




HCB Series Belt Driven Linear Module Hingpit nga Nalakip

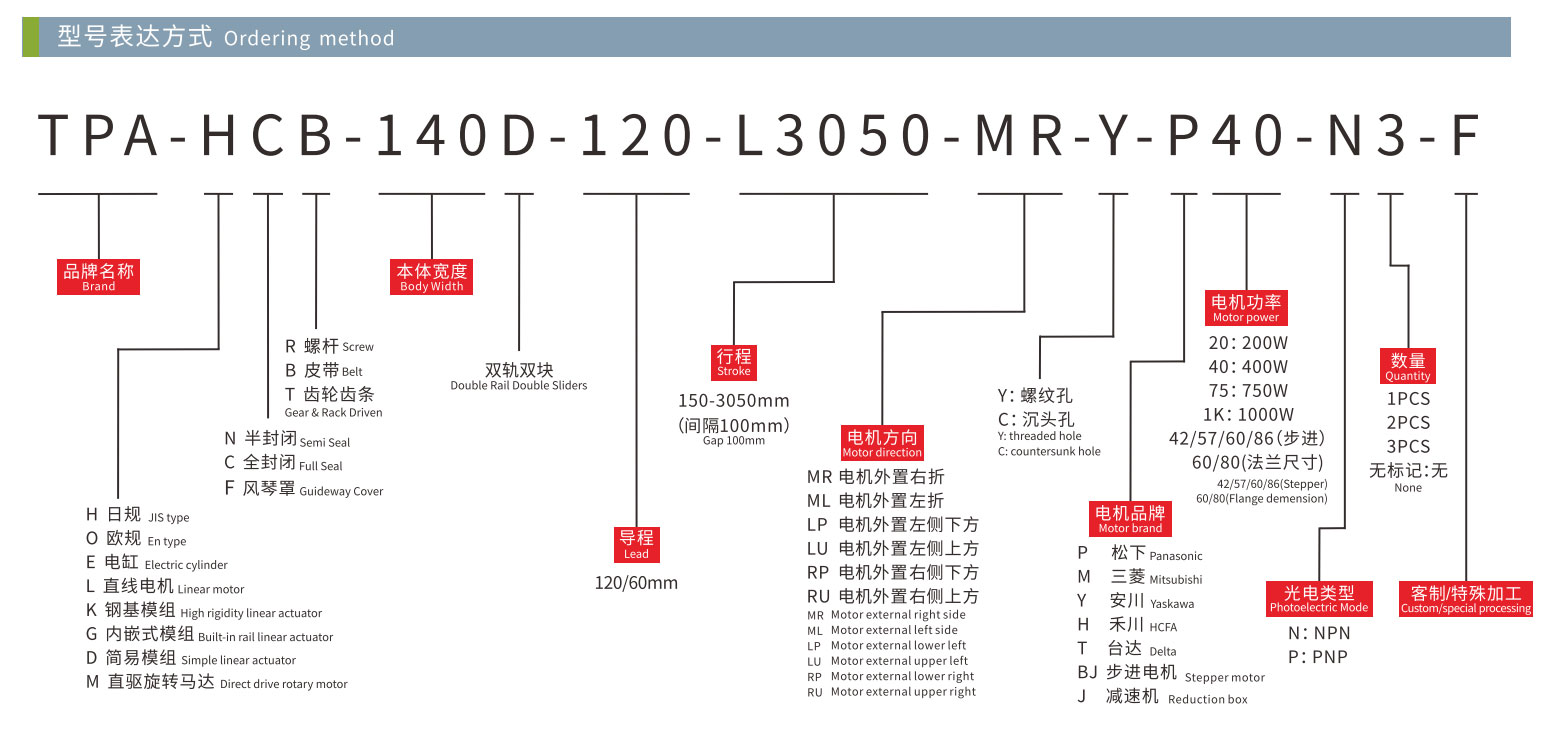
Tigpili sa Modelo
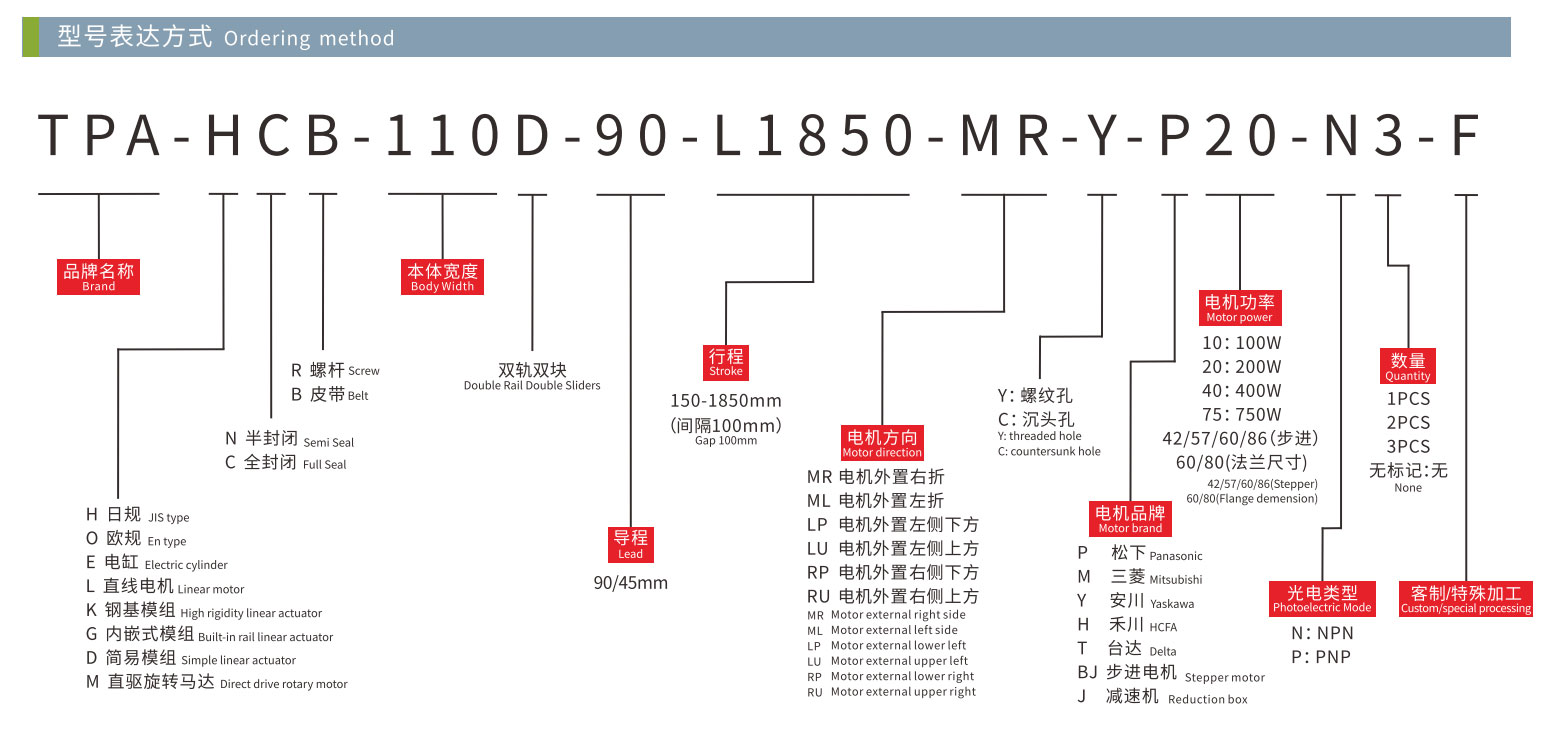
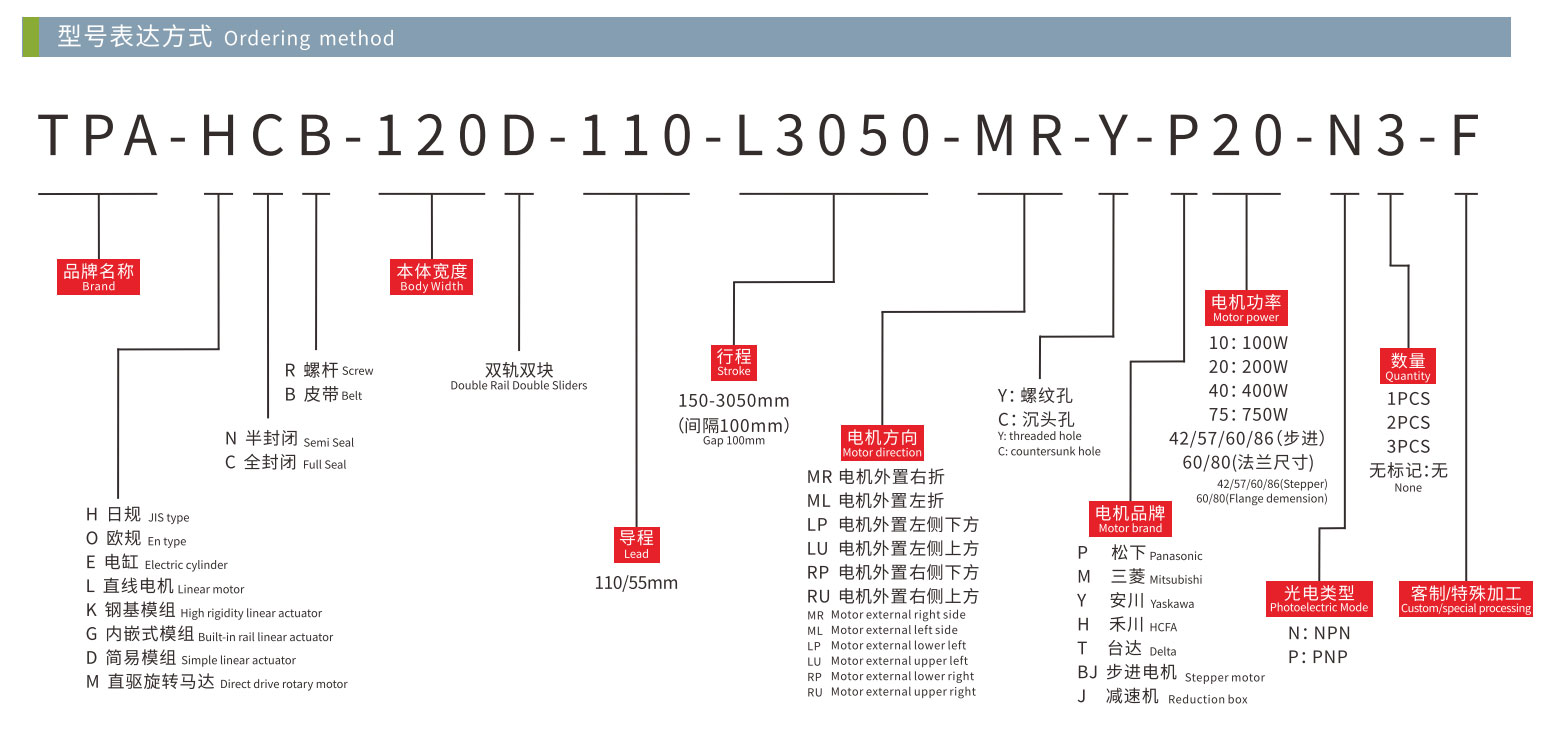
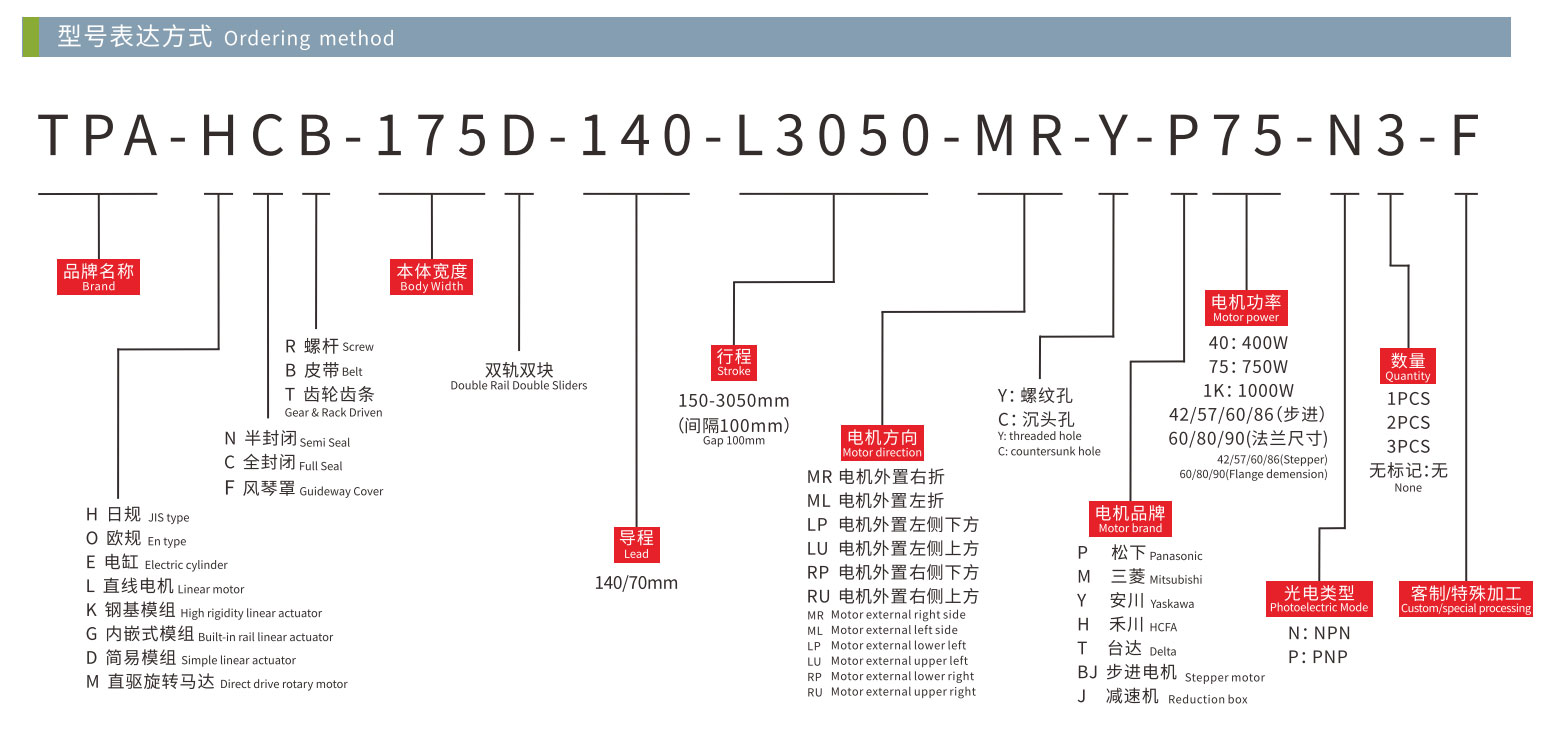
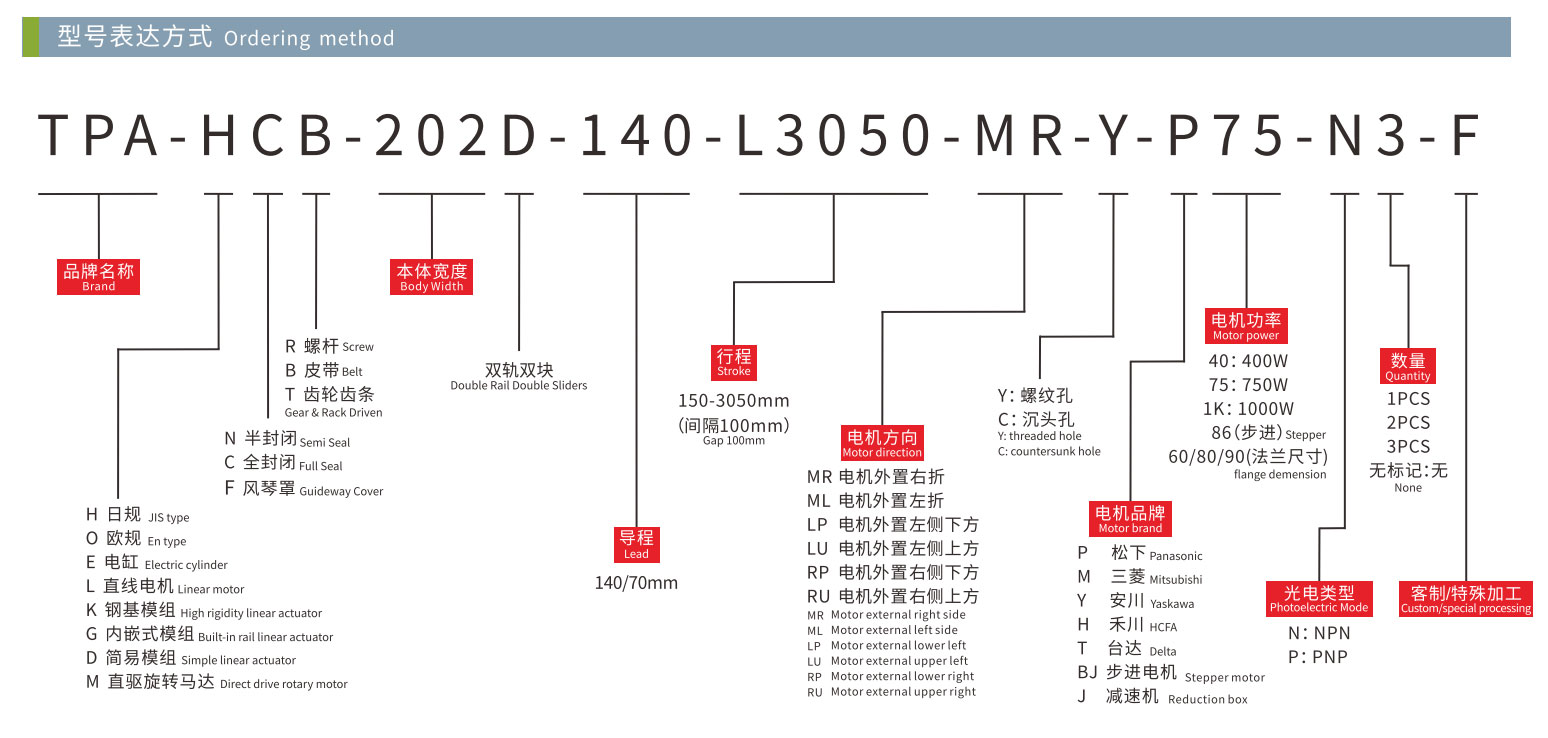
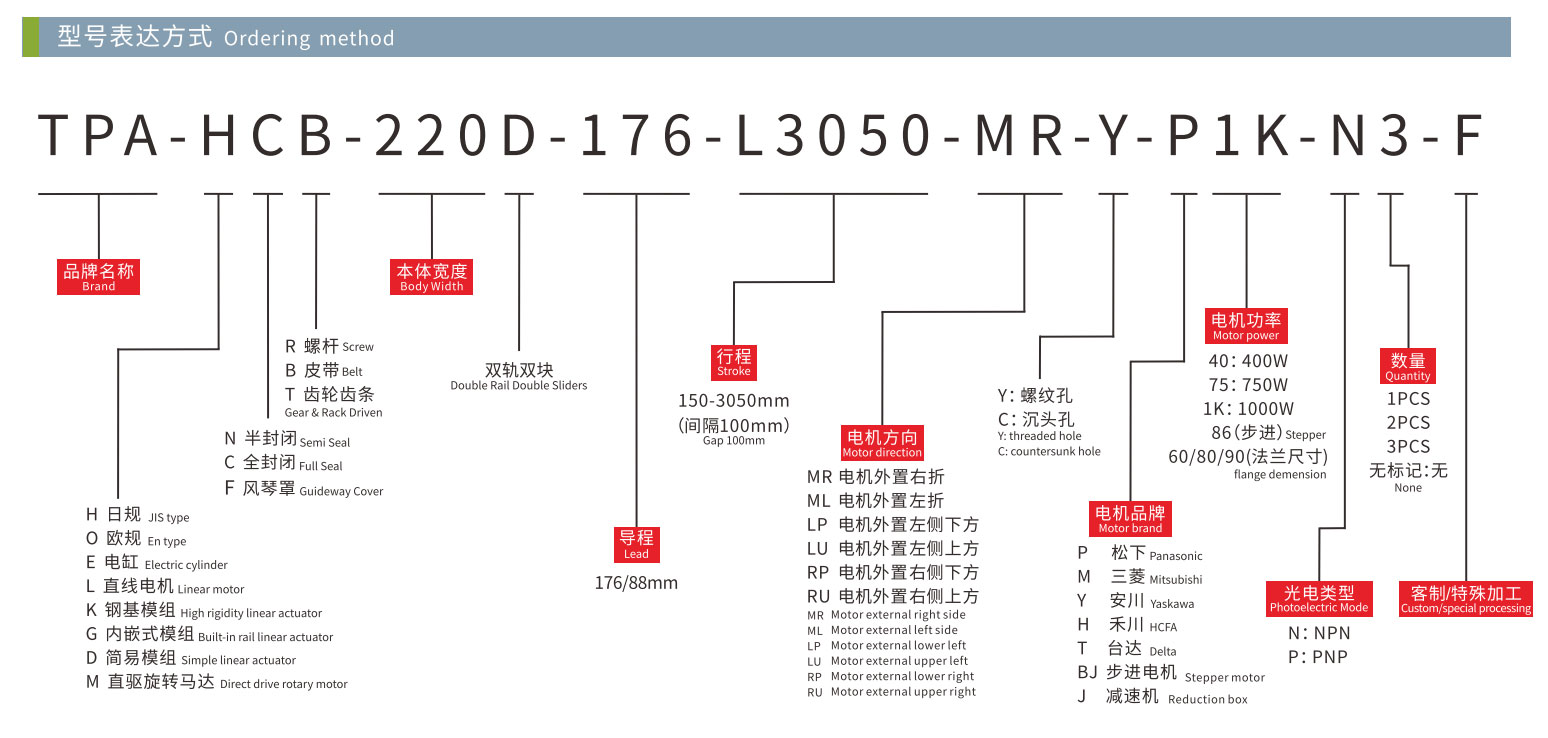
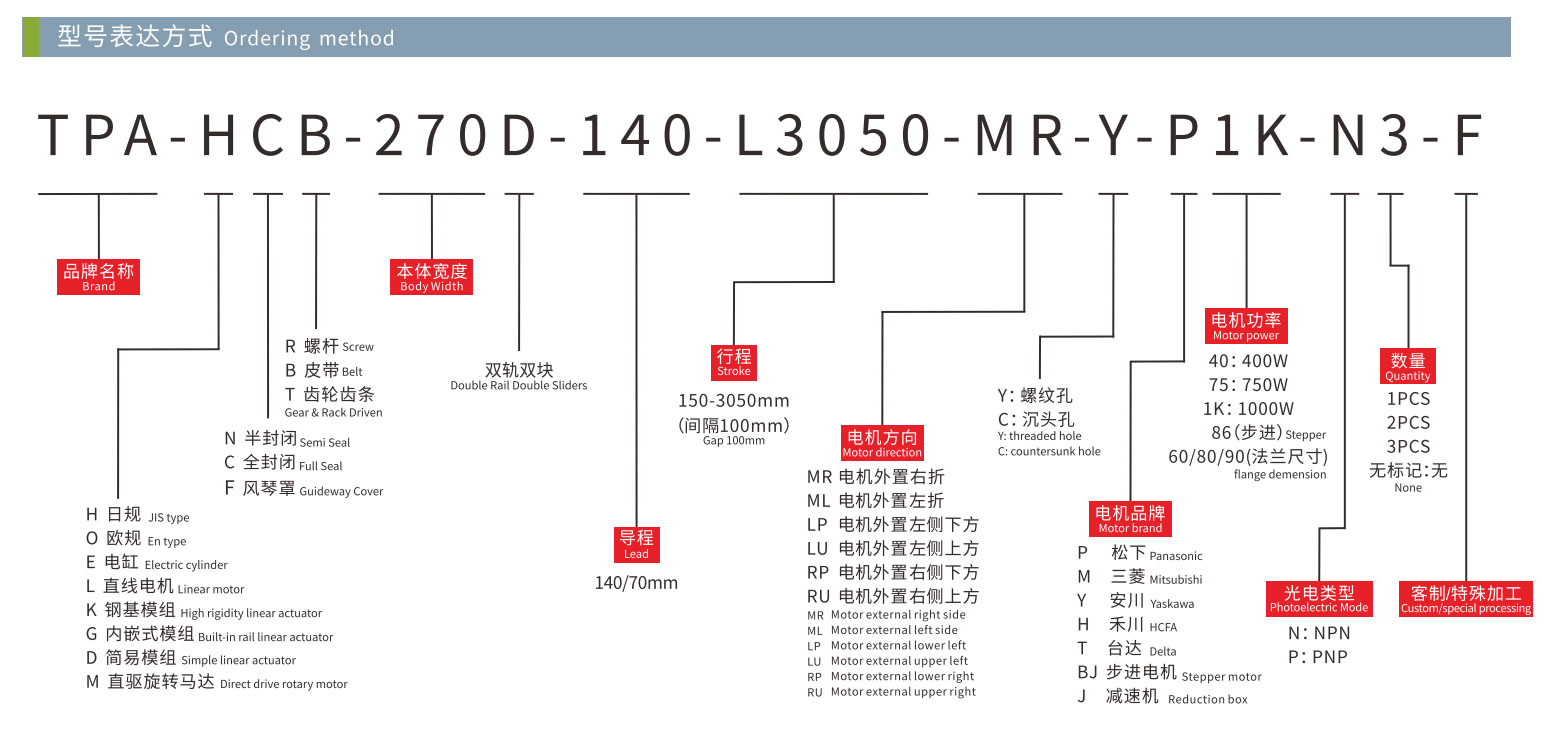
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
TPA-?-?-?-?-?-??-?
