




HNB-E Series Belt Driven Linear Actuators Half Hoʻopili ʻia

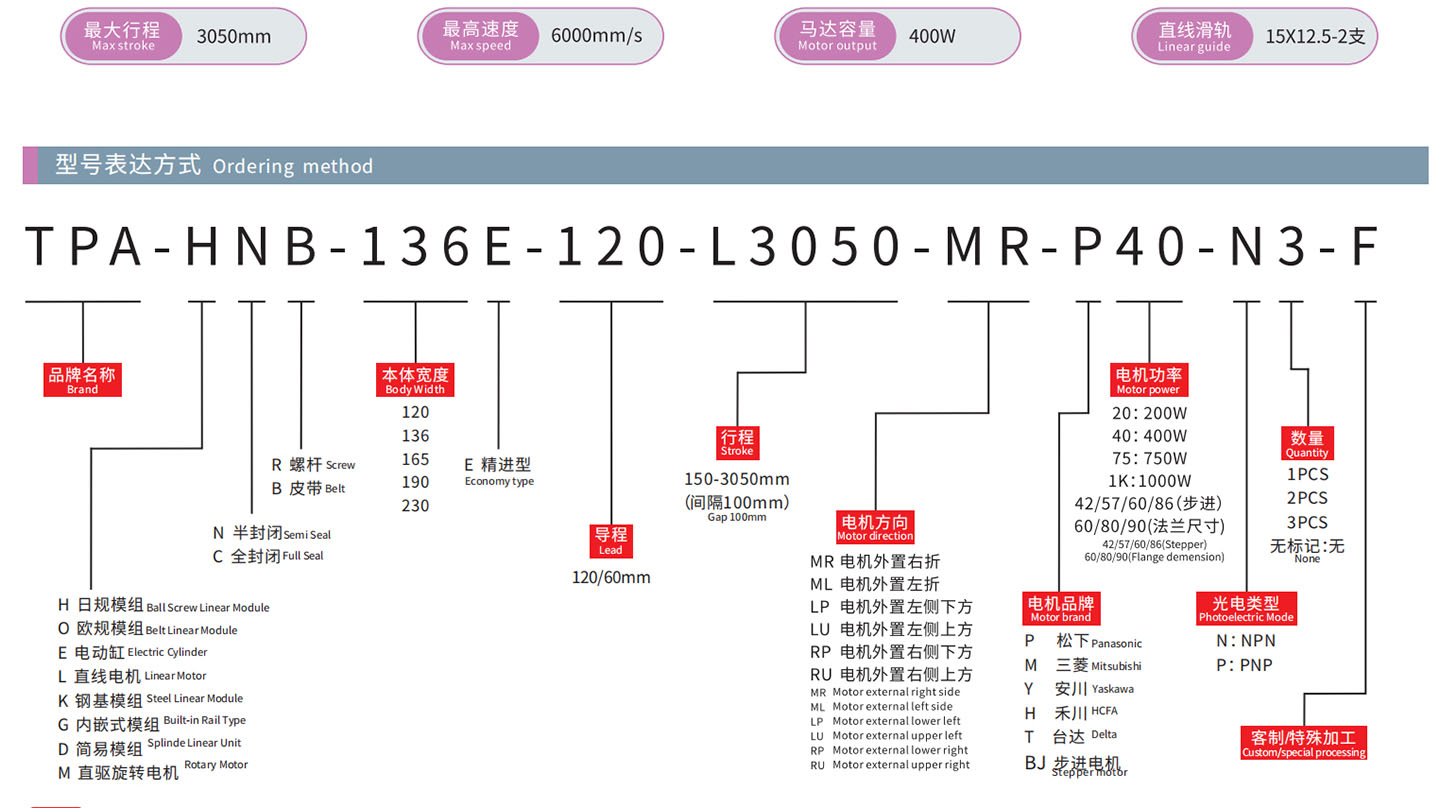
Mea koho hoʻohālike
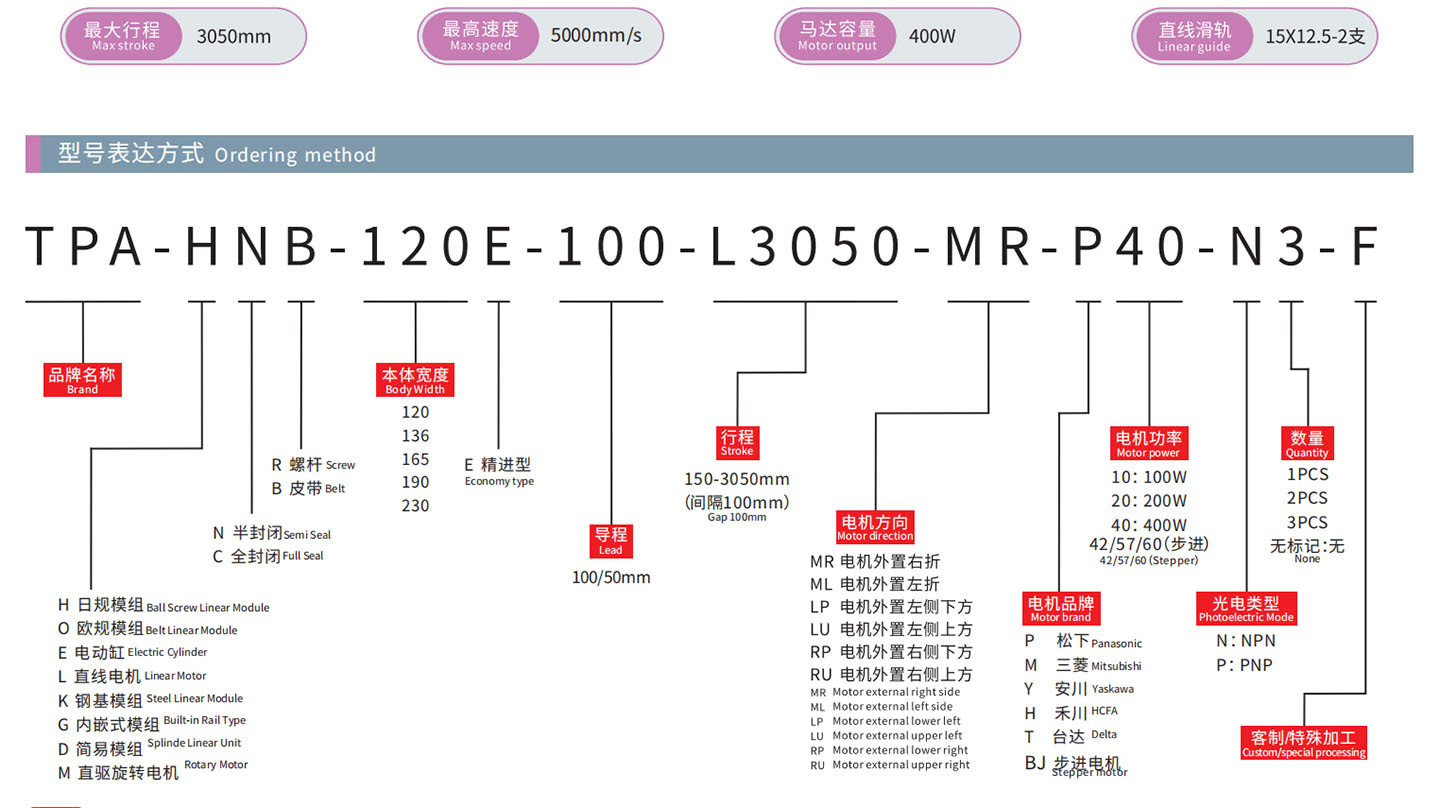
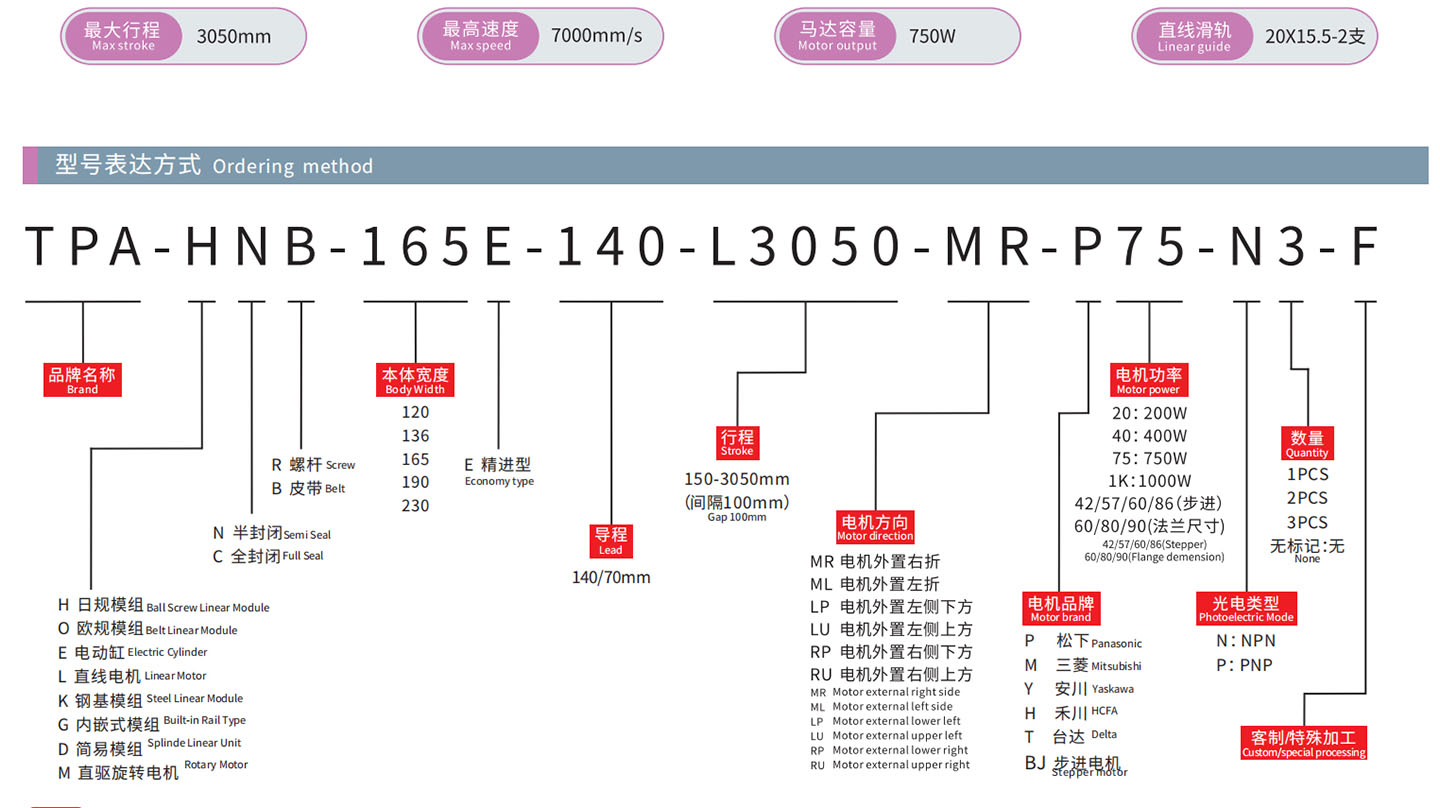
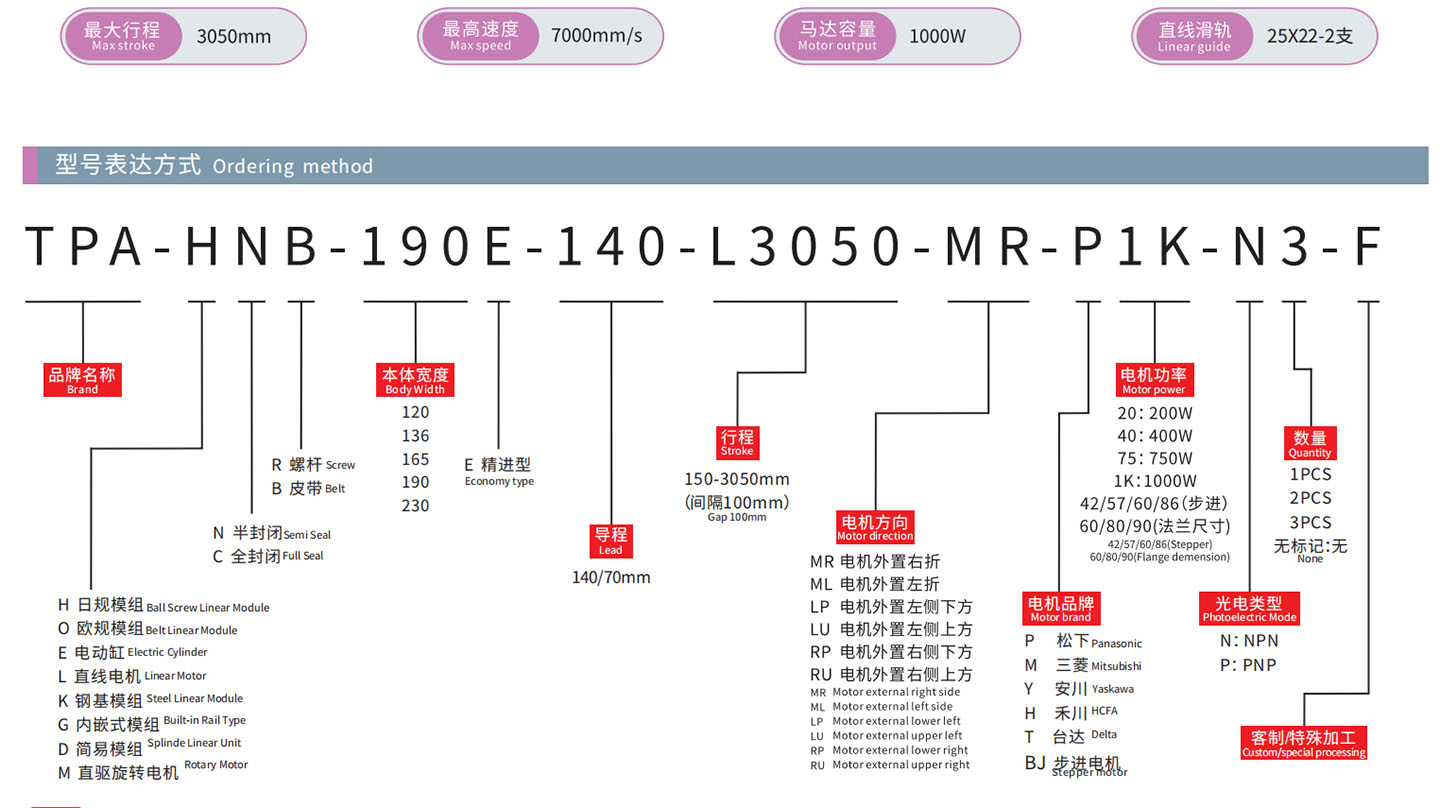
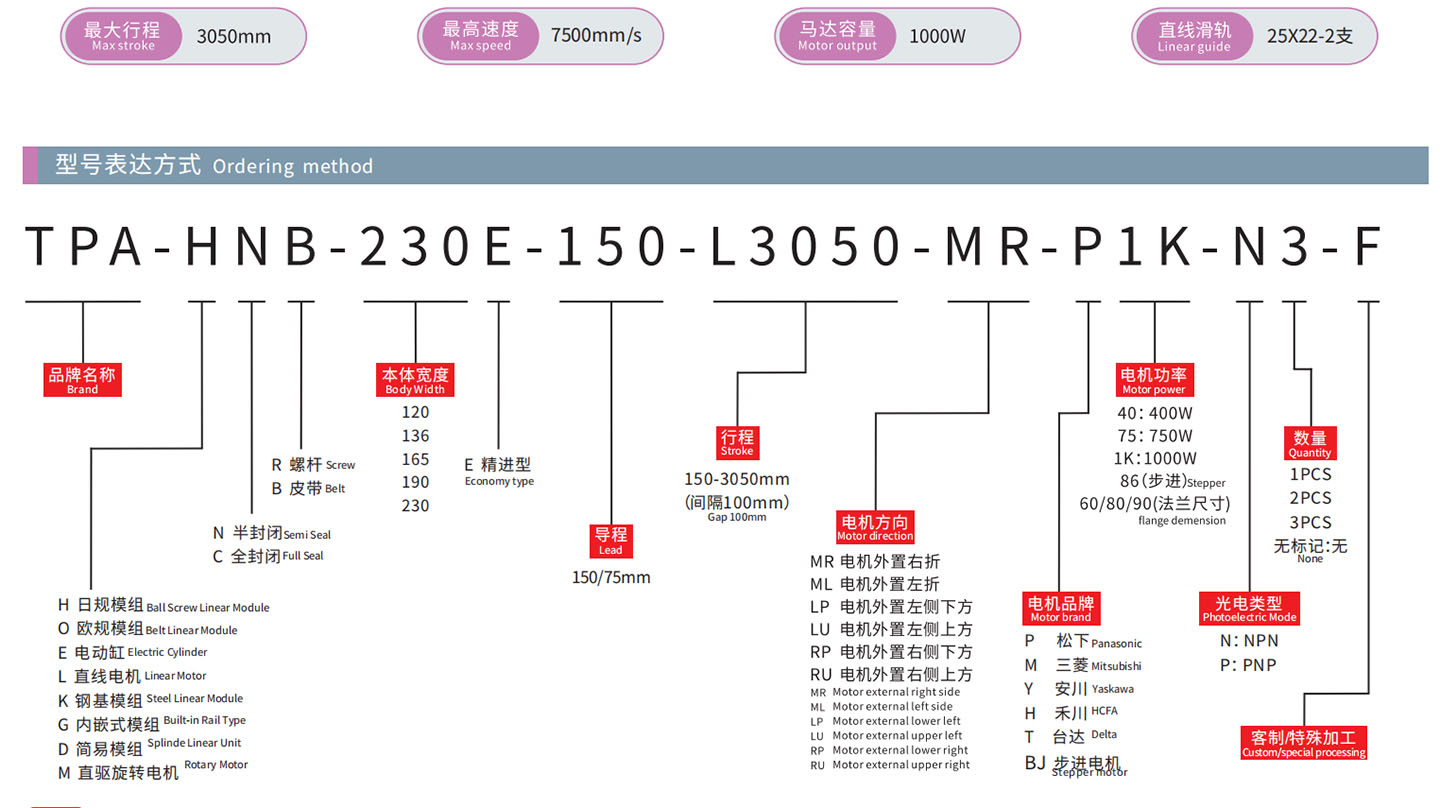
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
TPA-?-?-?-?-??-?
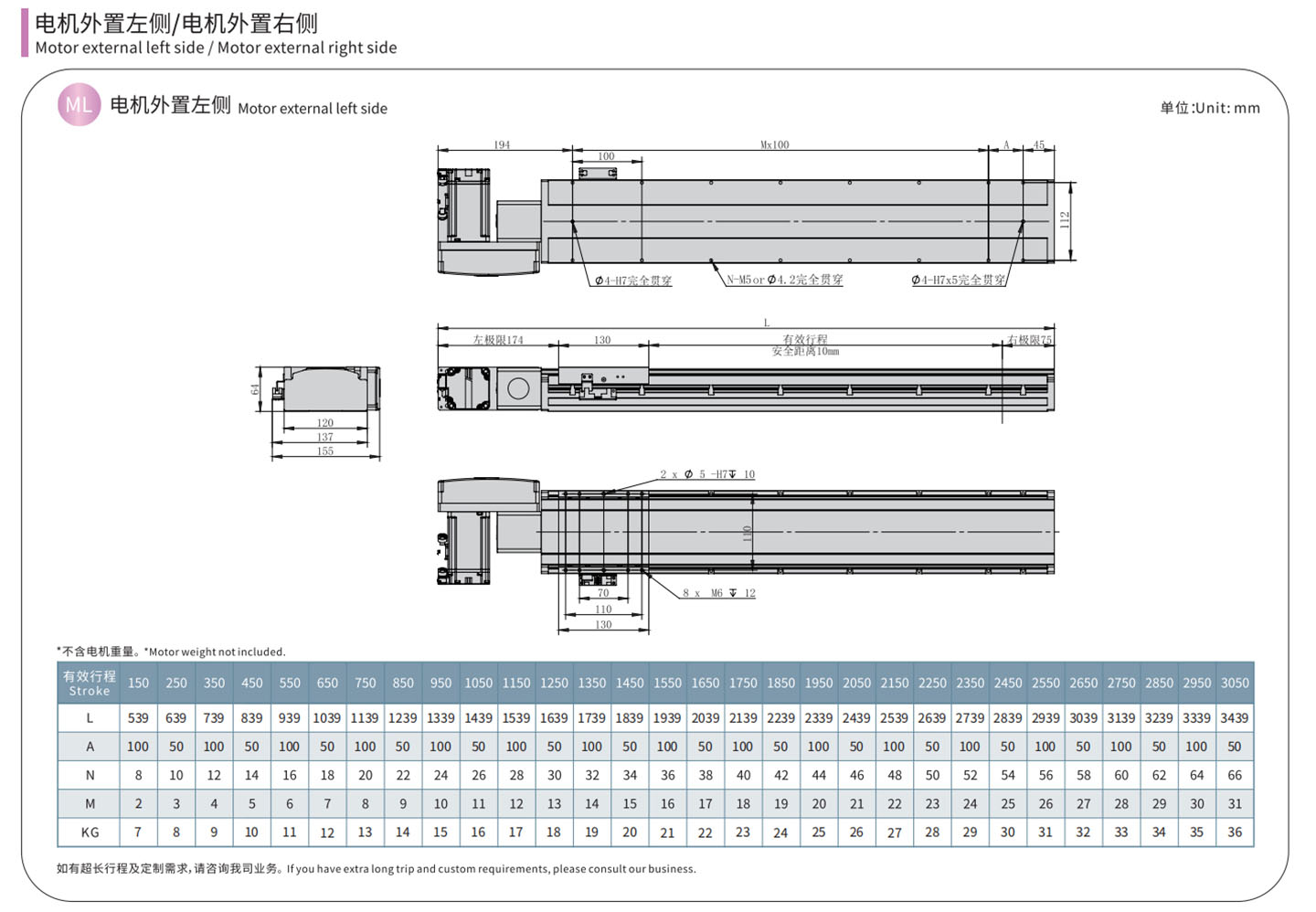
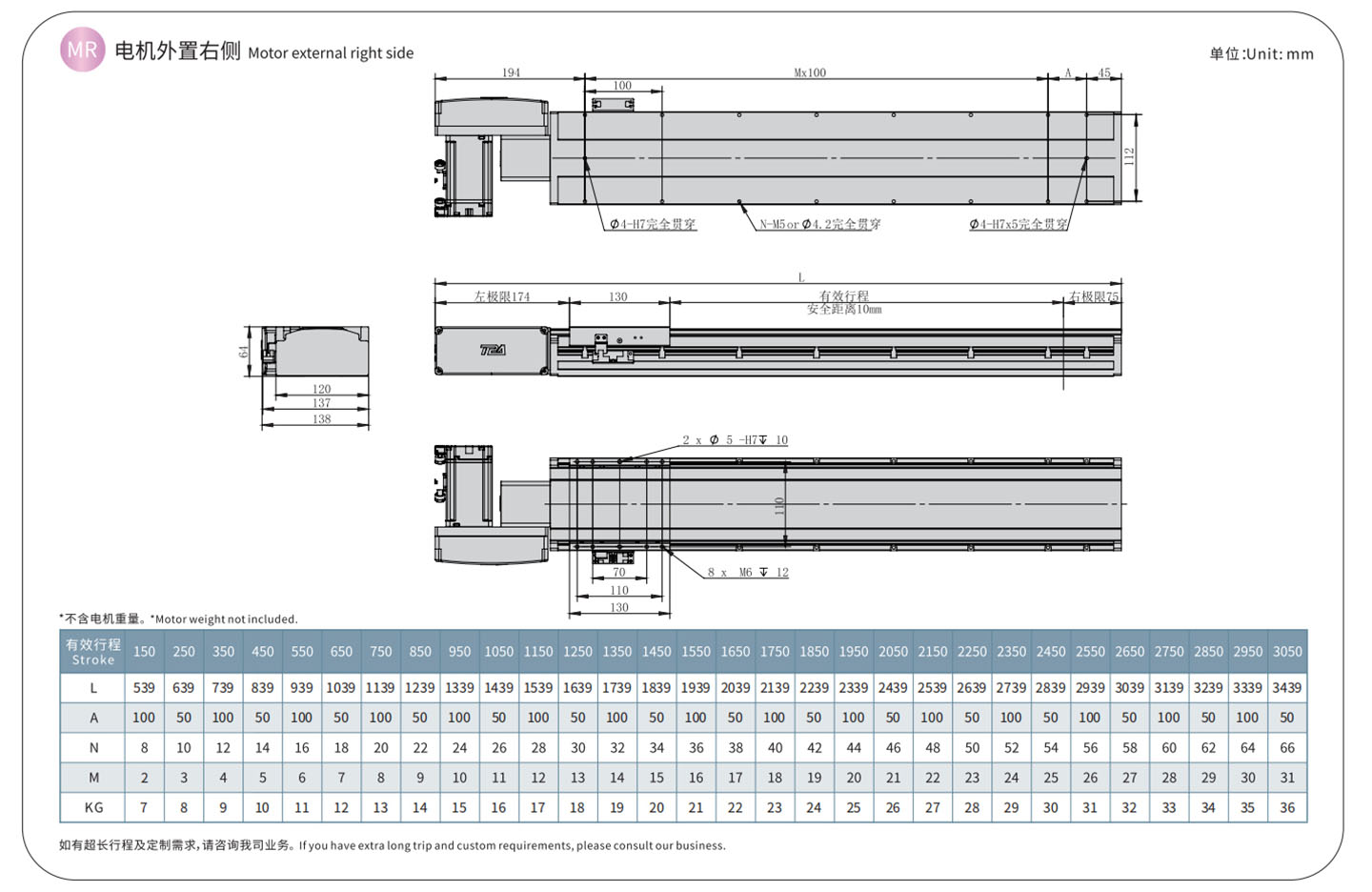
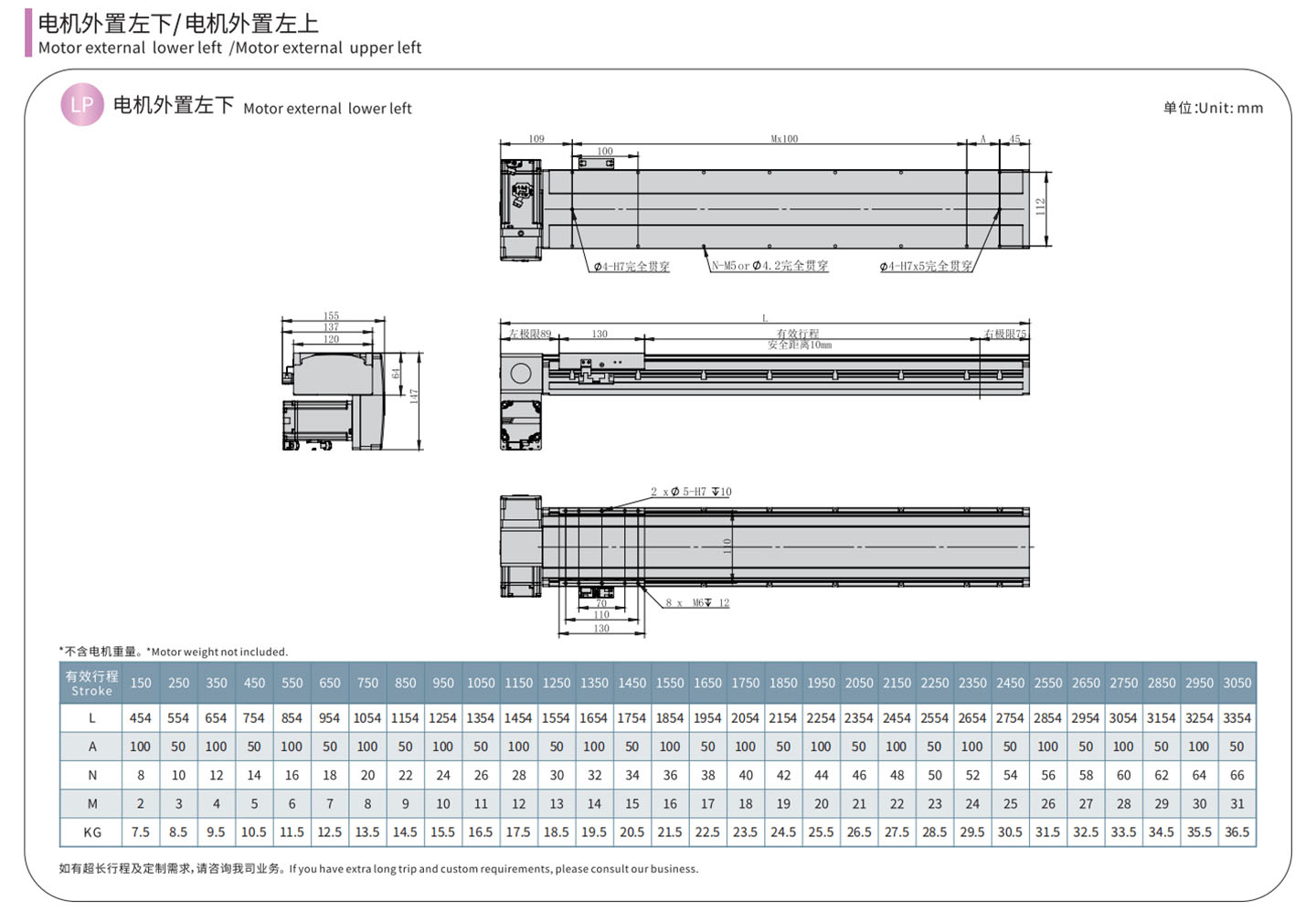
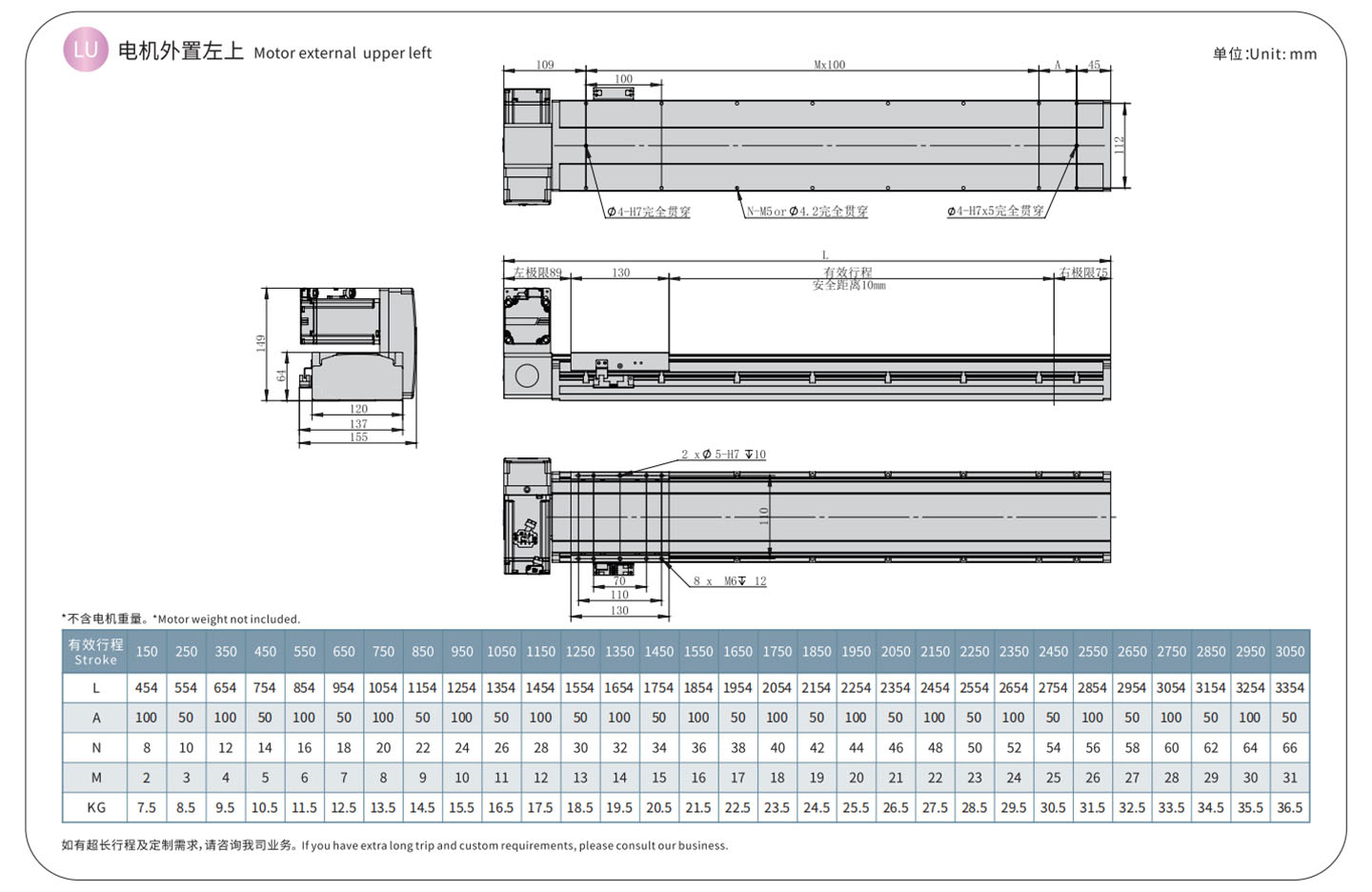
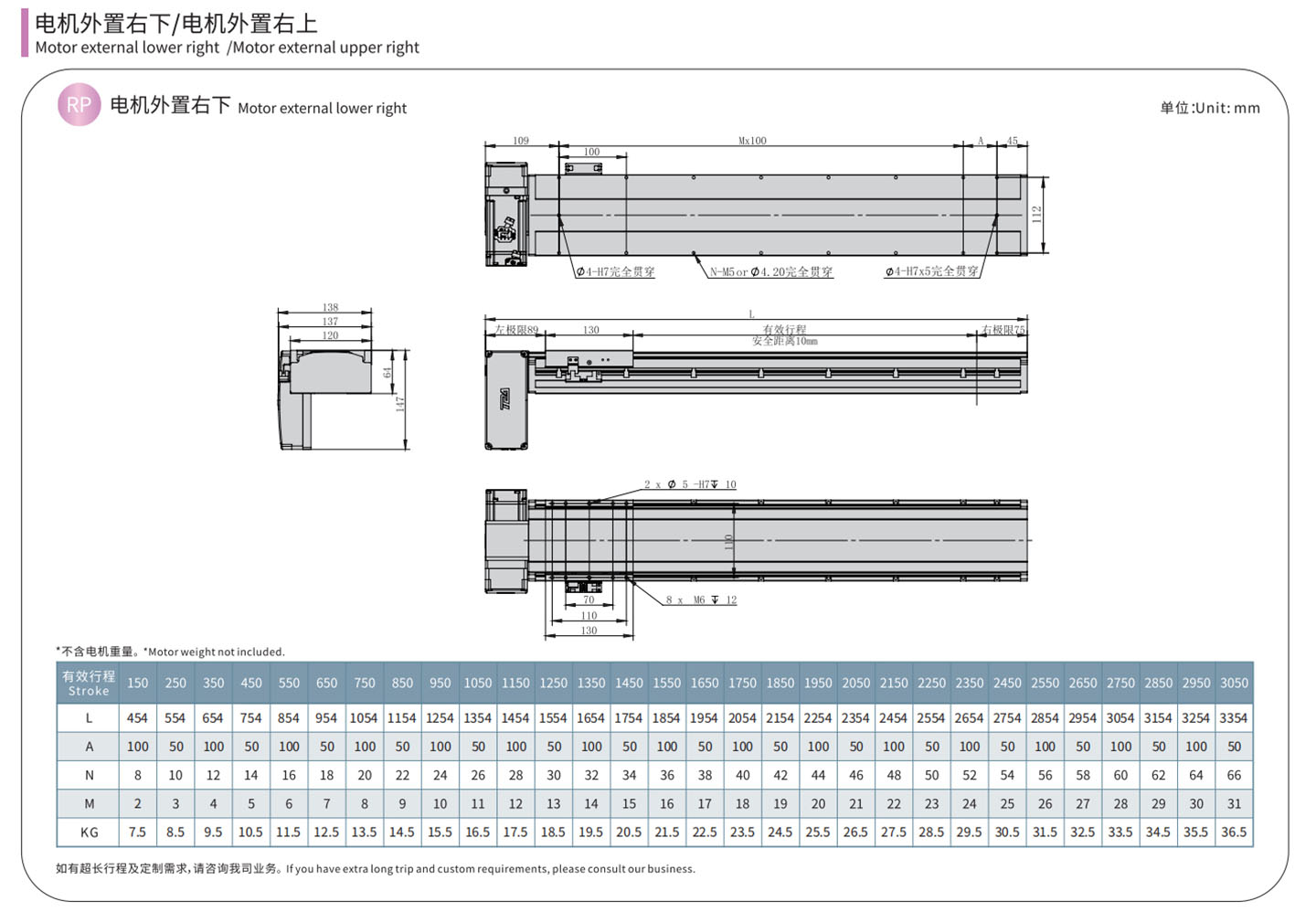
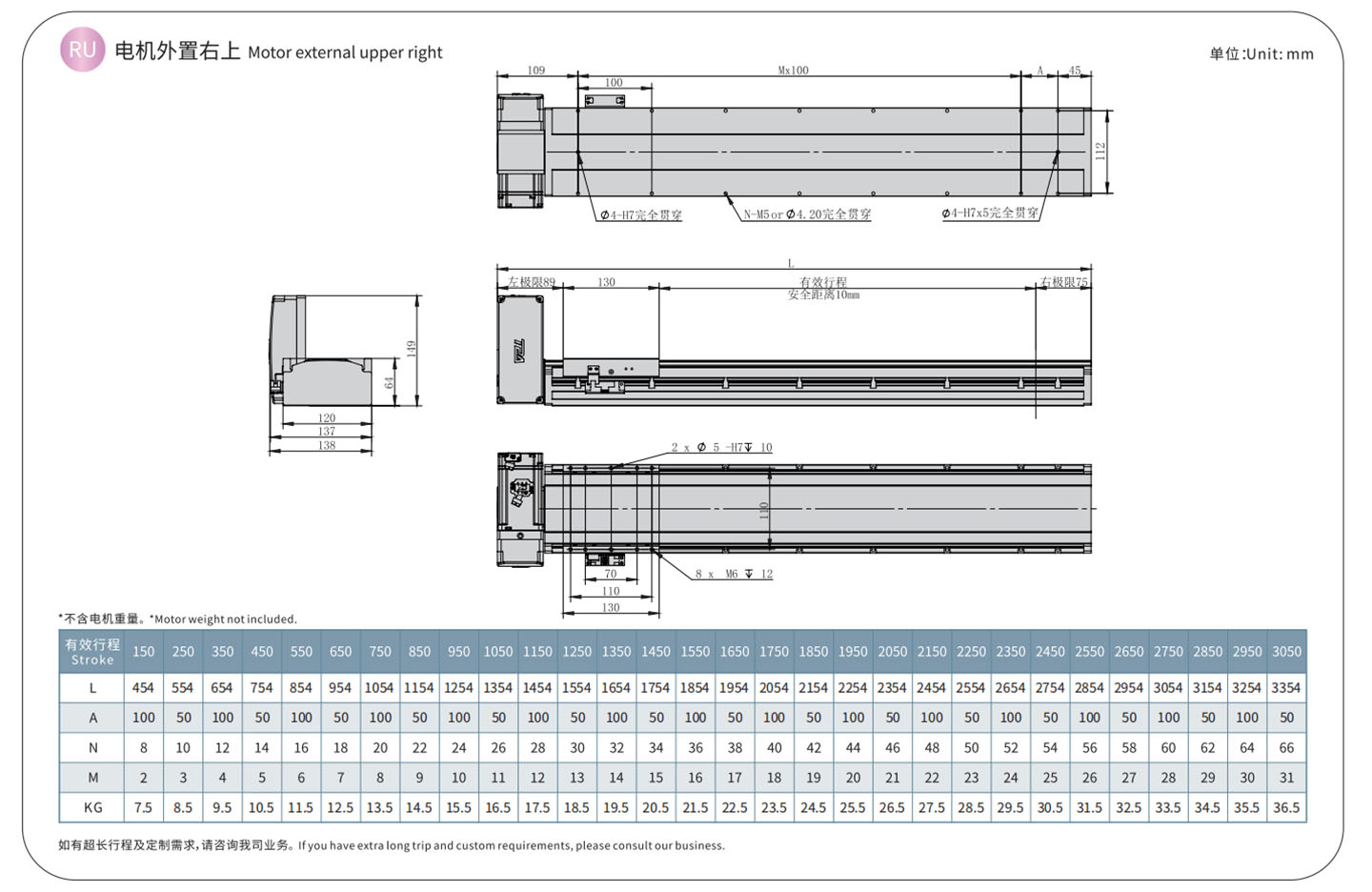
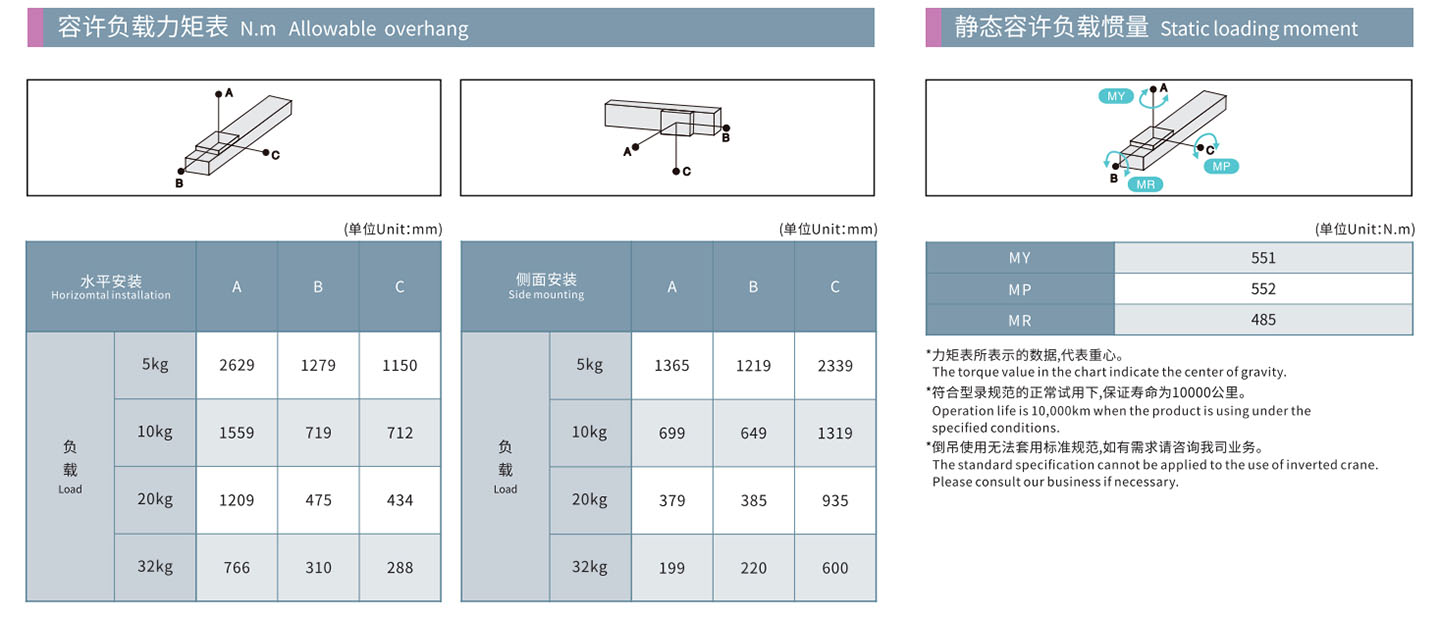
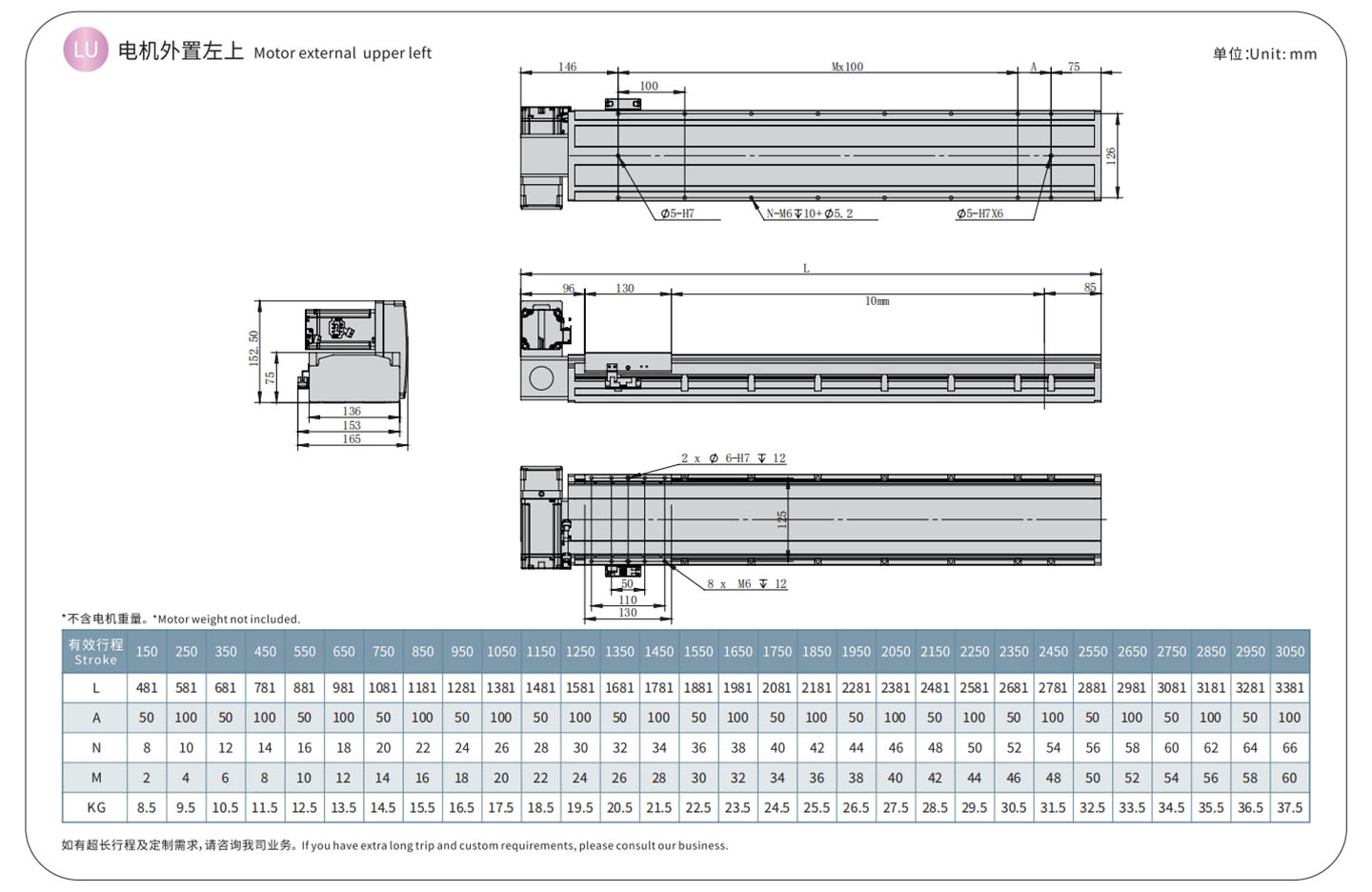
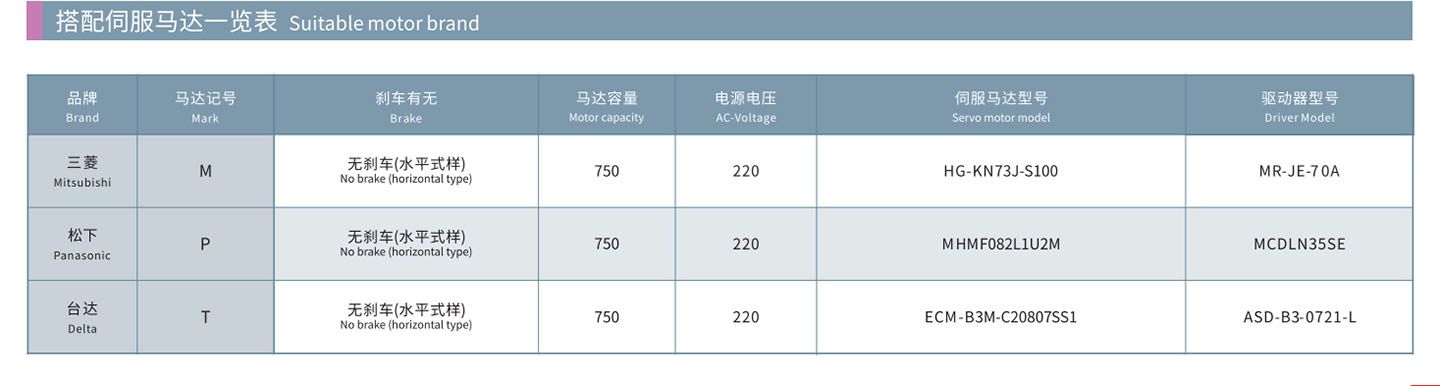
