




Base de acero de robots de eje único serie KSR/KNR/KCR/KFR


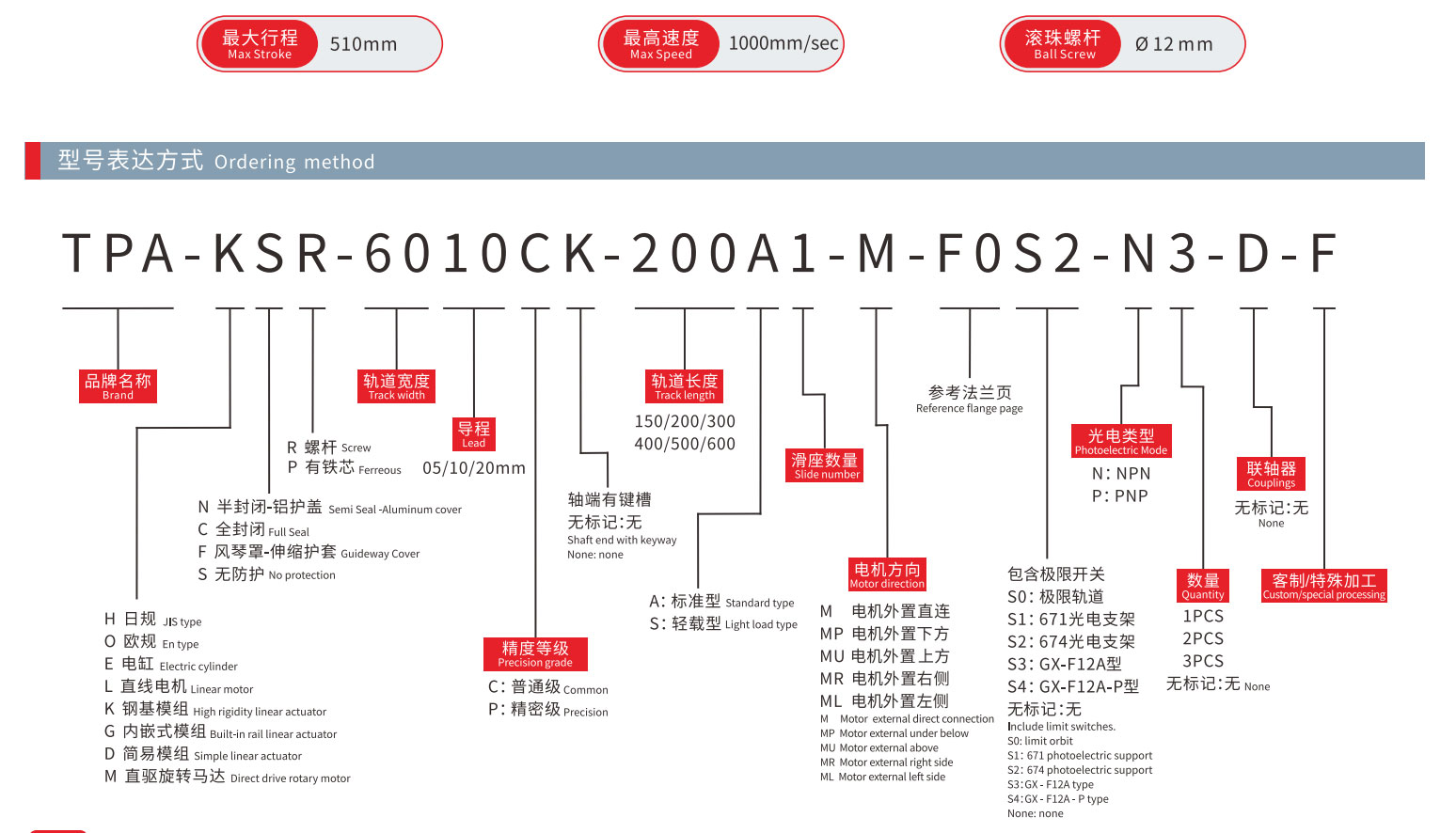
Selector de modelo
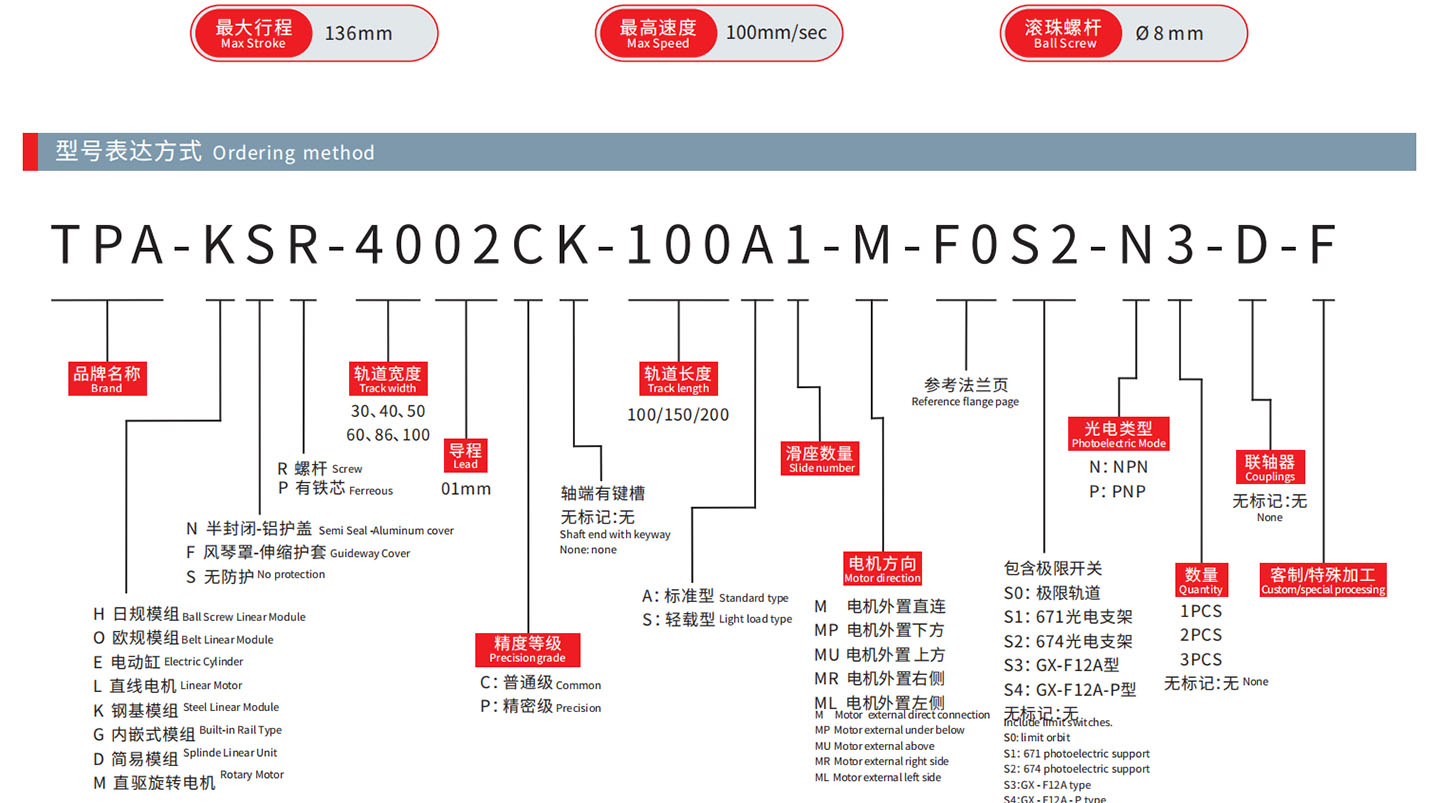
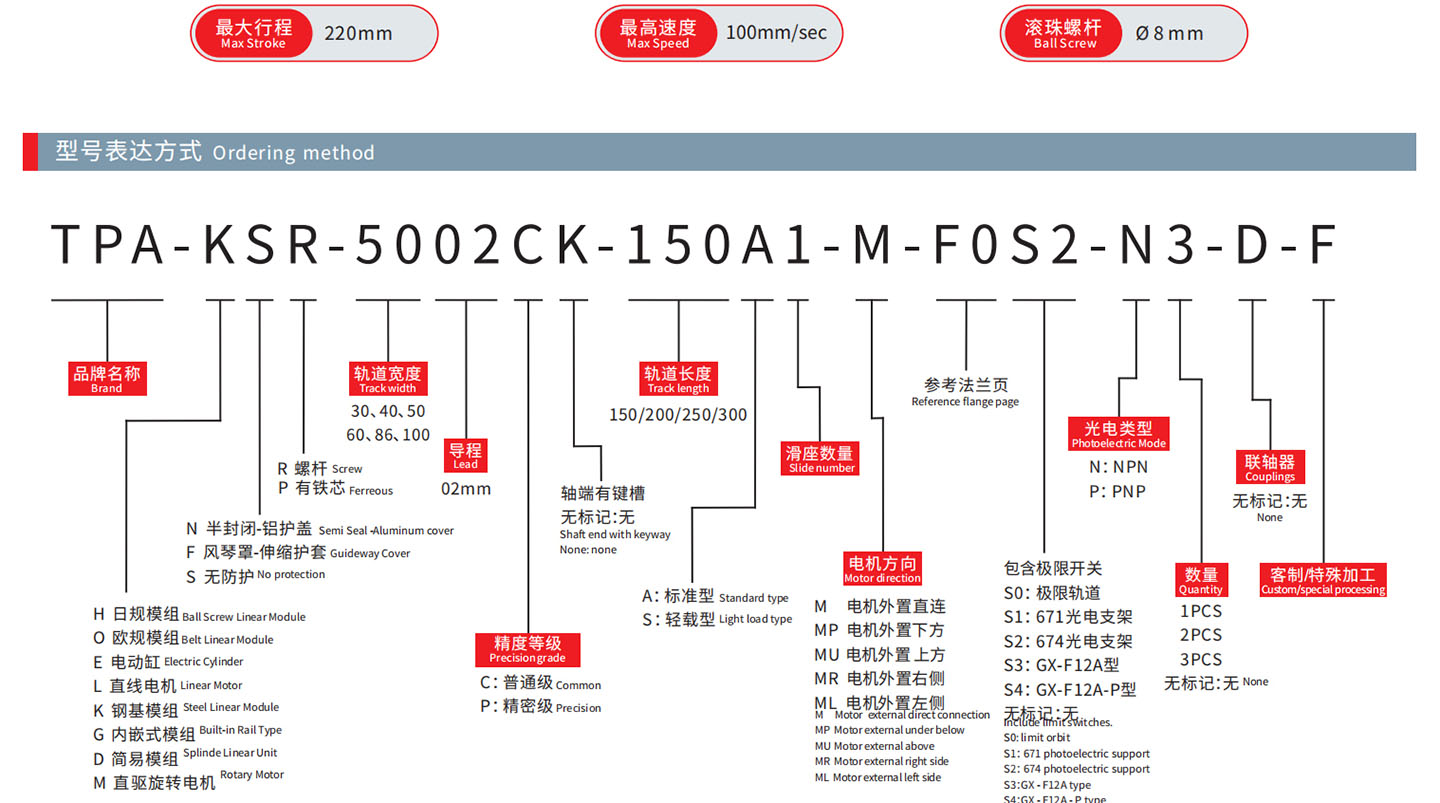
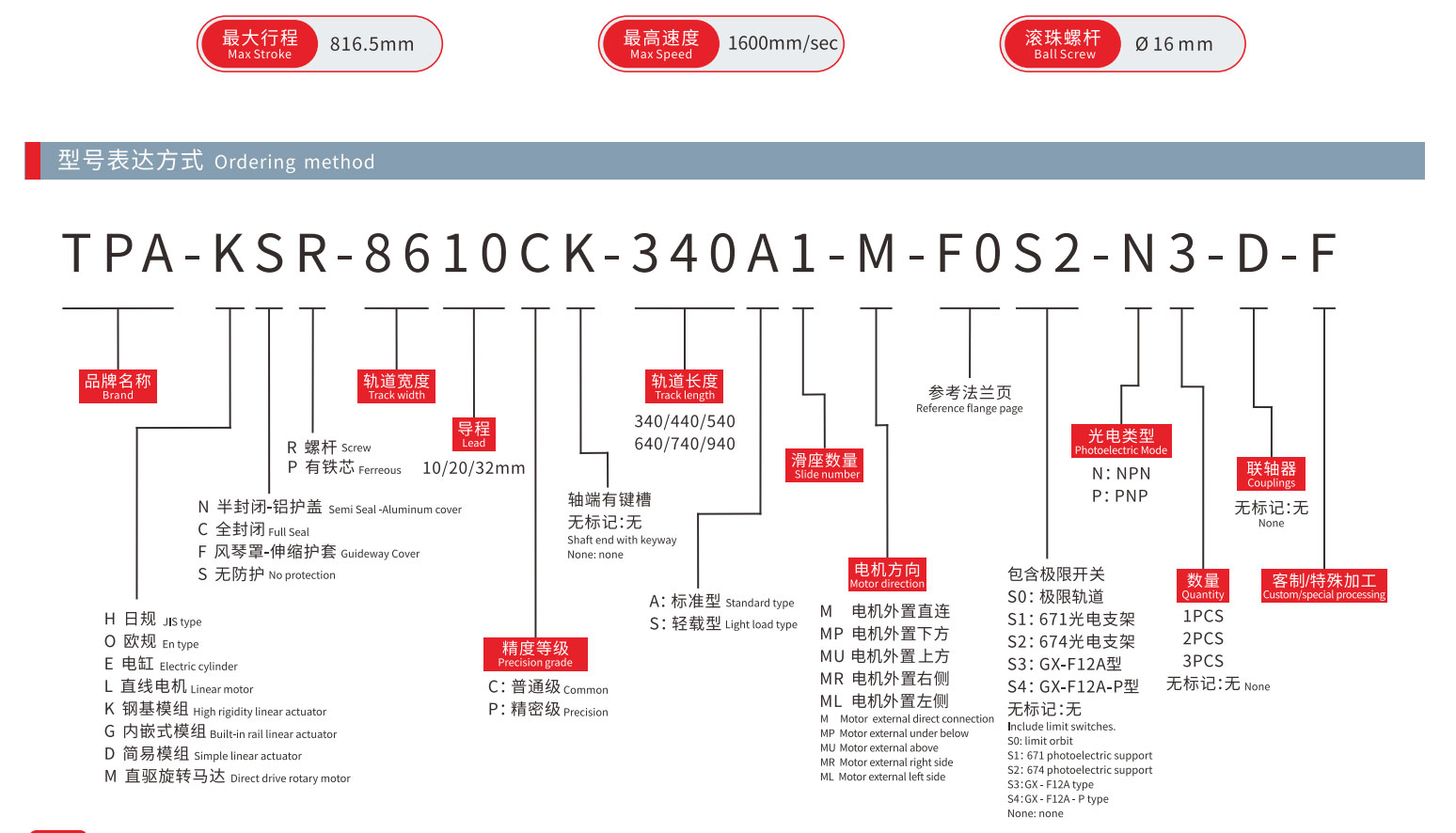
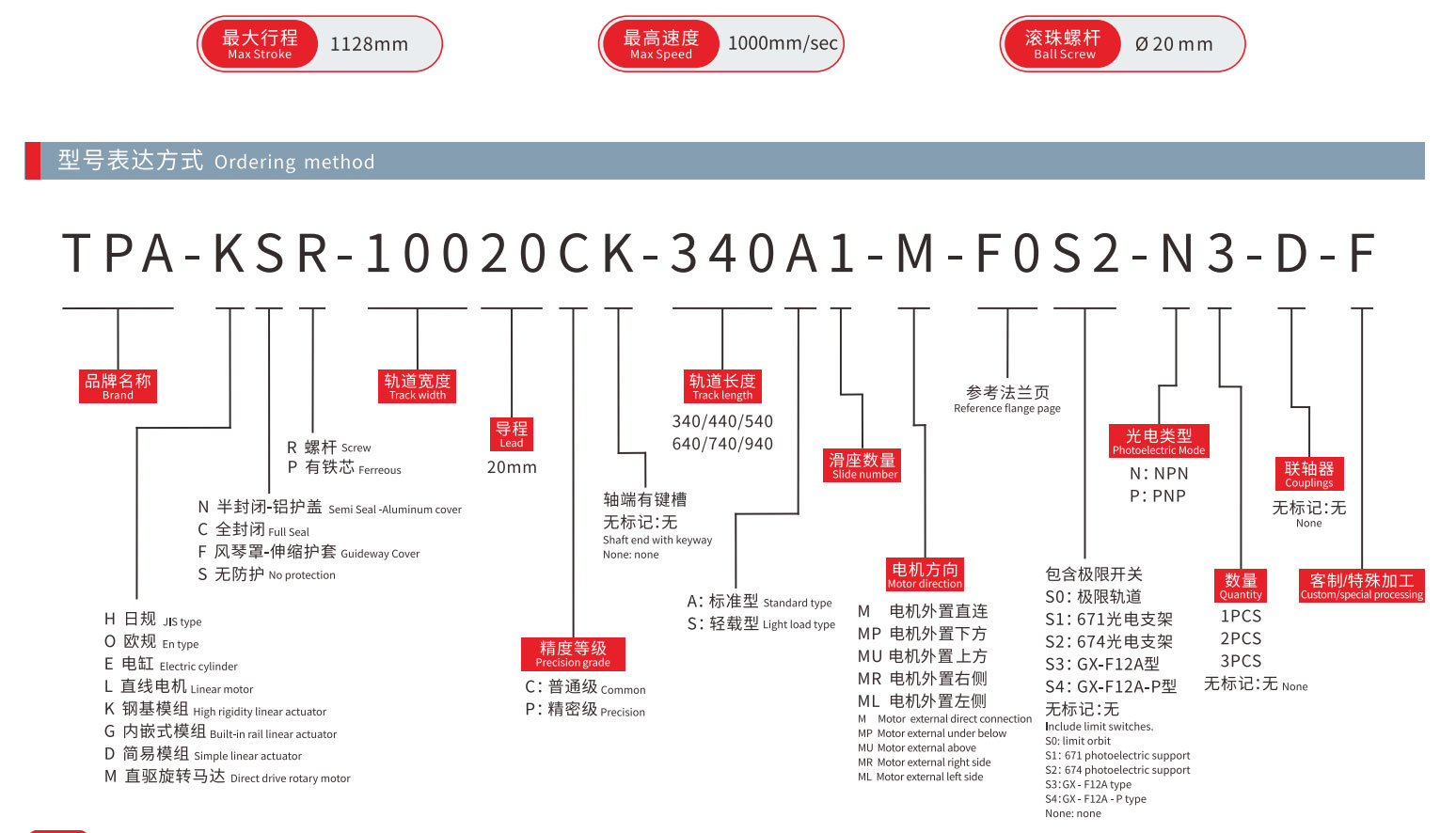
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
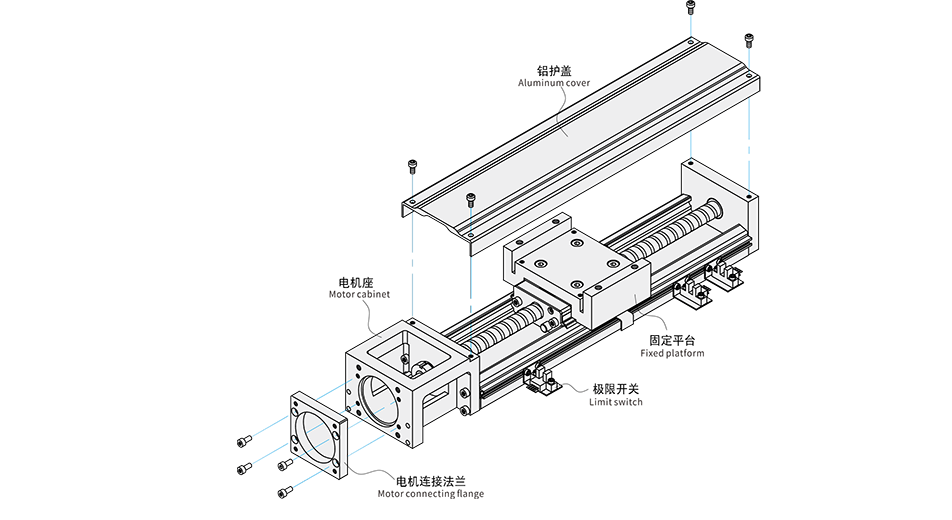
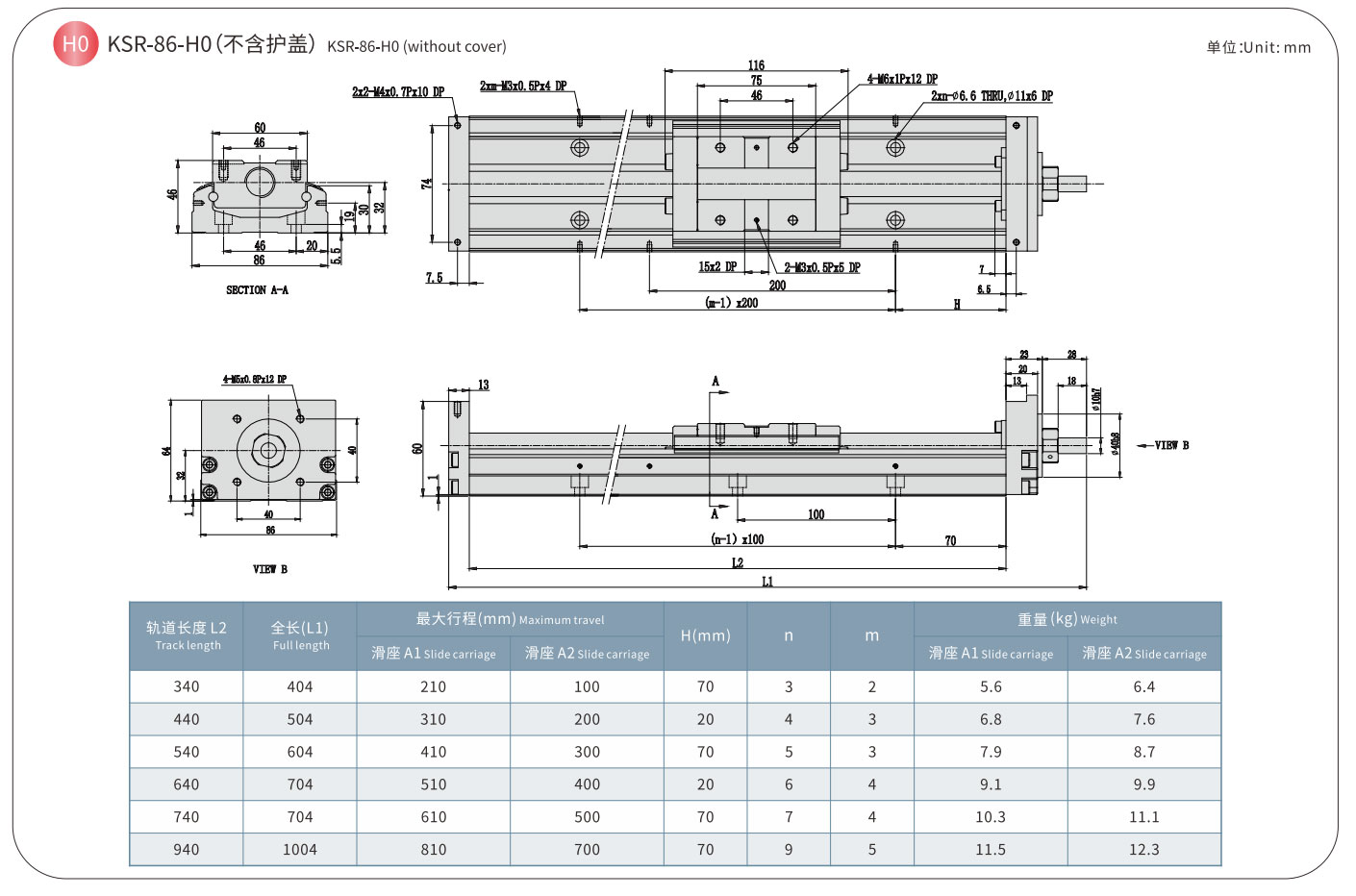
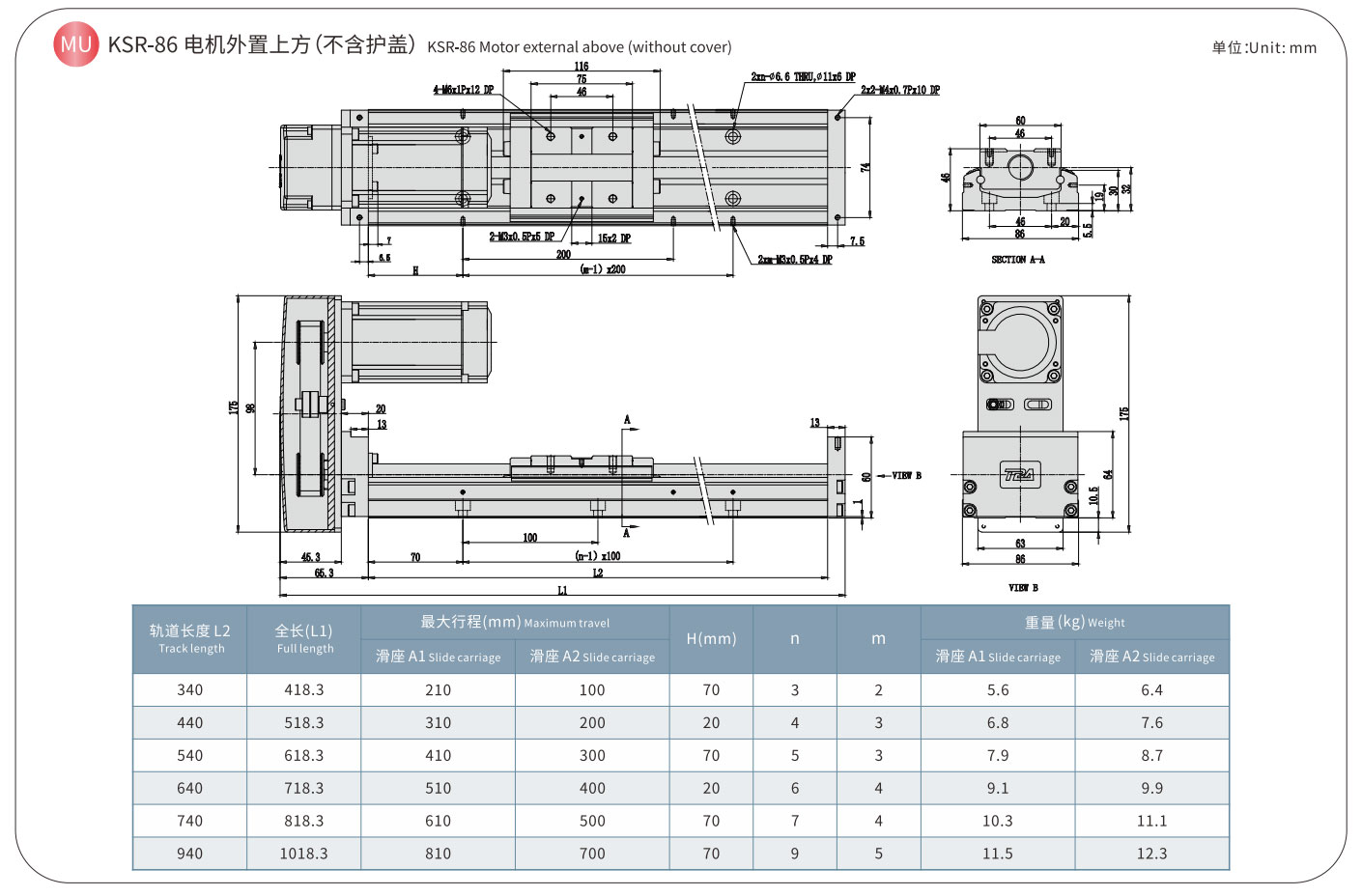
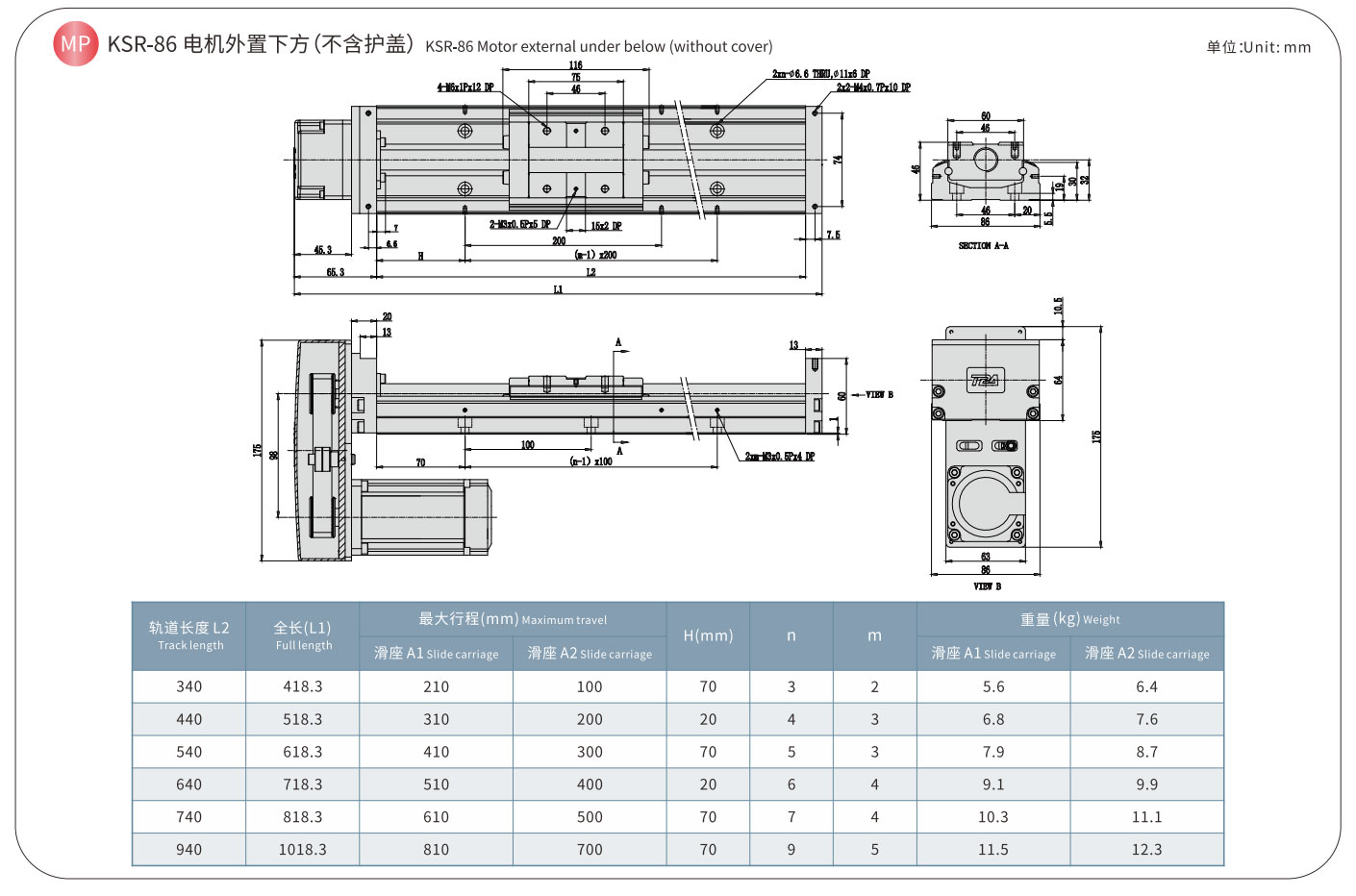
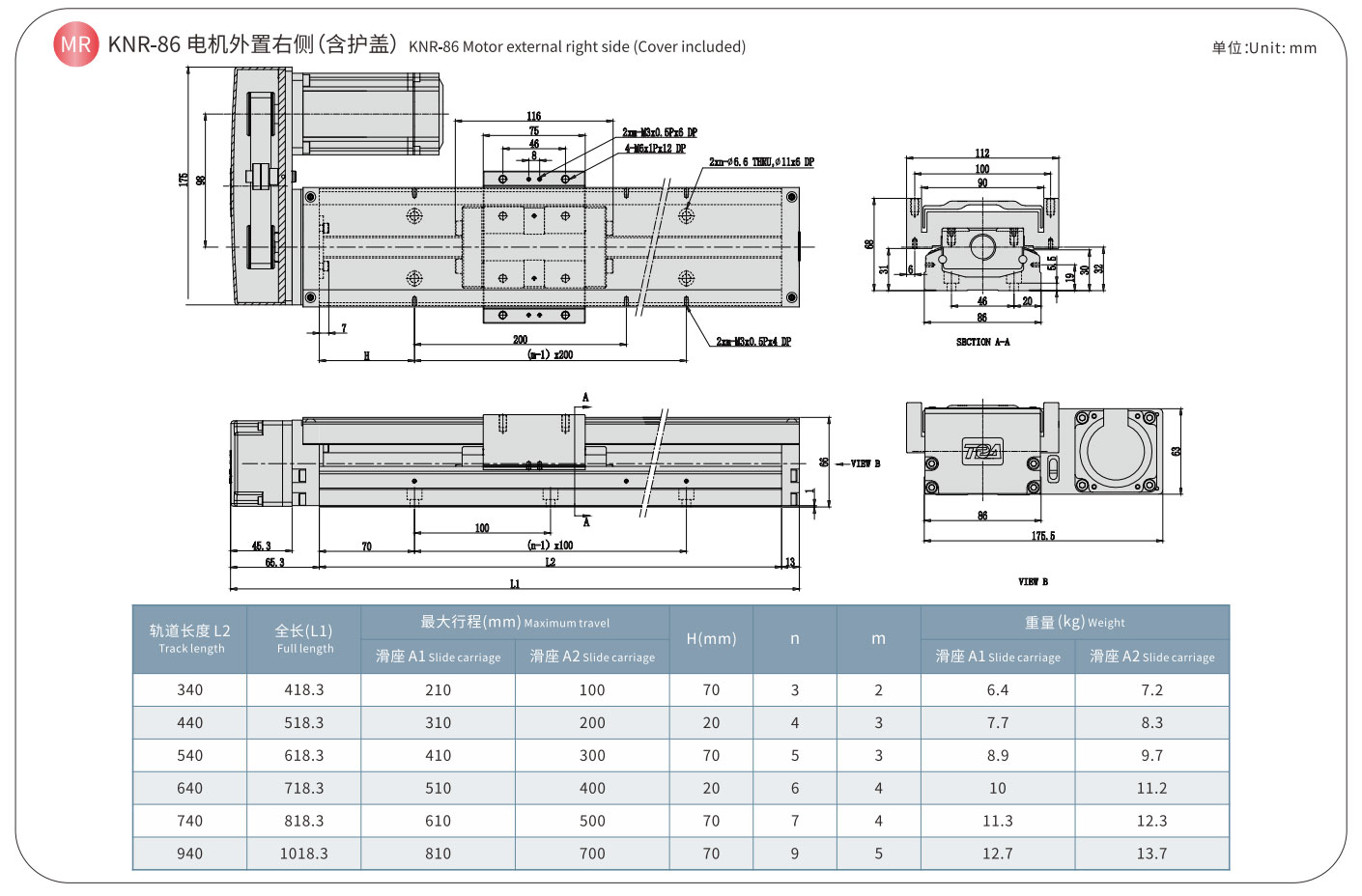
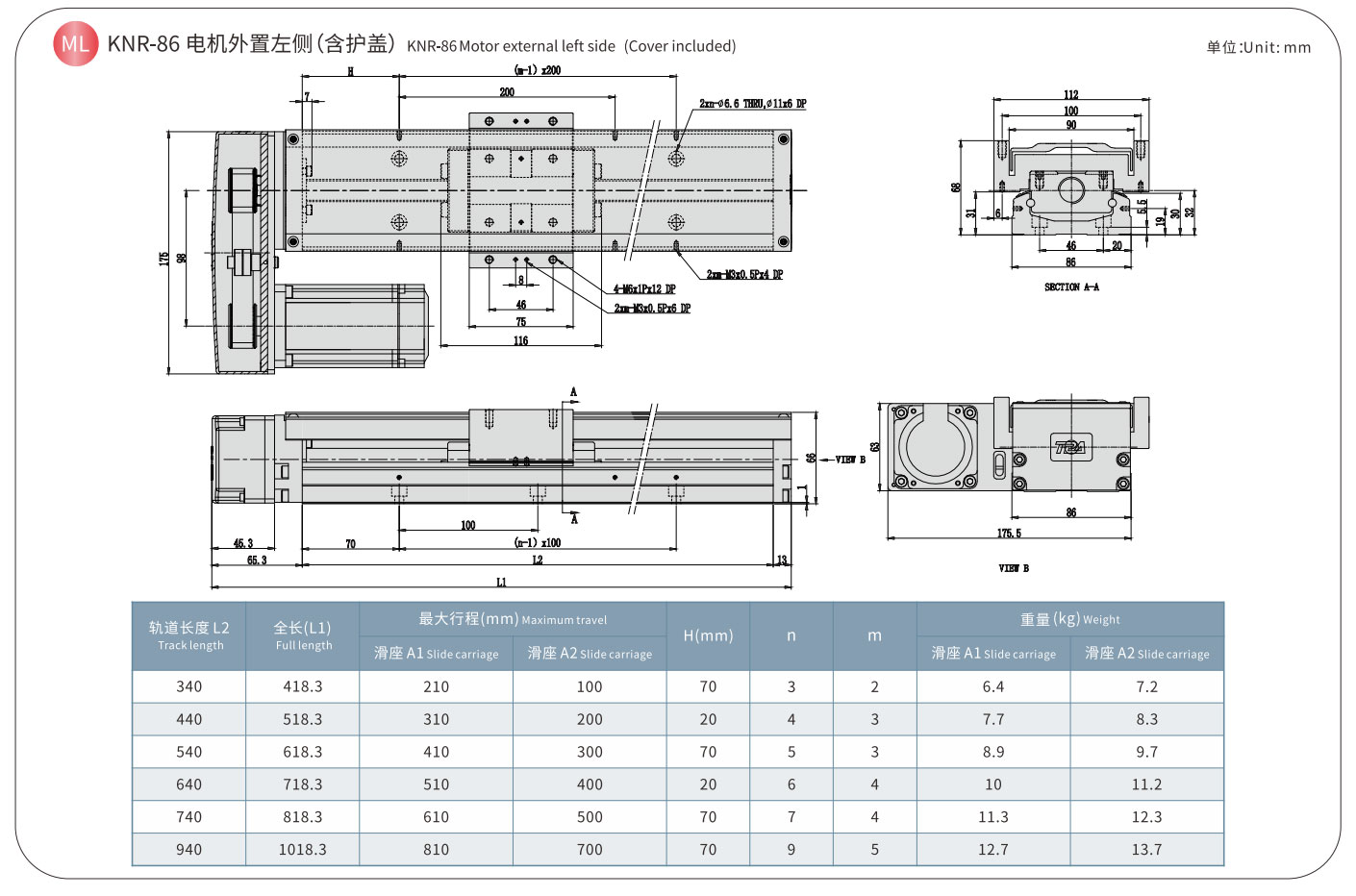
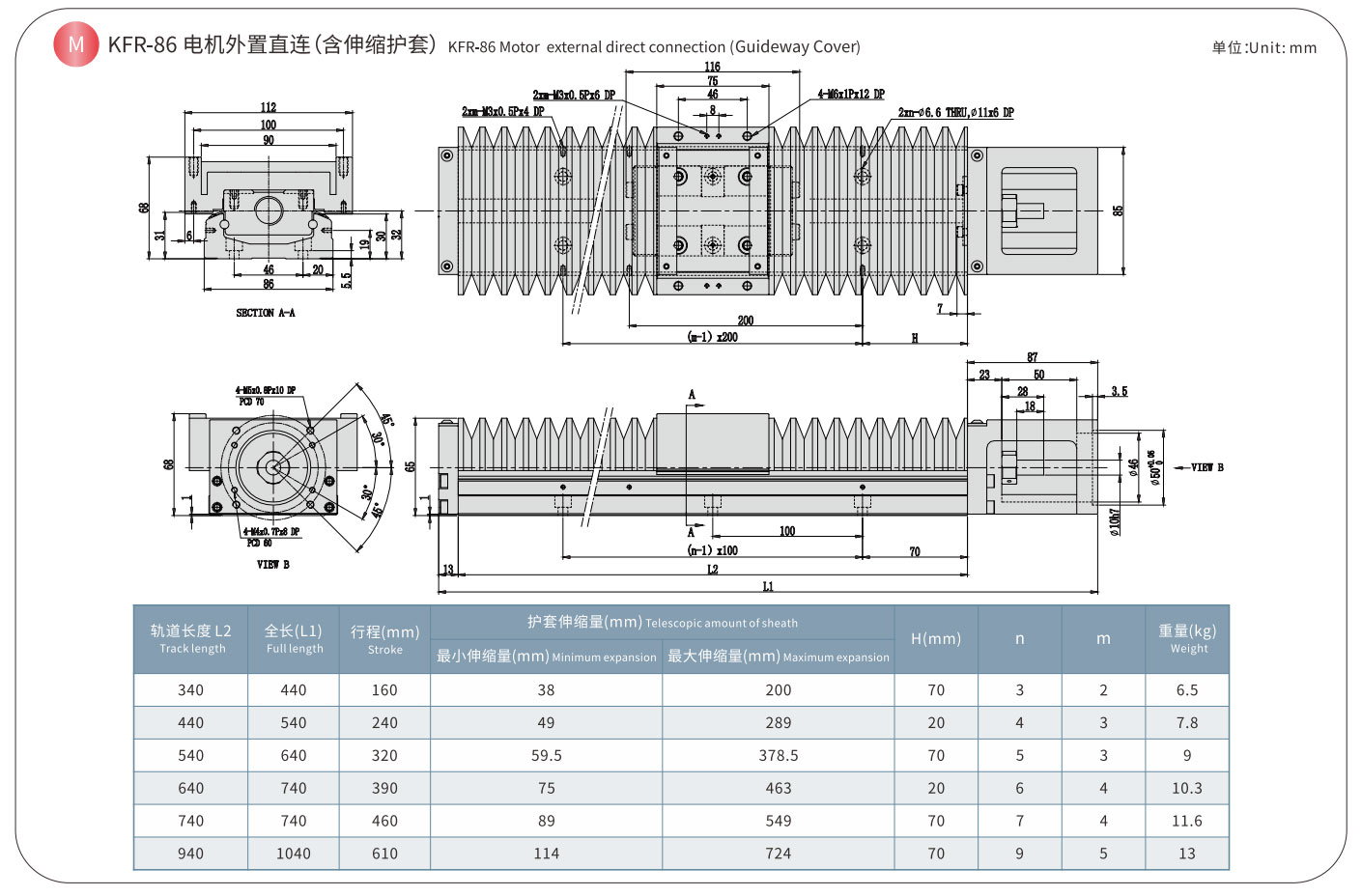
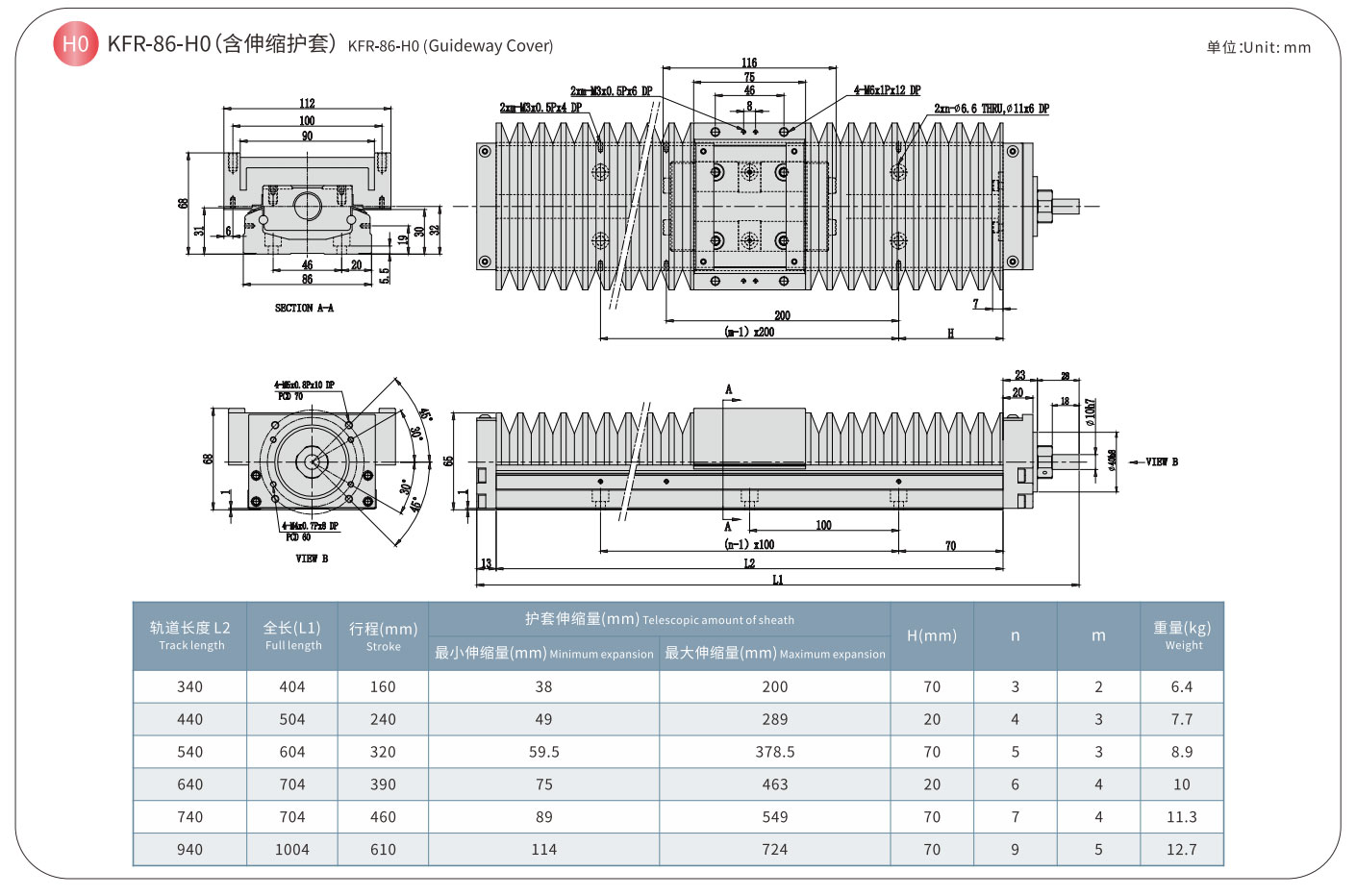
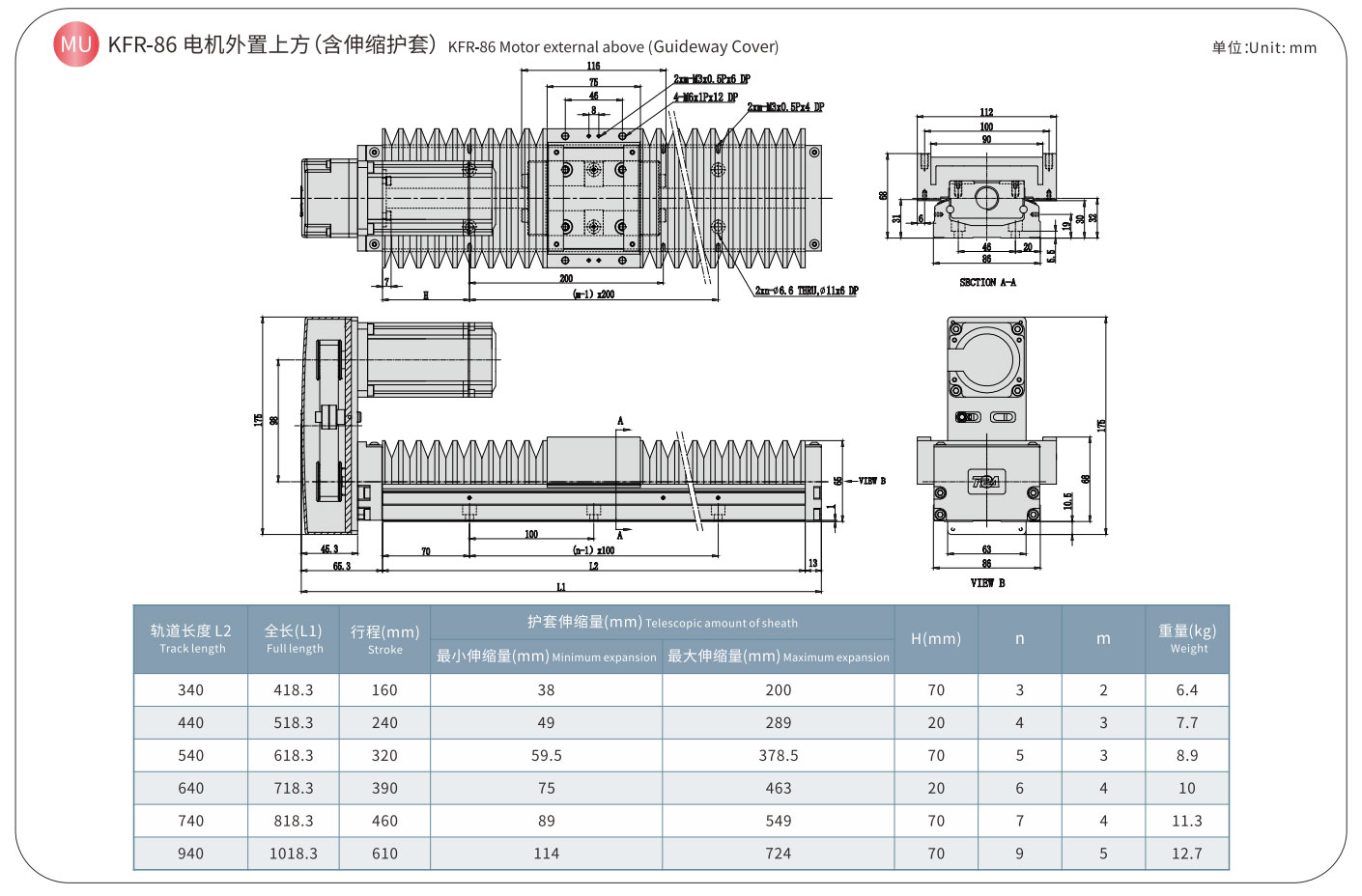
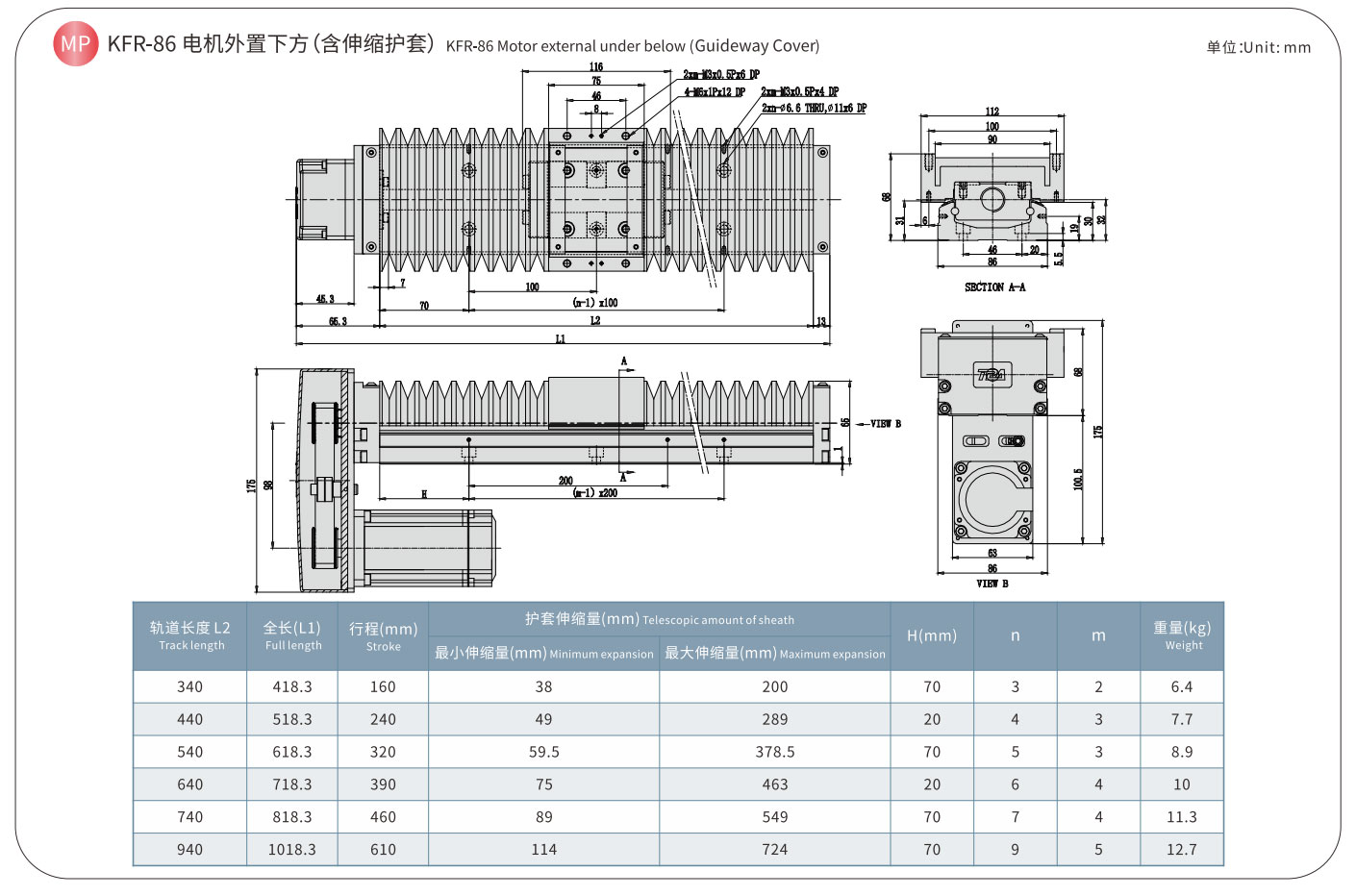
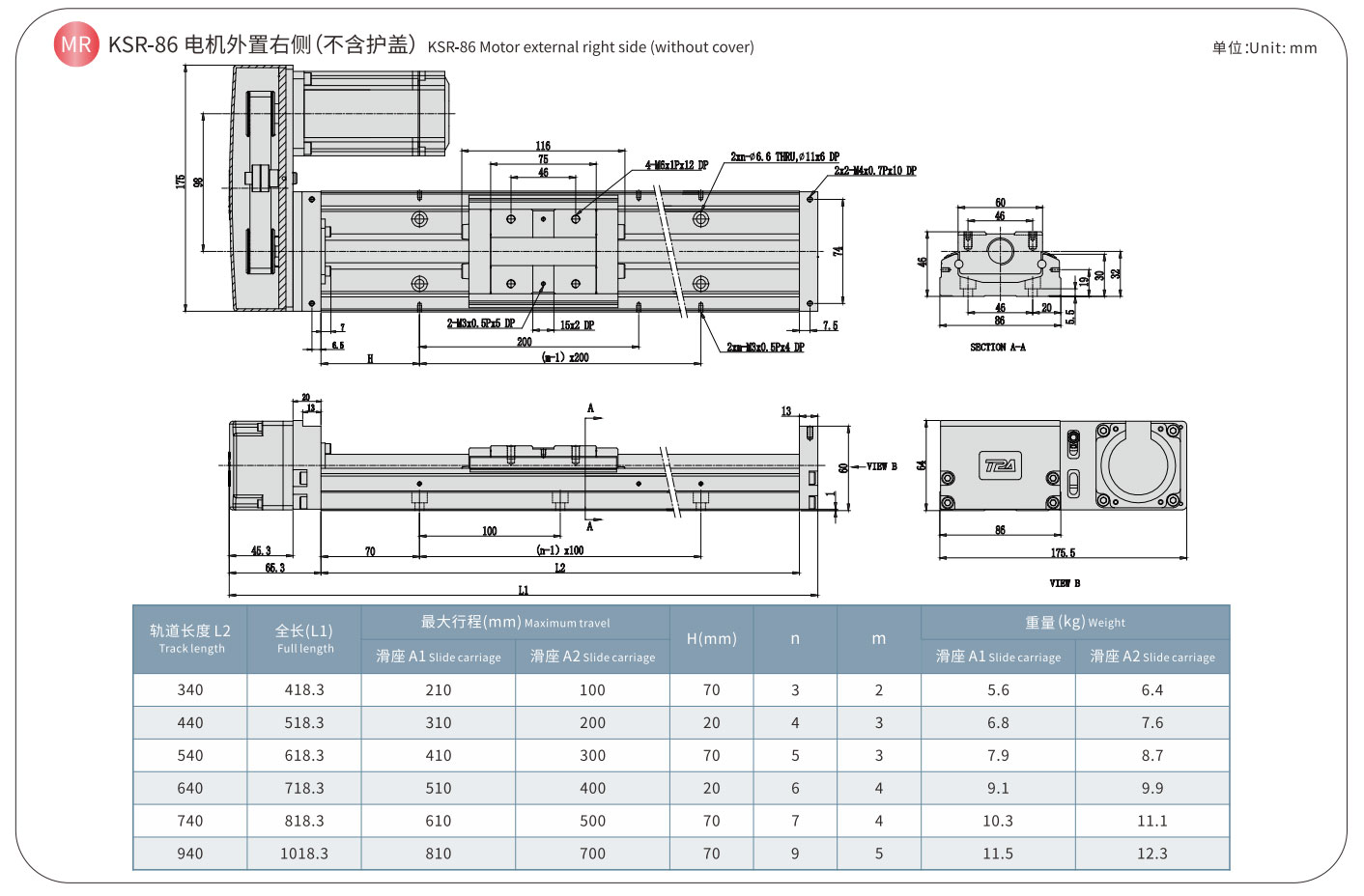
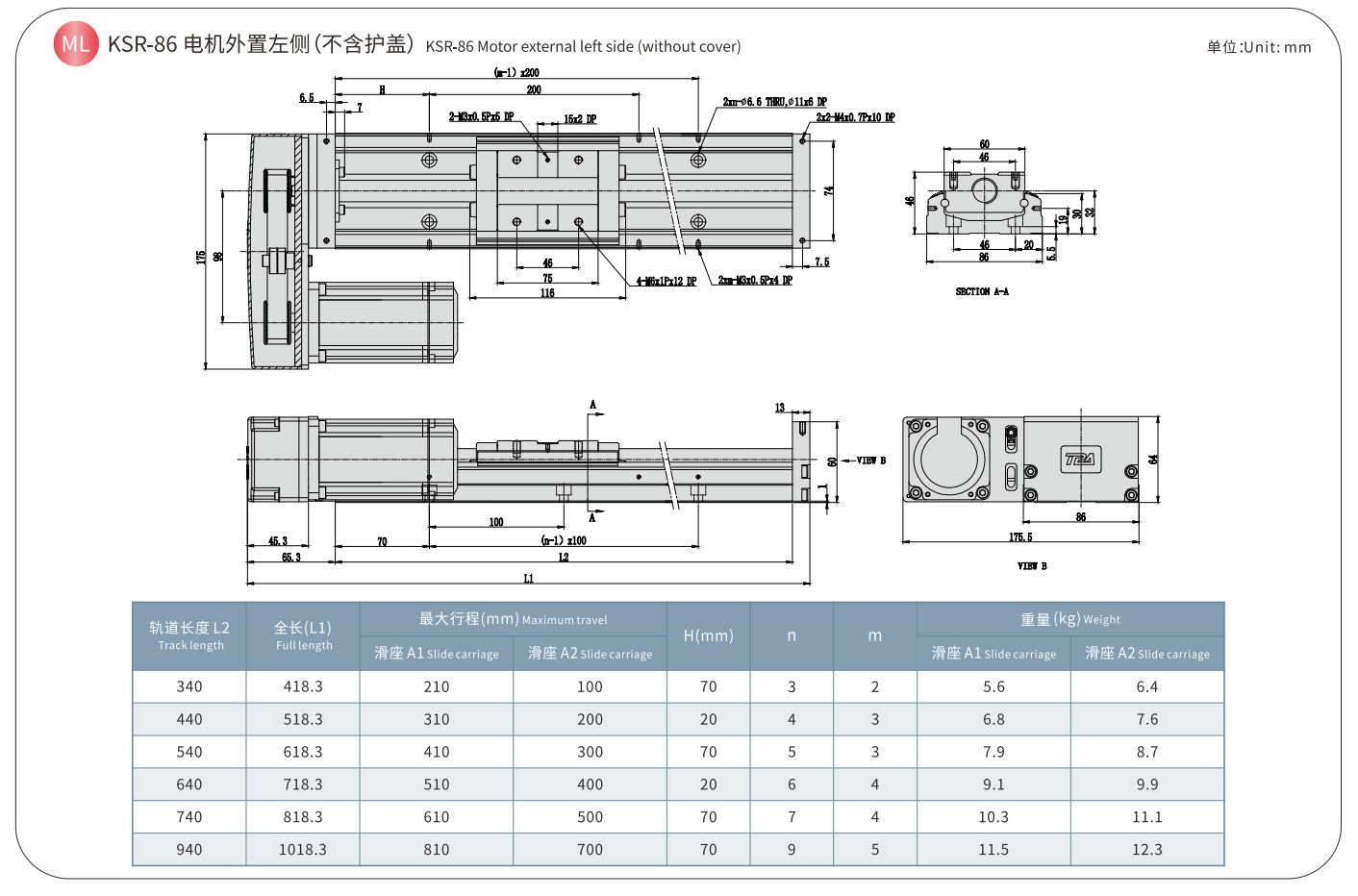
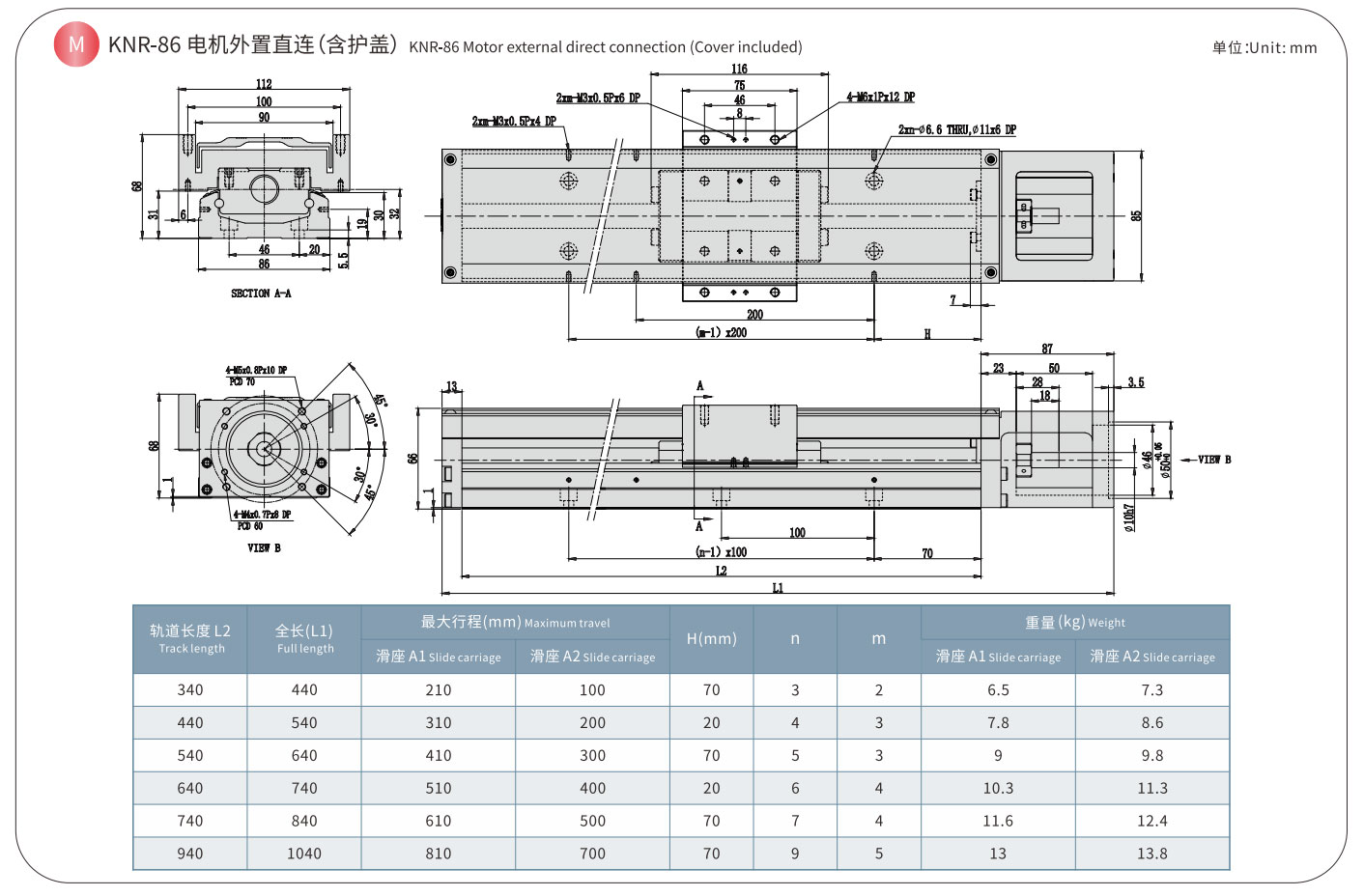
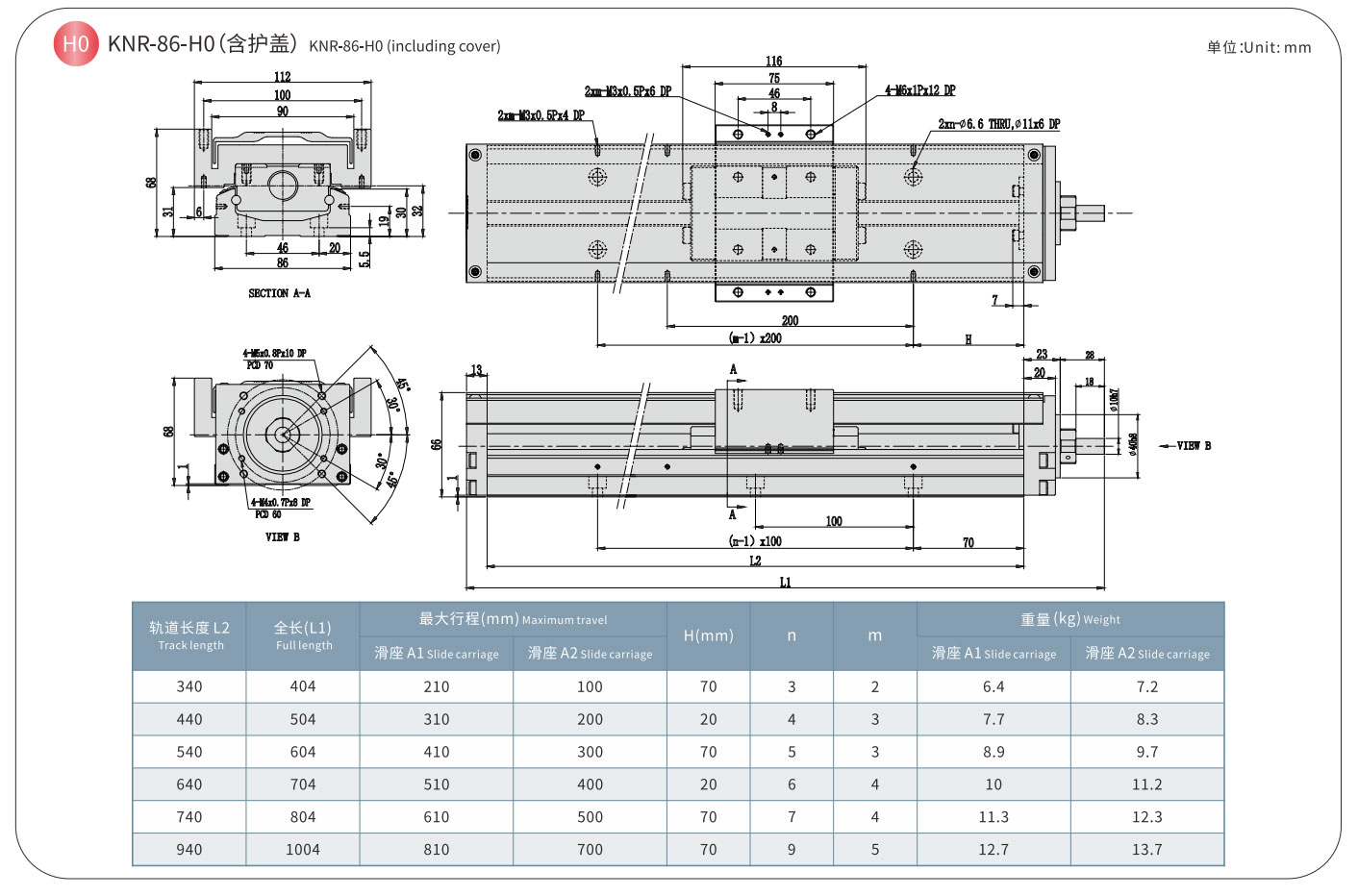
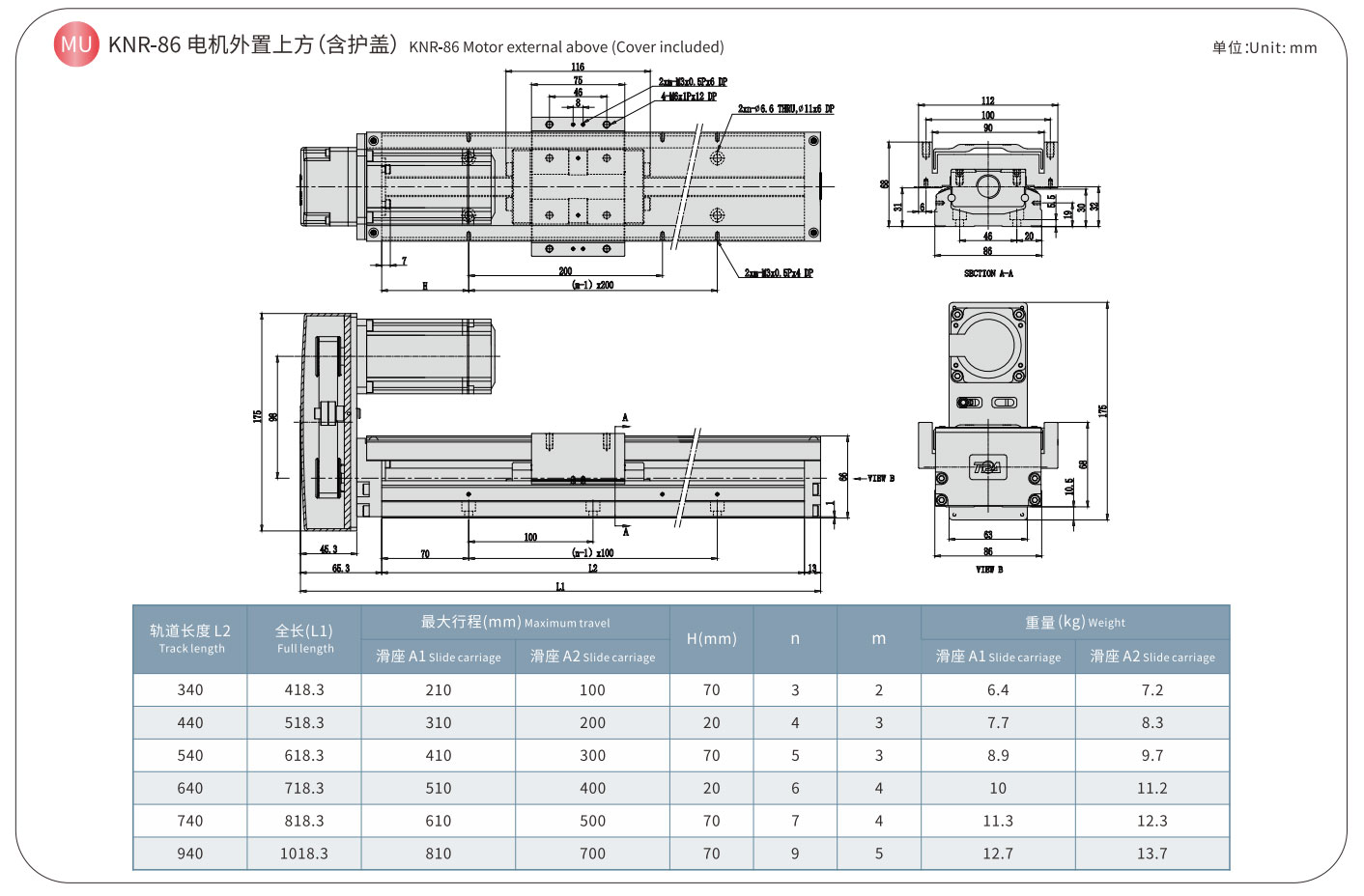
