




HNB-E Series Cingulum Driven Linear Actuators Half Conclusum

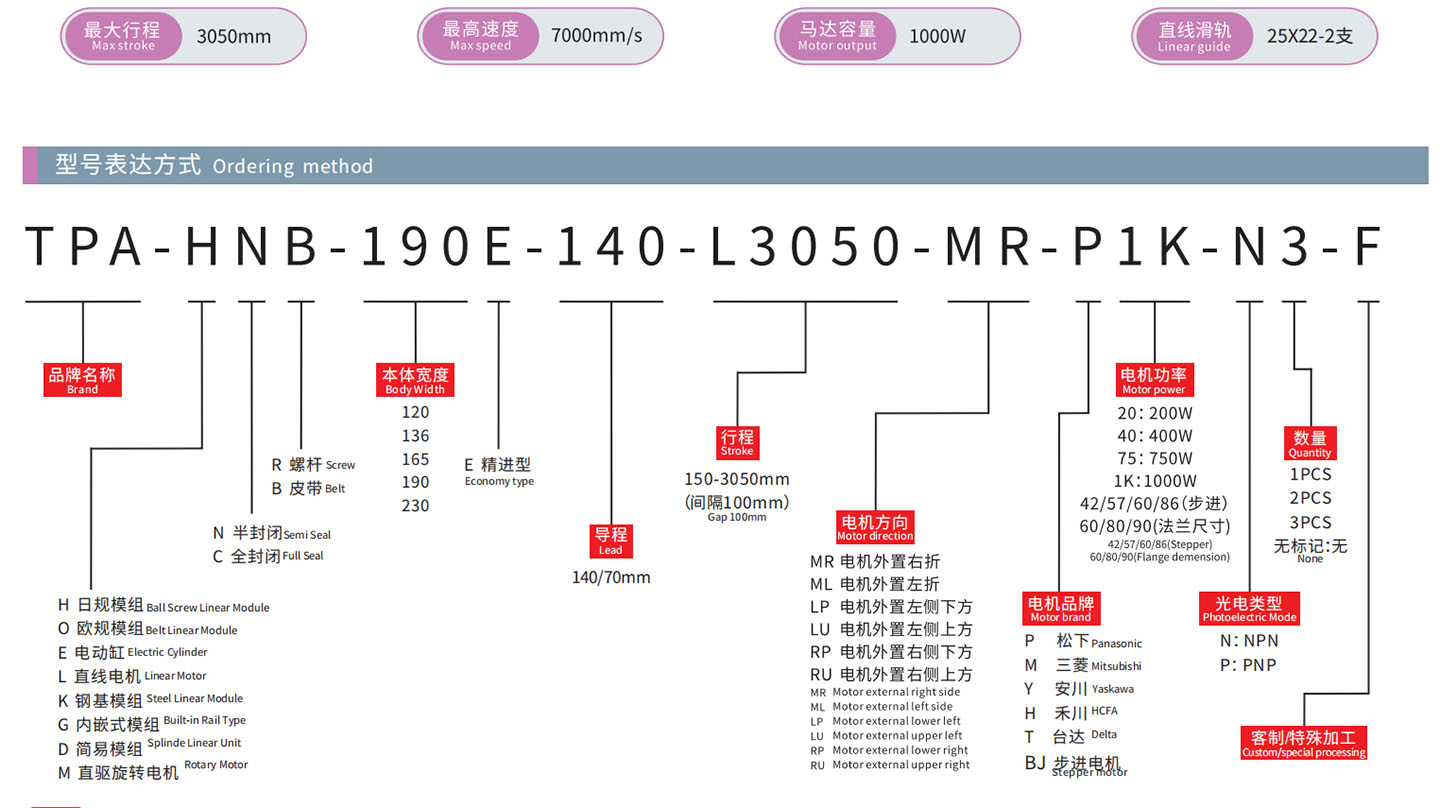
Exemplar Selector
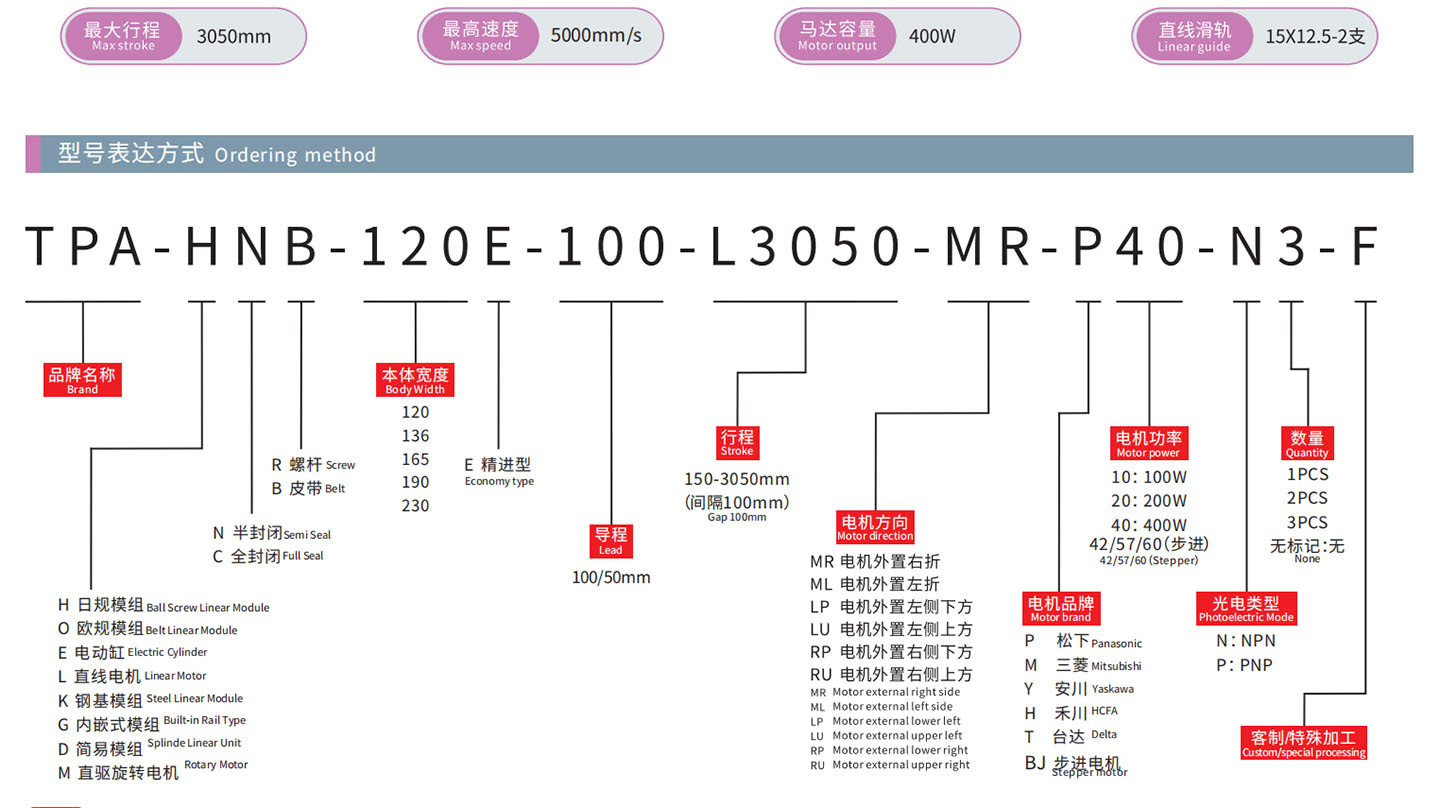
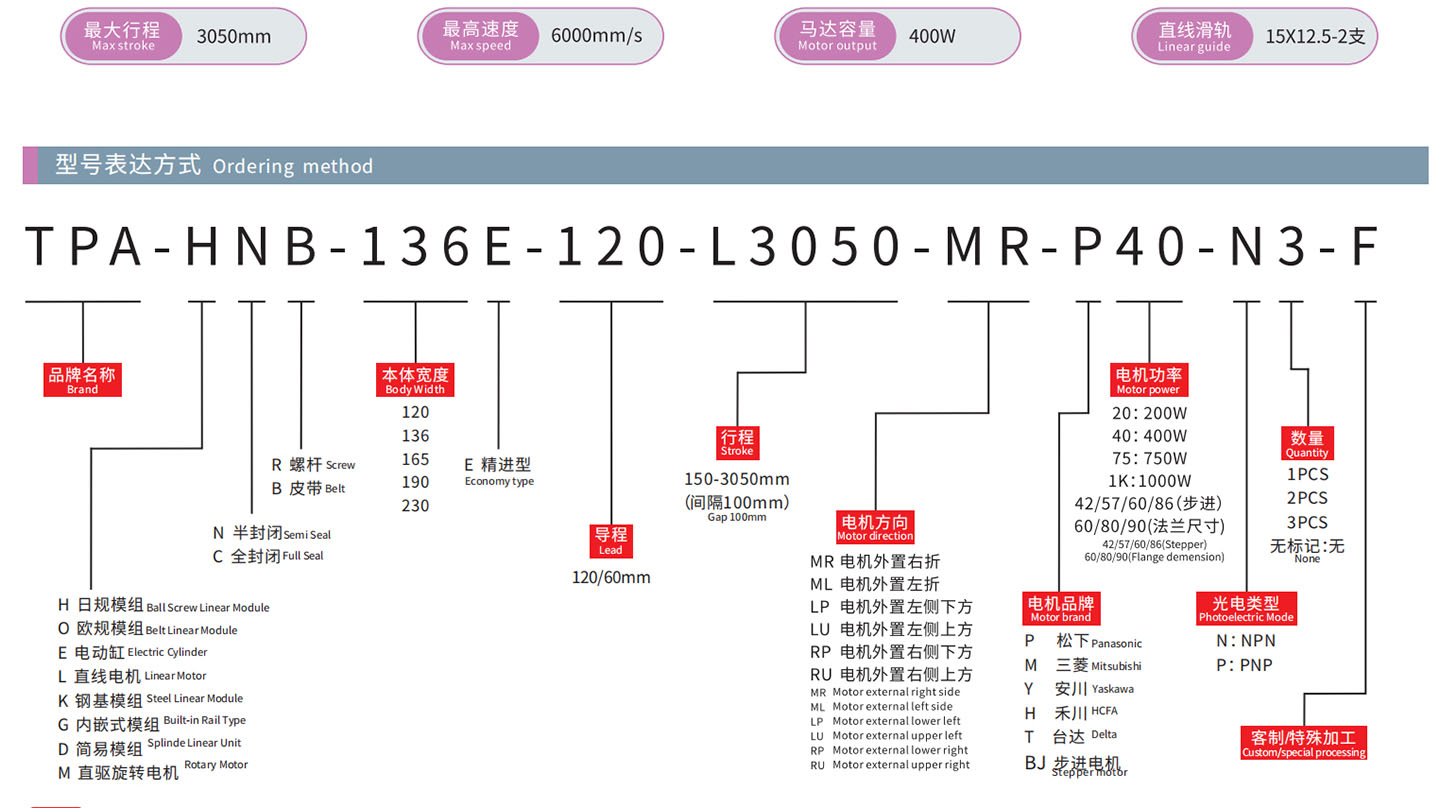
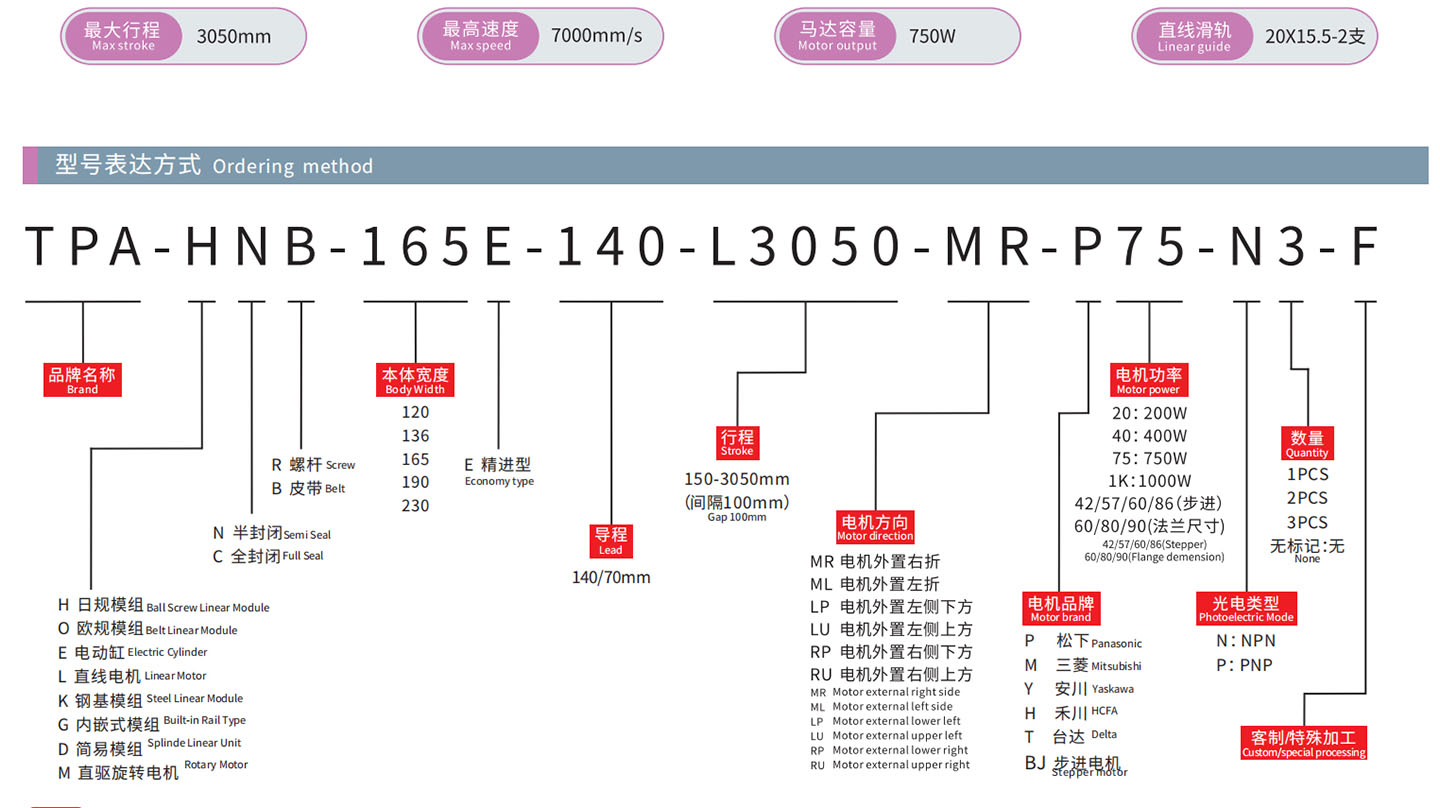
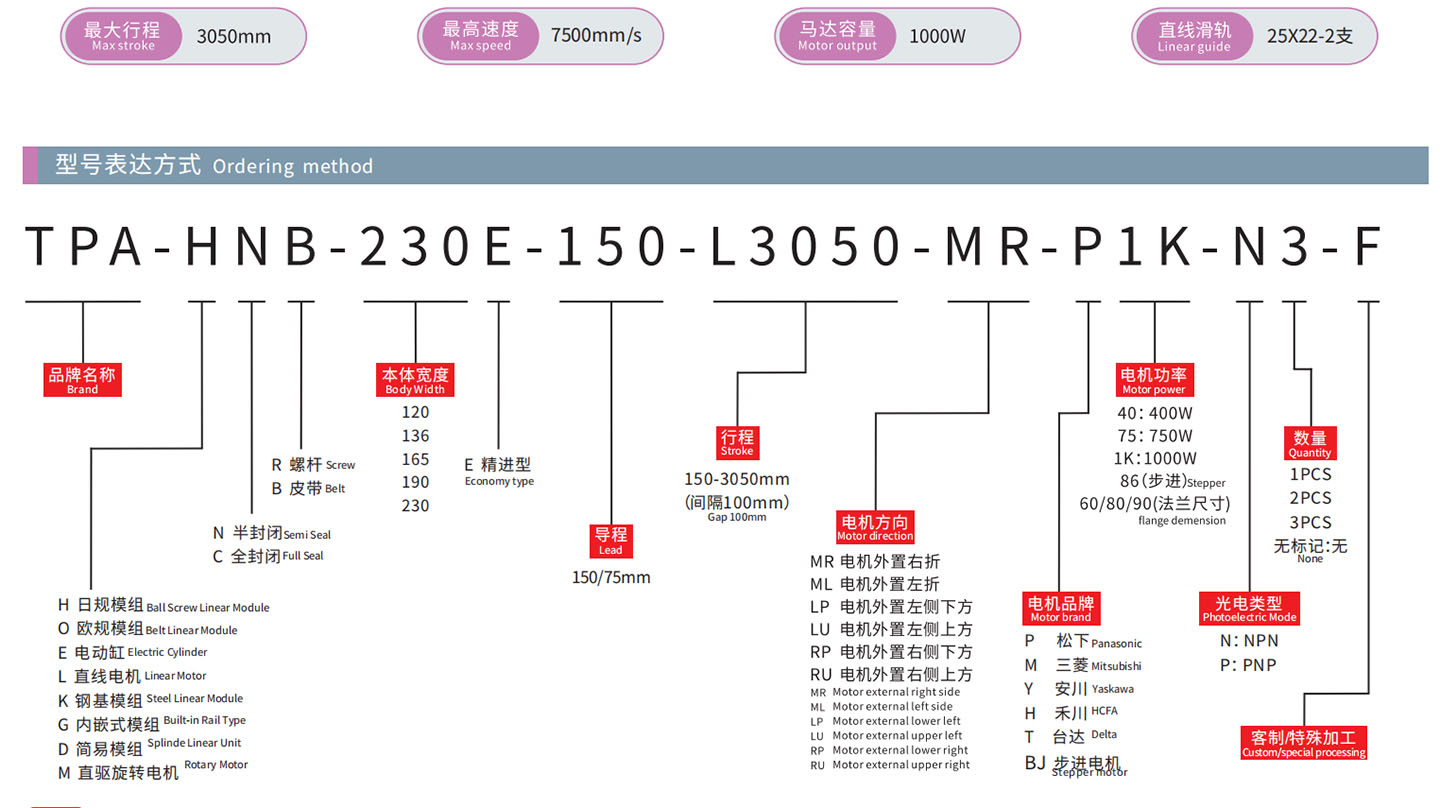
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
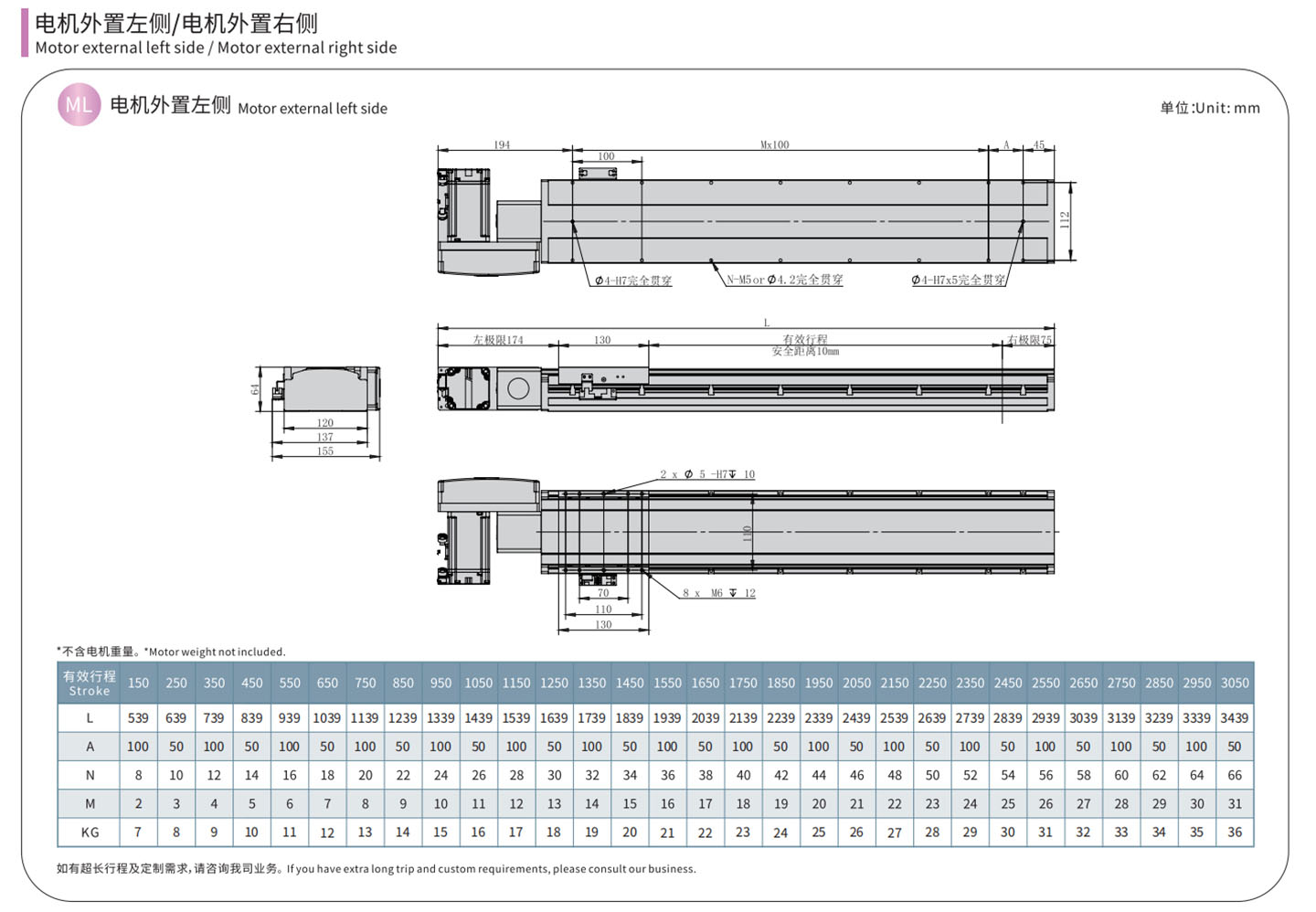
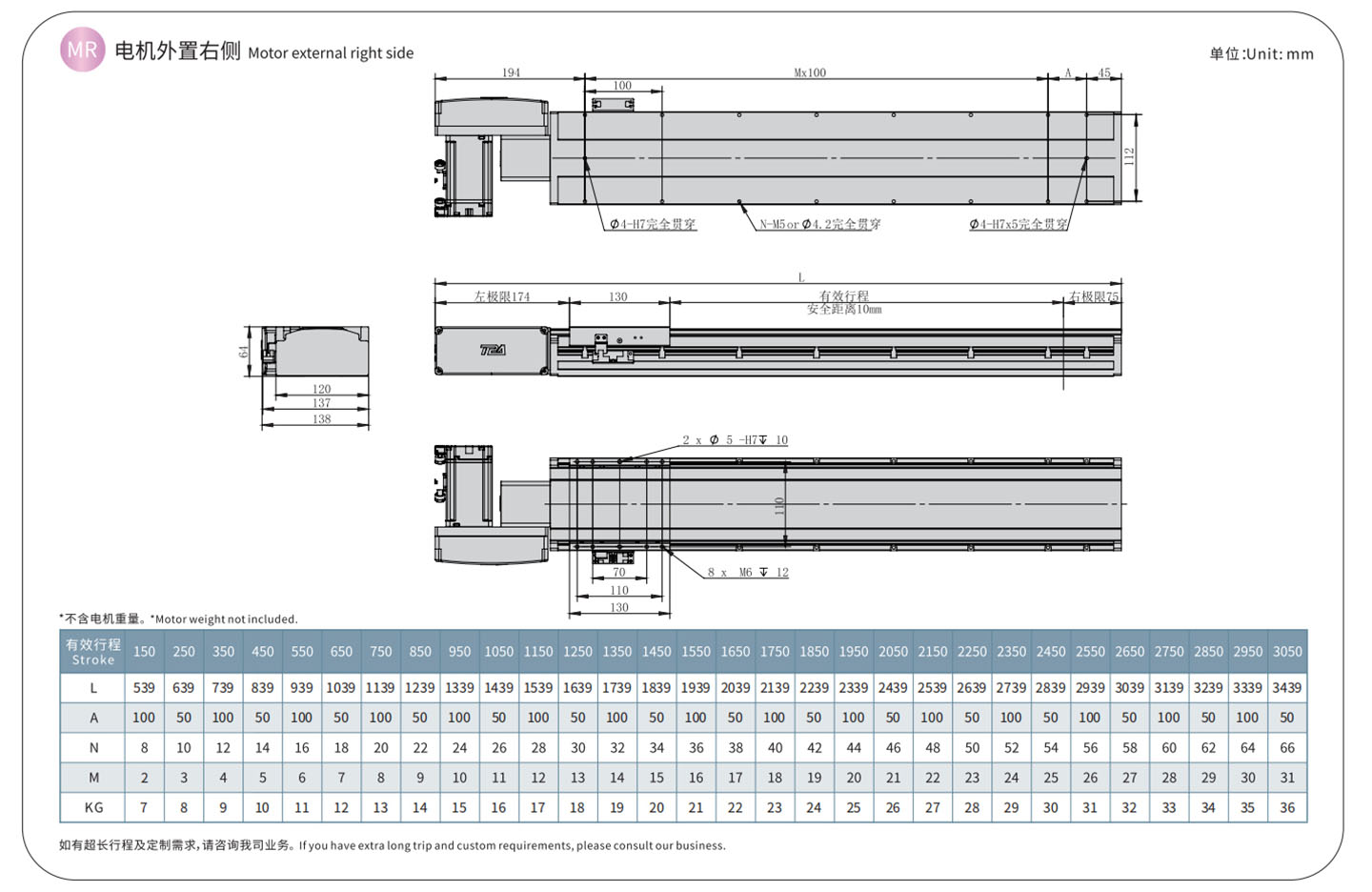
