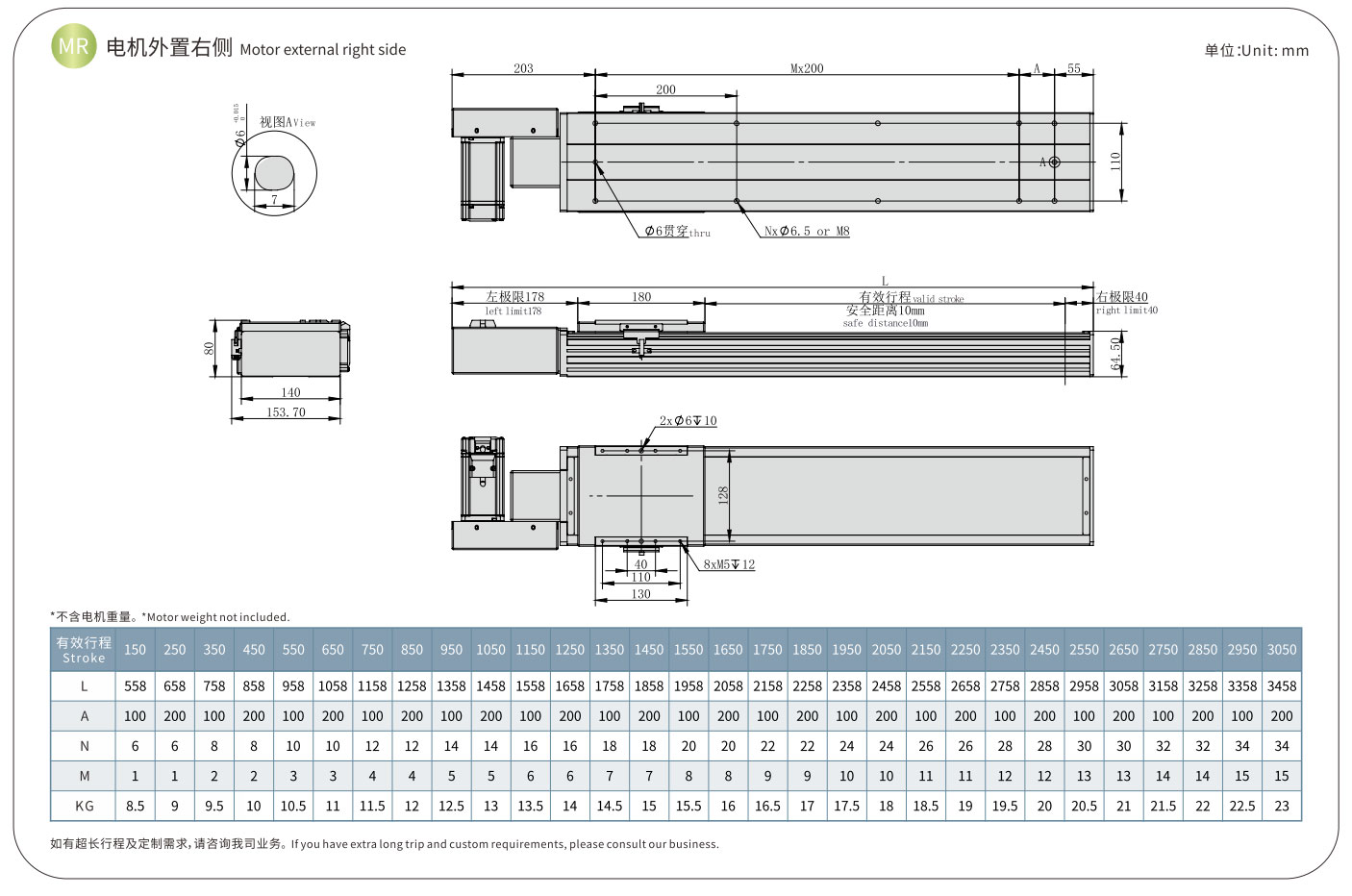
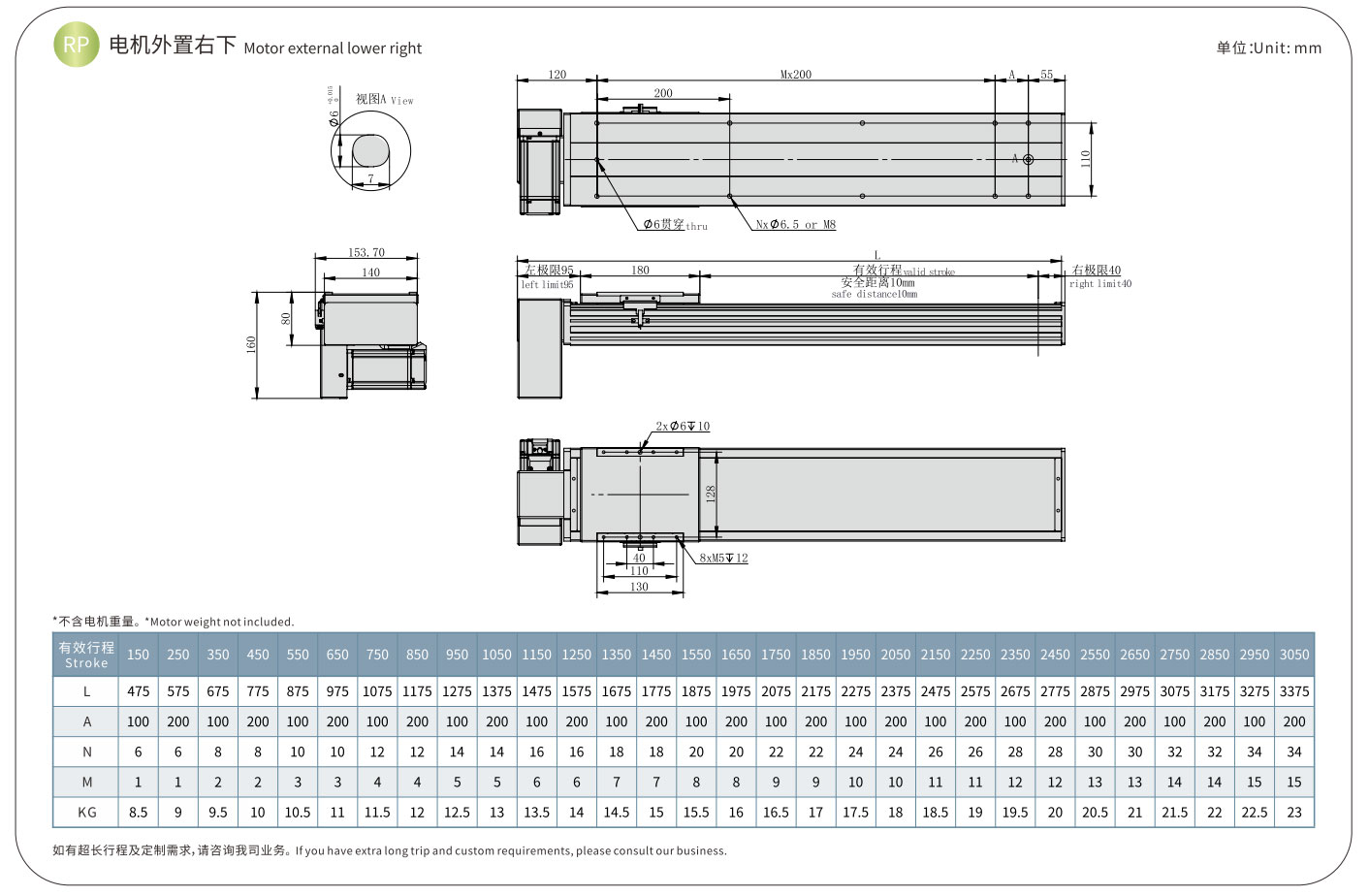
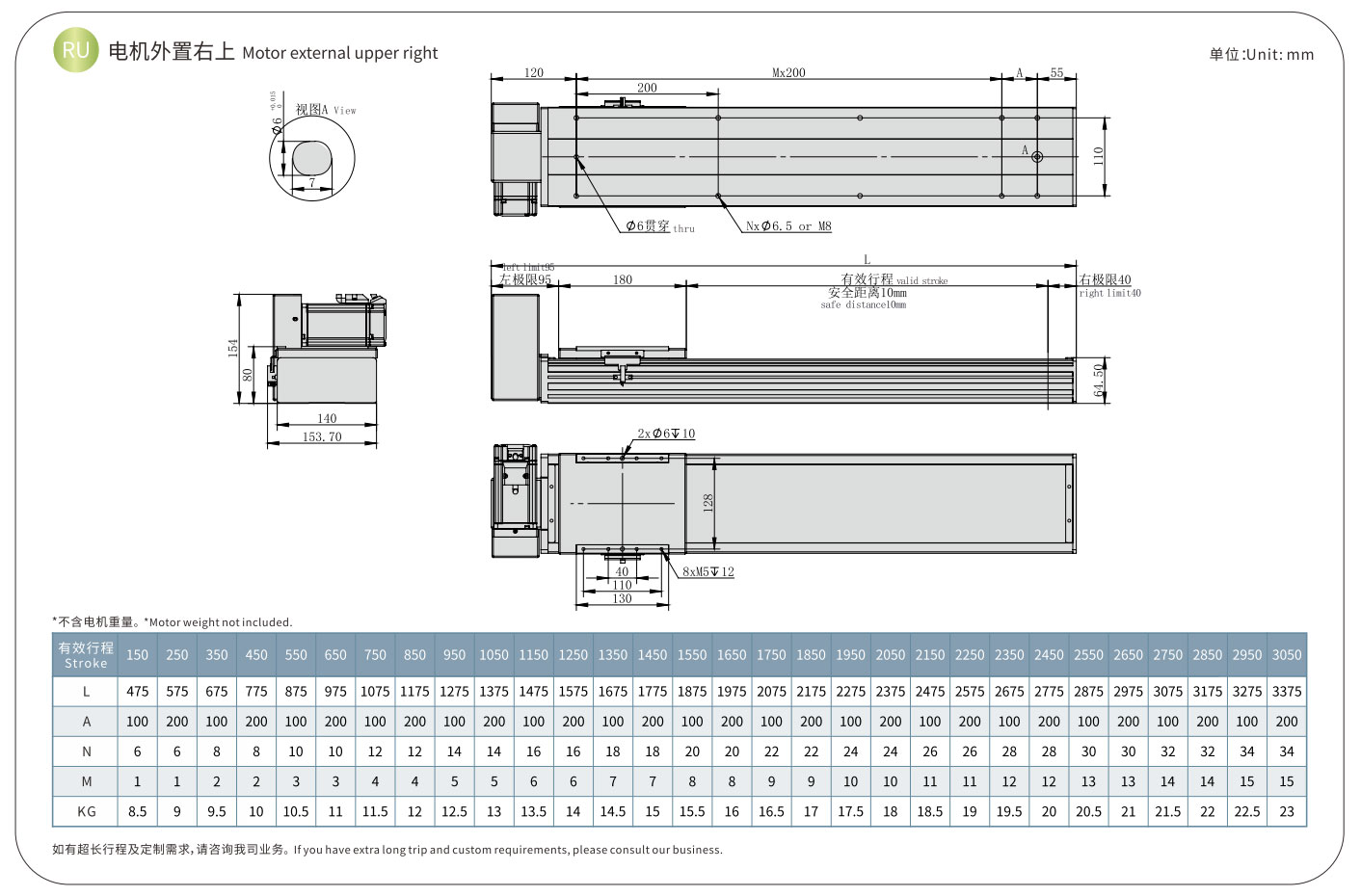
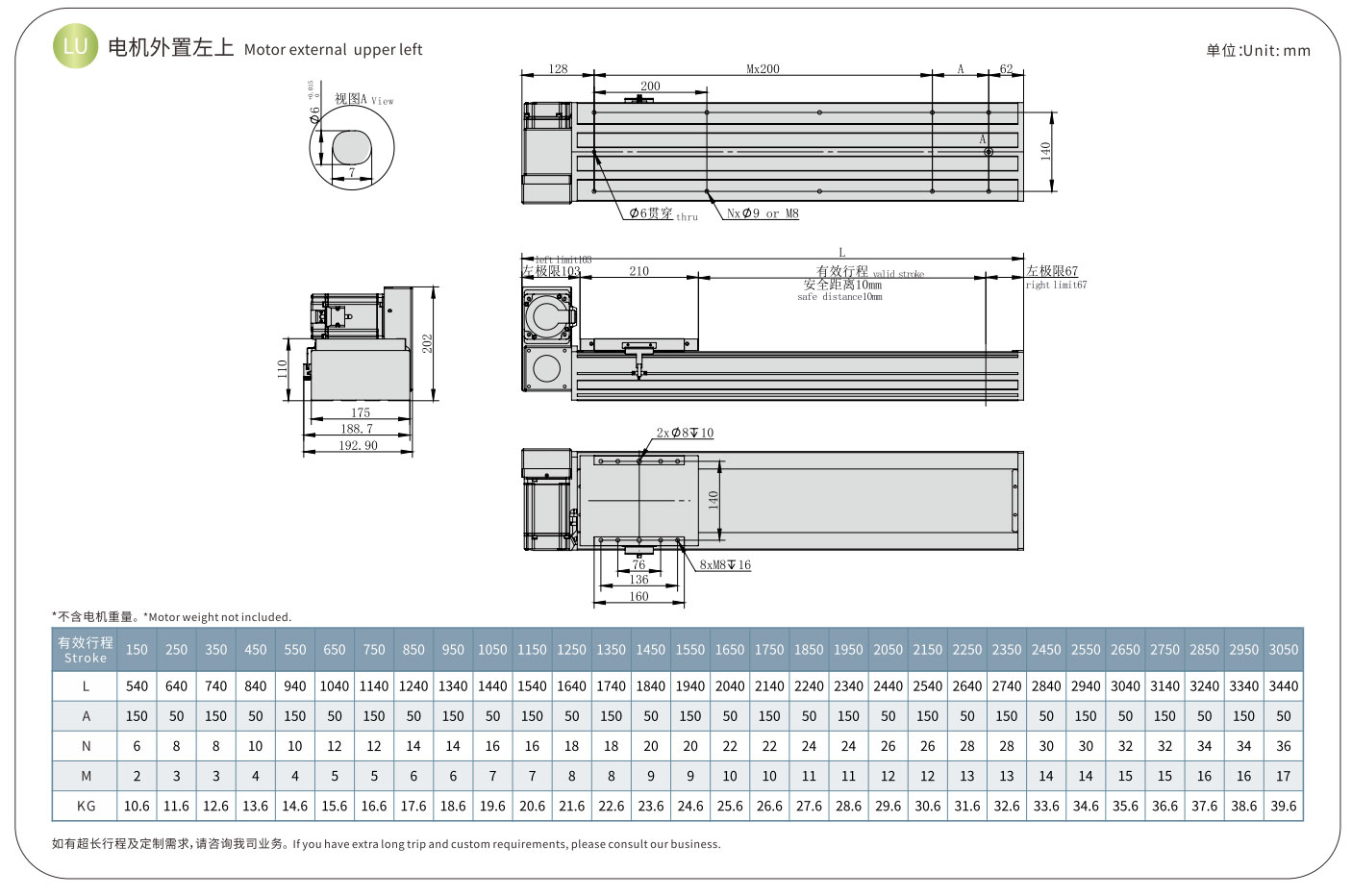
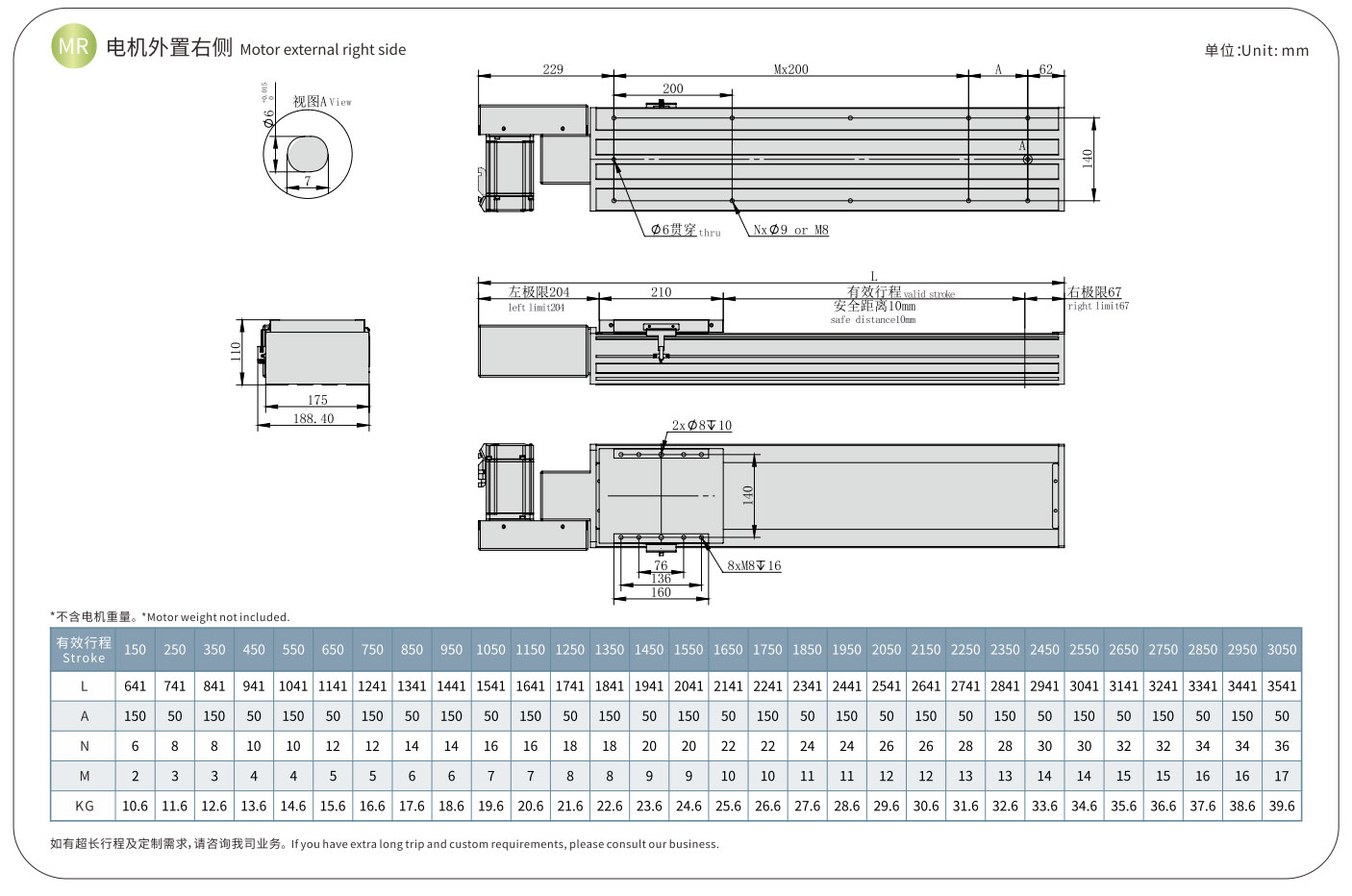
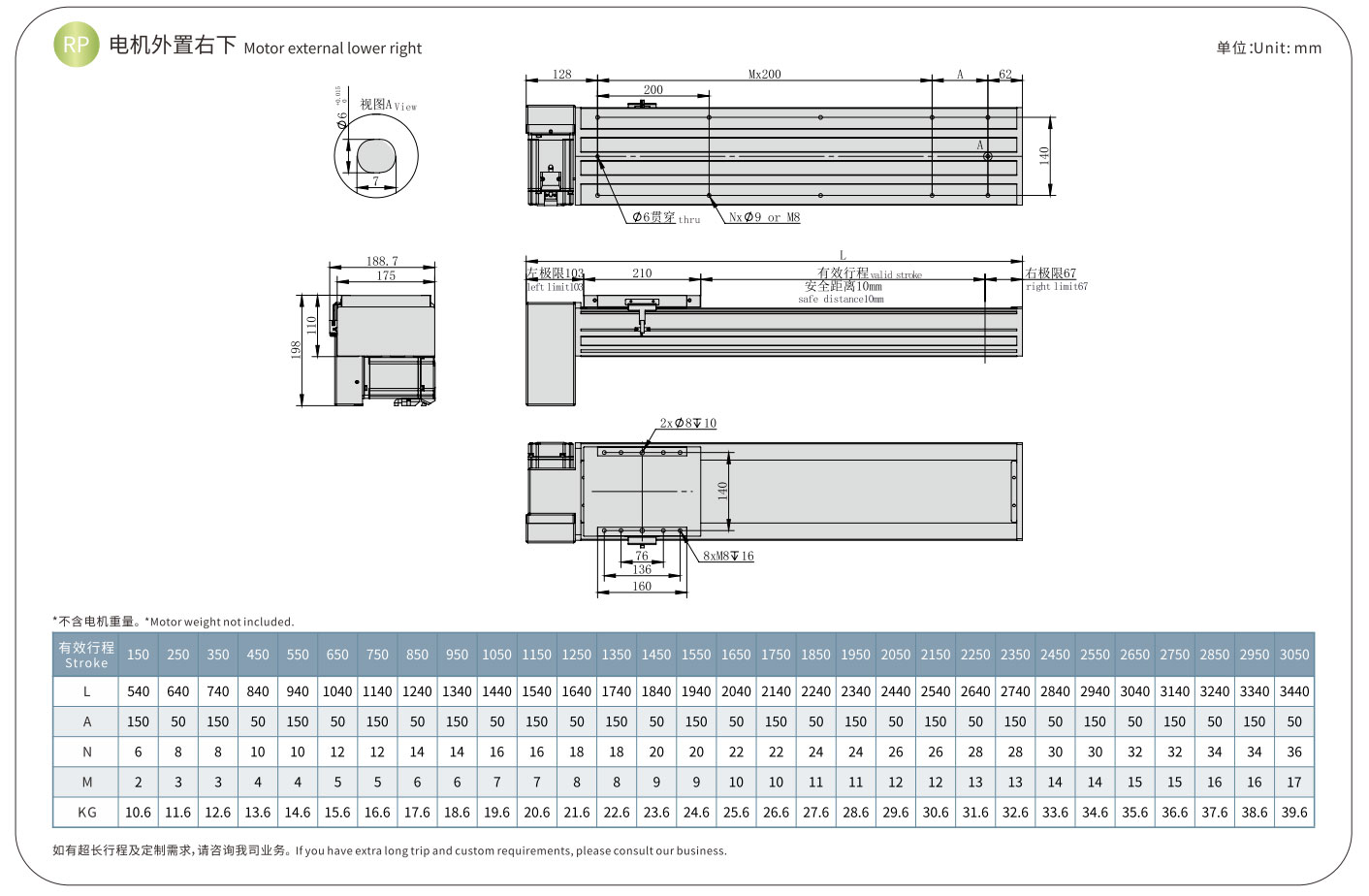
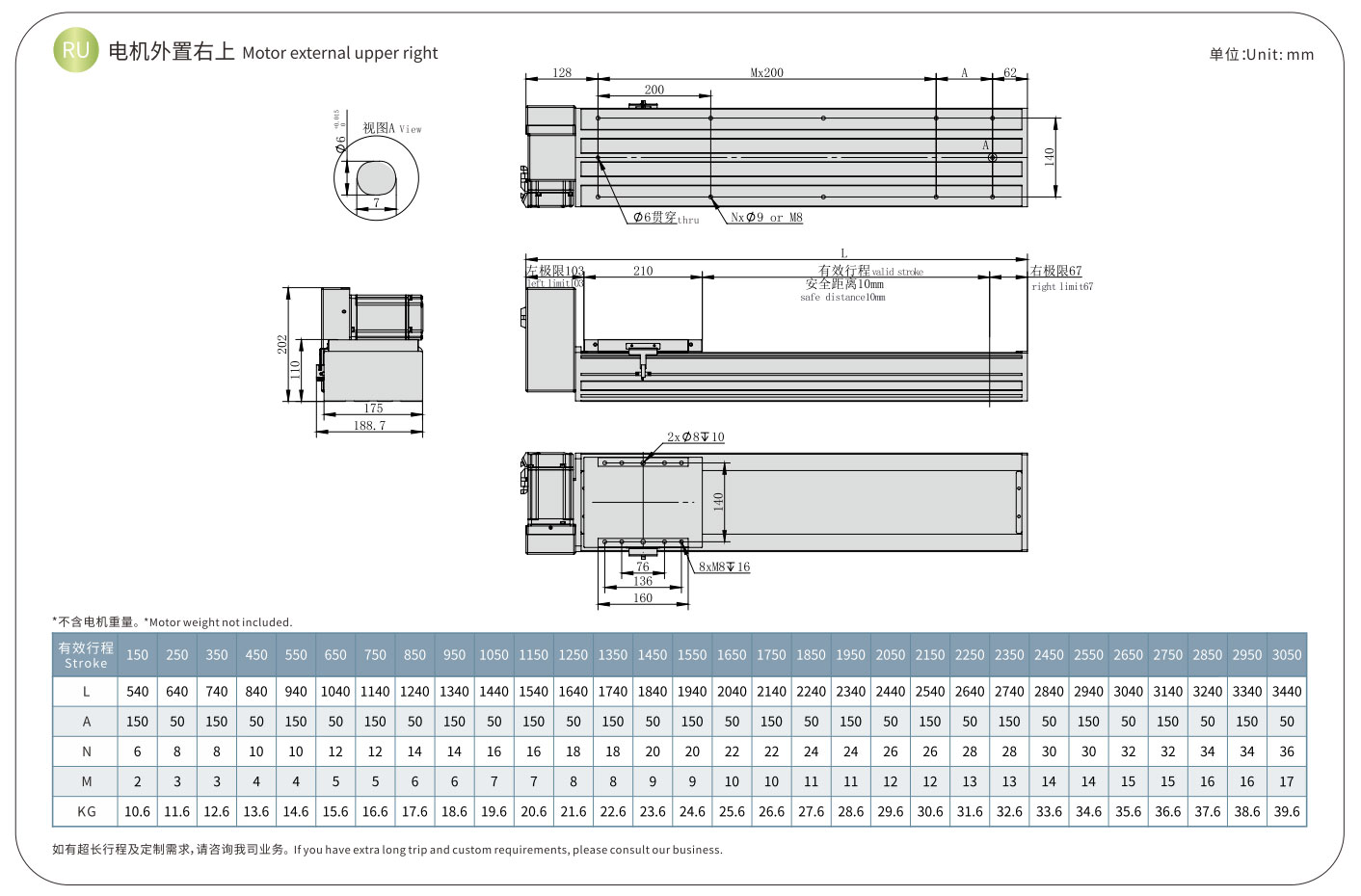
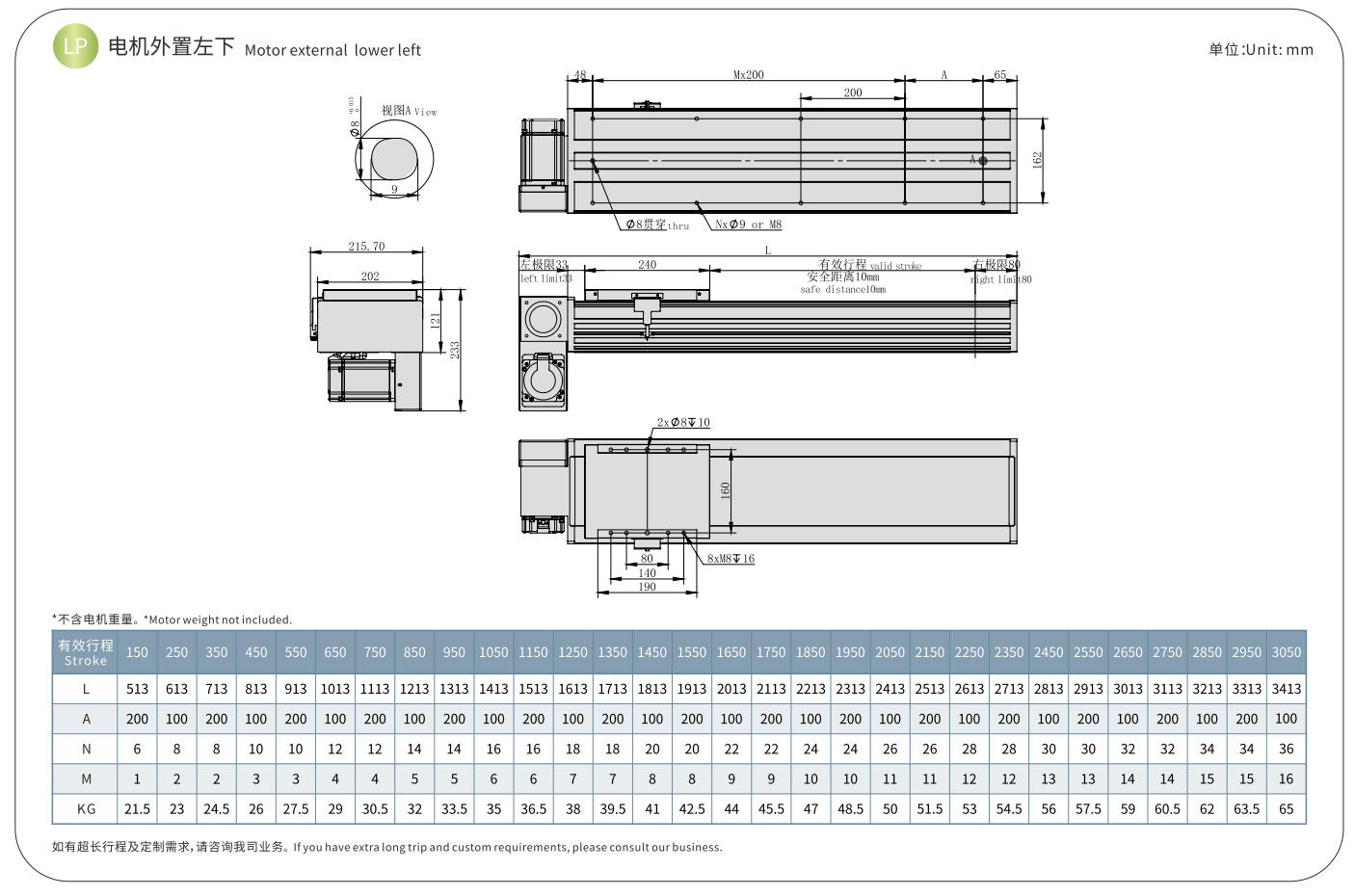
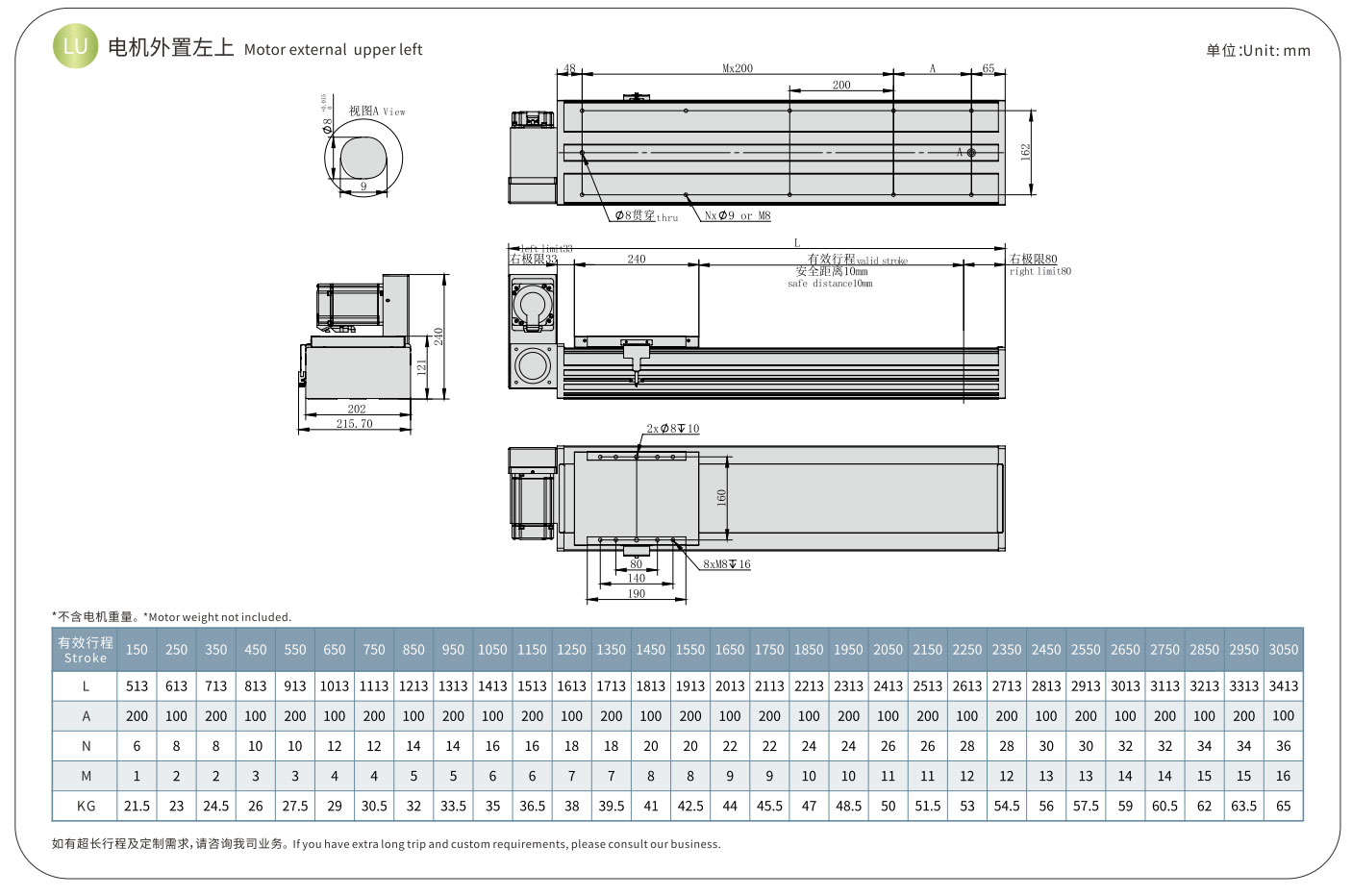
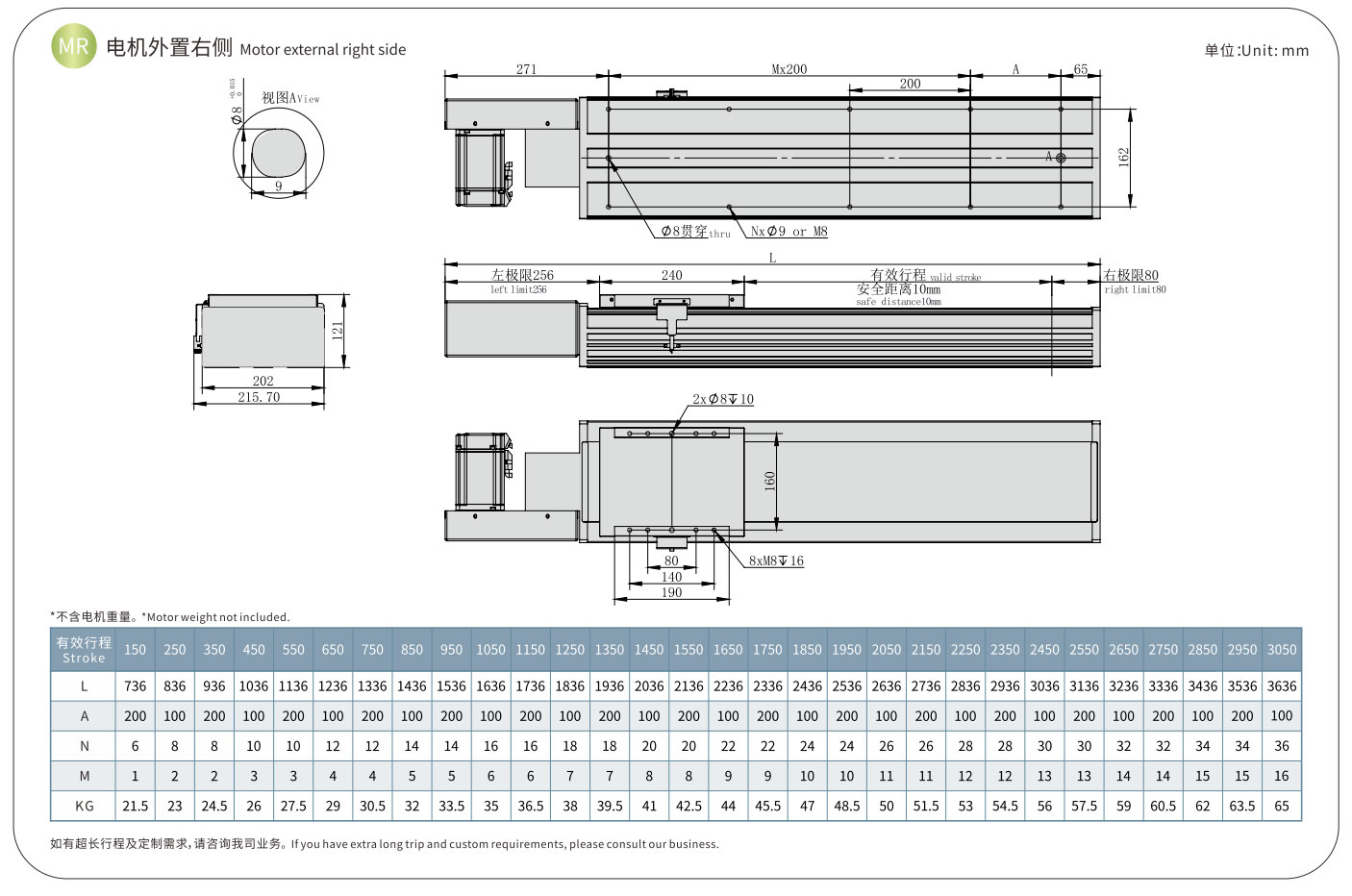