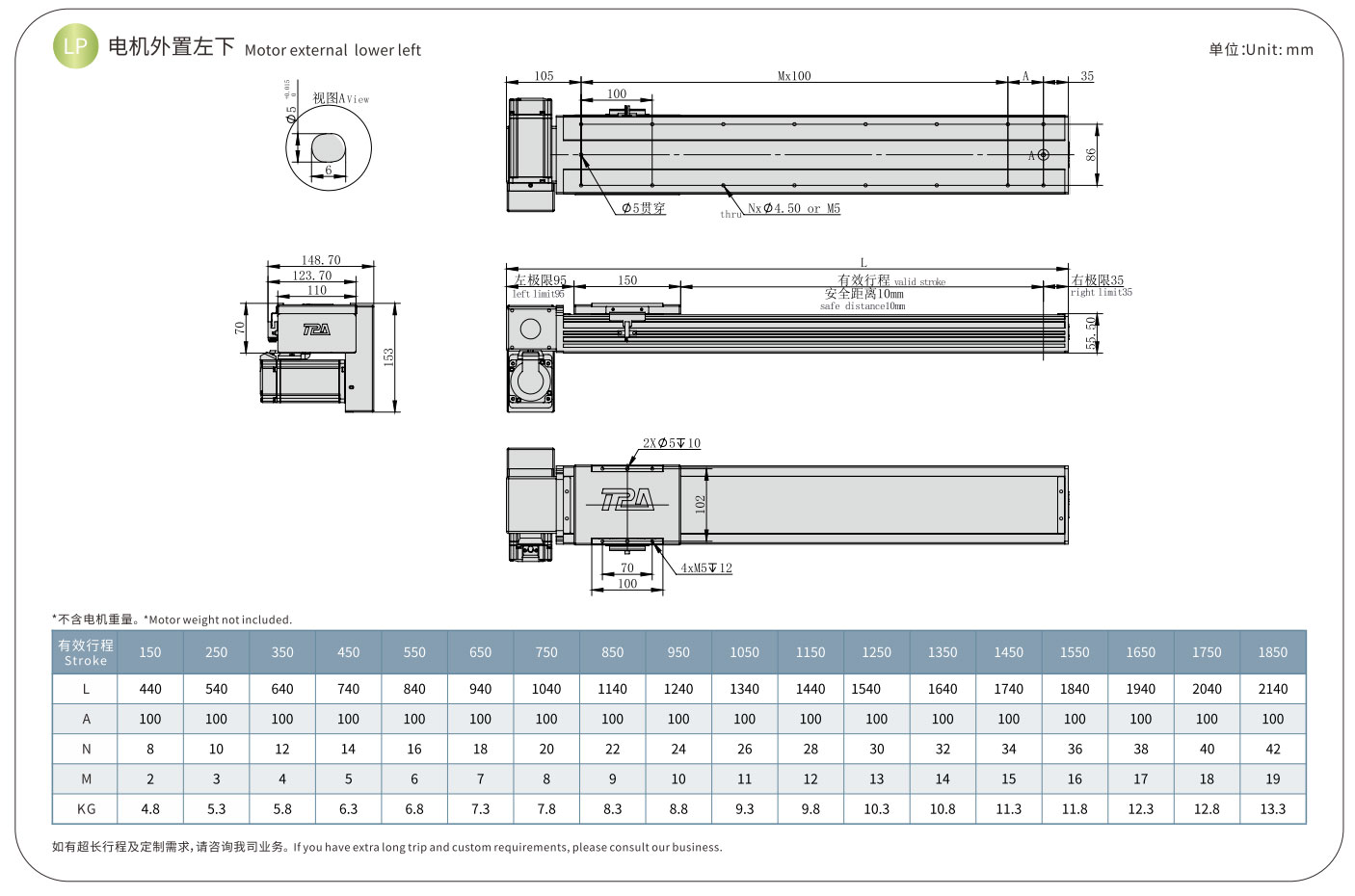
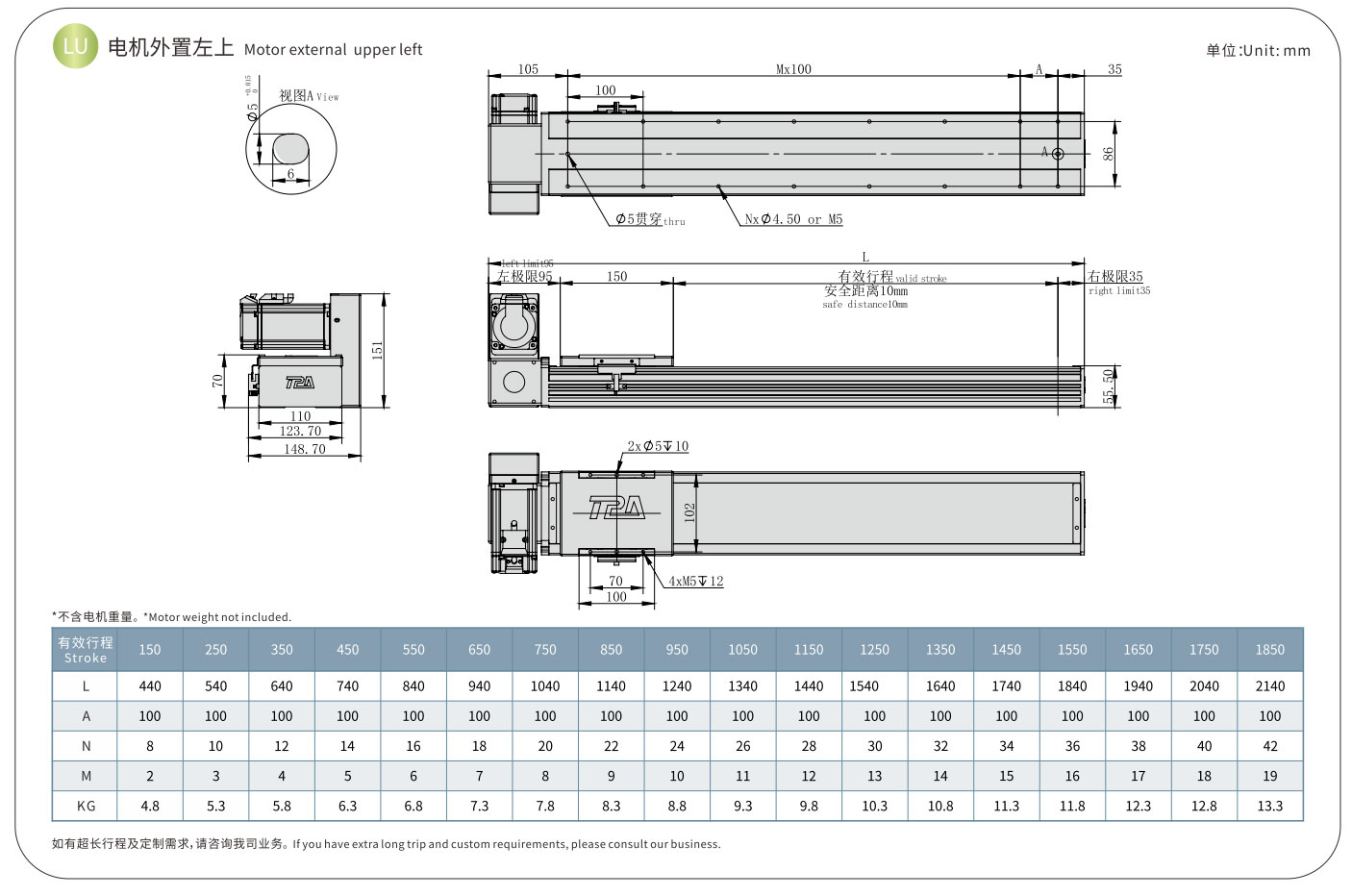
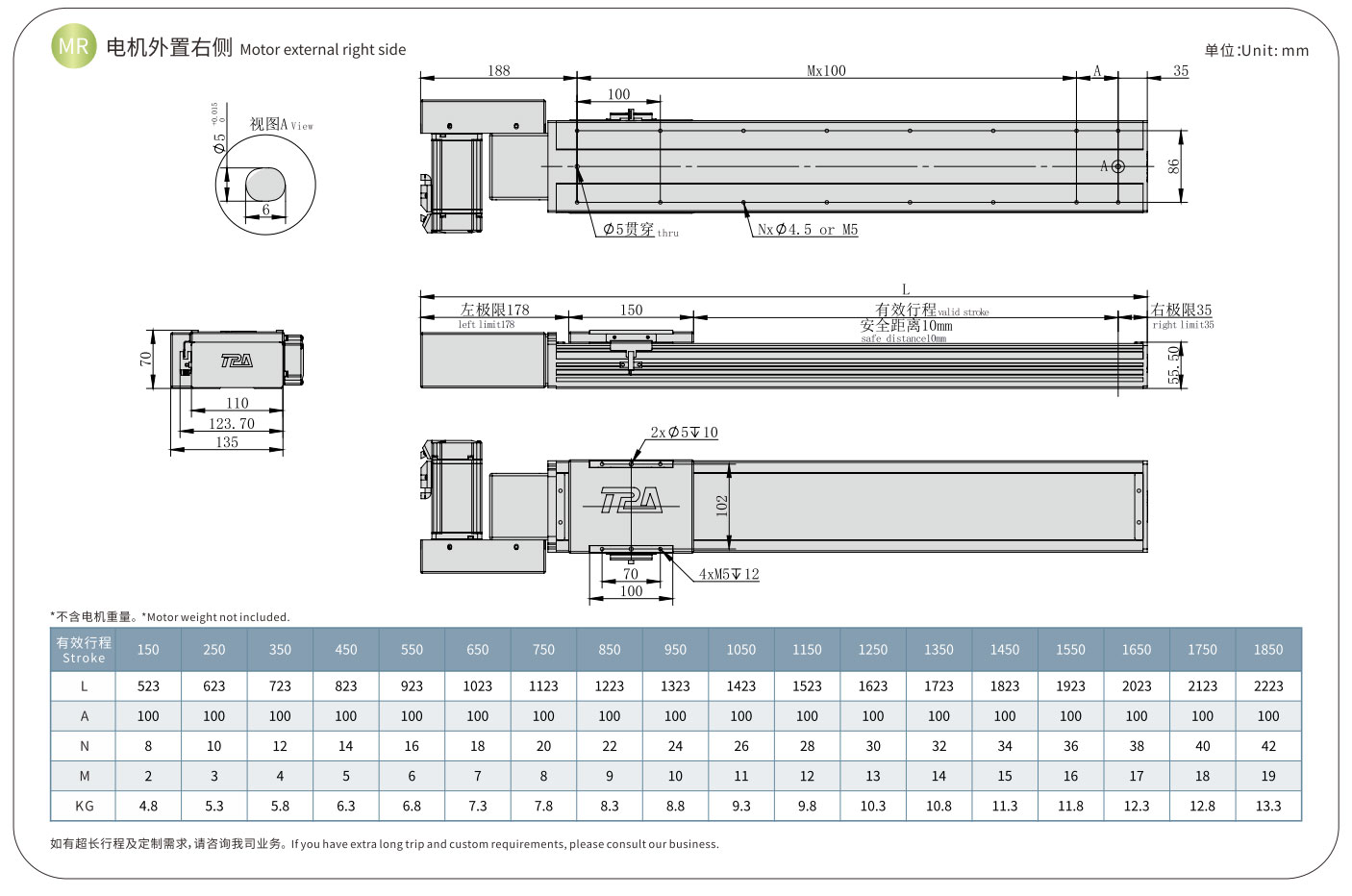
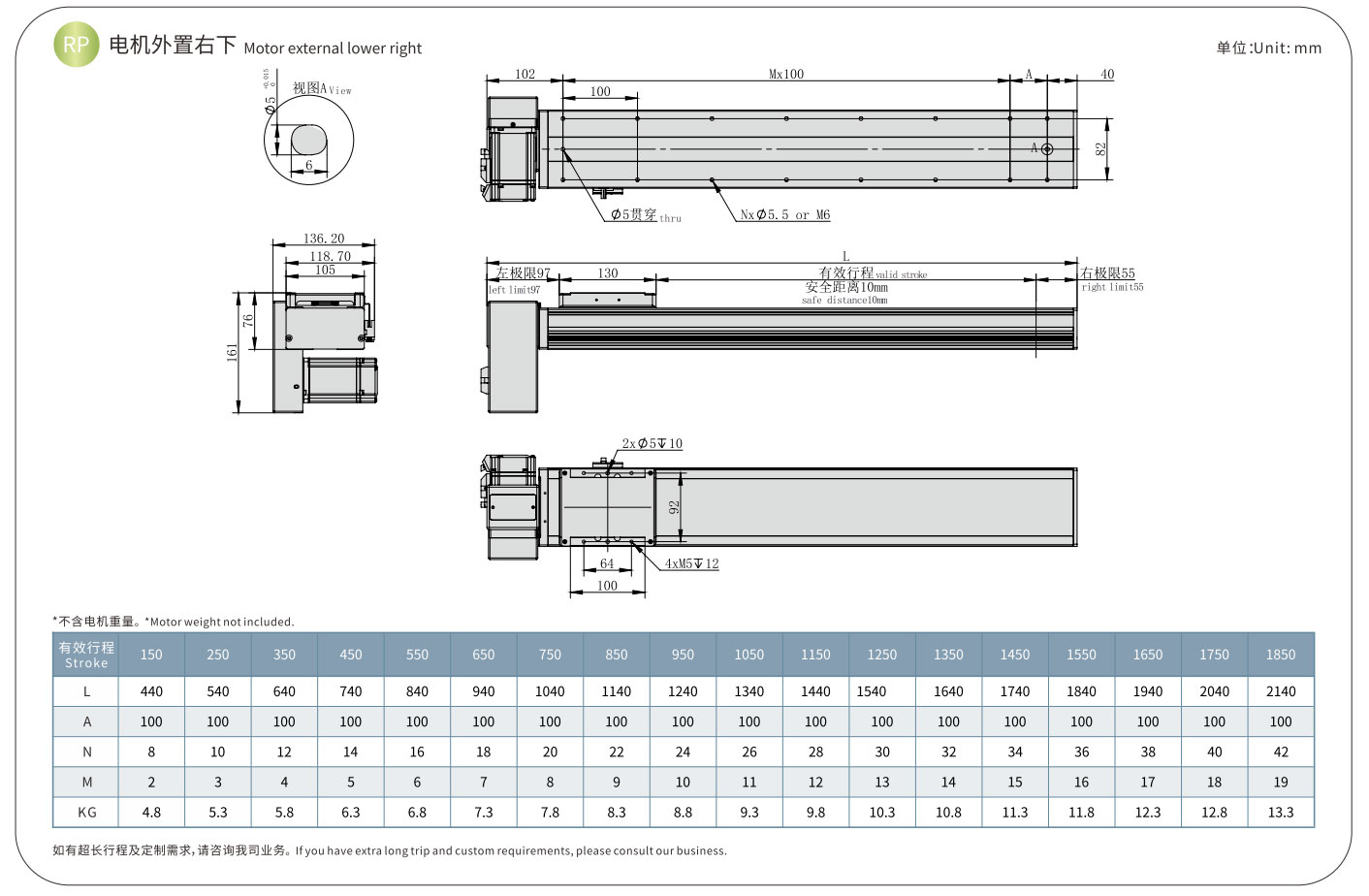
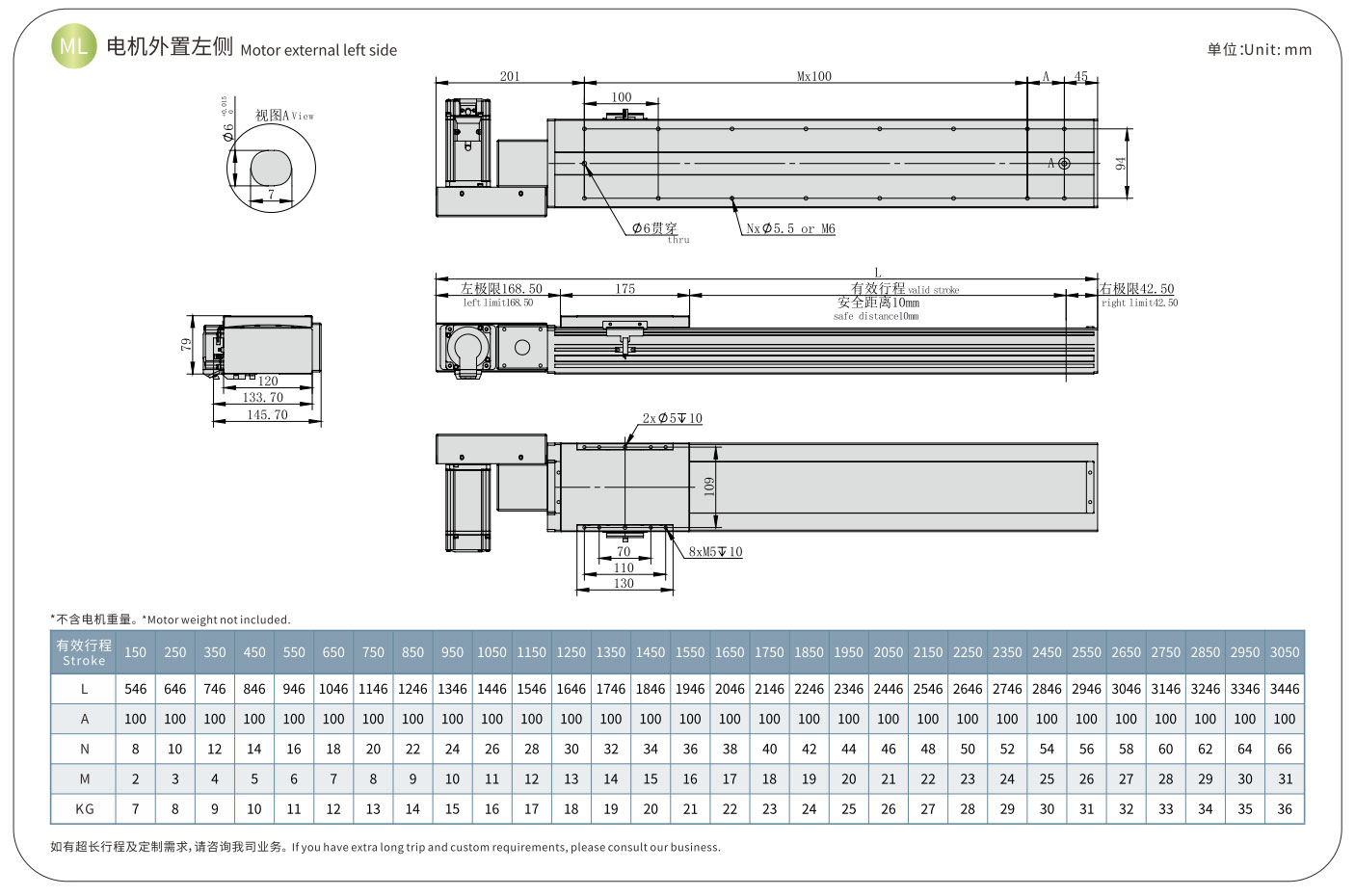
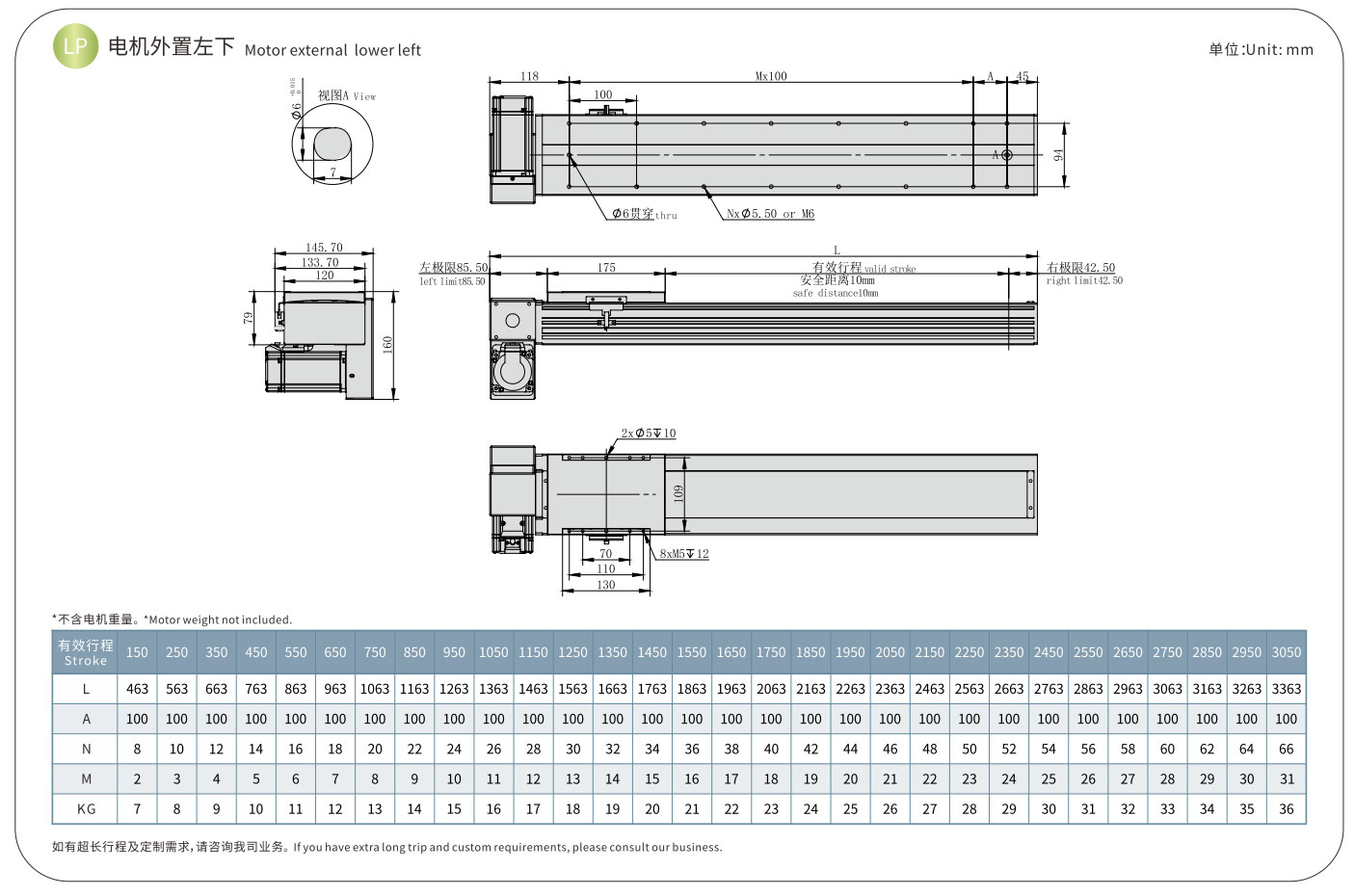
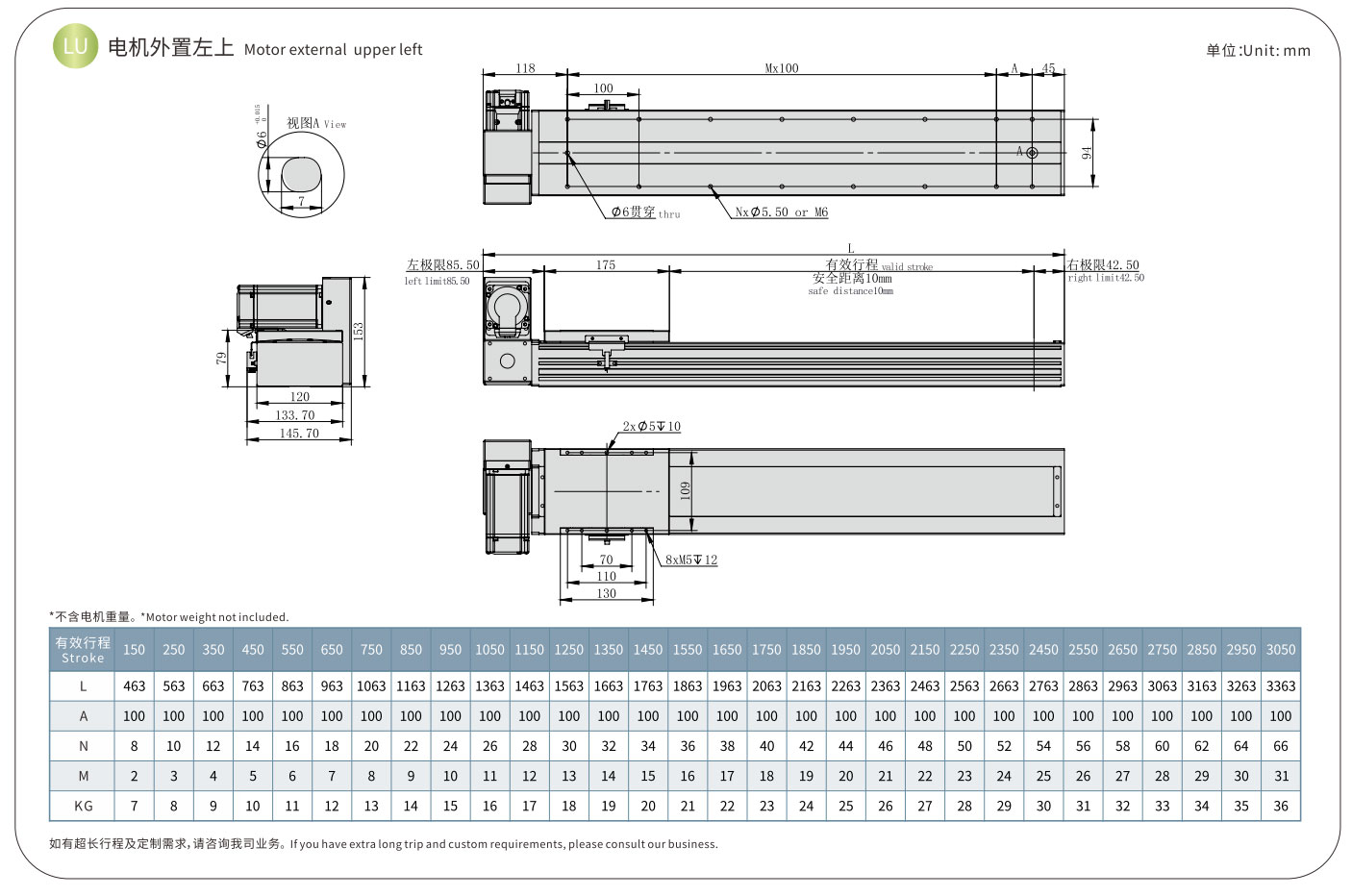
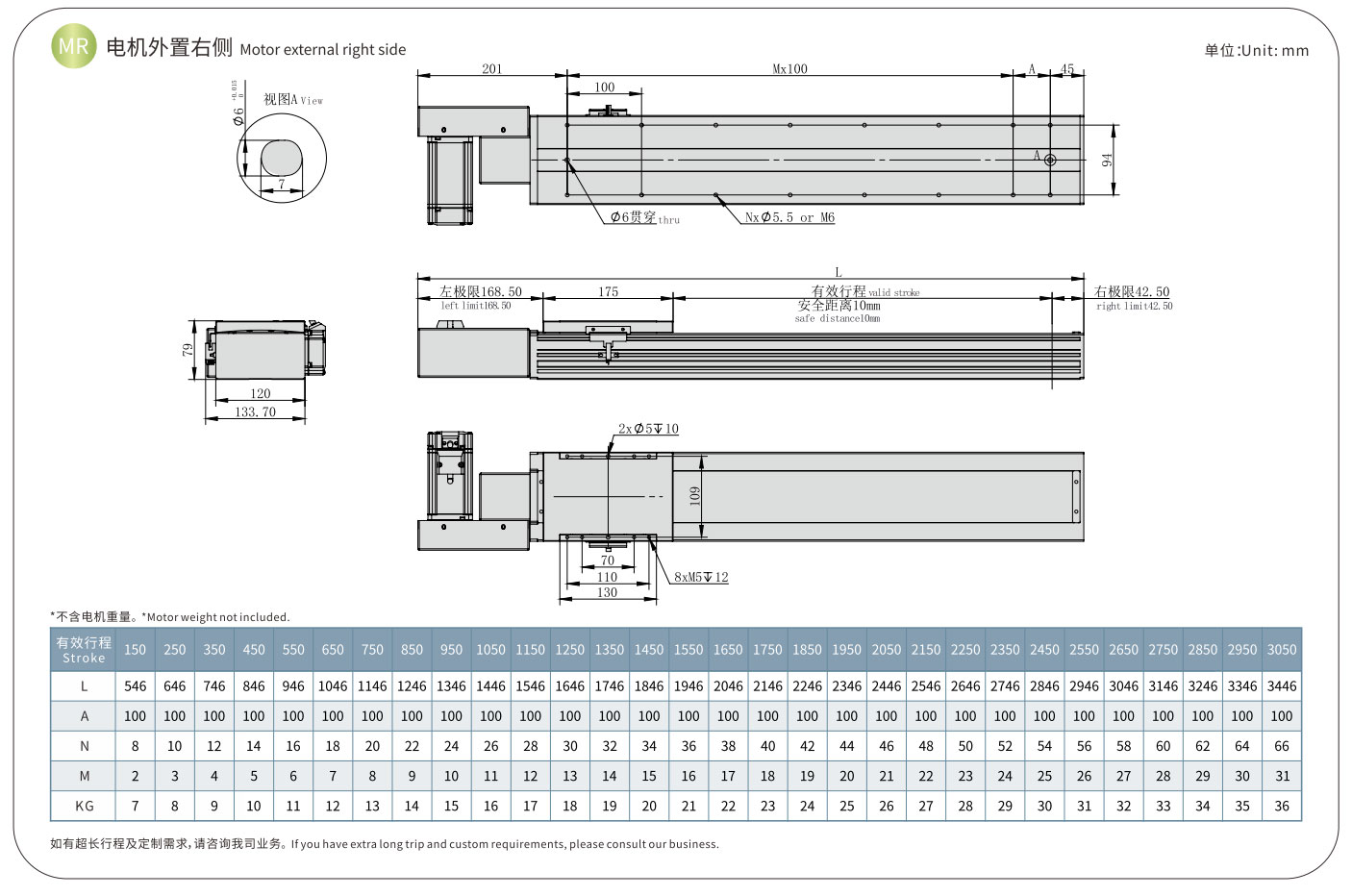
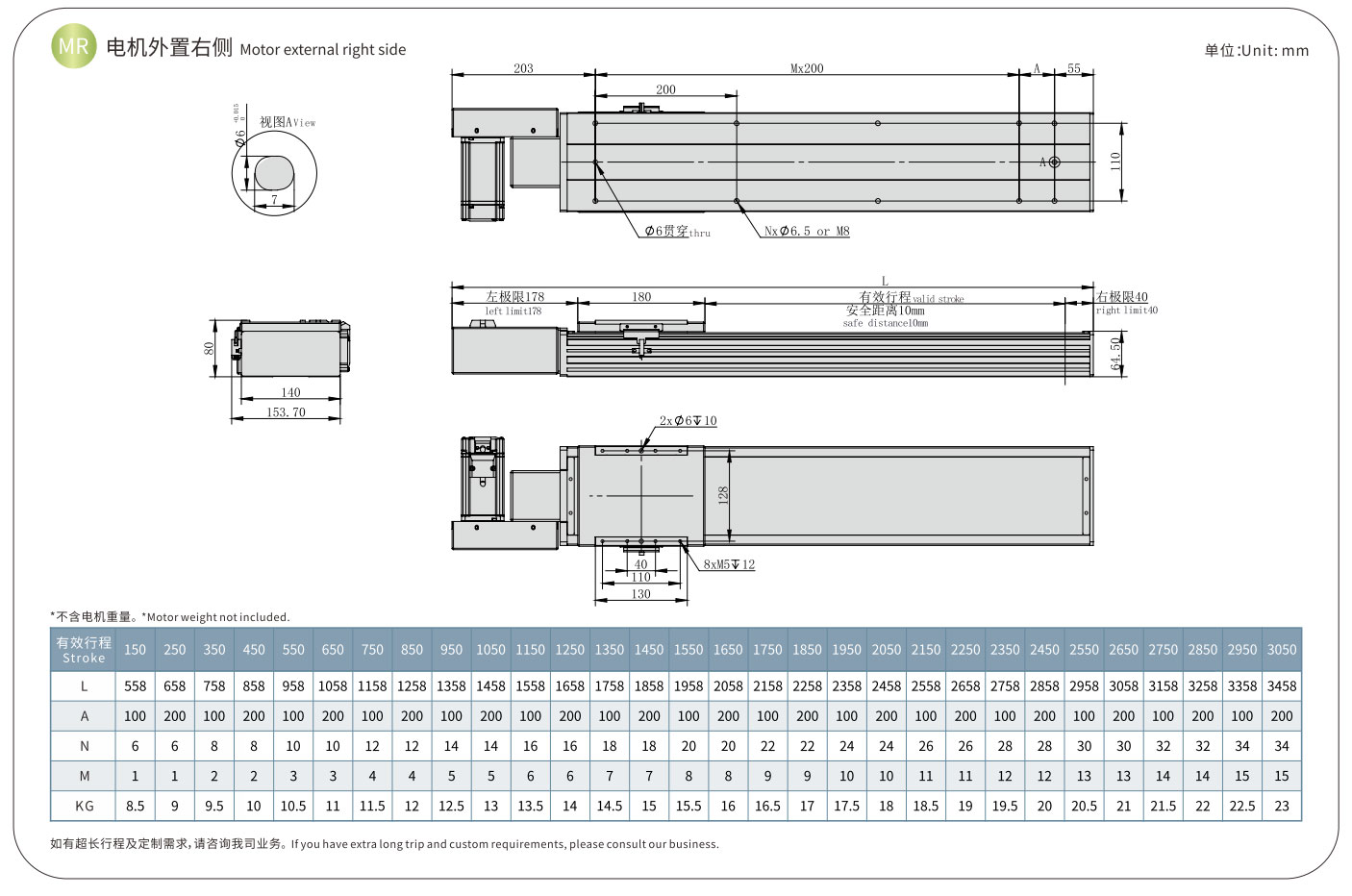
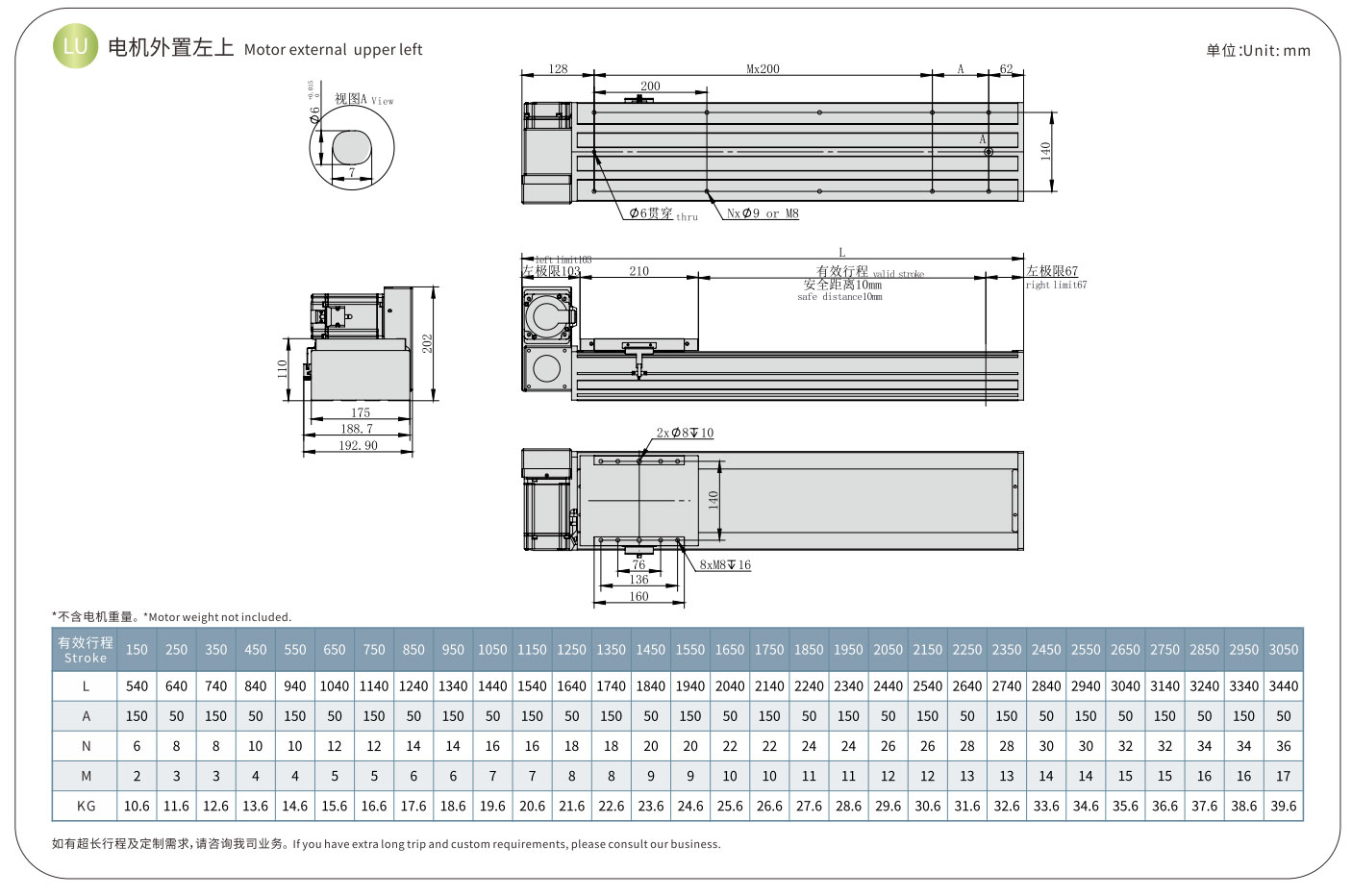
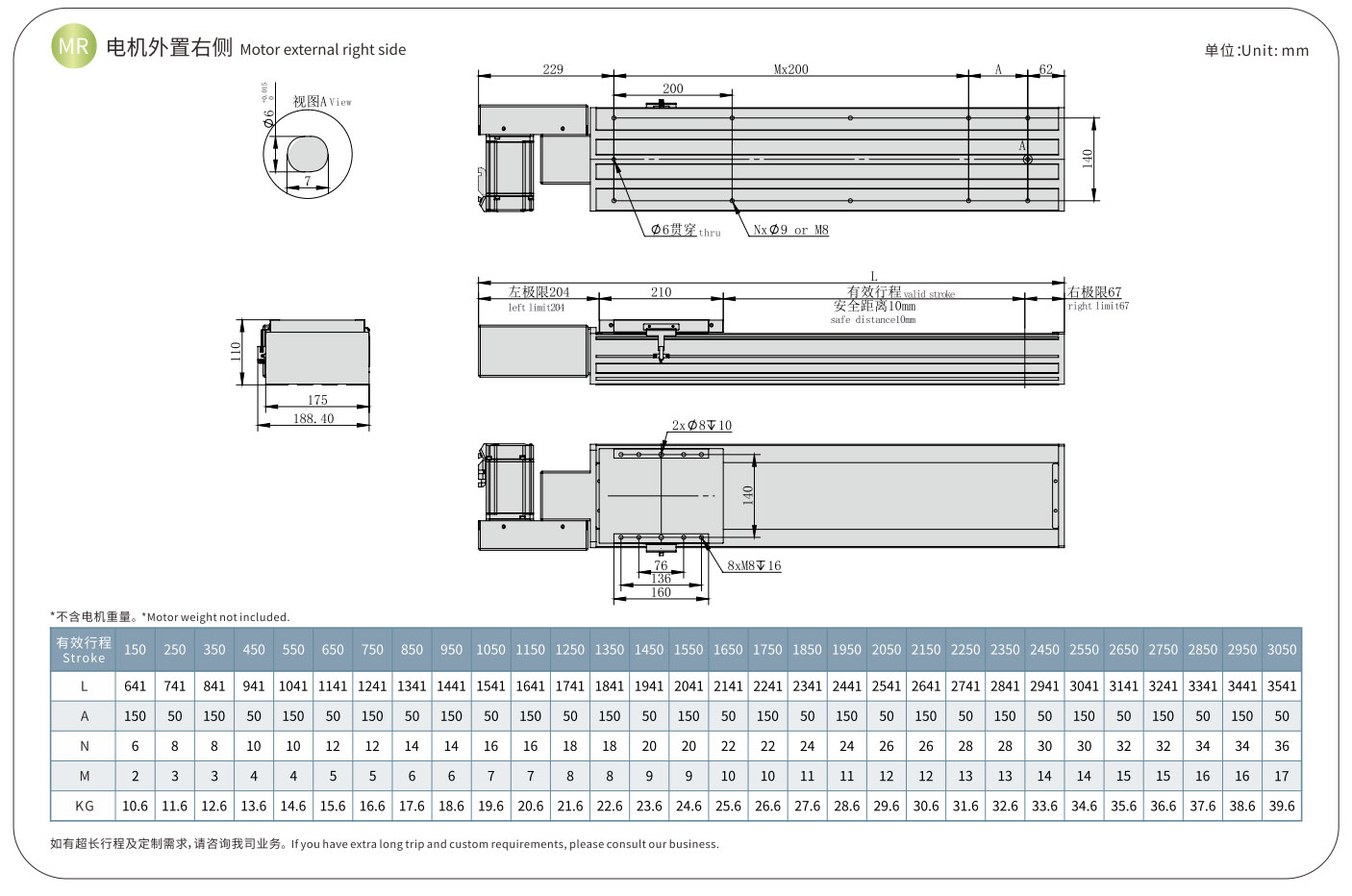
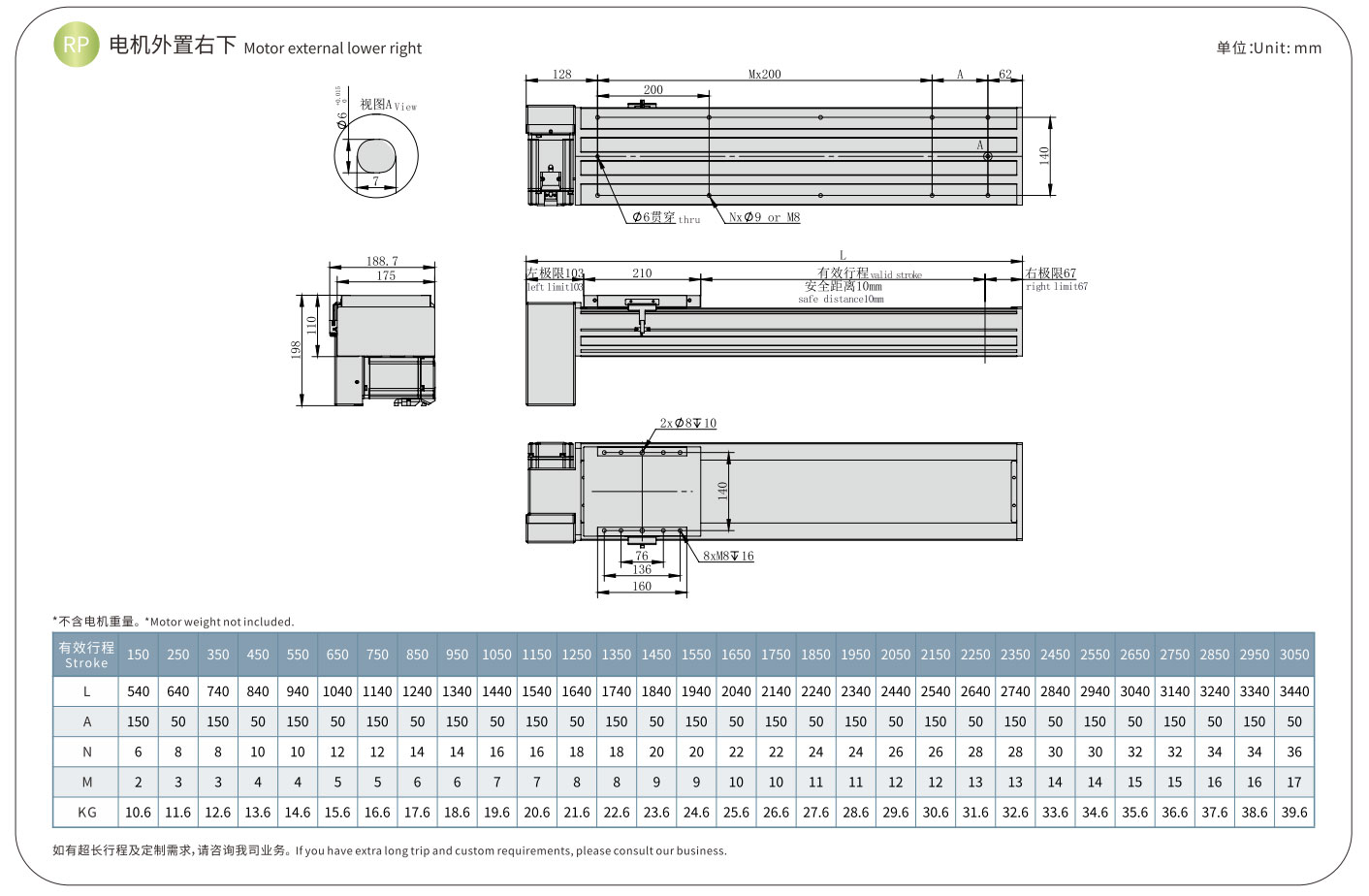
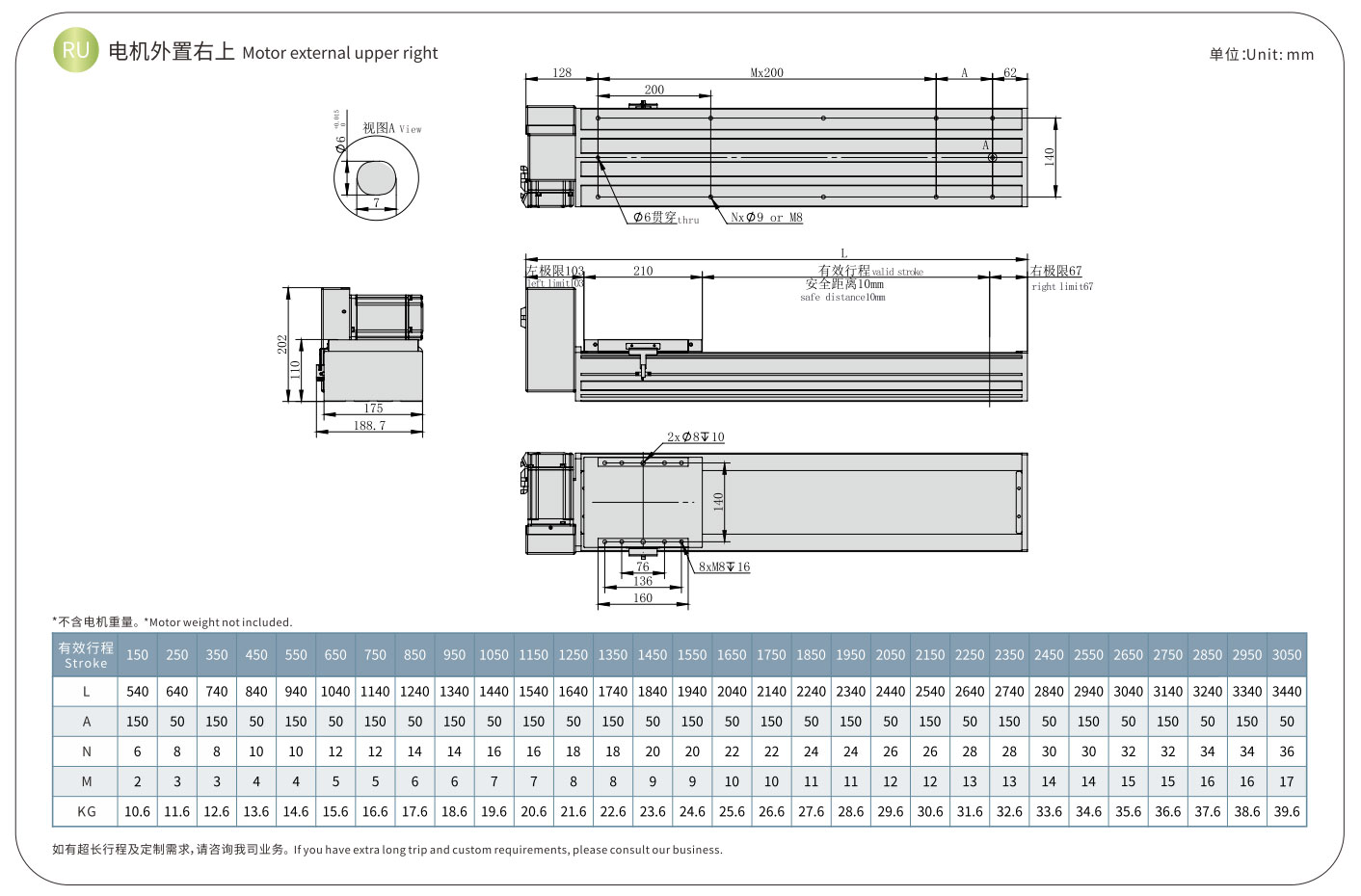
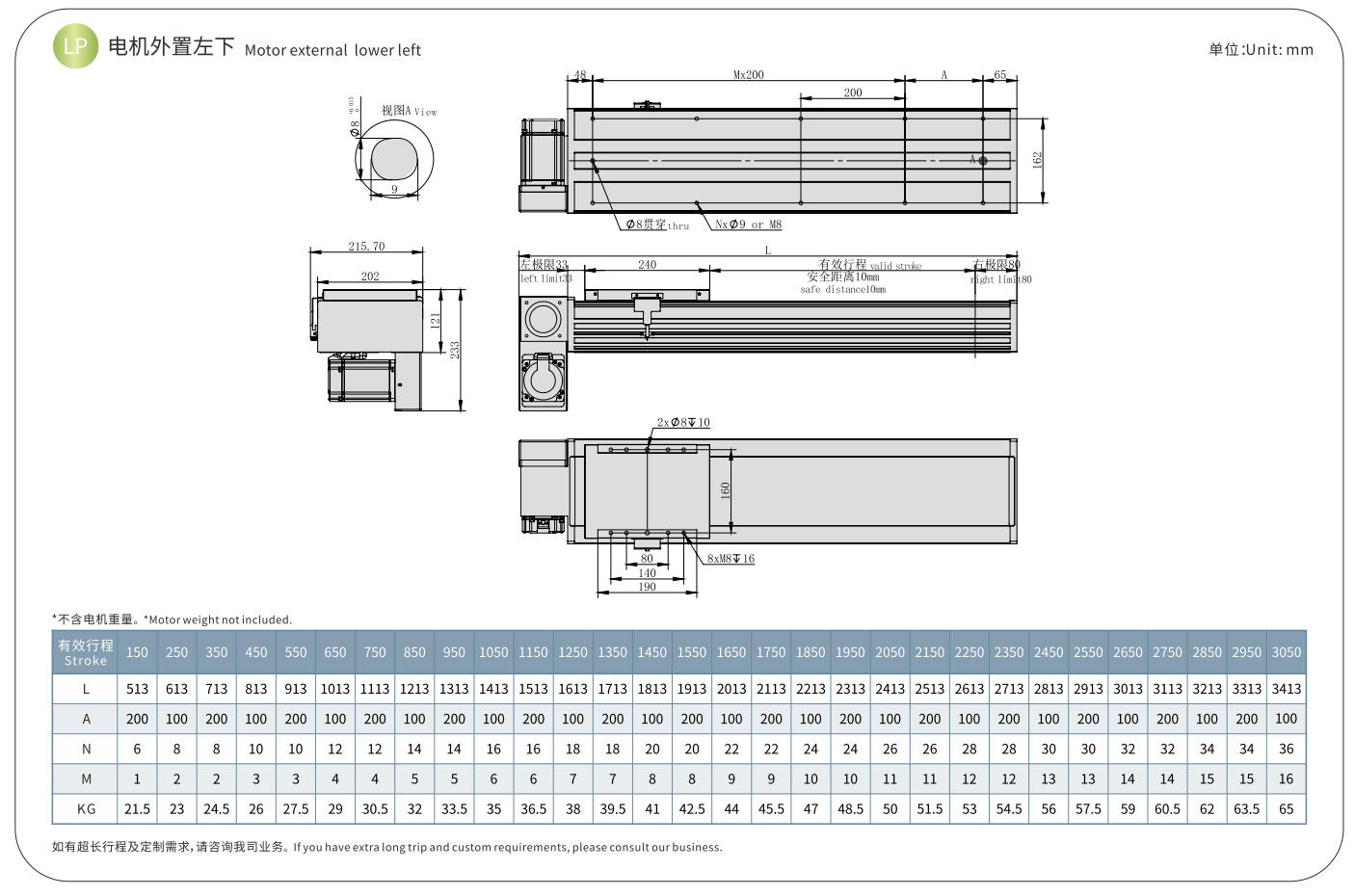
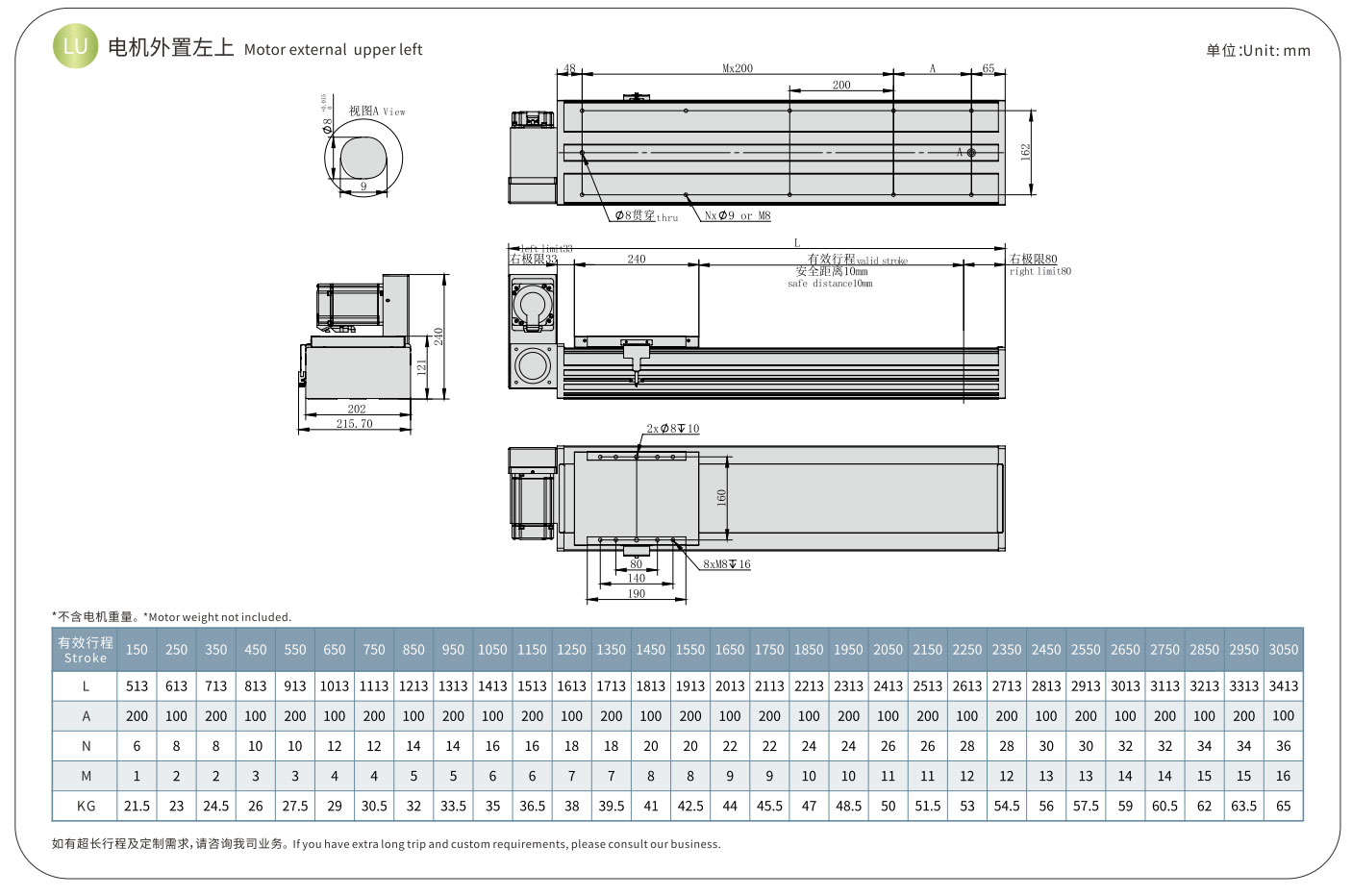
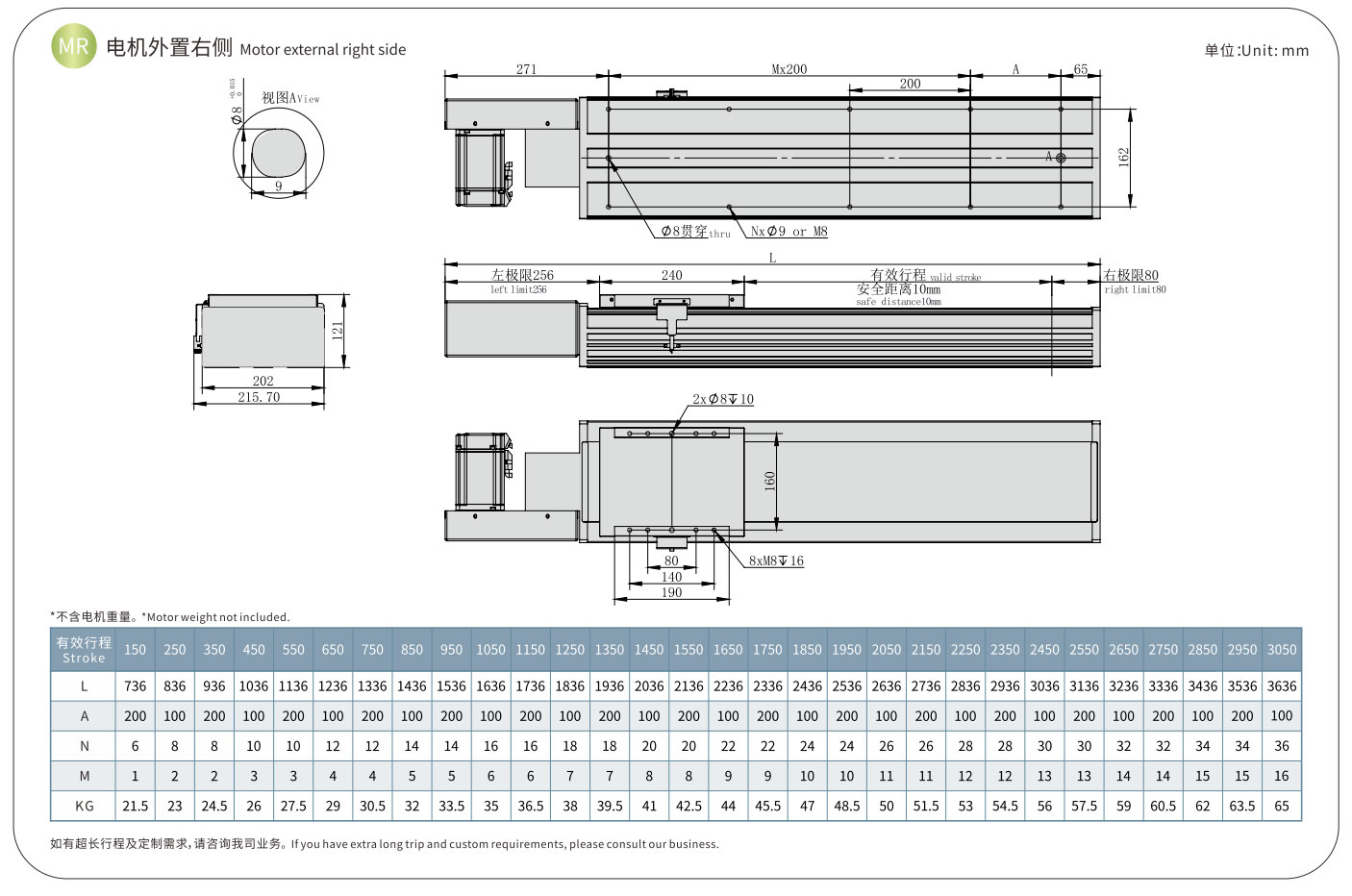
