




Stahlbasis für einachsige Roboter der Serien KSR/KNR/KCR/KFR


Modellauswahl
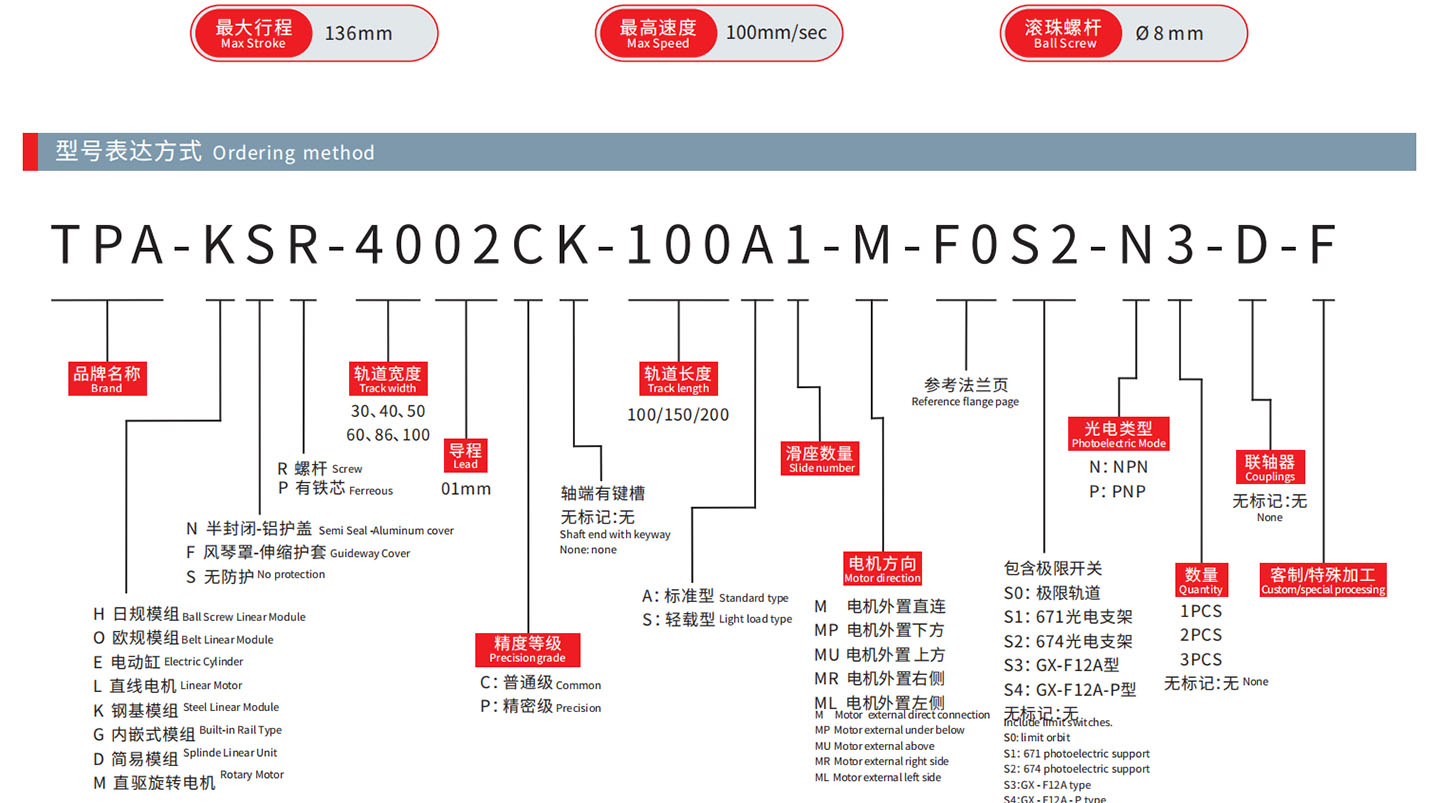
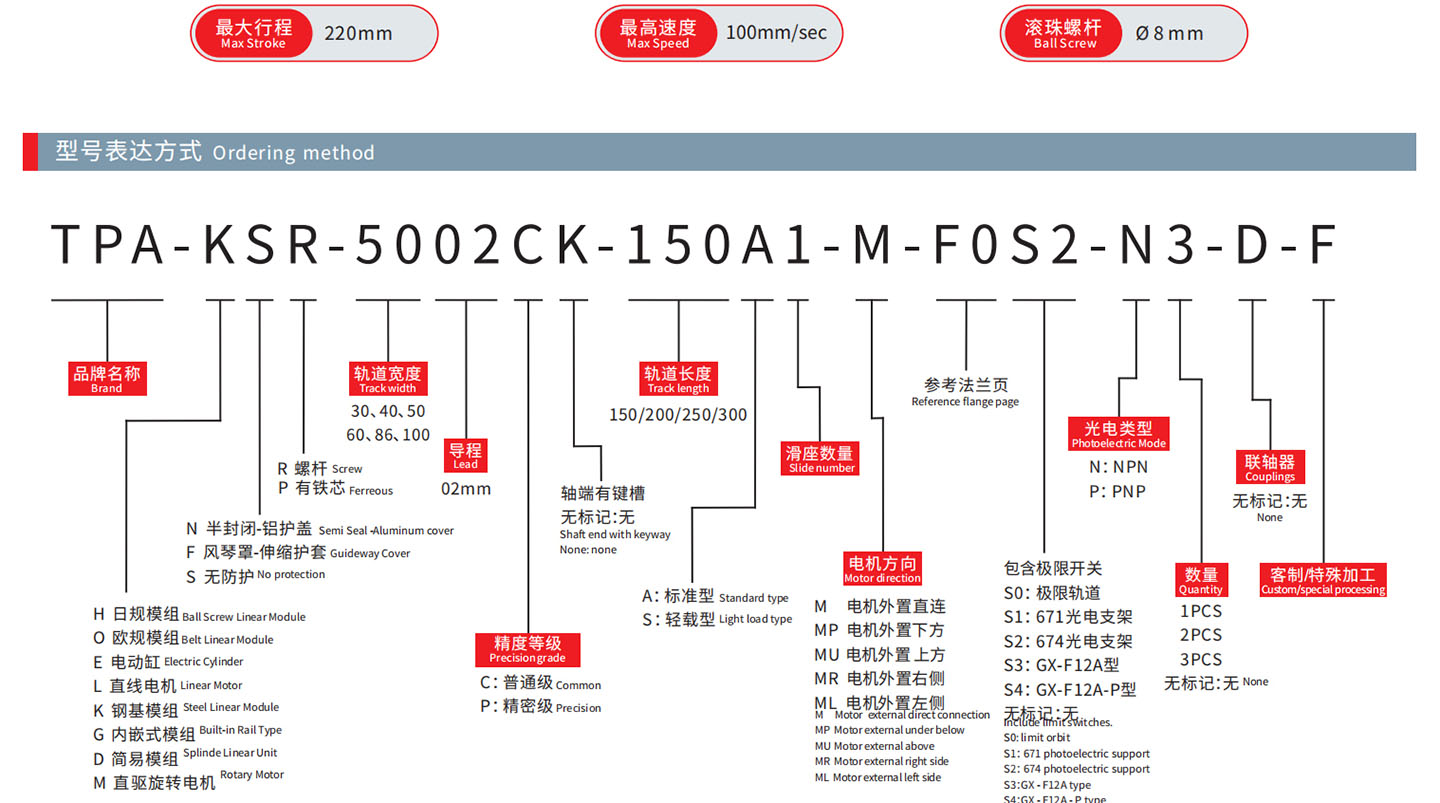
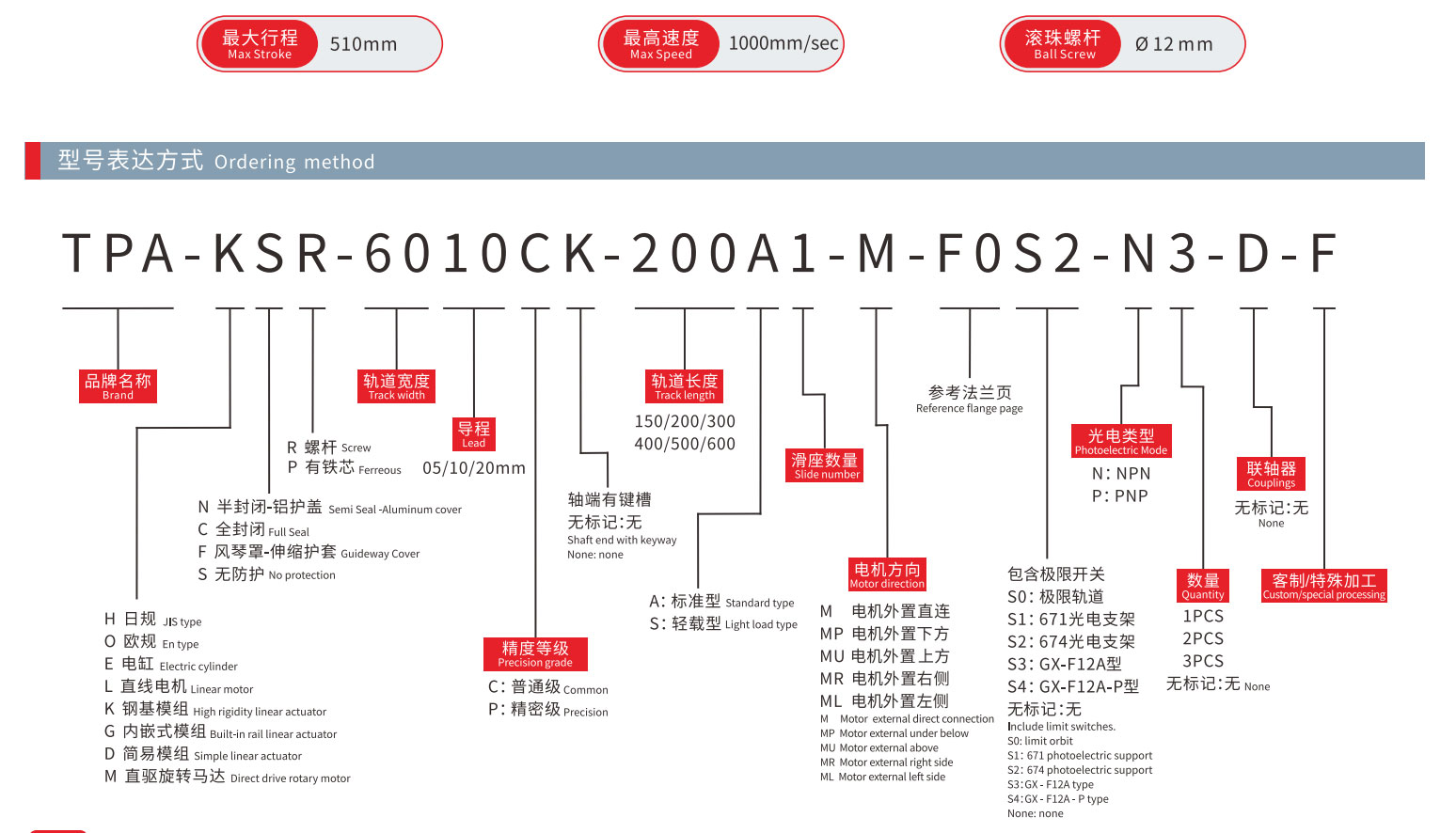
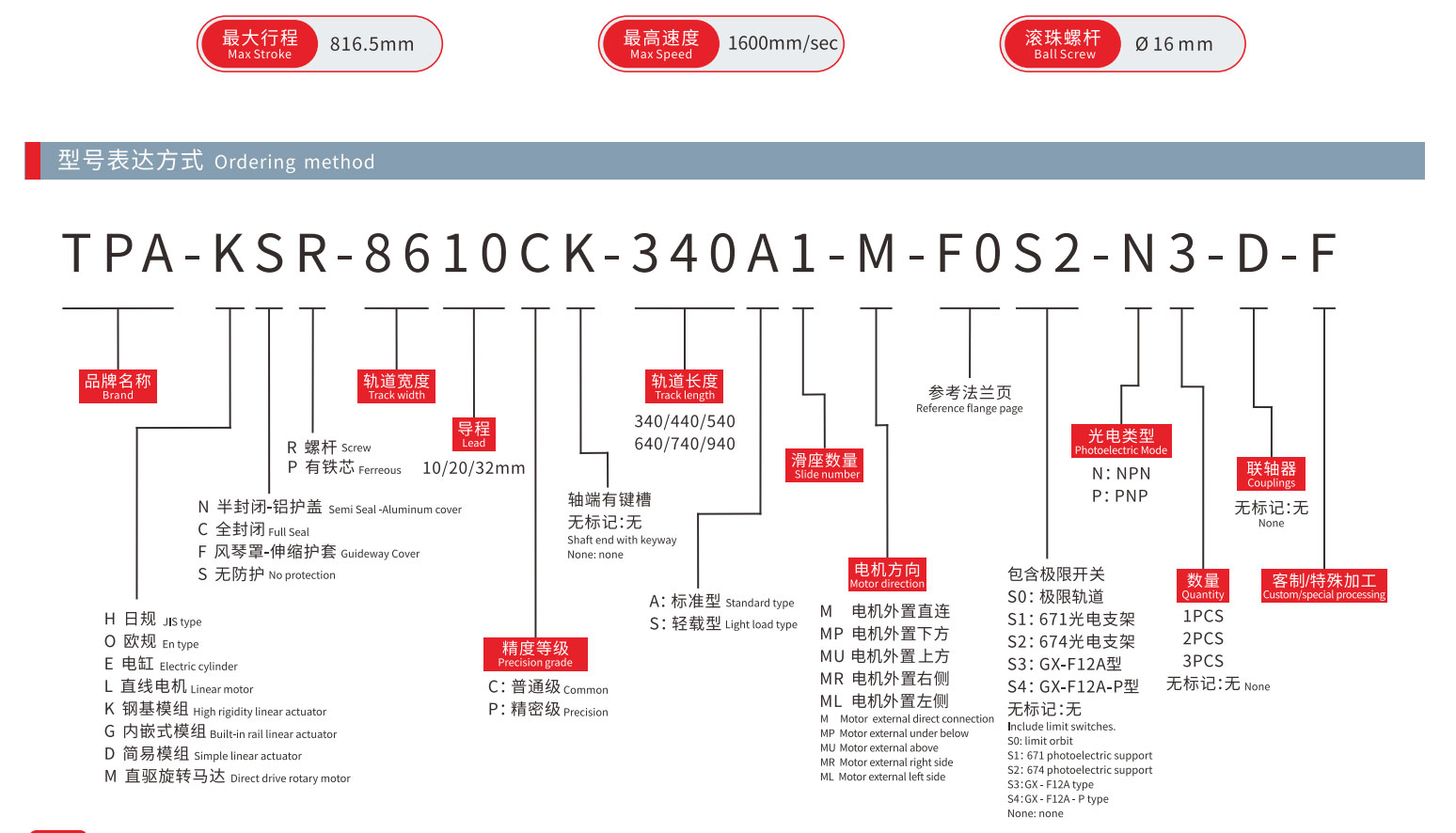
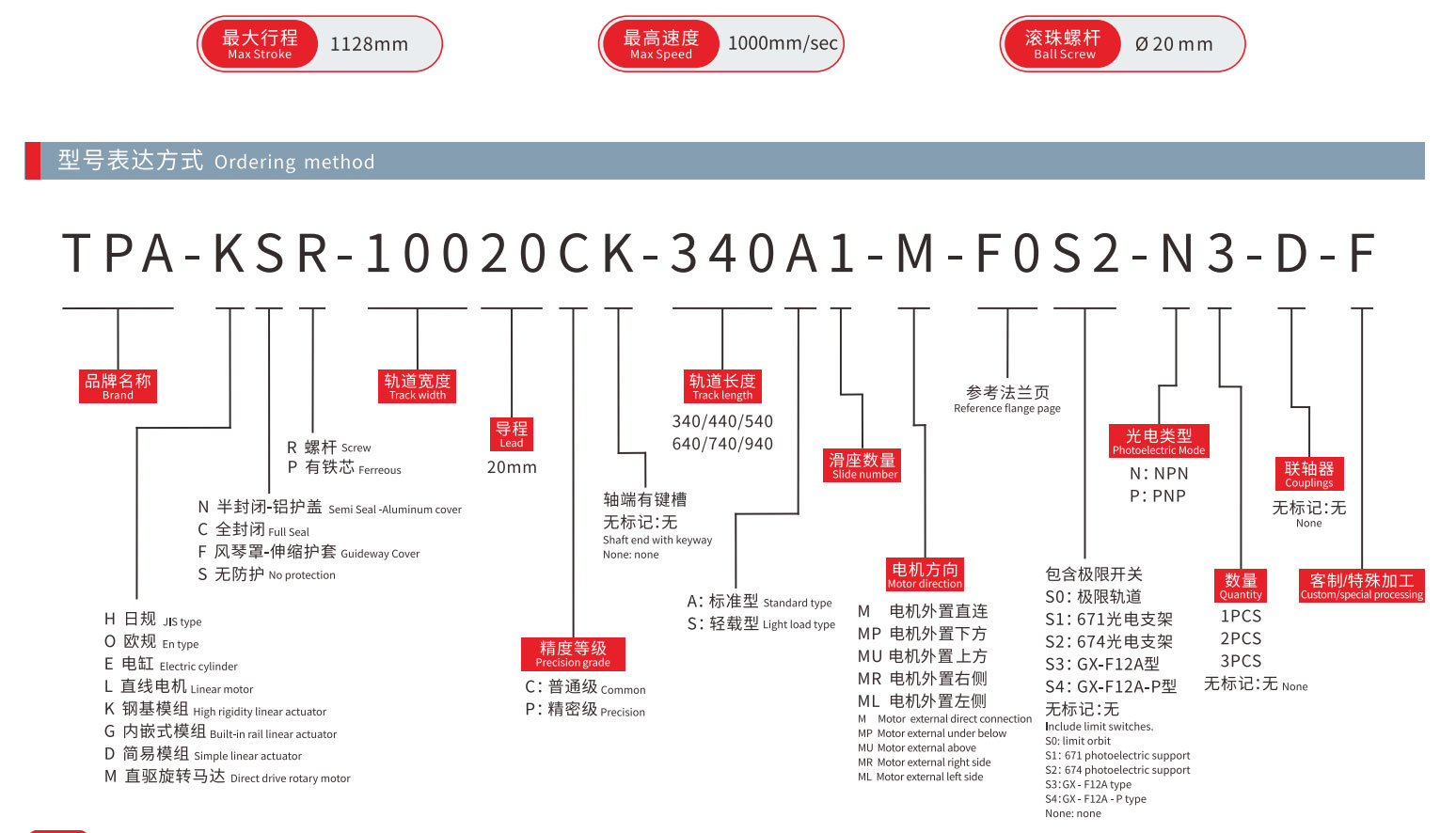
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
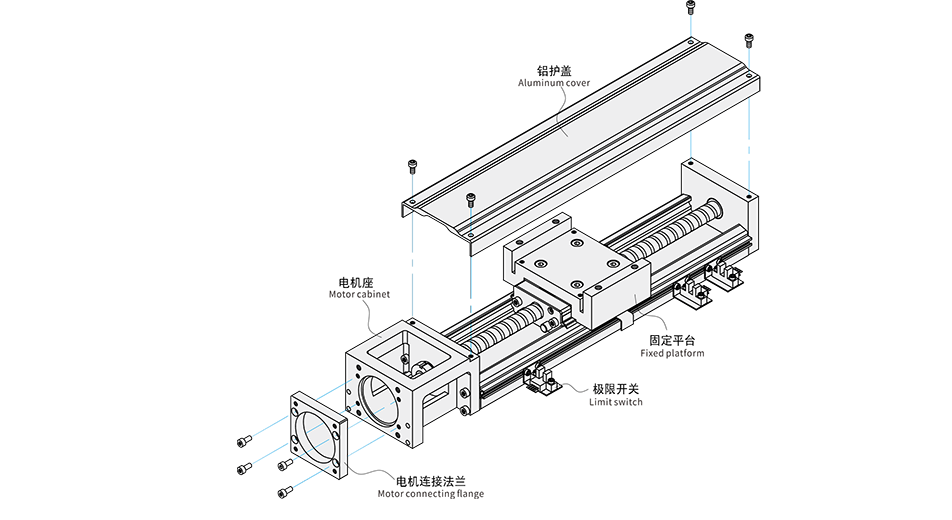
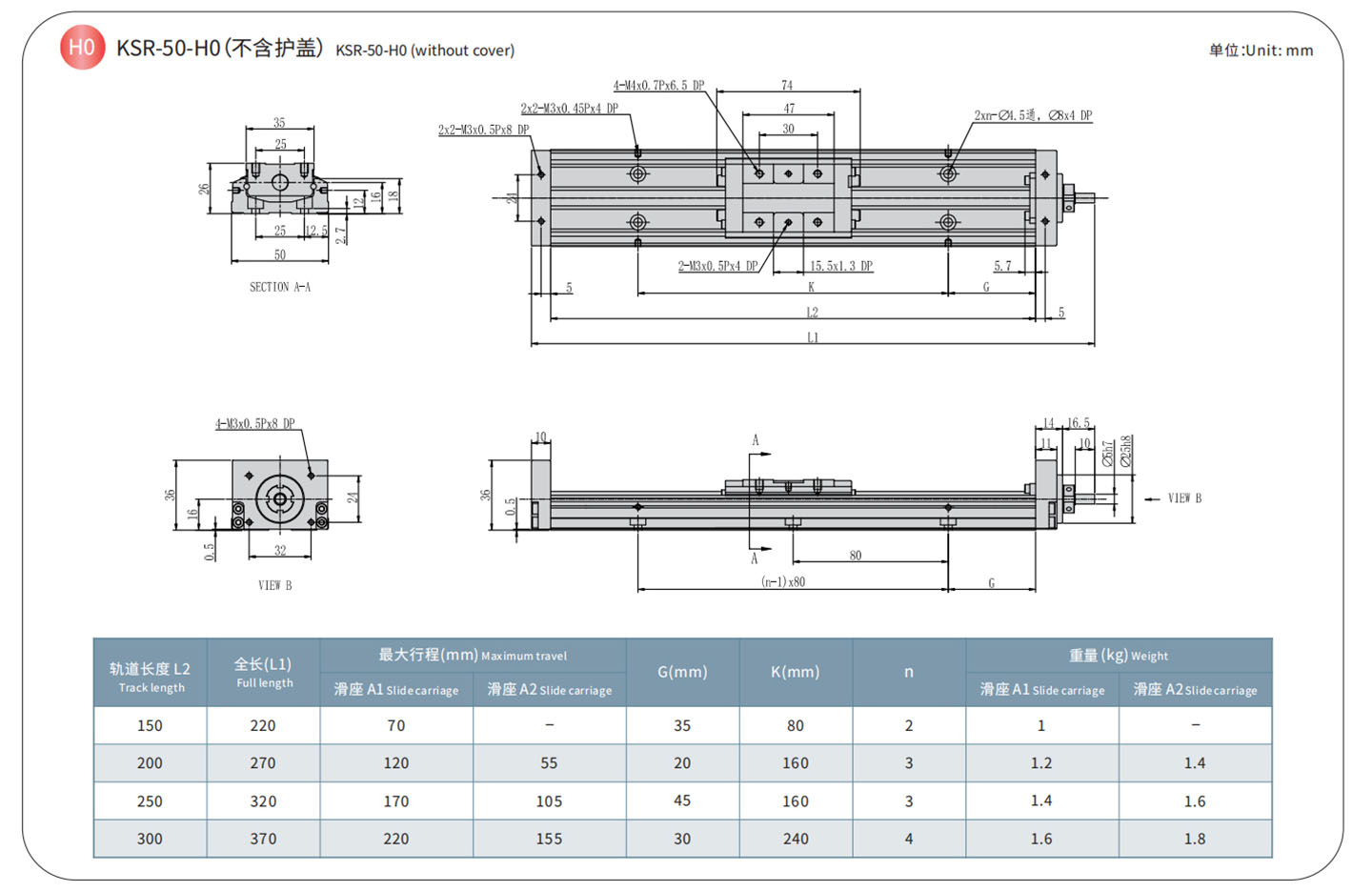
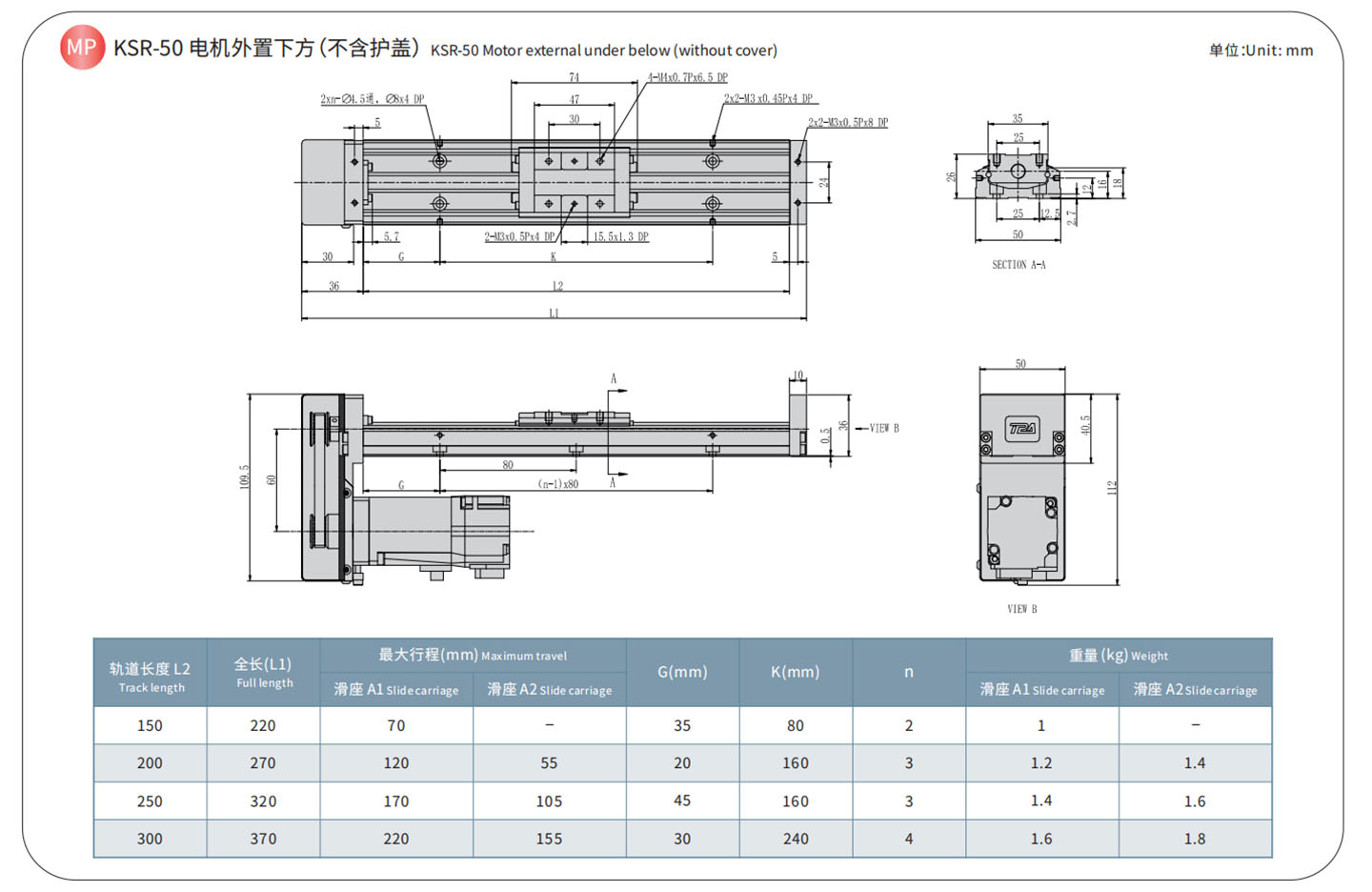
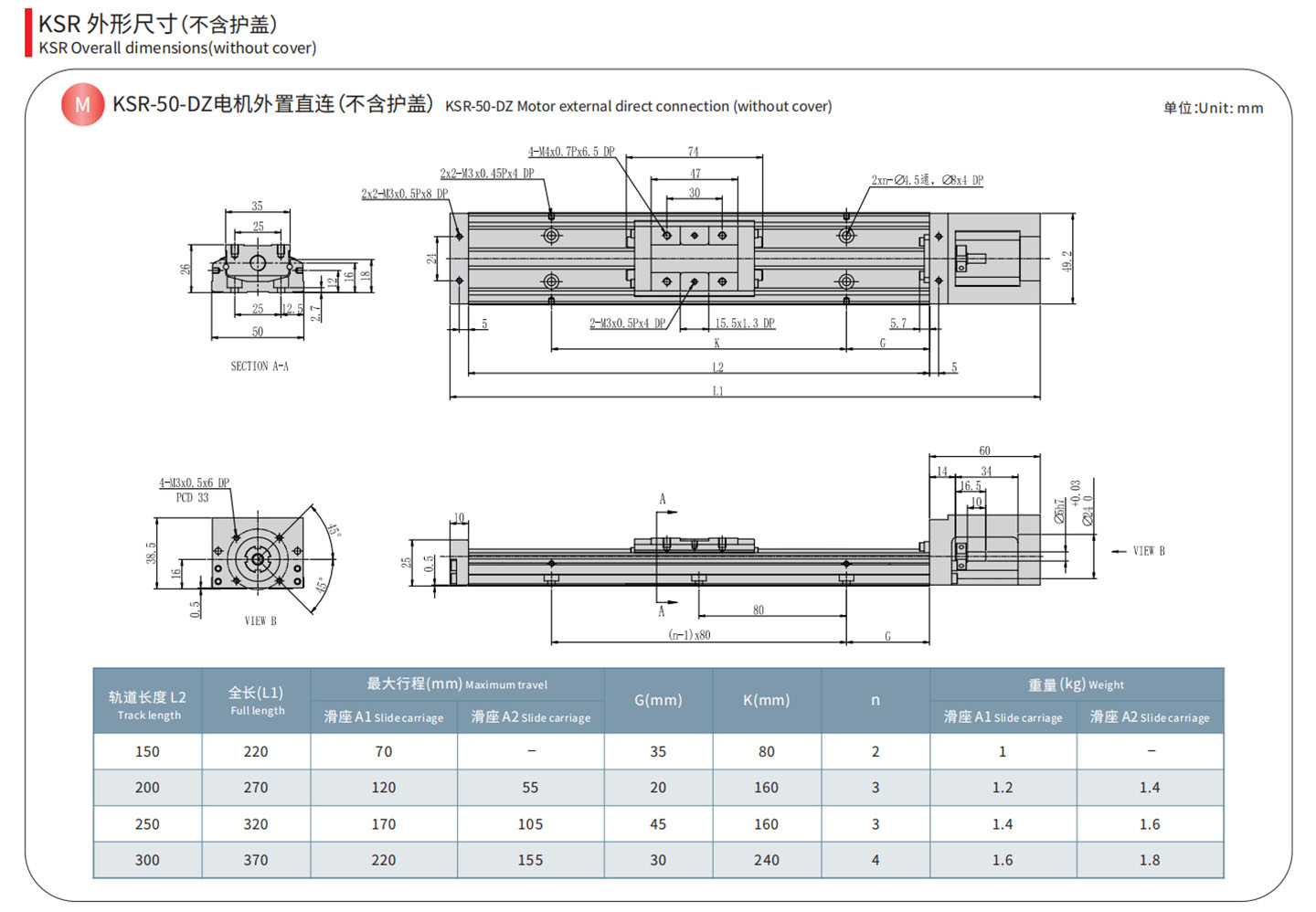
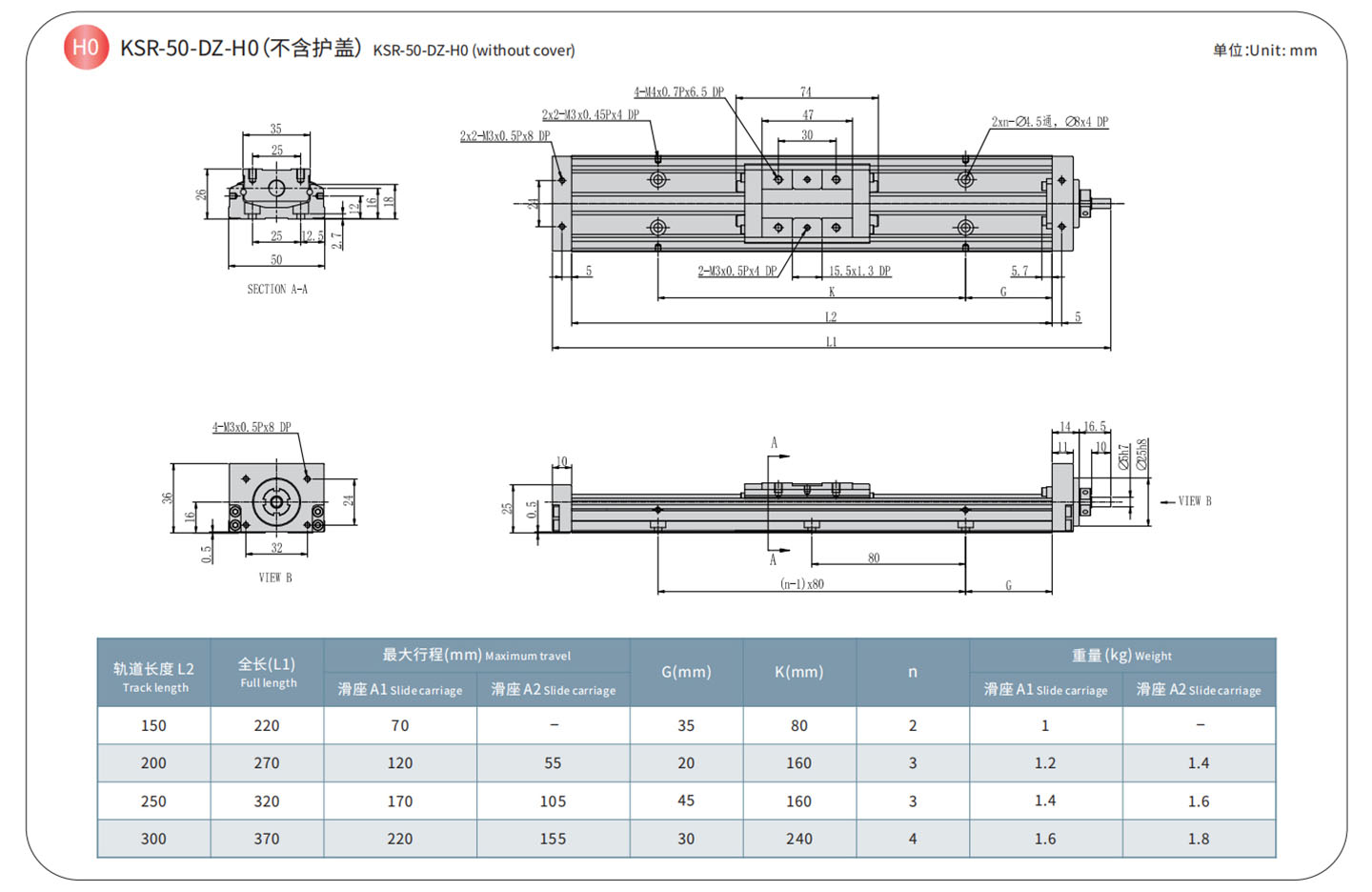
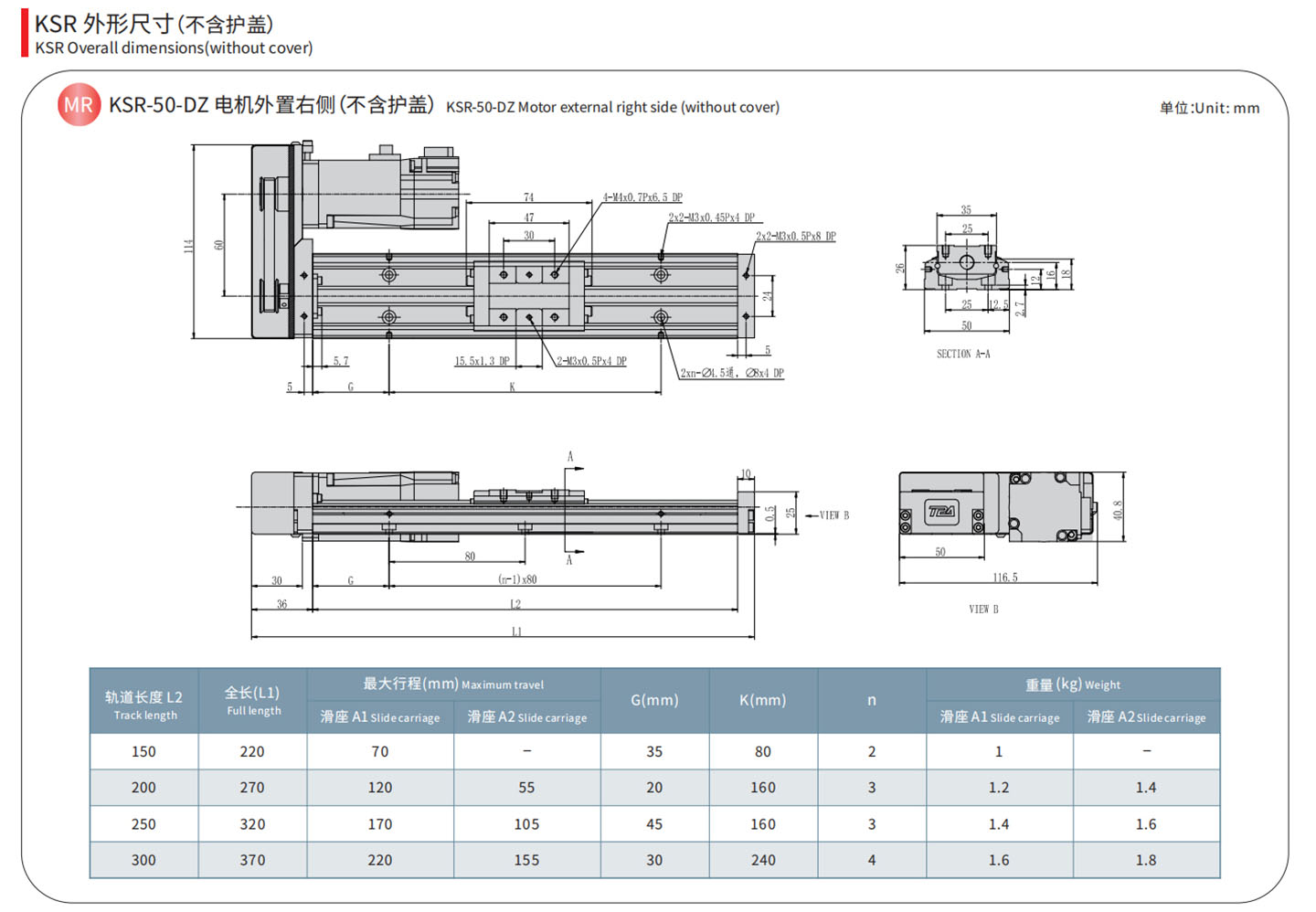
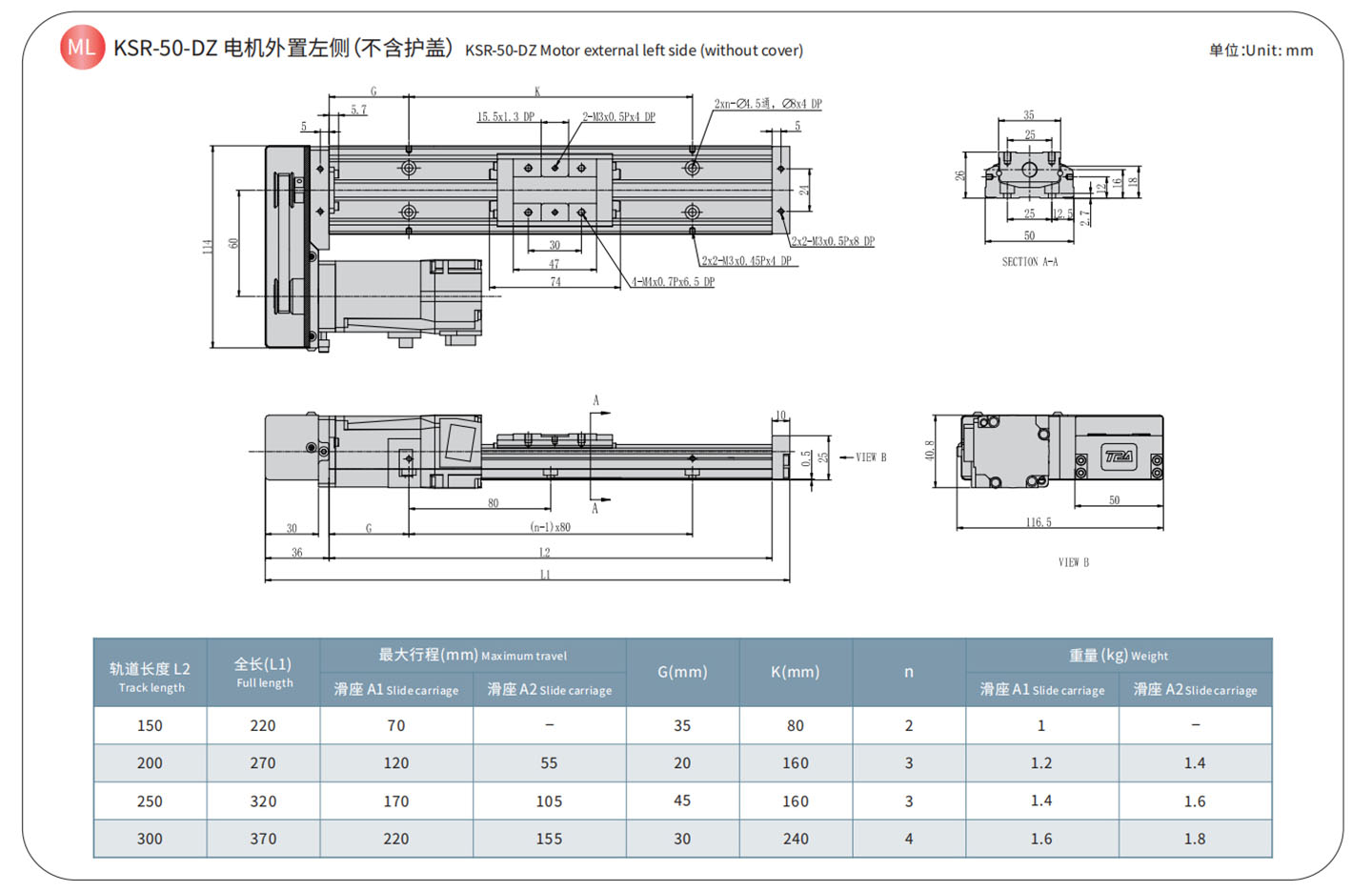
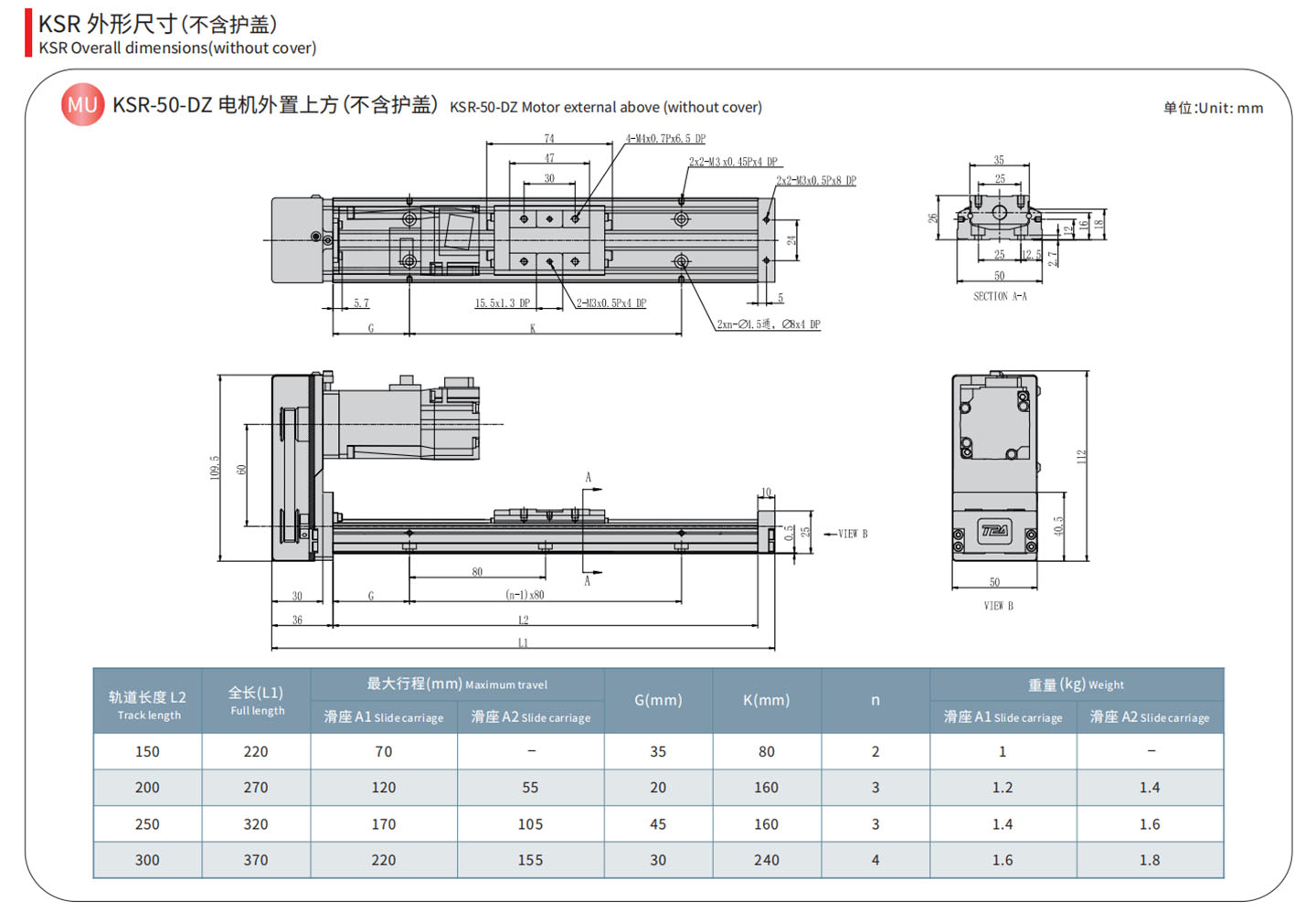
