




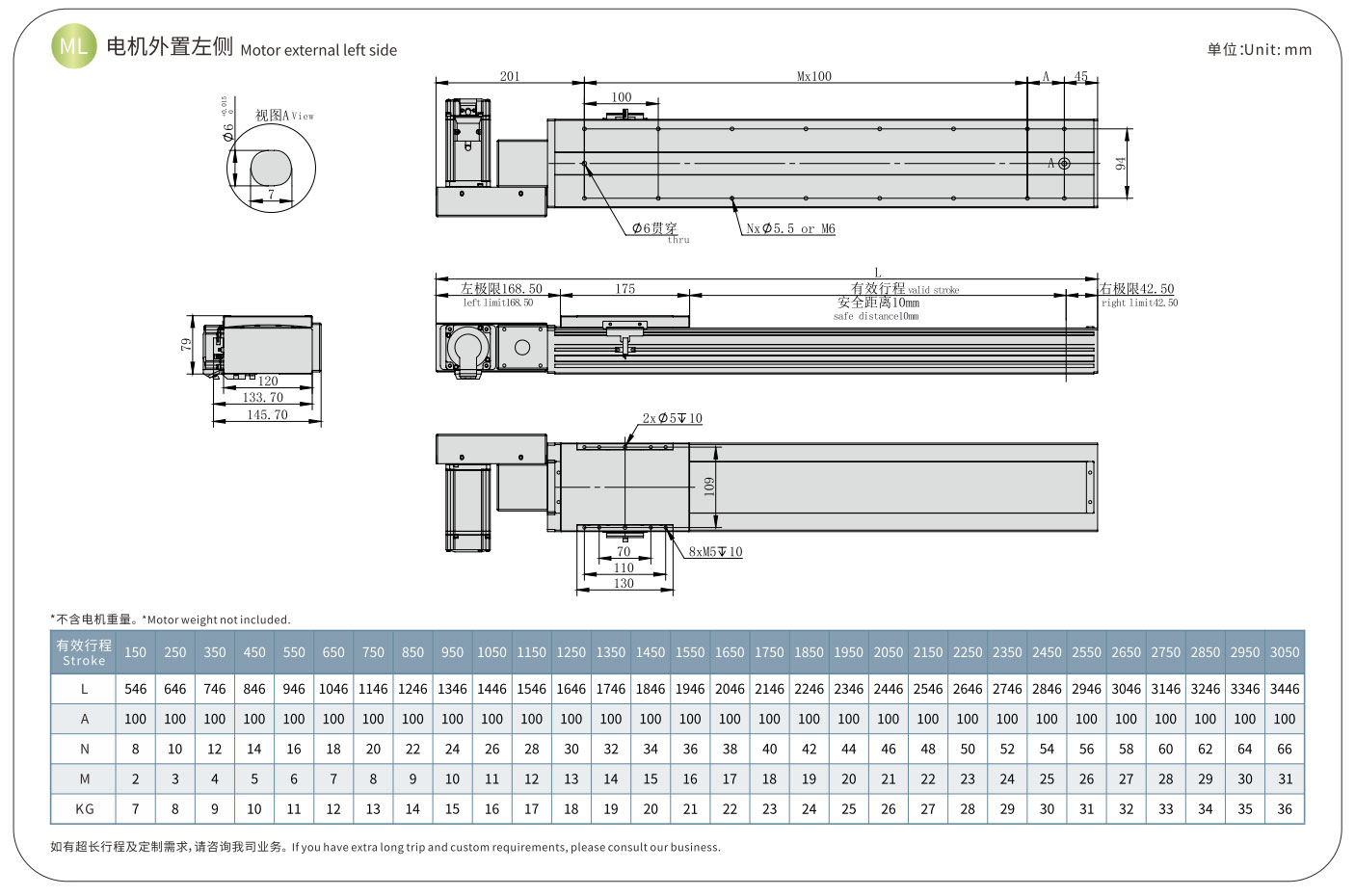
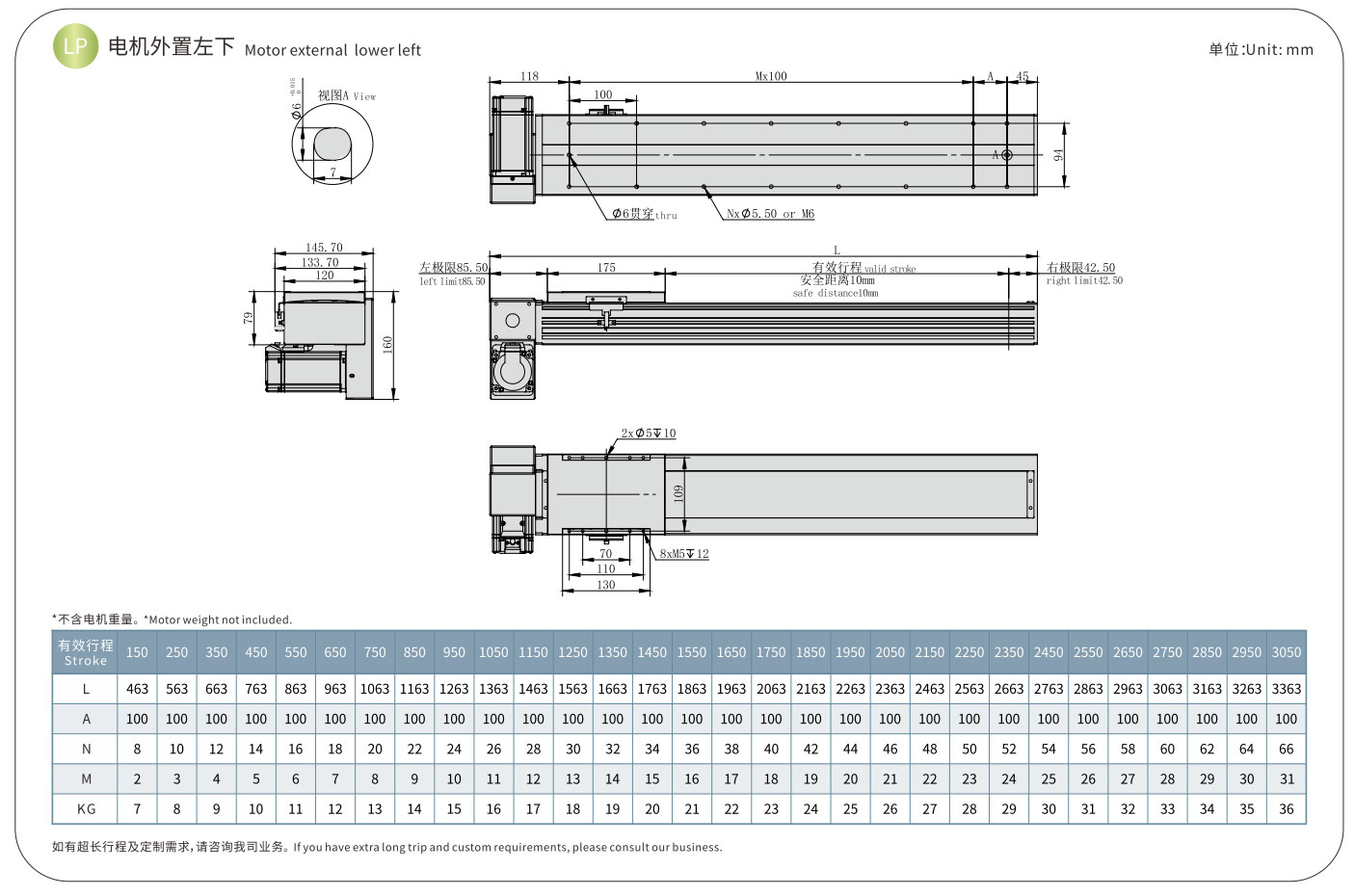
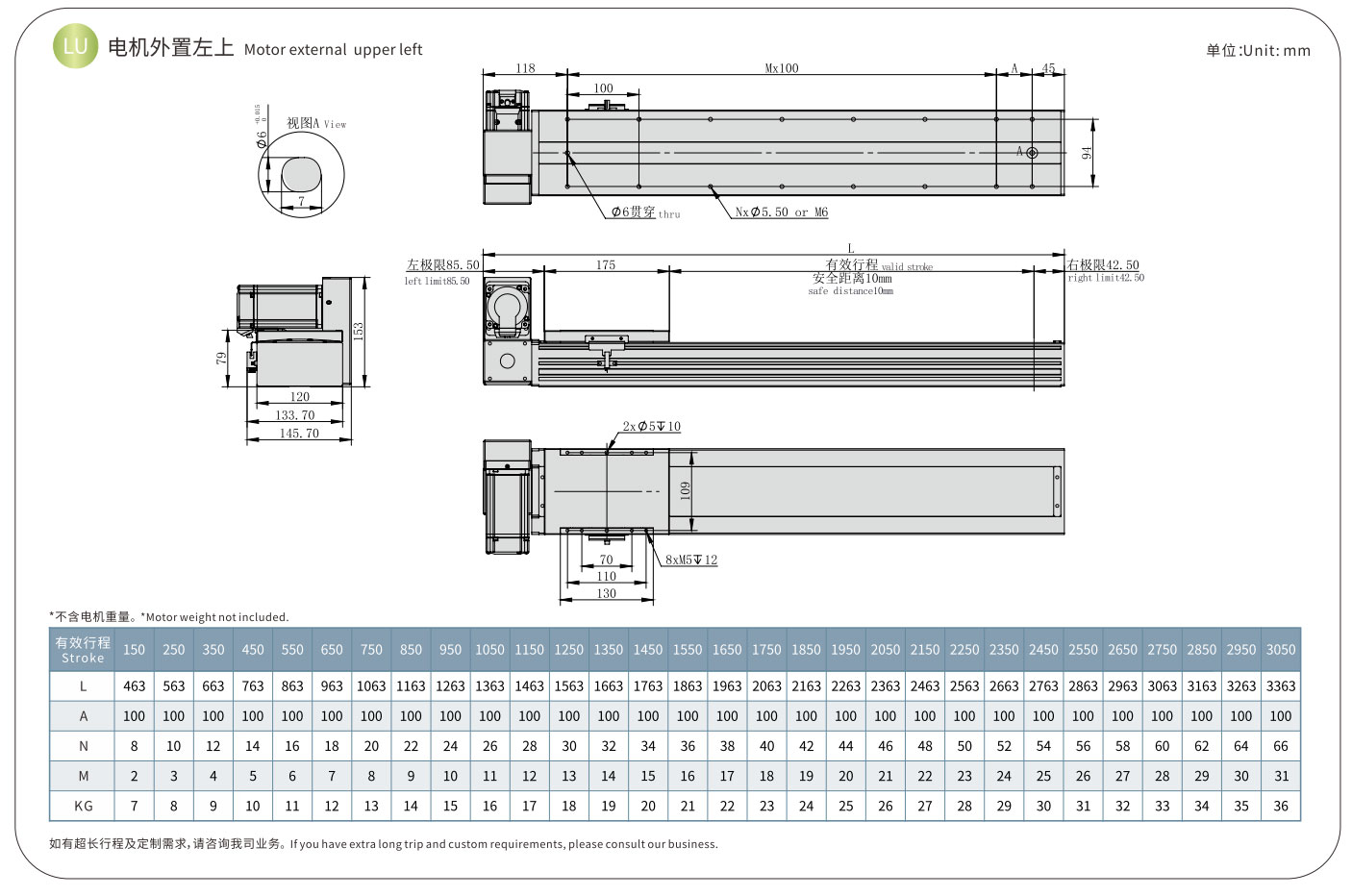
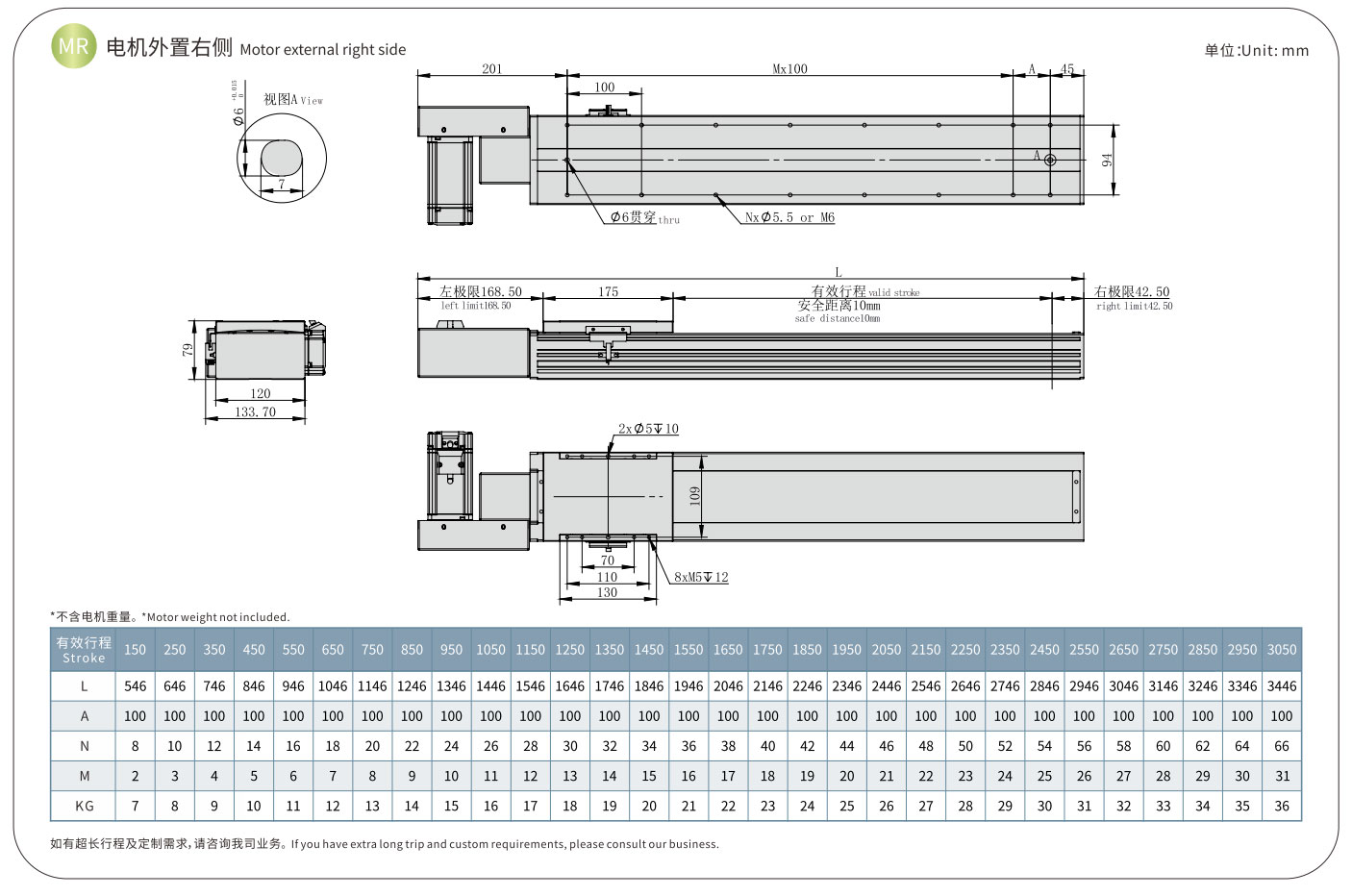
HCB Serie Rimm ugedriwwen Linearschrëft Modul Ganz zouene

Model Selector
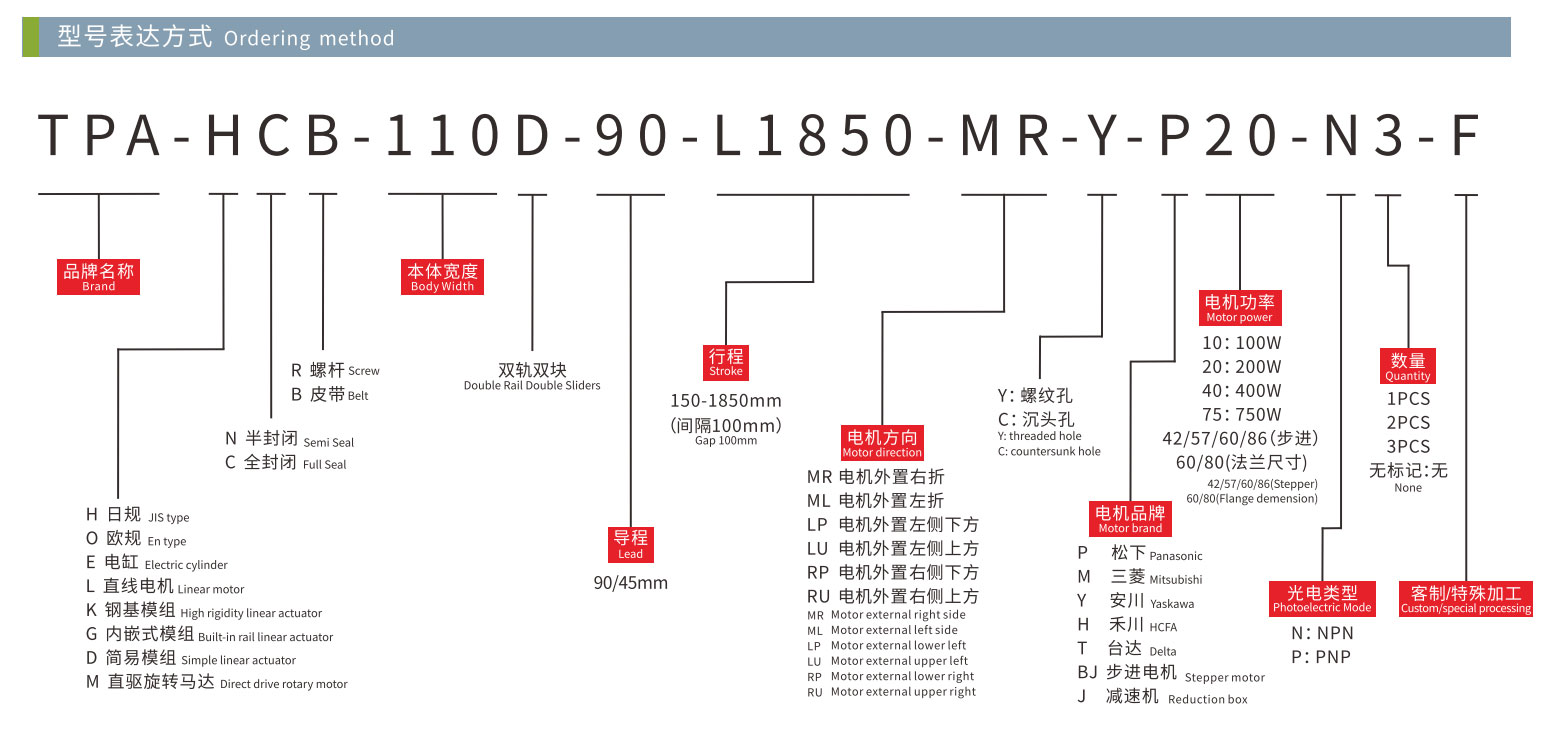
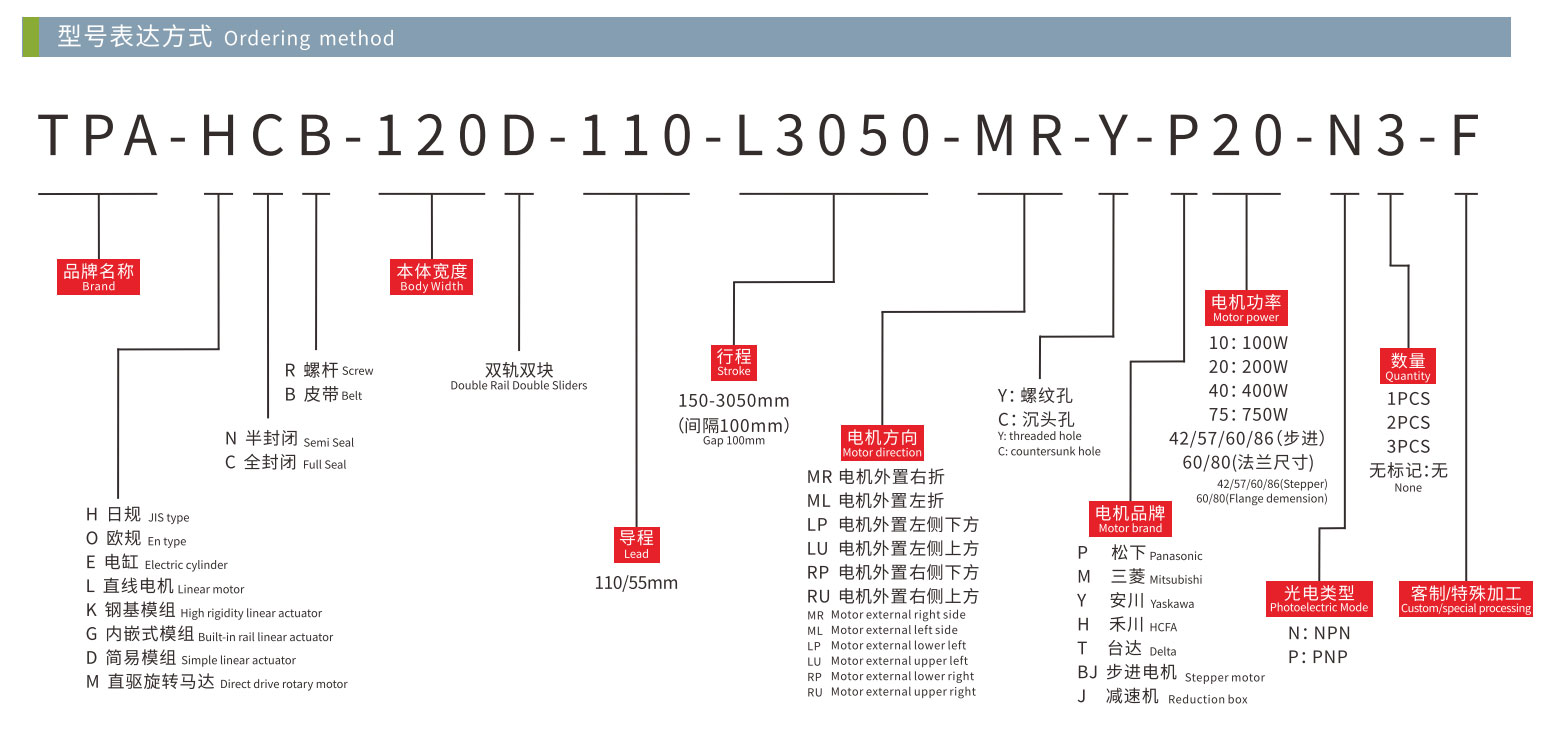
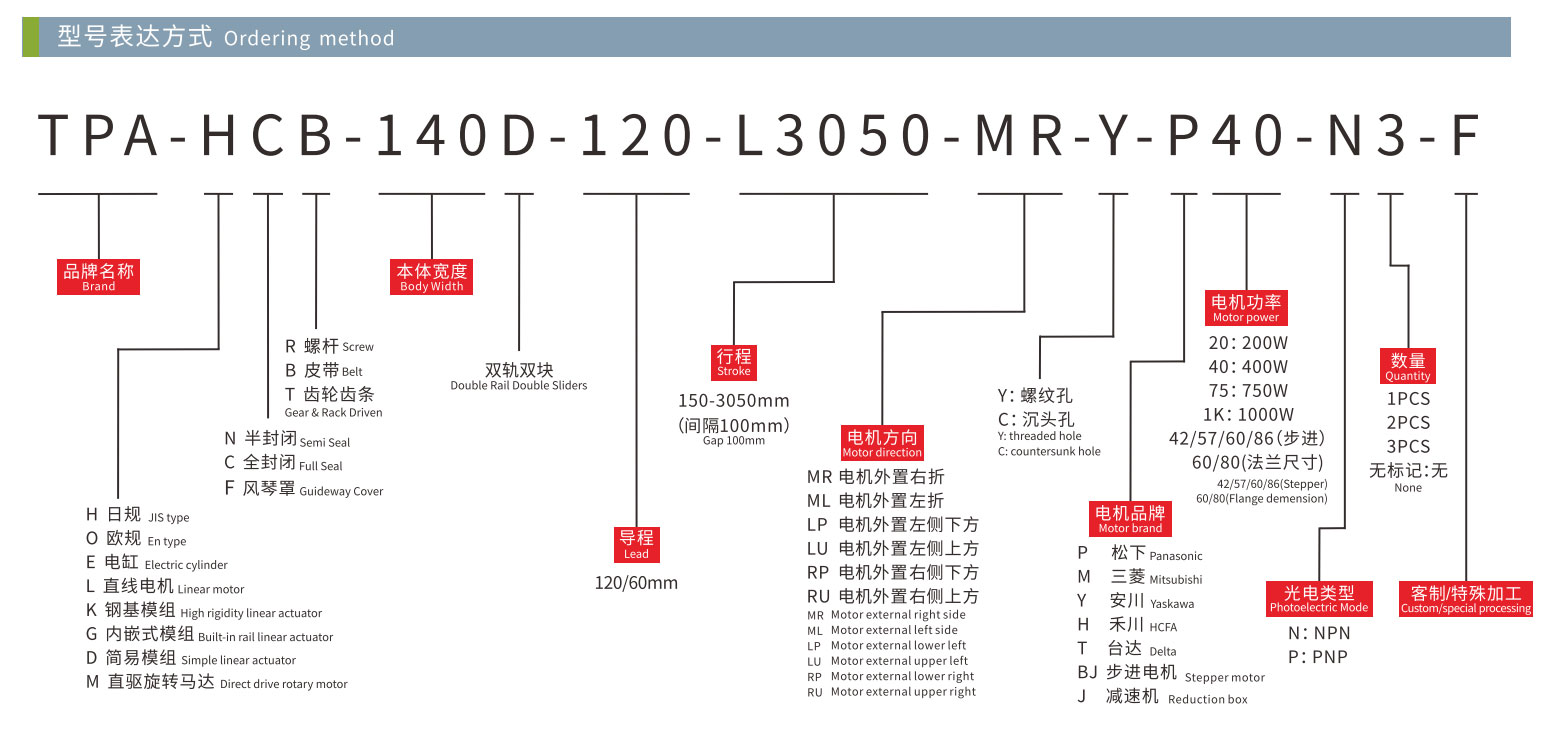
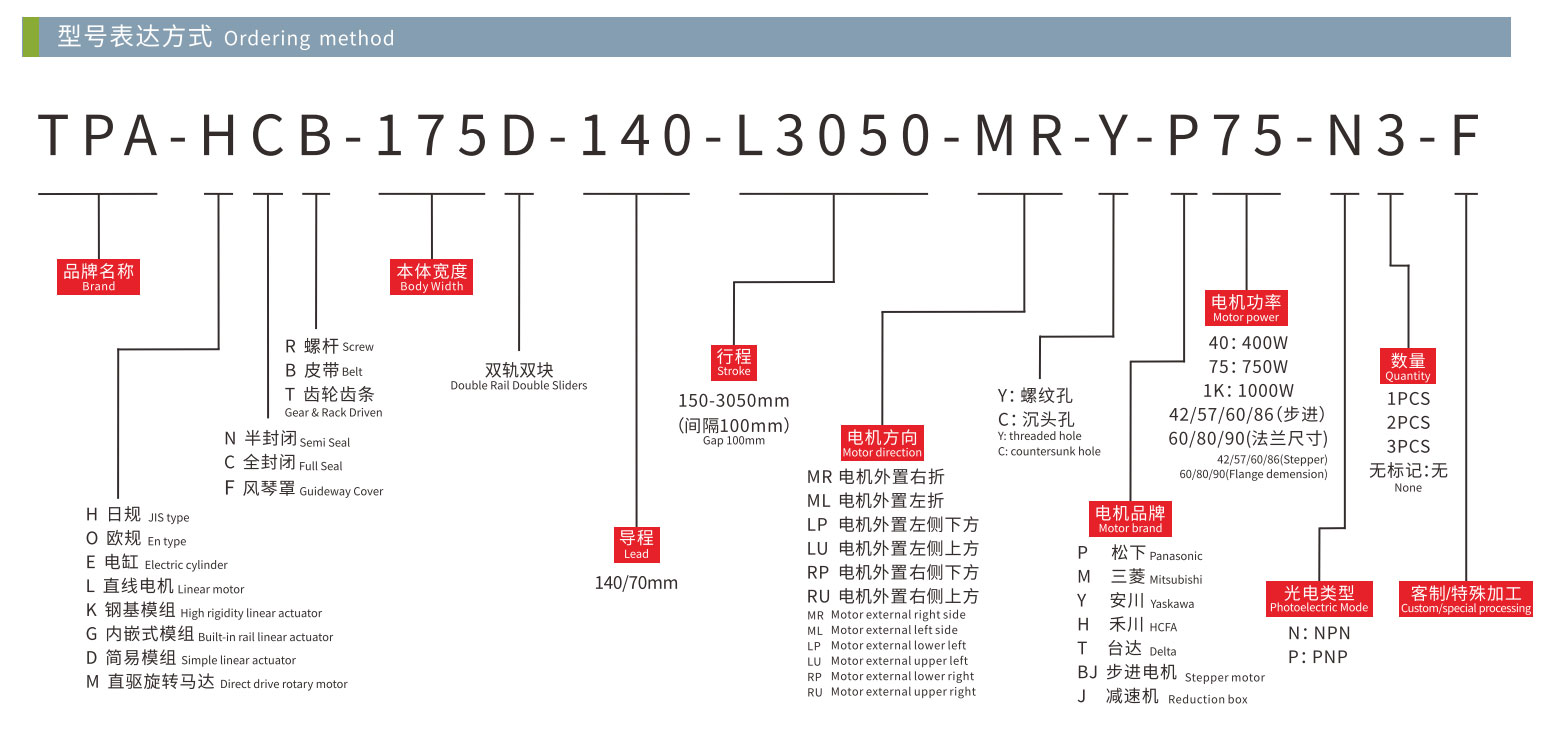
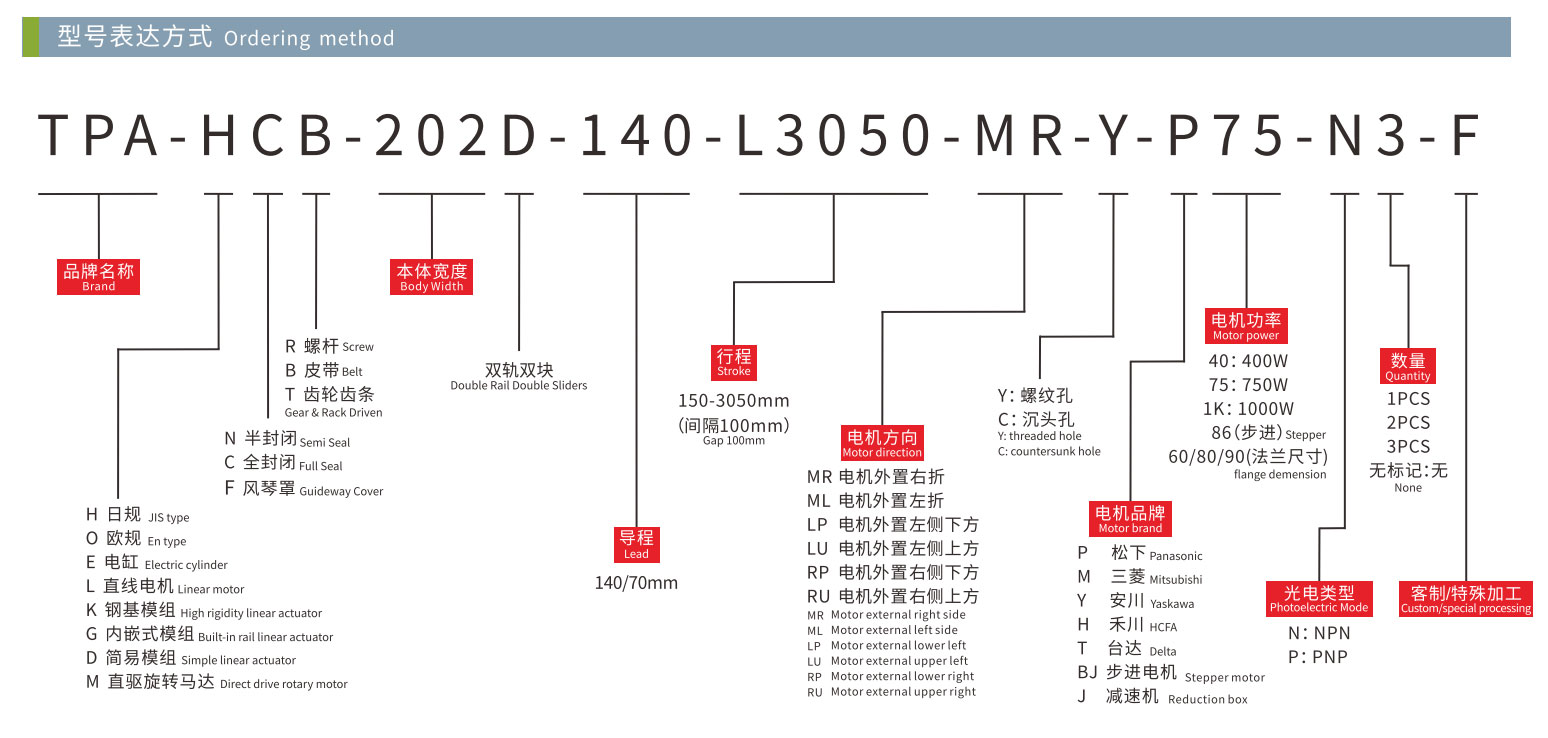
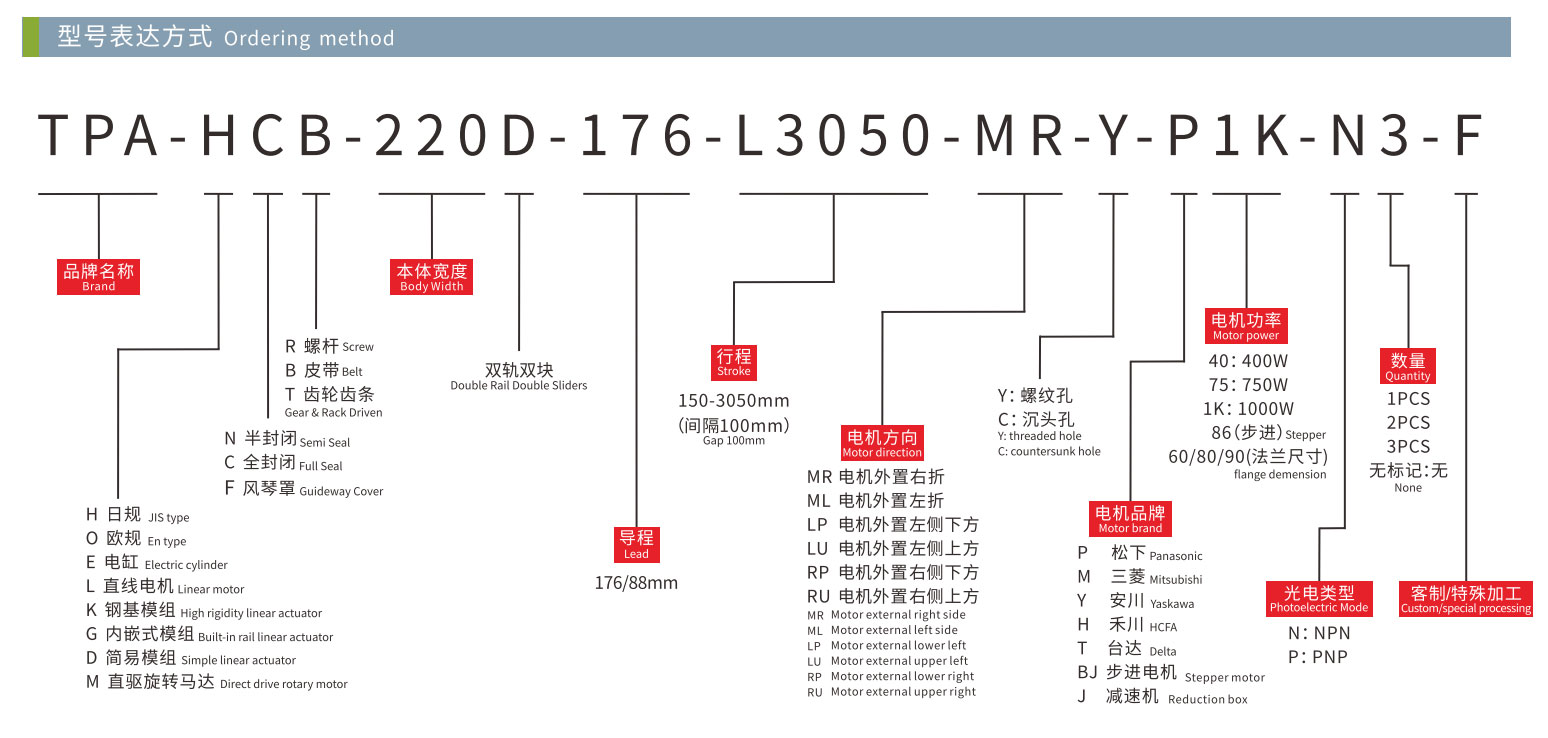
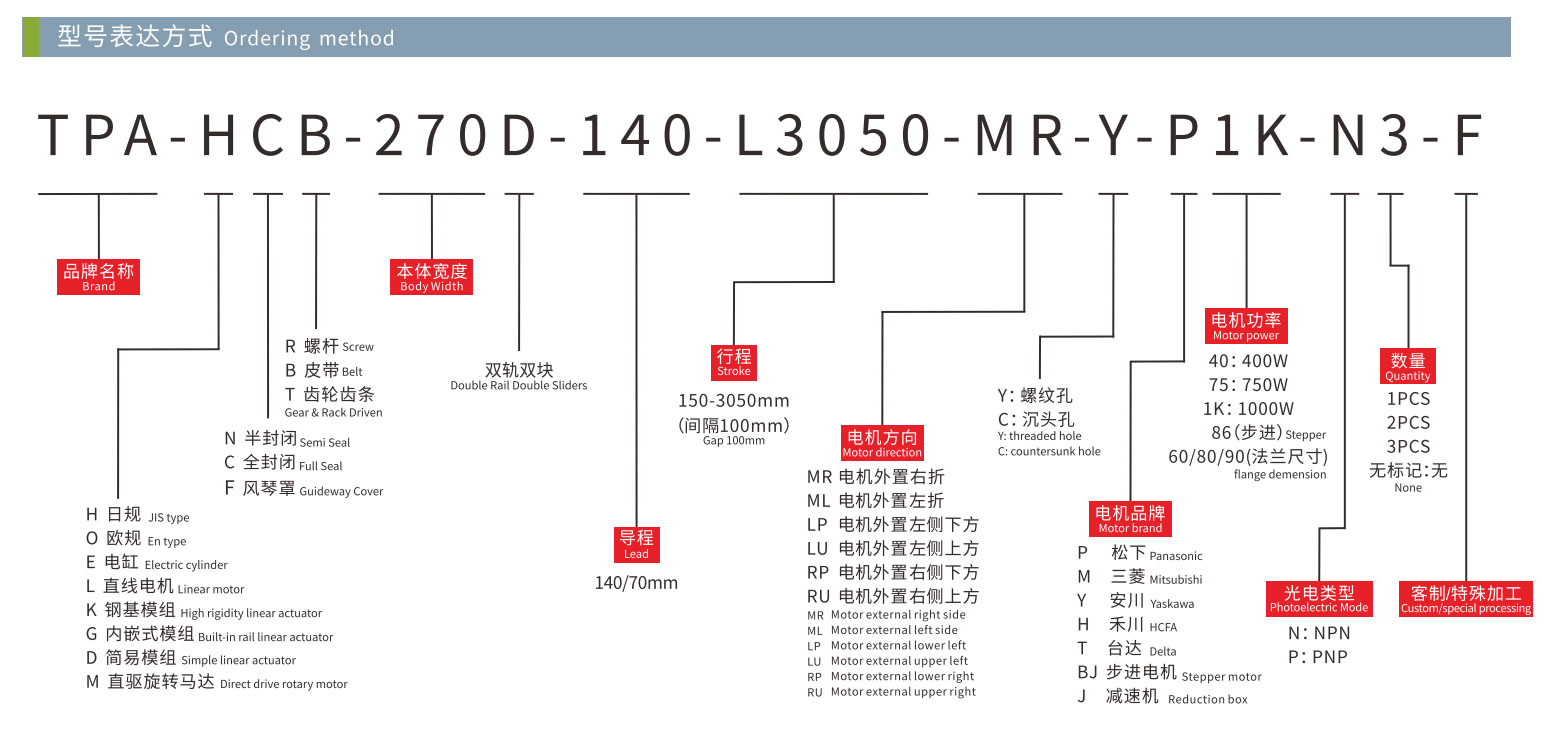
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