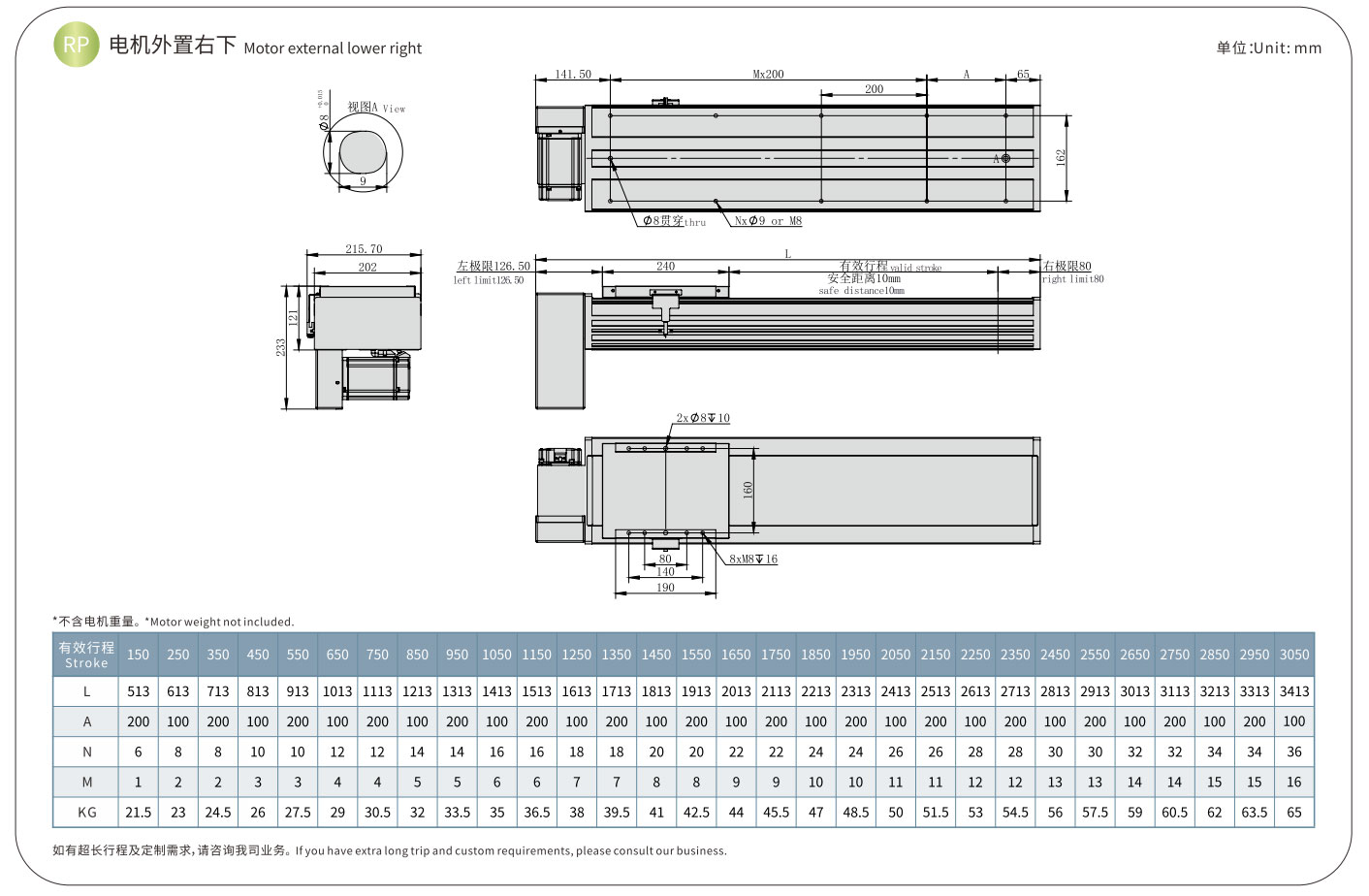
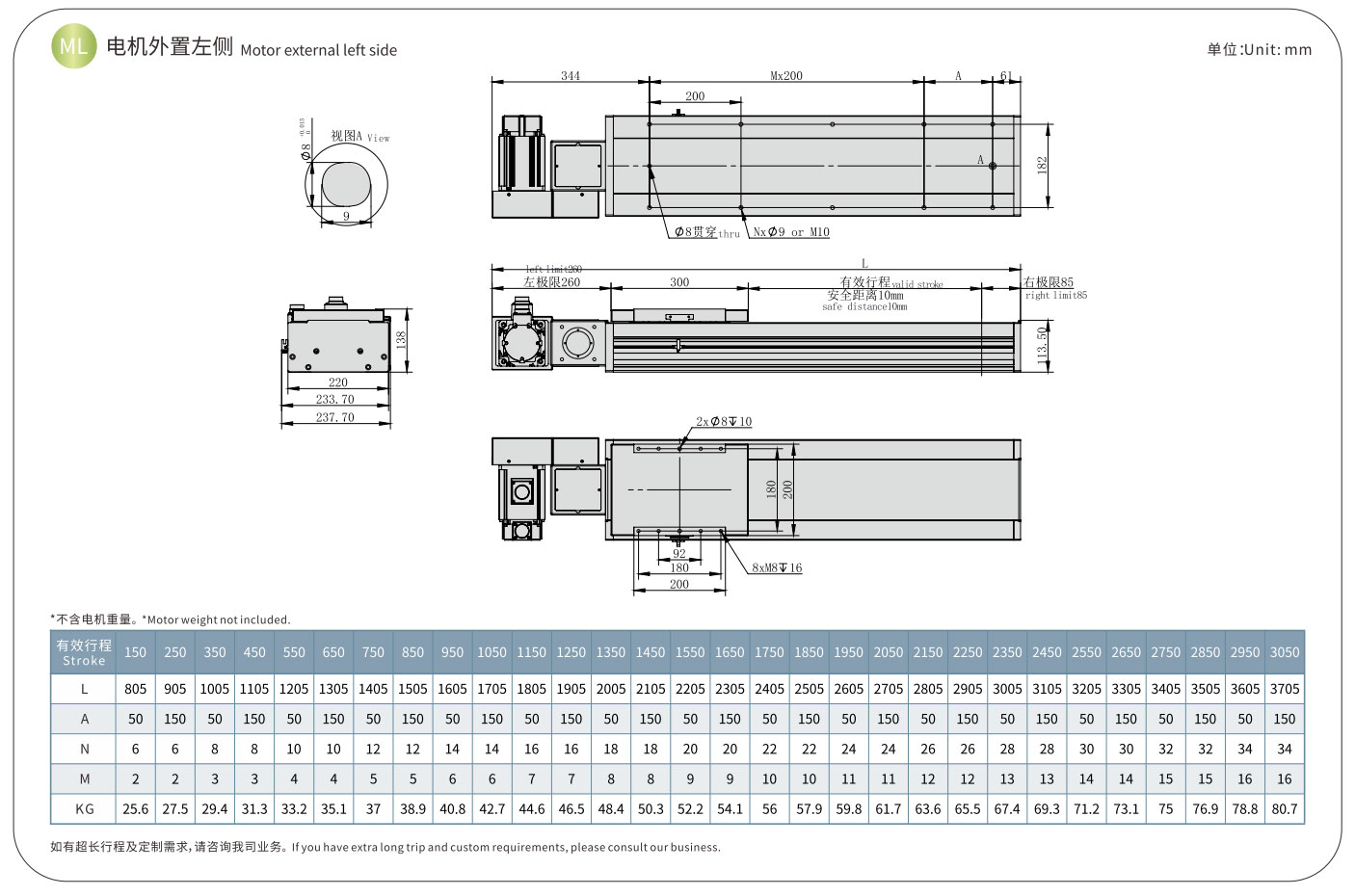
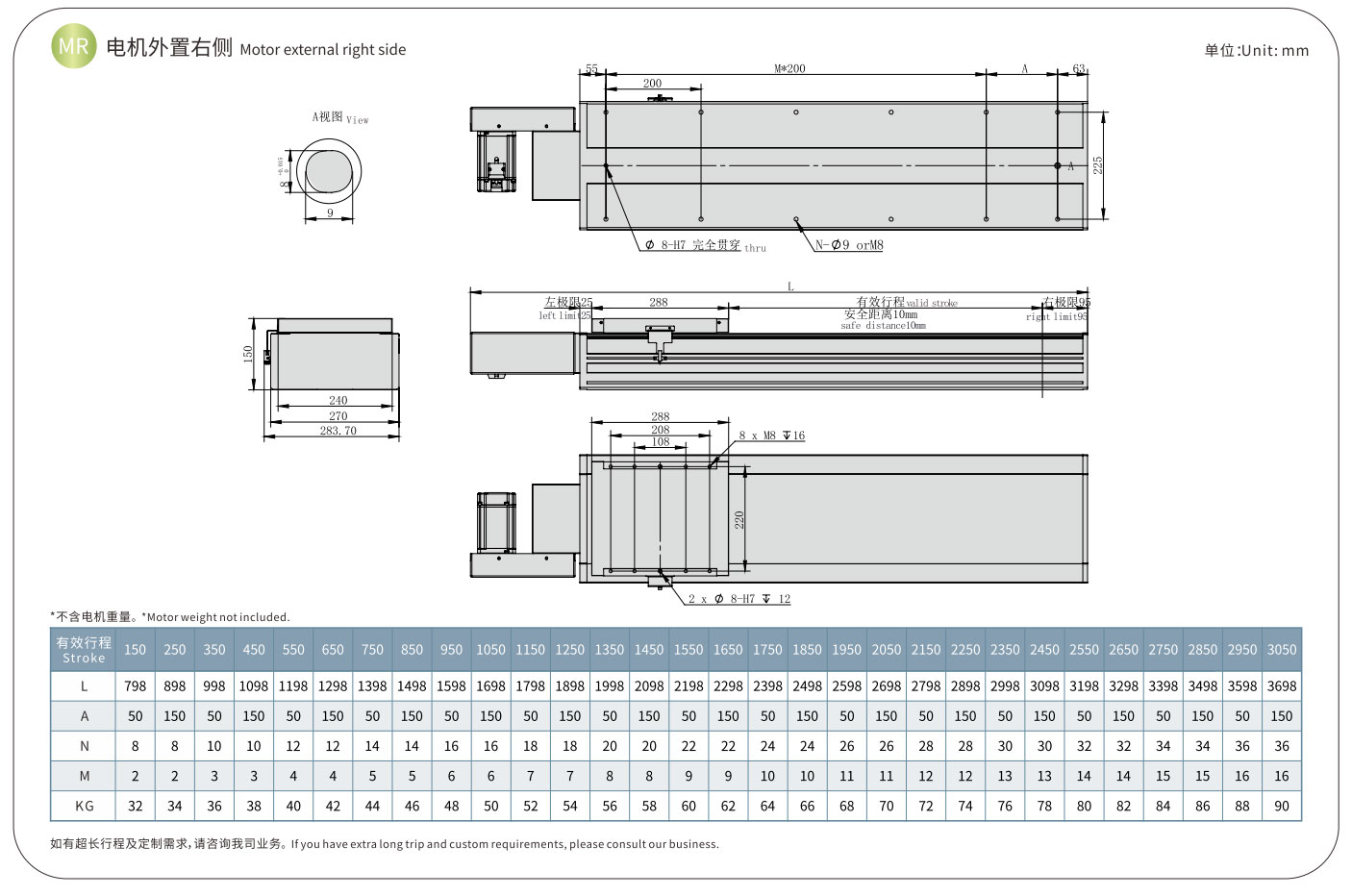
Како класичен линеарен погон на ремен на TPA ROBOT, во споредба со серијата HCR, лизгачот со погон на серијата HCB со временски ремен, што значи дека серијата HCB има подолг удар и поголема брзина. Воден од серво мотор, не само што ја има високата прецизност на серво