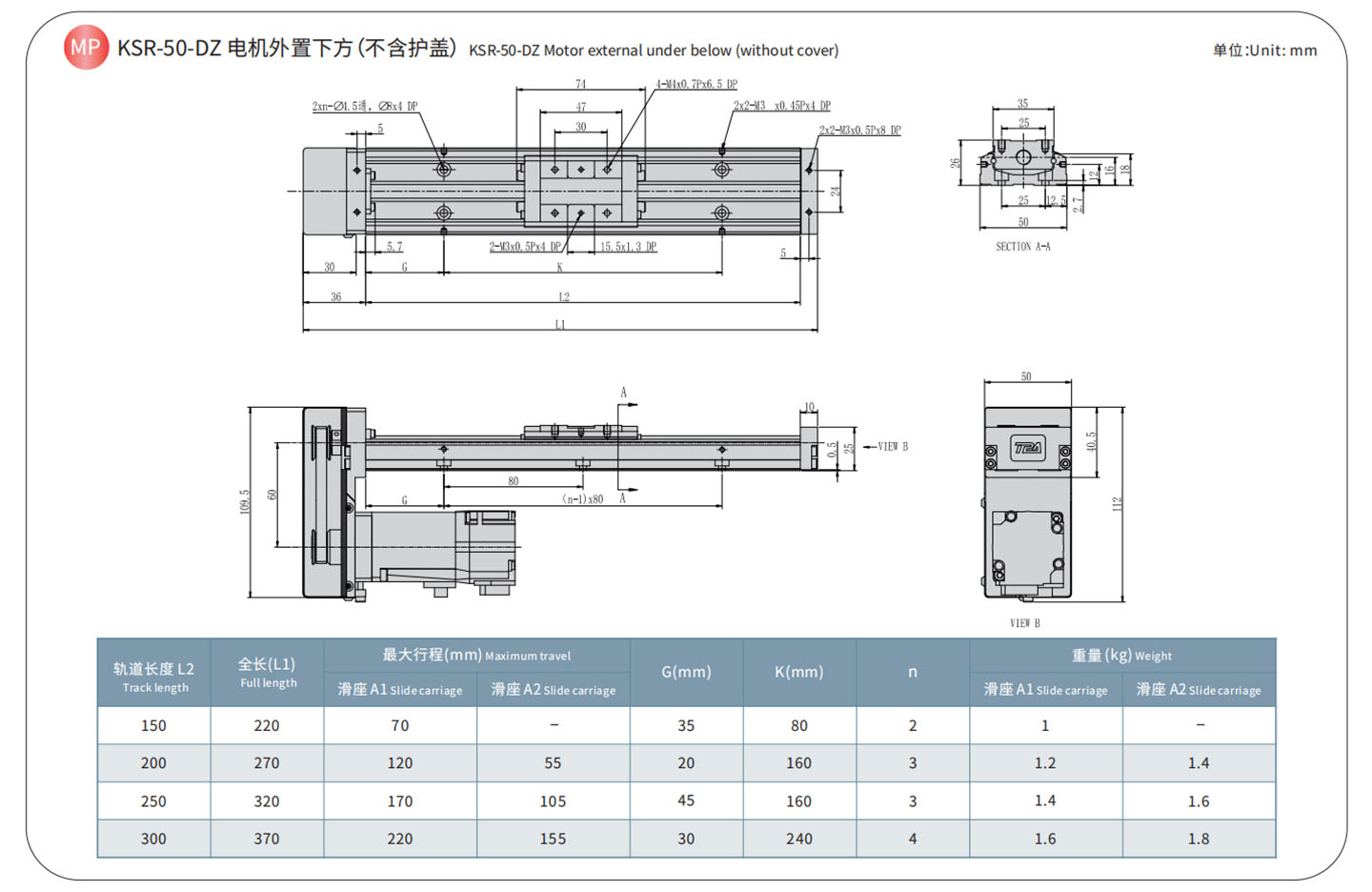
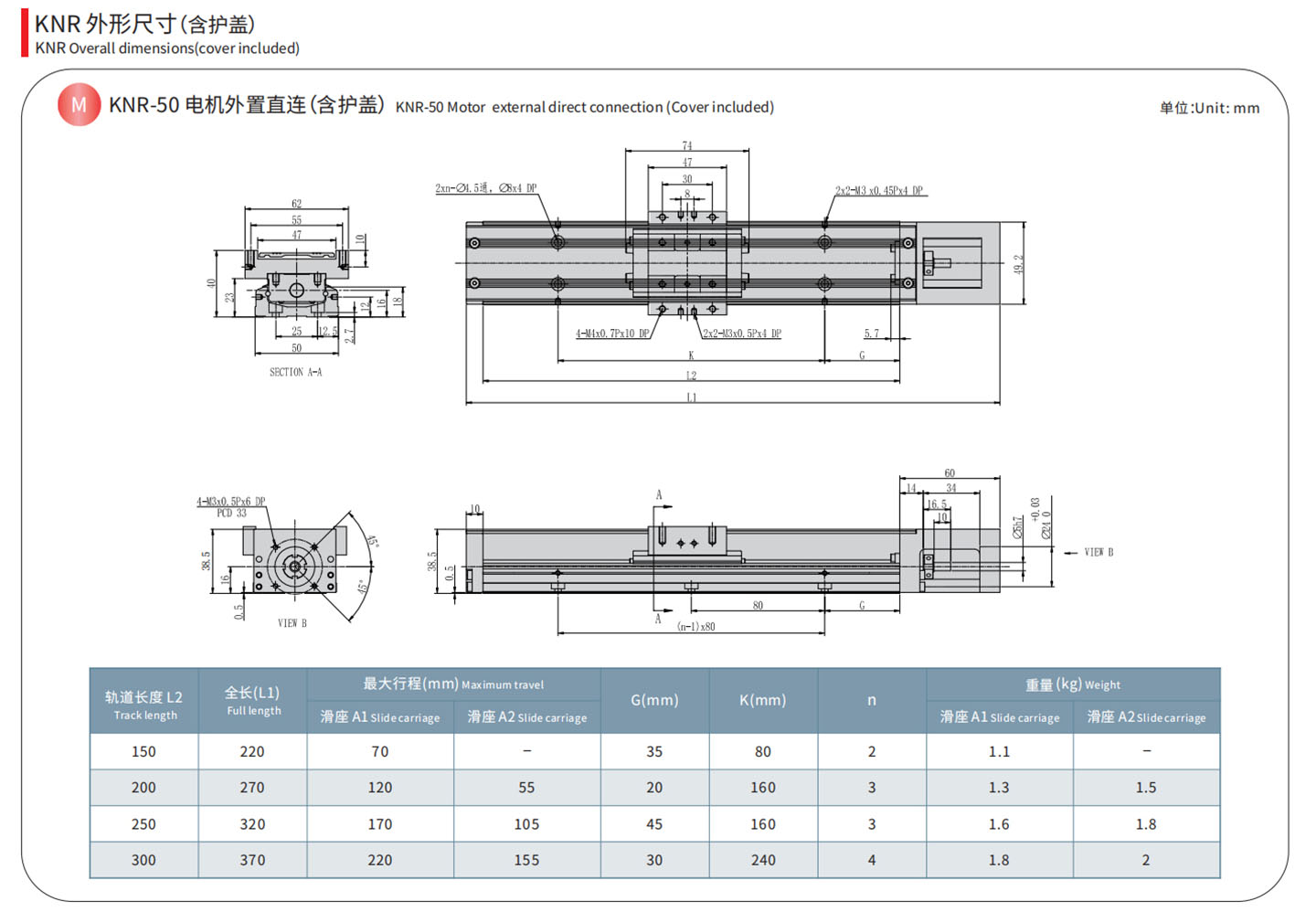
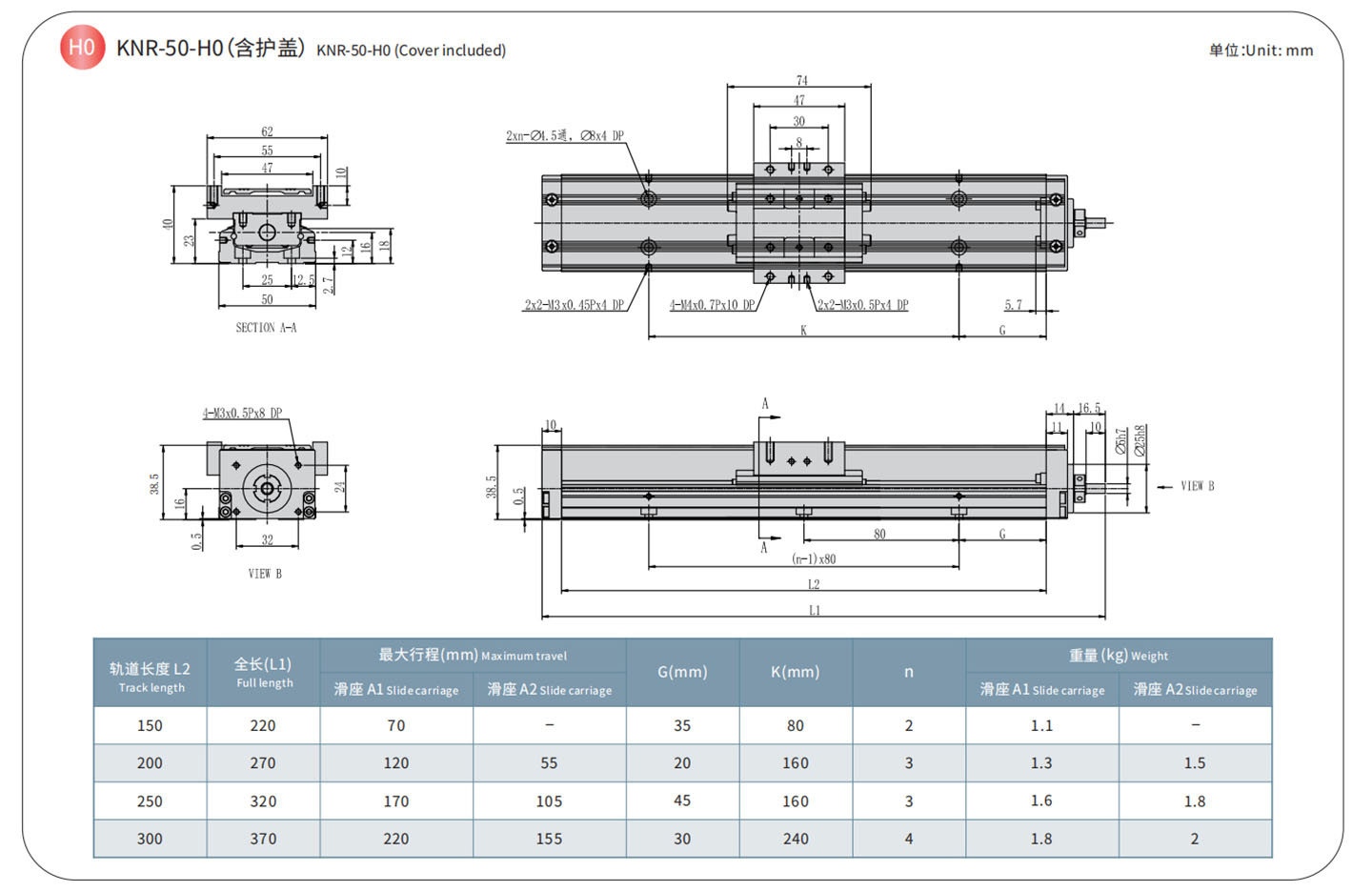
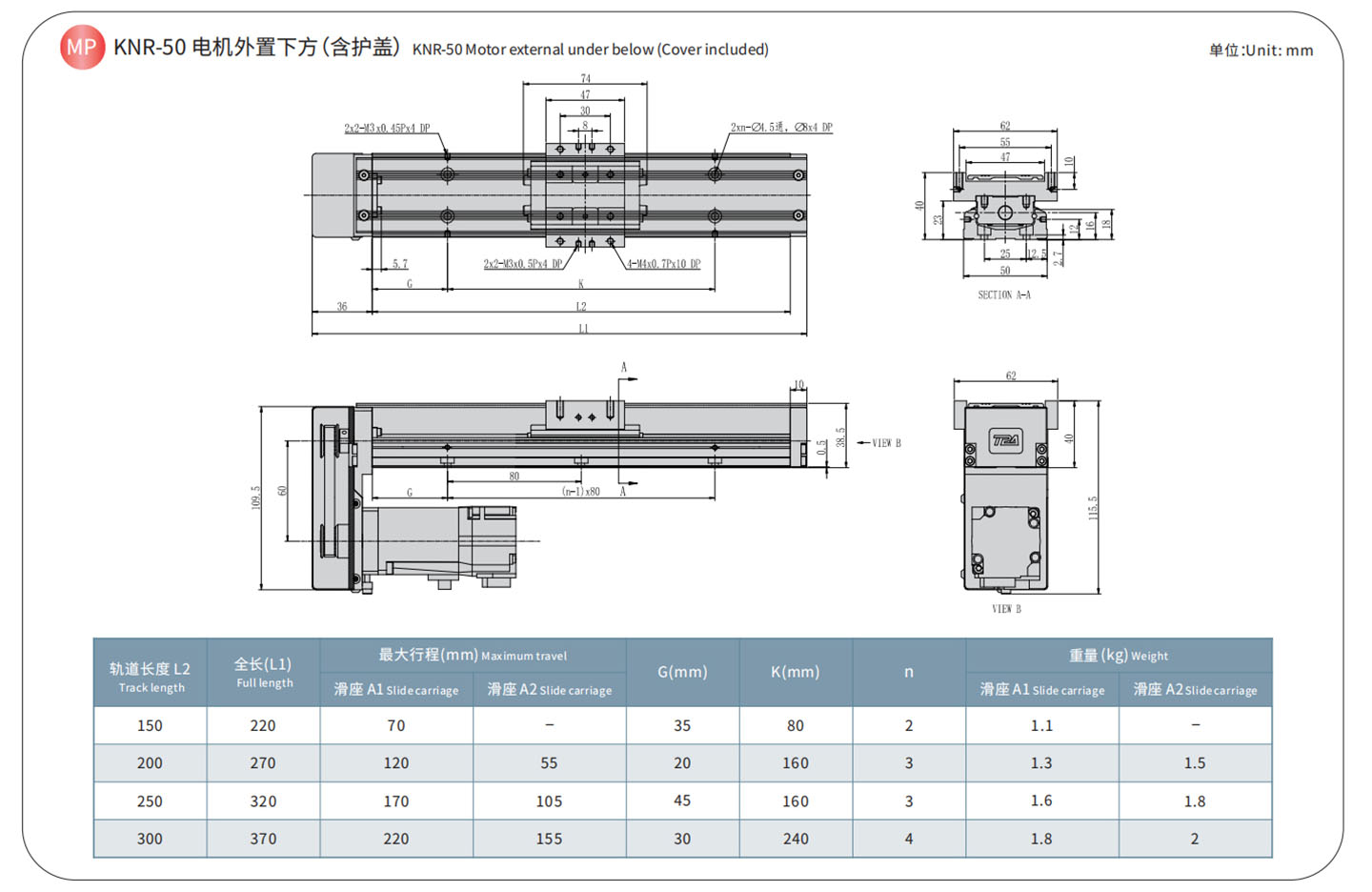
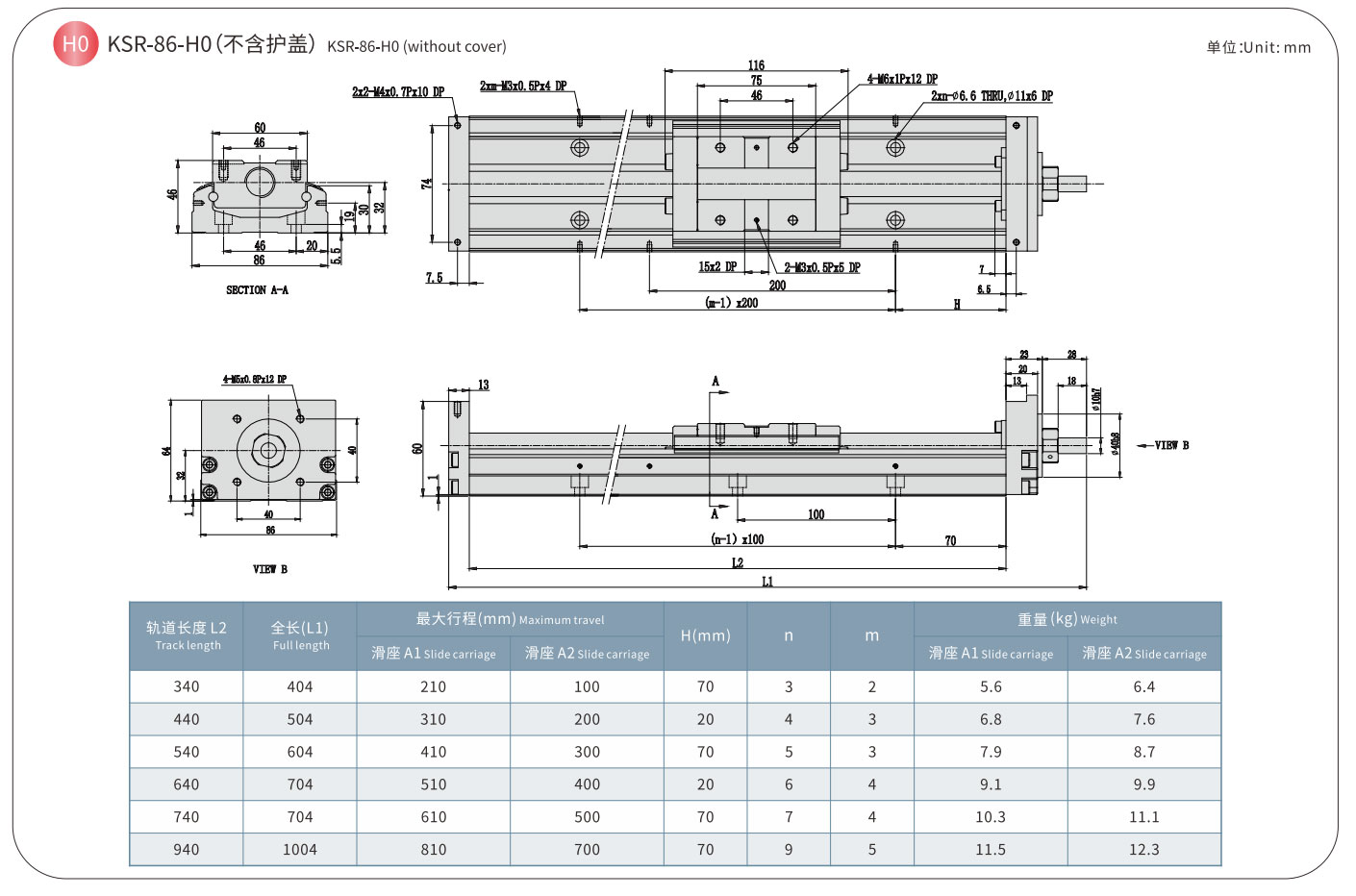
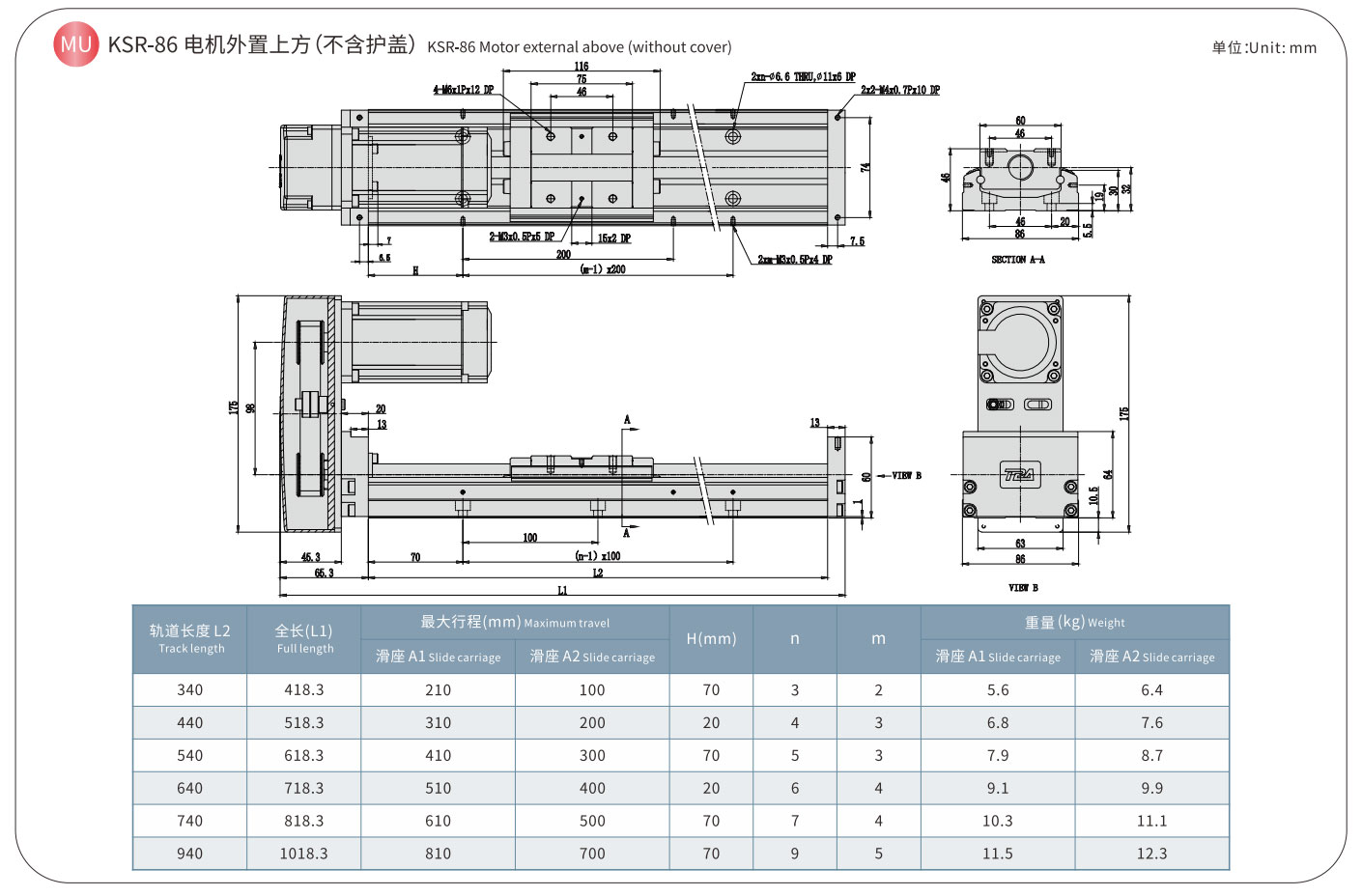
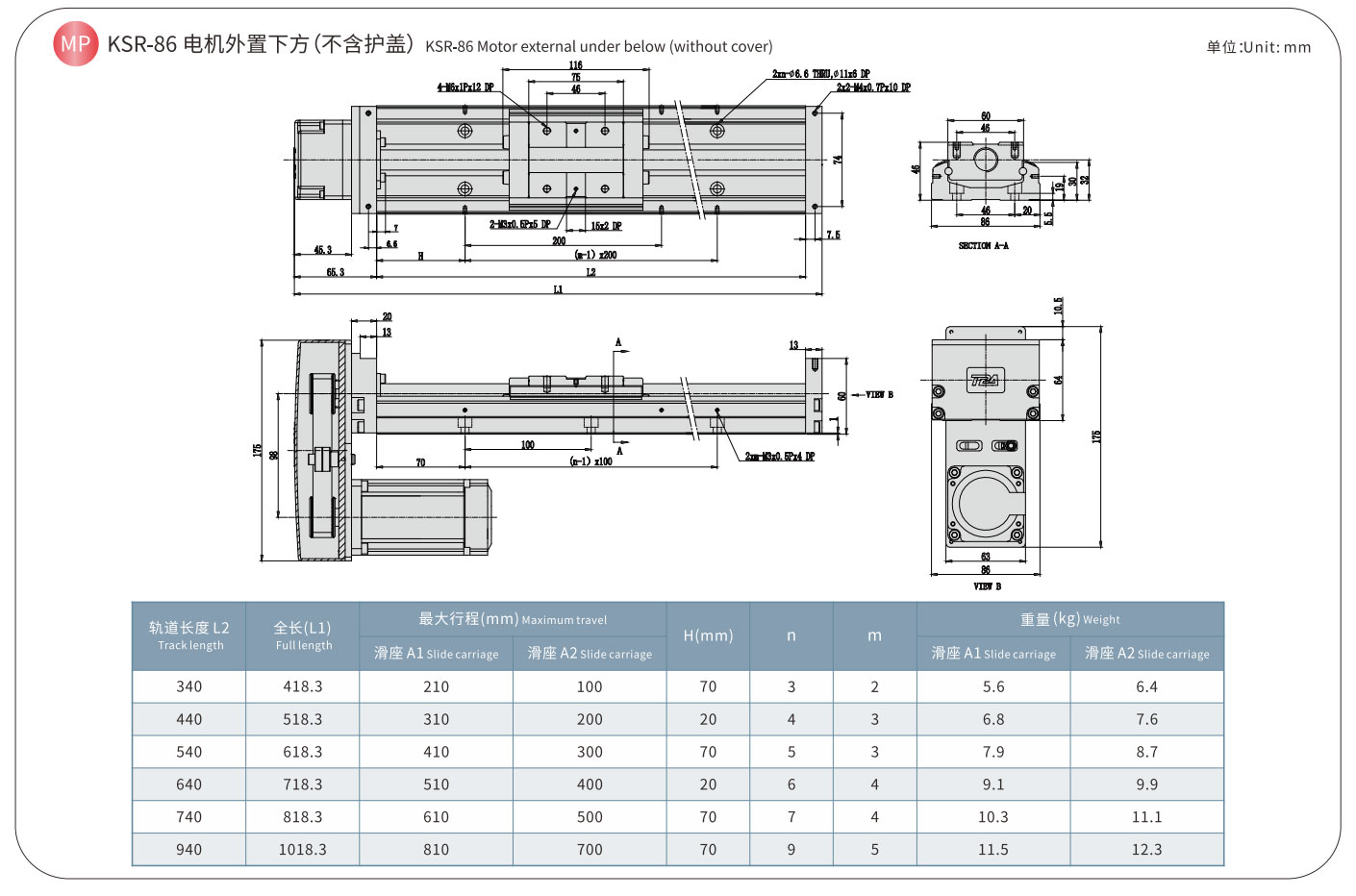
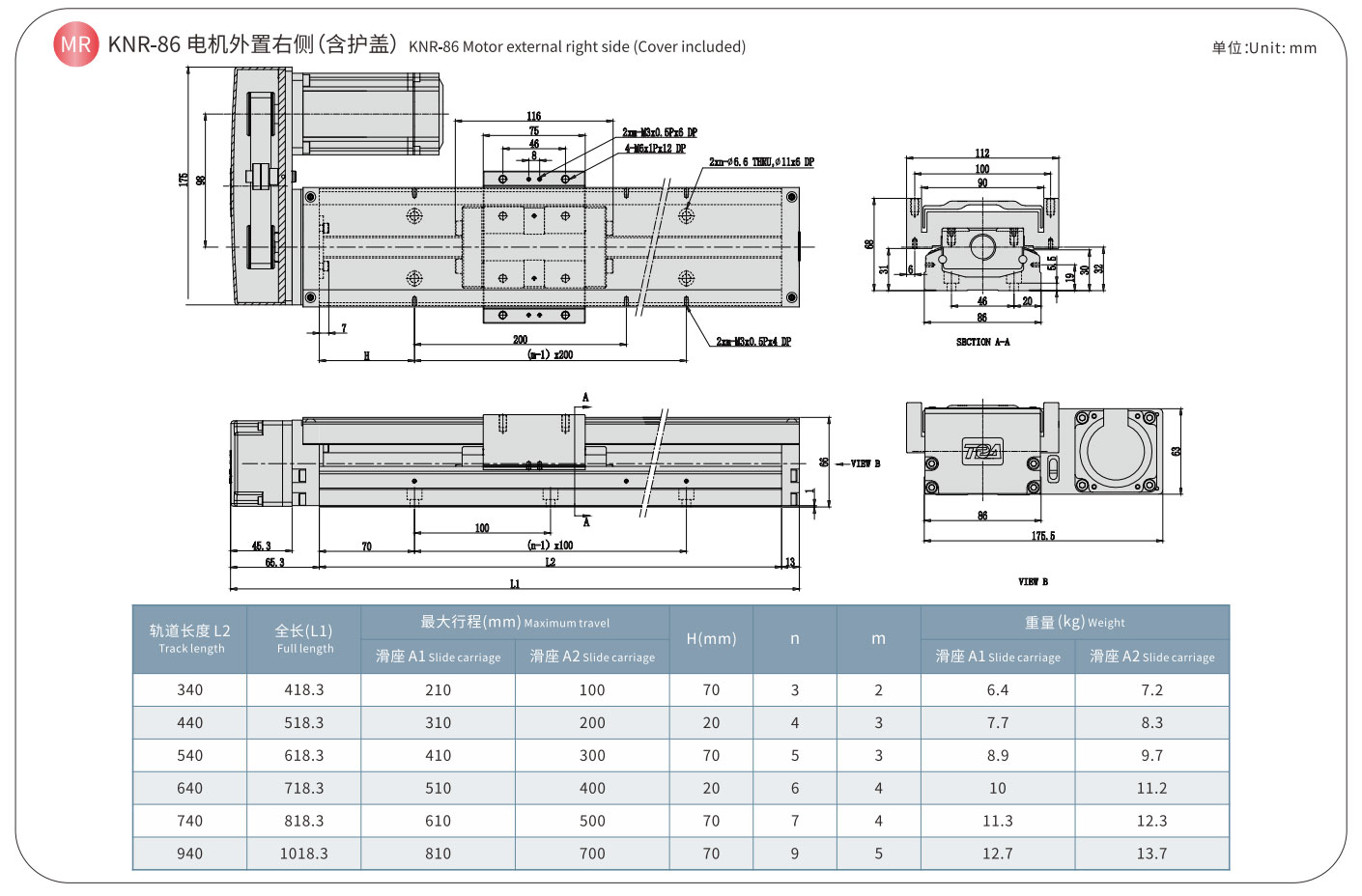
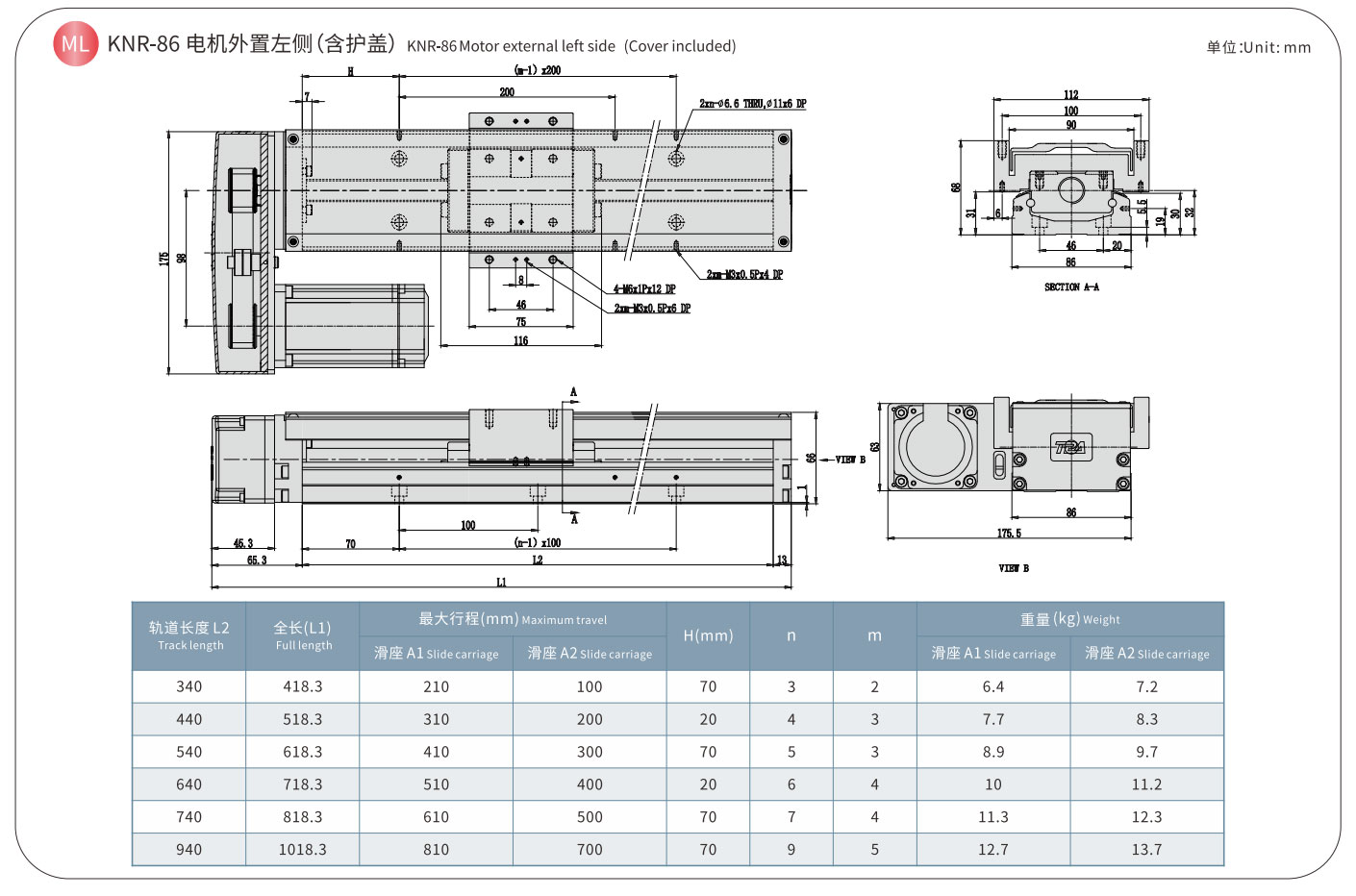
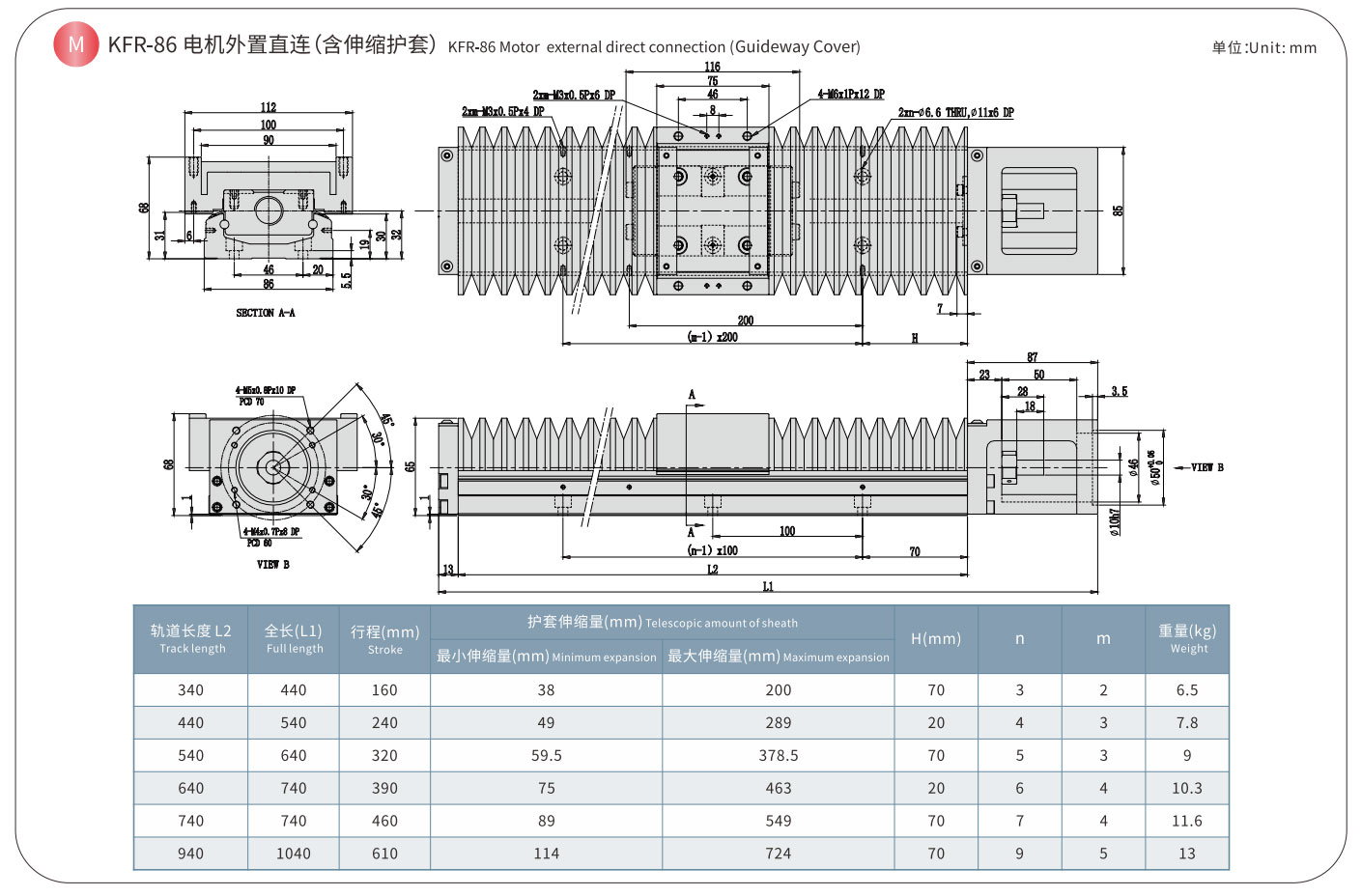
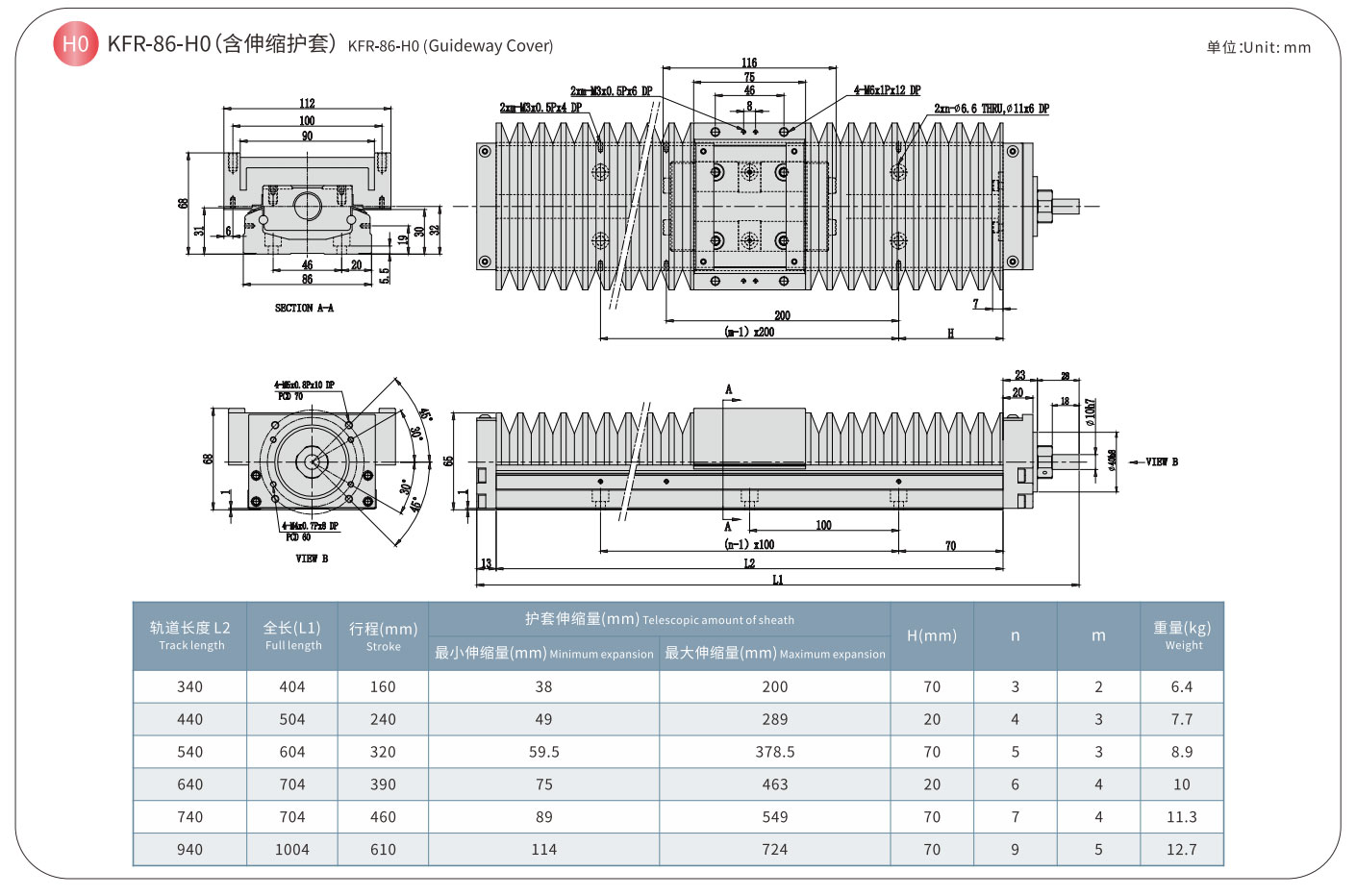
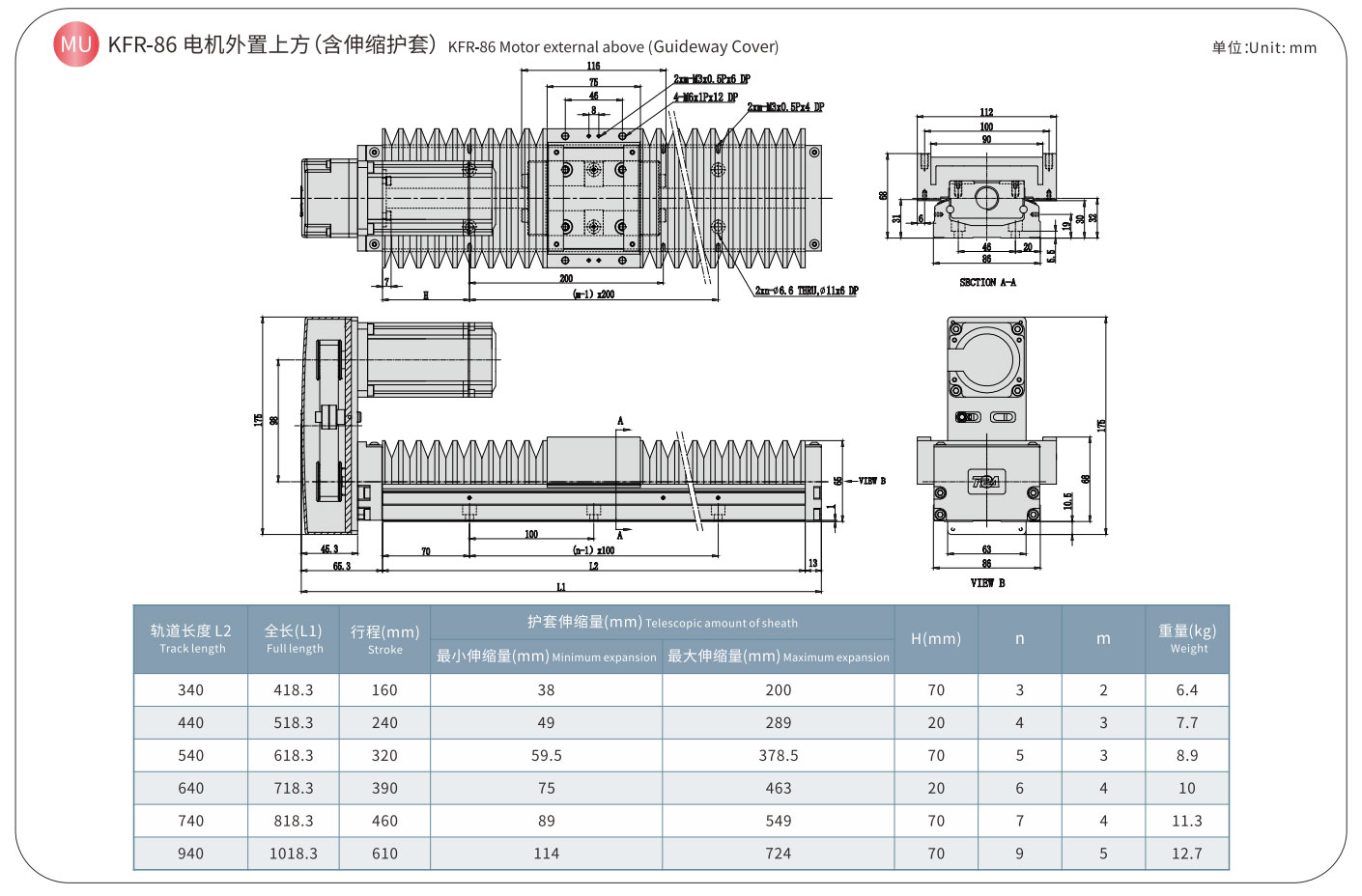
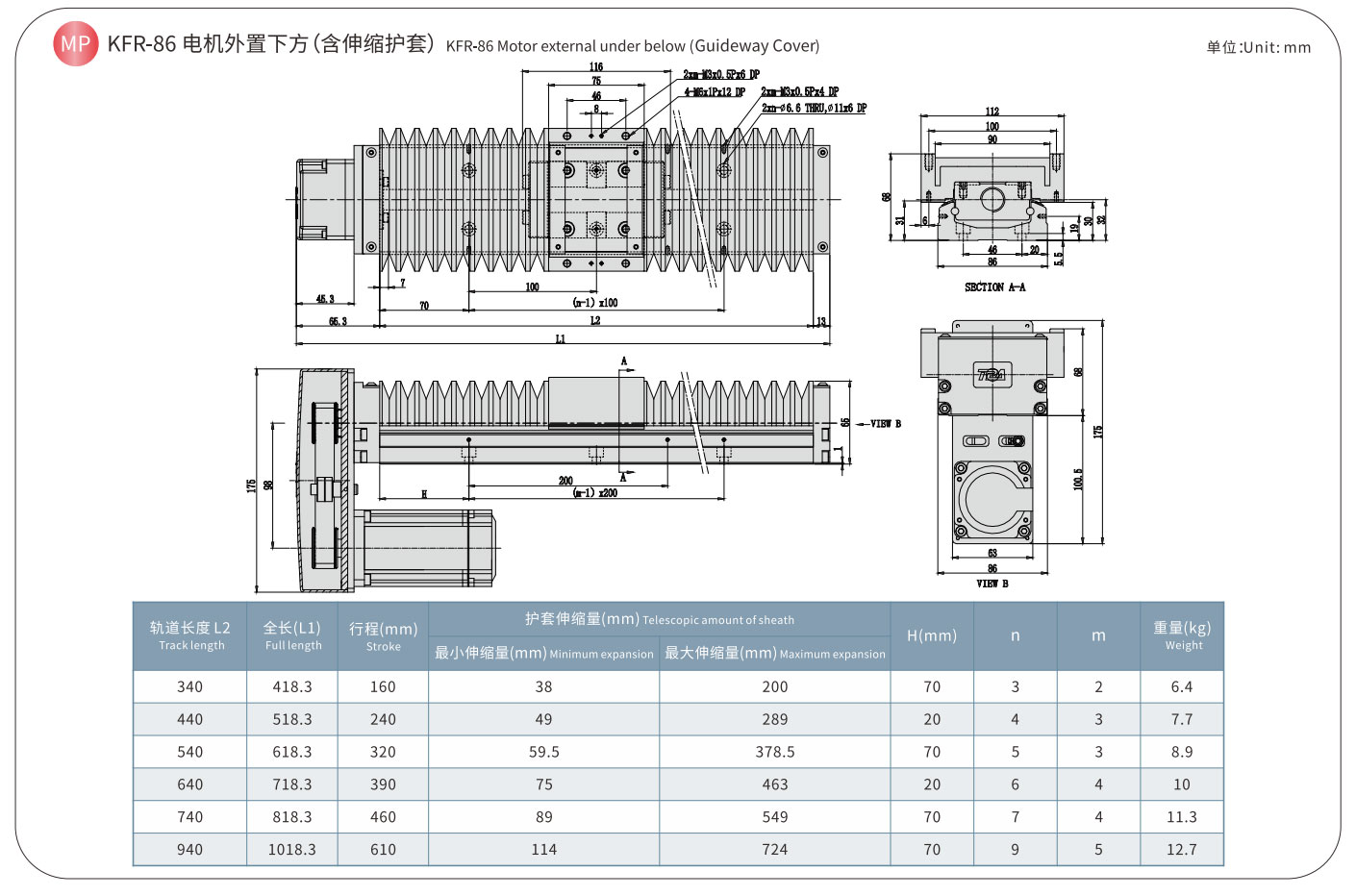
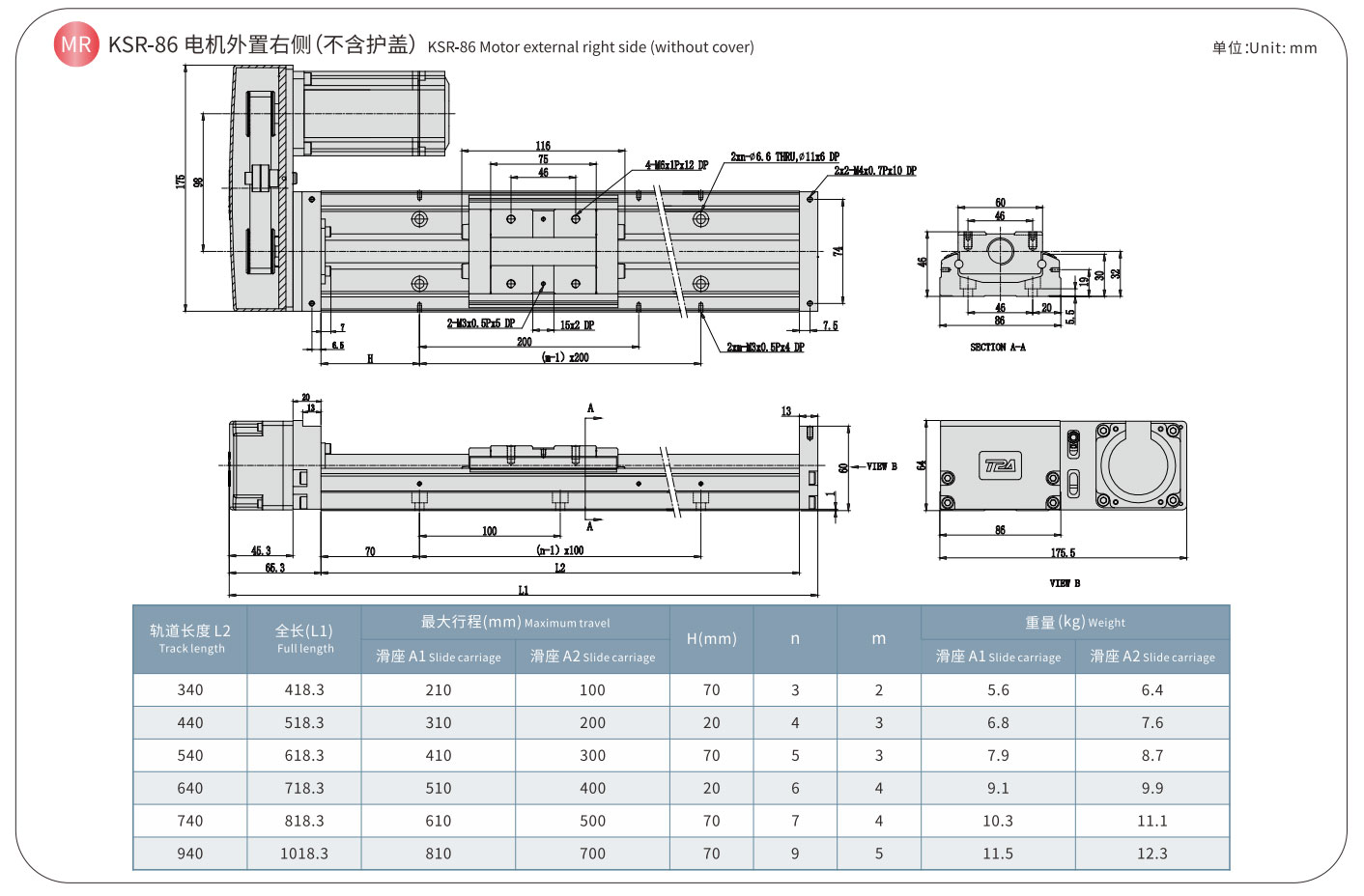
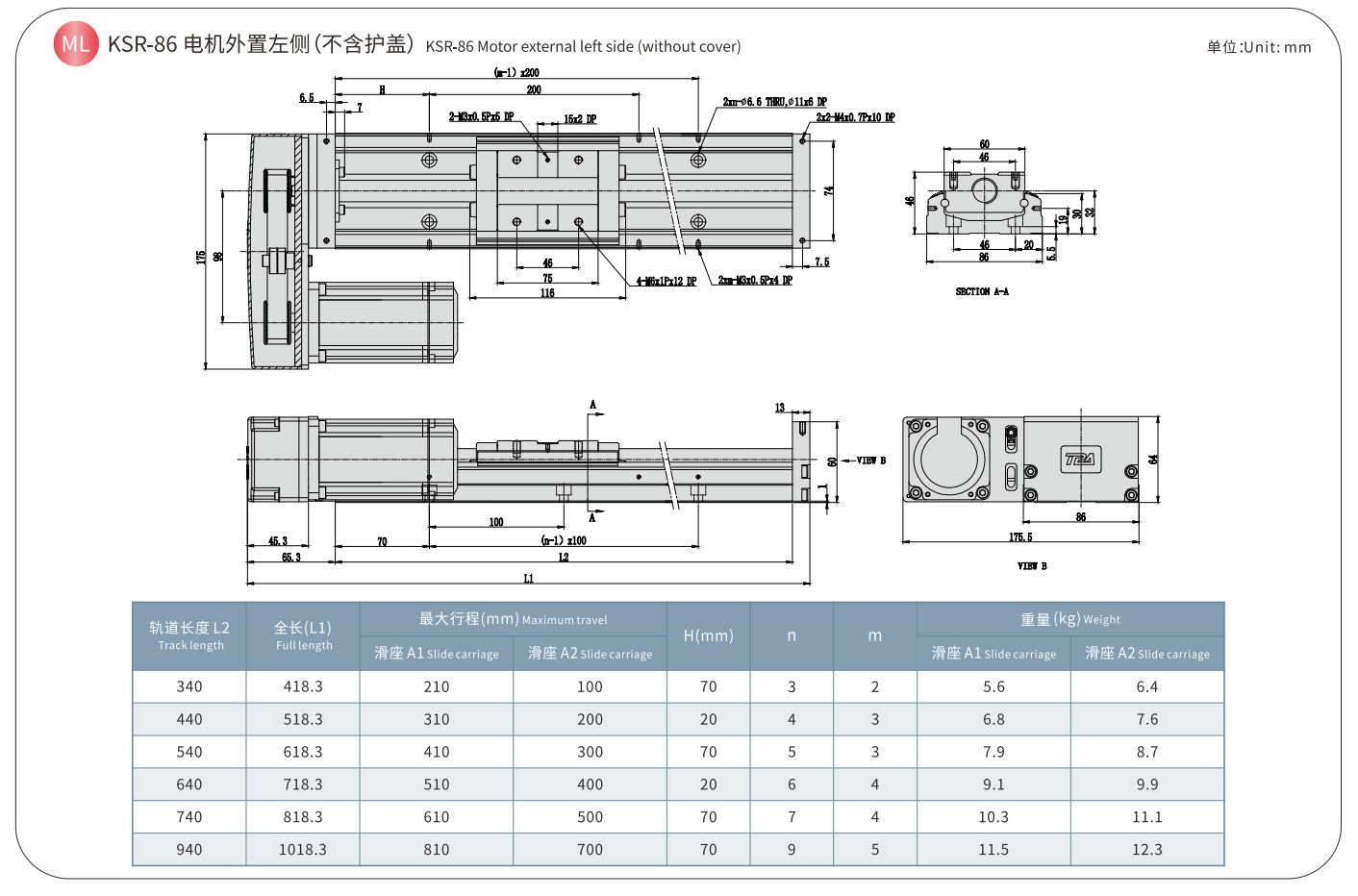
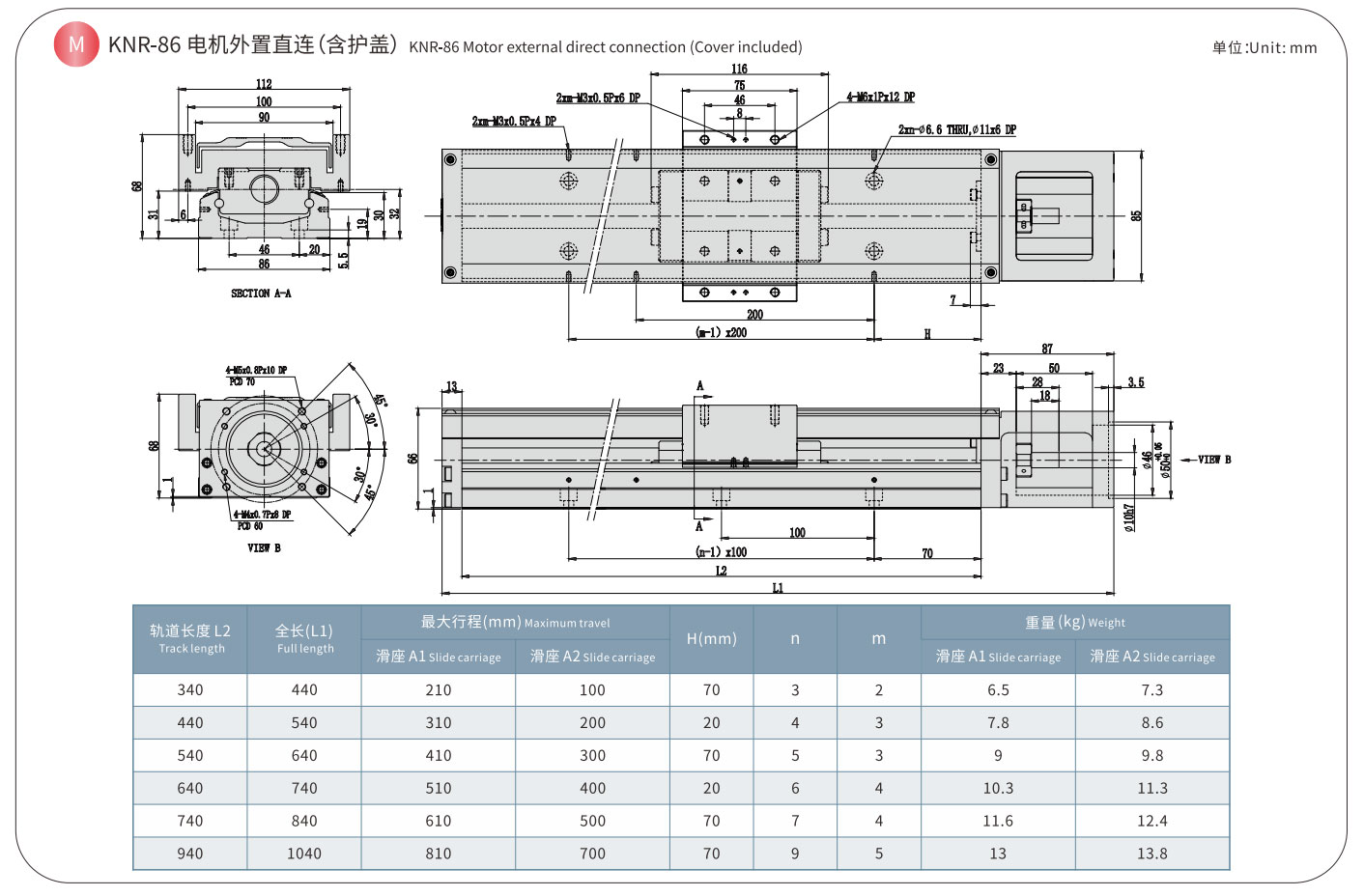
