




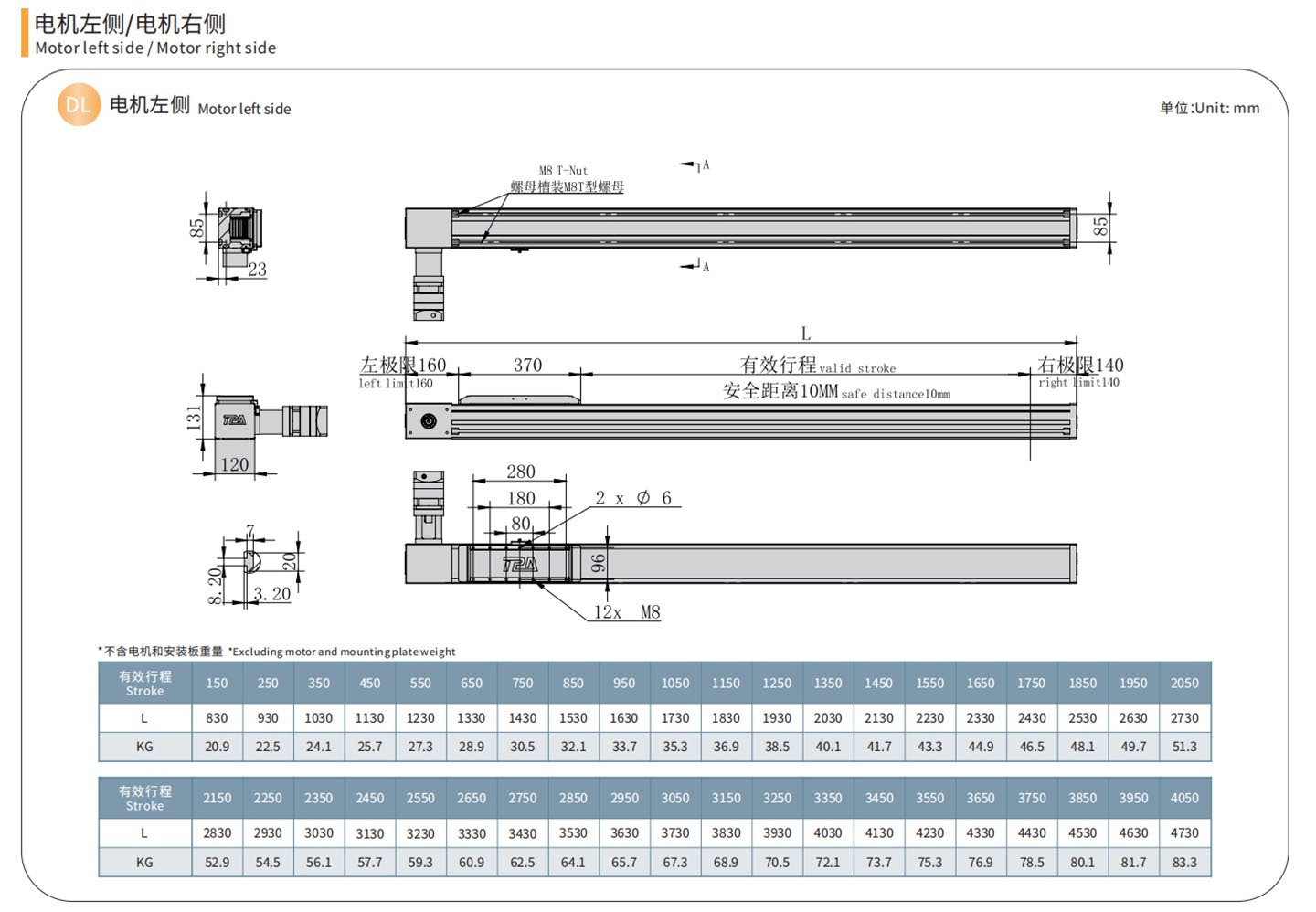
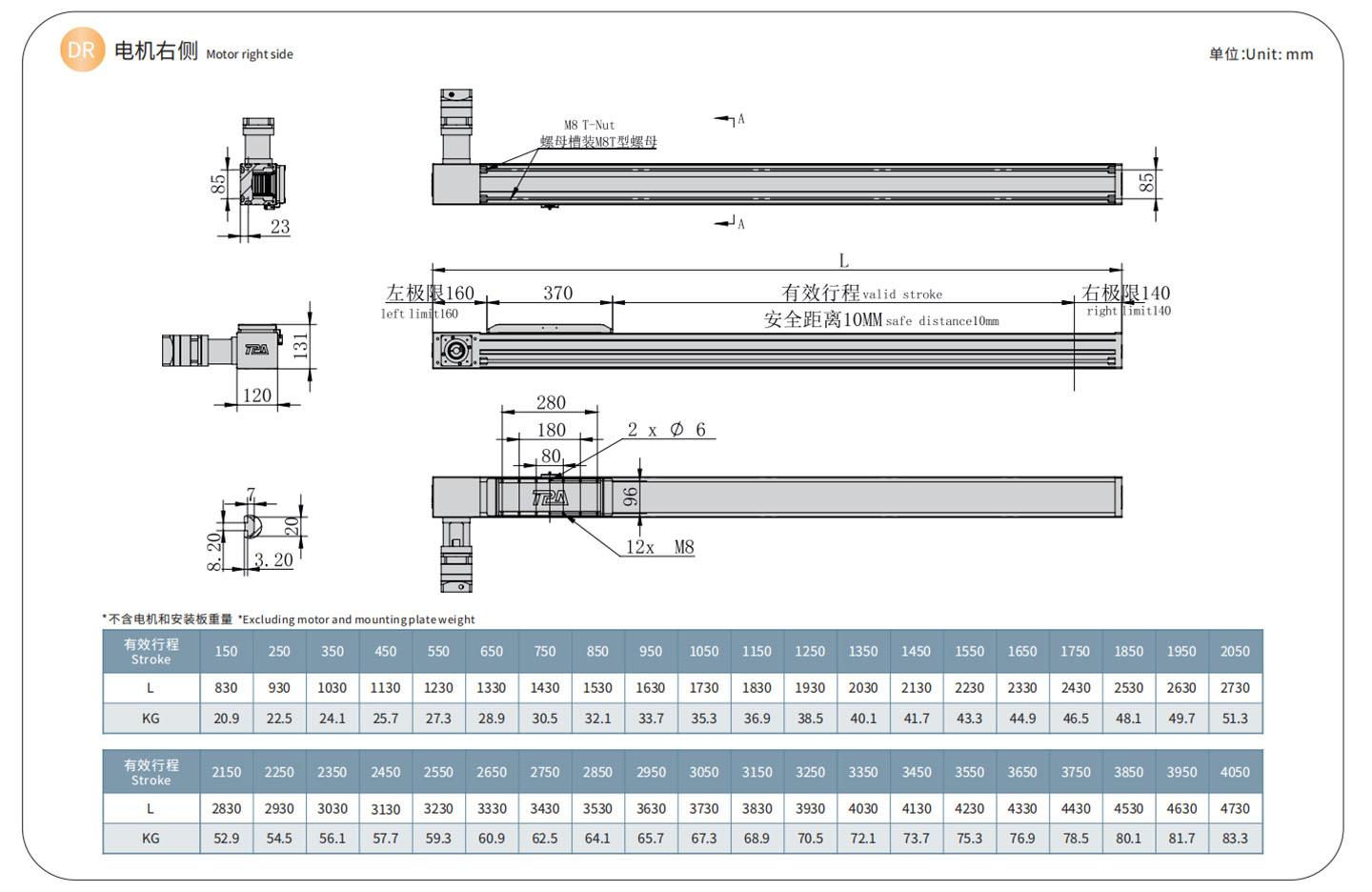
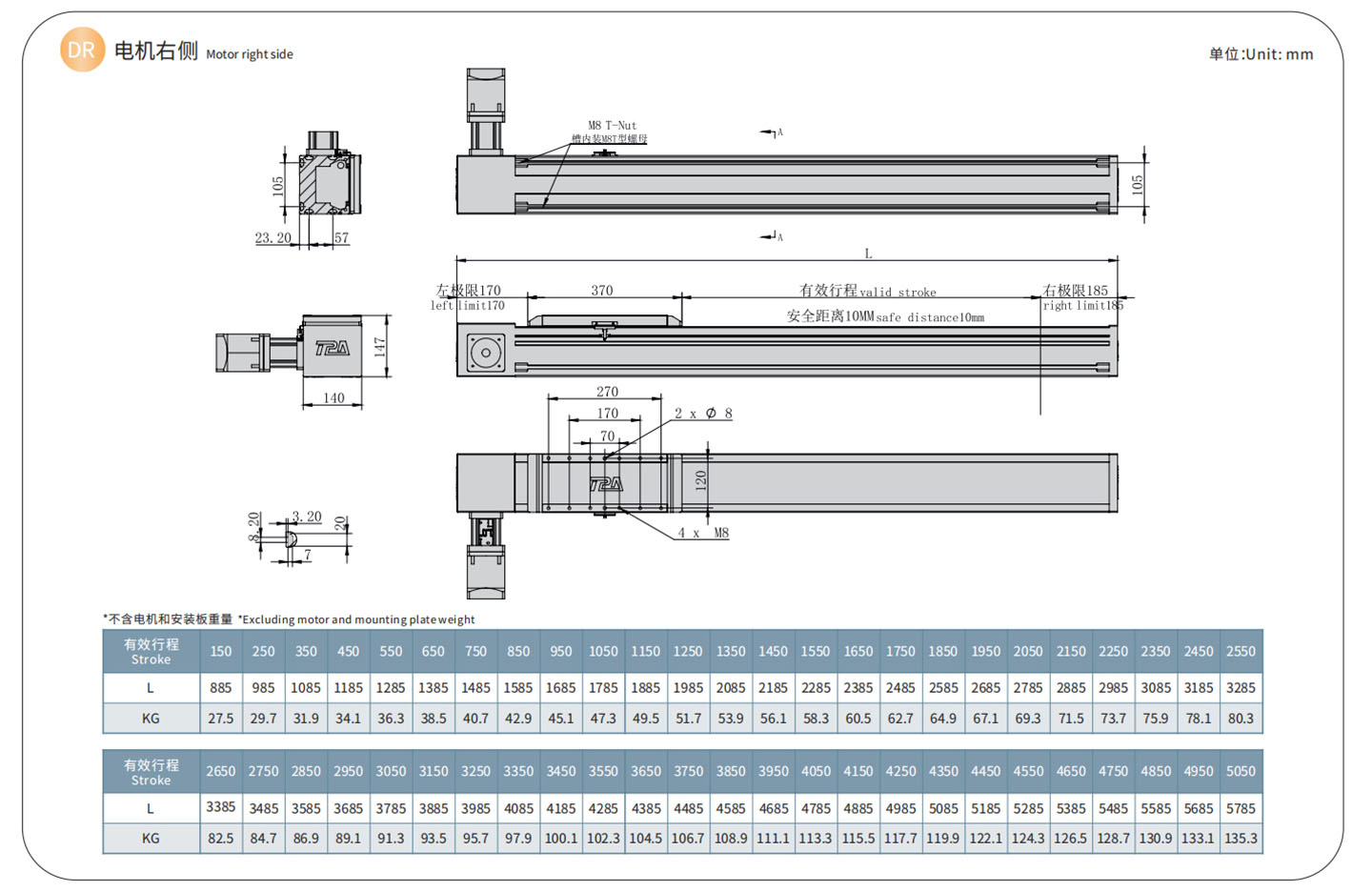
OCB Series Belt Driven Linear Module ຖືກປິດລ້ອມຢ່າງເຕັມສ່ວນ


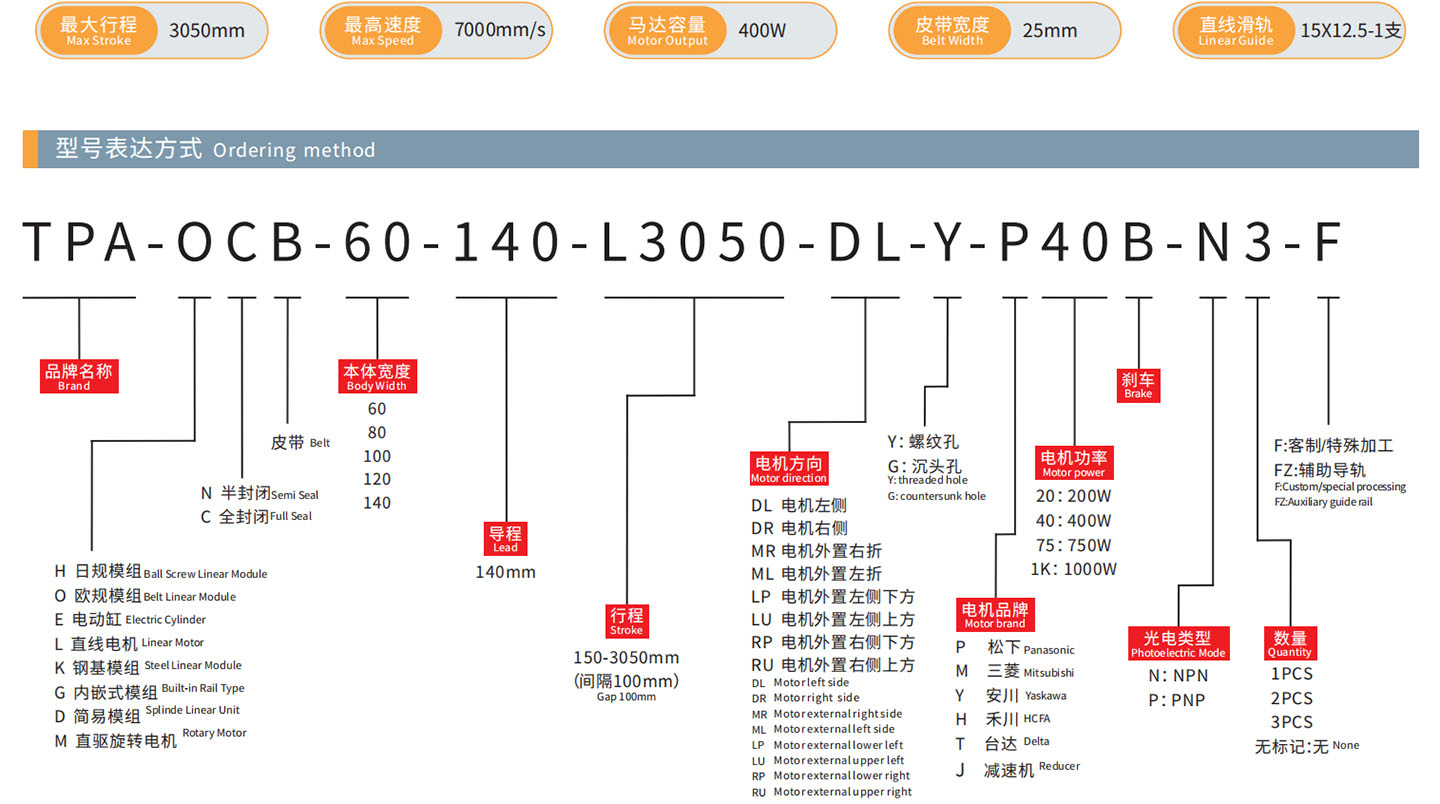
ຕົວເລືອກຕົວແບບ
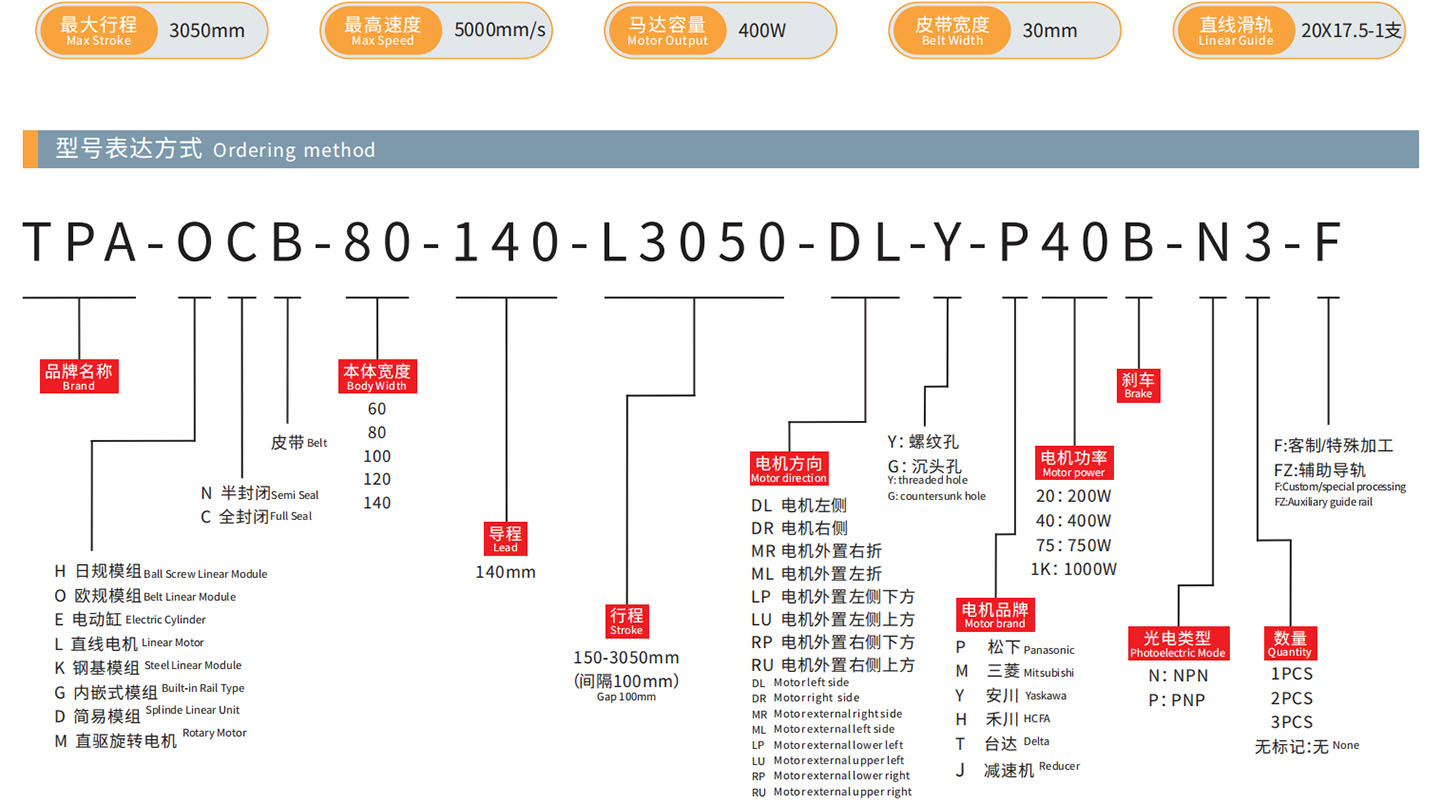
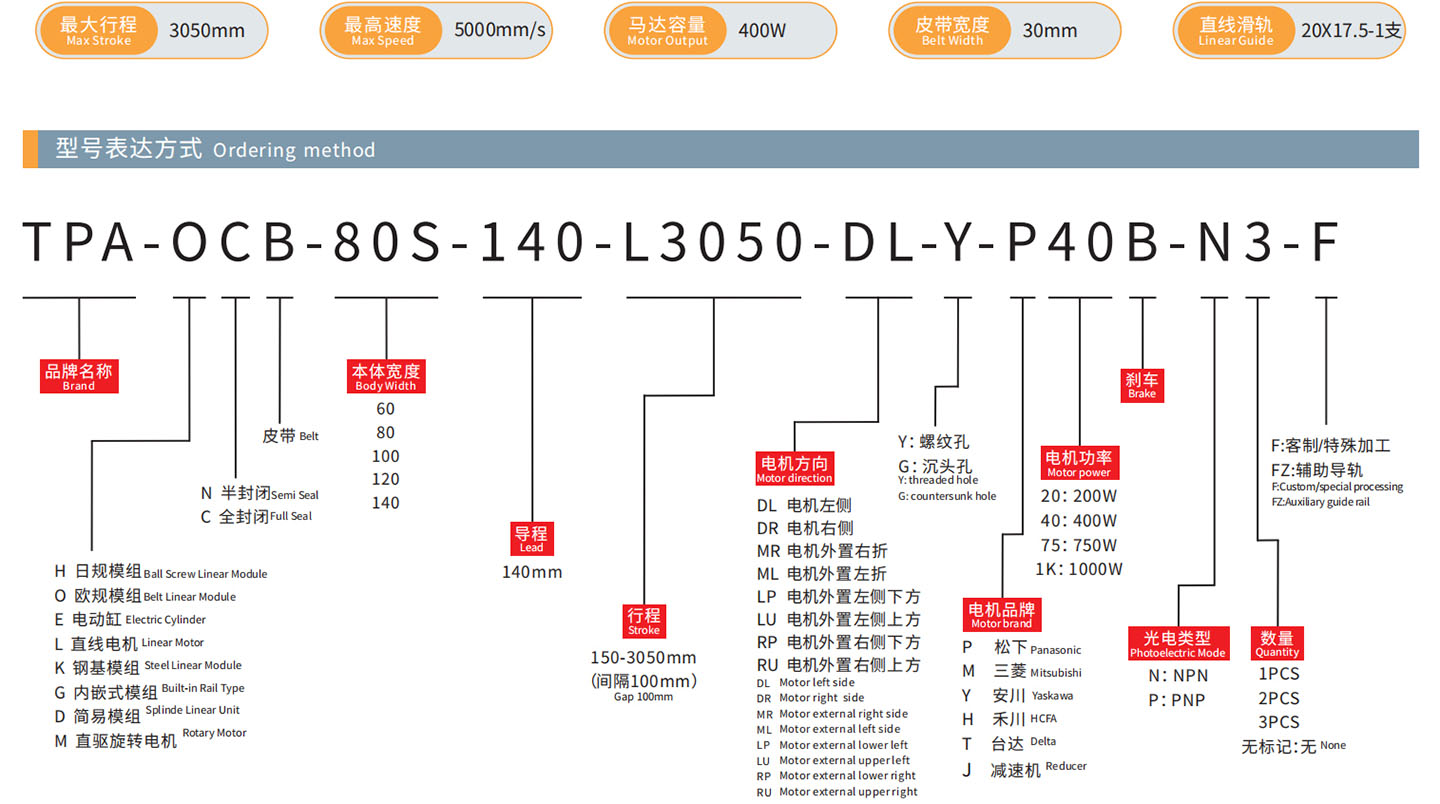
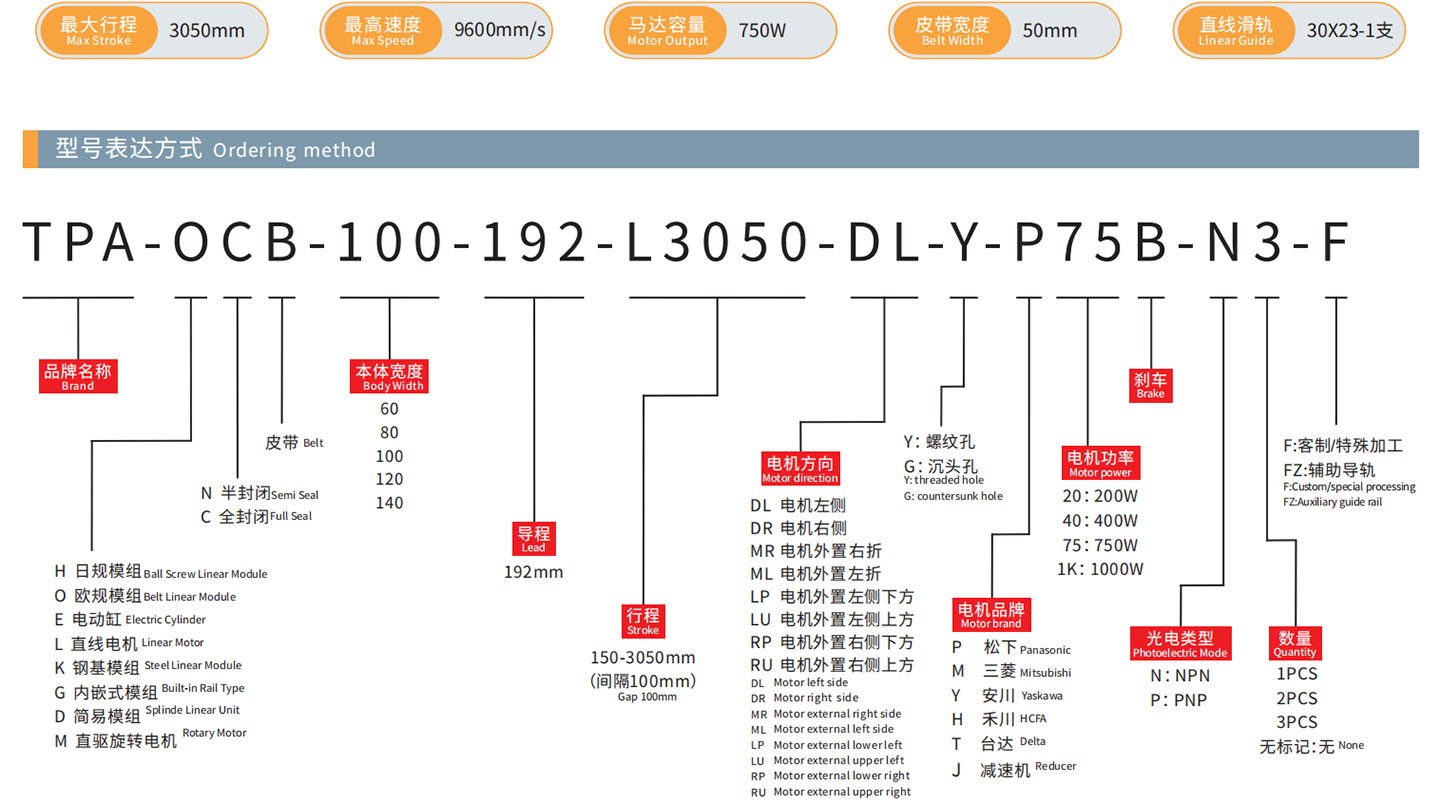
