




Modulu lineare à cinturione di a serie HCB cumpletamente chjusu

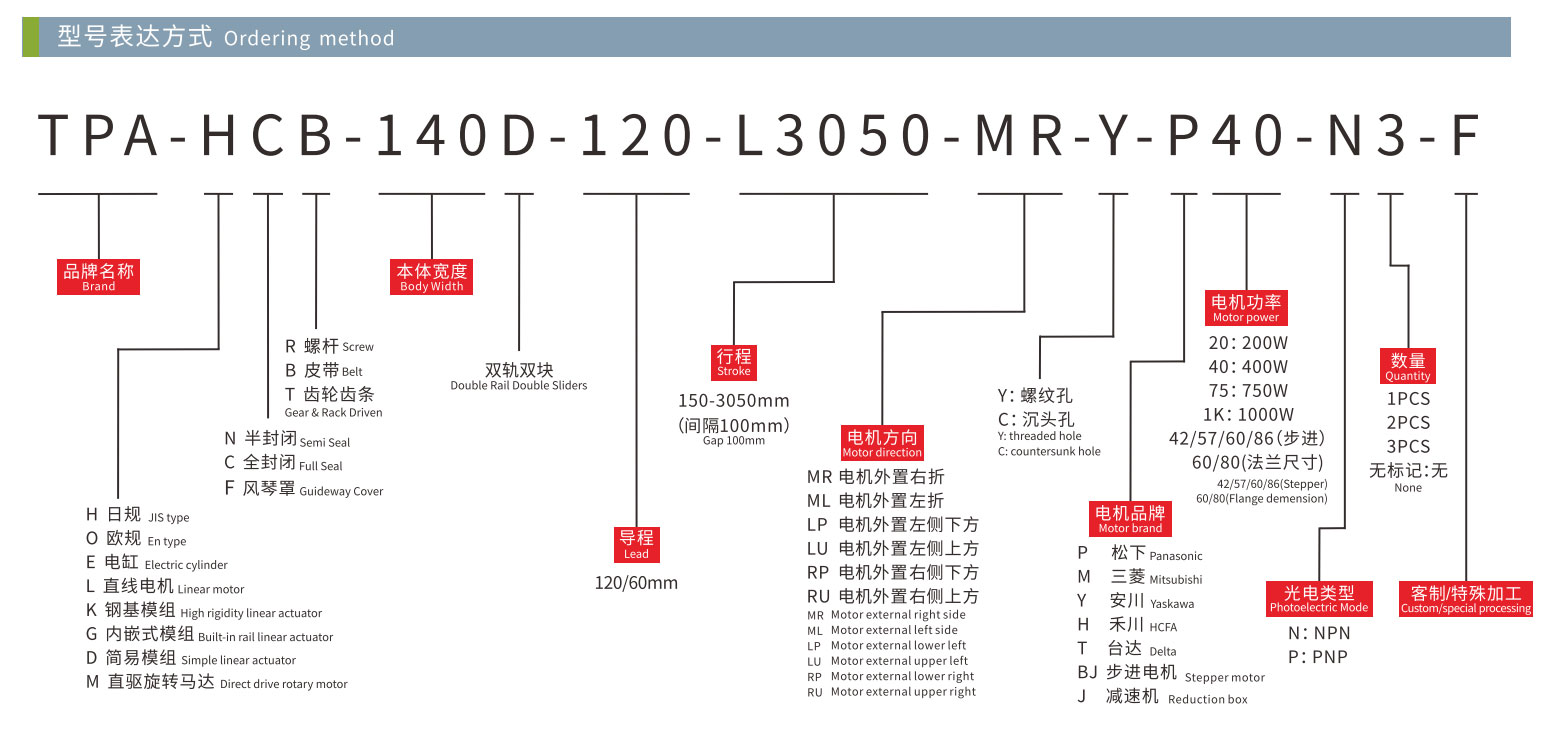
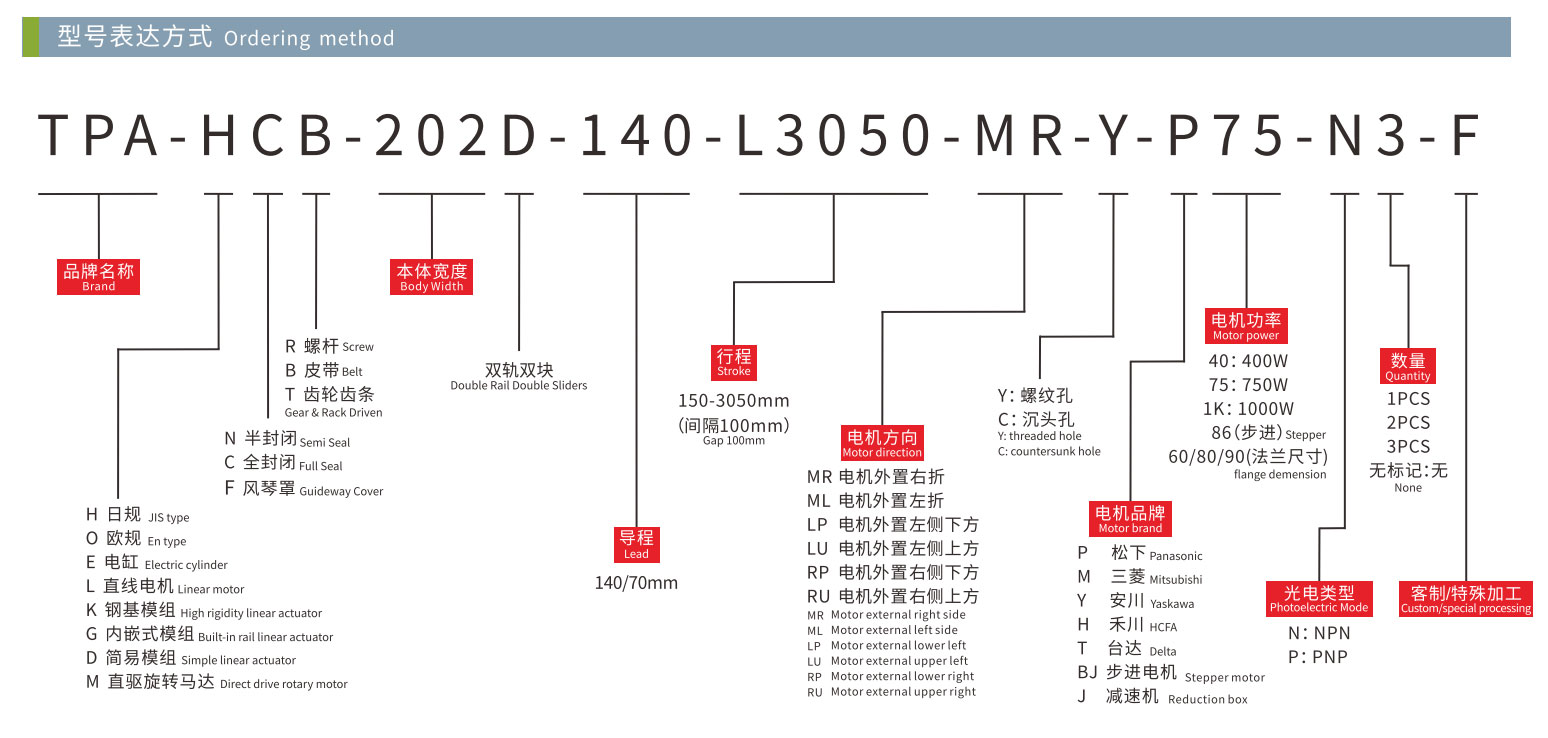
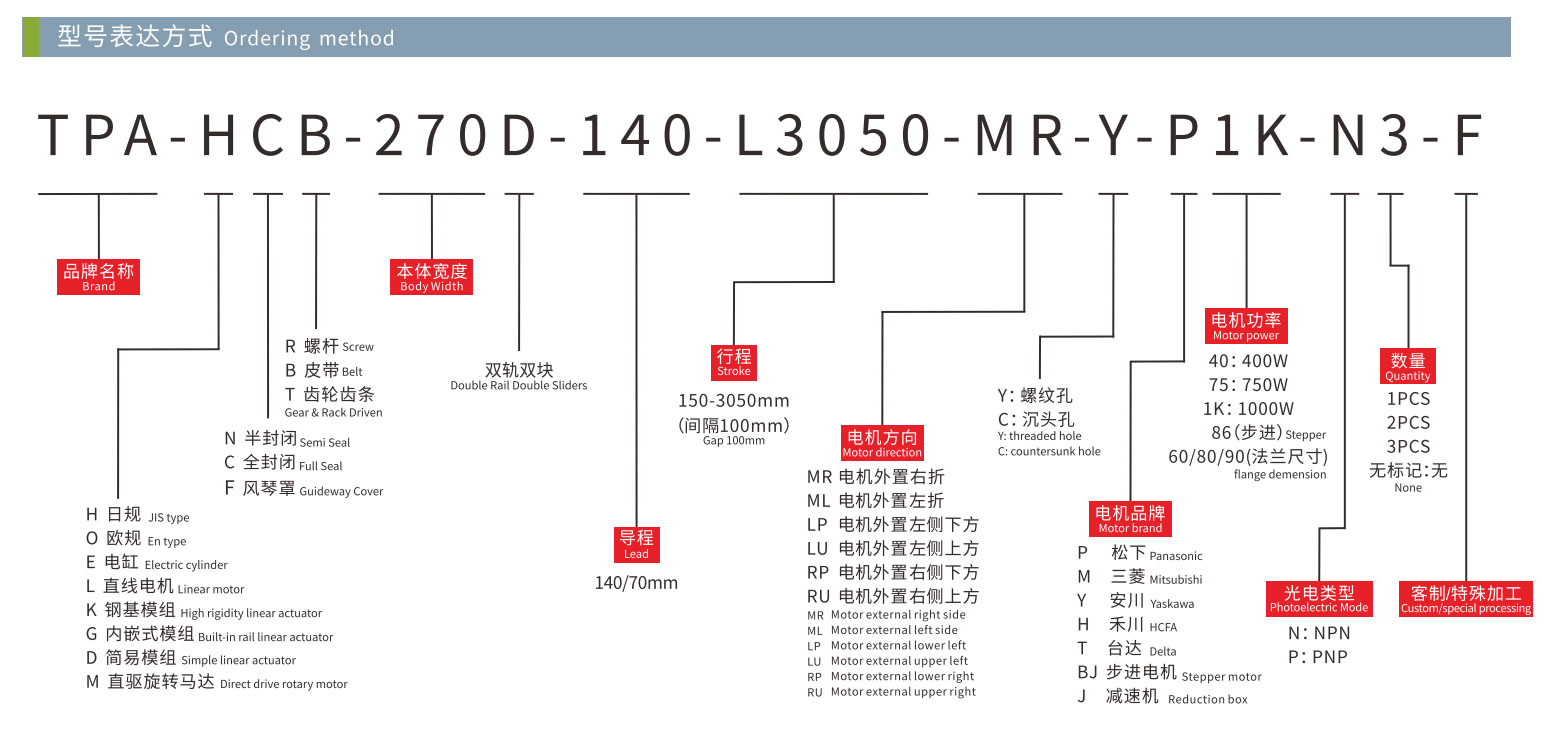
Selettore di mudelli
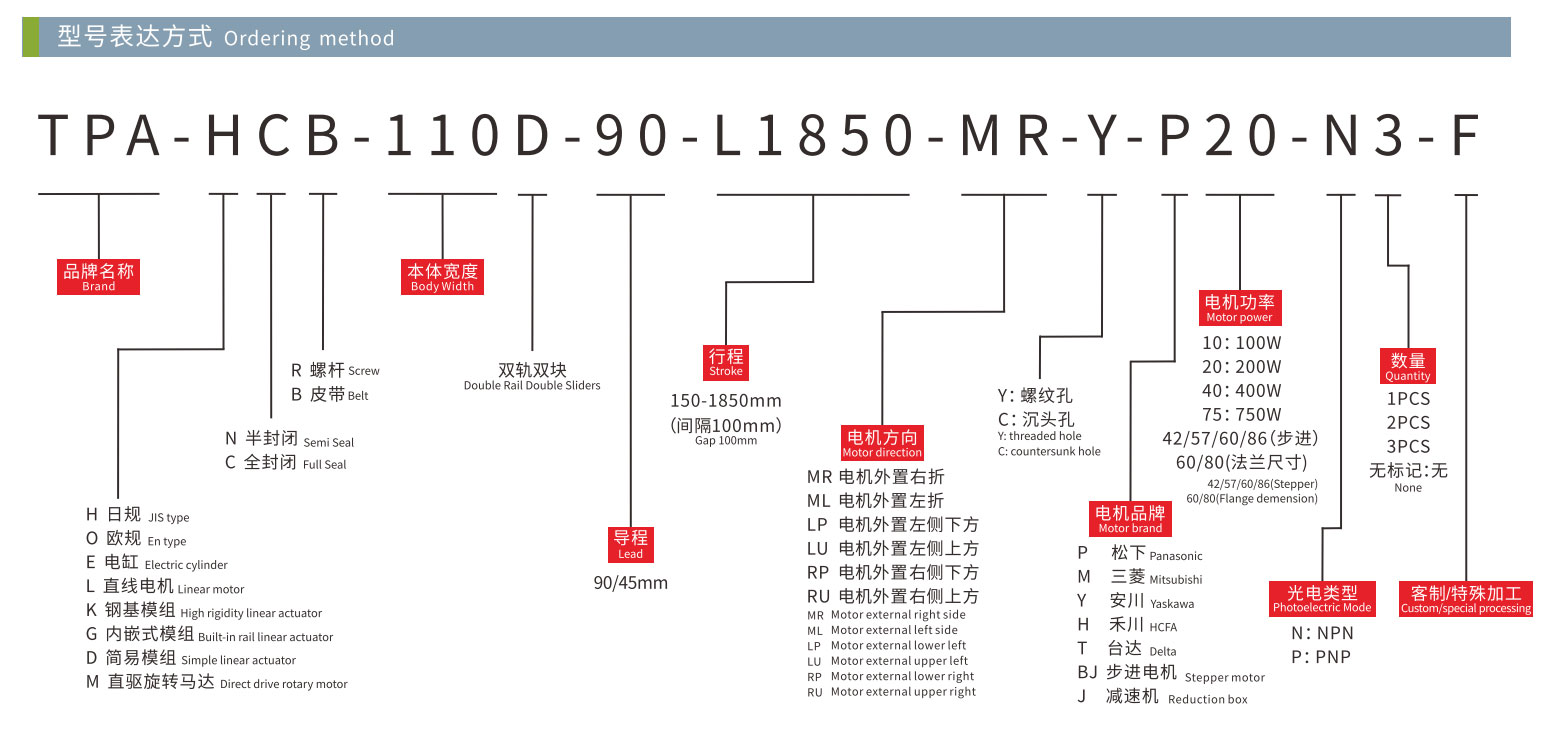
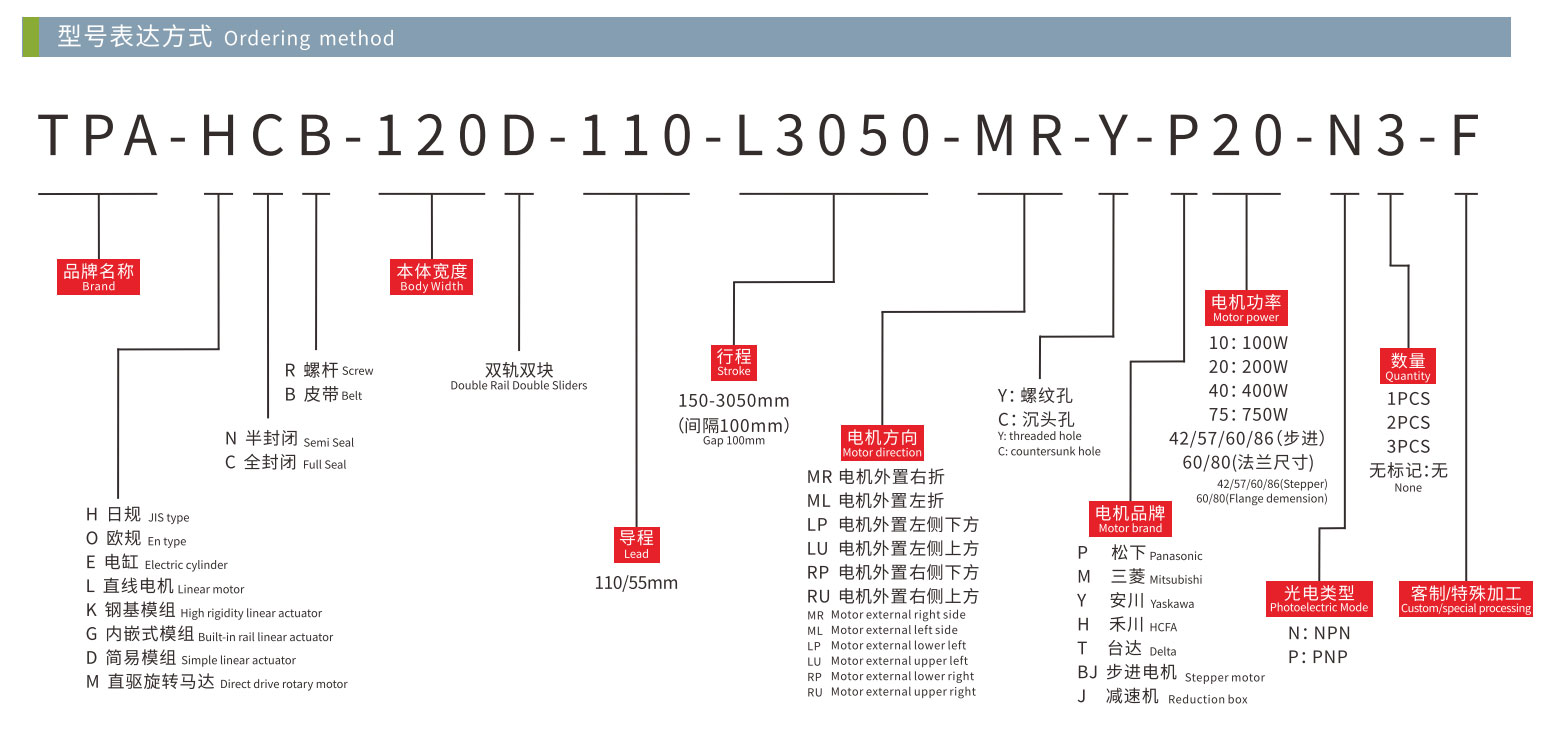
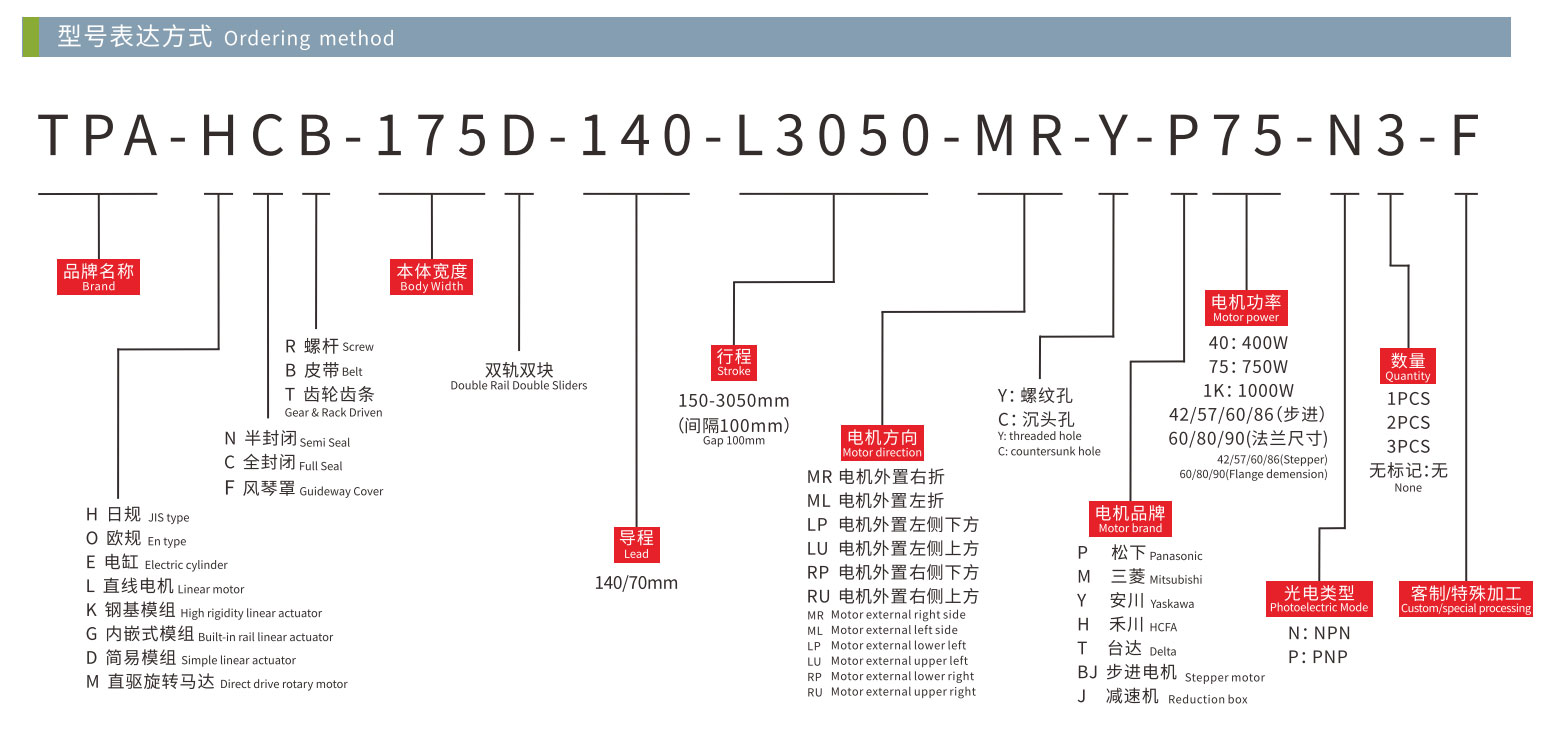
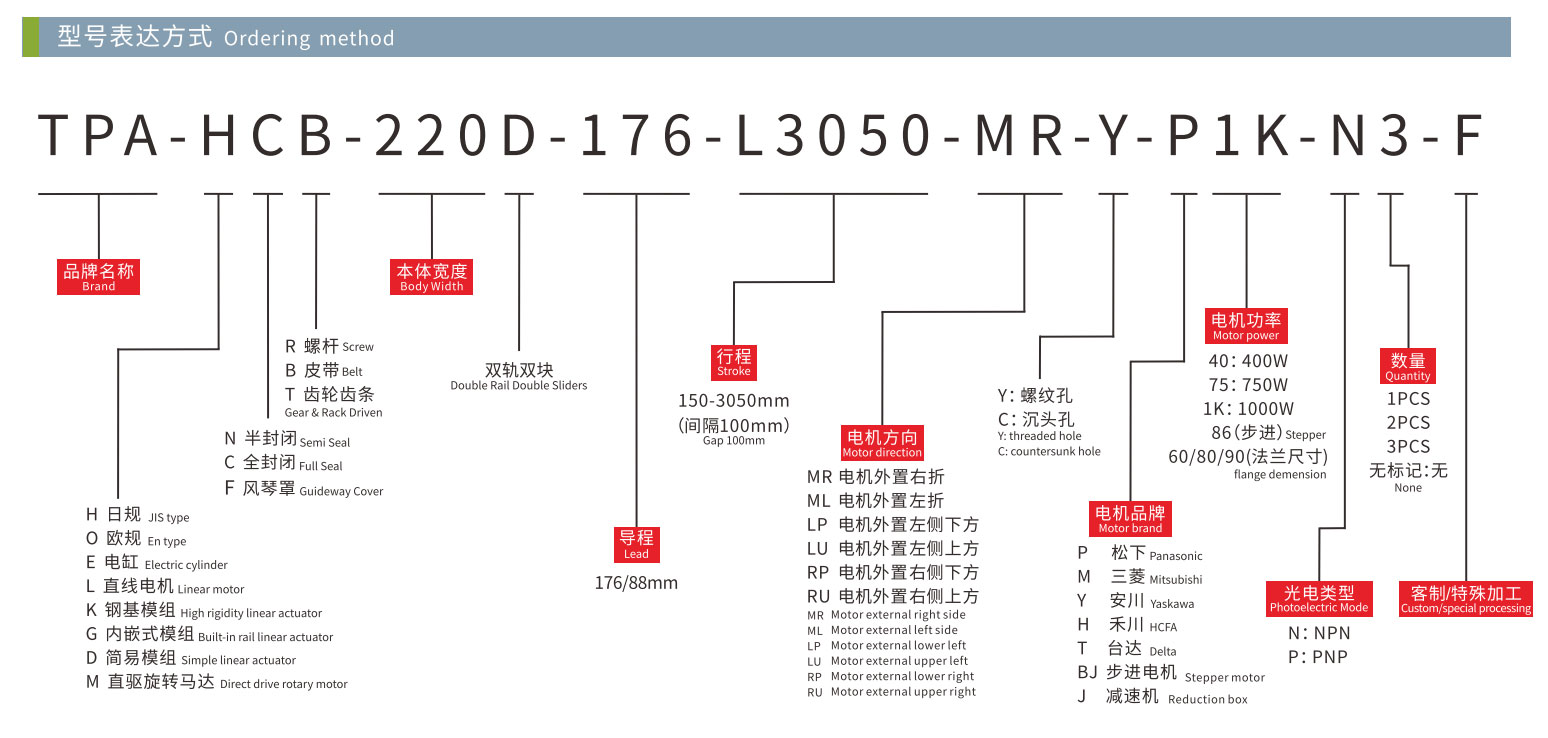
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
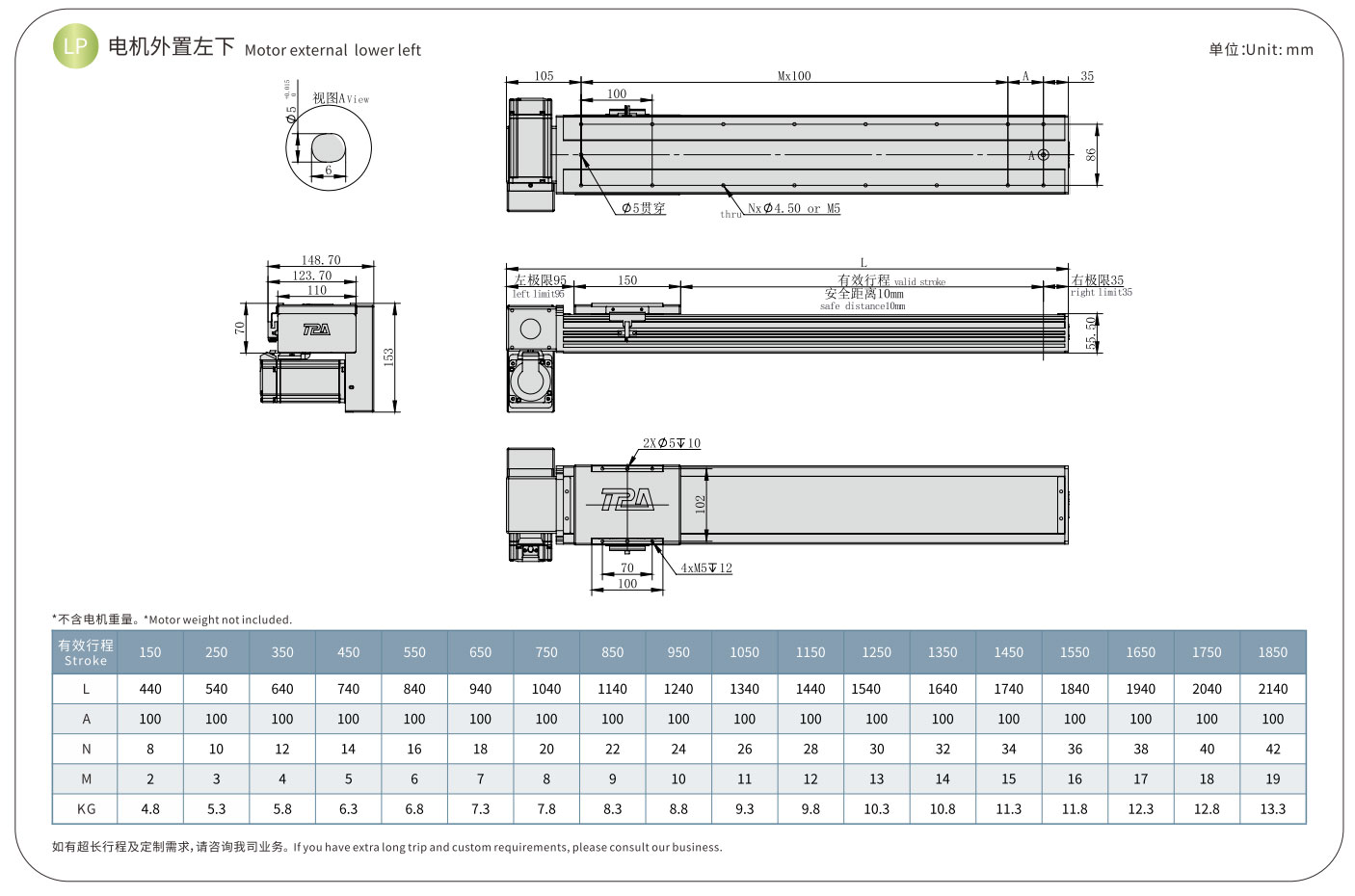
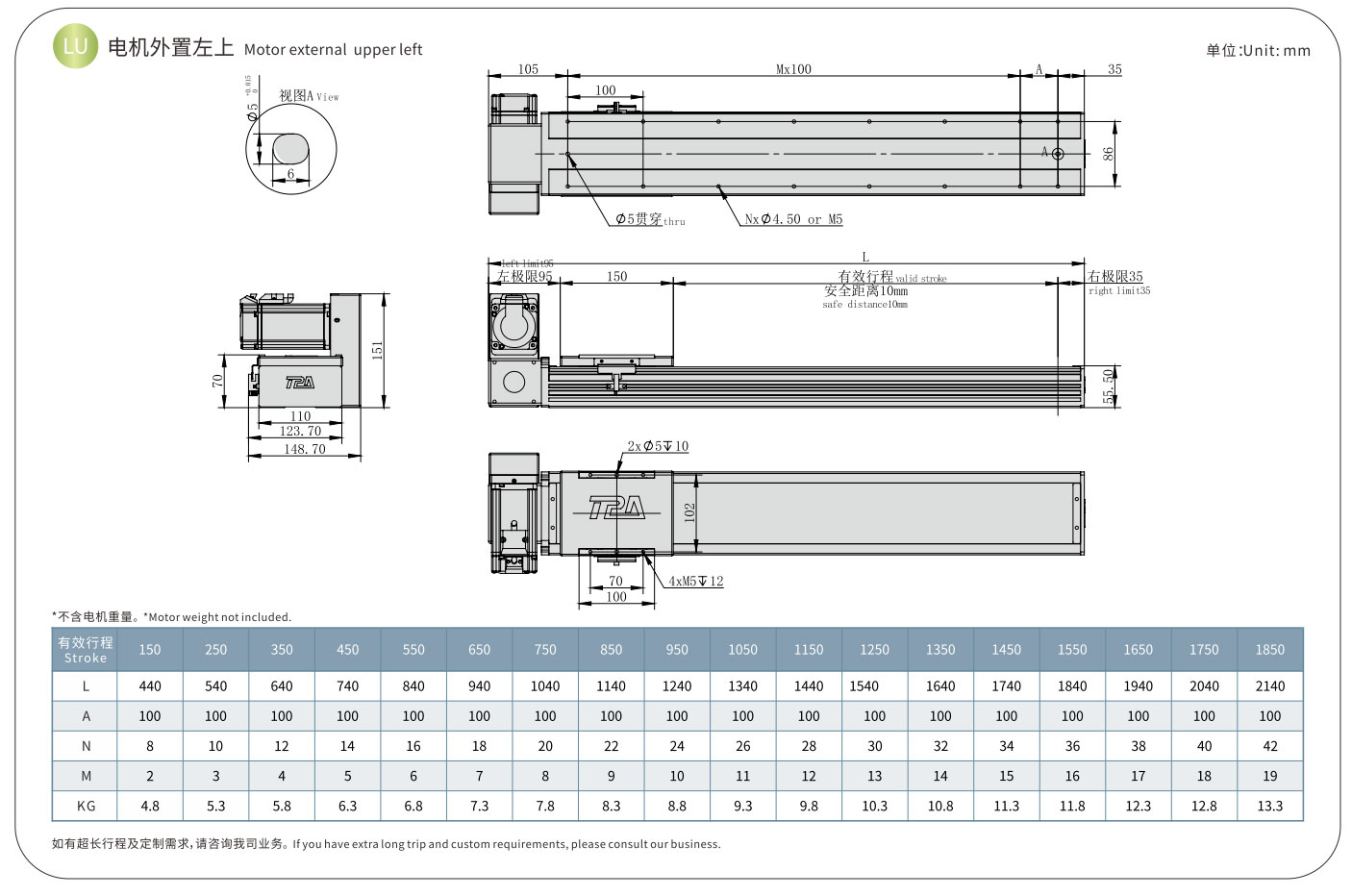
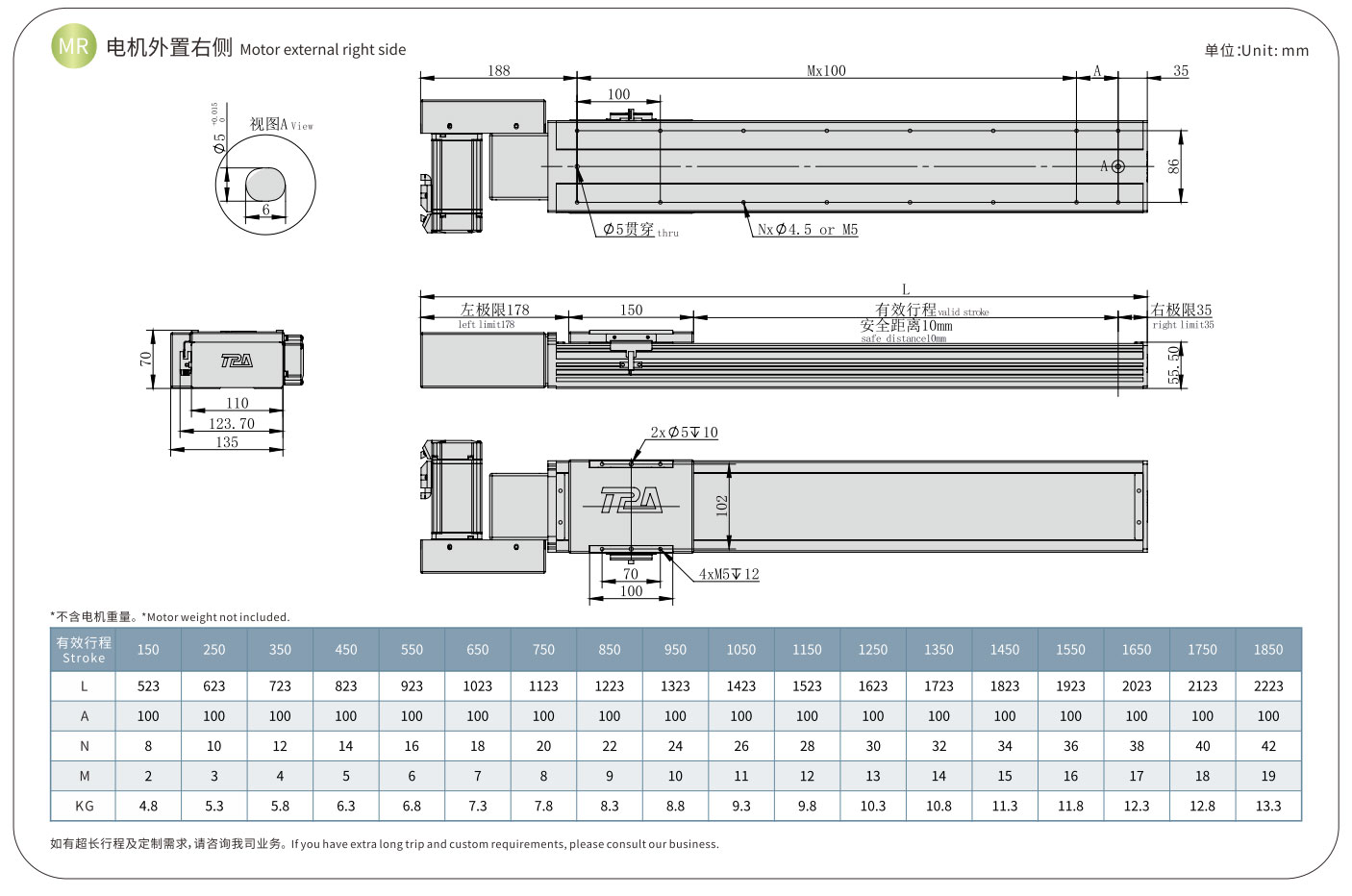
