




KSR/KNR/KCR/KFR serija jednoosnih robota čelična baza


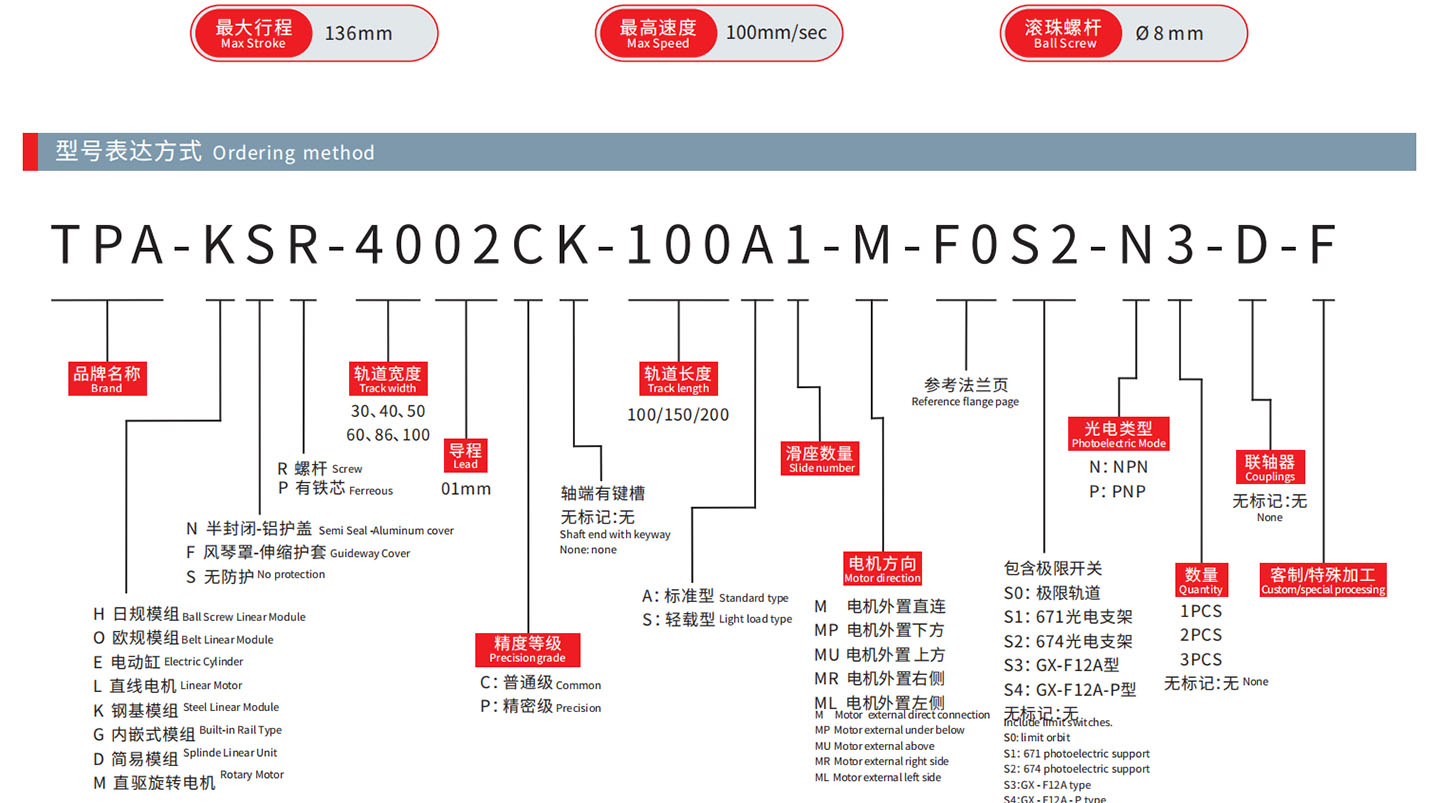
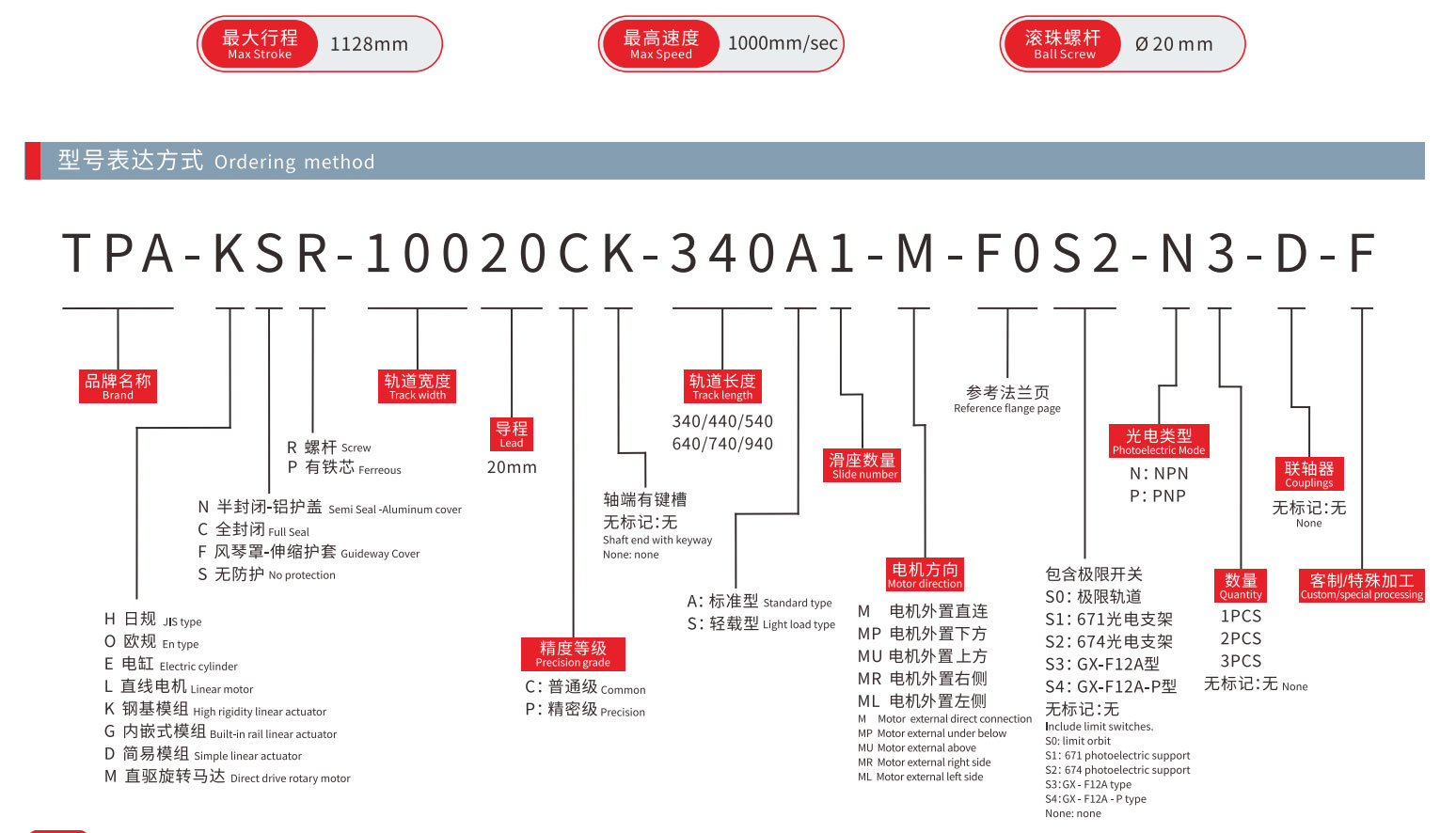
Birač modela
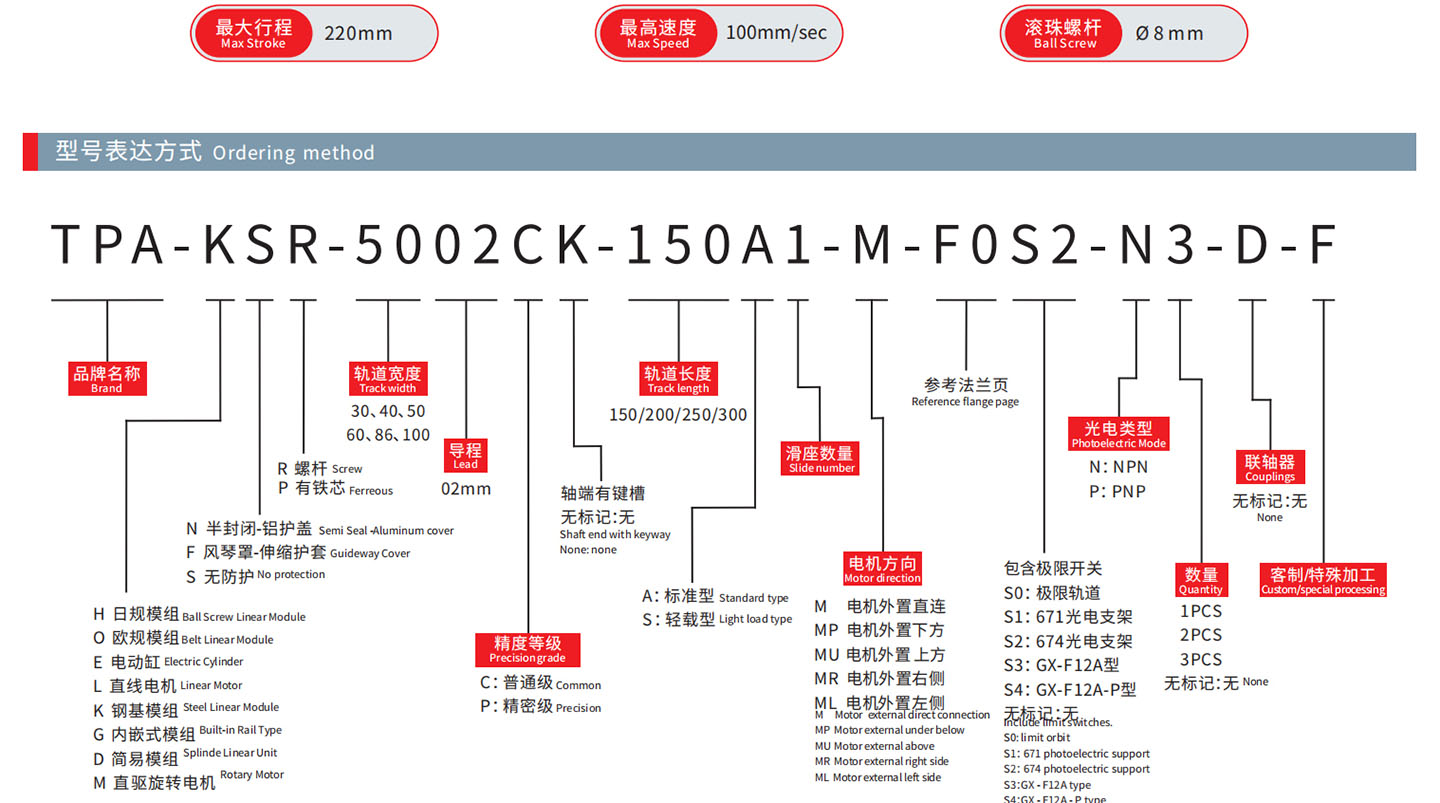
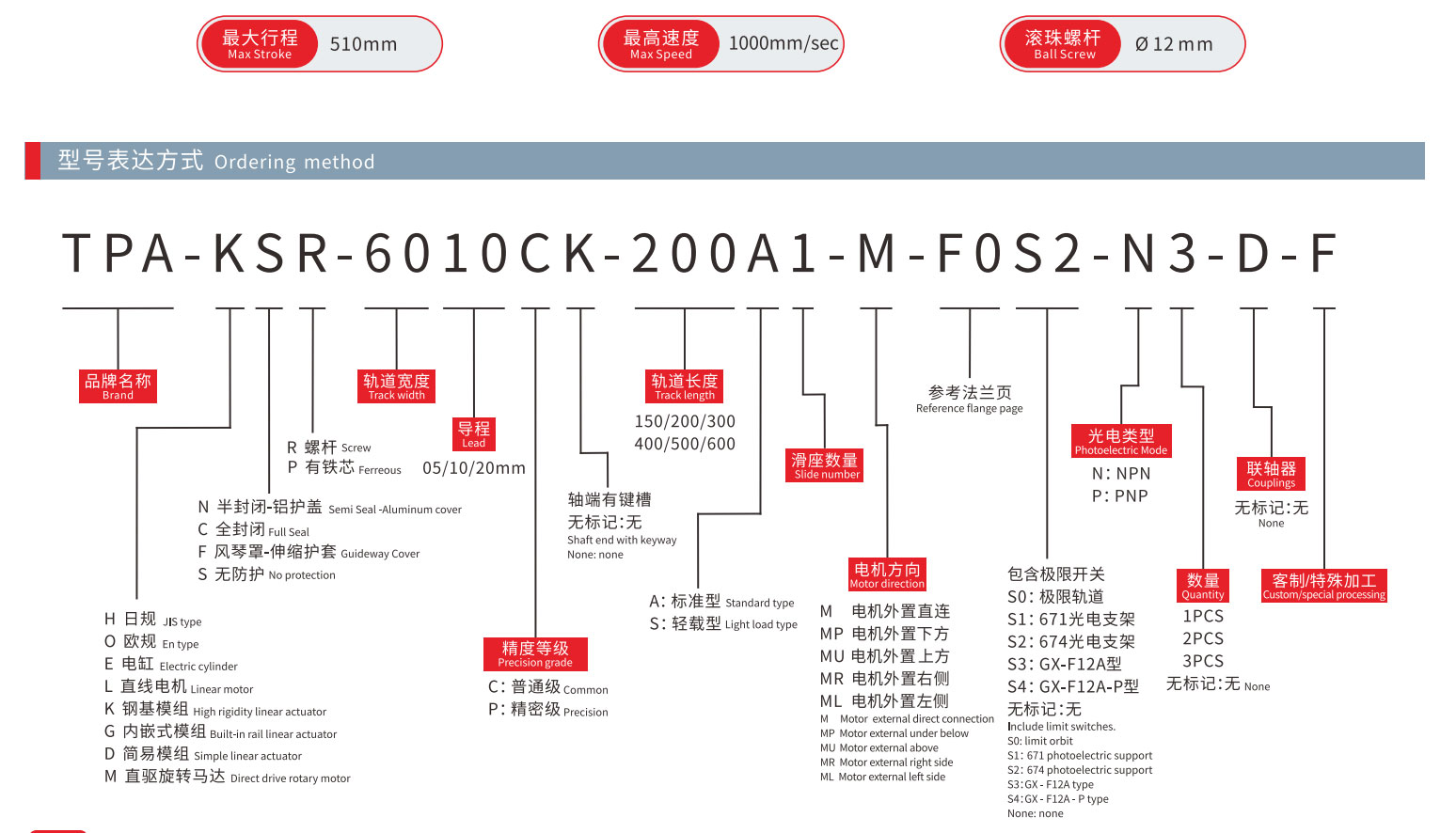
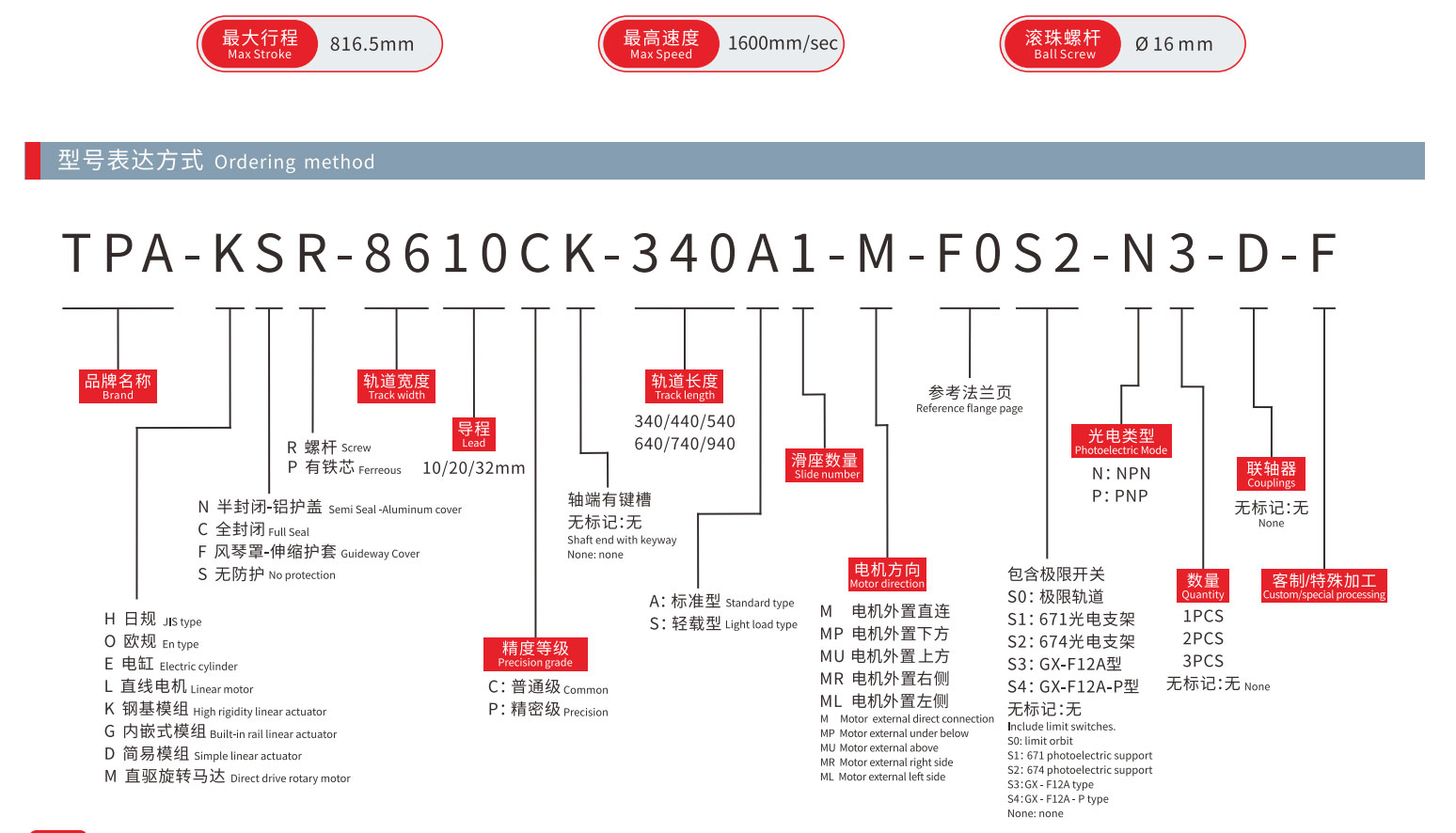
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
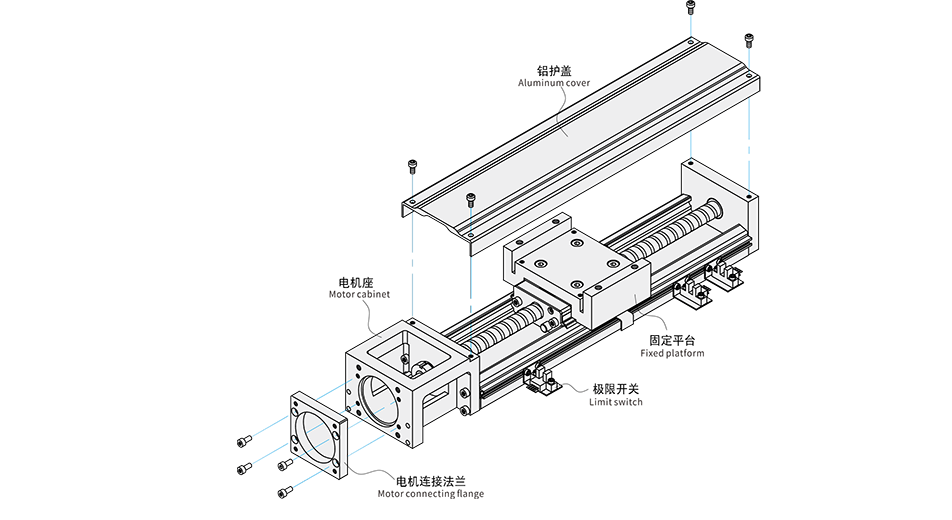
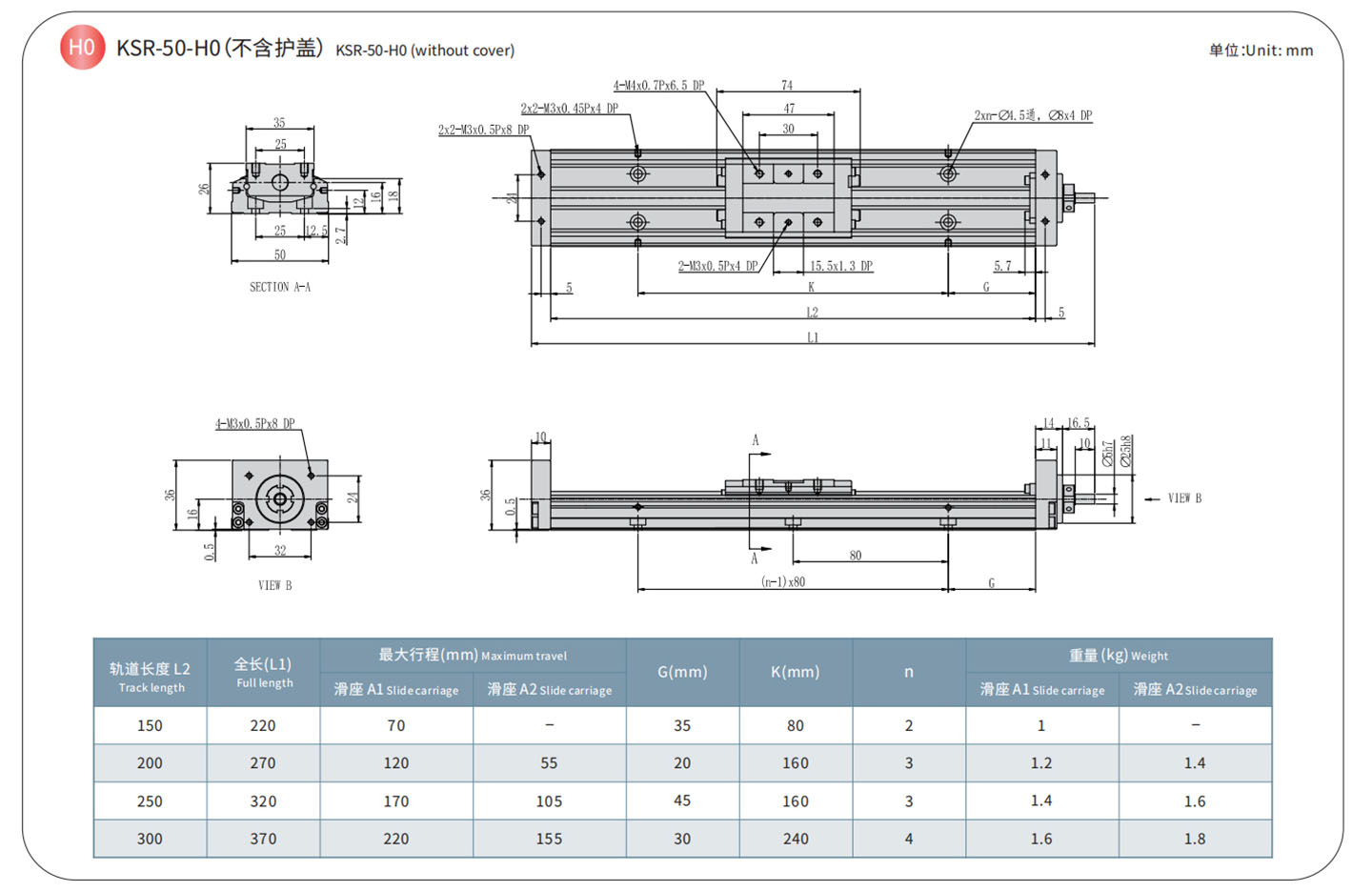
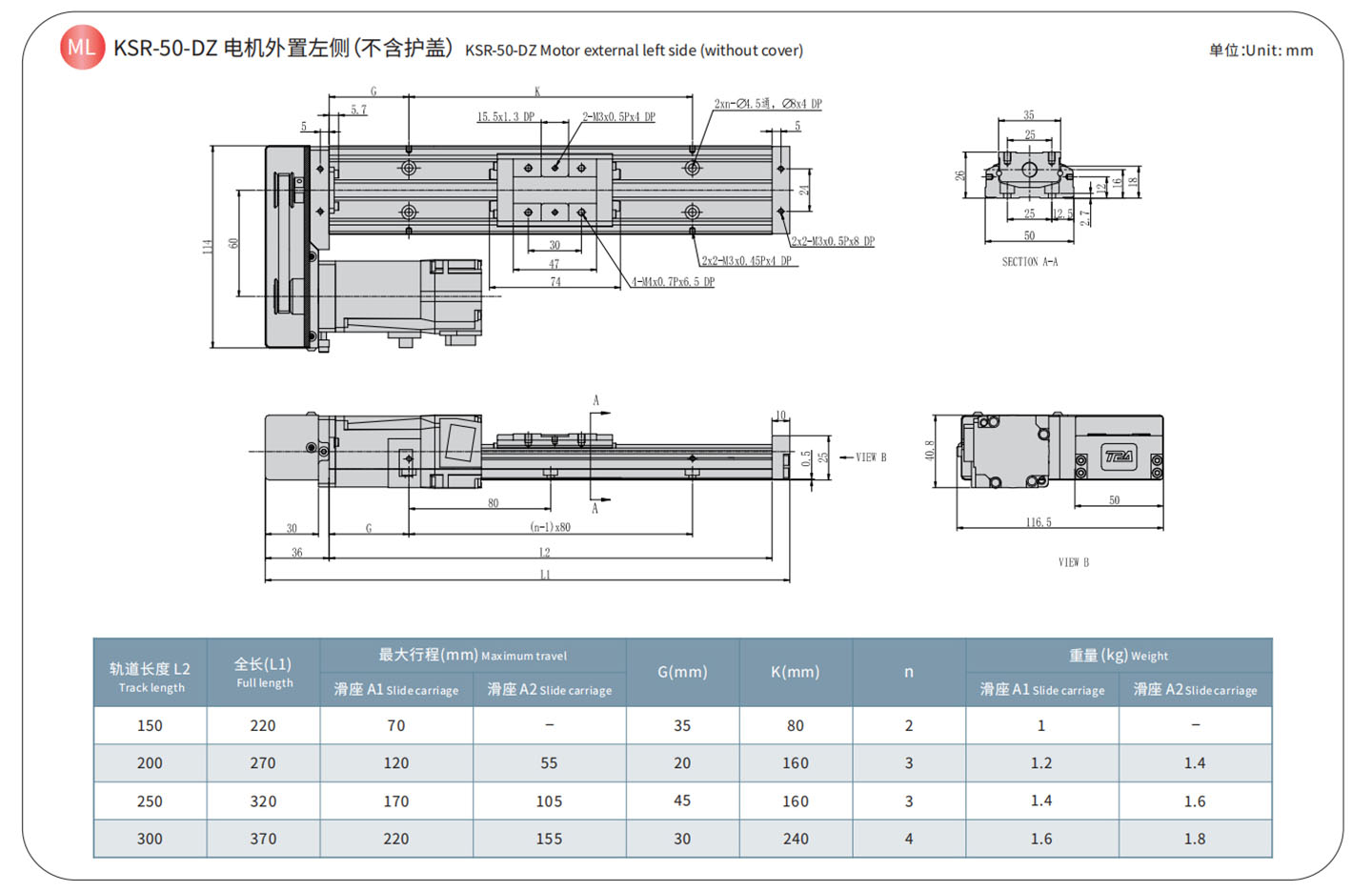
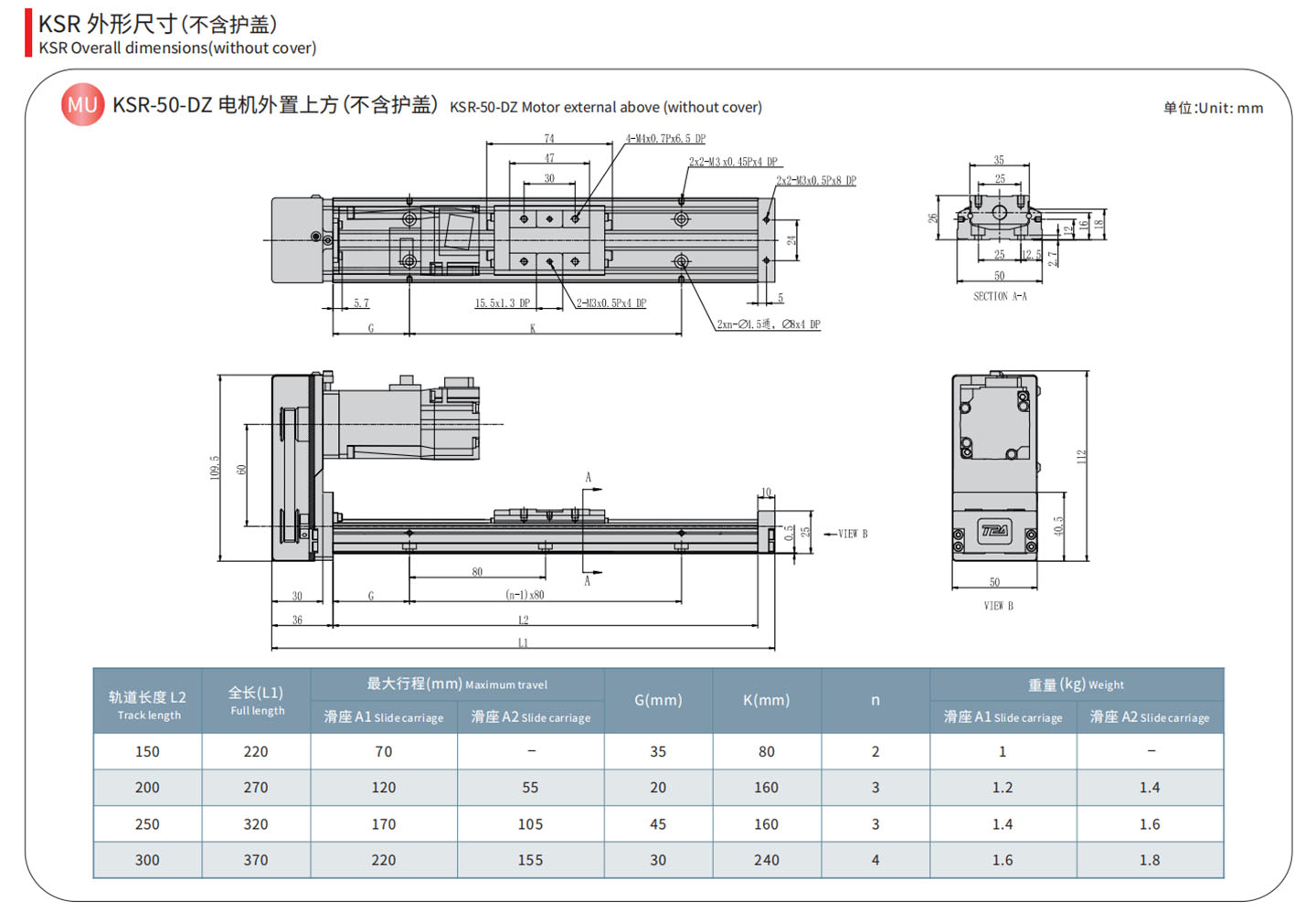
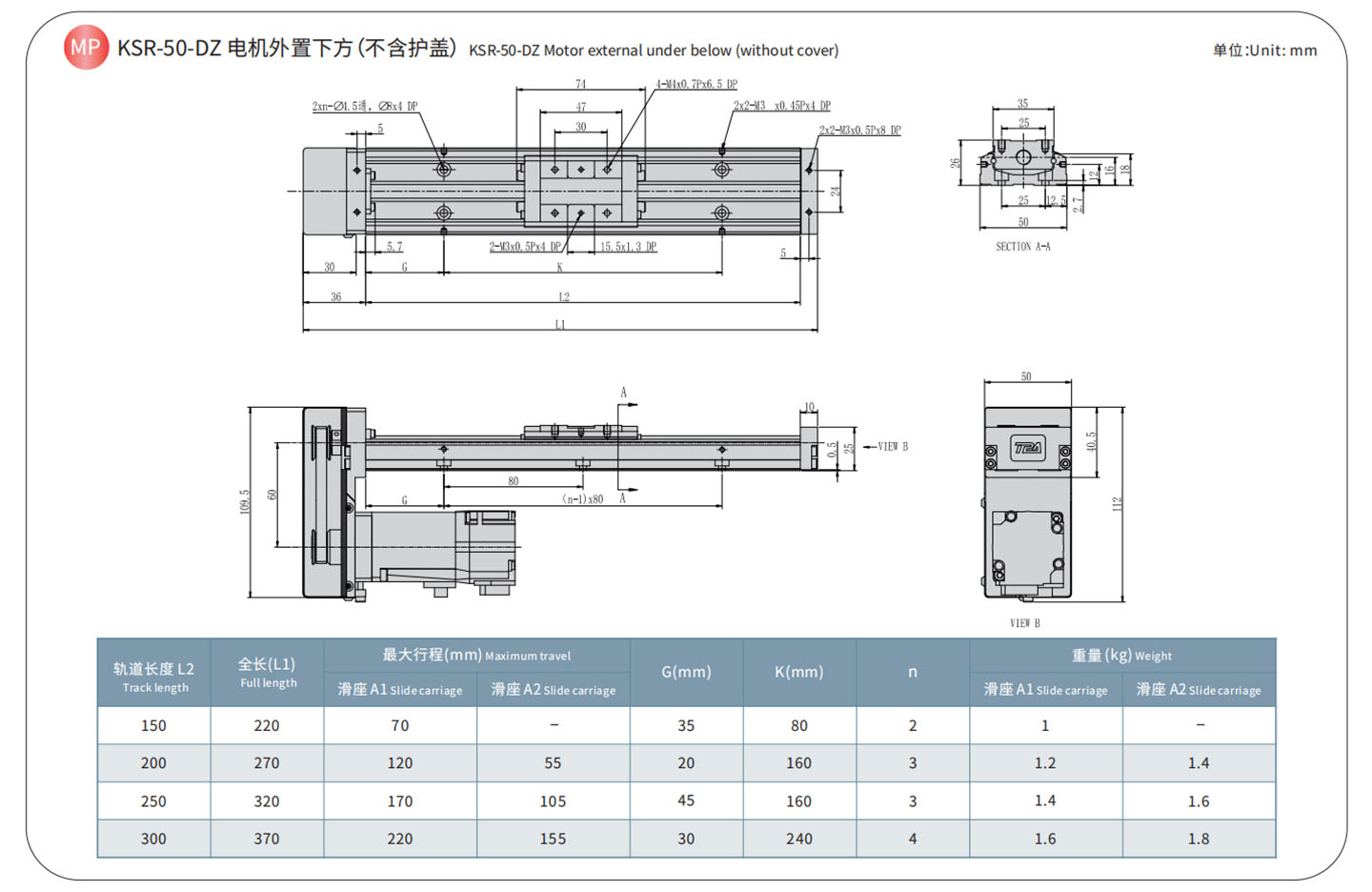
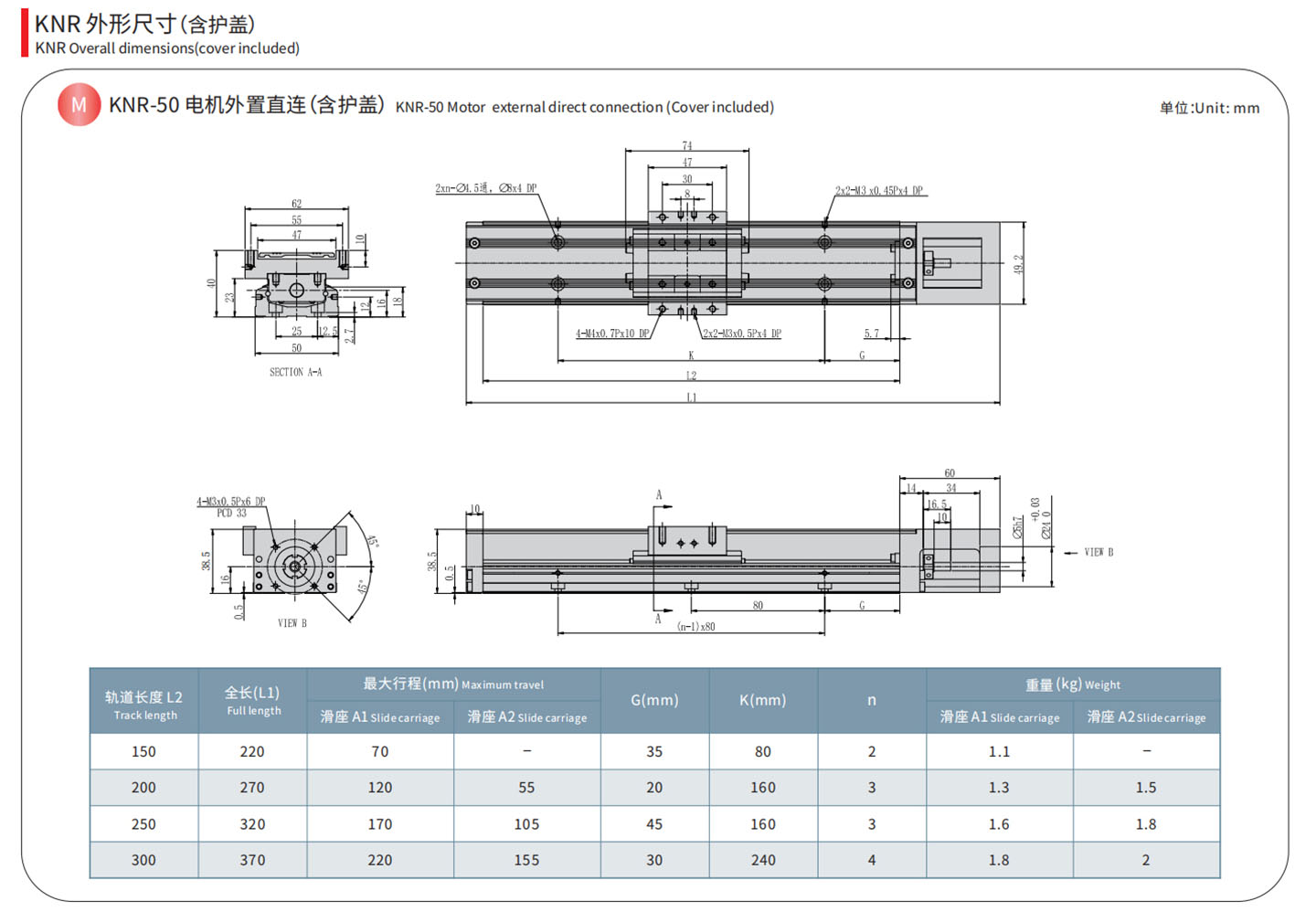
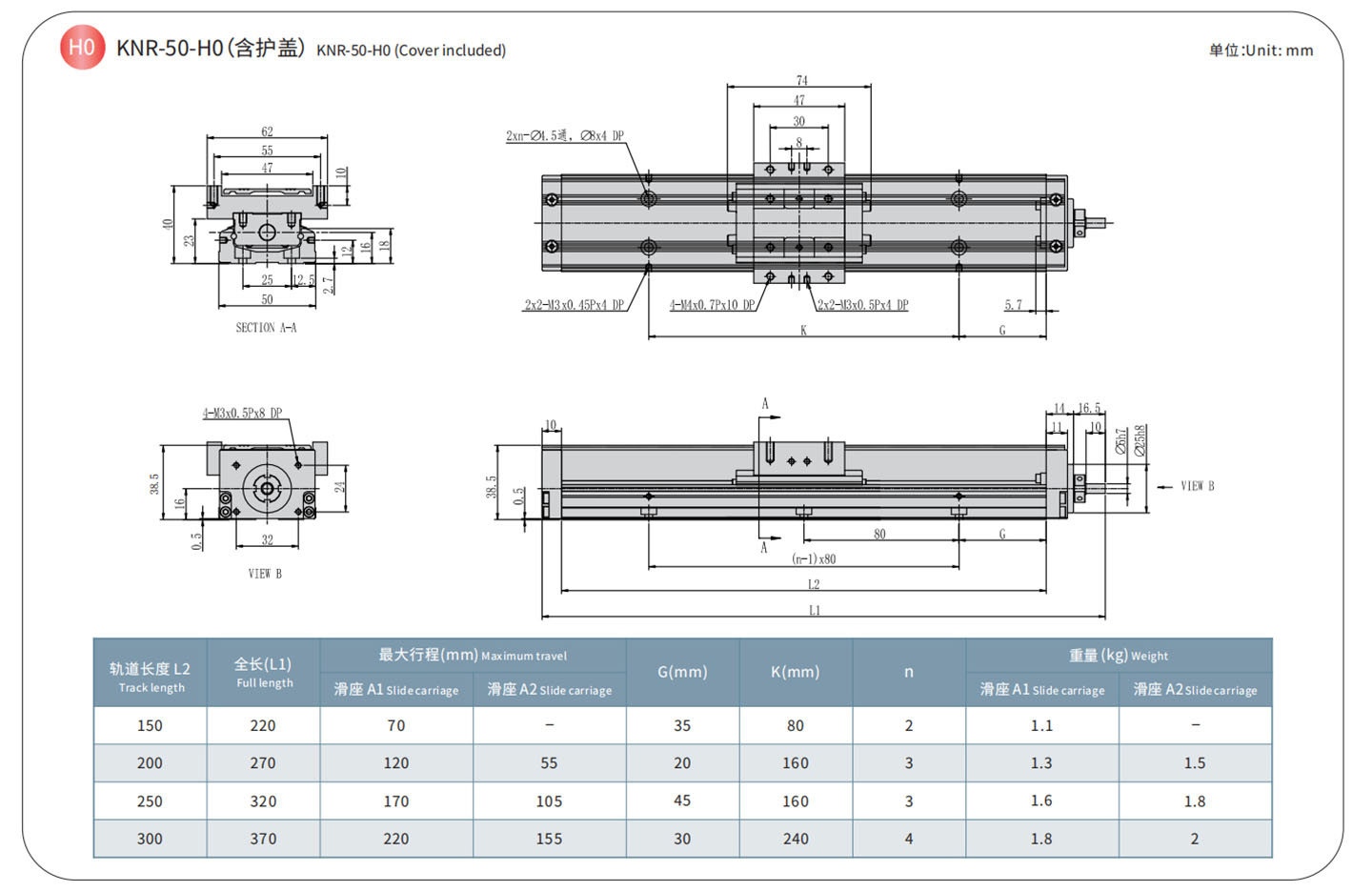