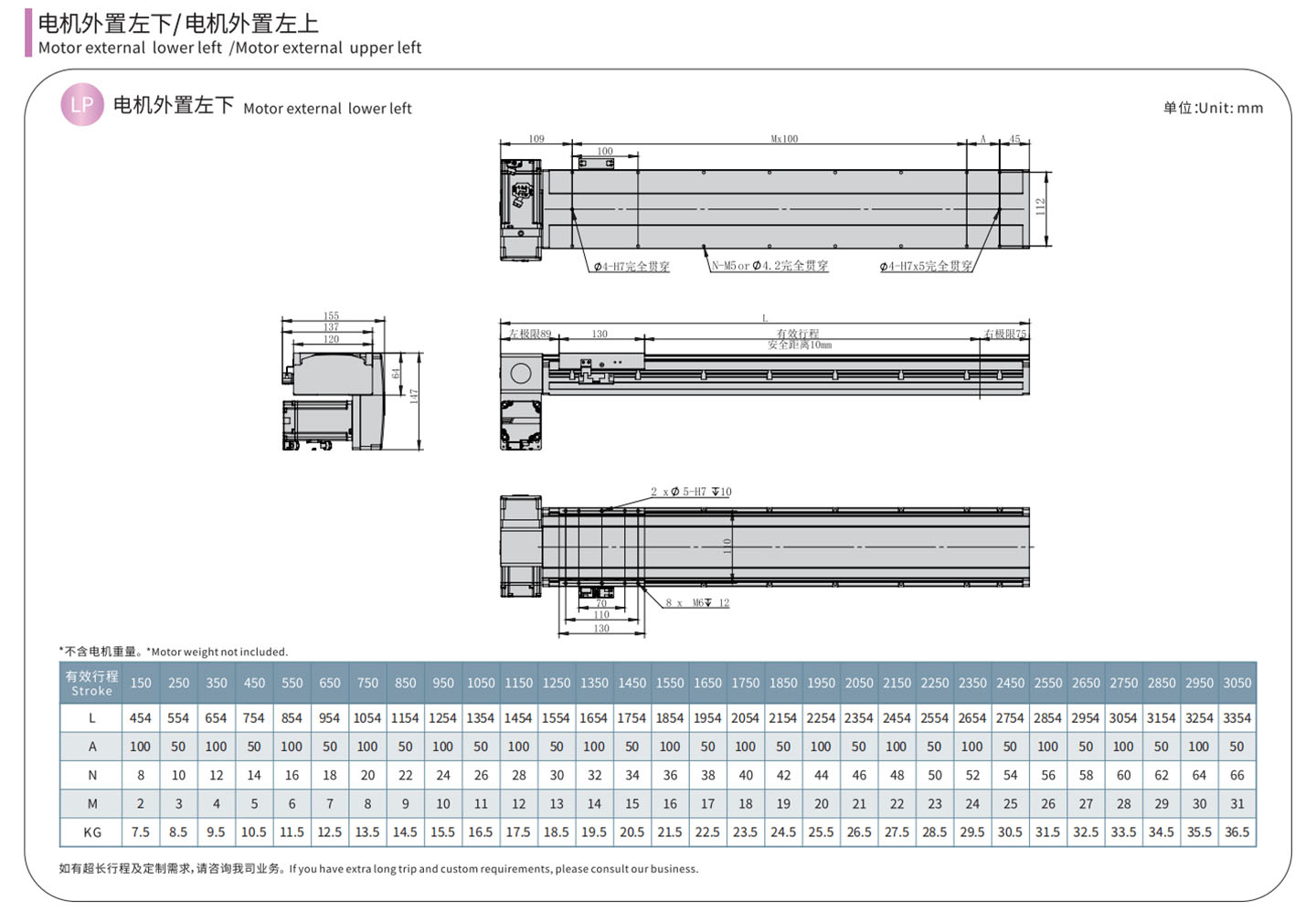
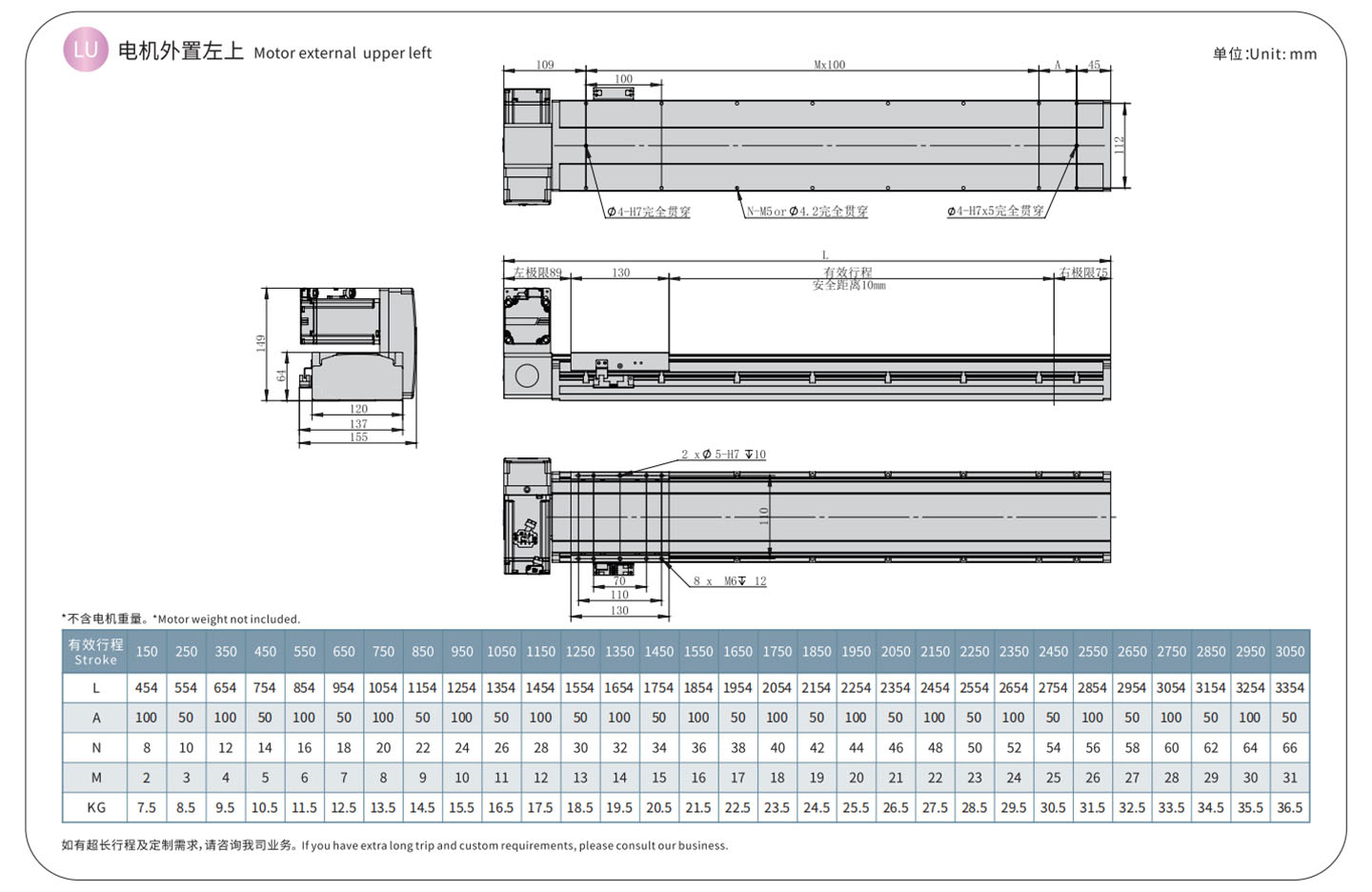
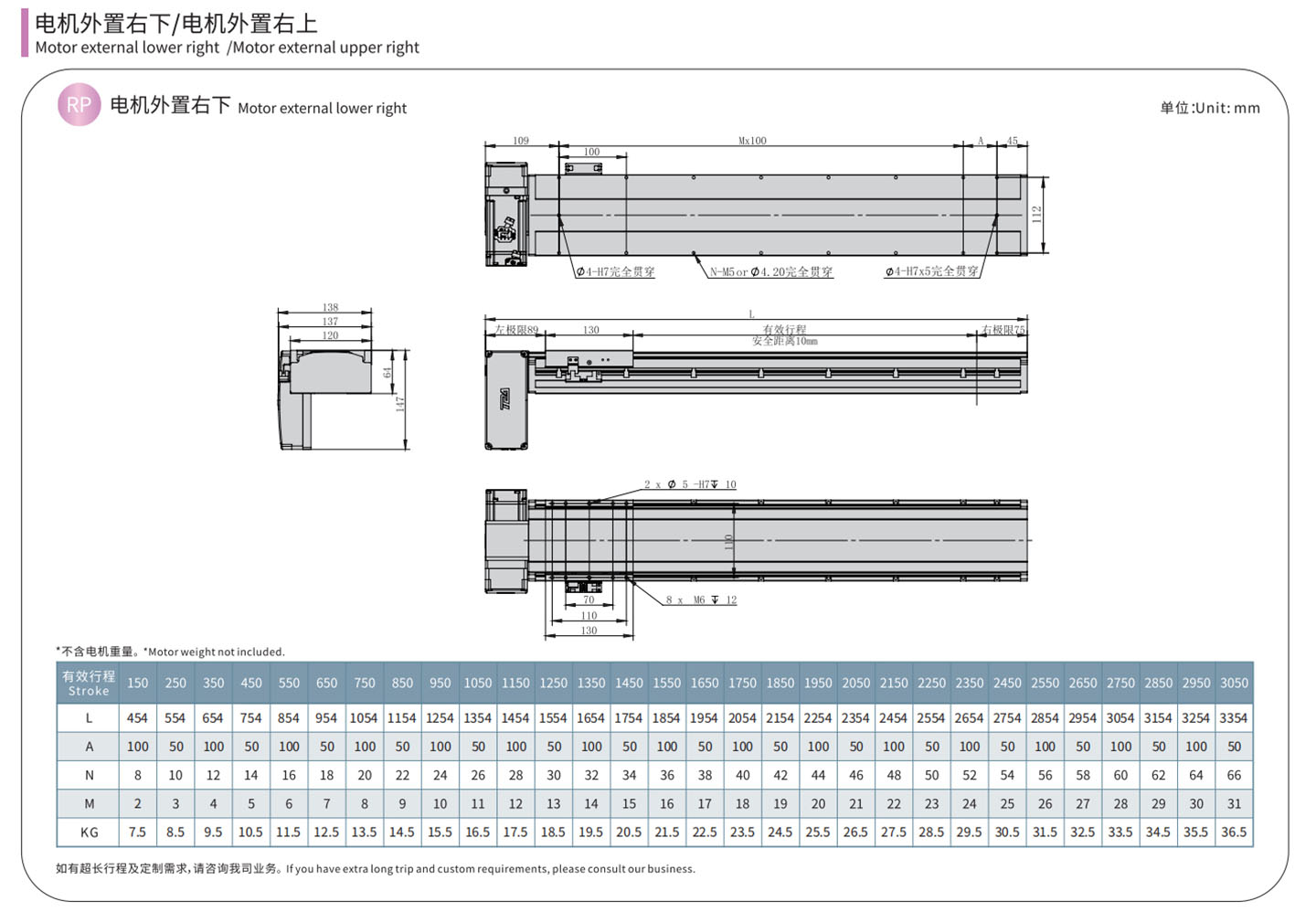
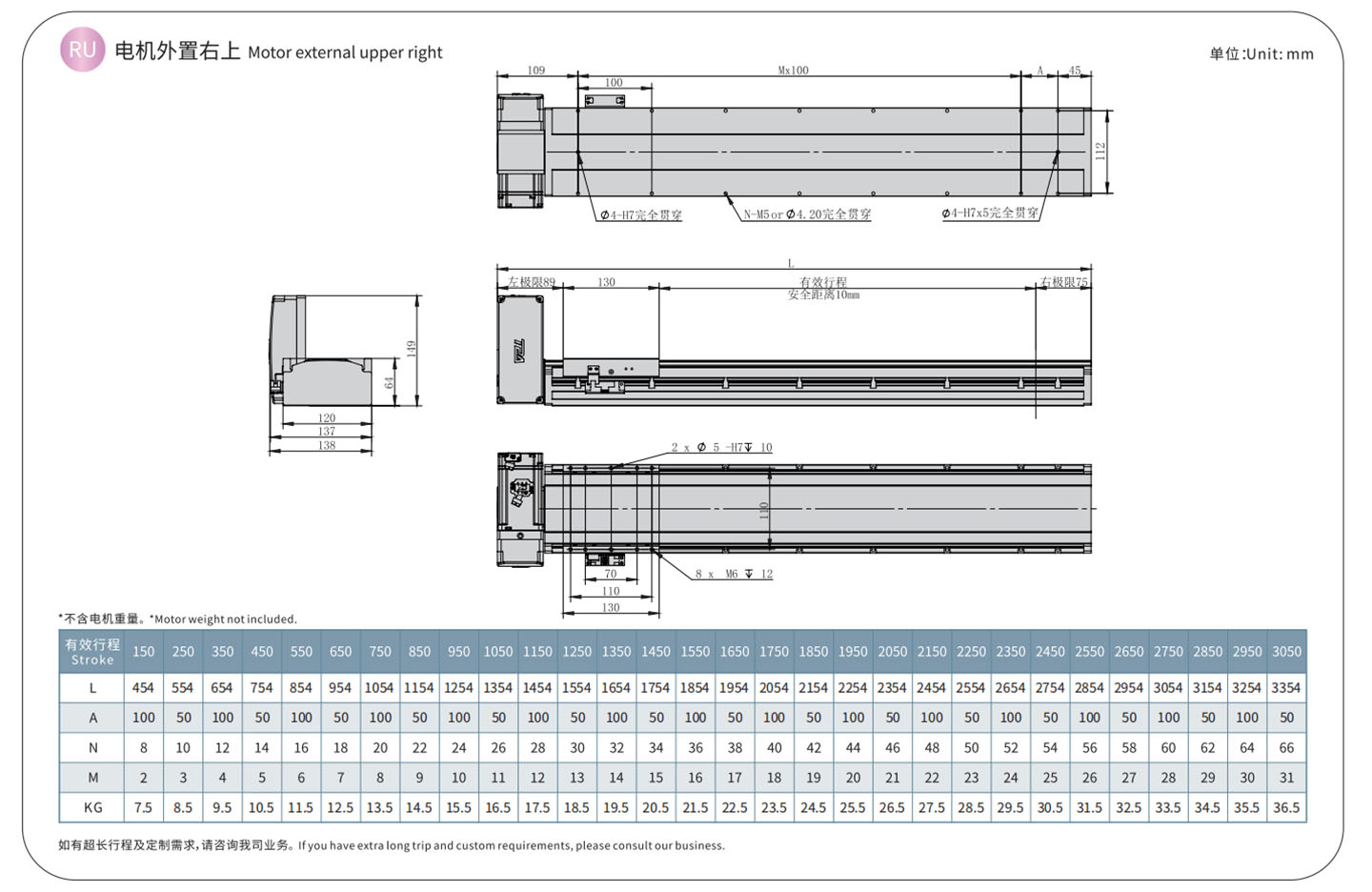
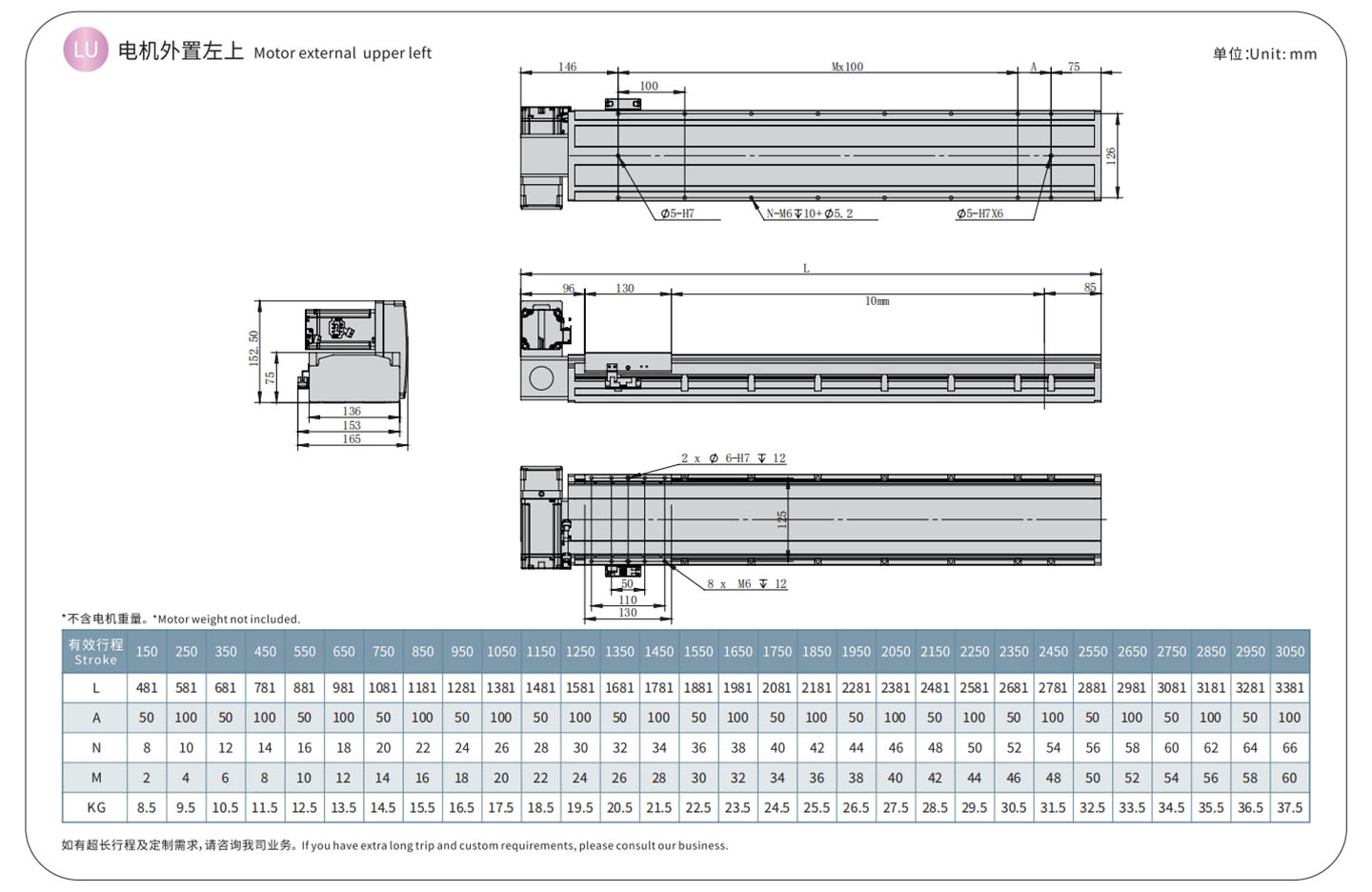
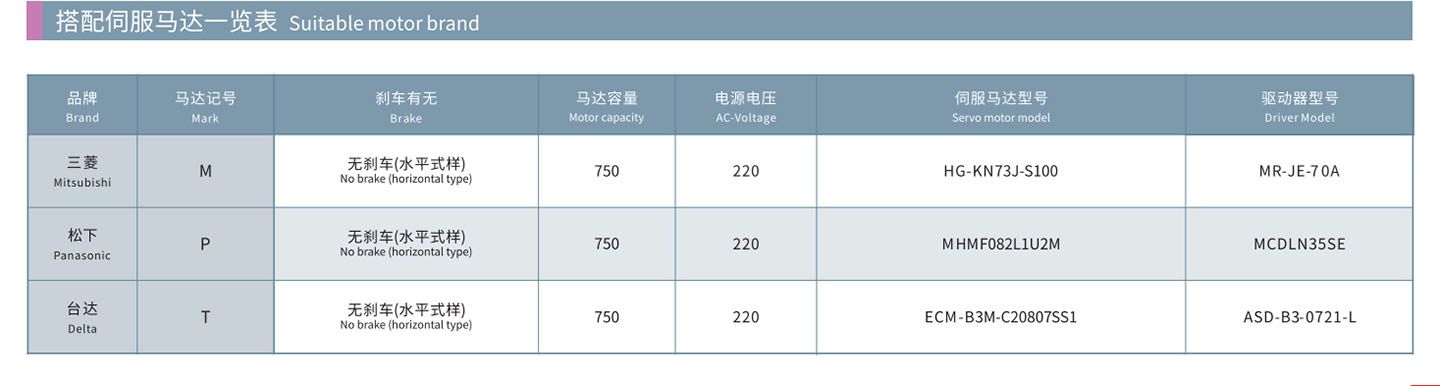
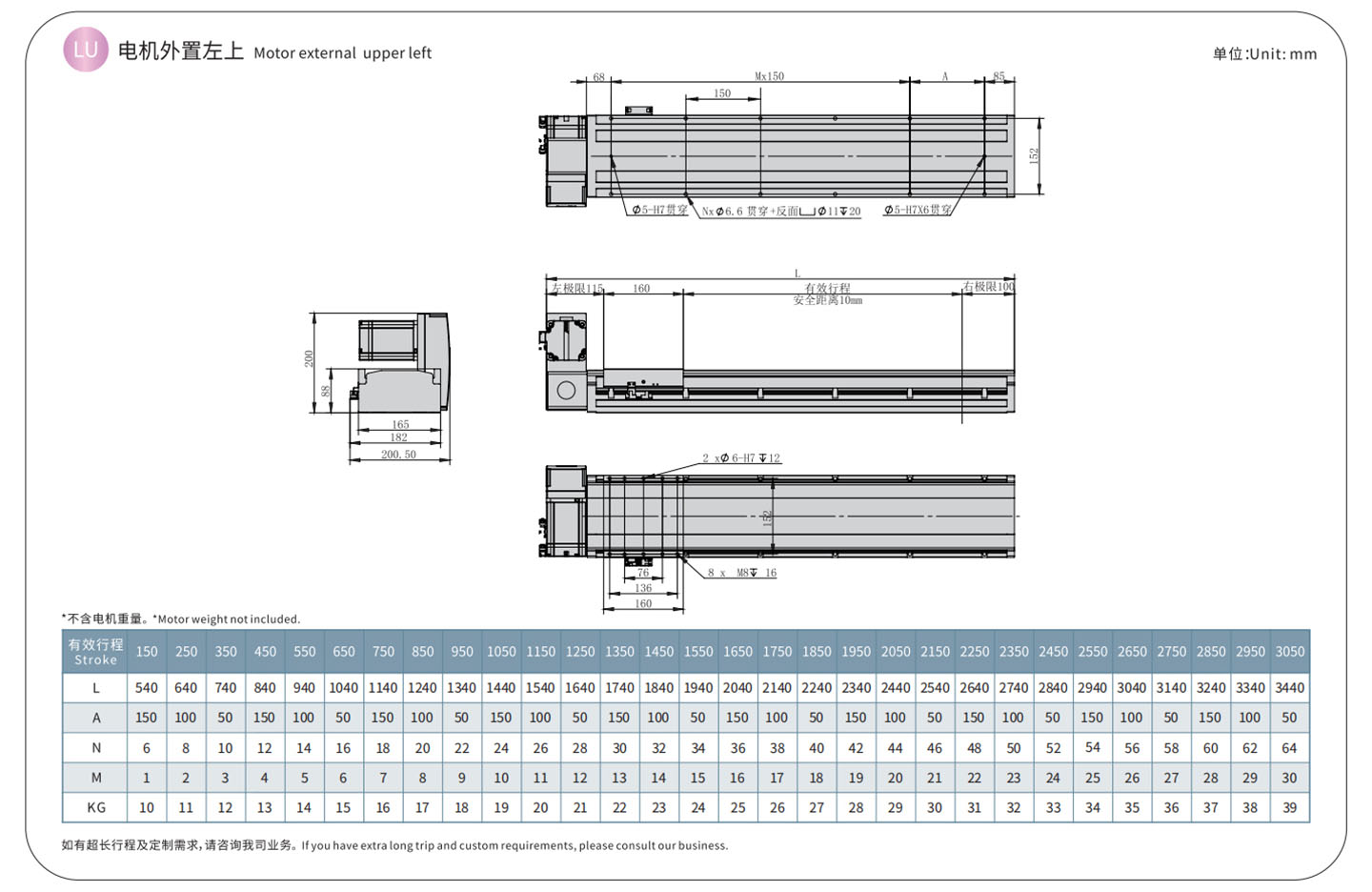
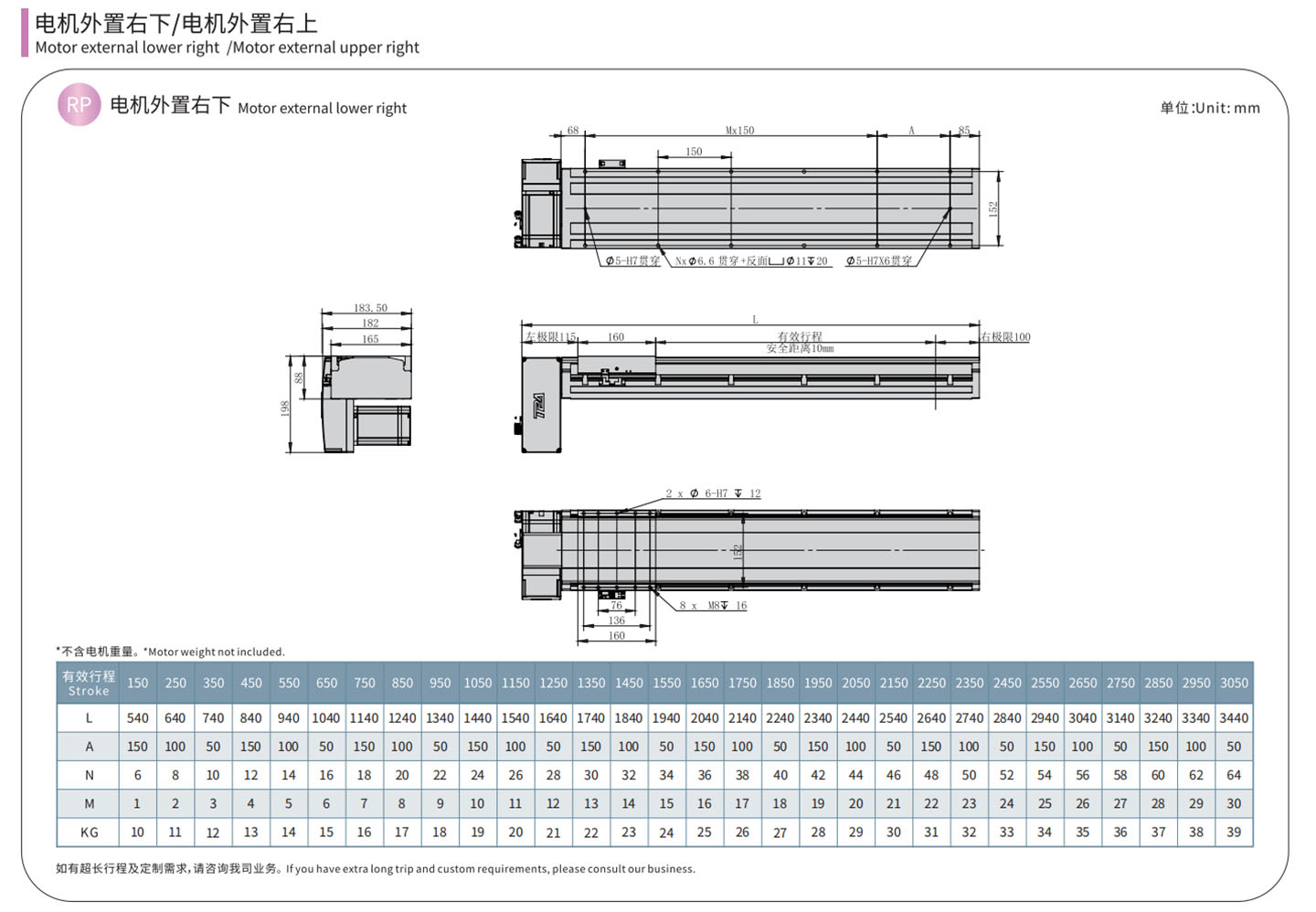
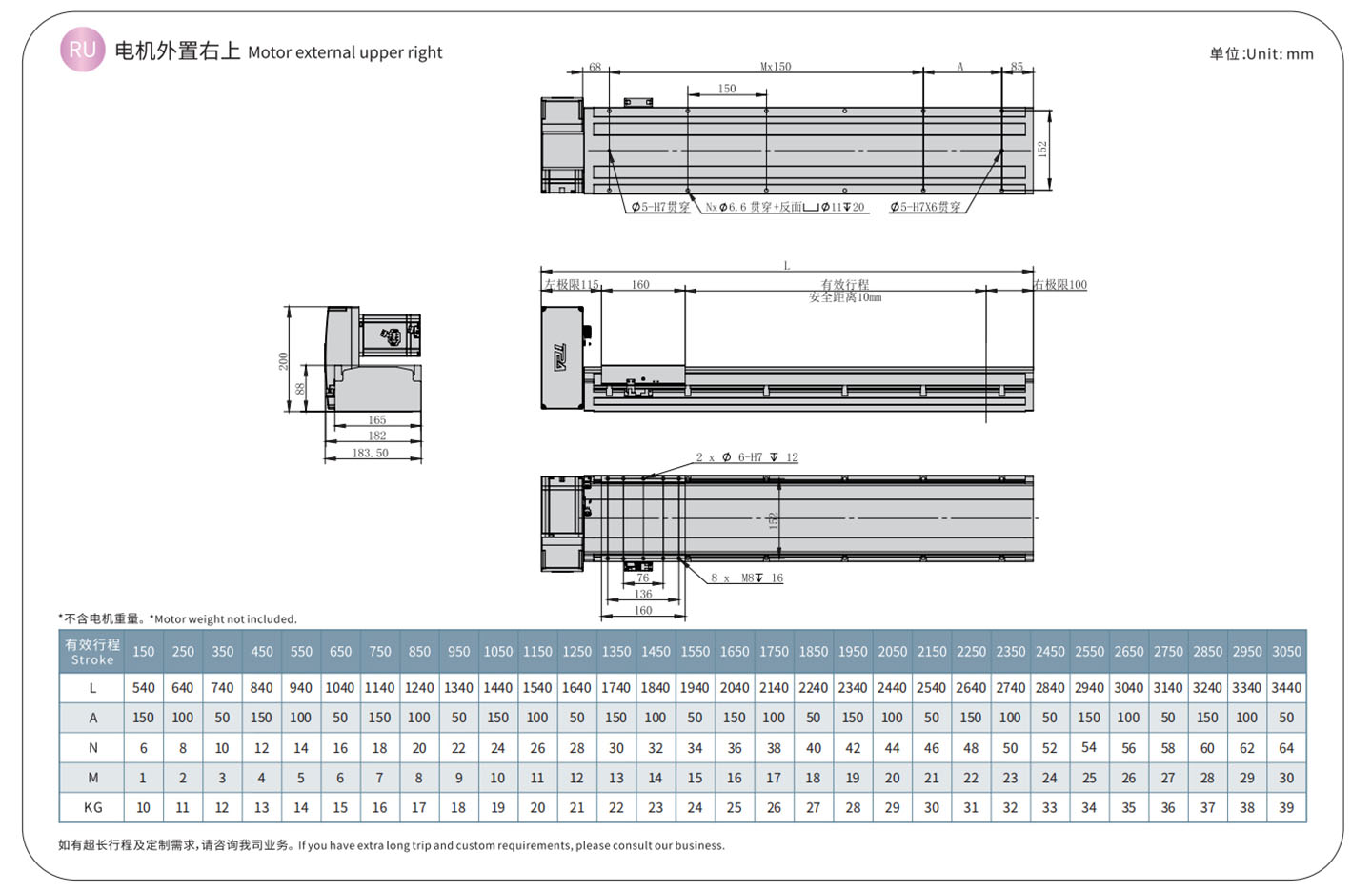
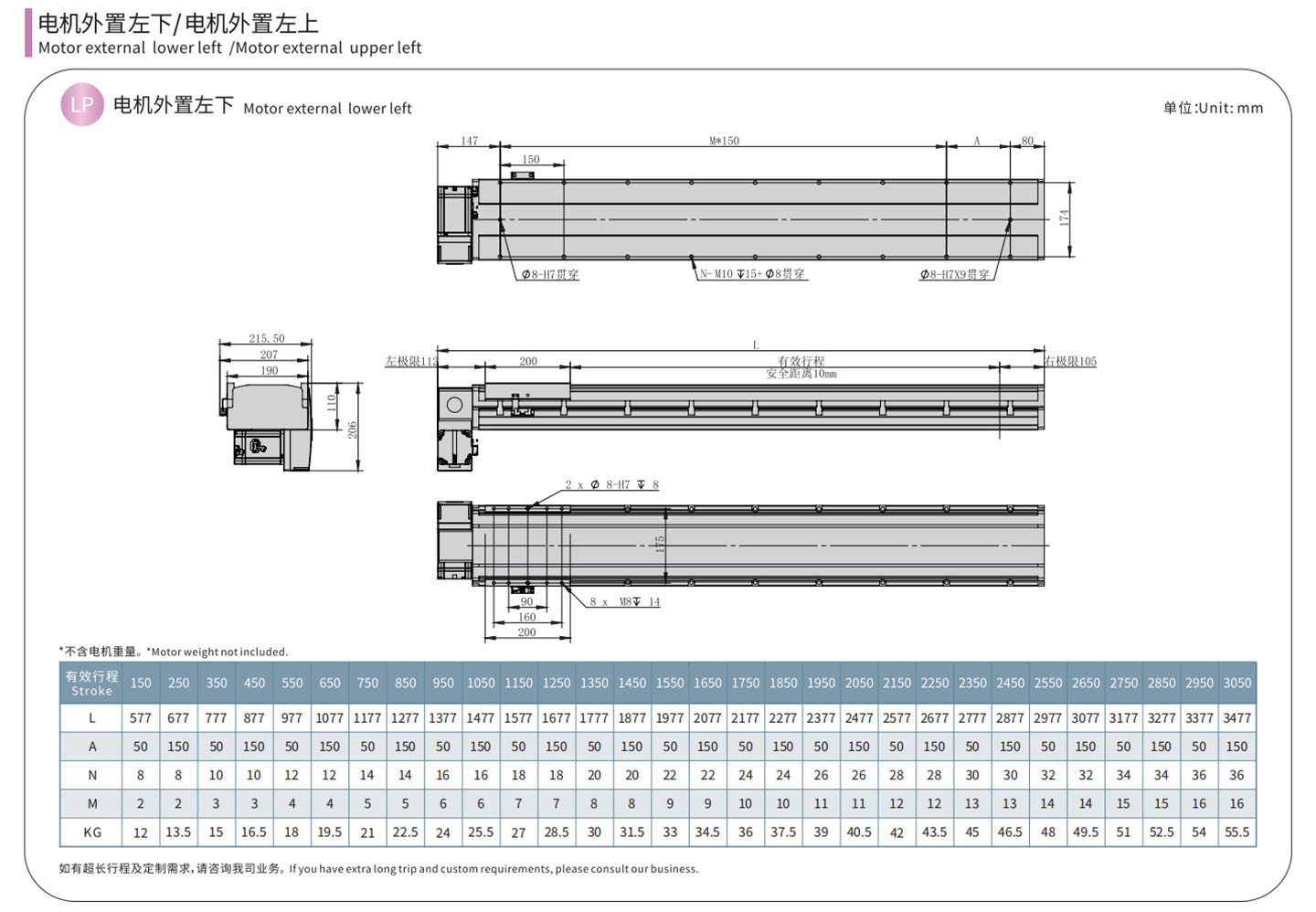
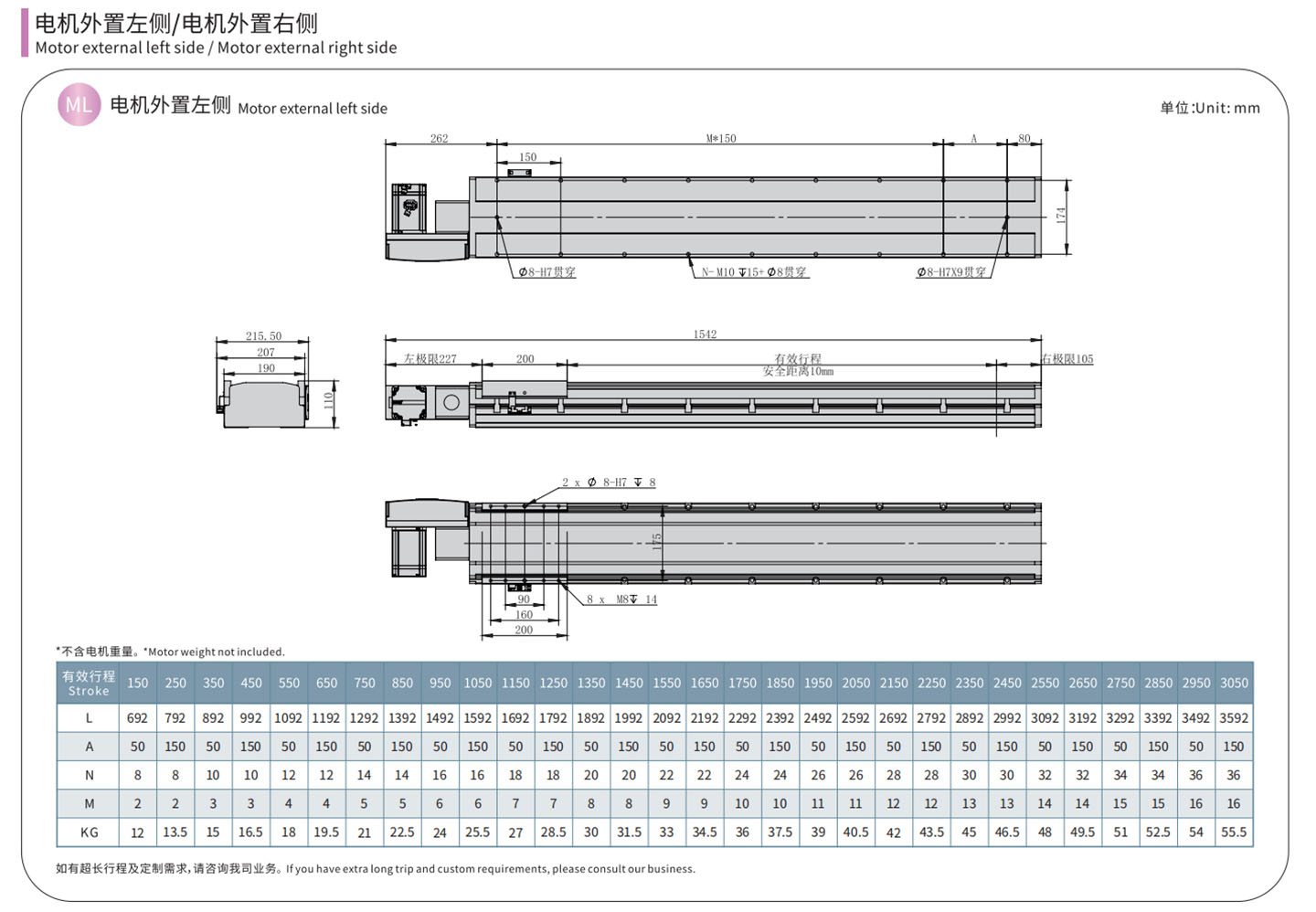