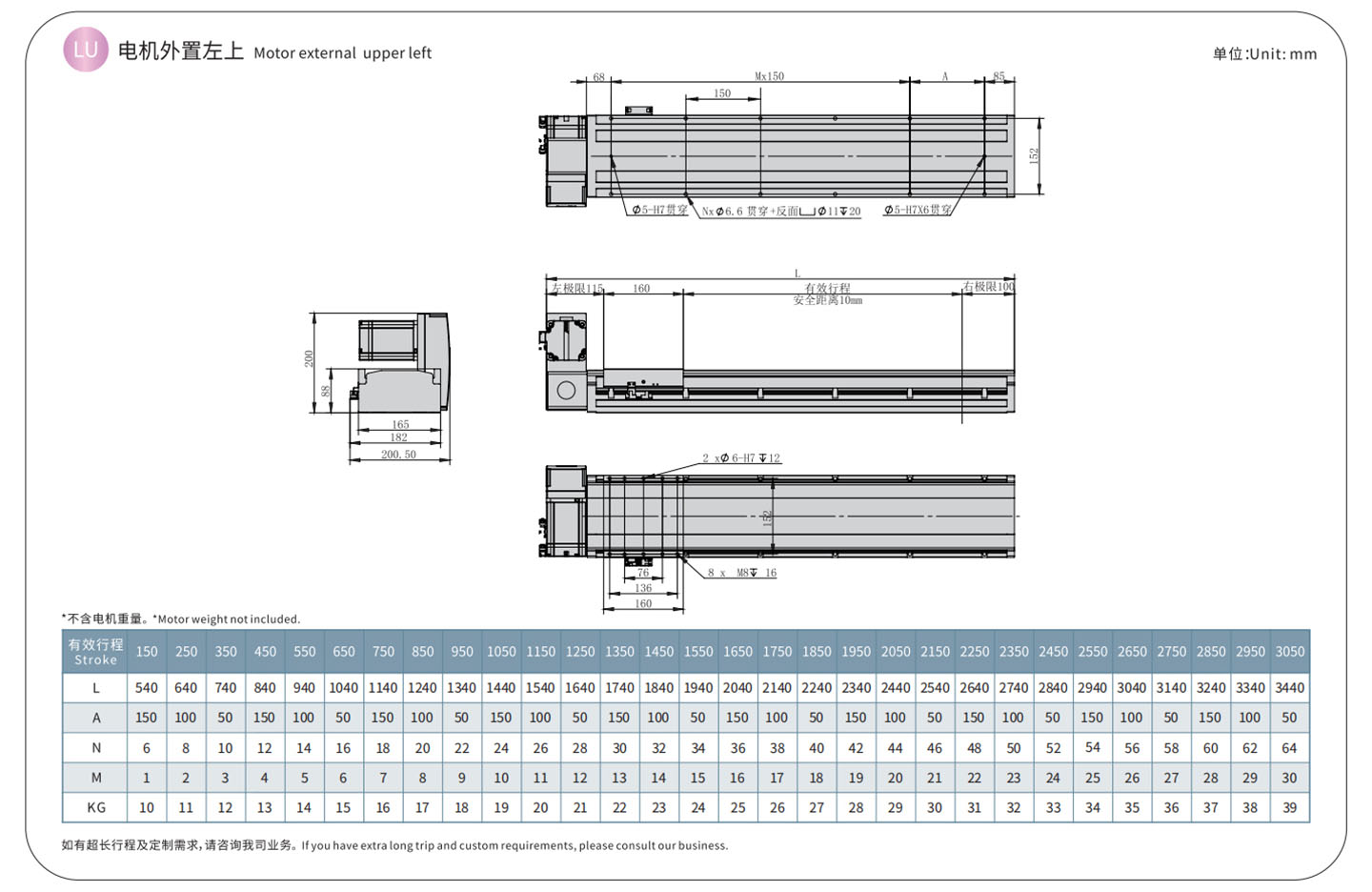
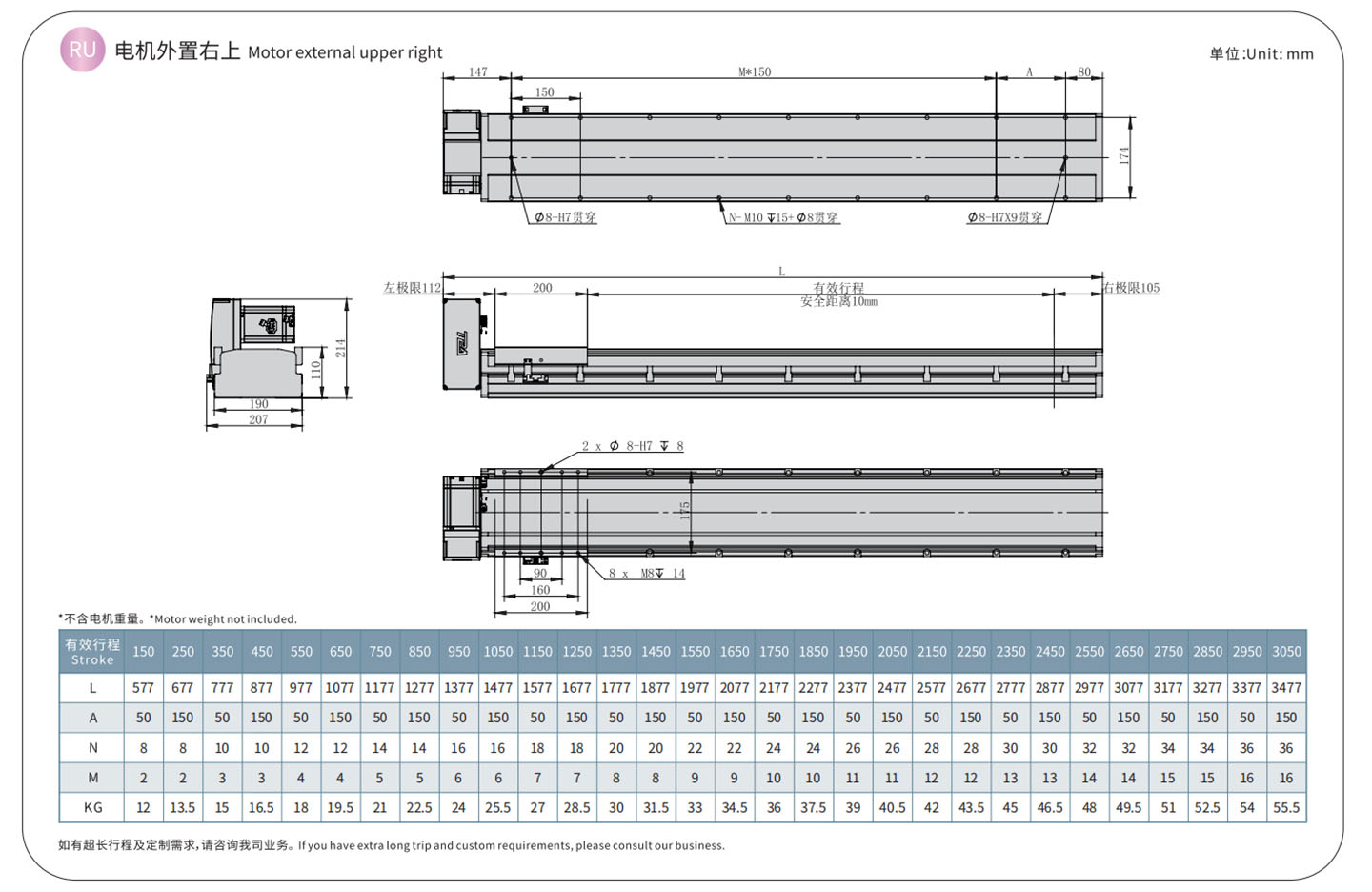
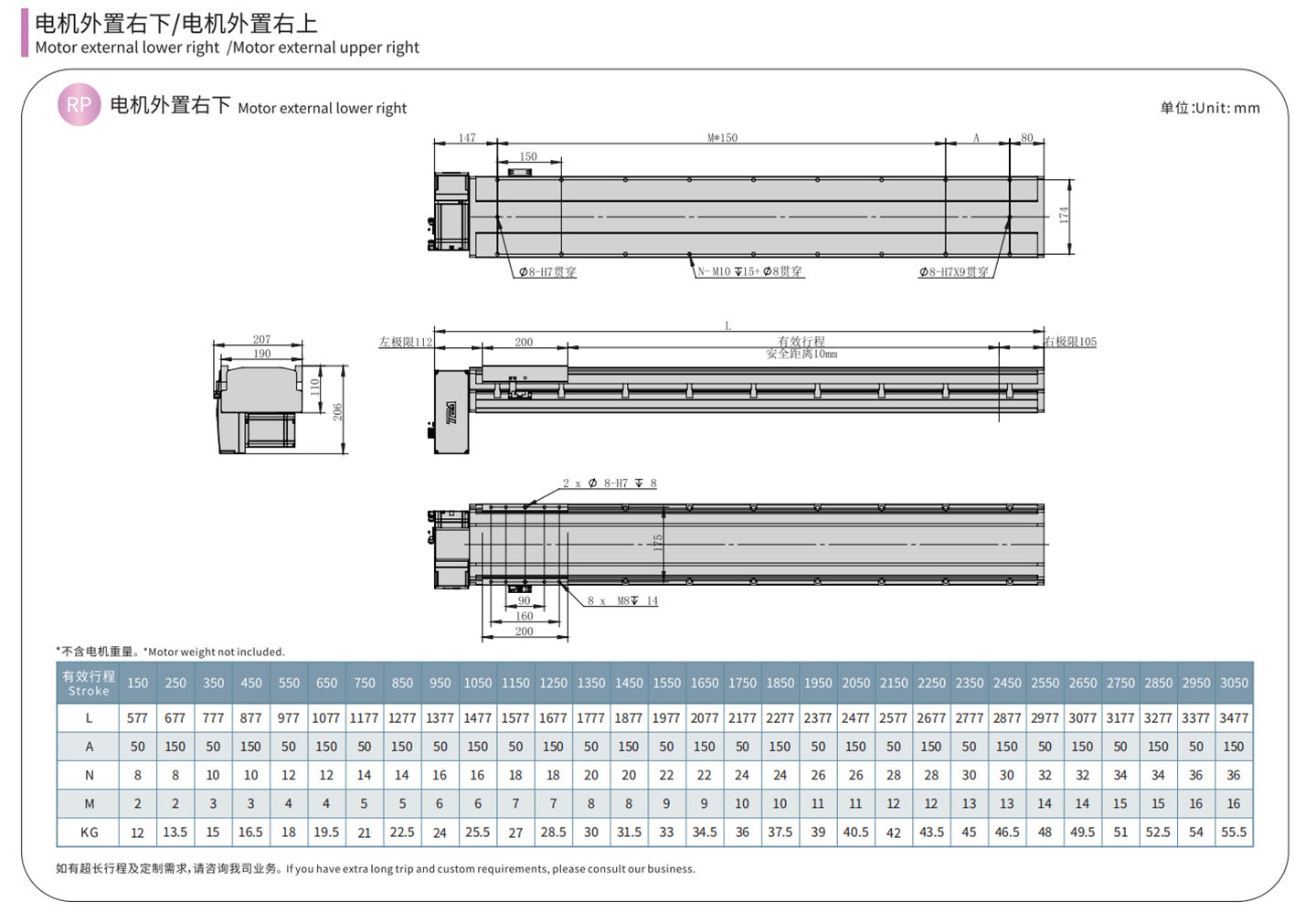
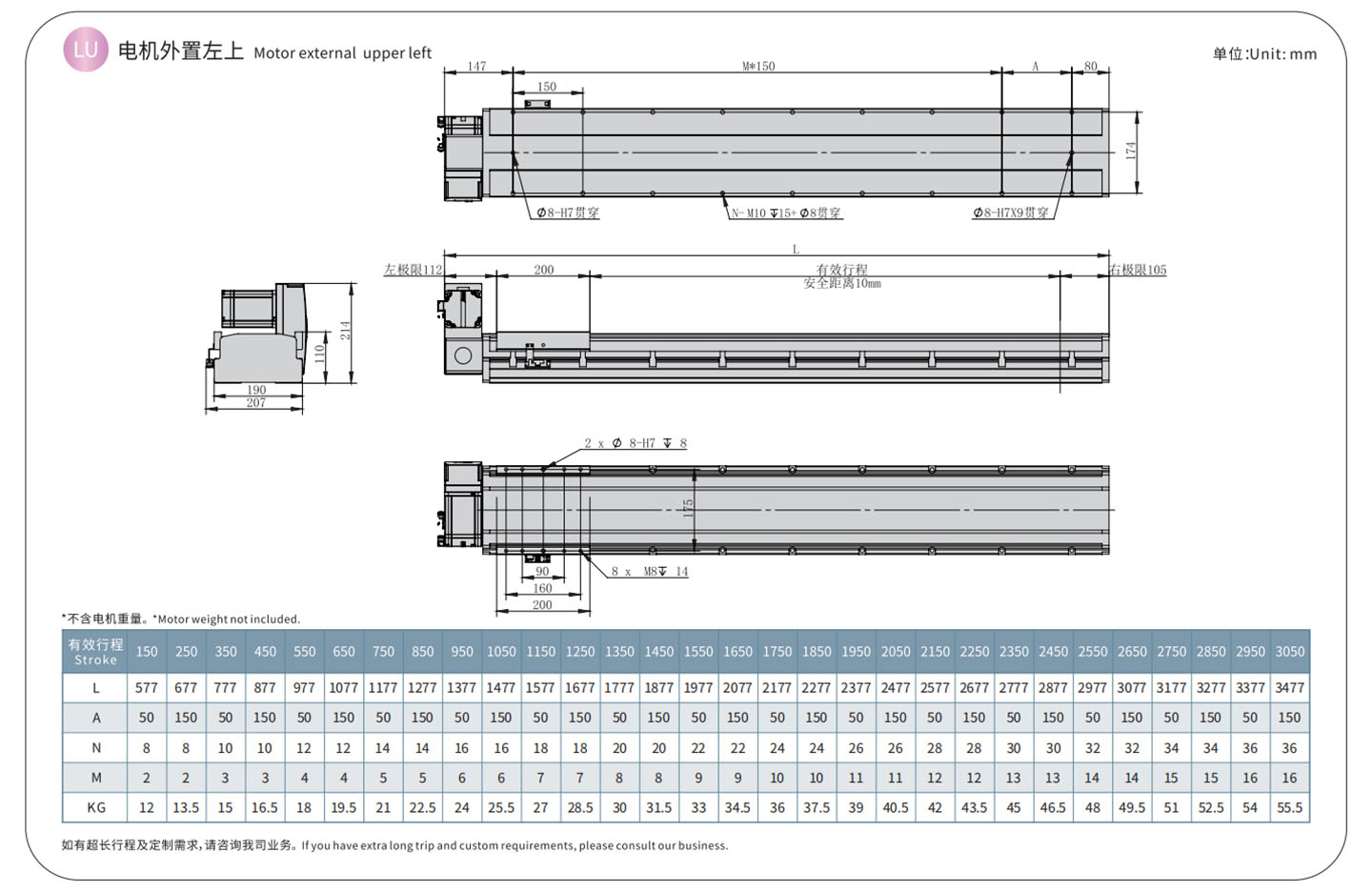
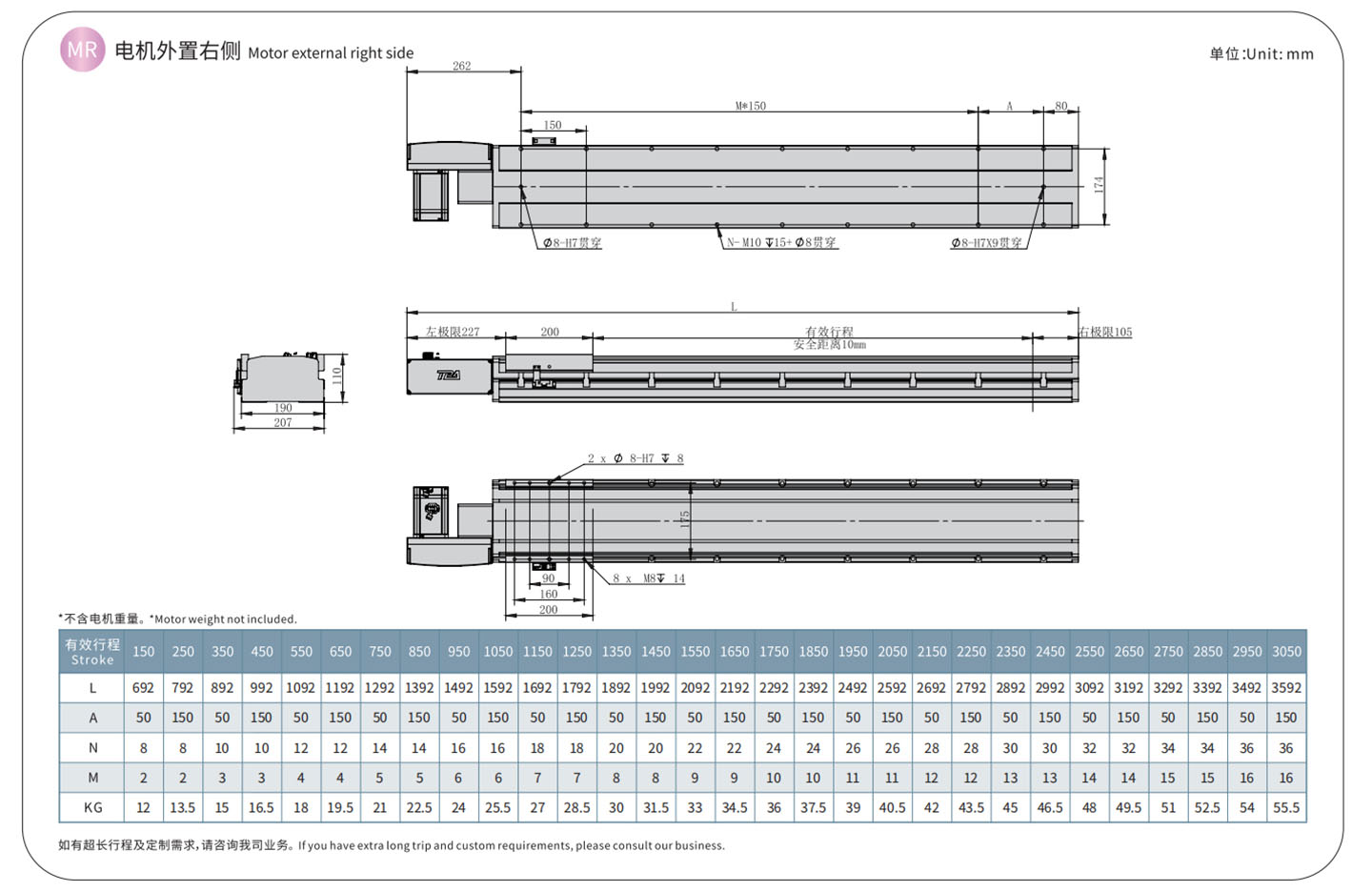
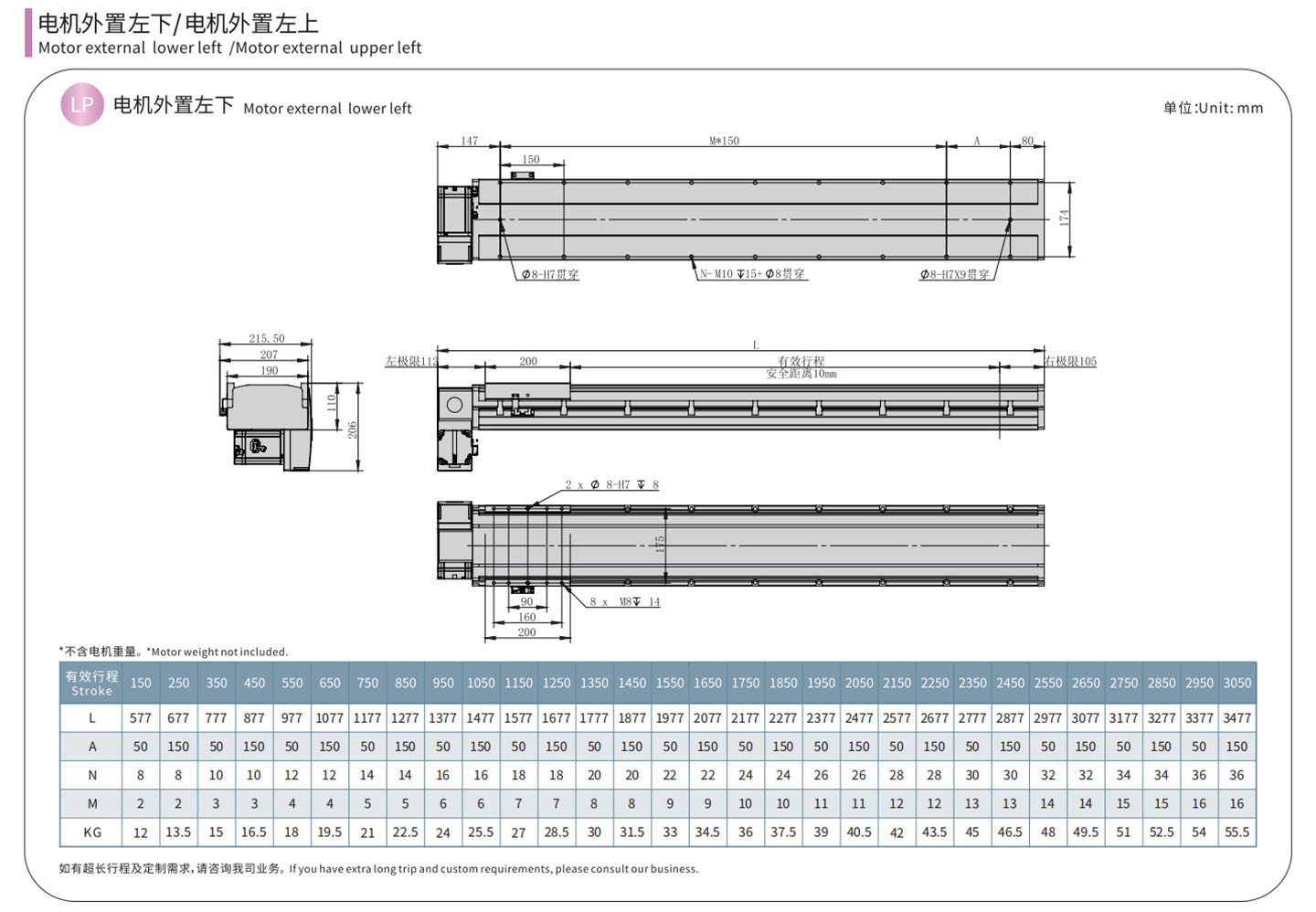
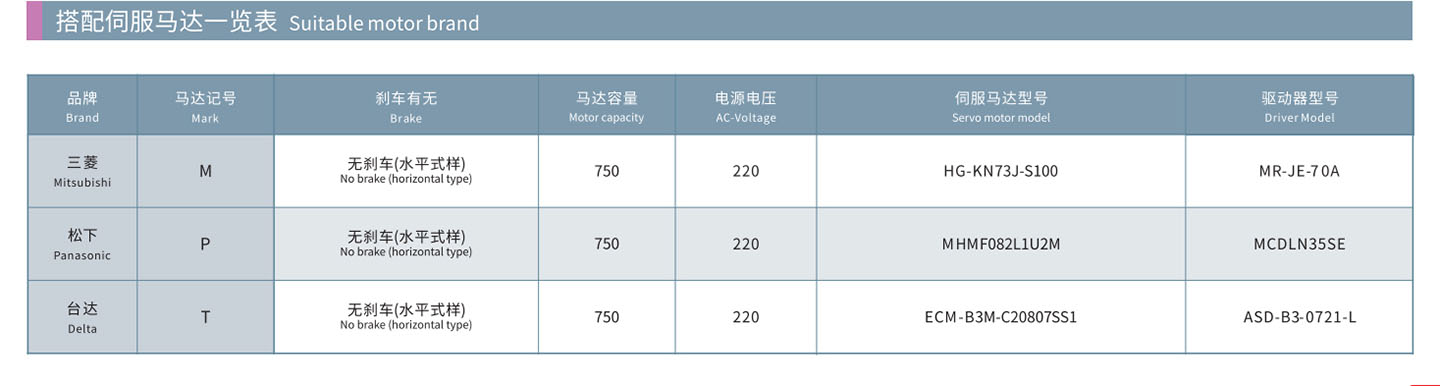
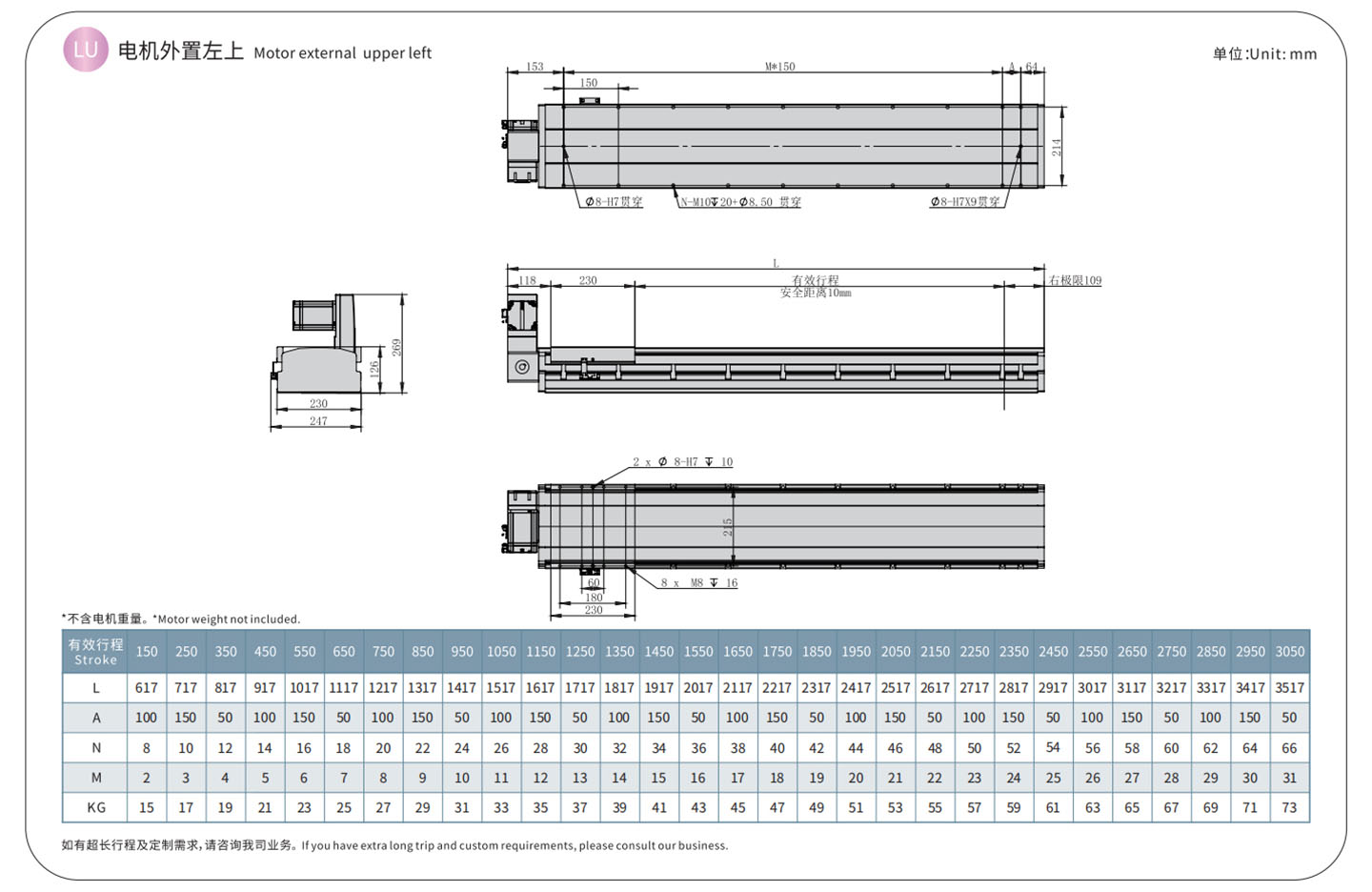
