




Сталёвая база аднавосевых робатаў серыі KSR/KNR/KCR/KFR


Выбар мадэлі
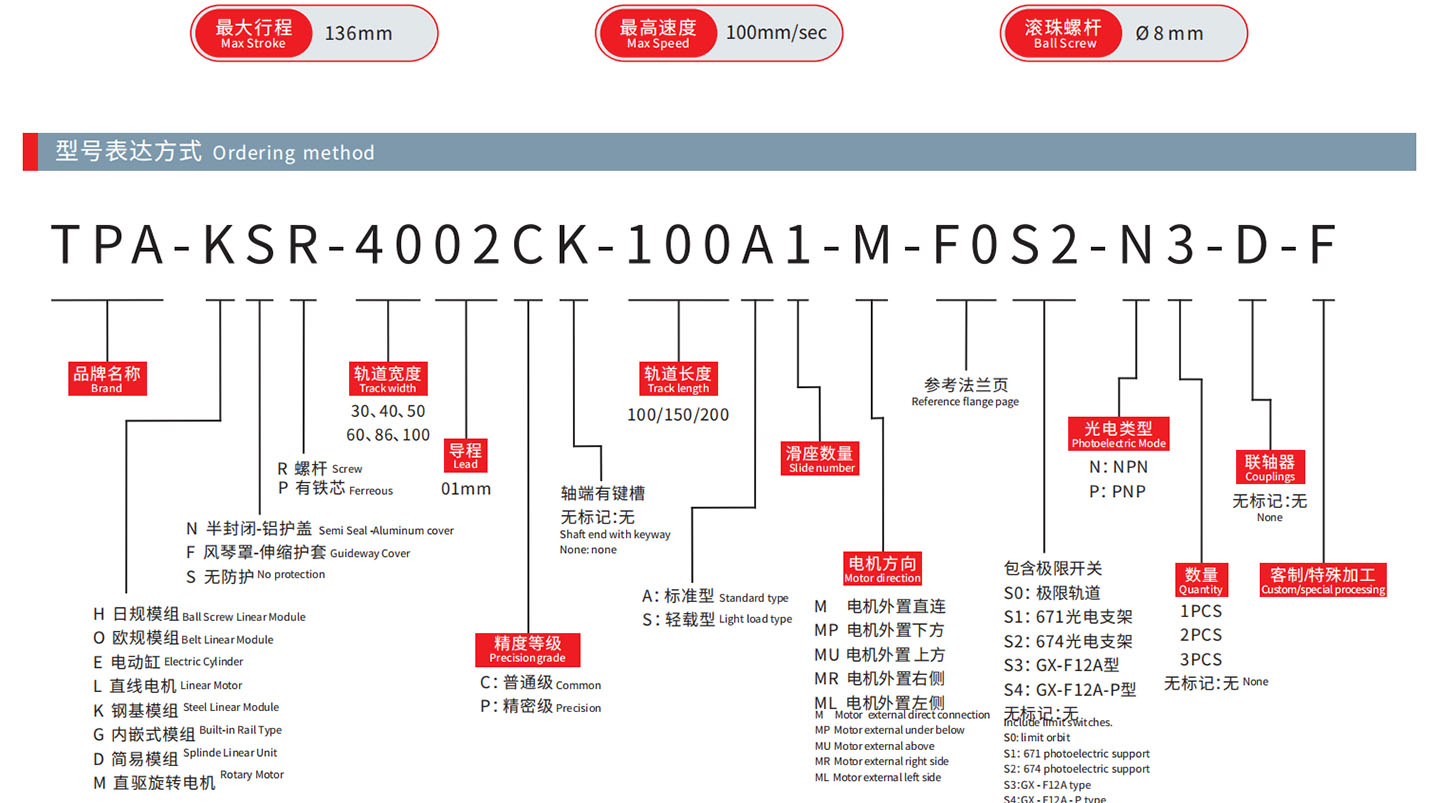
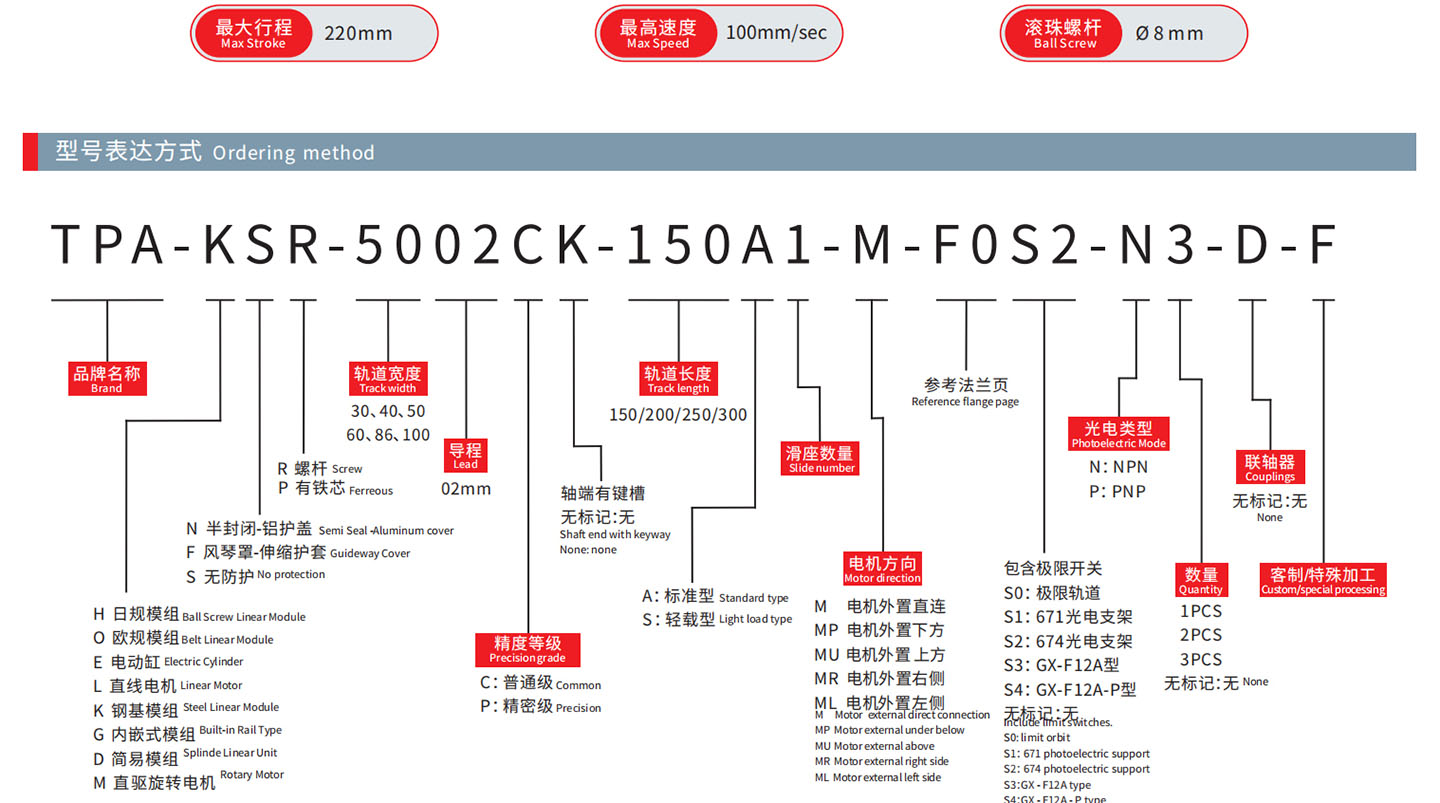
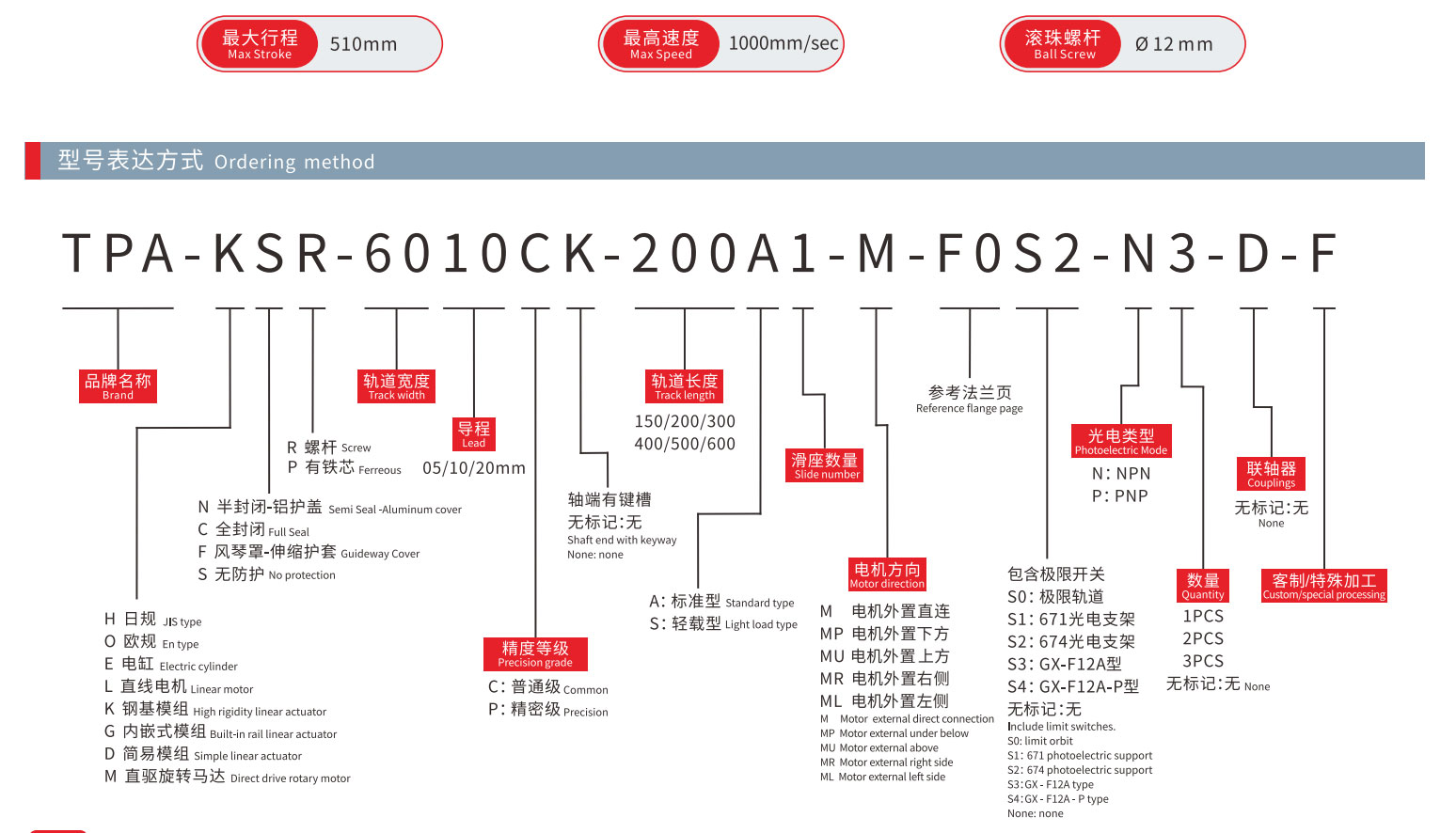
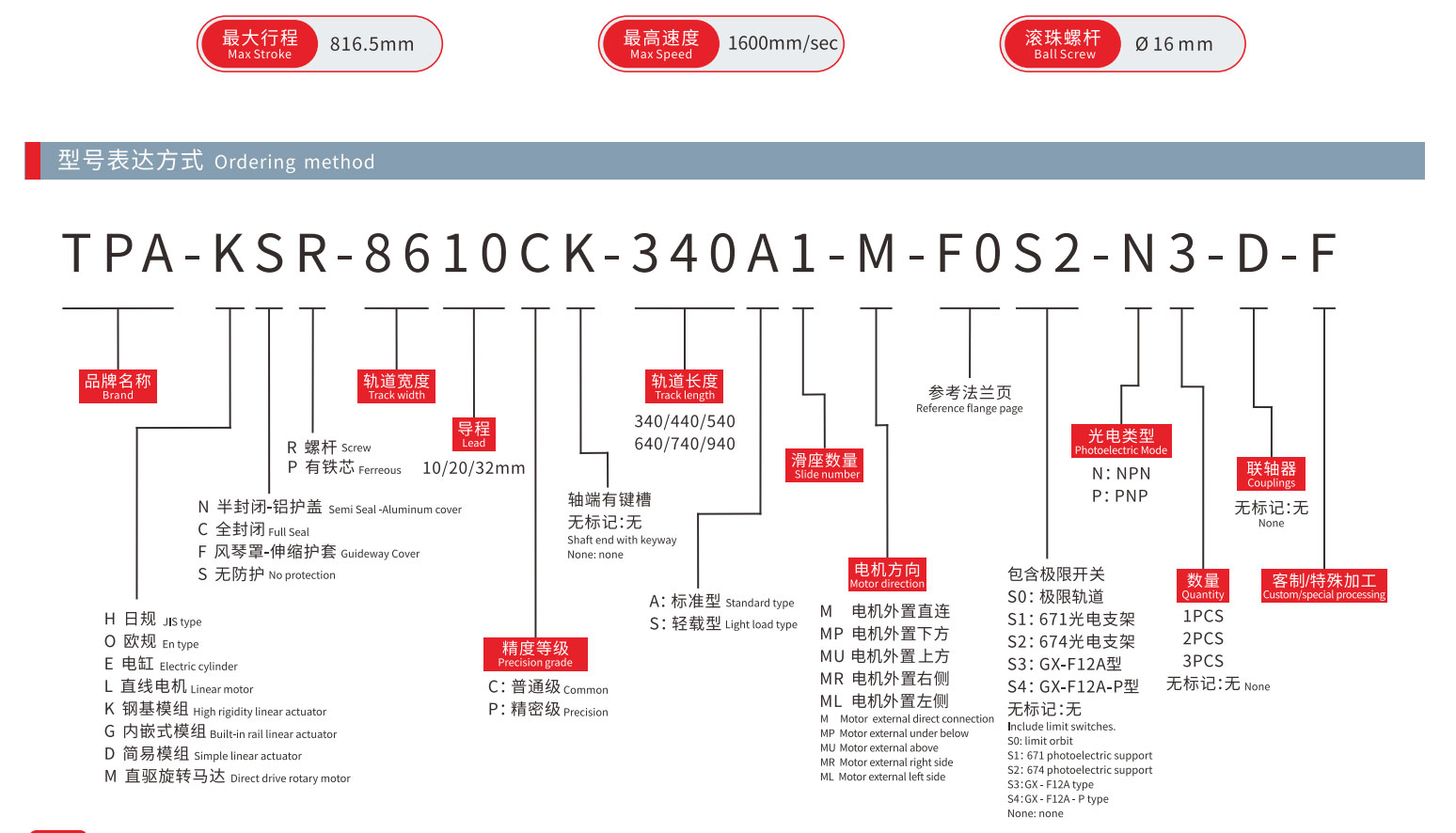
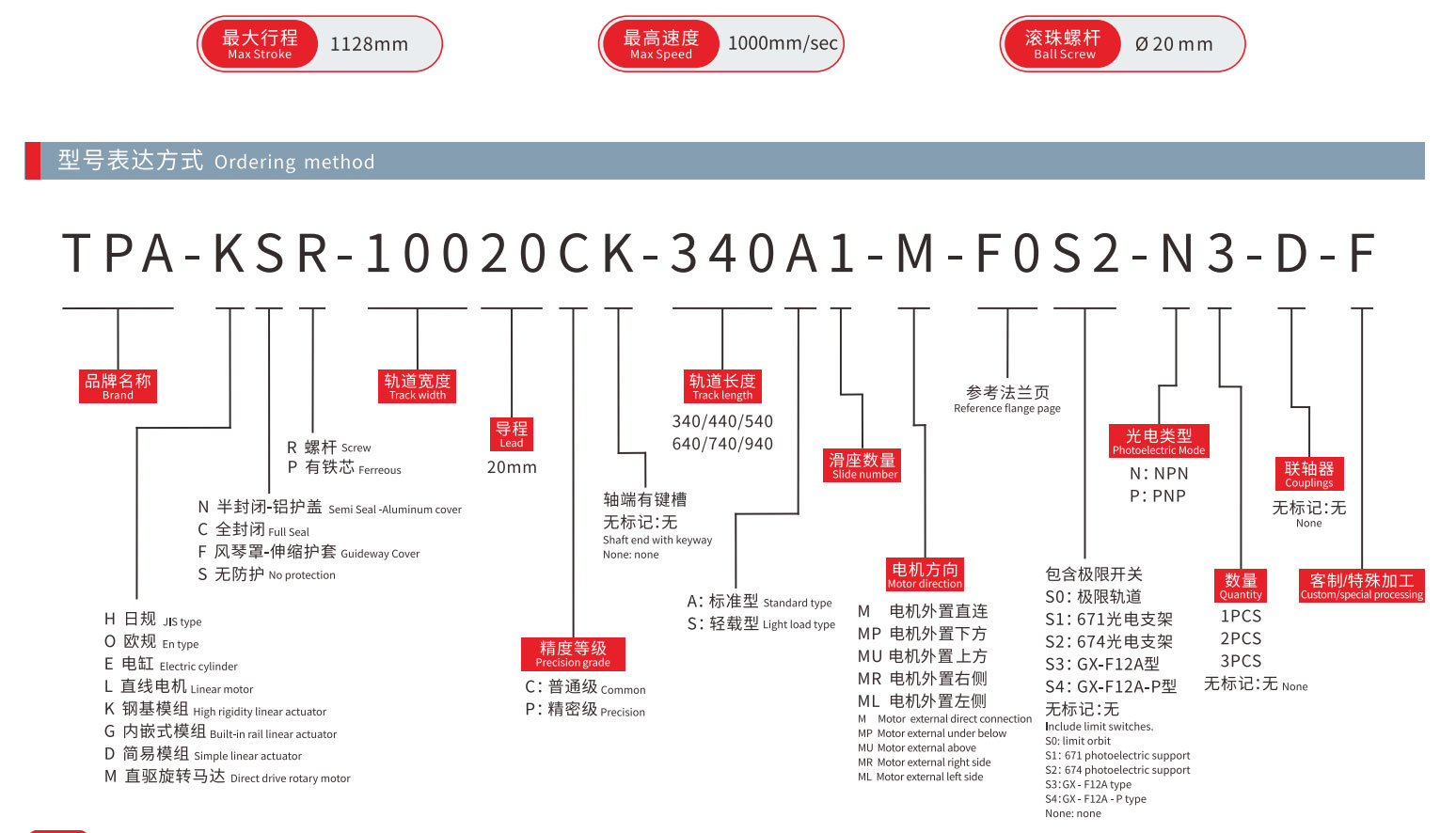
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
TPA-?-???-?-???-?-??-?-?
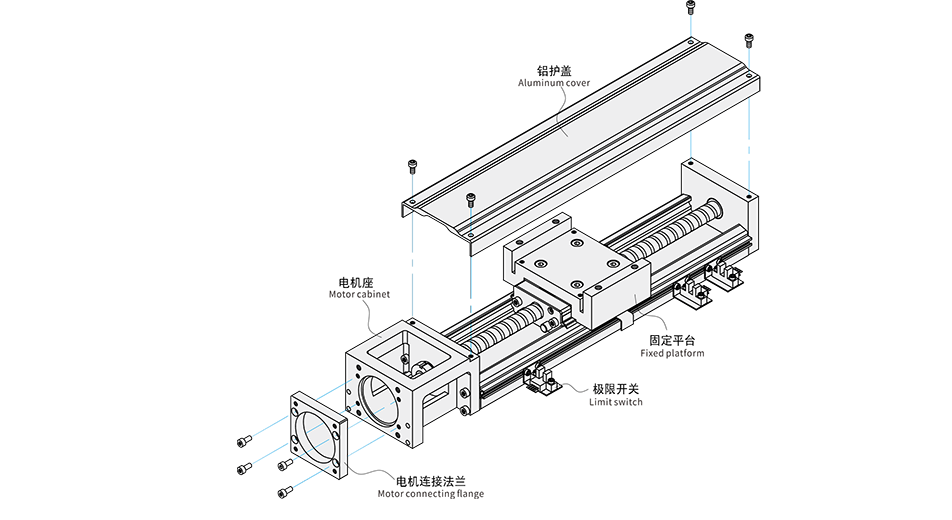
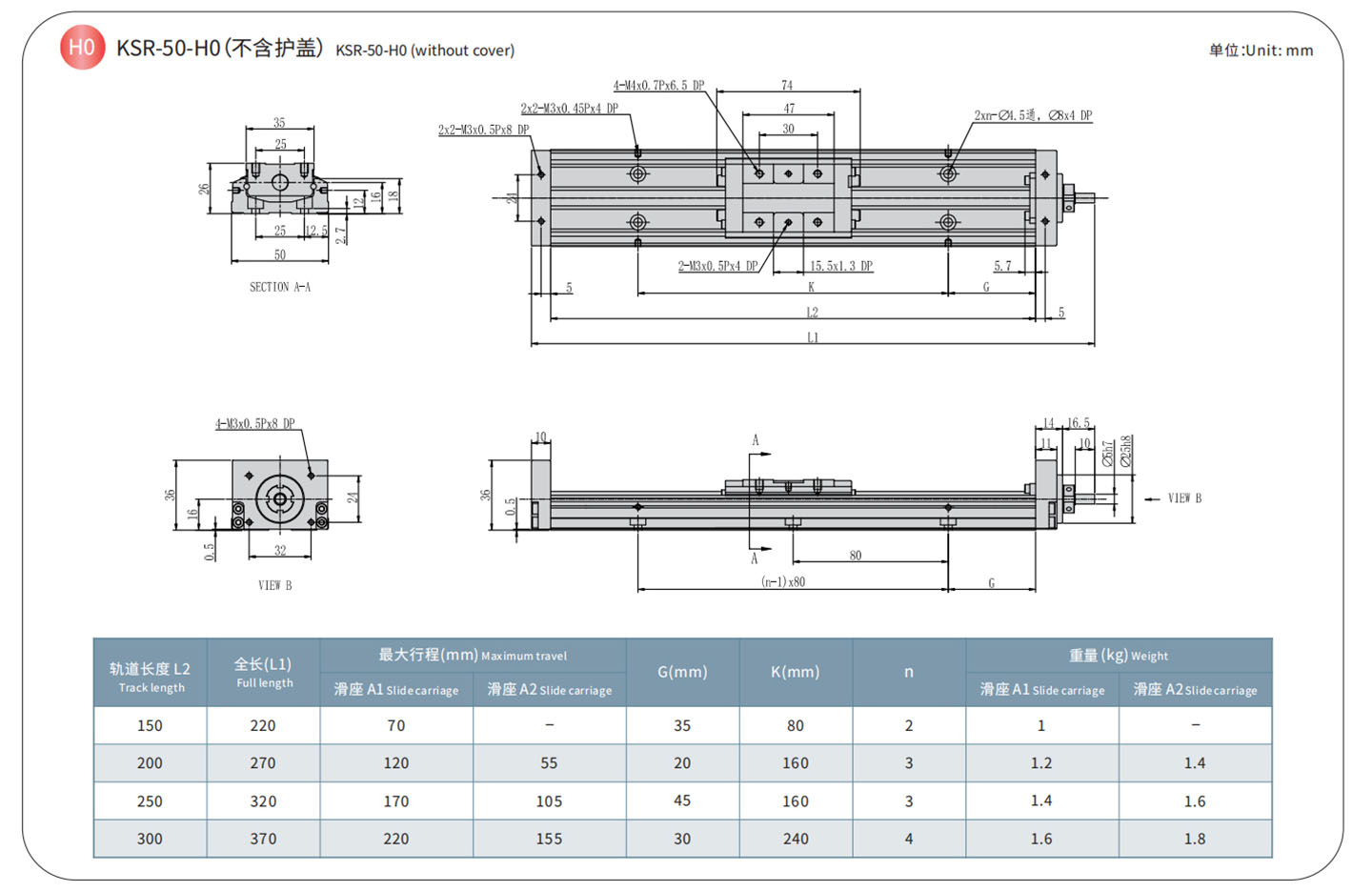
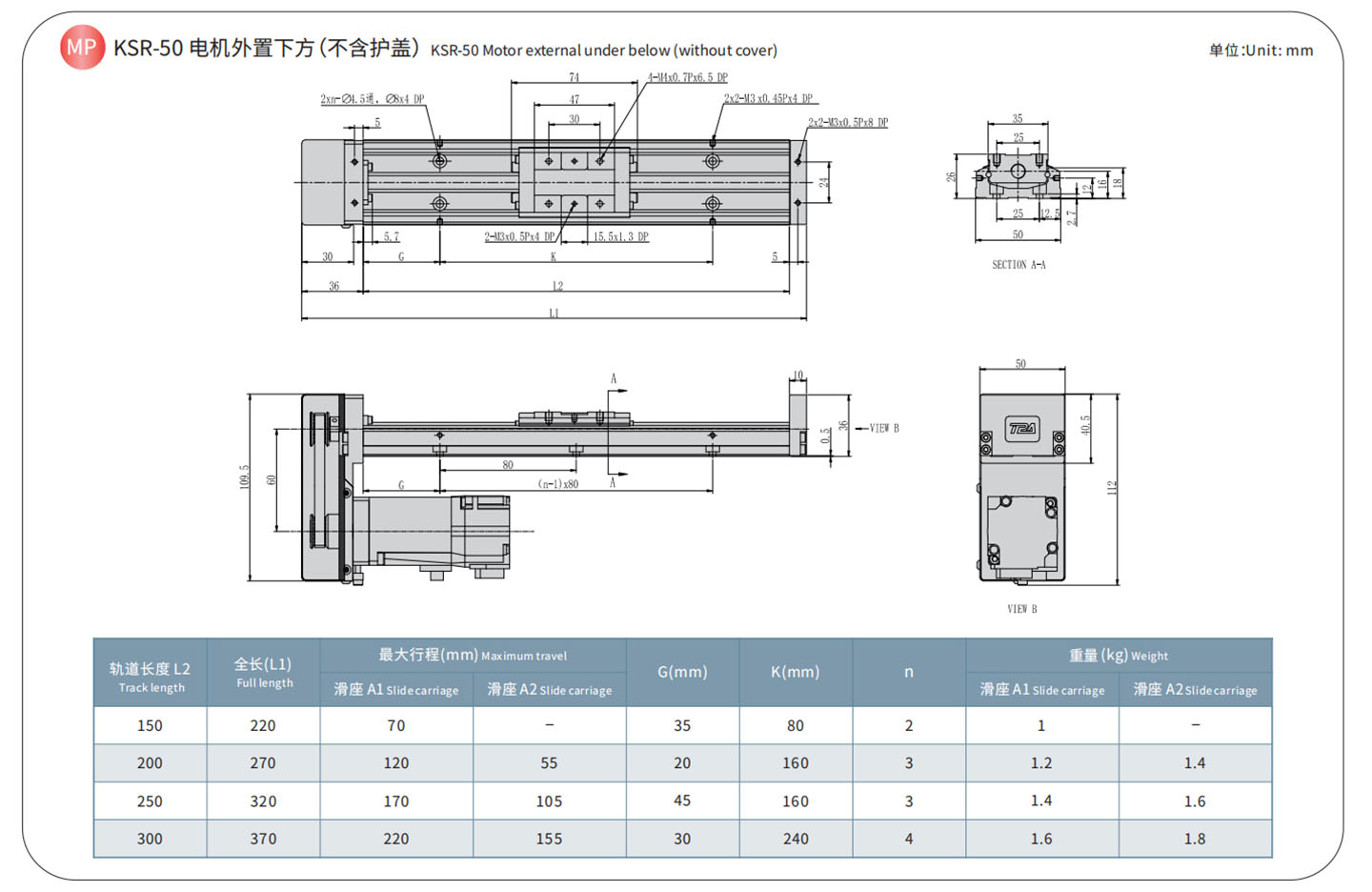
