




HCB Series Belt Driven Module Linear Enclosed ຢ່າງເຕັມສ່ວນ

ຕົວເລືອກຕົວແບບ
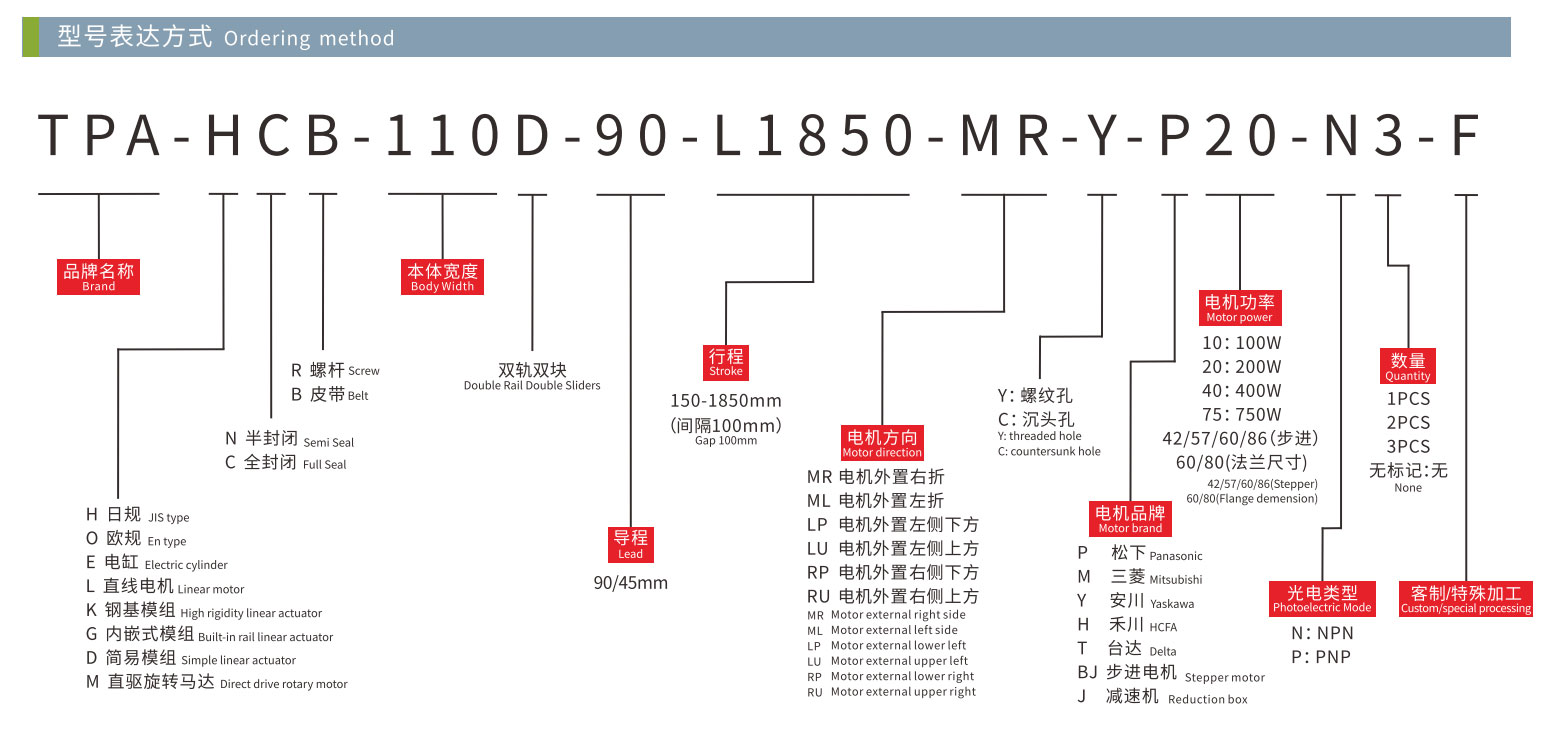
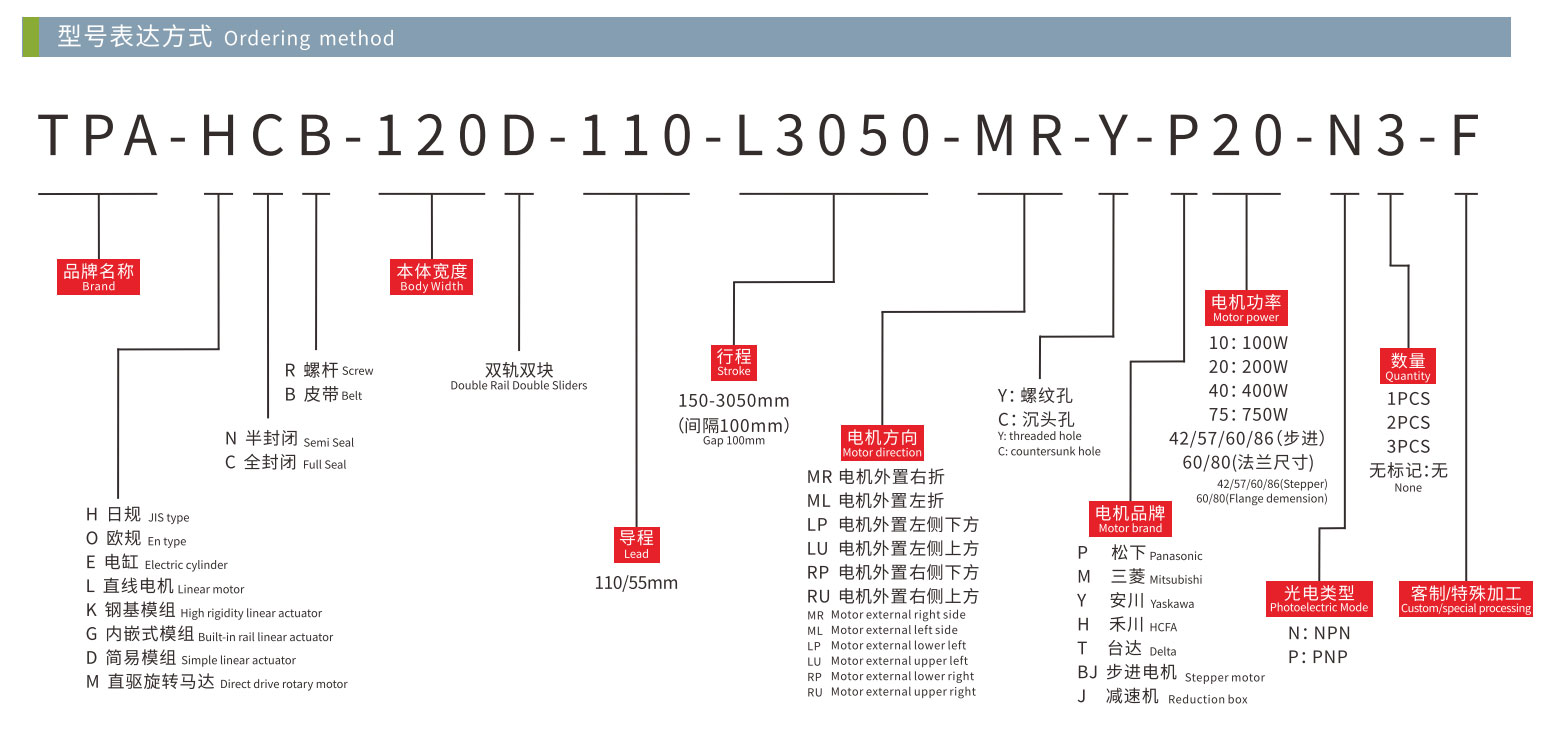
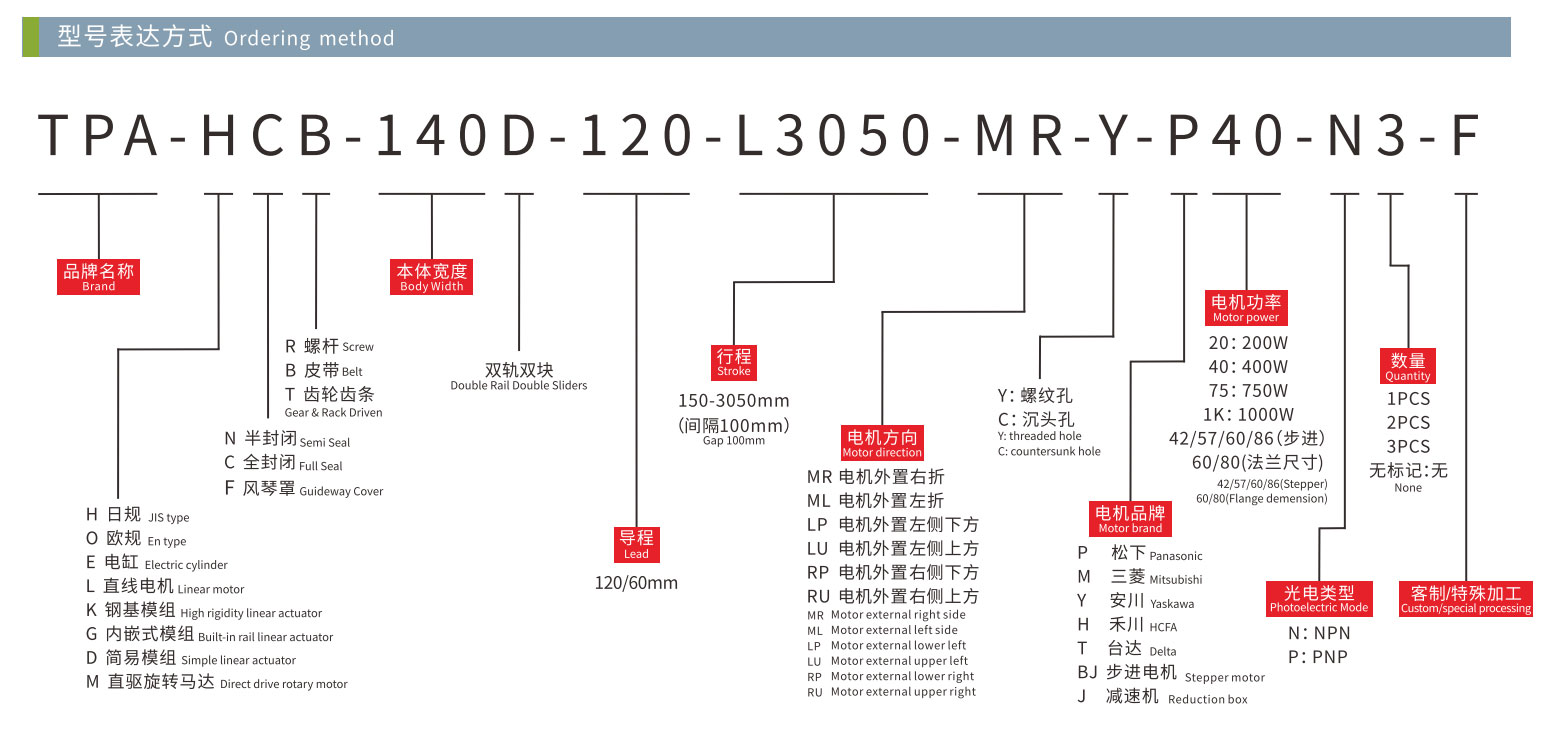
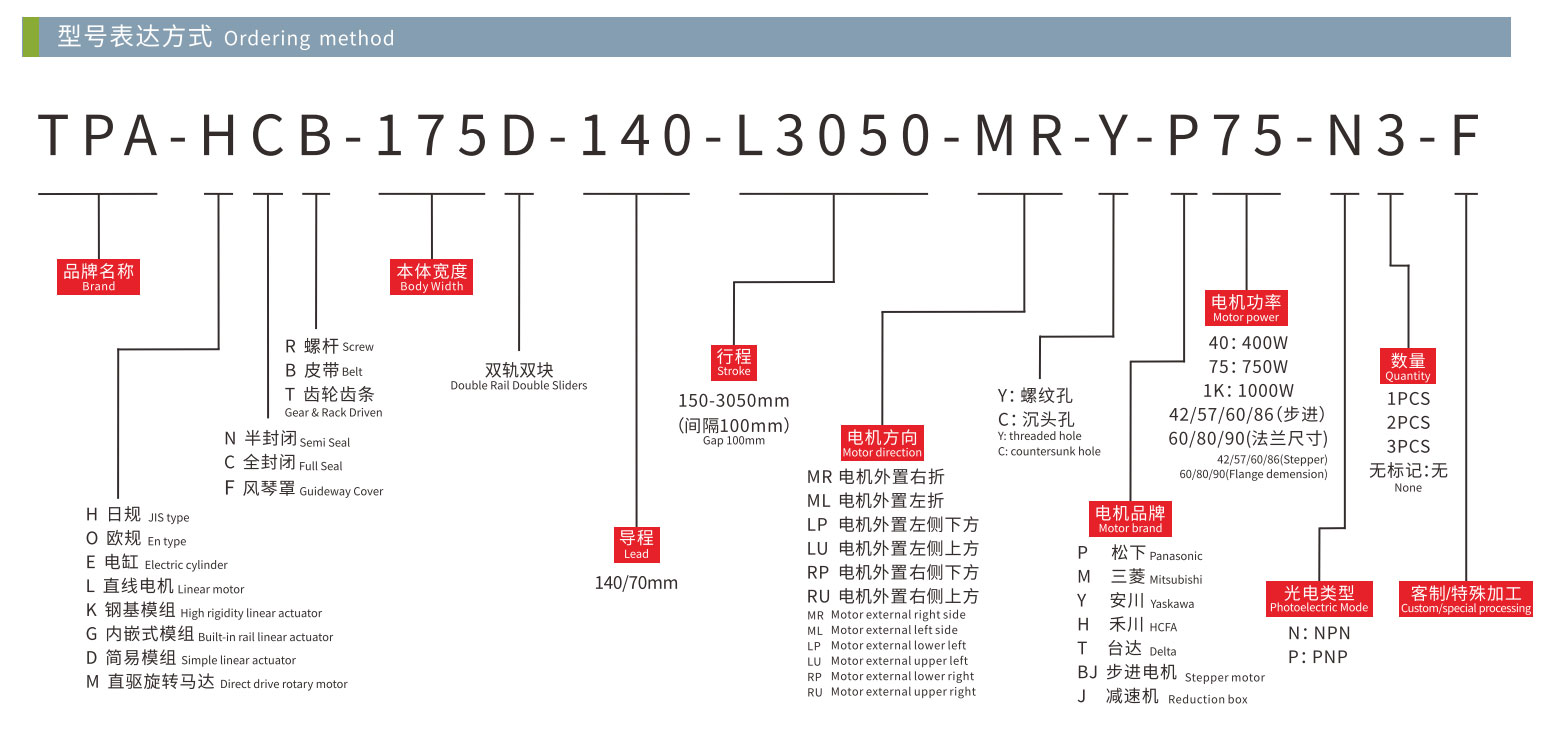
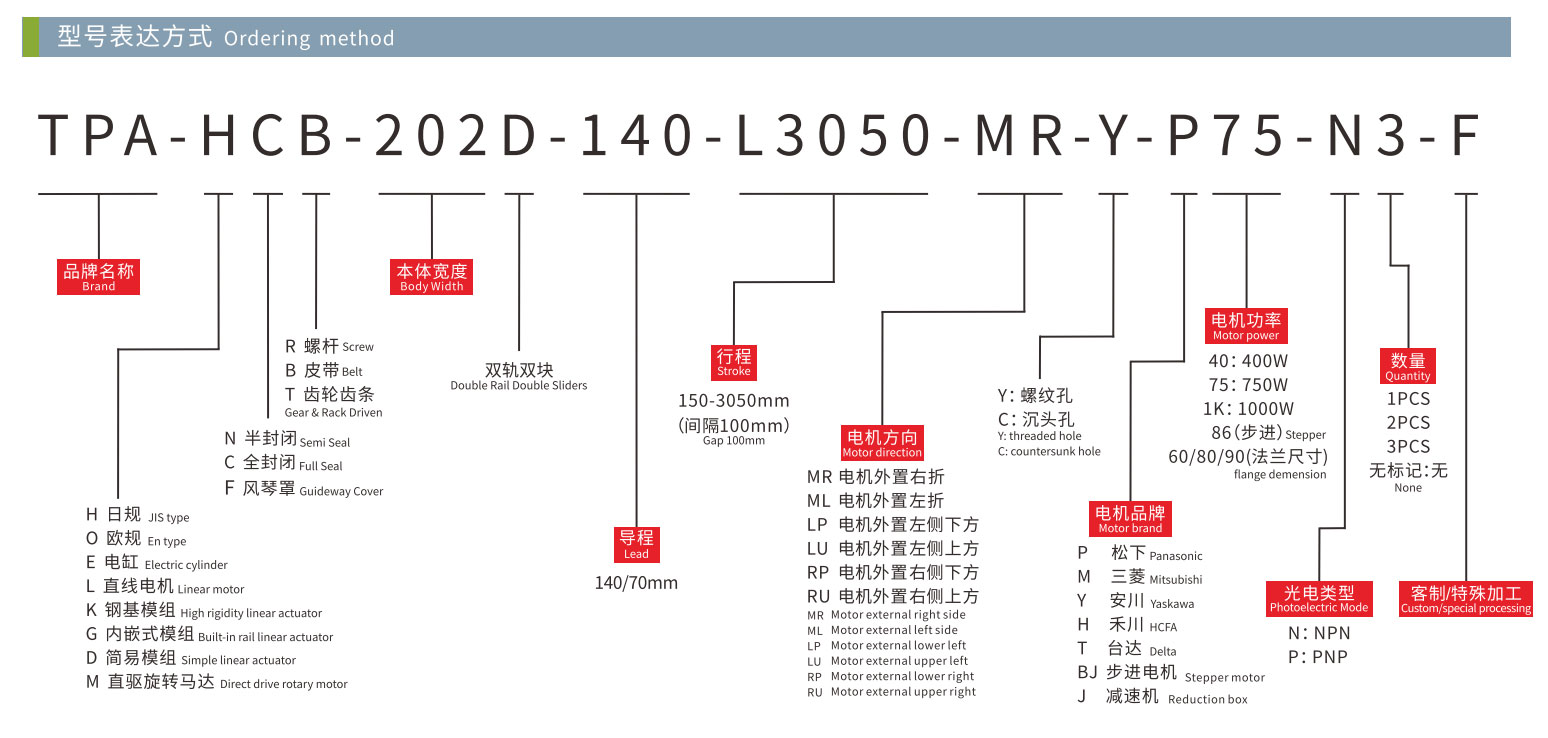
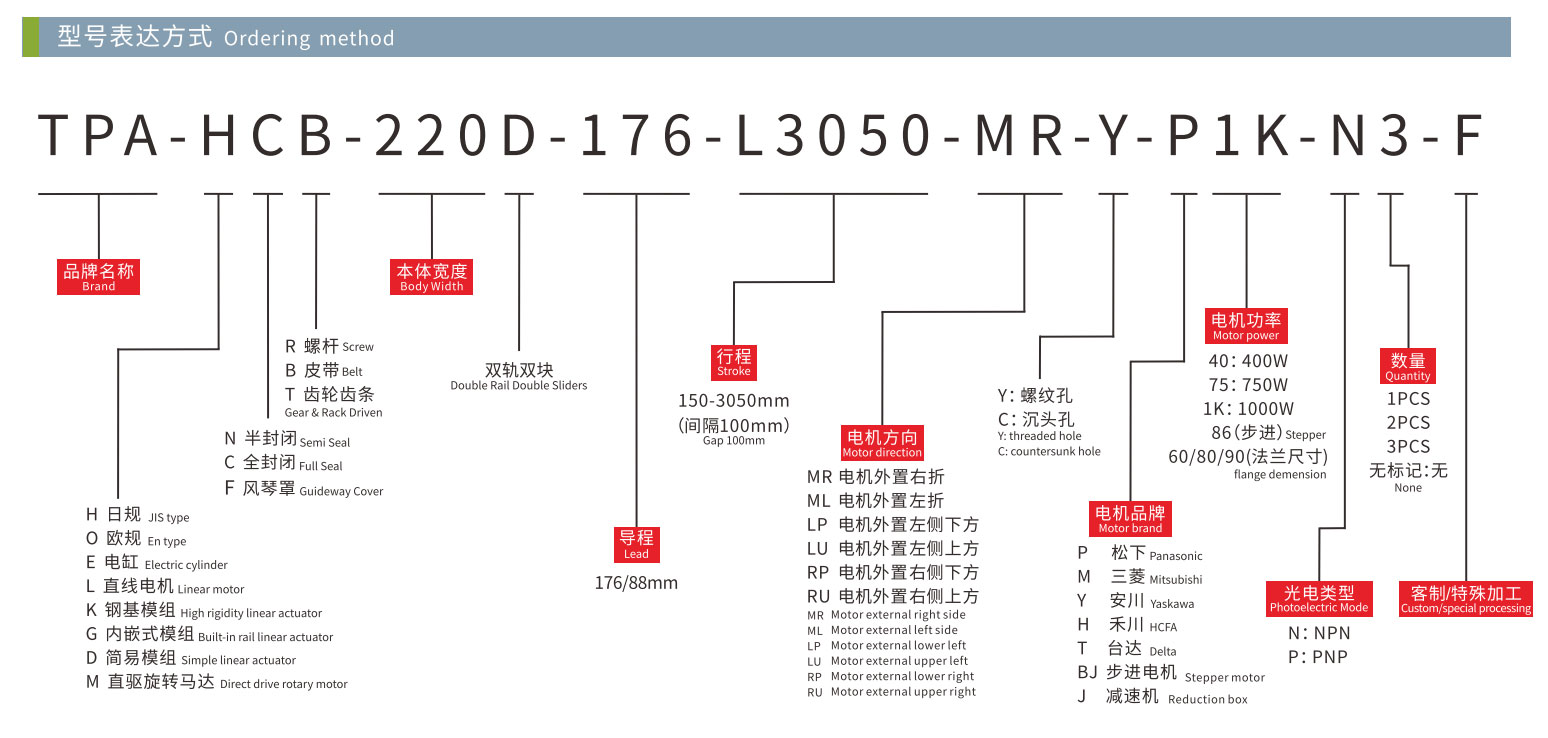
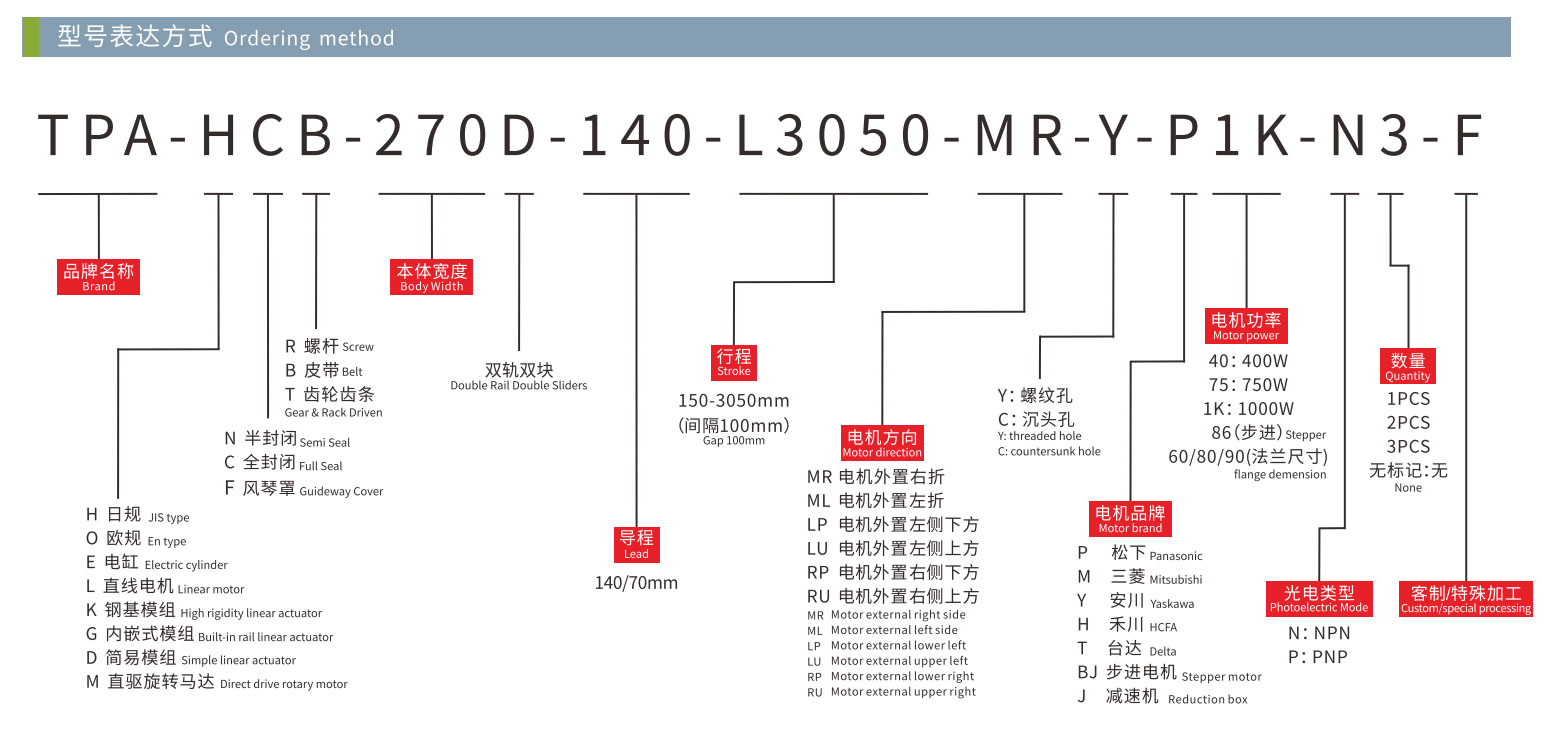
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
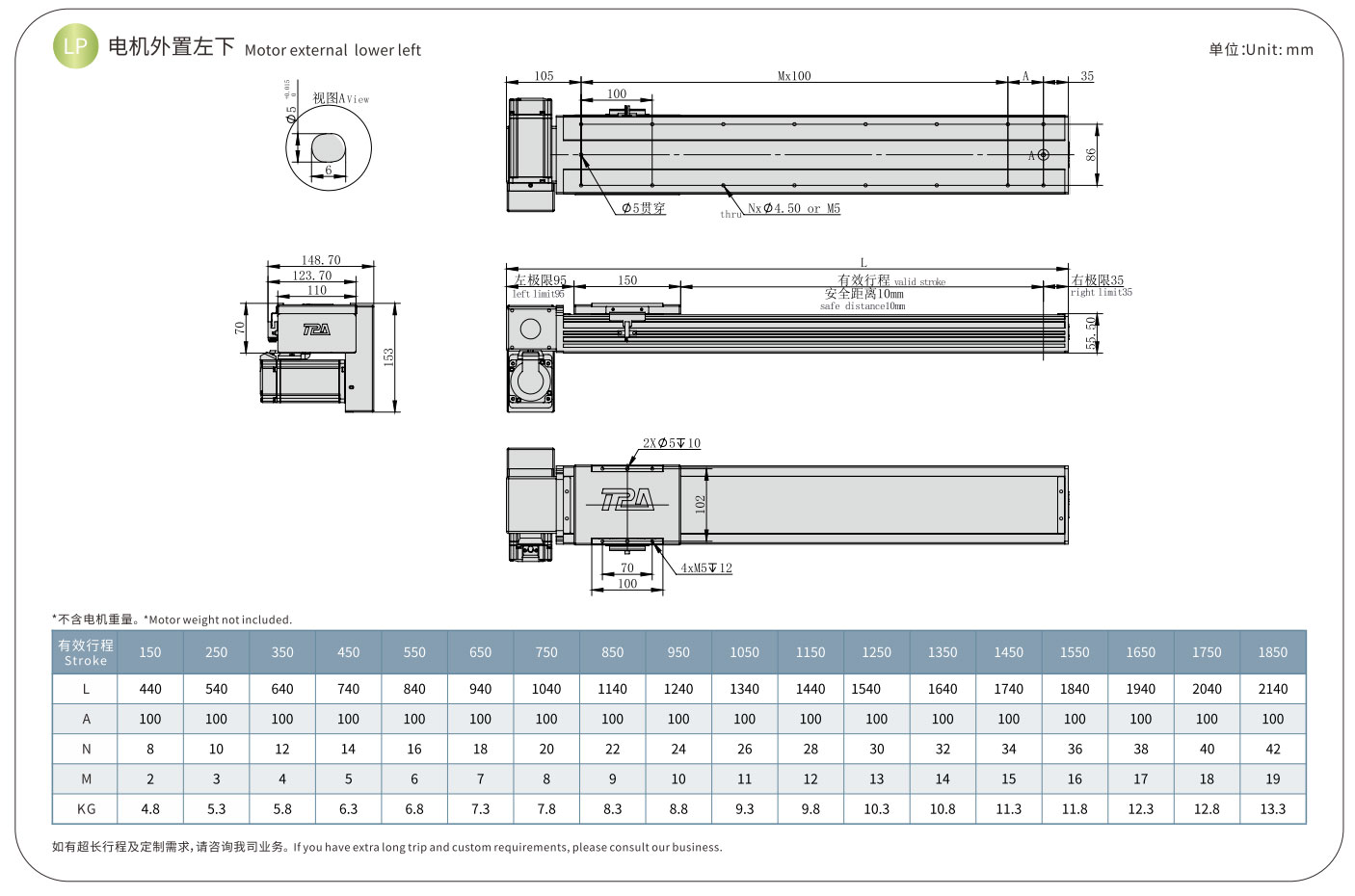
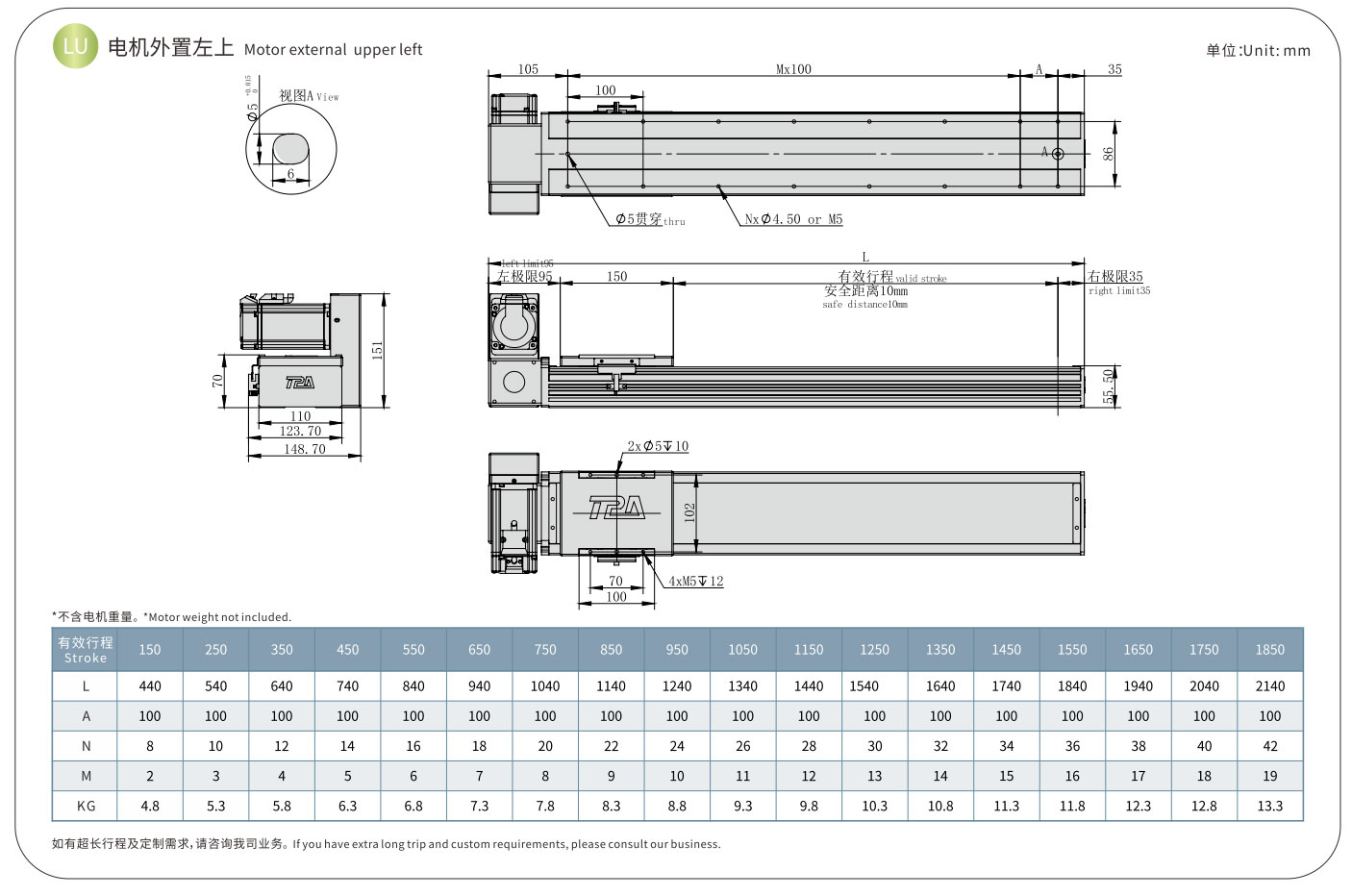