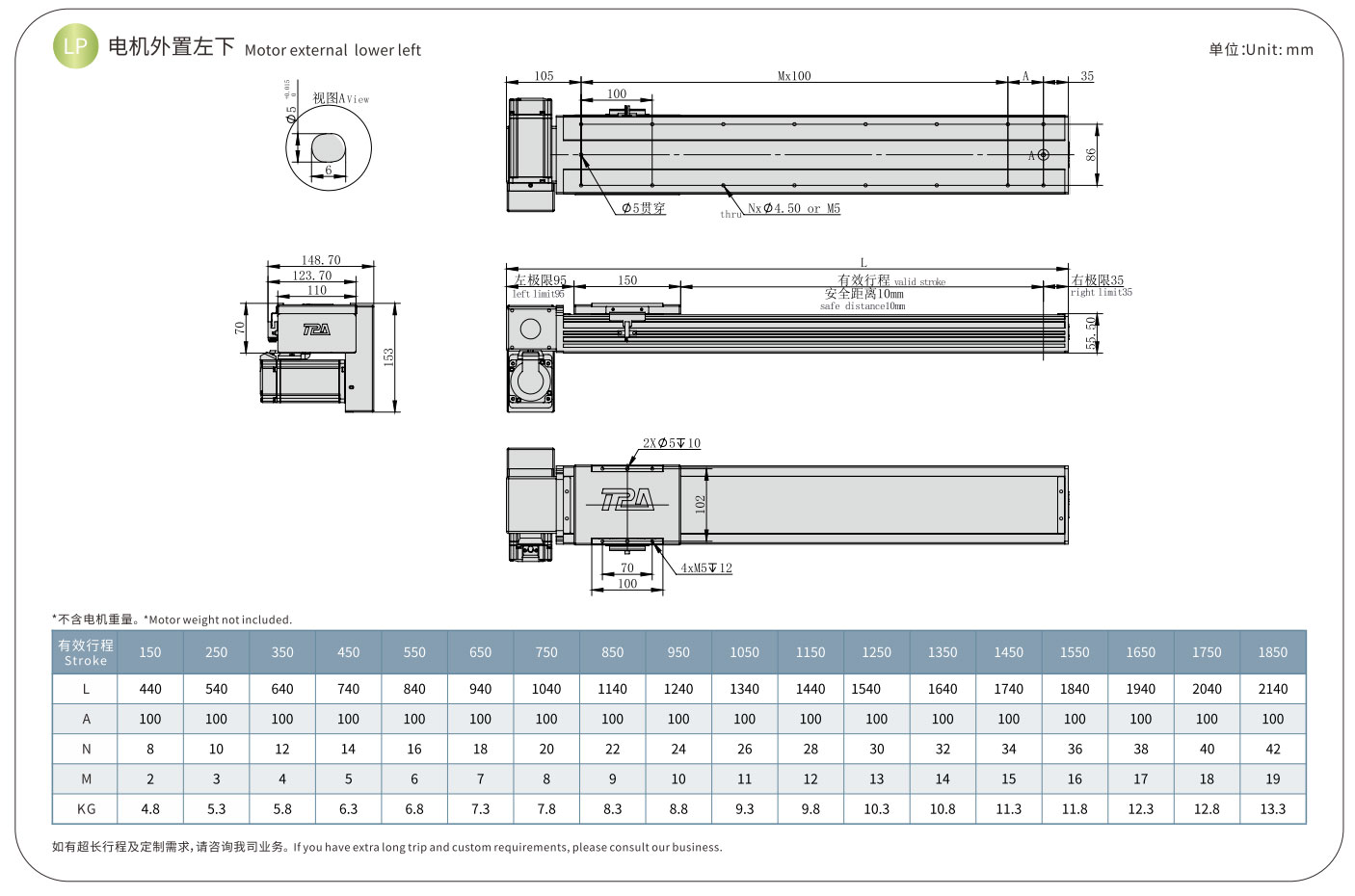
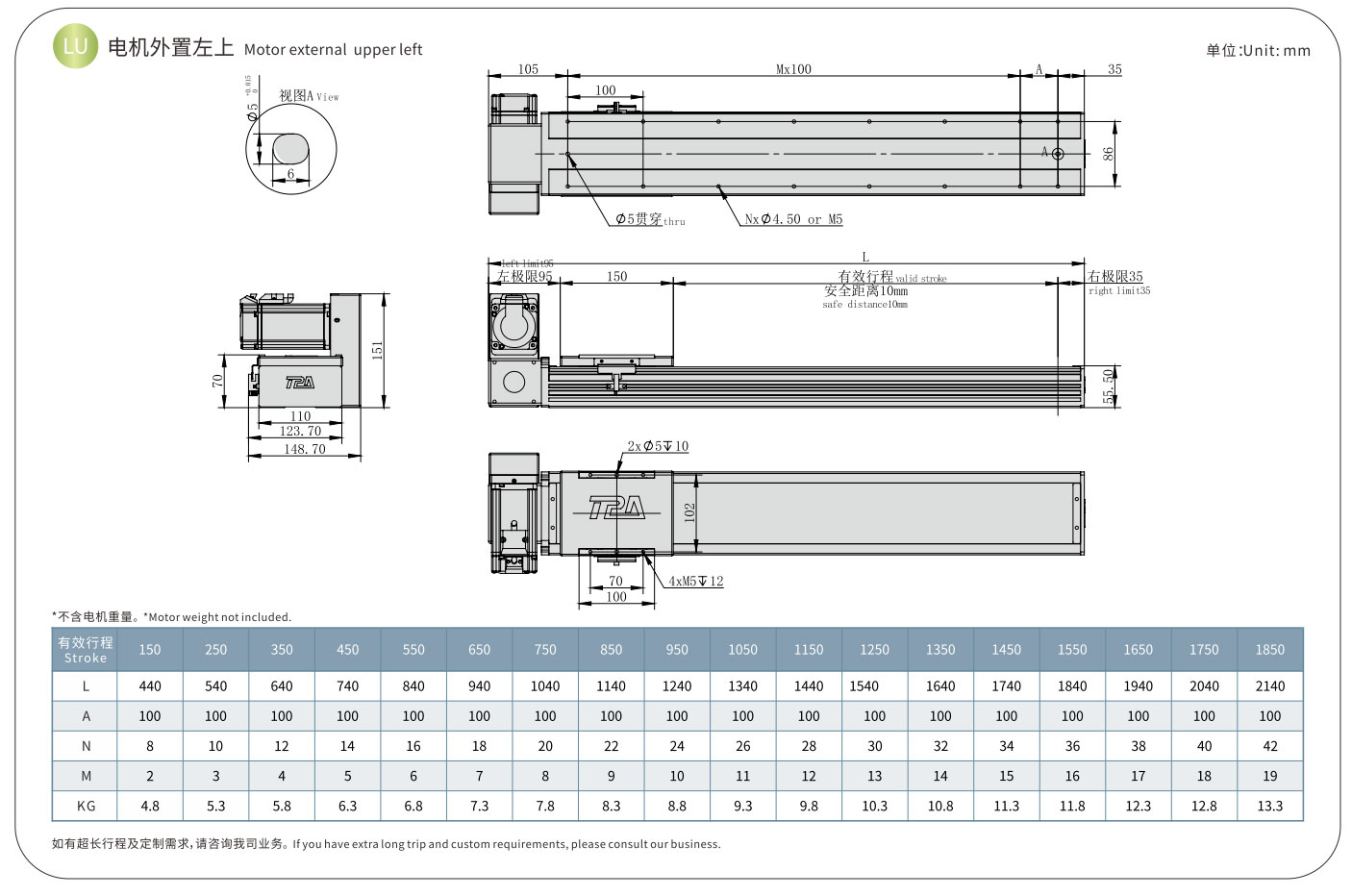
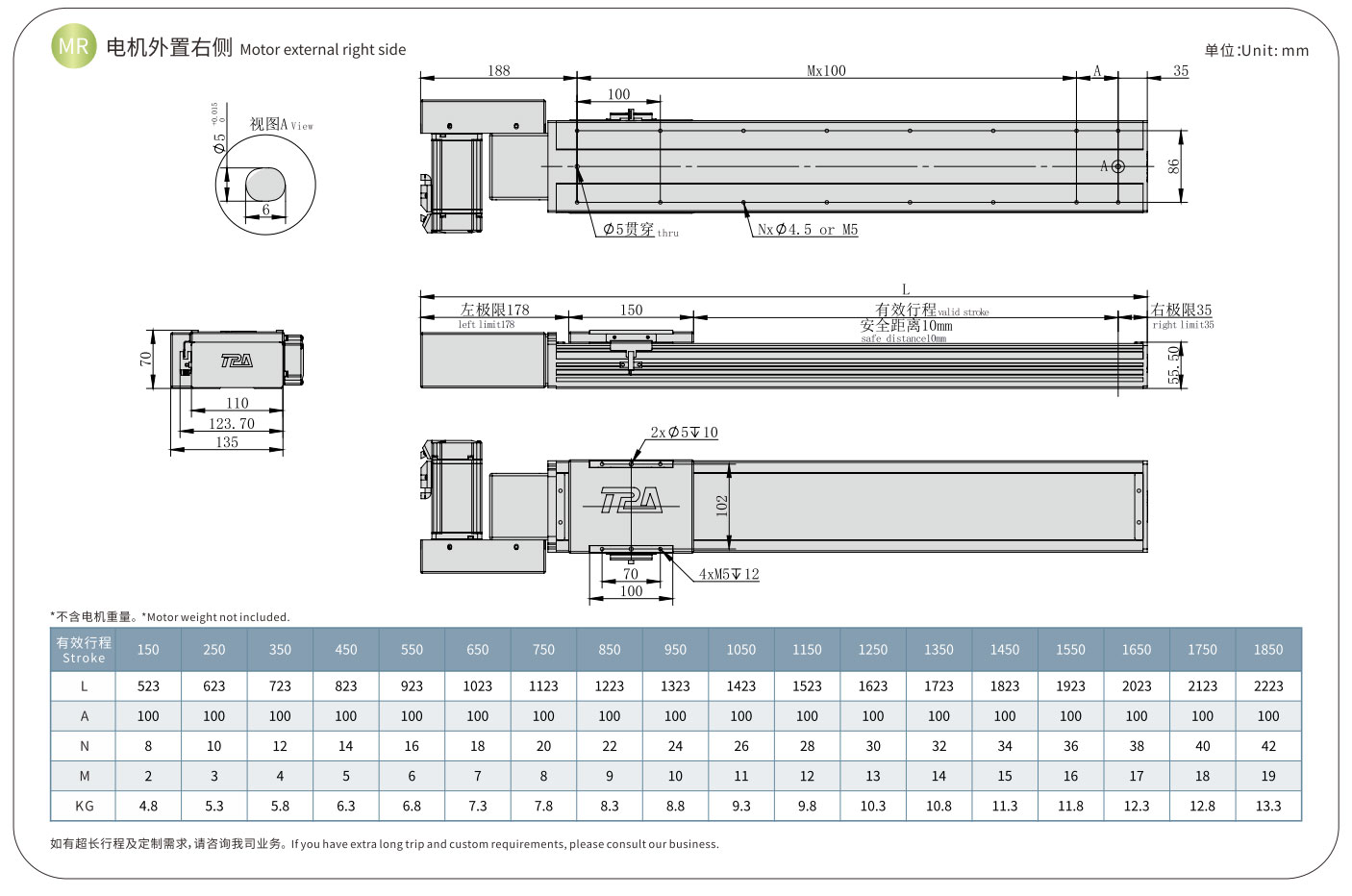
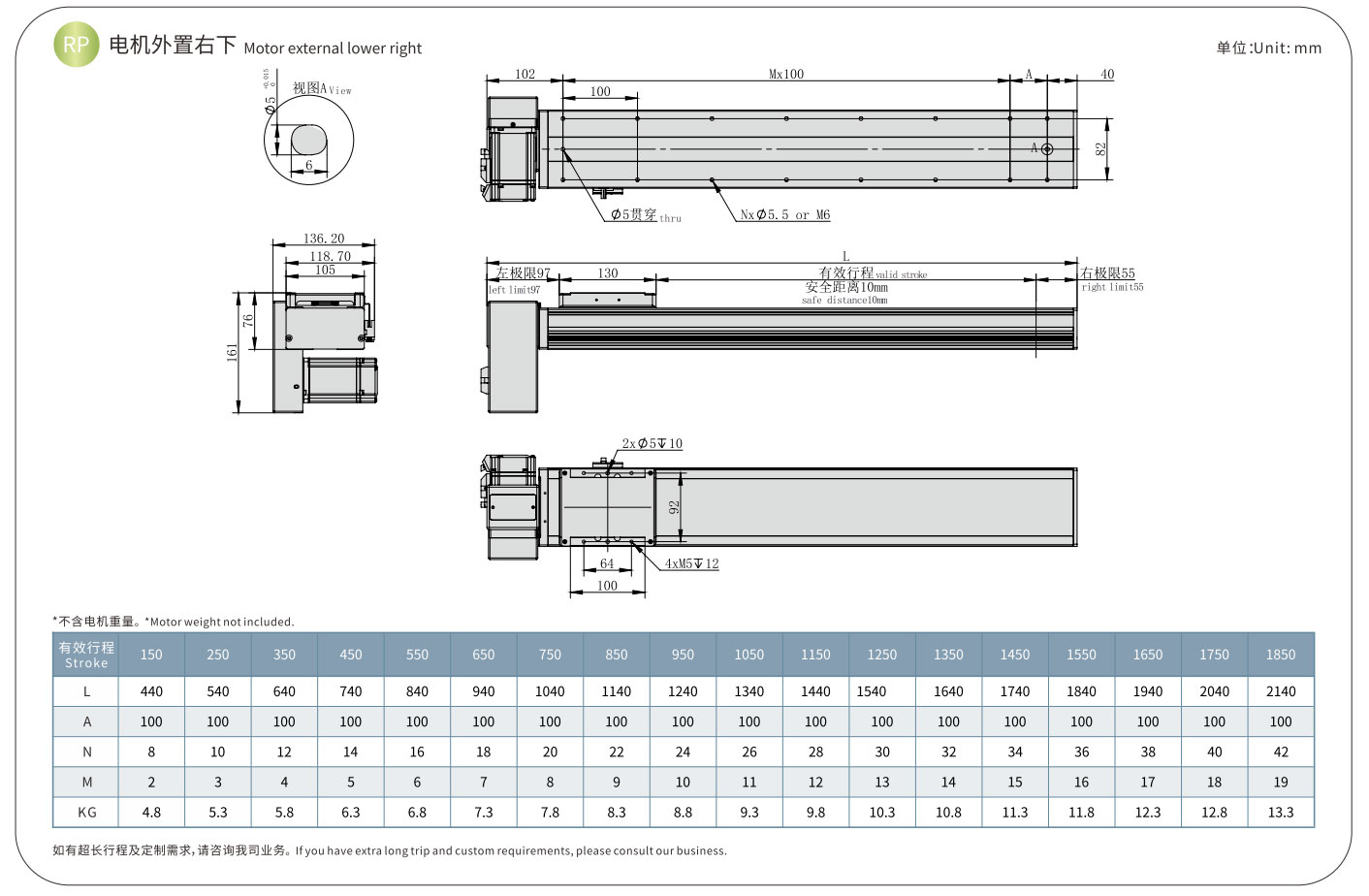
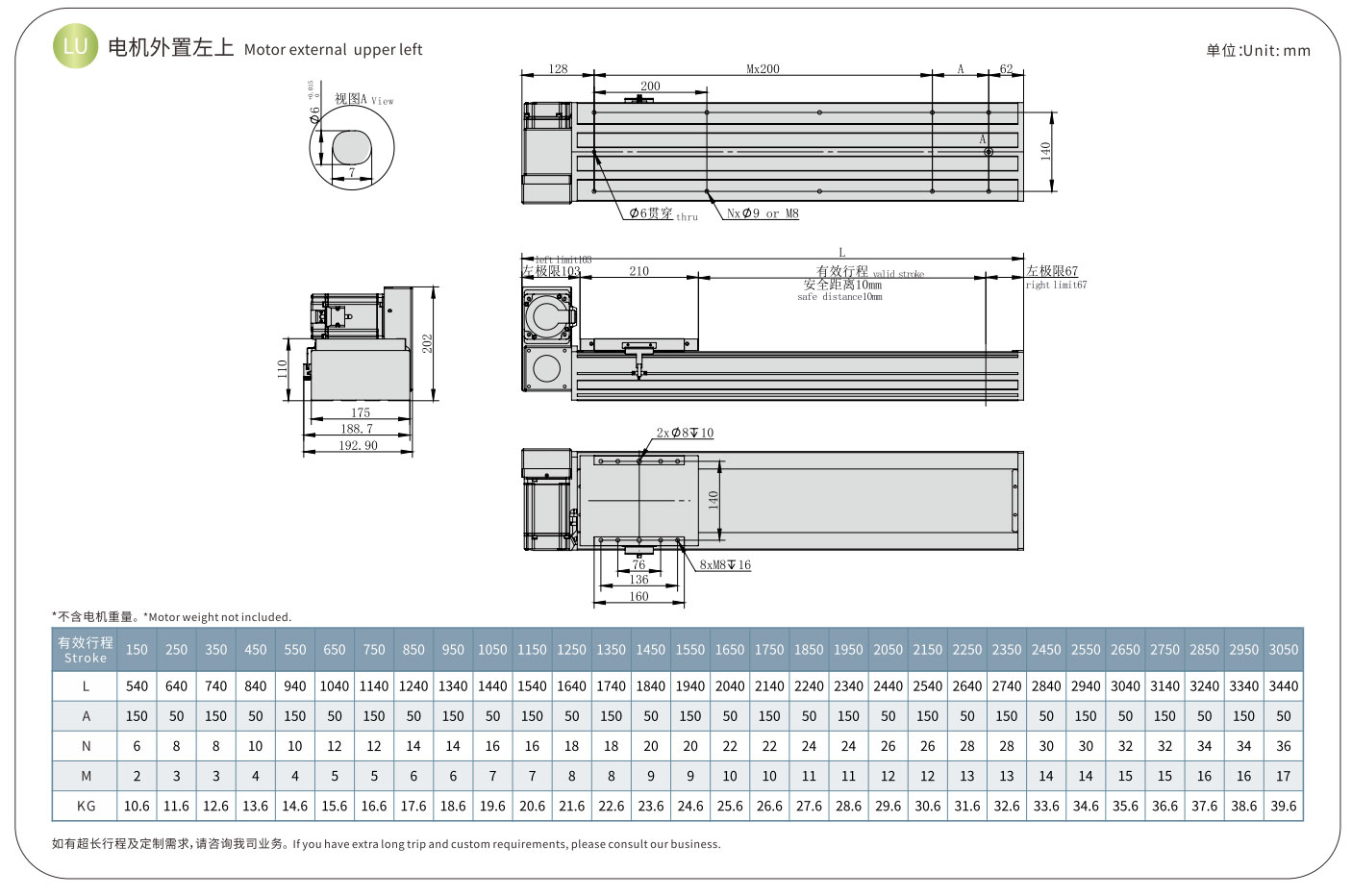
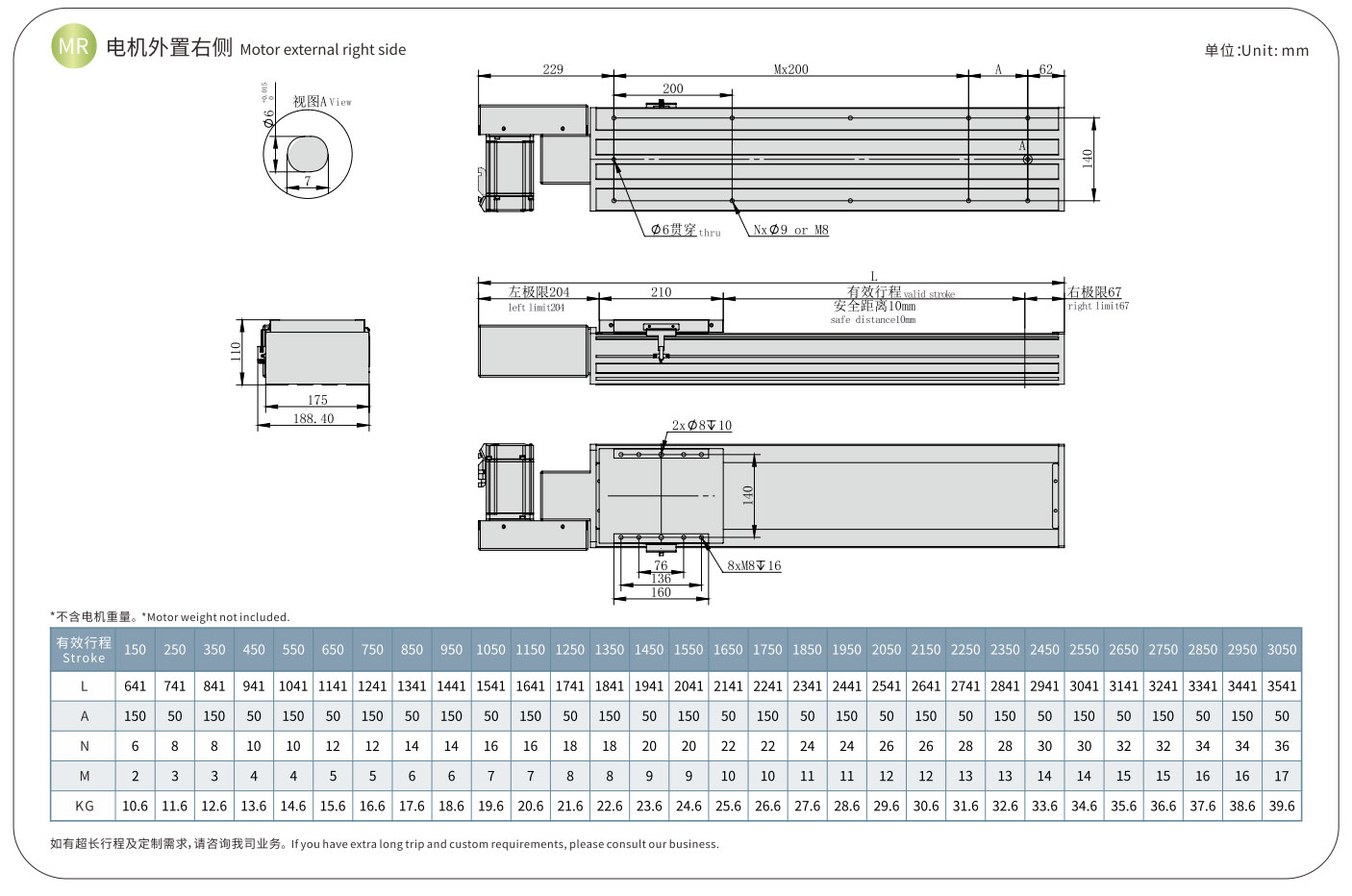
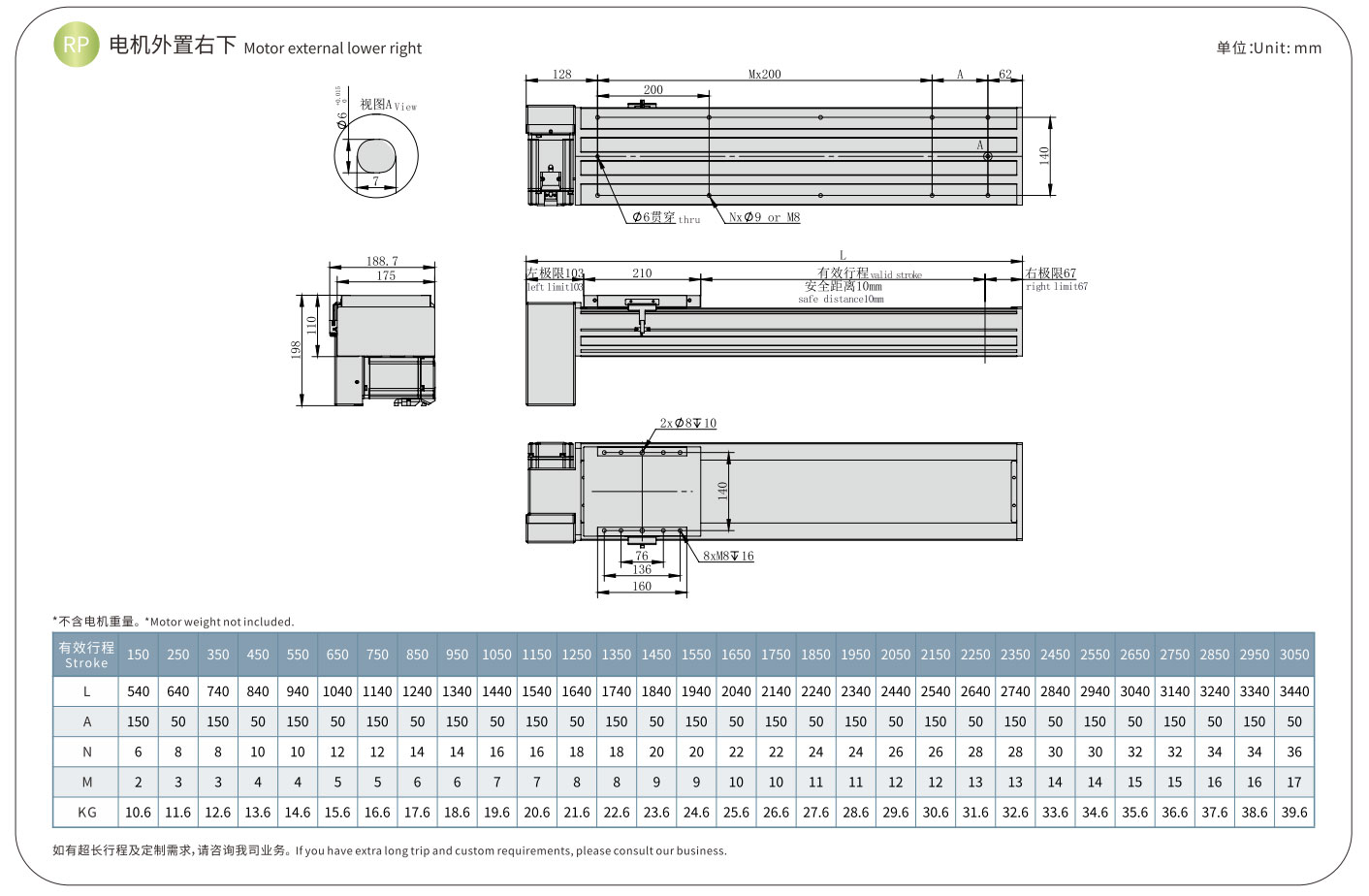
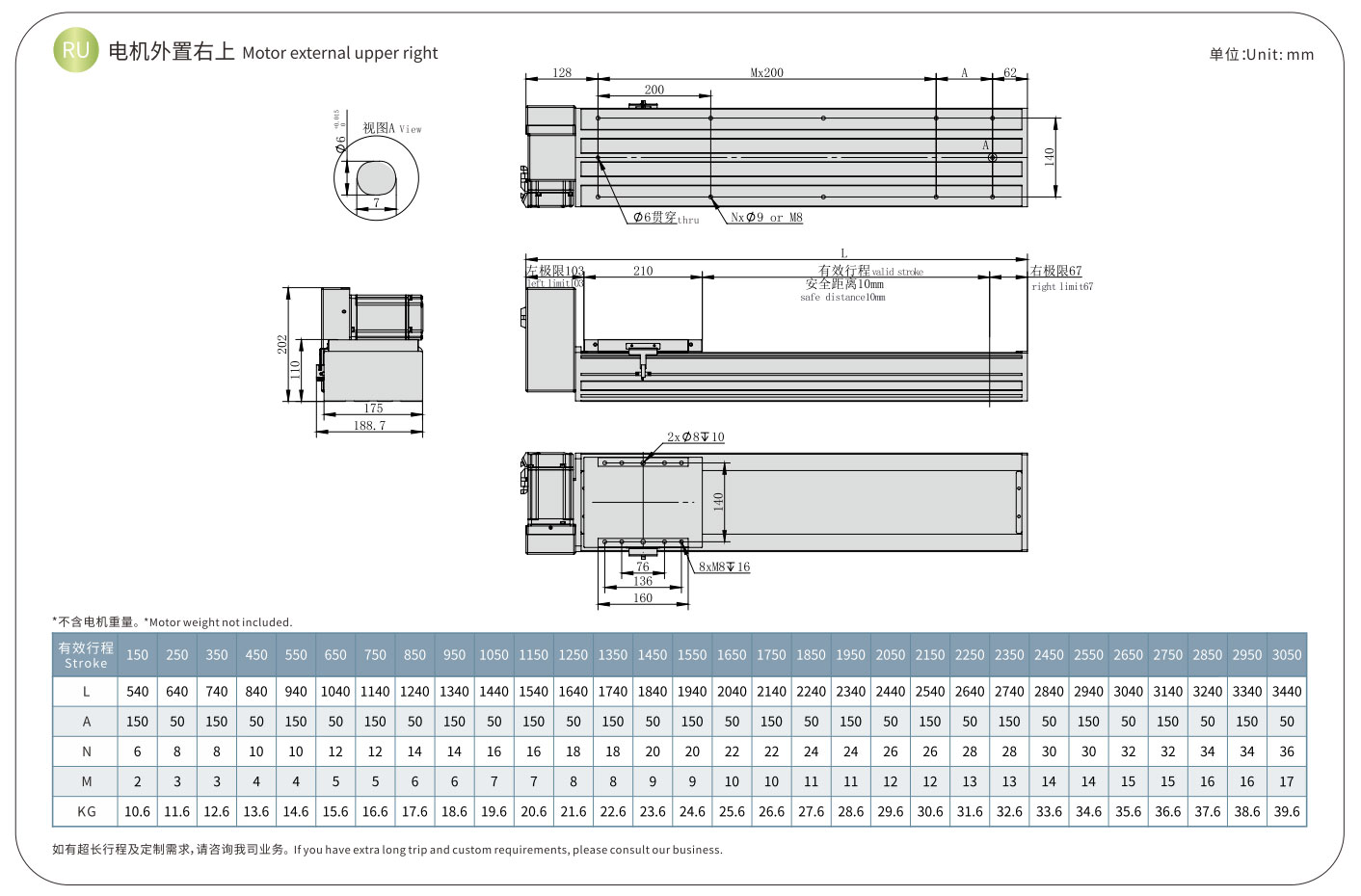
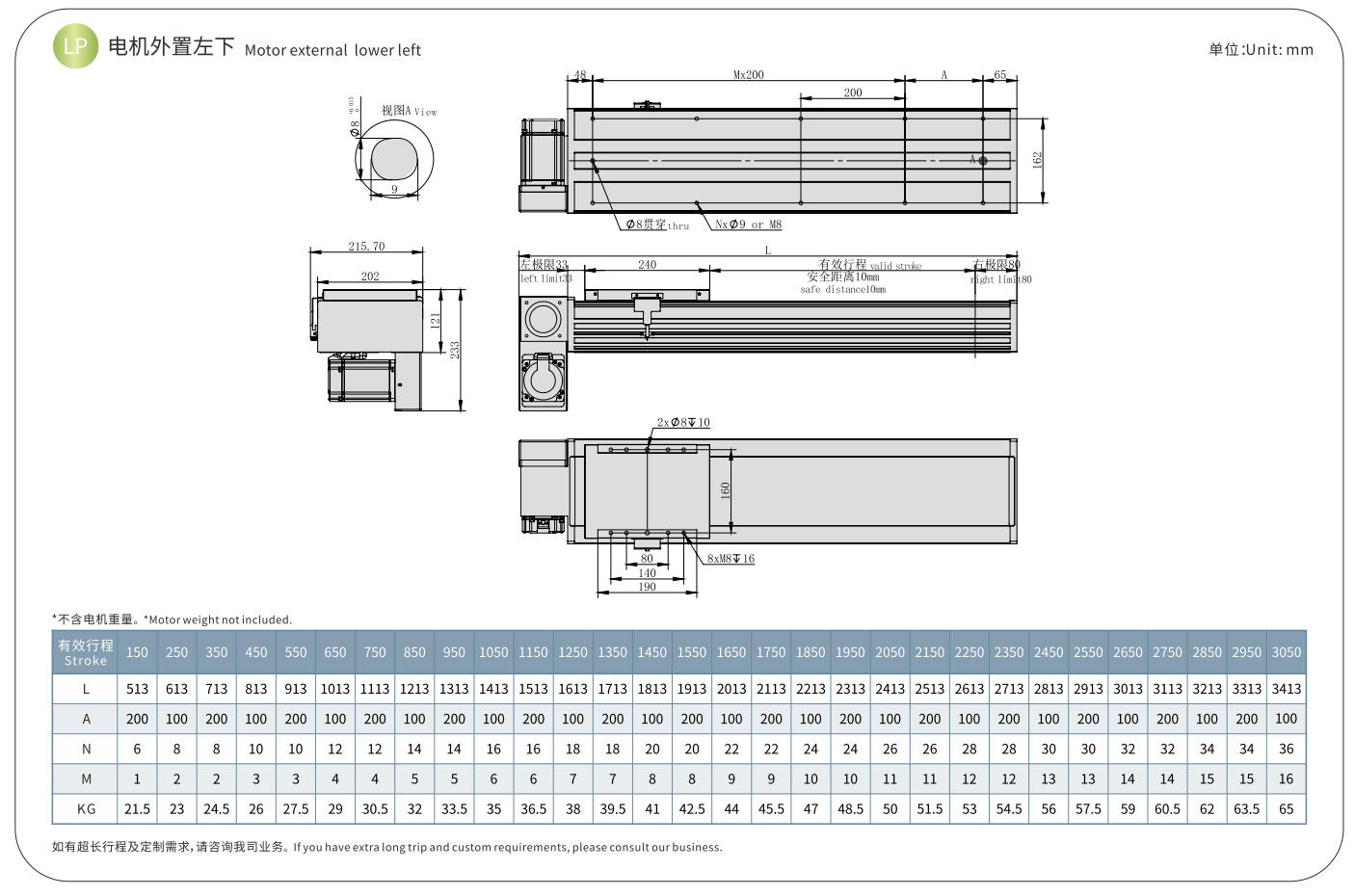
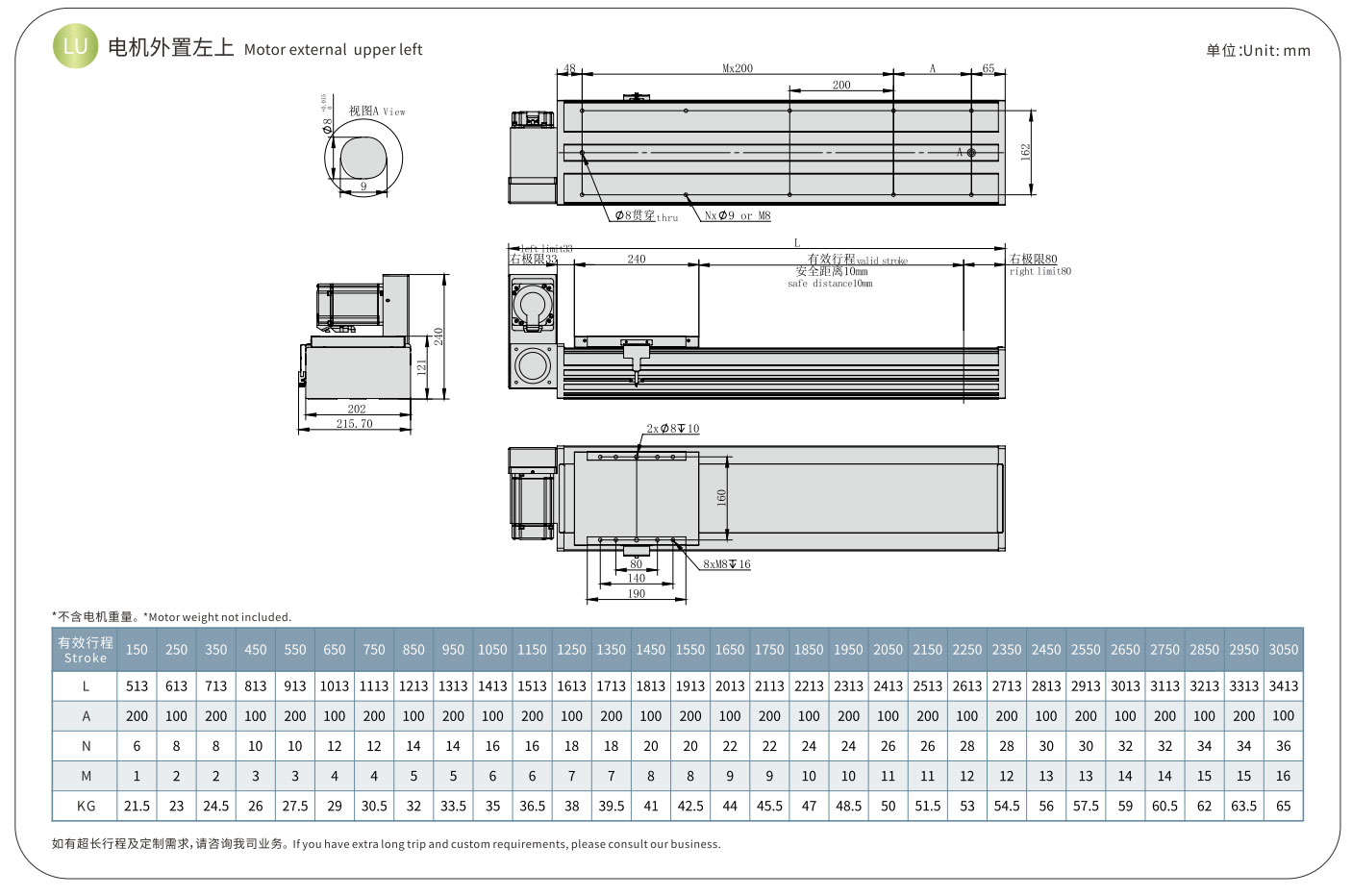
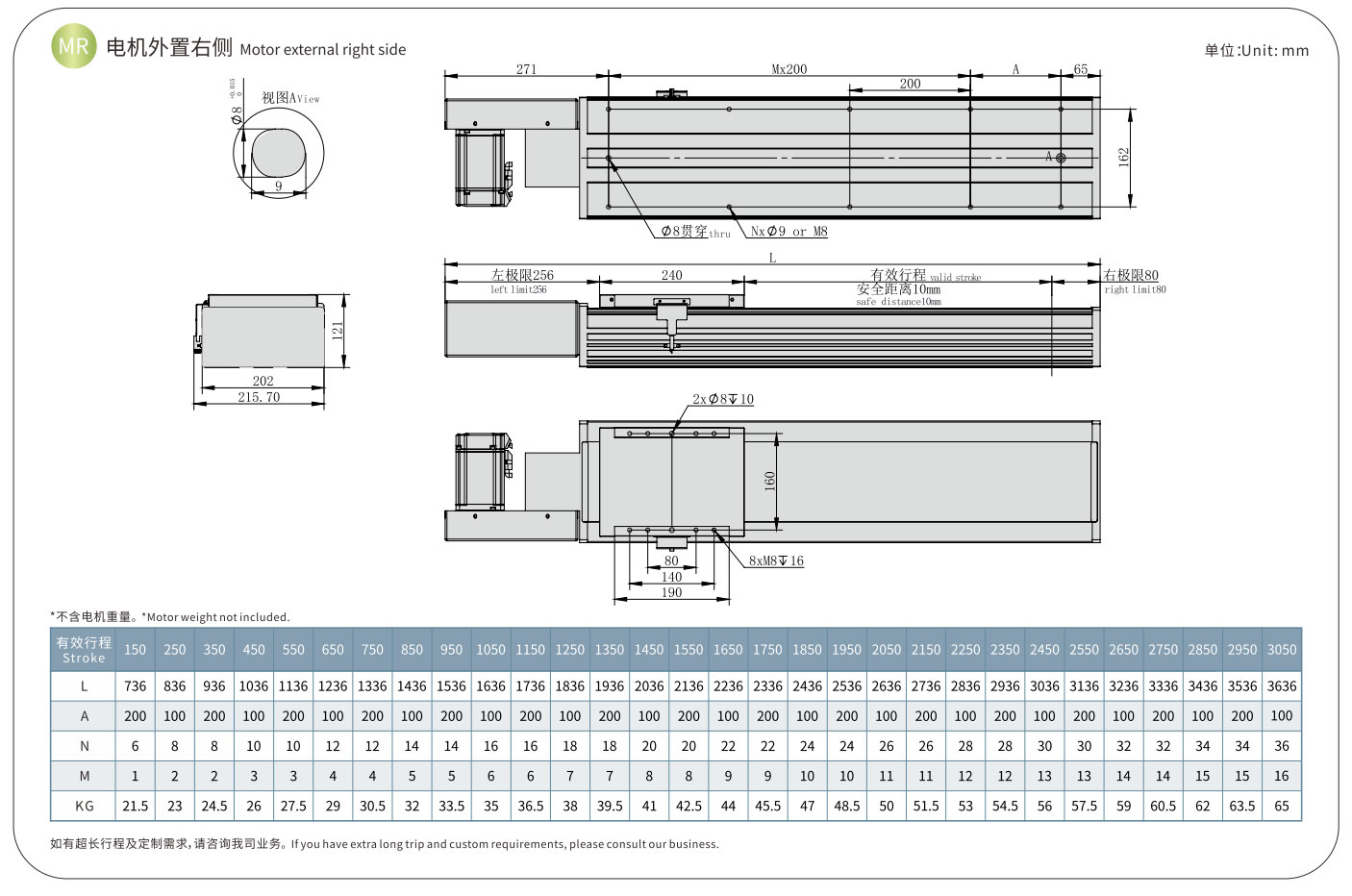
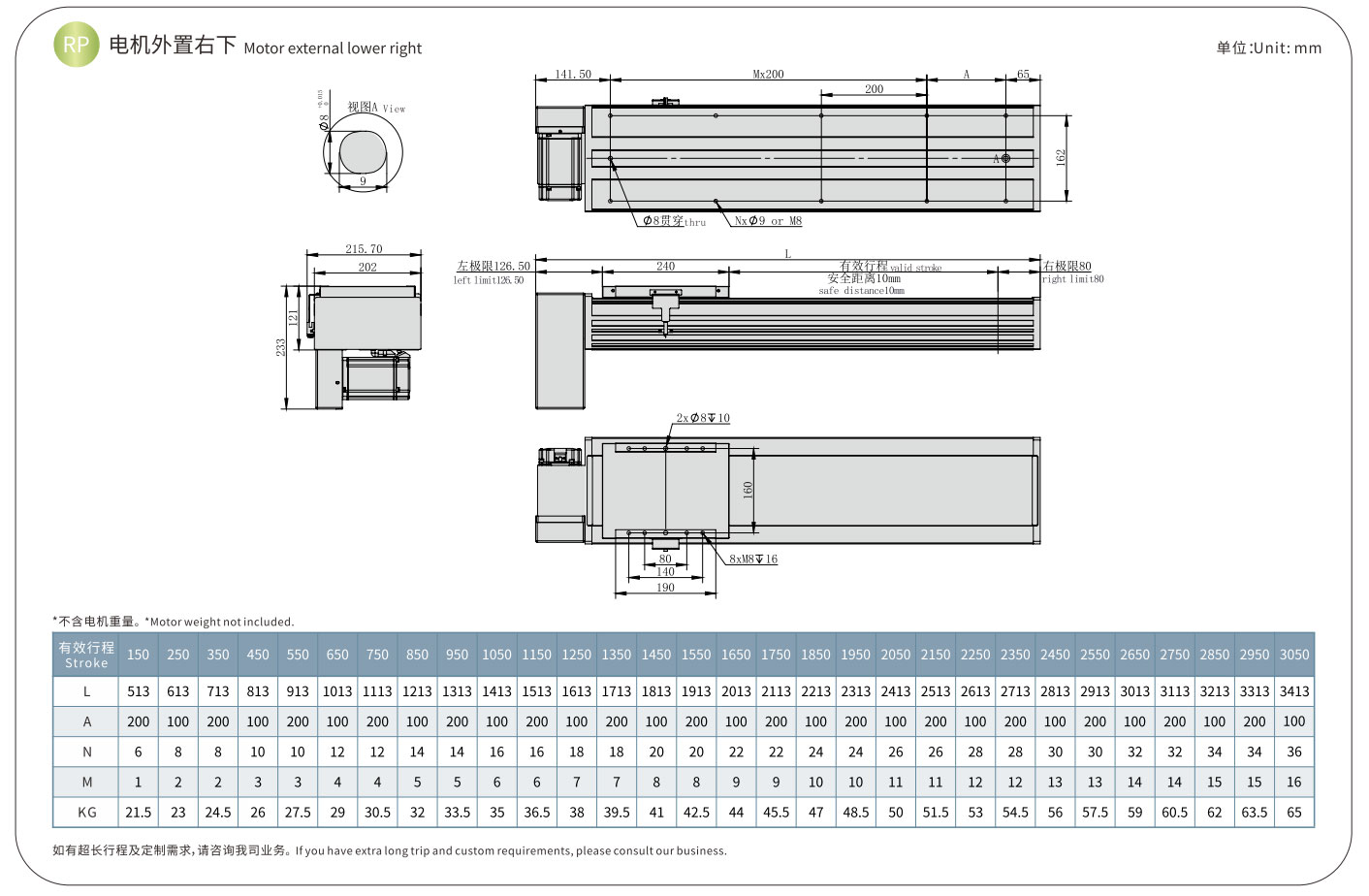
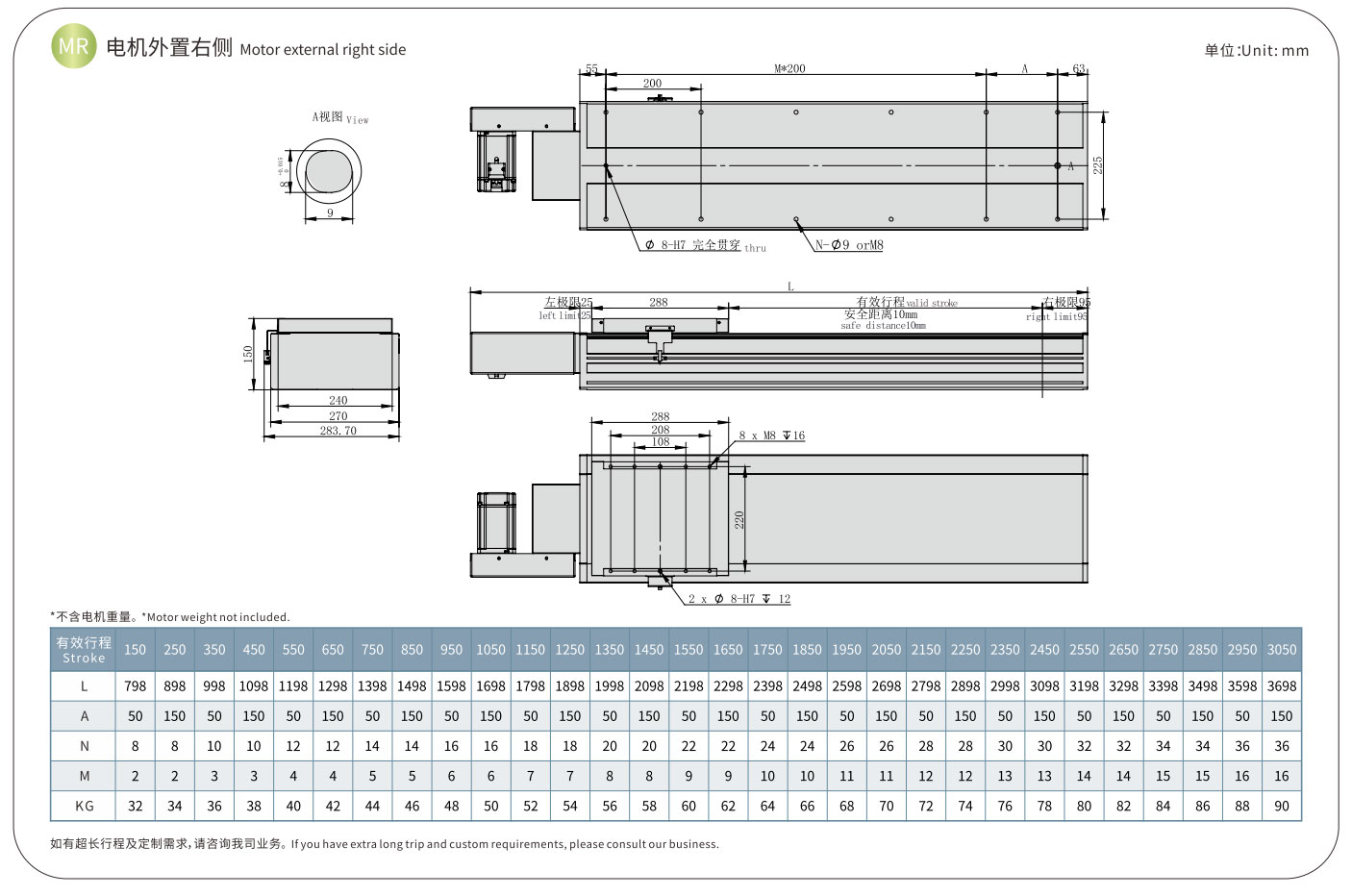
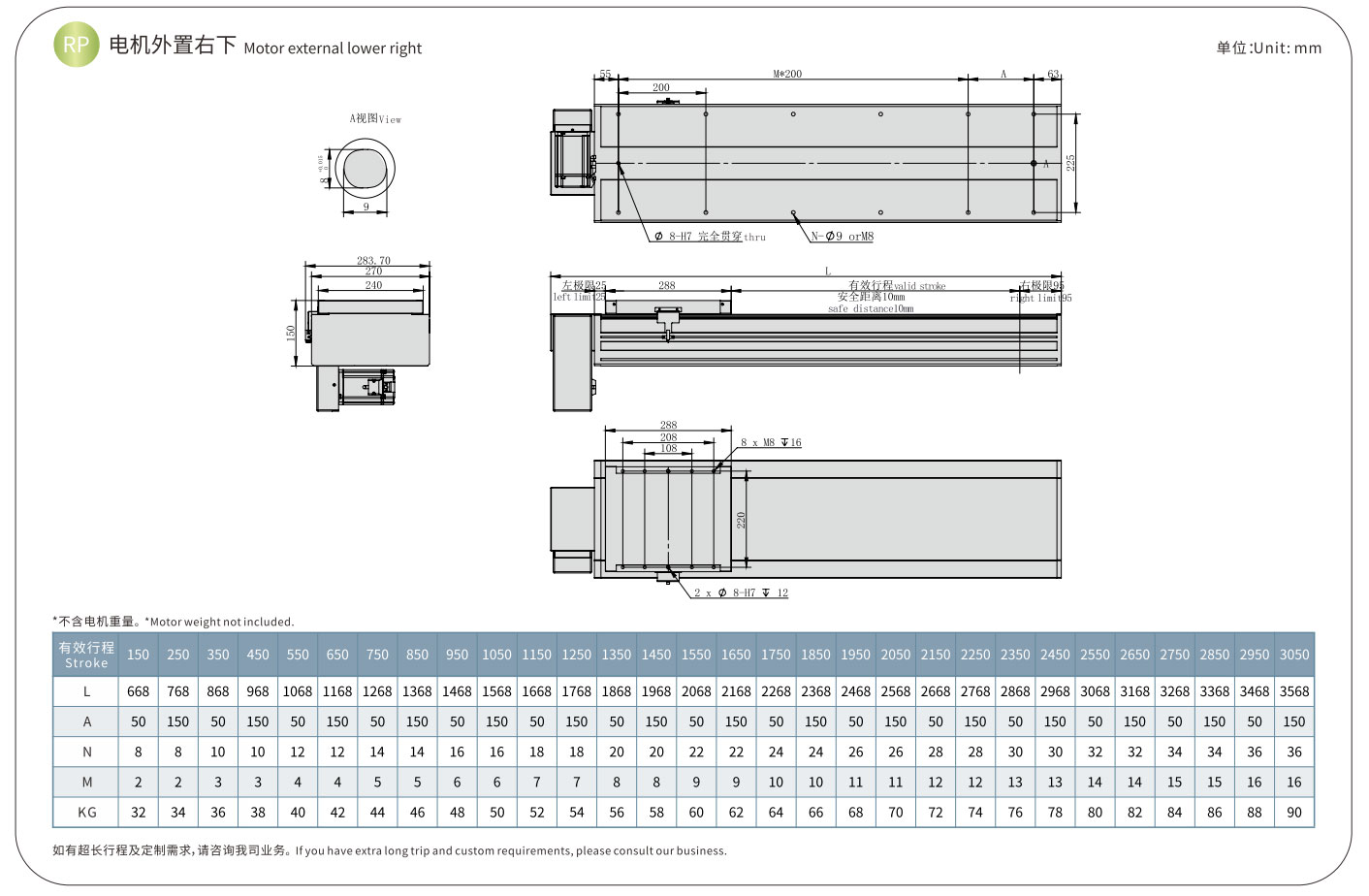