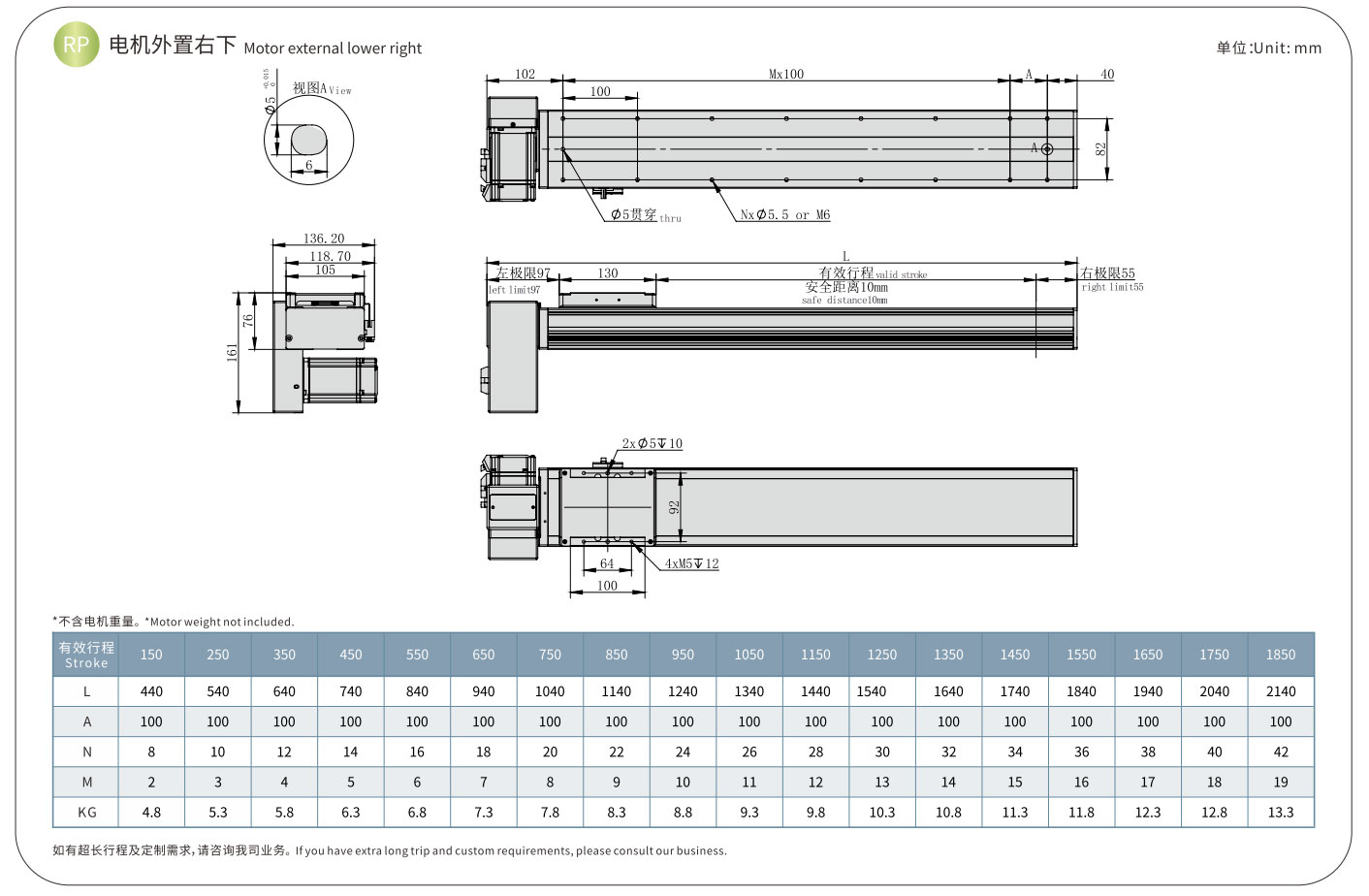
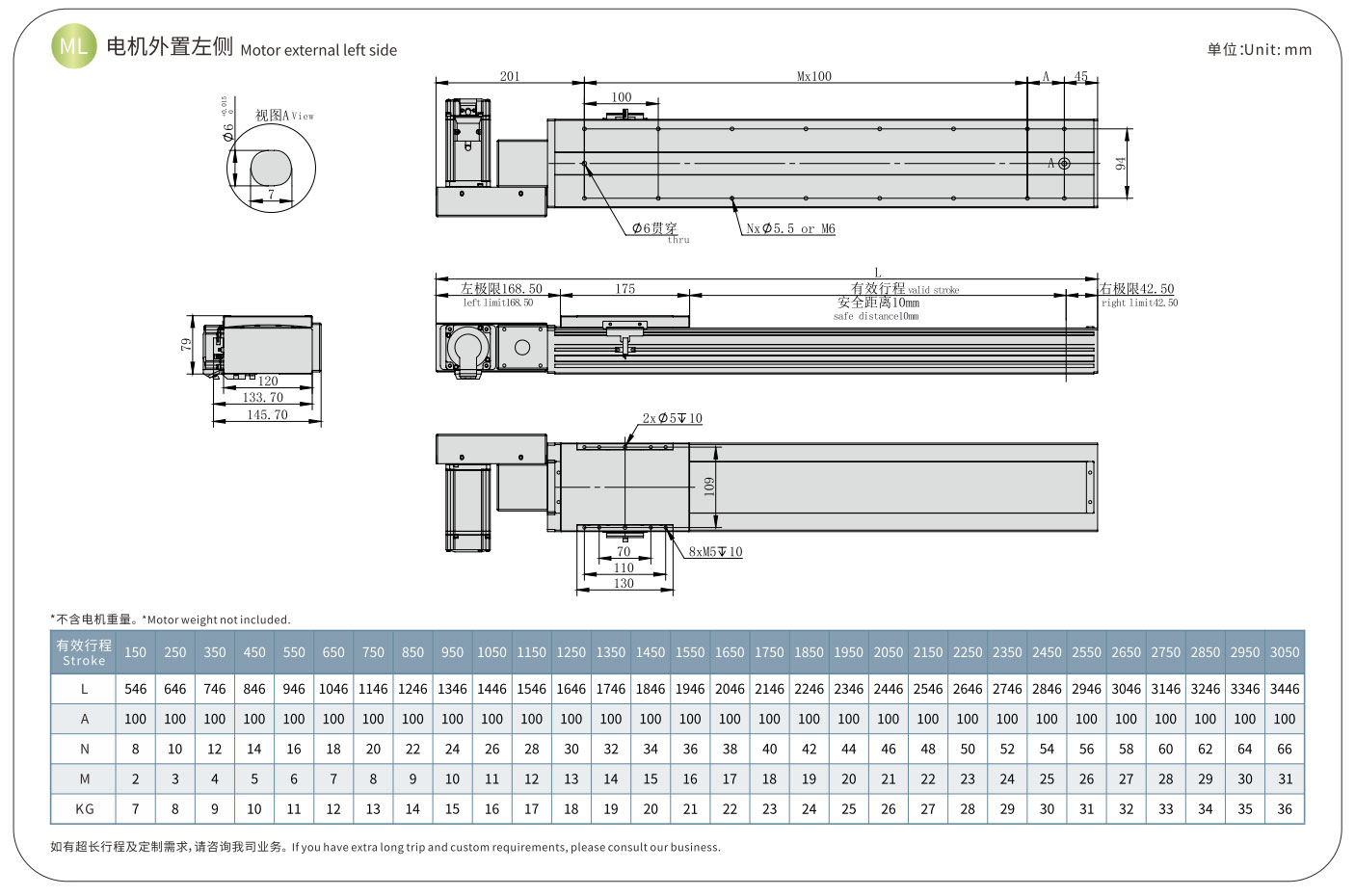
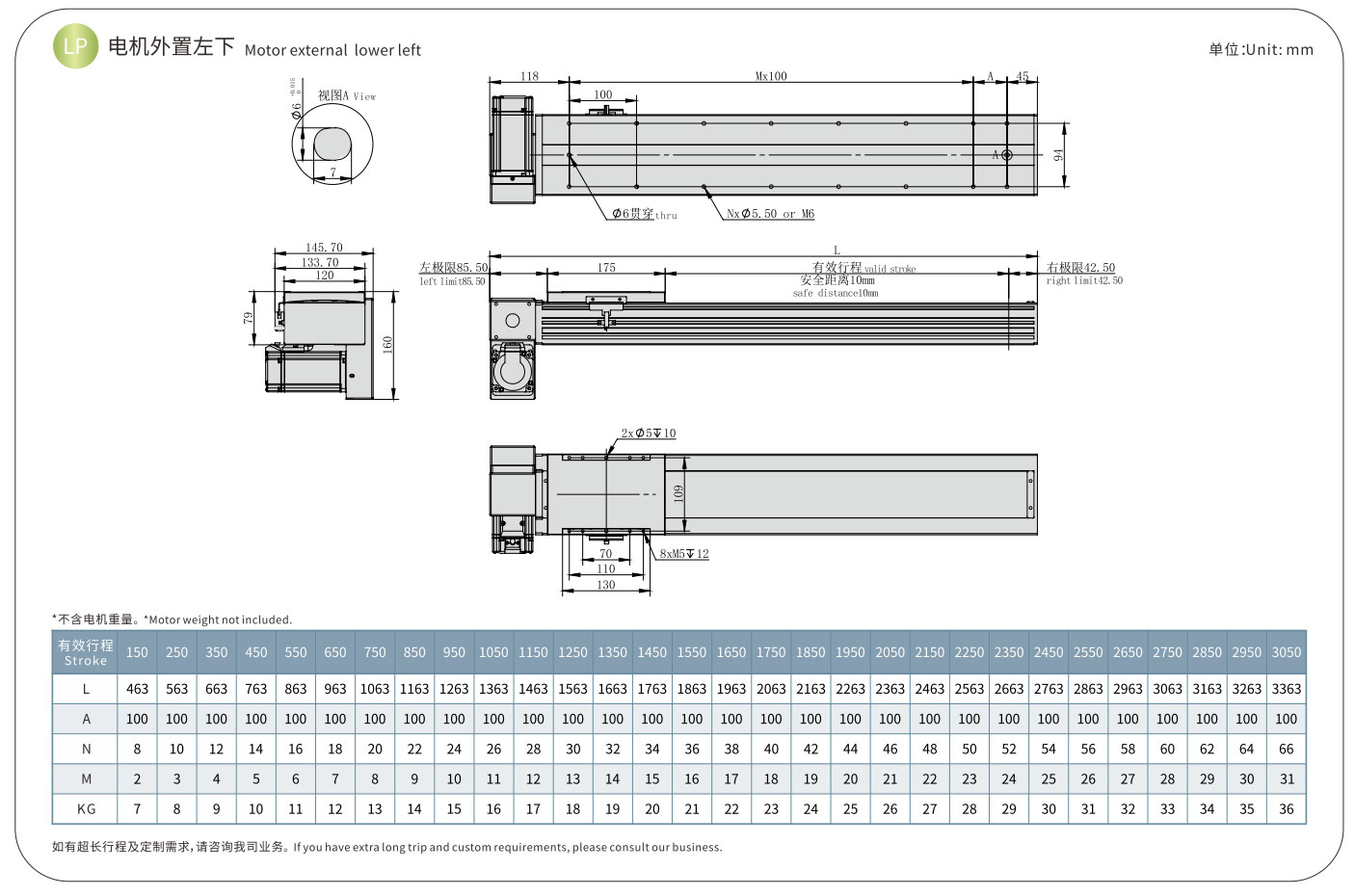
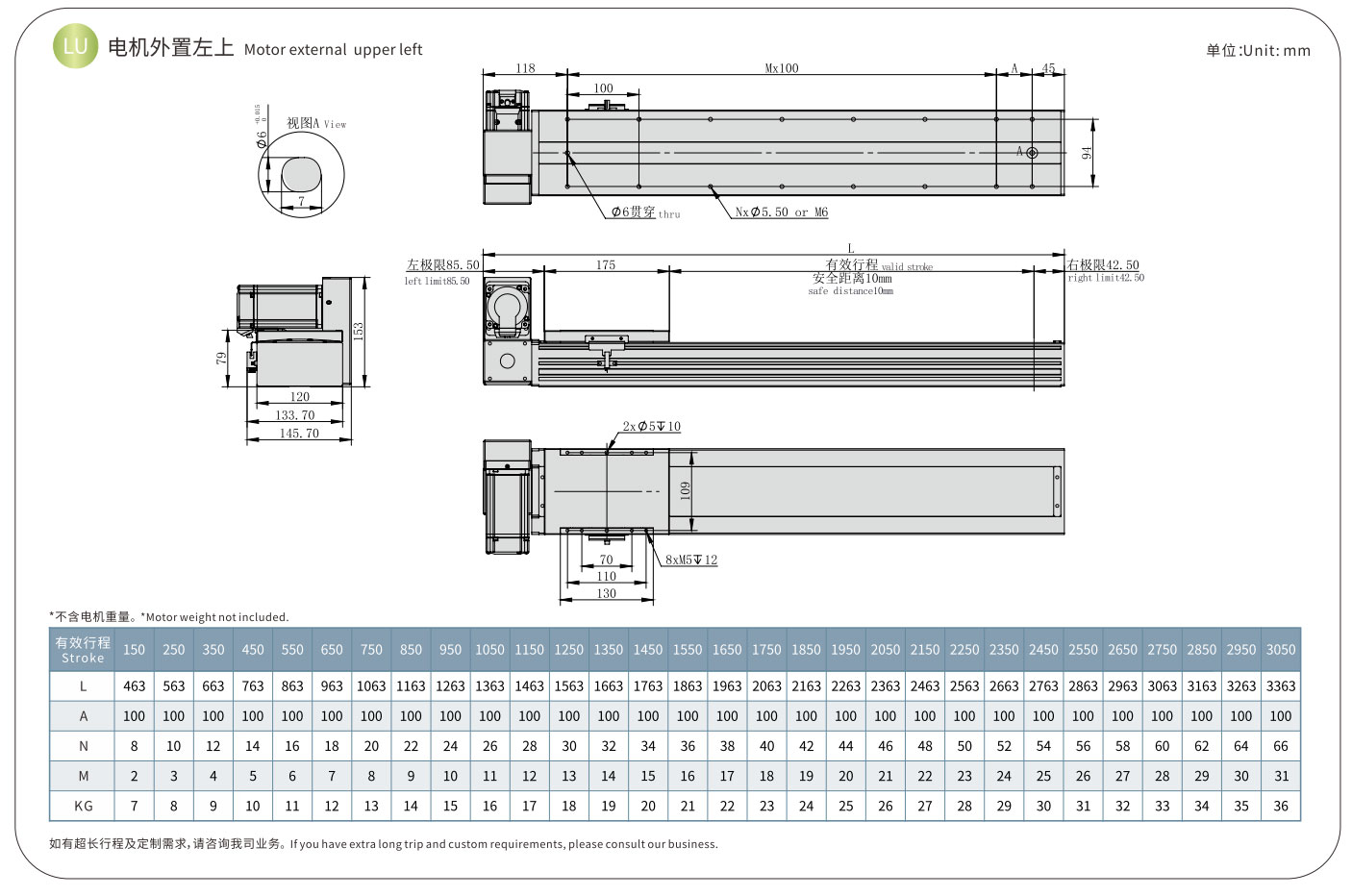
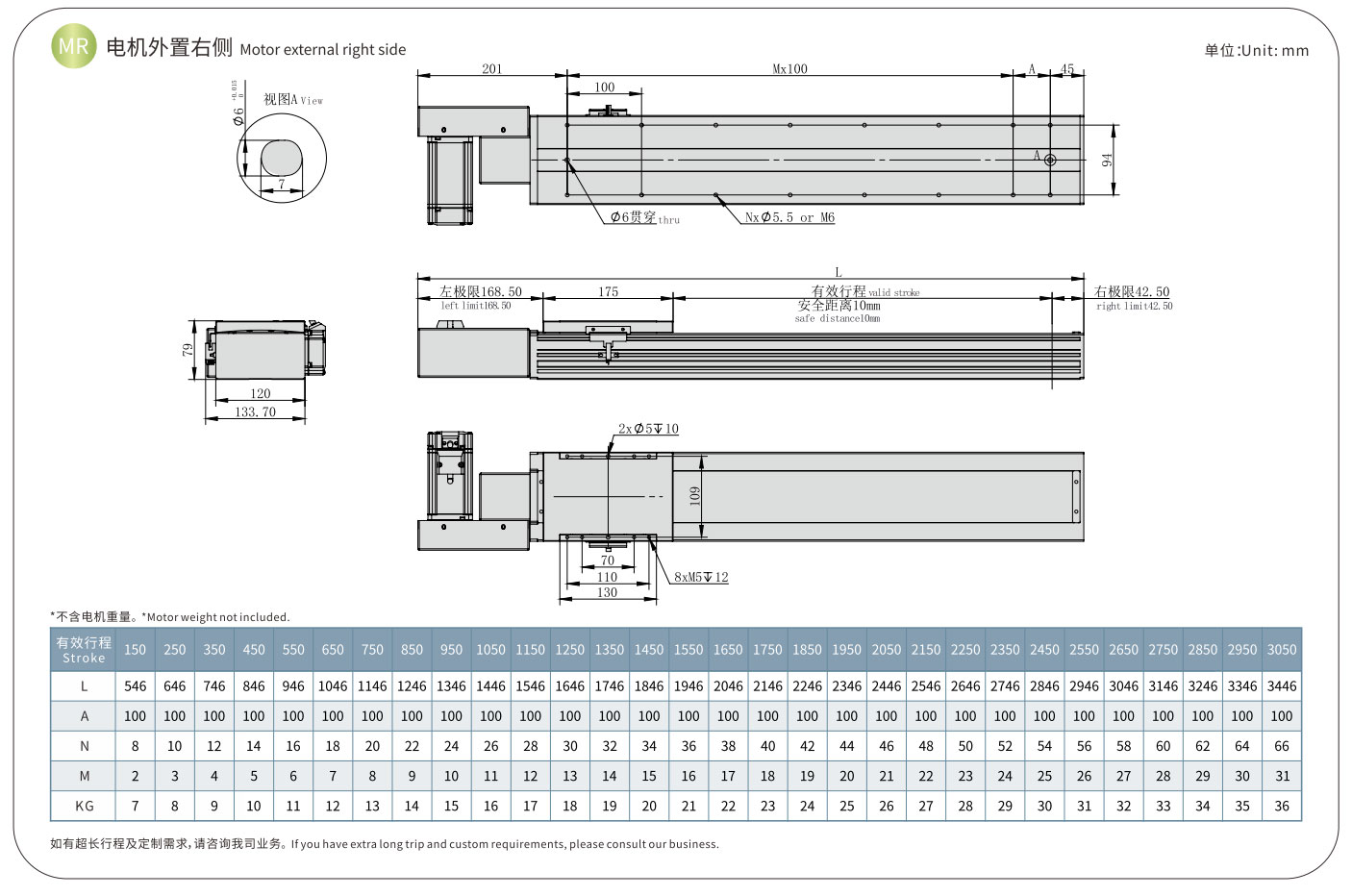
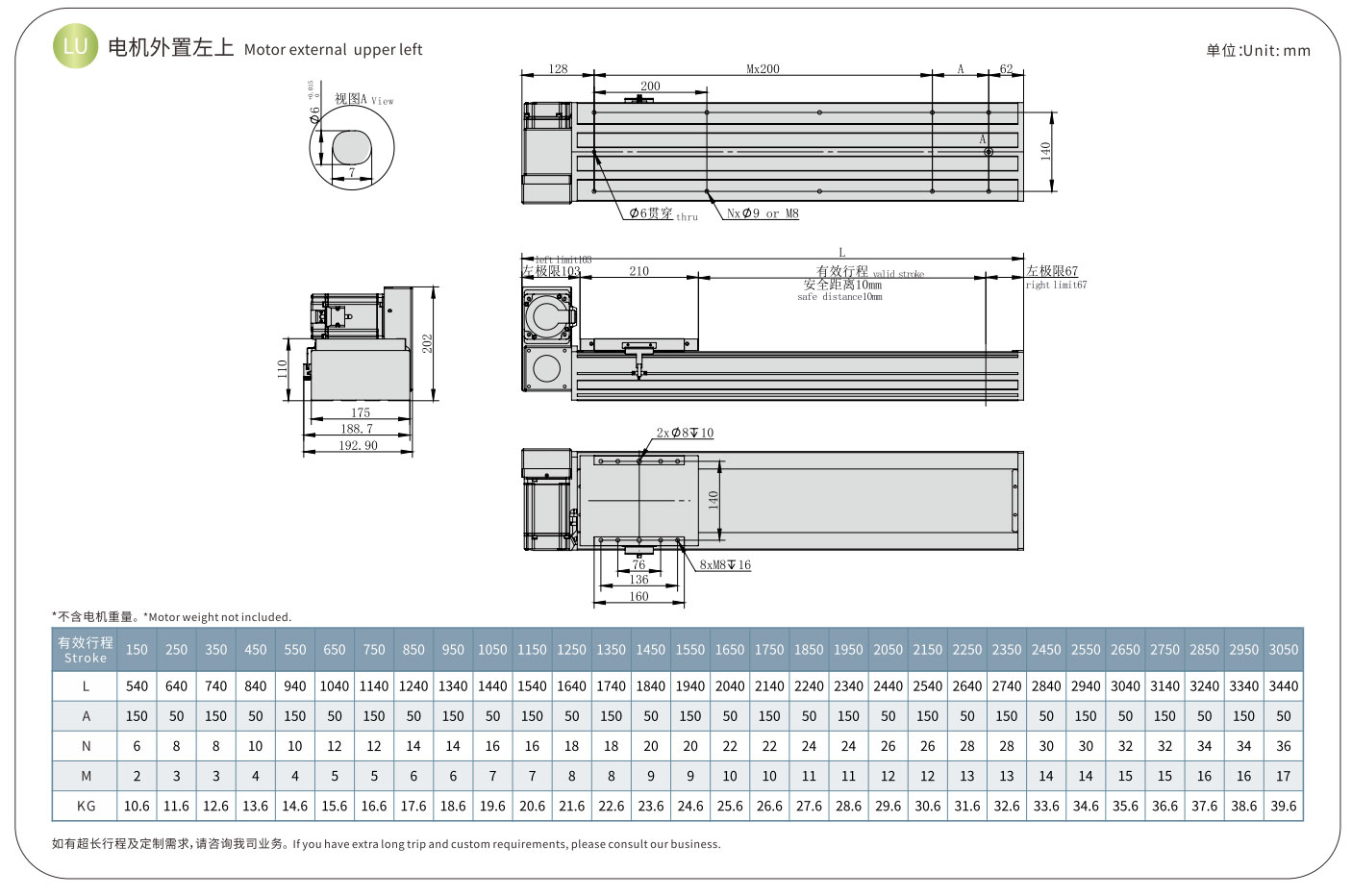
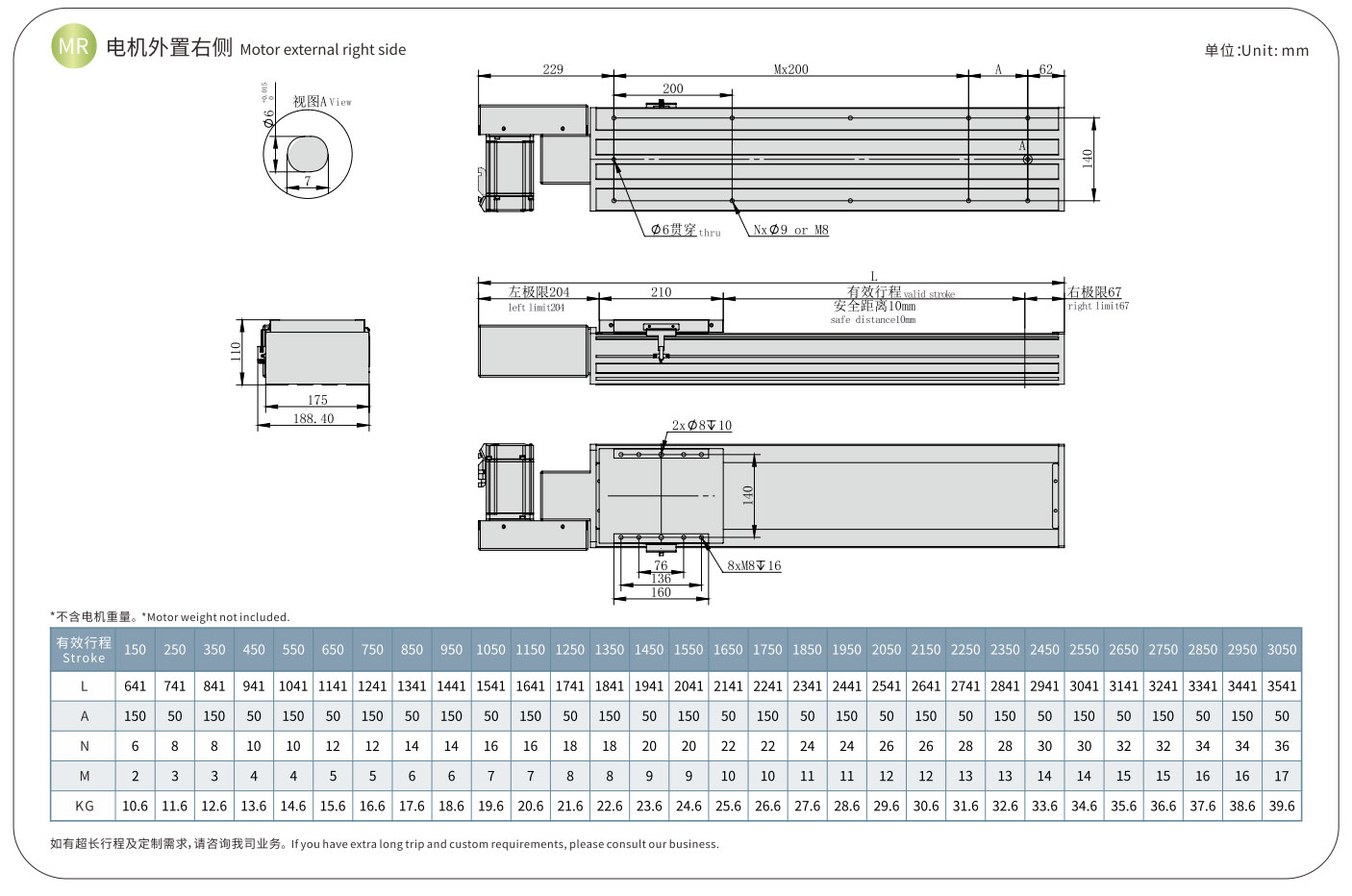
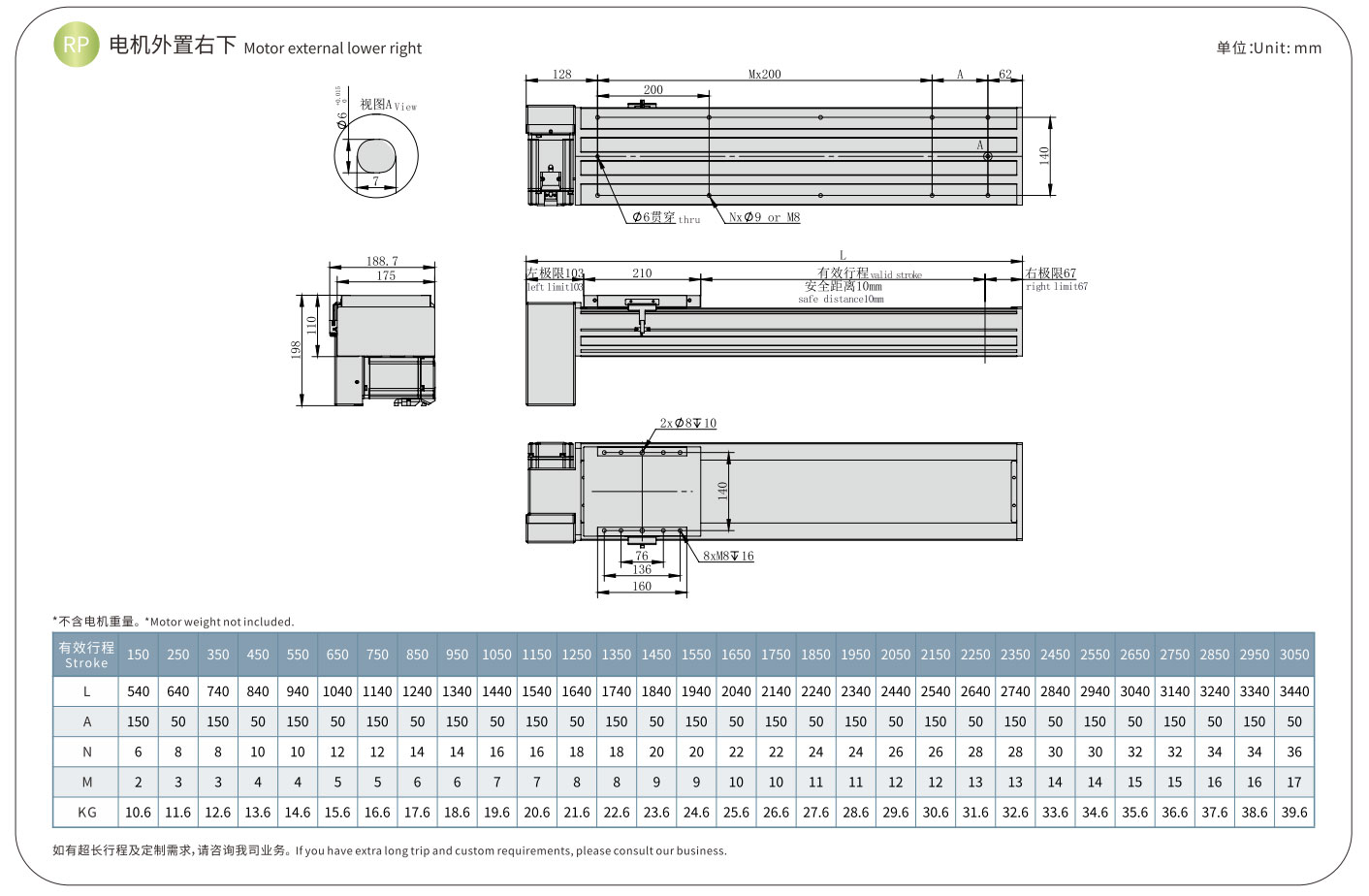
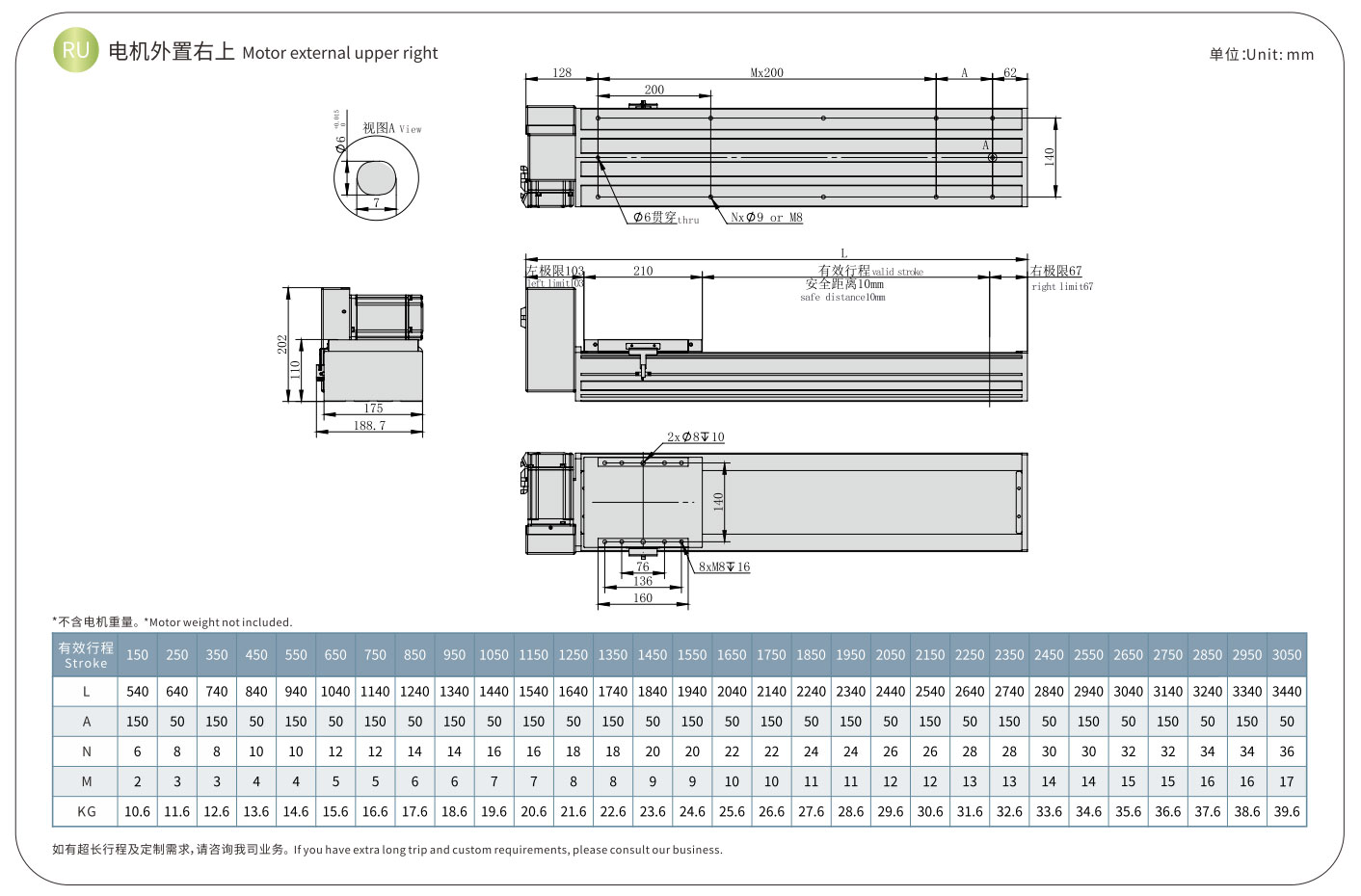
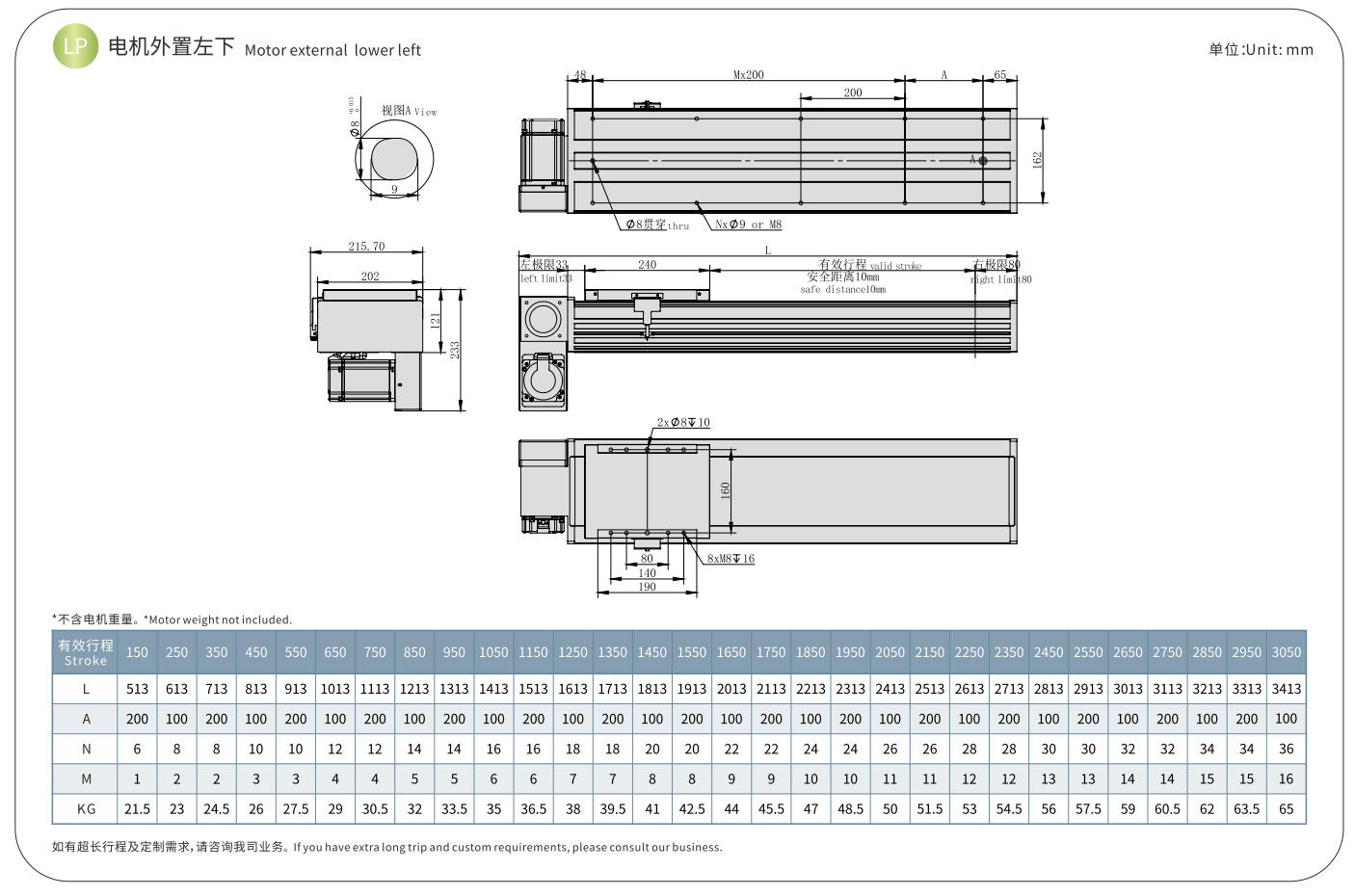
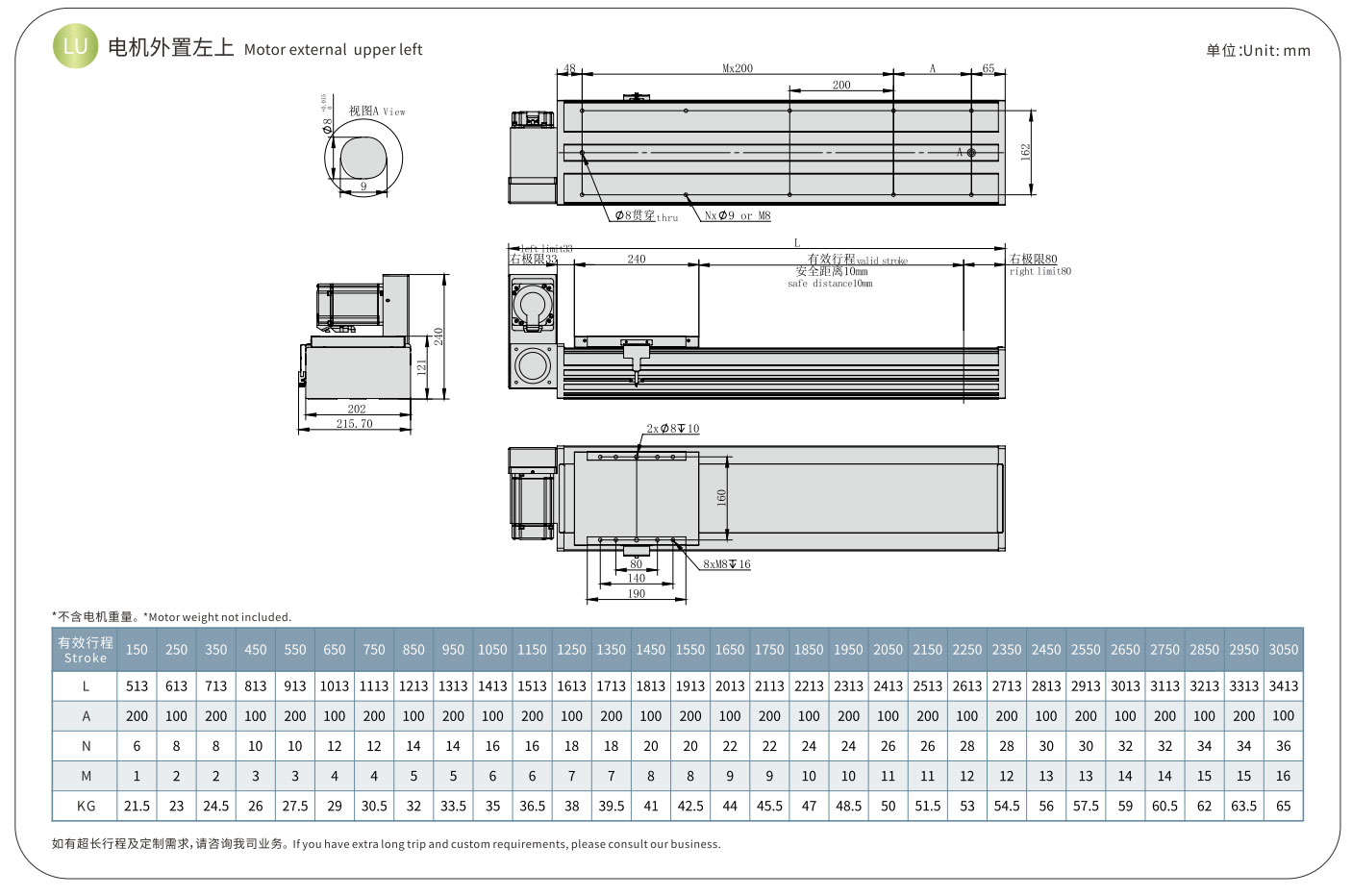
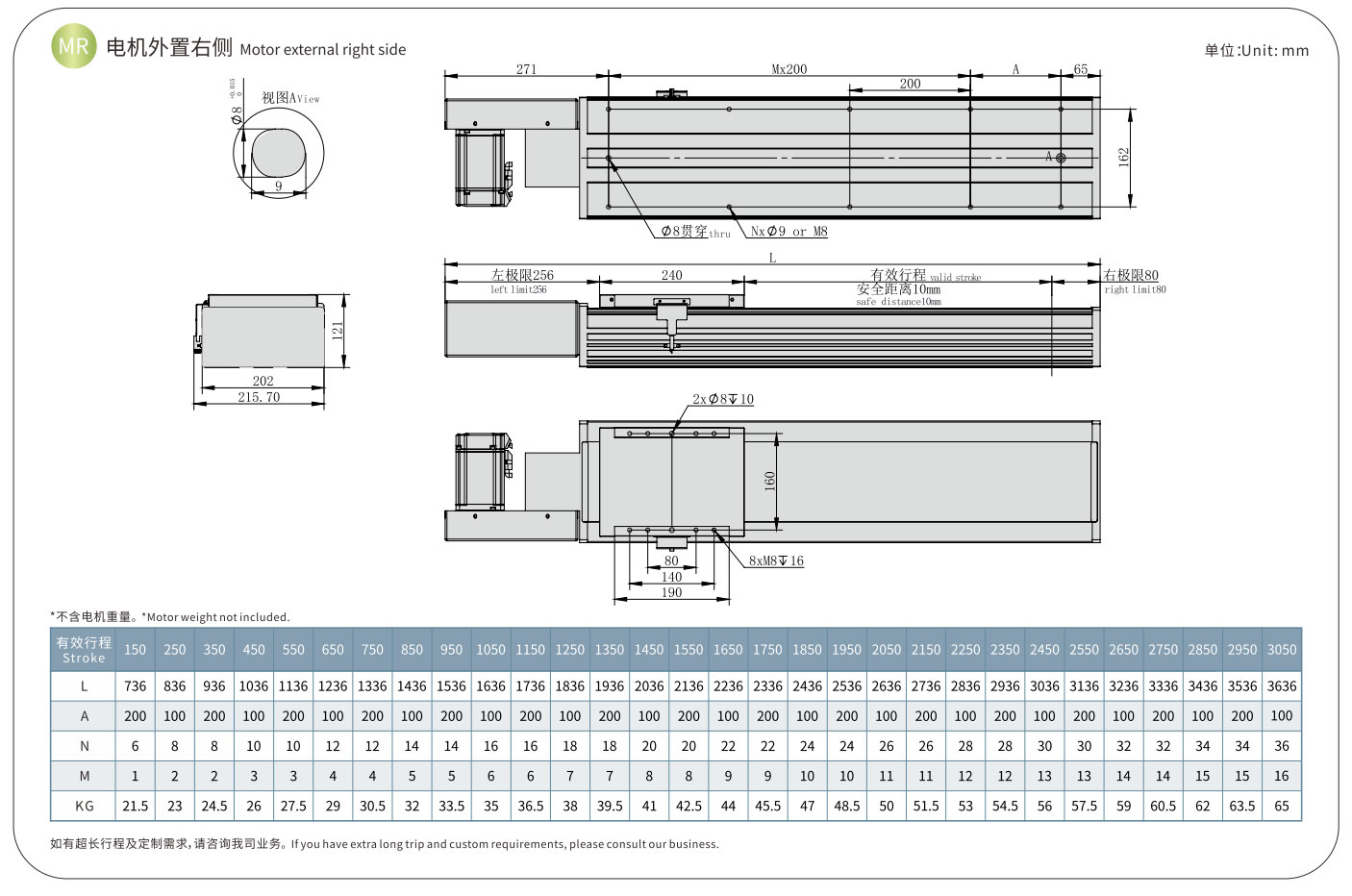
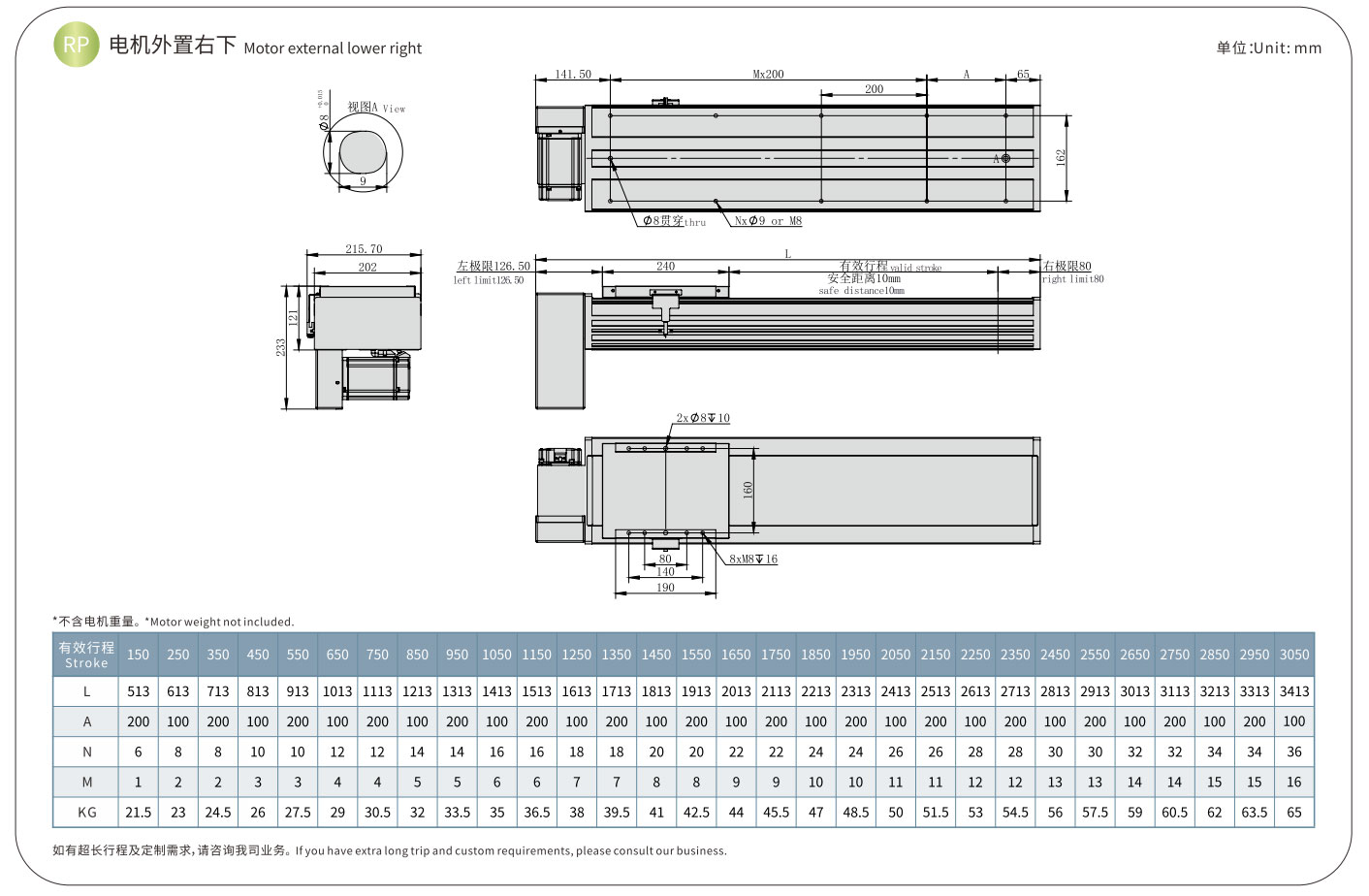