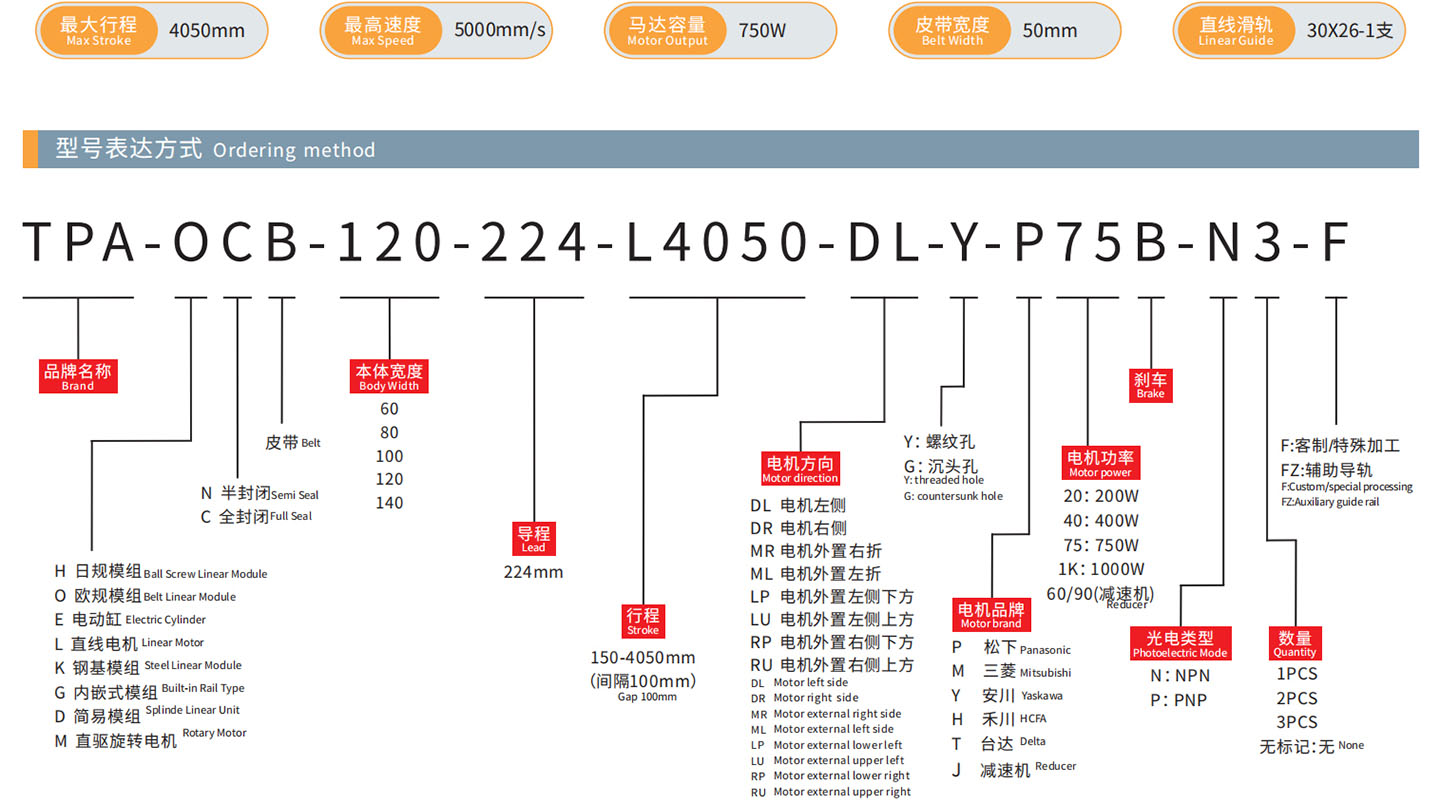
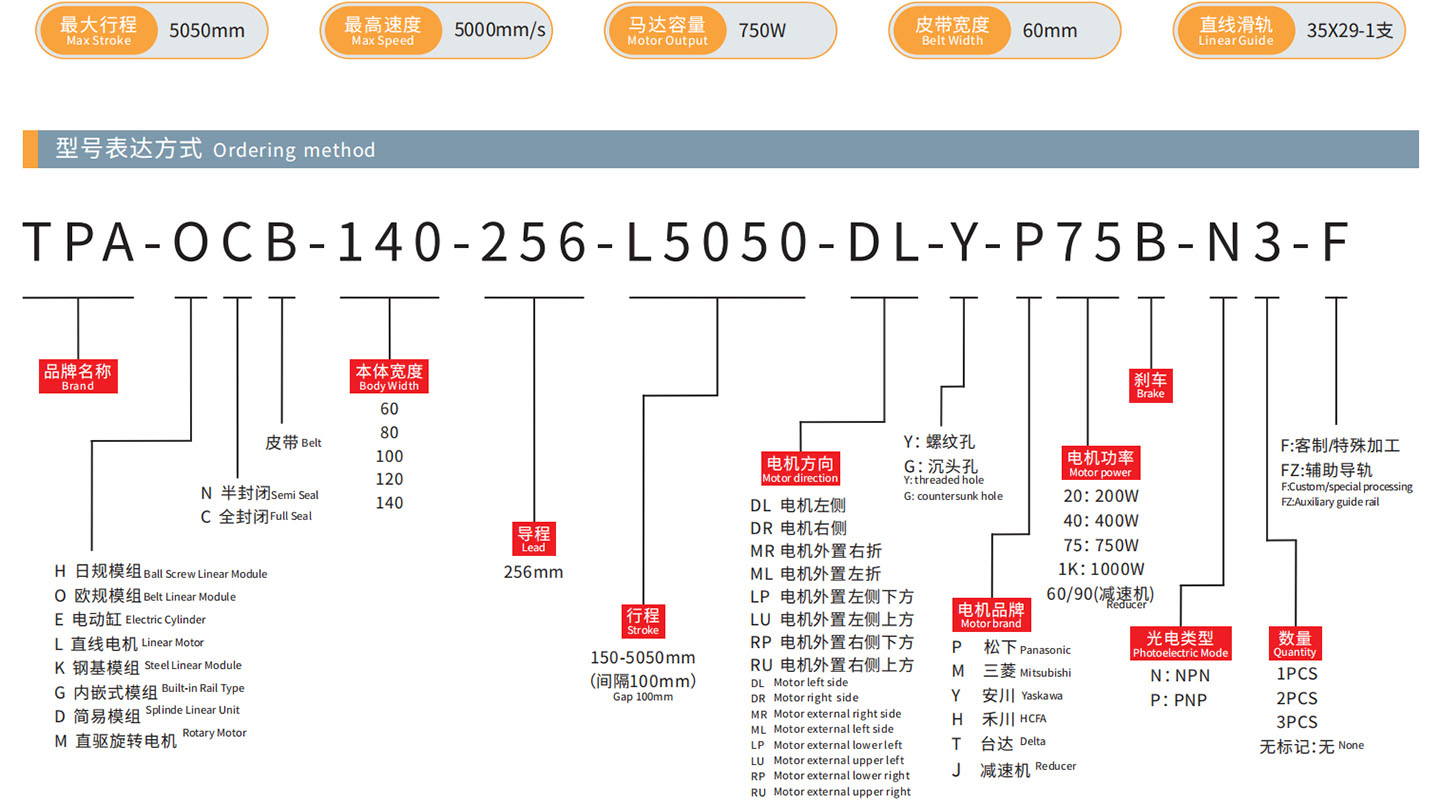
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
TPA-?-?-?-?-?-???-?
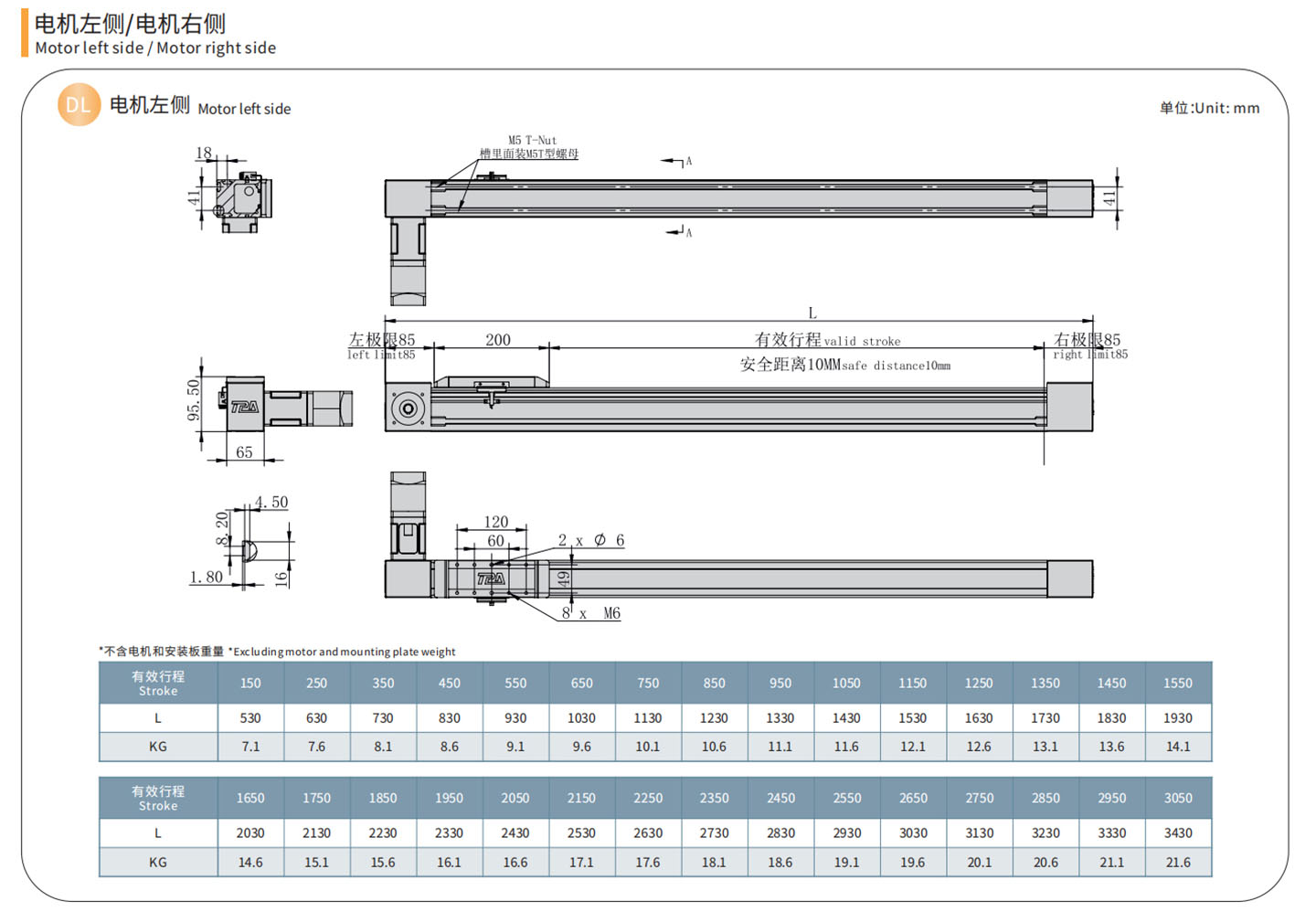
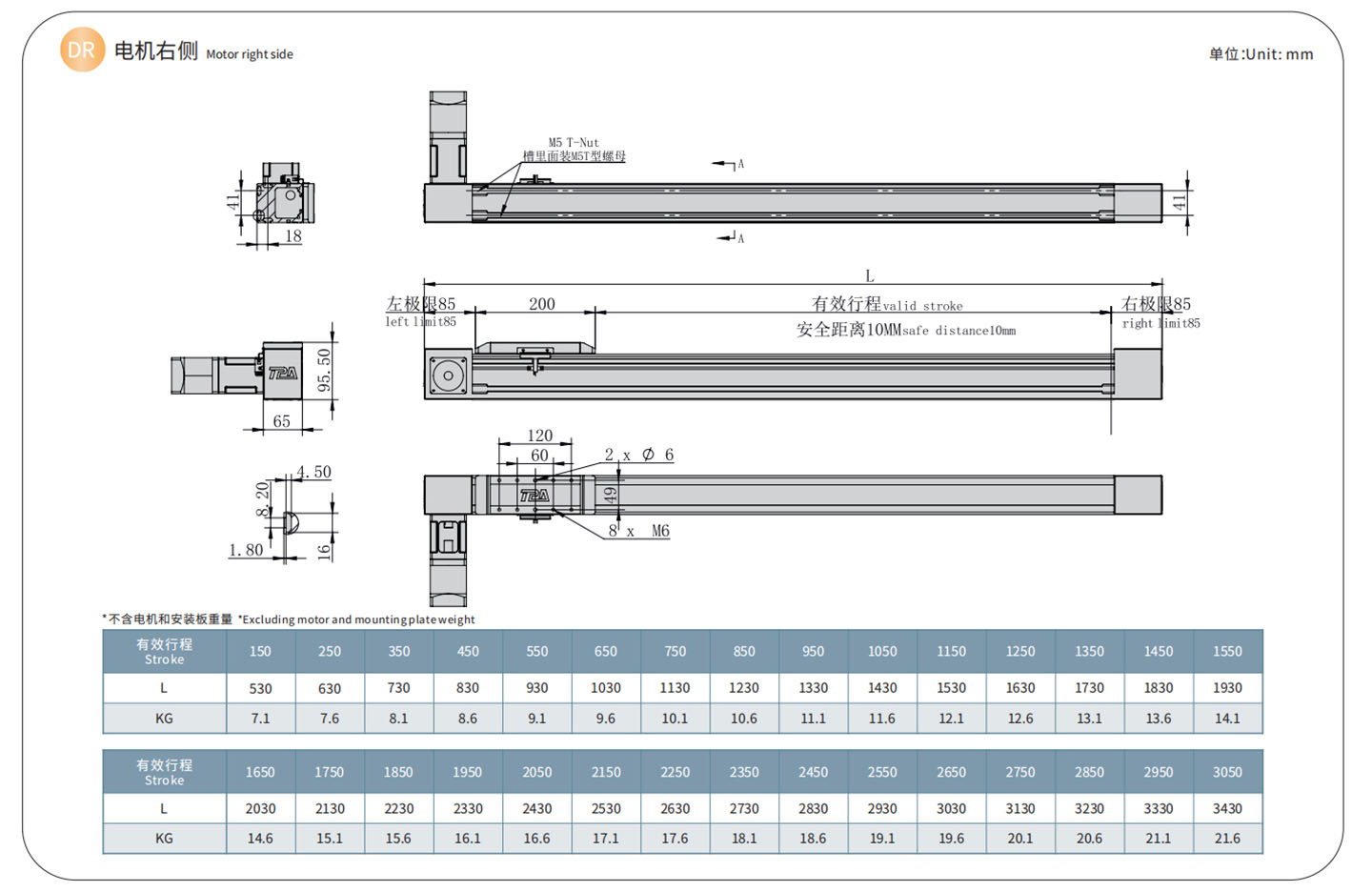
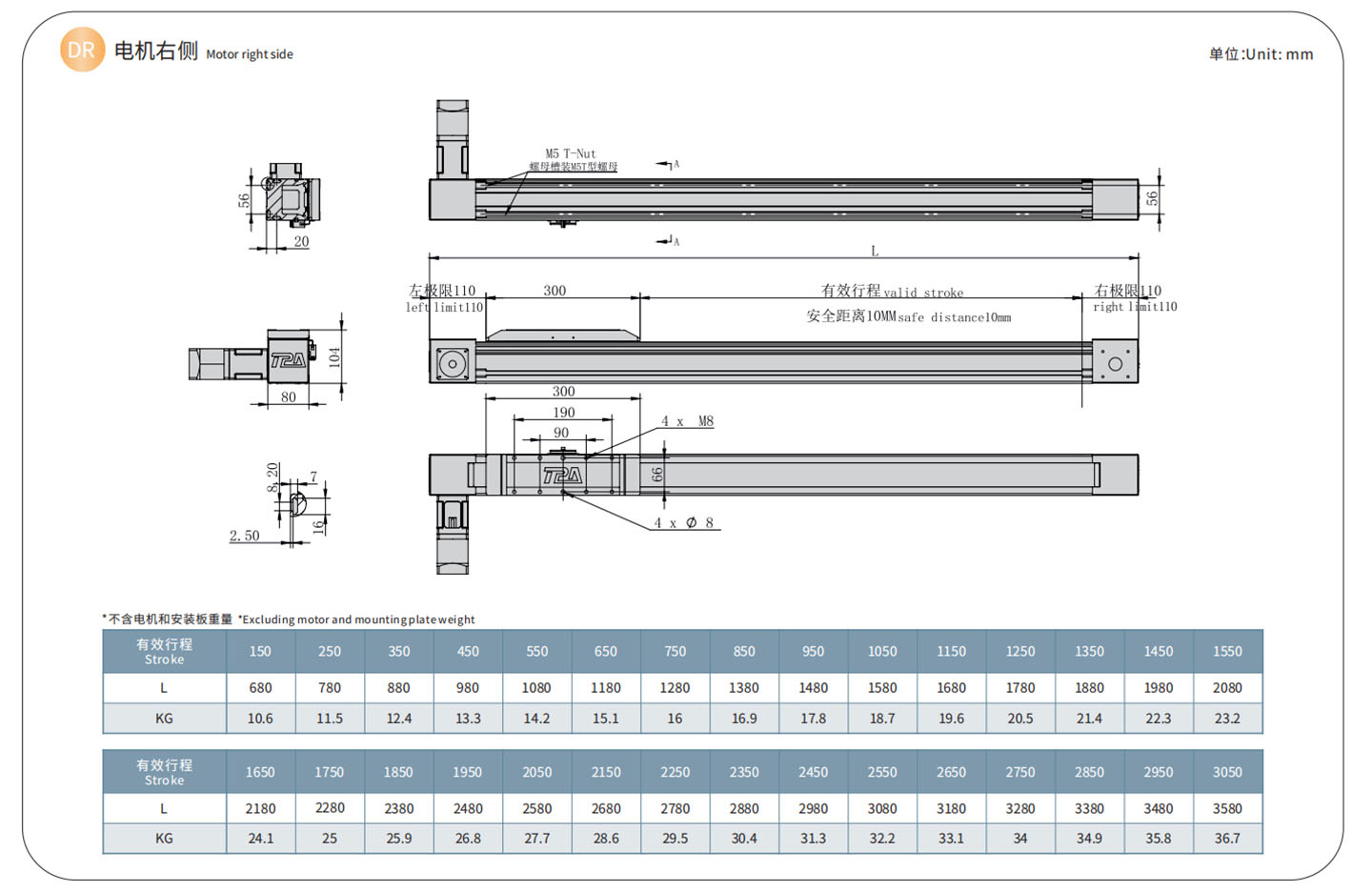
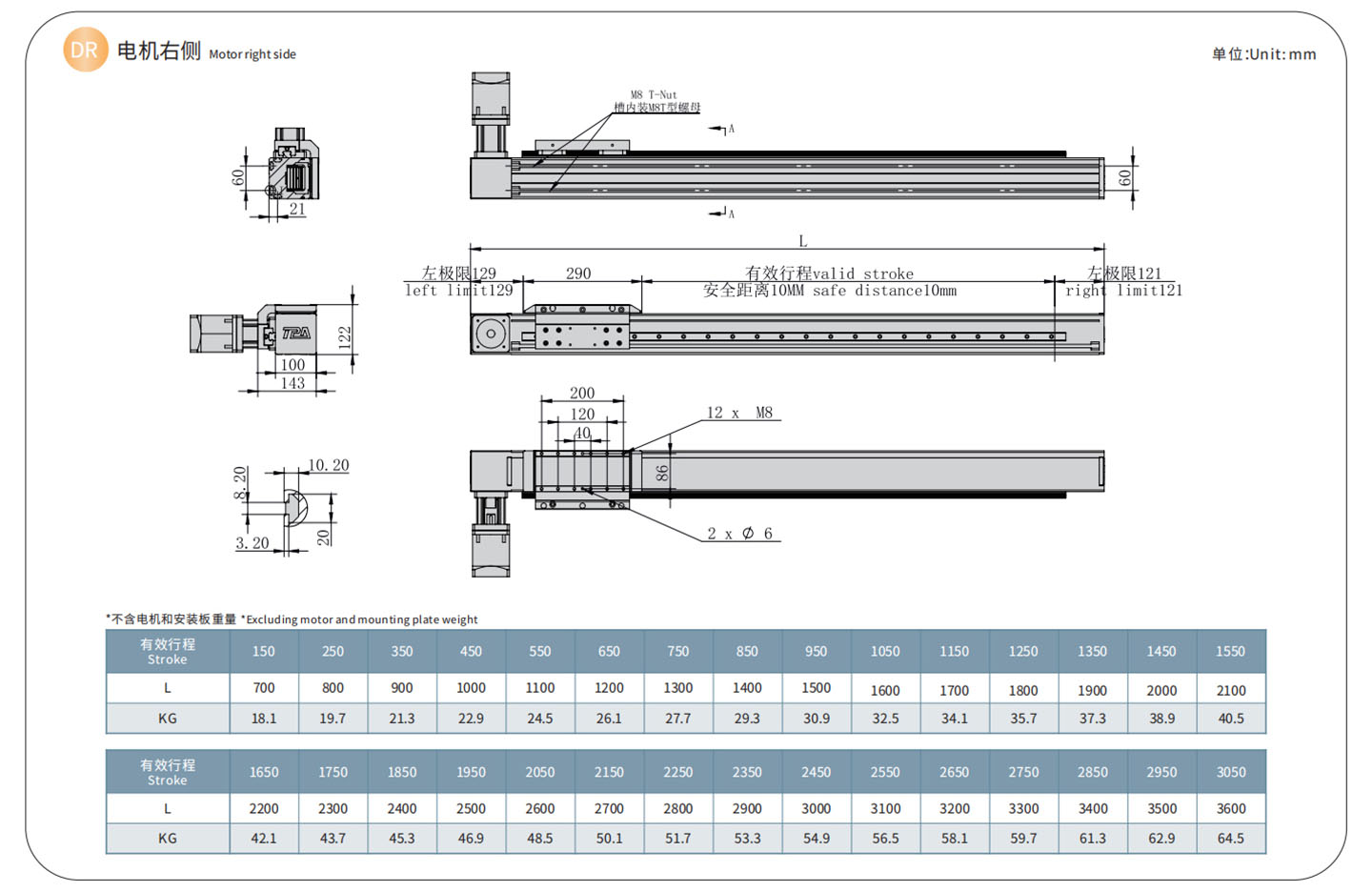
