




HCB 시리즈 벨트 구동 선형 모듈 완전 밀폐형

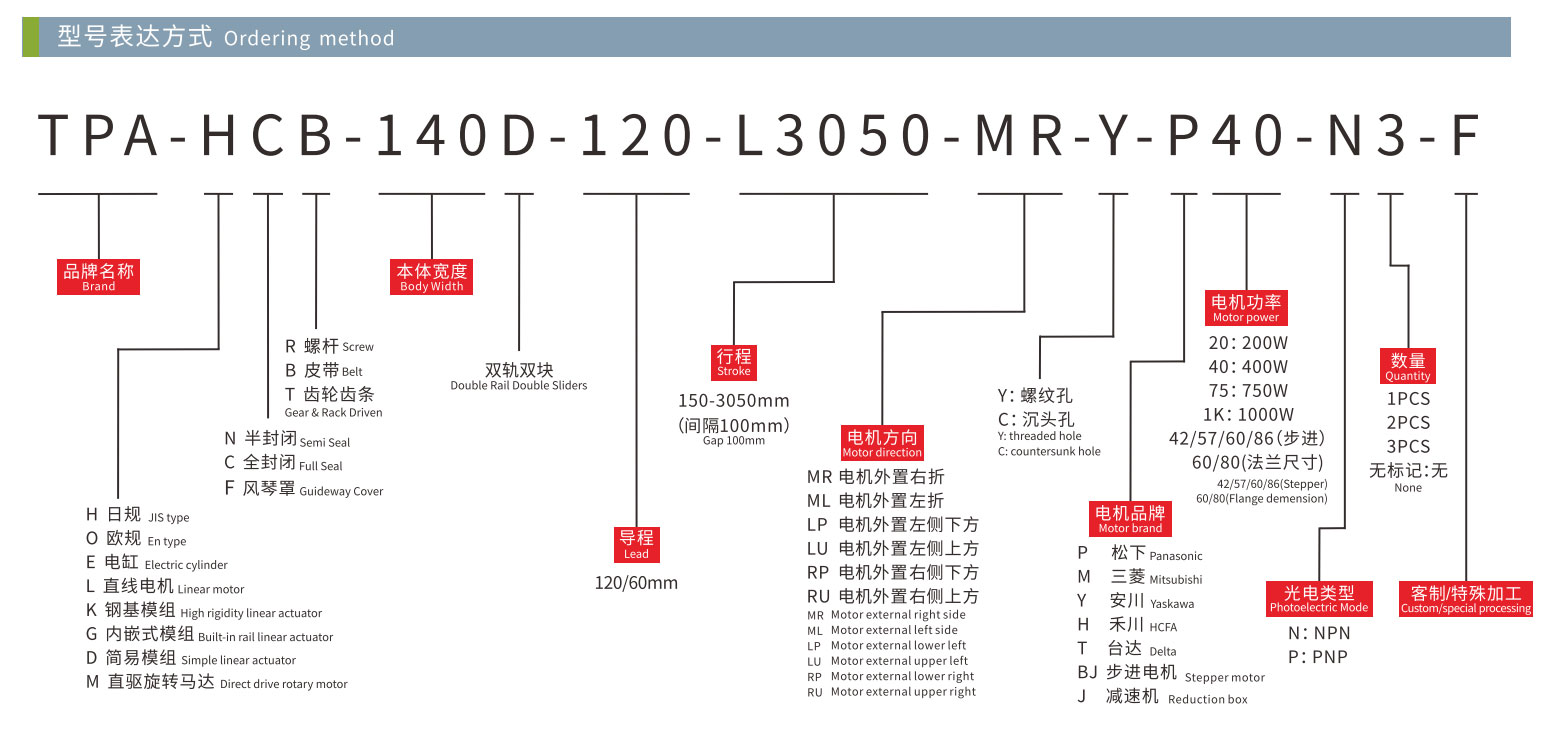
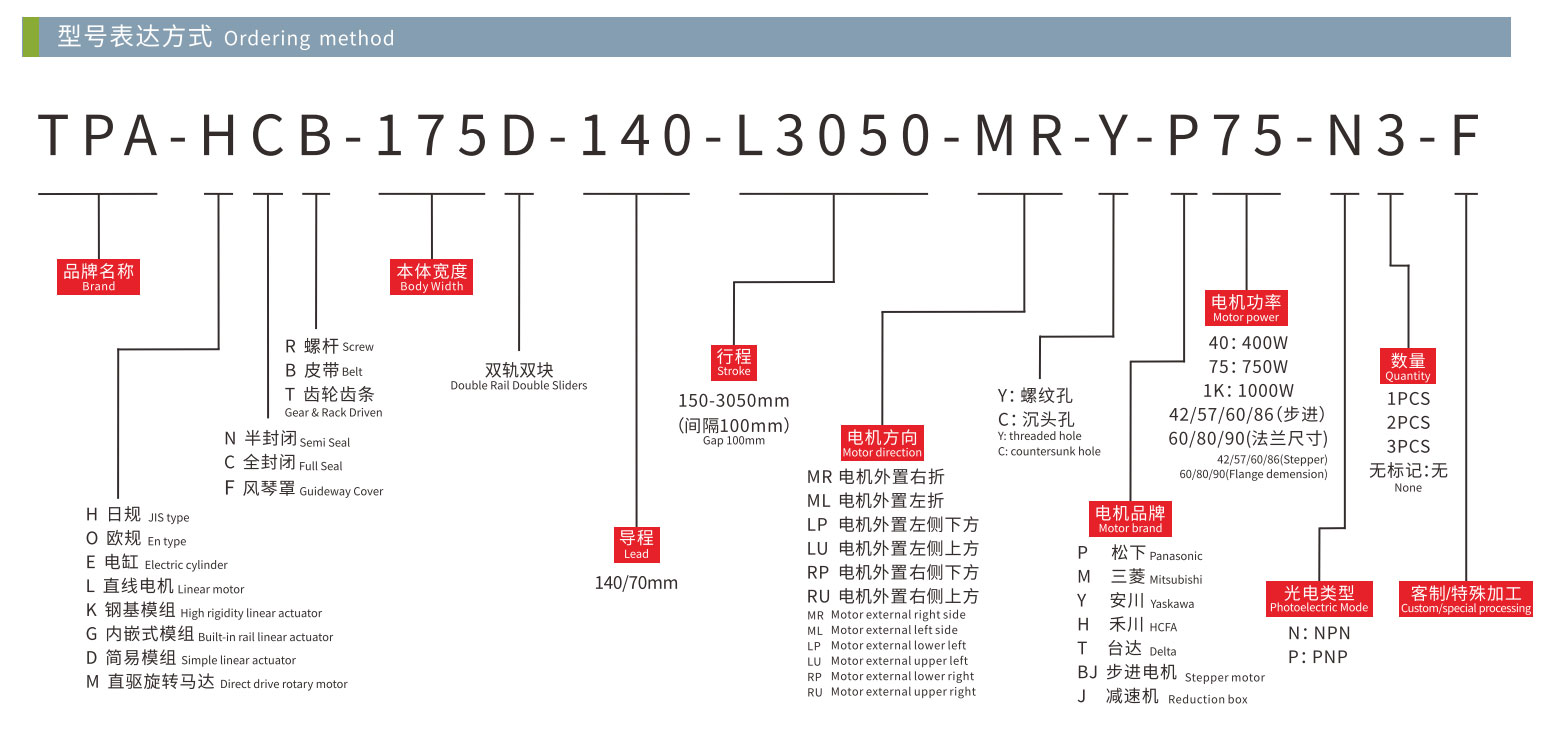
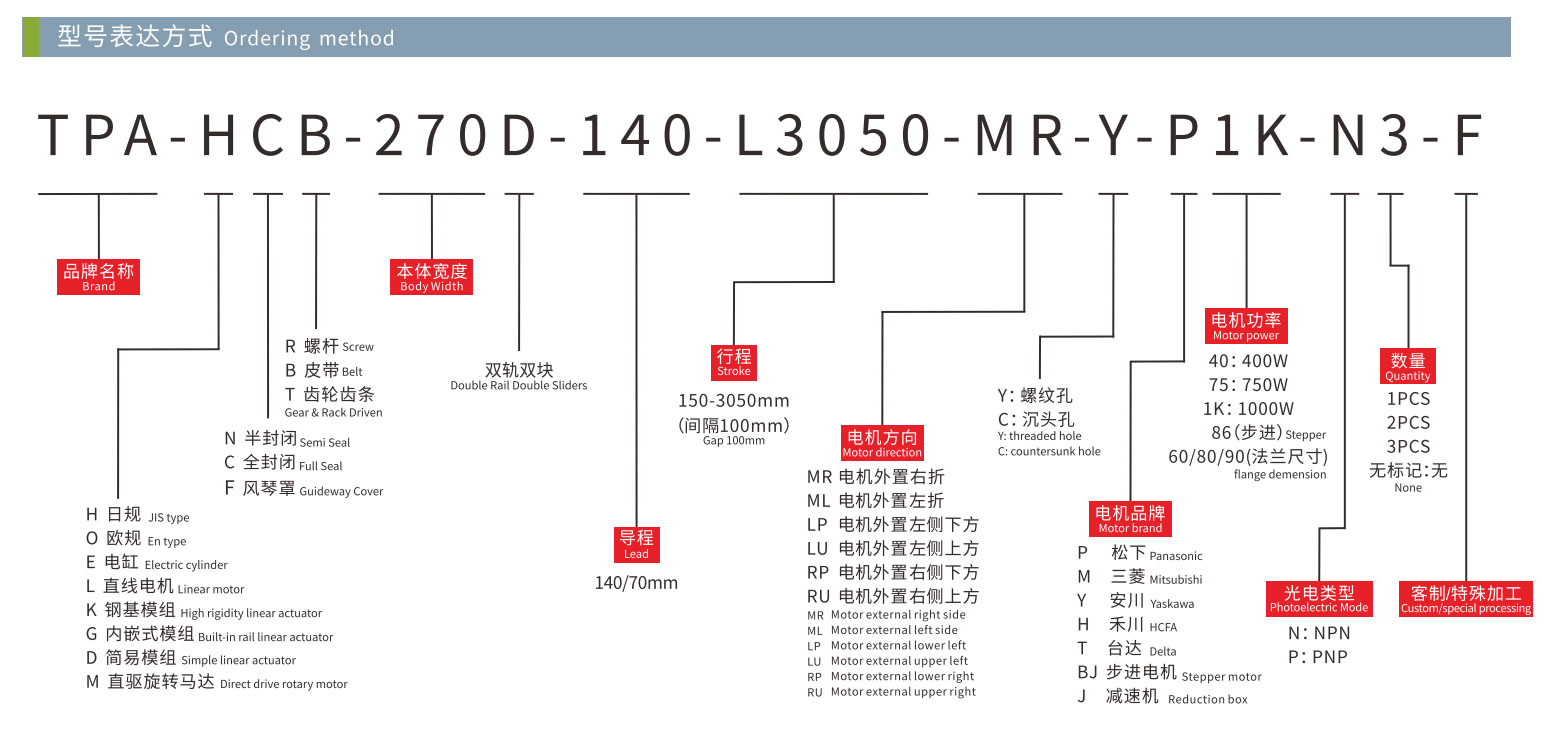
모델 선택기
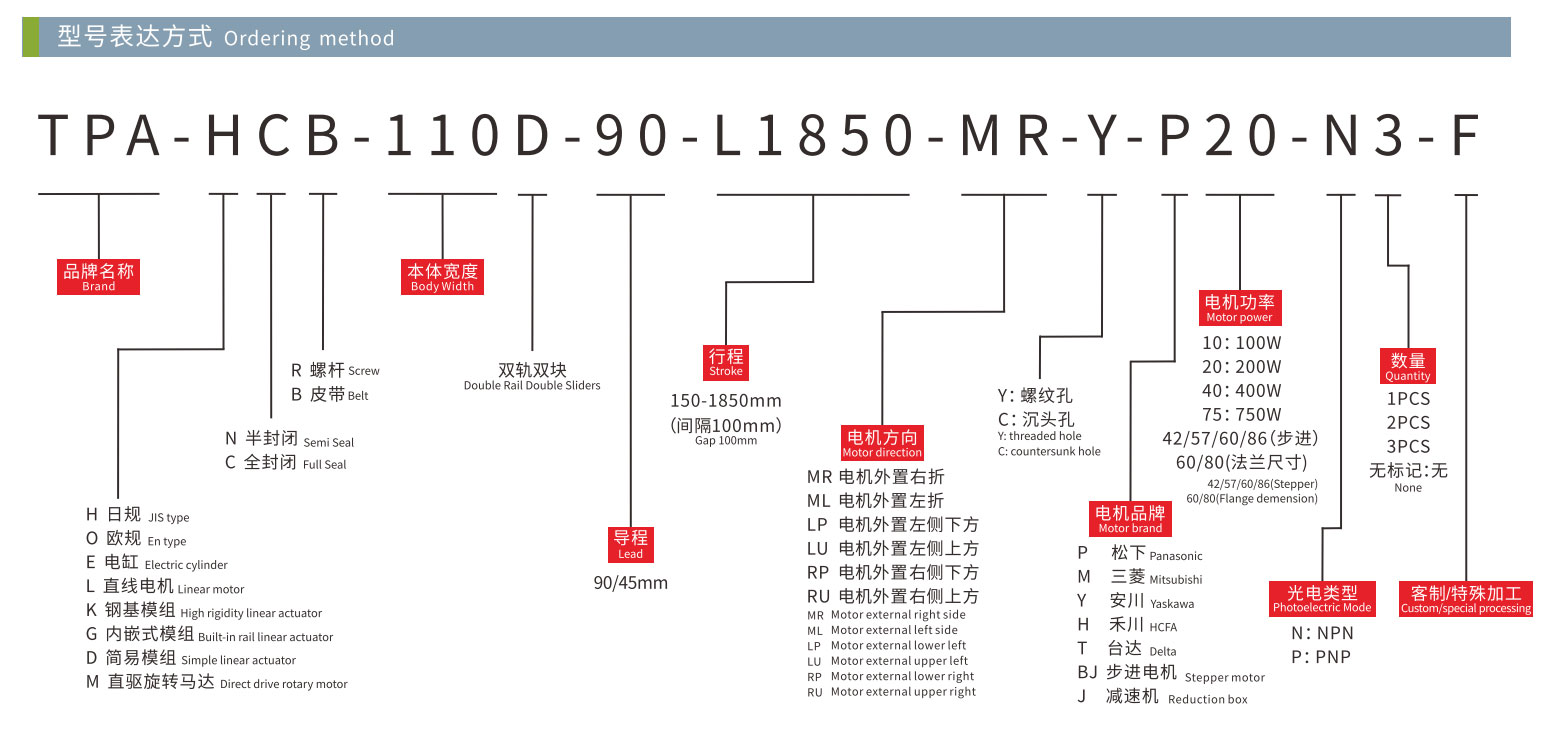
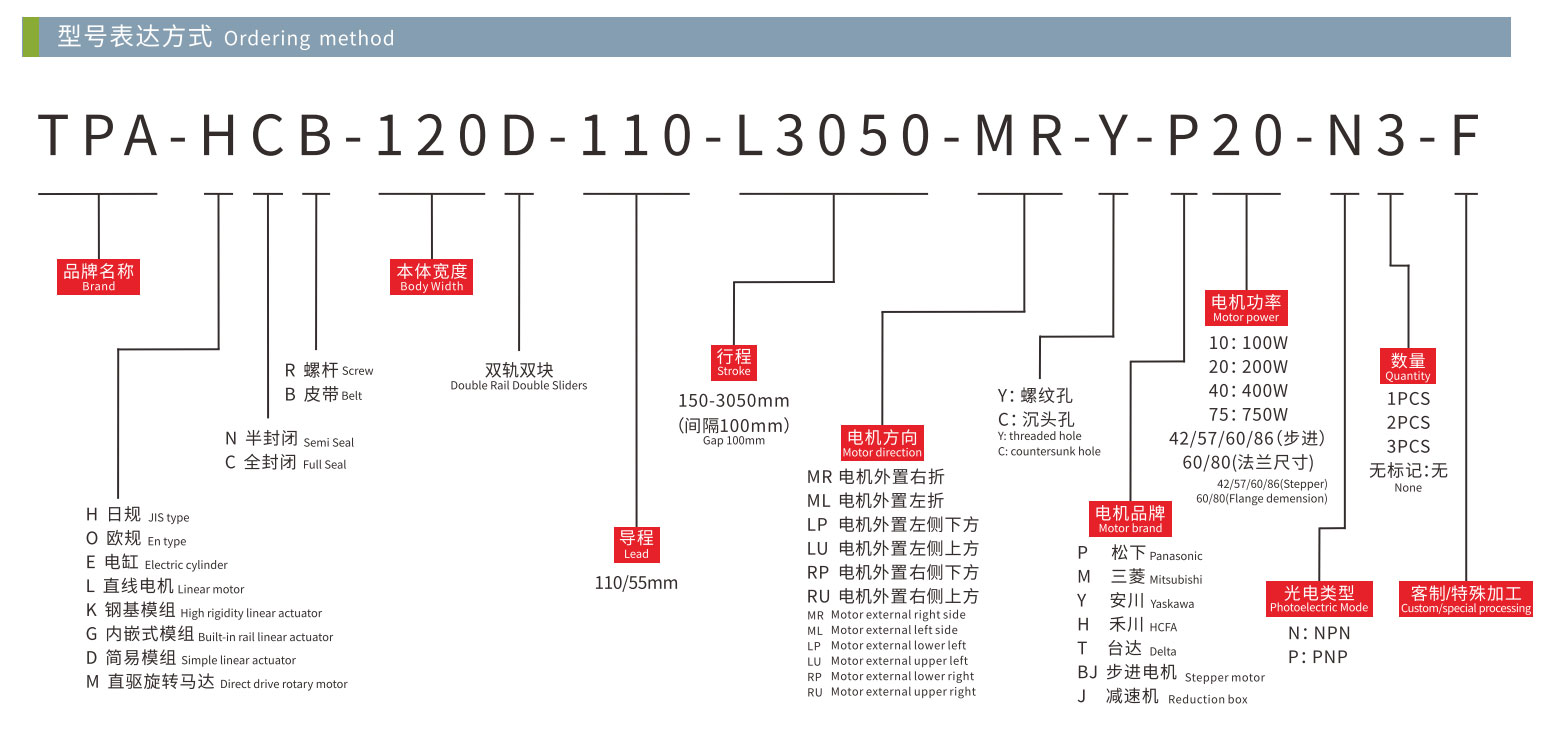
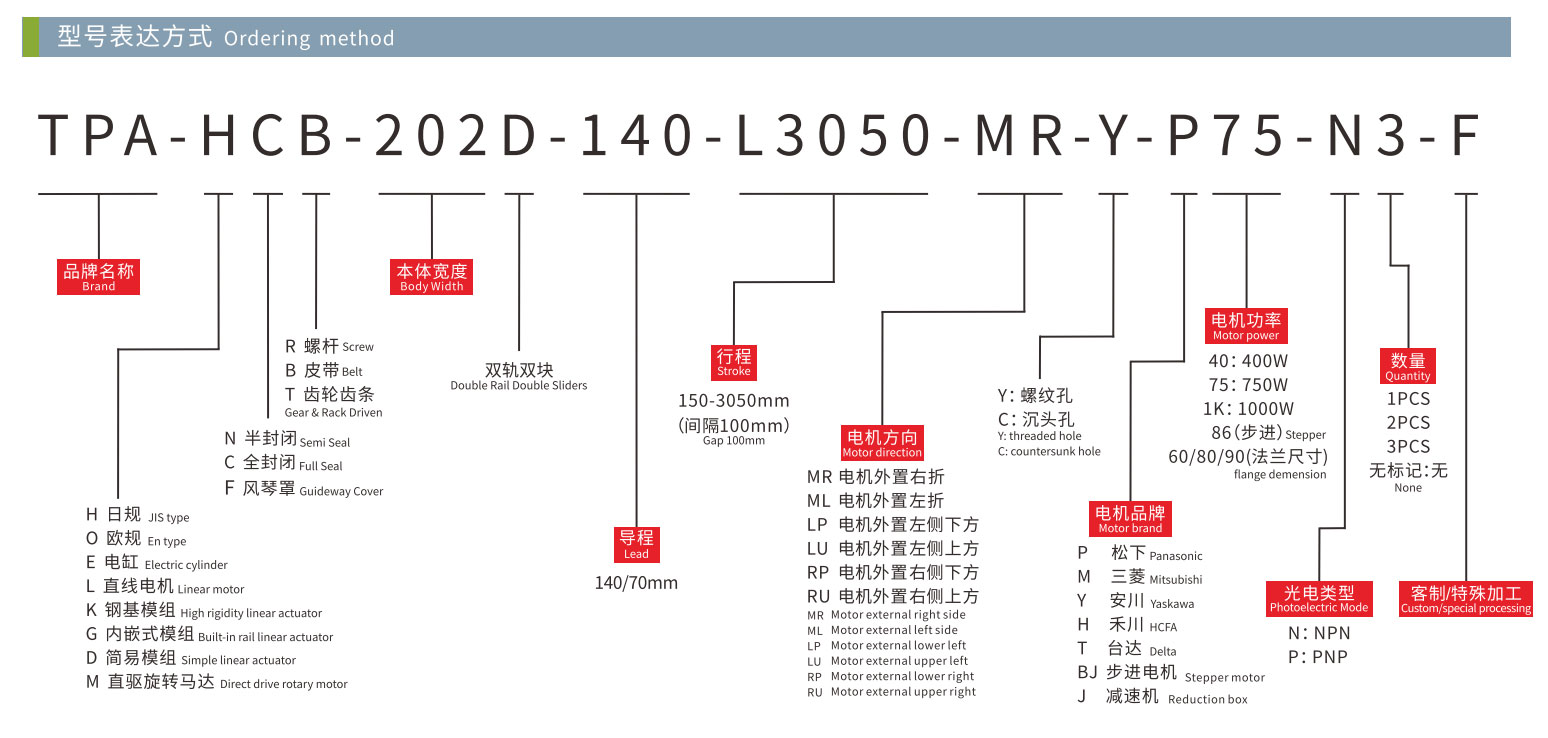
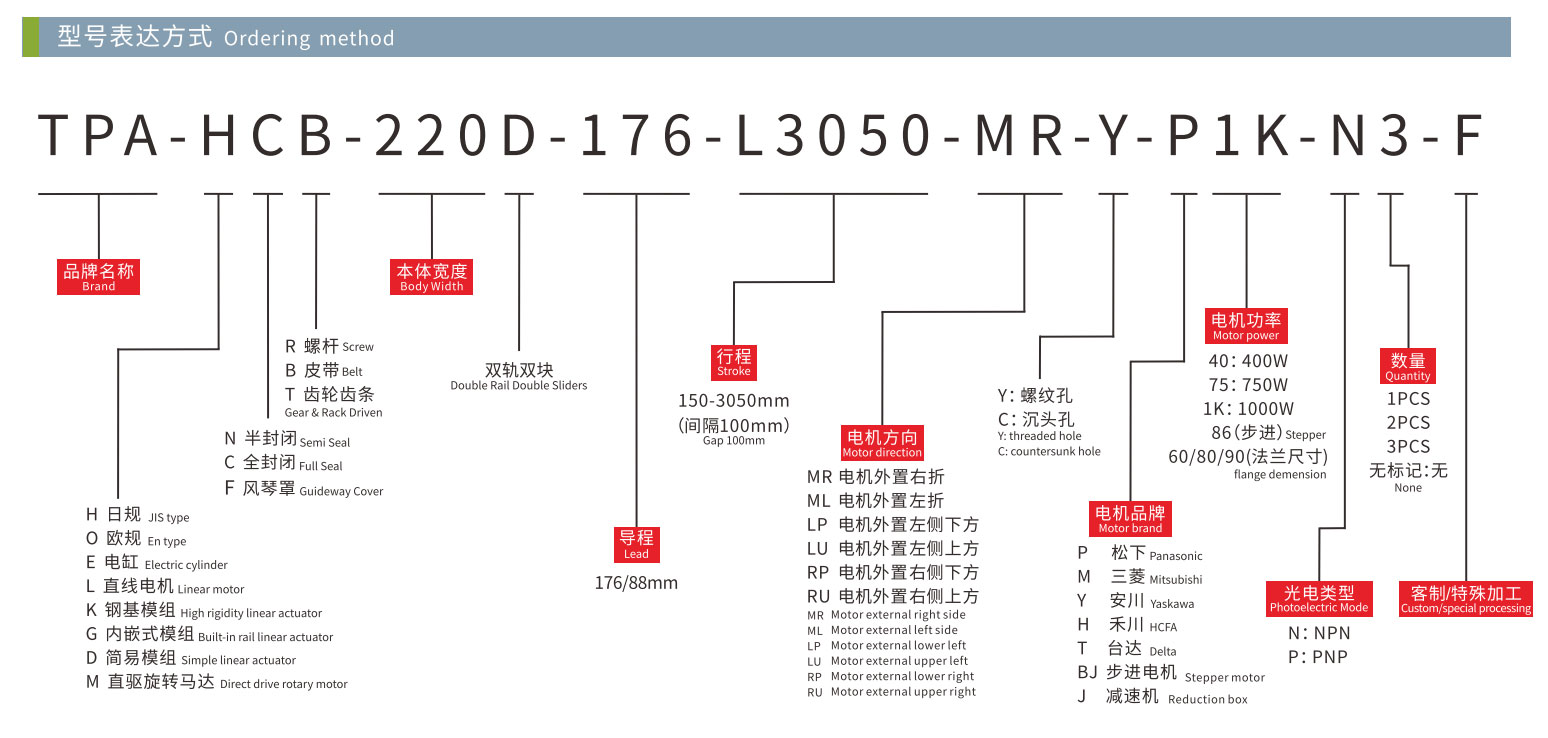
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
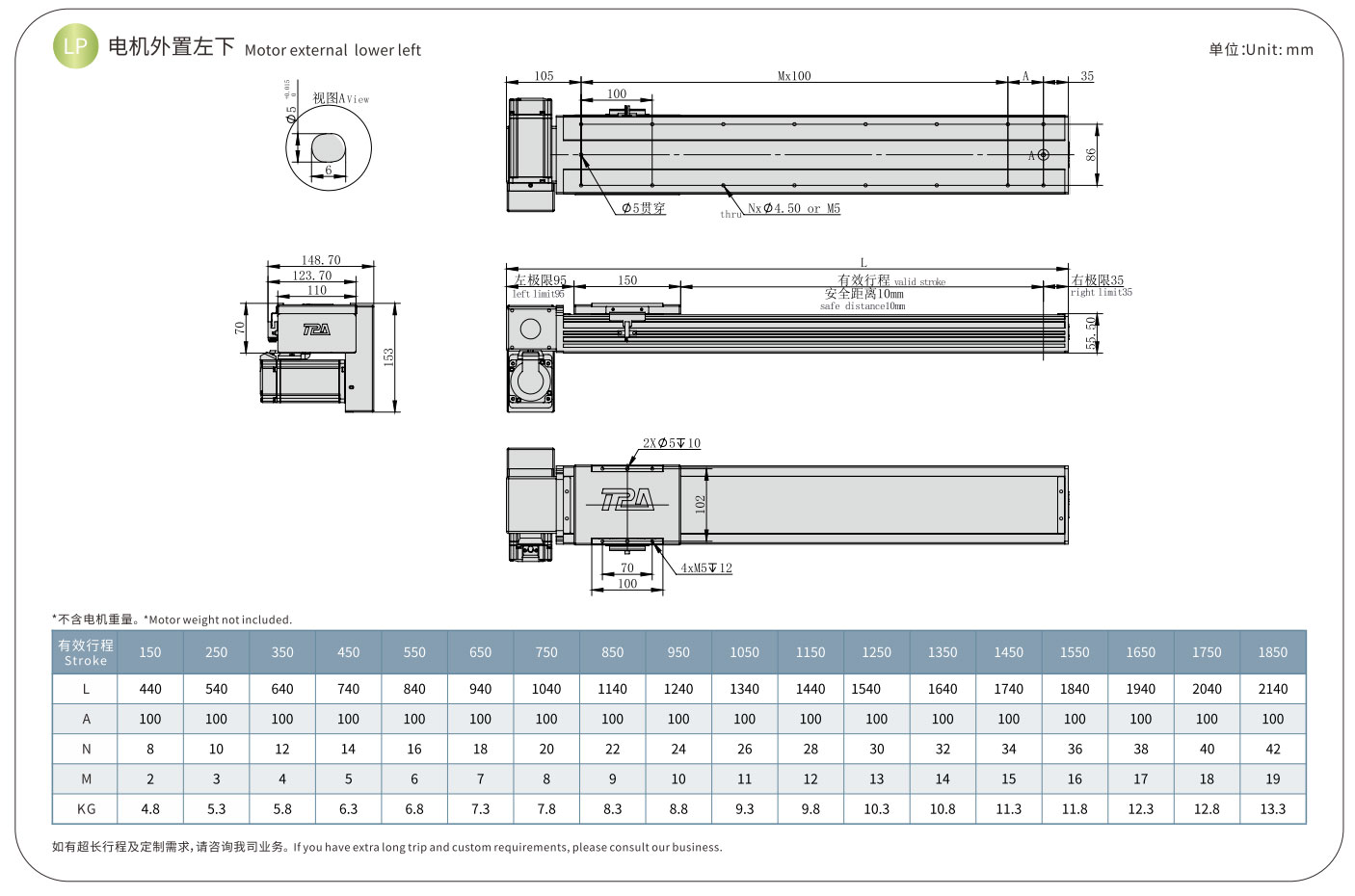
