




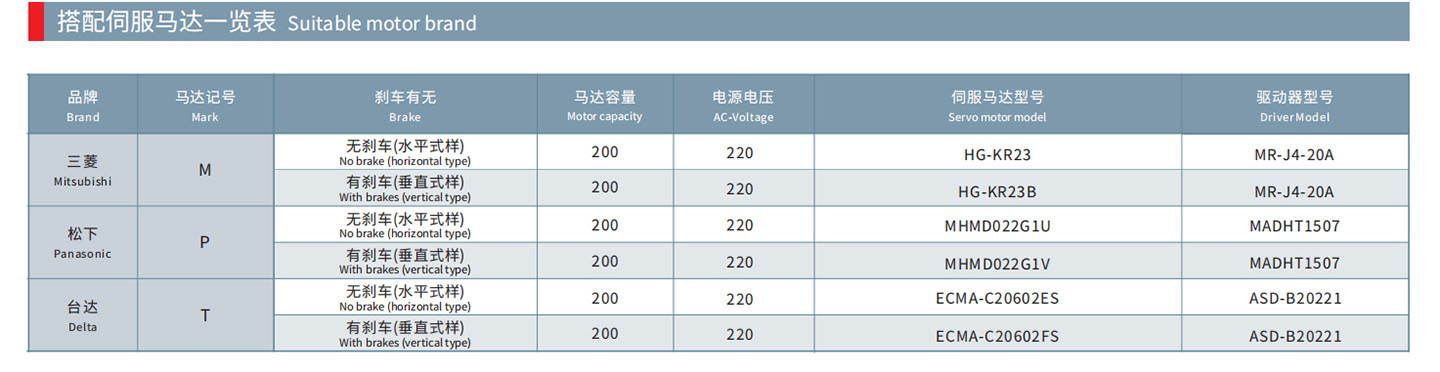
Base en aluminium pour robot à axe unique série KNR-E

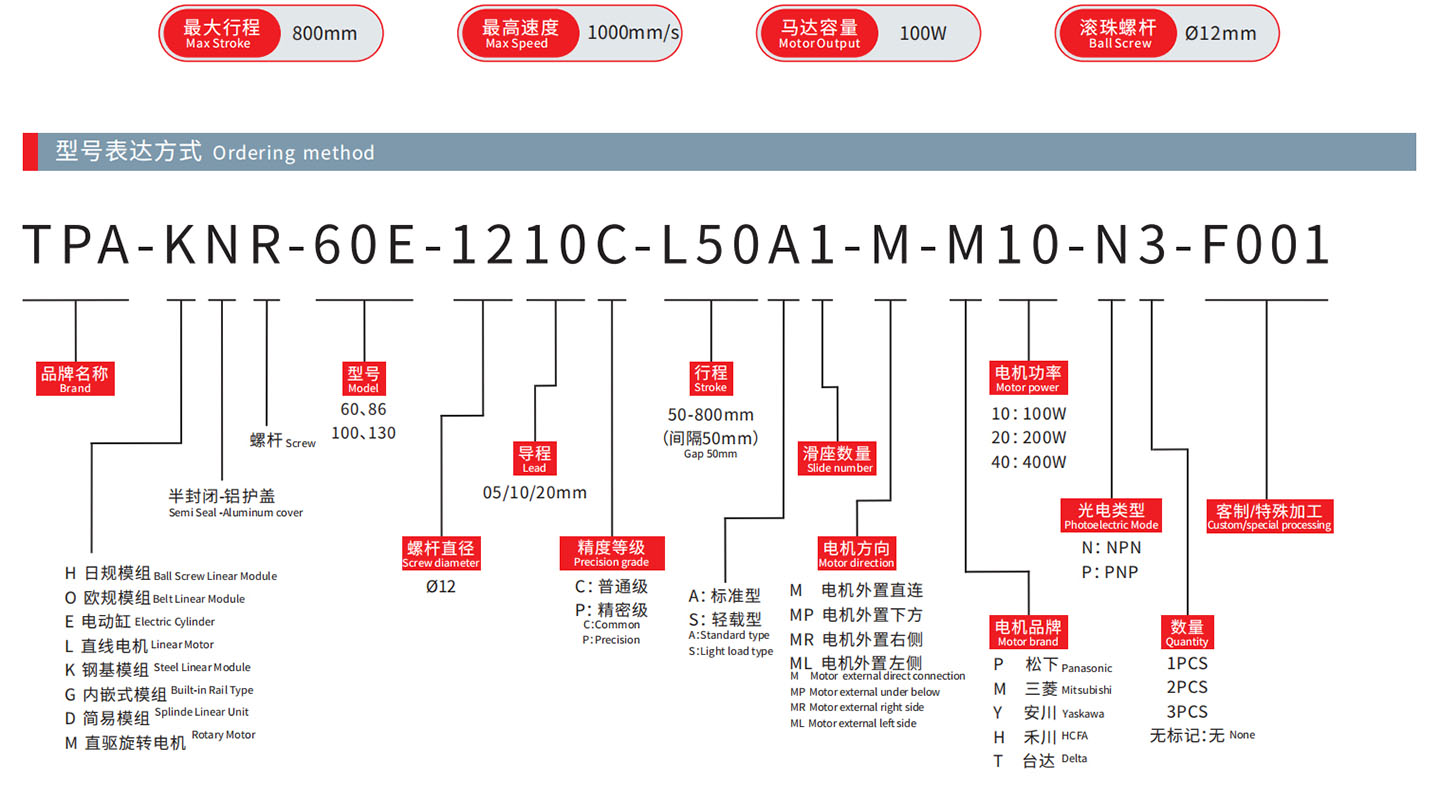
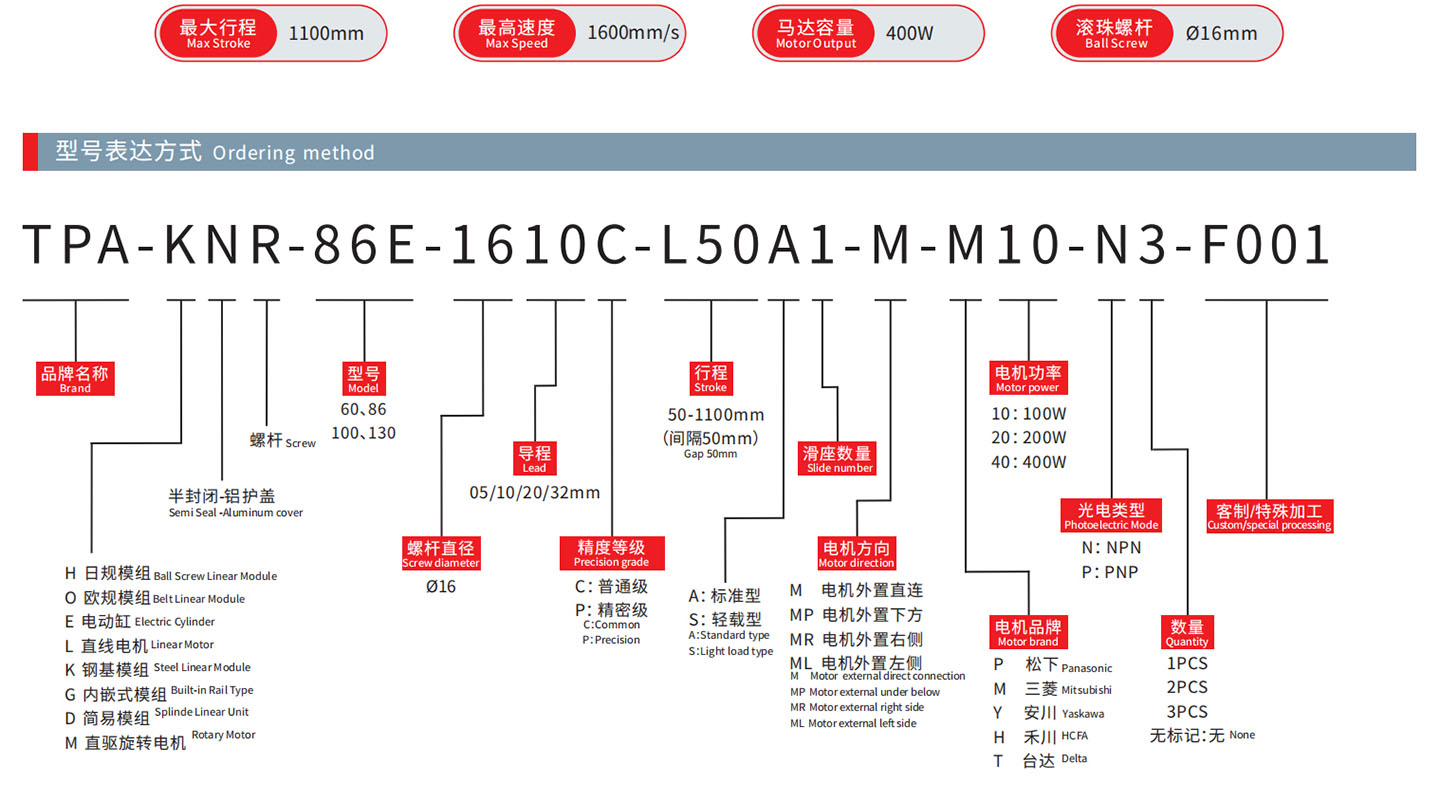
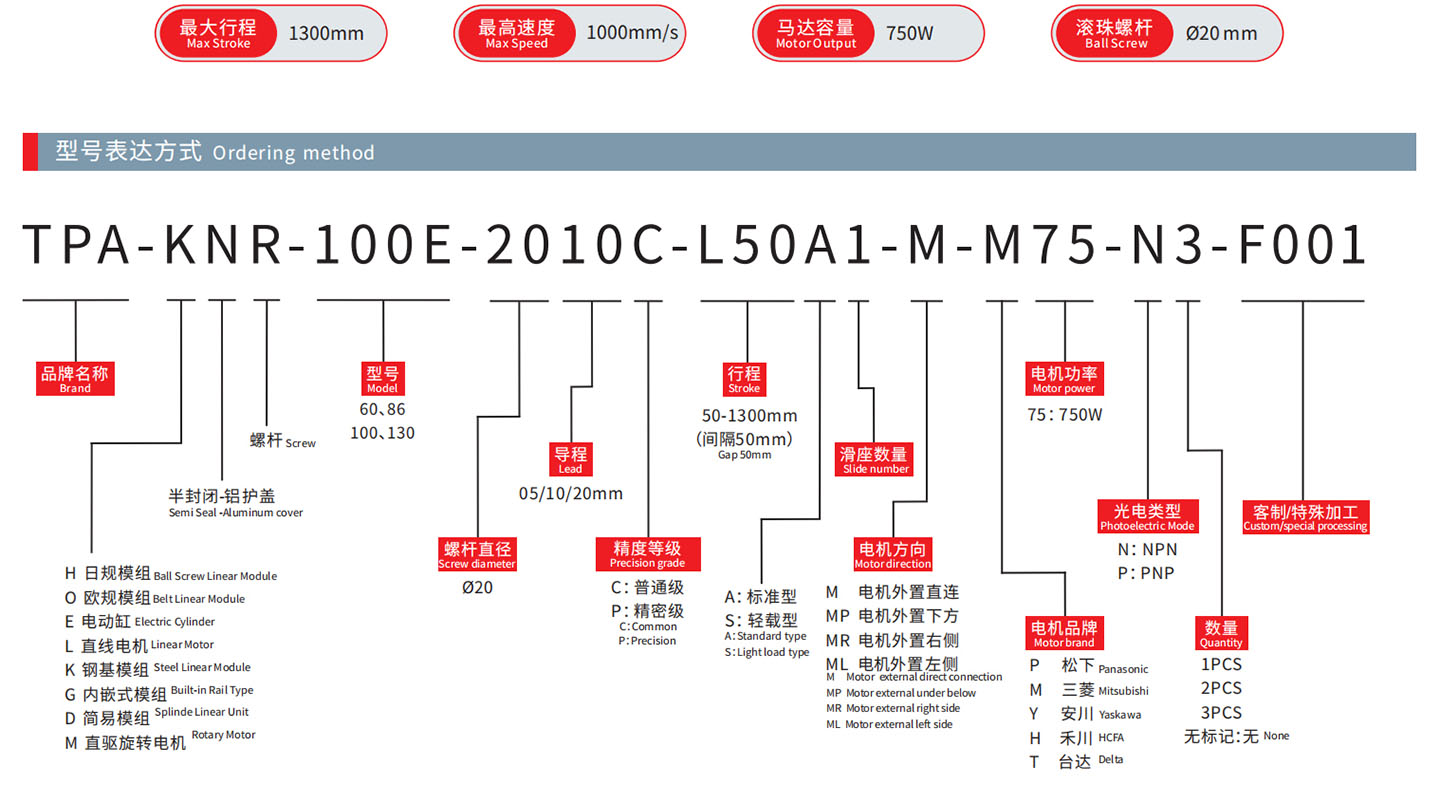
Sélecteur de modèle
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
TPA-?-???-?-??-?-???-?
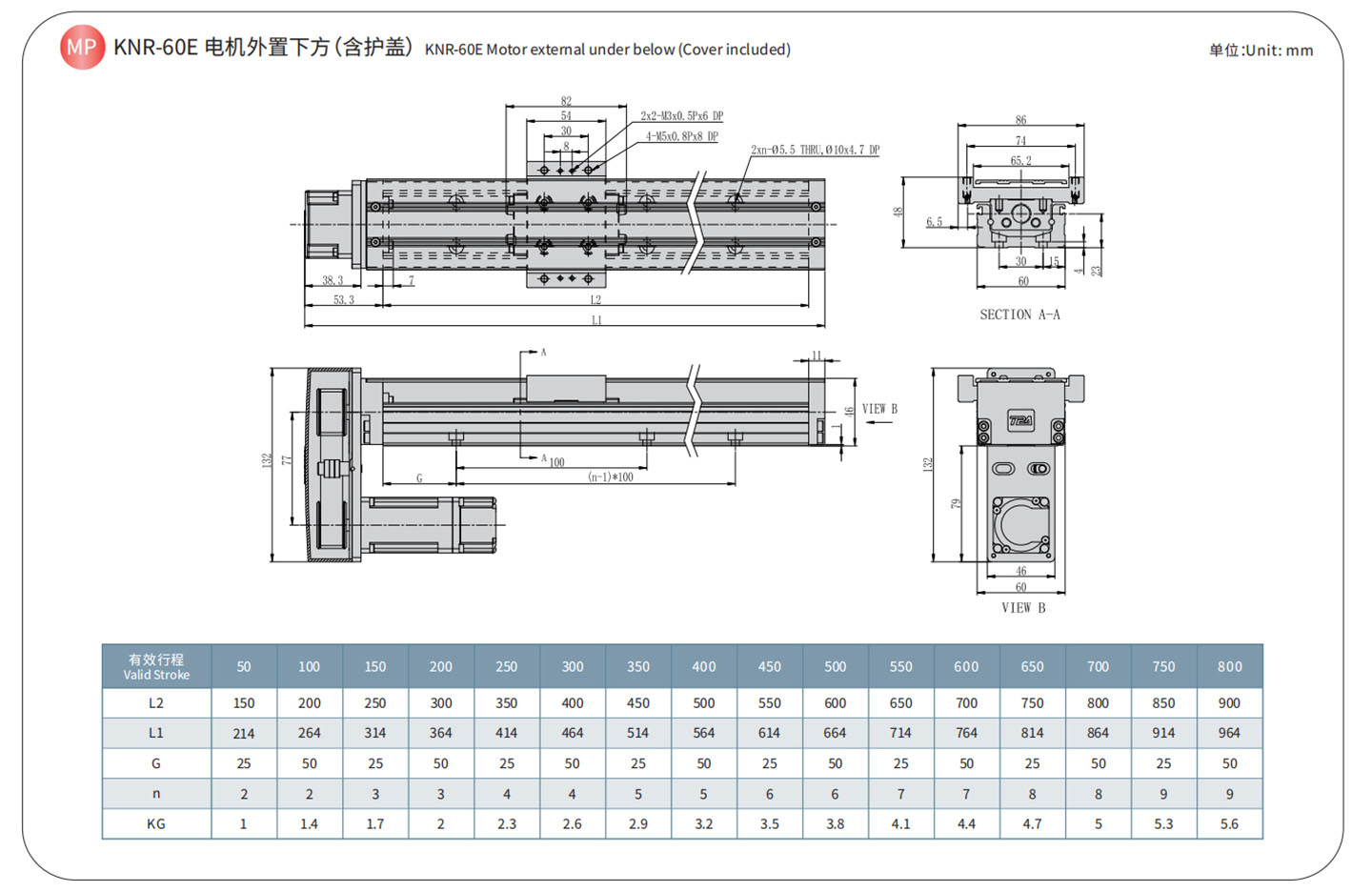