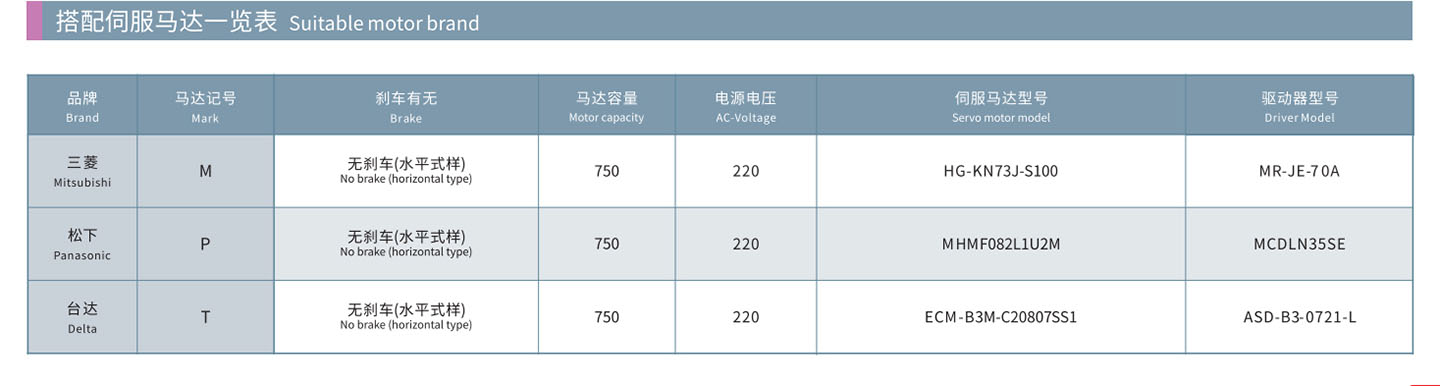
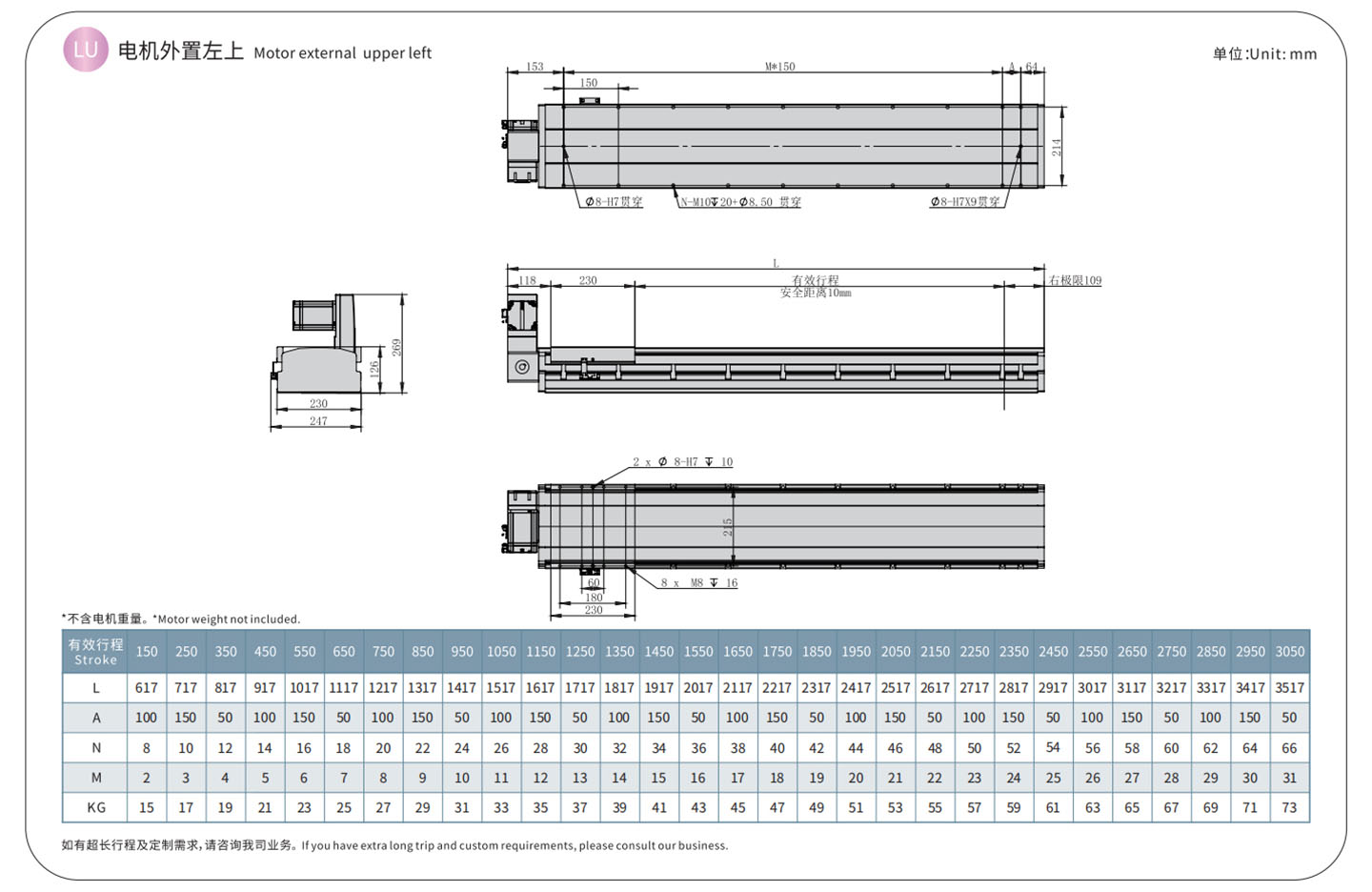
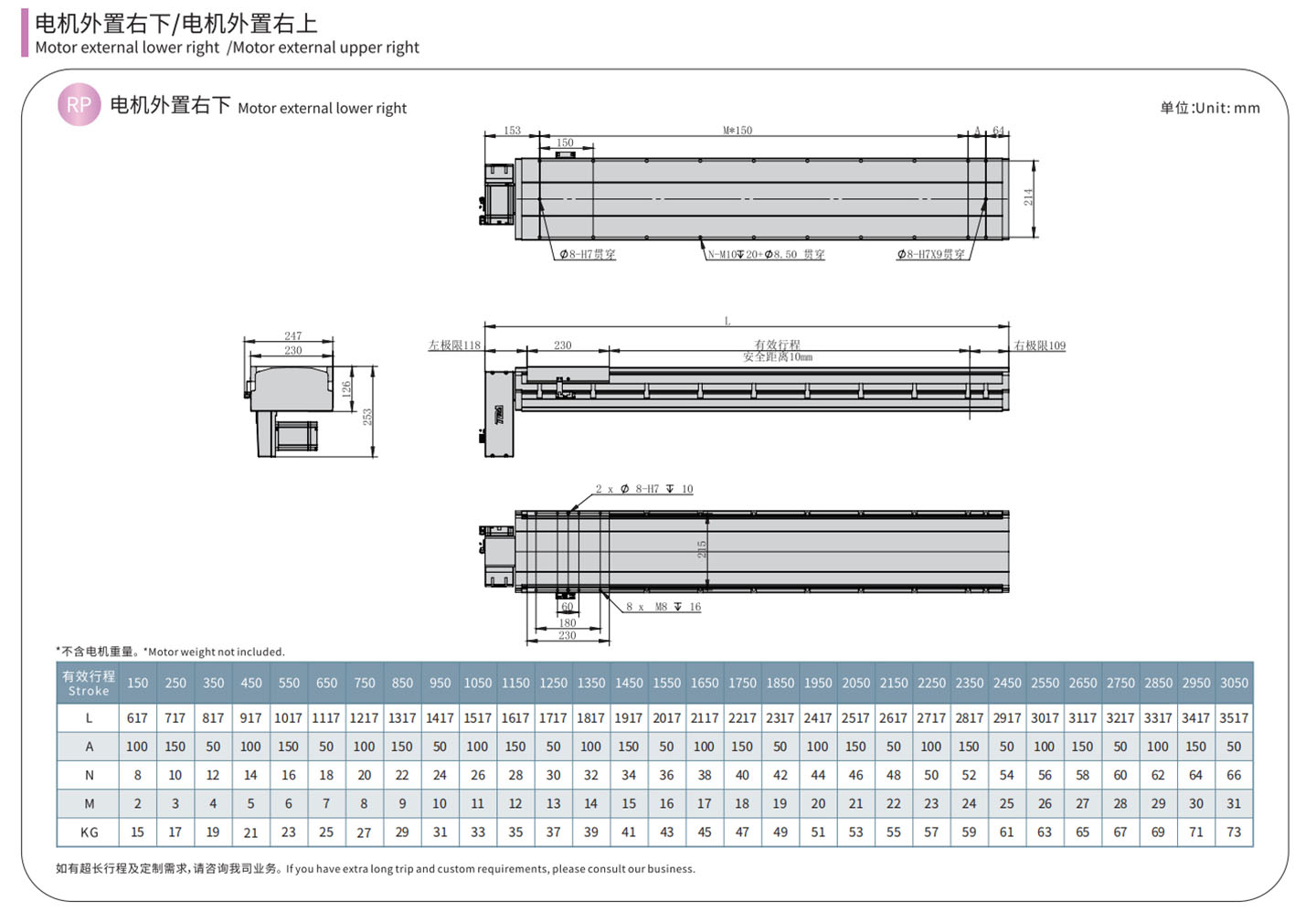
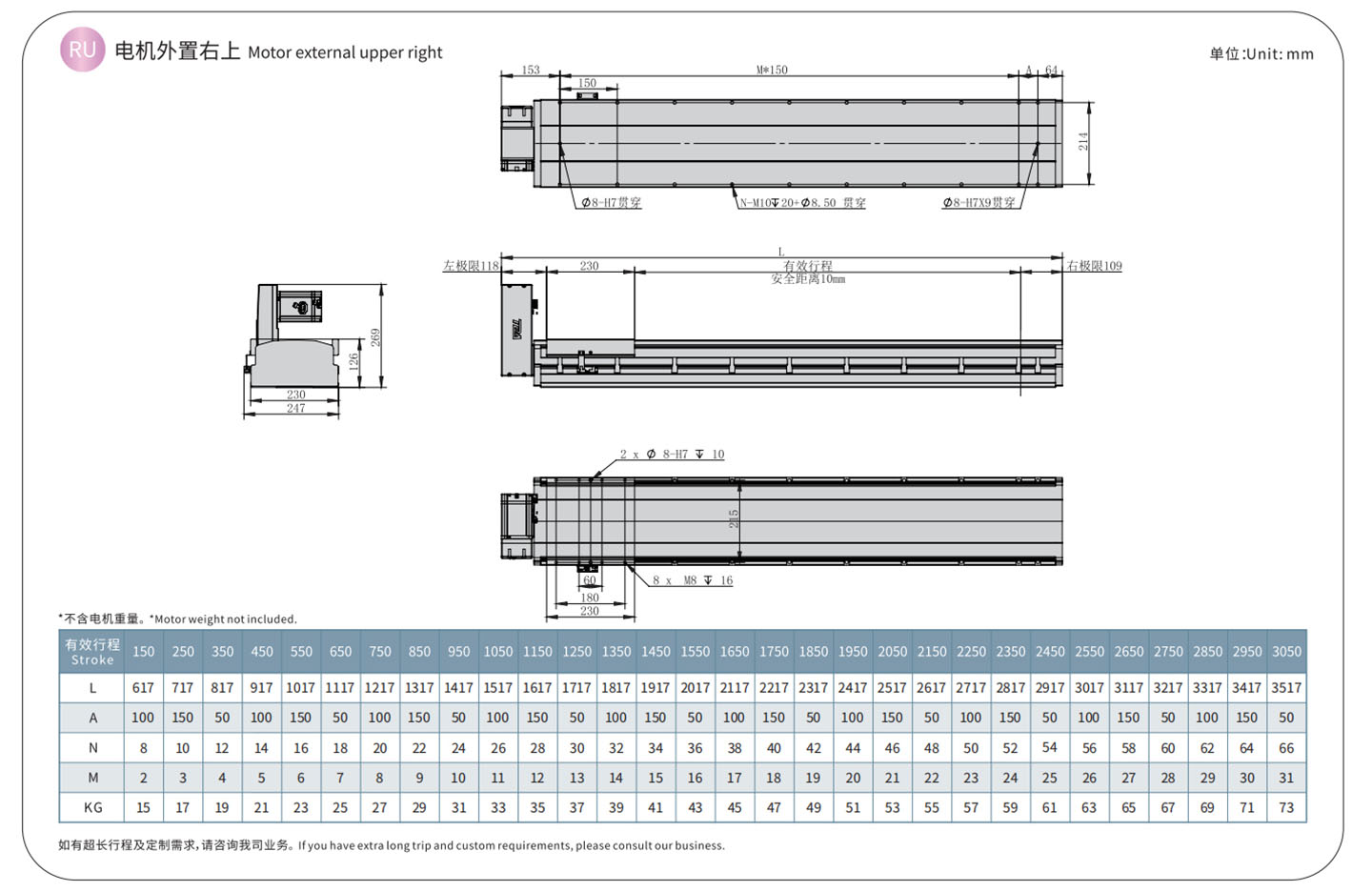
HNB series cingulum linearis actus singularem habet designationem semi-clausam, duas vires altas rigidas ductor cancellos, ut torques et velocitatem superiorem praebeat, TPA ROBOT usque ad CC species actus cinguli HNB agitatorum diversarum latitudinum et longitudinum