моторот, туку ги има и предностите на голема брзина и висока цврстина на самата лизгачка фаза. Лесно се контролира и лесно може да се поврзе со PLC и други системи. Активаторот на лизгачот е изработен од интегрално екструдиран алуминиумски профил, со мала тежина, мала големина и силна цврстина. Големината на инсталацијата и ударот може да се прилагодат според барањата, а инсталацијата може да се фиксира со завртки. Преку комбинација на повеќе насоки, може да се формира во системи за линеарно движење на различна опрема за автоматизација, со механички држачи, воздушни фаќачи и други тела, може да стане ексклузивни Декартови роботи или роботи подемен.

HCB65S

HCB-85D

HCB-105D

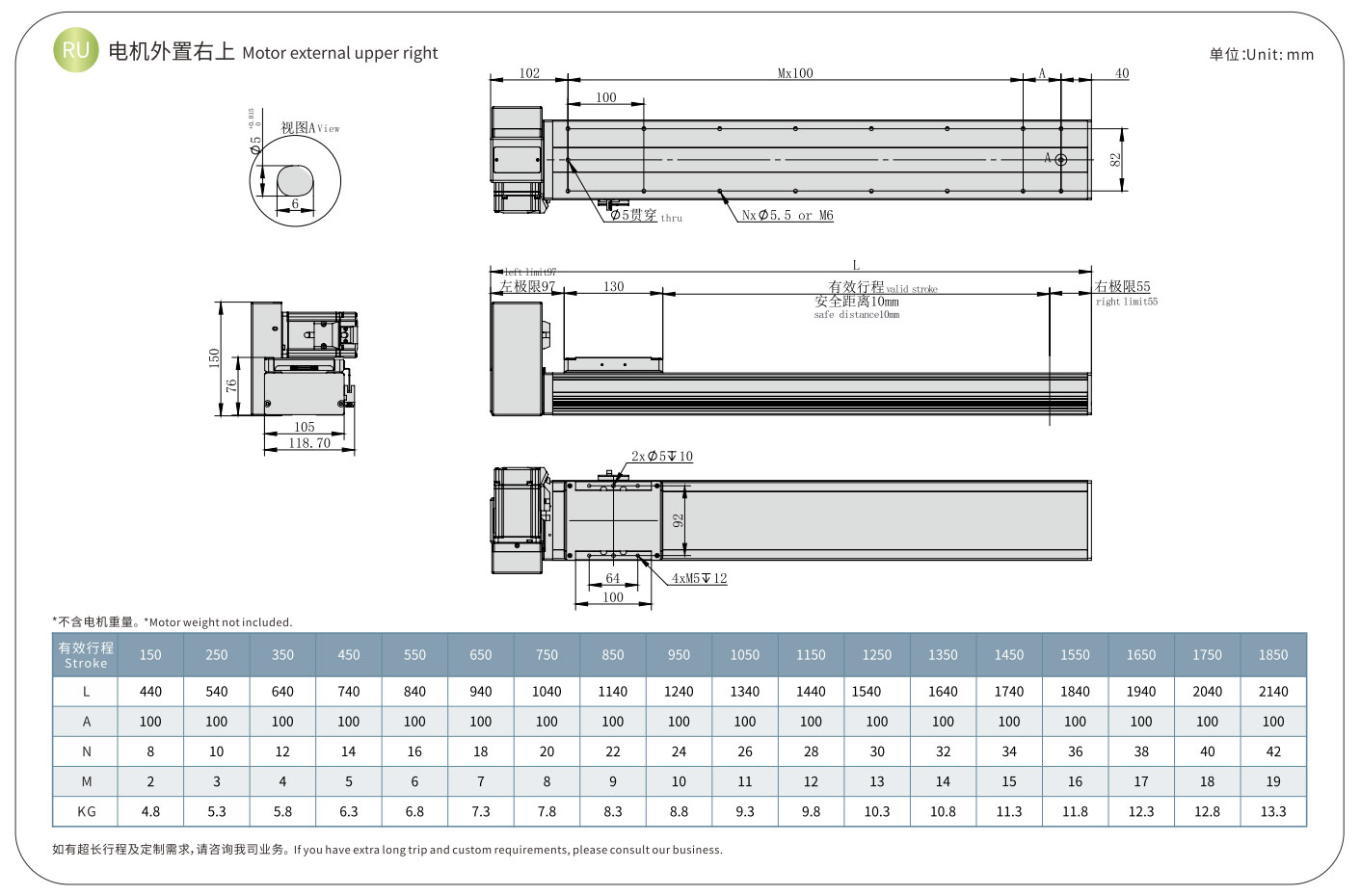
HCB-120D

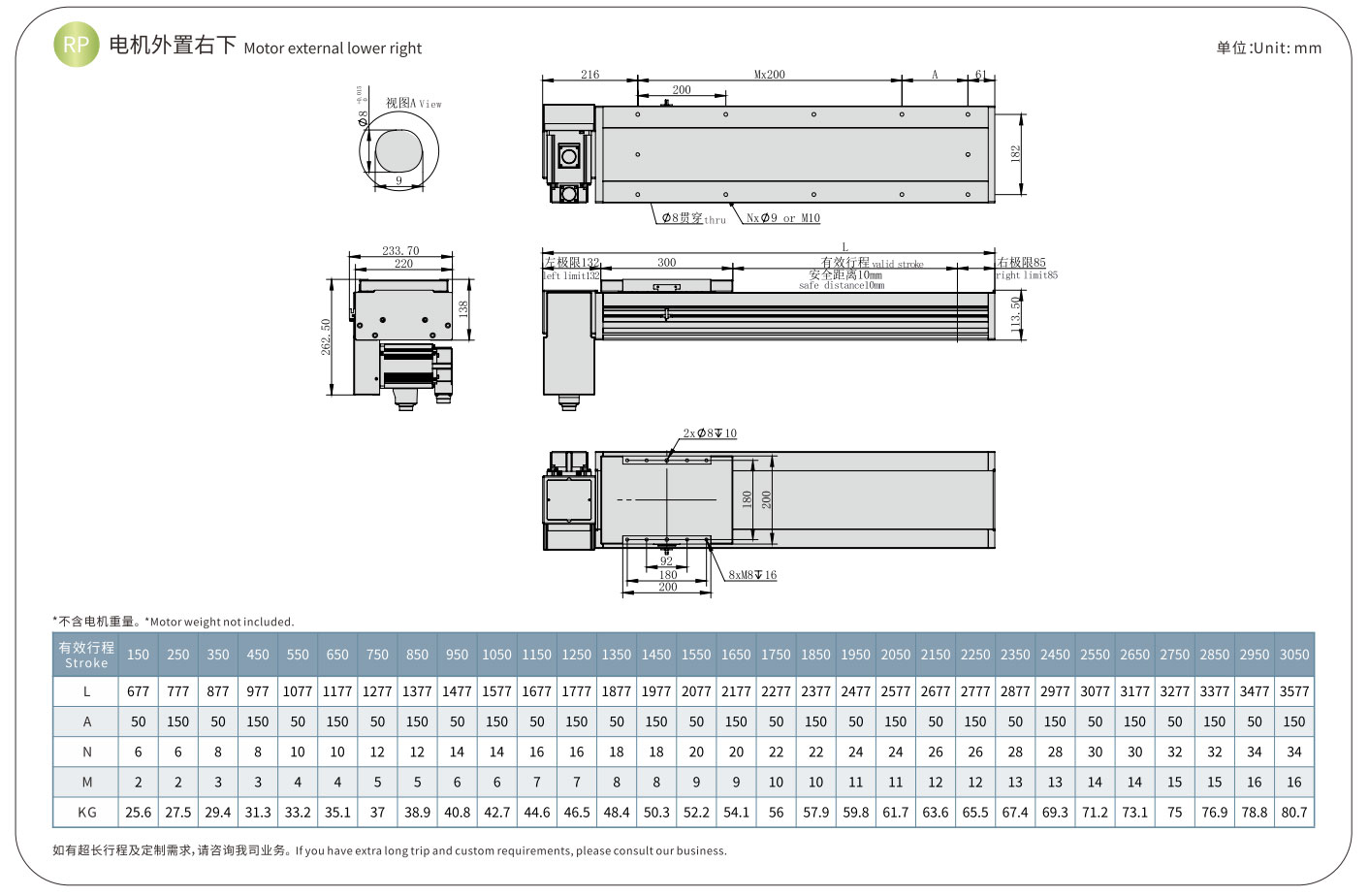
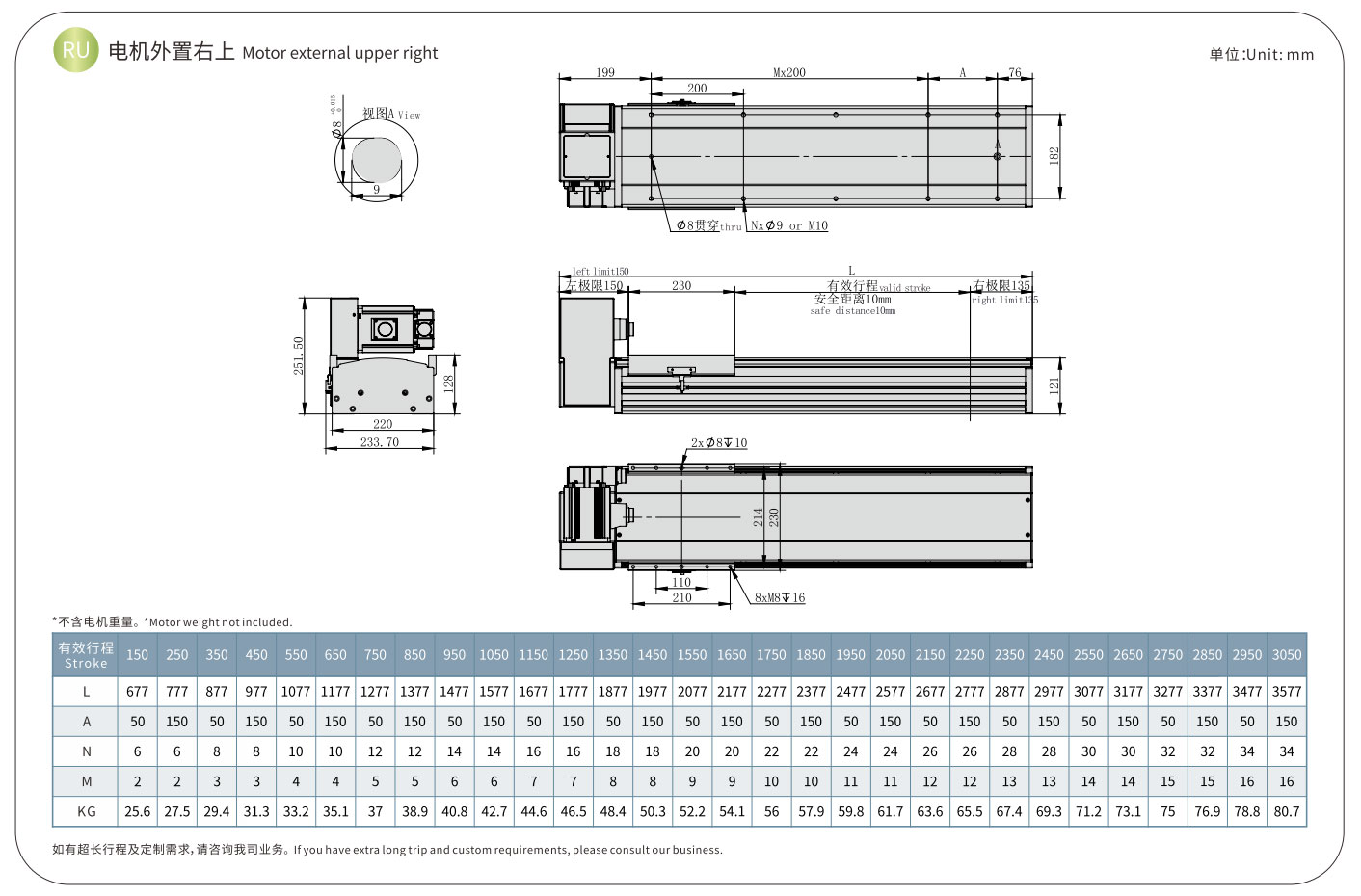