ຊຸດສາຍແອວ TPA OCB ຊຸດສາຍແອວຂັບເຄື່ອນໄດ້ຮັບຮອງເອົາການອອກແບບປະສົມປະສານປະສົມປະສານຂອງມໍເຕີ servo ແລະສາຍແອວທີ່ມີການອອກແບບທີ່ປິດລ້ອມຢ່າງສົມບູນ, ເຊິ່ງປ່ຽນການເຄື່ອນໄຫວ rotary ຂອງມໍເຕີ servo ເຂົ້າໄປໃນການເຄື່ອນໄຫວເສັ້ນ, ຄວບຄຸມຄວາມໄວ, ຕໍາແຫນ່ງ, ແລະແຮງດັນຂອງຕົວເລື່ອນ, ແລະຮັບຮູ້ໄດ້ສູງ. ຄວາມແມ່ນຍໍາການຄວບຄຸມອັດຕະໂນມັດ.

OCB-60

OCB-80
OCB-100
OCB-120

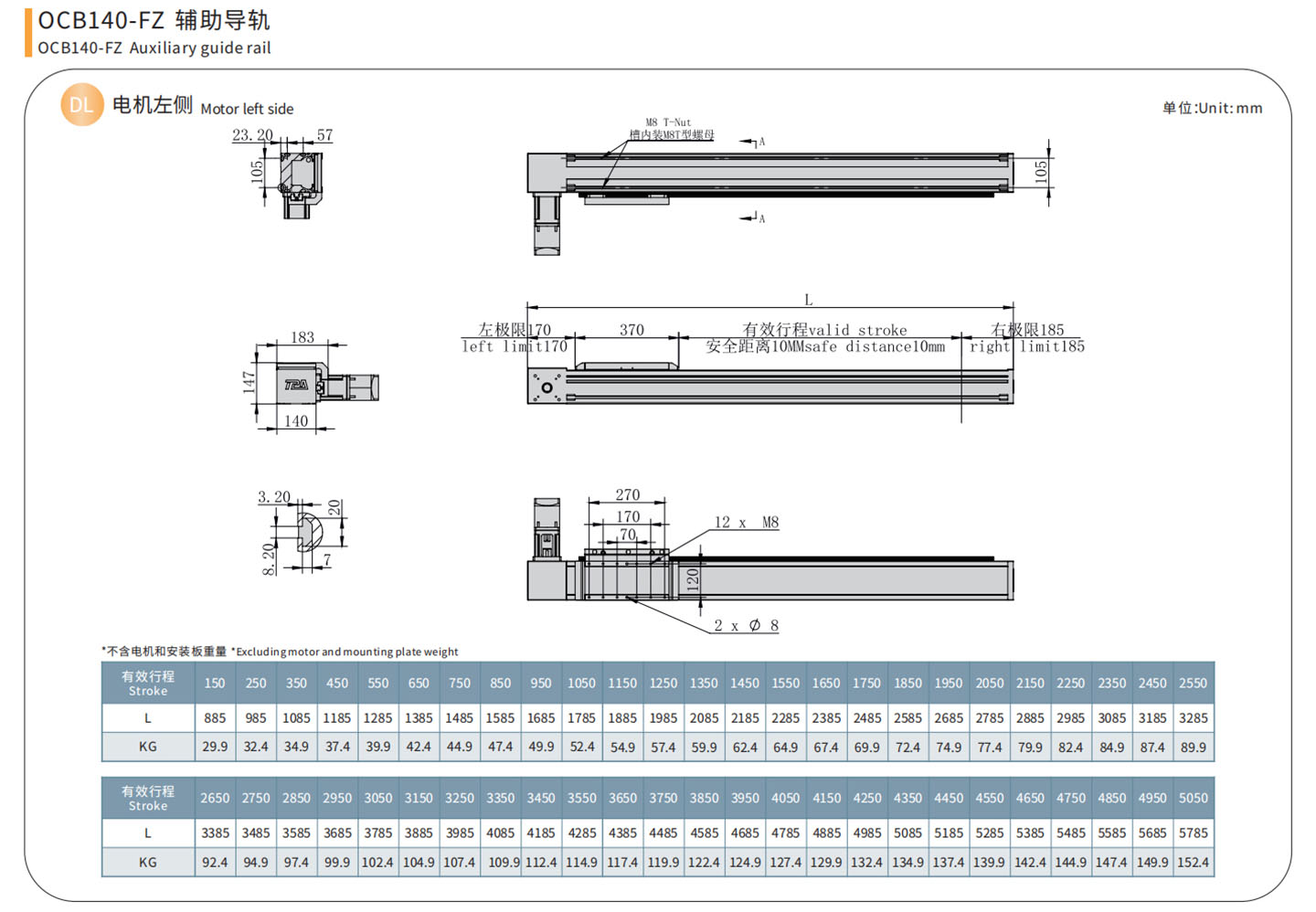
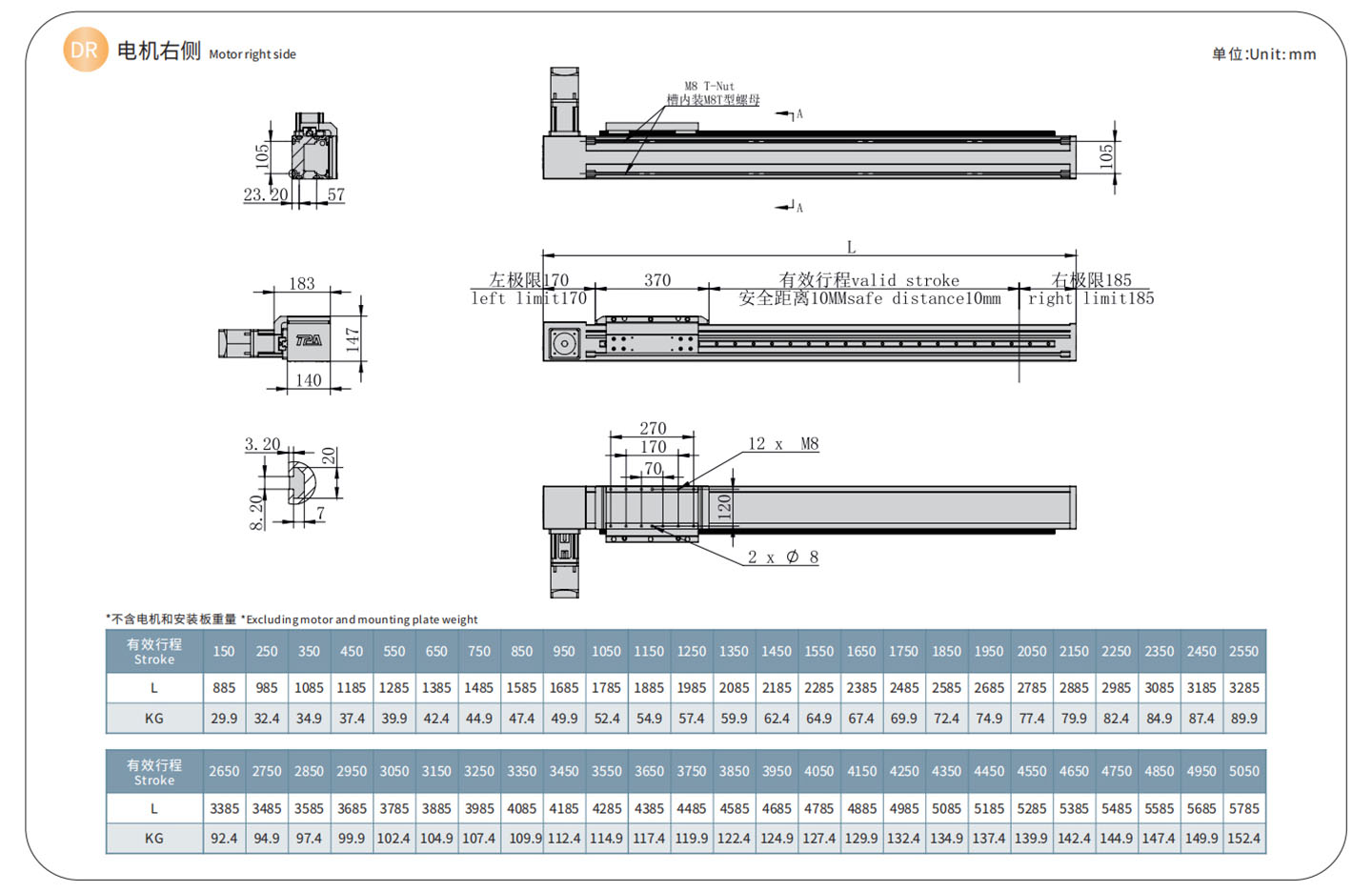