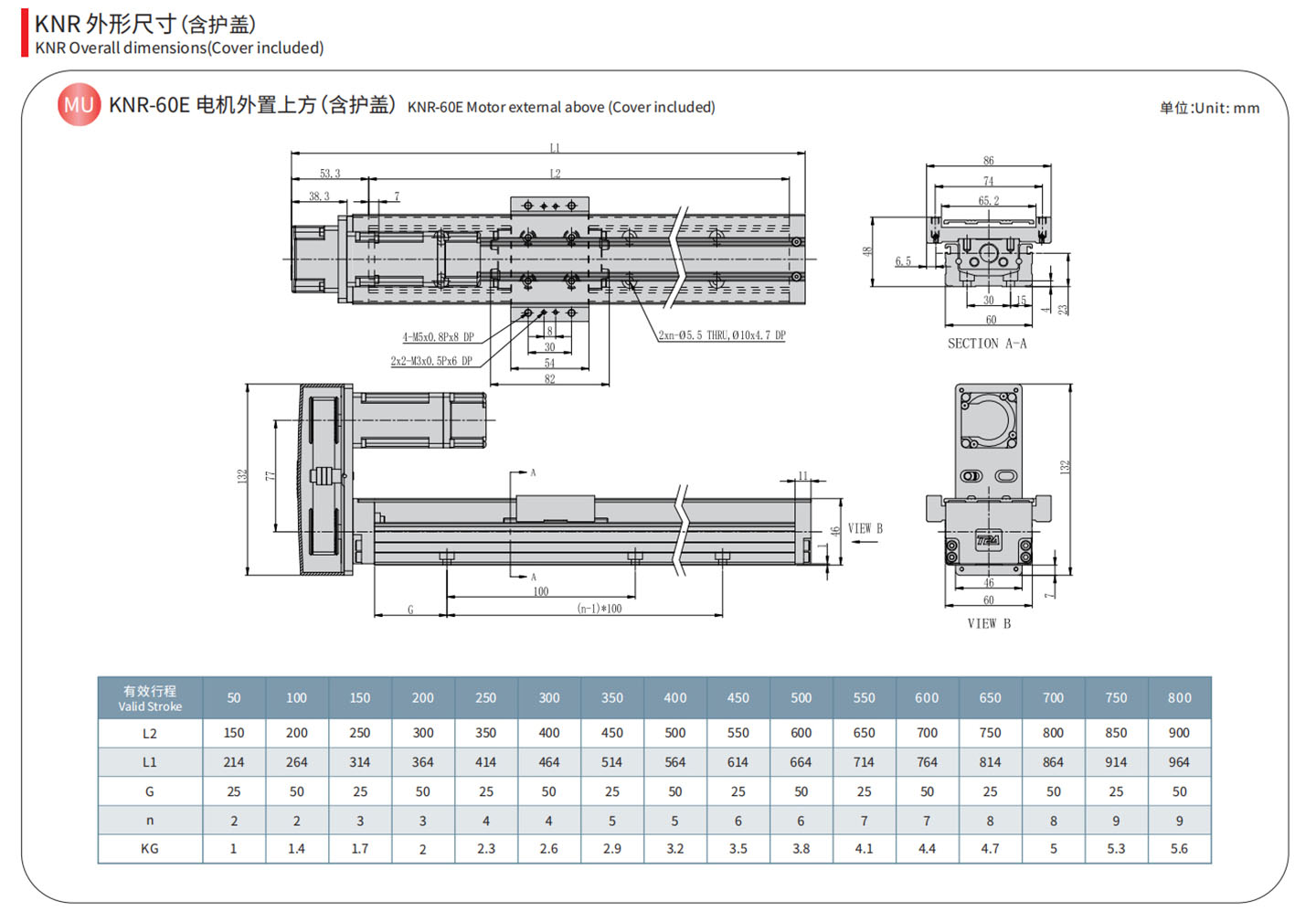
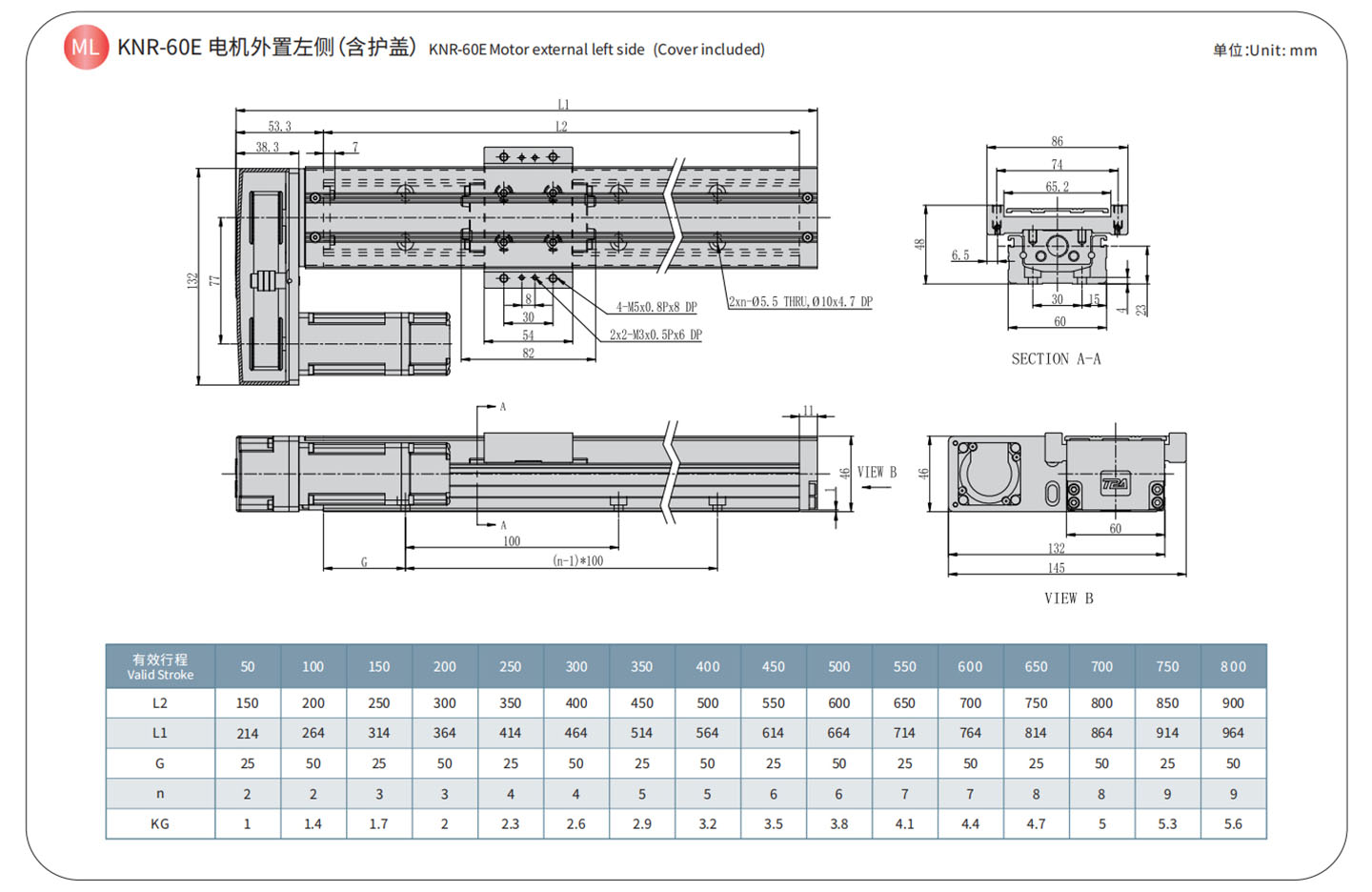
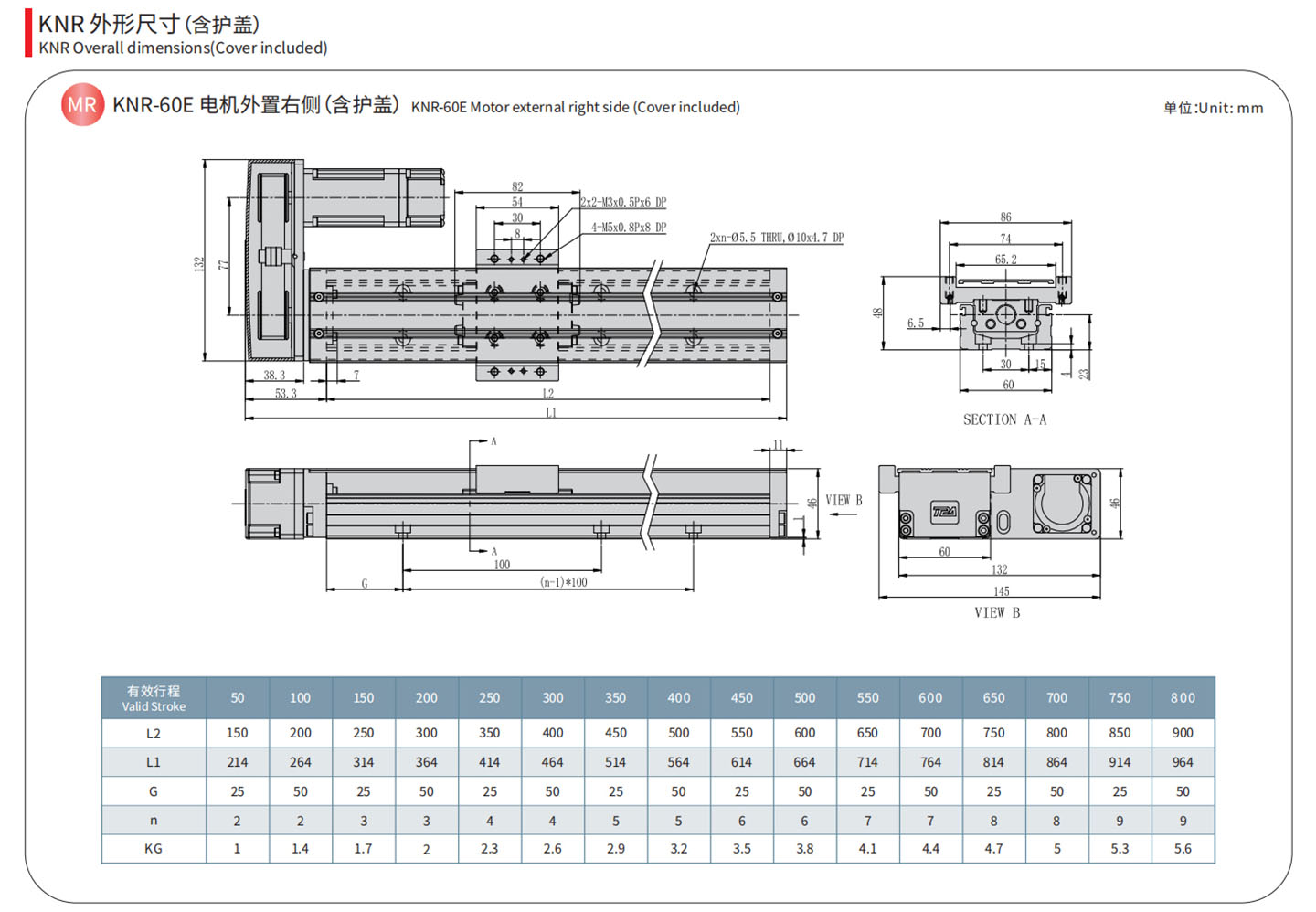
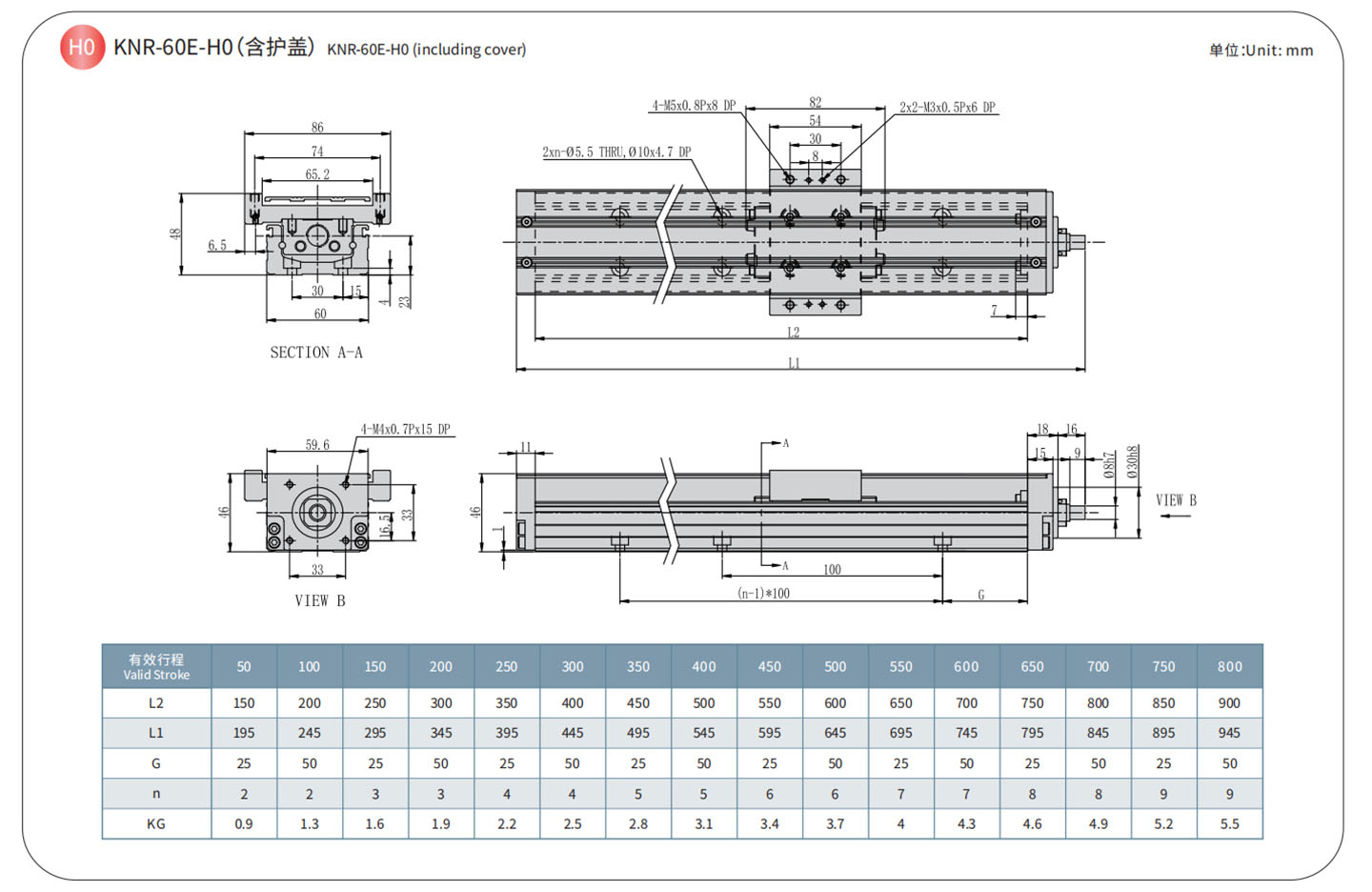
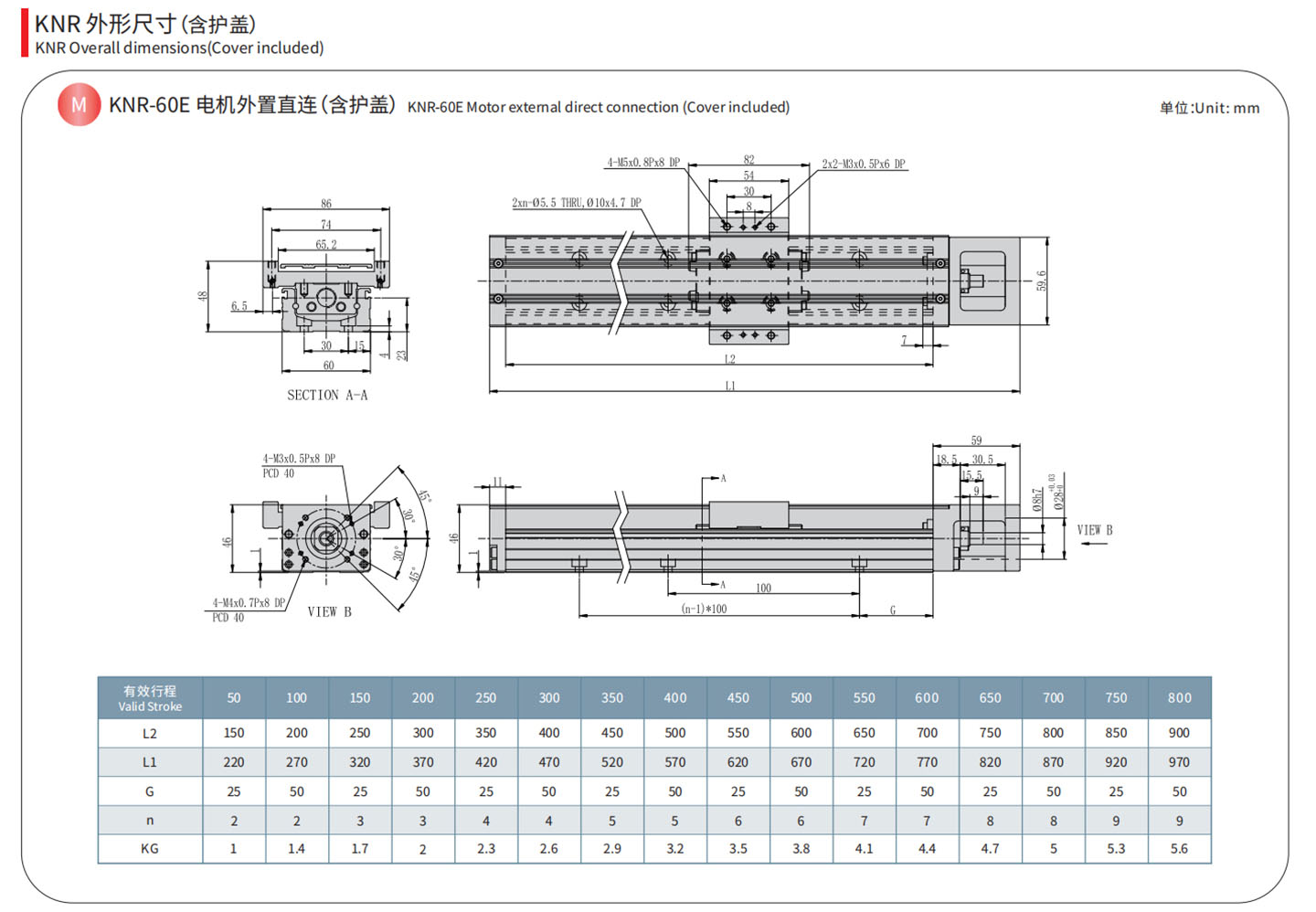
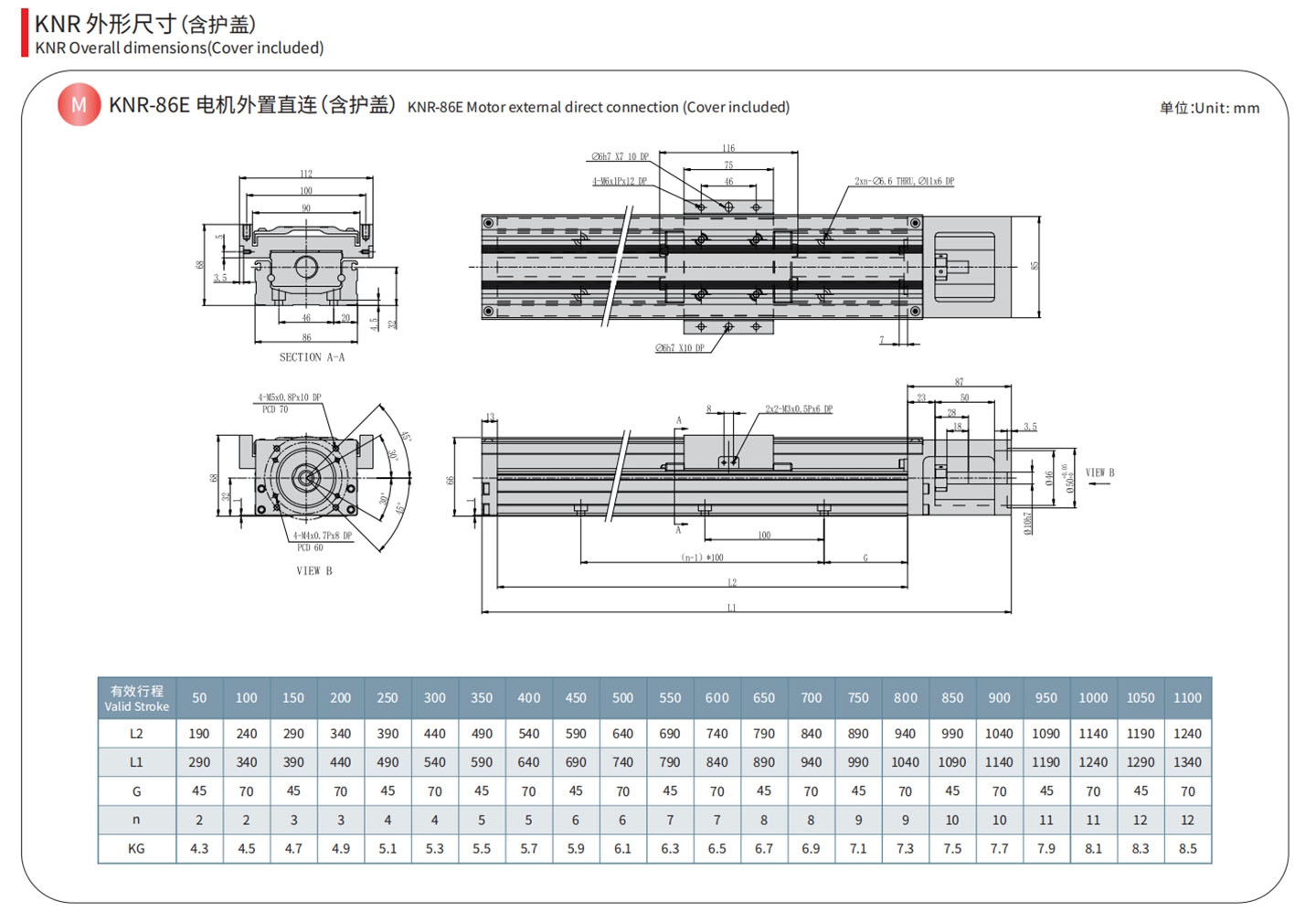
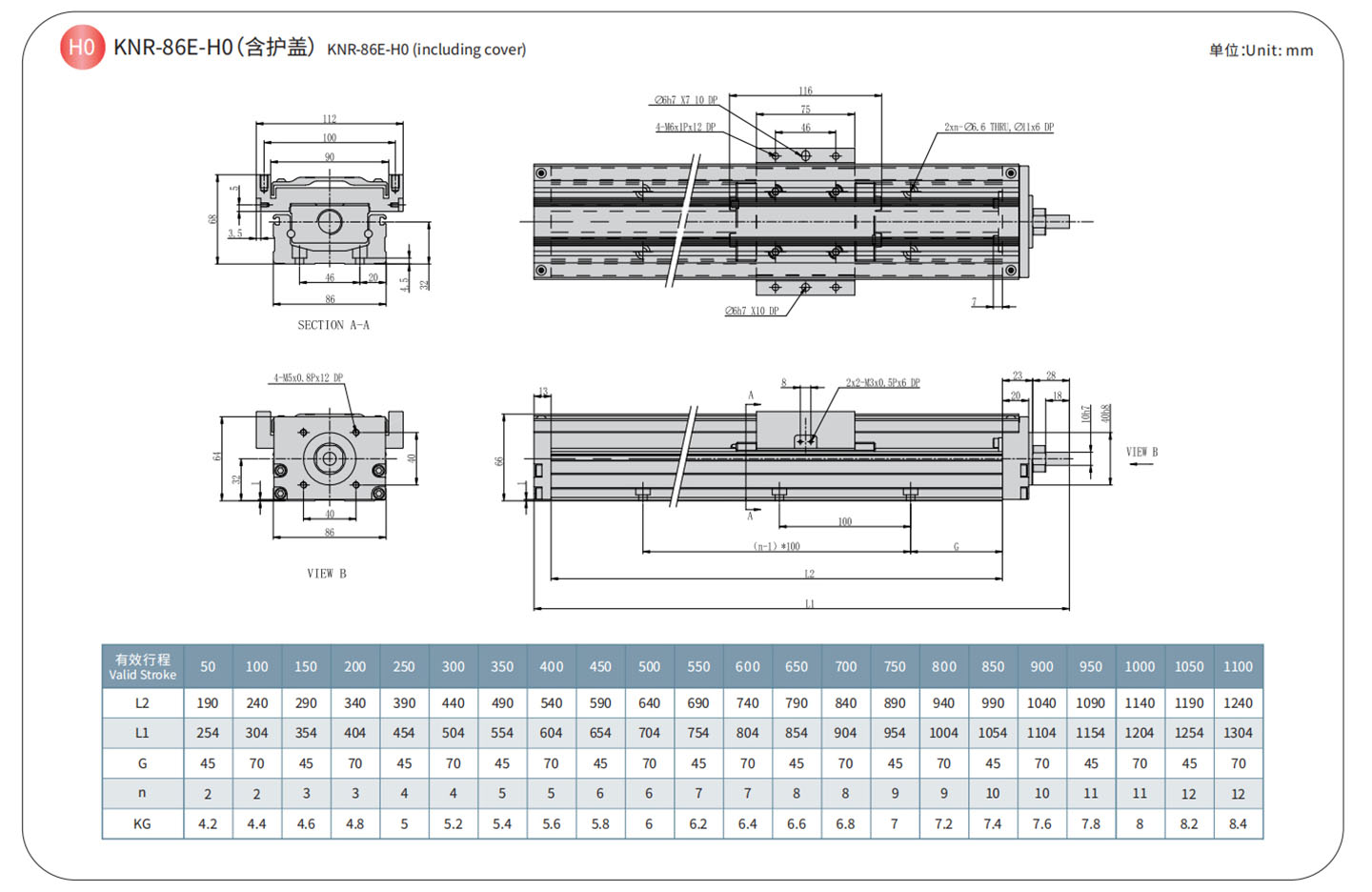
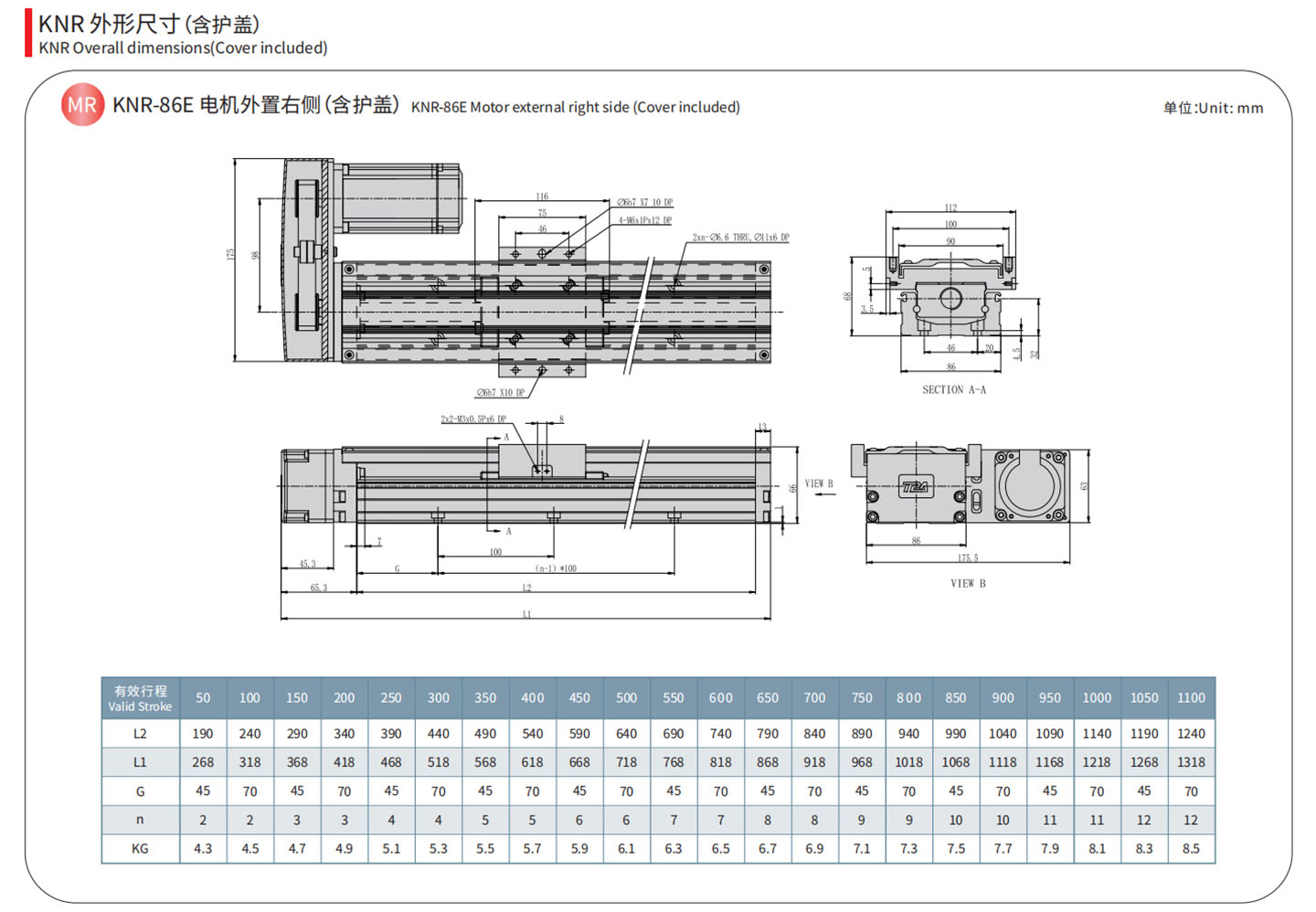
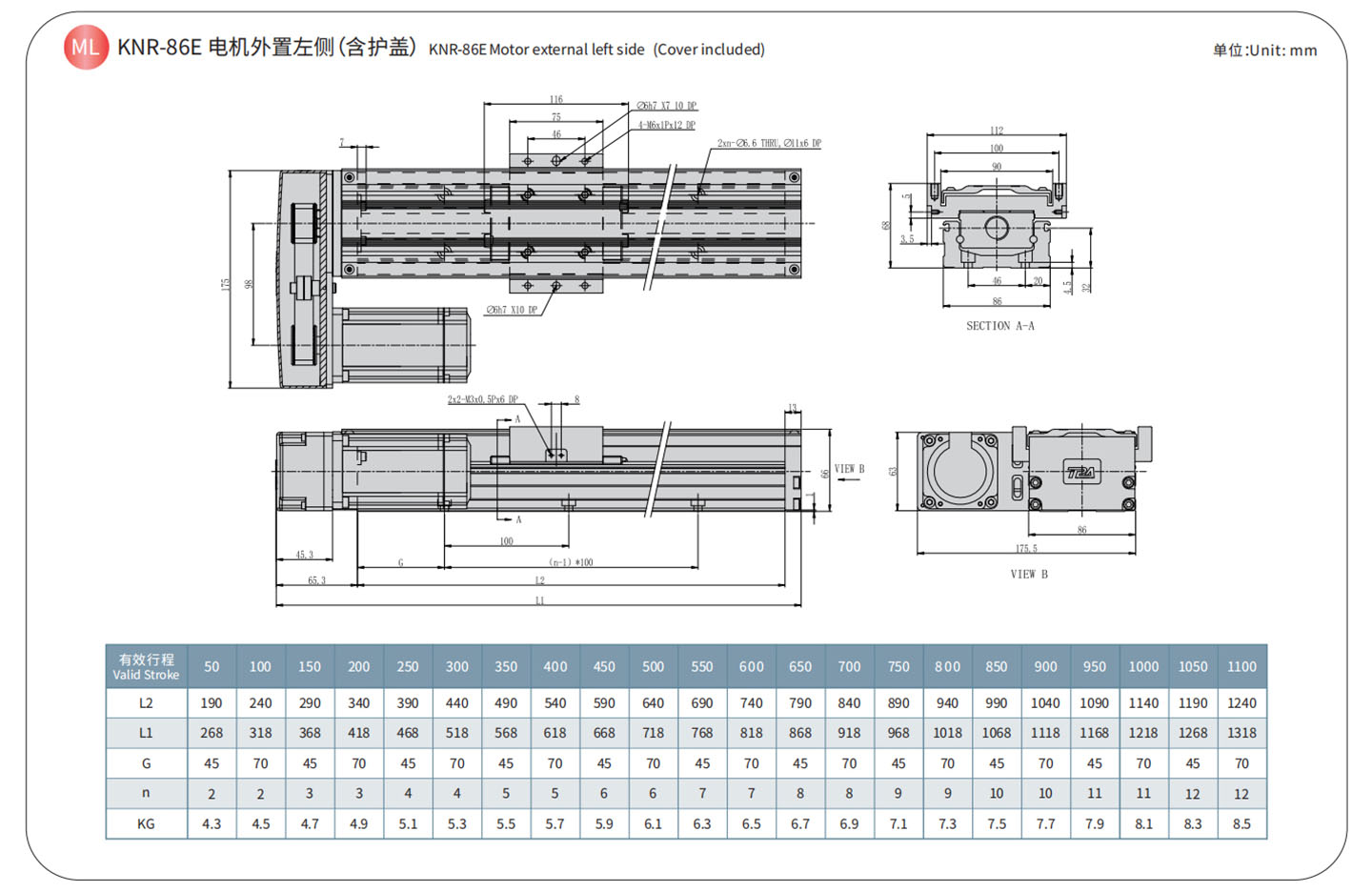