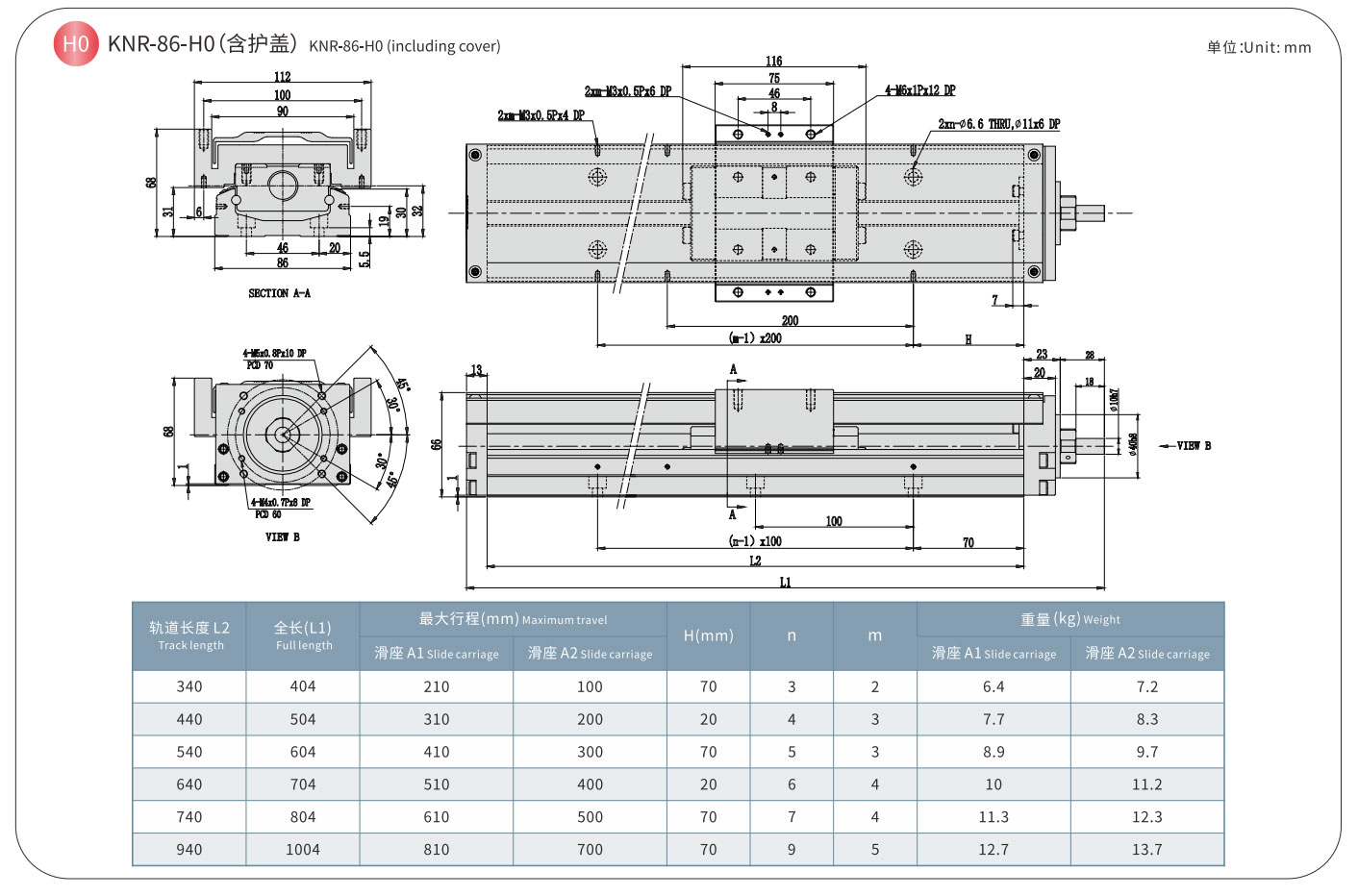
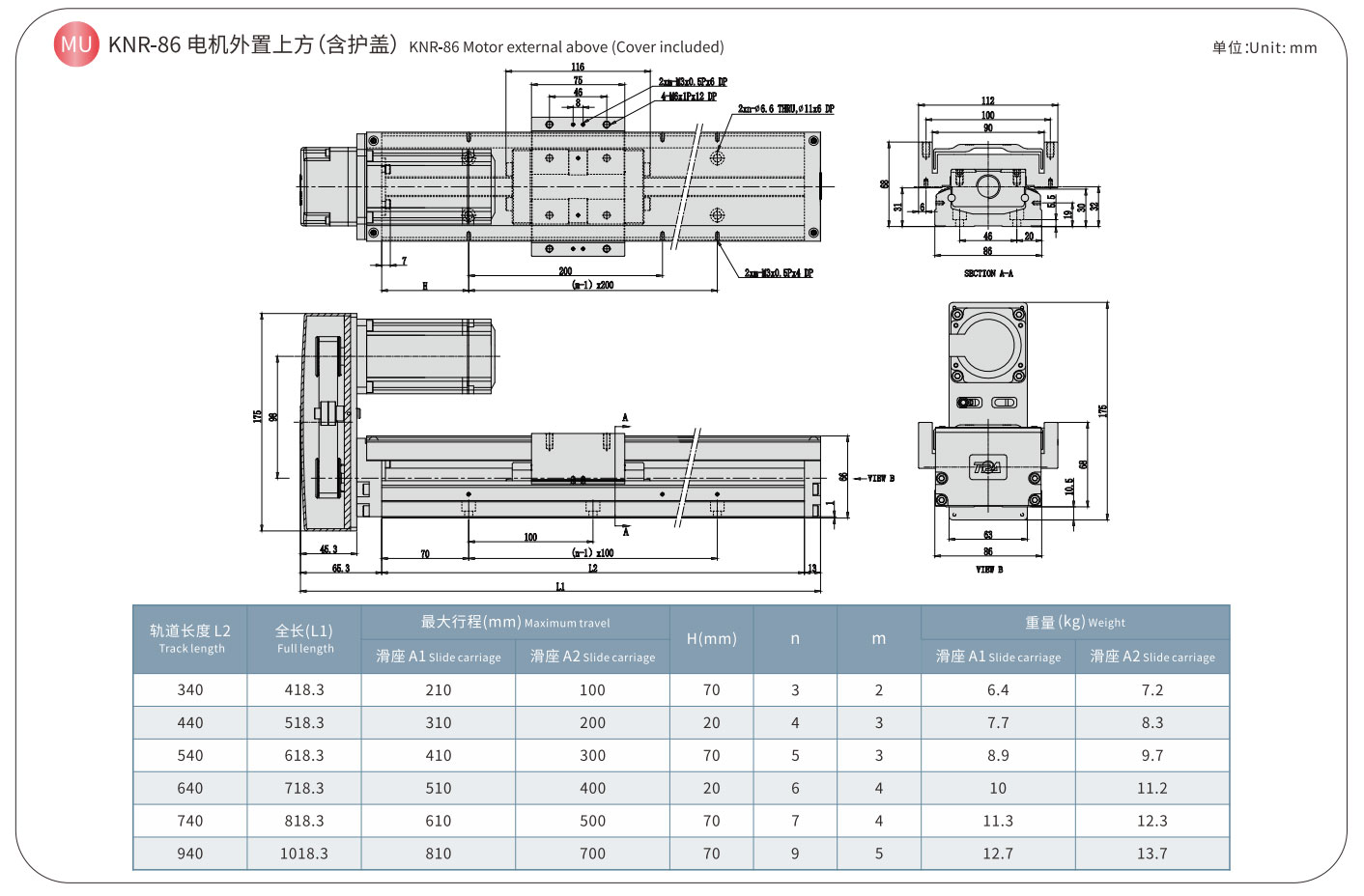
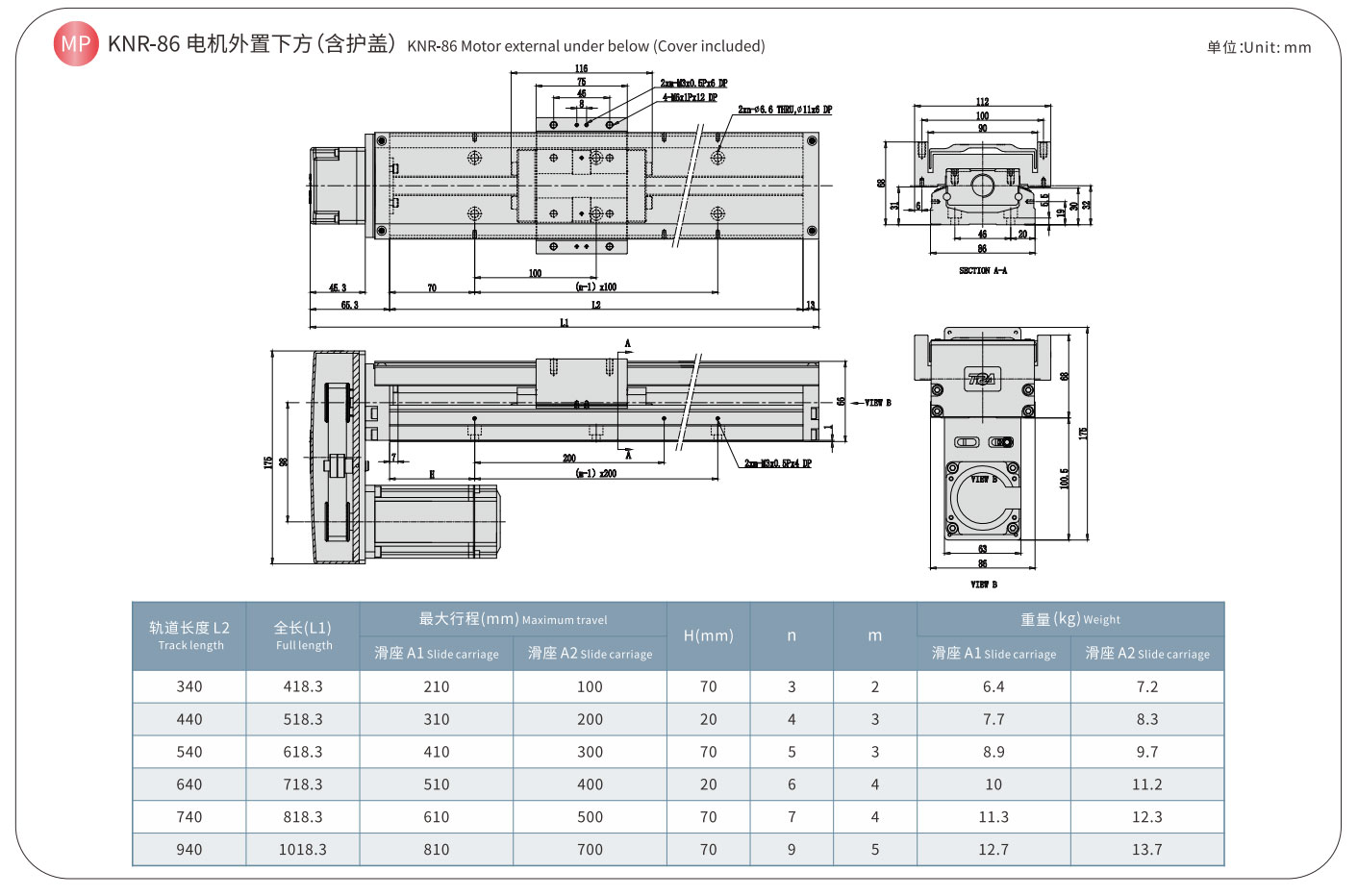
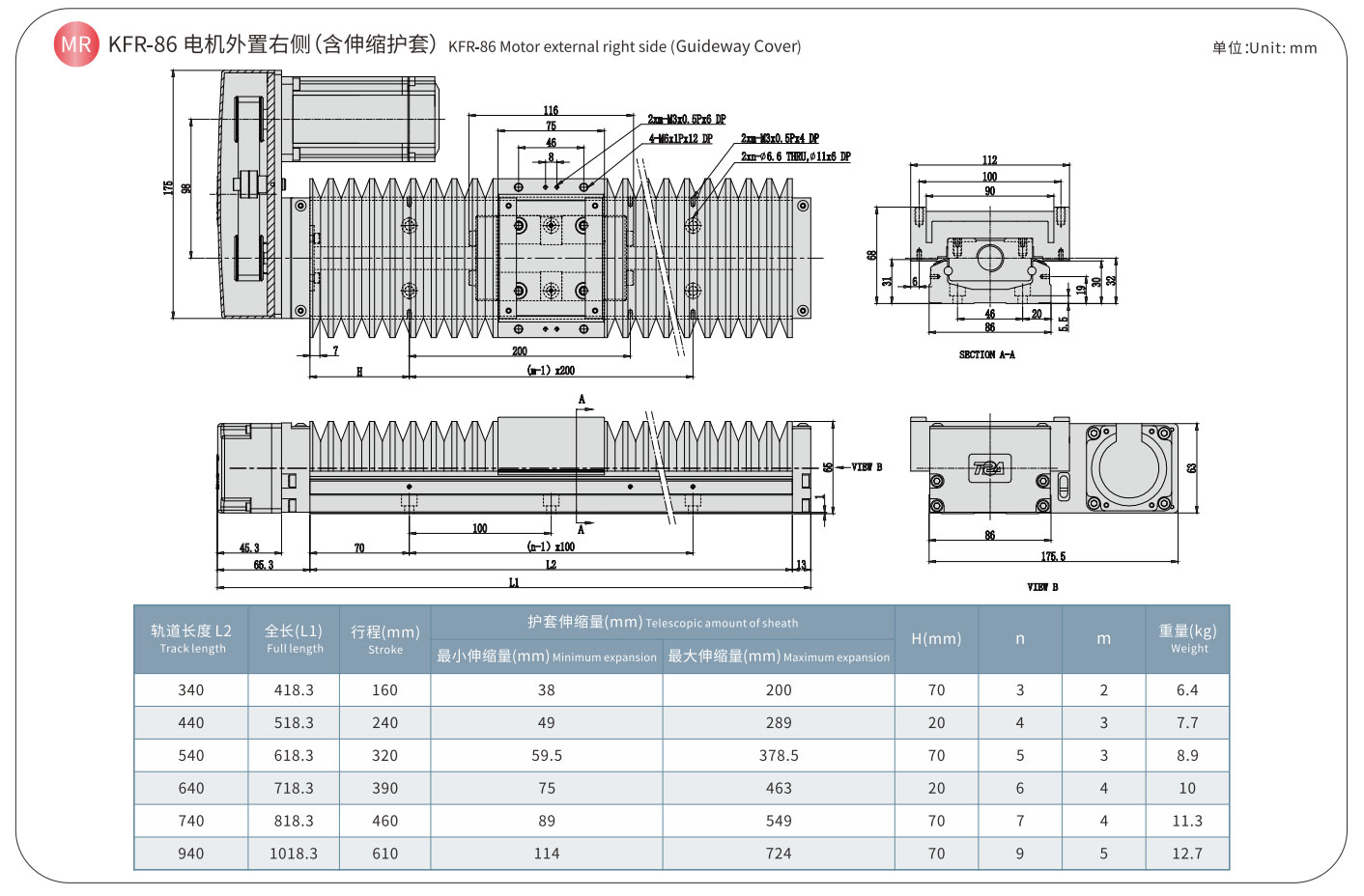
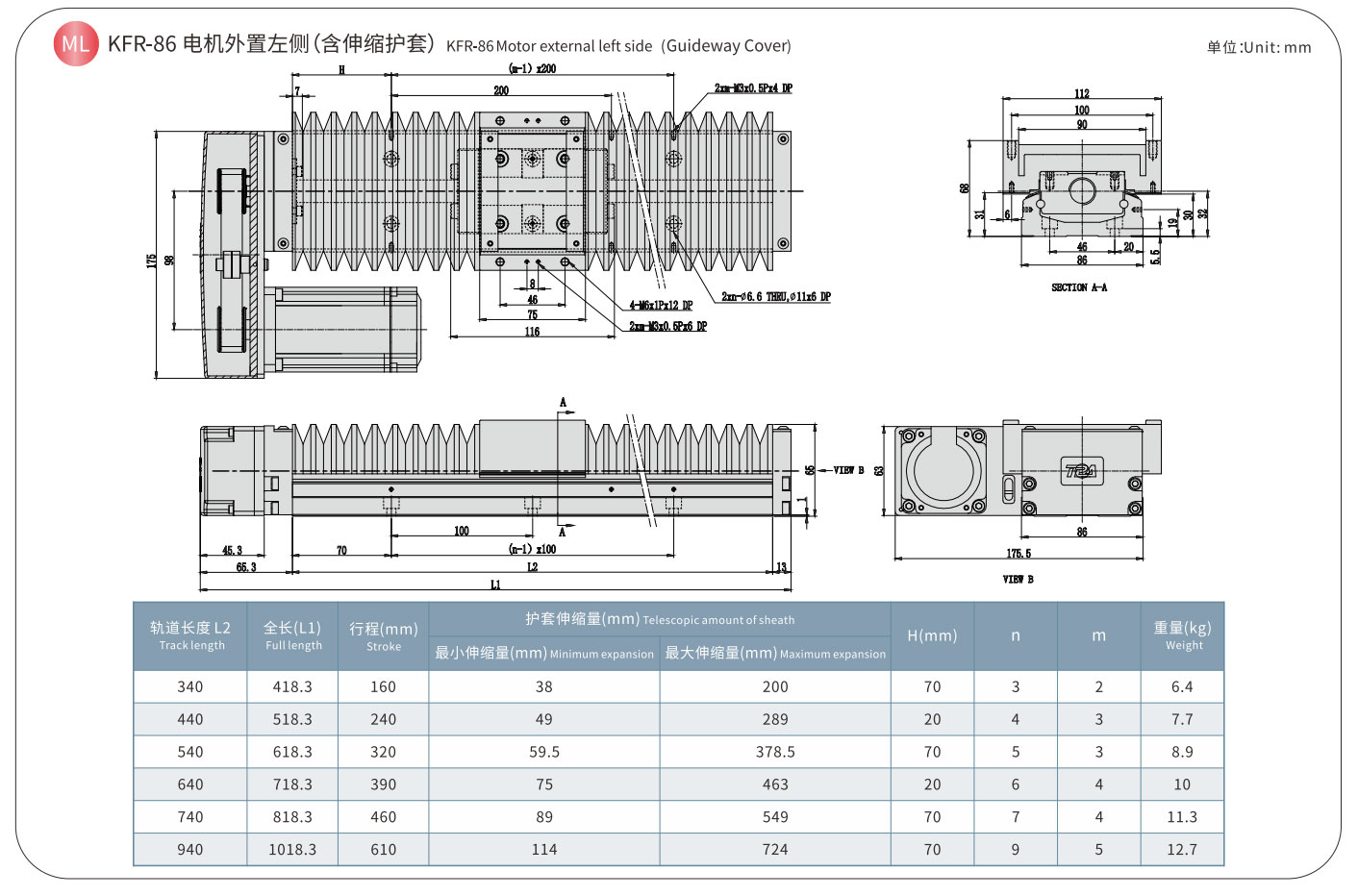
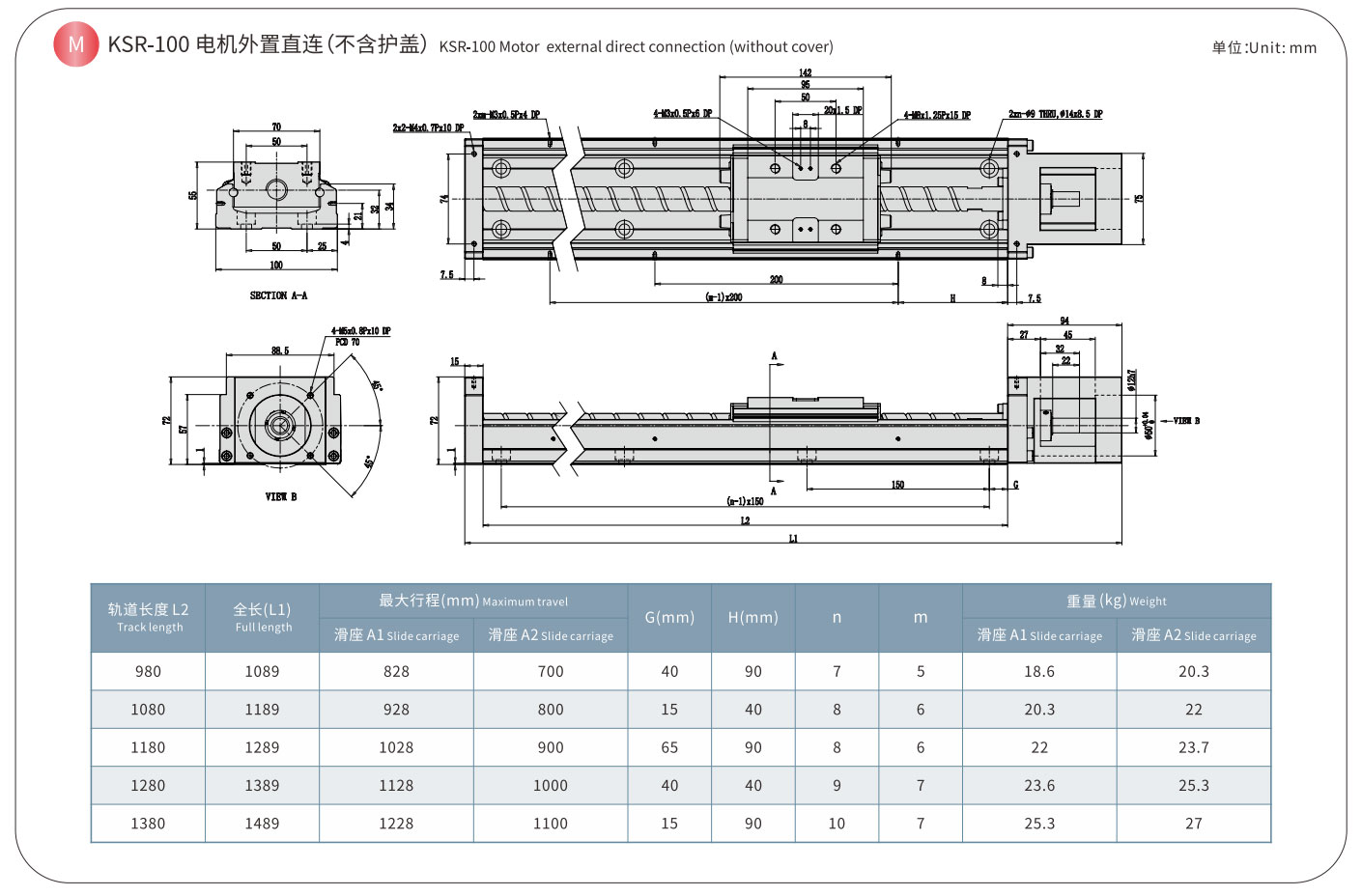
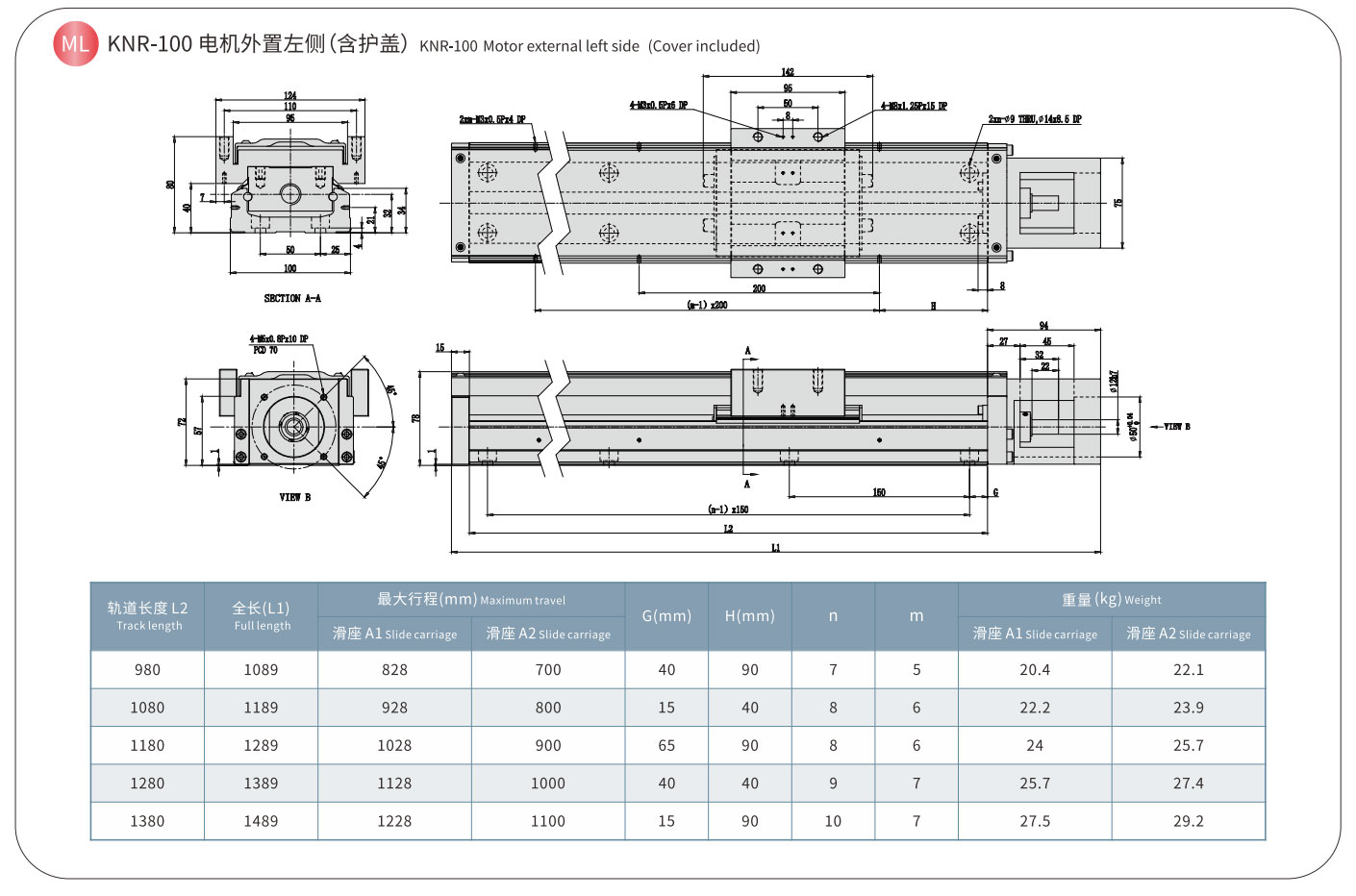
Der von TPA ROBOT entwickelte einachsige Roboter der KK-Serie verwendet eine teilweise gehärtete U-förmige Stahlbasisschiene, um die Festigkeit und Belastbarkeit des Roboters deutlich zu erhöhen. Aufgrund der unterschiedlichen Umgebungen verfügen wir über drei Typen von Linearroboterserien: KSR, KNR und KFR, abhängig von der Art der verwendeten Abdeckung.