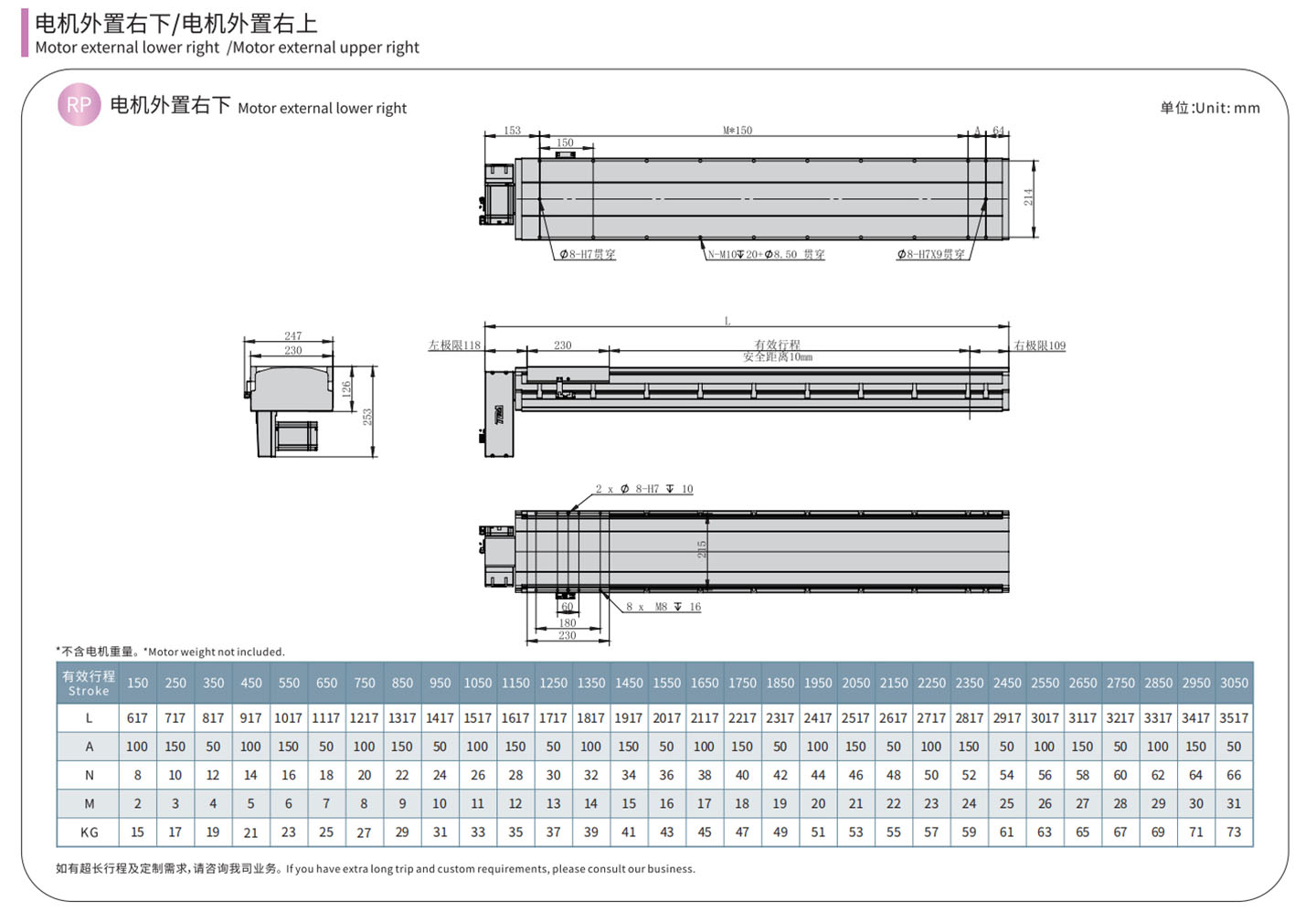
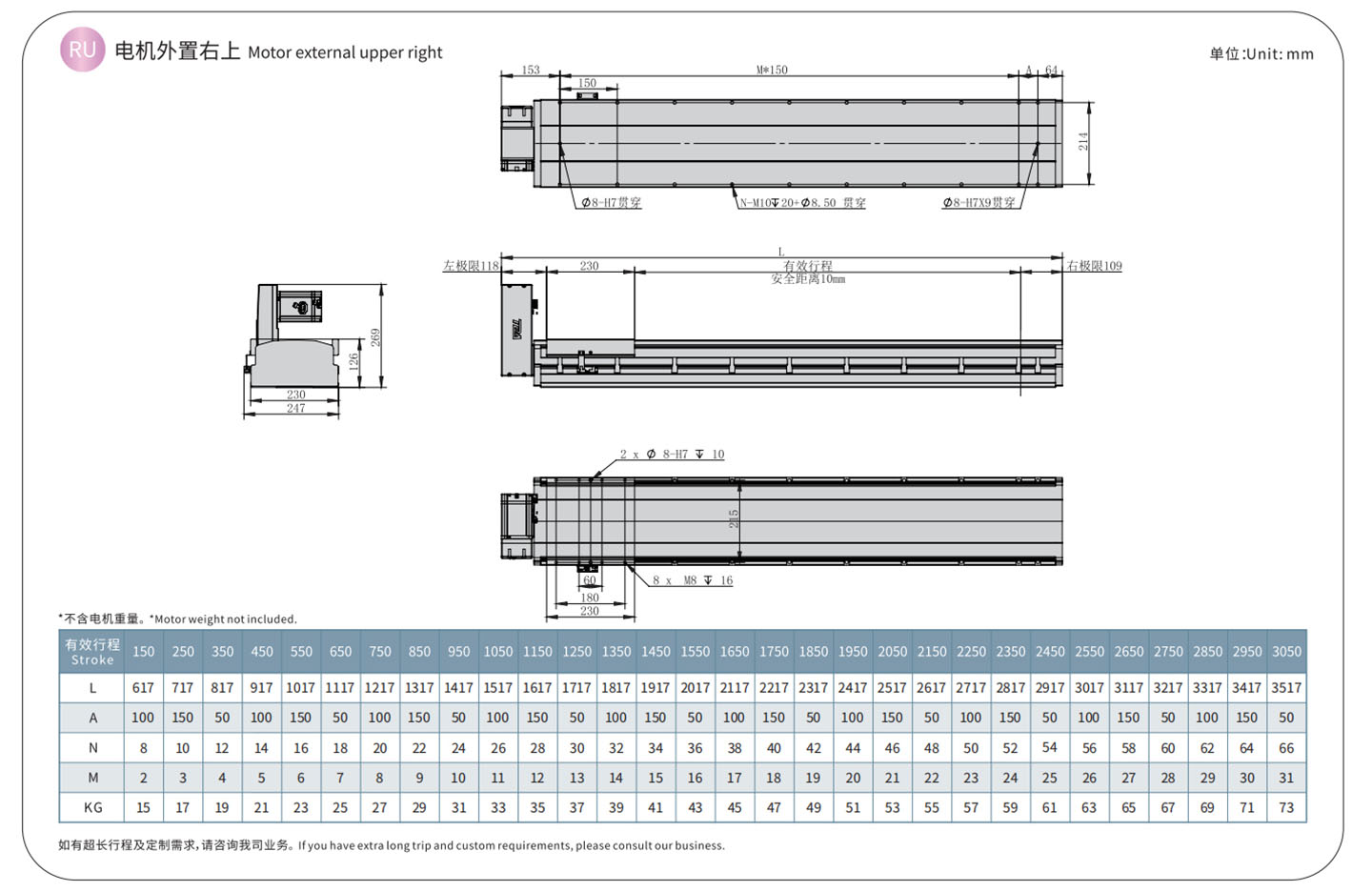
ʻO ka HNB series belt linear actuator he hoʻolālā semi-paʻa kūʻokoʻa, ʻelua mau alakaʻi alakaʻi ikaika ikaika, e hāʻawi i ka torque kiʻekiʻe a me ka wikiwiki, hiki iā TPA ROBOT ke hāʻawi i 200 mau ʻano o ka HNB belt-driven actuators o nā laulā like ʻole a me nā lōʻihi