obviam mos necessaria ad onus et peregrinatione. Maxima celeritas 6000mm/s attingere potest, et ingeniarius robots Cartesiani vel ganeliae sufficientes facile creare potest ad necessitates variarum industriarum automationis occurrere.
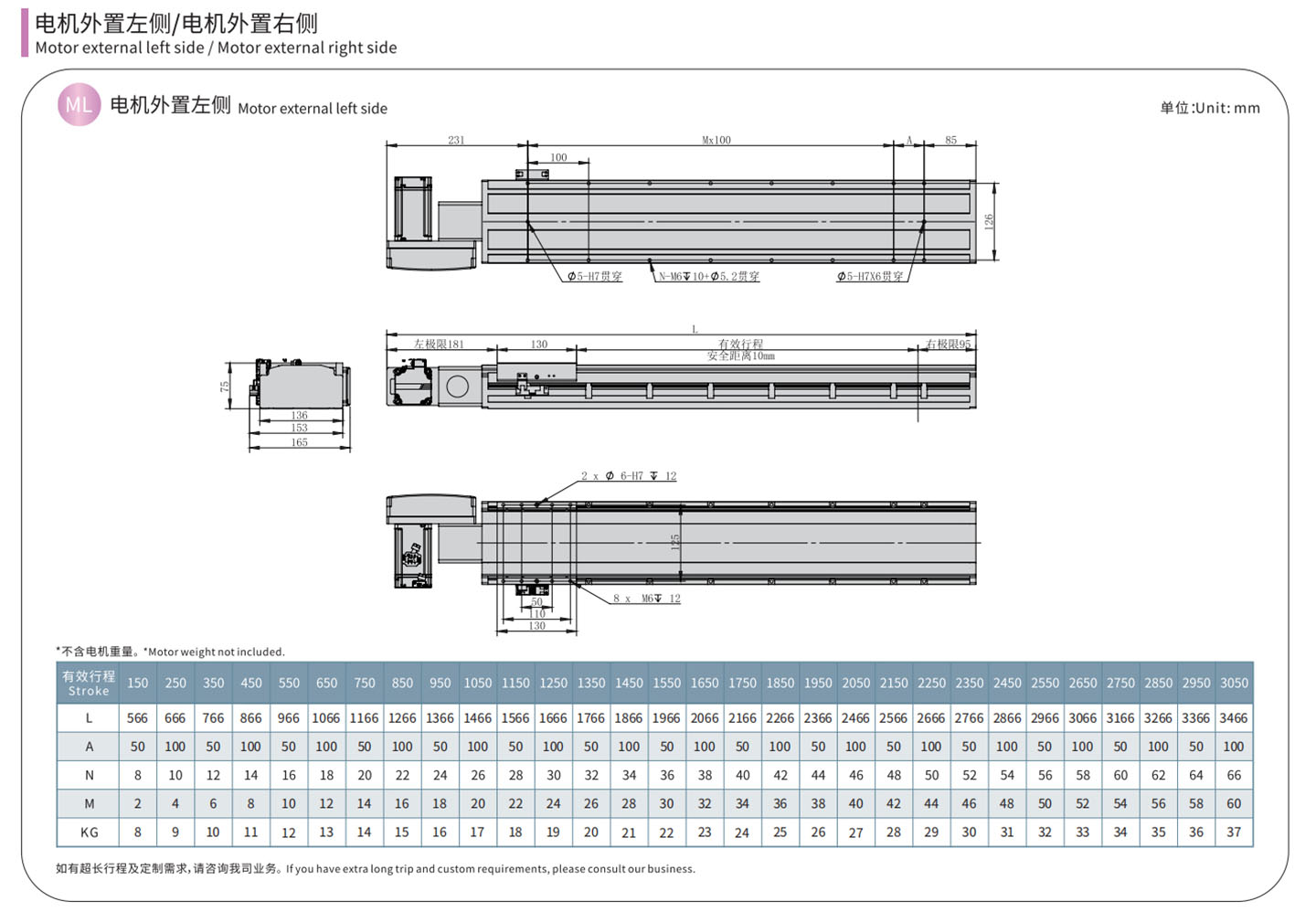
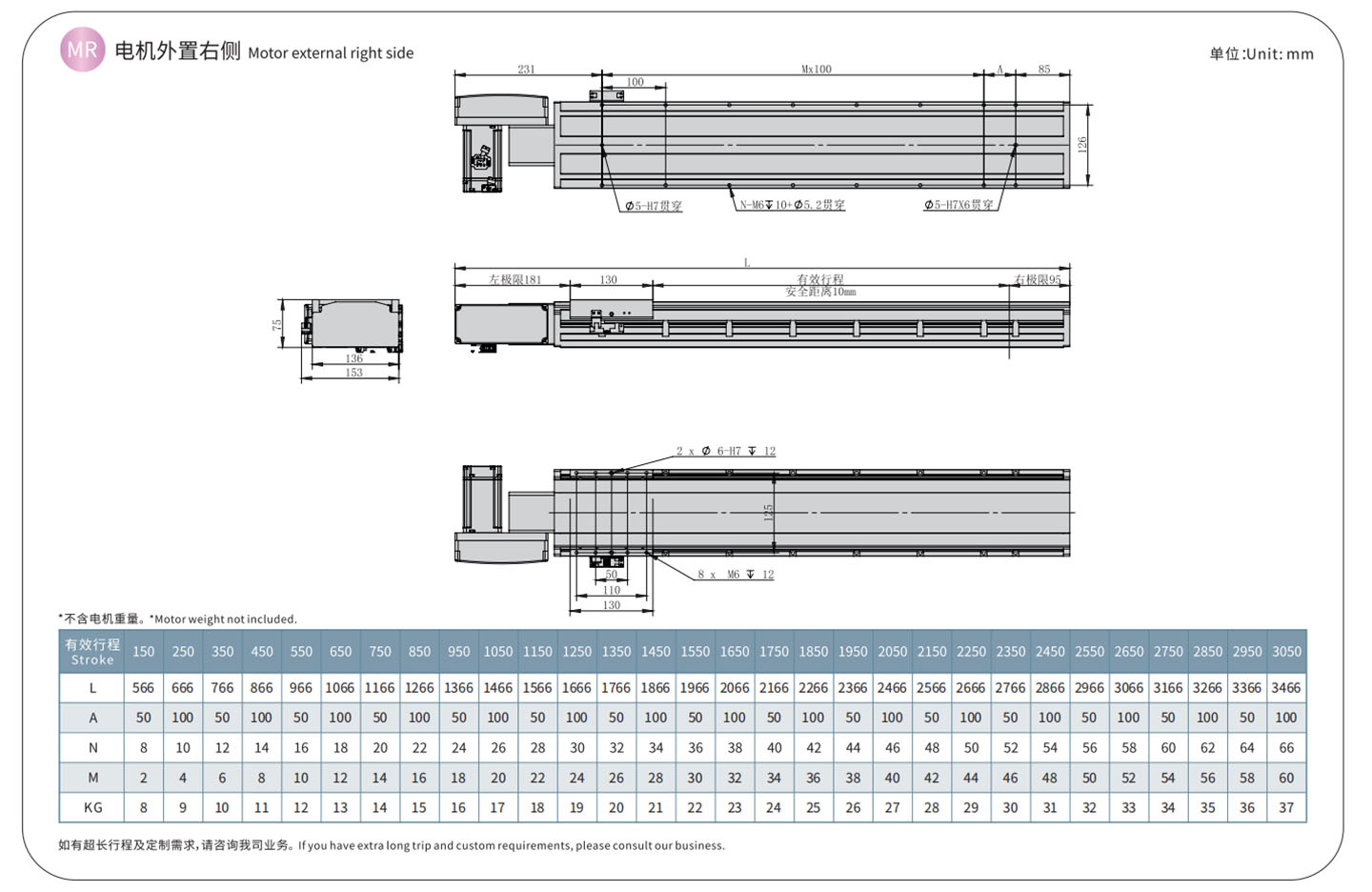
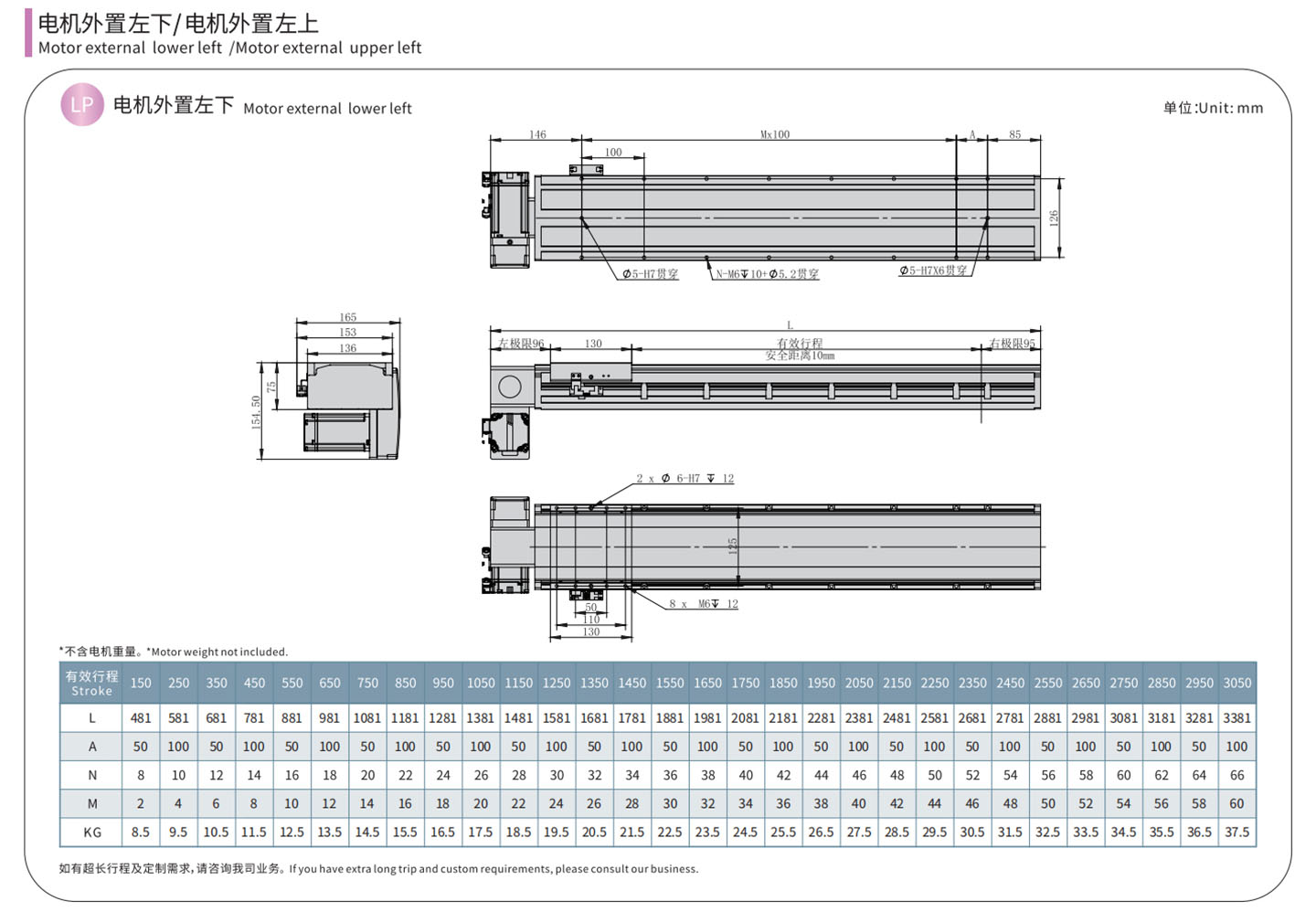
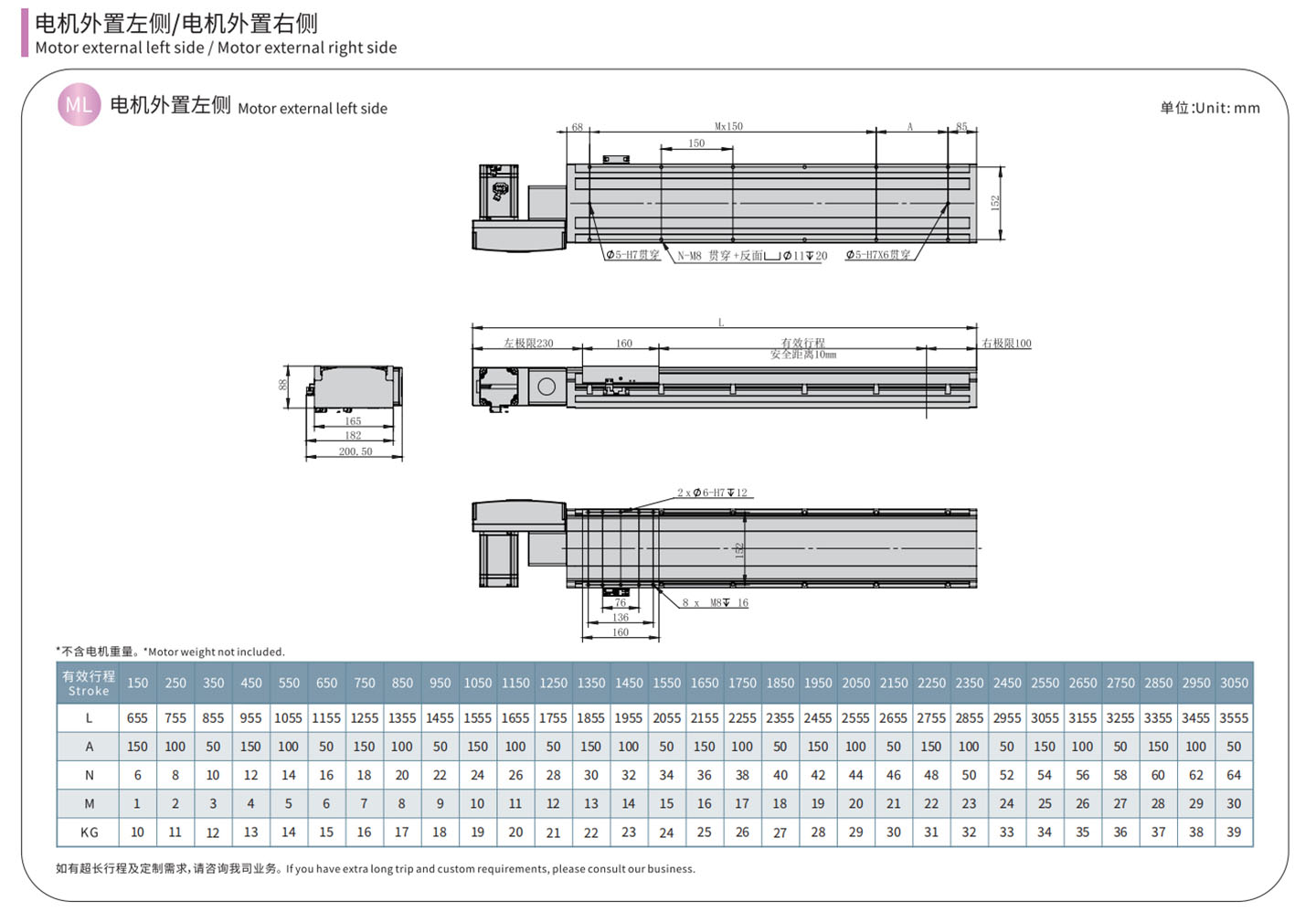
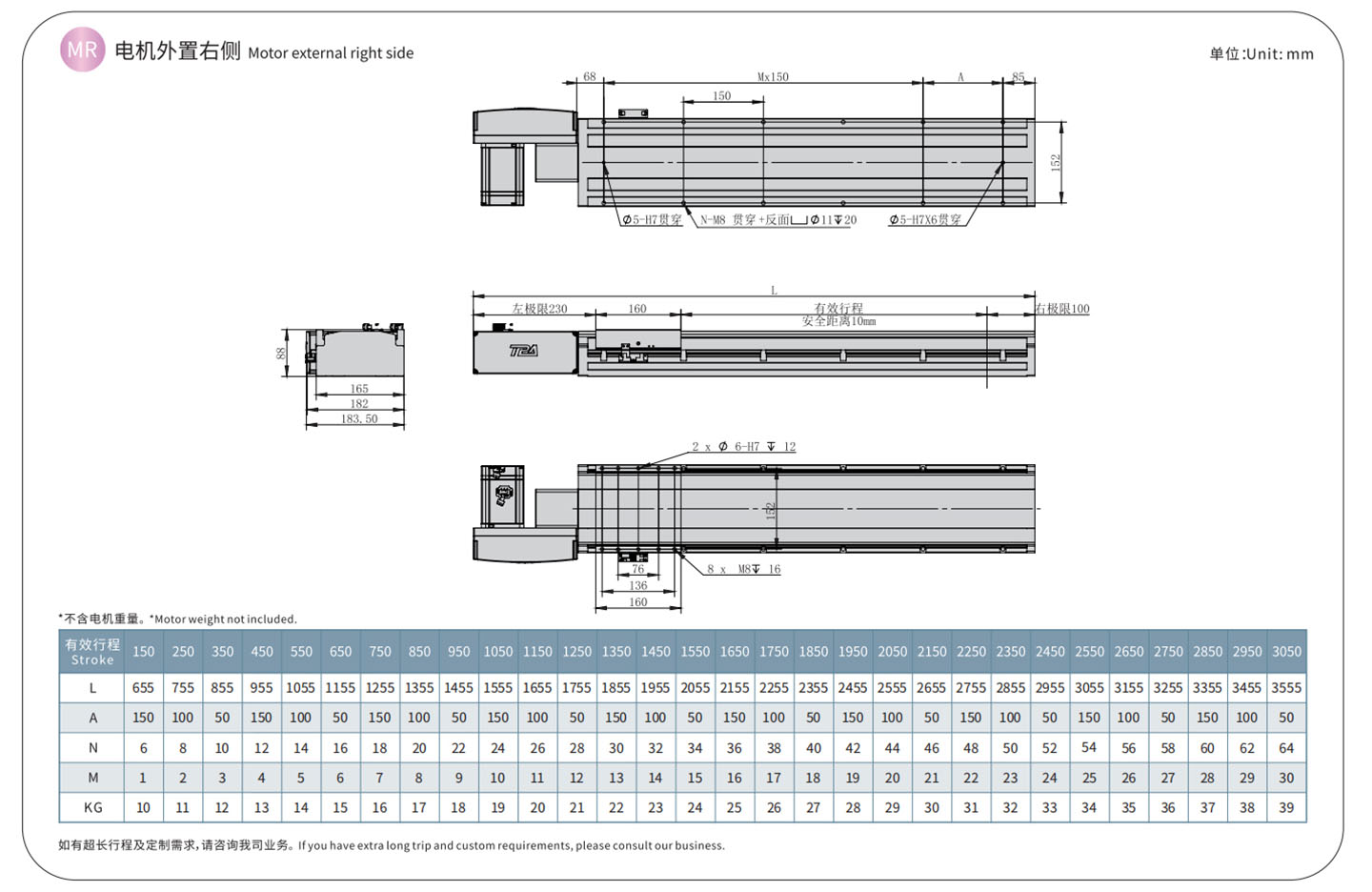