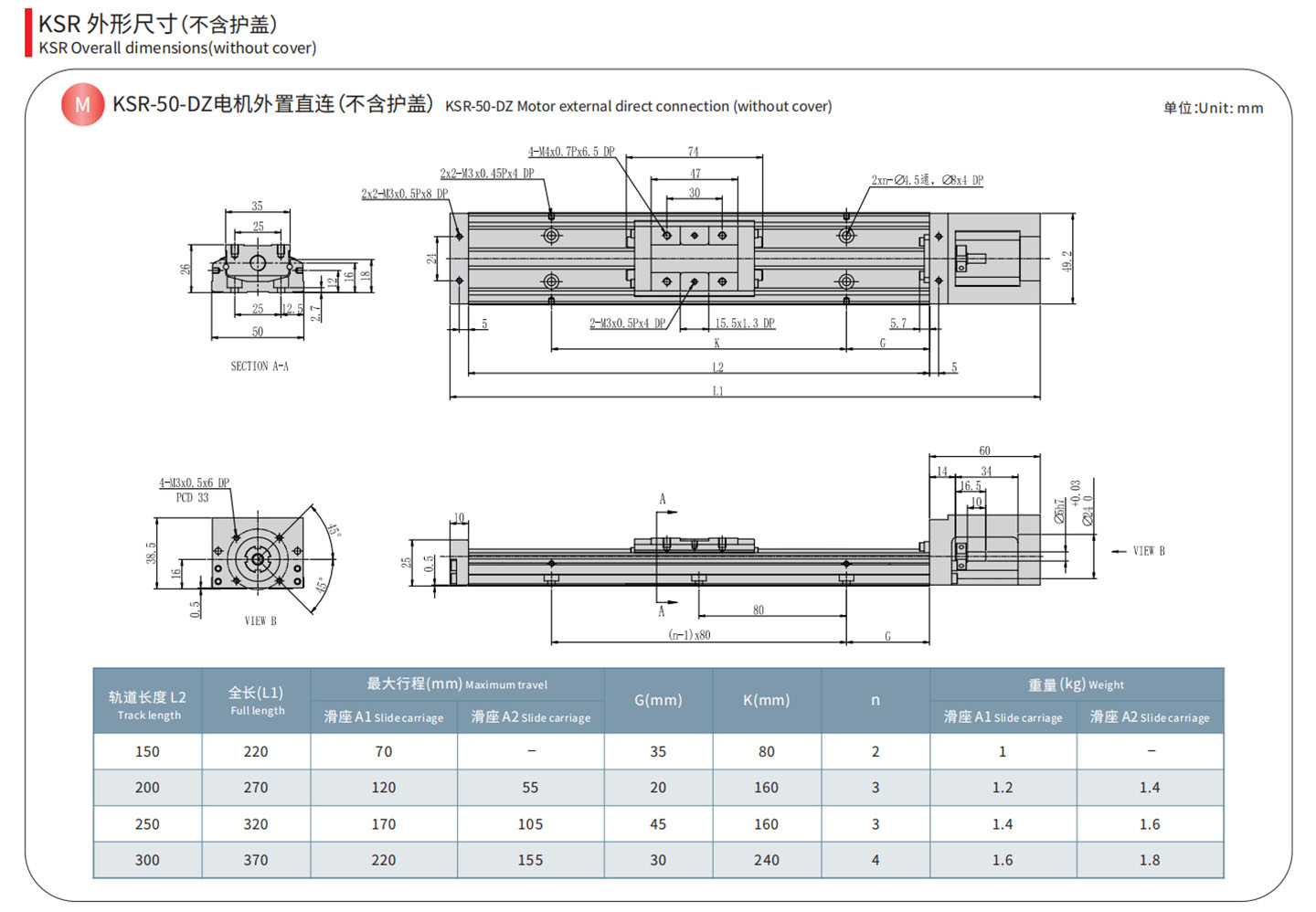
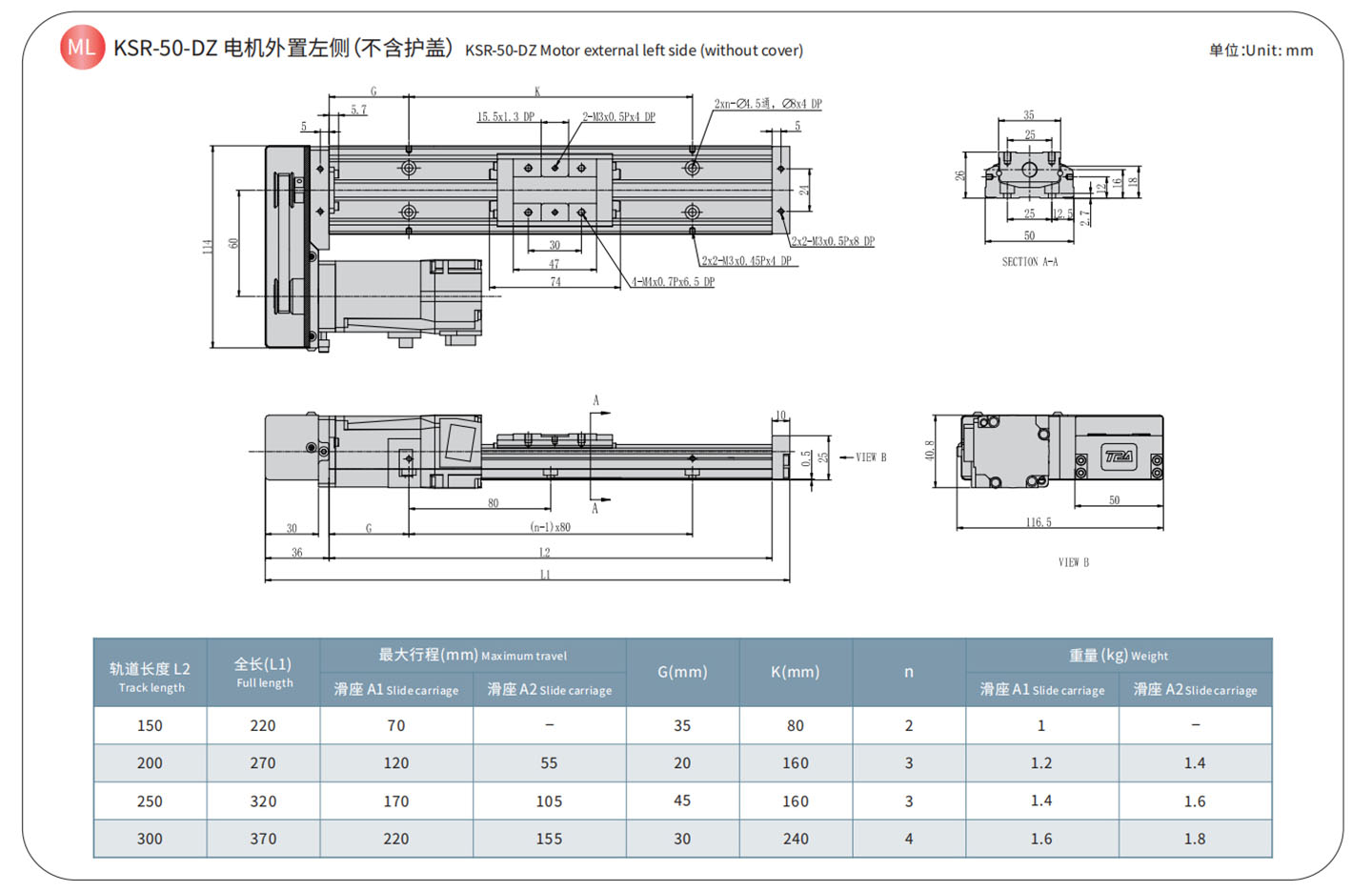
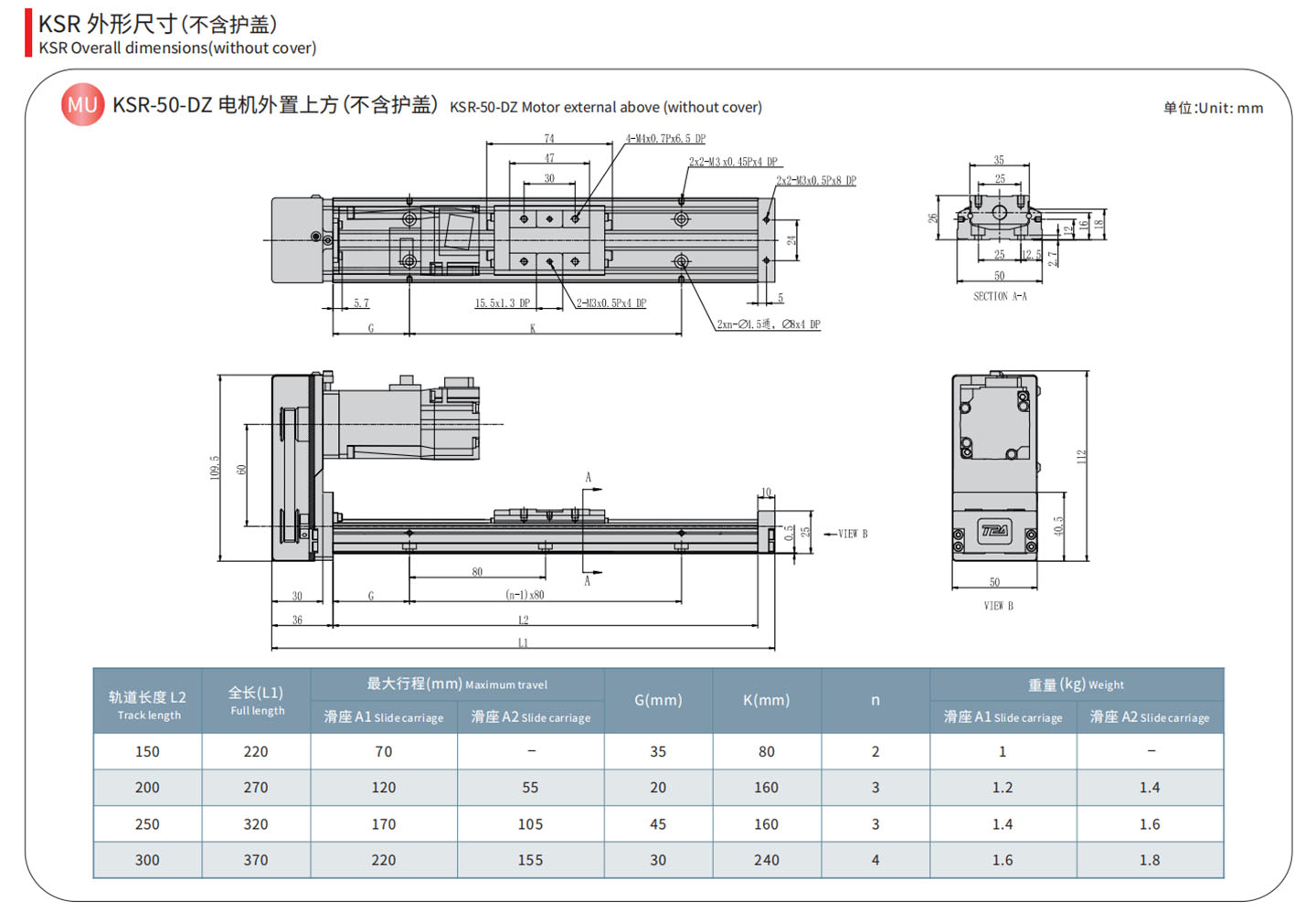
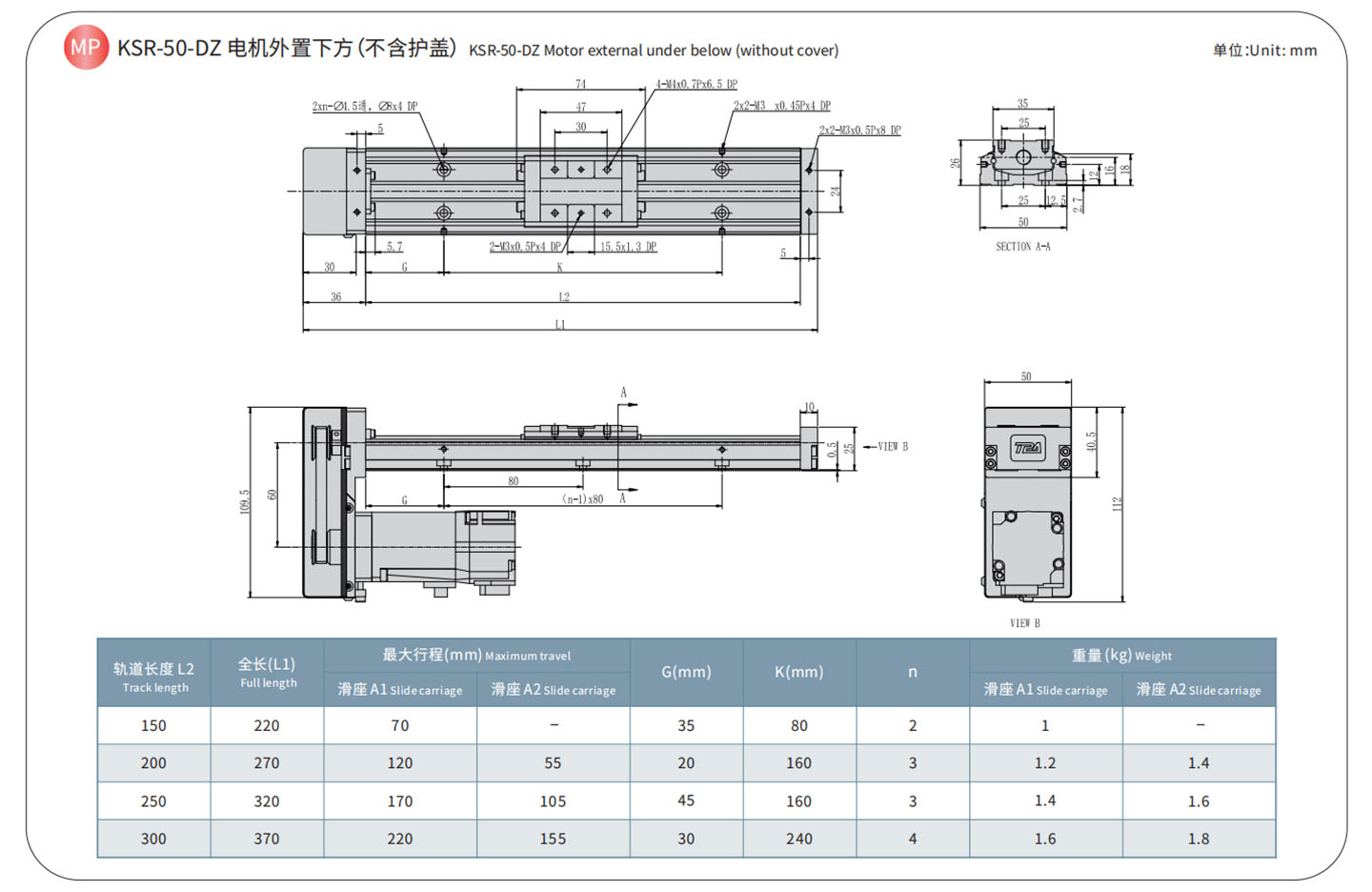
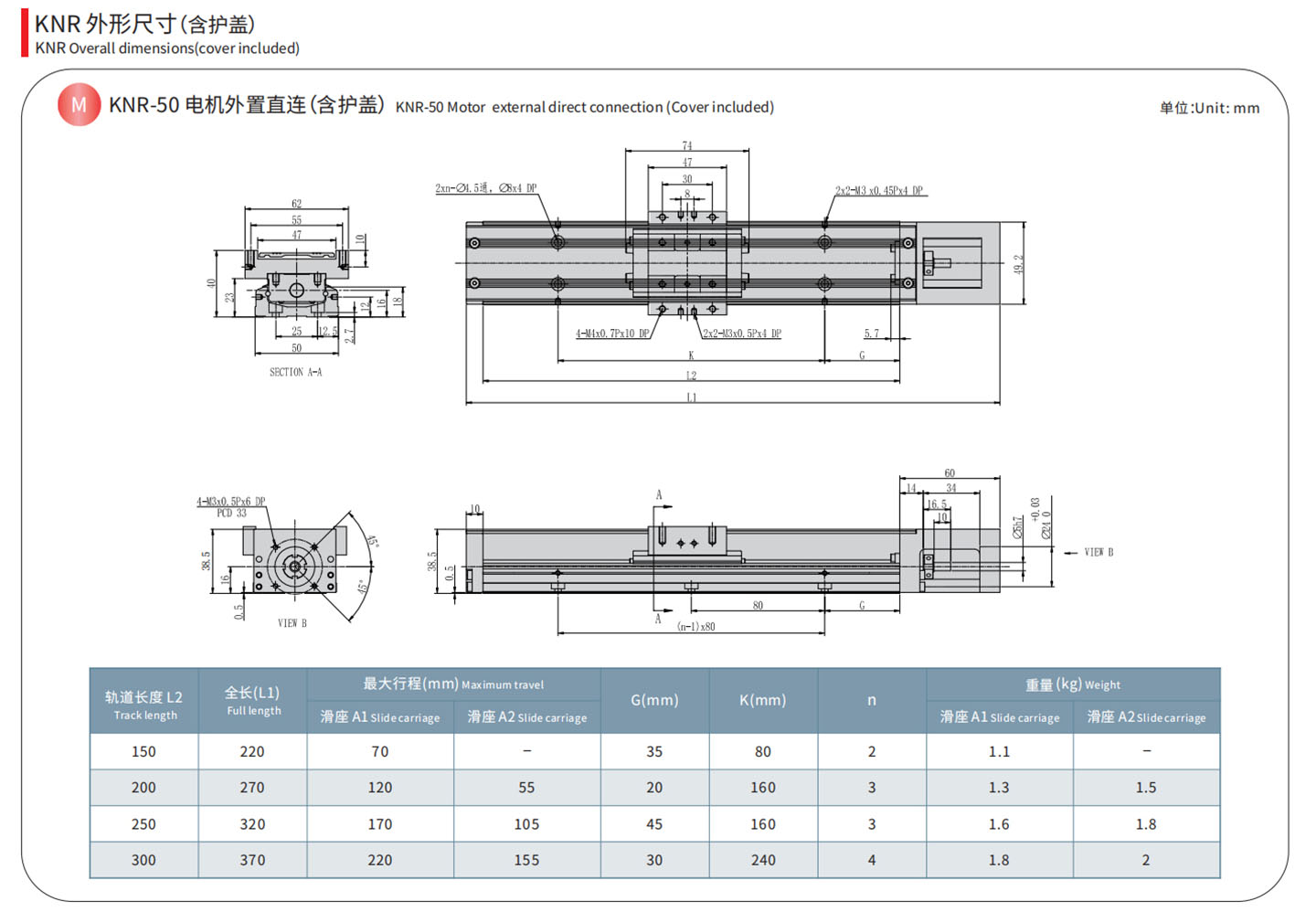
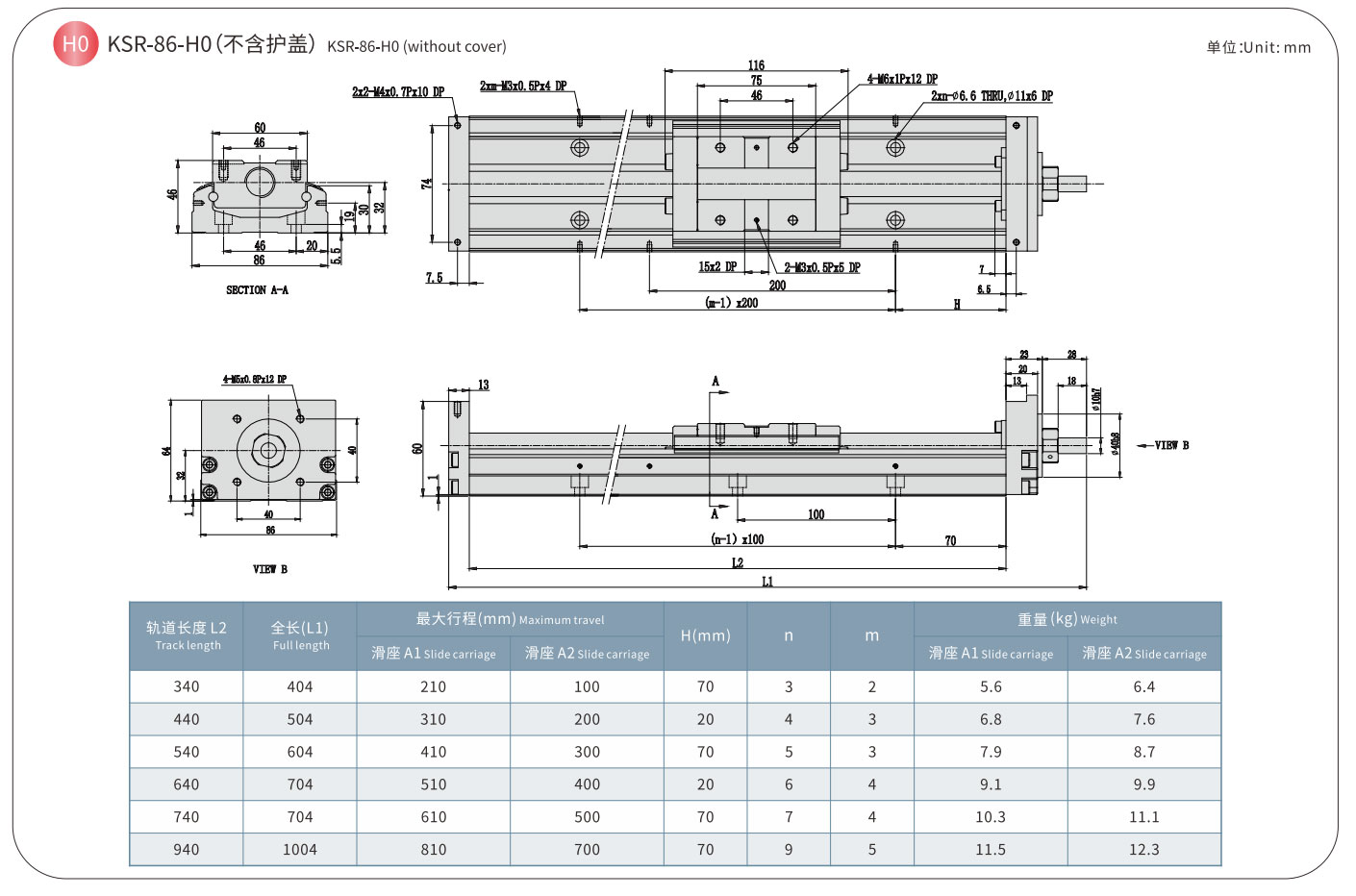
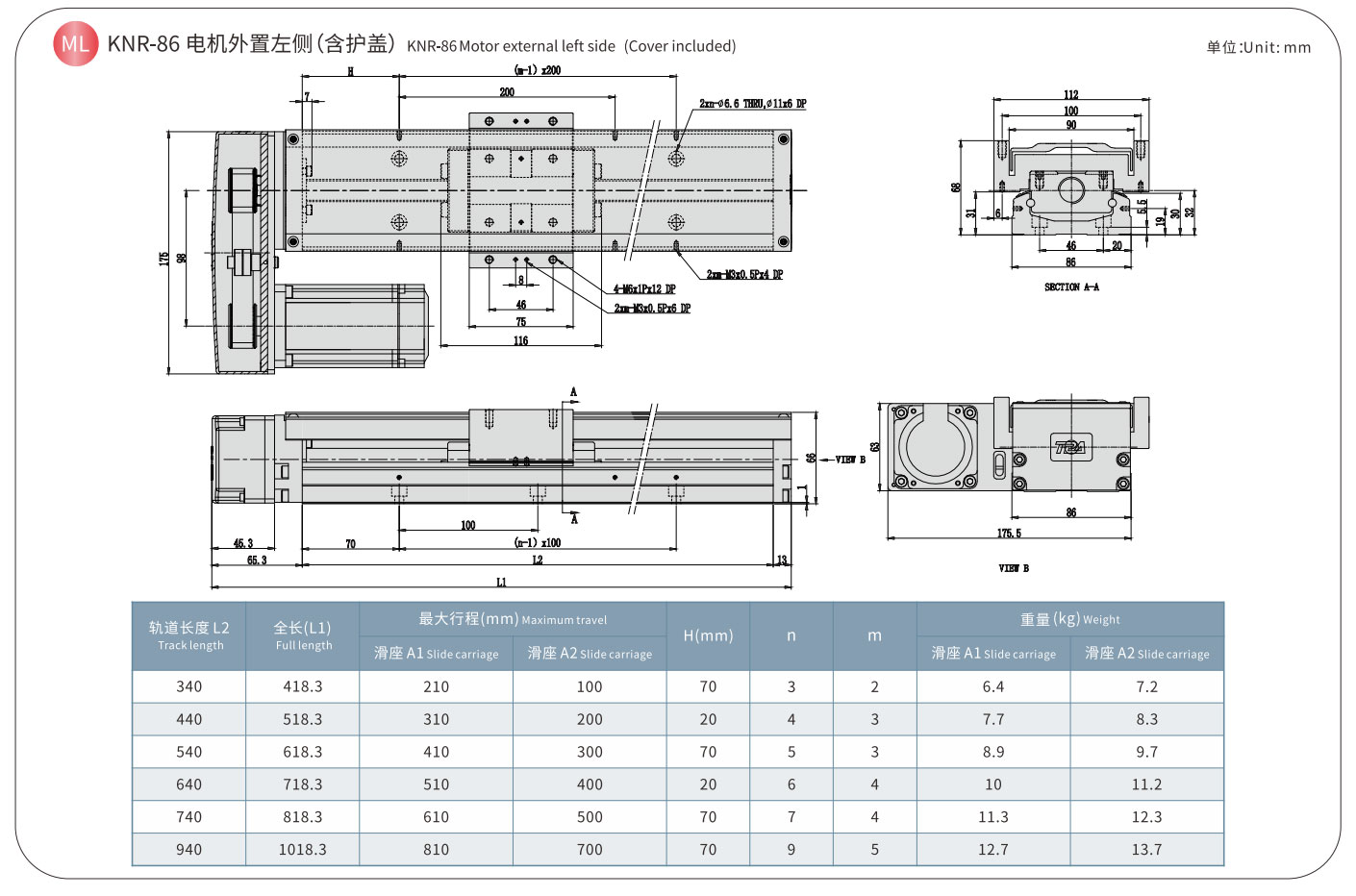
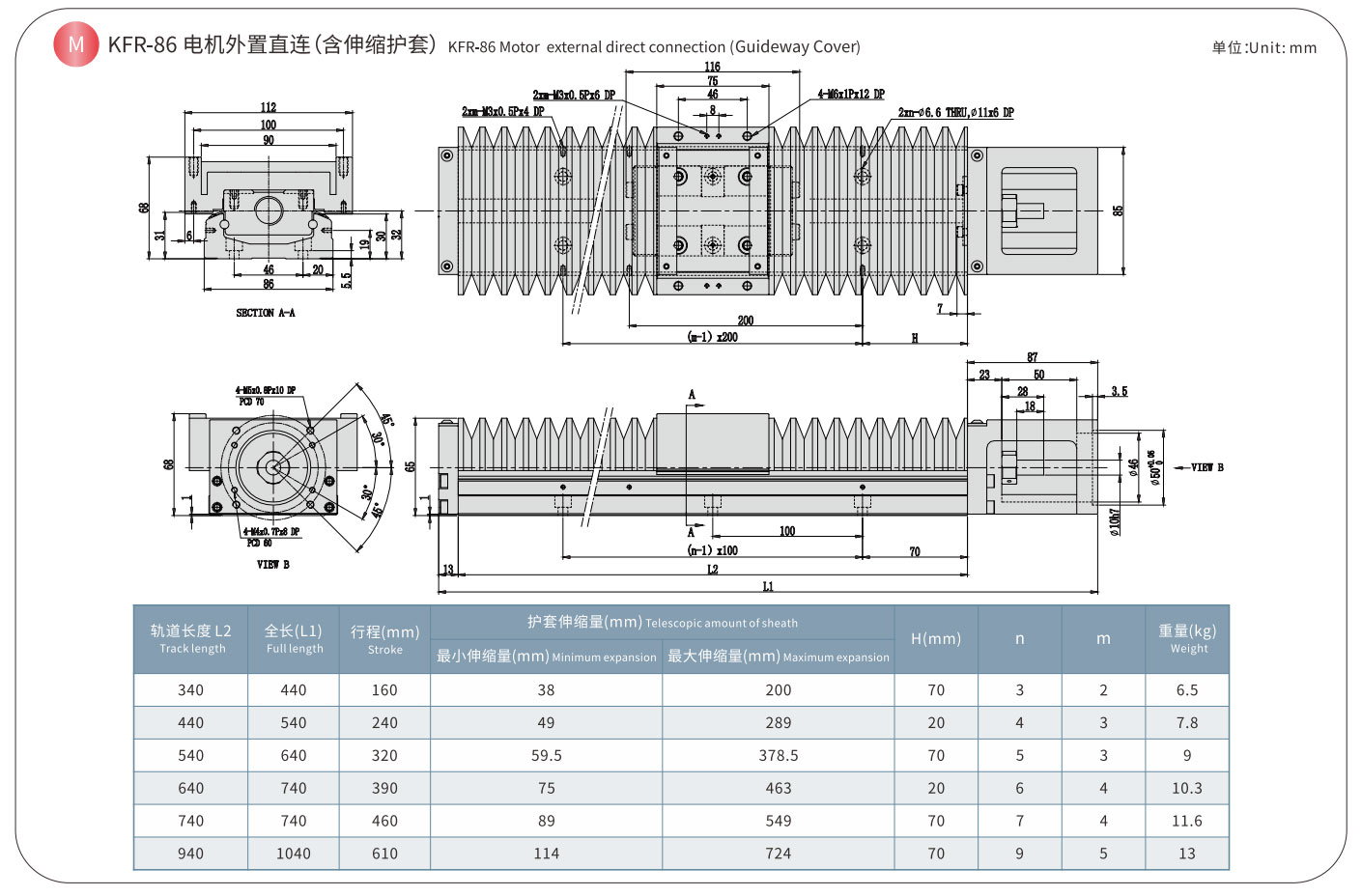
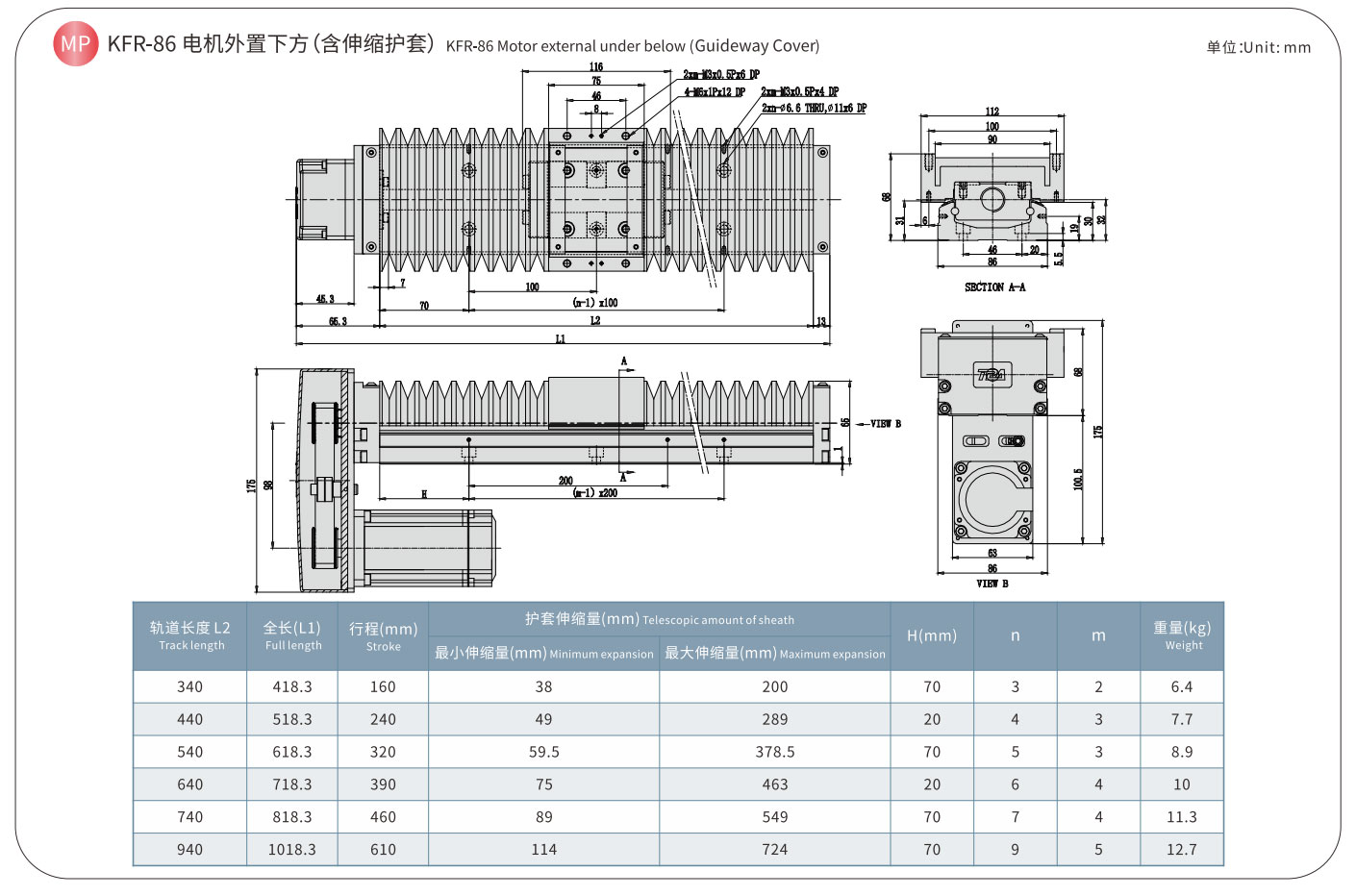
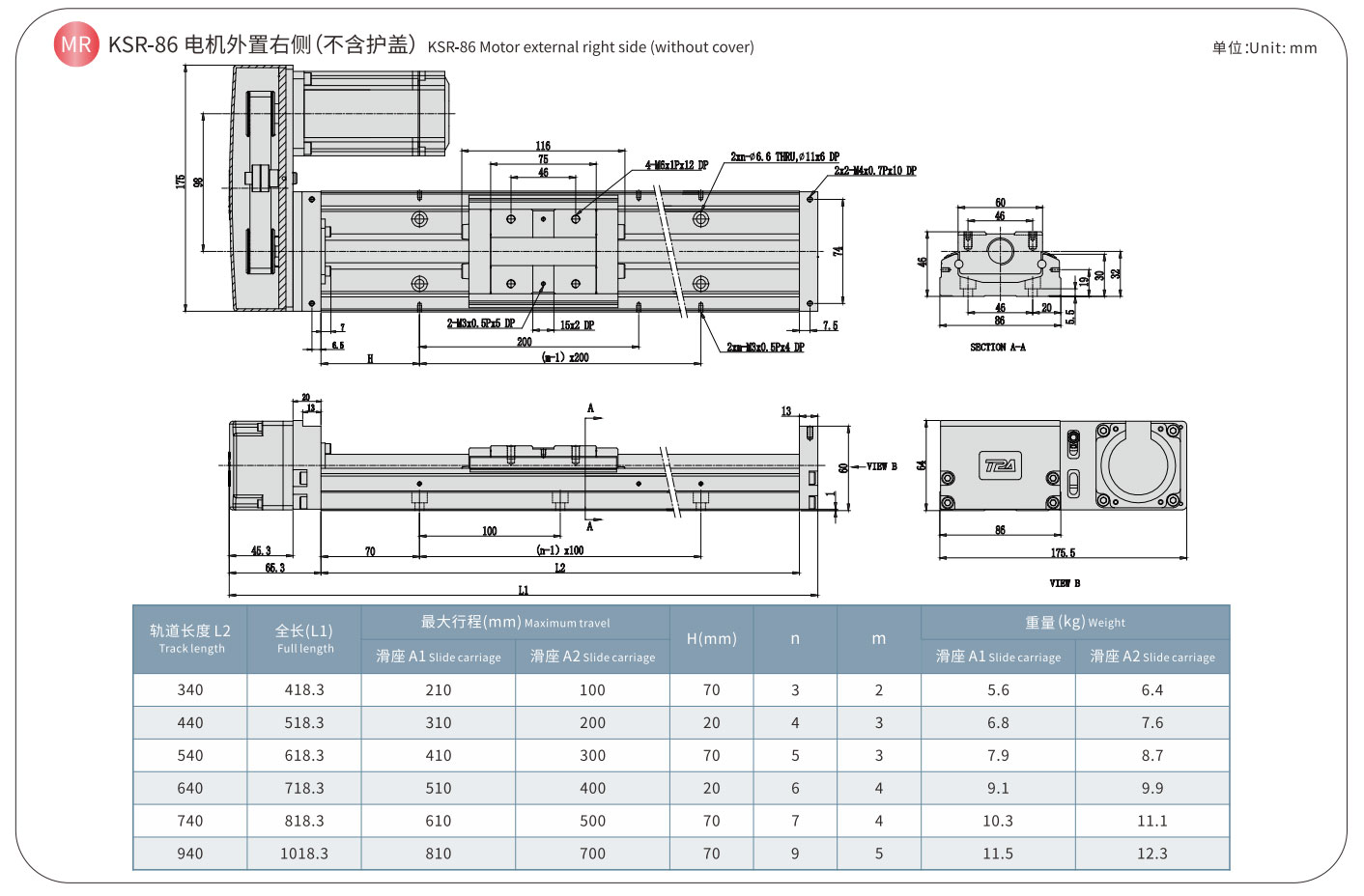
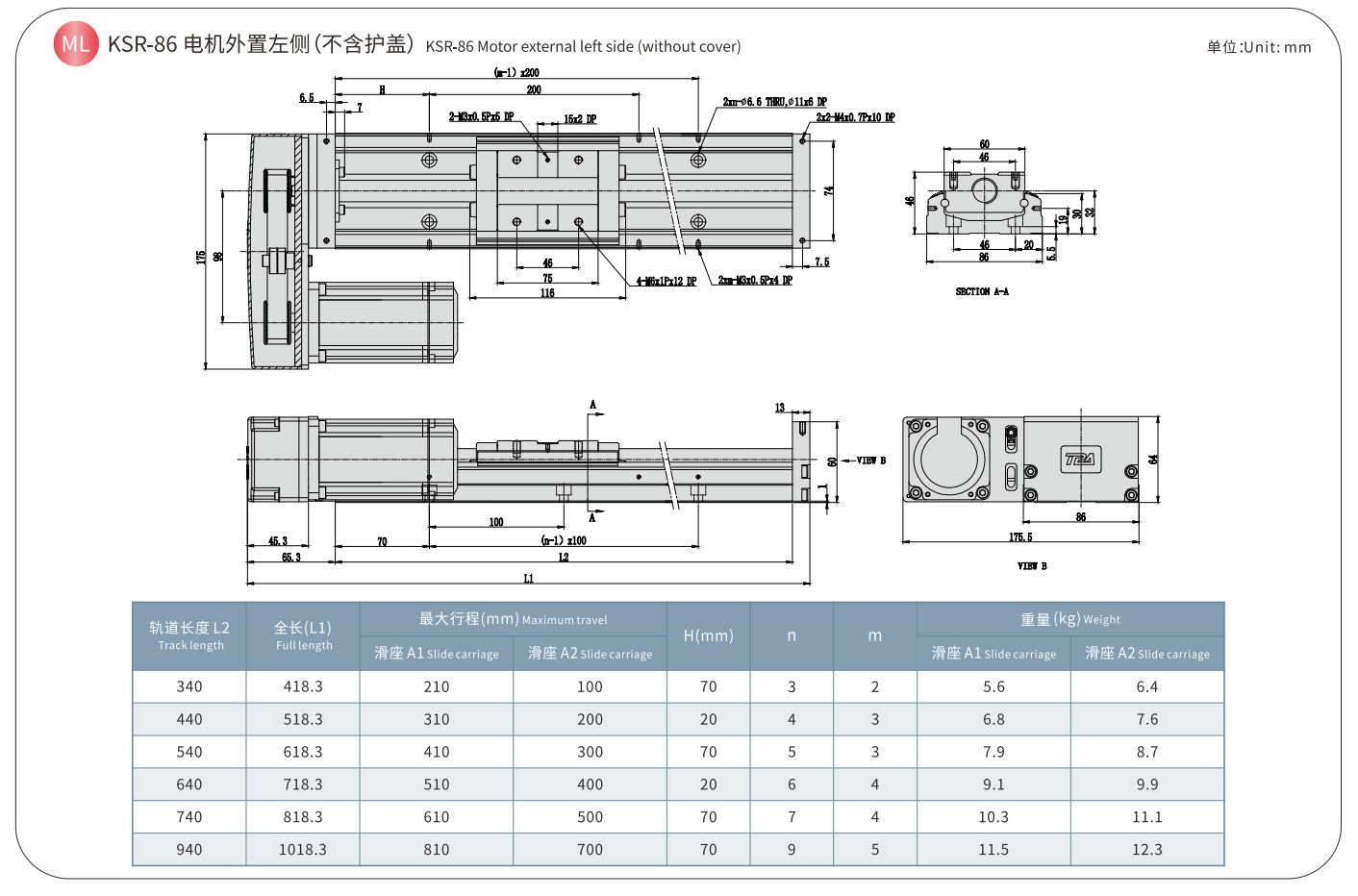
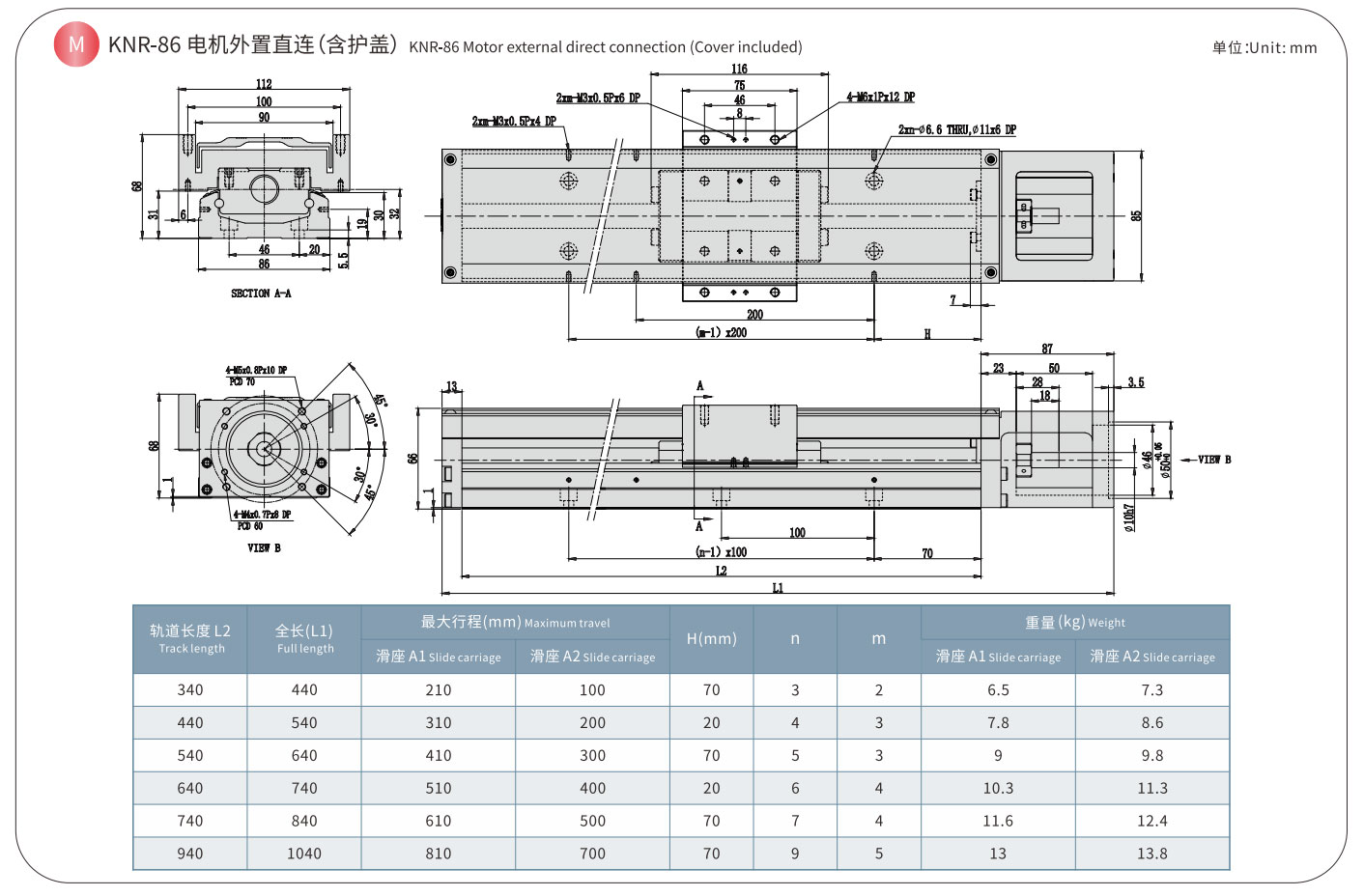
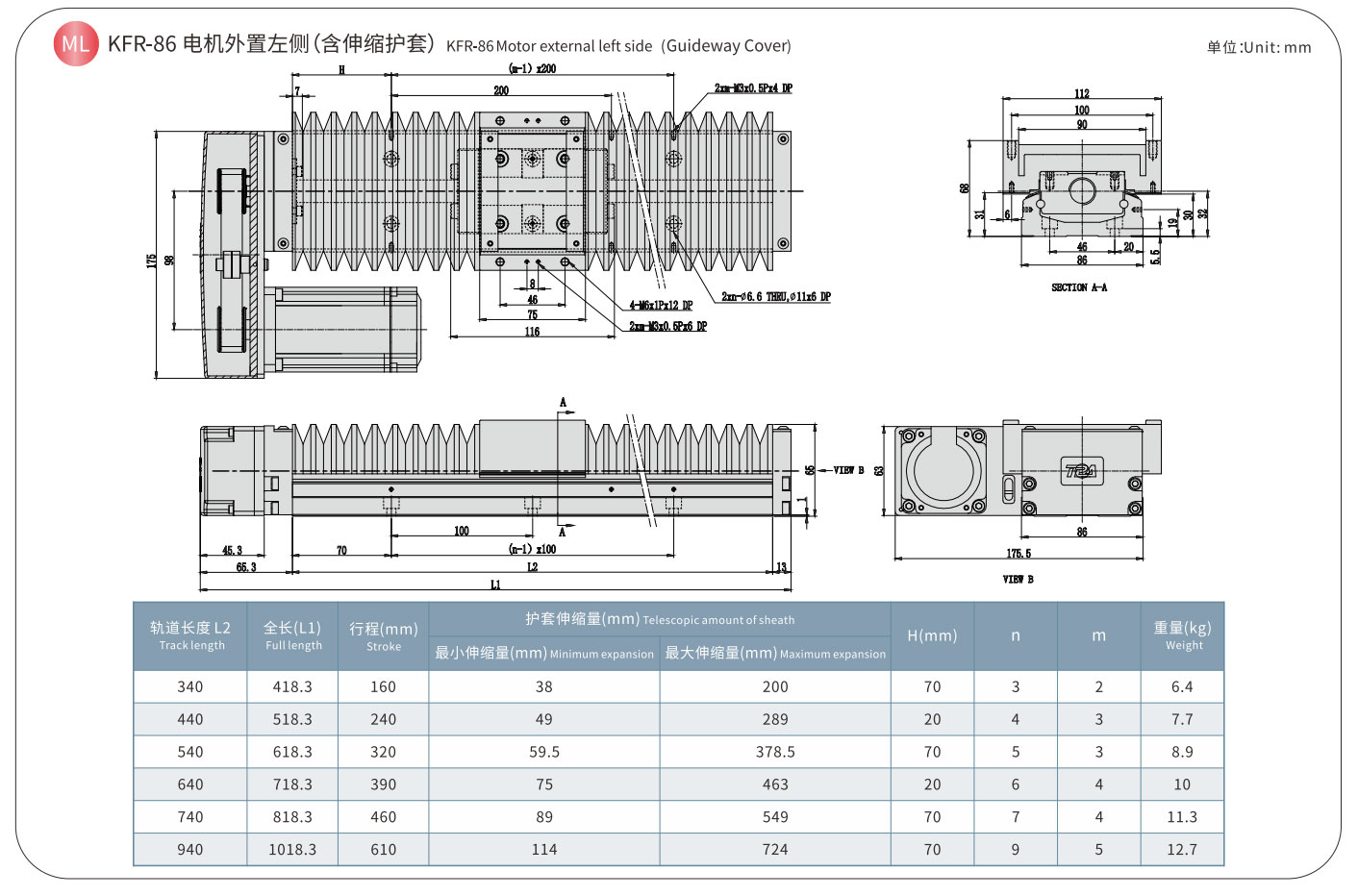
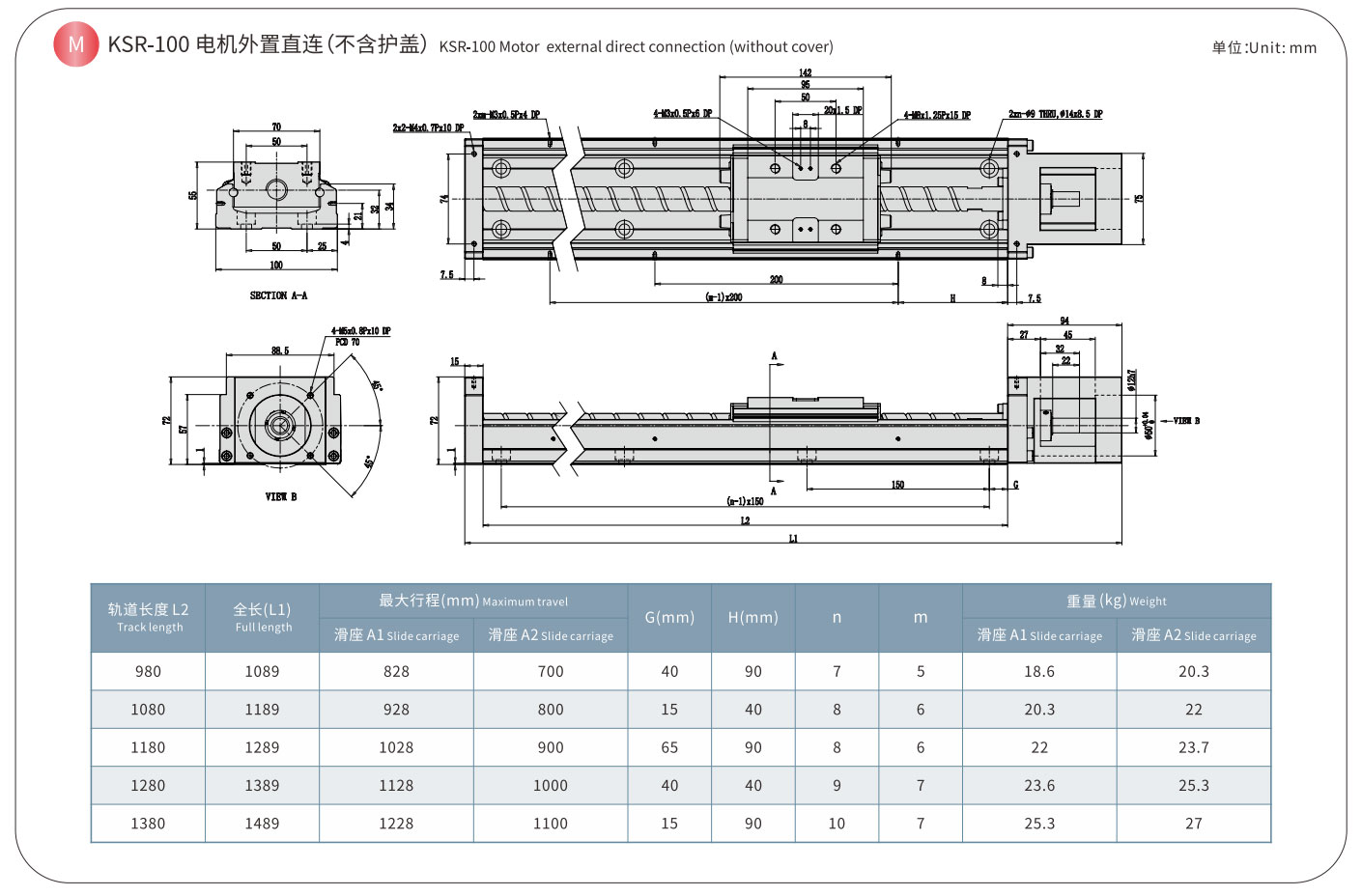
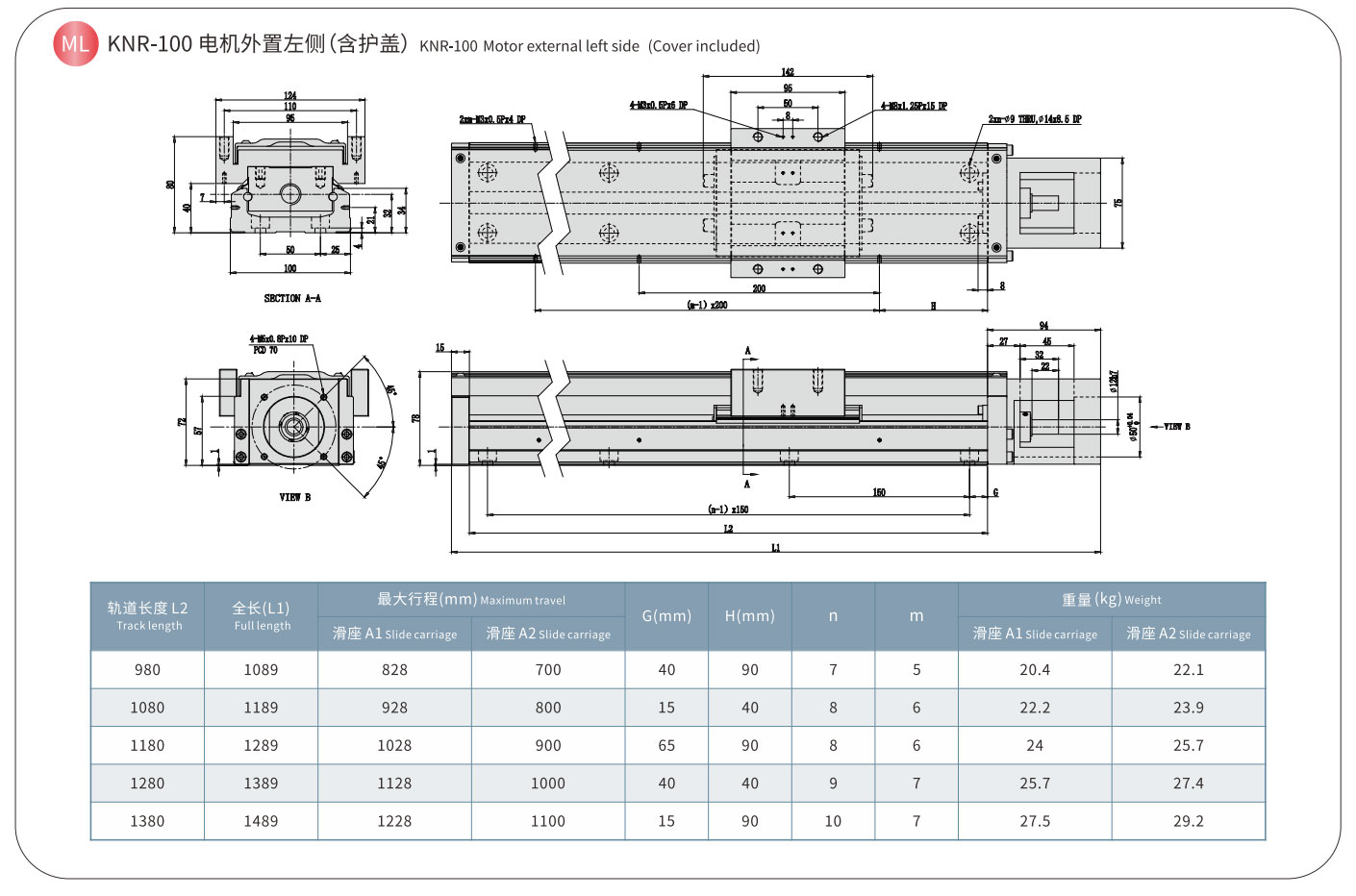
Аднавосевы робат серыі KK, распрацаваны TPA ROBOT, выкарыстоўвае часткова загартаваную U-вобразную сталёвую аснову, каб значна павялічыць трываласць і грузападымальнасць робата. З-за розных умоў у нас ёсць тры тыпу серый лінейных робатаў, KSR, KNR і KFR, у залежнасці ад тыпу выкарыстоўванага пакрыцця.