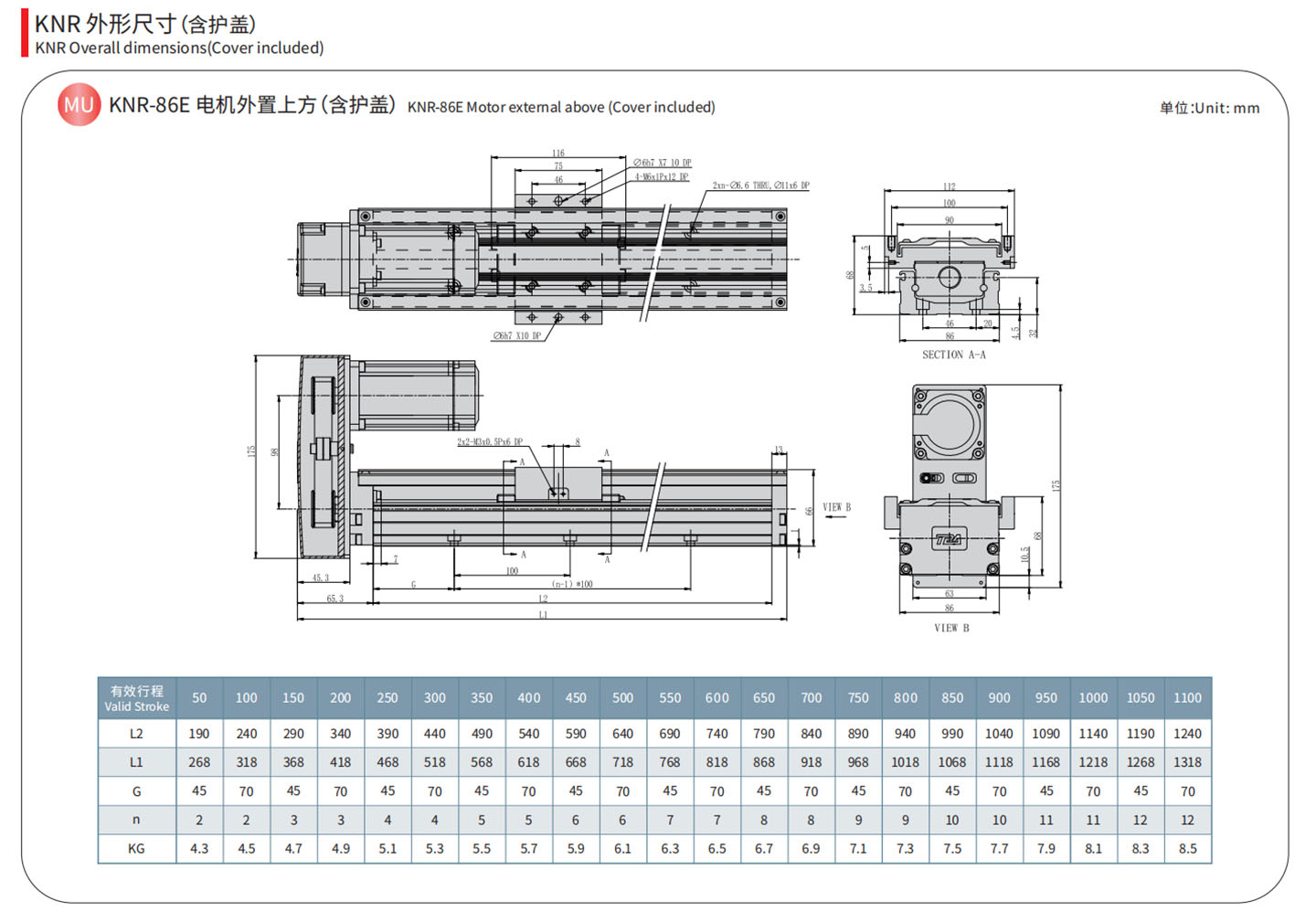
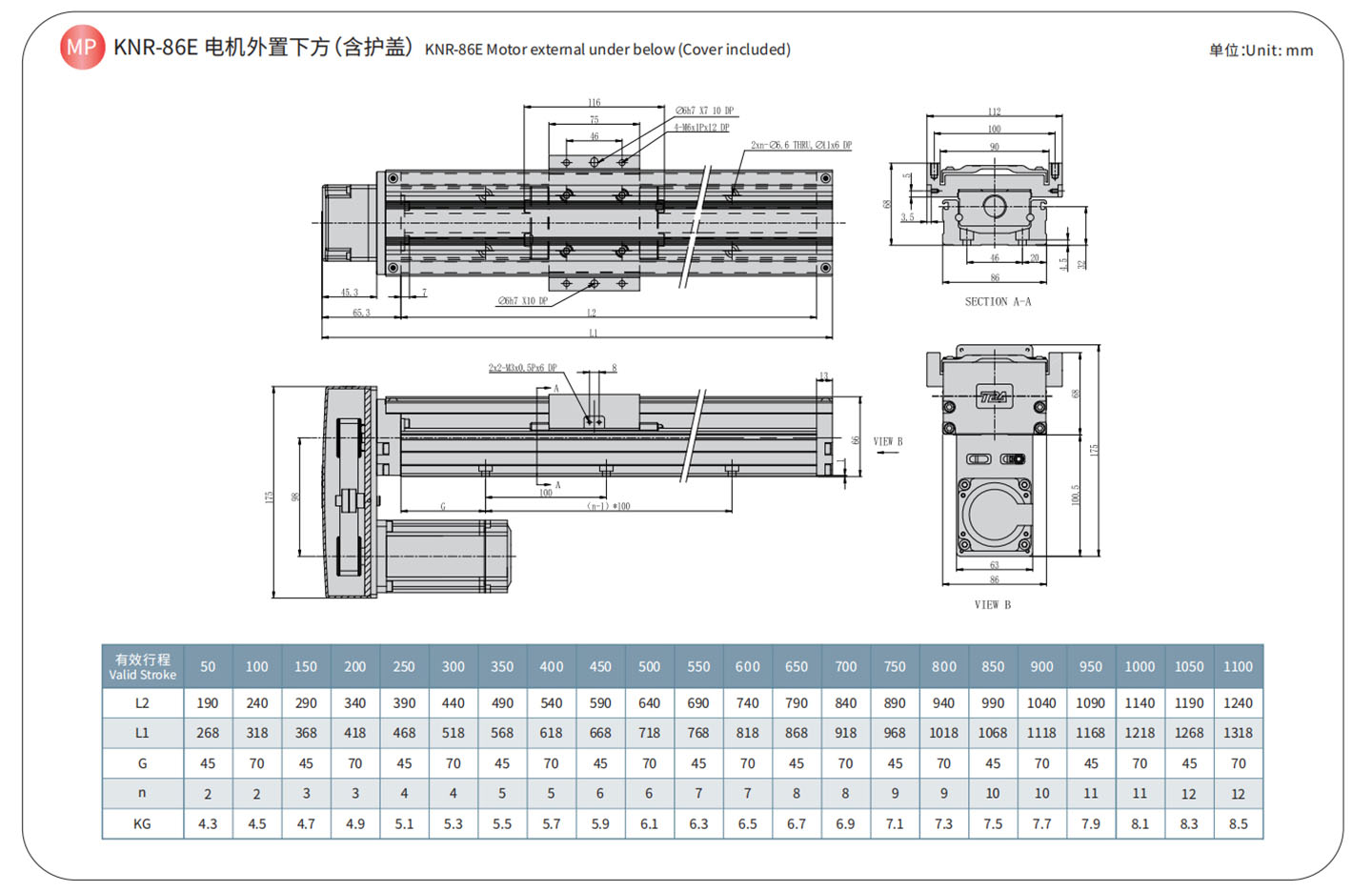
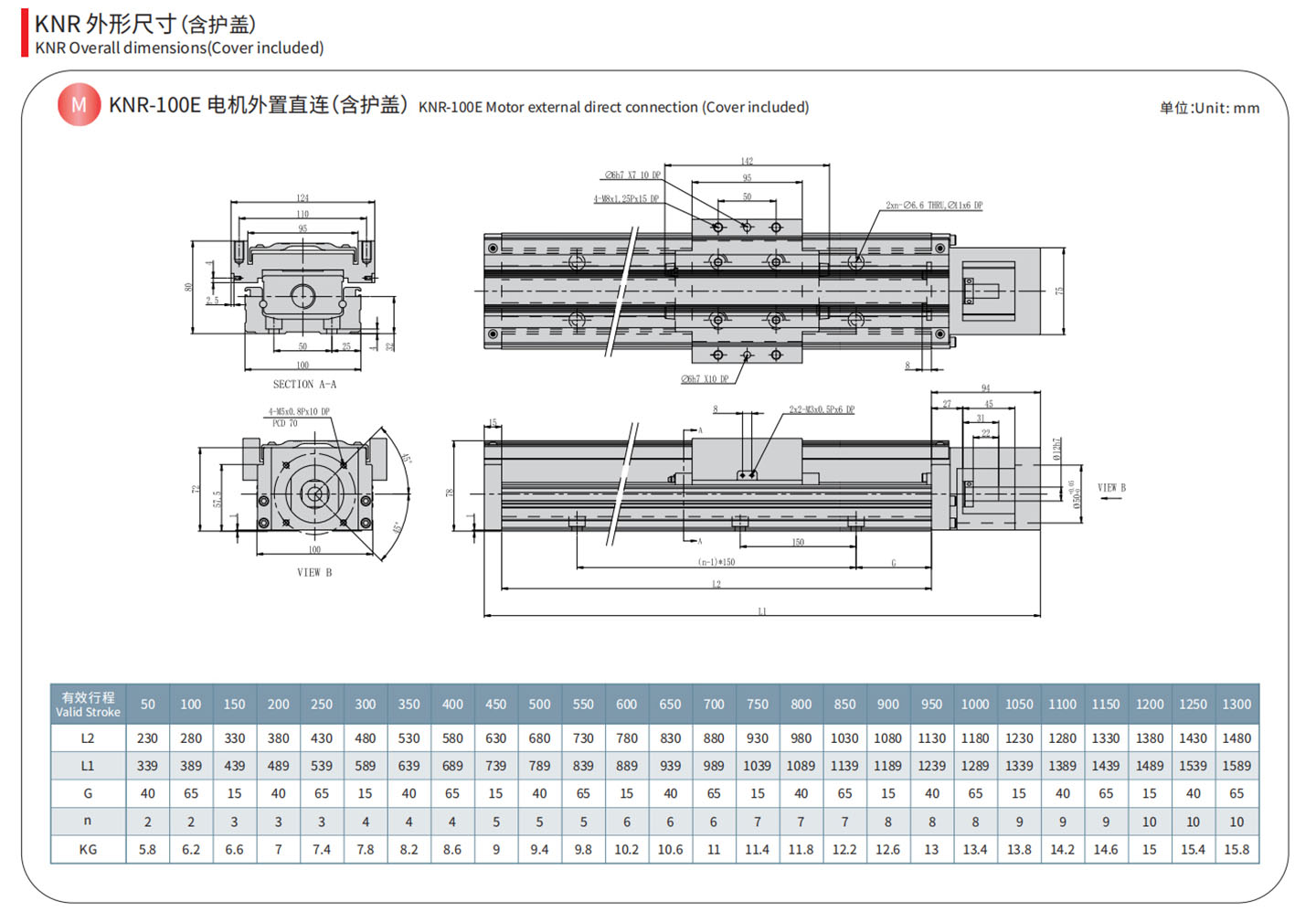
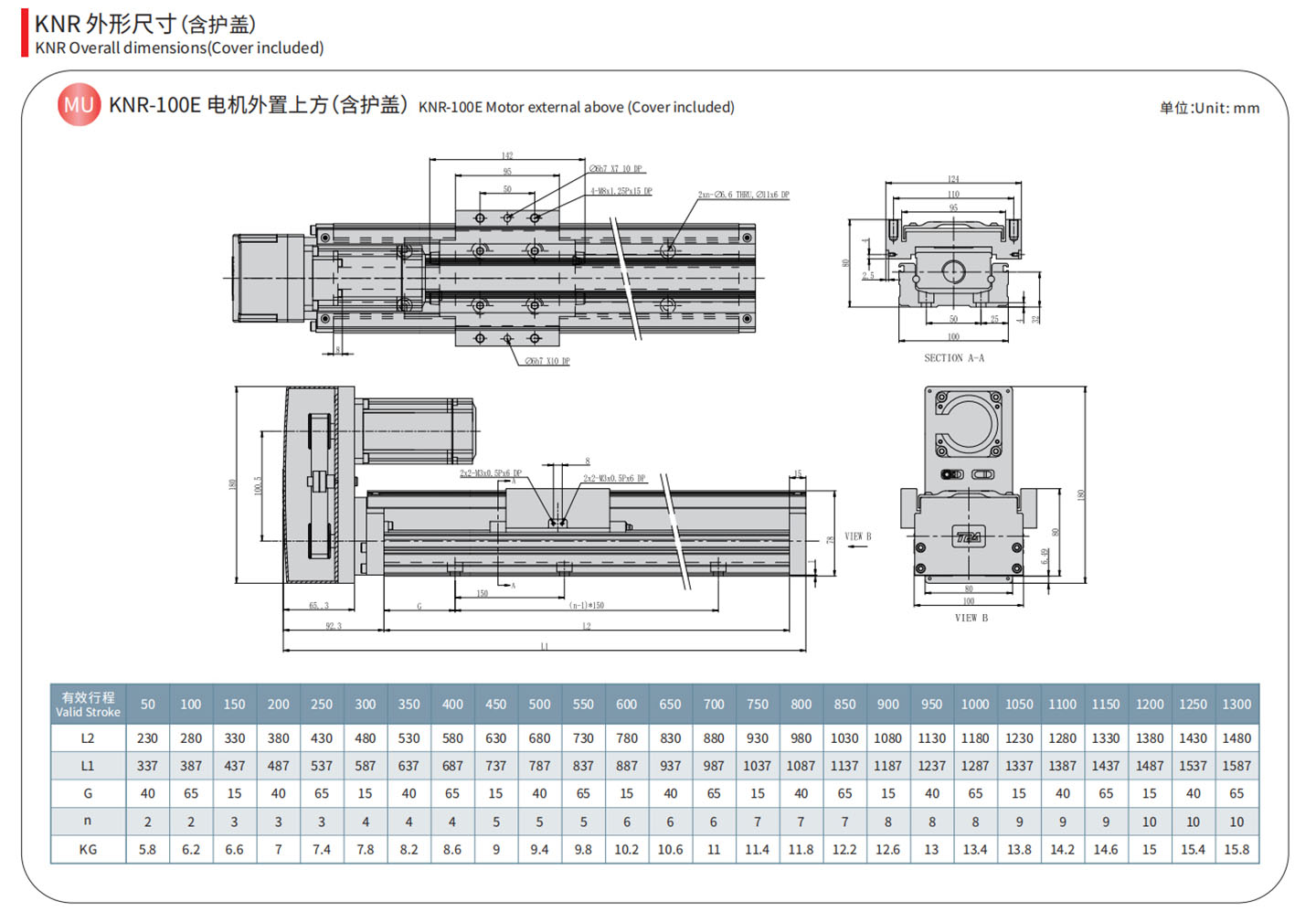
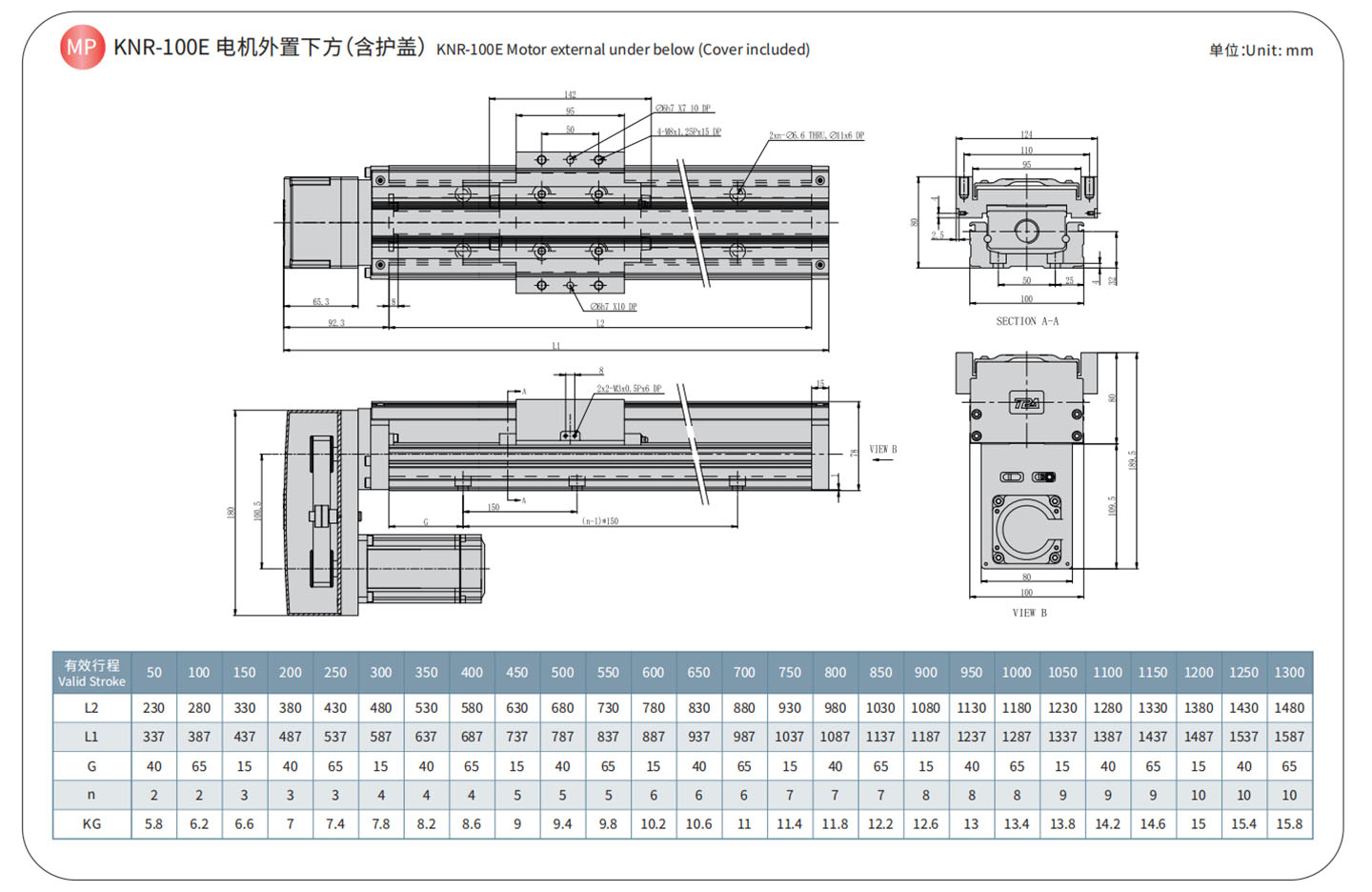
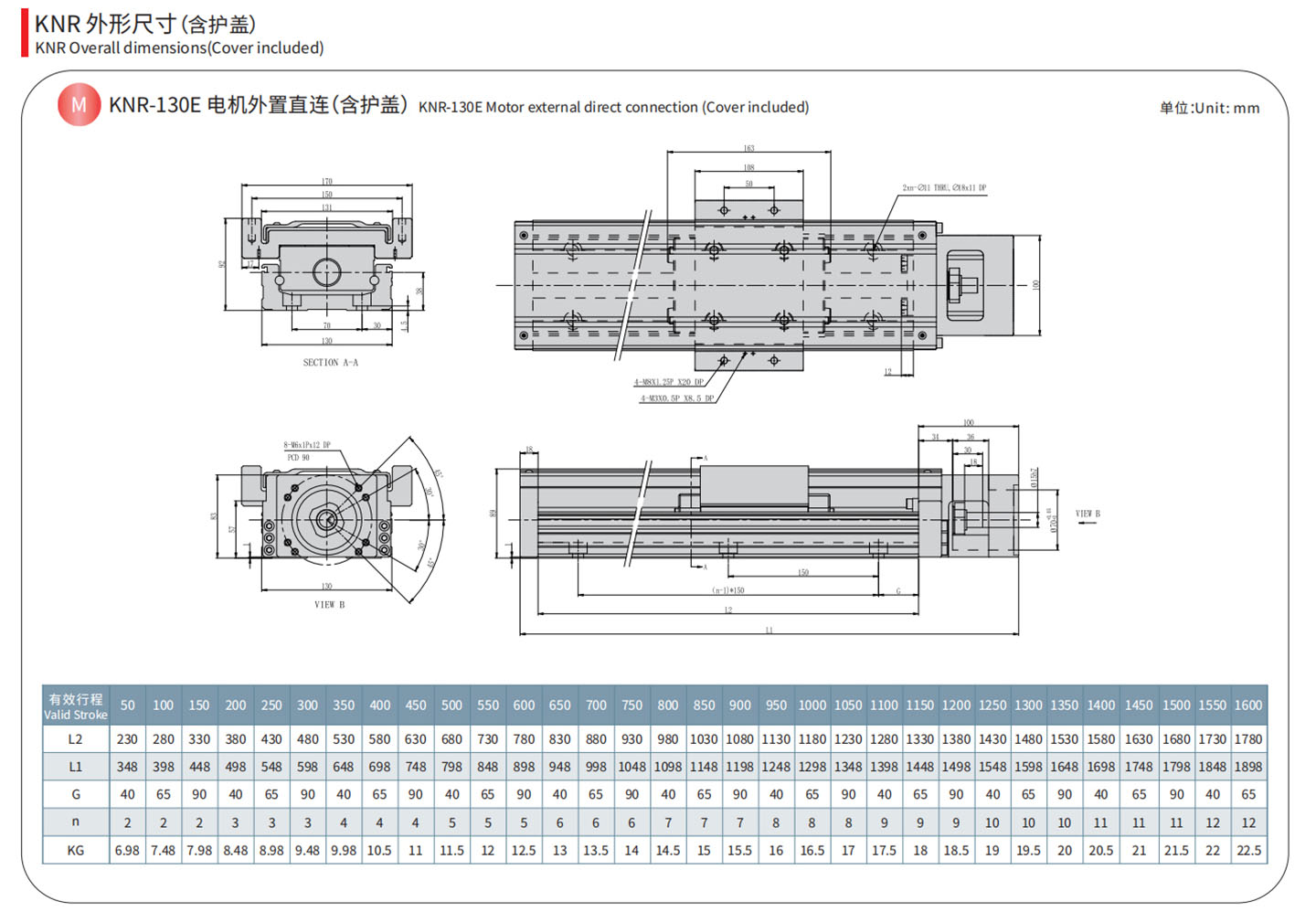
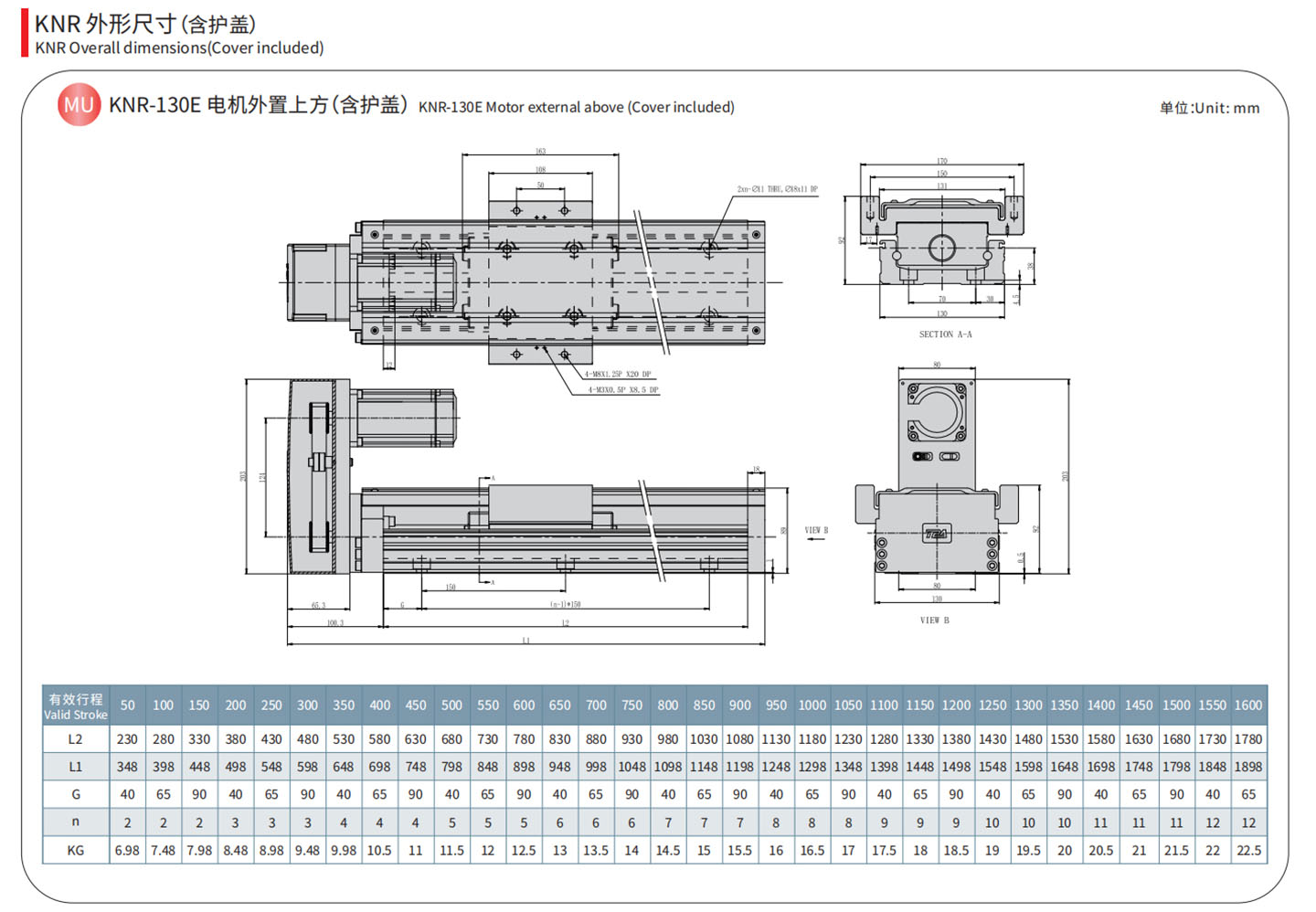
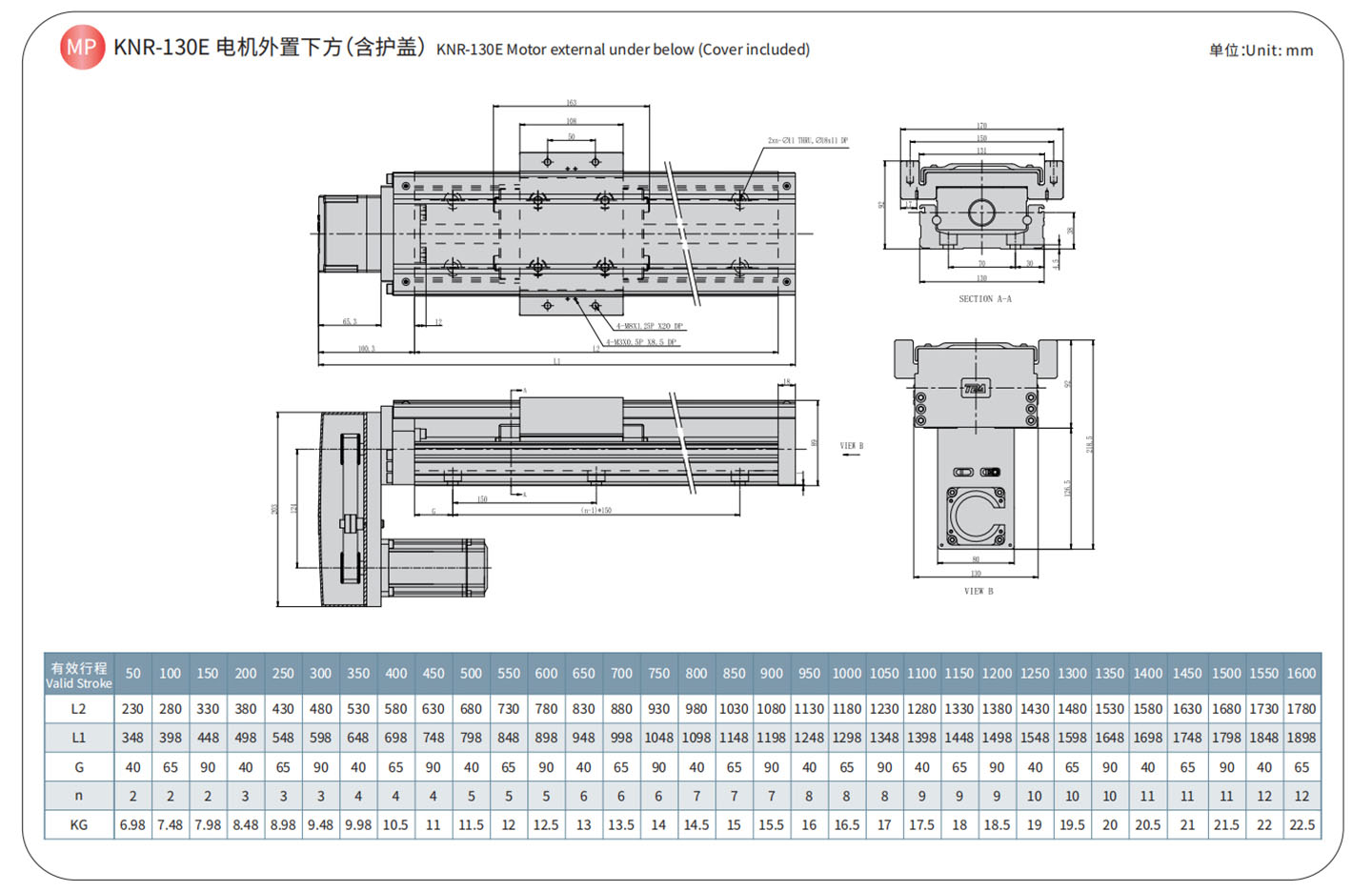
La série KK de robots à axe unique, développée par TPA ROBOT, utilise un rail de base en acier en forme de U partiellement trempé pour augmenter considérablement la résistance et la capacité de charge du robot. En raison des différents environnements, nous disposons de trois types de séries de robots linéaires, KSR, KNR et KFR, en fonction du type de couverture utilisé.