e hālāwai me ka mea kūʻai. pono no ka ukana a me ka hele ana. Hiki i ka wikiwiki kiʻekiʻe ke piʻi i 6000mm/s, a hiki i ka ʻenekinia ke hana maʻalahi i ka Cartesian robot a i ʻole gantry robots e hoʻokō i nā pono automation o nā ʻoihana like ʻole.
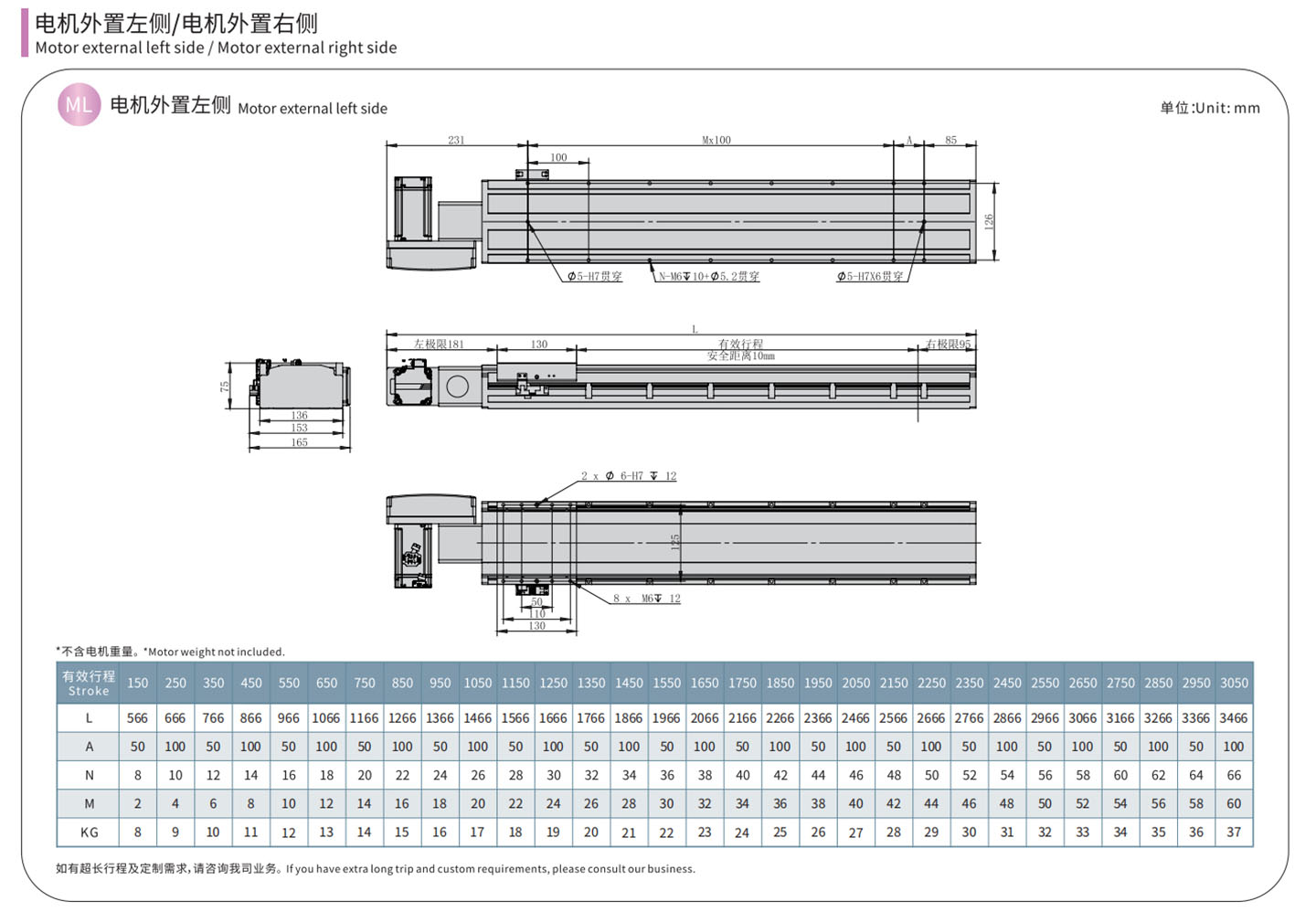
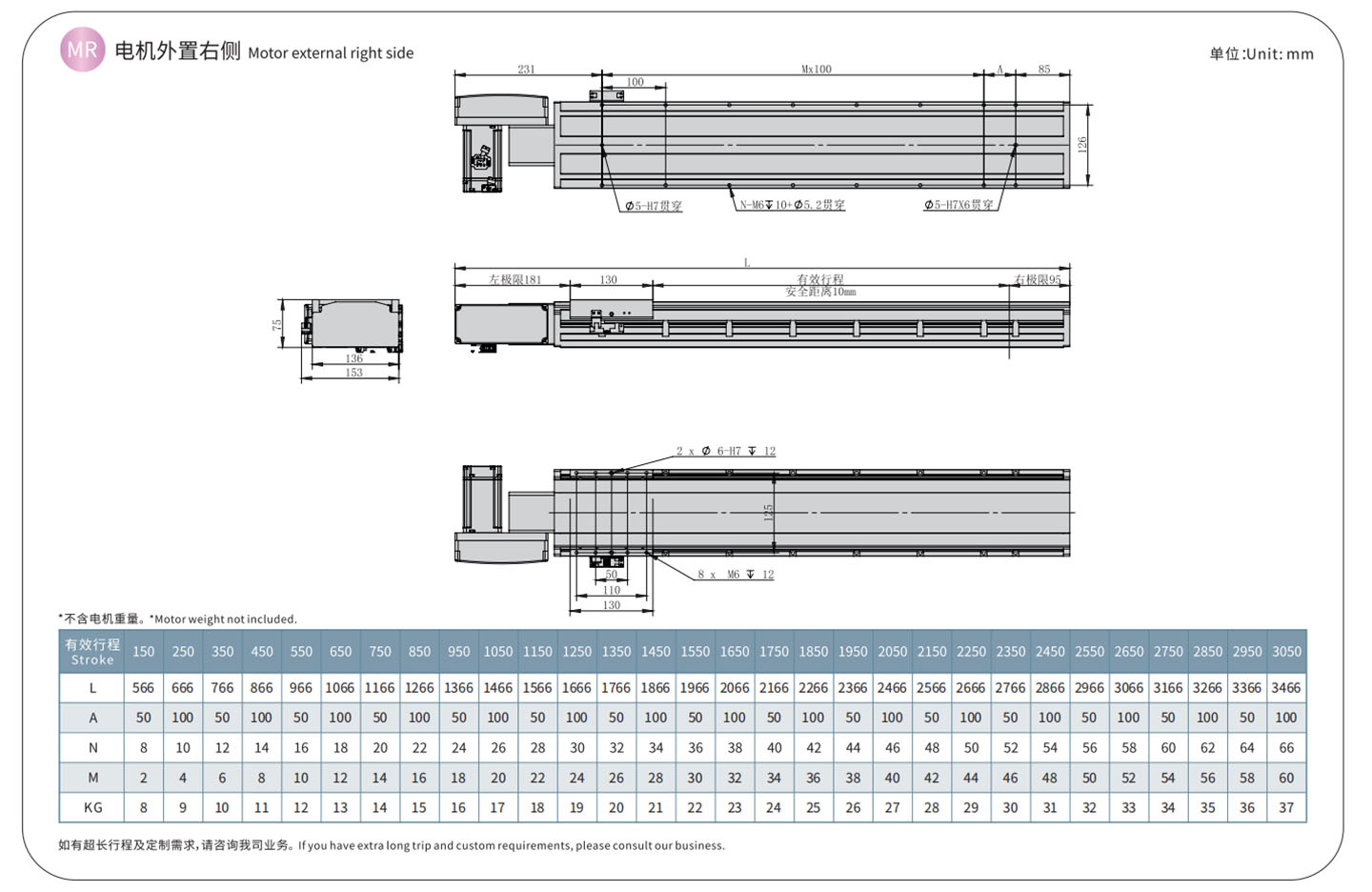