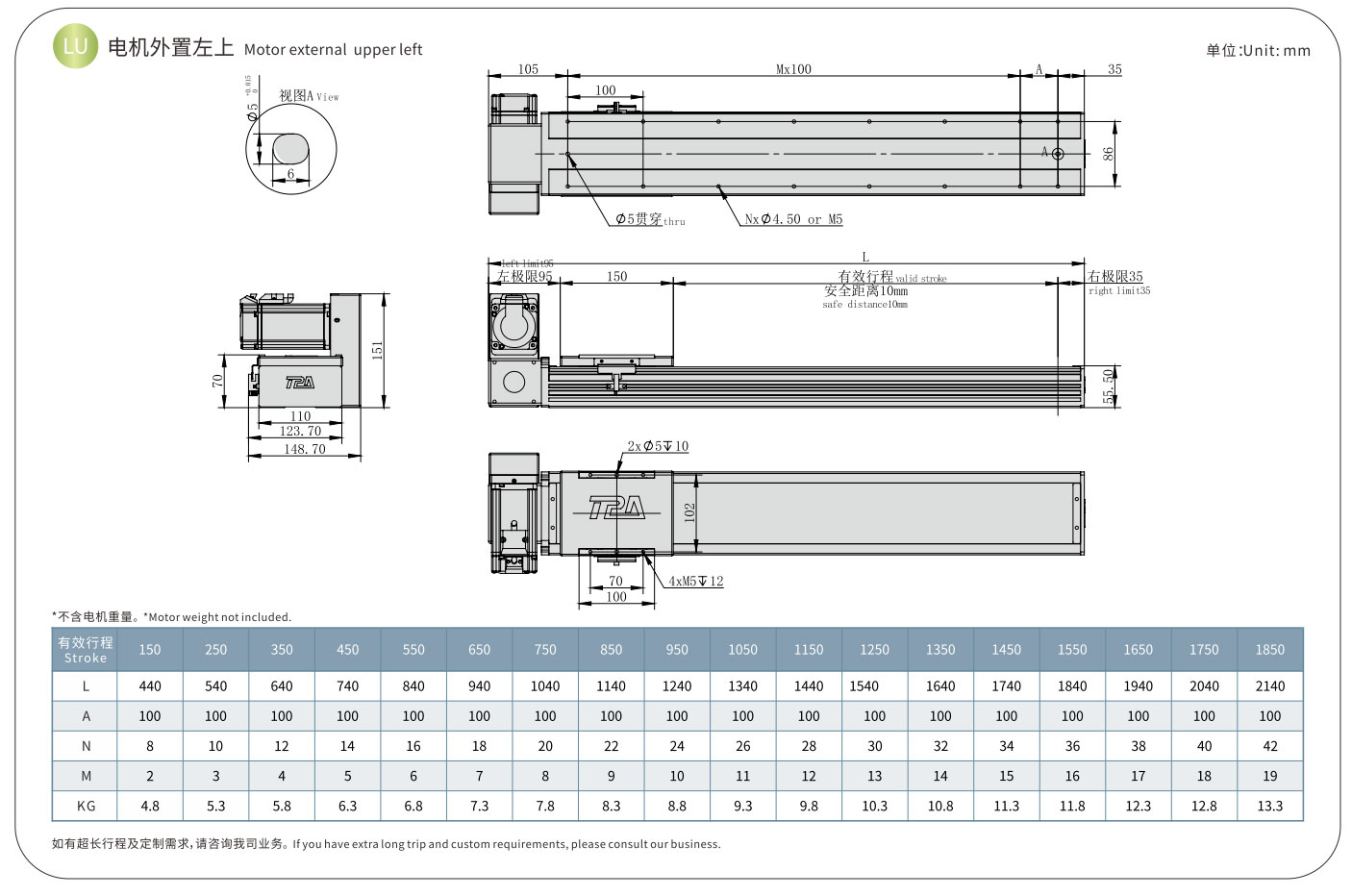
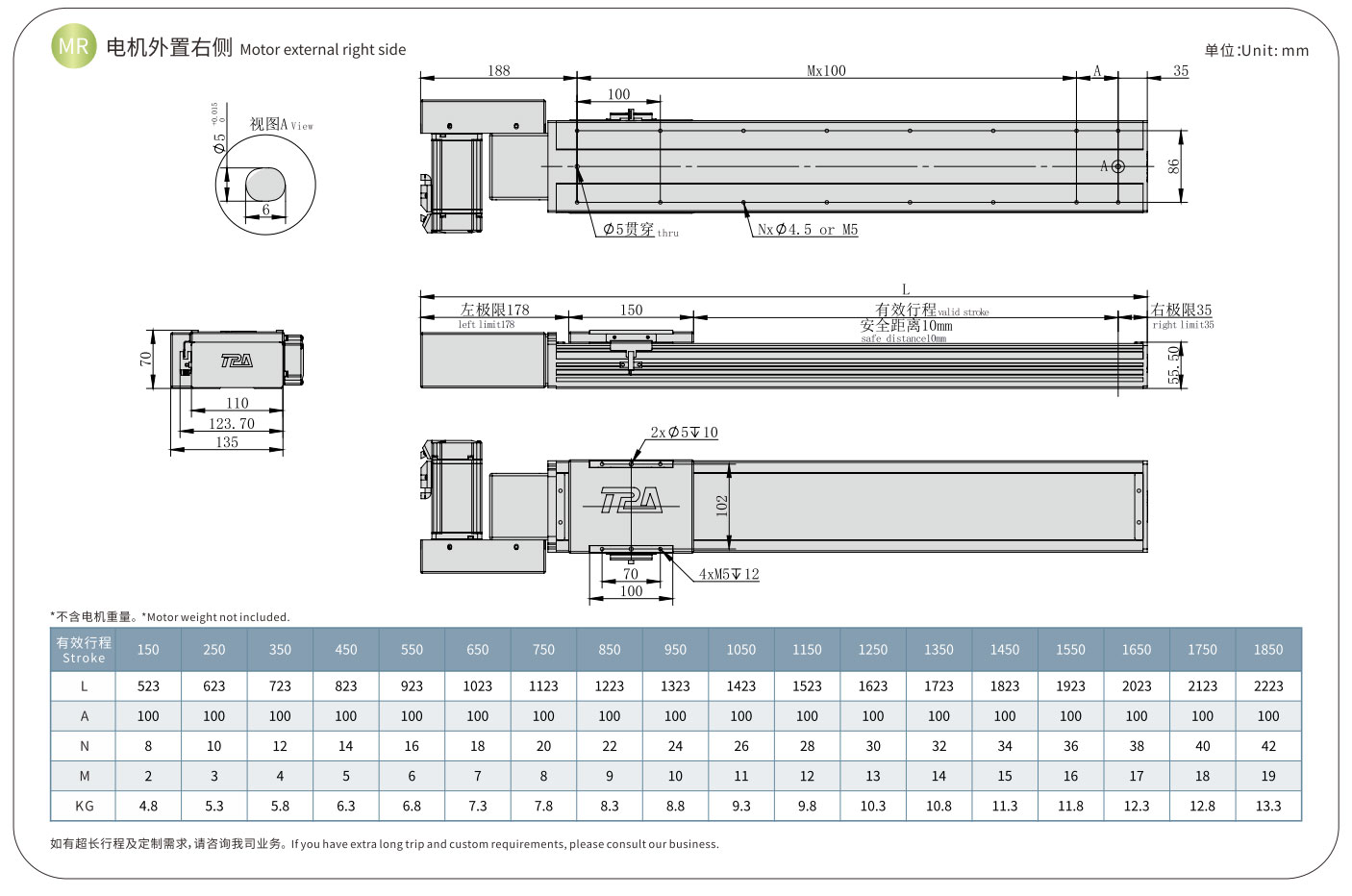
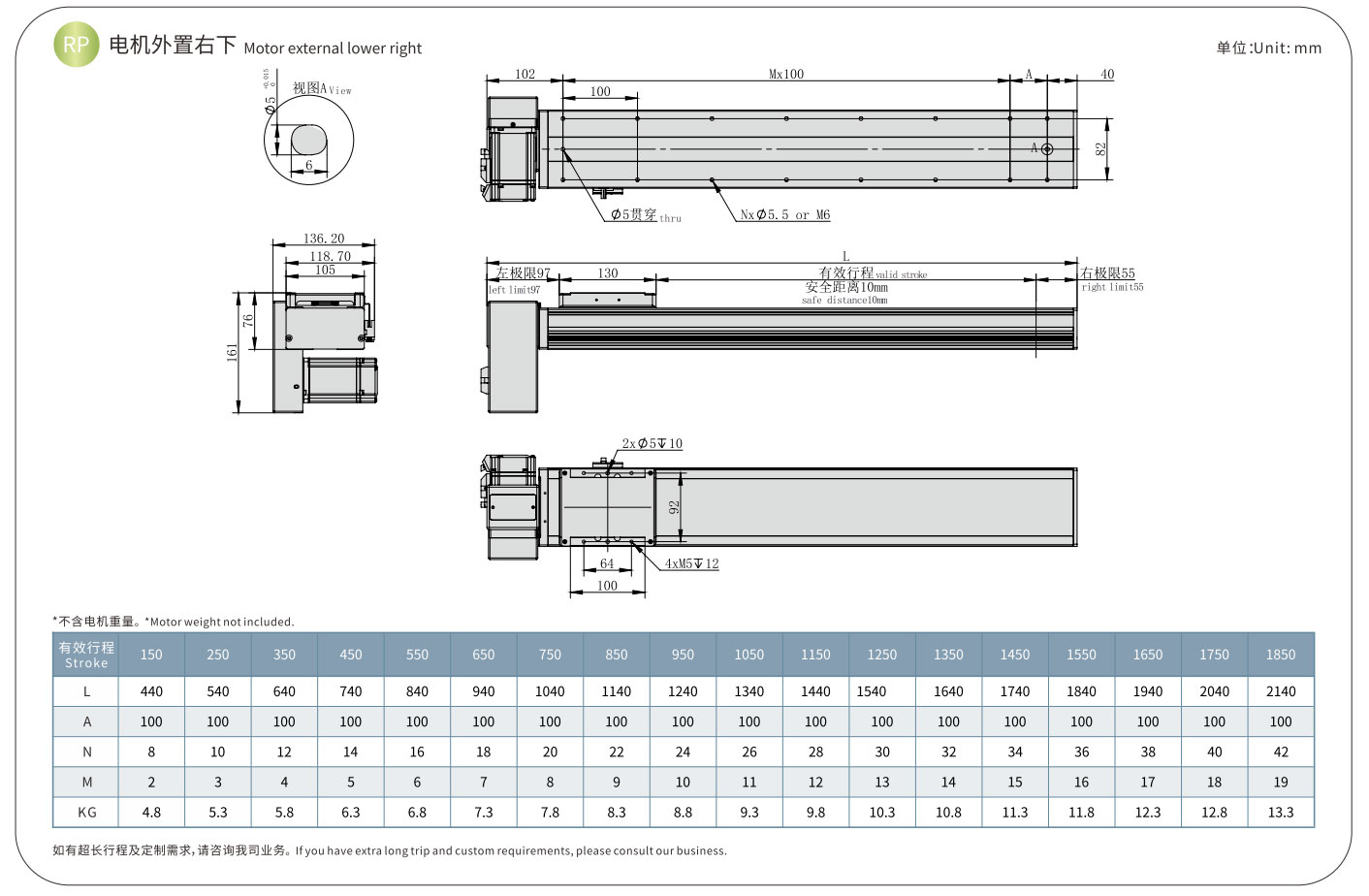
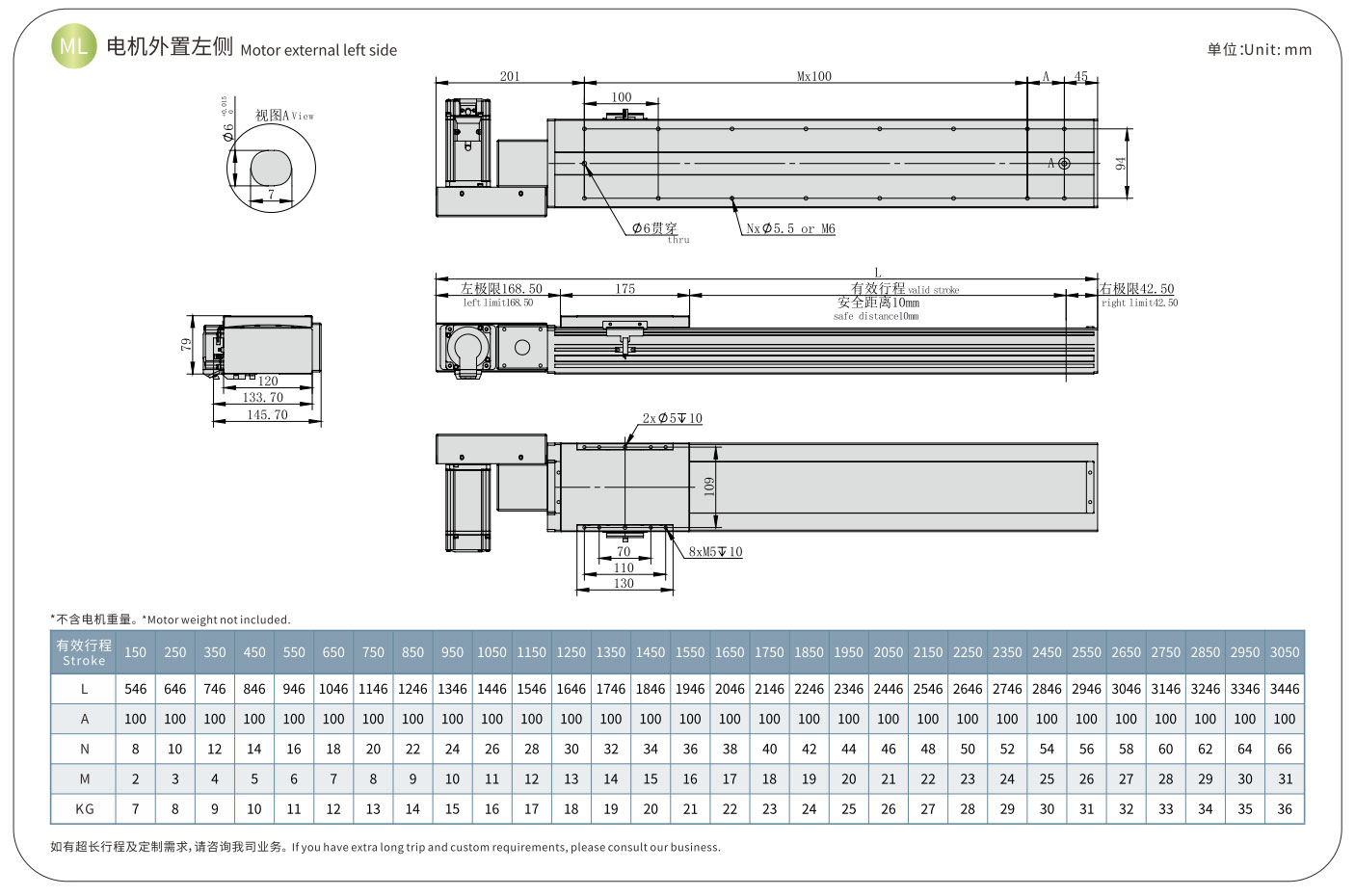
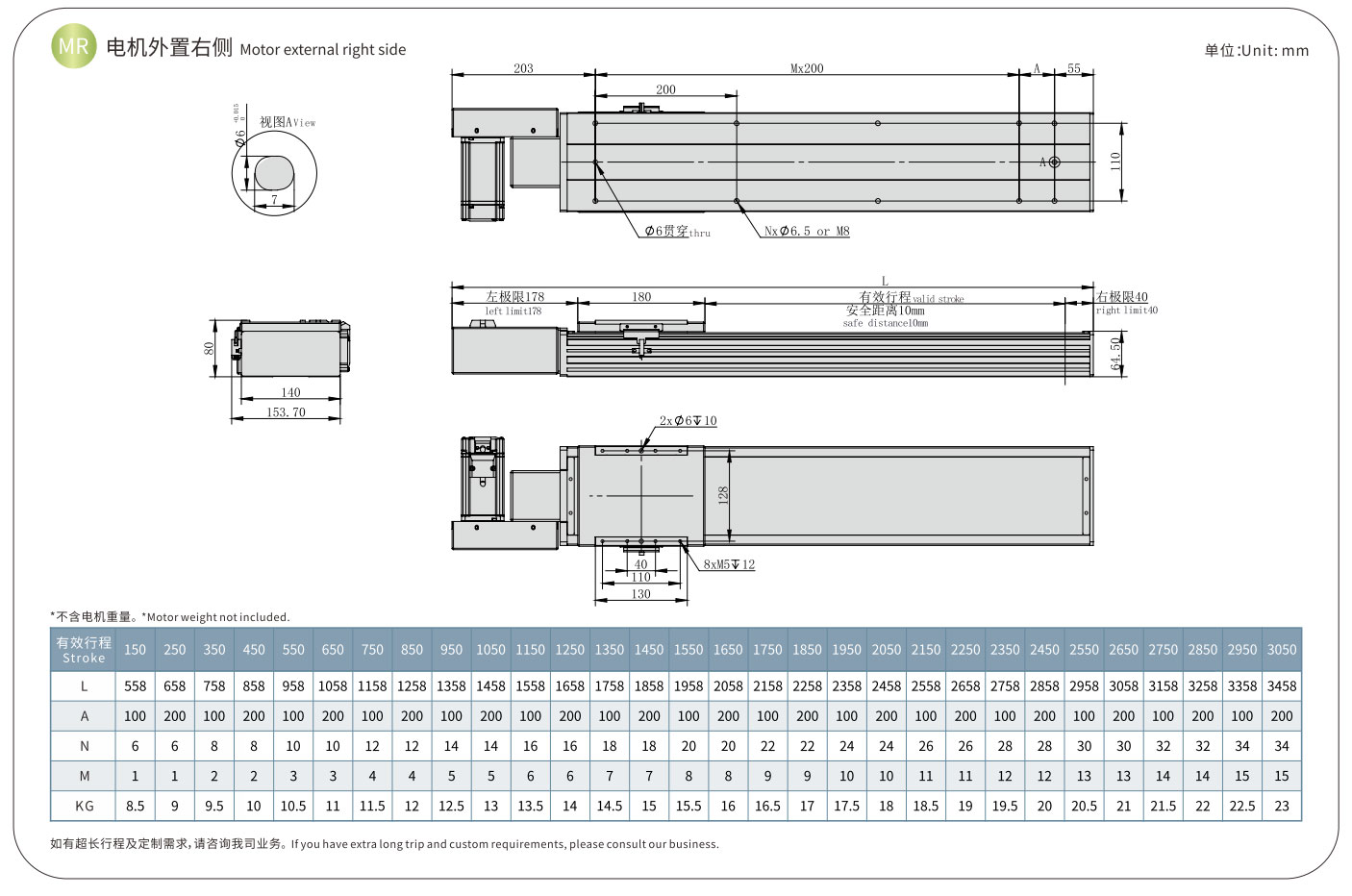
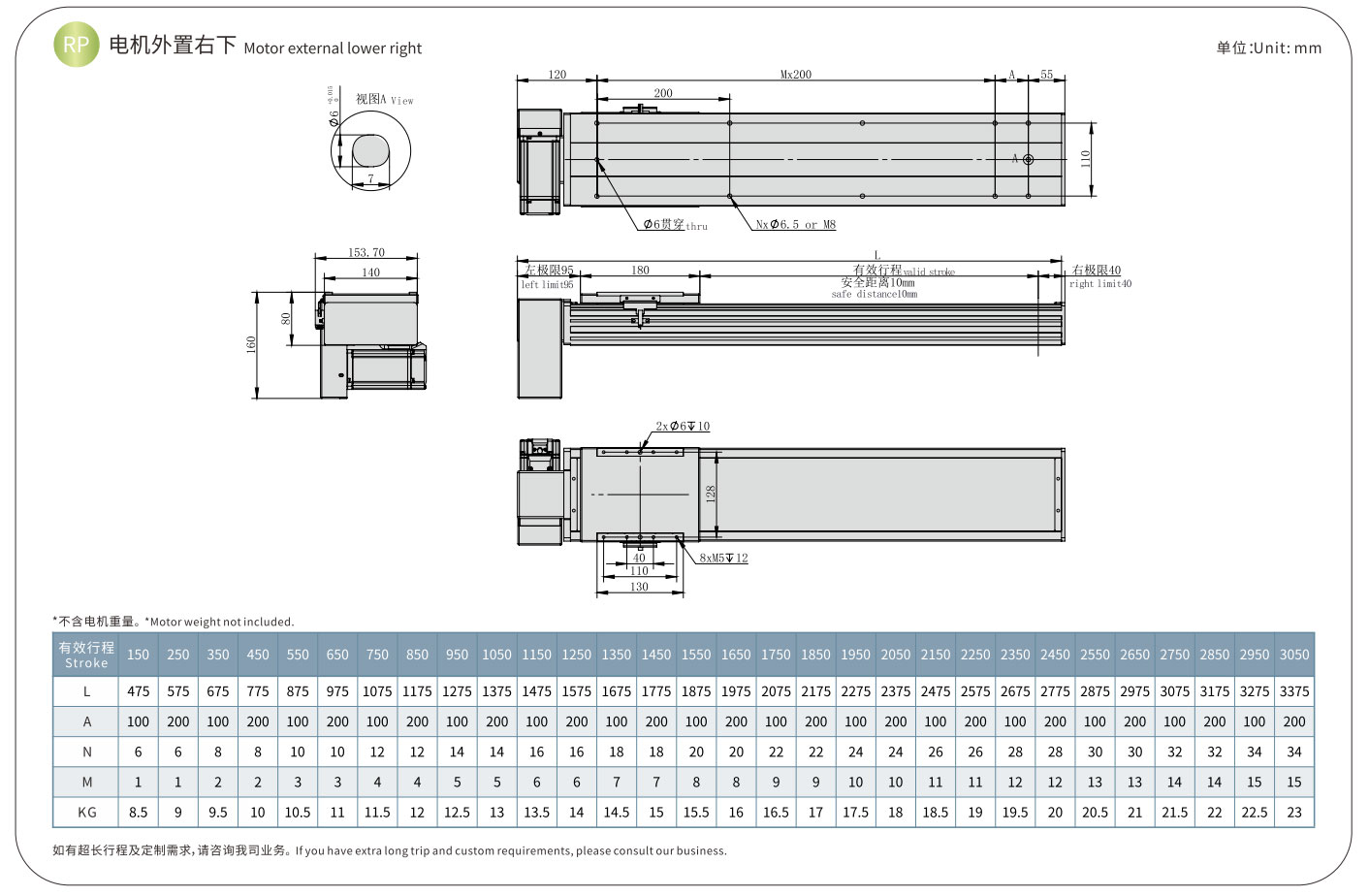
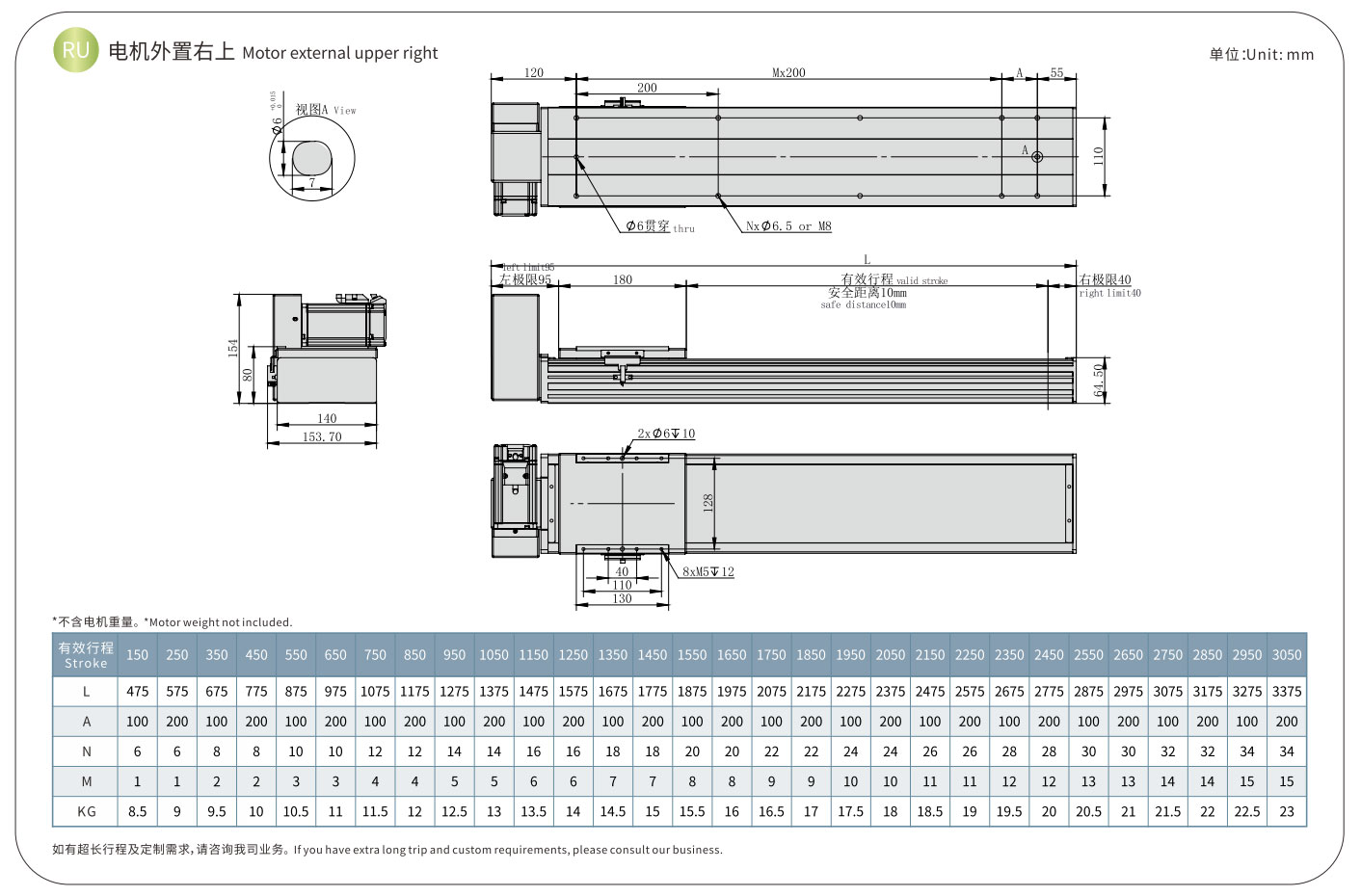
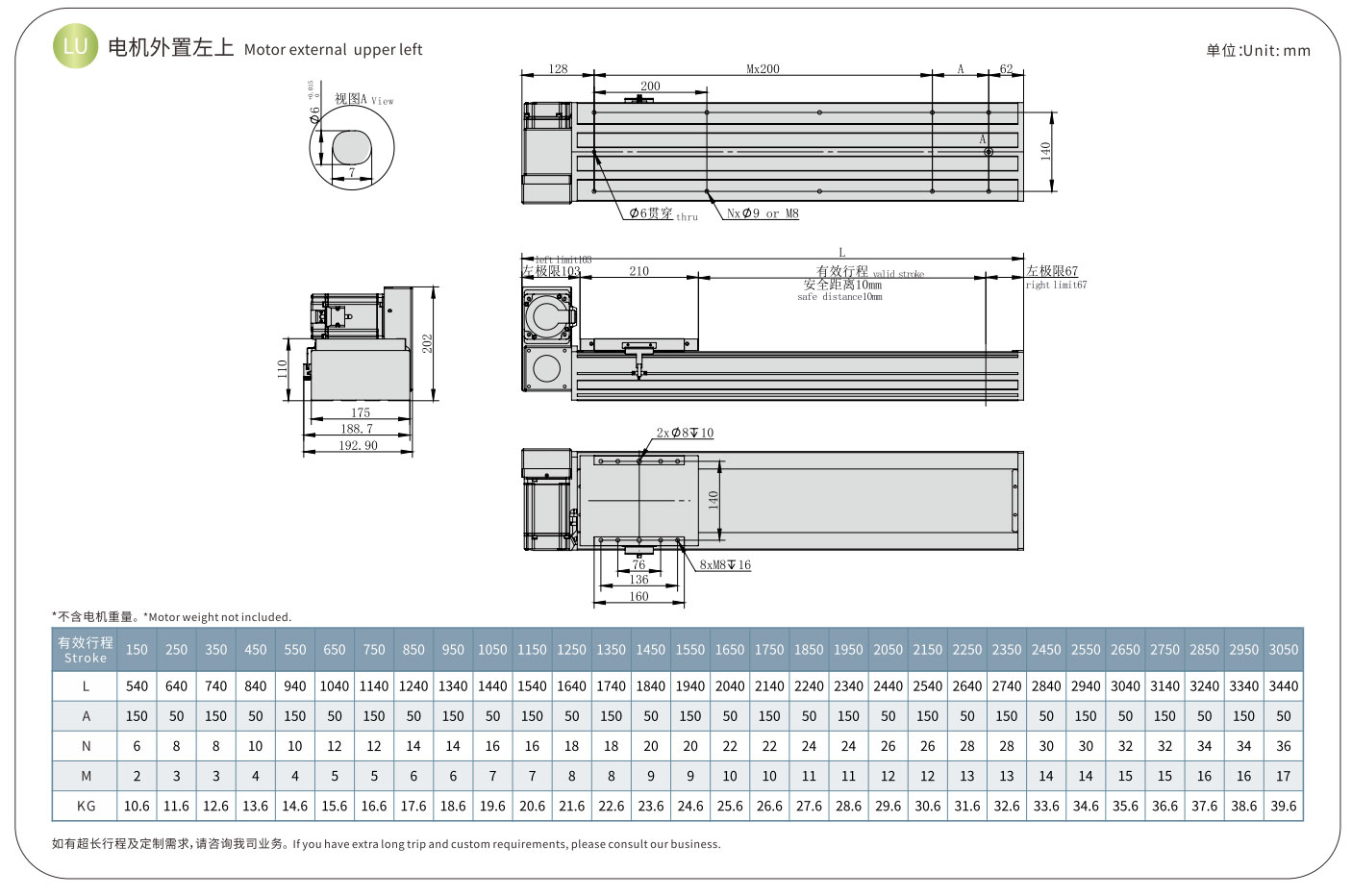
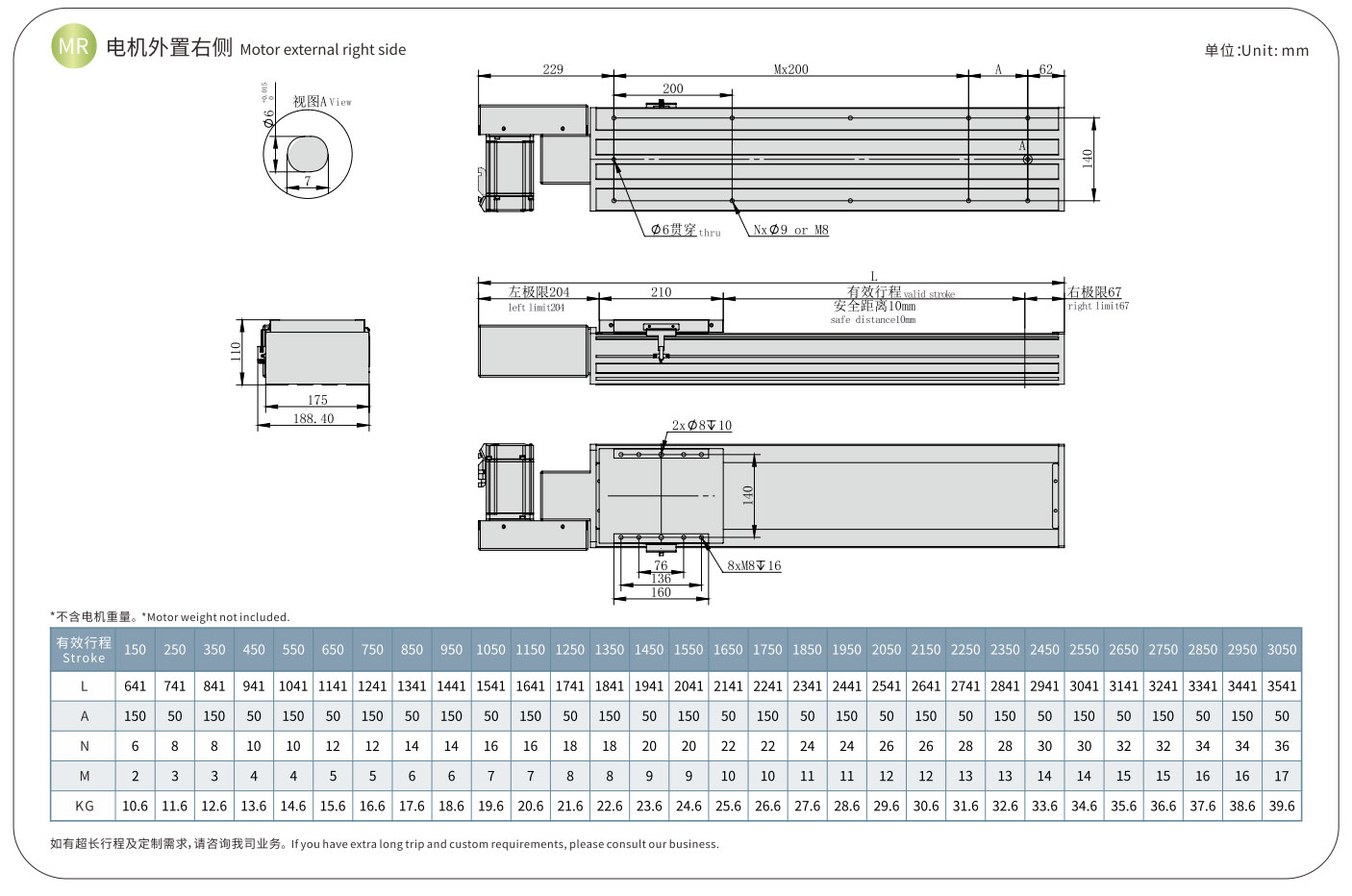
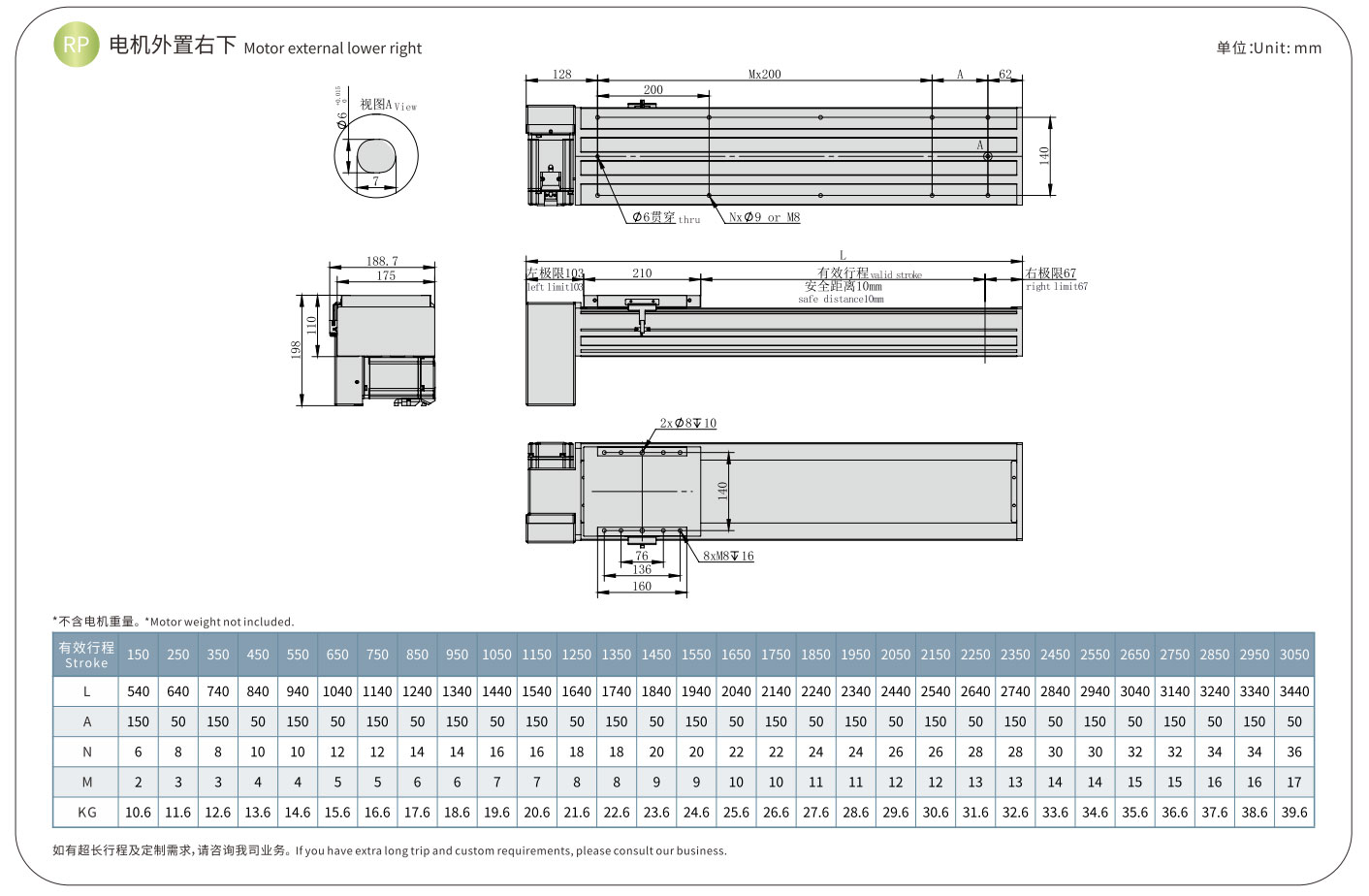