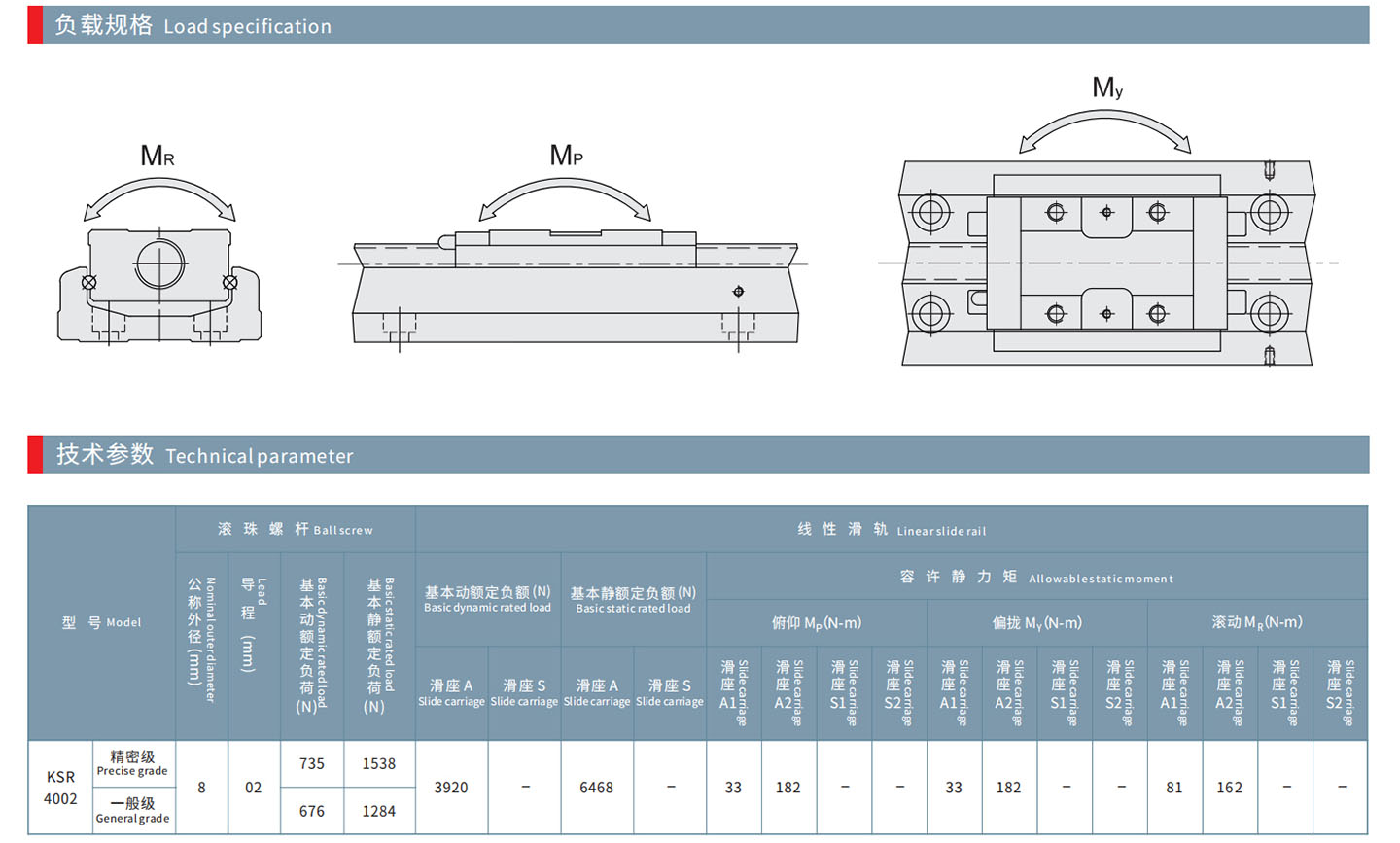
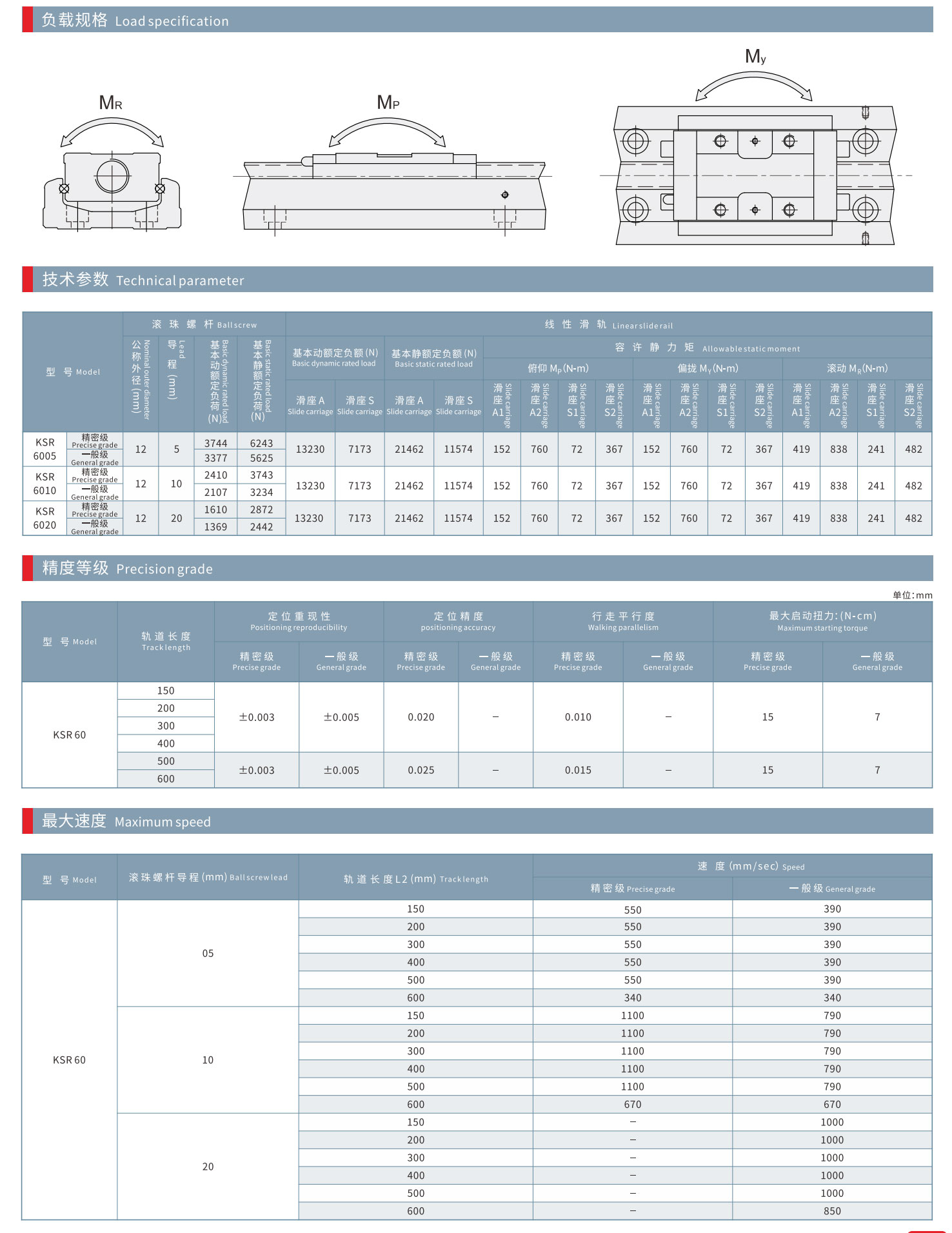
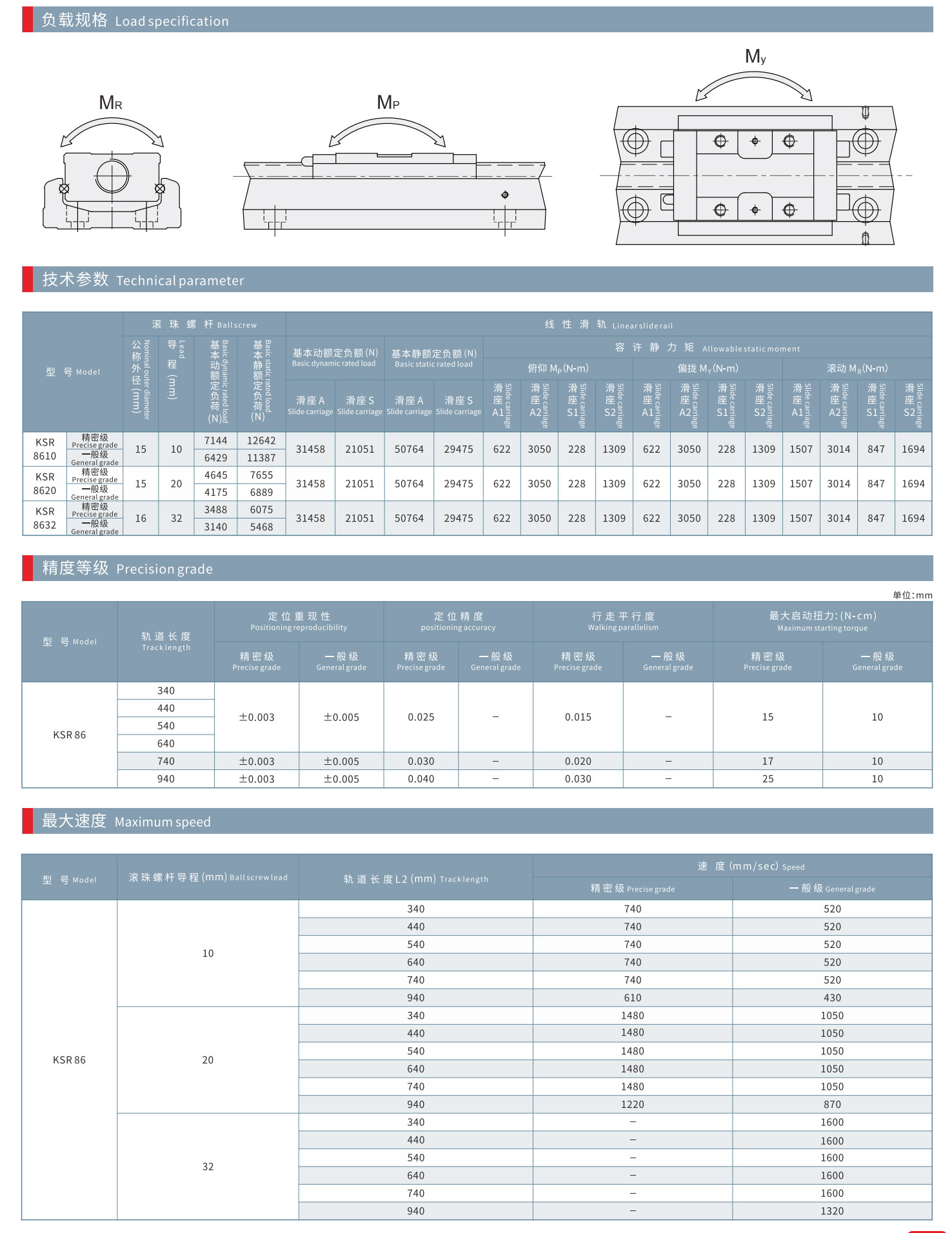
Для сістэмы зваротнага ходу паміж дарожкай і паўзуном кантактная паверхня паміж шарыкам і канаўкай для шарыка мае 2-радную канструкцыю зуба Гётэ з вуглом кантакту 45 градусаў, што можа прымусіць вось рукі робата вытрымліваць аднолькавую грузападымальнасць у чатырох кірунках. .
У той жа час высокадакладная шарыка-шрубавая шруба выкарыстоўваецца ў якасці трансмісійнай структуры, а U-вобразная дарожка