OCB-140
ຄຸນສົມບັດ
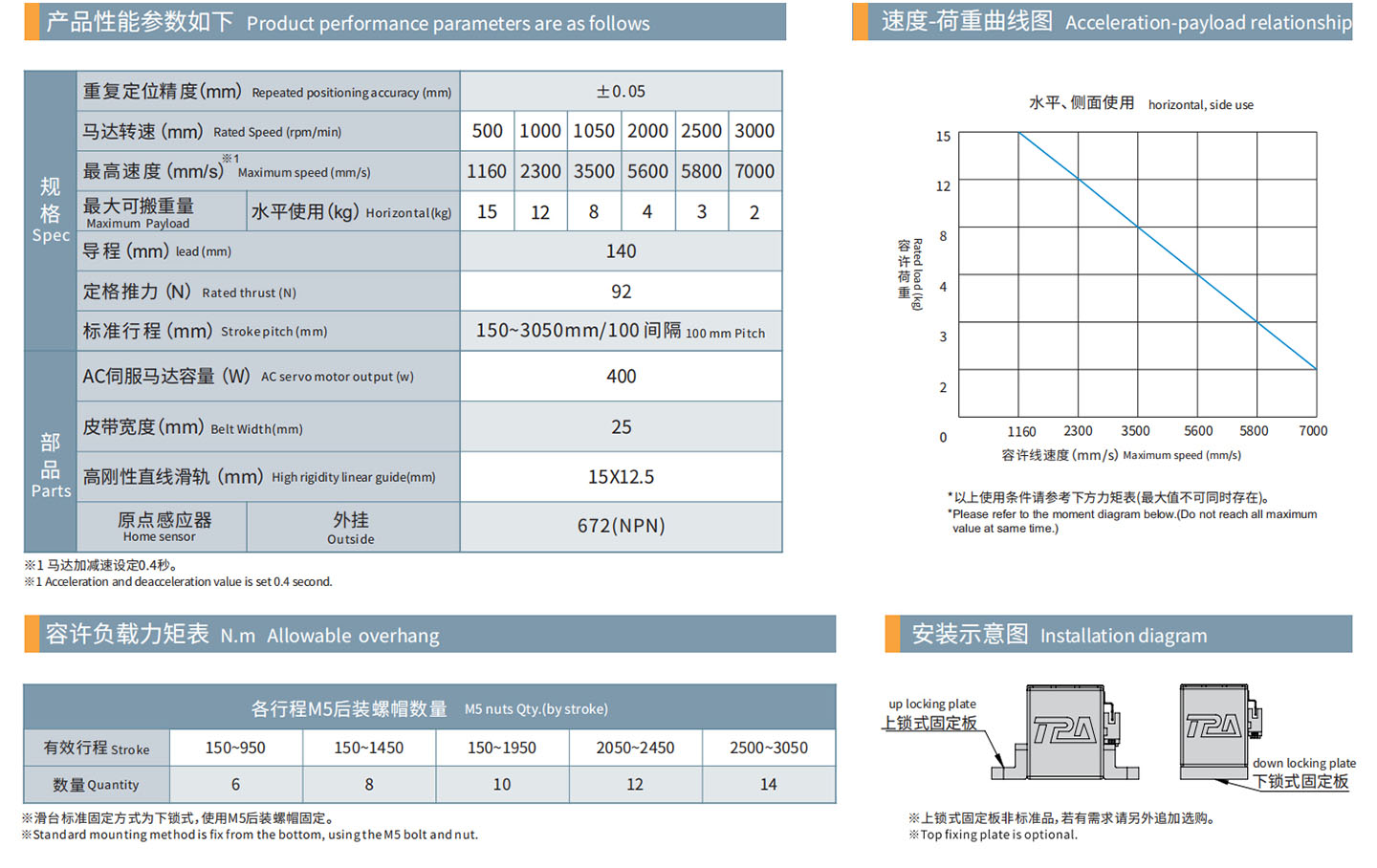
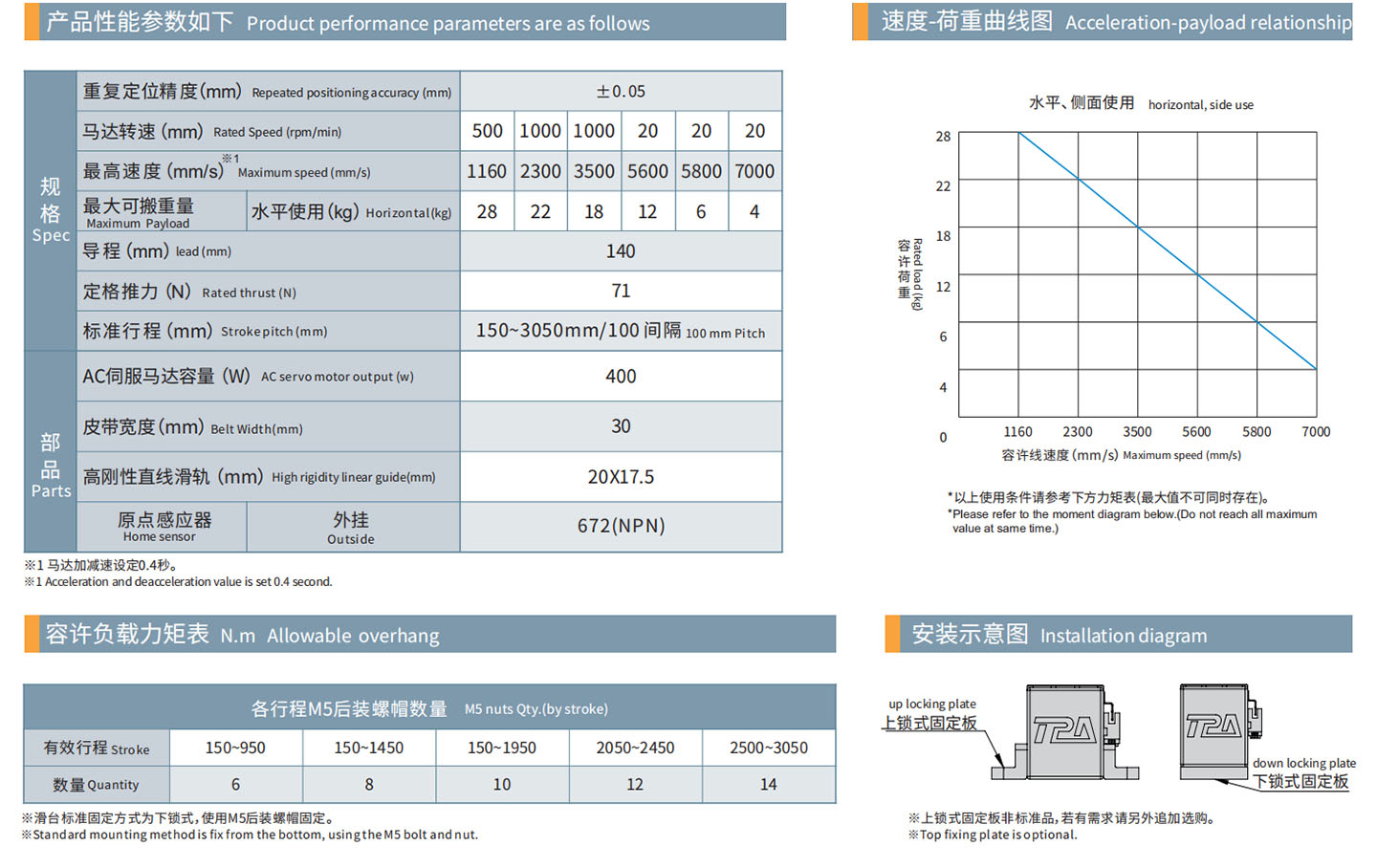
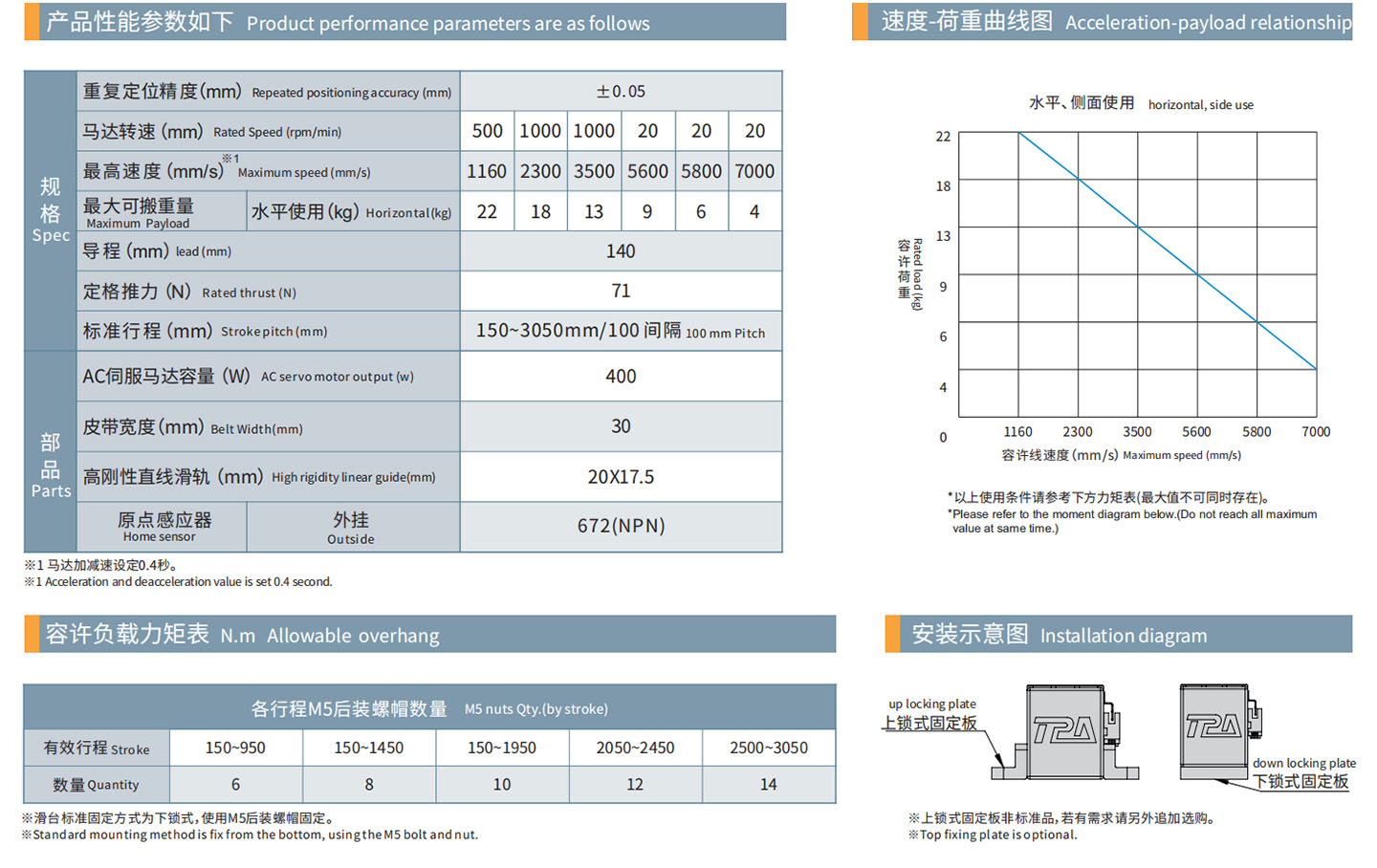
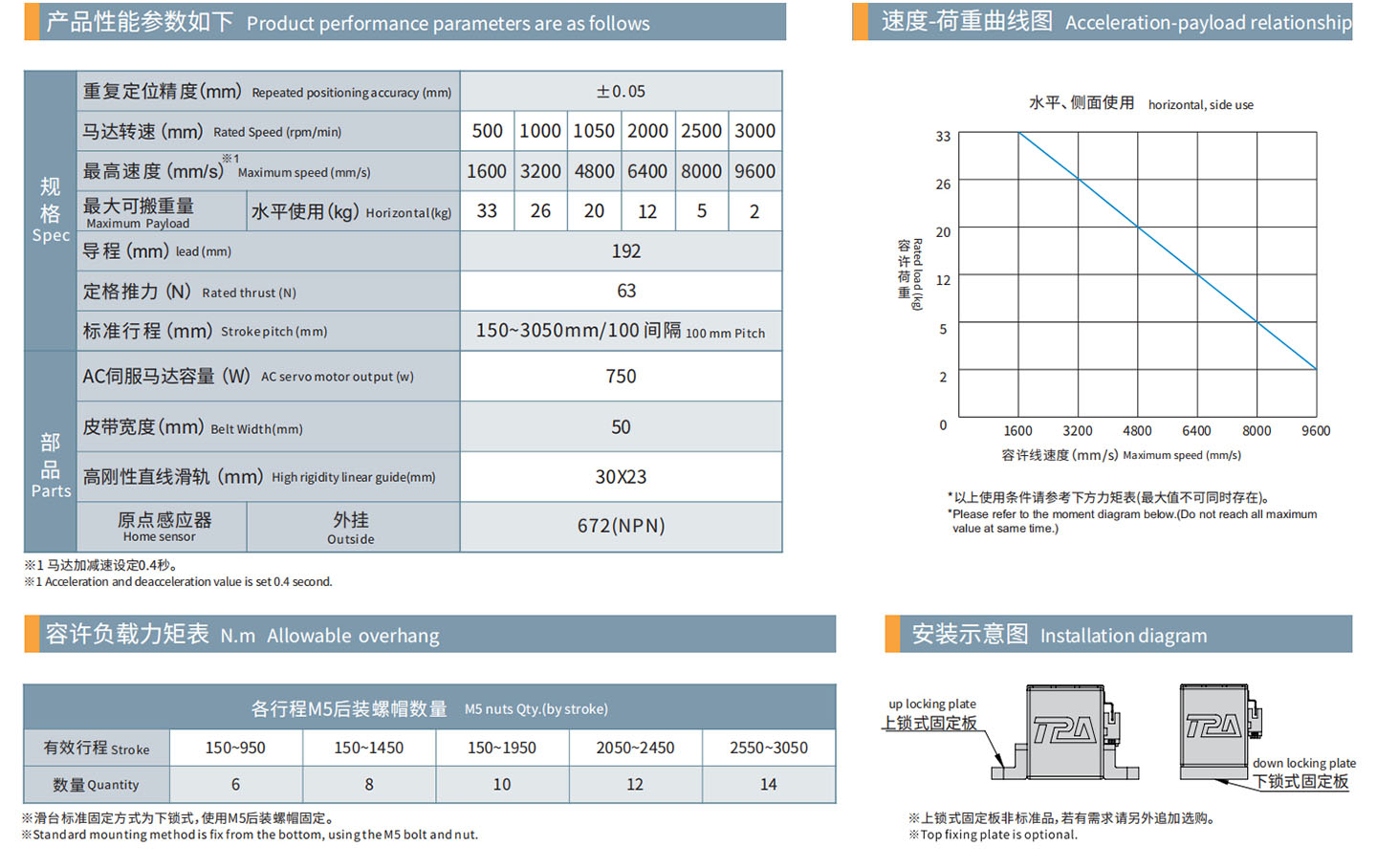
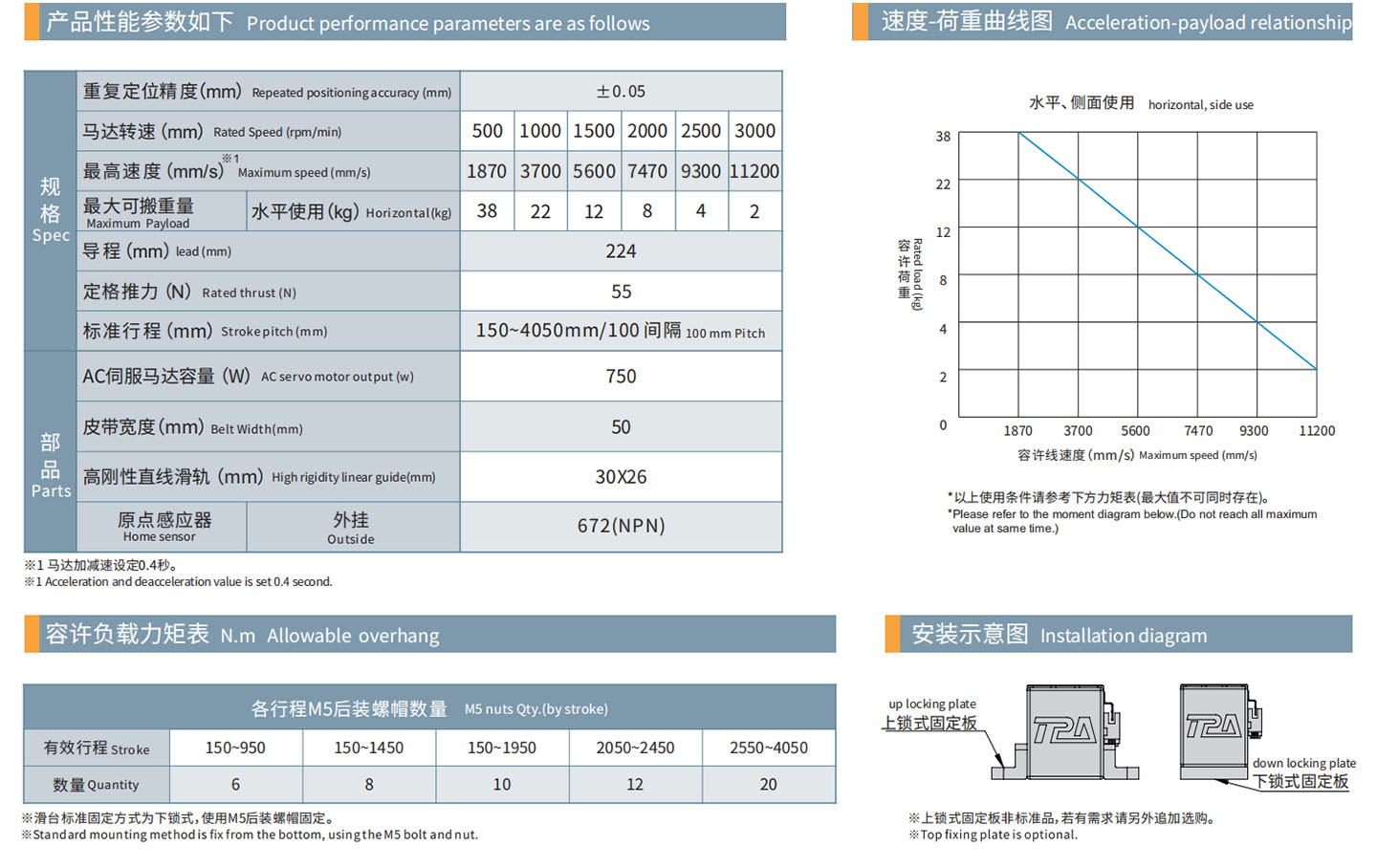
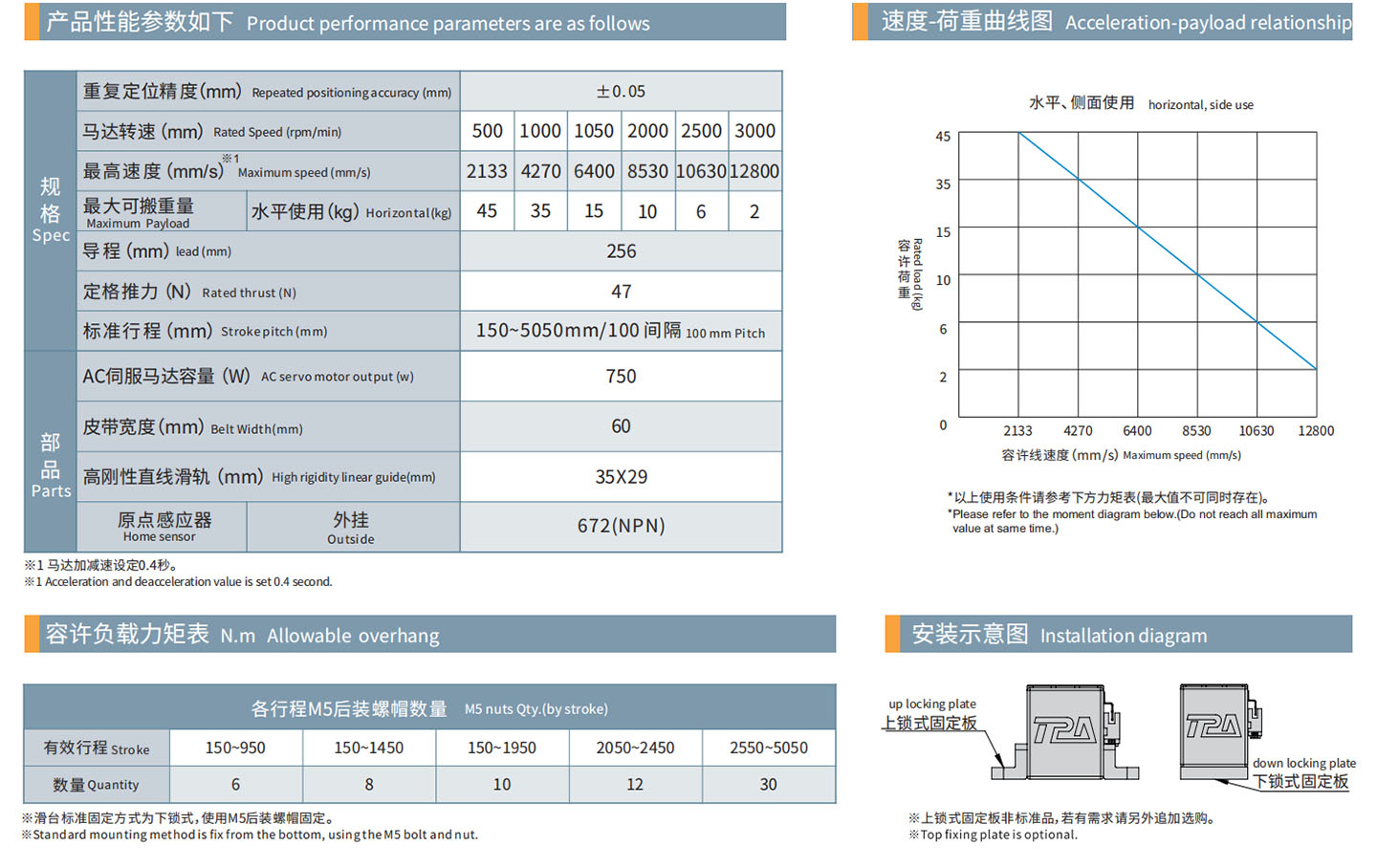
ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊ້ໍາຊ້ອນ: ± 0.05mm