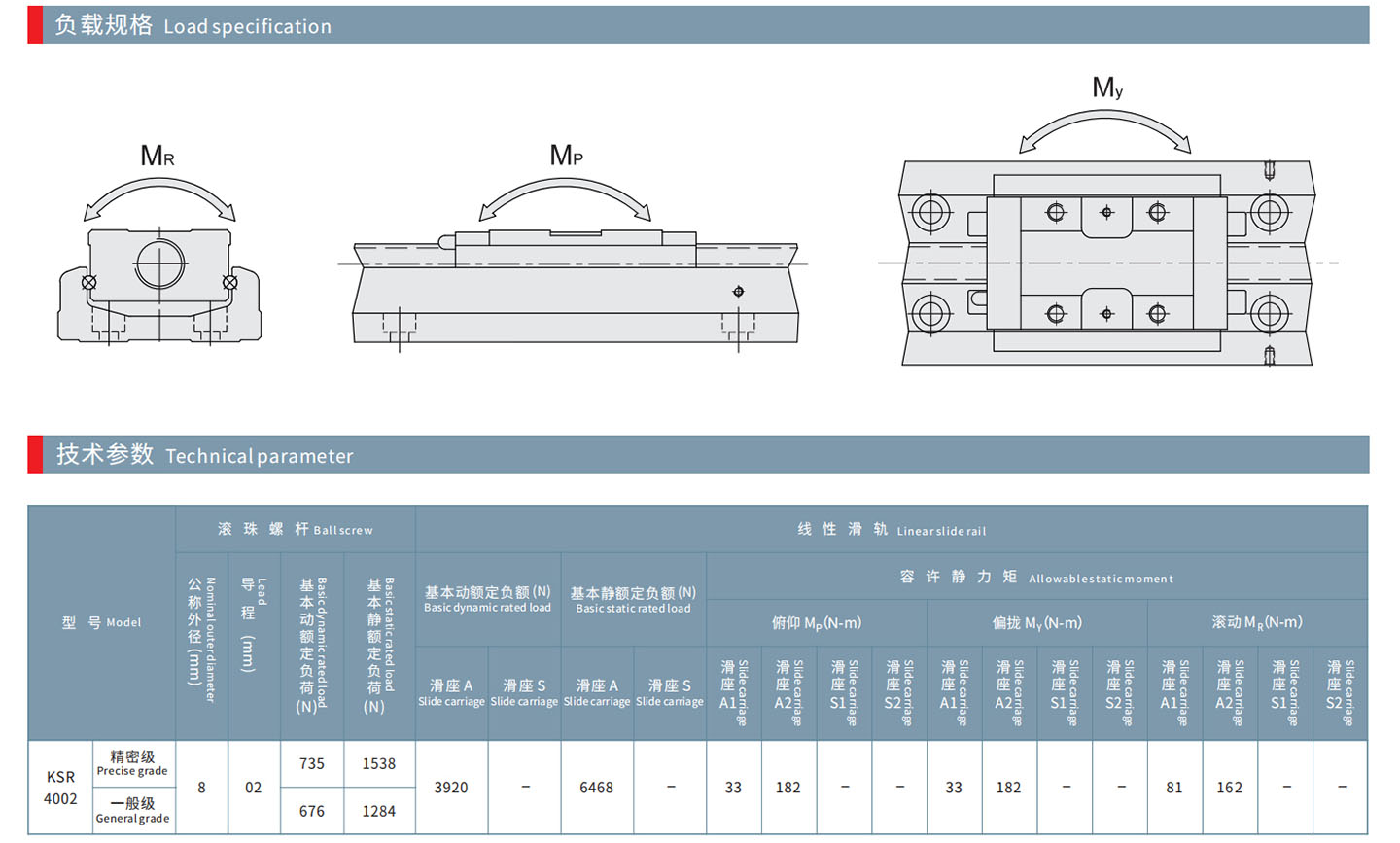
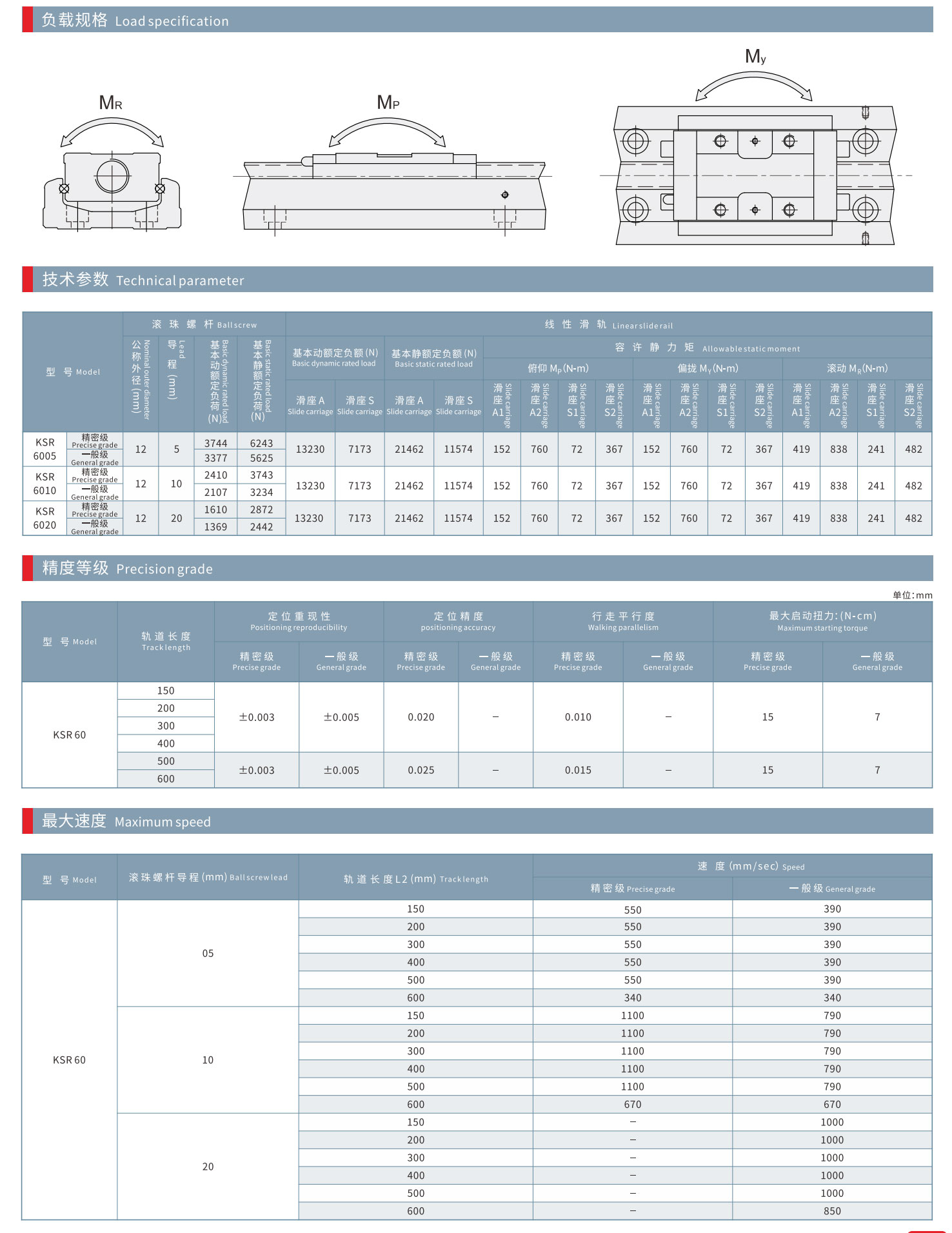
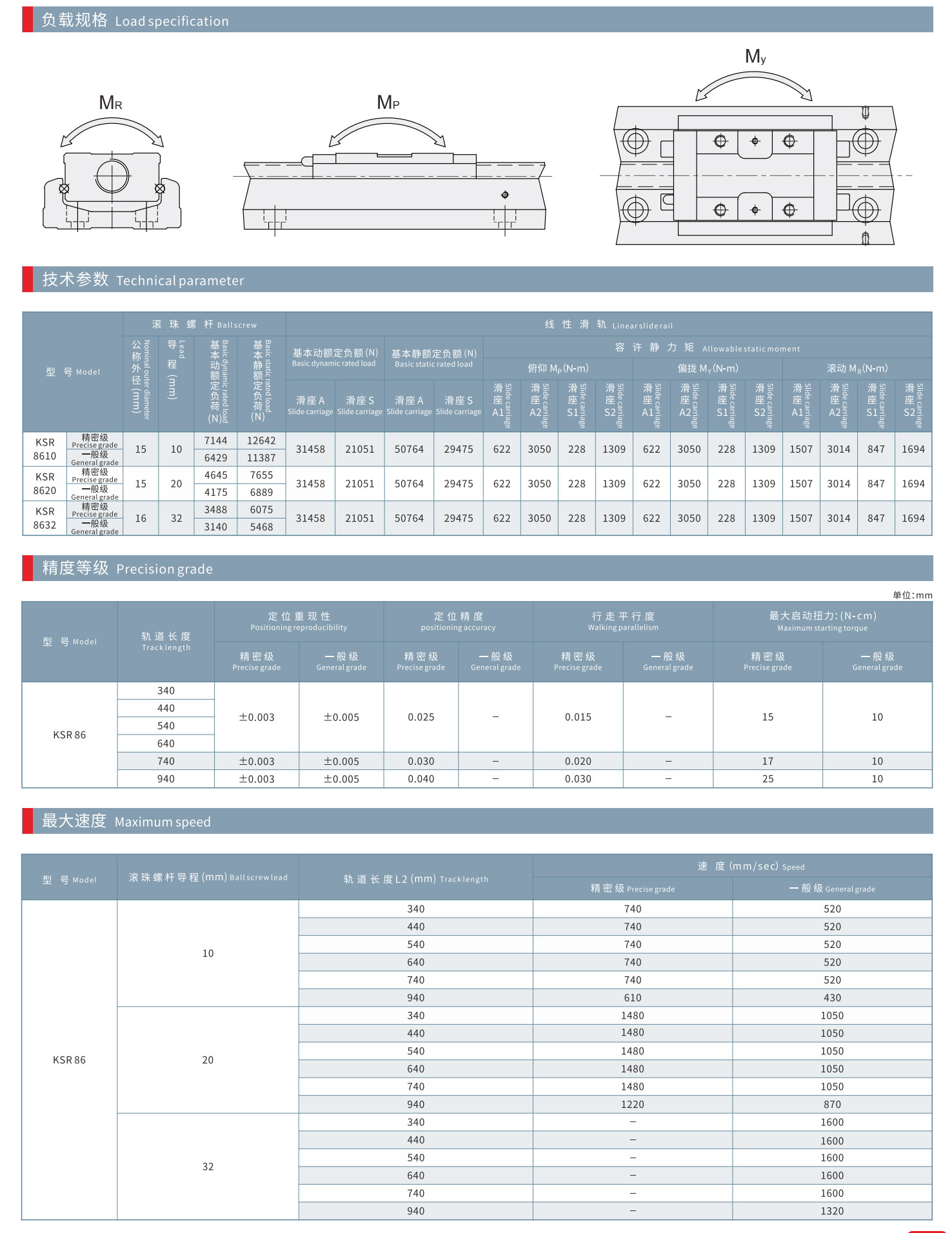
Für das Rückführungssystem zwischen der Schiene und dem Schlitten verfügt die Kontaktfläche zwischen der Kugel und der Kugelrille über ein zweireihiges Goethe-Zahndesign mit einem Kontaktwinkel von 45 Grad, wodurch der Achsenroboterarm in vier Richtungen die gleiche Tragfähigkeit tragen kann .
Gleichzeitig wird die hochpräzise Kugelumlaufspindel als Übertragungsstruktur verwendet, und die U-förmige Schiene arbeitet mit dem optimierten Design zusammen, sodass der KK-Achsenroboter eine beispiellose Präzision aufweist und seine wiederholte Positionierungsgenauigkeit ±0,003 mm erreichen kann.
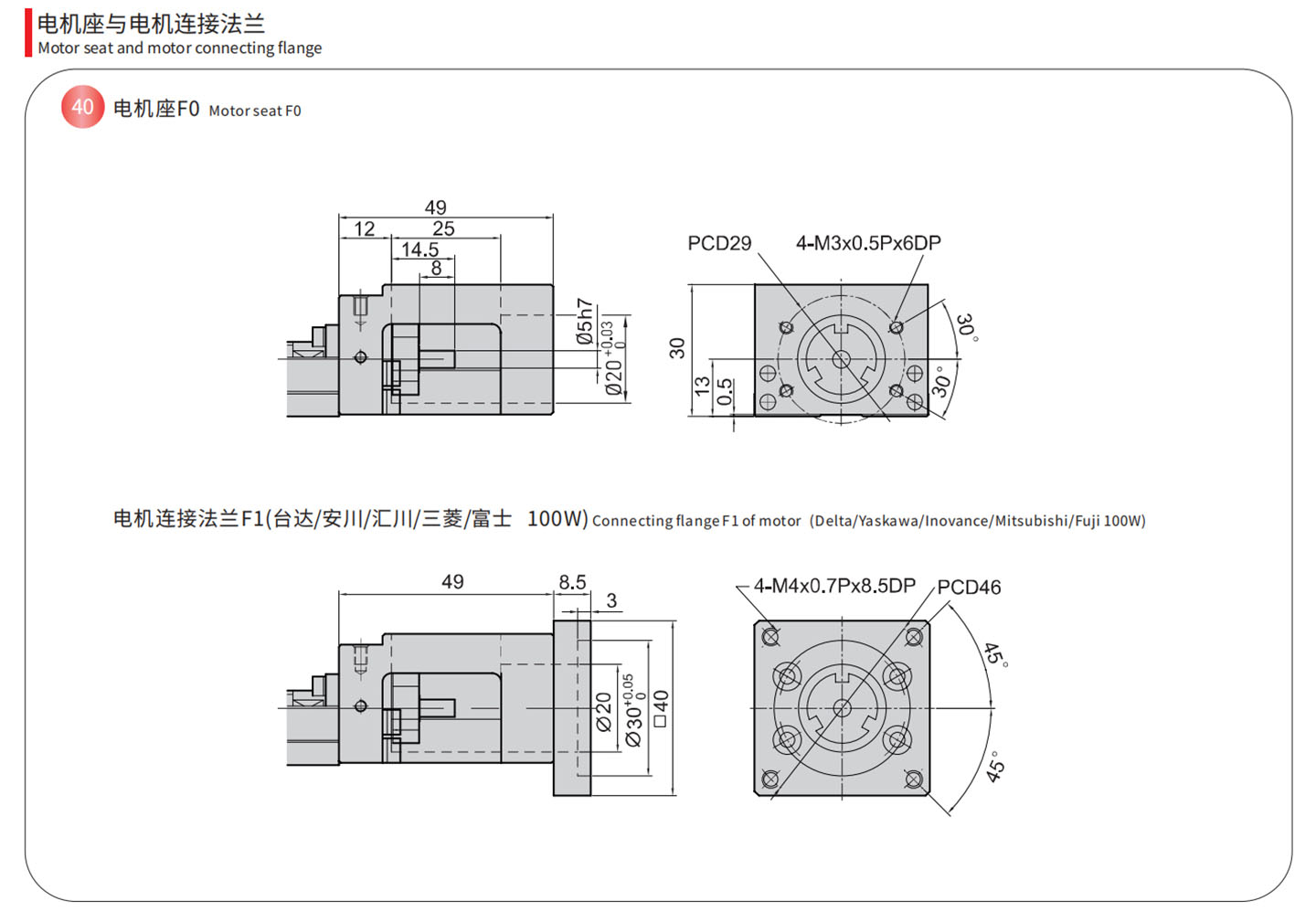
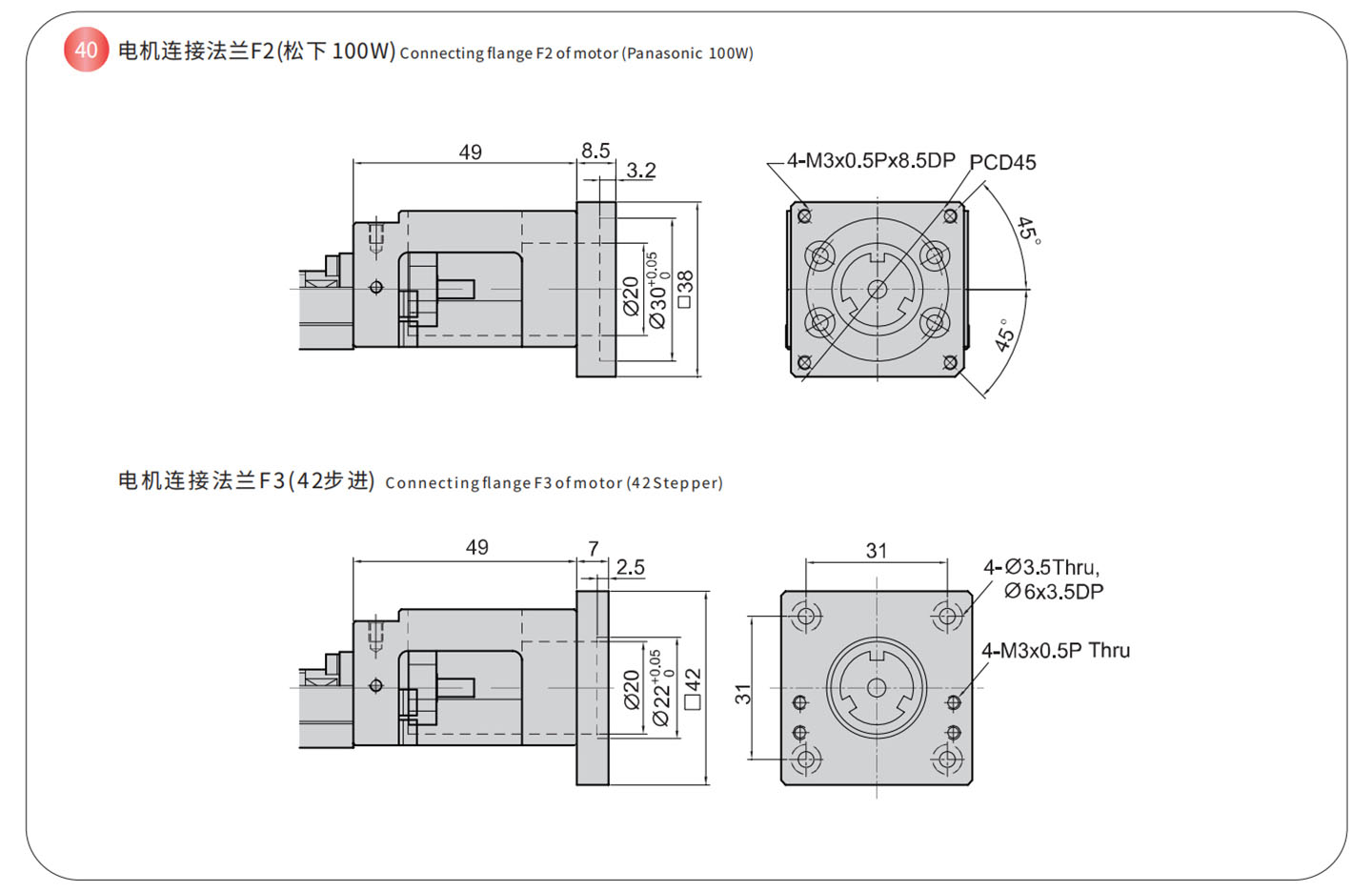
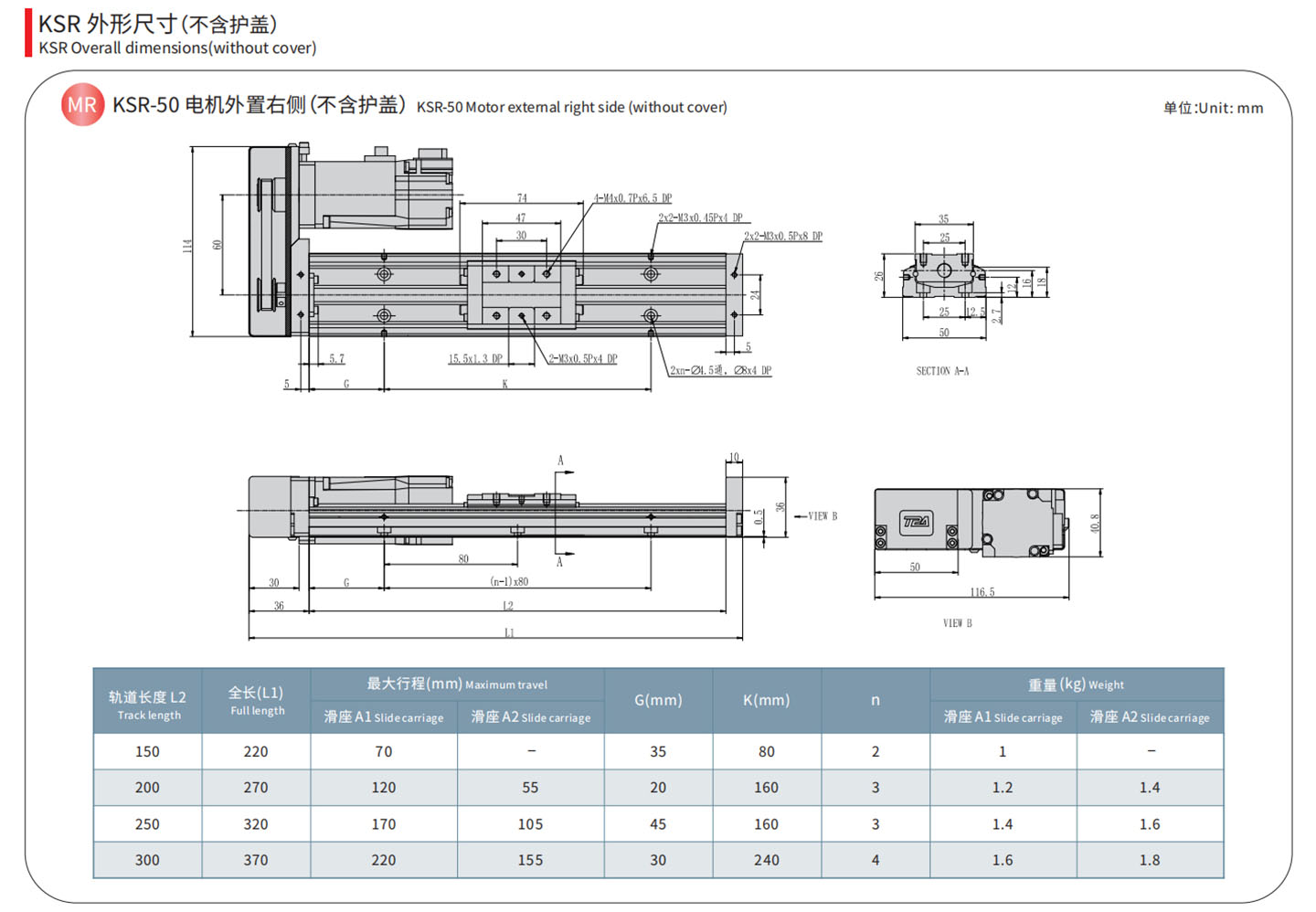
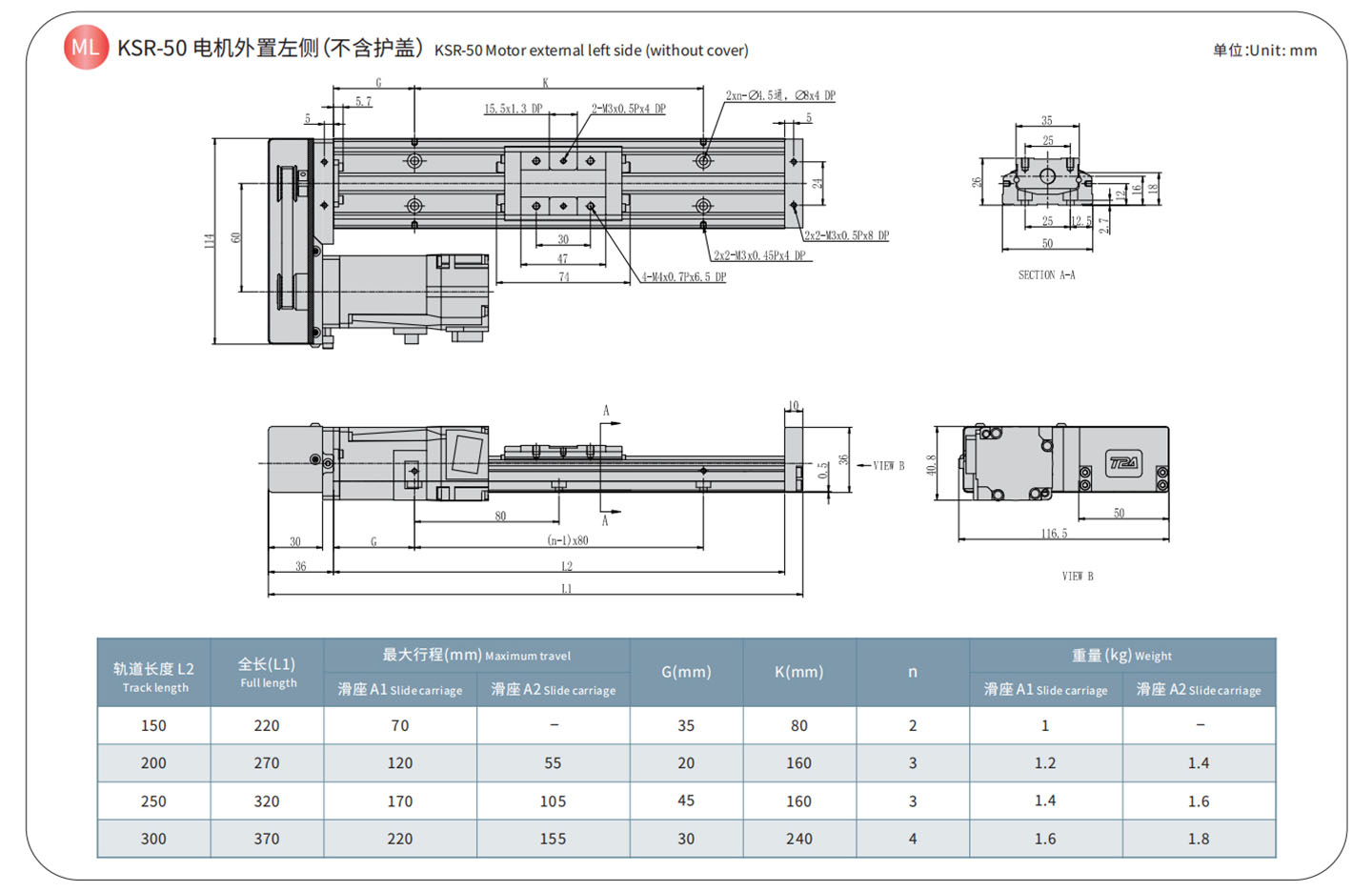
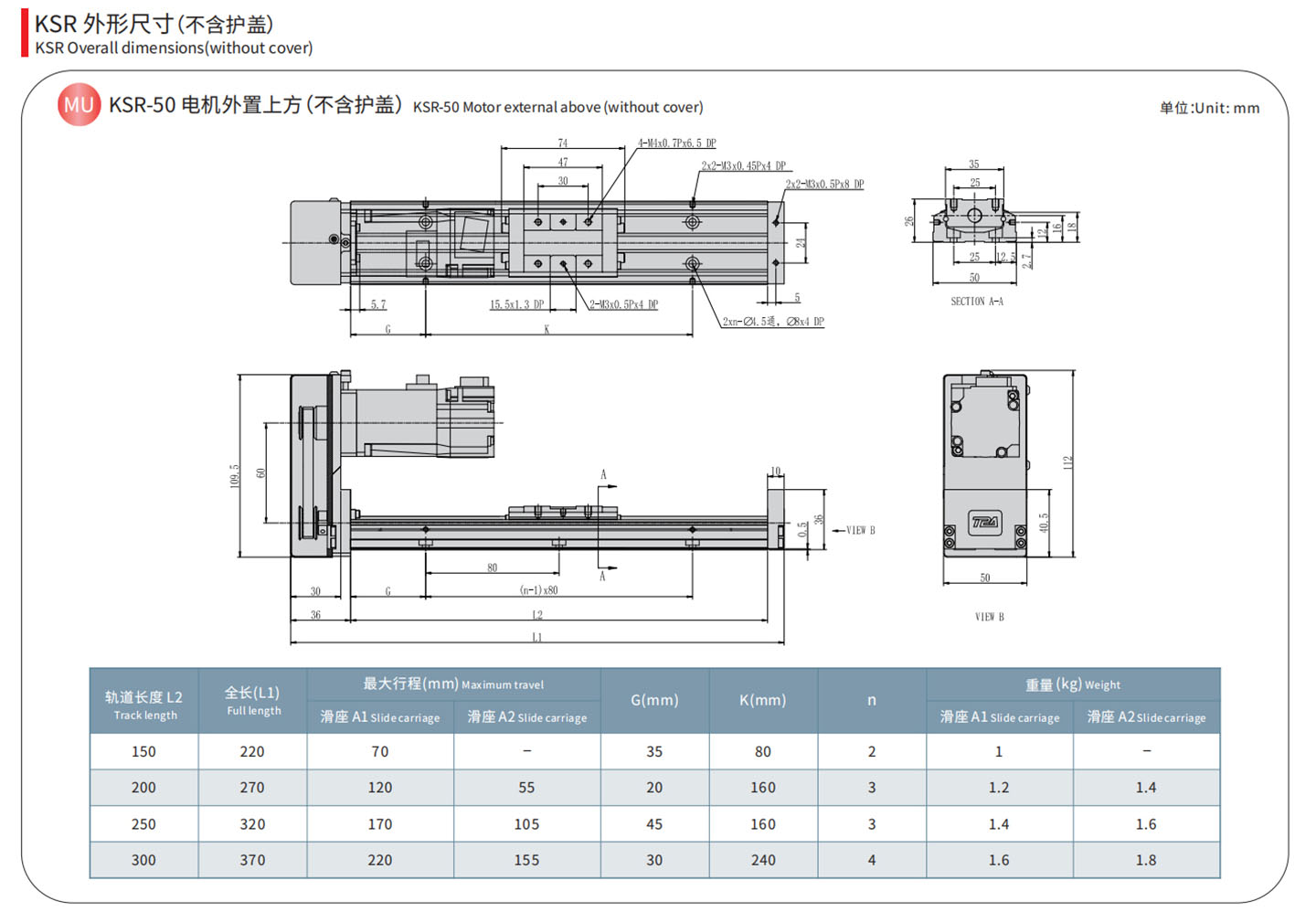
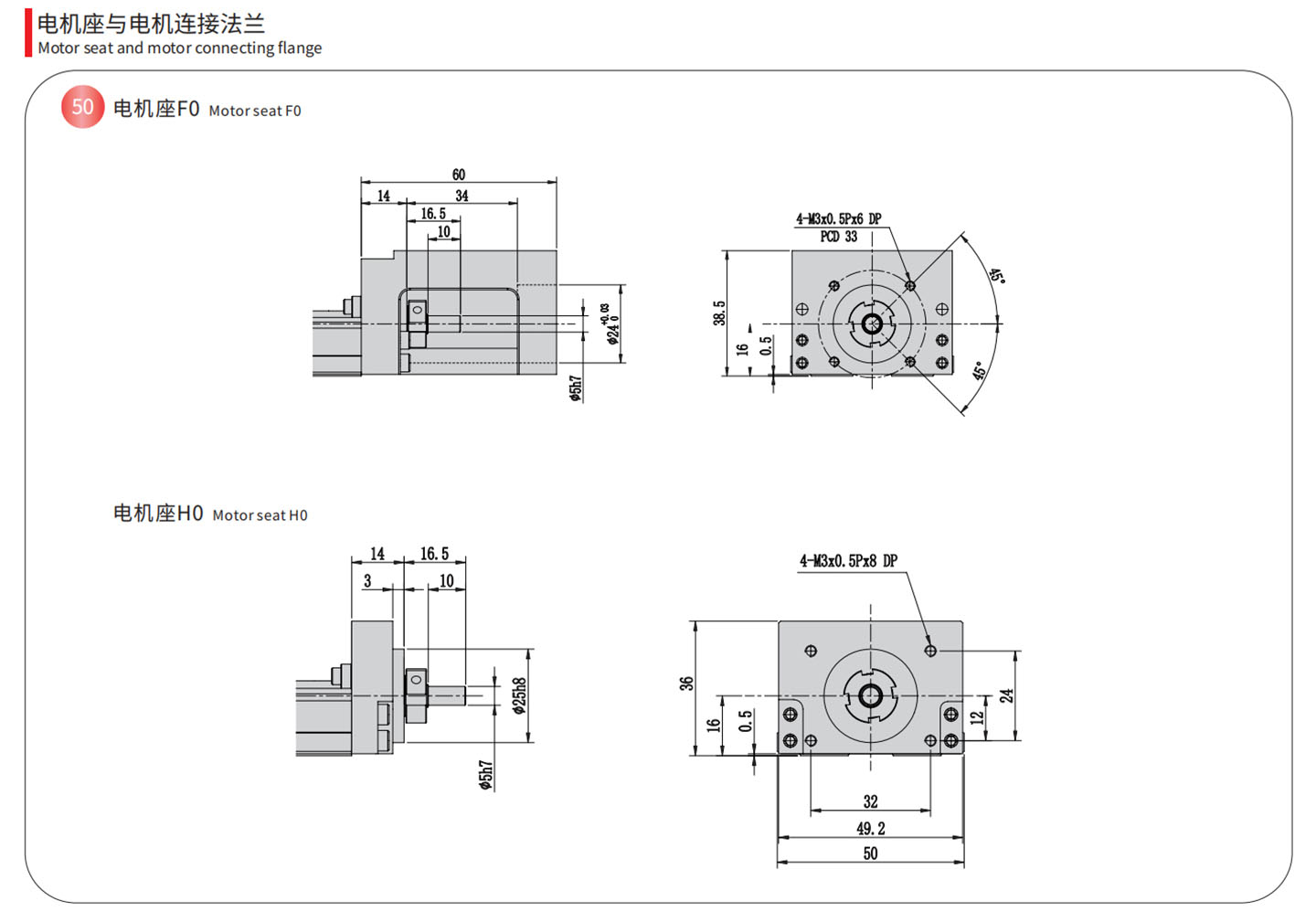
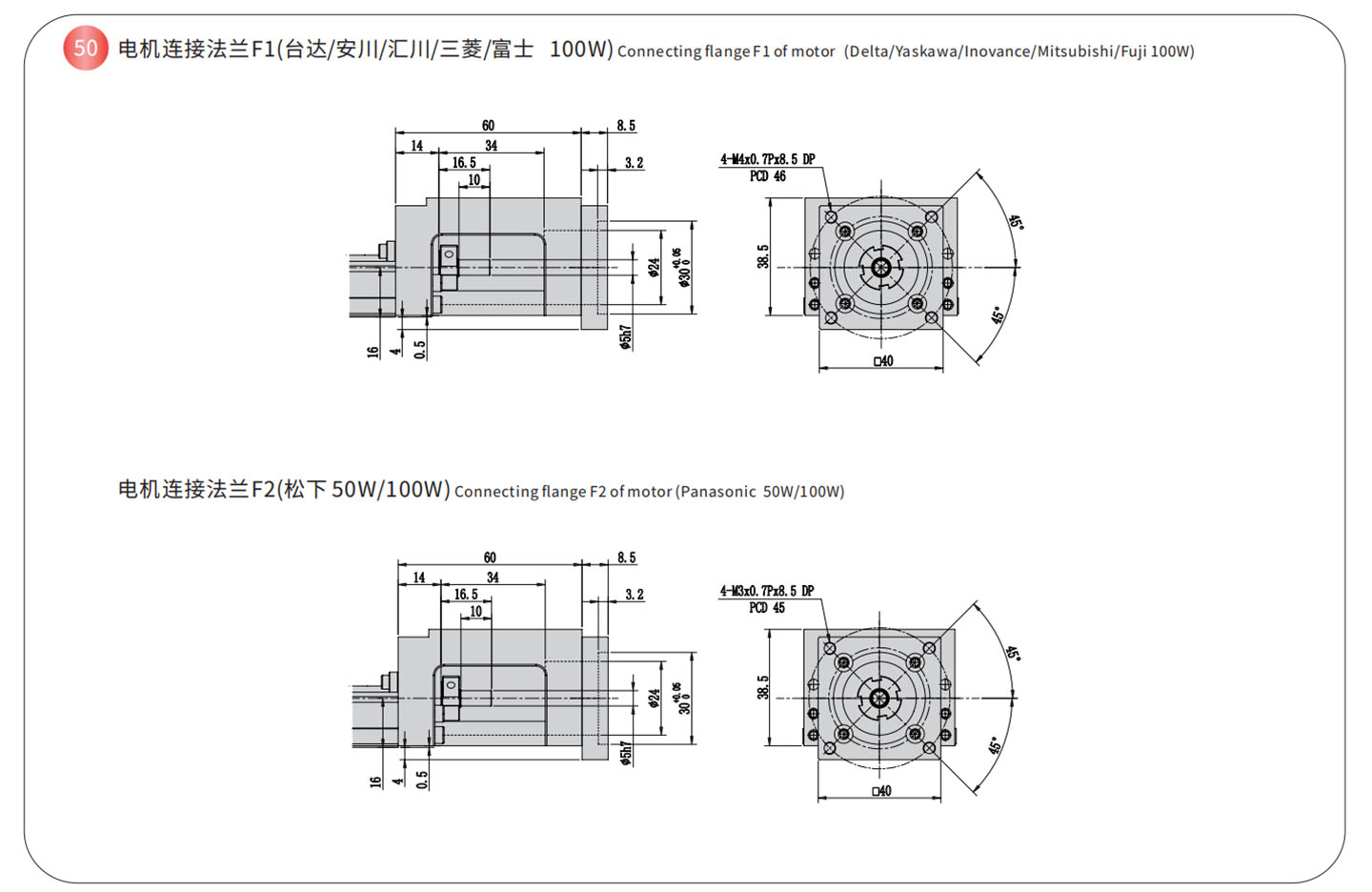
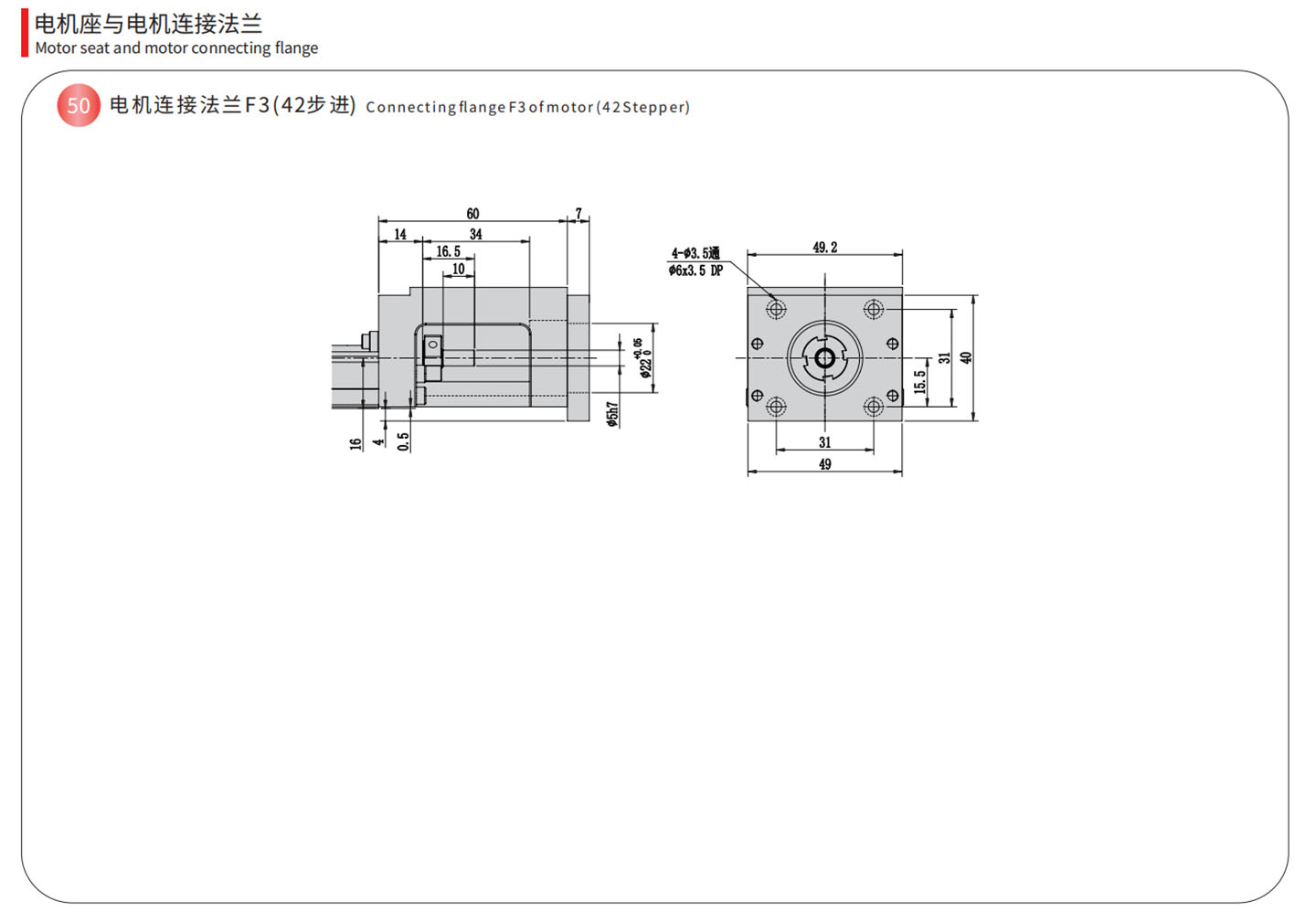
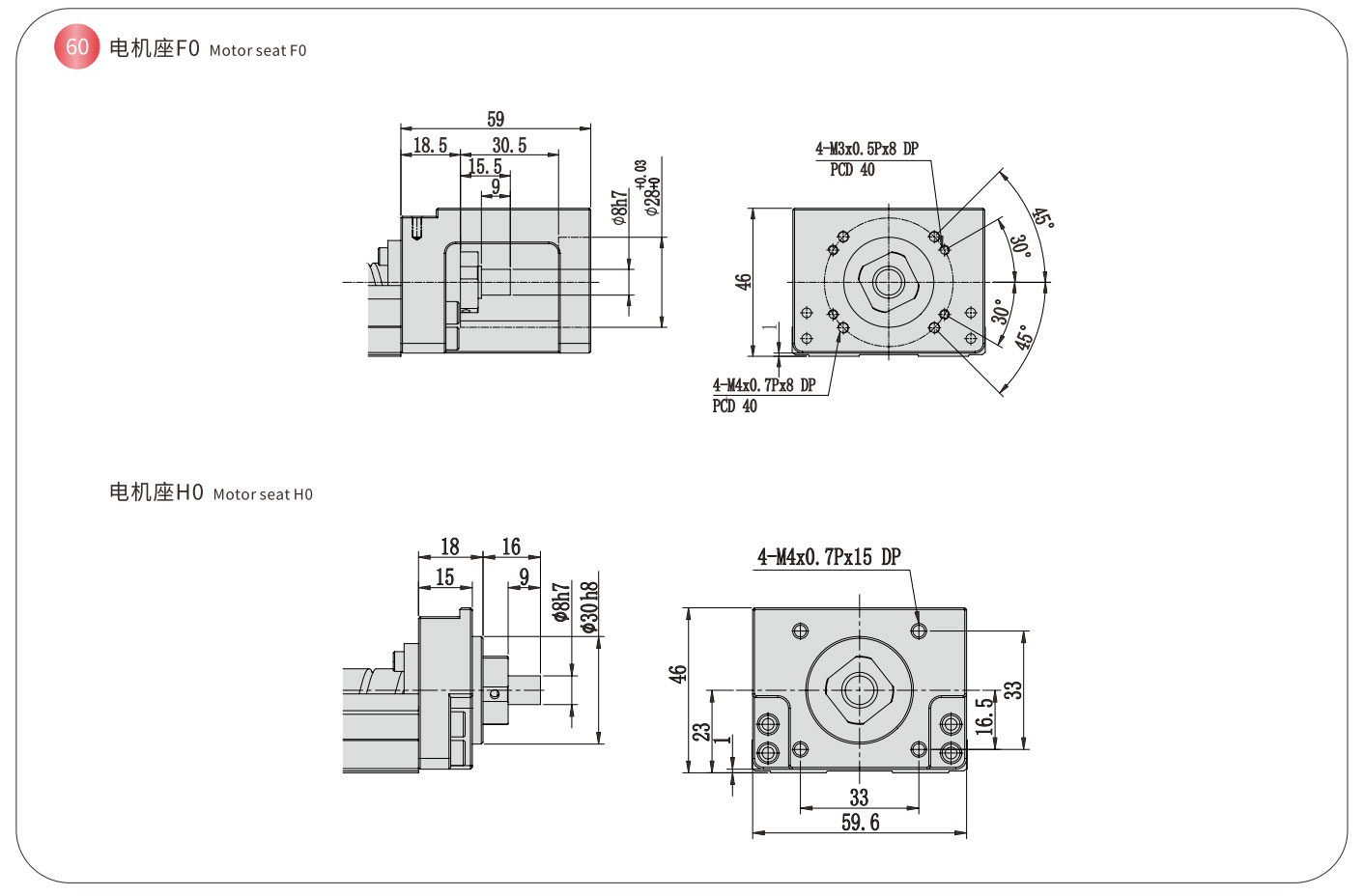