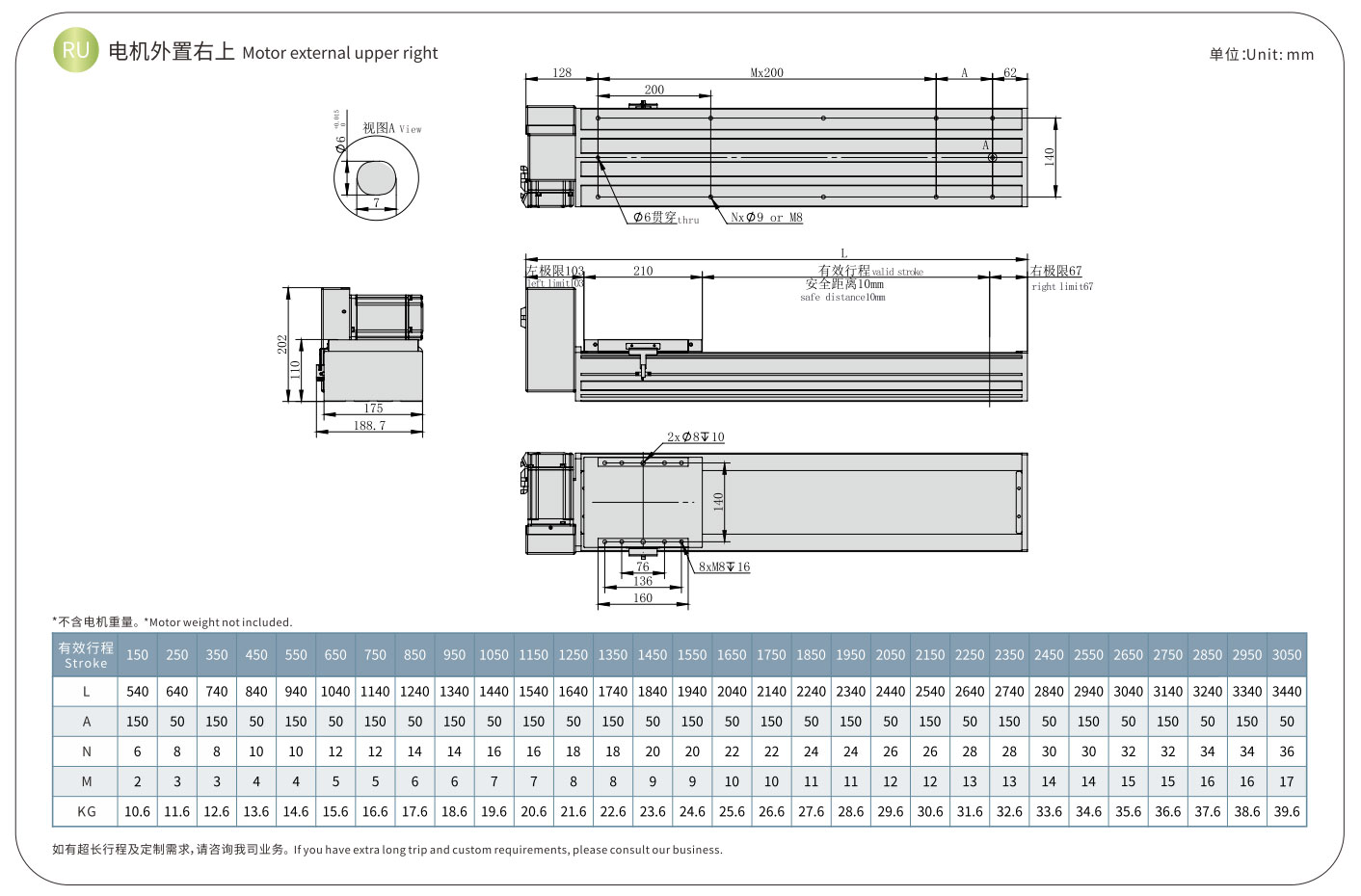
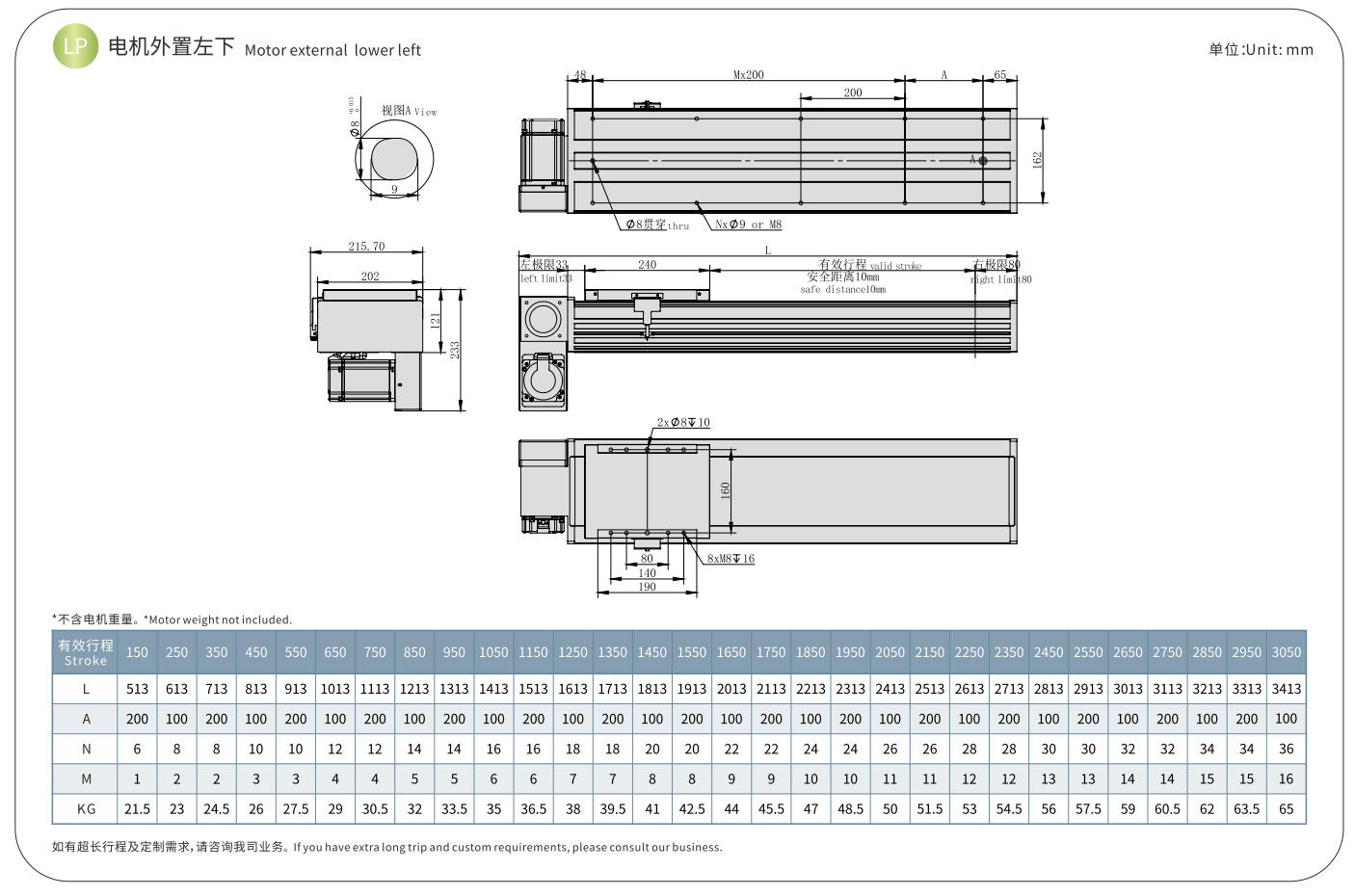
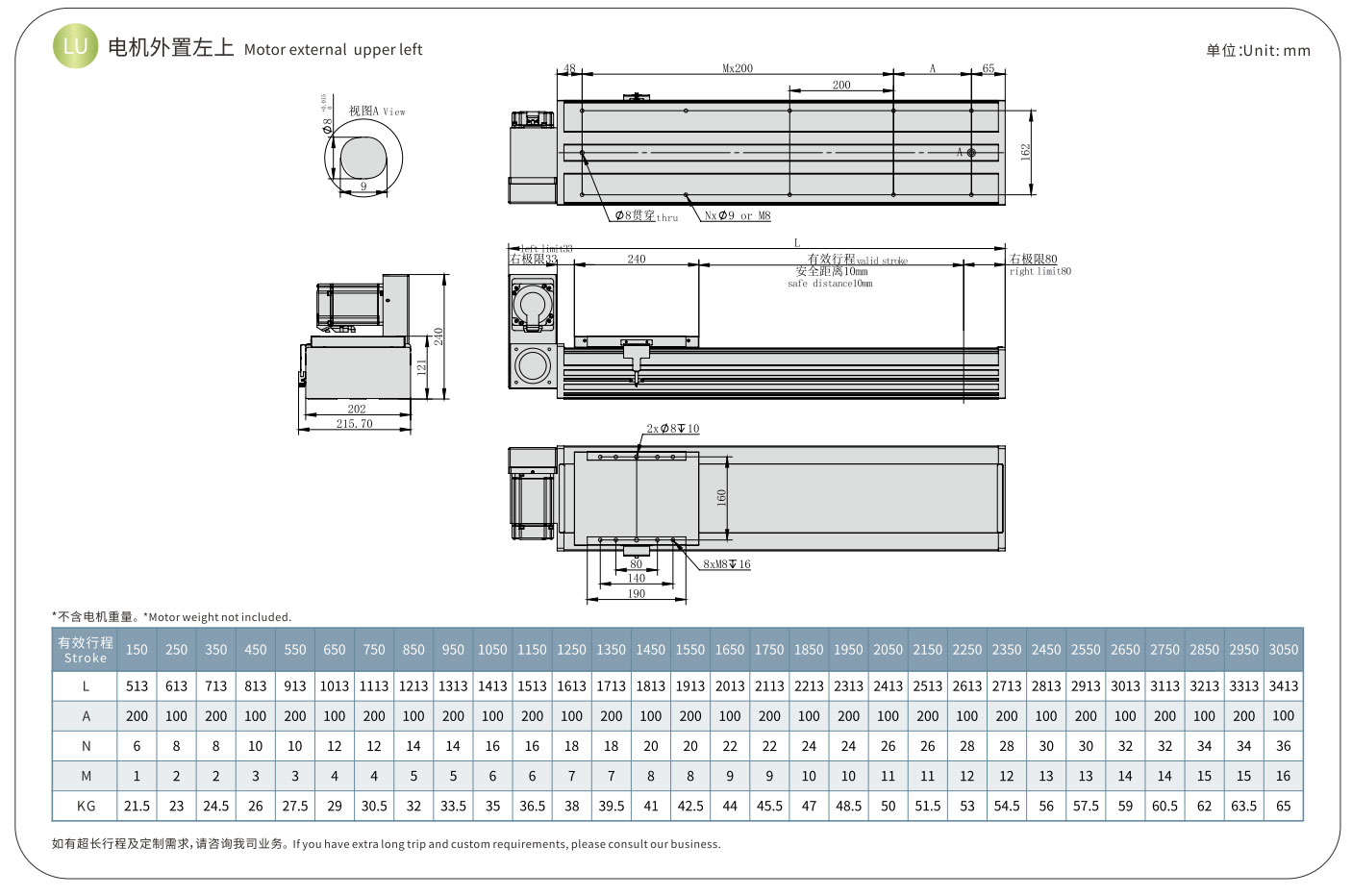
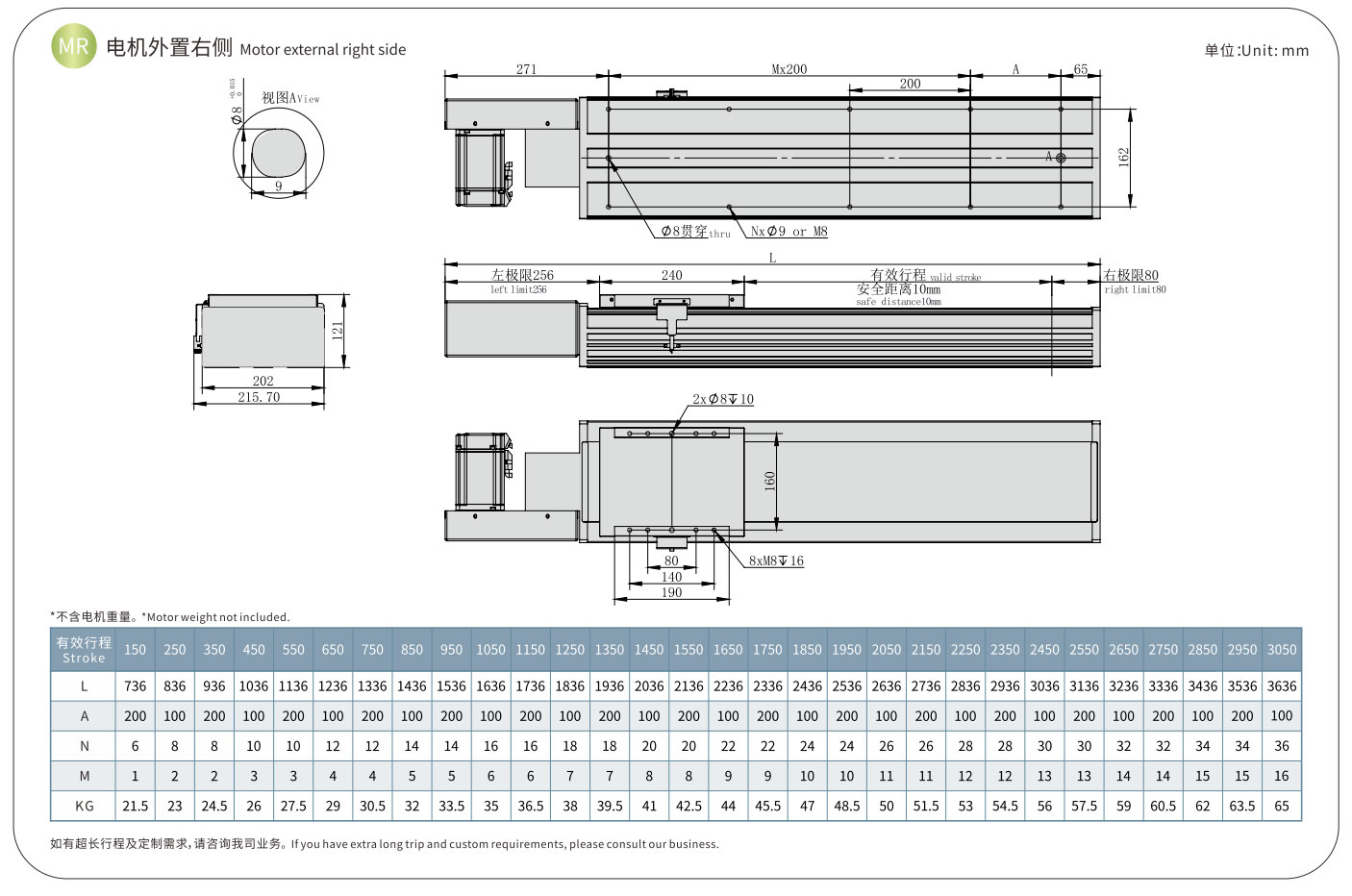
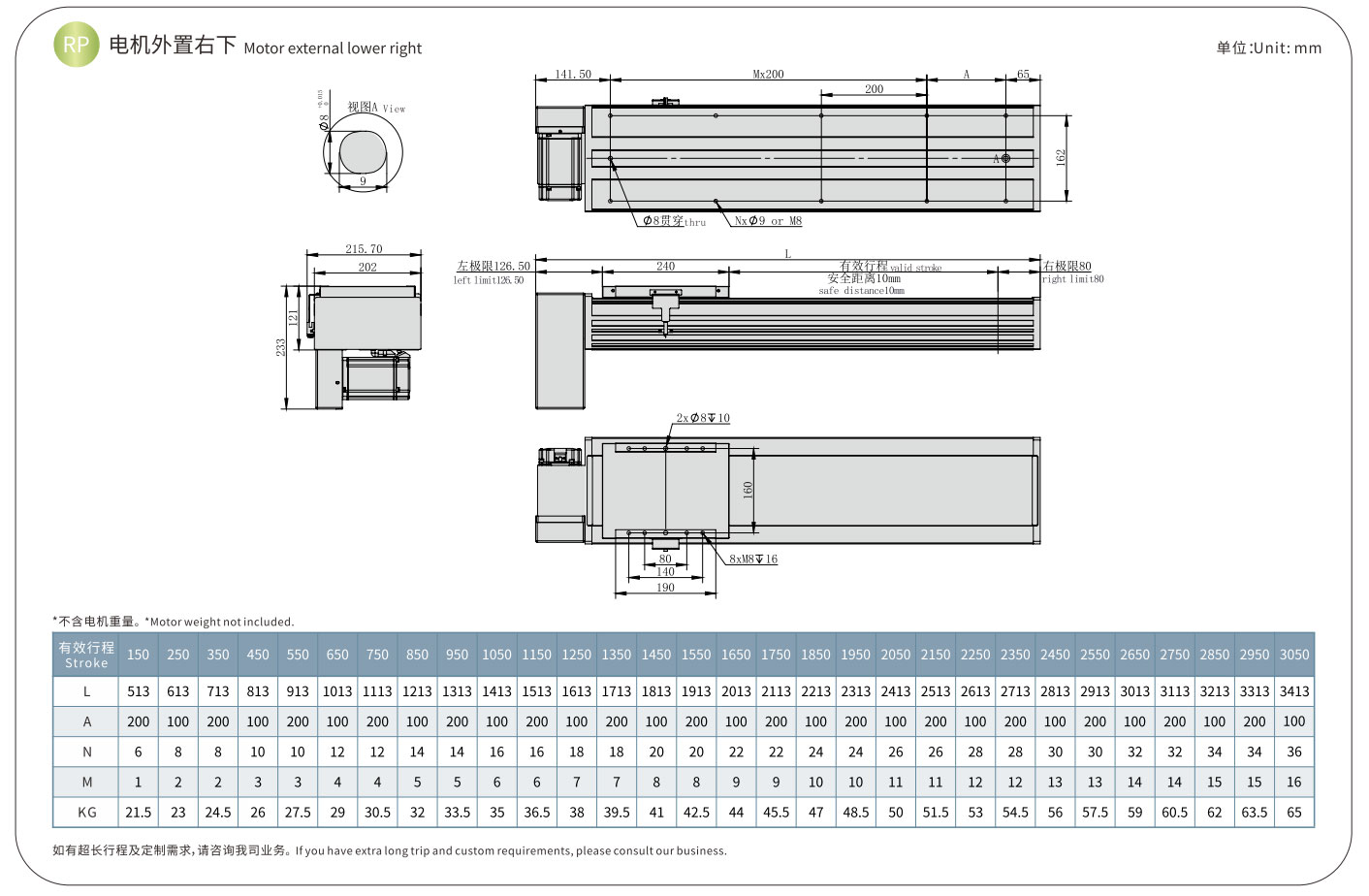
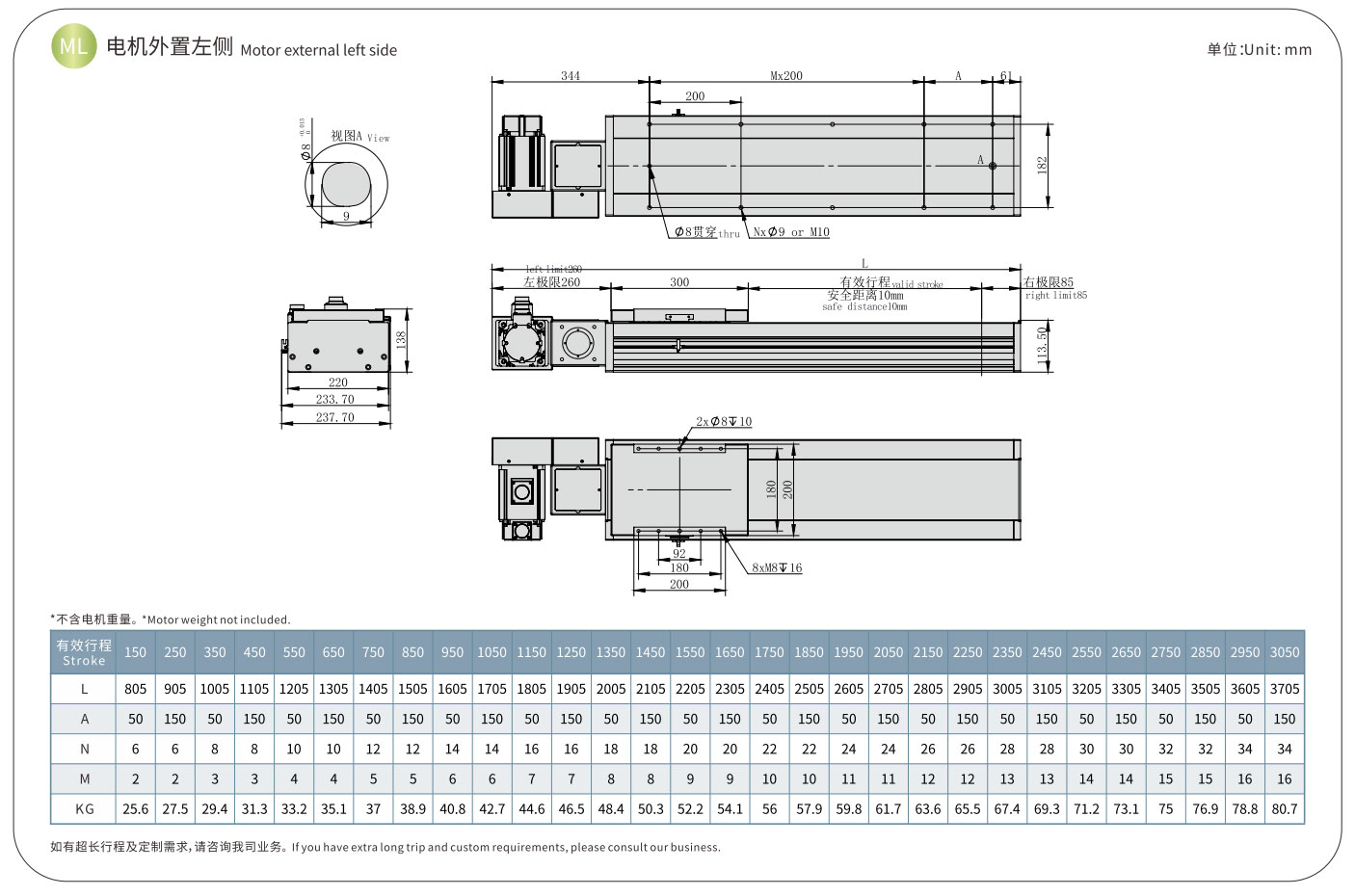
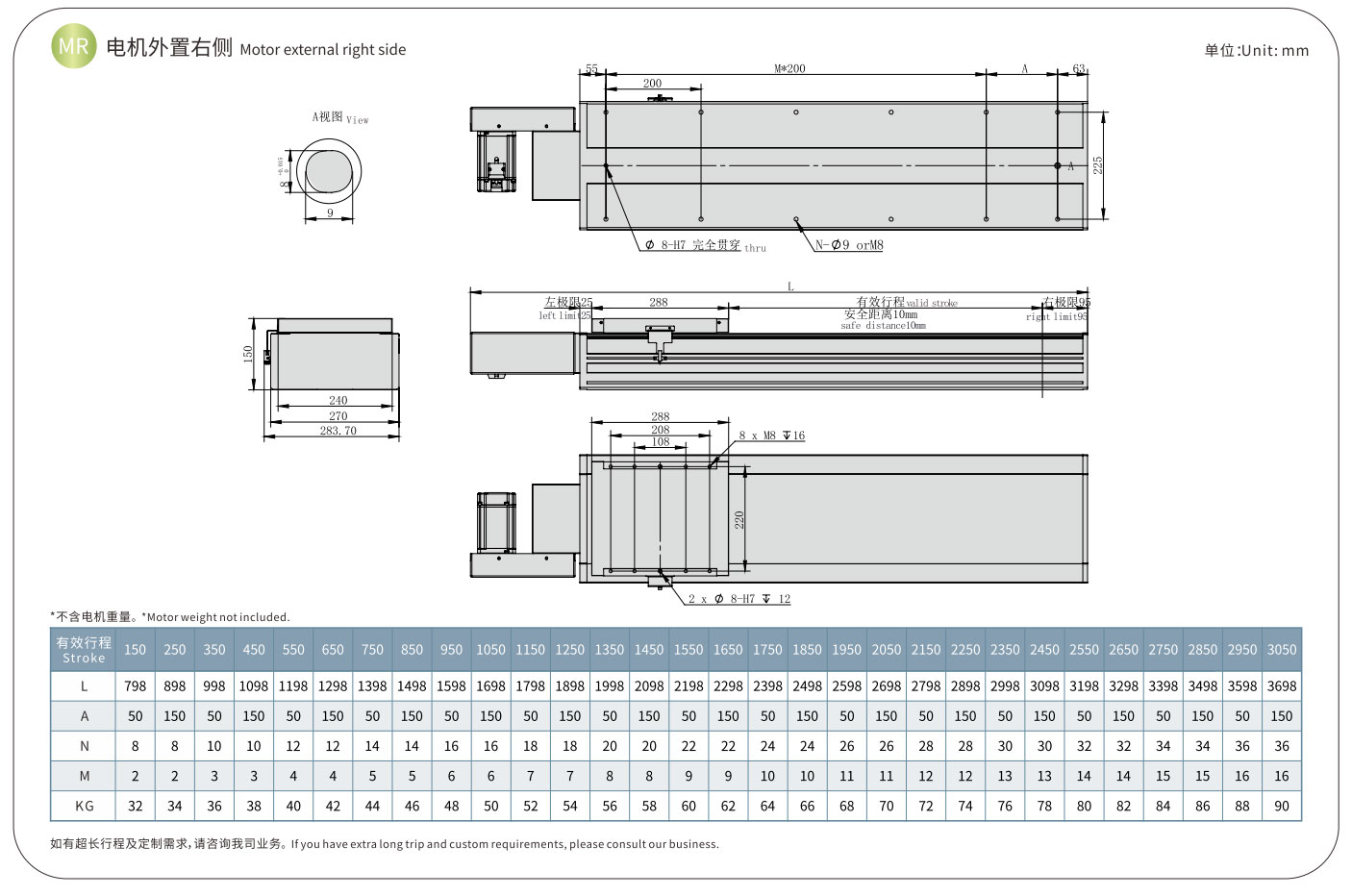
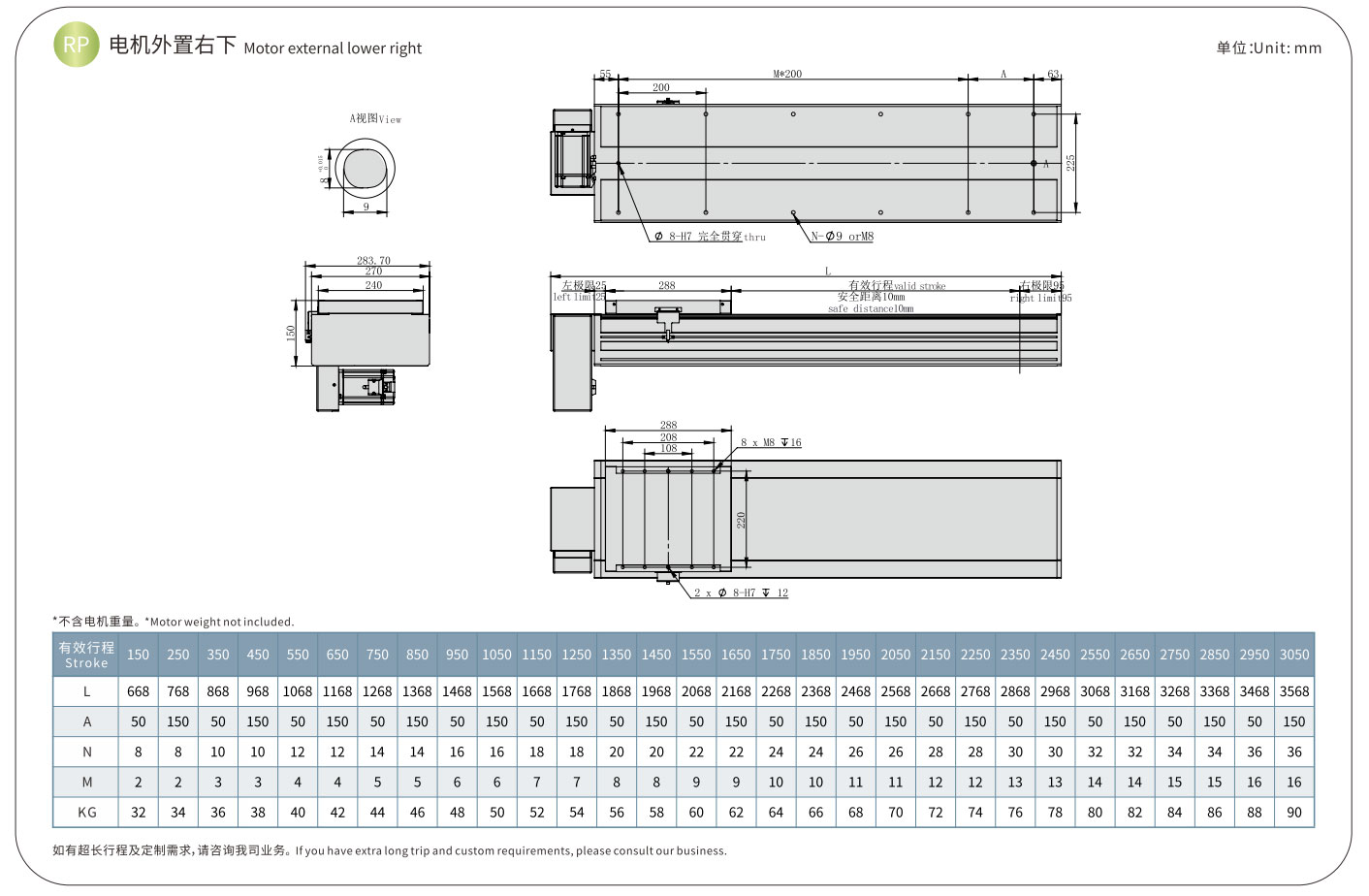
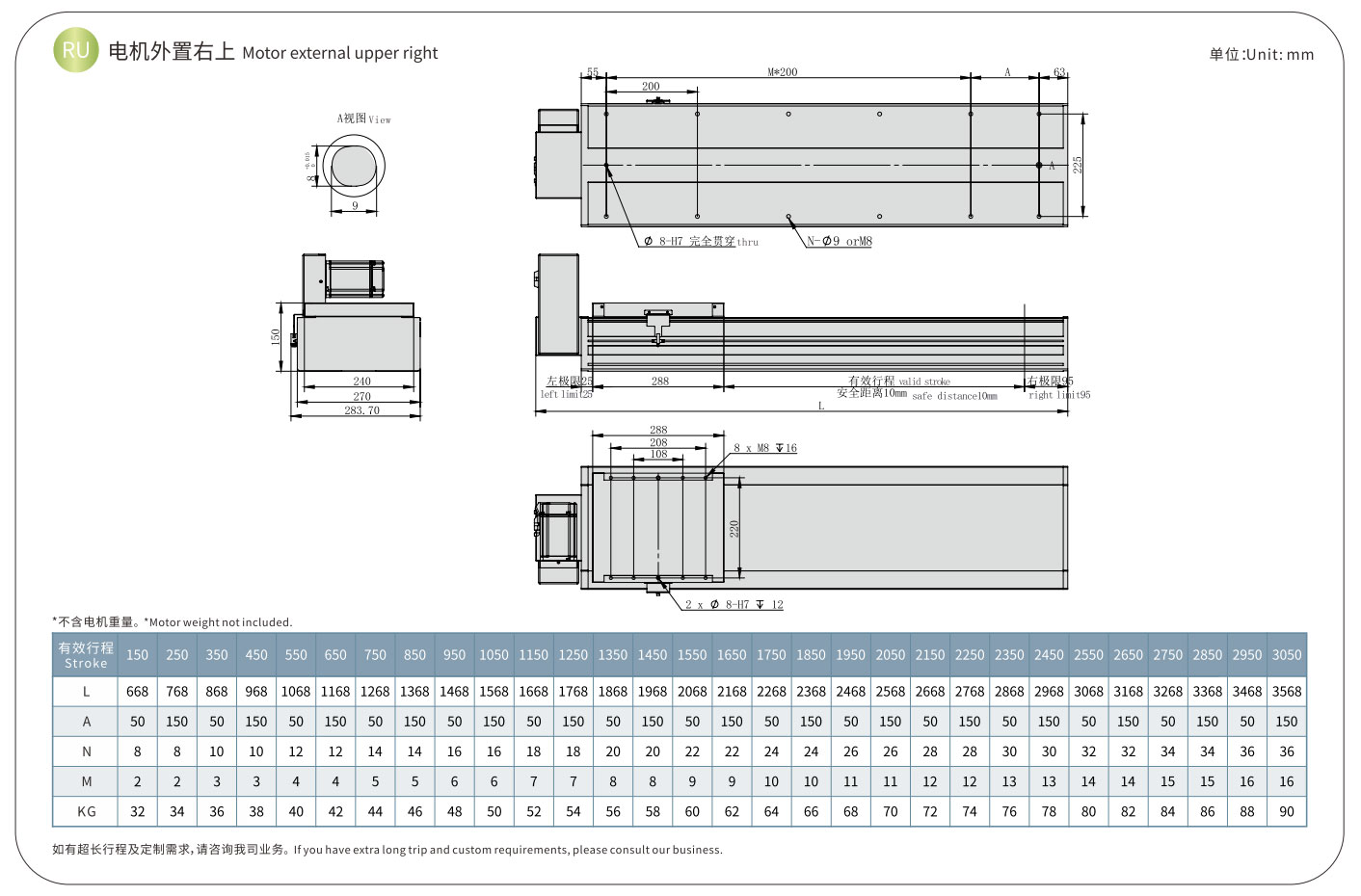
TPA ROBOT의 클래식 벨트 구동 리니어 액추에이터인 HCR 시리즈에 비해 타이밍 벨트가 있는 HCB 시리즈 구동 슬라이더는 HCB 시리즈의 스트로크가 더 길고 속도가 더 높다는 것을 의미합니다. 서보 모터로 구동되며 서보 모터의 고정밀도를 가질 뿐만 아니라 슬라이딩 스테이지 자체의 속도가 빠르고 강성이 높다는 장점도 있습니다. 제어가 용이하고 PLC 및 기타 시스템과 쉽게 연결될 수 있습니다. 슬라이드 액츄에이터는 일체형 압출 알루미늄 프로파일로 제작되었으며 경량, 작은 크기 및 강한 강성을 갖추고 있습니다. 설치 크기와 스트로크는 요구 사항에 따라 맞춤 설정할 수 있으며 설치는 볼트로 고정할 수 있습니다. 여러 방향의 조합을 통해 기계식 그리퍼, 에어 그리퍼 및 기타 고정 장치를 사용하여 다양한 자동화 장비의 선형 운동 시스템으로 형성될 수 있으며 독점적인 직교 로봇 또는 갠트리 로봇이 될 수 있습니다.