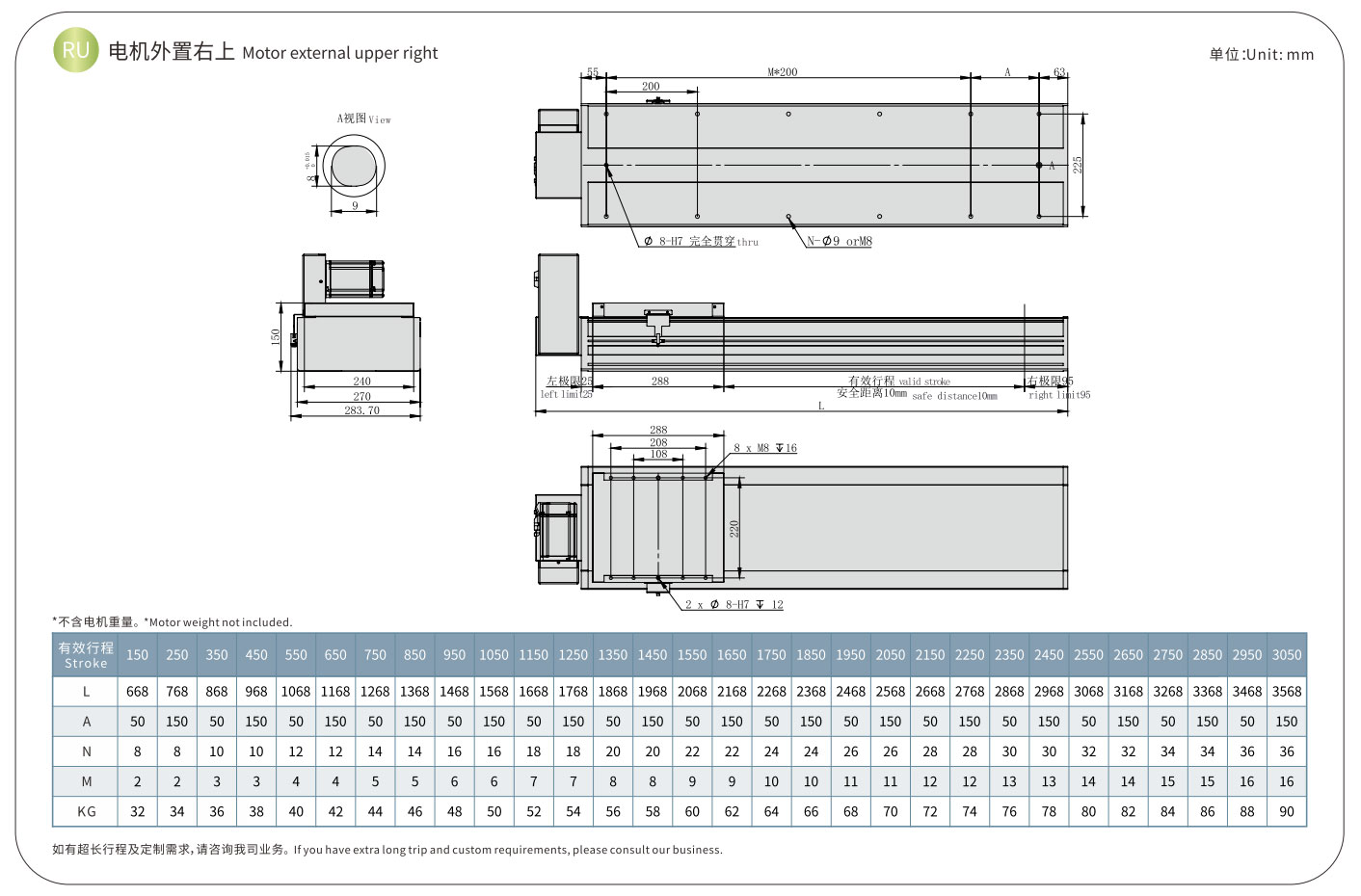
Als klassesche Rimm ugedriwwen linear Aktuator vun TPA ROBOT, am Verglach mat der HCR Serie, ass den HCB Serie ugedriwwe Schieber mat Timing Rimm, dat heescht datt d'HCB Serie e méi laang Schlag an eng méi héich Geschwindegkeet huet. Et gëtt vum Servomotor ugedriwwen, et huet net nëmmen déi héich Präzisioun vum Servomotor, awer huet och d'Virdeeler vun der héijer Geschwindegkeet an der héijer Steifheet vun der Rutschbühn selwer. Et ass einfach ze kontrolléieren a kann einfach mat PLC an aner Systemer verbonne ginn. De