




HNB Series Belt Driven Linear Module Half Hoʻopili ʻia


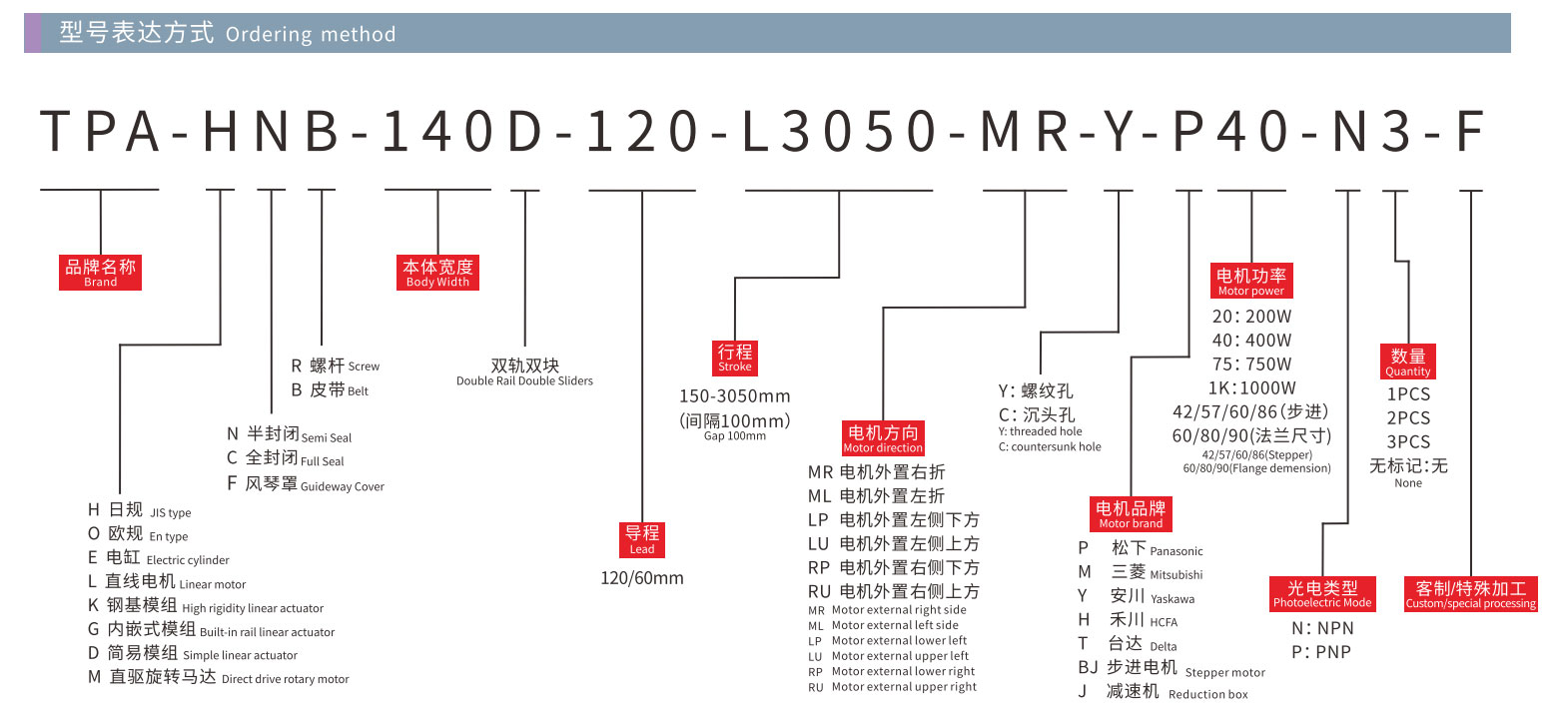
Mea koho hoʻohālike
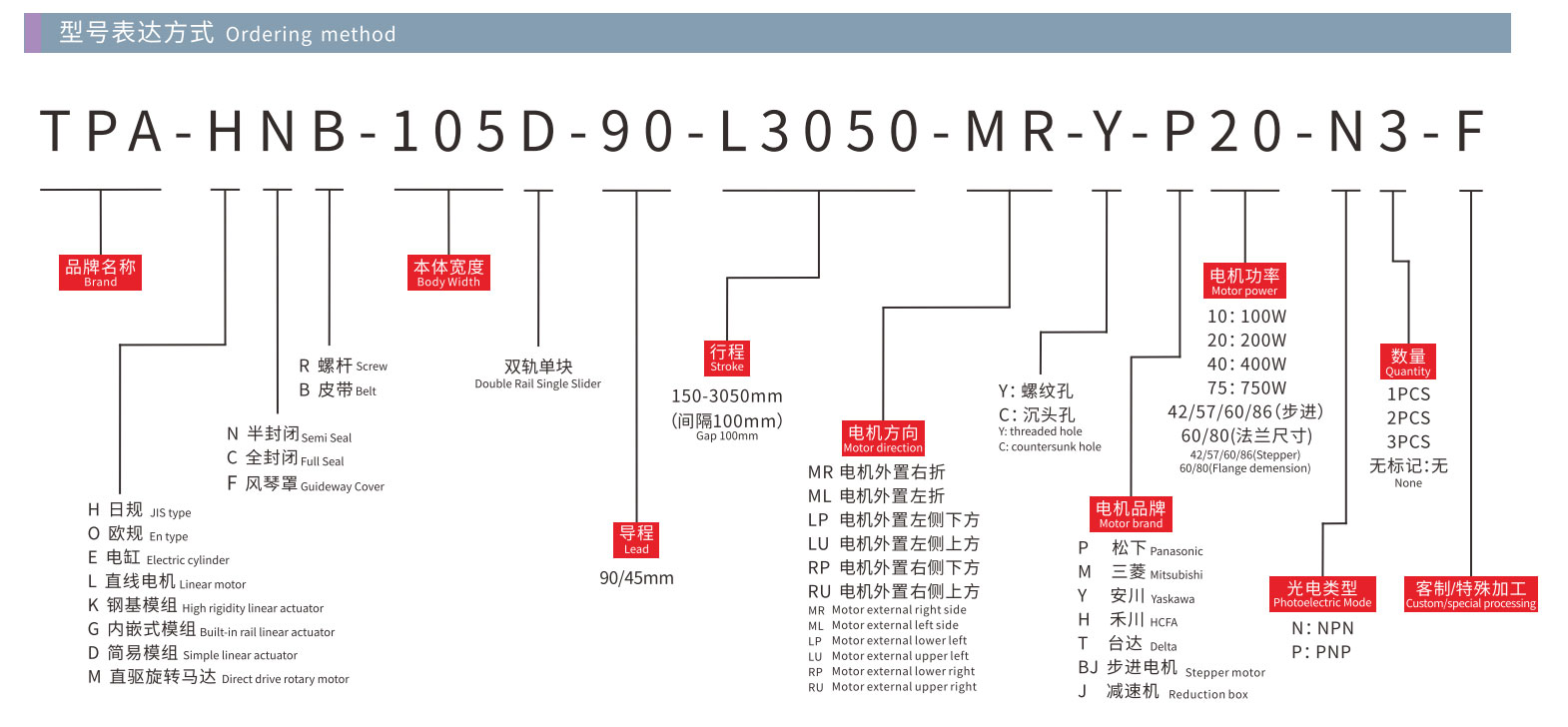
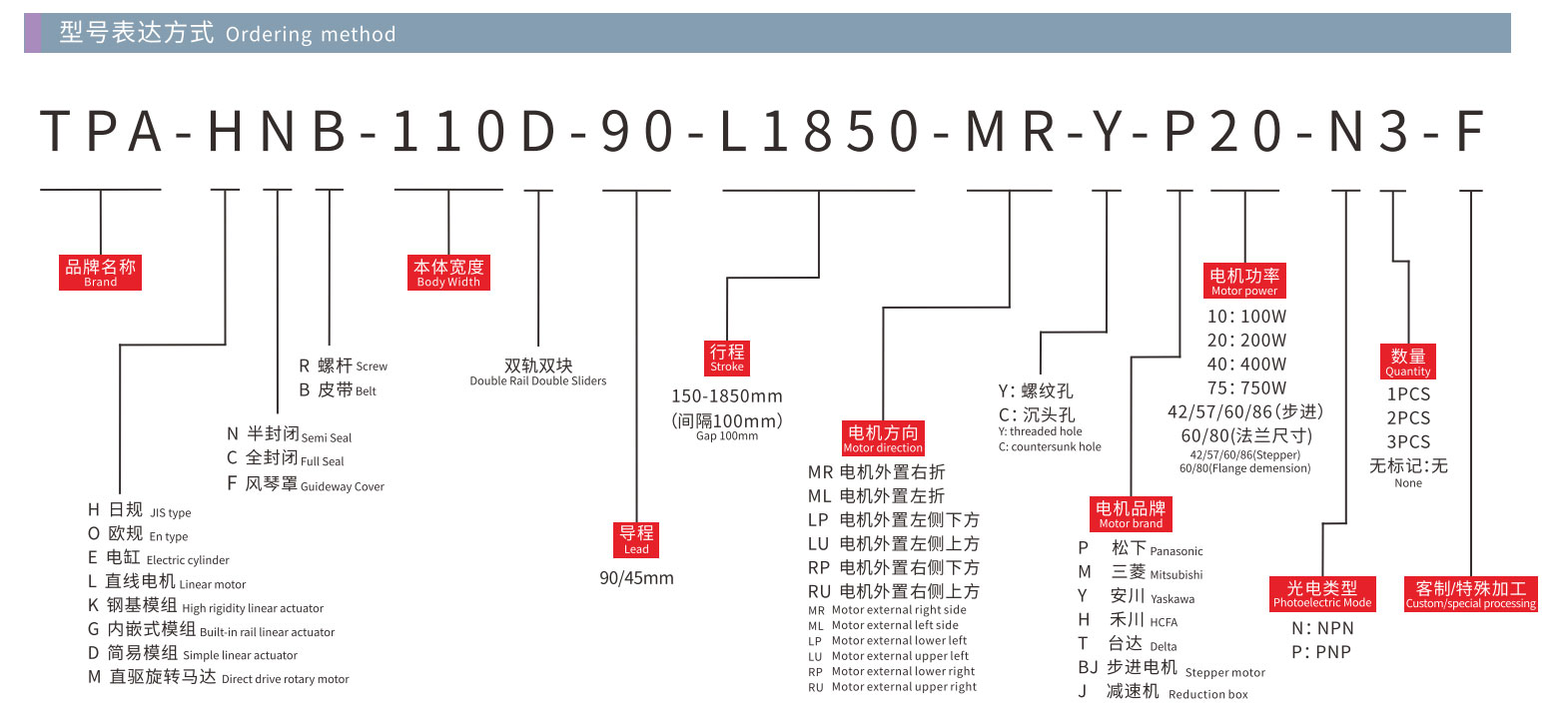
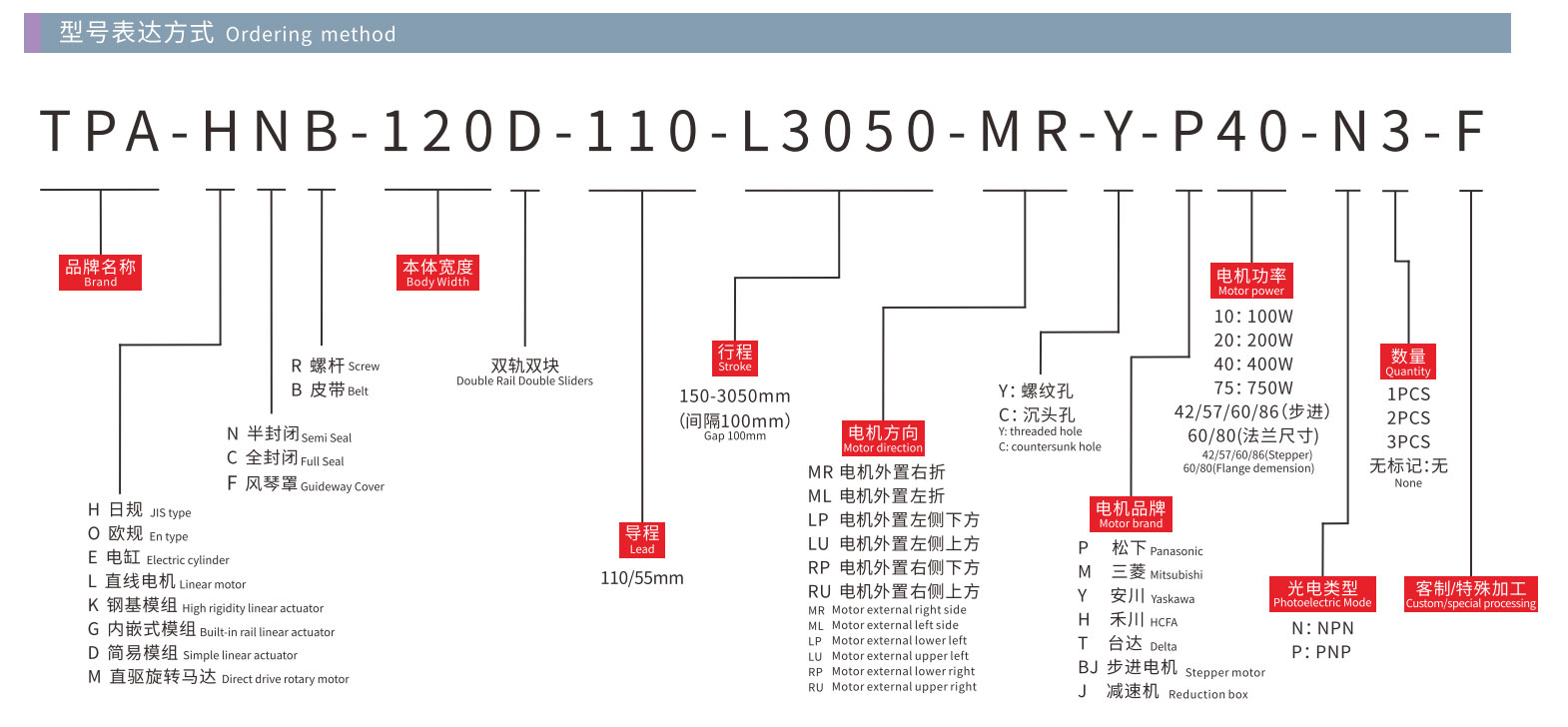
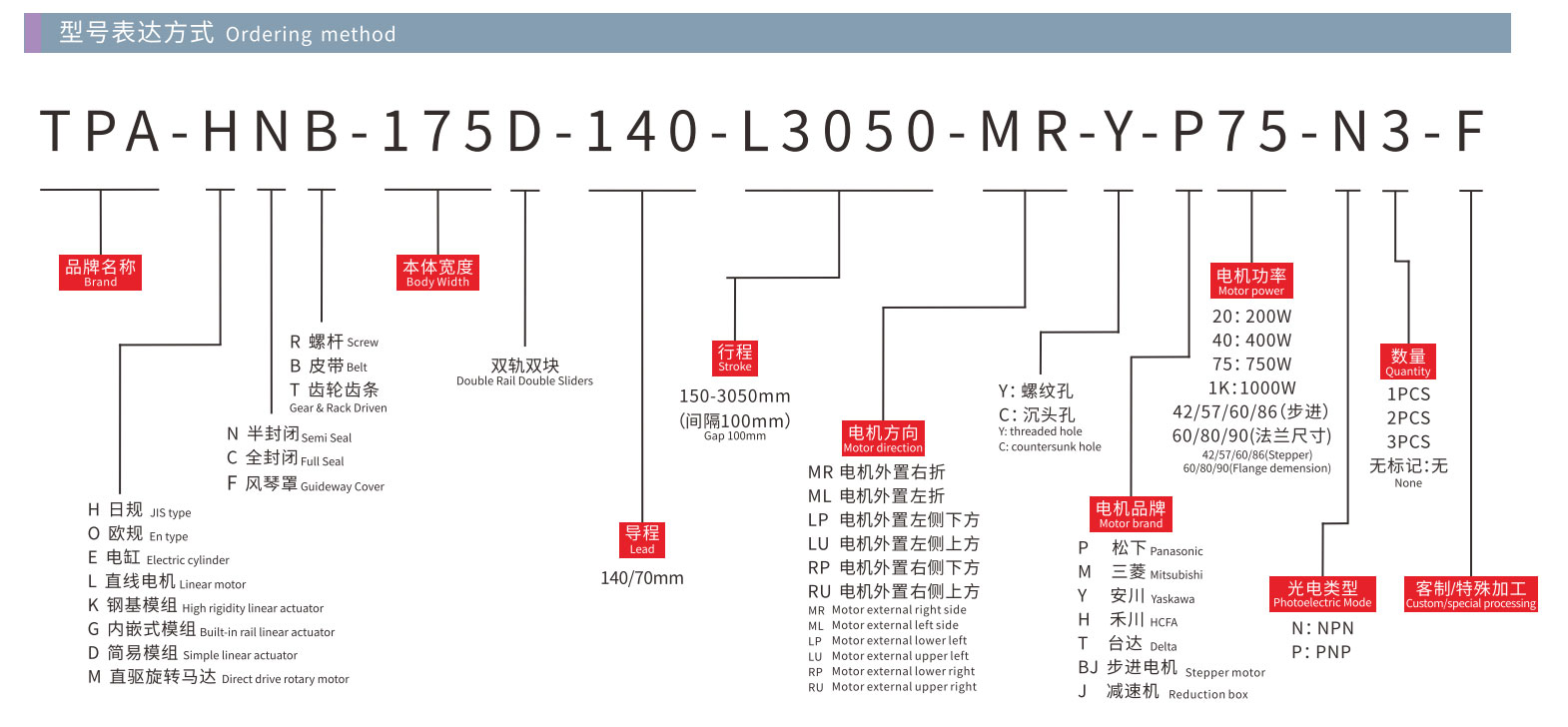
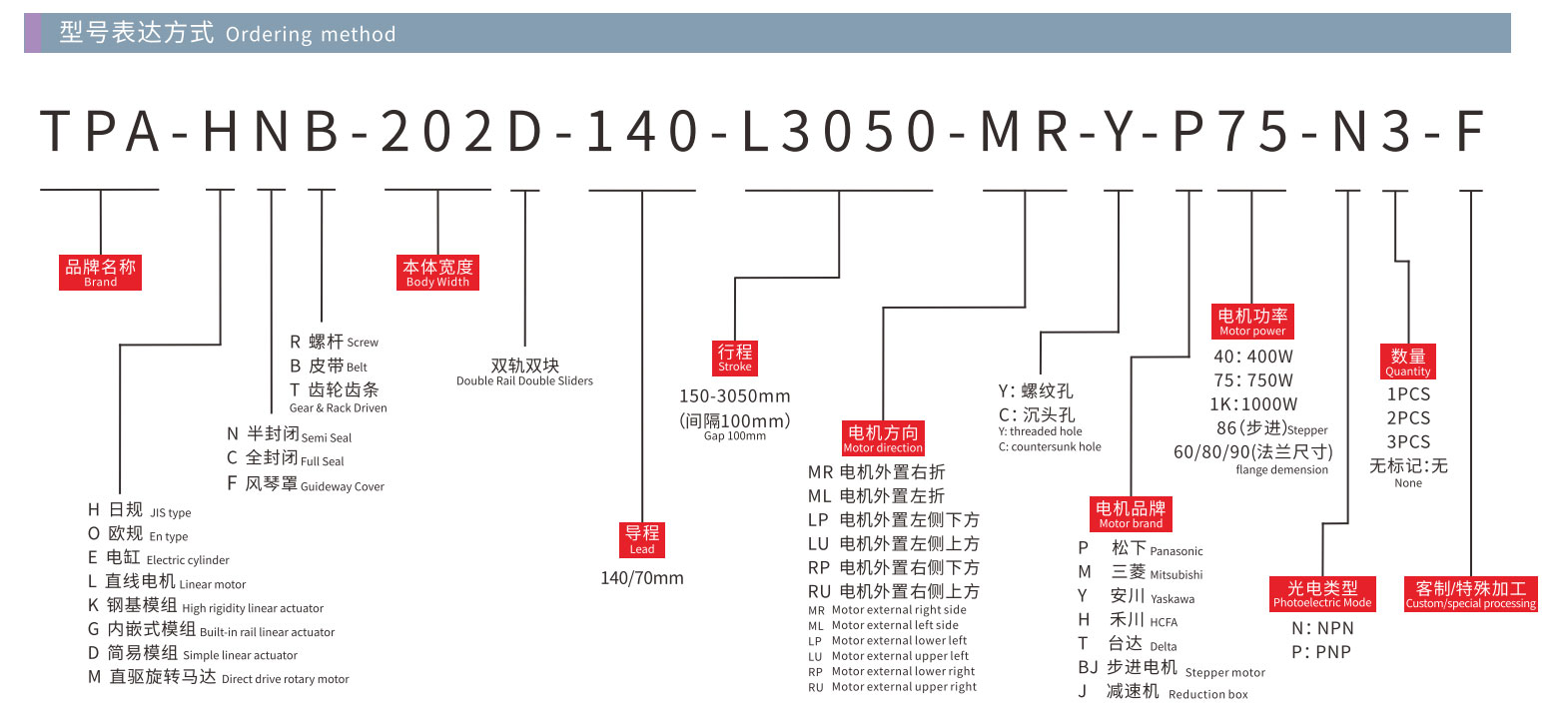
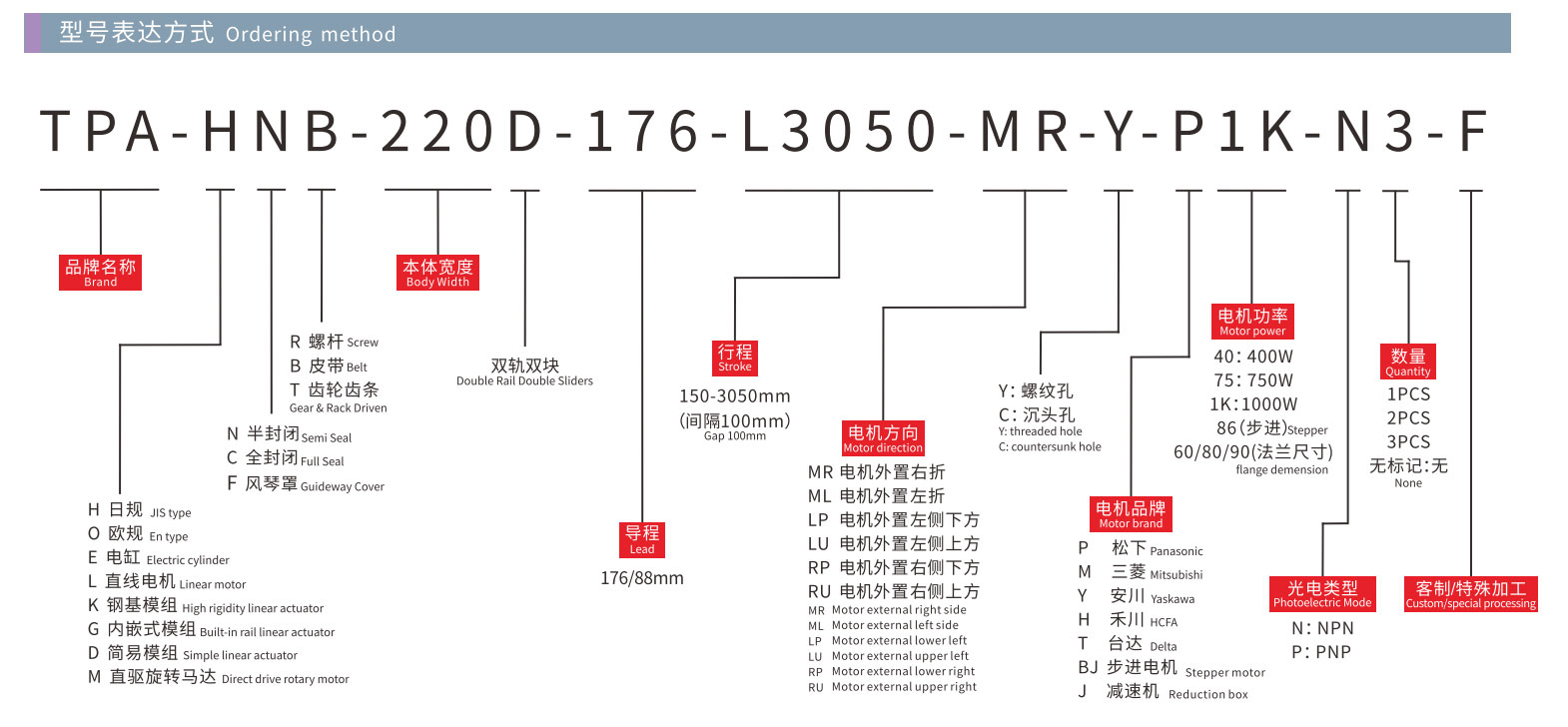
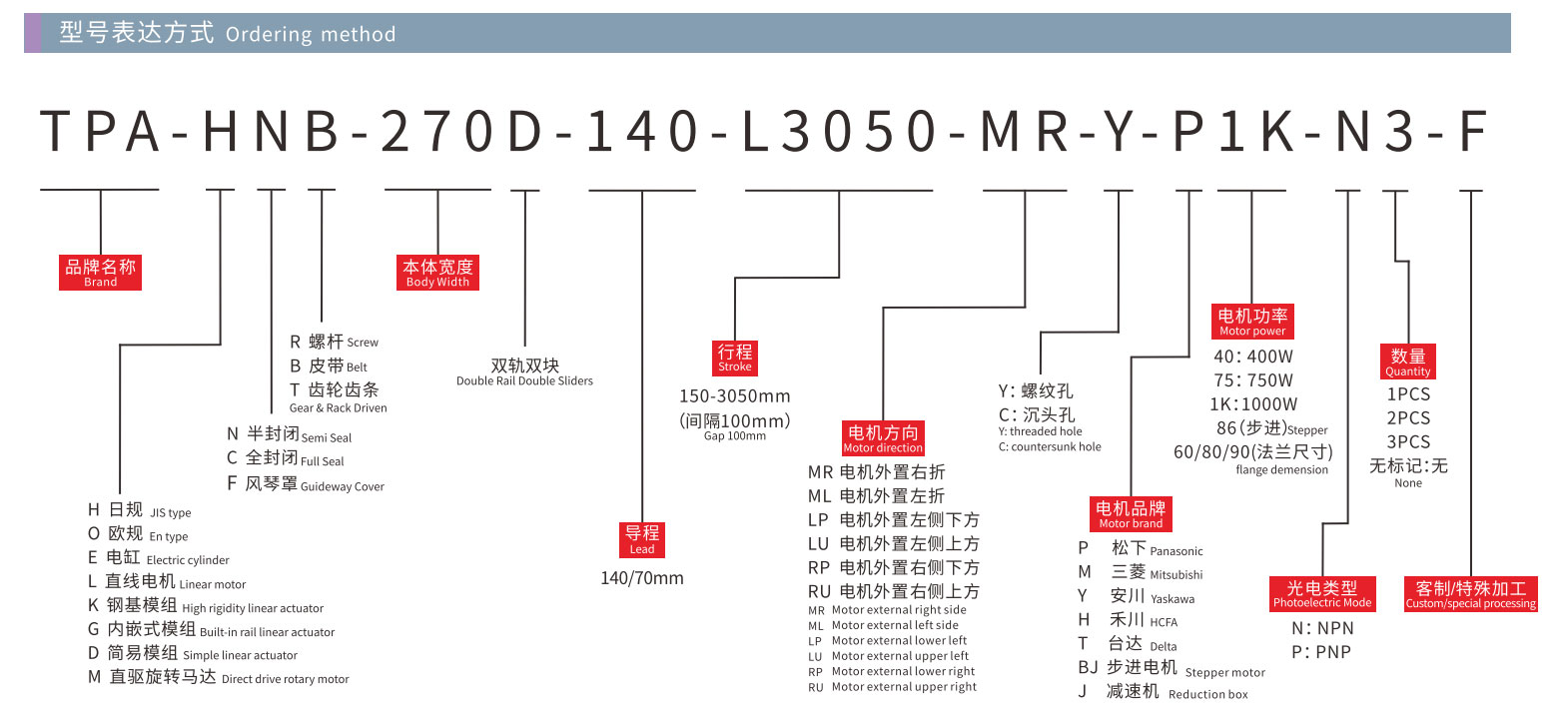
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