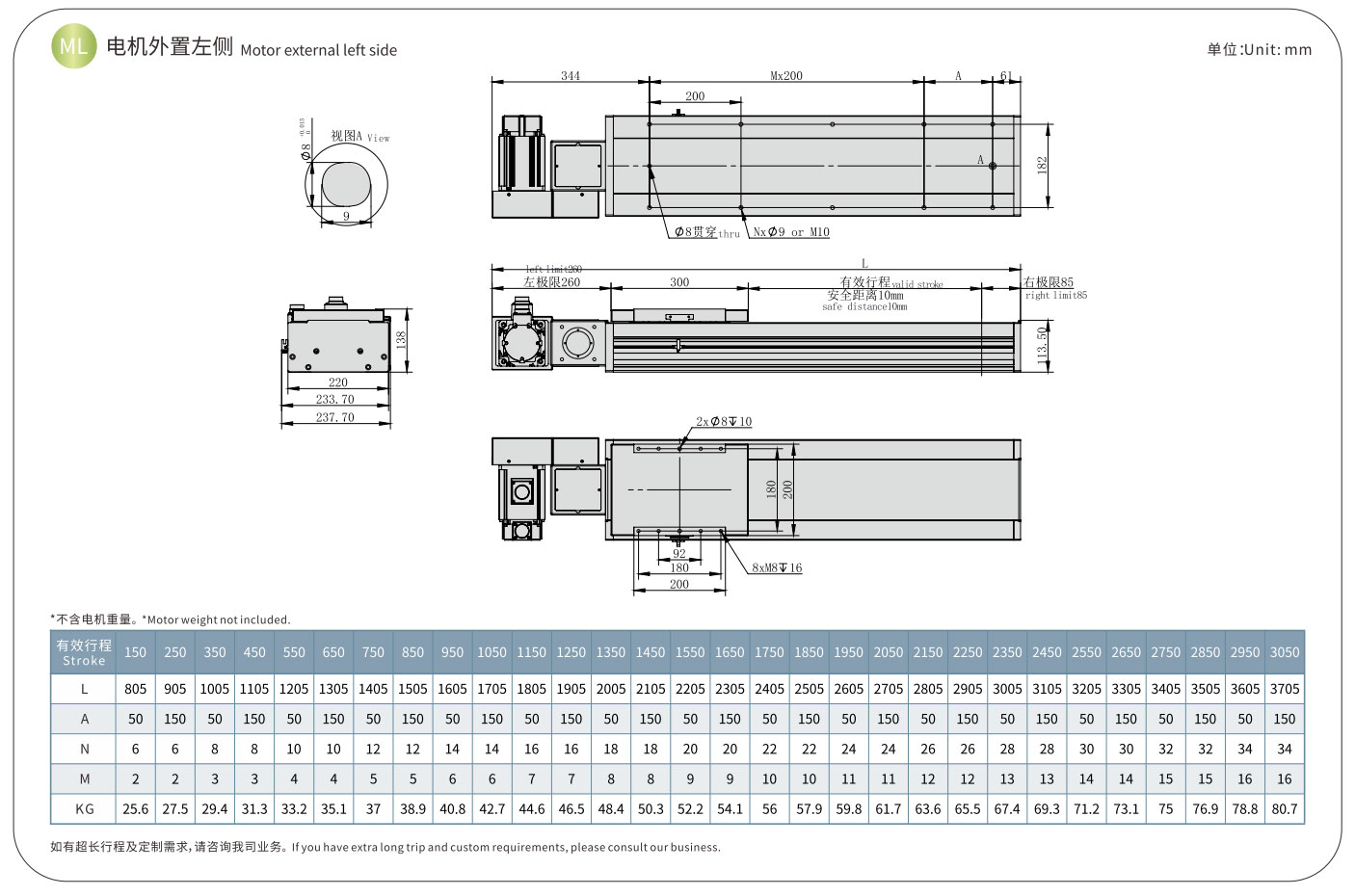
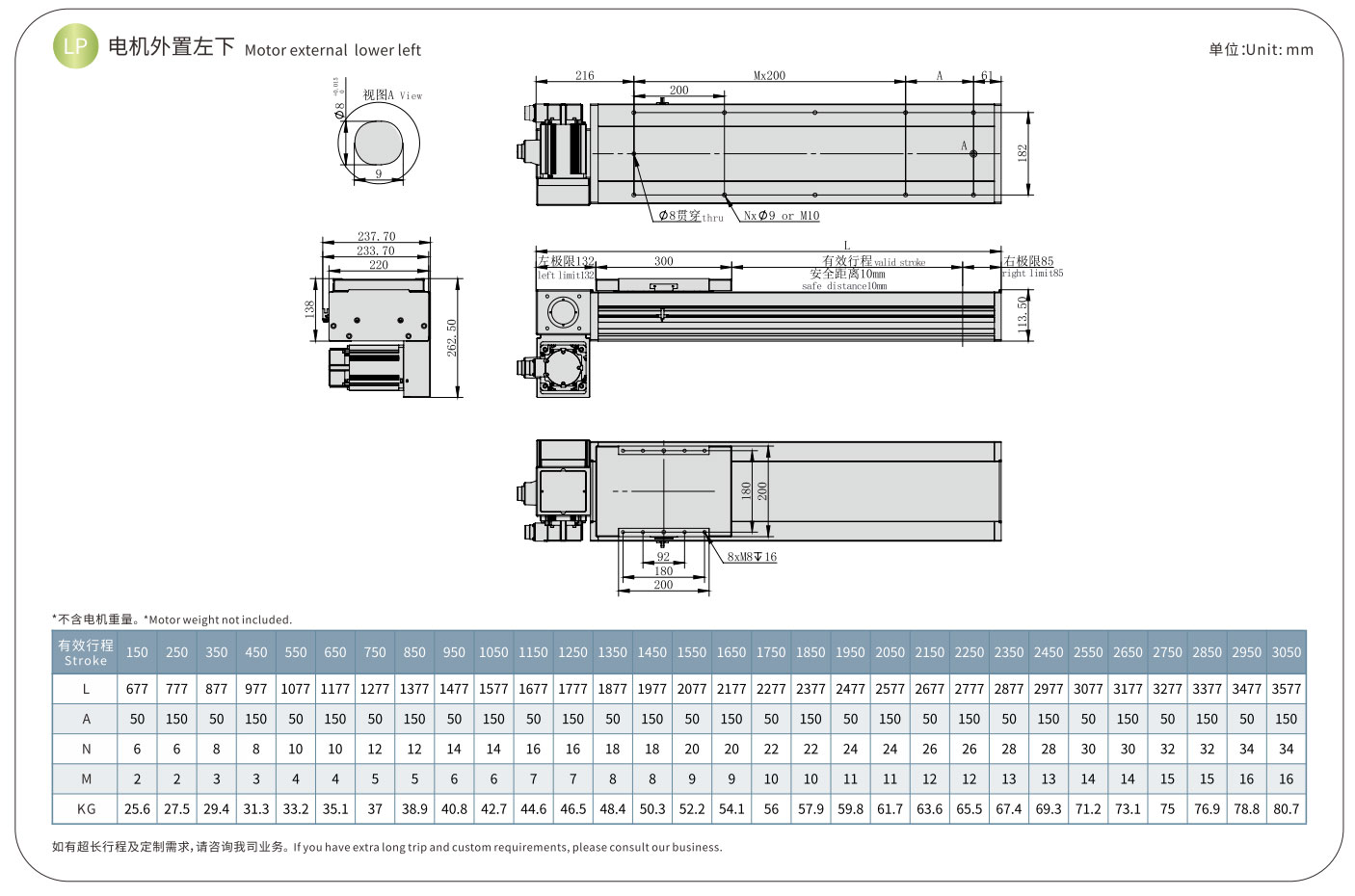
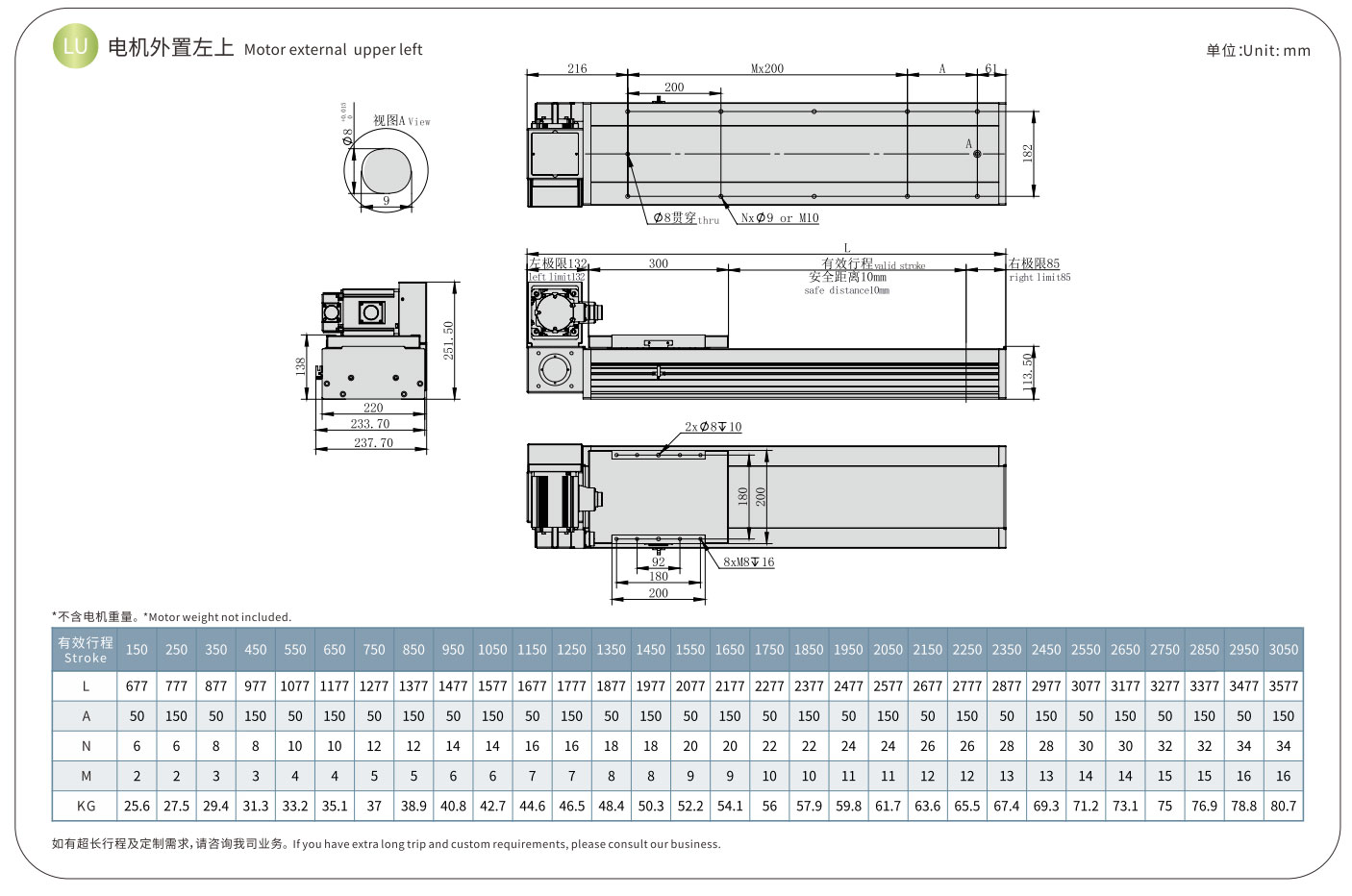
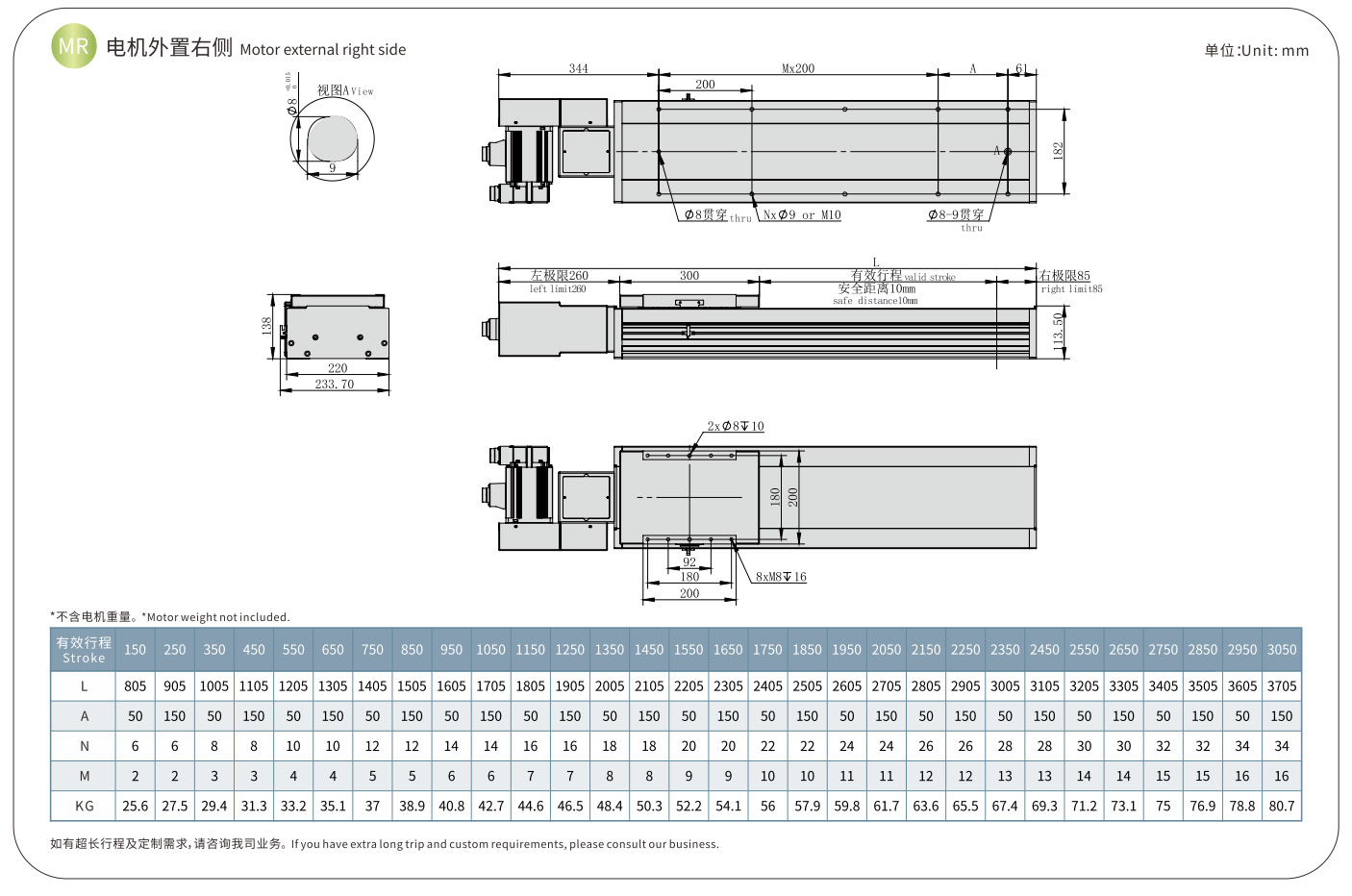
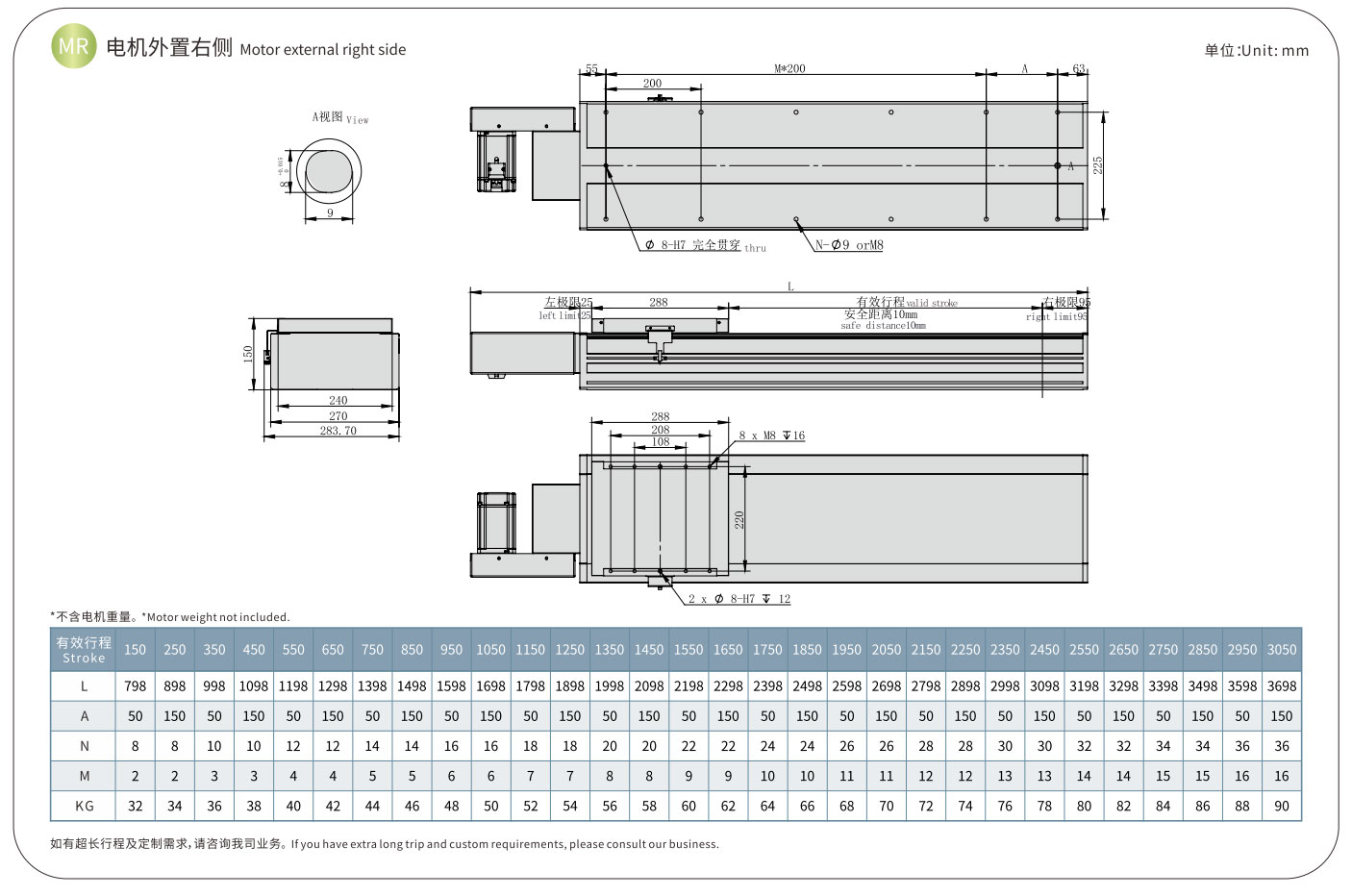
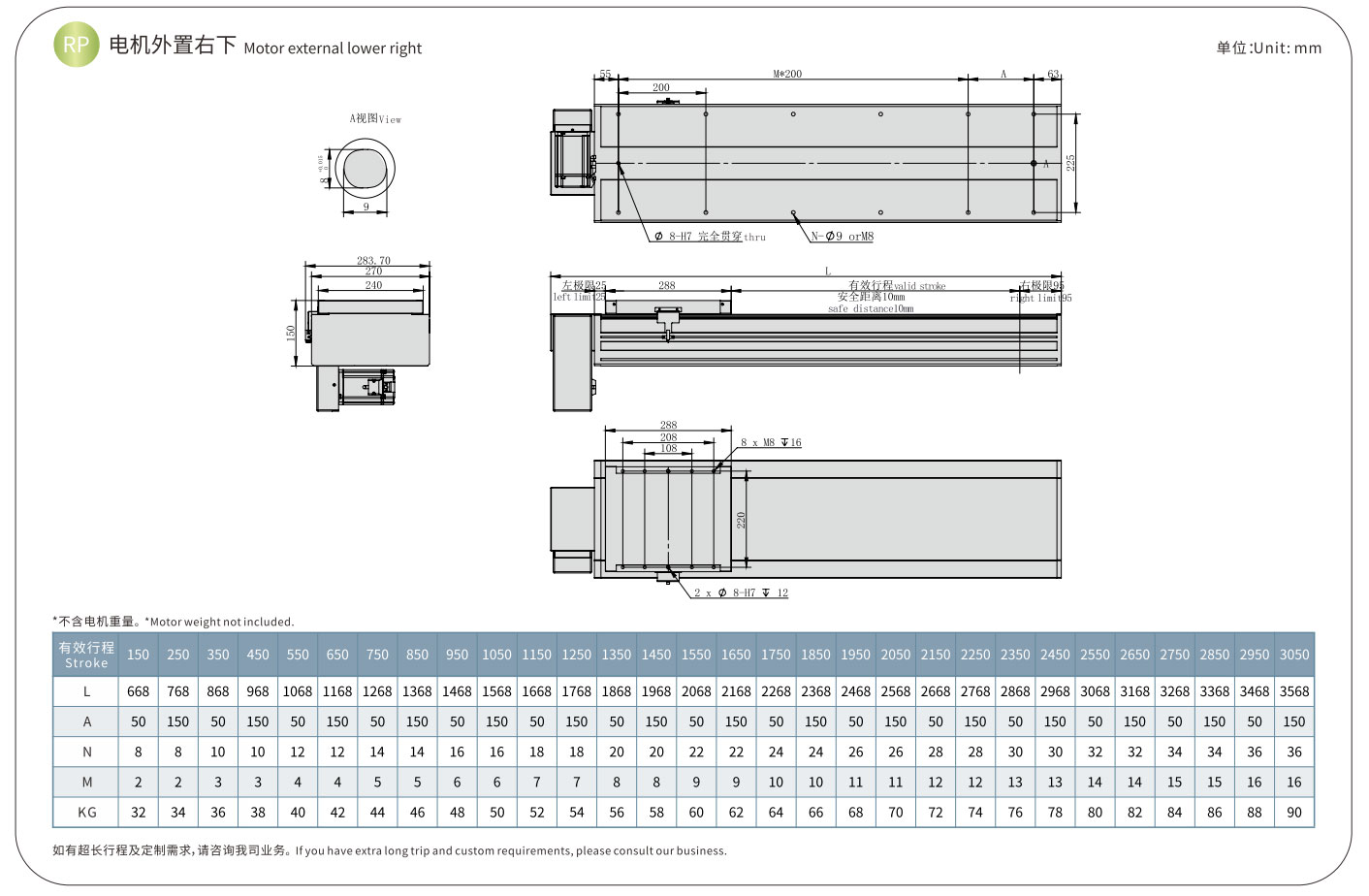
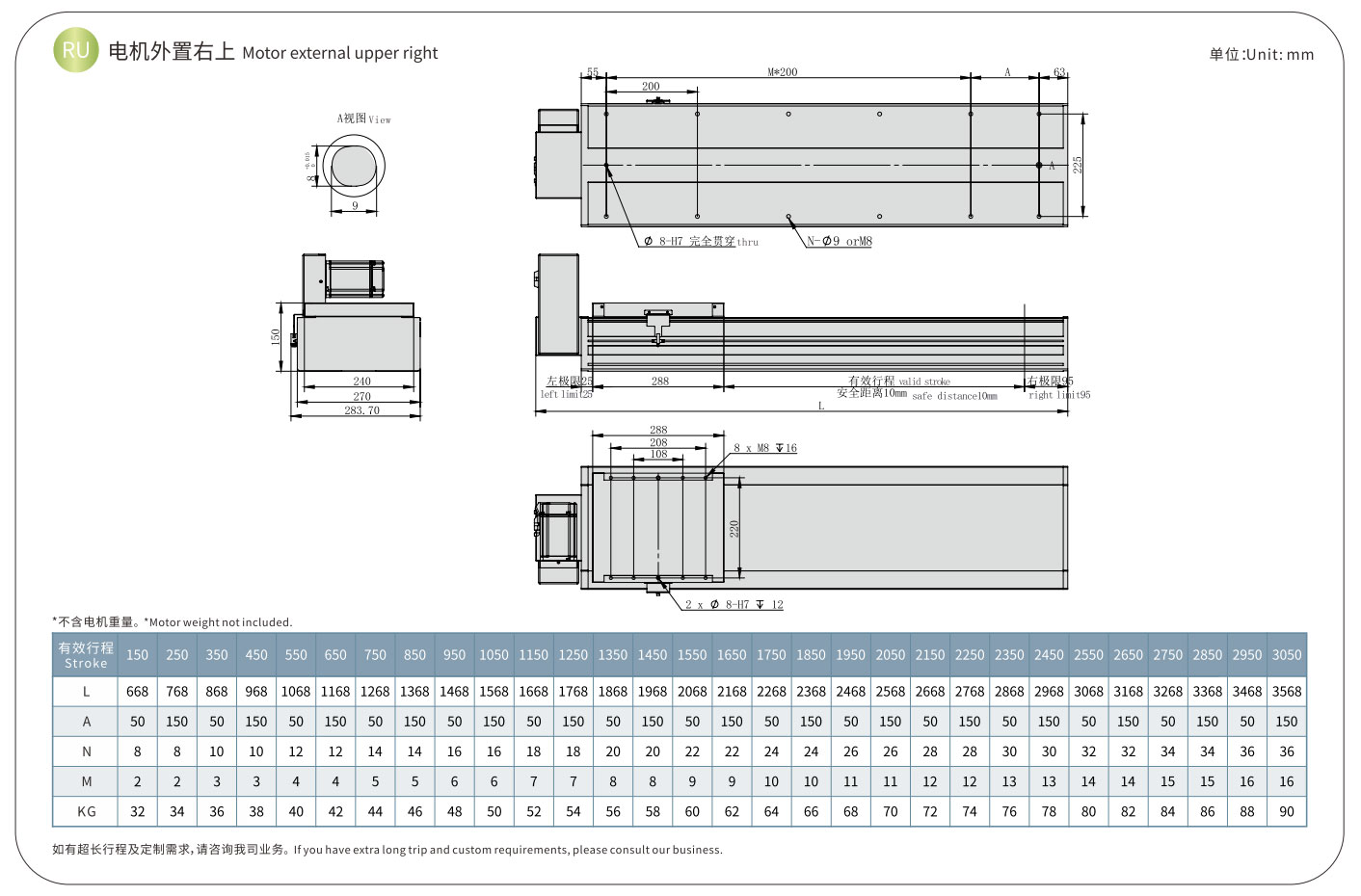
Cum'è un attuatore lineare classicu di TPA ROBOT, cumparatu cù a serie HCR, u slider guidatu di a serie HCB cù a cinghia di distribuzione, chì significa chì a serie HCB hà una corsa più longa è una velocità più alta. Hè guidatu da un servomotore, ùn hà