




KNR-E Series Axis Unius Robot Aluminium Base

Exemplar Selector
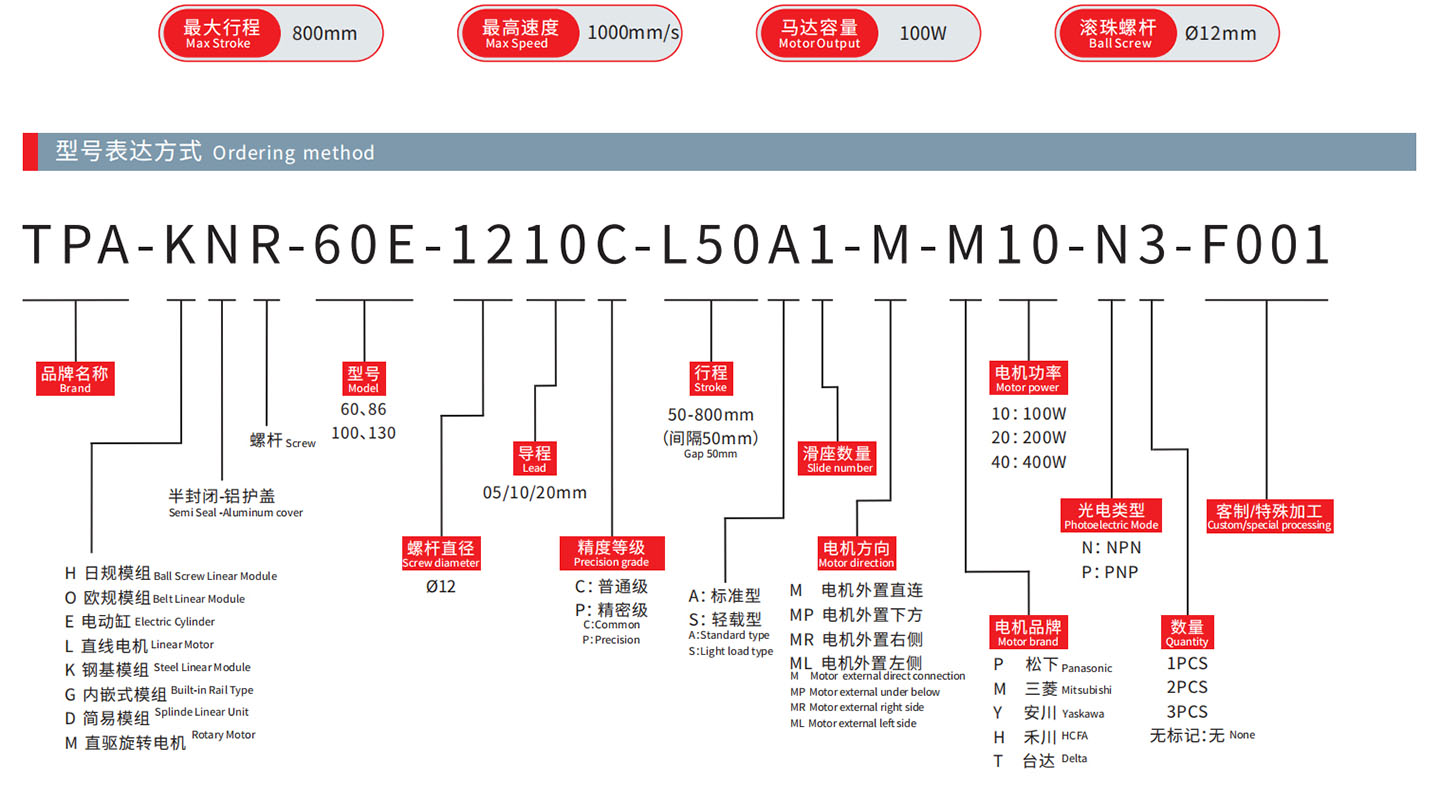
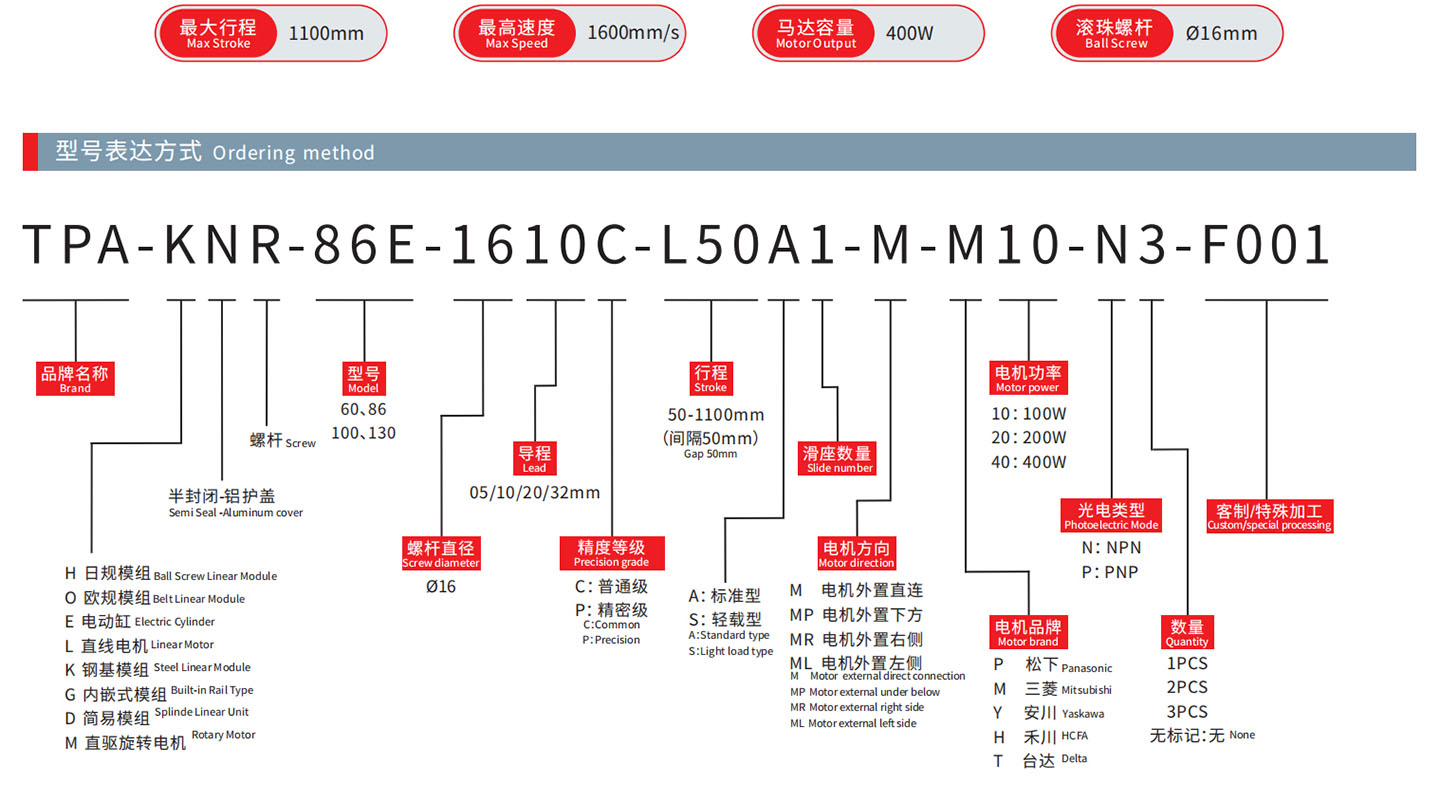
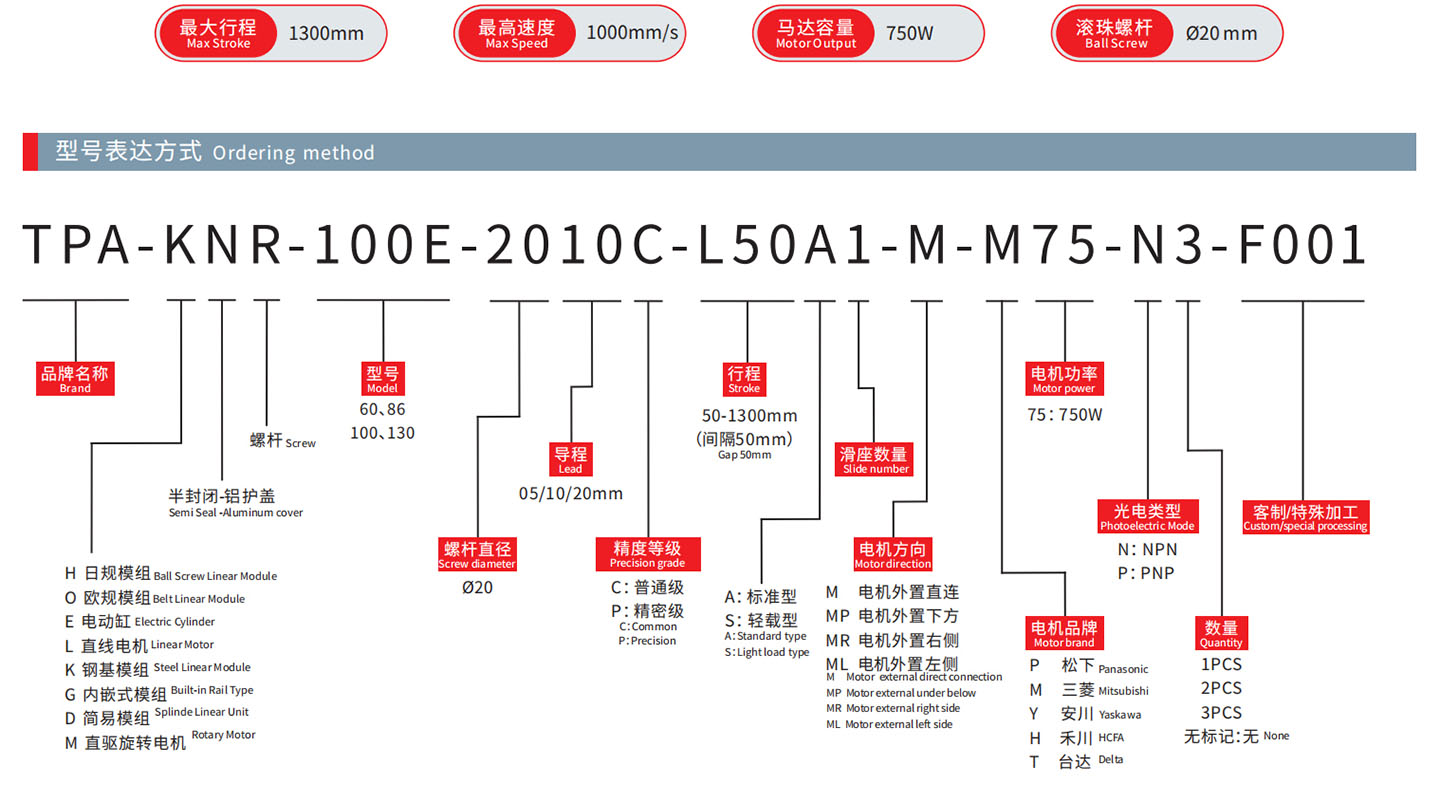
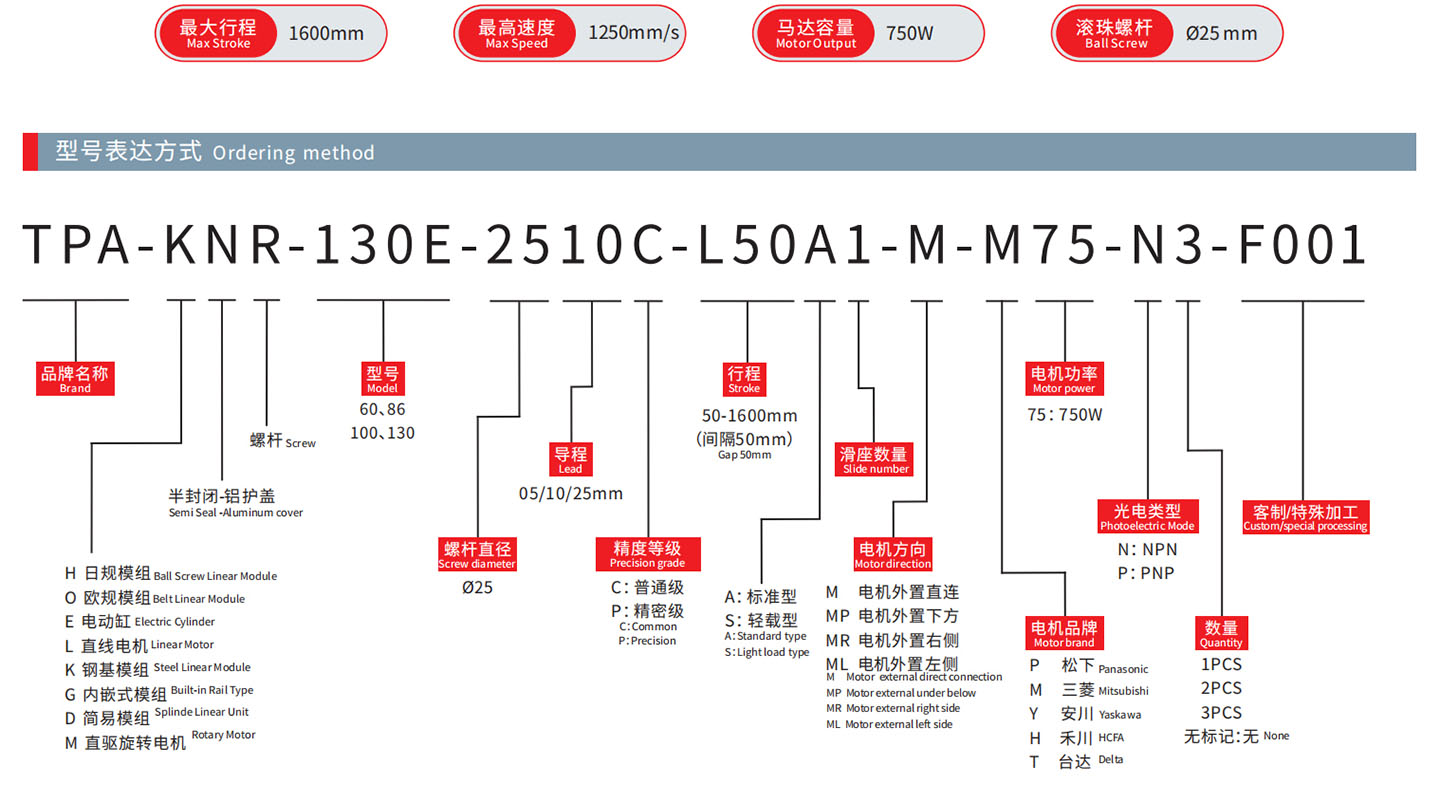