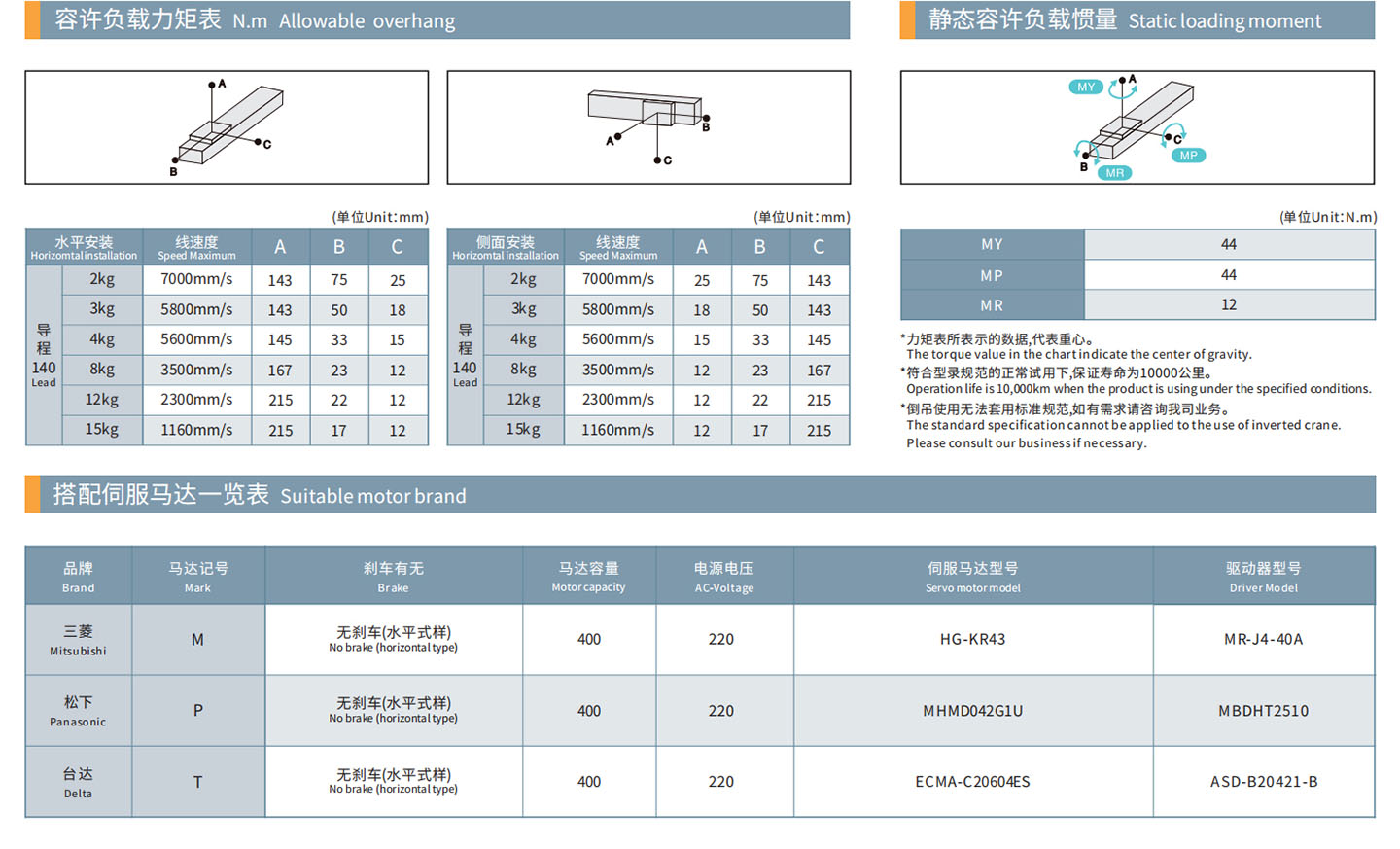
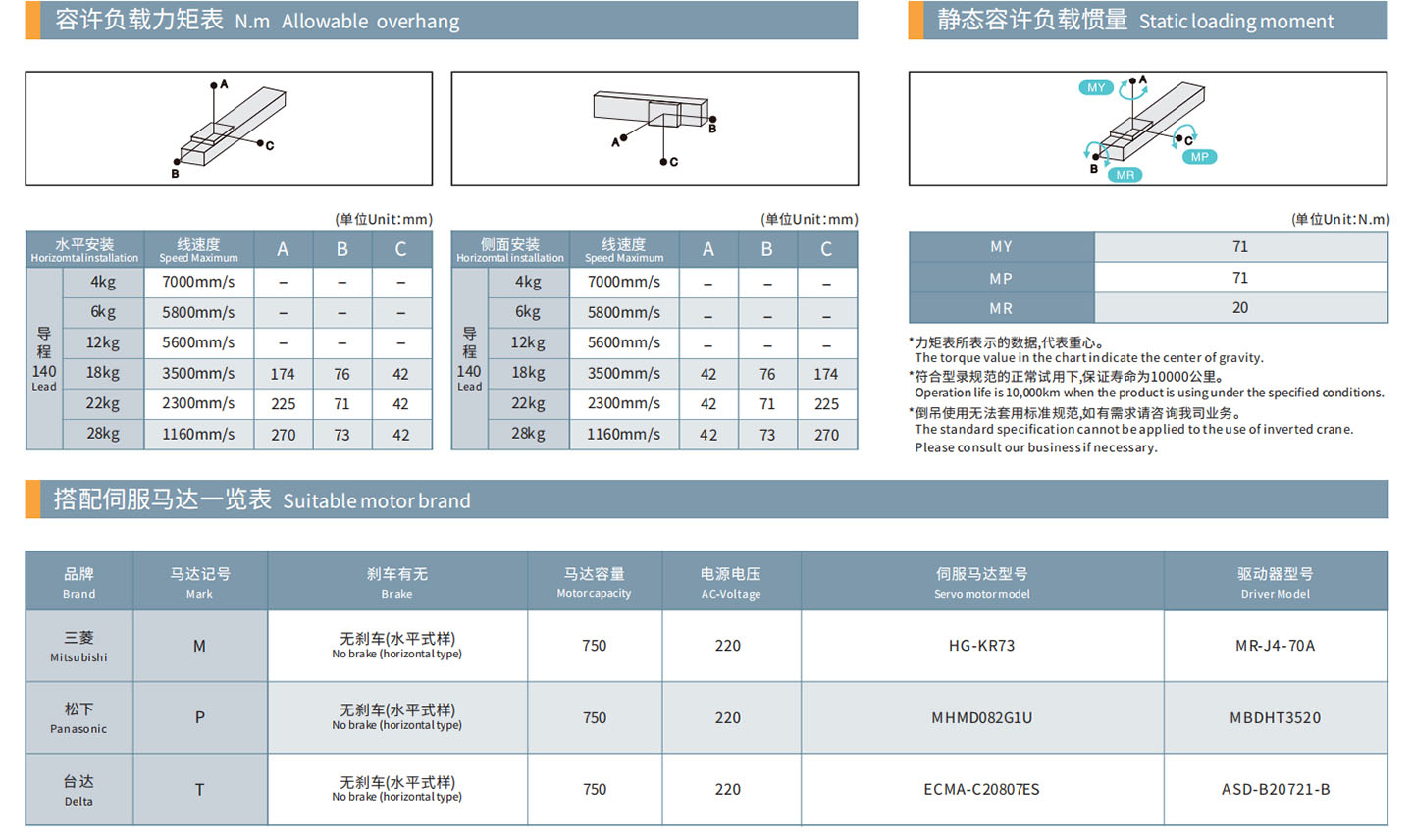
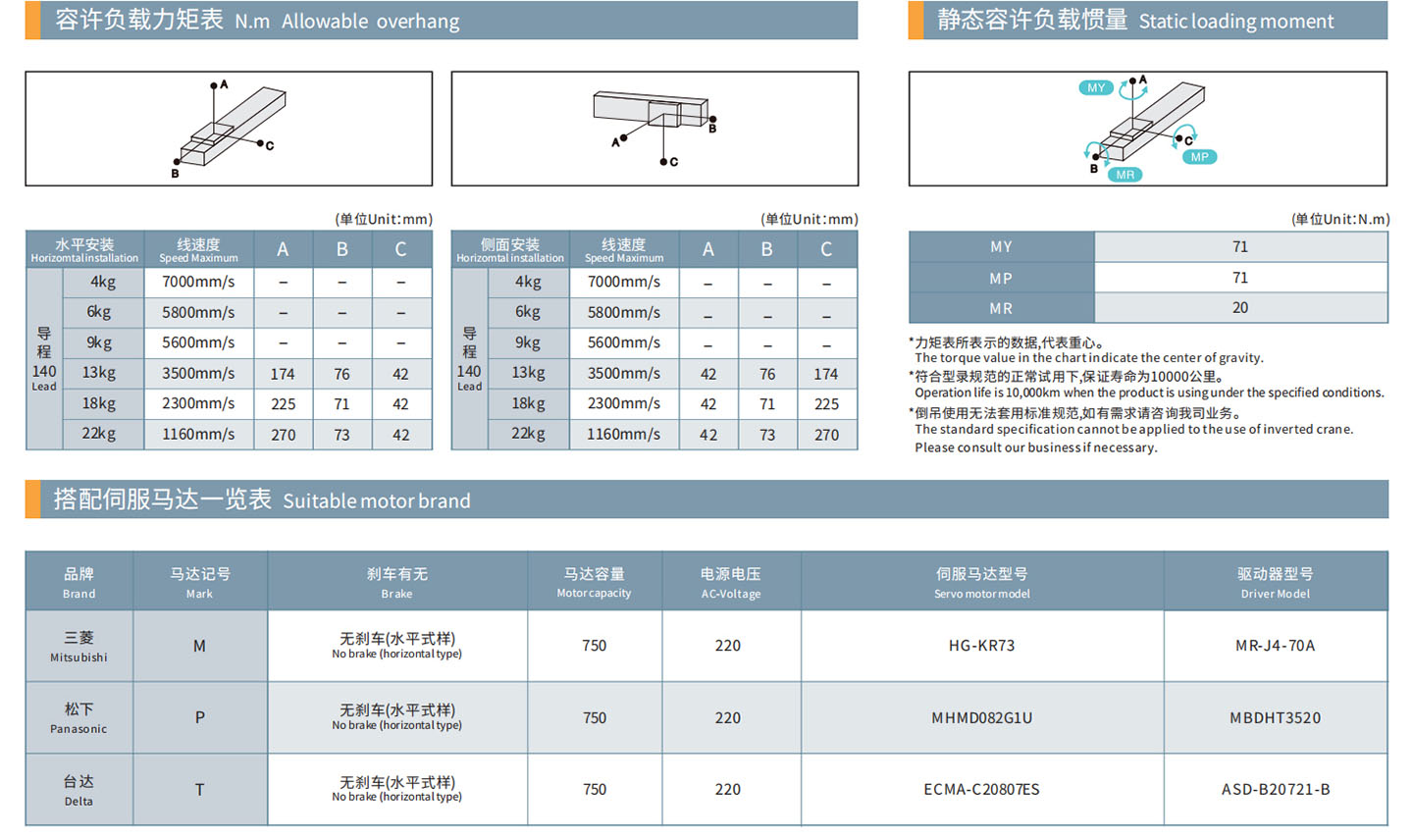
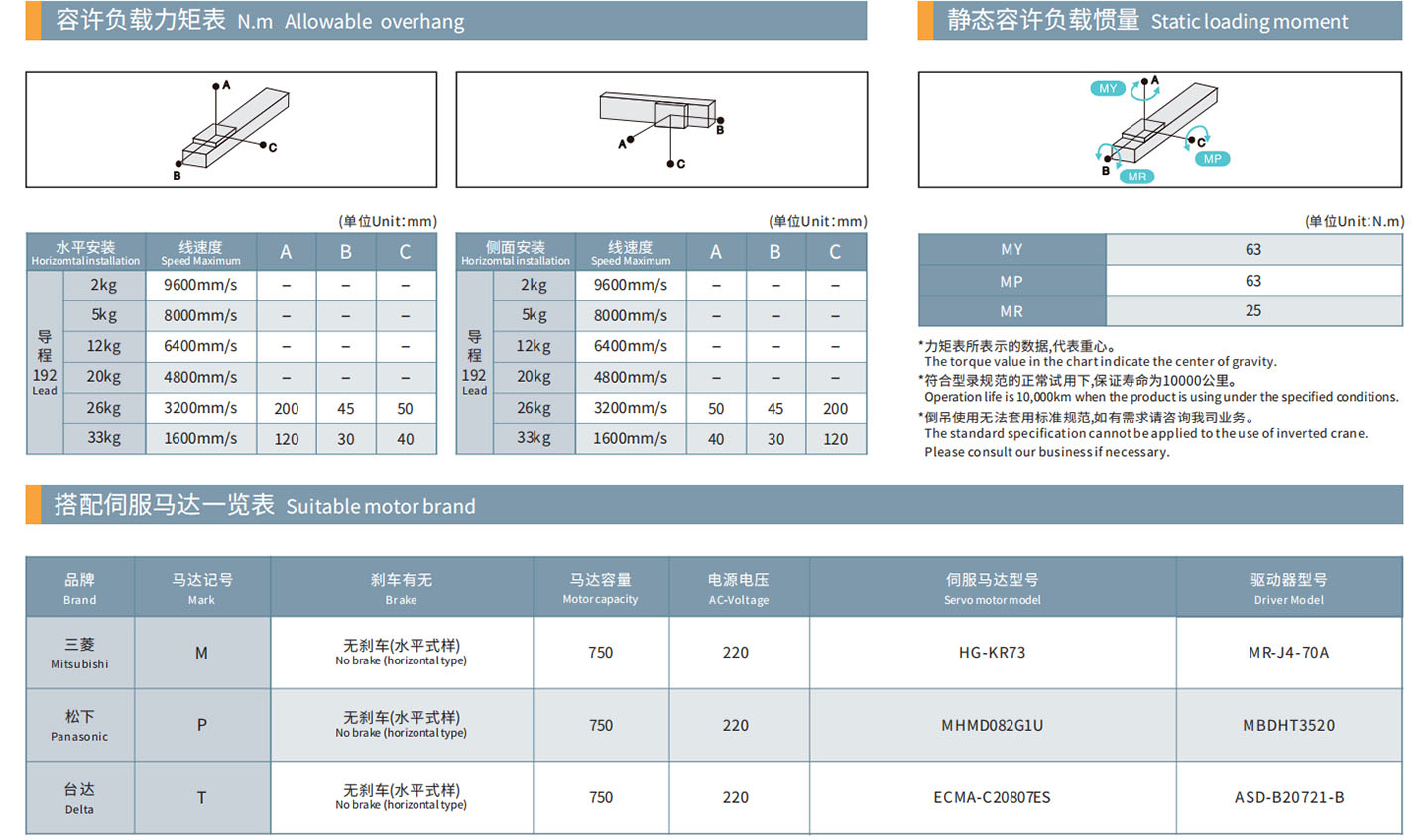
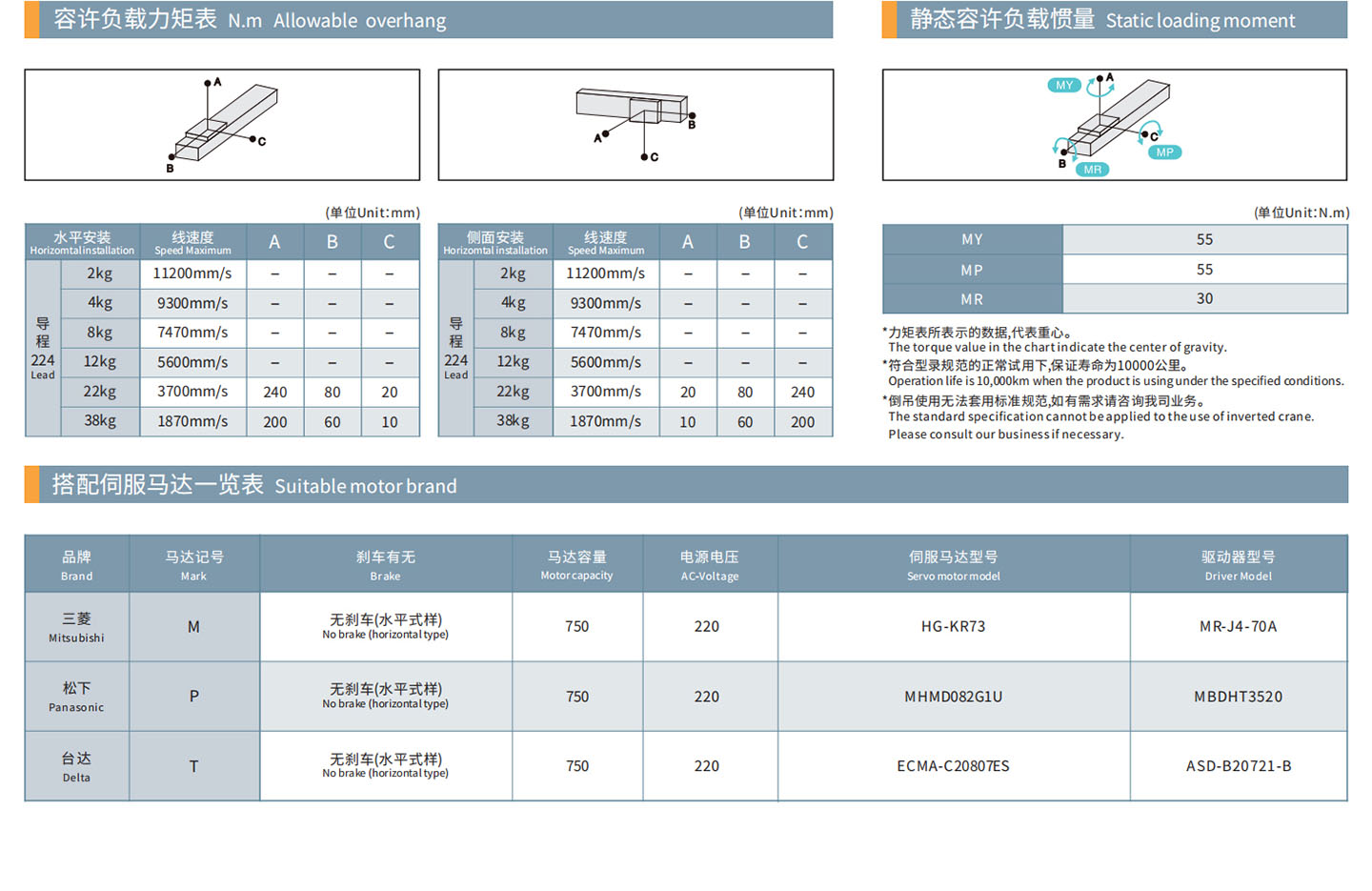
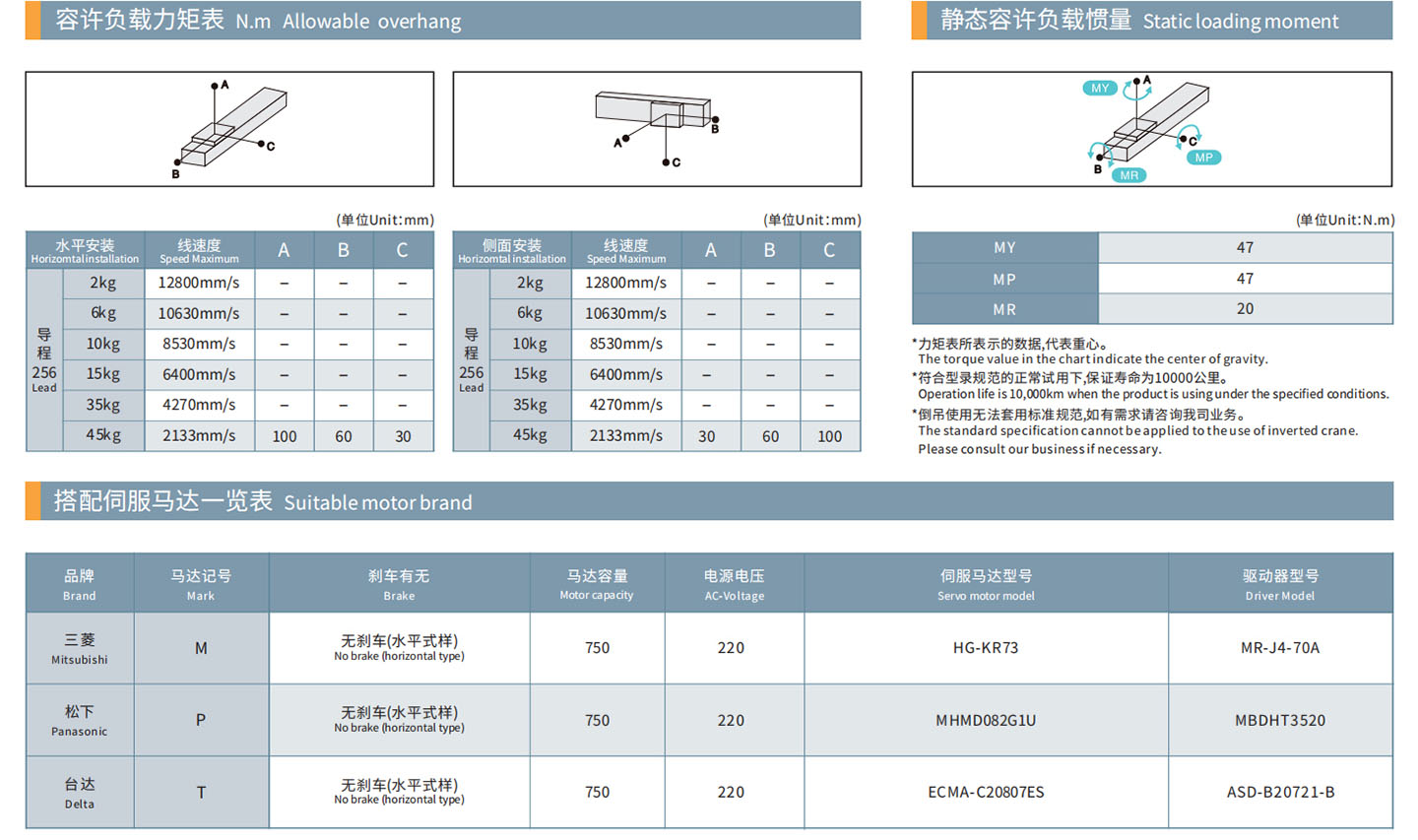
Max Payload (ແນວນອນ): 220kg
ນ້ໍາຫນັກສູງສຸດ (ແນວຕັ້ງ): 80kg
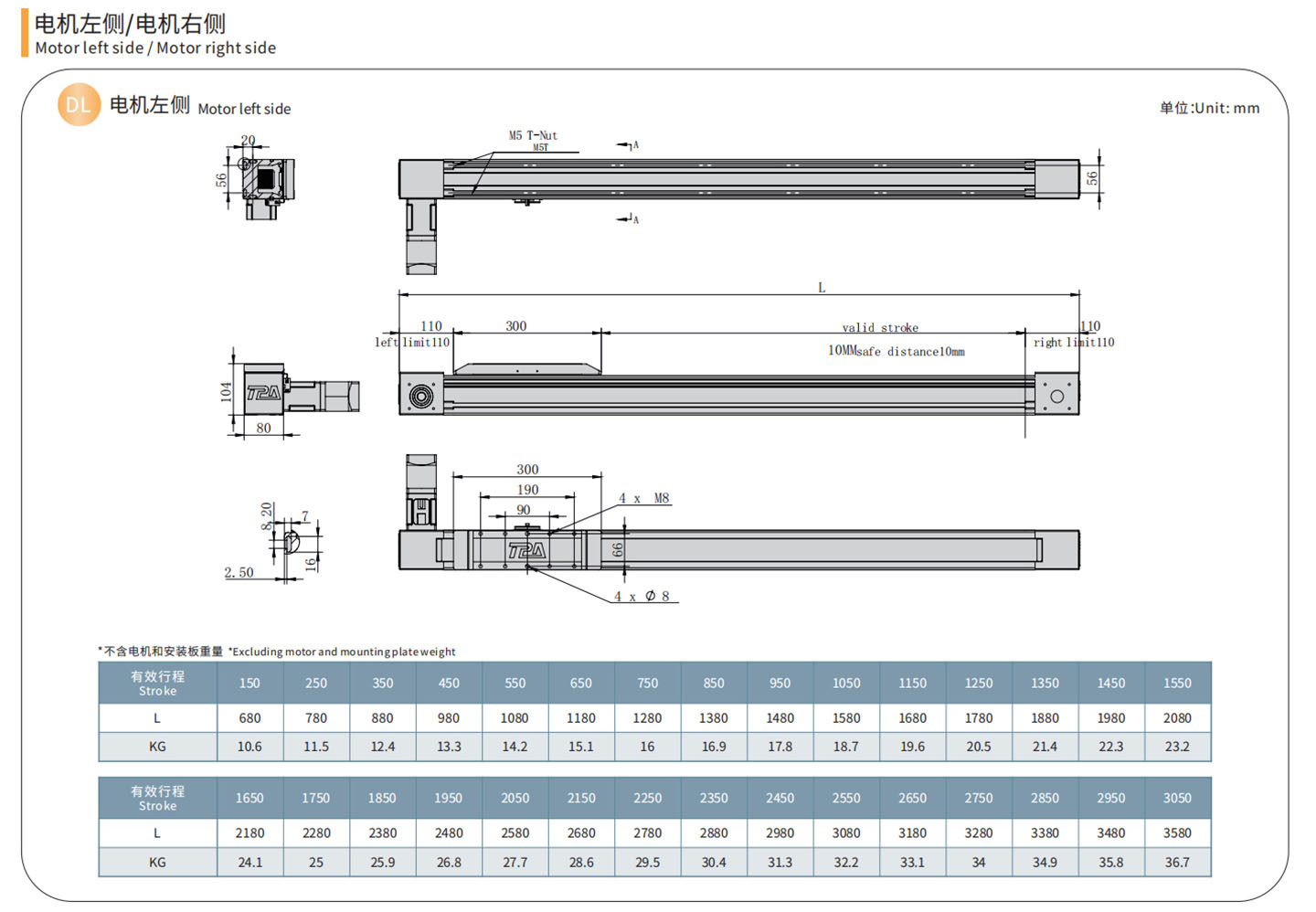
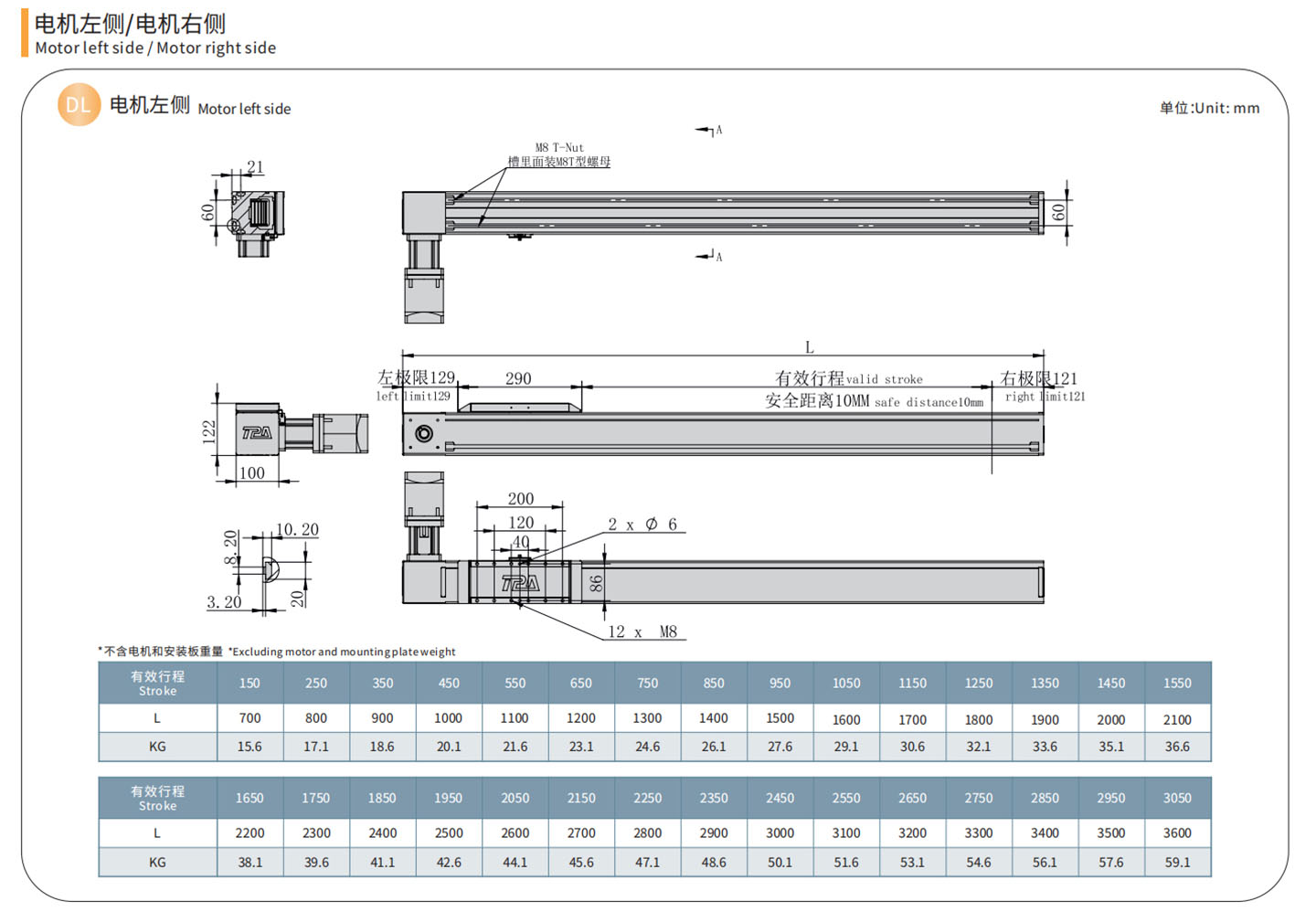