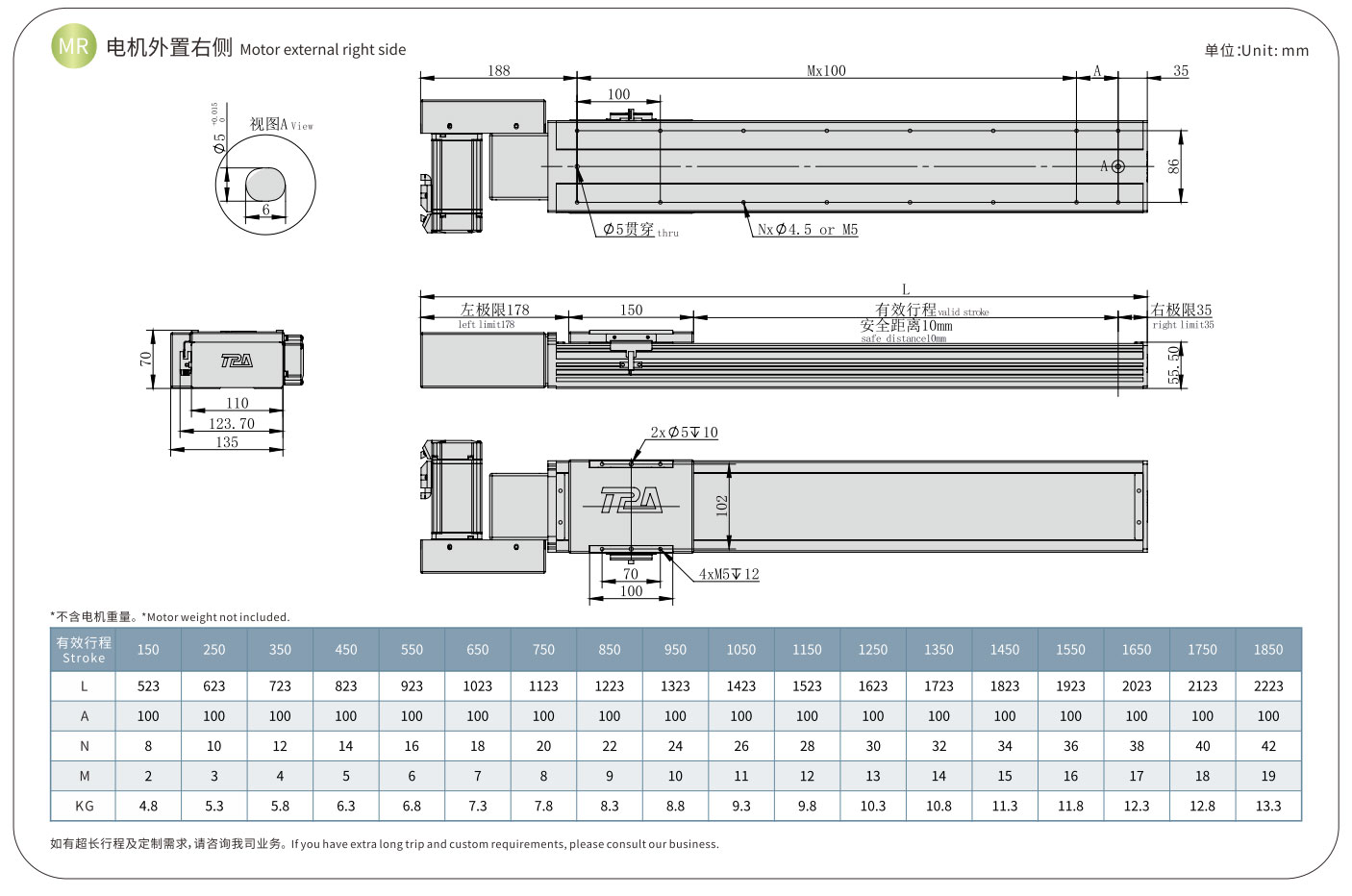
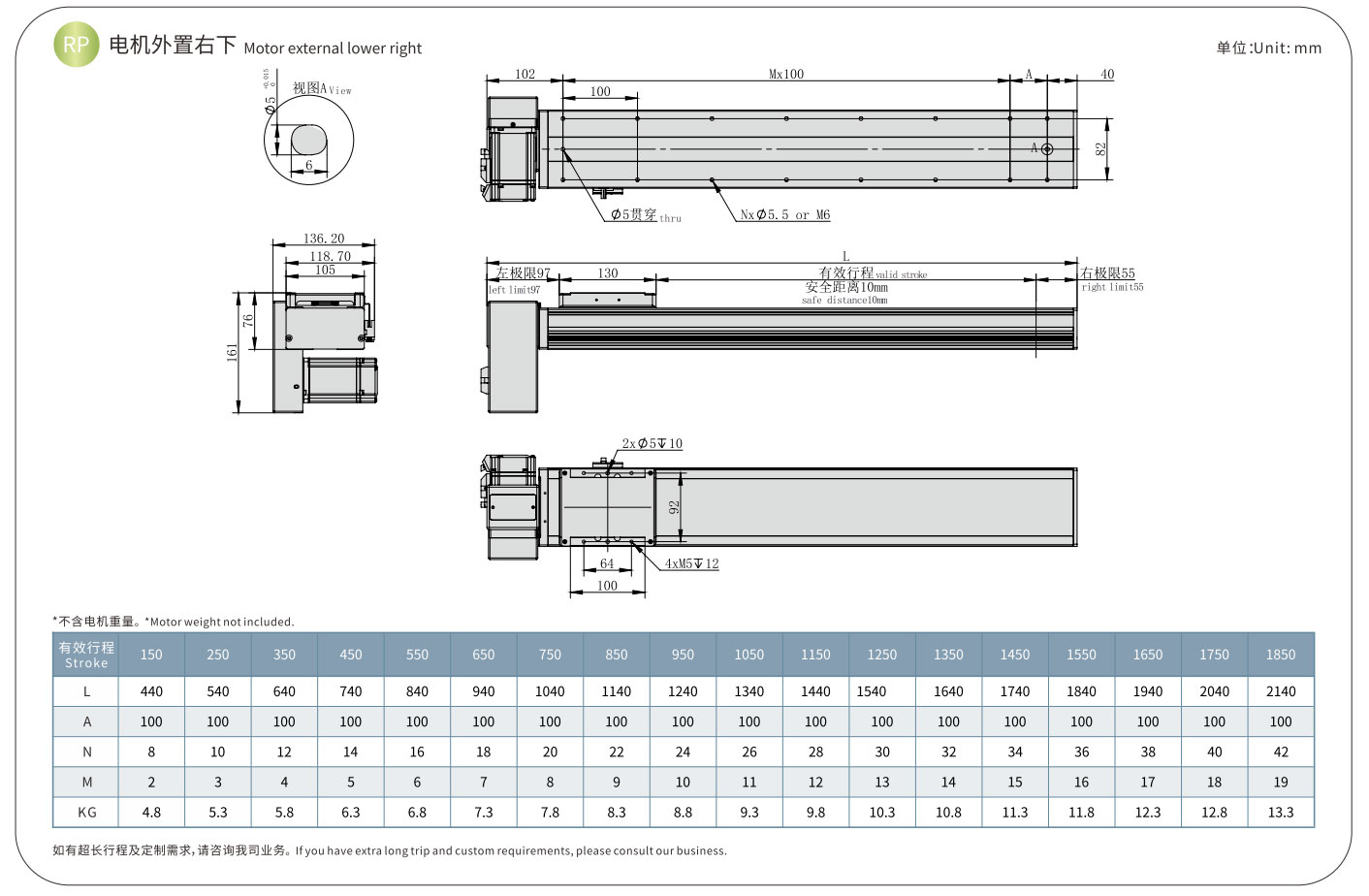
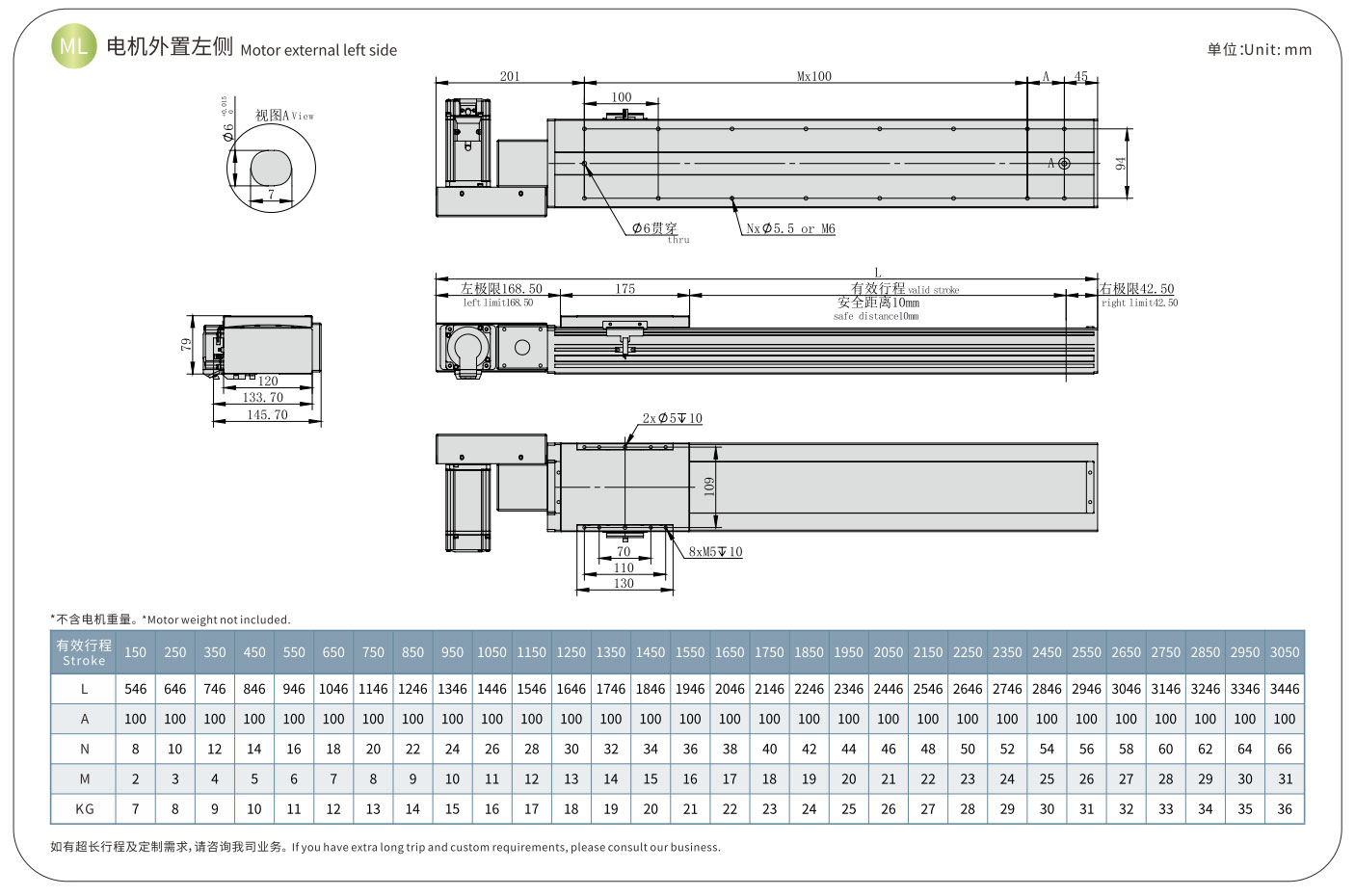
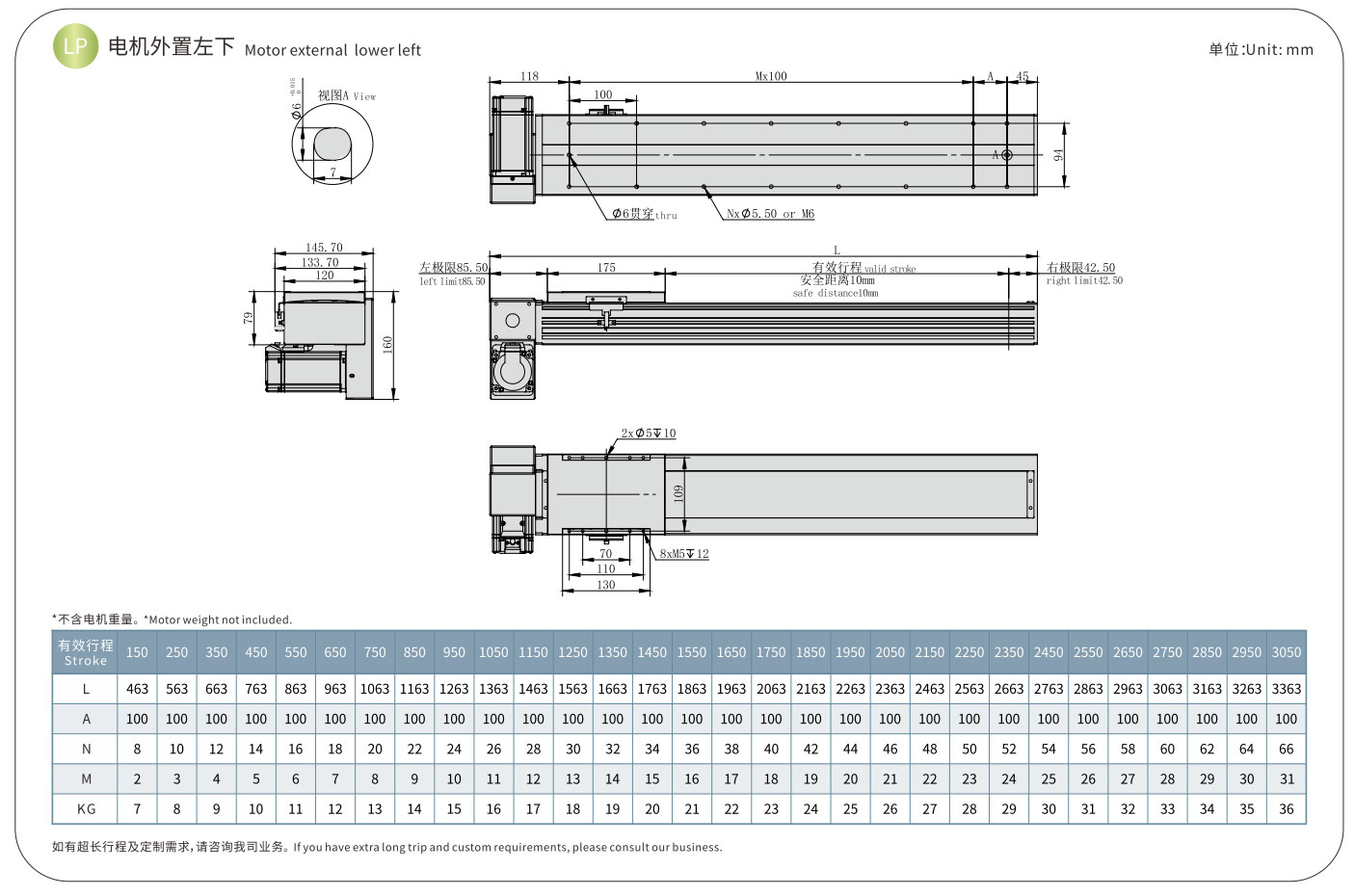
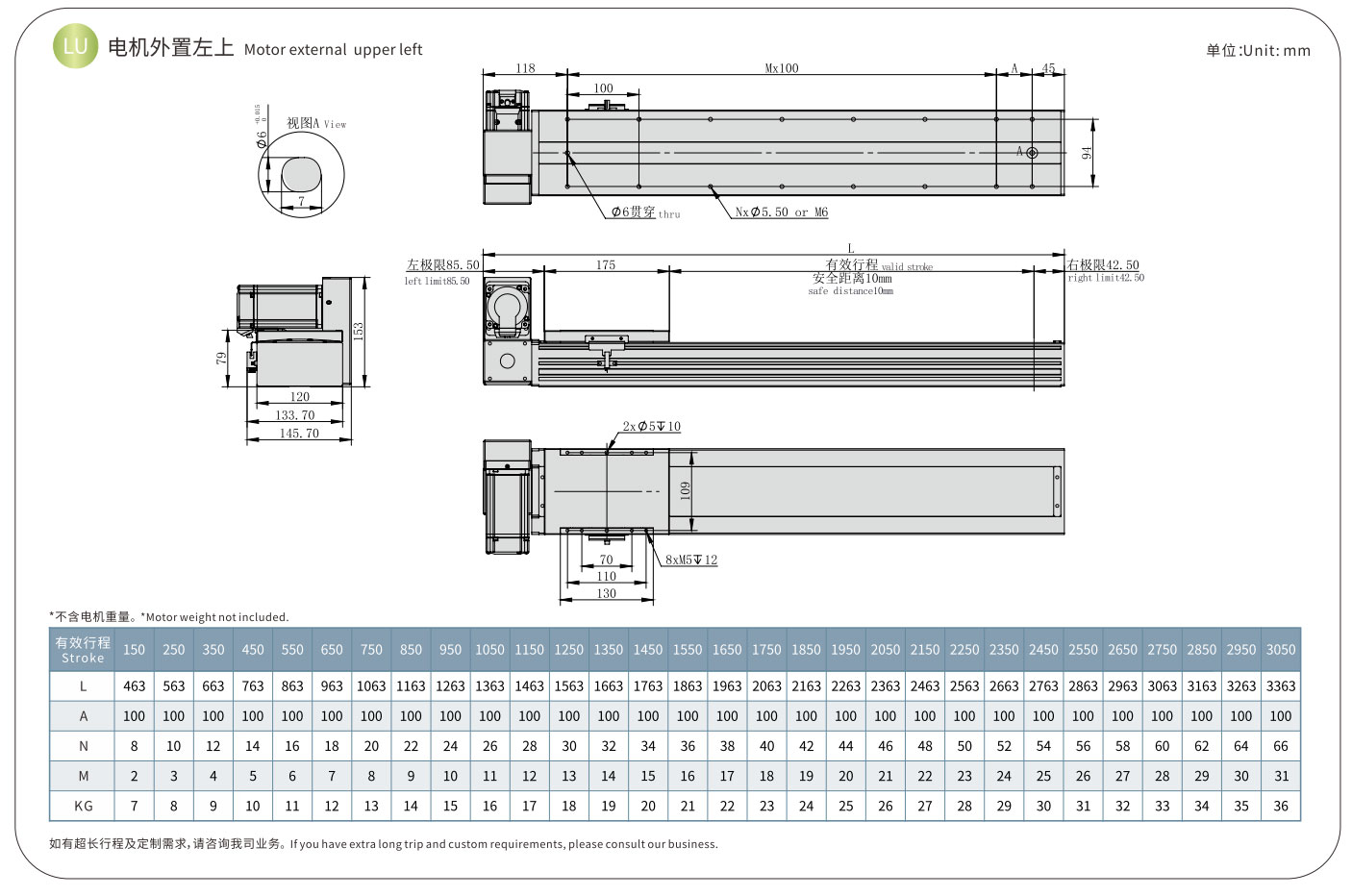
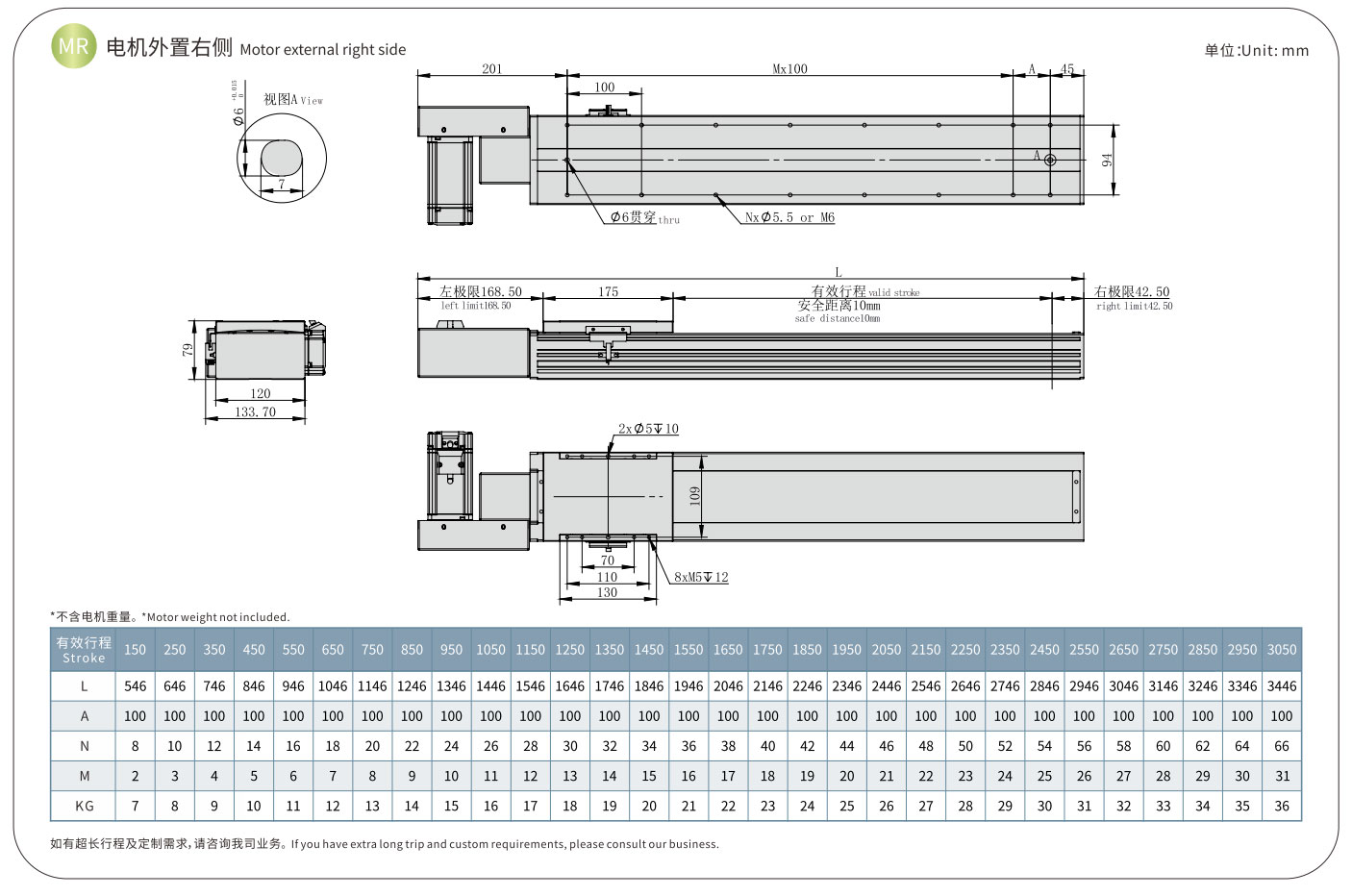
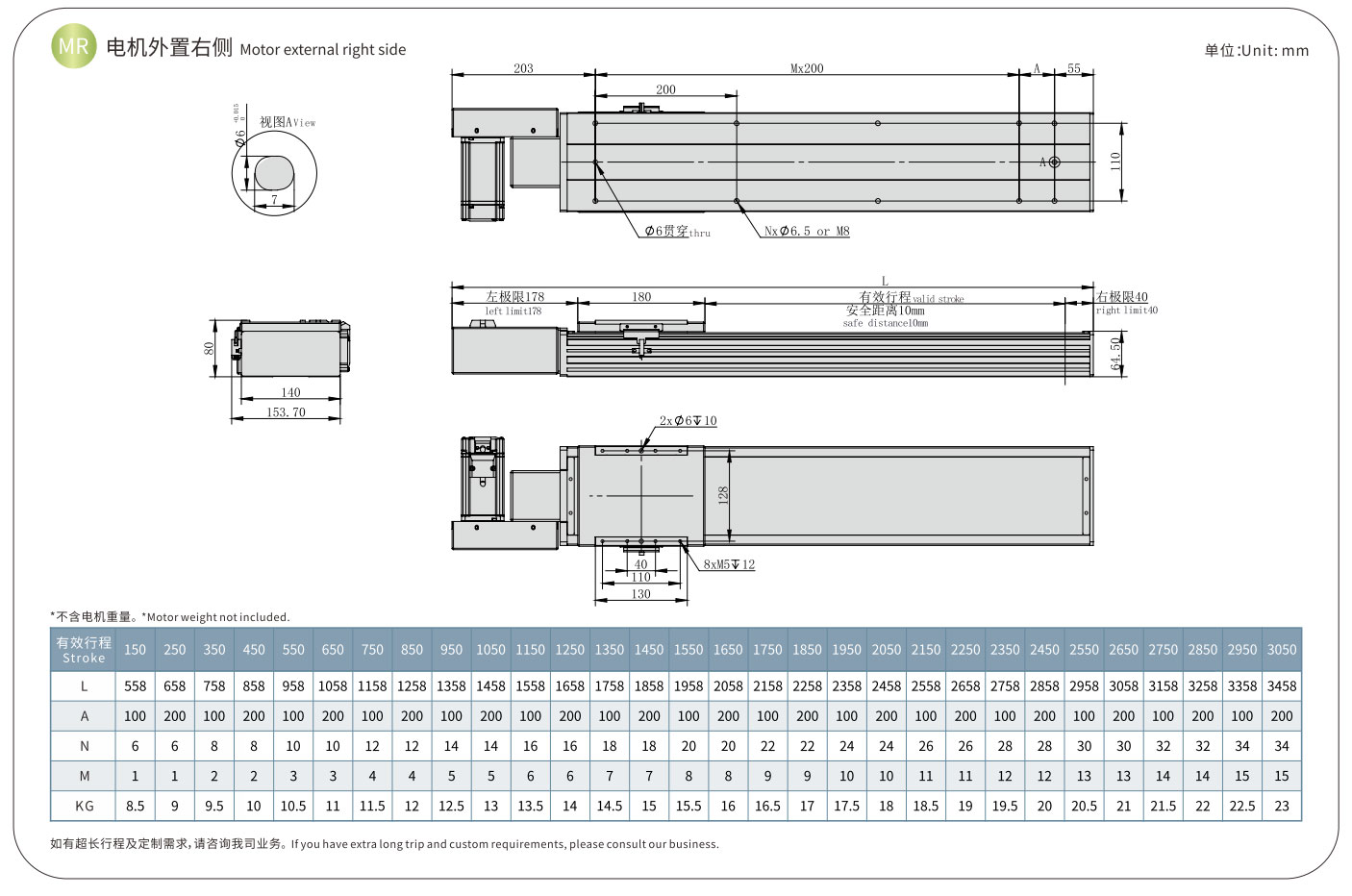
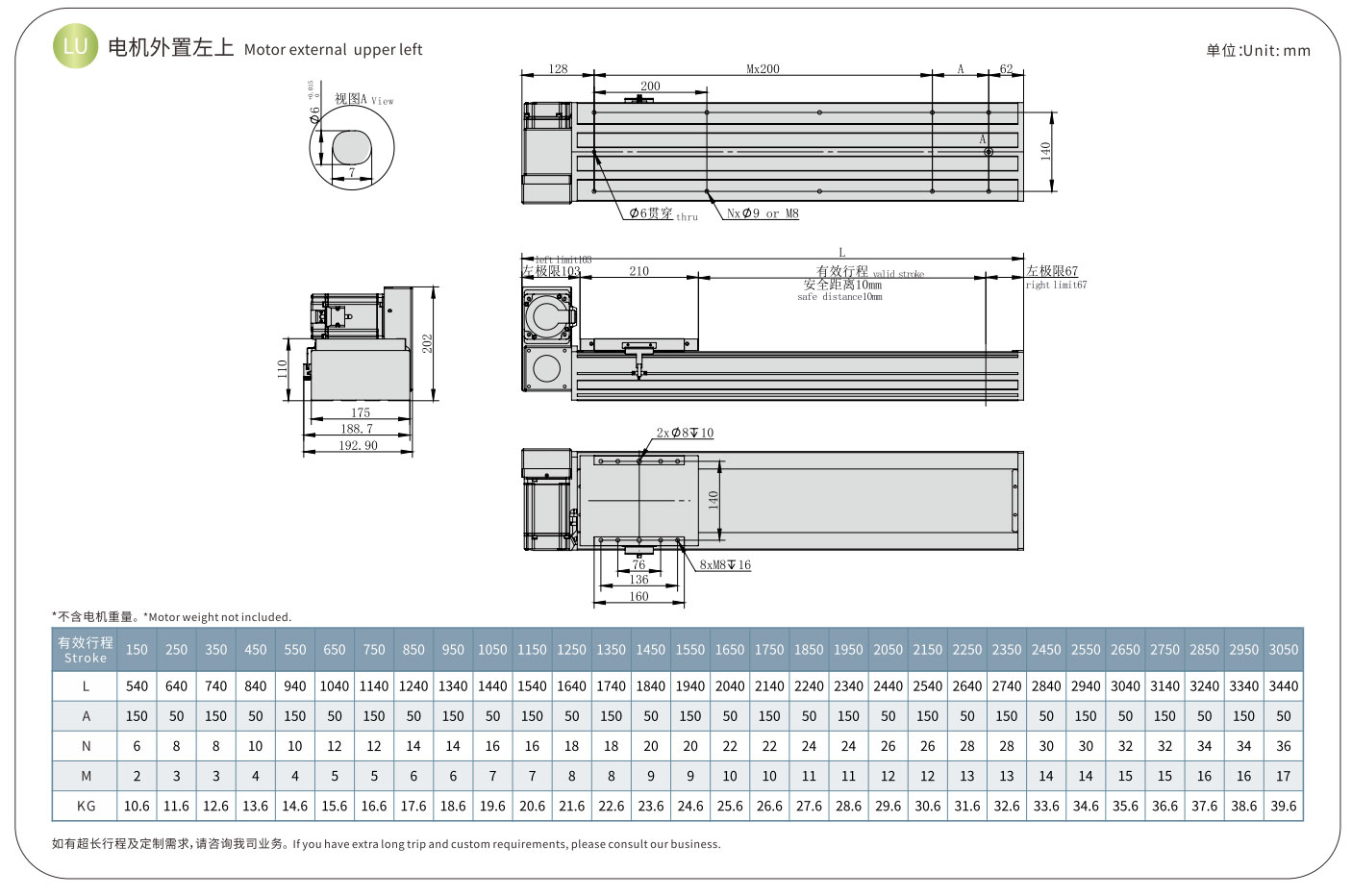
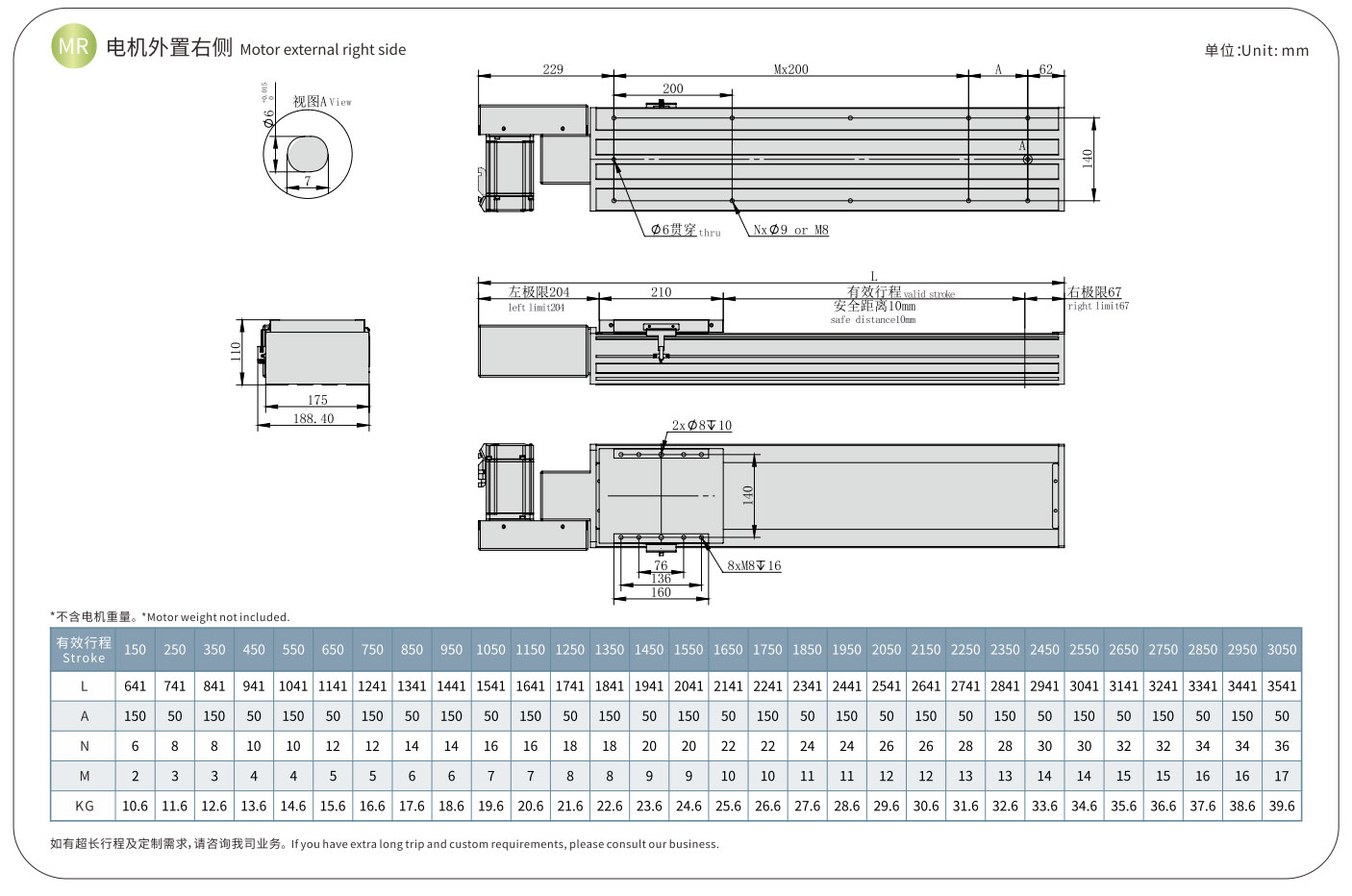
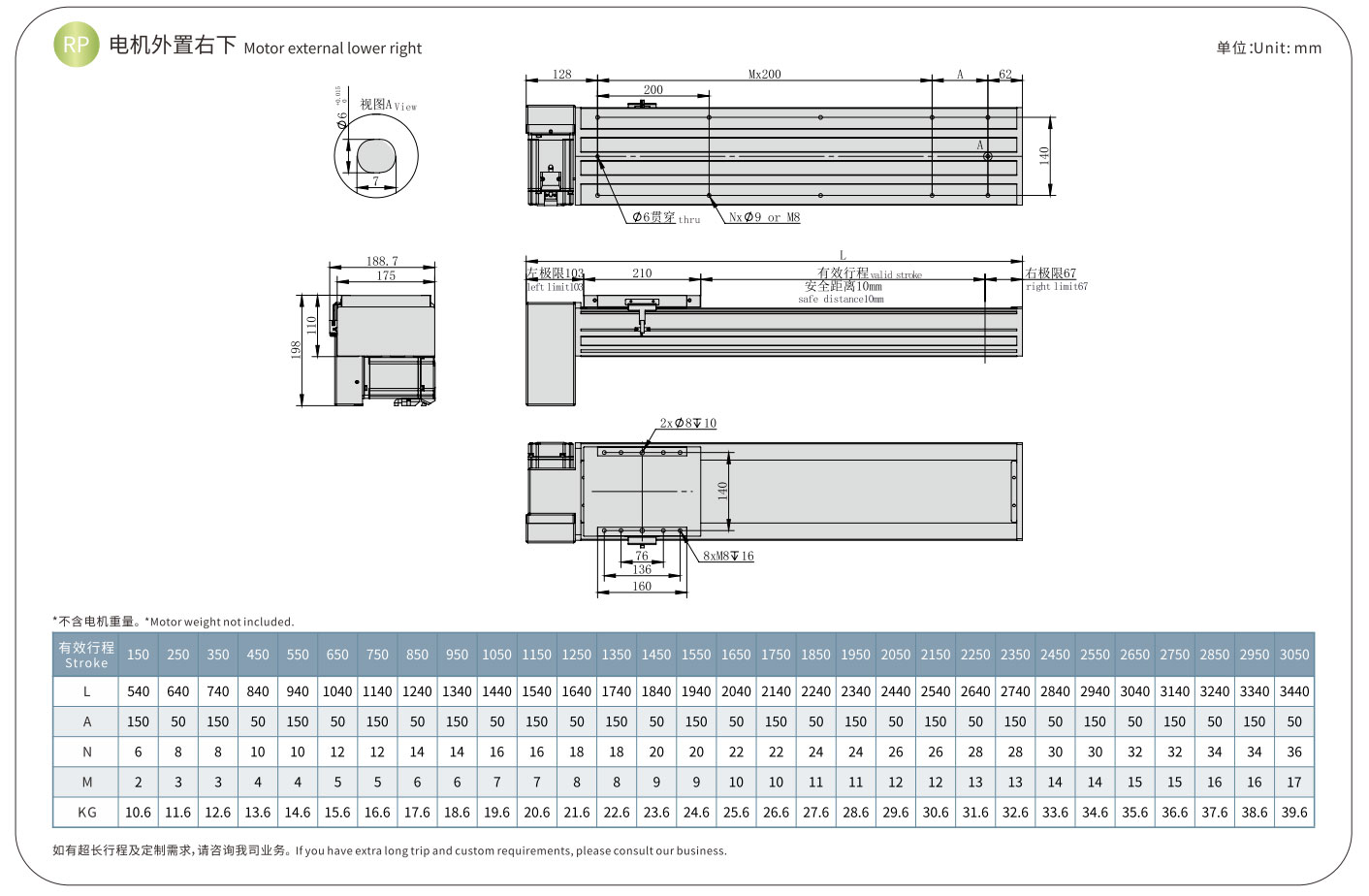
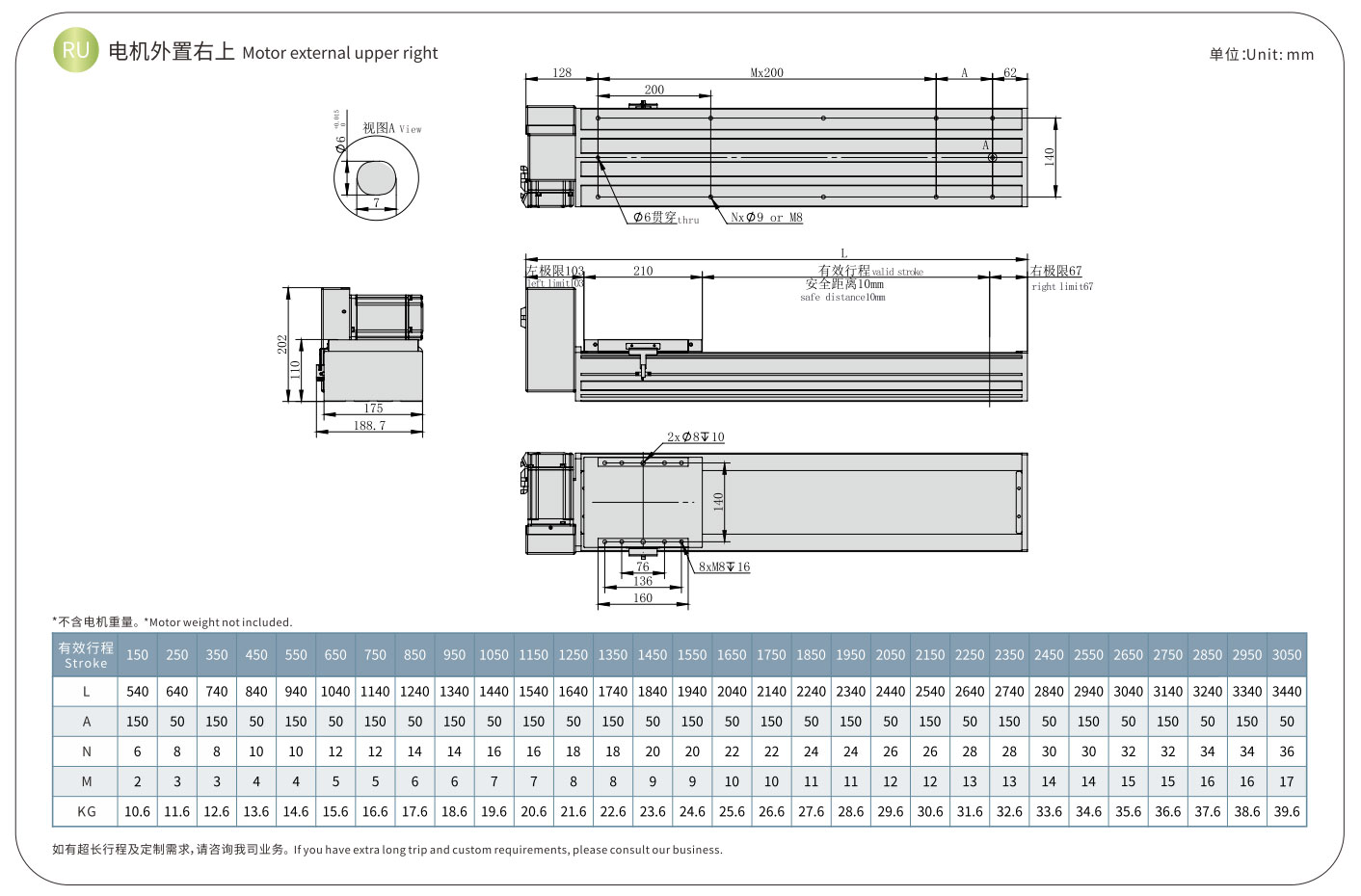
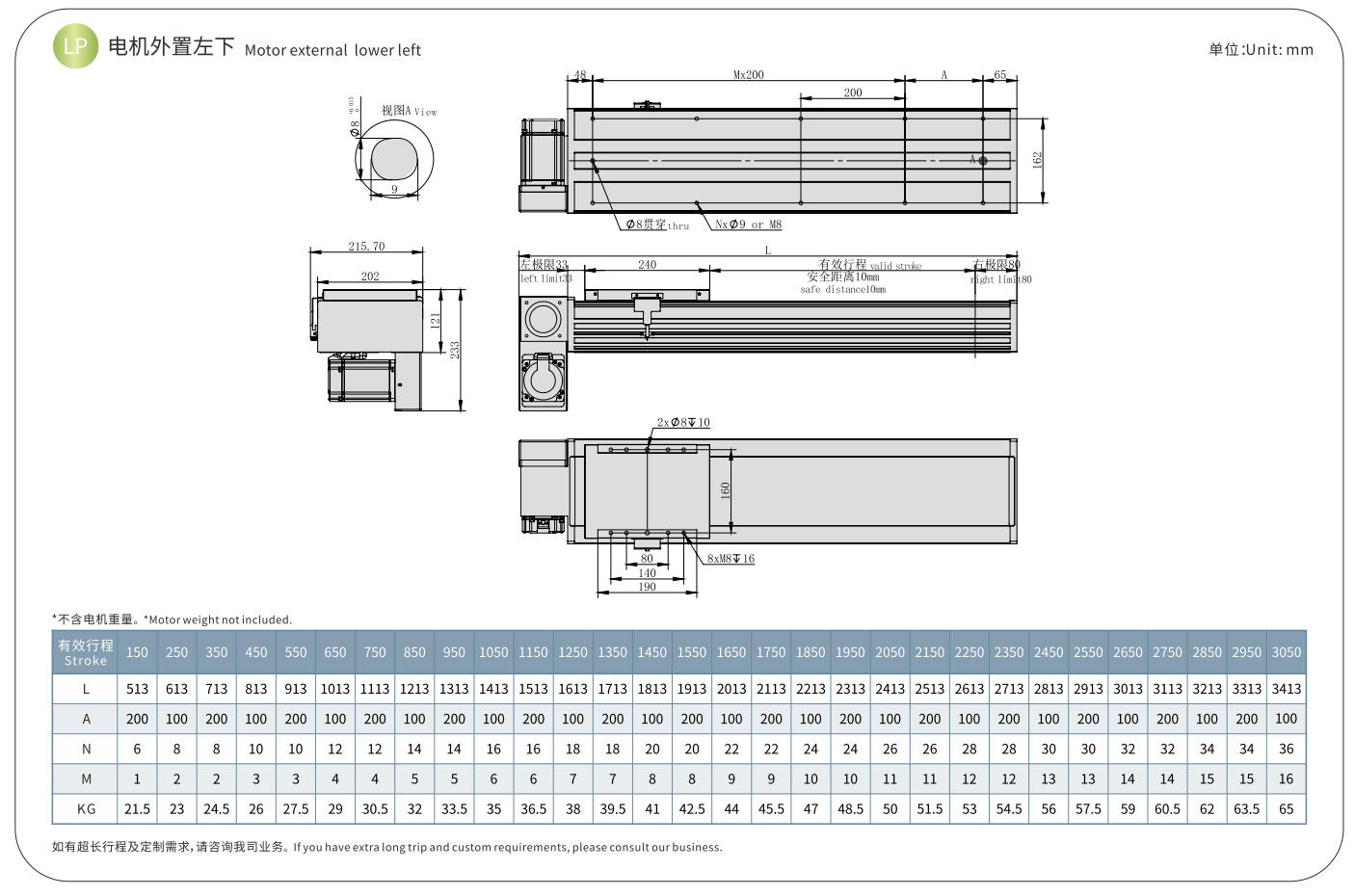
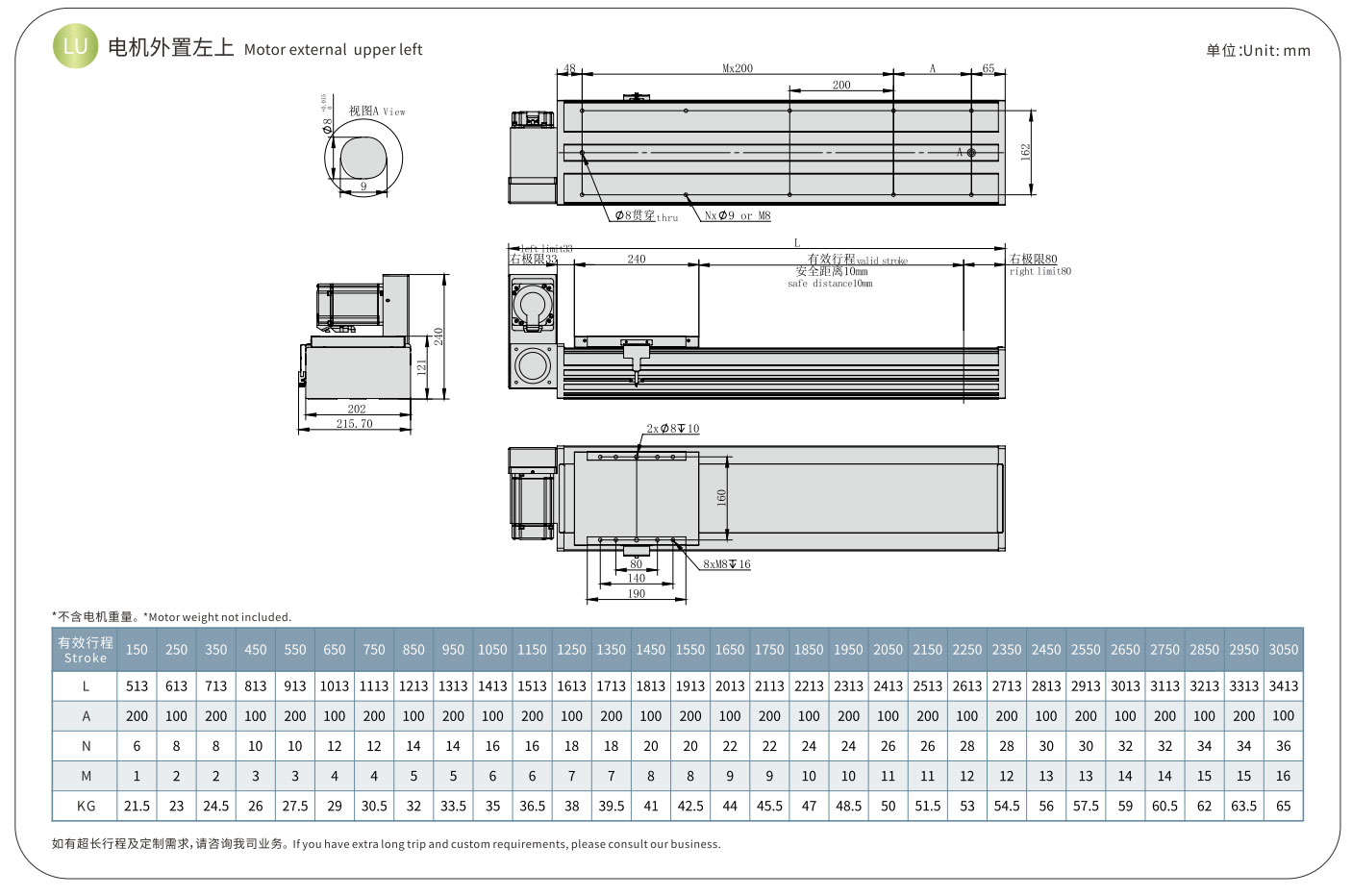