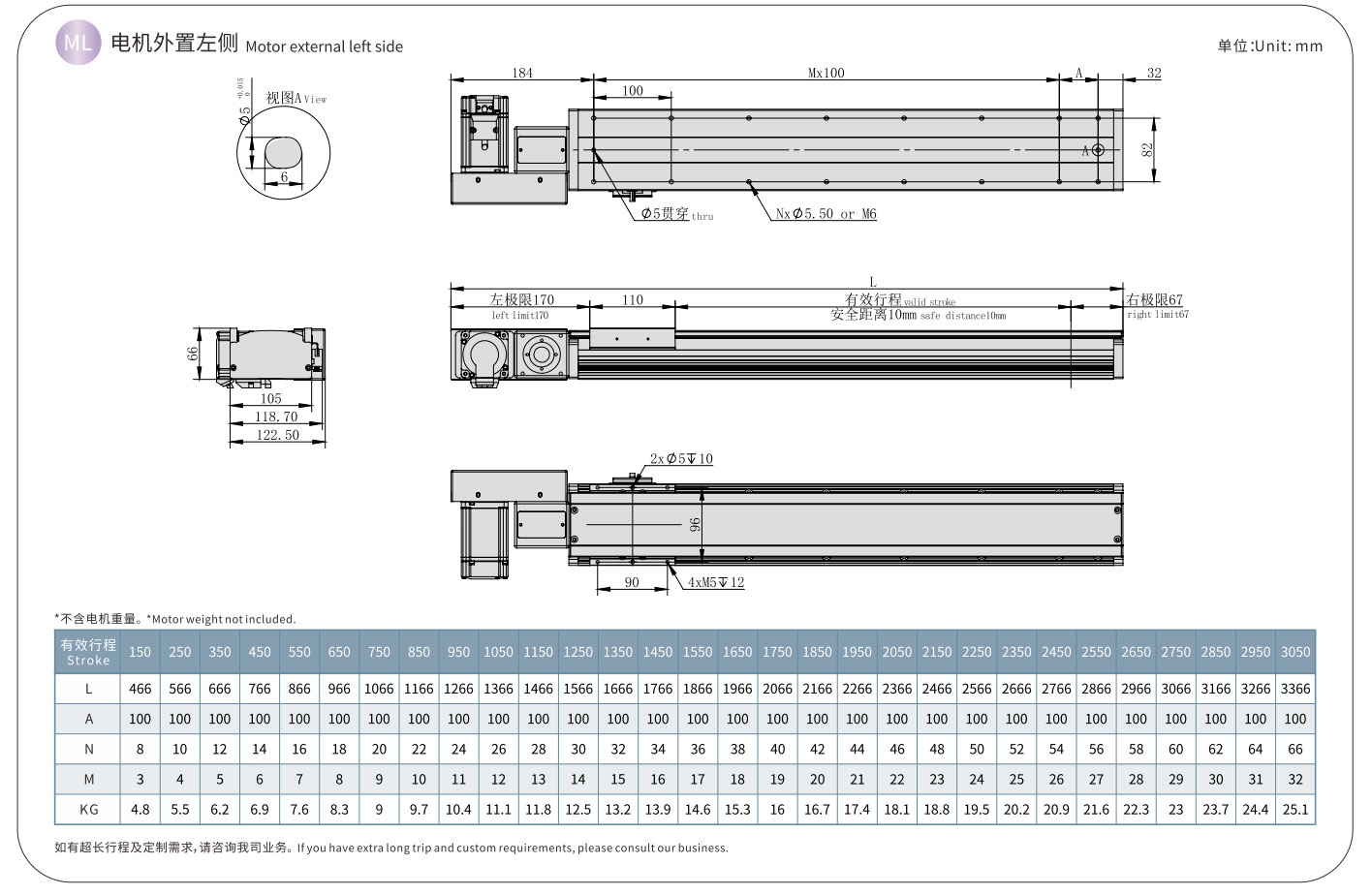
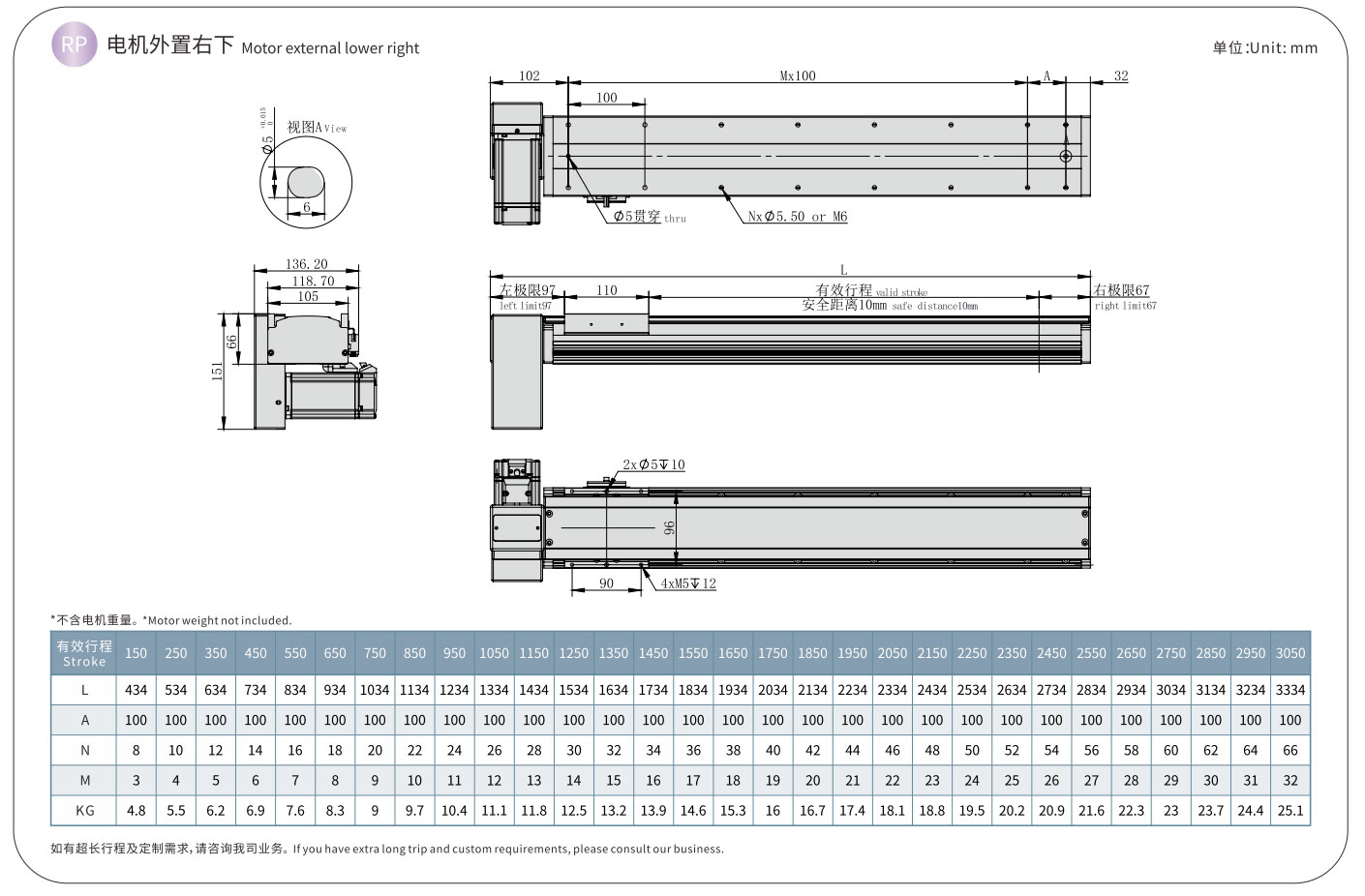
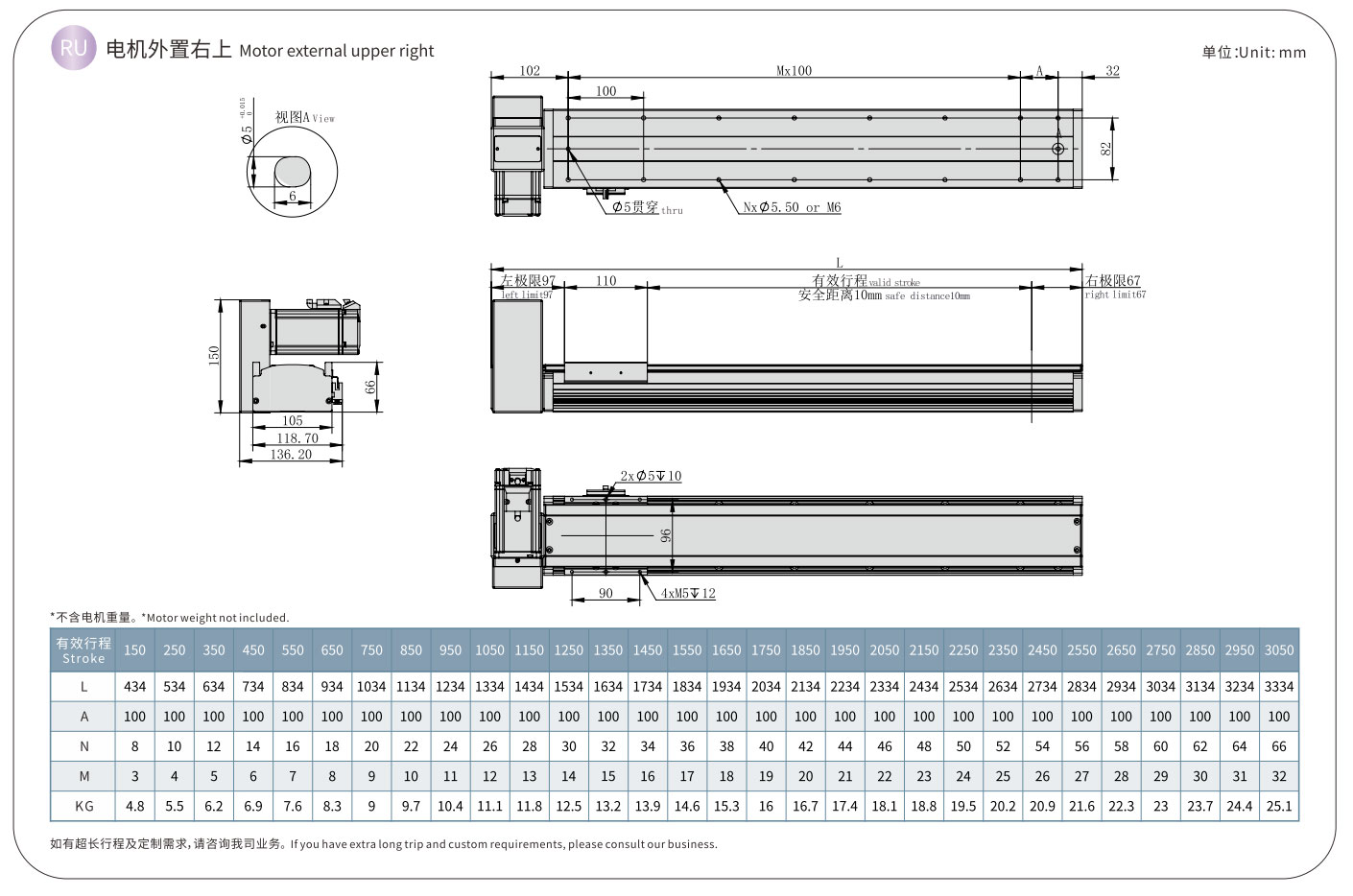
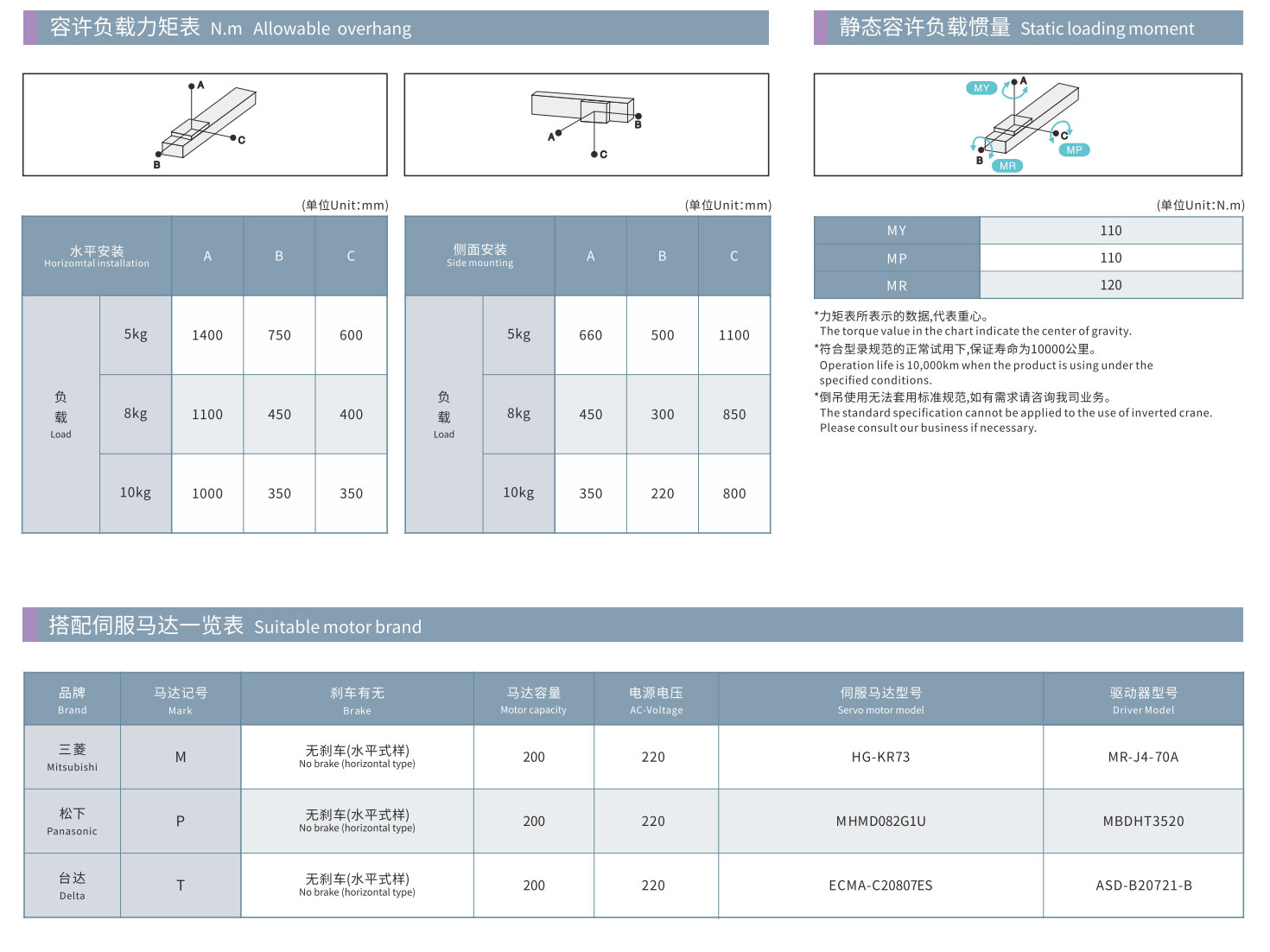
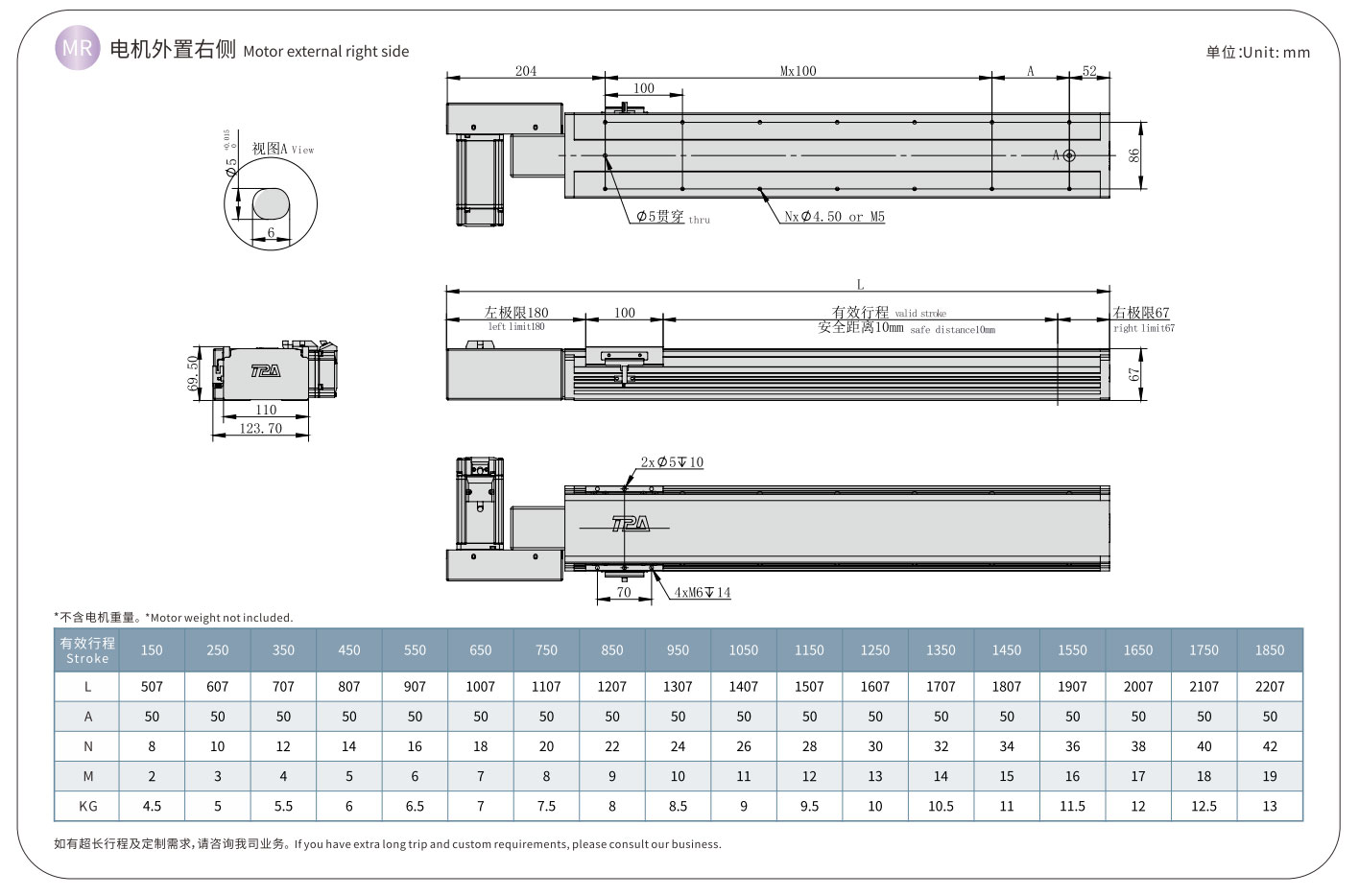
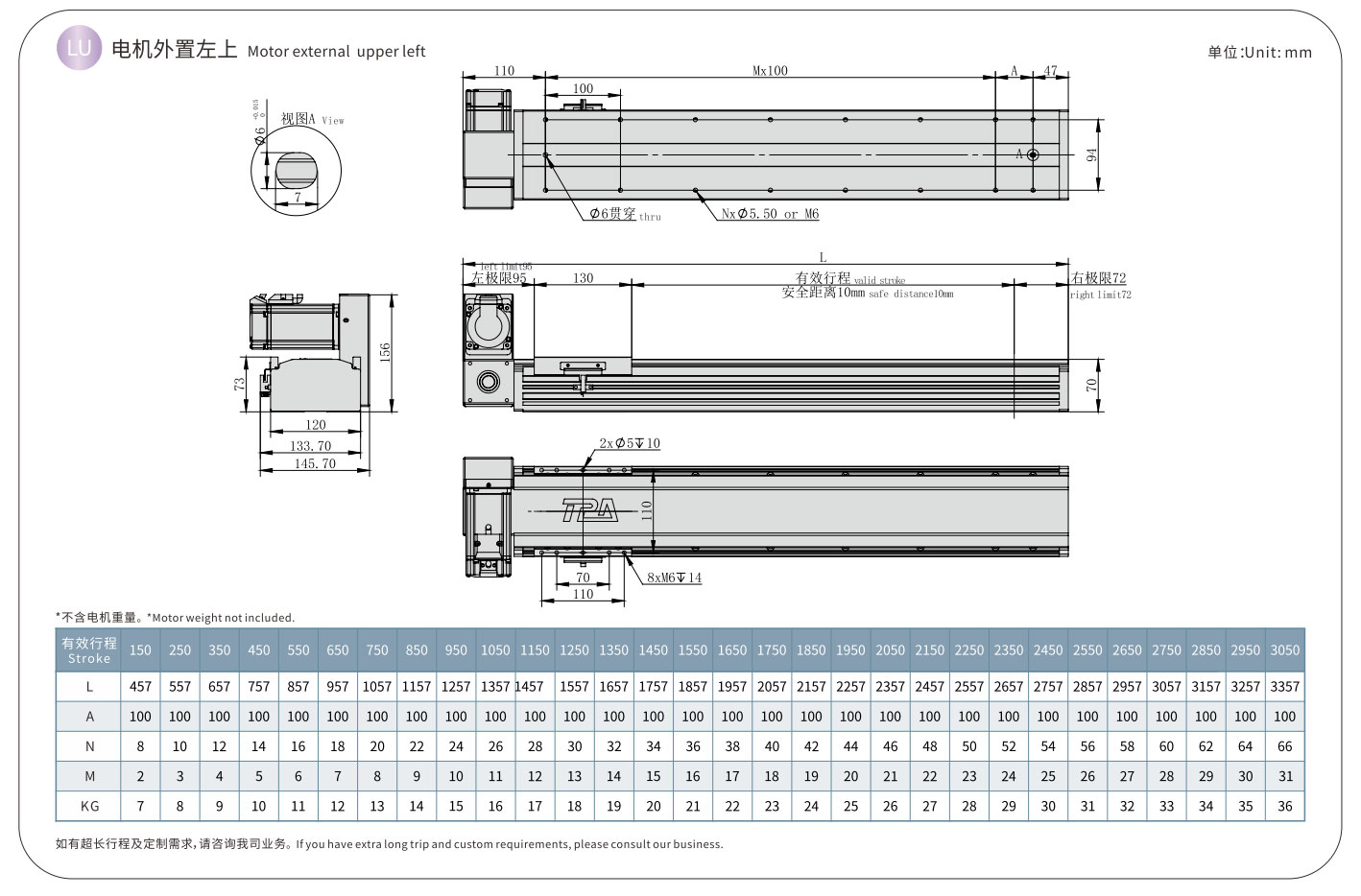
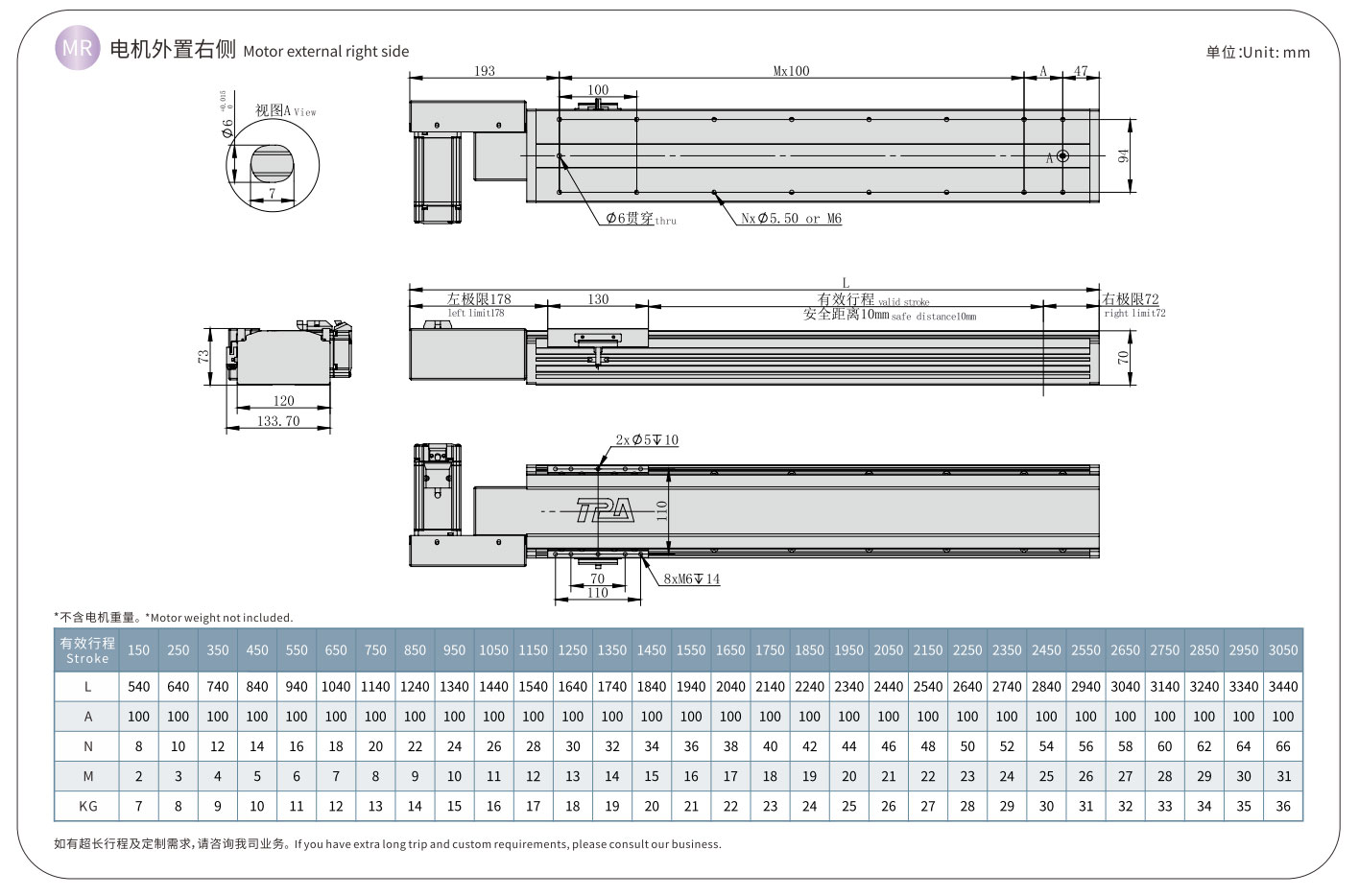
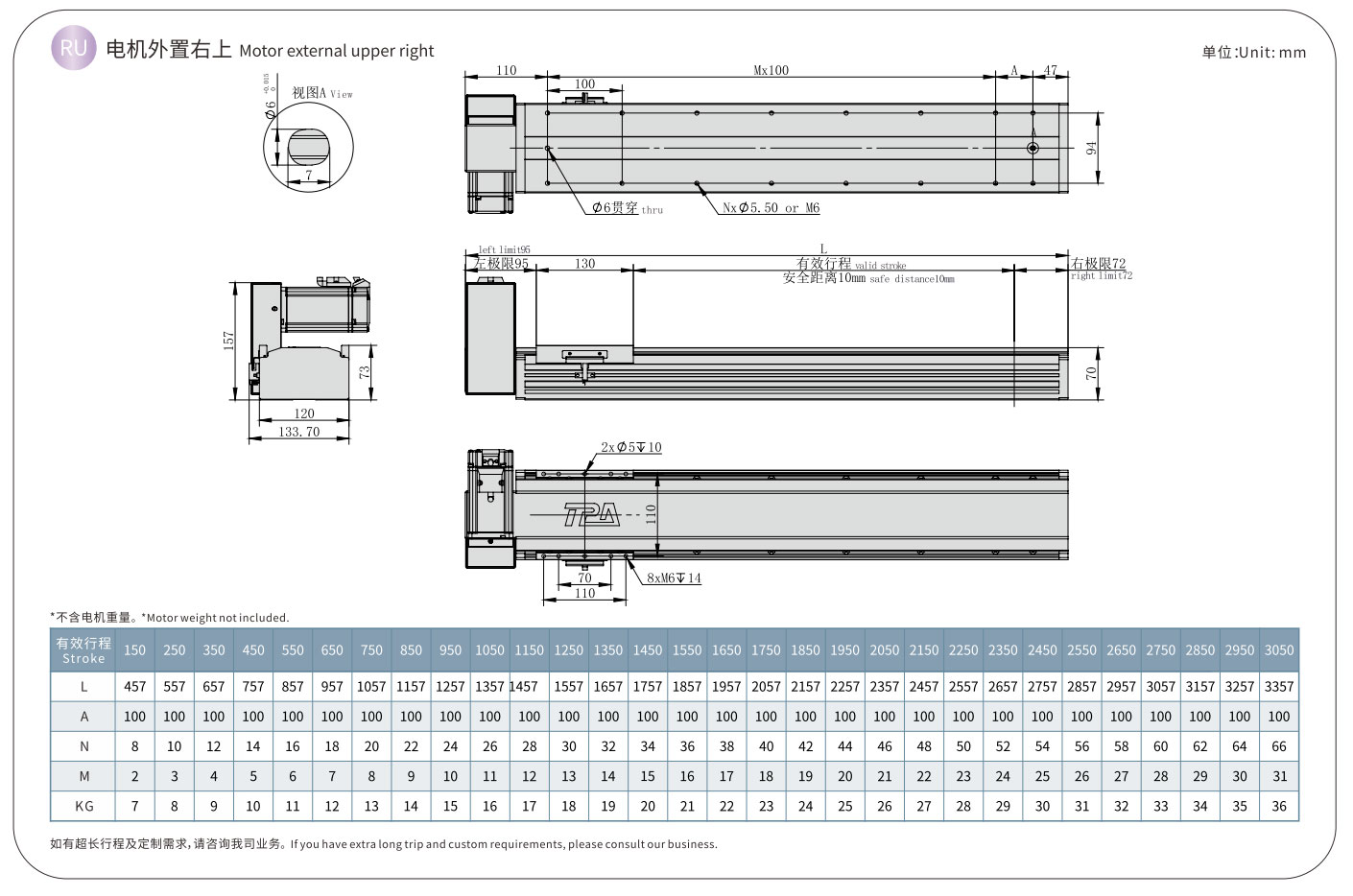
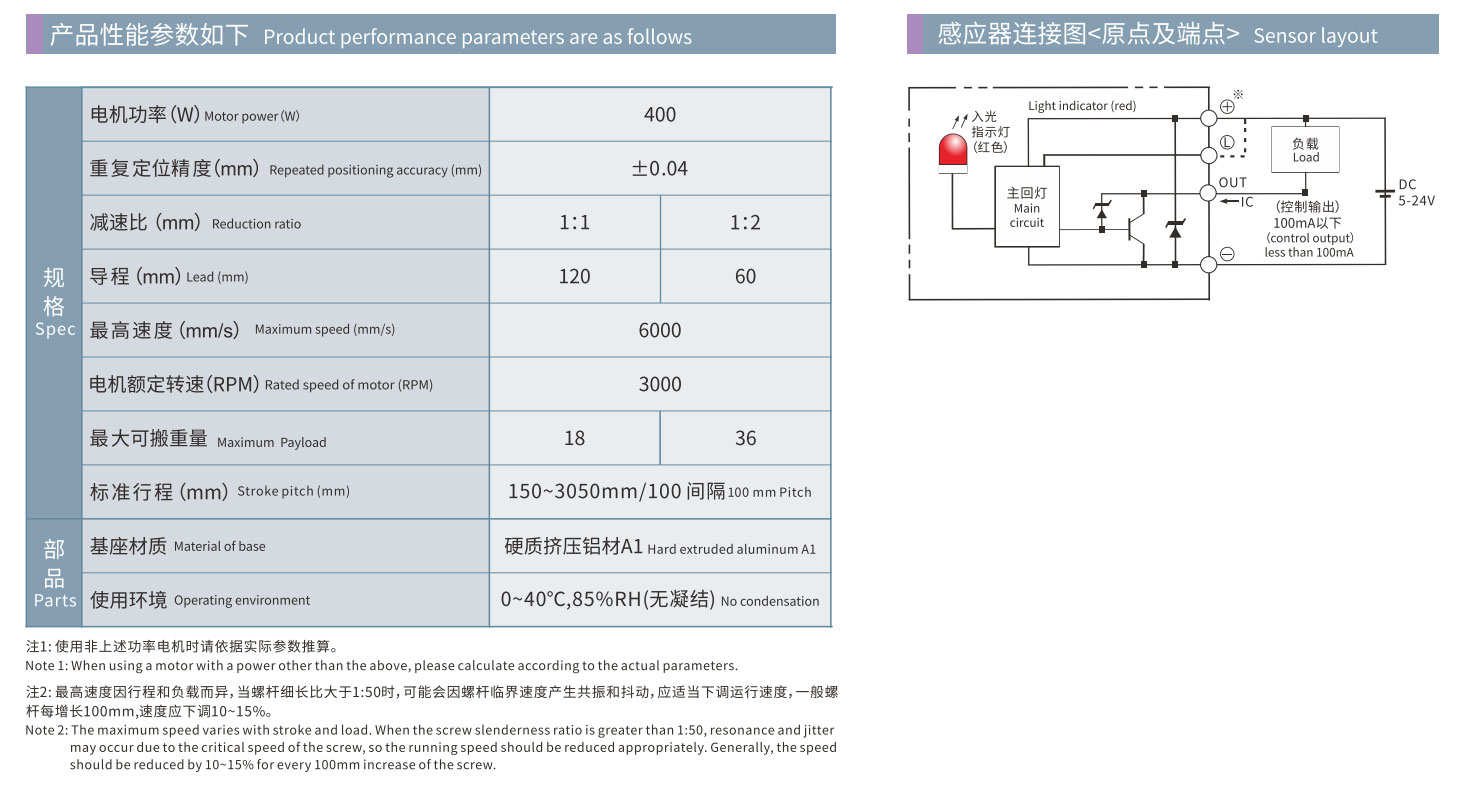
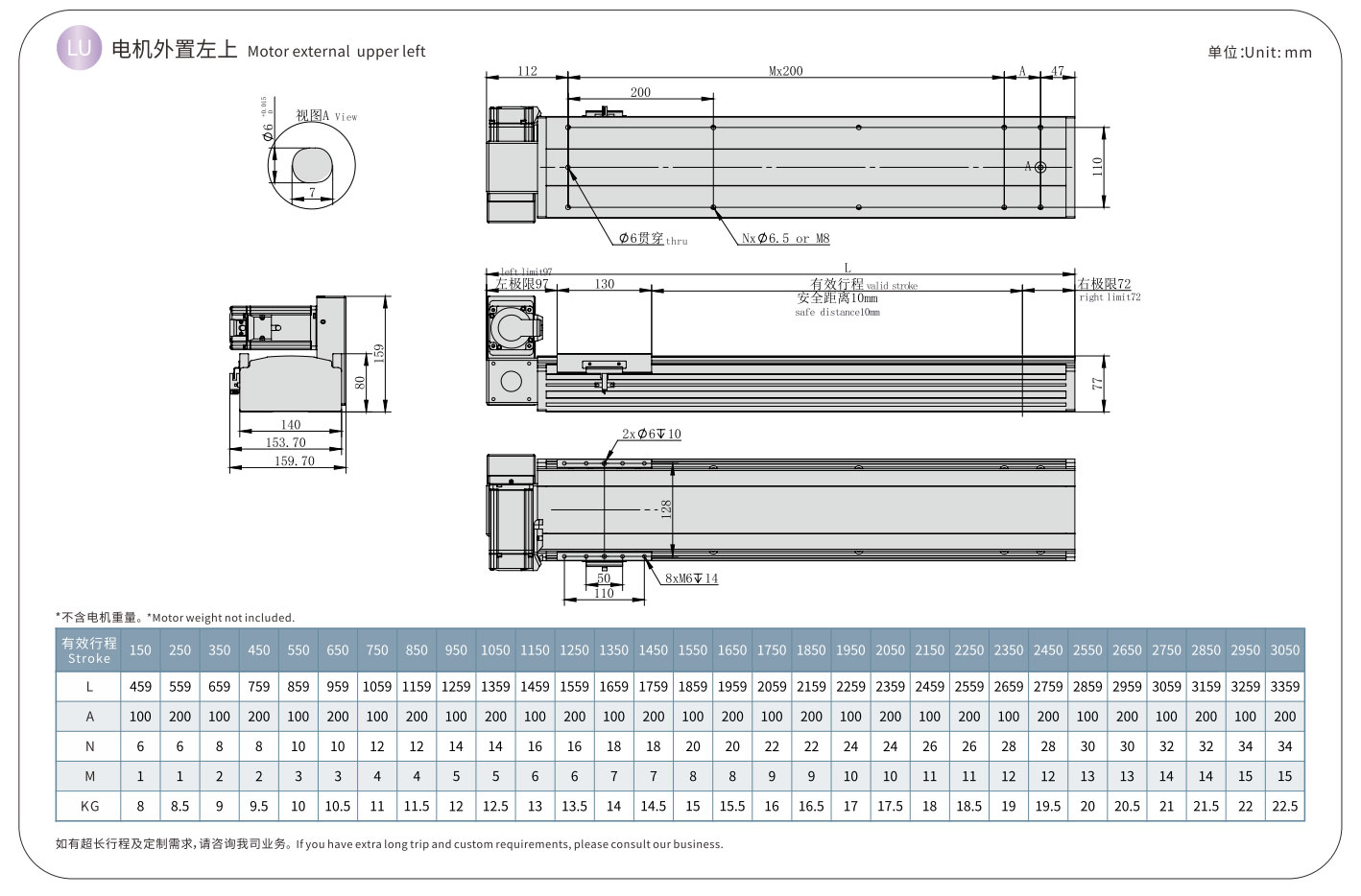