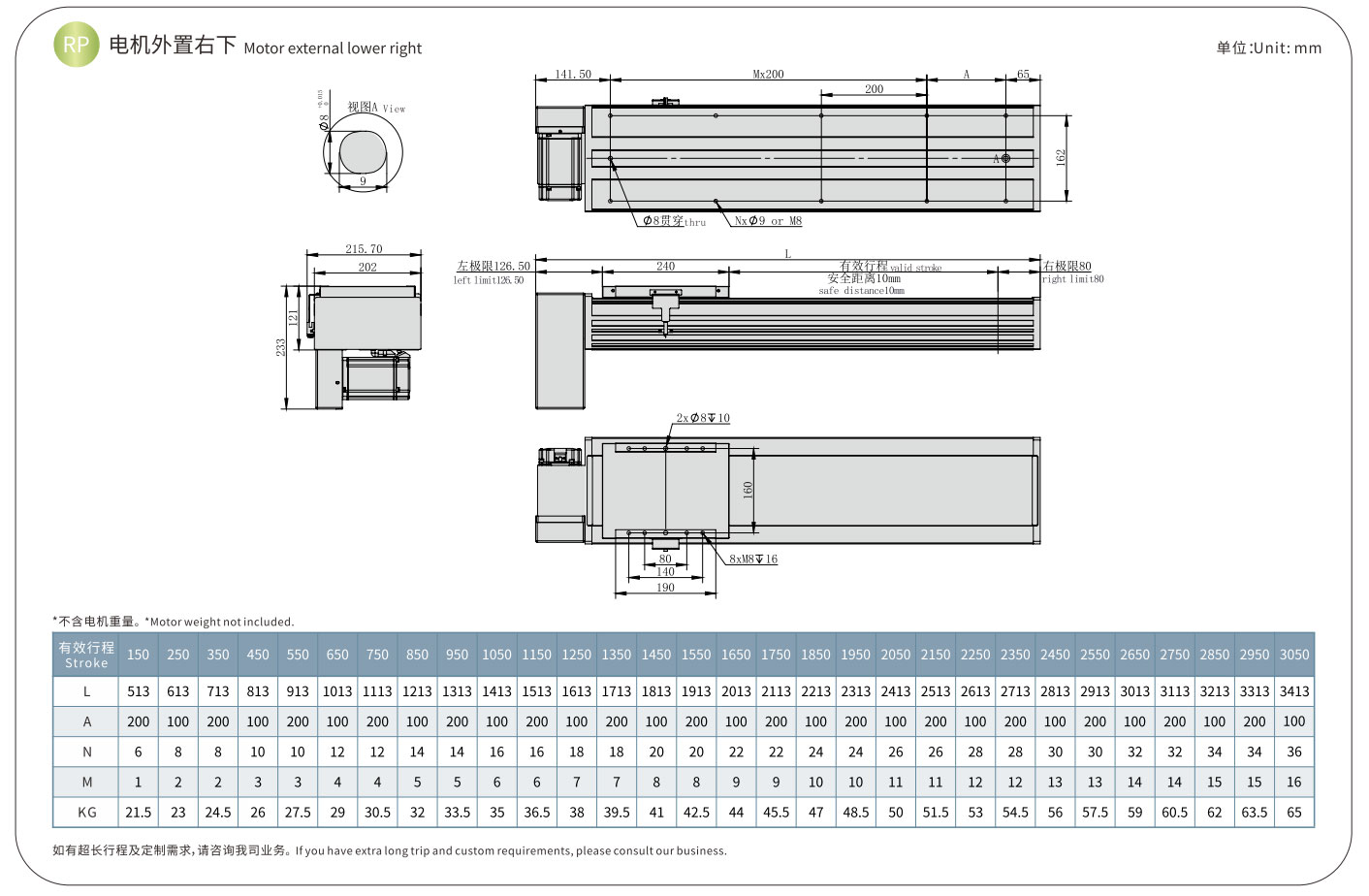
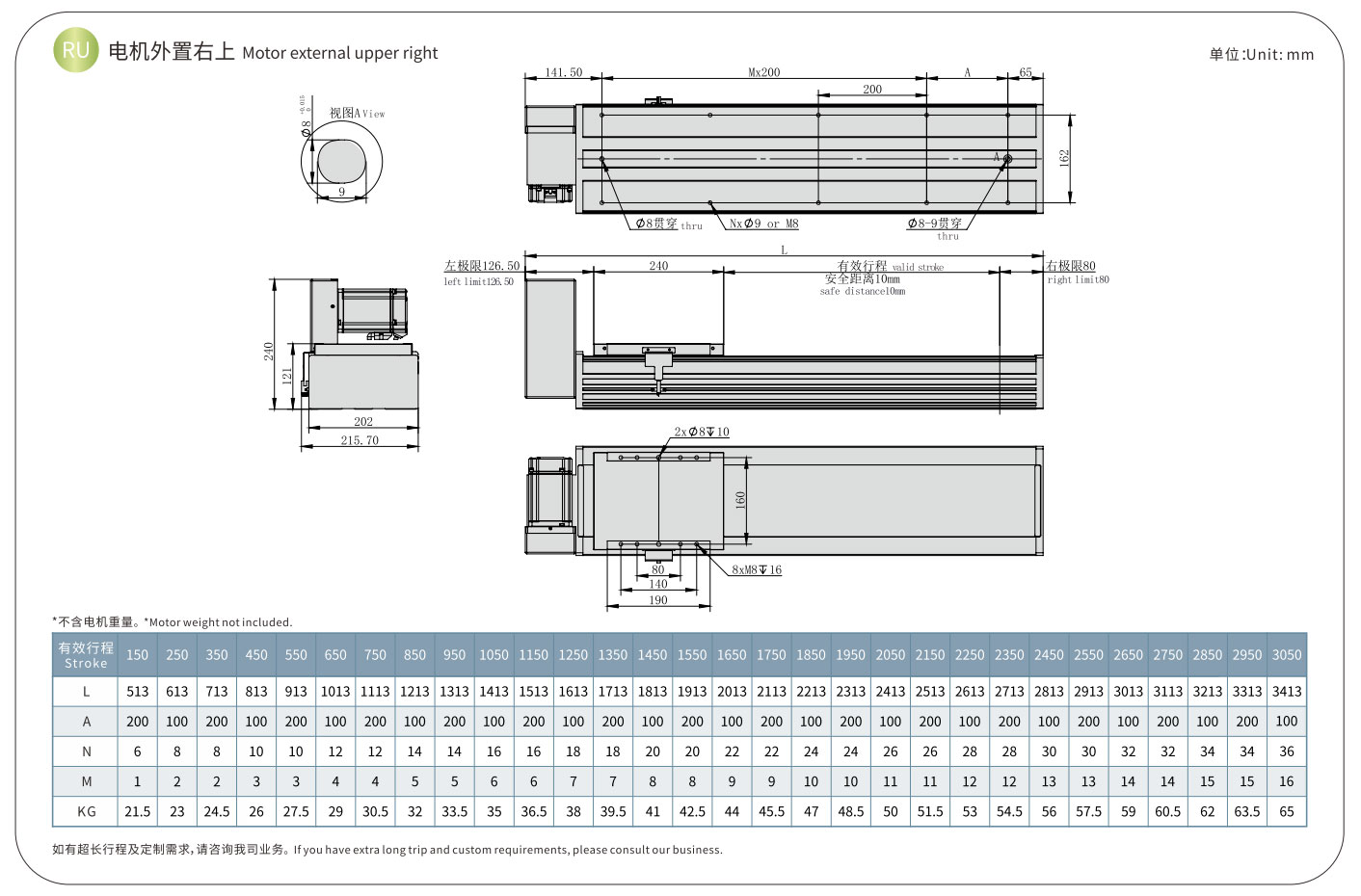
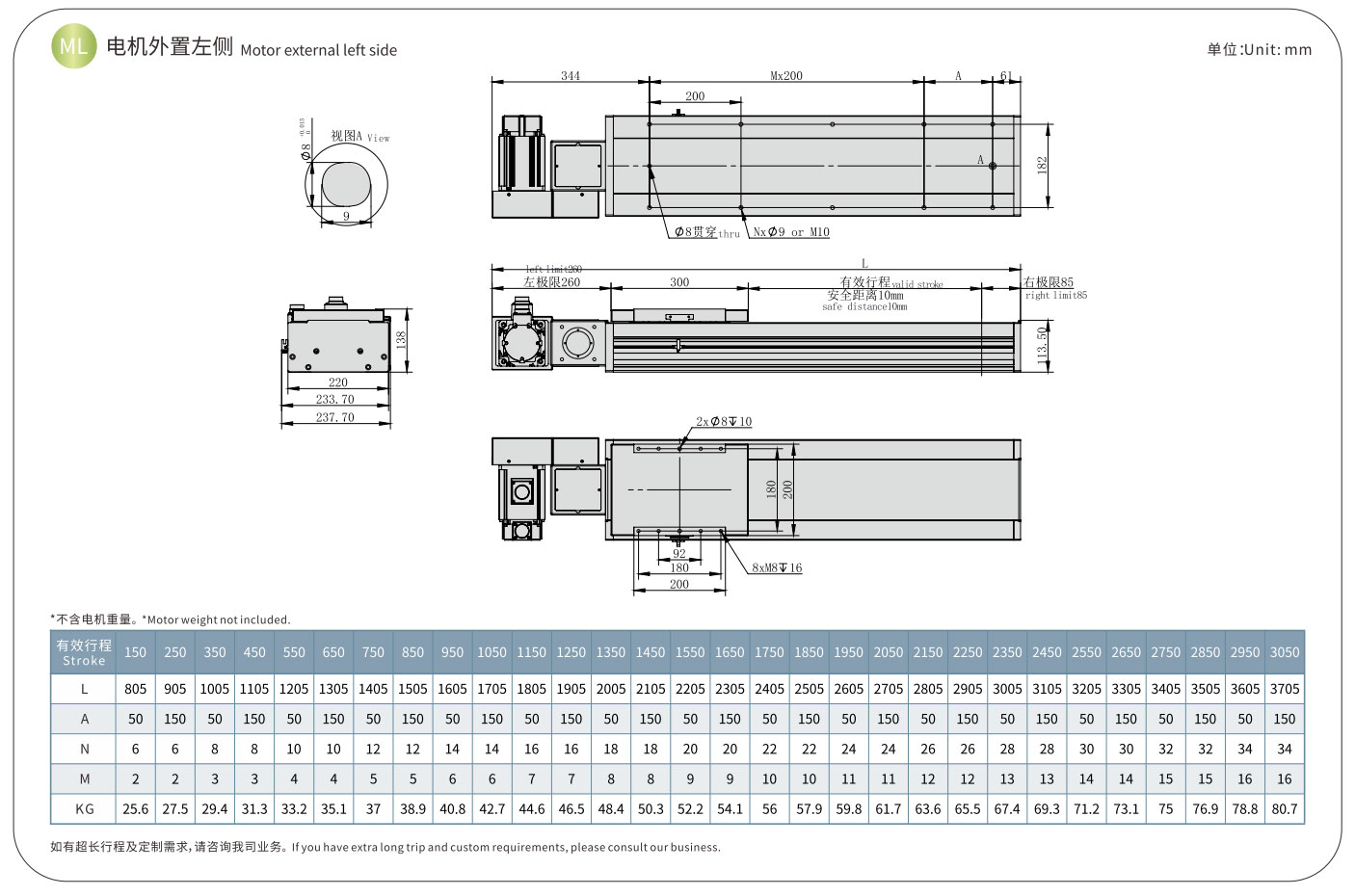
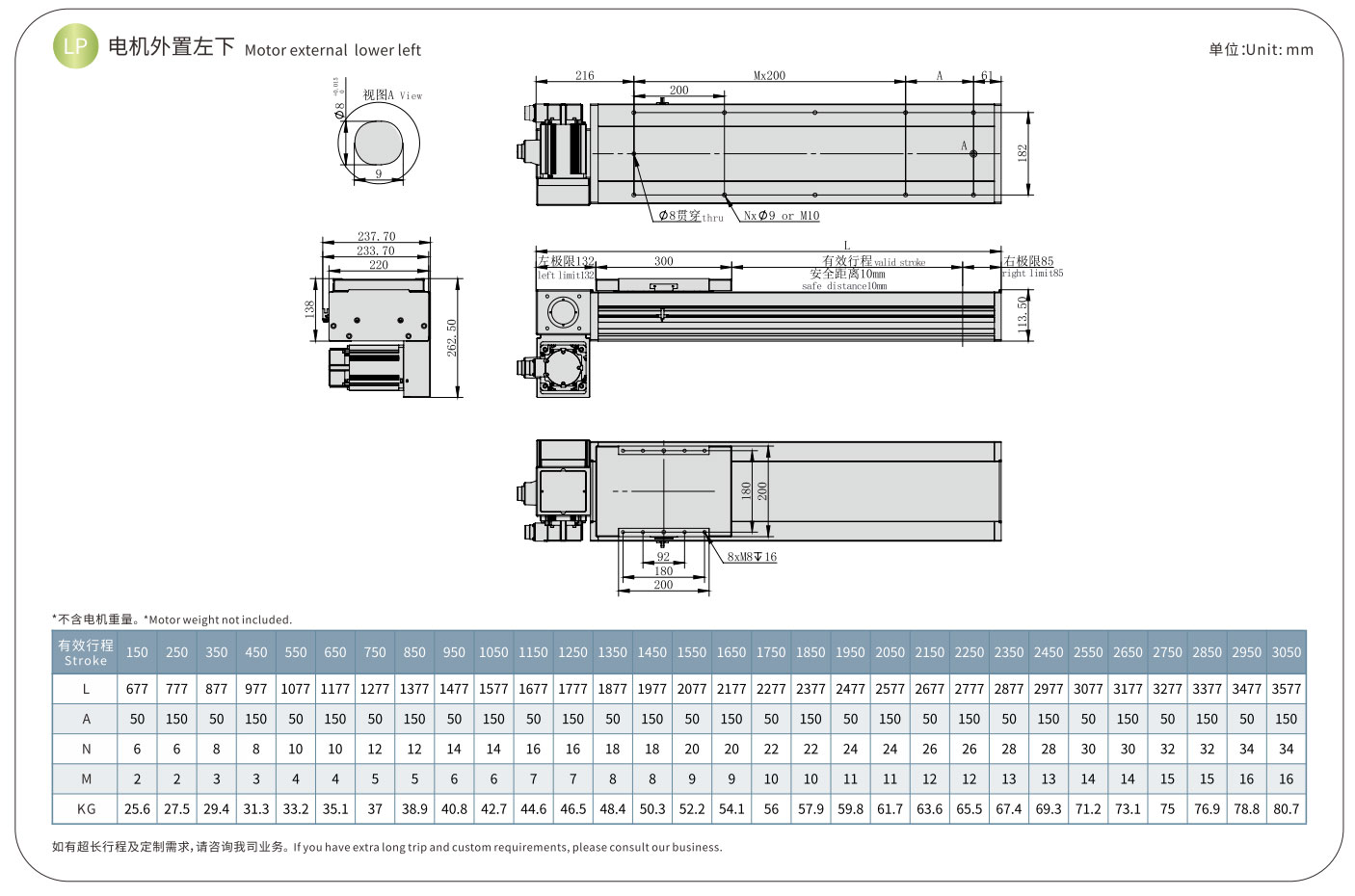
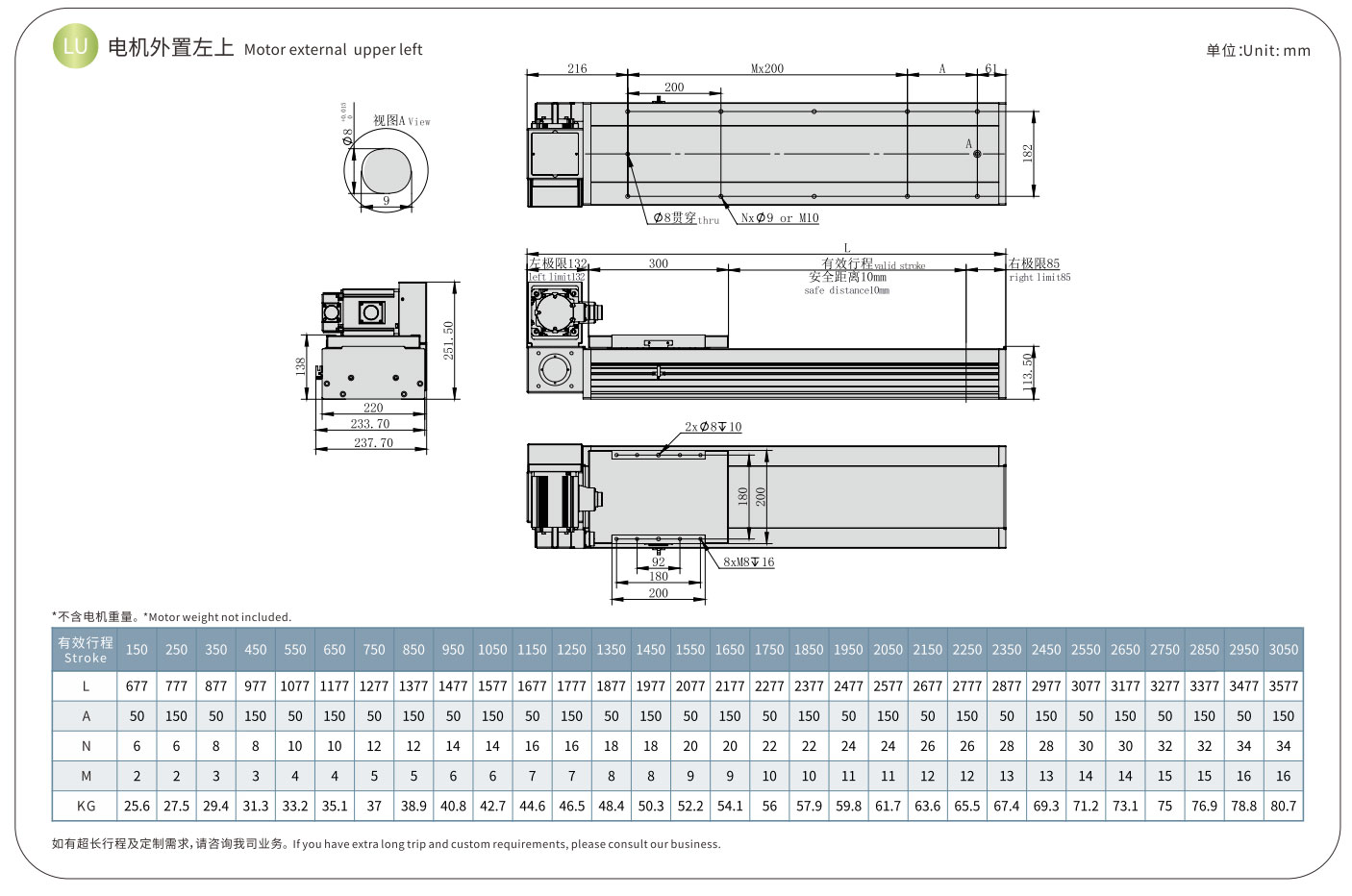
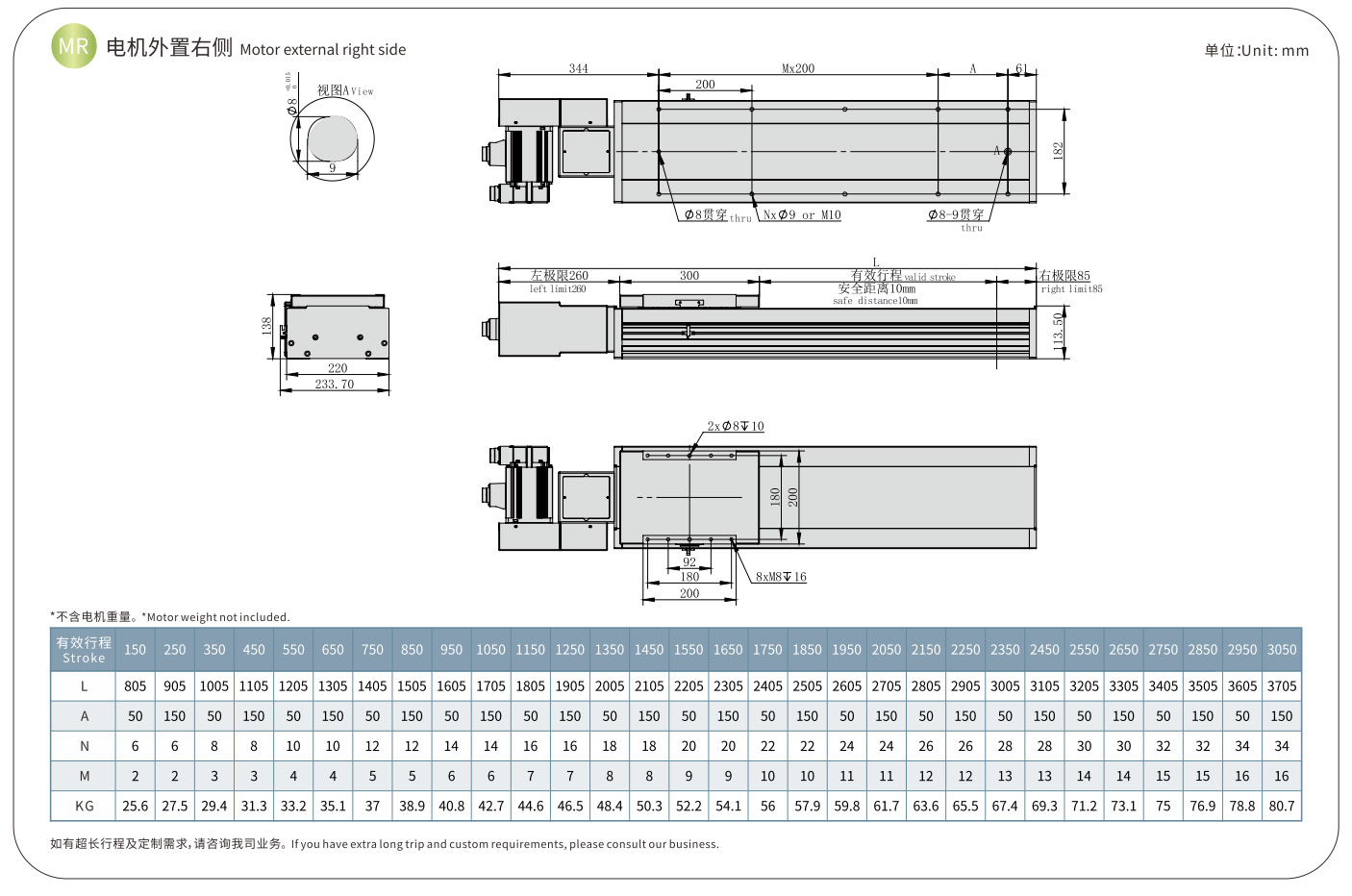
Ingon usa ka klasiko nga belt driven linear actuator sa TPA ROBOT, itandi sa HCR series, ang HCB series driven slider with timing belt, nga nagpasabot nga ang HCB series adunay mas taas nga stroke ug mas taas nga speed. Gimaneho kini sa servo motor, dili lamang kini adunay taas nga katukma sa servo motor, apan adunay usab mga bentaha sa taas nga tulin ug taas nga rigidity sa sliding stage mismo. Sayon kini nga kontrolon ug dali nga konektado sa PLC ug uban pang mga sistema. Ang slide actuator gihimo sa integrally extruded aluminum profile, nga adunay gaan nga gibug-aton, gamay nga gidak-on ug lig-on nga rigidity. Ang gidak-on sa pag-install ug stroke mahimong ipasibo sumala sa mga kinahanglanon, ug ang pag-instalar mahimong ayohon pinaagi sa mga bolts. Pinaagi sa kombinasyon sa daghang mga direksyon, mahimo kini nga usa ka linear nga sistema sa paglihok sa lainlaing mga kagamitan sa automation, nga adunay mga mekanikal nga grippers, air grippers ug uban pang mga fixtures, mahimo kini usa ka eksklusibo nga mga robot sa Cartesian o mga robot nga gantry.