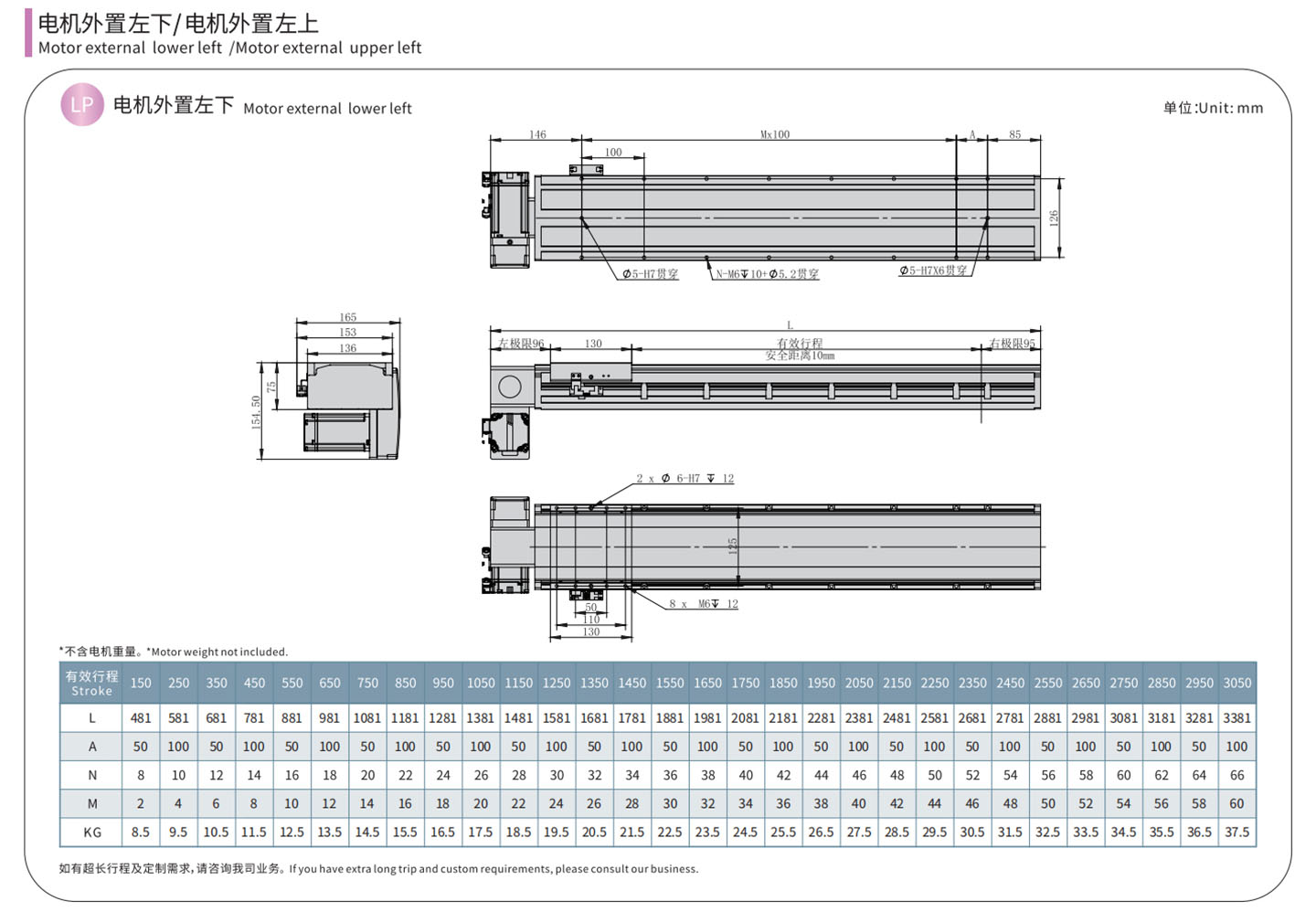
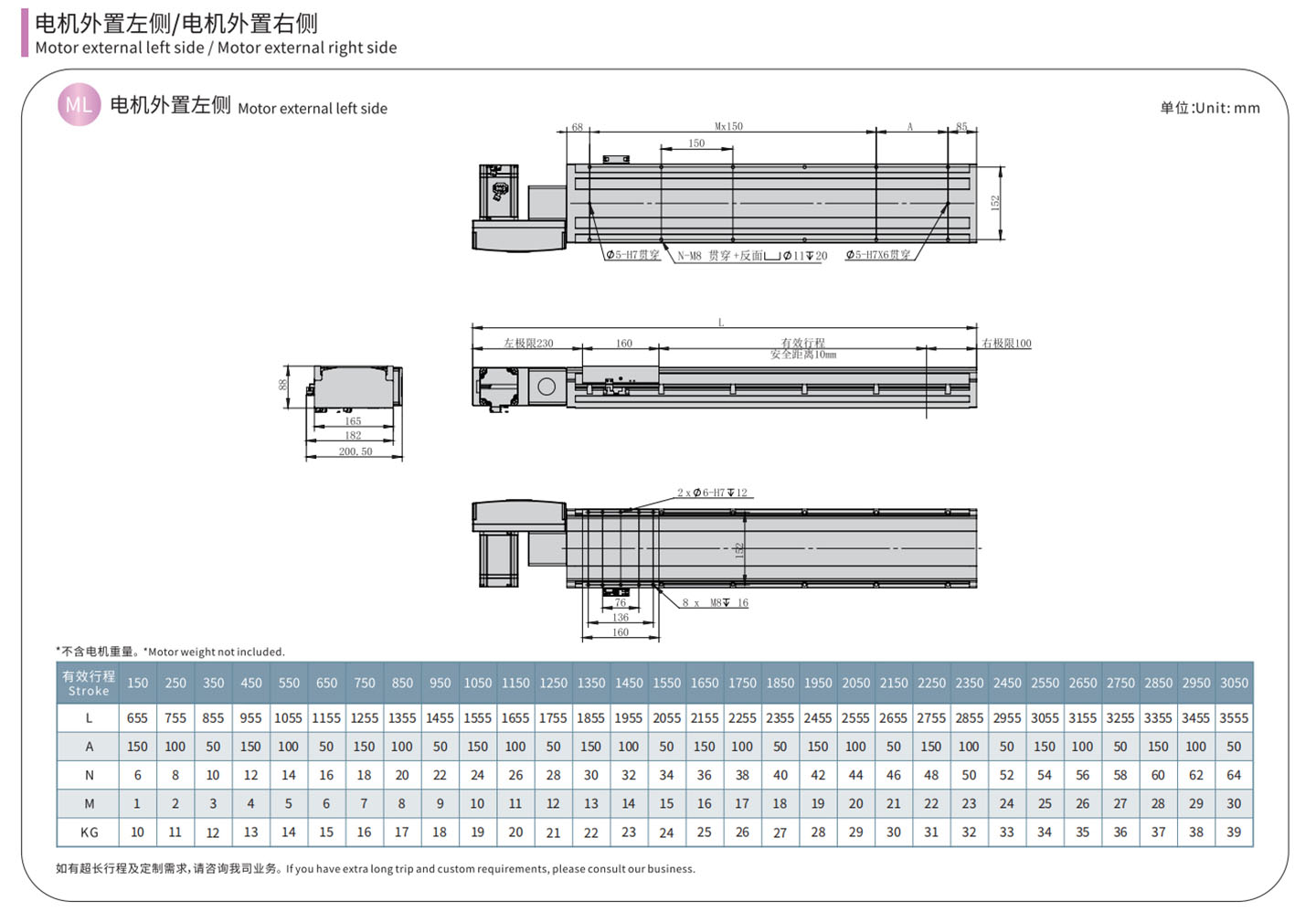
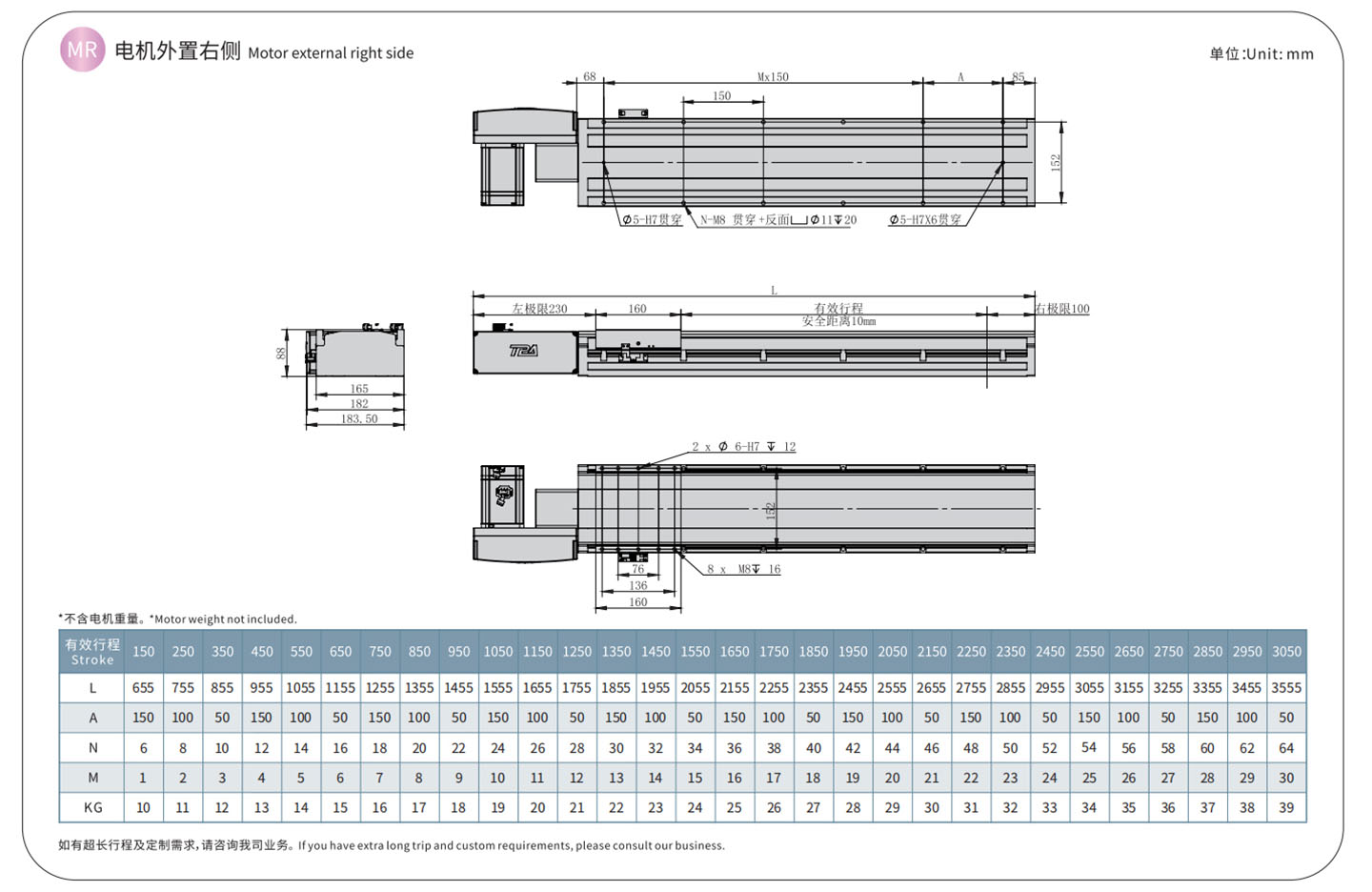
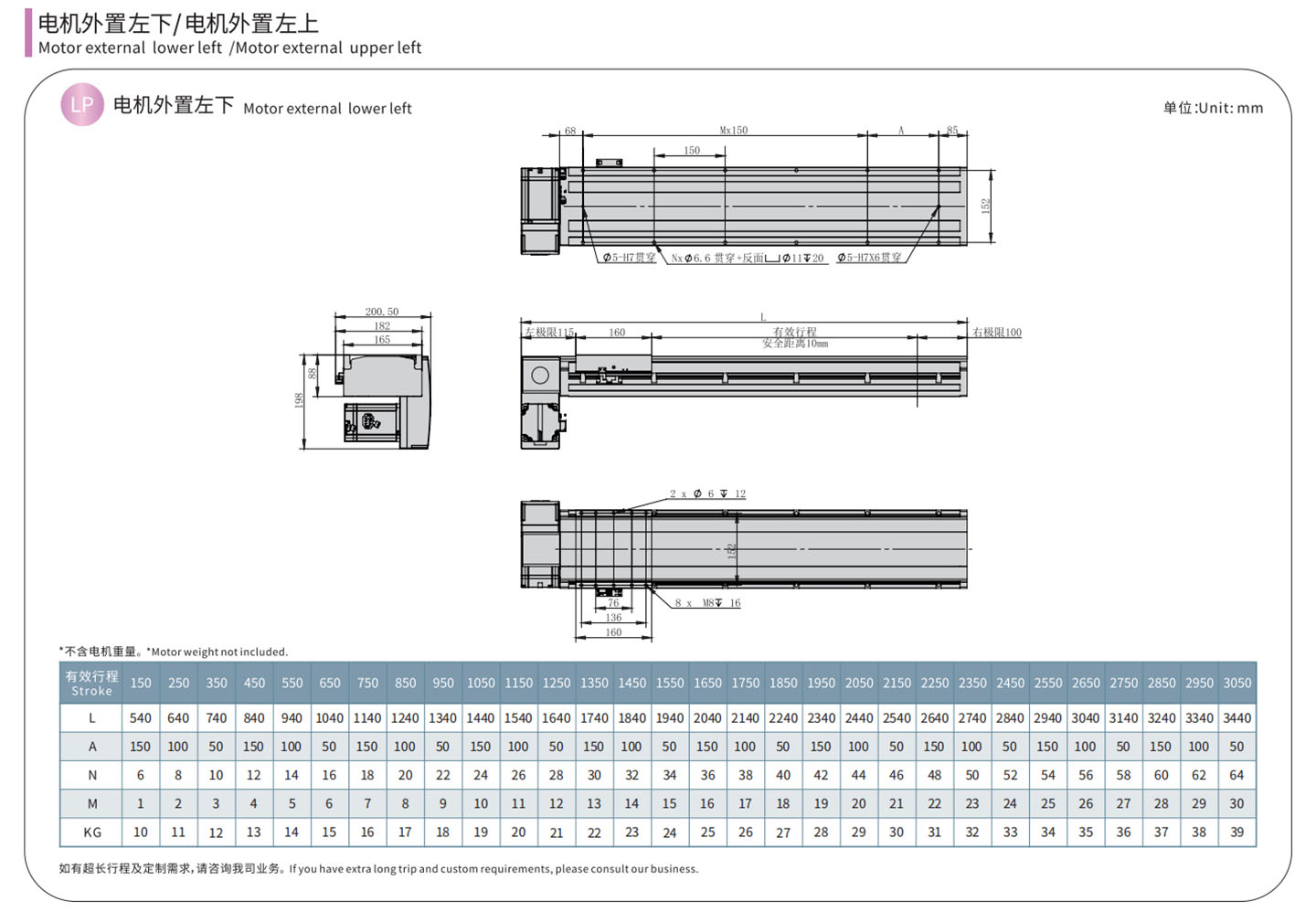
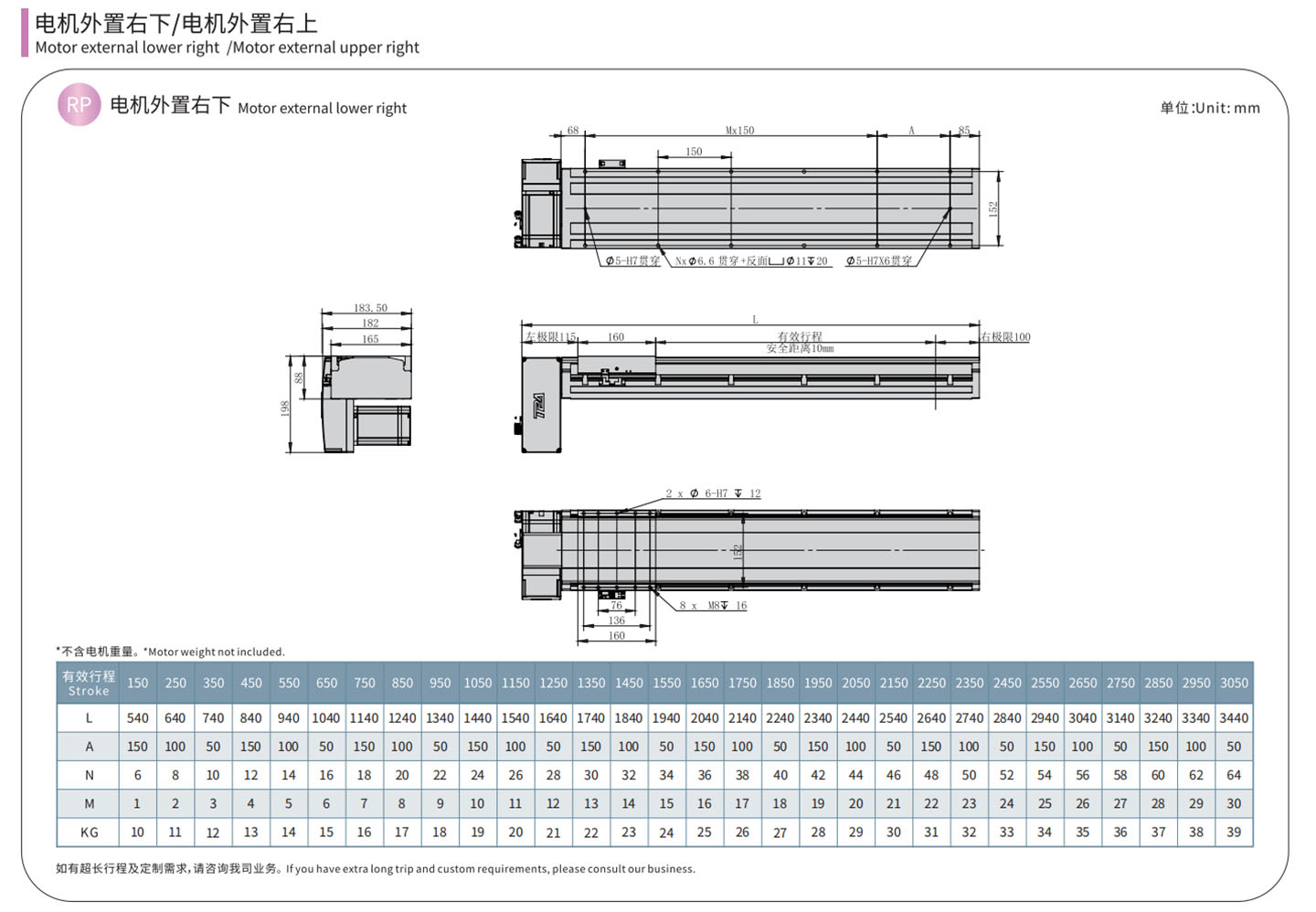
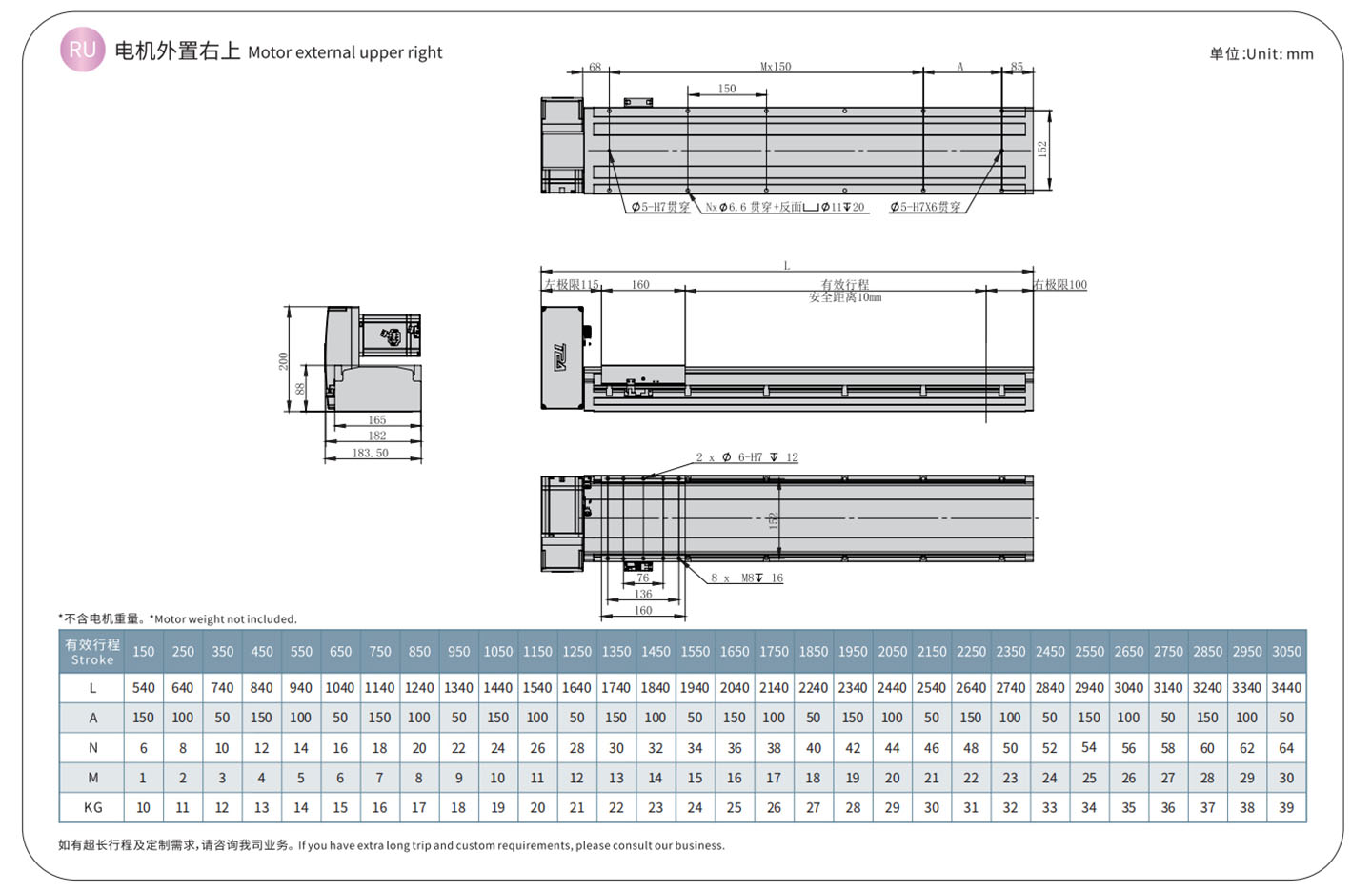
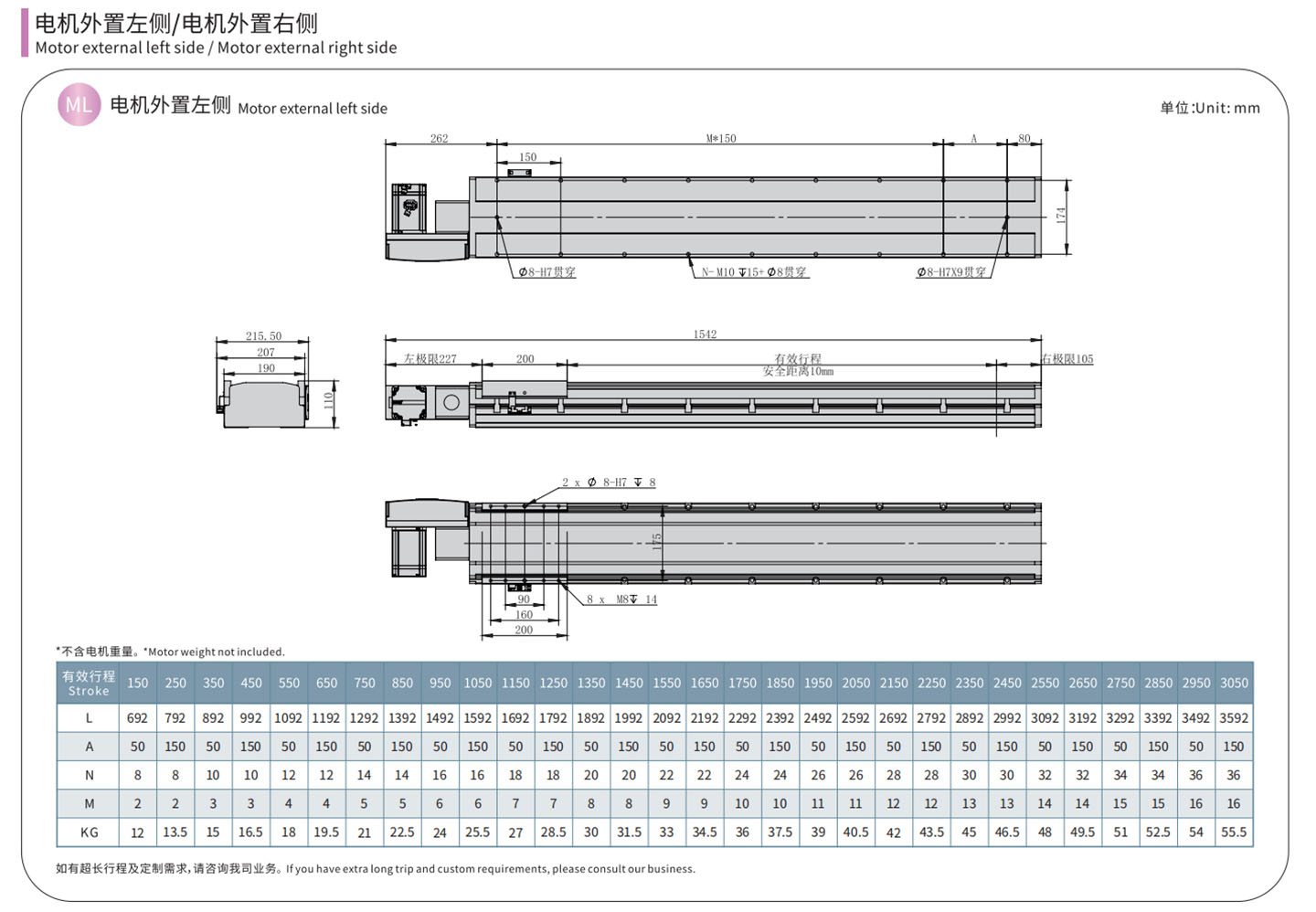
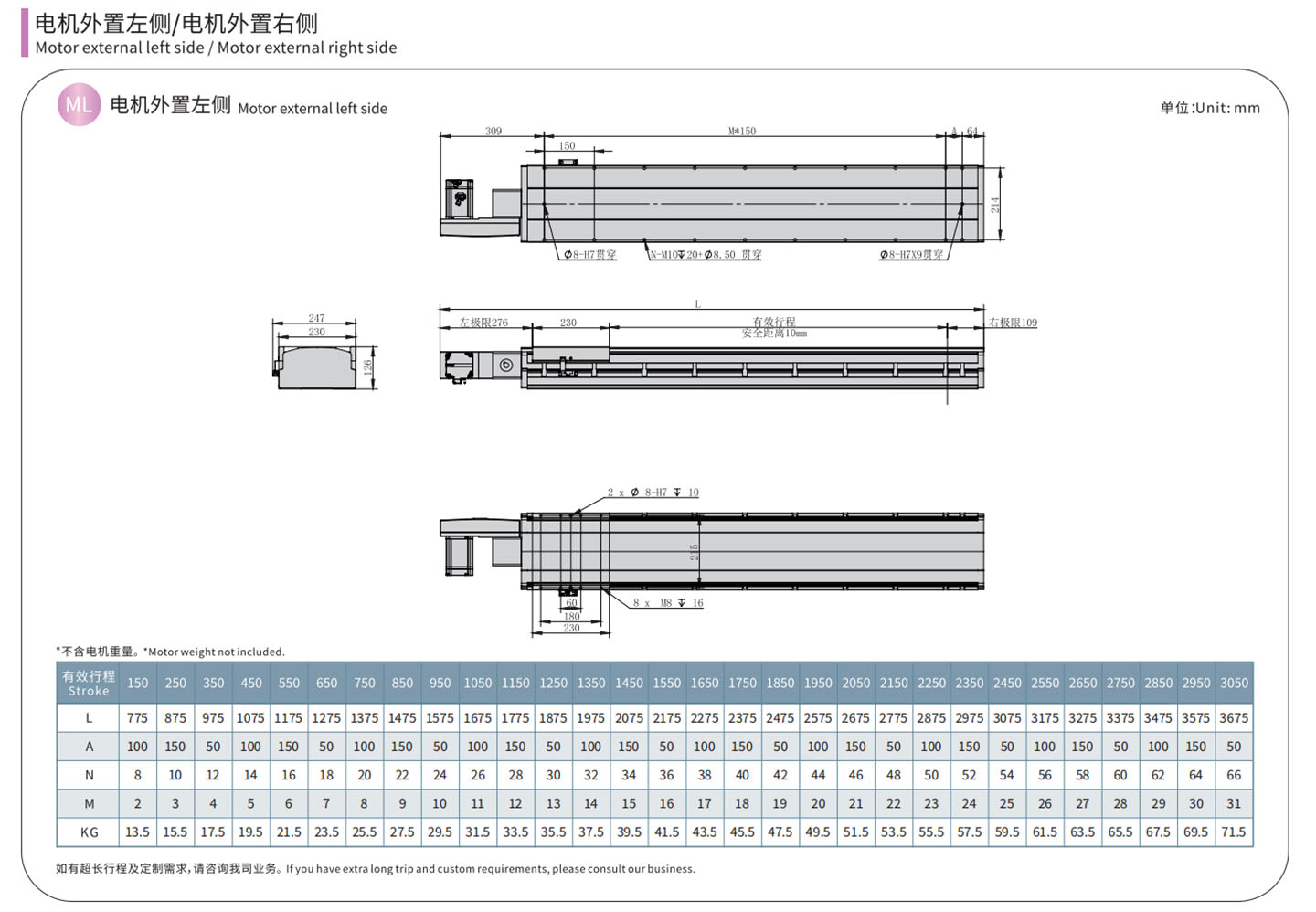
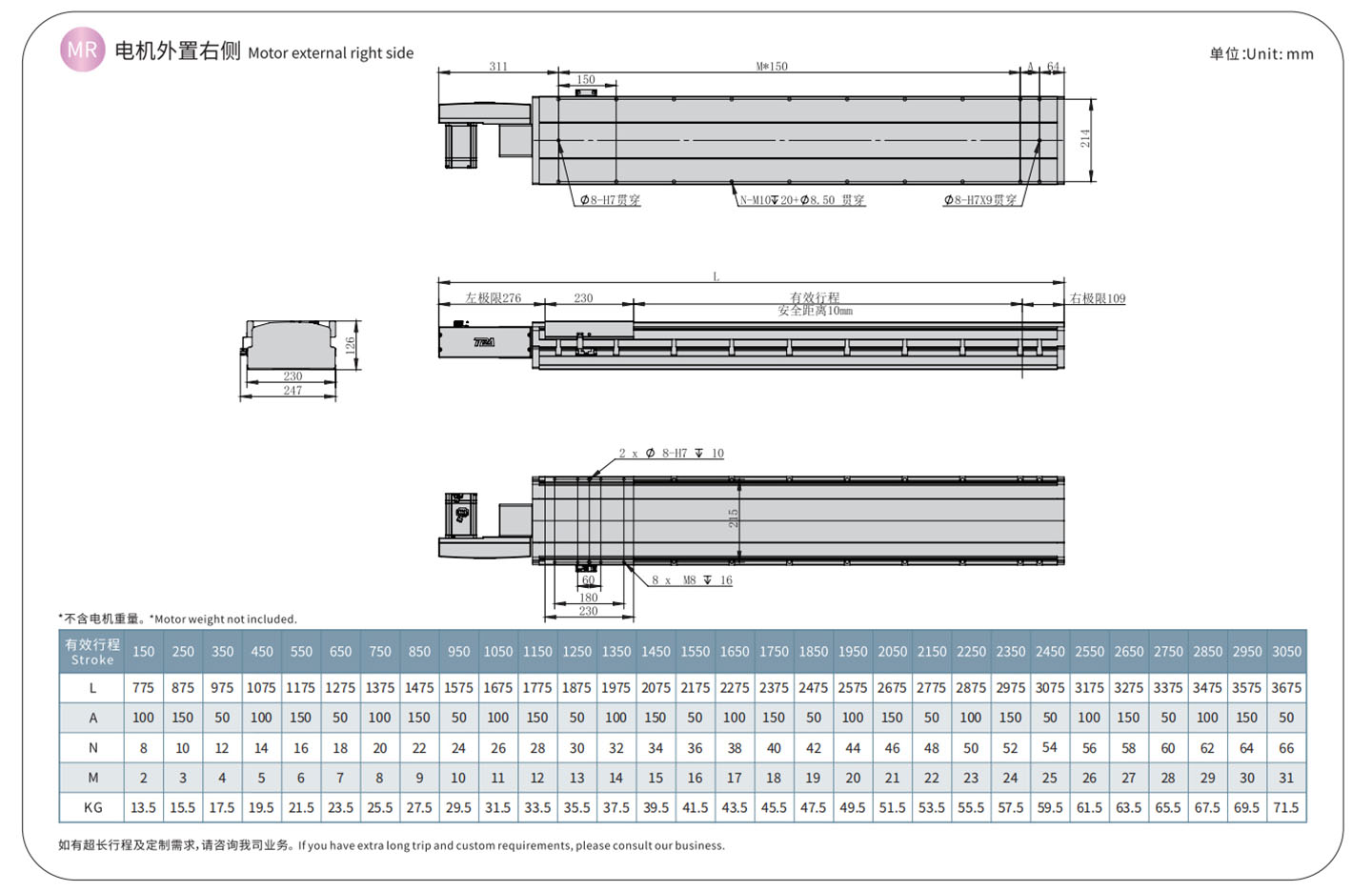