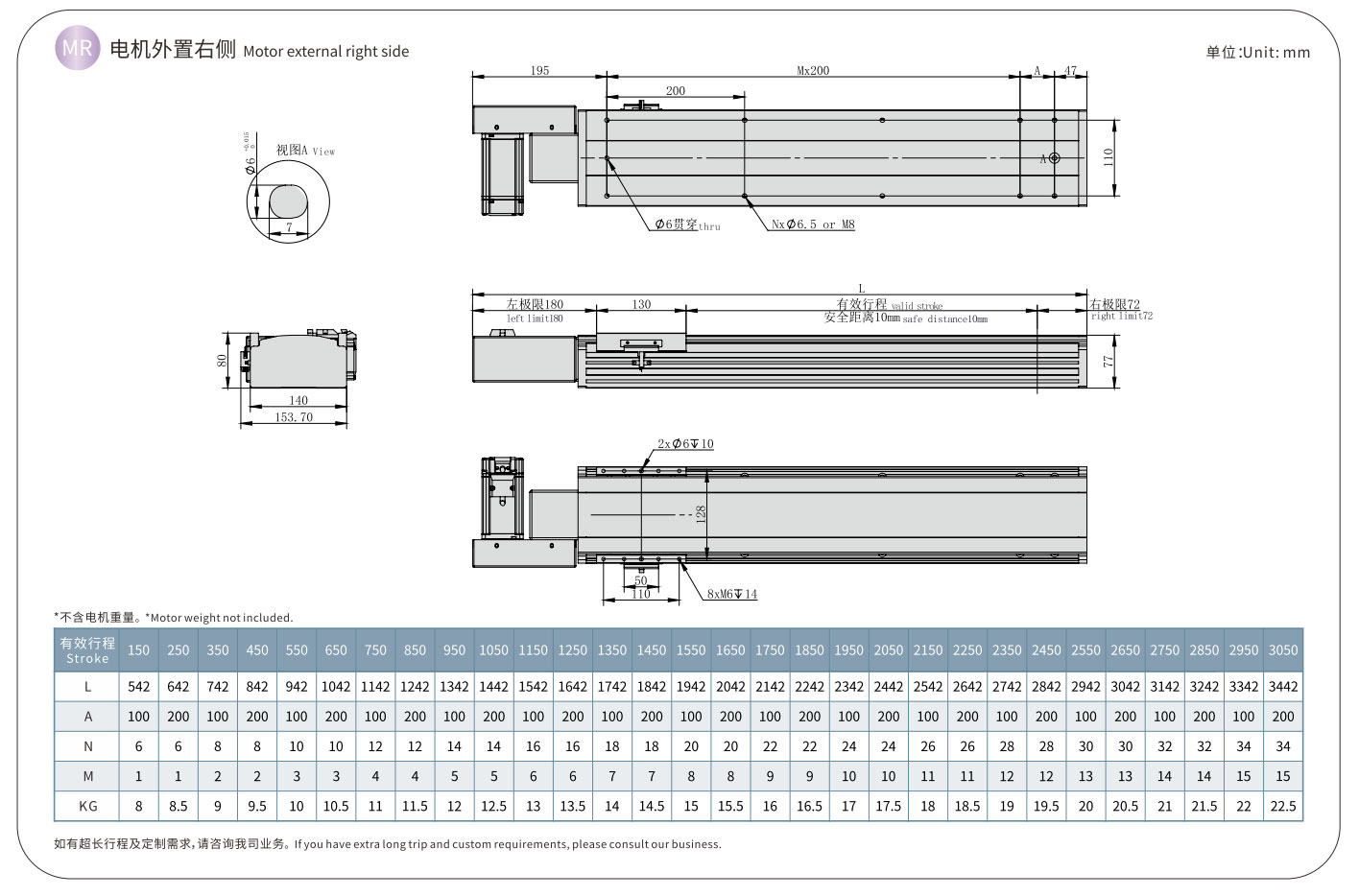
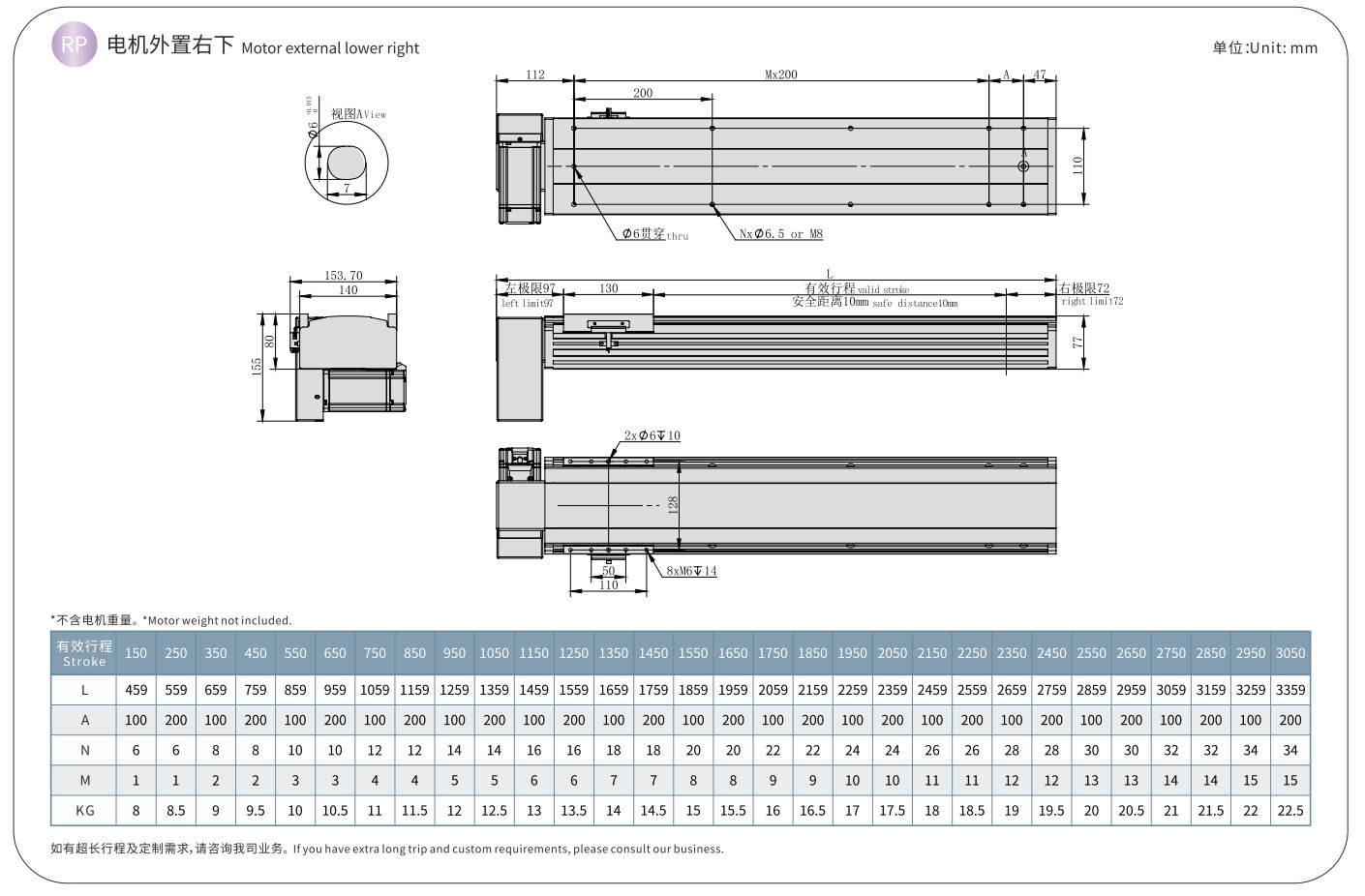
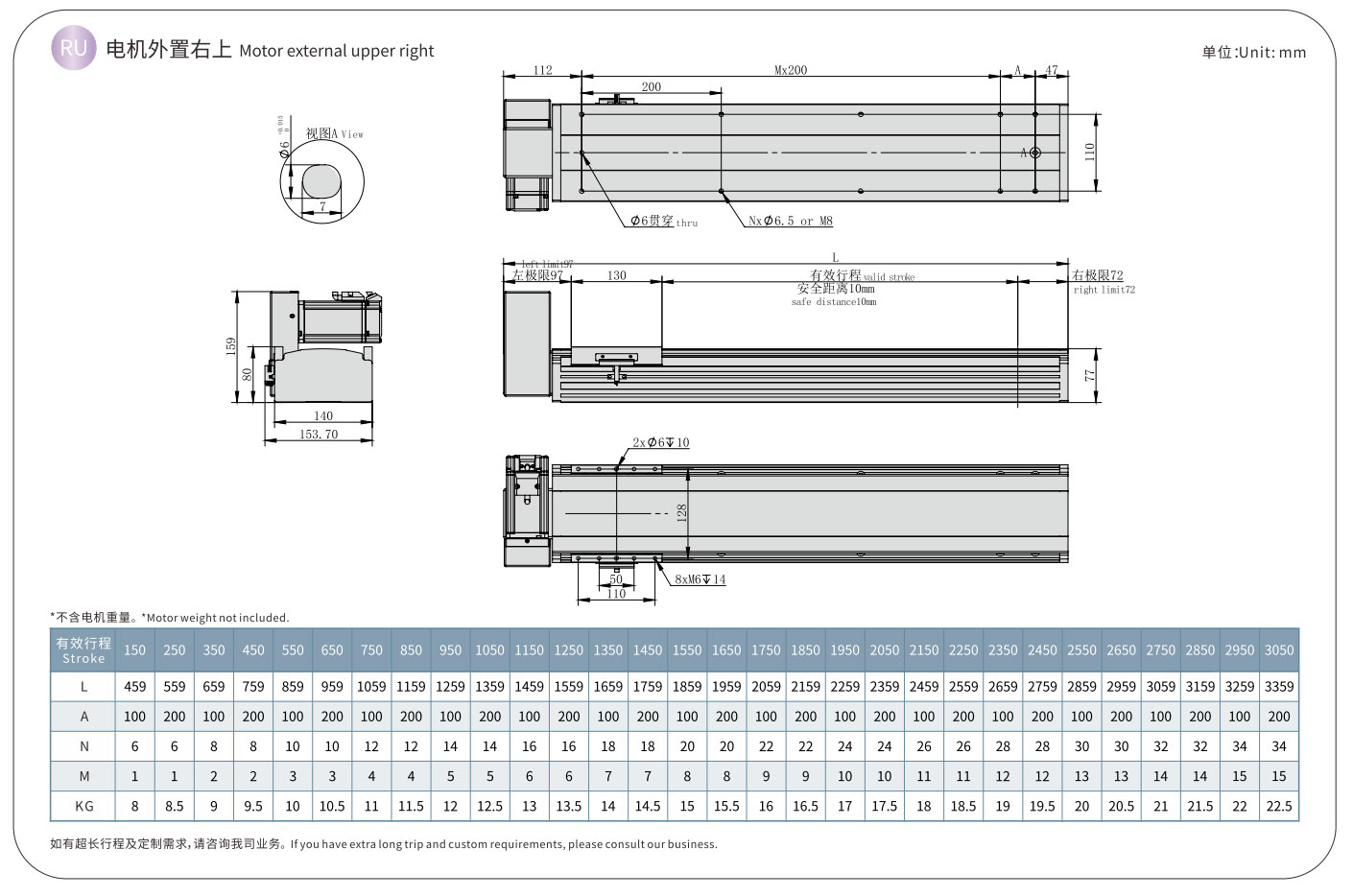
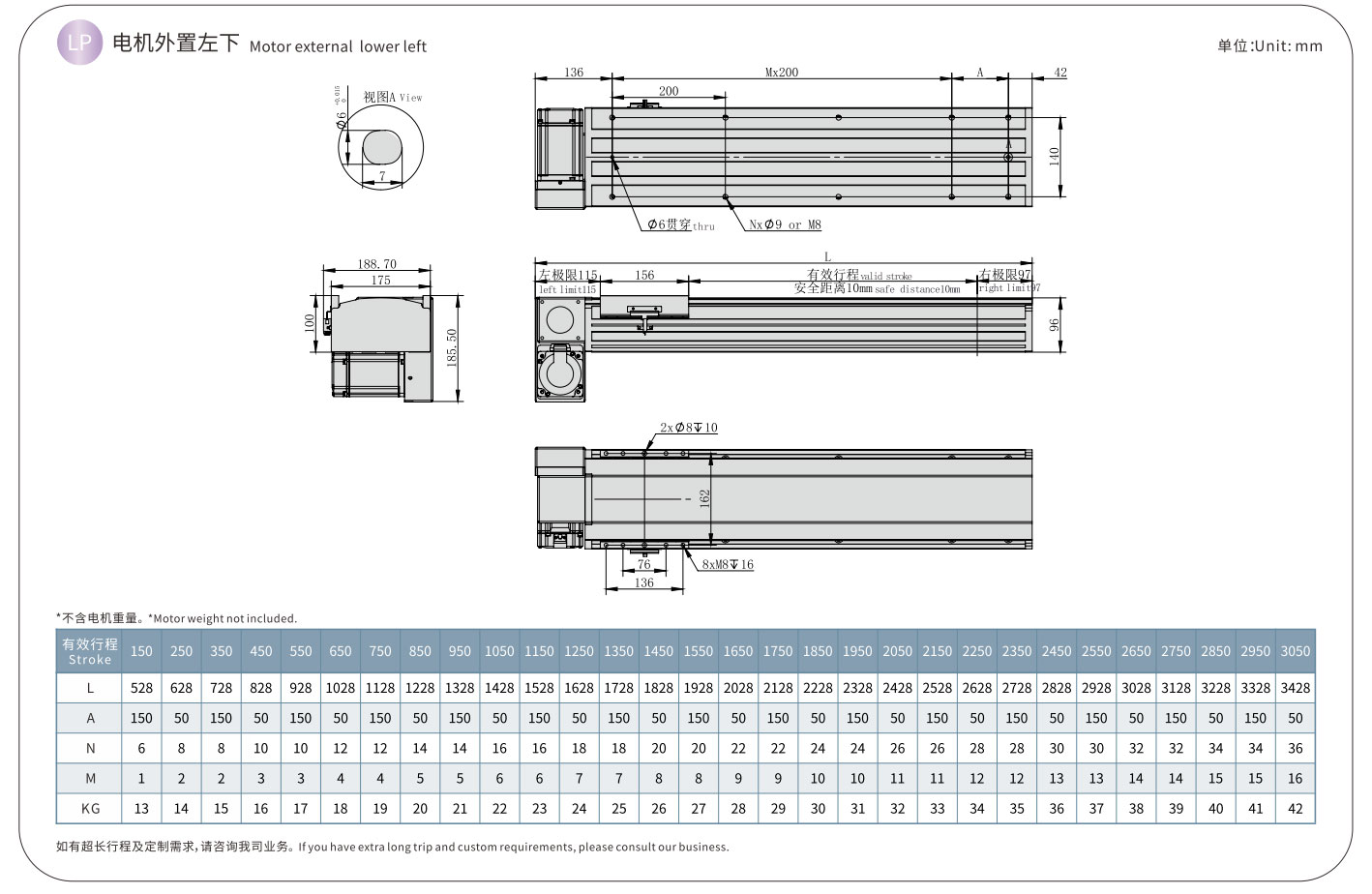
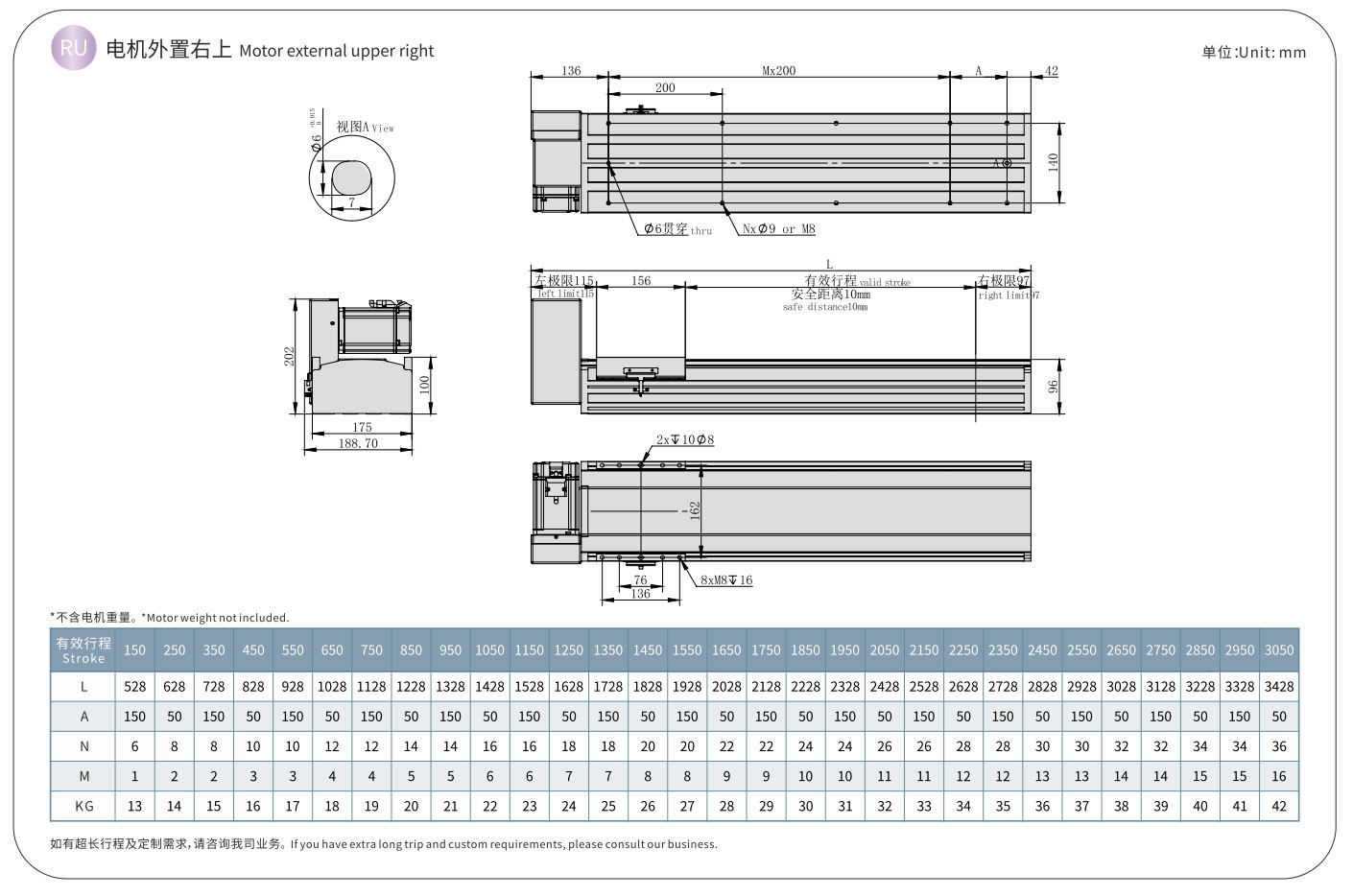
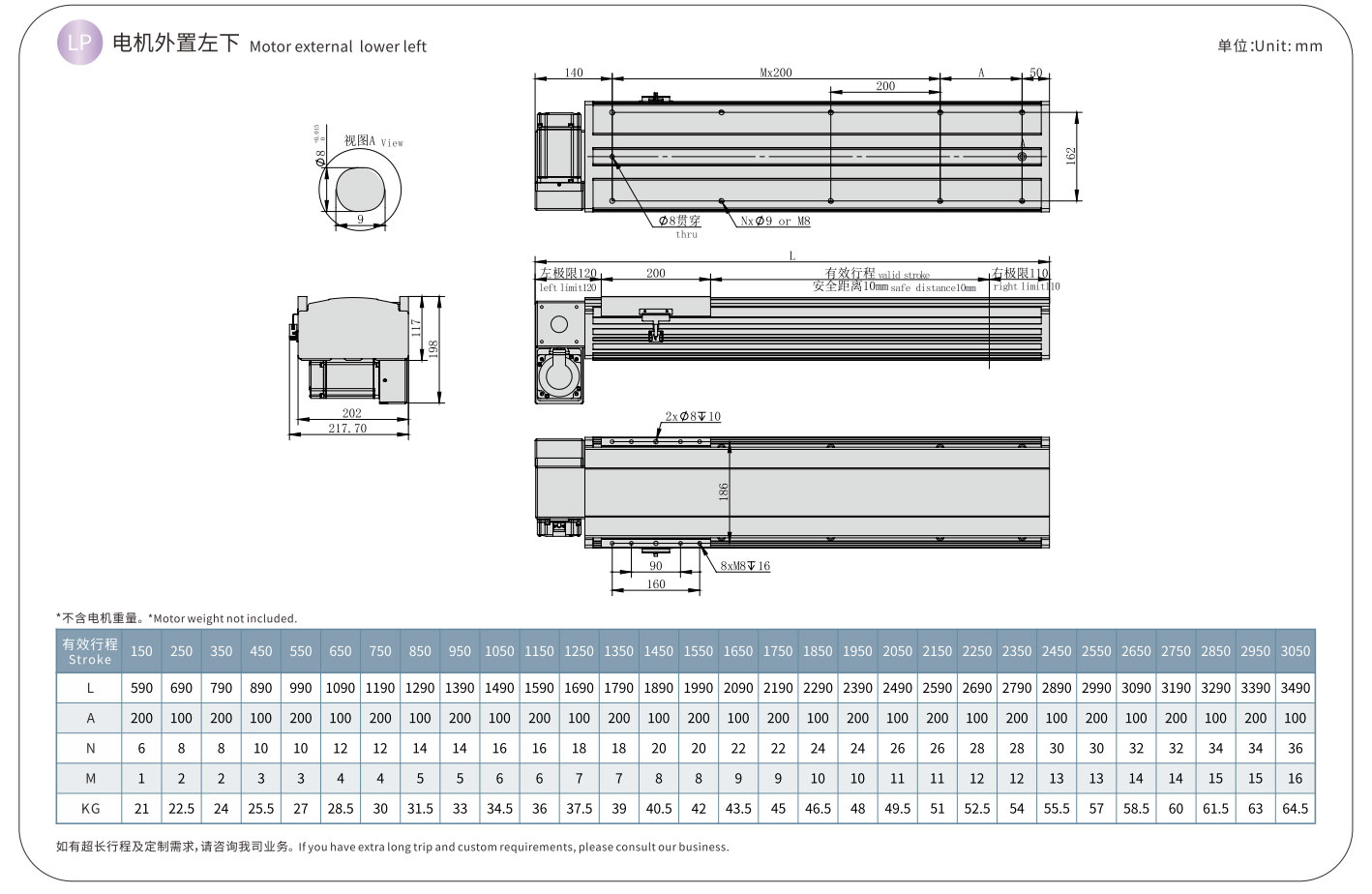
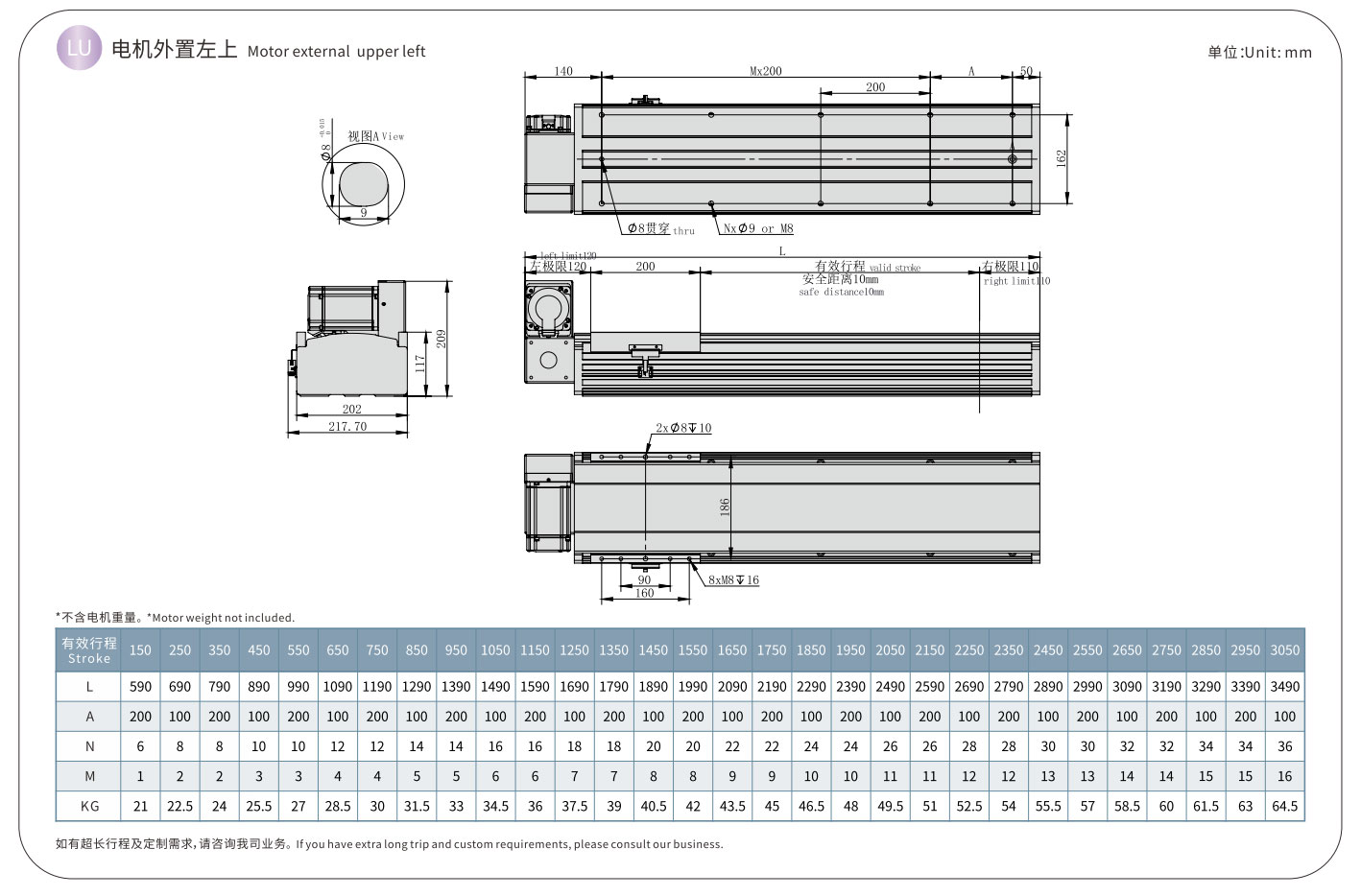
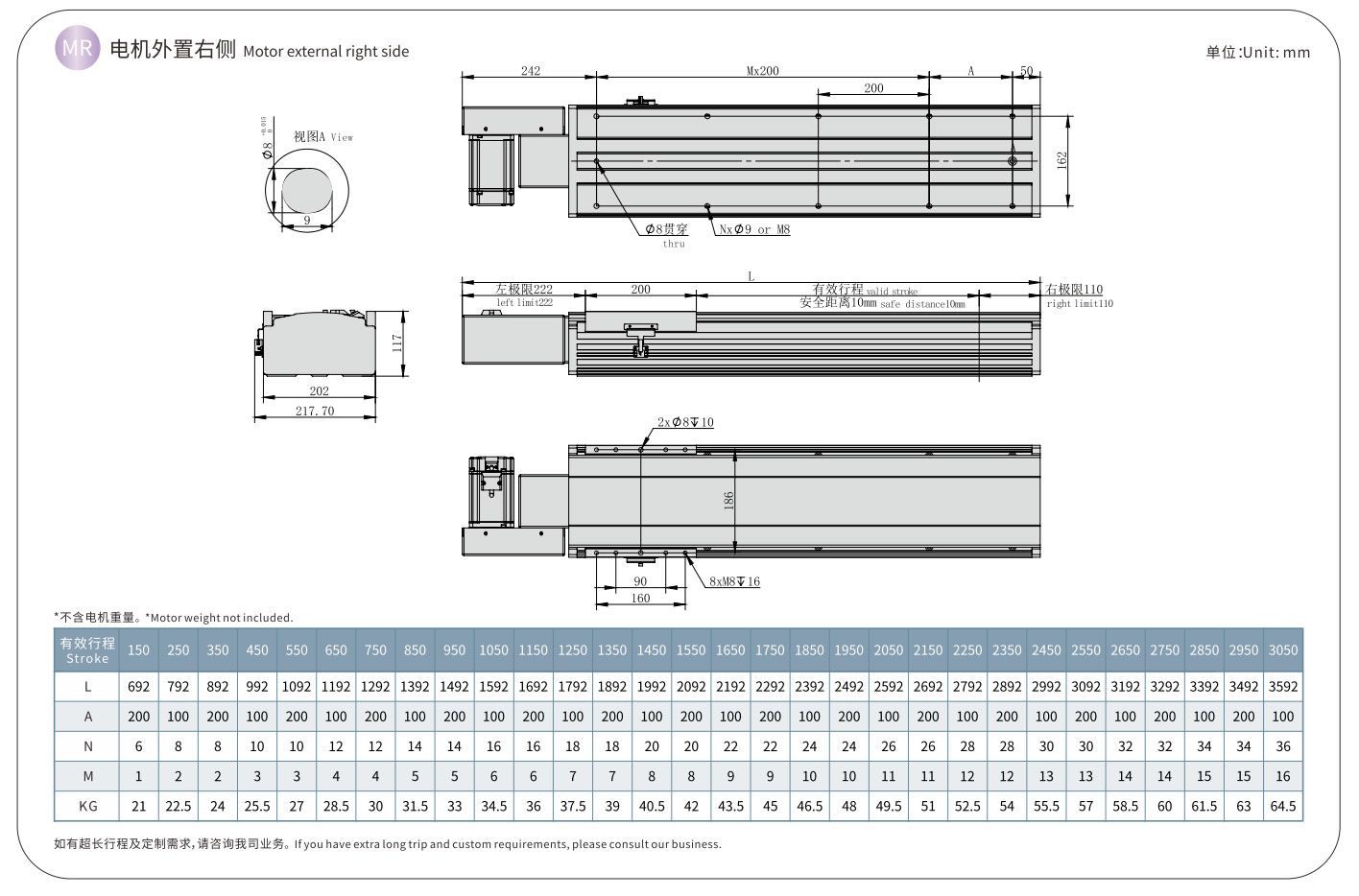
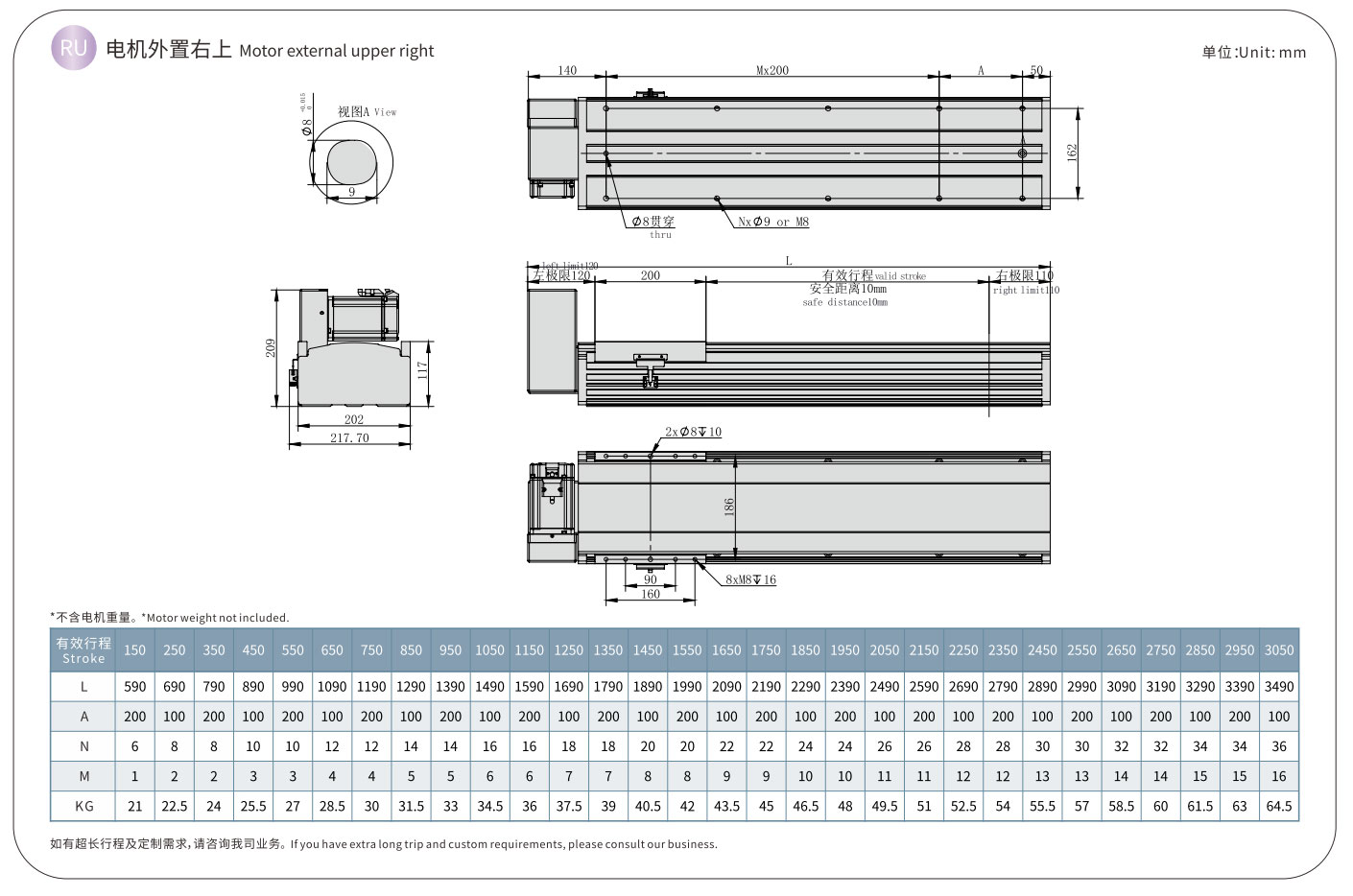
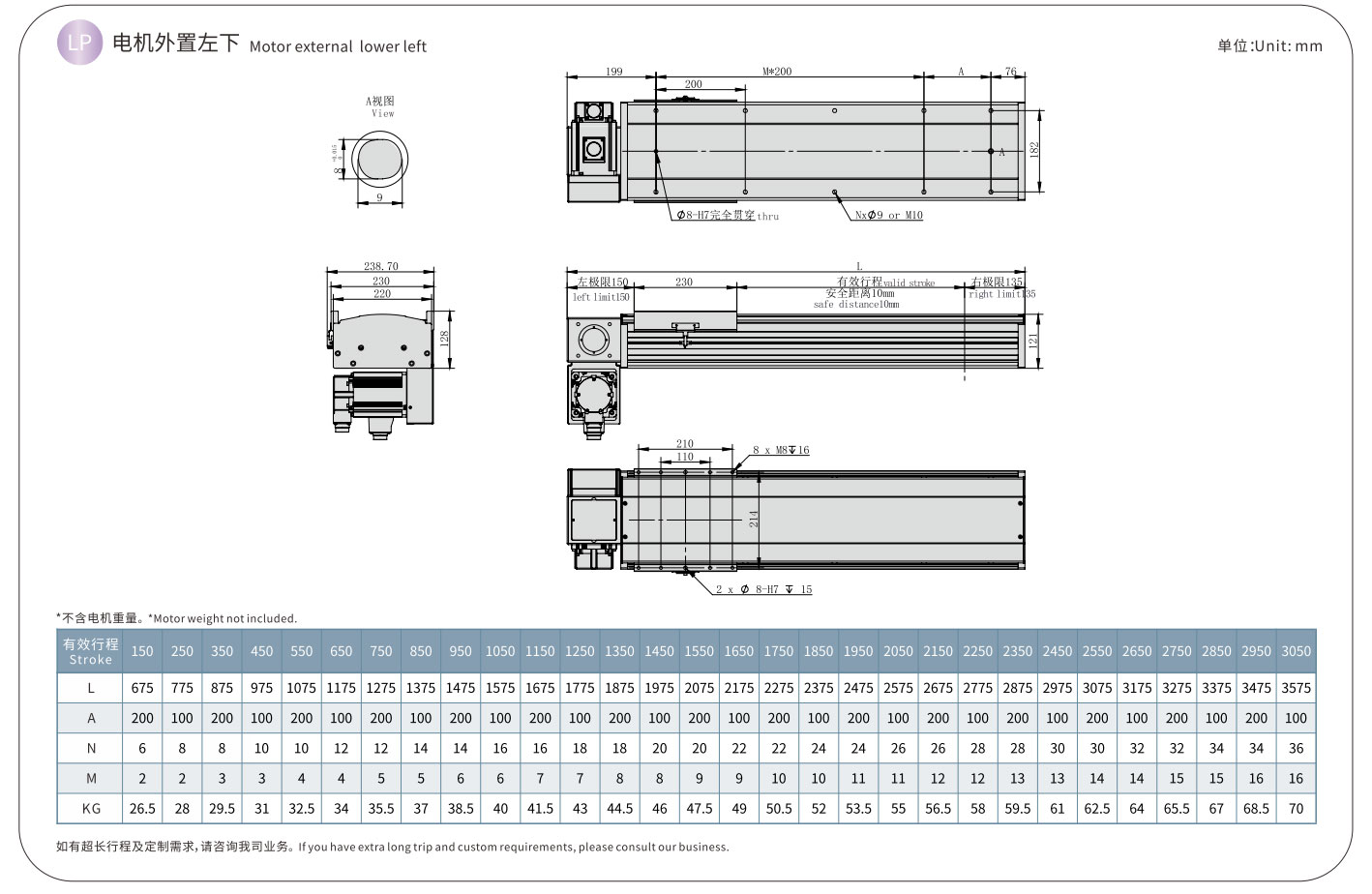
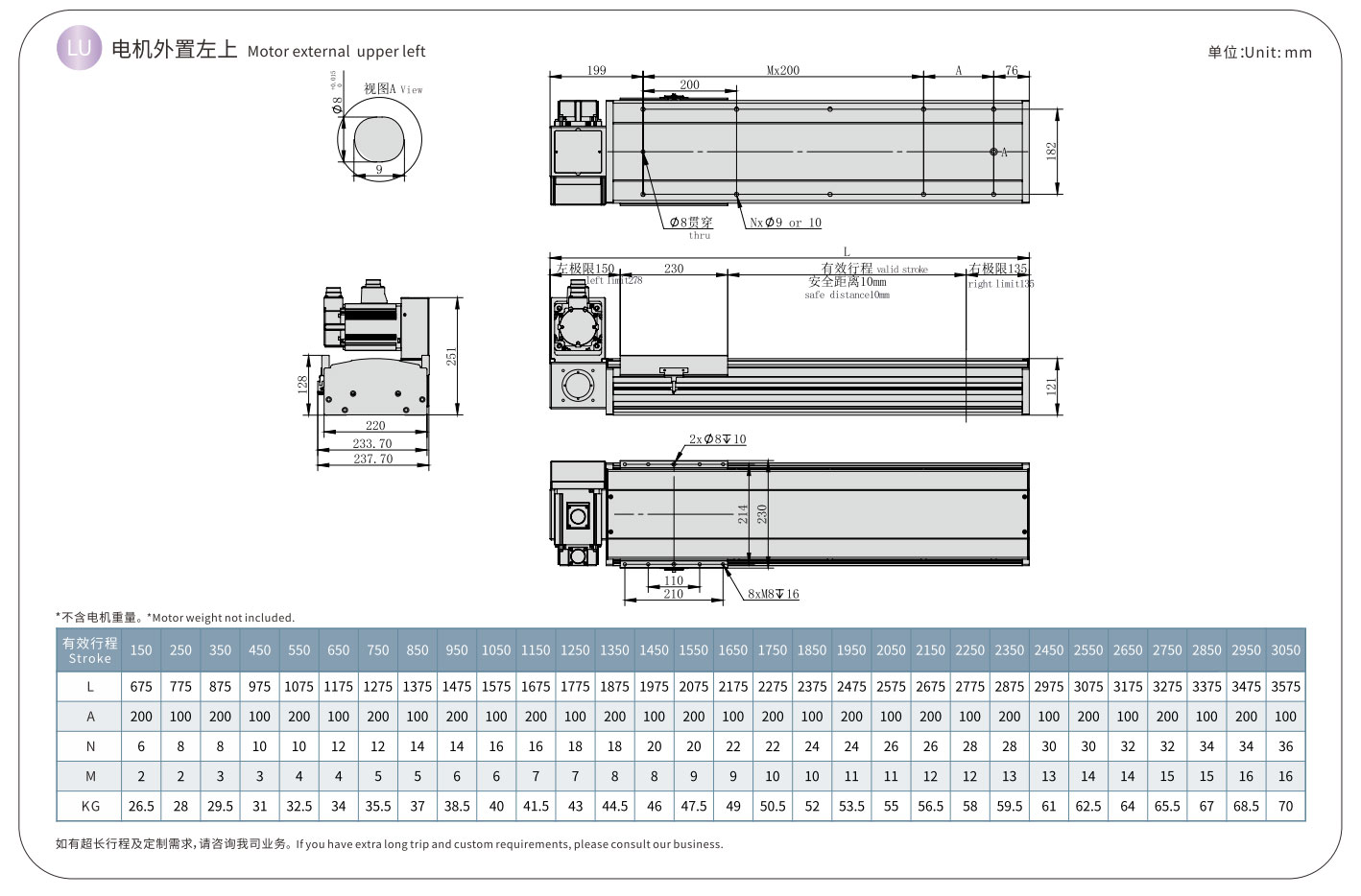