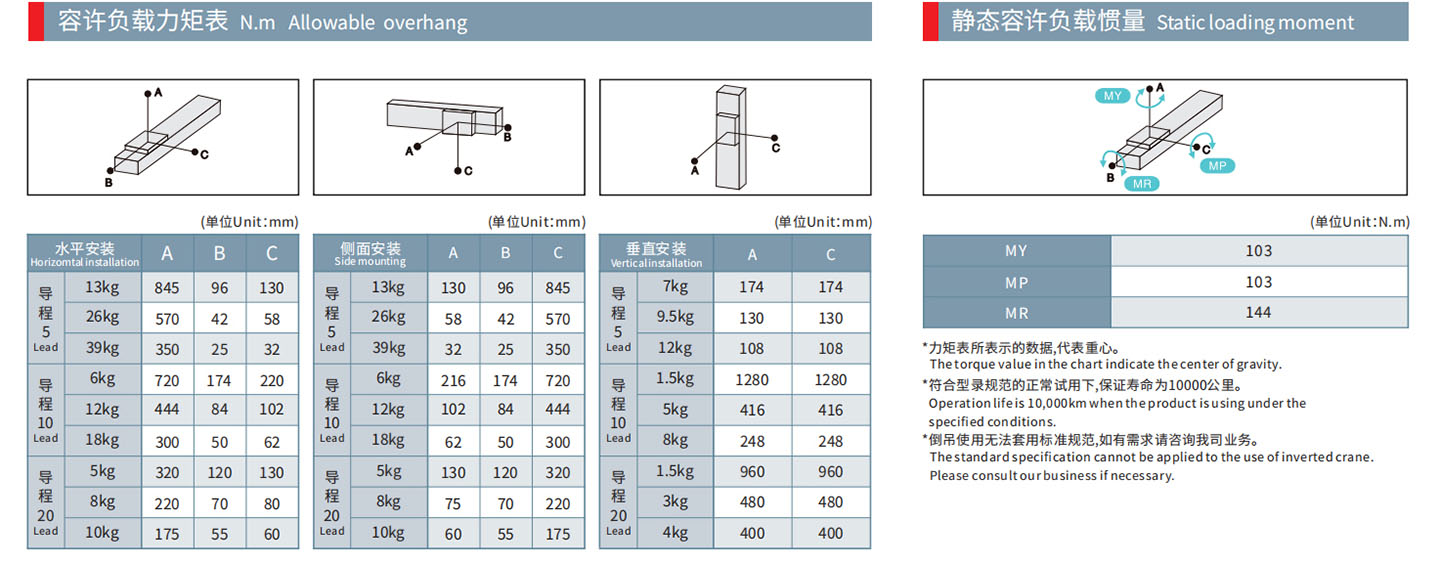
Pour le système de retour entre la piste et le curseur, la surface de contact entre la bille et la rainure à billes adopte une conception de dents de Goethe à 2 rangées avec un angle de contact de 45 degrés, ce qui permet au bras du robot d'axe de supporter une capacité de charge égale dans quatre directions. .
Dans le même temps, la vis à billes de haute précision est utilisée comme structure de transmission et la piste en forme de U coopère avec la conception optimisée, de sorte que le robot de l'axe KK ait une précision inégalée et que sa précision de positionnement répété puisse atteindre ± 0,003 mm.