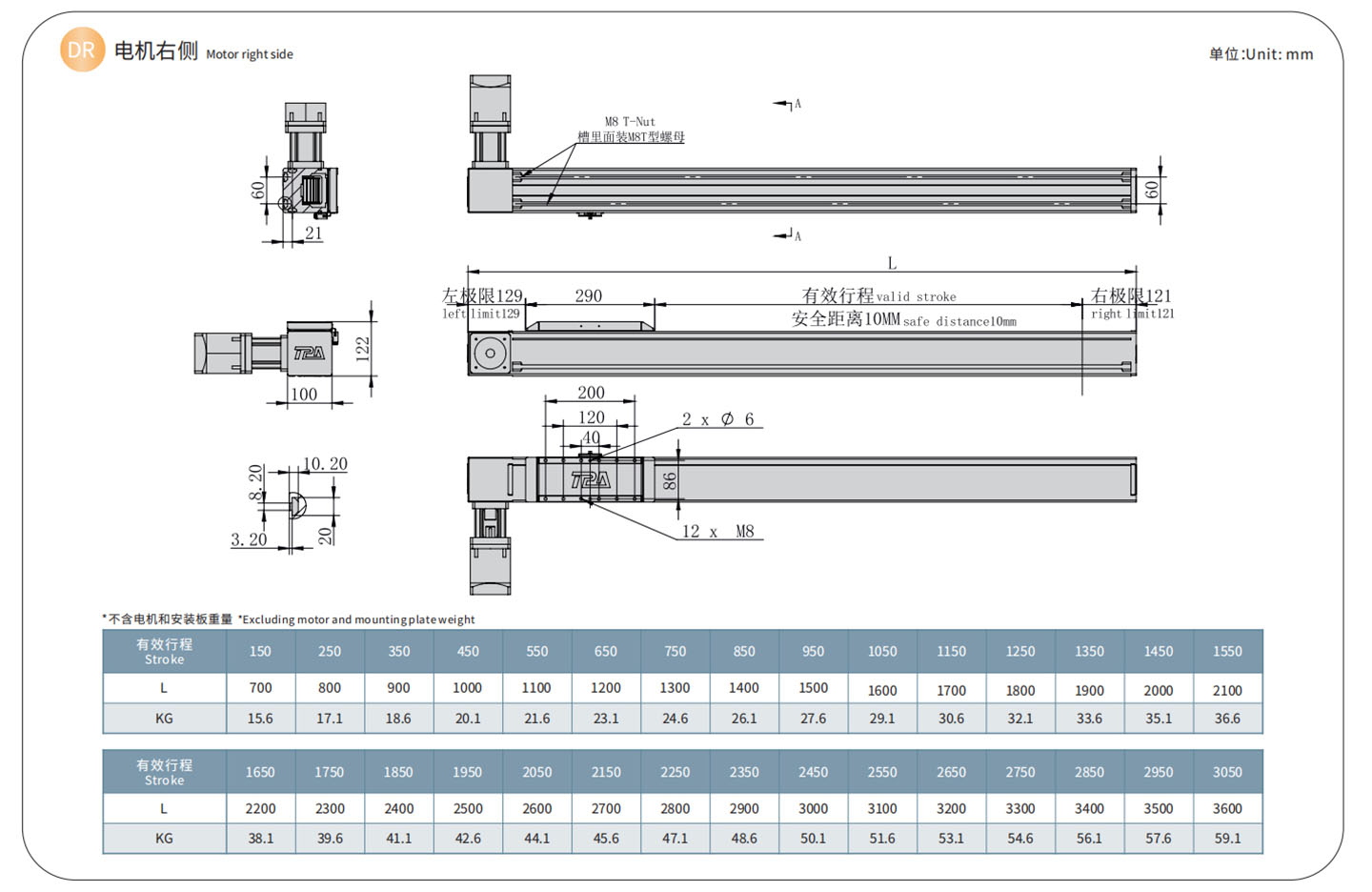
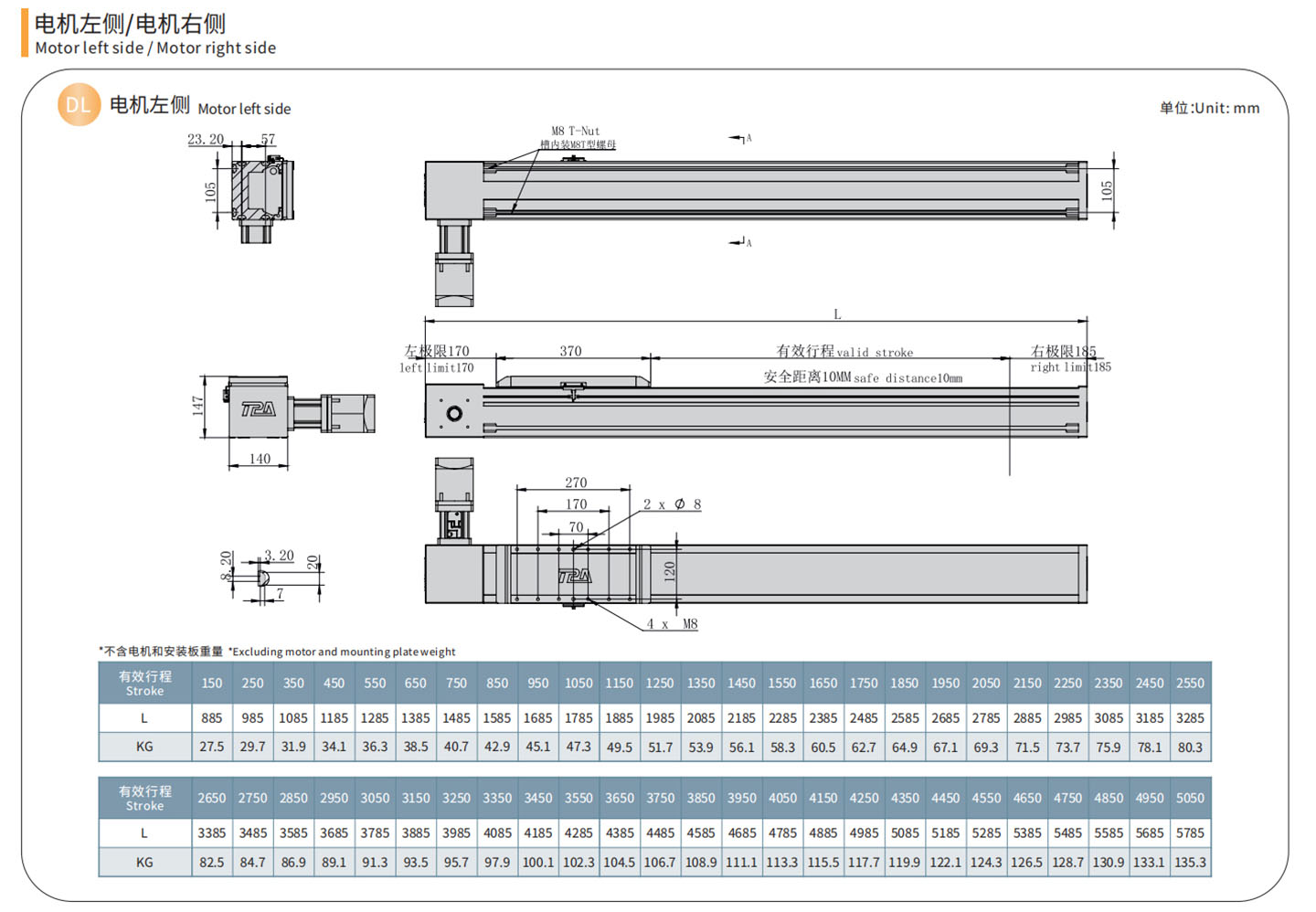
Stroke: 150 – 5050mm
ຄວາມໄວສູງສຸດ: 5000mm/s

ການອອກແບບໂປຣໄຟລ໌: ການວິເຄາະຄວາມຄຽດຂອງອົງປະກອບ finite ຖືກນໍາໃຊ້ໃນການອອກແບບໂປຣໄຟລ໌ເພື່ອຈໍາລອງຄວາມແຂງແລະຄວາມຫມັ້ນຄົງຂອງໂຄງສ້າງຂອງໂປຣໄຟລ໌. ການຫຼຸດຜ່ອນນ້ໍາຫນັກຂອງຮ່າງກາຍ profile, ມີຄວາມສາມາດຮັບຜິດຊອບຕົວຈິງທີ່ເຂັ້ມແຂງແລະການອອກແບບຂອງມະນຸດ.