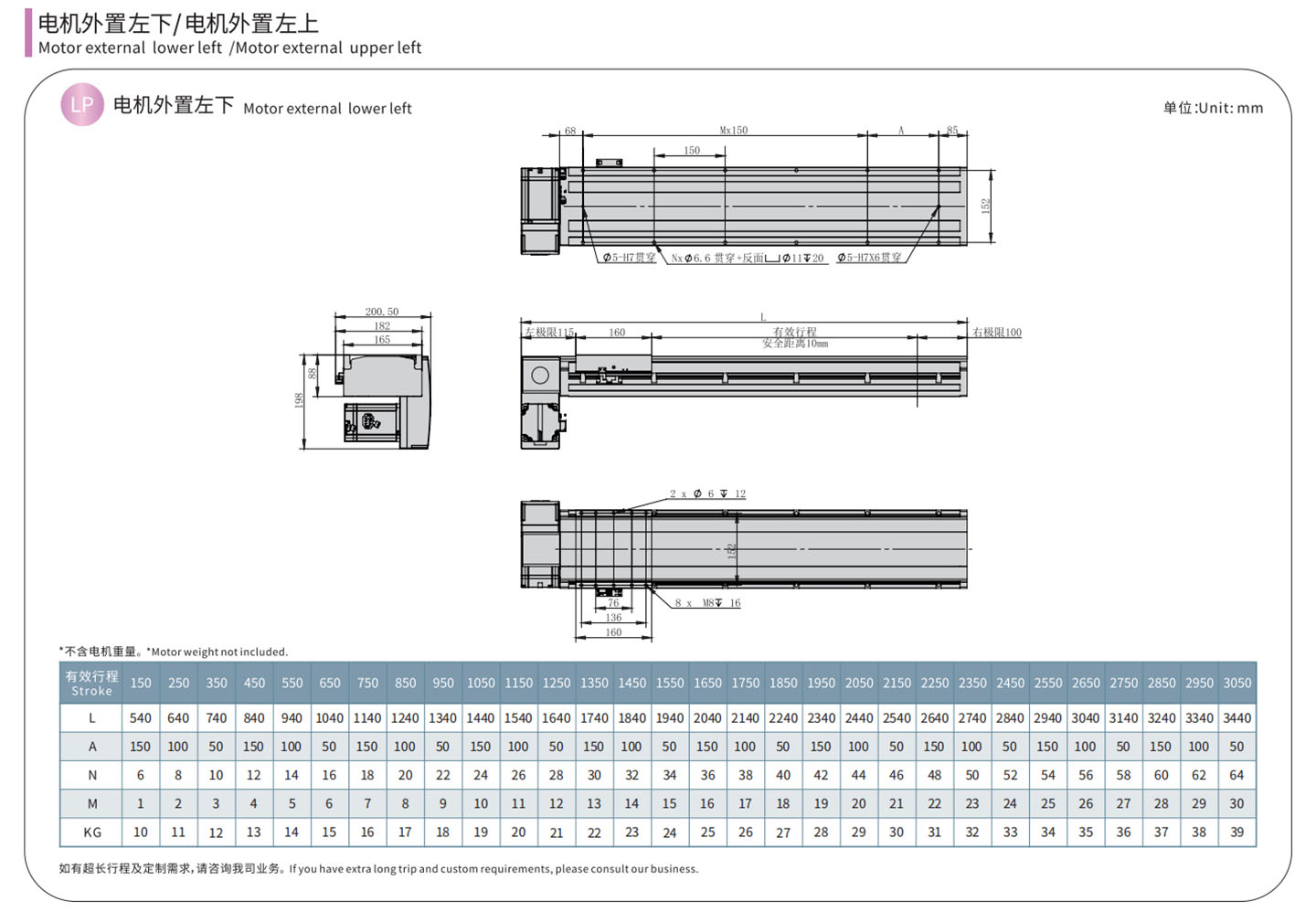
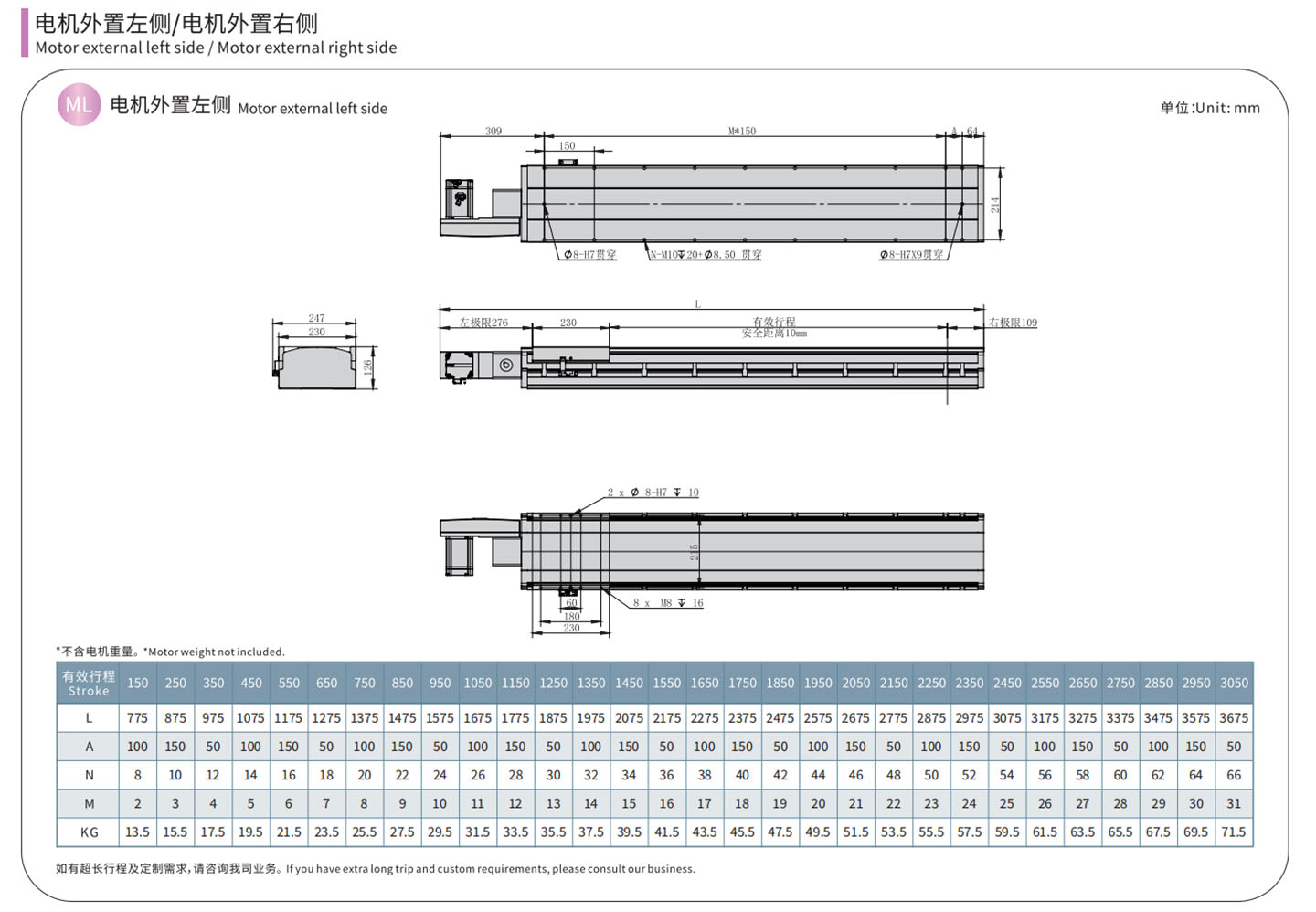
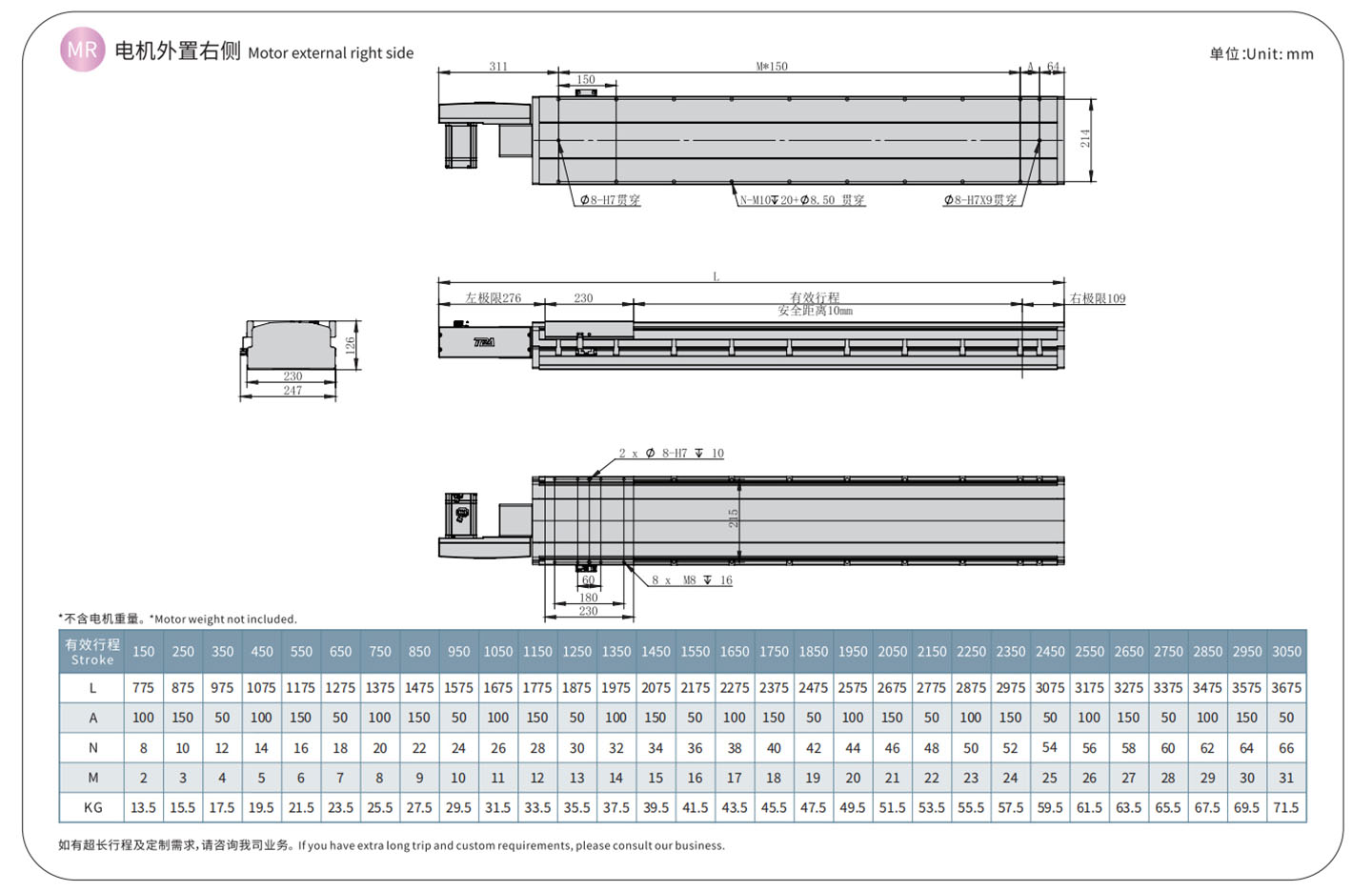
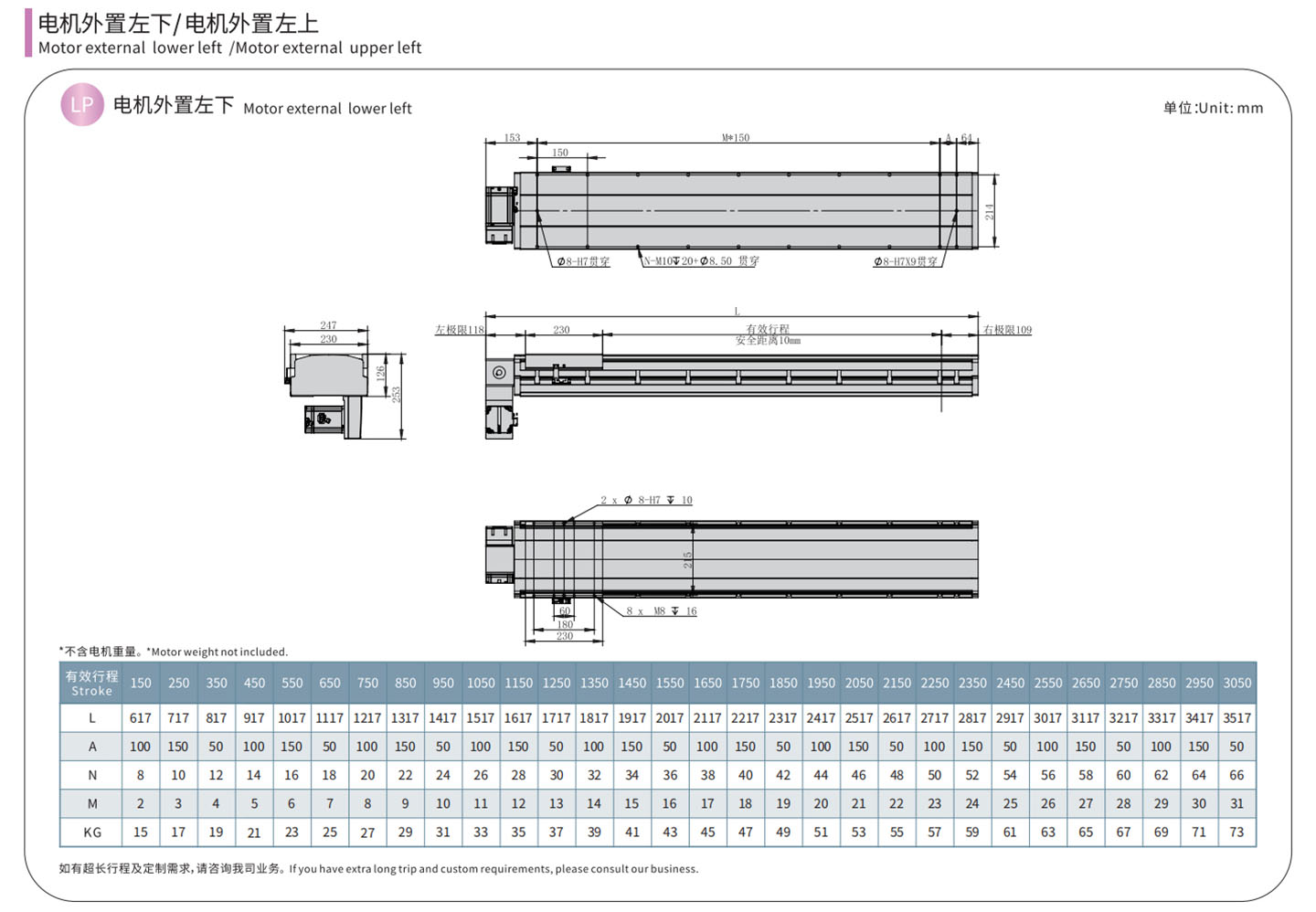
In addition ut torques altum, altum celeritatem et longum ictum in actuatorem linearem lapsi praebeat, callide etiam destinavimus viam ut laminam bracteae foris ponendam esse permittat, qui nostros actuatores lineares ad VIII modos institutionis ad varias ambitus automationis ambitus accommodandos accommodare sinit.