Rutschaktuator ass aus integral extrudéierten Aluminiumprofil, mat liichtem Gewiicht, kleng Gréisst a staarker Steifheit. D'Installatioun Gréisst a Schlag kann no den Ufuerderunge personaliséiert ginn, an d'Installatioun kann duerch Bolzen fixéiert ginn. Duerch d'Kombinatioun vu verschidde Richtungen kann et zu enger linearer Bewegungssystemer vu verschiddenen Automatisatiounsausrüstung geformt ginn, mat mechanesche Gripper, Loftgripper an aner Armaturen, kann et en exklusive Cartesian Roboter oder Gantry Roboter ginn.

HCB65S

HCB-85D Fotoen

HCB-105D Fotoen

HCB-120D Fotoen

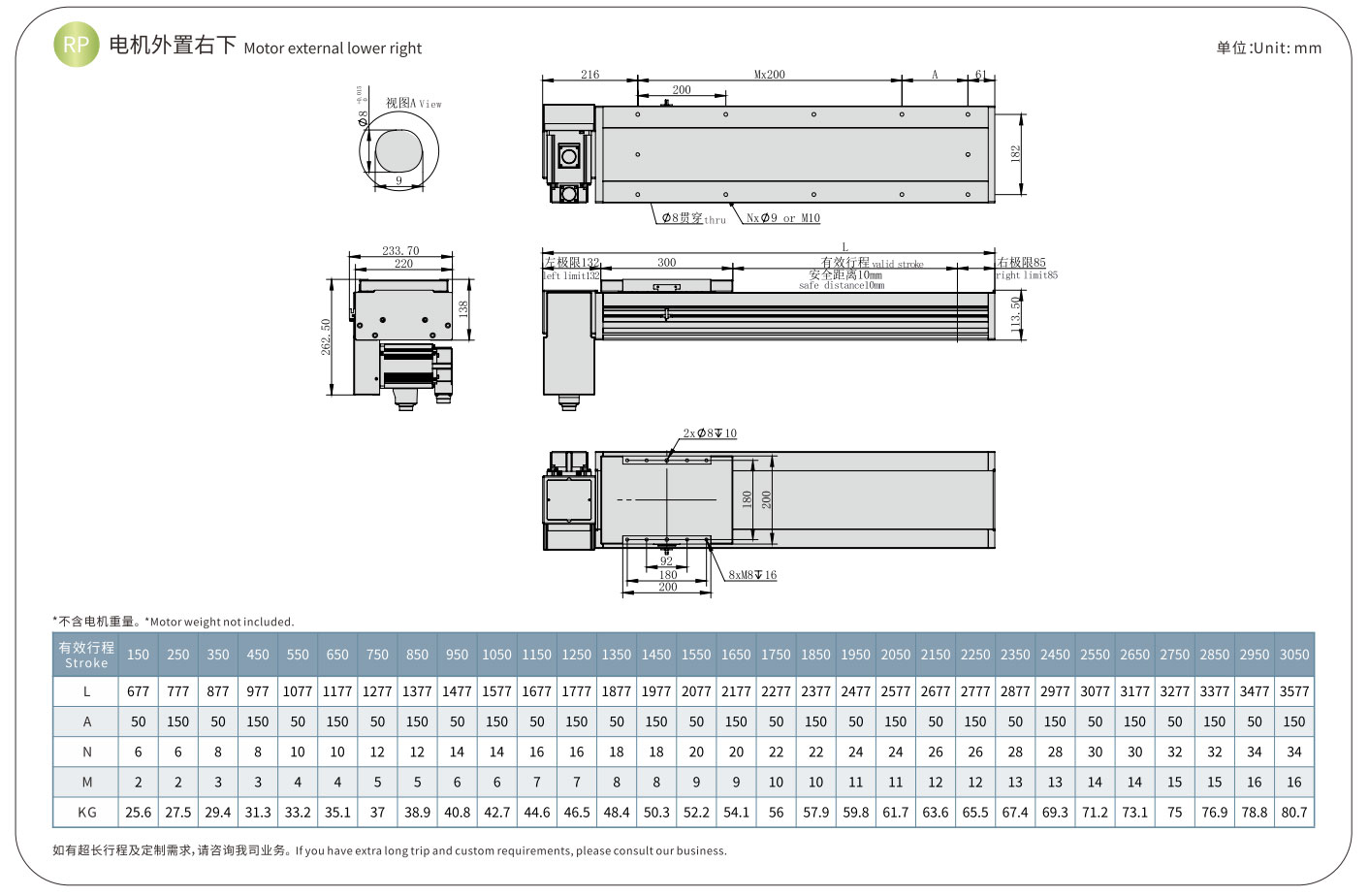
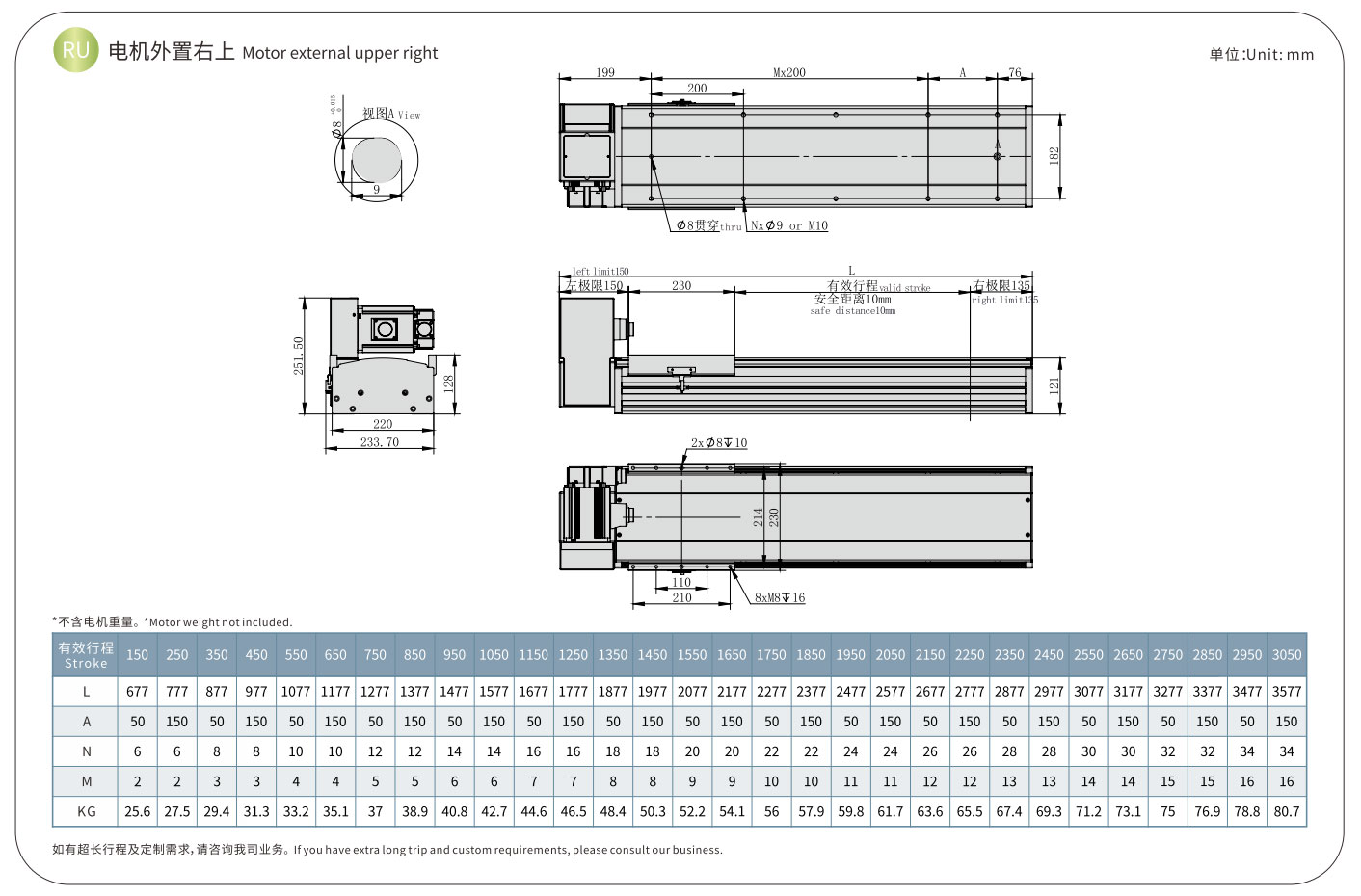
HCB-270D Fotoen
Fonctiounen
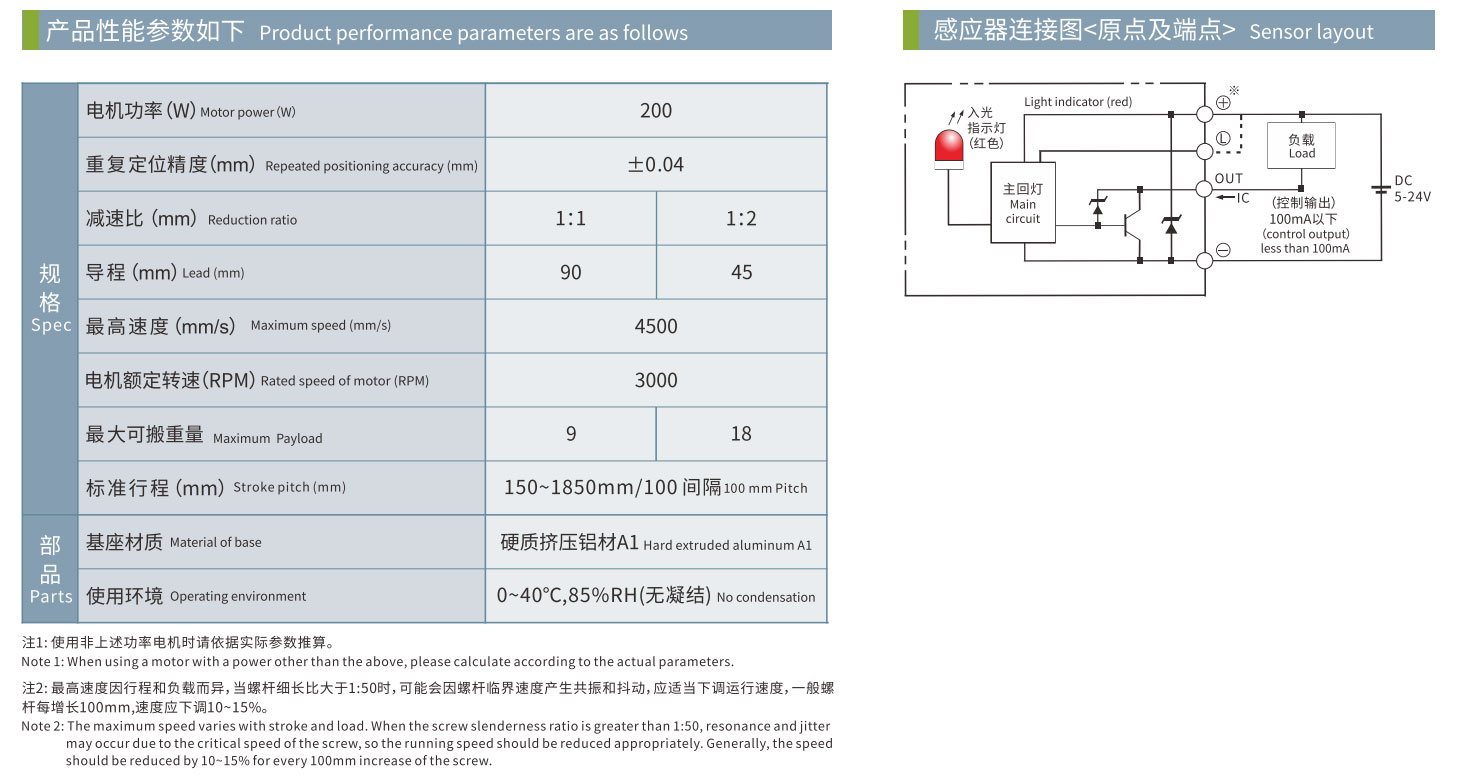
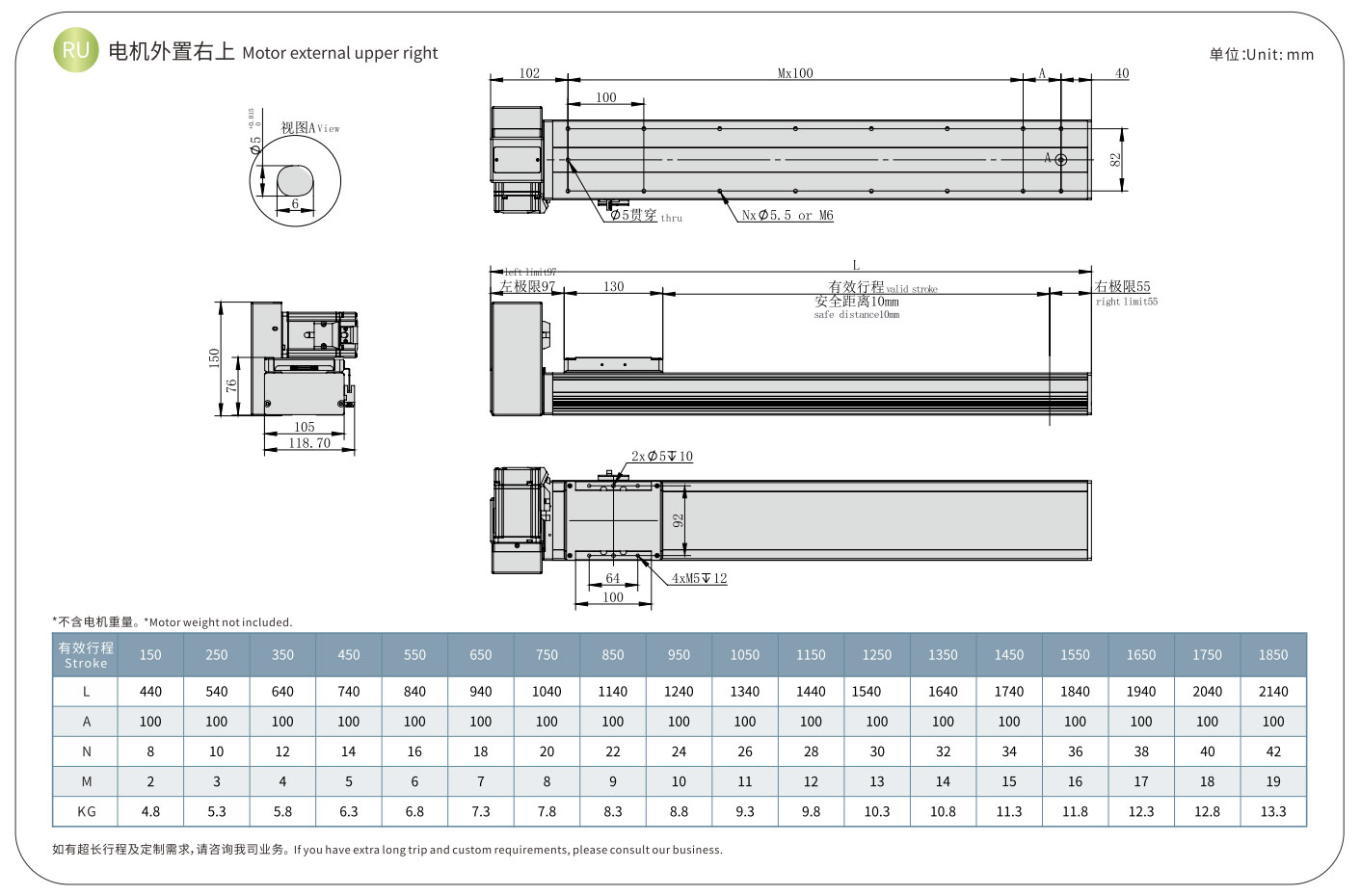
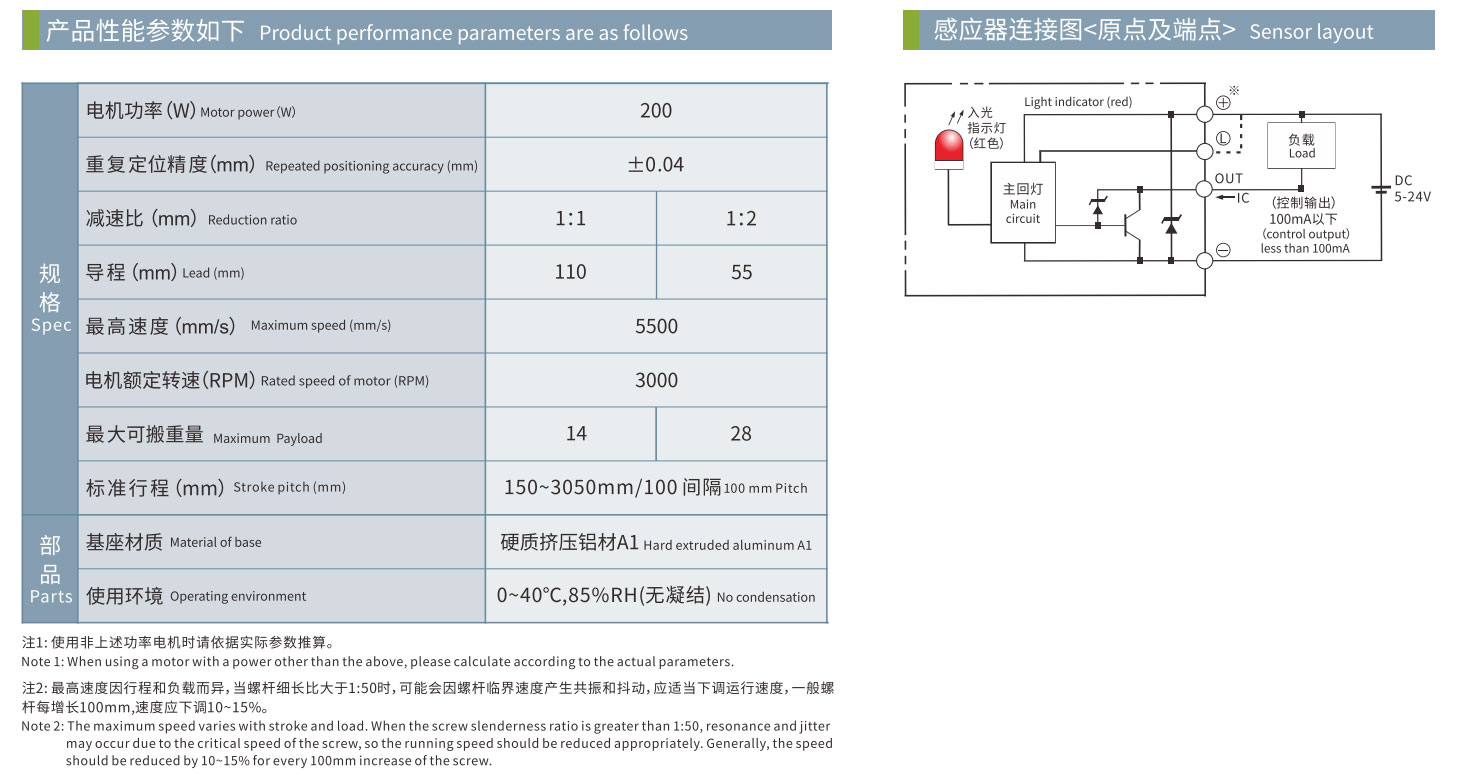
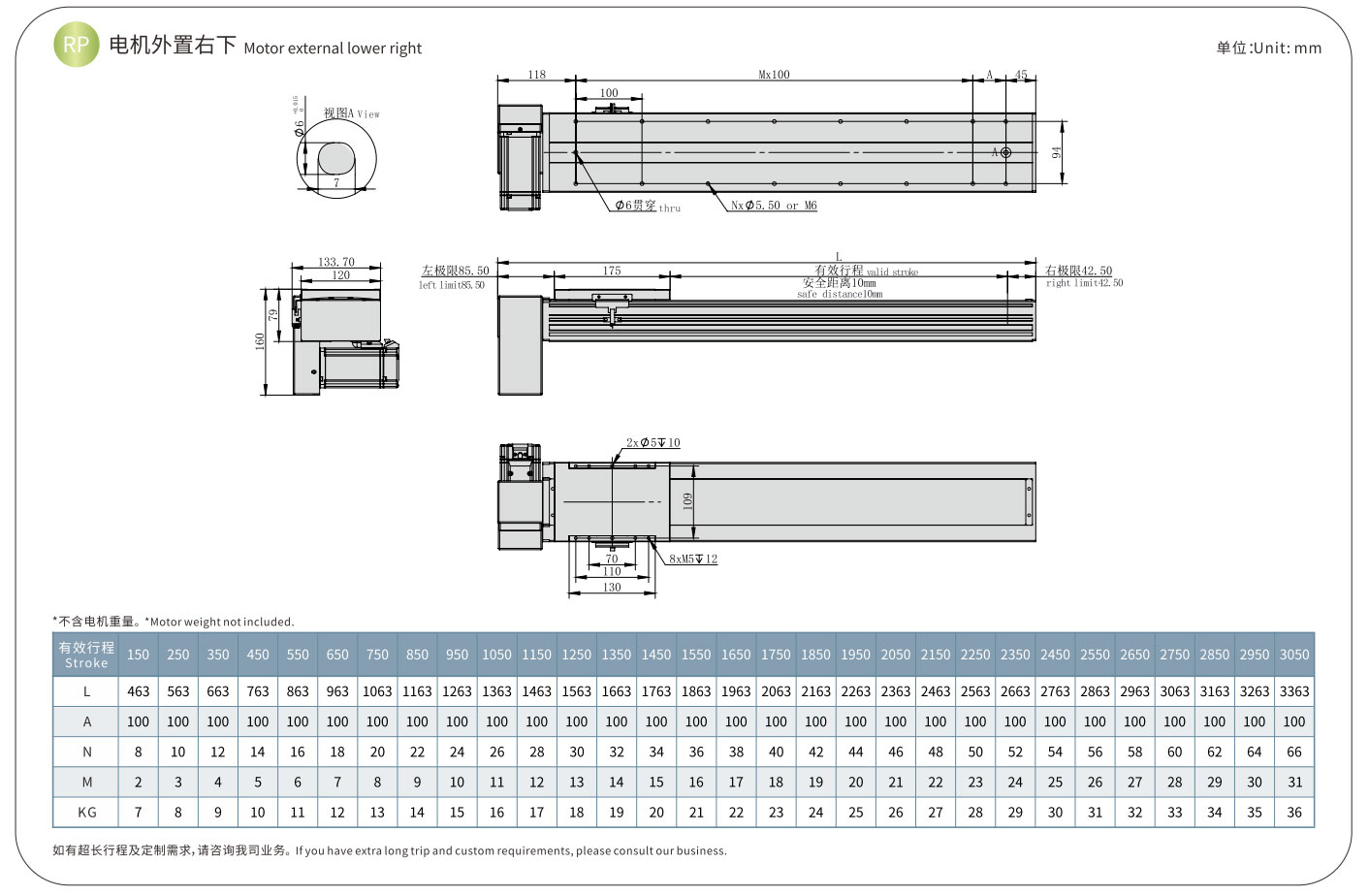
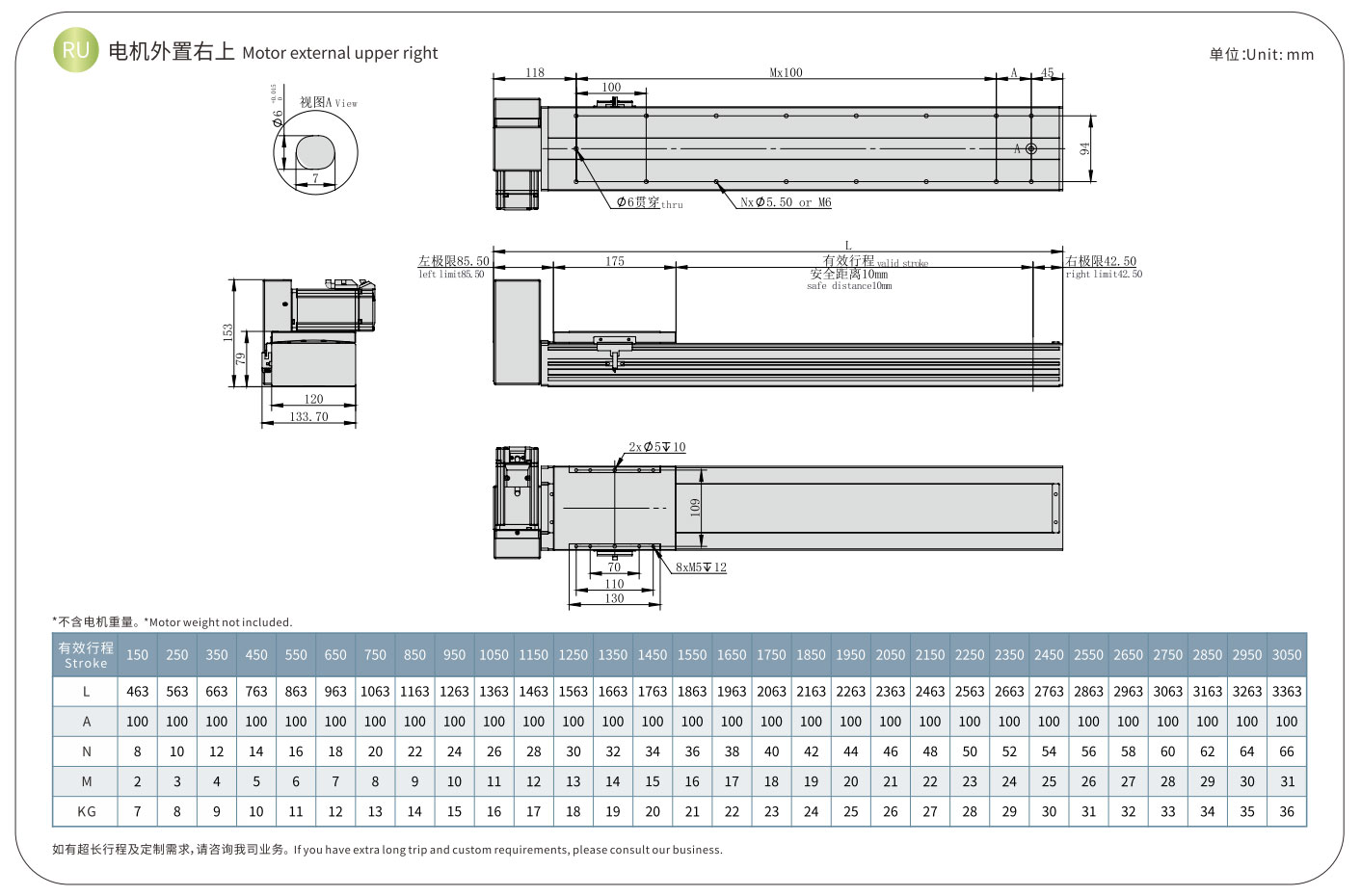
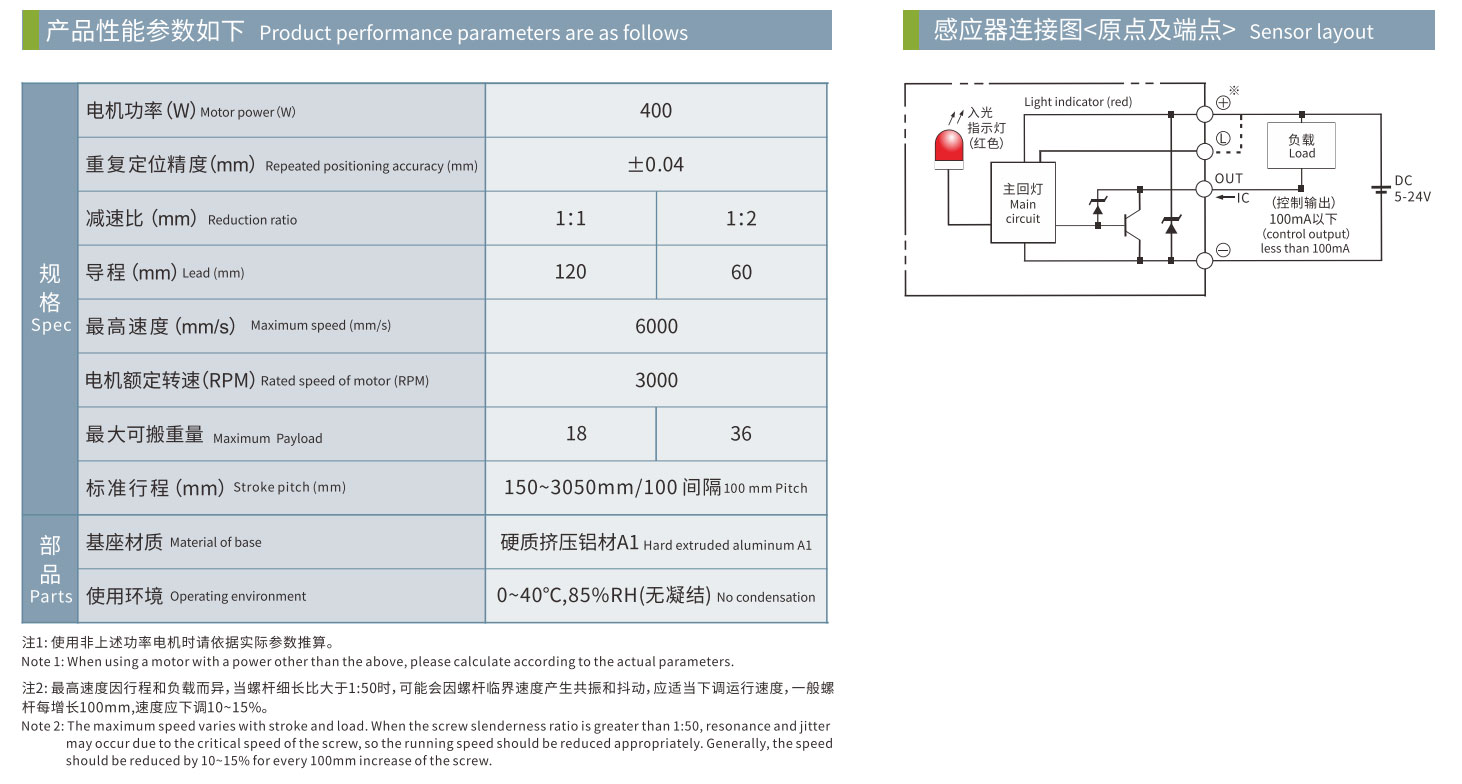
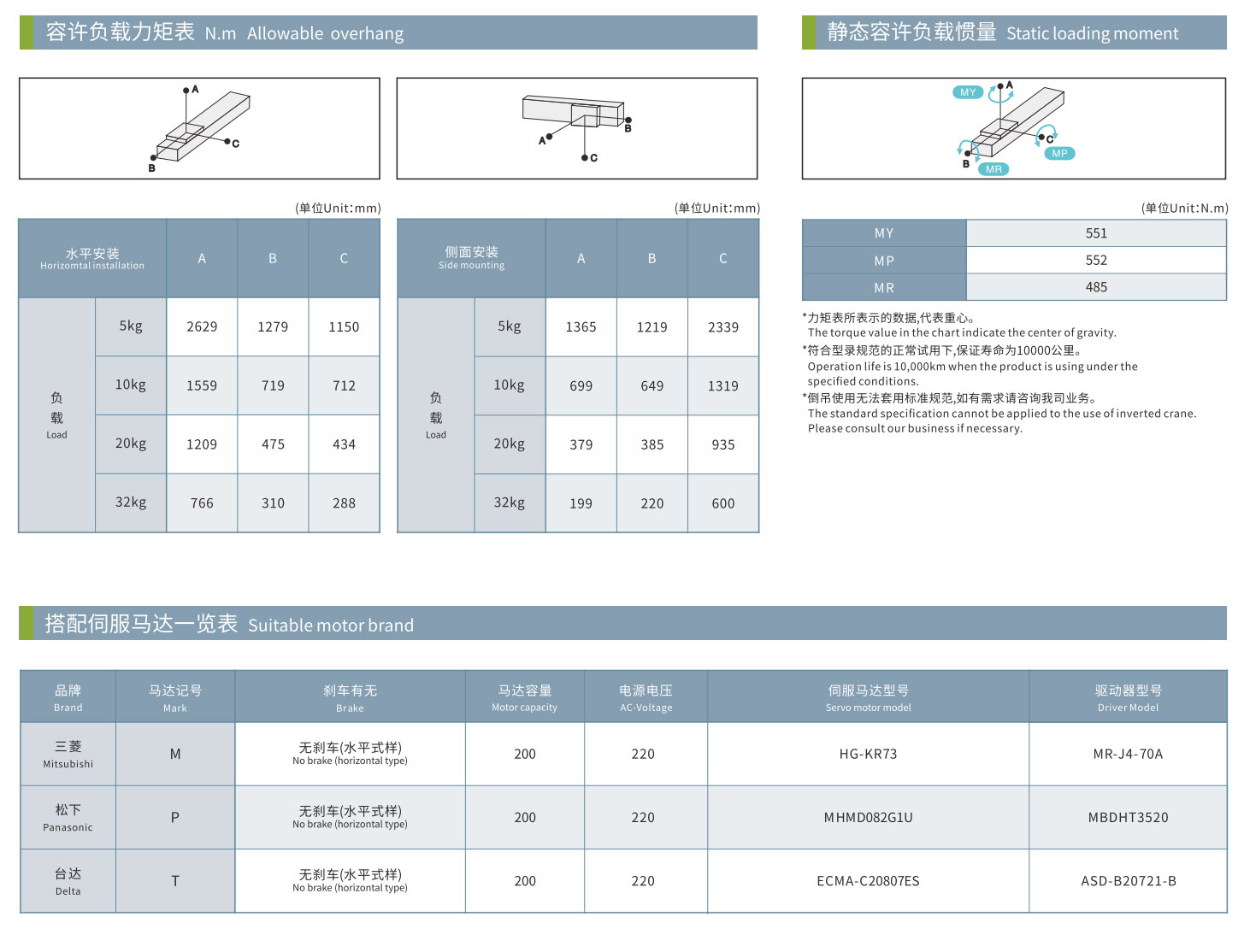
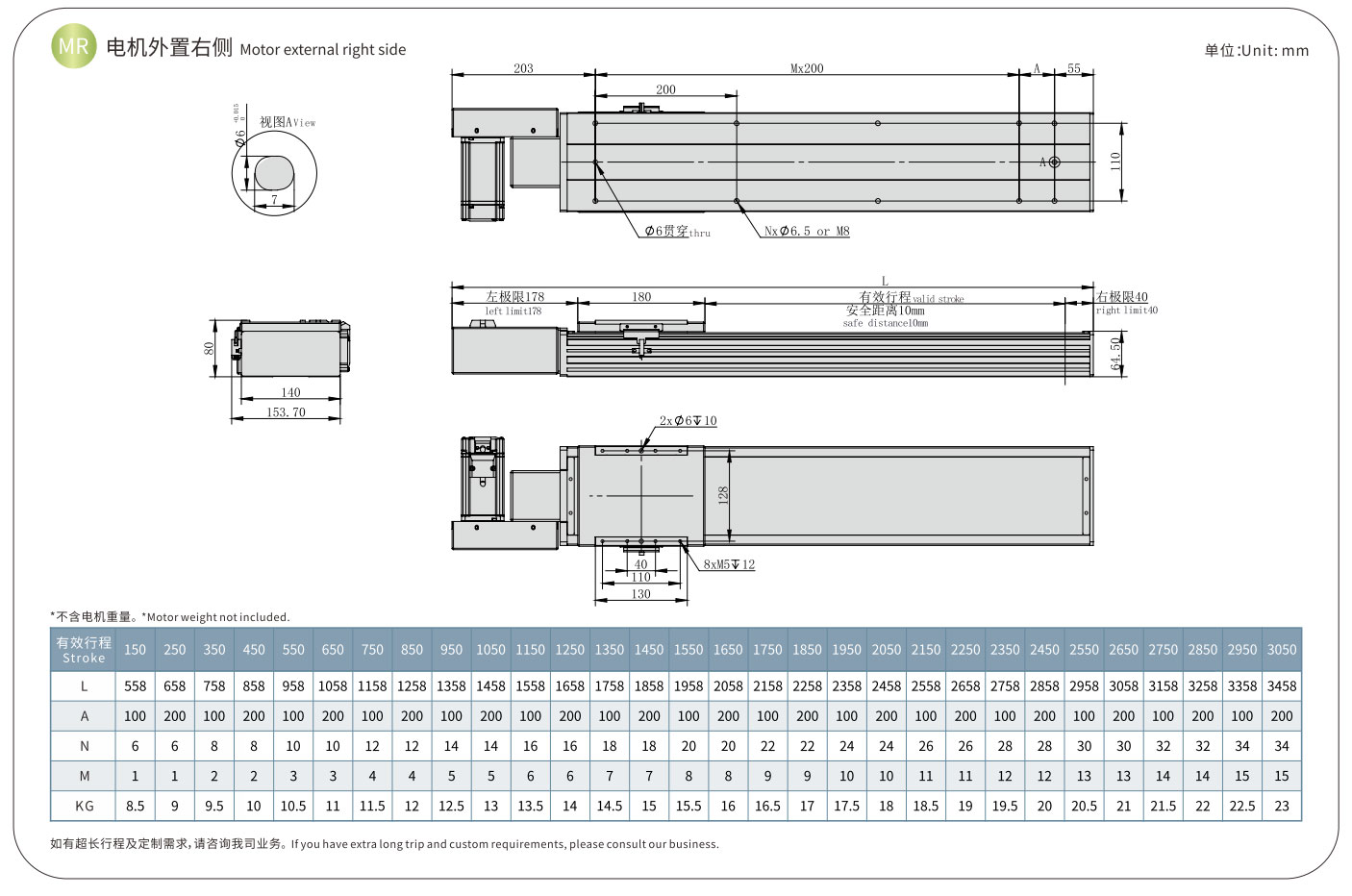
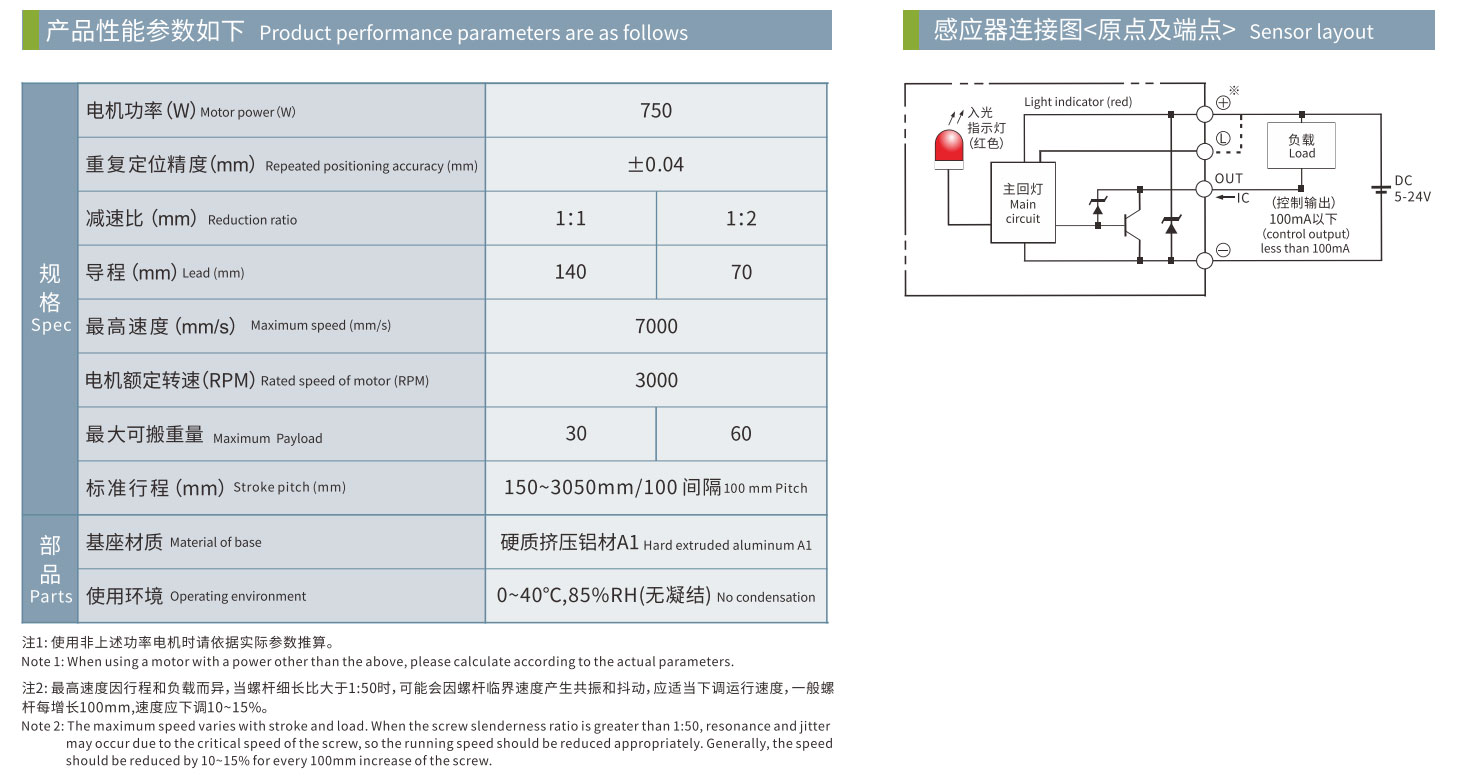
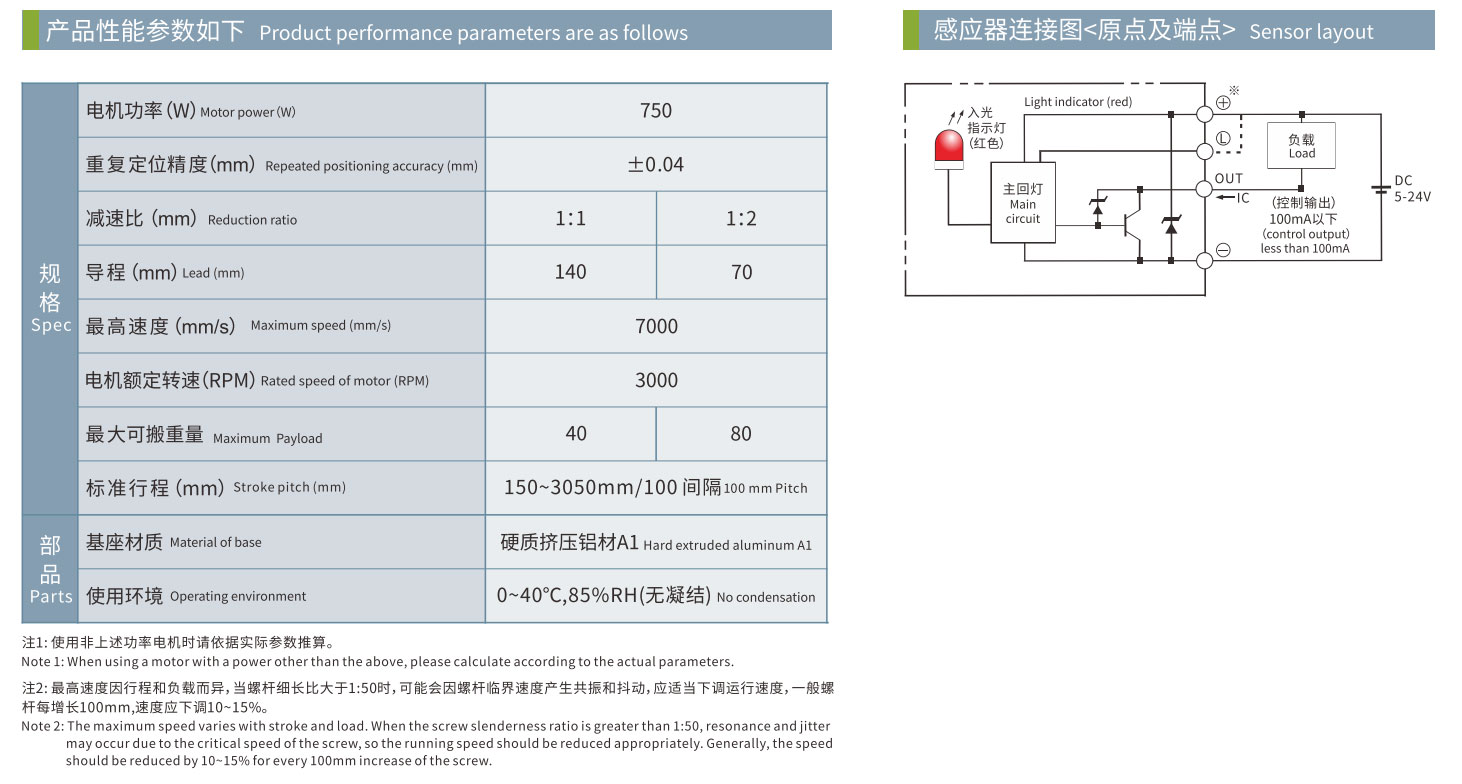
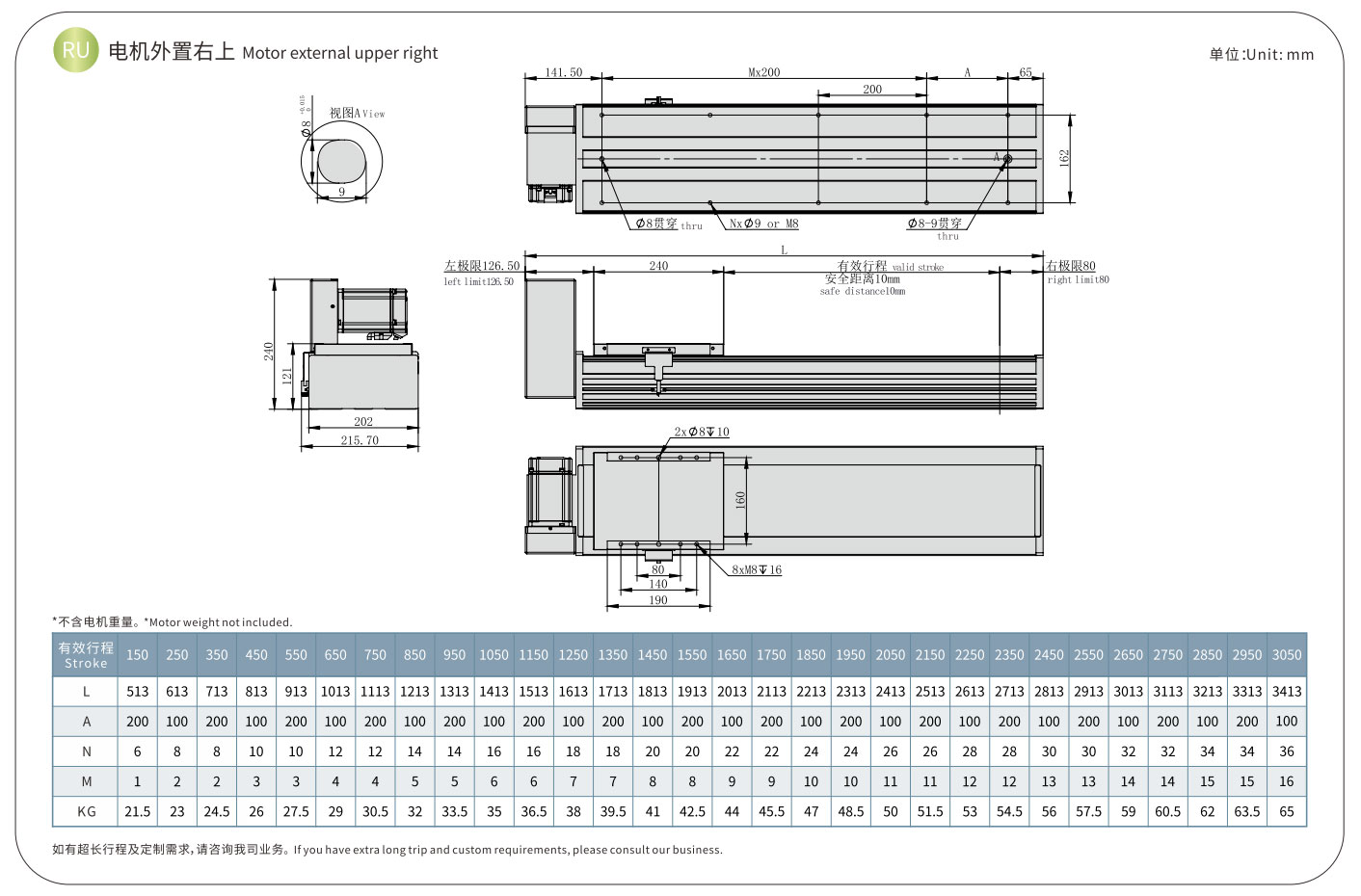