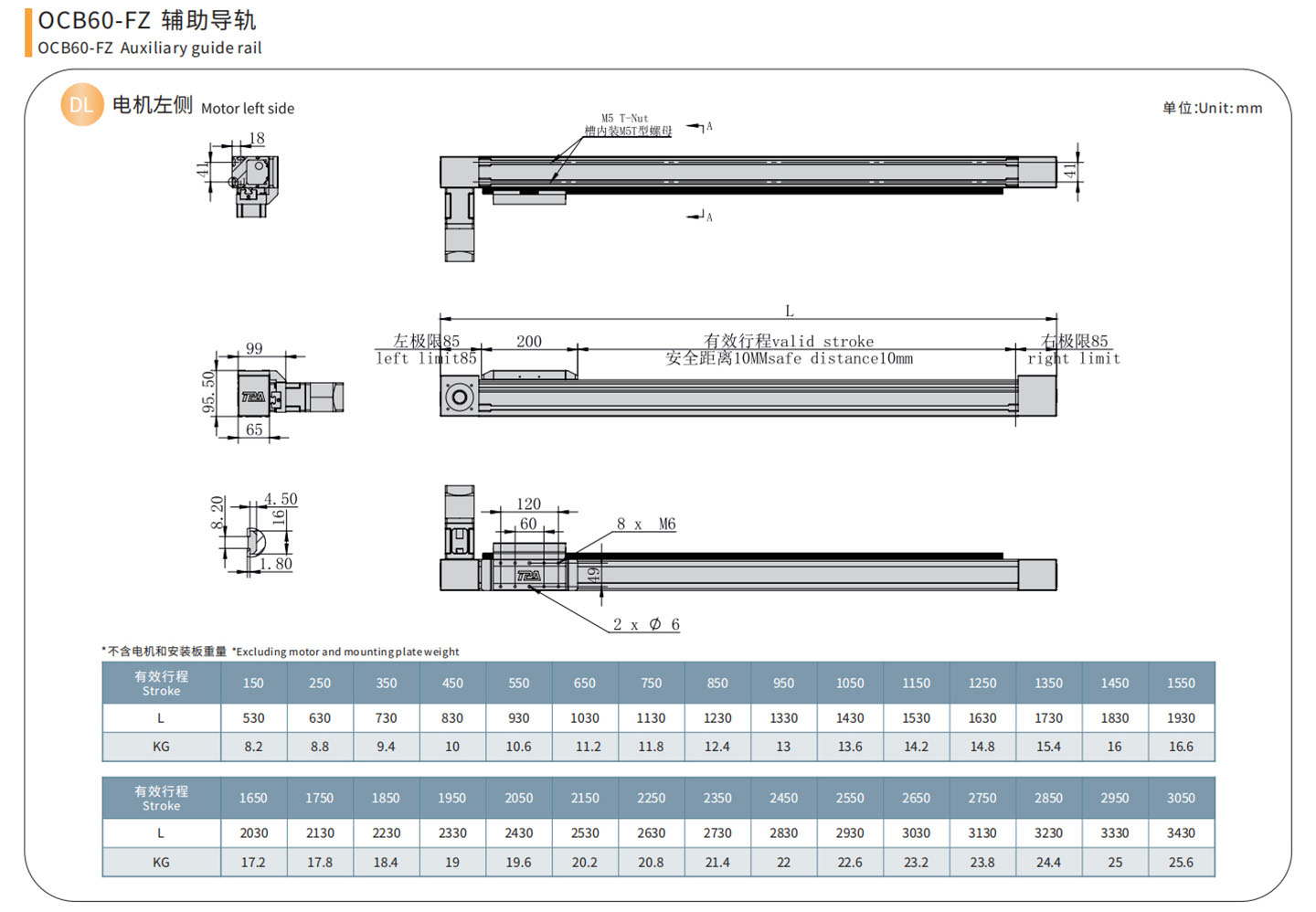
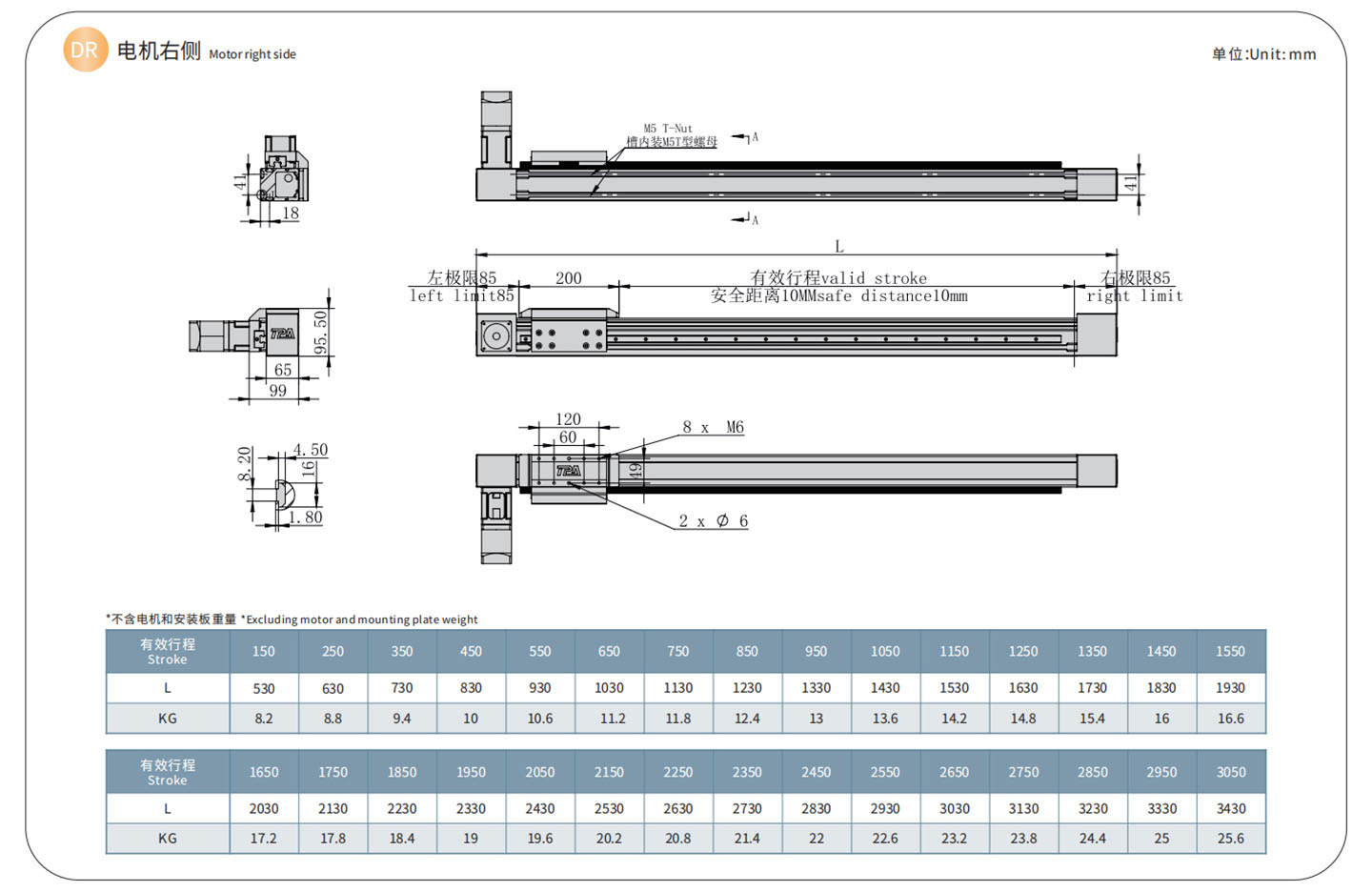
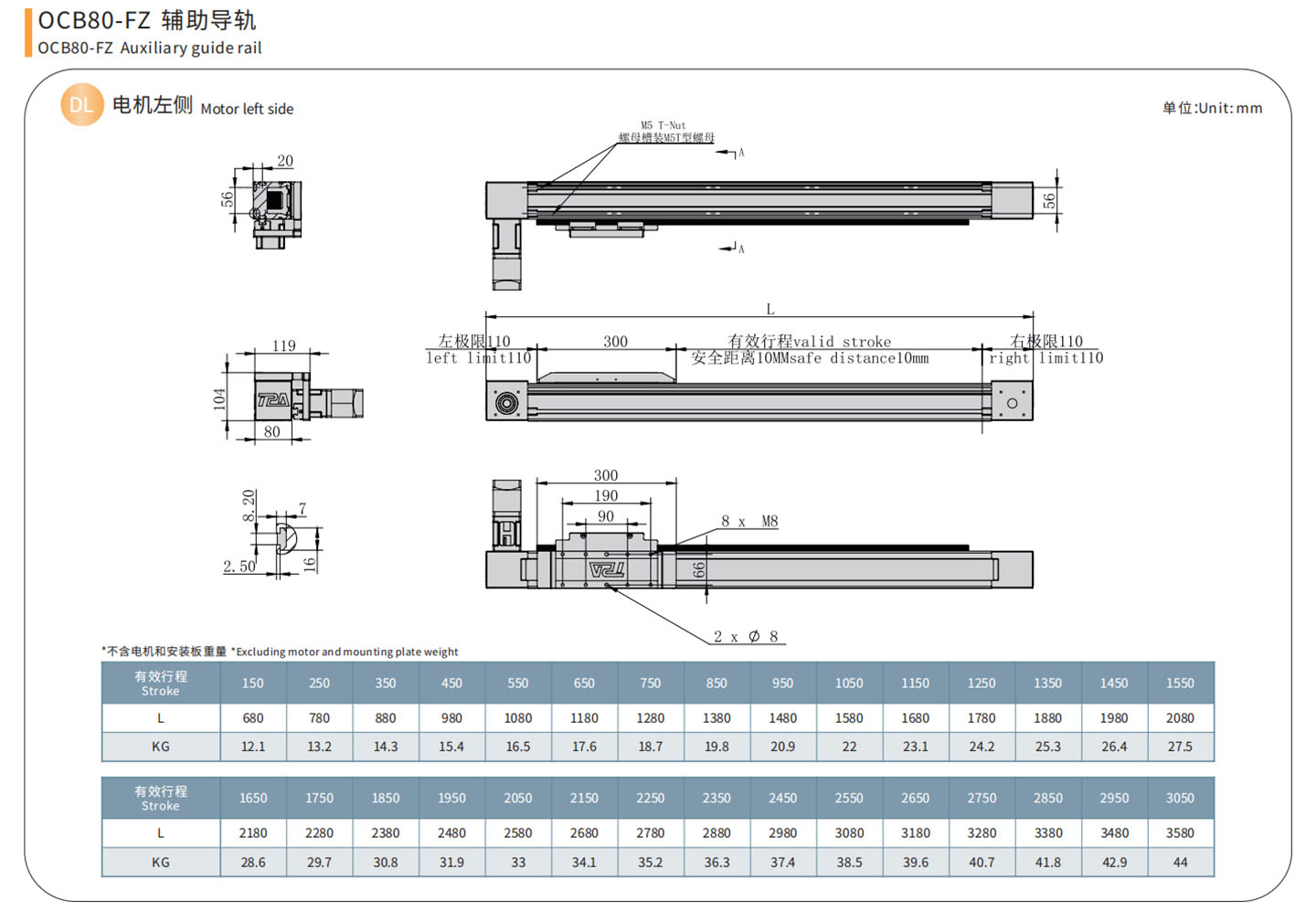
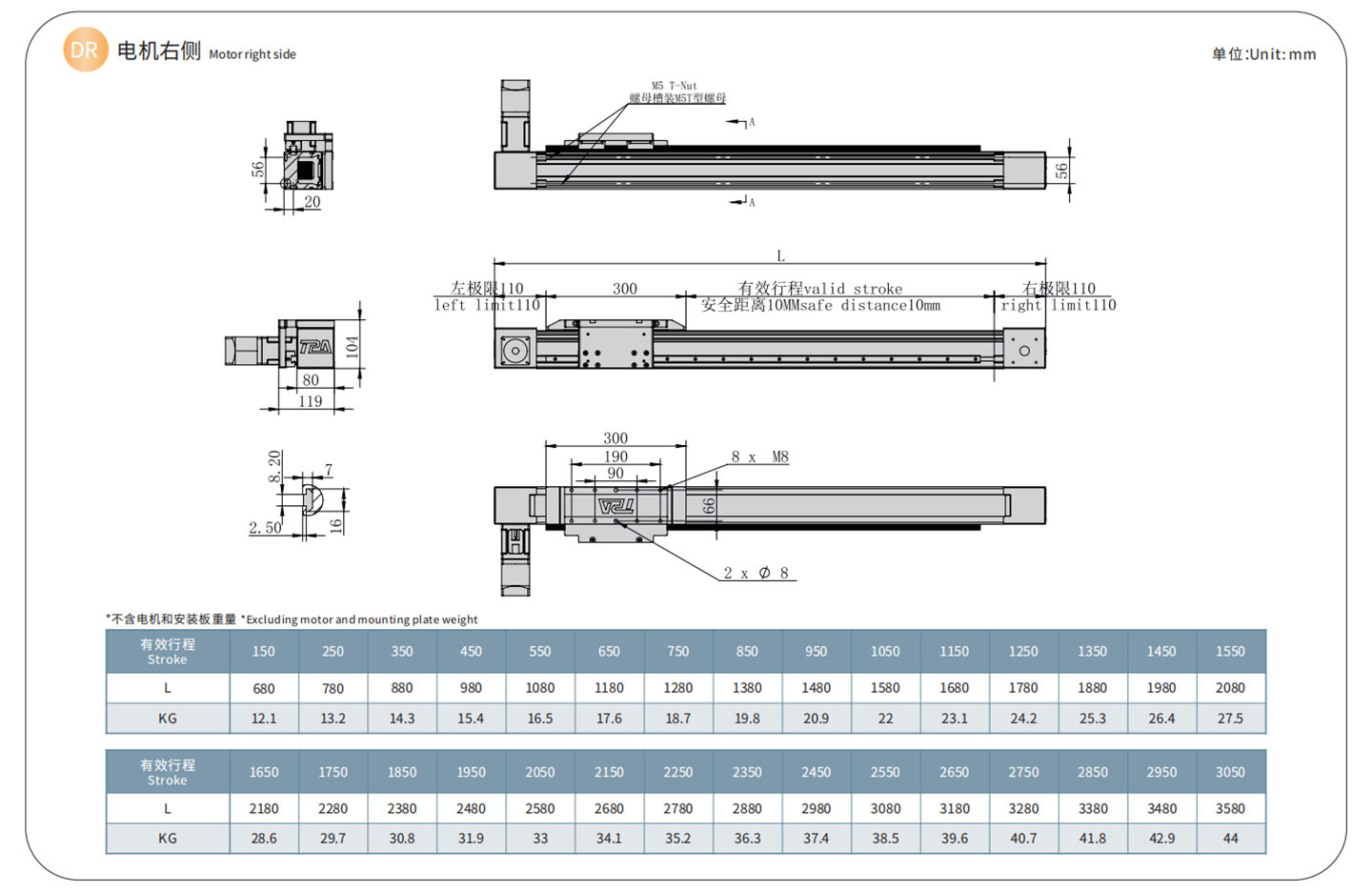
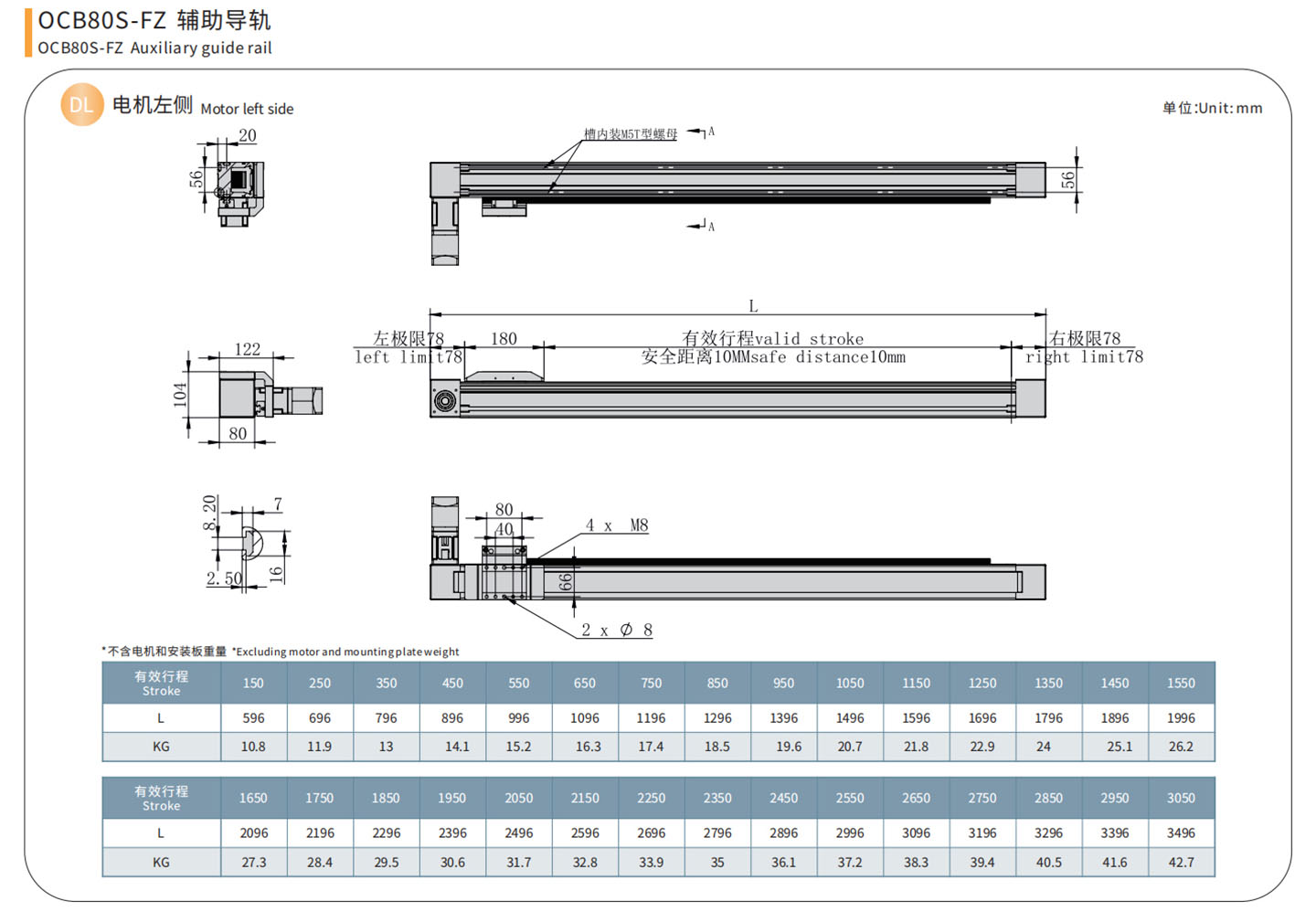
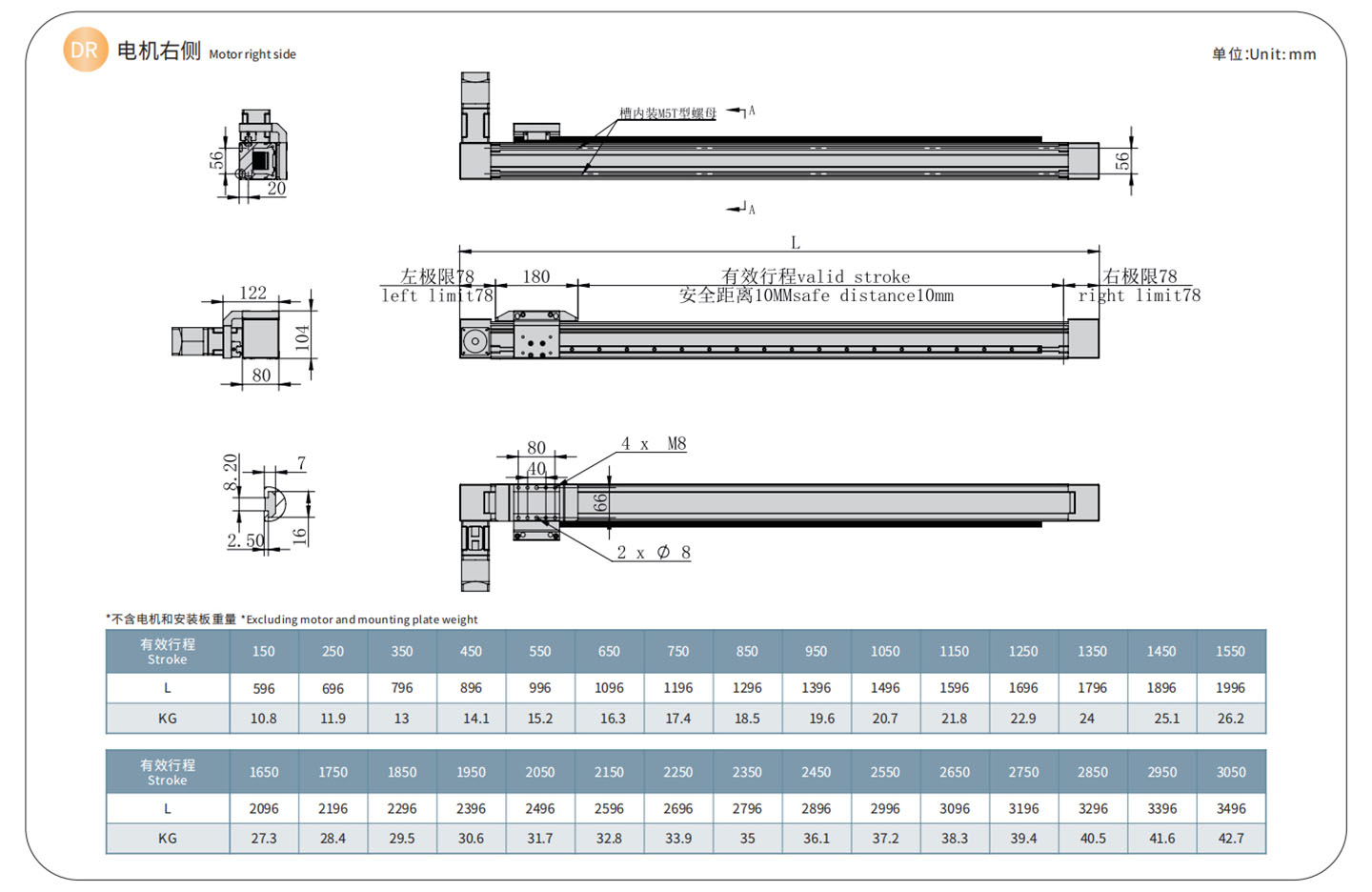
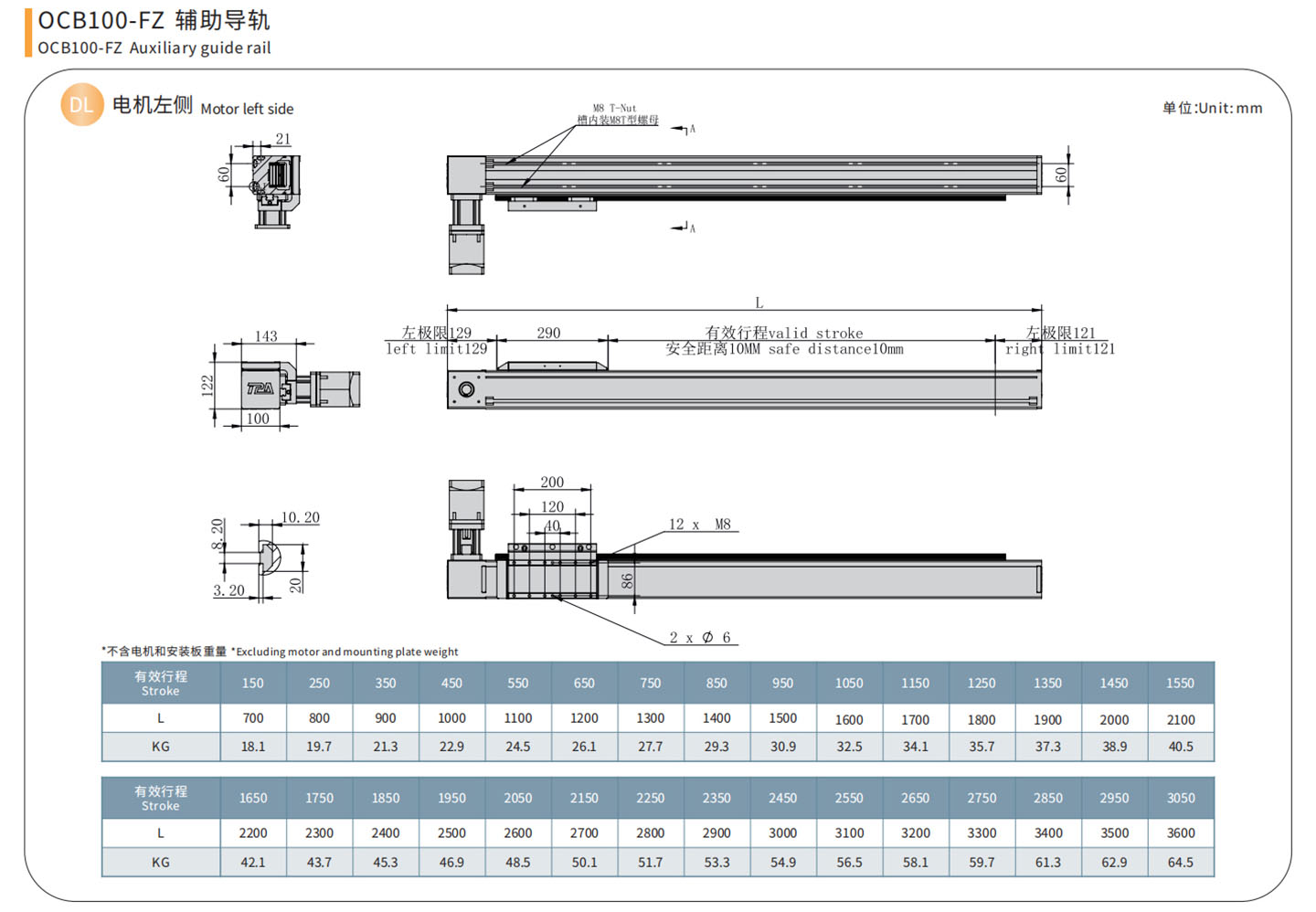
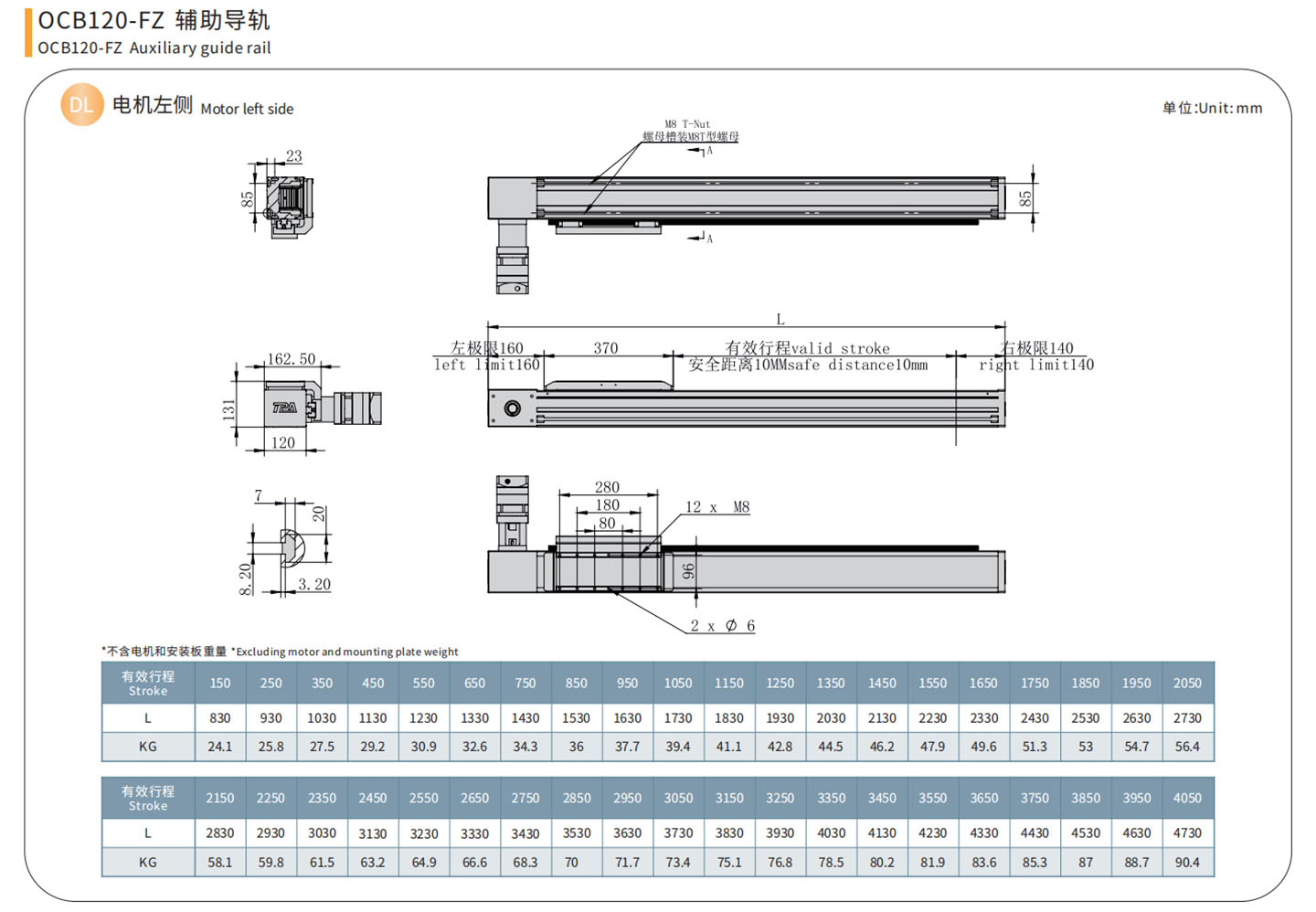
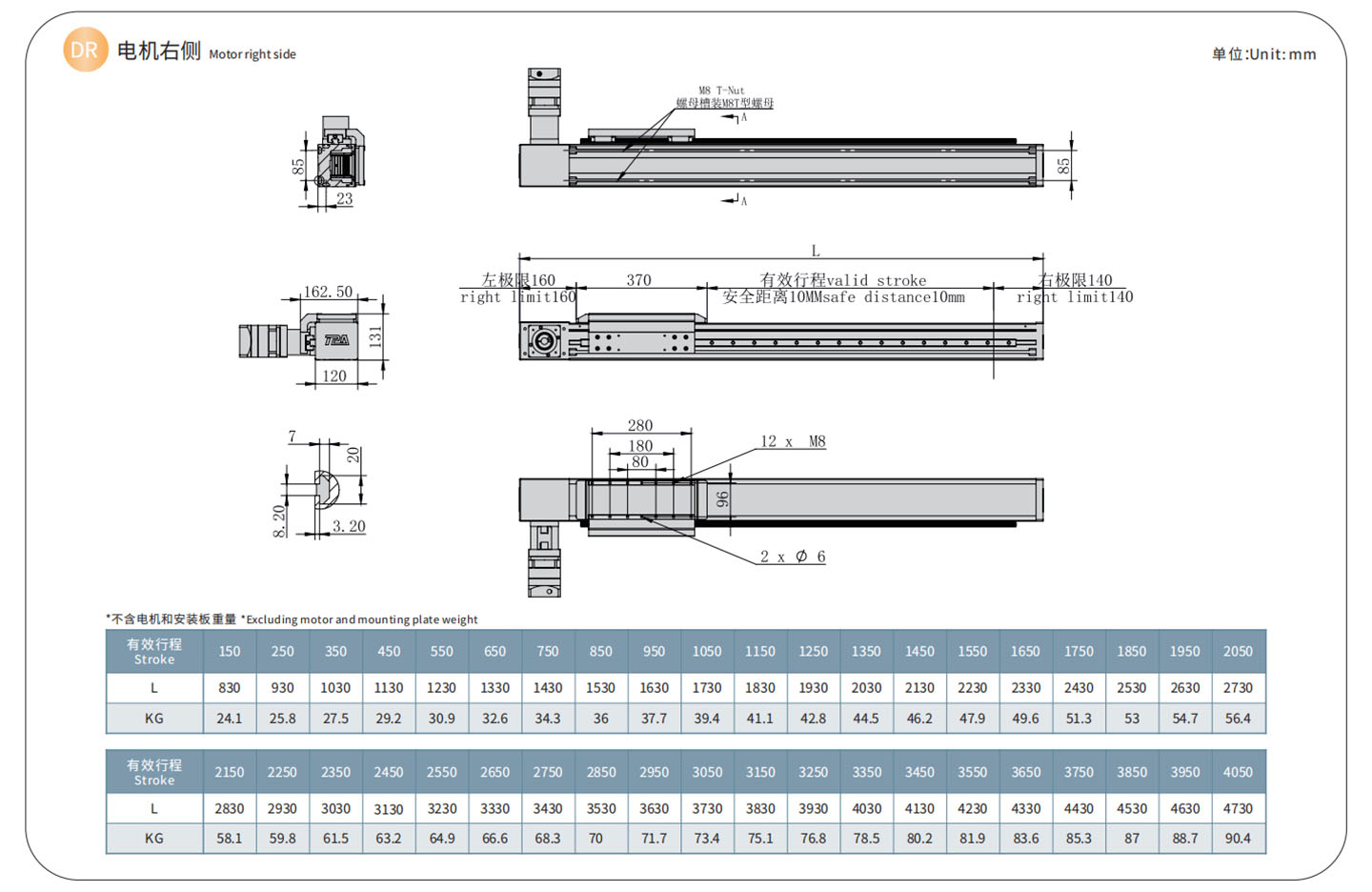
Auxiliary guide rail: ເມື່ອການໂຫຼດແນວຕັ້ງ ແລະ ຂ້າງມີຂະຫນາດໃຫຍ່, ໂດຍບໍ່ມີການປ່ຽນແປງຄວາມກວ້າງ ແລະໂຄງສ້າງຂອງໂມດູນ, ລົດໄຟຄູ່ມືຊ່ວຍແມ່ນຕິດຕັ້ງຢູ່ດ້ານຂ້າງຂອງໂມດູນເພື່ອເສີມສ້າງຄວາມເຂັ້ມແຂງຂອງໂມດູນຂ້າງຄຽງ, ແລະເພີ່ມຄວາມເຂັ້ມແຂງແລະ ສະຖຽນລະພາບການເຄື່ອນໄຫວຂອງໂມດູນ.