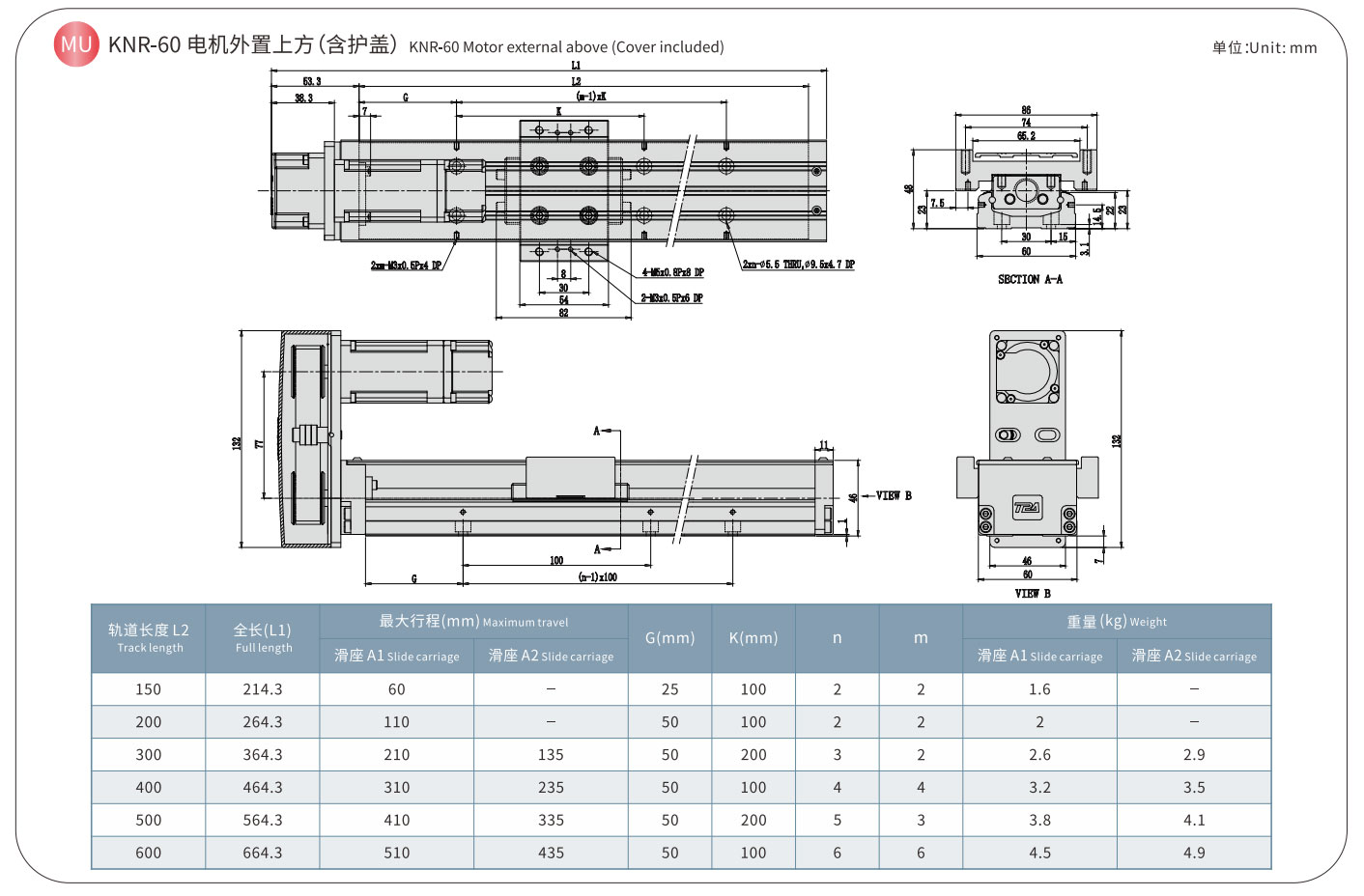
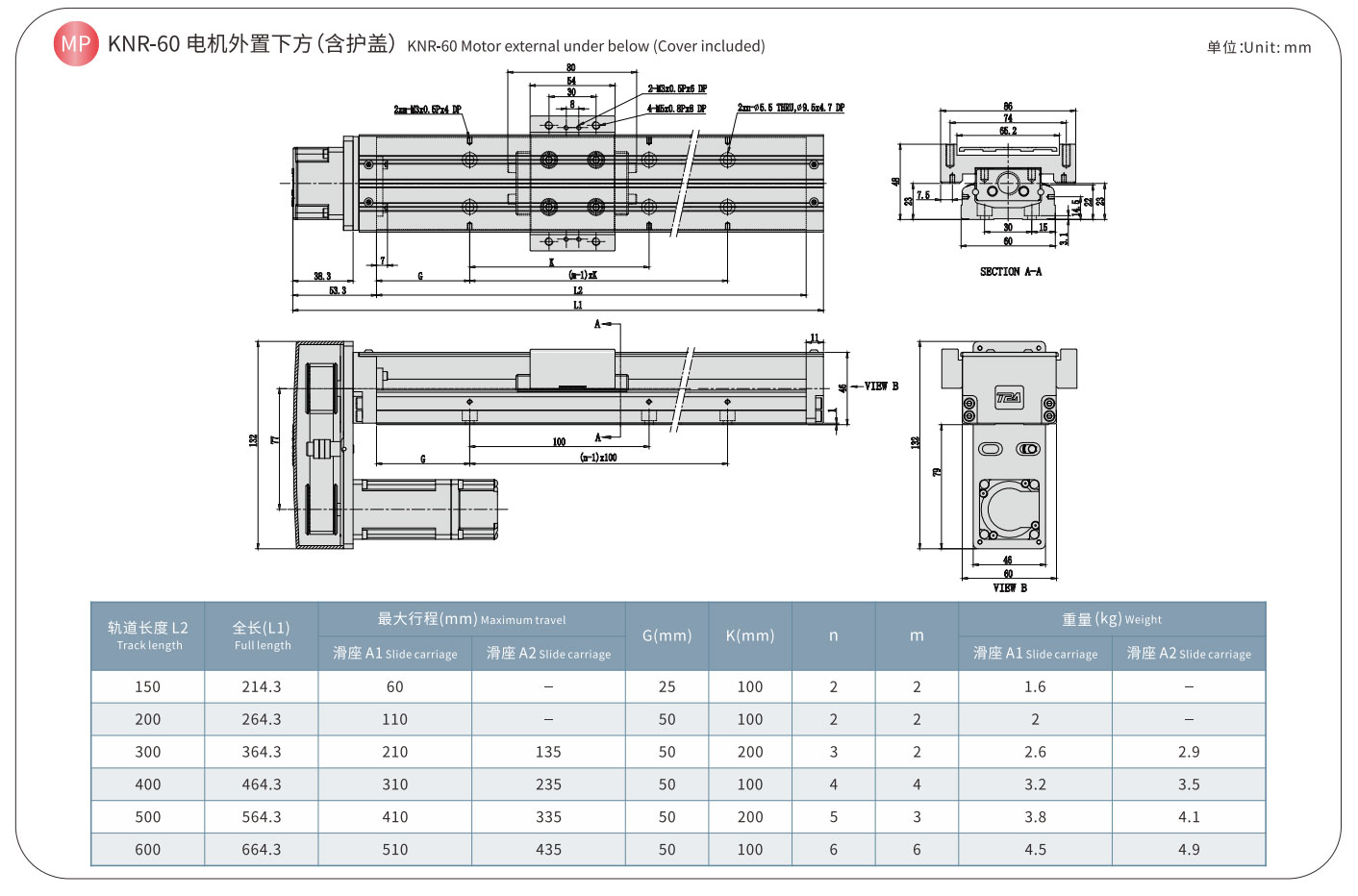
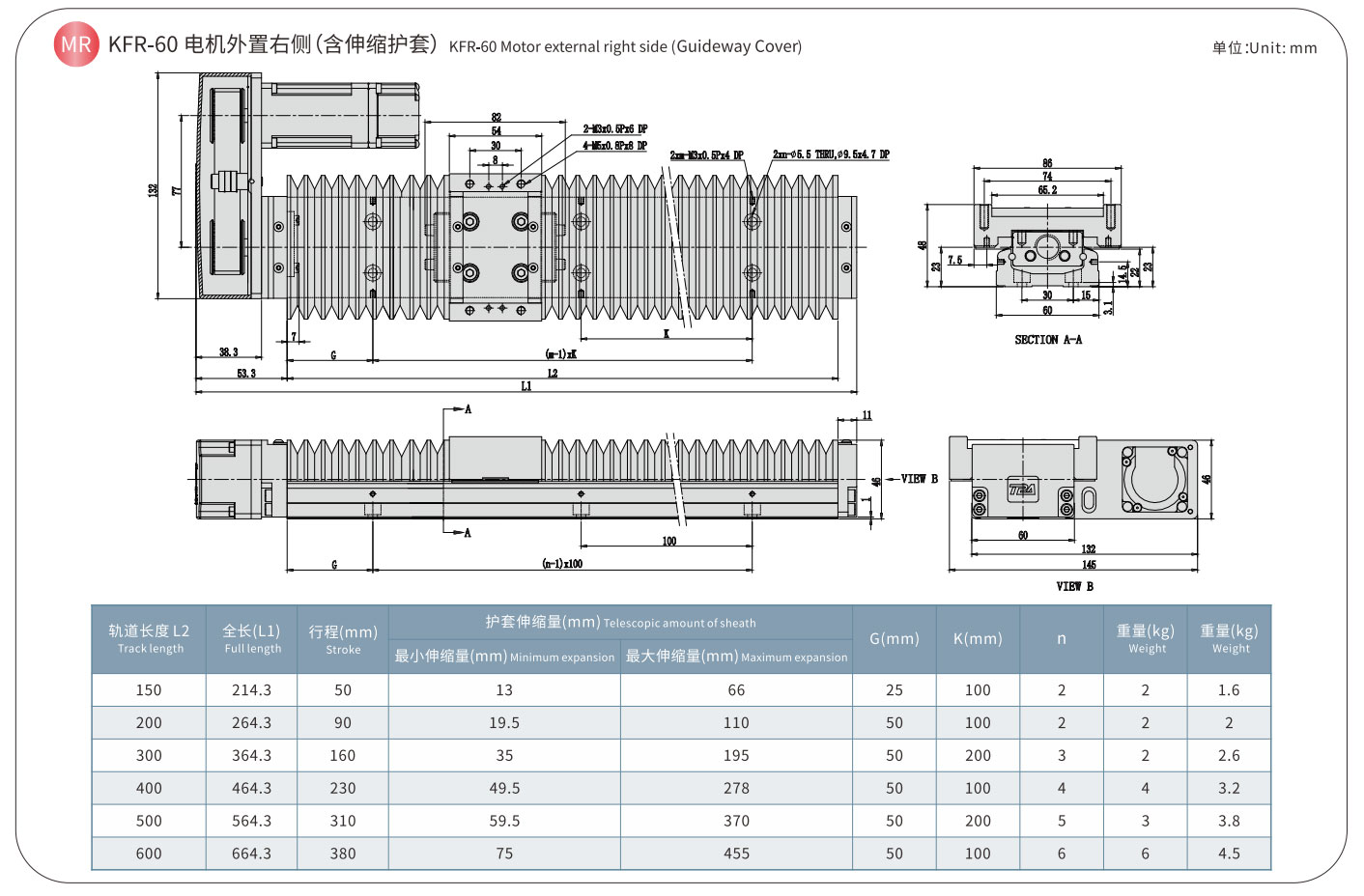
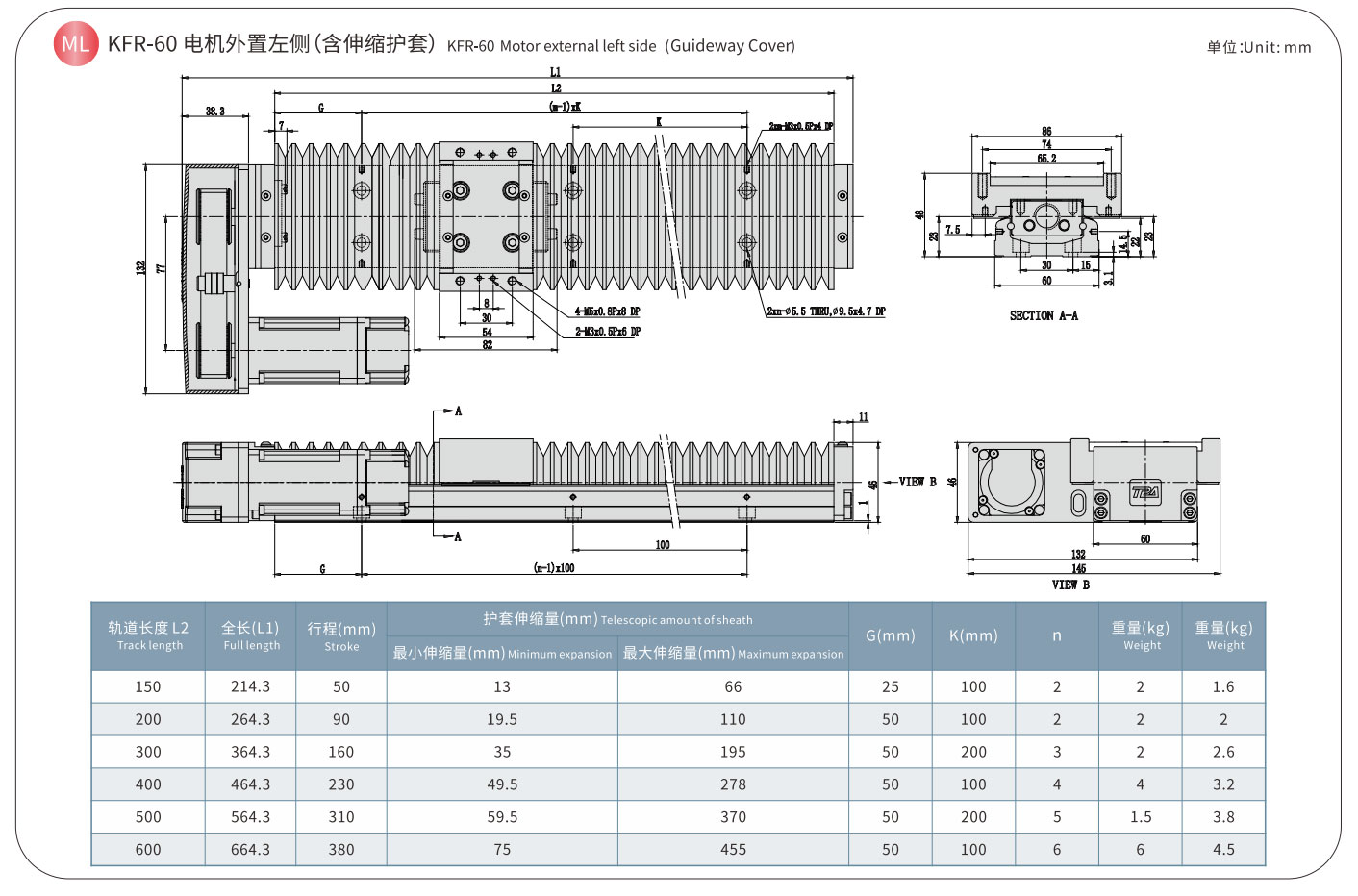
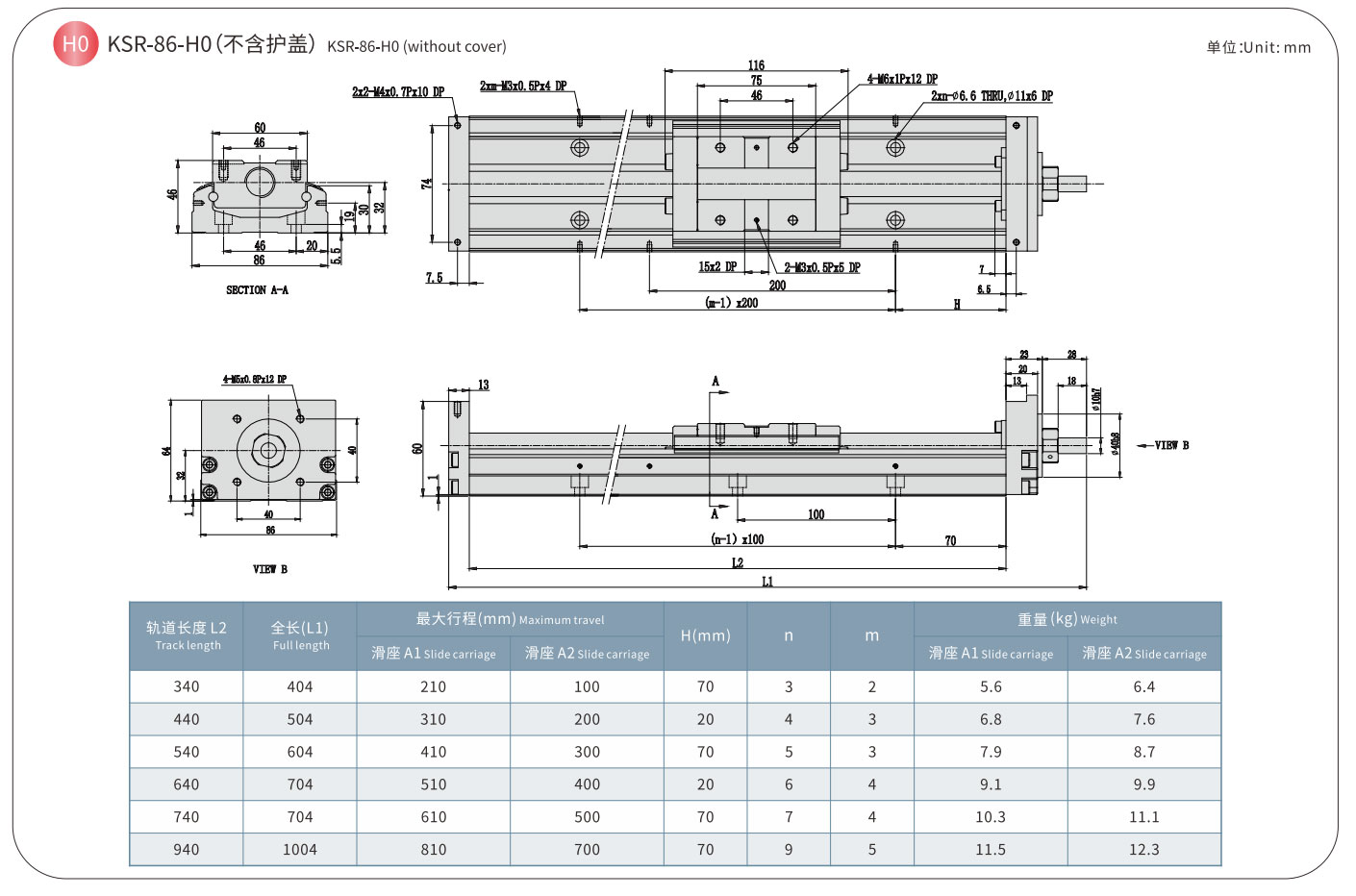
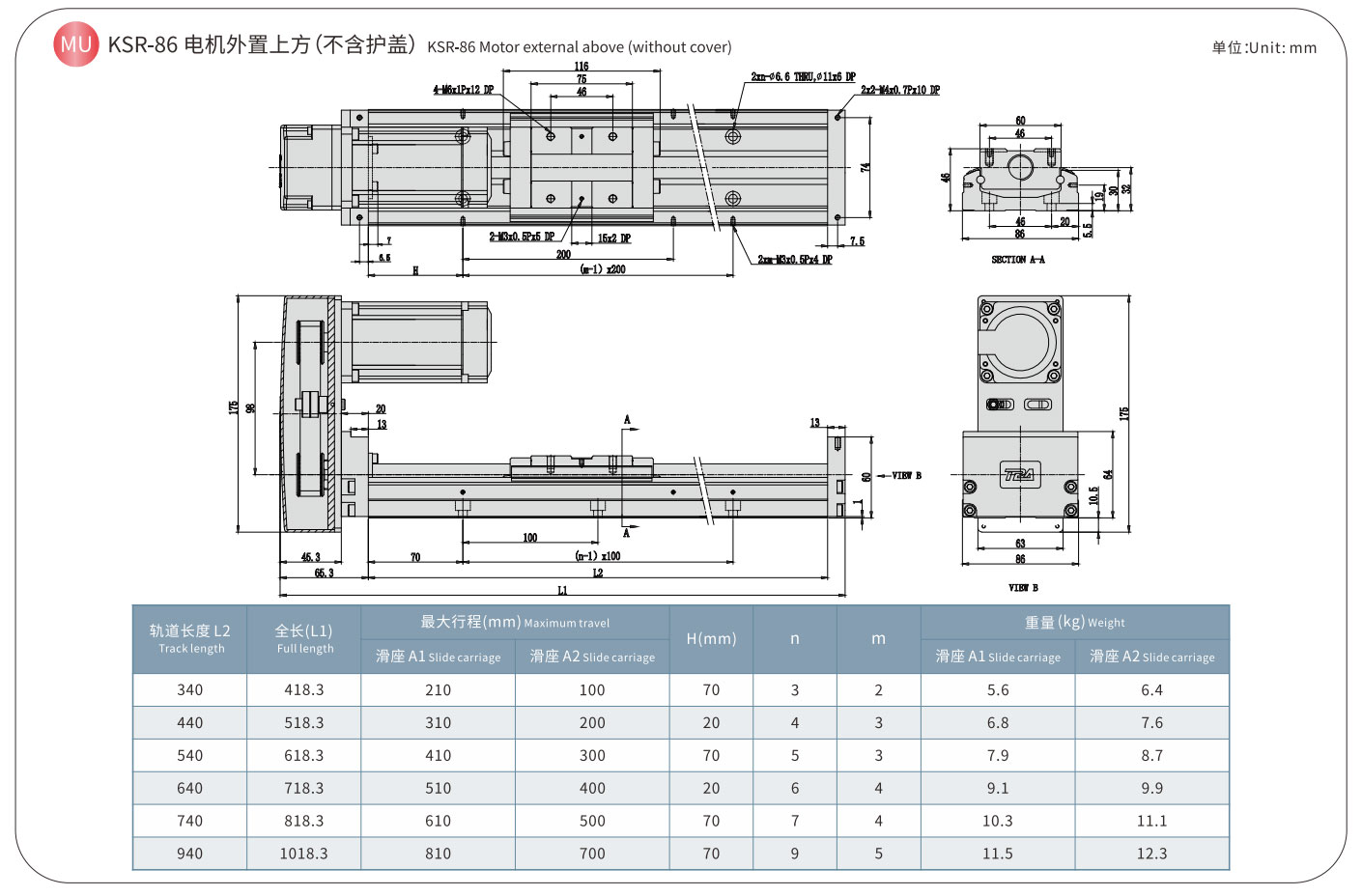
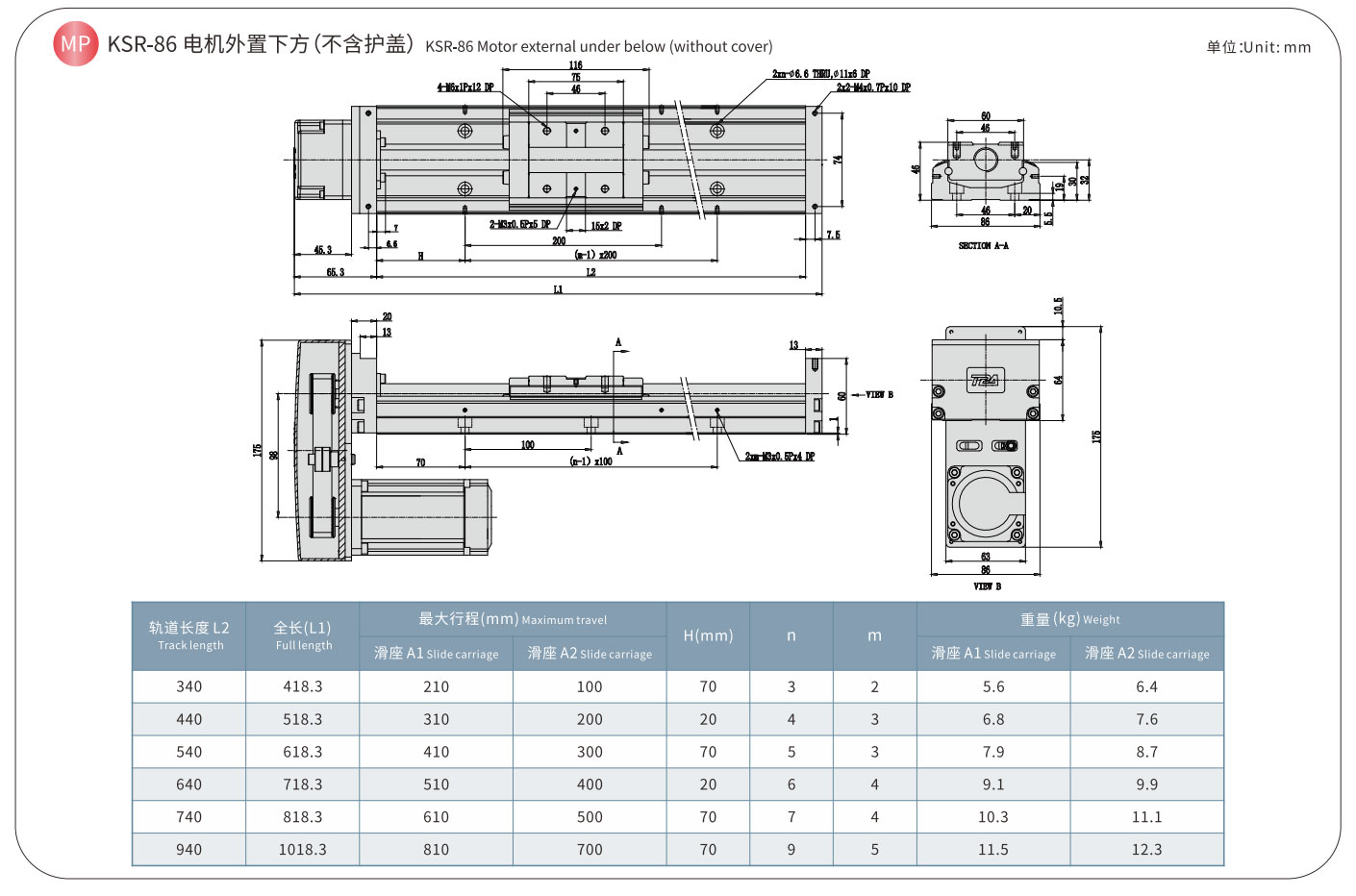
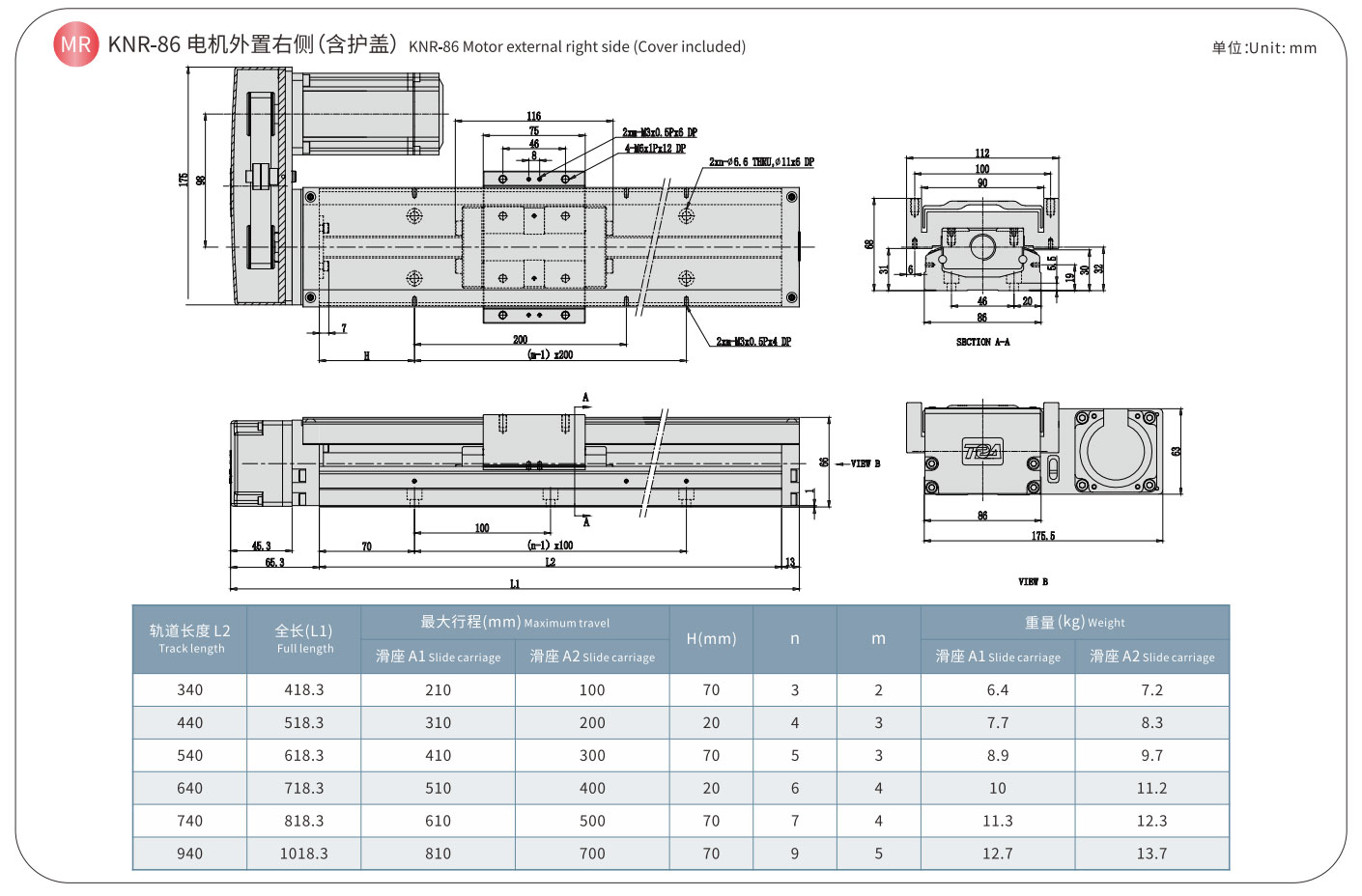
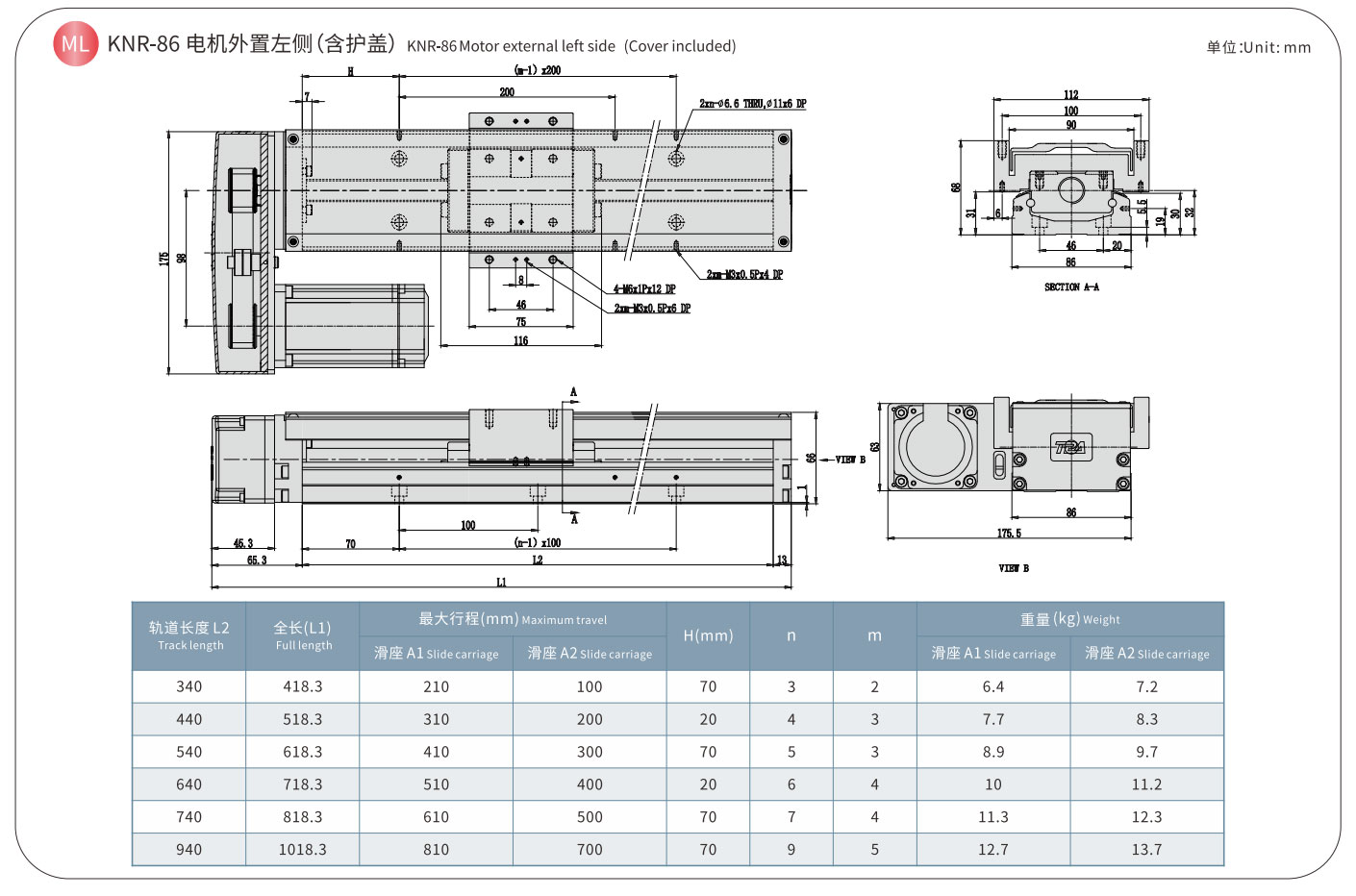
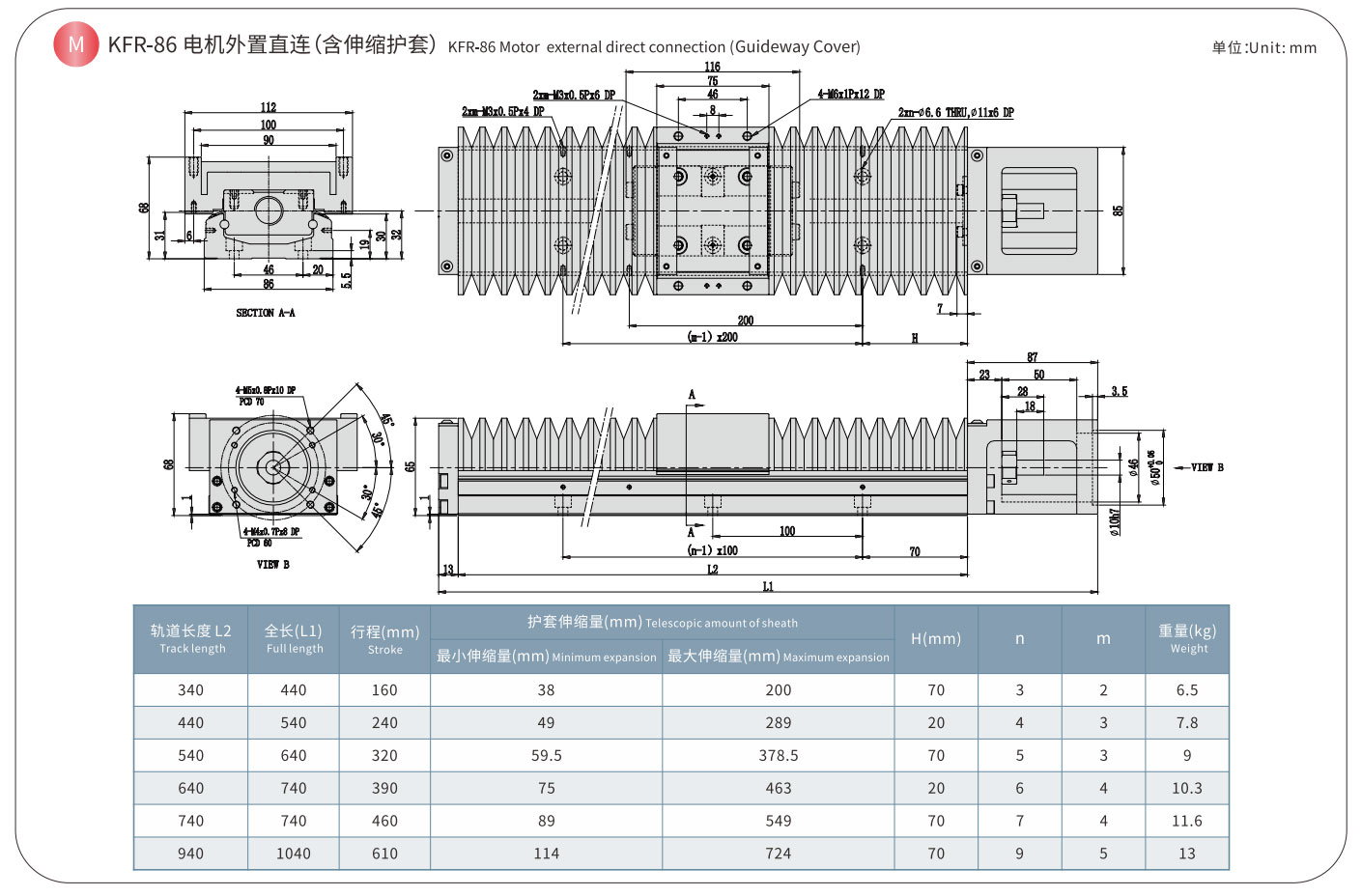
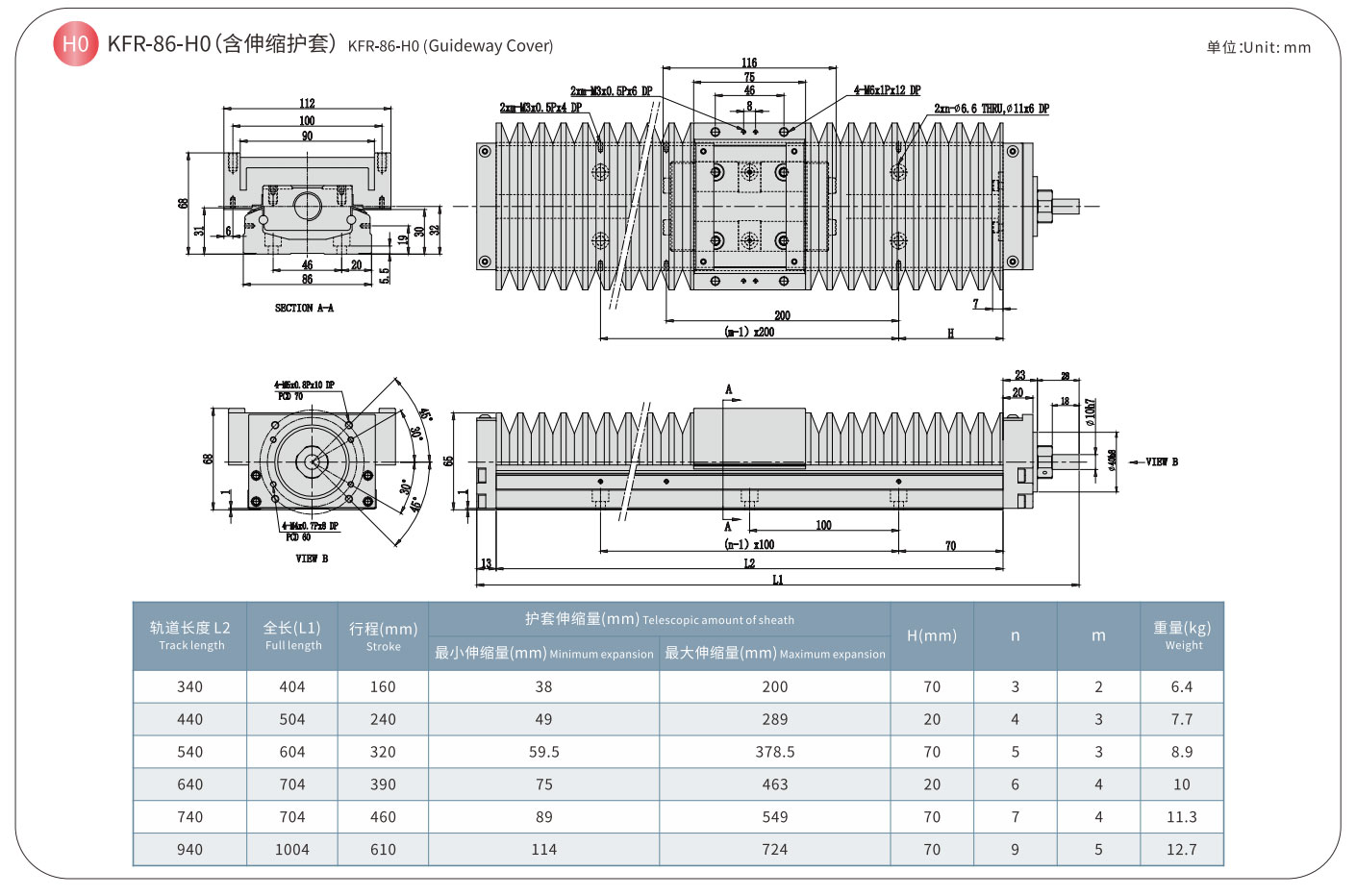
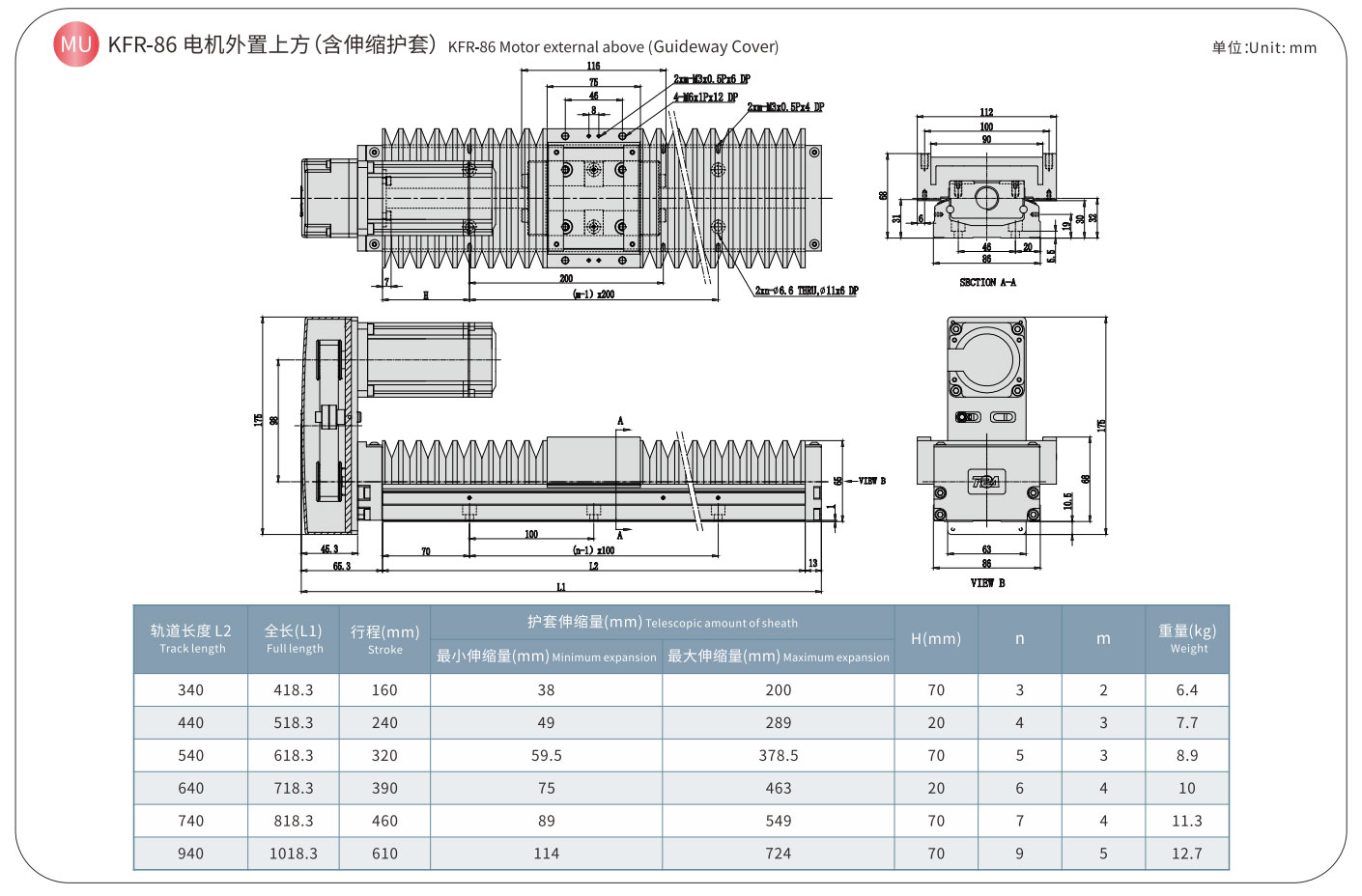
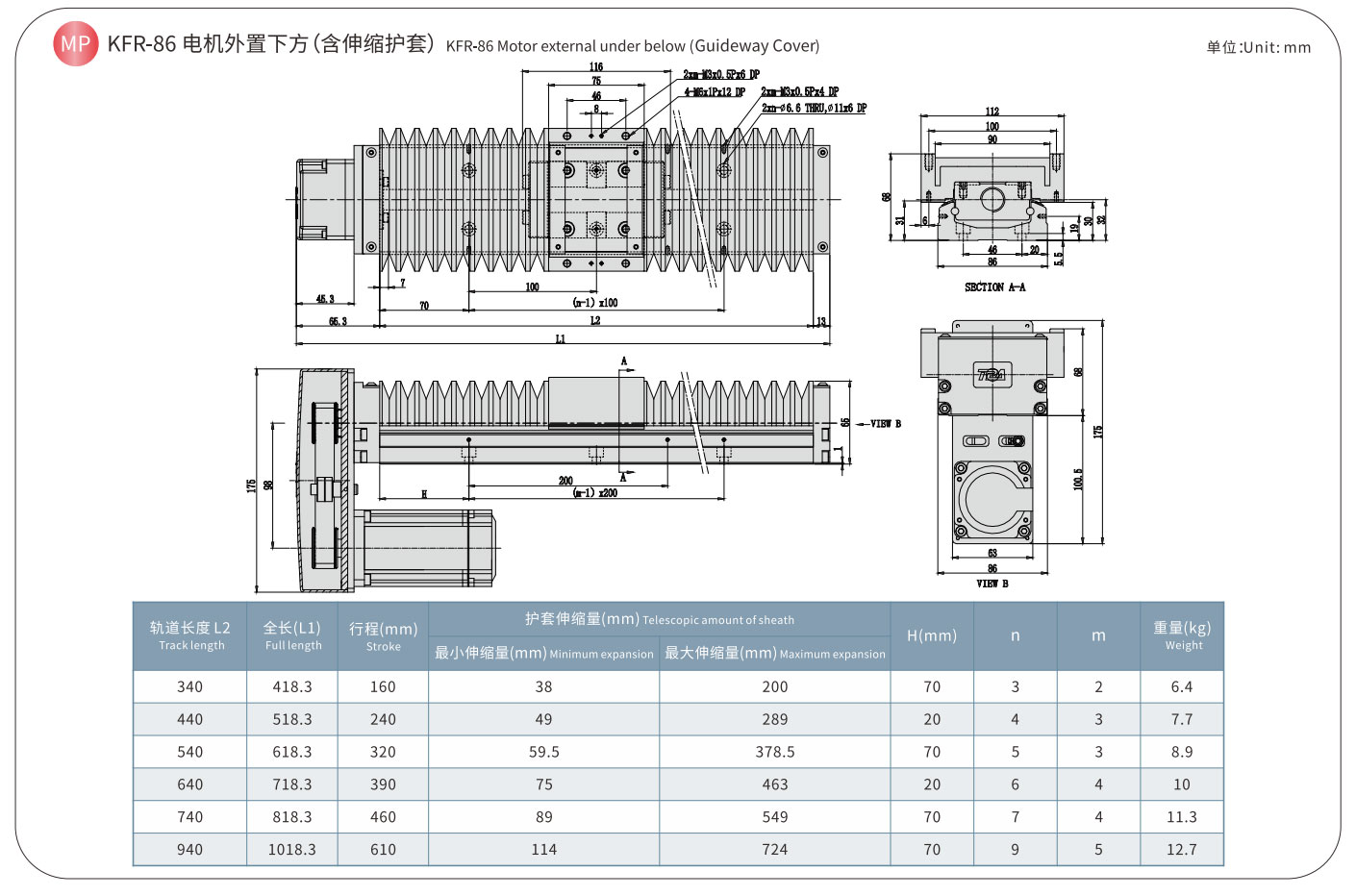
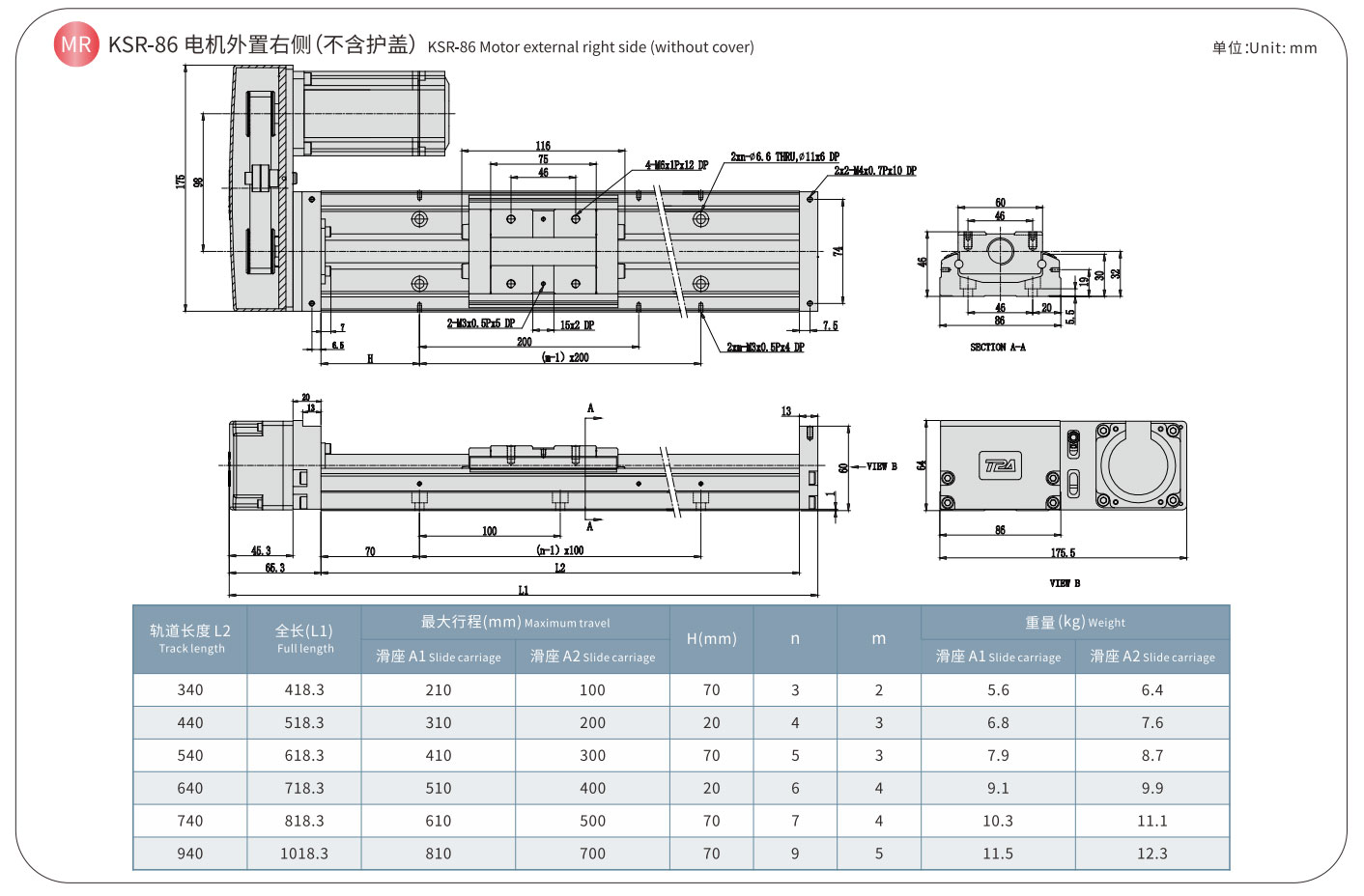
