




HCB Series Belt Driven Linear Module Լիովին փակված

Մոդելի ընտրիչ
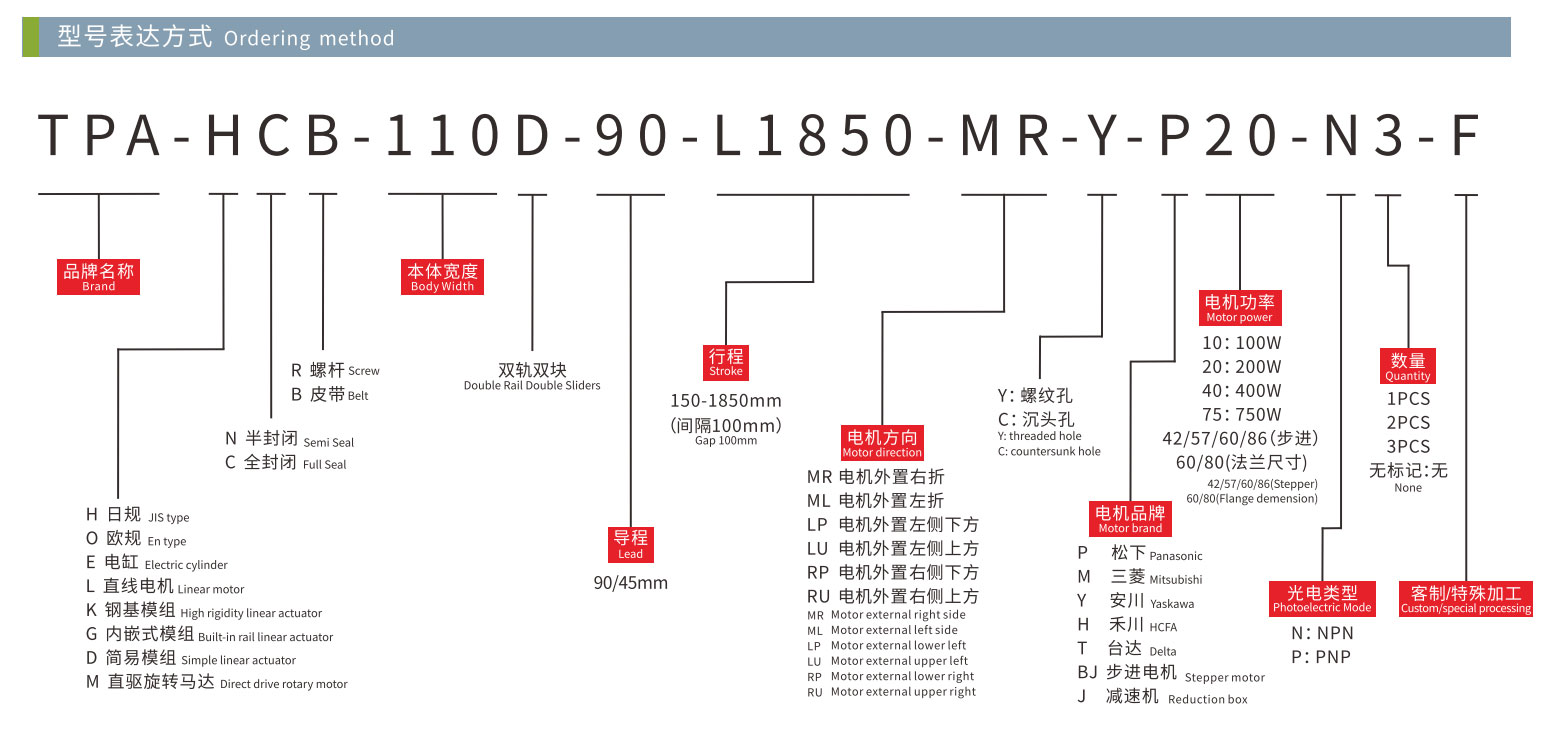
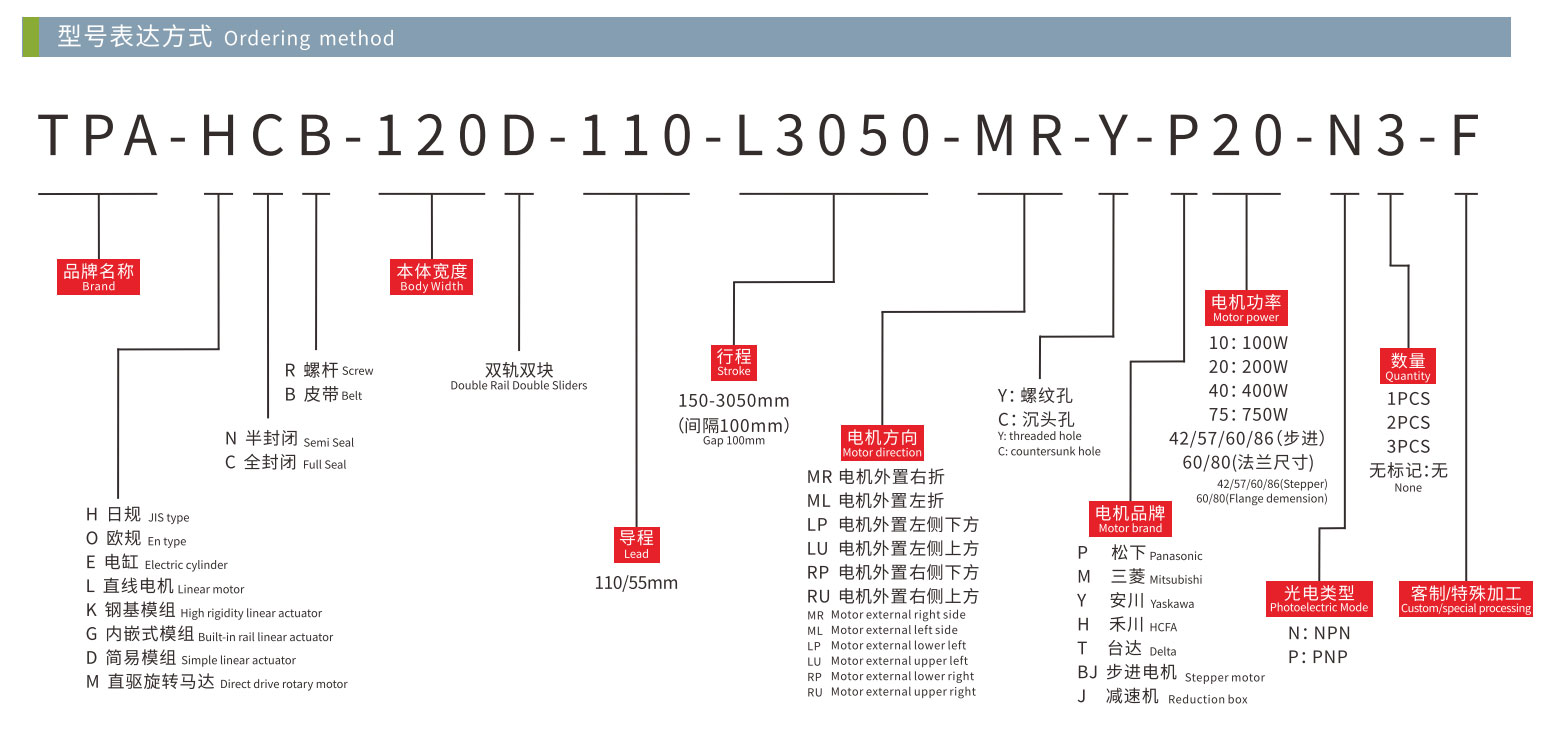
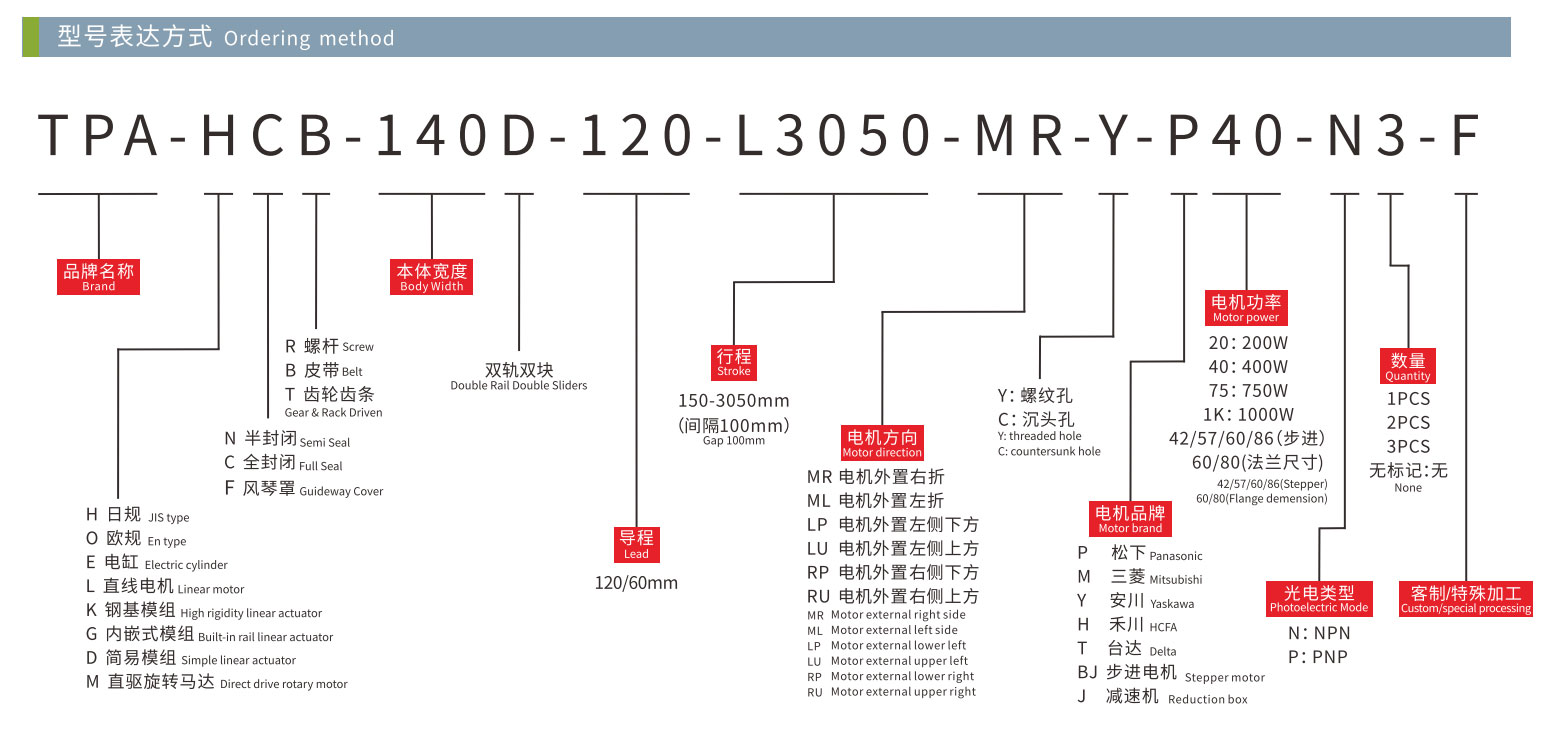
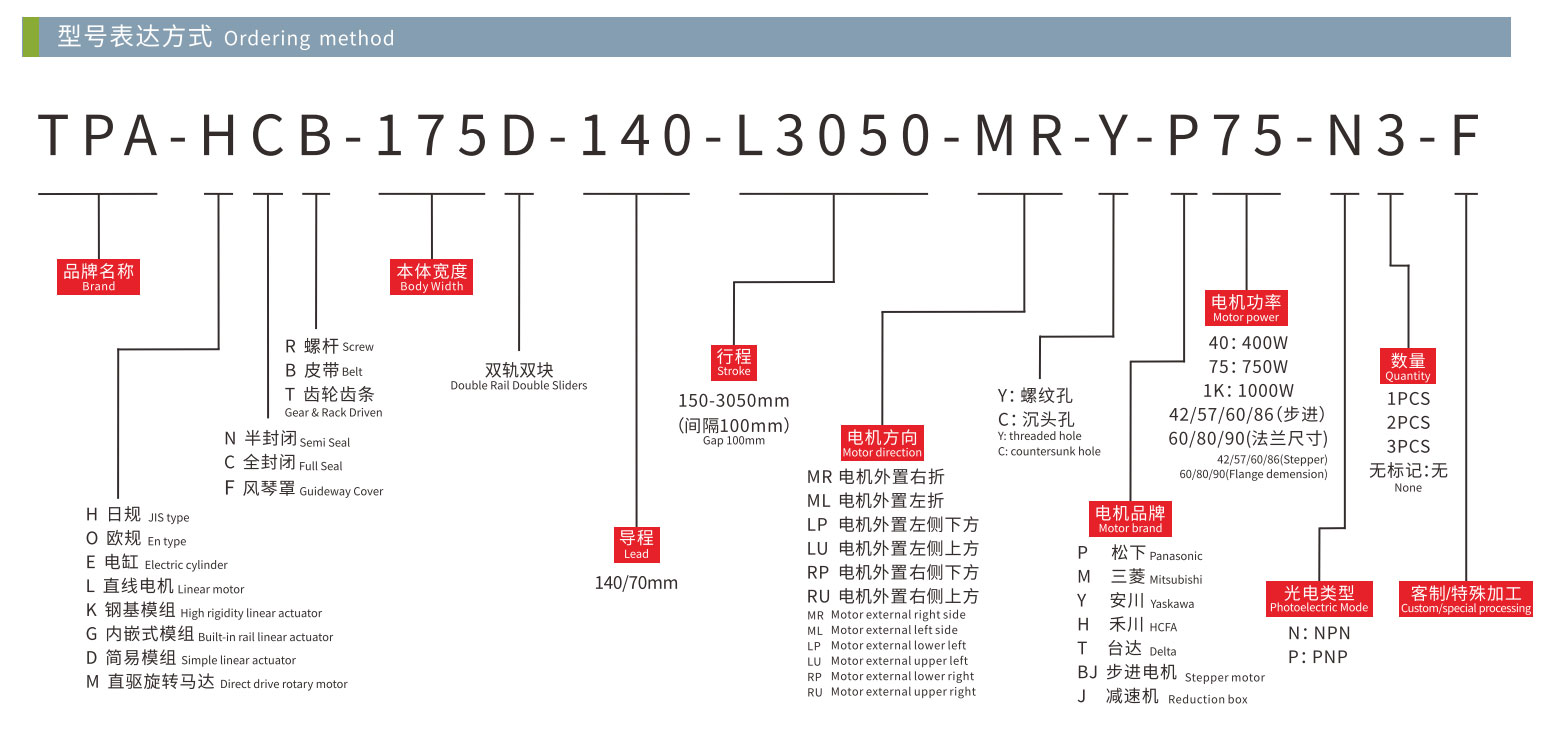
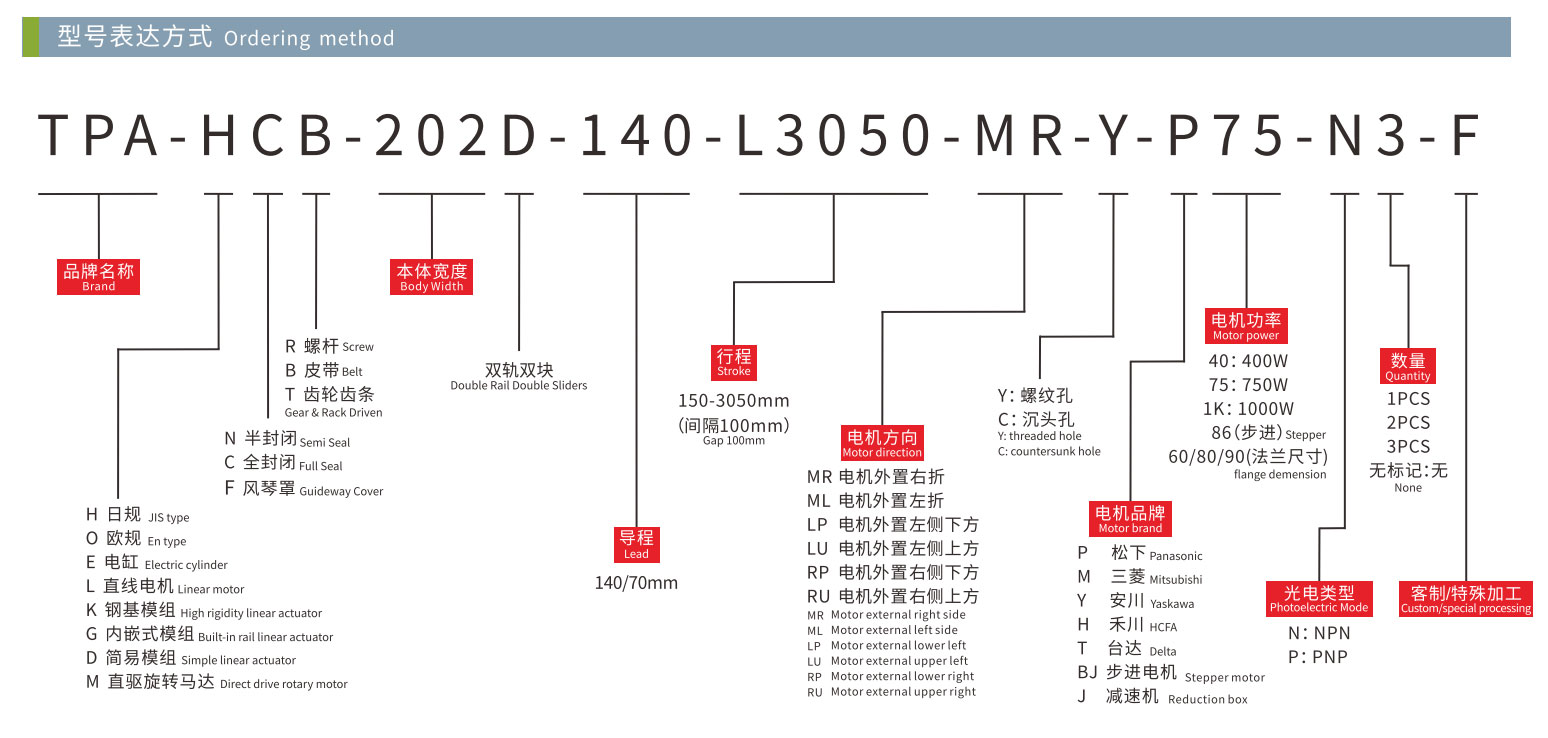
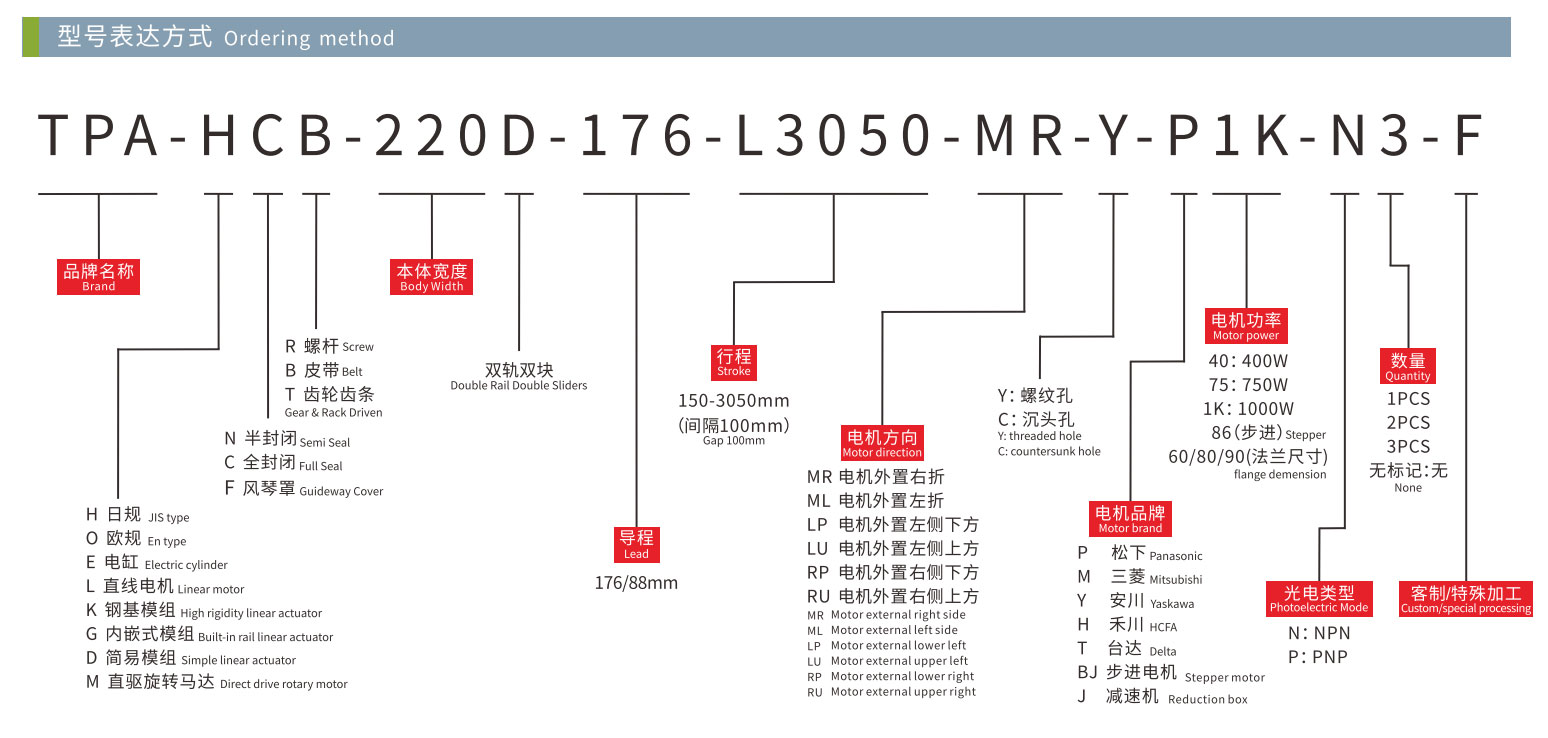
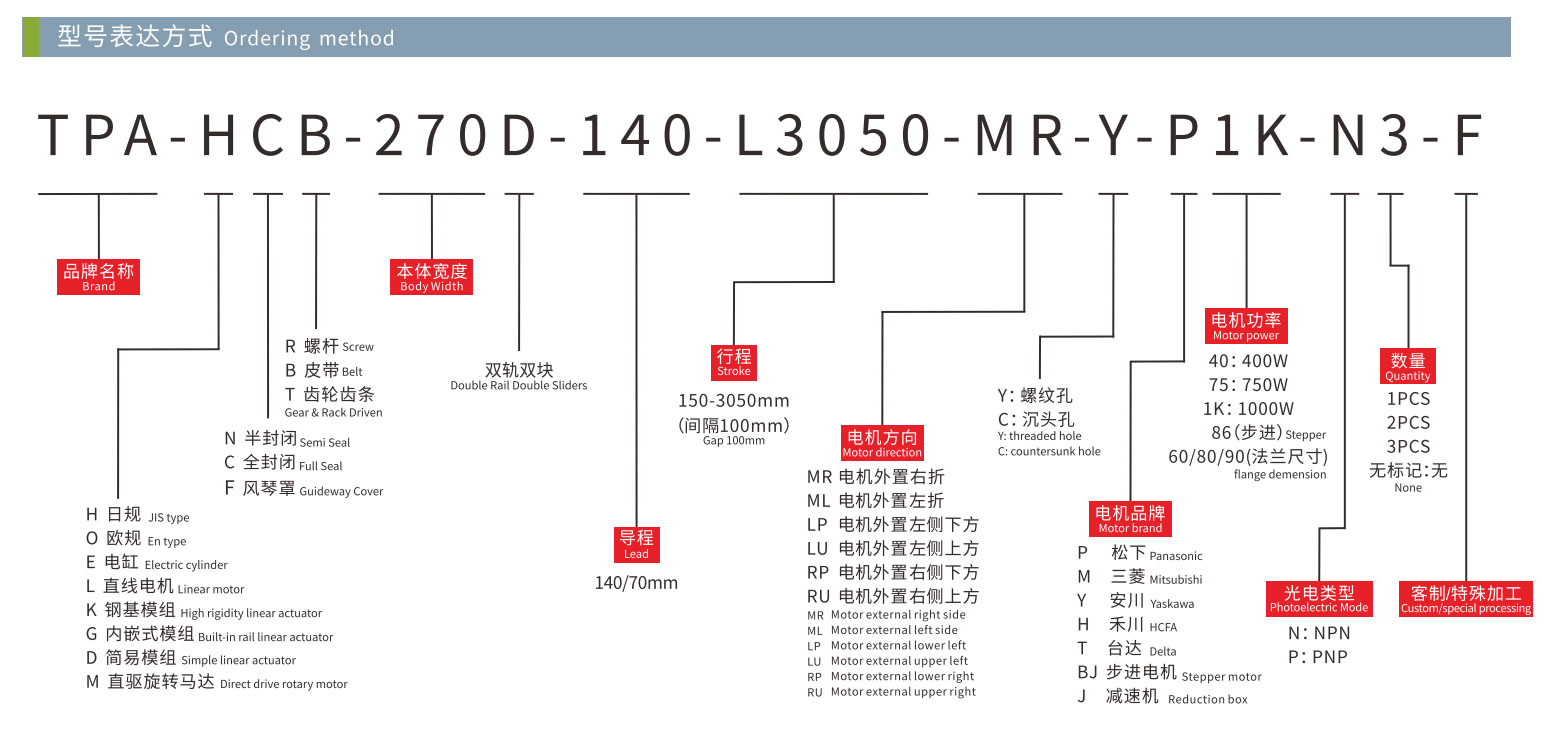
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
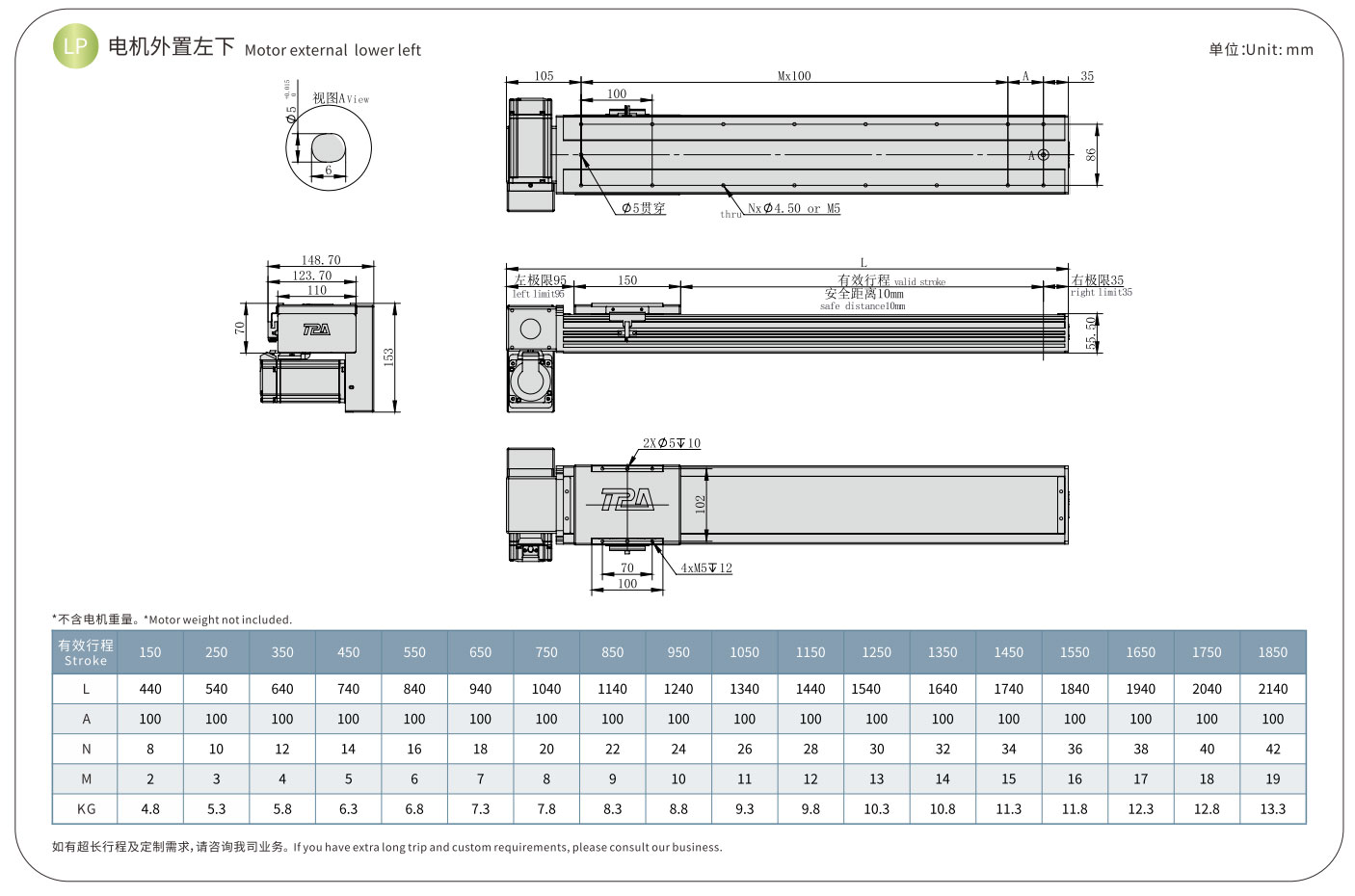
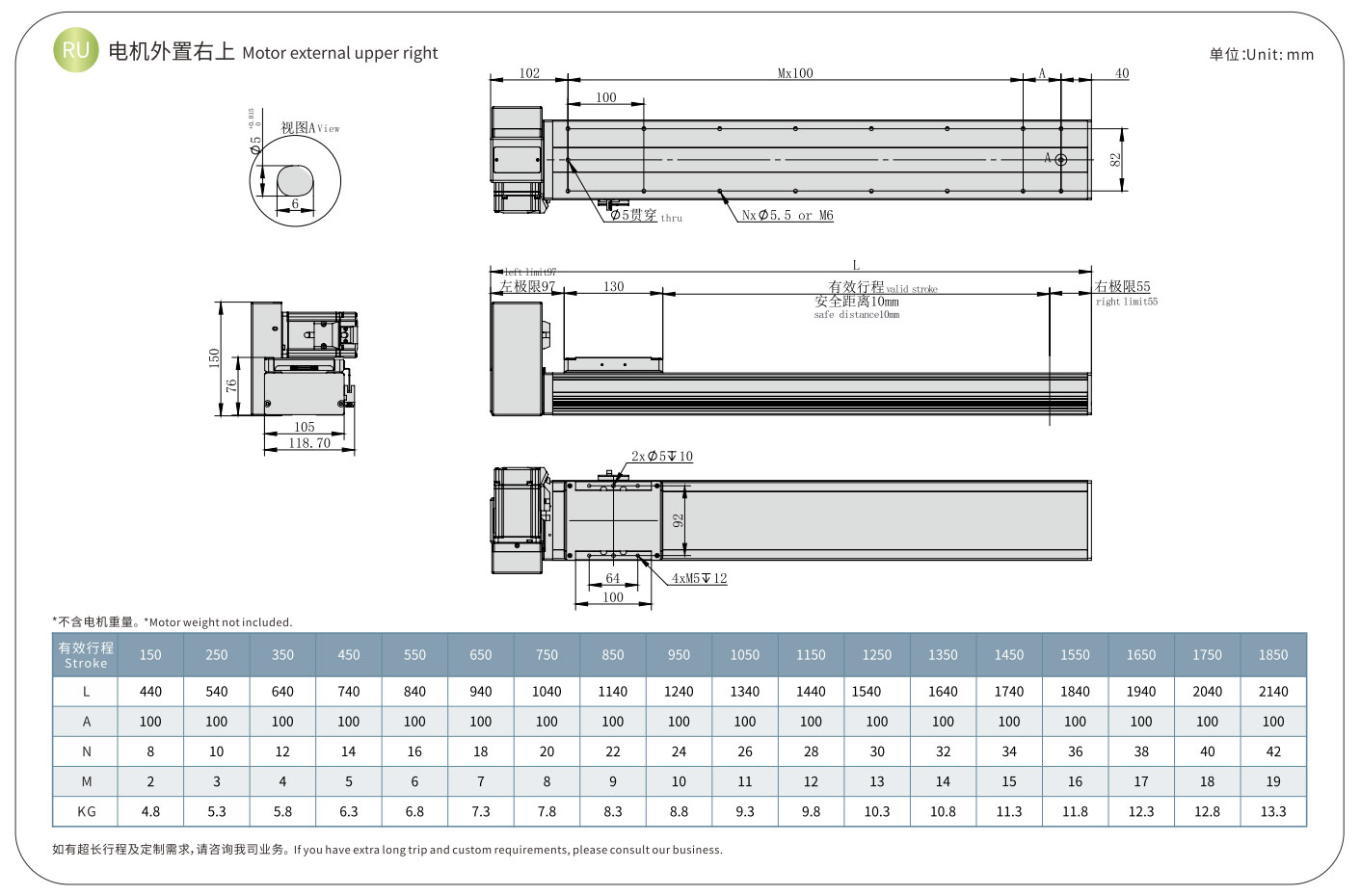
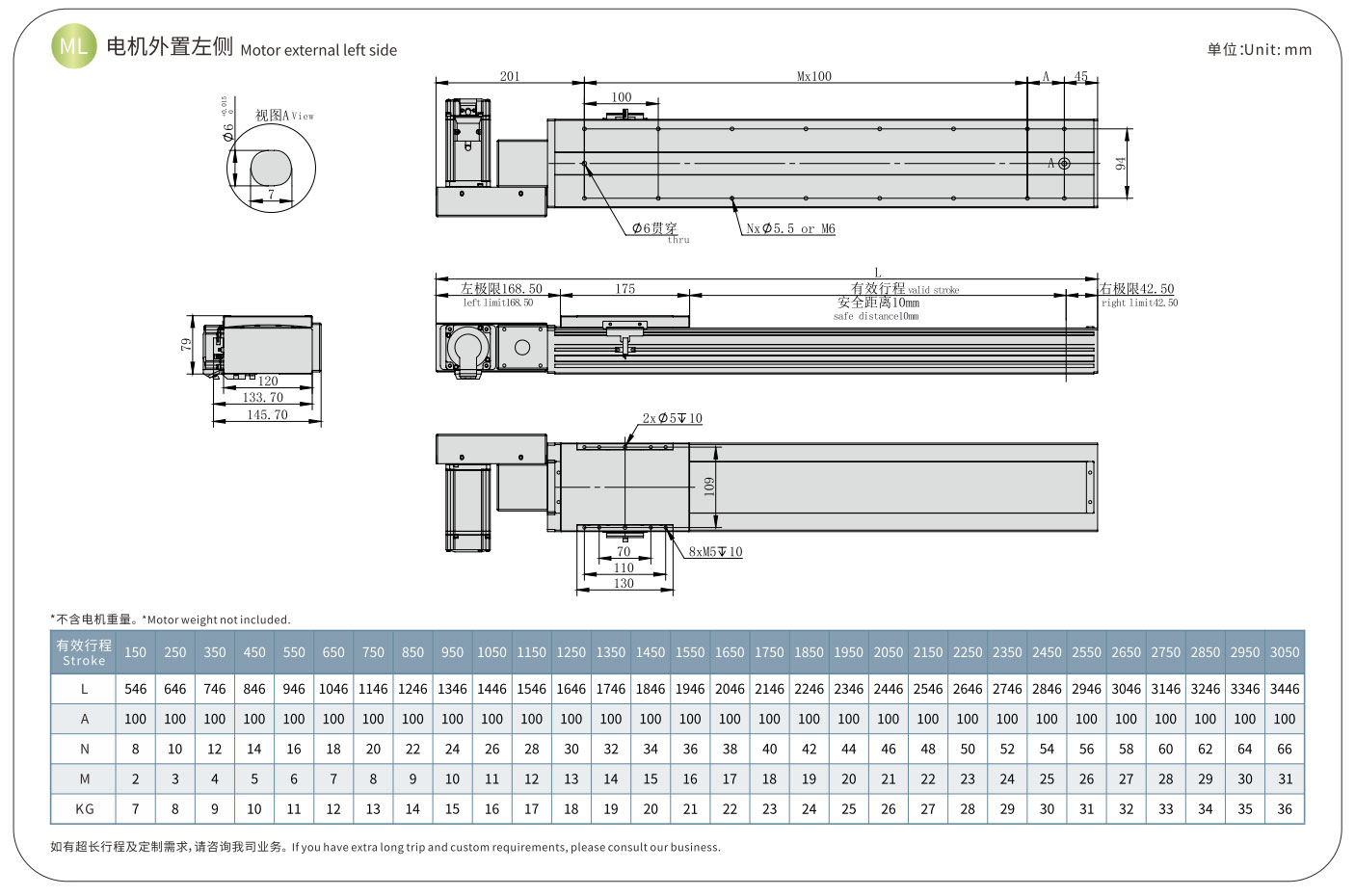