HCB65S

HCB-85D

HCB-105D

HCB-120D

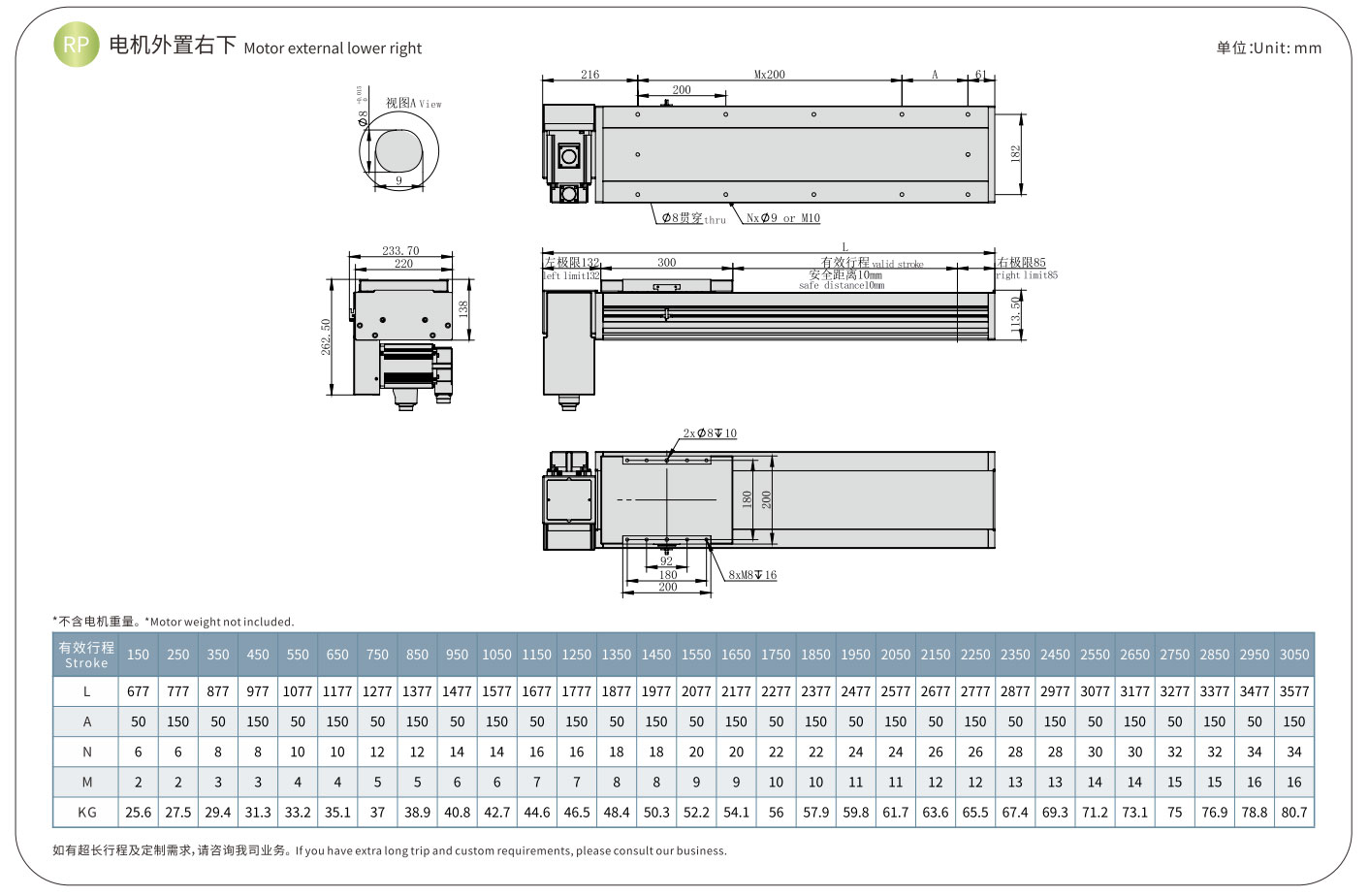
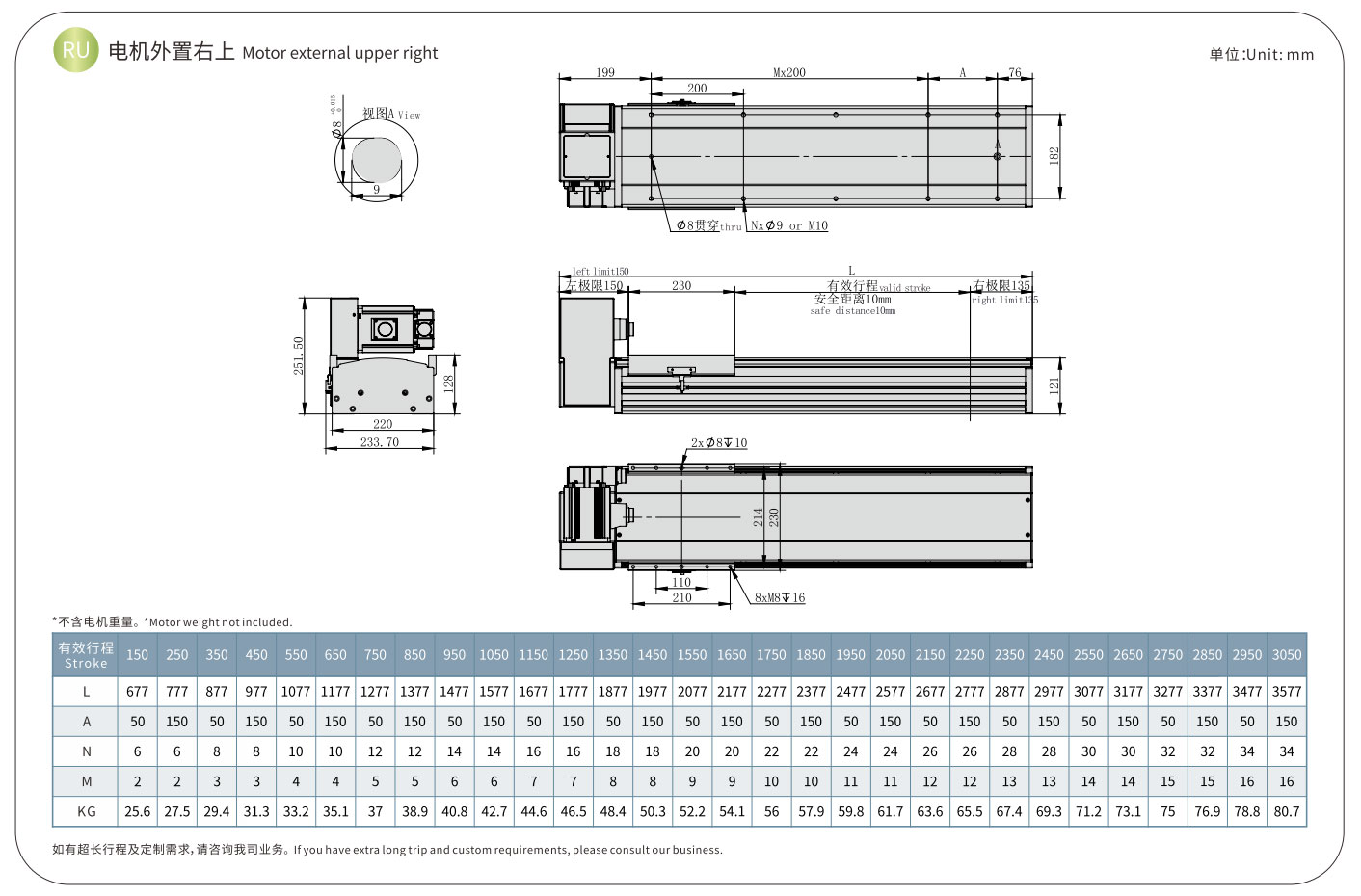
HCB-270D
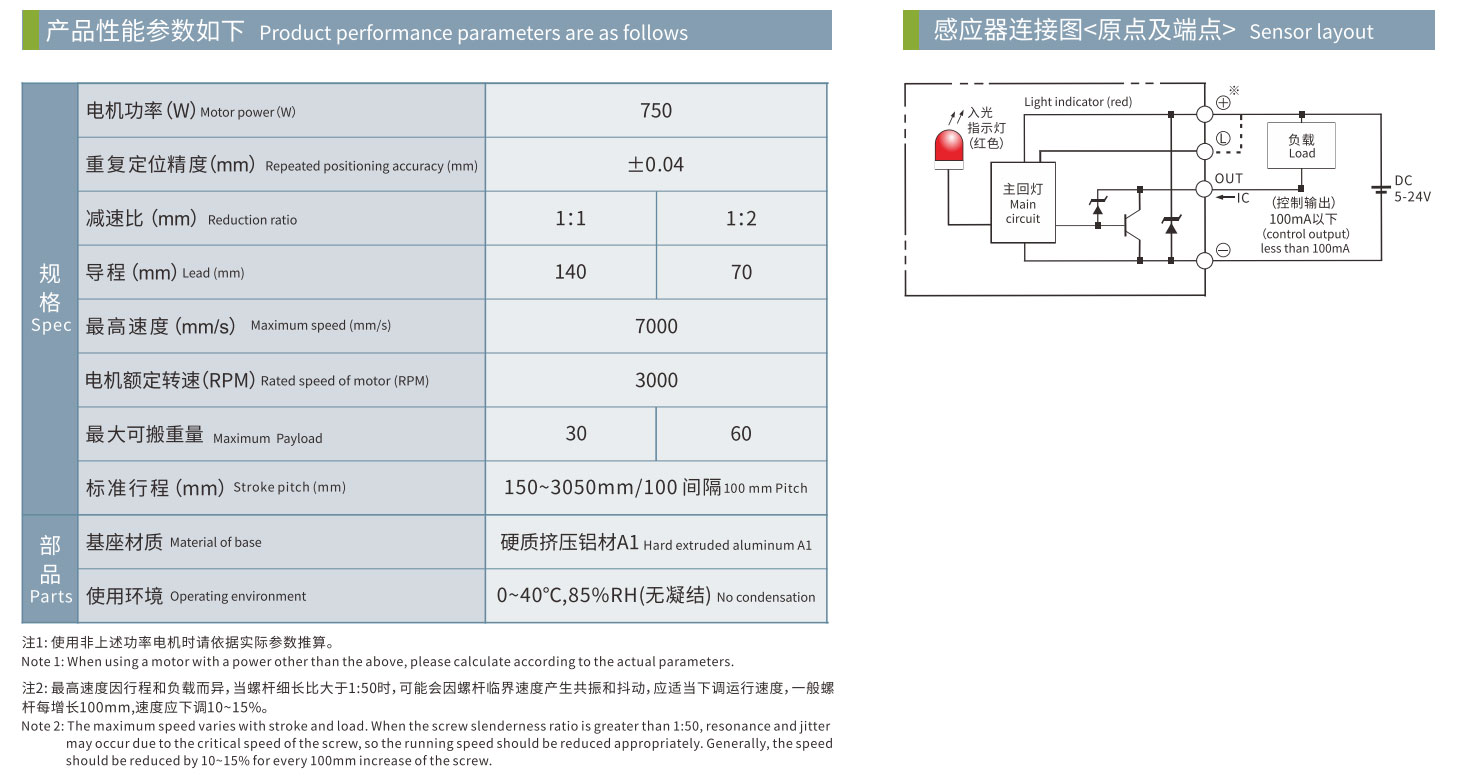
Mga bahin
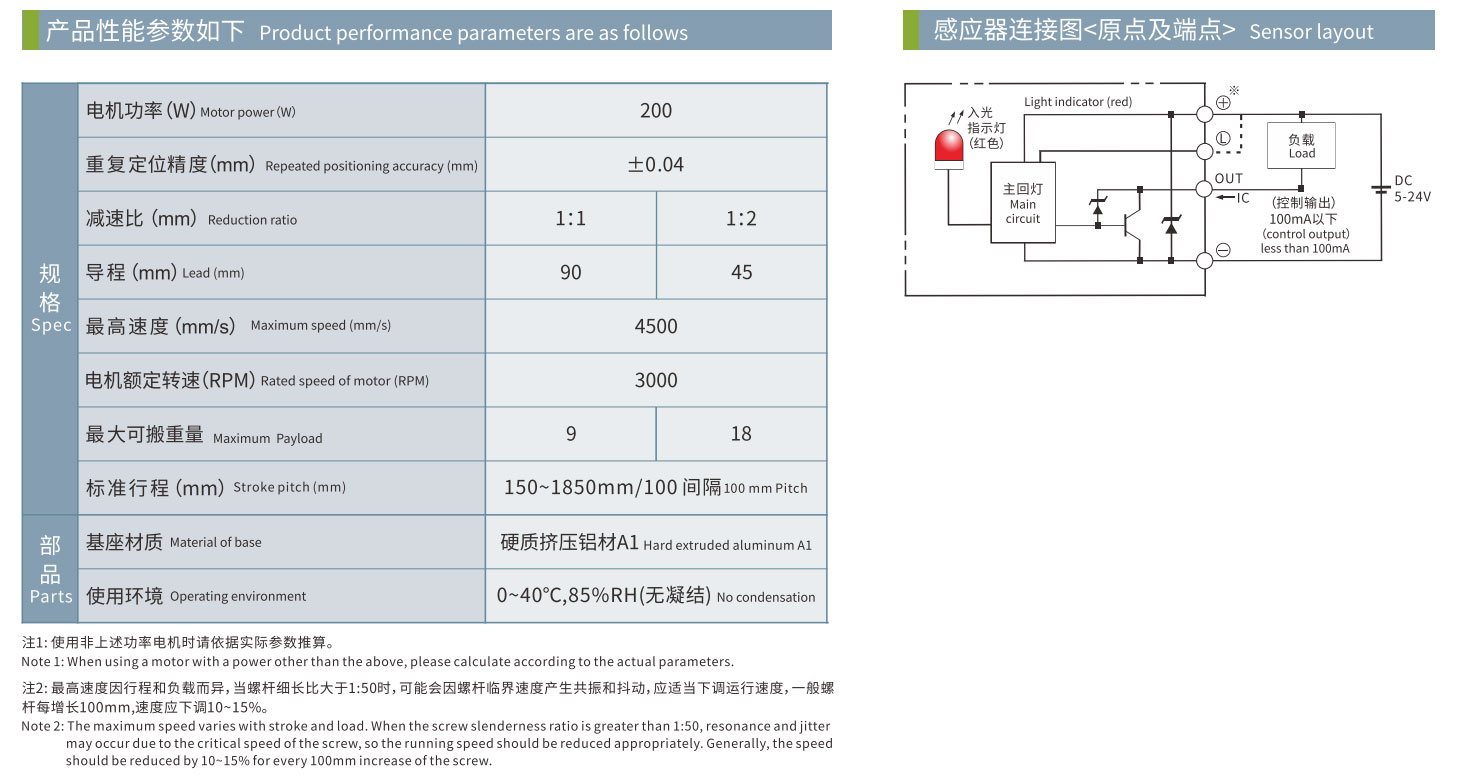
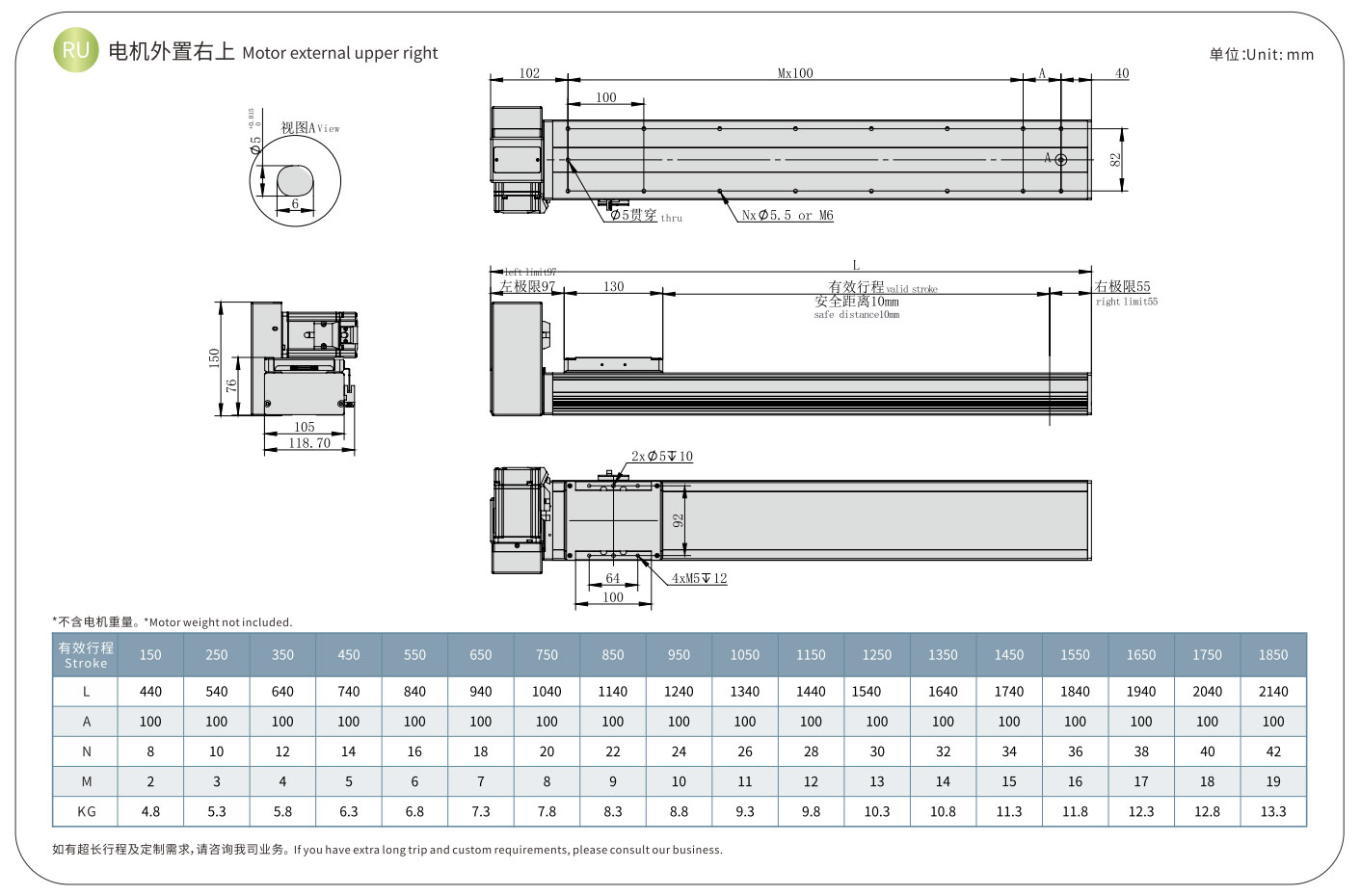
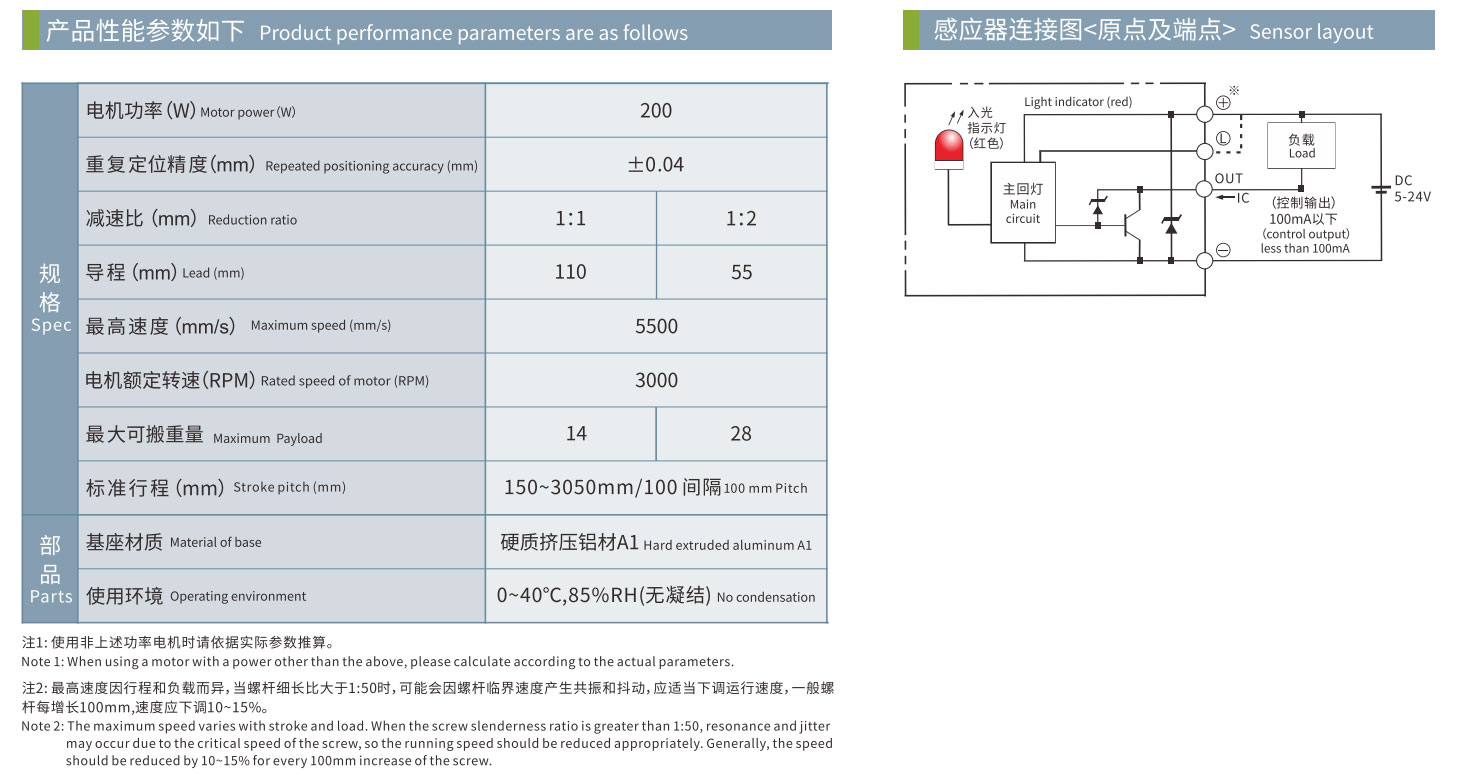
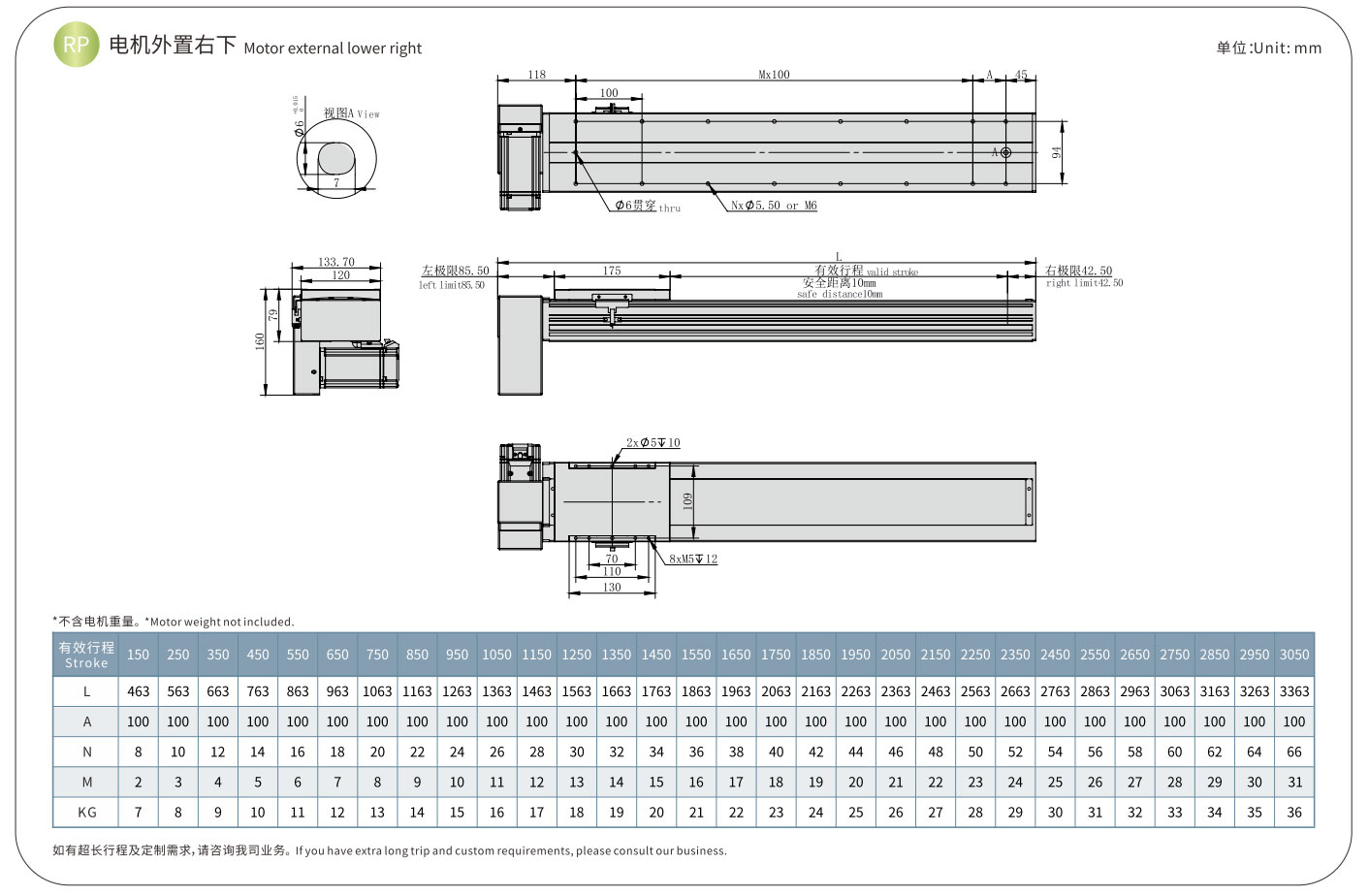
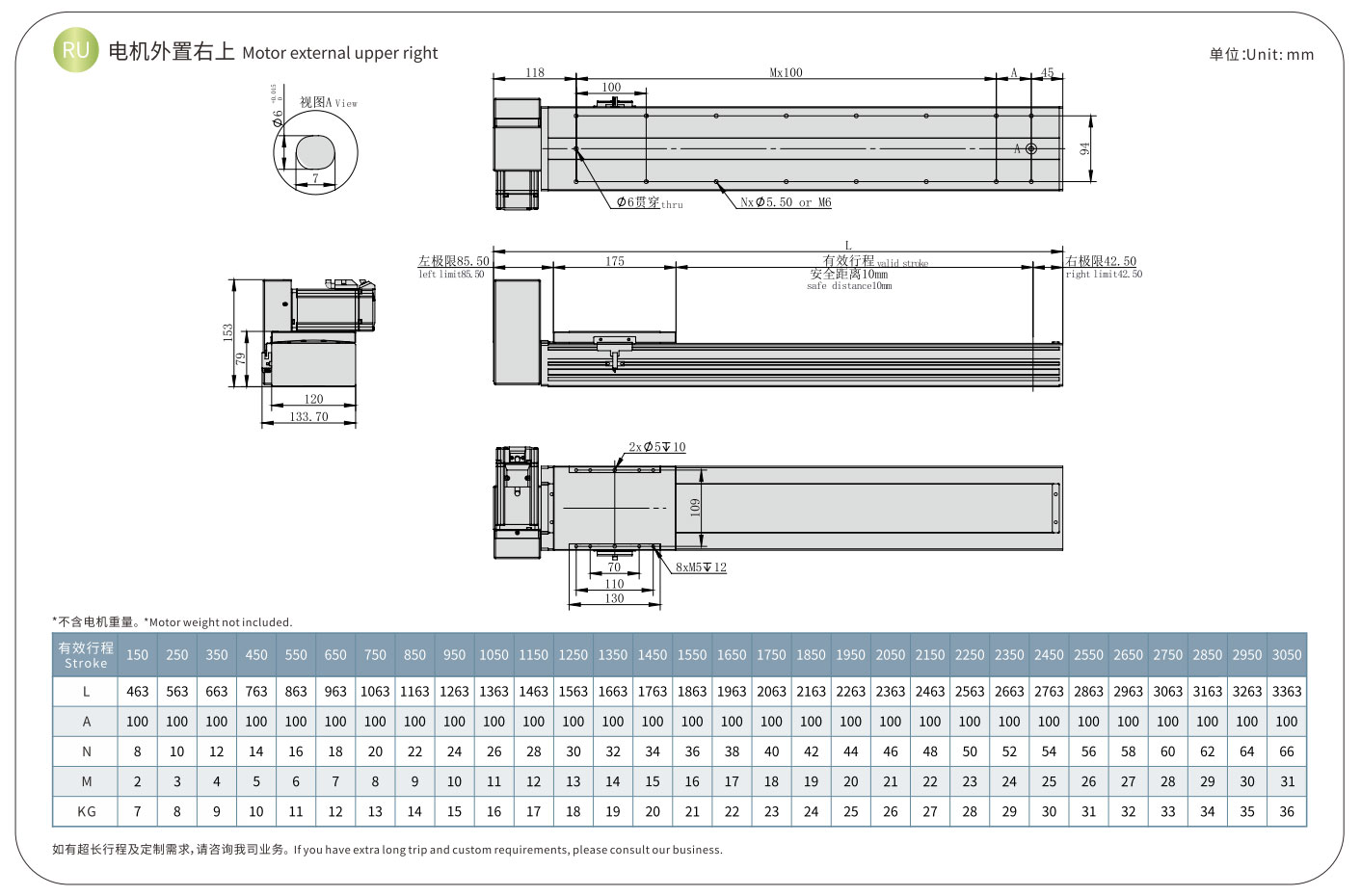
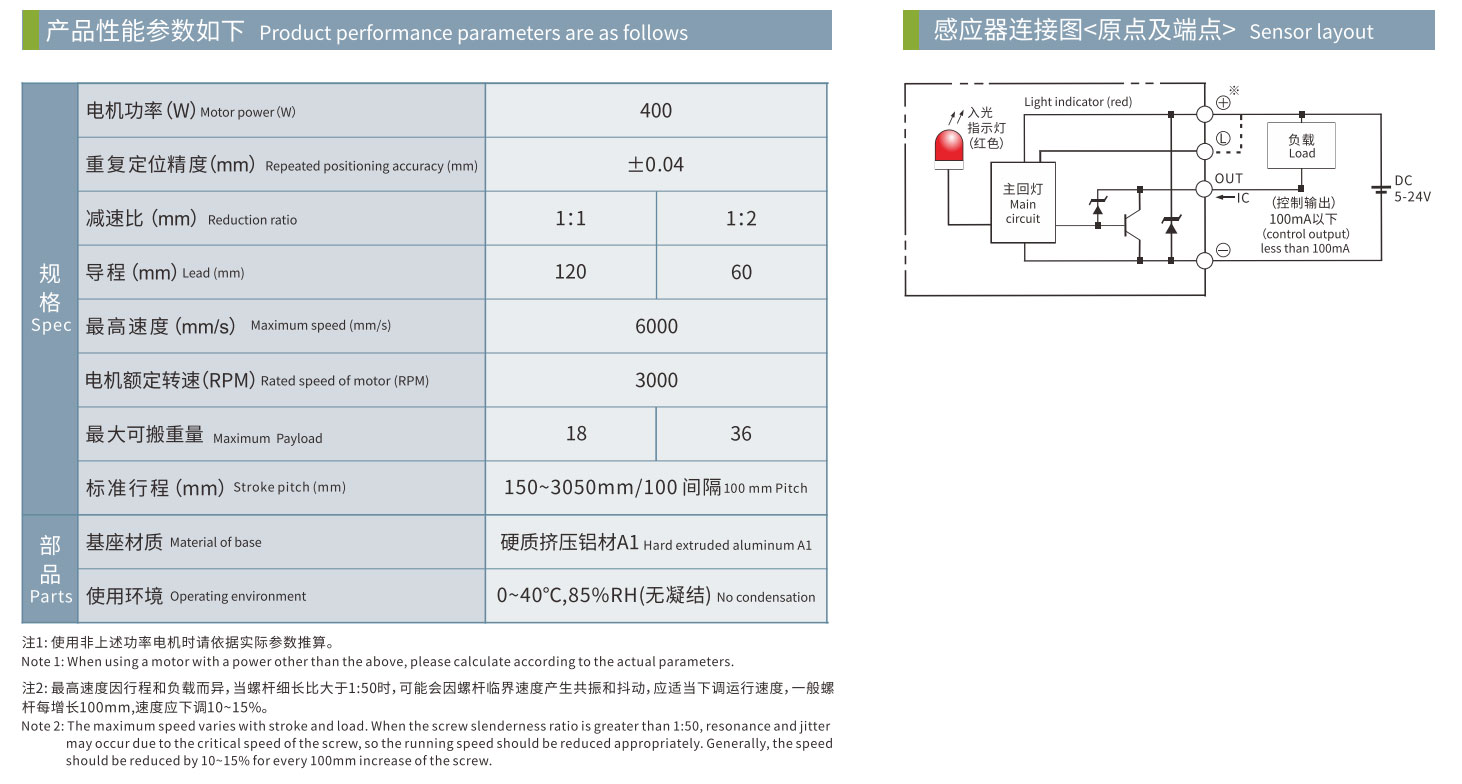
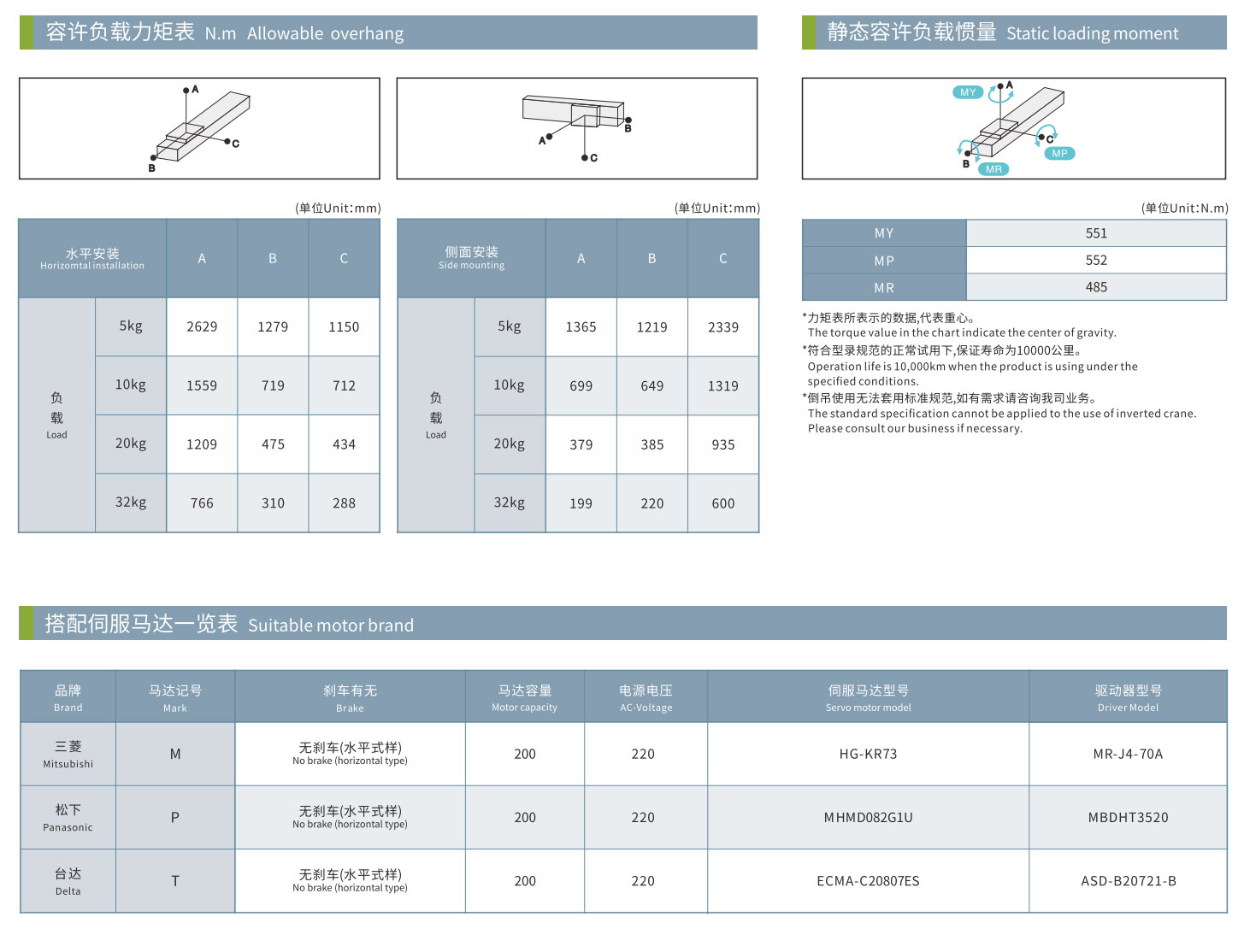
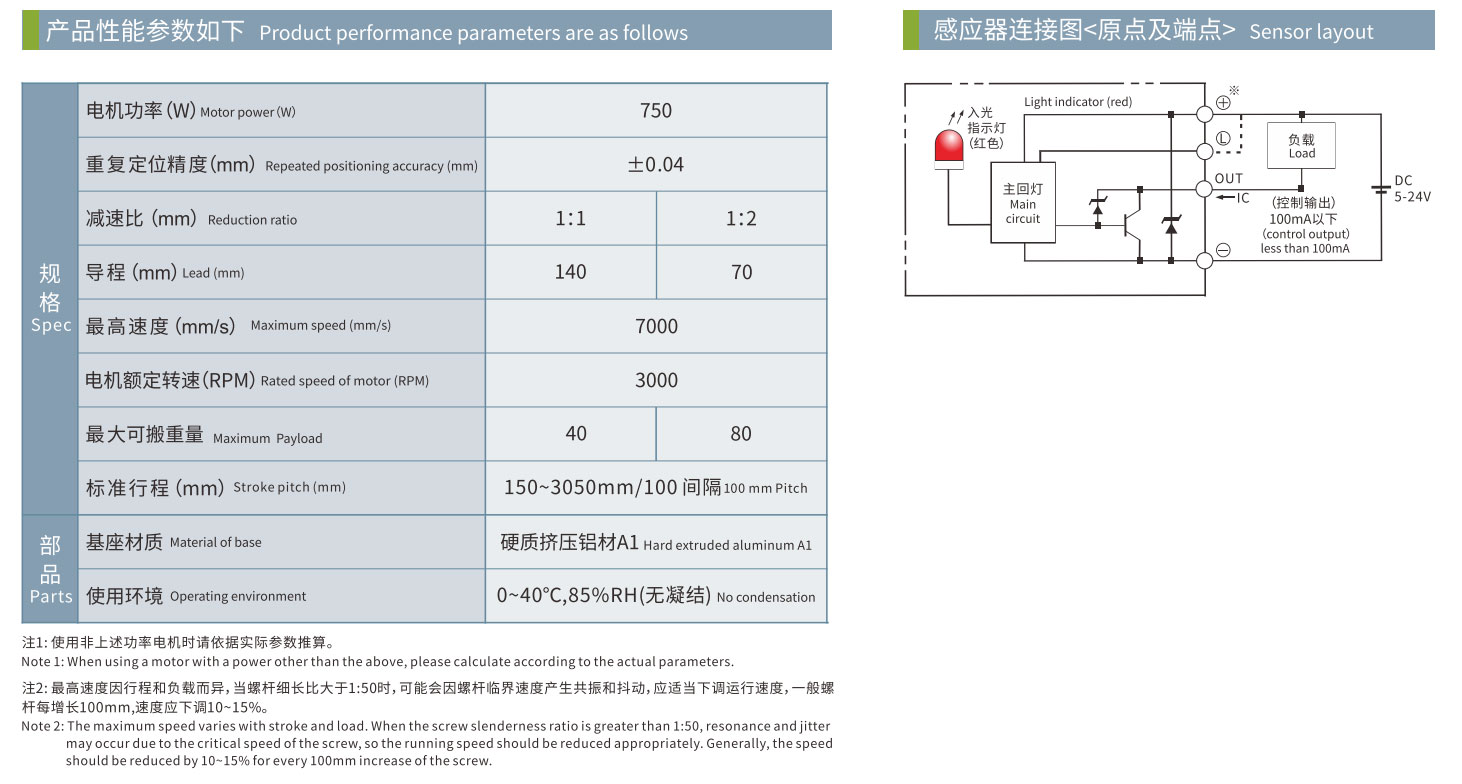
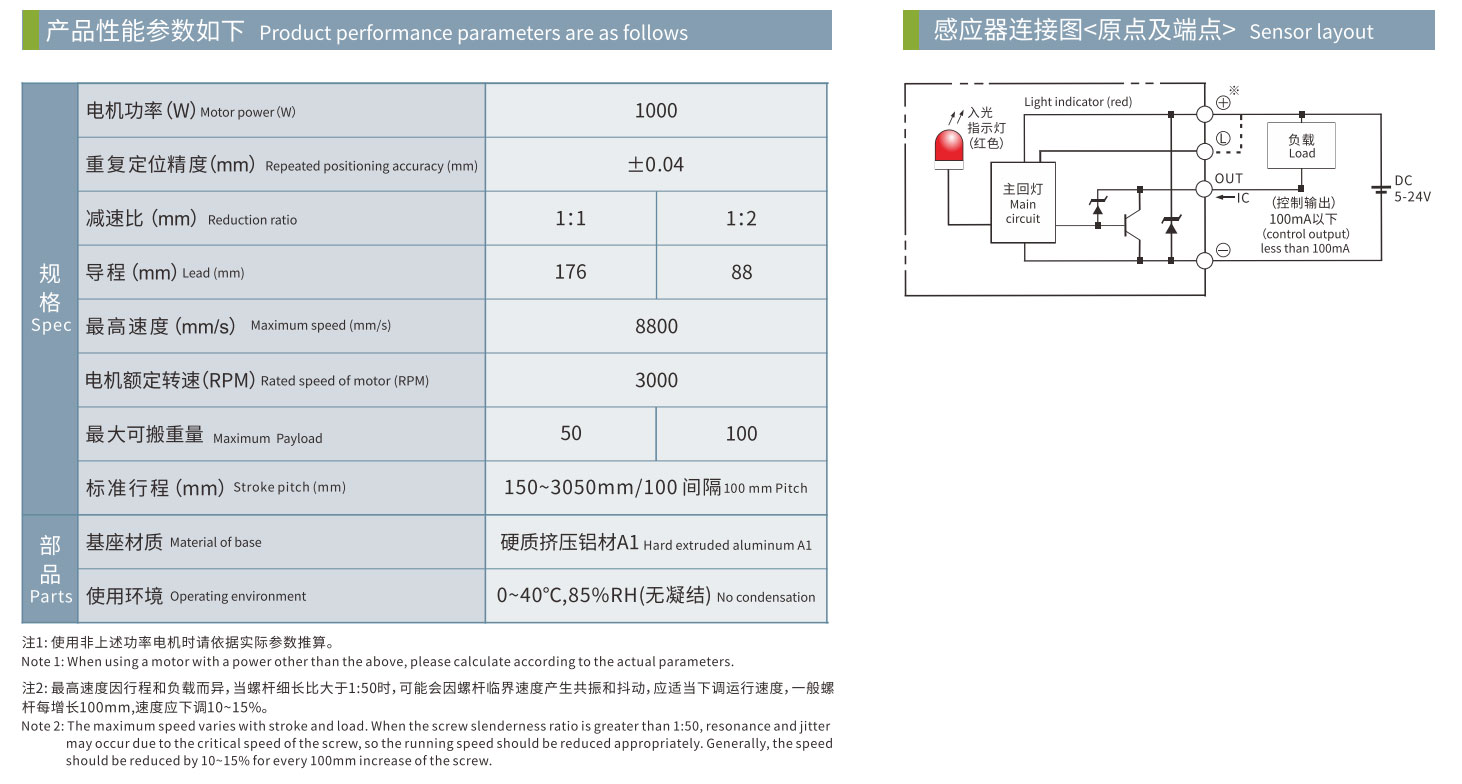