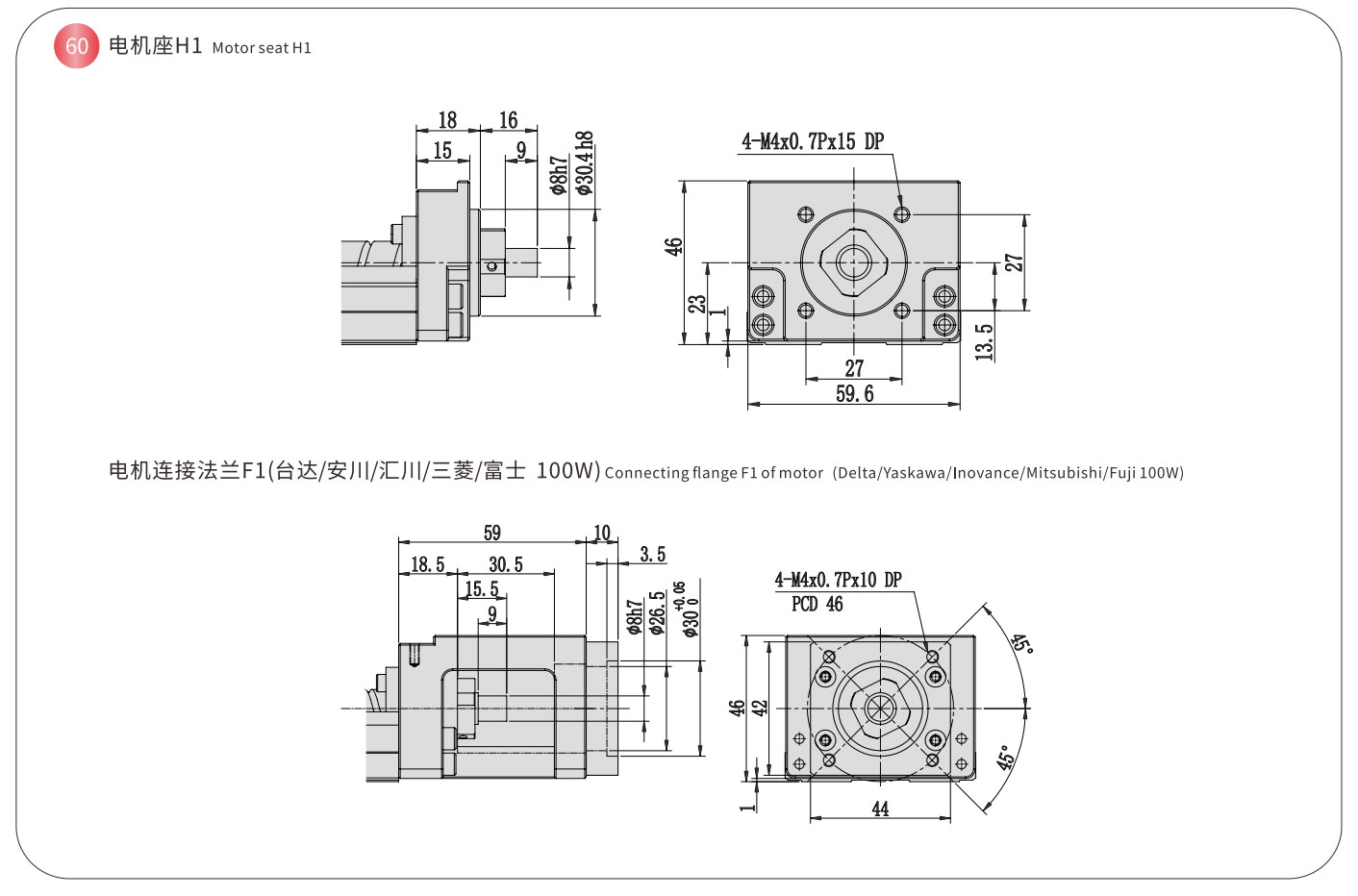
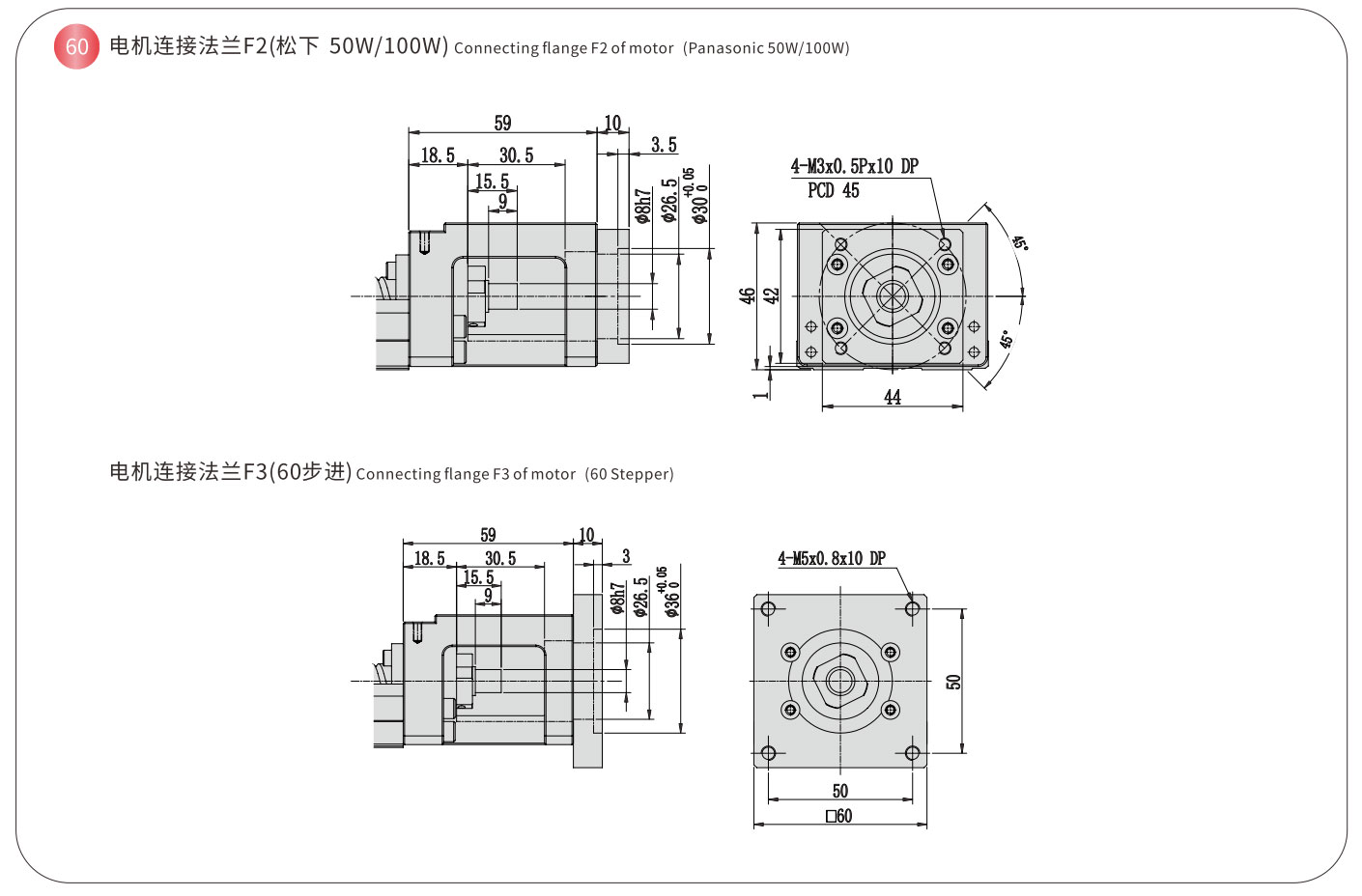
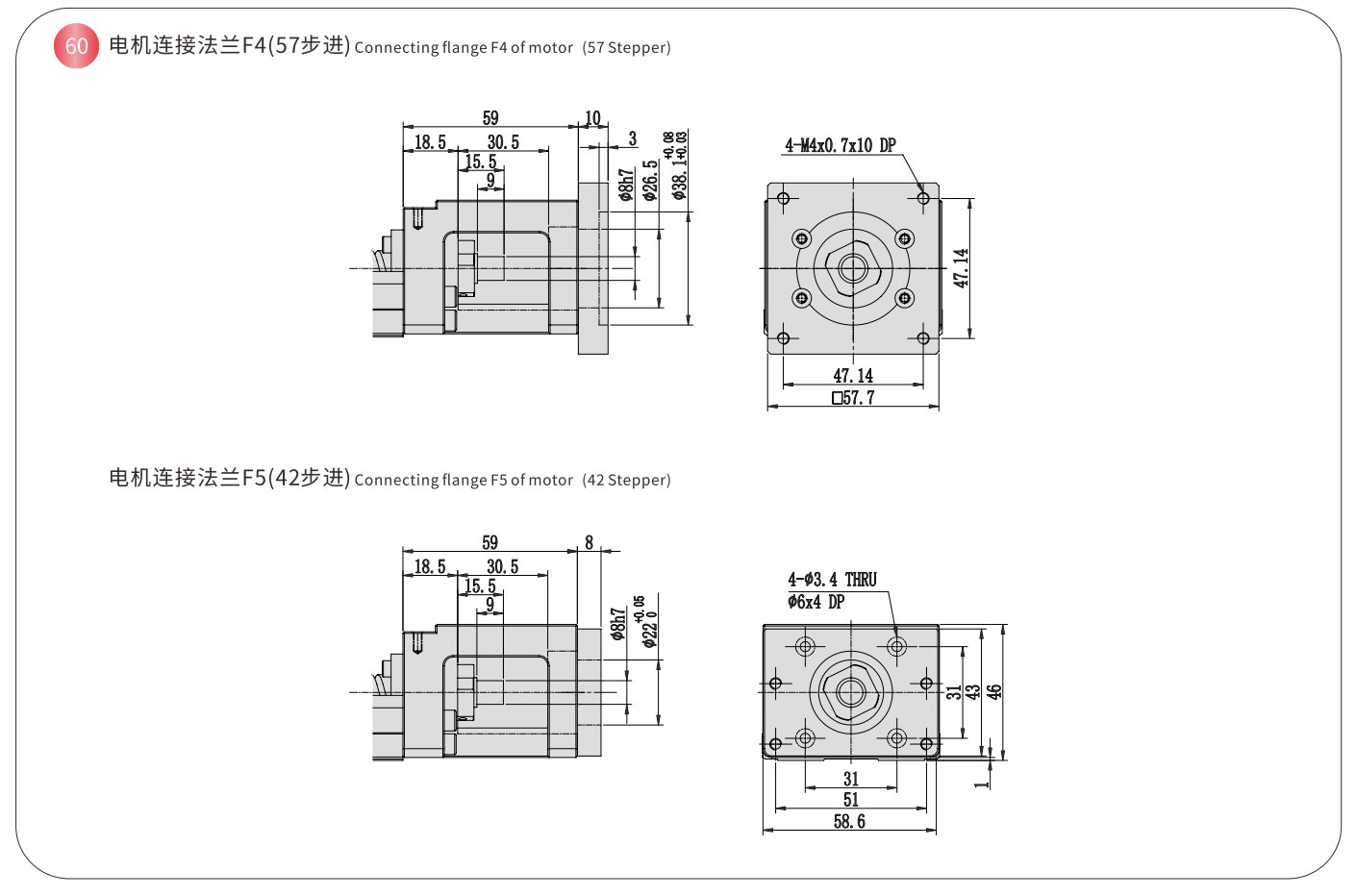
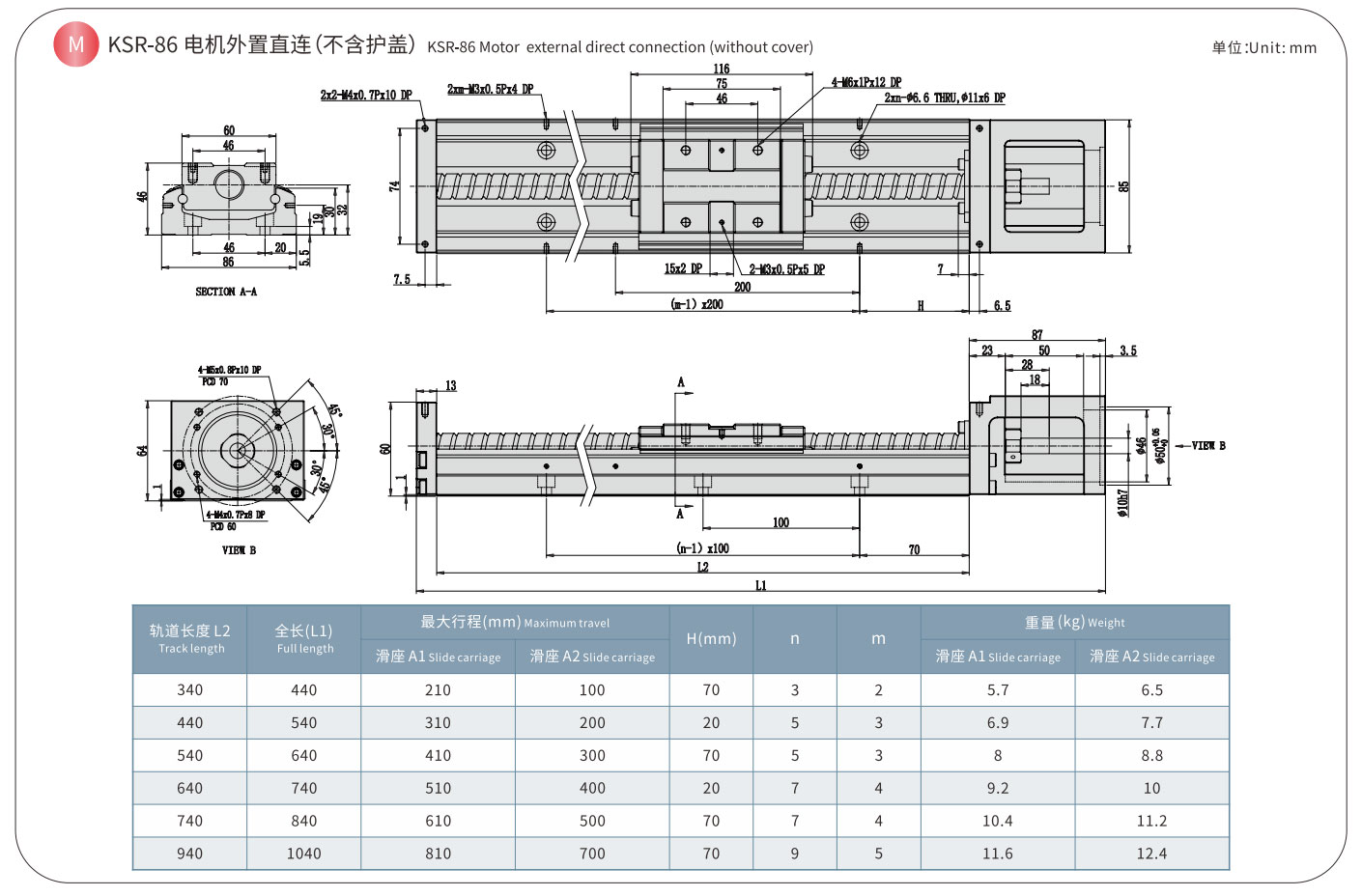
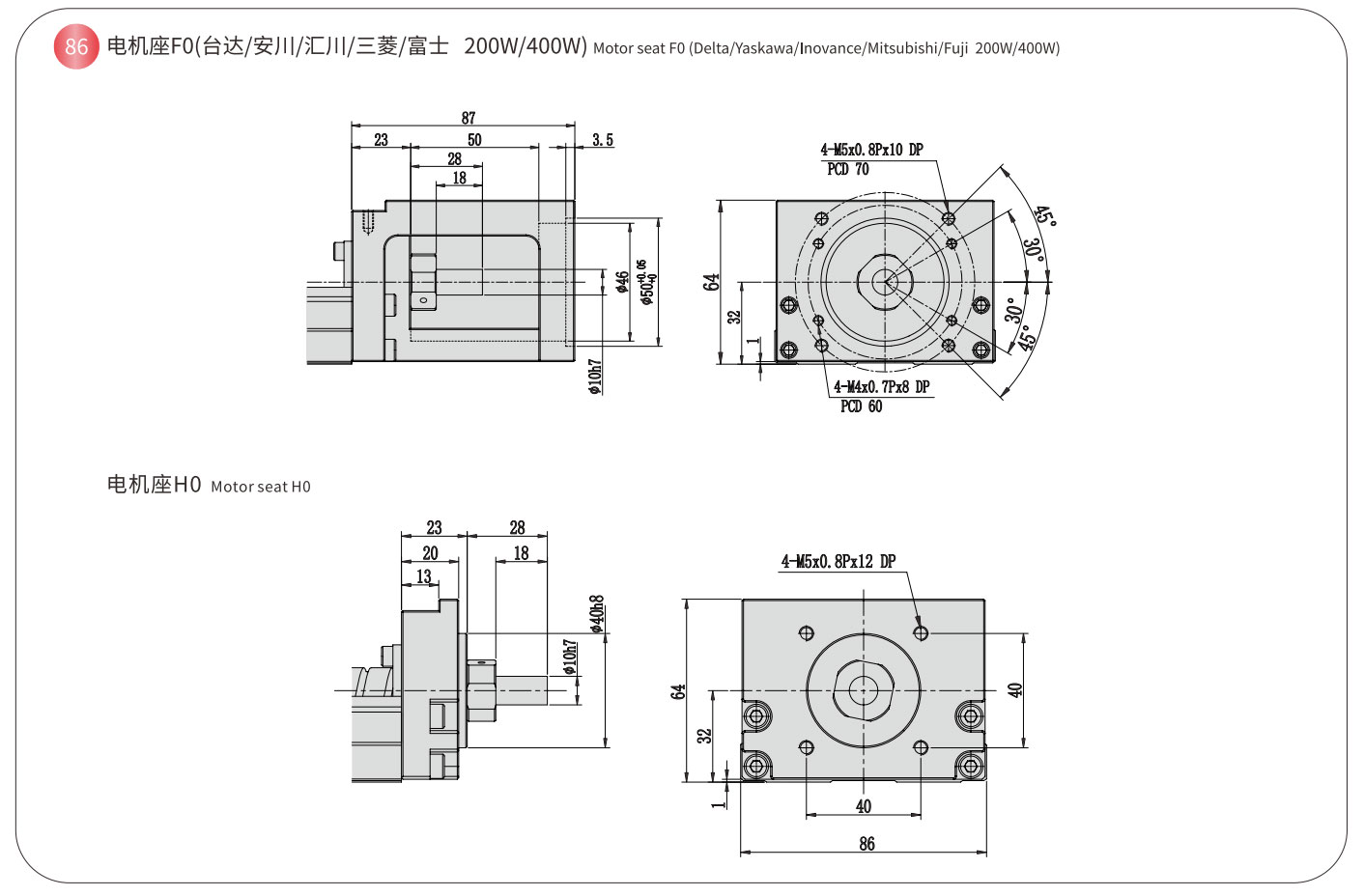
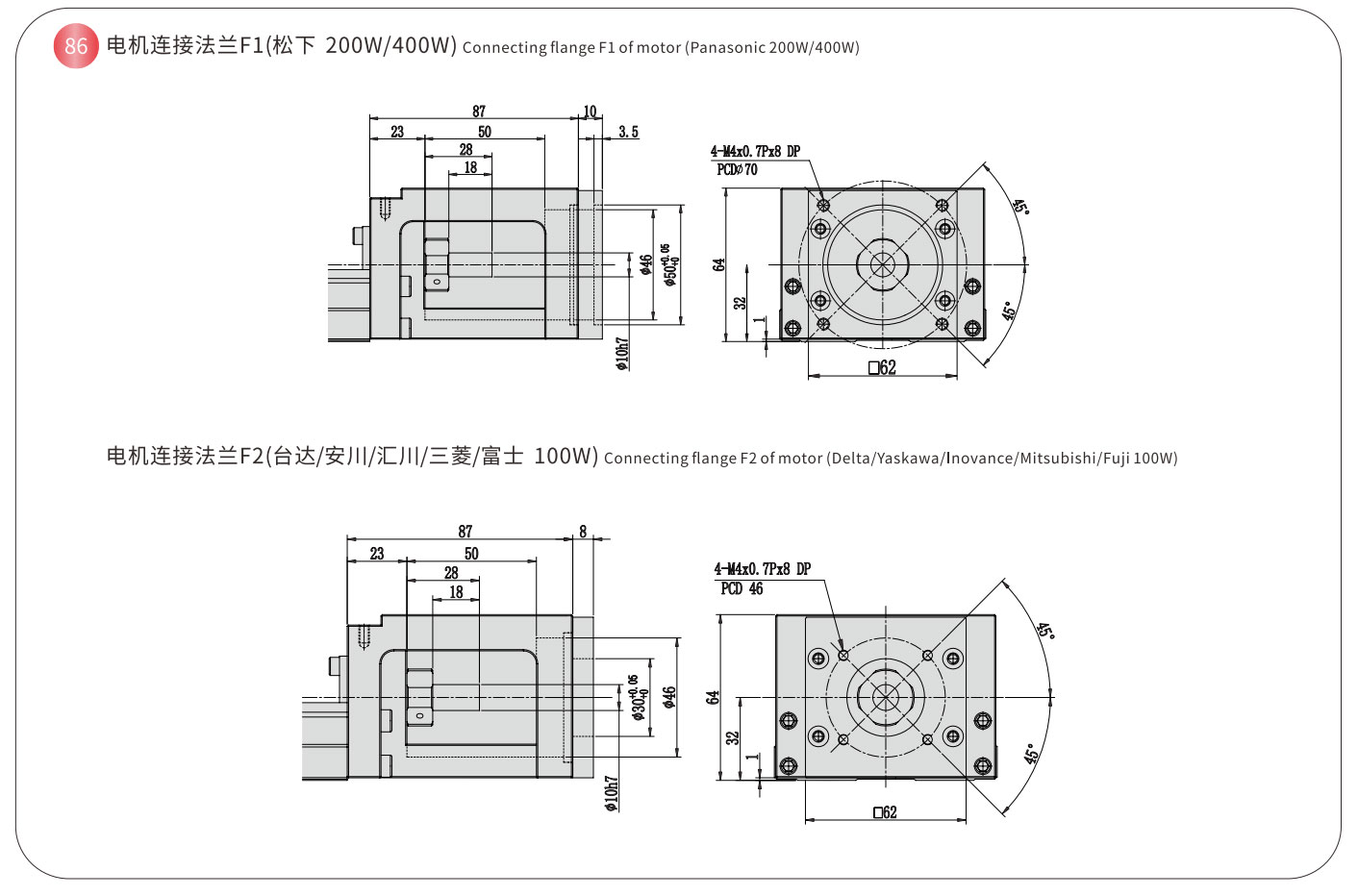
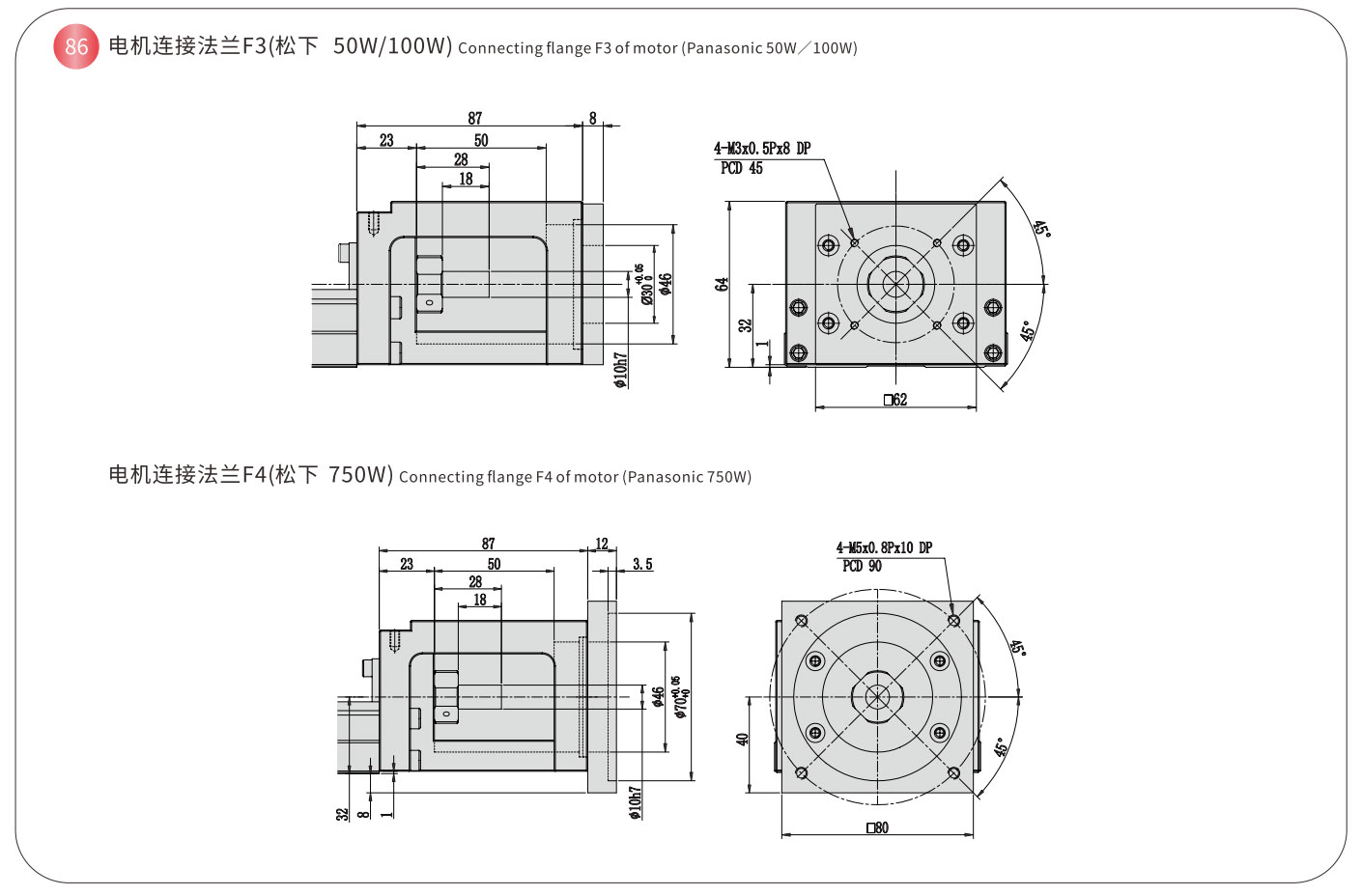
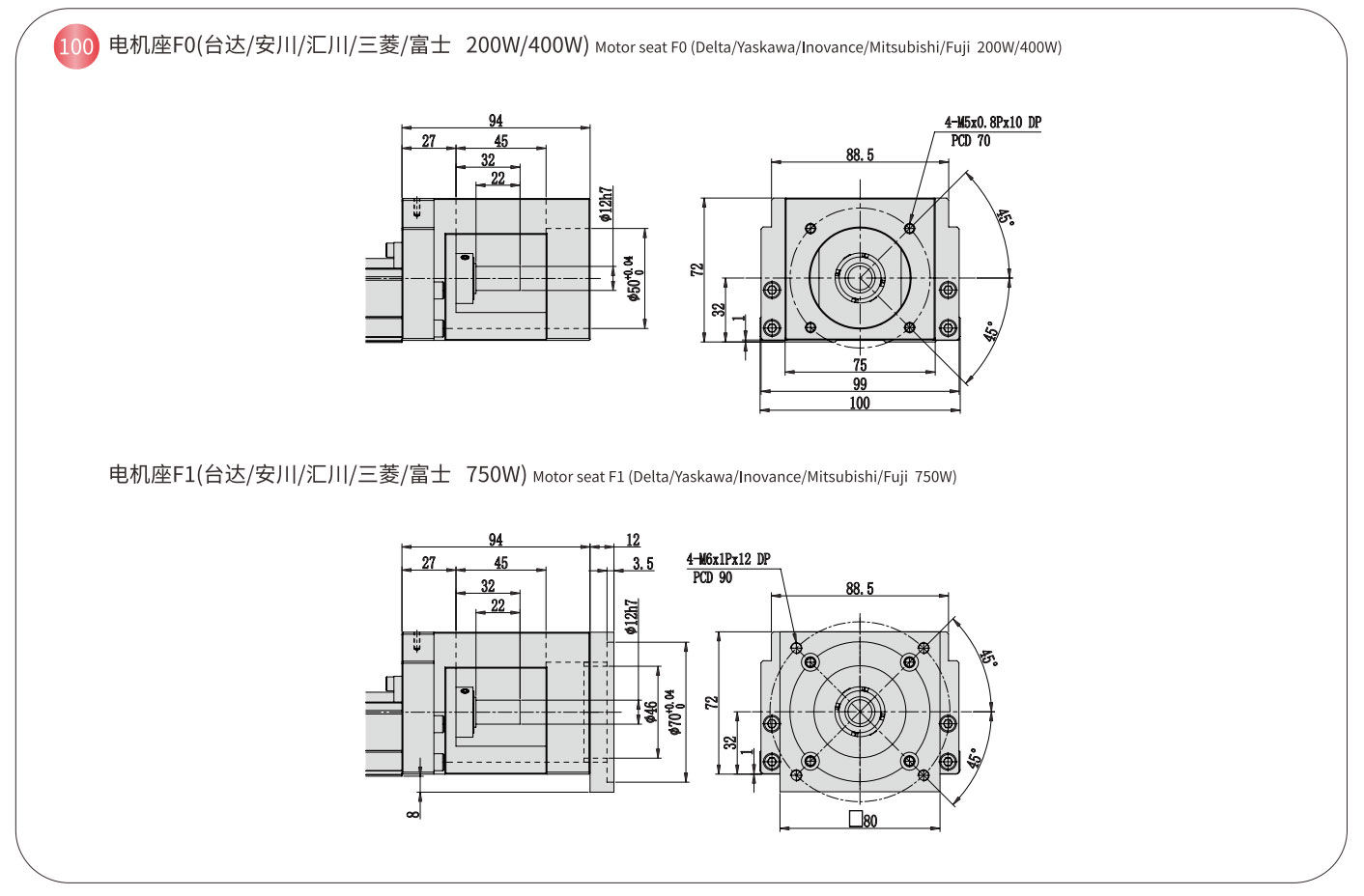
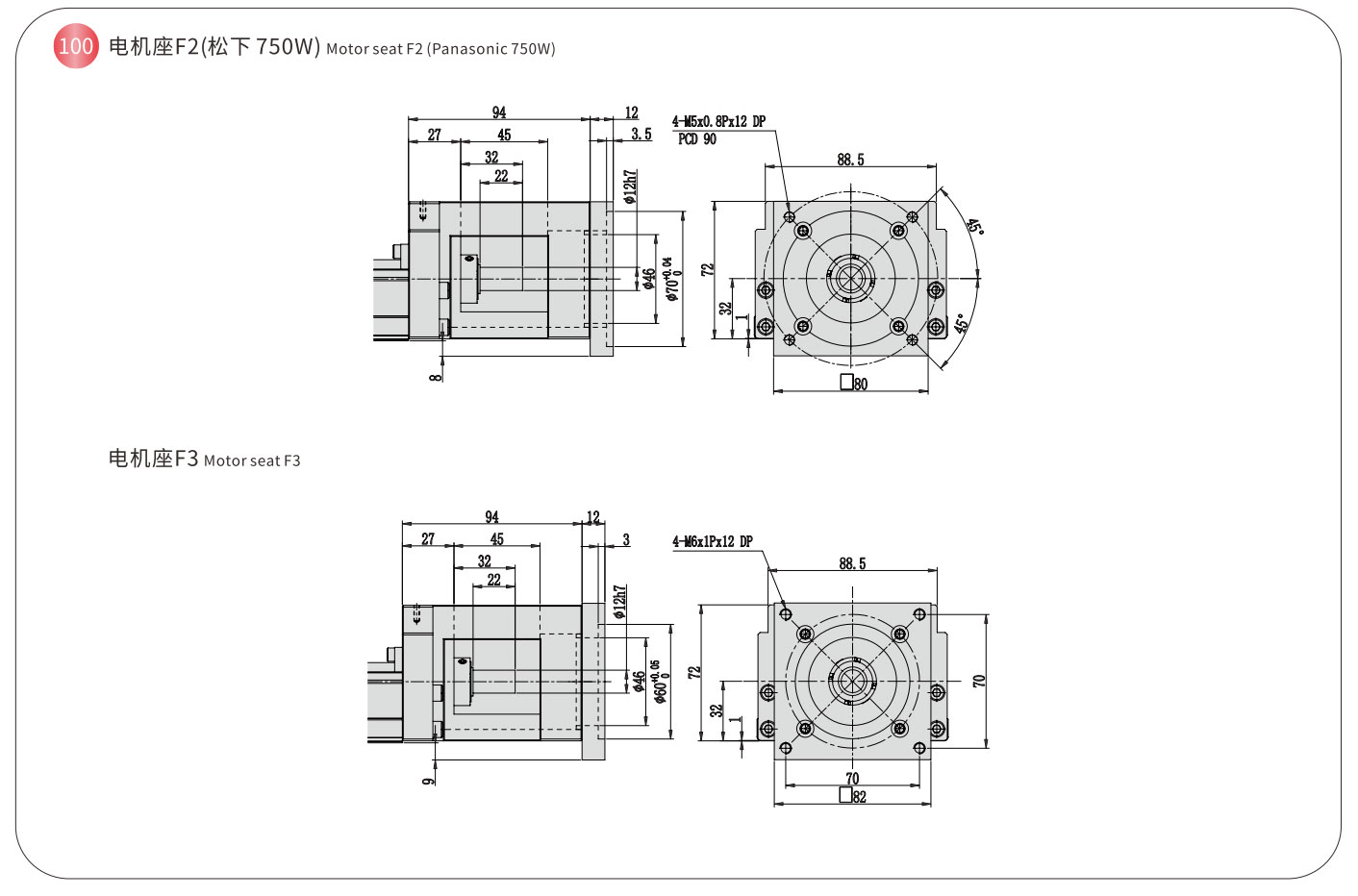
Unter den gleichen Lastbedingungen ist unser einachsiger Roboter der KK-Serie kleiner, wir bieten Standard-Gewindelöcher an der Stahlbasis und am Schieber und unsere Motoradapterplatte bietet bis zu 8 Motorinstallationsmethoden, was bedeutet, dass er einfach zusammengebaut werden kann jedes kartesische Robotersystem. Daher werden einachsige Roboter der KK-Serie häufig in der Handhabung von Siliziumwafern, der automatischen Dosierung, der FPD-Industrie, der medizinischen Automatisierungsindustrie, Präzisionsmessgeräten, Schiebetischen und der Koordinierungsindustrie für lineare Schiebetische eingesetzt.

KSR-KNR-KFR-KCR-Serie2

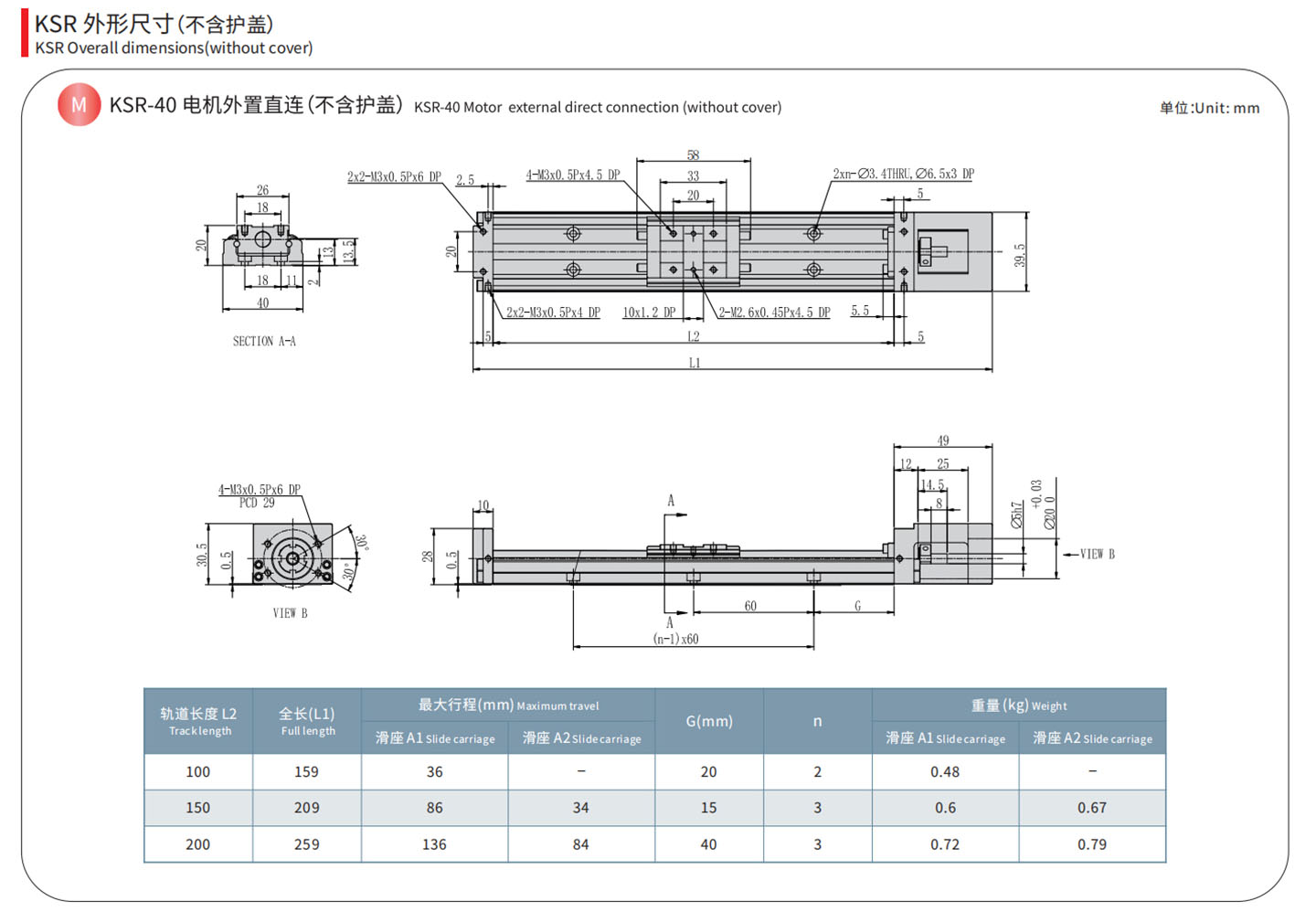
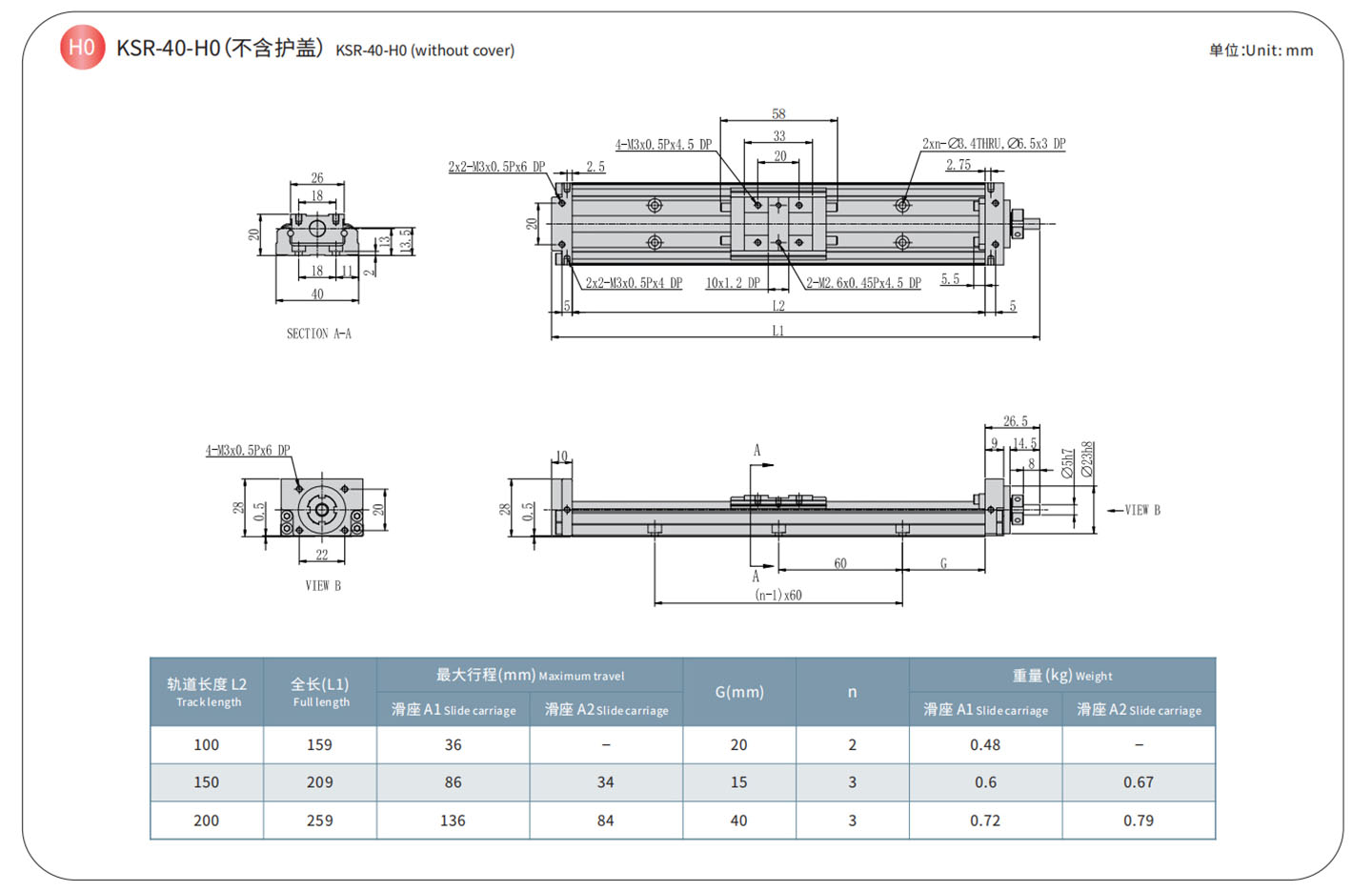