micca solu l'alta precisione di u servomotore, ma hà ancu i vantaghji di l'alta velocità è a rigidità alta di u stadiu scorrevule stessu. Hè faciule da cuntrullà è pò esse facilmente cunnessu cù PLC è altri sistemi. L'attuatore scorrevule hè fattu di prufilu d'aluminiu estrusu integralmente, cù pesu ligeru, dimensioni petite è rigidità forte. A dimensione di a stallazione è u colpu pò esse persunalizatu secondu i bisogni, è a stallazione pò esse fissata da bulloni. Attraversu a cumminazzioni di parechje direzzione, pò esse furmatu in un sistema di muvimentu lineale di vari equipaghji d'automatizazione, cù pinze meccaniche, pinze d'aria è altre attrezzature, pò diventà un robot cartesianu esclusivu o robot gantry.

HCB65S

HCB-85D

HCB-105D

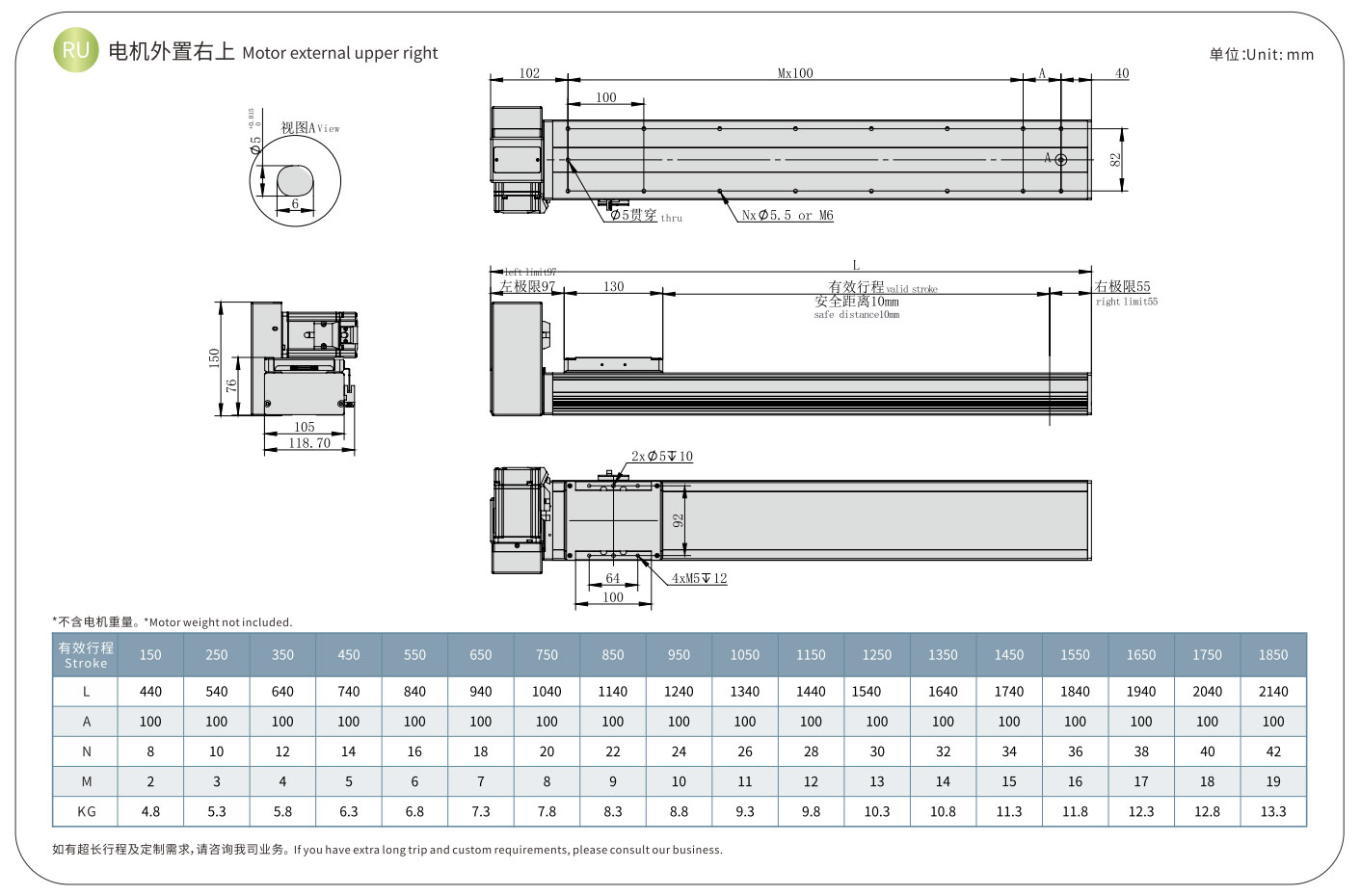
HCB-120D

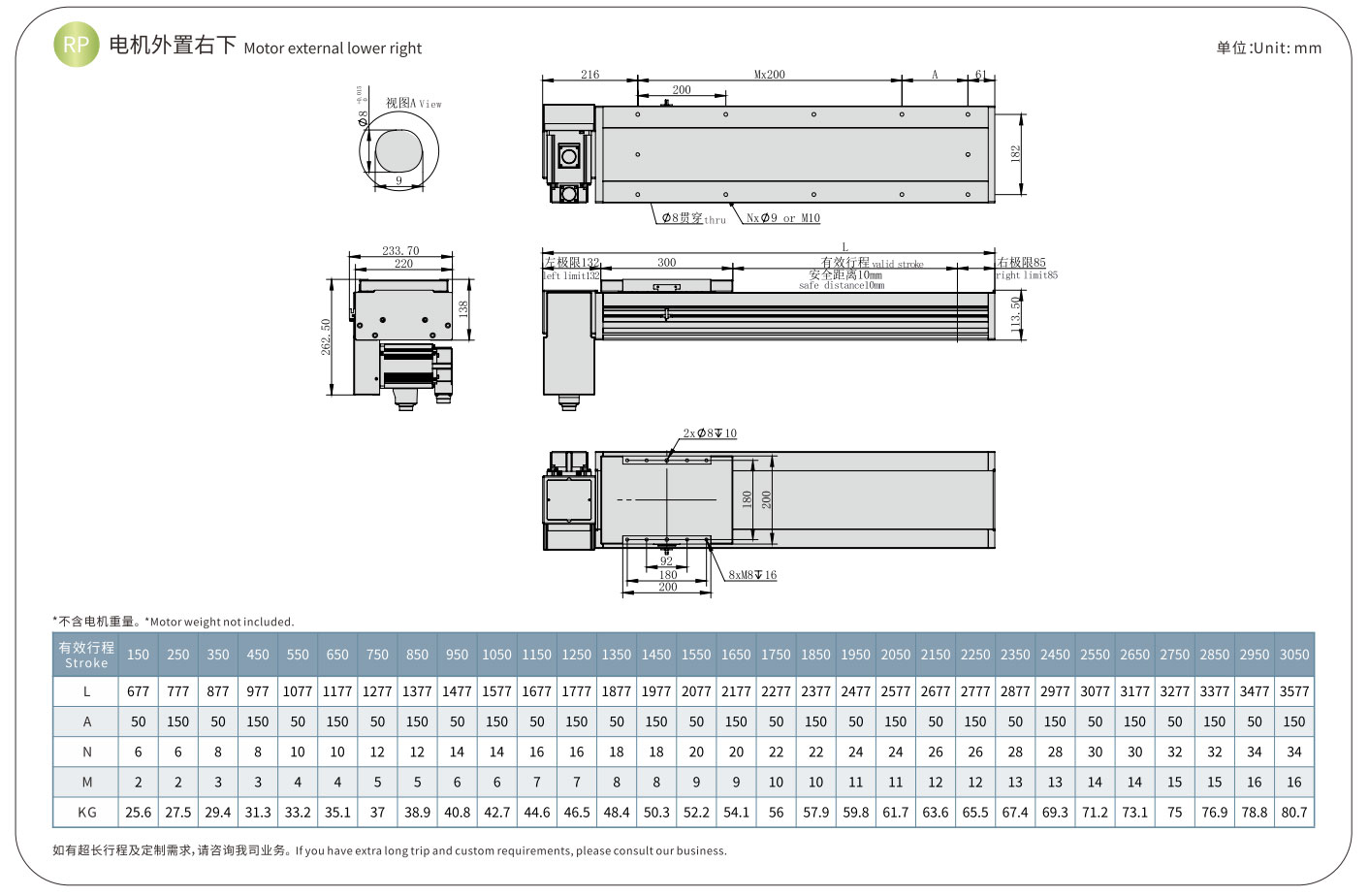
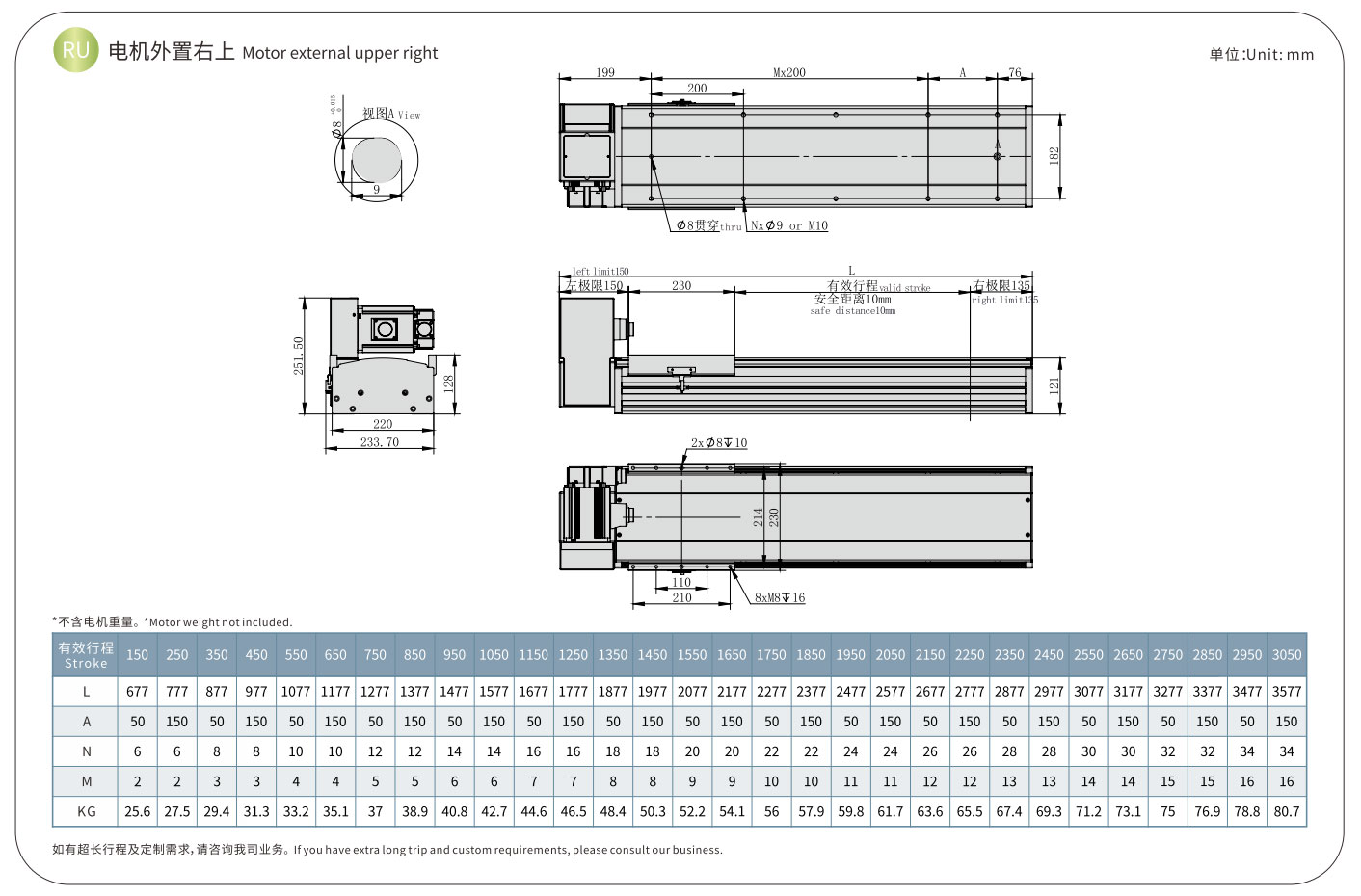
HCB-270D
Features
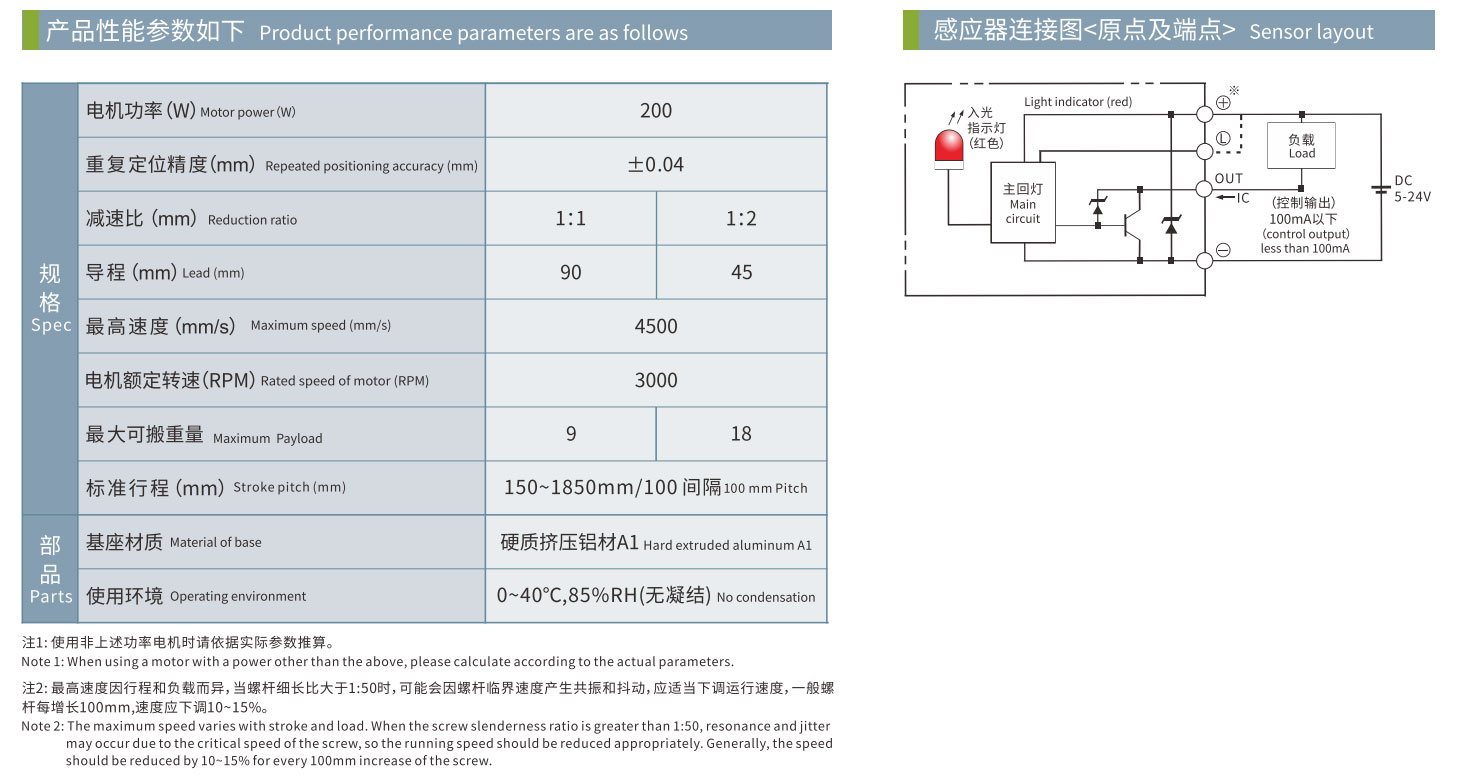
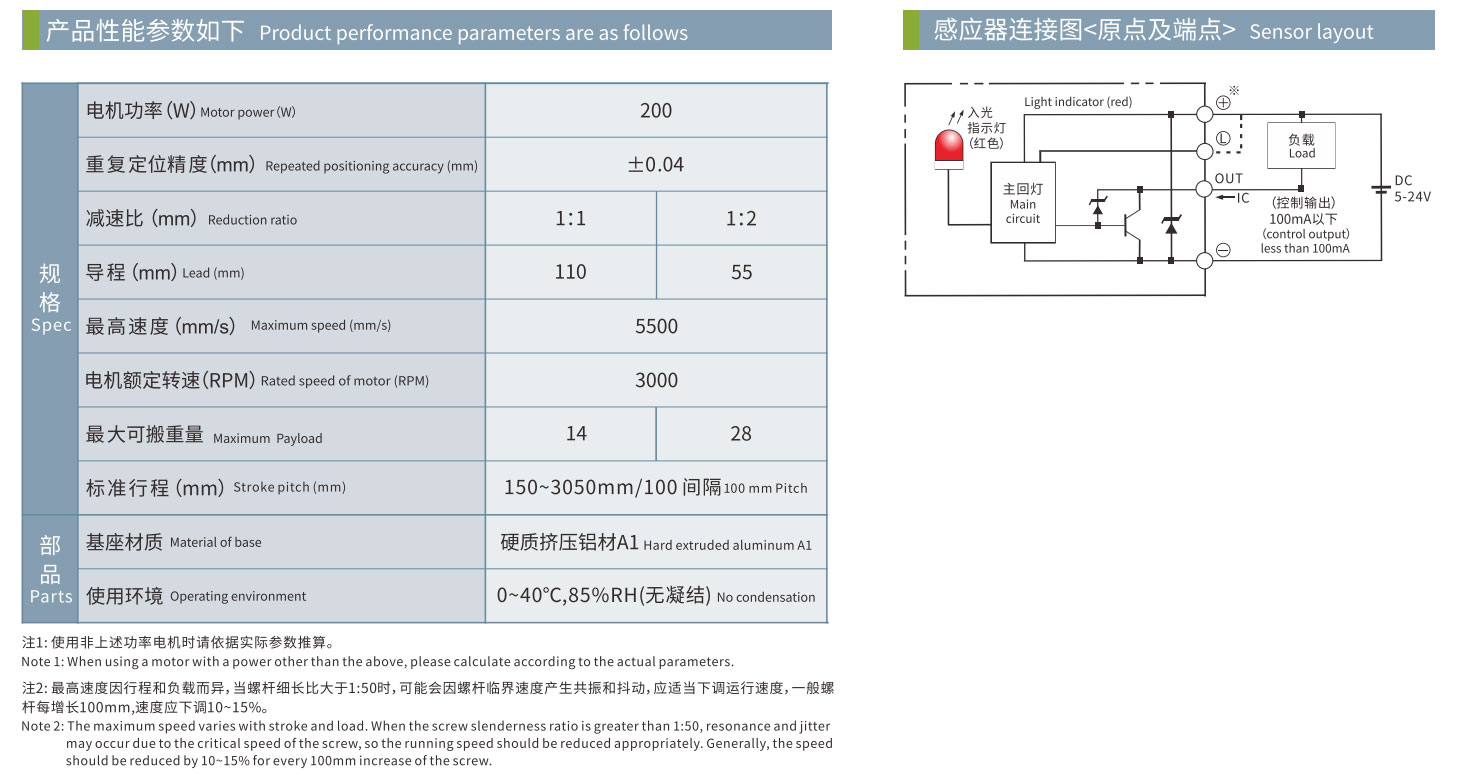
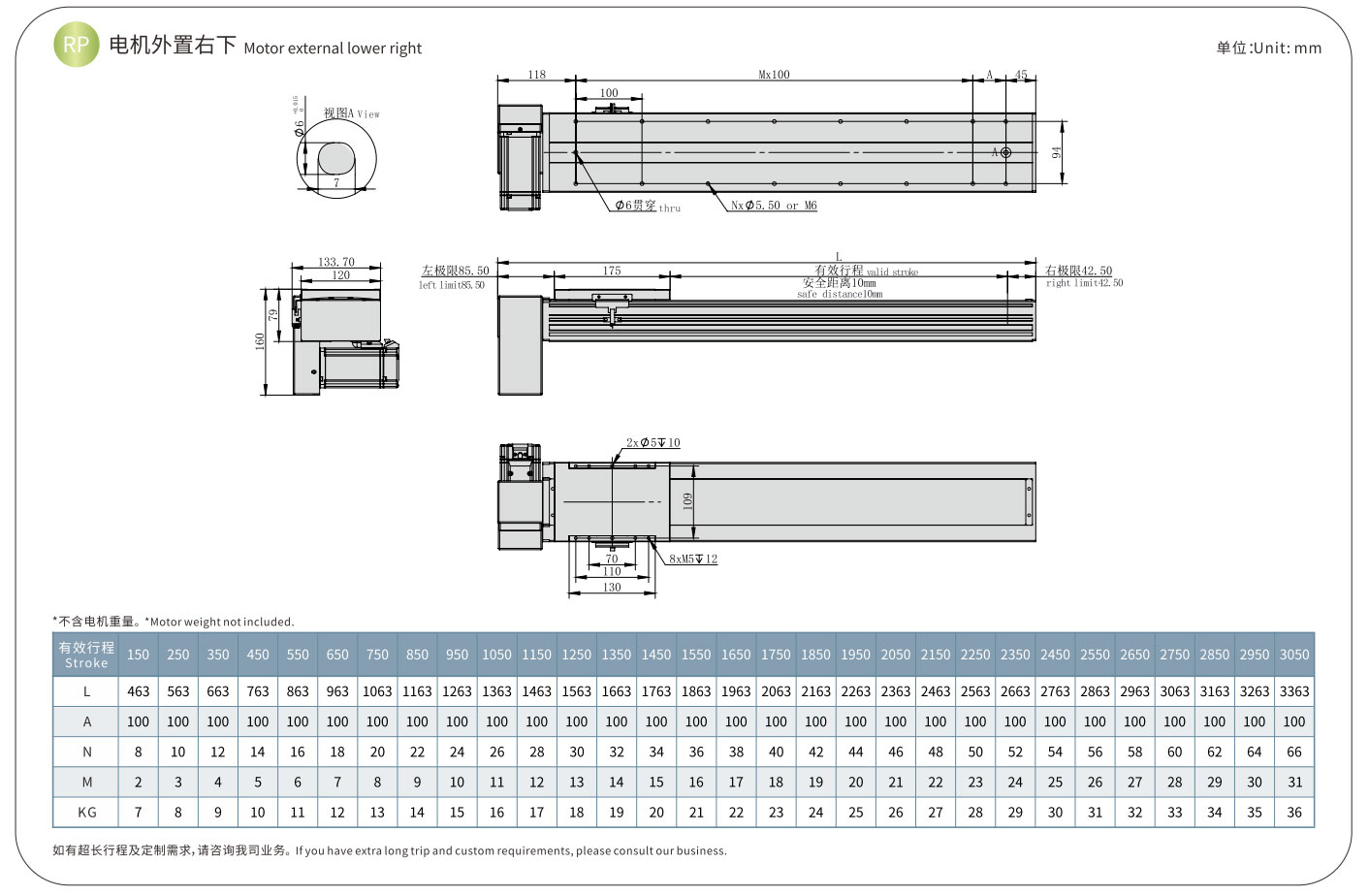
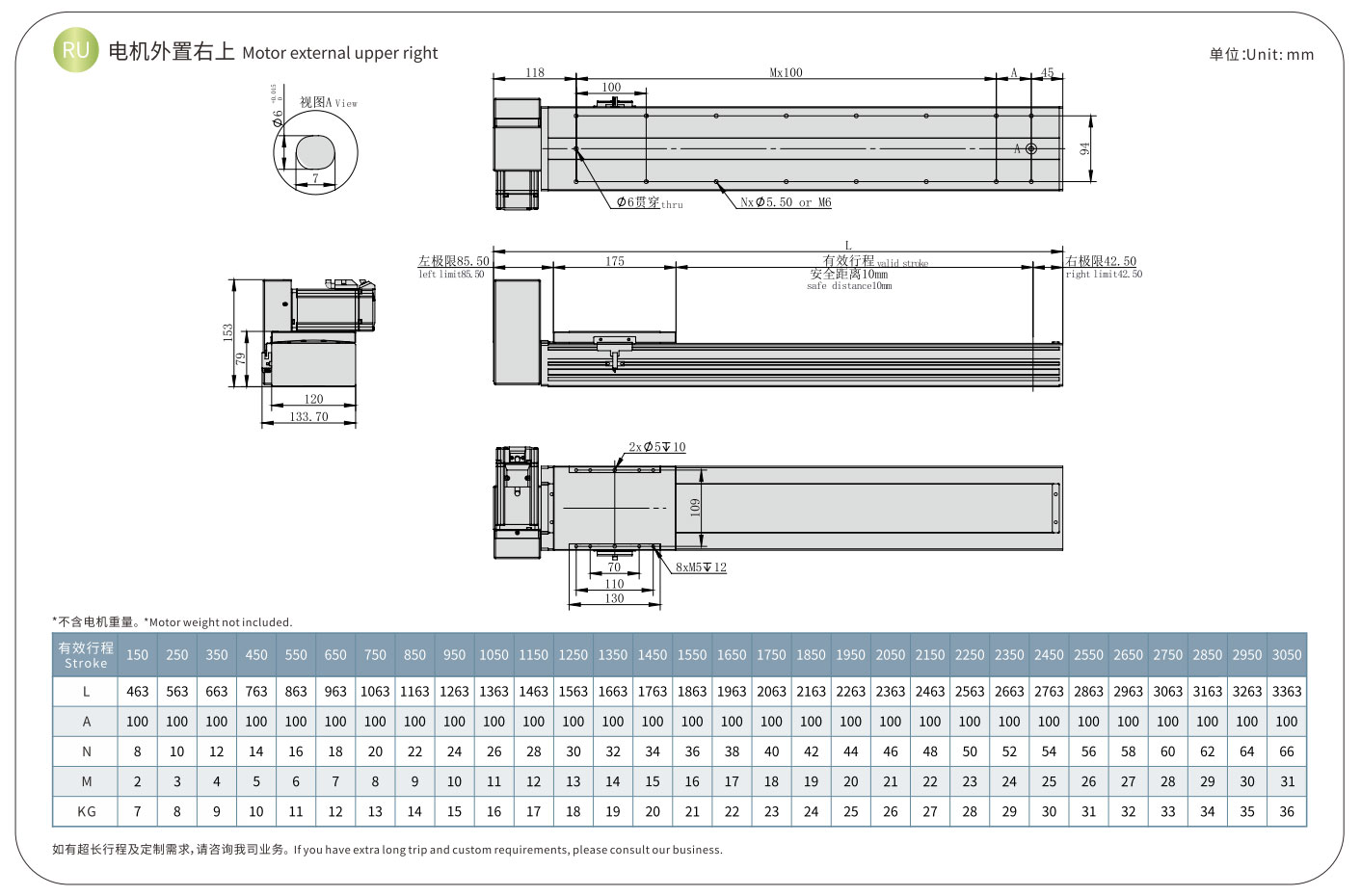