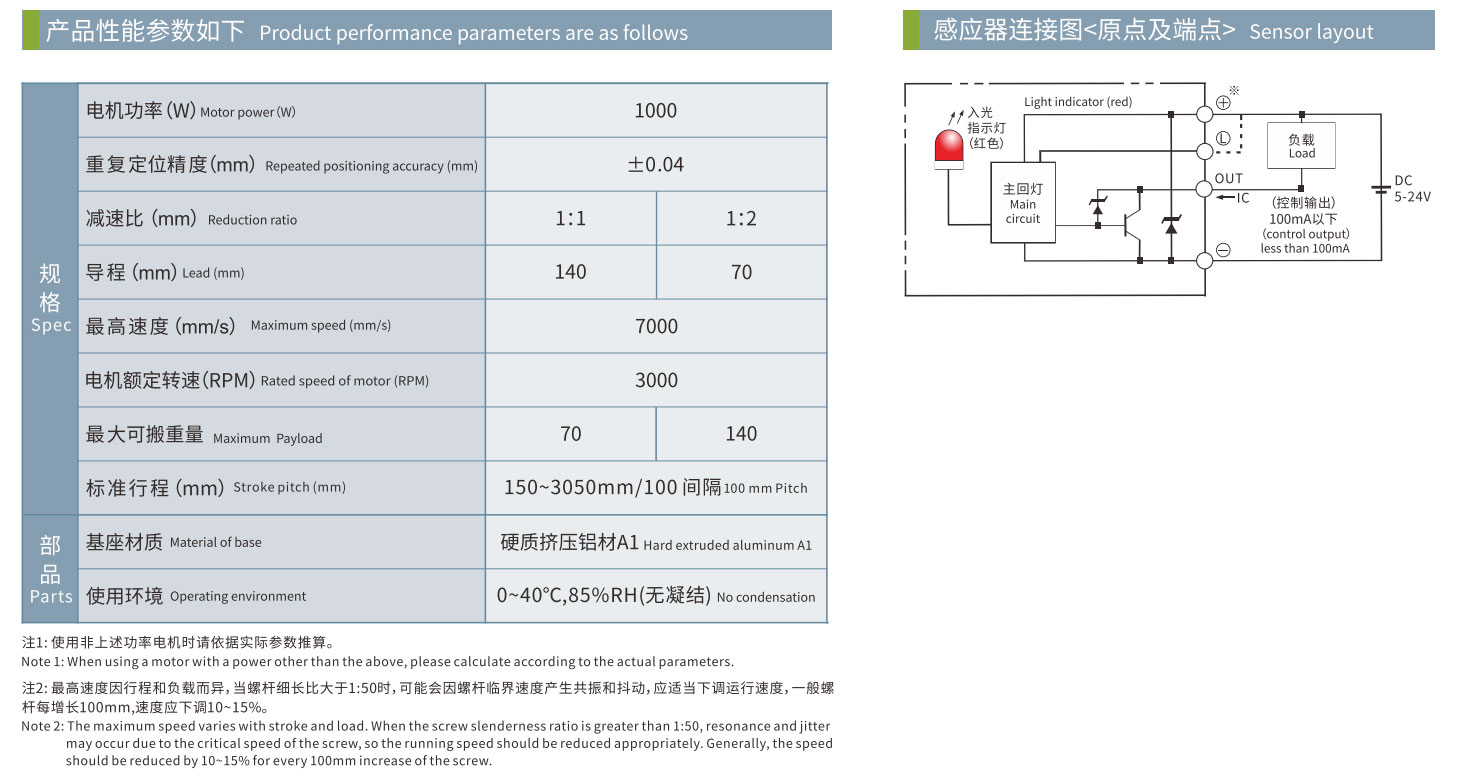
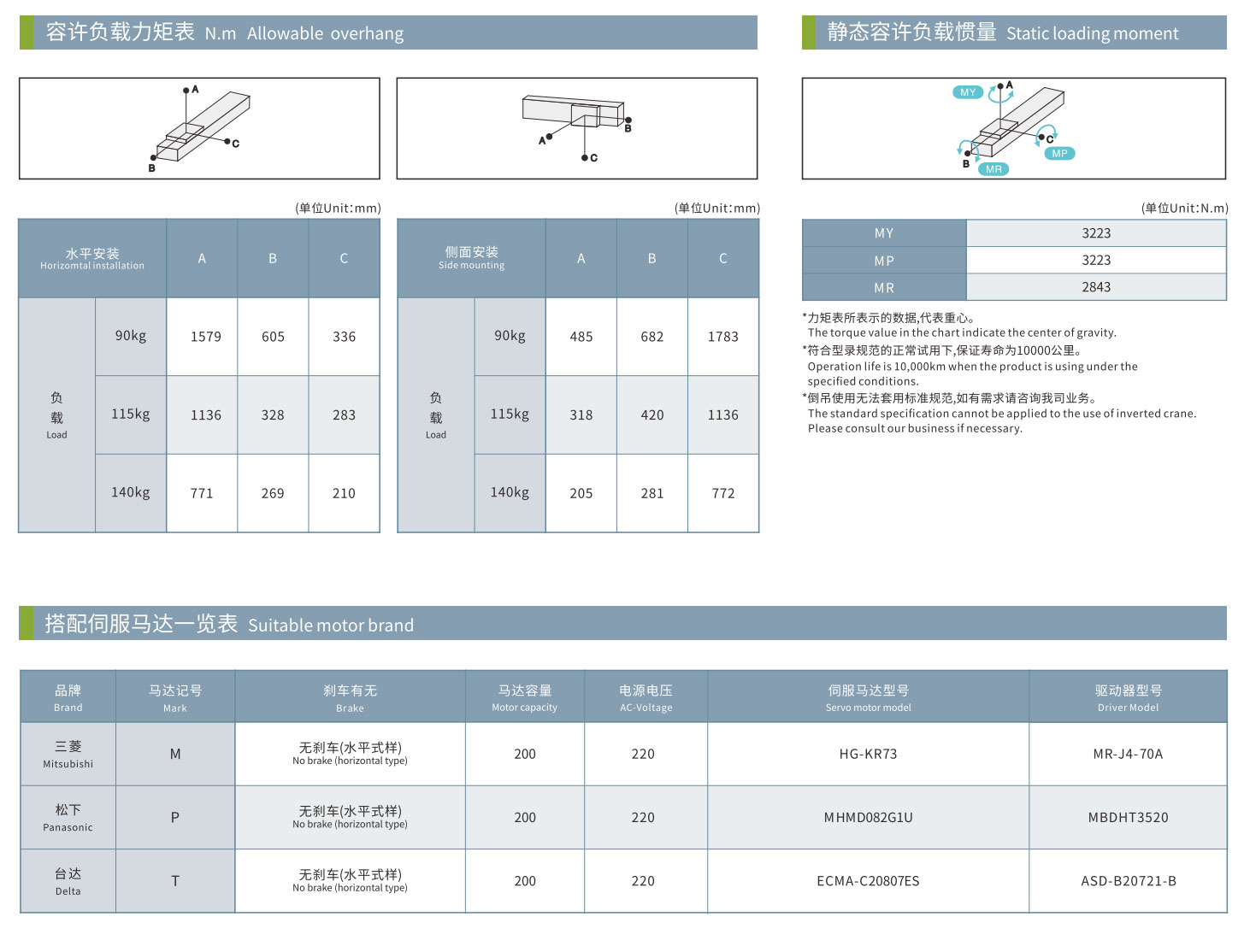
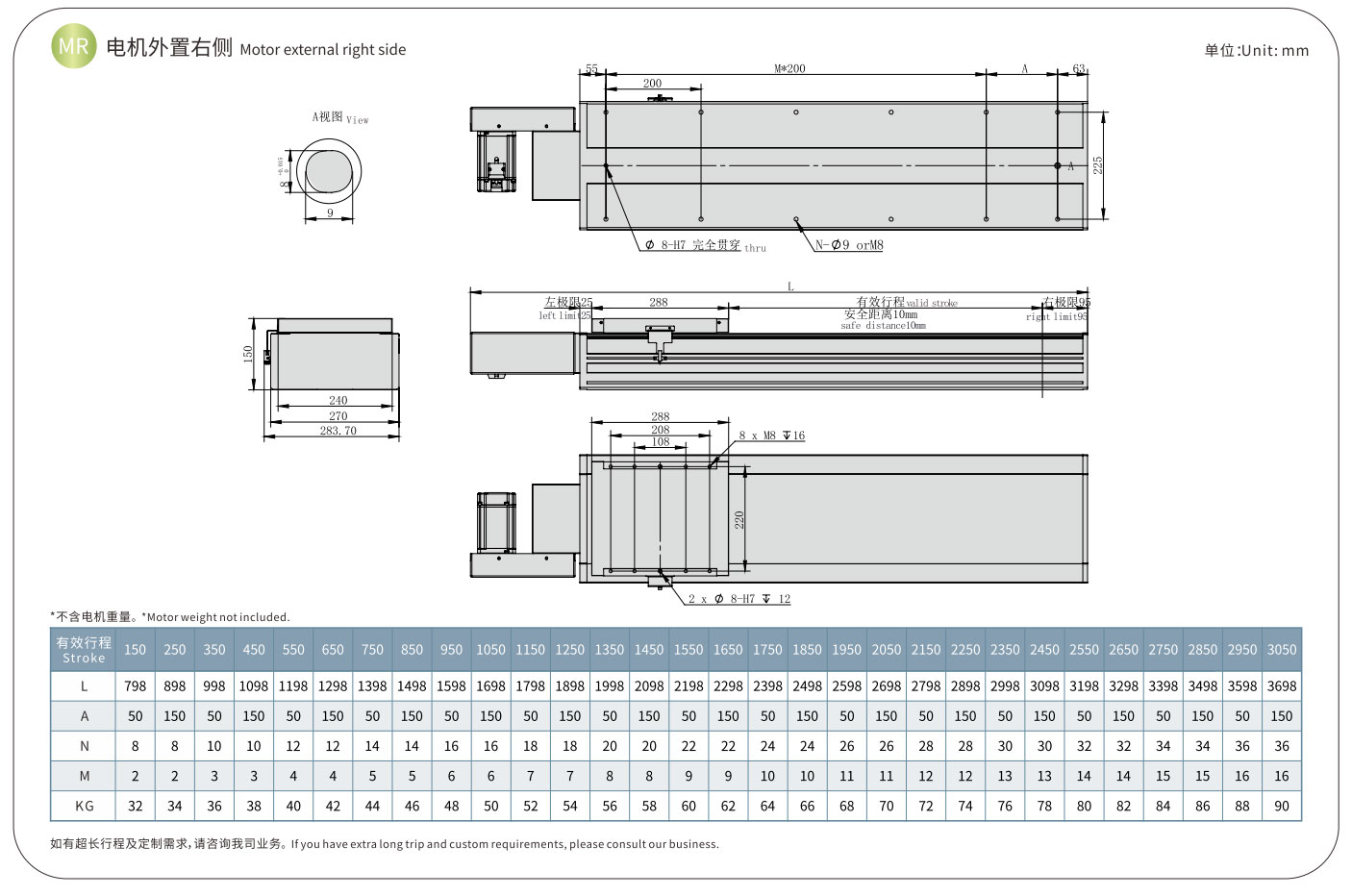
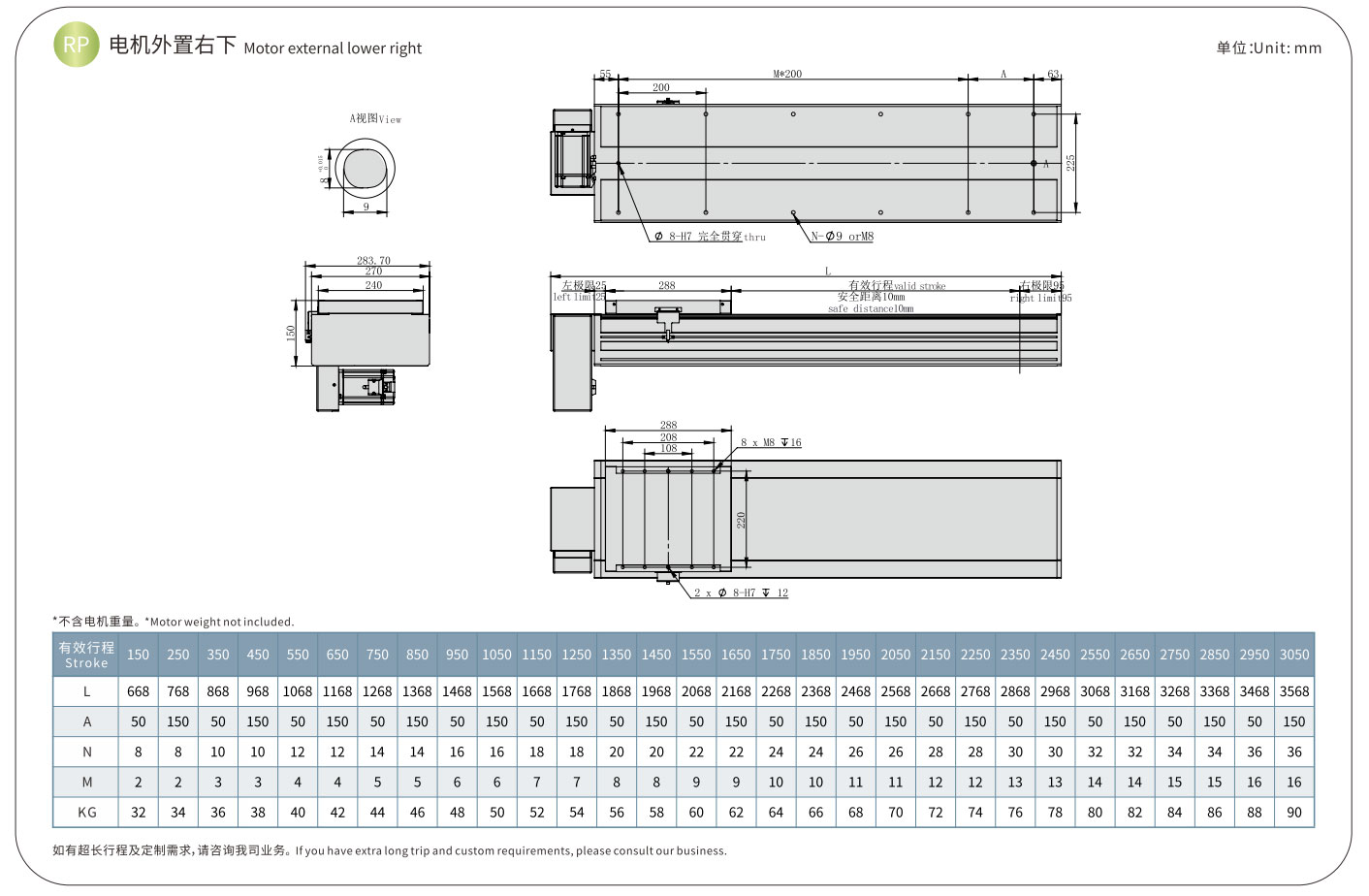
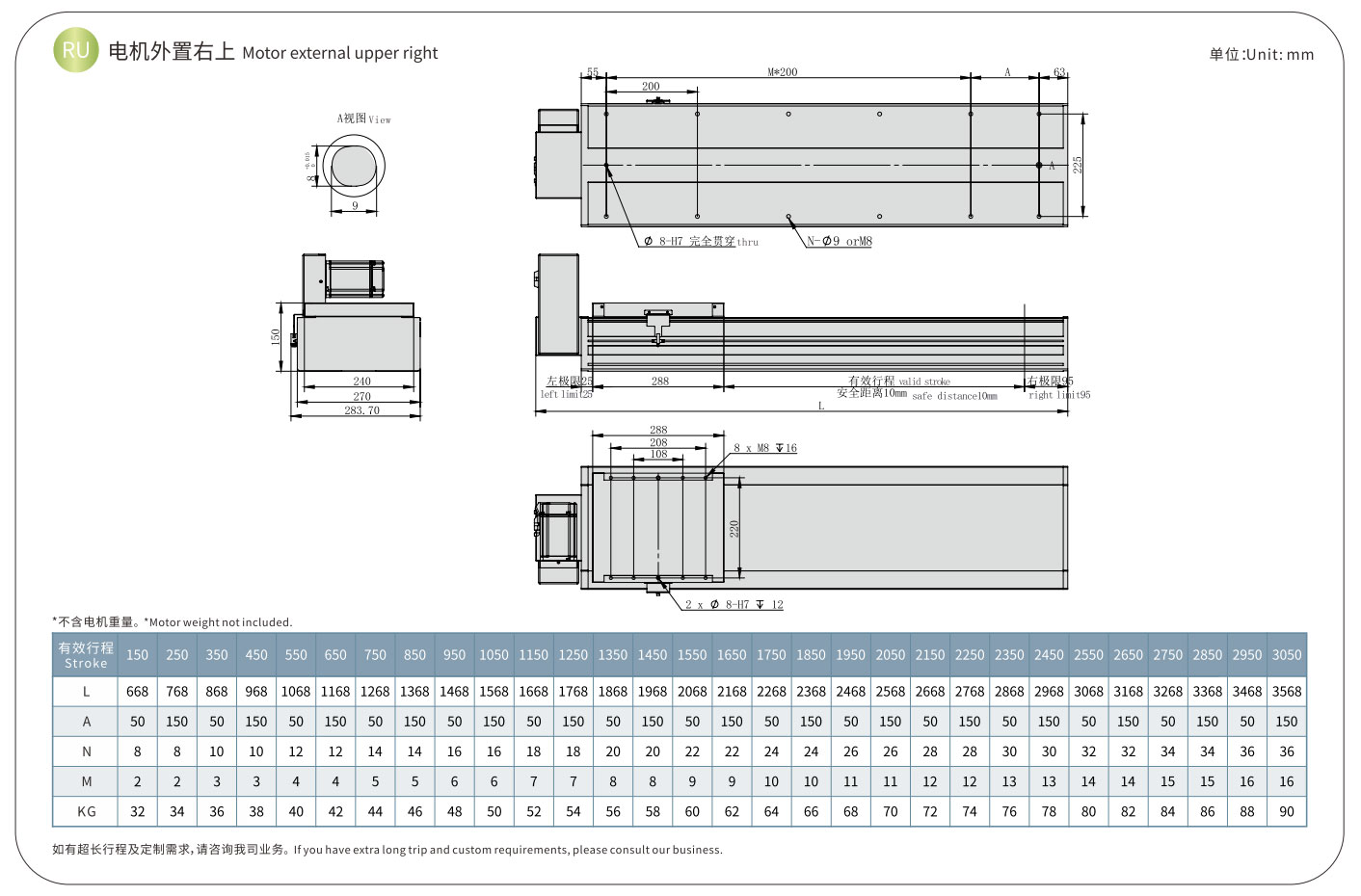
Gibalikbalik nga Pagkatukma sa Pagposisyon: ± 0.04mm
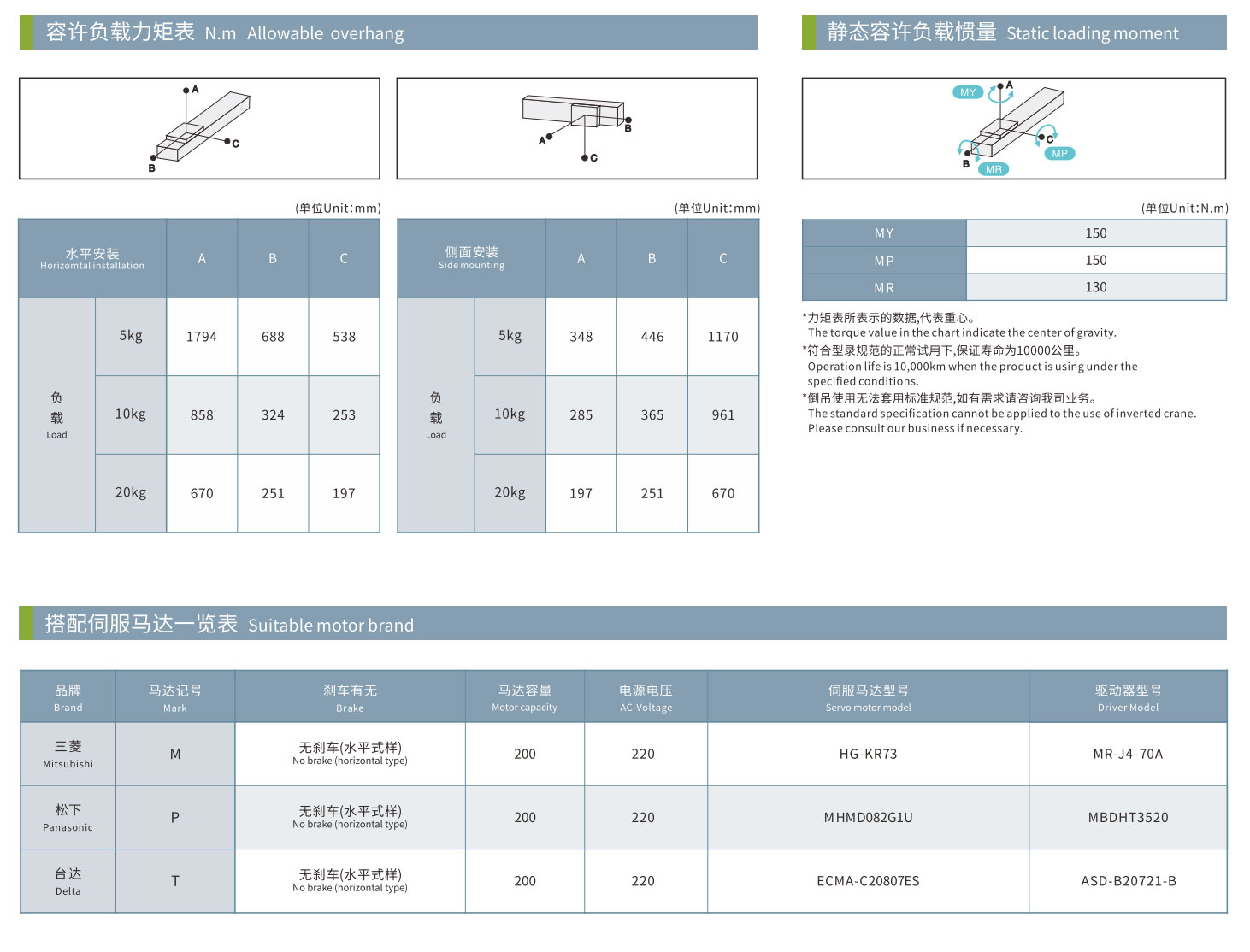
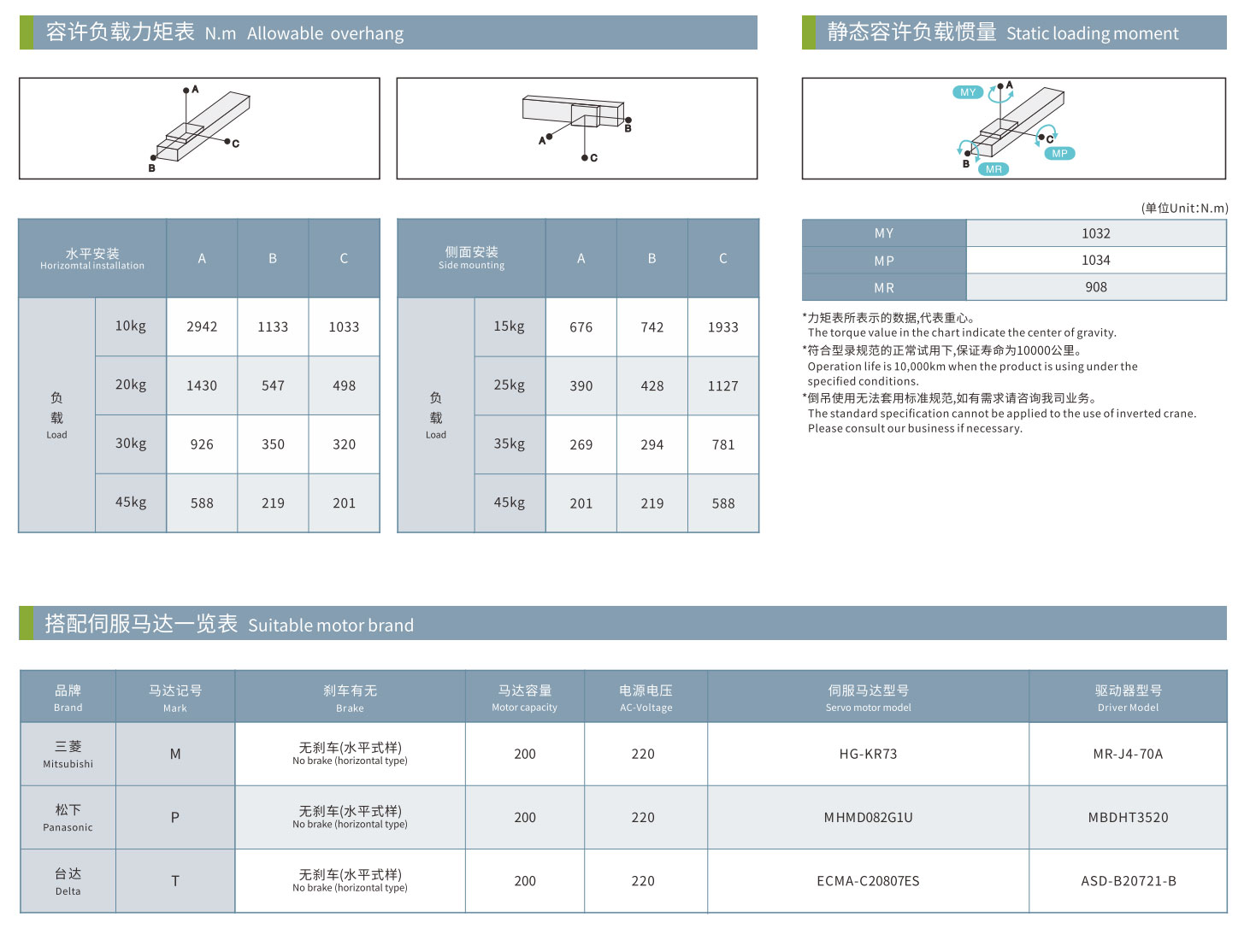
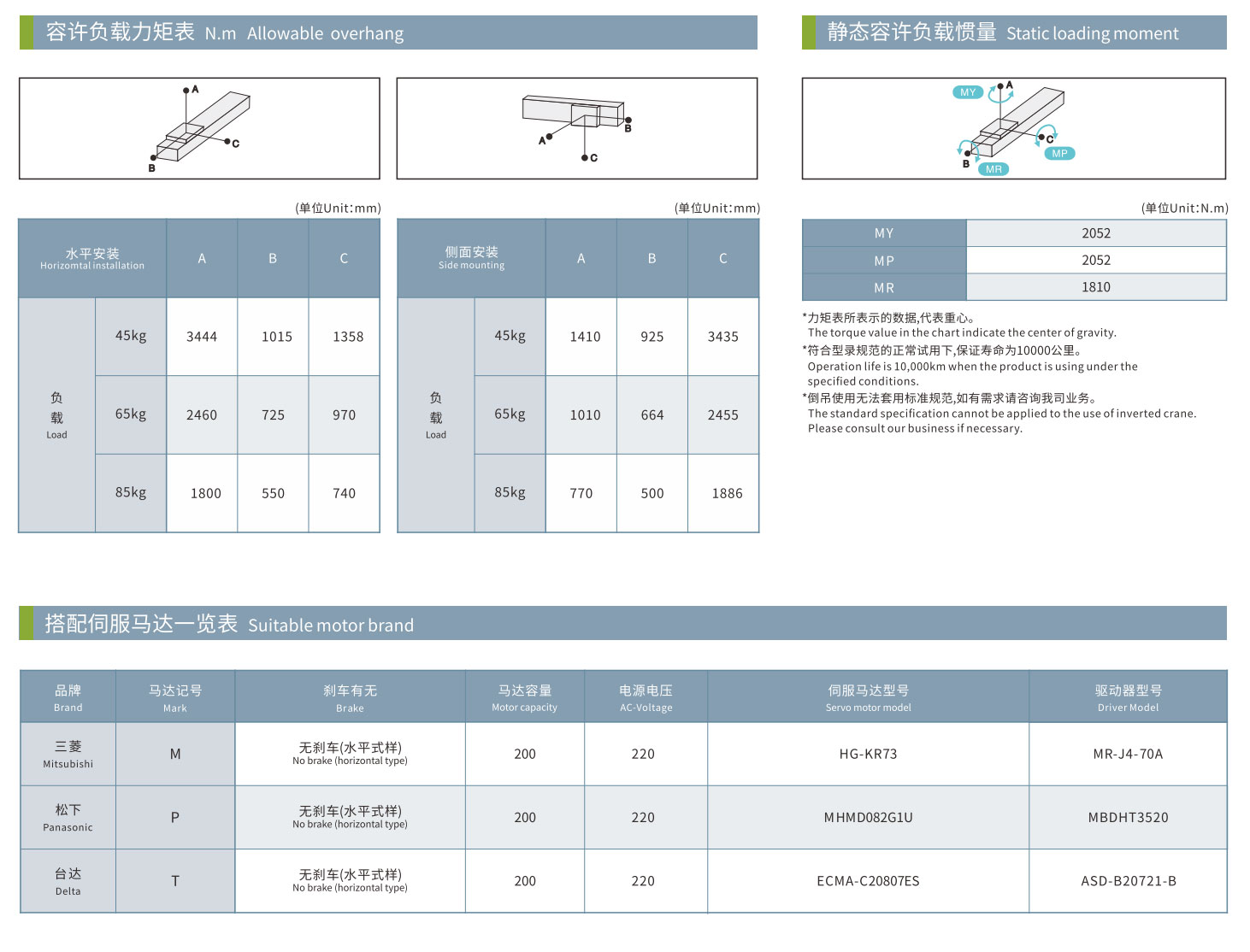
Max Payload: 140kg
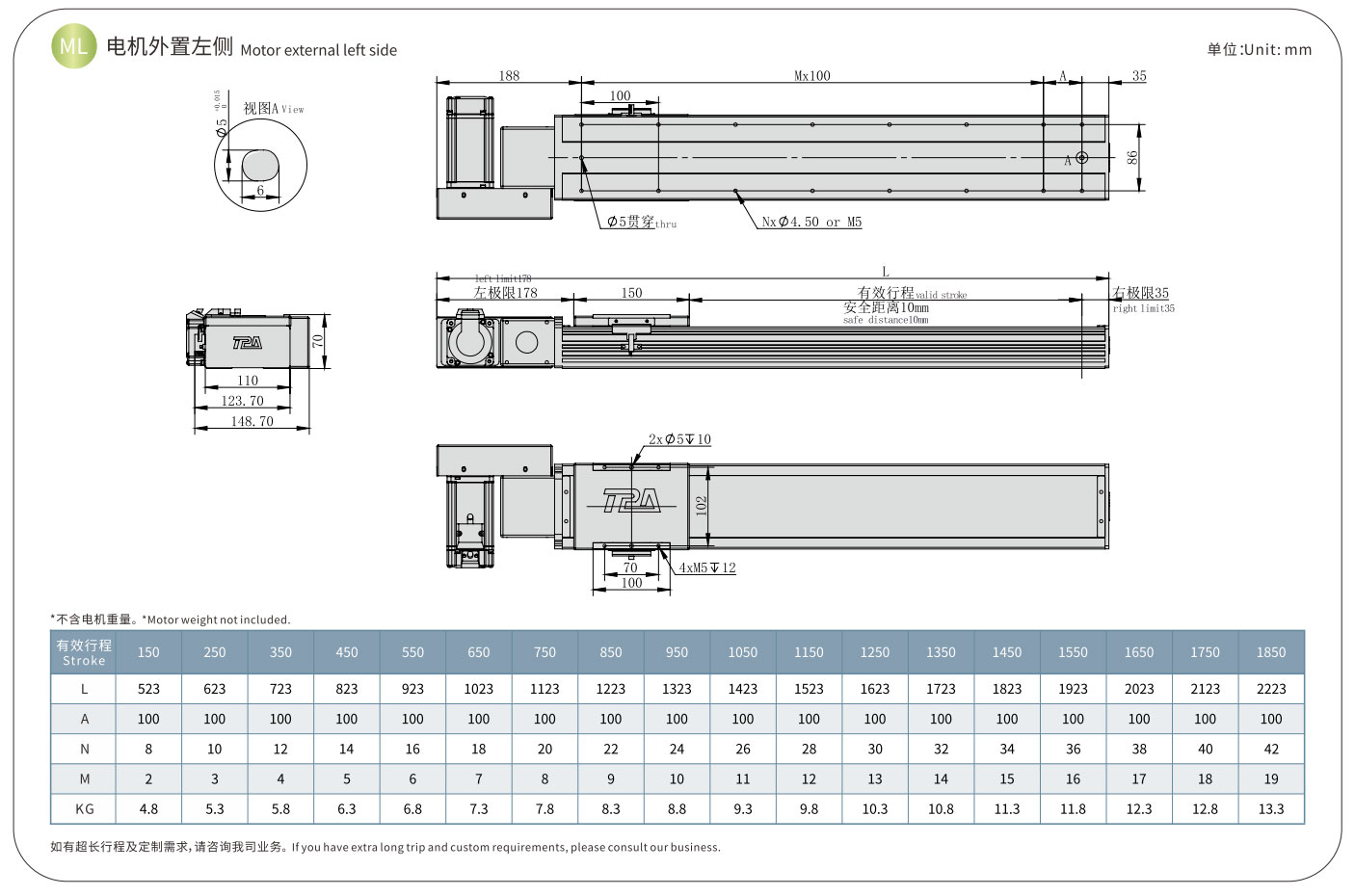
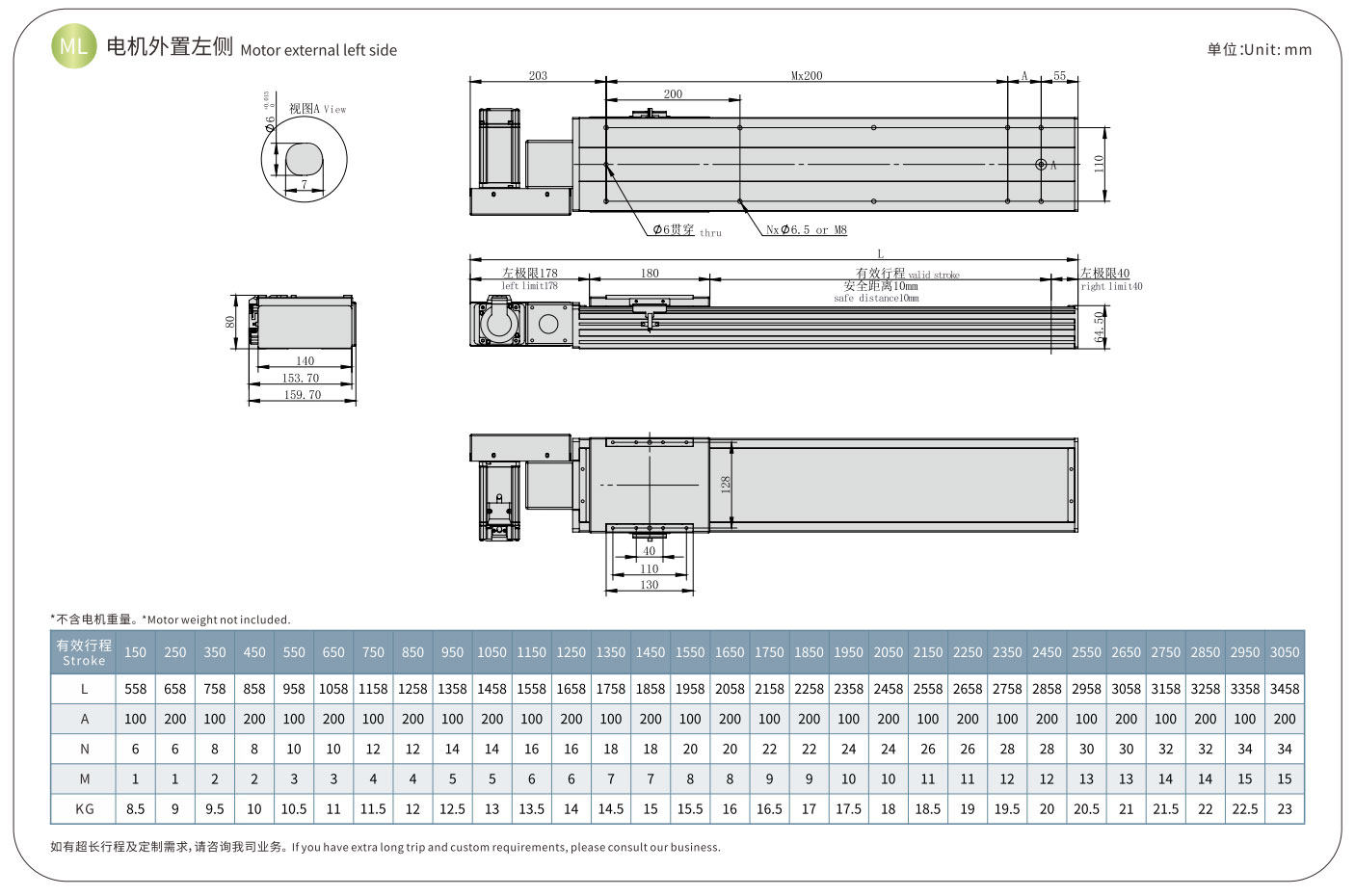
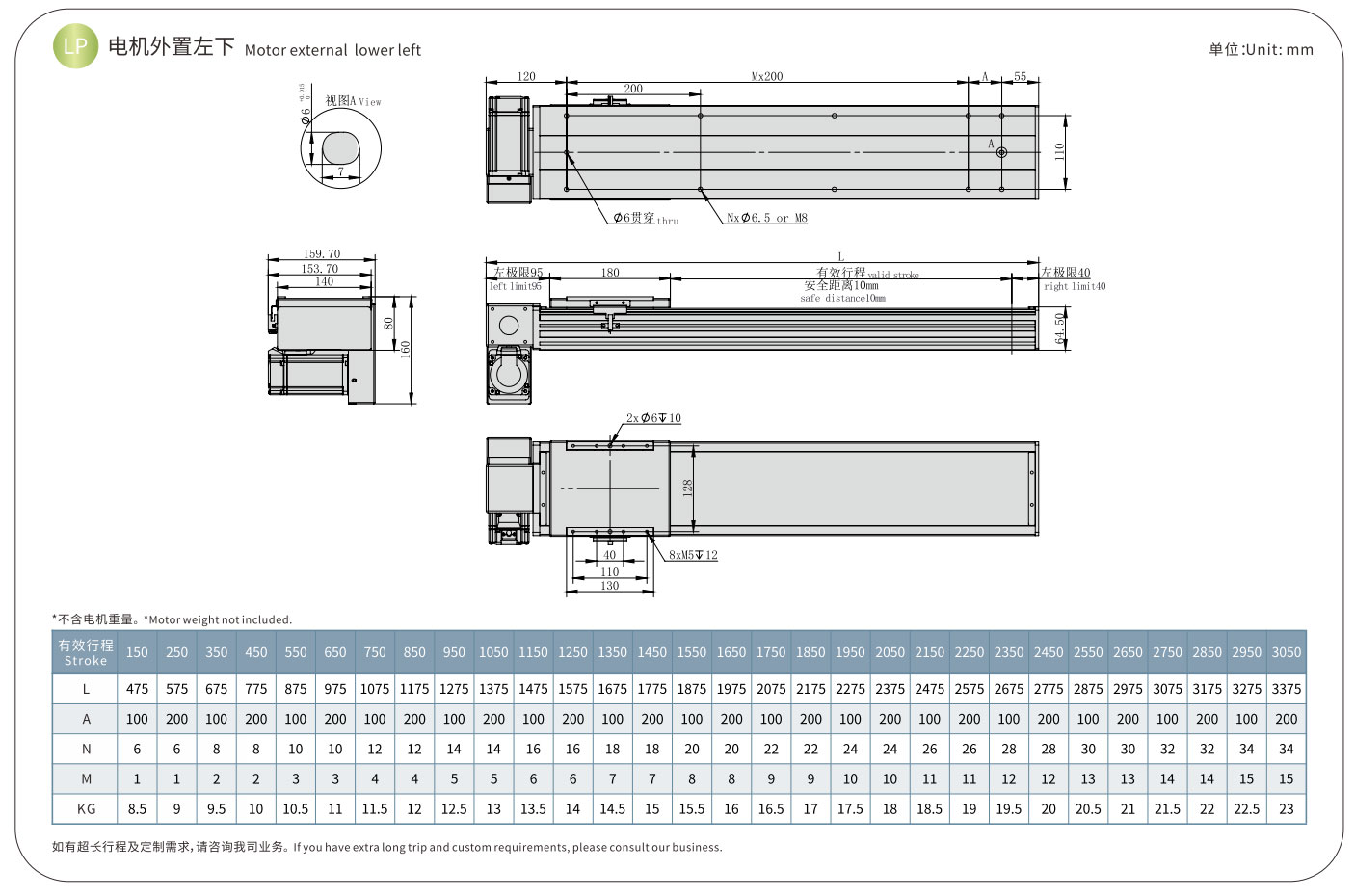
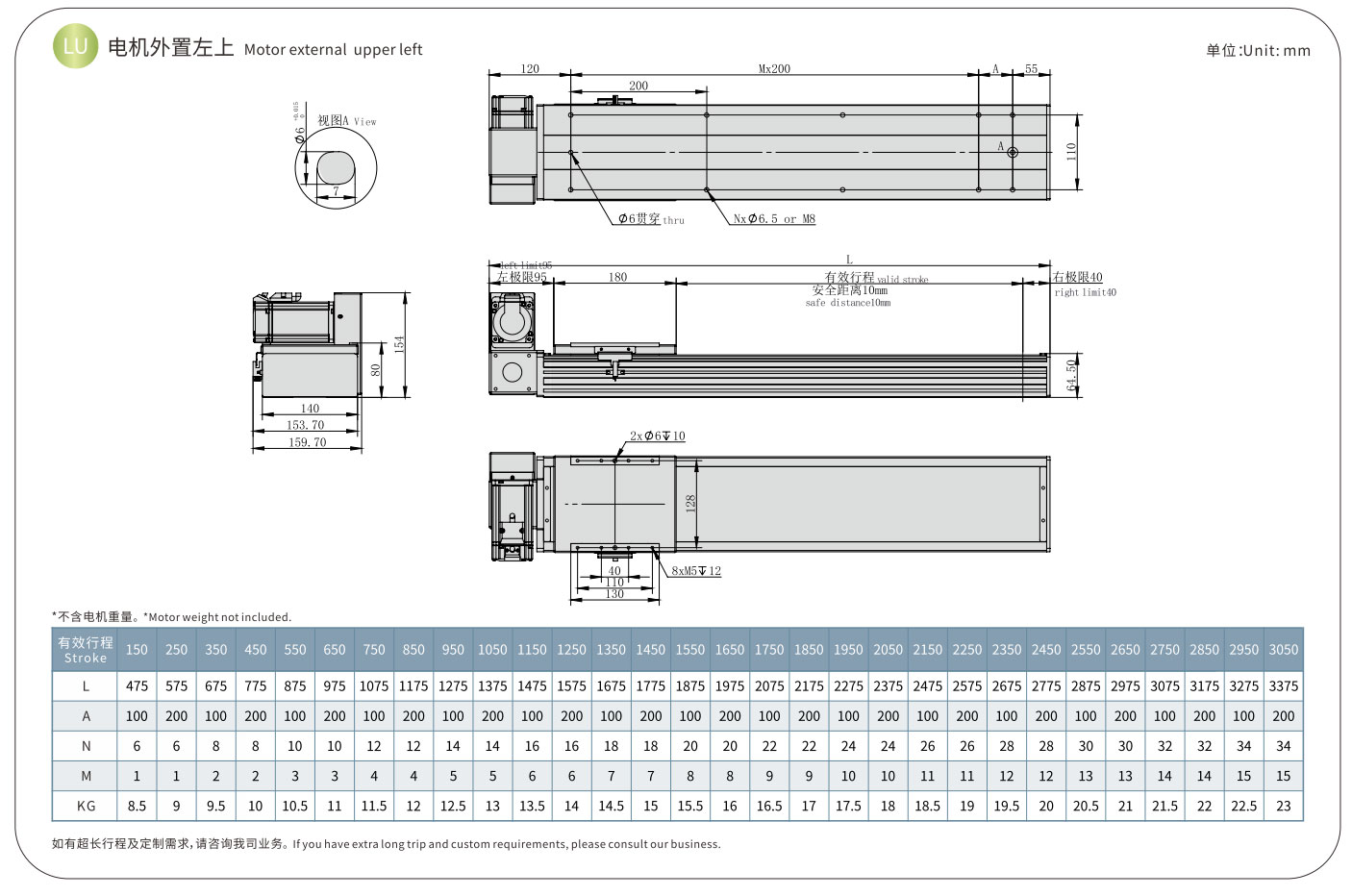