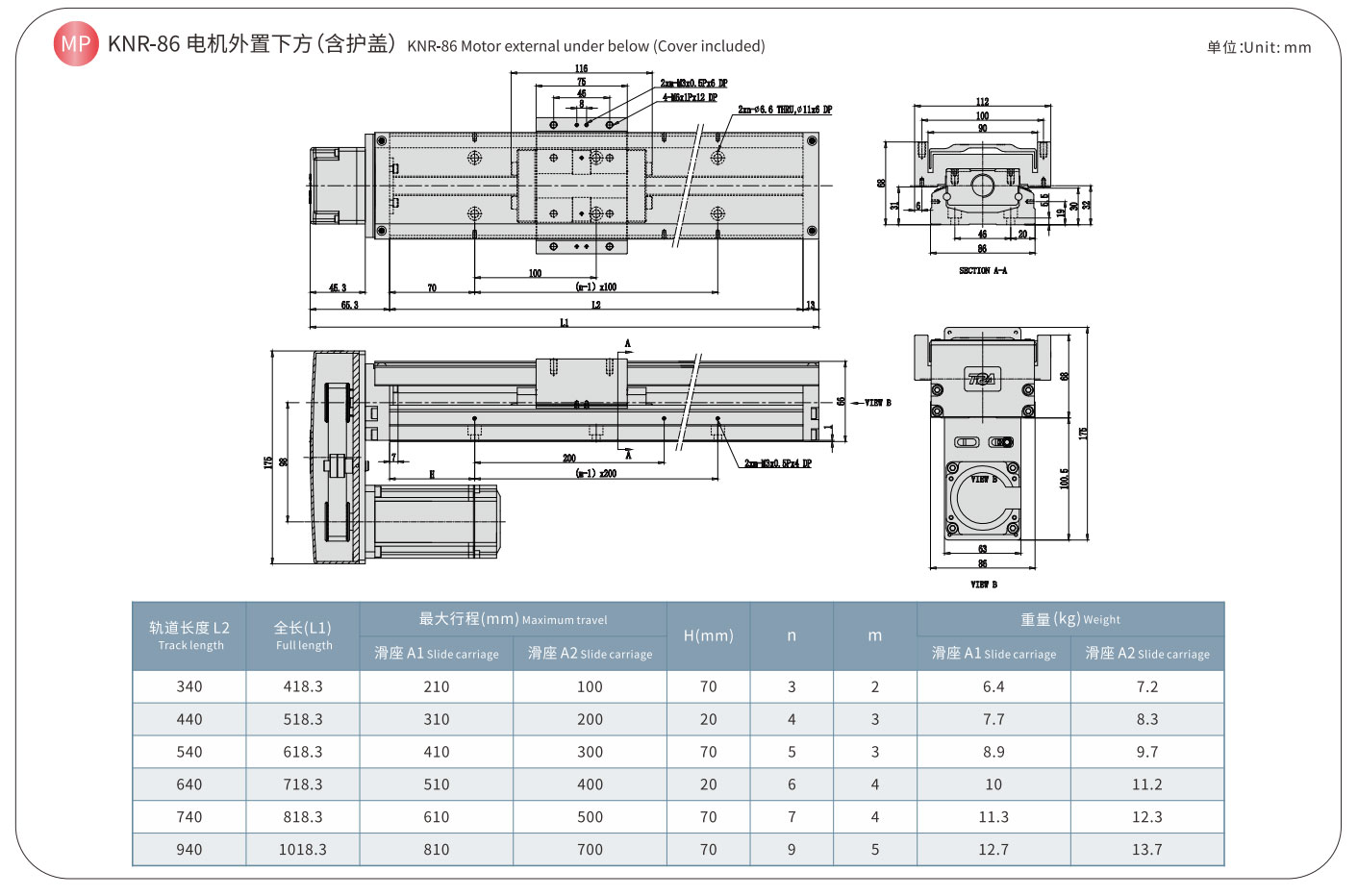
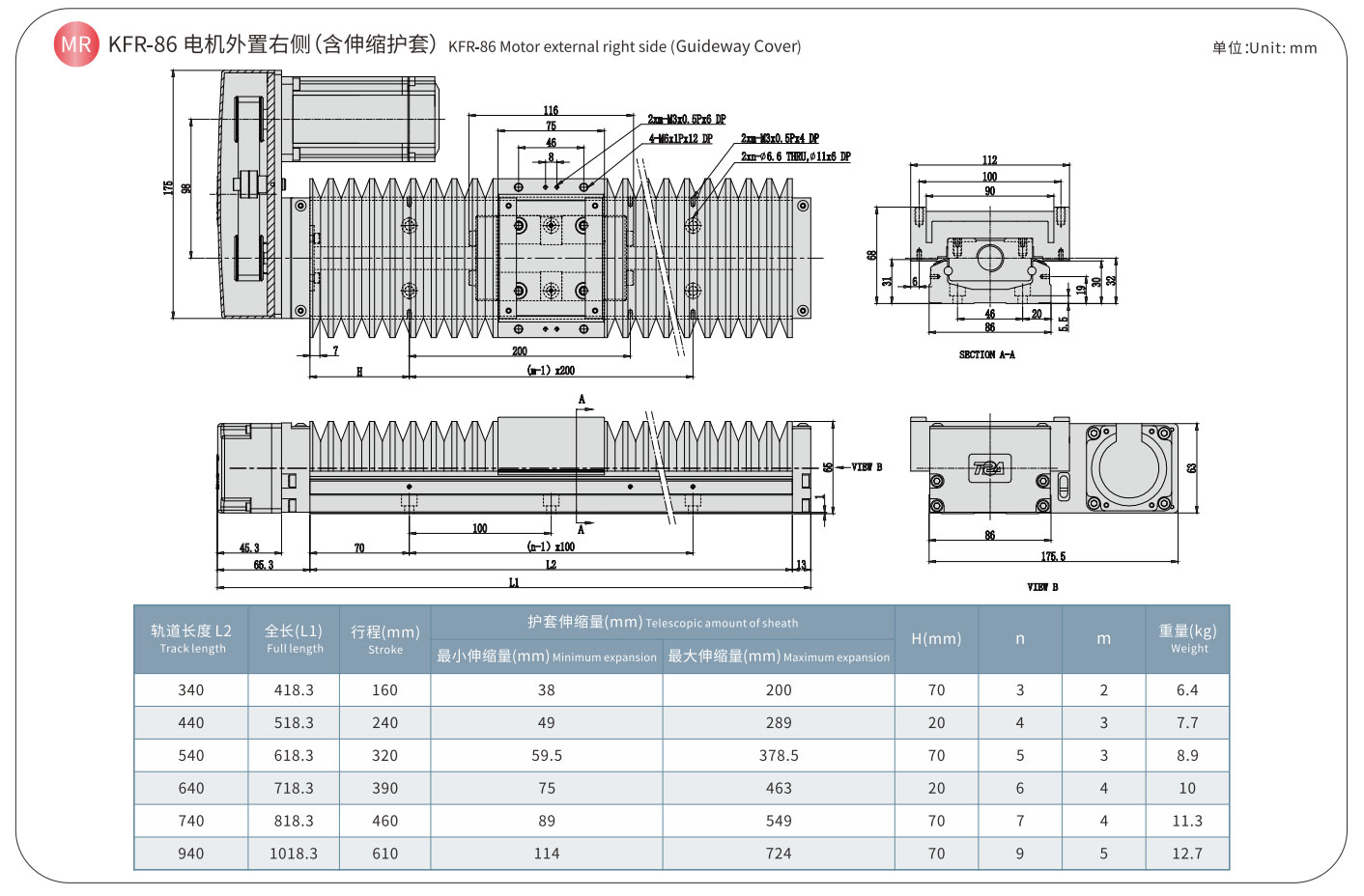
El robot de un solo eje de la serie KK, desarrollado por TPA ROBOT, utiliza una base de acero parcialmente endurecido en forma de U para aumentar significativamente la resistencia y la capacidad de carga del robot. Debido a los diferentes entornos, disponemos de tres tipos de series de robots lineales, KSR, KNR y KFR, dependiendo del tipo de cubierta utilizada.
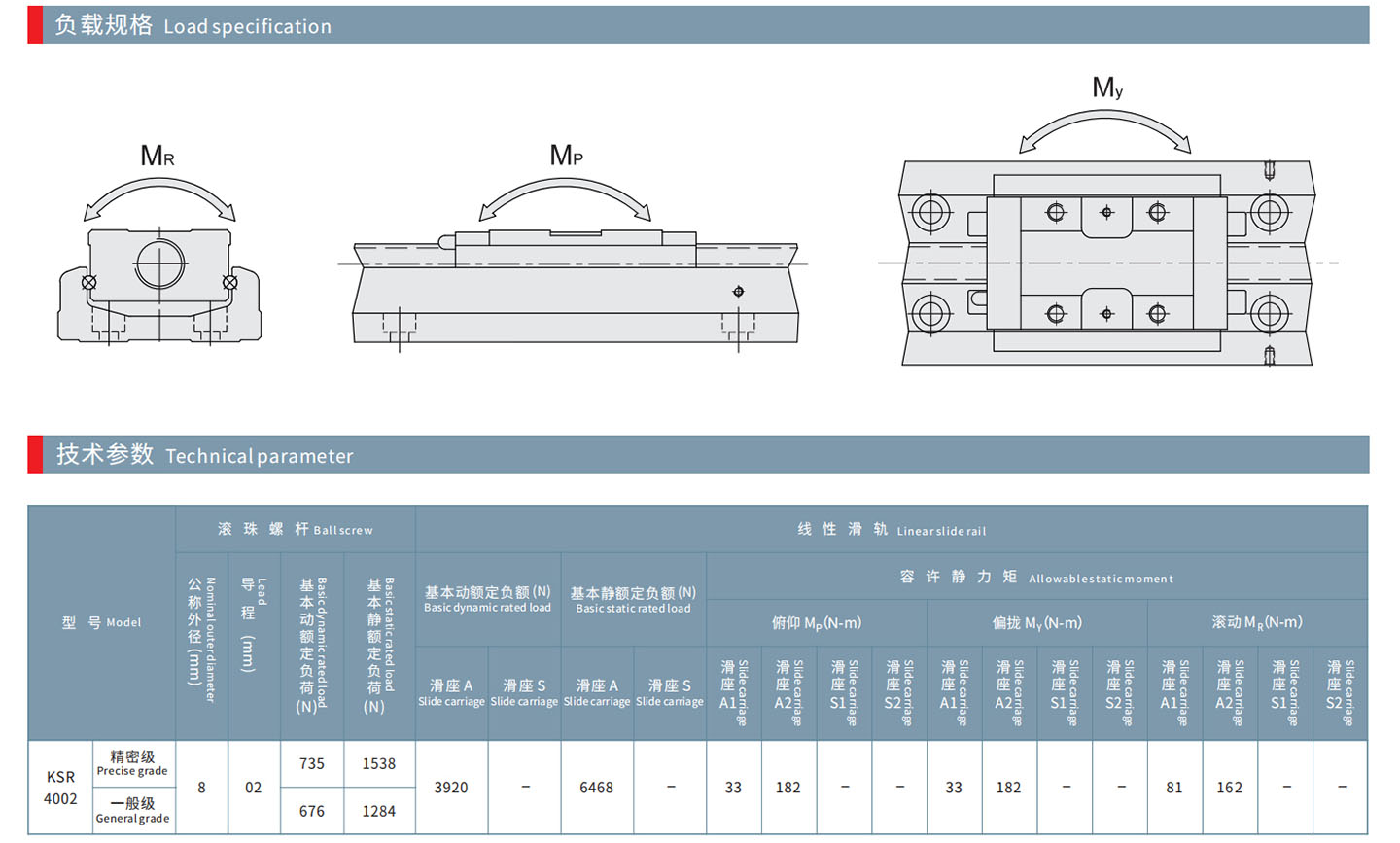
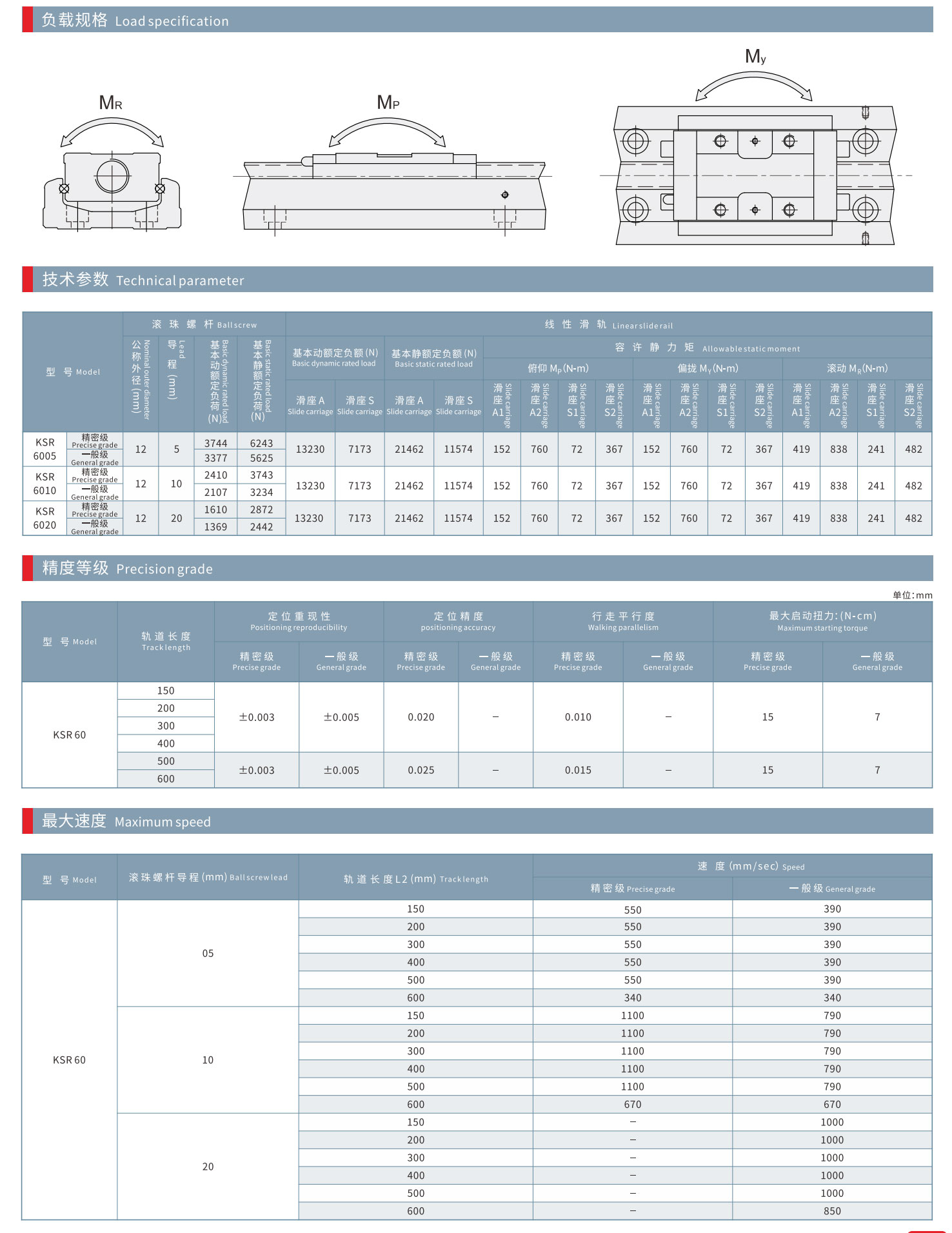
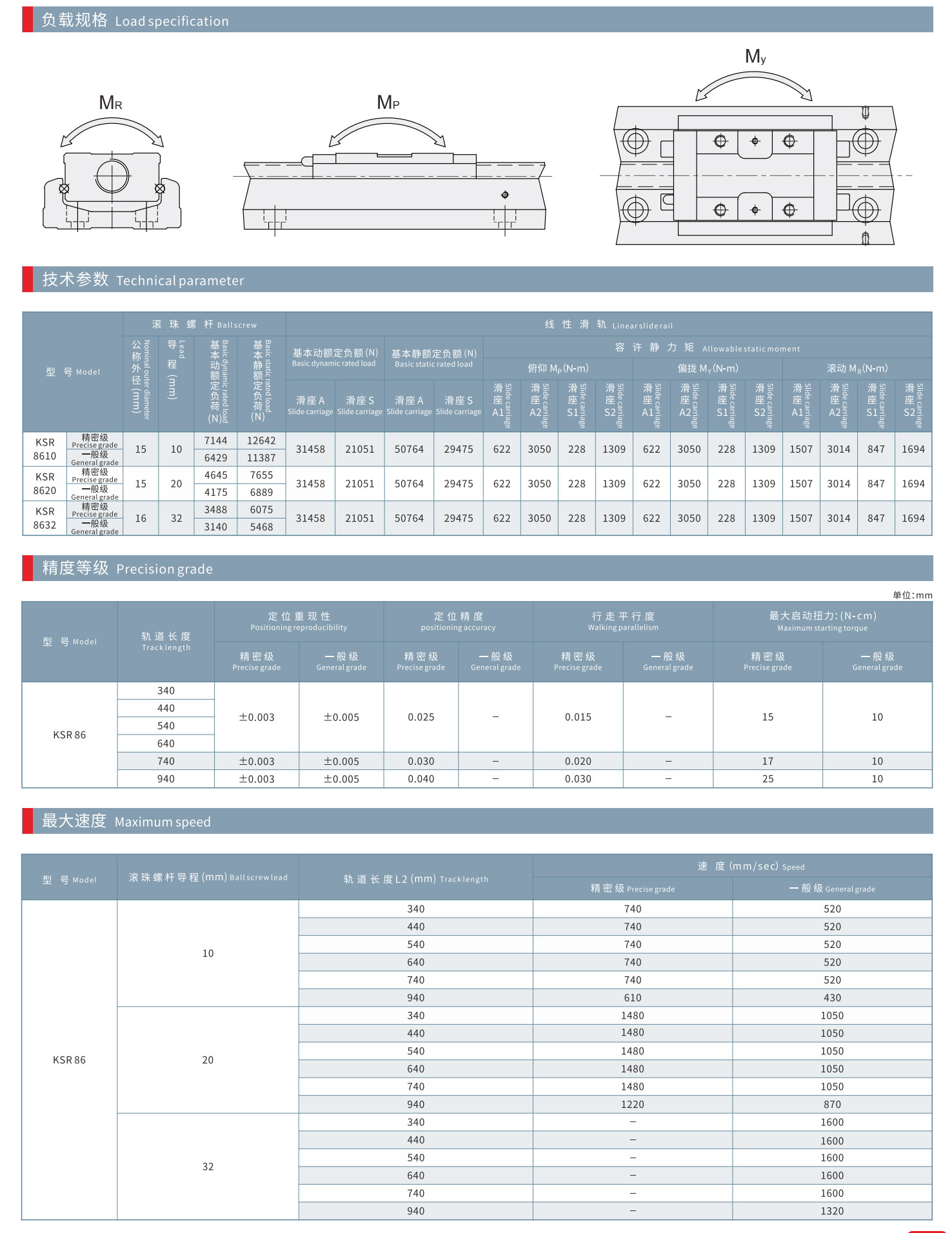
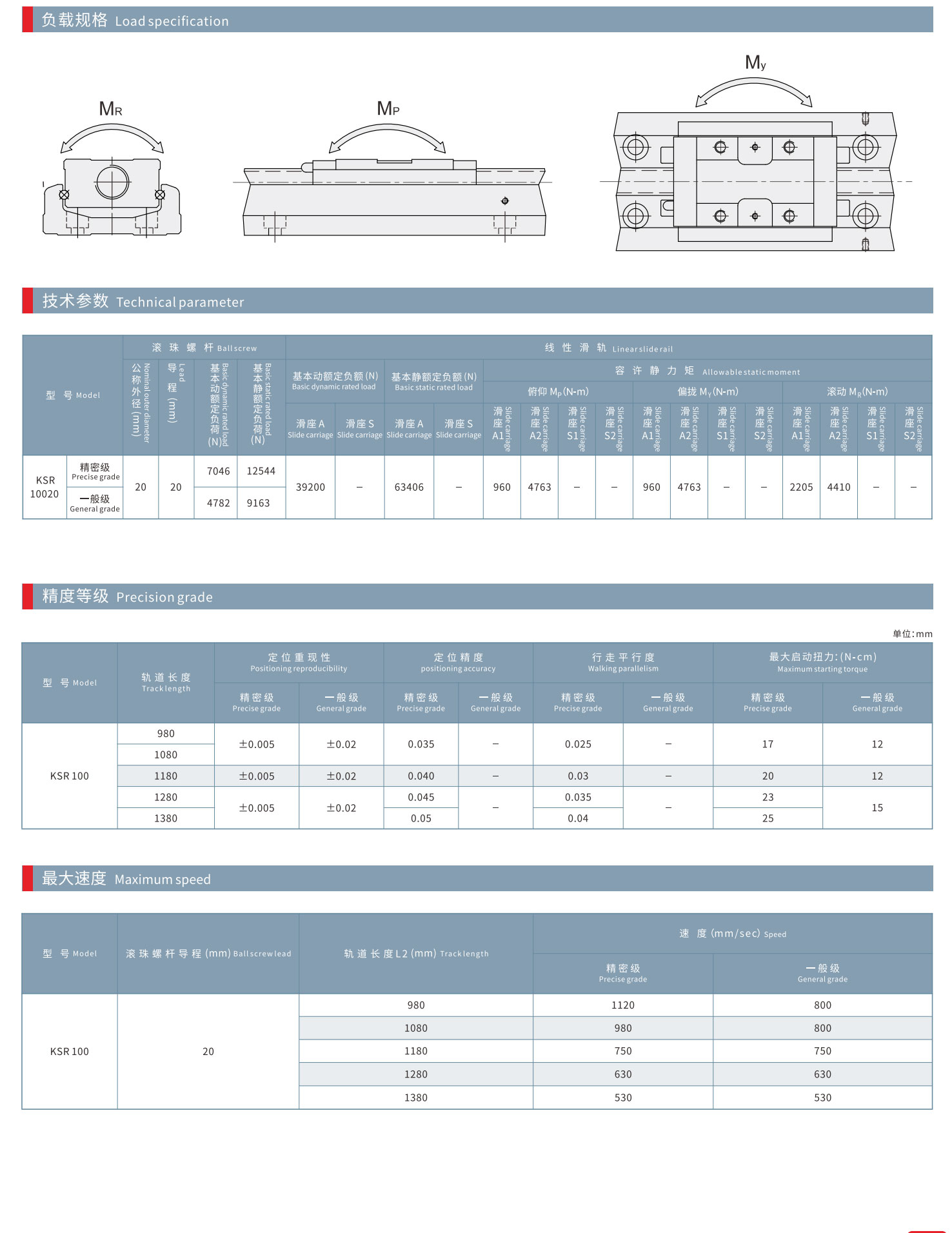
Para el sistema de retorno entre la pista y el control deslizante, la superficie de contacto entre la bola y la ranura de la bola adopta un diseño de dientes Goethe de 2 hileras con un ángulo de contacto de 45 grados, lo que puede hacer que el brazo del robot del eje soporte la misma capacidad de carga en cuatro direcciones. .