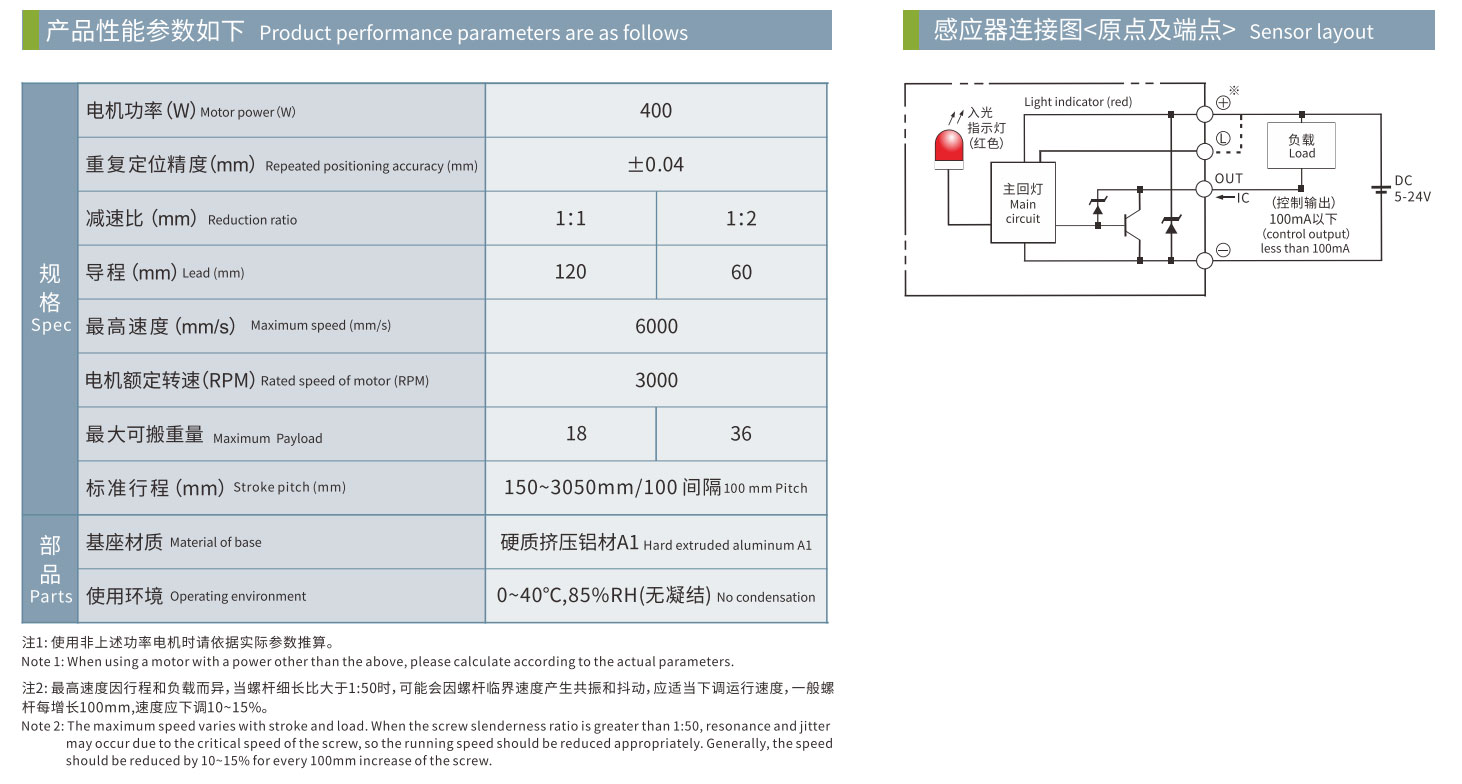
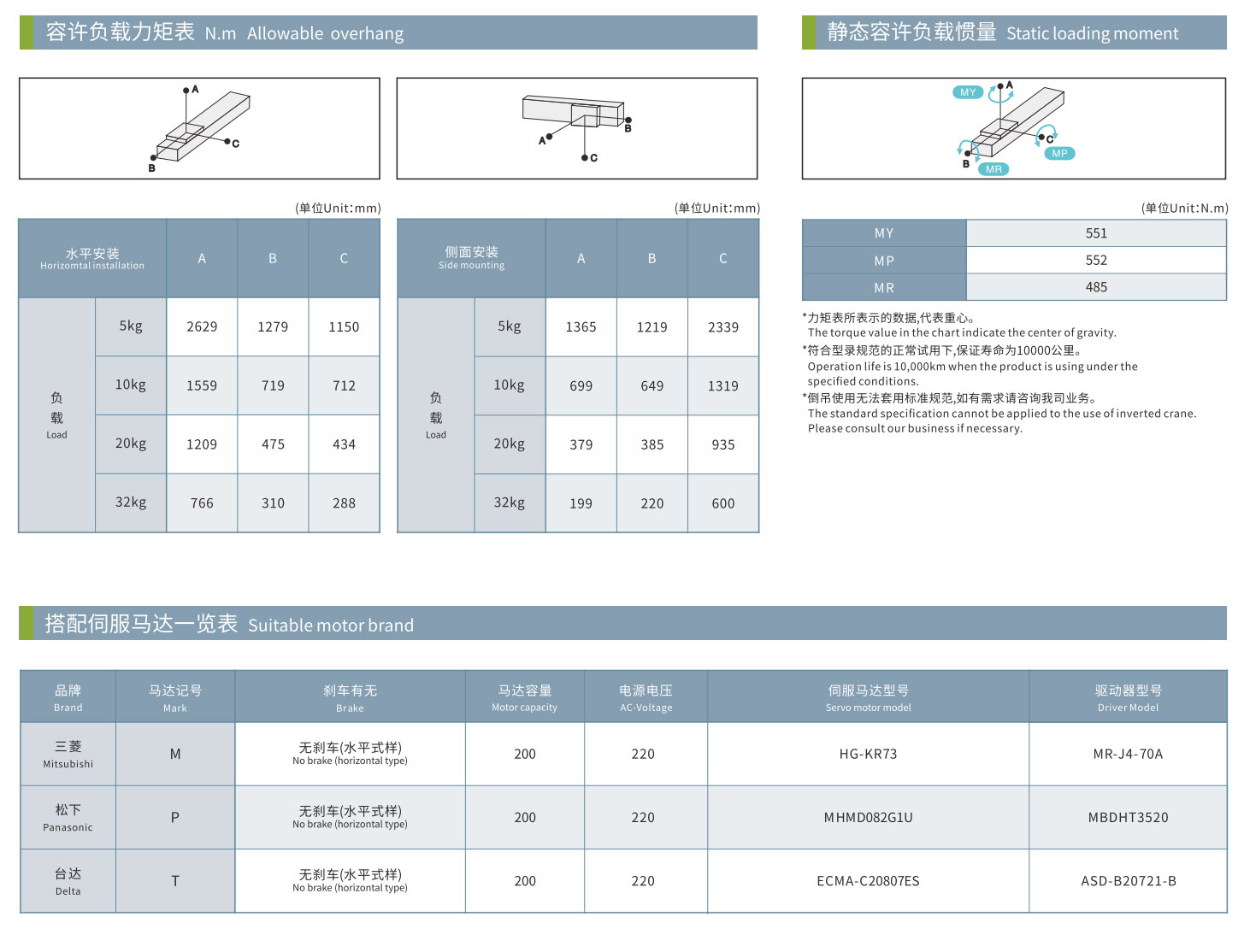
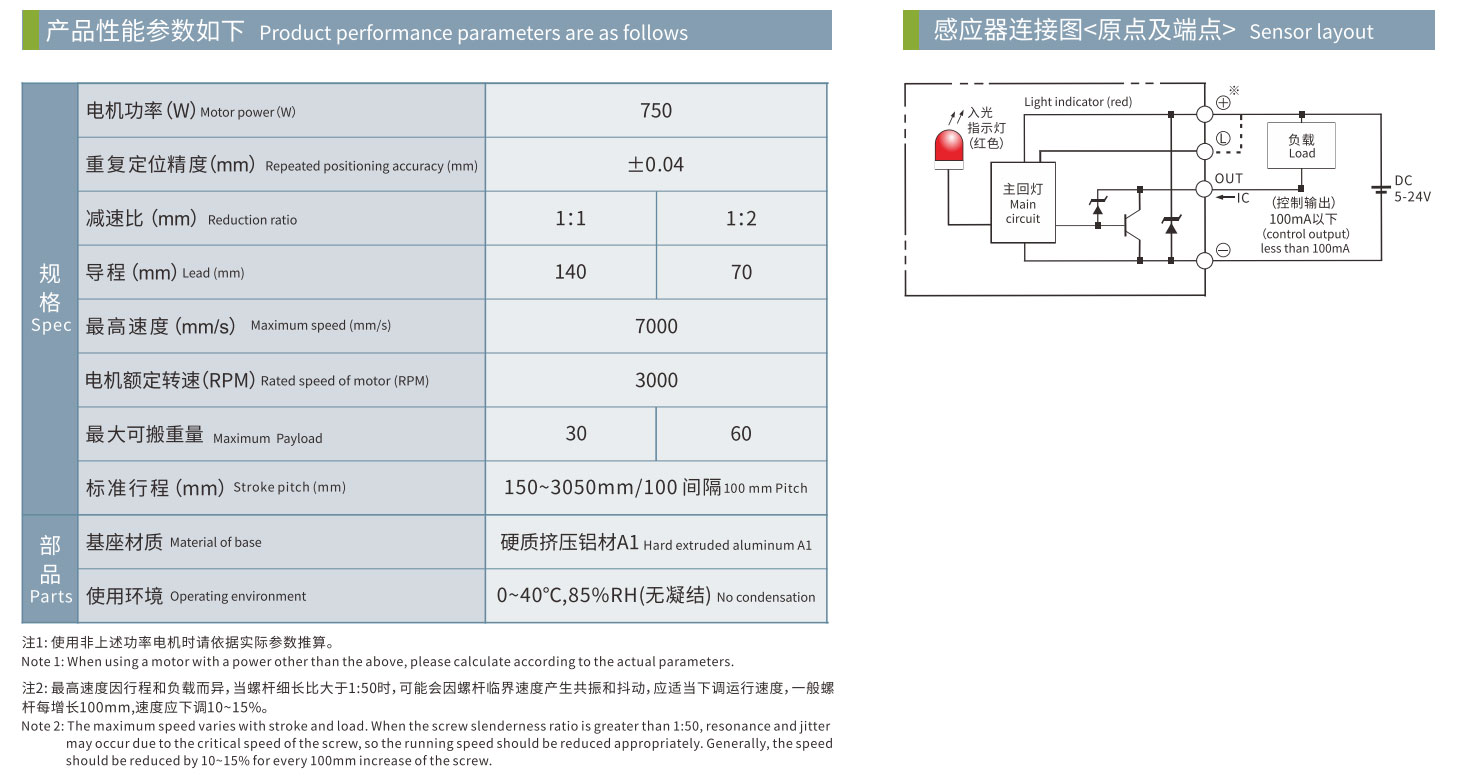
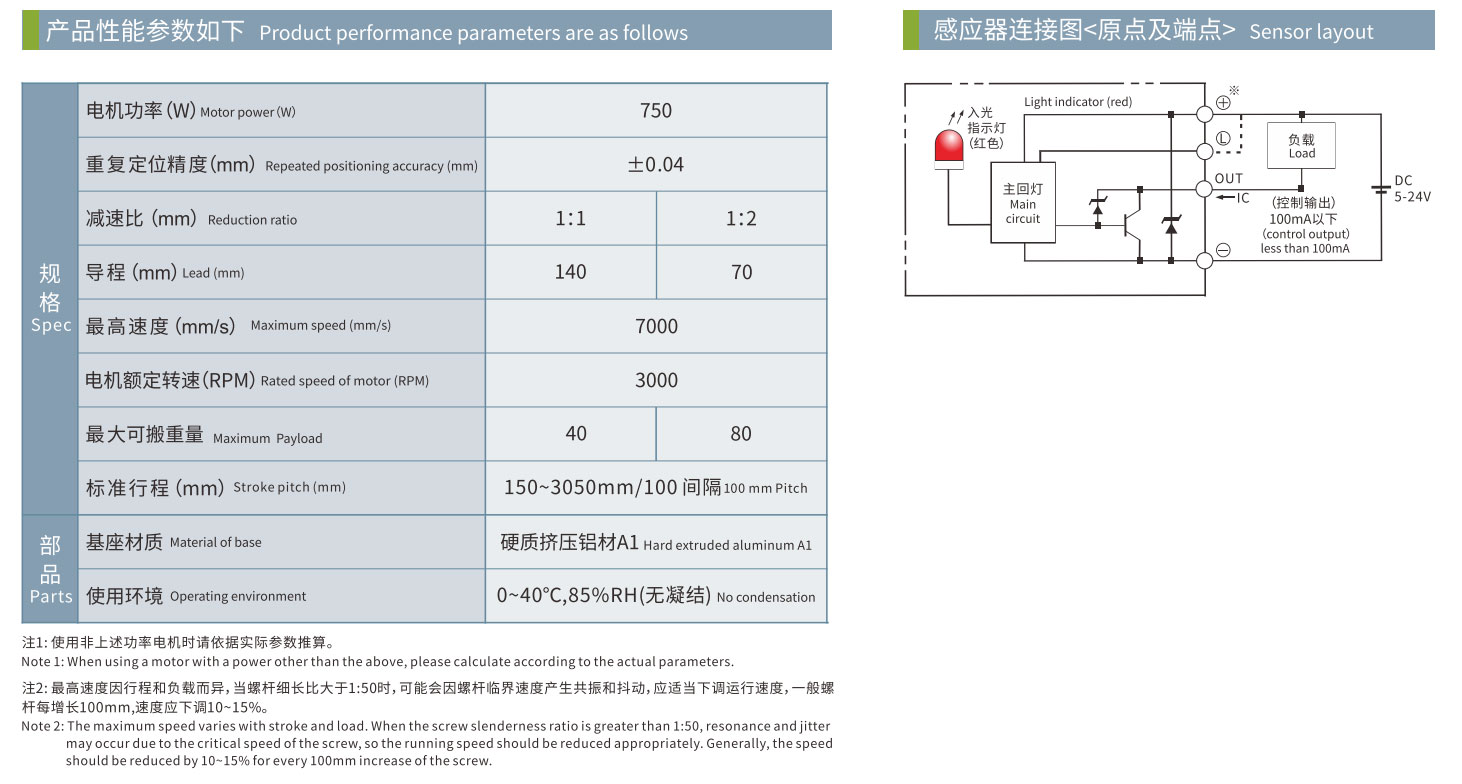
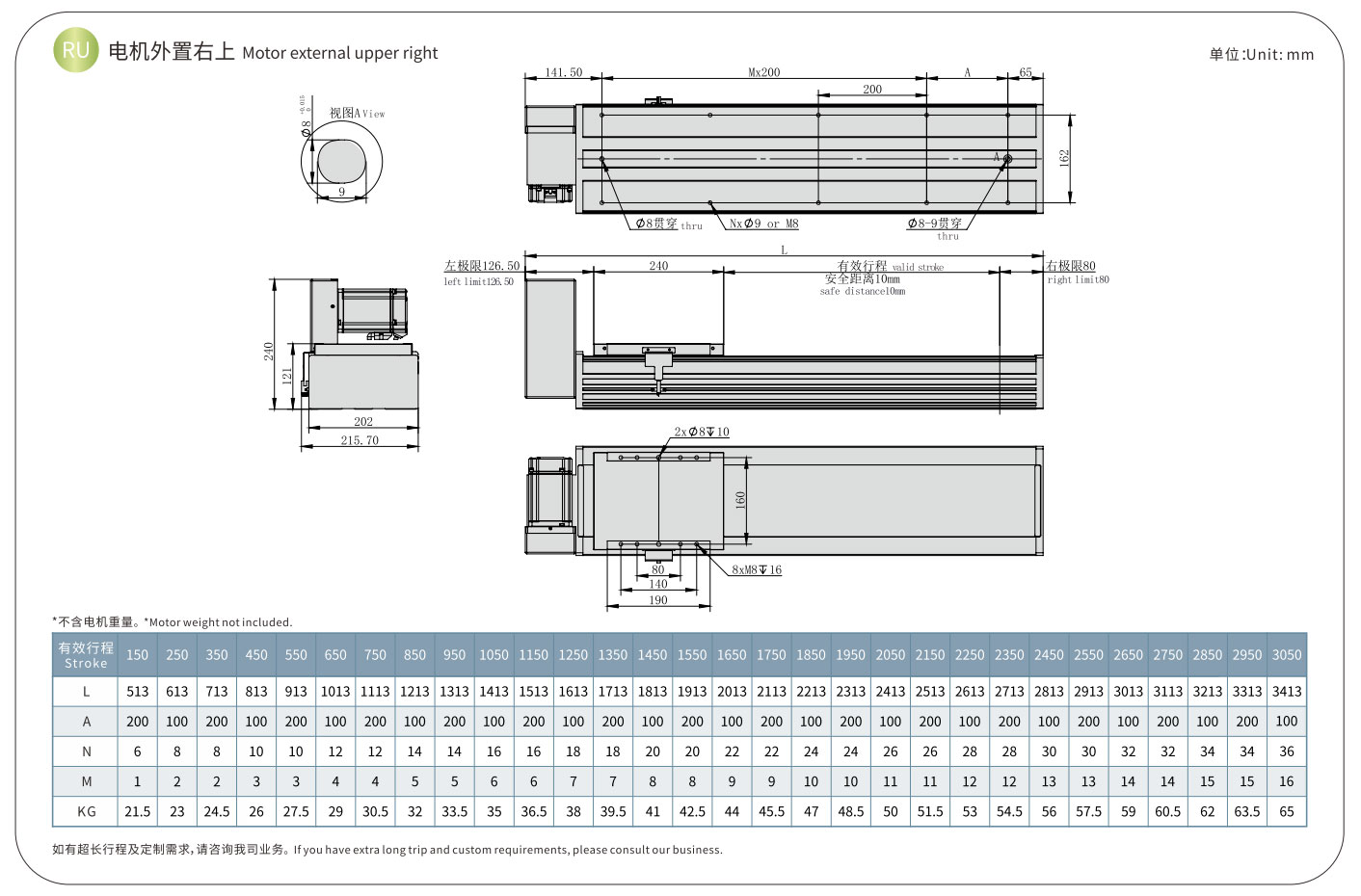
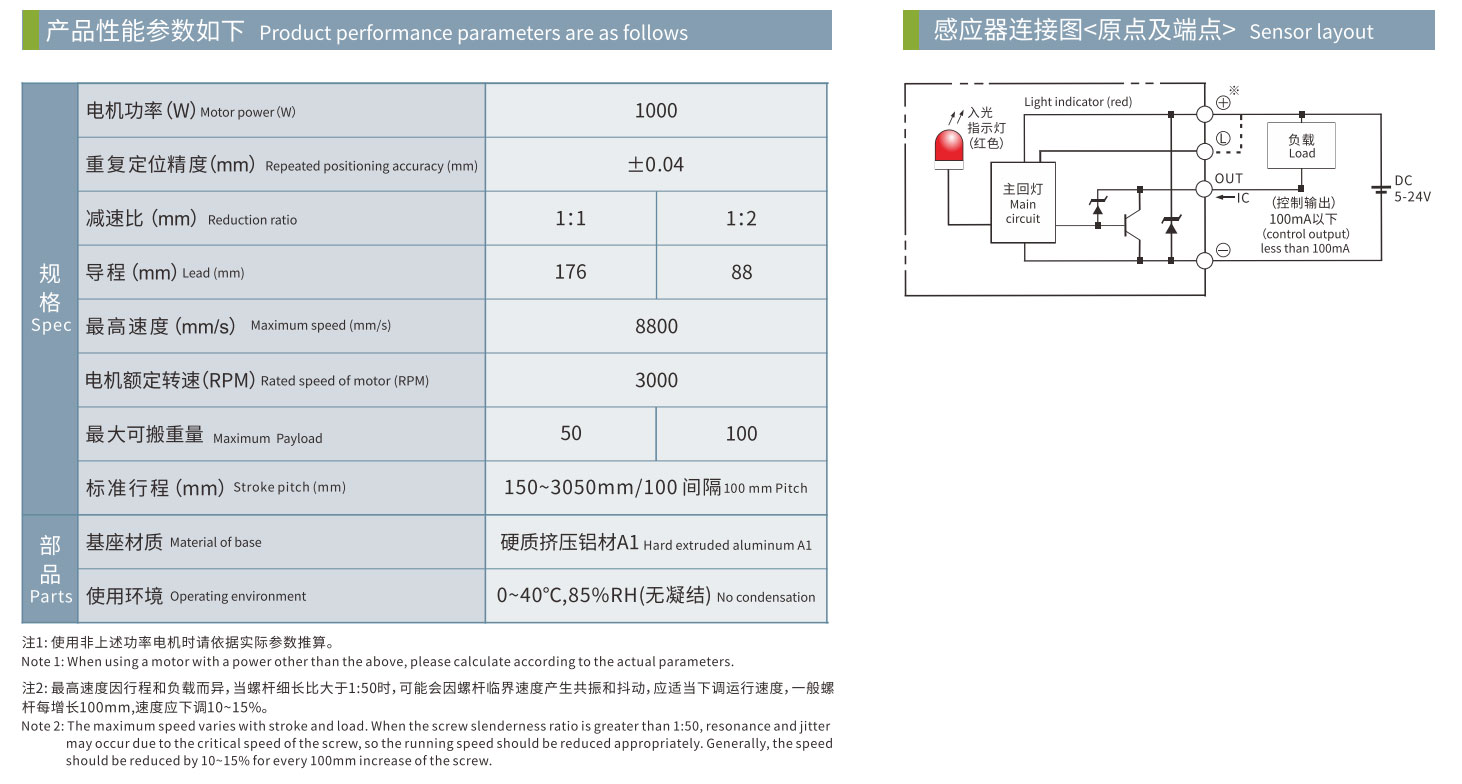
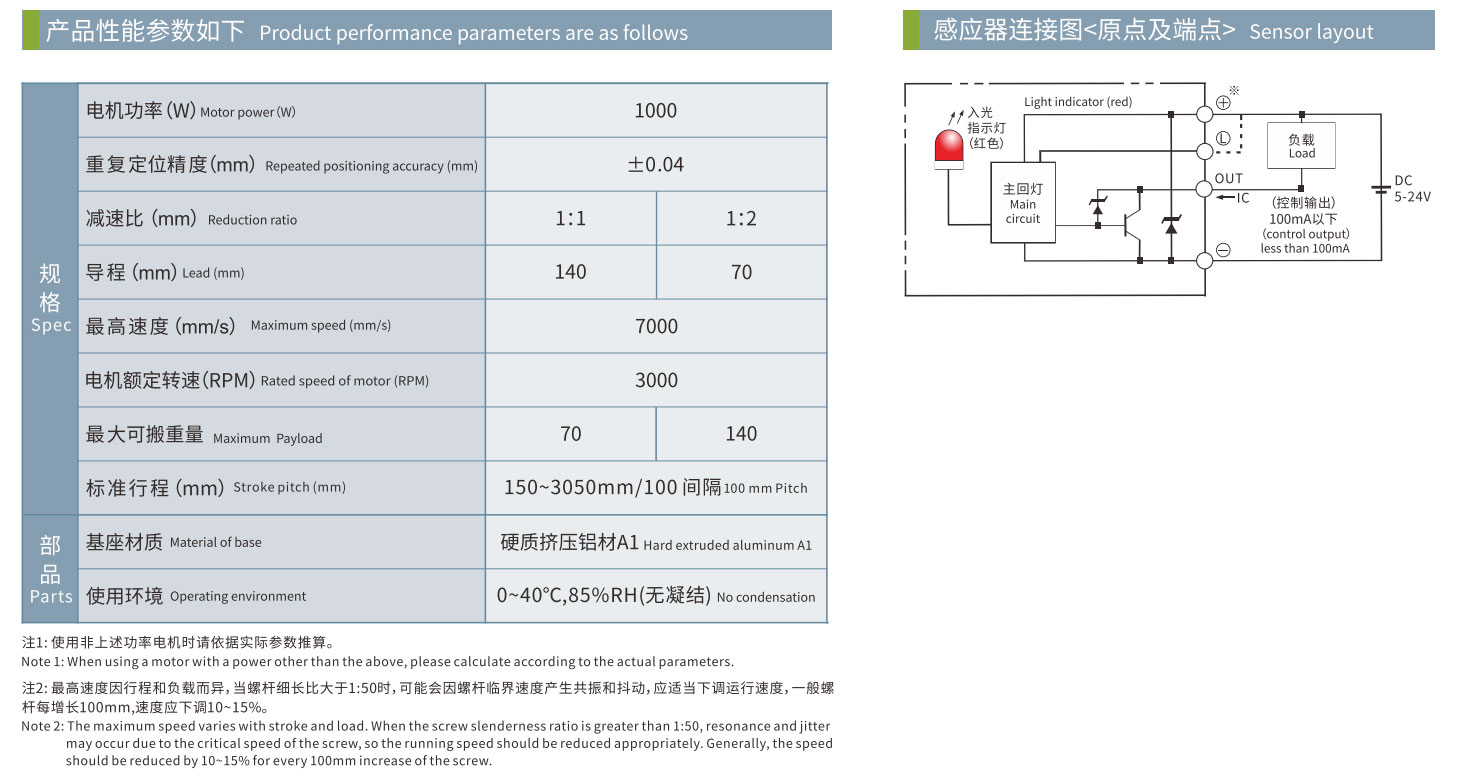
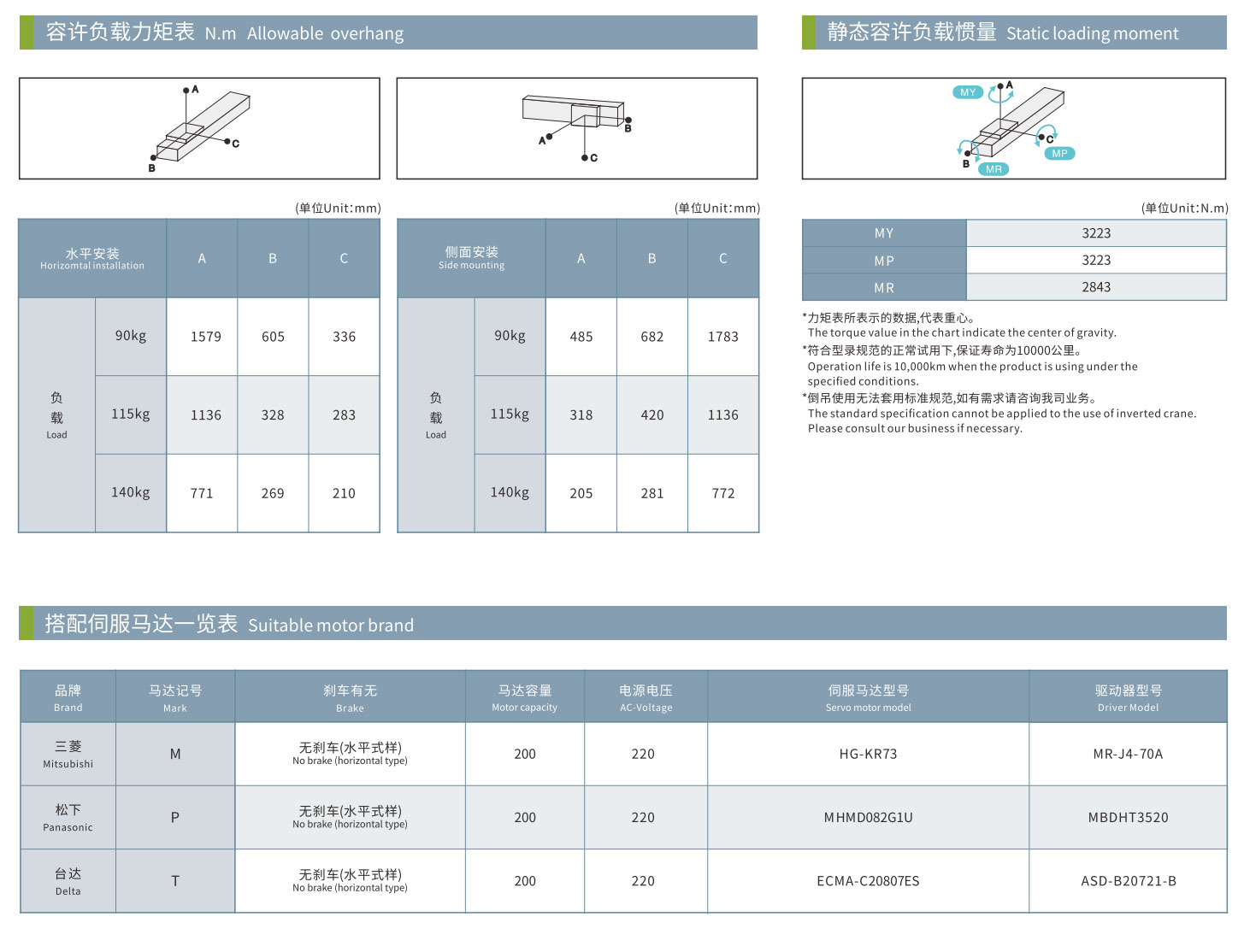
Precisione di posizionamentu ripetutu: ± 0,04 mm
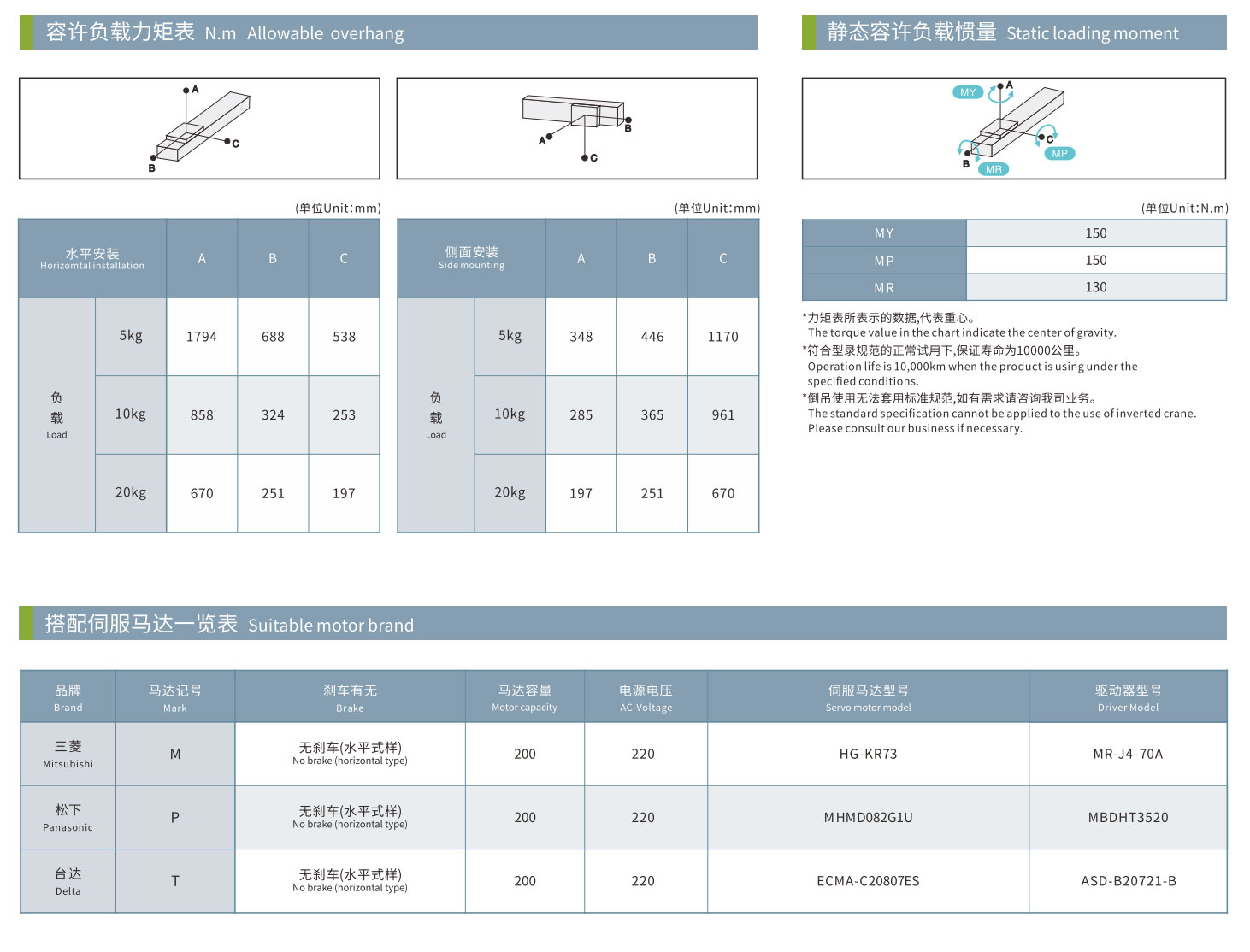
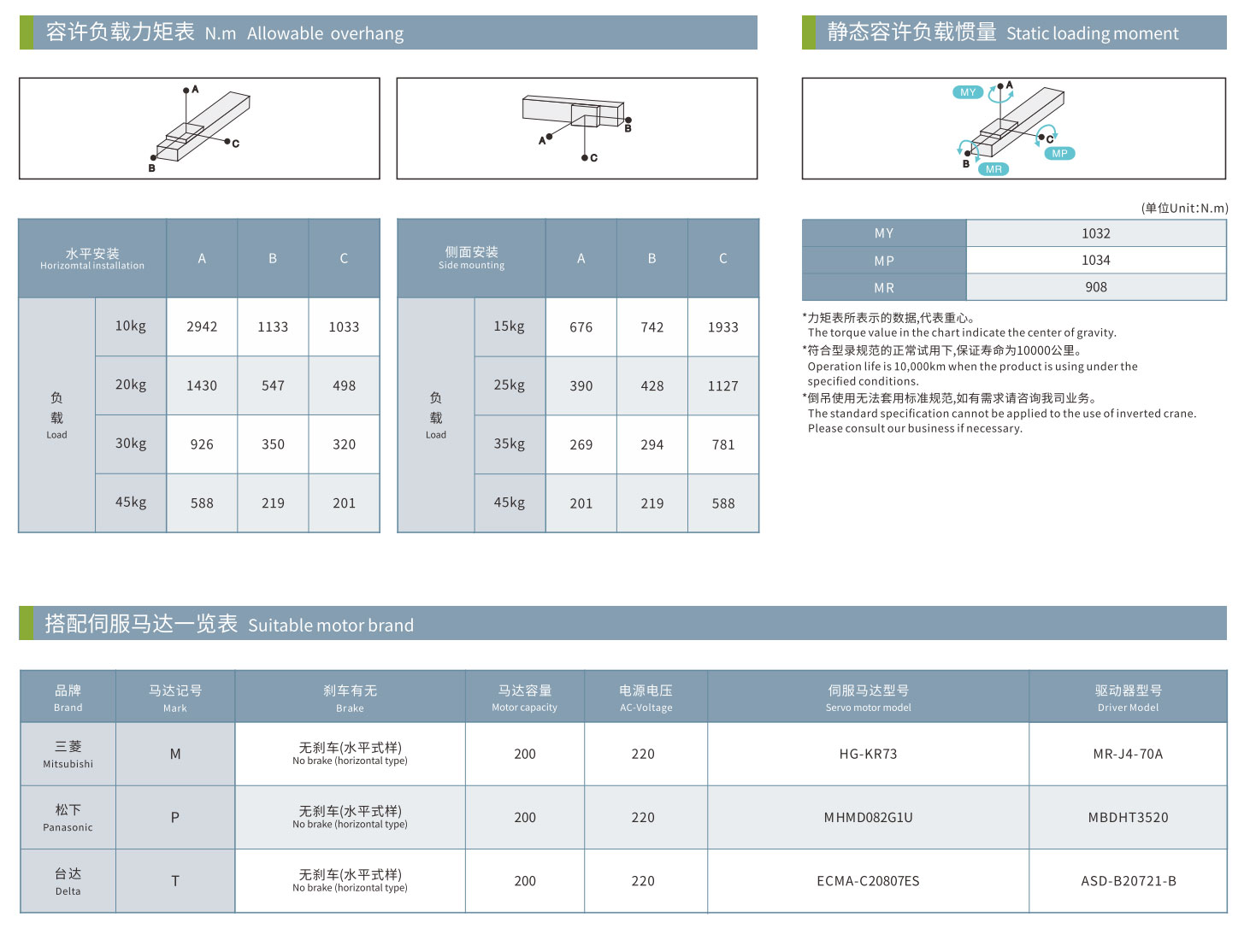
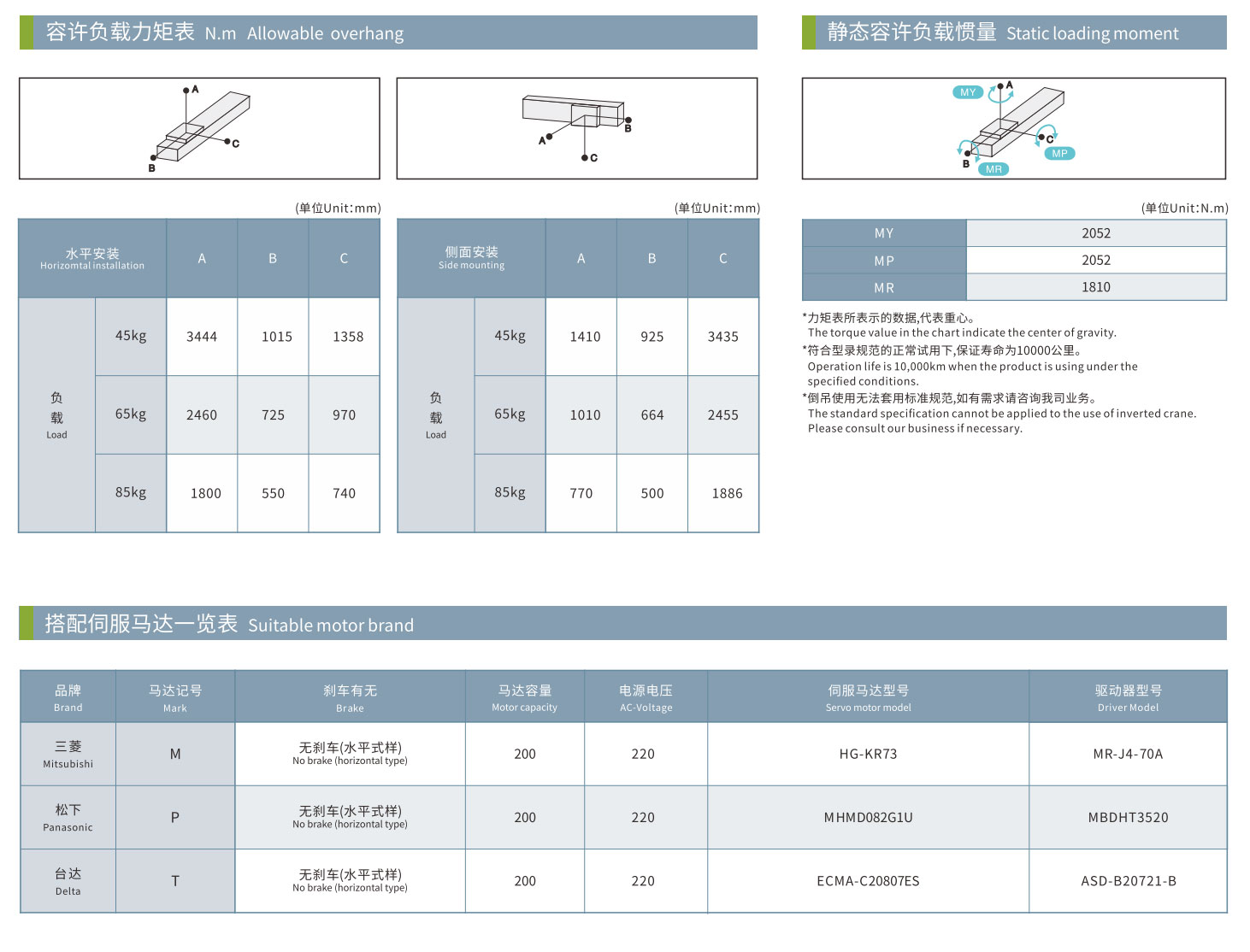
Carica massima: 140 kg
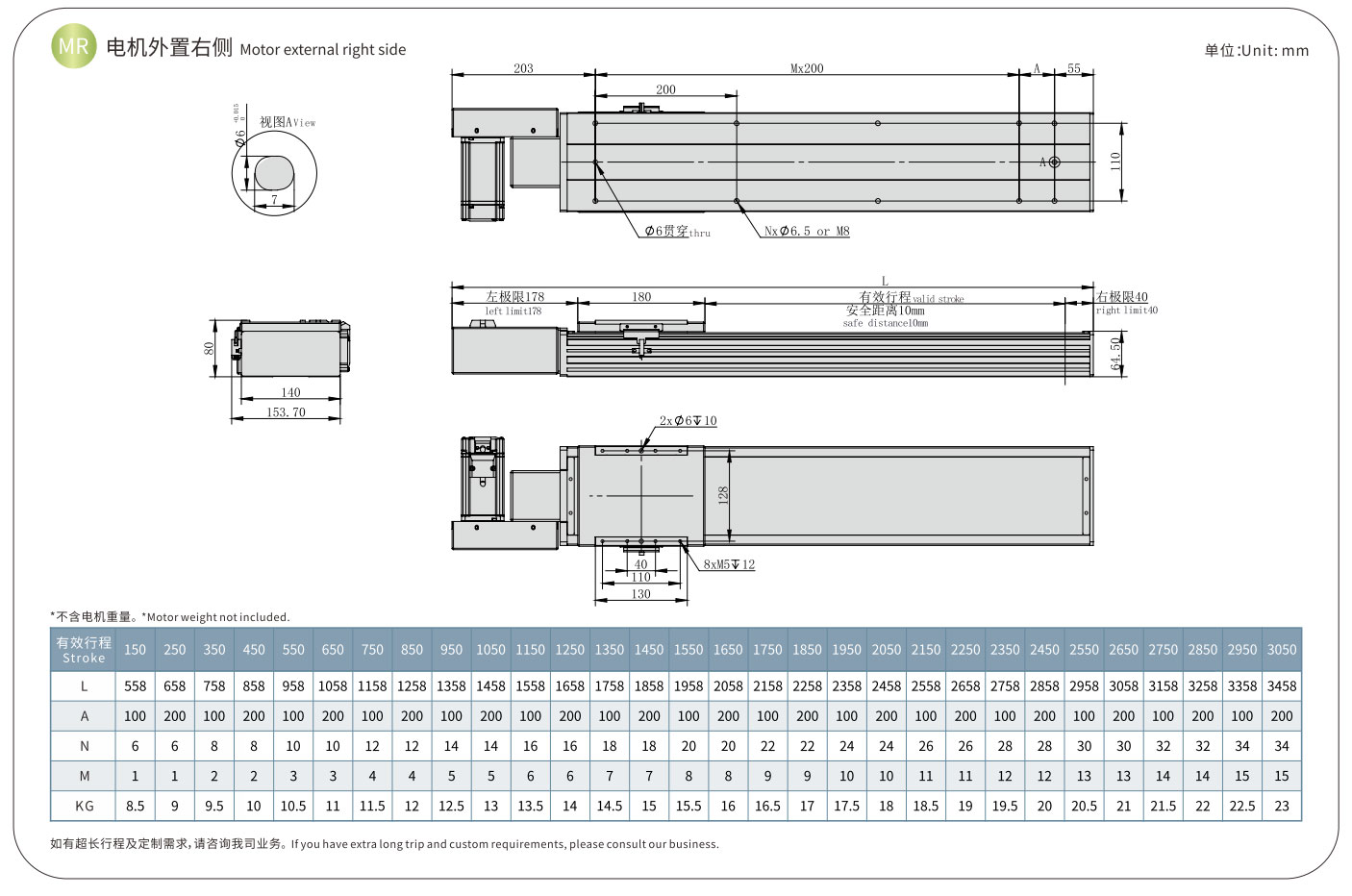