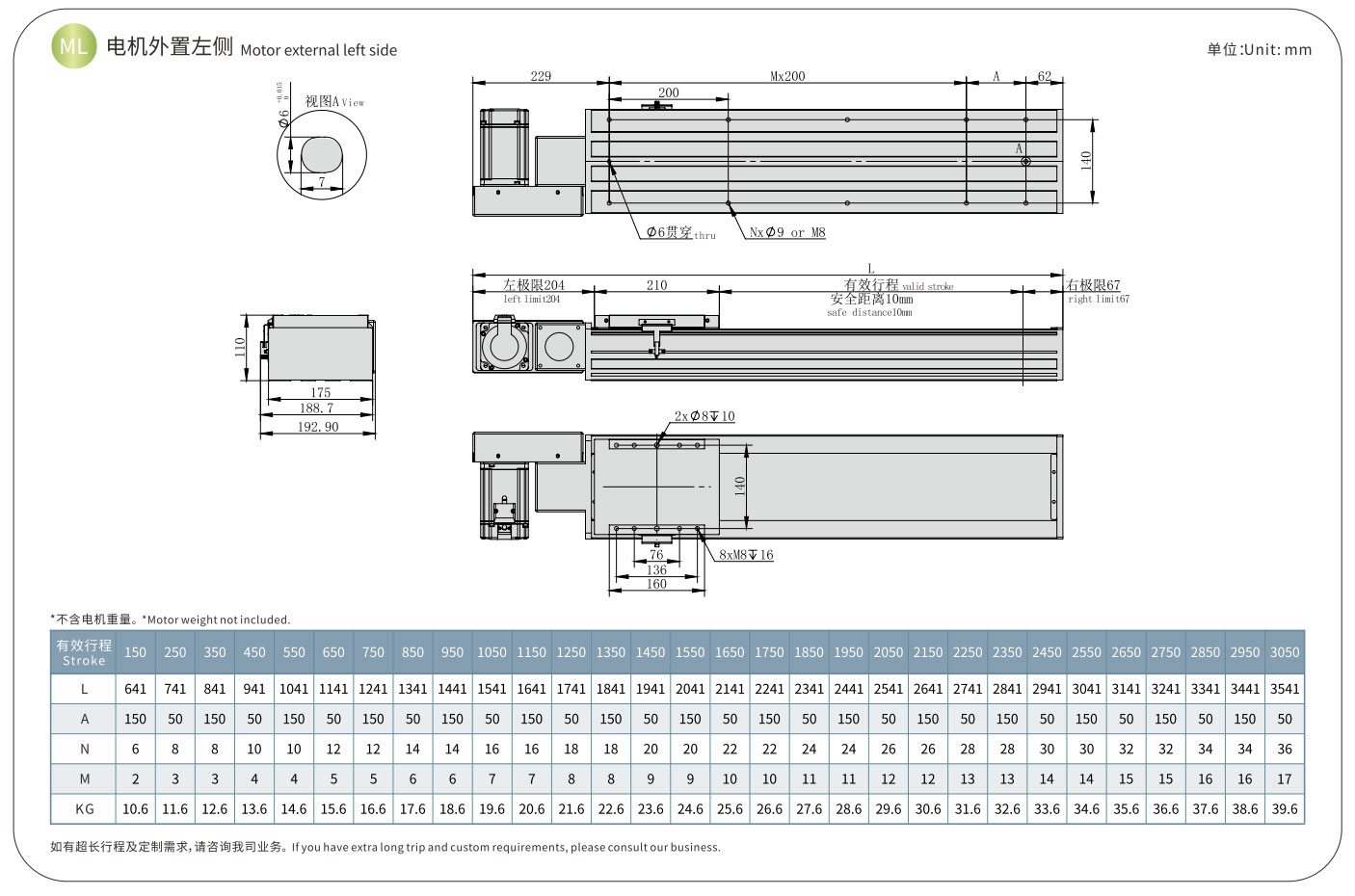
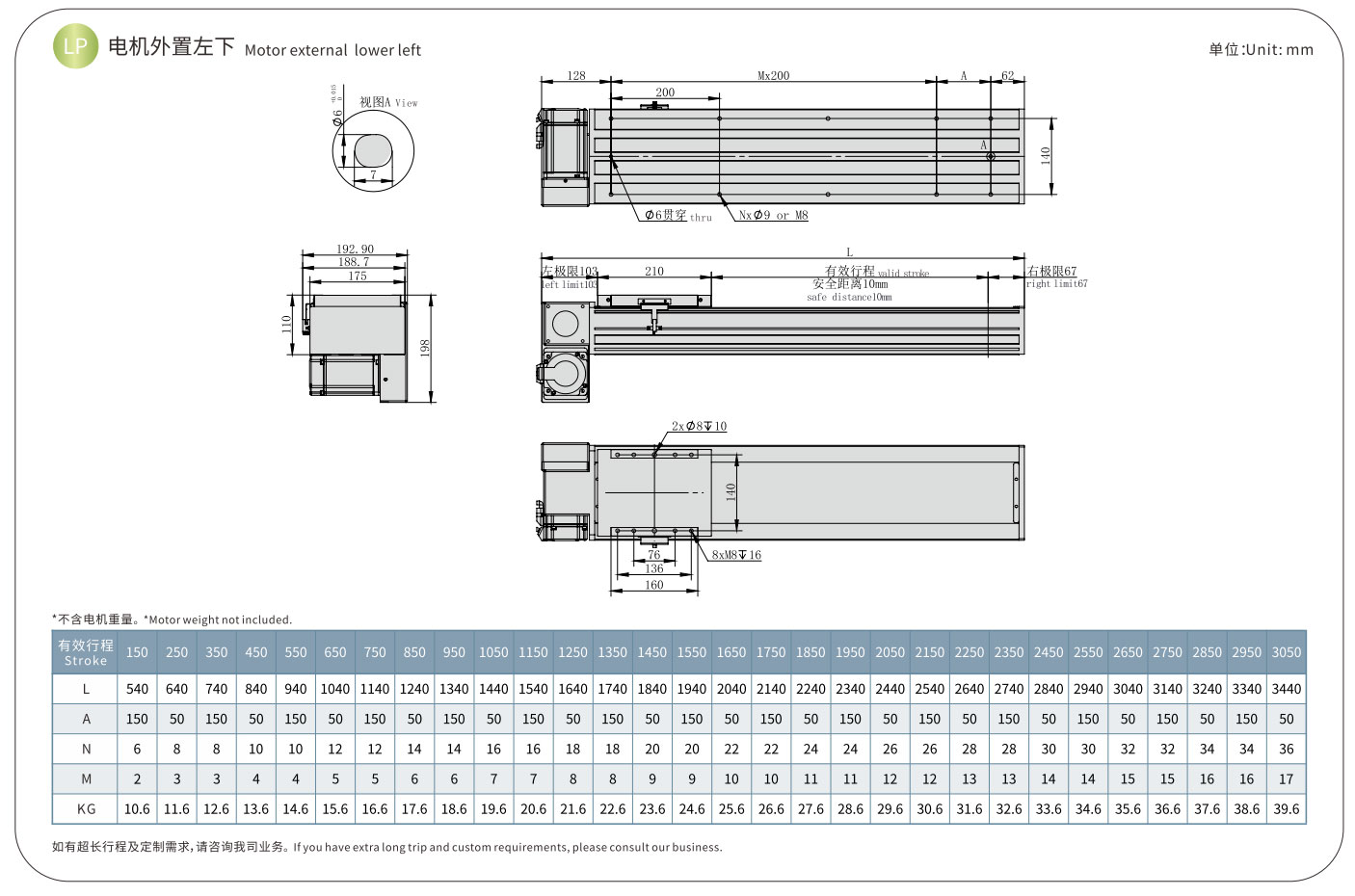
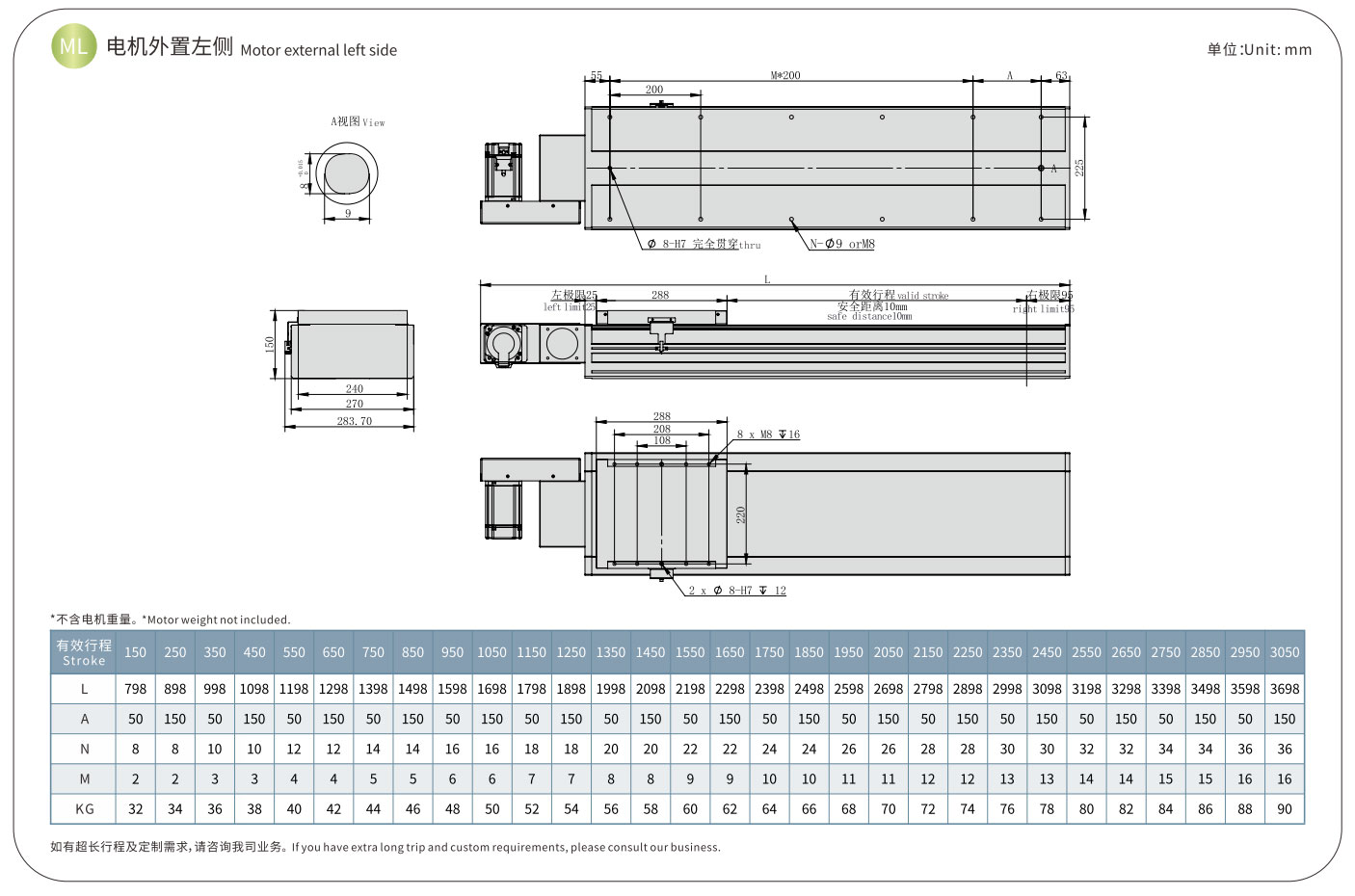
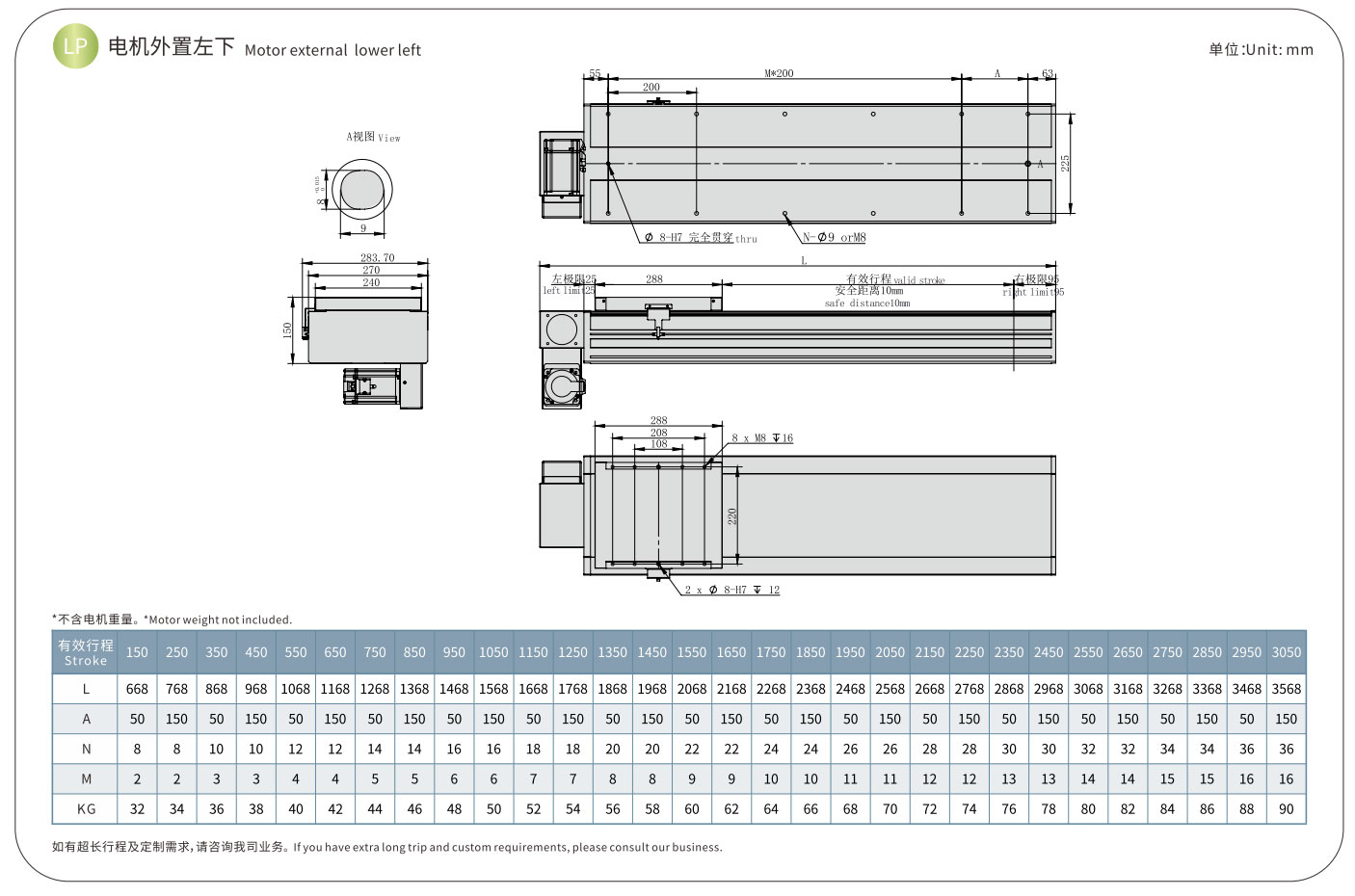
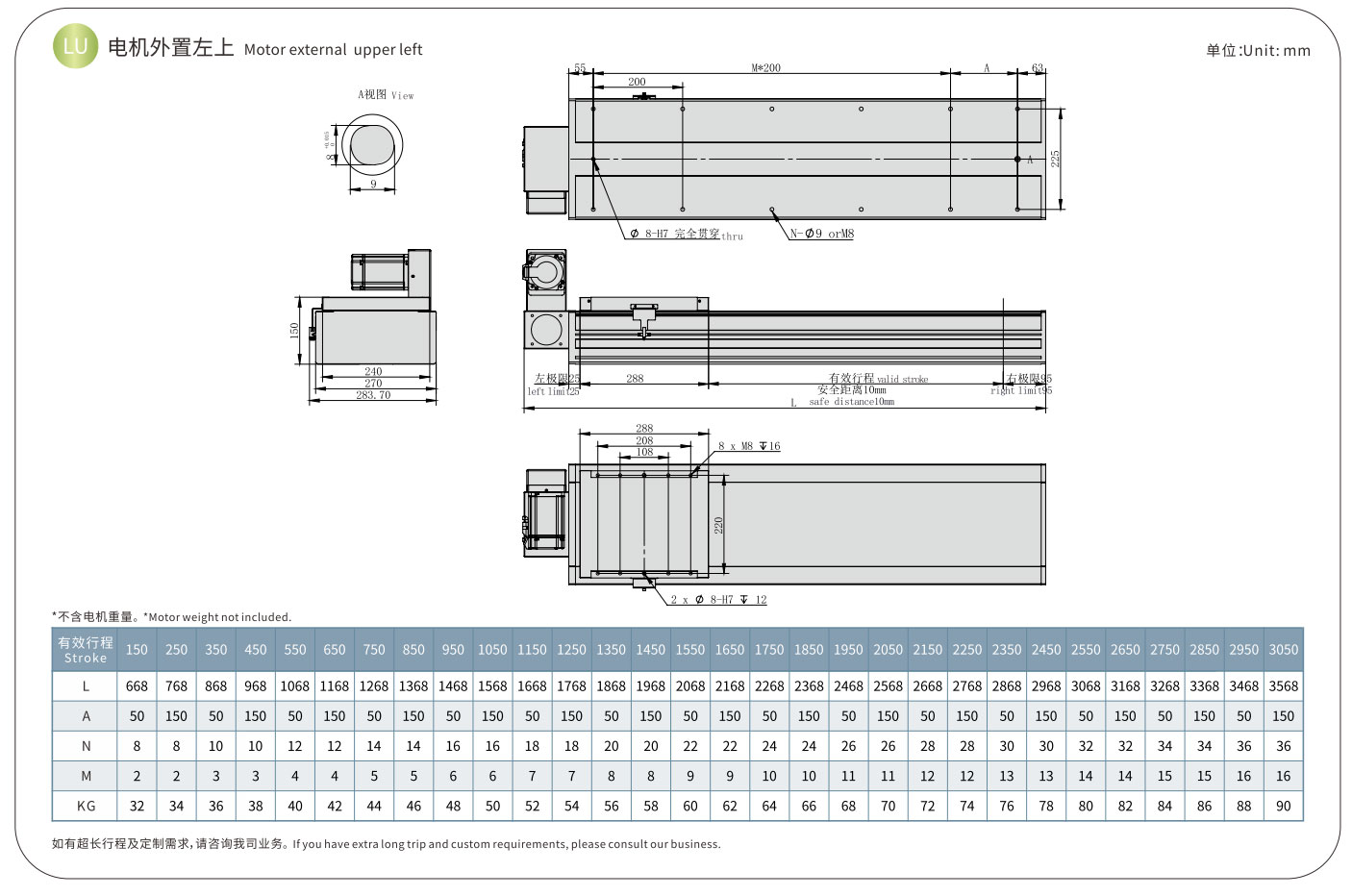
Stroke: 100 - 3050mm
Max Speed: 7000mm/s

1. Flat nga disenyo, mas gaan nga kinatibuk-ang gibug-aton, ubos nga kombinasyon sa gitas-on ug mas maayo nga rigidity.
2. Ang istruktura na-optimize, ang katukma mas maayo, ug ang sayup nga gipahinabo sa pag-assemble sa daghang mga aksesorya gipakunhod.
3. Ang asembliya makadaginot sa panahon, makadaginot sa trabaho ug sayon. Dili kinahanglan nga tangtangon ang tabon sa aluminyo aron ma-install ang pagkabit o module.
4. Ang pagmentinar yano ra, ang duha ka kilid sa module adunay mga lungag sa pag-injection sa lana, ug ang tabon dili kinahanglan nga tangtangon.







Dugang nga mga produkto

ONB Series Belt Driven Linear Module Half Enclosed

OCB Series Belt Driven Linear Module Hingpit nga Gilakip ...

ONB-F Series Belt Driven Linear Module External...

HNB-E Series Belt Driven Linear Actuators Half ...

HNB Series Belt Driven Linear Module Half Enclosed