165

半封闭精进皮带模组136
半封闭精进皮带模组120
Features
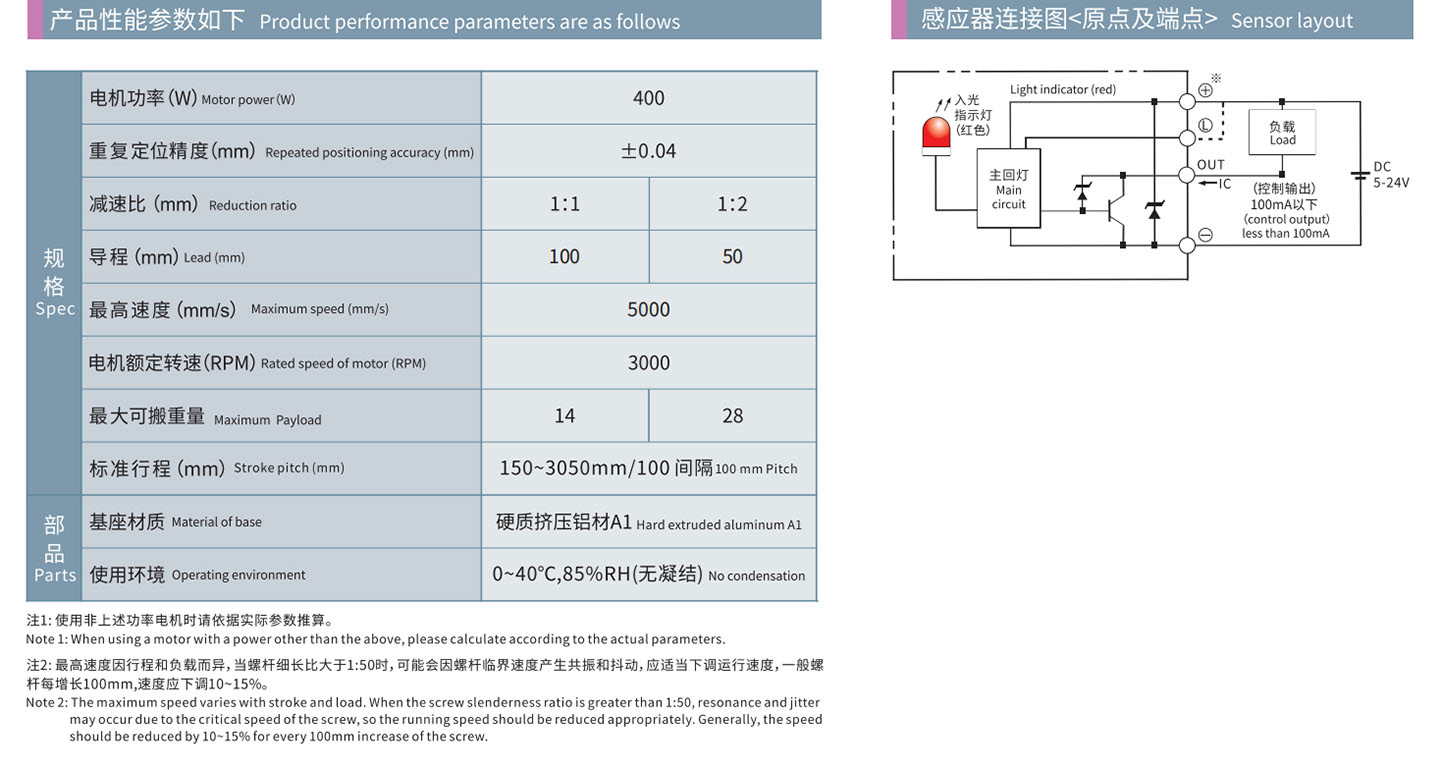
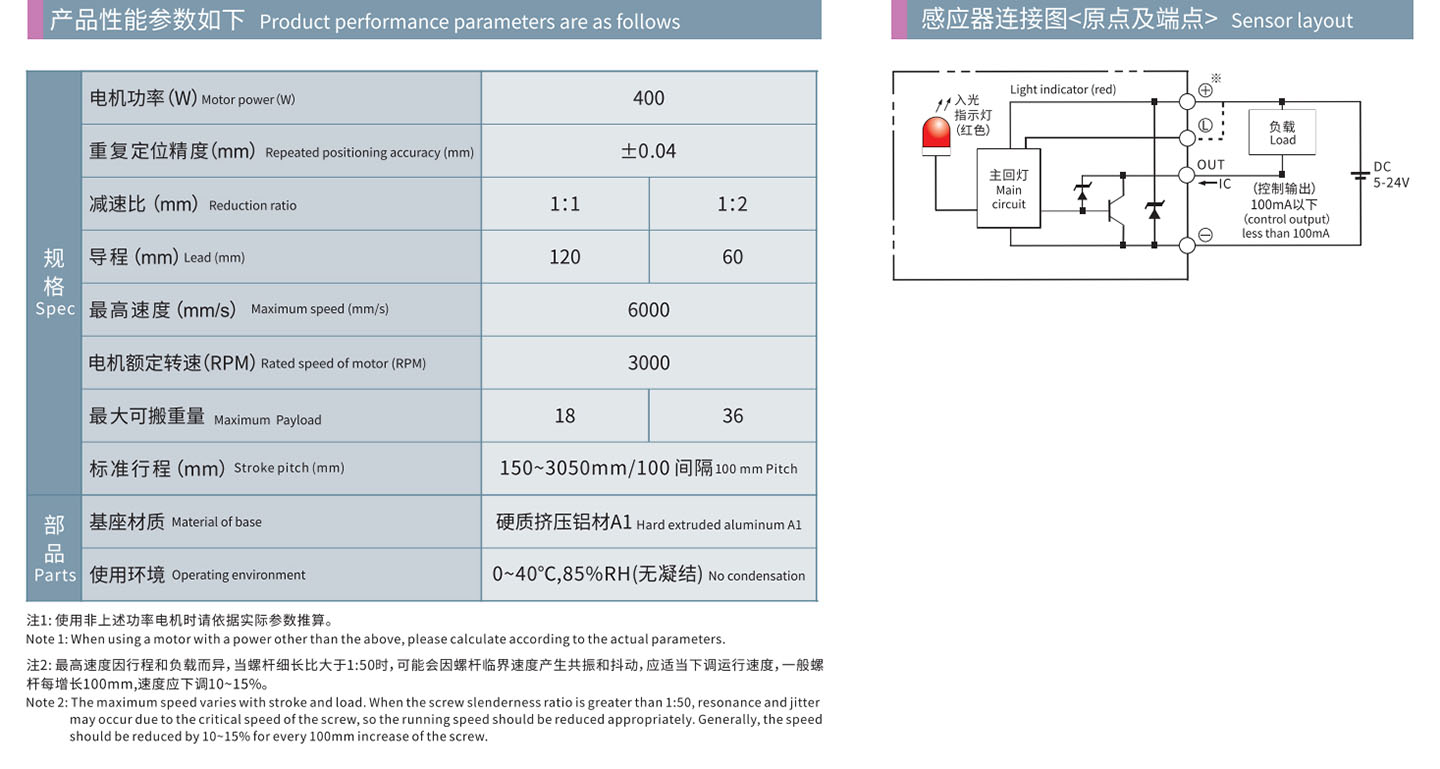
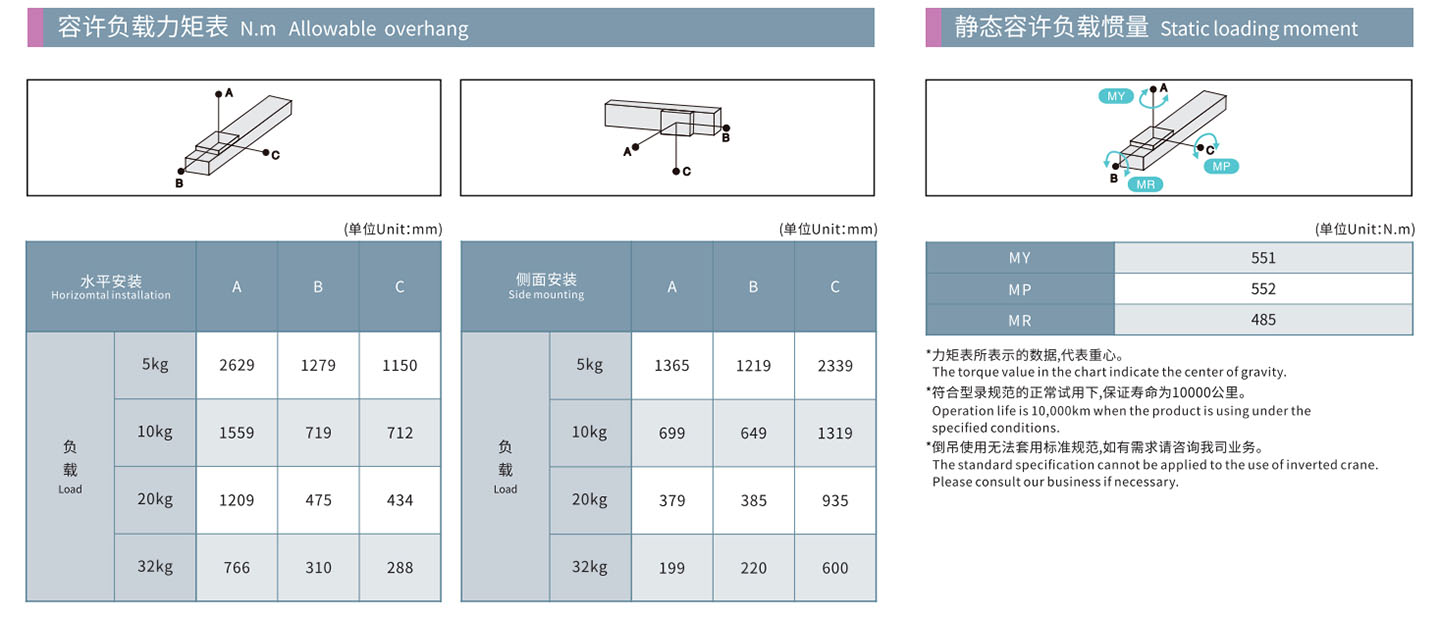
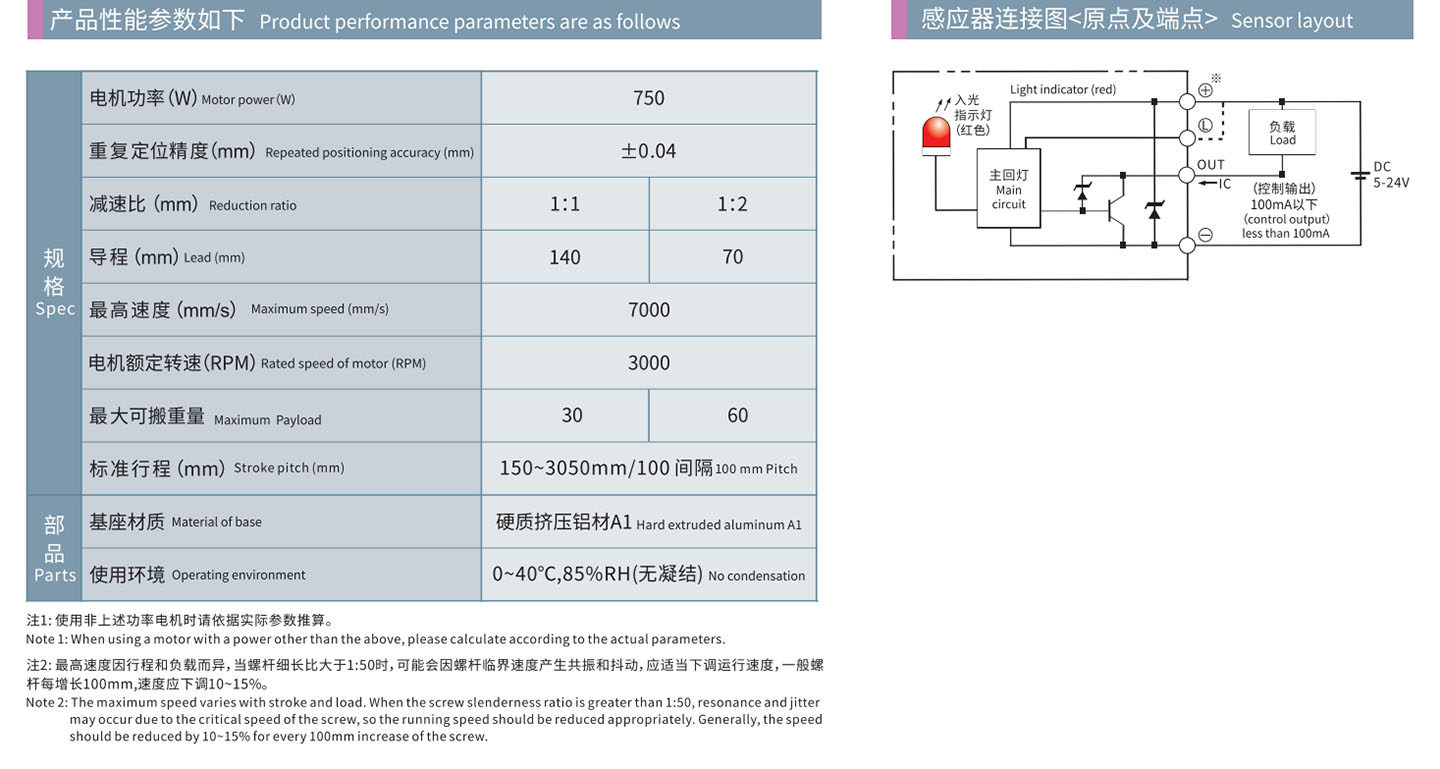
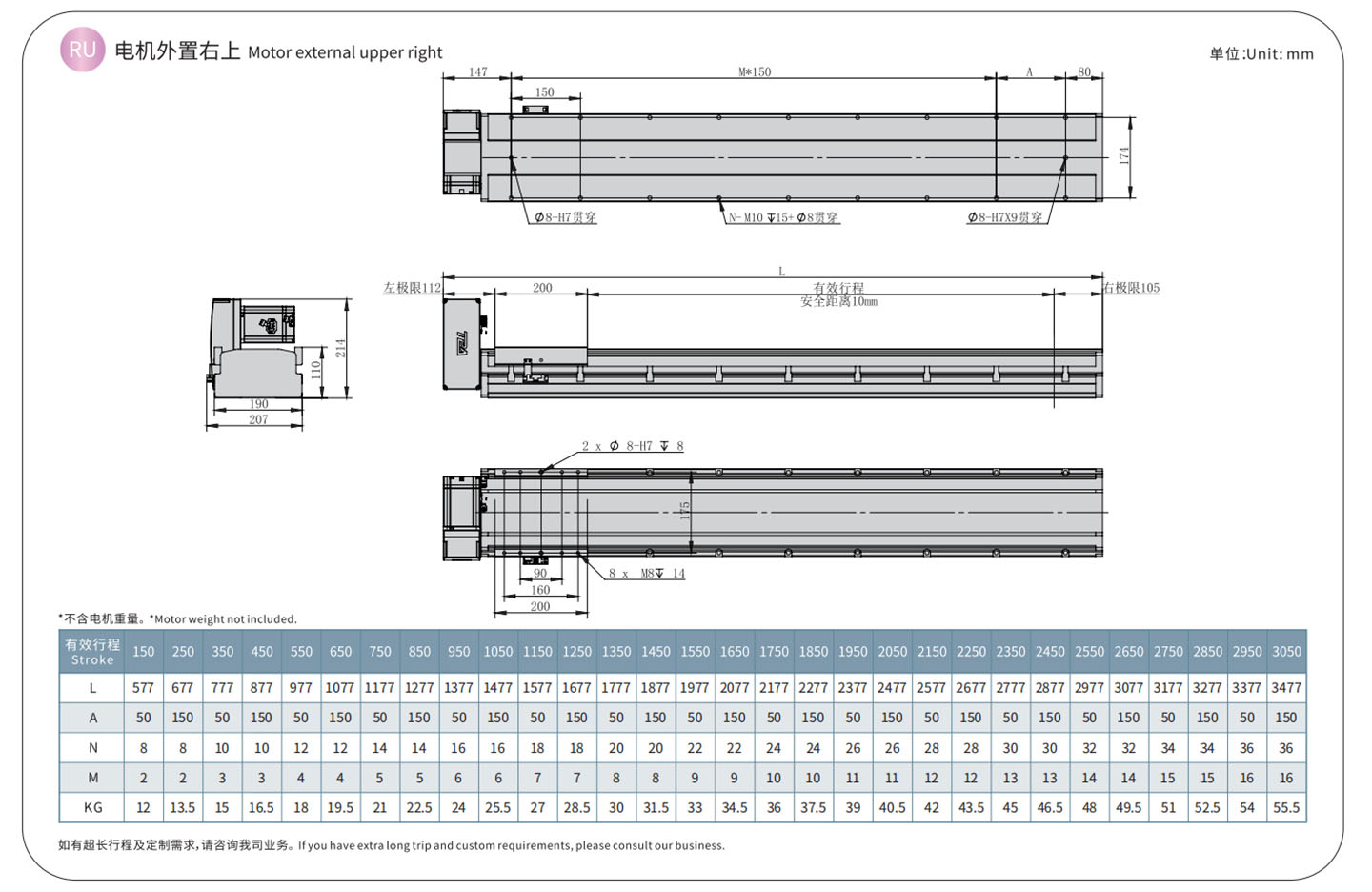
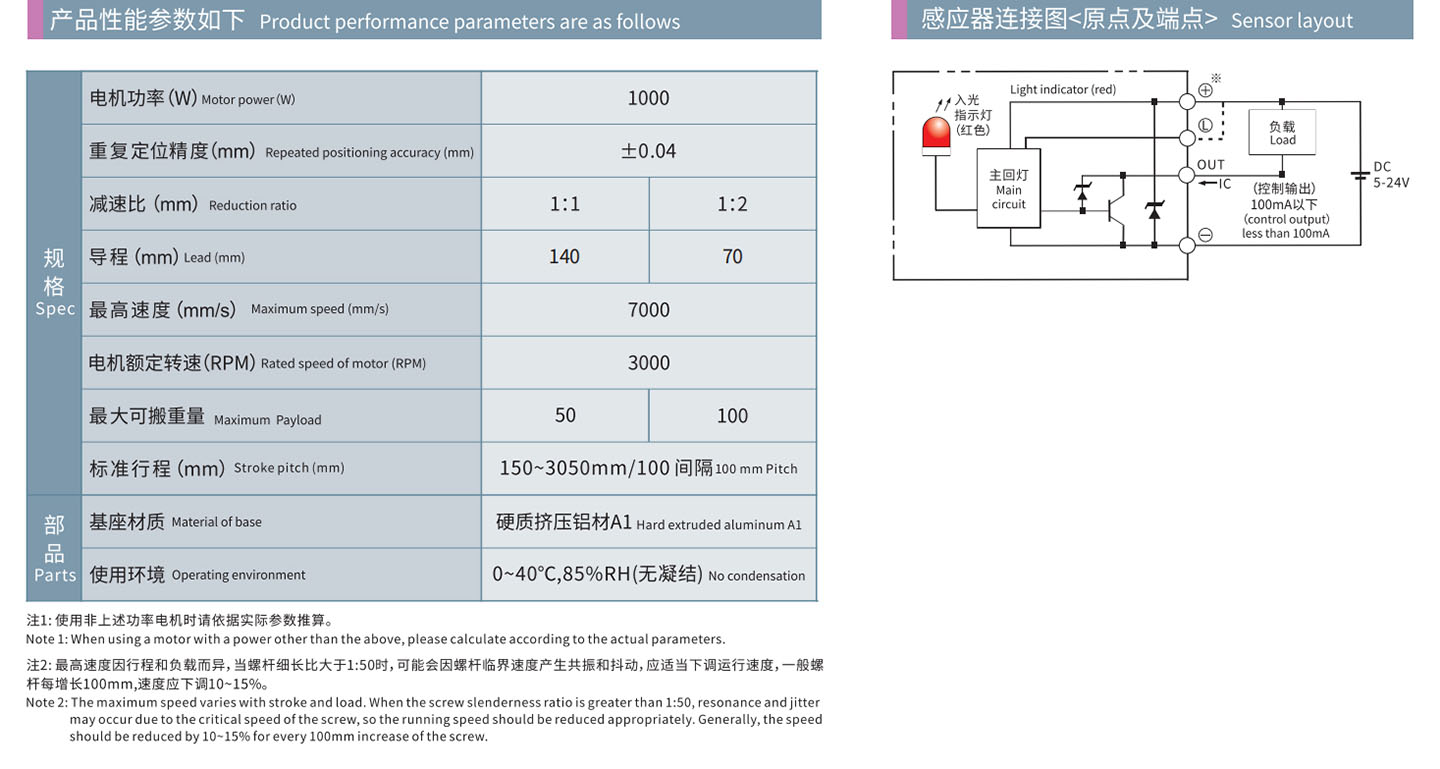
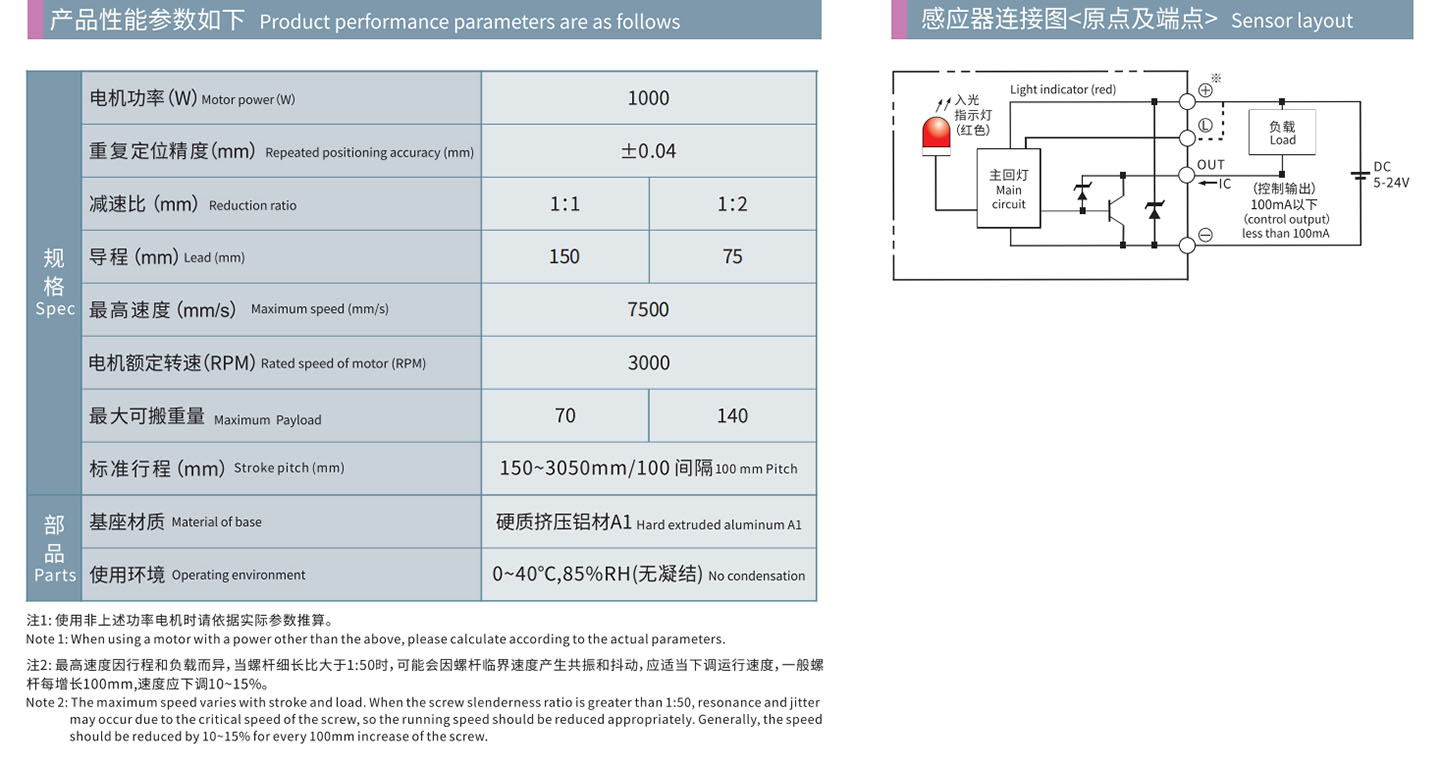
Repetita Positioning accuratius: ± 0.04mm