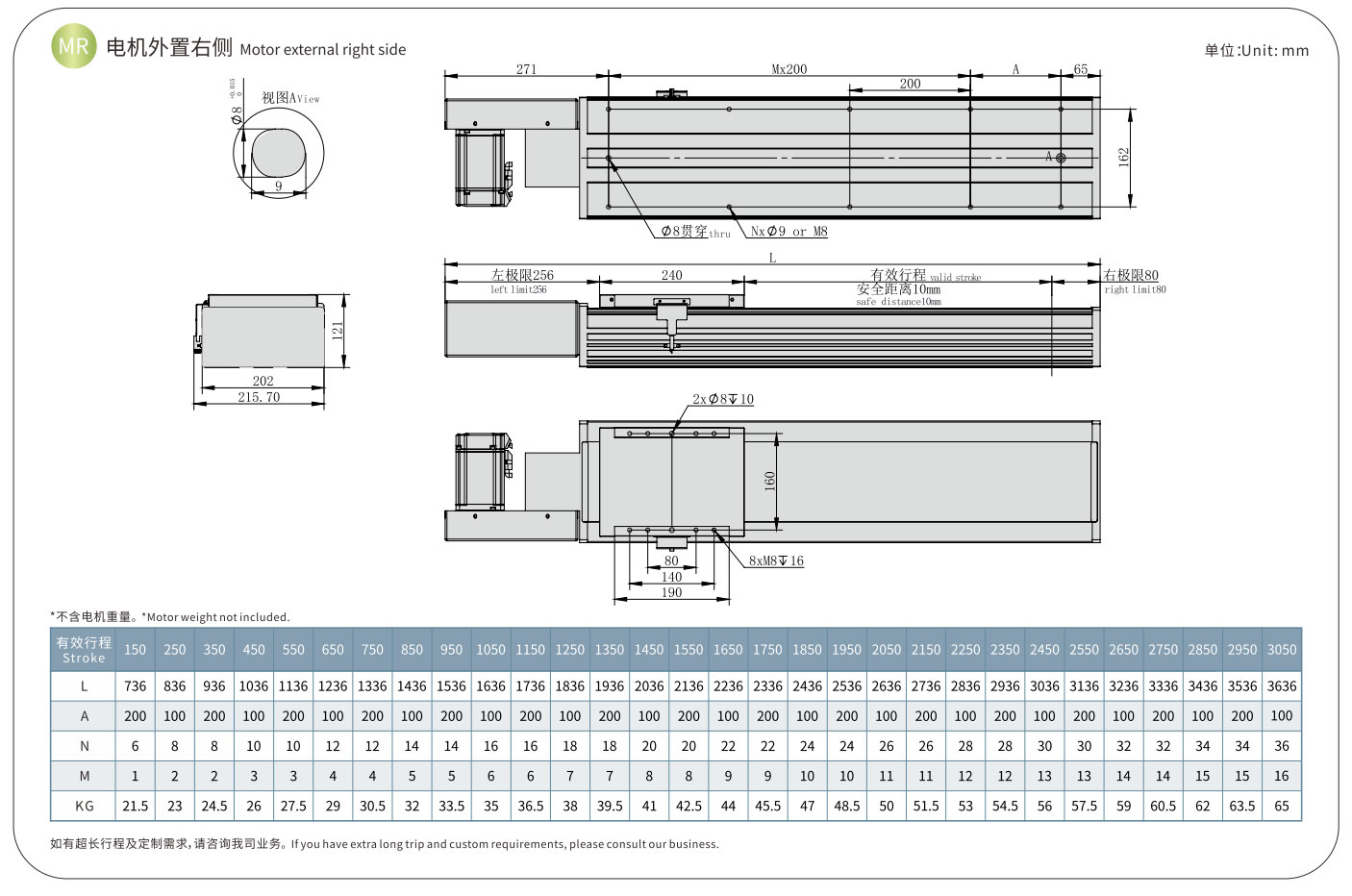
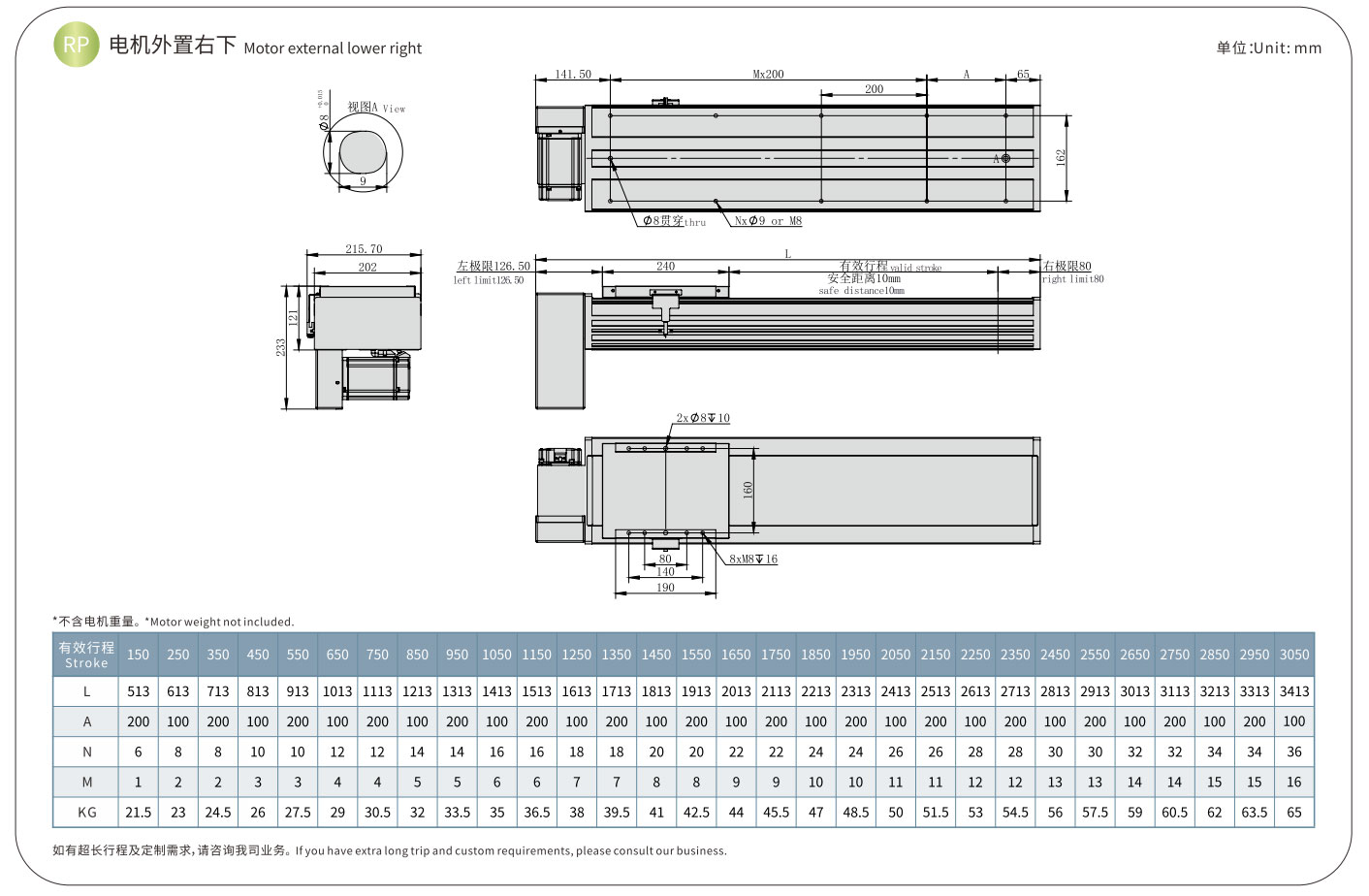
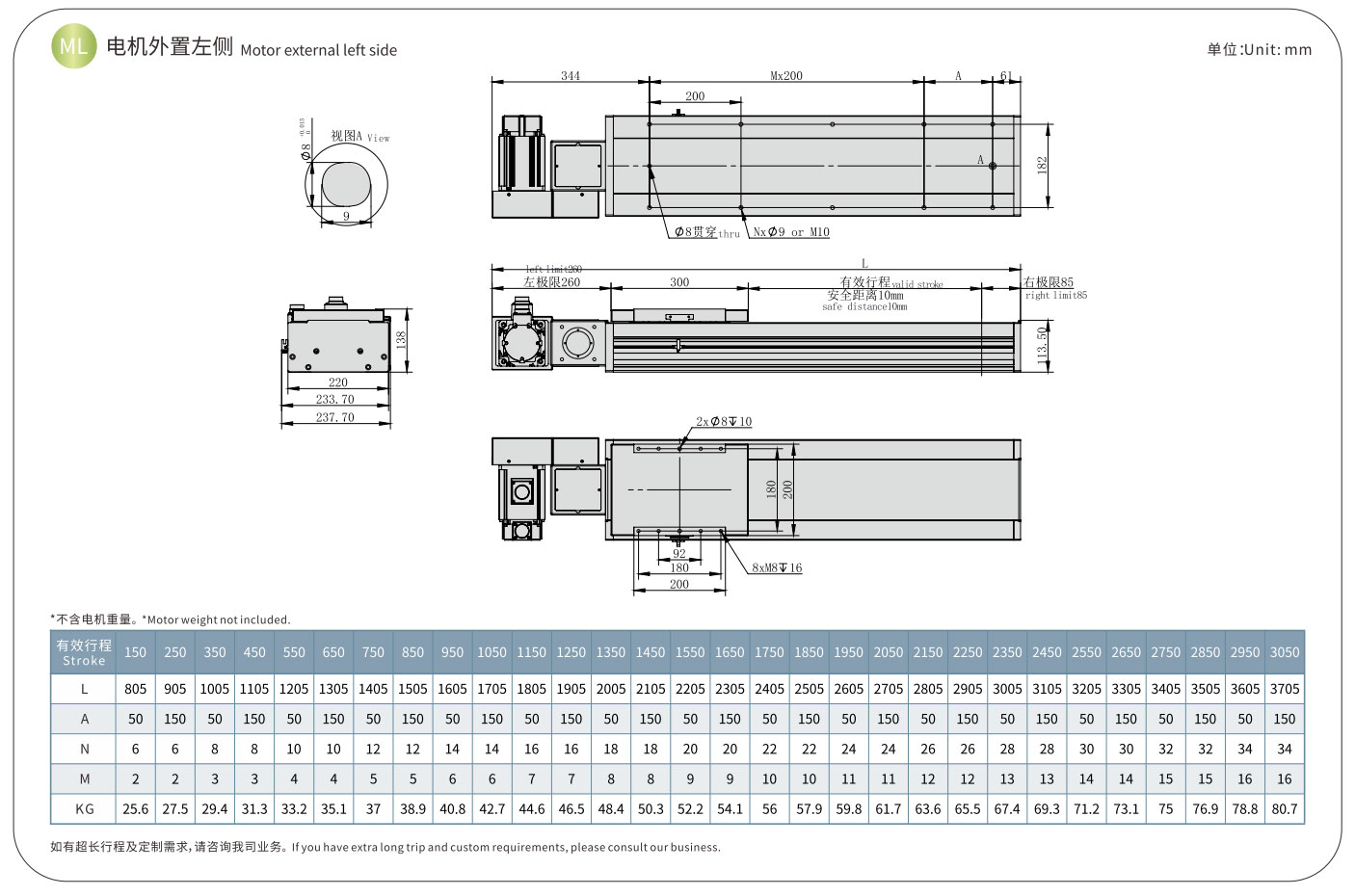
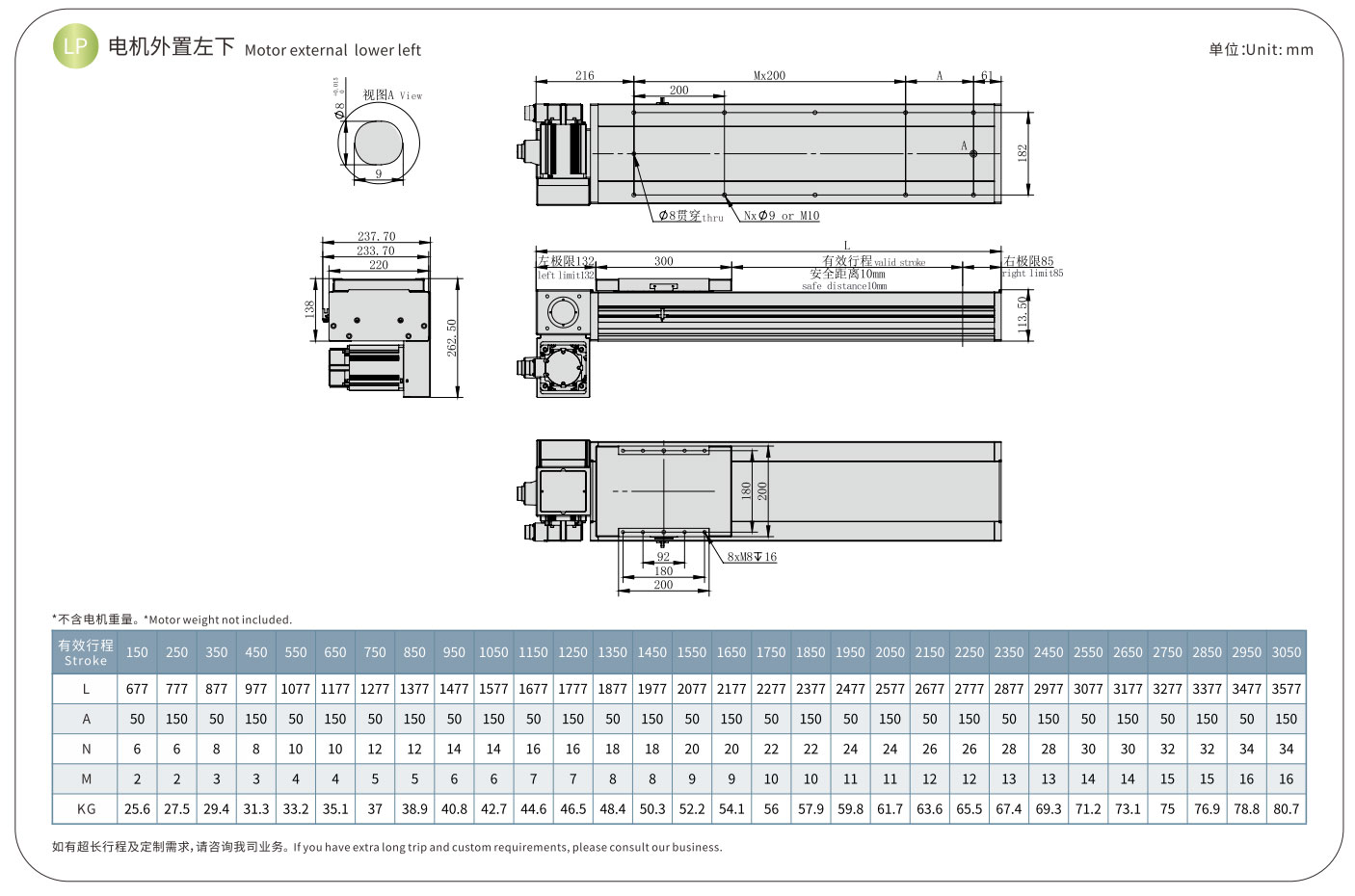
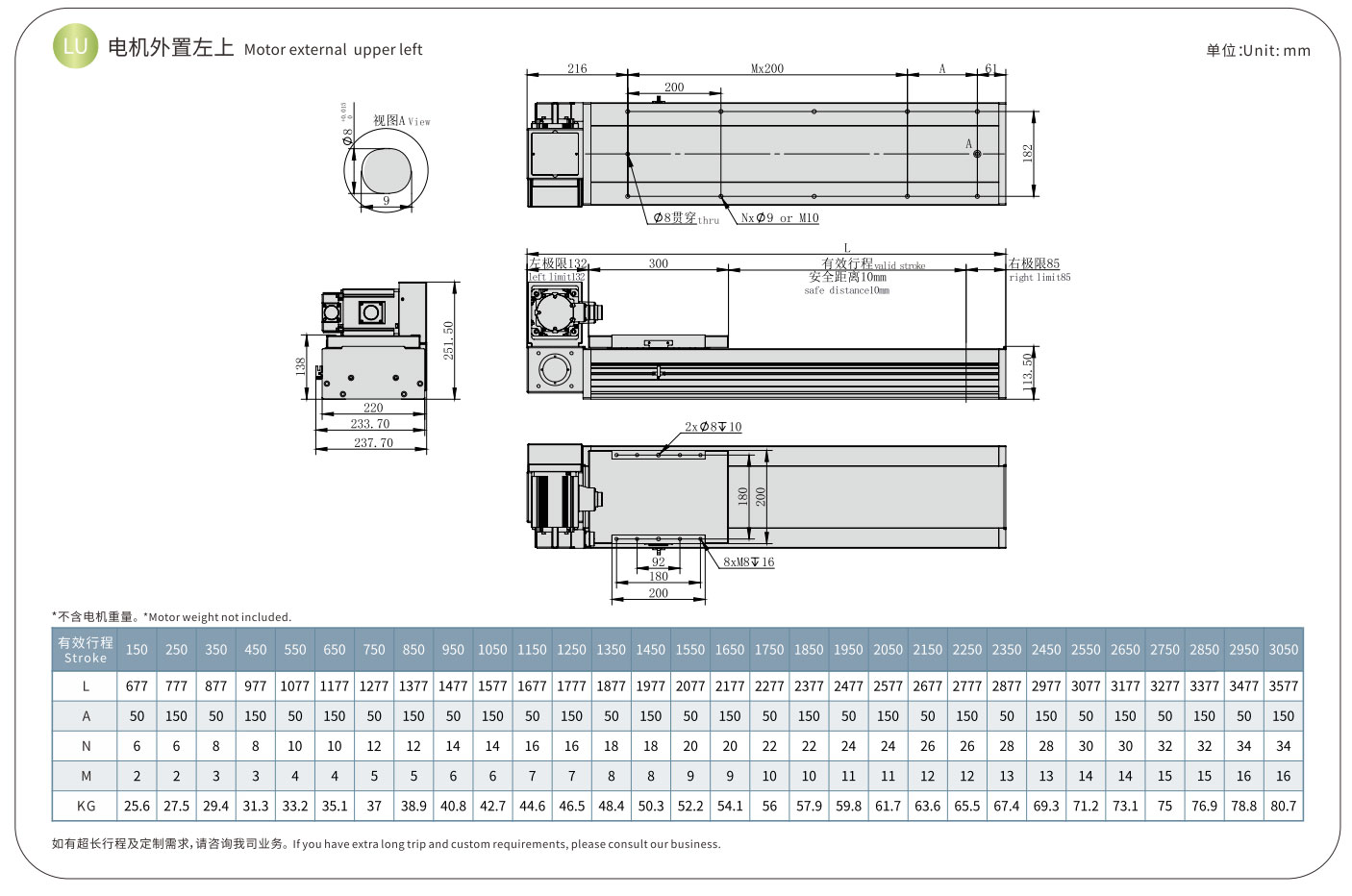
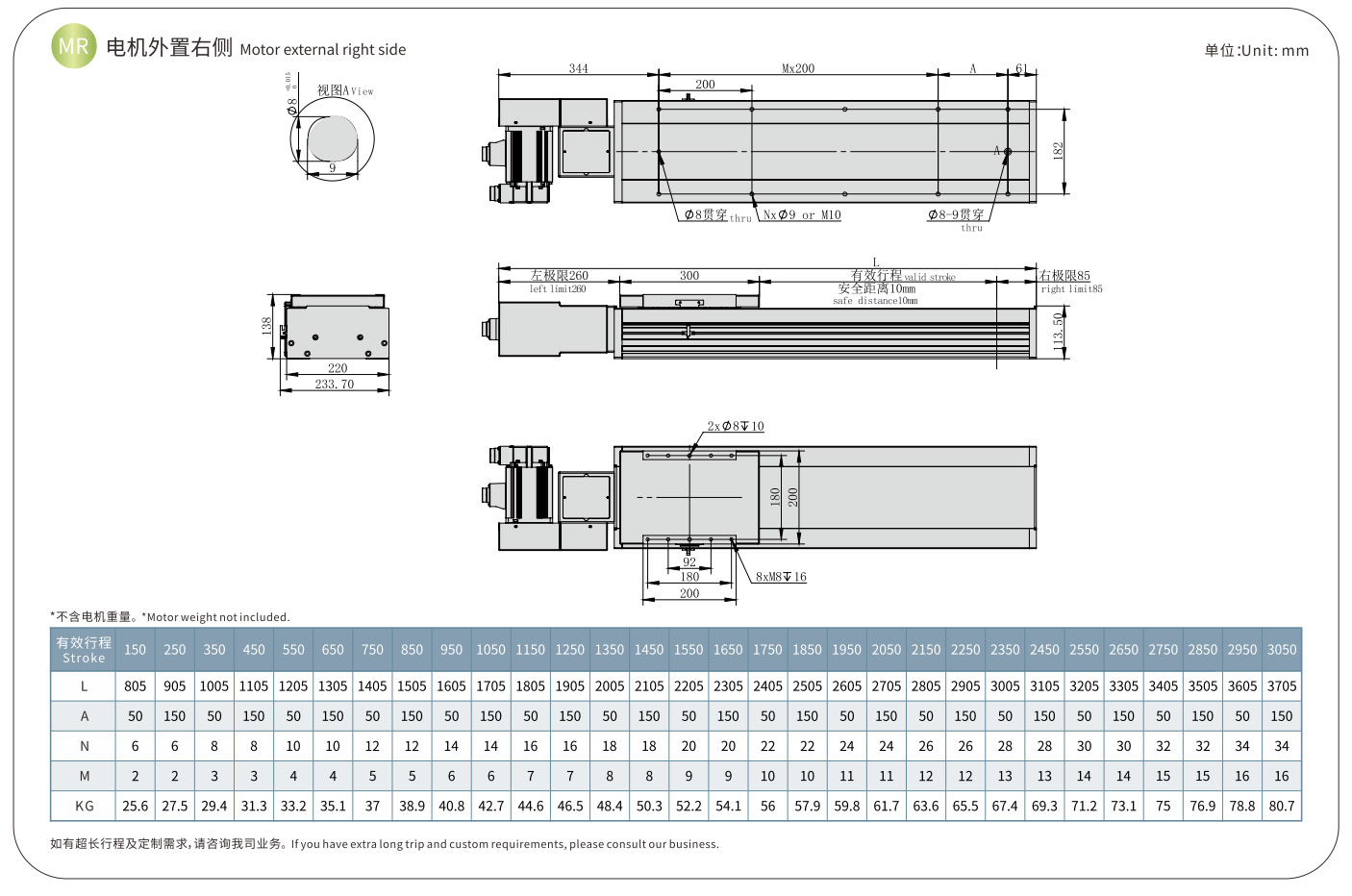
ໃນຖານະທີ່ເປັນຕົວກະຕຸ້ນສາຍແອວແບບຄລາສສິກຂອງ TPA ROBOT, ເມື່ອທຽບກັບຊຸດ HCR, ຊຸດ HCB ຂັບເຄື່ອນ slider ກັບສາຍແອວກໍານົດເວລາ, ຊຶ່ງຫມາຍຄວາມວ່າຊຸດ HCB ມີເສັ້ນເລືອດຕັນໃນທີ່ຍາວກວ່າແລະຄວາມໄວສູງ. ມັນຂັບເຄື່ອນໂດຍມໍເຕີ servo, ມັນບໍ່ພຽງແຕ່ມີຄວາມແມ່ນຍໍາສູງຂອງມໍເຕີ servo, ແຕ່ຍັງມີຄວາມໄດ້ປຽບຂອງຄວາມໄວສູງແລະຄວາມເຄັ່ງຄັດສູງຂອງຂັ້ນຕອນຂອງການເລື່ອນຕົວມັນເອງ. ມັນງ່າຍທີ່ຈະຄວບຄຸມແລະສາມາດເຊື່ອມຕໍ່ໄດ້ງ່າຍກັບ PLC ແລະລະບົບອື່ນໆ. ຕົວກະຕຸ້ນສະໄລ້ແມ່ນເຮັດຈາກໂປຣໄຟລ໌ອາລູມີນຽມ extruded ປະສົມປະສານ, ມີນ້ໍາຫນັກເບົາ, ຂະຫນາດນ້ອຍແລະຄວາມແຂງທີ່ເຂັ້ມແຂງ. ຂະຫນາດການຕິດຕັ້ງແລະເສັ້ນເລືອດຕັນໃນສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການ, ແລະການຕິດຕັ້ງສາມາດໄດ້ຮັບການແກ້ໄຂດ້ວຍ bolts. ໂດຍຜ່ານການປະສົມປະສານຂອງຫຼາຍທິດທາງ, ມັນສາມາດຖືກສ້າງຕັ້ງຂຶ້ນເປັນລະບົບການເຄື່ອນໄຫວເສັ້ນຊື່ຂອງອຸປະກອນອັດຕະໂນມັດຕ່າງໆ, ມີ grippers ກົນຈັກ, grippers ອາກາດແລະອຸປະກອນອື່ນໆ, ມັນສາມາດກາຍເປັນຫຸ່ນຍົນ Cartesian ພິເສດຫຼື gantry ຫຸ່ນຍົນ.

HCB65S

HCB-85D

HCB-105D

HCB-120D

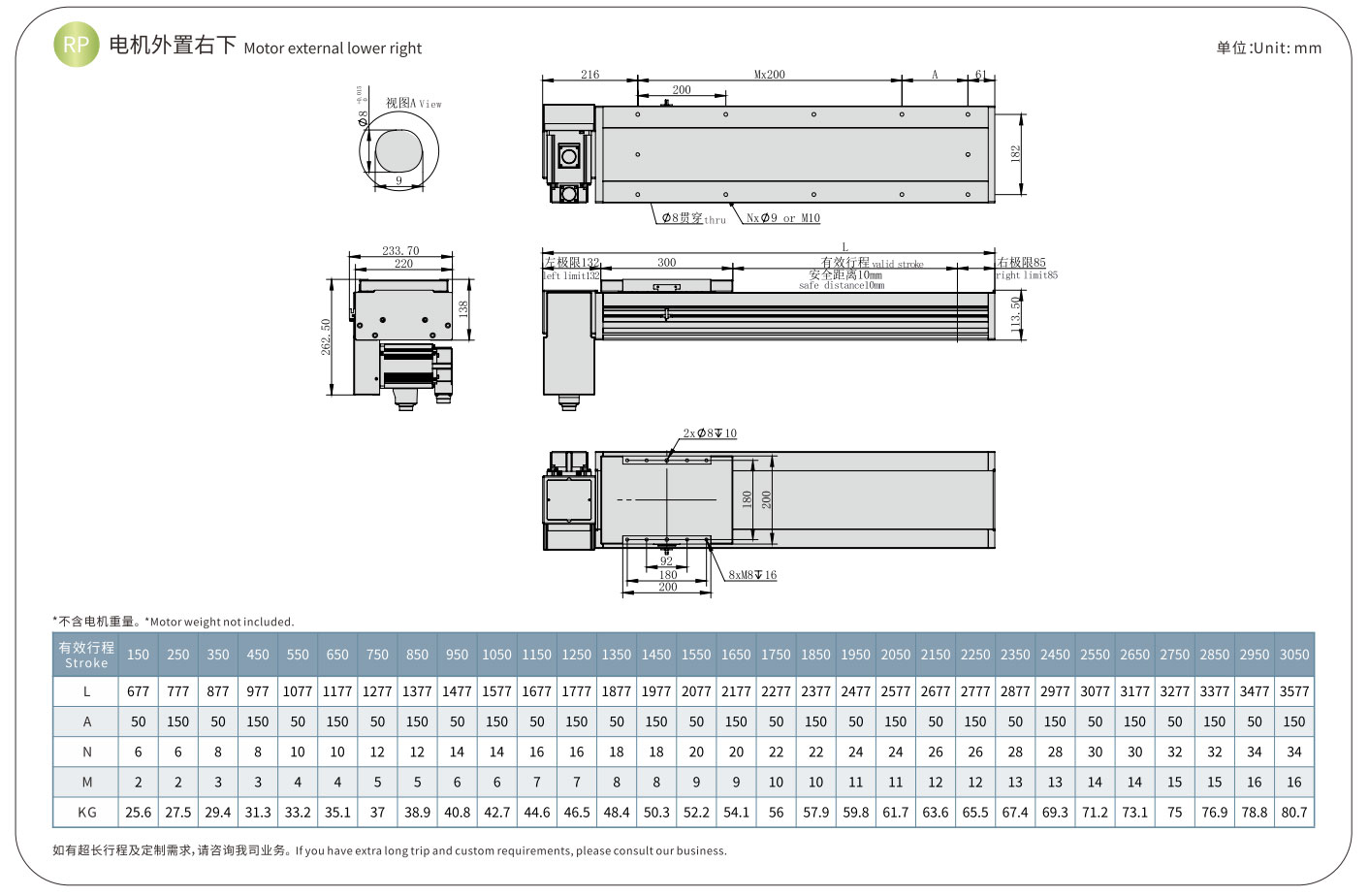
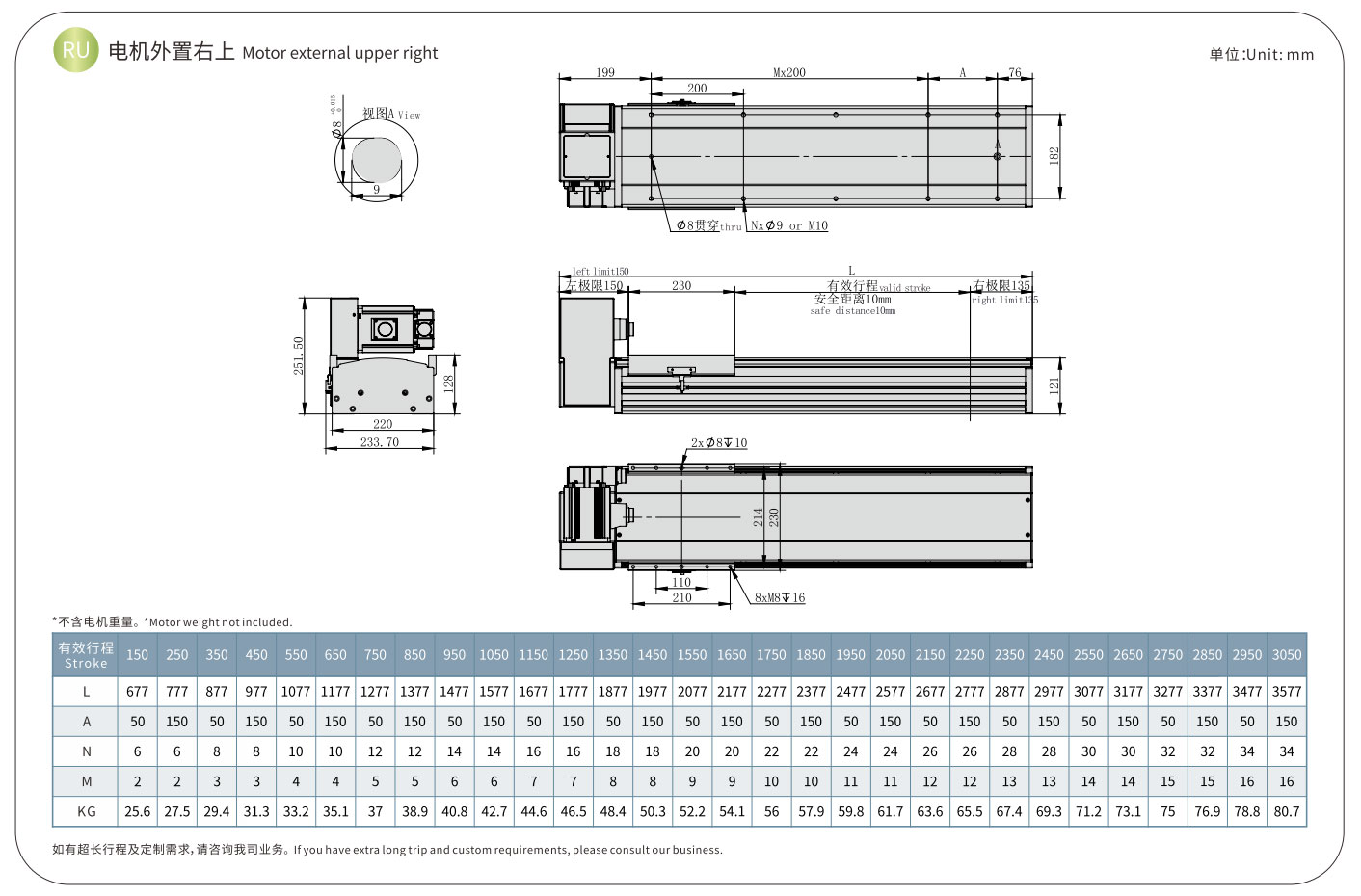
HCB-270D
ຄຸນສົມບັດ
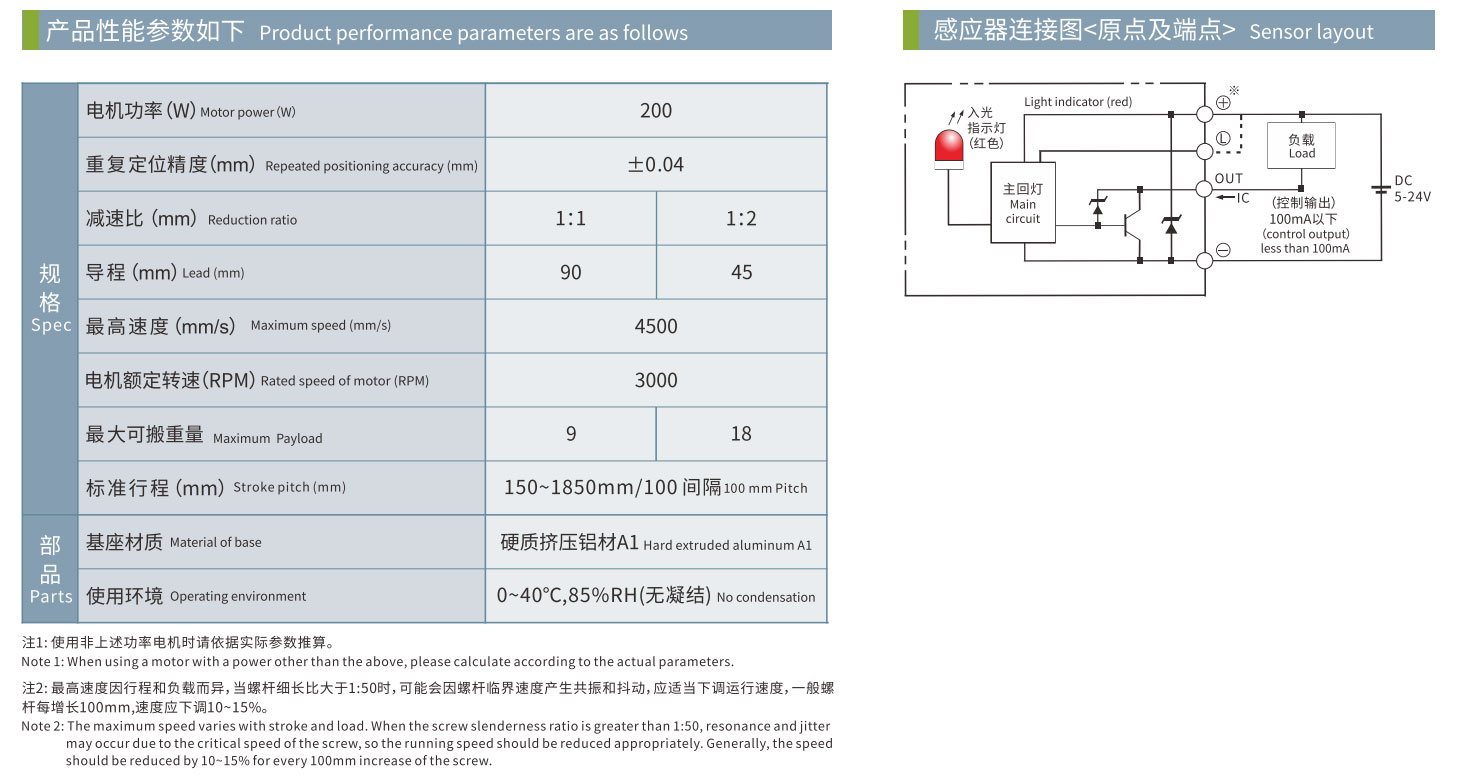
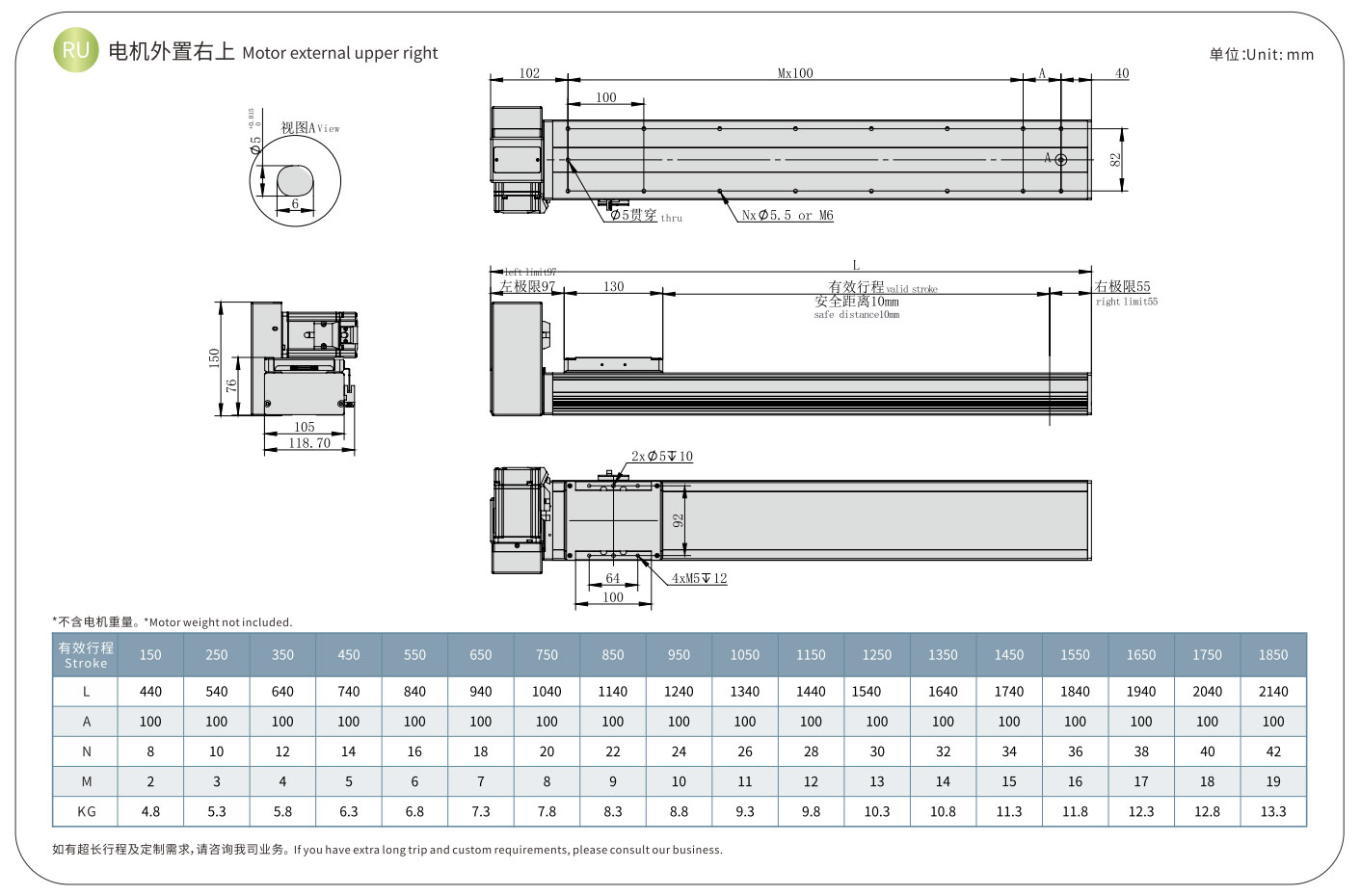
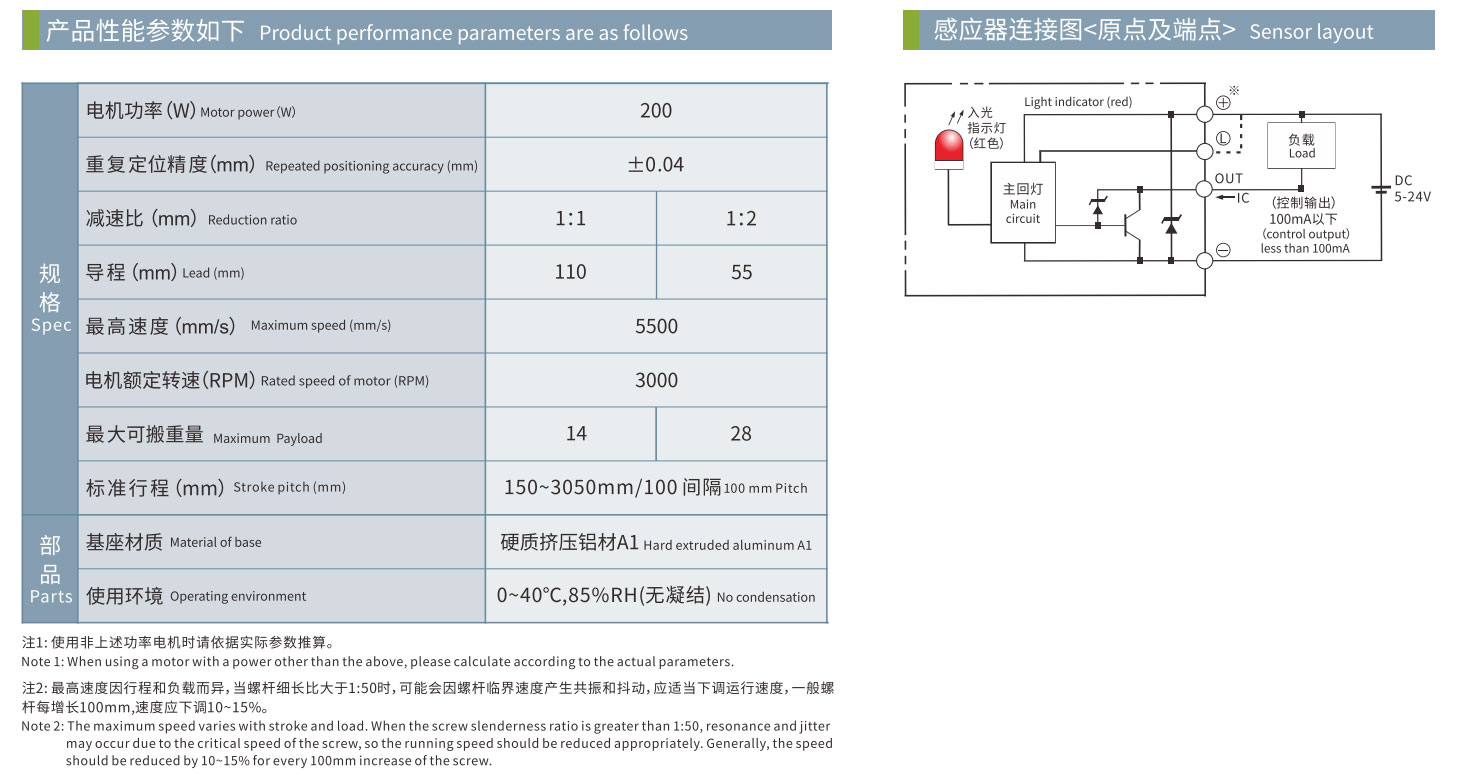
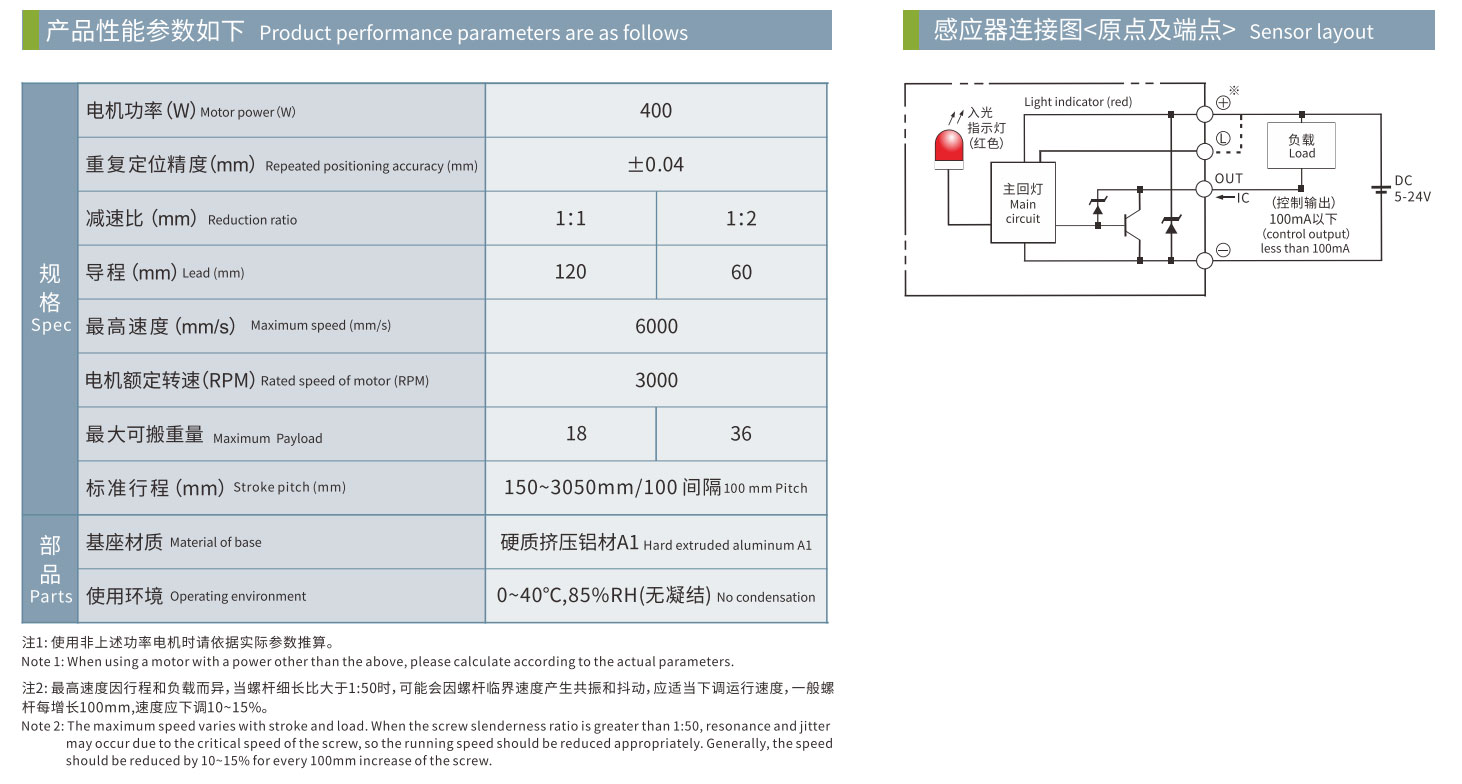
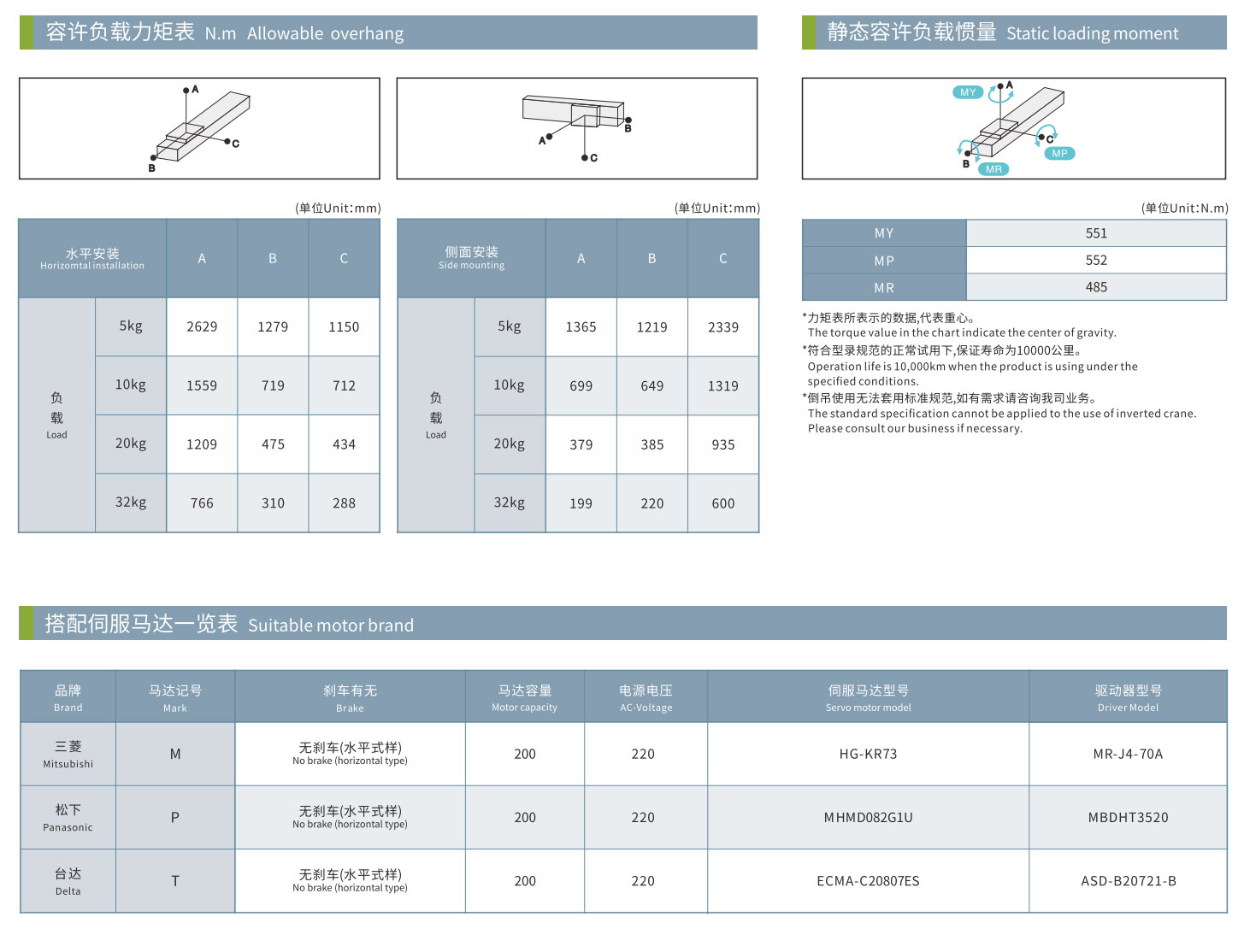
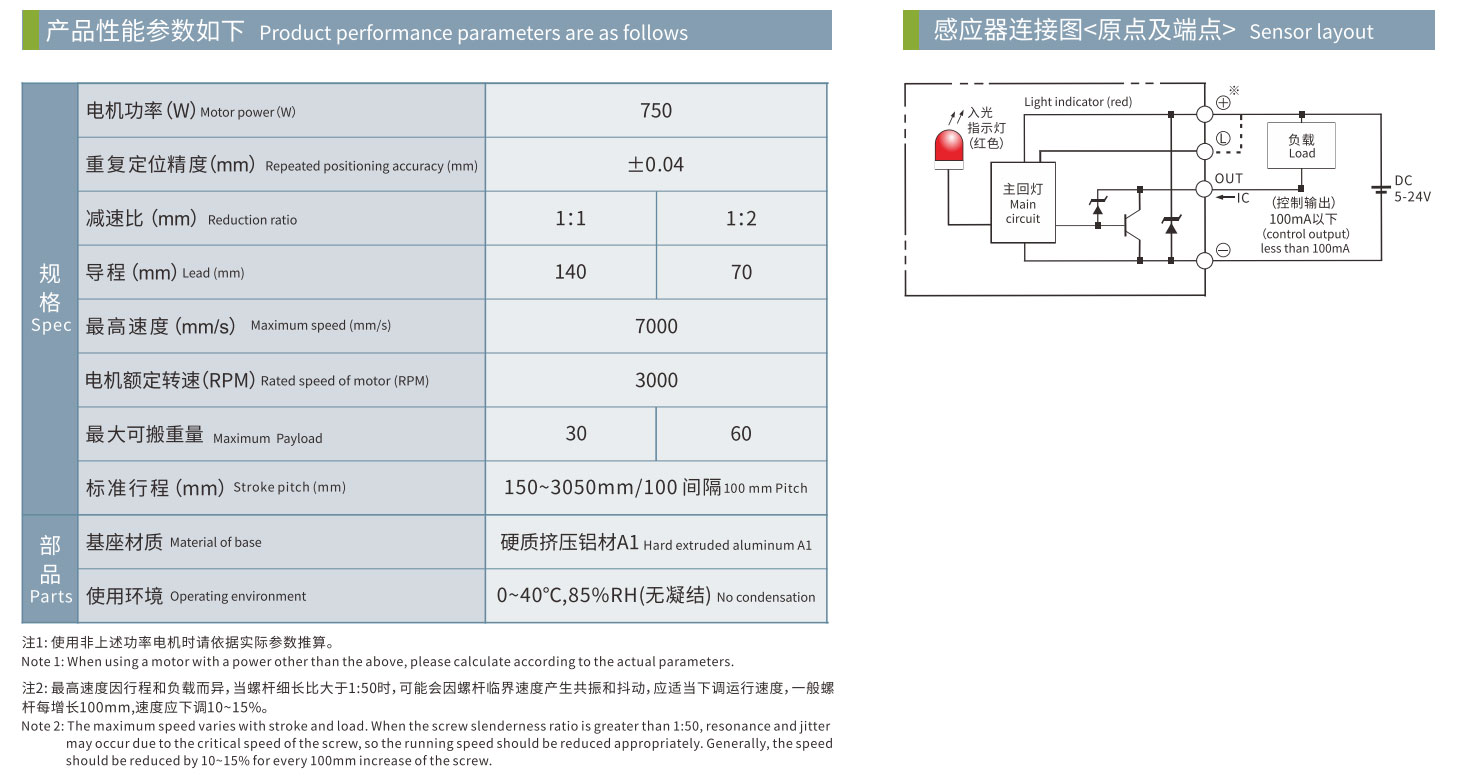