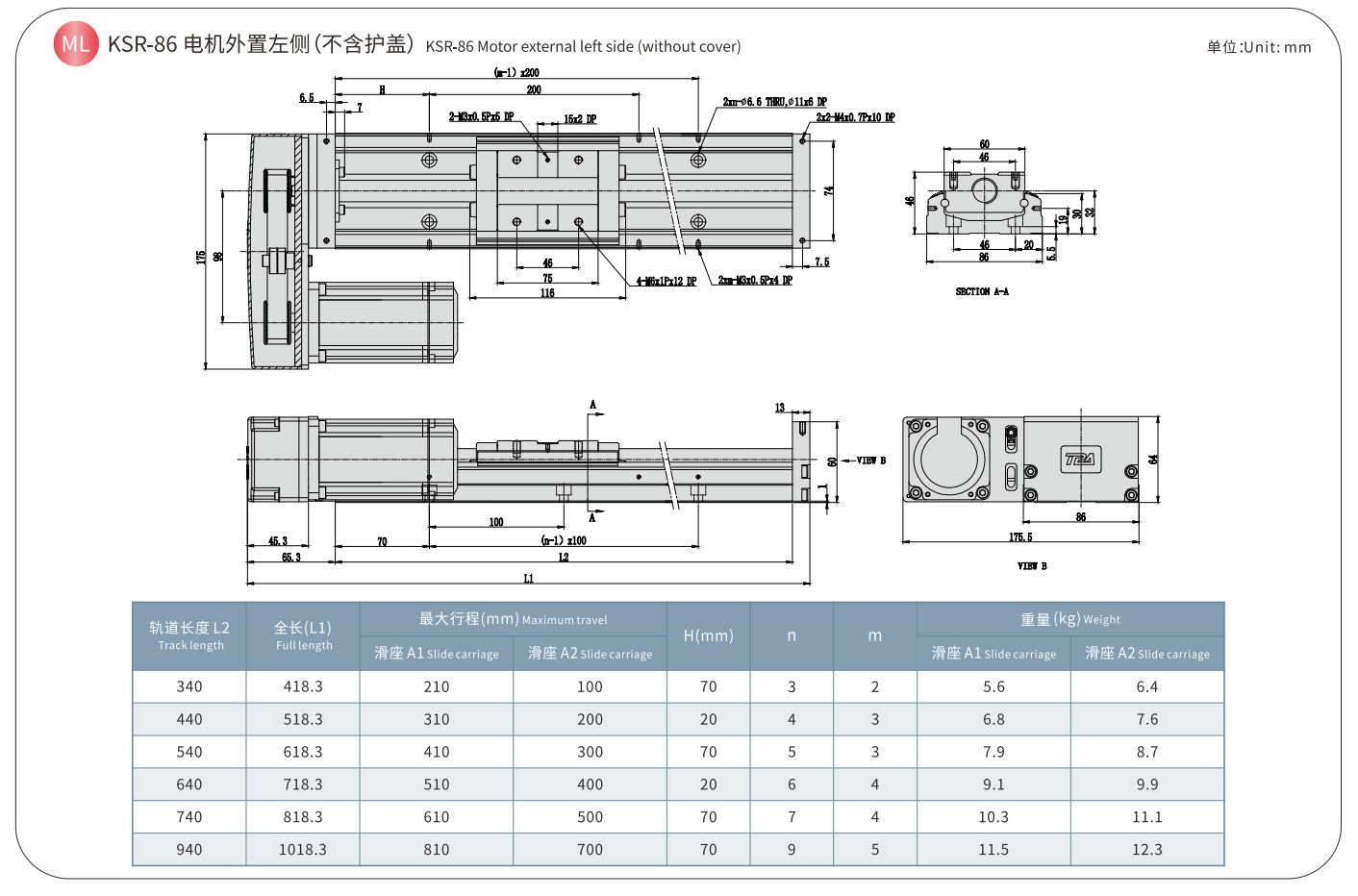
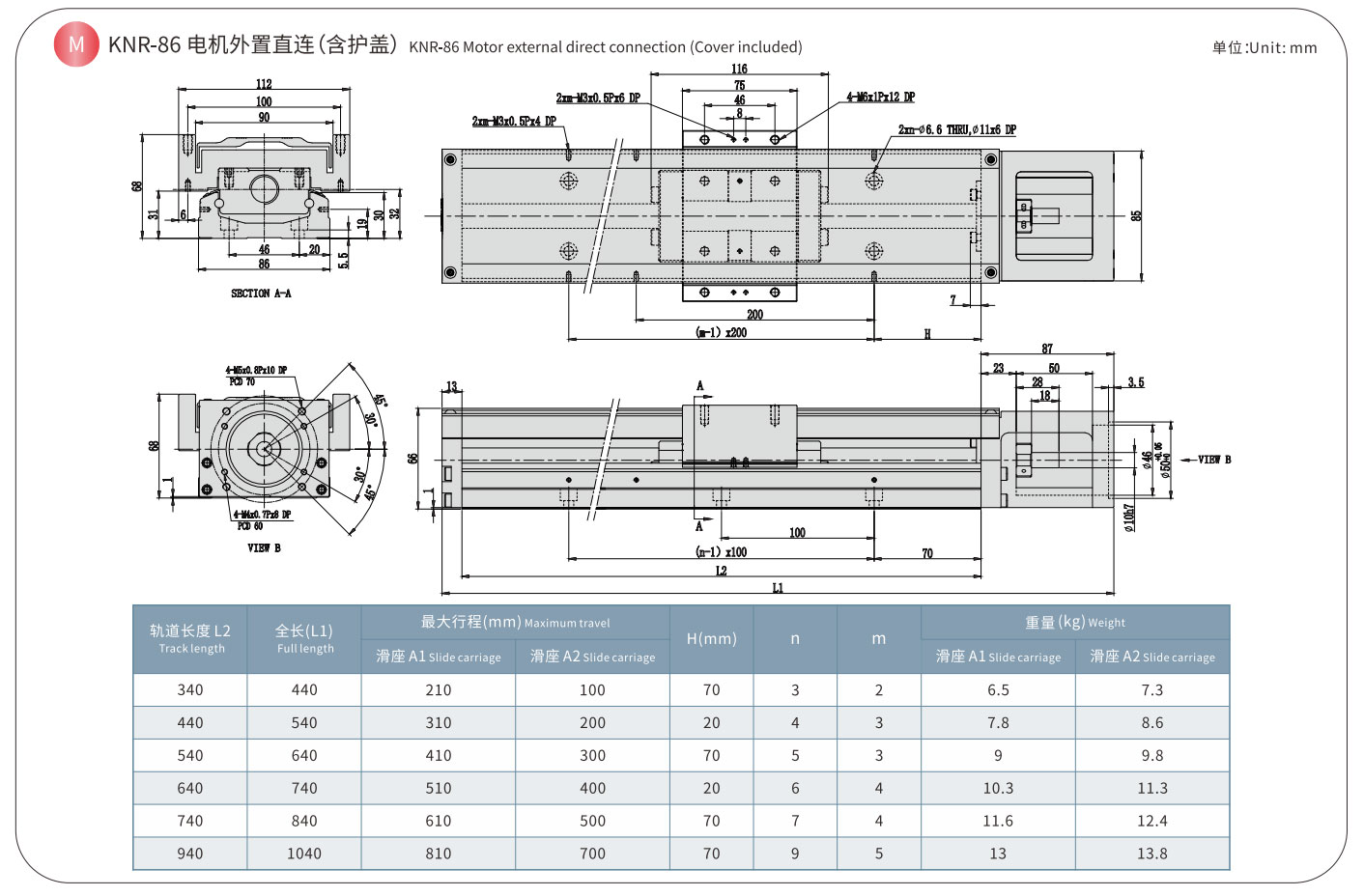
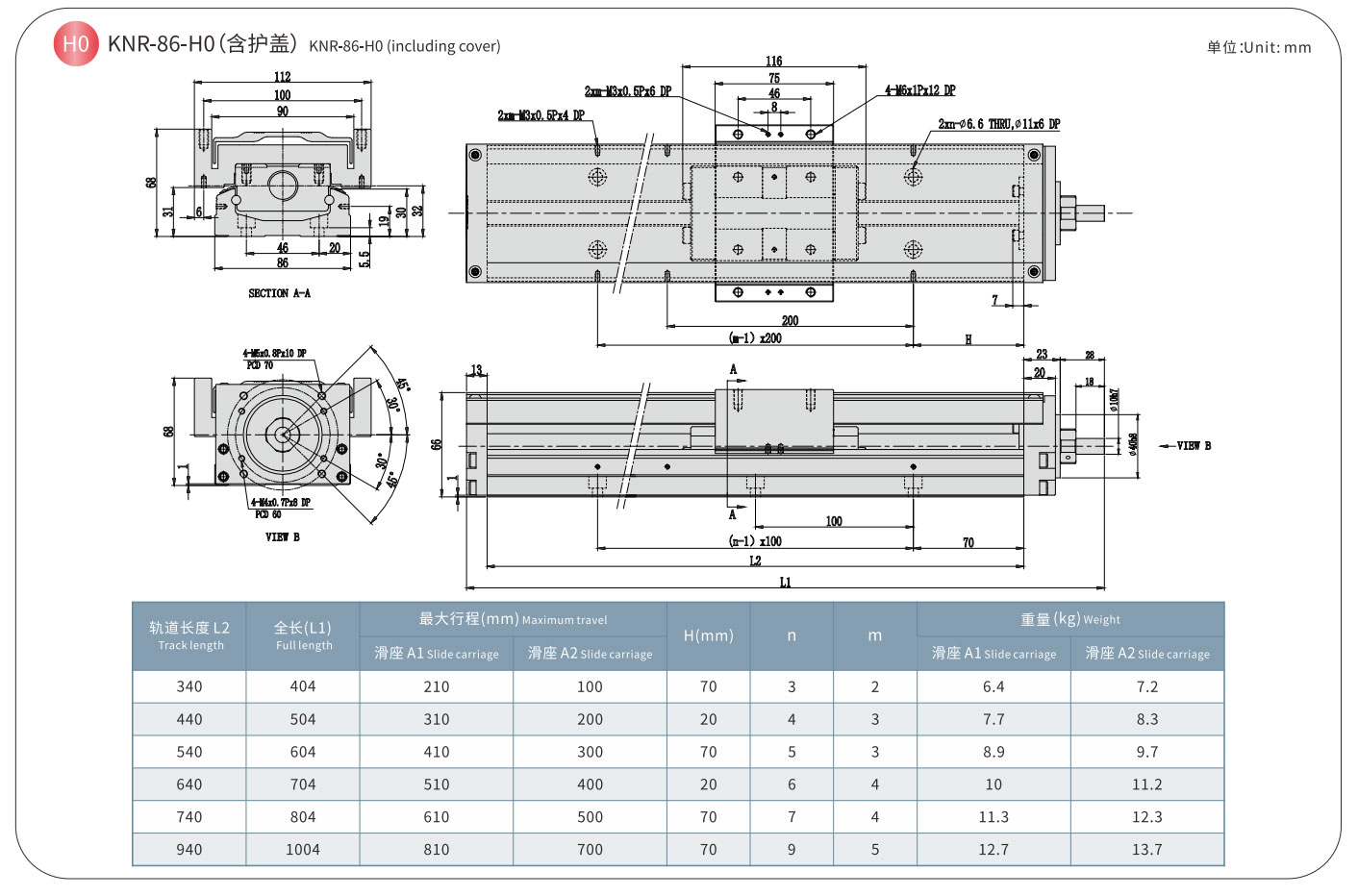
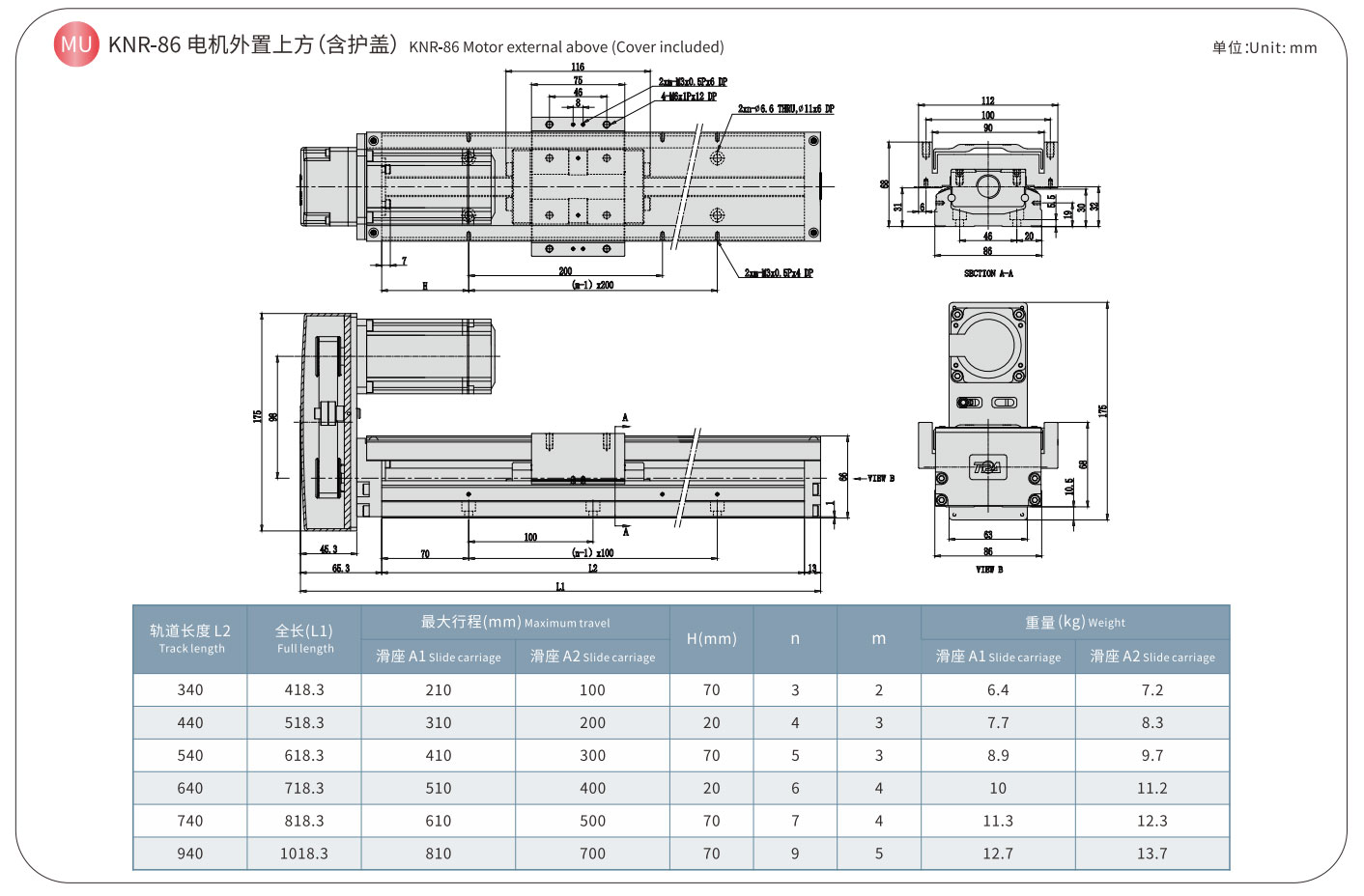
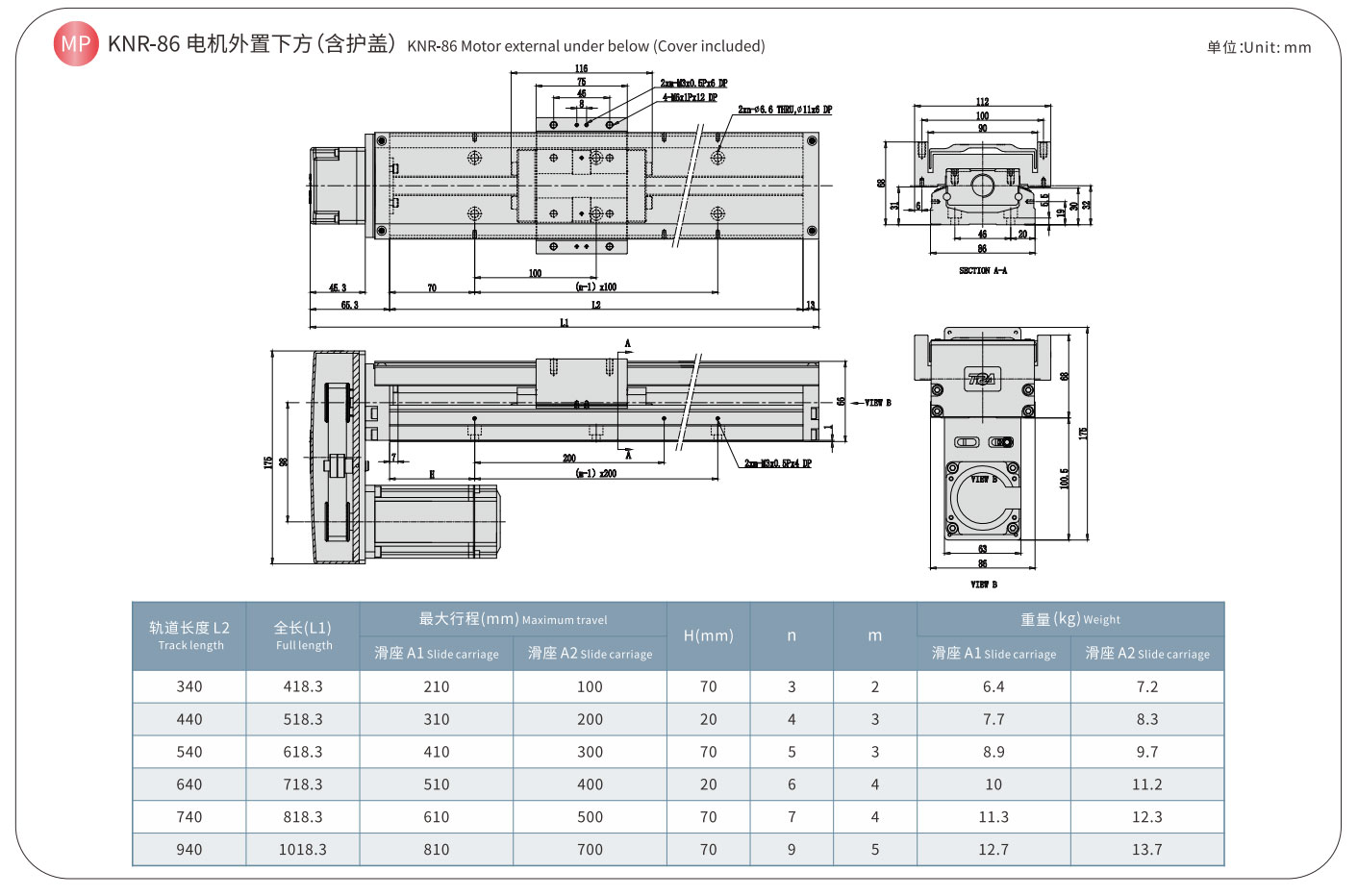
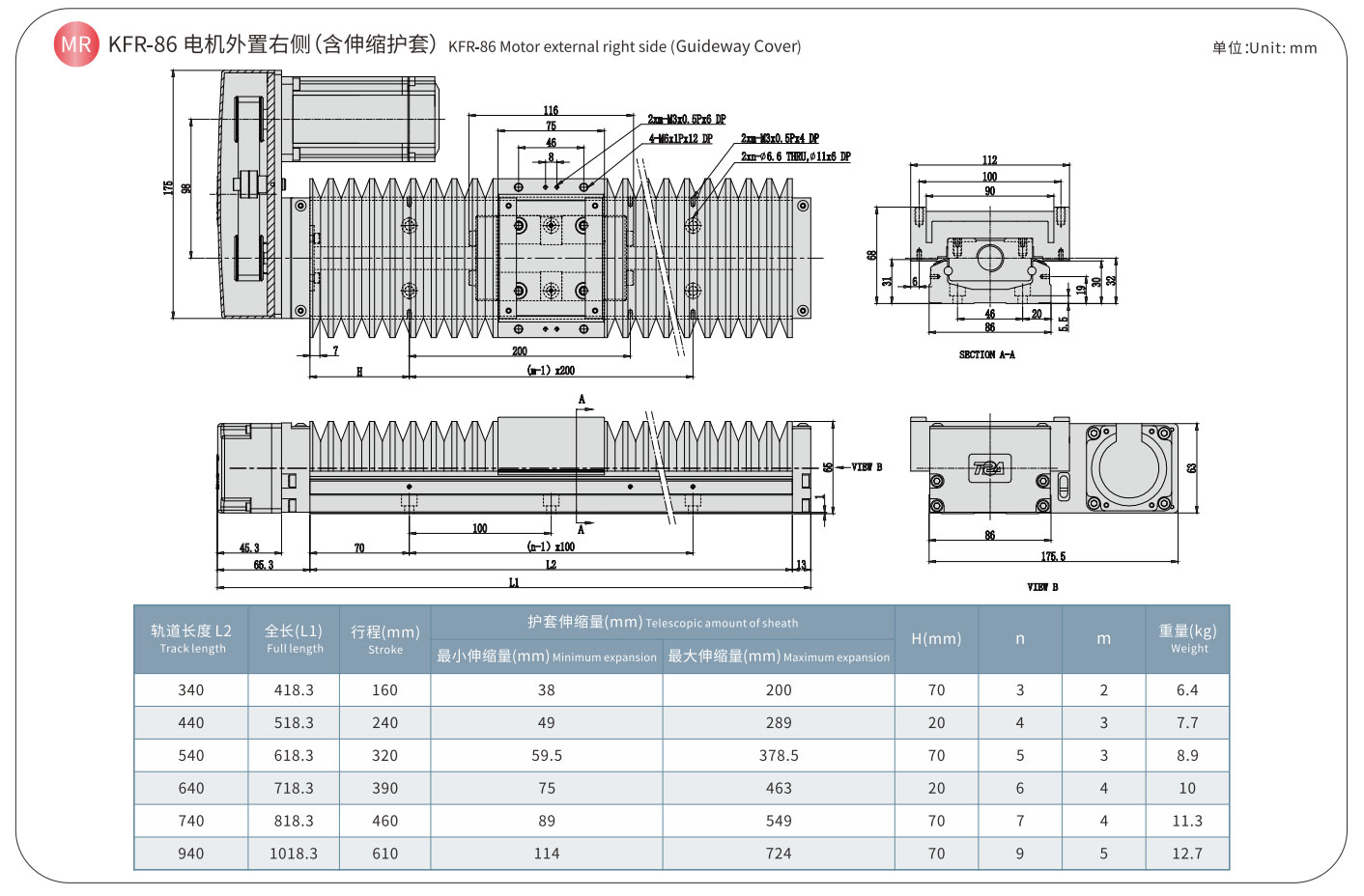
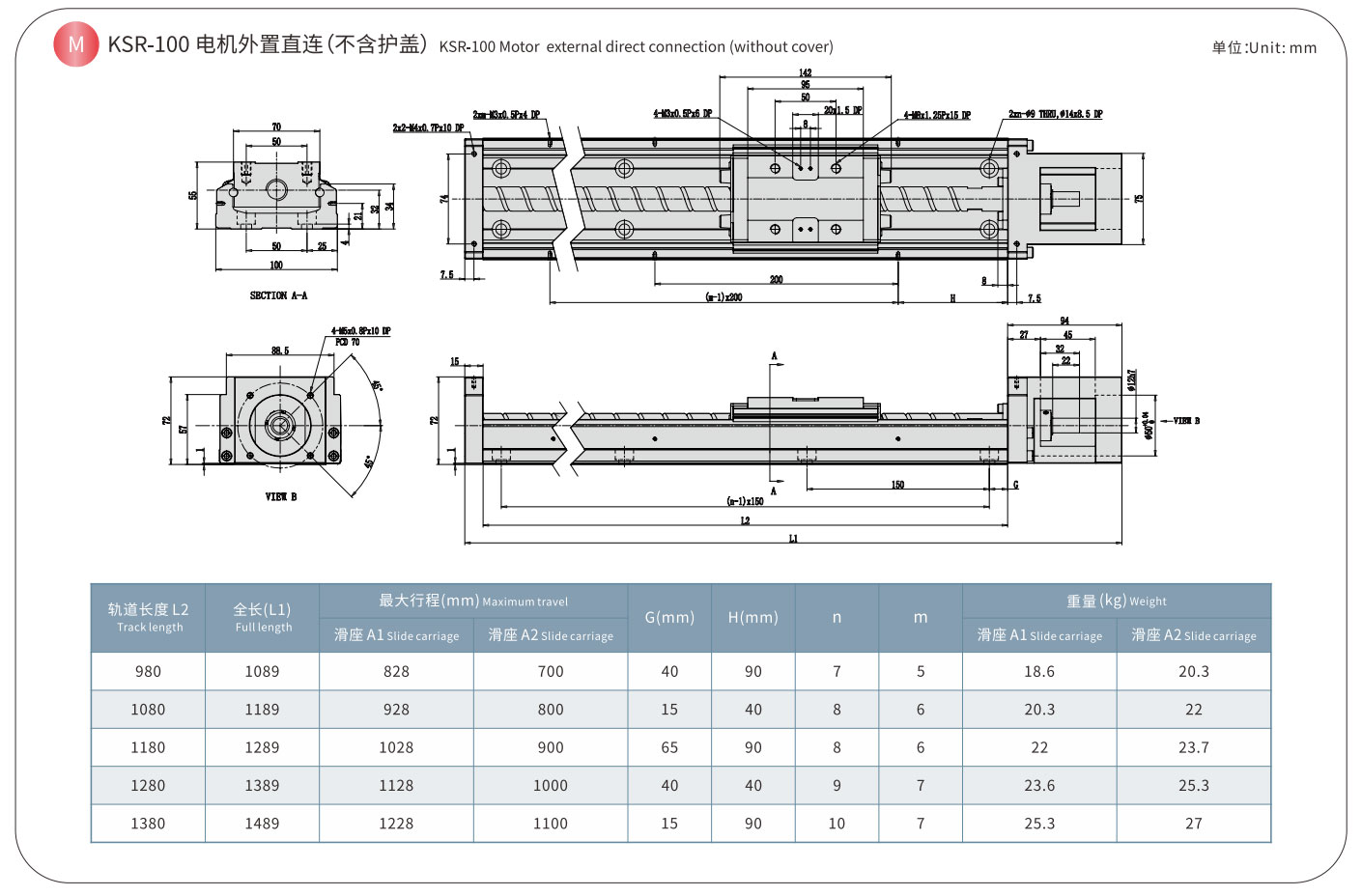
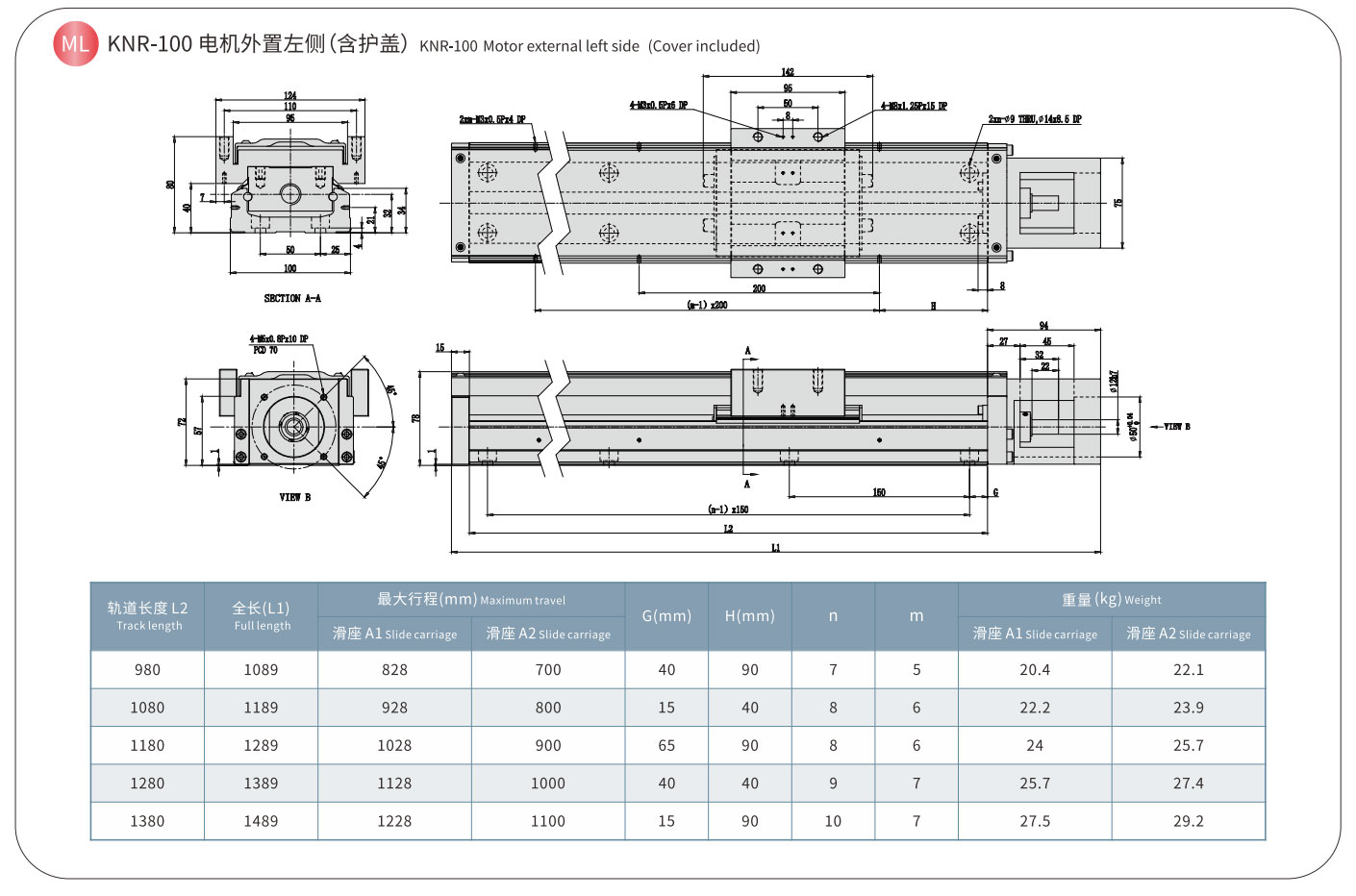
Jednoosni robot serije KK, koji je razvio TPA ROBOT, koristi djelomično kaljenu čeličnu stazu u obliku slova U kako bi se značajno povećala snaga i nosivost robota. Zbog različitih okruženja, imamo tri tipa serije linearnih robota, KSR, KNR i KFR, ovisno o vrsti poklopca koji se koristi.