HCB65S

HCB-85D

HCB-105D

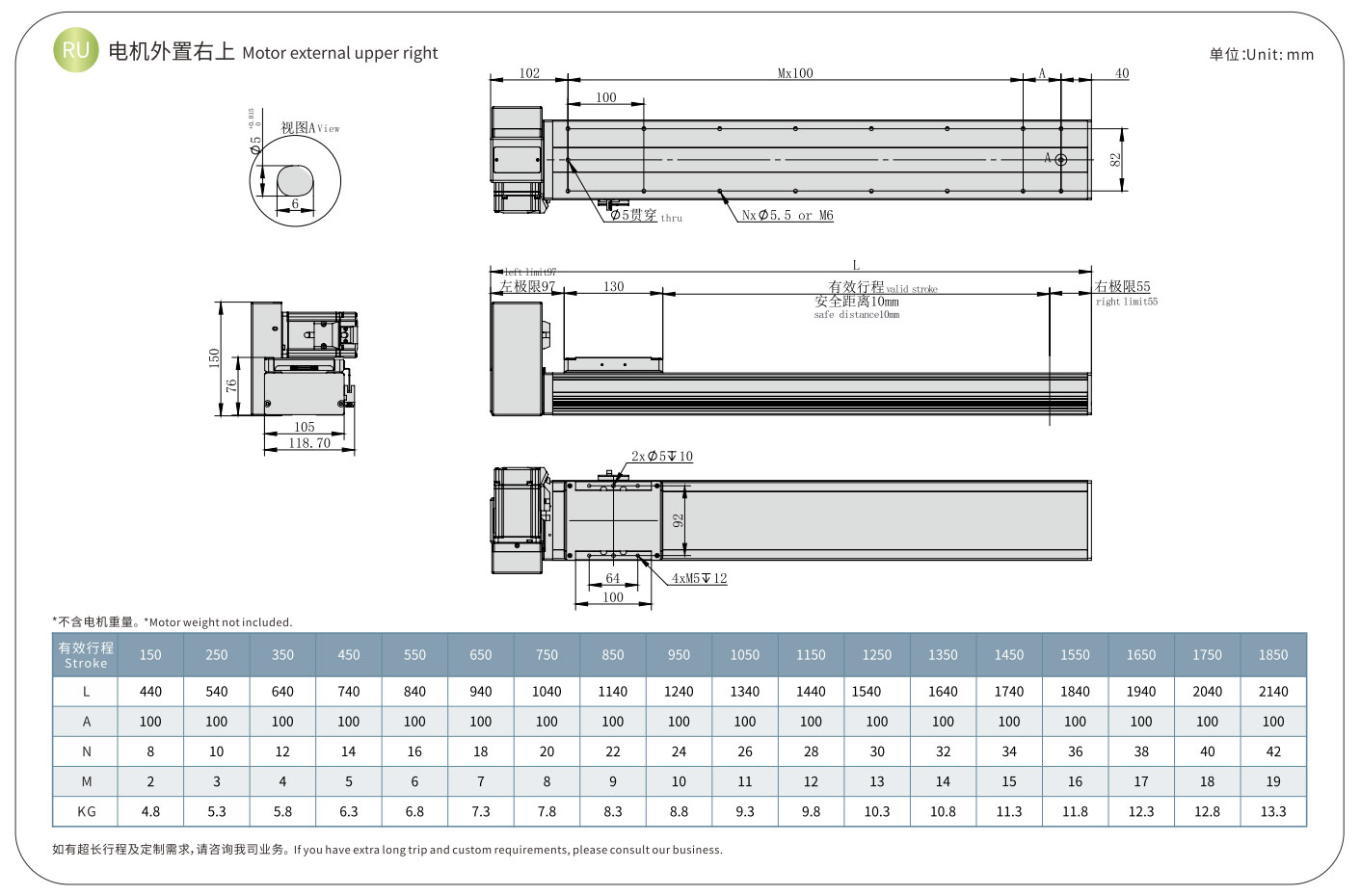
HCB-120D

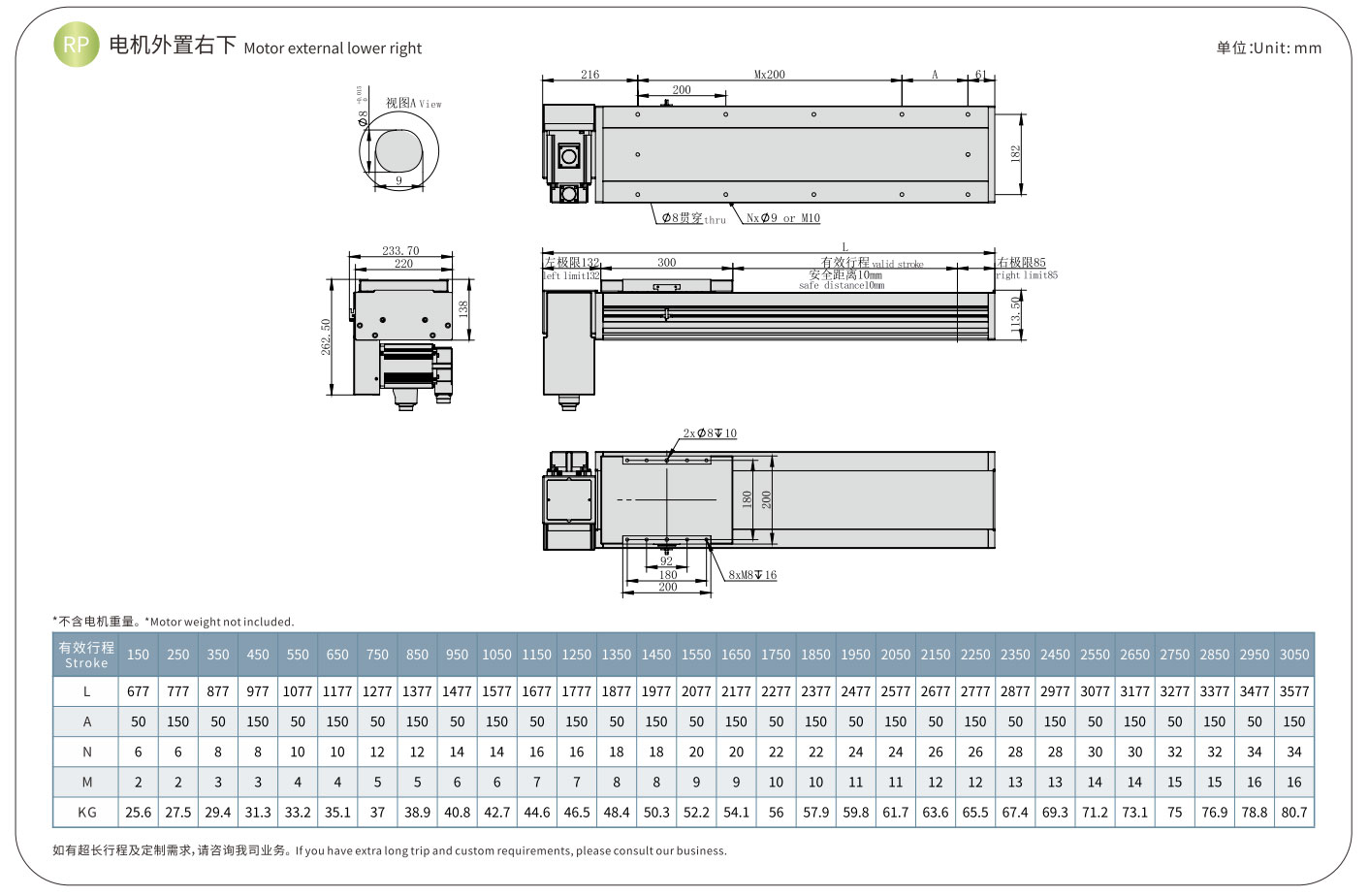
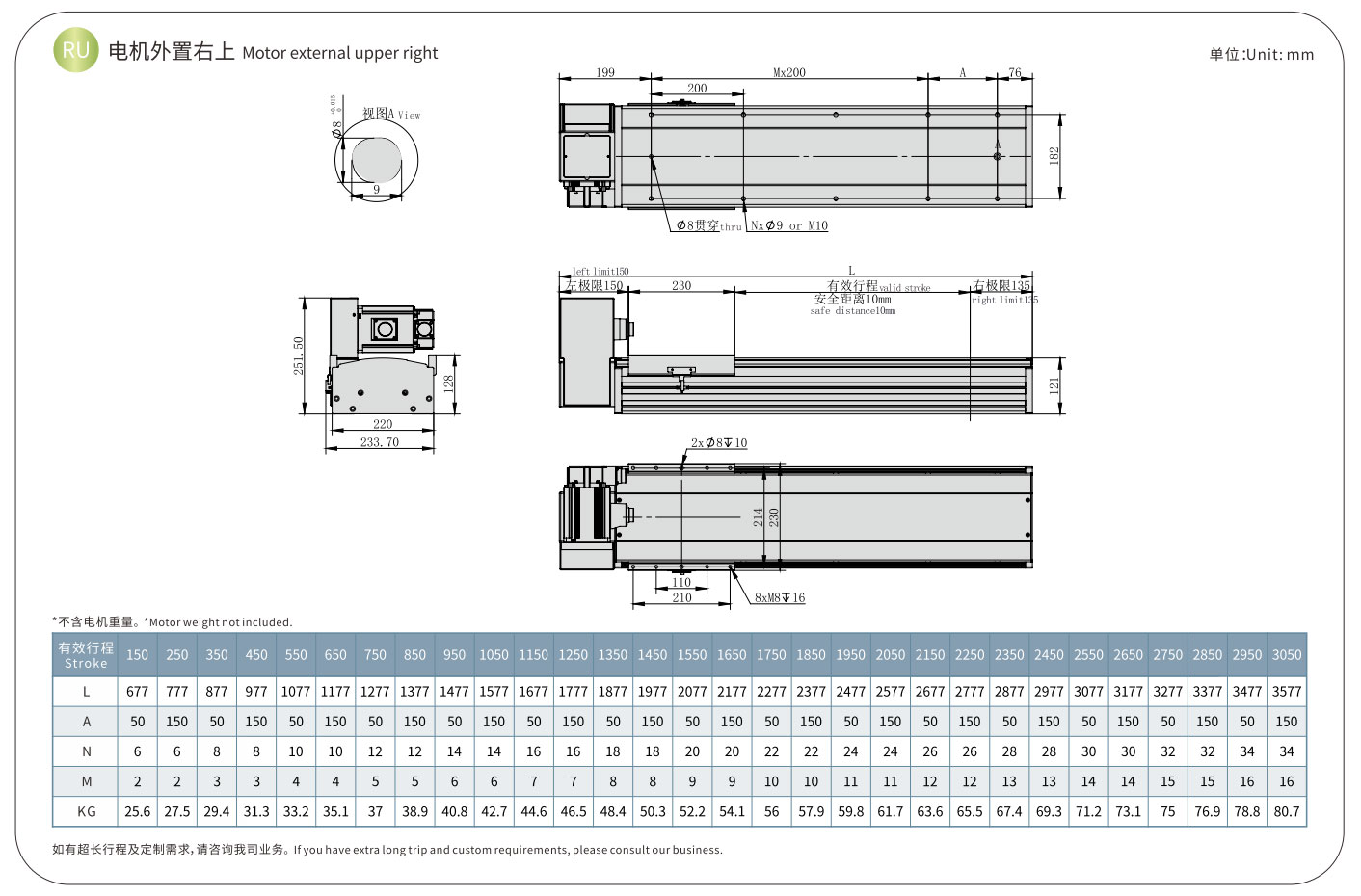
HCB-270D
특징
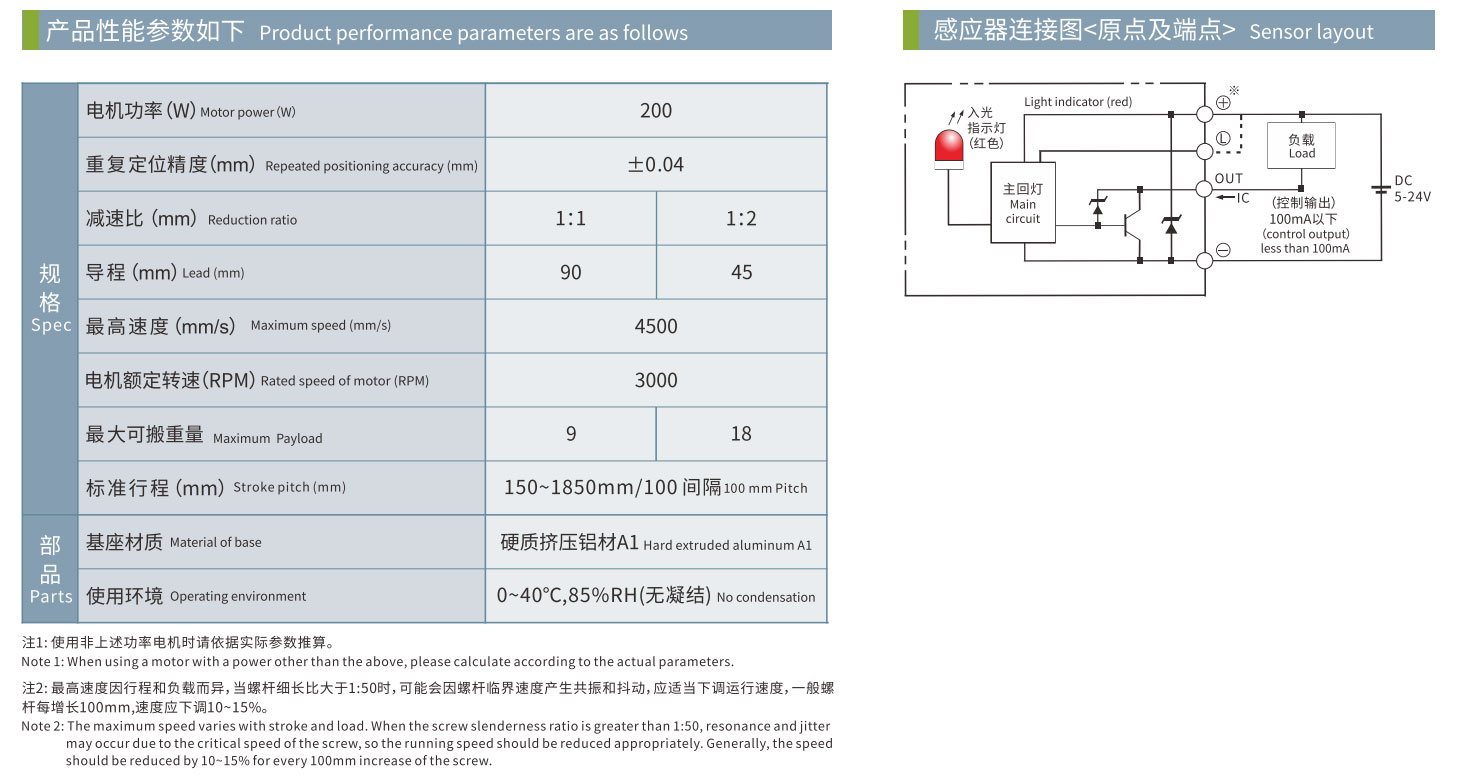
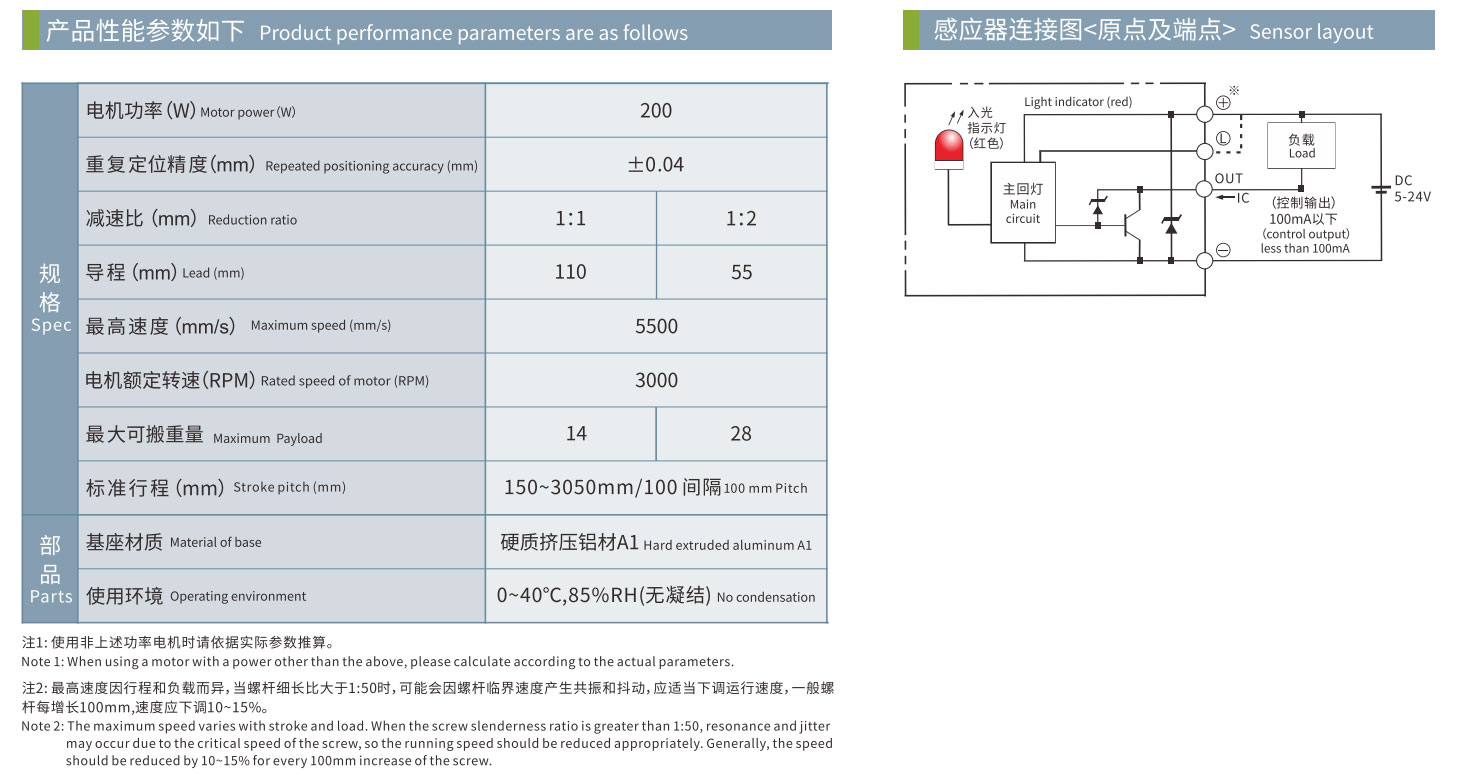
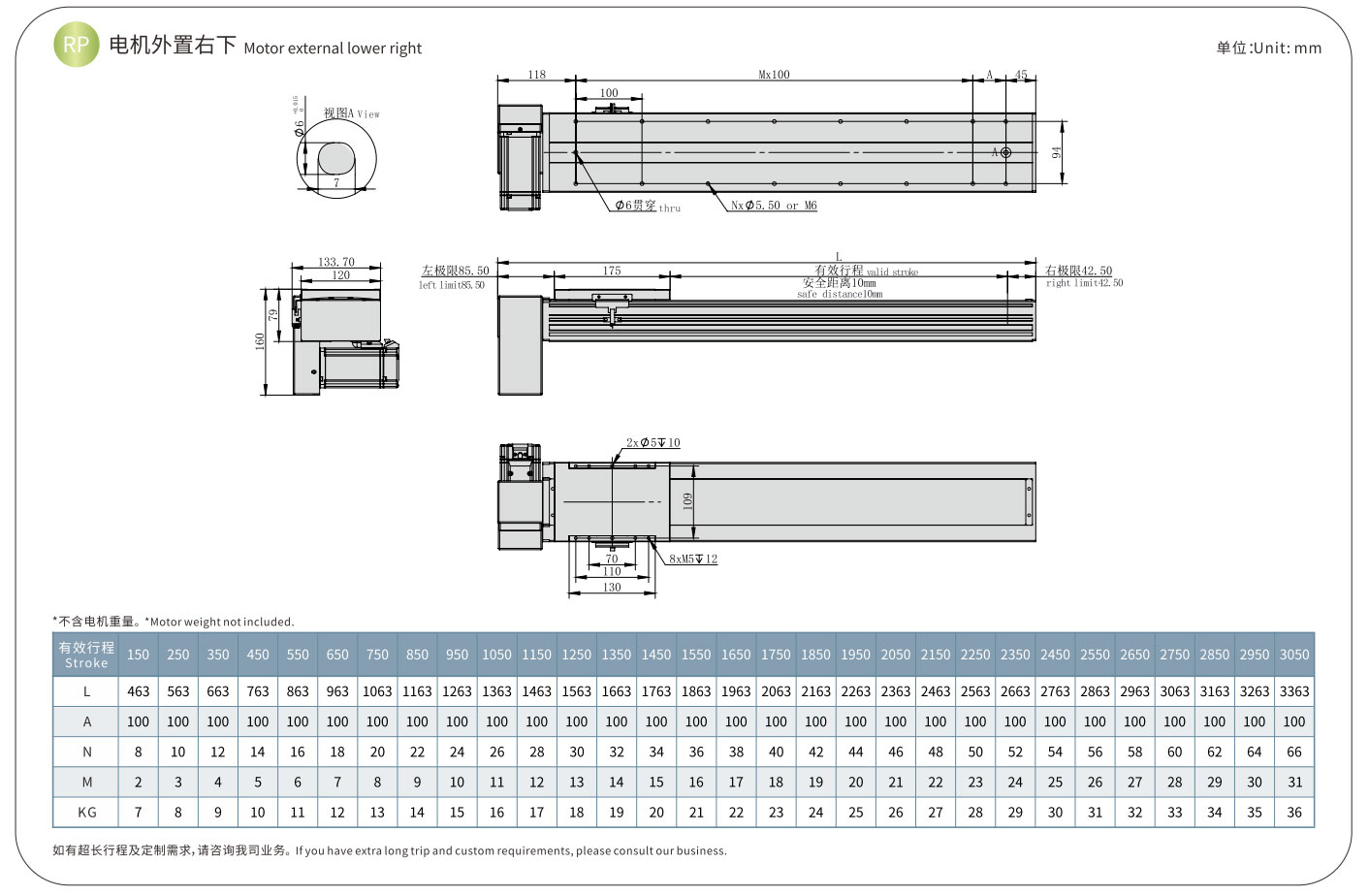
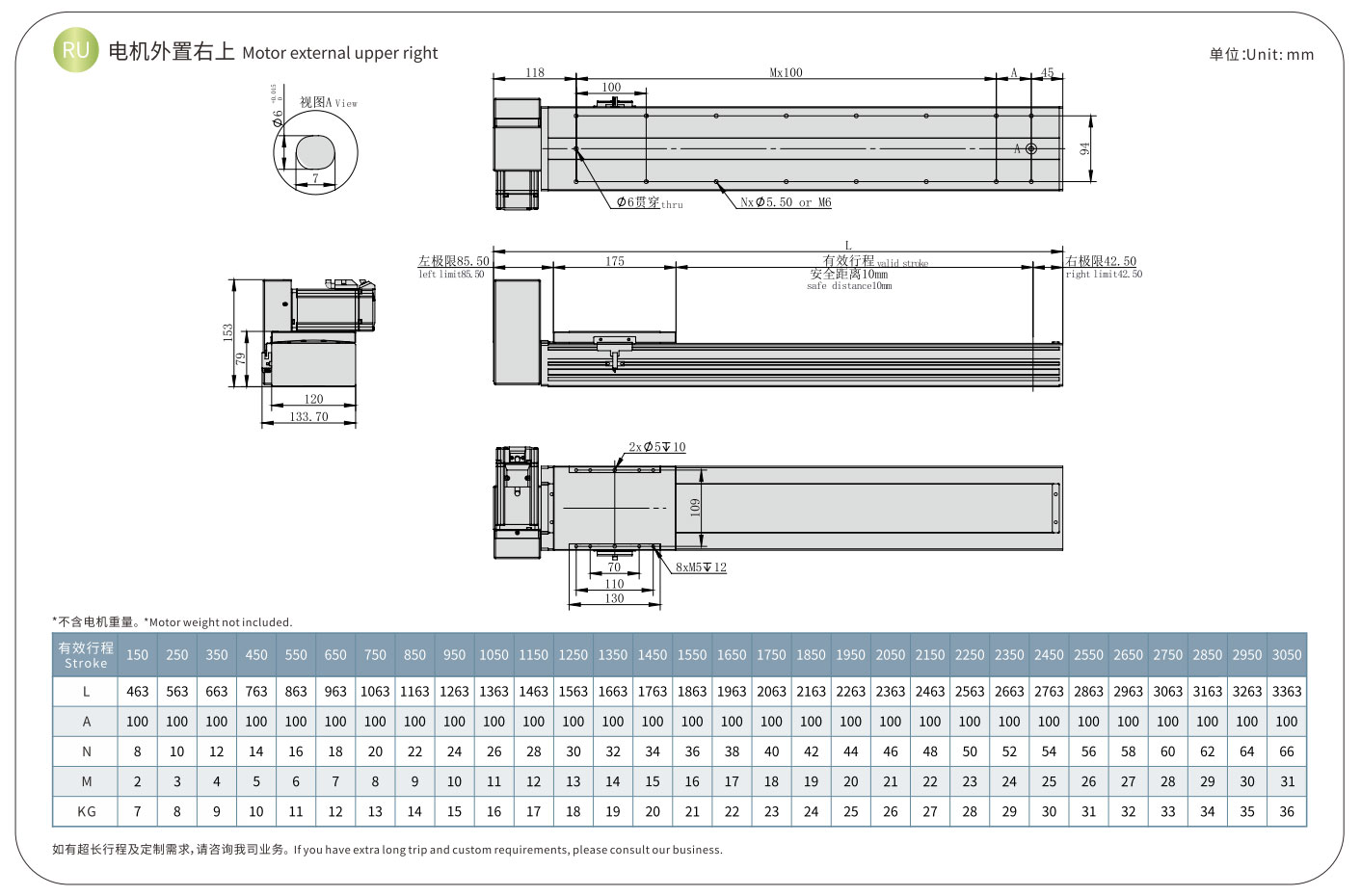
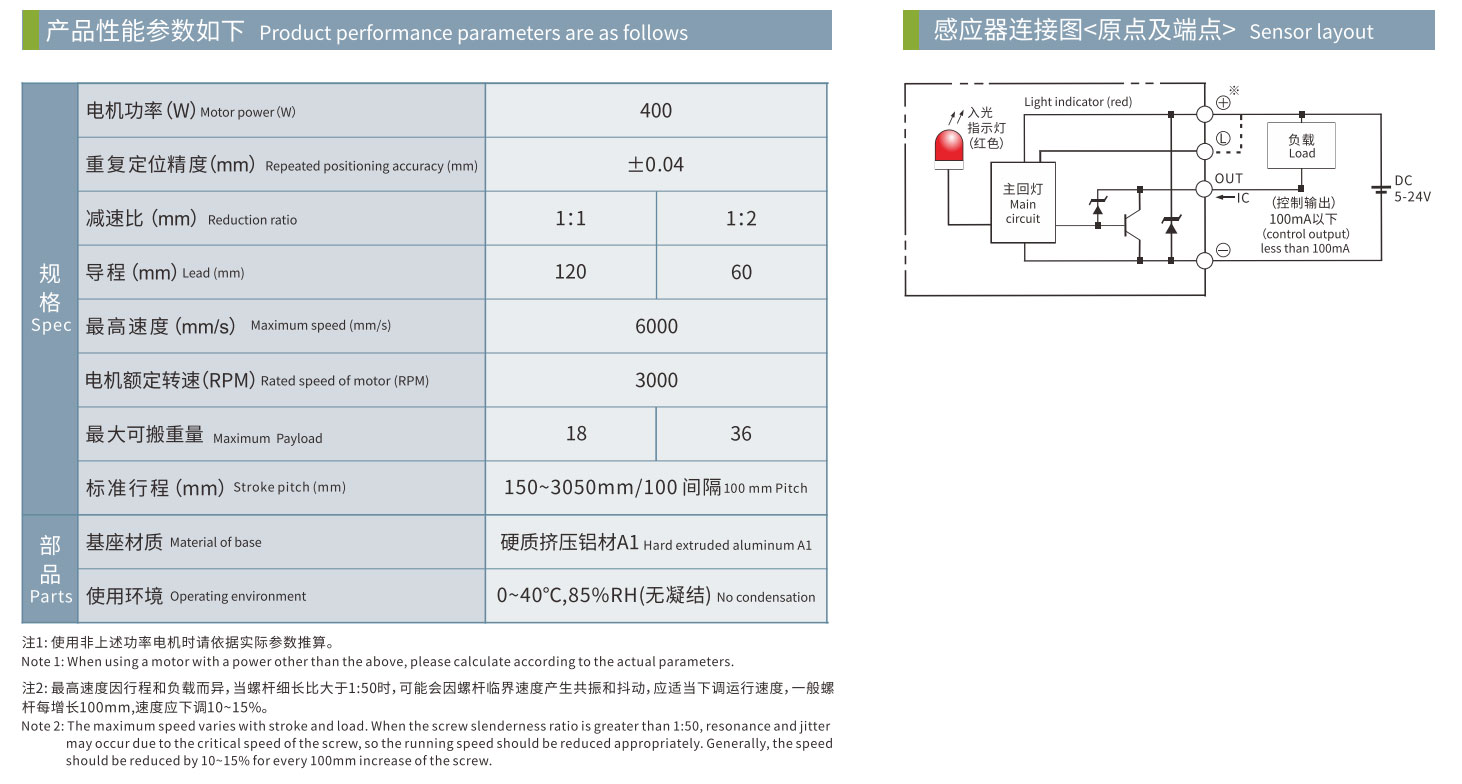
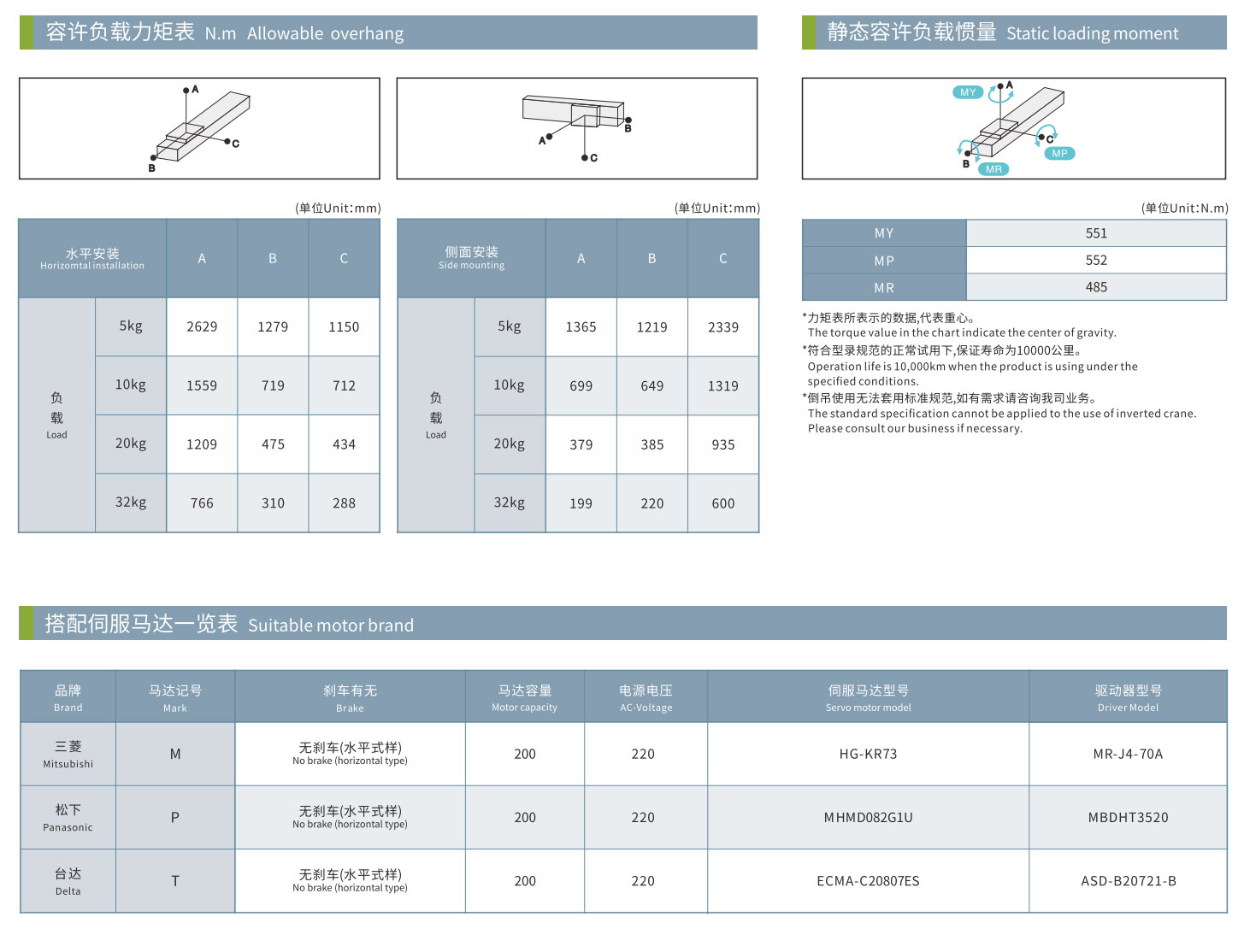