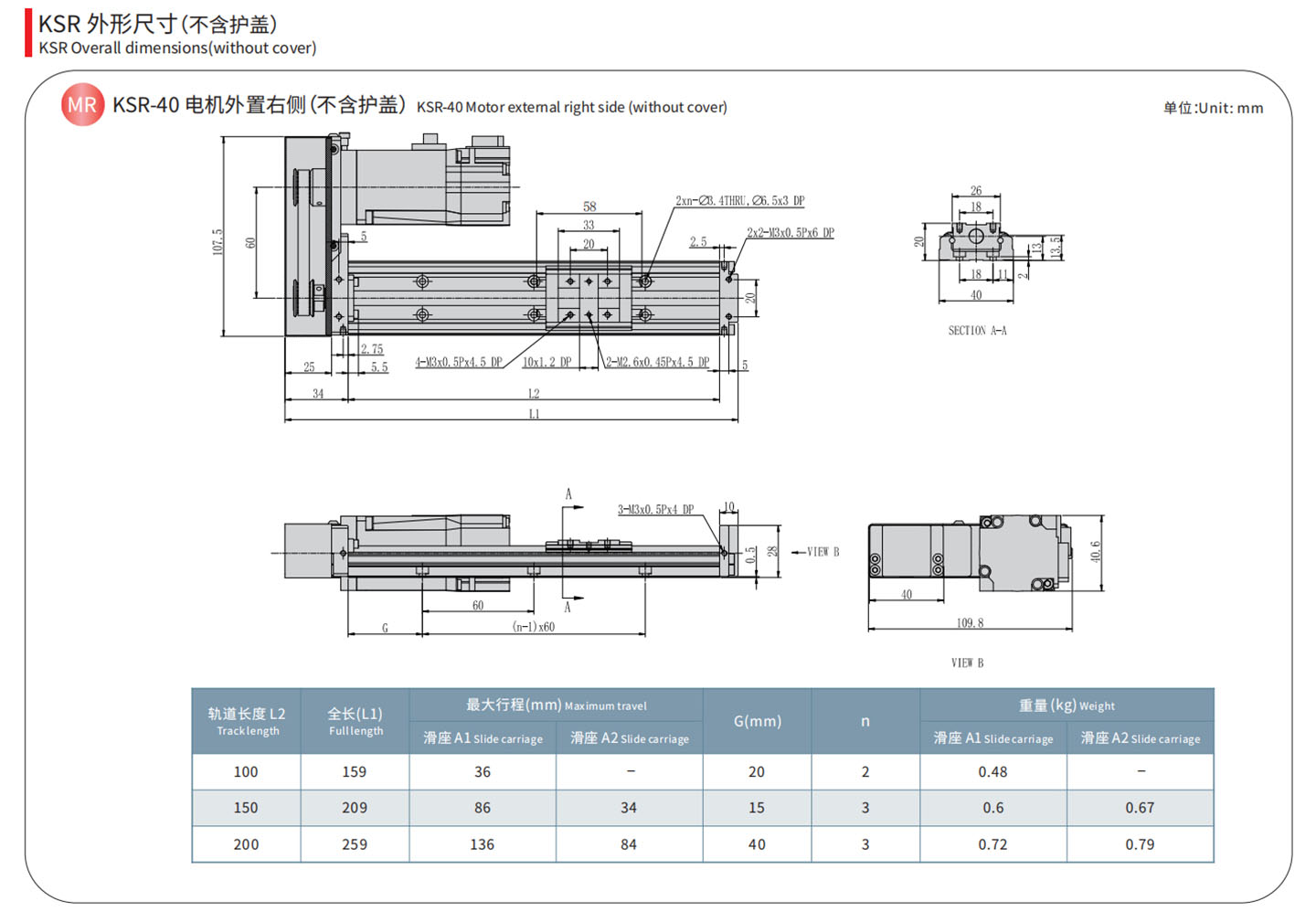
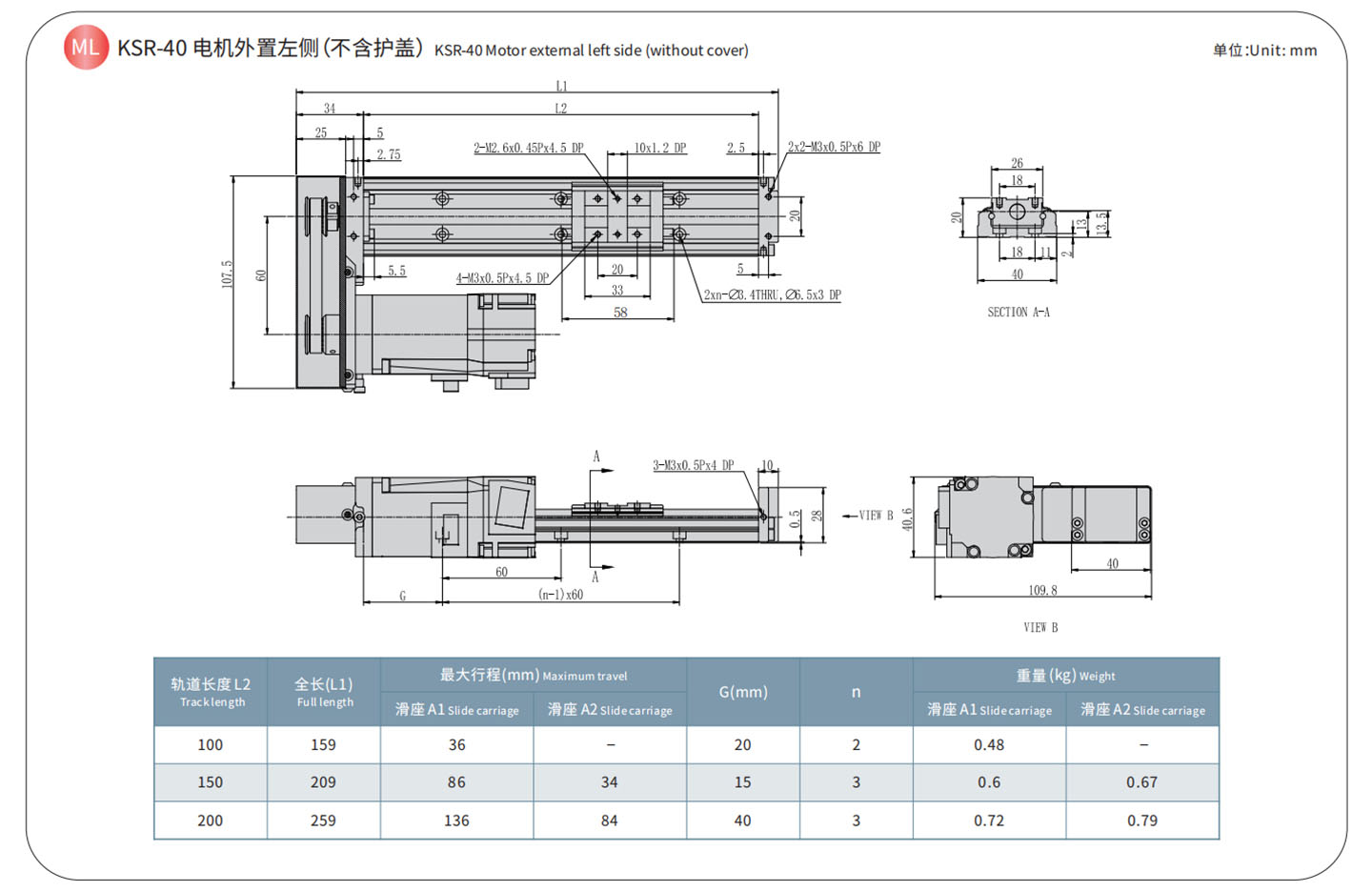
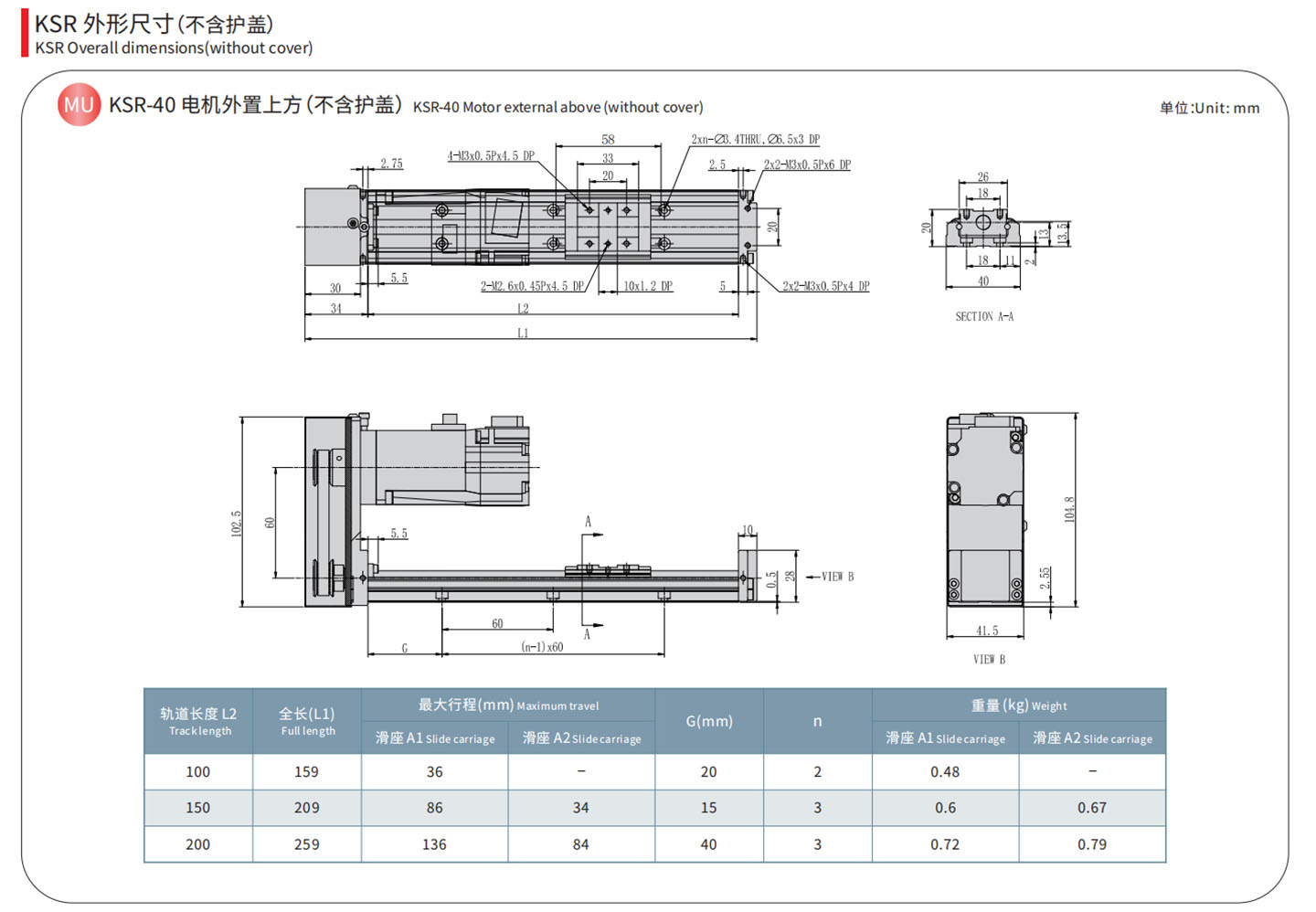
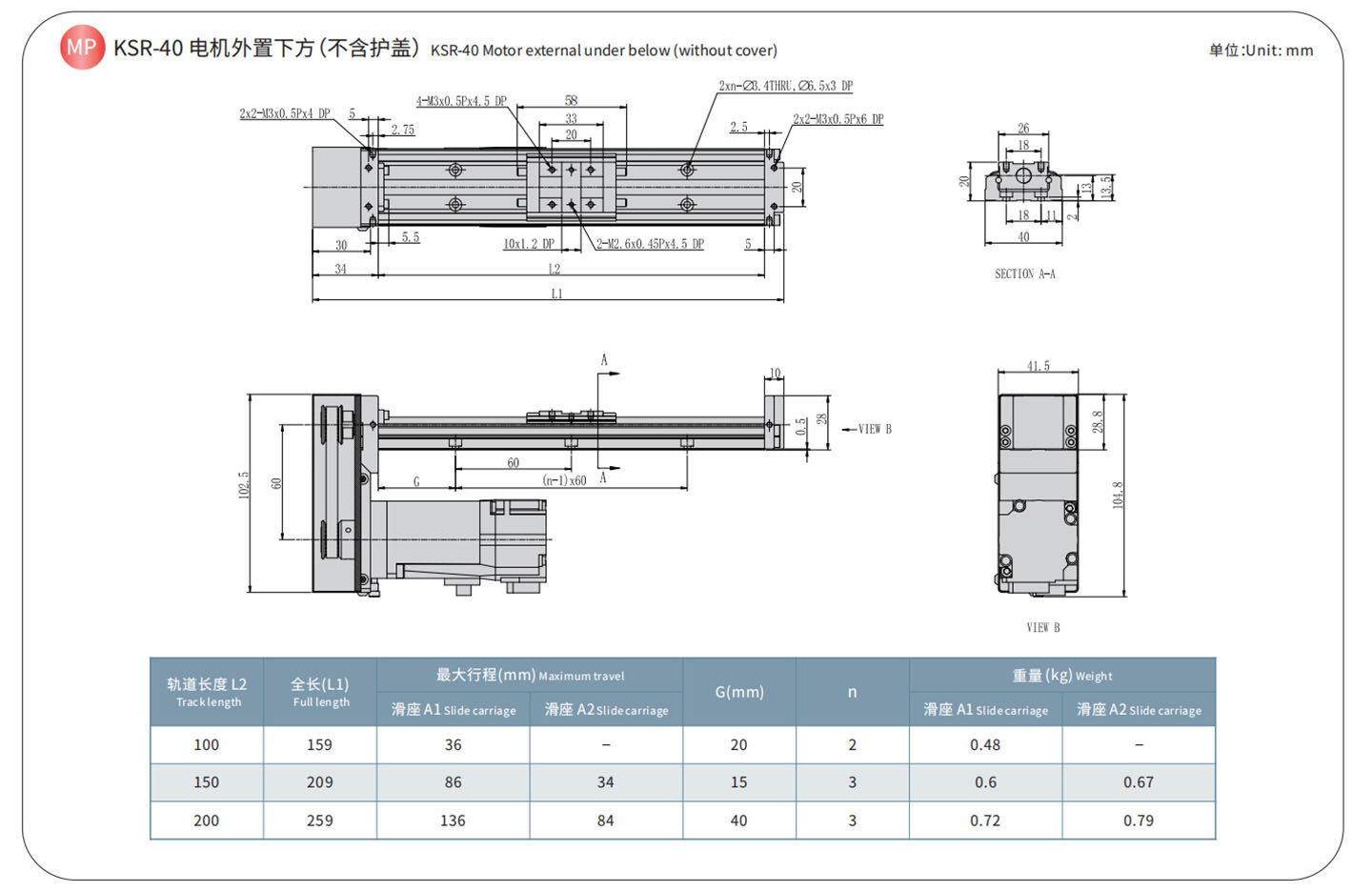
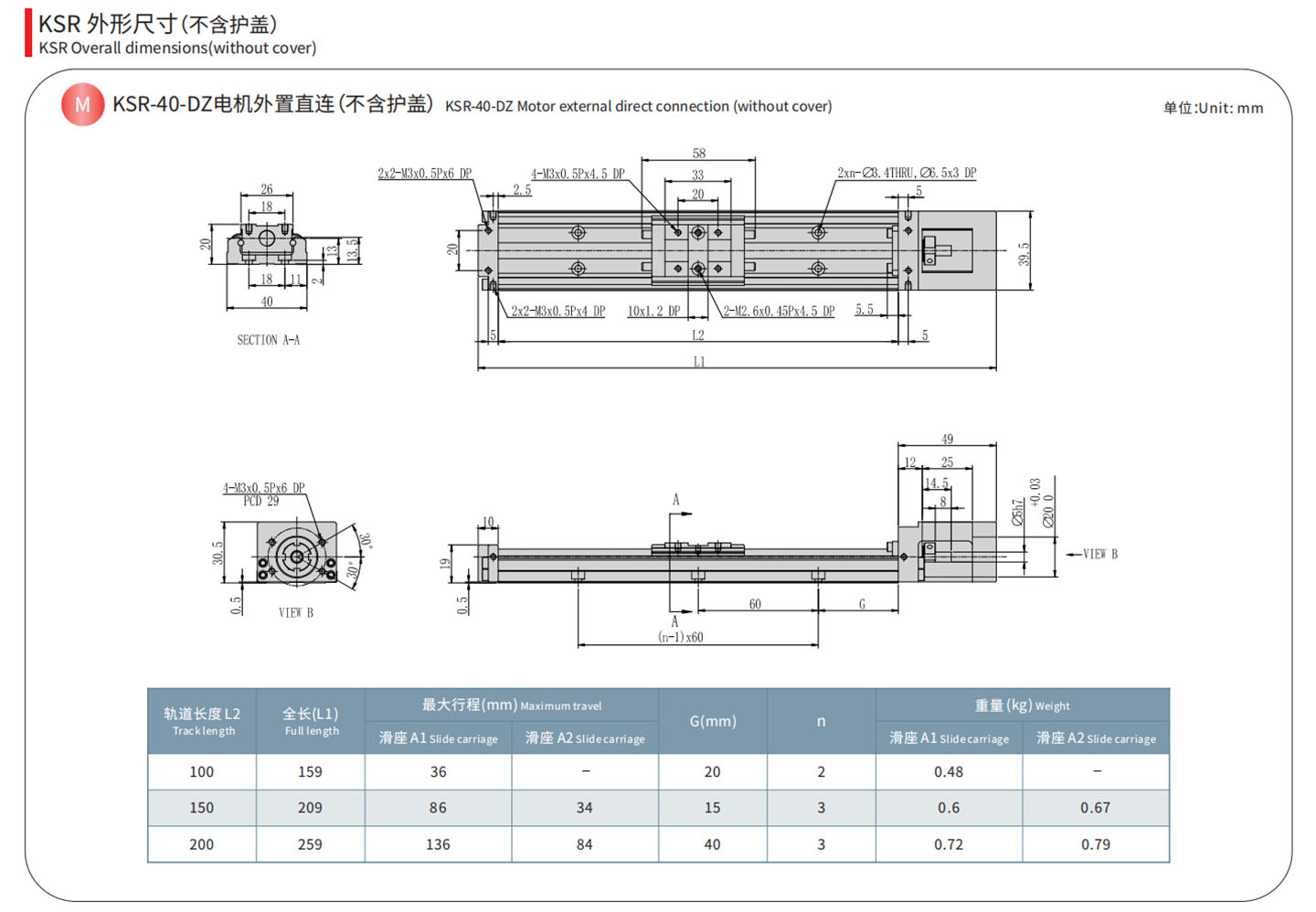
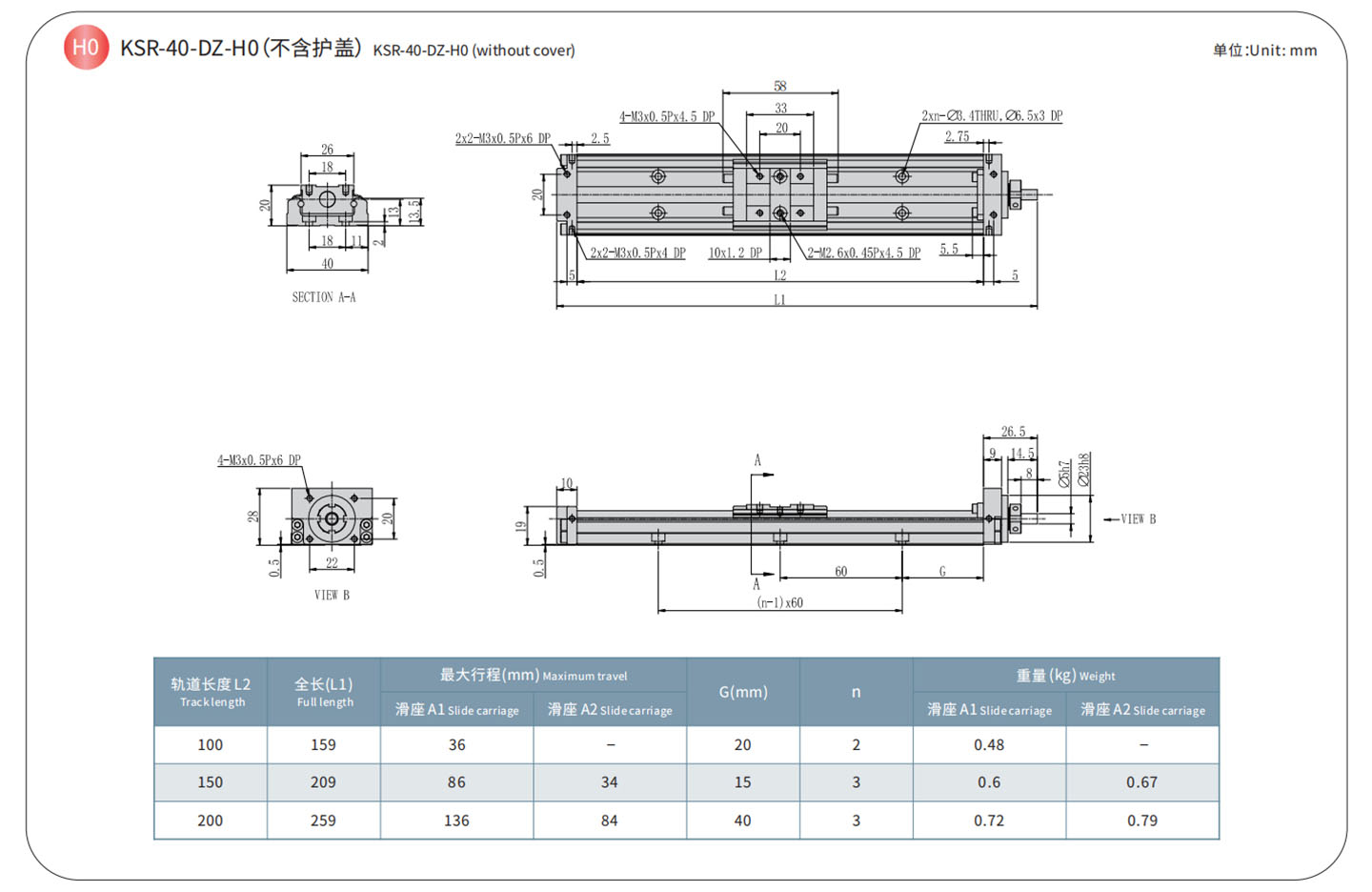
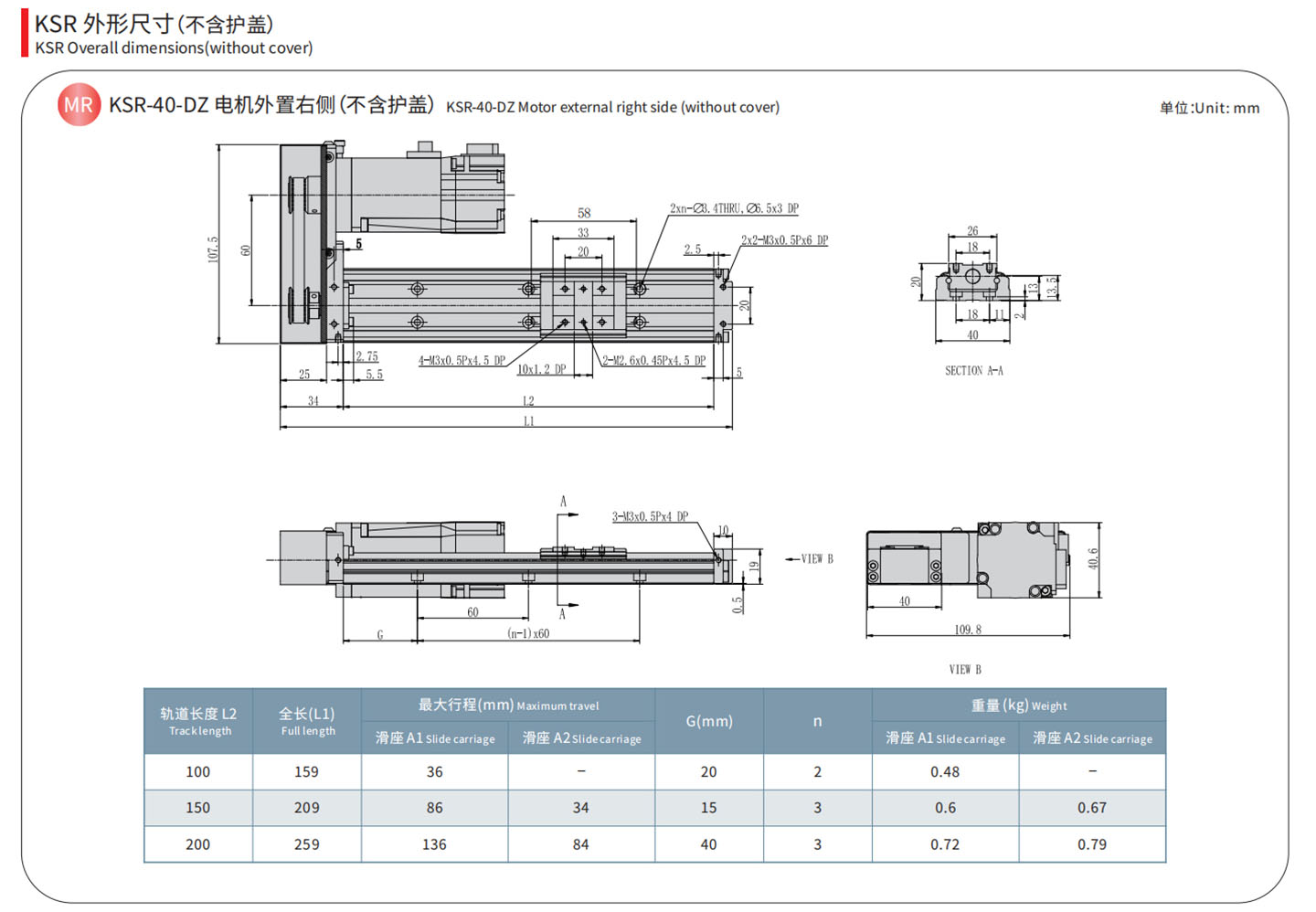
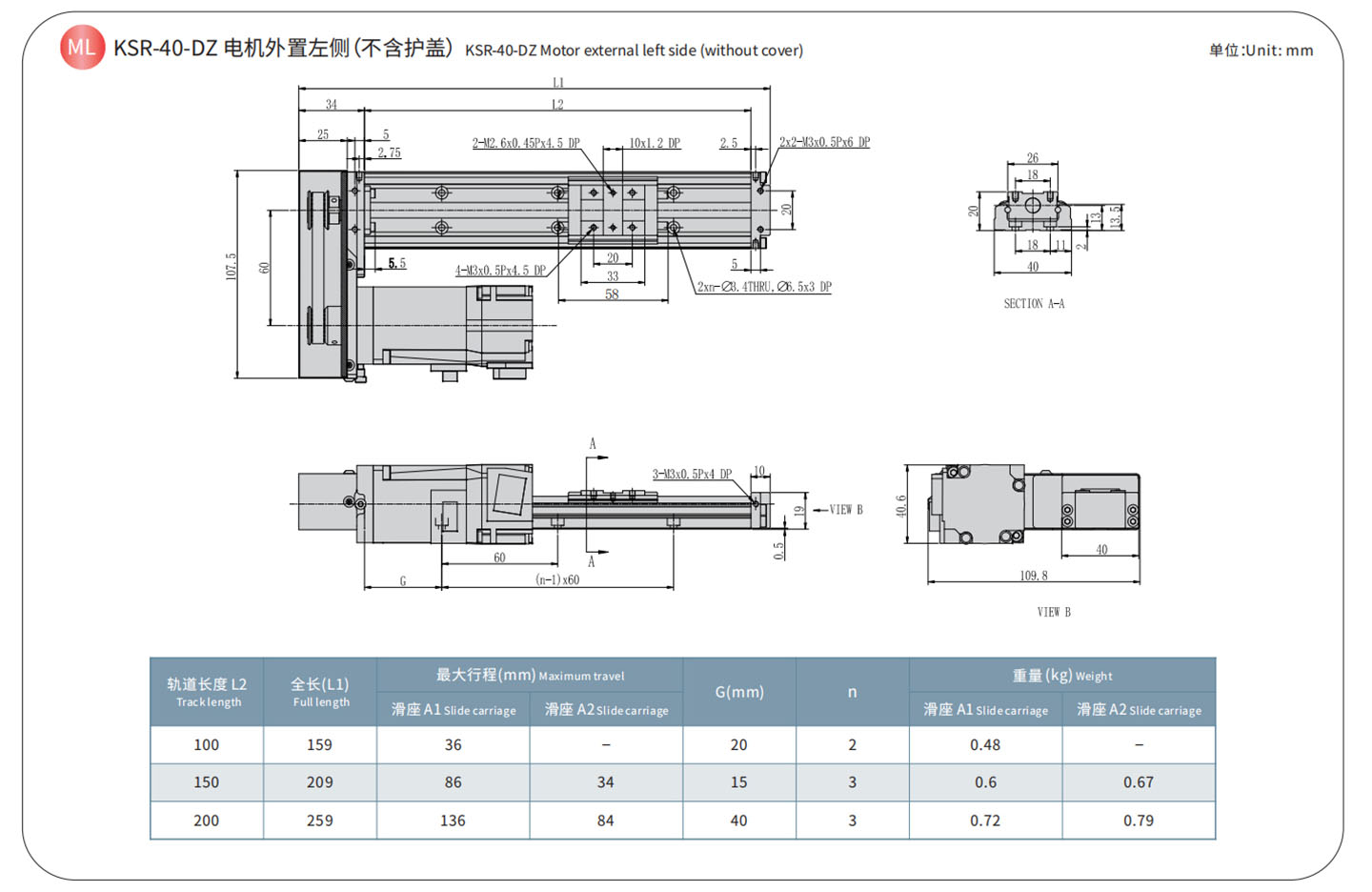
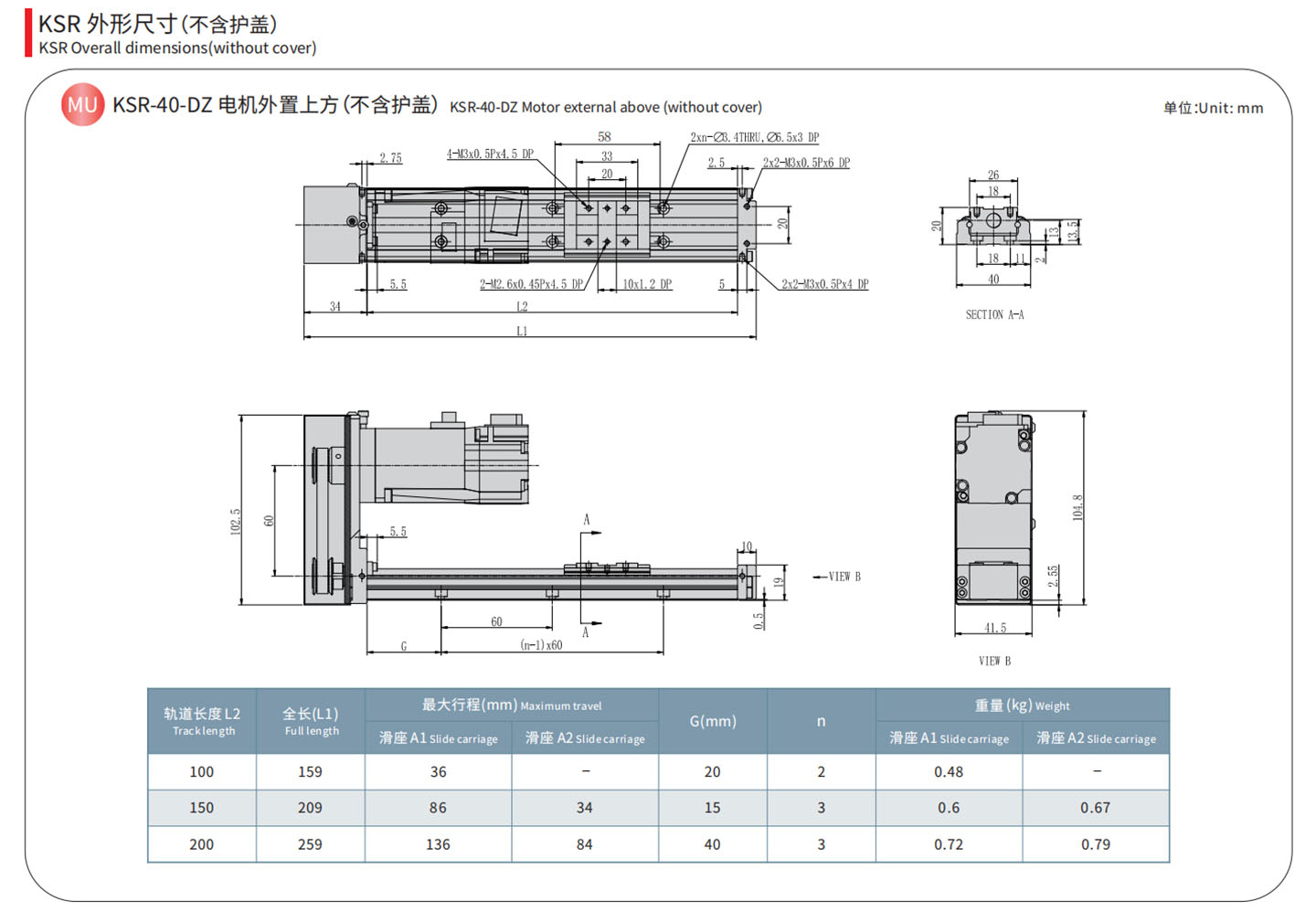
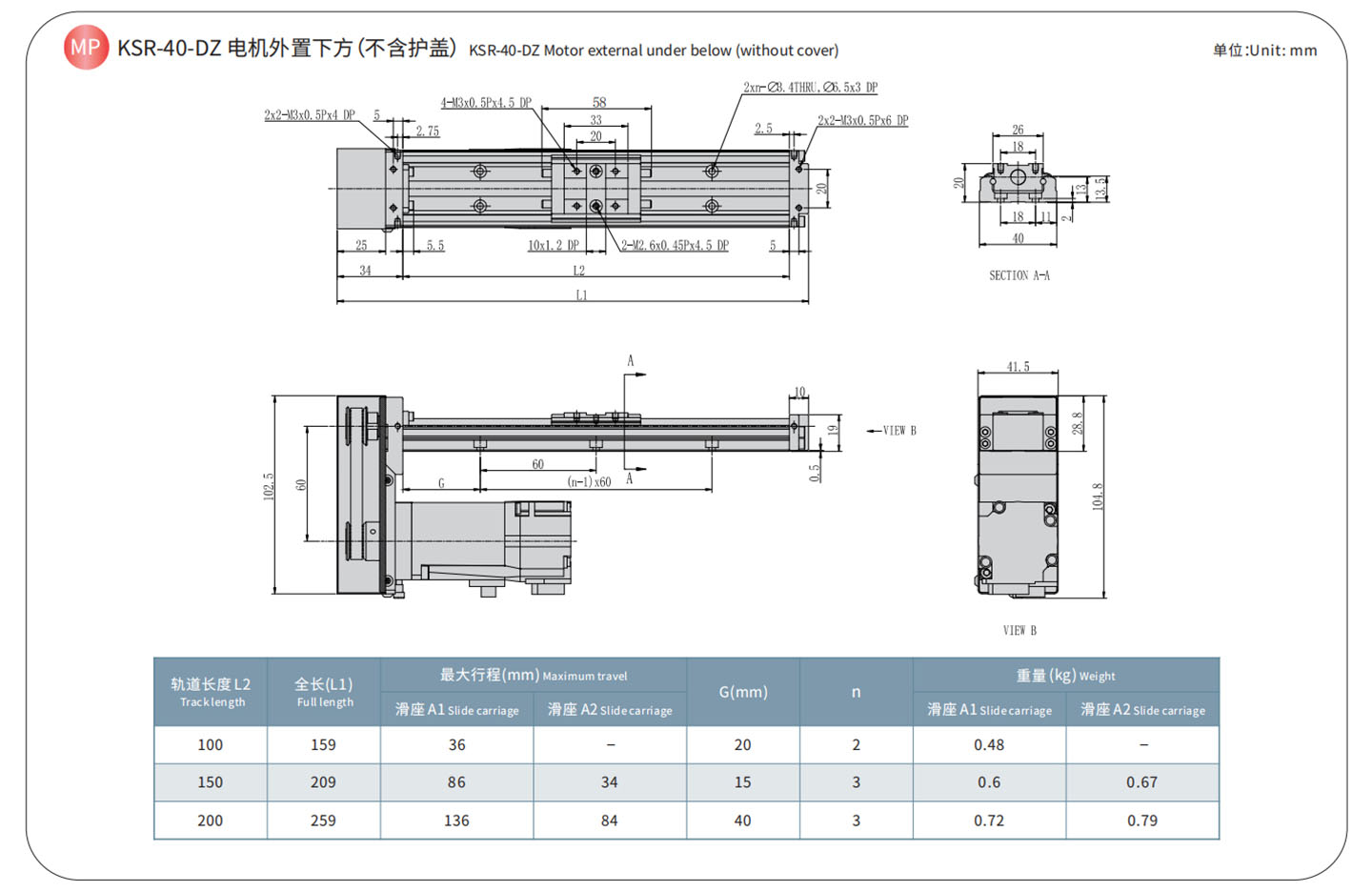
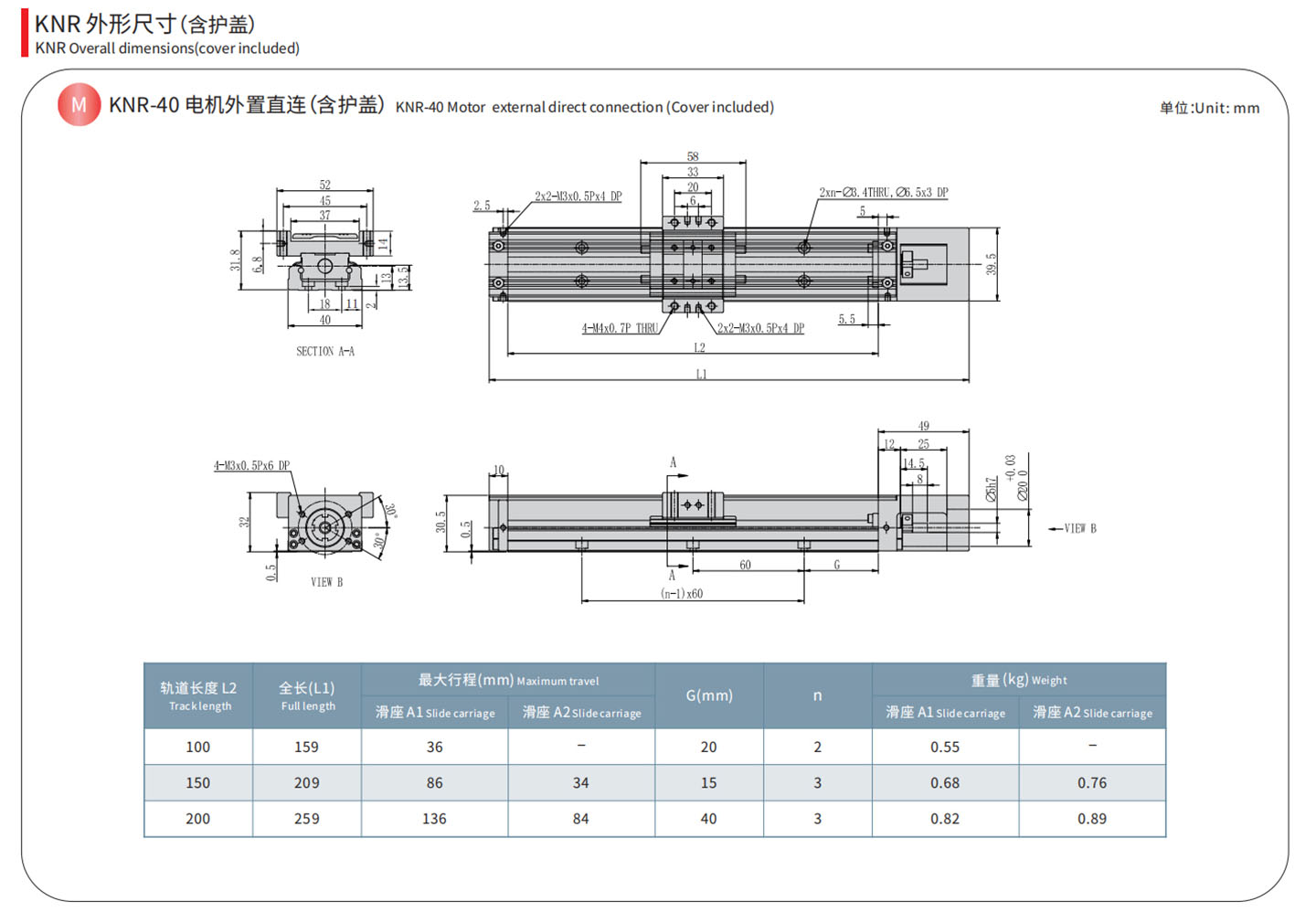
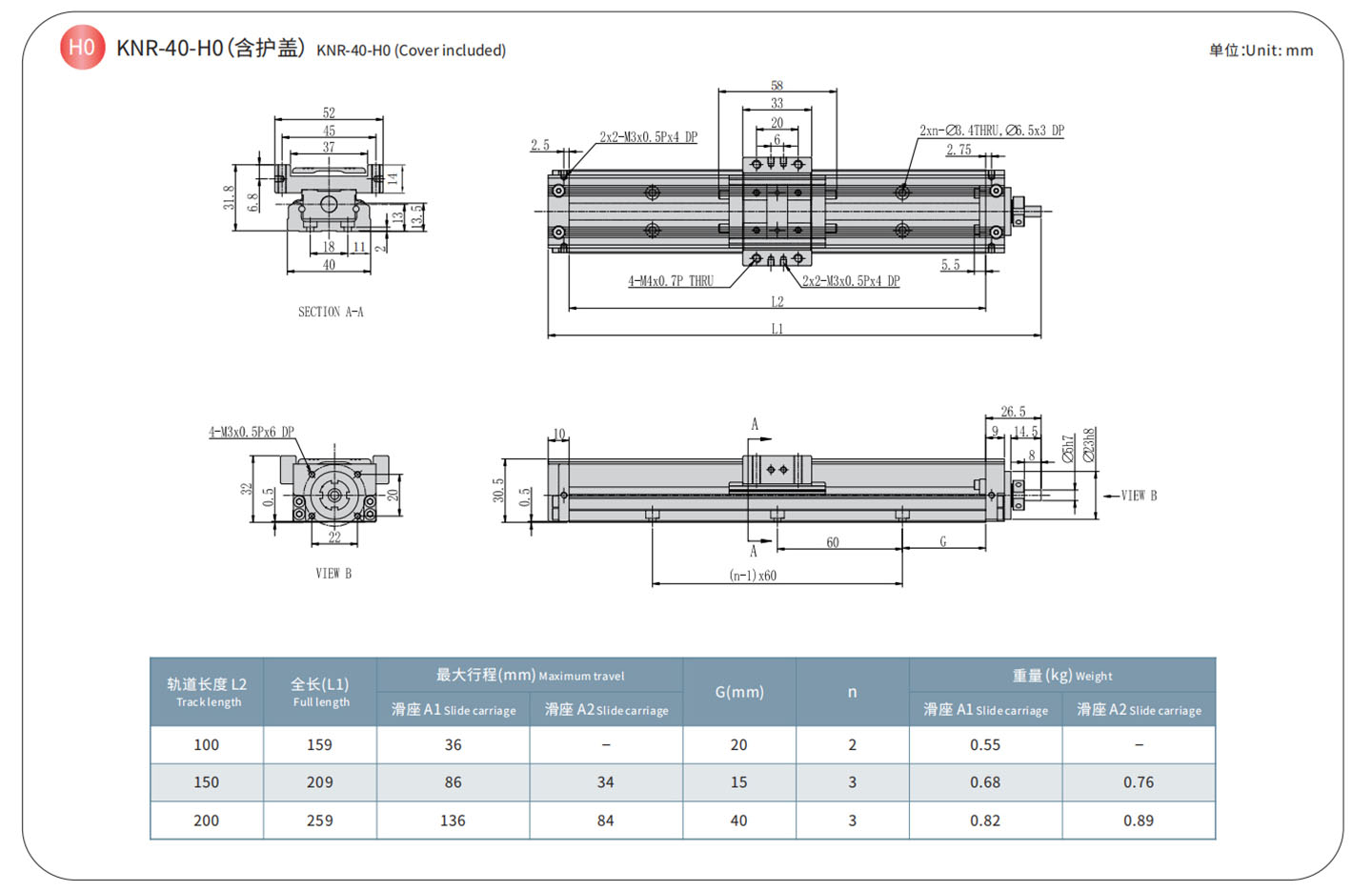
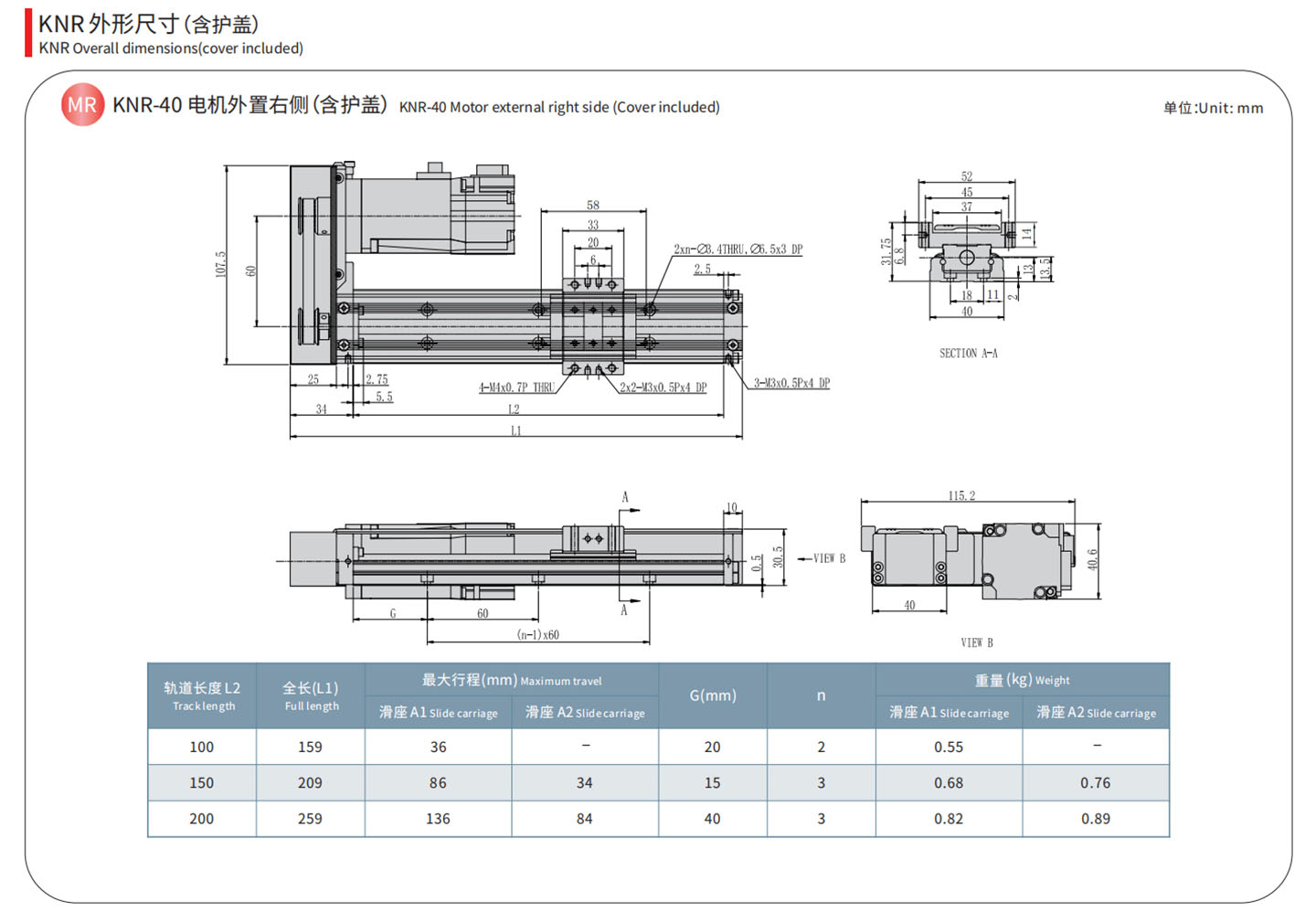
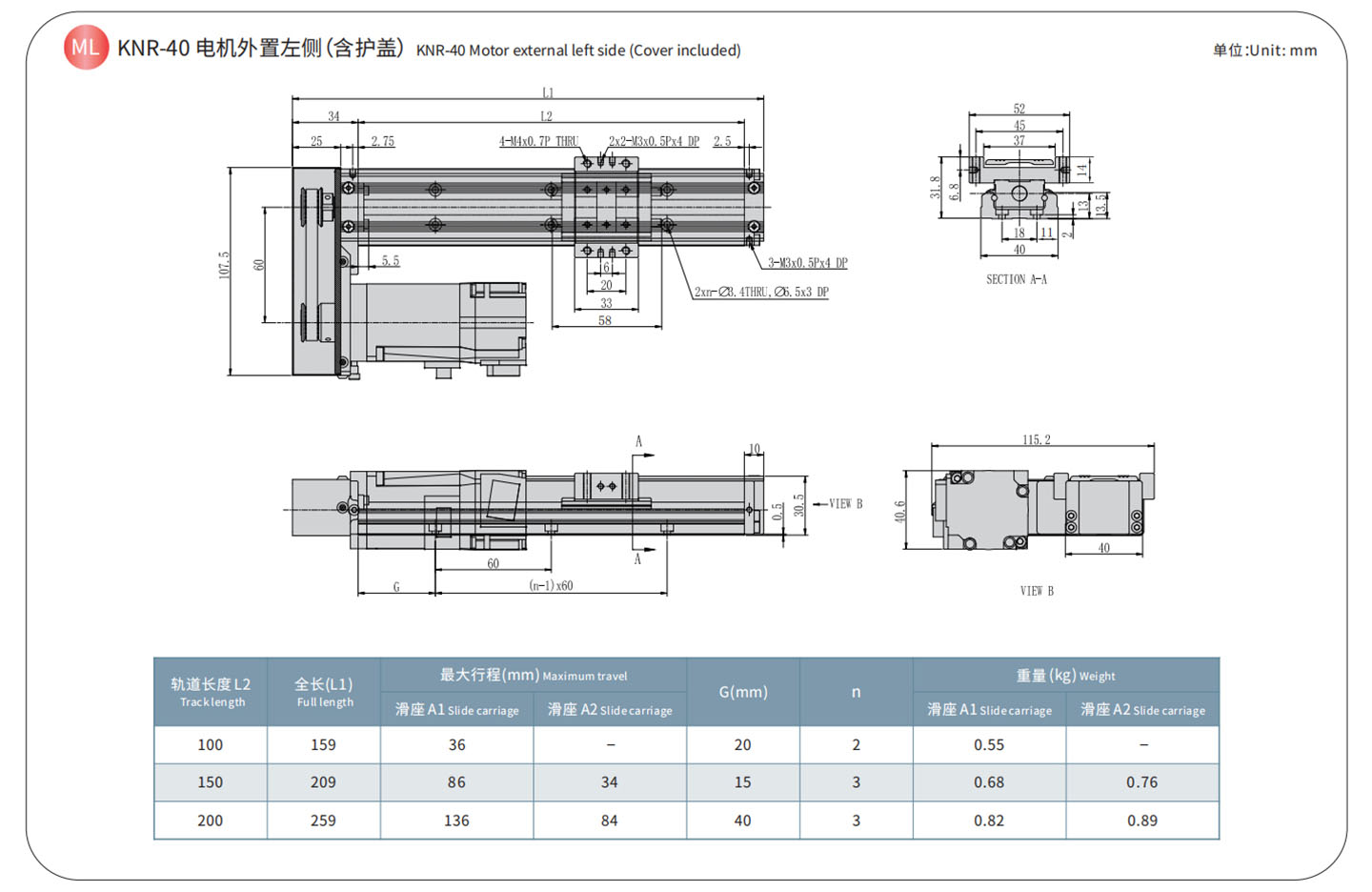
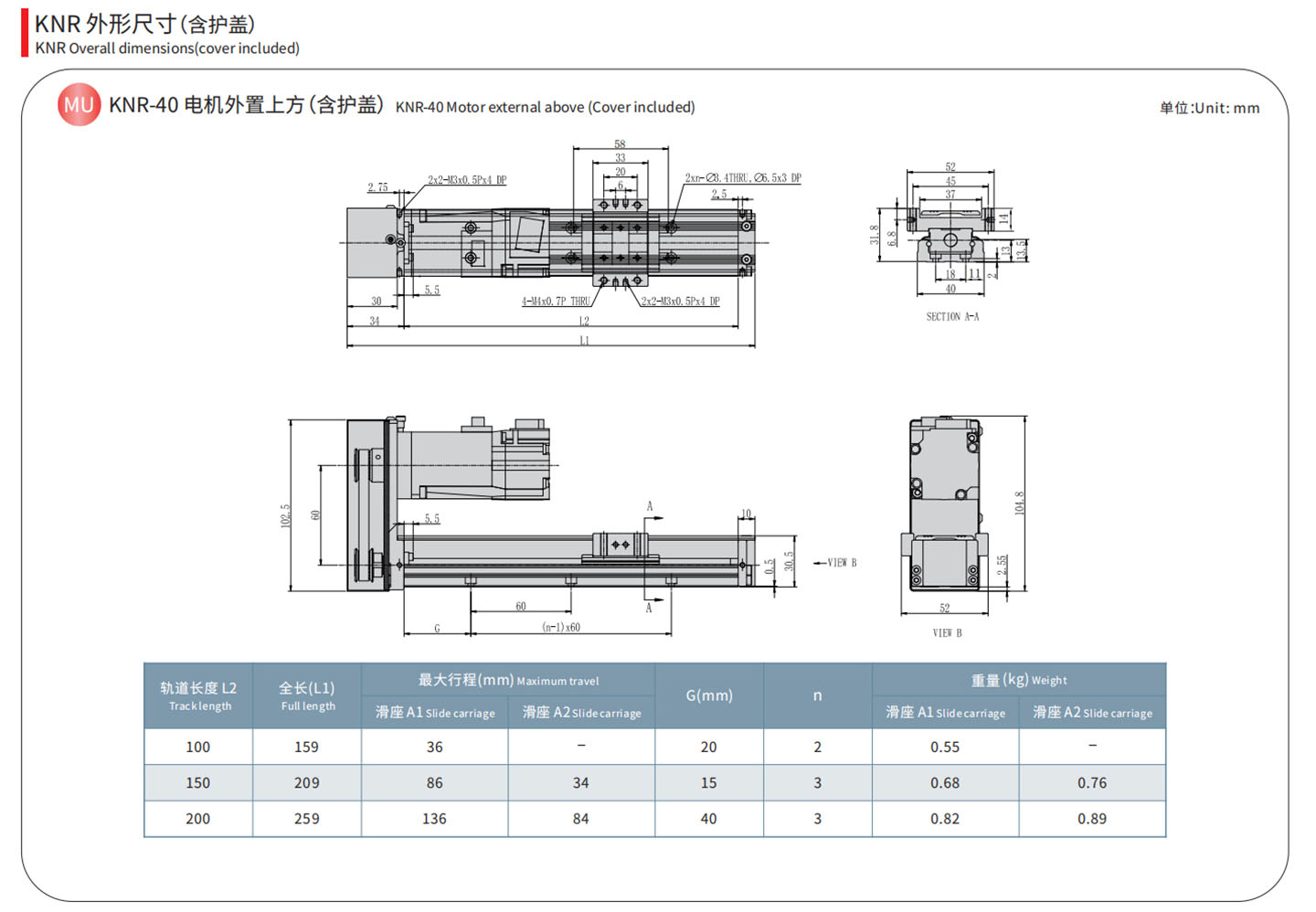
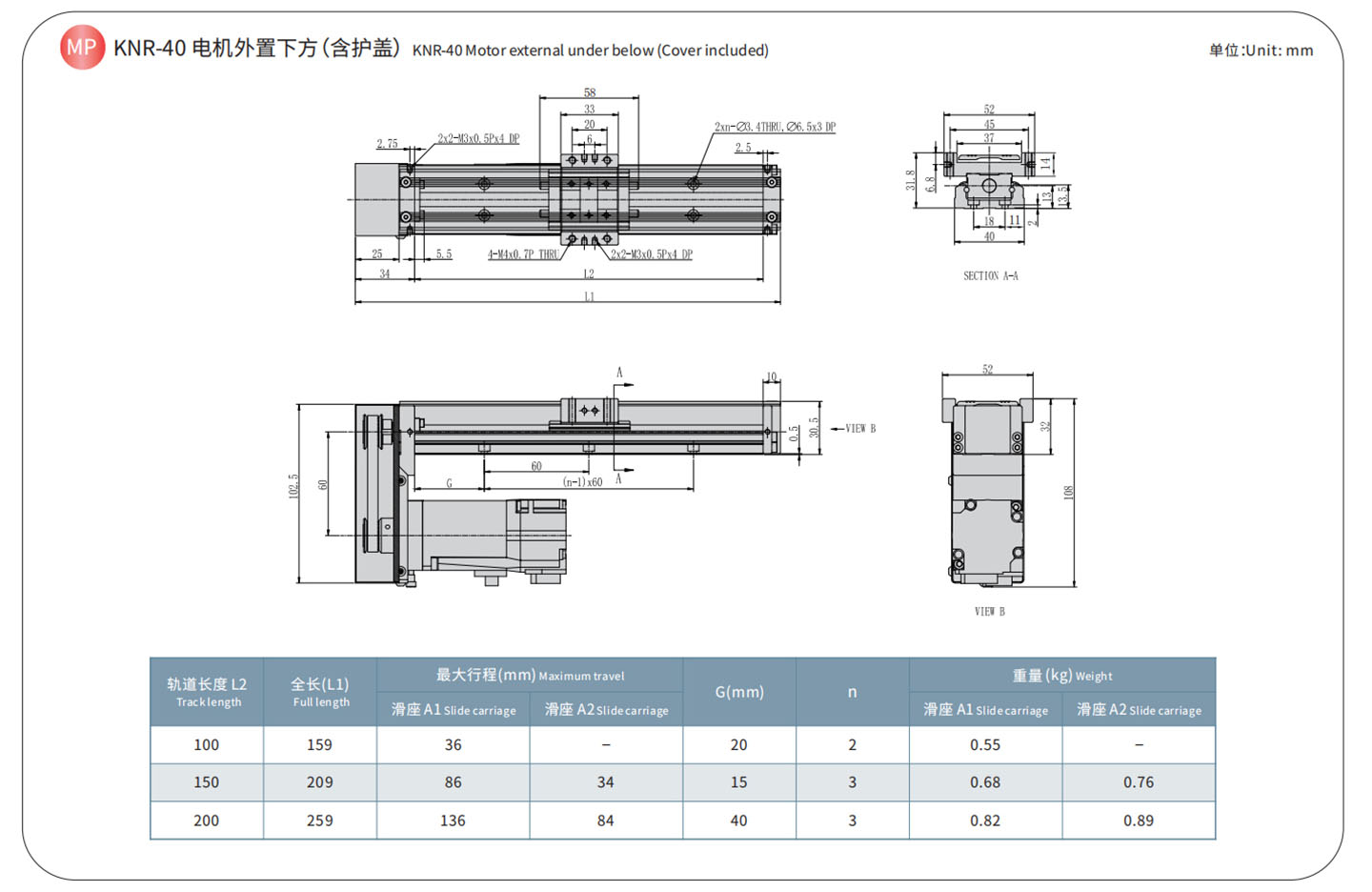
KSR-40 KNR-40

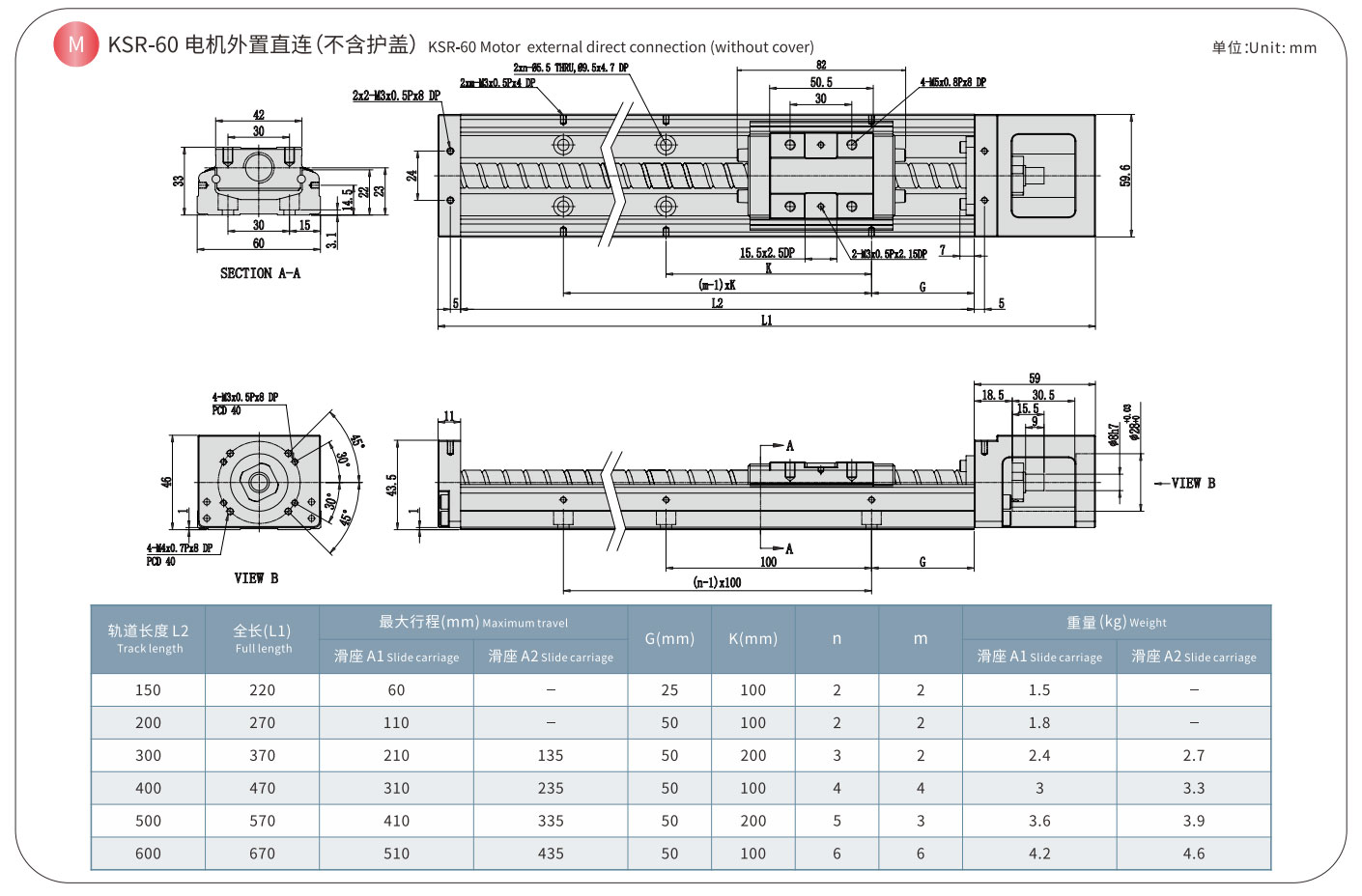
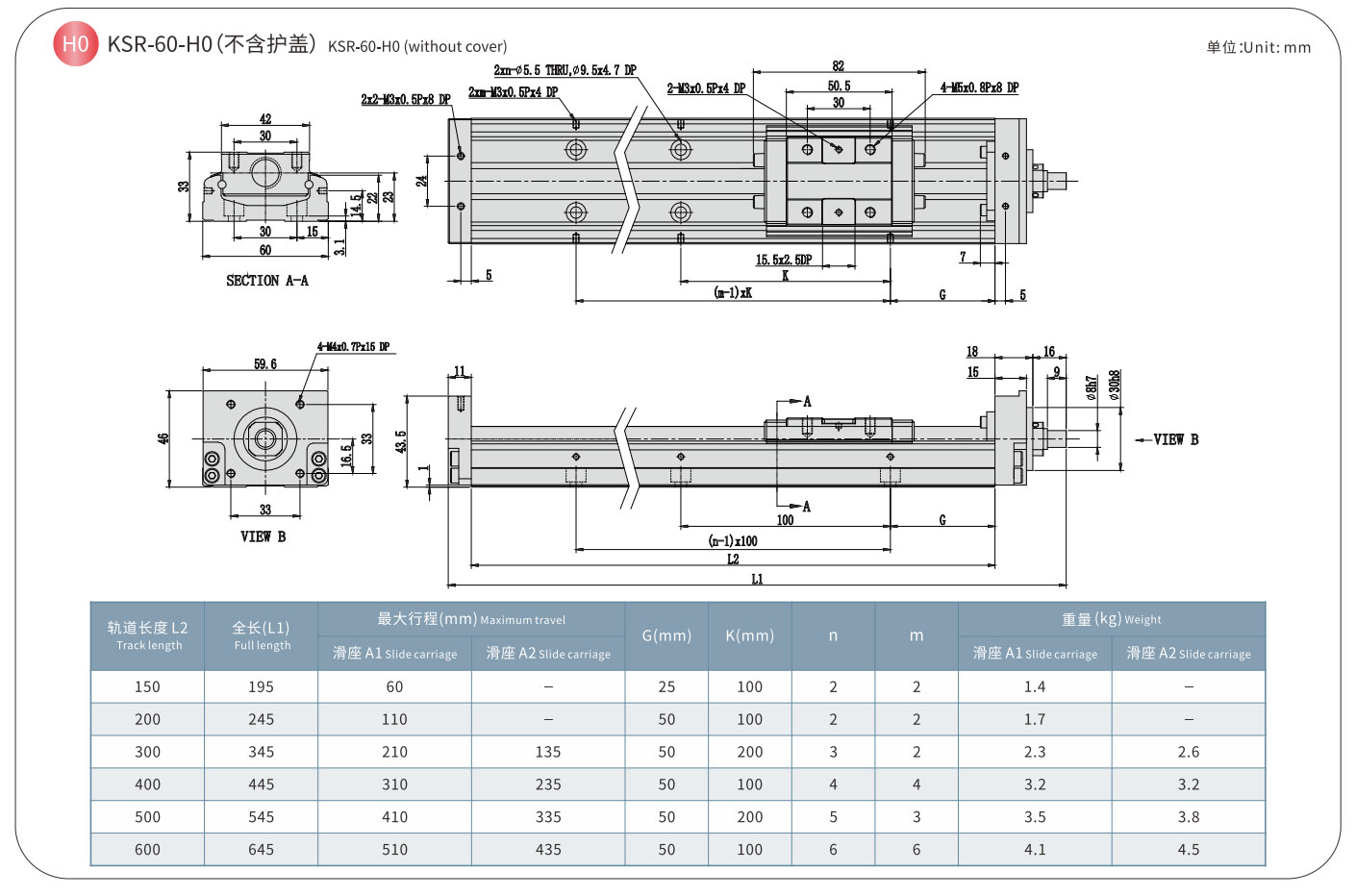
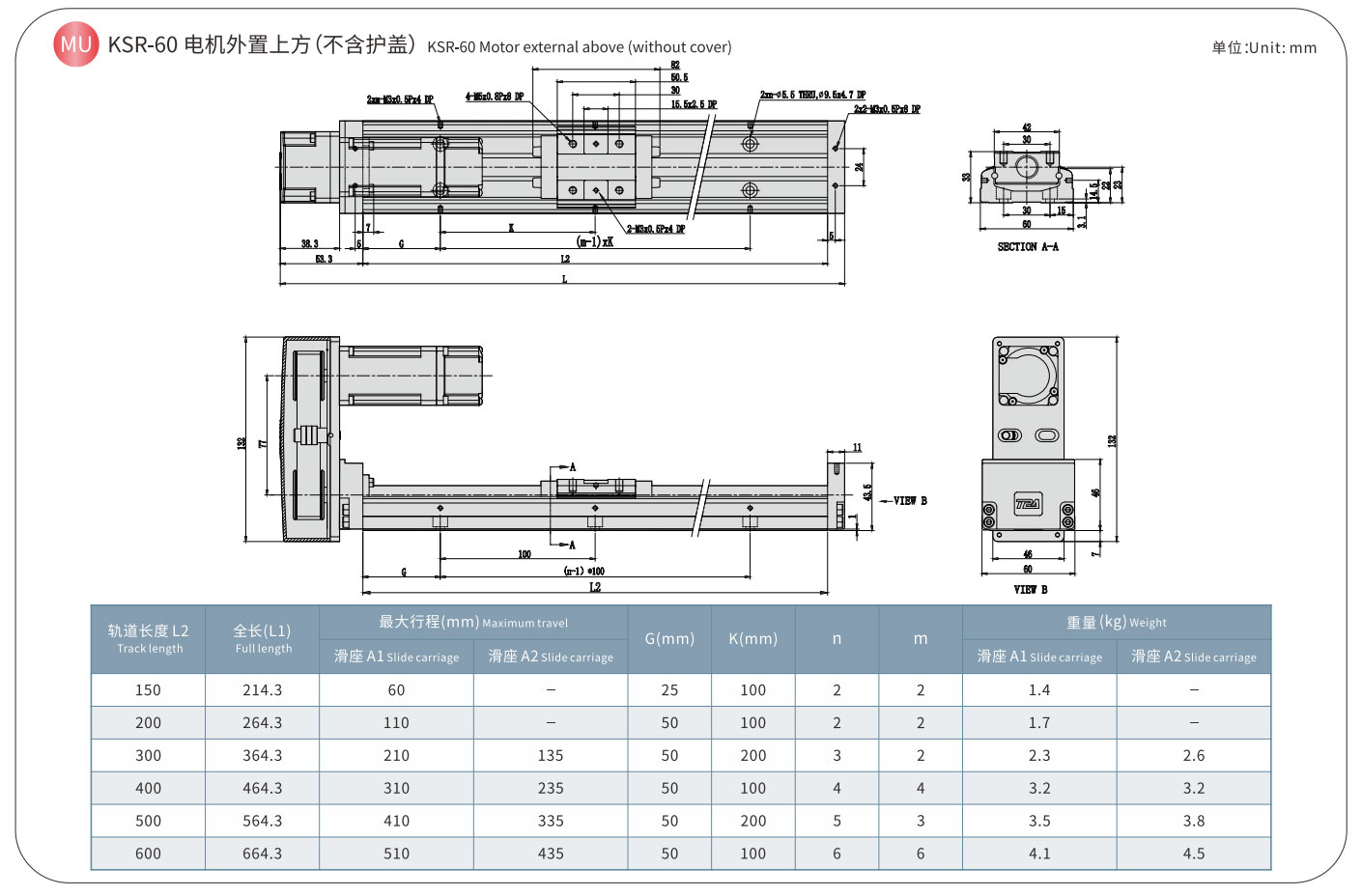
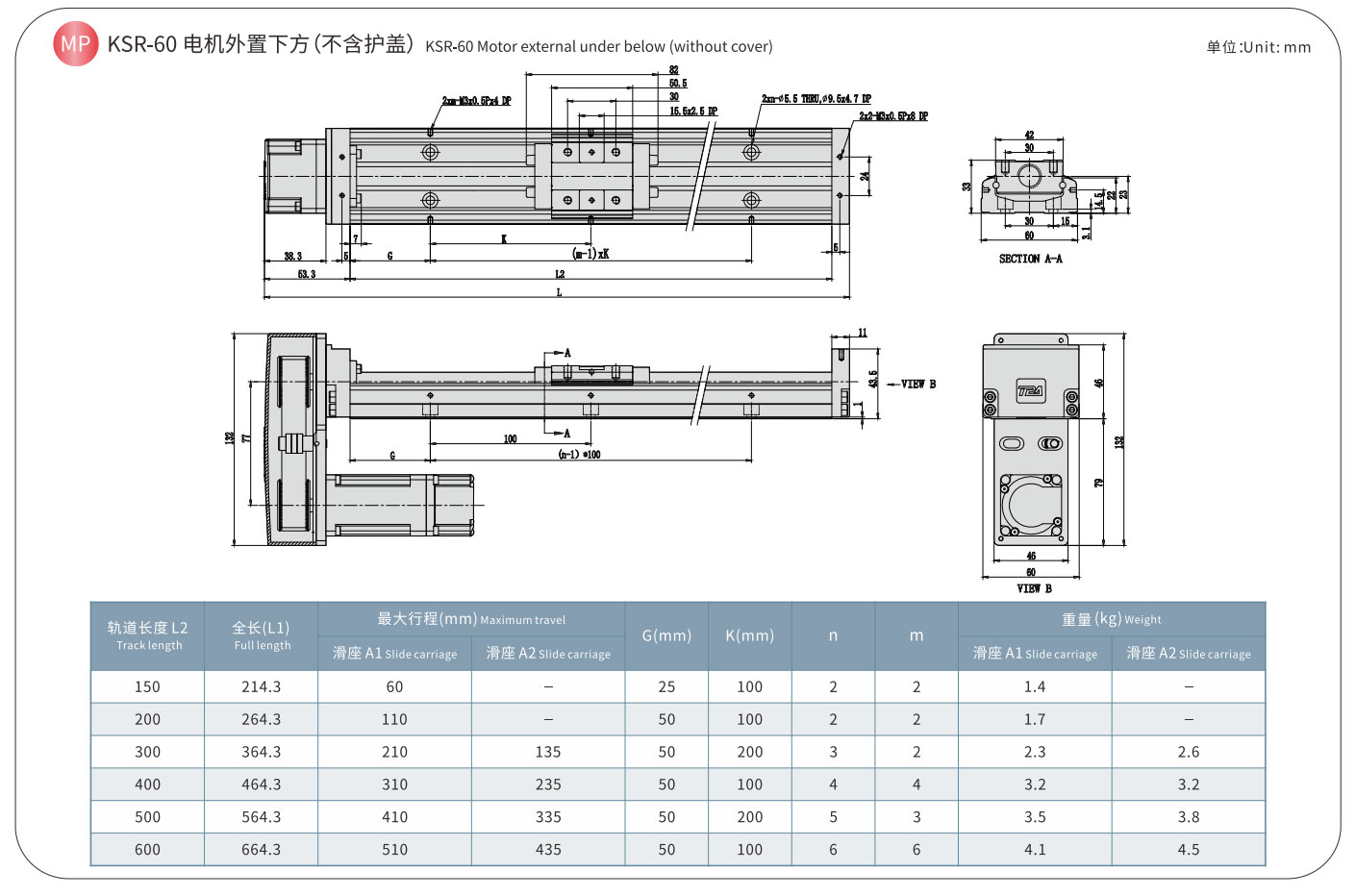
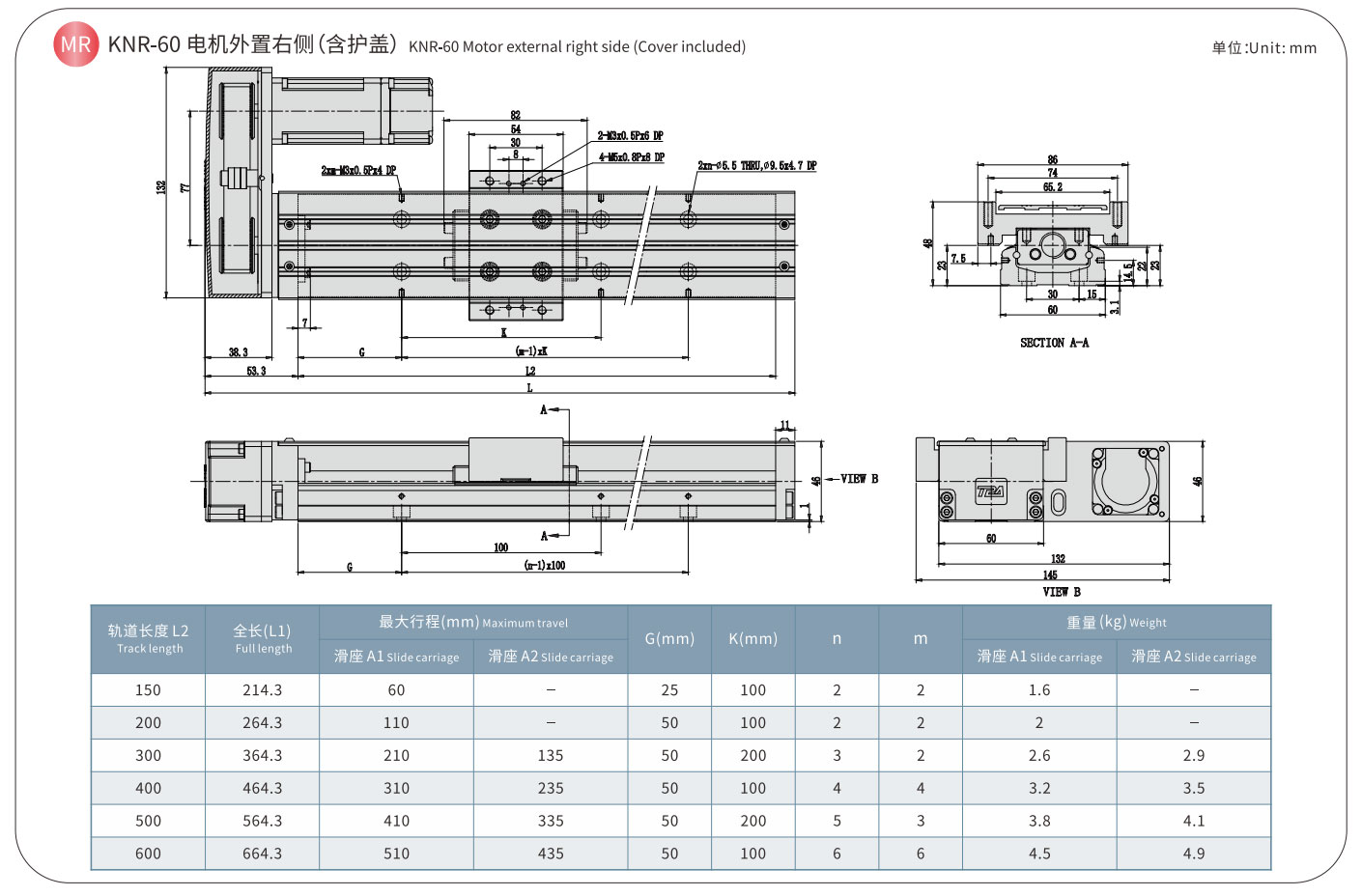
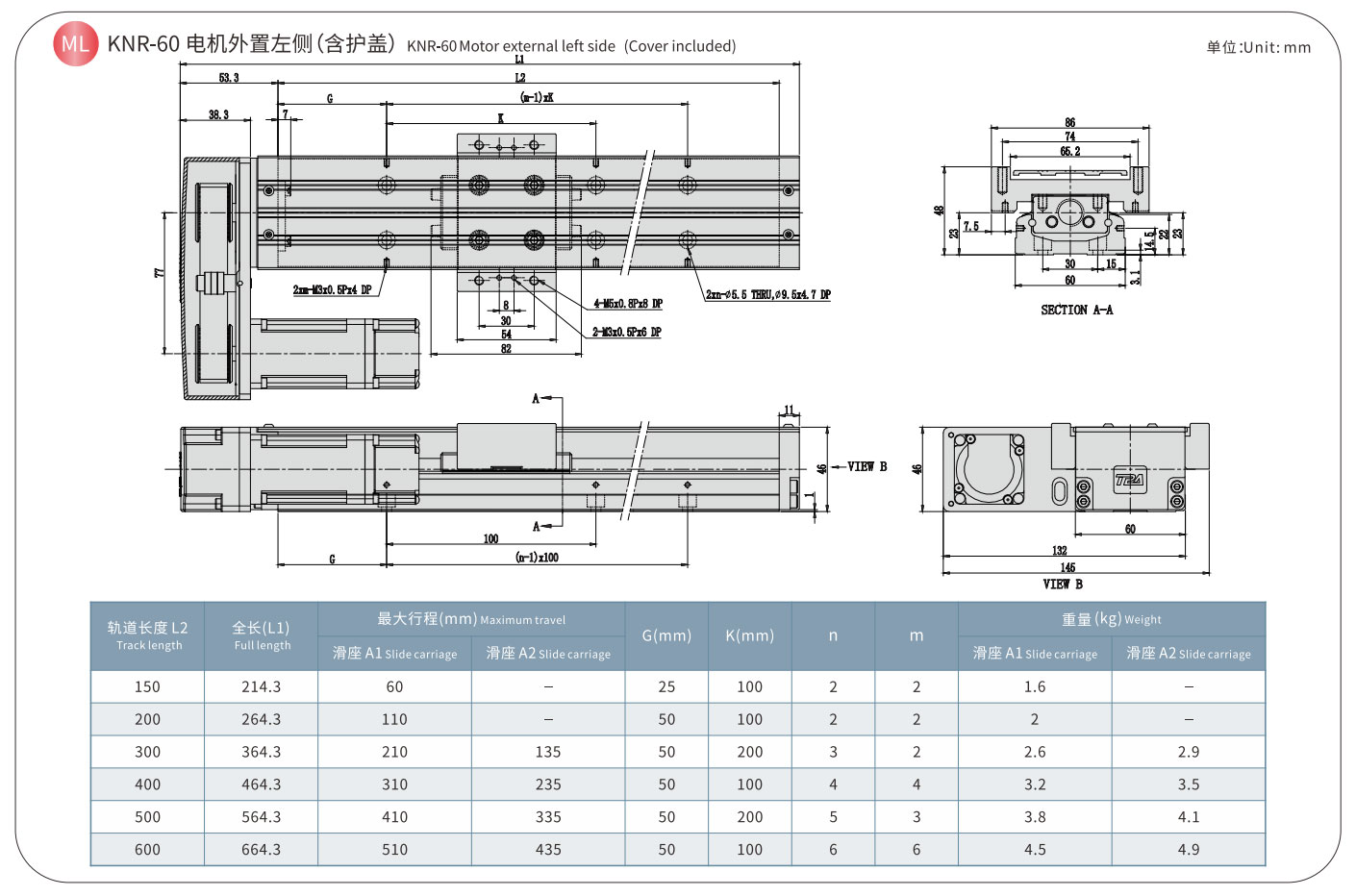
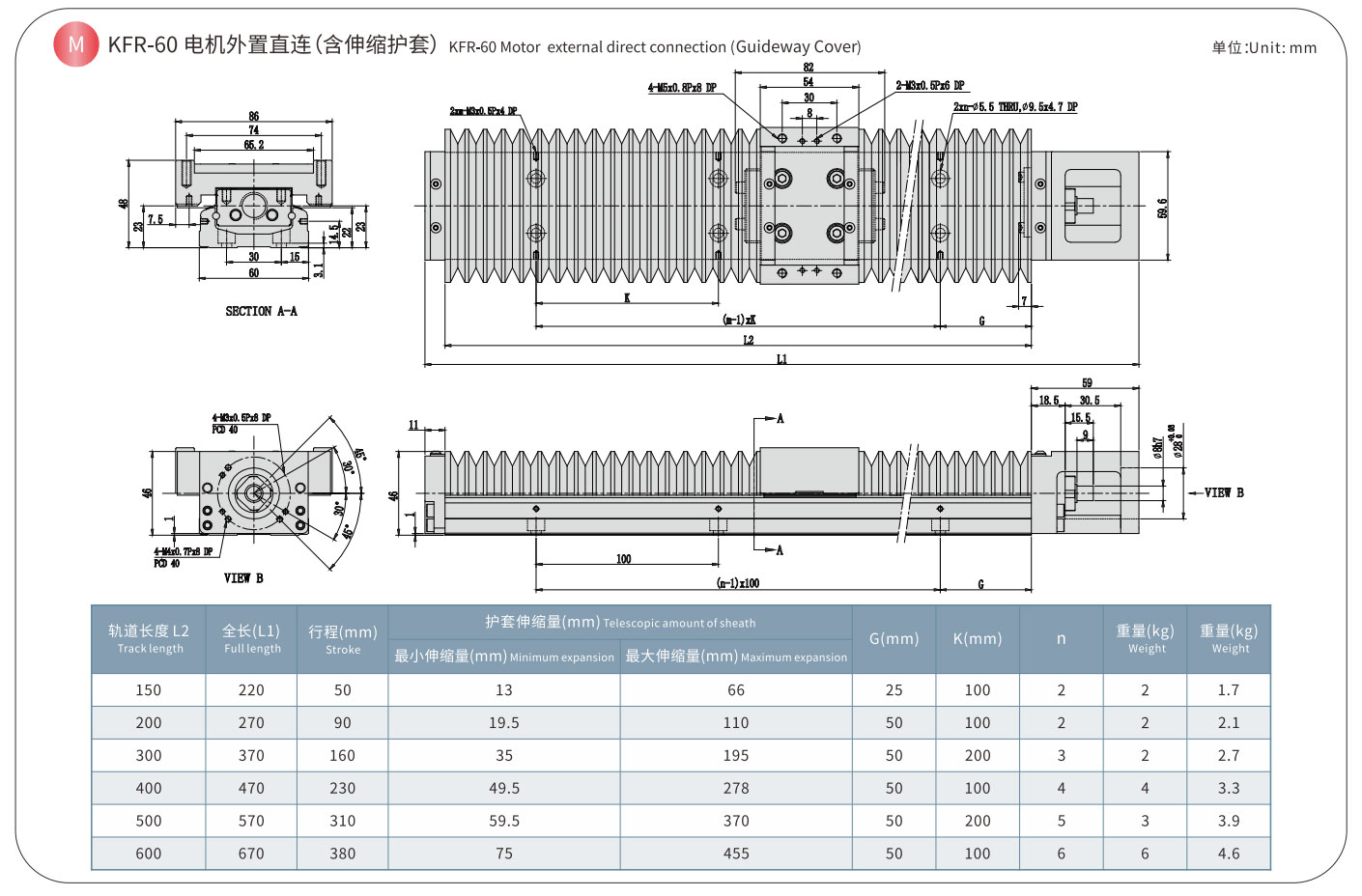
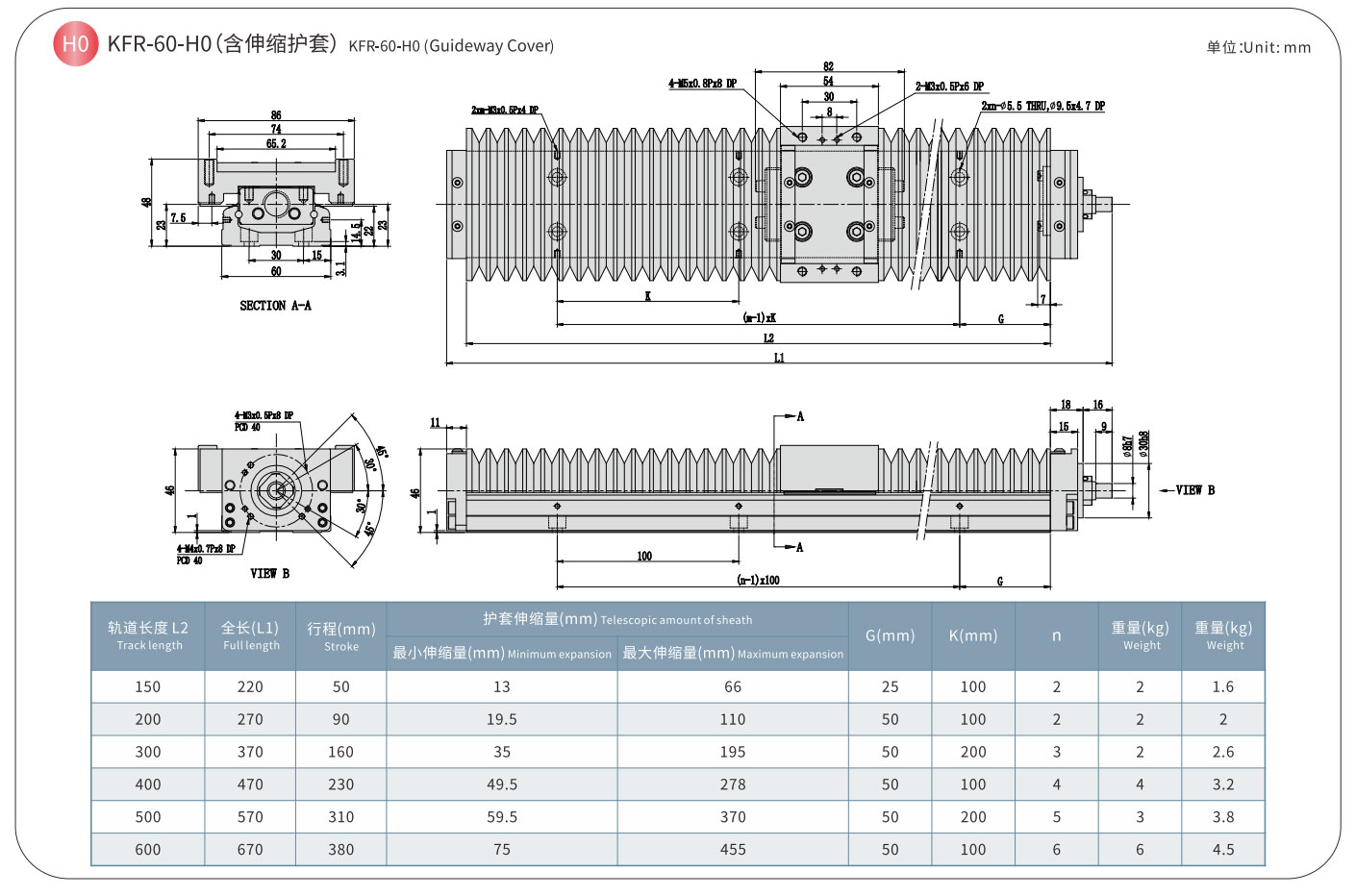
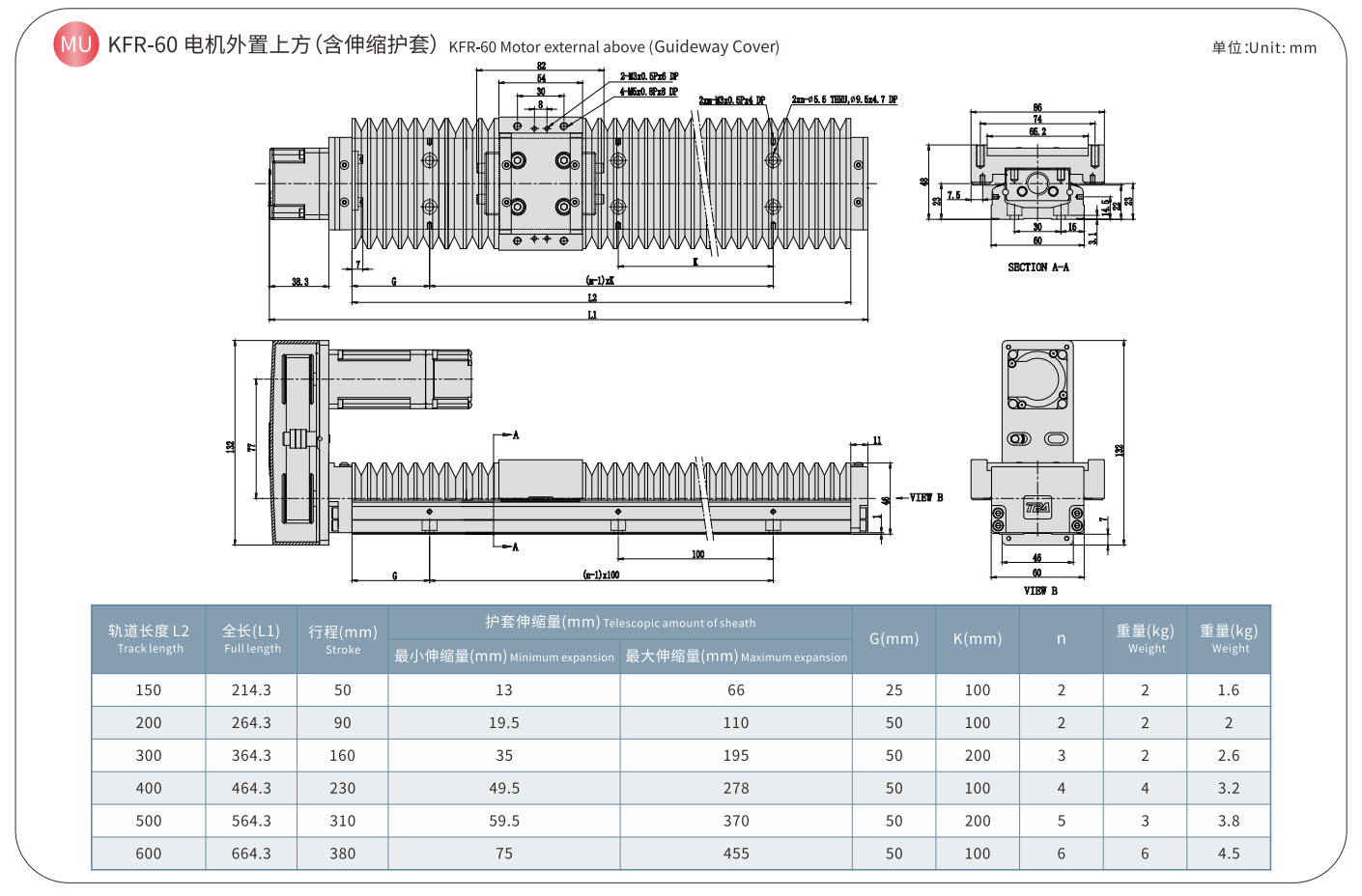
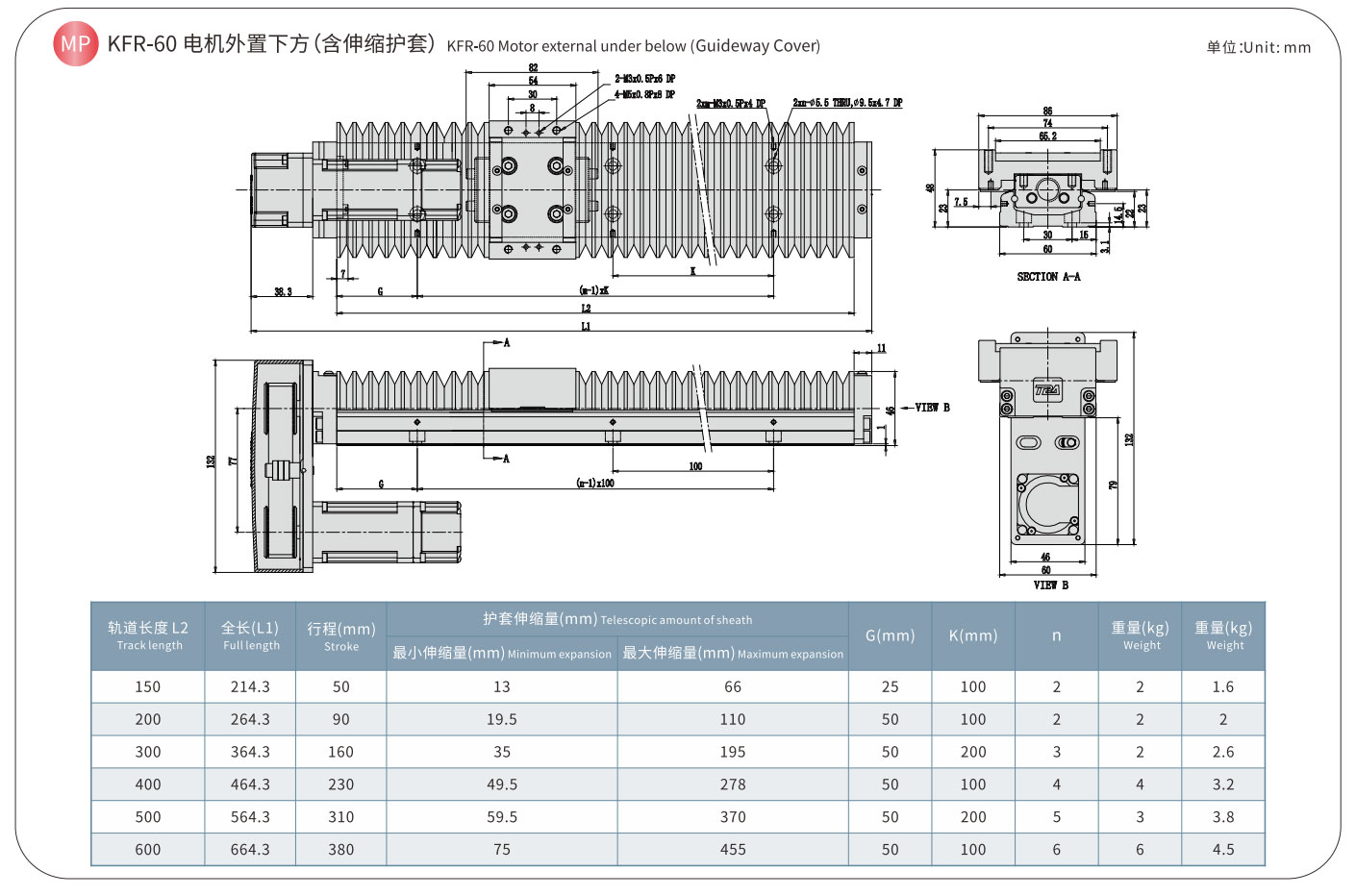