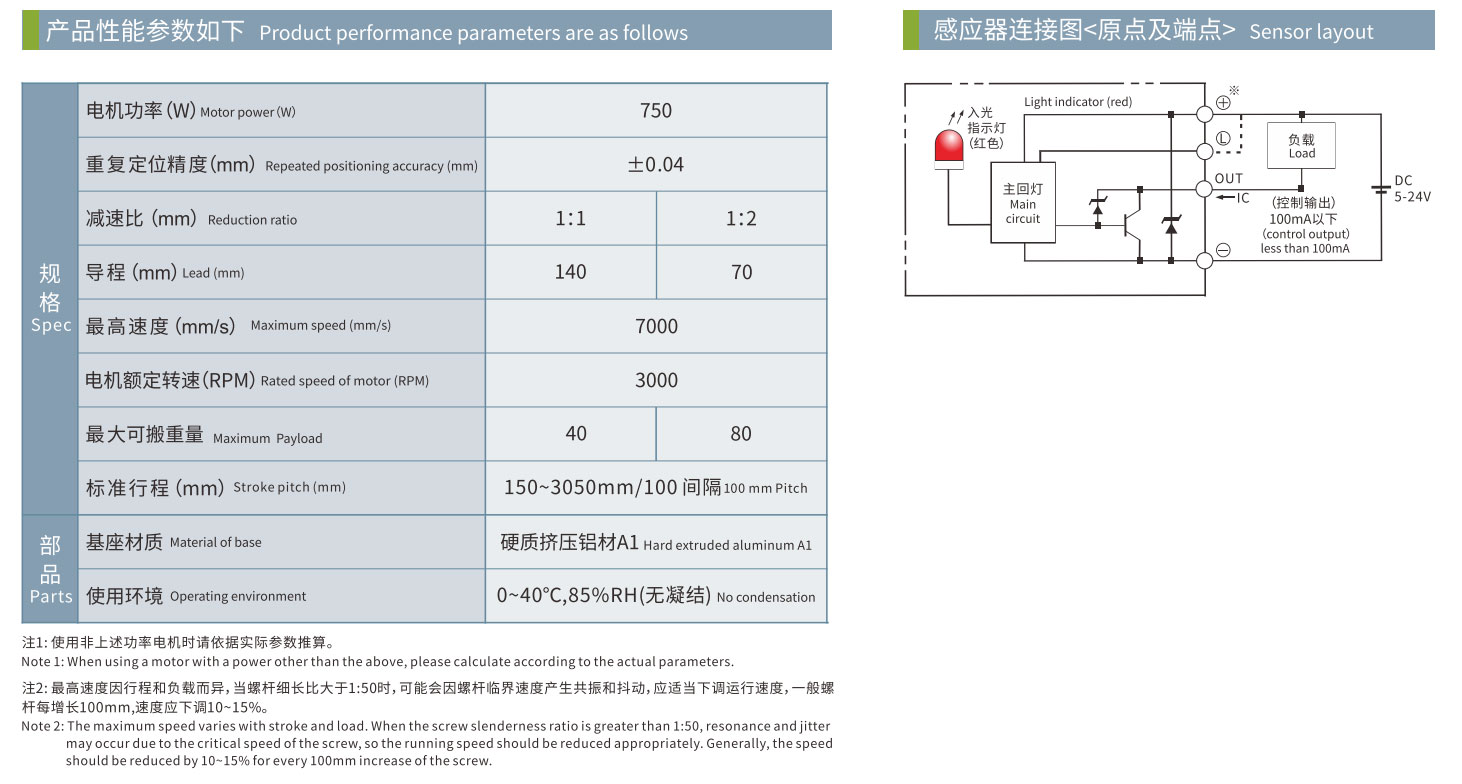
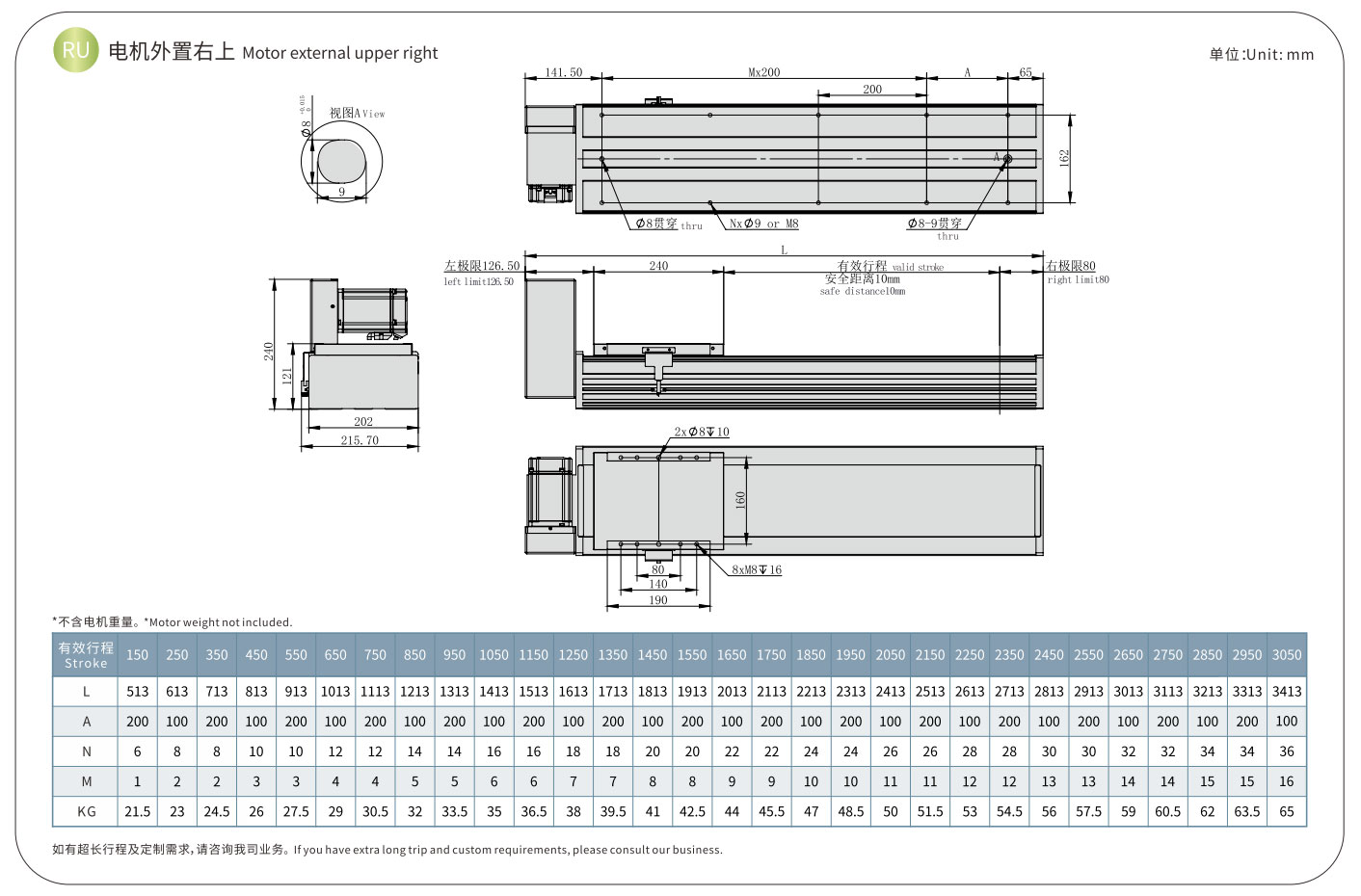
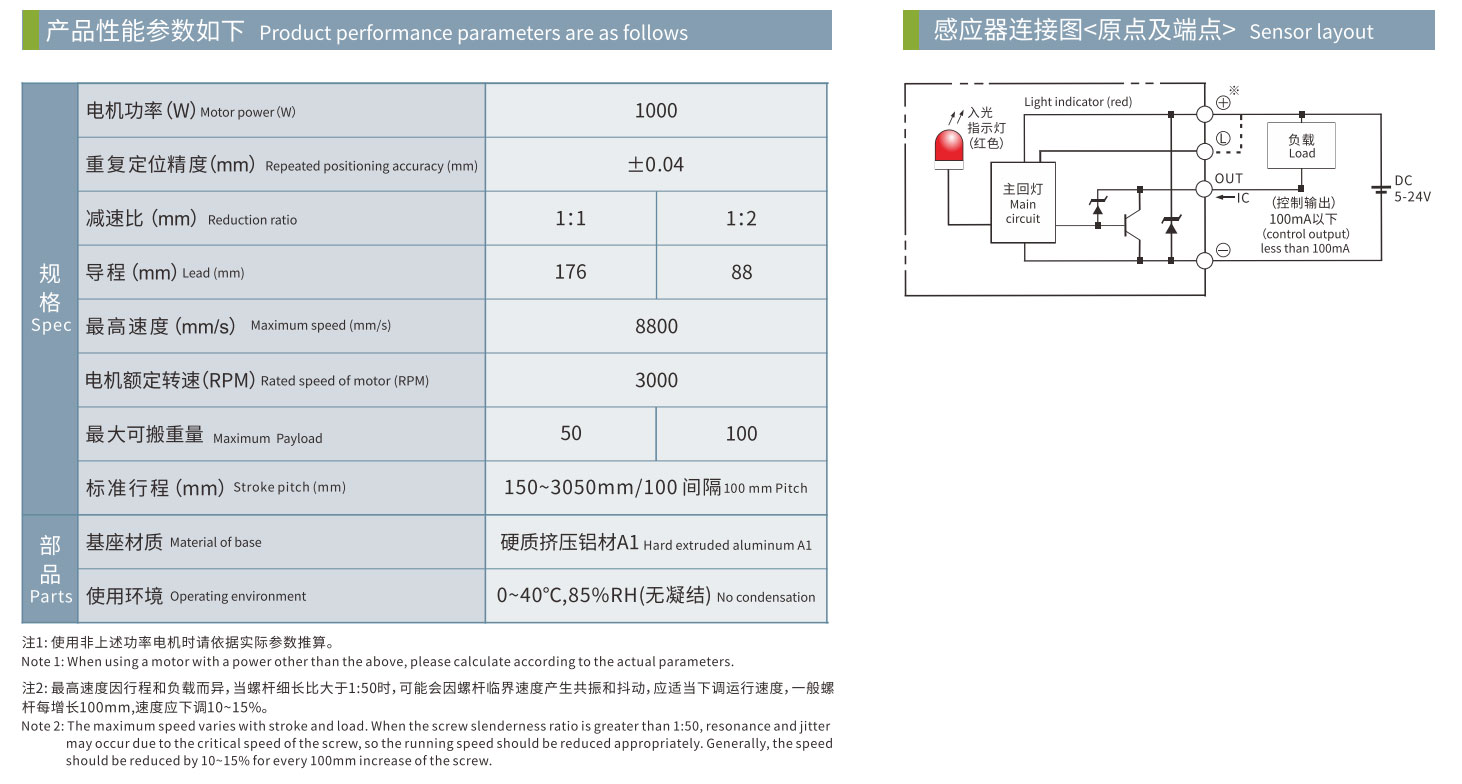
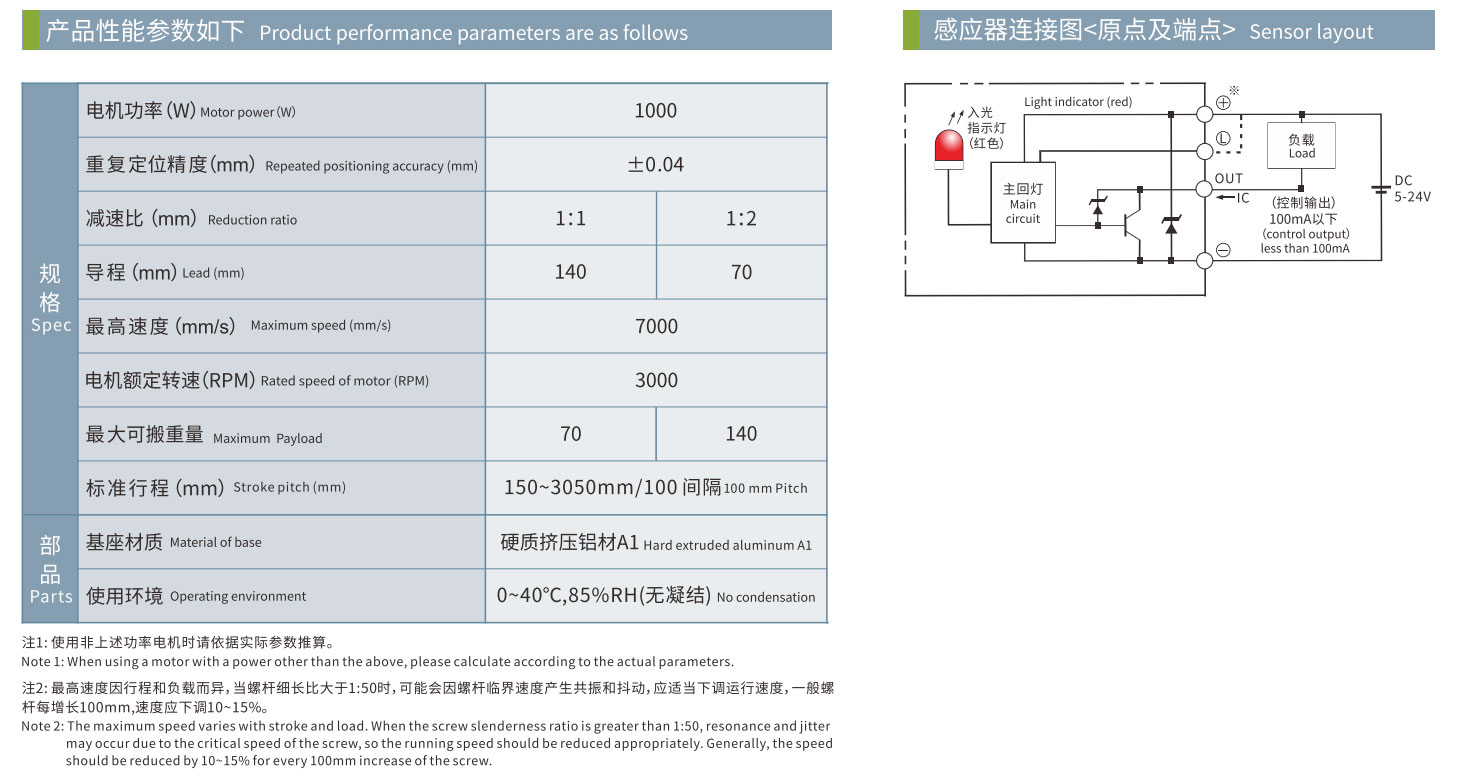
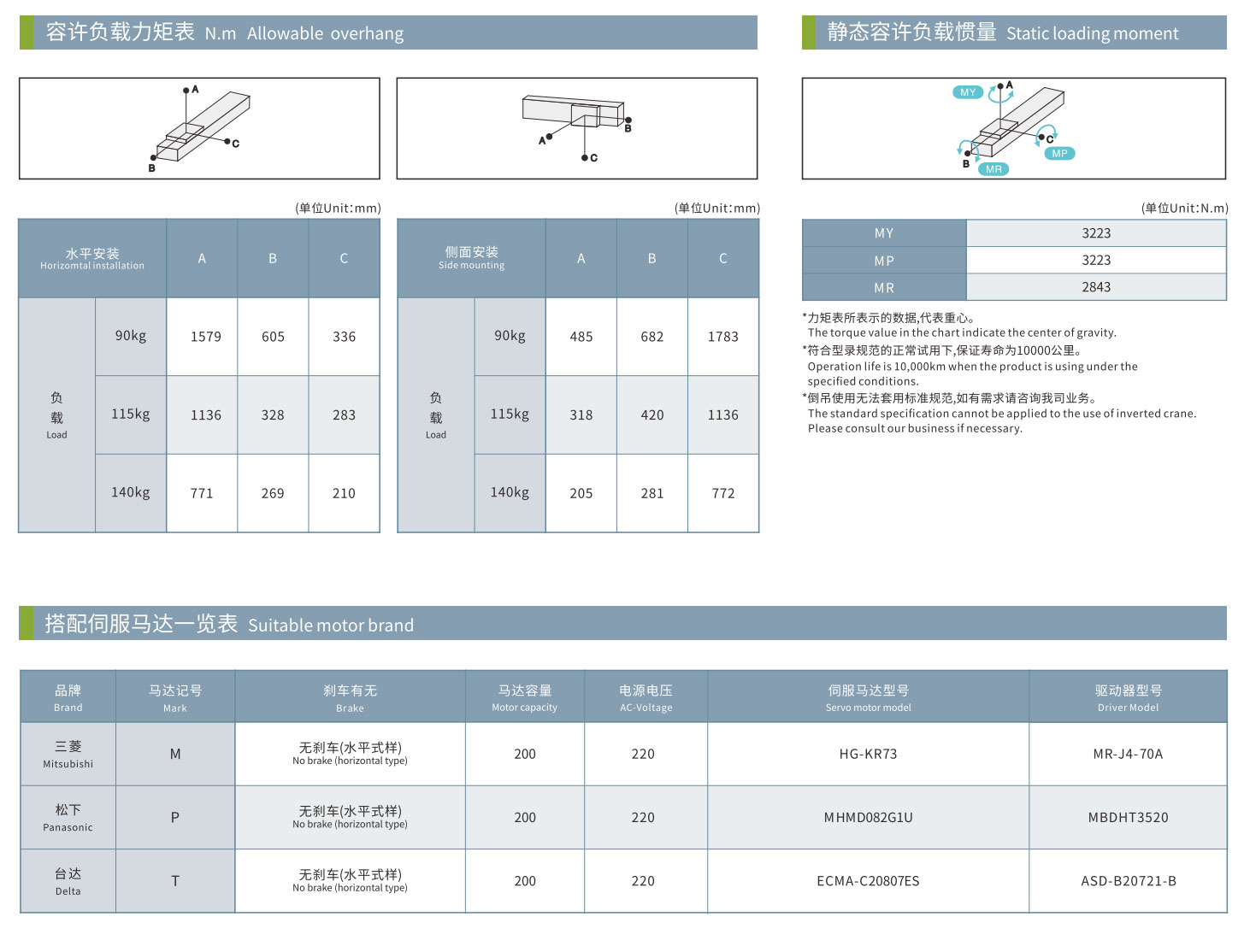
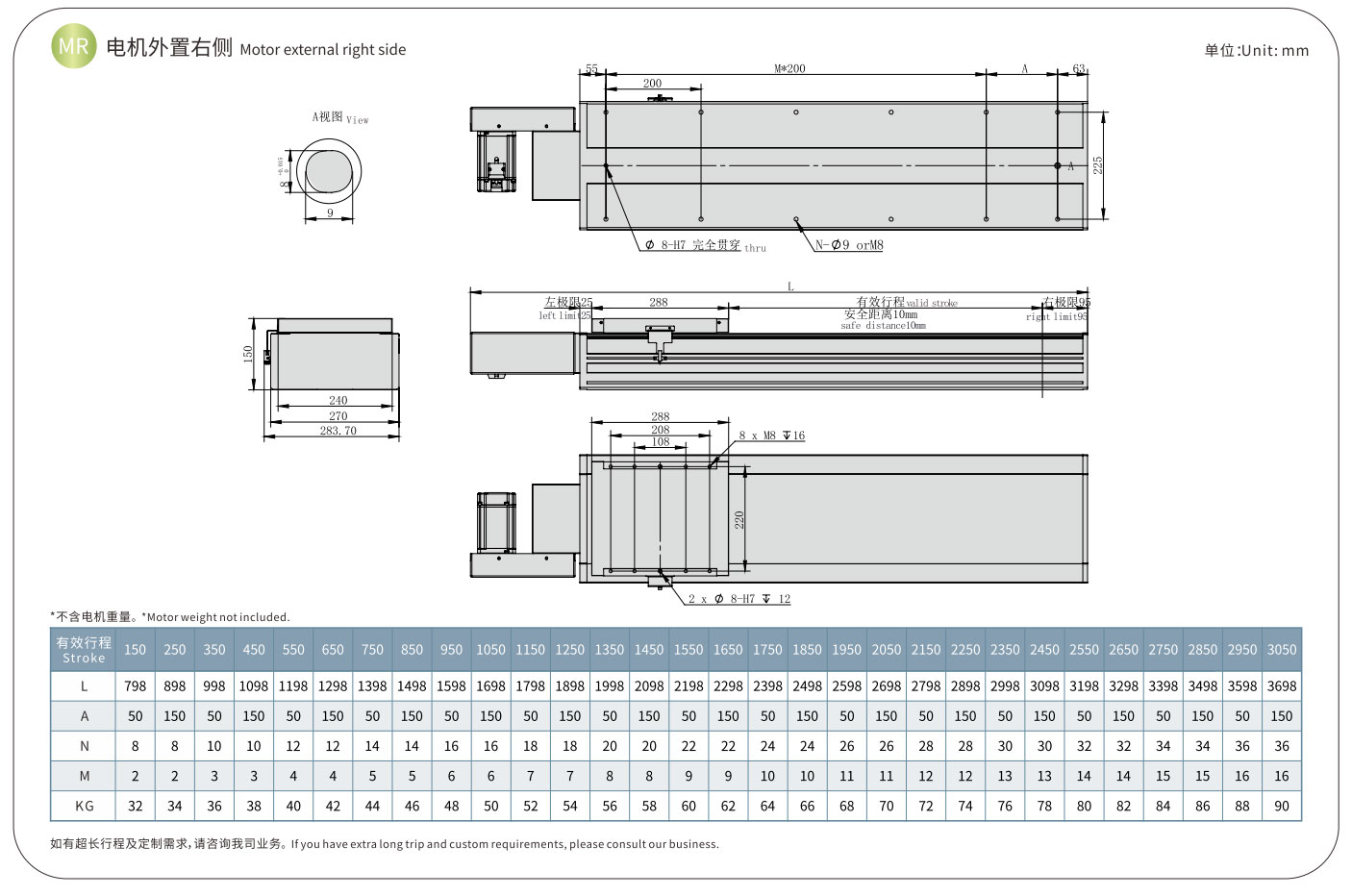
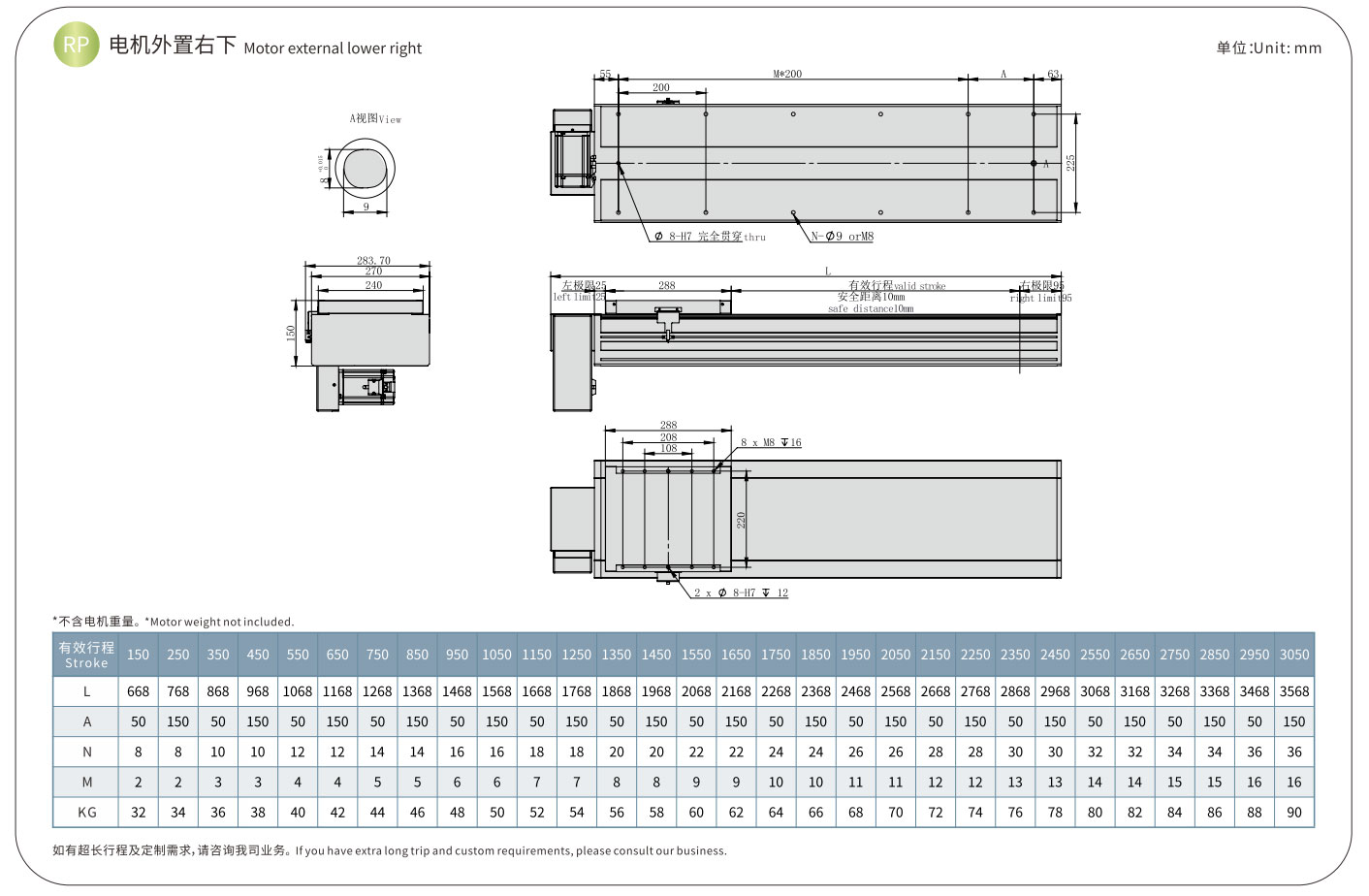
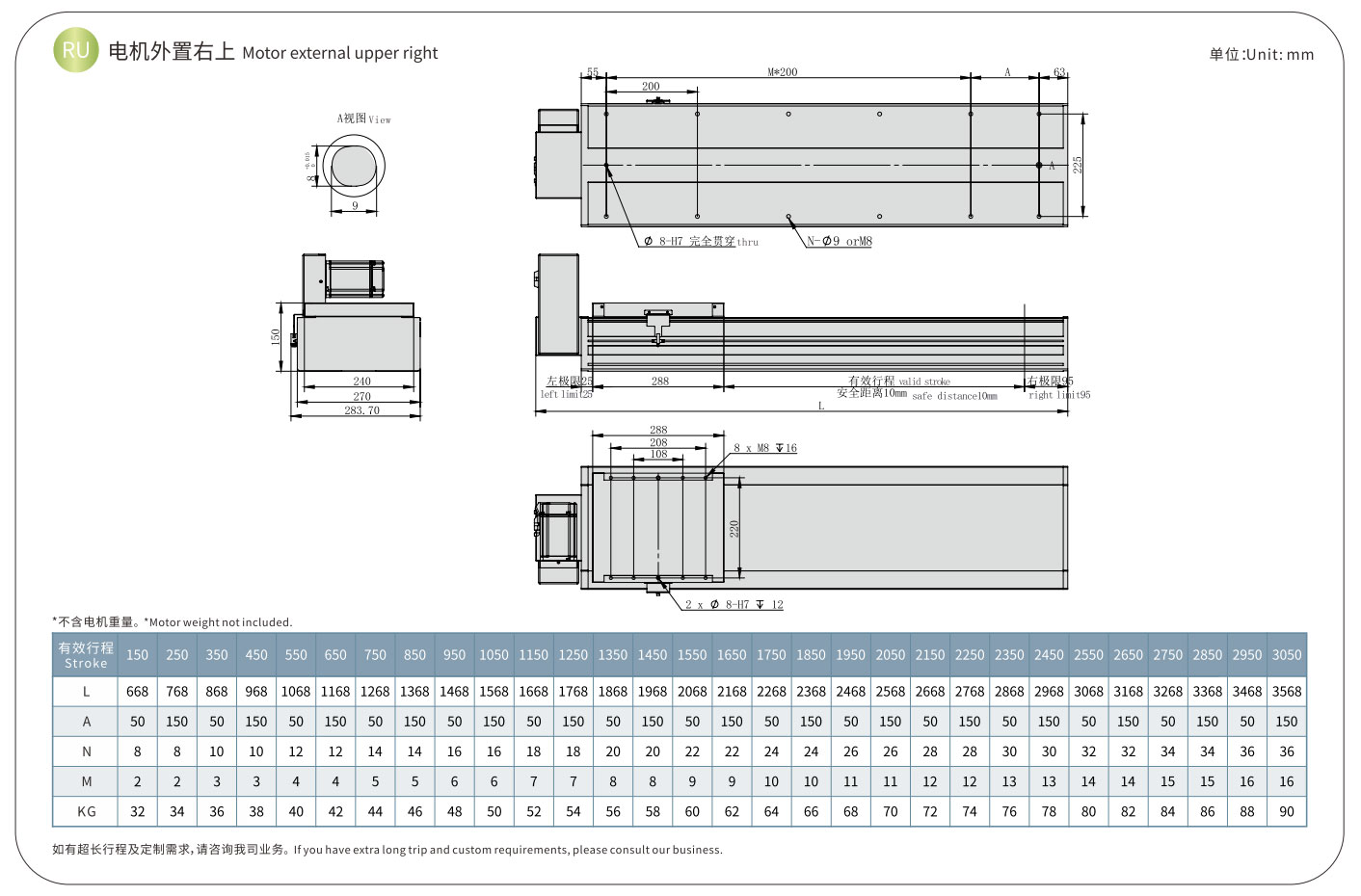
ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊ້ໍາຊ້ອນ: ±0.04mm
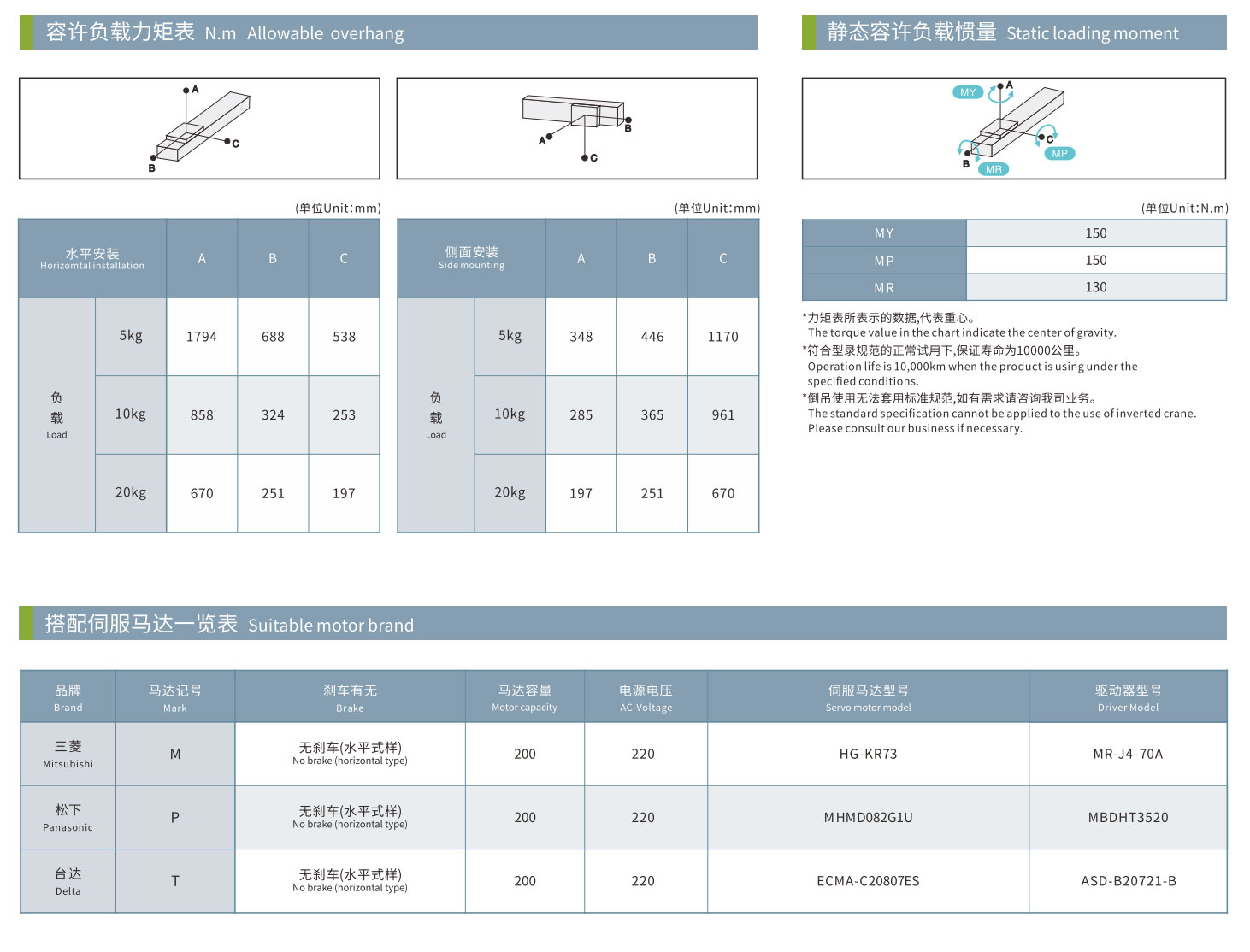
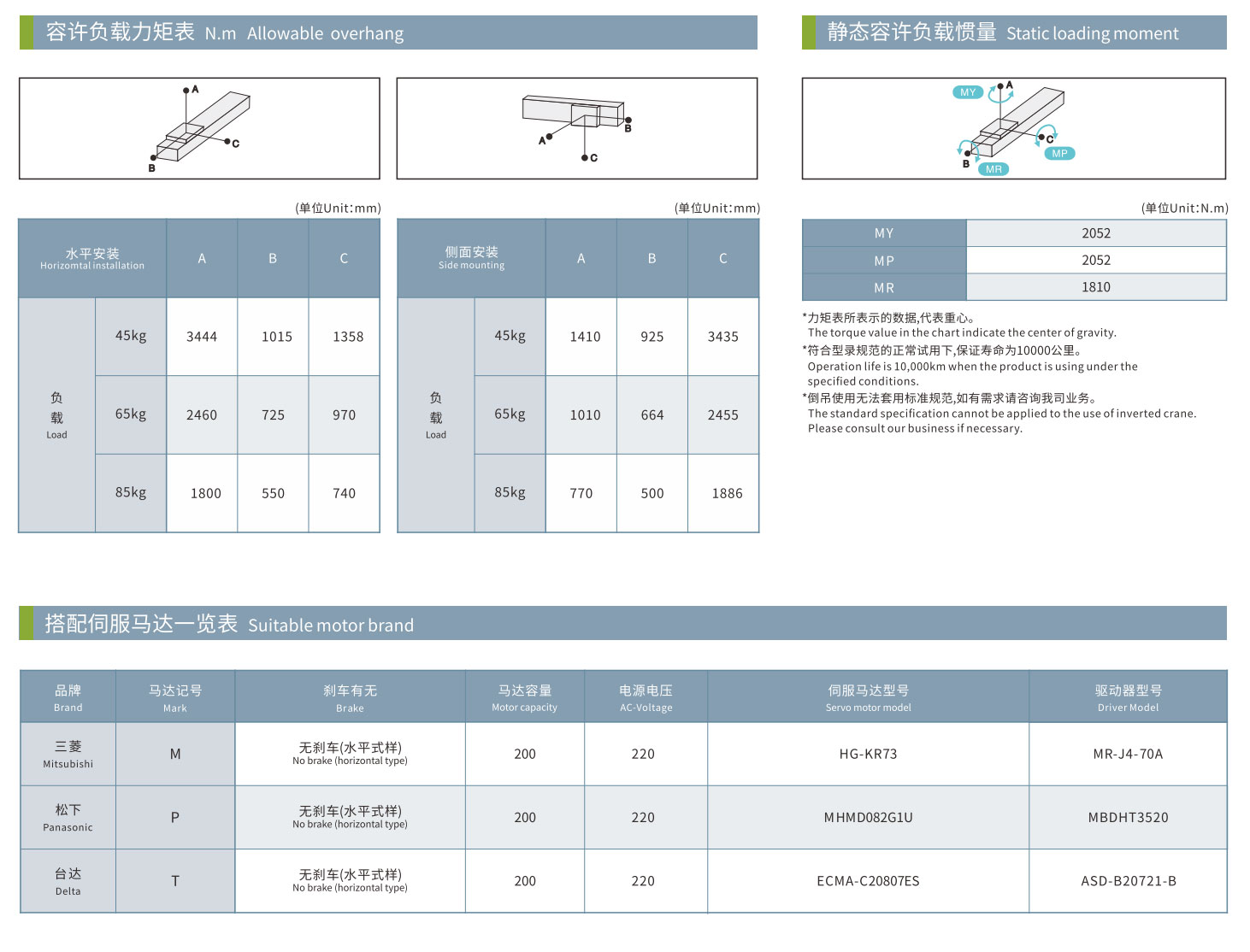
ນ້ໍາຫນັກສູງສຸດ: 140kg