HCB-270D
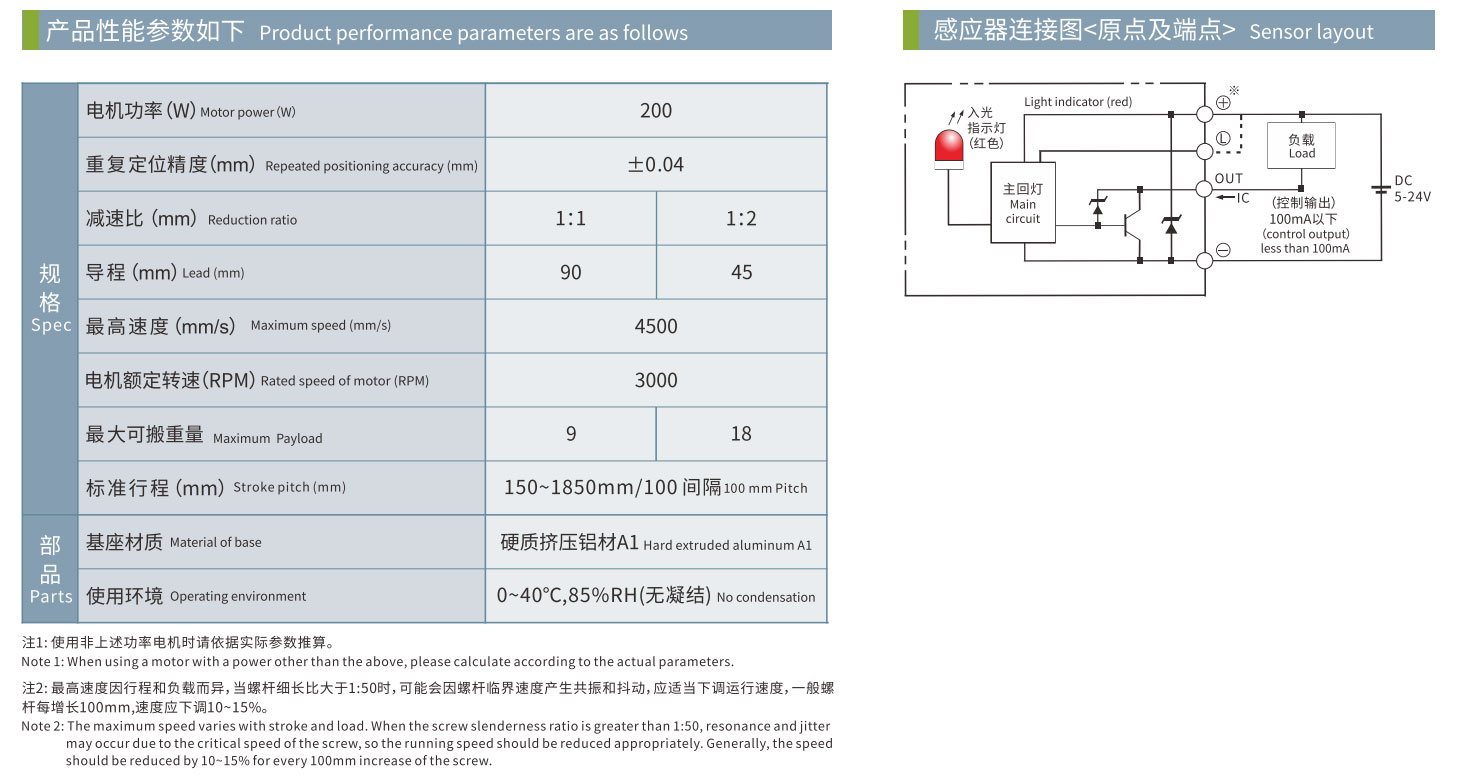
Карактеристики
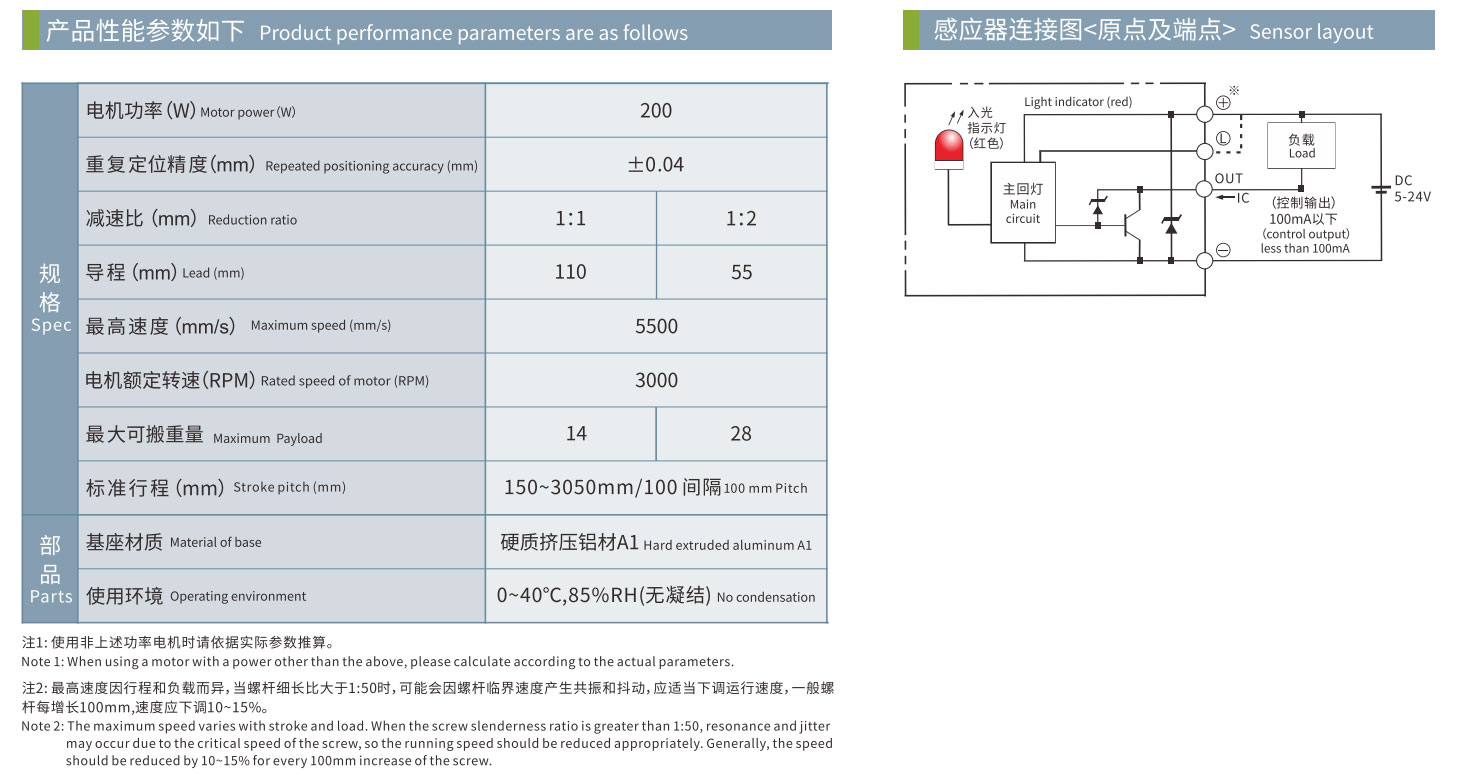
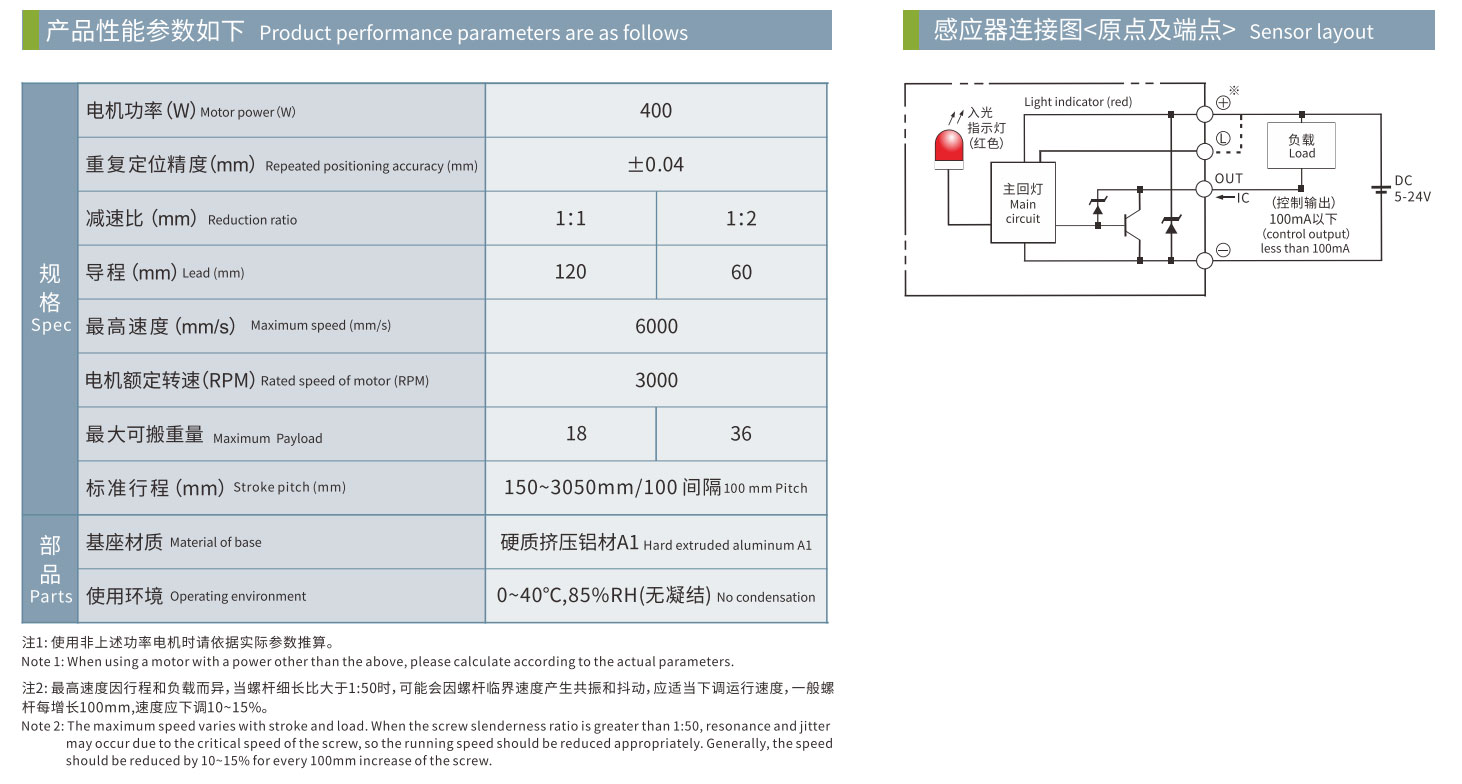
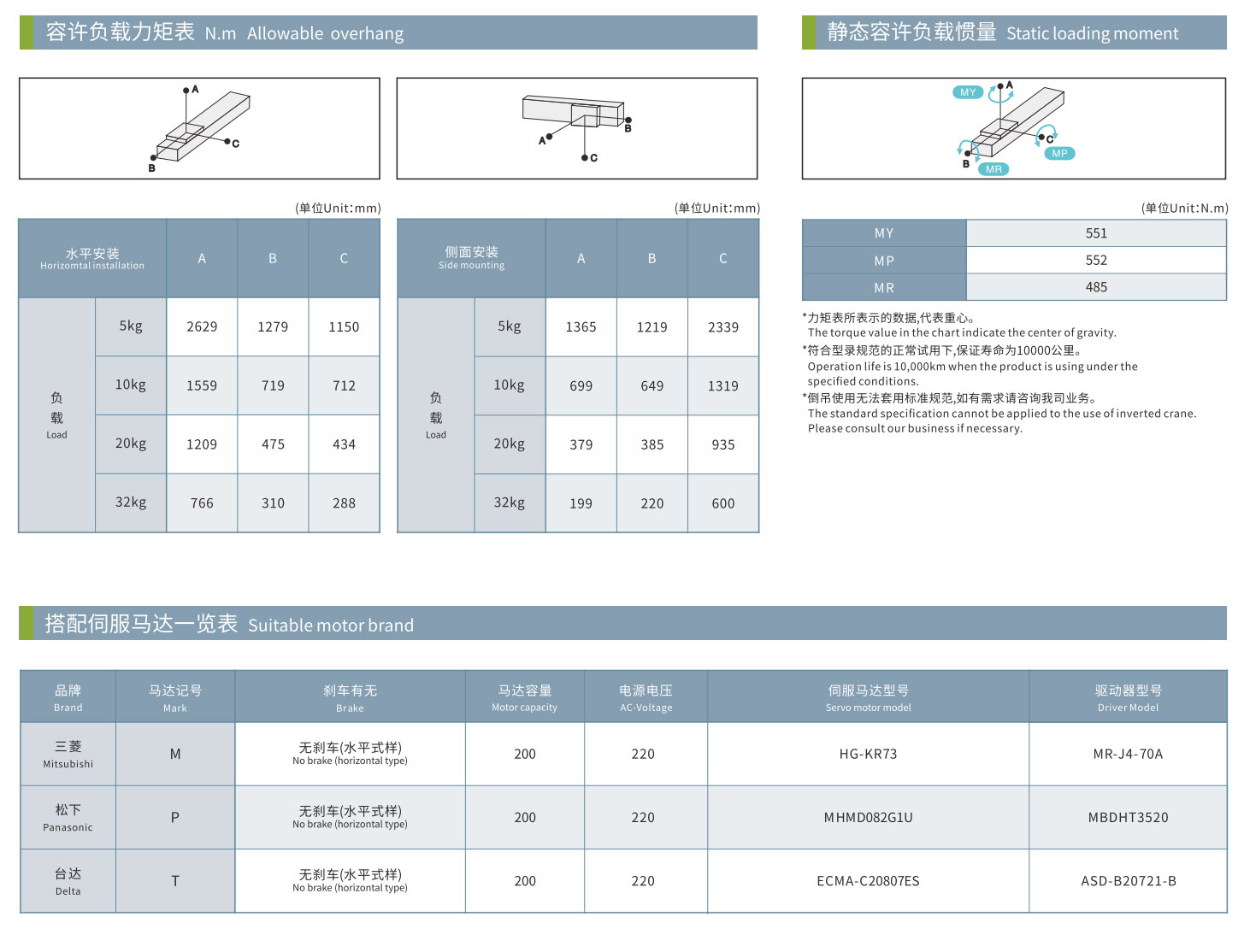
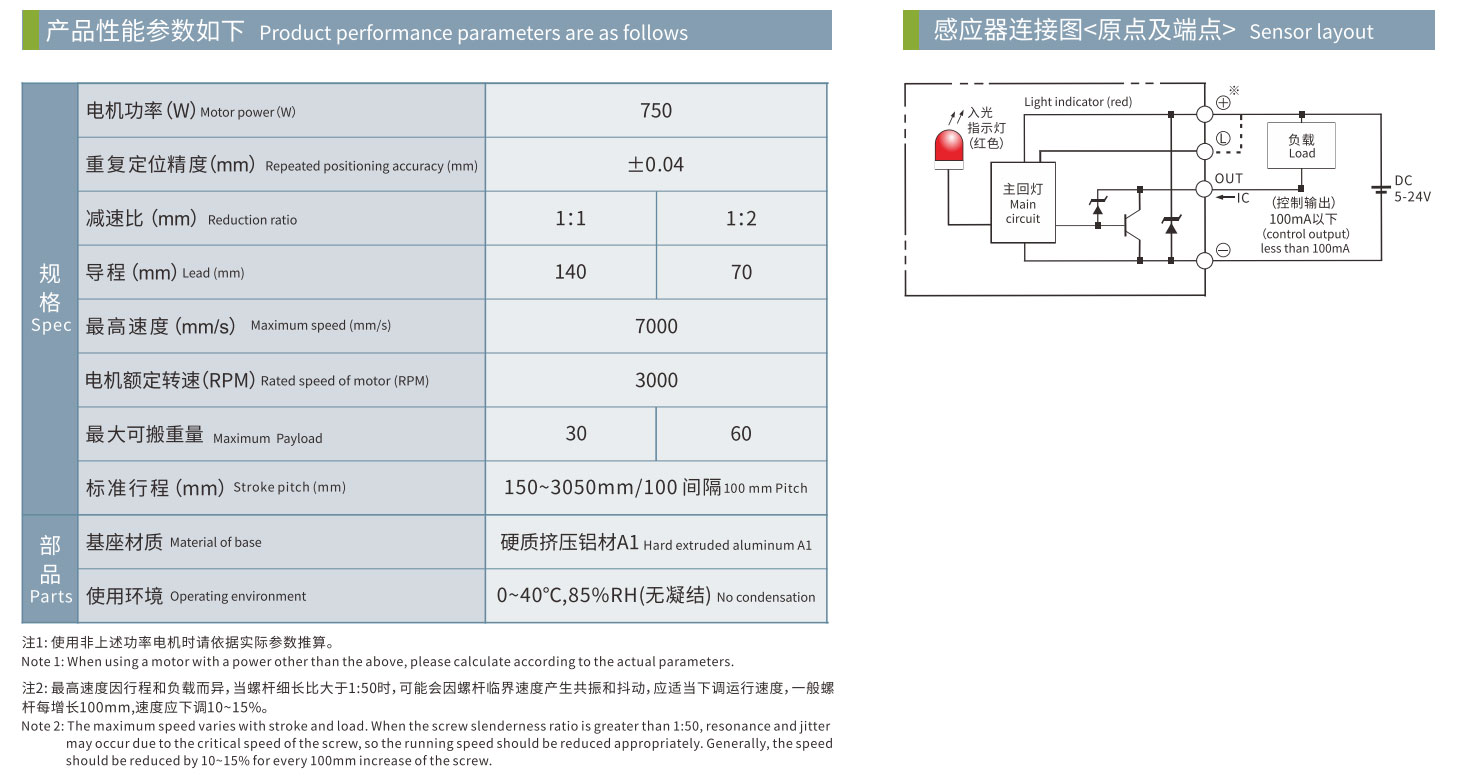
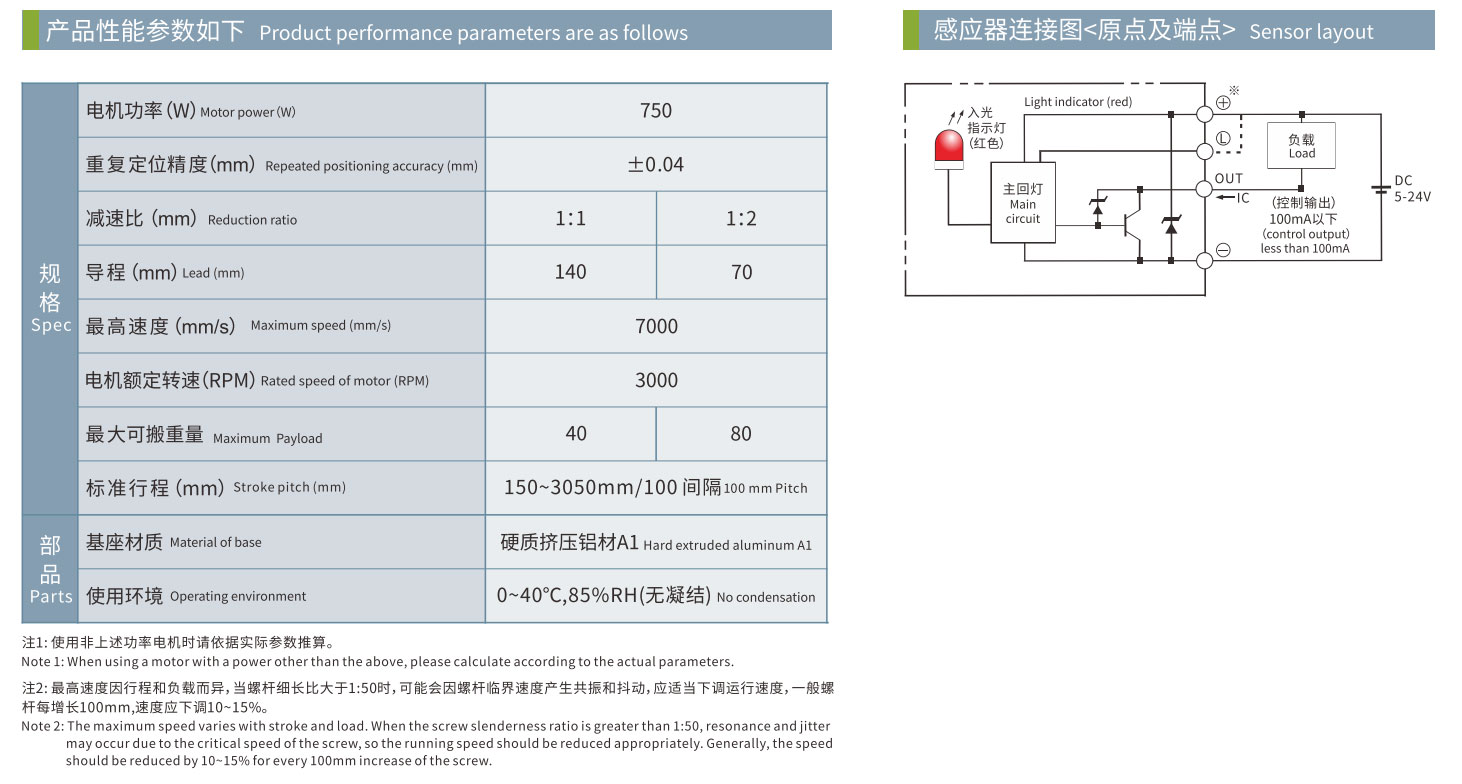
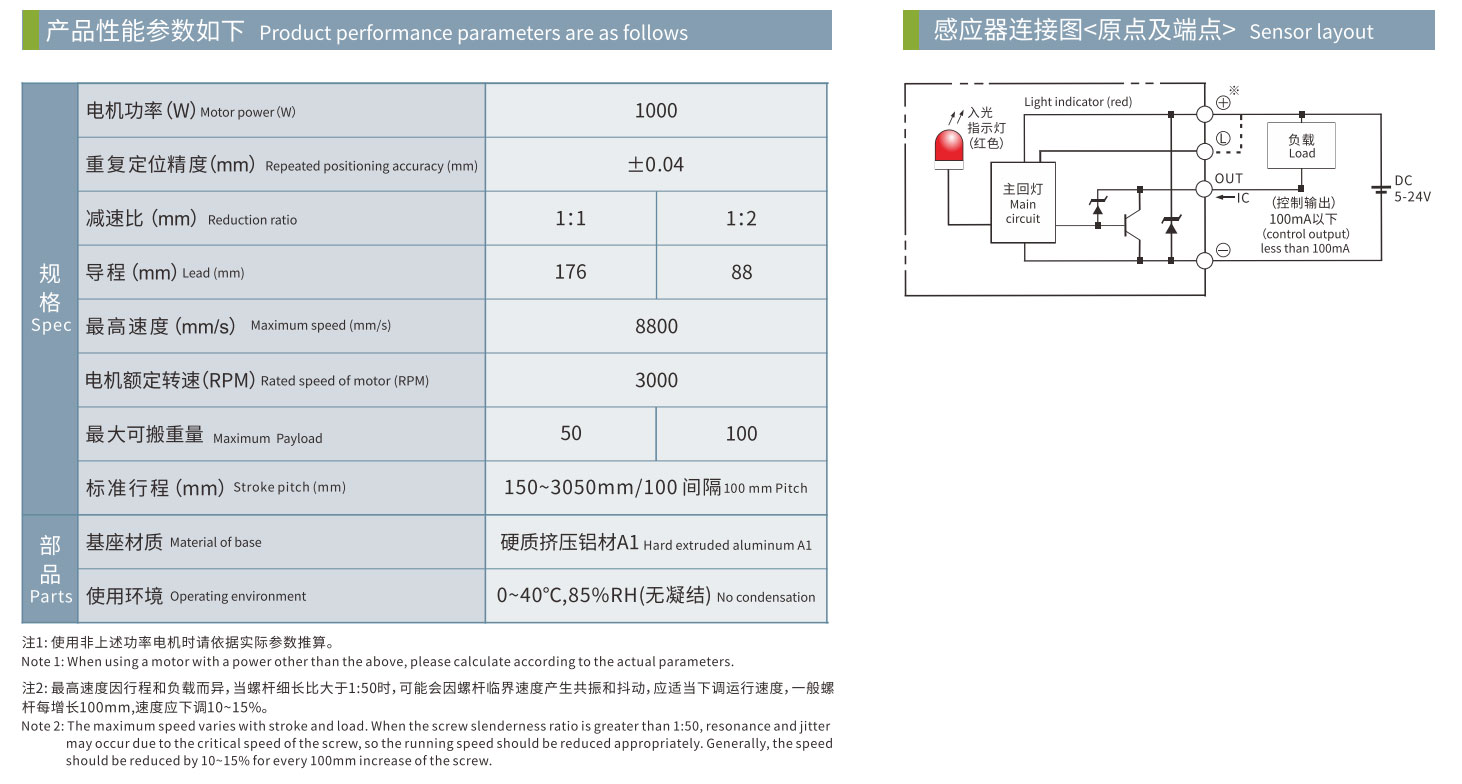
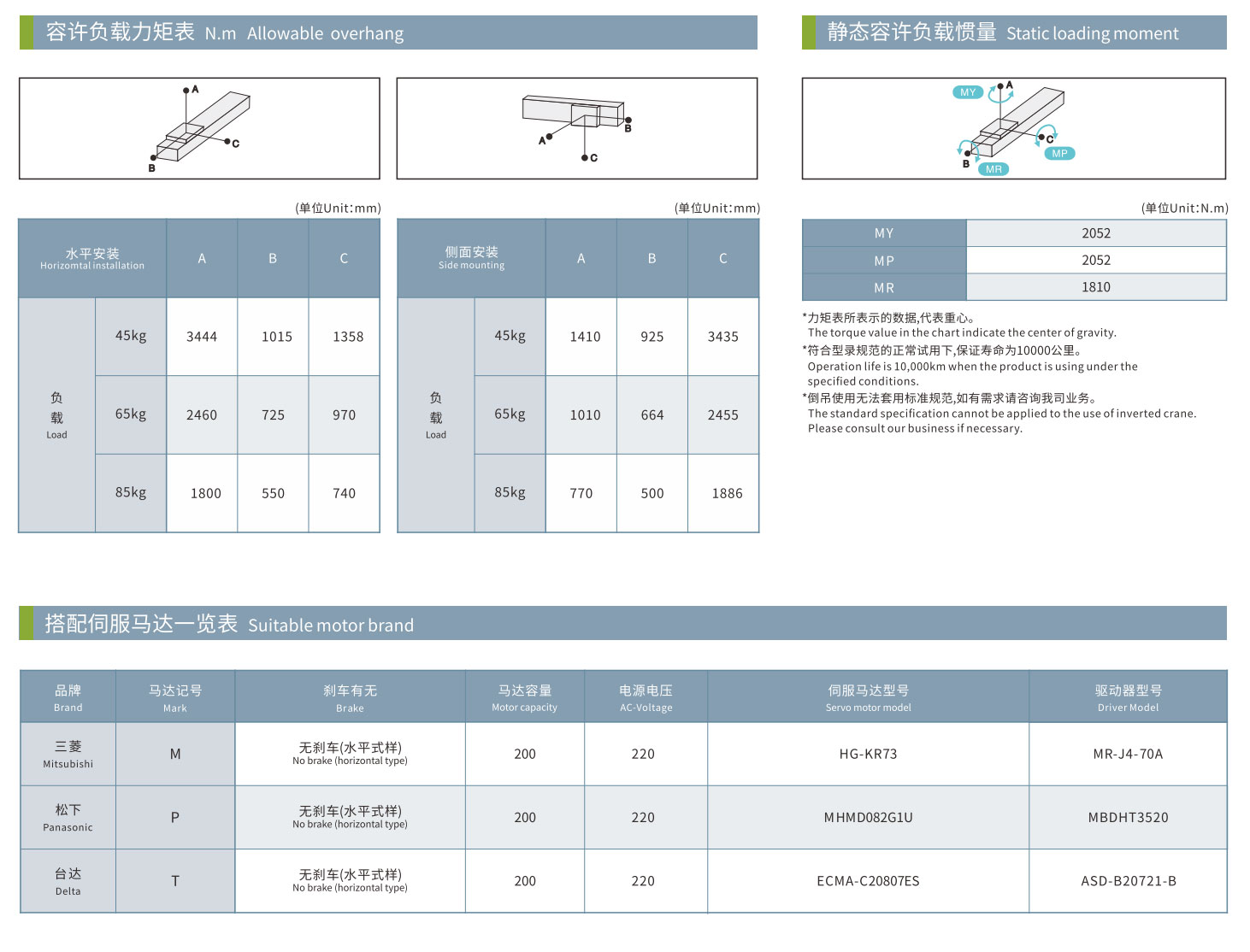
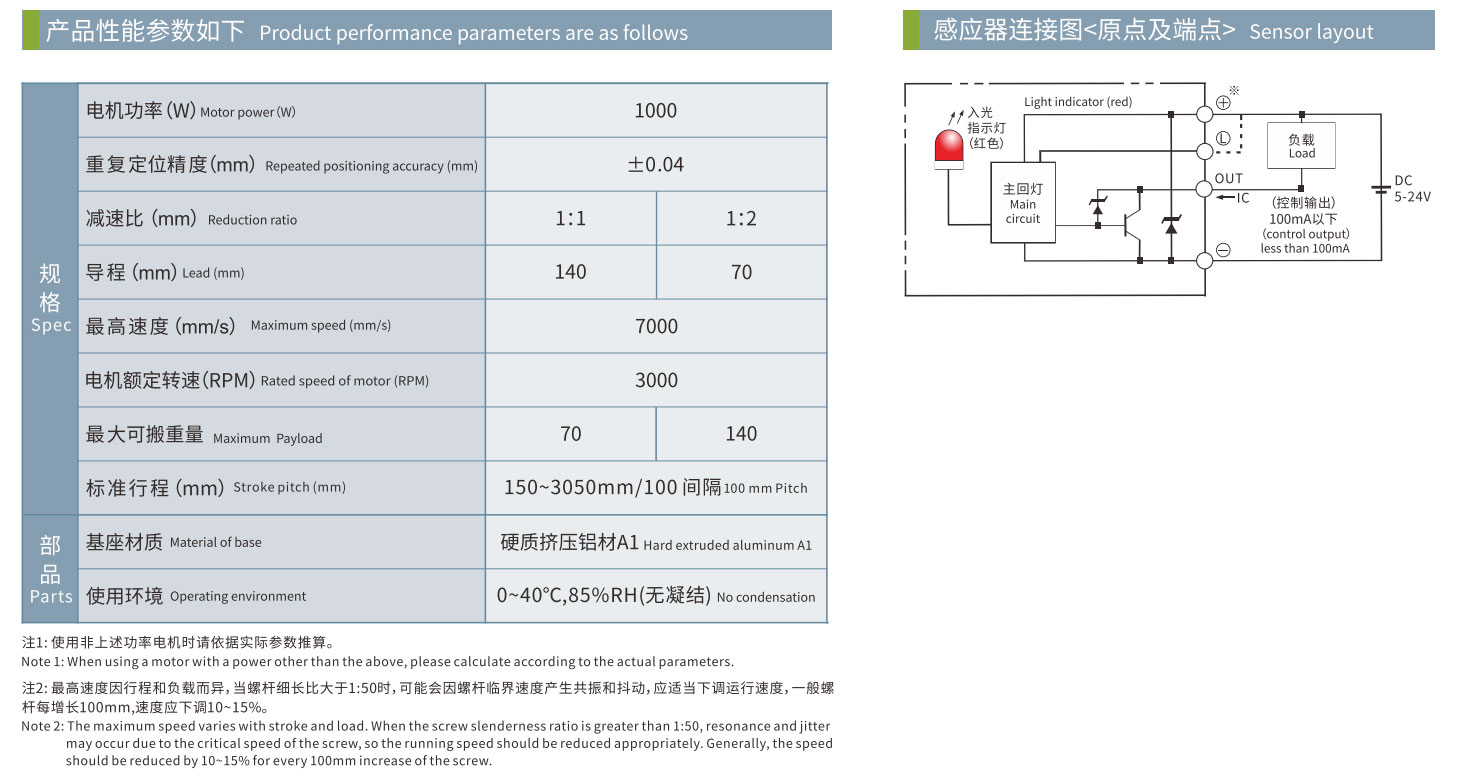