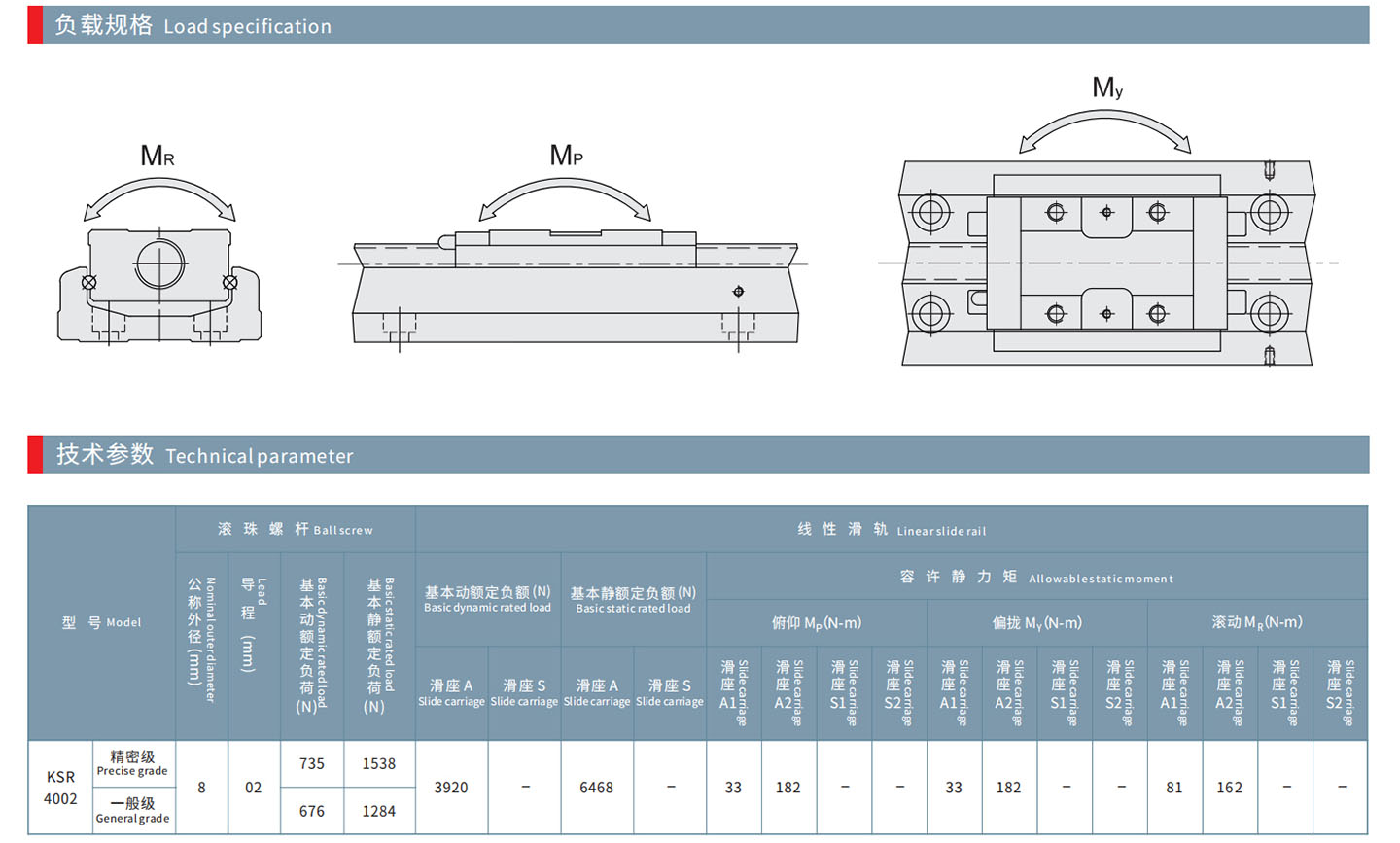
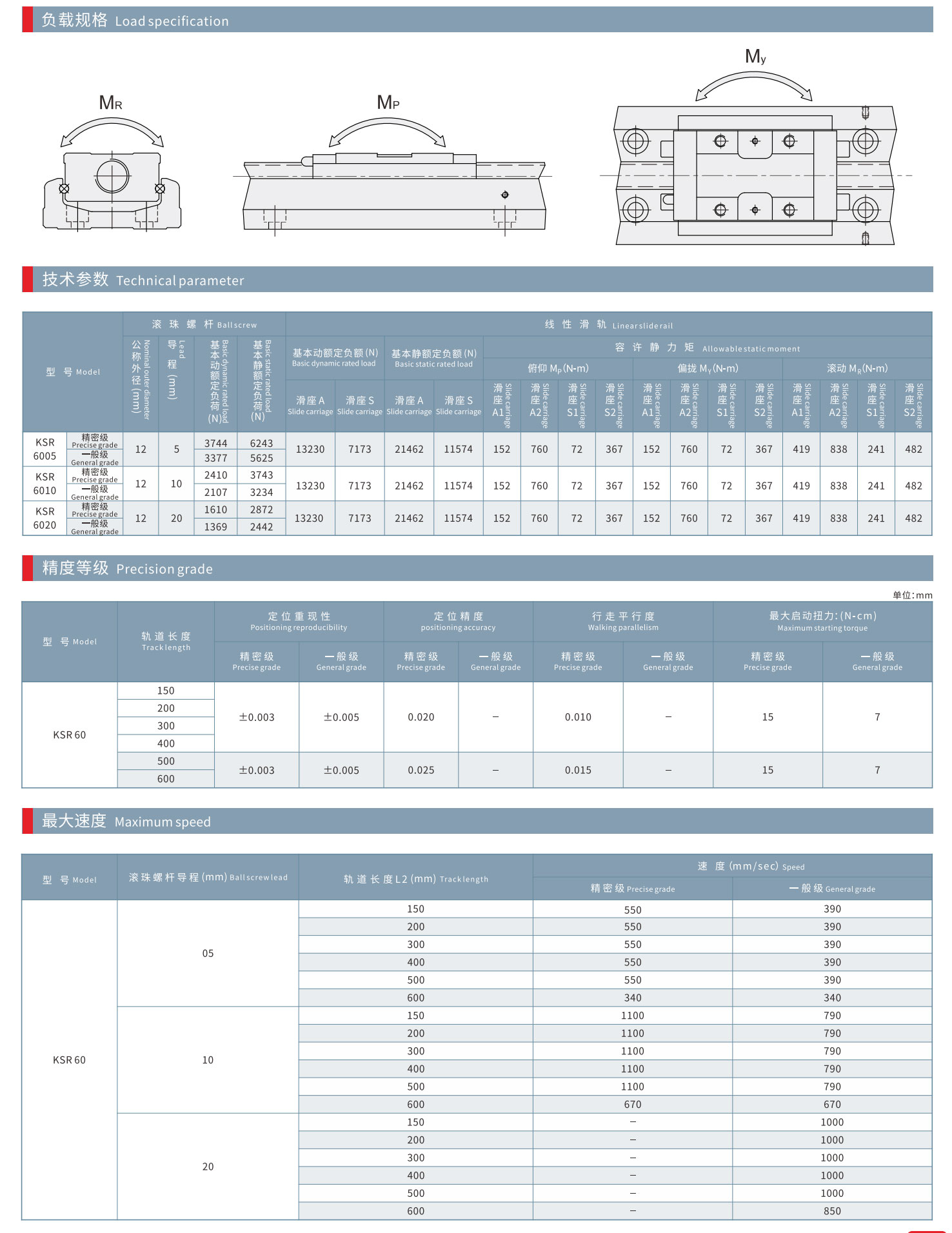
Za povratni sistem između staze i klizača, kontaktna površina između kugle i žljeba kugle ima 2-redni dizajn Goethe zubaca sa kontaktnim uglom od 45 stepeni, što može učiniti da osovinska ruka robota nosi jednak kapacitet opterećenja u četiri smjera .
U isto vrijeme, visokoprecizni kuglični vijak se koristi kao struktura prijenosa, a gusjenica u obliku slova U sarađuje s optimiziranim dizajnom, tako da KK osni robot ima neusporedivu preciznost, a njegova ponovljena tačnost pozicioniranja može doseći ±0,003 mm.
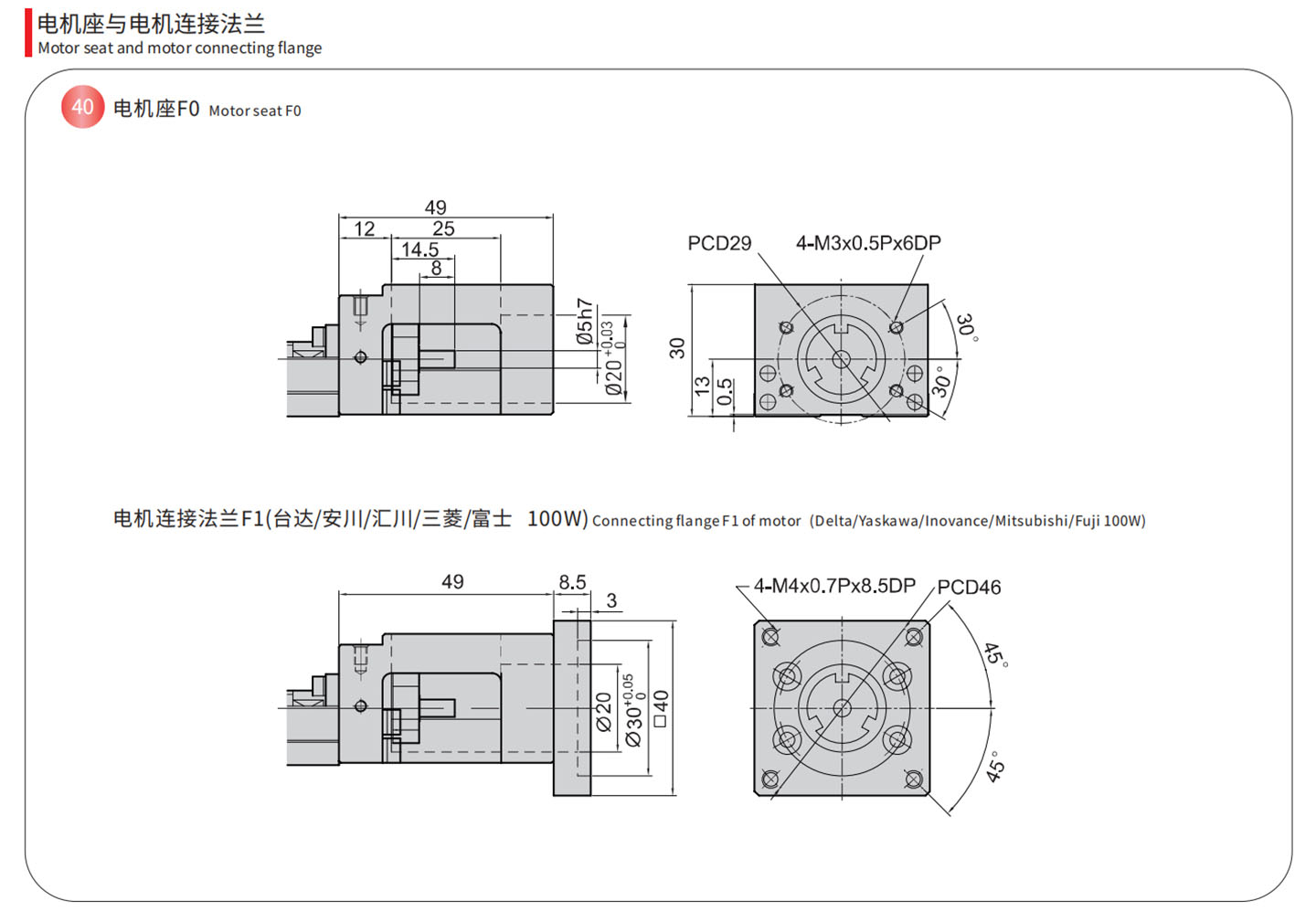
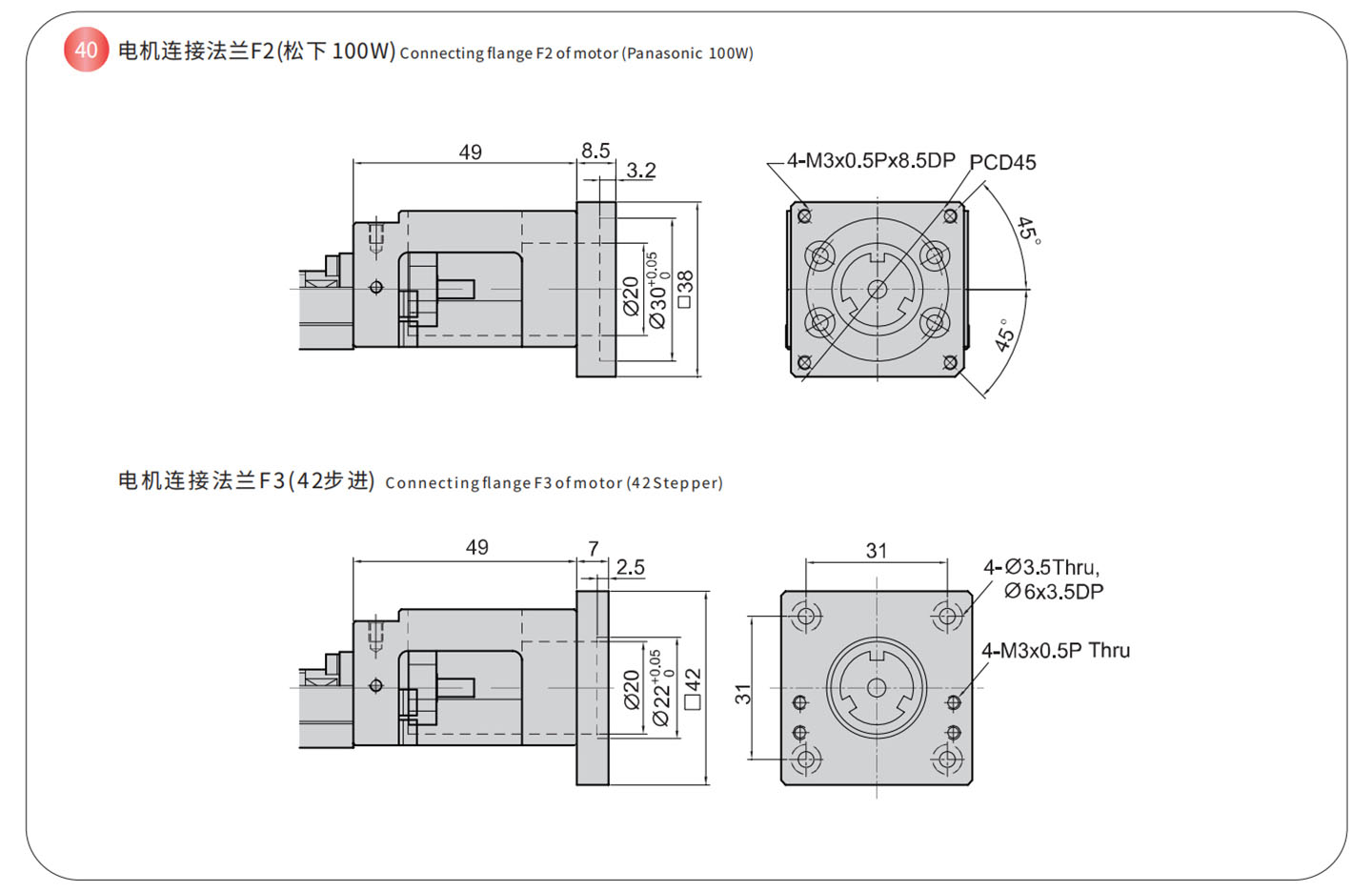
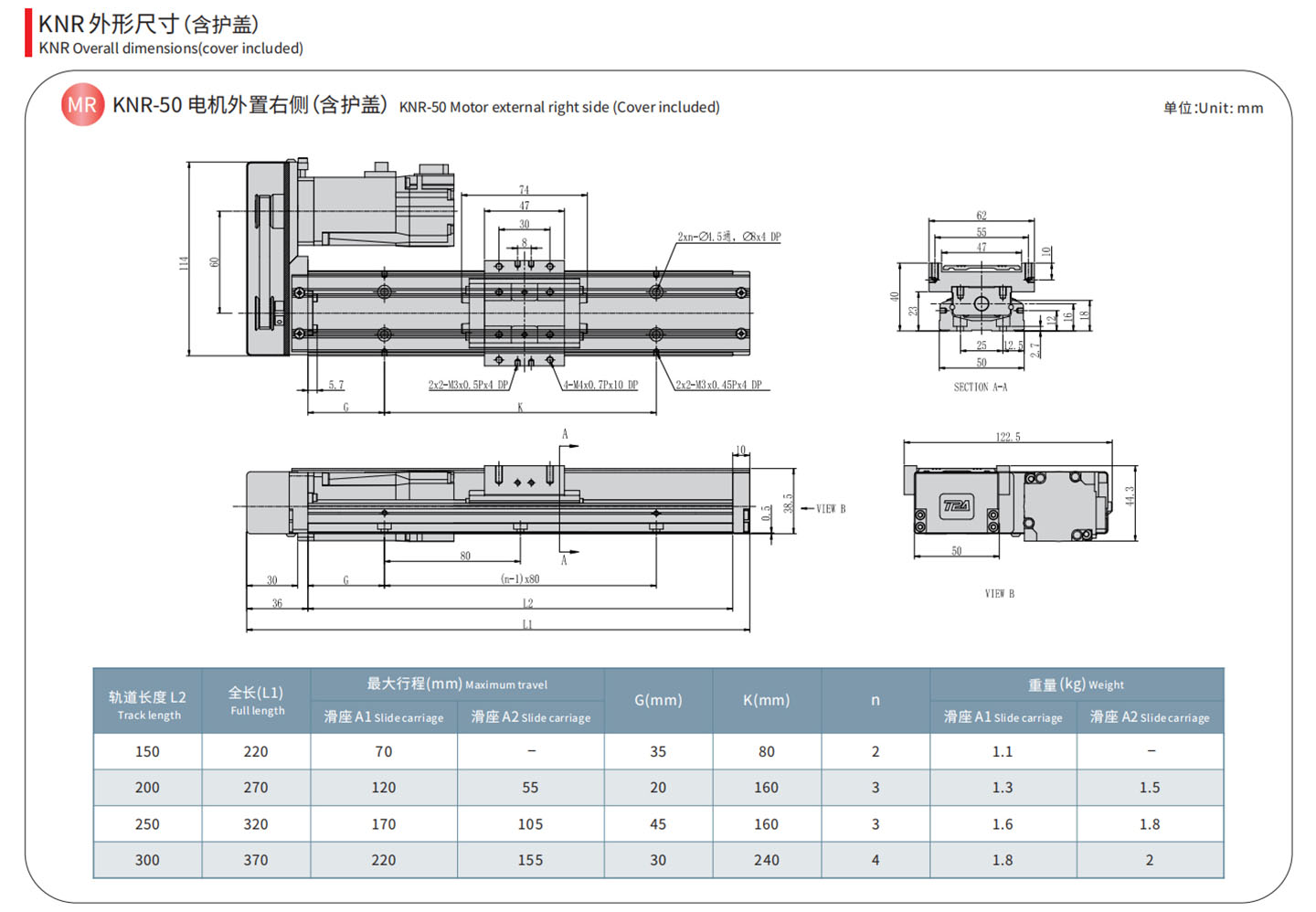
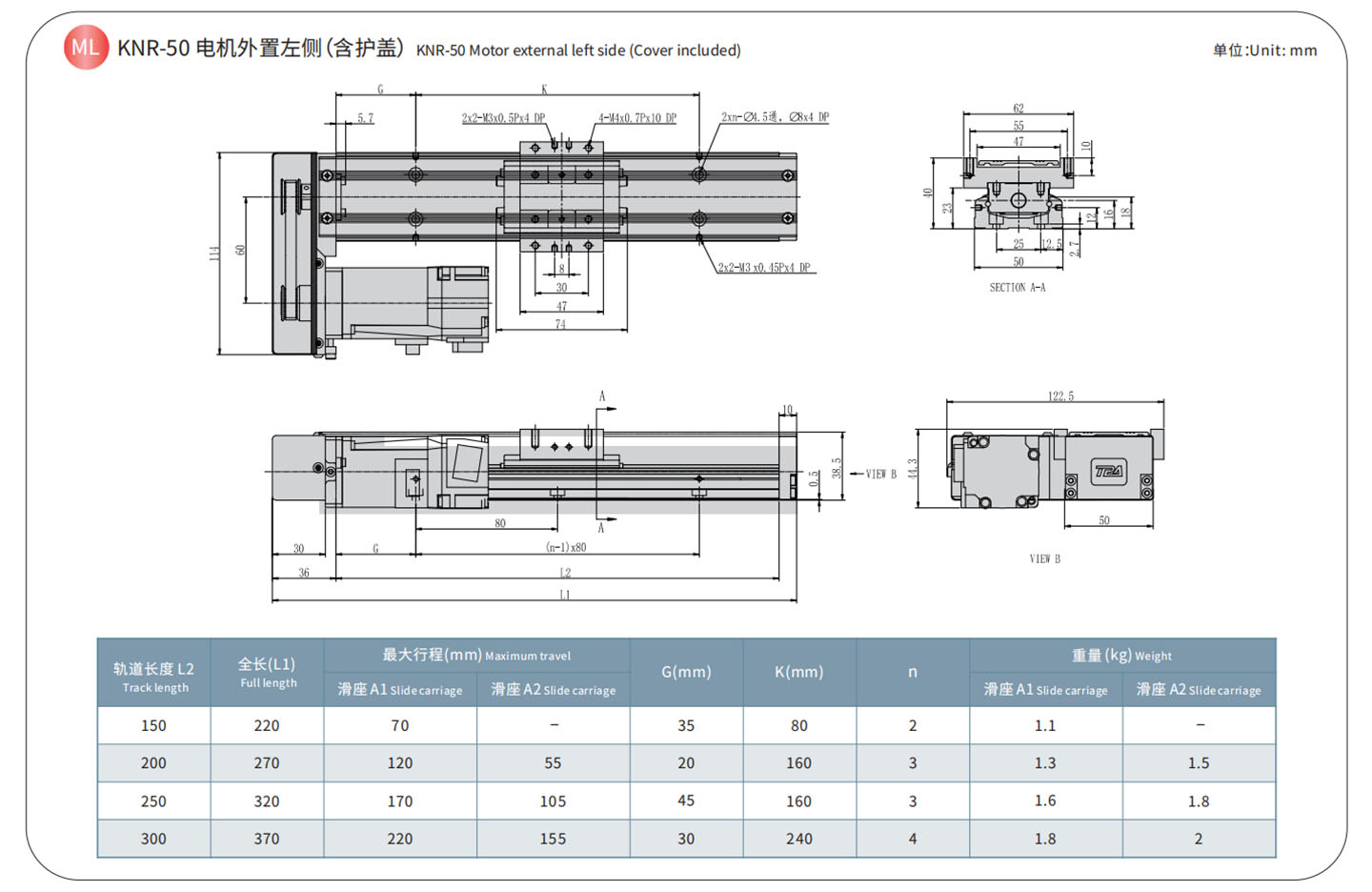
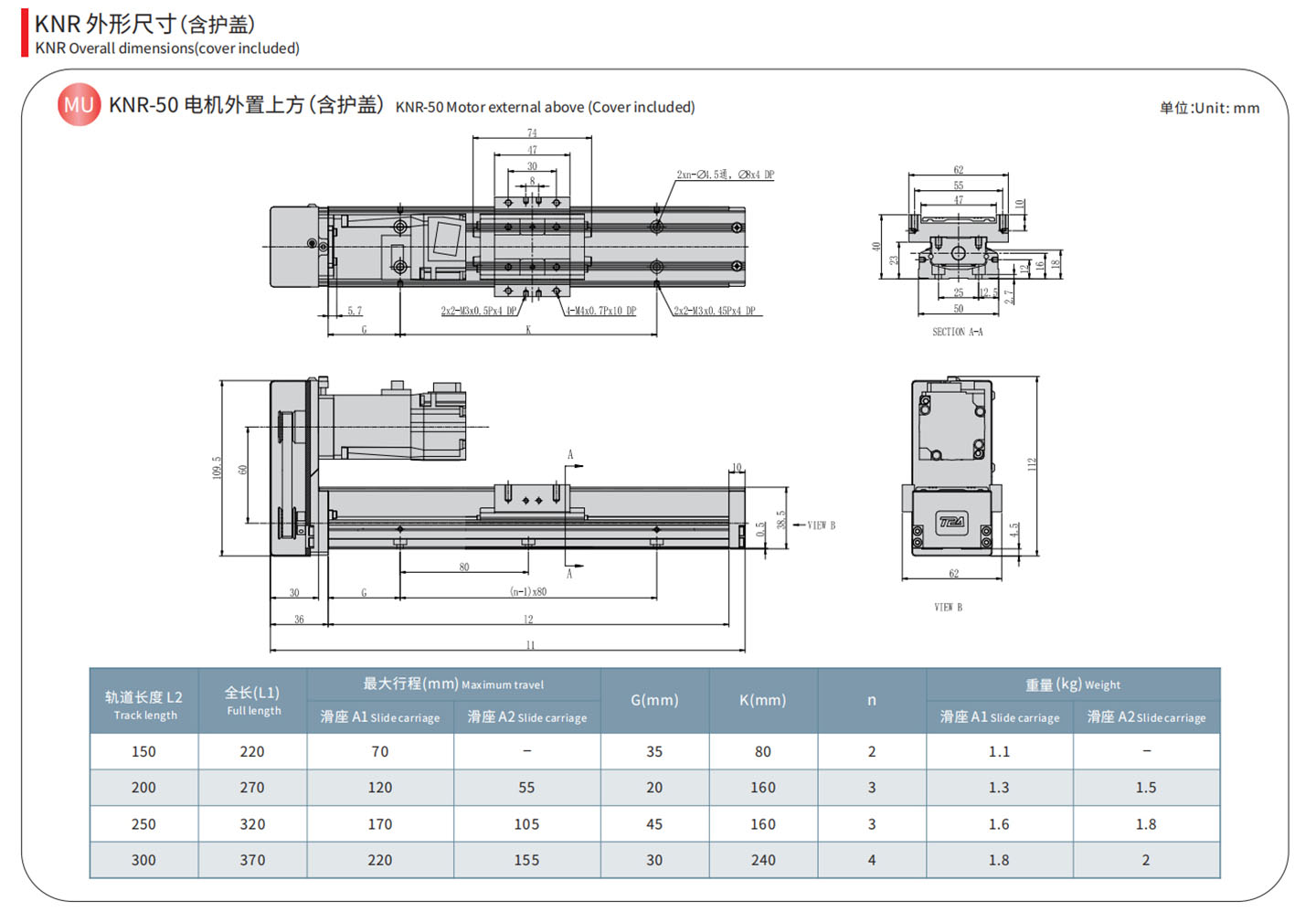
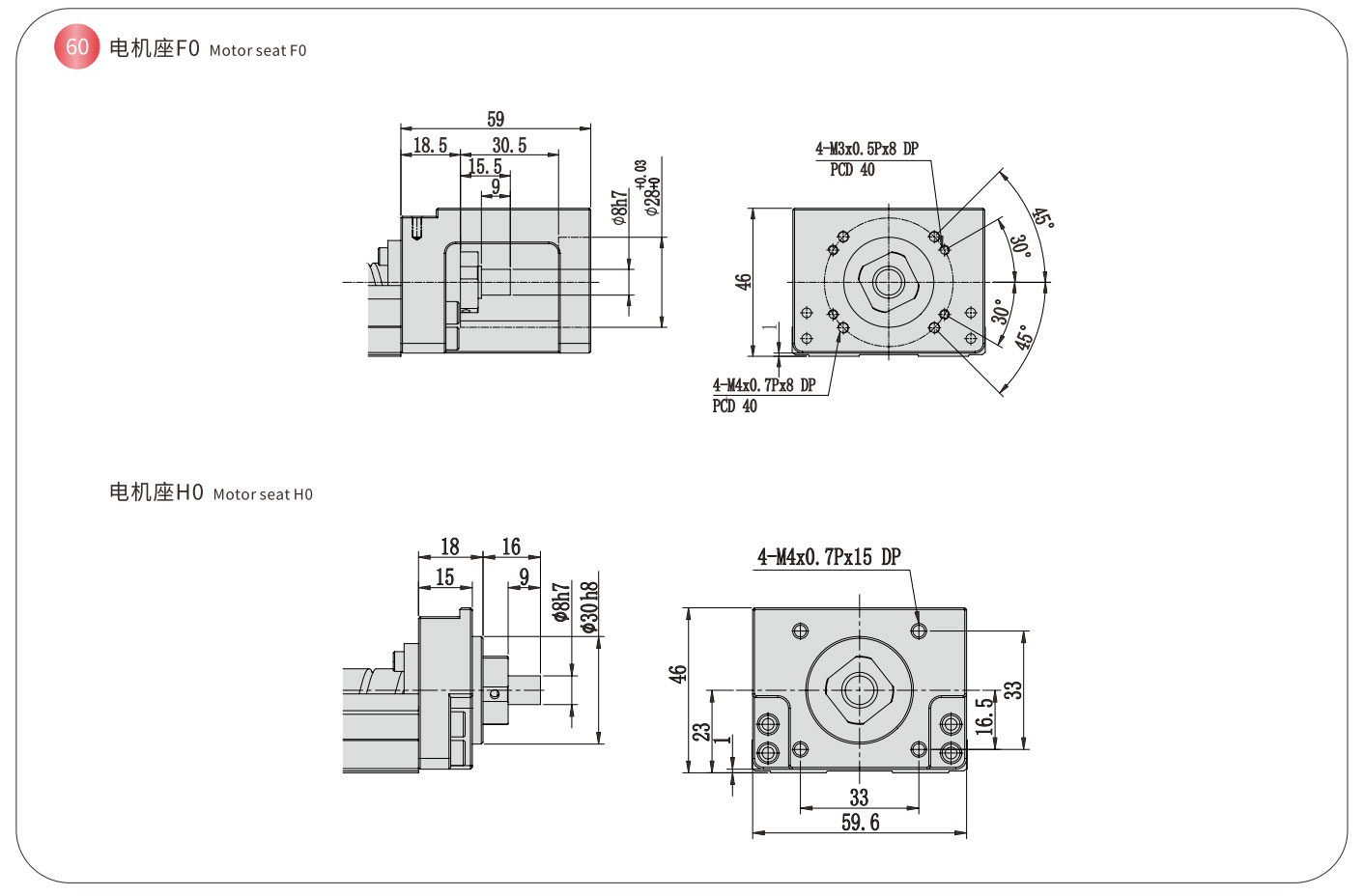
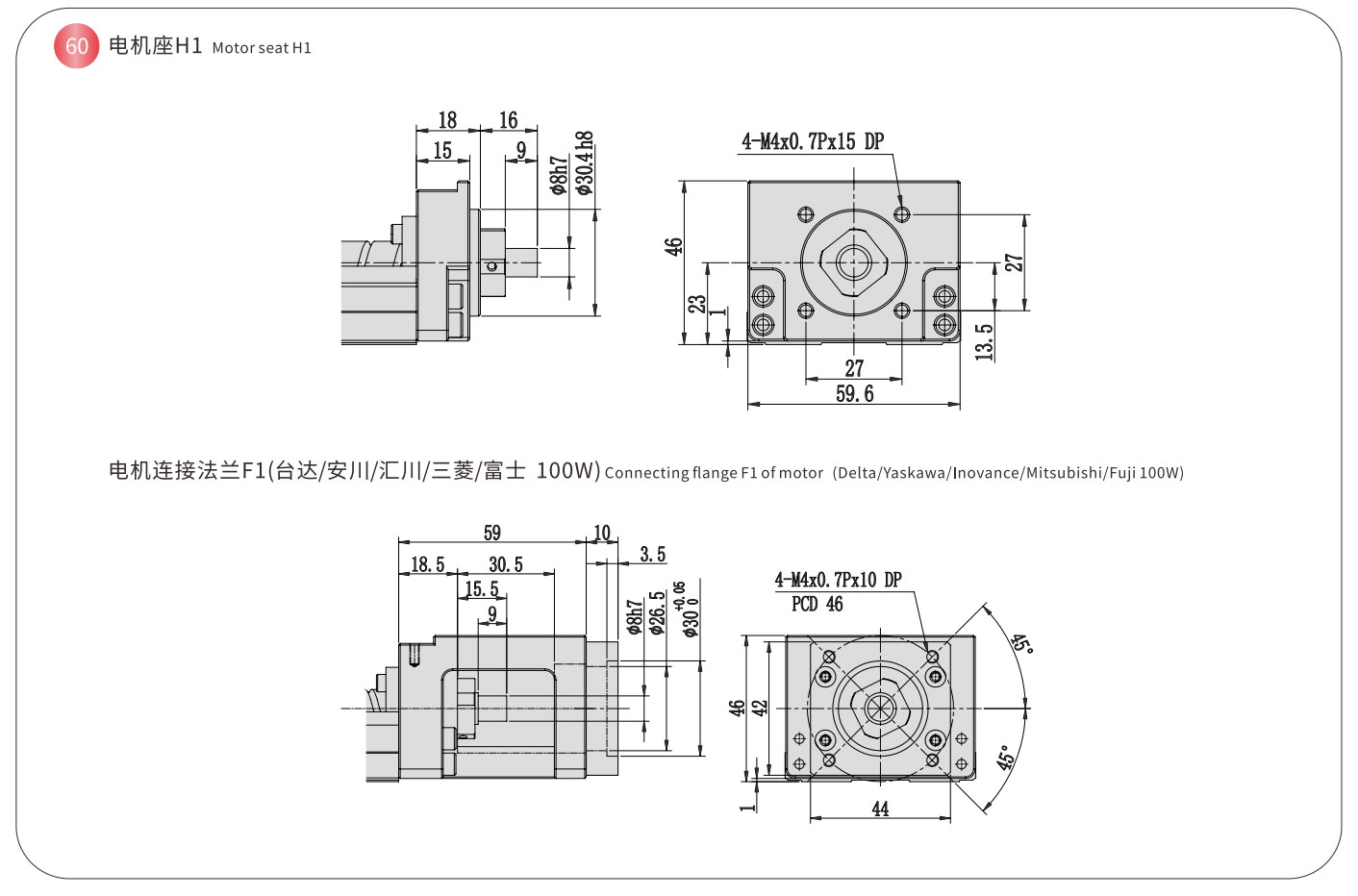
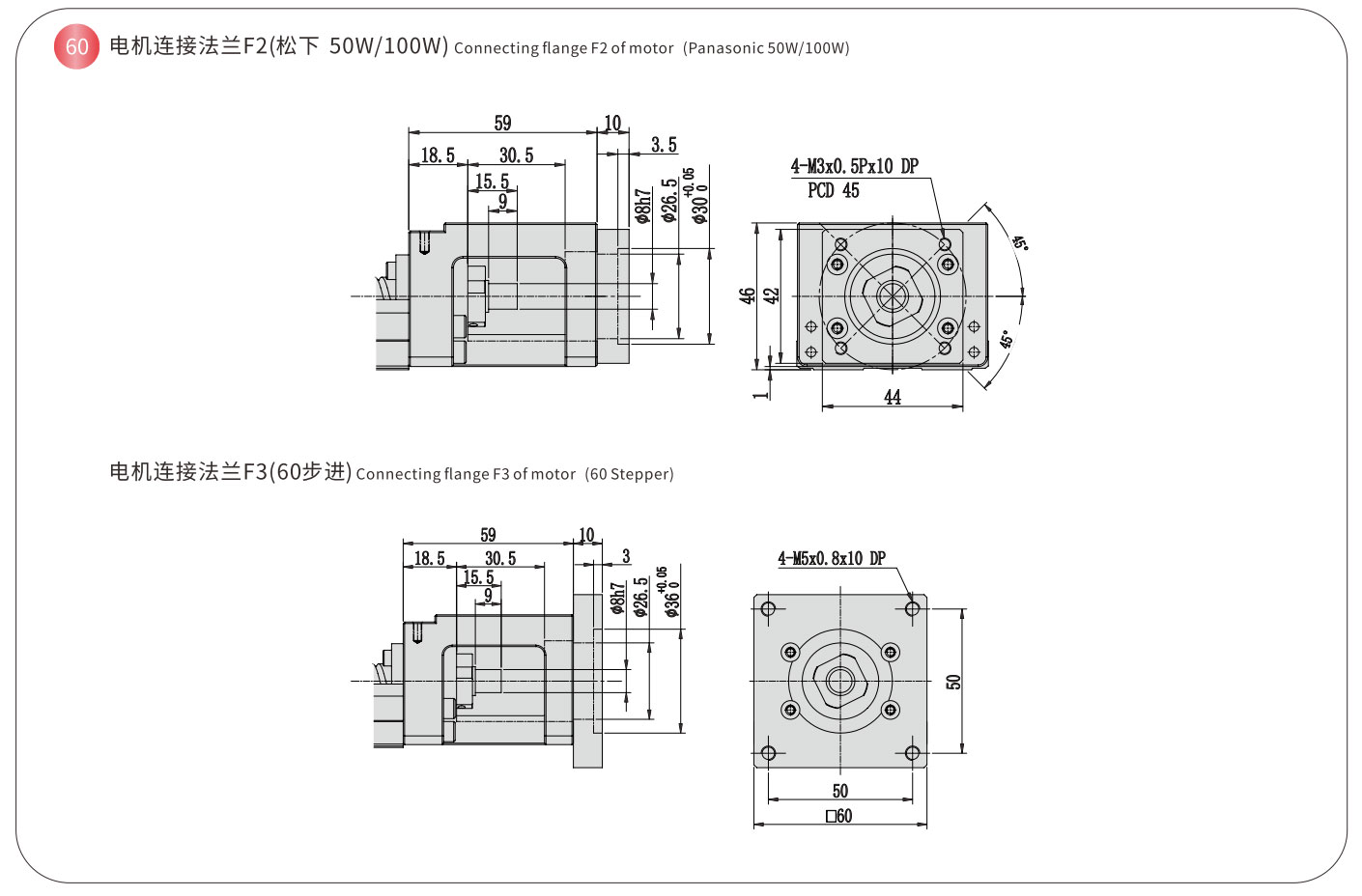
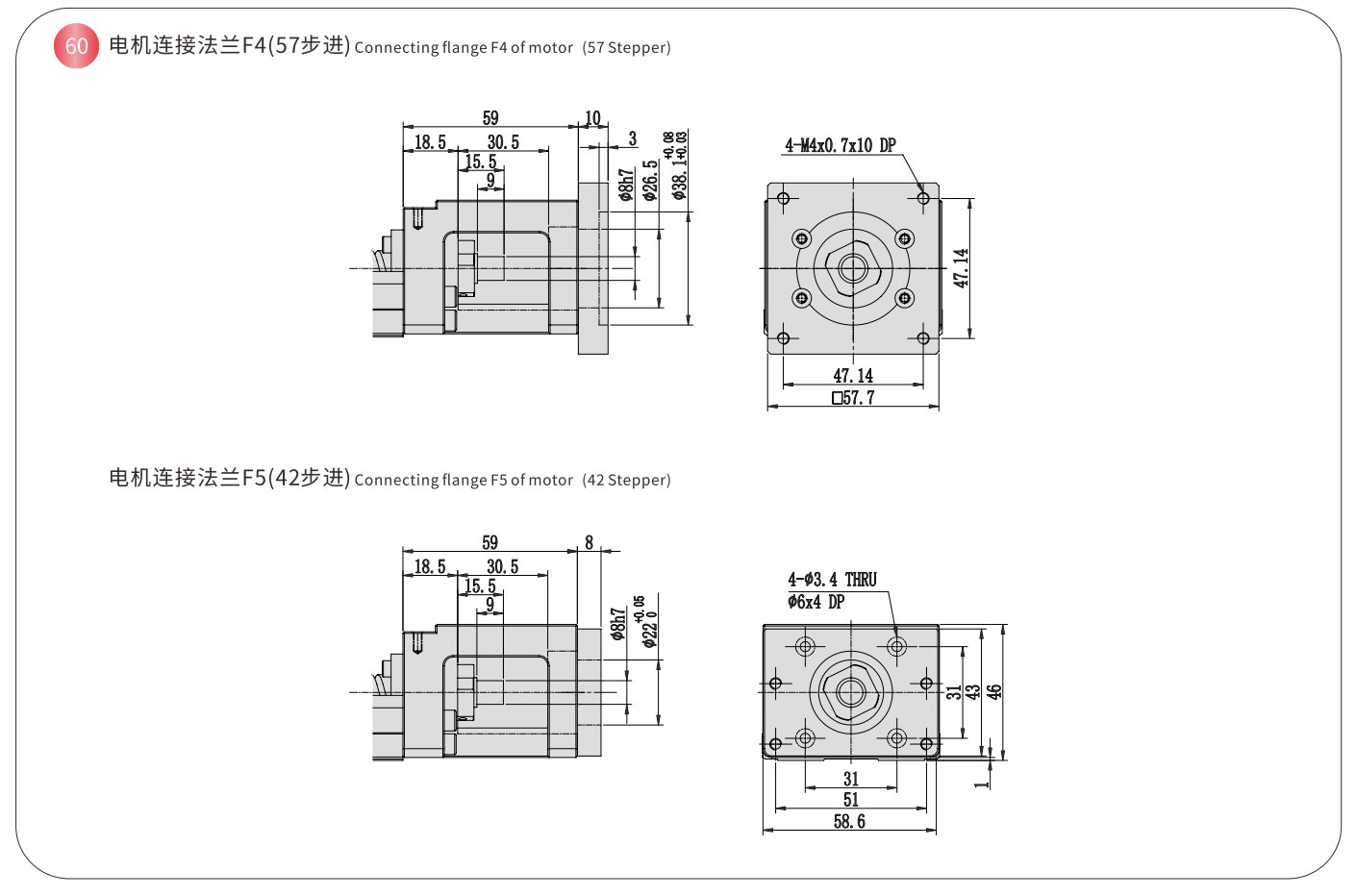