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
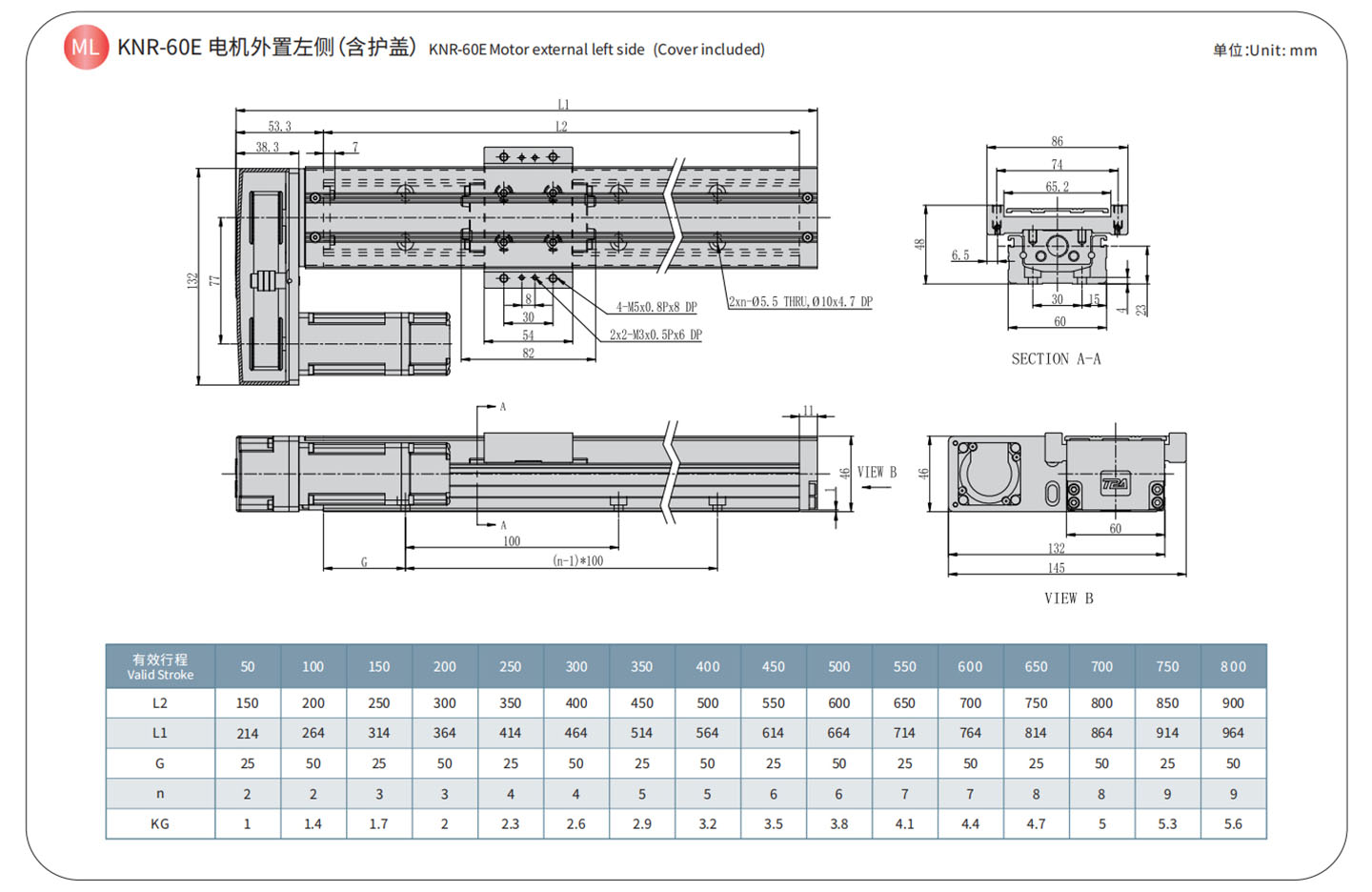
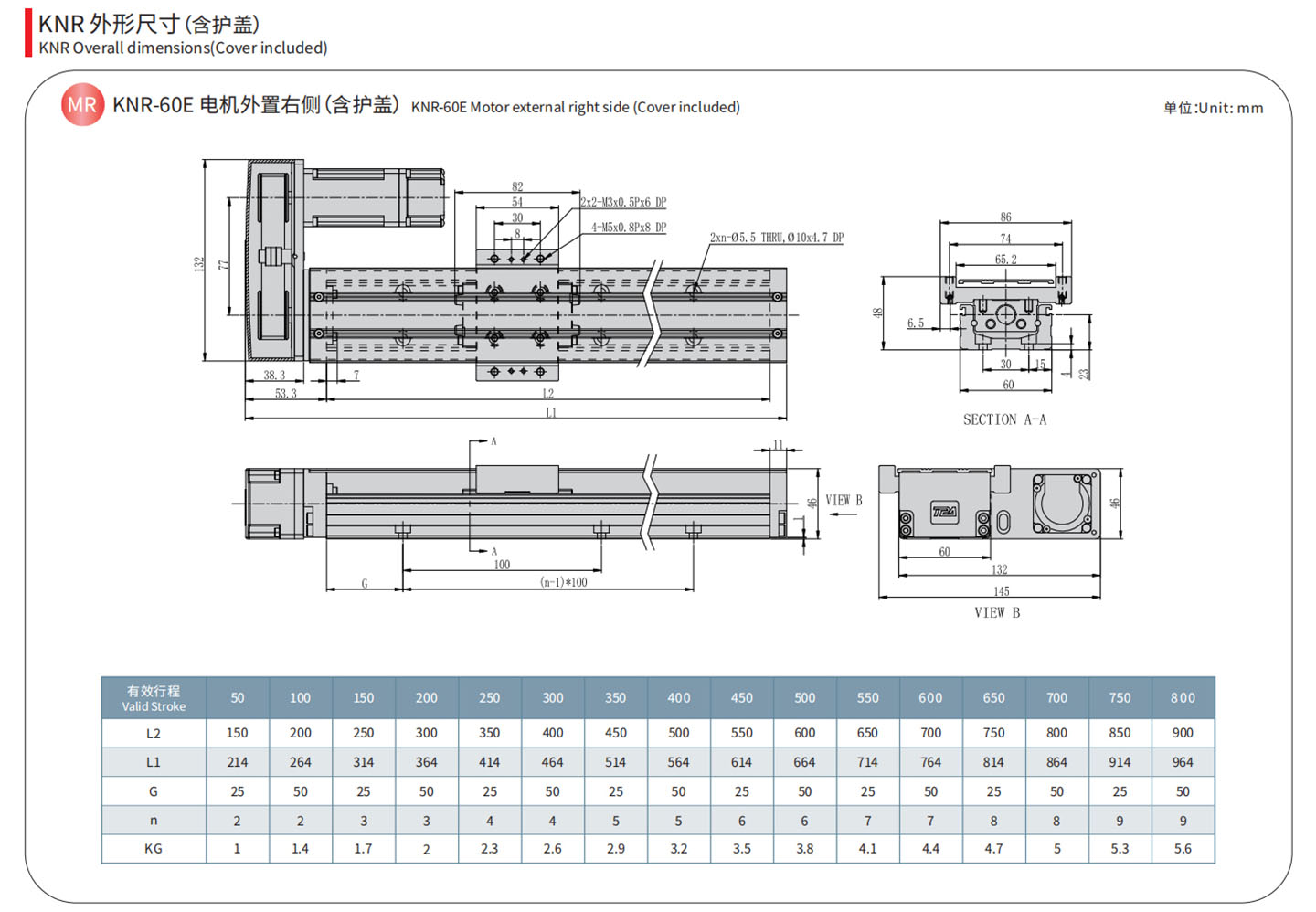
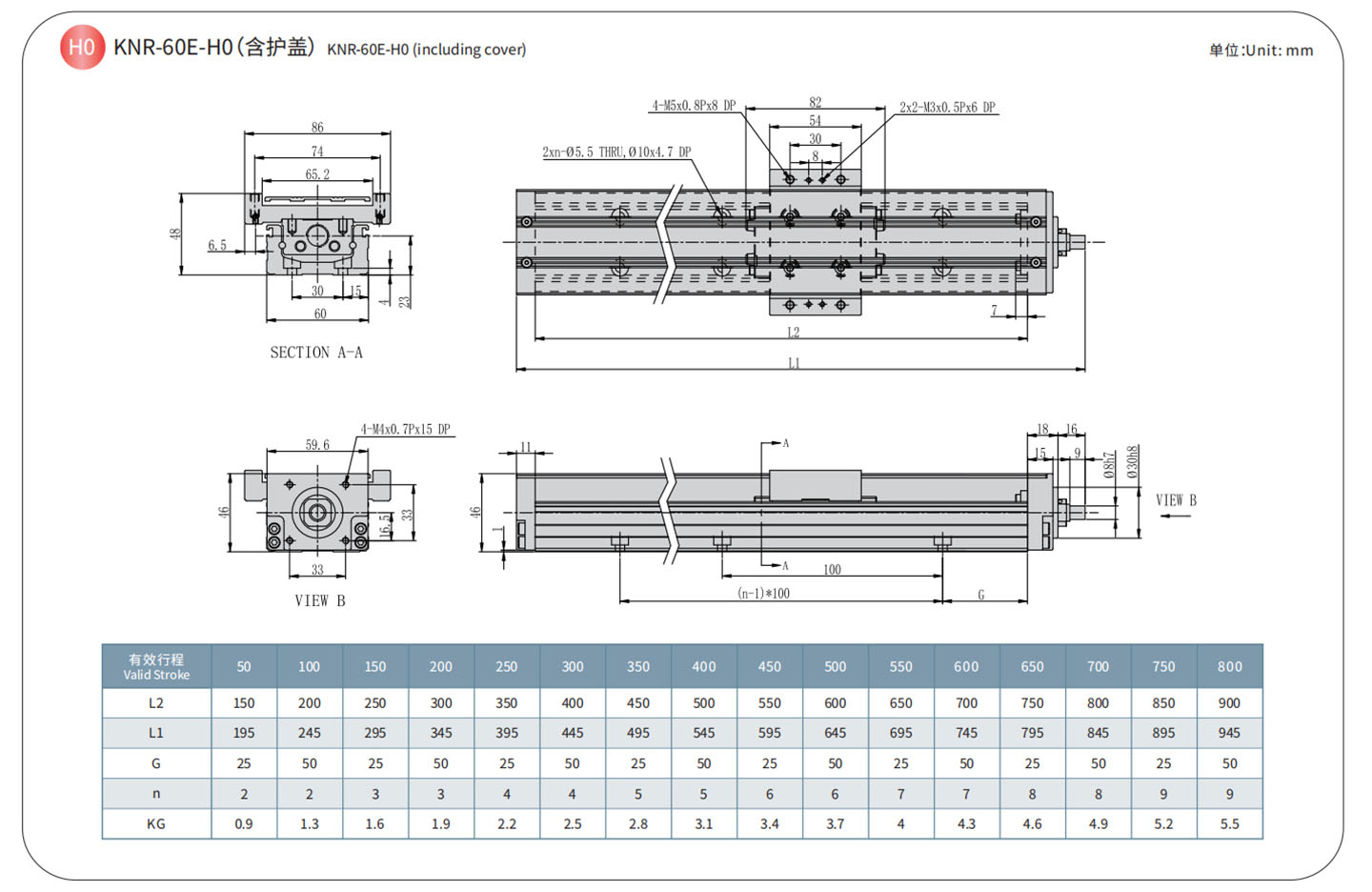
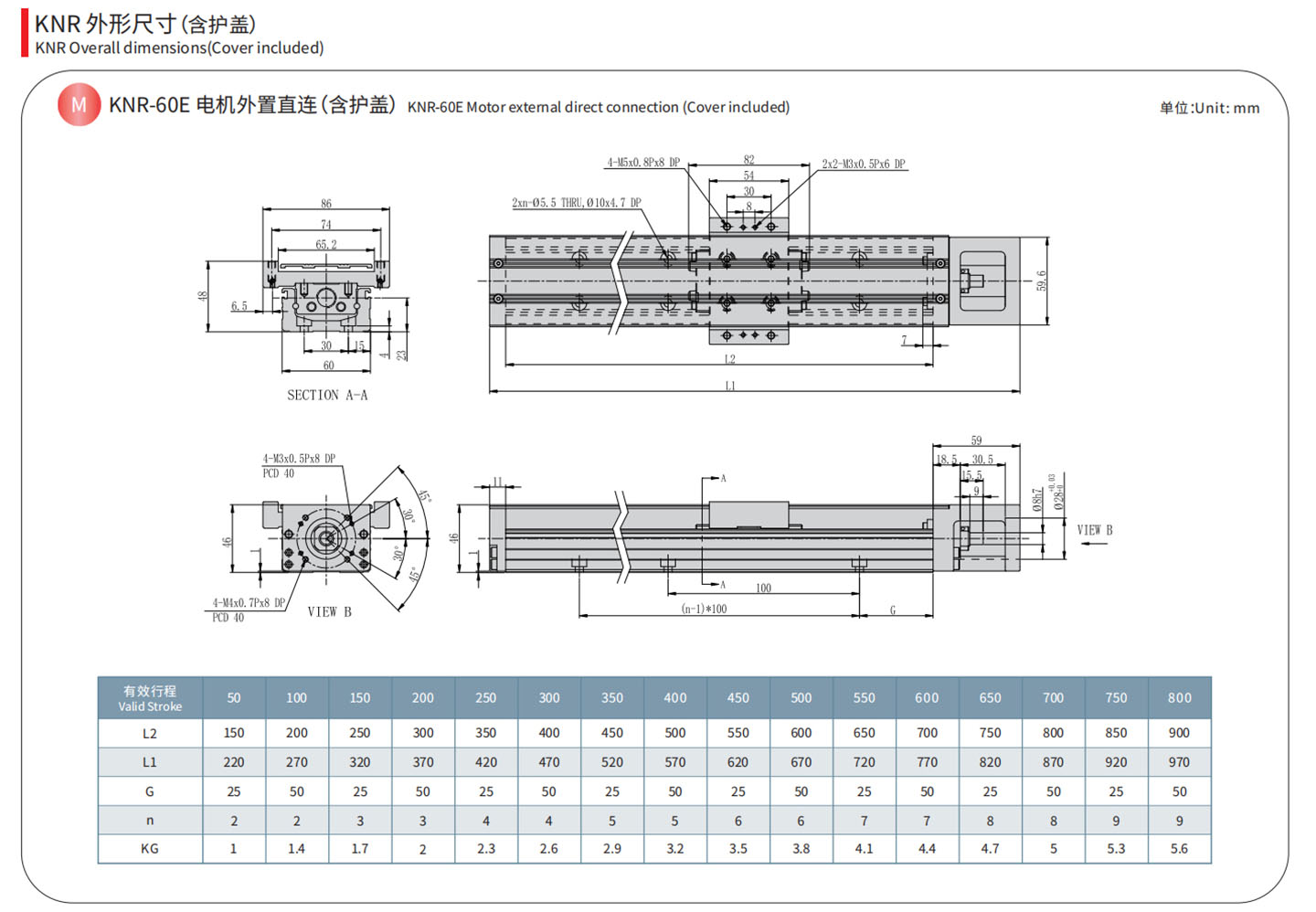
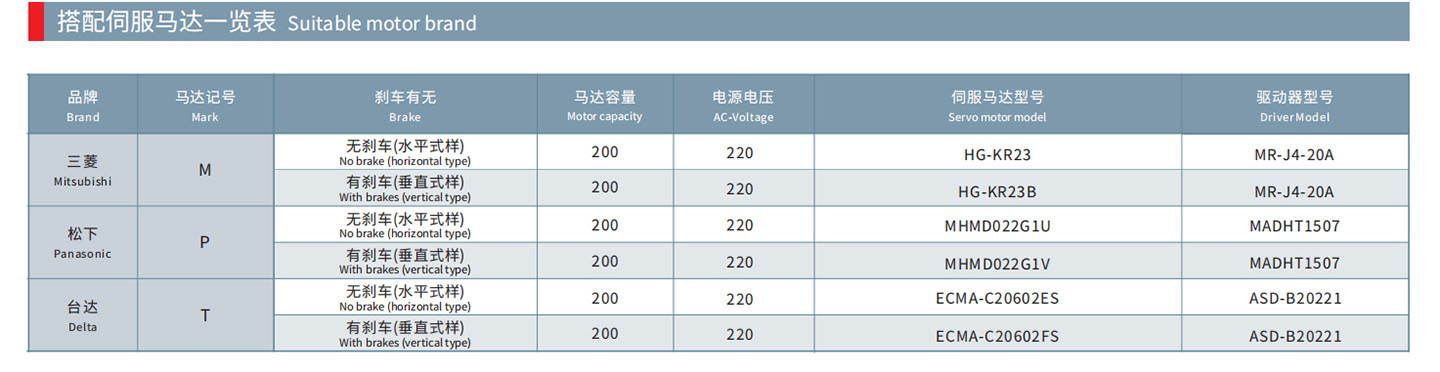