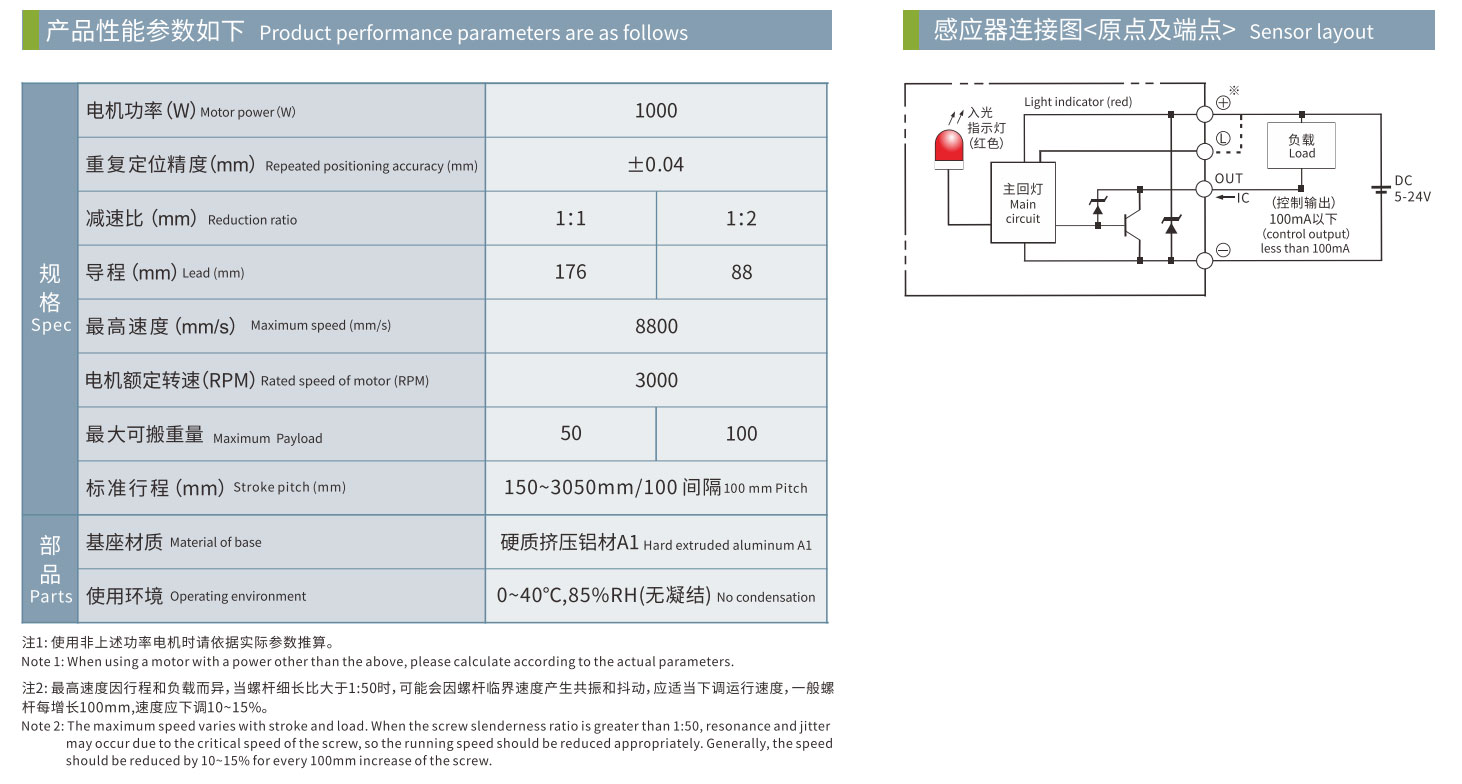
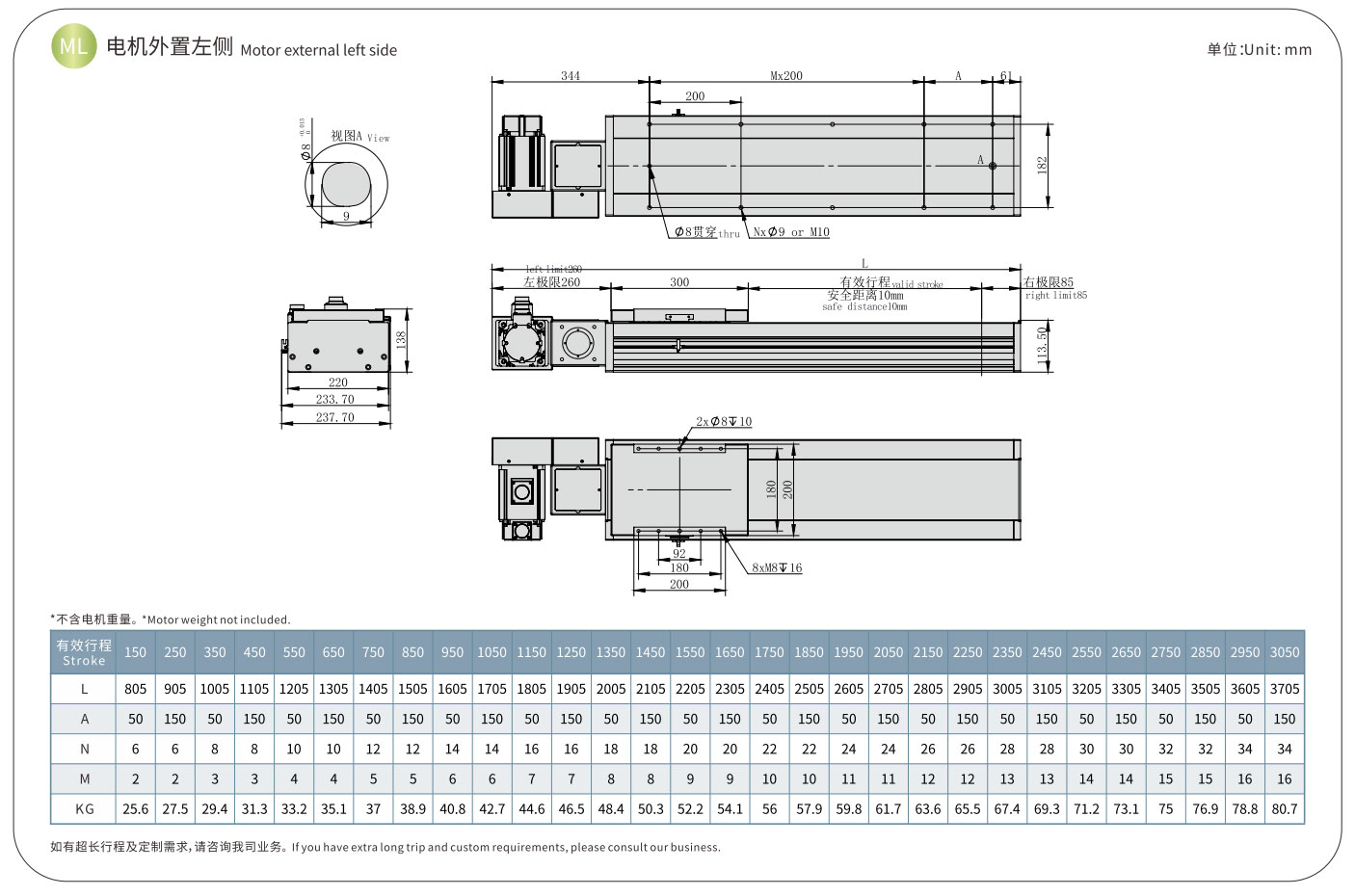
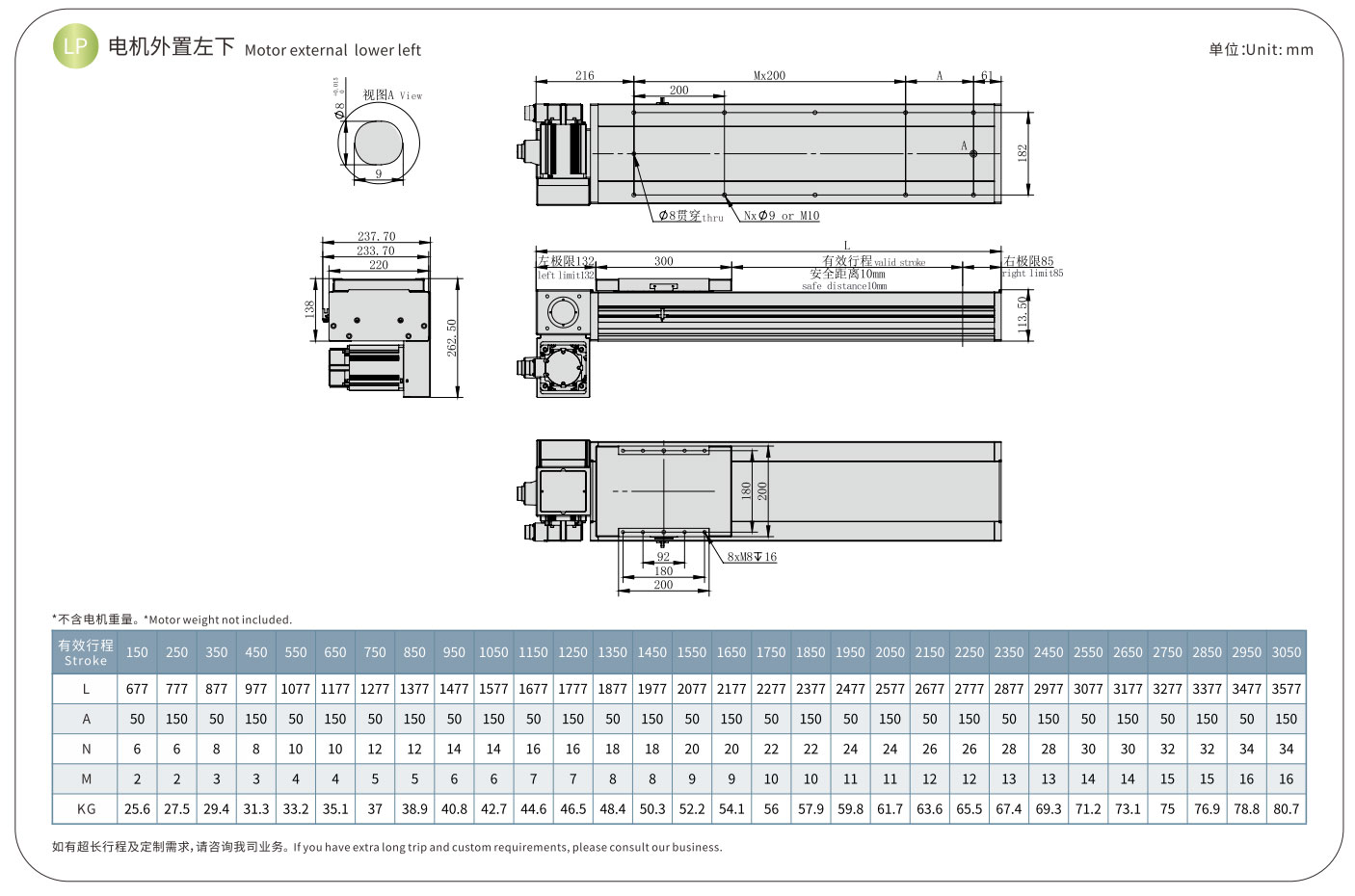
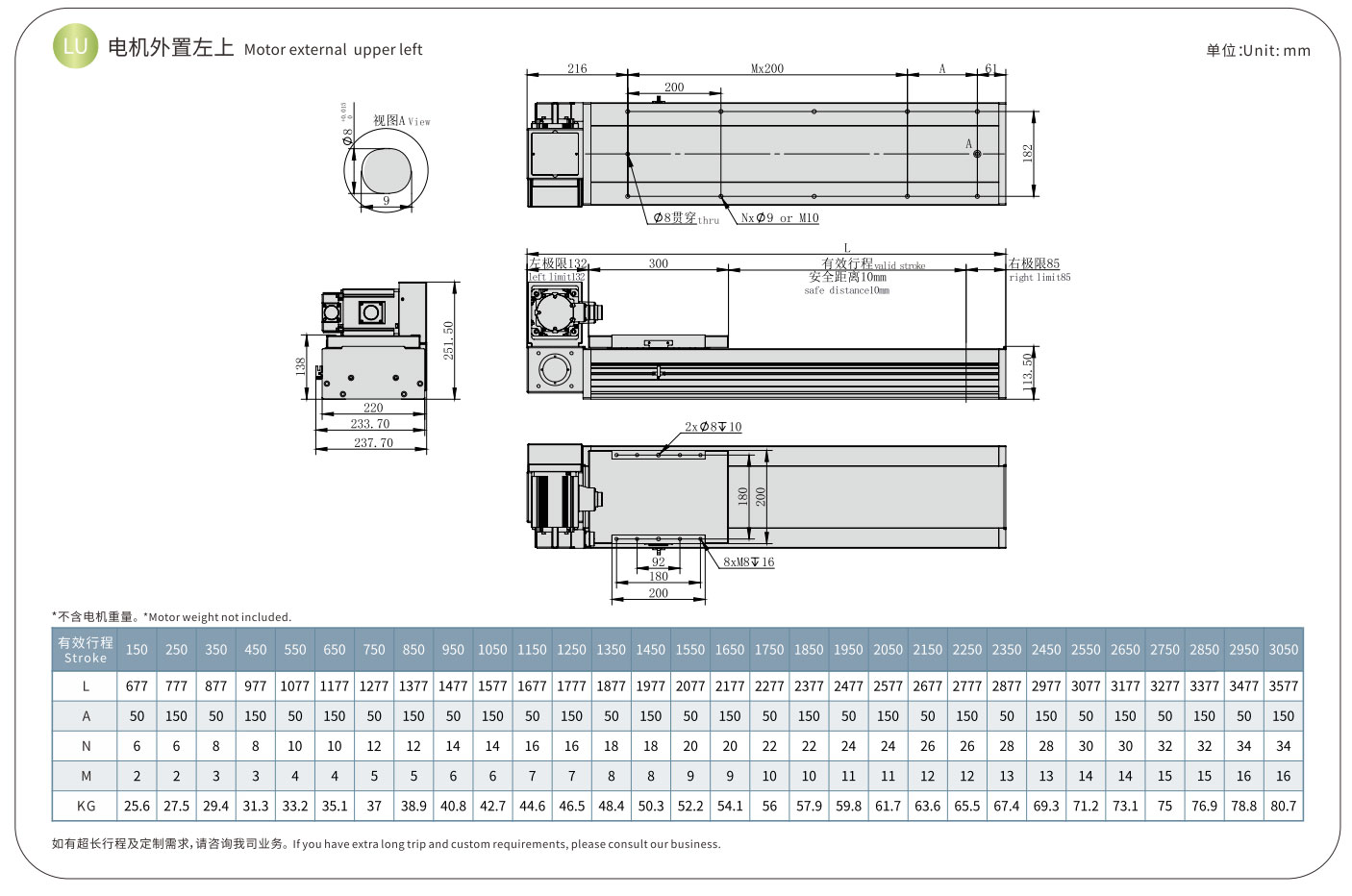
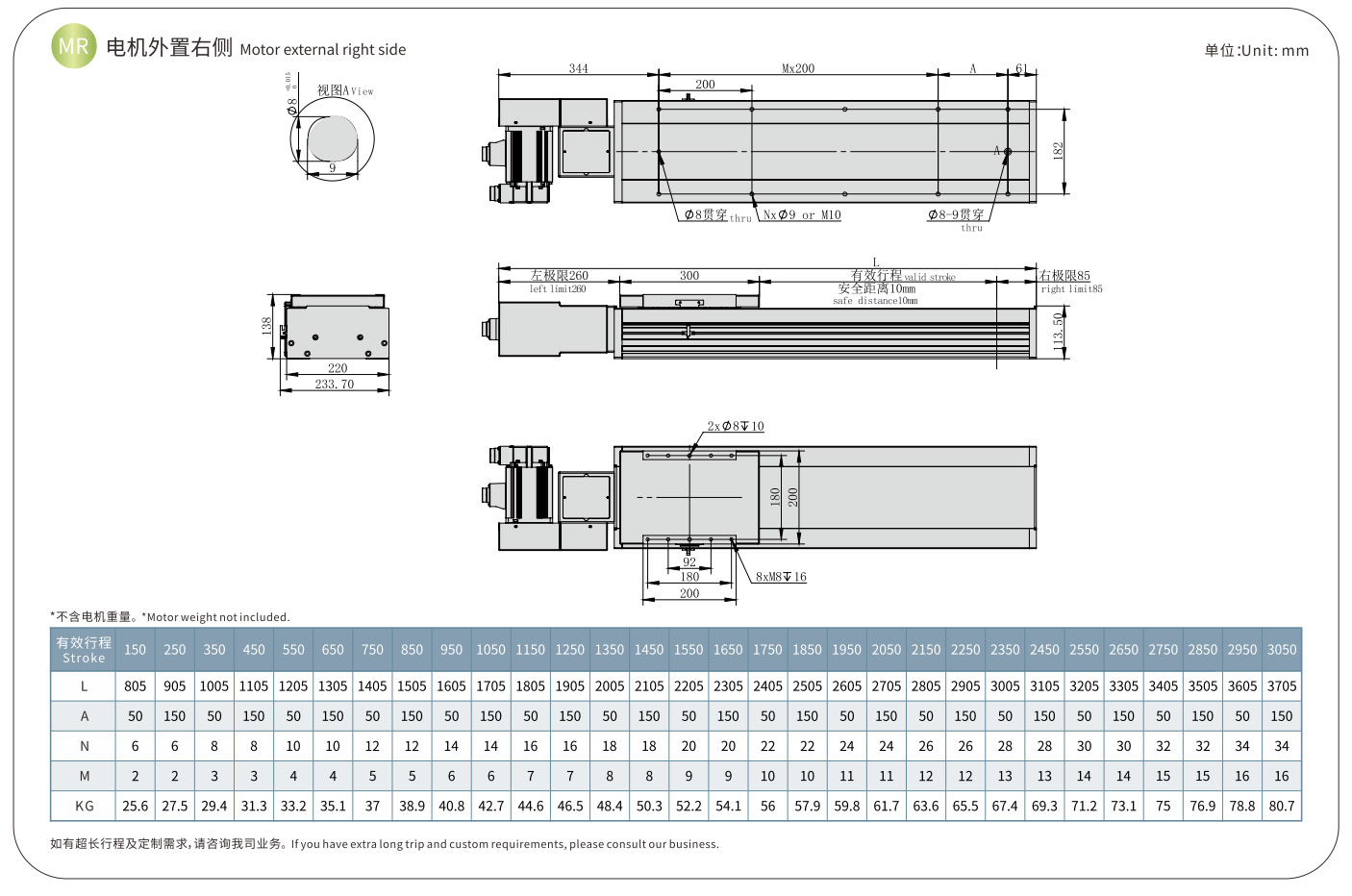
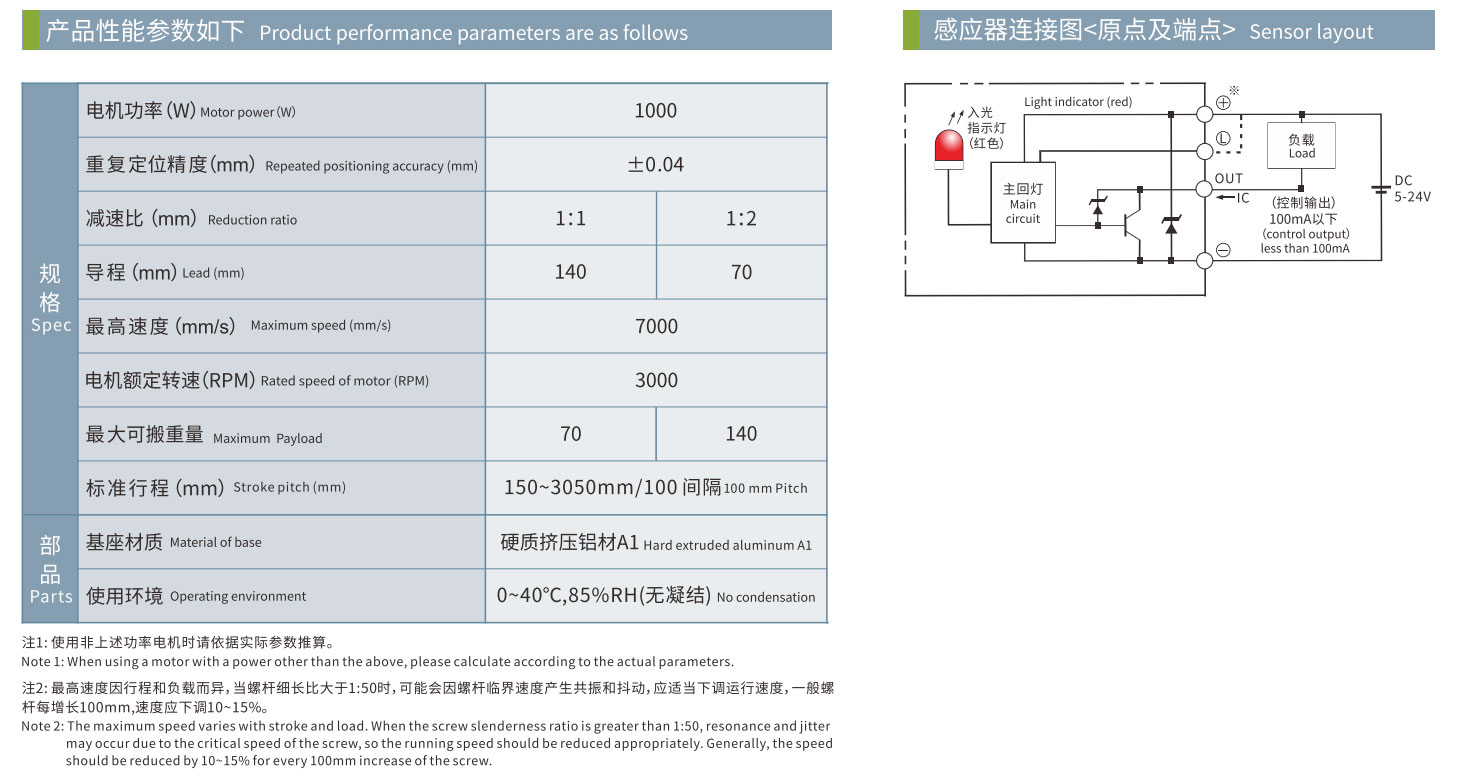
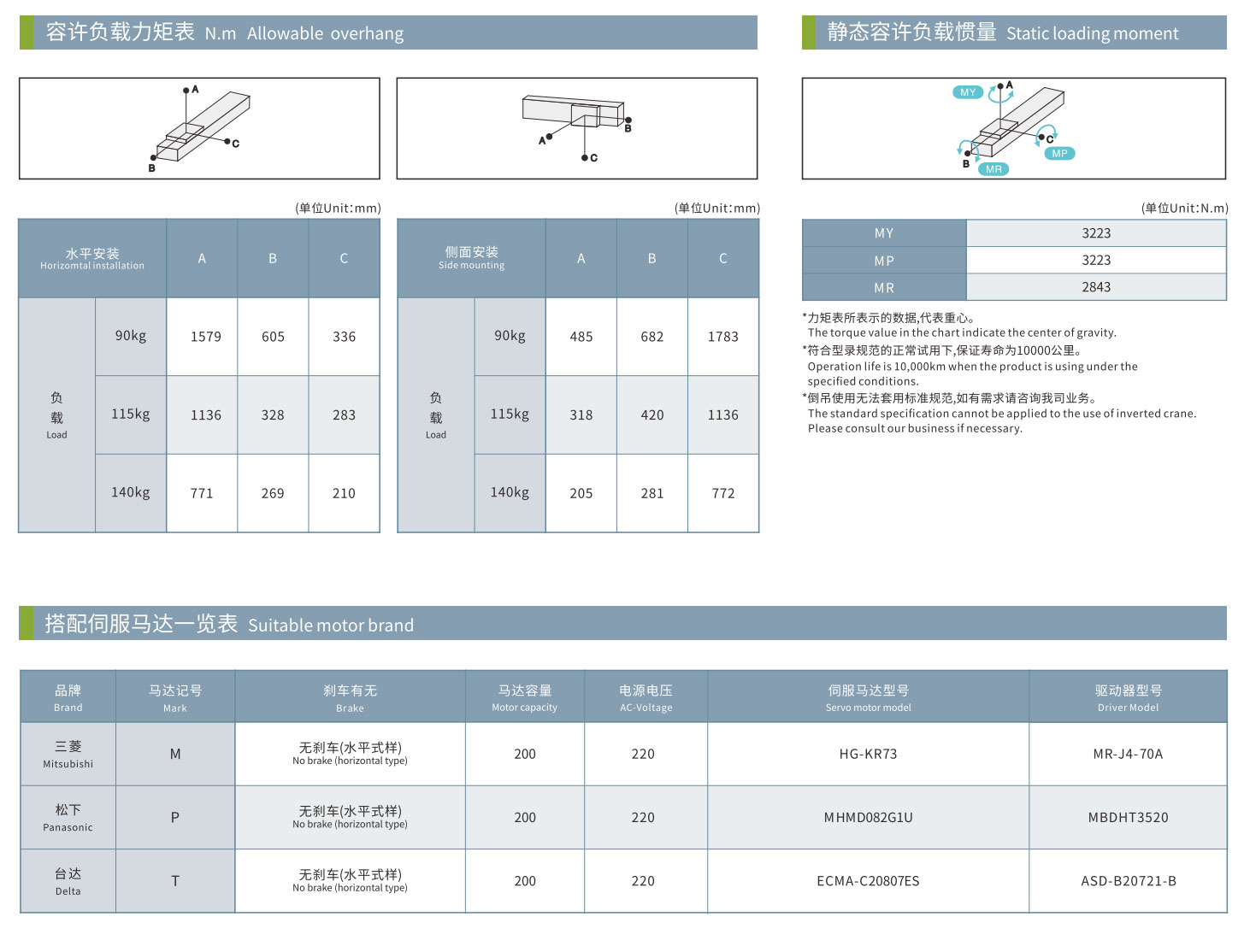
Widderholl Positionéierung Genauegkeet: ± 0,04 mm
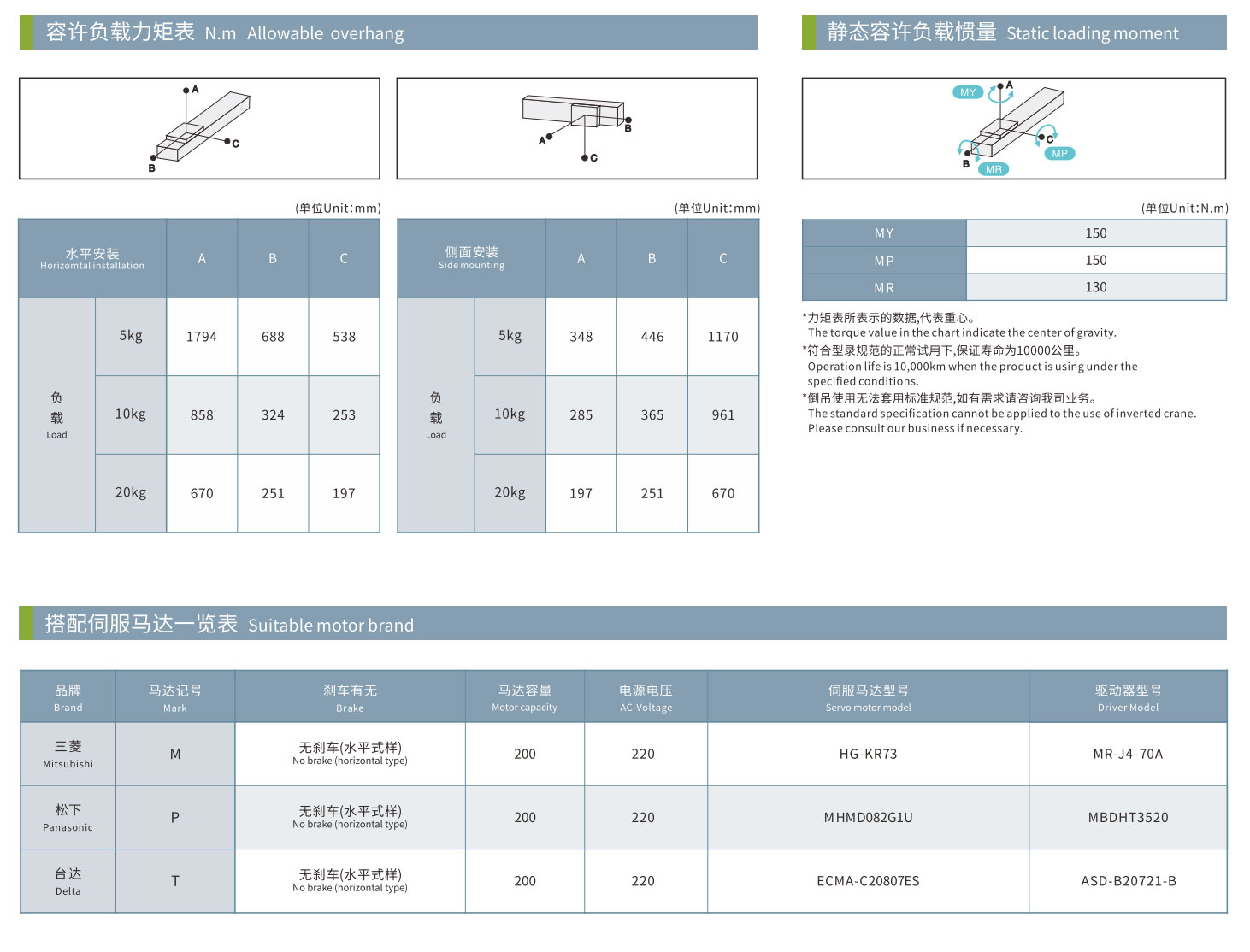
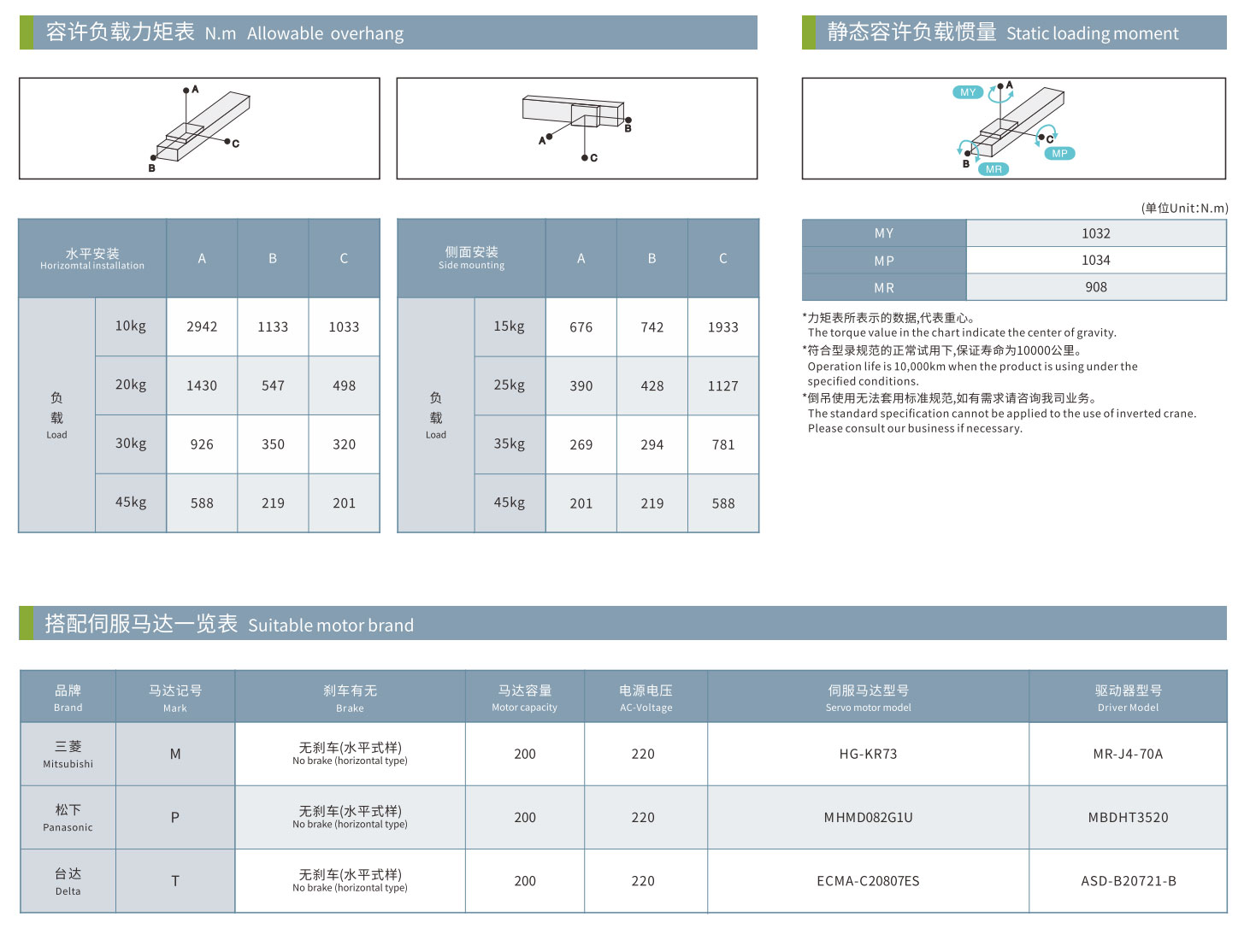
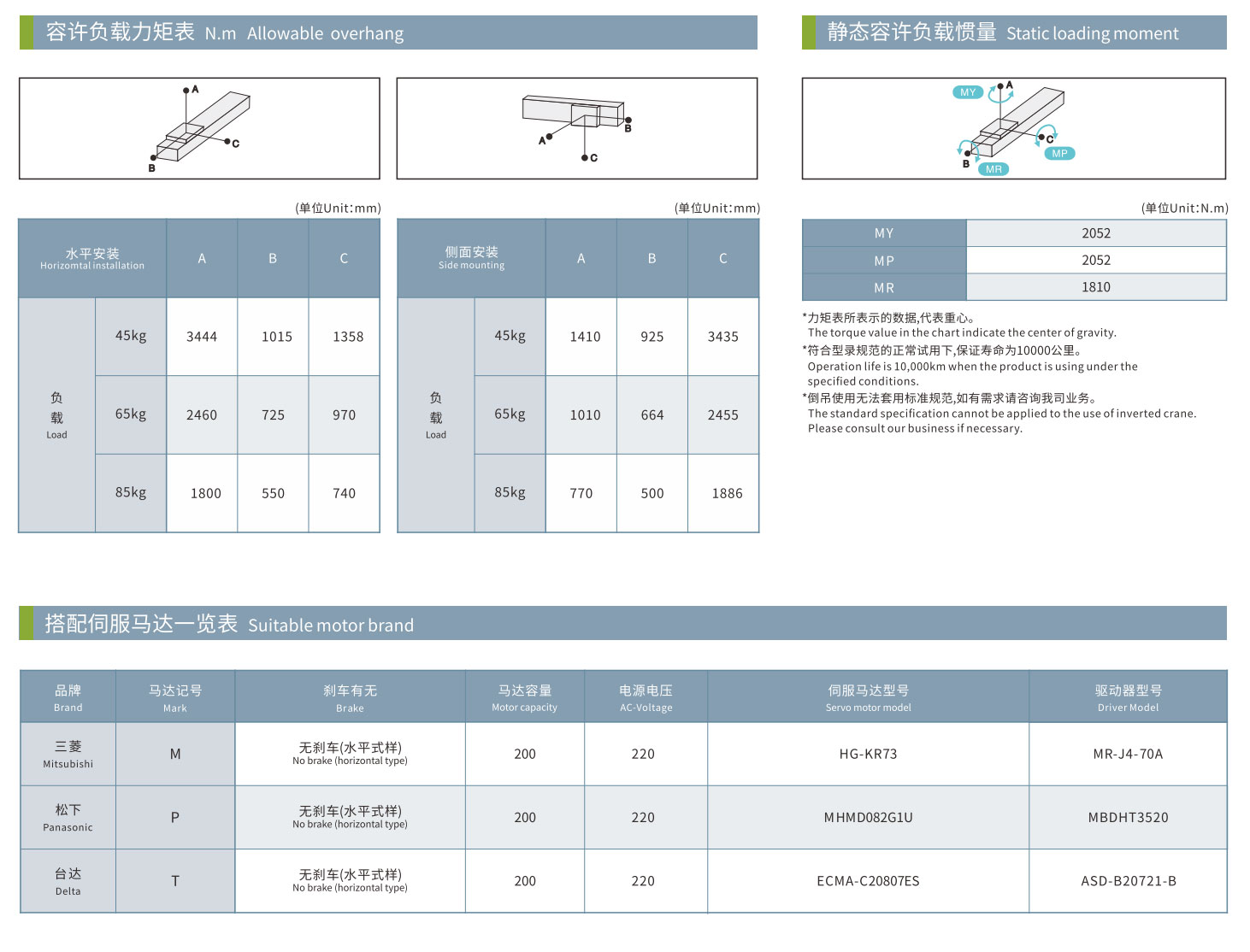
Max Notzlaascht: 140 kg
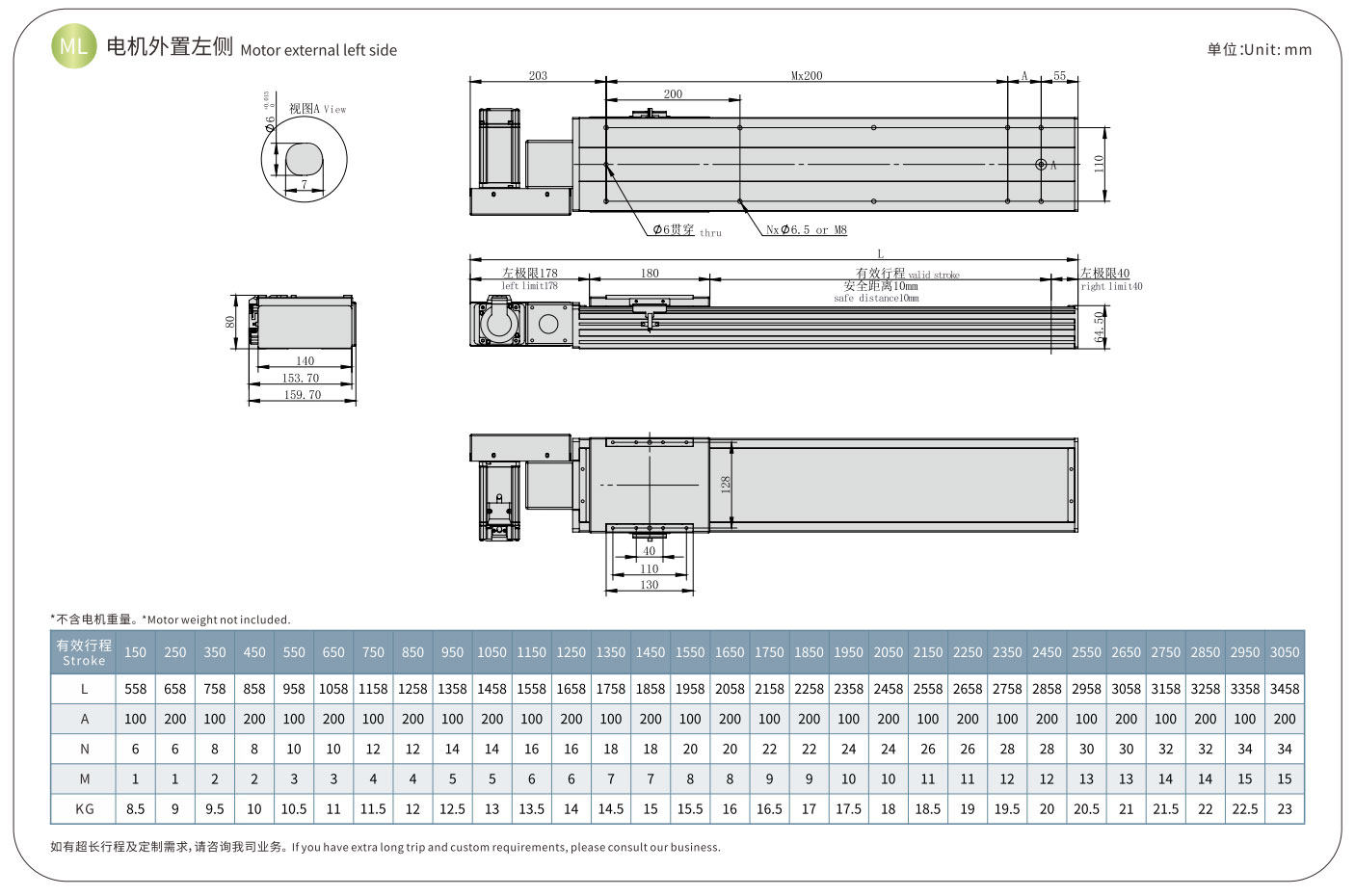
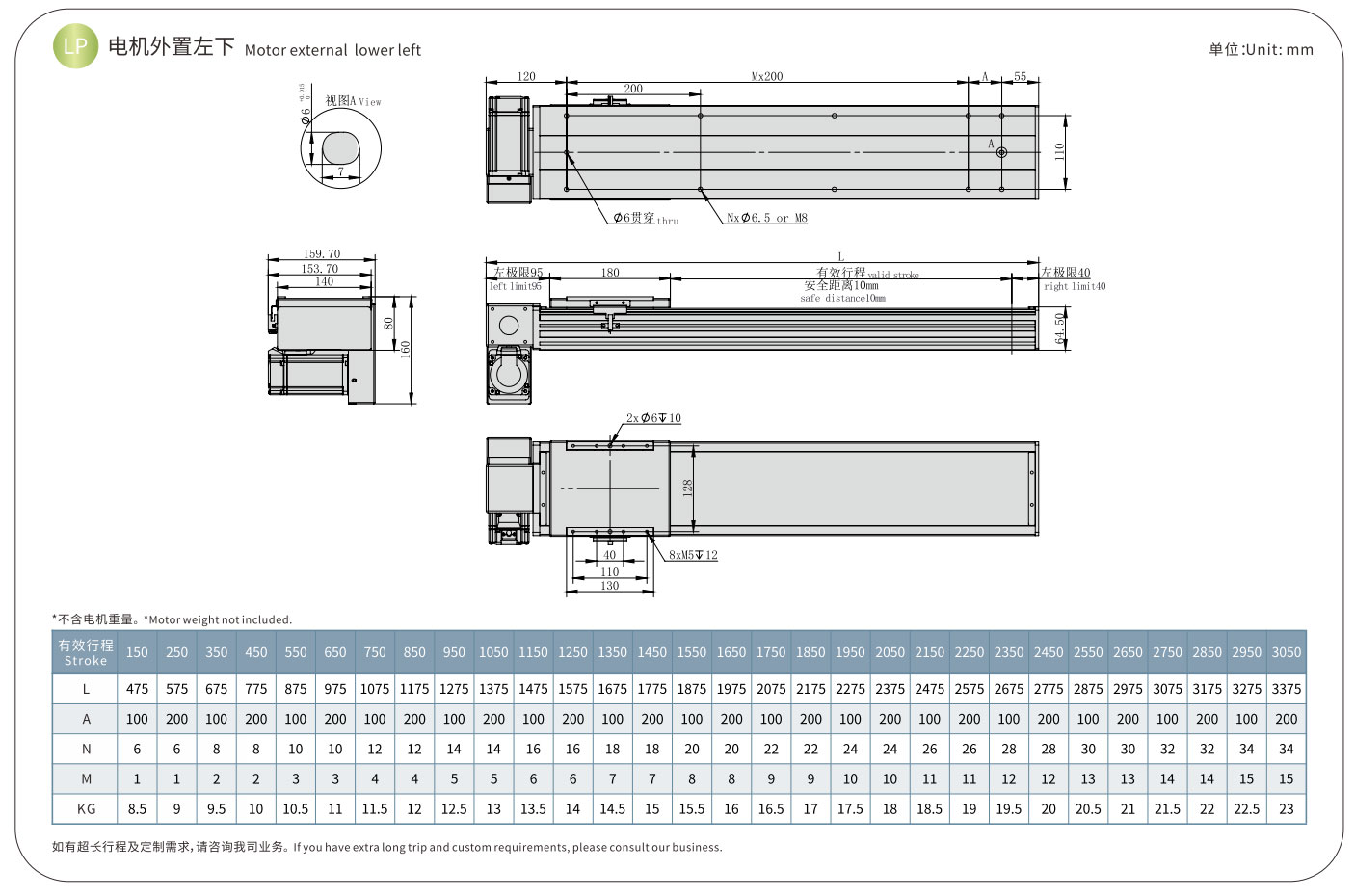