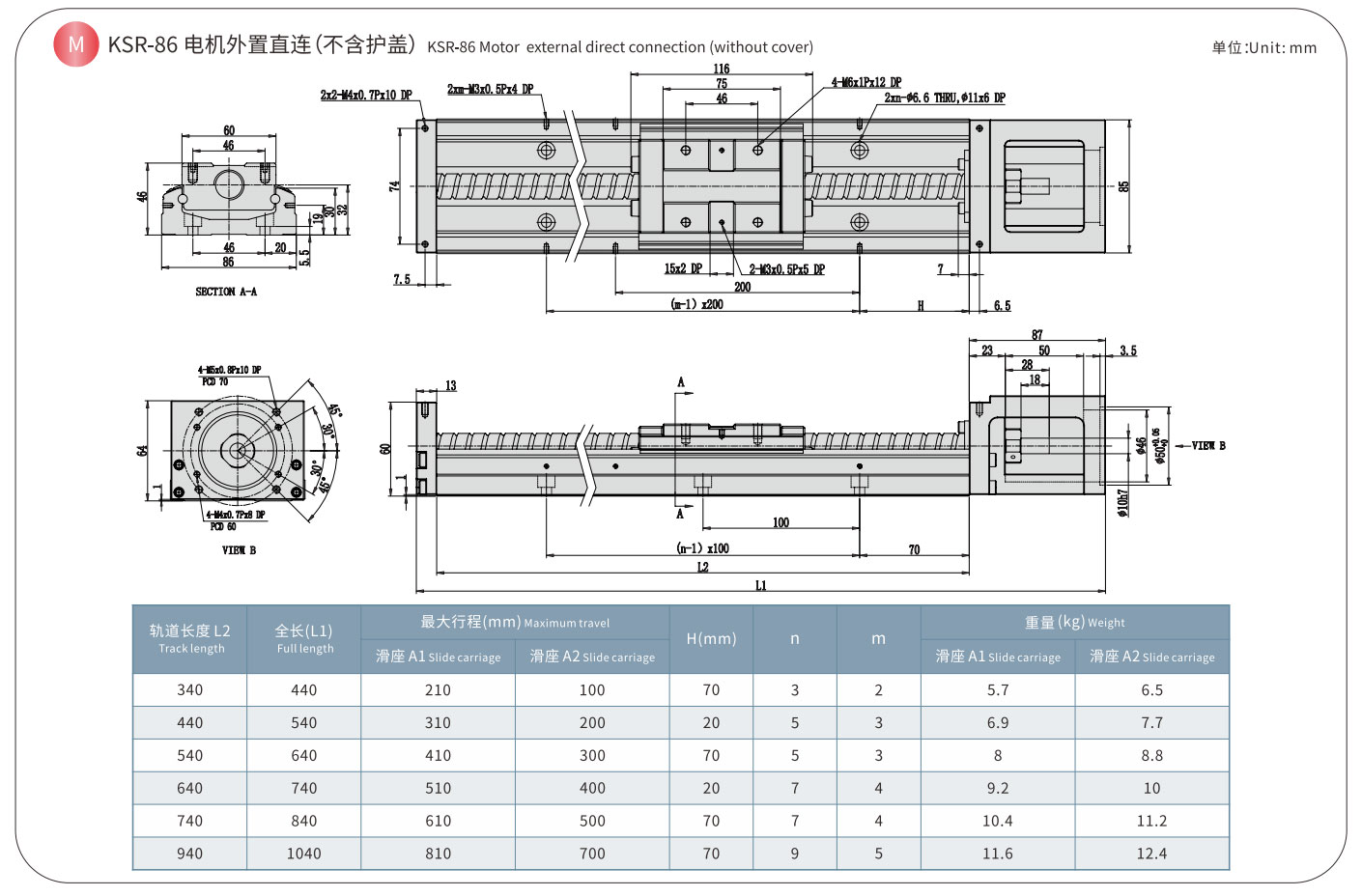
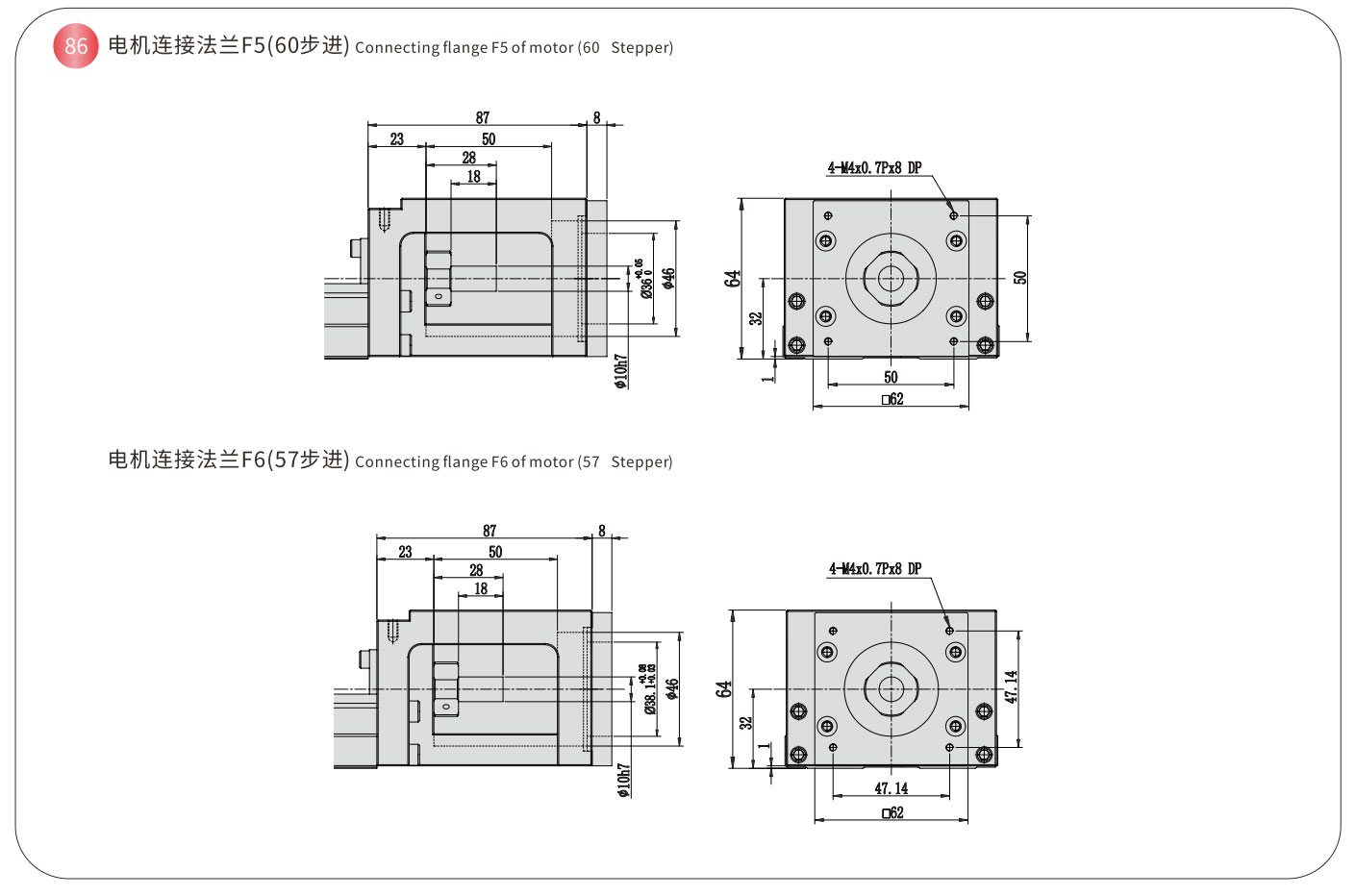
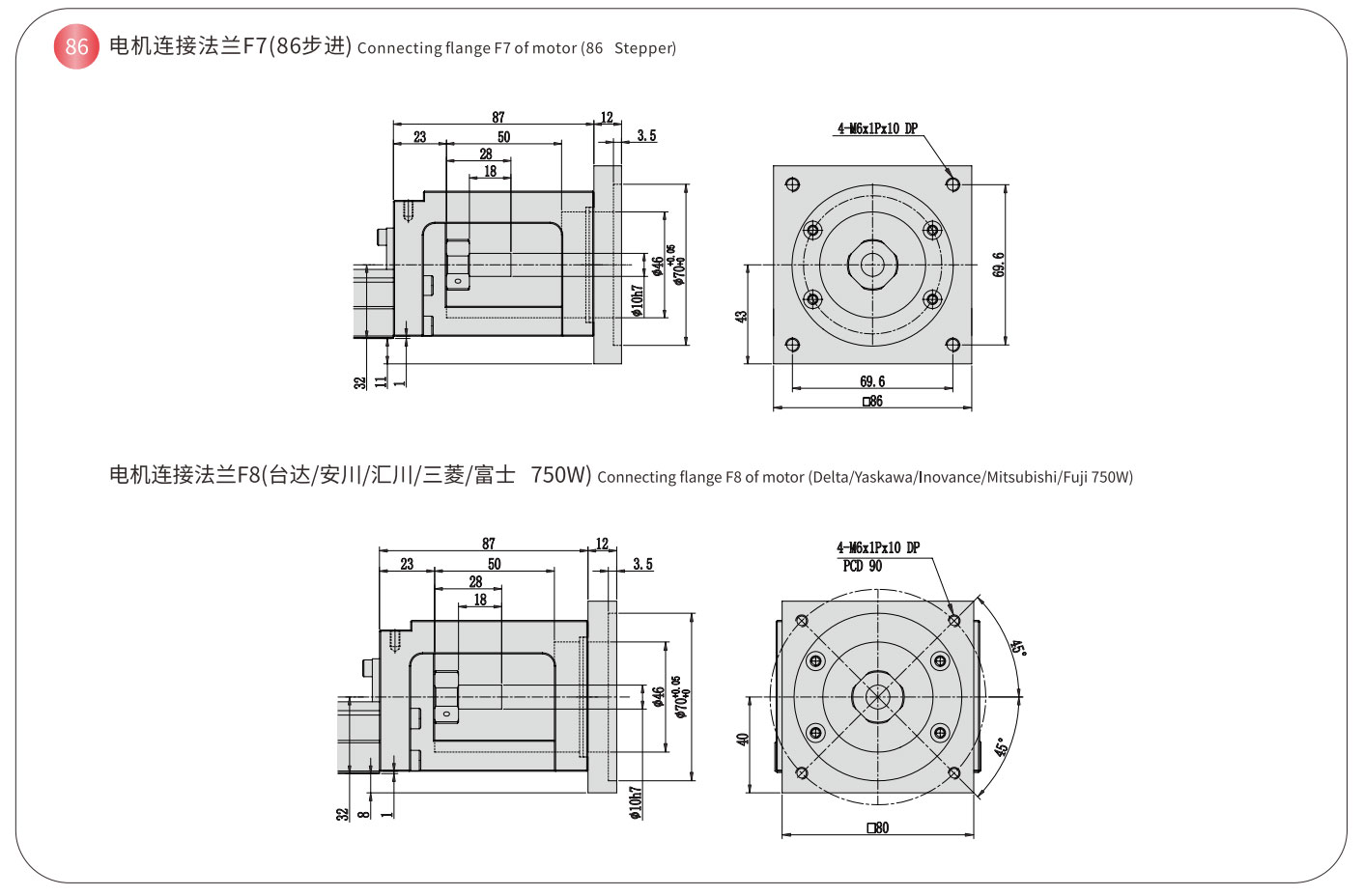
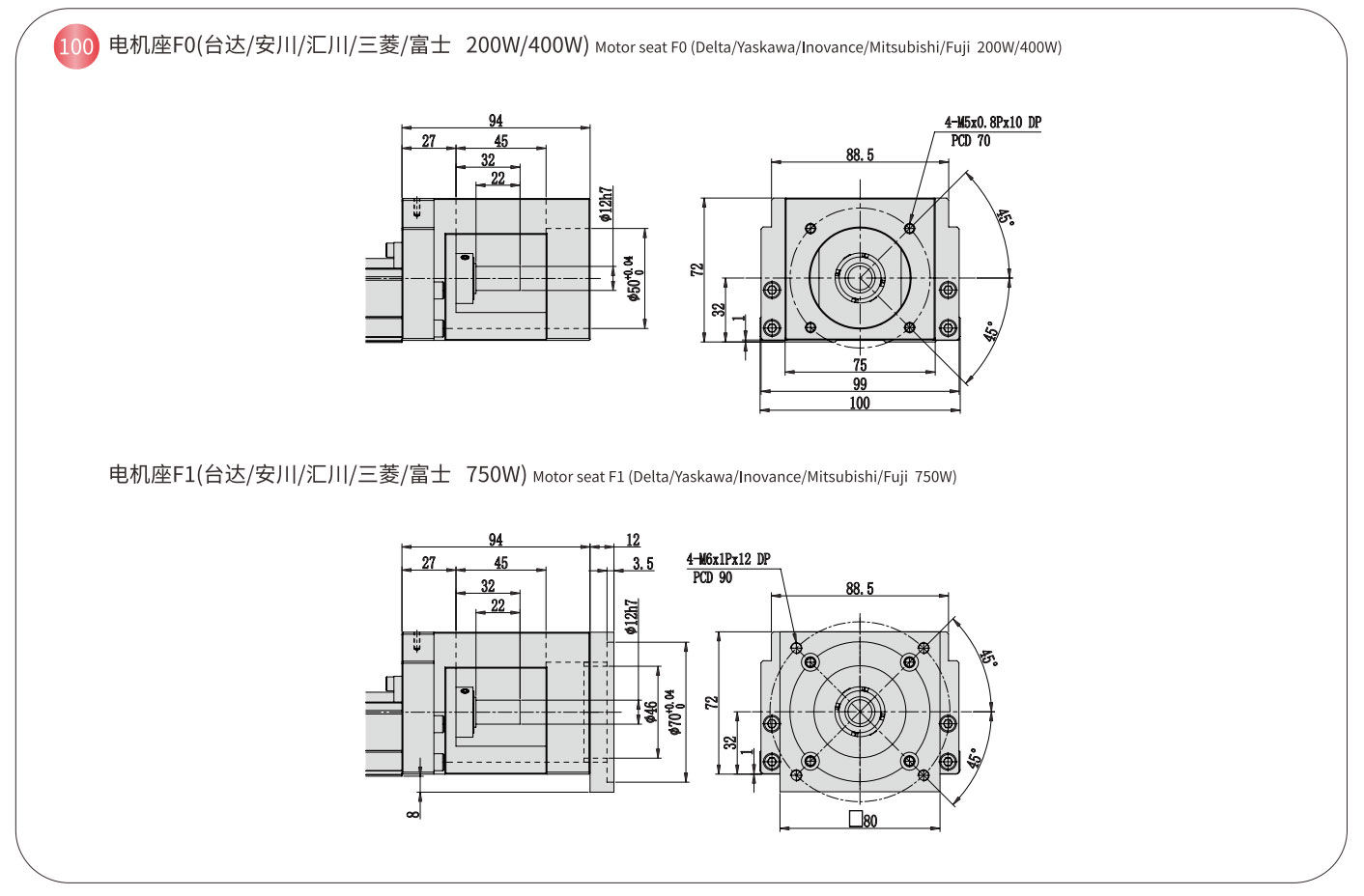
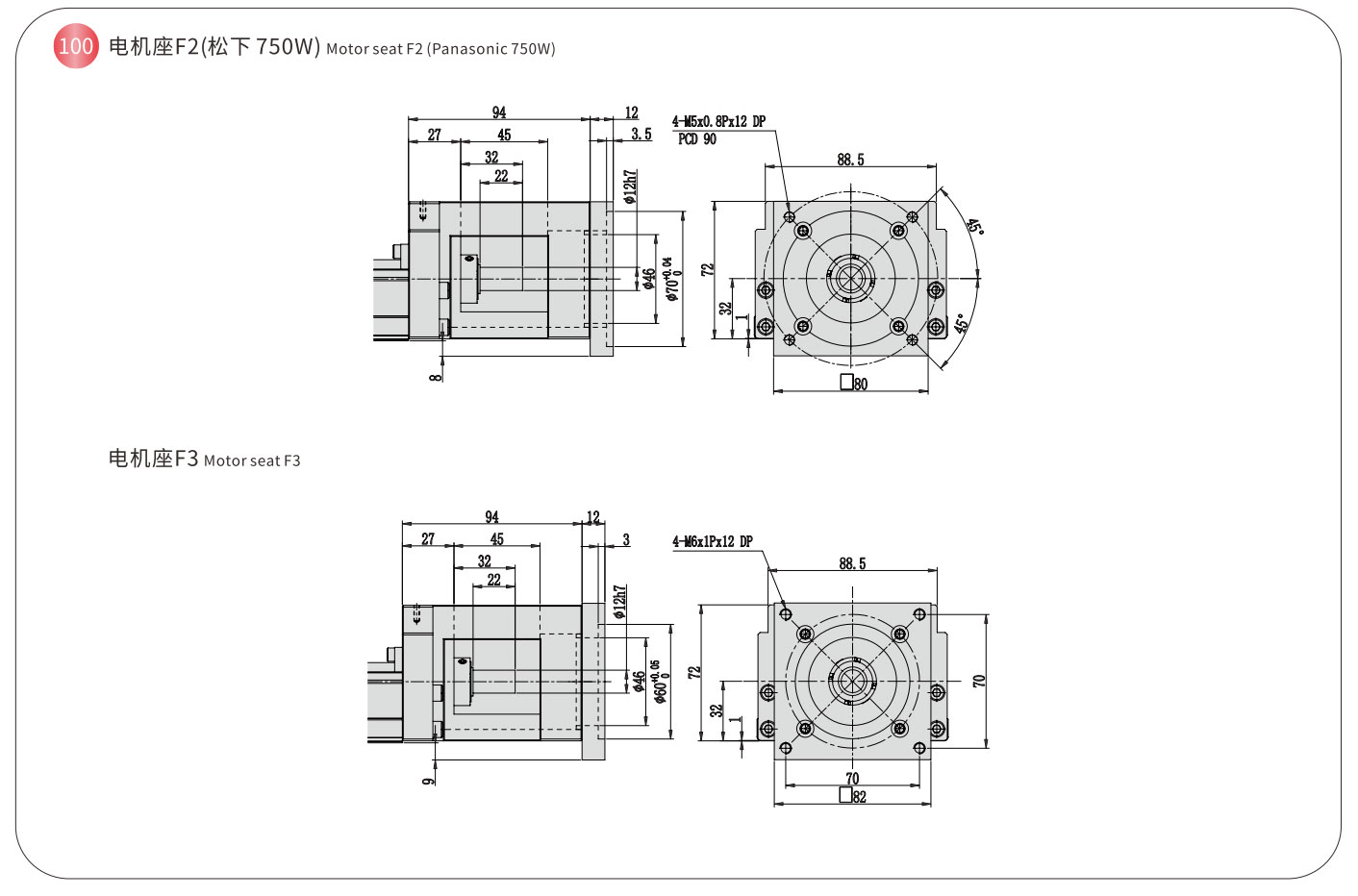
Pod istim uslovima opterećenja, naš jednoosni robot KK serije je manje veličine, nudimo standardne rupe s navojem na čeličnoj bazi i klizaču, a naša adapterska ploča motora može pružiti do 8 metoda ugradnje motora, što znači da se može lako sastaviti bilo koji kartezijanski robotski sistem. Stoga se roboti KK serije s jednom osovinom naširoko koriste u rukovanju silikonskim pločicama, automatskom doziranju, industriji FPD, industriji medicinske automatizacije, preciznim mjernim instrumentima, kliznim stolovima, industriji koordinacije linearnih kliznih stolova.

KSR-KNR-KFR-KCR serija 2

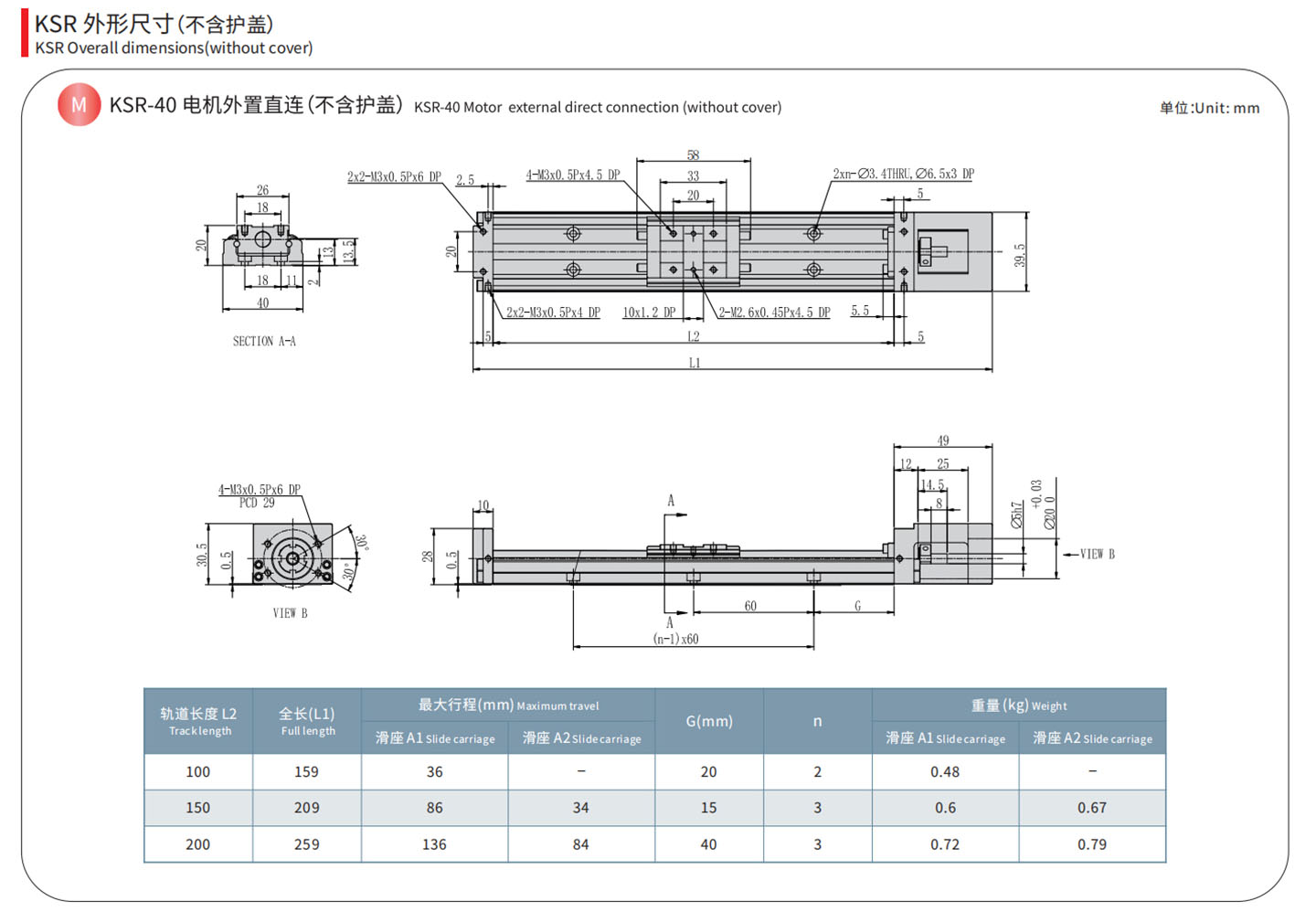
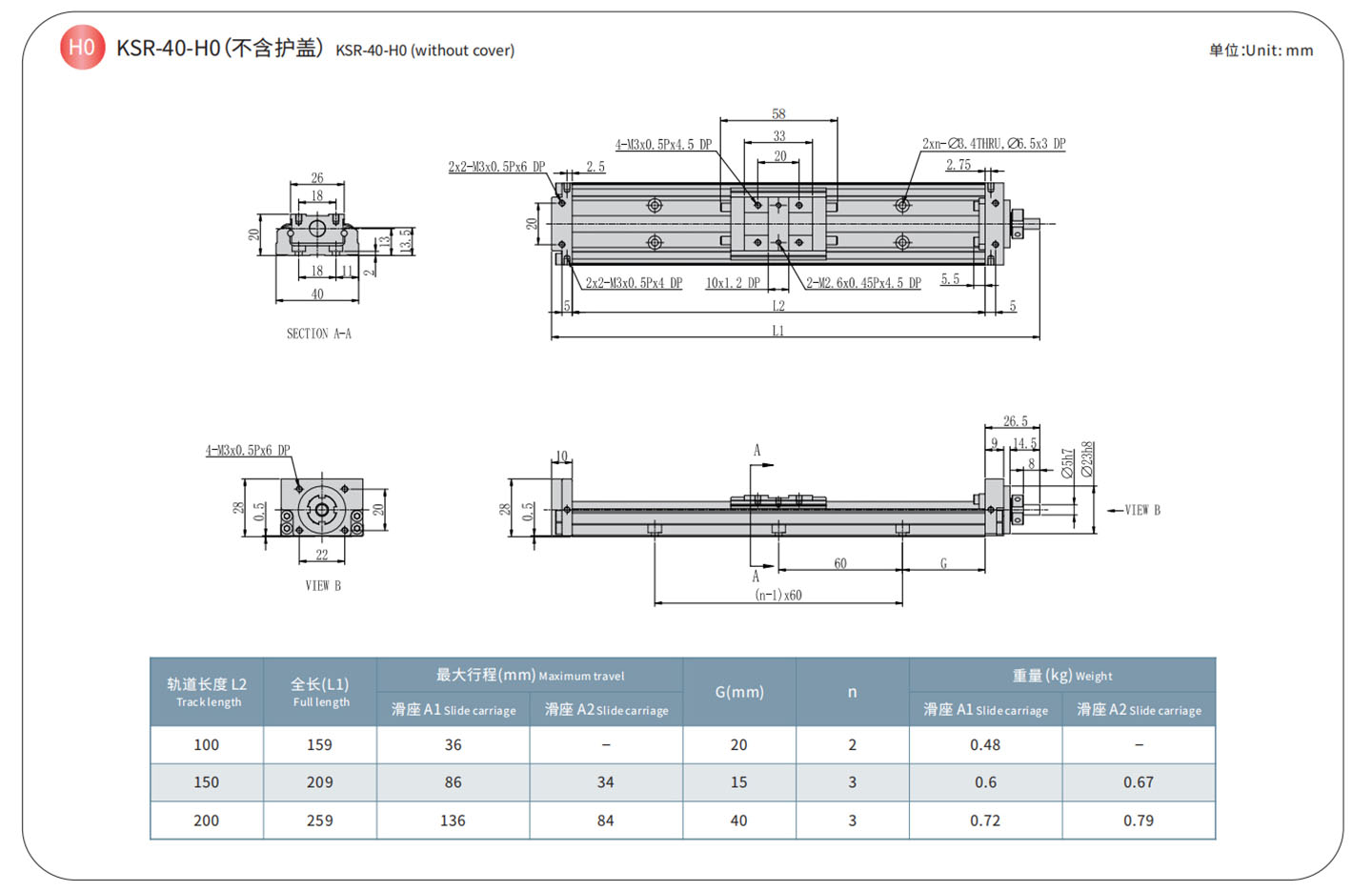
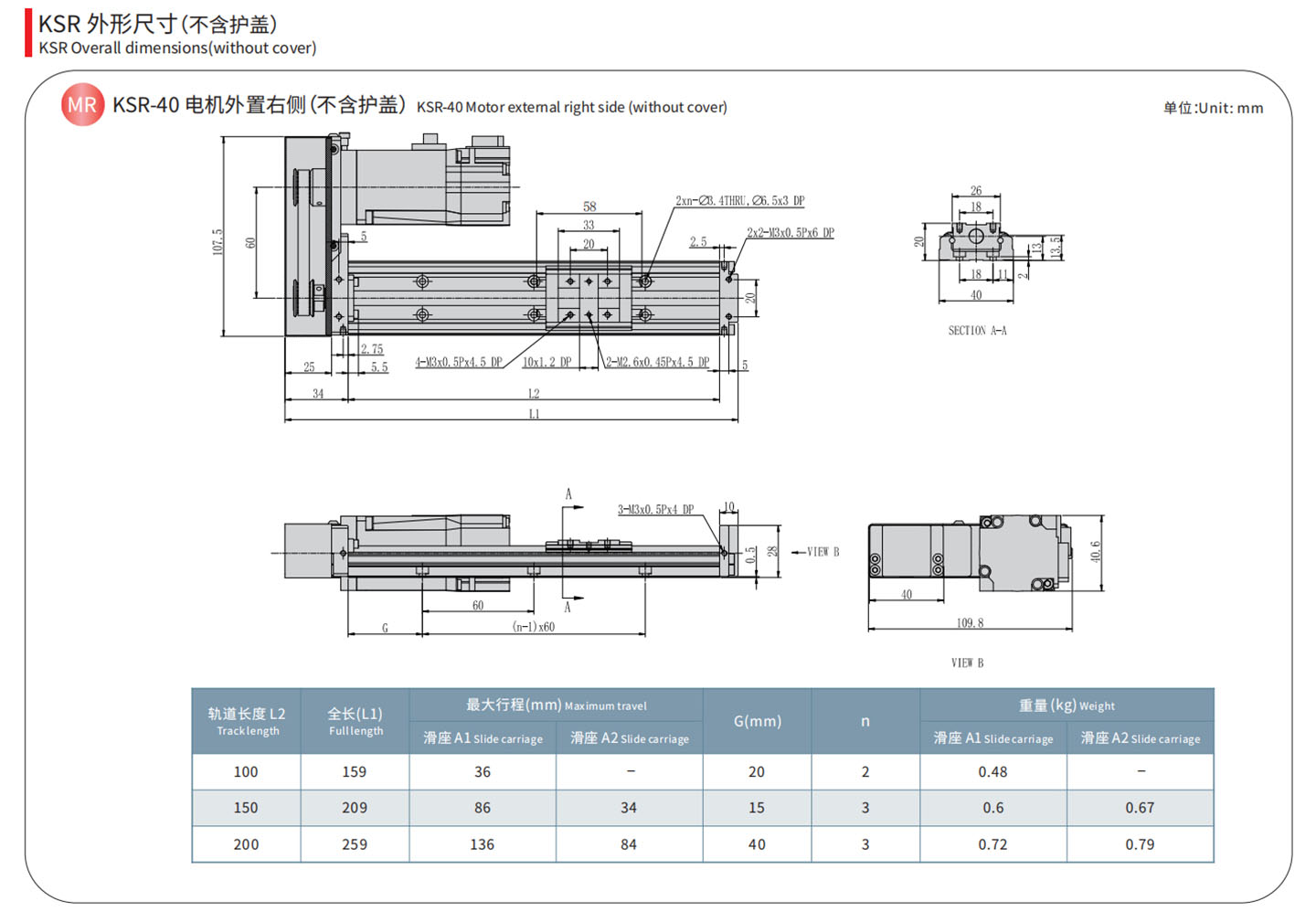
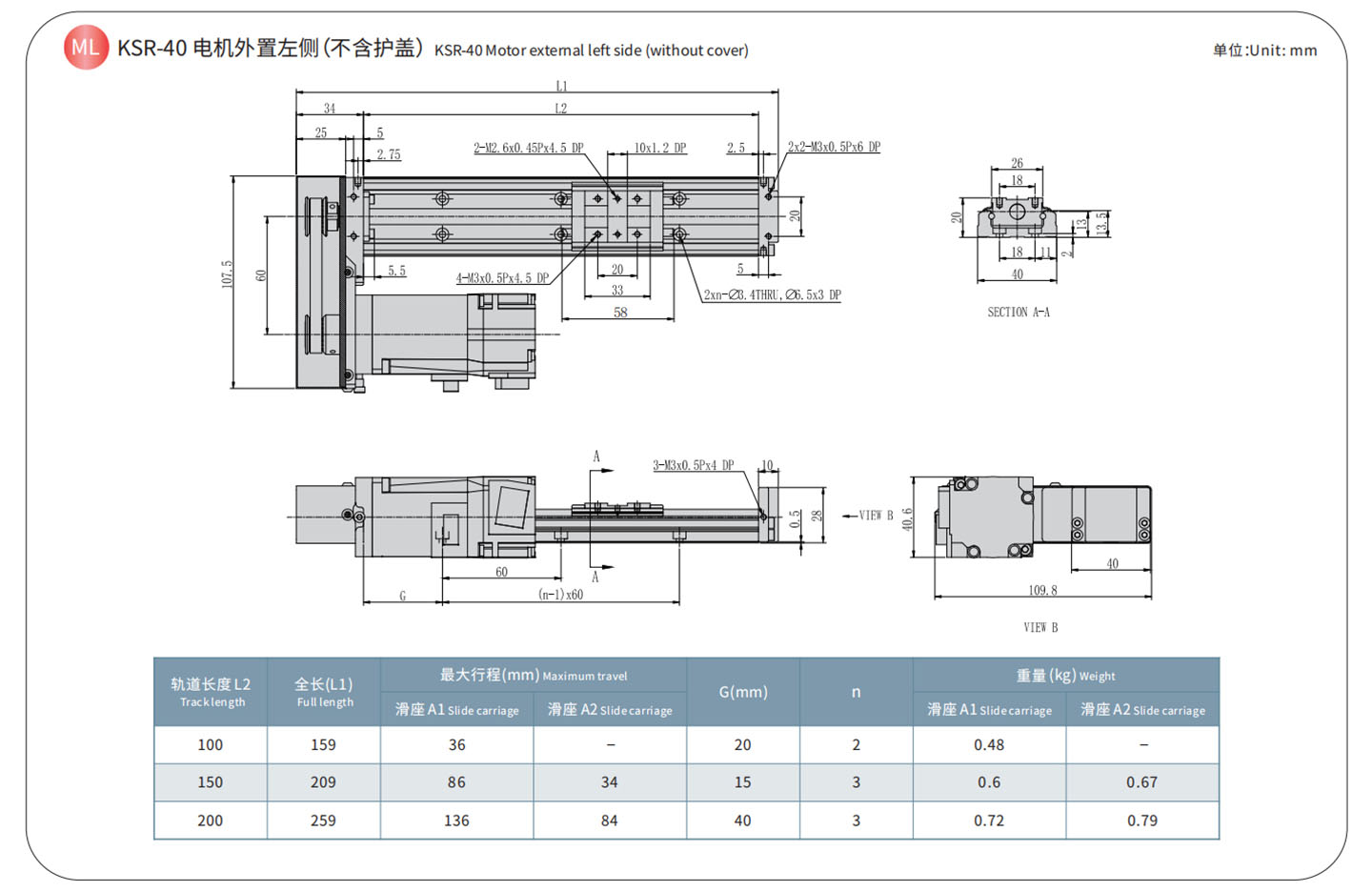