Al mismo tiempo, el husillo de bolas de alta precisión se utiliza como estructura de transmisión y la pista en forma de U coopera con el diseño optimizado, de modo que el robot del eje KK tiene una precisión incomparable y su precisión de posicionamiento repetido puede alcanzar ±0,003 mm.
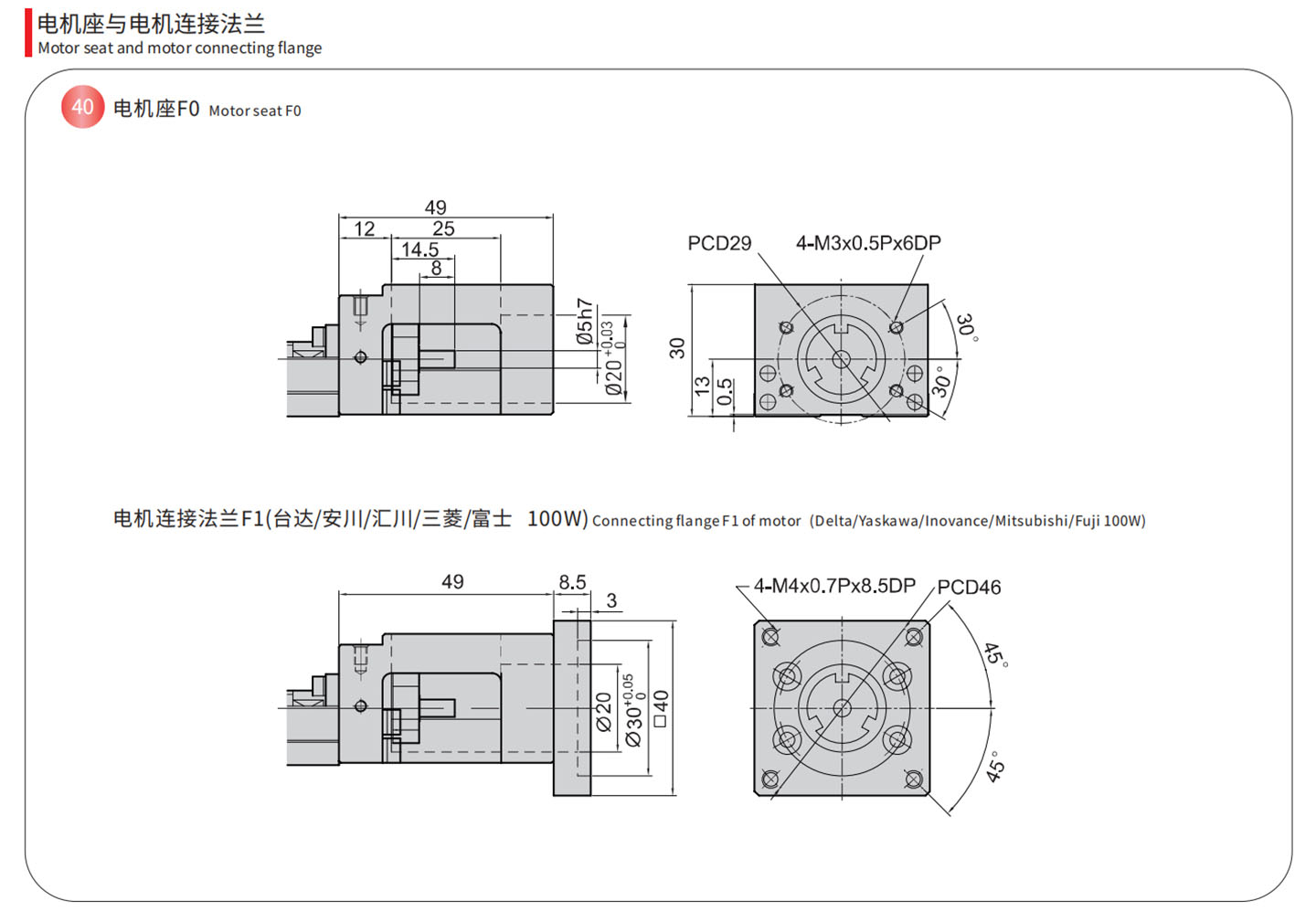
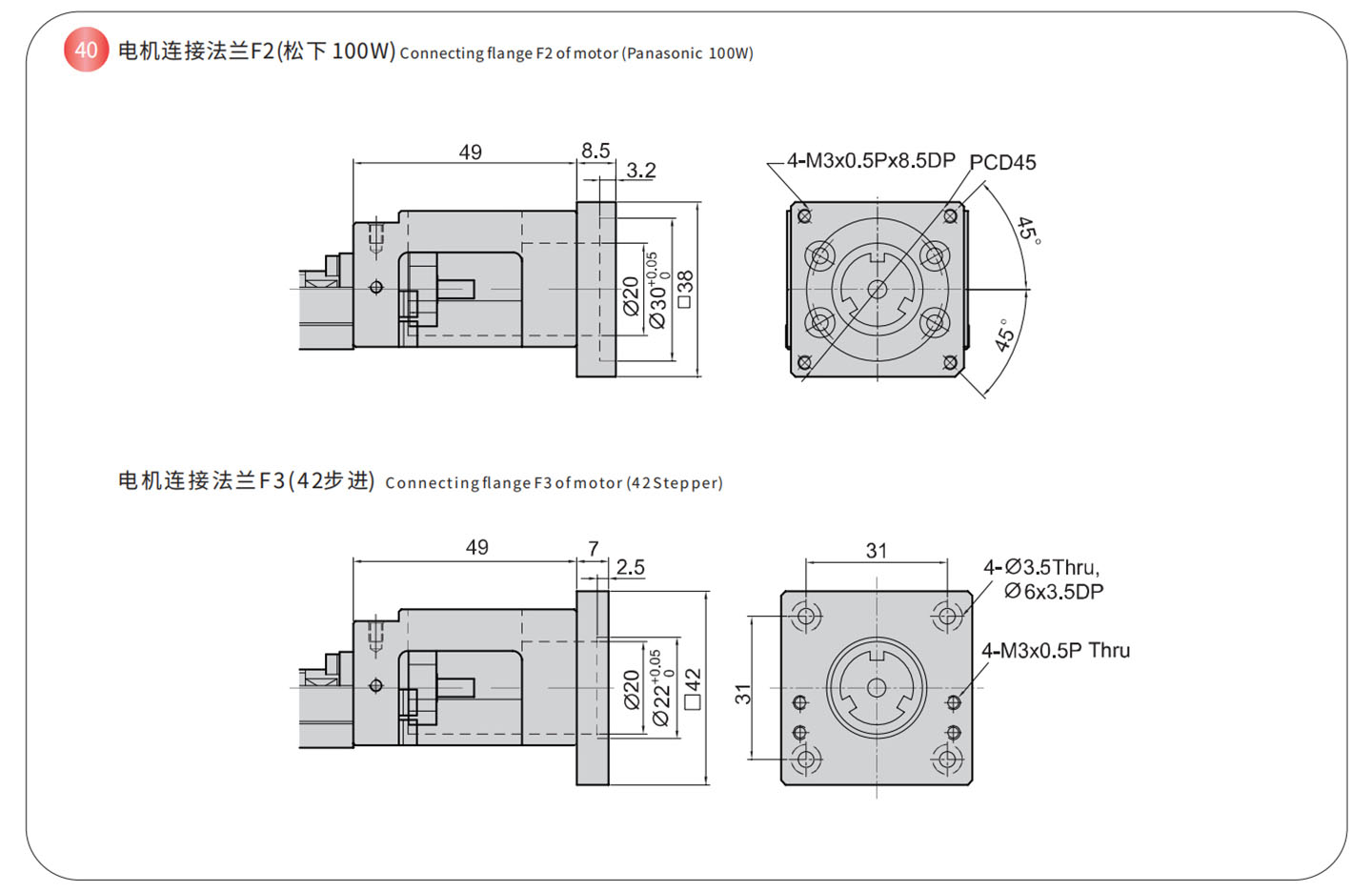
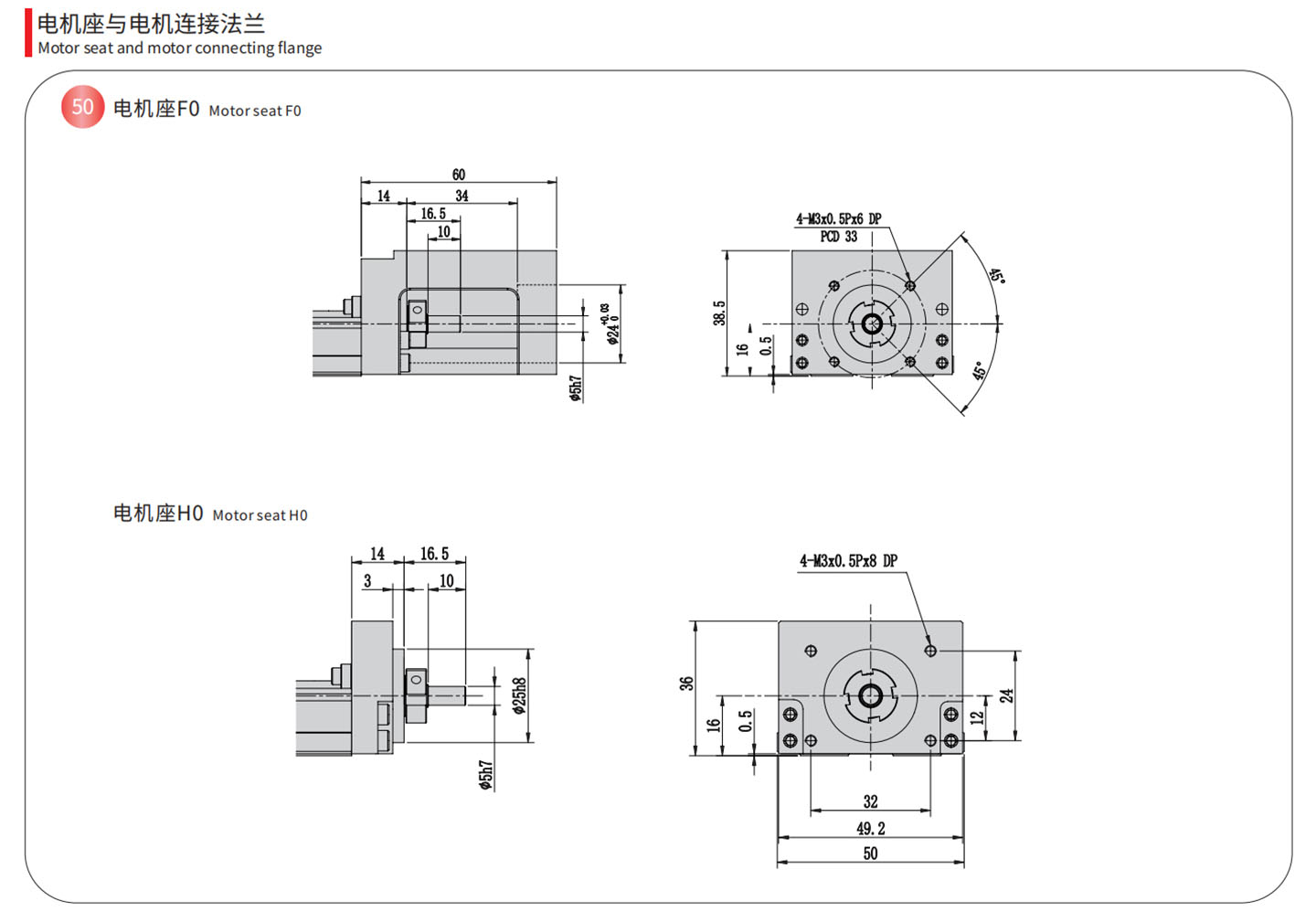
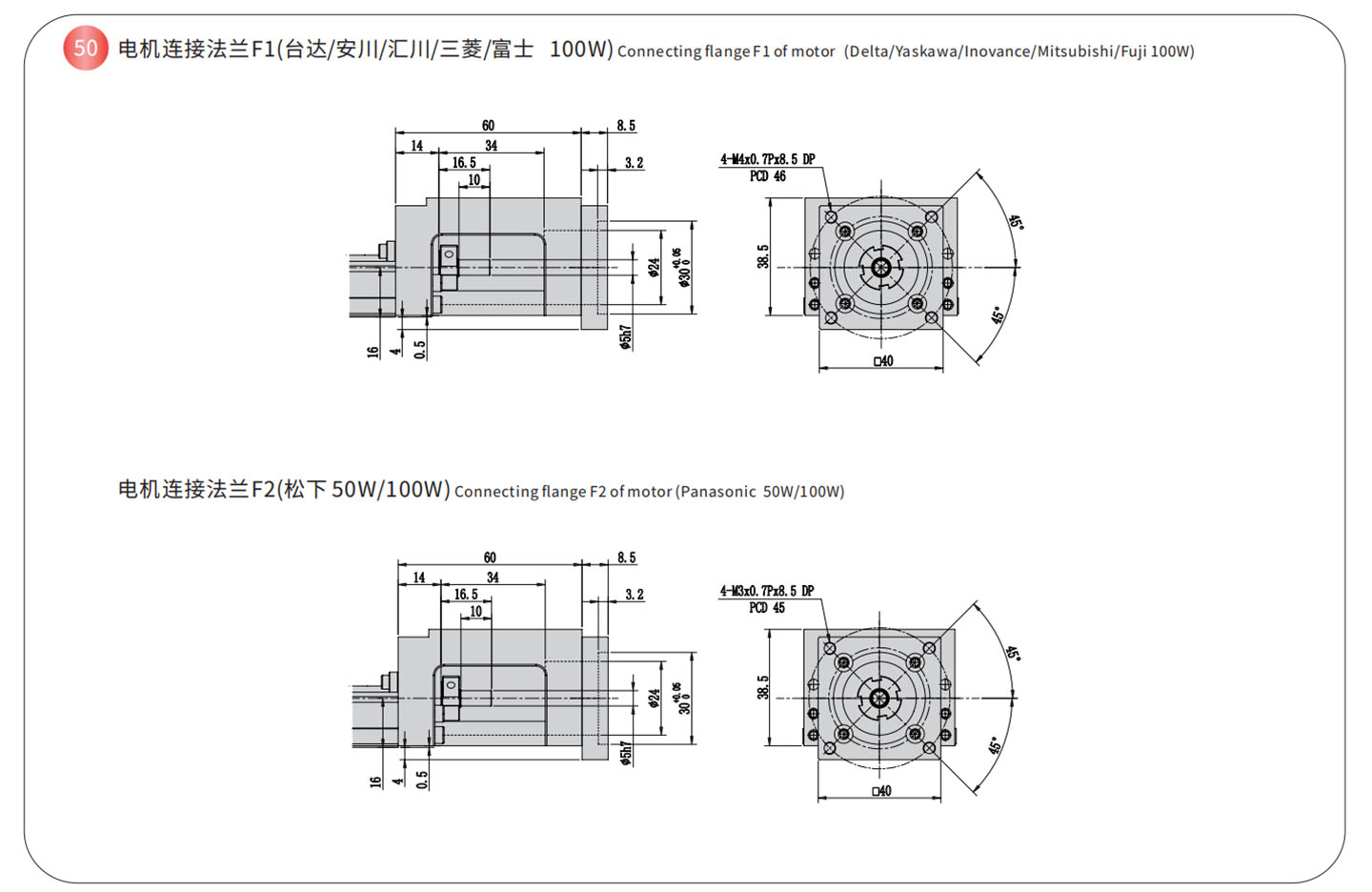
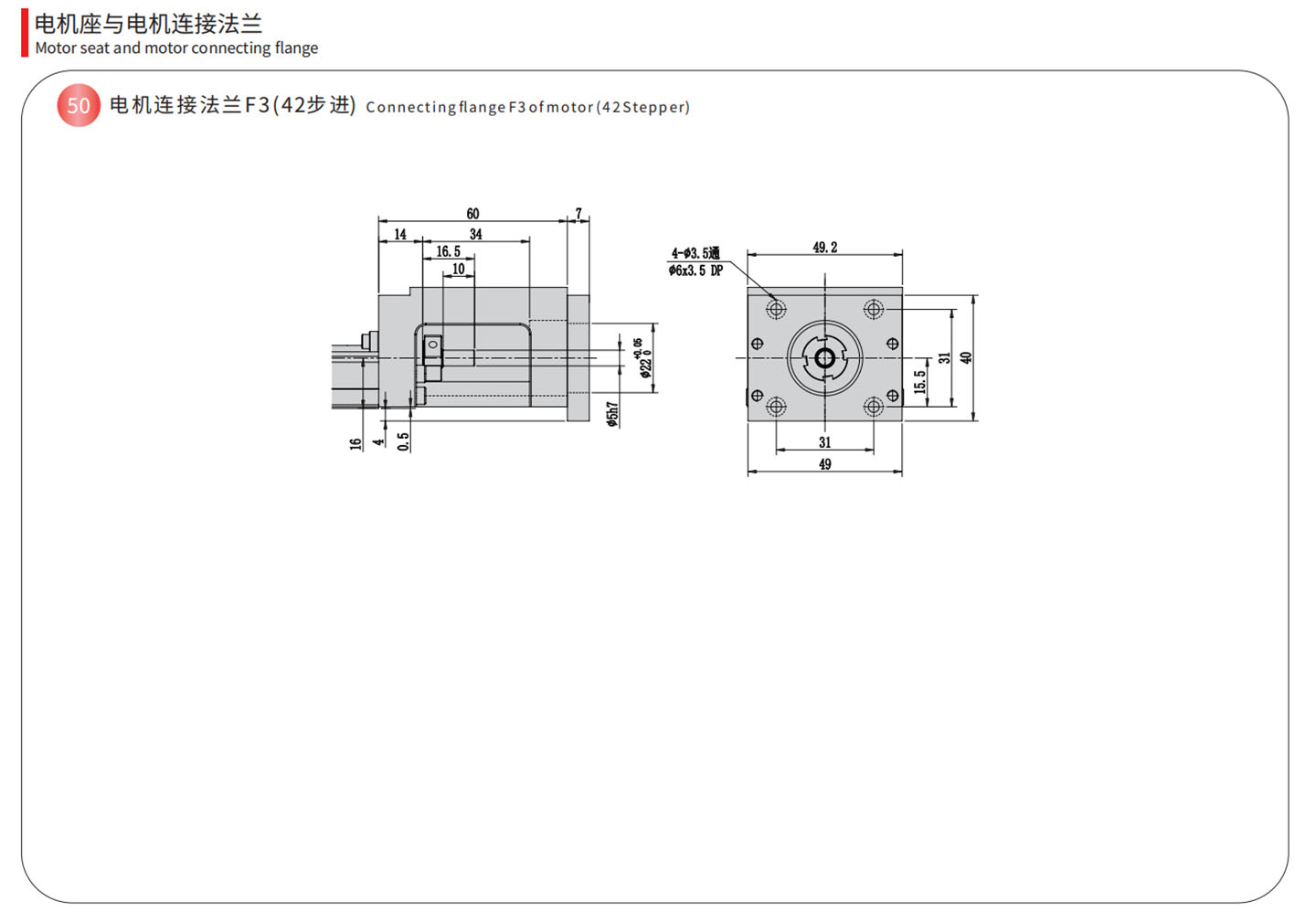
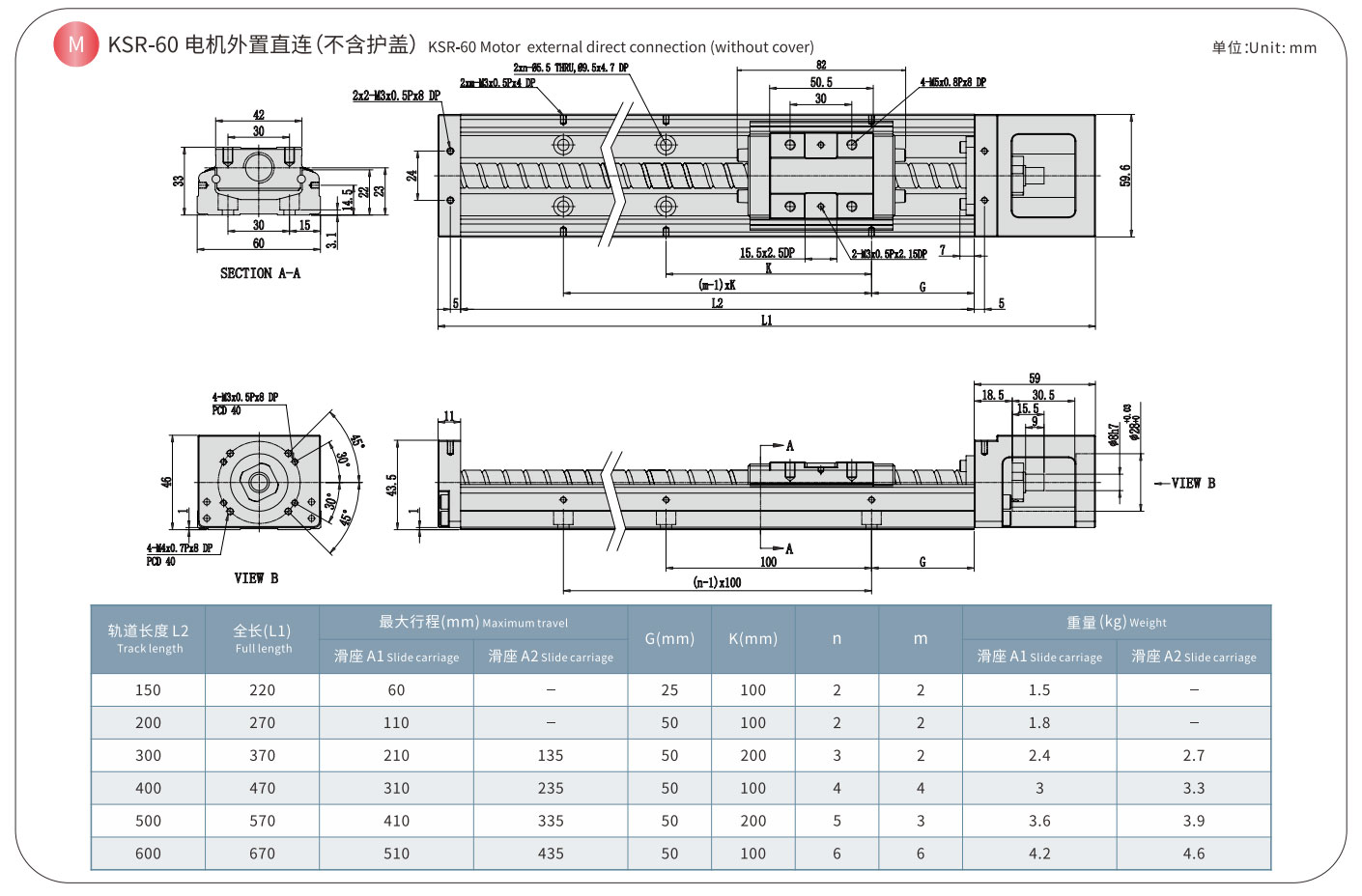
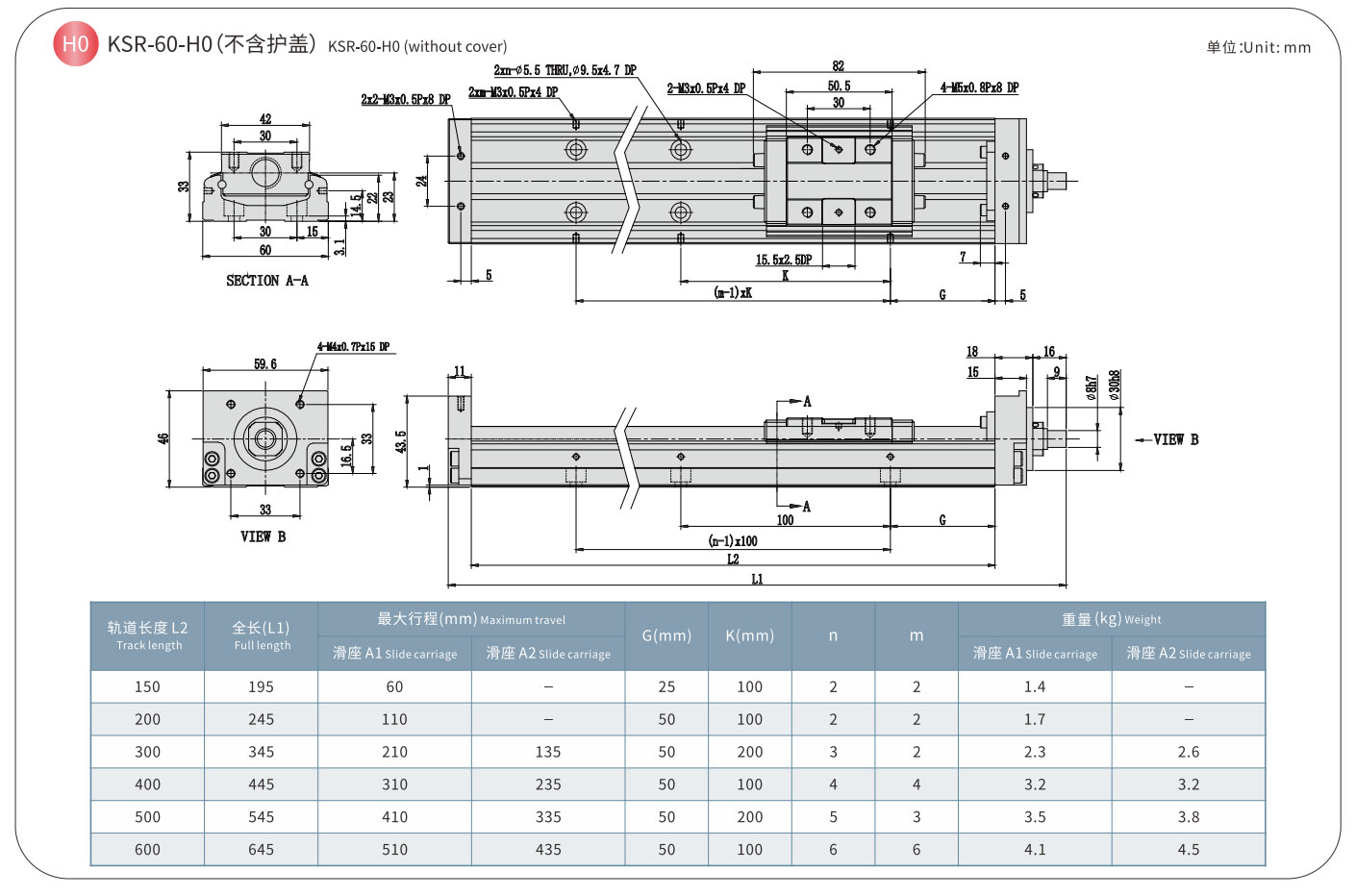
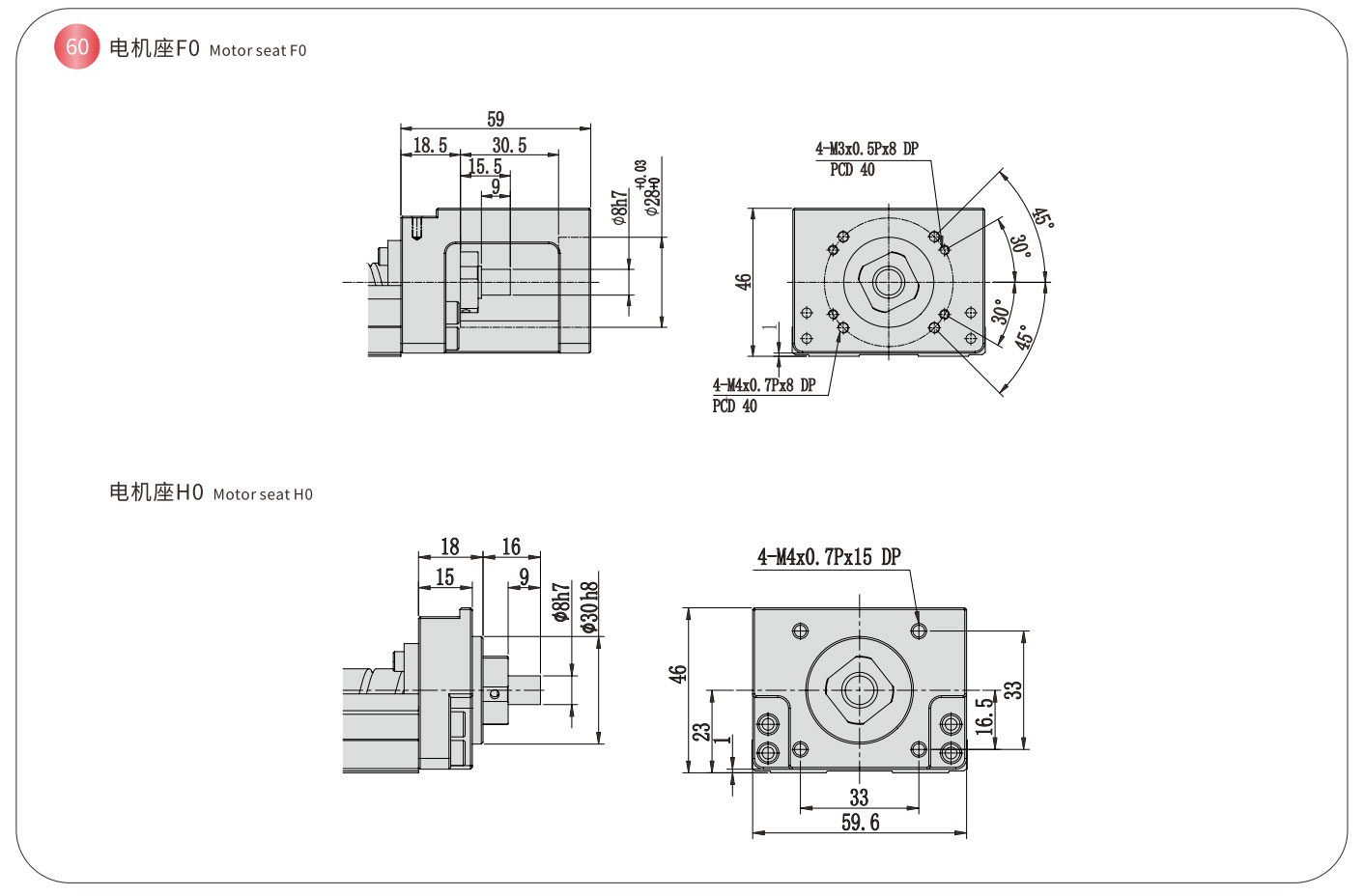
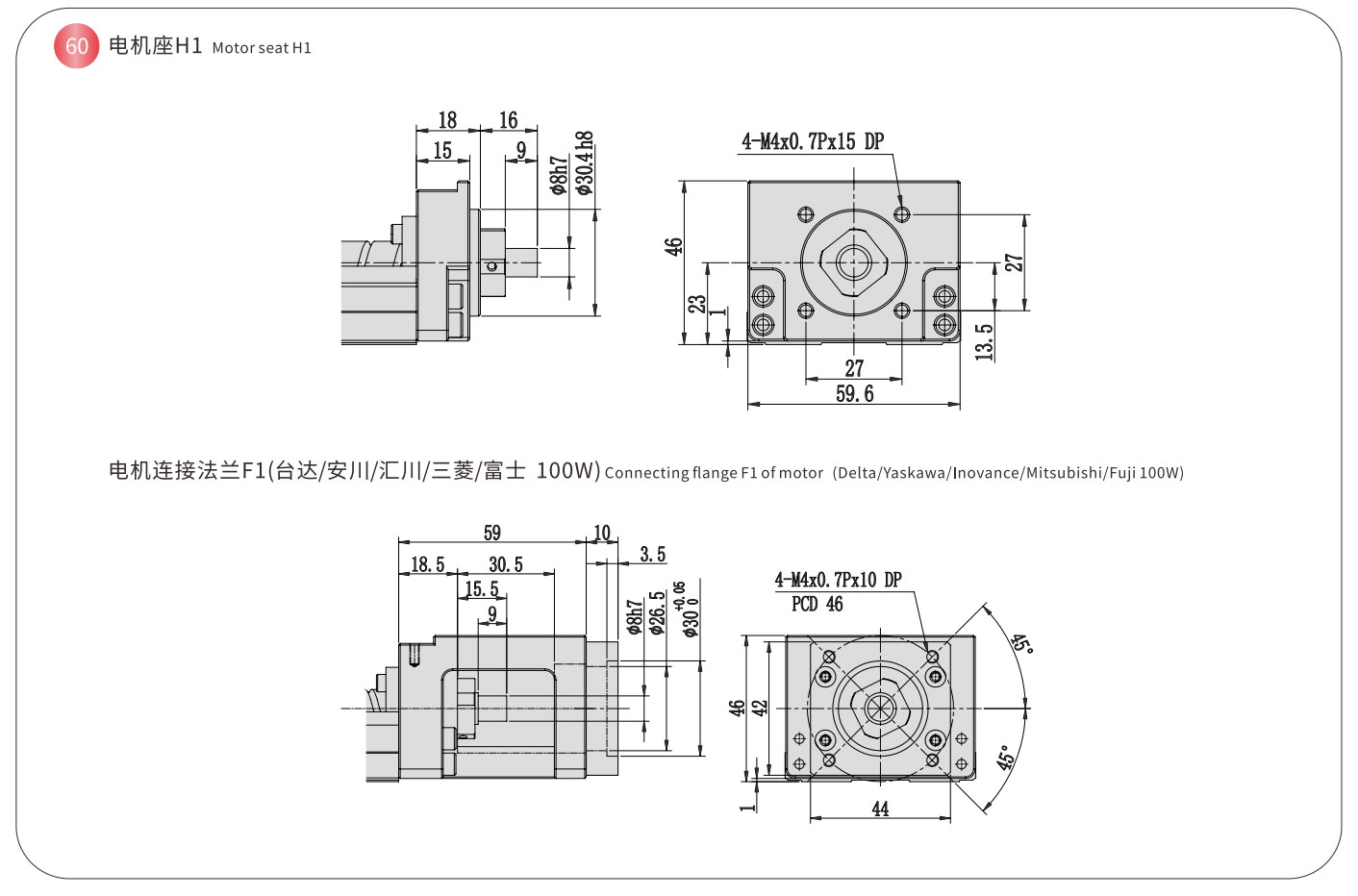
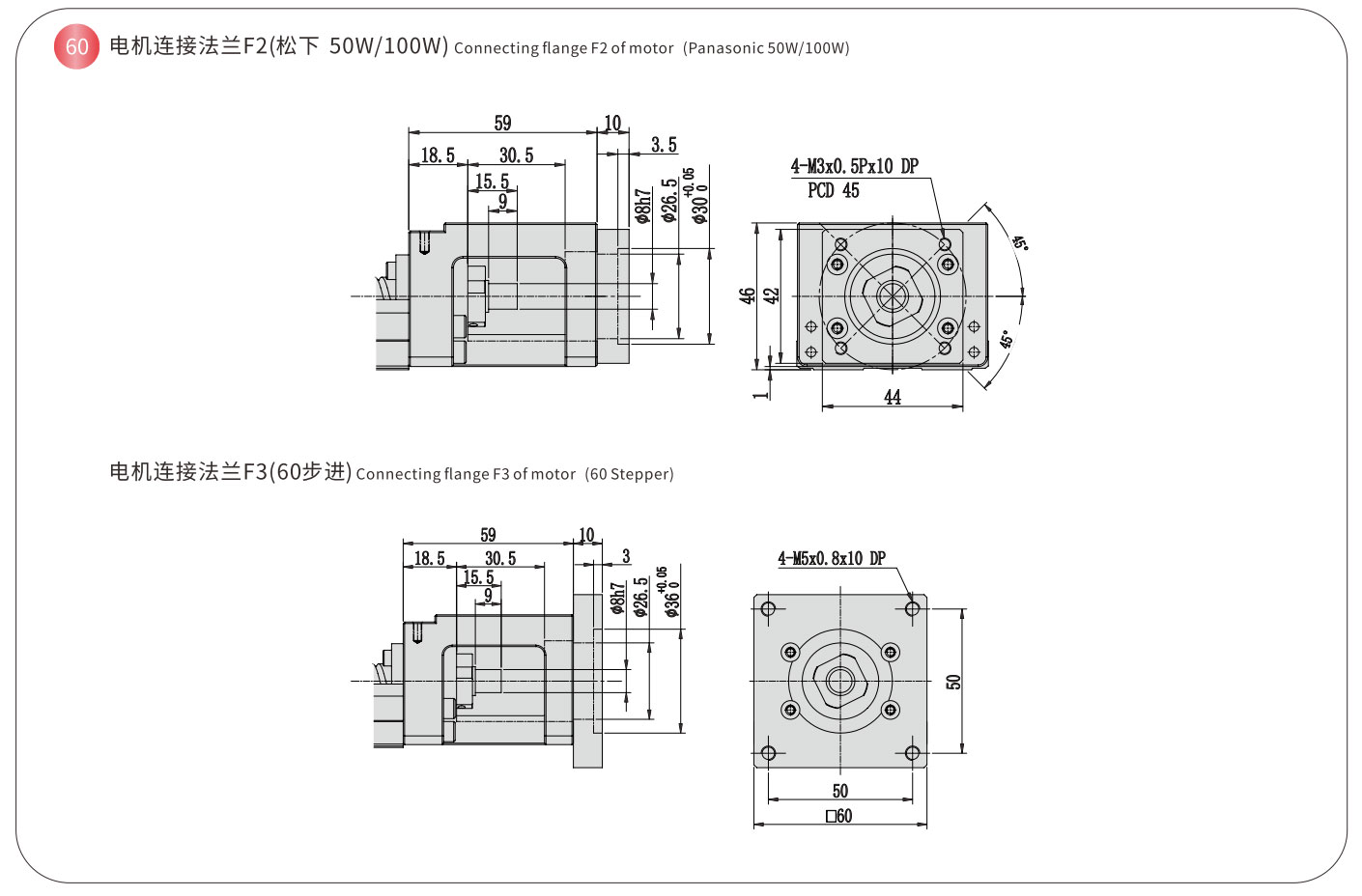
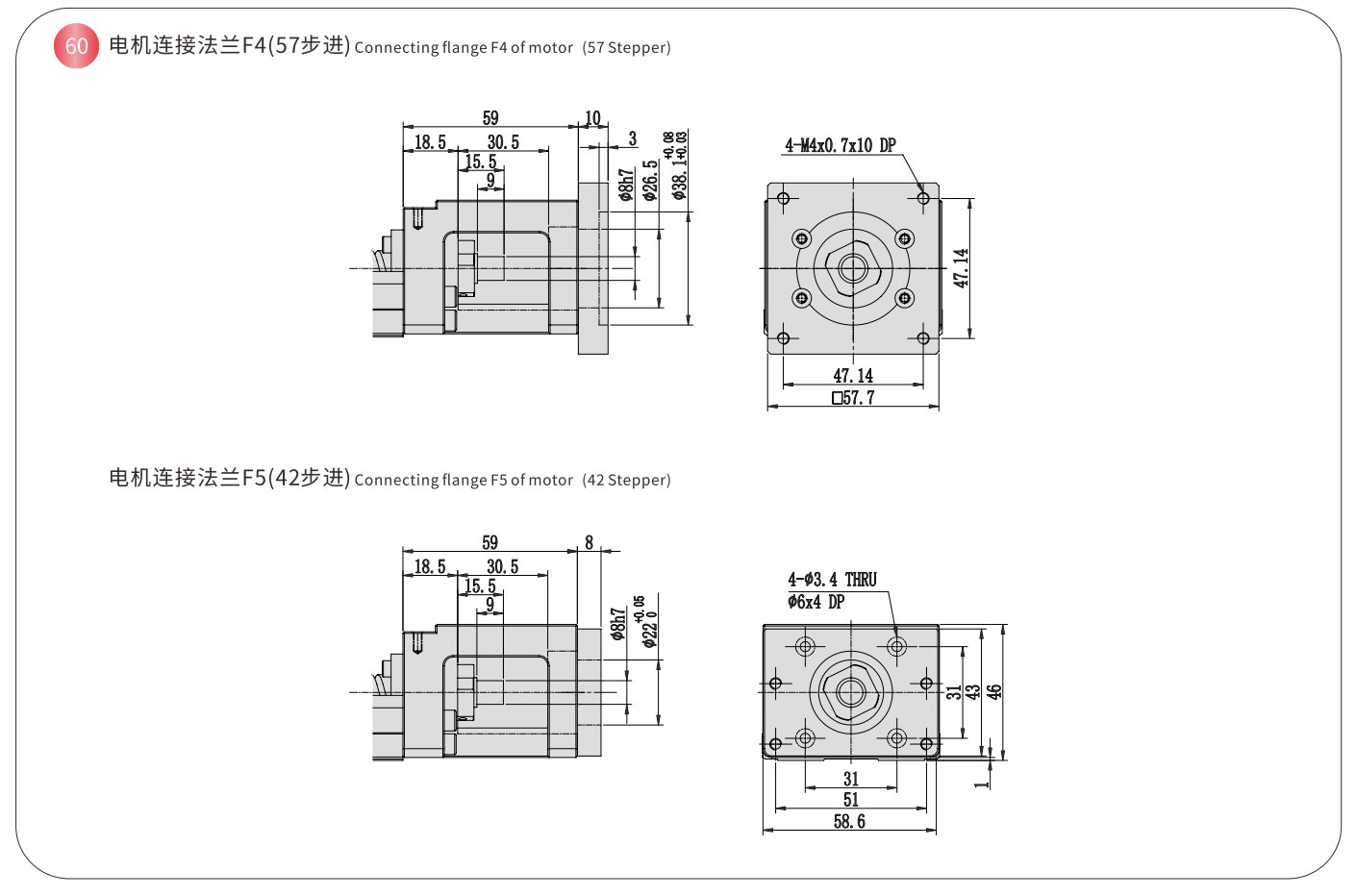
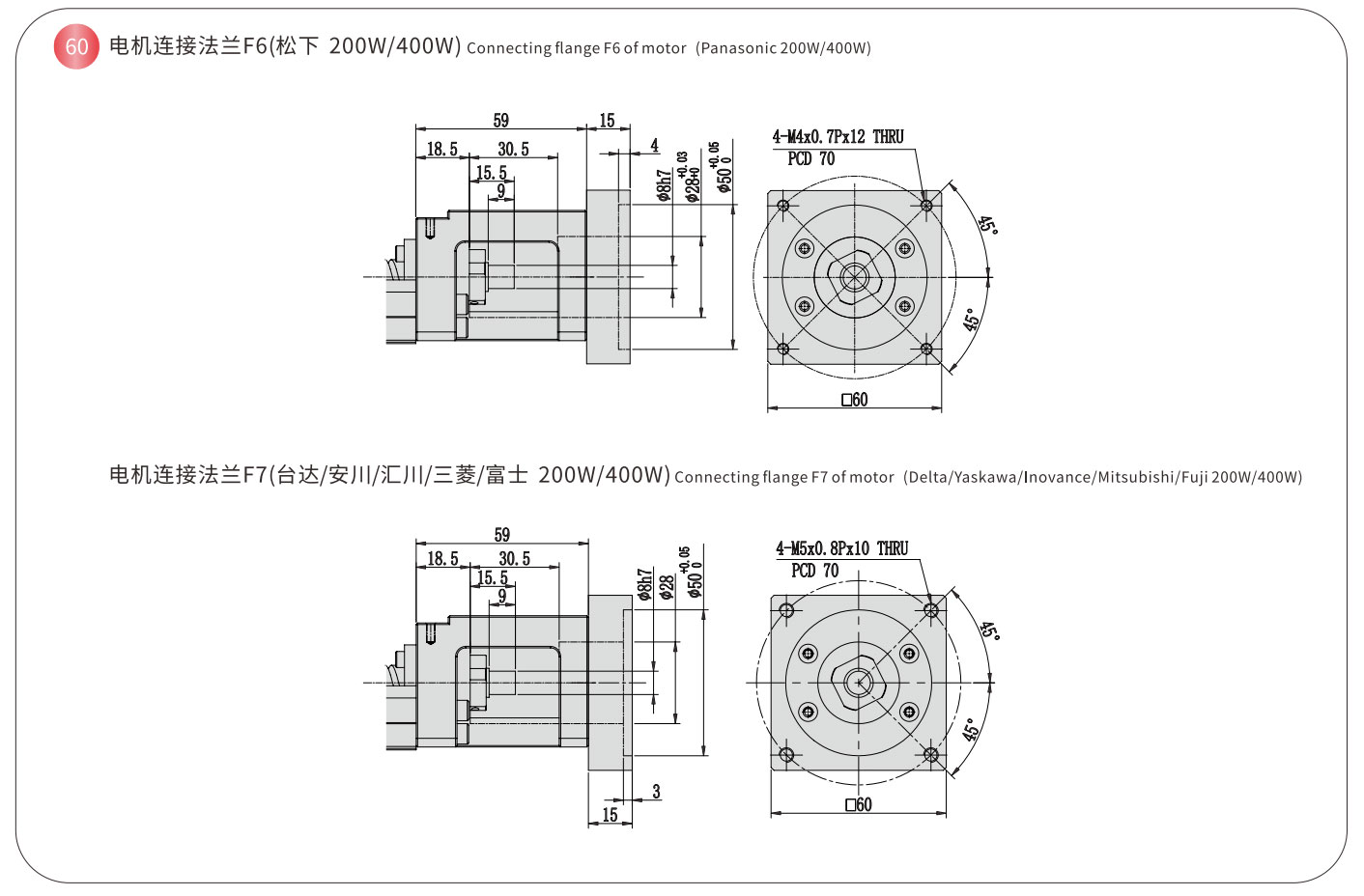
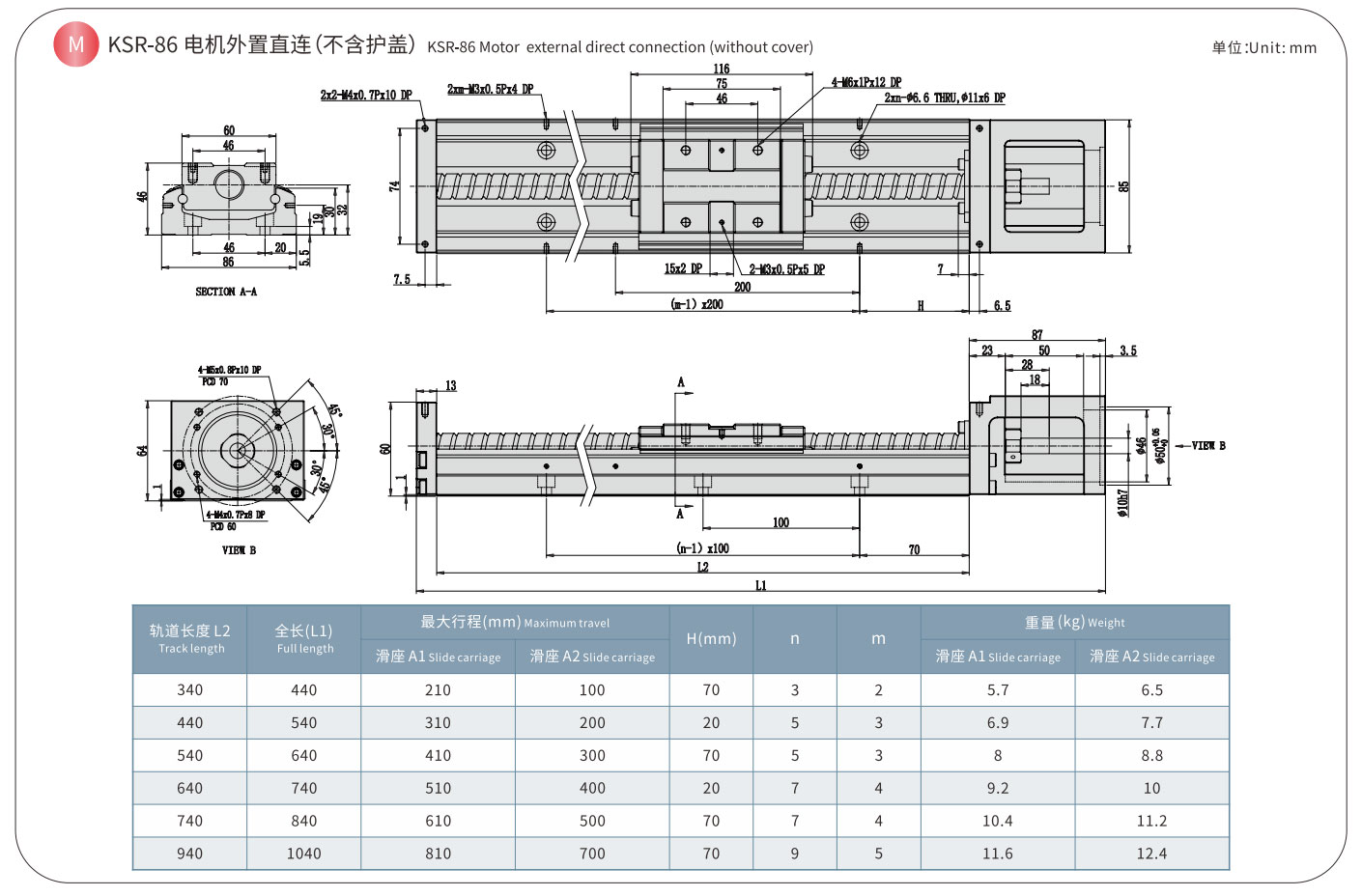
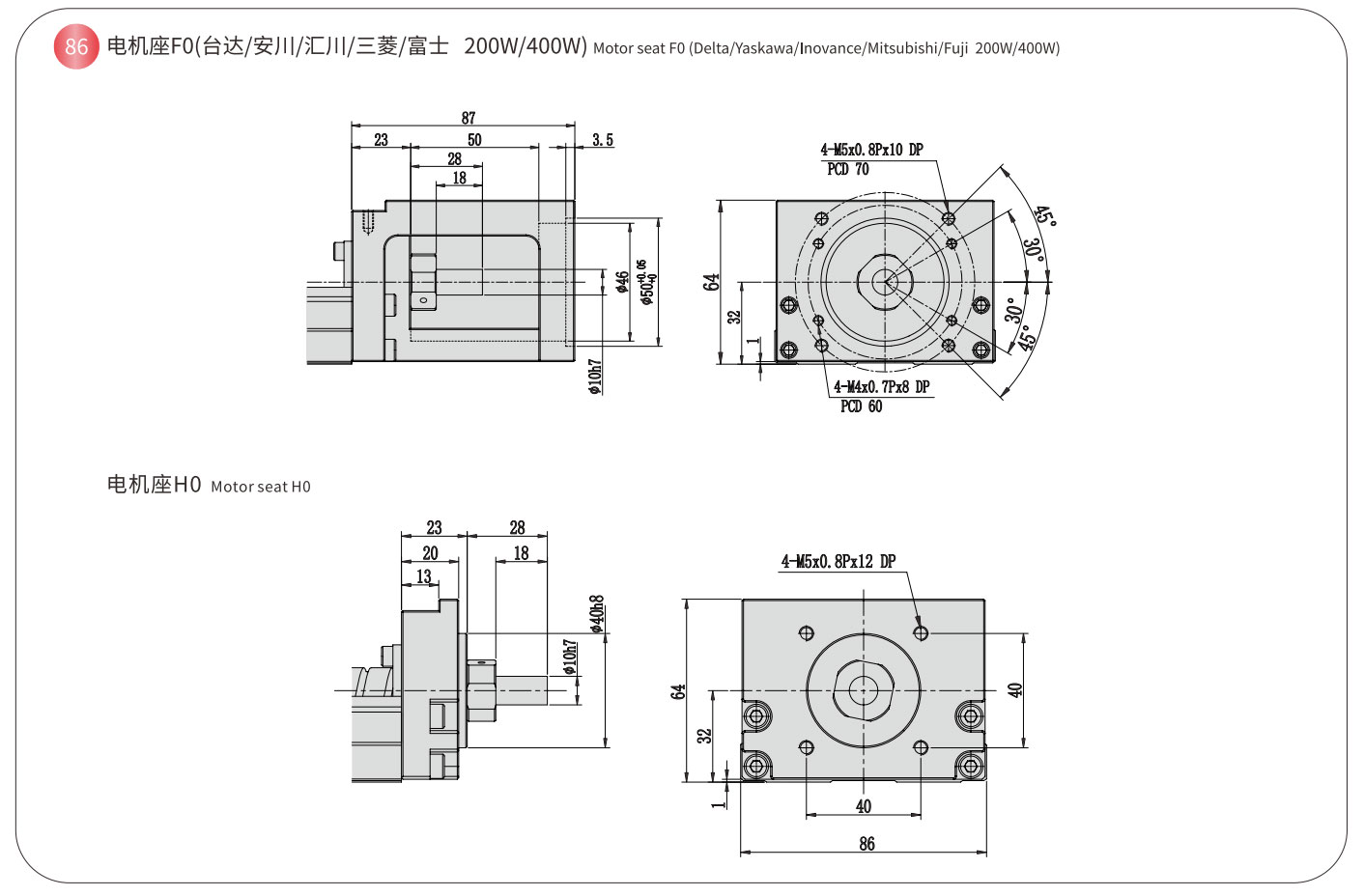
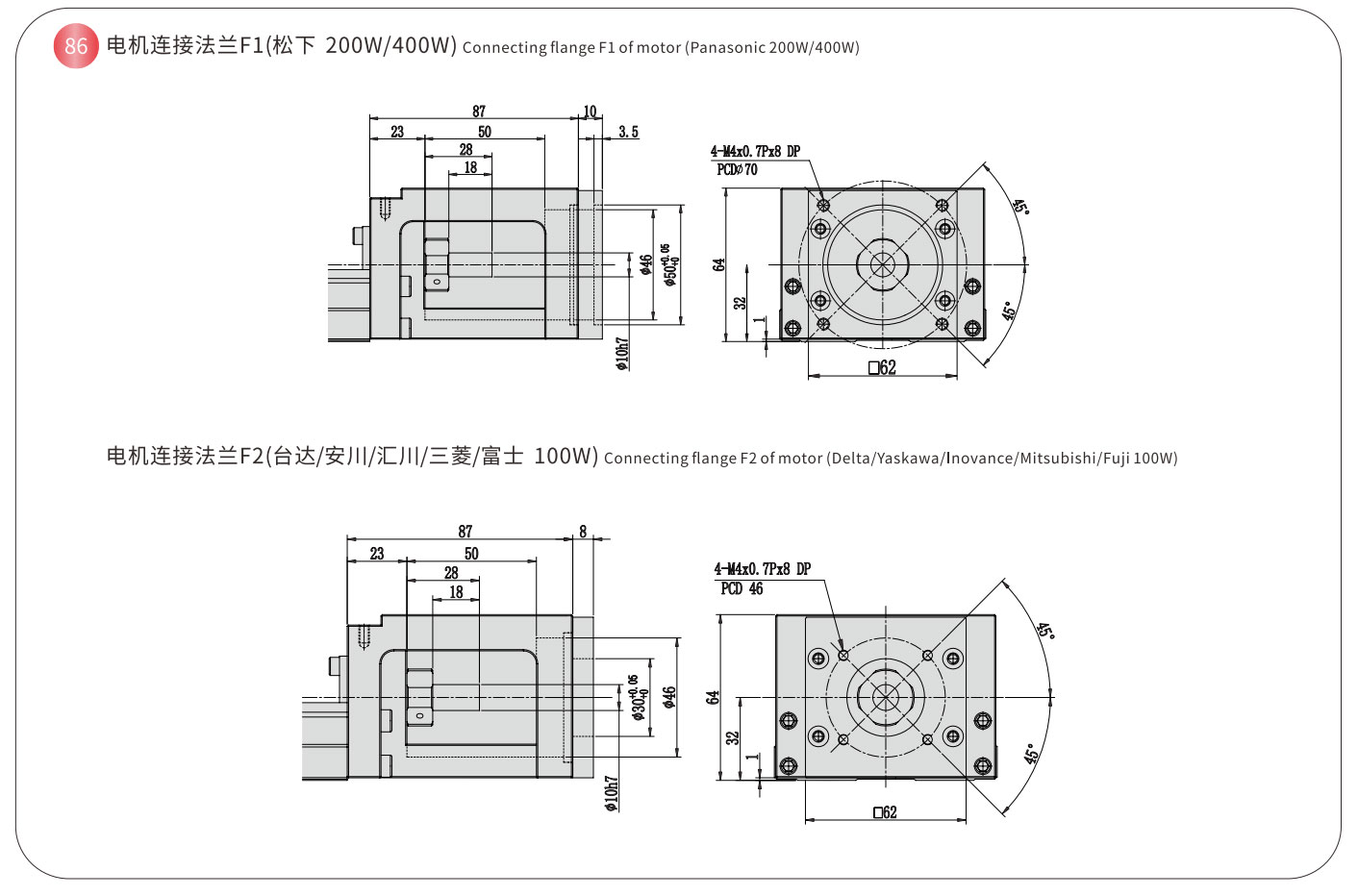