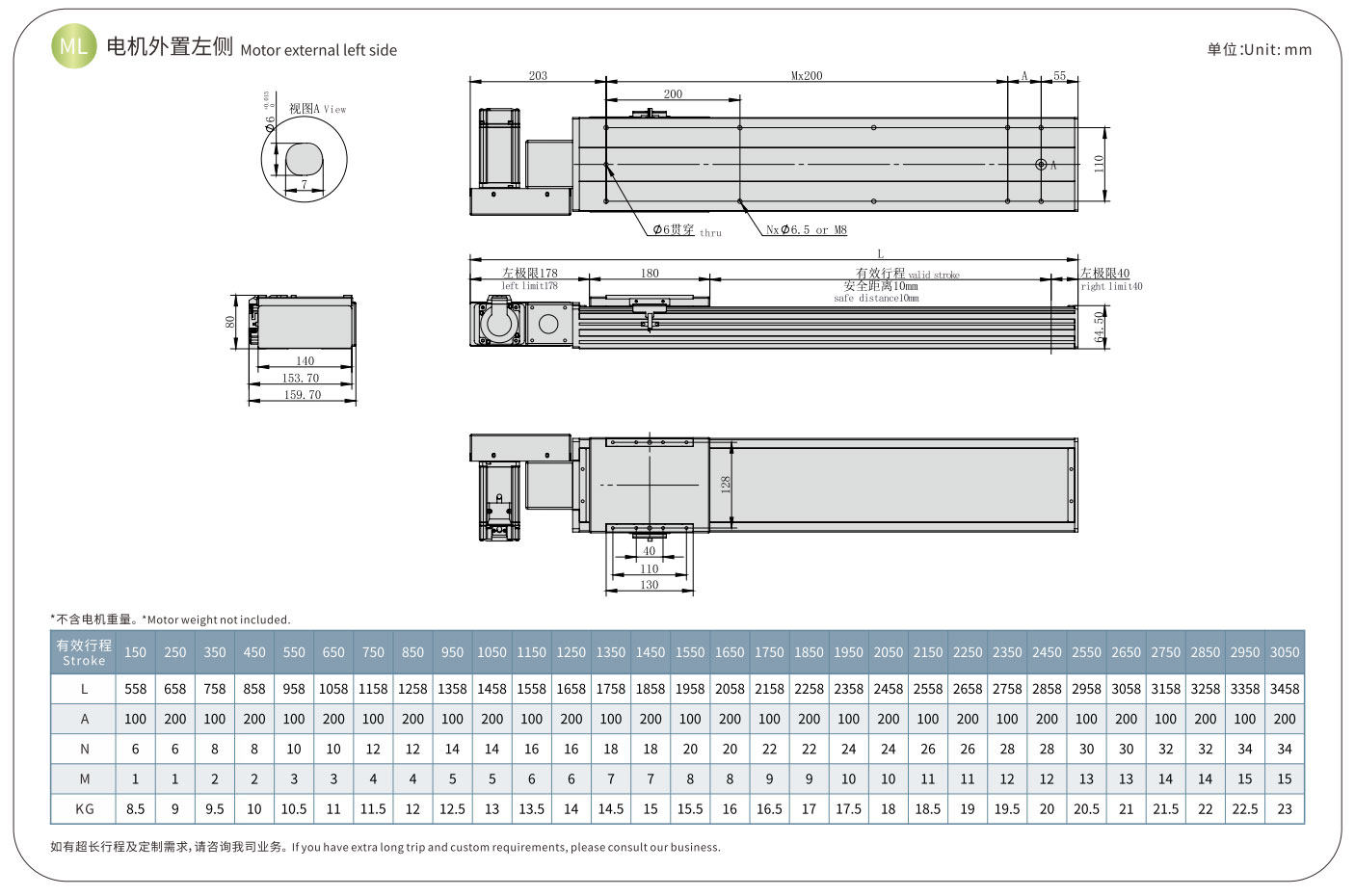
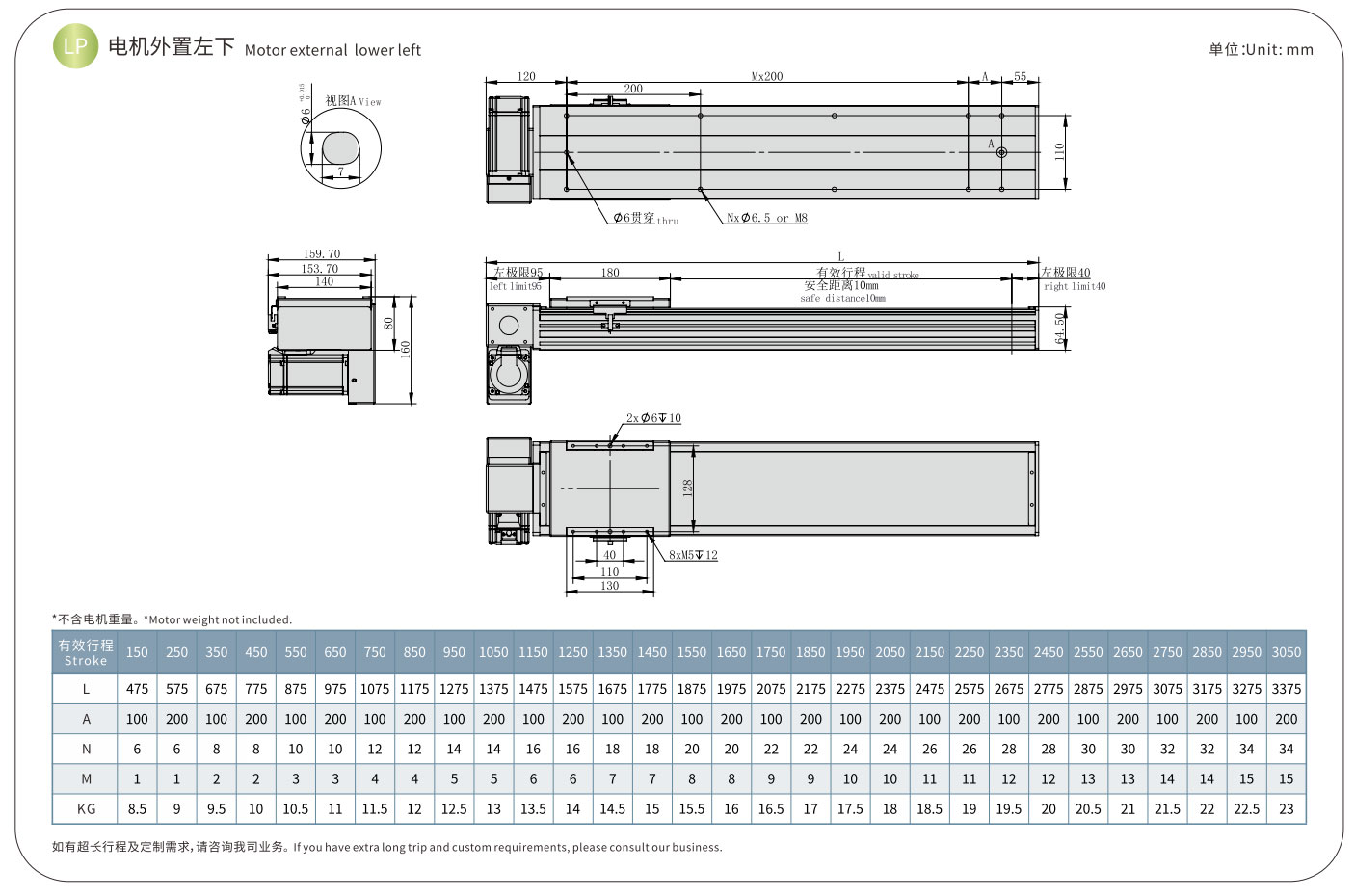
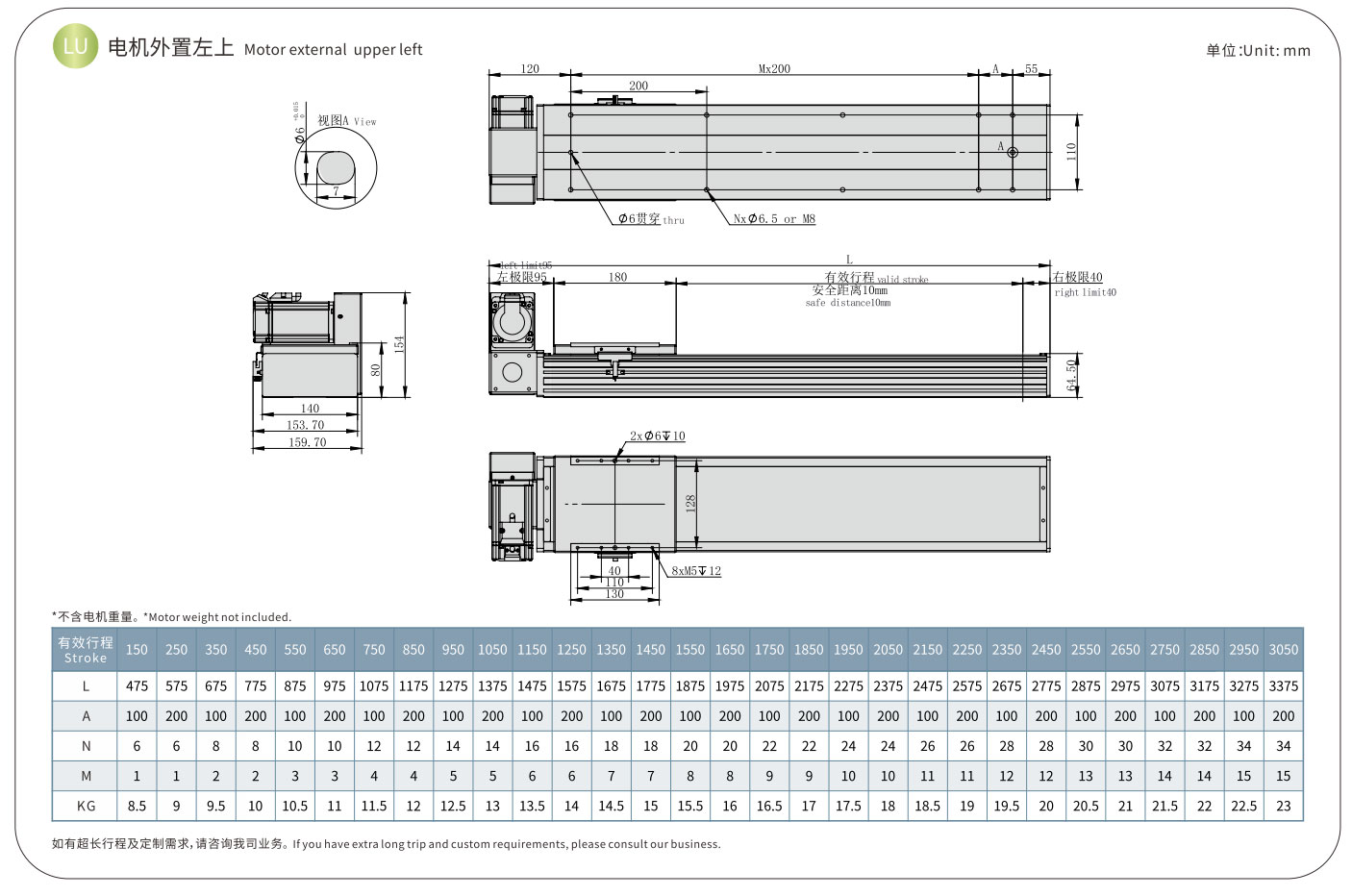
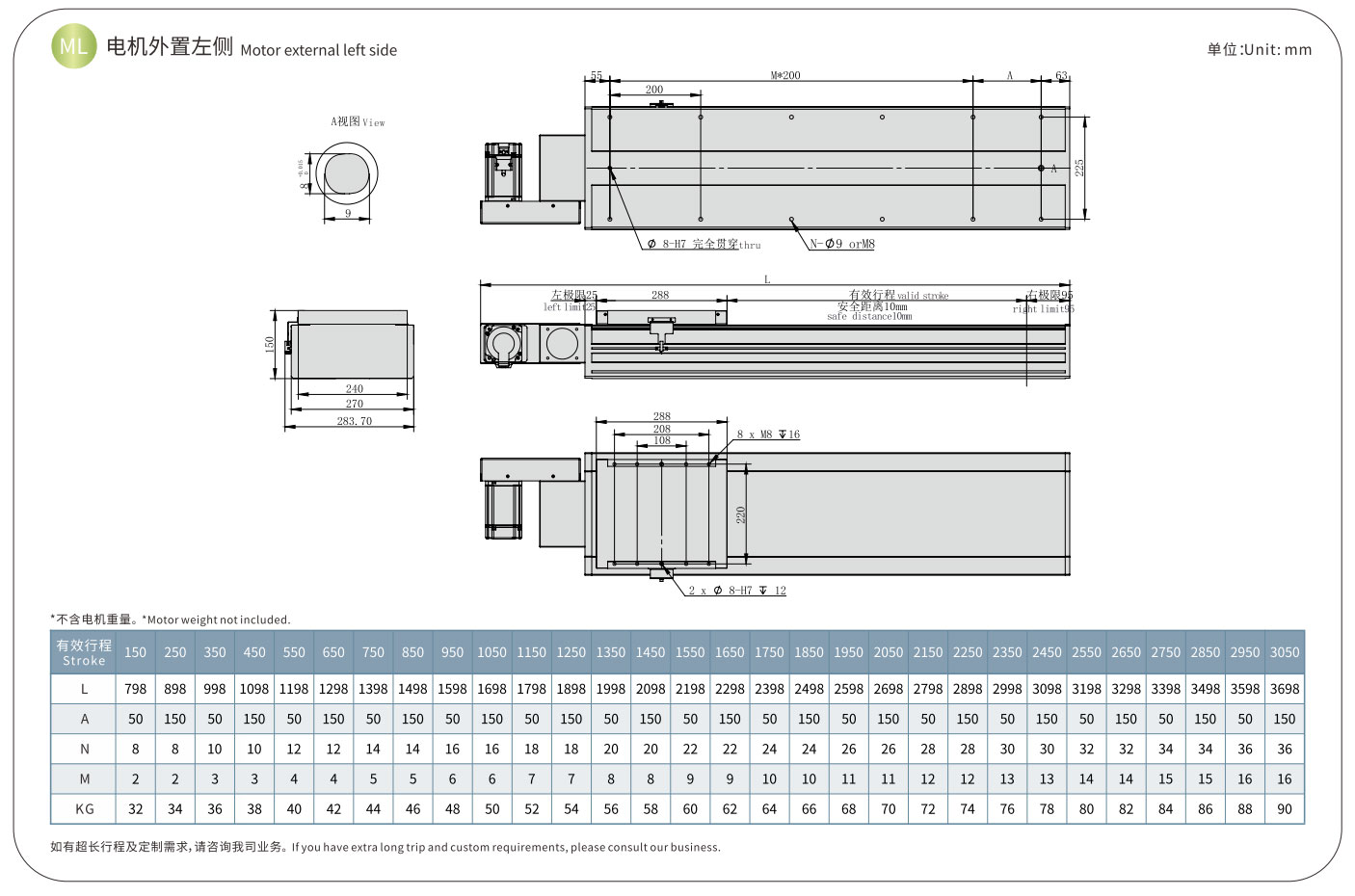
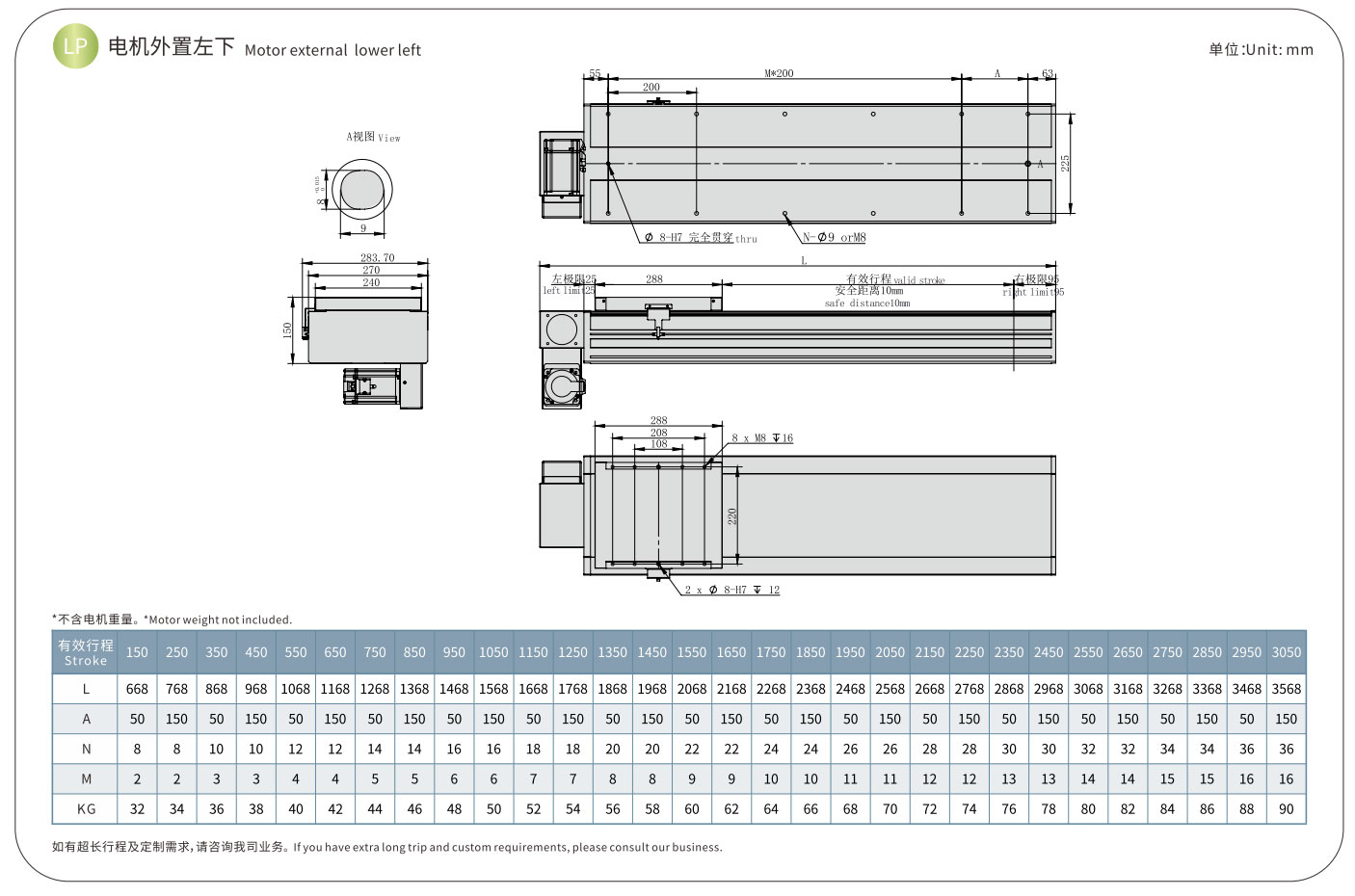
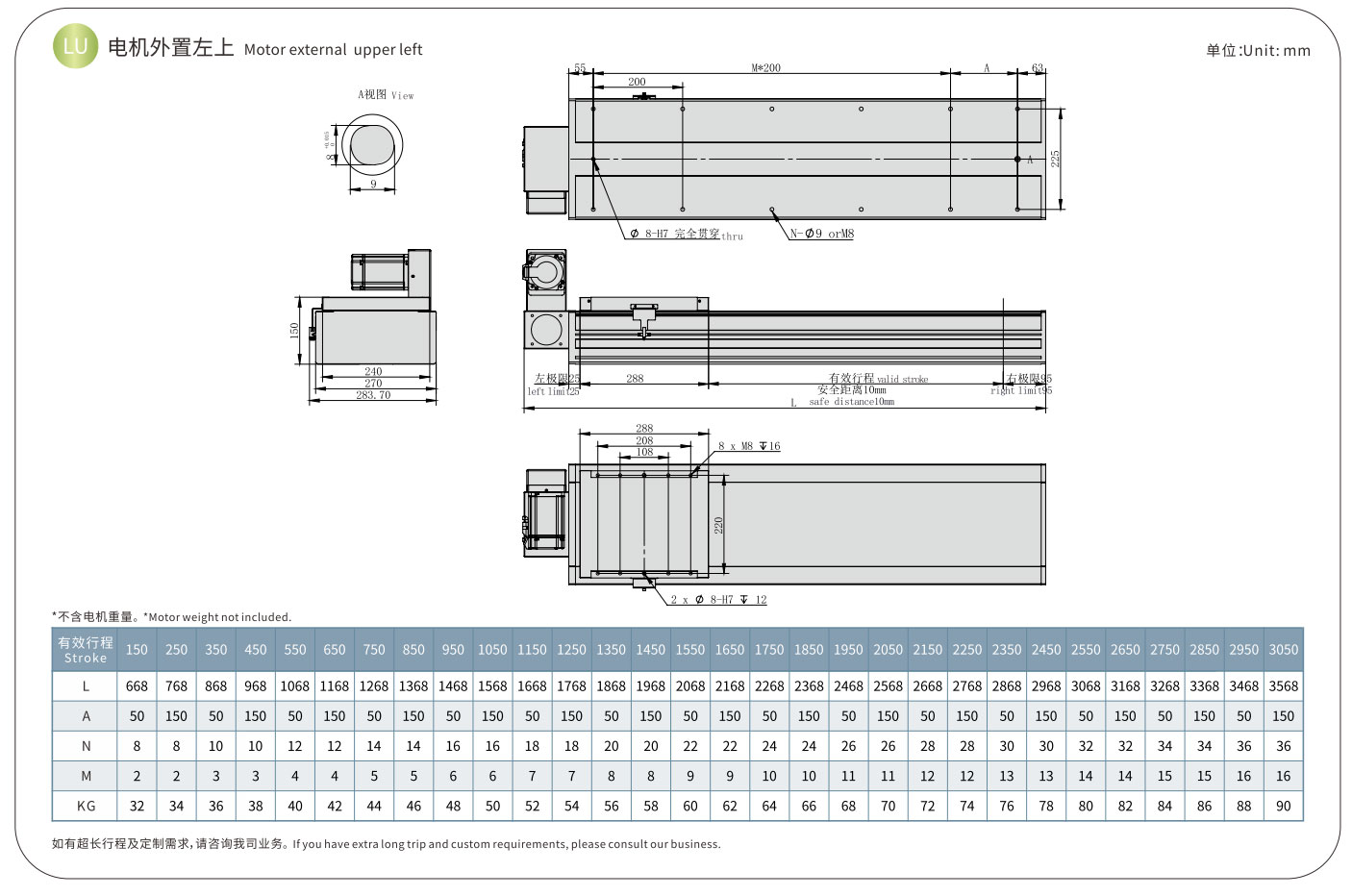
Stroke: 100 – 3050mm
ຄວາມໄວສູງສຸດ: 7000mm/s

1. ການອອກແບບຮາບພຽງ, ນ້ໍາຫນັກລວມເບົາກວ່າ, ລະດັບຄວາມສູງຂອງການປະສົມປະສານຕ່ໍາແລະຄວາມເຂັ້ມງວດທີ່ດີກວ່າ.
2. ໂຄງປະກອບການແມ່ນ optimized, ຄວາມແມ່ນຍໍາແມ່ນດີກວ່າ, ແລະຄວາມຜິດພາດທີ່ເກີດຈາກການປະກອບອຸປະກອນເສີມຫຼາຍແມ່ນຫຼຸດລົງ.
3. ການປະກອບແມ່ນປະຫຍັດເວລາ, ປະຫຍັດແຮງງານແລະສະດວກ. ບໍ່ຈໍາເປັນຕ້ອງເອົາຝາປິດອະລູມິນຽມເພື່ອຕິດຕັ້ງການເຊື່ອມຫຼືໂມດູນ.
4. ການບໍາລຸງຮັກສາແມ່ນງ່າຍດາຍ, ທັງສອງດ້ານຂອງໂມດູນໄດ້ຖືກຕິດຕັ້ງດ້ວຍຮູສີດນ້ໍາມັນ, ແລະຝາປິດບໍ່ຈໍາເປັນຕ້ອງເອົາອອກ.







ຜະລິດຕະພັນເພີ່ມເຕີມ

ONB Series Belt Driven Linear Module Half Enclosed

OCB Series Belt Driven Linear Module Fully Encl...

ONB-F Series Belt Driven Linear Module ພາຍນອກ...

HNB-E Series Belt Driven Linear Actuators ເຄິ່ງ ...

HNB Series Belt Driven Linear Module Half Enclosed