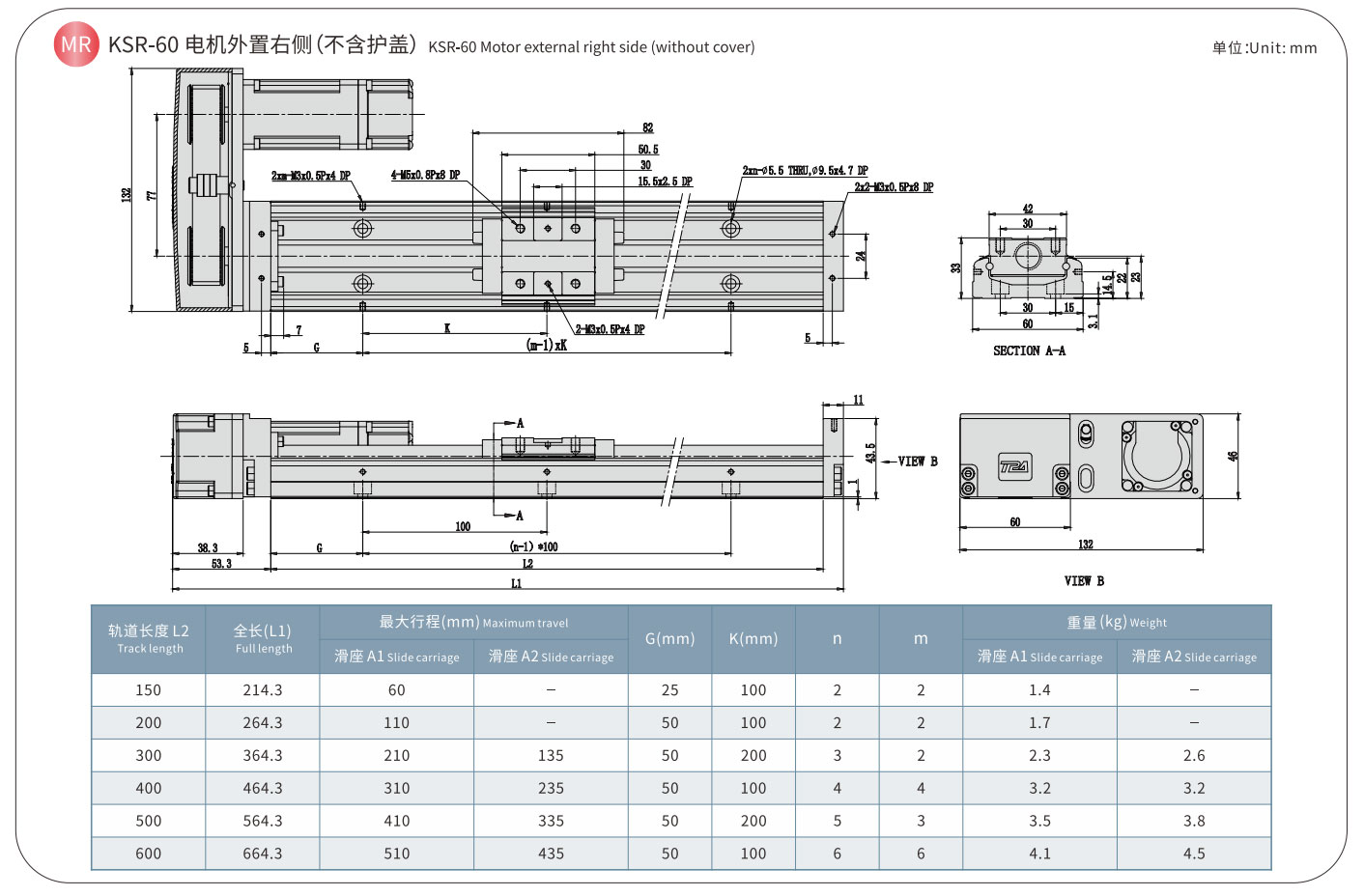
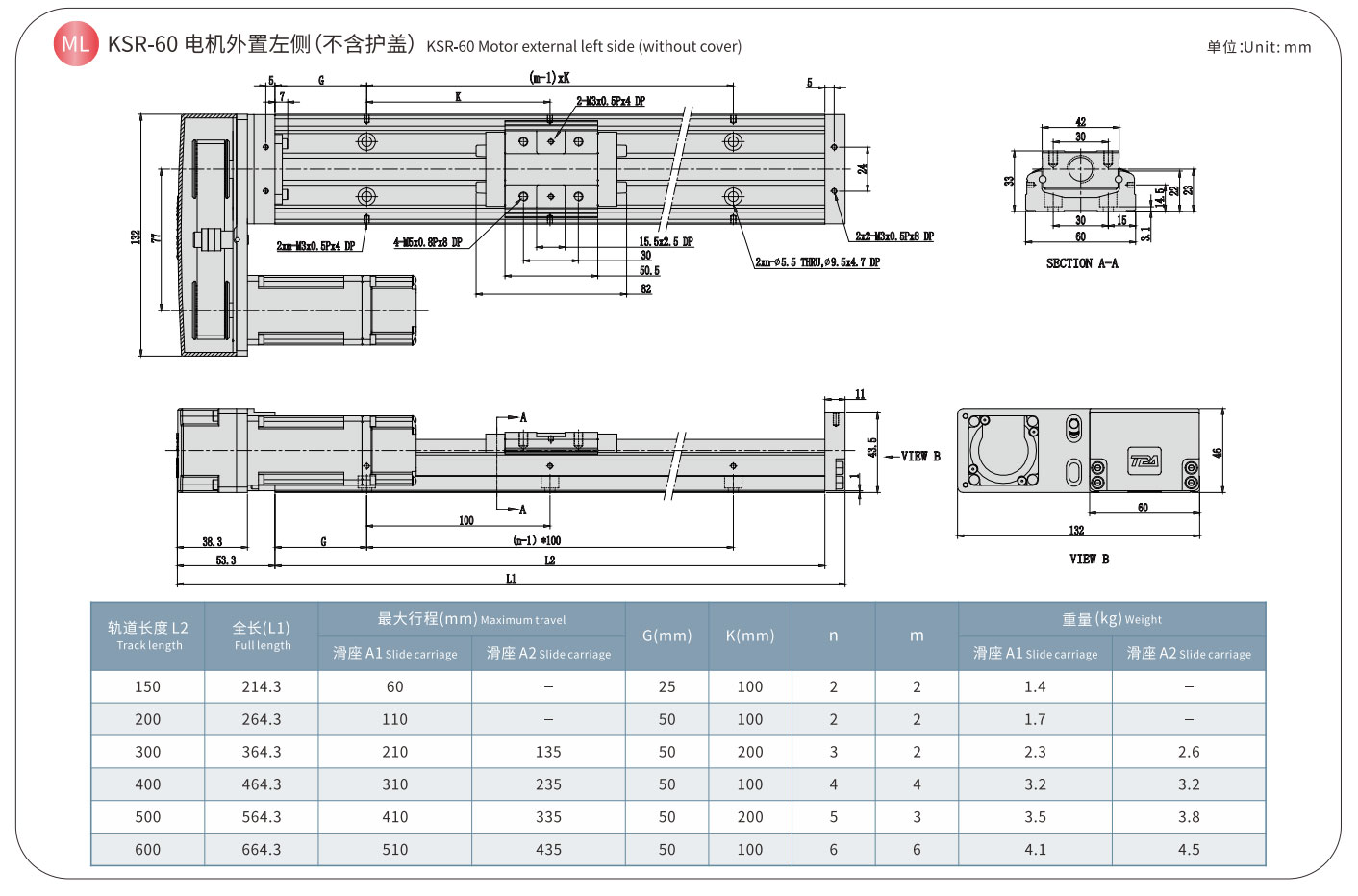
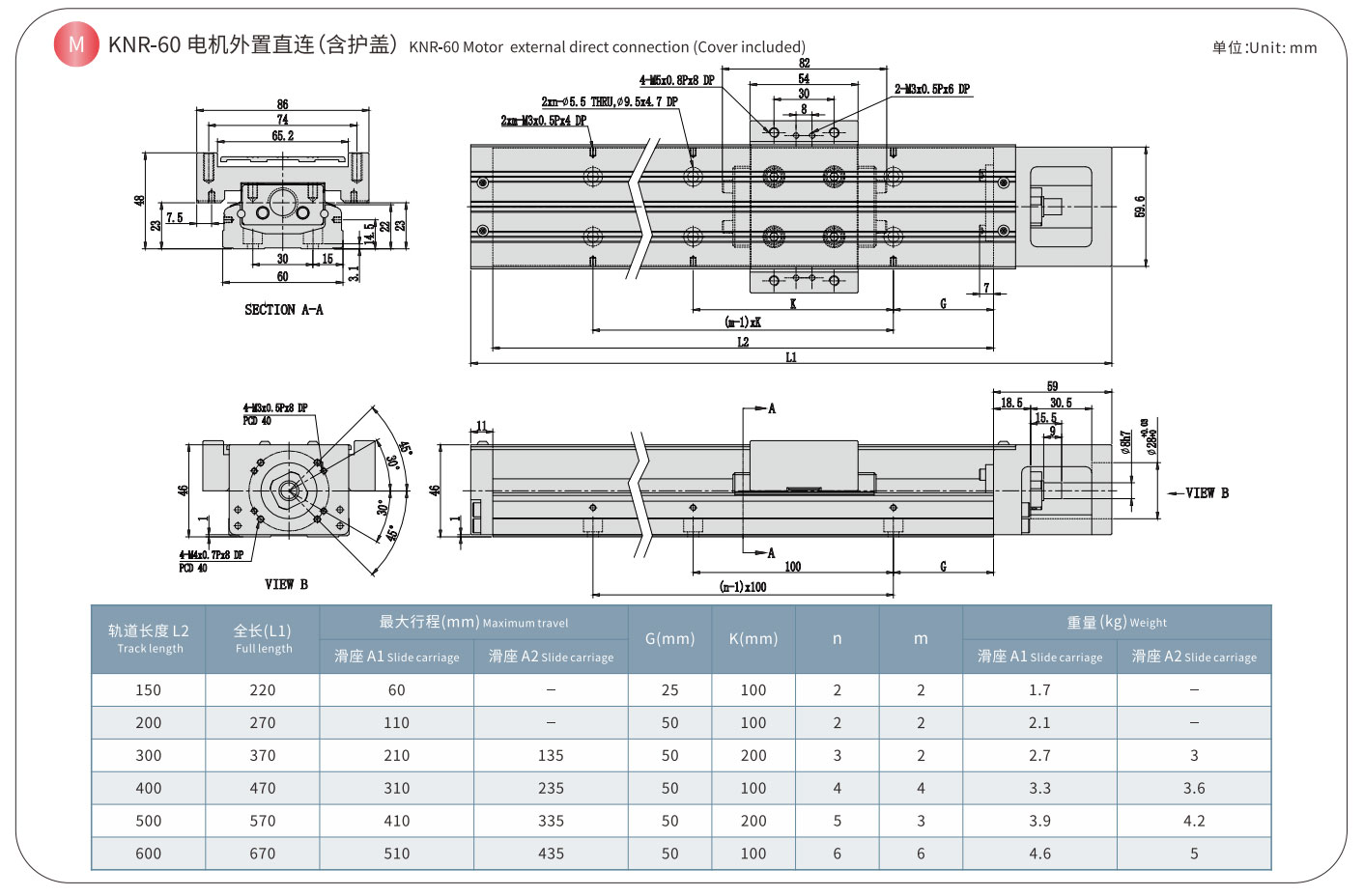
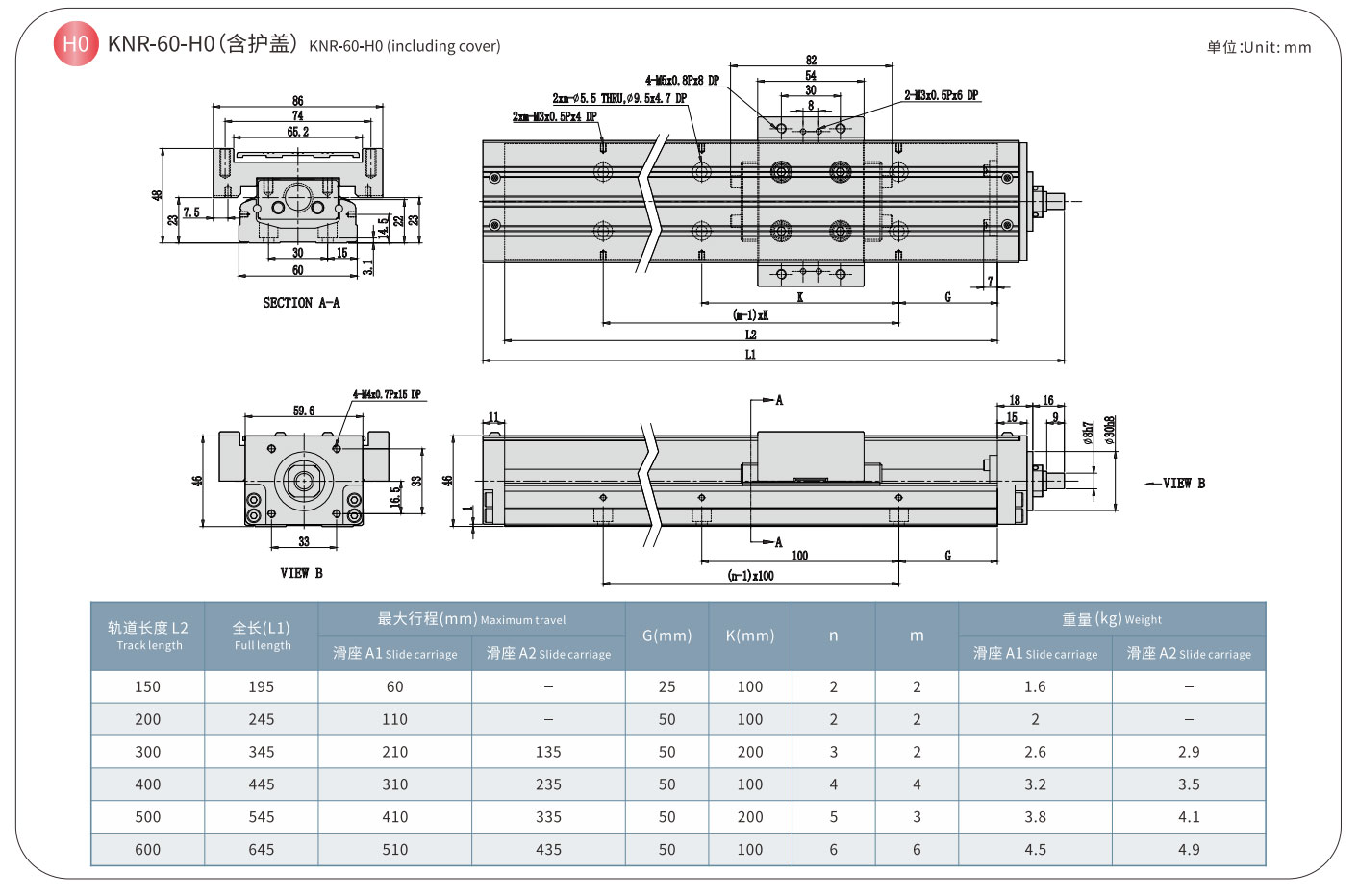
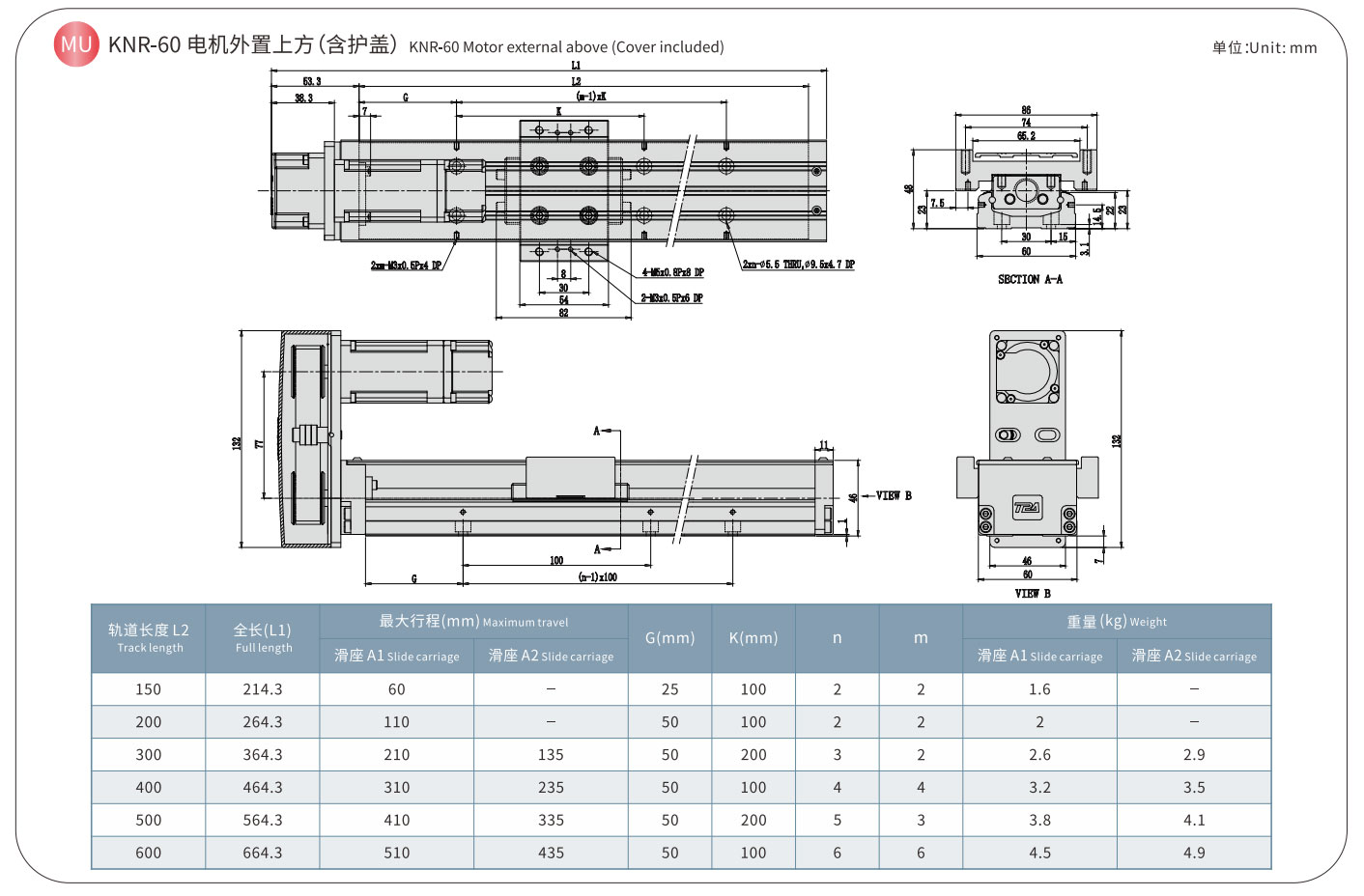
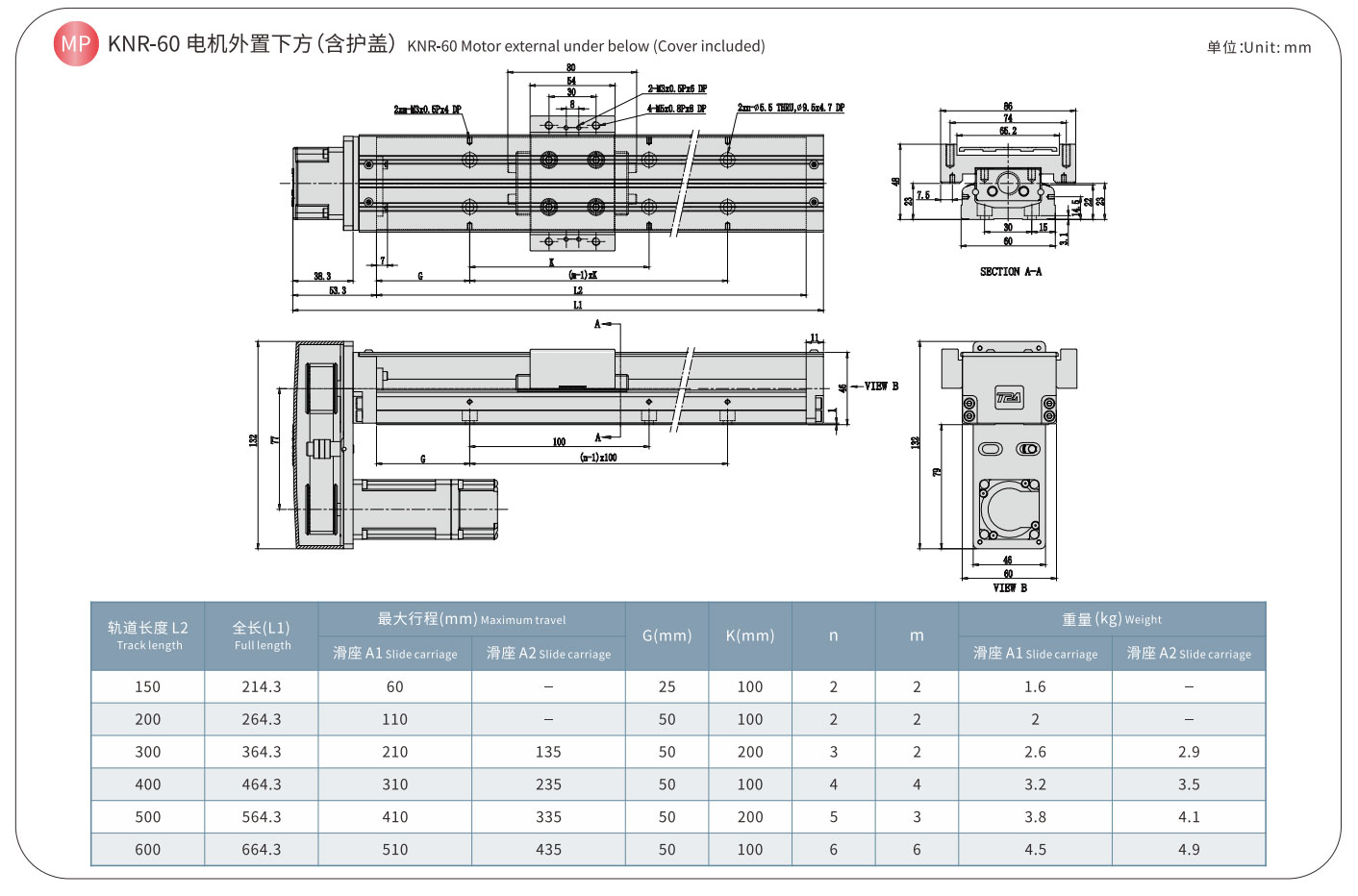
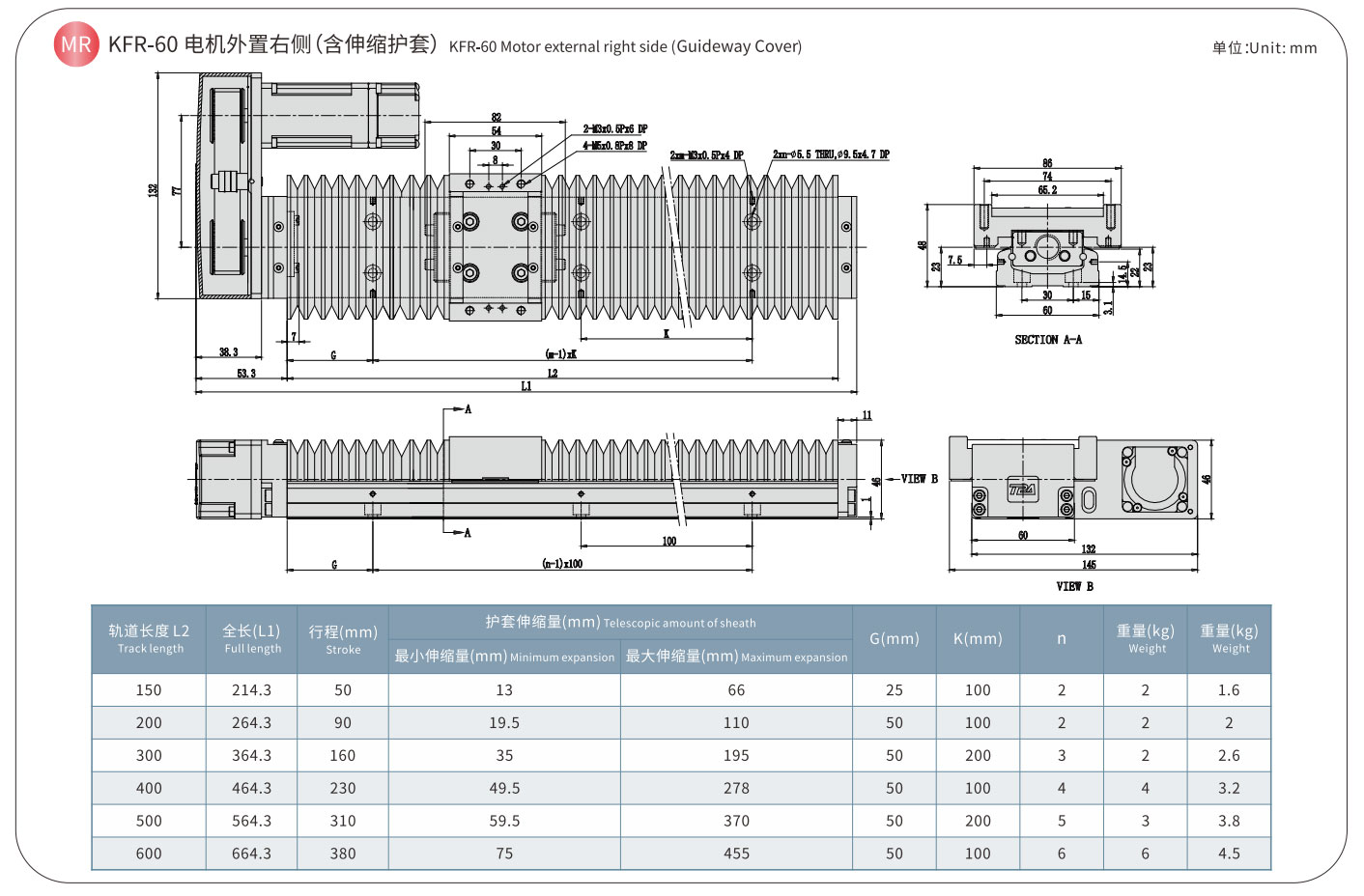
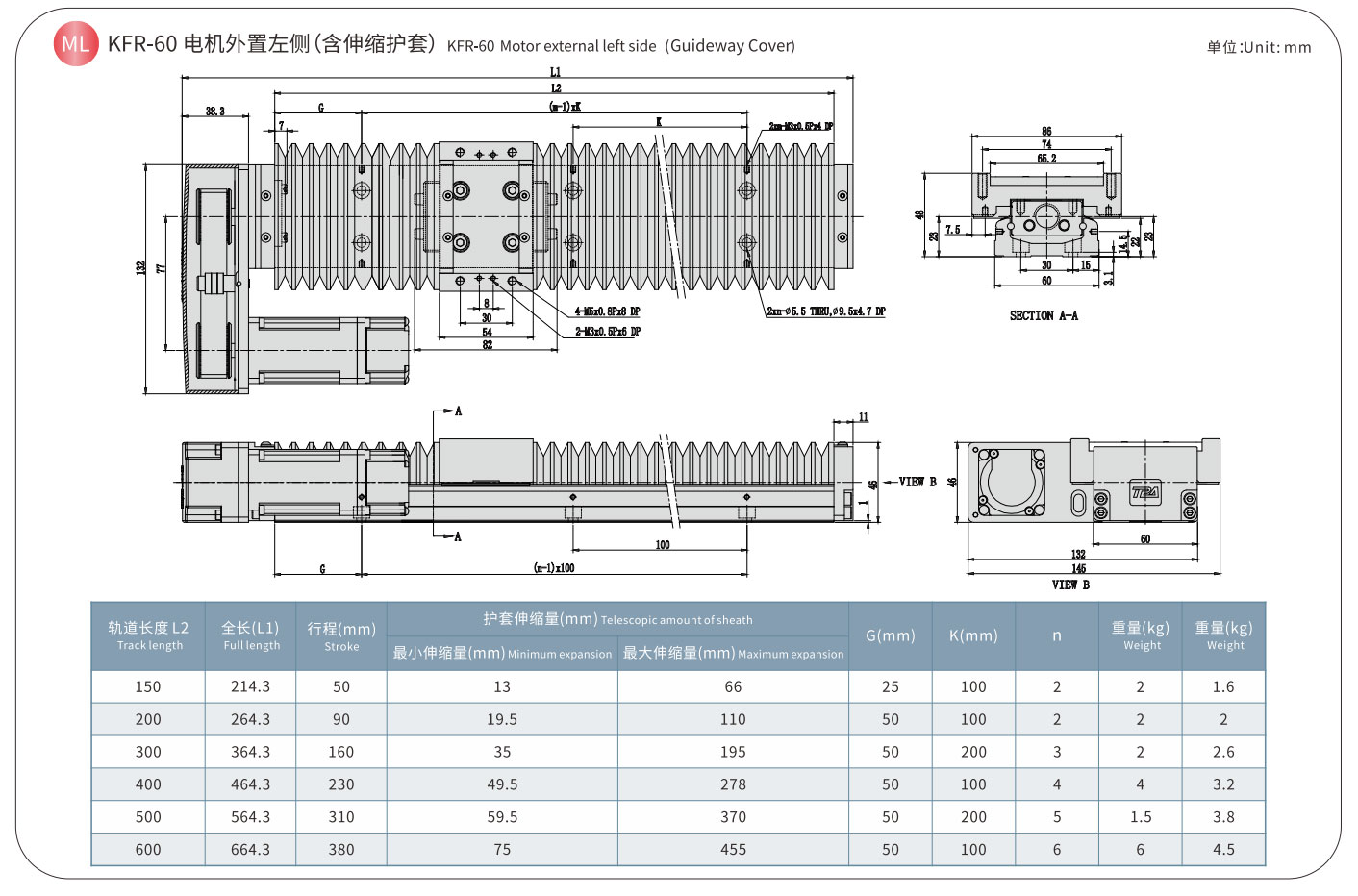
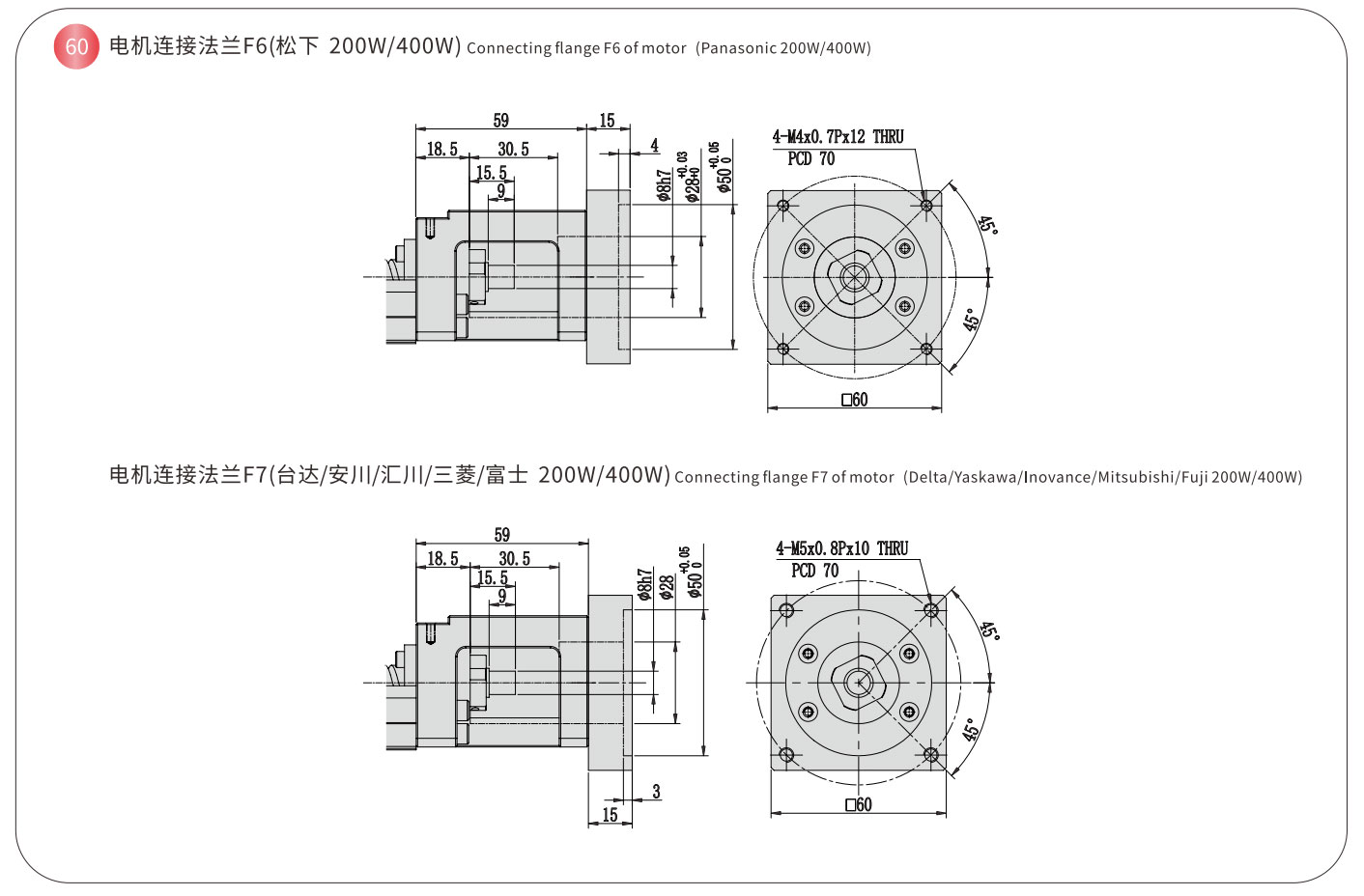
KSR-60 KNR-60 KFR-60

KSR-KNR-KFR-KCR-Serie
Merkmale
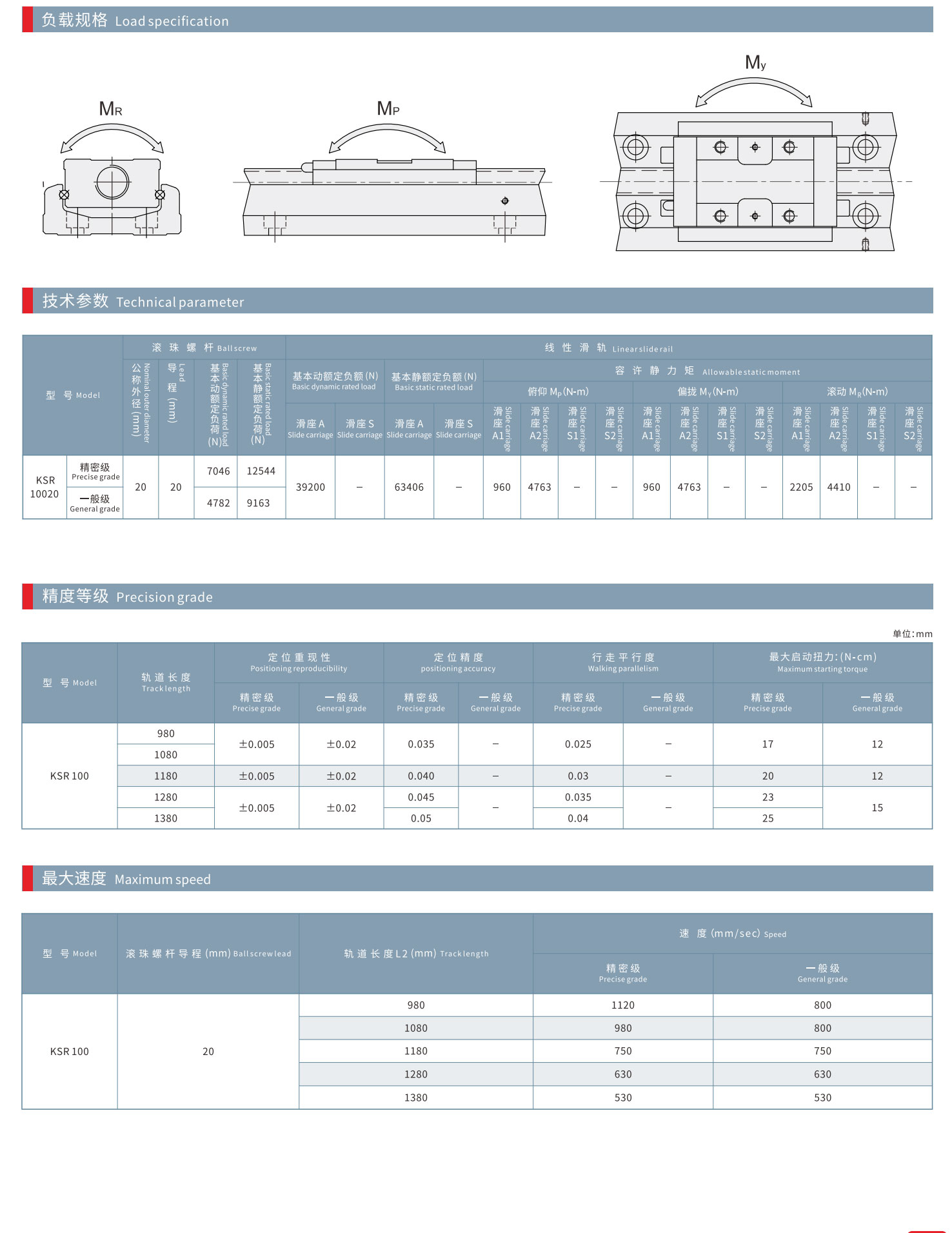
Wiederholte Positionierungsgenauigkeit: ±0,005 mm
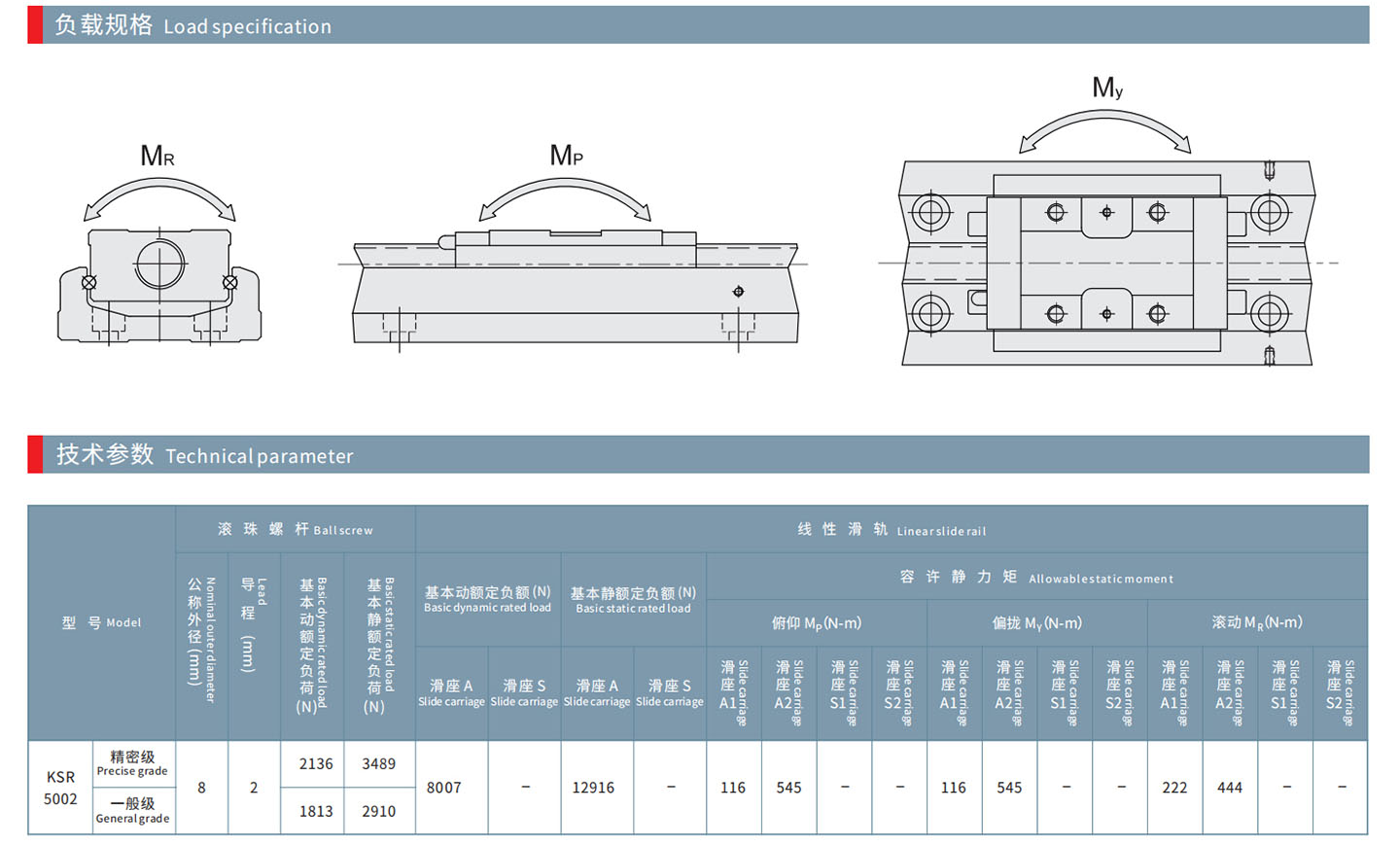
Statische Nennlast: 12642 N
Grundlegende dynamische Nennlast: 7144 N
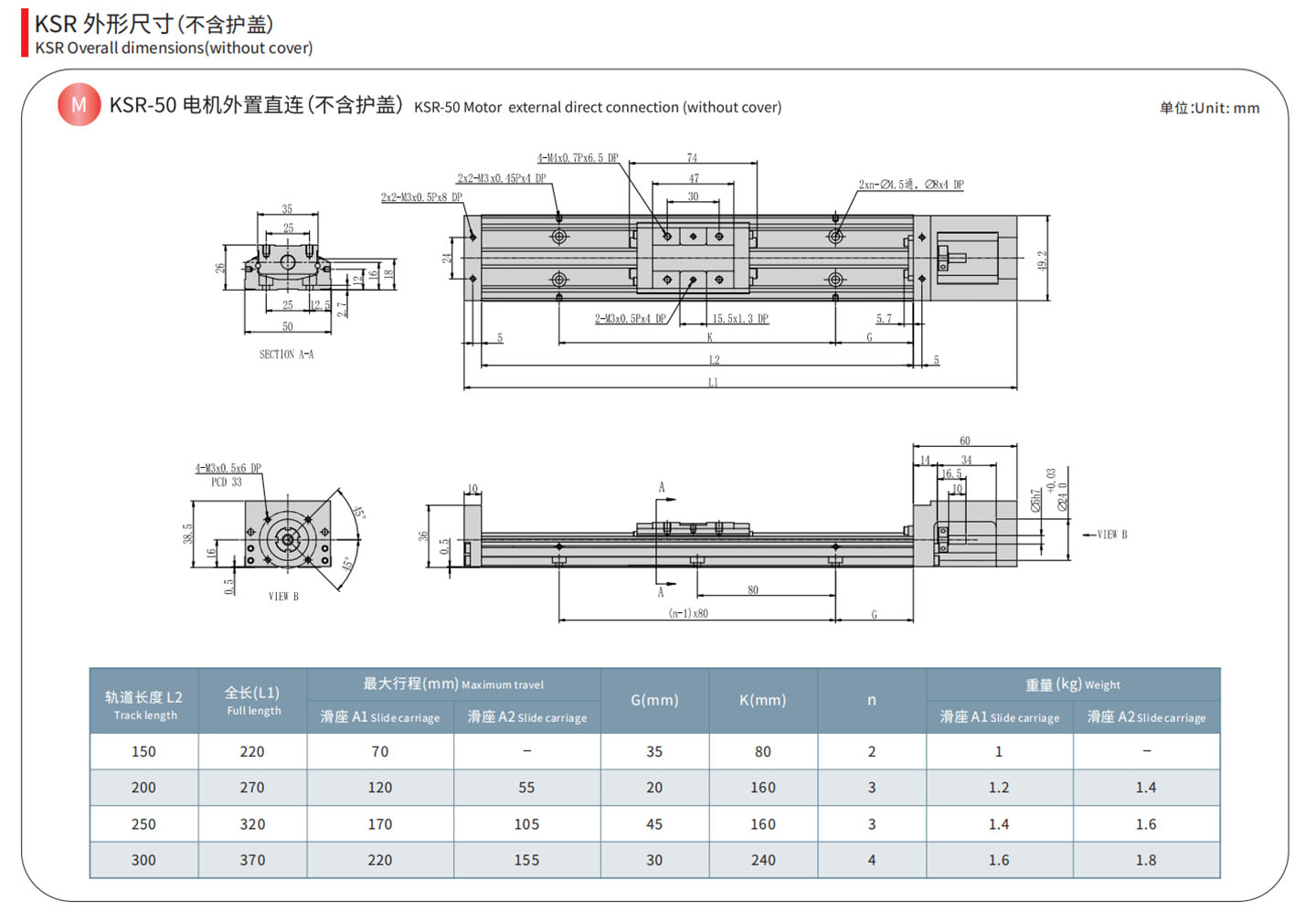
Hub: 31 – 1128 mm
Maximale Geschwindigkeit: 1000 mm/s
Als Übertragungsstruktur kommt die hochpräzise Kugelumlaufspindel zum Einsatz und die U-förmige Bahn ist auf das optimierte Design abgestimmt. Als Führungsstruktur, um die Genauigkeits- und Steifigkeitsanforderungen sicherzustellen.