спалучаецца з аптымізаванай канструкцыяй, так што робат па восі KK мае беспрэцэдэнтную дакладнасць, а дакладнасць яго паўторнага пазіцыянавання можа дасягаць ±0,003 мм.
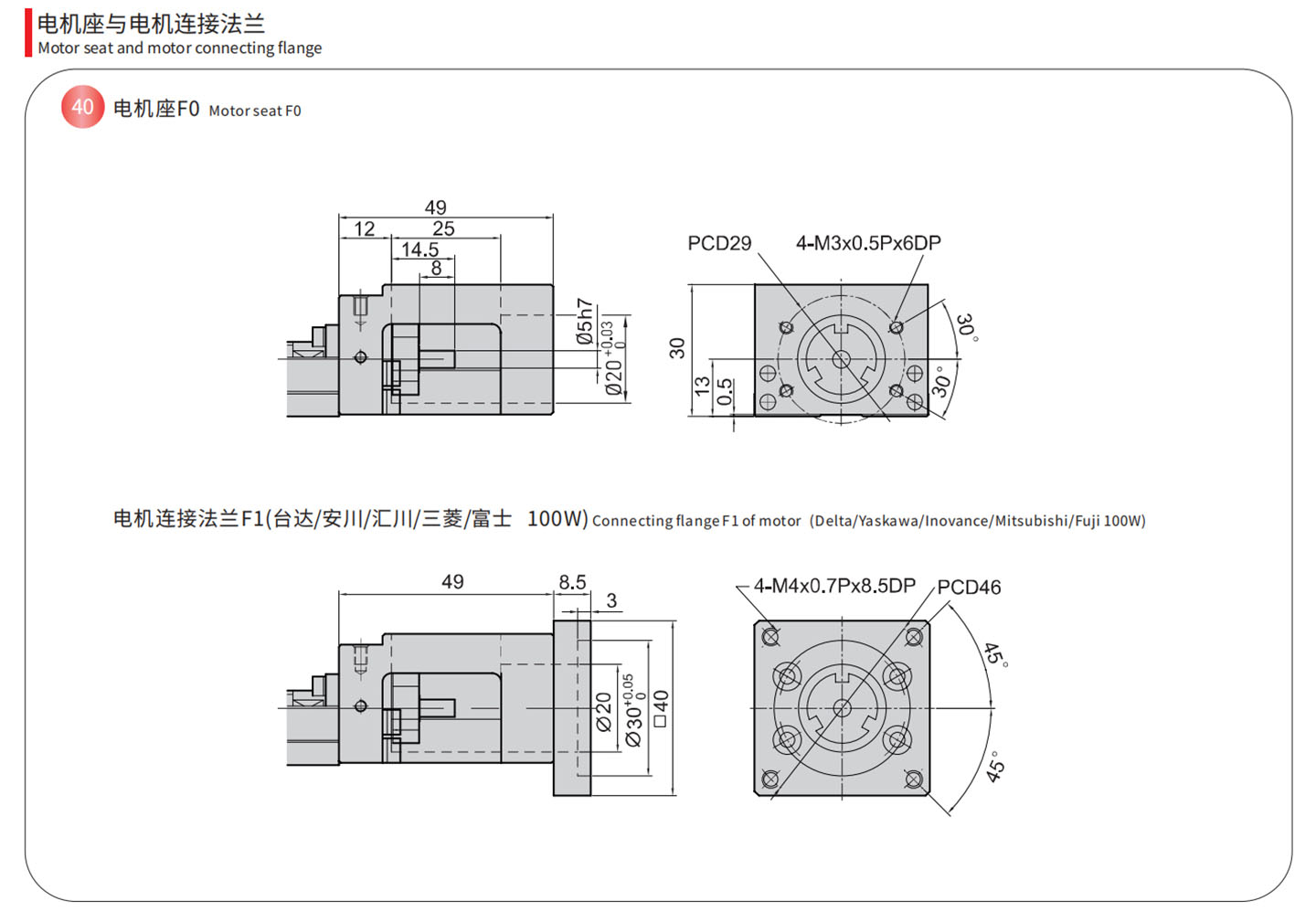
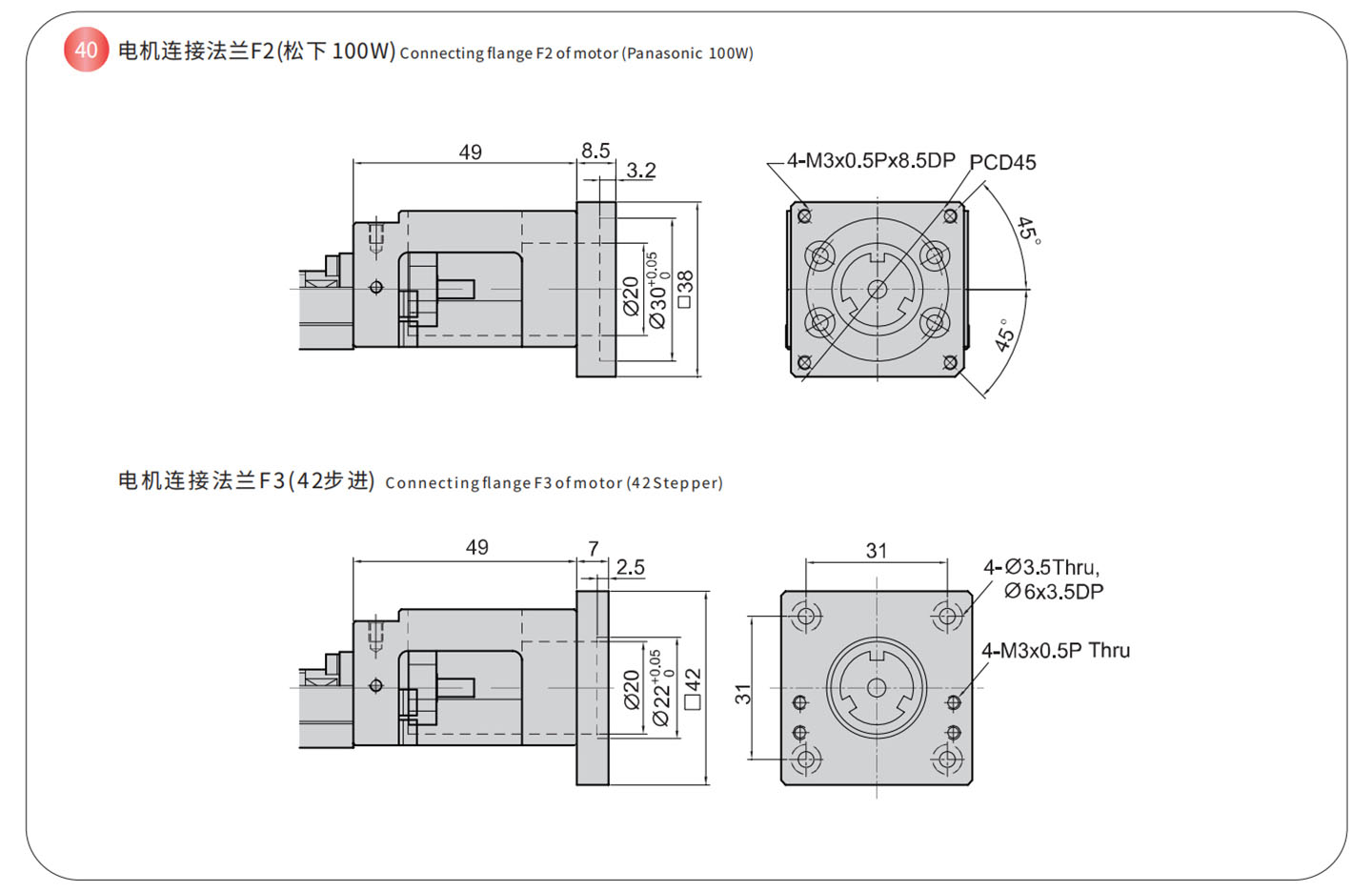
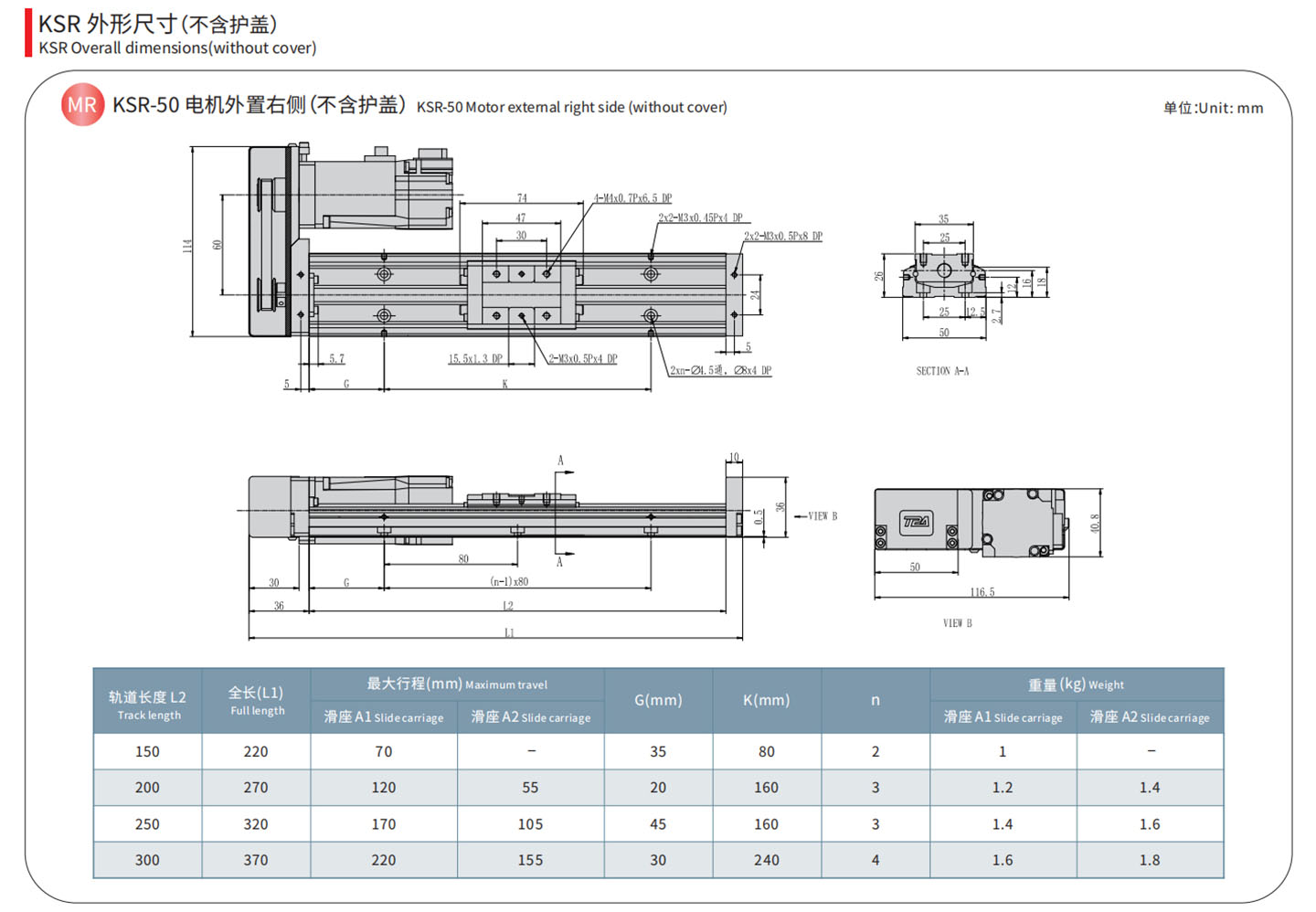
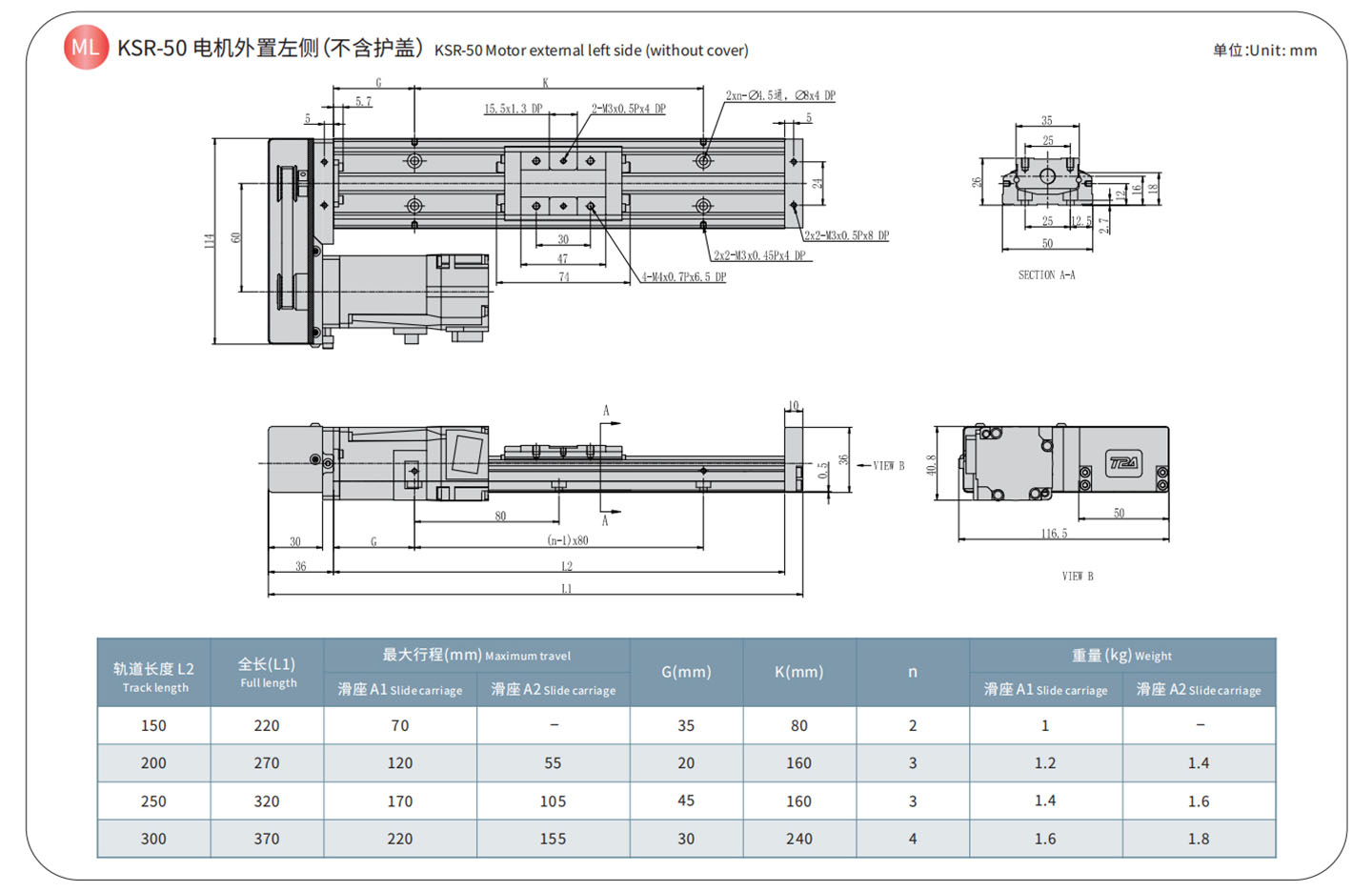
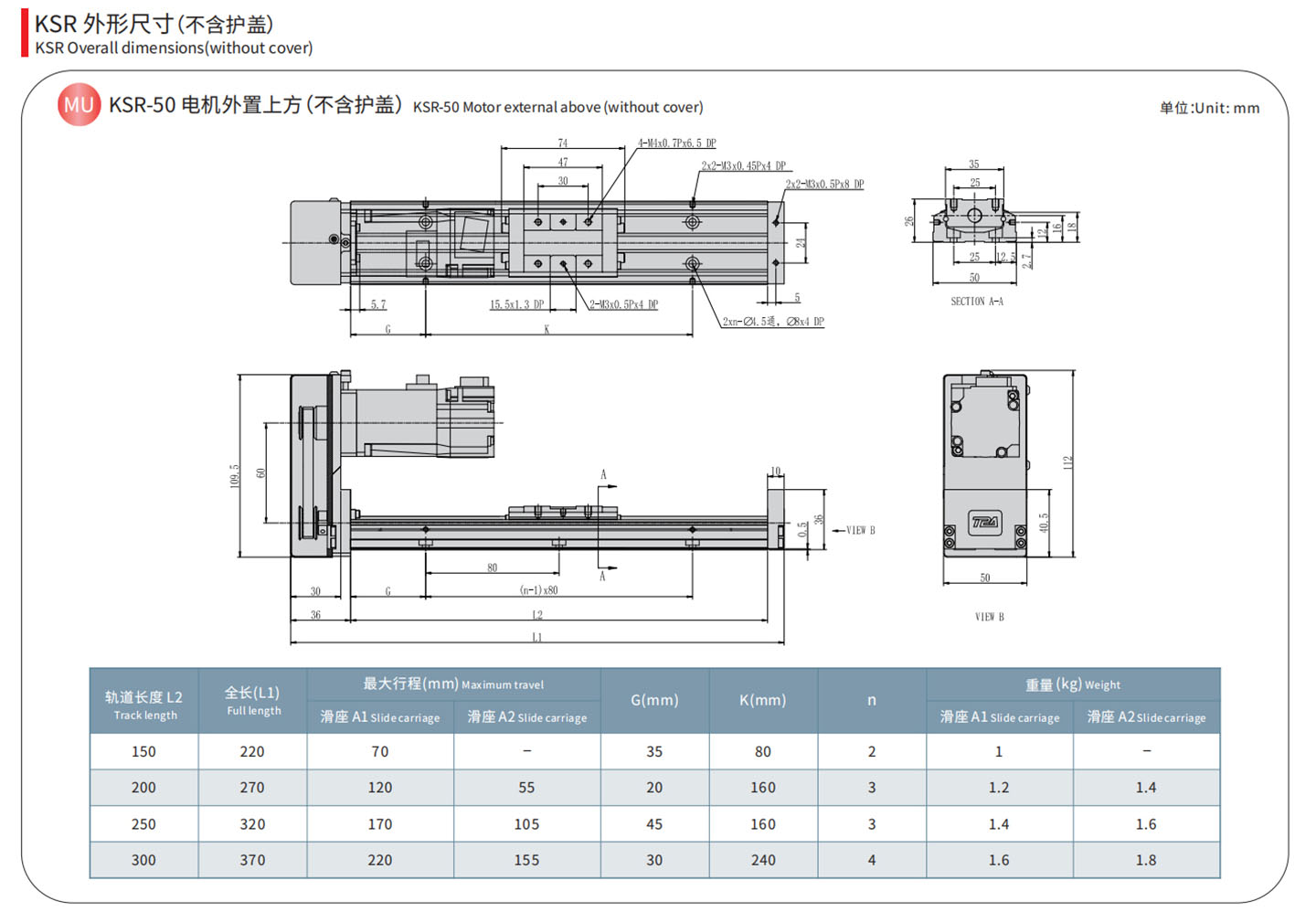
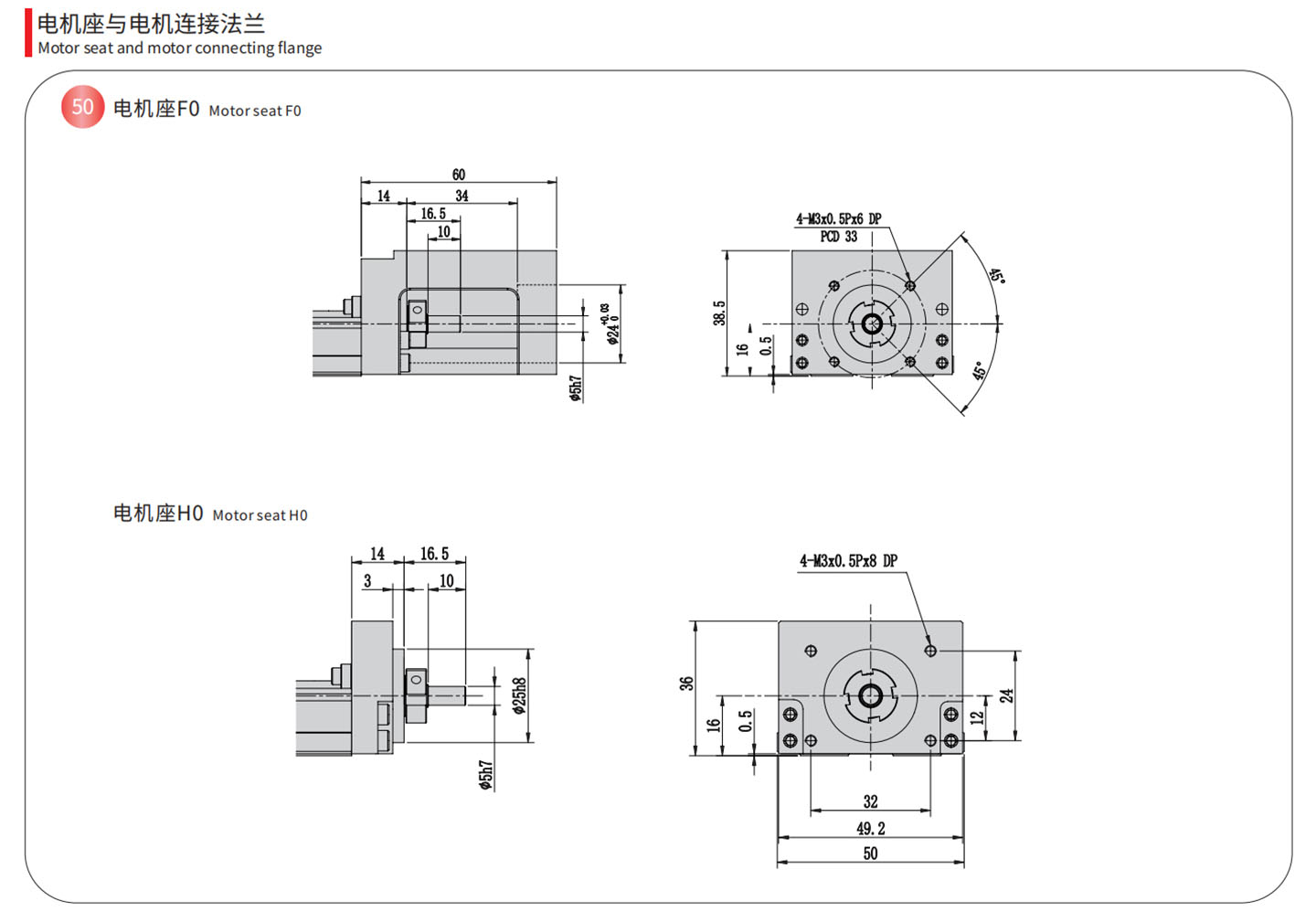
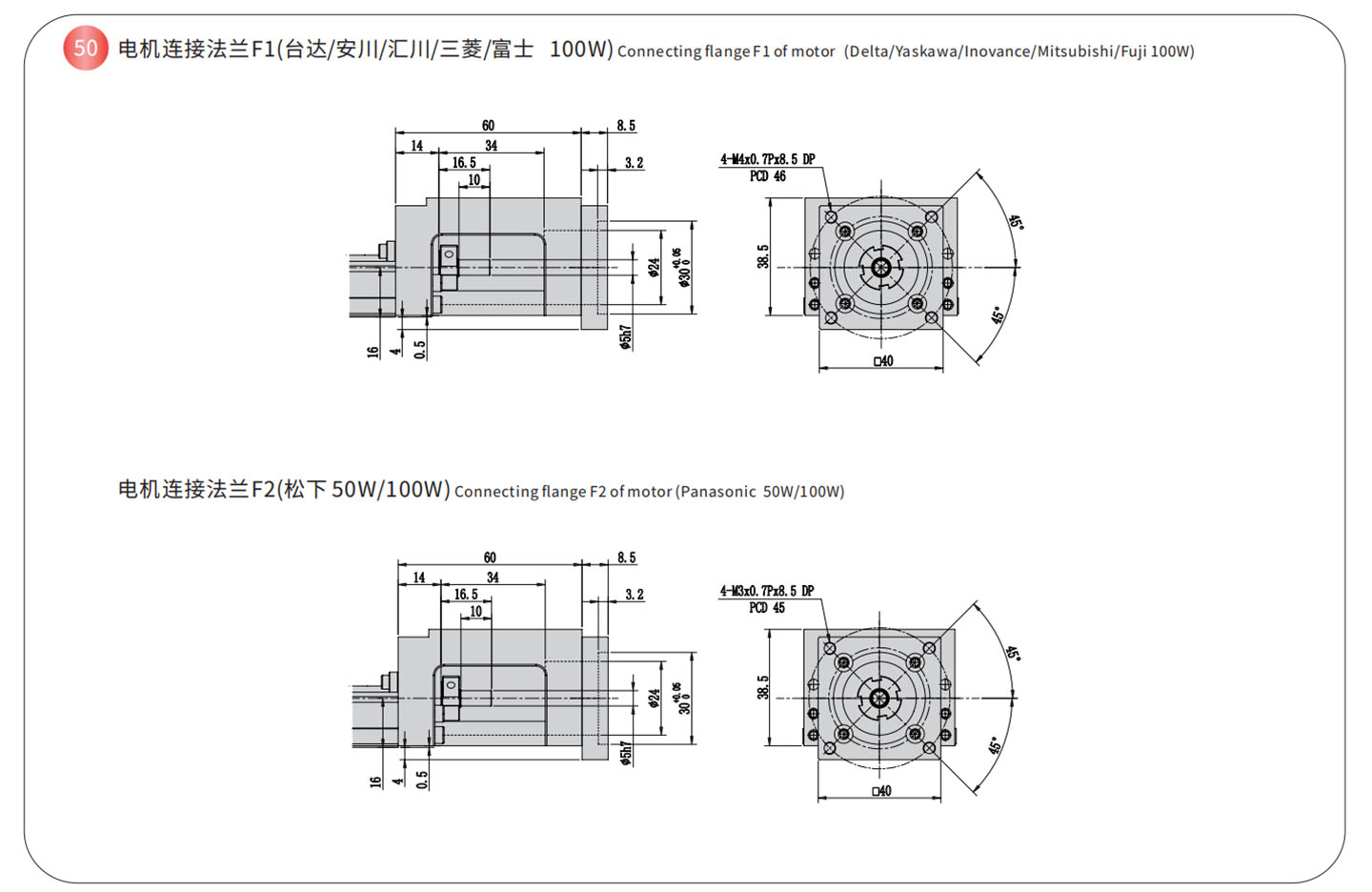
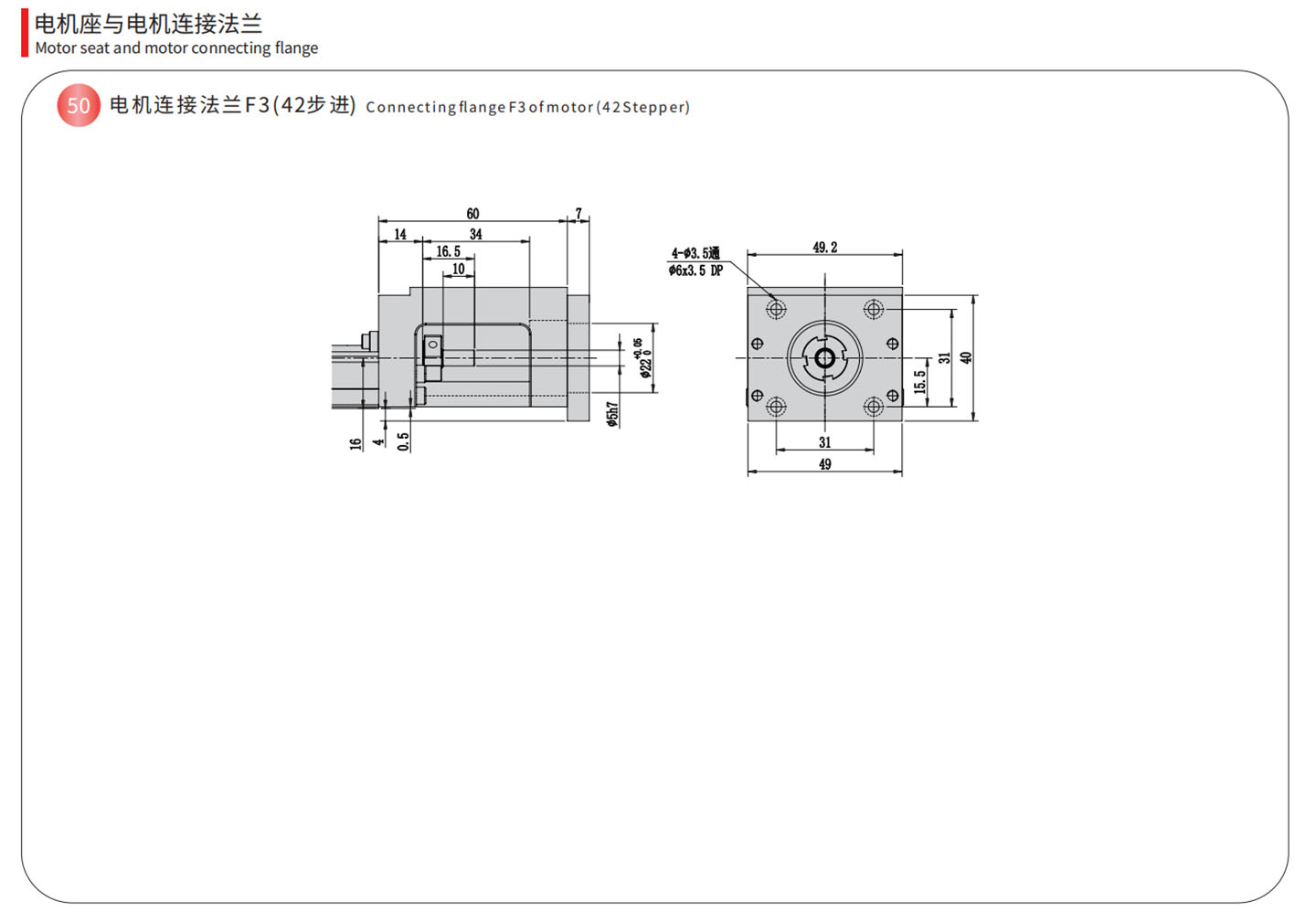
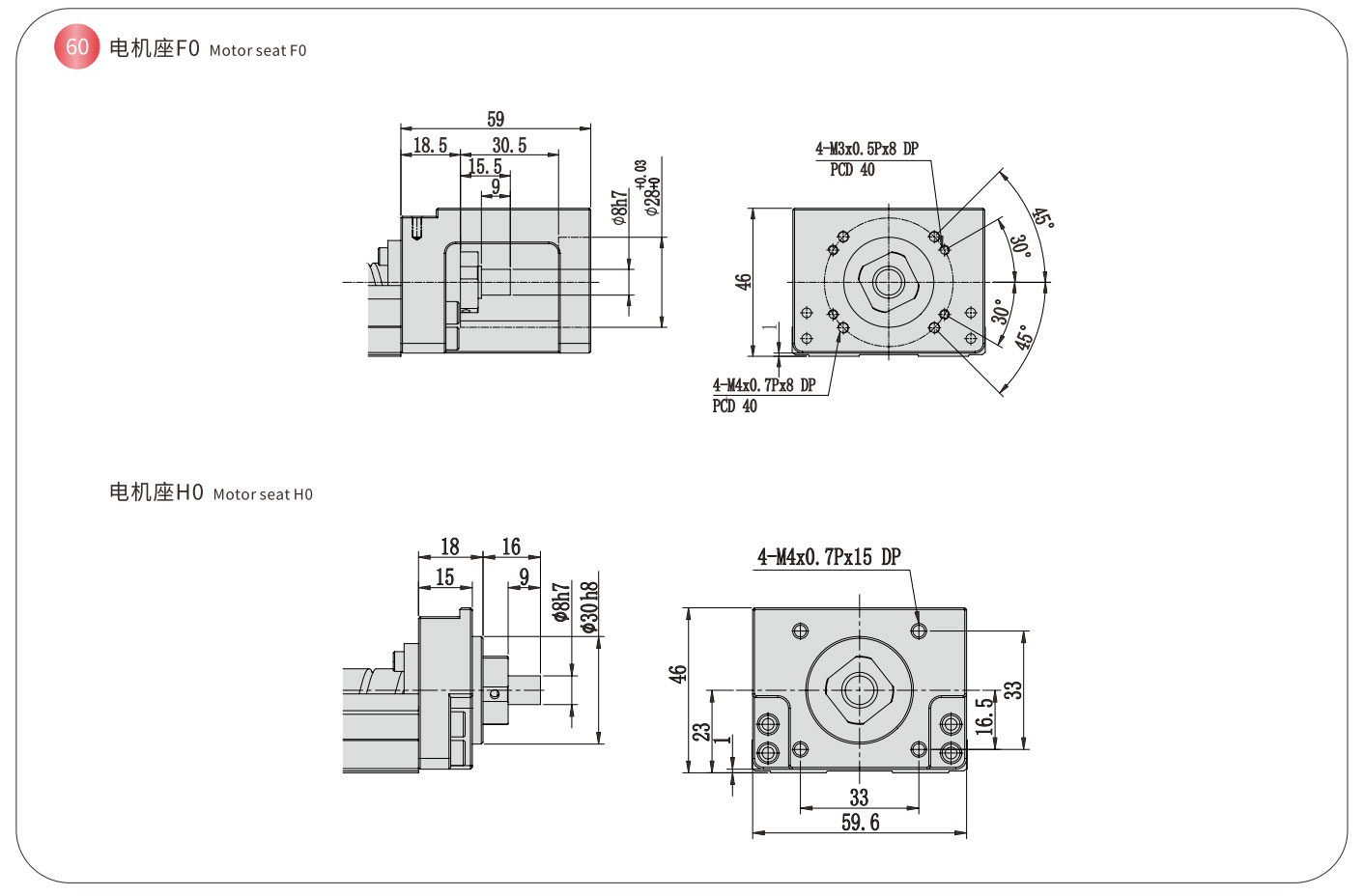