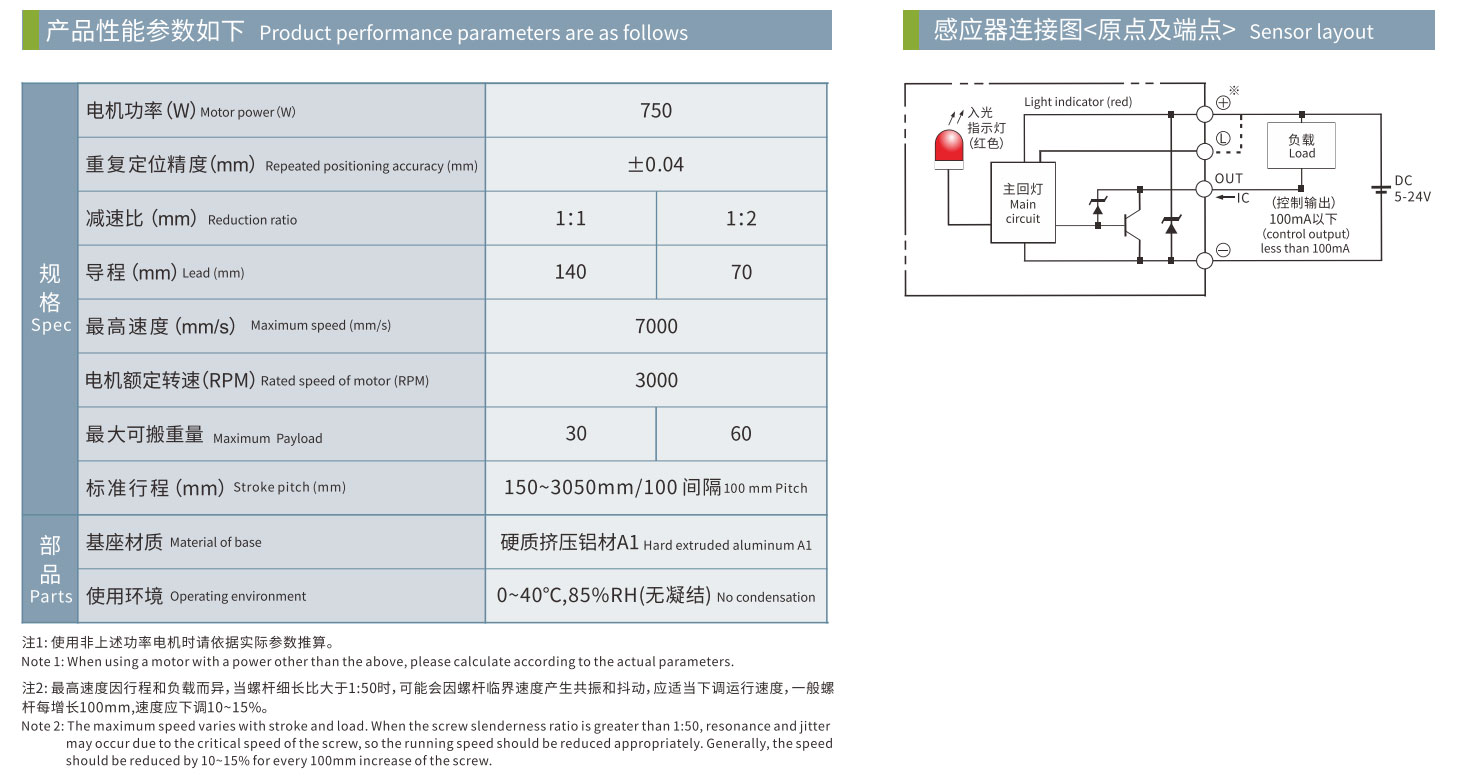
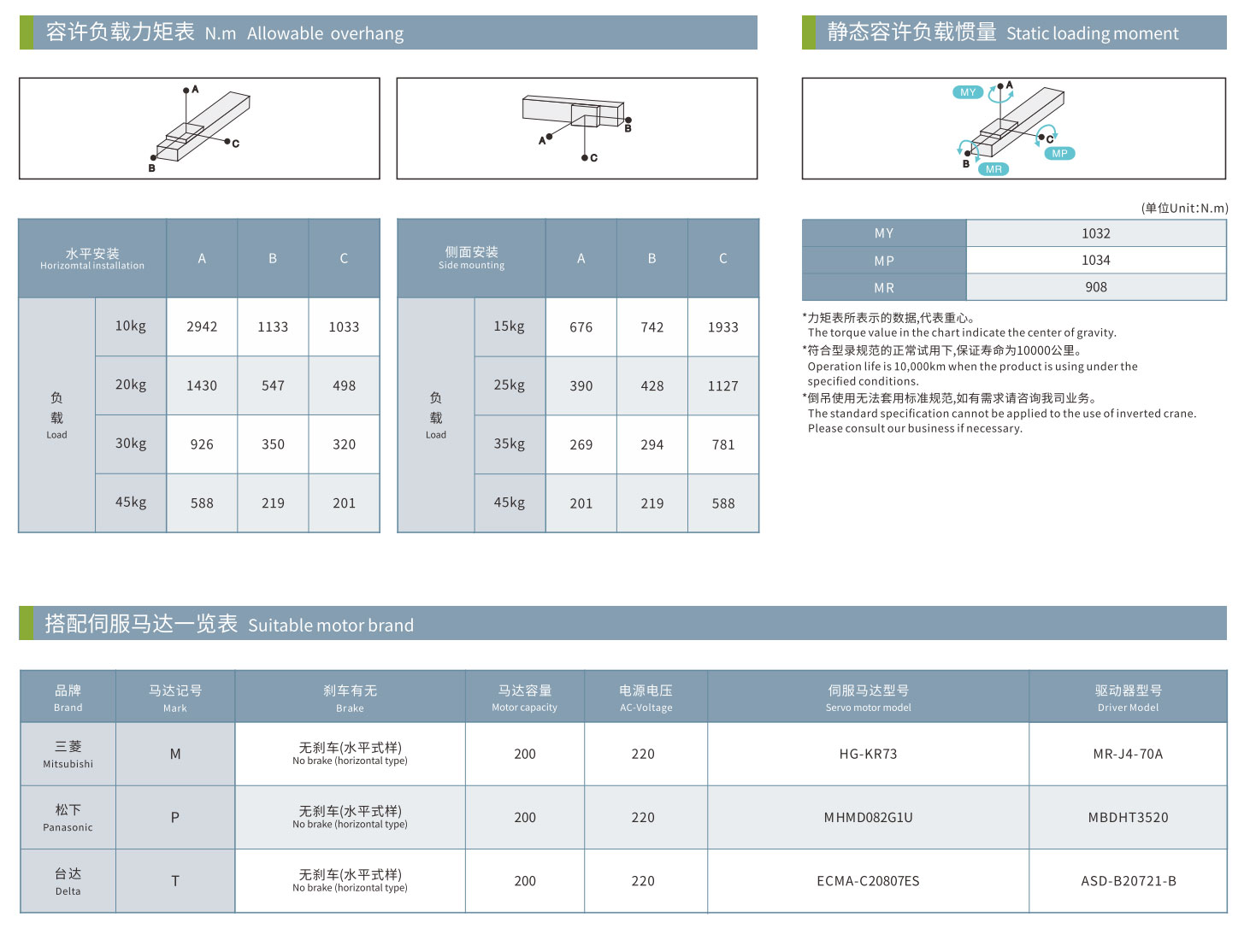
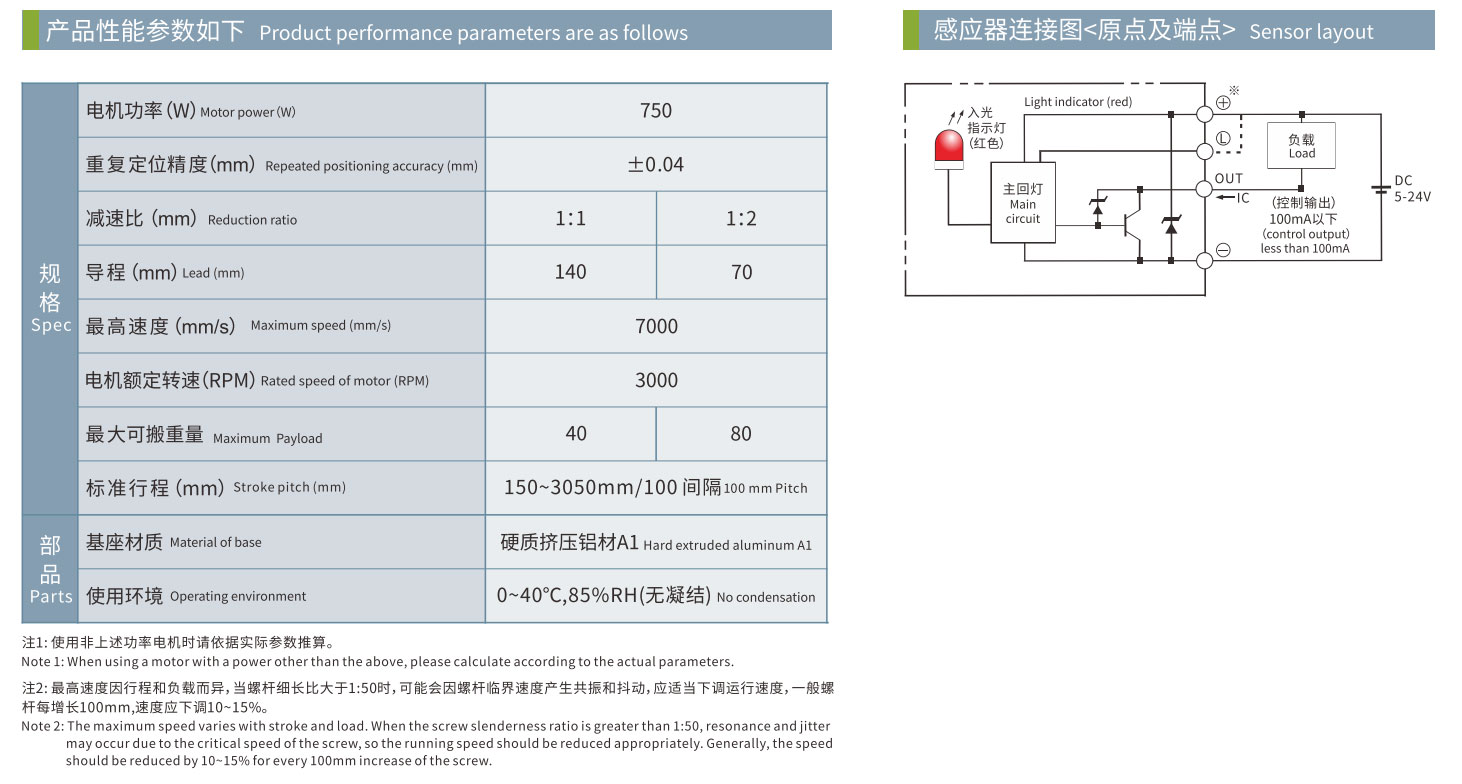
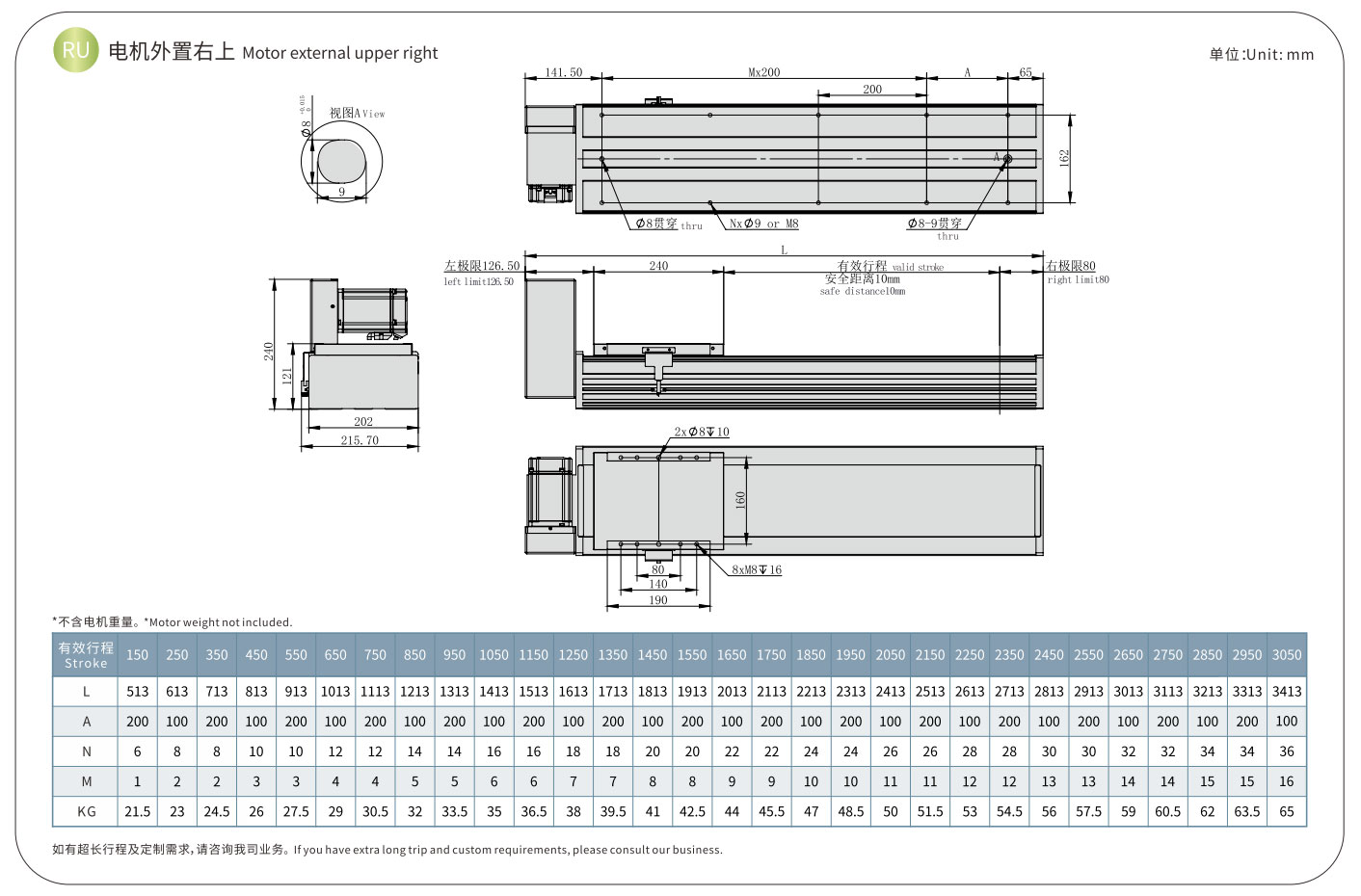
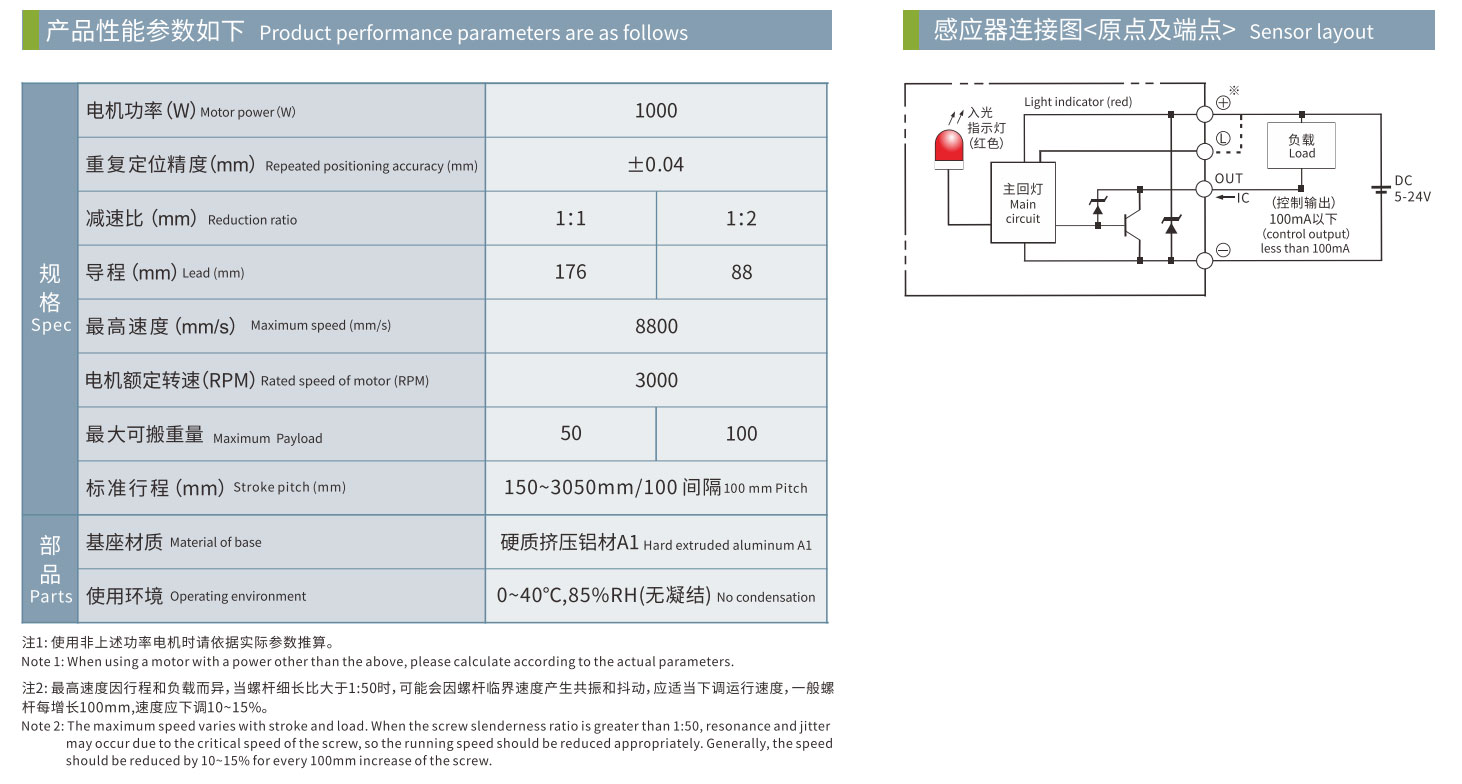
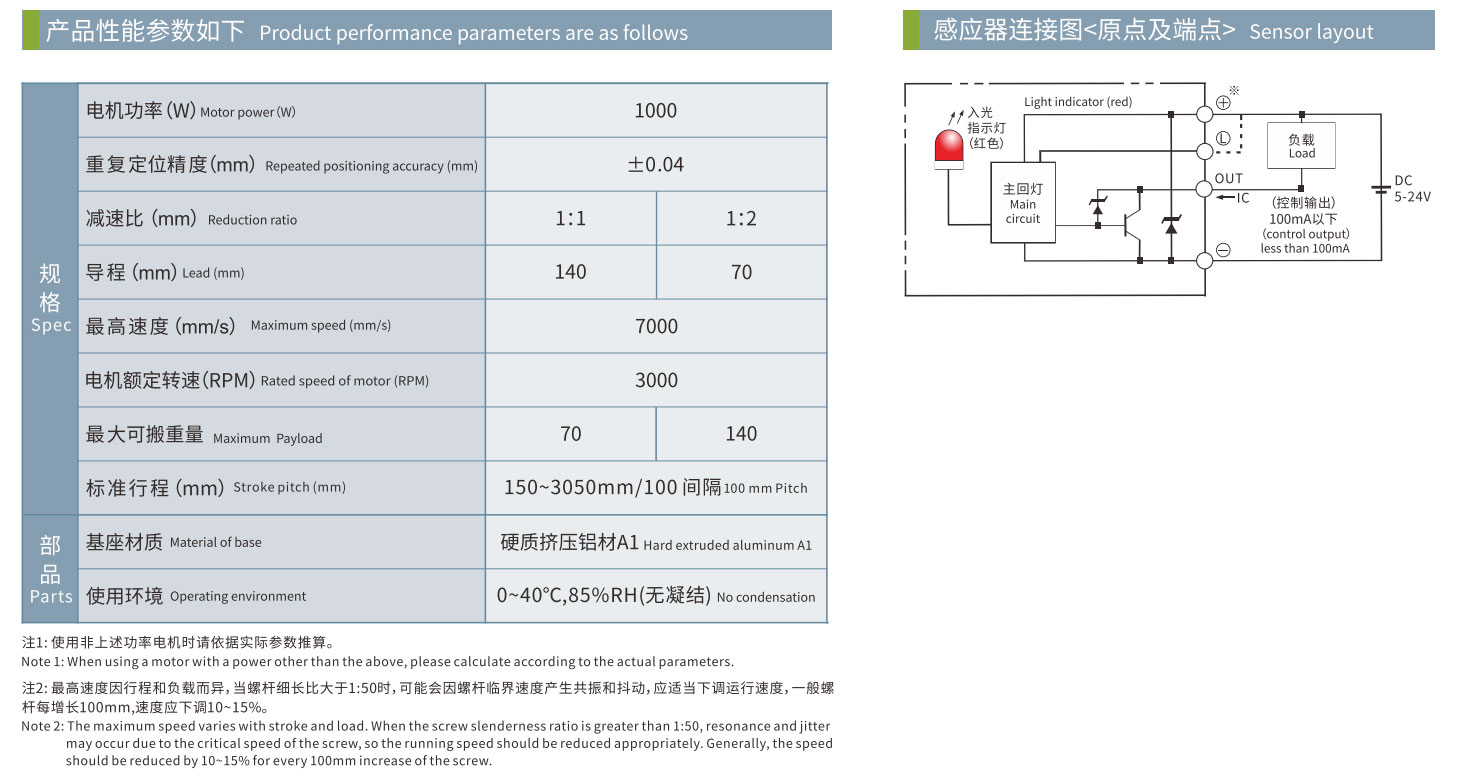
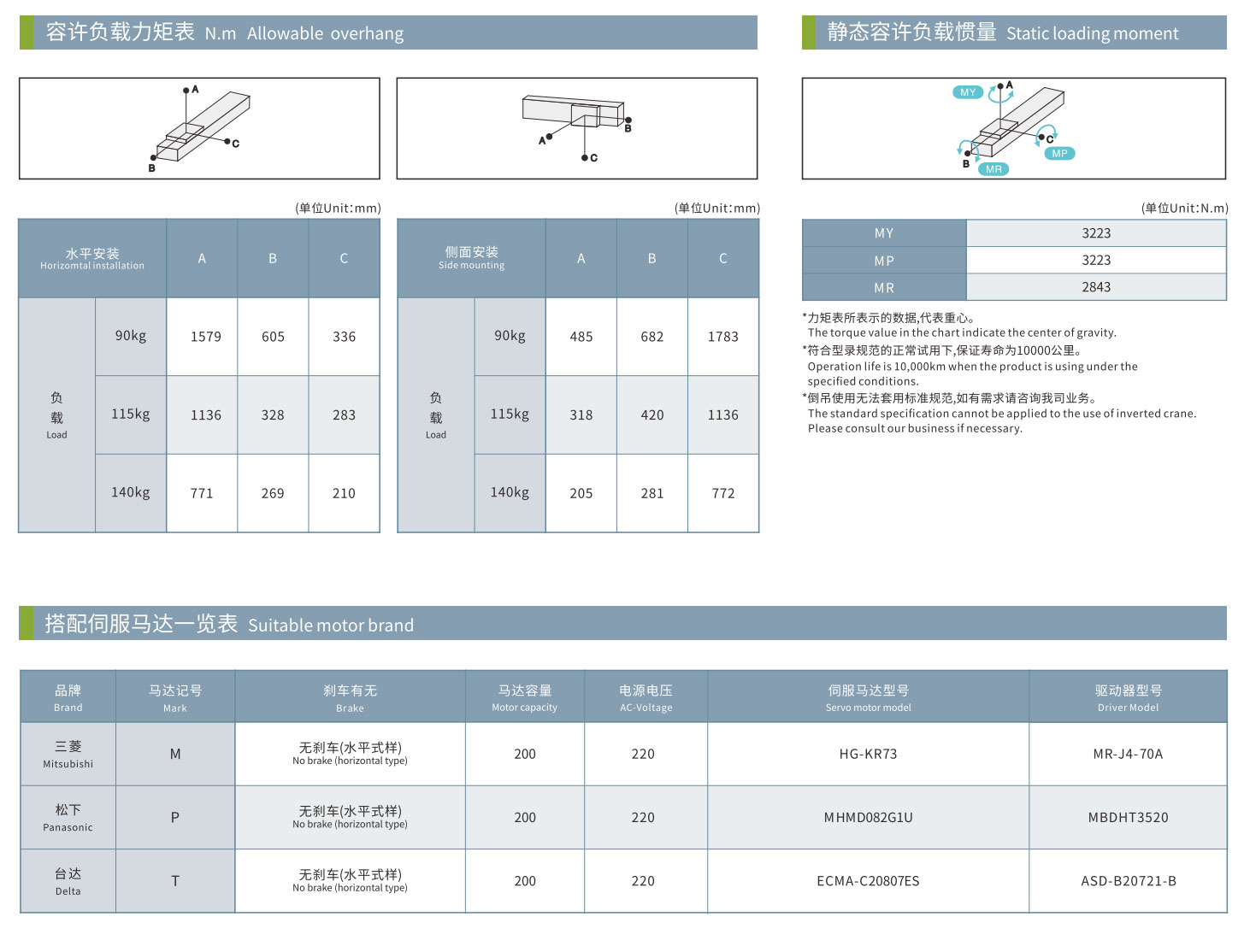
반복 위치 정확도: ±0.04mm
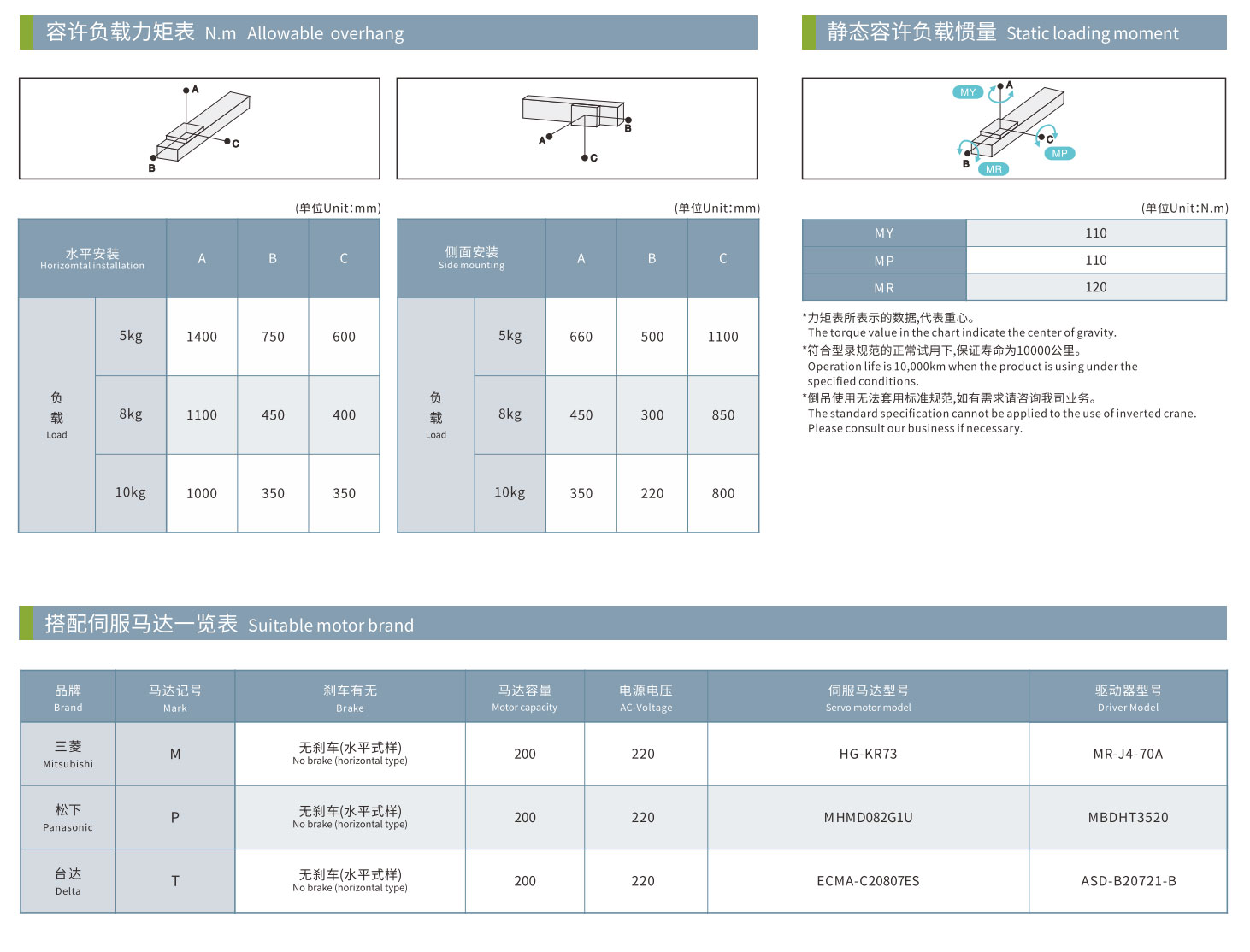
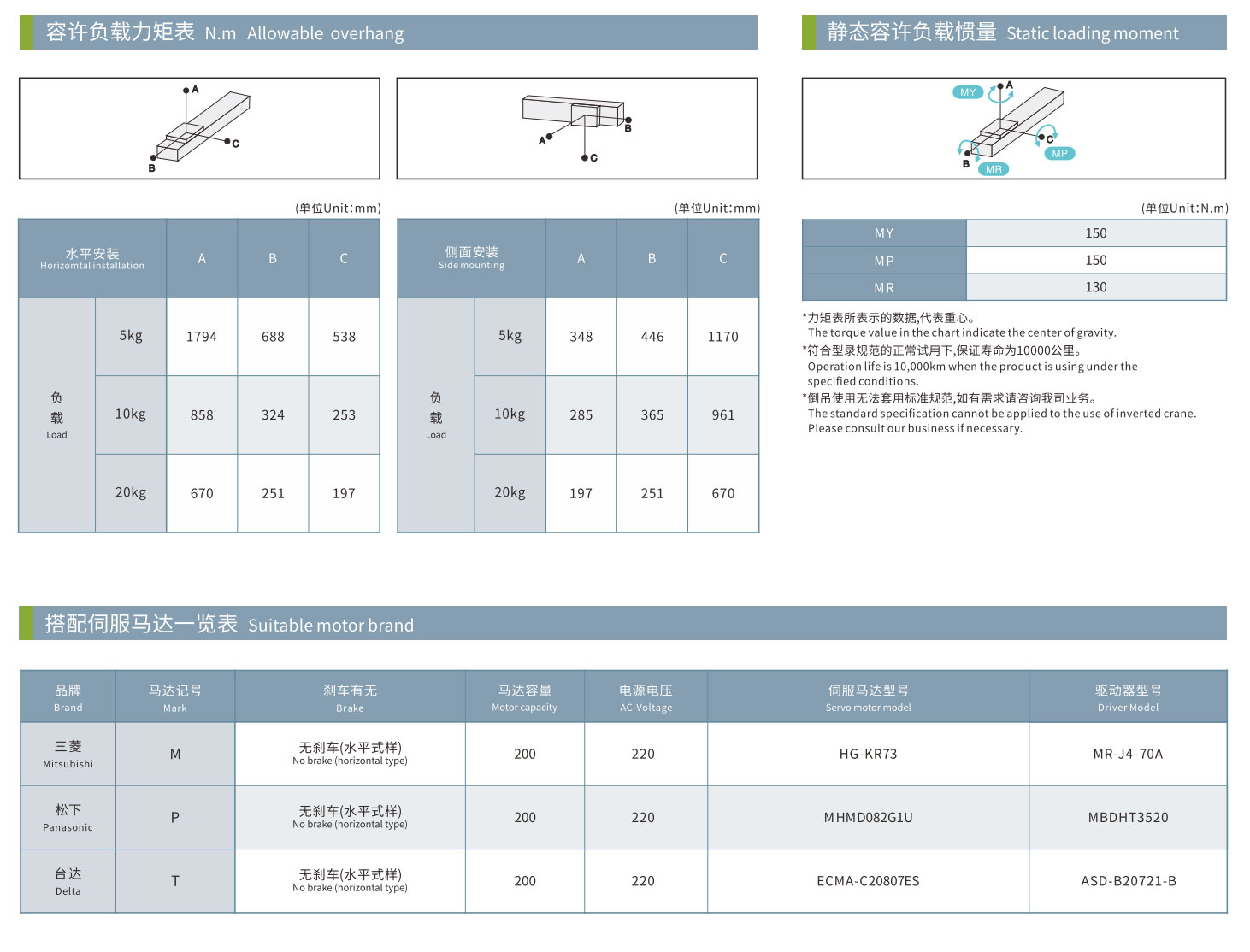