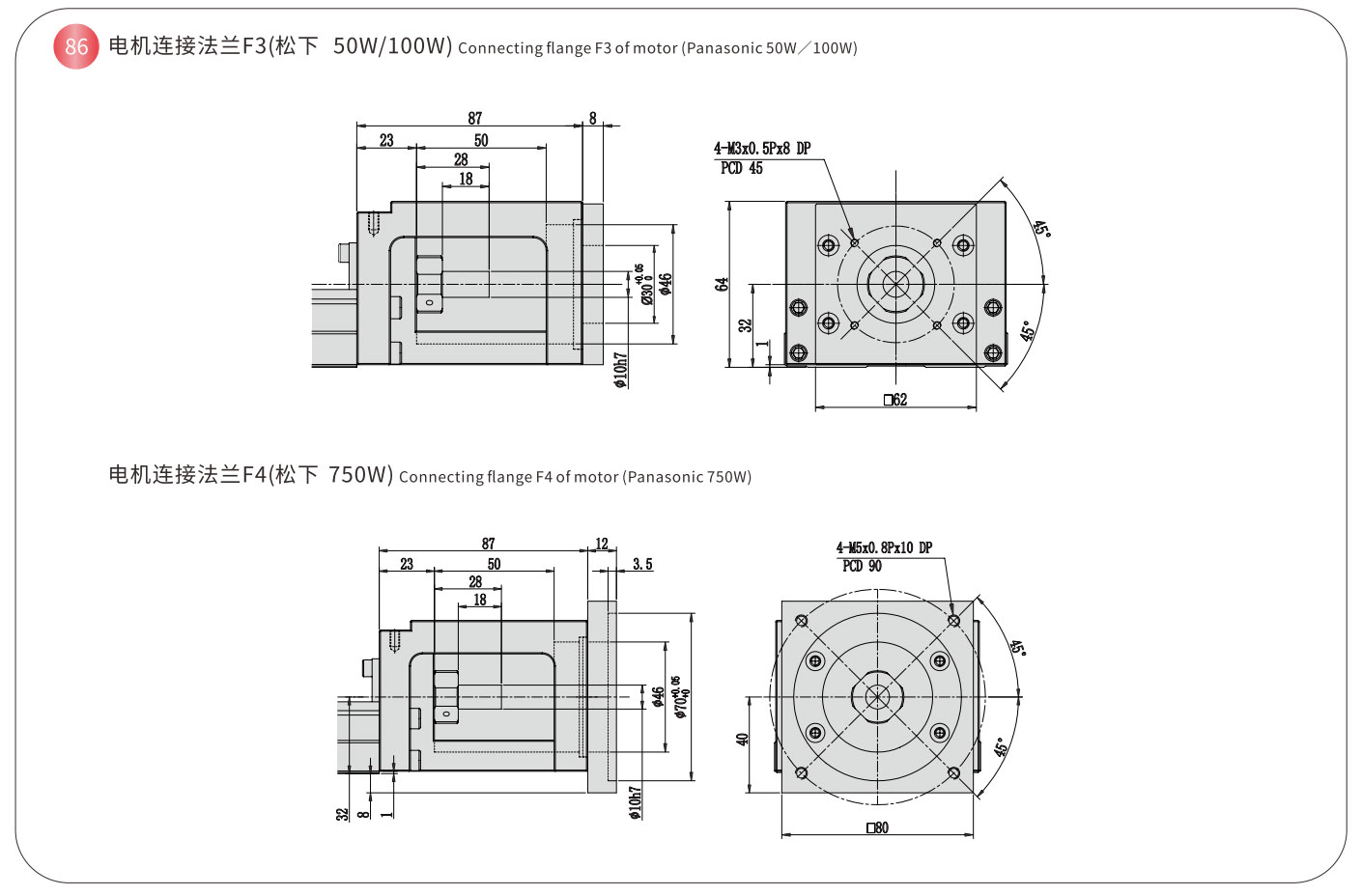
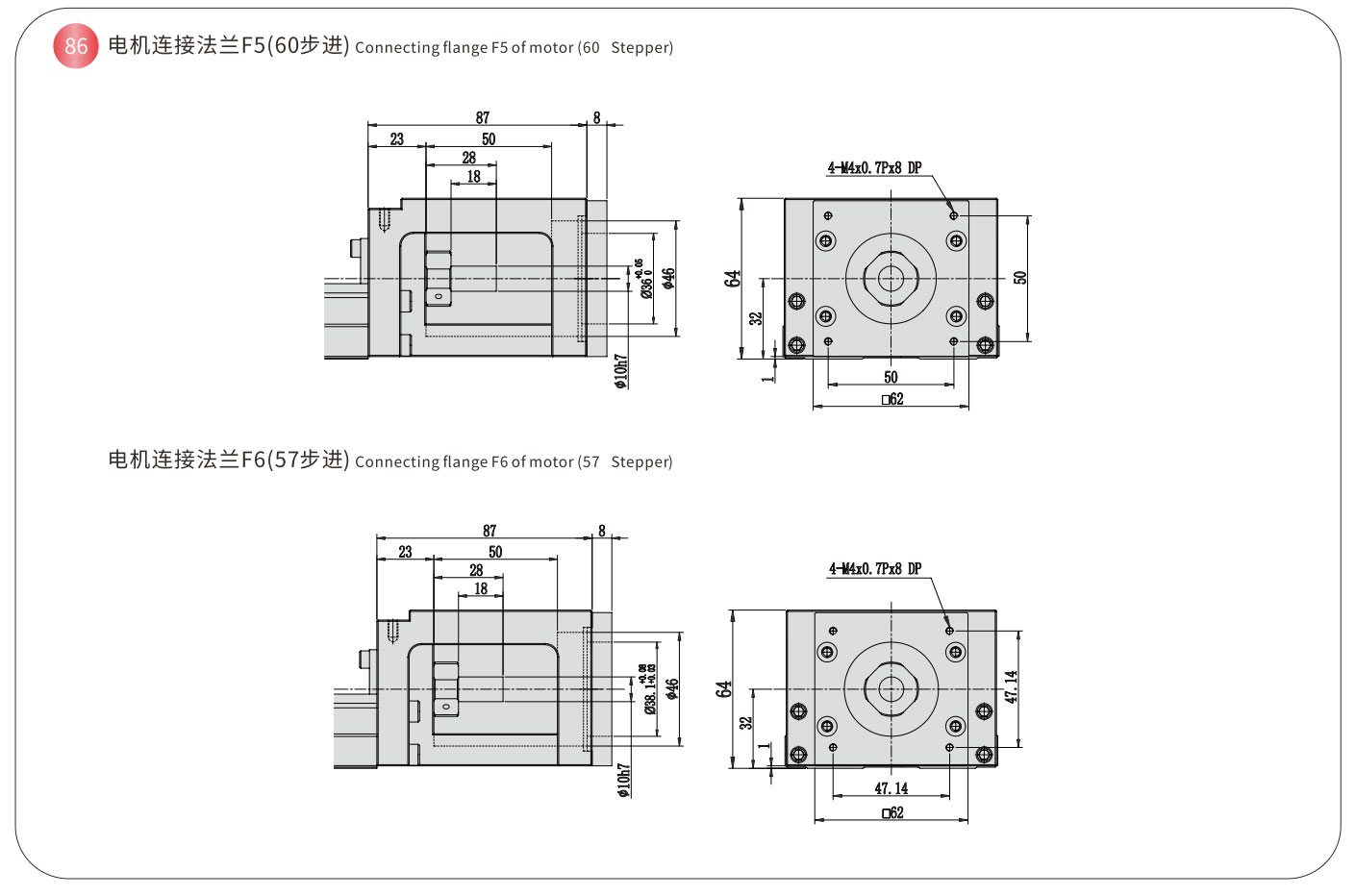
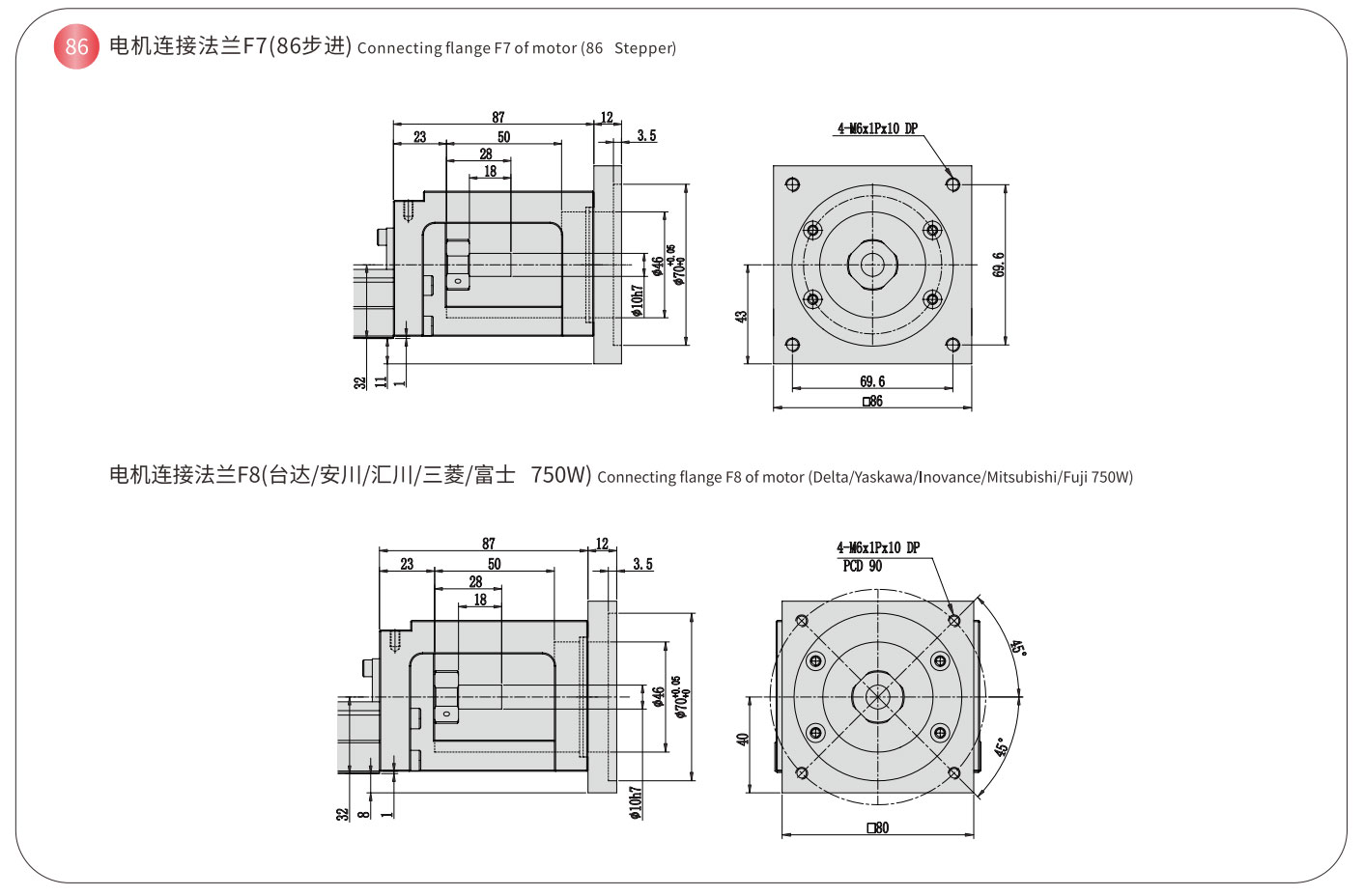
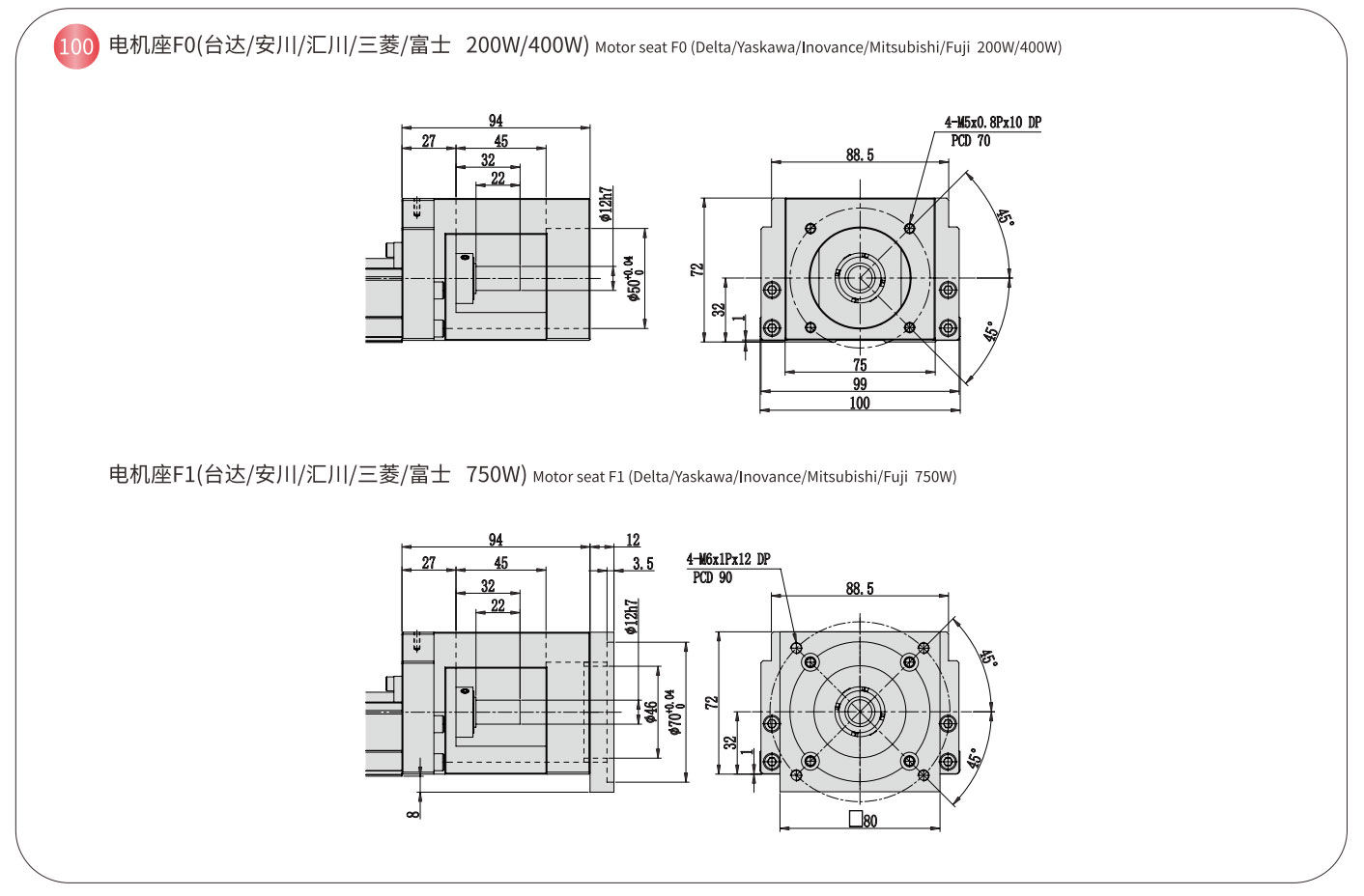
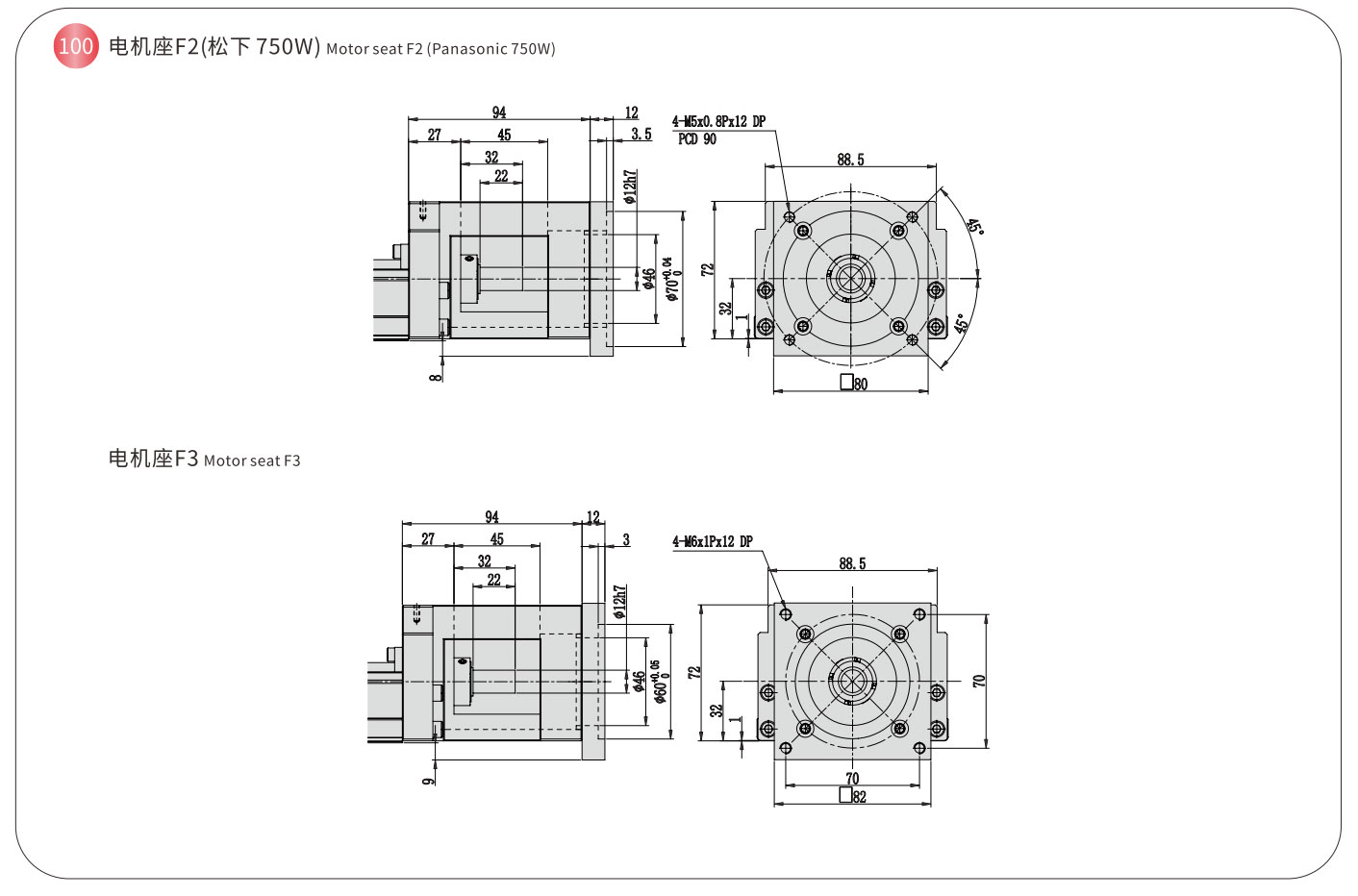
Bajo las mismas condiciones de carga, nuestro robot de un solo eje Serie KK es de menor tamaño, proporcionamos orificios roscados estándar en la base de acero y el control deslizante, y nuestra placa adaptadora de motor puede proporcionar hasta 8 métodos de instalación del motor, lo que significa que se puede ensamblar fácilmente. cualquier sistema robótico cartesiano. Por lo tanto, los robots de un solo eje de la serie KK se utilizan ampliamente en la manipulación de obleas de silicio, dispensación automática, industria FPD, industria de automatización médica, instrumentos de medición de precisión, mesas deslizantes y coordinación de mesas deslizantes lineales.