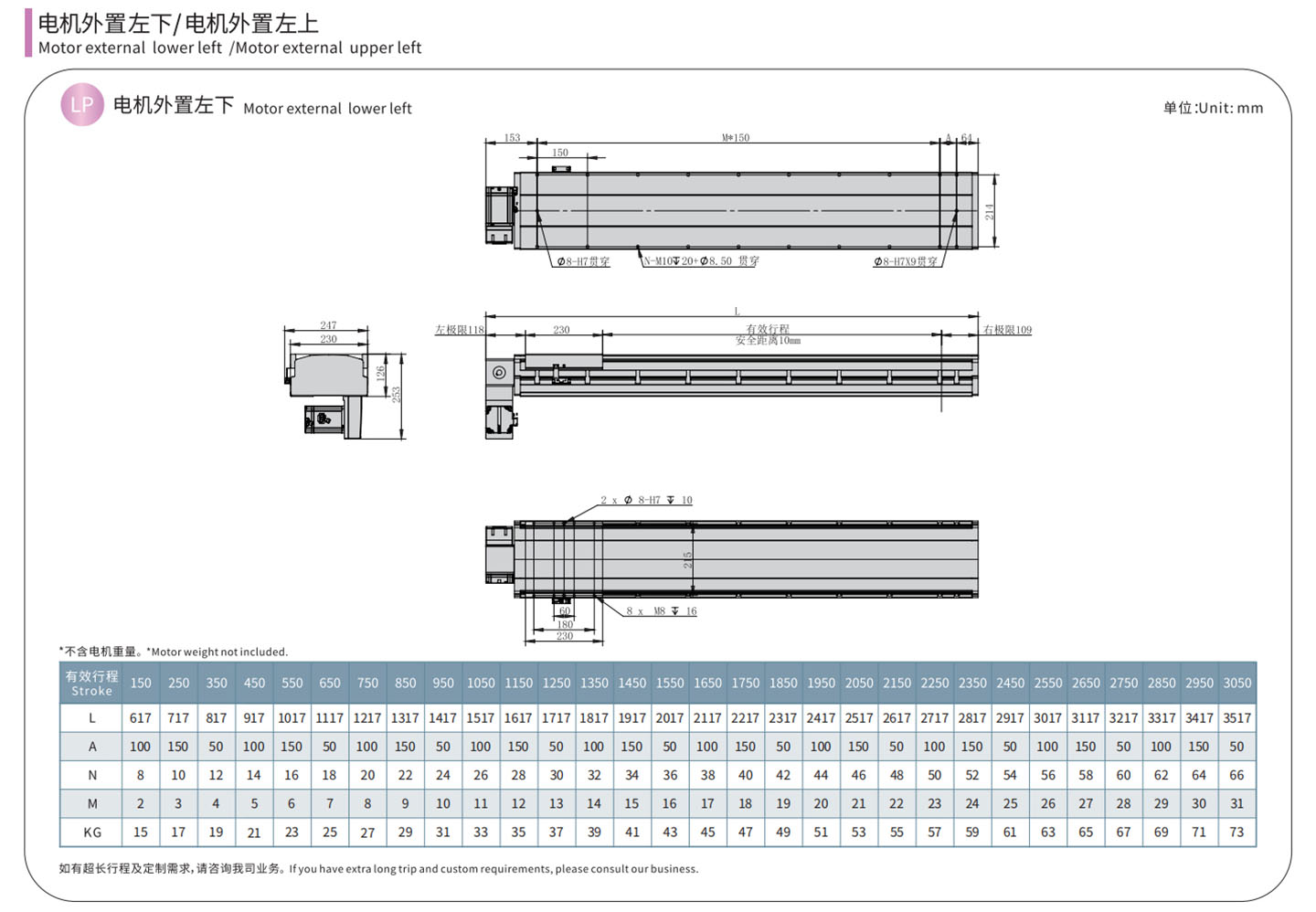
Ma waho aʻe o ka hāʻawi ʻana i ka torque kiʻekiʻe, kiʻekiʻe kiʻekiʻe, a me ka lōʻihi stroke linear slide actuator, ua hoʻolālā akamai mākou i ke ʻano o ka waiho ʻana o ka flange plate i waho, e hiki ai i kā mākou mea hana laina ke hāʻawi i nā ʻano hoʻonohonoho 8 e hoʻololi i nā ʻano ʻenehana automation.