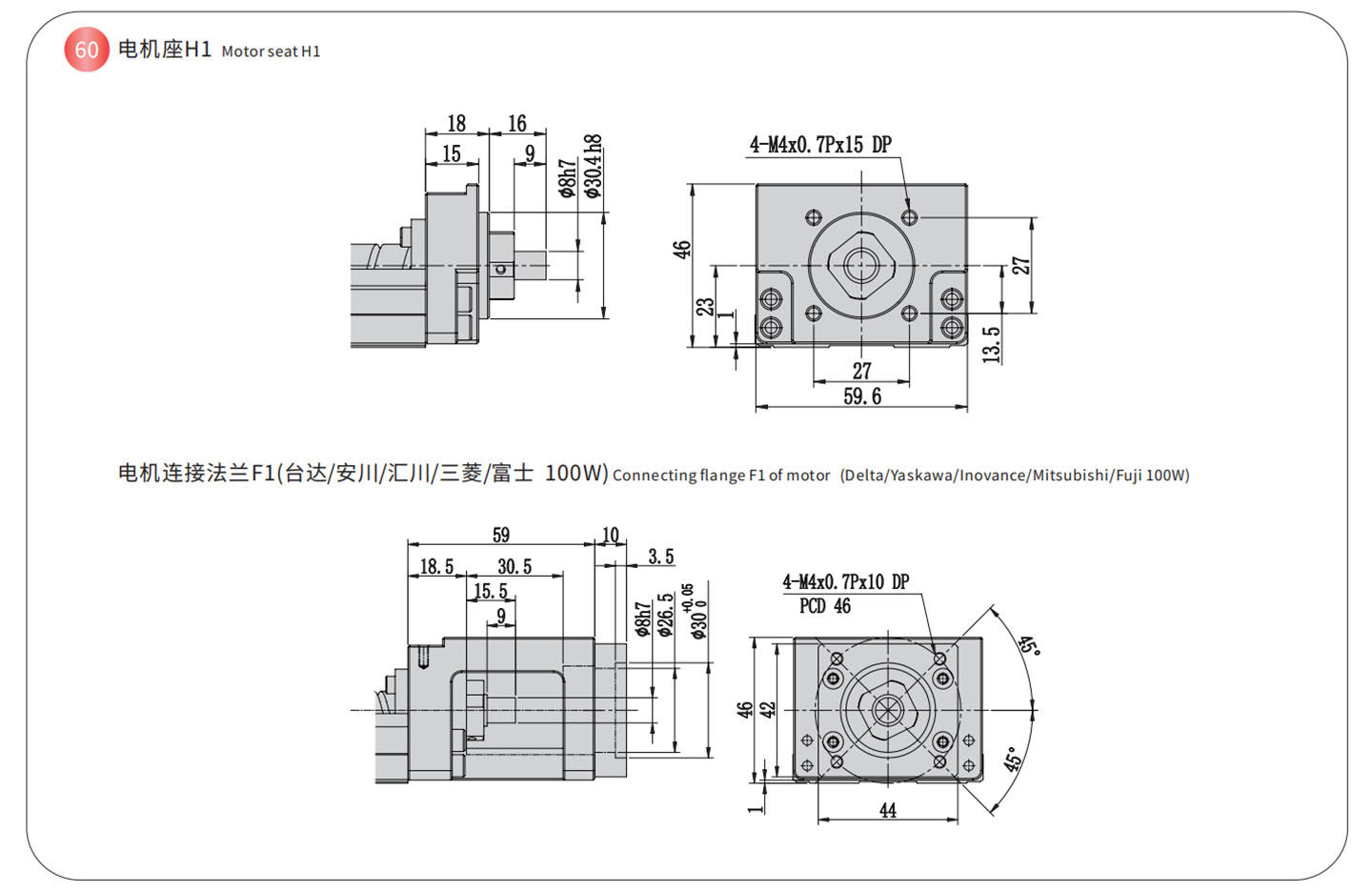
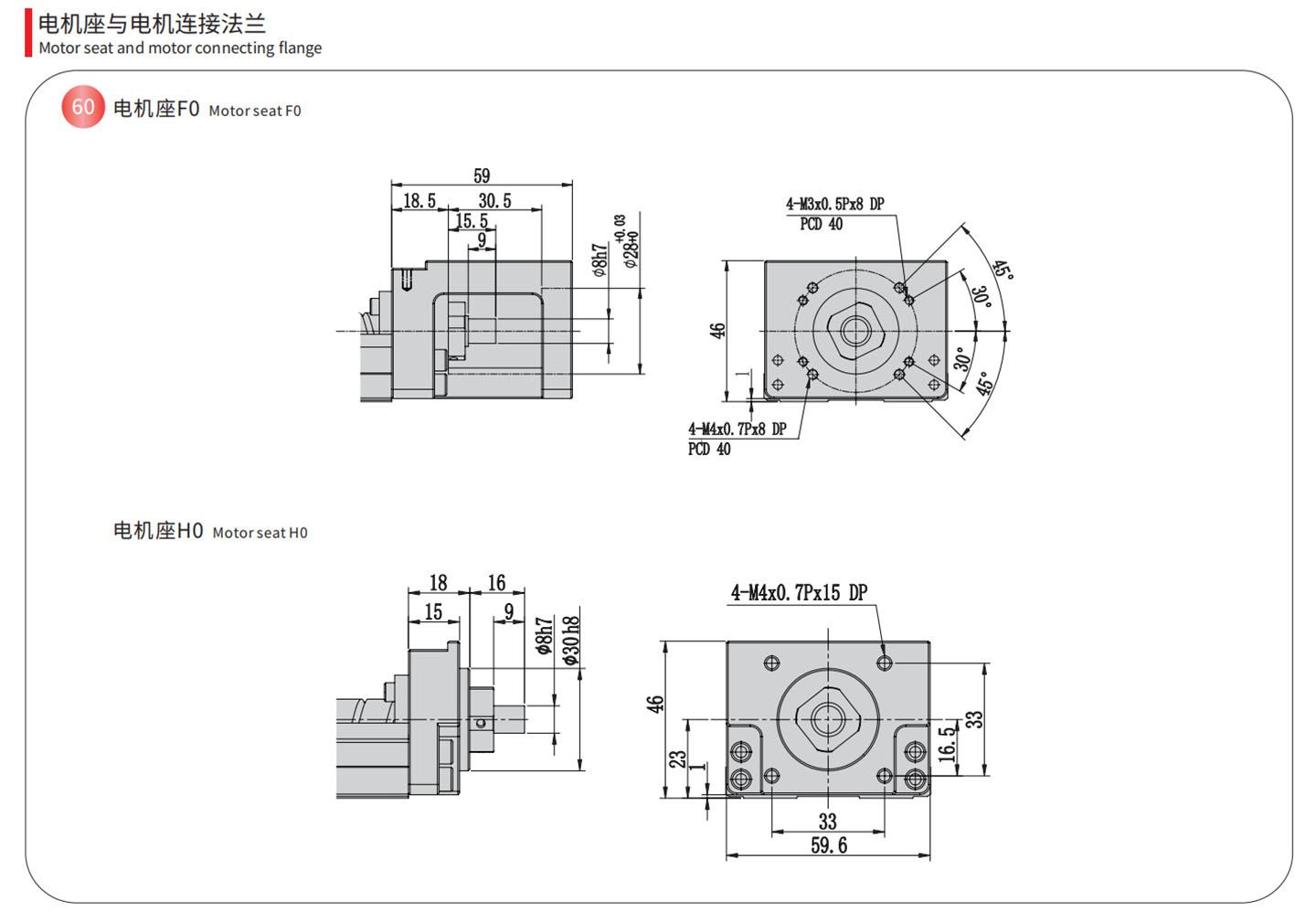
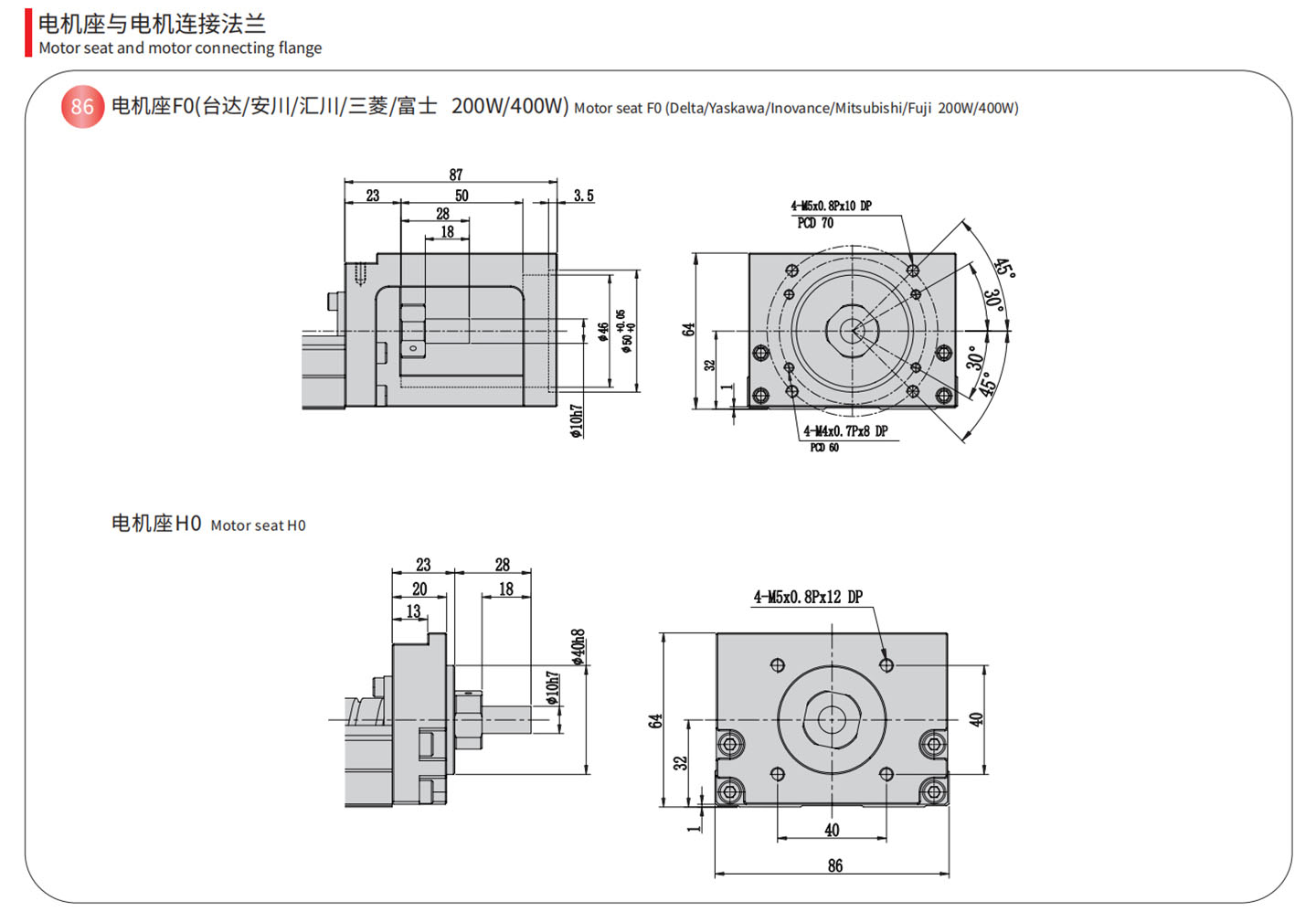
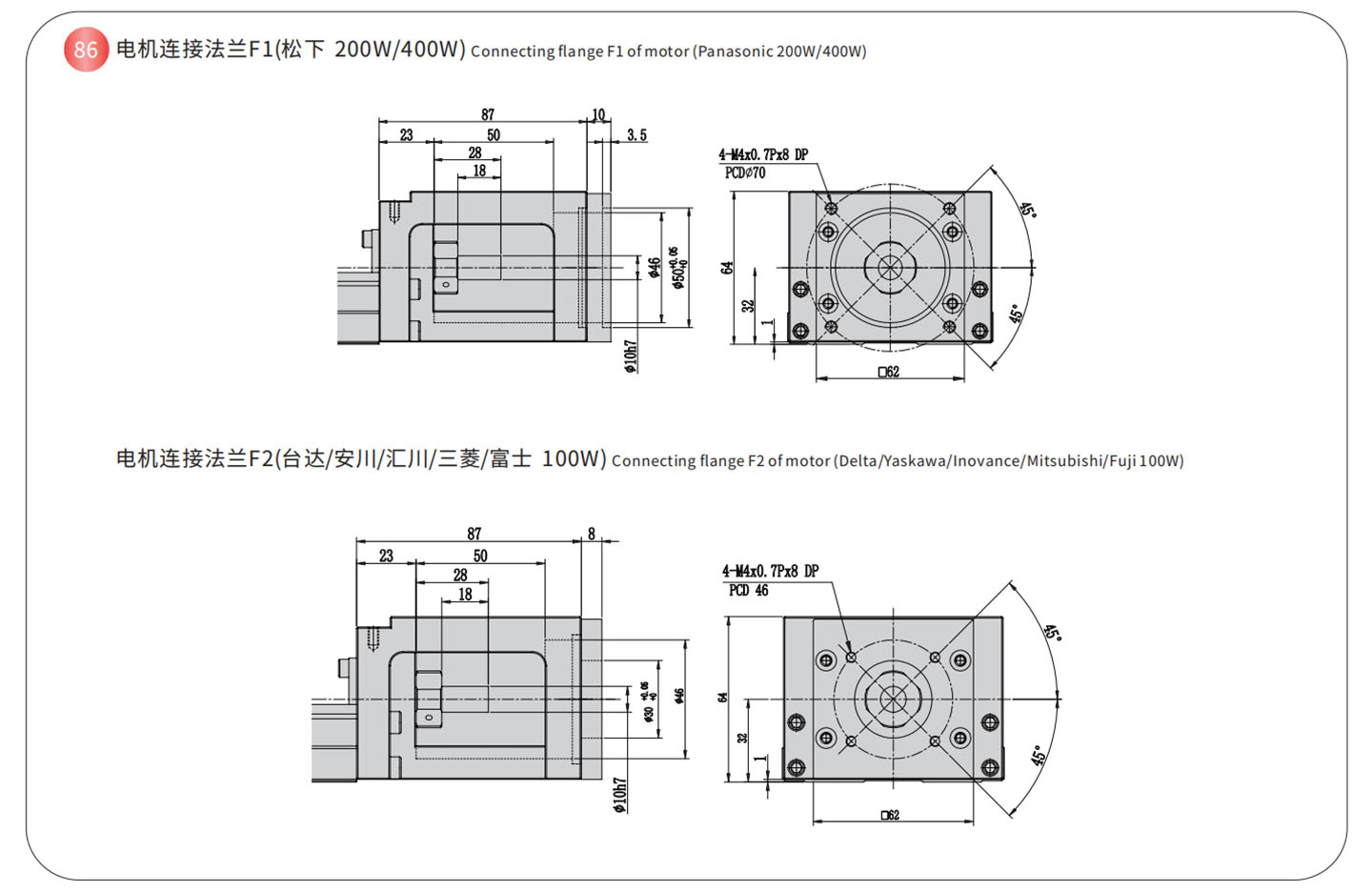
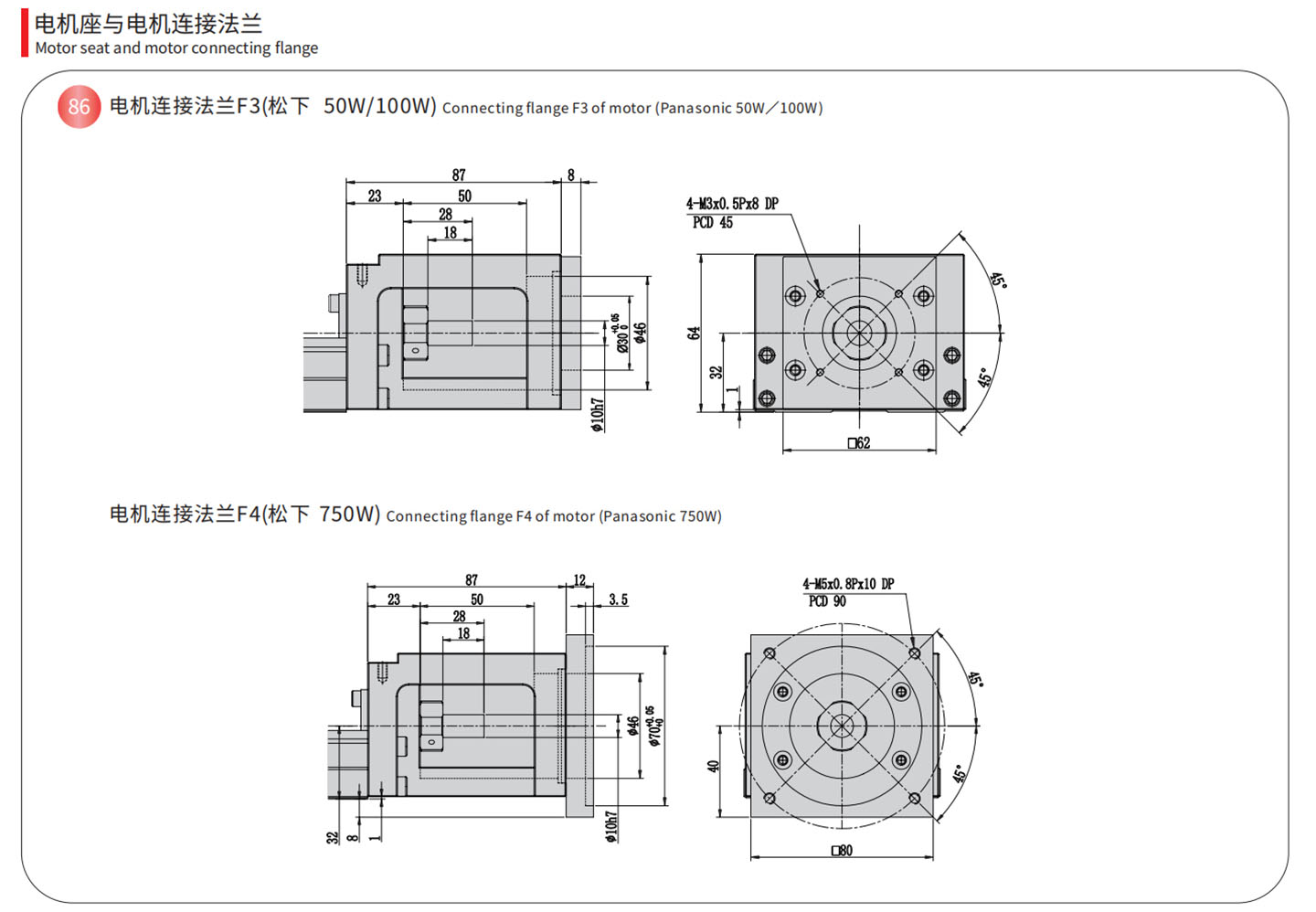
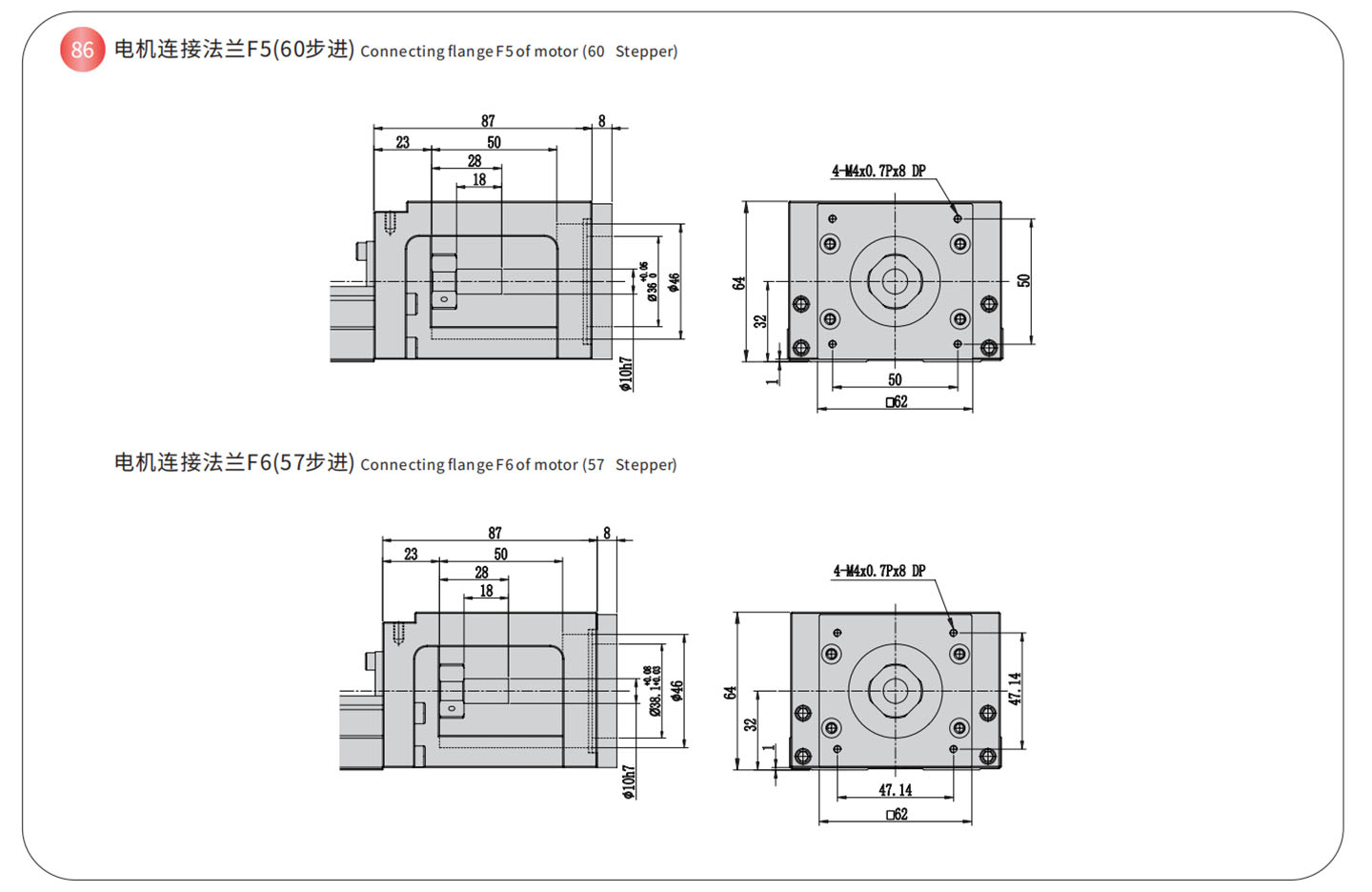
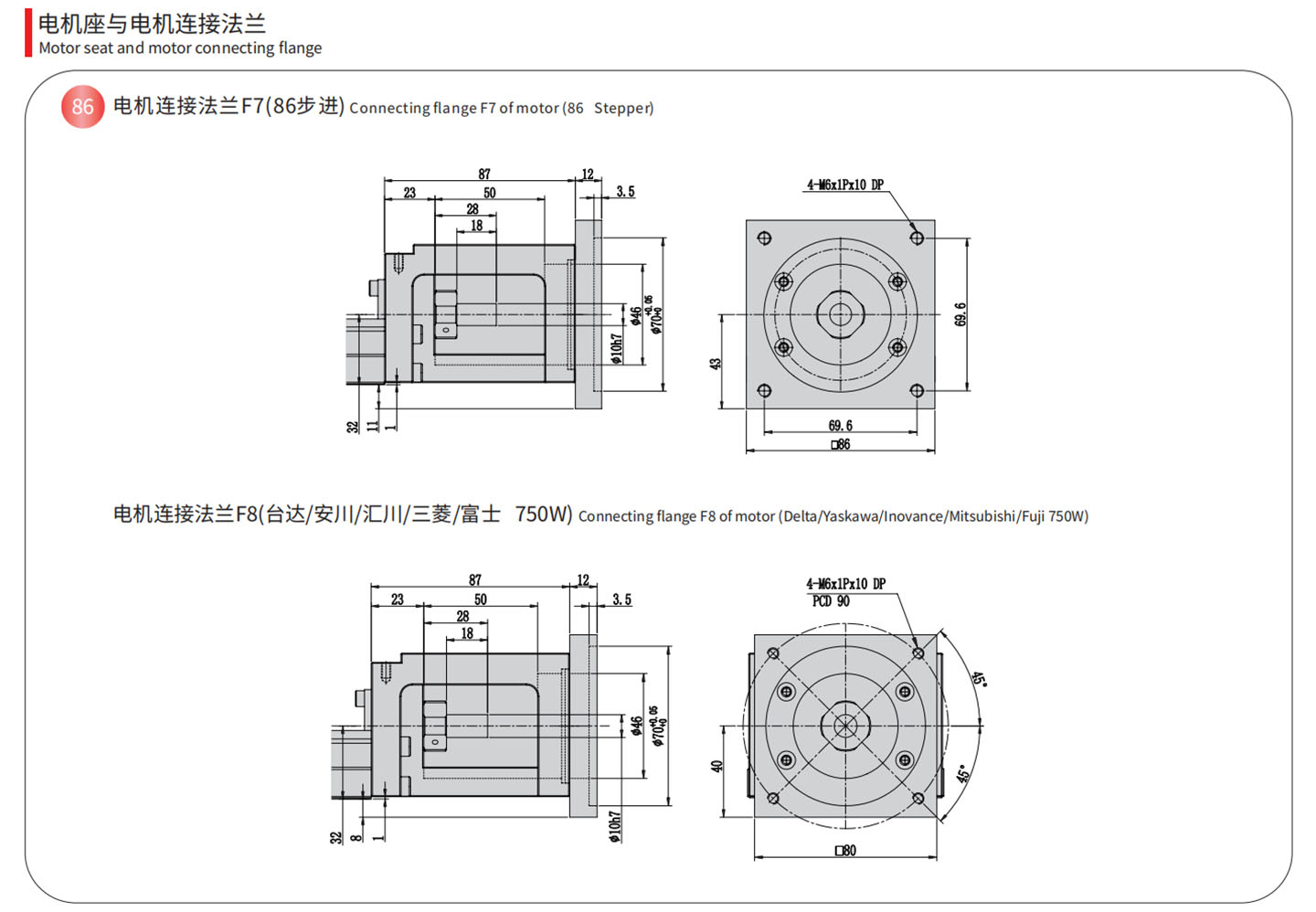
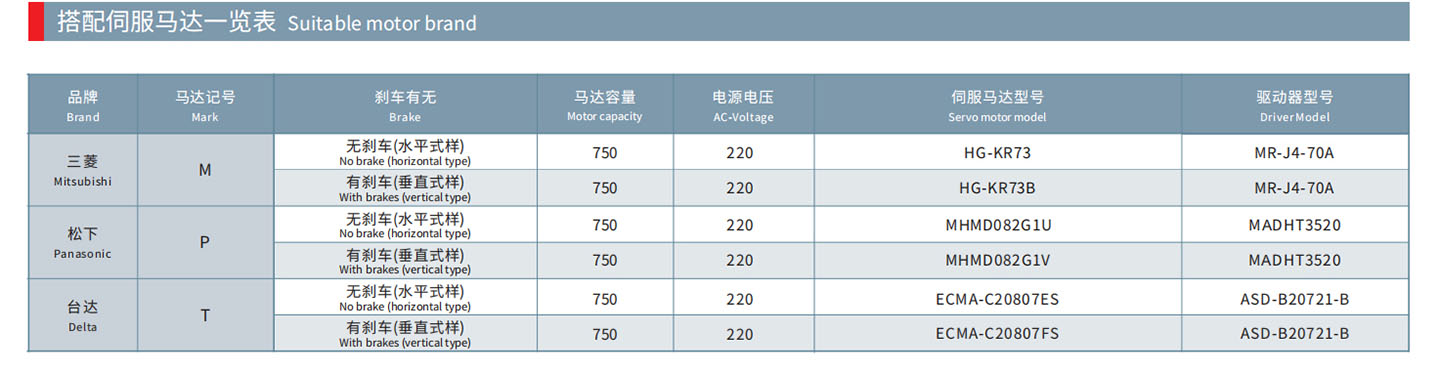
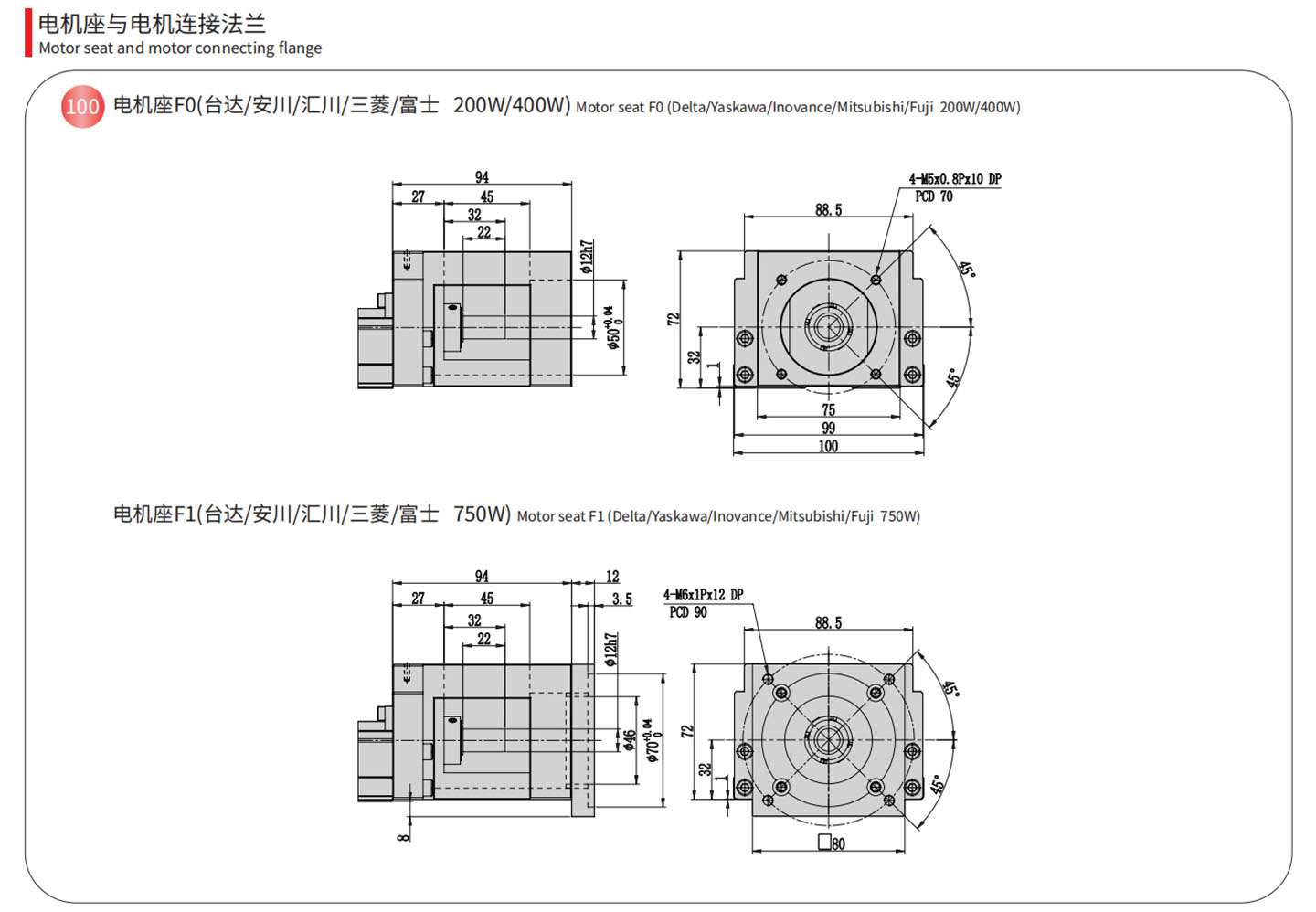
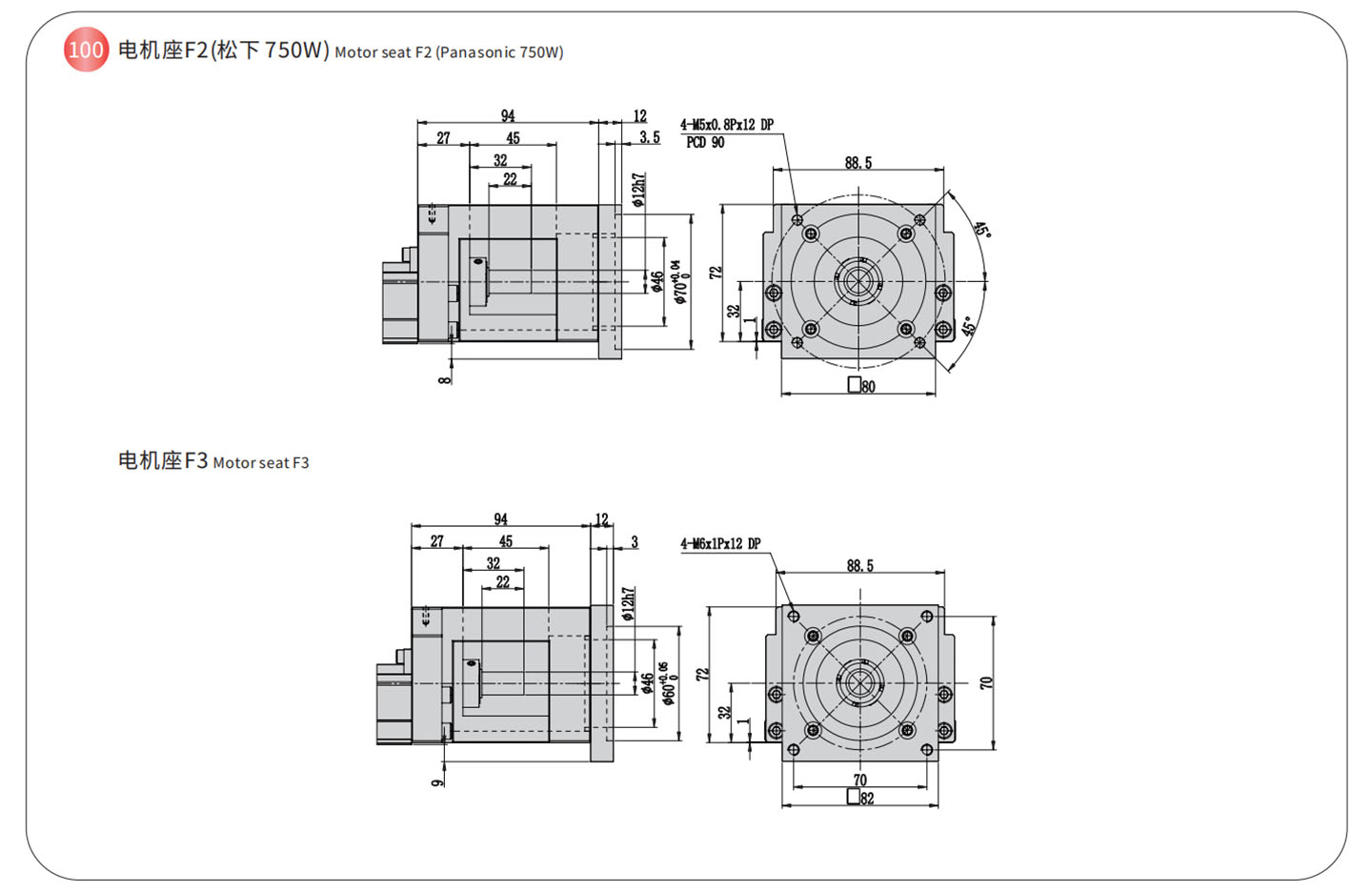
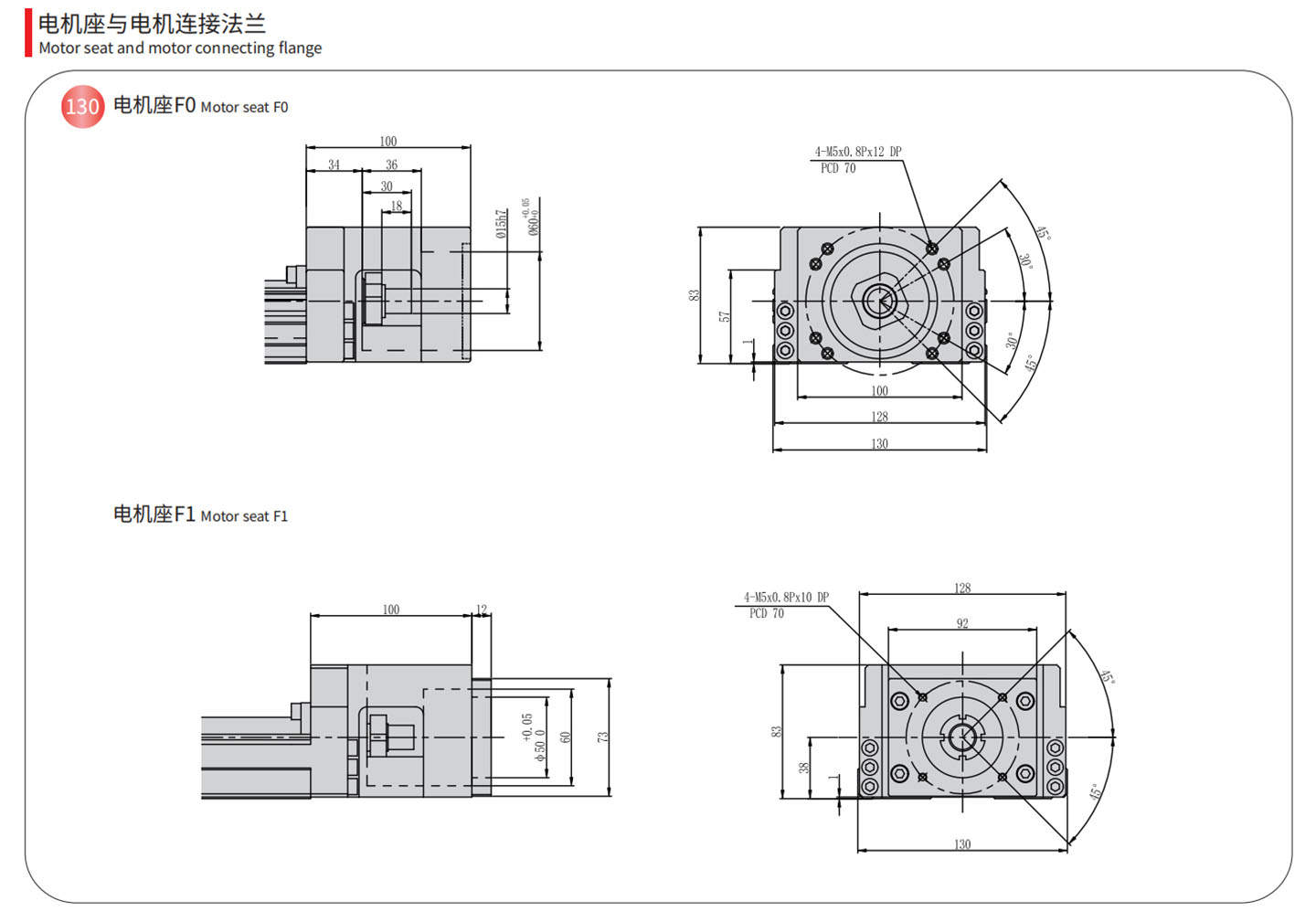
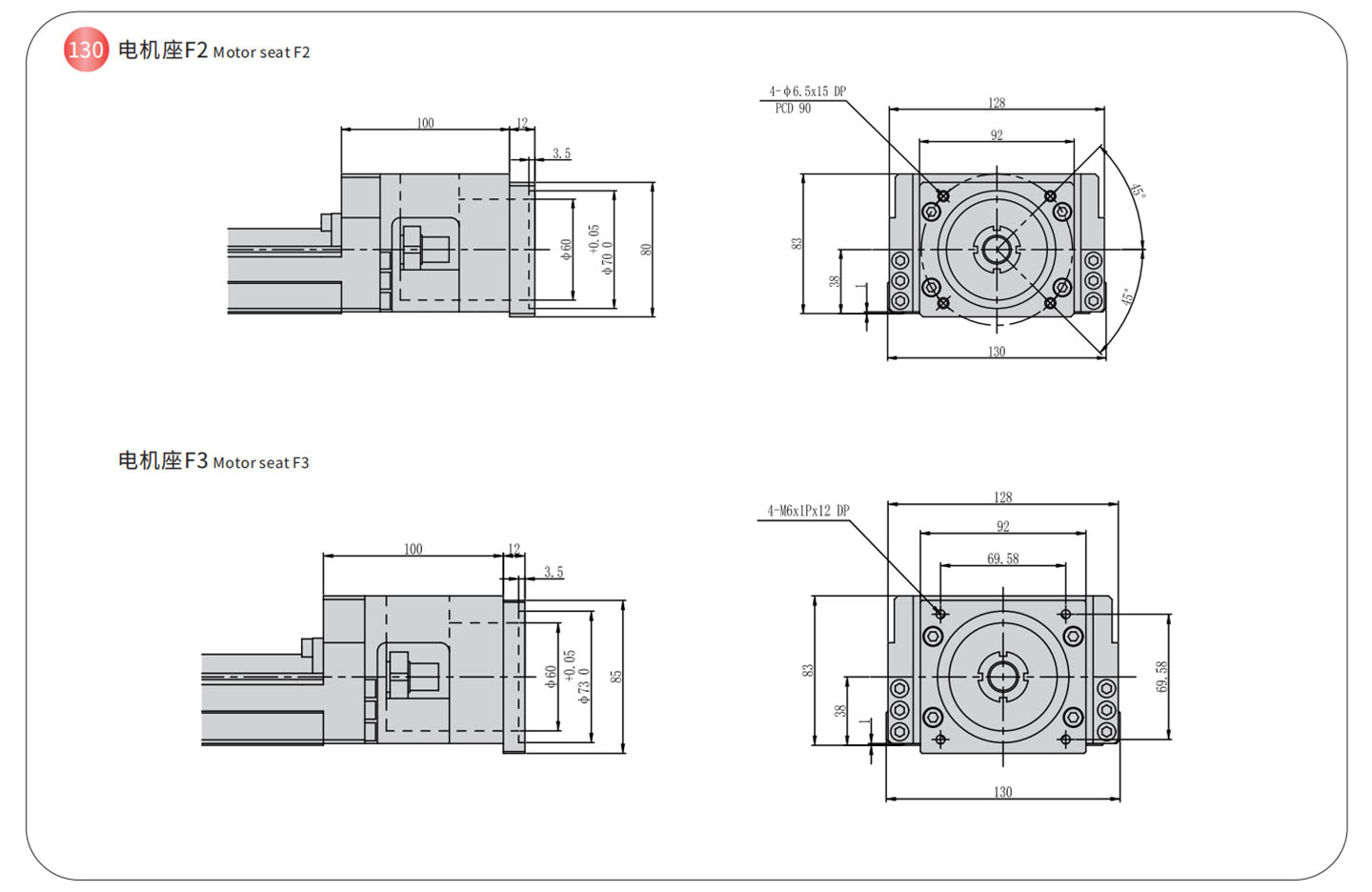
Dans les mêmes conditions de charge, notre robot à axe unique série KK est plus petit, nous fournissons des trous filetés standard sur la base et le curseur en acier, et