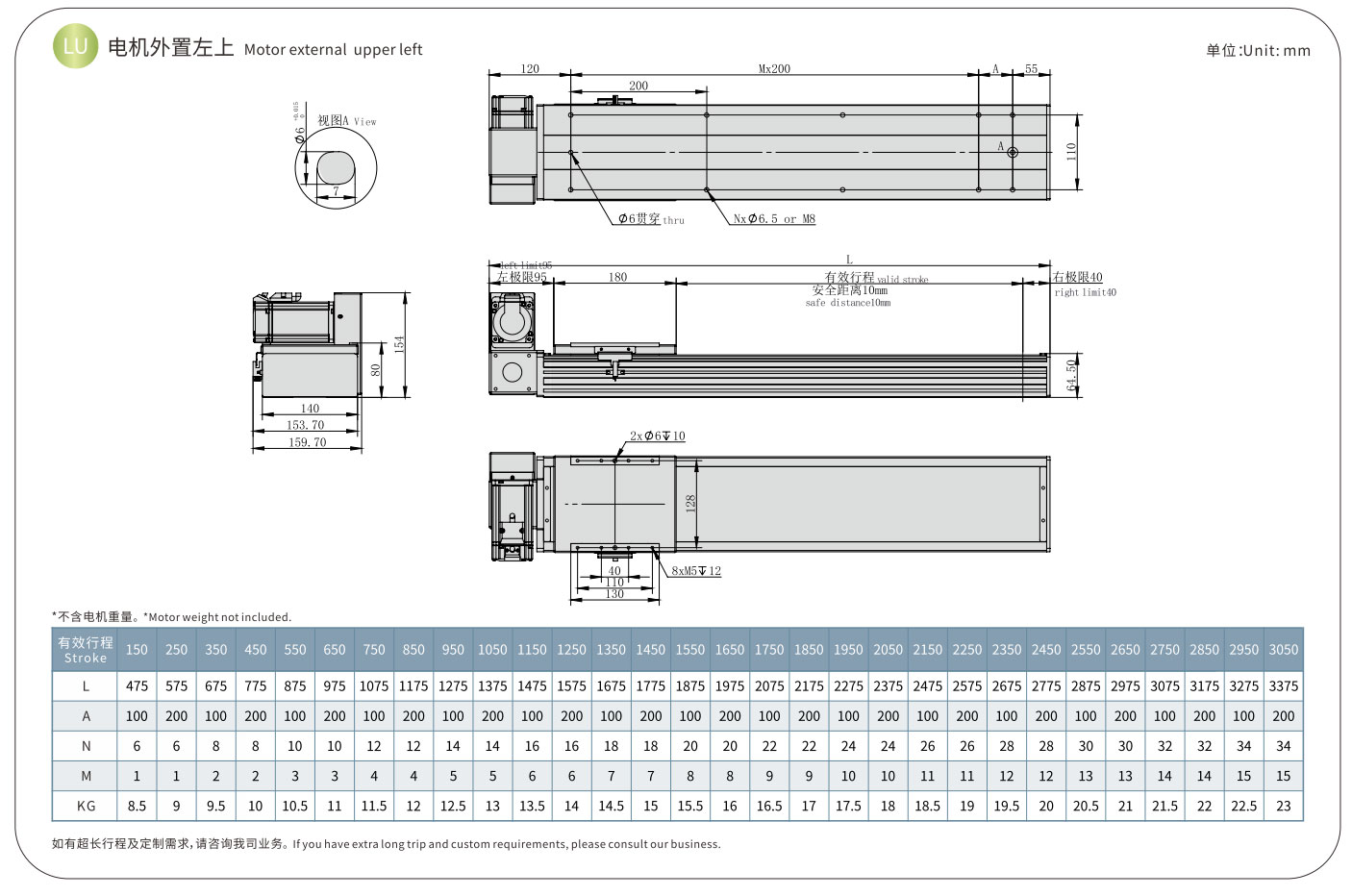
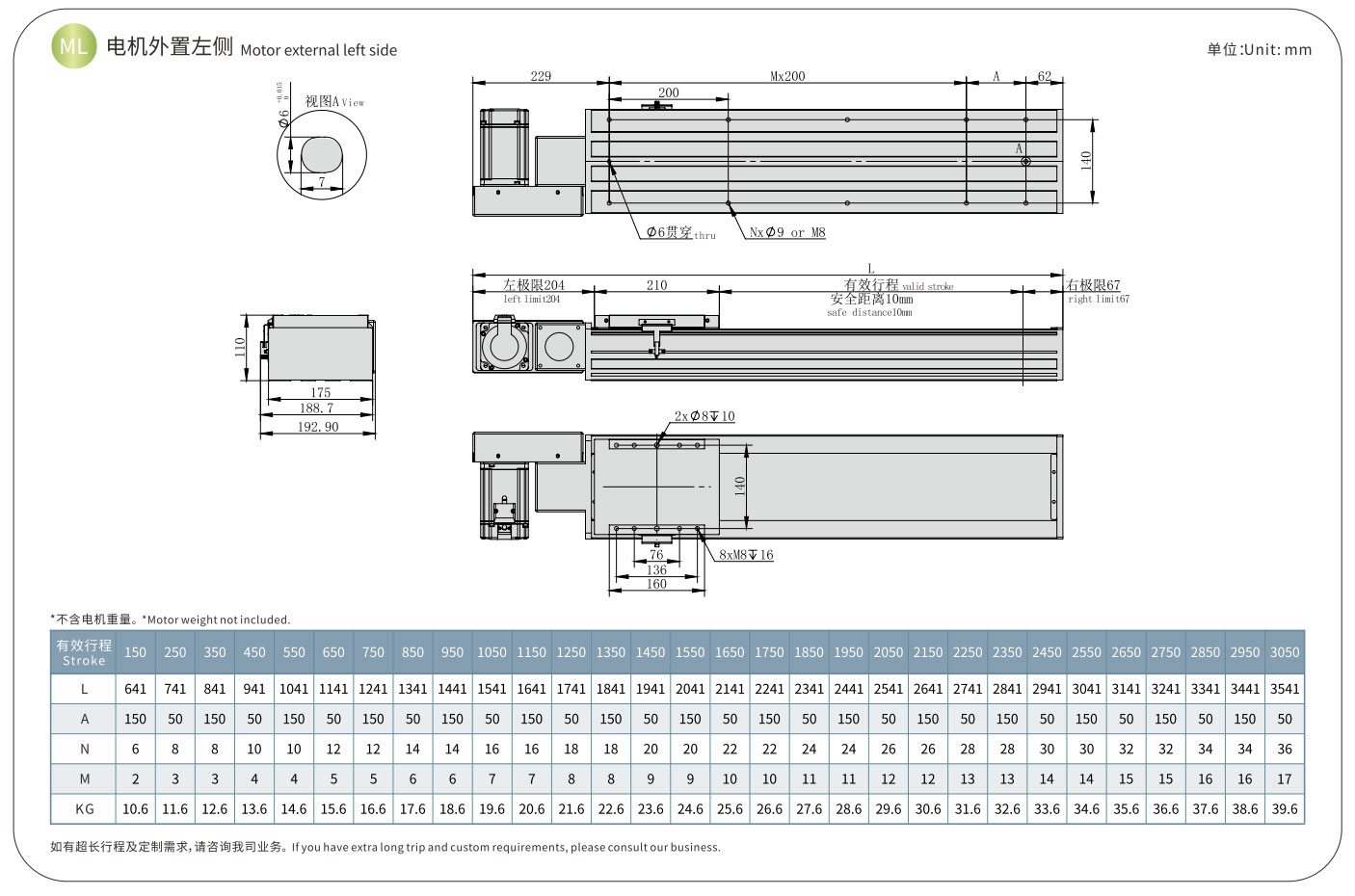
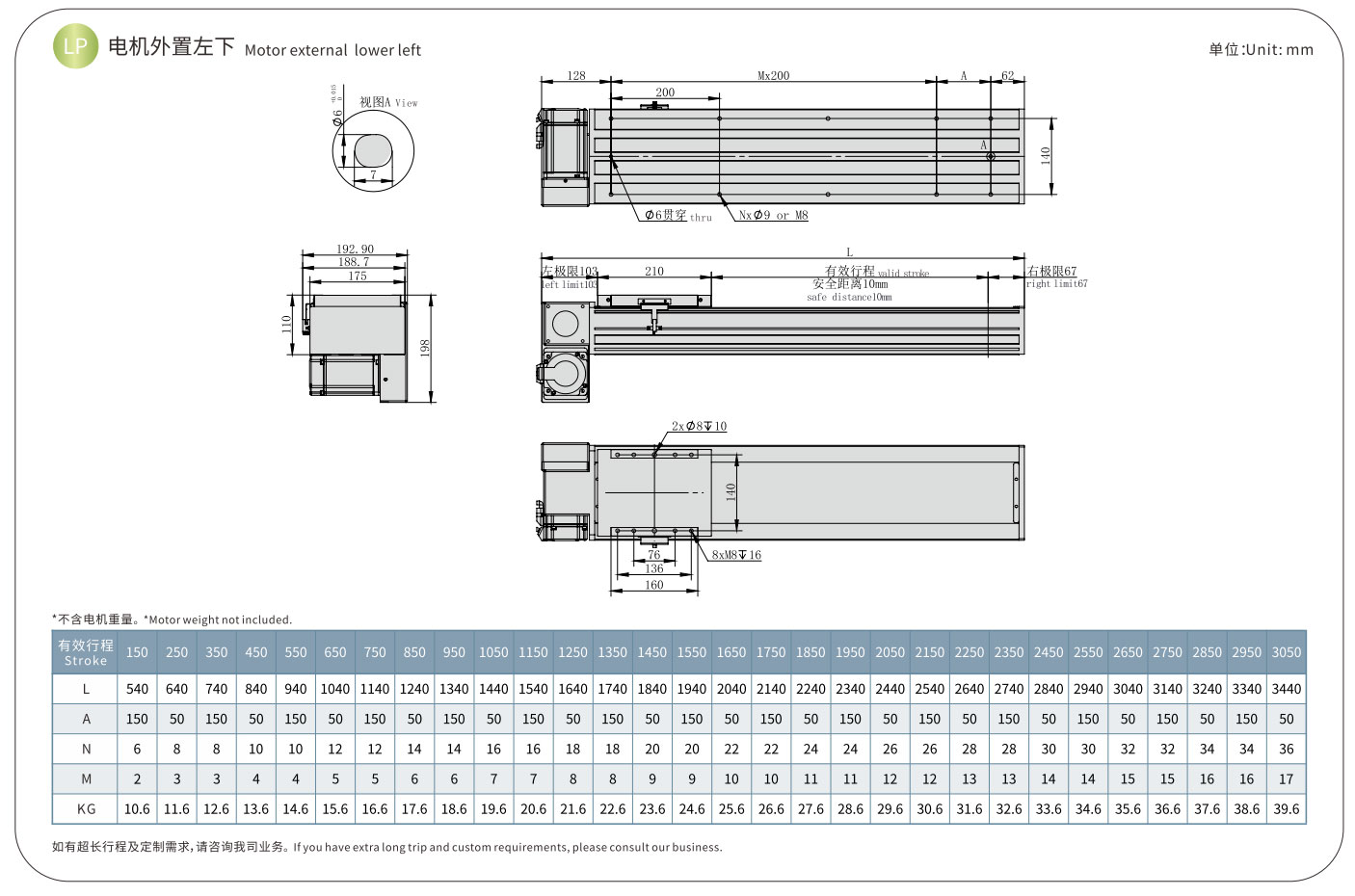
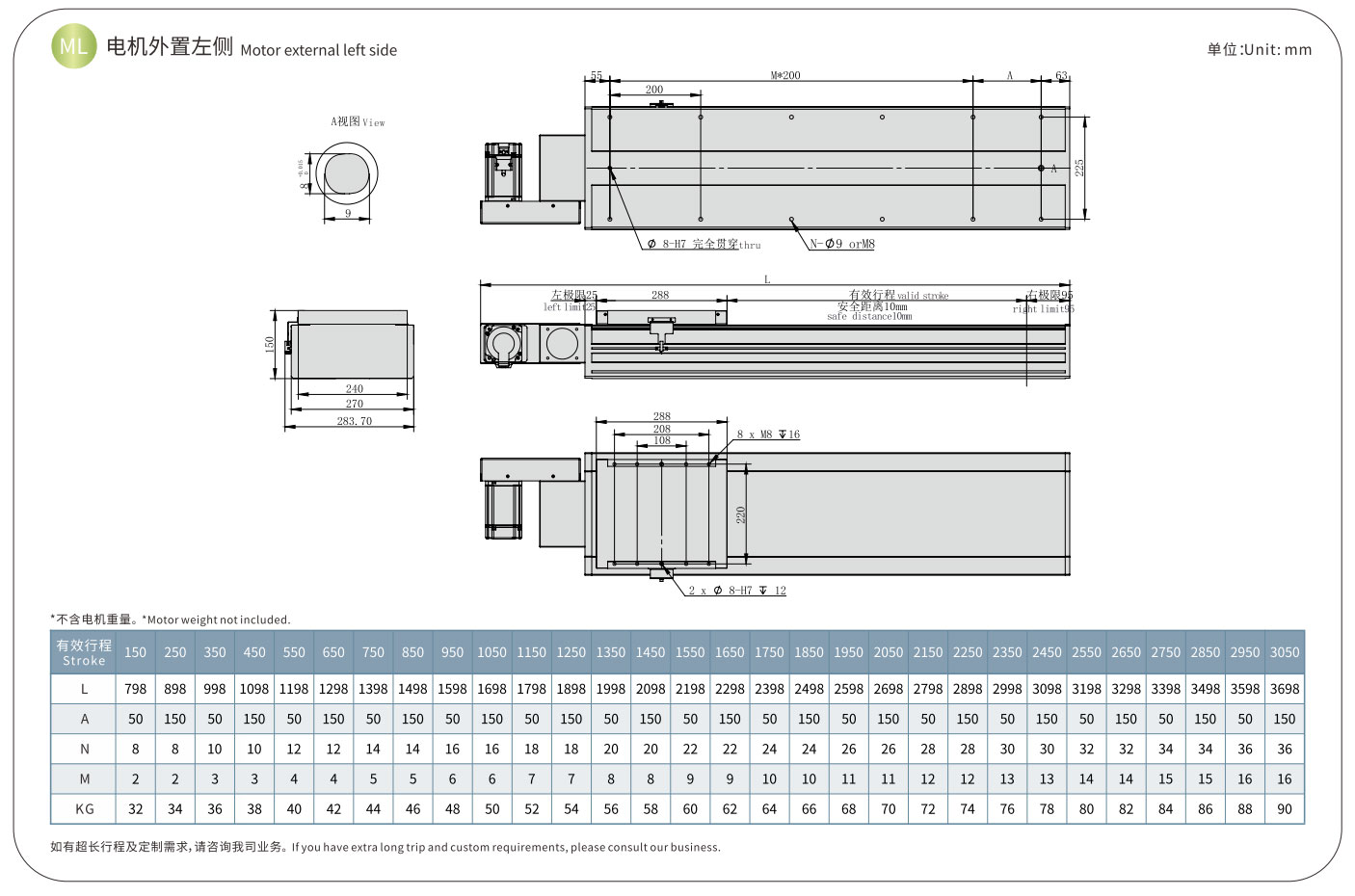
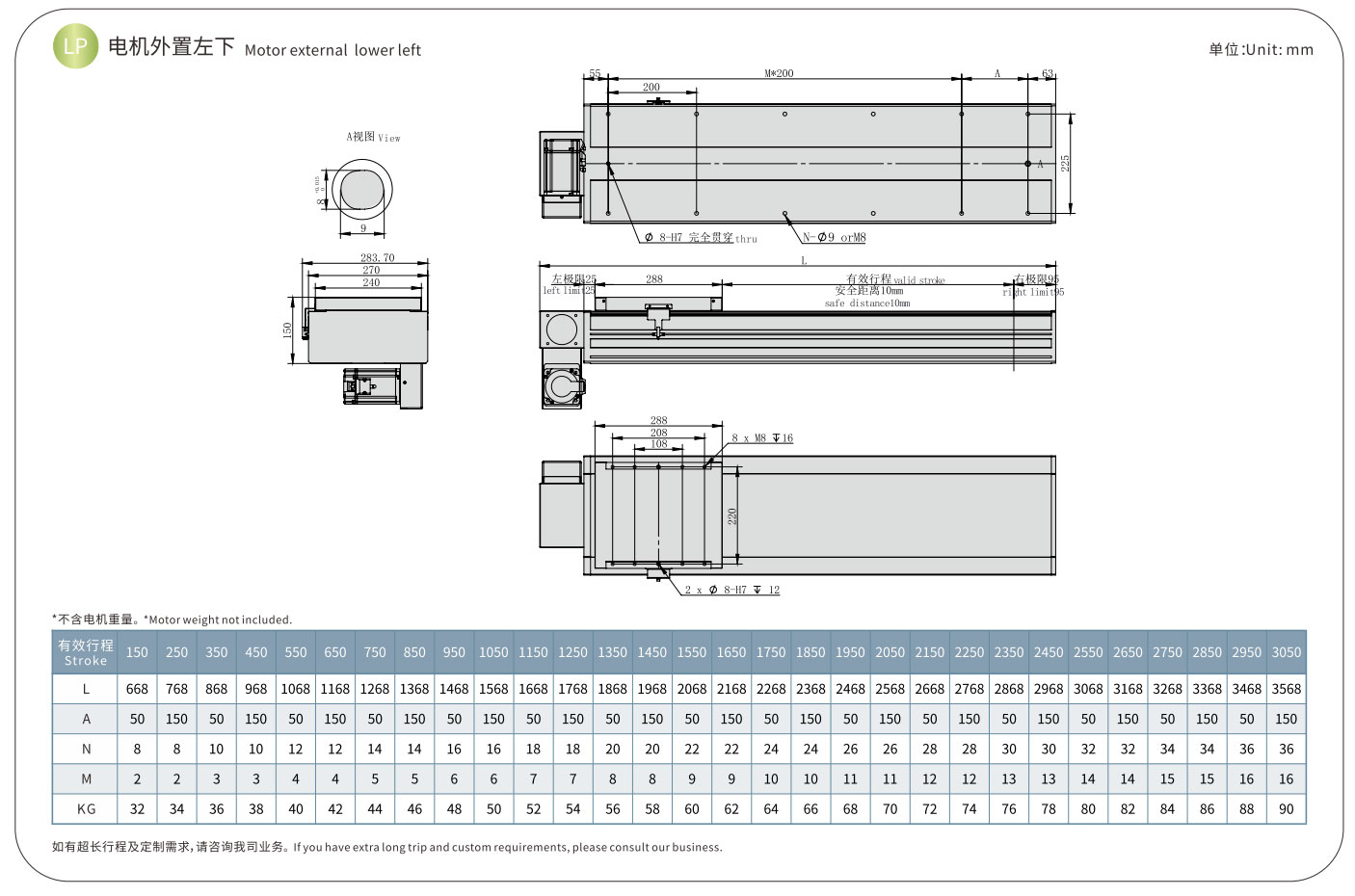
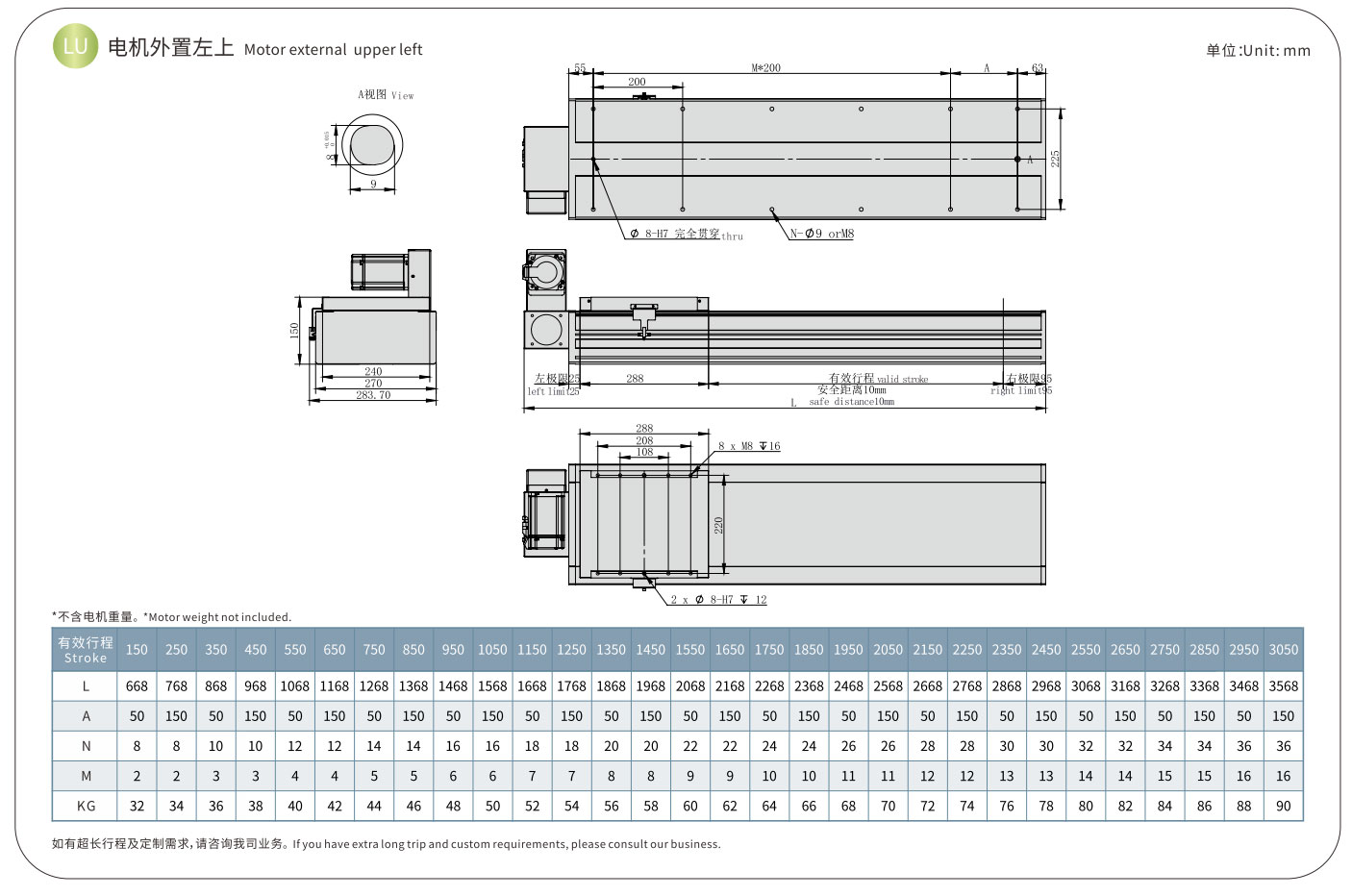
Schlag: 100 – 3050 mm
Max Geschwindegkeet: 7000 mm / s

1. Flaach Design, liicht Gesamtgewicht, manner Kombinatioun Héicht a besser Steifheit.
2. D'Struktur ass optimiséiert, d'Präzisioun ass besser, an de Feeler, deen duerch Montage vun Multiple Accessoiren verursaacht gëtt, gëtt reduzéiert.
3. D'Versammlung ass Zäit spueren, Aarbechtsspueren a praktesch. Et ass net néideg den Aluminiumdeckel ze läschen fir d'Kupplung oder de Modul ze installéieren.
4. Ënnerhalt ass einfach, zwou Säiten vum Modul sinn mat Ueleg Sprëtz Lächer equipéiert, an de Cover muss net geläscht ginn.







Méi Produkter

ONB Serie Rimm ugedriwwen Linearschrëft Modul Halschent zougemaach

OCB Serie Rimm ugedriwwen Linear Modul komplett enk ...

ONB-F Serie Rimm ugedriwwen Linear Modul Extern ...

HNB-E Serie Riemgedriwwen Linearaktuatoren Hallef ...

HNB Serie Rimm ugedriwwen Linearschrëft Modul Halschent zougemaach