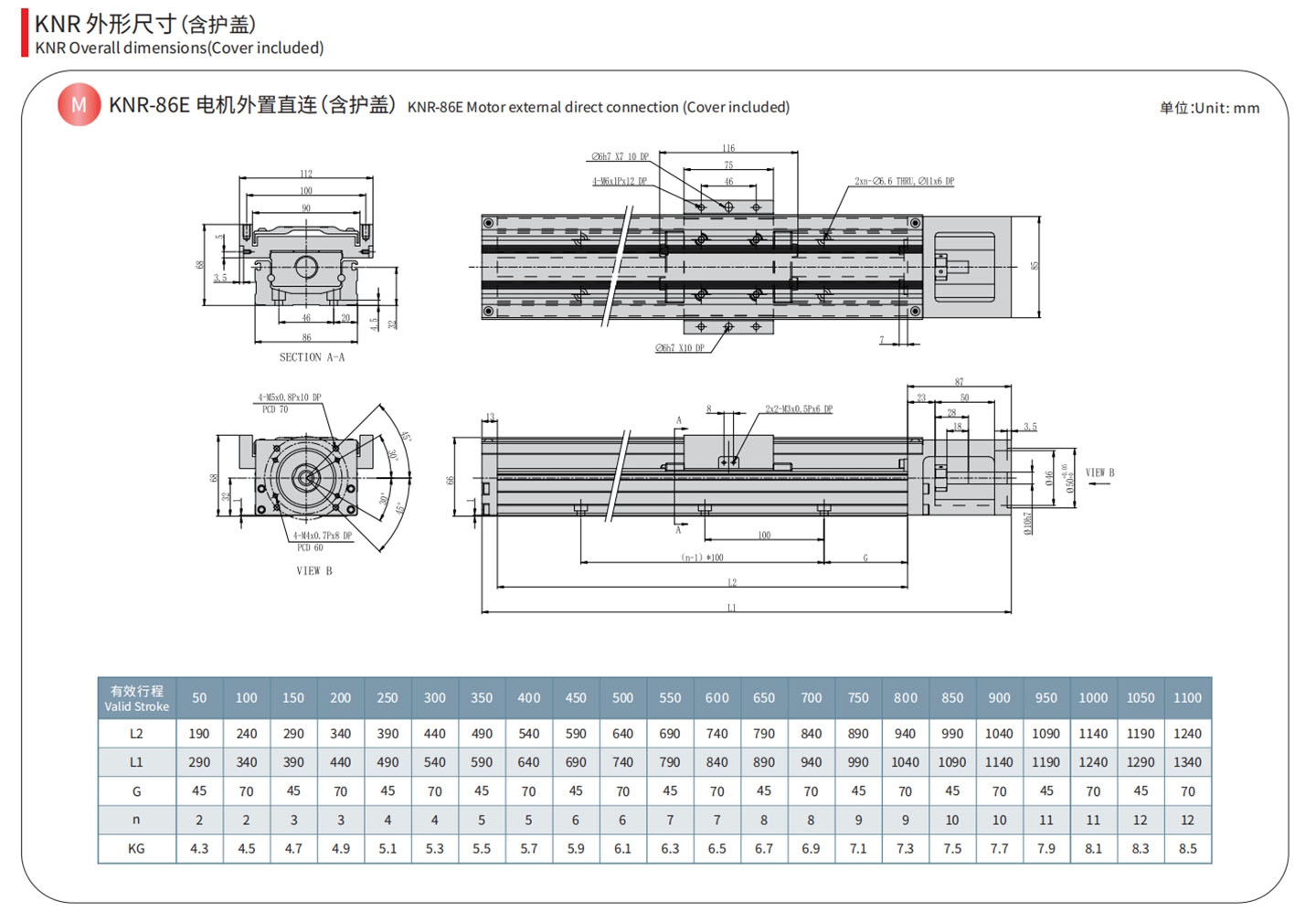
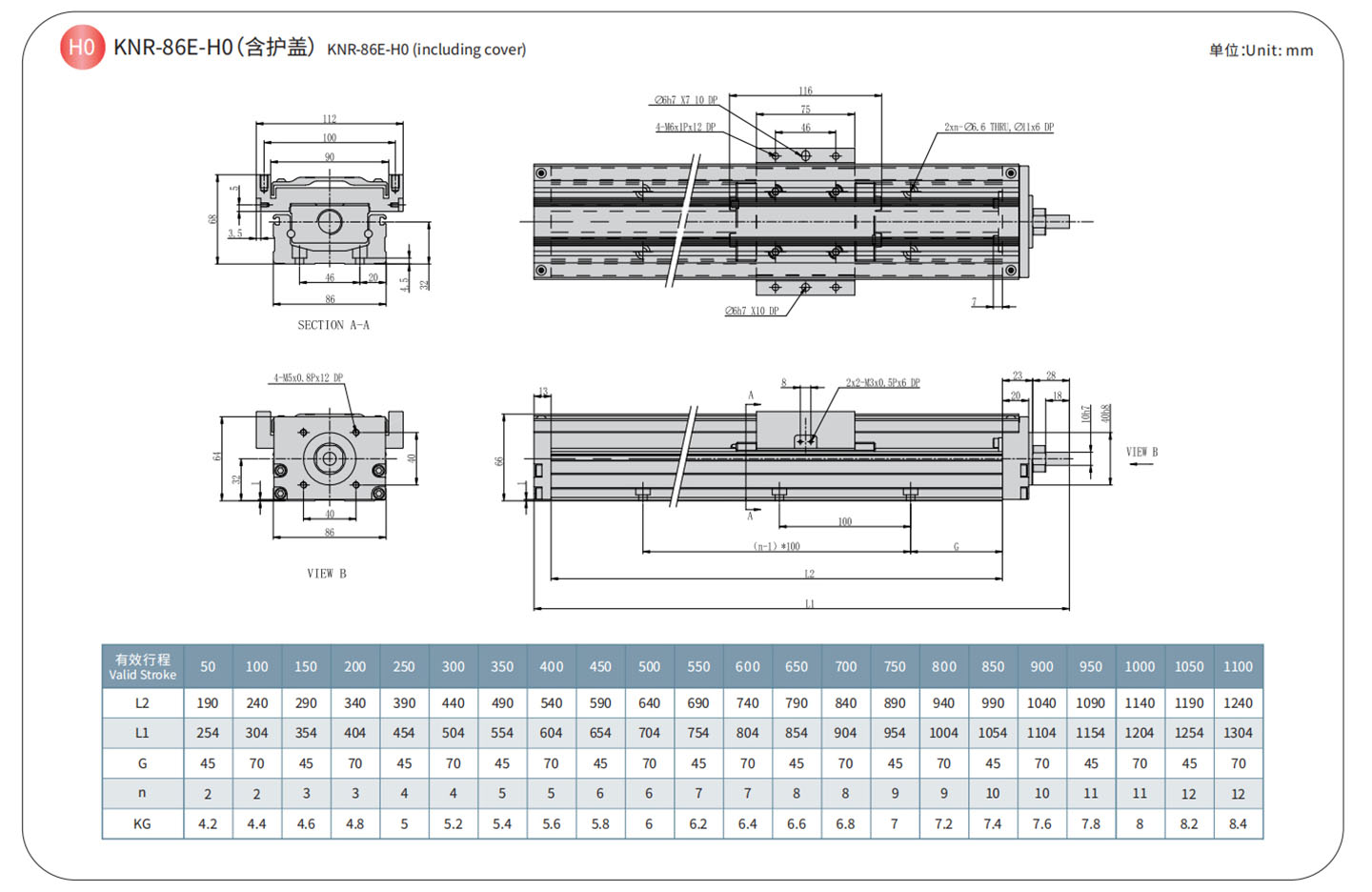
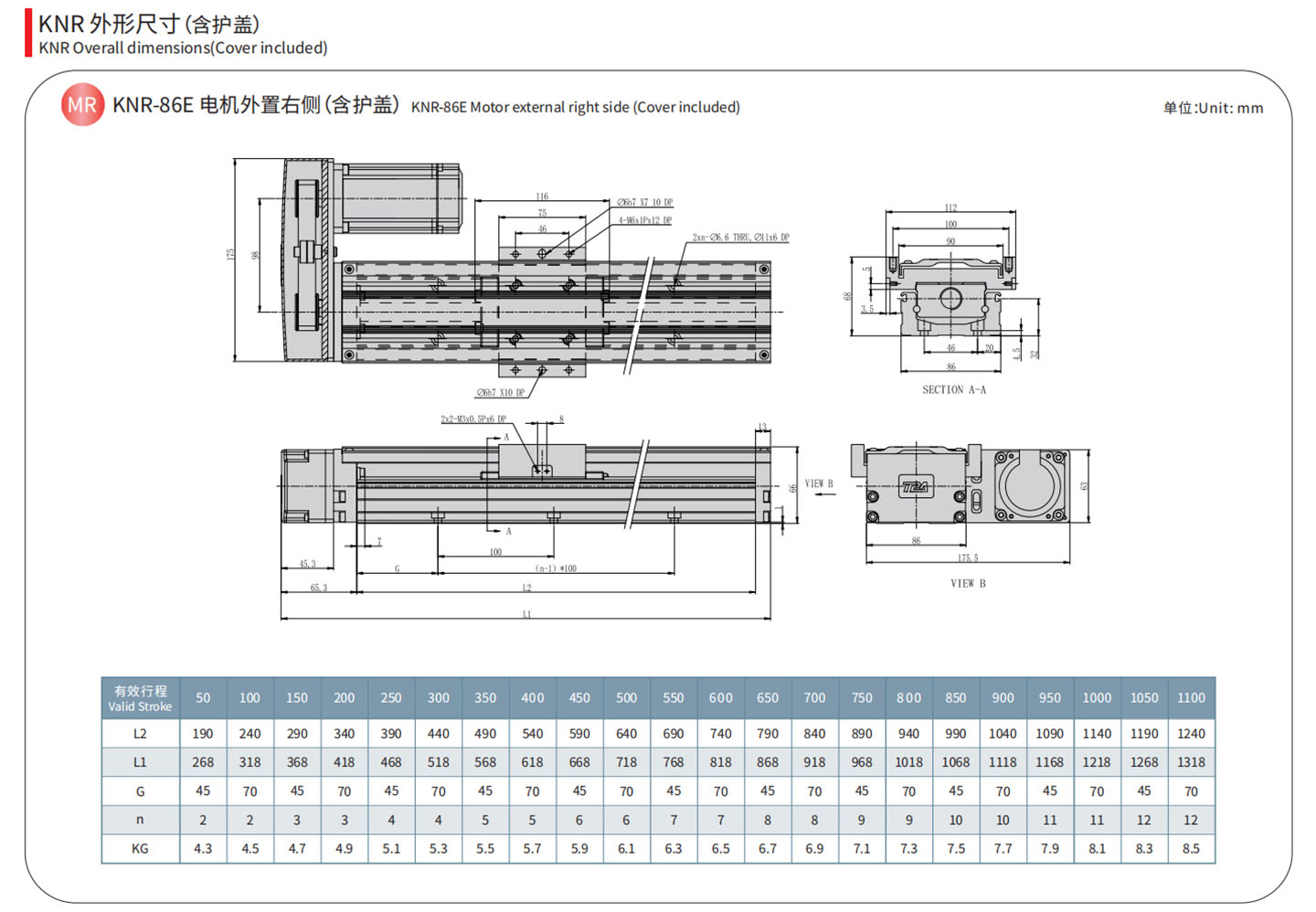
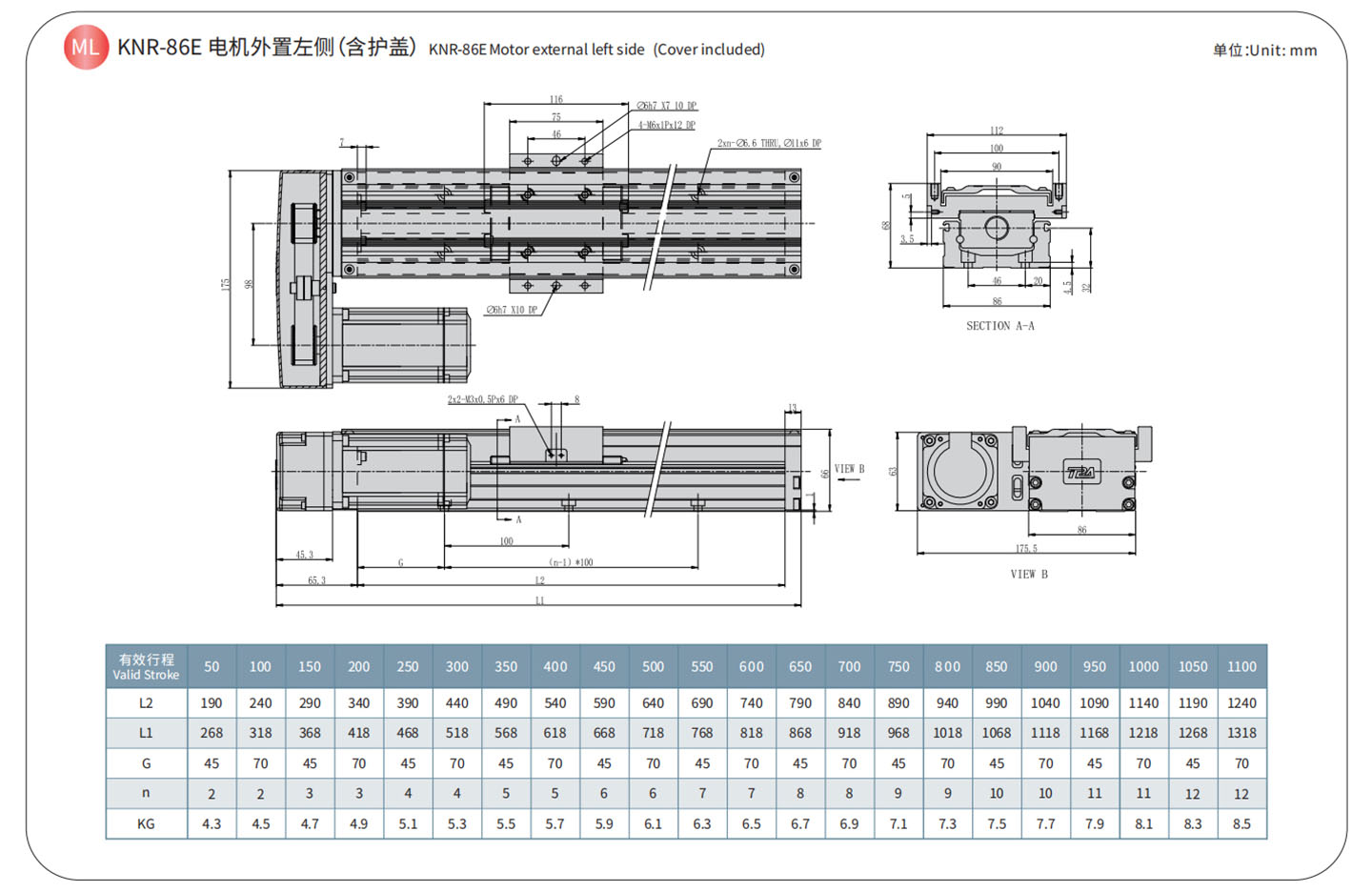
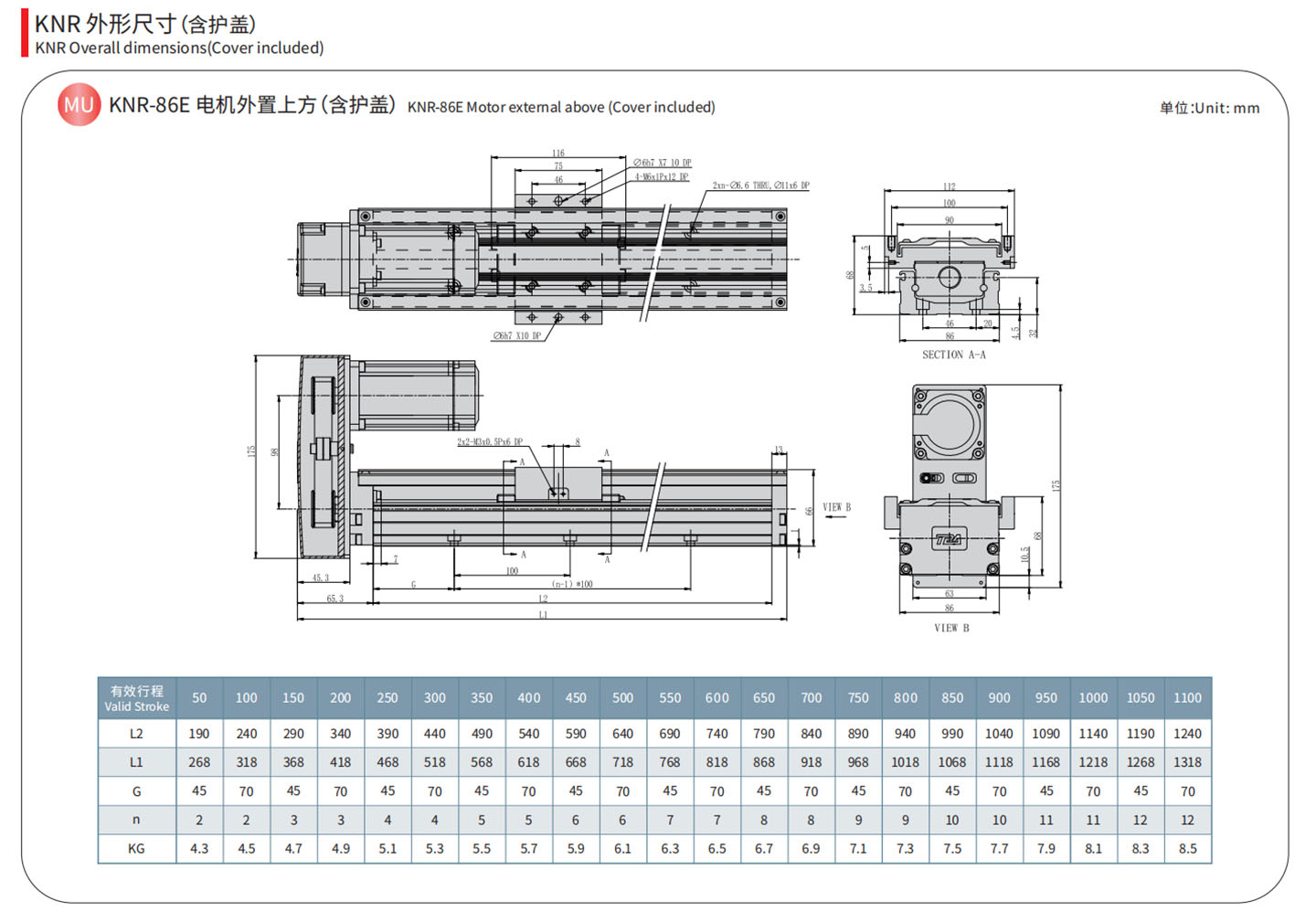
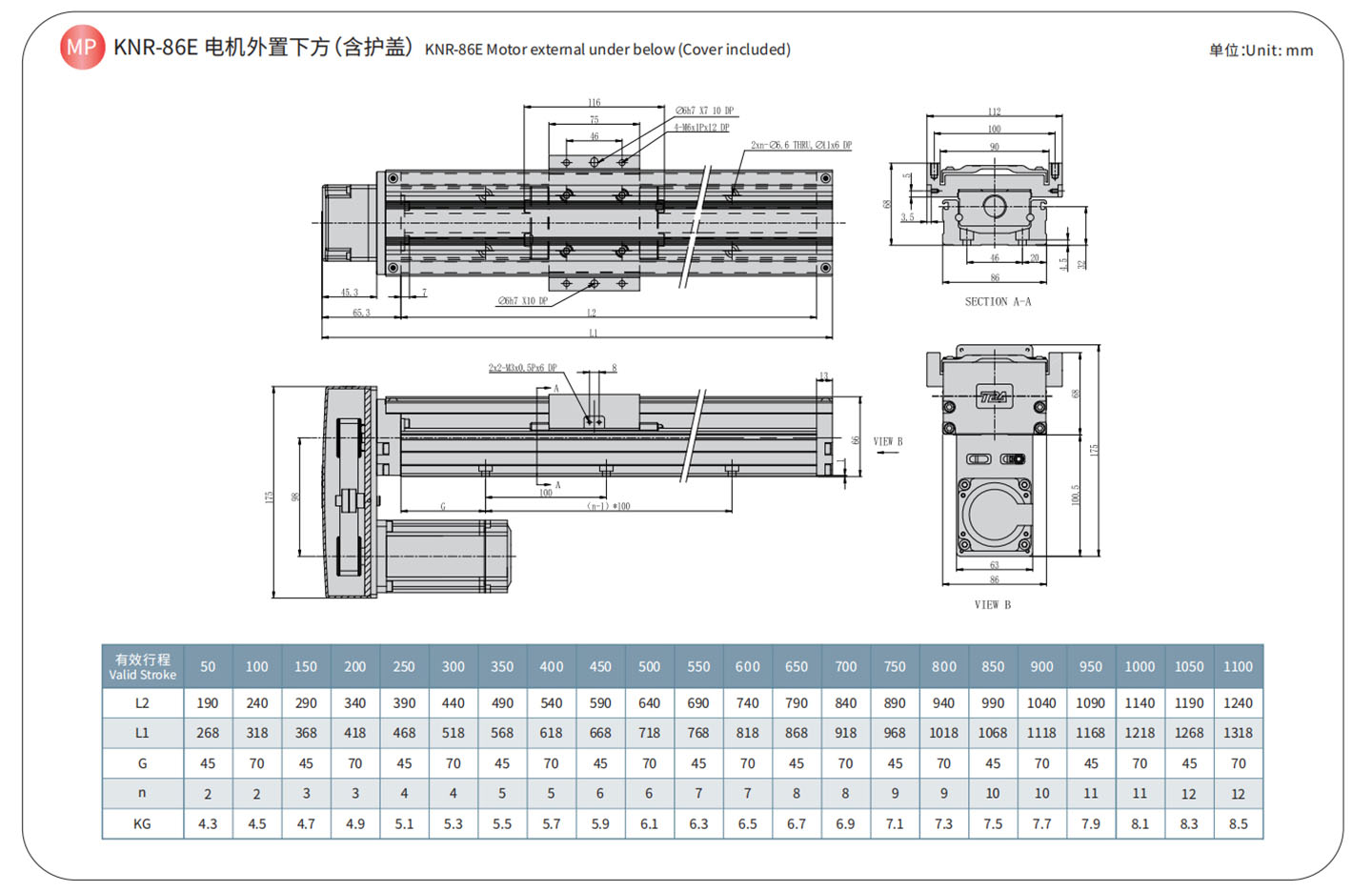