notre plaque d'adaptation de moteur peut fournir jusqu'à 8 méthodes d'installation de moteur, ce qui signifie qu'il peut être facilement assemblé. tout système robotique cartésien. Par conséquent, les robots à axe unique de la série KK sont largement utilisés dans la manipulation de plaquettes de silicium, la distribution automatique, l'industrie FPD, l'industrie de l'automatisation médicale, les instruments de mesure de précision, les tables coulissantes, l'industrie de la coordination des tables coulissantes linéaires.
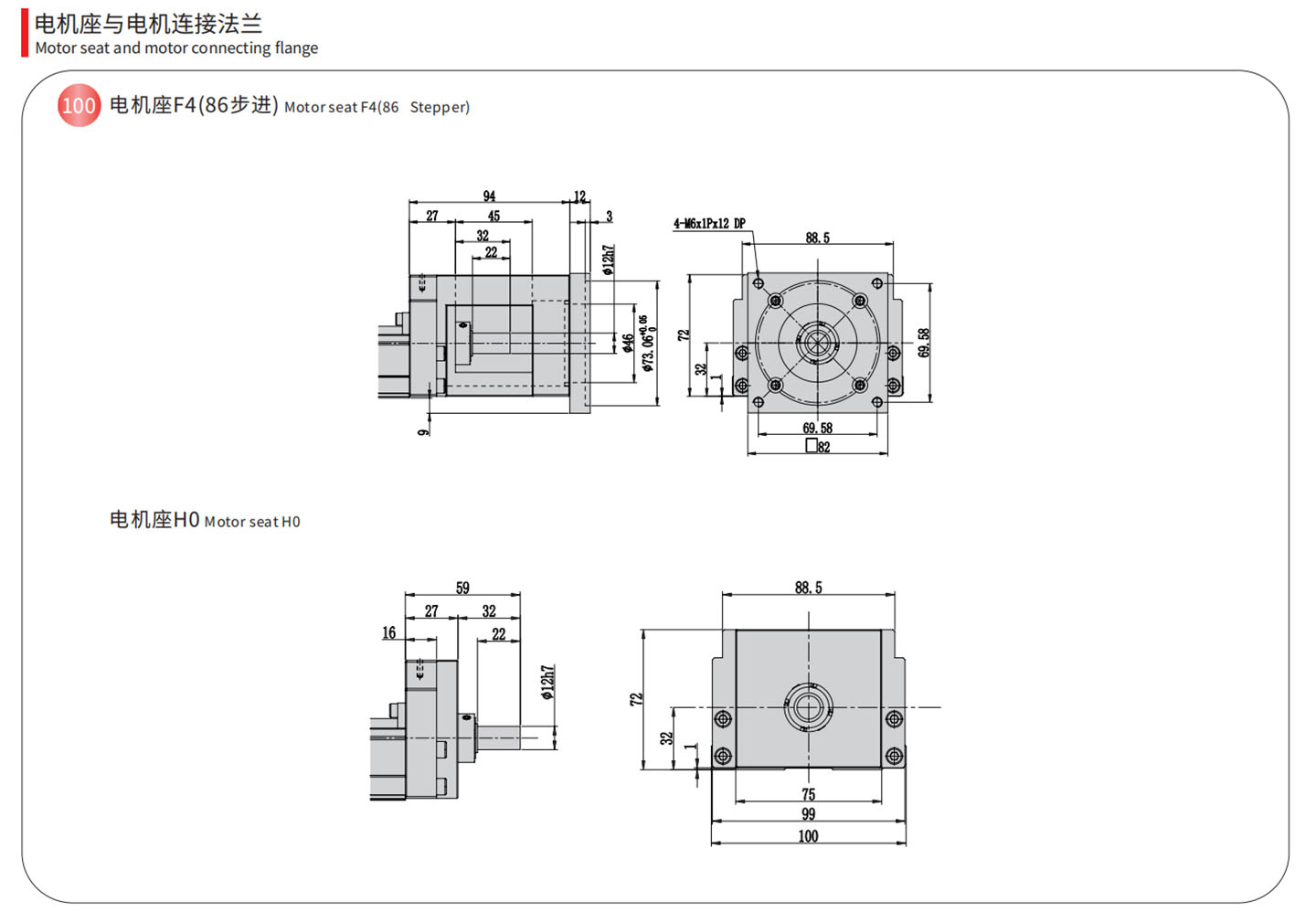
钢基铝内嵌

钢基铝内嵌100

钢基铝内嵌86
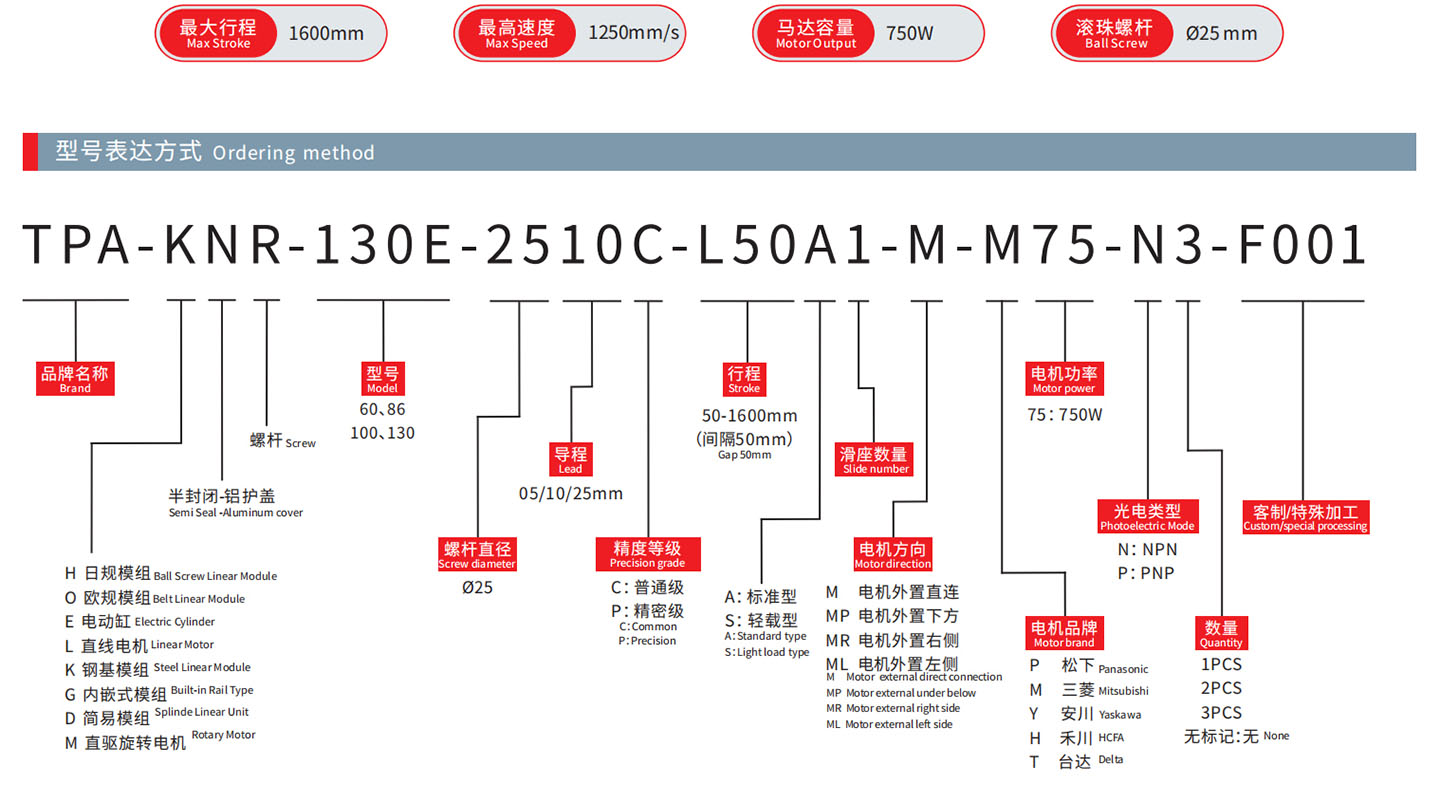
Caractéristiques