Die Kontaktfläche zwischen der Kugel und der Wulstnut besteht aus einem zweireihigen Goethe-Zahntyp. Das Design zeichnet sich durch einen Kontaktwinkel von 45 Grad aus, wodurch das stahlbasierte Modul vier Richtungen standhalten kann. Die Fähigkeit der gleichen Belastung.
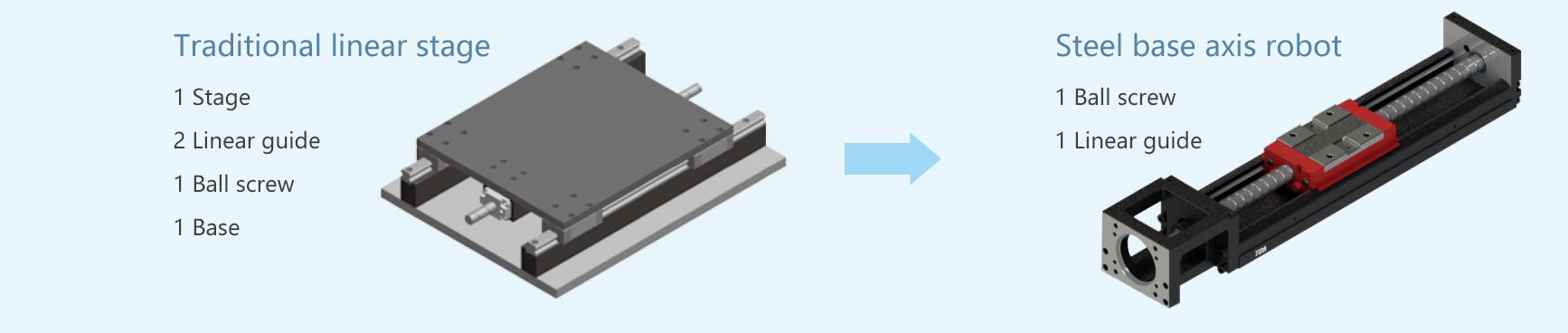
Durch den modularen Aufbau integriert das Stahlbasismodul eine Kugelumlaufspindel und eine U-förmige Schiene, wodurch die herkömmliche Betätigungsplattform von der Auswahl der Führungs- und Antriebskomponenten, der Installation und Überprüfung, dem großen Volumen und dem Platzbedarf befreit werden kann. Daher kann das stahlbasierte Modul die Eigenschaften einer schnellen Auswahl, Installation, kompakten Größe, hohen Steifigkeit usw. bieten, was den Nutzungsraum und die Nutzungszeit des Kunden erheblich reduzieren kann.


Weitere Produkte

HFR-Serie – Laserschneiden Z-Achse

GCRS-Serie Doppelschlitten-Einbauschienen-Linear-A...

Kugelumlaufspindel-Linearaktuatoren der HNR-Serie mit halber Enc...

Linearmodule mit Kugelumlaufspindelantrieb der GCR-Serie ...

Vollständig geschlossenes Kugelumlaufspindel-Linearmodul der HCR-Serie

Einachsiger Roboter-Aluminiumsockel der KNR-E-Serie