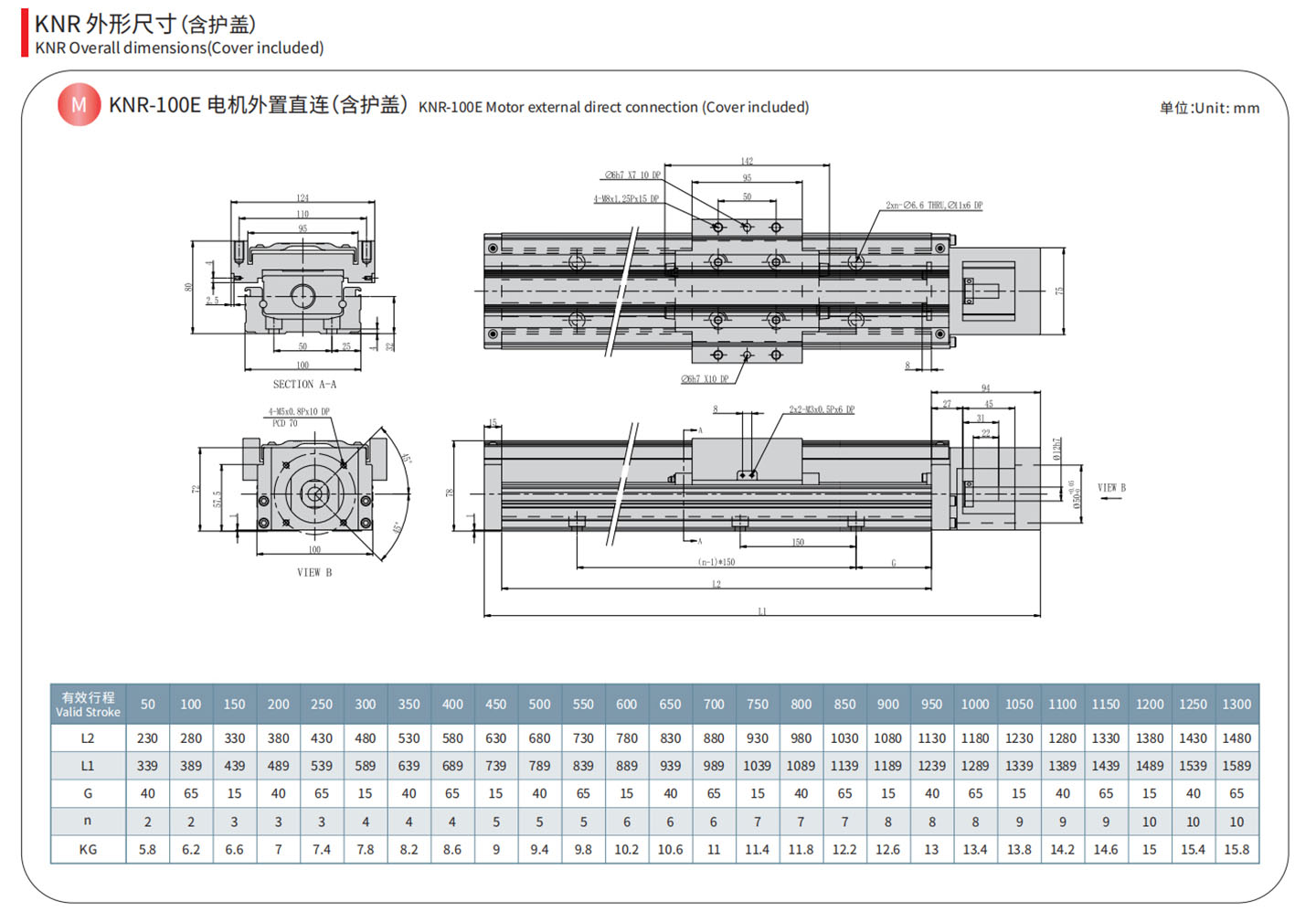
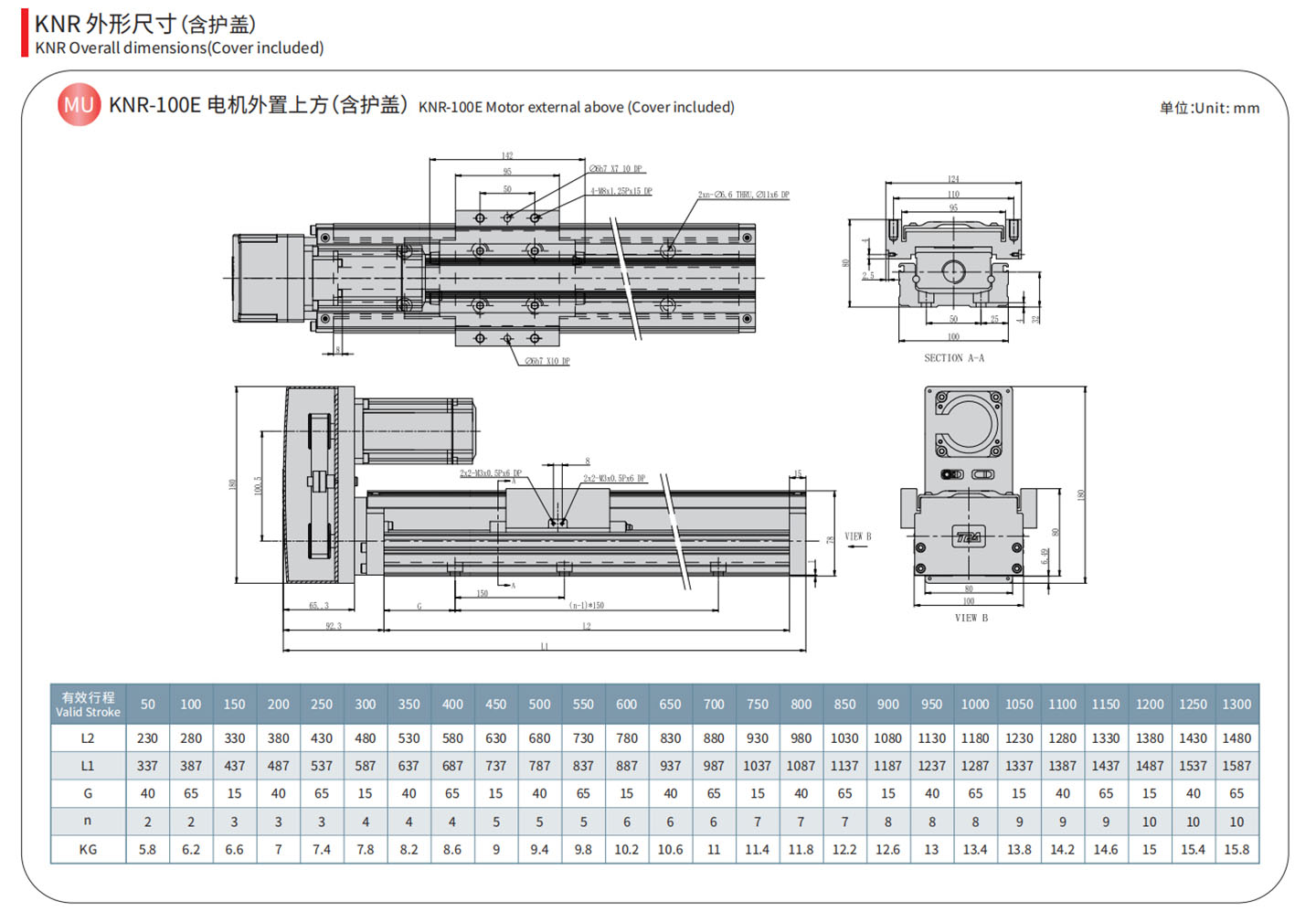
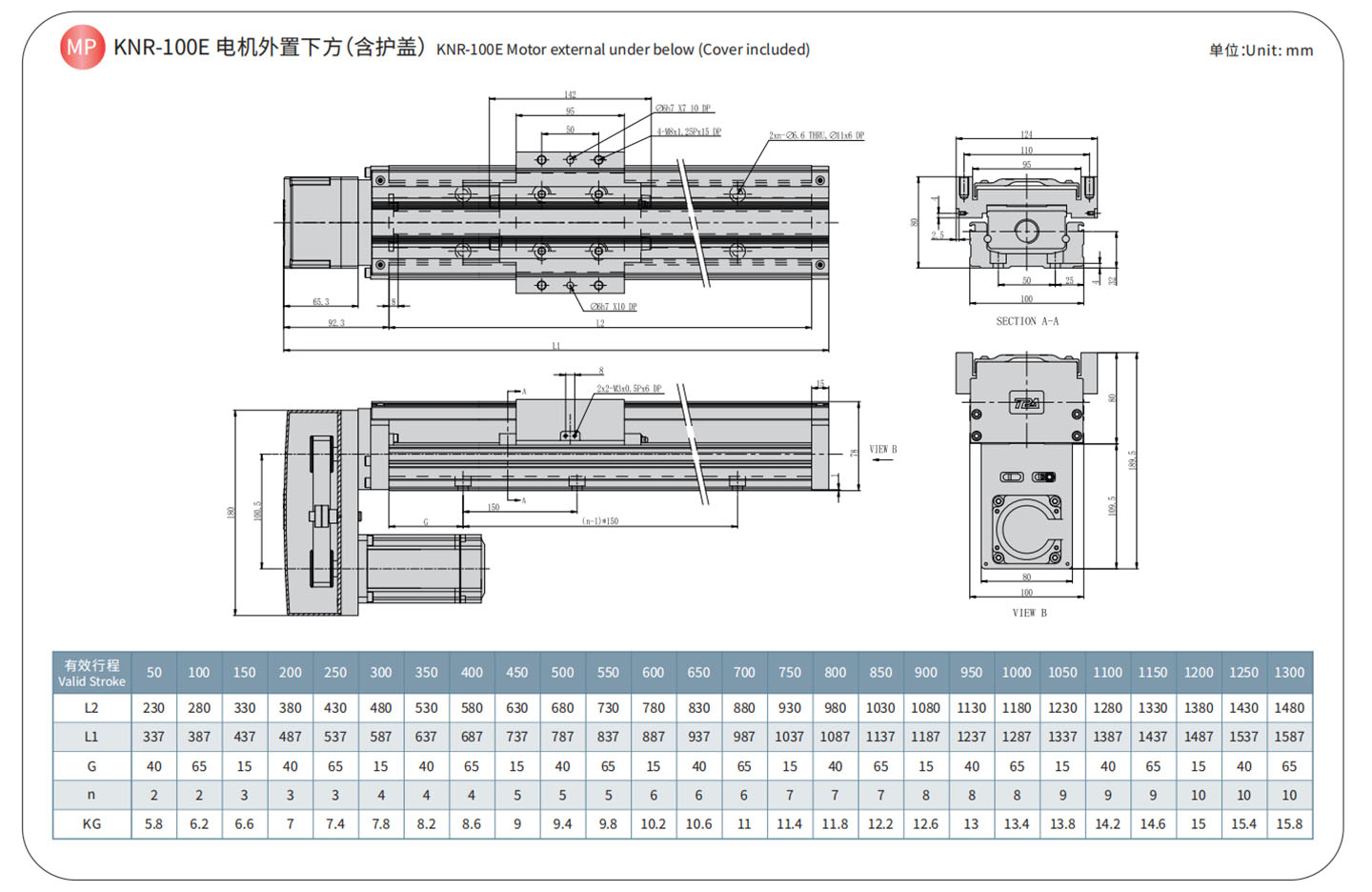
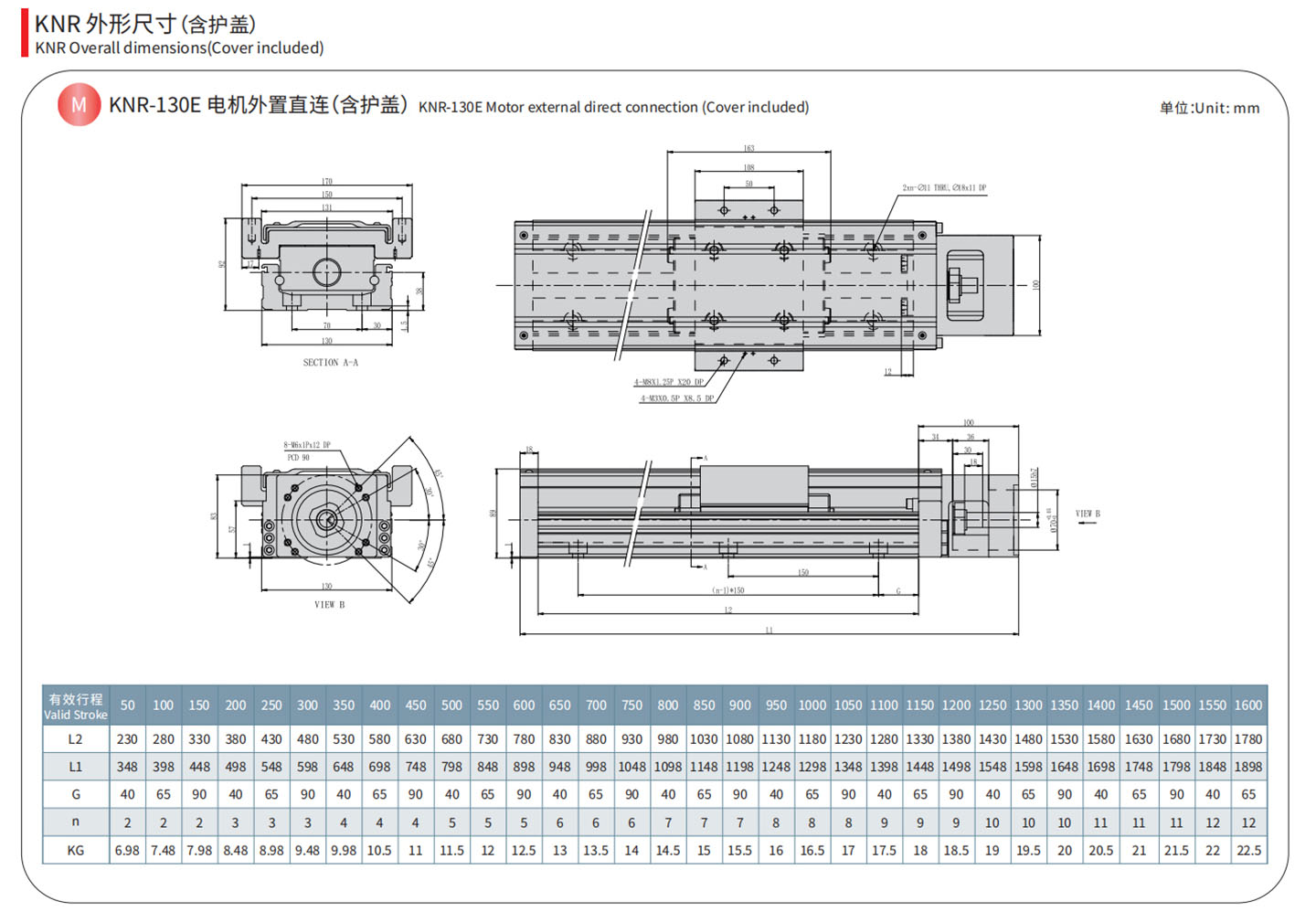
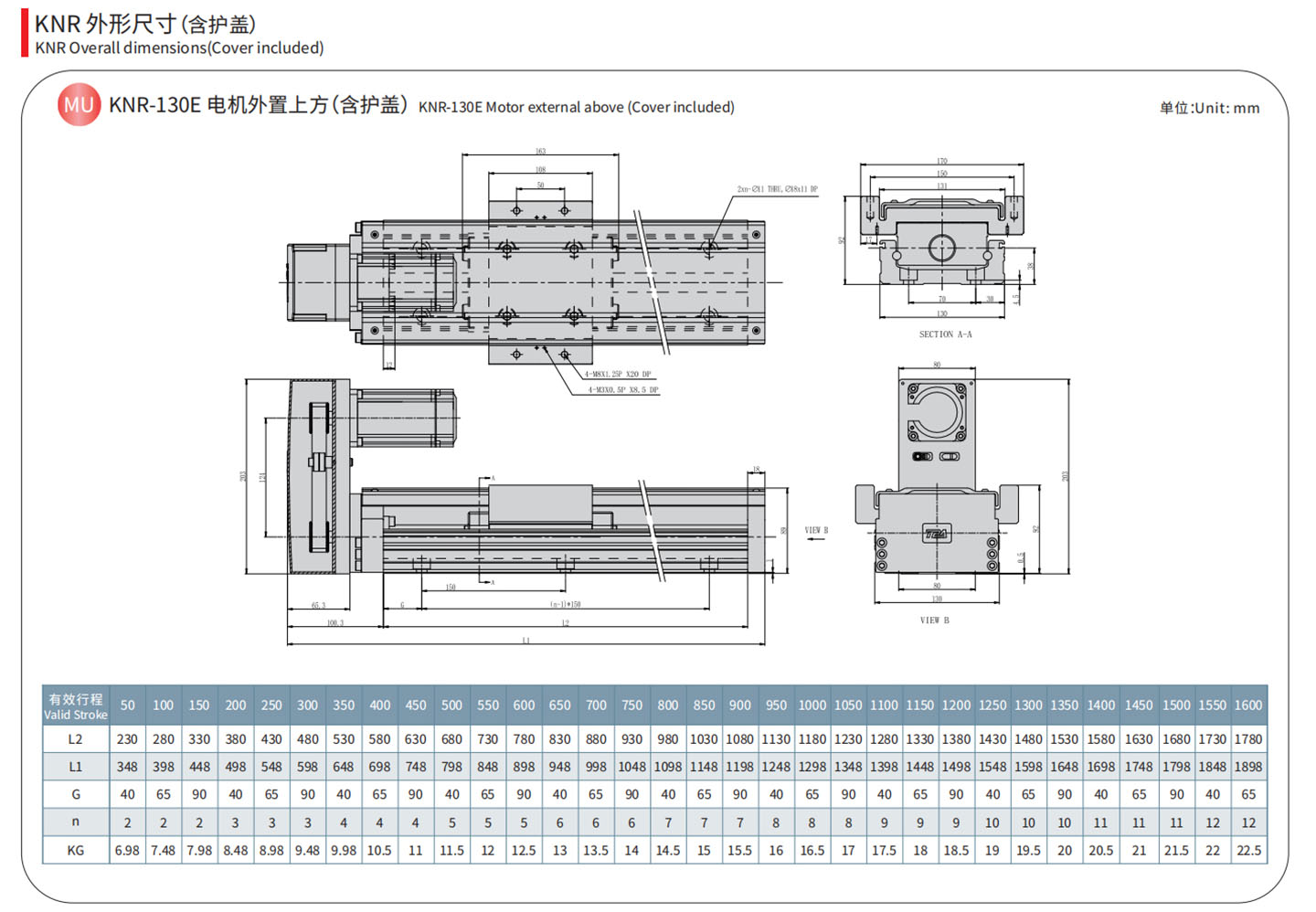
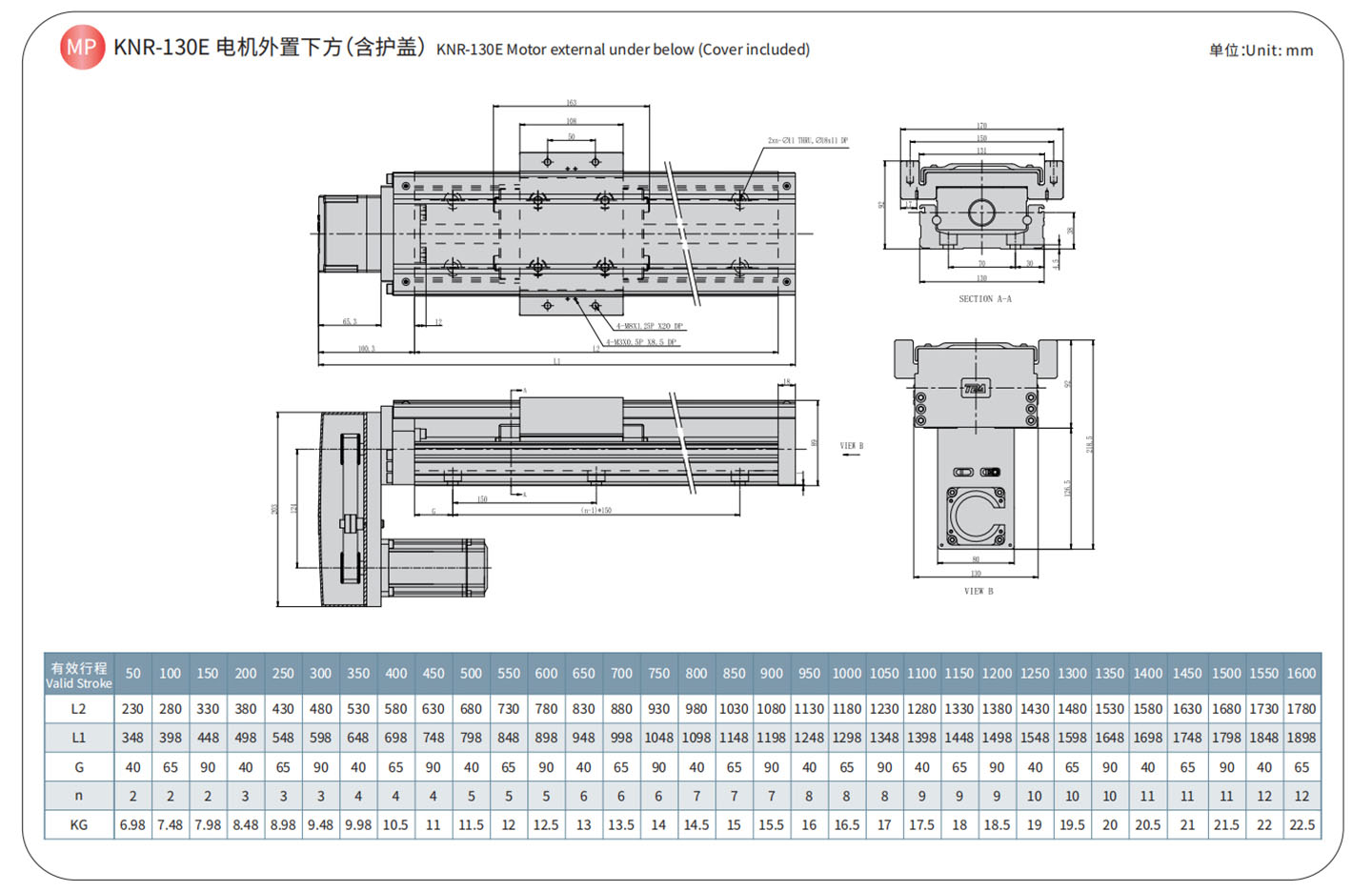
Unius axis roboti KK Series, a TPA ROBOT evoluta, in vestigio chalybe U-formato partim obdurato utitur, ad vires roboti significanter augendas et capacitatem oneris. Ob varias ambitus tres species robot seriei linearis KSR, KNR et KFR habemus, secundum genus operculi adhibitae.