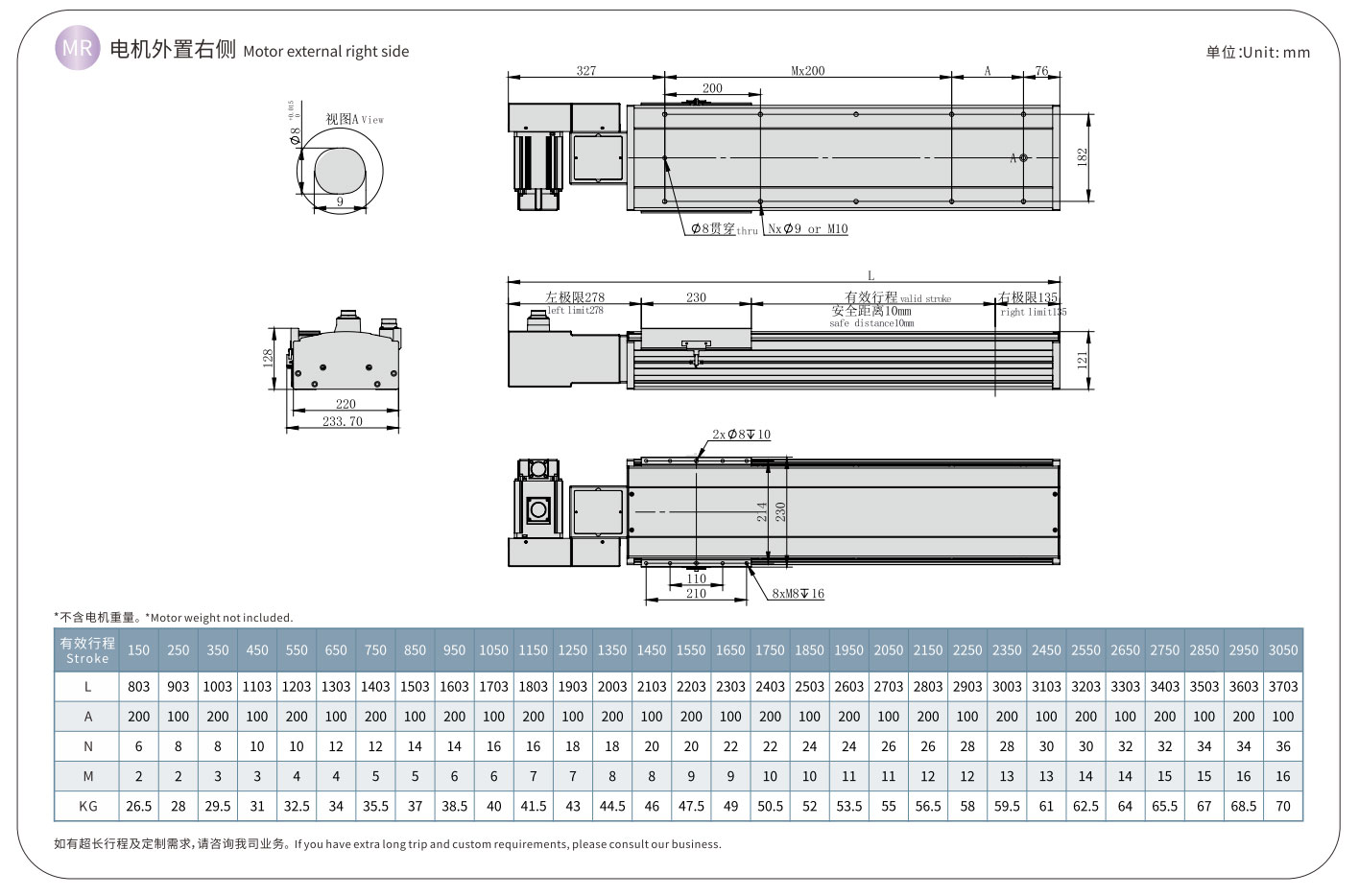
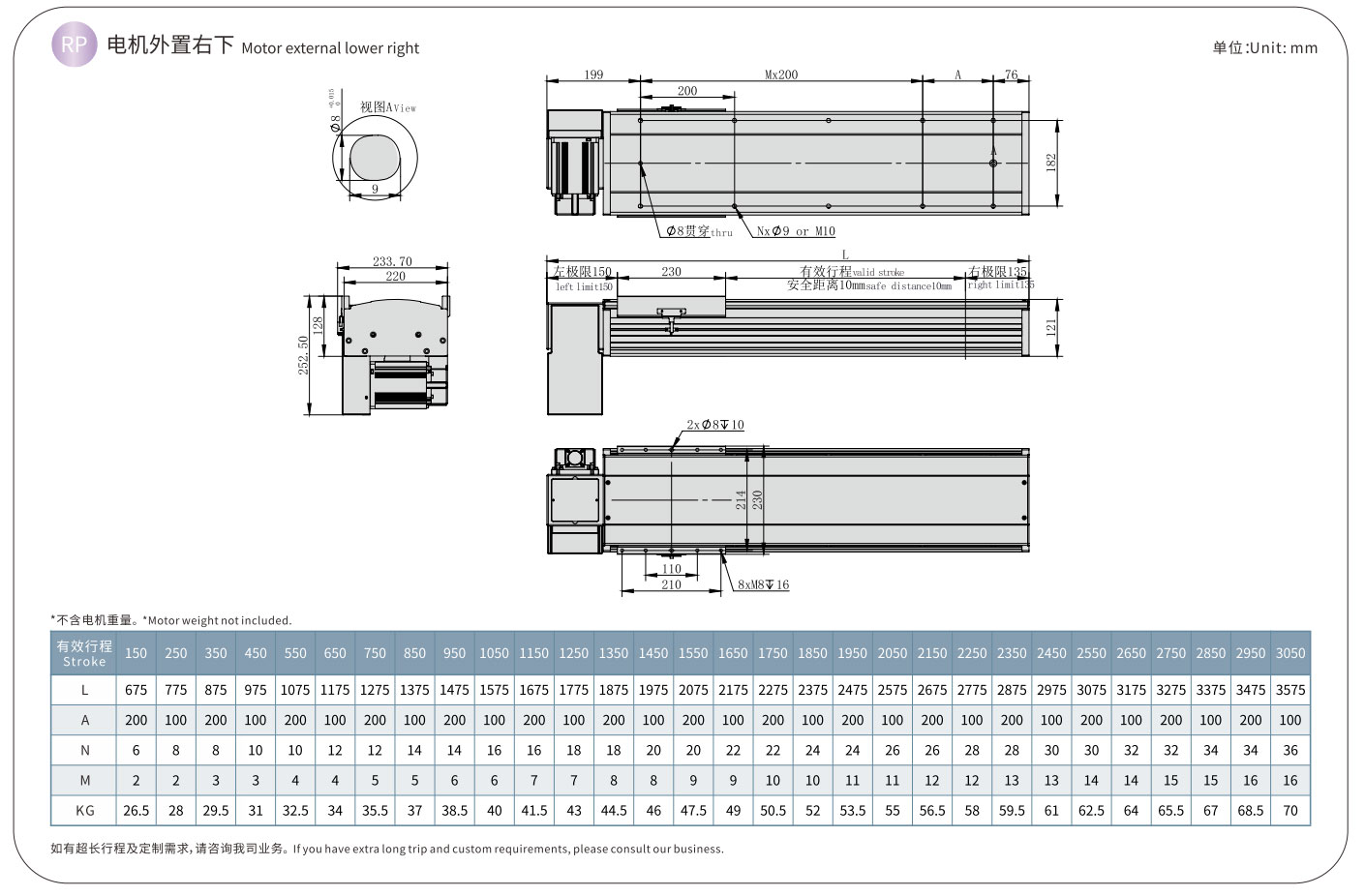
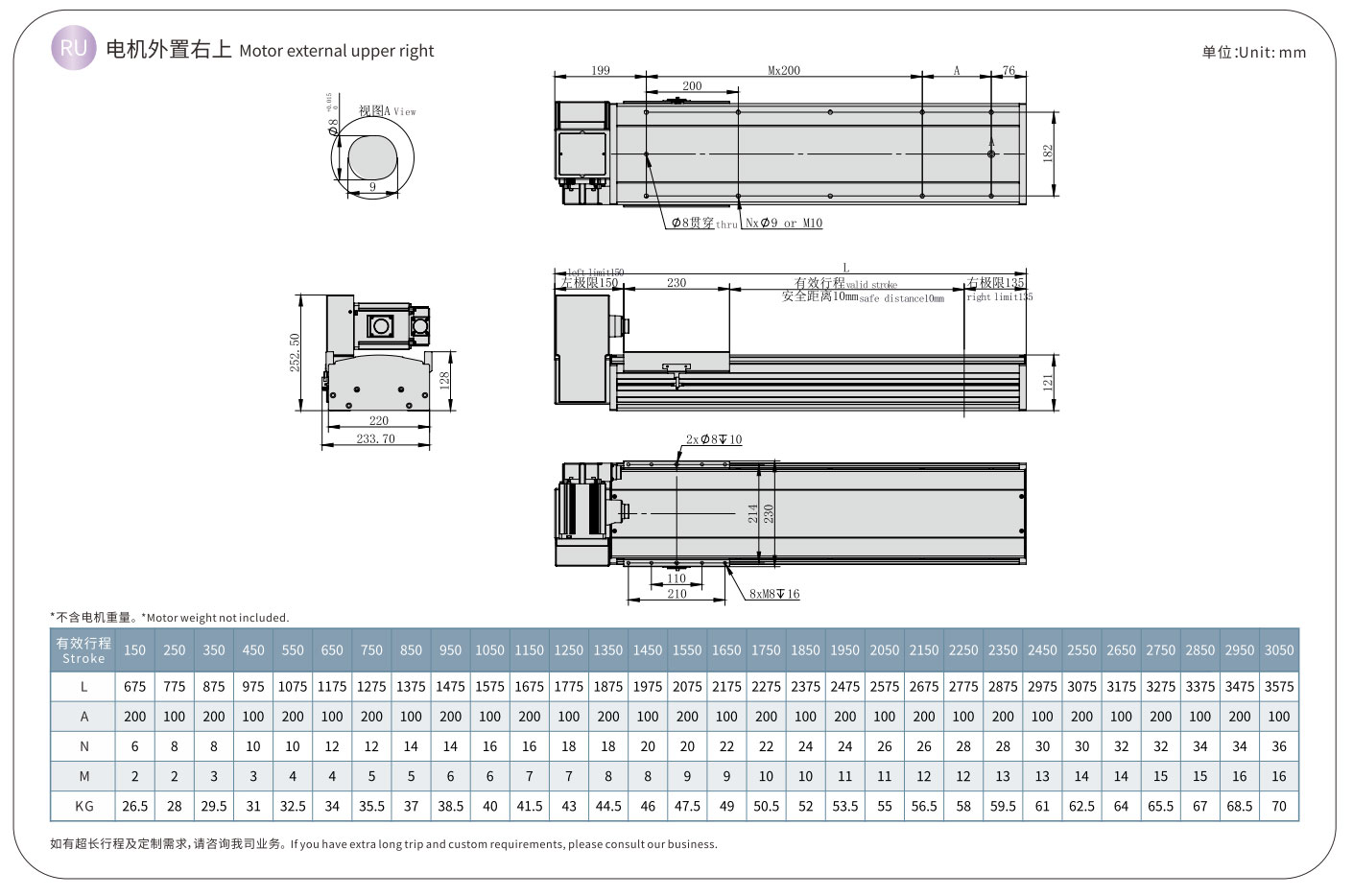
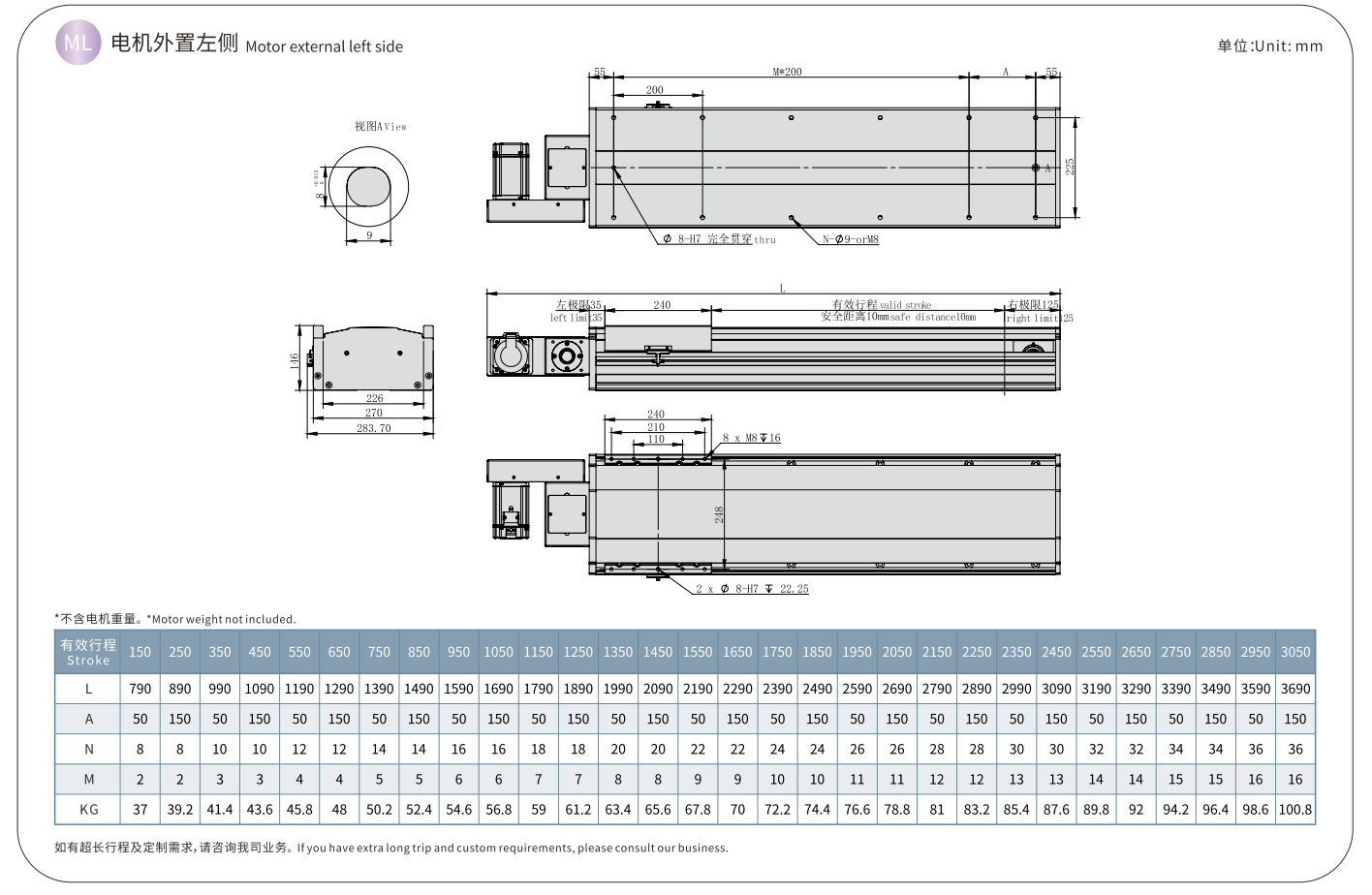
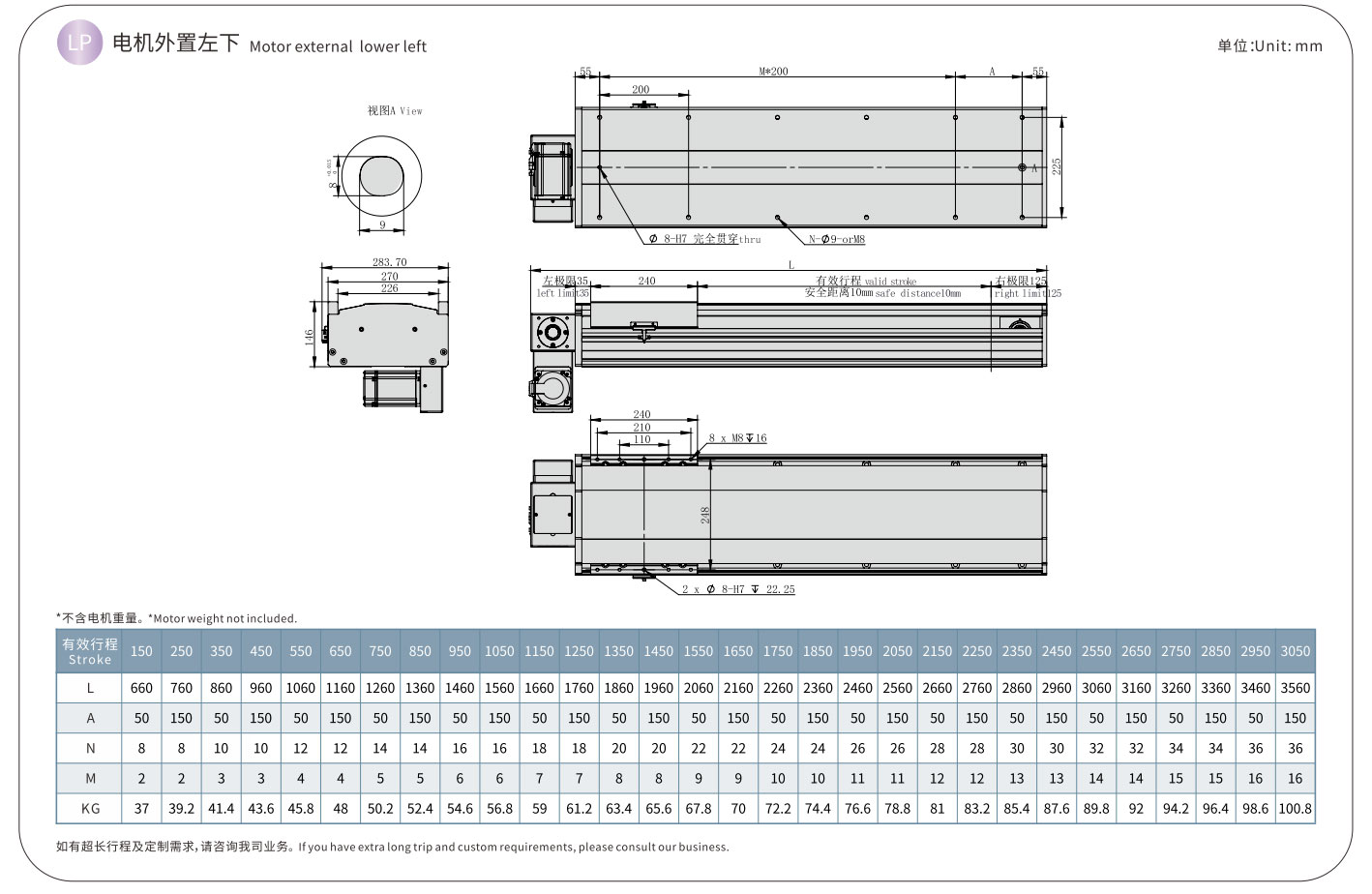
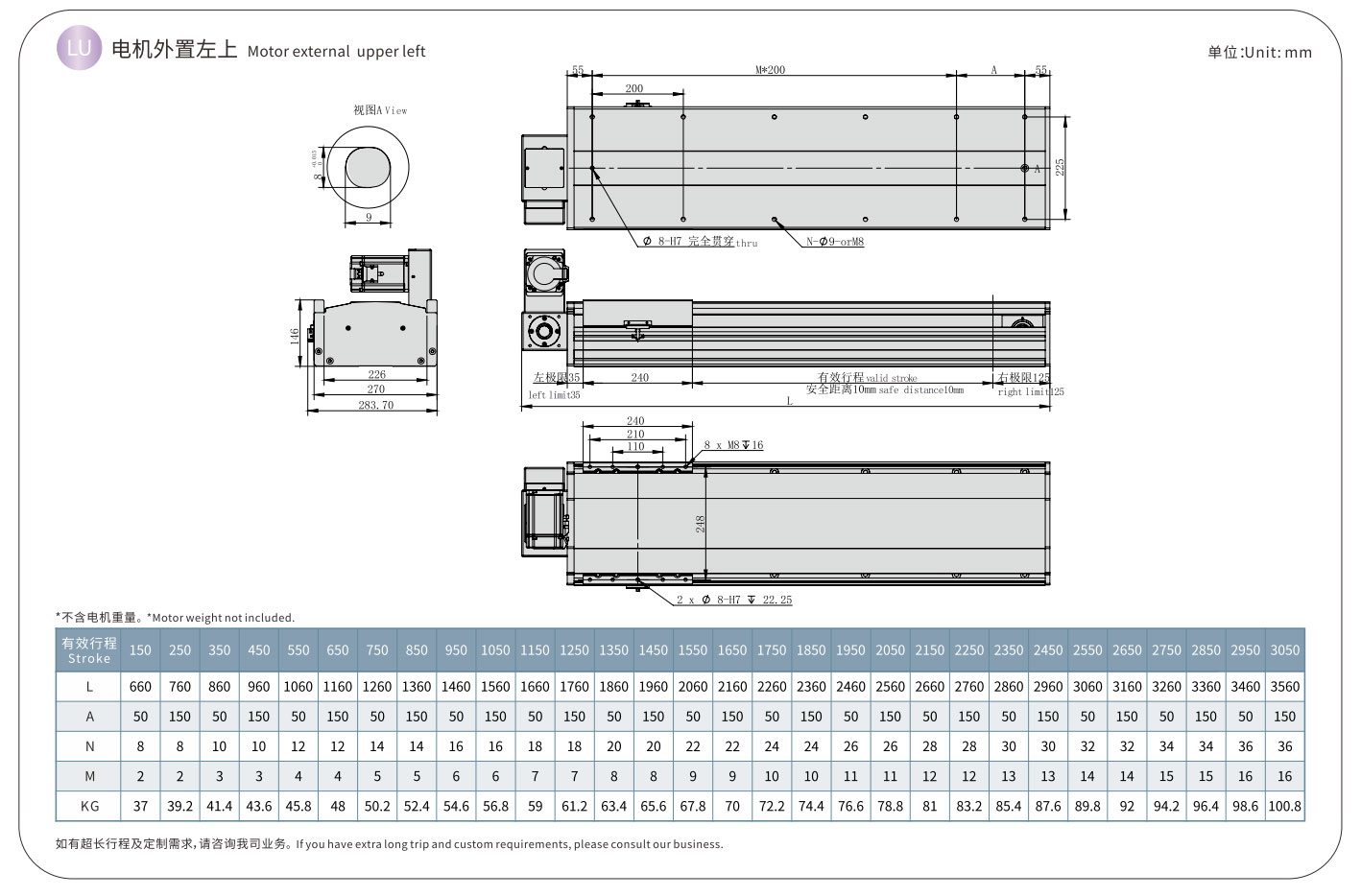
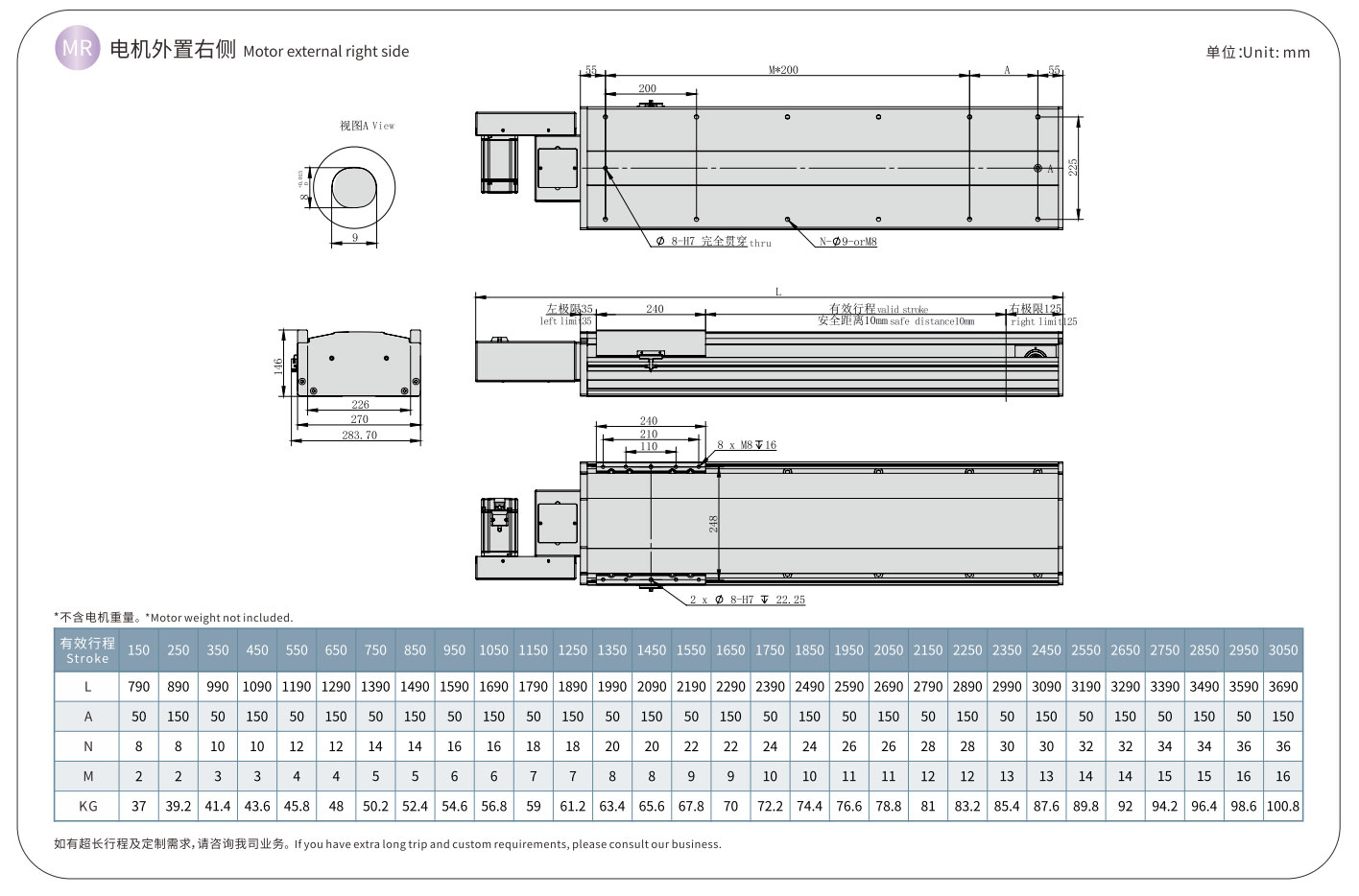
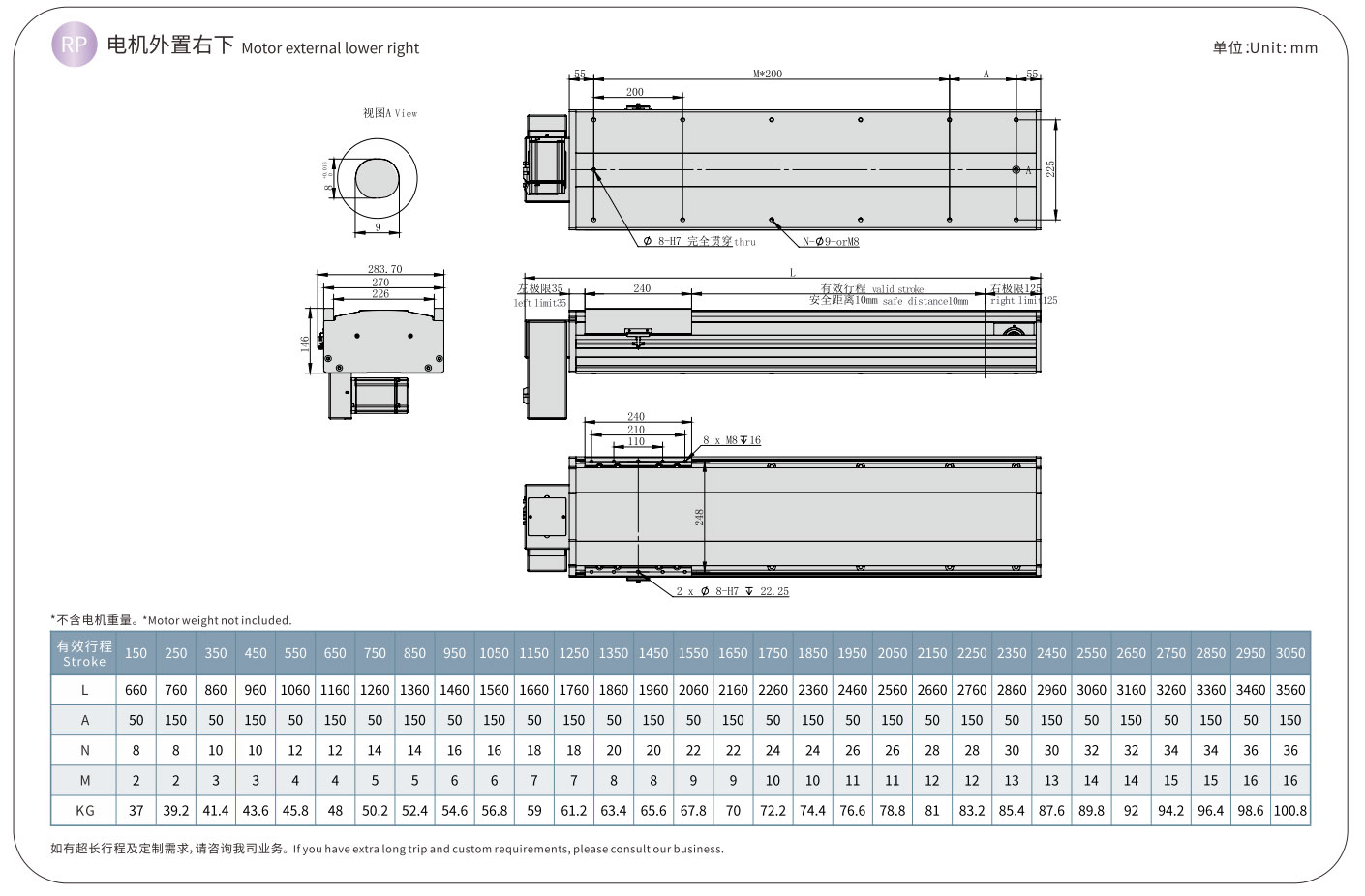
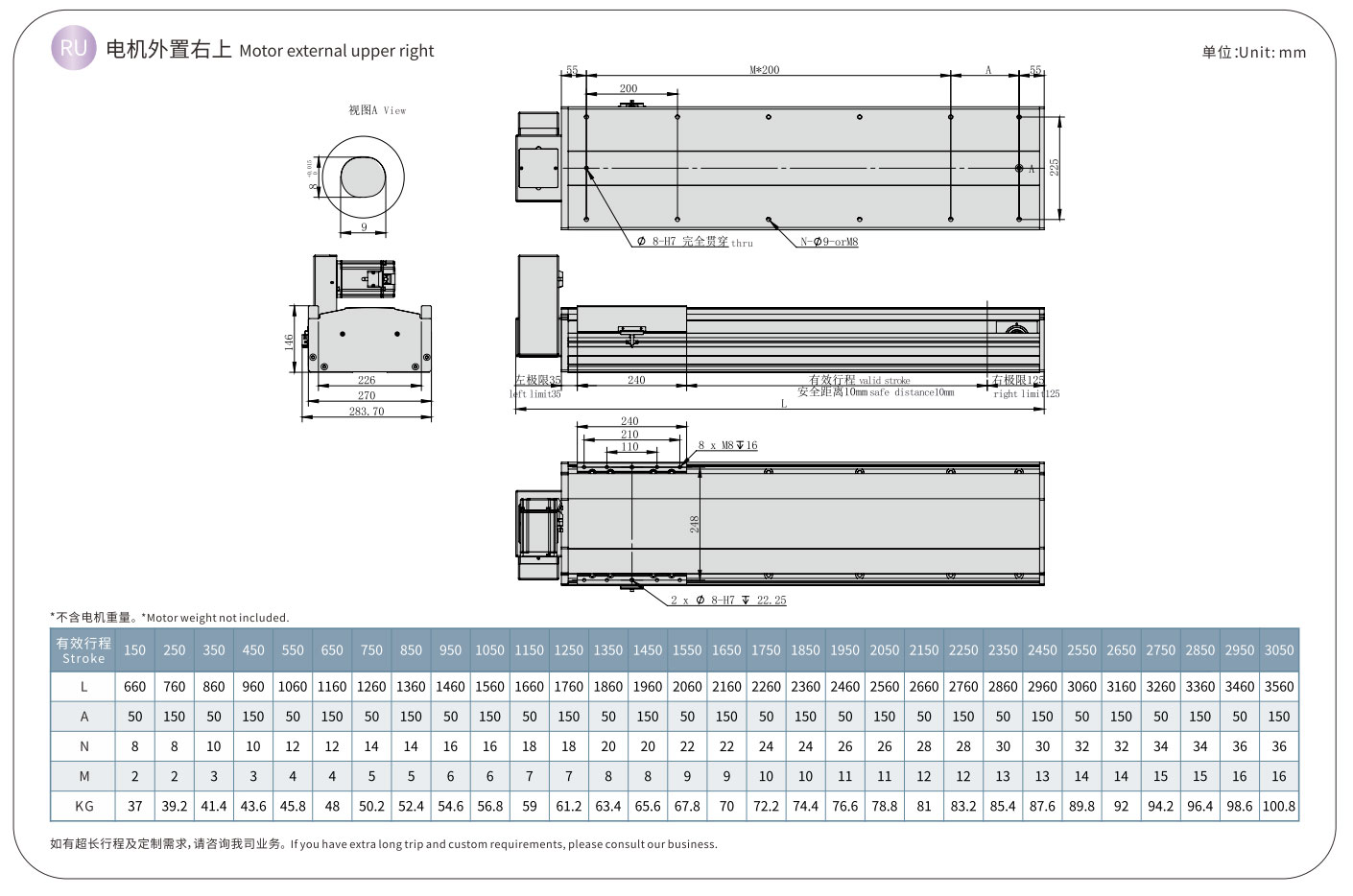
ʻO ka HNB series belt linear actuator he hoʻolālā semi-paʻa kūʻokoʻa, ʻelua mau alakaʻi alakaʻi ikaika ikaika, e hāʻawi i ka torque kiʻekiʻe a me ka wikiwiki, hiki iā TPA ROBOT ke hāʻawi i 200 mau ʻano o ka HNB belt-driven actuators o nā laulā like ʻole a me nā lōʻihi e hālāwai me ka mea kūʻai. pono no ka ukana a me ka hele ana. Hiki i ka wikiwiki kiʻekiʻe ke piʻi i 6000mm/s, a hiki i ka ʻenekinia ke hana maʻalahi i ka Cartesian robot a i ʻole gantry robots e hoʻokō i nā pono automation o nā ʻoihana like ʻole.