최대 탑재량: 140kg
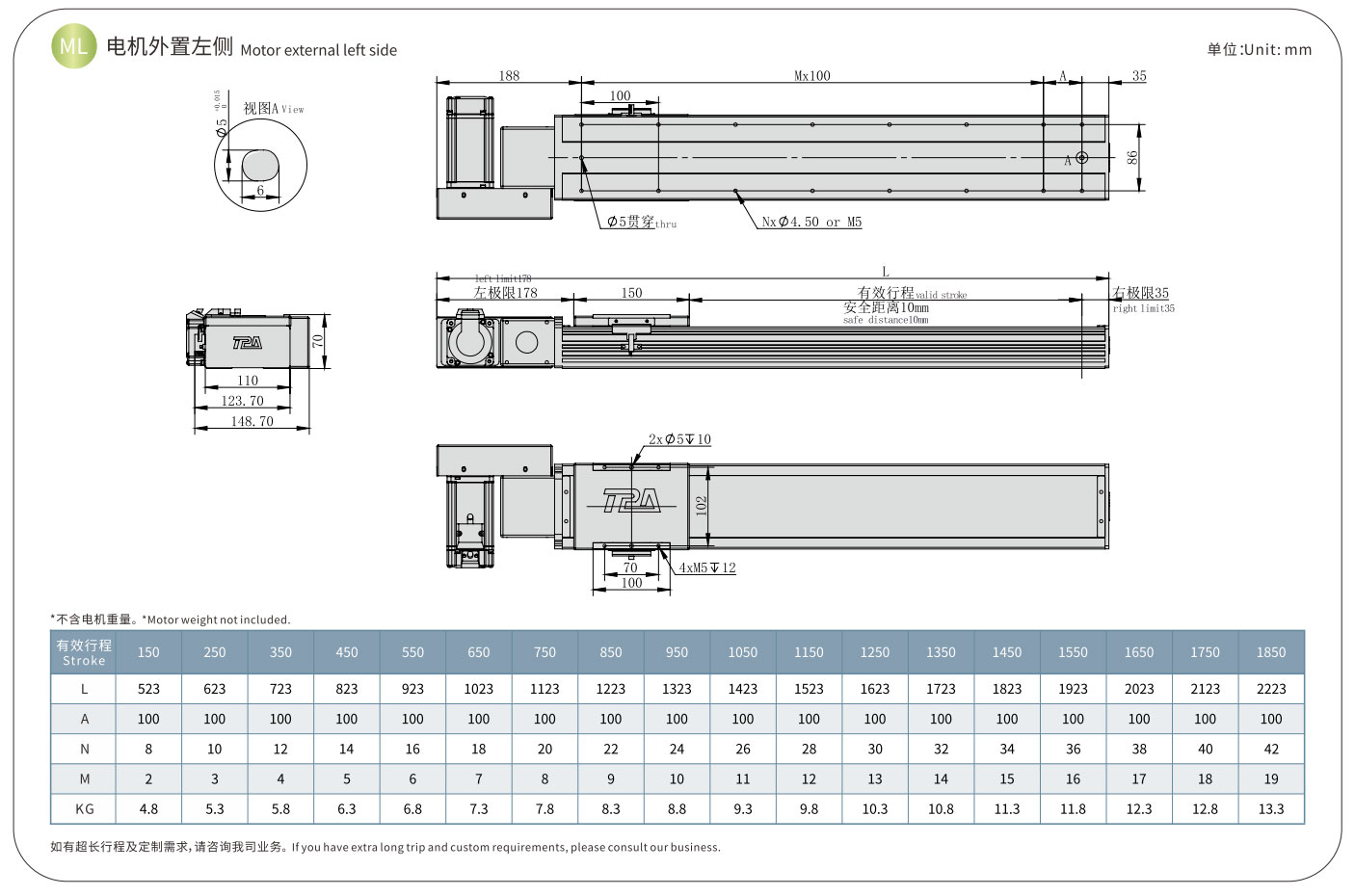
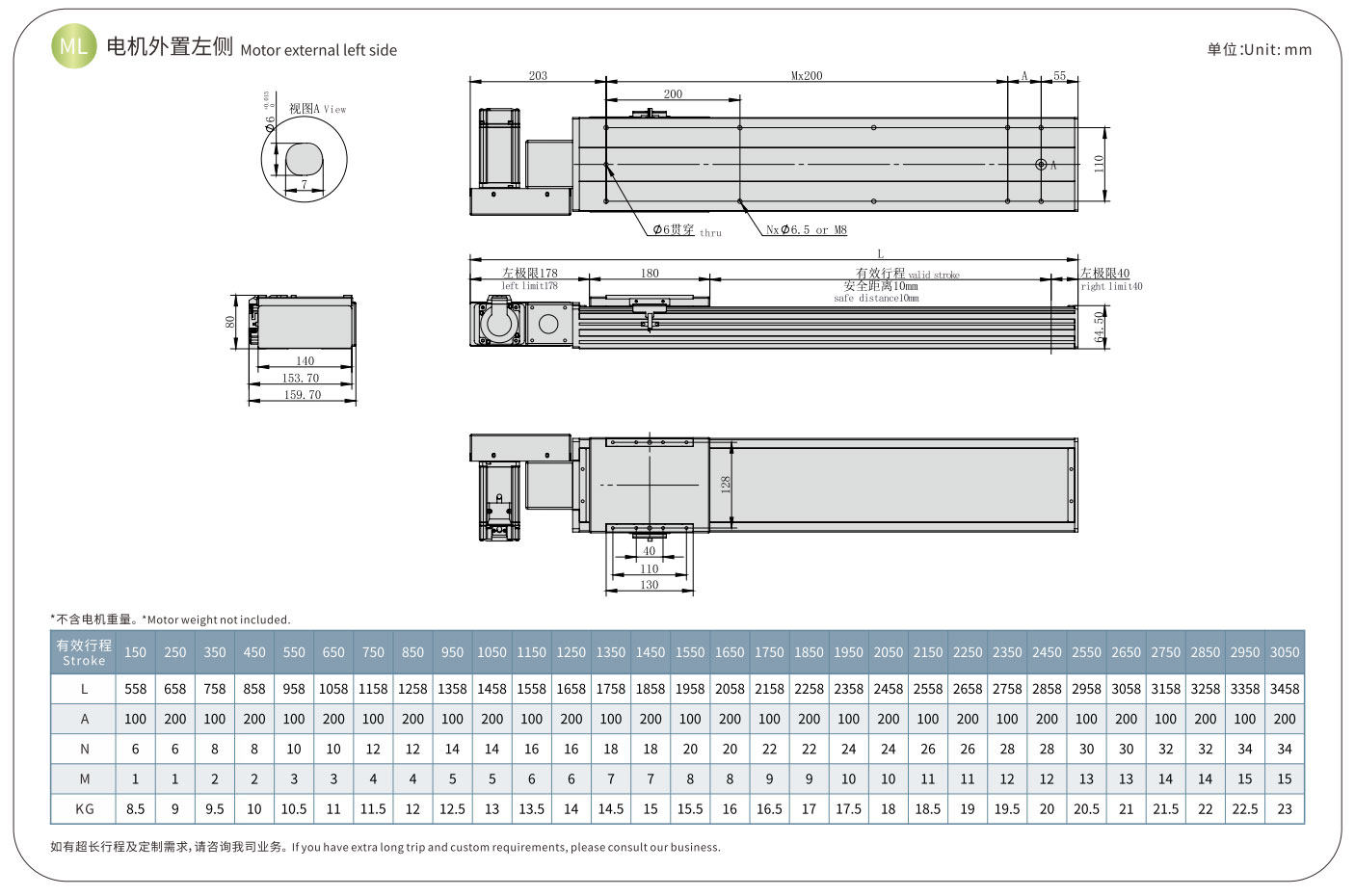
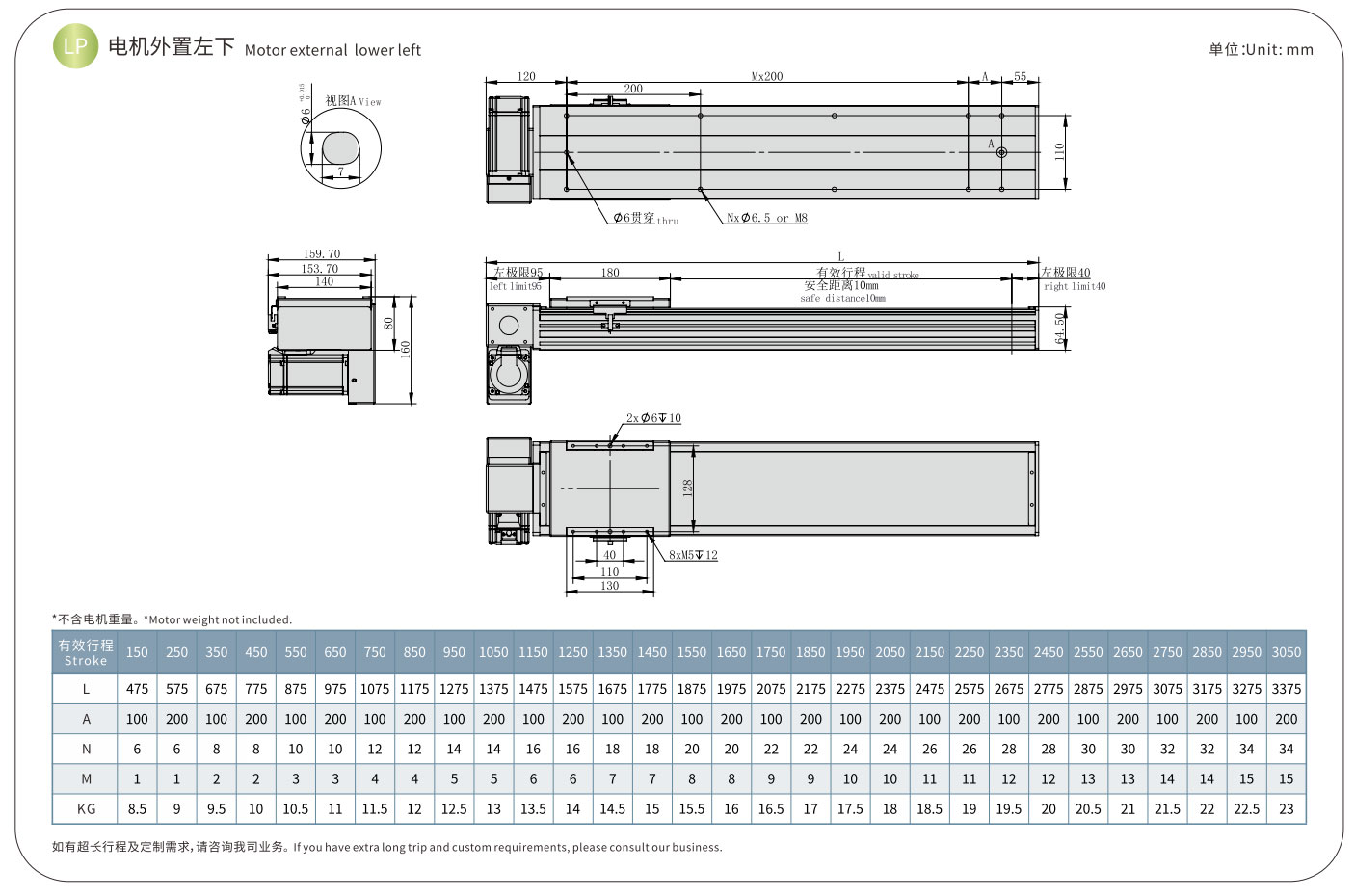
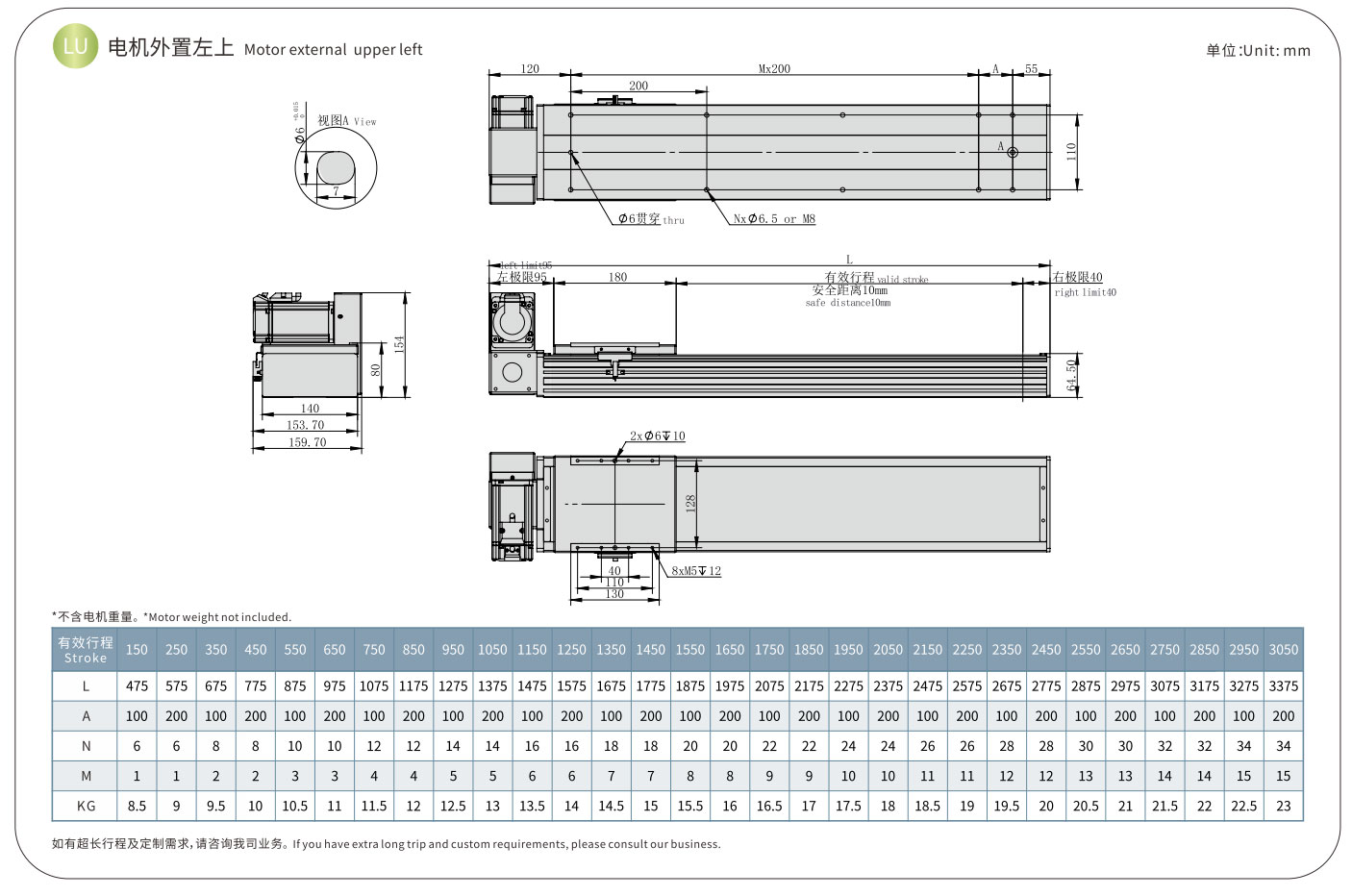
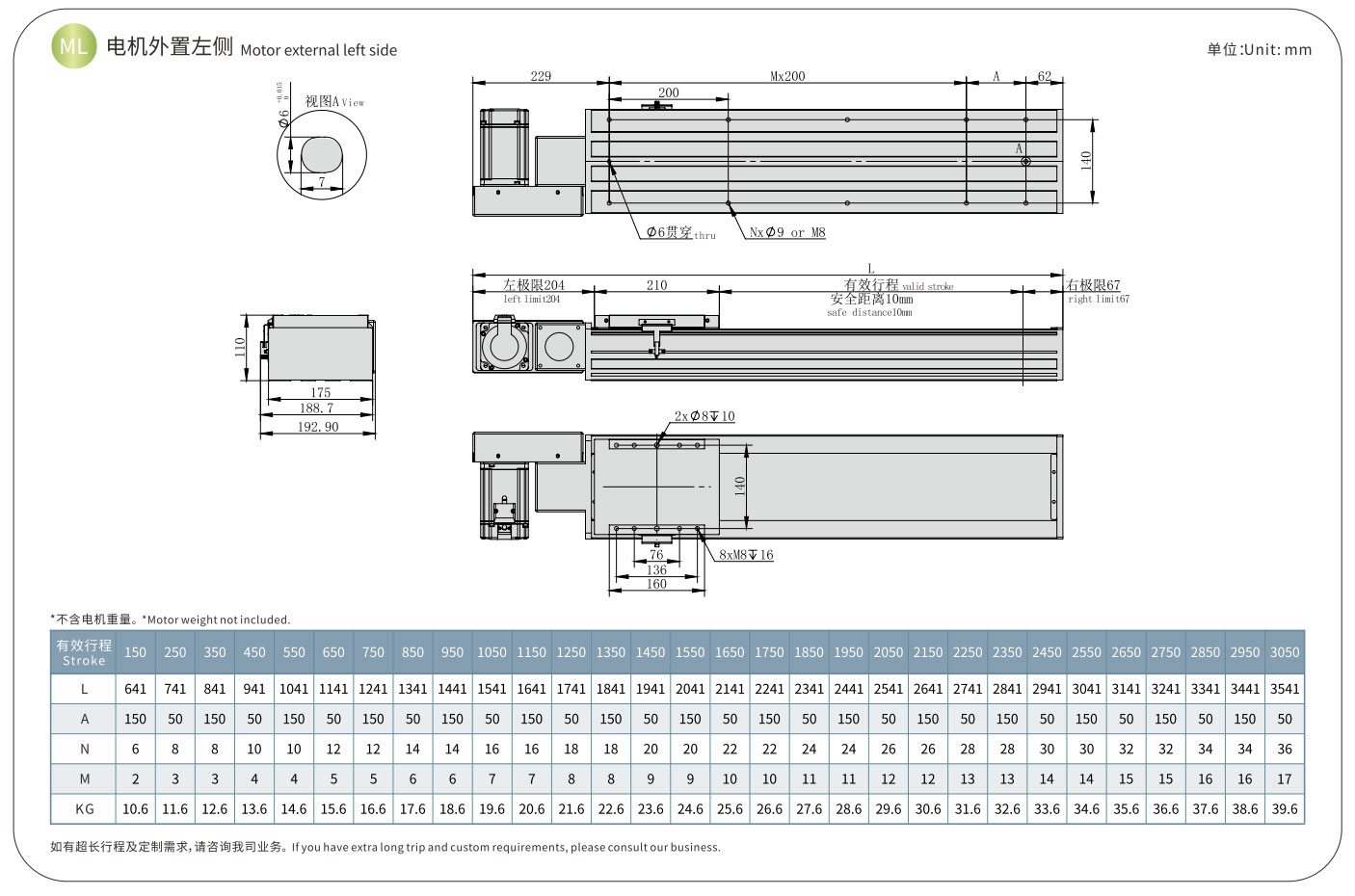
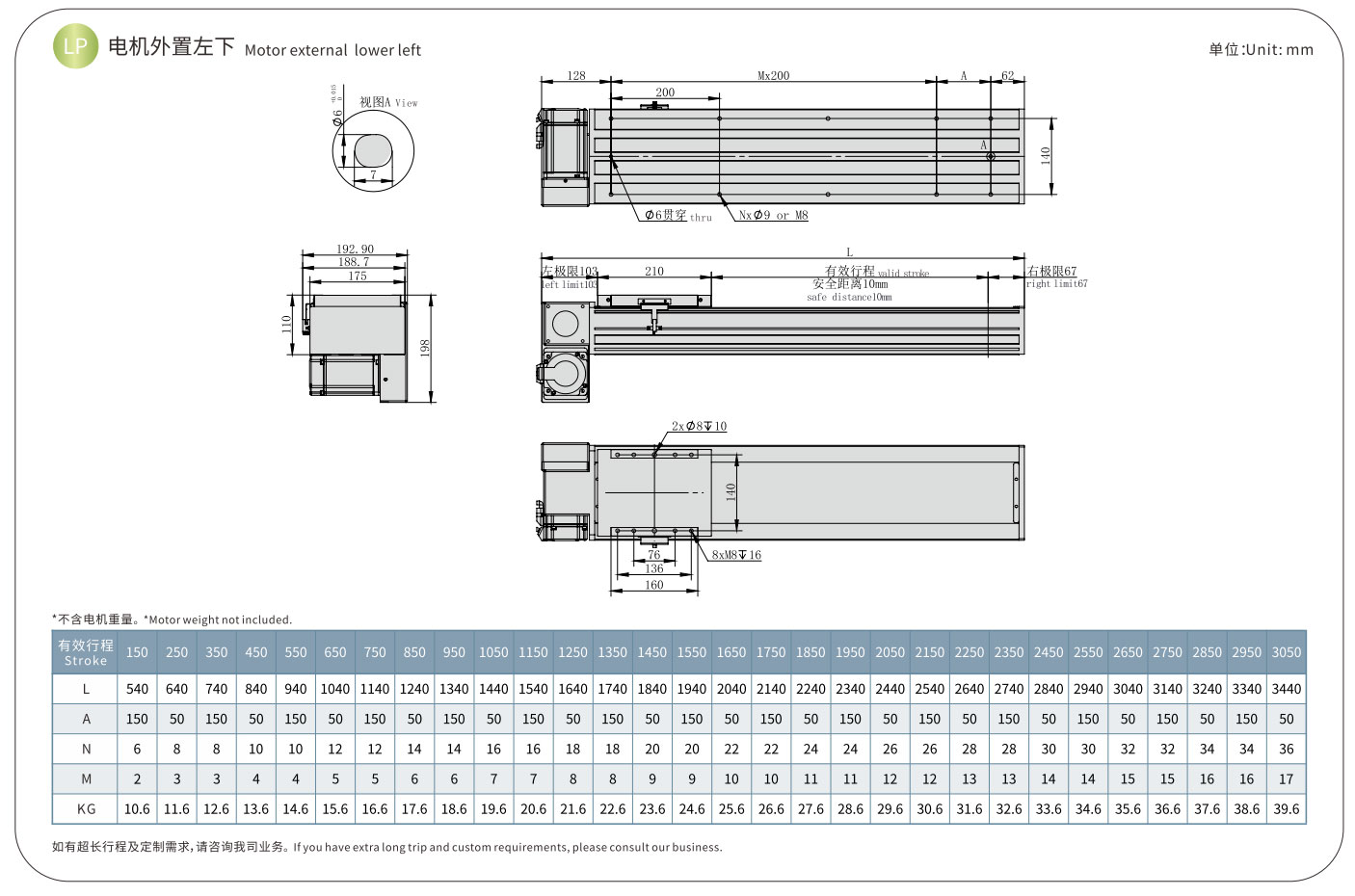
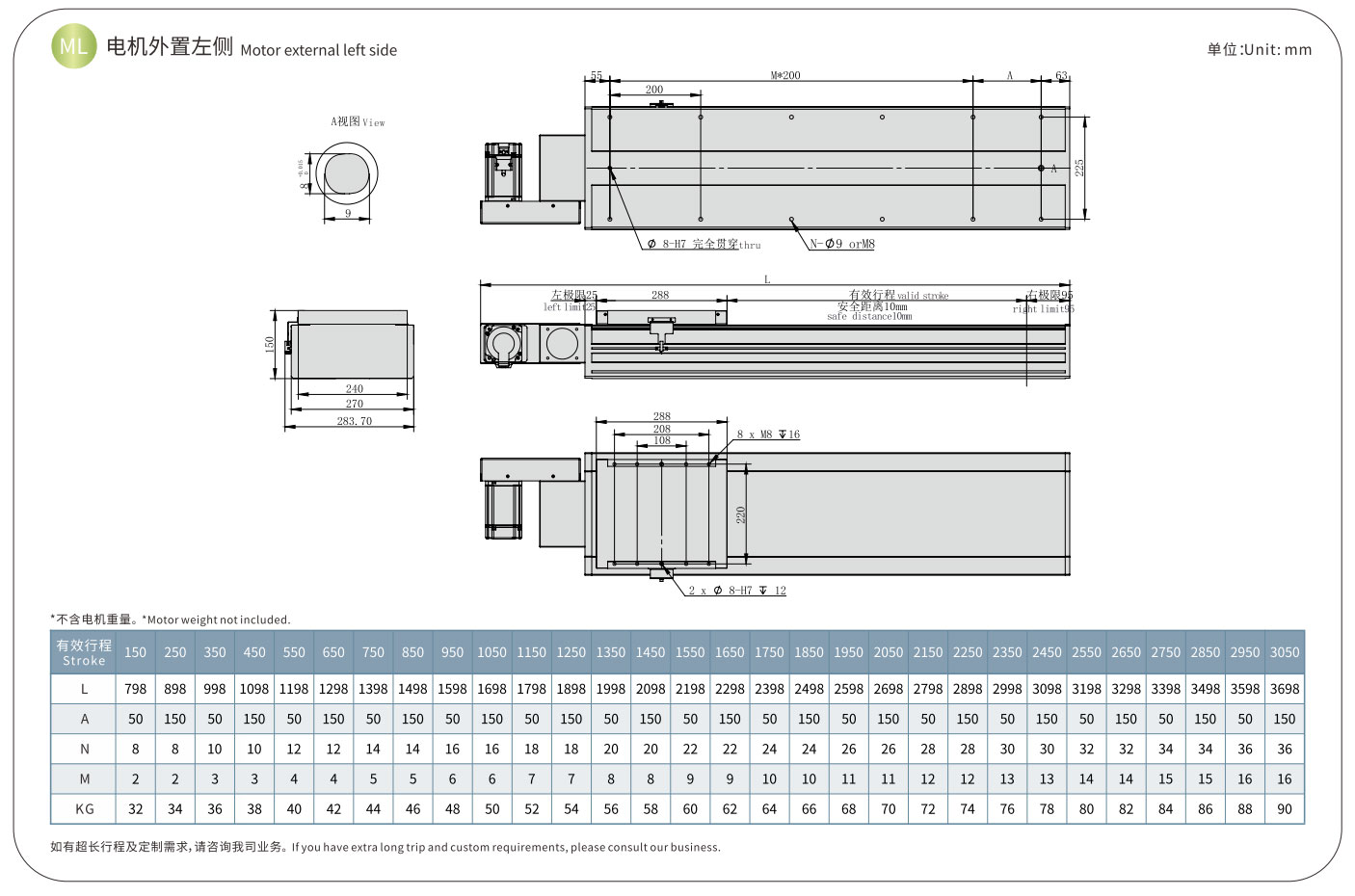
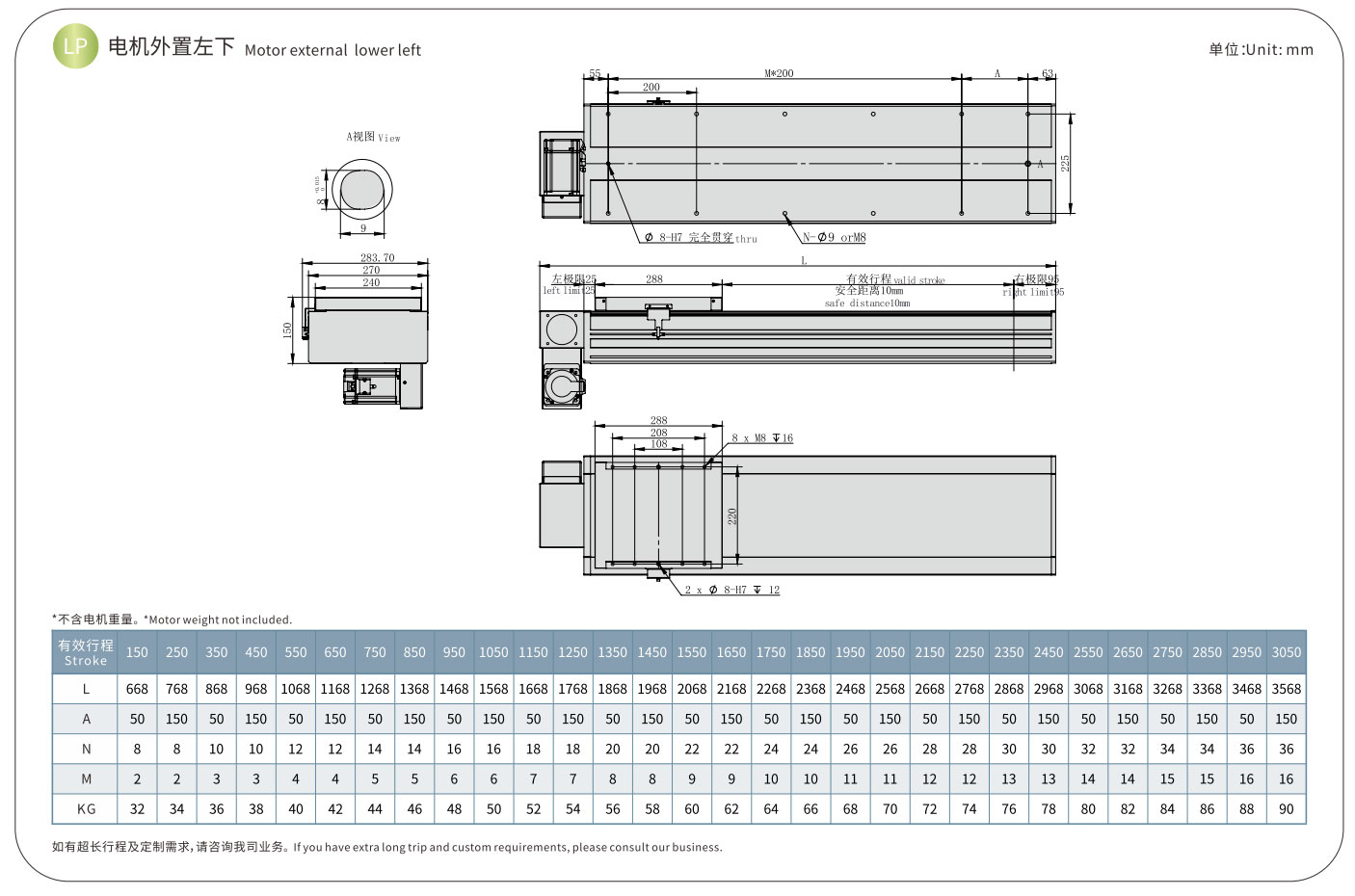
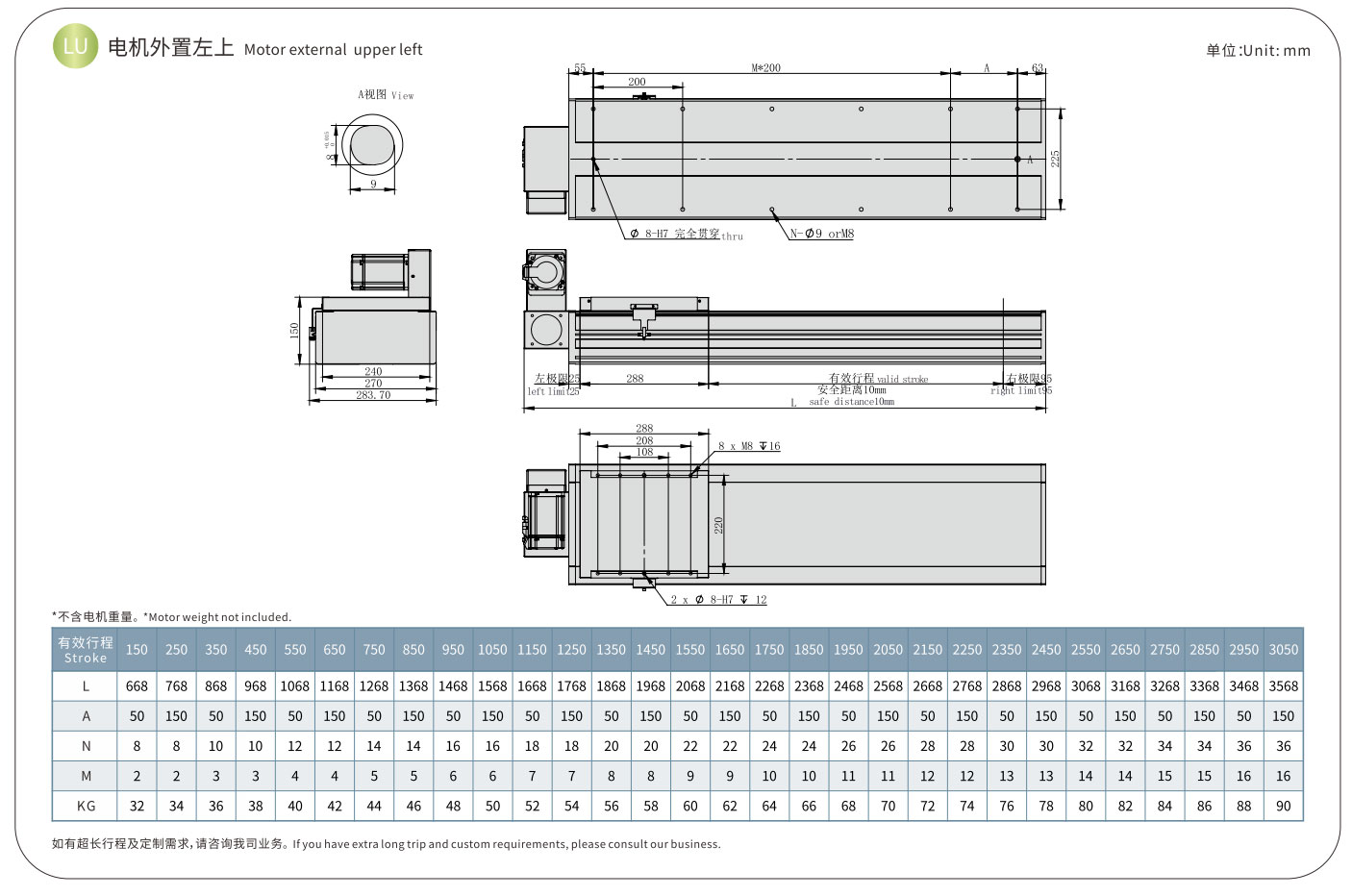
스트로크: 100 – 3050mm
최고 속도: 7000mm/s

1. 평면 디자인, 더 가벼운 전체 무게, 더 낮은 조합 높이 및 더 나은 강성.
2. 구조가 최적화되고 정밀도가 향상되며 여러 액세서리를 조립할 때 발생하는 오류가 줄어듭니다.
3. 조립은 시간을 절약하고 노동력을 절약하며 편리합니다. 커플링이나 모듈을 설치하기 위해 알루미늄 커버를 제거할 필요가 없습니다.
4. 유지 관리가 간단하고 모듈 양쪽에 오일 주입 구멍이 있어 덮개를 제거할 필요가 없습니다.







더 많은 제품

ONB 시리즈 벨트 구동 선형 모듈 절반 폐쇄형

OCB 시리즈 벨트 구동 선형 모듈 완전 인클로저

ONB-F 시리즈 벨트 구동 선형 모듈 외부...

HNB-E 시리즈 벨트 구동 선형 액추에이터 하프 ...

HNB 시리즈 벨트 구동 선형 모듈 절반 폐쇄형