Systema enim reditus inter semita et lapsus, contactus superficies inter pilam et pilam sulcus, consilium 2-row Goethe dens cum angulo contactuum 45 graduum adhibet, qui bracchium roboti axem aequalem facultatem in quattuor directionibus facere potest. .
Eodem tempore, summus praecisio globulus cochleae ad structuram transmissionis adhibetur, et semita U informibus cum consilio optimized cooperatur, ut robot KK axis singularem praecisionem habeat, et eius repetita positio accuratio ±0.003mm pervenire possit.
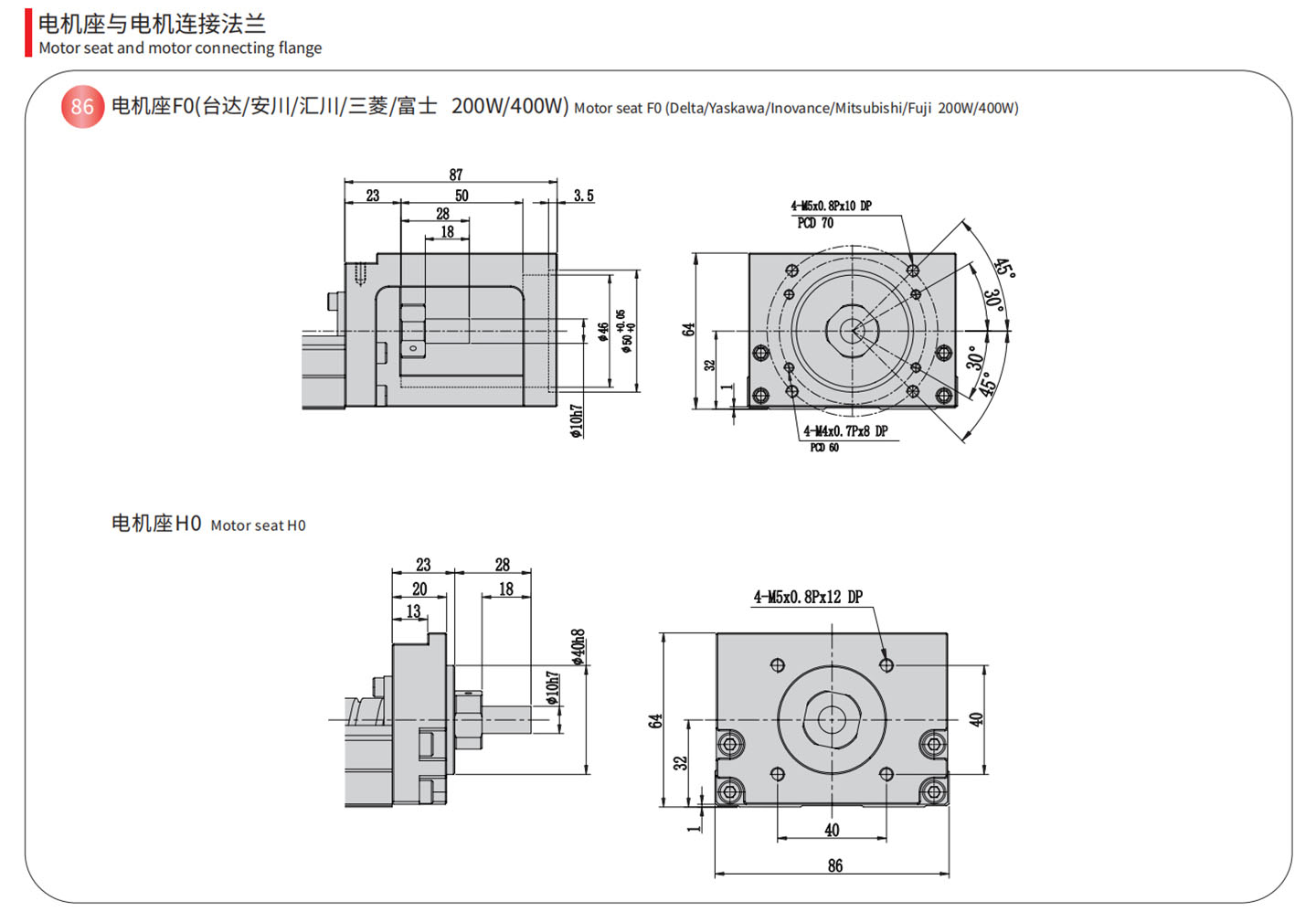
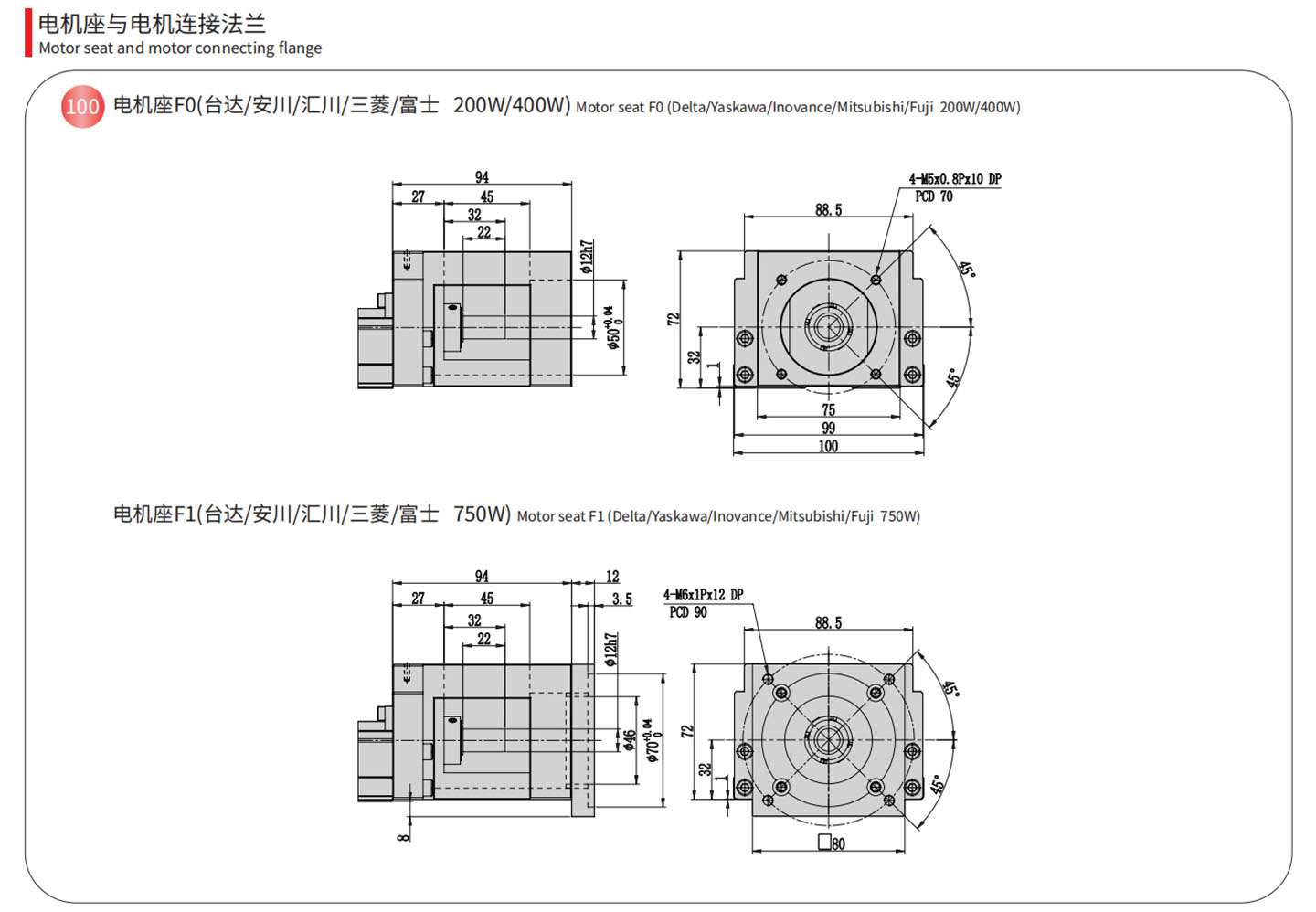
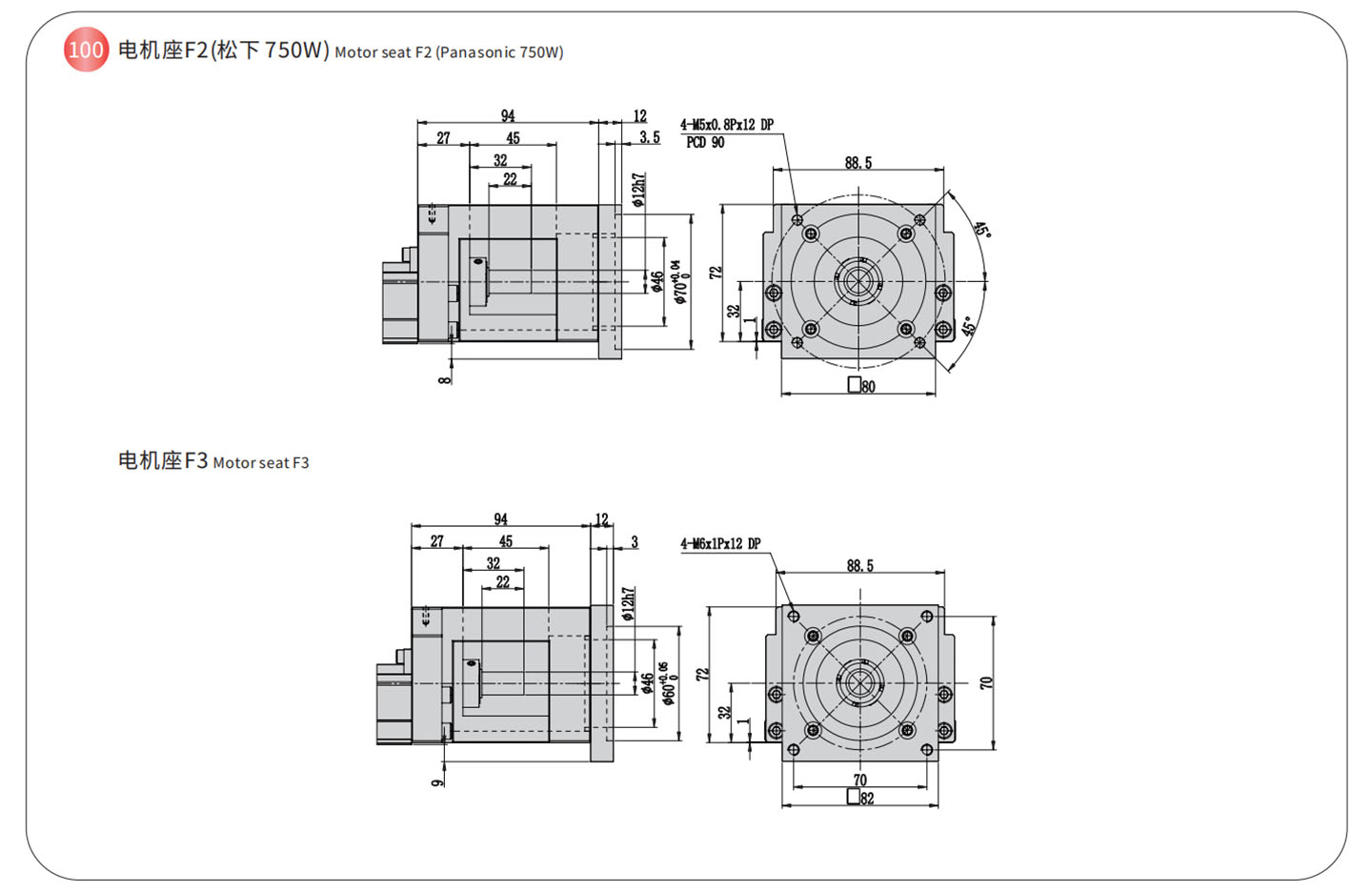