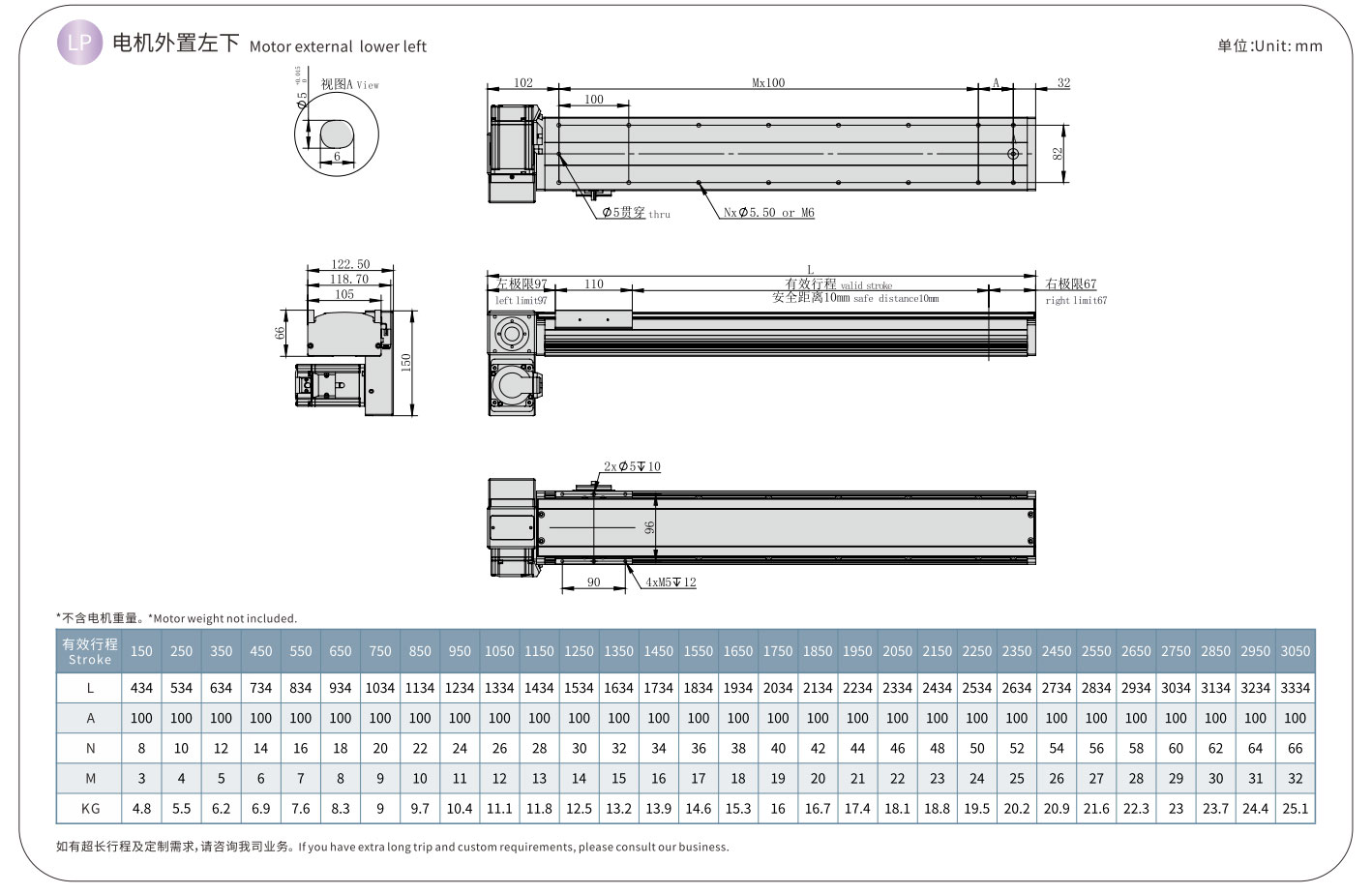
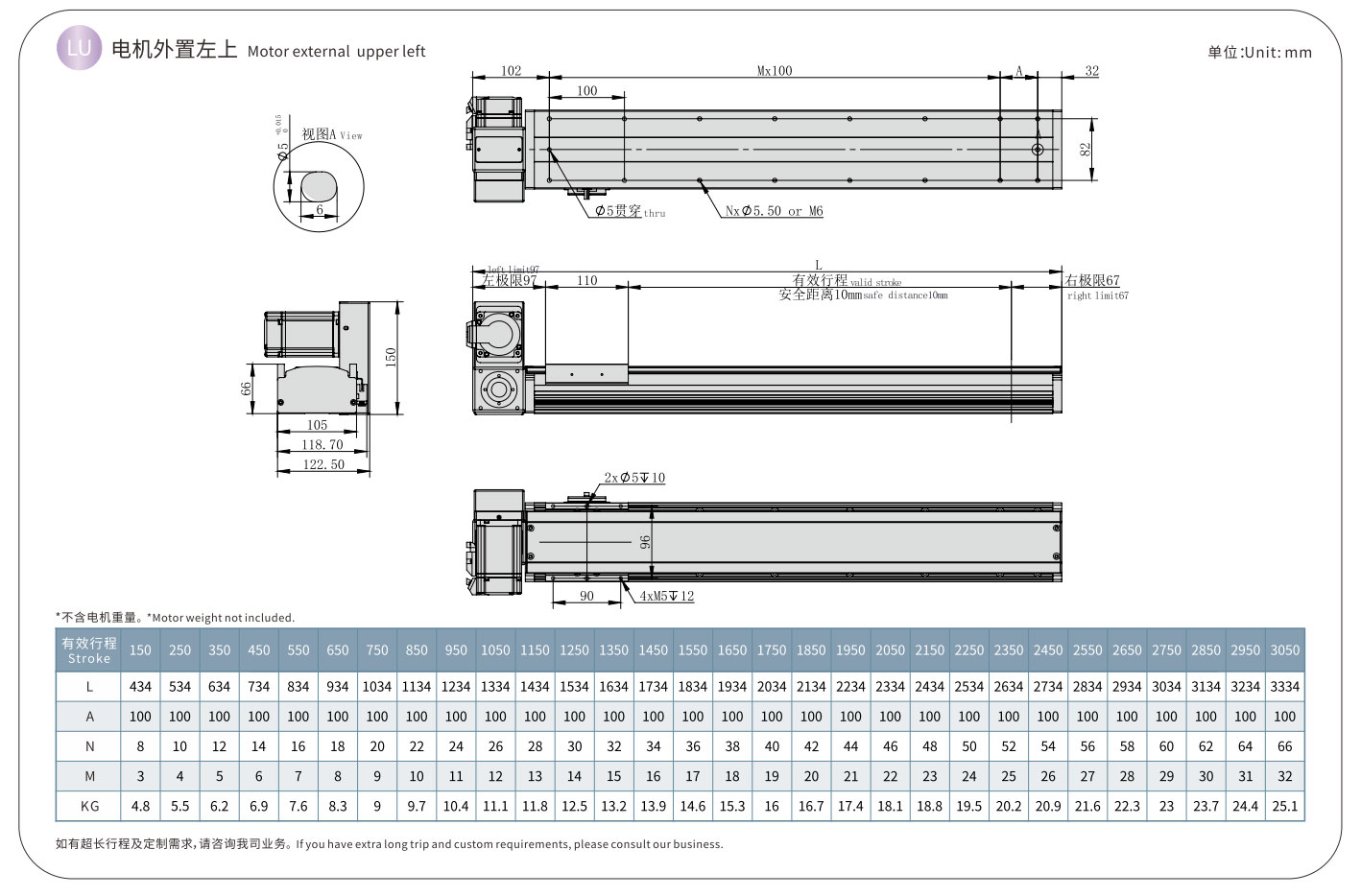
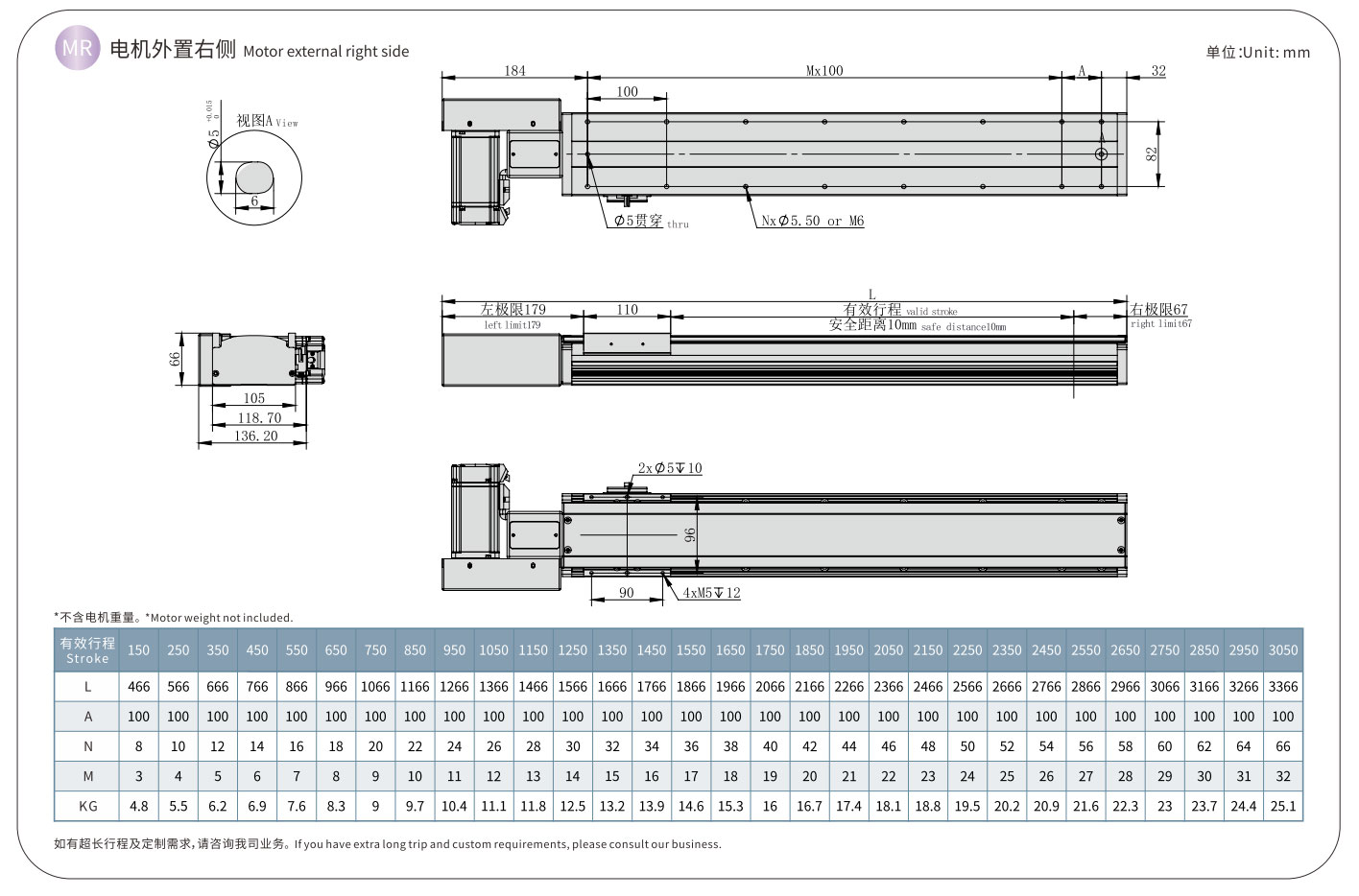
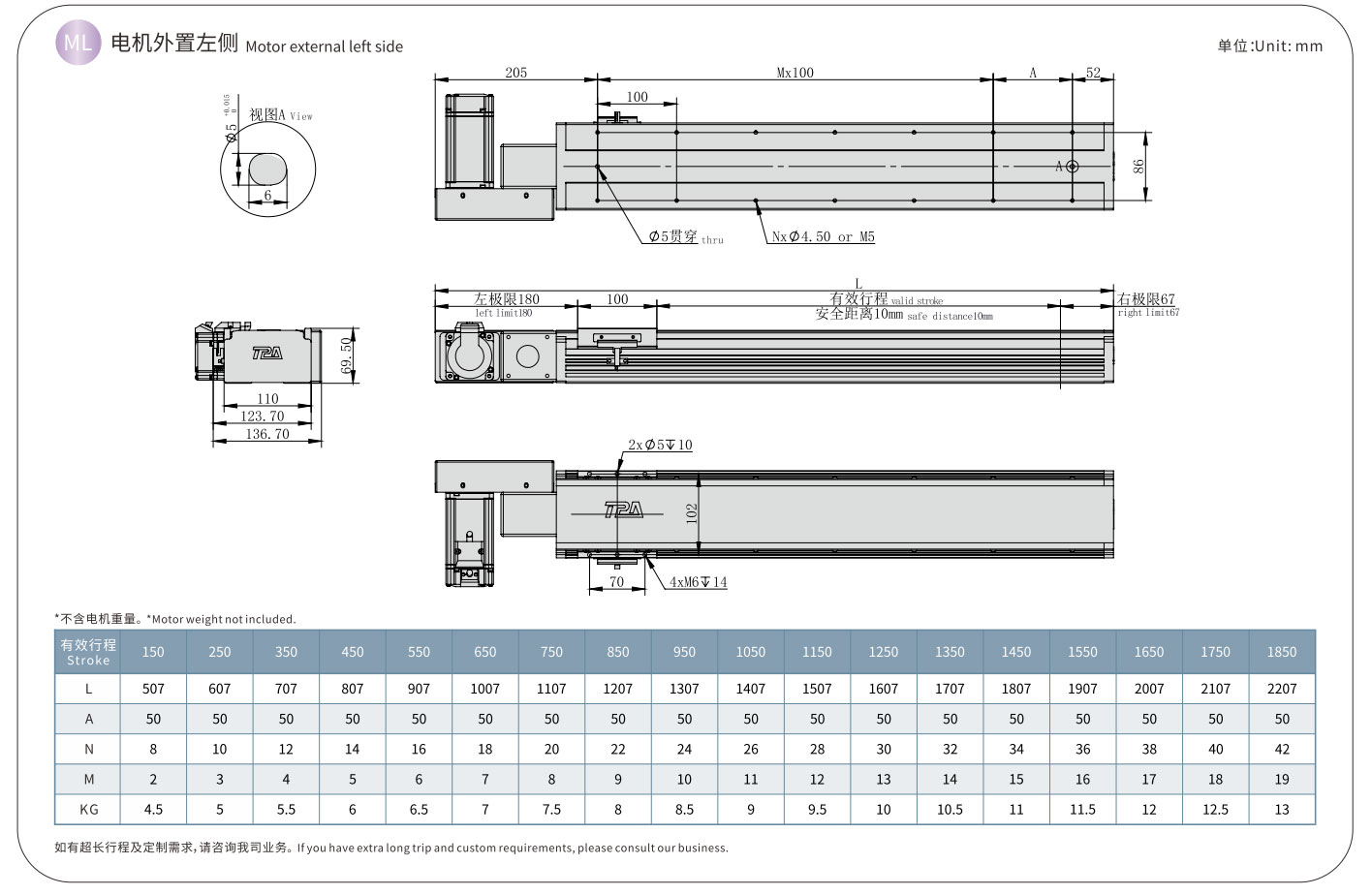
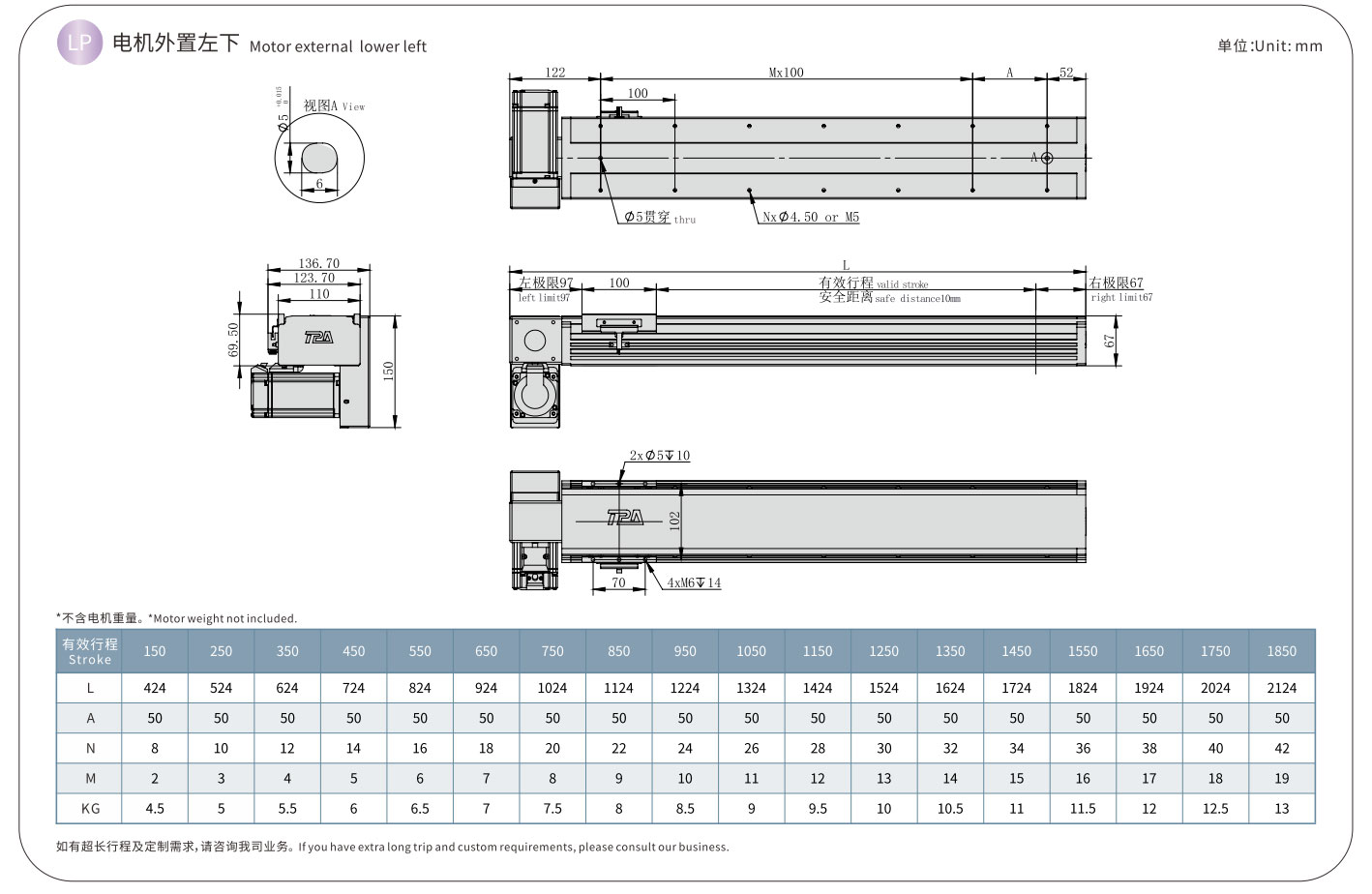
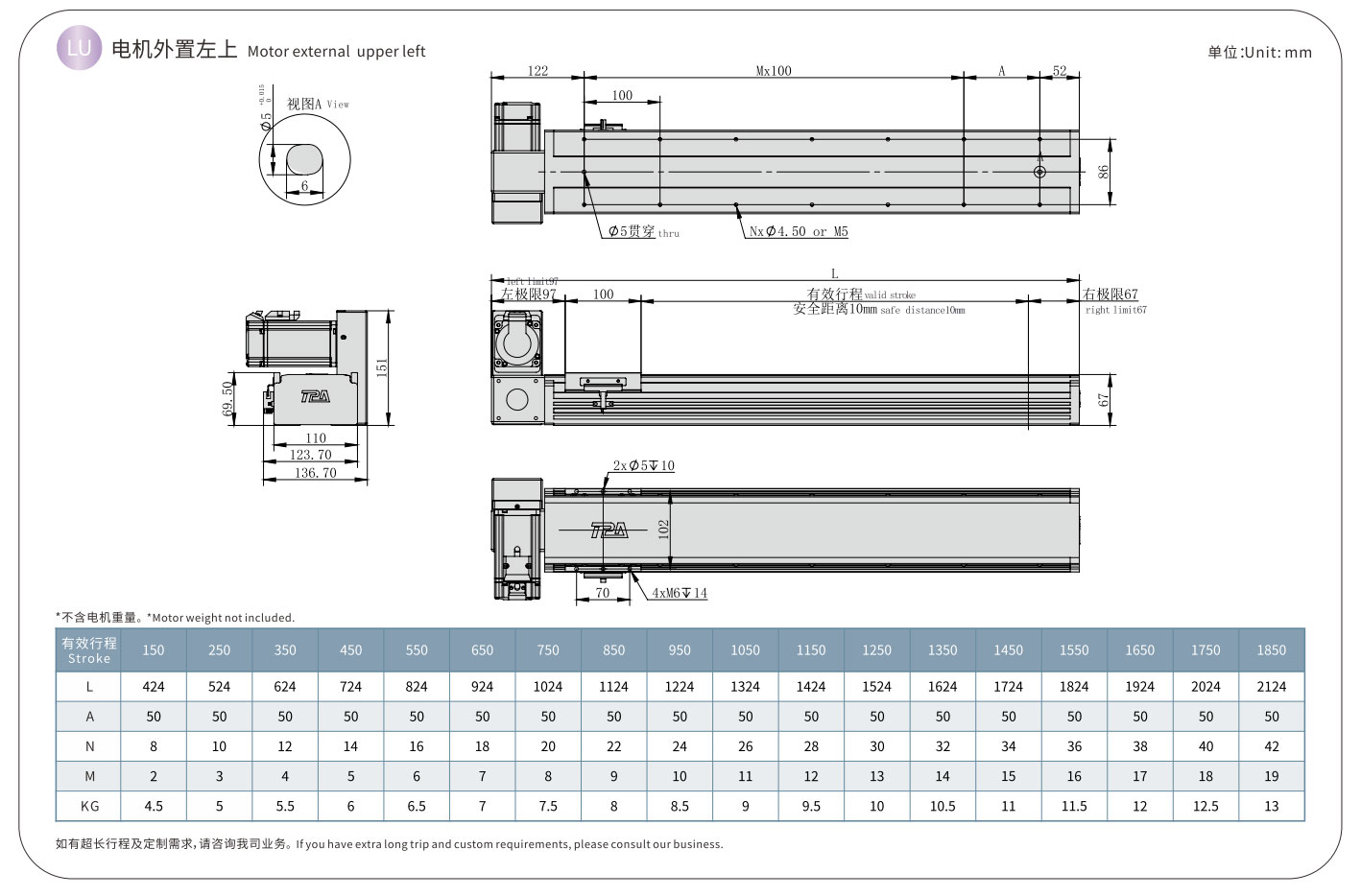
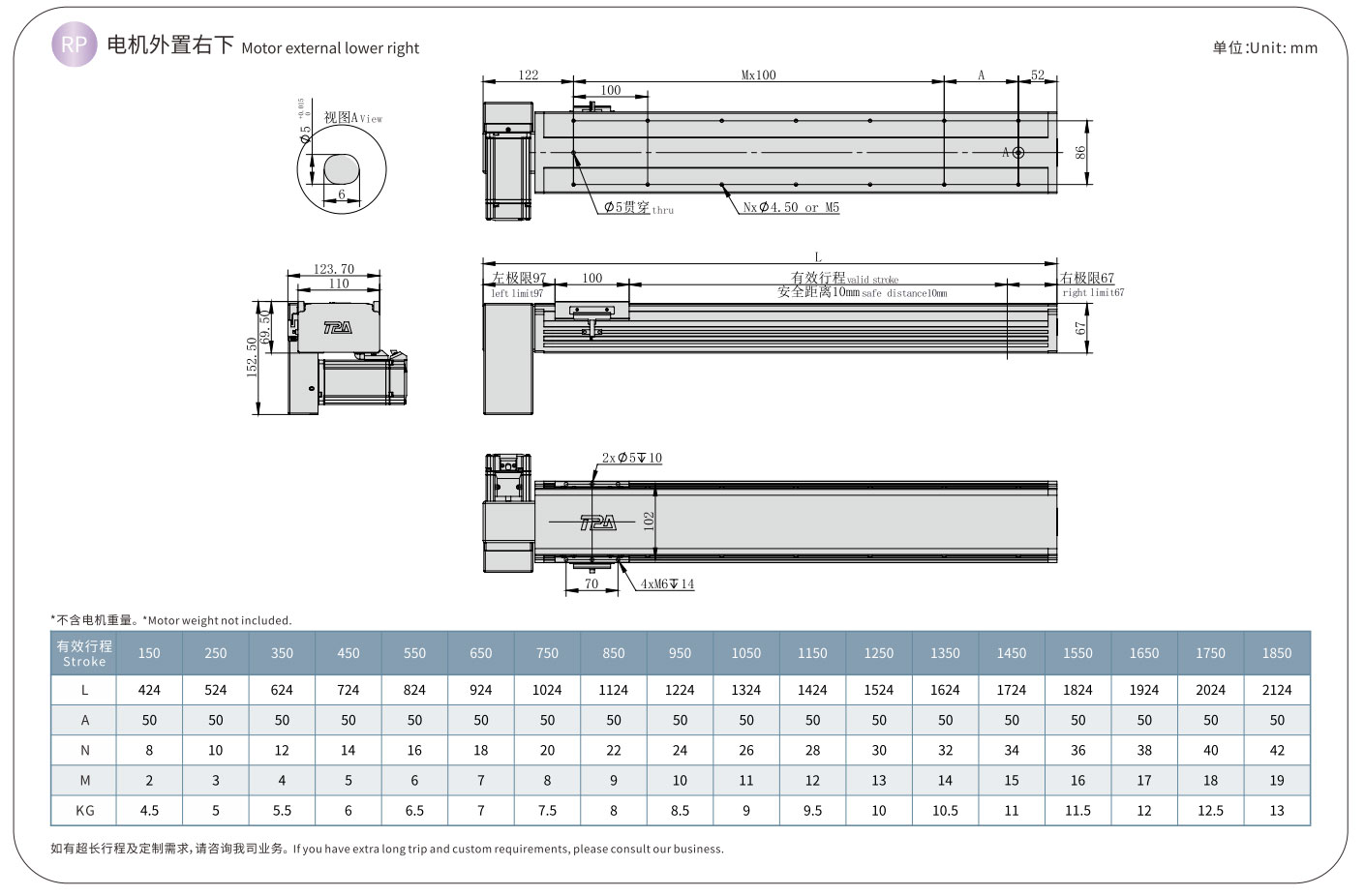
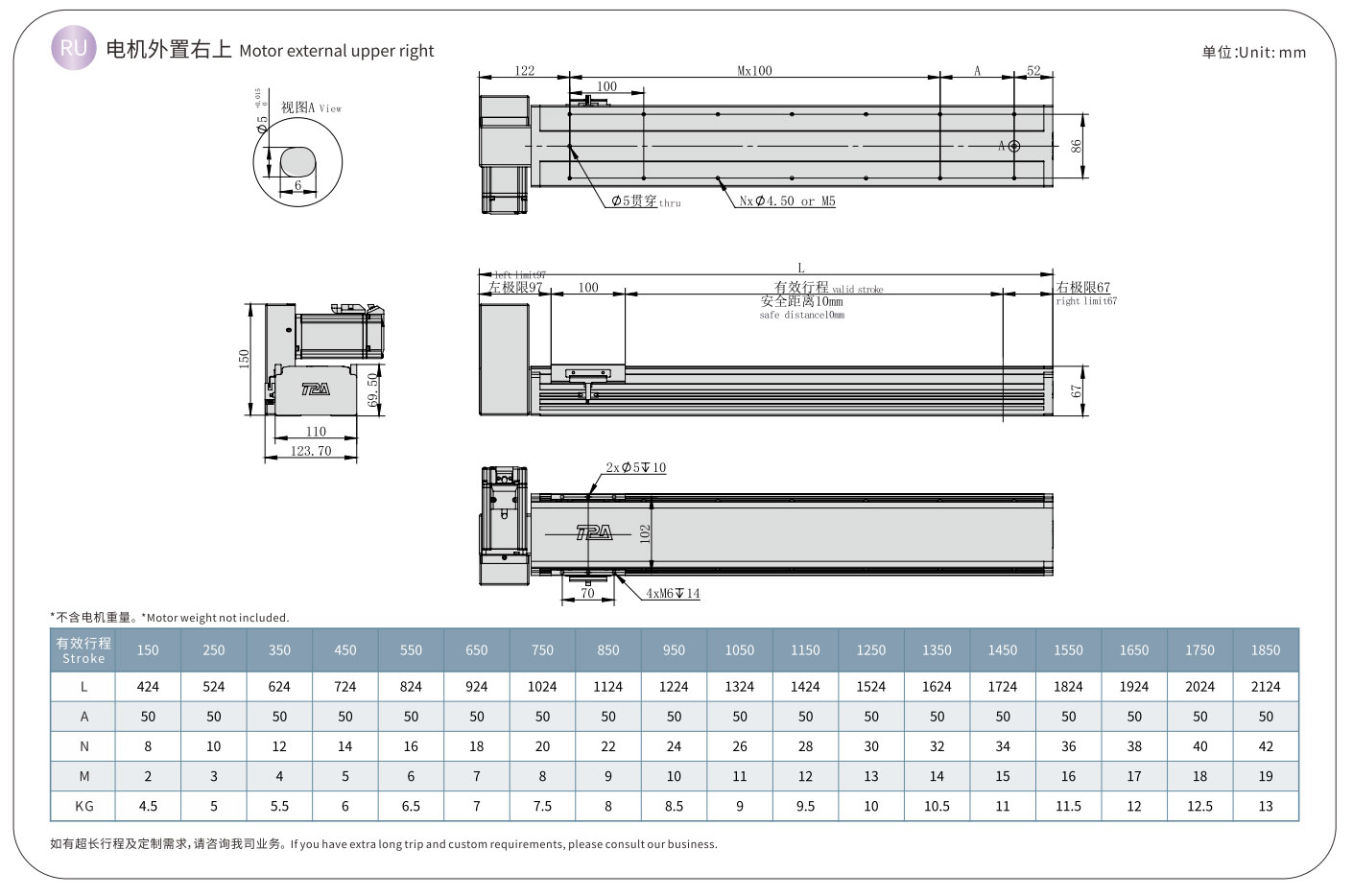
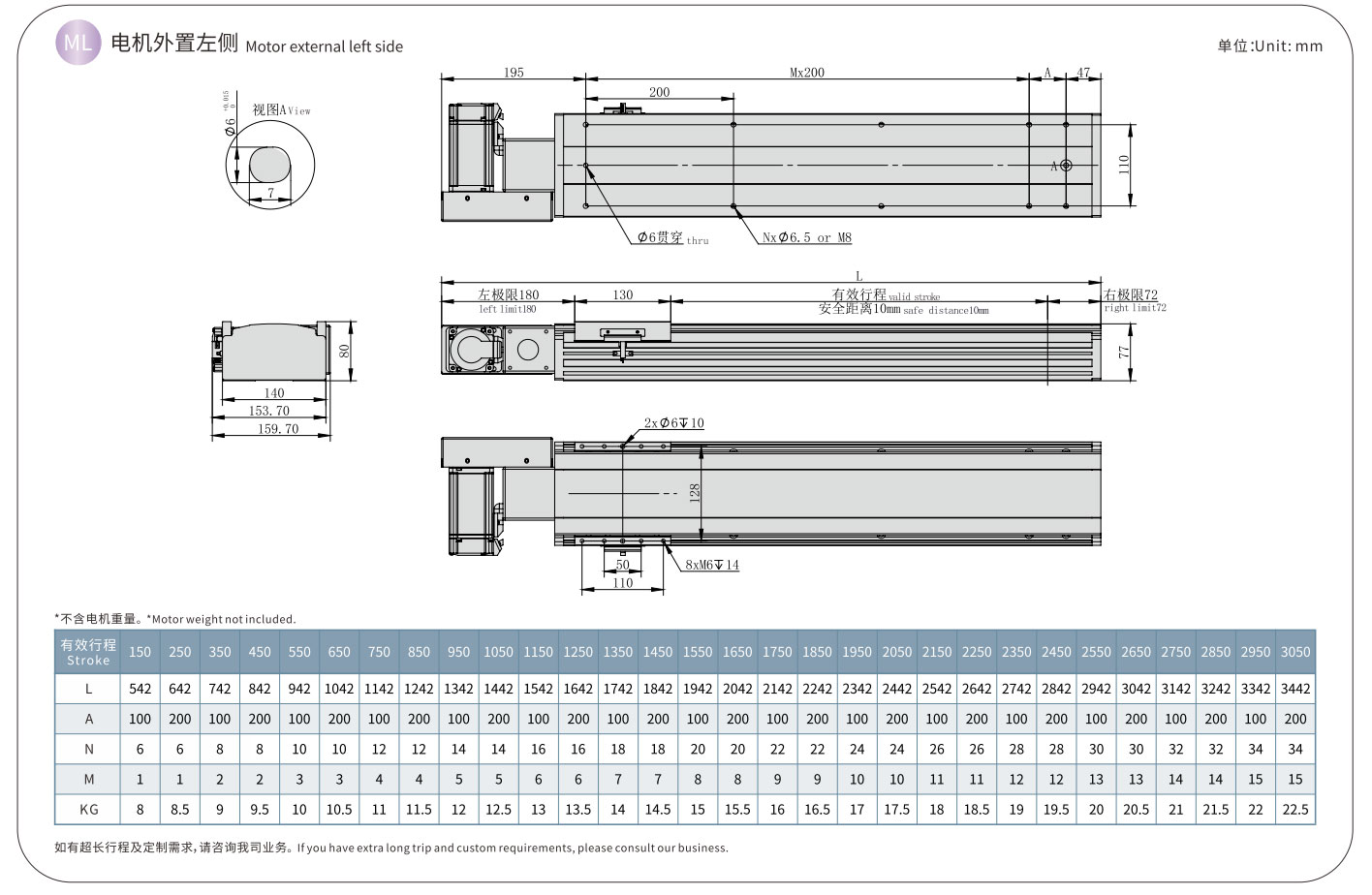
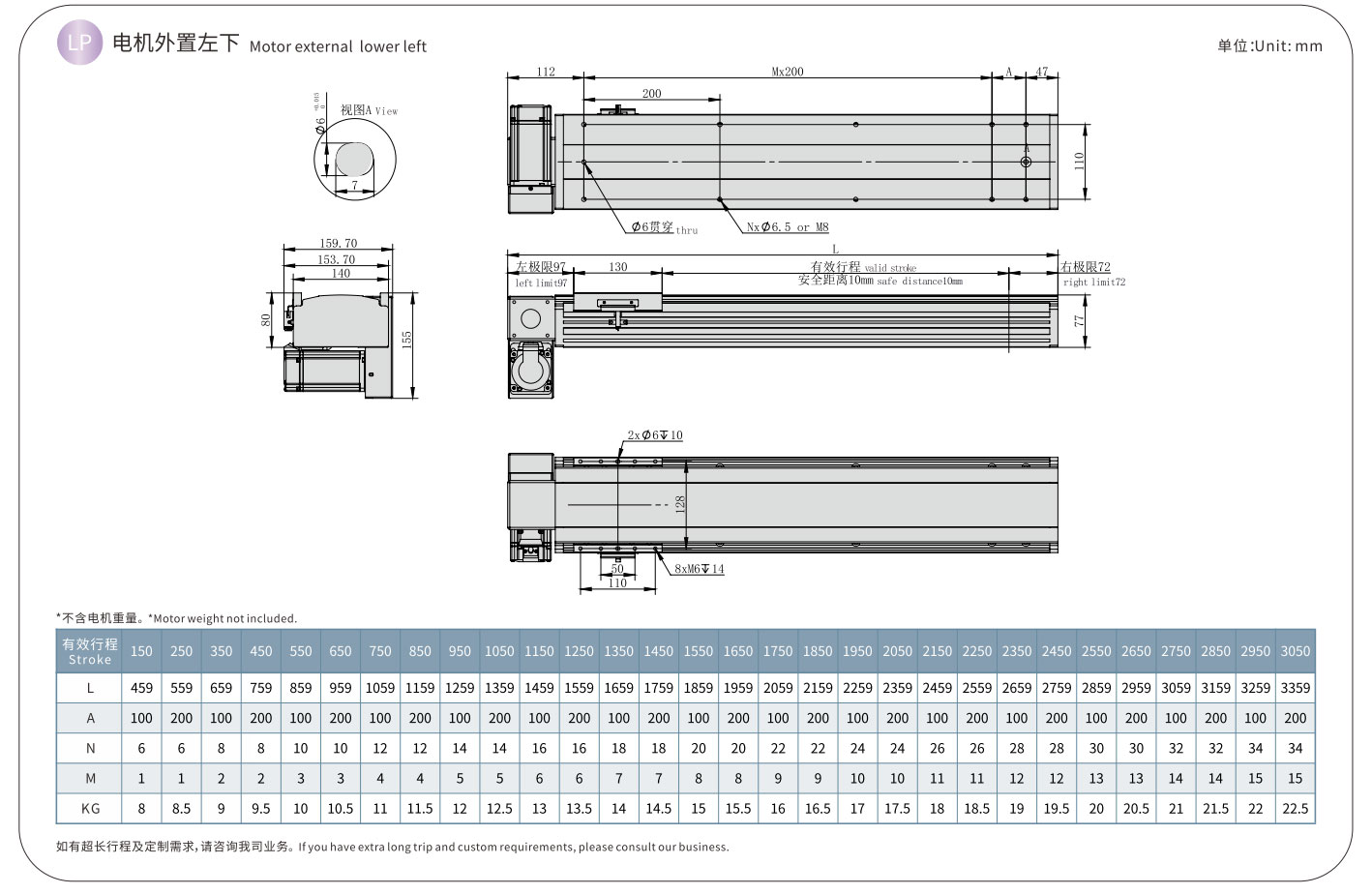
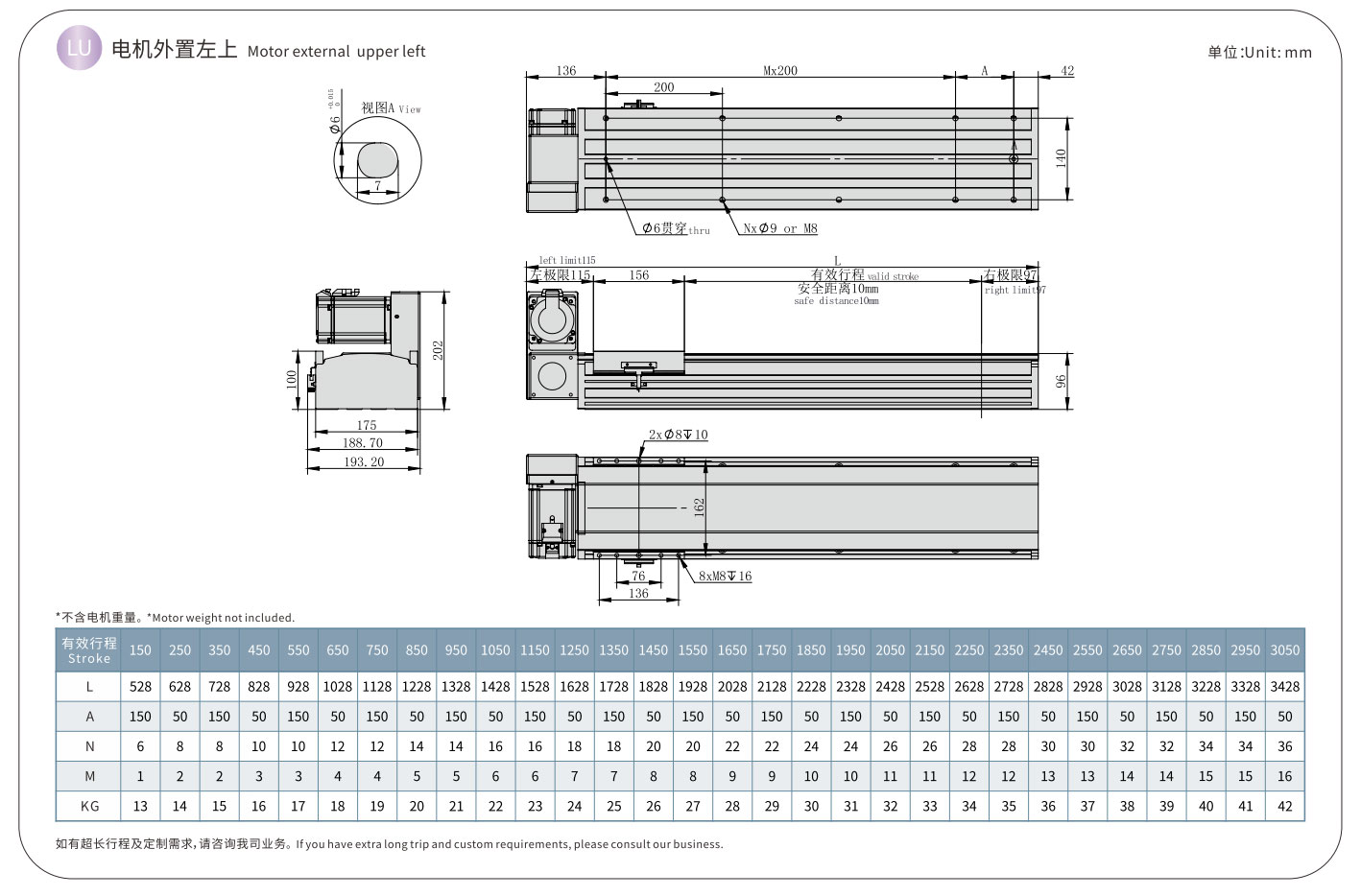
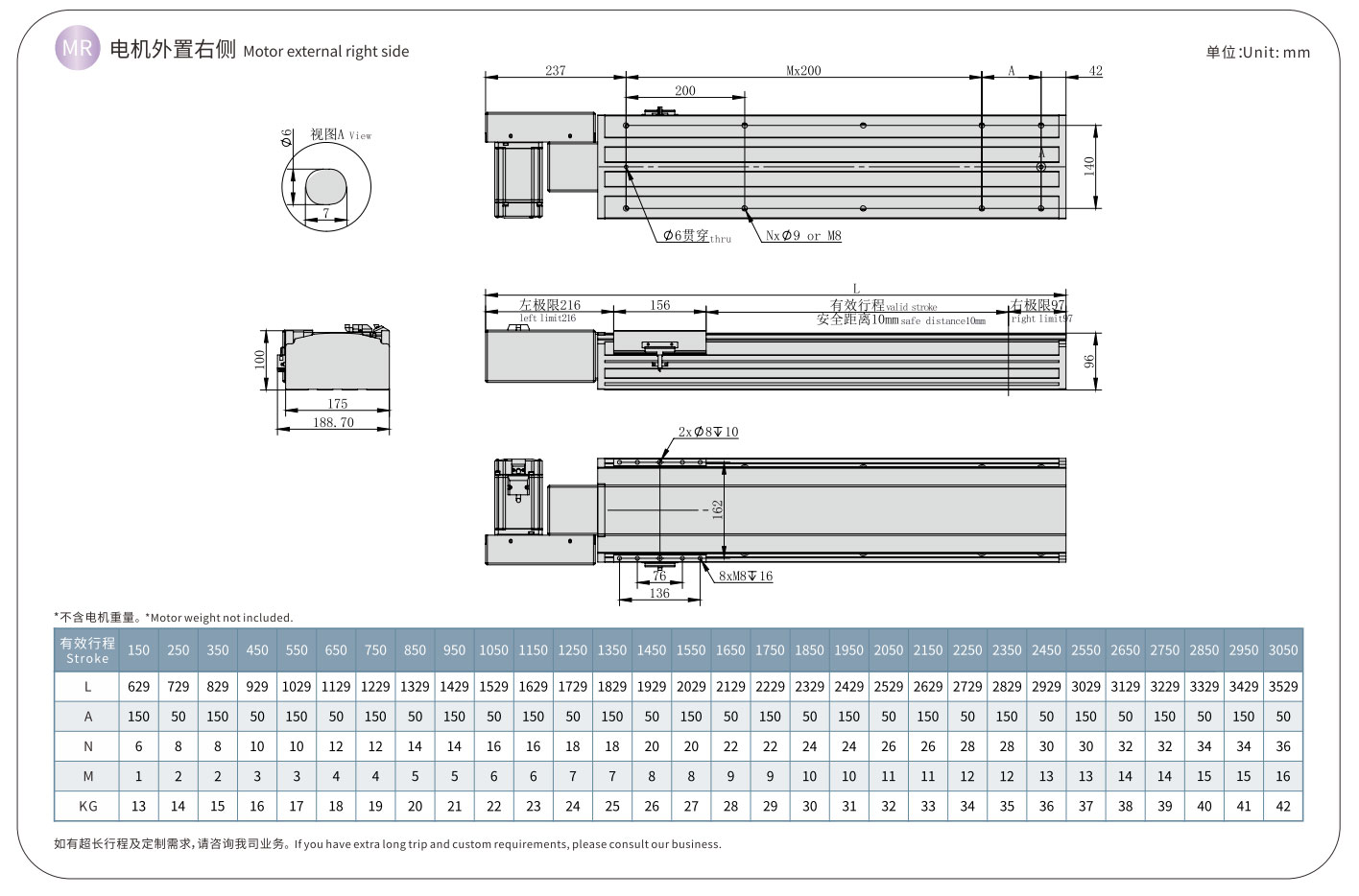
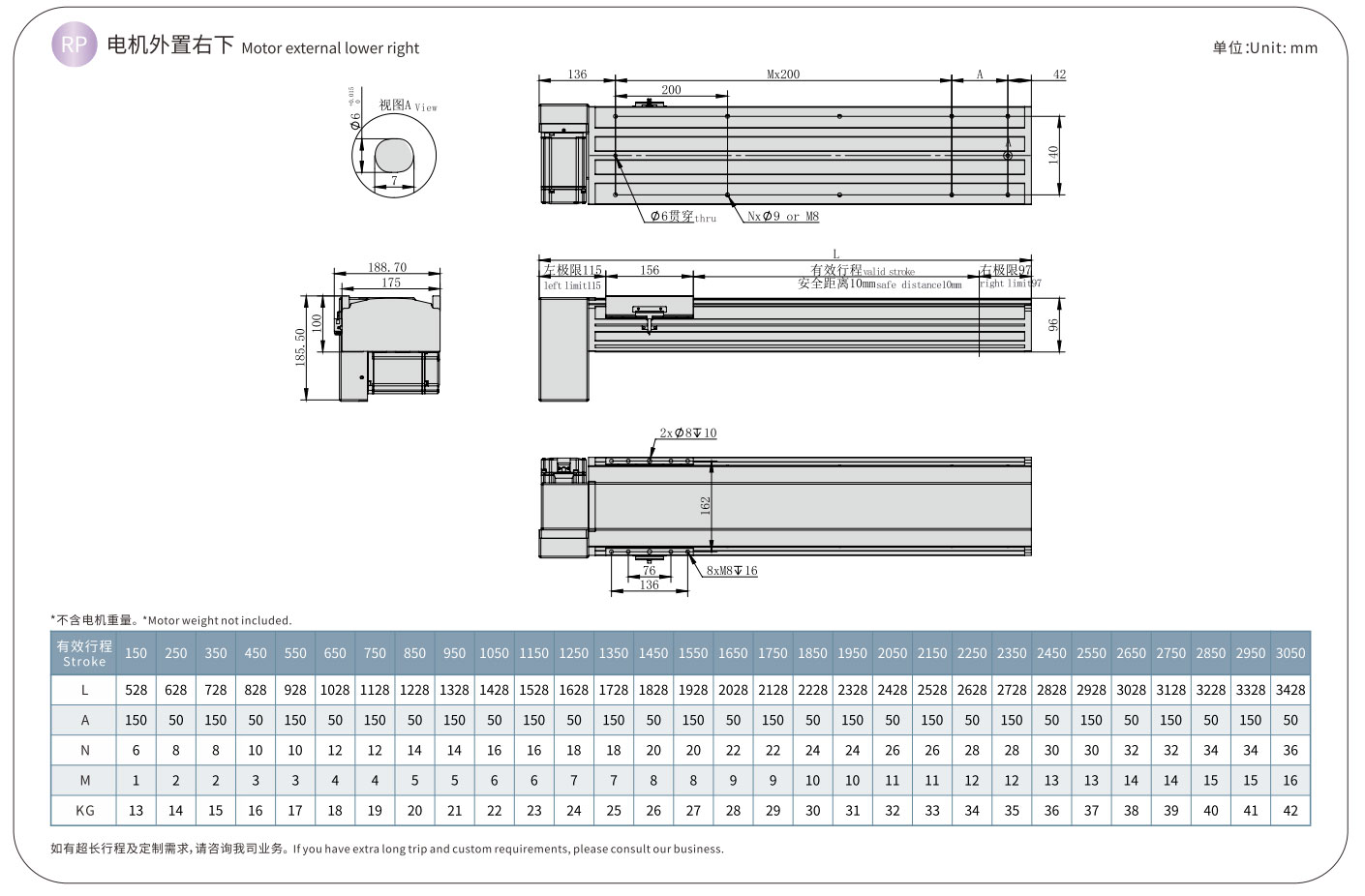
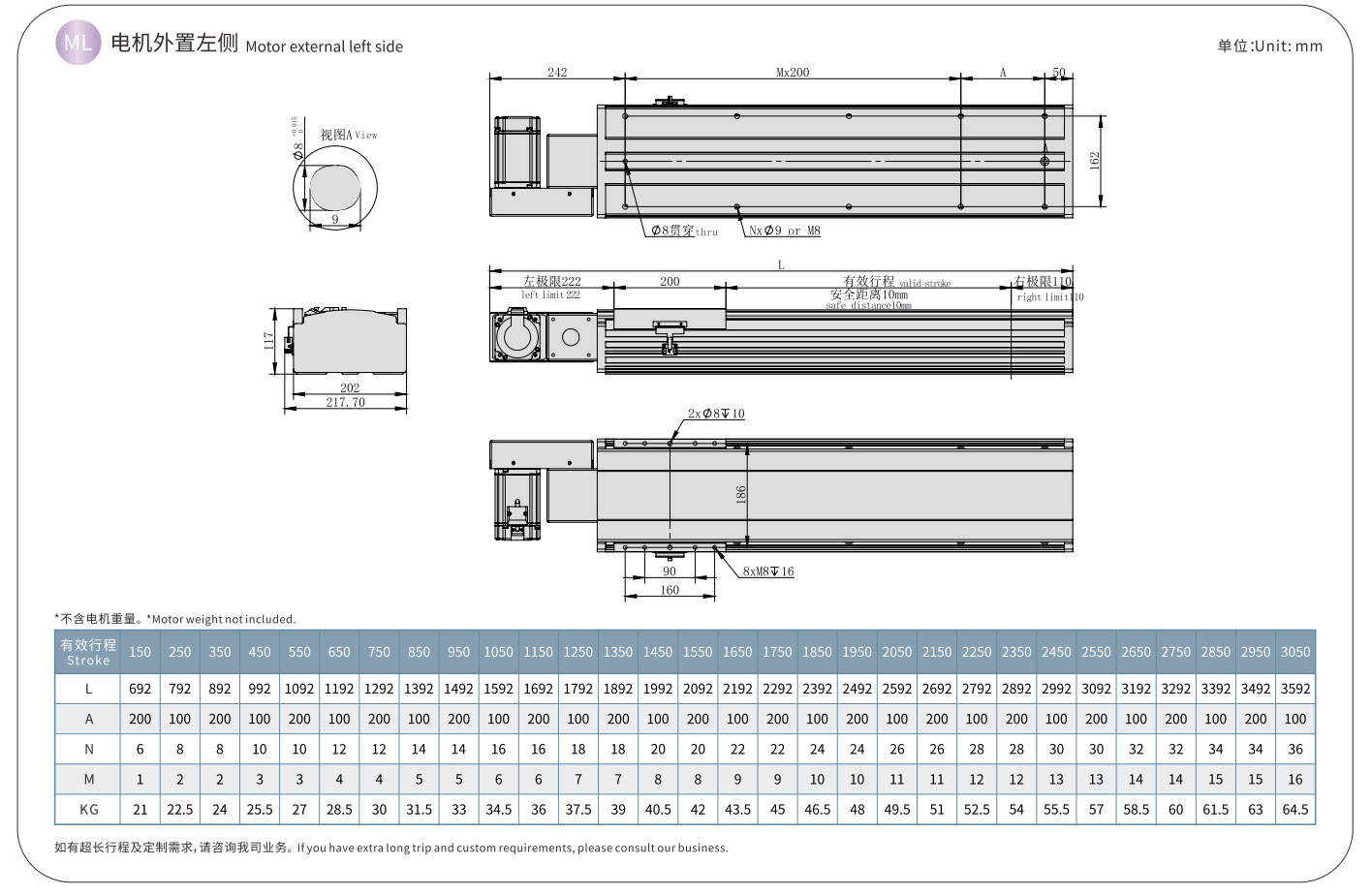
Ma waho aʻe o ka hāʻawi ʻana i ka torque kiʻekiʻe, kiʻekiʻe kiʻekiʻe, a me ka lōʻihi stroke linear slide actuator, ua hoʻolālā akamai mākou i ke ʻano o ka waiho ʻana o ka flange plate i waho, e hiki ai i kā mākou mea hana laina ke hāʻawi i nā ʻano hoʻonohonoho 8 e hoʻololi i nā ʻano ʻenehana automation.