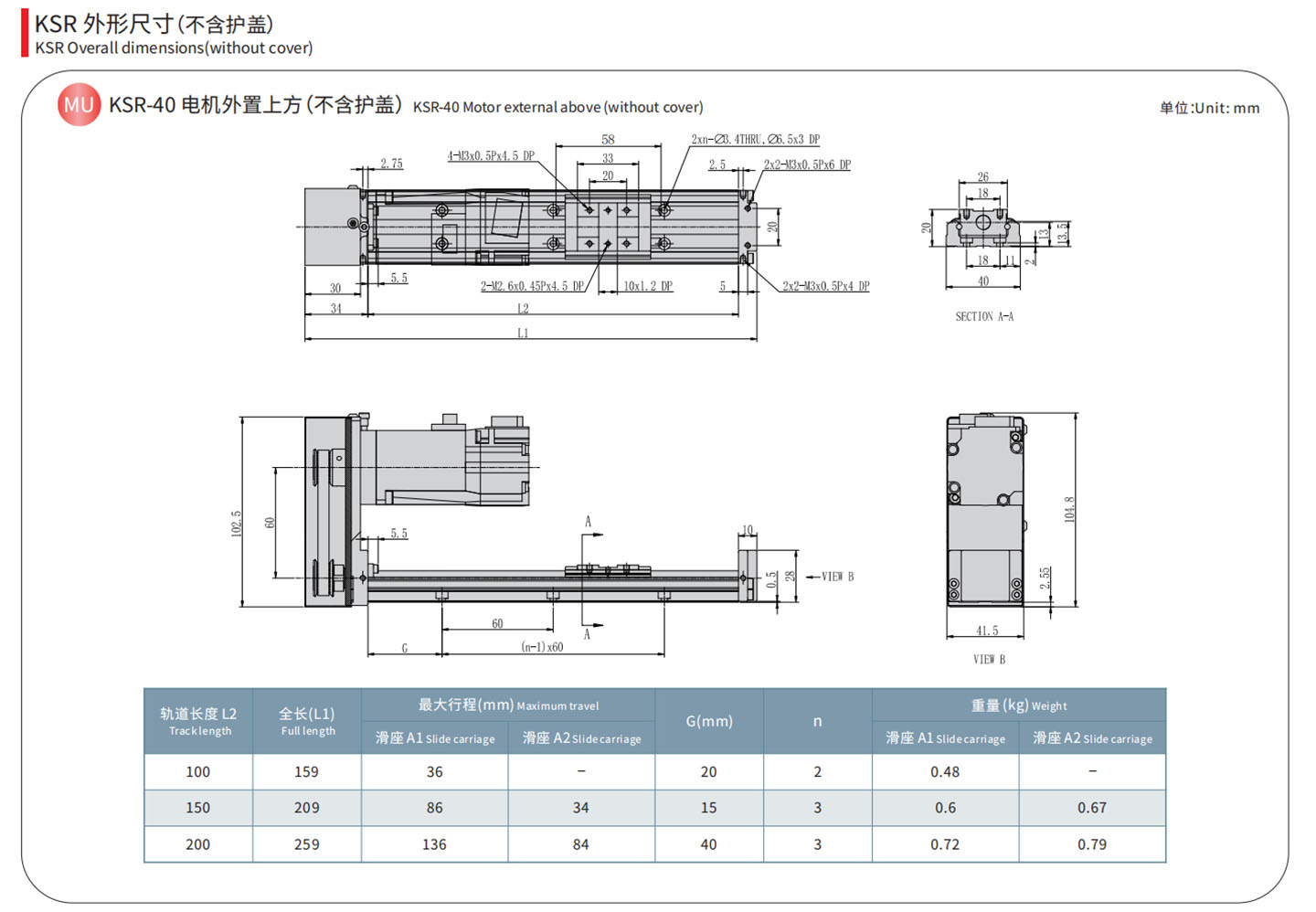
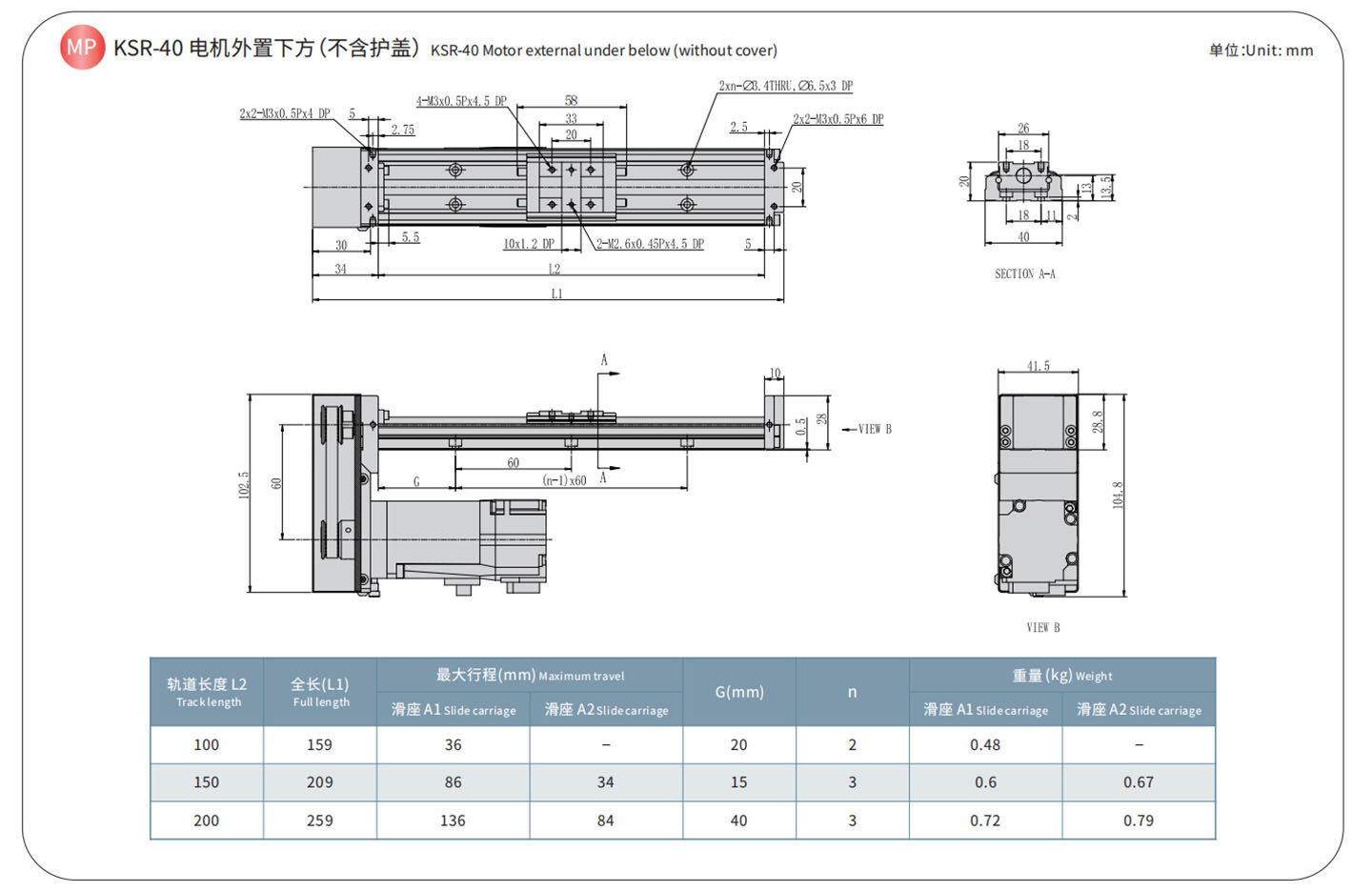
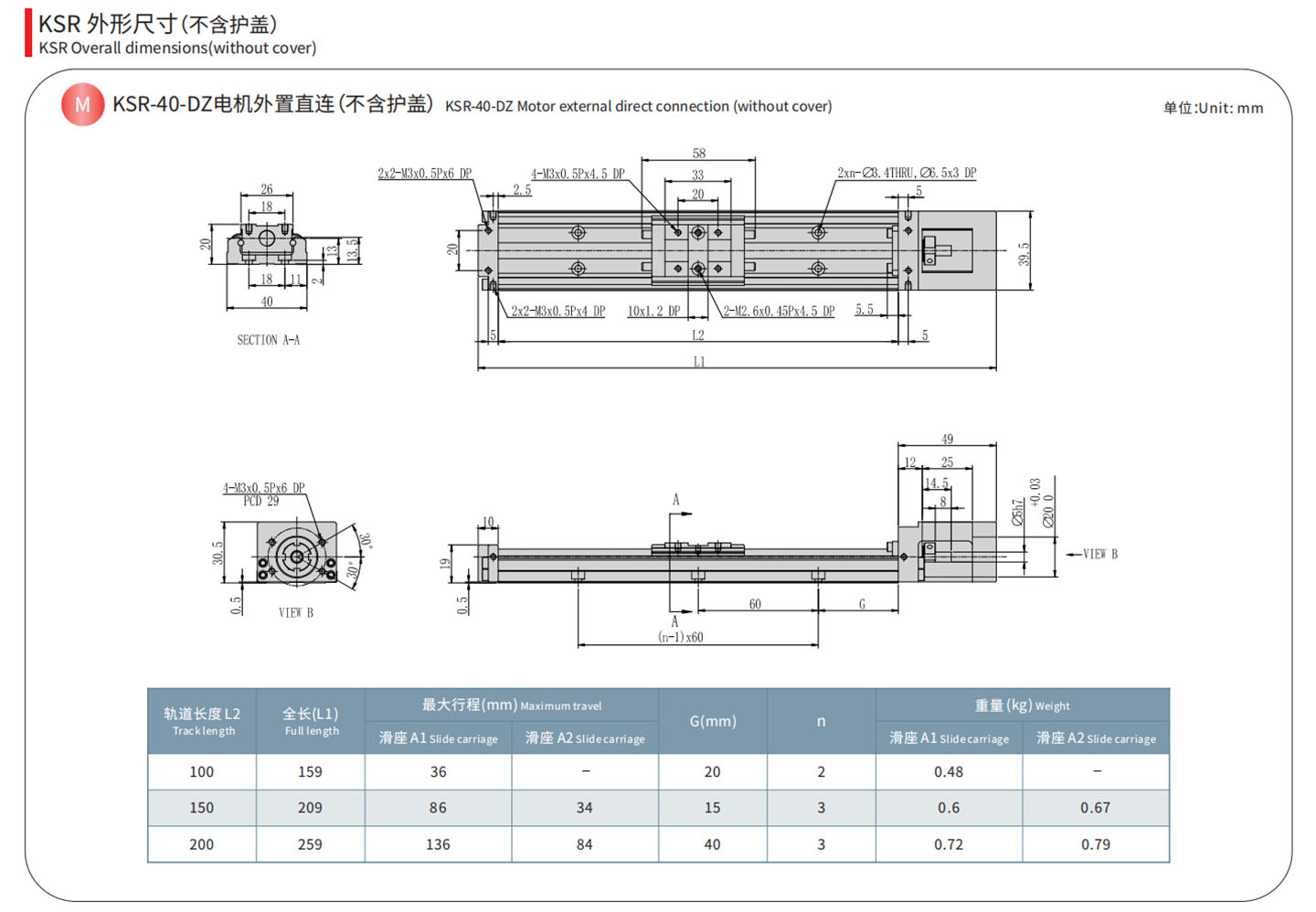
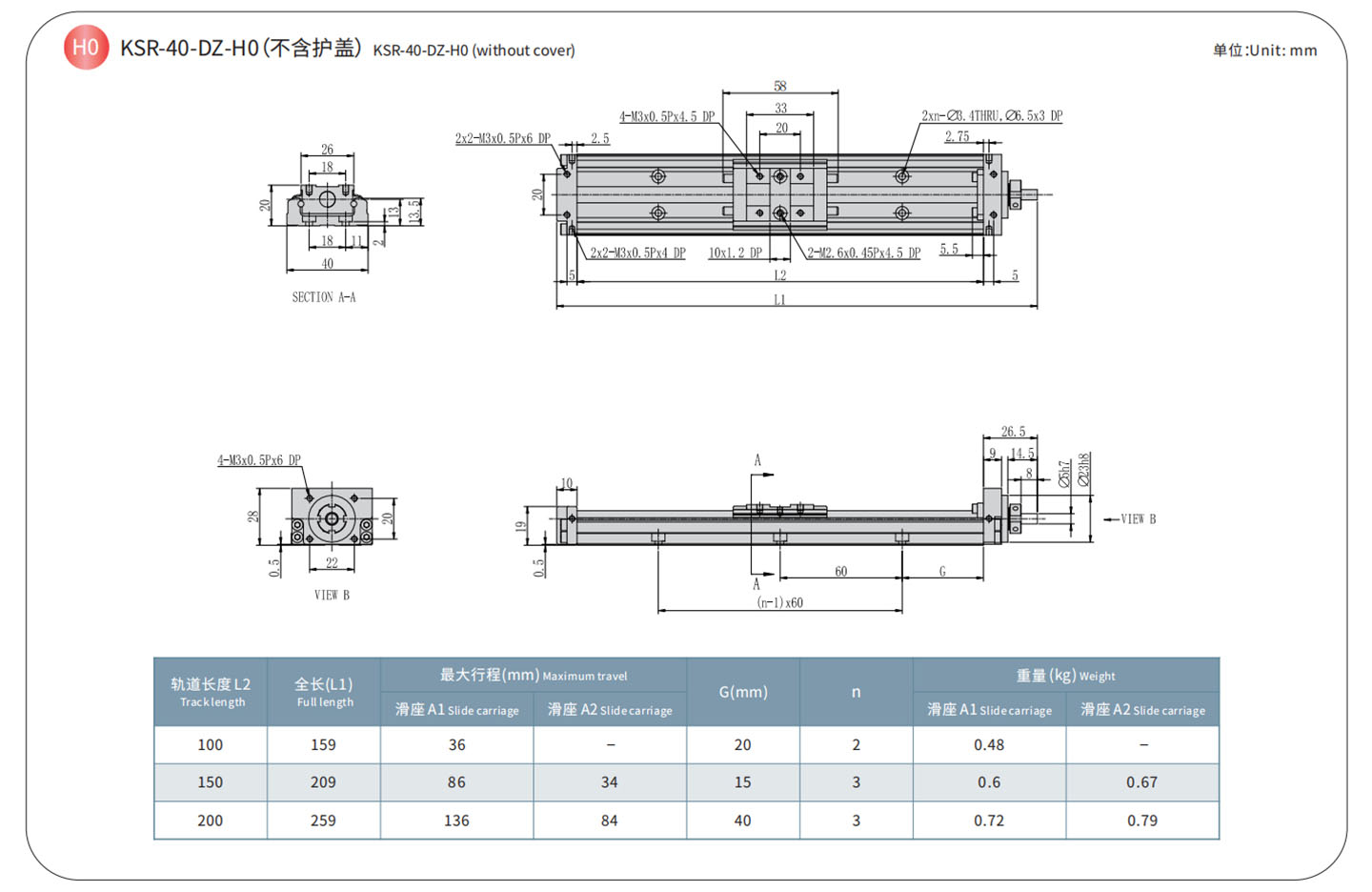
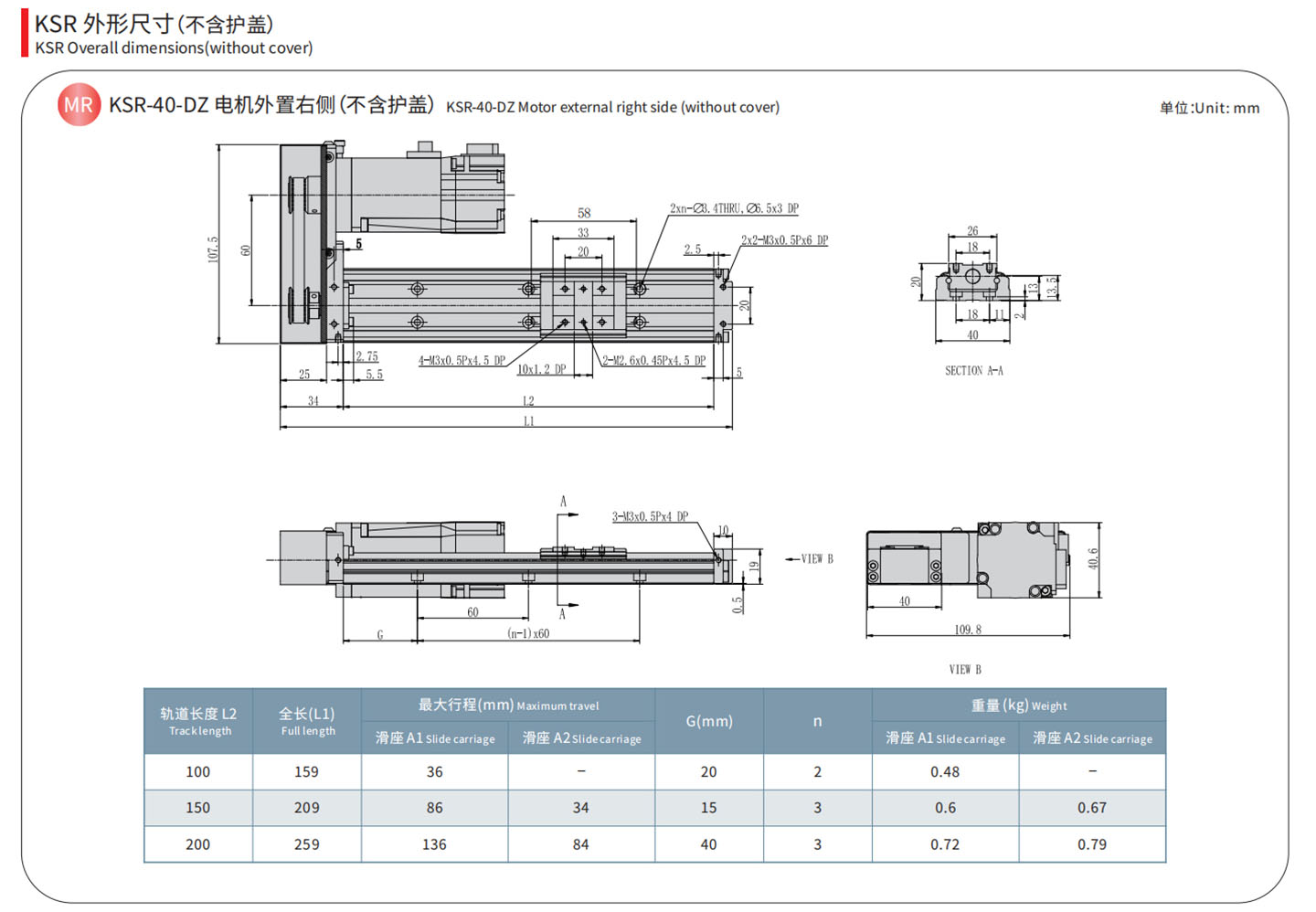
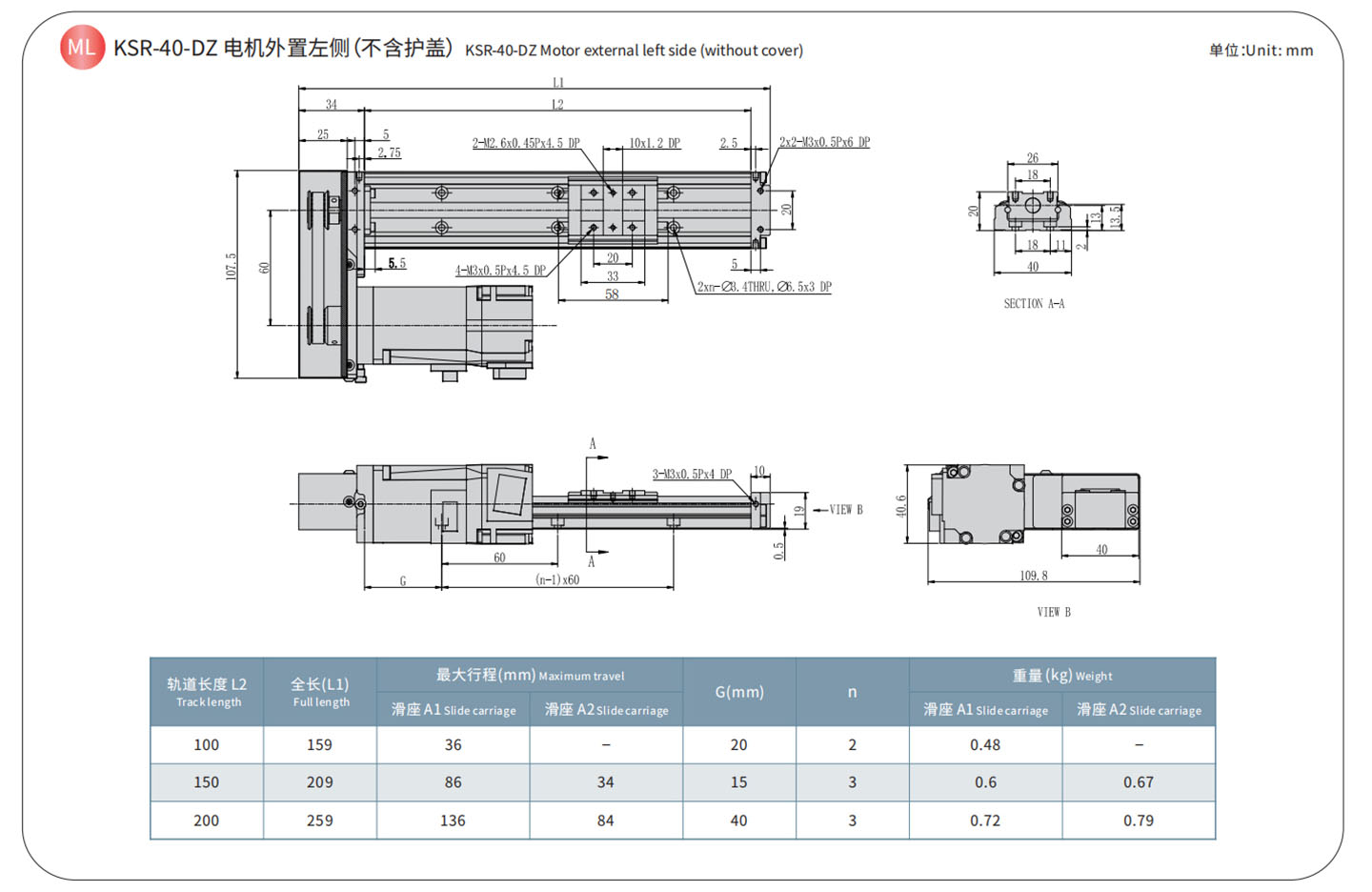
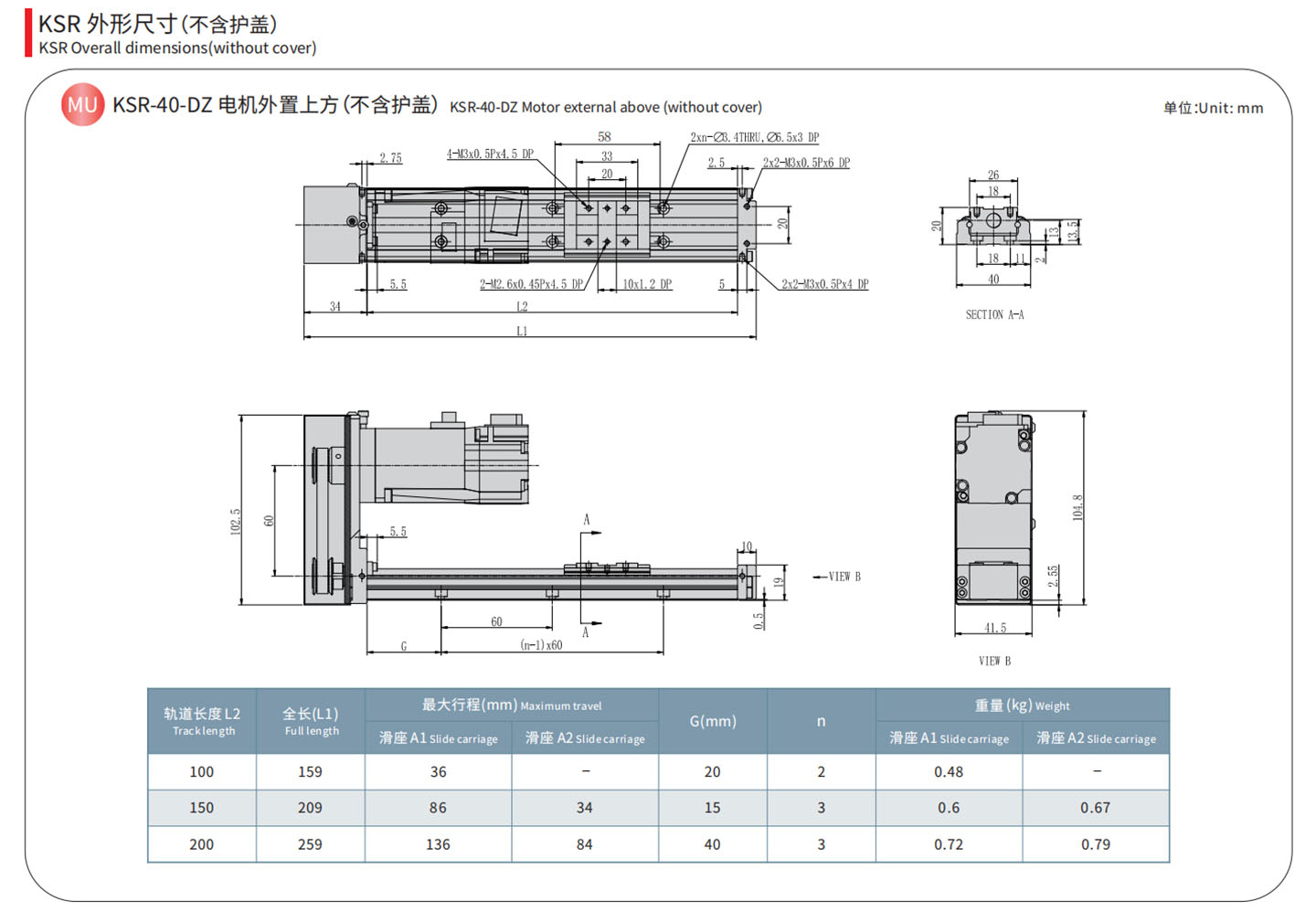
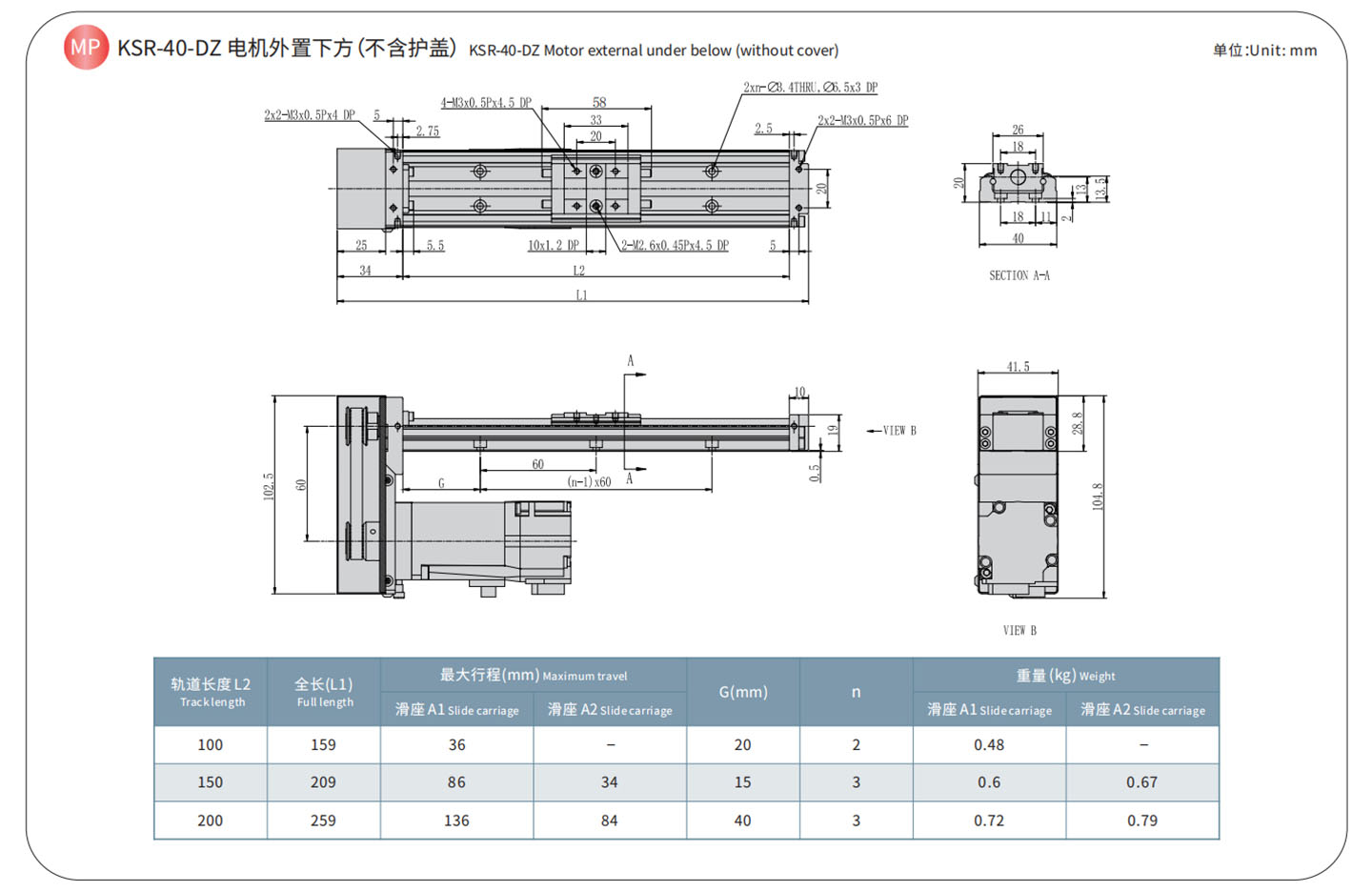
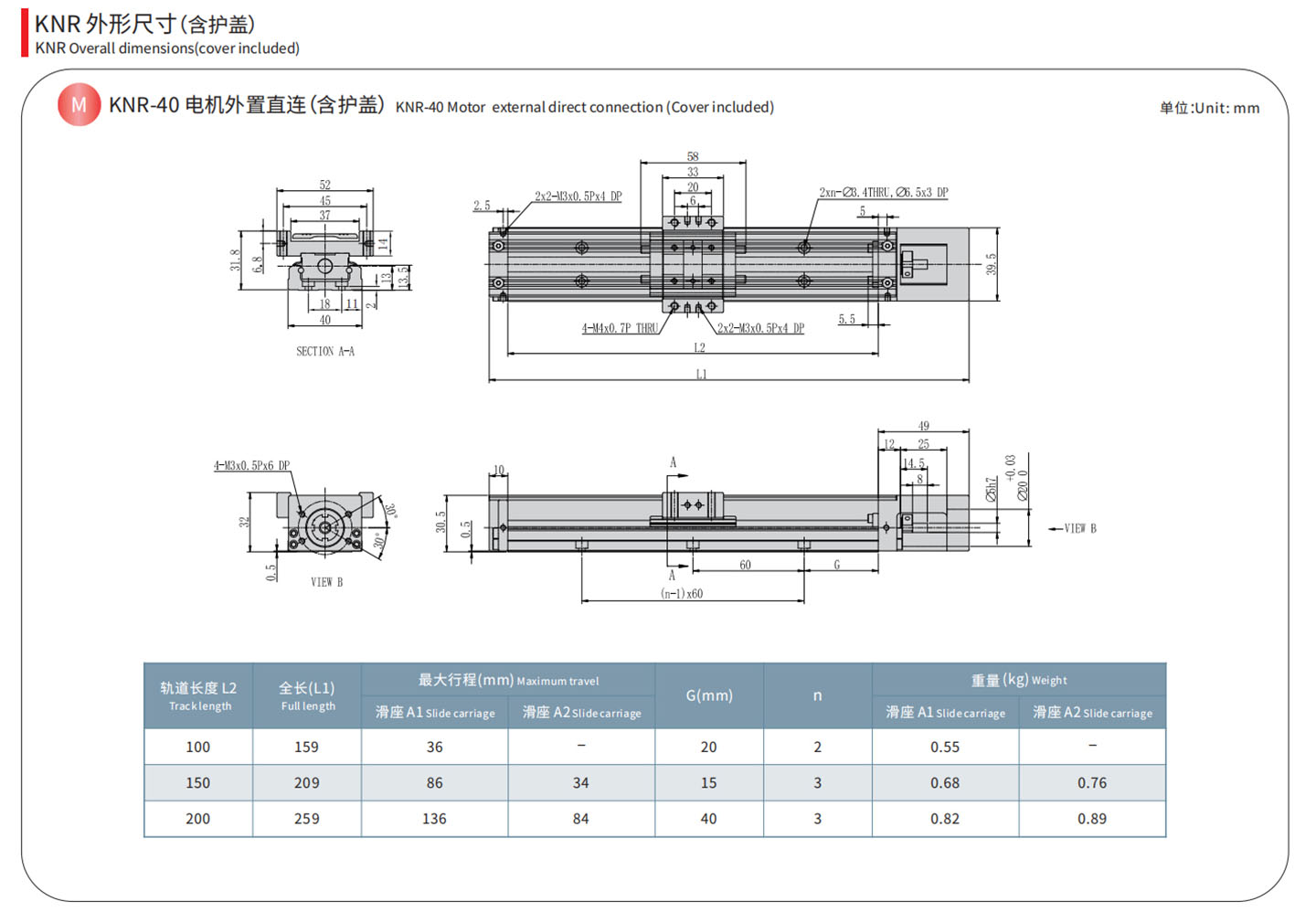
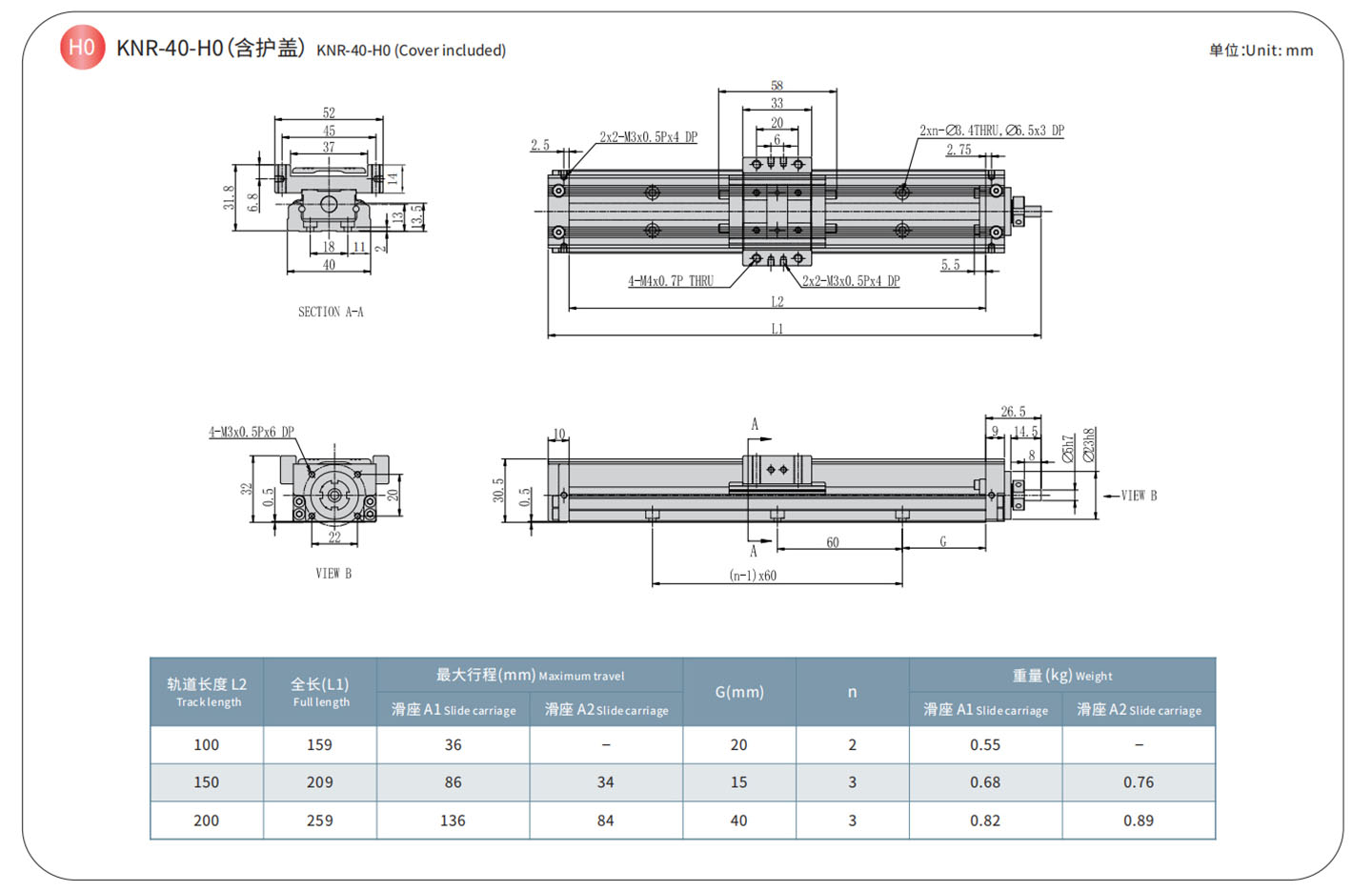
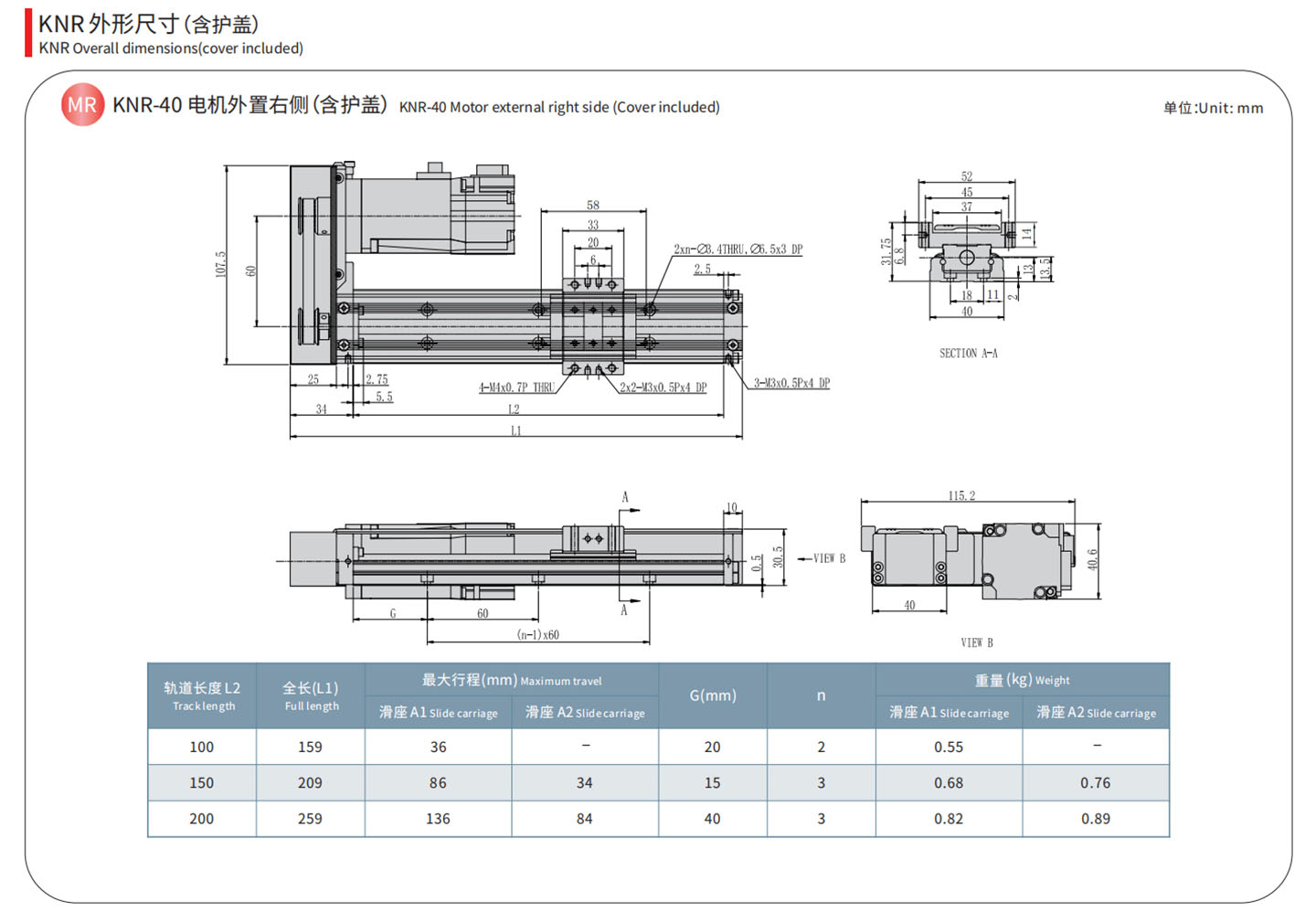
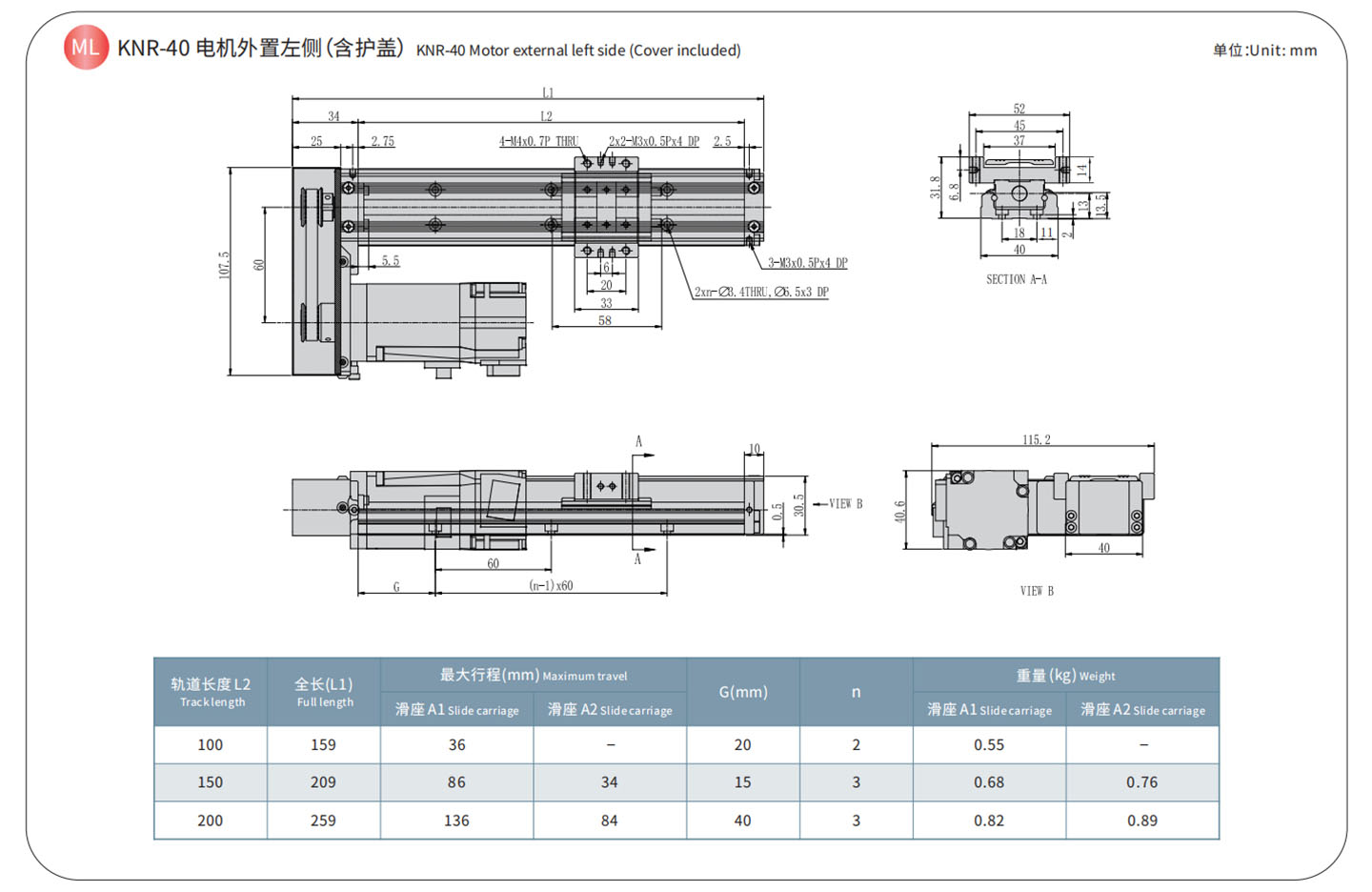
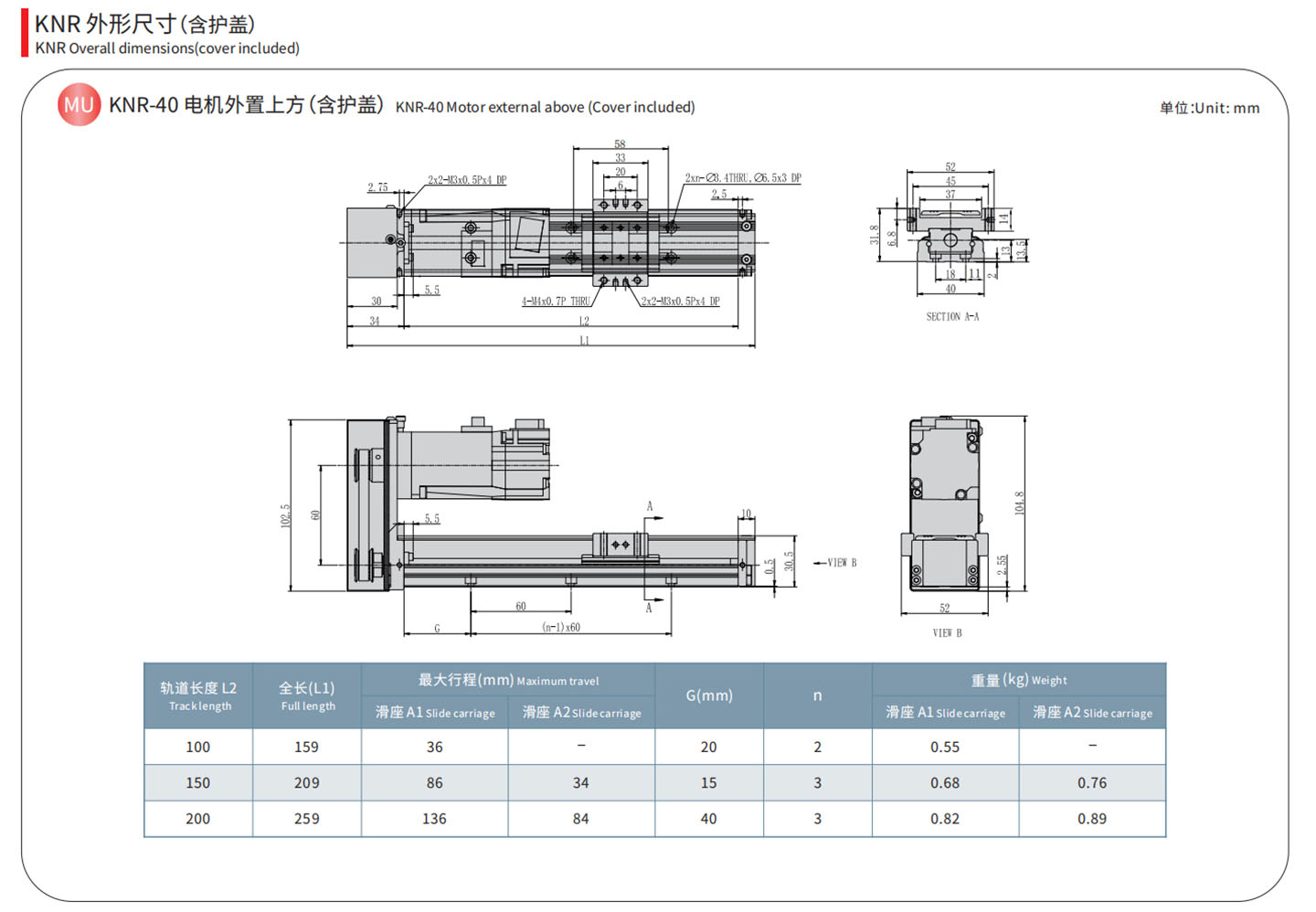
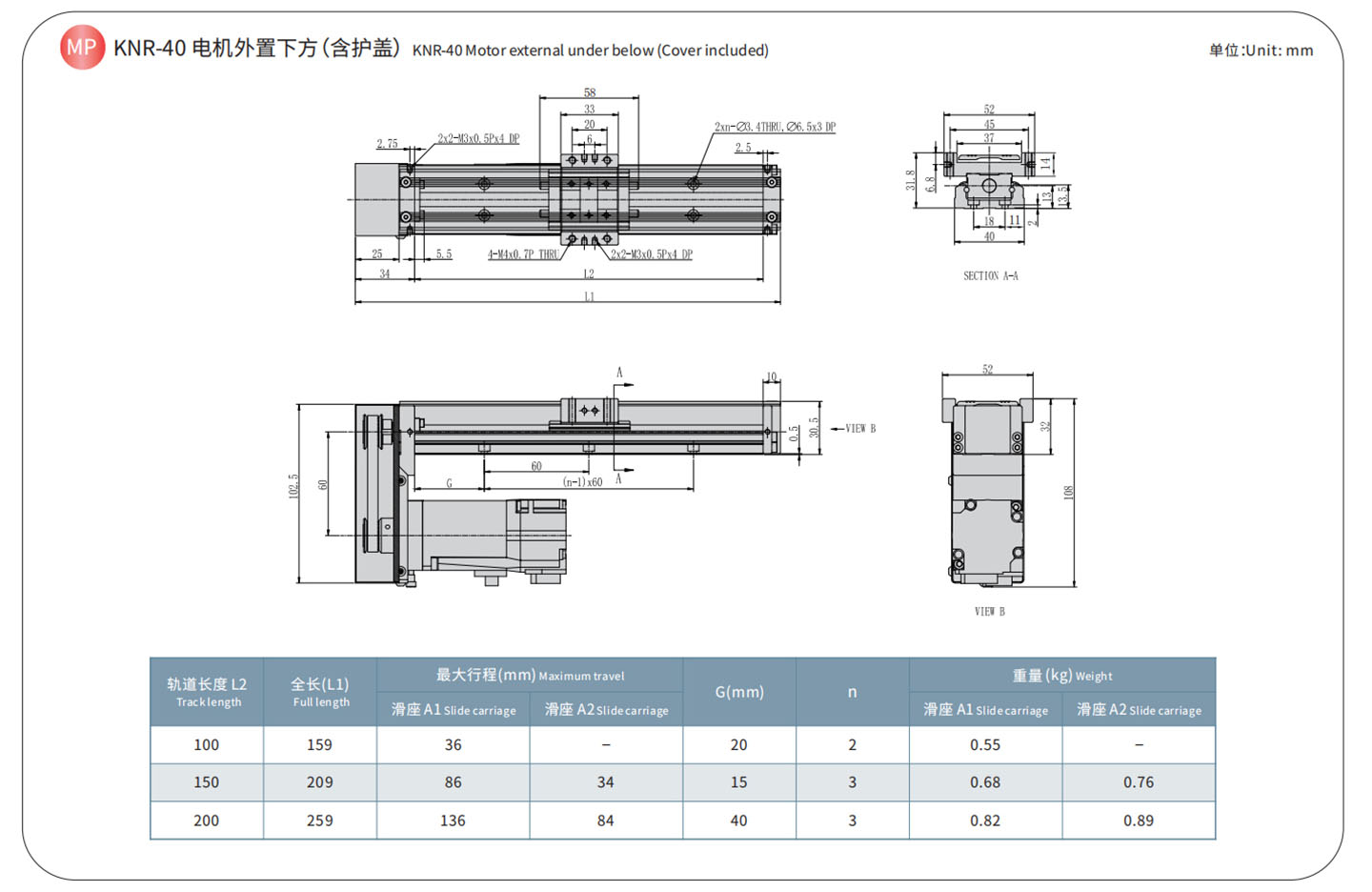
KSR-40 KNR-40

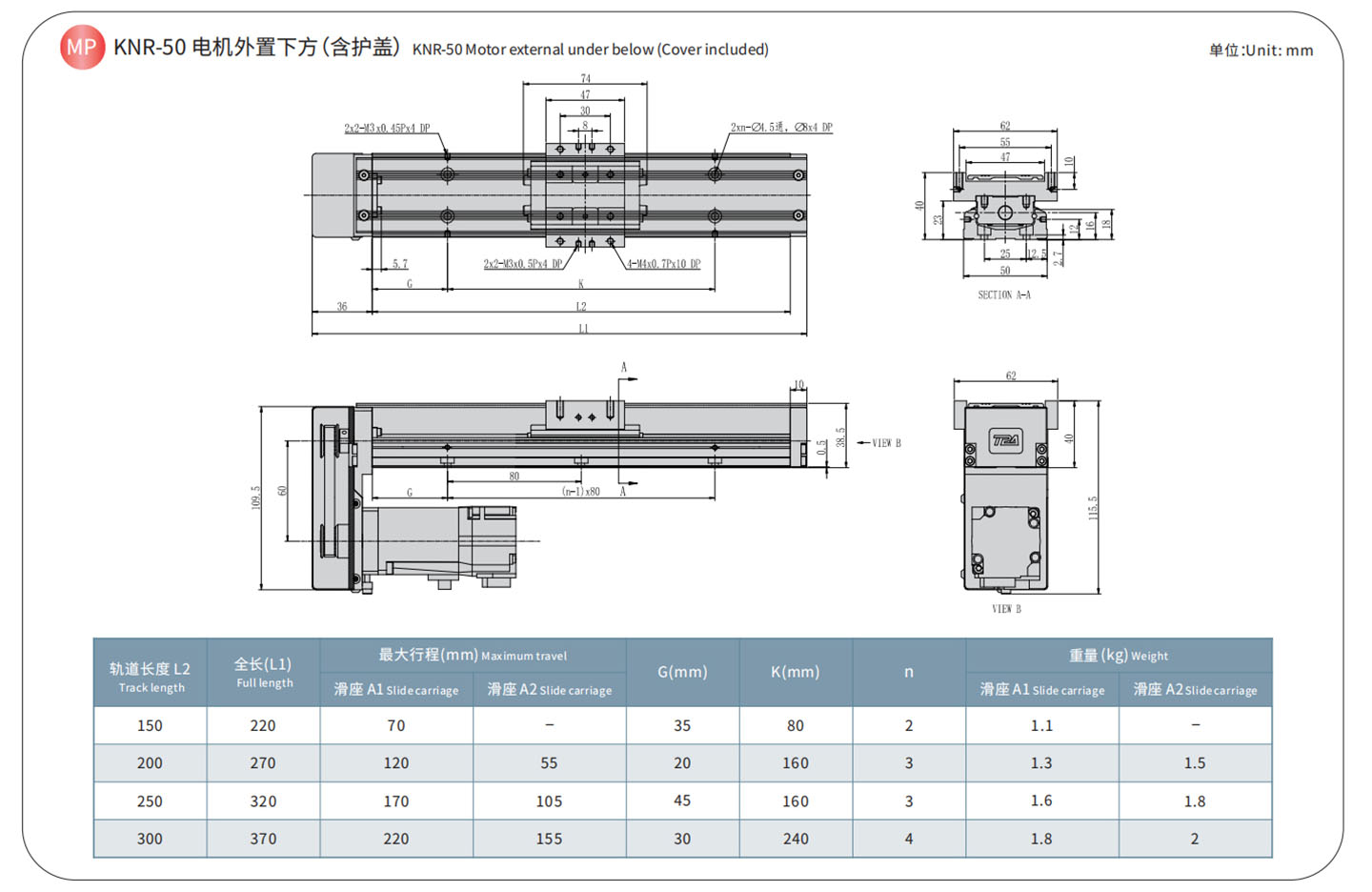
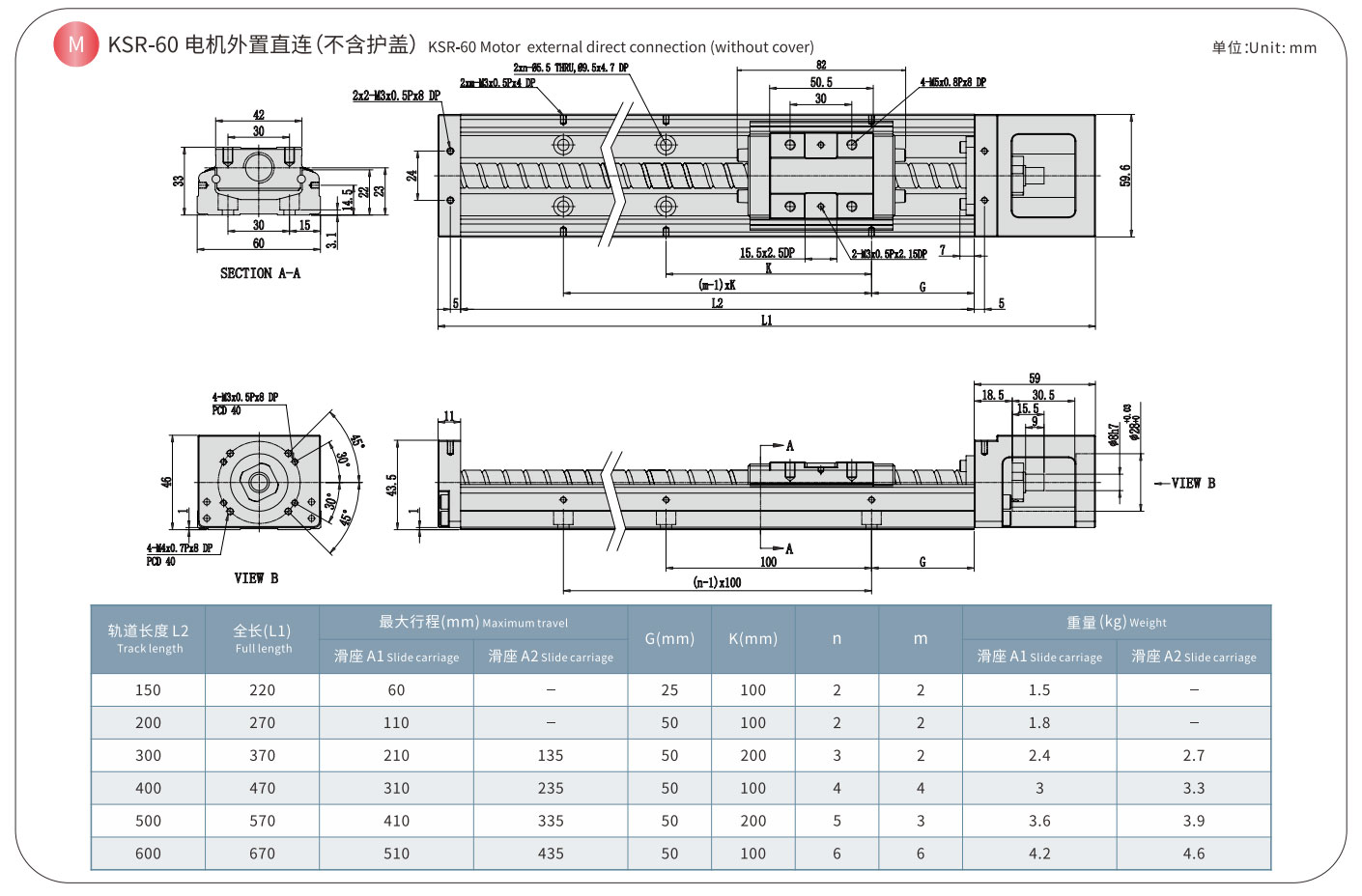
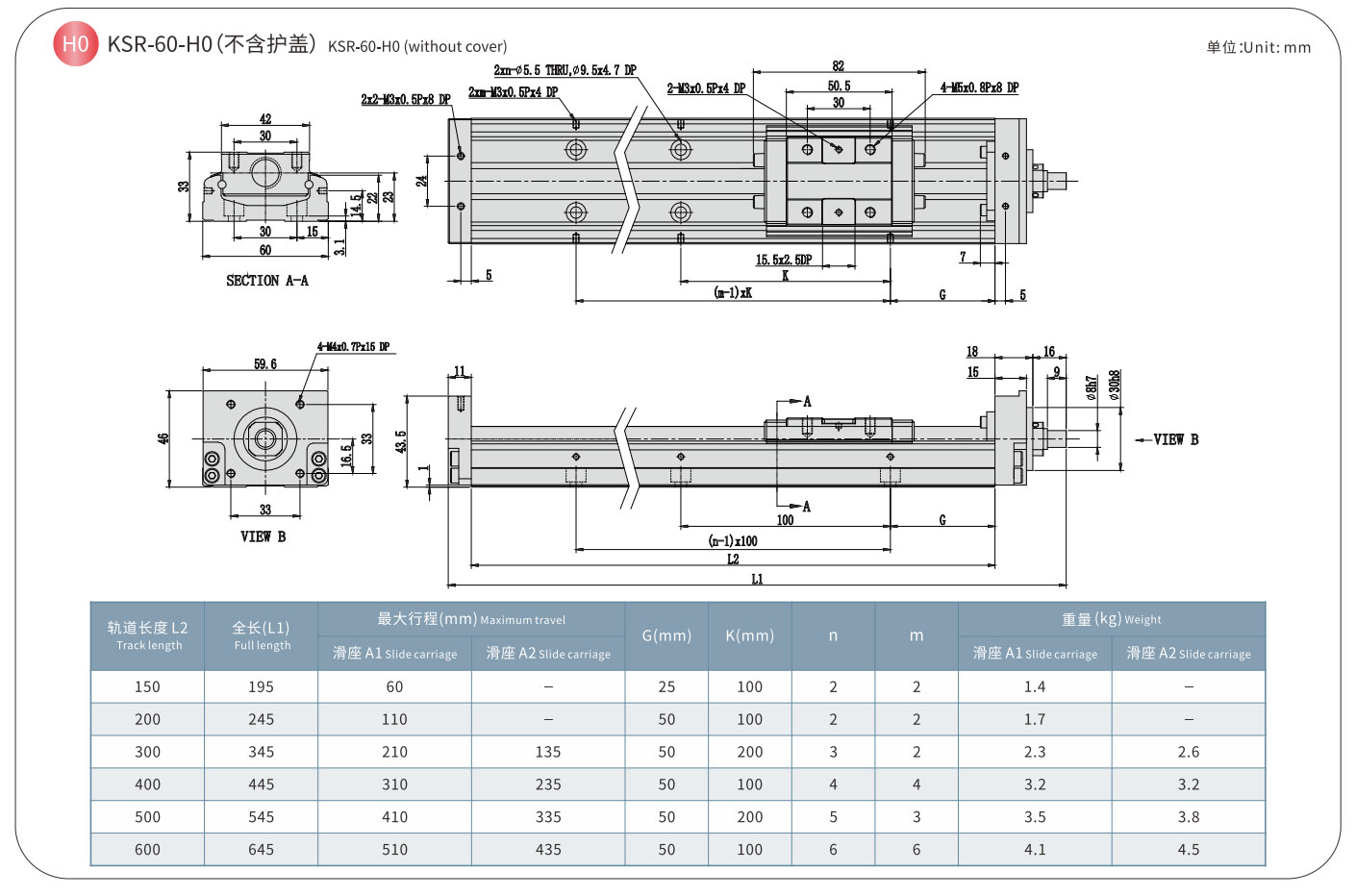
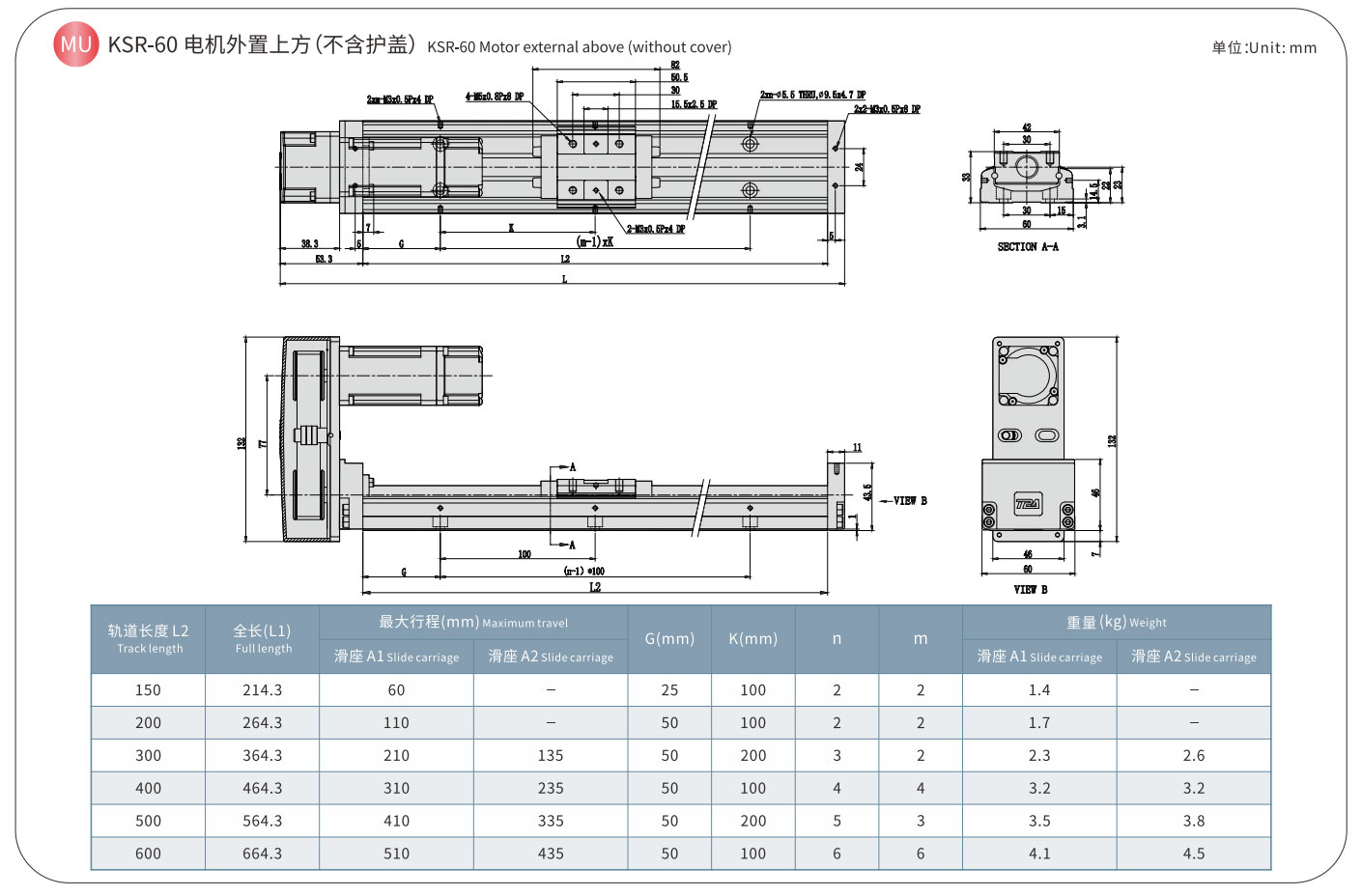
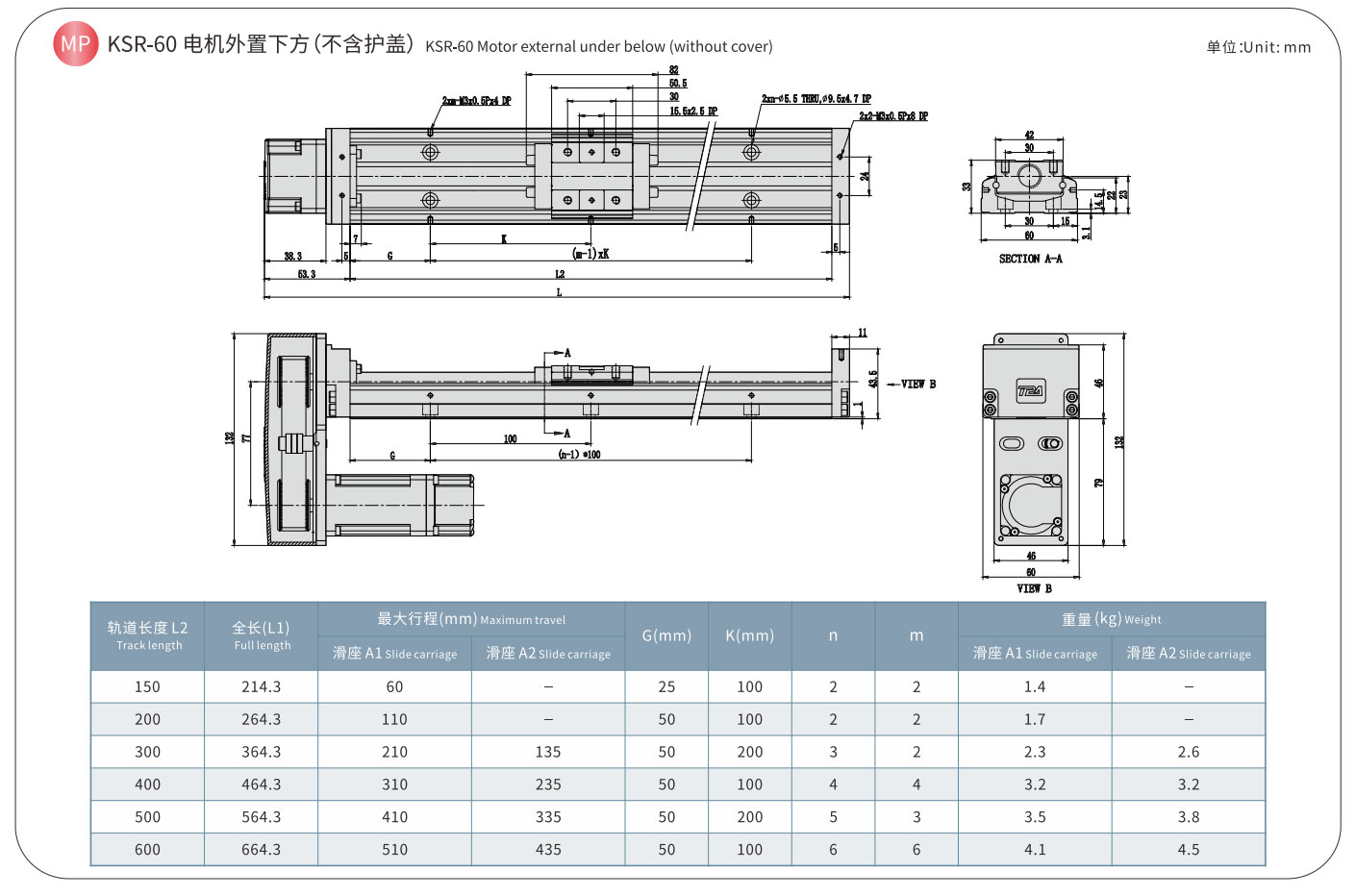
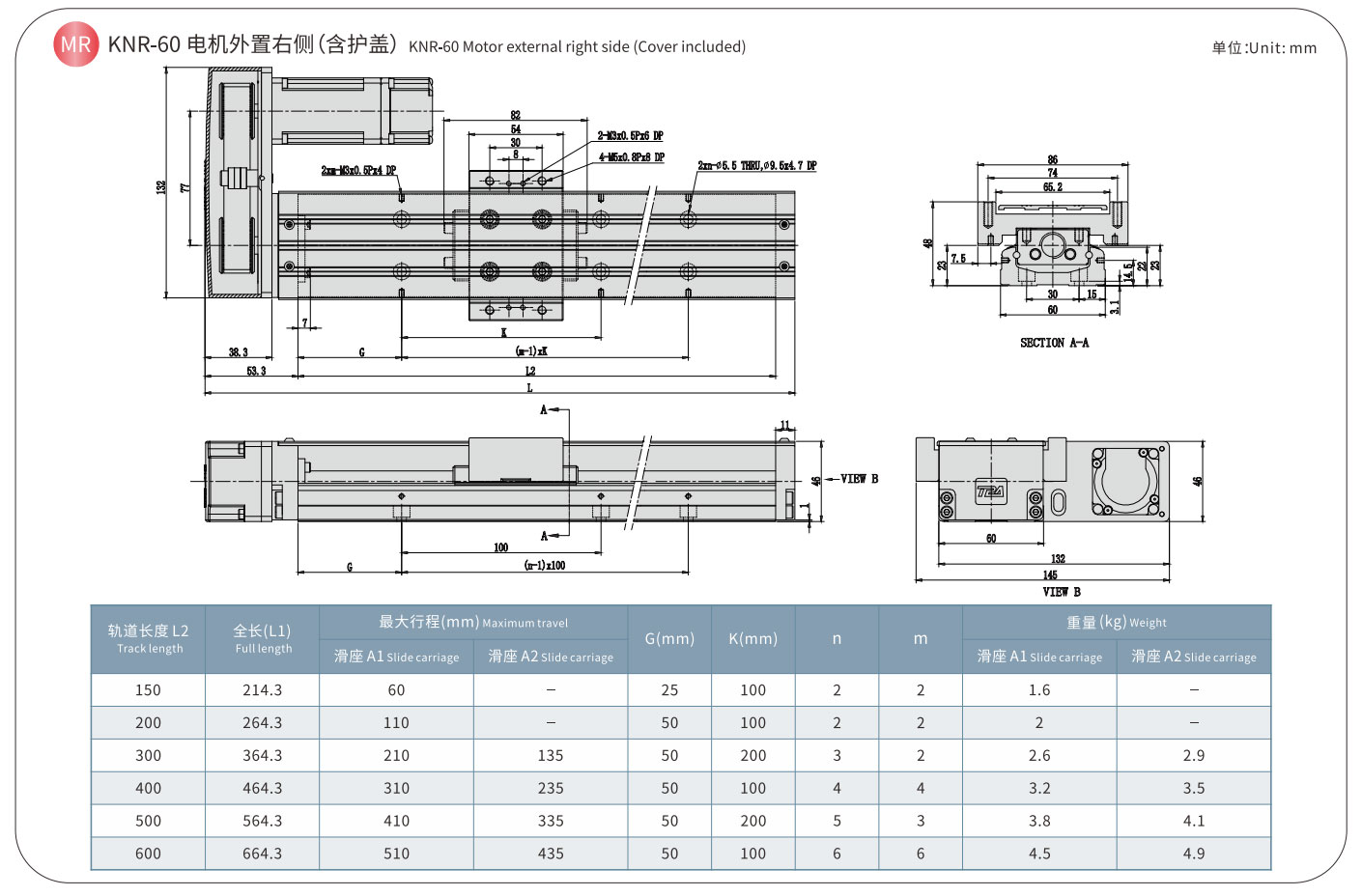
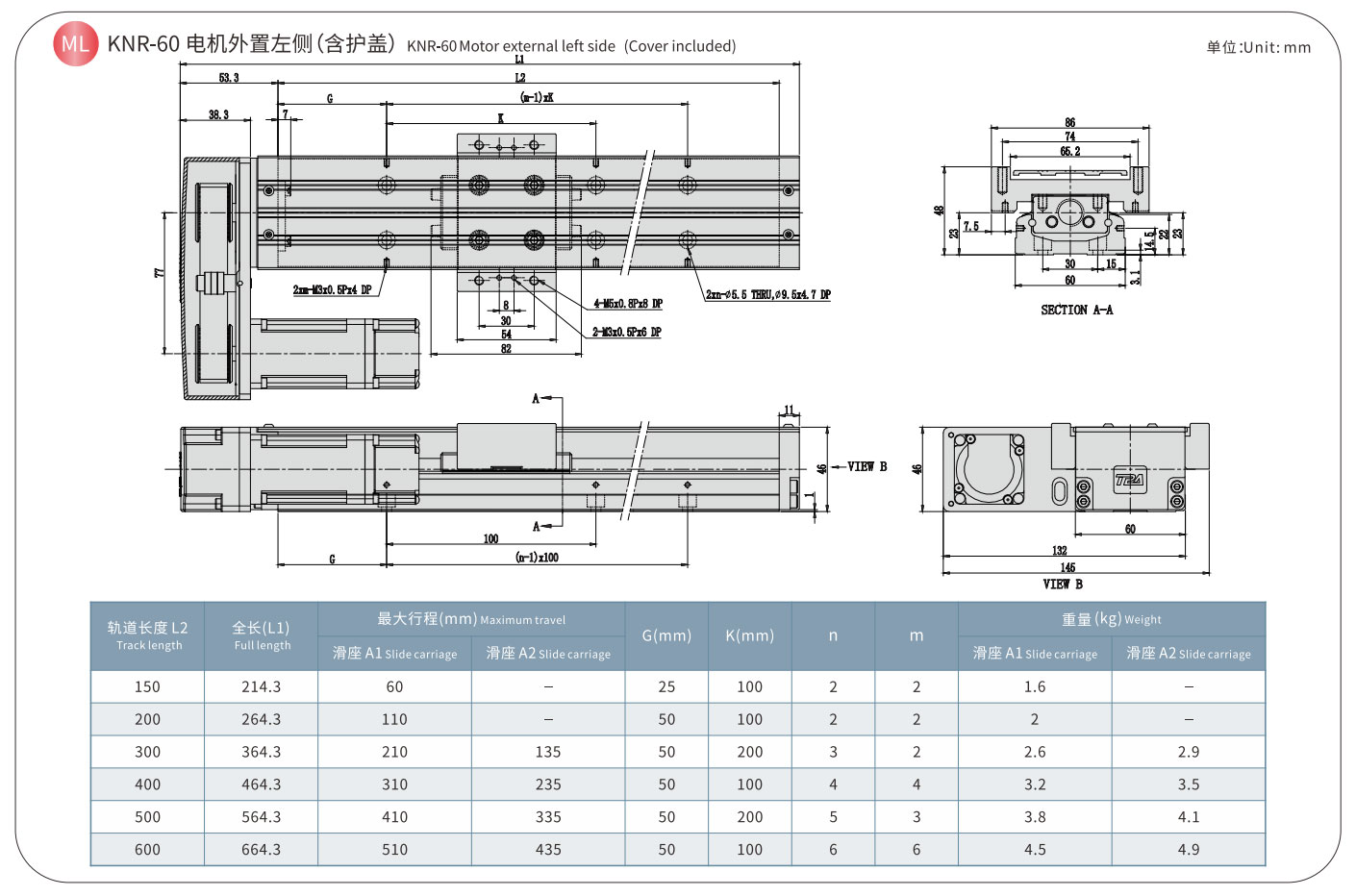
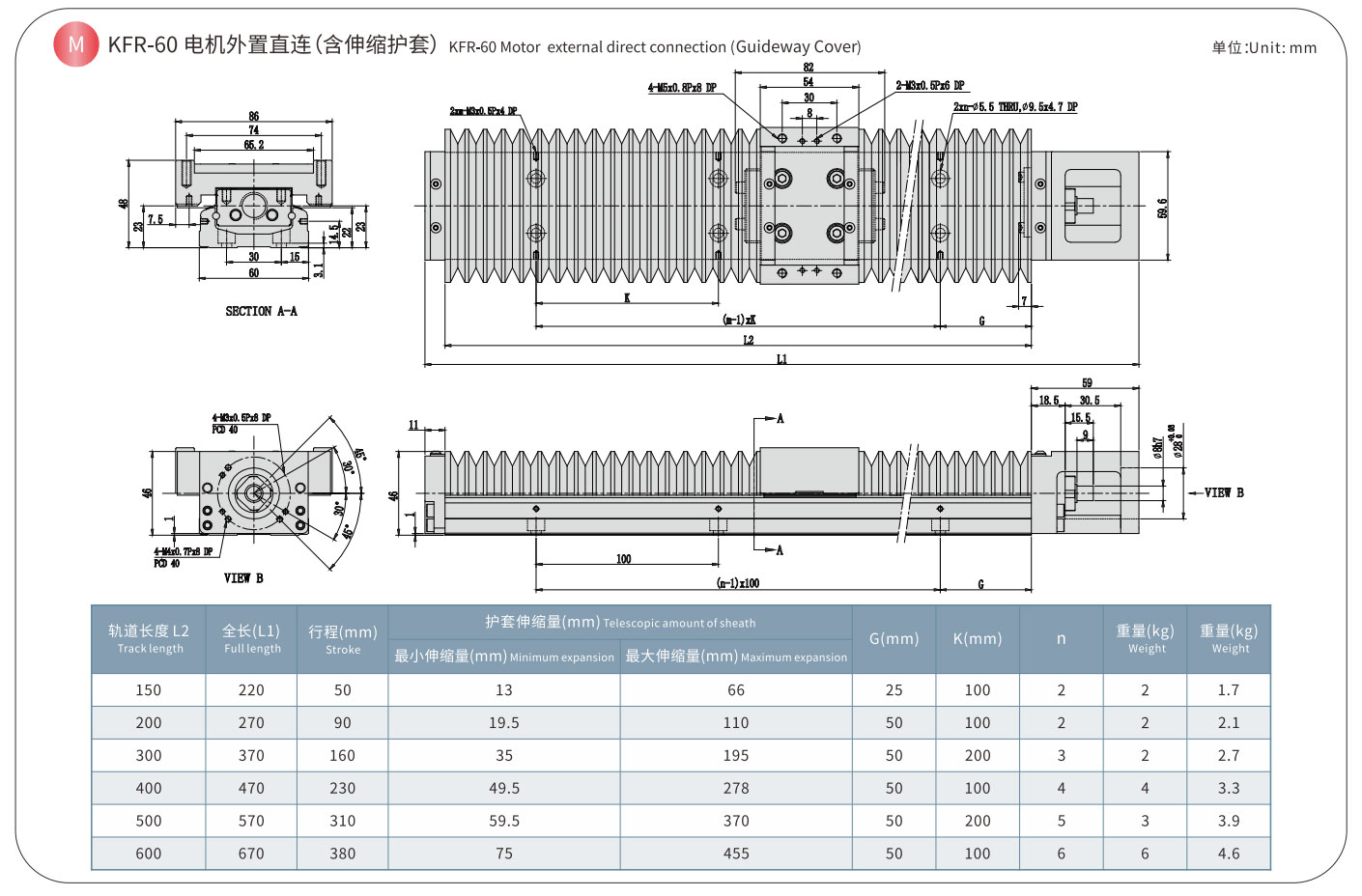
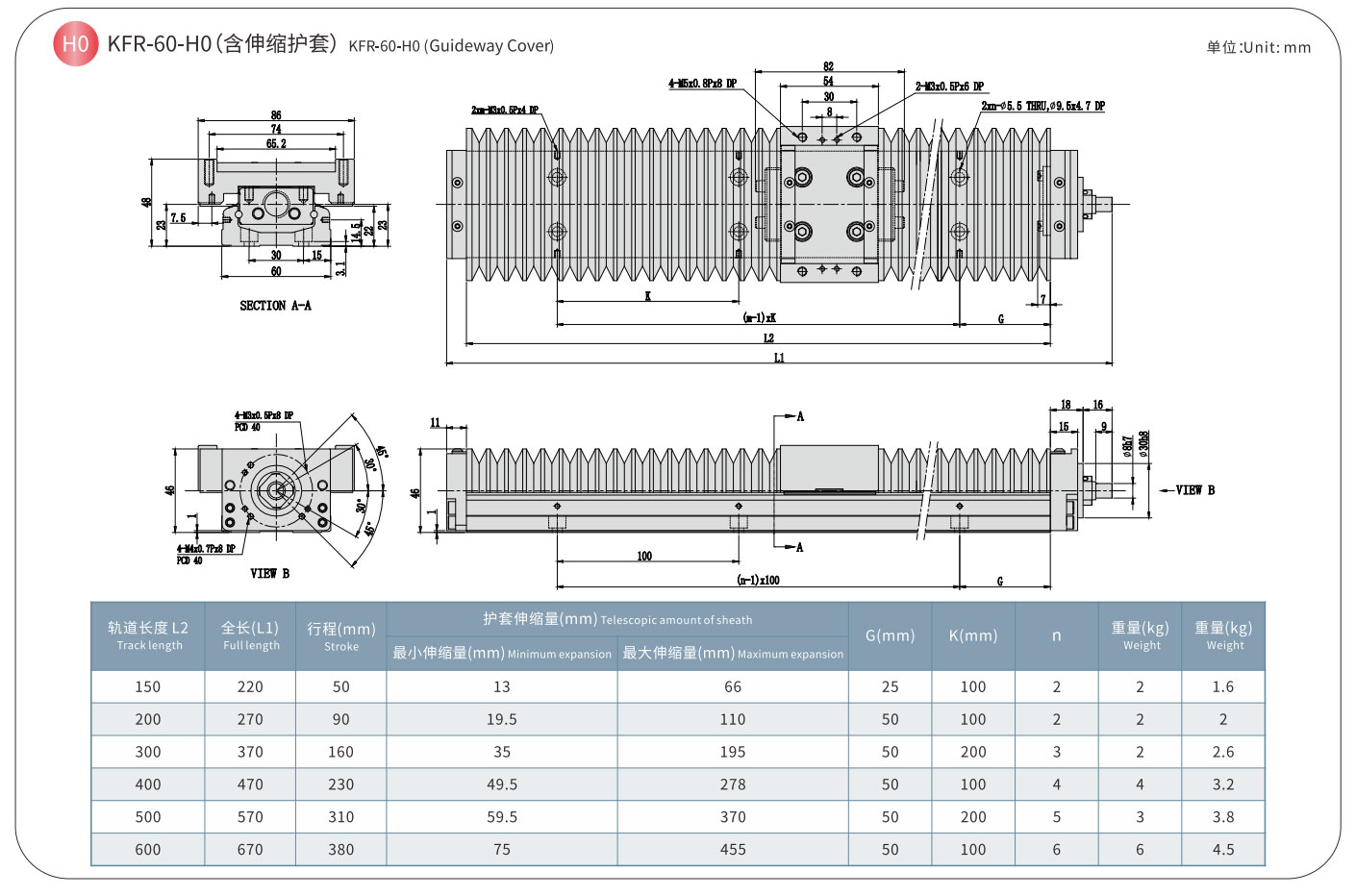
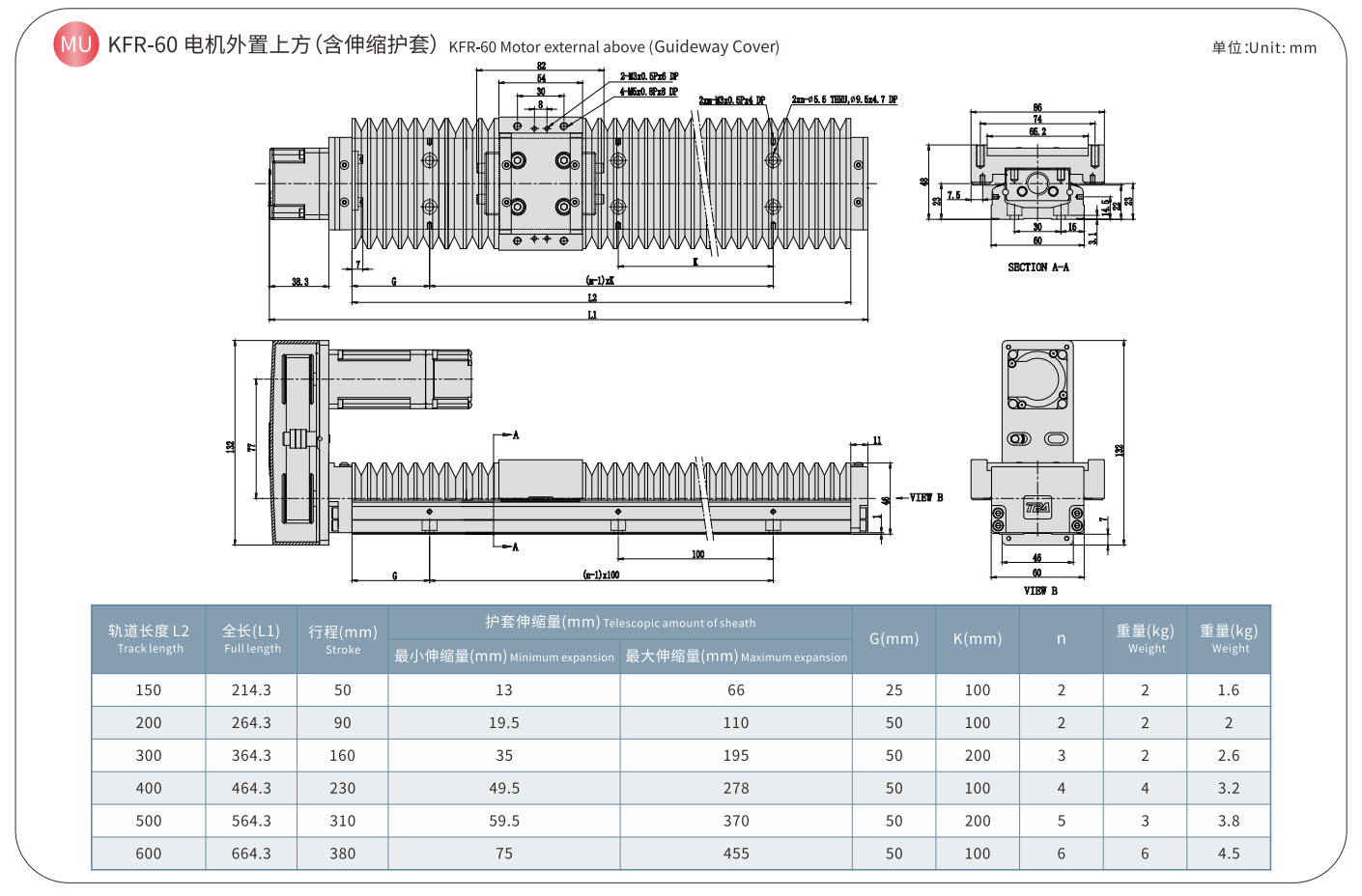