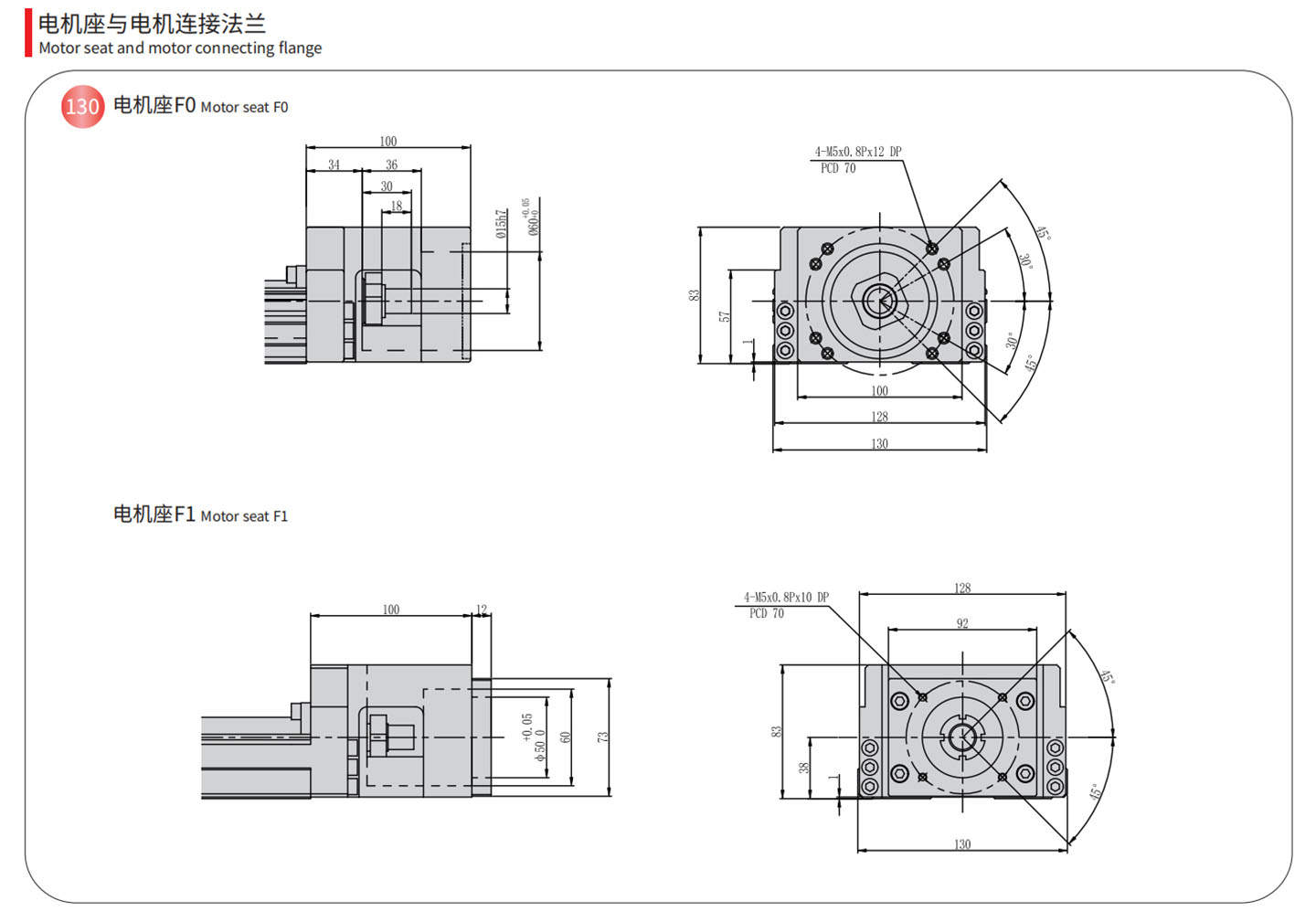
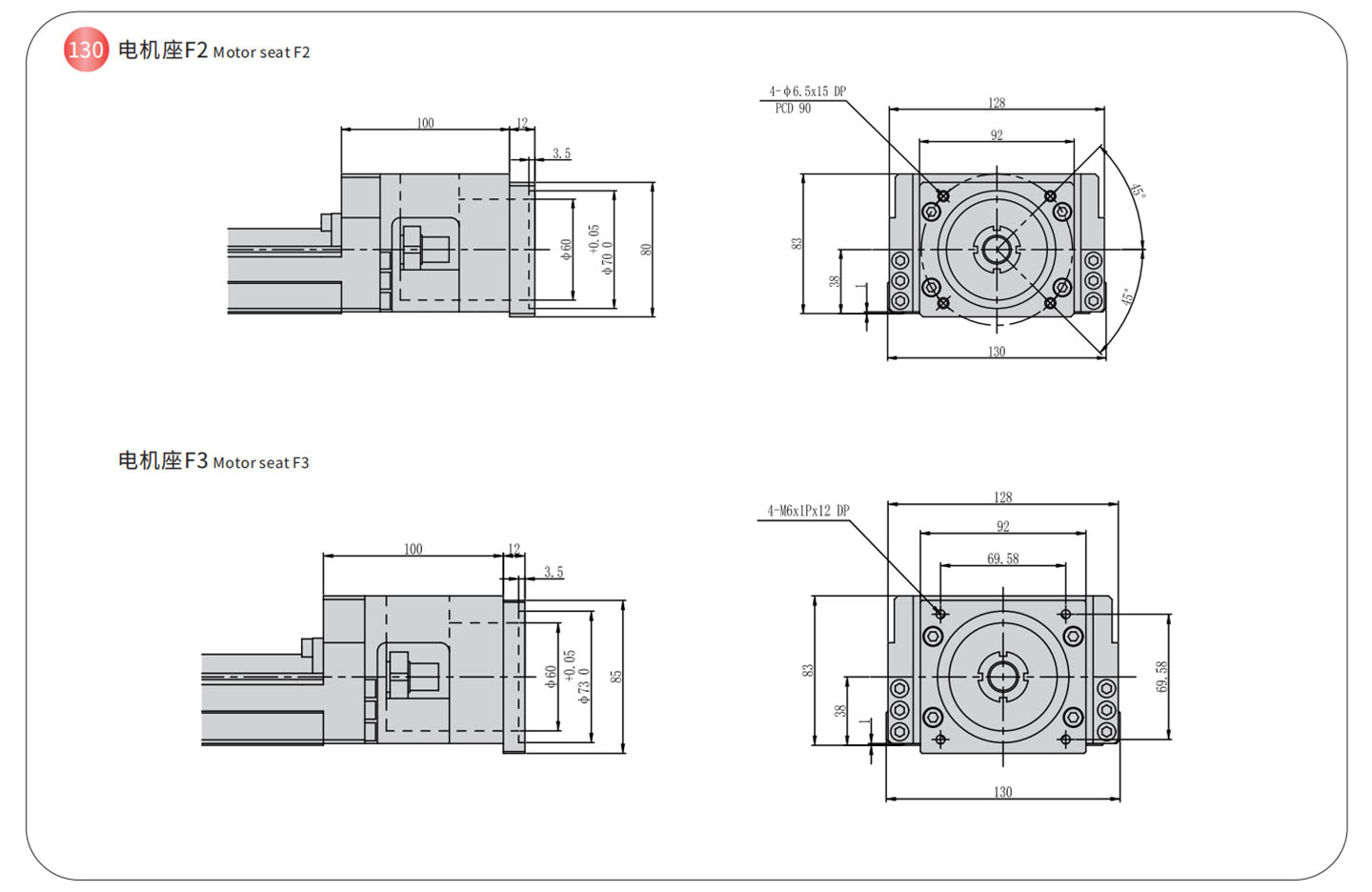
Sub eodem onere condiciones, unus noster axis roboti KK Series minor est magnitudine, vexillum foramina staminea in basi et lapsus ferreo praebemus, ac adaptor motor noster usque ad octo modos institutionis motorias praebere potest, id quod facile colligi potest. nulla ratio robotici cartesian. Ergo series unius axis robotorum KK late adhibentur in tractatione lagani pii, automataria dispensatio, industria FPD, industria medica automationis, instrumentorum praecisio mensurandi, mensa labens, tabulae lapsus linearis coordinatio industriae.
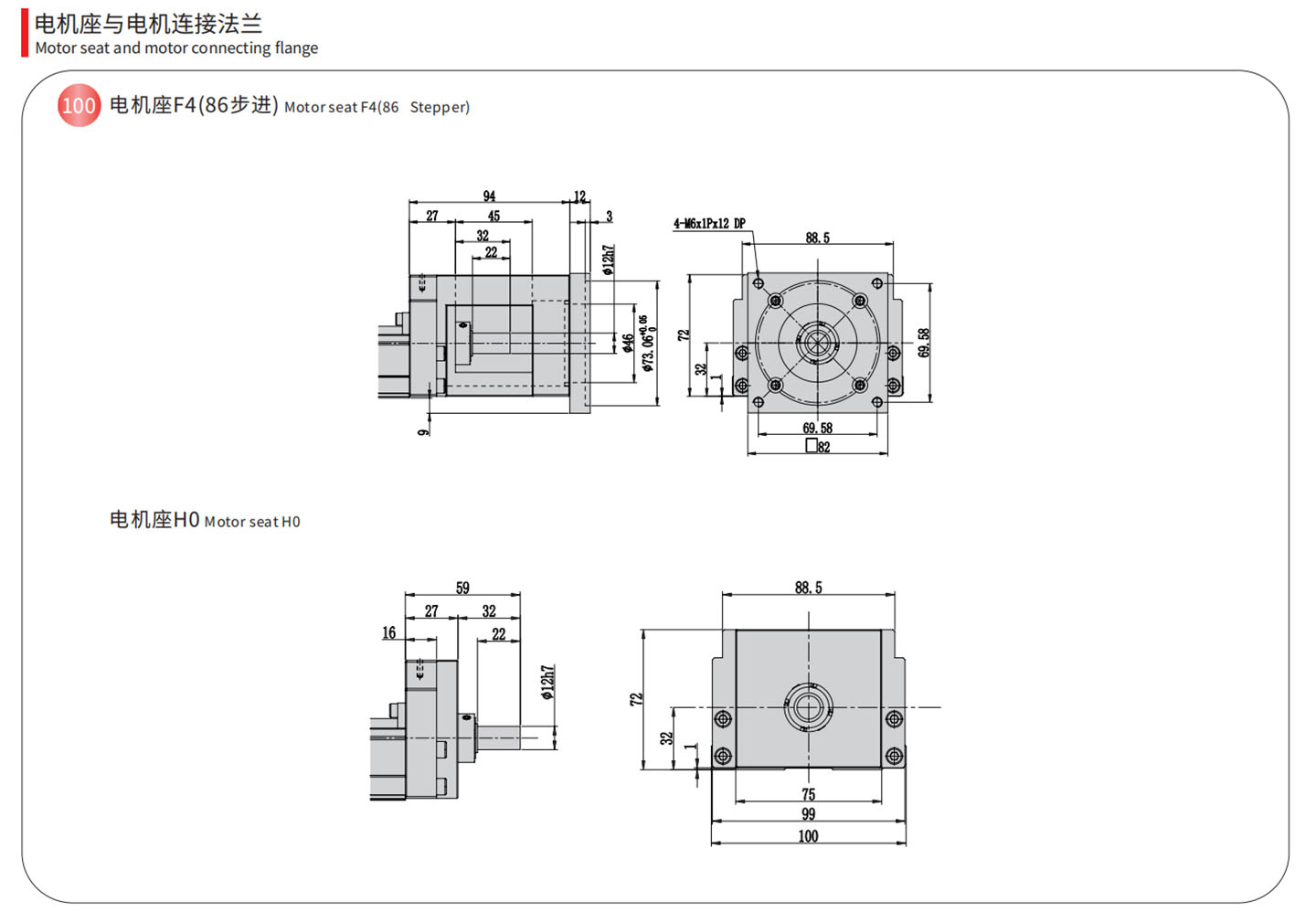