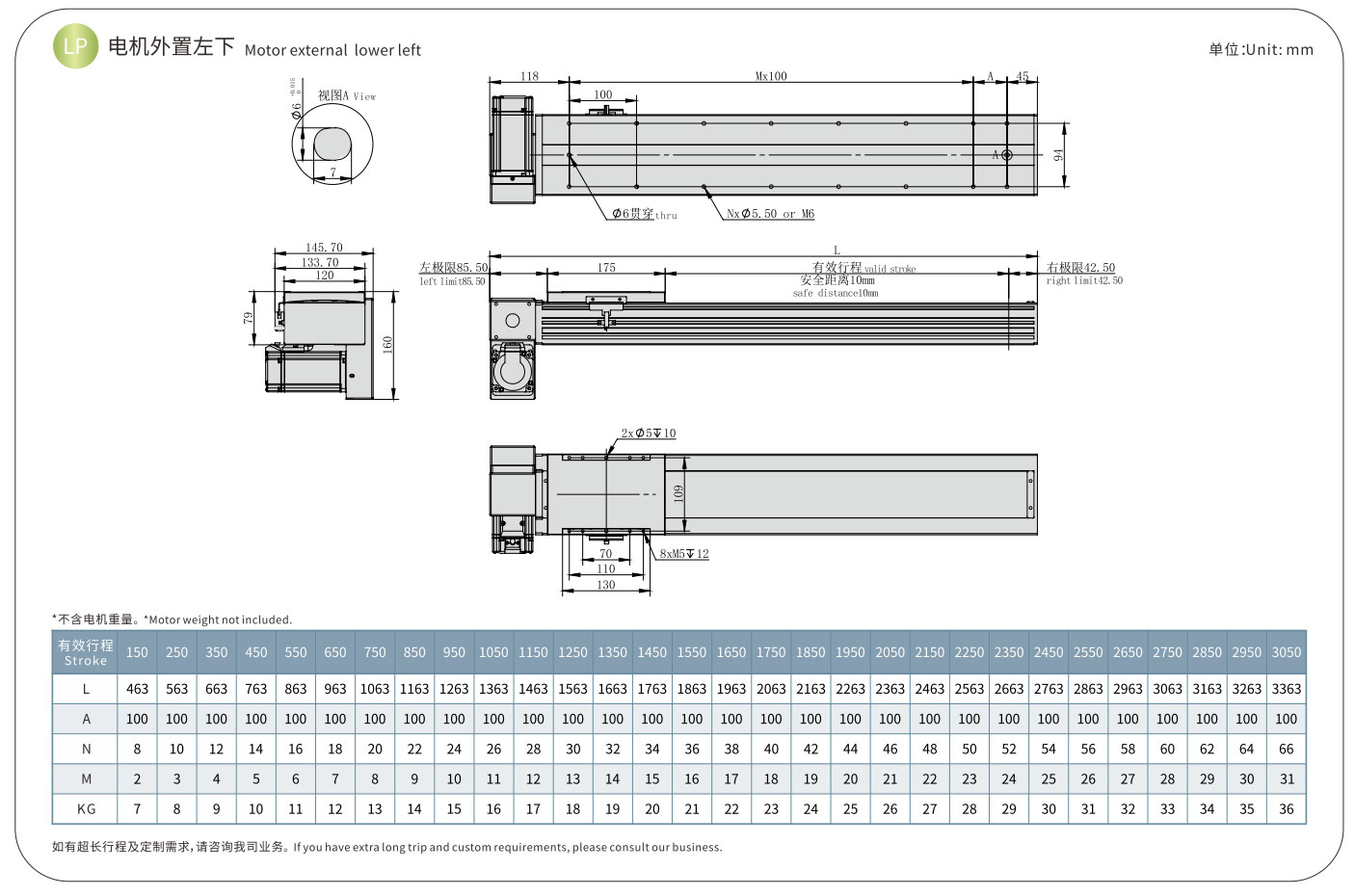
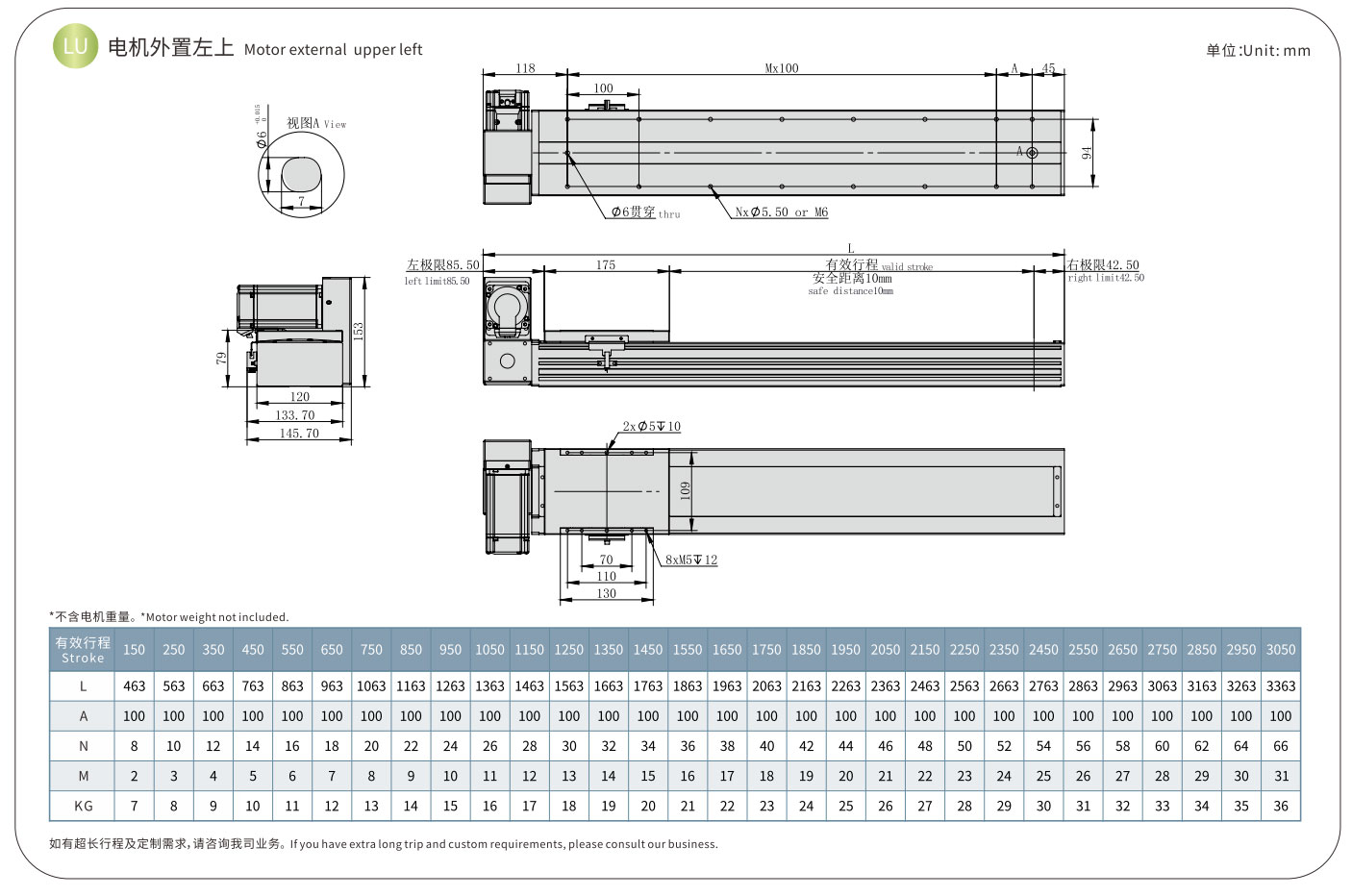
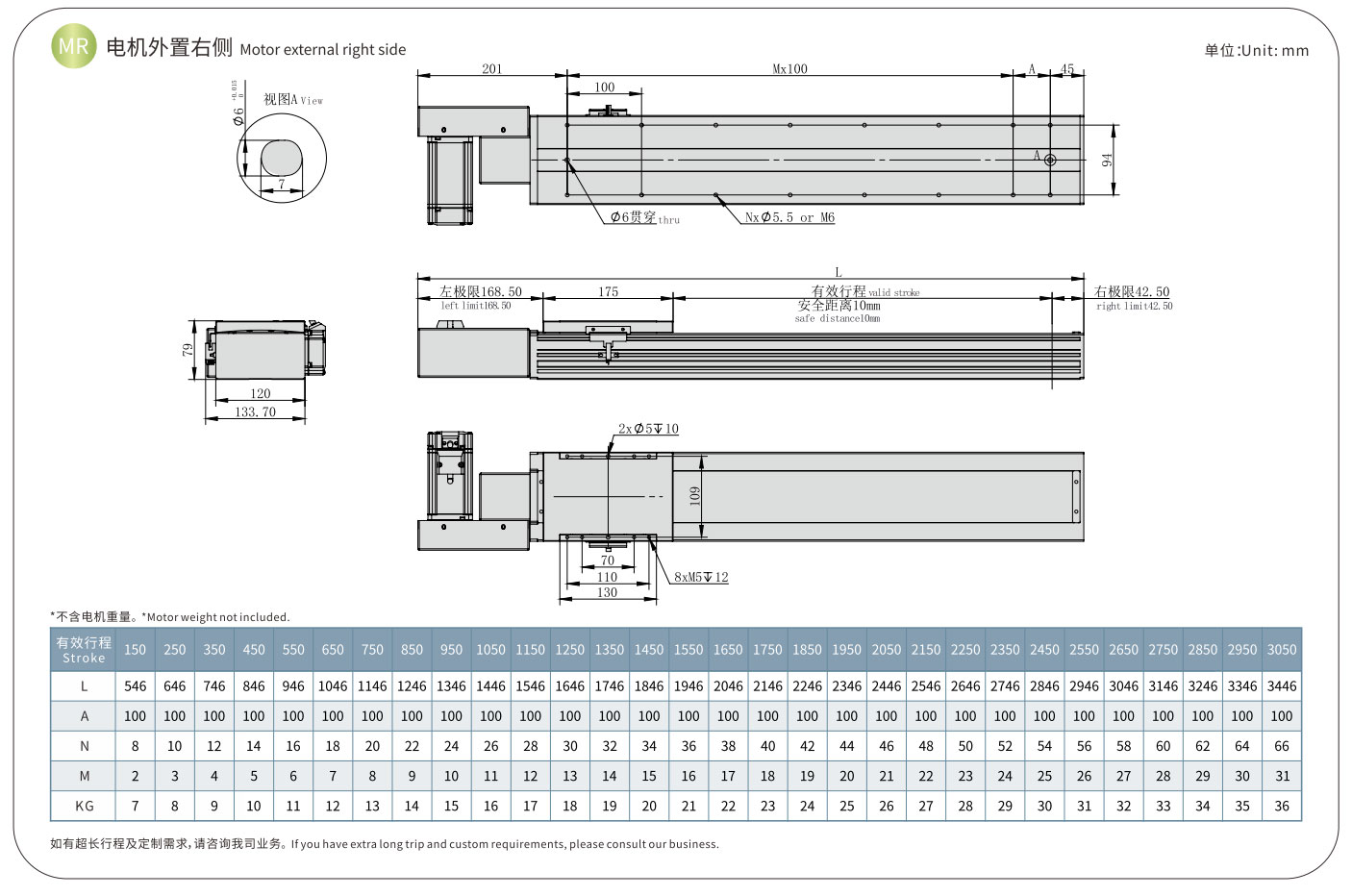
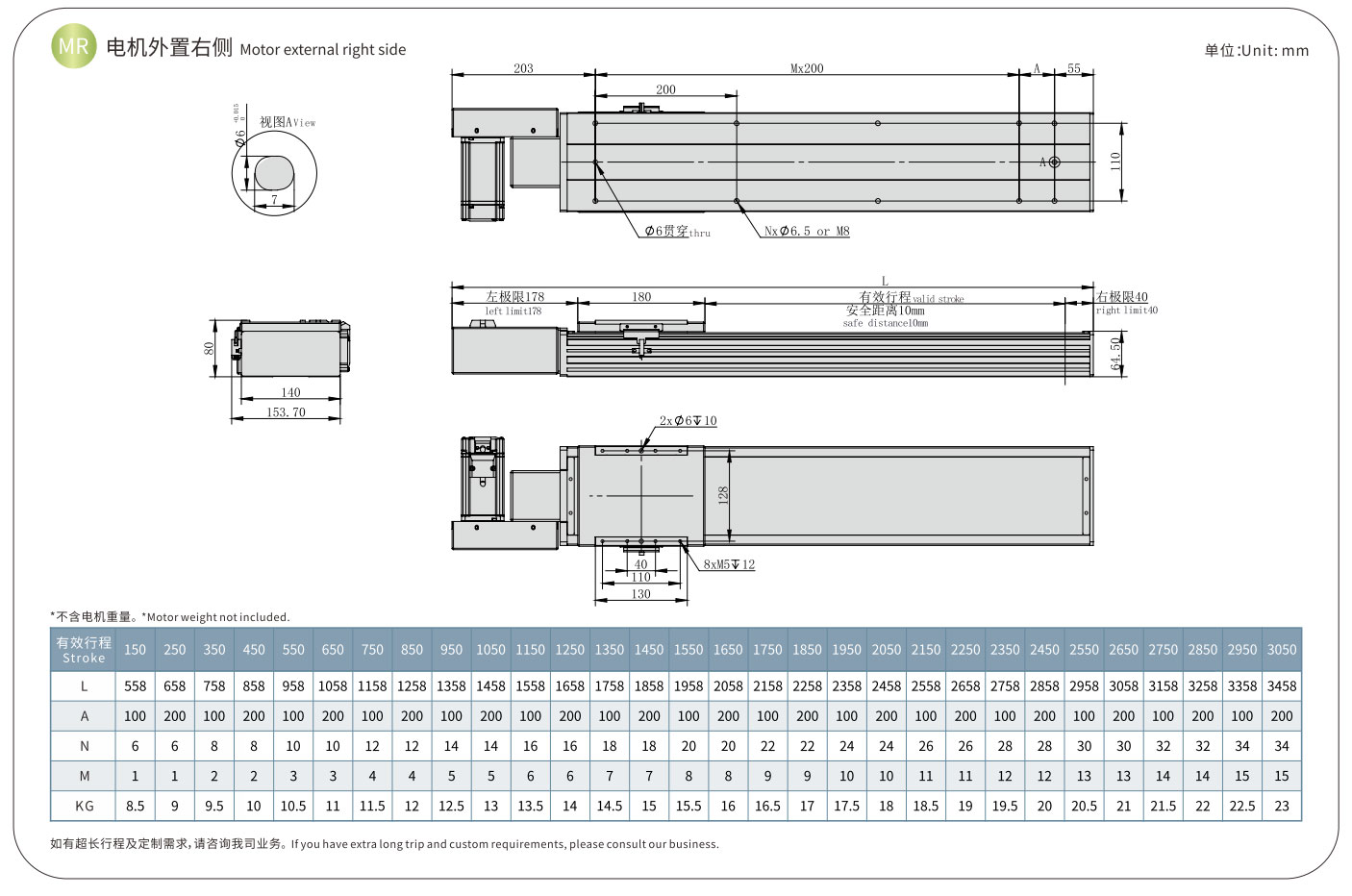
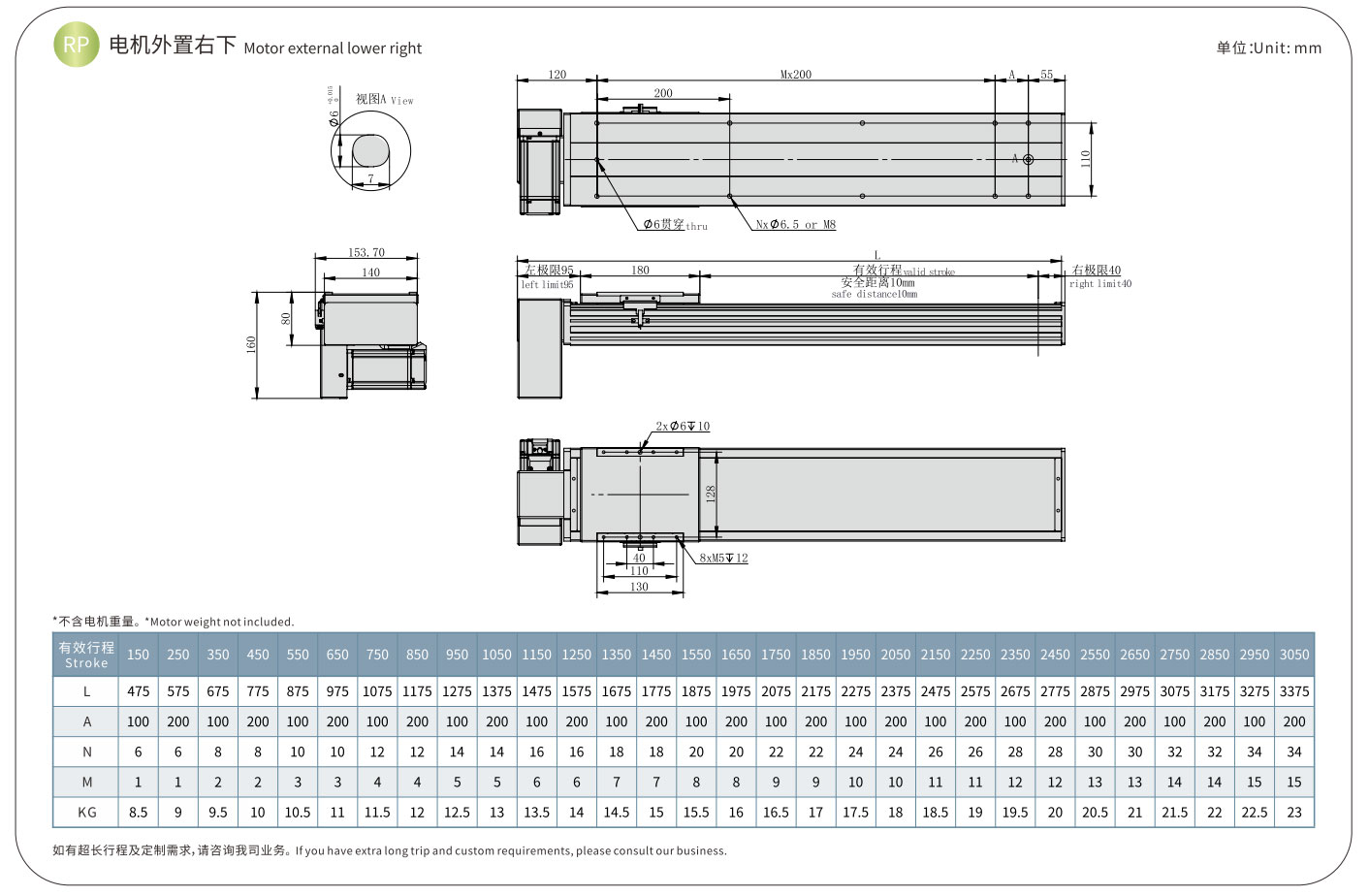
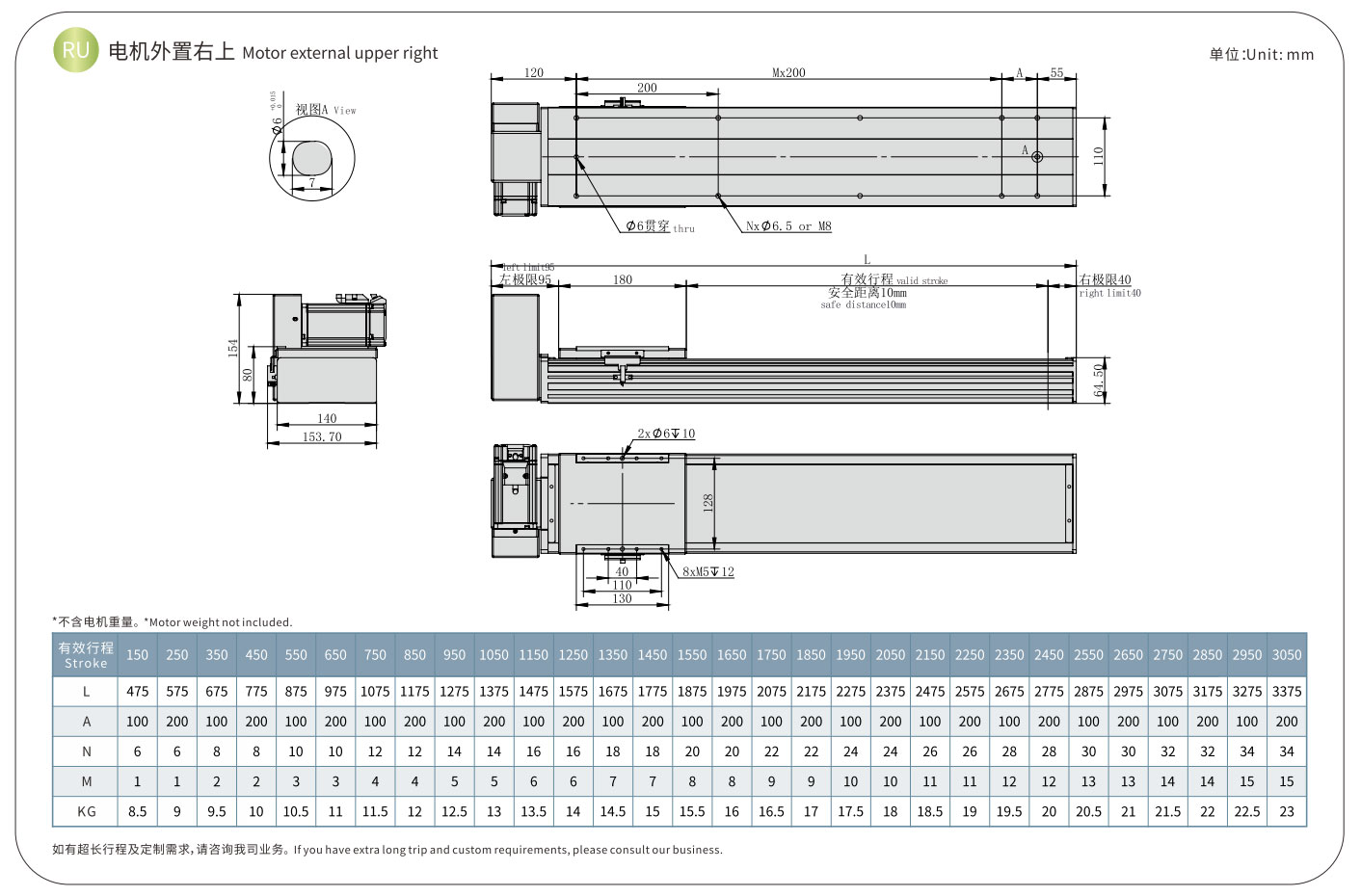
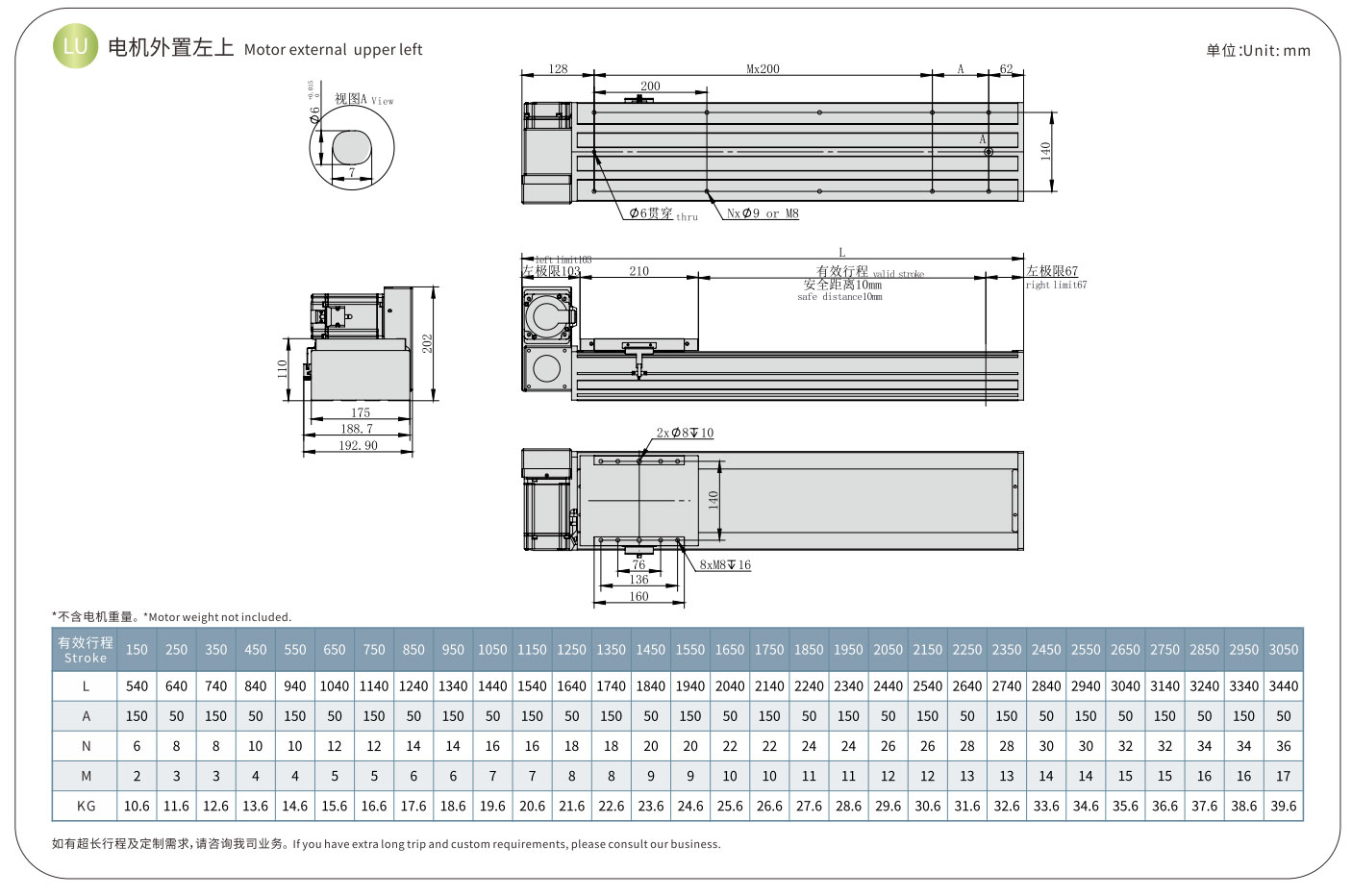
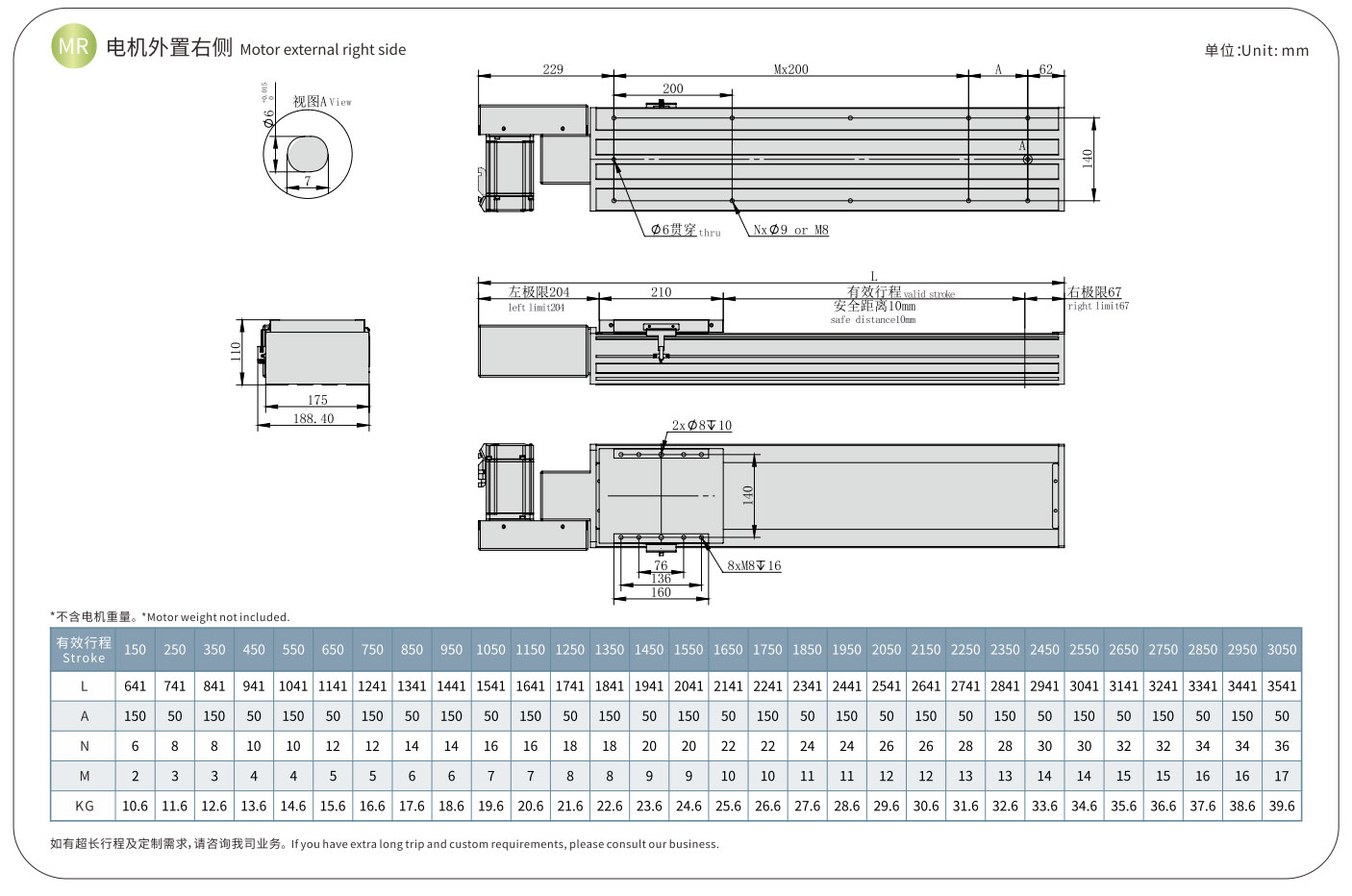
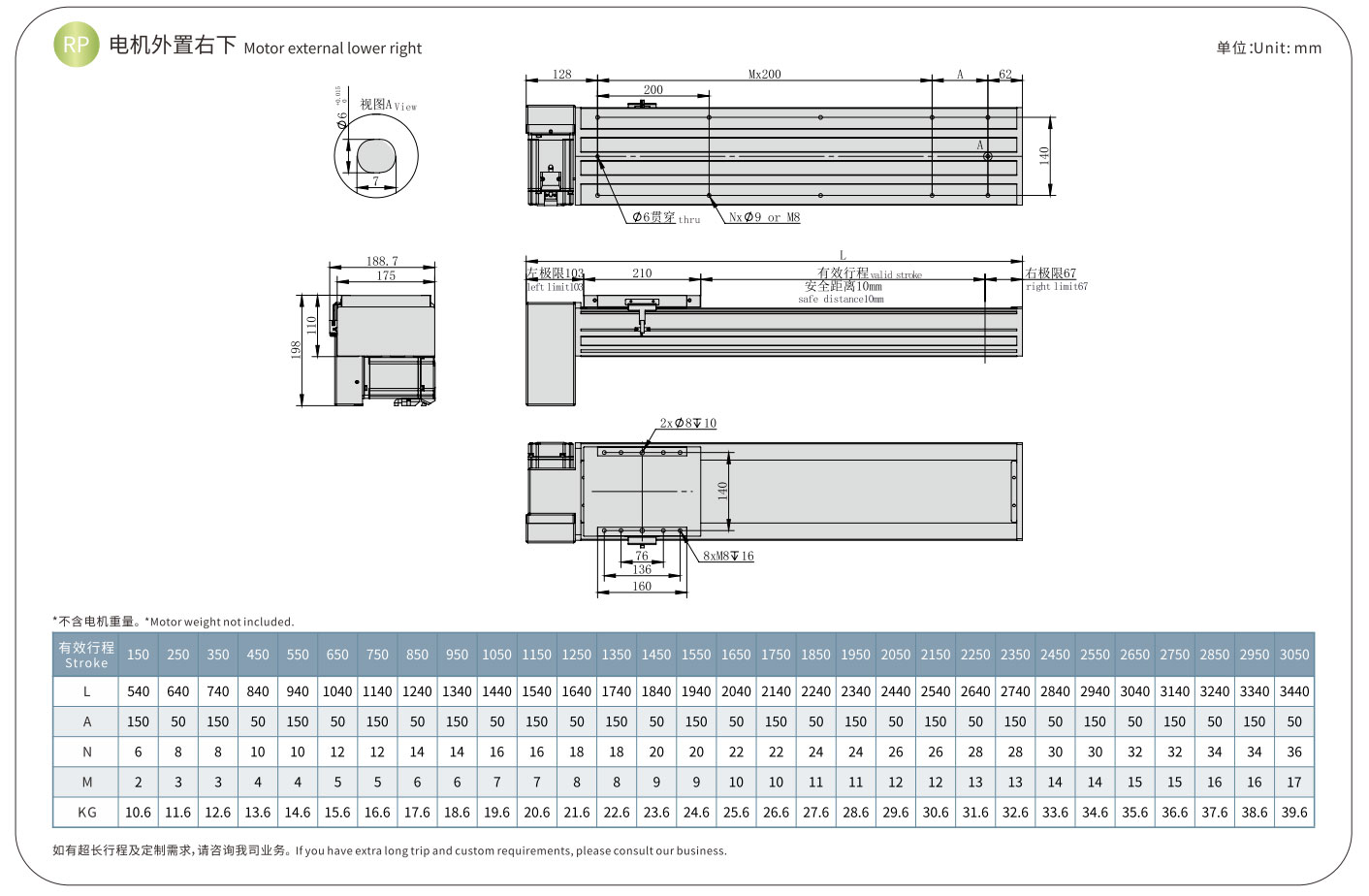
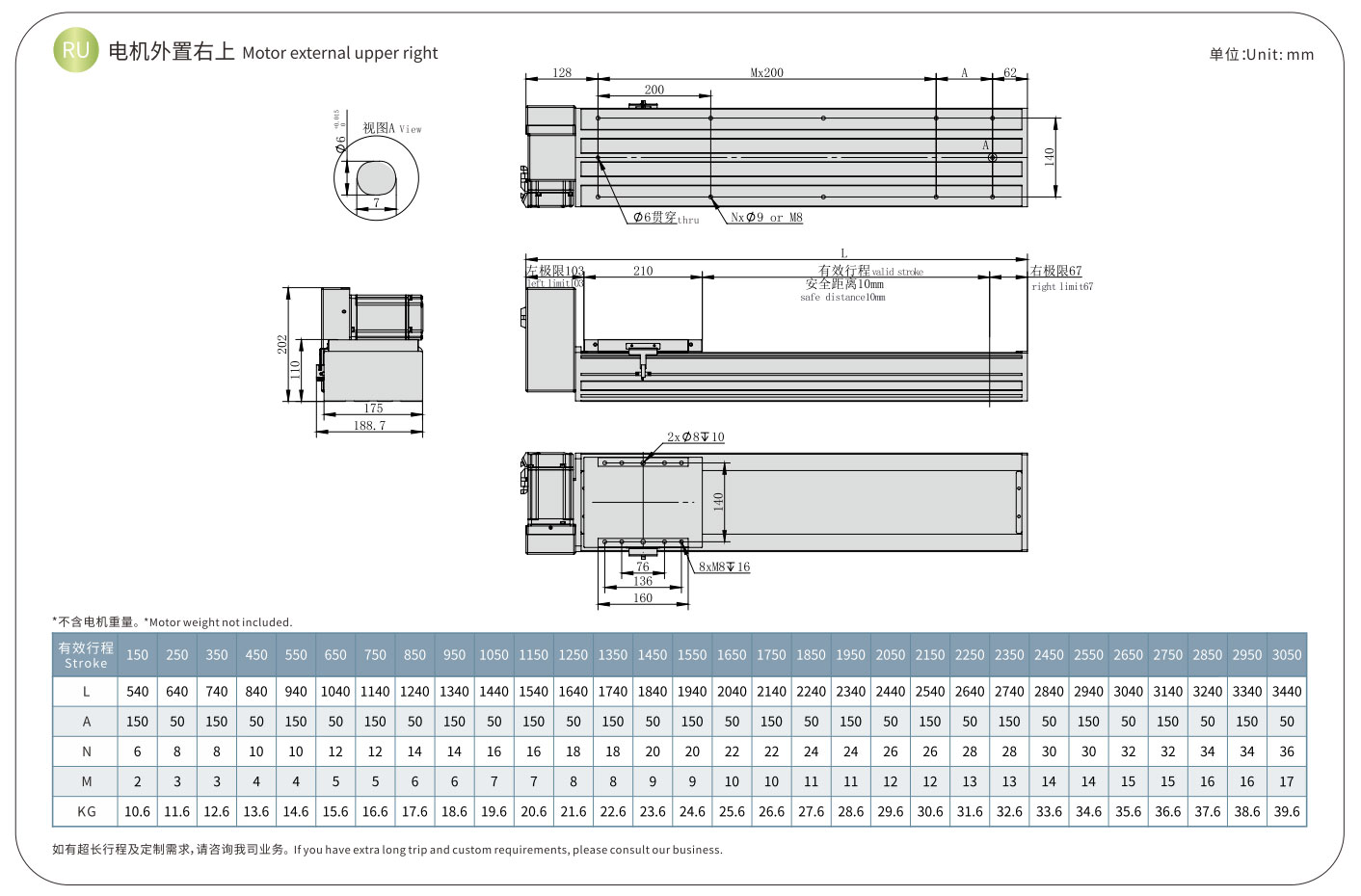
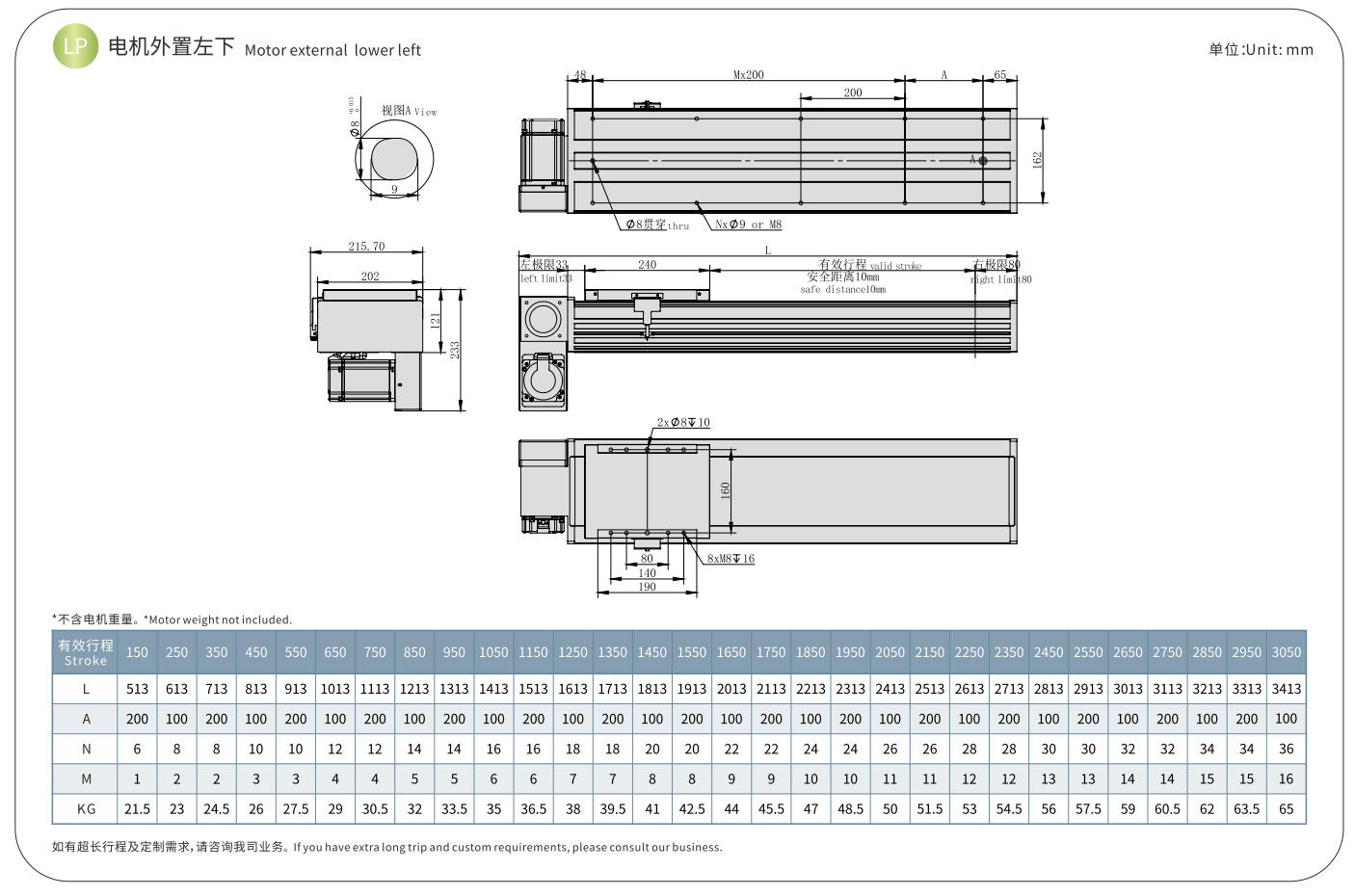
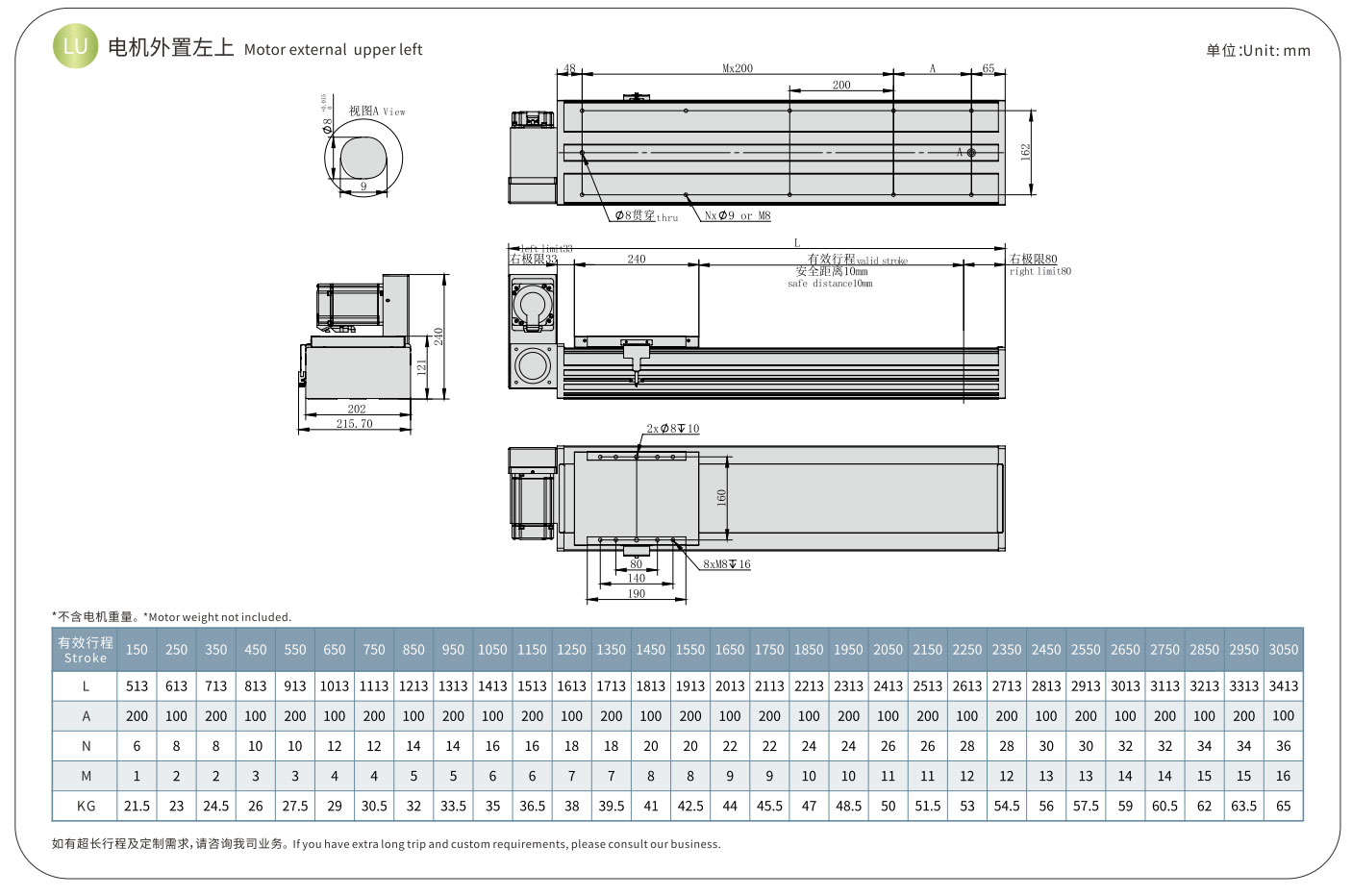
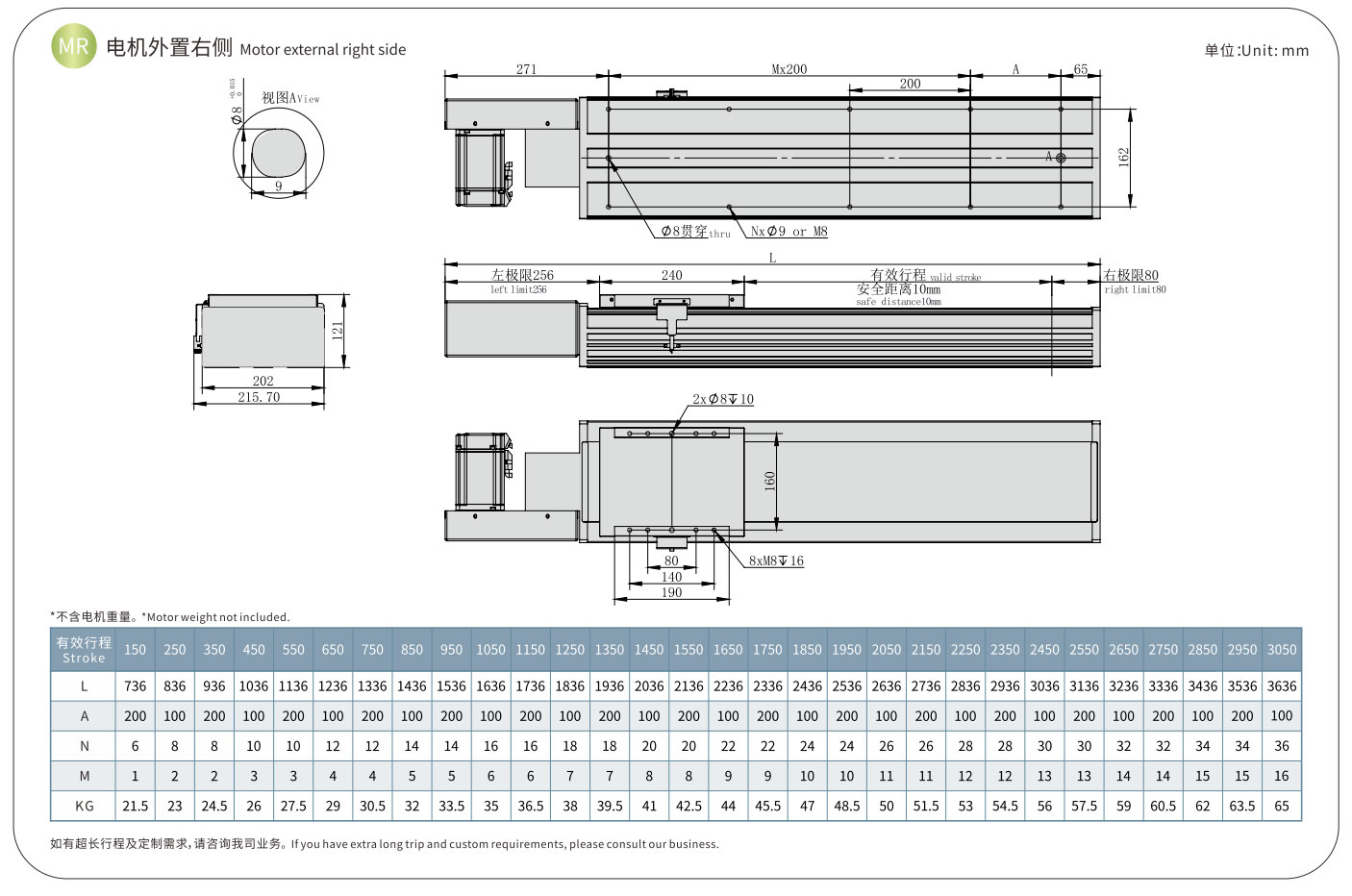