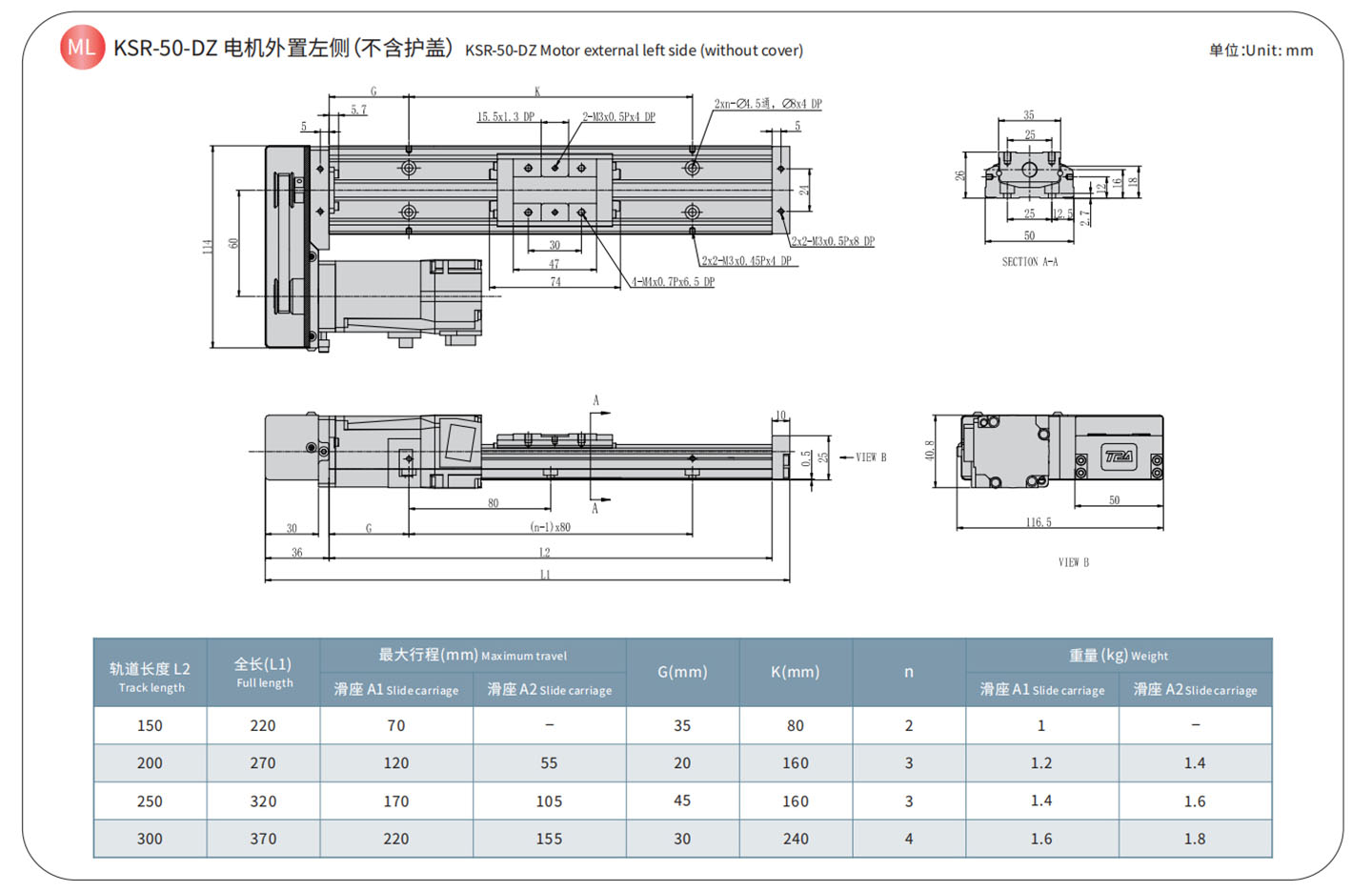
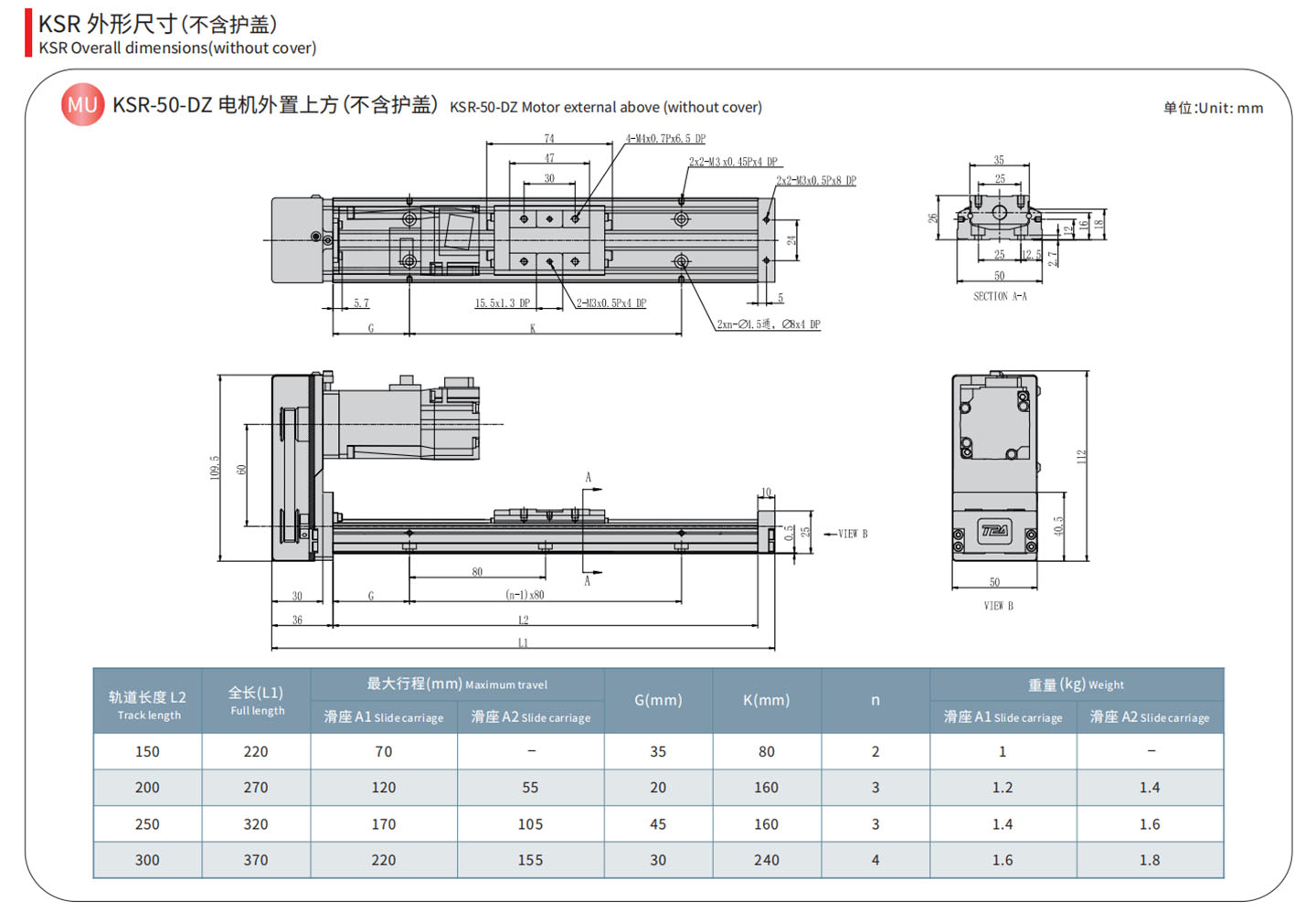
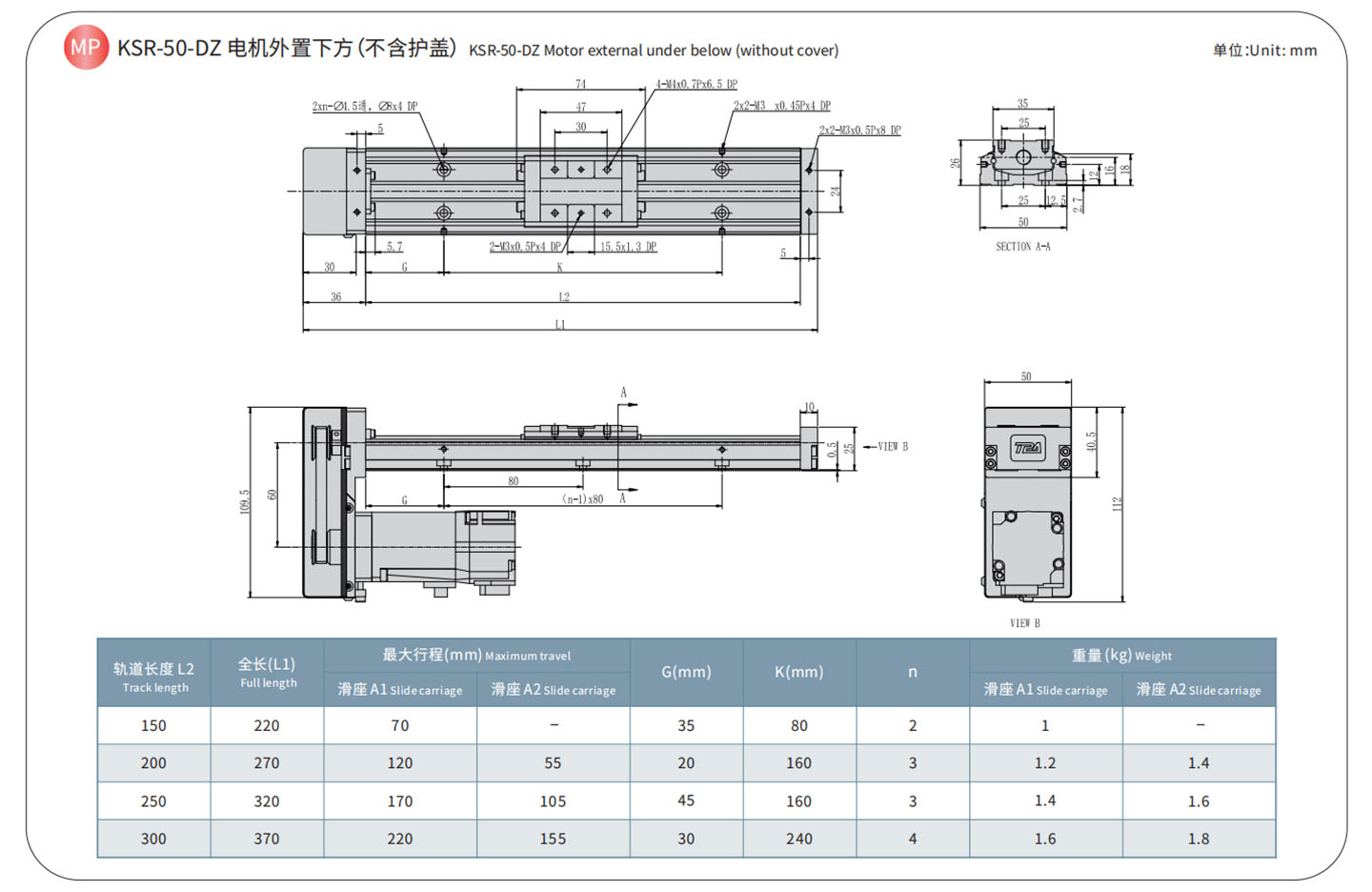
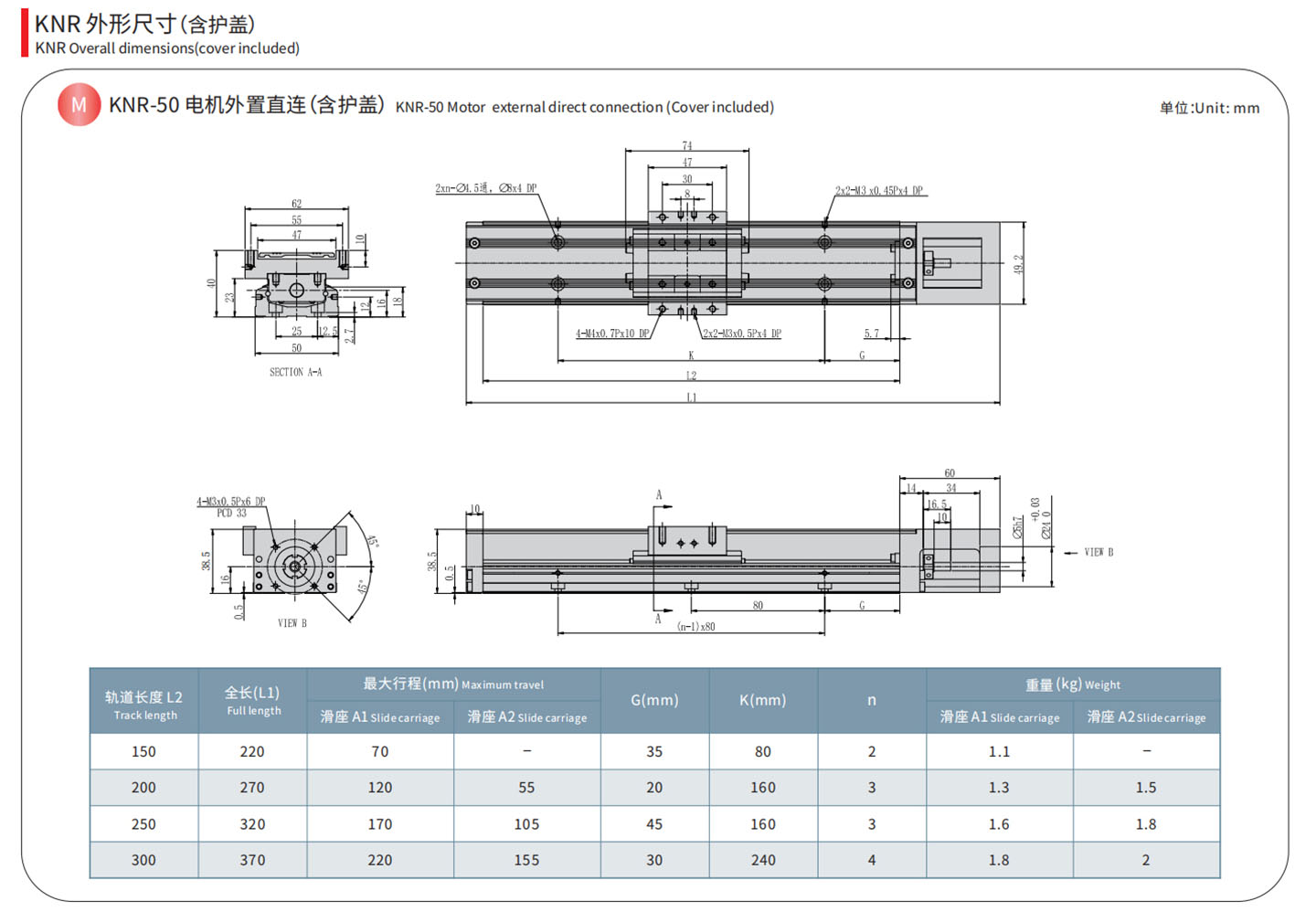
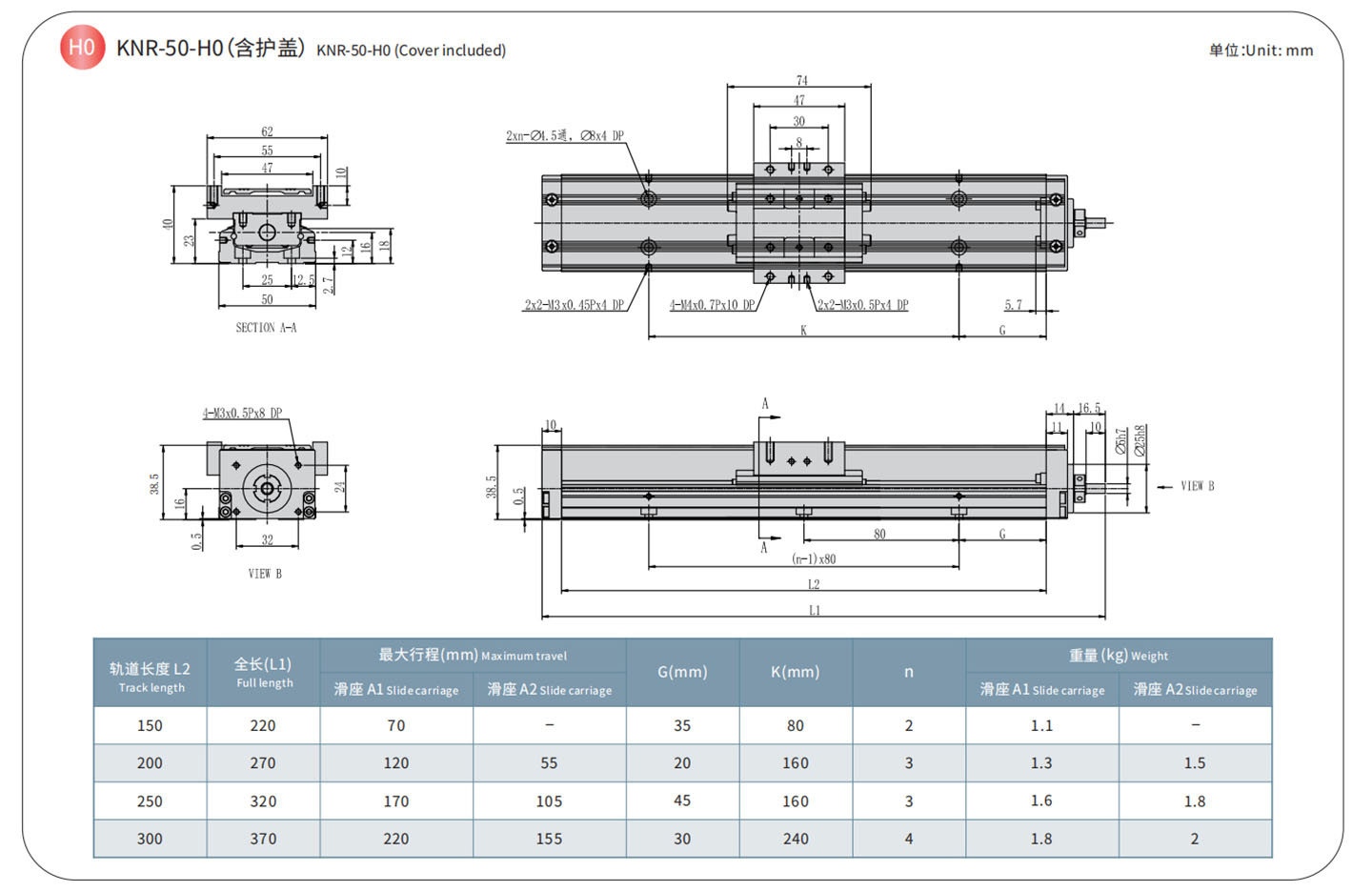
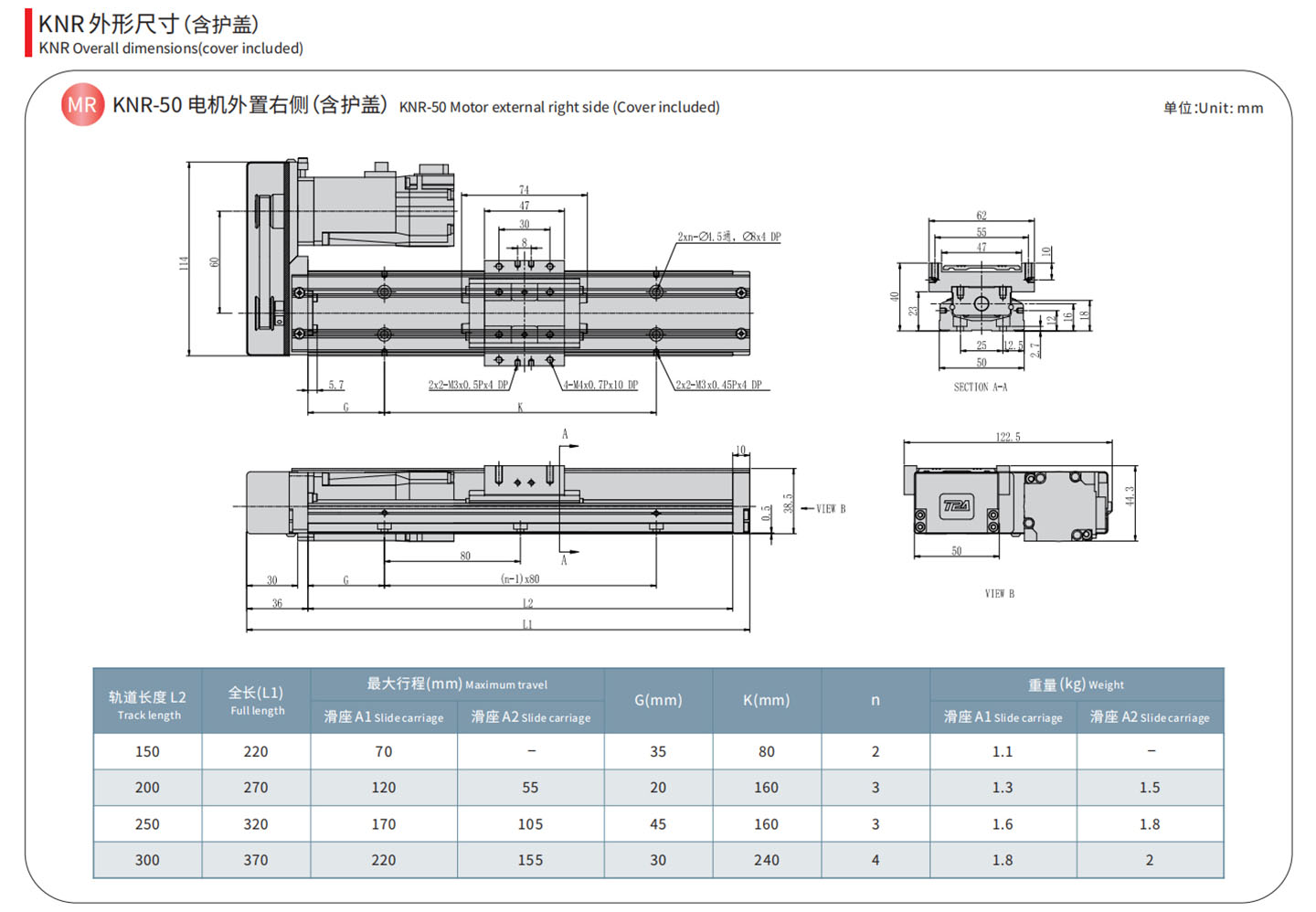
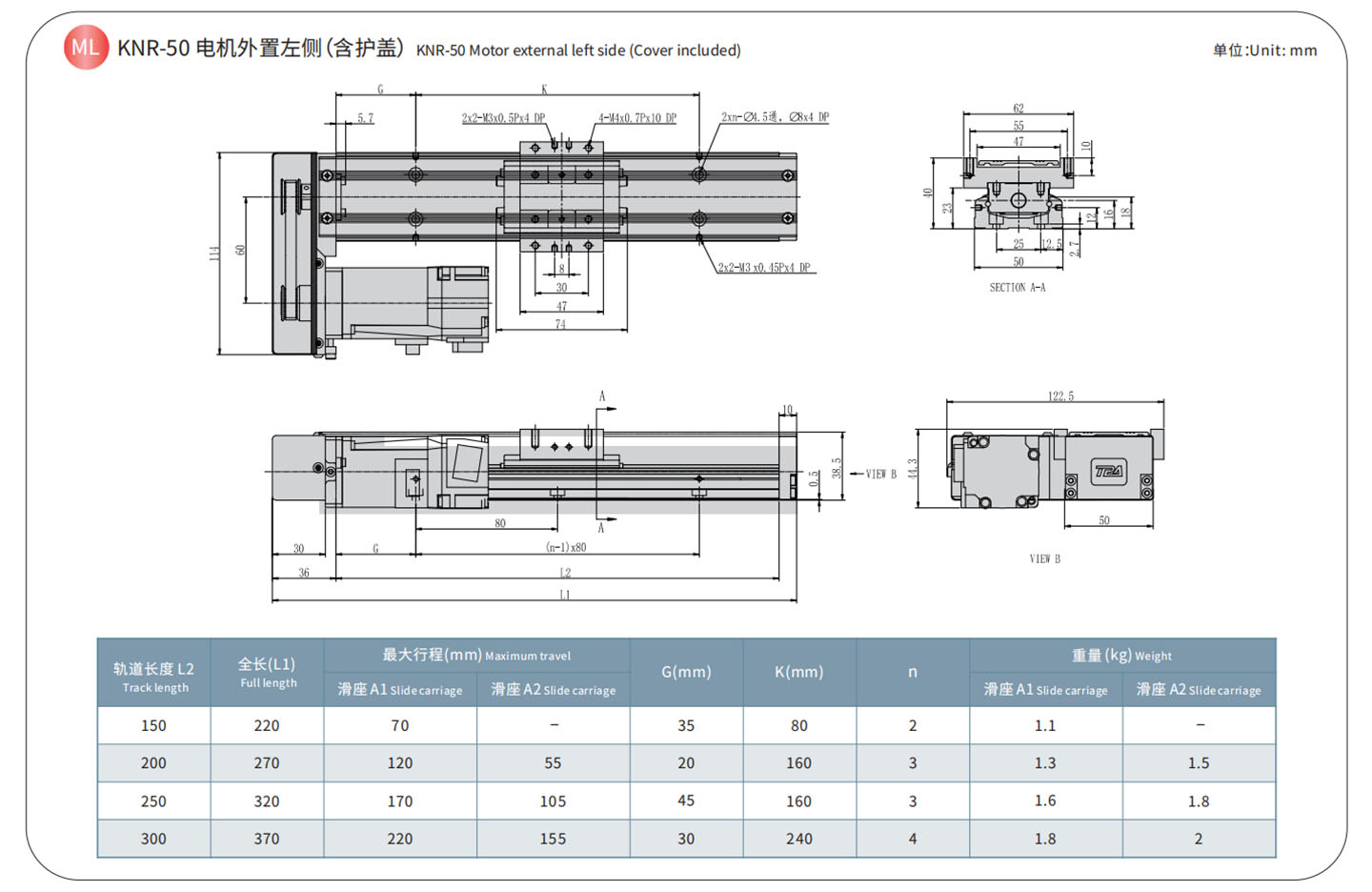
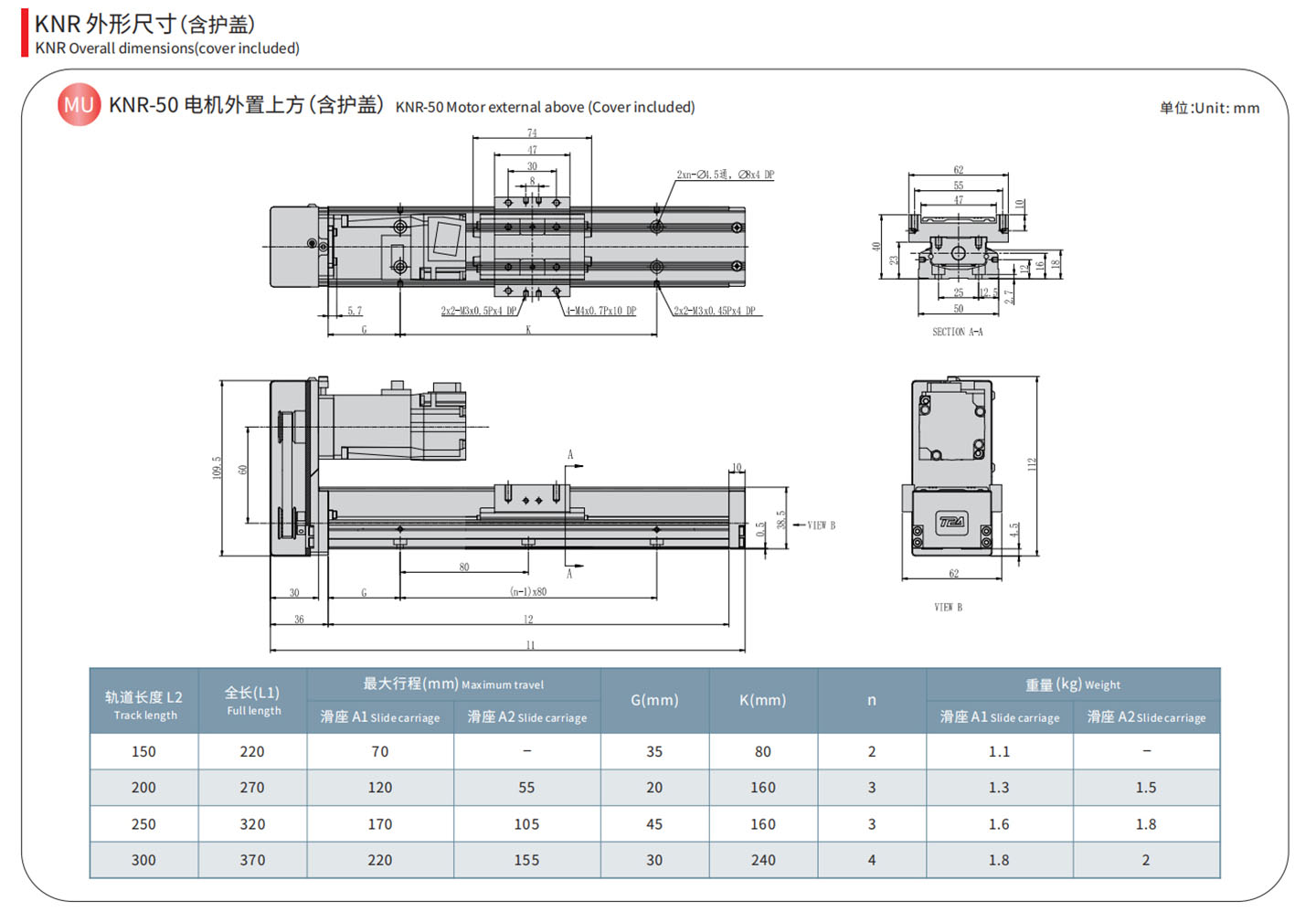
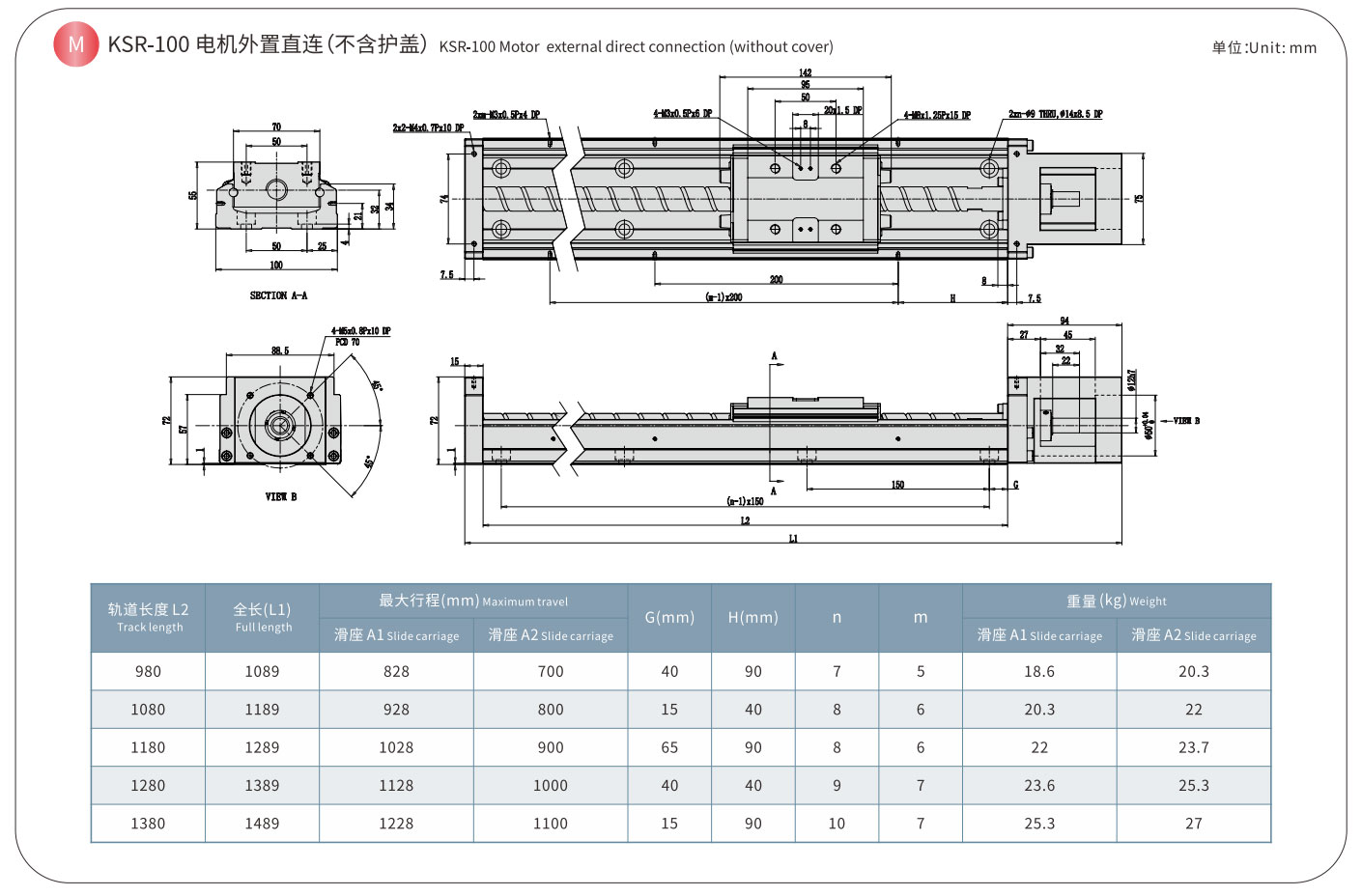
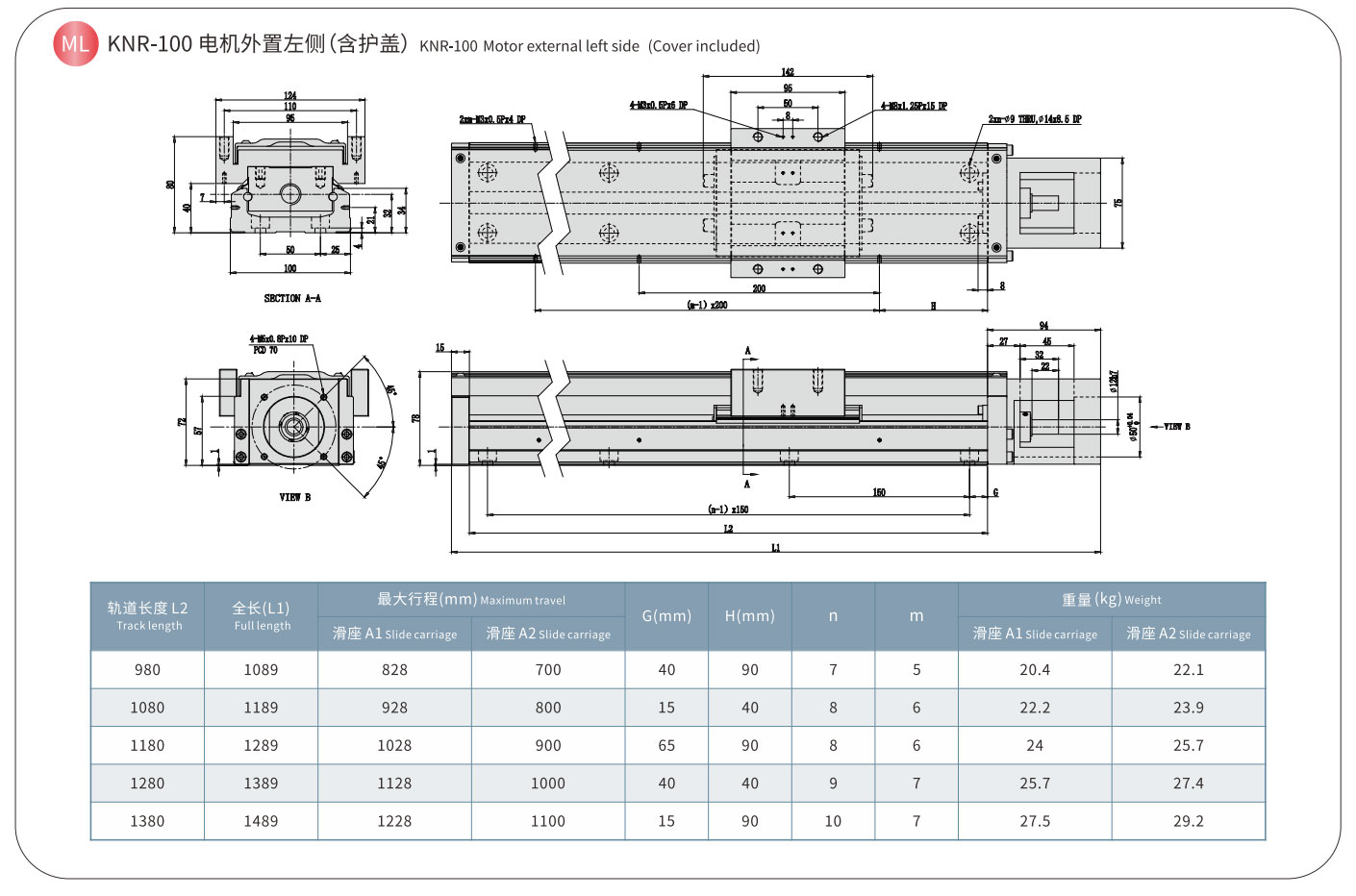
Serie KSR-KNR-KFR-KCR2

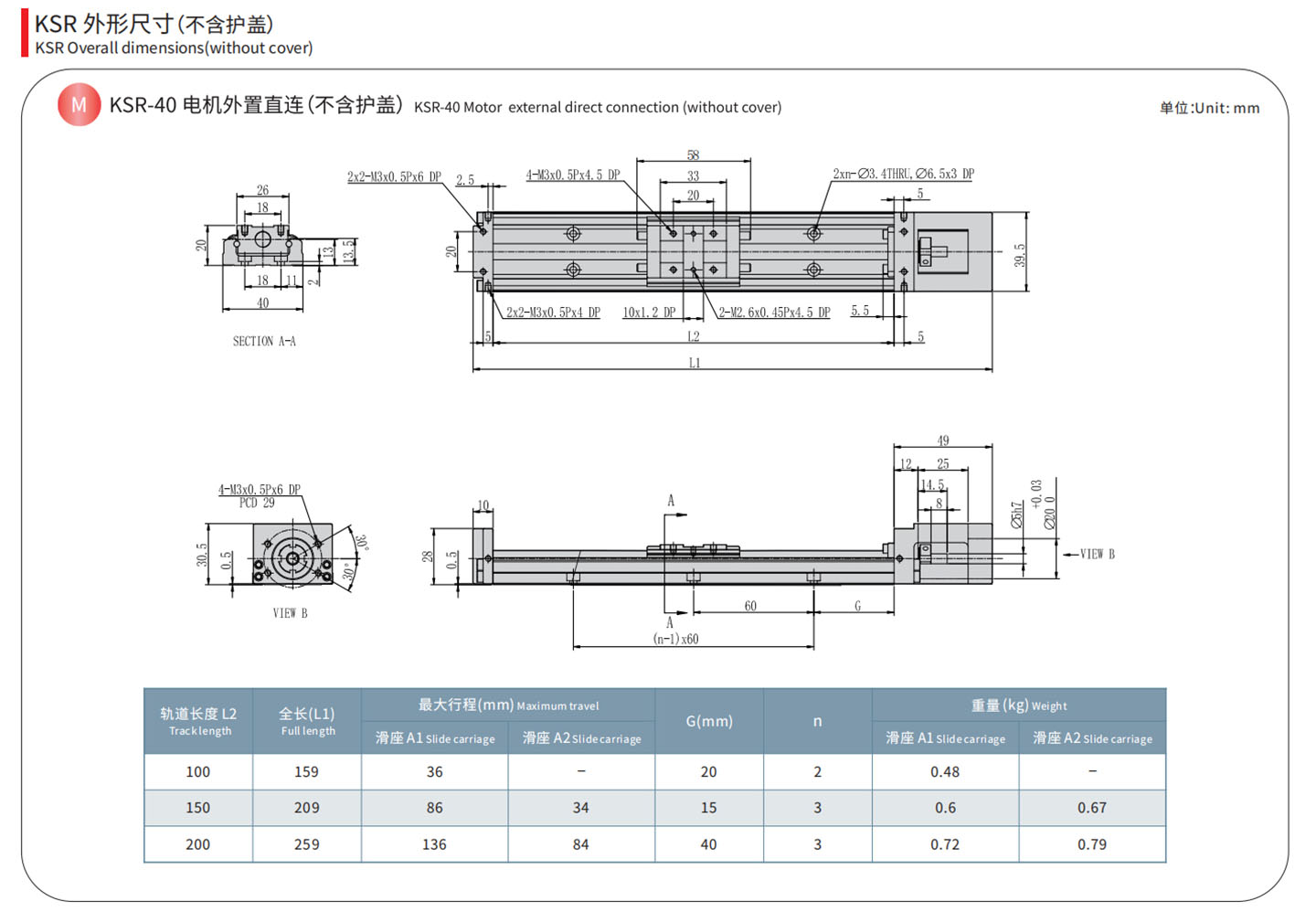
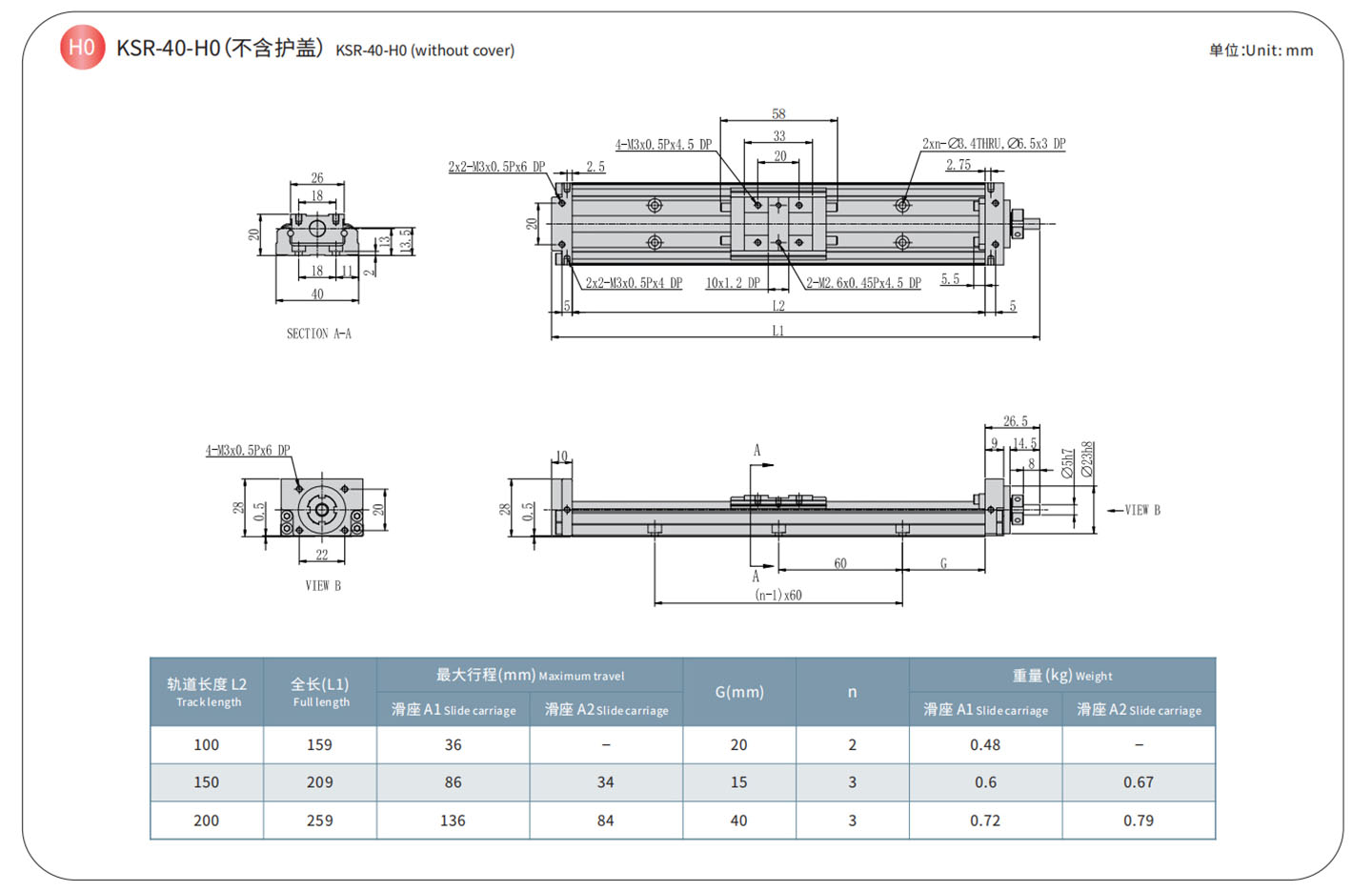
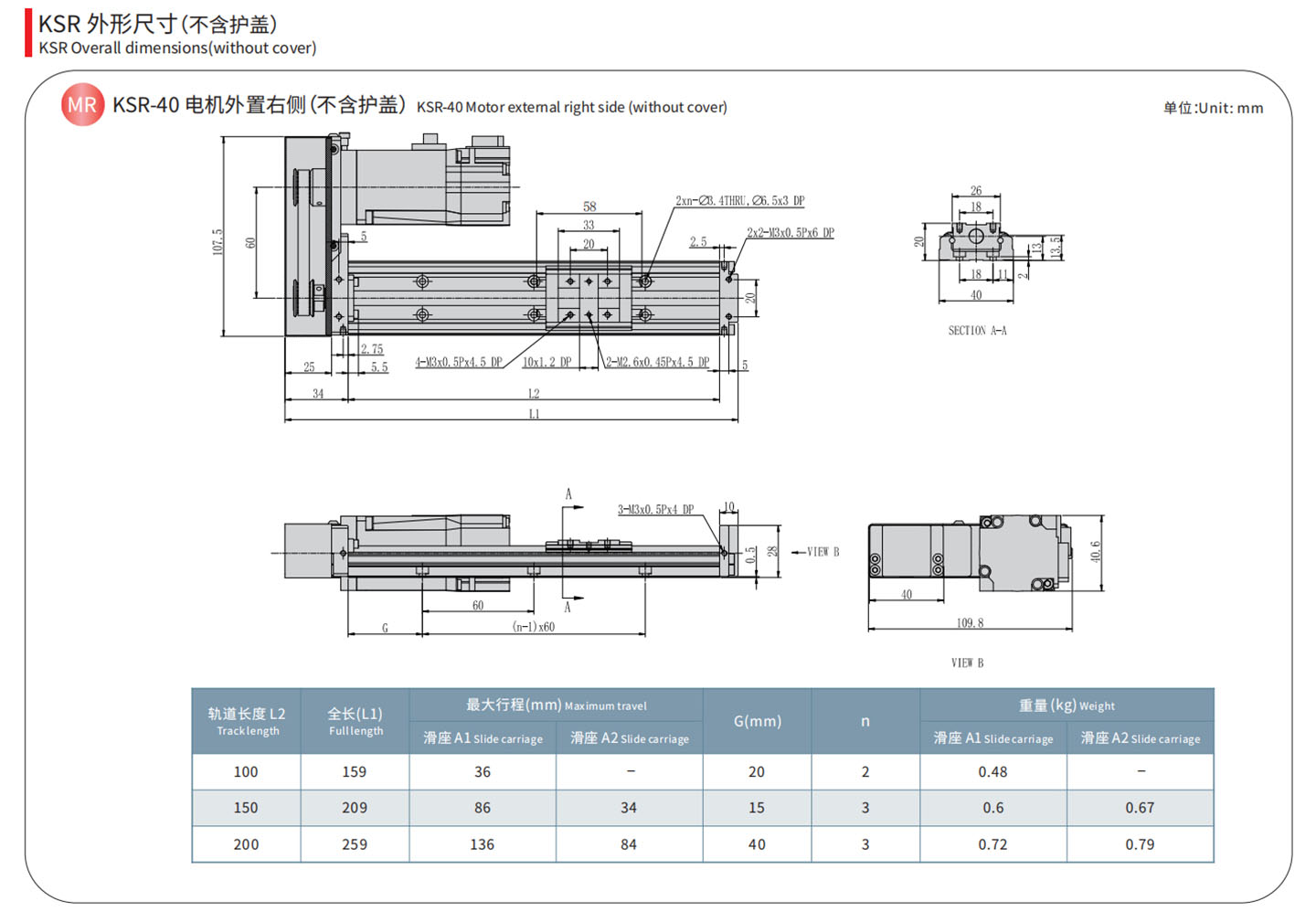
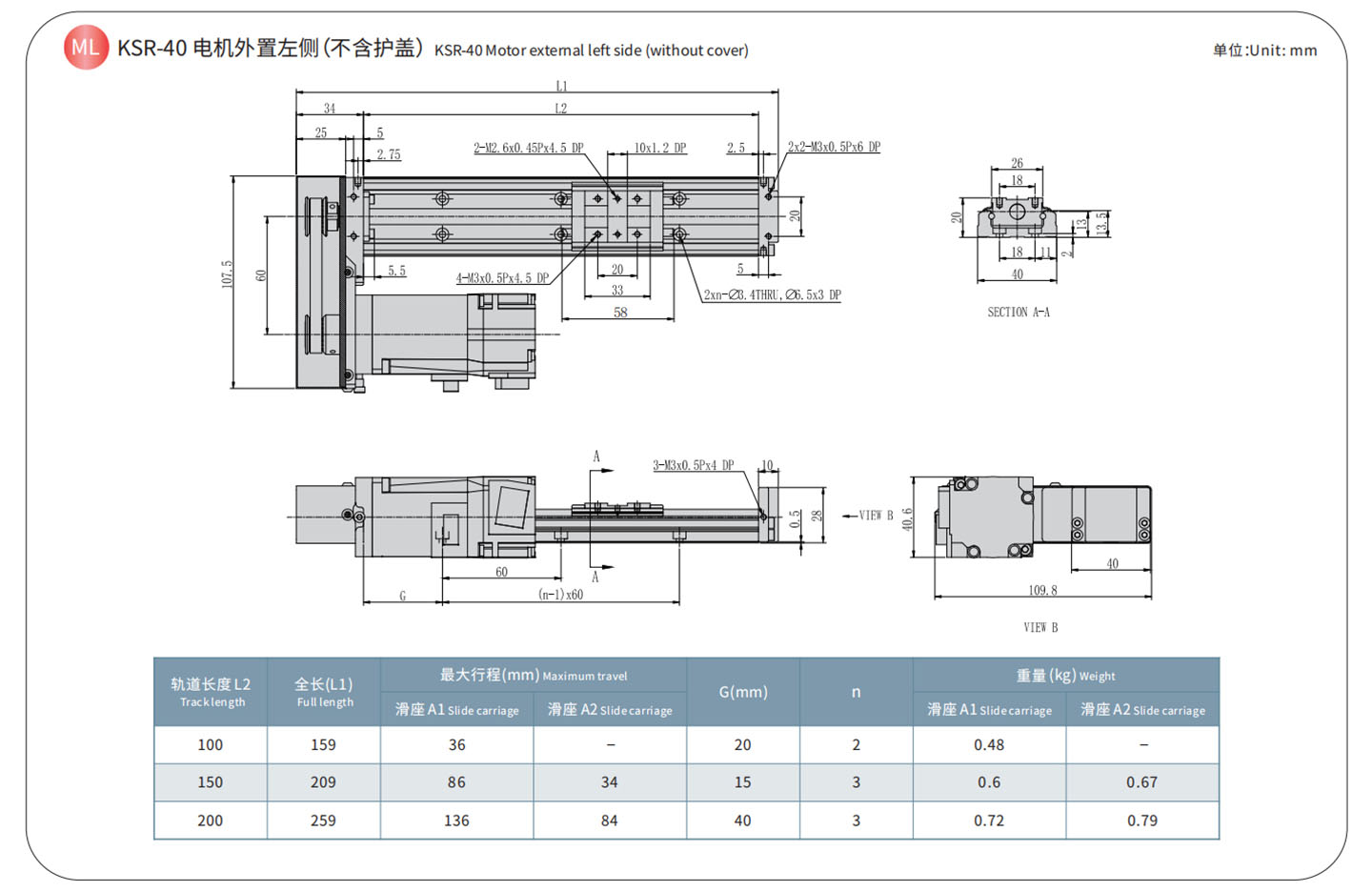
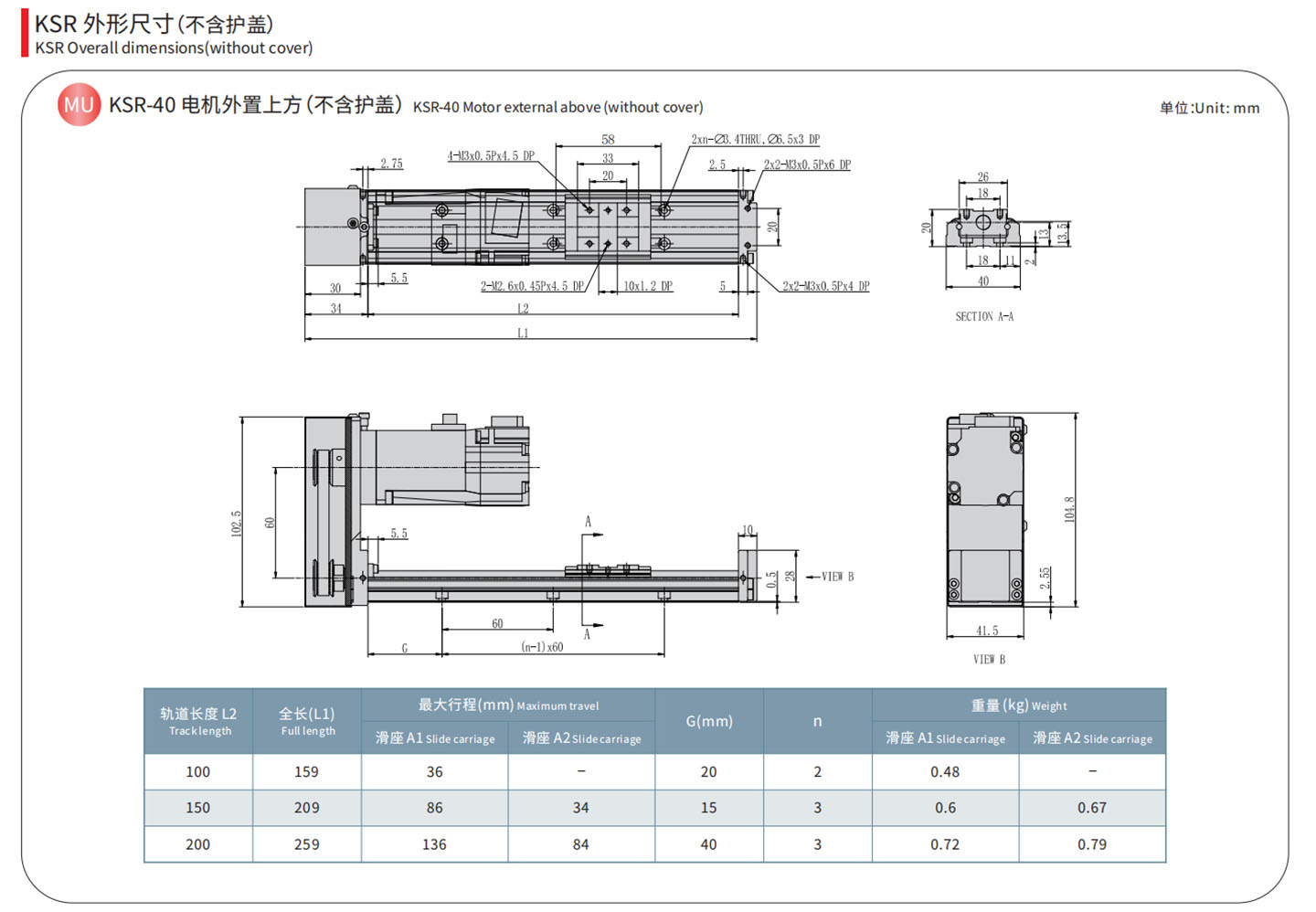
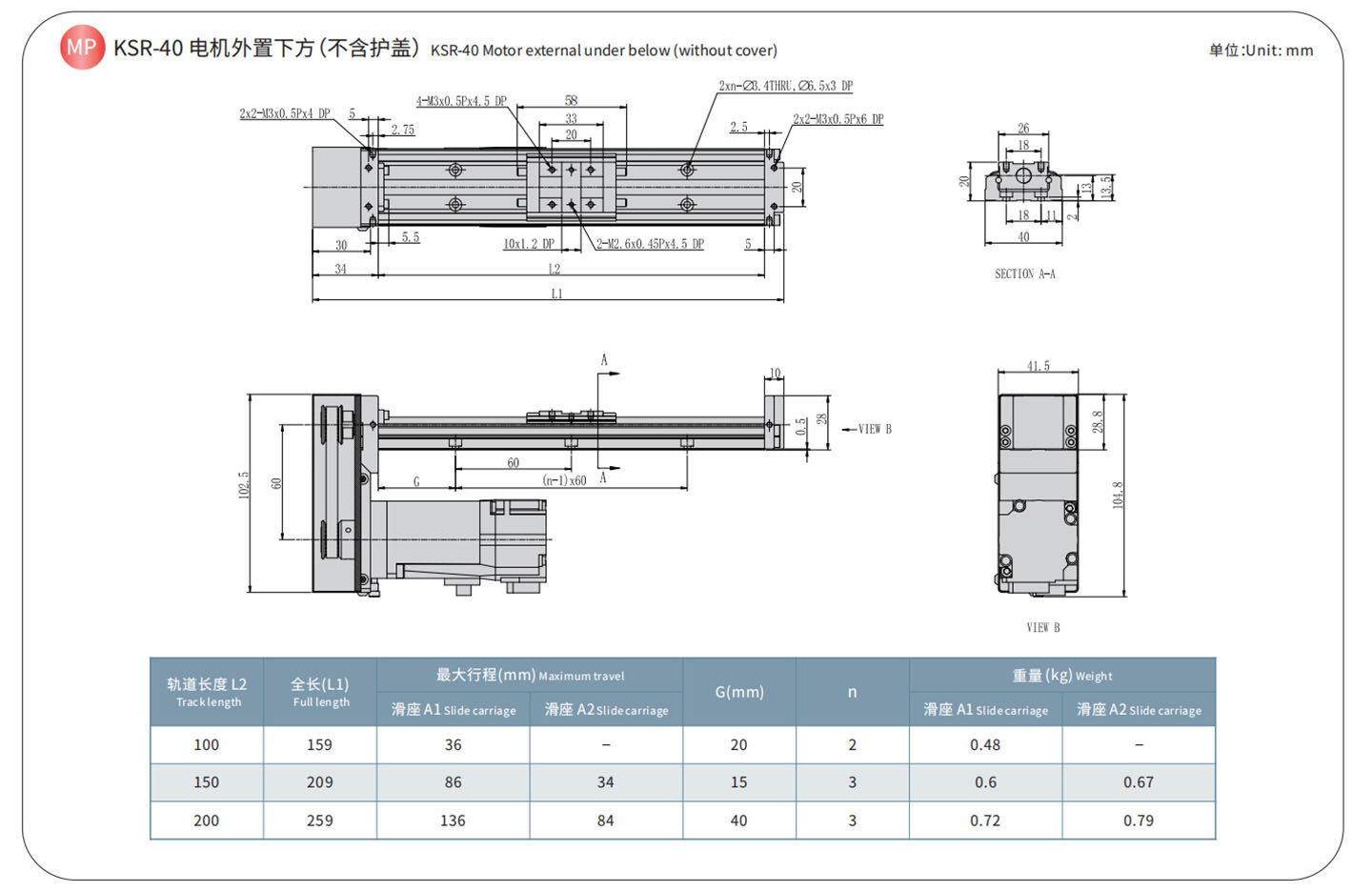
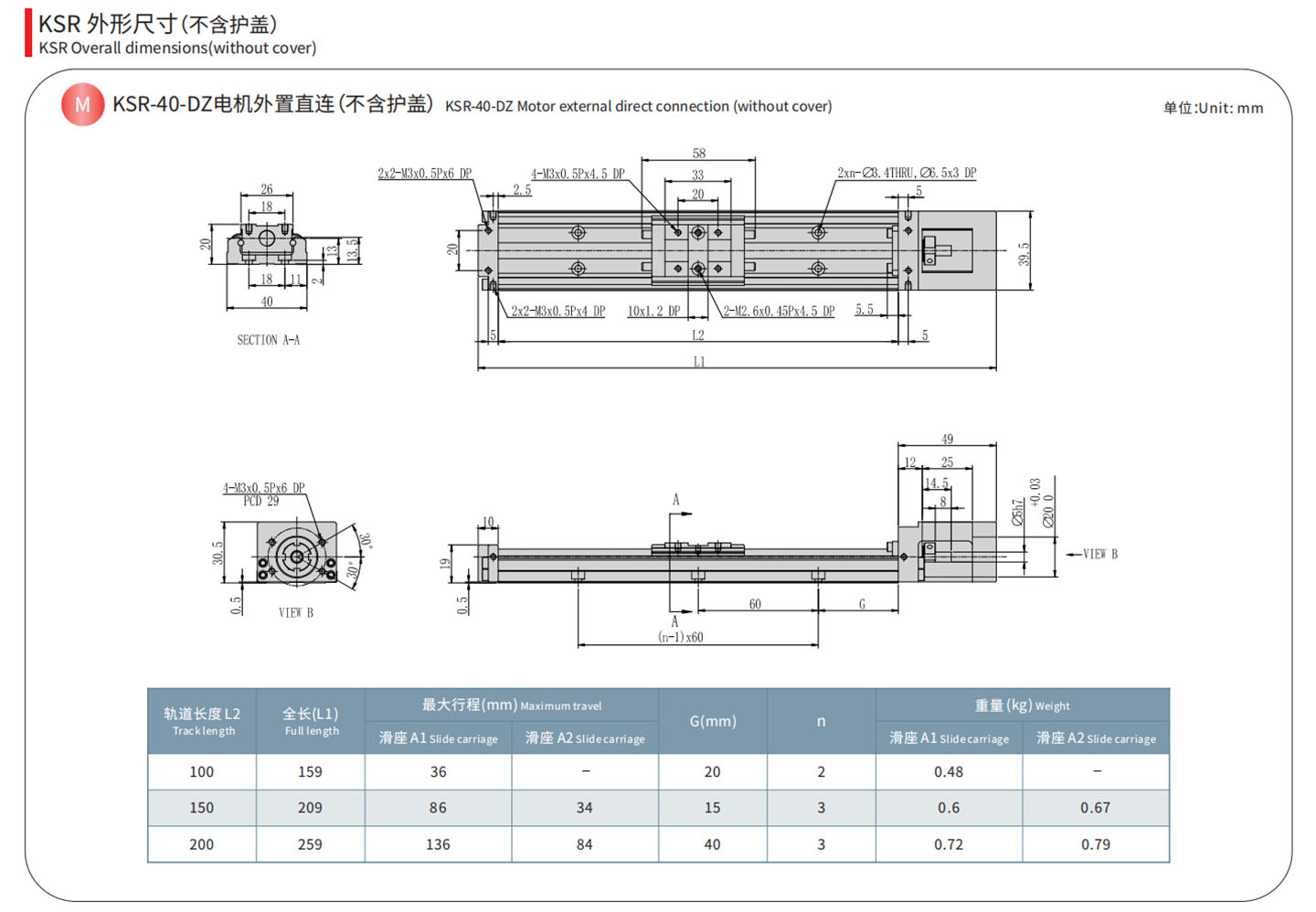
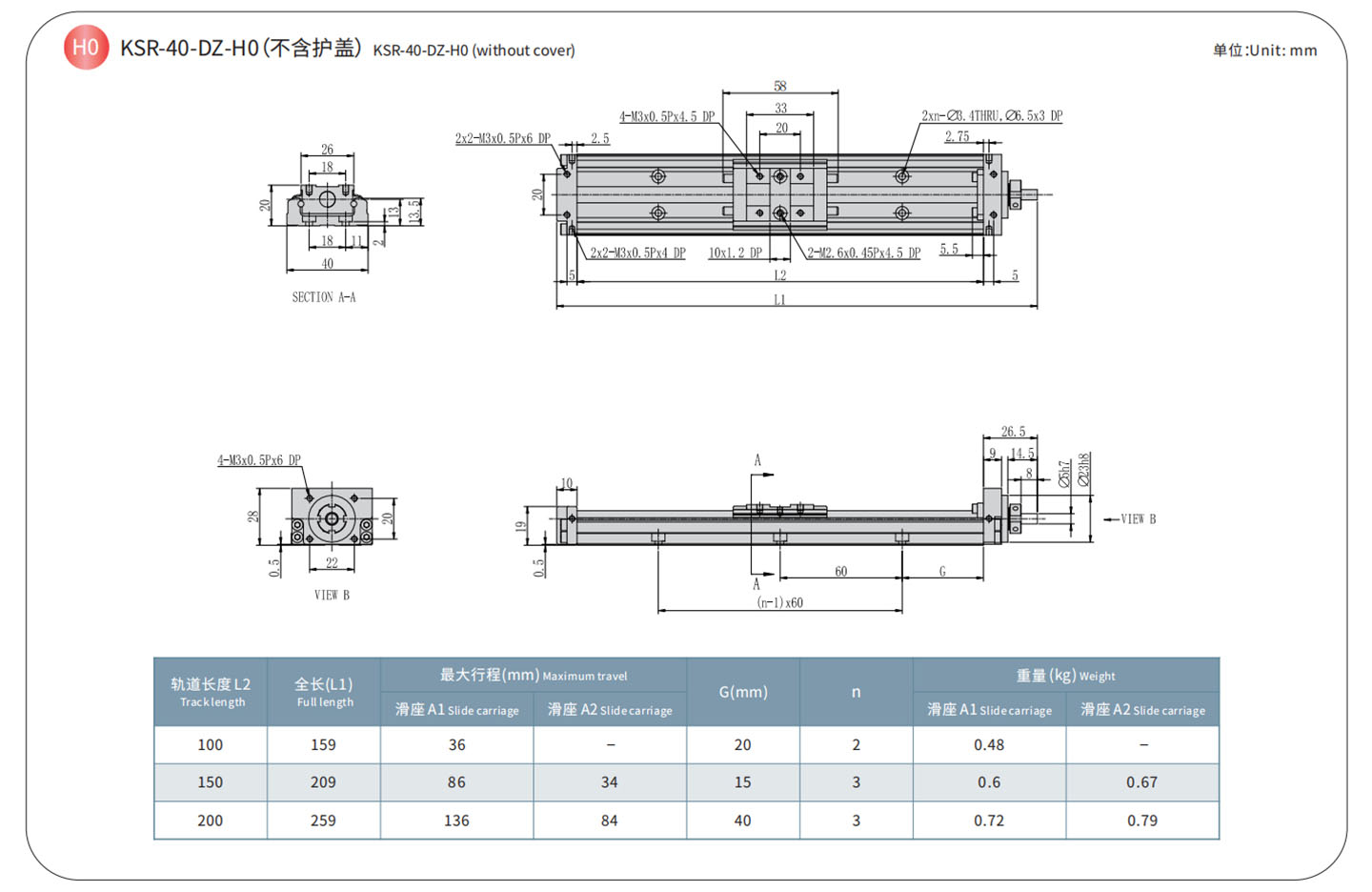
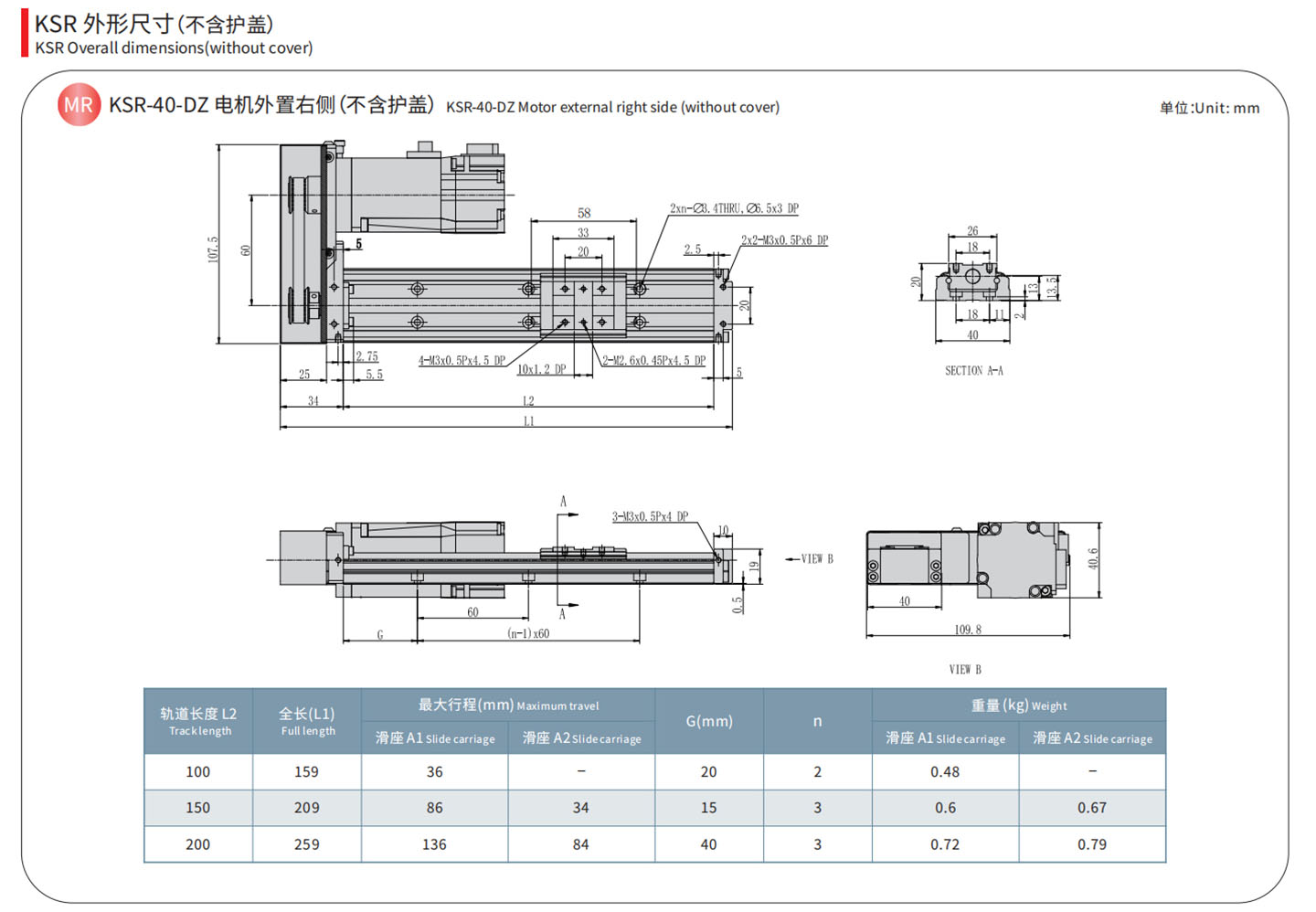
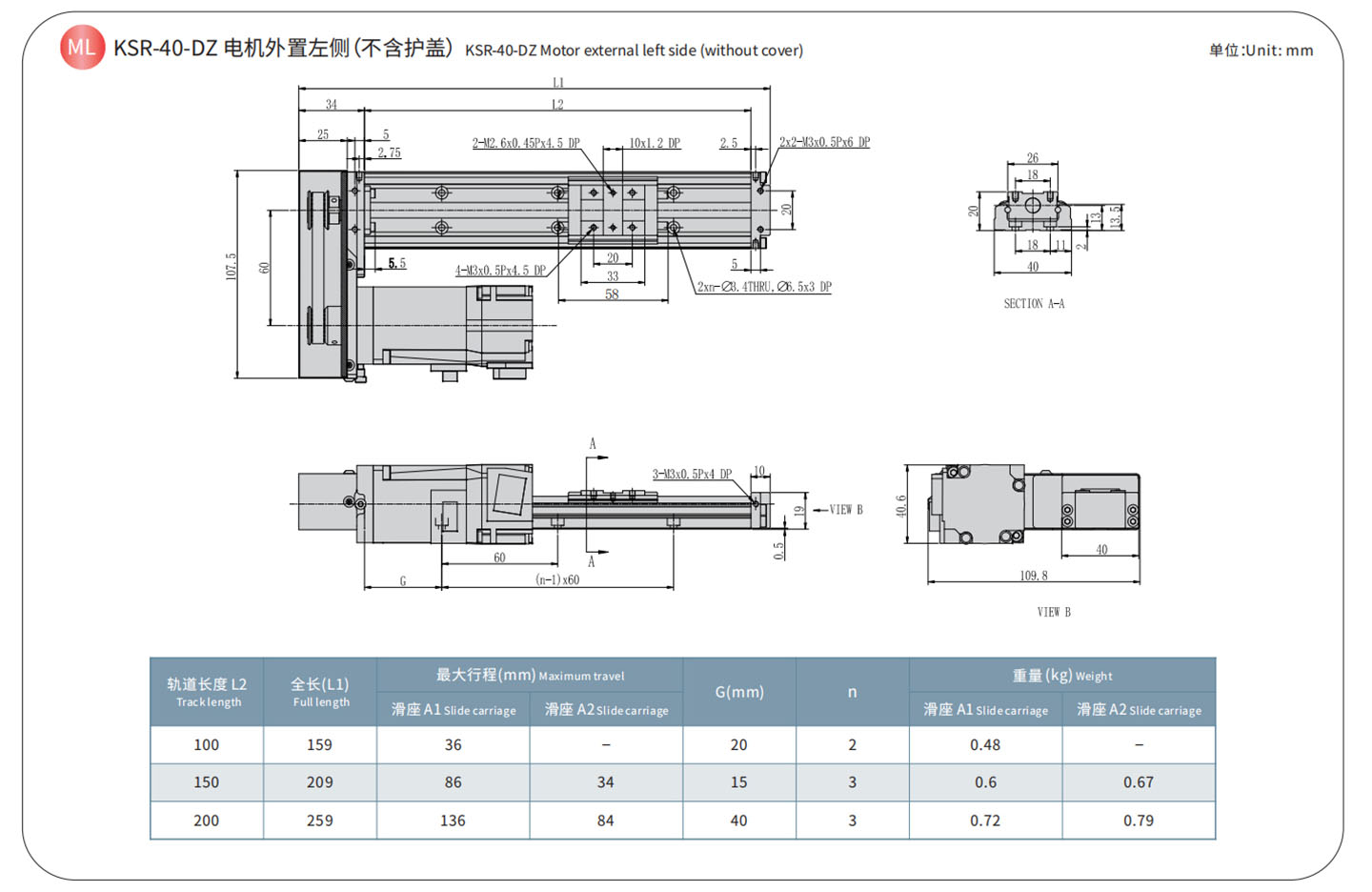
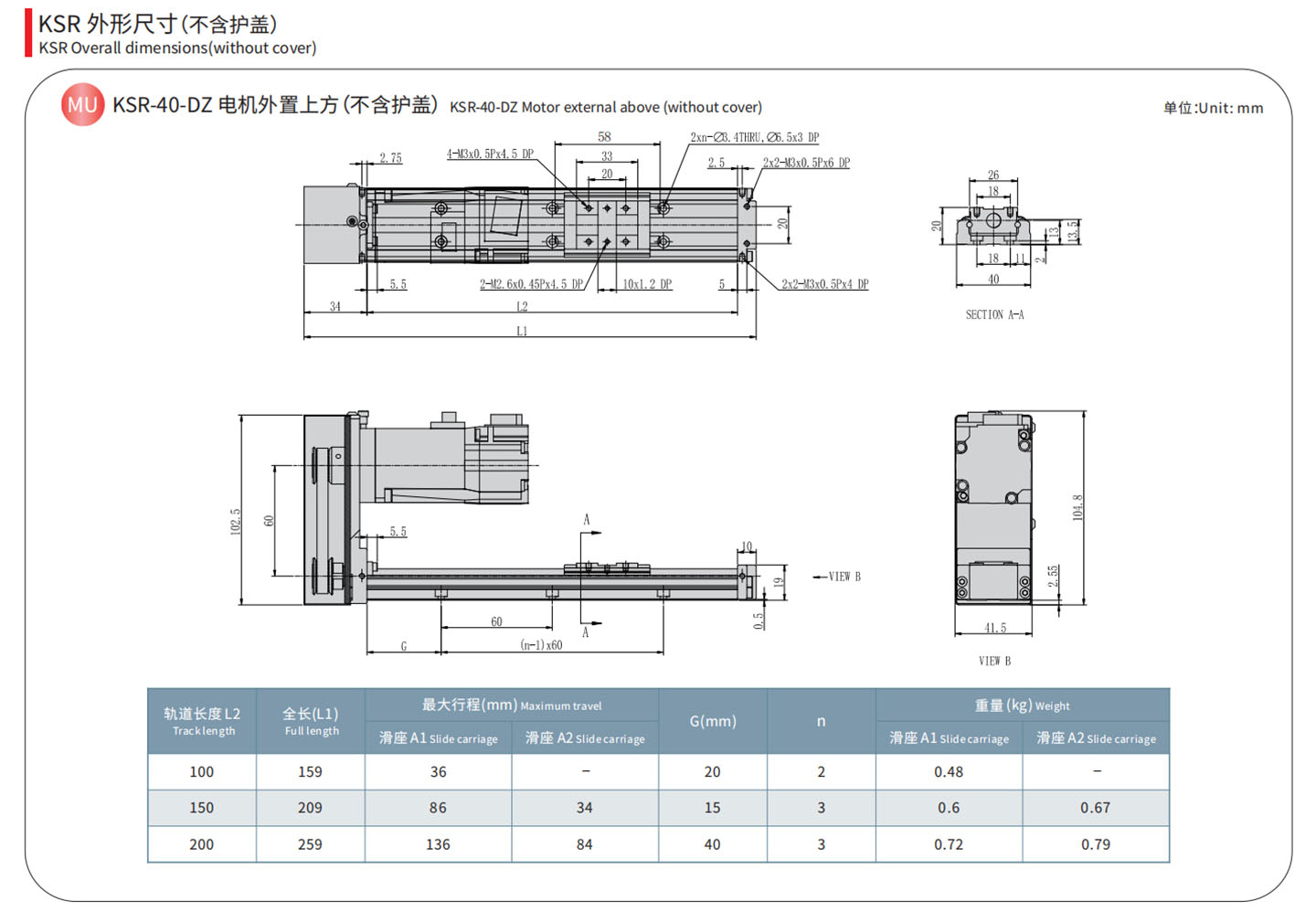
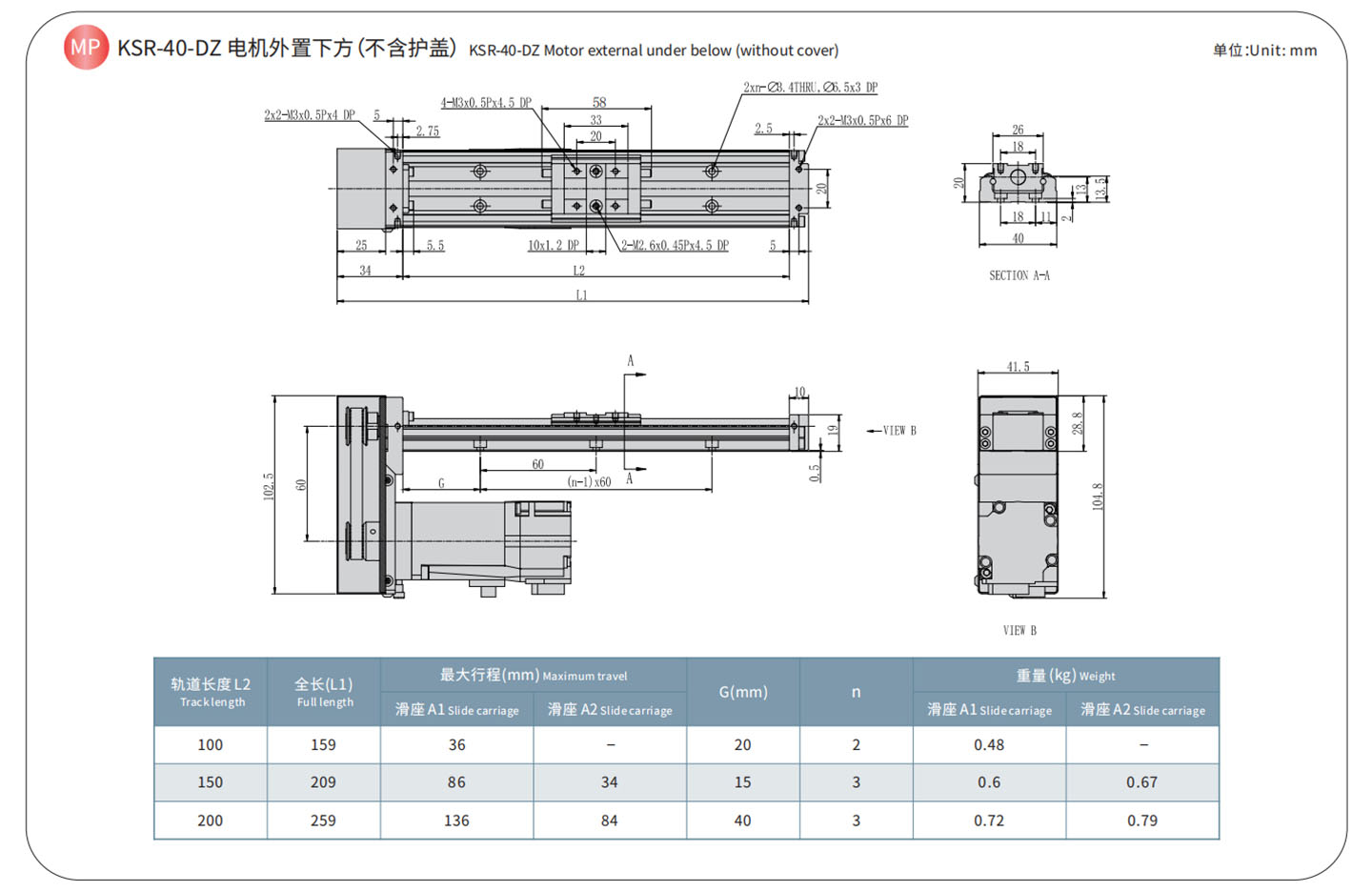