钢基铝内嵌

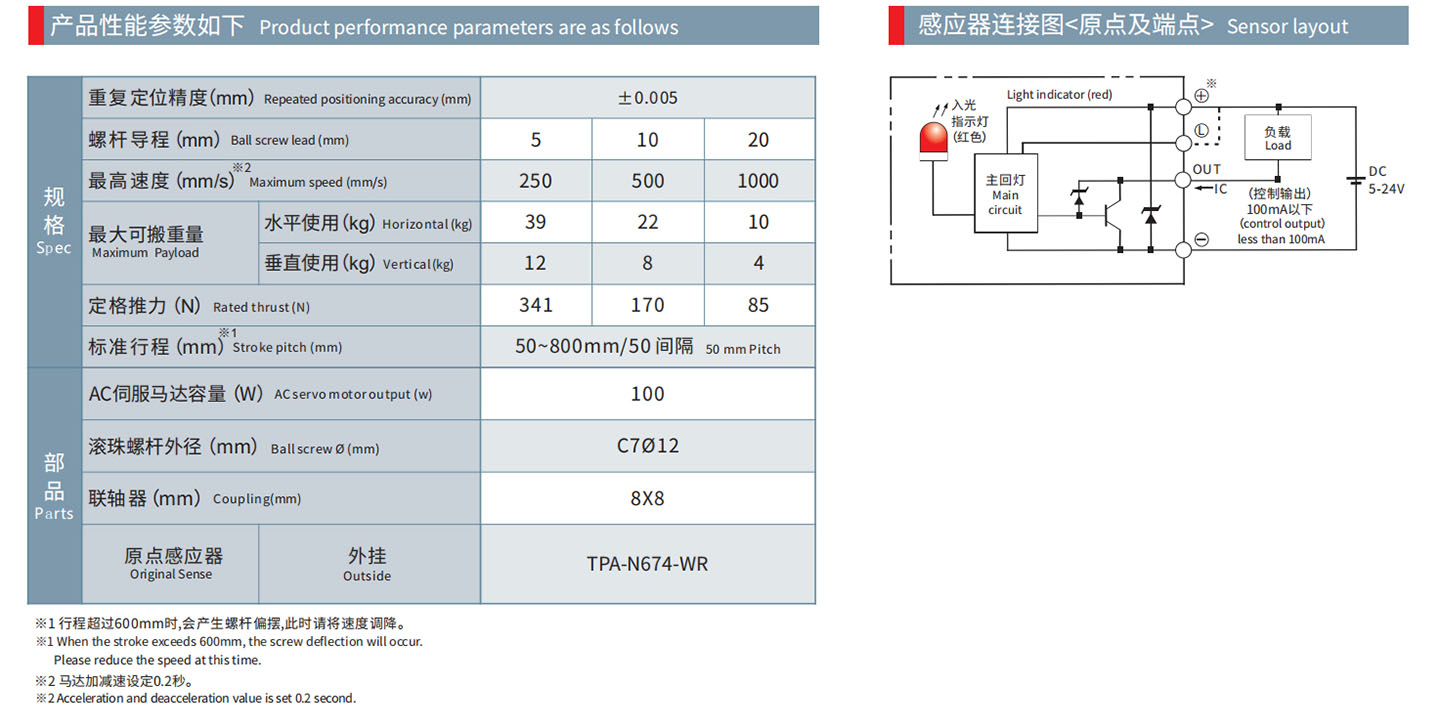
100

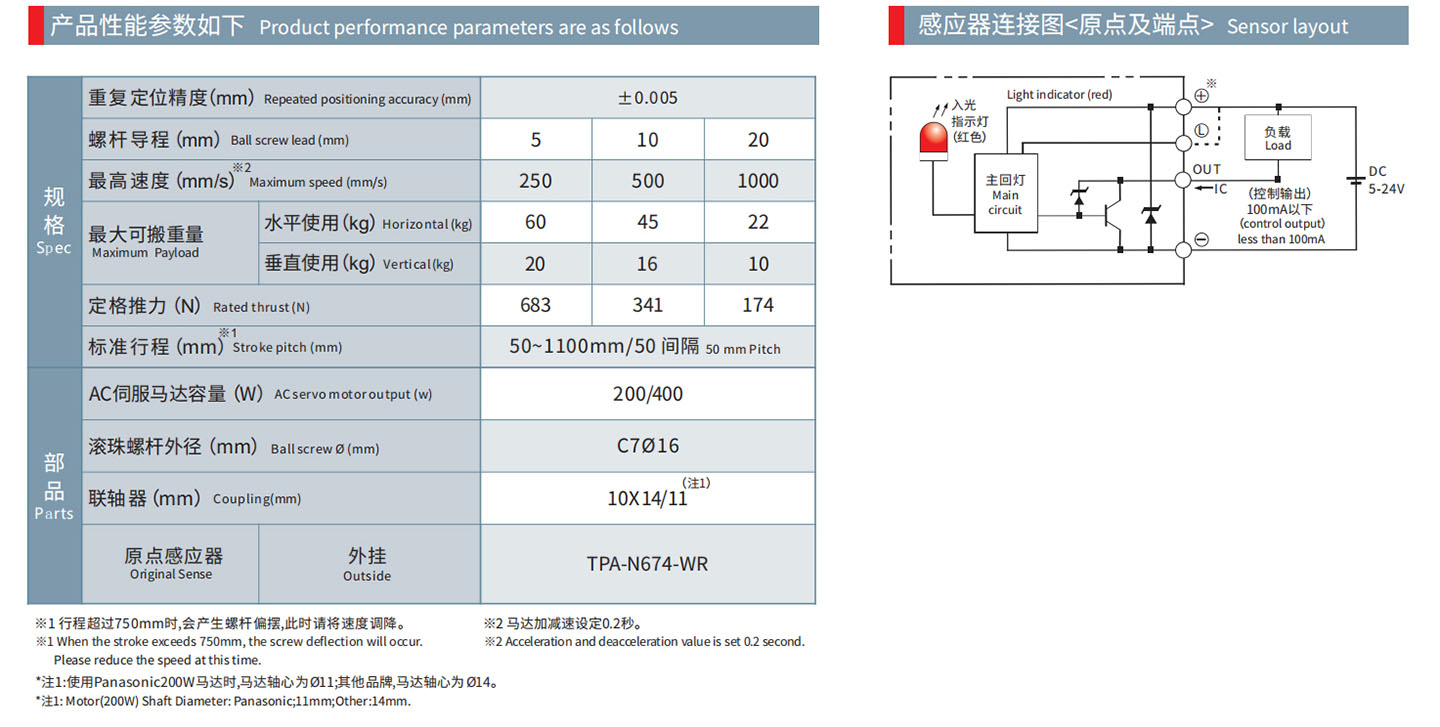
钢基铝内嵌86
Features
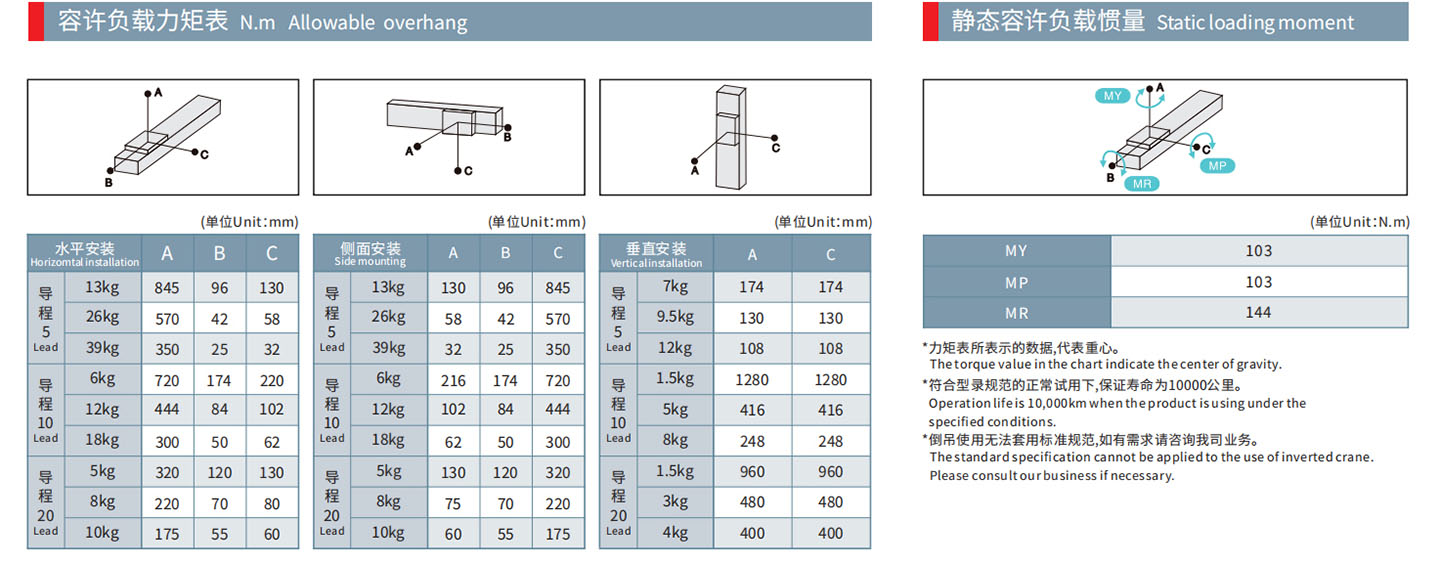
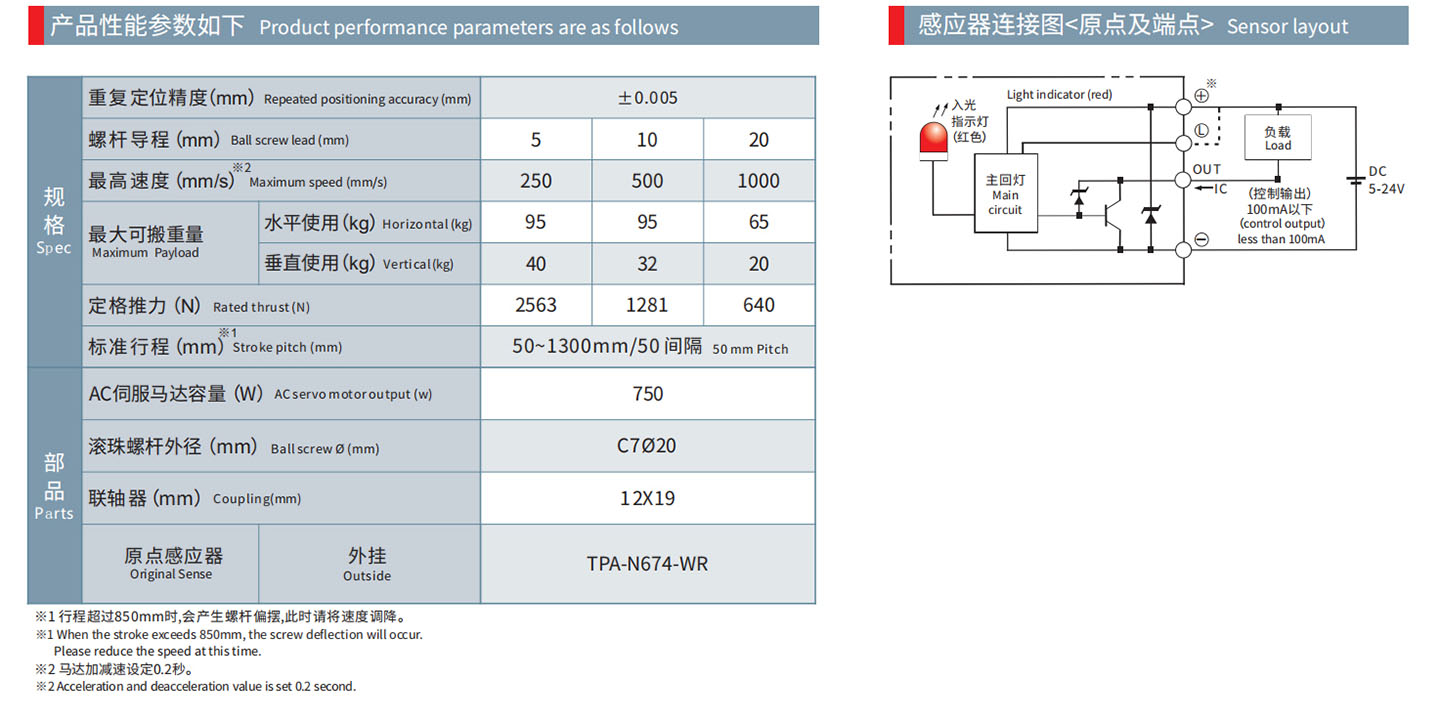
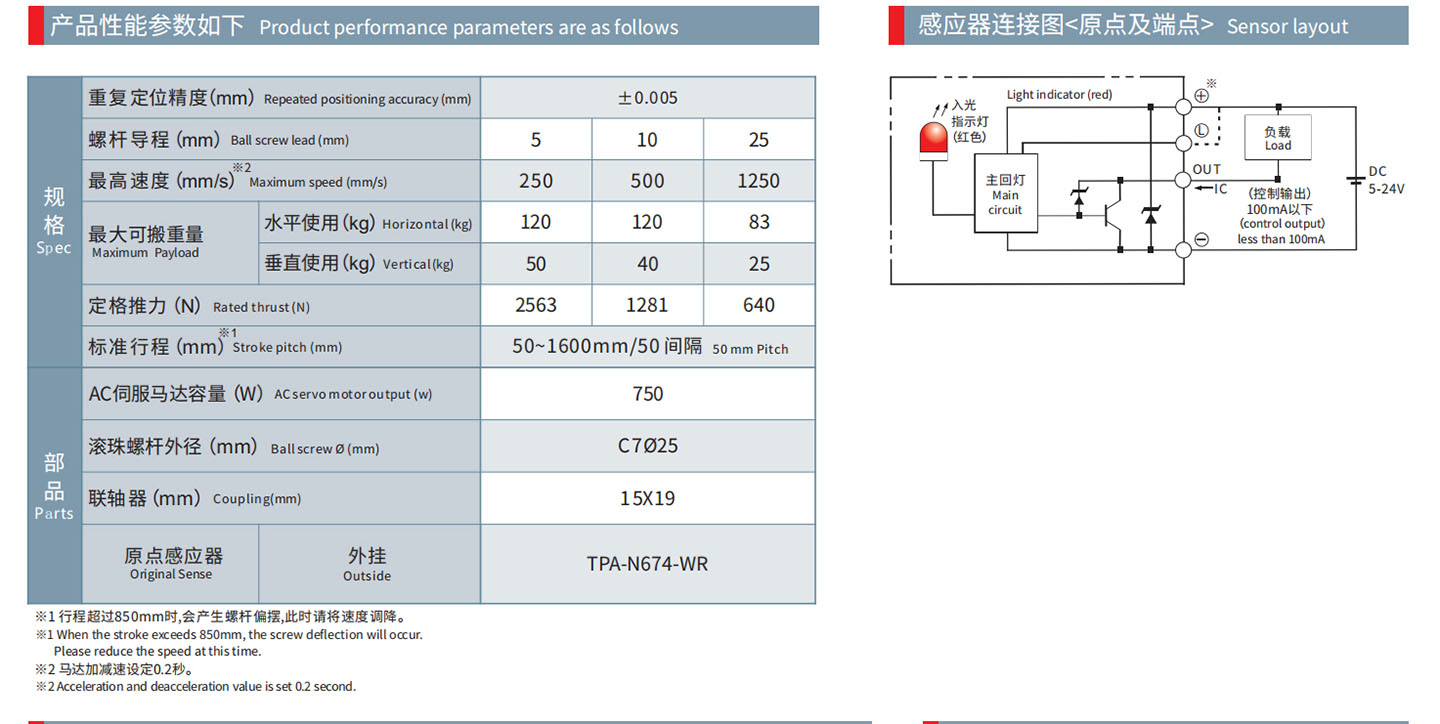
Repetita Positioning accuratione: ± 0.005mm
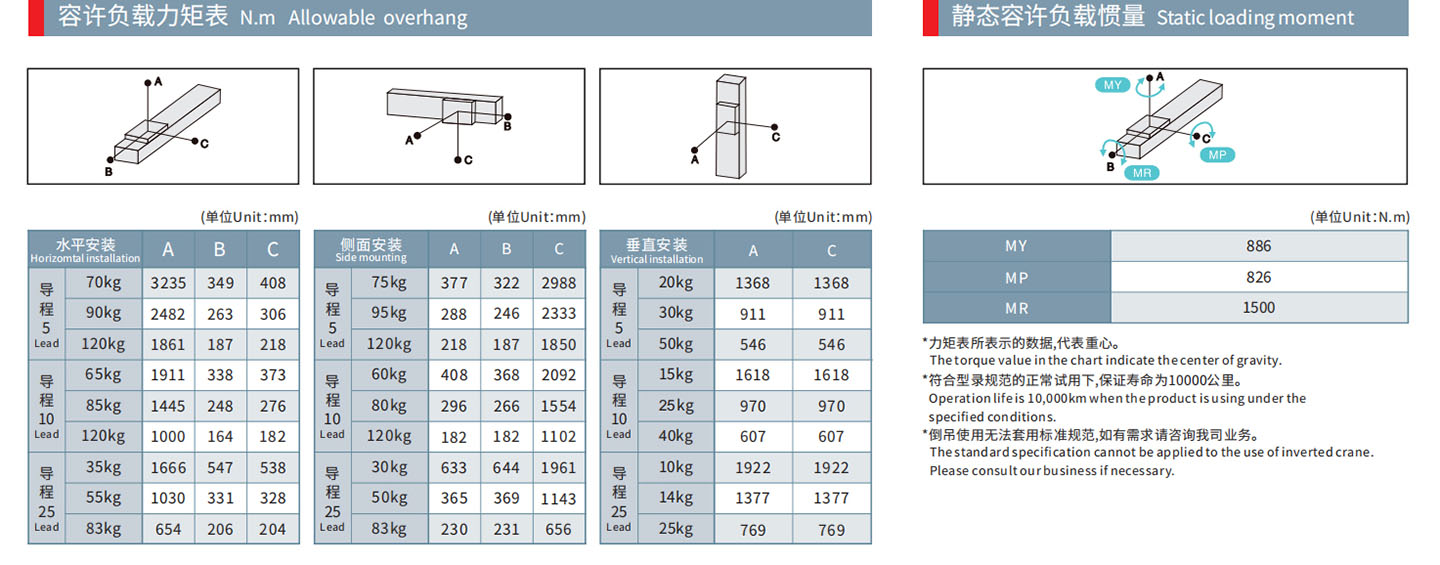
Basic Static Rated Load: 12642N
Basic Dynamic Rated Load: 7144N
Plaga: 31 – 1128mm
Max Speed: 1000mm/s


More products

HFR Series-Laser Secans Z axis

HCR Series Ball Screw Linear Module plene conclusus

HNR Series Ball Screw Linear Actuators Half Enc...

HNR-E Series Ball Screw Linear Module Half Encl...