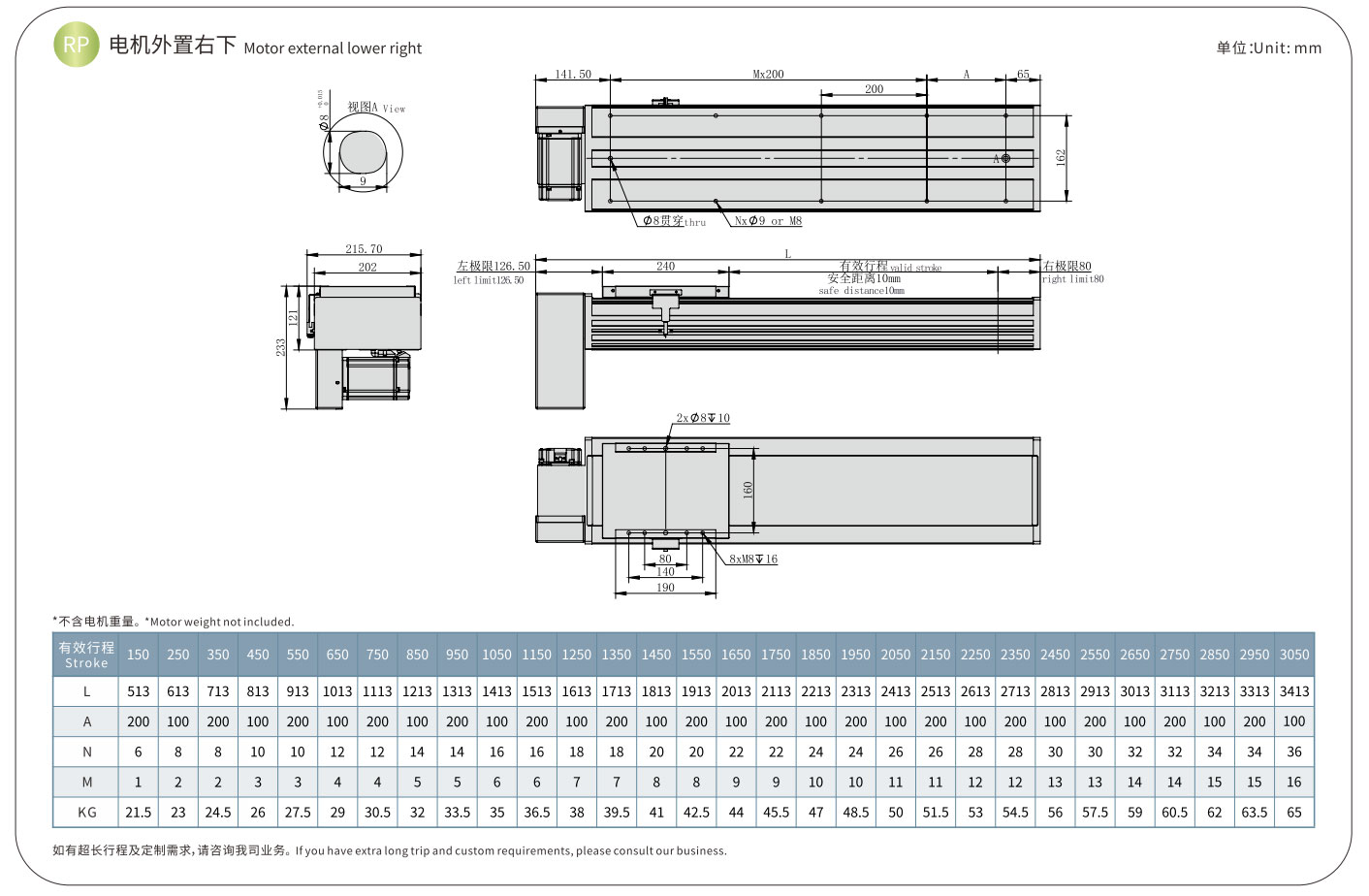
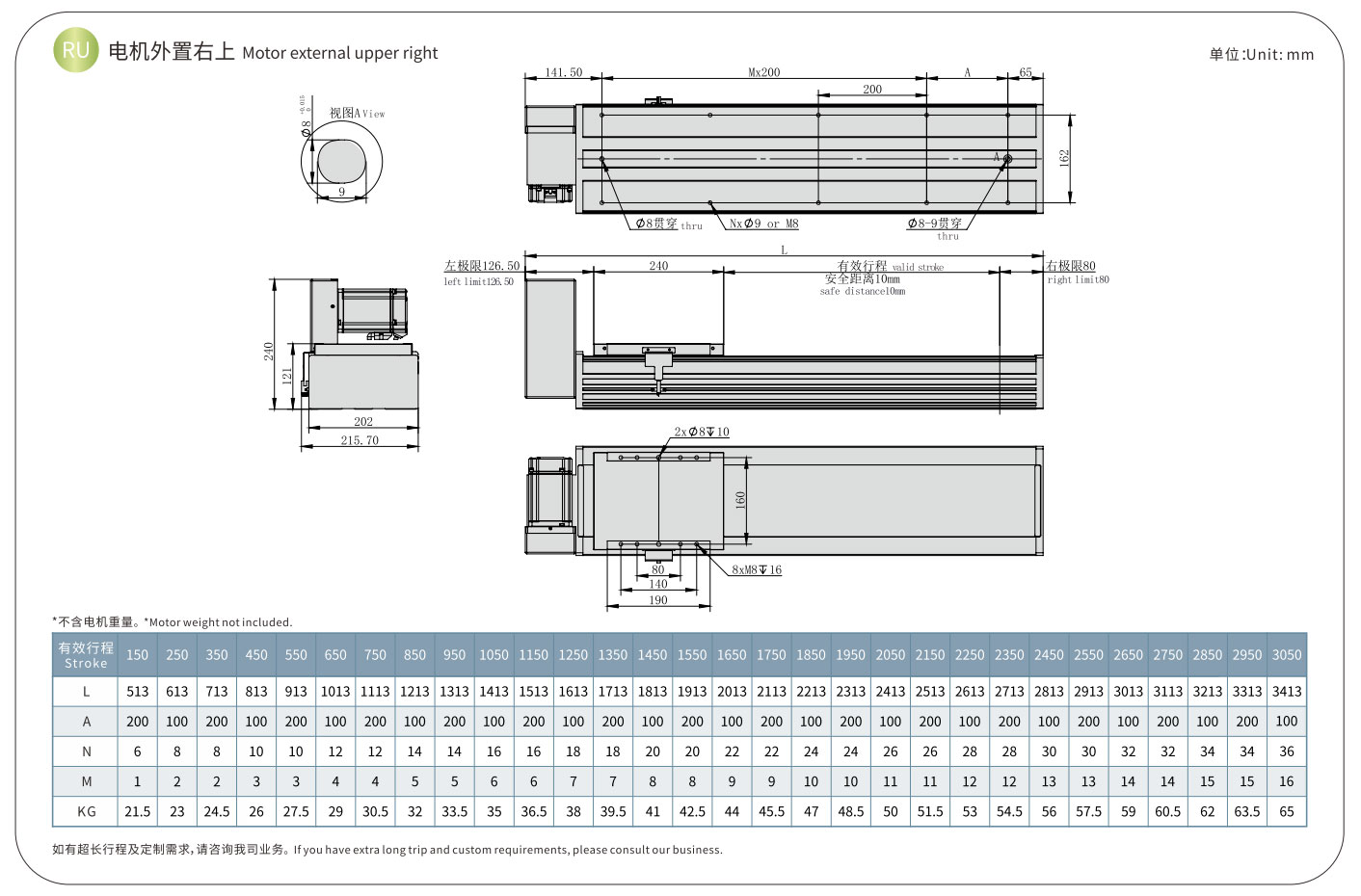
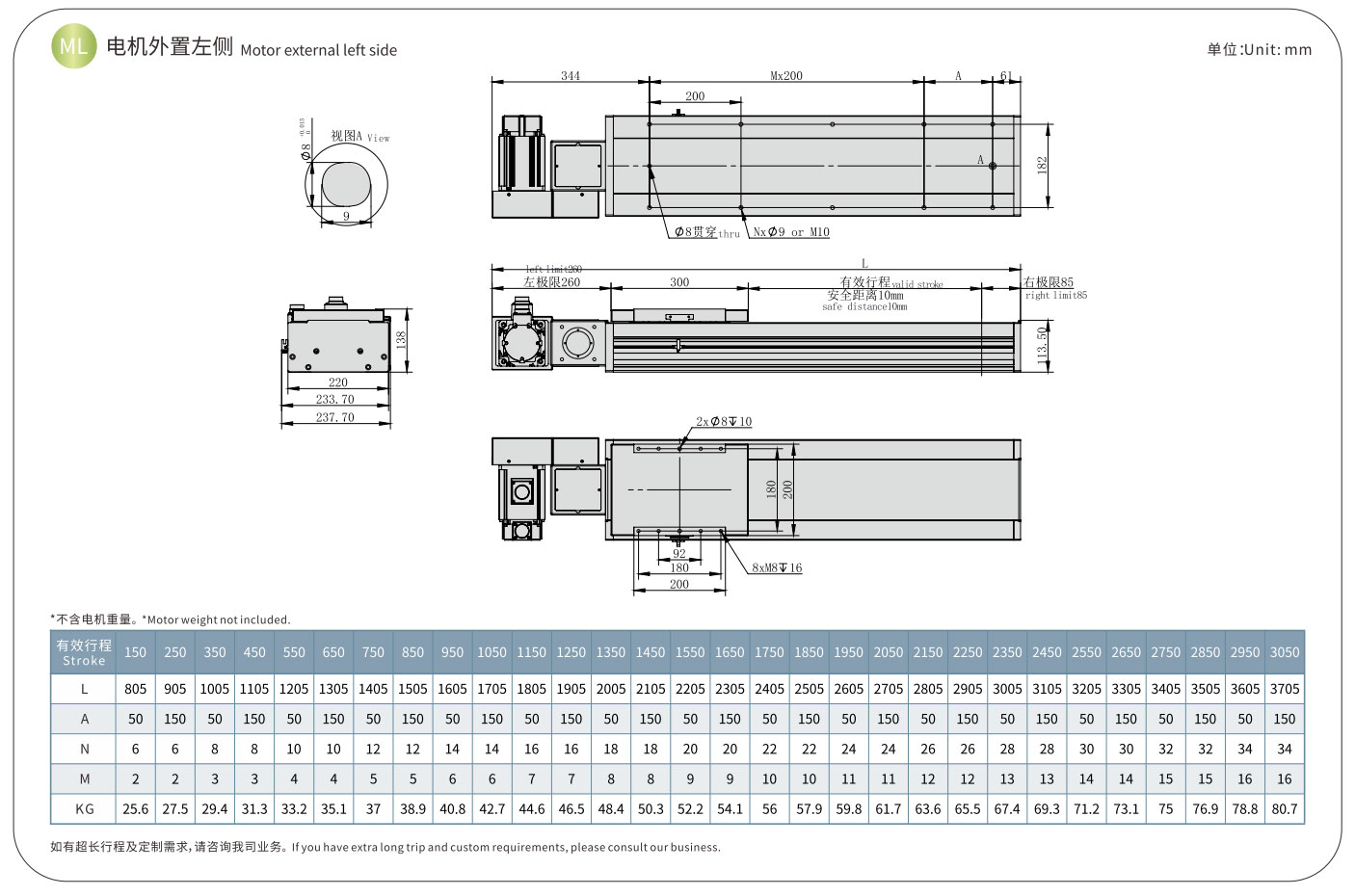
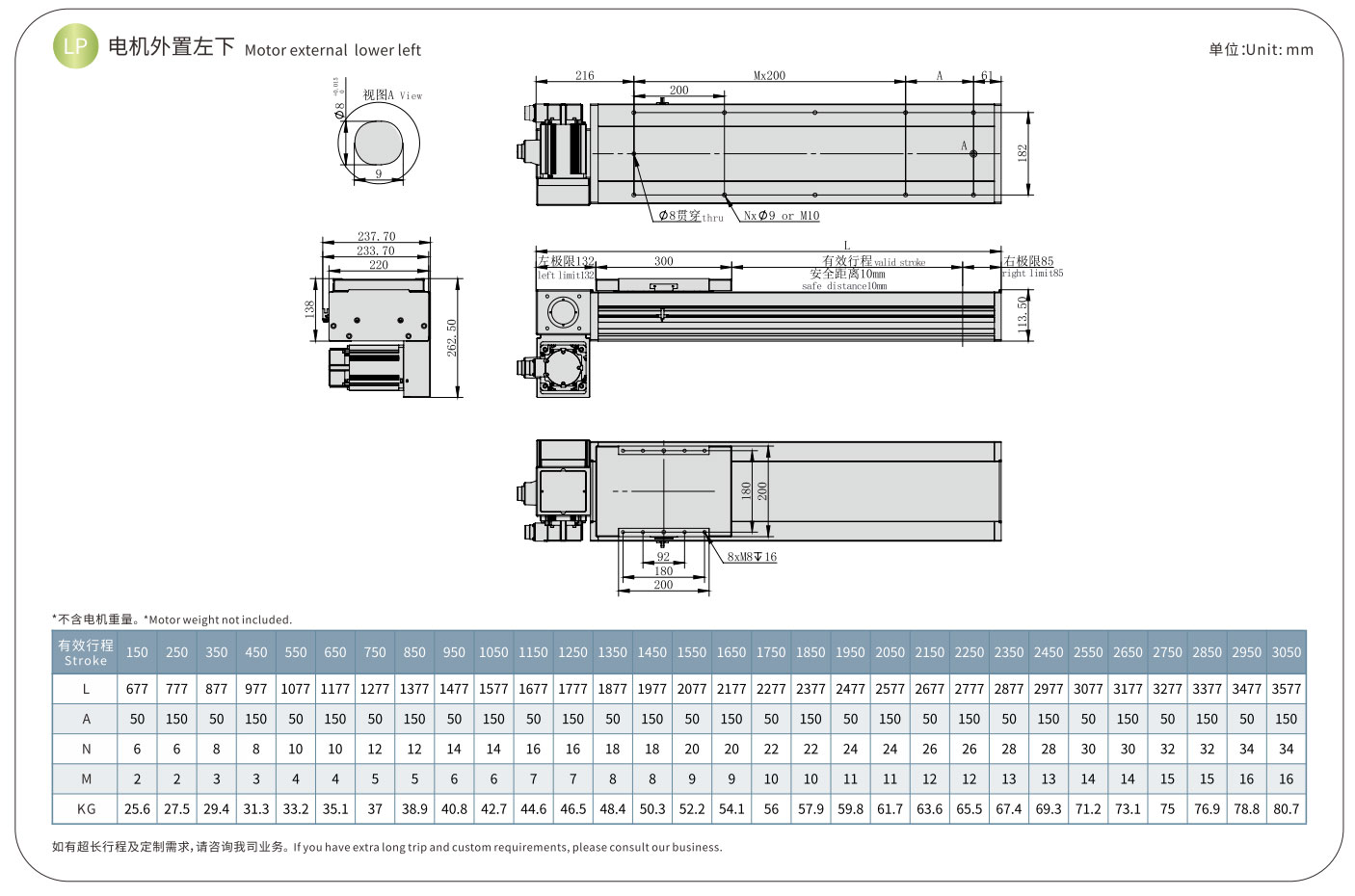
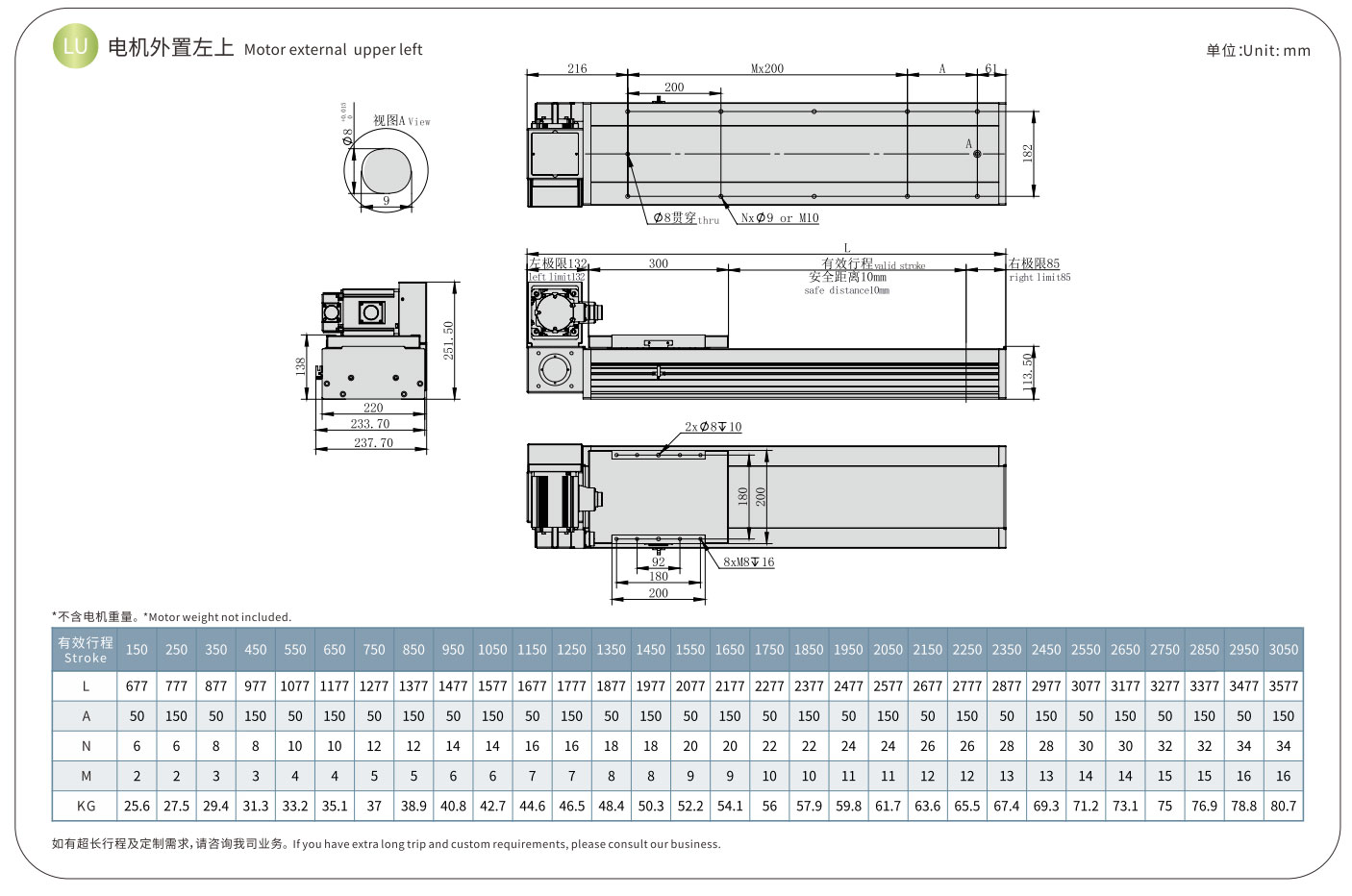
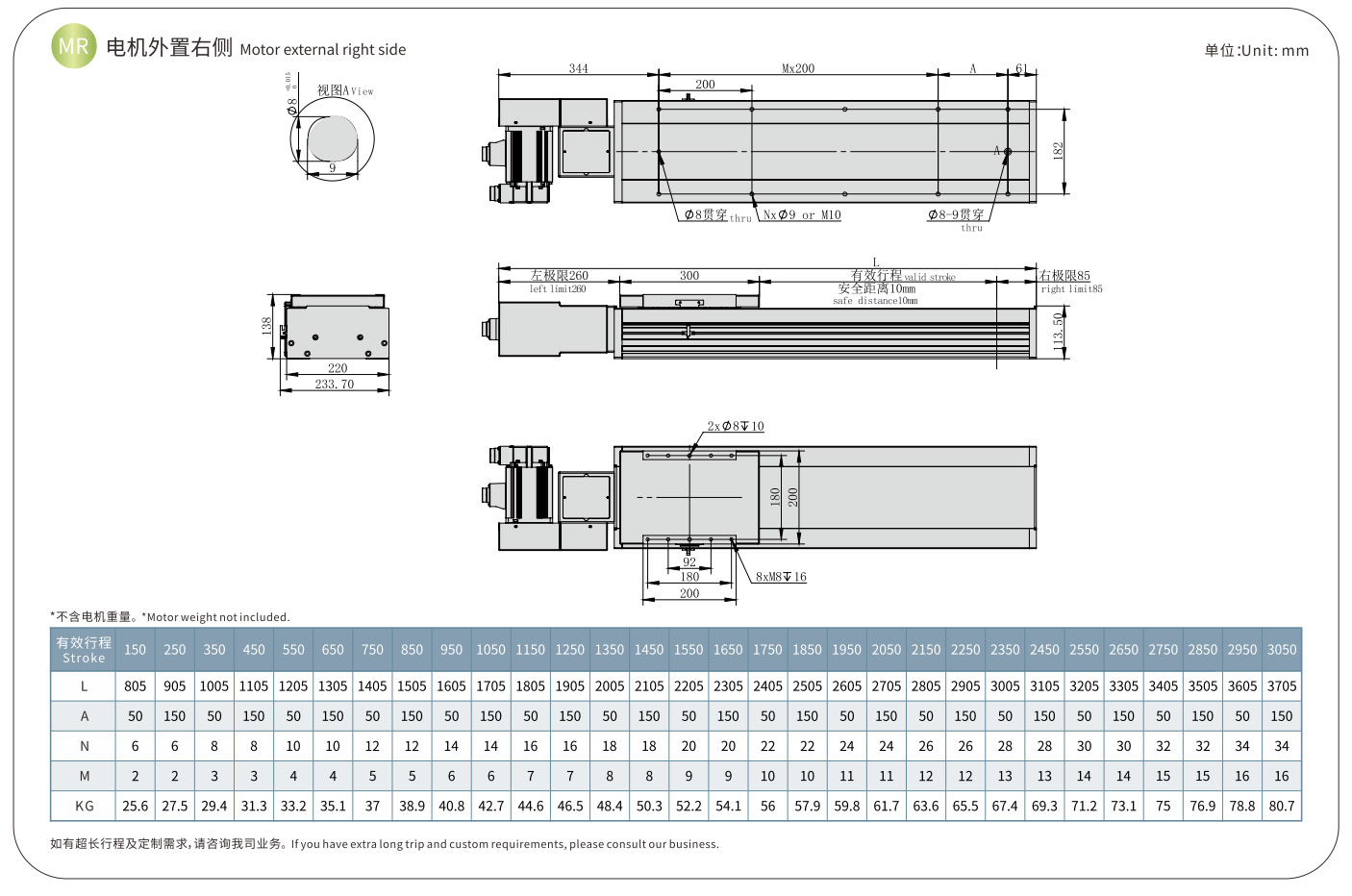
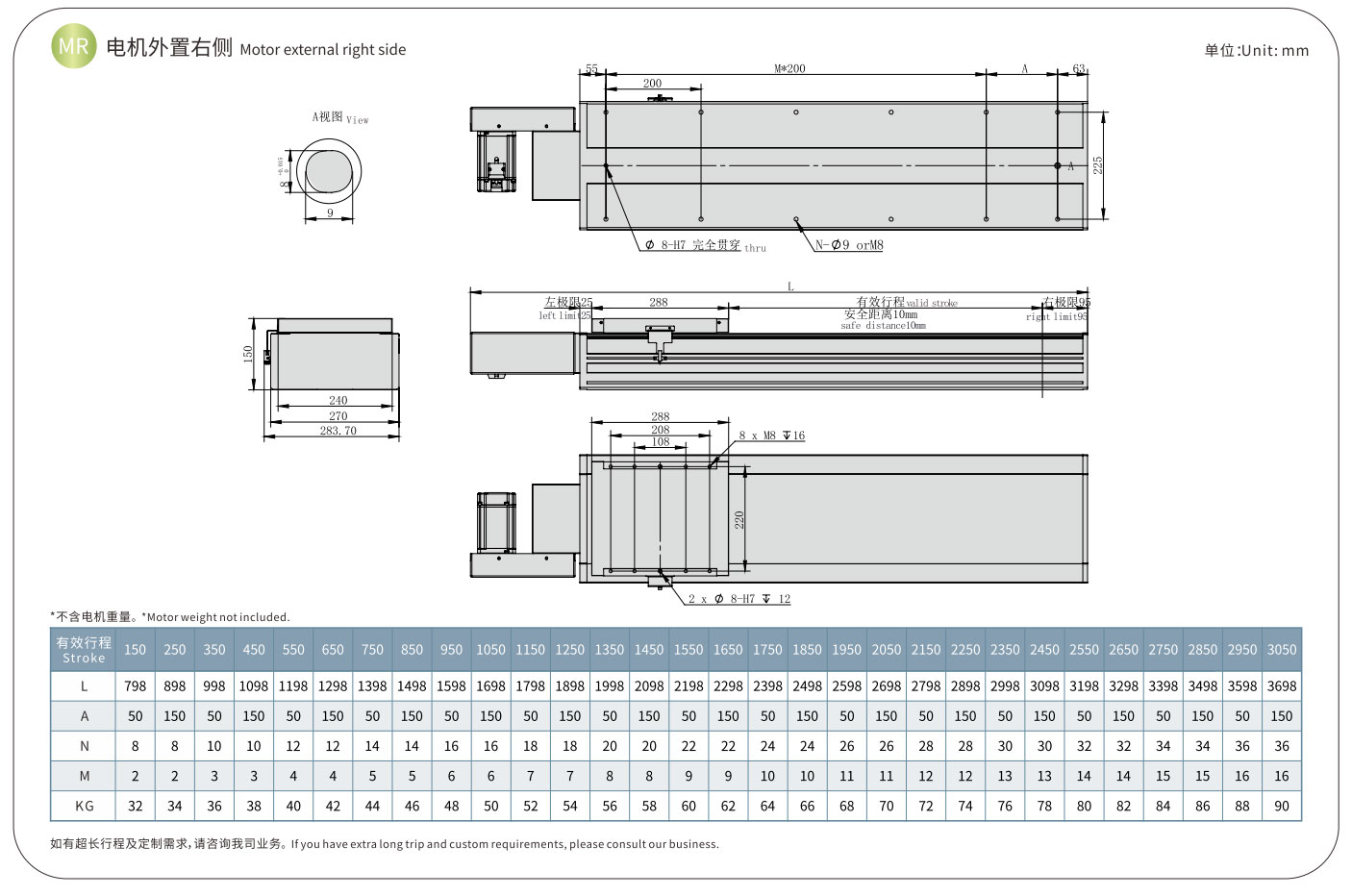
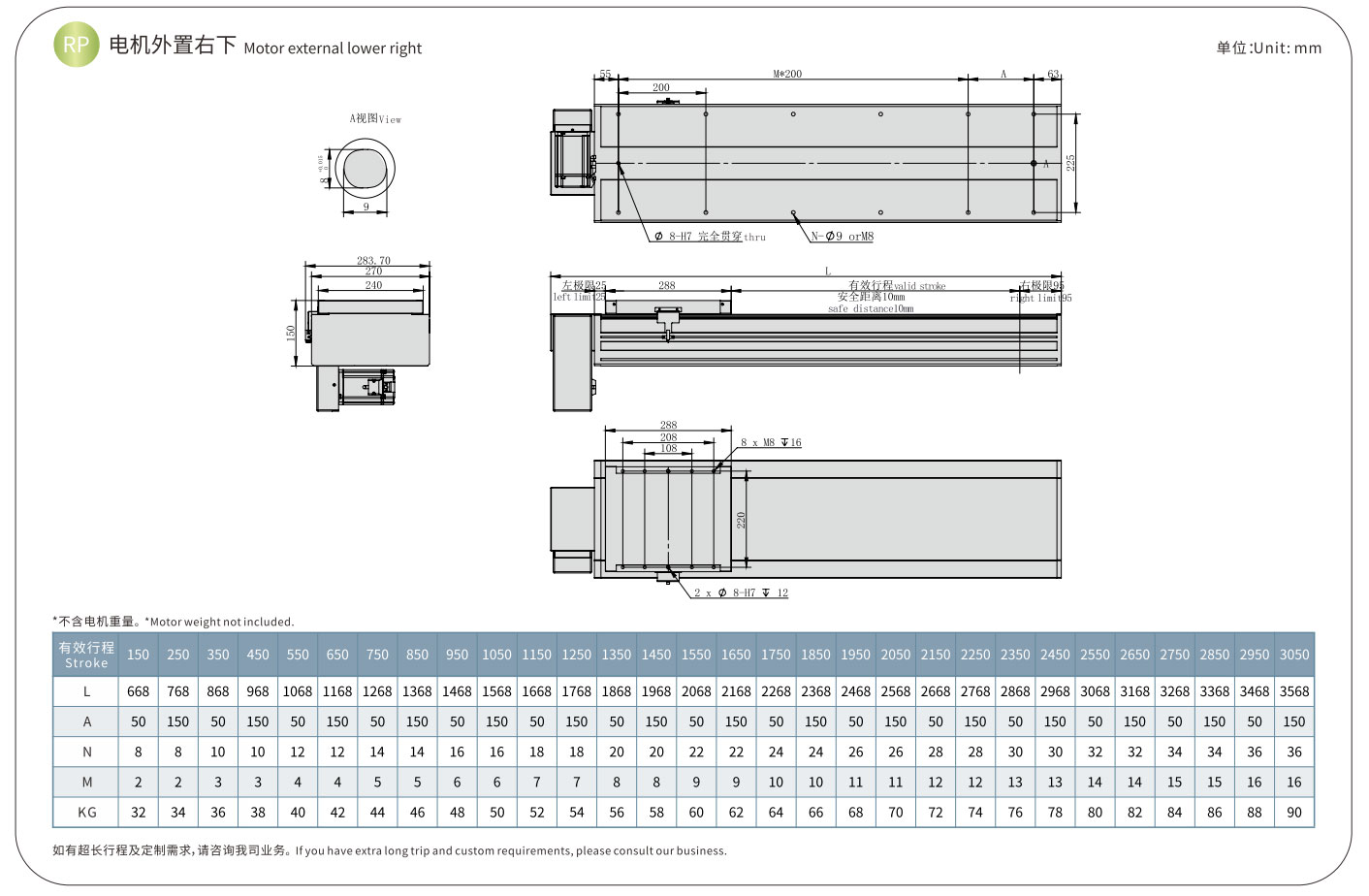
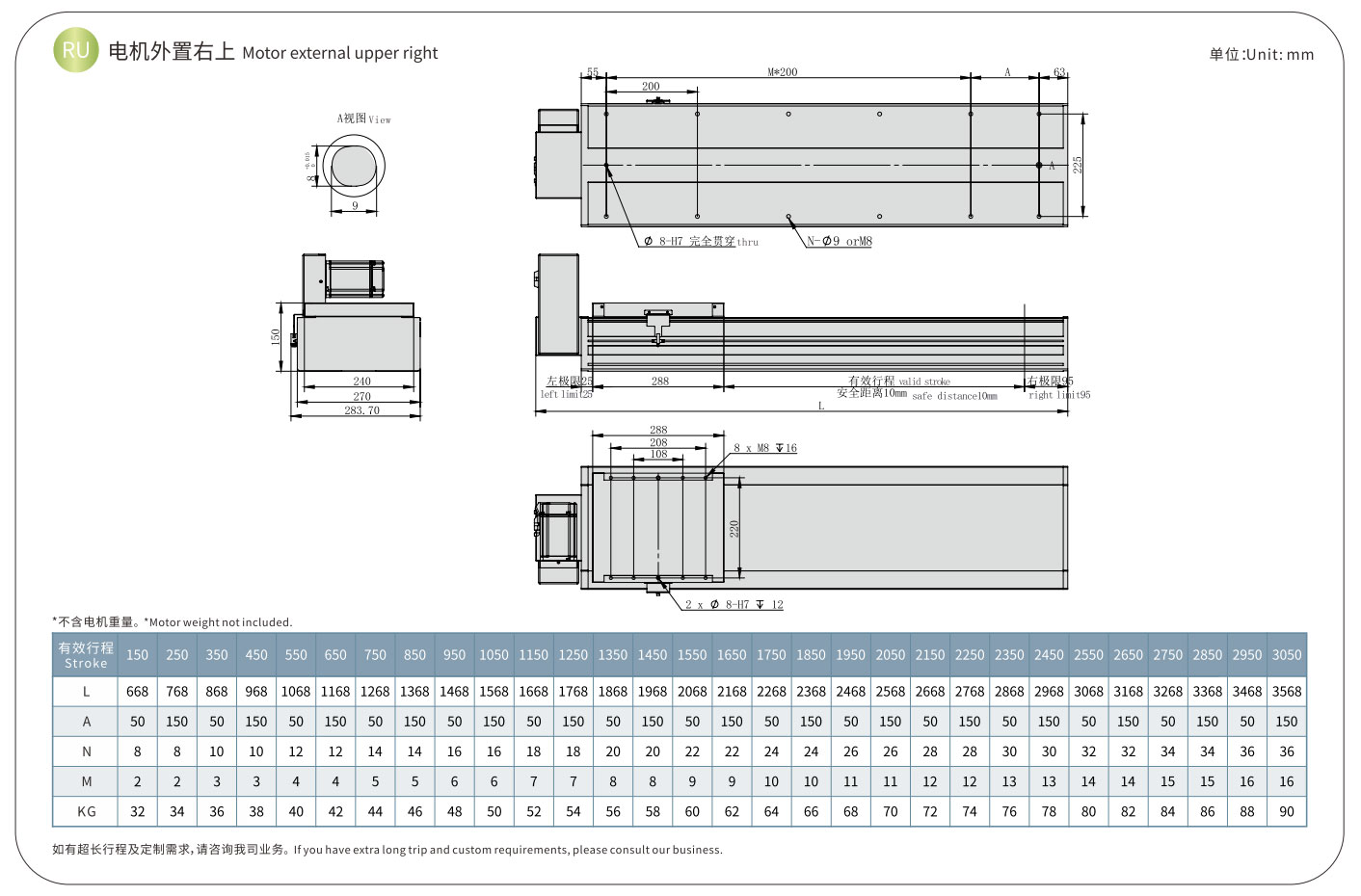
Որպես TPA ROBOT-ի դասական գոտիով շարժվող գծային մղիչ, համեմատած HCR շարքի հետ, HCB սերիայի շարժվող սահիչը ժամանակային գոտիով, ինչը նշանակում է, որ HCB շարքն ունի ավելի երկար