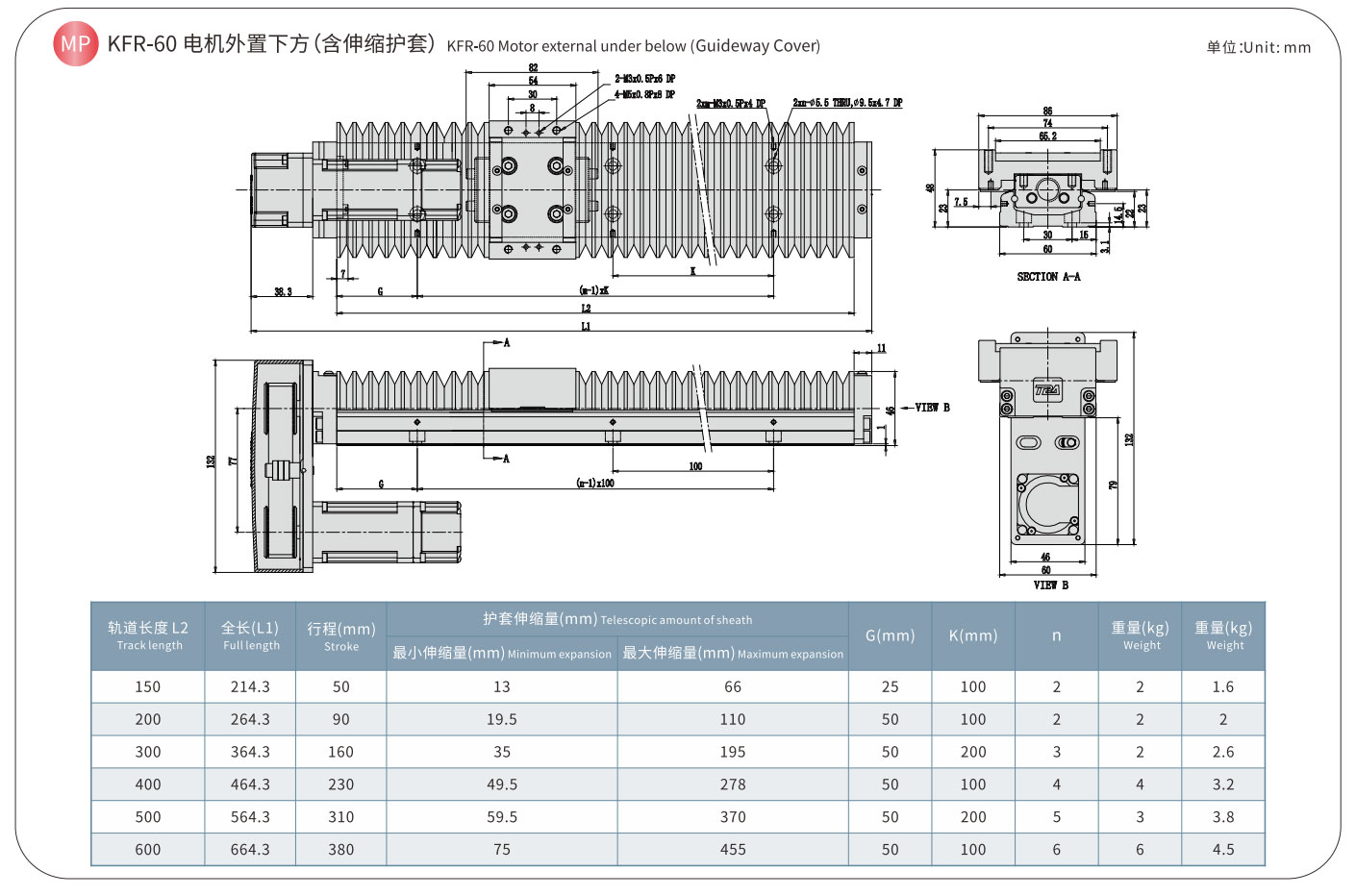
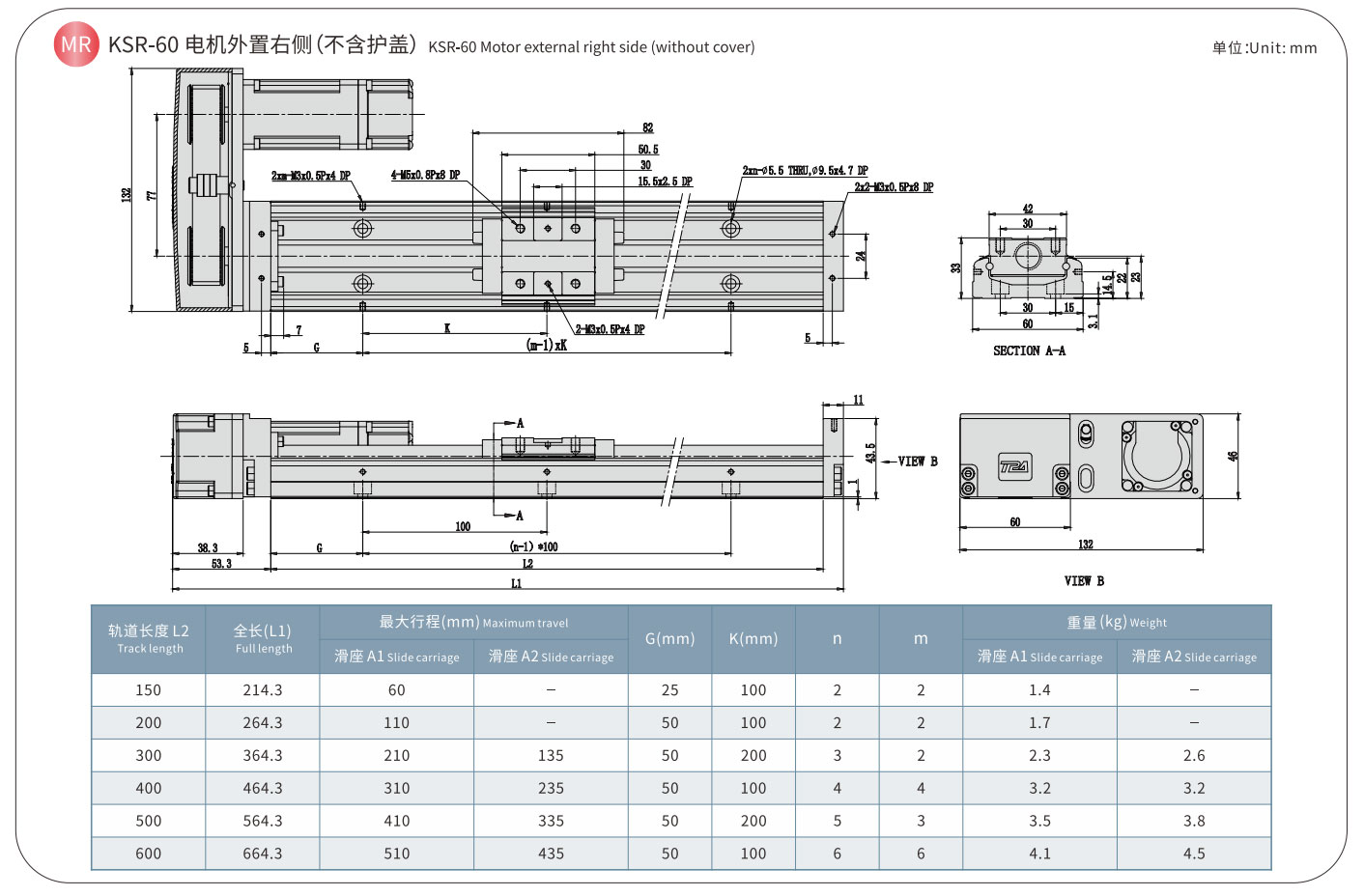
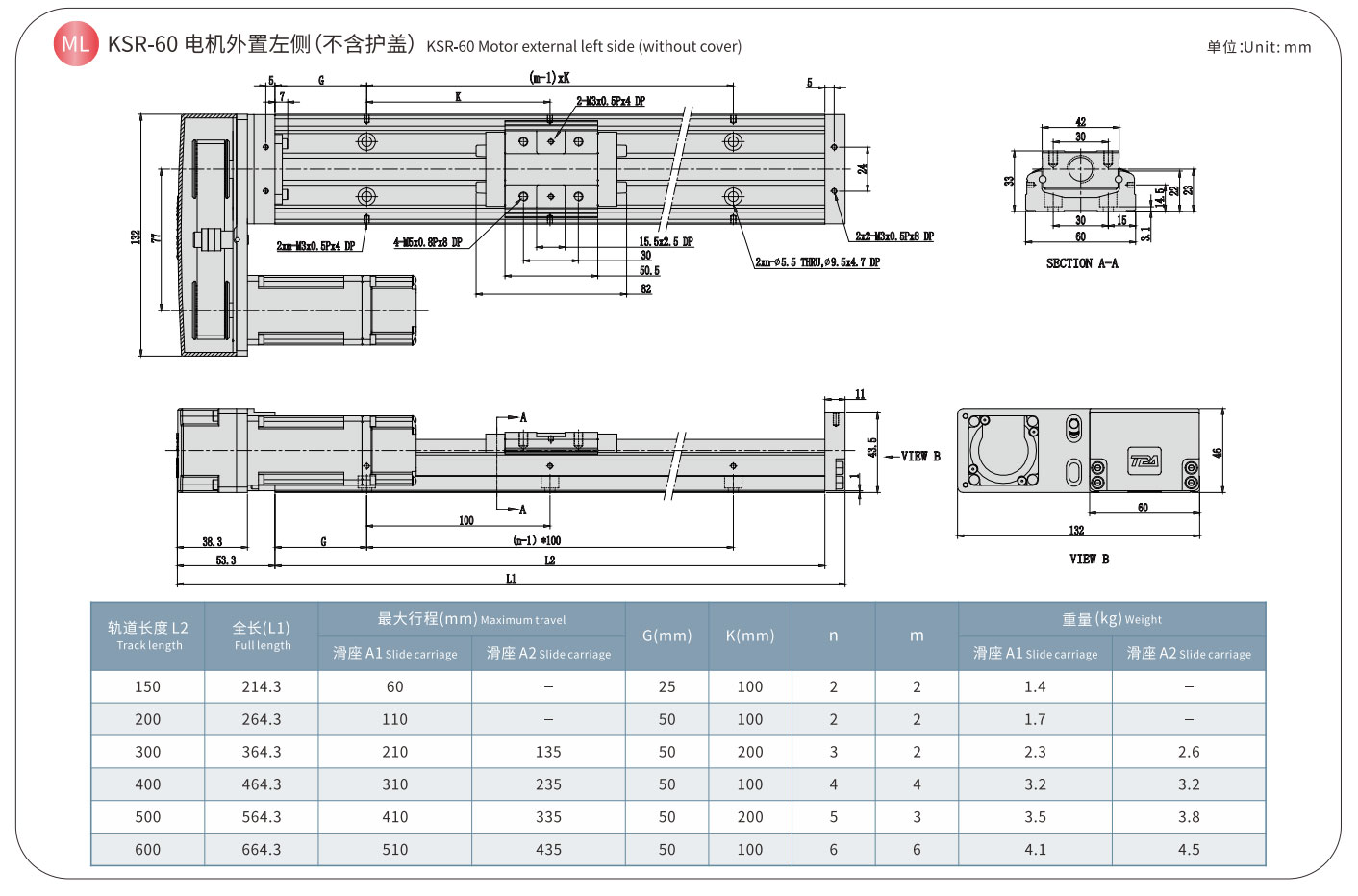
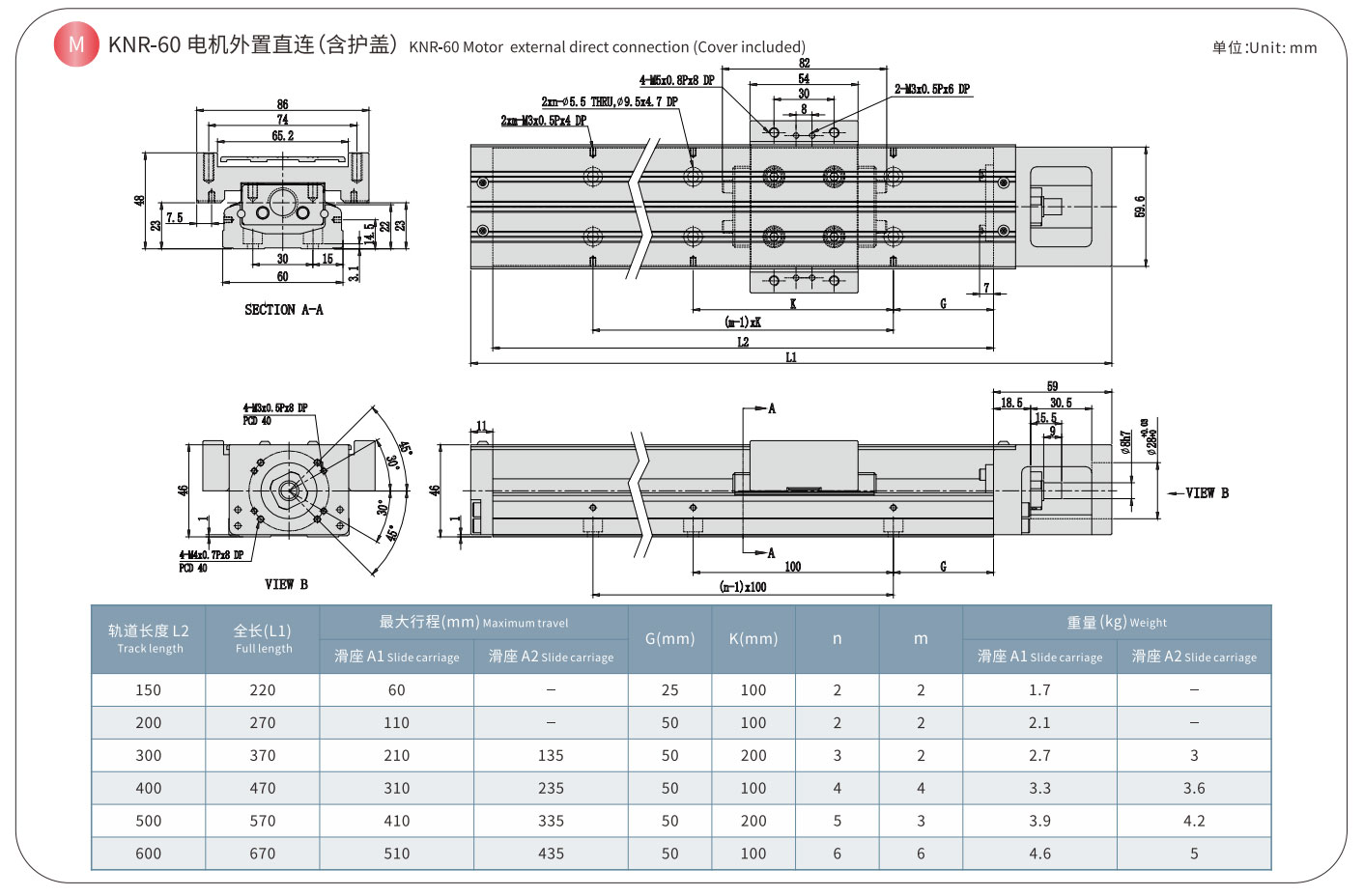
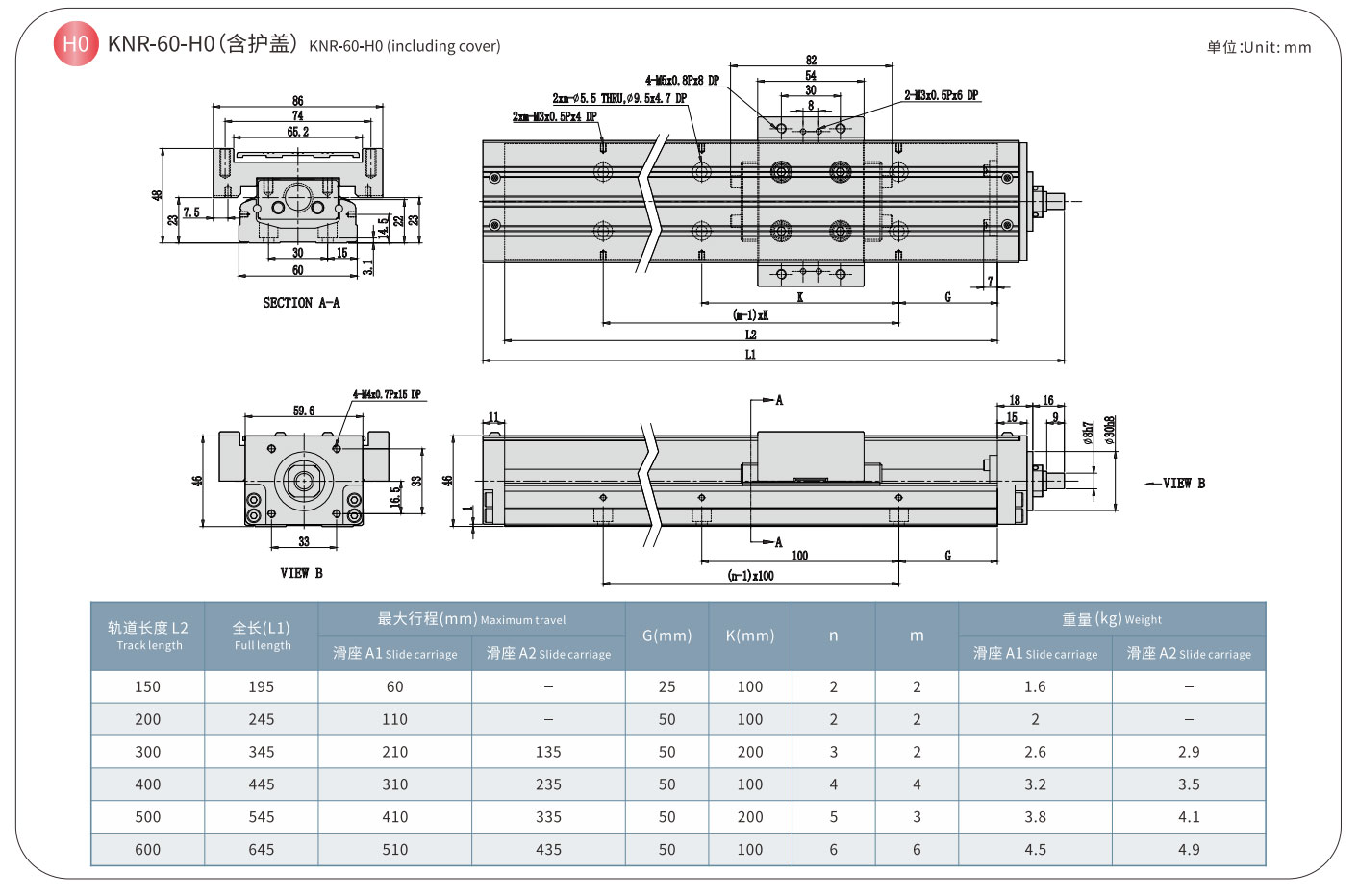
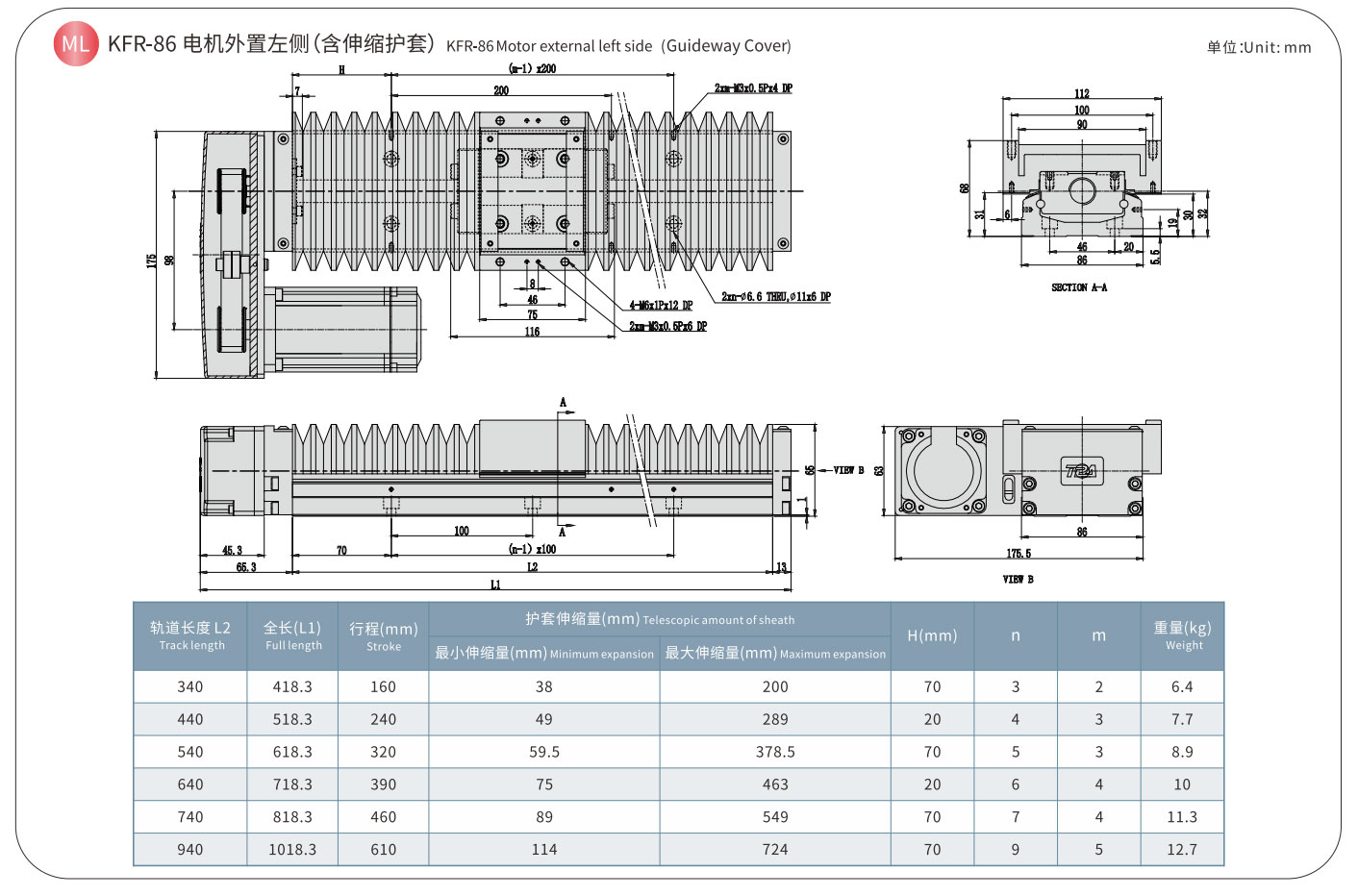
KSR-60 KNR-60 KFR-60

KSR-KNR-KFR-KCR serija
Karakteristike
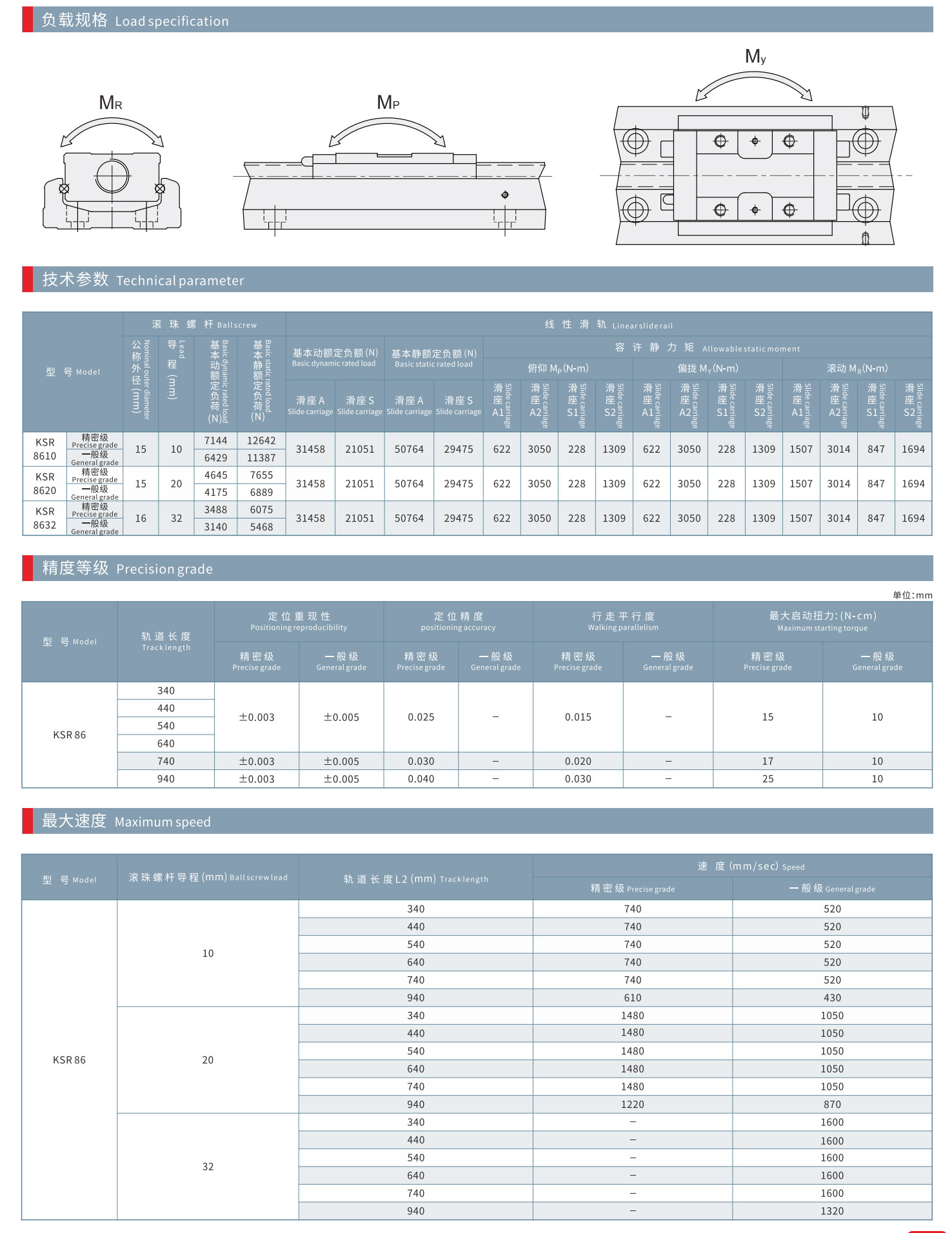
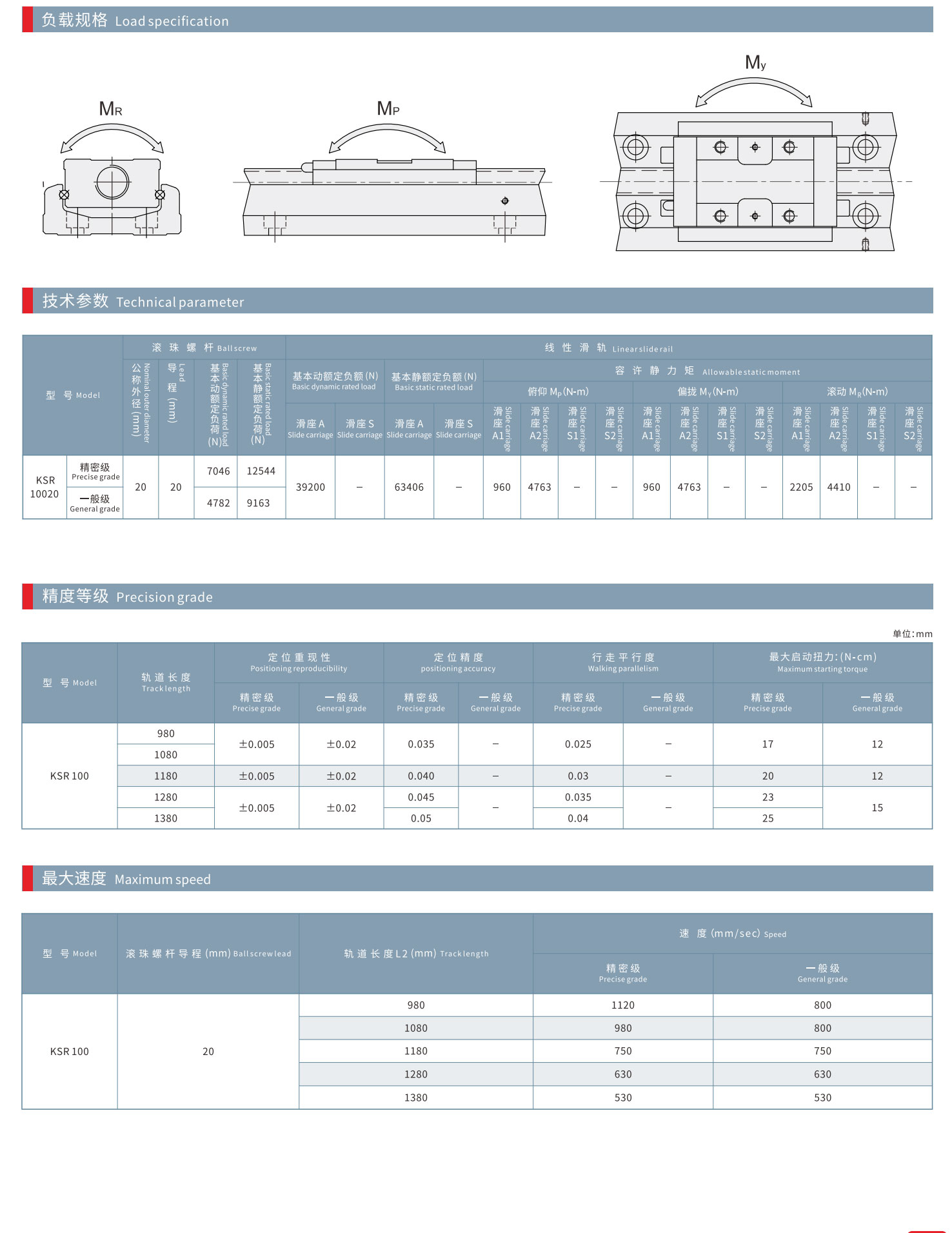
Ponovljena tačnost pozicioniranja: ±0,005 mm
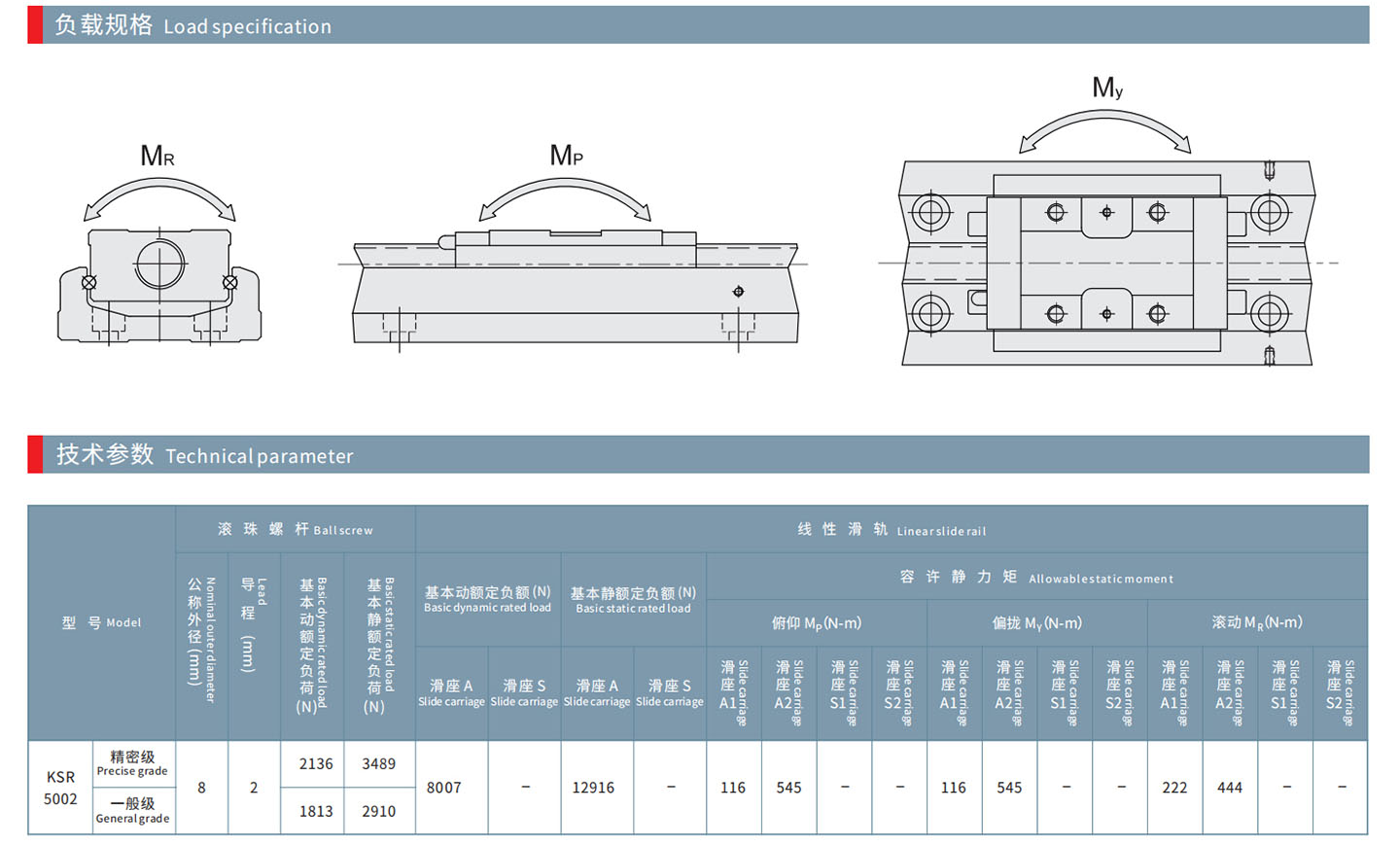
Osnovno statičko opterećenje: 12642N
Osnovno dinamičko nazivno opterećenje: 7144N
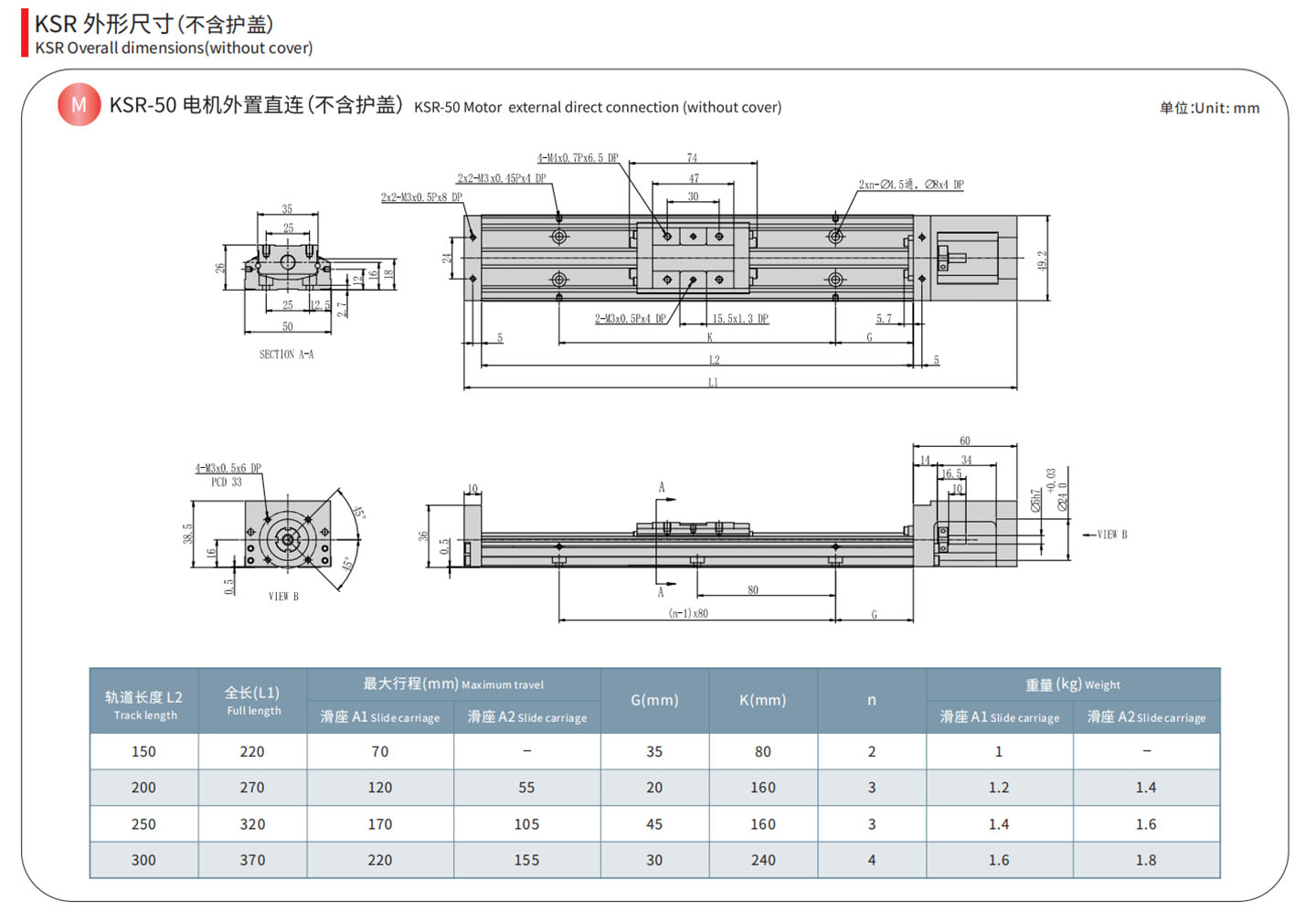
Hod: 31 – 1128 mm
Maksimalna brzina: 1000 mm/s
Visokoprecizni kuglični vijak se koristi kao struktura prijenosa, a gusjenica u obliku slova U usklađena je s optimiziranim dizajnom. Kao struktura vodiča, kako bi se osigurali zahtjevi za točnost i krutost.
Kontaktna površina između kuglice i žljeba perle ima 2-redni tip Goethe zuba. Dizajn ima karakteristike kontaktnog ugla od 45 stepeni, što omogućava modulu na bazi čelika da izdrži četiri pravca. Sposobnost jednakog opterećenja.