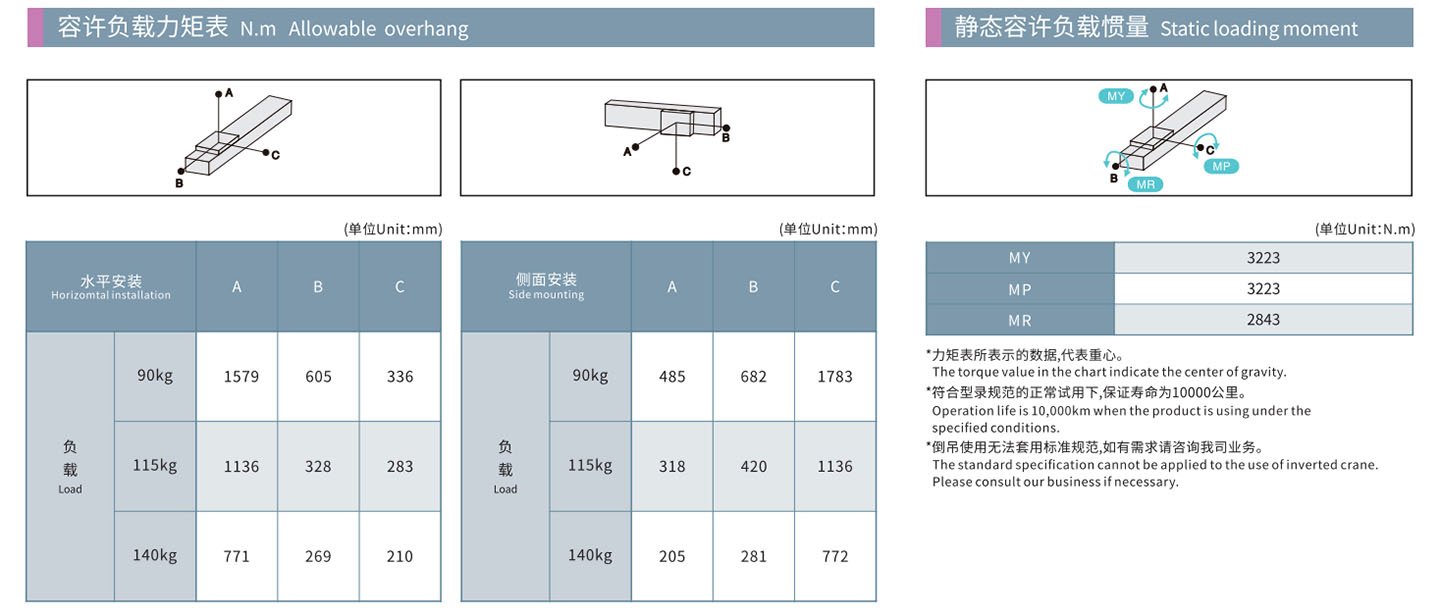
Max Payload: 140kg
Plaga: 100 – 3050mm
Max Volo: 7000mm/s

1. Planum consilium, levius altiore pondere, inferioris complexionis altitudine et melius rigiditate.
2. Structura optimized est, accuratio melior, et error ex multiplici accessu coacto reducitur.
3. Conventus est tempus salutaris, laboris salutaris et opportuni. Aluminium operculum removere ut iuncturam vel modulum instituere non est necesse.
4. Sustentatio simplex est, utraque moduli oleo infusione foraminum instructa, et operculum removeri non oportet.

More products

HNB Series Cingulum pulsus linearibus OMNIBUS Dimidium inclusum

ONB-F Series Cingulum Coactus Module Linearis Externi...

OCB Series Cingulum Coactus Module Linear Plene Encl...

ONB Series Cingulum agitata Linearibus OMNIBUS Dimidium inclusum

HCB Series Cingulum Accensus Module Linearis Plene Encl...