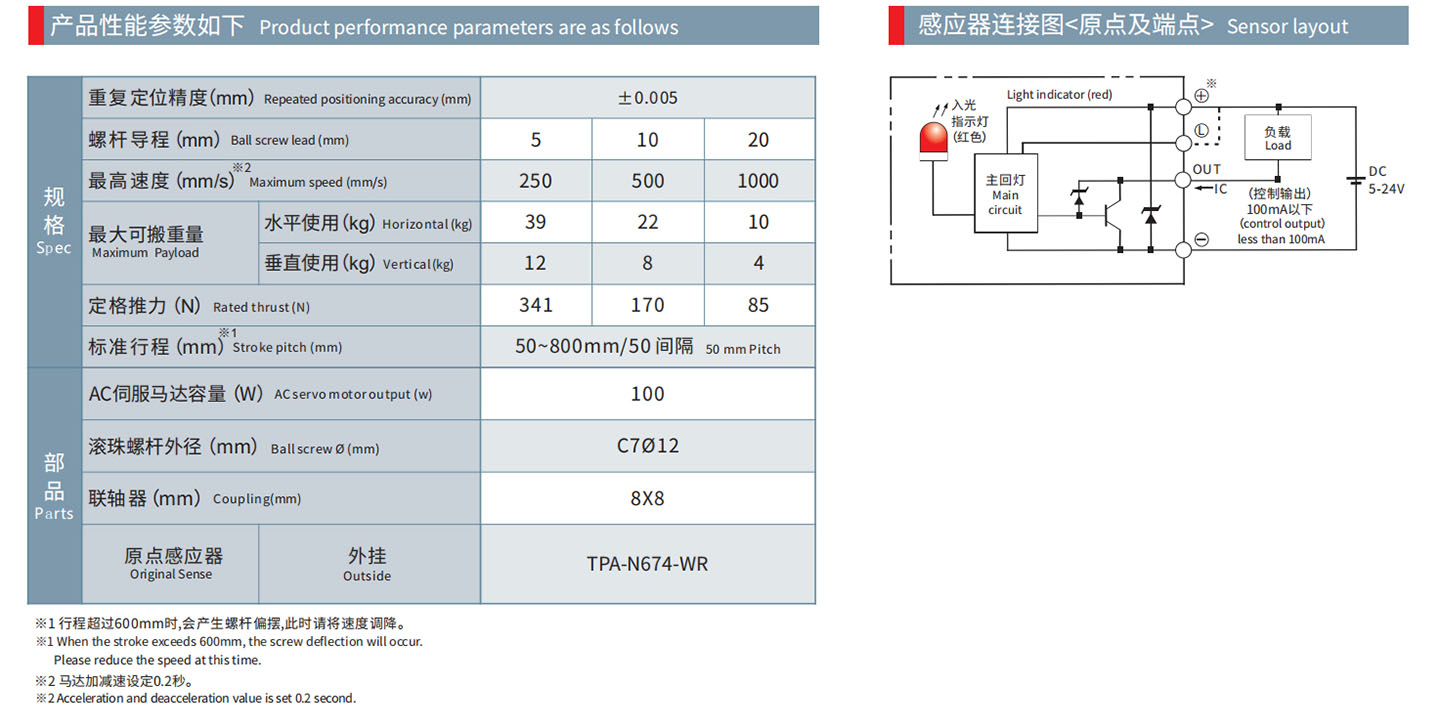
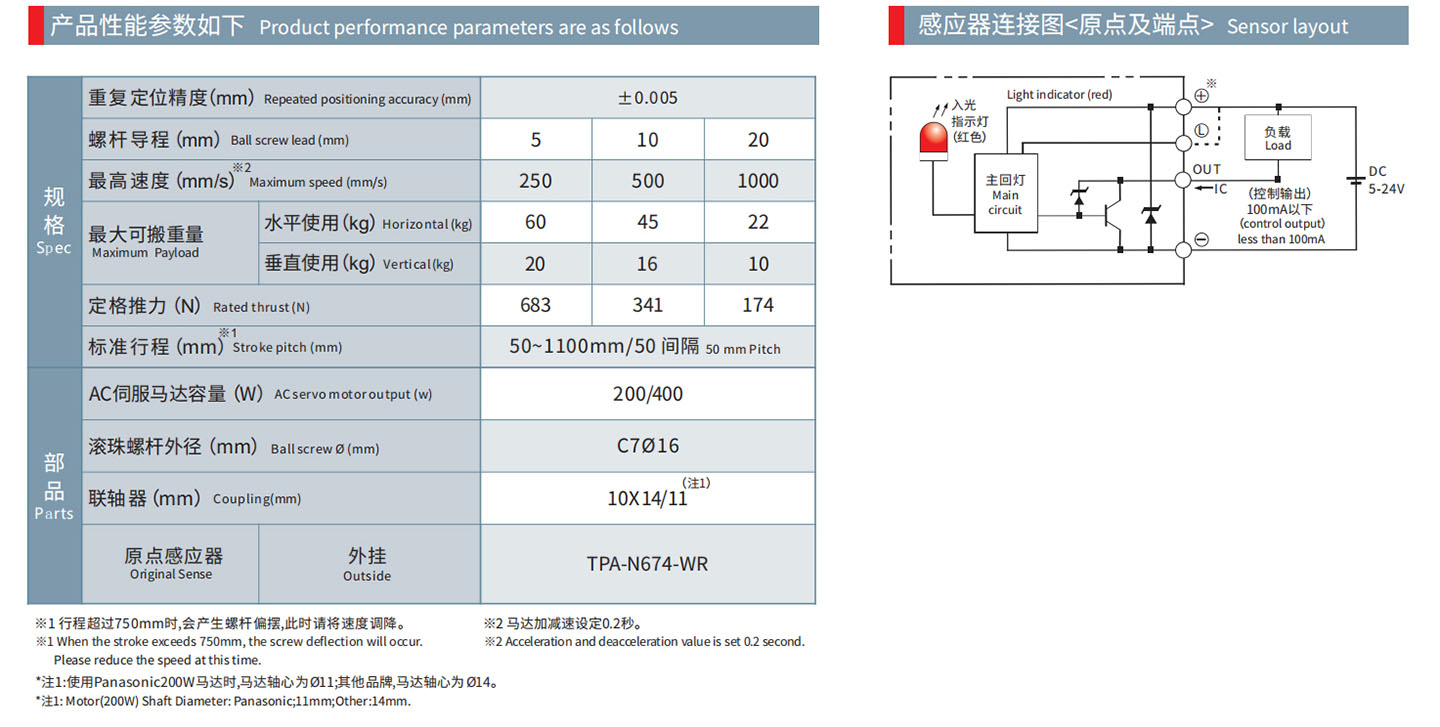
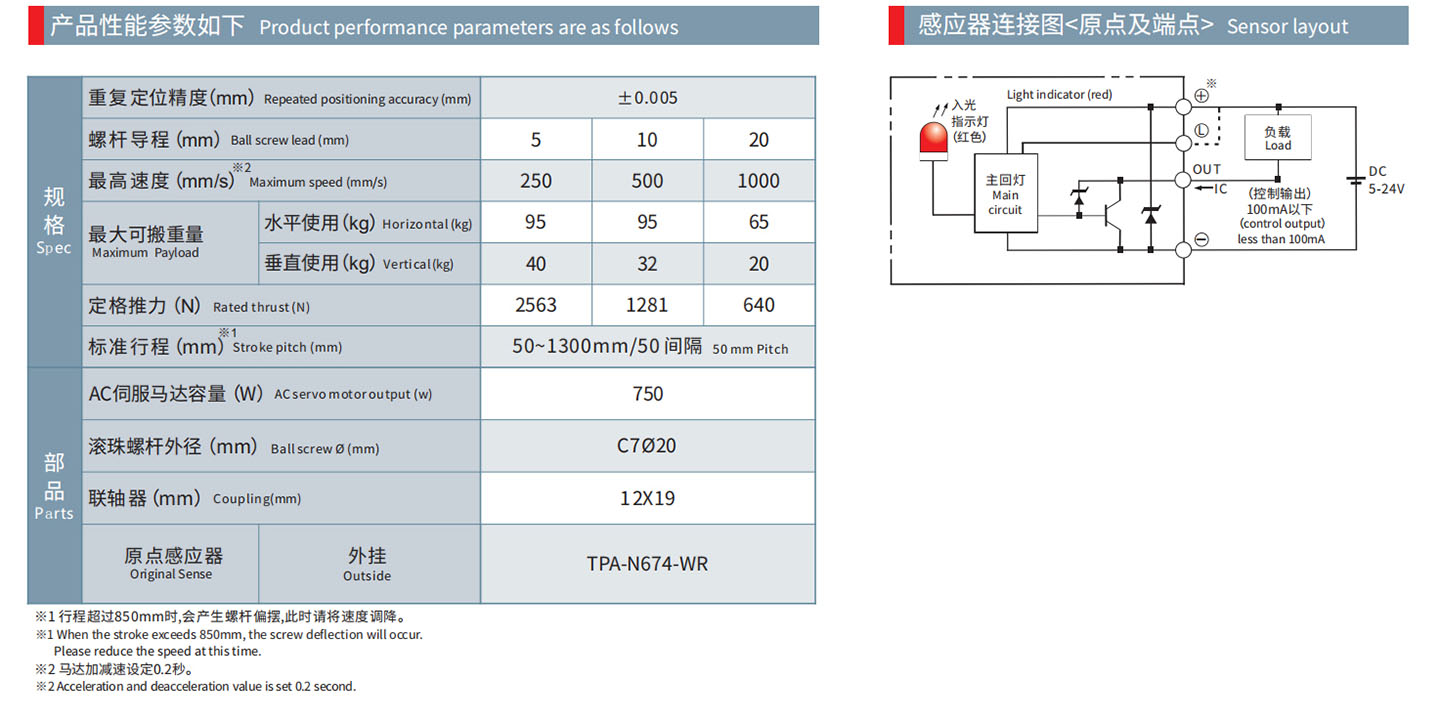
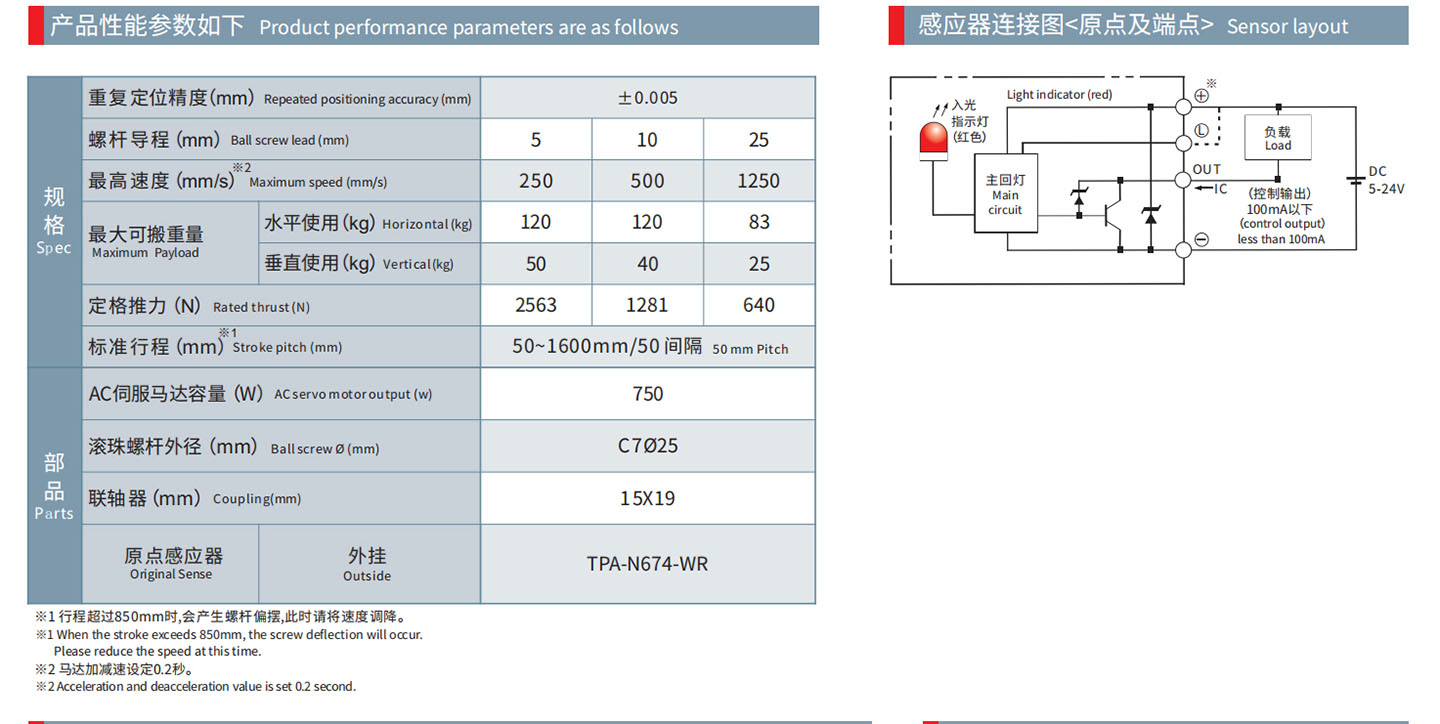
Précision de positionnement répété : ±0,005 mm
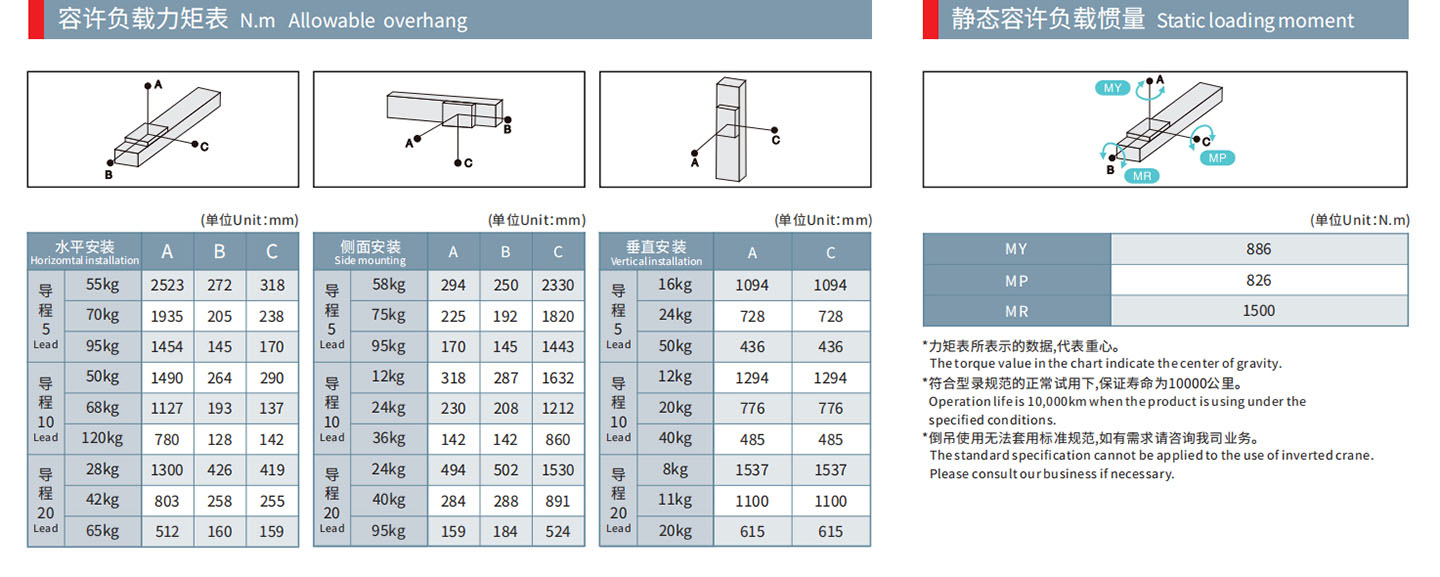
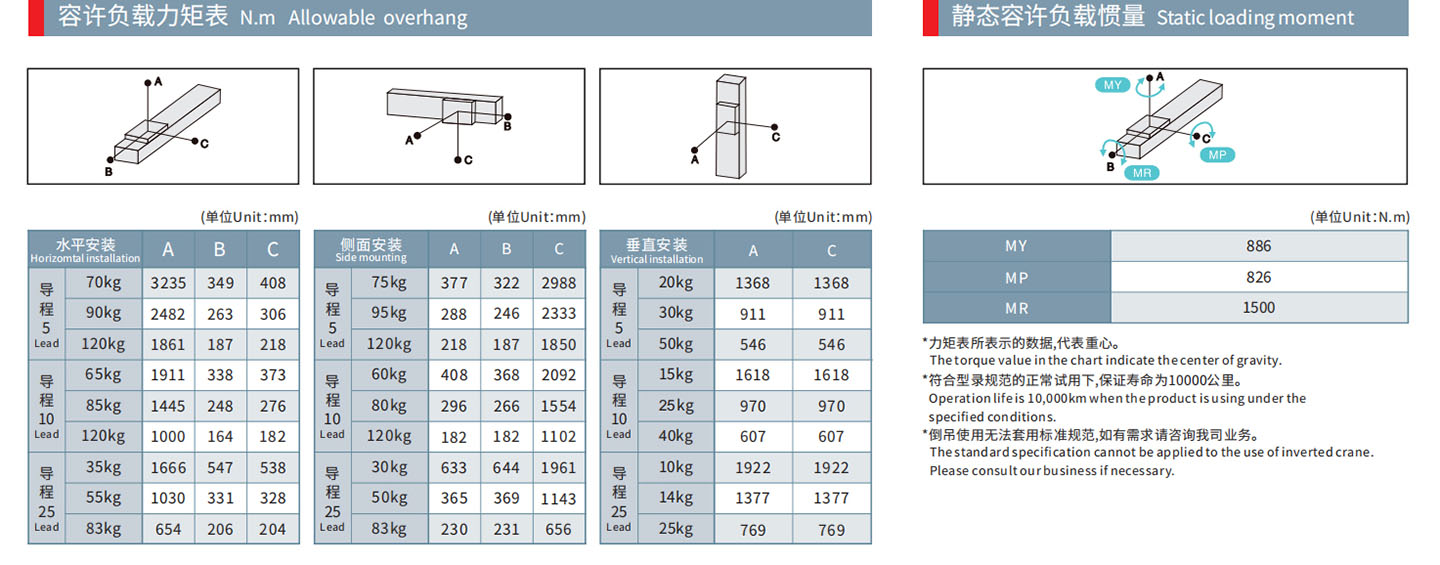
Charge statique de base : 12642N
Charge nominale dynamique de base : 7144N
Course : 31 – 1128 mm
Vitesse maximale : 1000 mm/s


Plus de produits

Axe Z de découpe laser série HFR

Module linéaire à vis à billes série HCR entièrement fermé

Actionneurs linéaires à vis à billes série HNR demi-enc...

Demi-boîtier de module linéaire à vis à billes série HNR-E...