հարված և ավելի բարձր արագություն: Այն շարժվում է սերվո շարժիչով, այն ոչ միայն ունի սերվո շարժիչի բարձր ճշգրտություն, այլև ունի բարձր արագության և ինքնին սահող փուլի բարձր կոշտության առավելությունները: Այն հեշտ է վերահսկել և կարելի է հեշտությամբ միացնել PLC-ի և այլ համակարգերի հետ: Սլայդ ակտուատորը պատրաստված է անբաժան մամլված ալյումինե պրոֆիլից, թեթև քաշով, փոքր չափերով և ուժեղ կոշտությամբ: Տեղադրման չափը և հարվածը կարող են հարմարեցվել ըստ պահանջների, և տեղադրումը կարող է ամրագրվել պտուտակներով: Բազմաթիվ ուղղությունների համակցման միջոցով այն կարող է ձևավորվել տարբեր ավտոմատացման սարքավորումների գծային շարժման համակարգերի, մեխանիկական բռնիչներով, օդային բռնիչներով և այլ հարմարանքներով, այն կարող է դառնալ բացառիկ դեկարտյան ռոբոտներ կամ գետնափոր ռոբոտներ:

HCB65S

HCB-85D

HCB-105D

HCB-120D

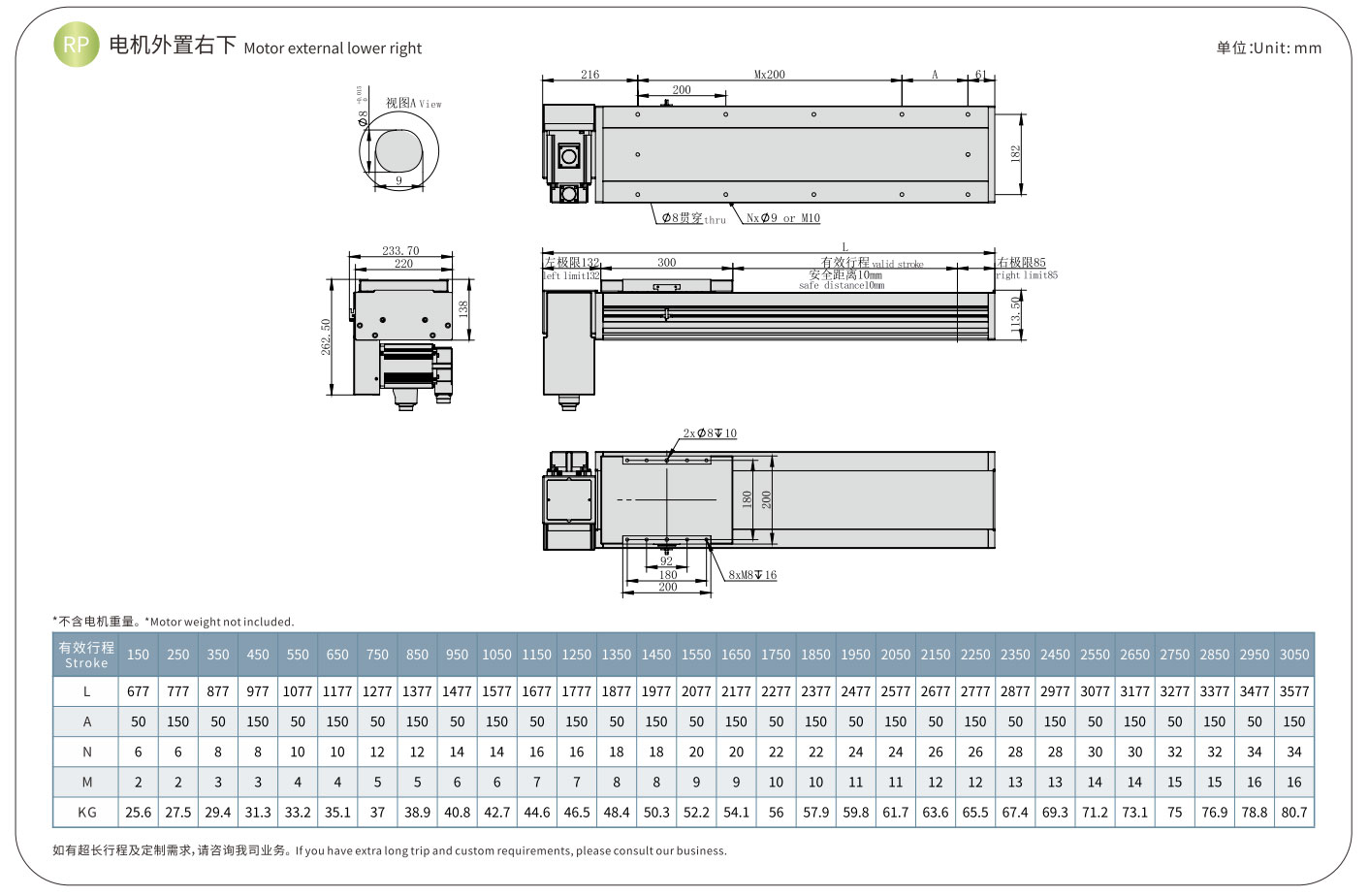
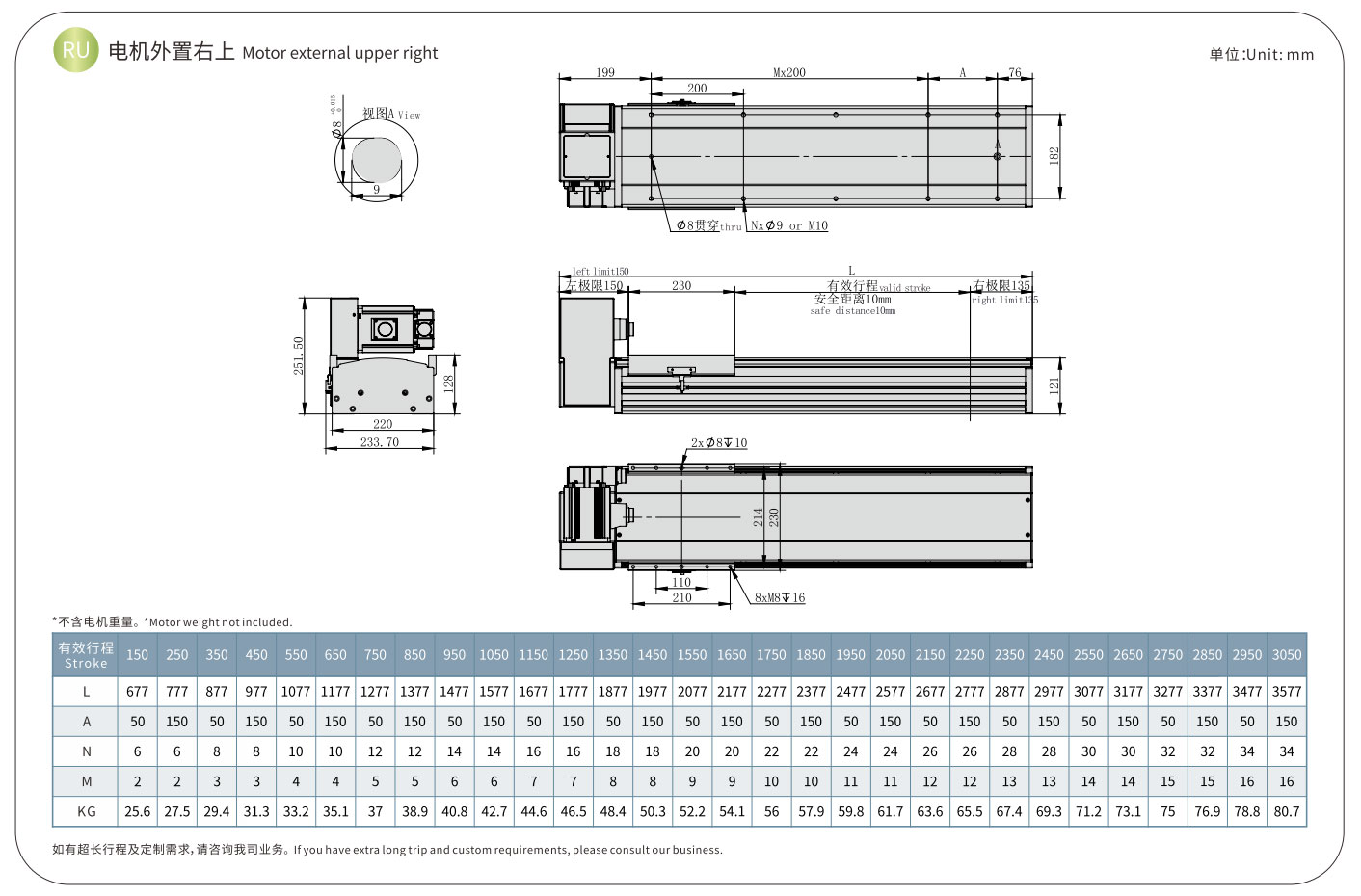
HCB-270D
Առանձնահատկություններ
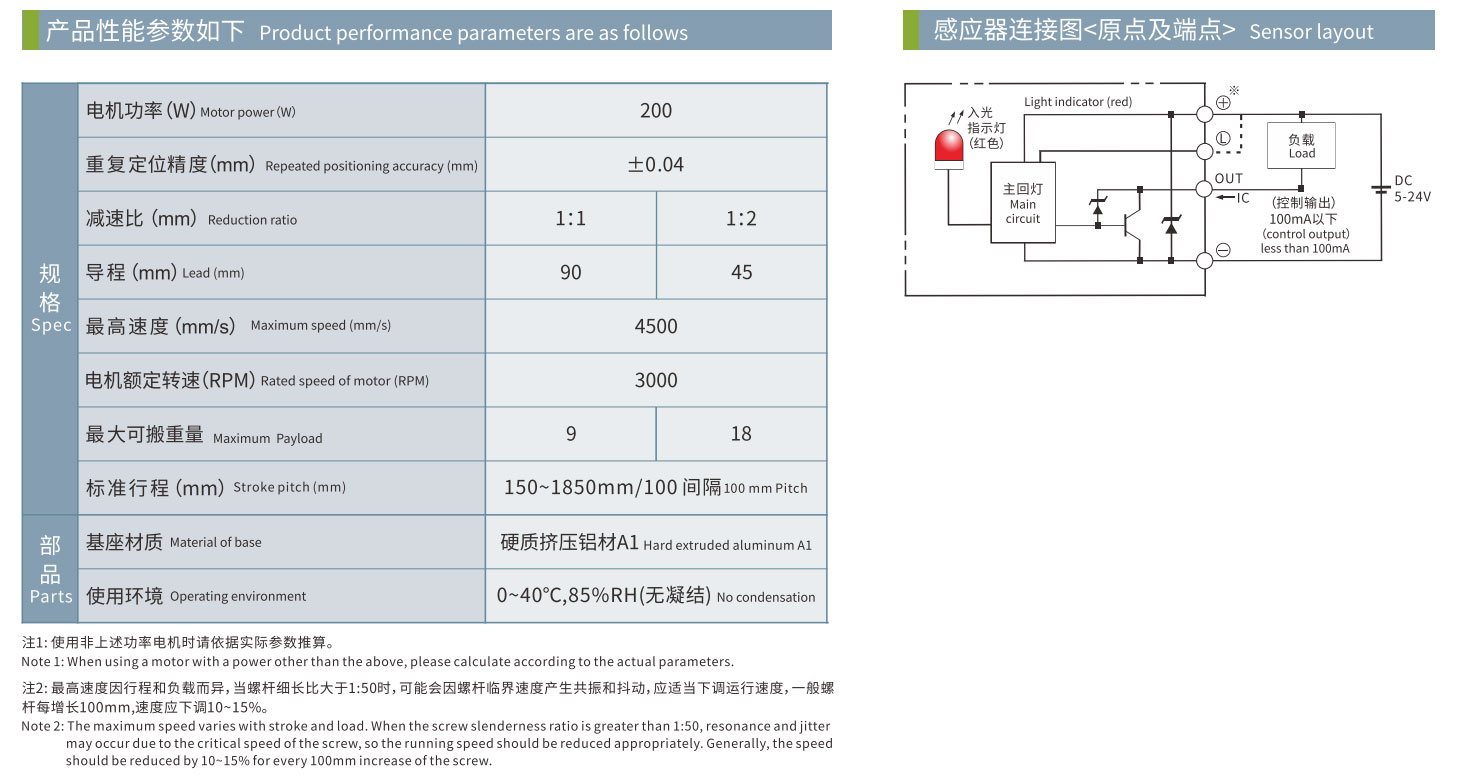
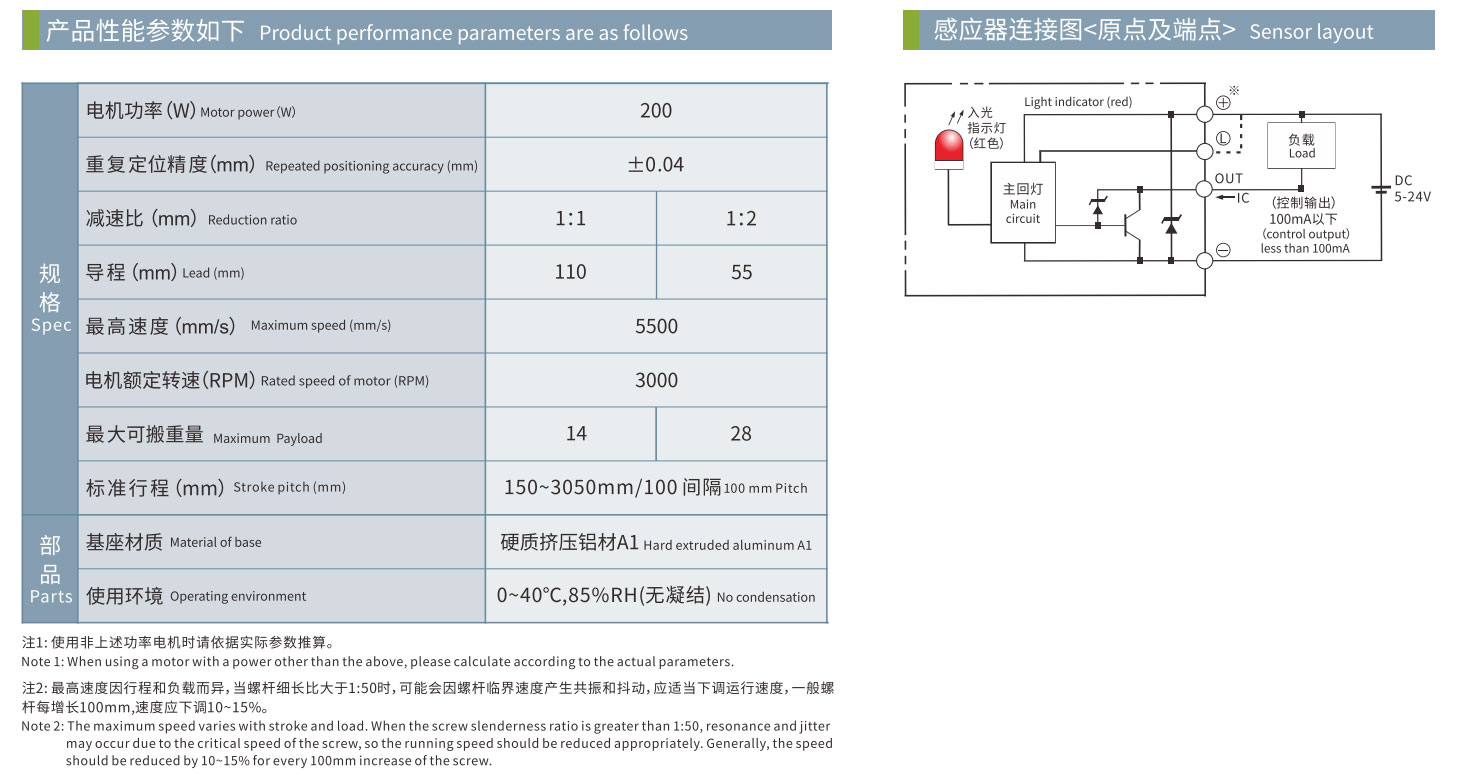
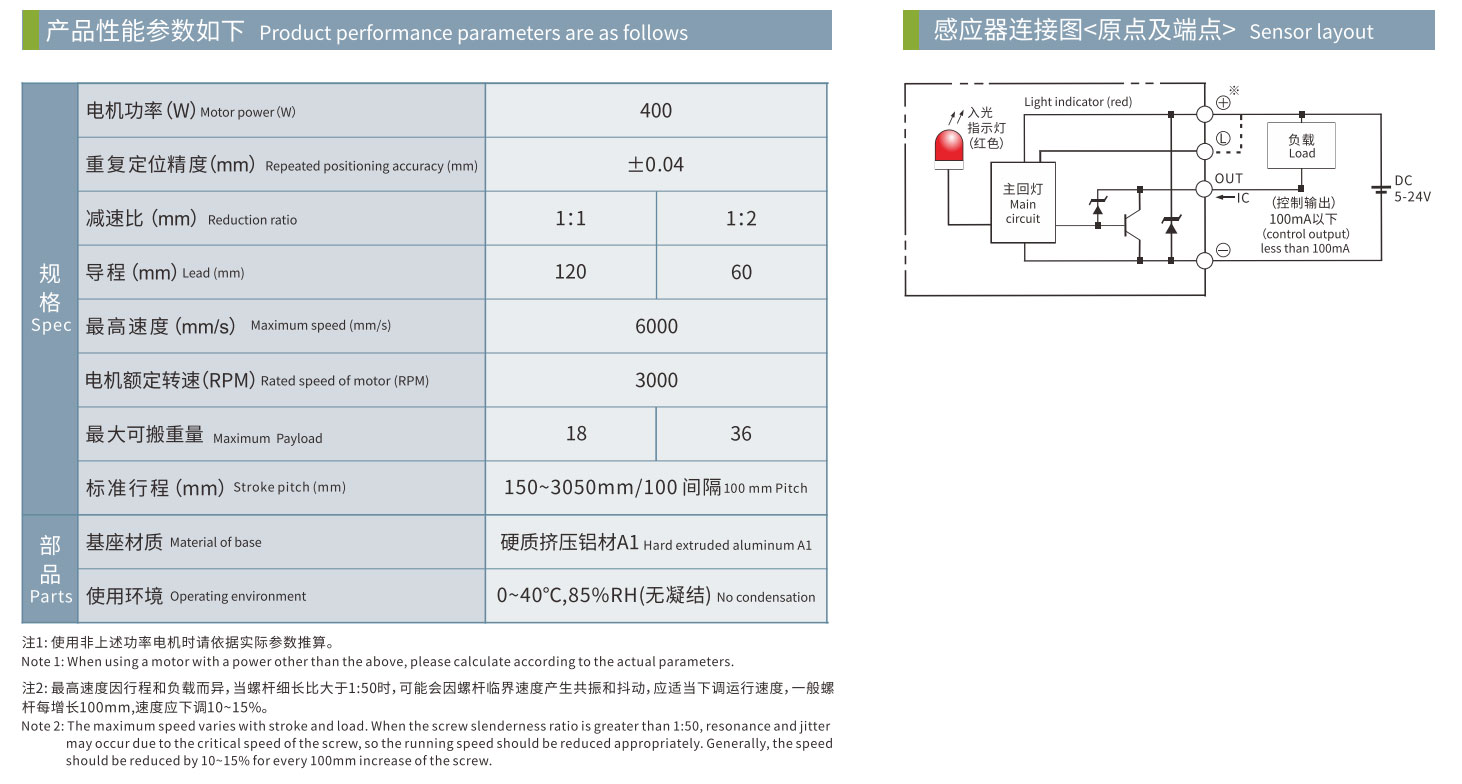
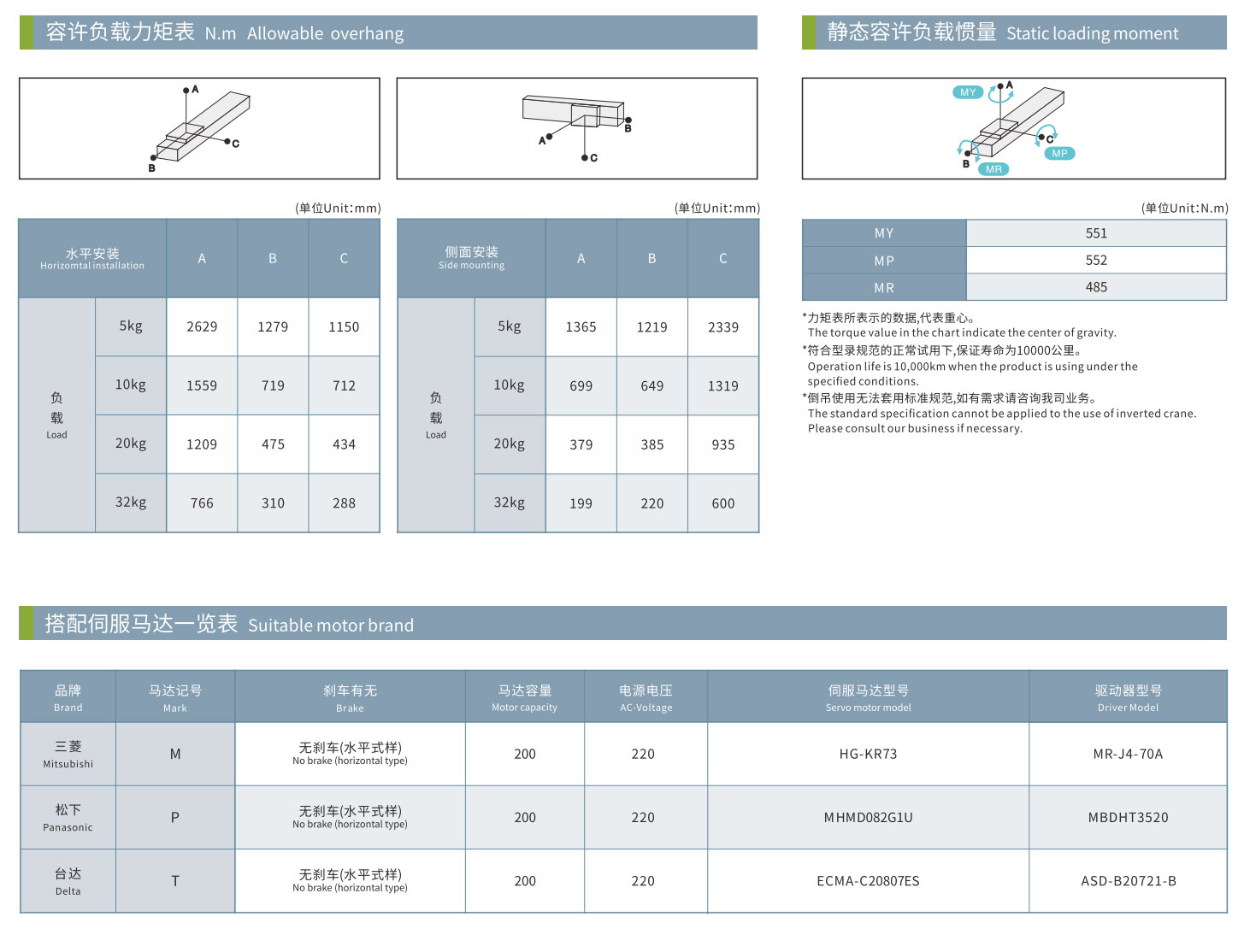