Повторена точност на позиционирање: ±0,04mm
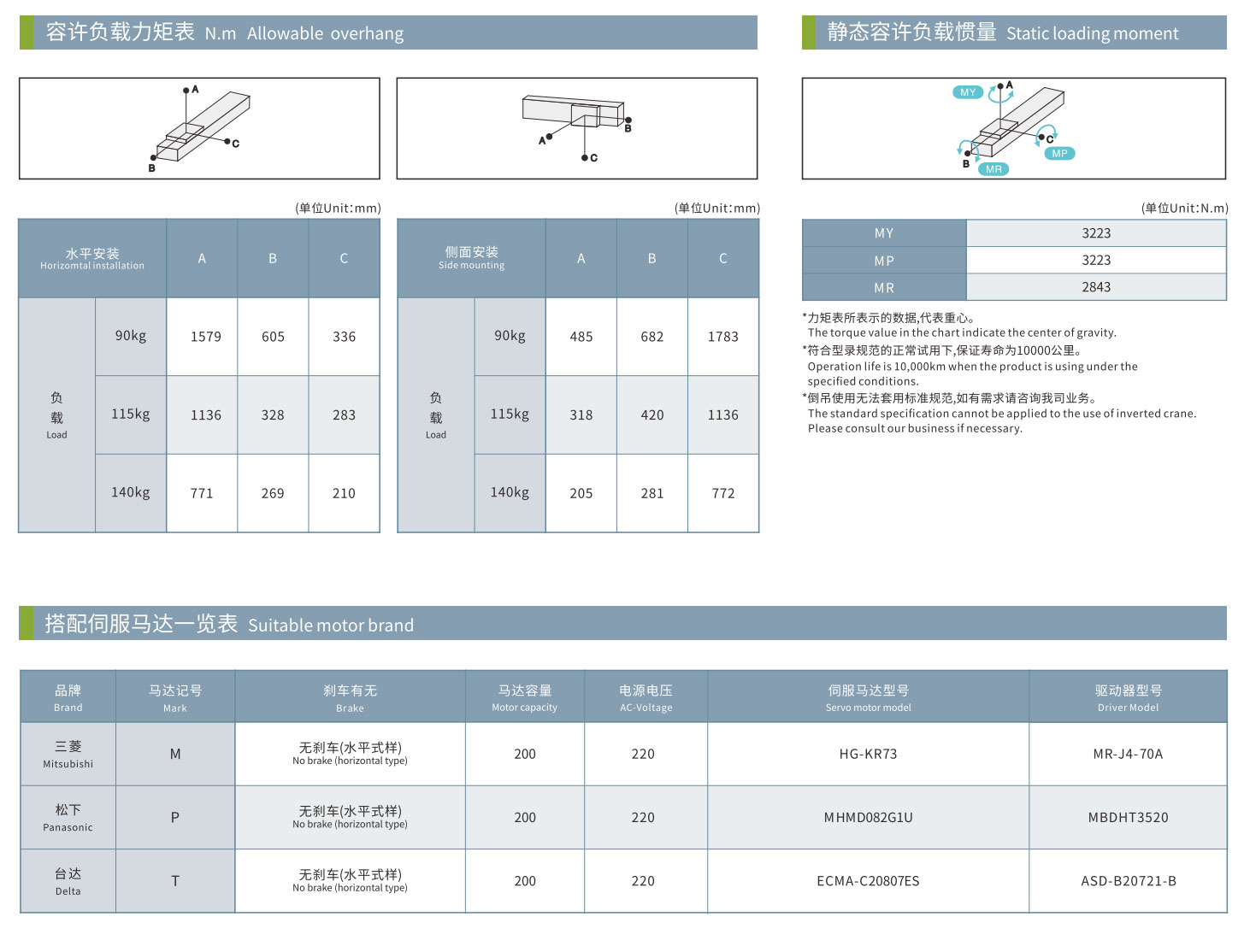
Максимална носивост: 140 кг
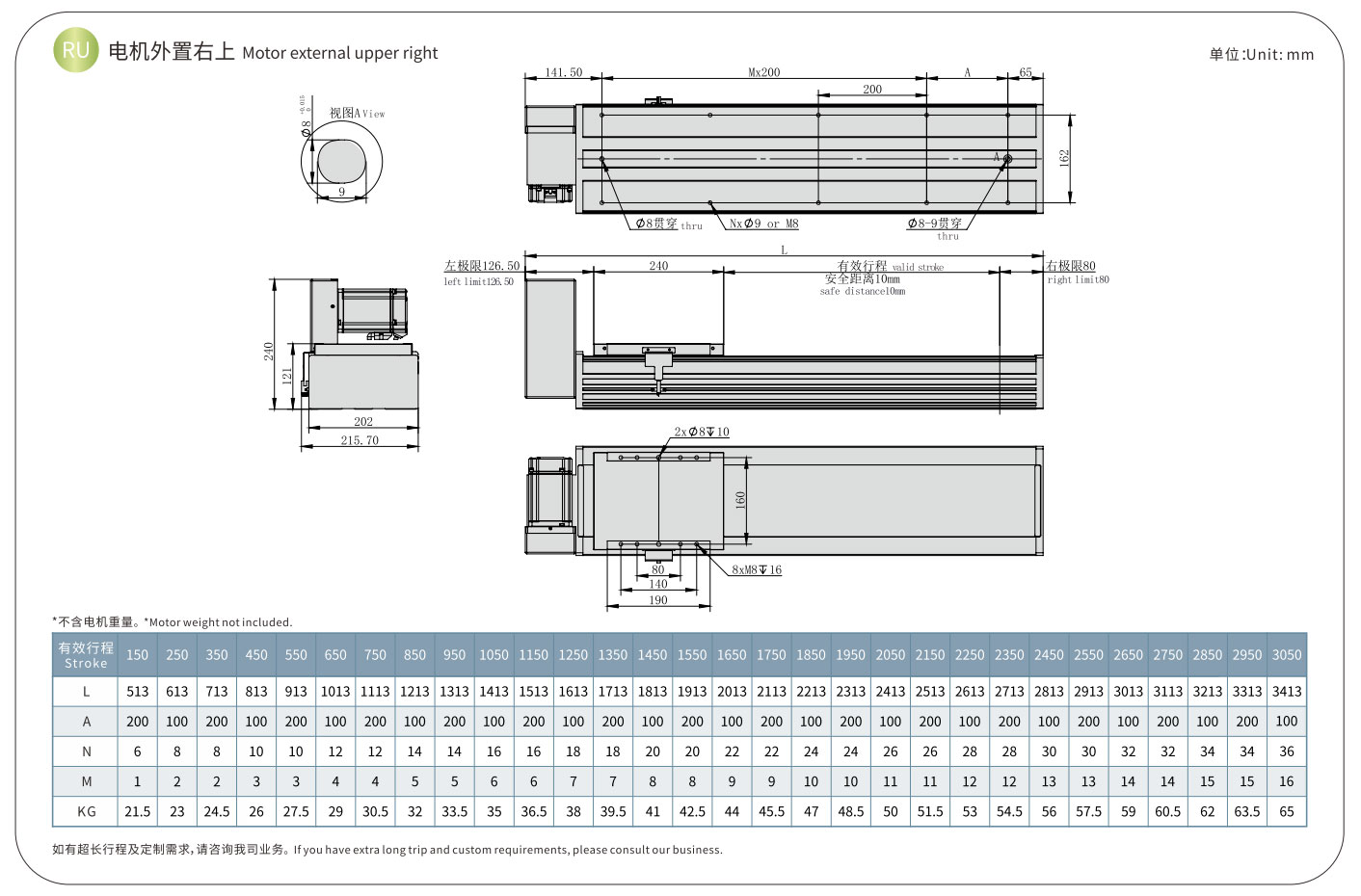
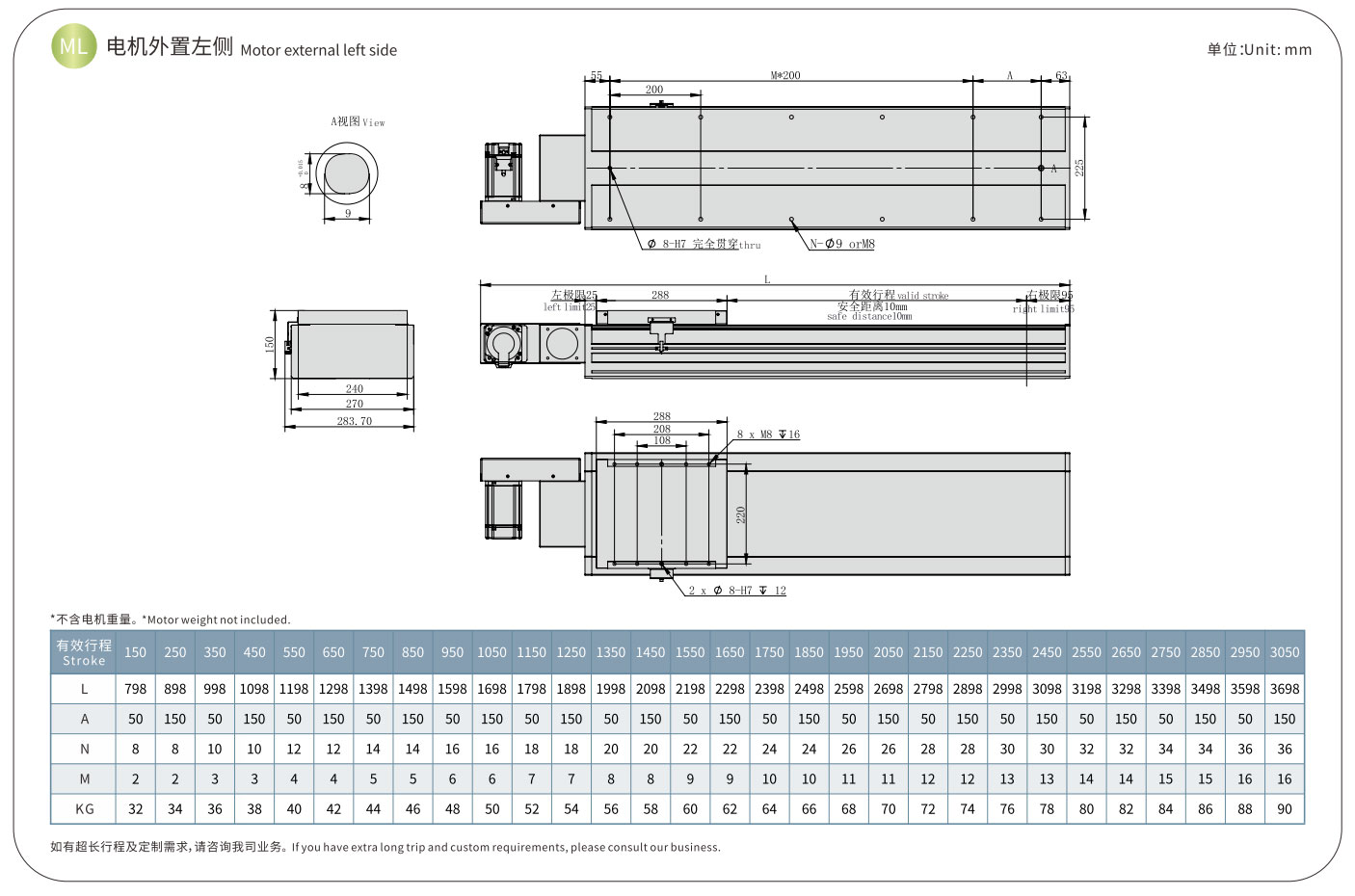
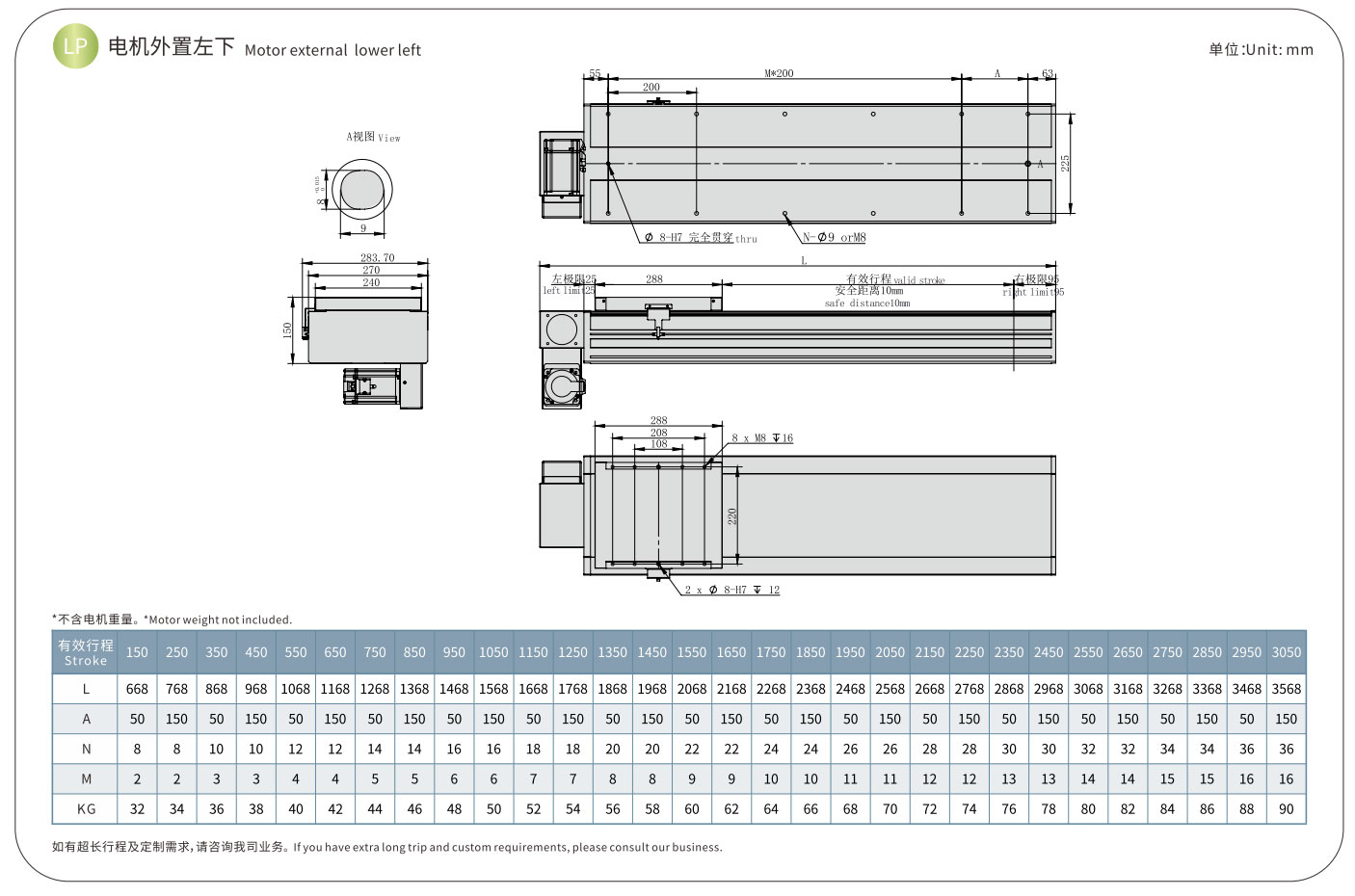
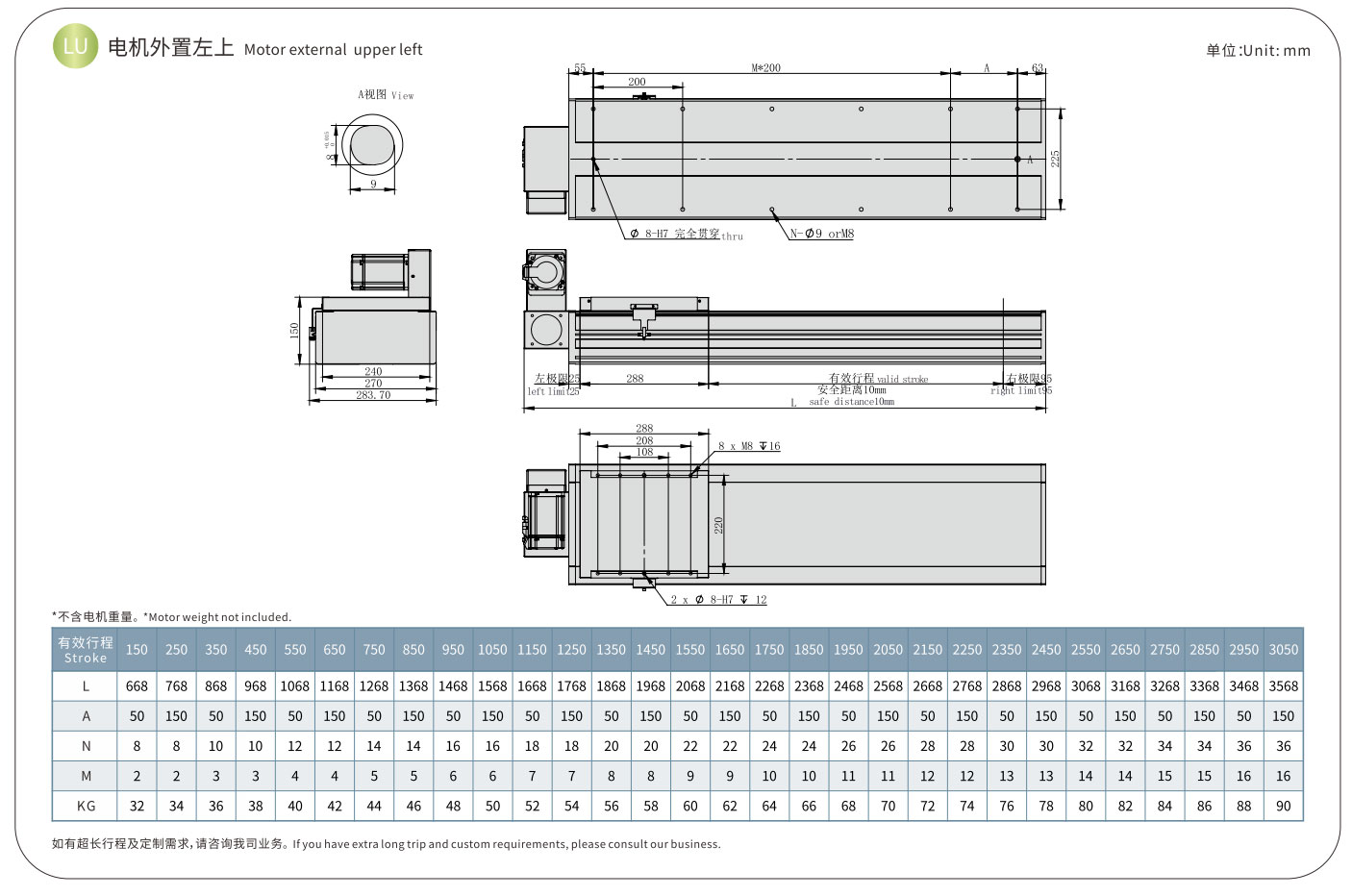
Мозочен удар: 100 – 3050 mm
Максимална брзина: 7000 mm/s

1. Рамен дизајн, полесна вкупна тежина, помала висина на комбинацијата и подобра цврстина.
2. Структурата е оптимизирана, прецизноста е подобра, а грешката предизвикана од склопување на повеќе додатоци е намалена.
3. Склопот заштедува време, заштедува труд и удобен. Нема потреба да се отстранува алуминиумскиот капак за да се инсталира спојката или модулот.
4. Одржувањето е едноставно, двете страни на модулот се опремени со отвори за вбризгување масло, а капакот не треба да се отстранува.







Повеќе производи

Половично затворен линеарен модул со појас на серијата ONB

Линеарен модул со појас погон од серијата OCB Целосно опкружен...

Надворешен линеарен модул со погон на појас од серијата ONB-F...

Линеарни активатори на појас погонски појаси од серијата HNB-E Половина ...

Линеарен модул со појас на серијата HNB е половина затворен