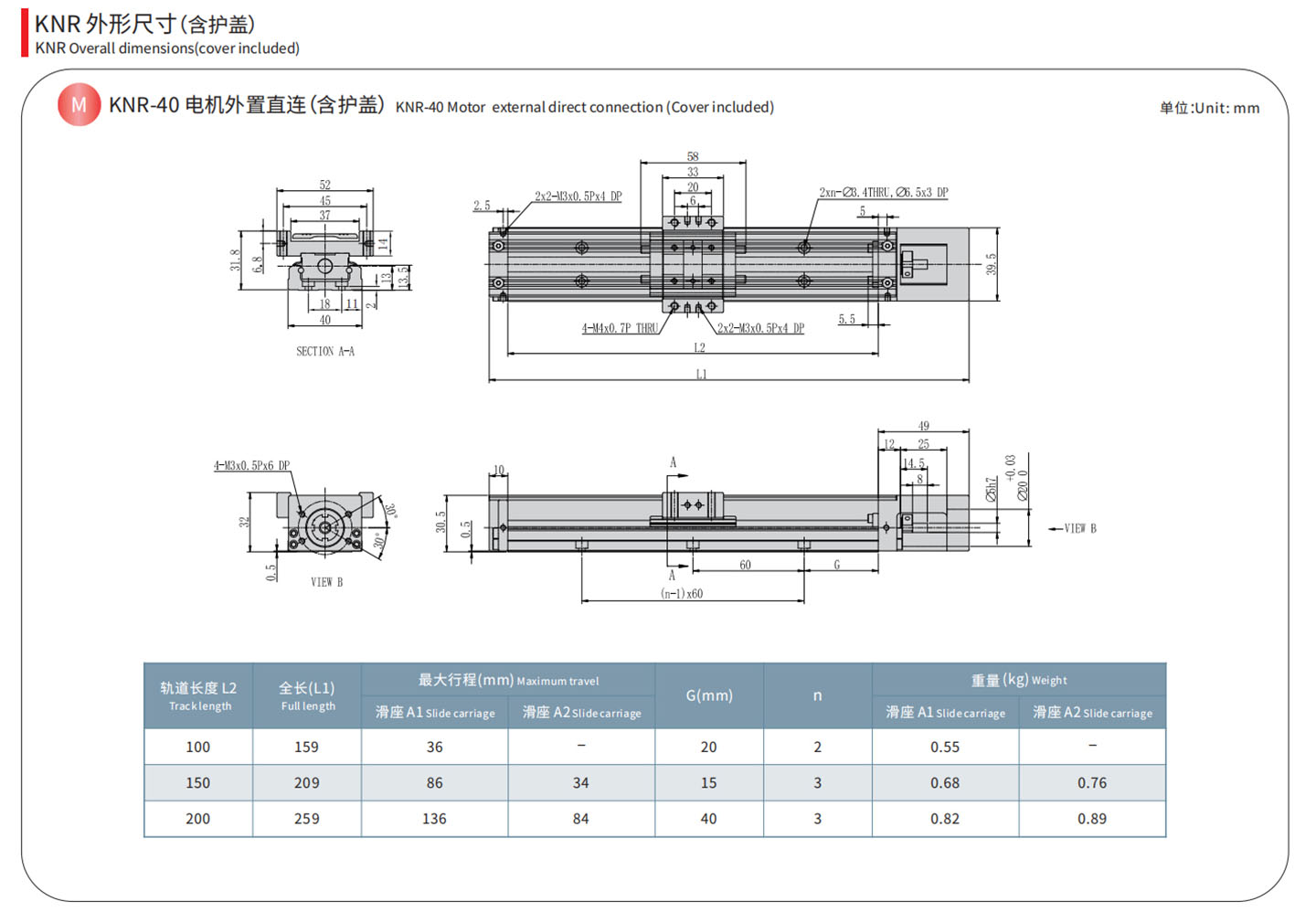
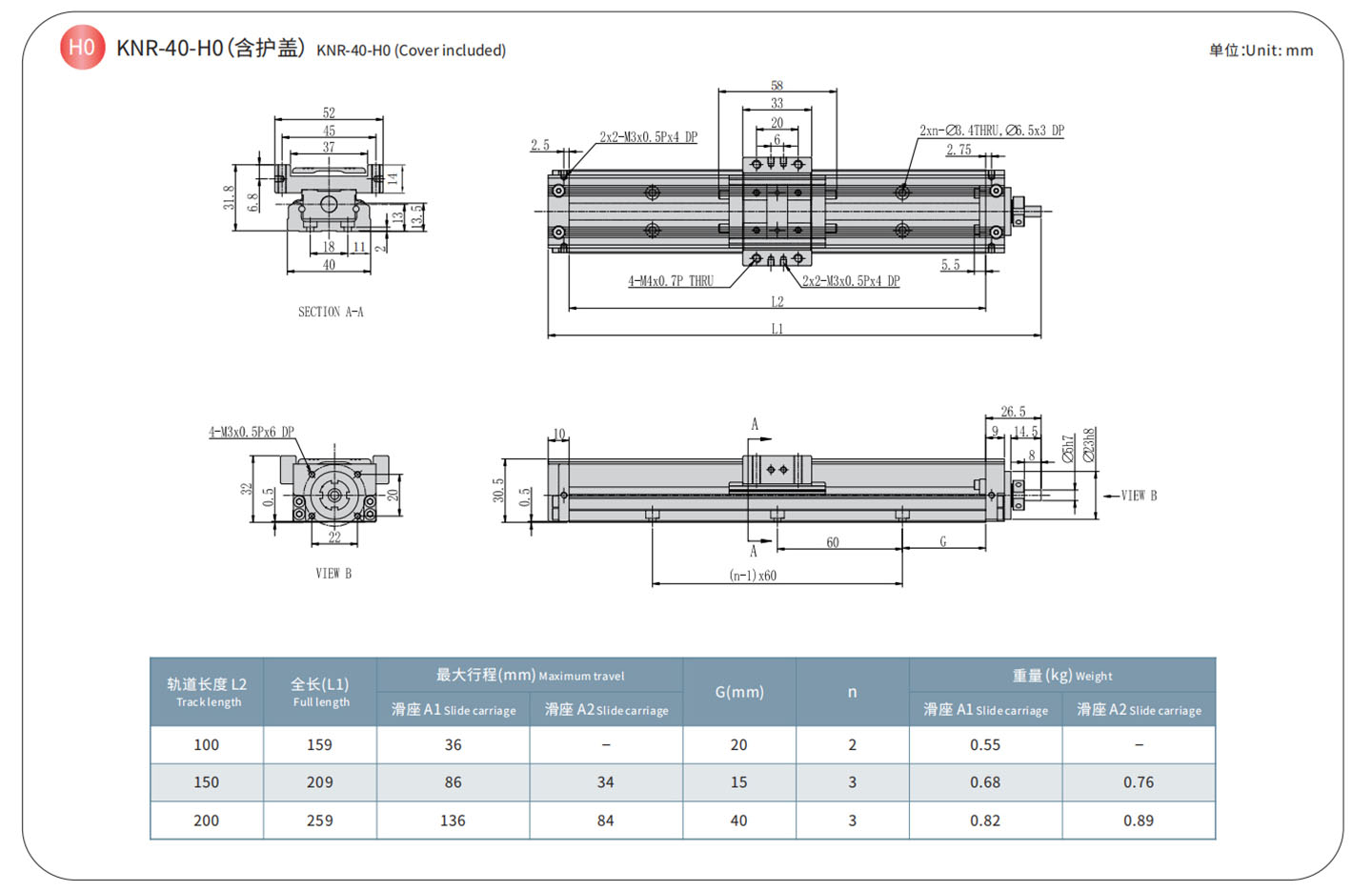
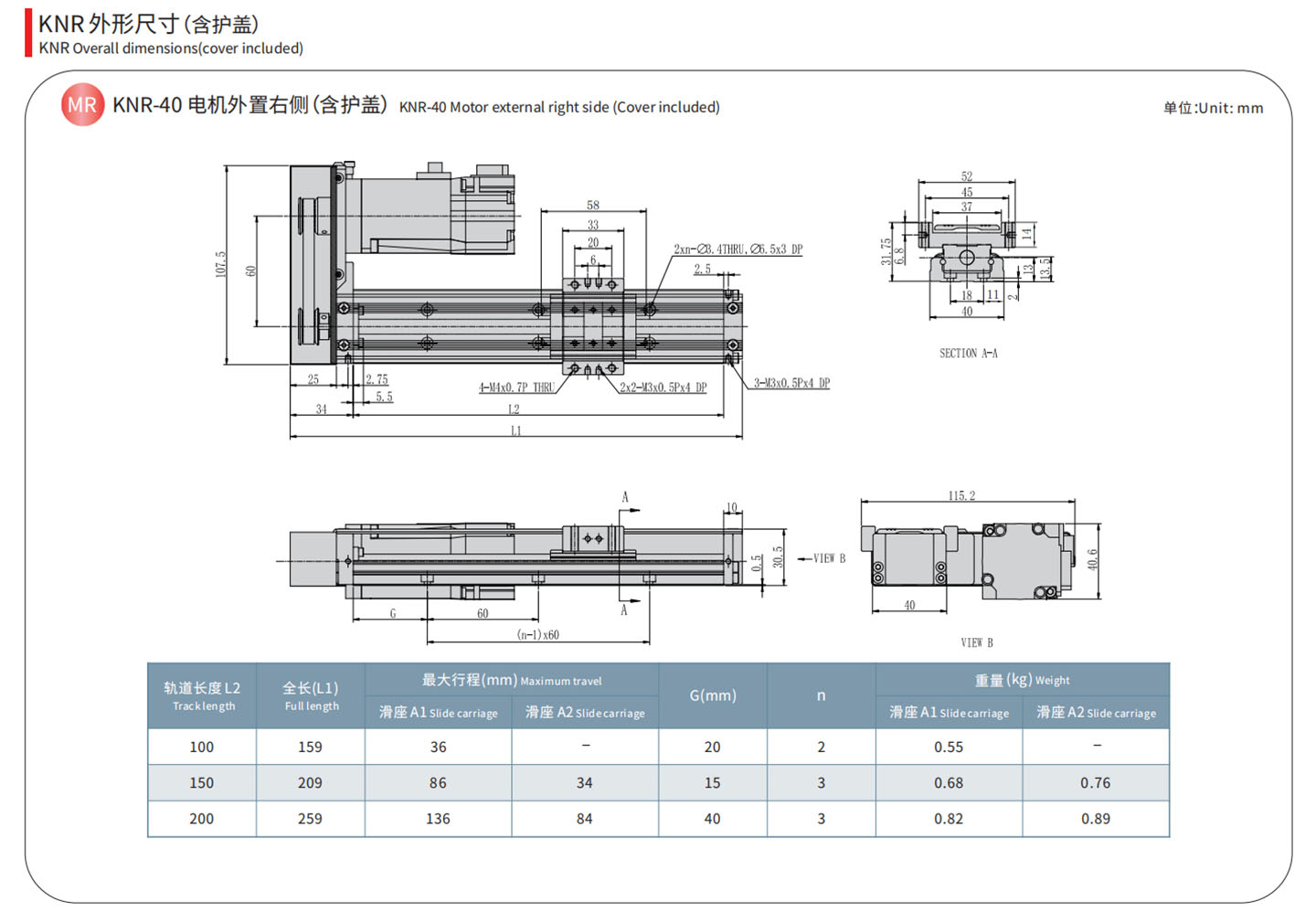
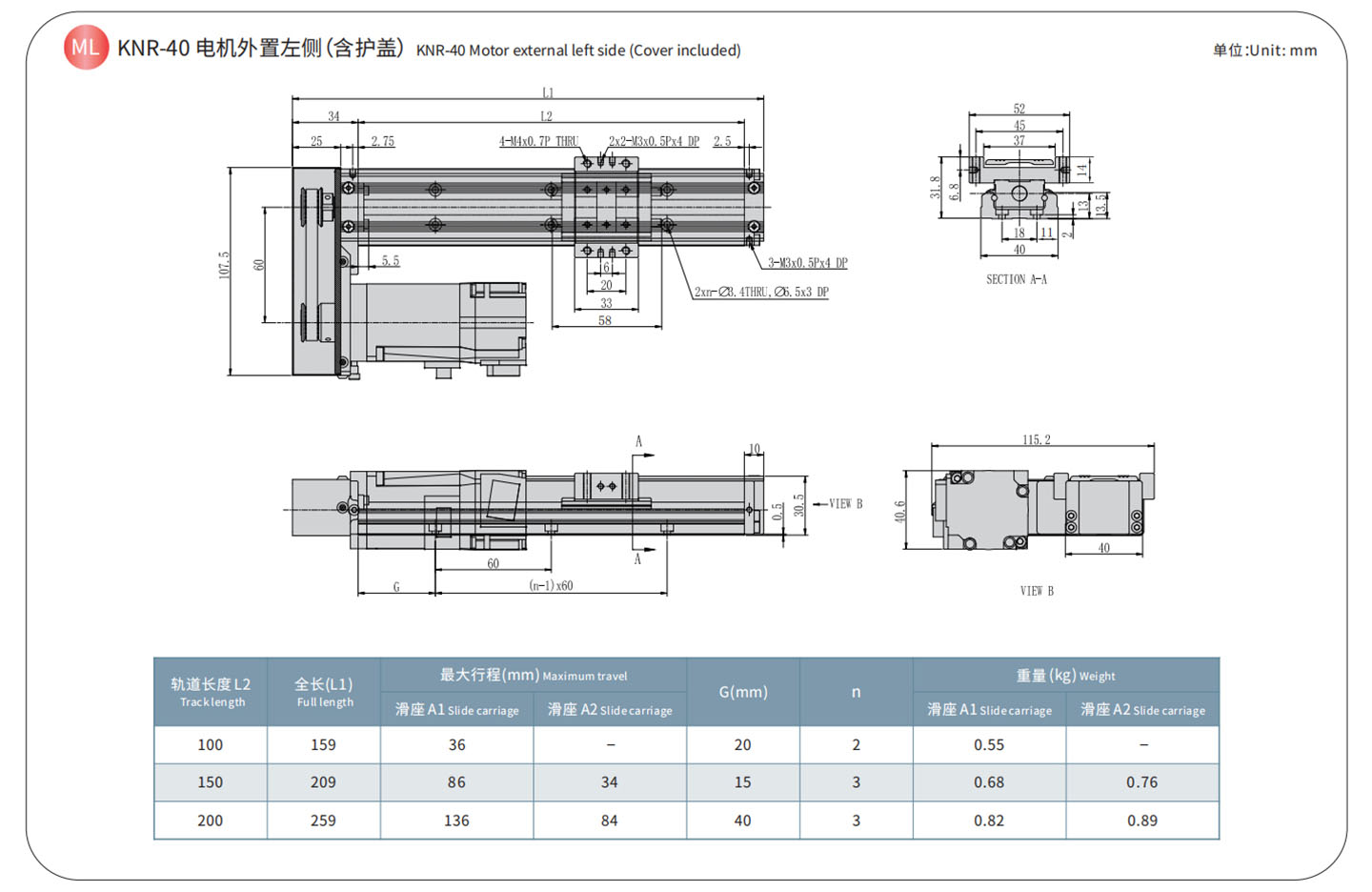
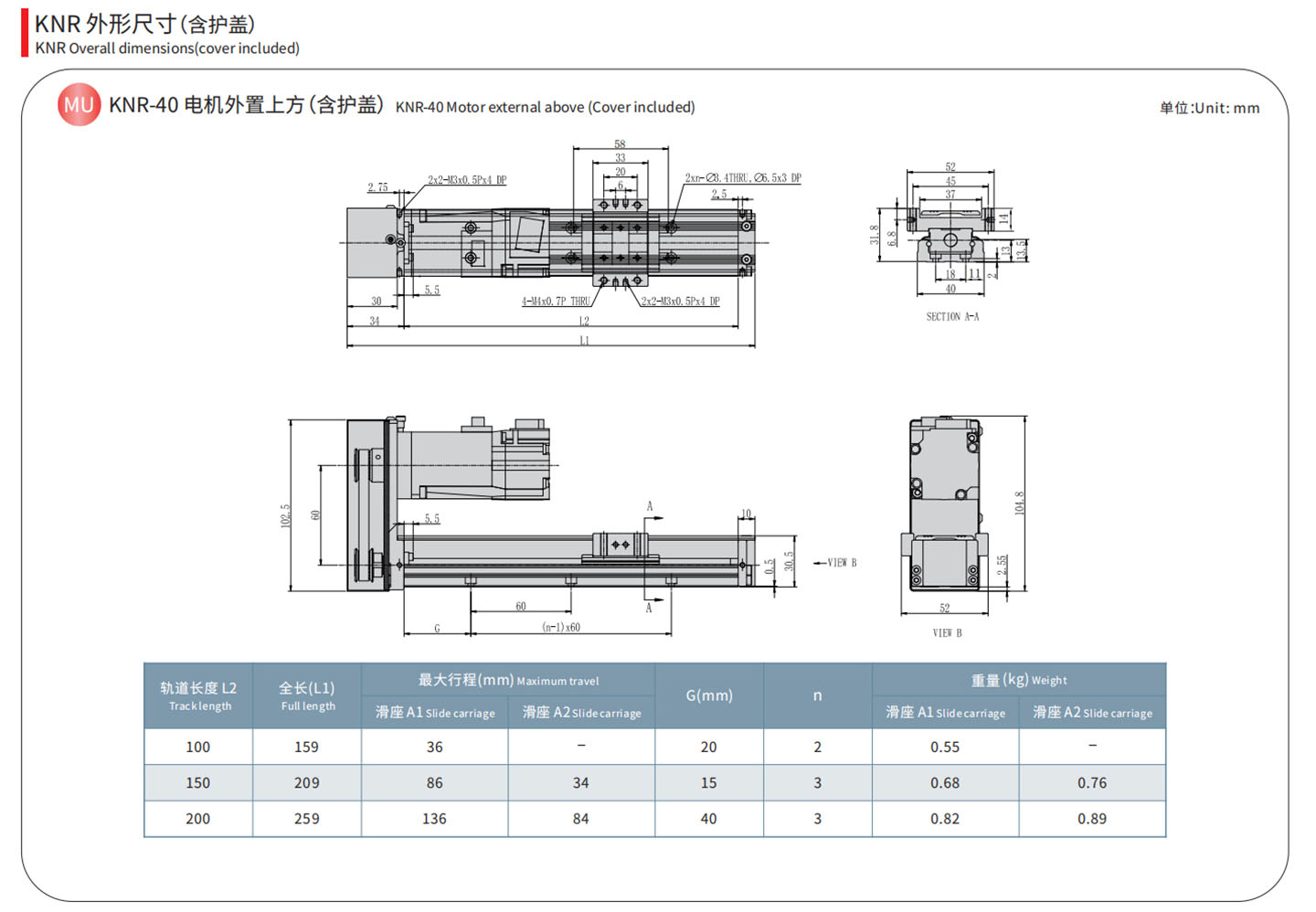
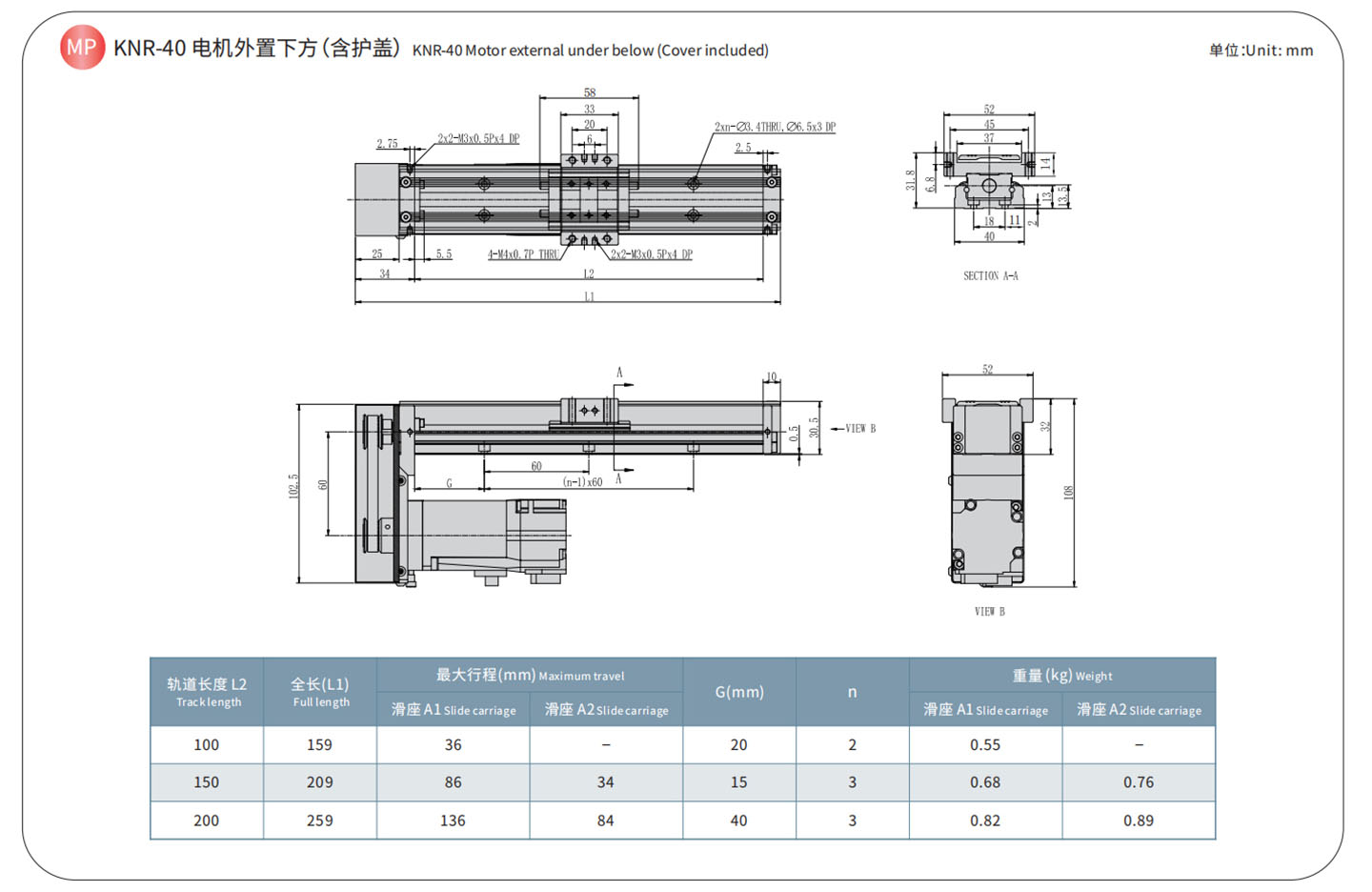
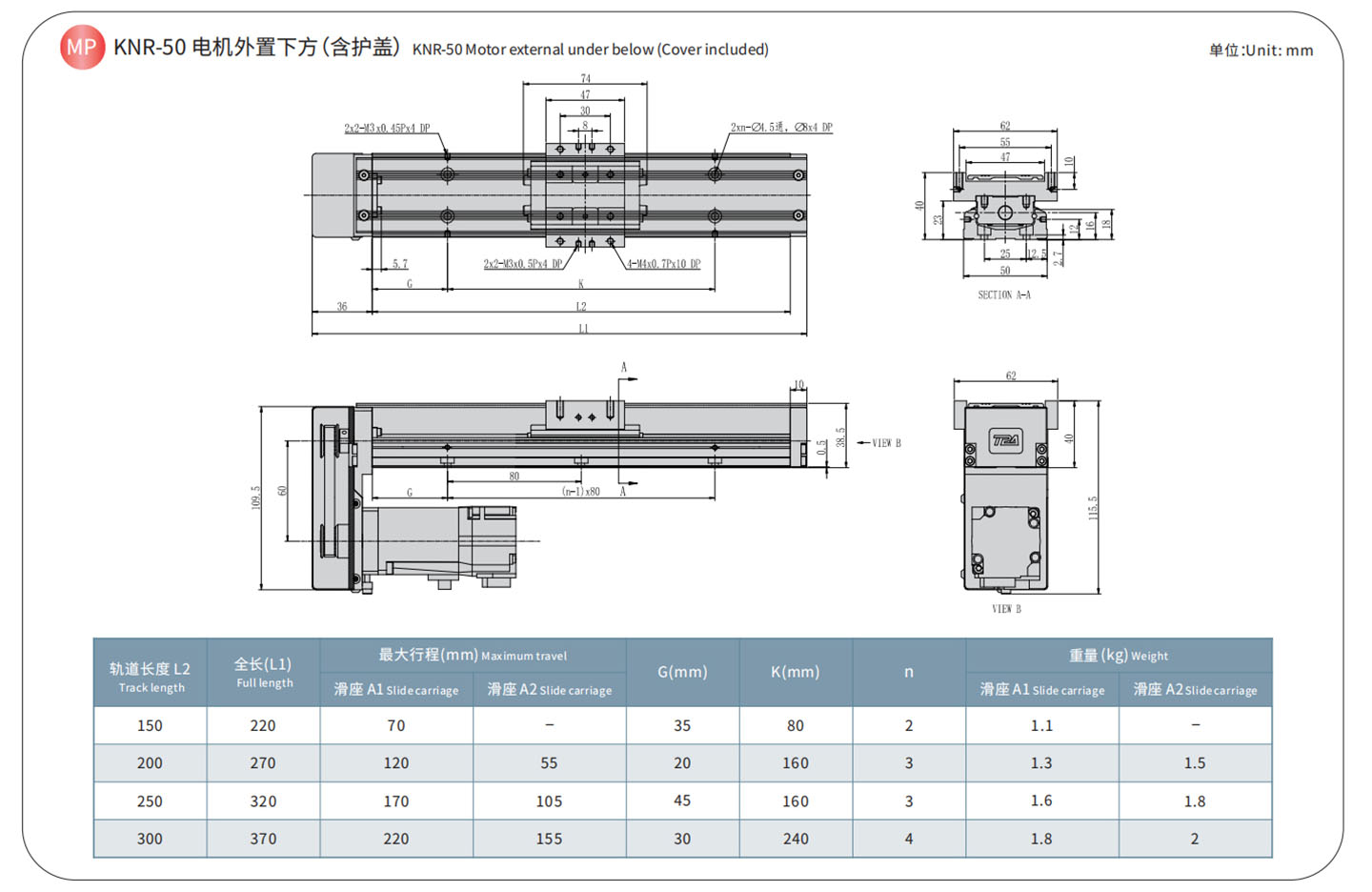
KSR-40 KNR-40

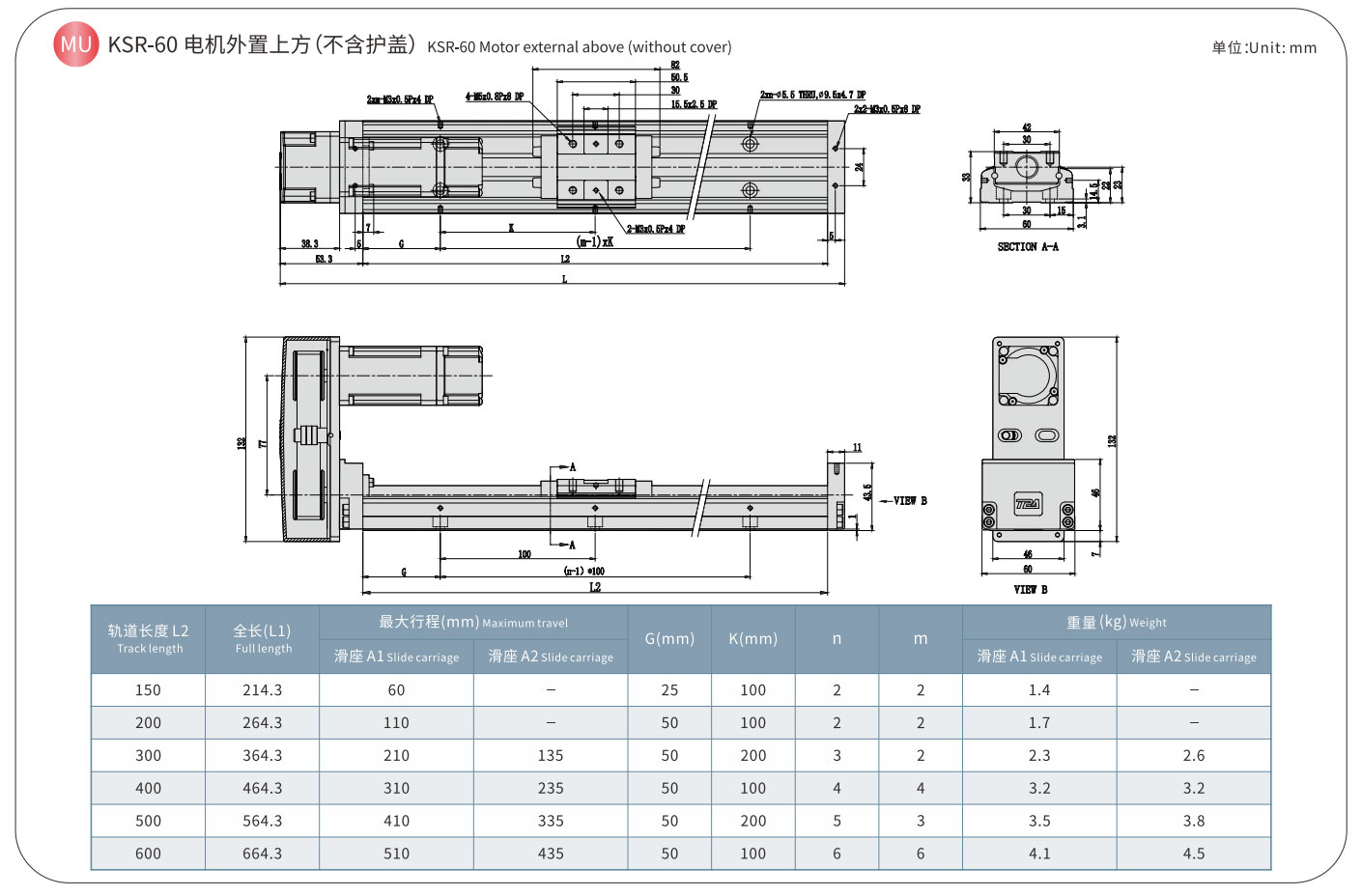
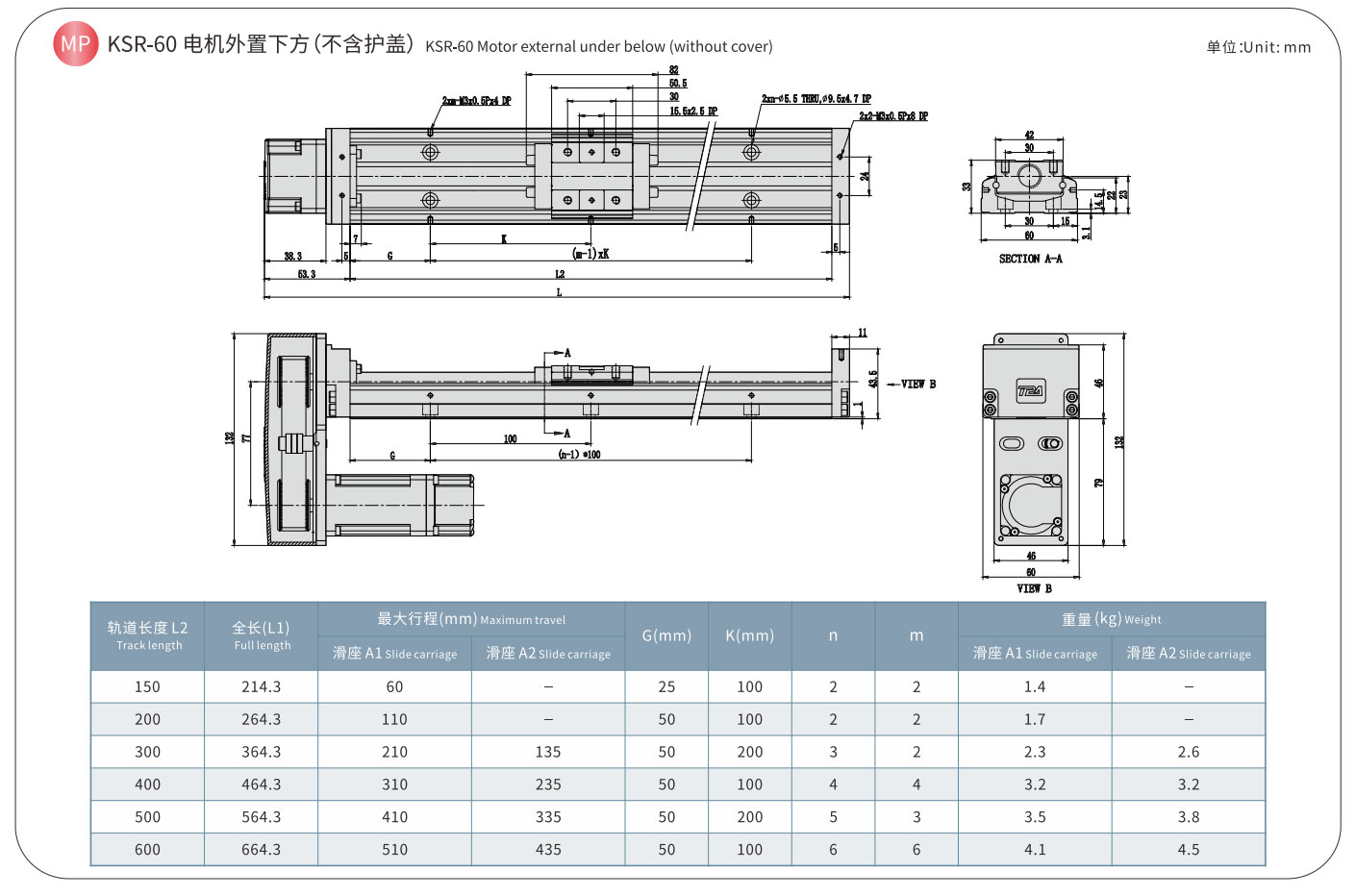
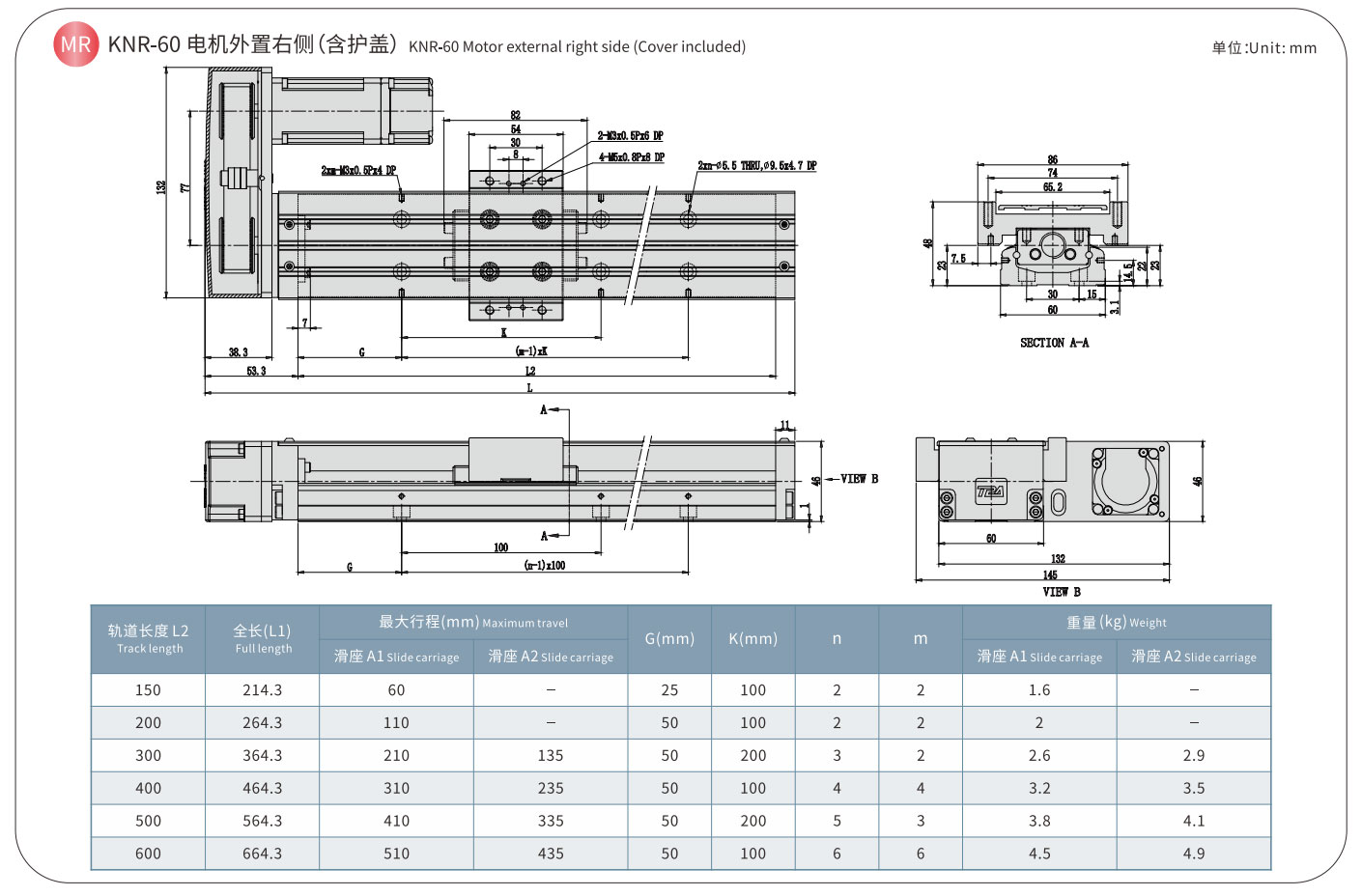
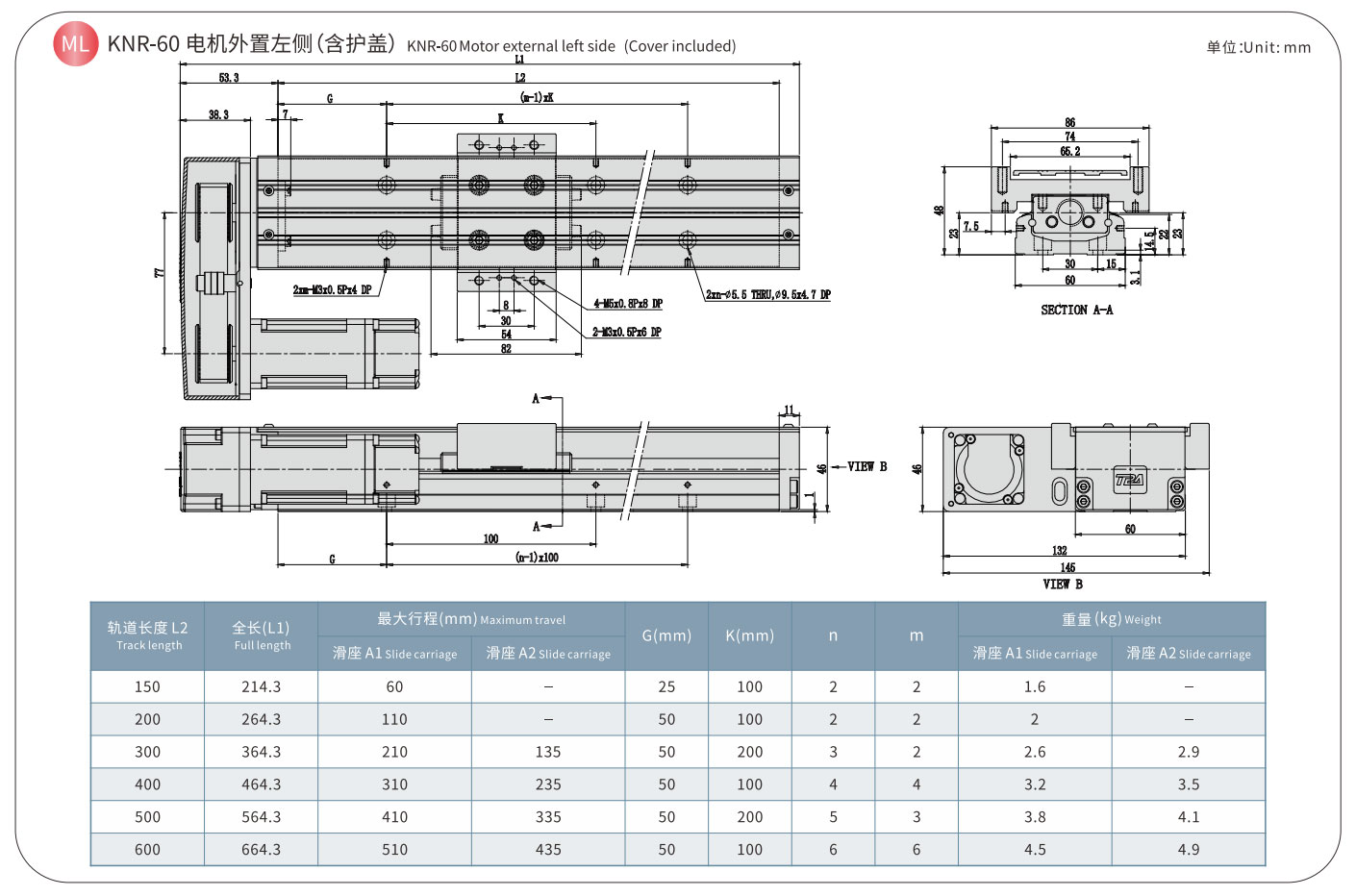
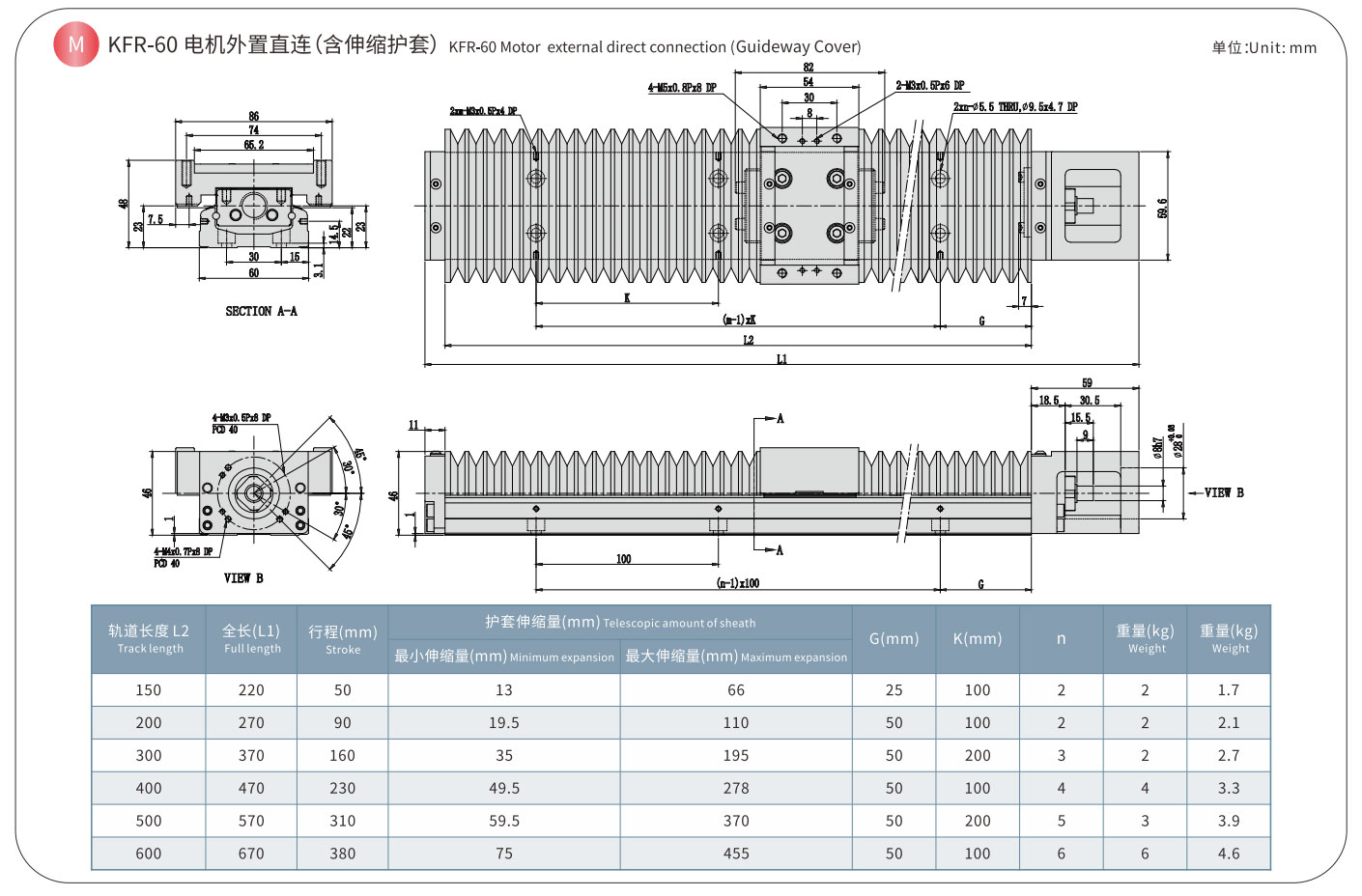
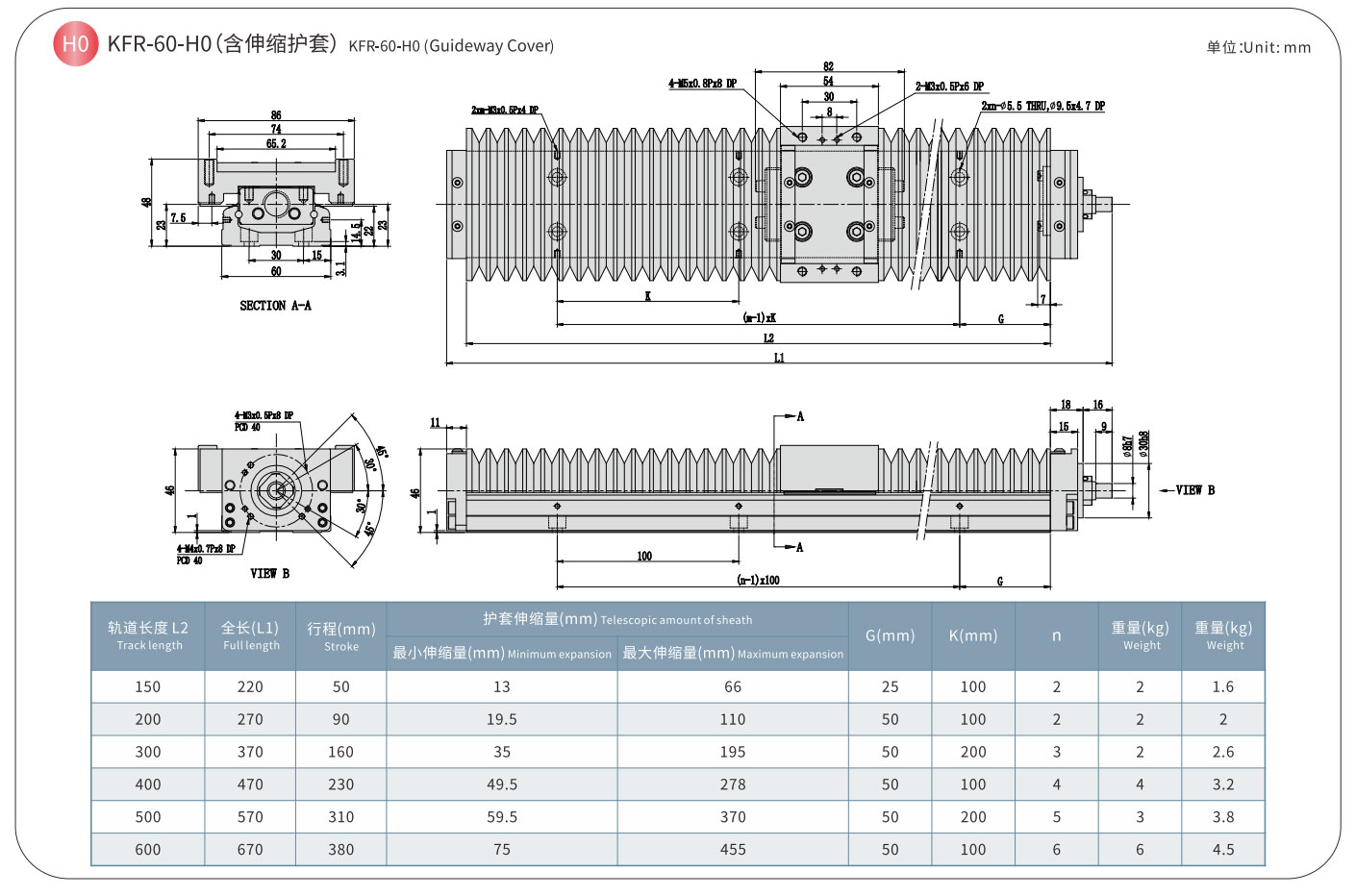
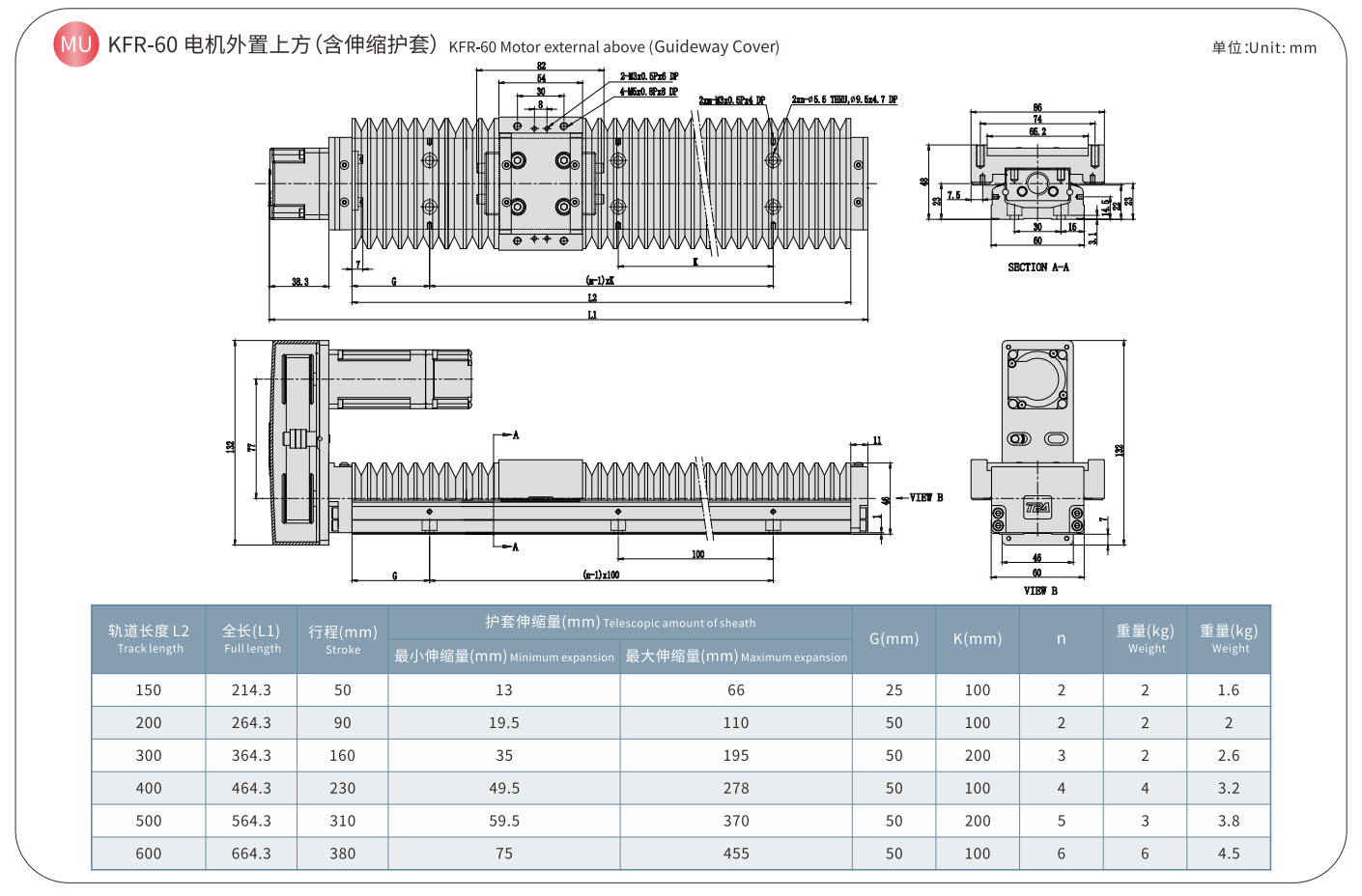
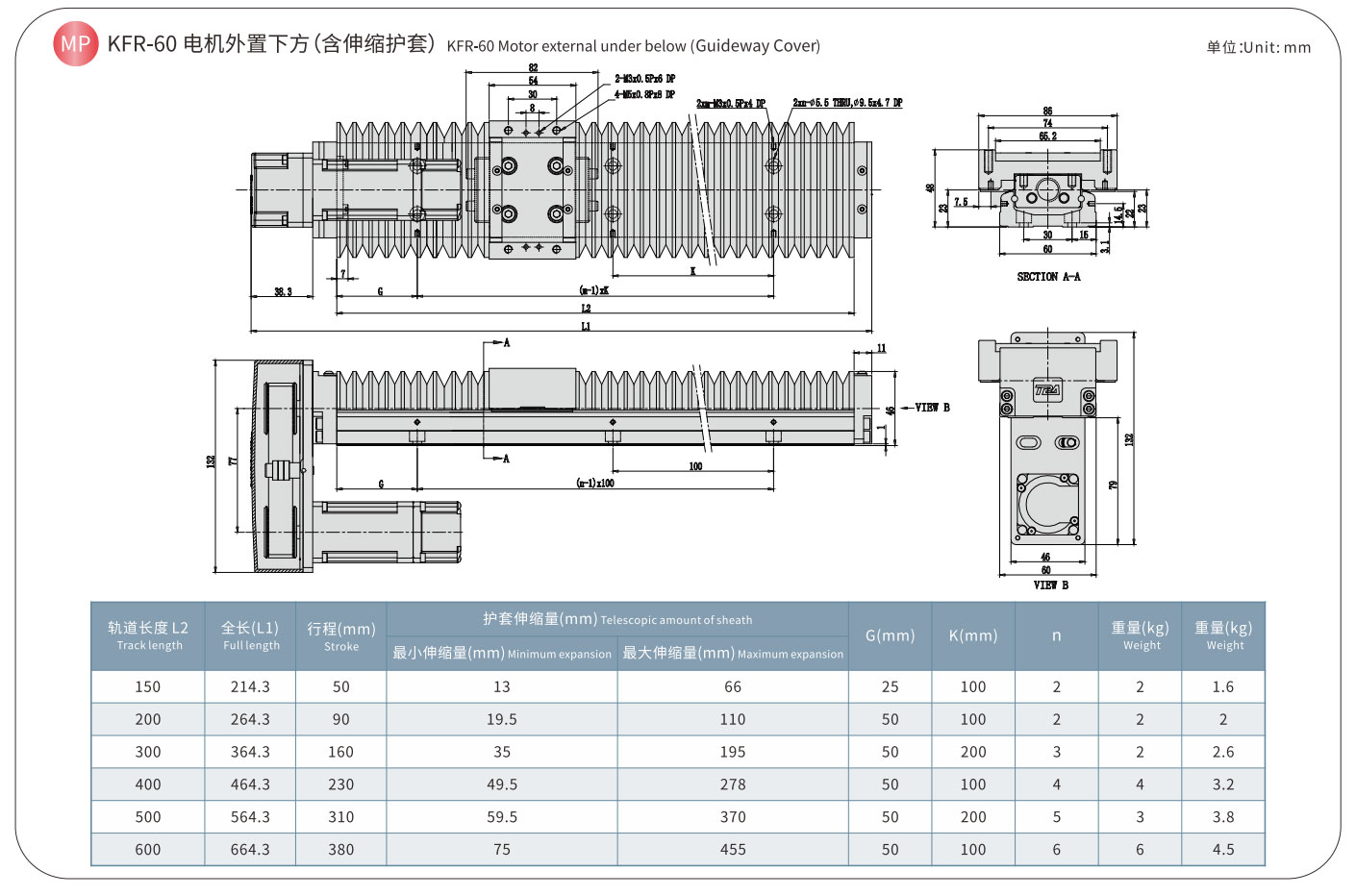
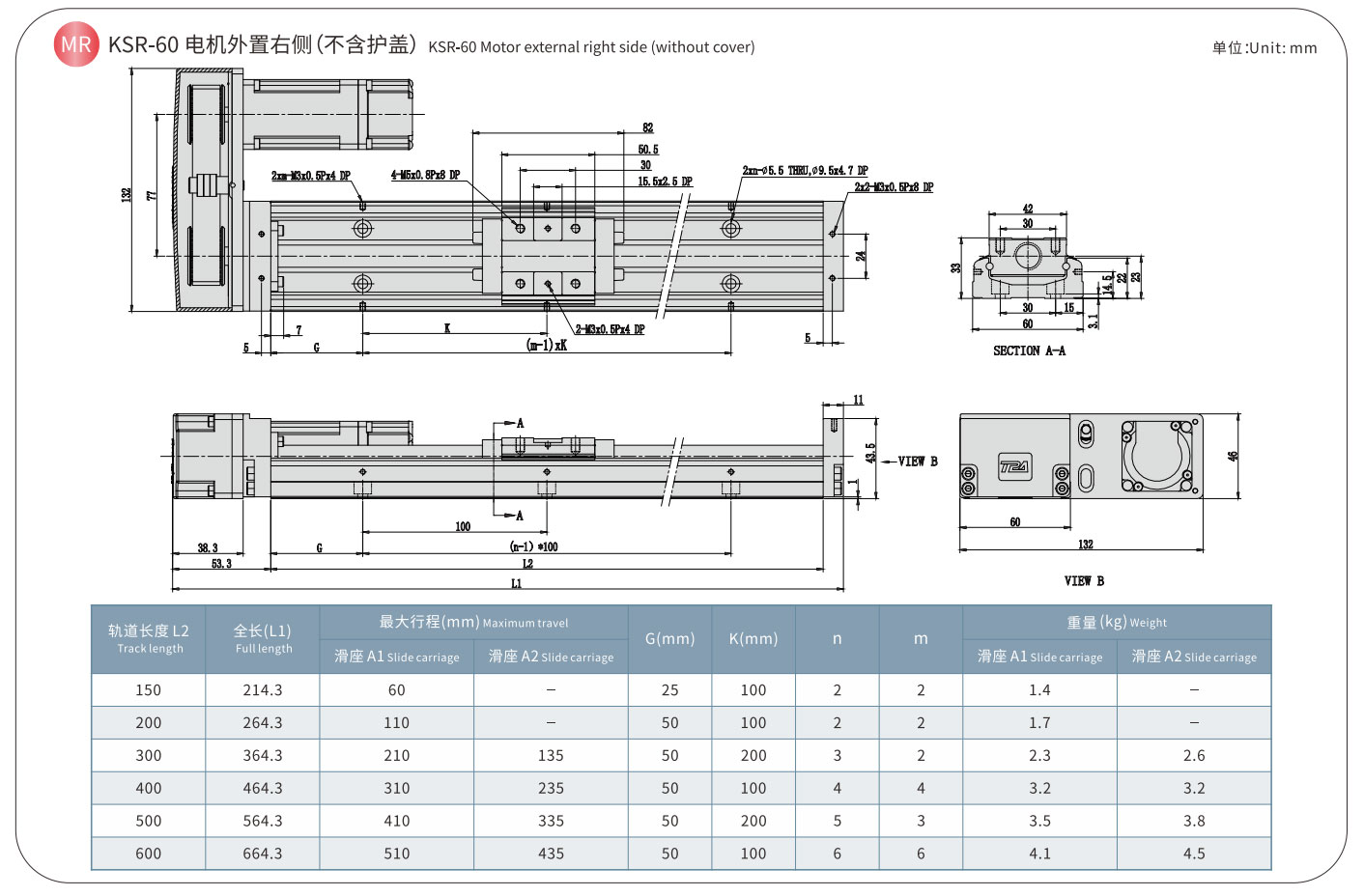
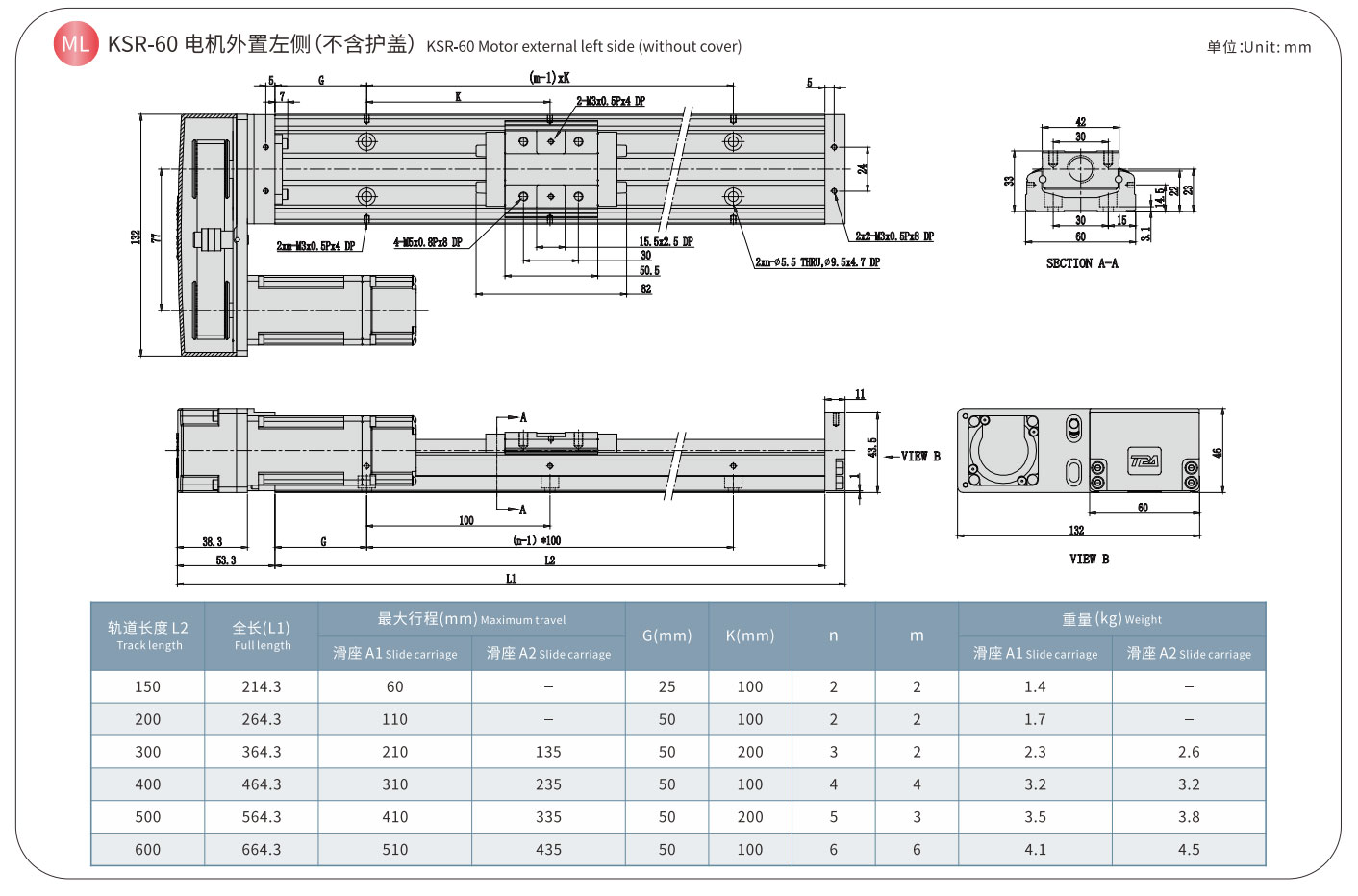
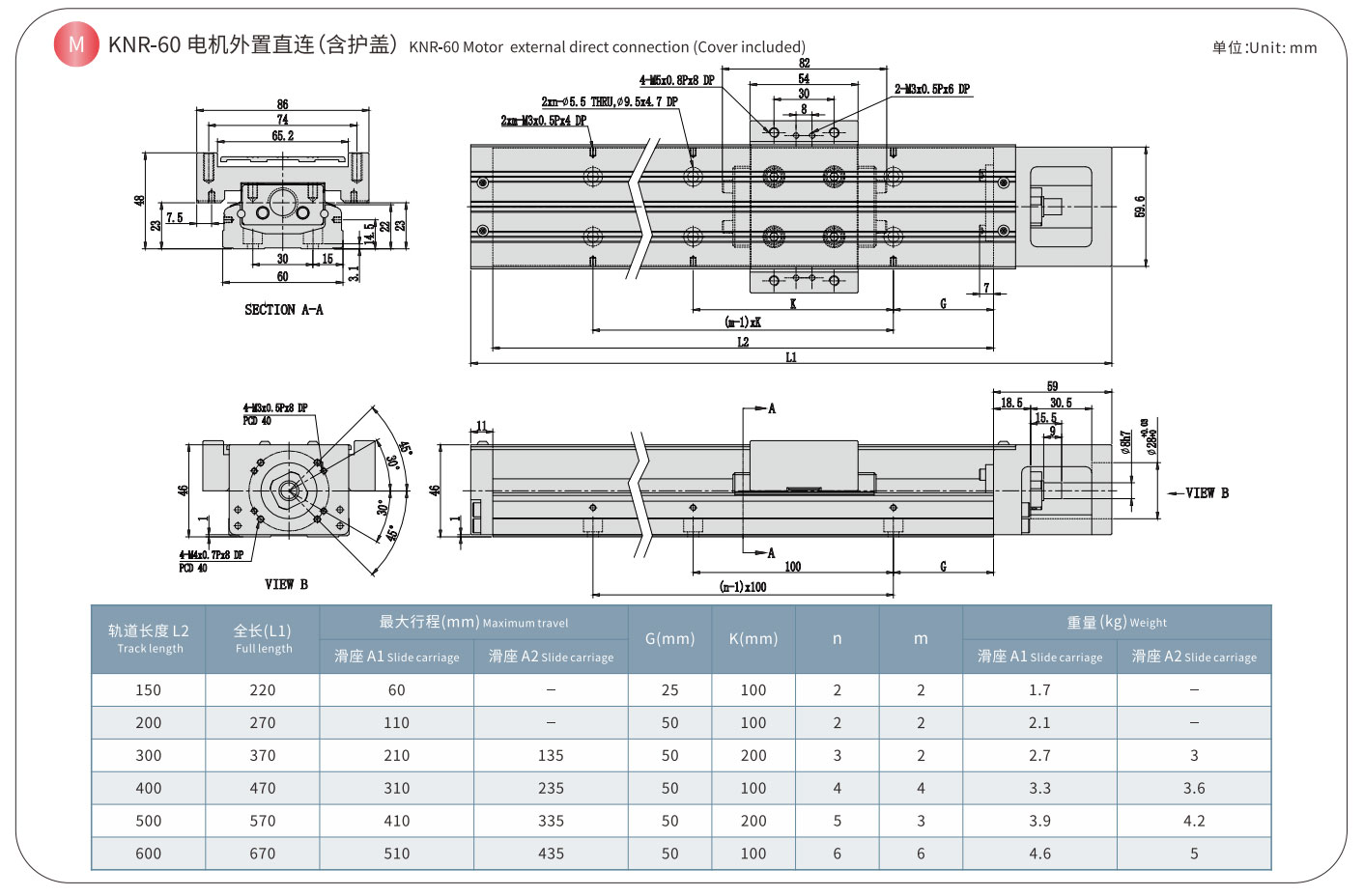
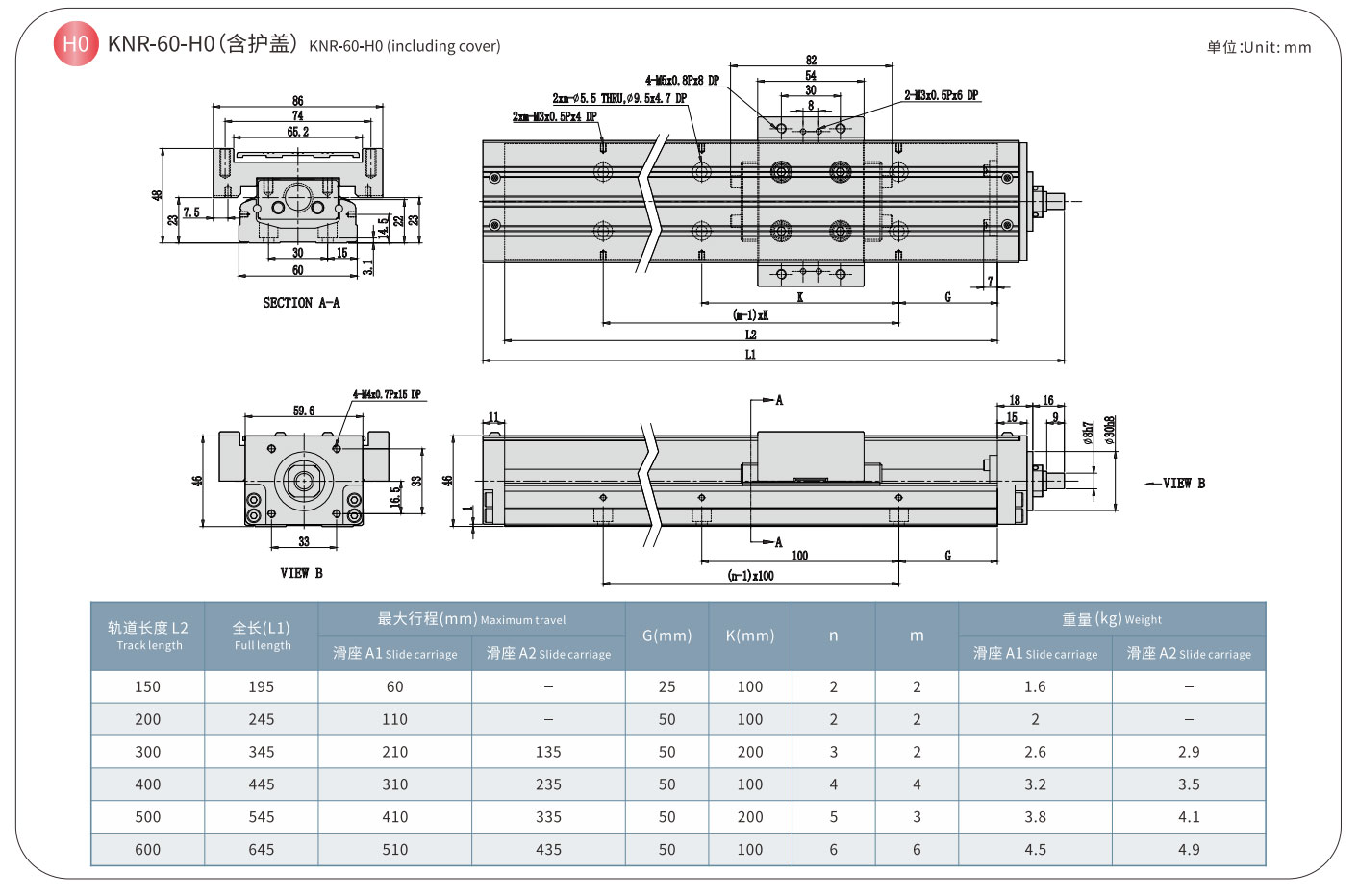
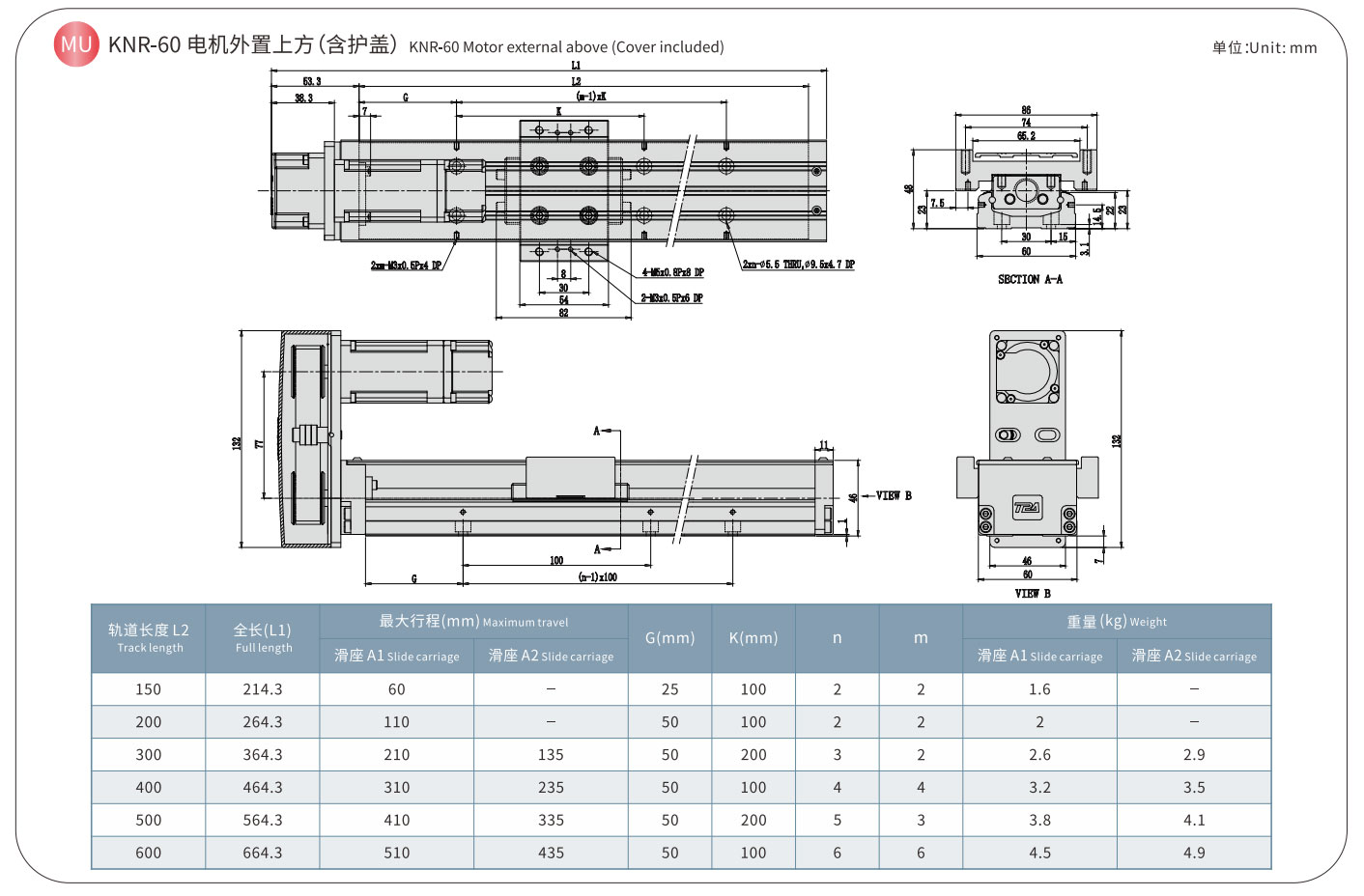
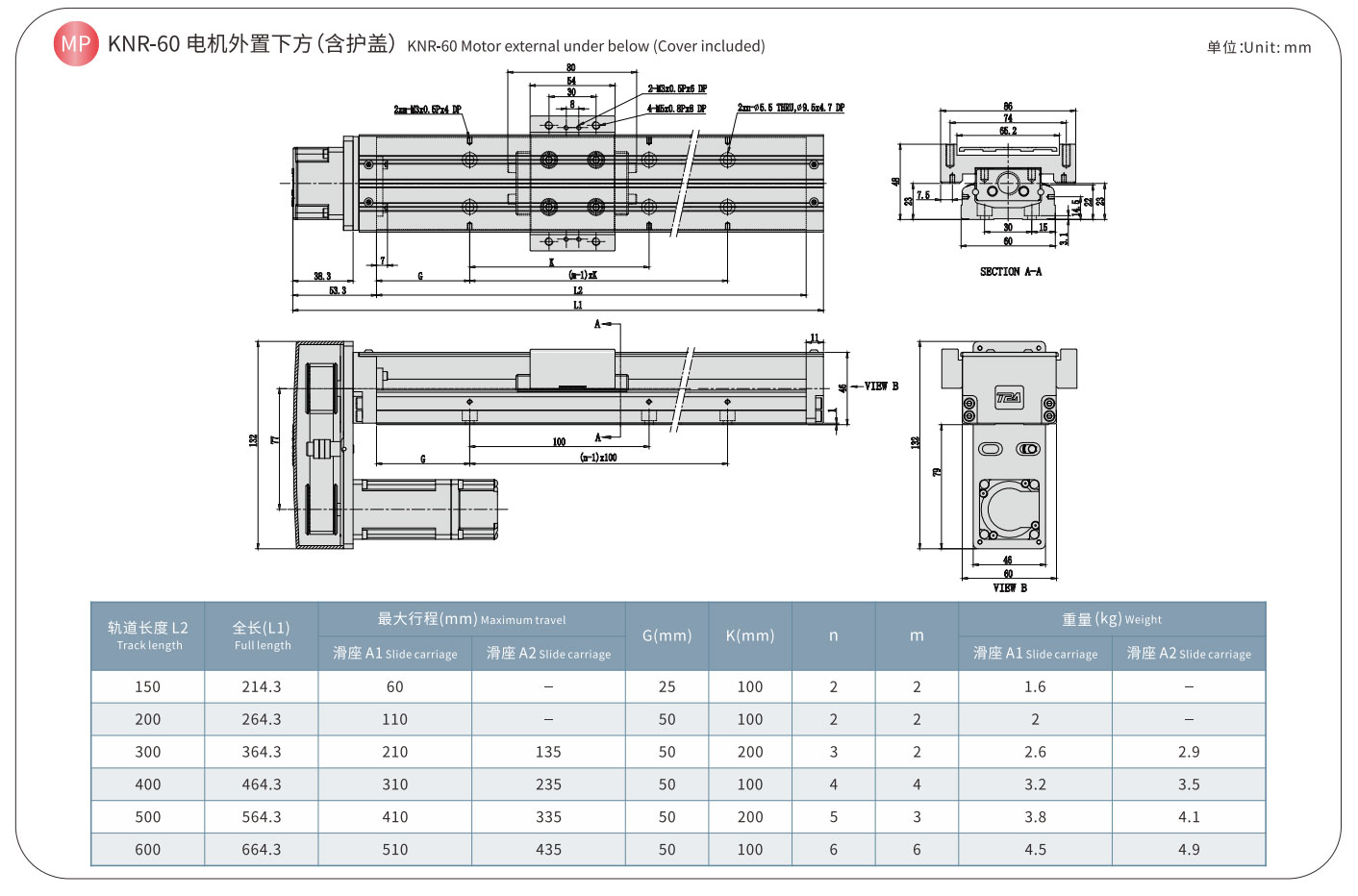
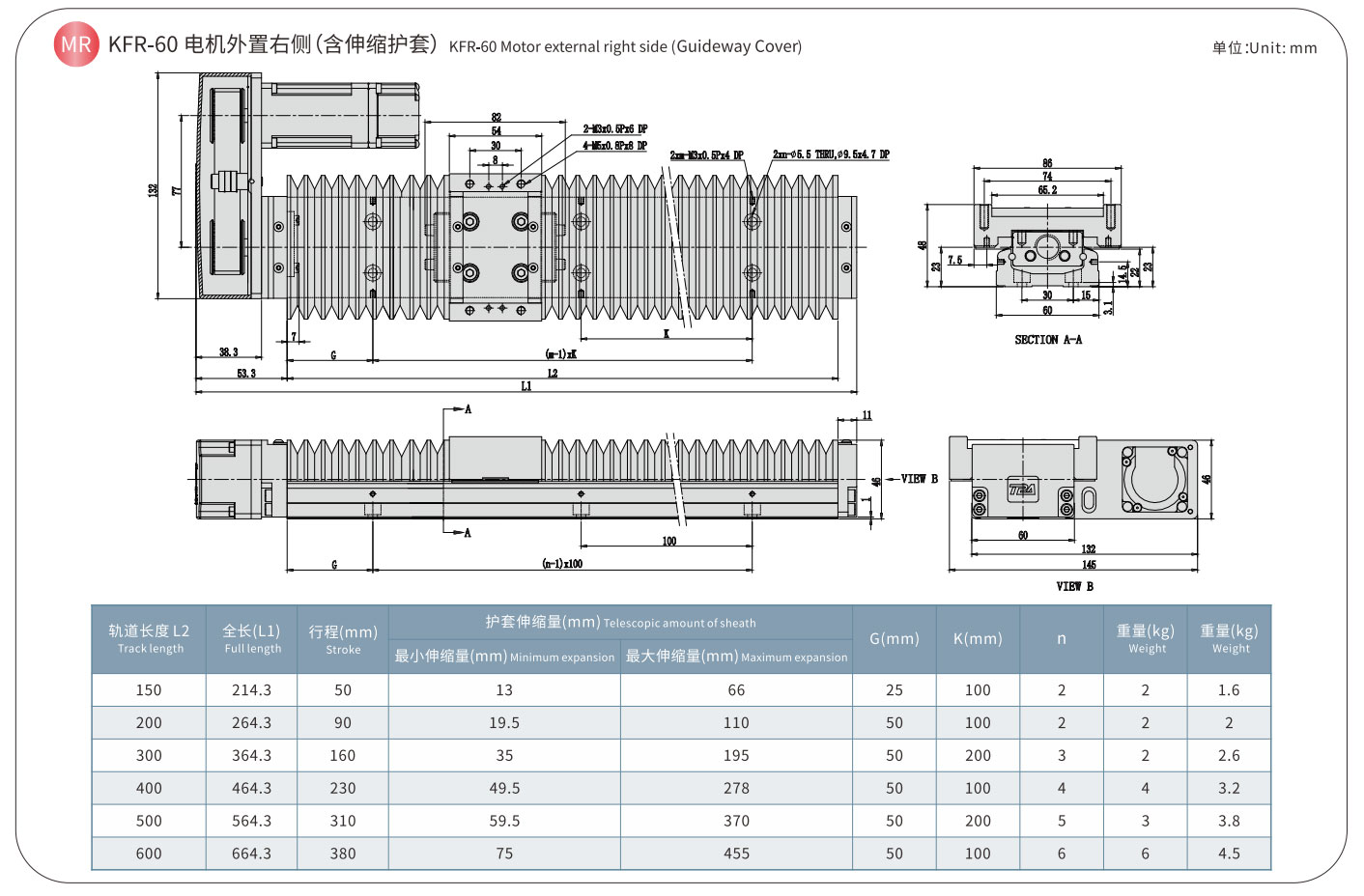