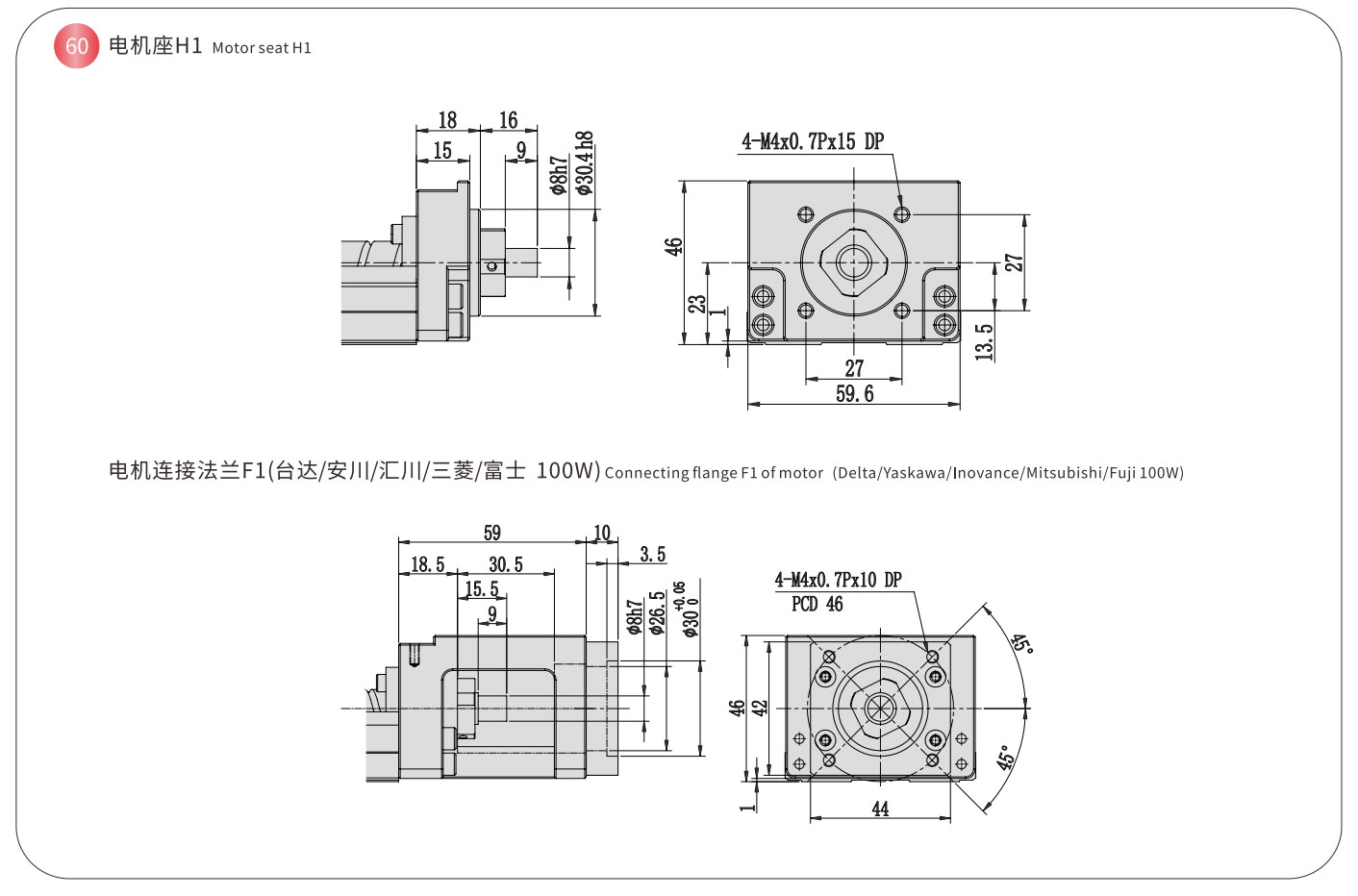
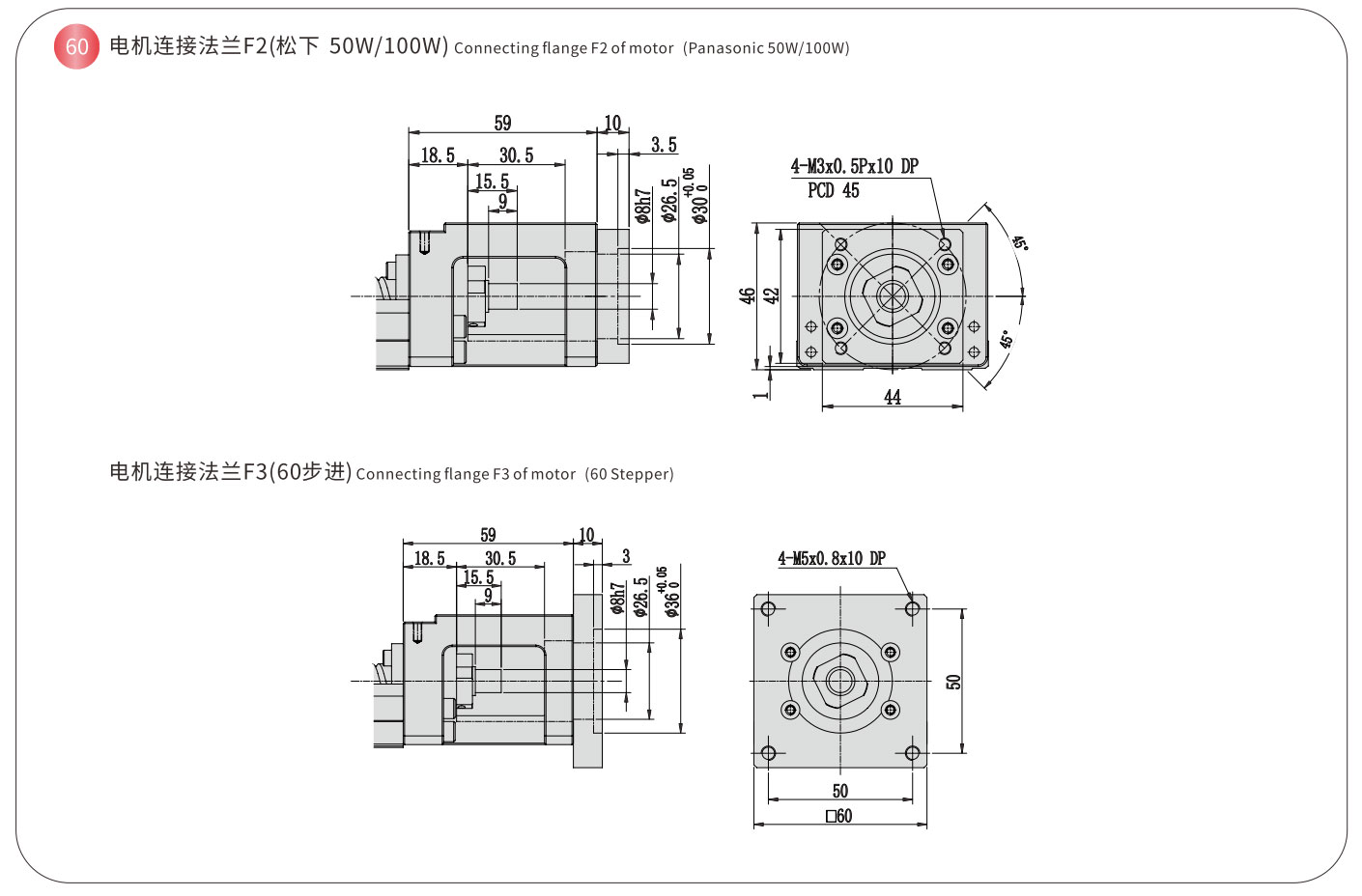
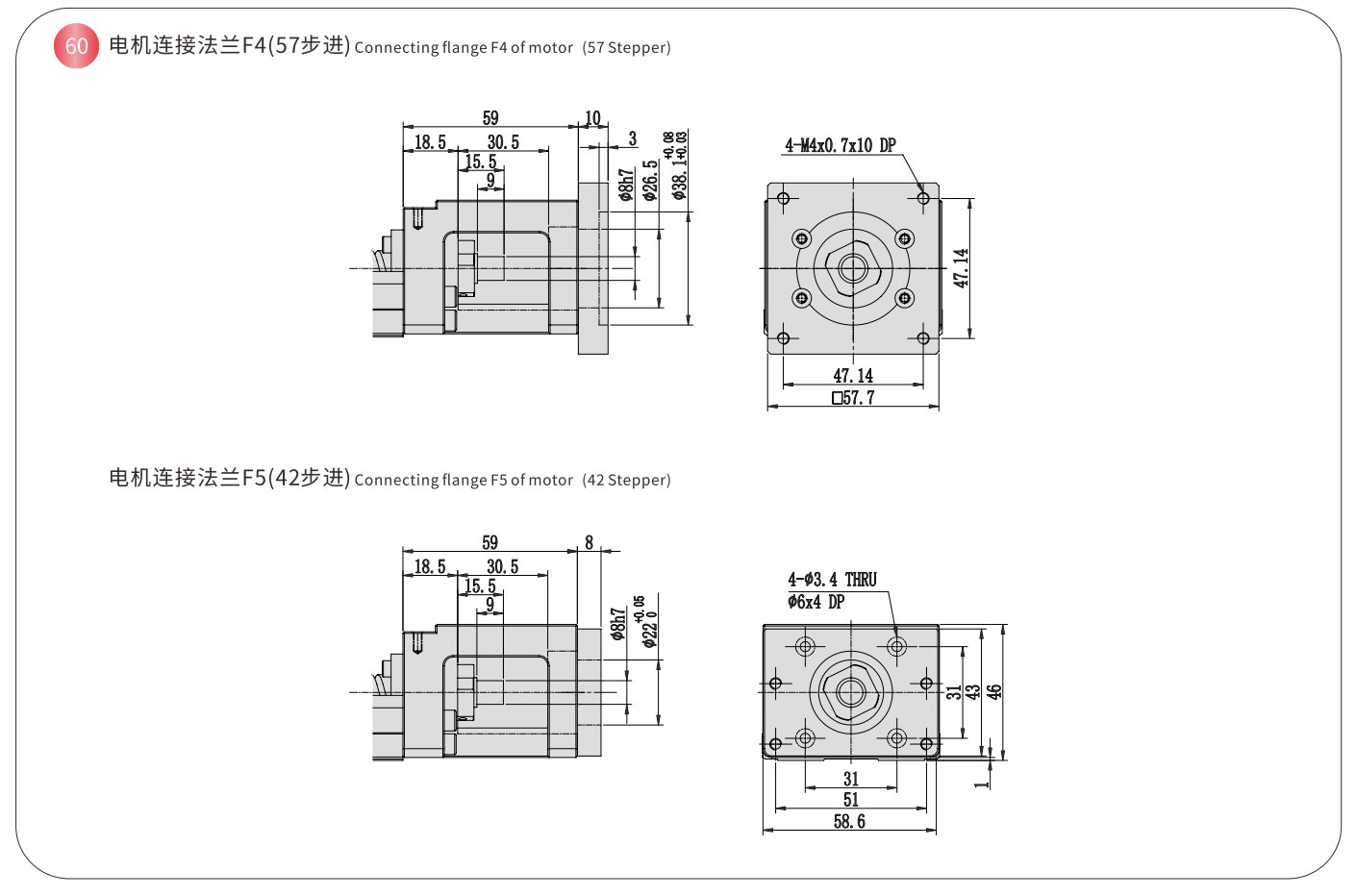
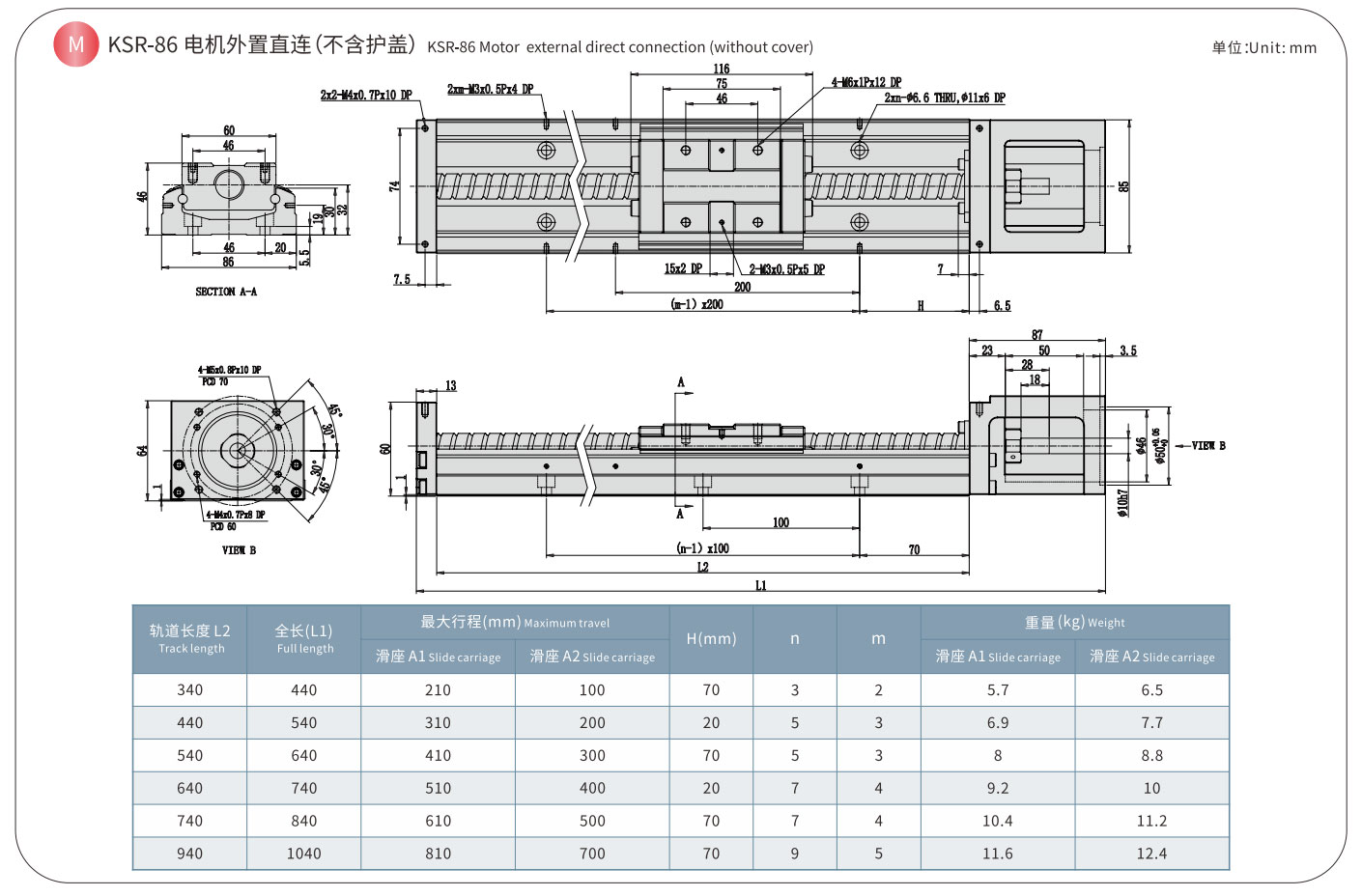
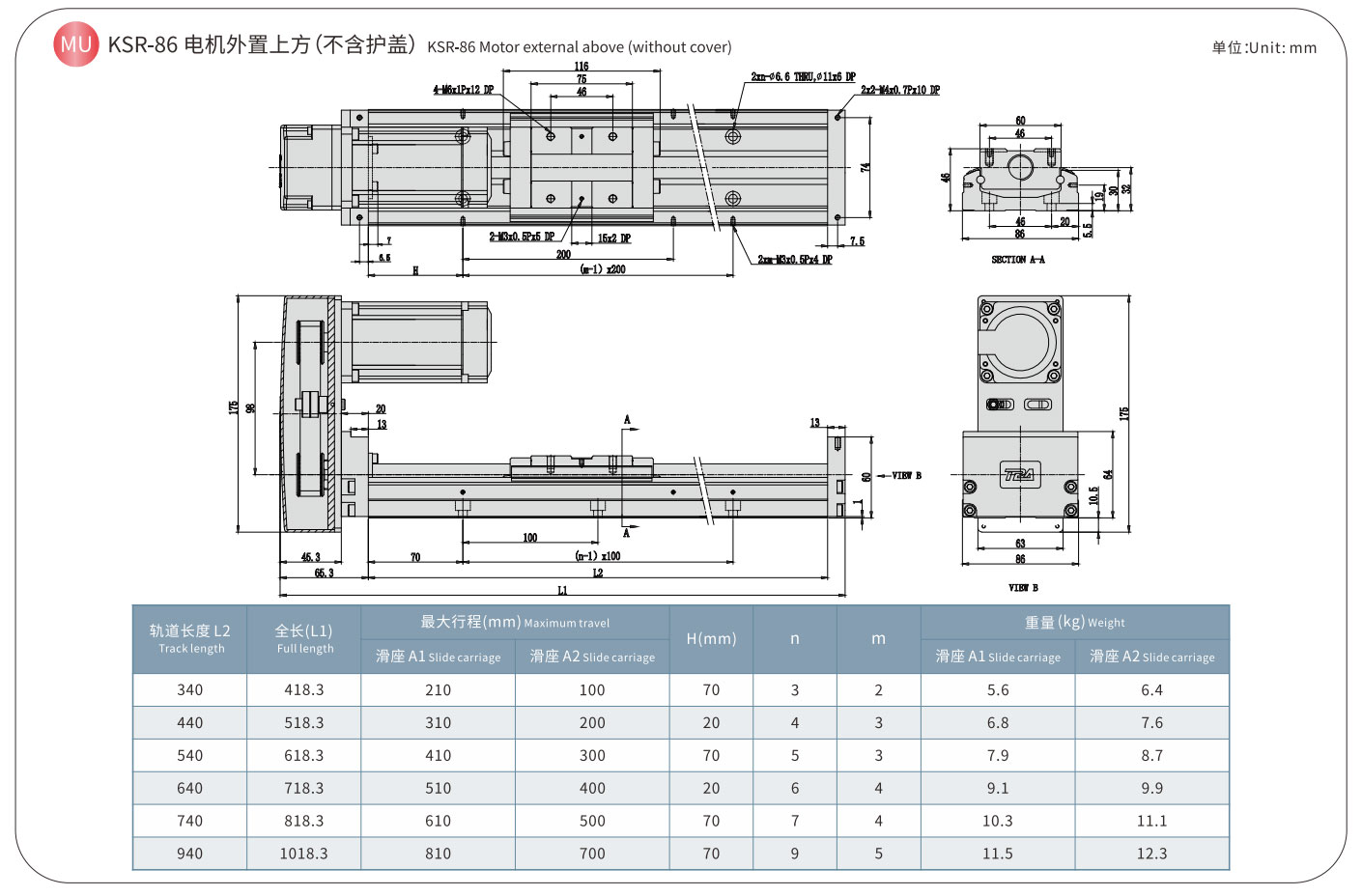
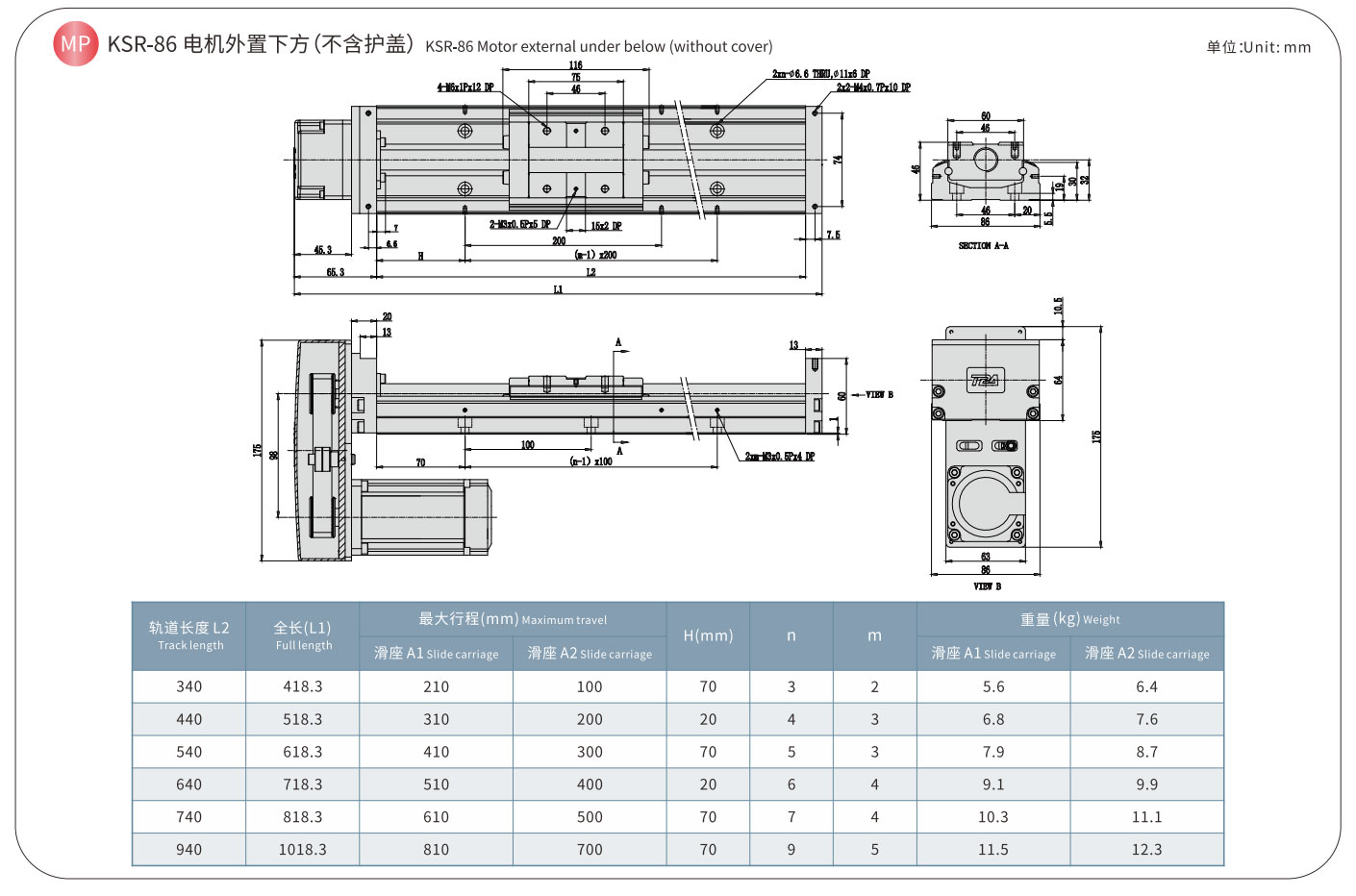
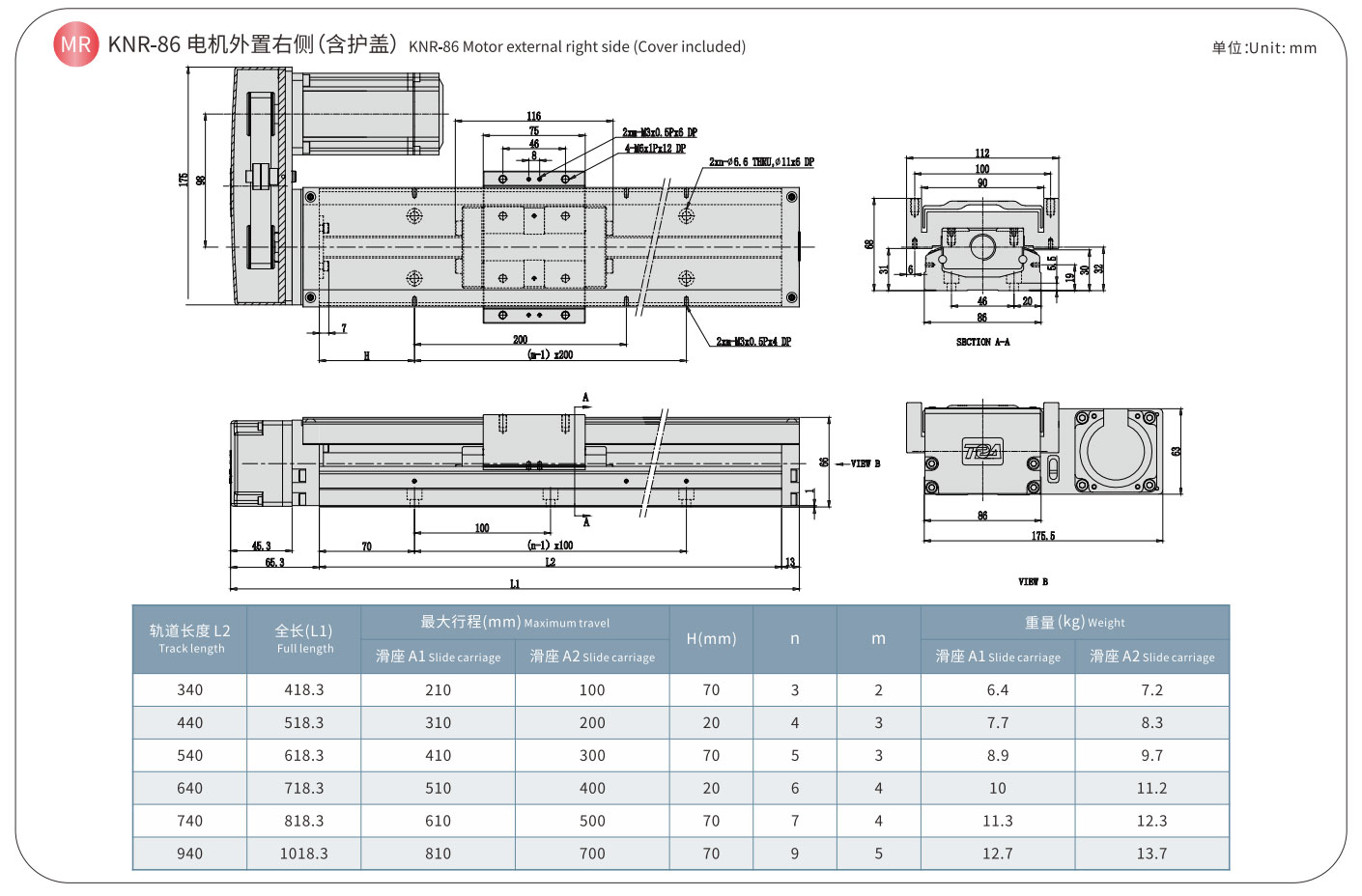
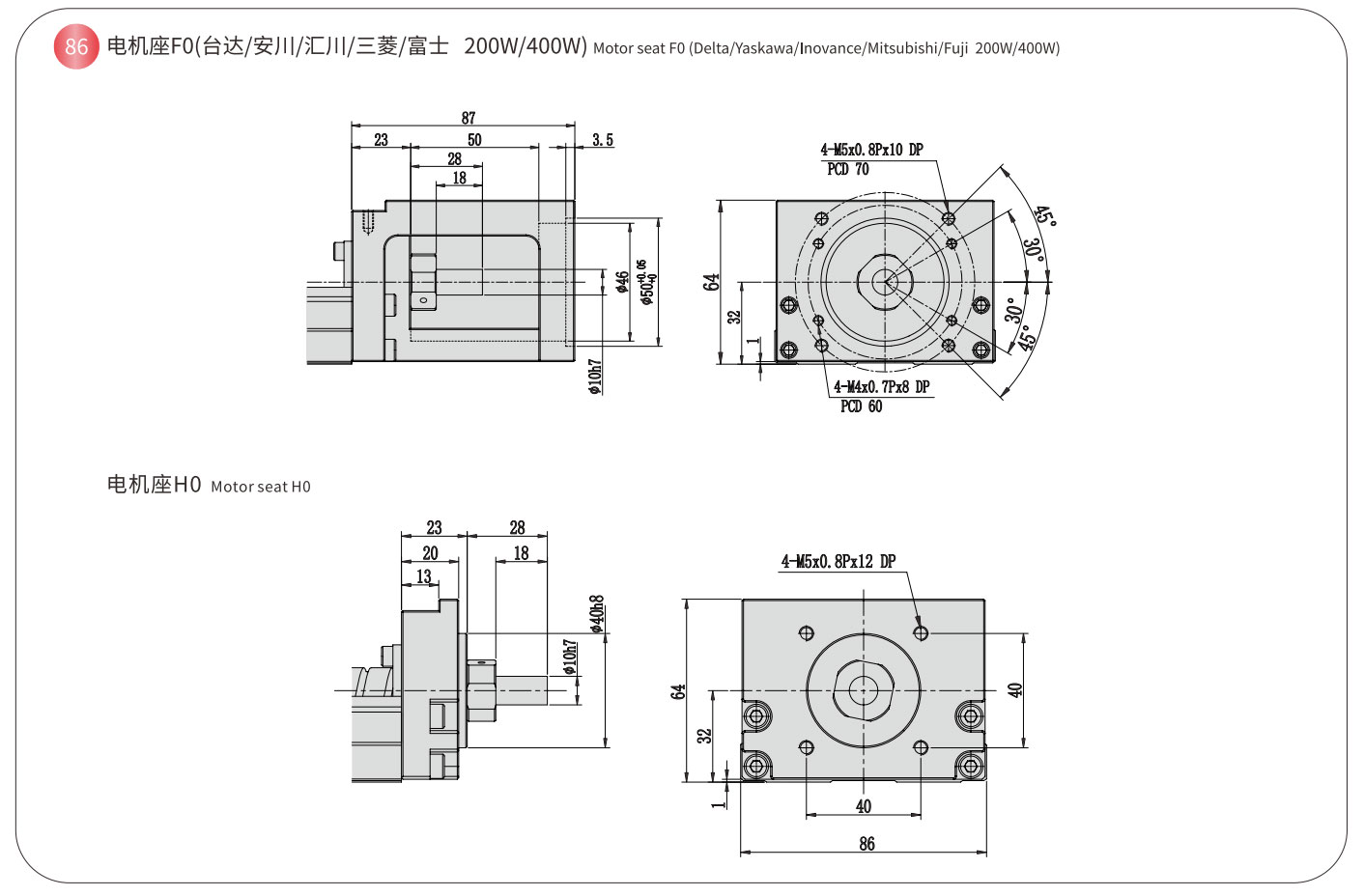
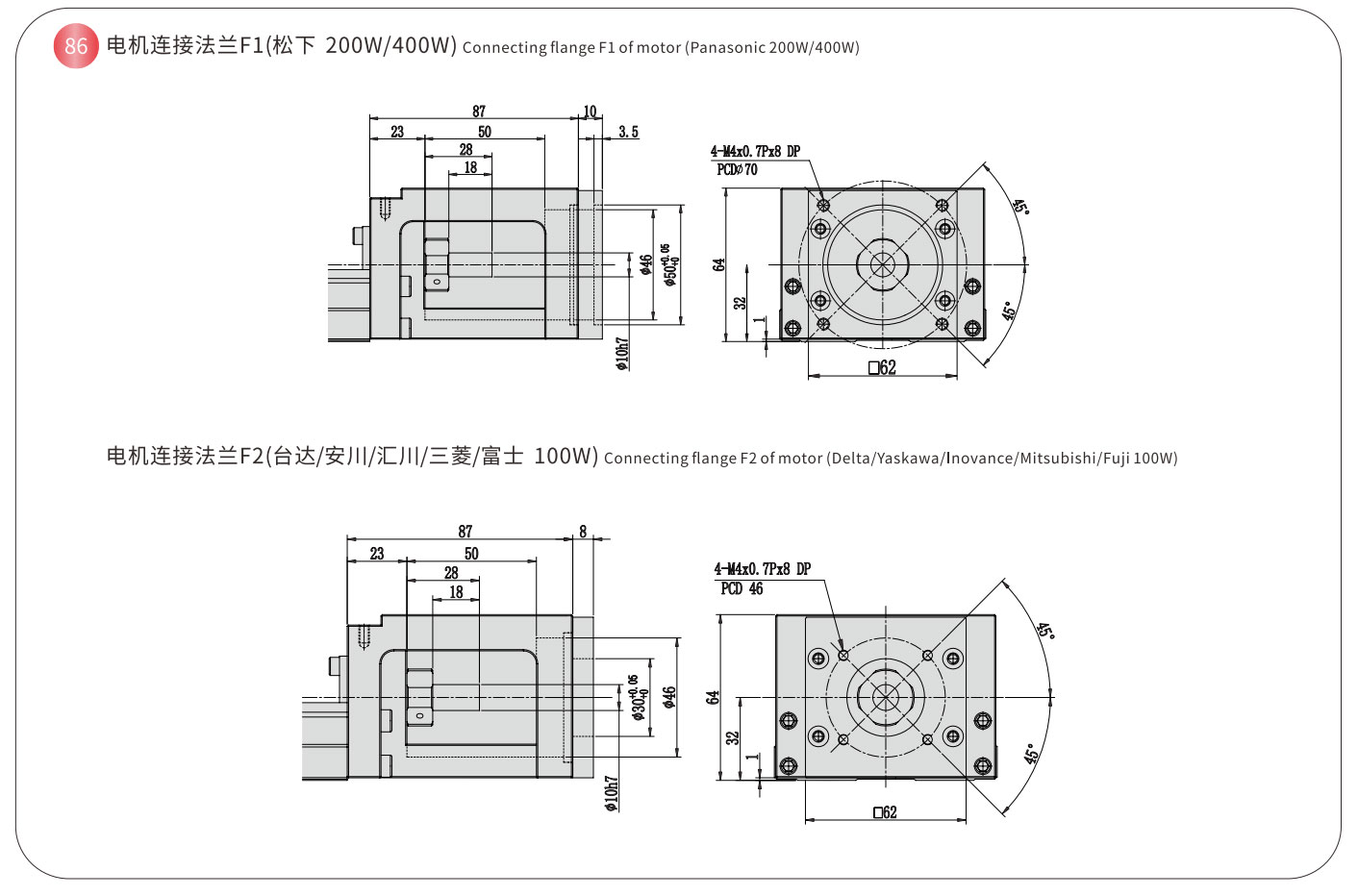
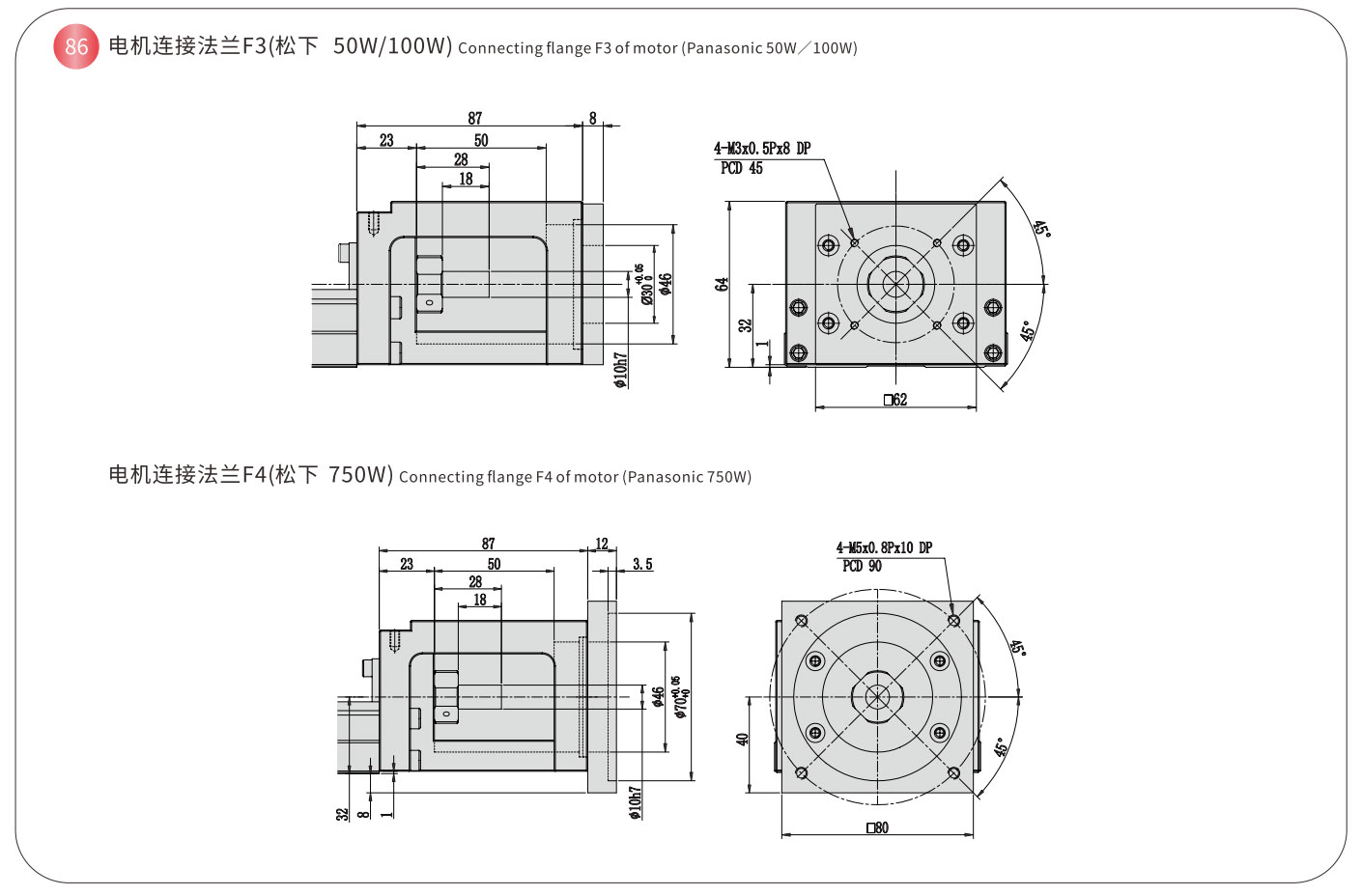
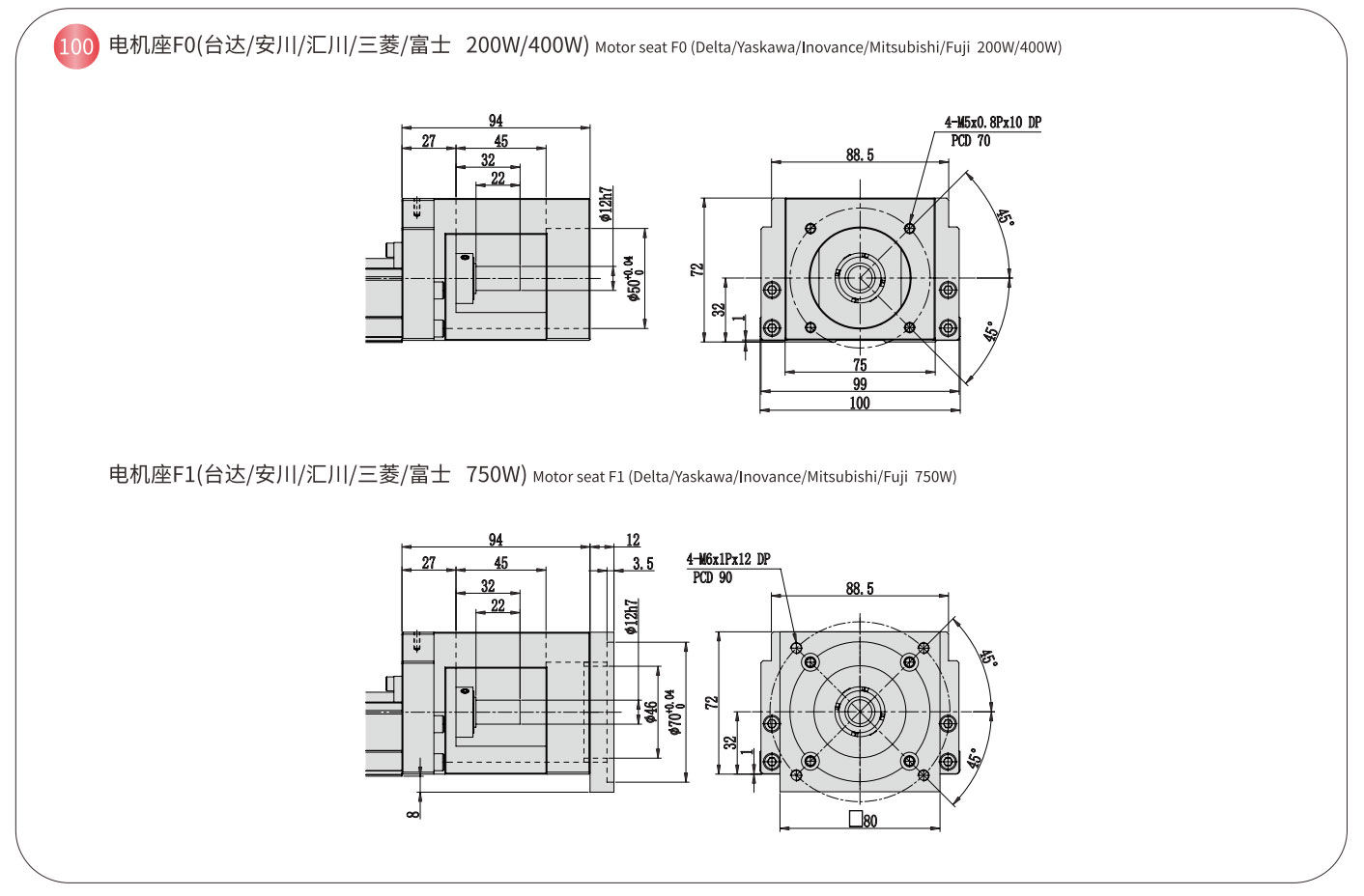
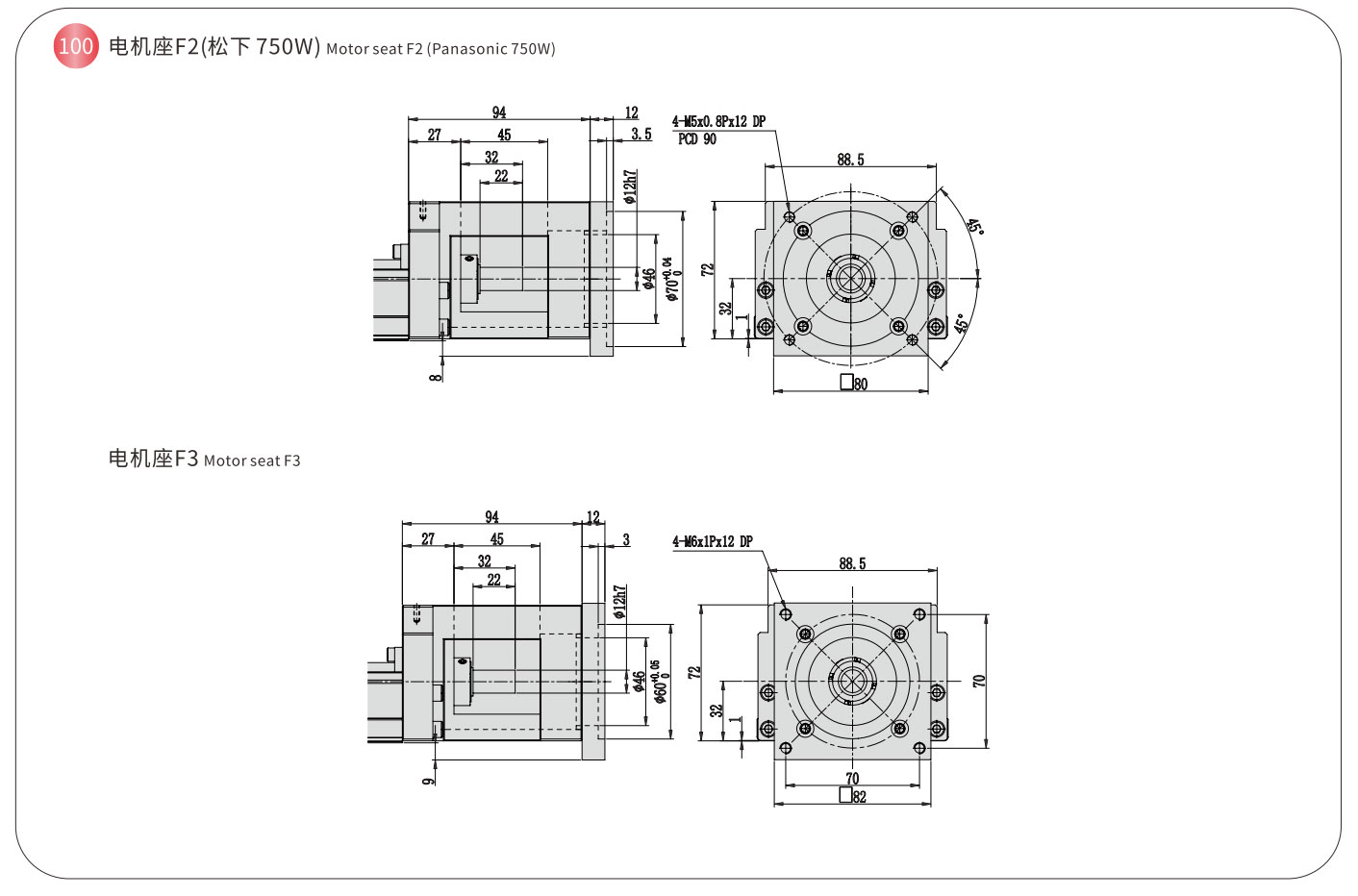