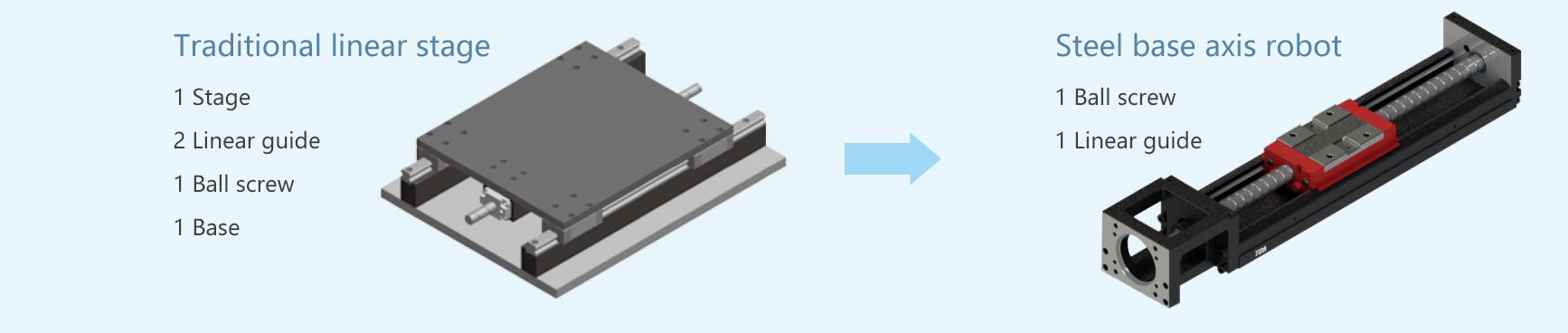
Kroz modularni dizajn, čelični osnovni modul integriše kuglični vijak i šinu u obliku slova U, što može spasiti tradicionalnu platformu za pokretanje od potrebe da prolazi kroz izbor komponenti za vođenje i pogon, instalaciju i verifikaciju, veliki volumen i zauzimanje prostora. Stoga, modul na bazi čelika može pružiti karakteristike brzog odabira, ugradnje, kompaktne veličine, visoke krutosti i tako dalje, što može značajno smanjiti prostor i vrijeme korištenja klijenta.


Više proizvoda

HFR serija-Lasersko rezanje Z osa

GCRS serija dvostrukih kliznih ugrađenih linearnih A...

Linearni aktuatori s kugličnim vijkom serije HNR Polu enc...

GCR serija linearnih modula na kuglične vijke Bui...

Linearni modul sa kugličnim vijkom serije HCR potpuno zatvoren

KNR-E serija jednoosnog robota od aluminijuma