ການຮັກສາ: ທັງສອງດ້ານຂອງ slider ສາມາດນ້ໍາມັນສູນກາງ, ແລະບໍ່ຈໍາເປັນຕ້ອງຖອດສາຍແອວແລະສາຍແອວເຫຼັກ, ດັ່ງນັ້ນການຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍໃນການບໍາລຸງຮັກສາຂອງລູກຄ້າ.
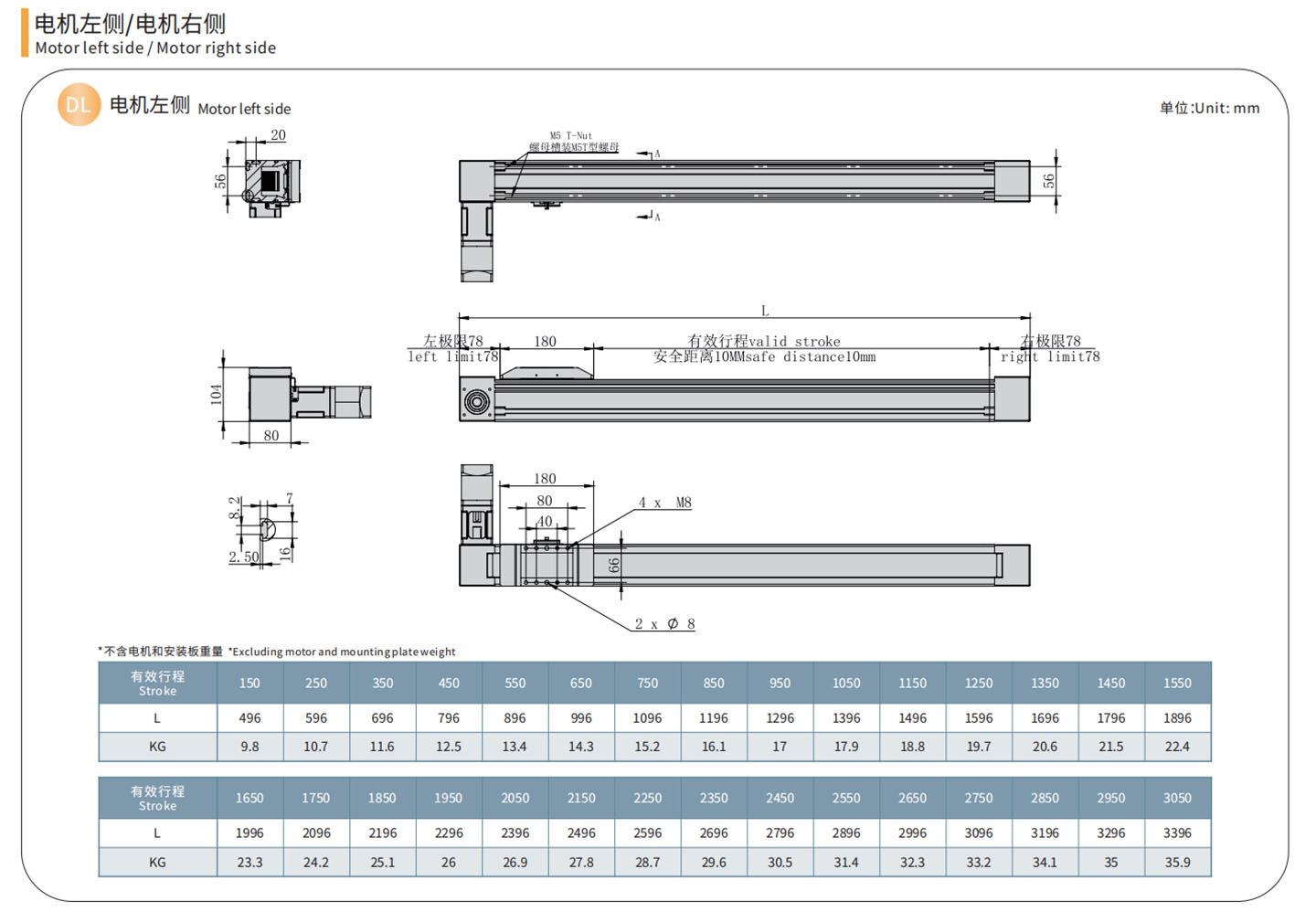
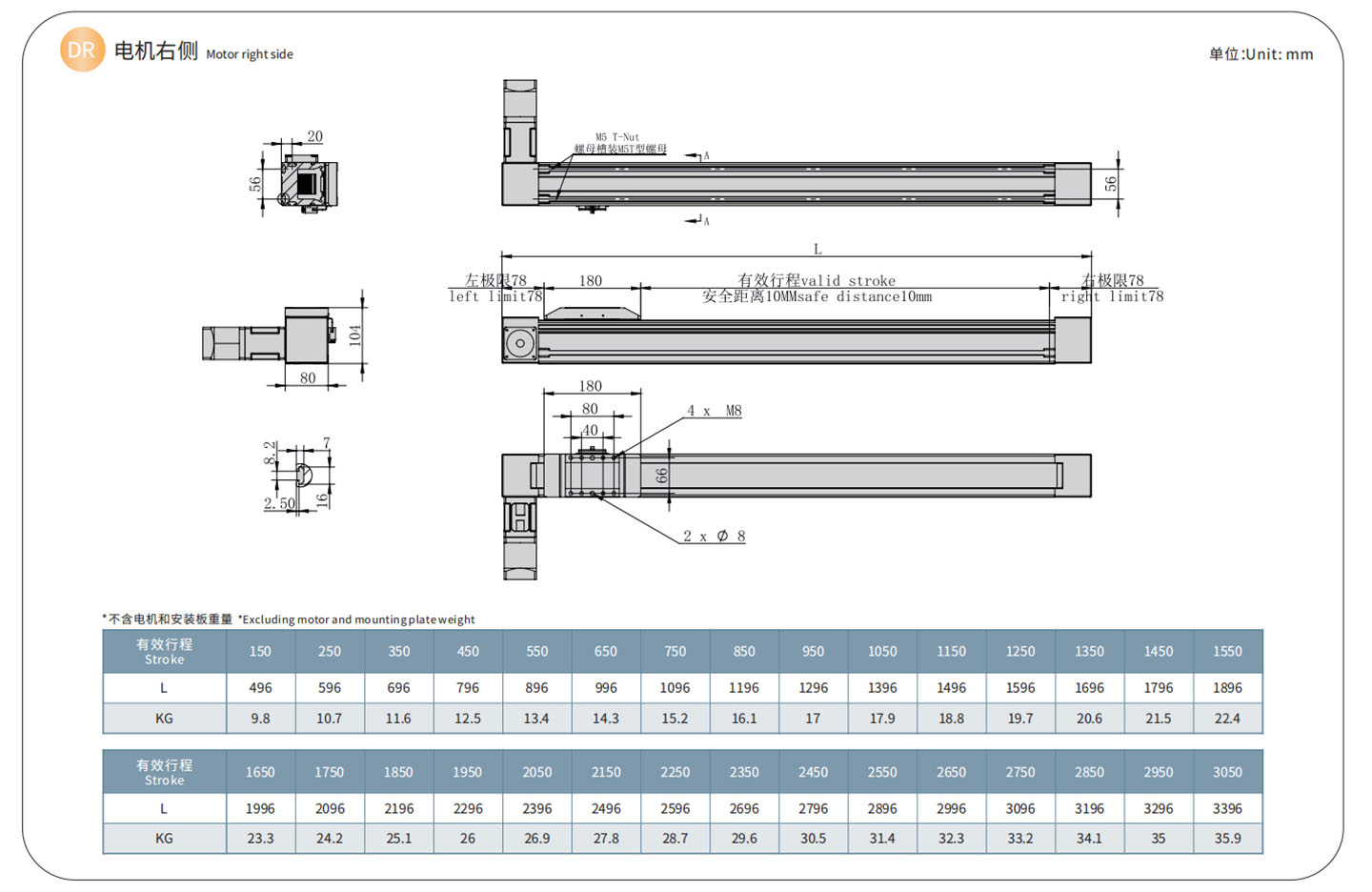
ການຕິດຕັ້ງ: ງ່າຍທີ່ຈະຕິດຕັ້ງ, ສາມດ້ານຂອງ actuator ໄດ້ຖືກອອກແບບດ້ວຍສະລັອດຕິງຫມາກແຫ້ງເປືອກແຂງ slider, ການຕິດຕັ້ງທາງເລືອກໃນສາມດ້ານ.
ຜະລິດຕະພັນເພີ່ມເຕີມ

HNB-E Series Belt Driven Linear Actuators ເຄິ່ງ ...

ONB-F Series Belt Driven Linear Module ພາຍນອກ...

ONB Series Belt Driven Linear Module Half Enclosed

HNB Series Belt Driven Linear Module Half Enclosed

HCB Series Belt Driven Linear Module Fully Encl...