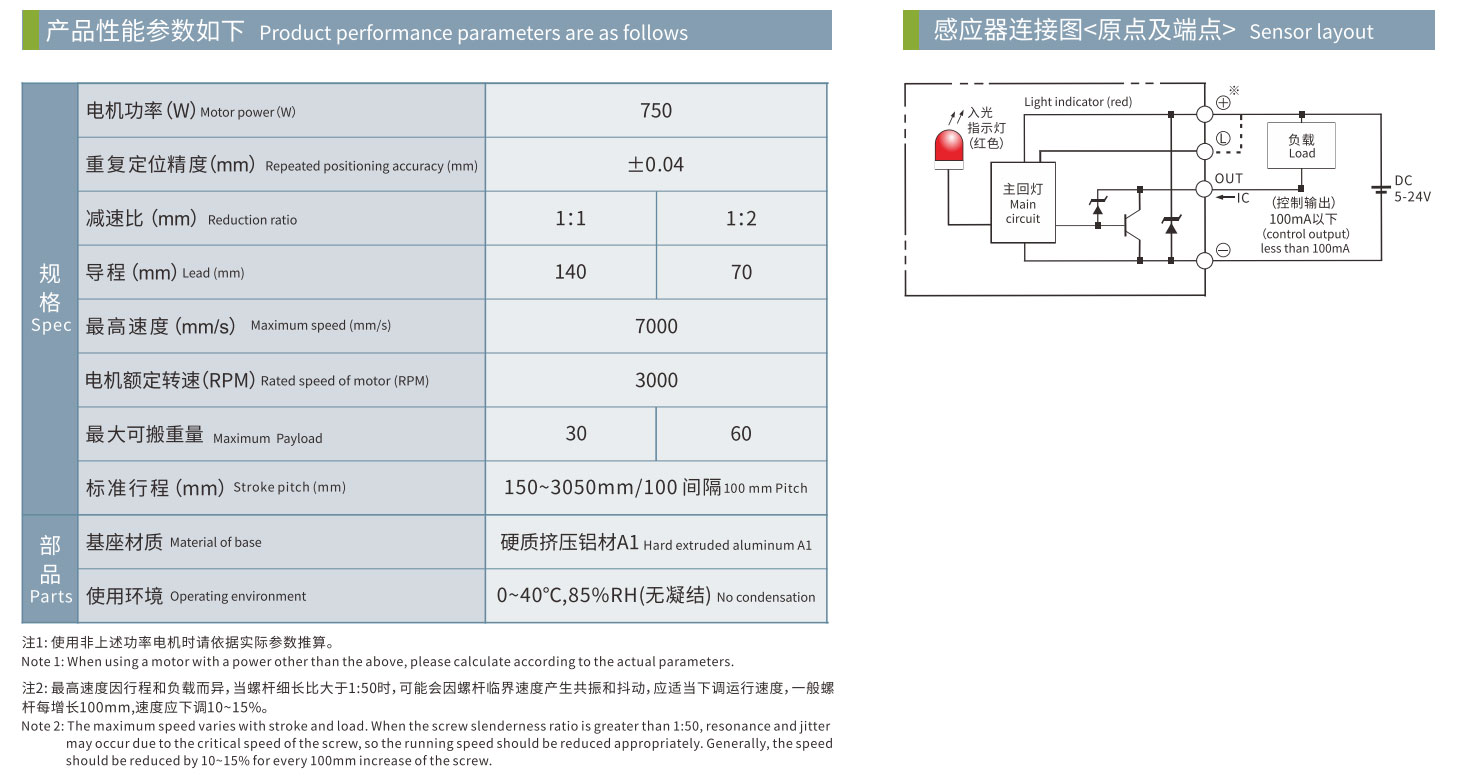
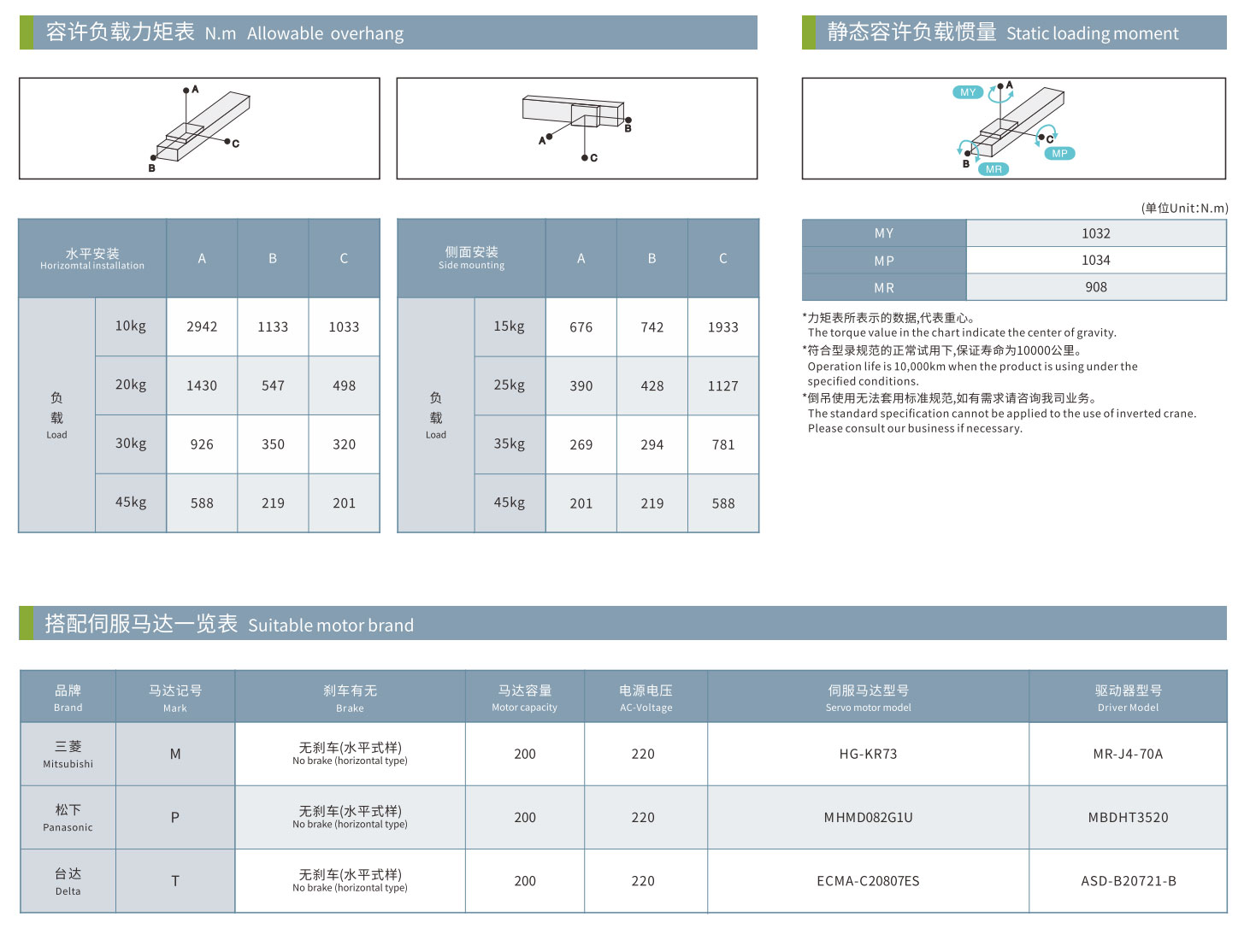
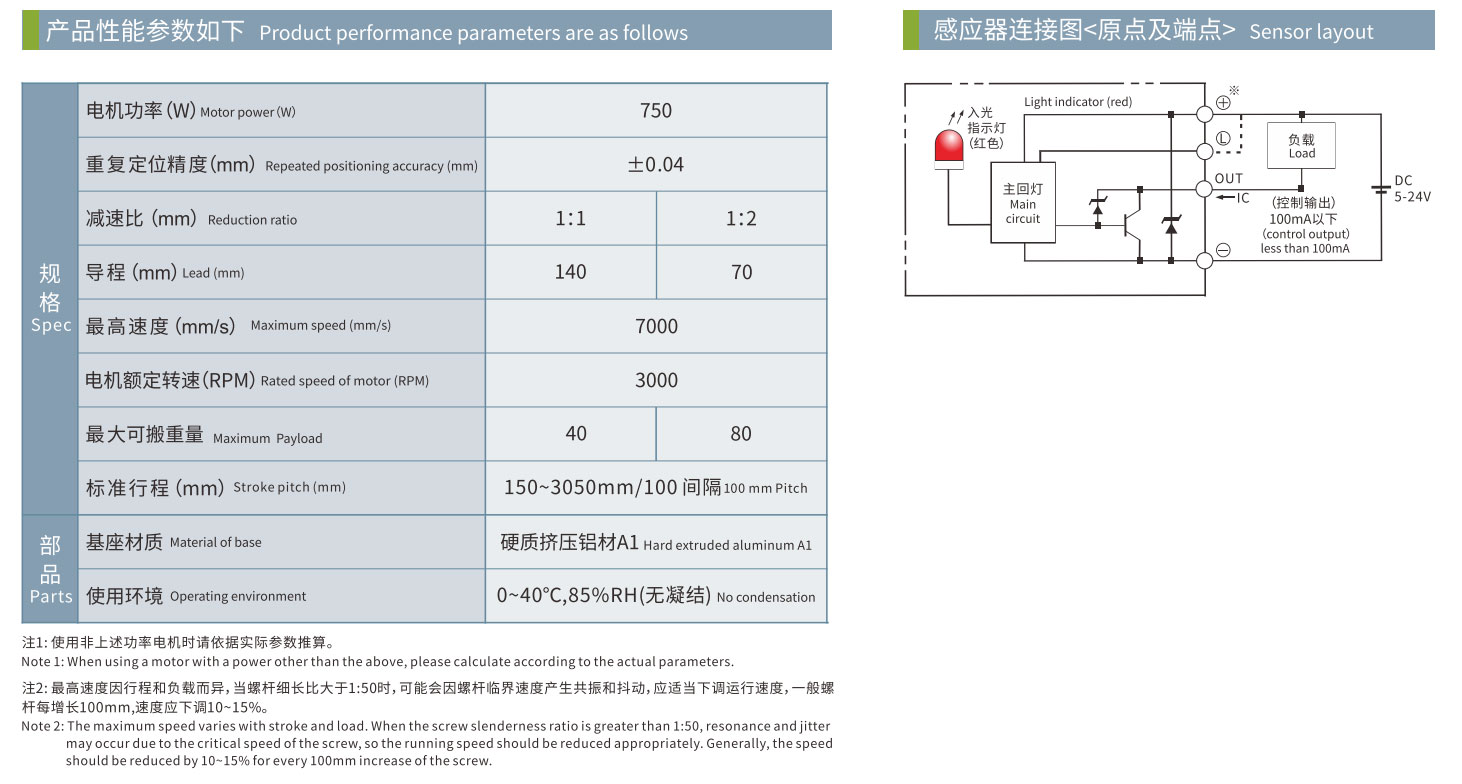
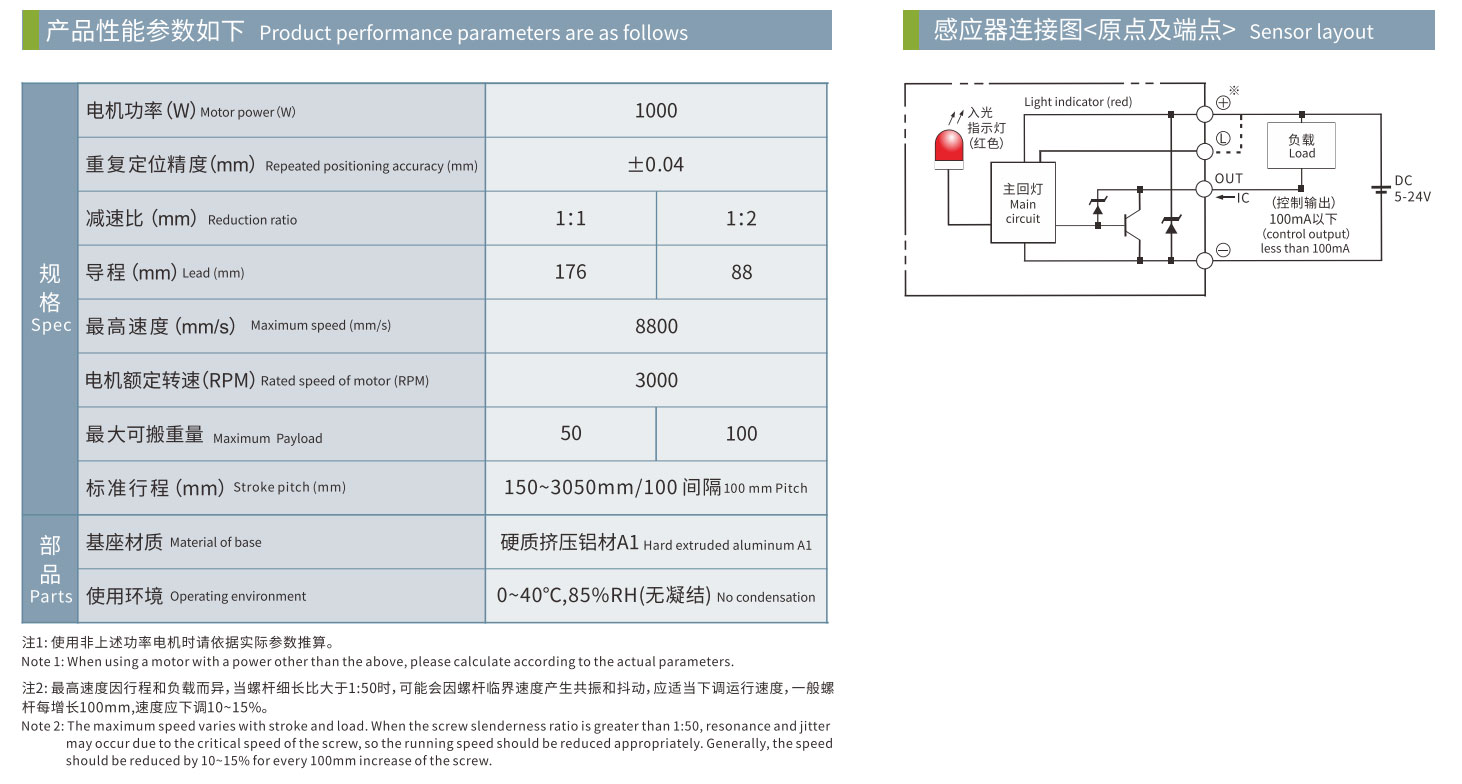
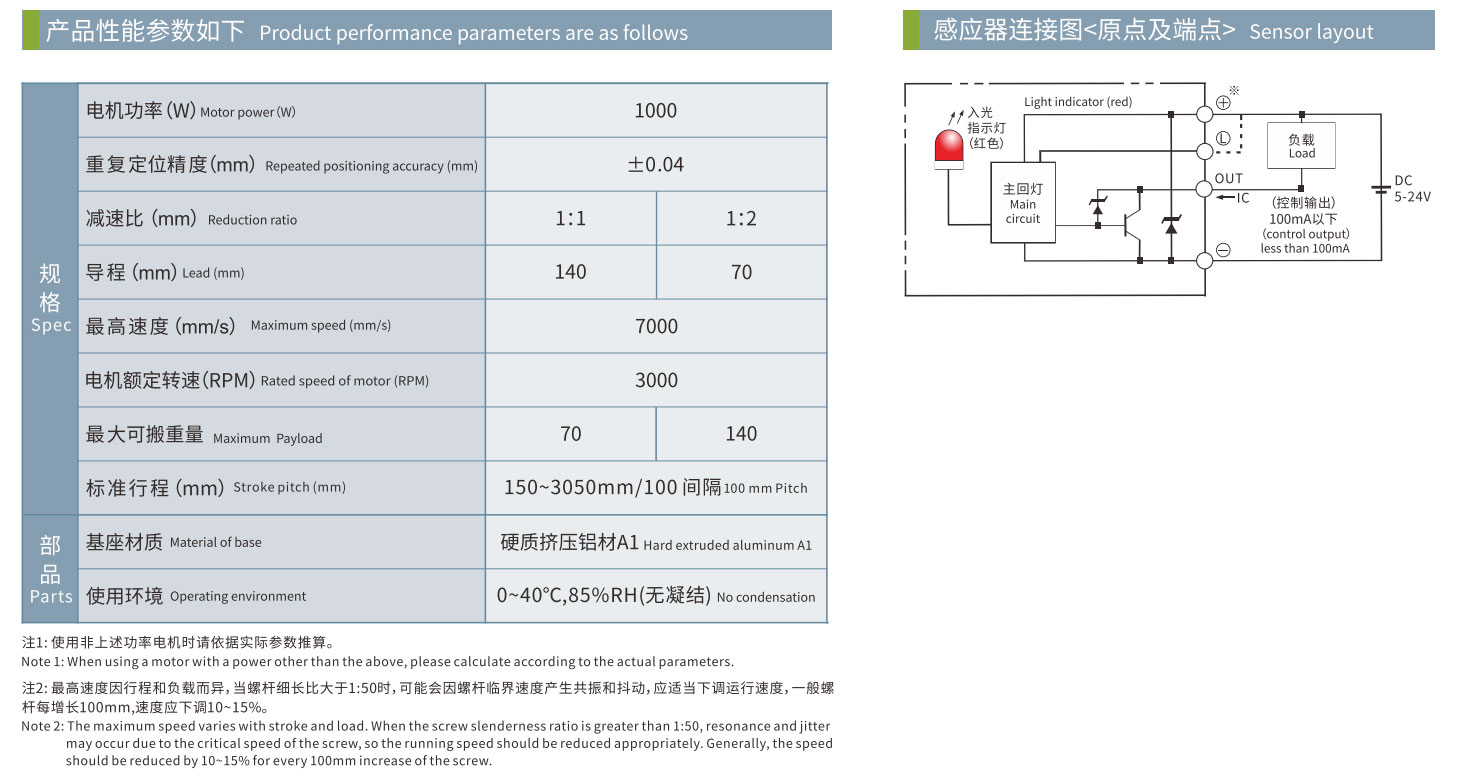
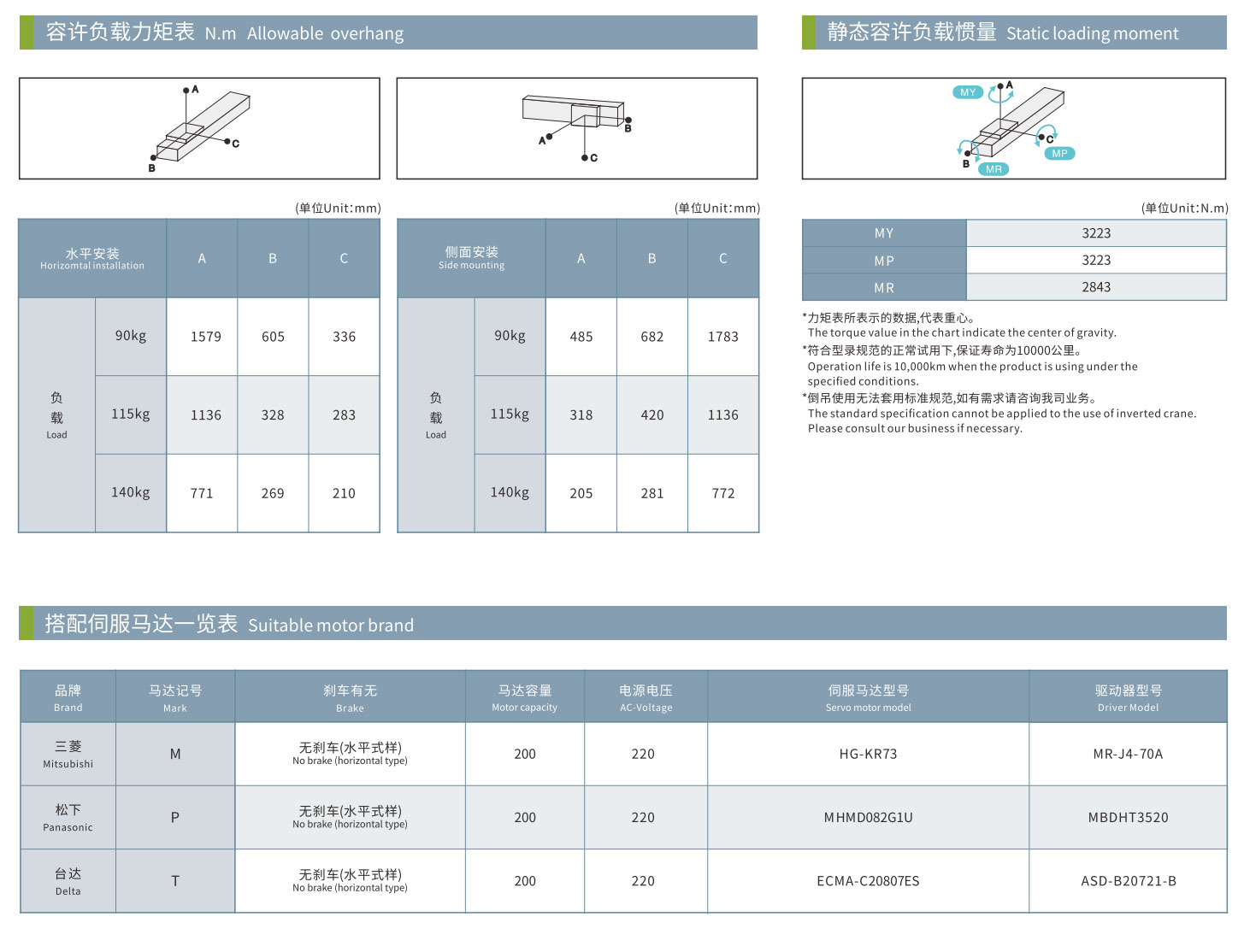
Կրկնվող դիրքավորման ճշգրտություն՝ ±0.04 մմ
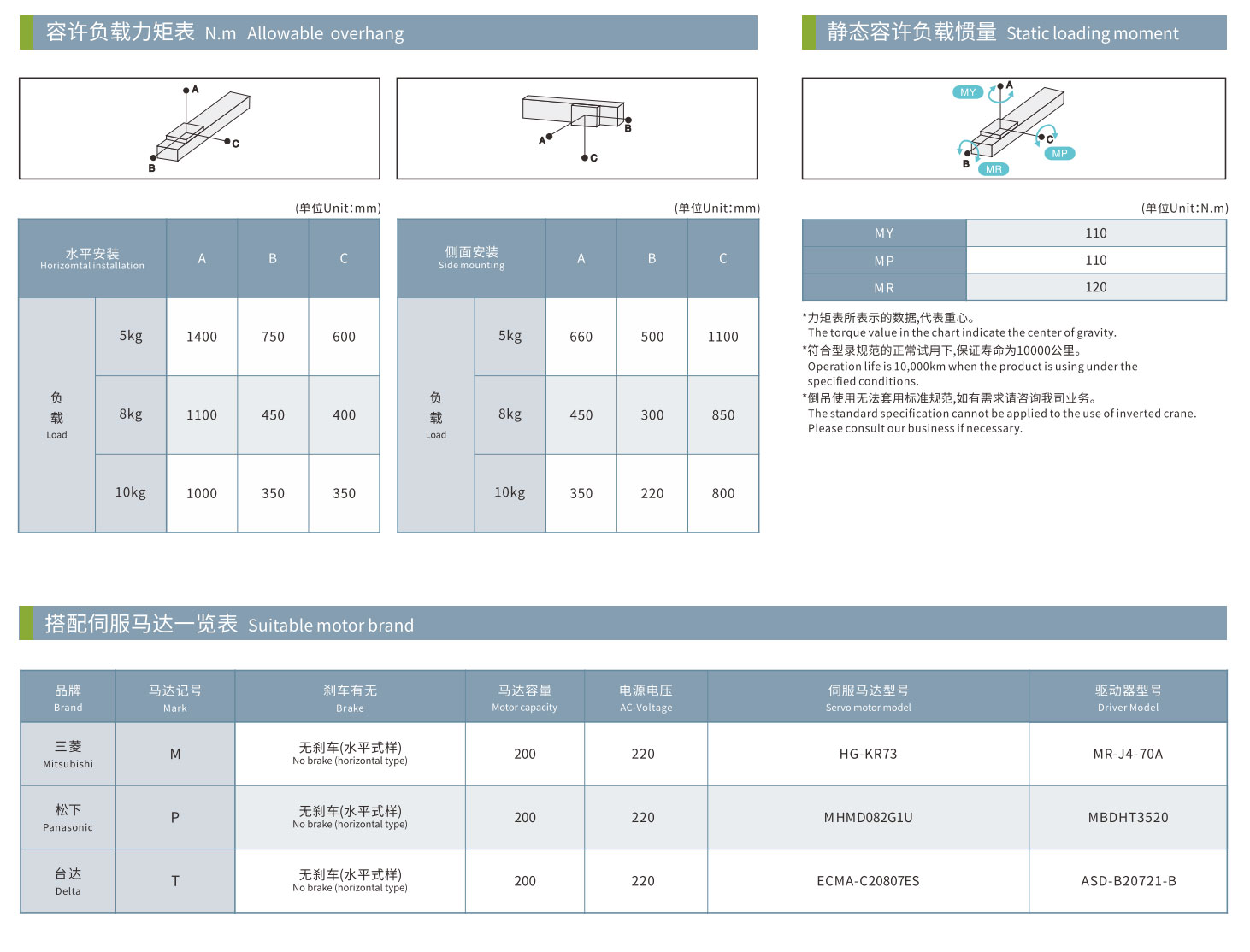
Առավելագույն ծանրաբեռնվածությունը՝ 140 կգ
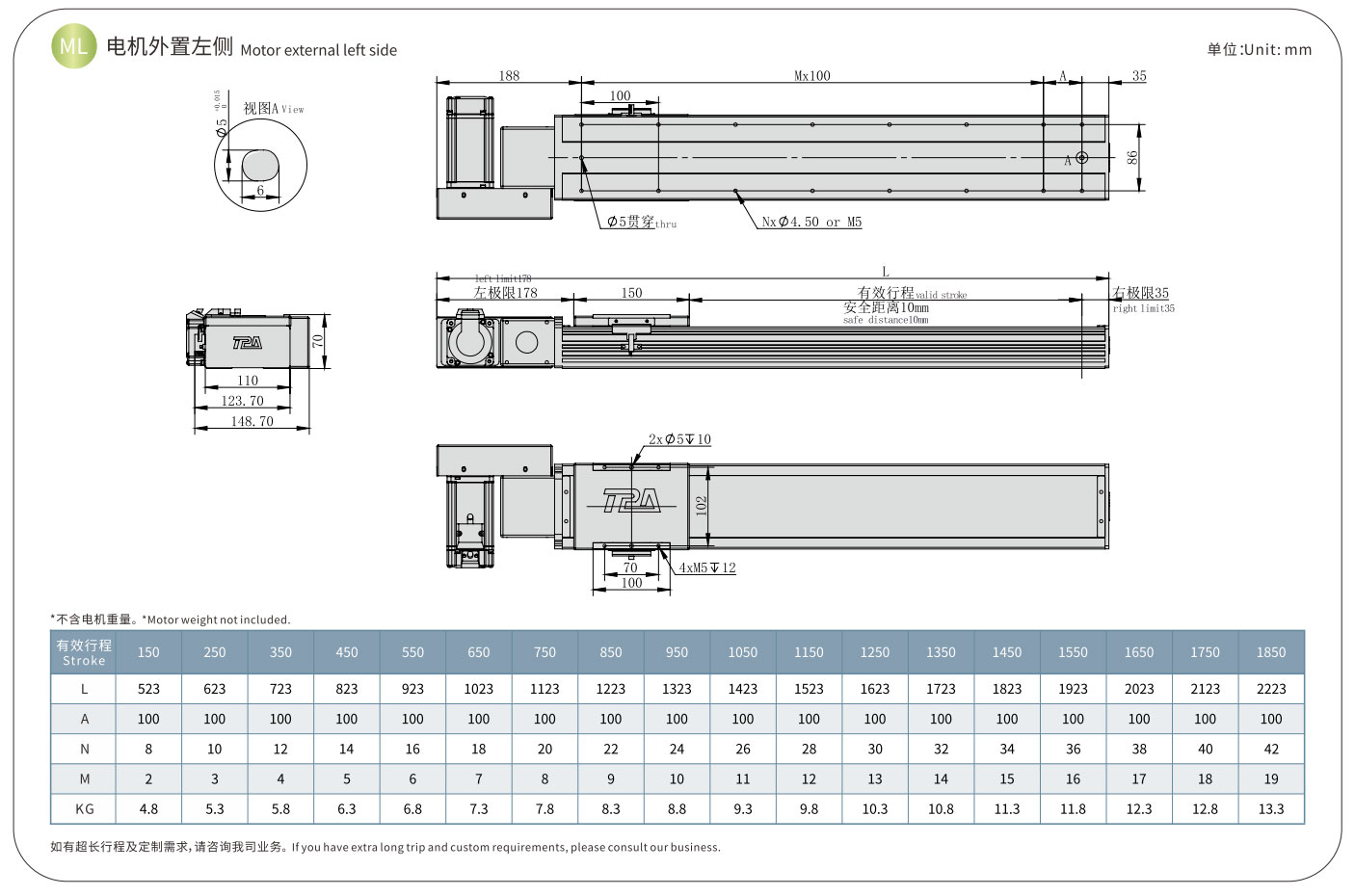
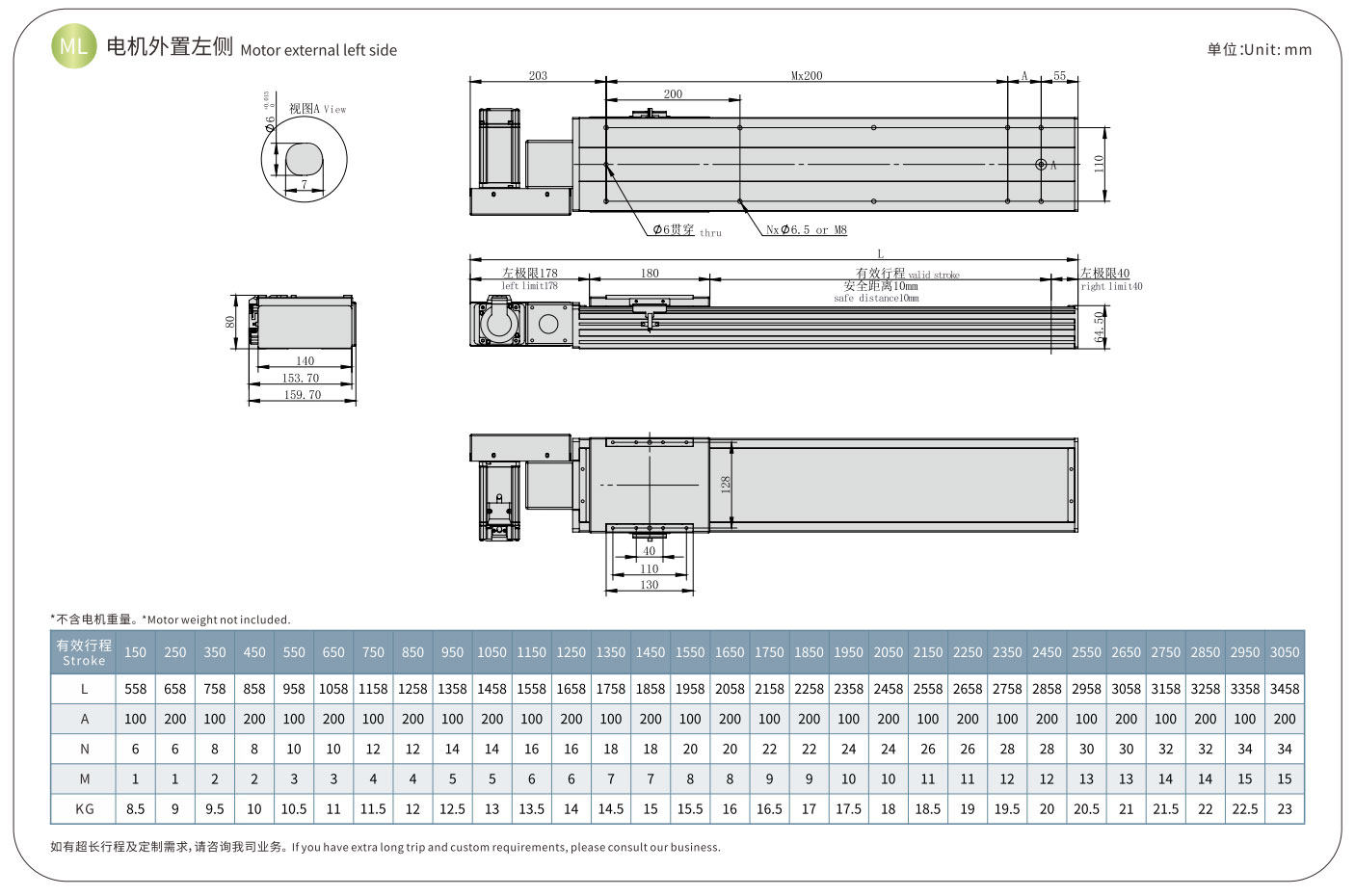
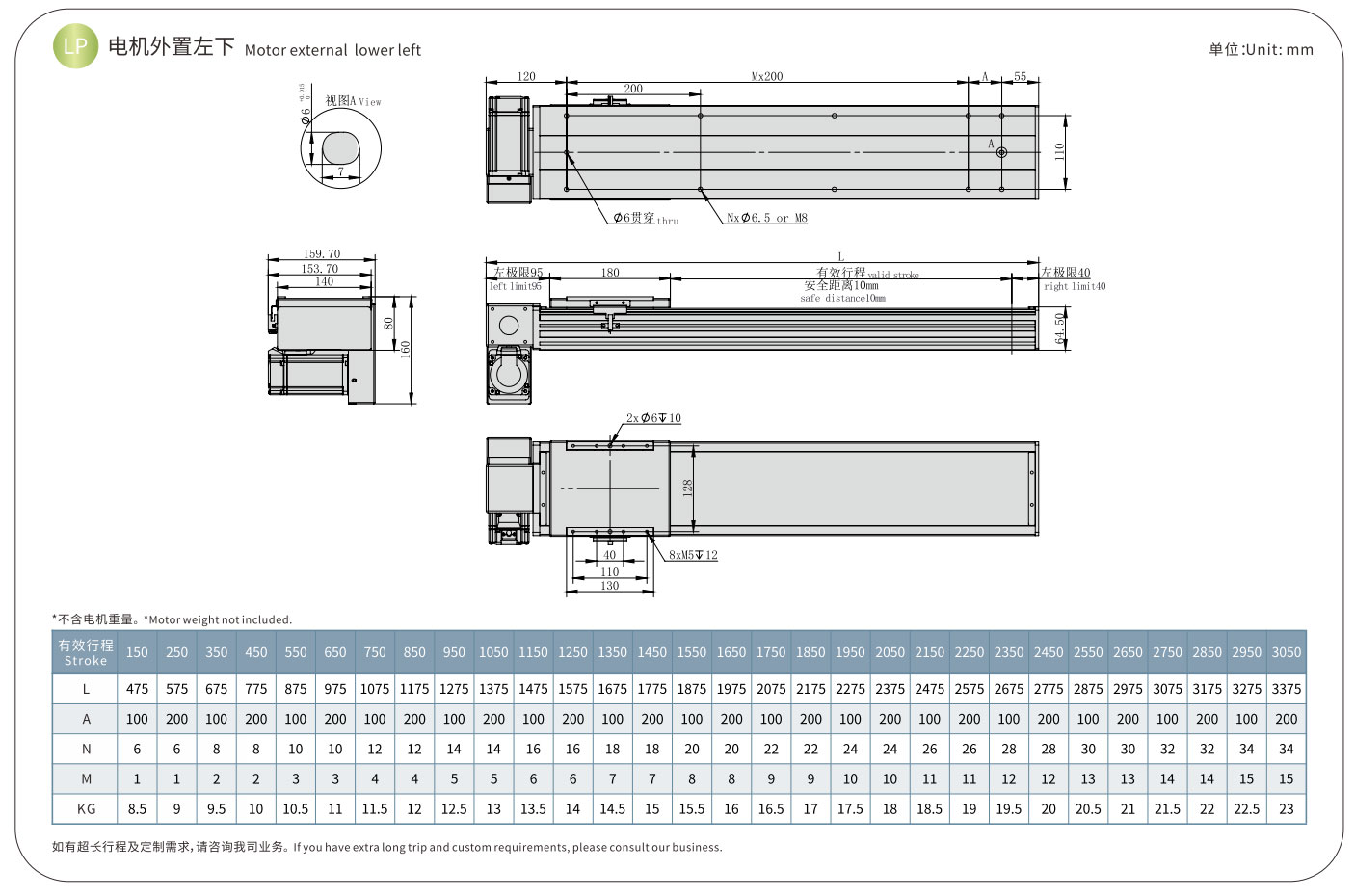
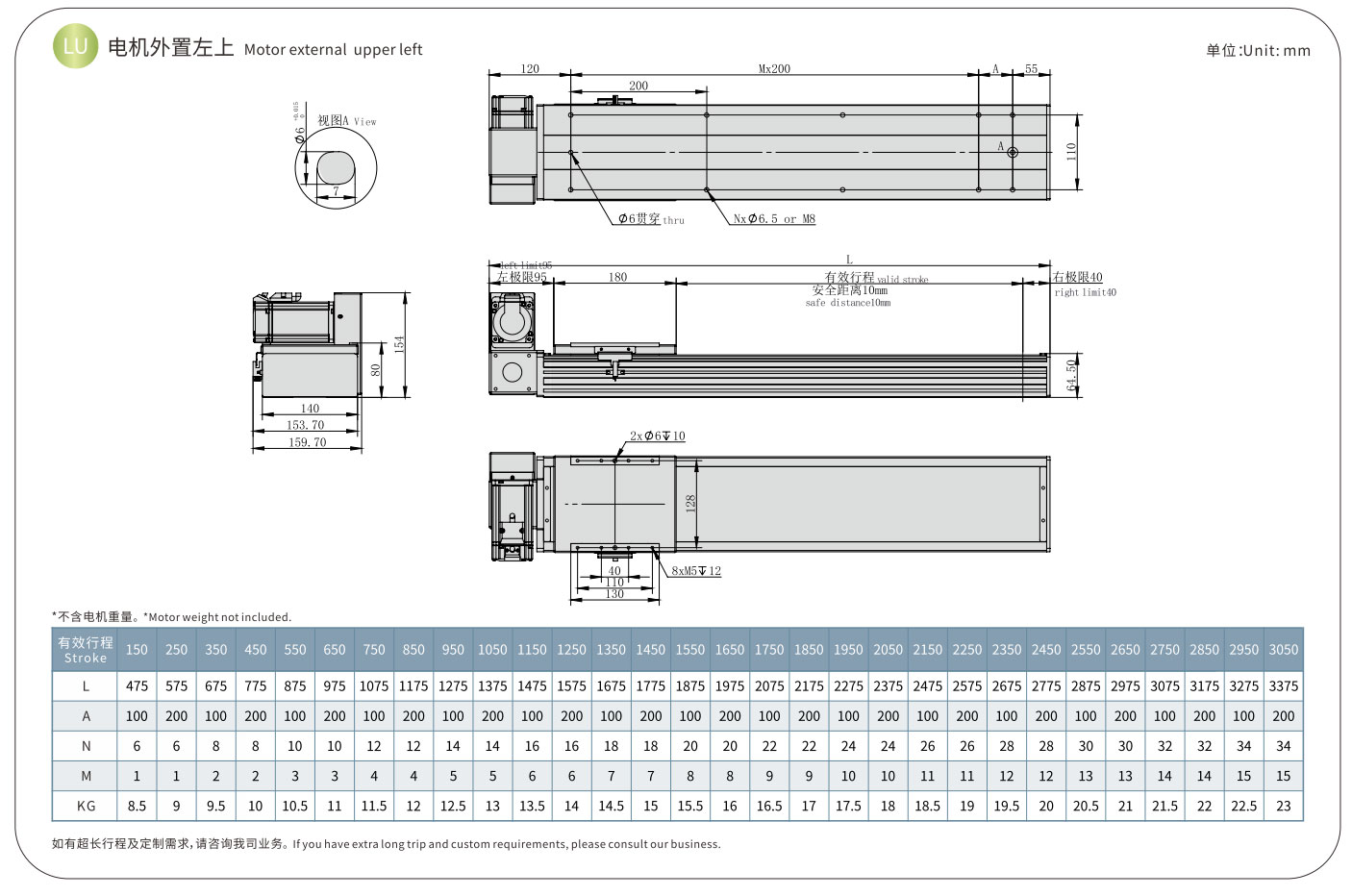