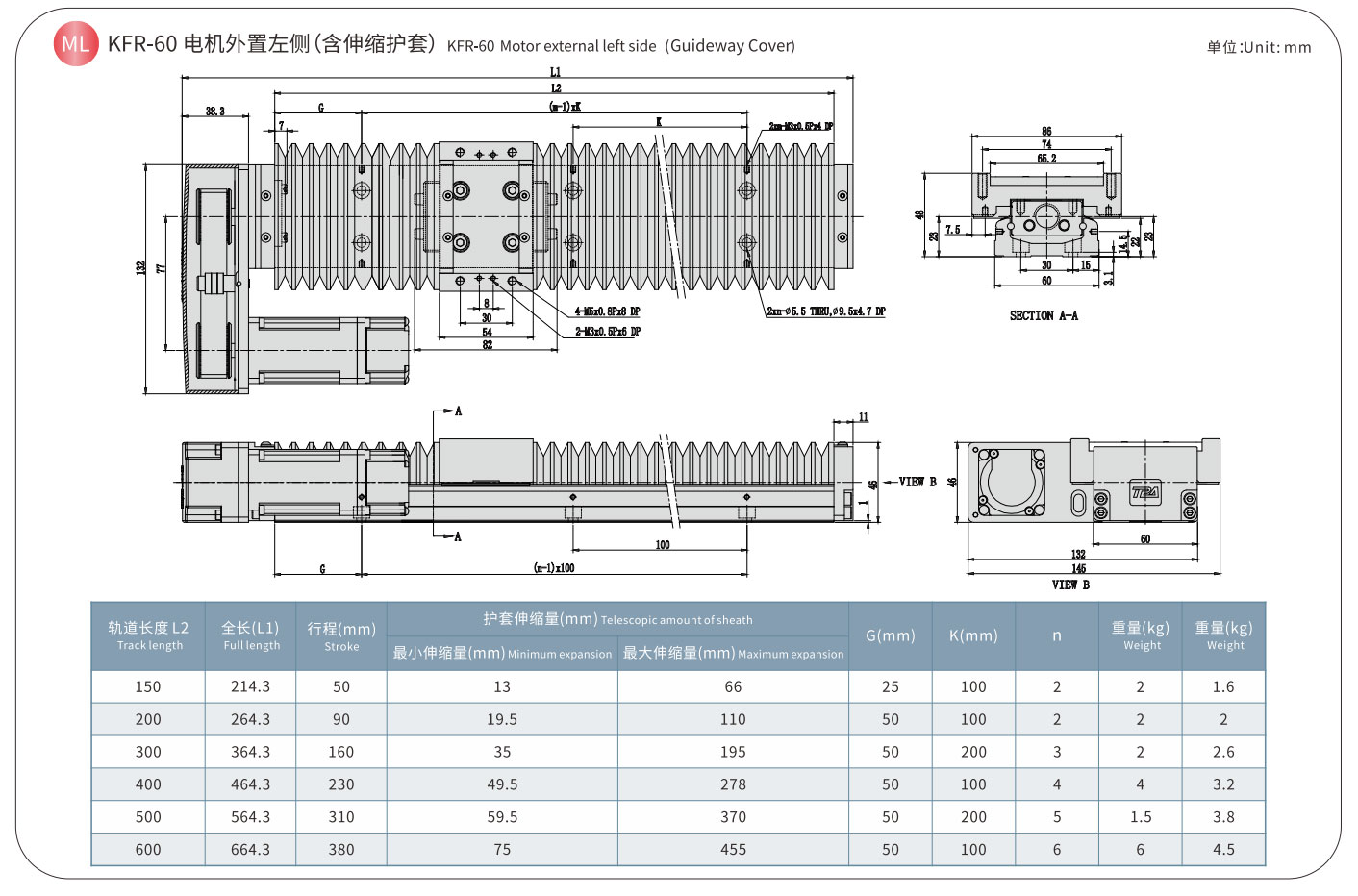
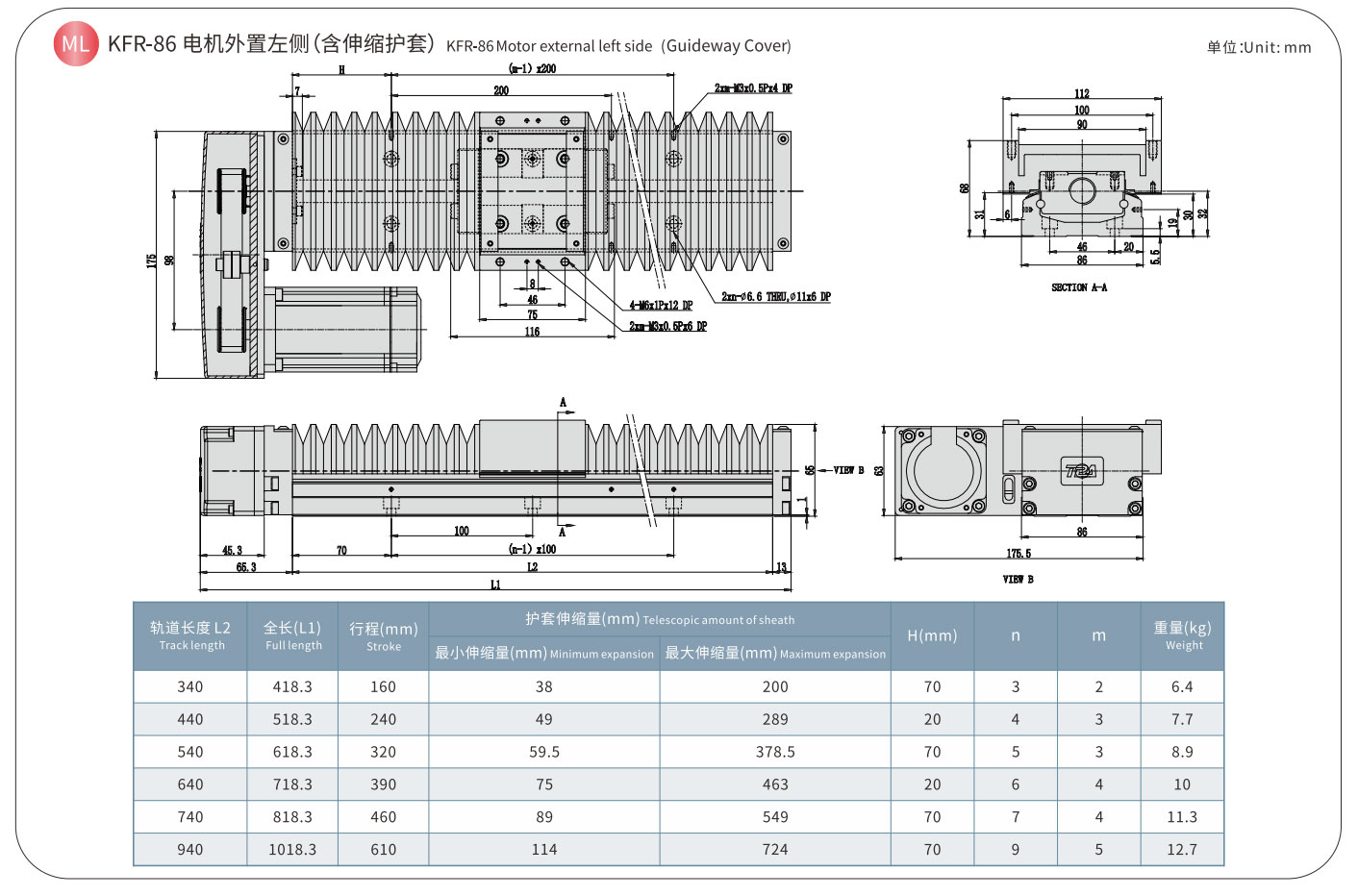
KSR-60 KNR-60 KFR-60

Serie KSR-KNR-KFR-KCR
Características
Precisión de posicionamiento repetido: ±0,005 mm
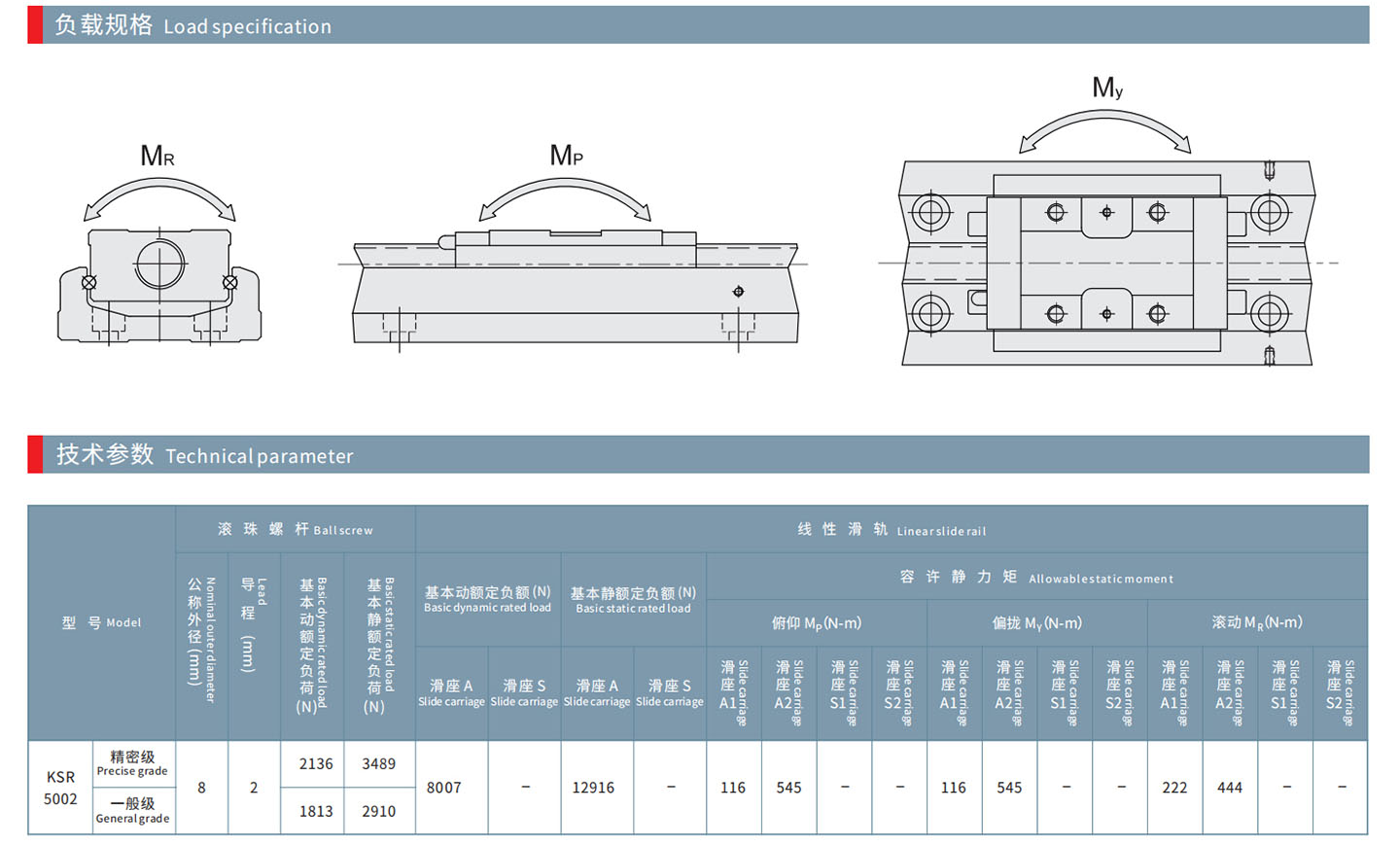
Carga nominal estática básica: 12642N
Carga nominal dinámica básica: 7144N
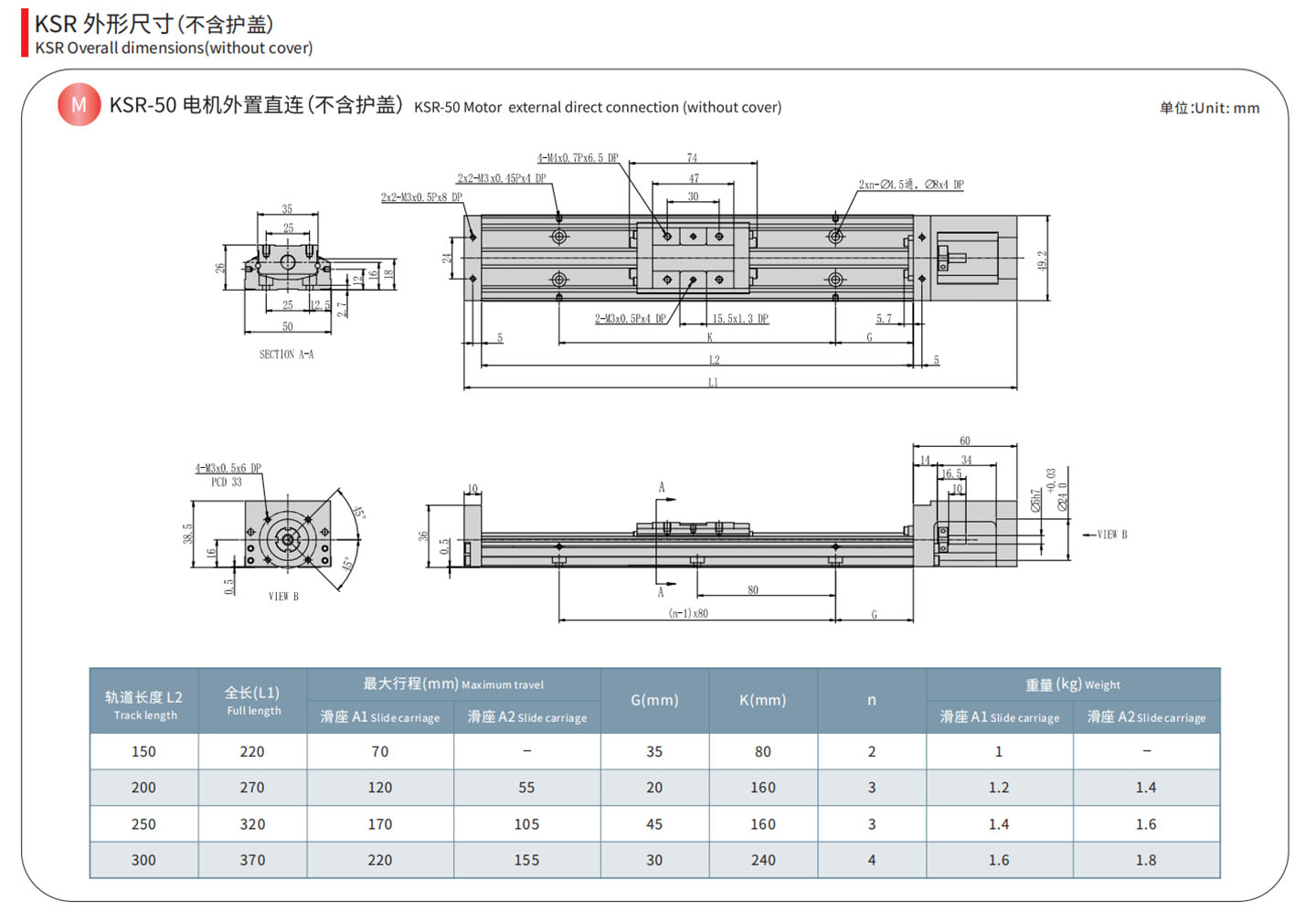
Carrera: 31 - 1128 mm
Velocidad máxima: 1000 mm/s
El husillo de bolas de alta precisión se utiliza como estructura de transmisión y la pista en forma de U se combina con el diseño optimizado. Como estructura guía, para garantizar los requisitos de precisión y rigidez.
La superficie de contacto entre la bola y la ranura del talón adopta un tipo de diente Goethe de 2 hileras. El diseño tiene las características de un ángulo de contacto de 45 grados, lo que permite que el módulo de acero resista cuatro direcciones. La capacidad de carga igual.
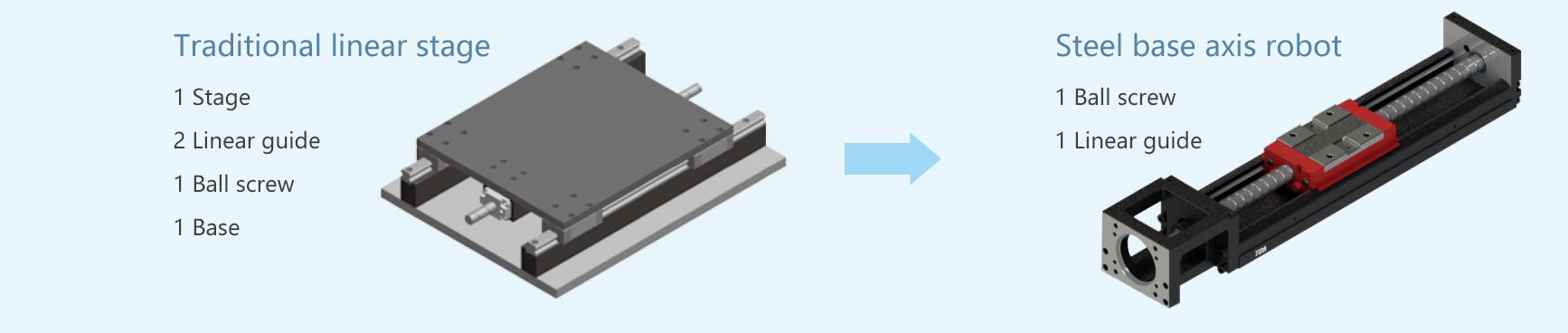
A través del diseño modular, el módulo de base de acero integra un husillo de bolas y un riel en forma de U, lo que puede evitar que la plataforma de accionamiento tradicional tenga que pasar por la selección de componentes de guía y conducción, instalación y verificación, gran volumen y ocupación de espacio. Por lo tanto, el módulo a base de acero puede proporcionar las características de selección e instalación rápidas, tamaño compacto, alta rigidez, etc., lo que puede reducir en gran medida el espacio y el tiempo de uso del cliente.


Más productos

Serie HFR: corte por láser del eje Z

Serie GCRS de doble deslizamiento con riel incorporado lineal...

Actuadores lineales de husillo de bolas serie HNR Half Enc...

Módulos lineales accionados por husillo de bolas serie GCR ...

Módulo lineal de husillo de bolas serie HCR completamente cerrado

Base de aluminio para robot de eje único serie KNR-E