HNB-120D

HNB-140D

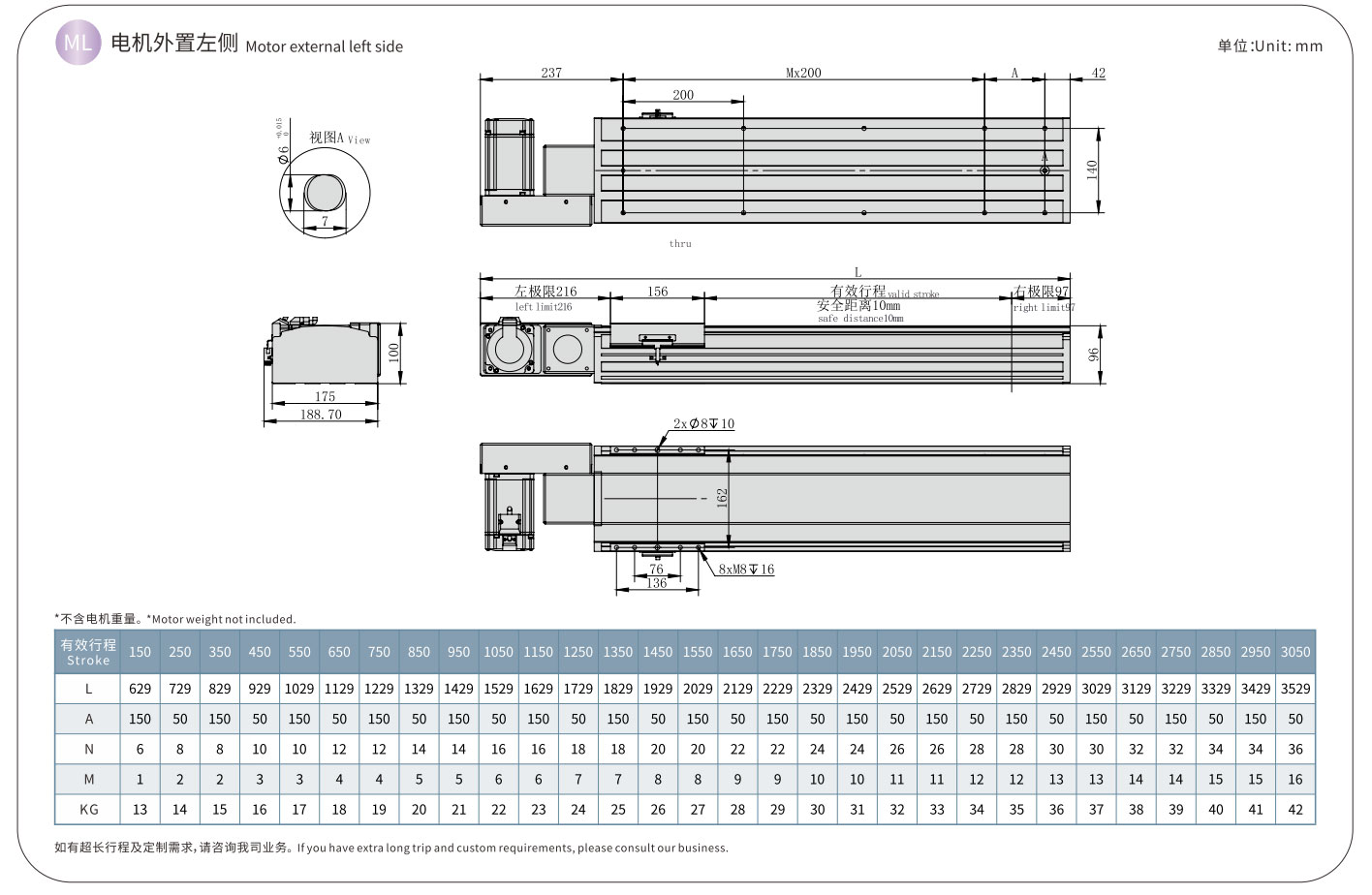
HNB-175D

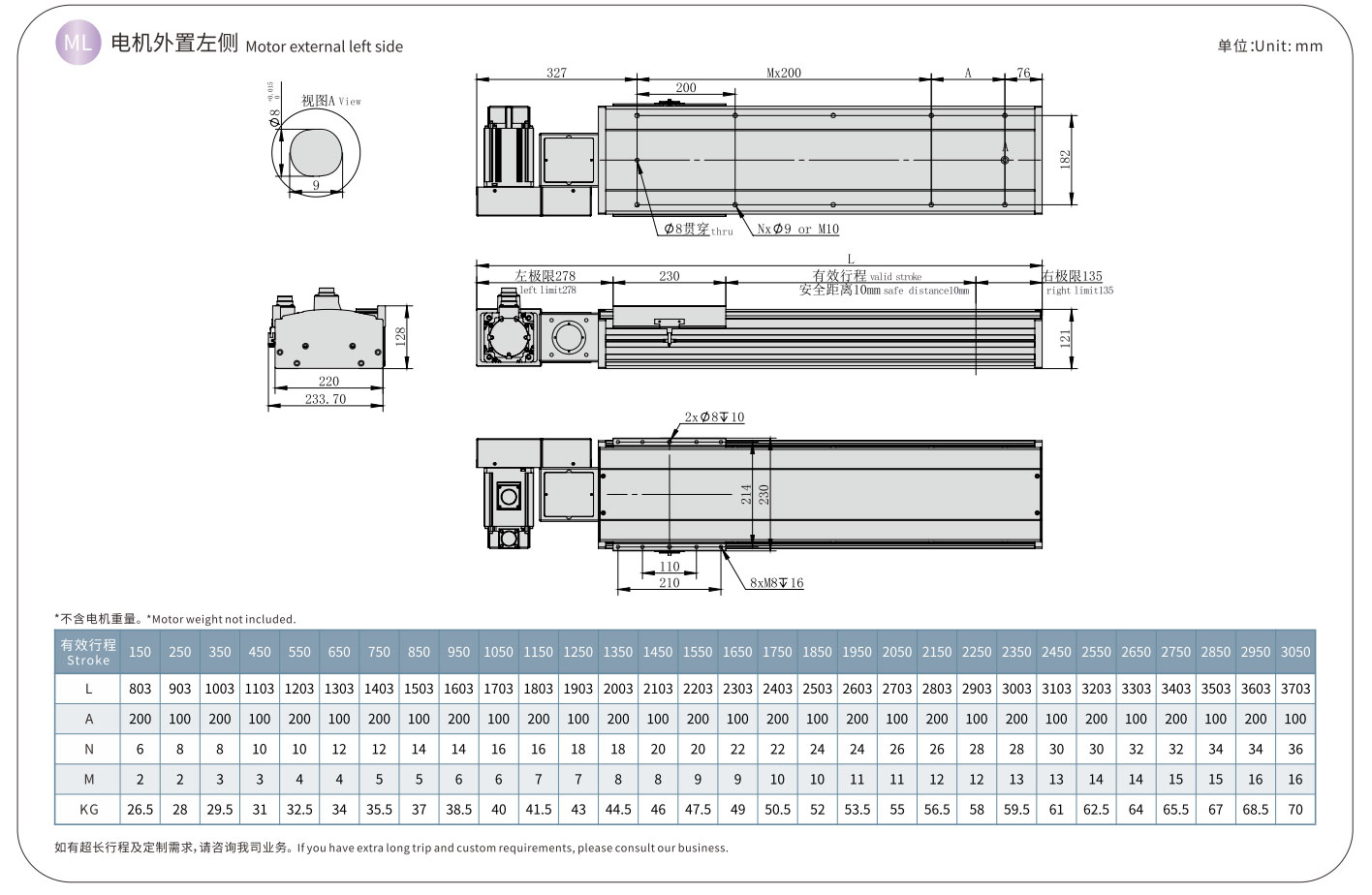
HNB-220D
Nā hiʻohiʻona
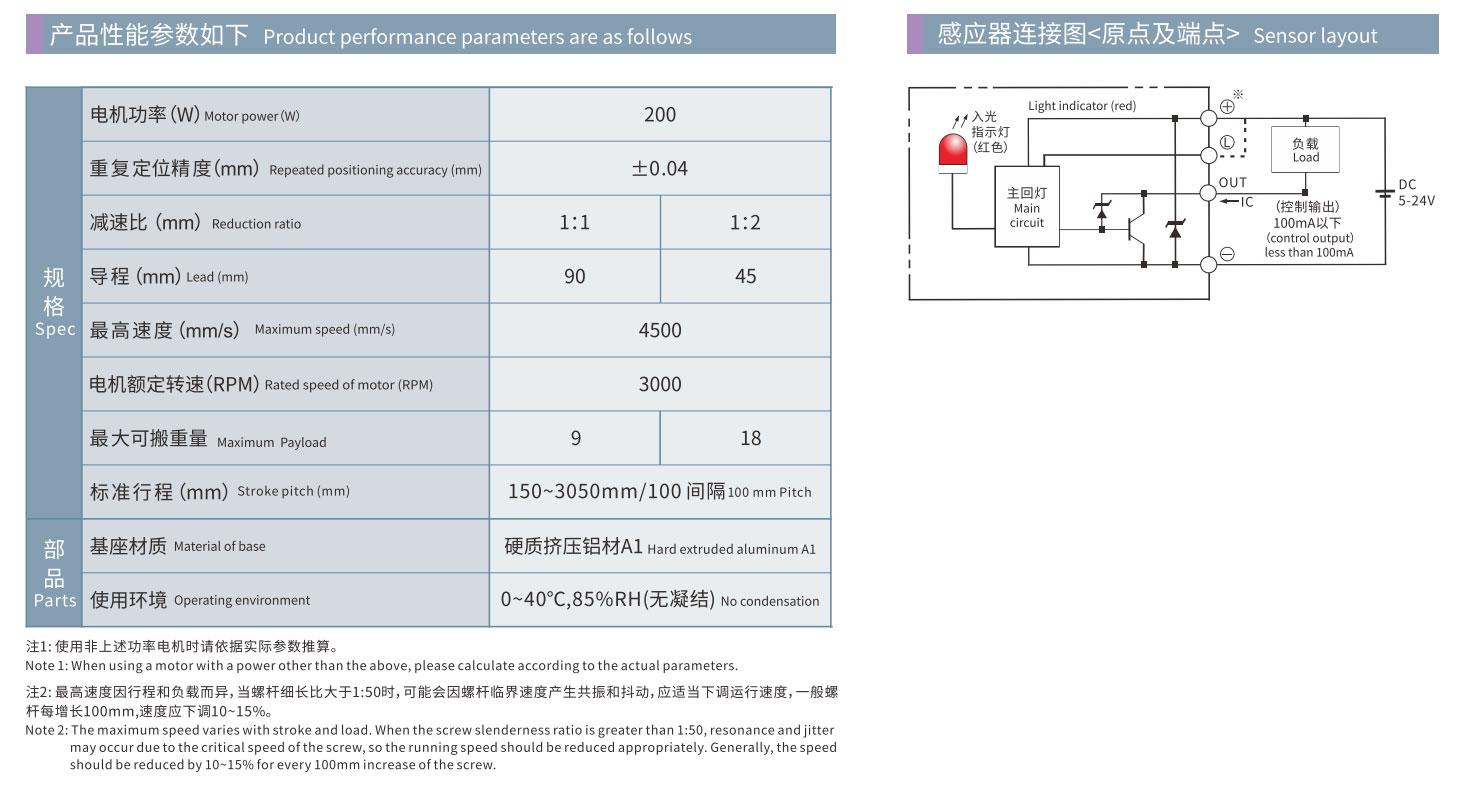
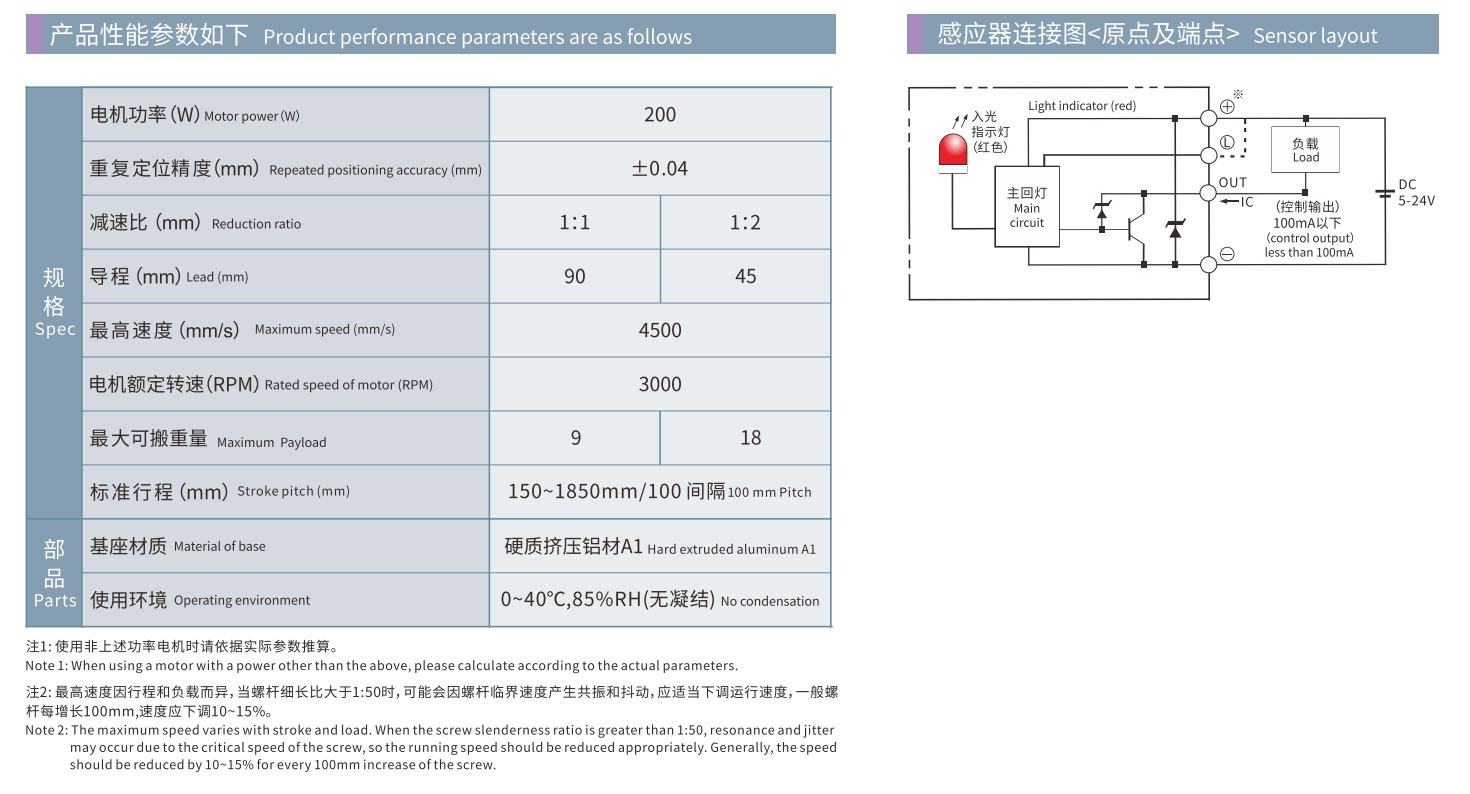
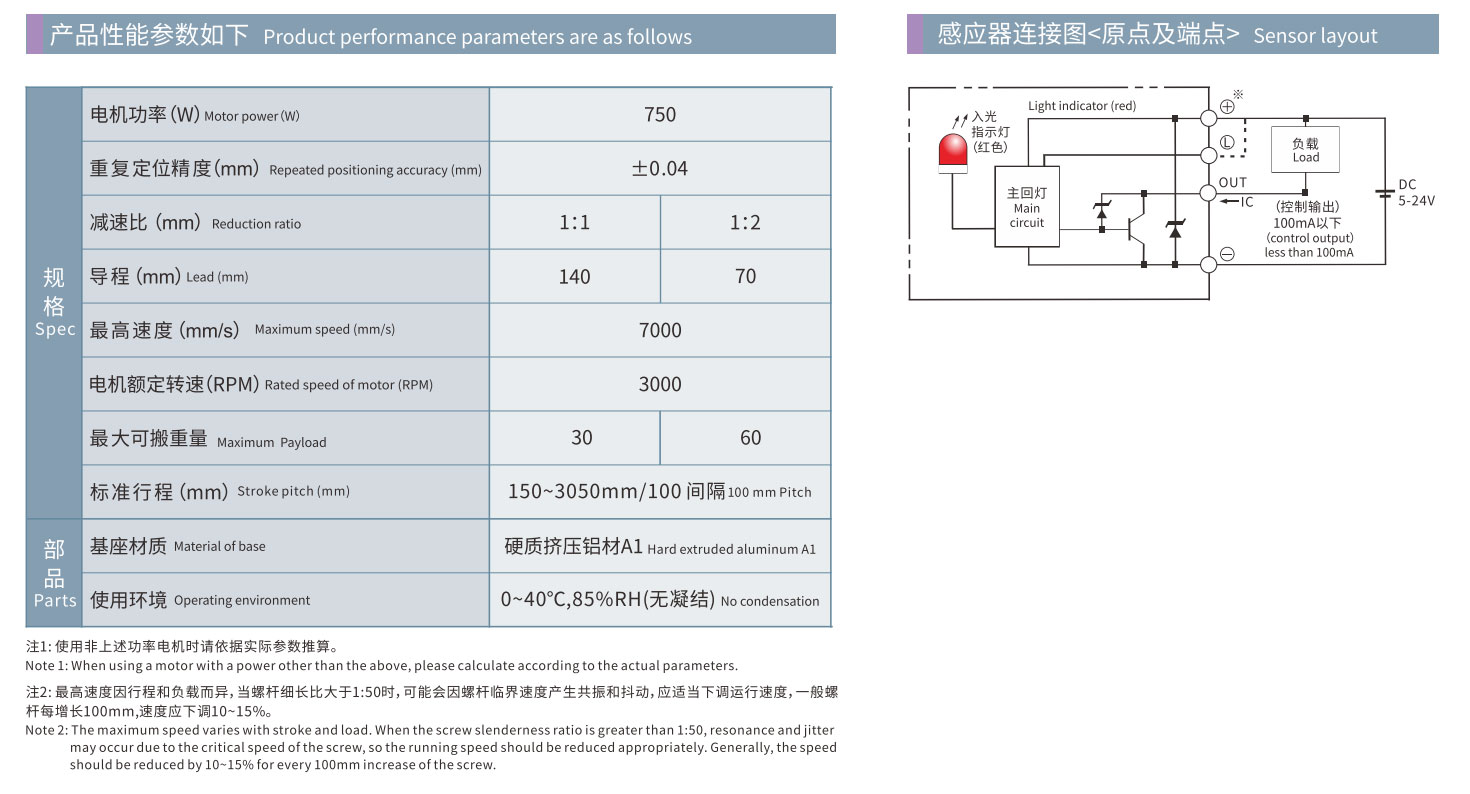
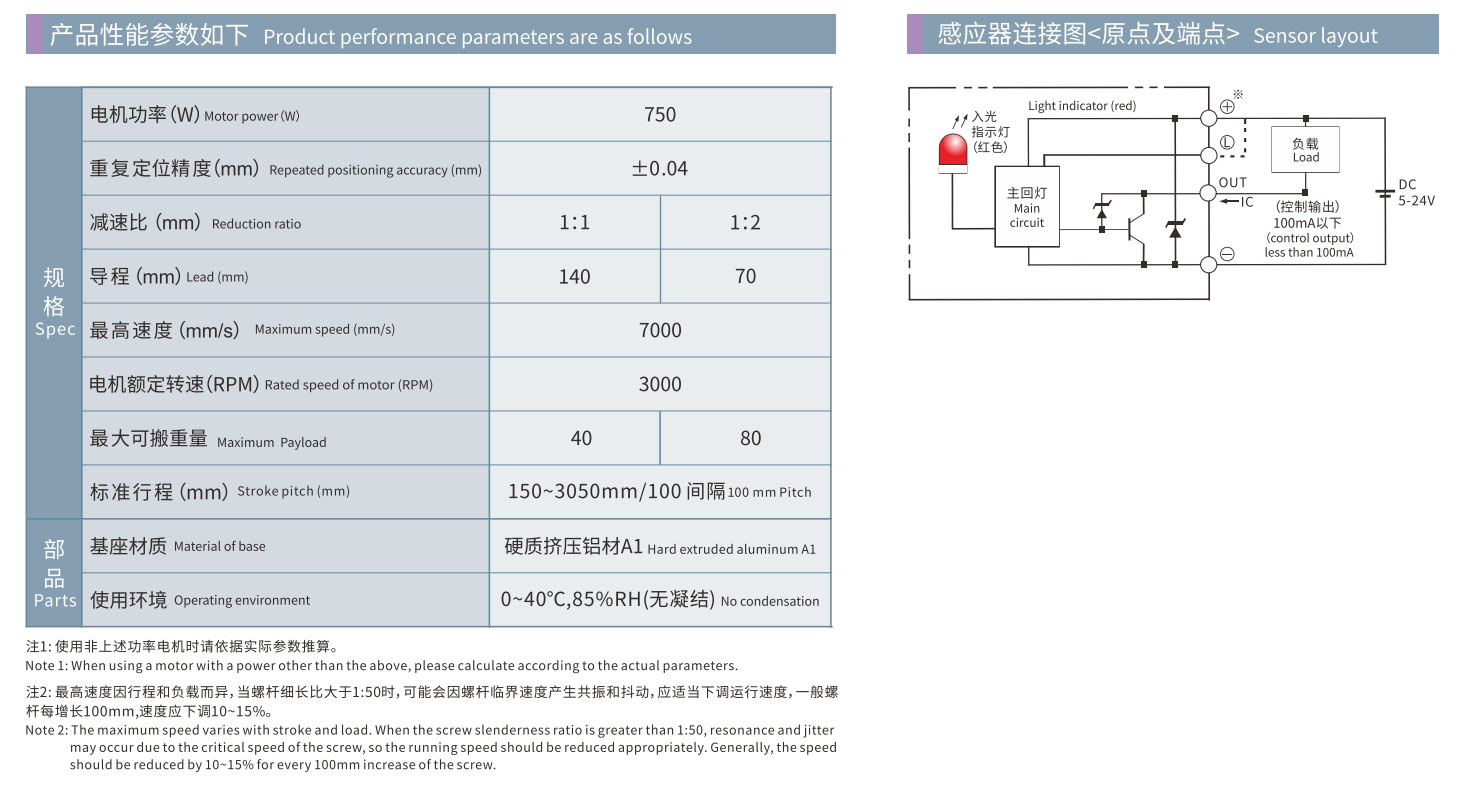
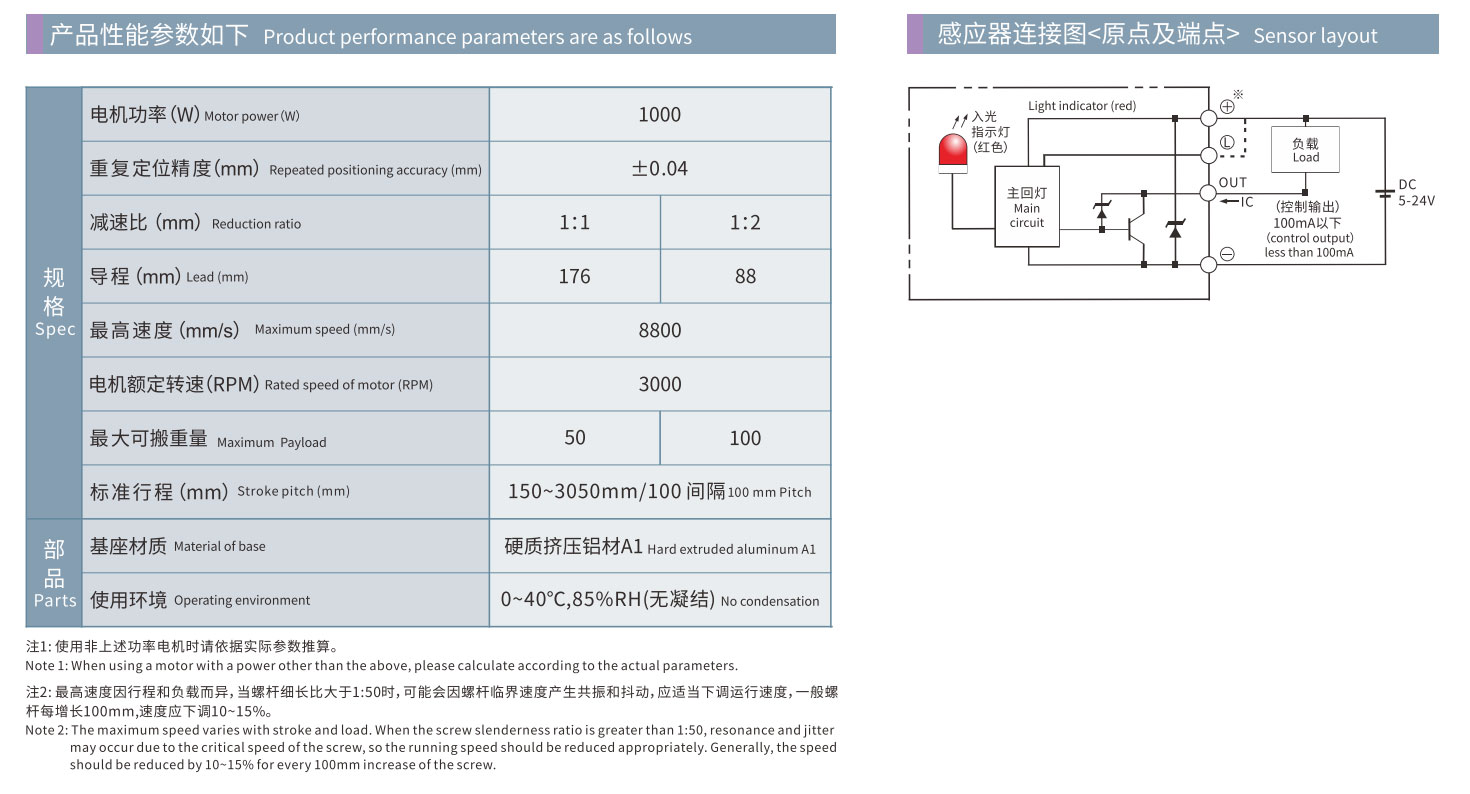
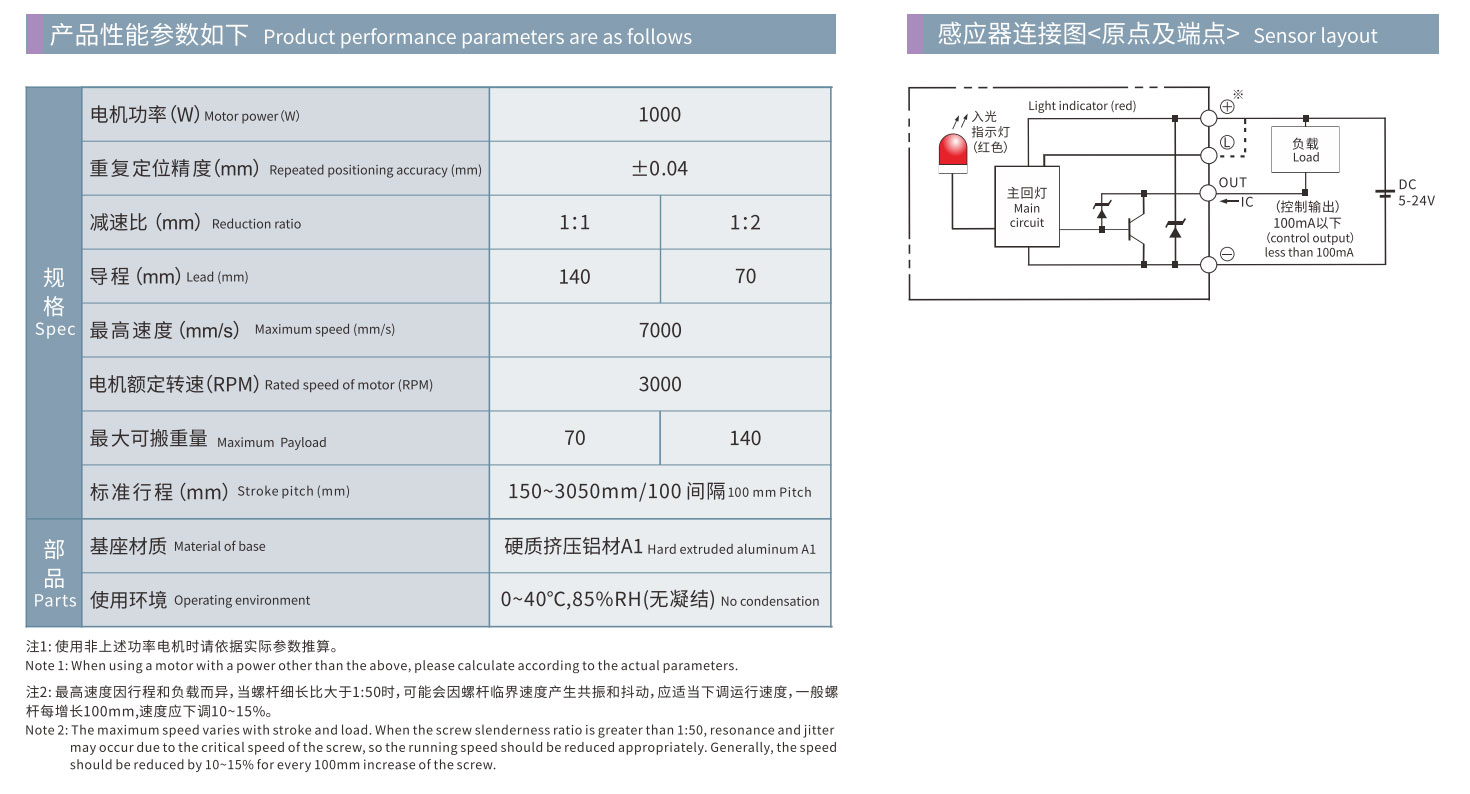
Hoʻonohonoho hou ʻia ka pololei: ± 0.04mm
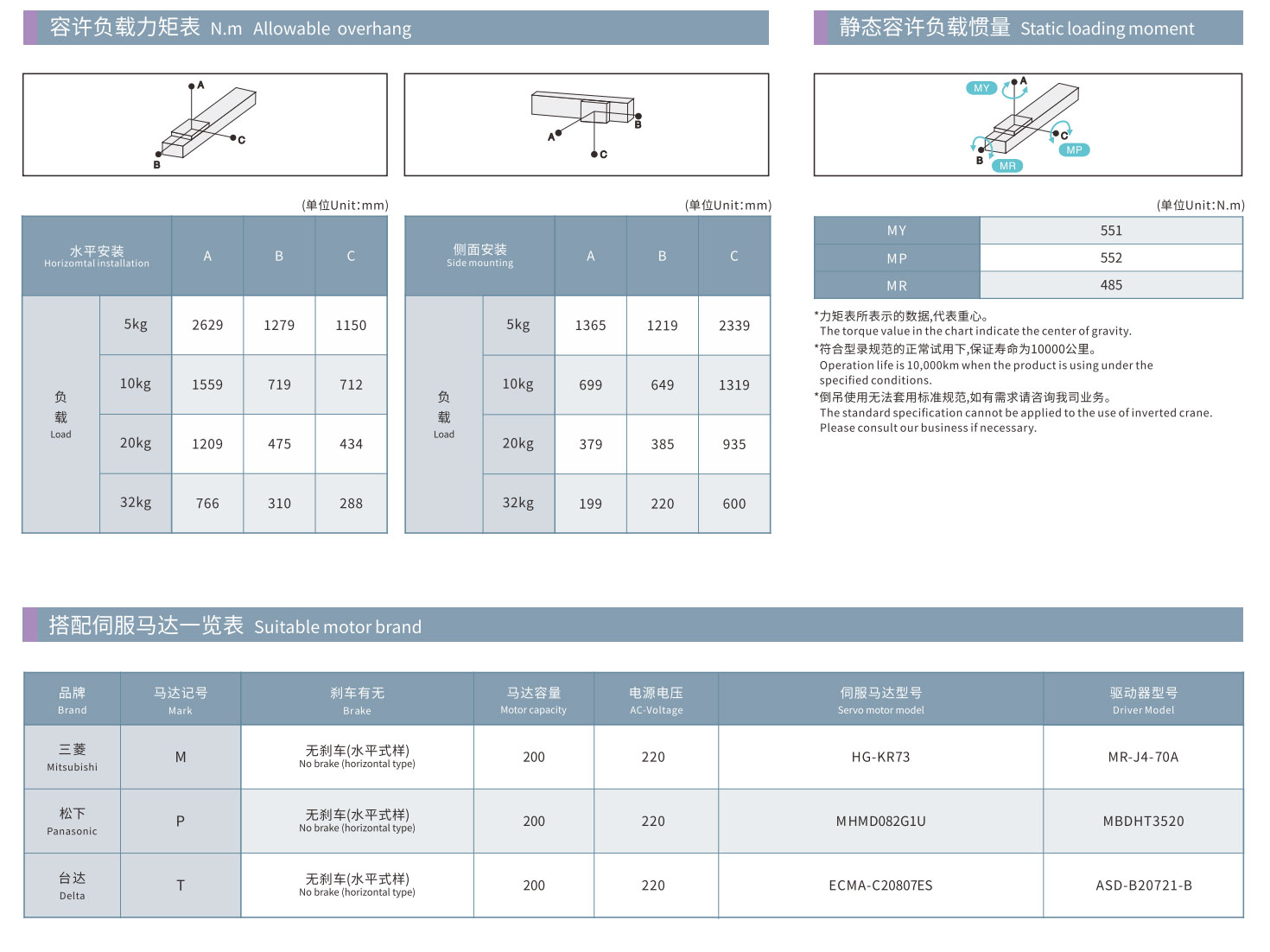
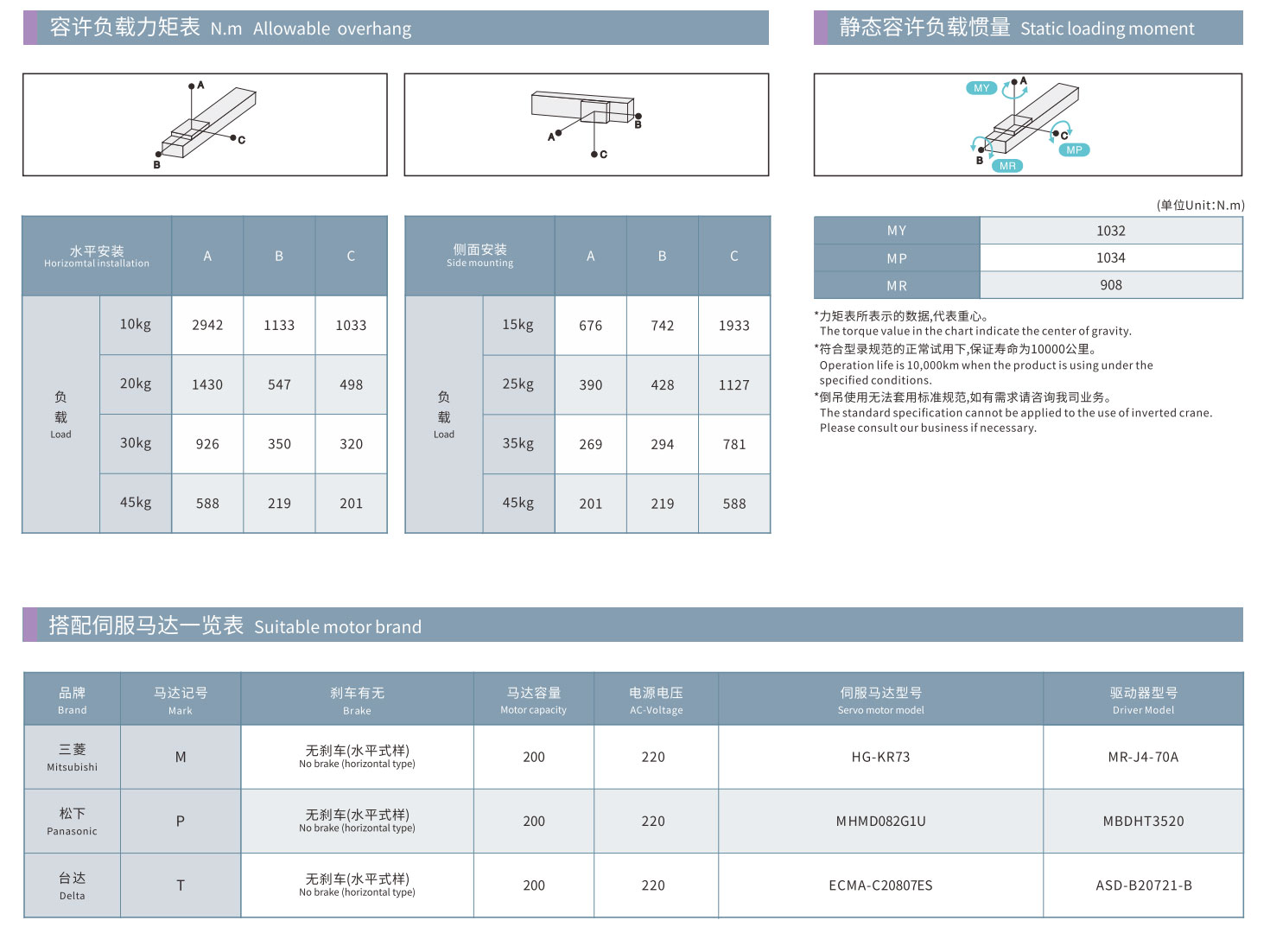
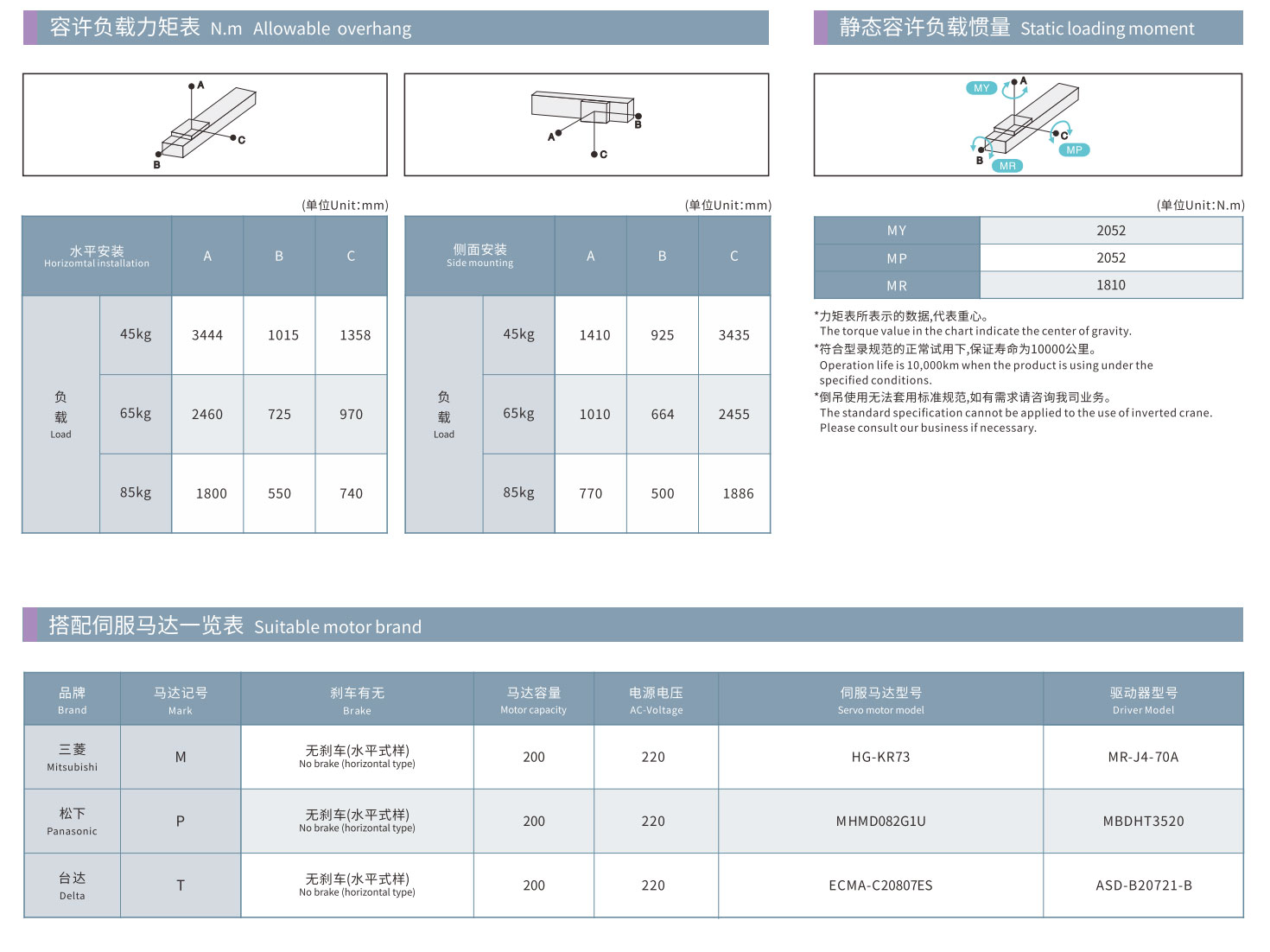
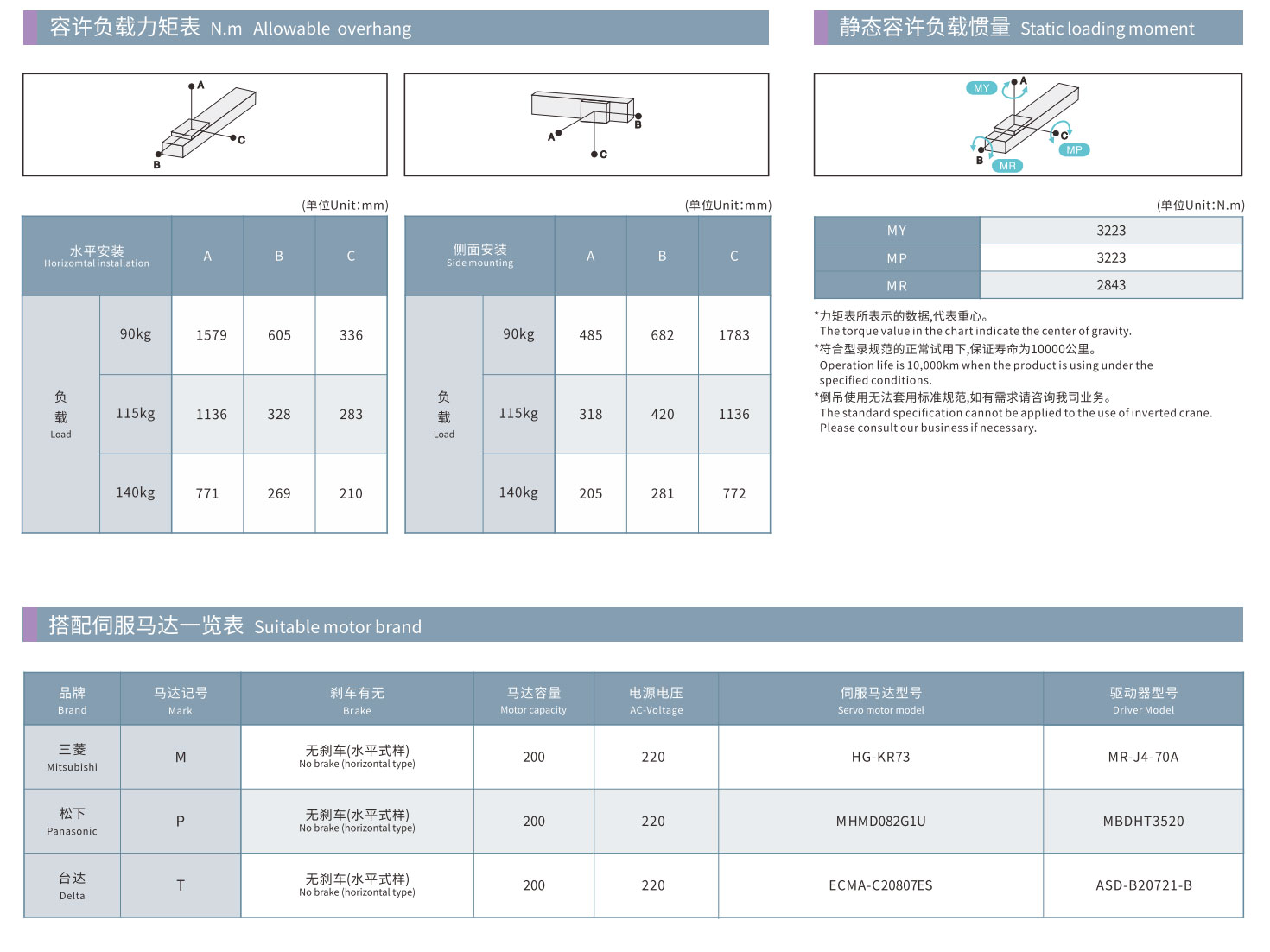
ʻO ka uku nui: 140kg
Kaha: 100 – 3050mm
ʻO ka wikiwiki nui: 7000mm/s

1. Hoʻolālā pālahalaha, ʻoi aku ka māmā o ke kaumaha holoʻokoʻa, ke kiʻekiʻe hui haʻahaʻa a ʻoi aku ka rigidity.
2. Hoʻoponopono maikaʻi ʻia ke ʻano, ʻoi aku ka maikaʻi o ka pololei, a ua hoʻemi ʻia ka hewa i hana ʻia e ka hui ʻana i nā lako he nui.
3. ʻO ka hui ʻana he manawa mālama, mālama hana a maʻalahi. ʻAʻohe pono e wehe i ka uhi alumini no ka hoʻokomo ʻana i ka hui ʻana a i ʻole module.
4. He mea maʻalahi ka mālamaʻana, ua hoʻolakoʻia nāʻaoʻaoʻelua o ka module me nā lua o kaʻaila, aʻaʻole pono e weheʻia ka uhi.











Nā huahana hou aku

HCB Series Belt Driven Linear Module Hoʻopili piha ...

HNB-E Series Belt Driven Linear Actuators Half ...

ONB Series Belt Driven Linear Module Half Hoʻopili ʻia

ONB-F Series Belt Driven Linear Module Mawaho...

OCB Series Belt Driven Linear Module Hoʻopili piha ...