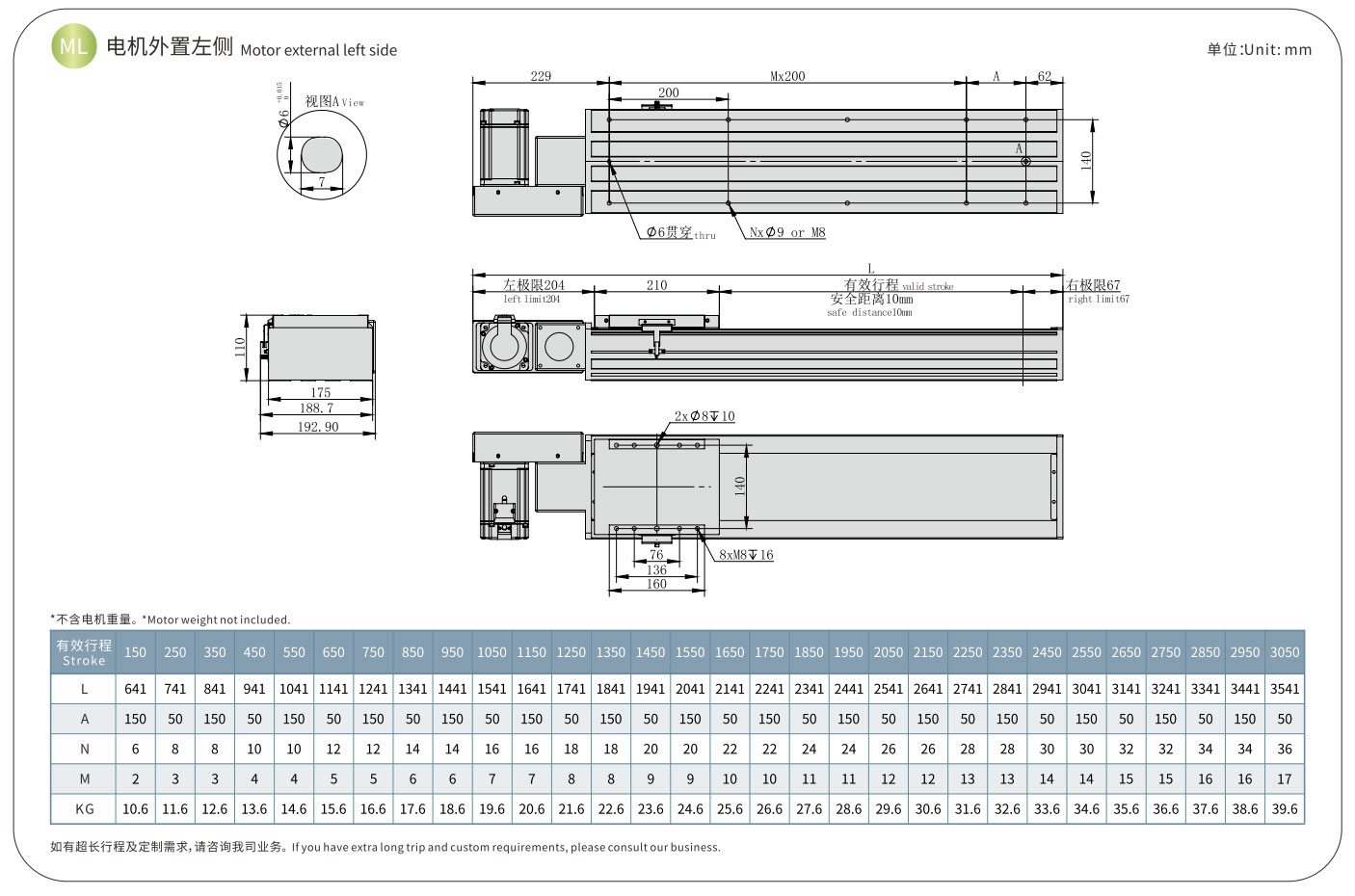
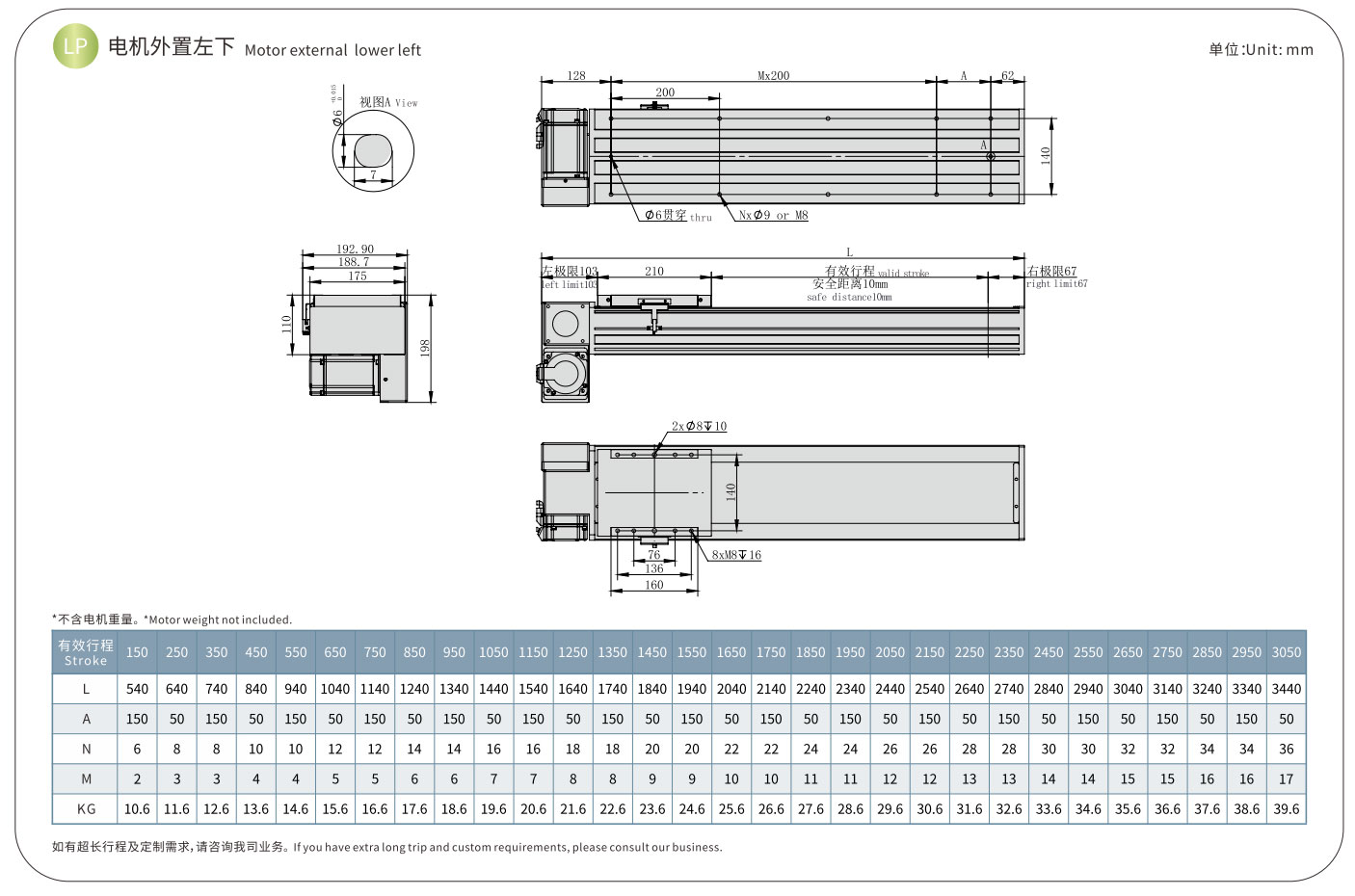
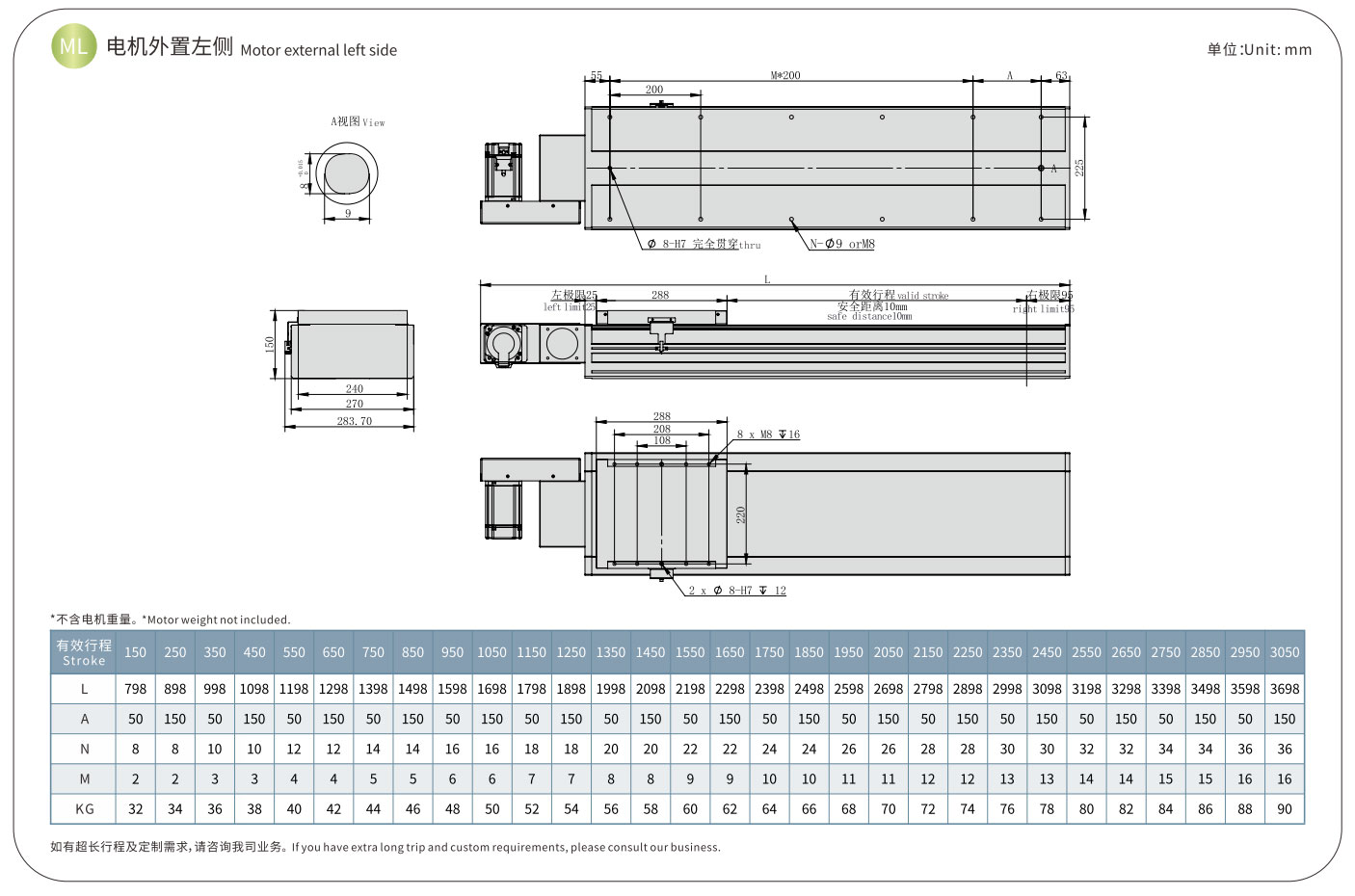
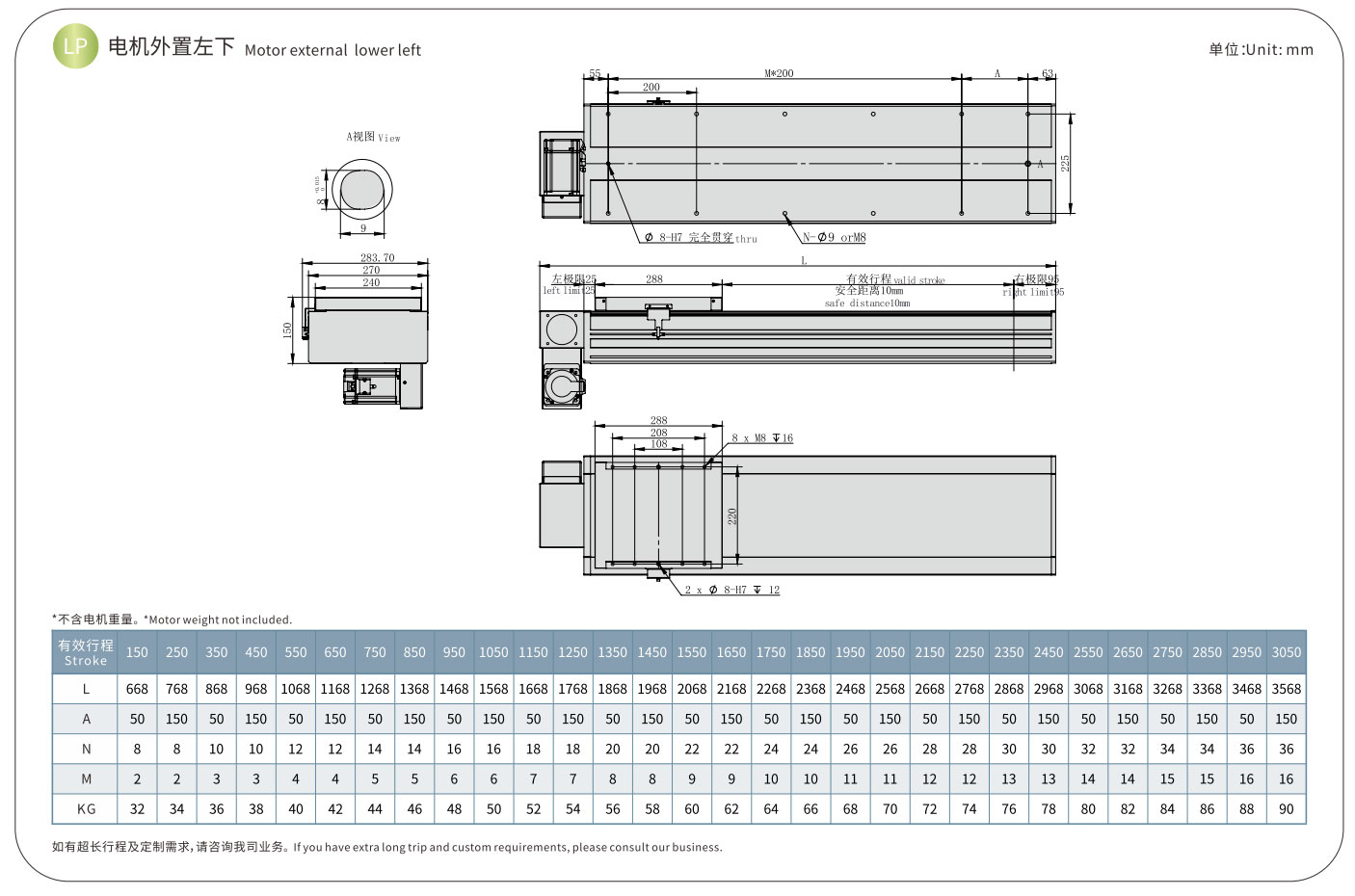
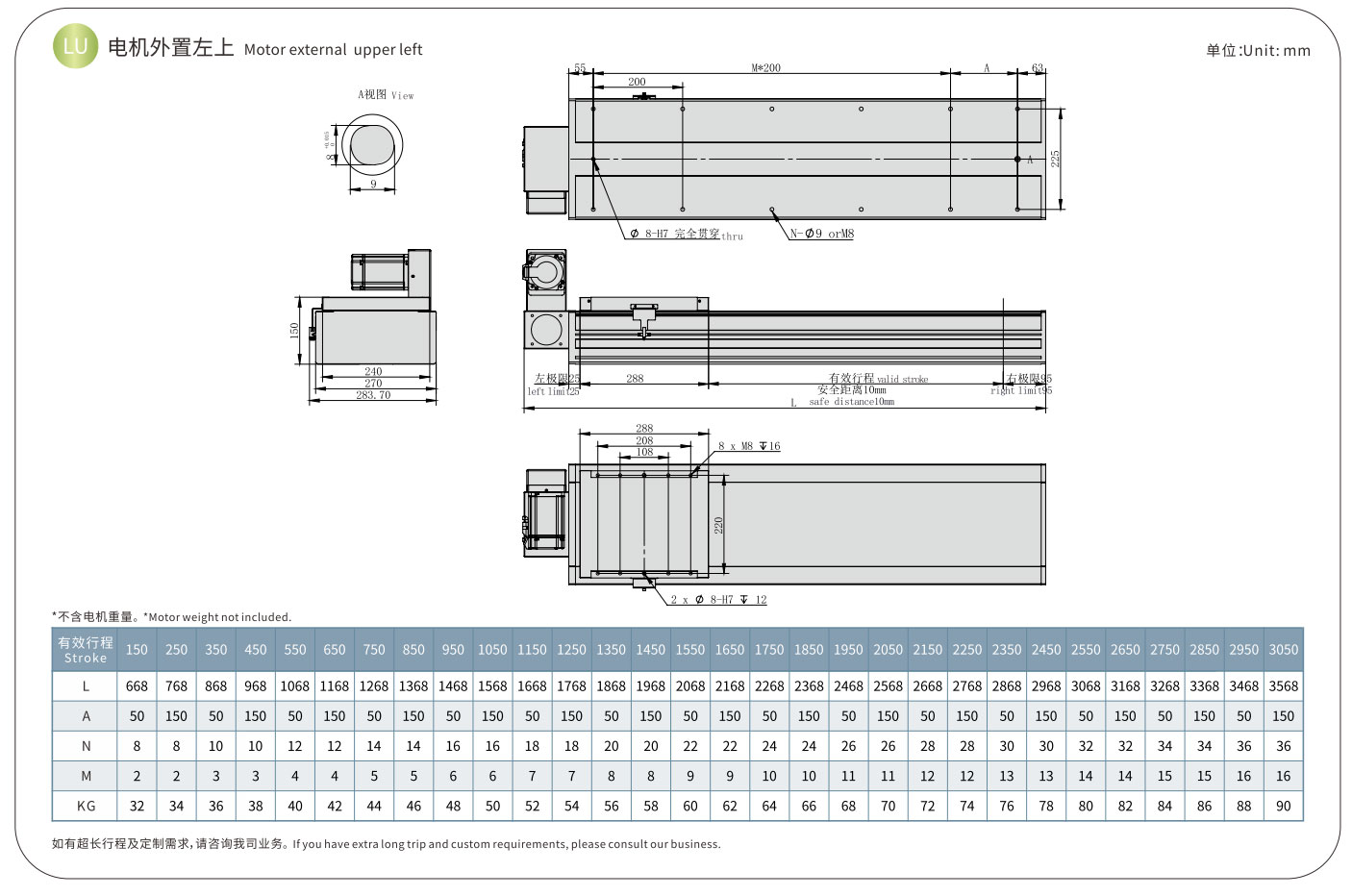
Corsa: 100 - 3050 mm
Velocità massima: 7000 mm/s

1. Disegnu flat, pesu generale più liggeru, altezza di cumminazione più bassa è rigidità megliu.
2. A struttura hè ottimizzata, a precisione hè megliu, è l'errore causatu da l'assemblea di parechji accessori hè ridutta.
3. L'assemblea hè risparmiu di tempu, risparmiu di travagliu è cunvene. Ùn ci hè bisognu di caccià a tappa d'aluminiu per installà l'accoppiamentu o u modulu.
4. U mantenimentu hè simplice, i dui lati di u modulu sò furnuti cù buchi d'iniezione d'oliu, è a tappa ùn deve esse eliminata.







Più prudutti

Modulu lineare à cinturione di serie ONB Mezzi chjusu

Modulu lineare à cinghia di a serie OCB cumplettamente ...

Modulu lineare à cinghia di a serie ONB-F esterno ...

Serie HNB-E Attuatori Lineari Azionati da Cinghia Semi...

Serie HNB Modulu lineare guidatu da cinturione mezzu chjusu