半封闭精进皮带模组165

半封闭精进皮带模组136
半封闭精进皮带模组120
Nā hiʻohiʻona
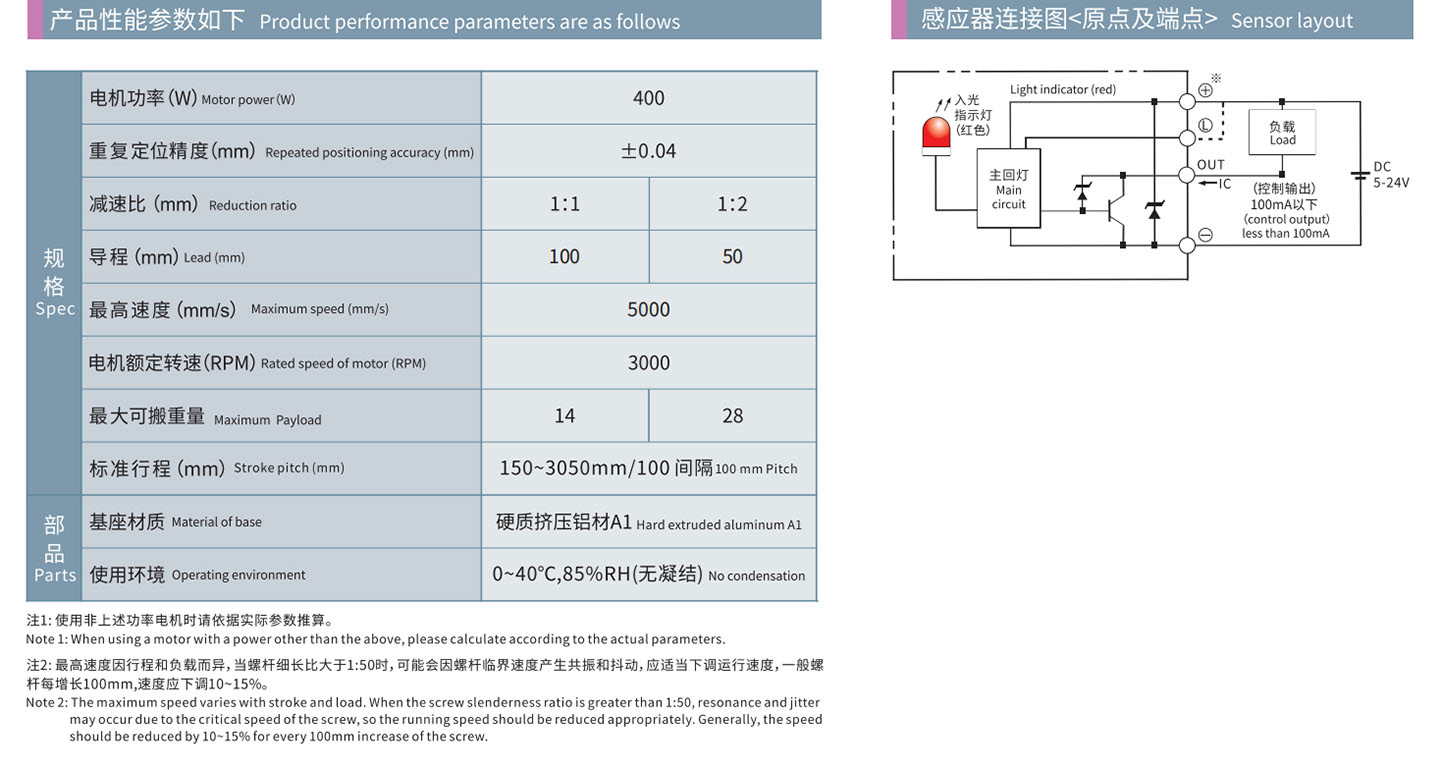
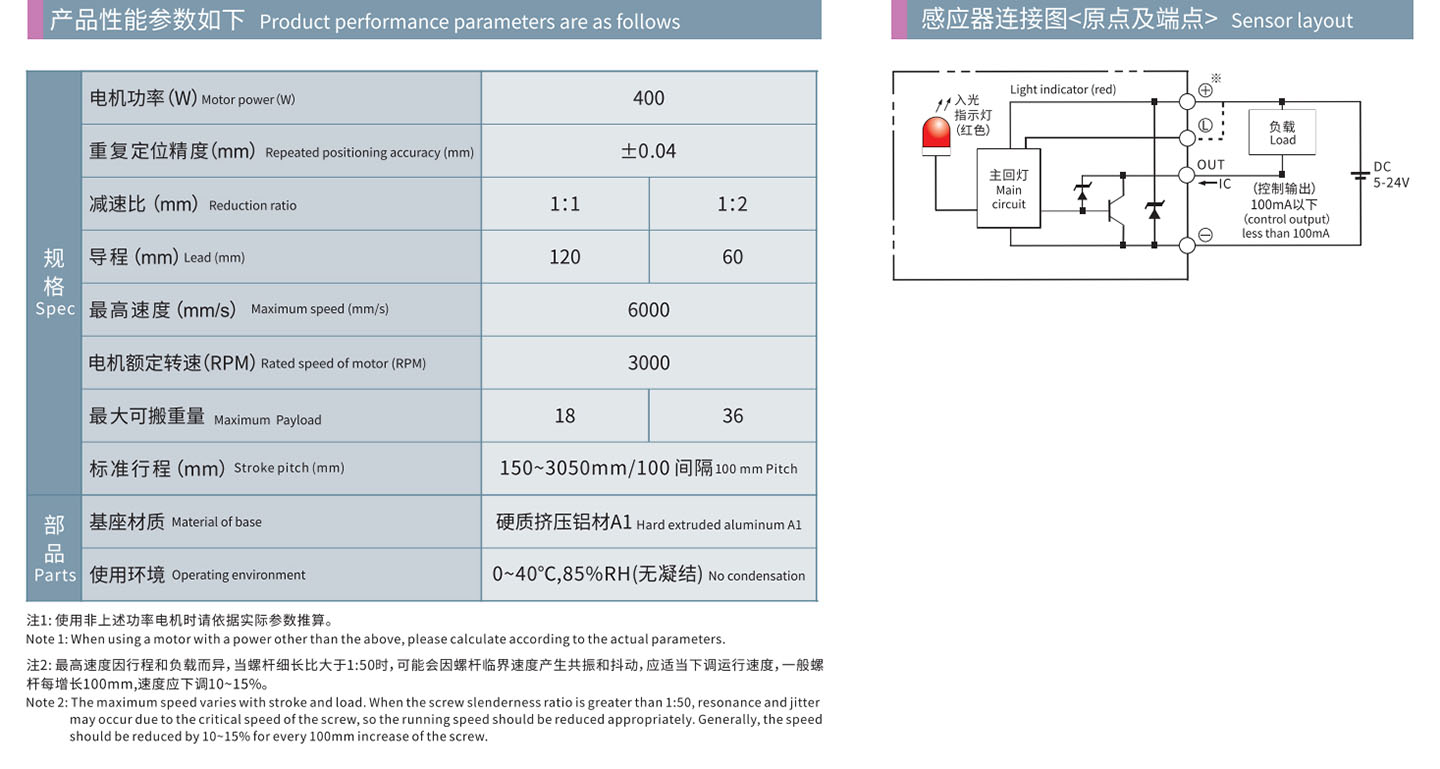
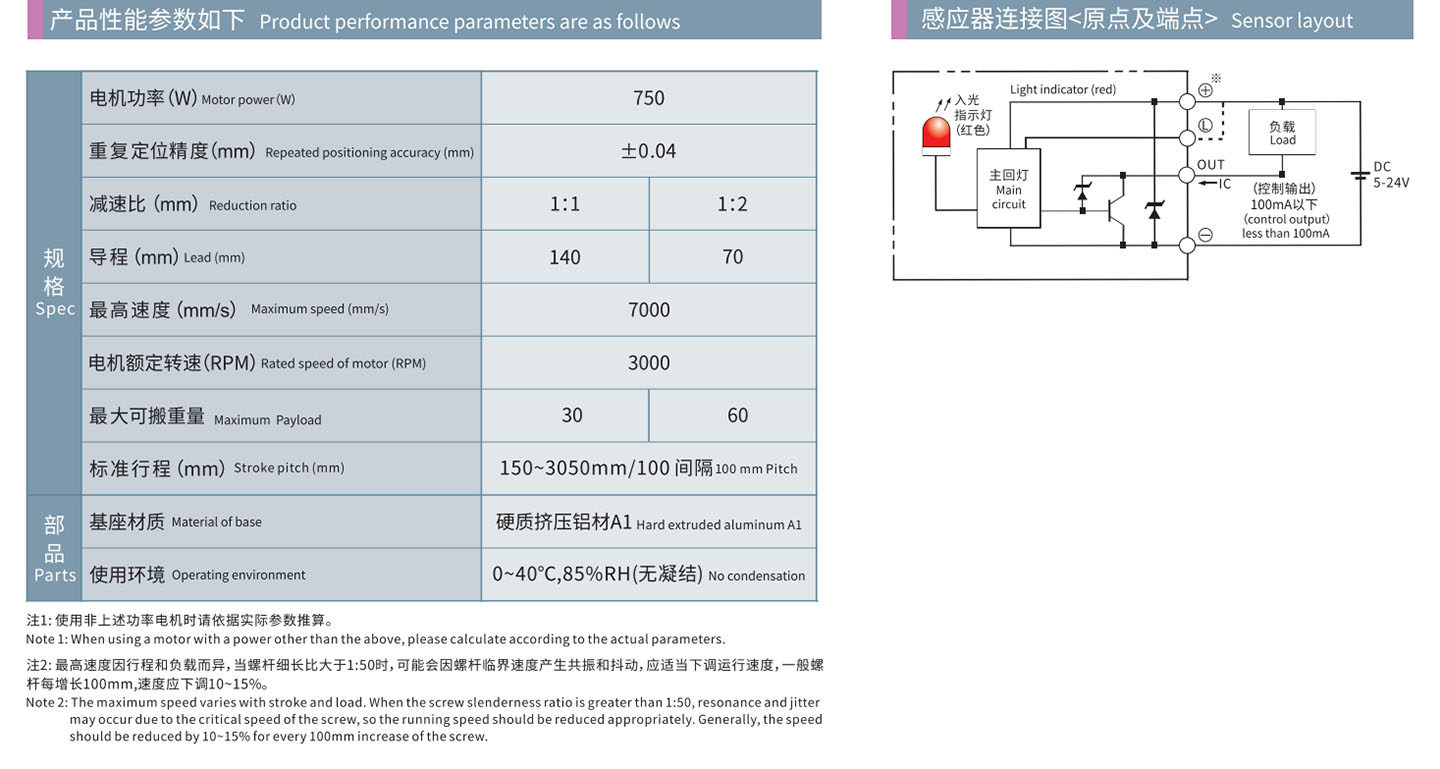
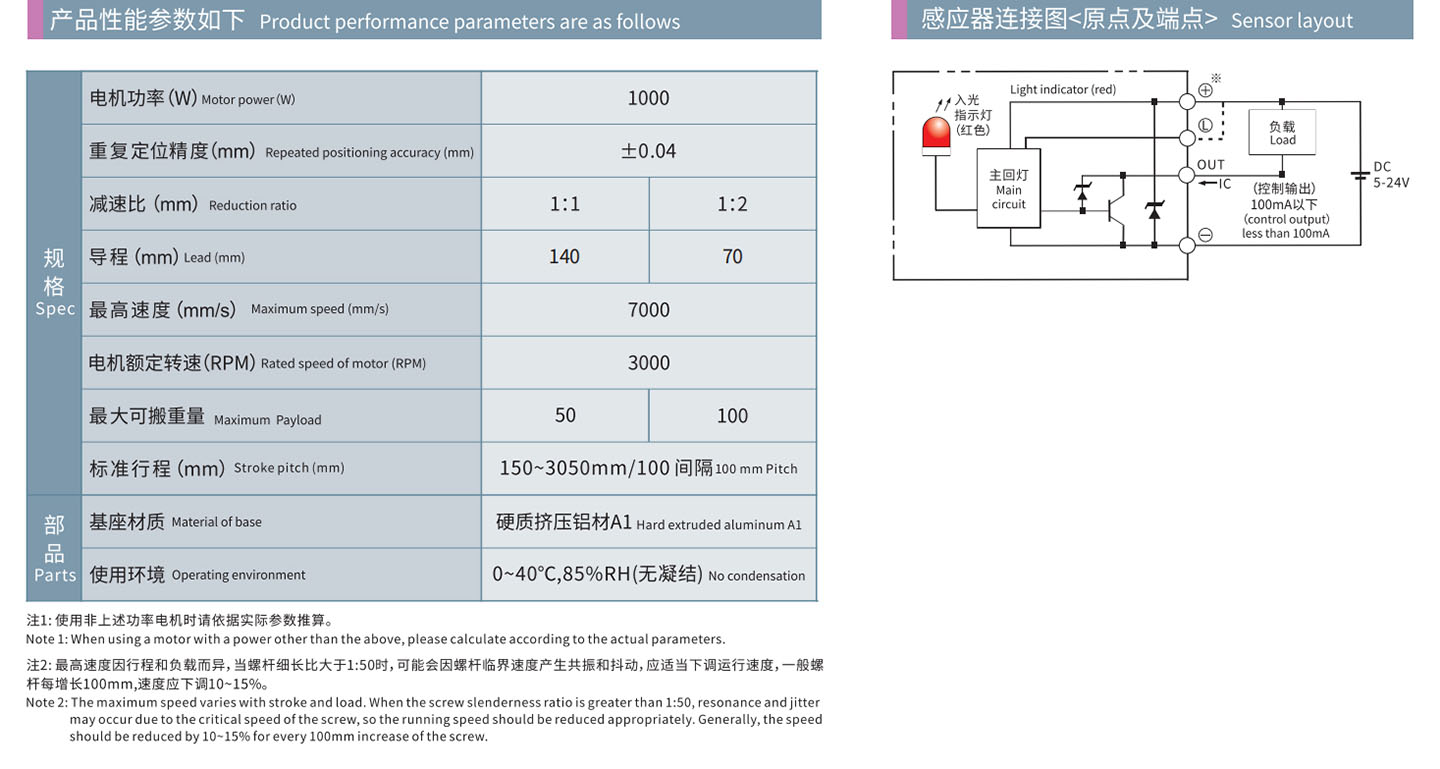
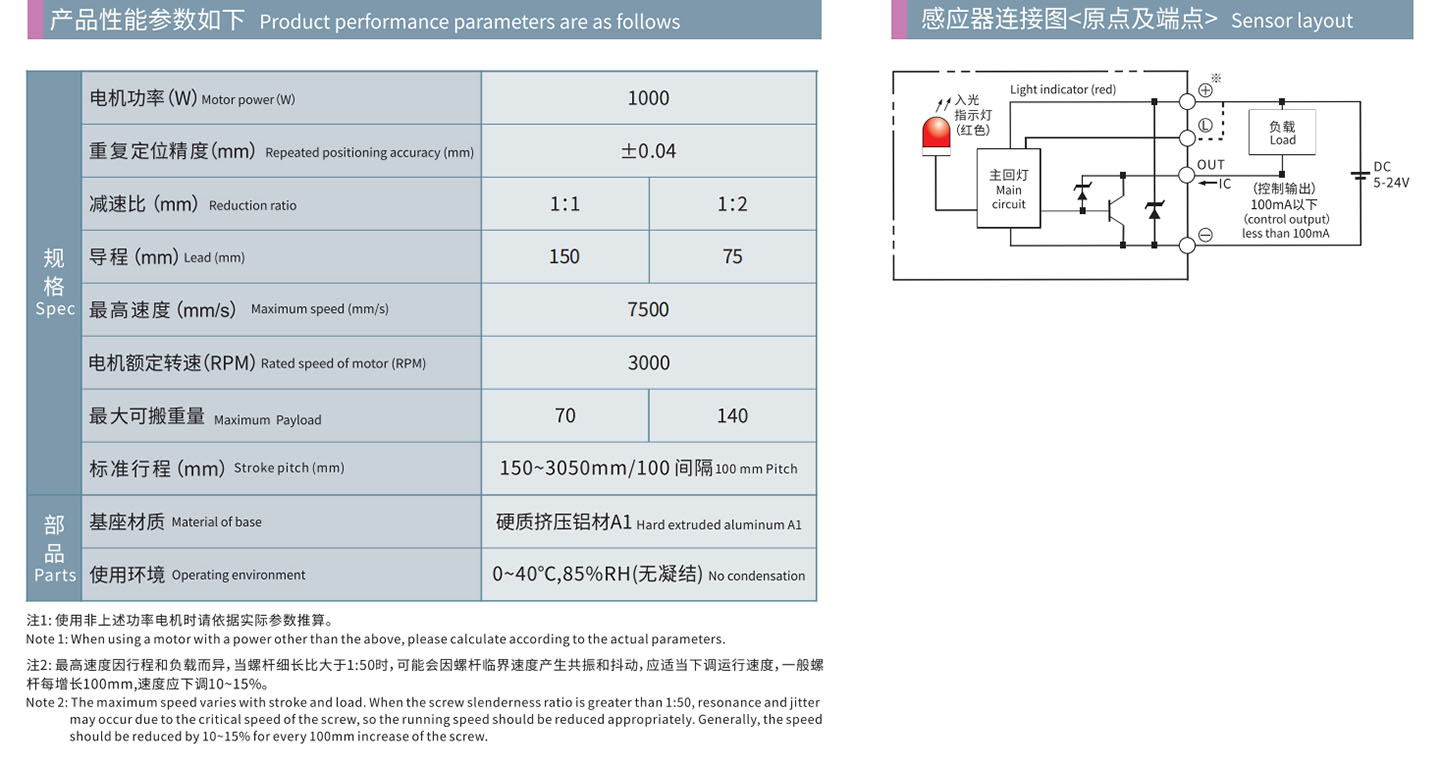
Hoʻonohonoho hou ʻia ka pololei: ± 0.04mm
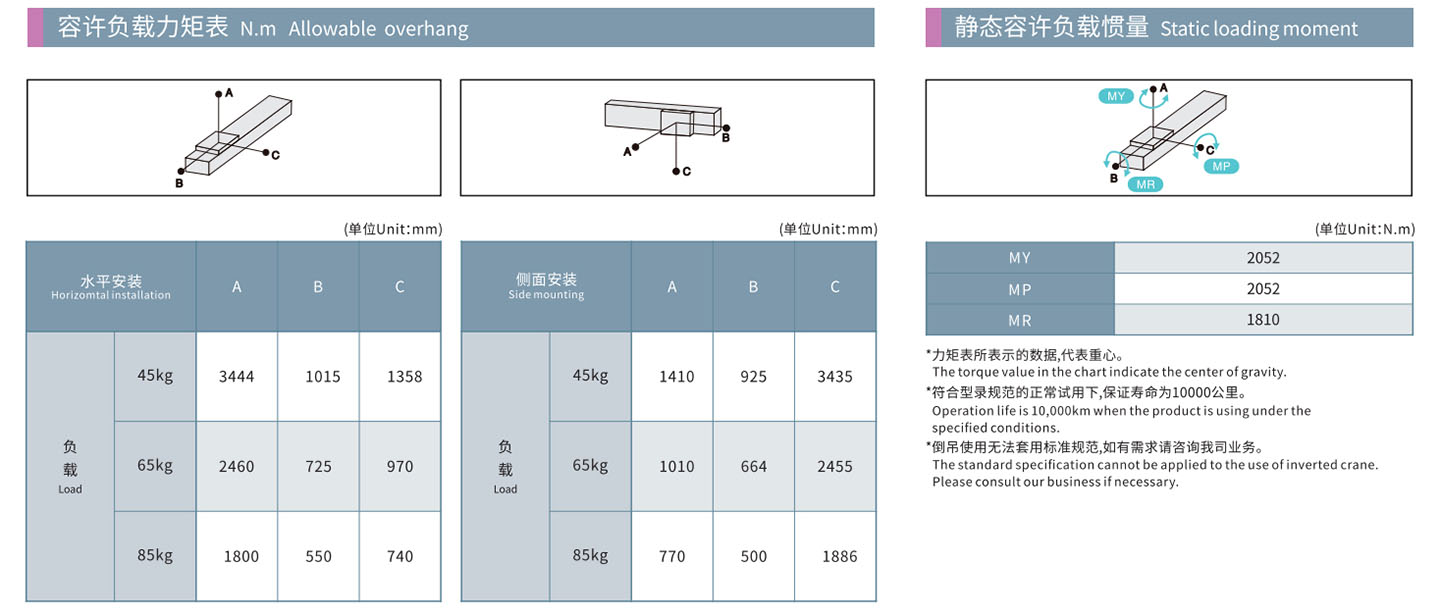
ʻO ka uku nui: 140kg
Kaha: 100 – 3050mm
ʻO ka wikiwiki nui: 7000mm/s

1. Hoʻolālā pālahalaha, ʻoi aku ka māmā o ke kaumaha holoʻokoʻa, ke kiʻekiʻe hui haʻahaʻa a ʻoi aku ka rigidity.
2. Hoʻoponopono maikaʻi ʻia ke ʻano, ʻoi aku ka maikaʻi o ka pololei, a ua hoʻemi ʻia ka hewa i hana ʻia e ka hui ʻana i nā lako he nui.
3. ʻO ka hui ʻana he manawa mālama, mālama hana a maʻalahi. ʻAʻohe pono e wehe i ka uhi alumini no ka hoʻokomo ʻana i ka hui ʻana a i ʻole module.
4. He mea maʻalahi ka mālamaʻana, ua hoʻolakoʻia nāʻaoʻaoʻelua o ka module me nā lua o kaʻaila, aʻaʻole pono e weheʻia ka uhi.

Nā huahana hou aku

HNB Series Belt Driven Linear Module Half Hoʻopili ʻia

ONB-F Series Belt Driven Linear Module Mawaho...

OCB Series Belt Driven Linear Module Hoʻopili piha ...

ONB Series Belt Driven Linear Module Half Hoʻopili ʻia

HCB Series Belt Driven Linear Module Hoʻopili piha ...