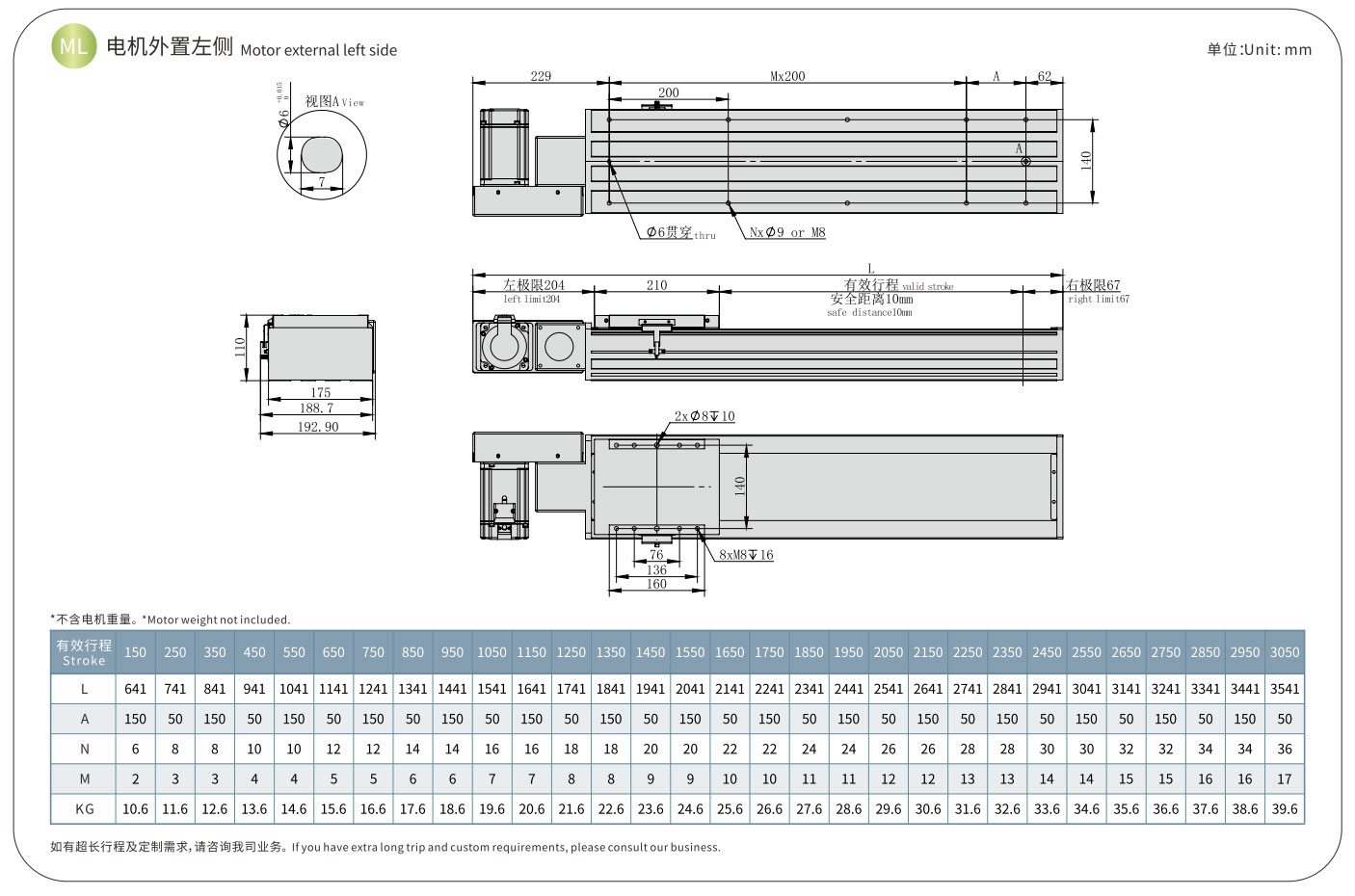
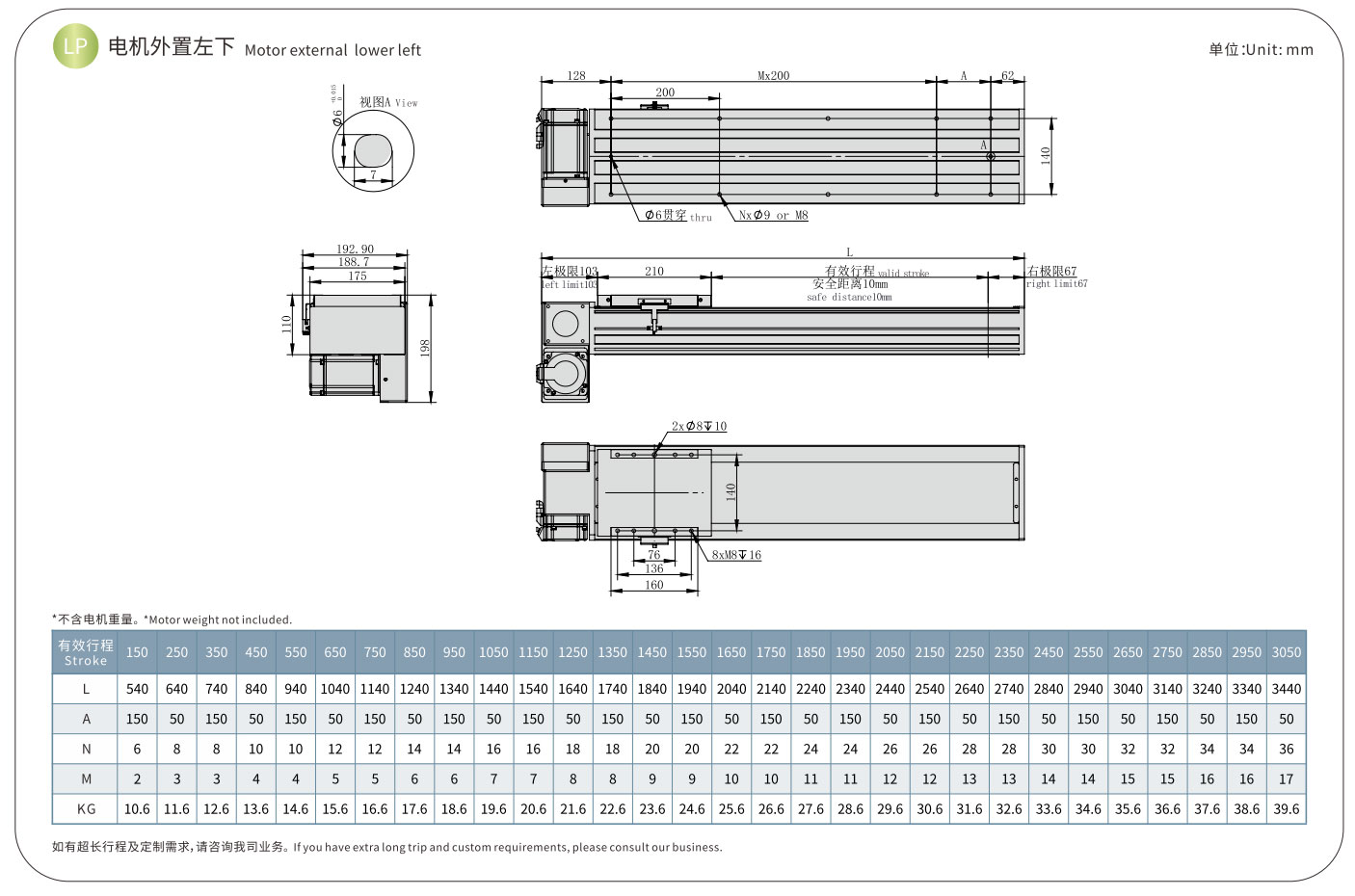
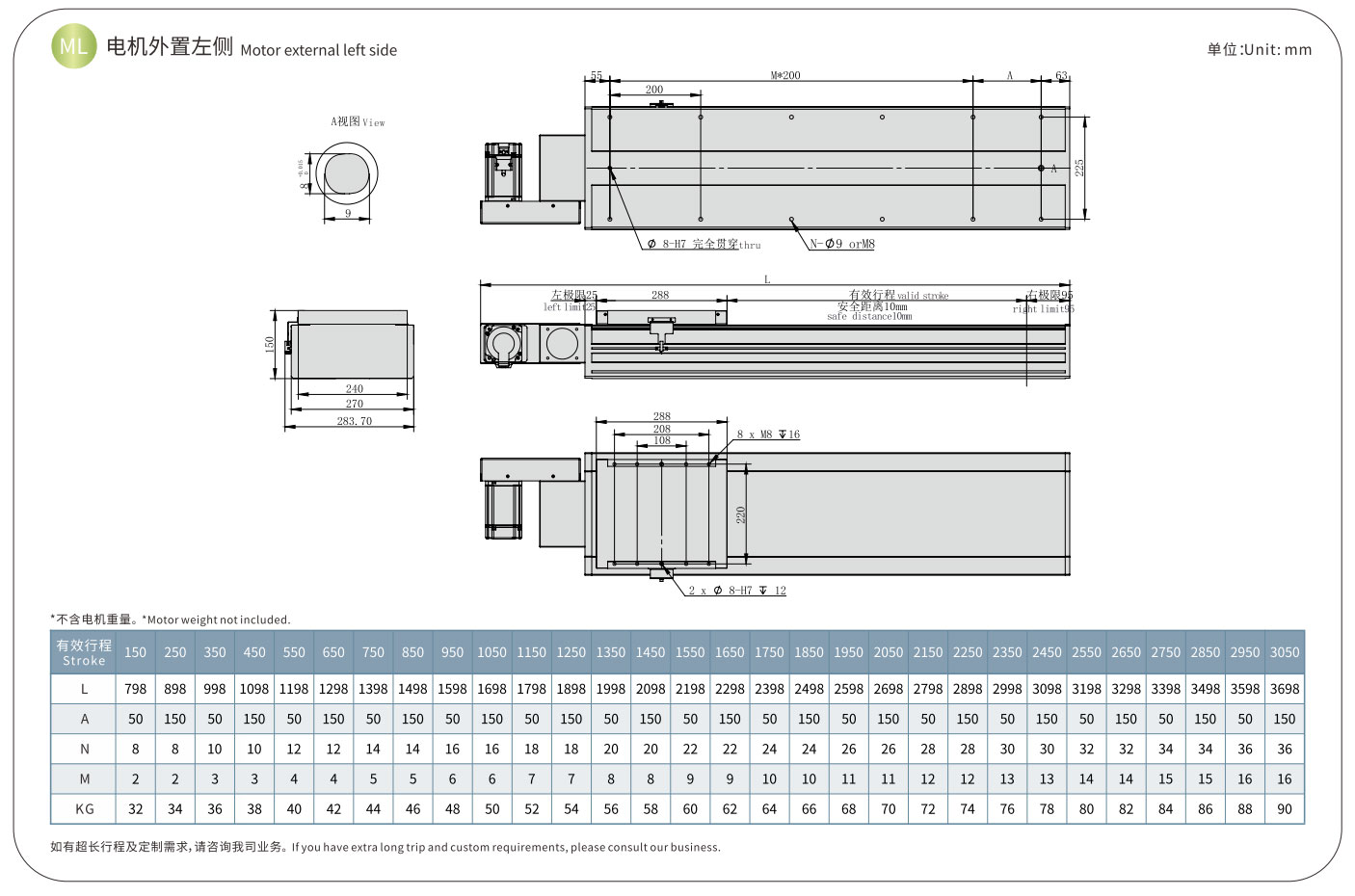
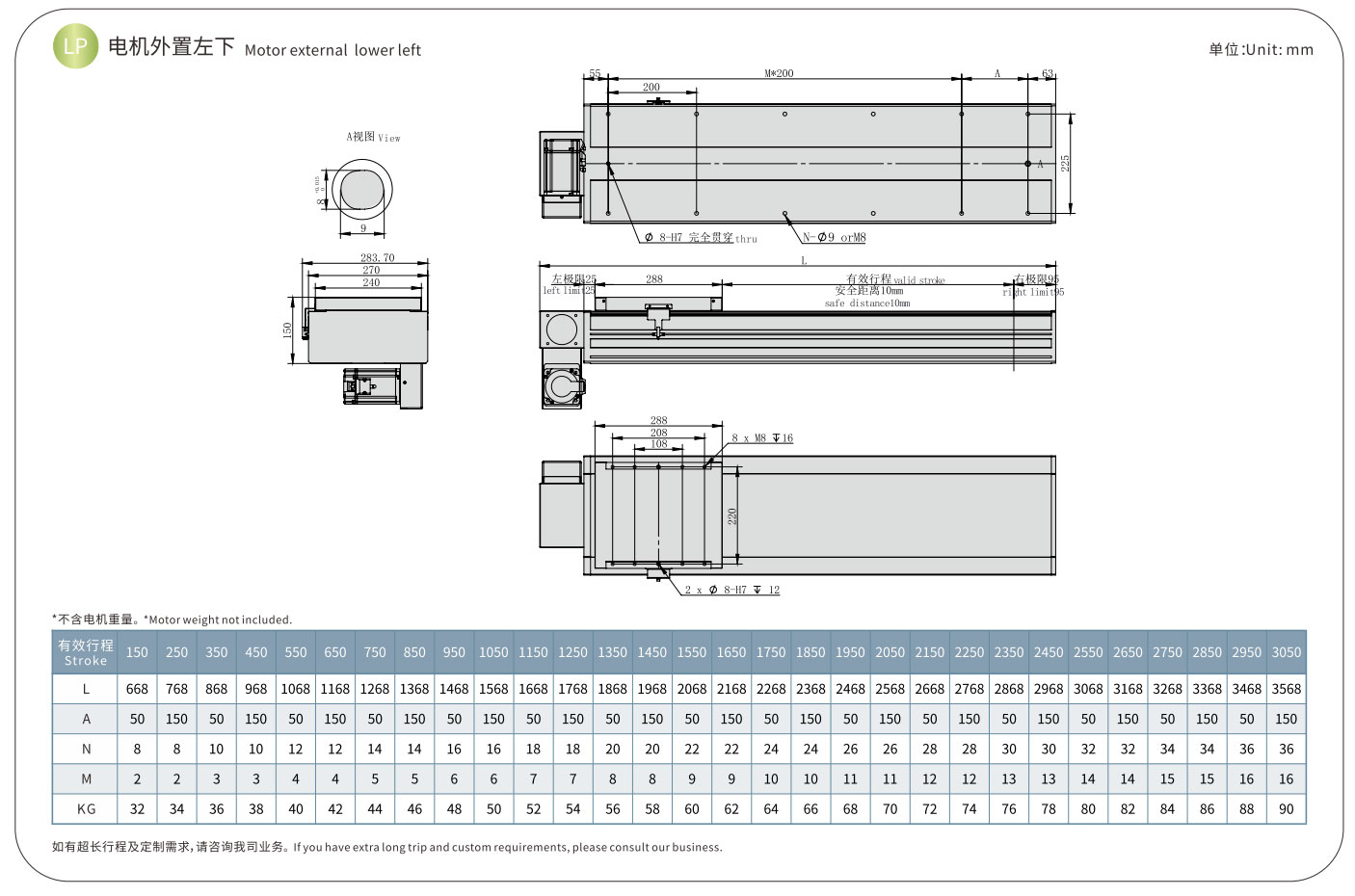
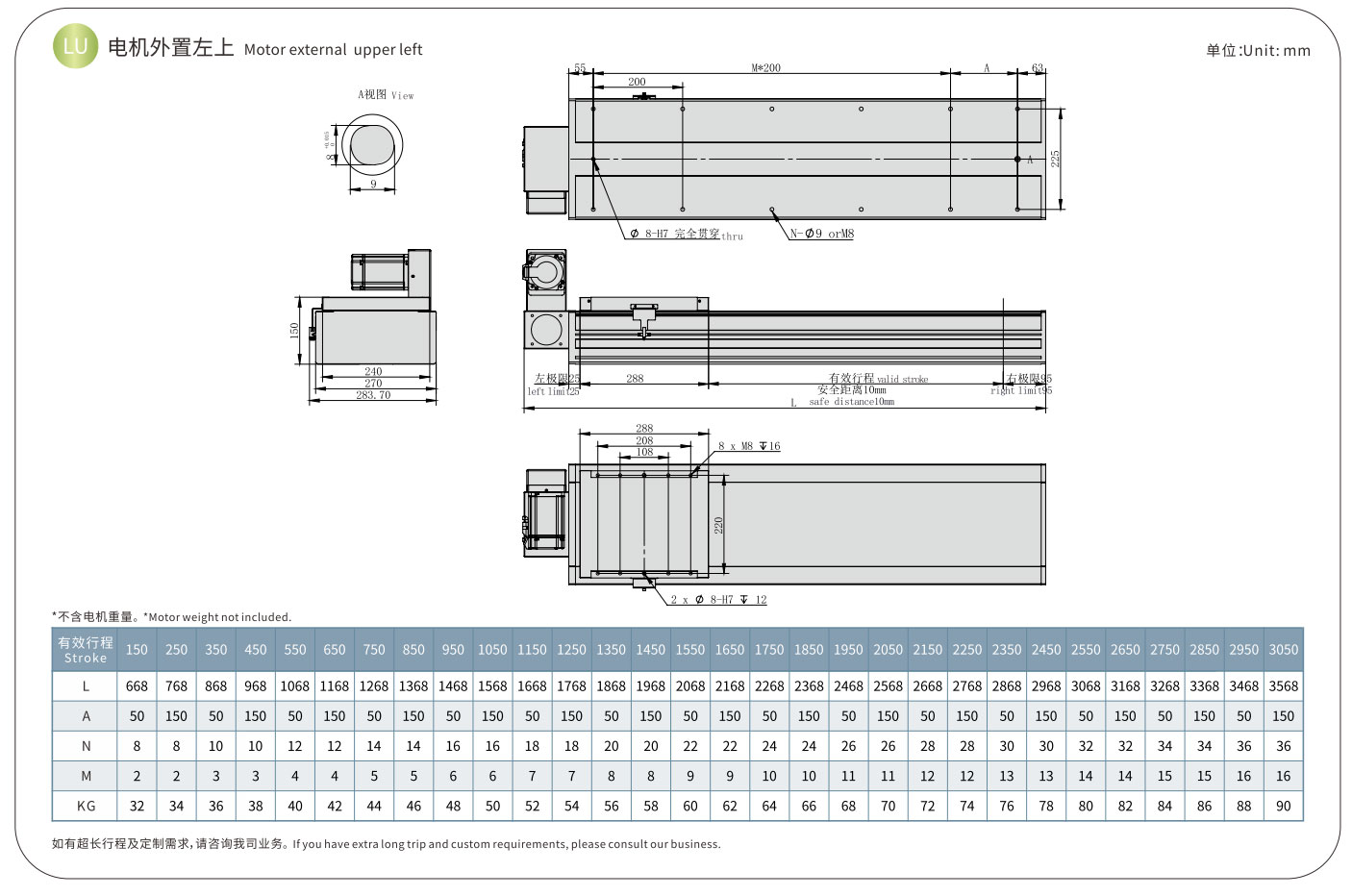
Հարվածը՝ 100 – 3050 մմ
Առավելագույն արագությունը՝ 7000 մմ/վ

1. Հարթ դիզայն, ավելի թեթև ընդհանուր քաշ, ավելի ցածր համակցված բարձրություն և ավելի լավ կոշտություն:
2. Կառուցվածքը օպտիմիզացված է, ճշգրտությունն ավելի լավ է, և մի քանի պարագաներ հավաքելու արդյունքում առաջացած սխալը կրճատվում է:
3. Ժողովը ժամանակ խնայող է, աշխատուժ խնայող և հարմար: Կցորդիչը կամ մոդուլը տեղադրելու համար ալյումինե ծածկը հեռացնելու կարիք չկա:
4. Տեխնիկական սպասարկումը պարզ է, մոդուլի երկու կողմերն էլ հագեցած են նավթի ներարկման անցքերով, և ծածկը հեռացնելու կարիք չկա:







Ավելի շատ ապրանքներ

ONB Series Belt Driven Linear Module կիսով չափ փակված

OCB շարքի գոտիով շարժվող գծային մոդուլը ամբողջությամբ ներառված է...

ONB-F շարքի գոտիով շարժվող գծային մոդուլ արտաքին...

HNB-E սերիայի գոտիով շարժվող գծային ակտուատորներ կիսա...

HNB Series Belt Driven Linear Module կիսով չափ փակված