Пры аднолькавых умовах нагрузкі наш аднавосевы робат серыі KK меншы па памеры, мы прапануем стандартныя разьбовыя адтуліны на сталёвай аснове і паўзунку, а наша адаптарная пласціна рухавіка можа забяспечваць да 8 спосабаў усталёўкі рухавіка, што азначае, што яго можна лёгка сабраць любая дэкартава рабатызаваная сістэма. Такім чынам, аднавосевыя робаты серыі KK шырока выкарыстоўваюцца ў апрацоўцы крамянёвых пласцін, аўтаматычным раздачы, прамысловасці FPD, прамысловасці медыцынскай аўтаматызацыі, дакладных вымяральных прыборах, слізгальным стале, лінейным каардынацыйным стале.

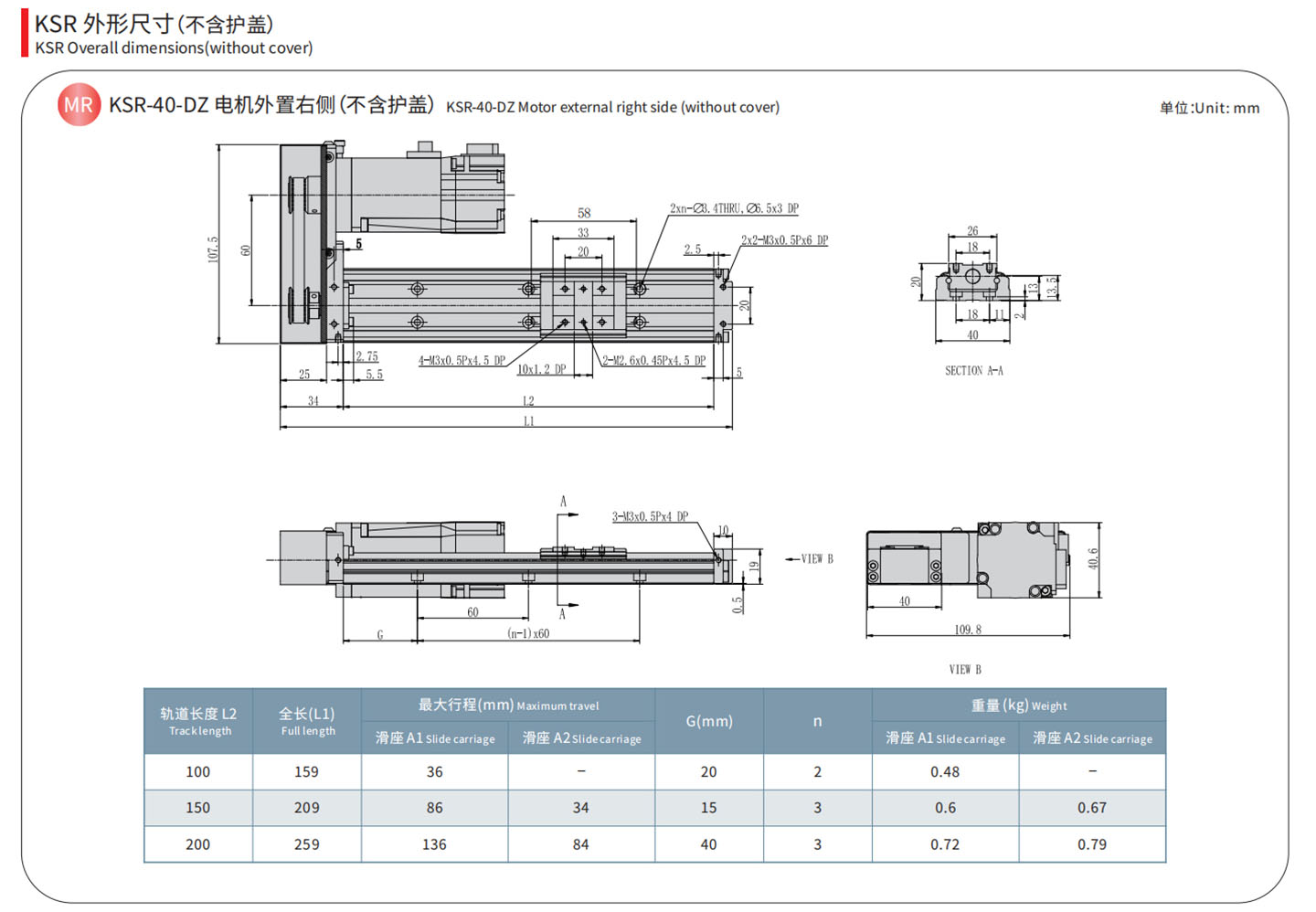
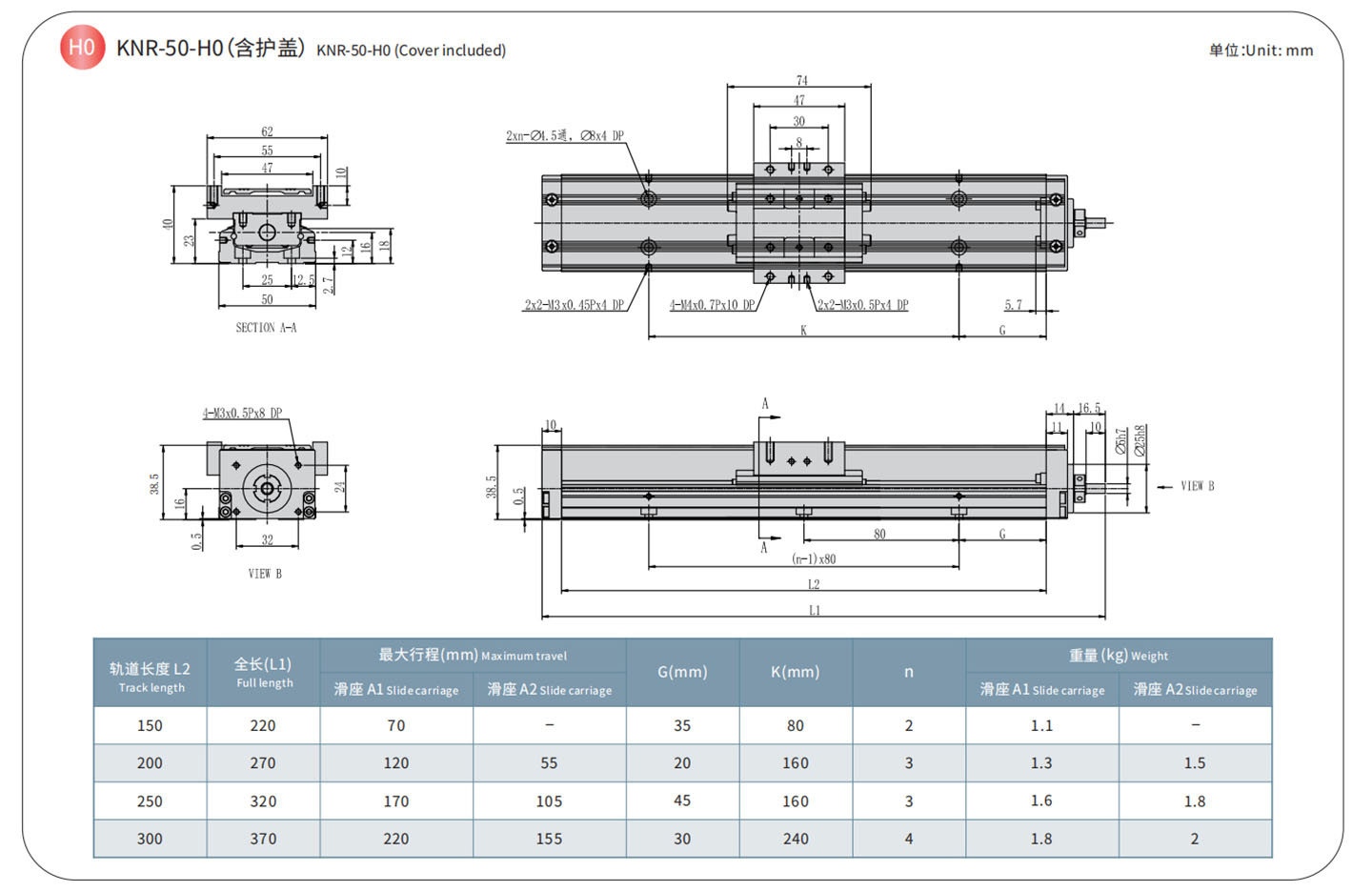
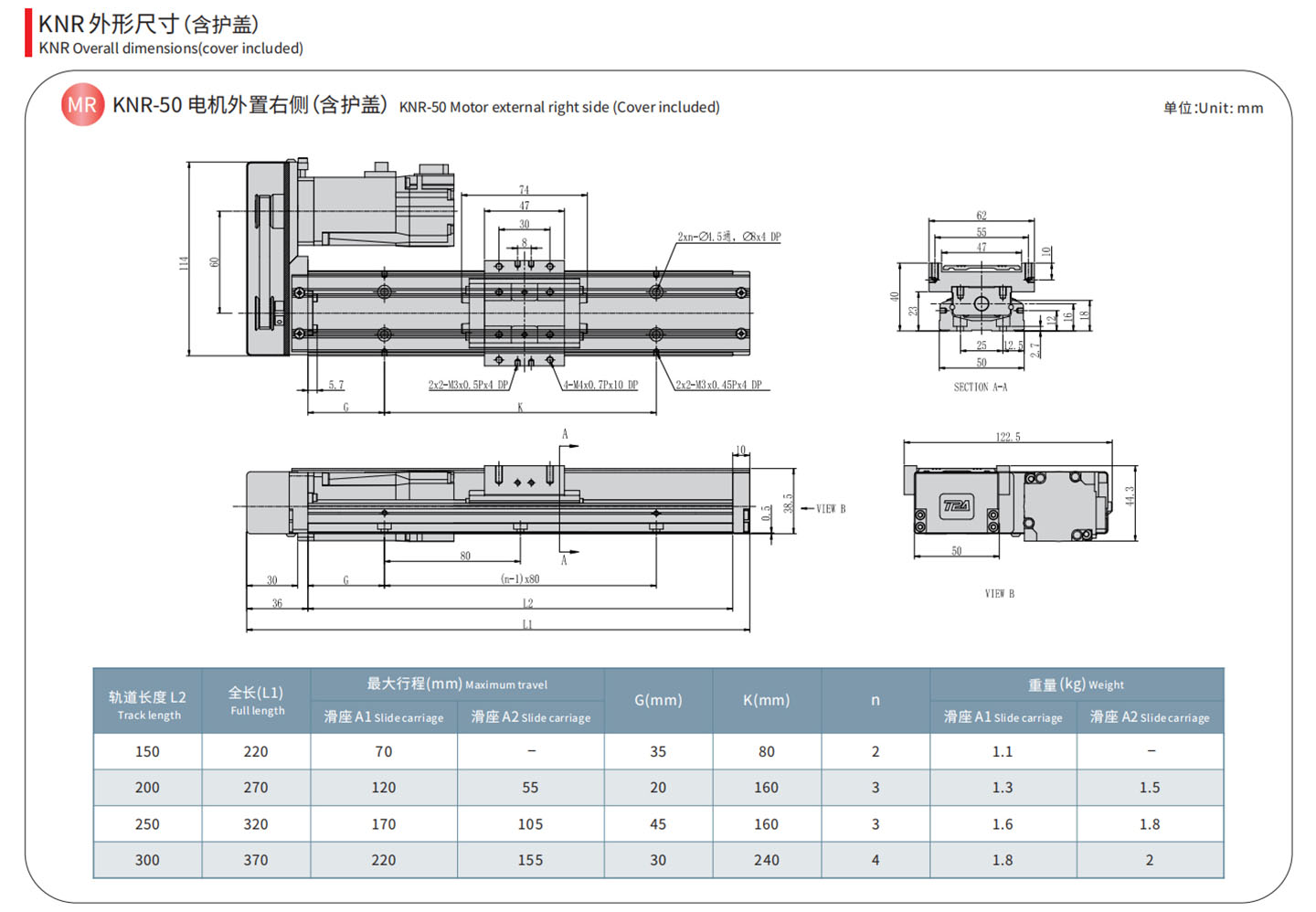
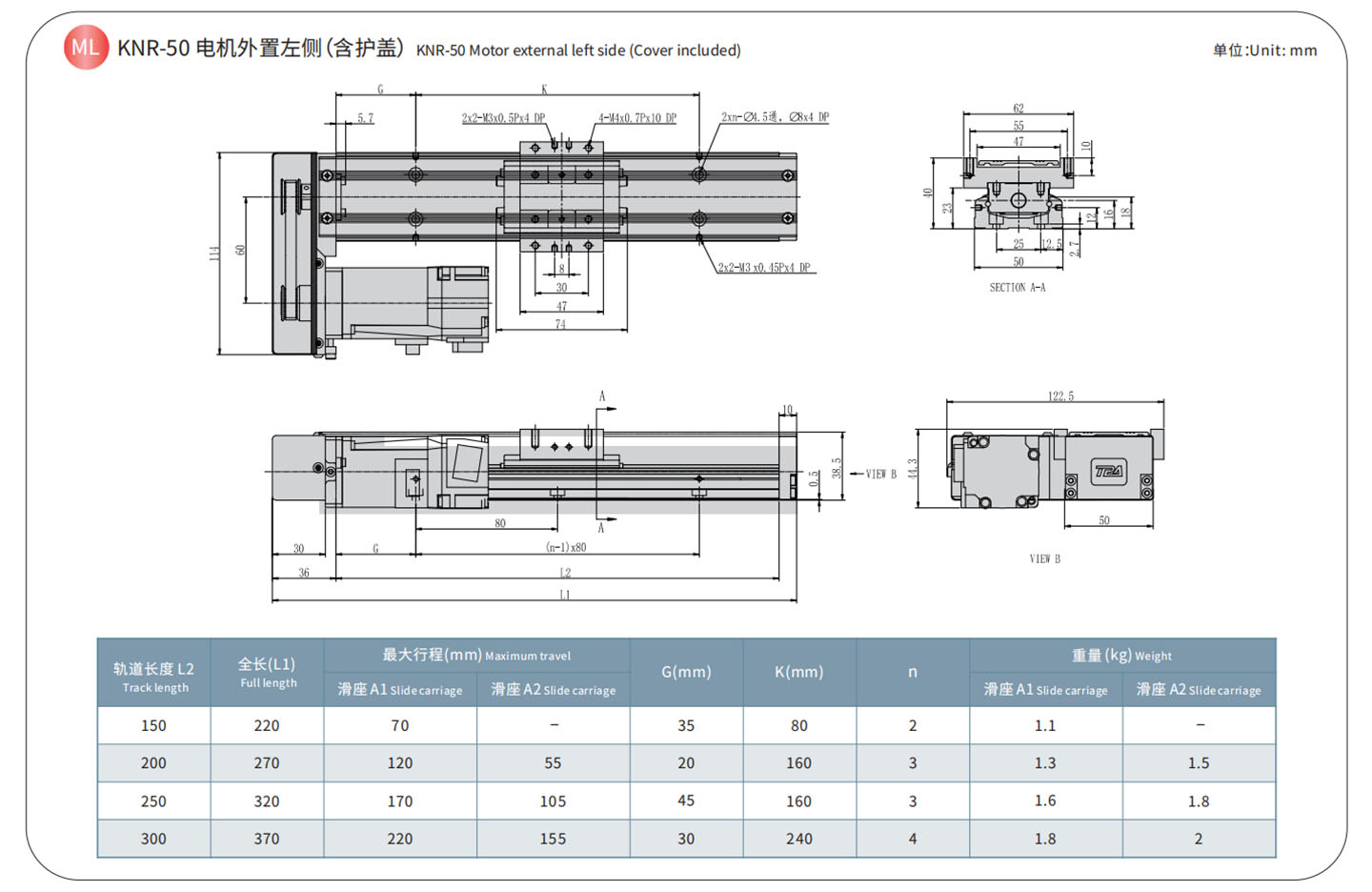
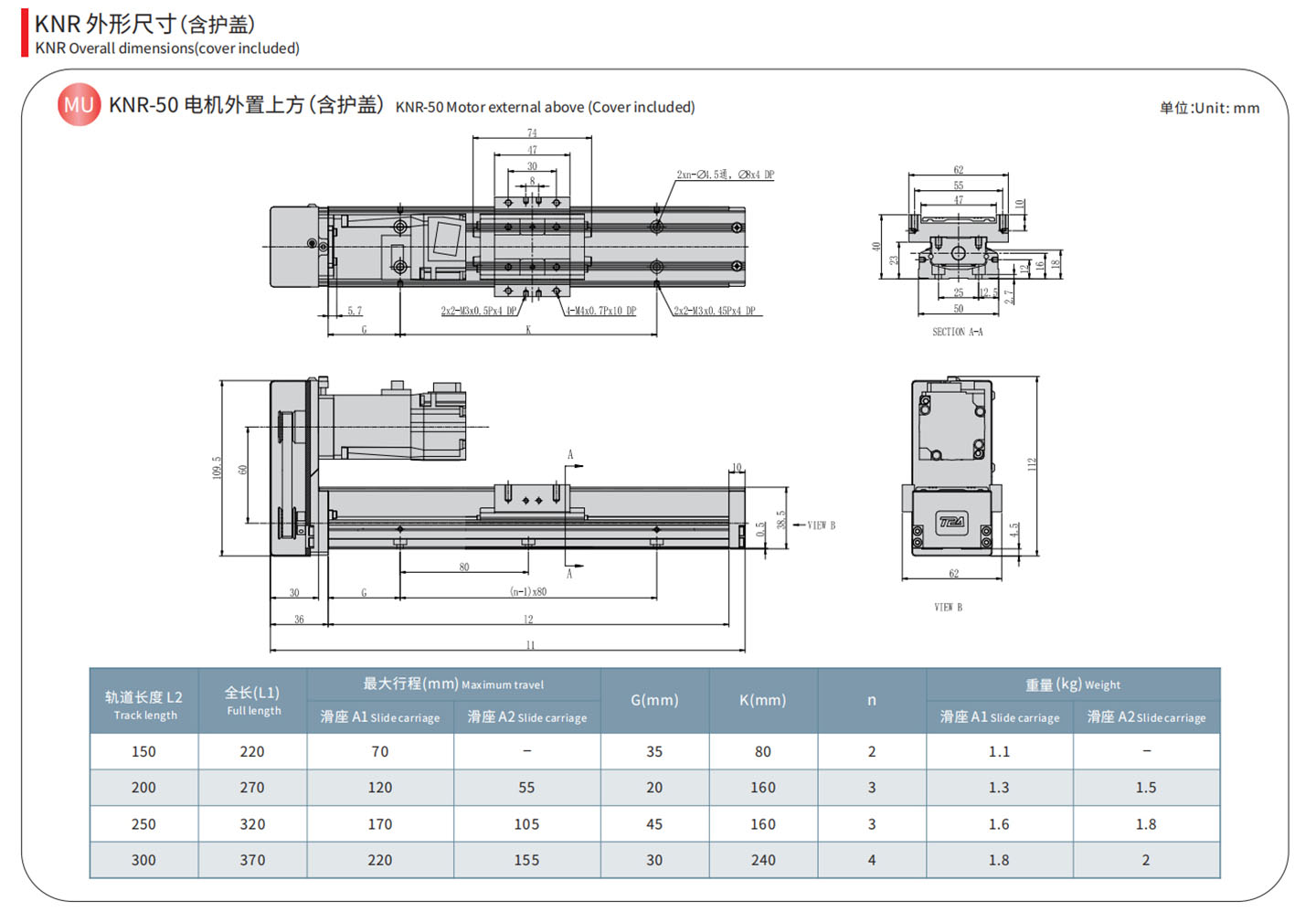
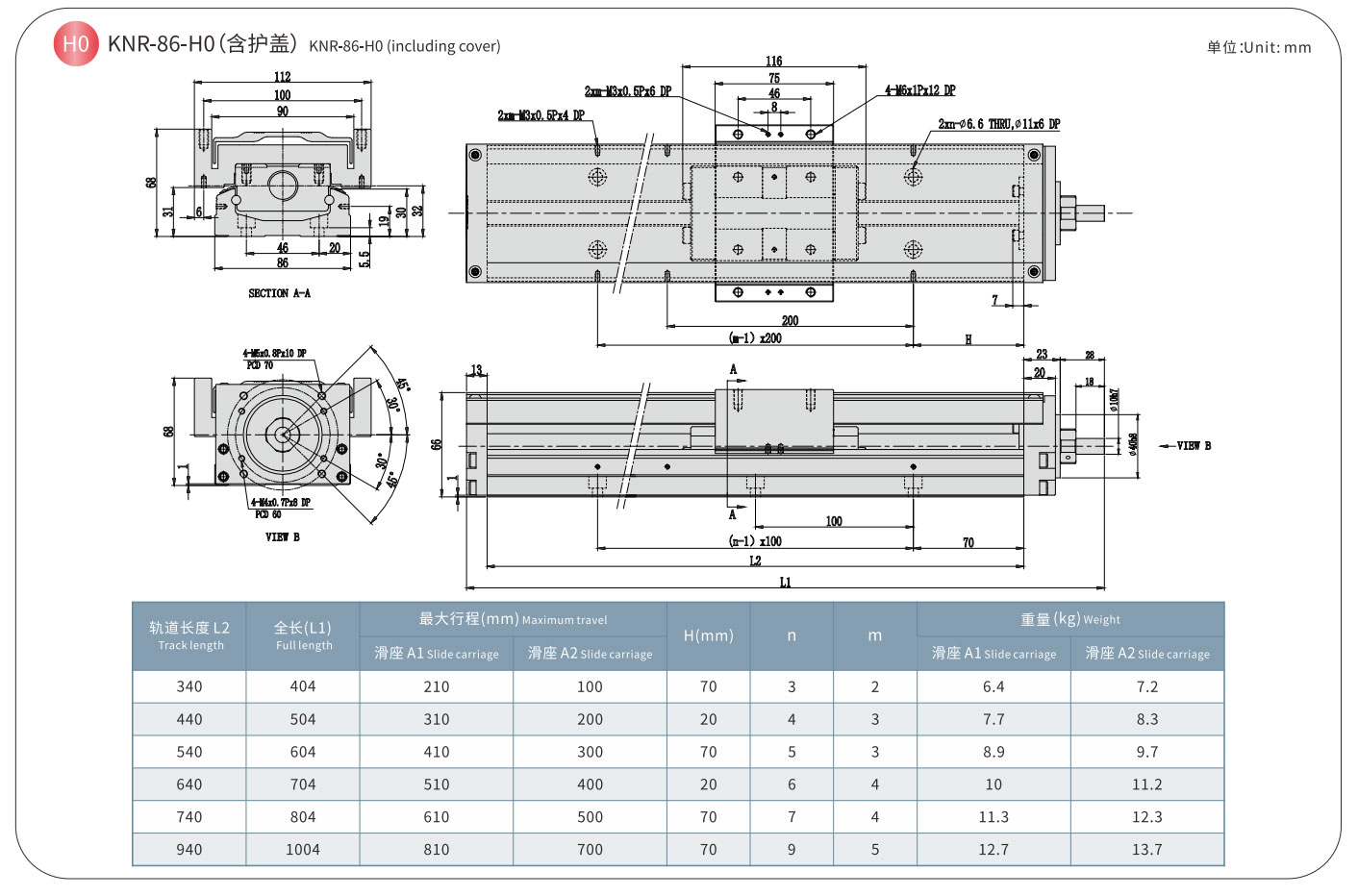
Серыя КСР-КНР-КФР-КЧР2

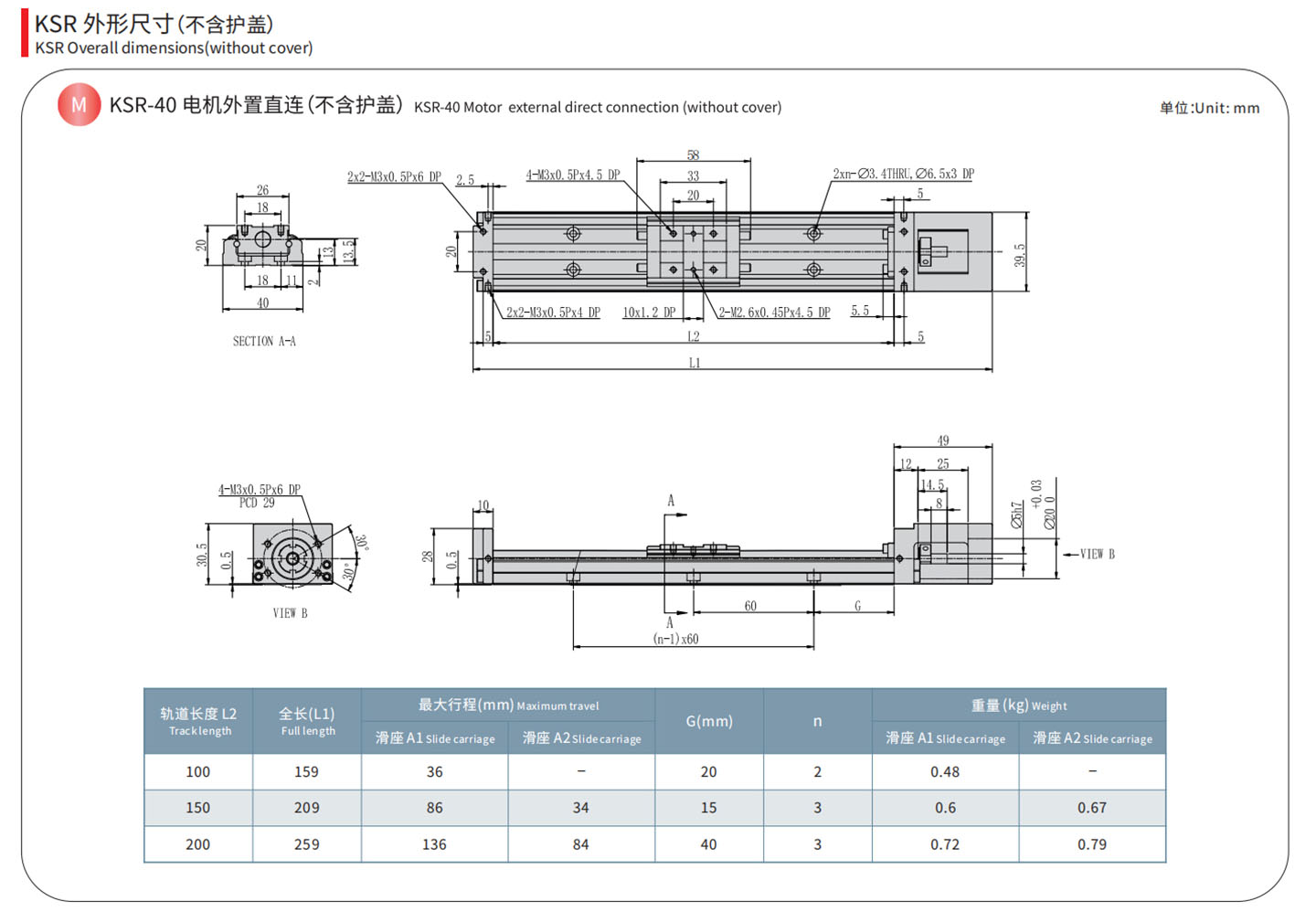
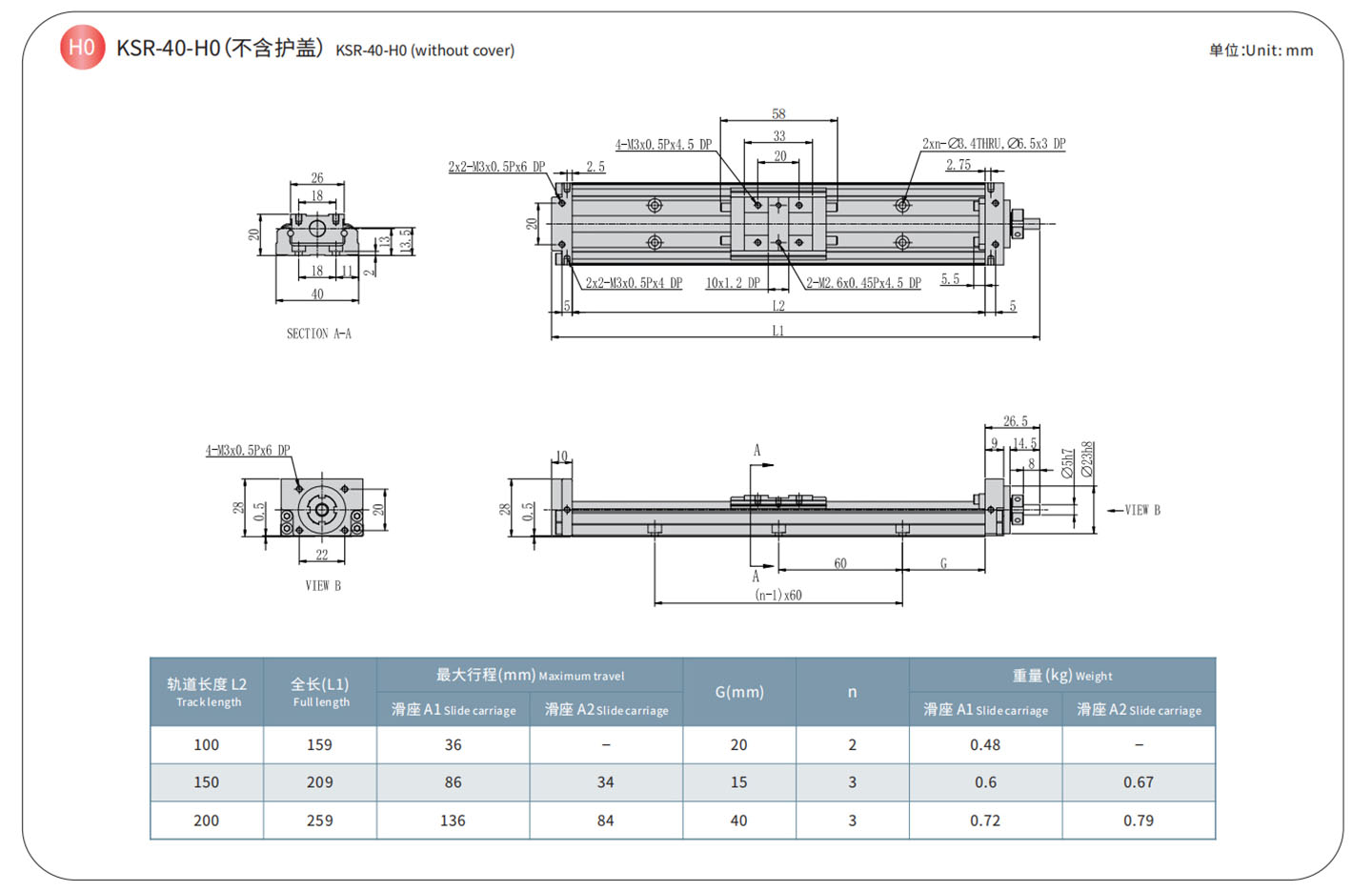
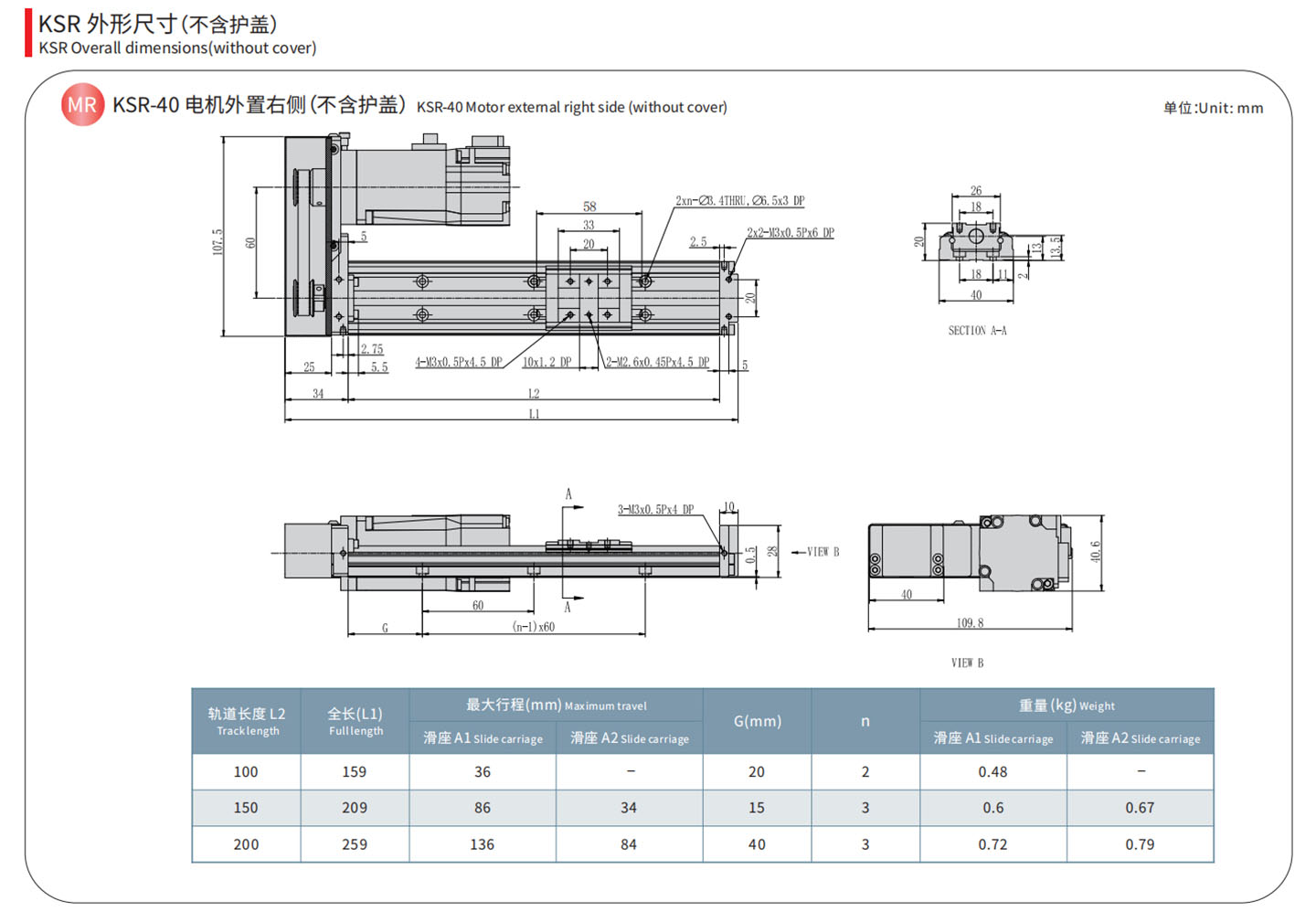
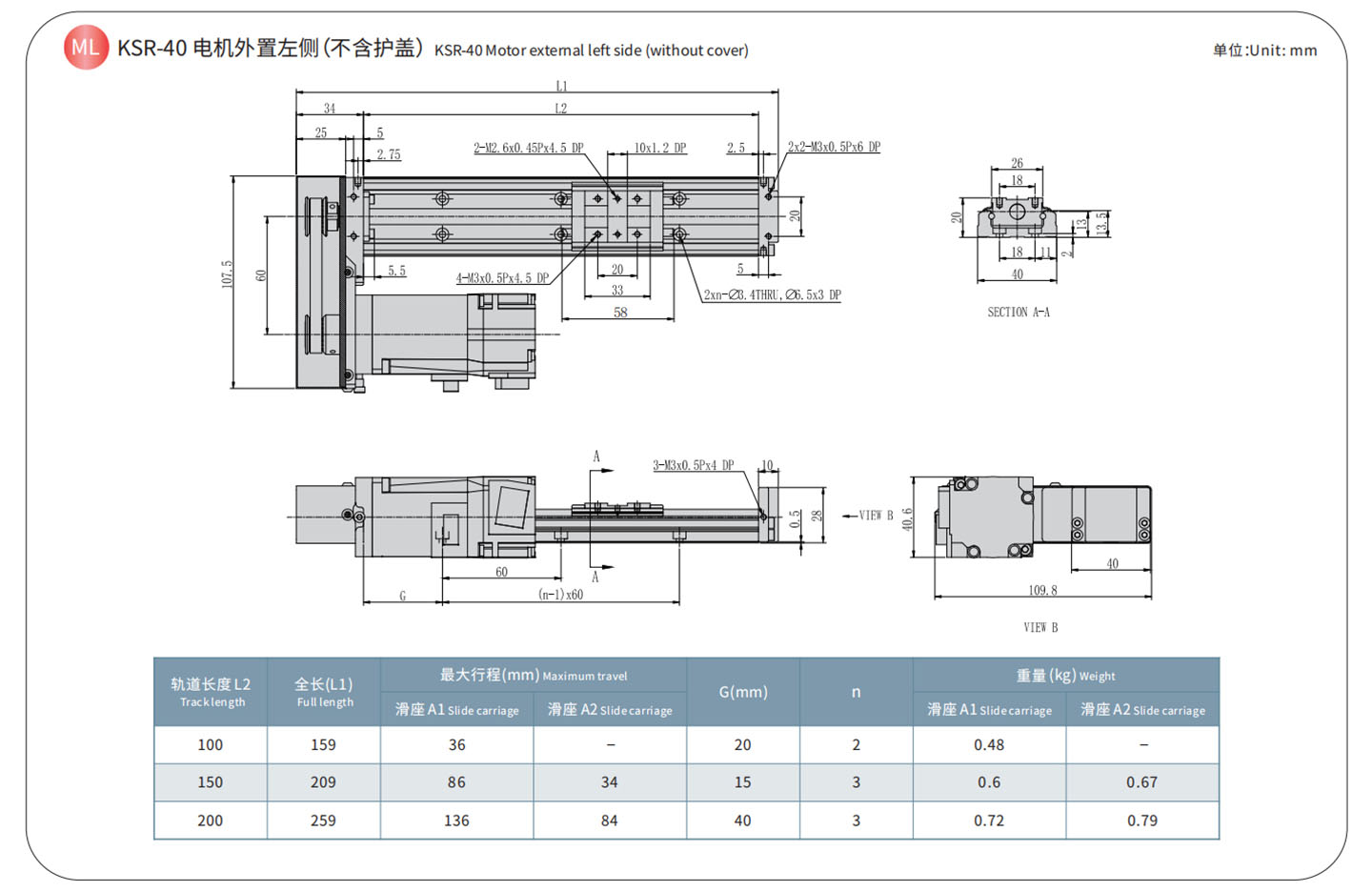
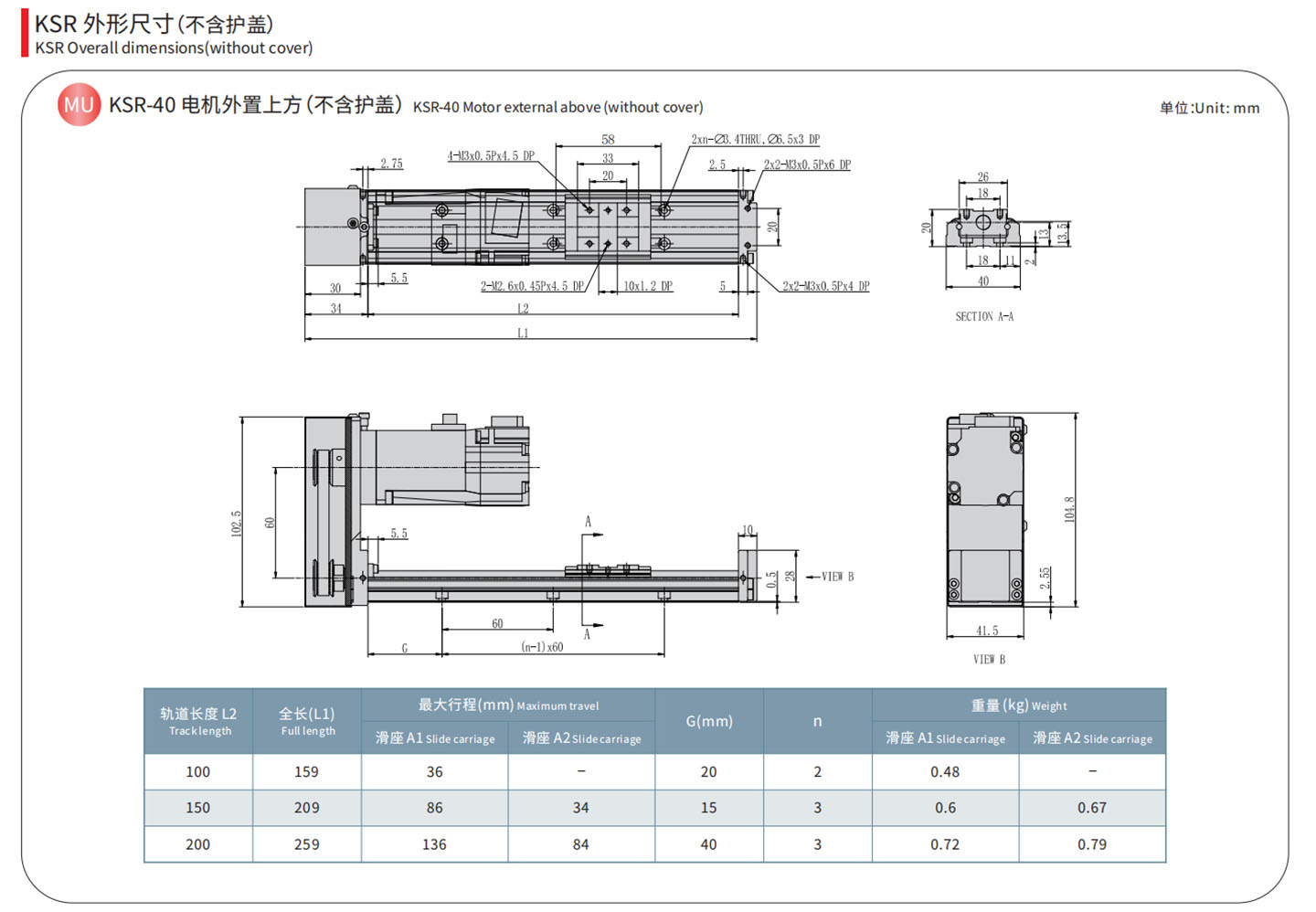
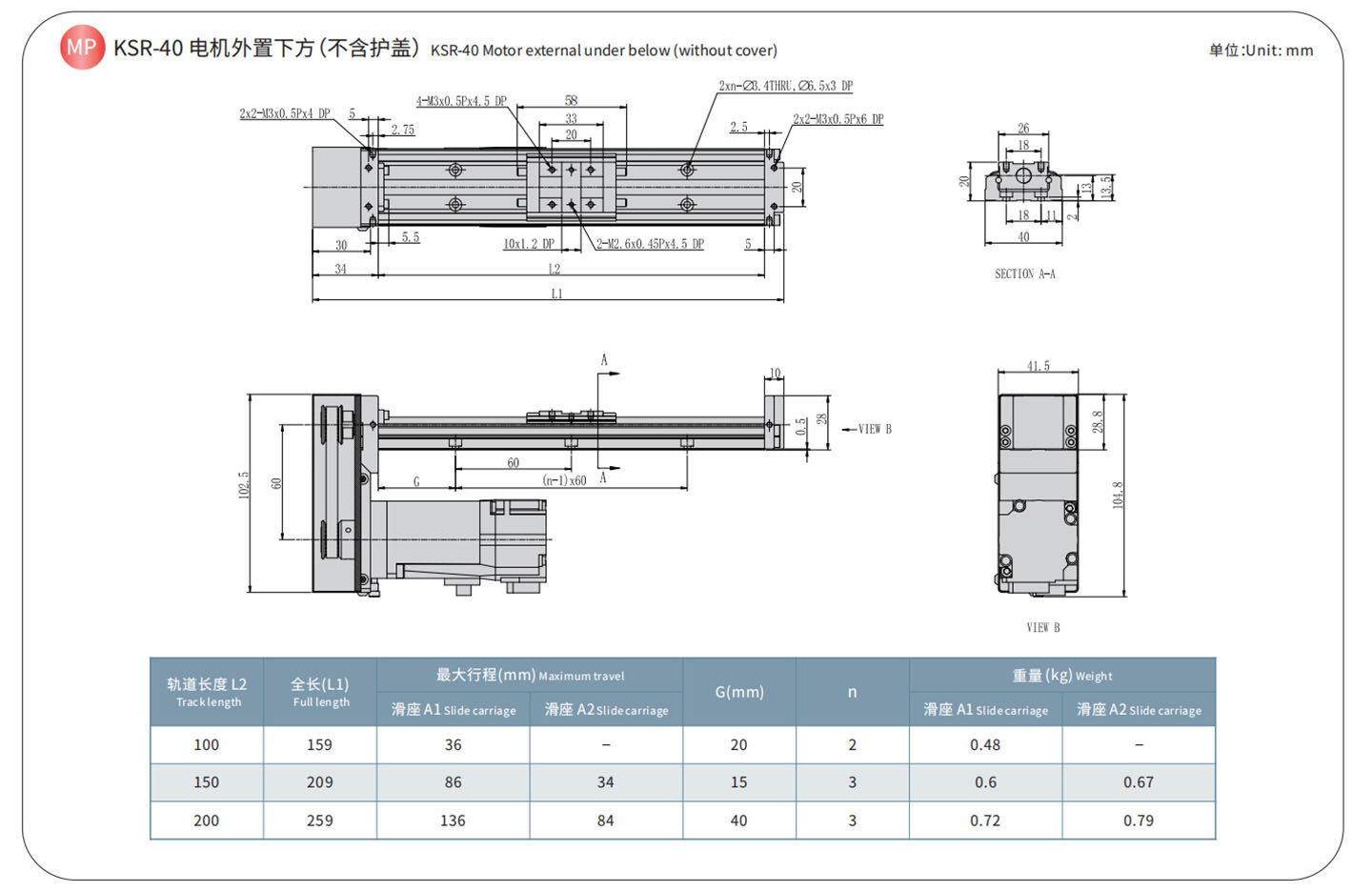
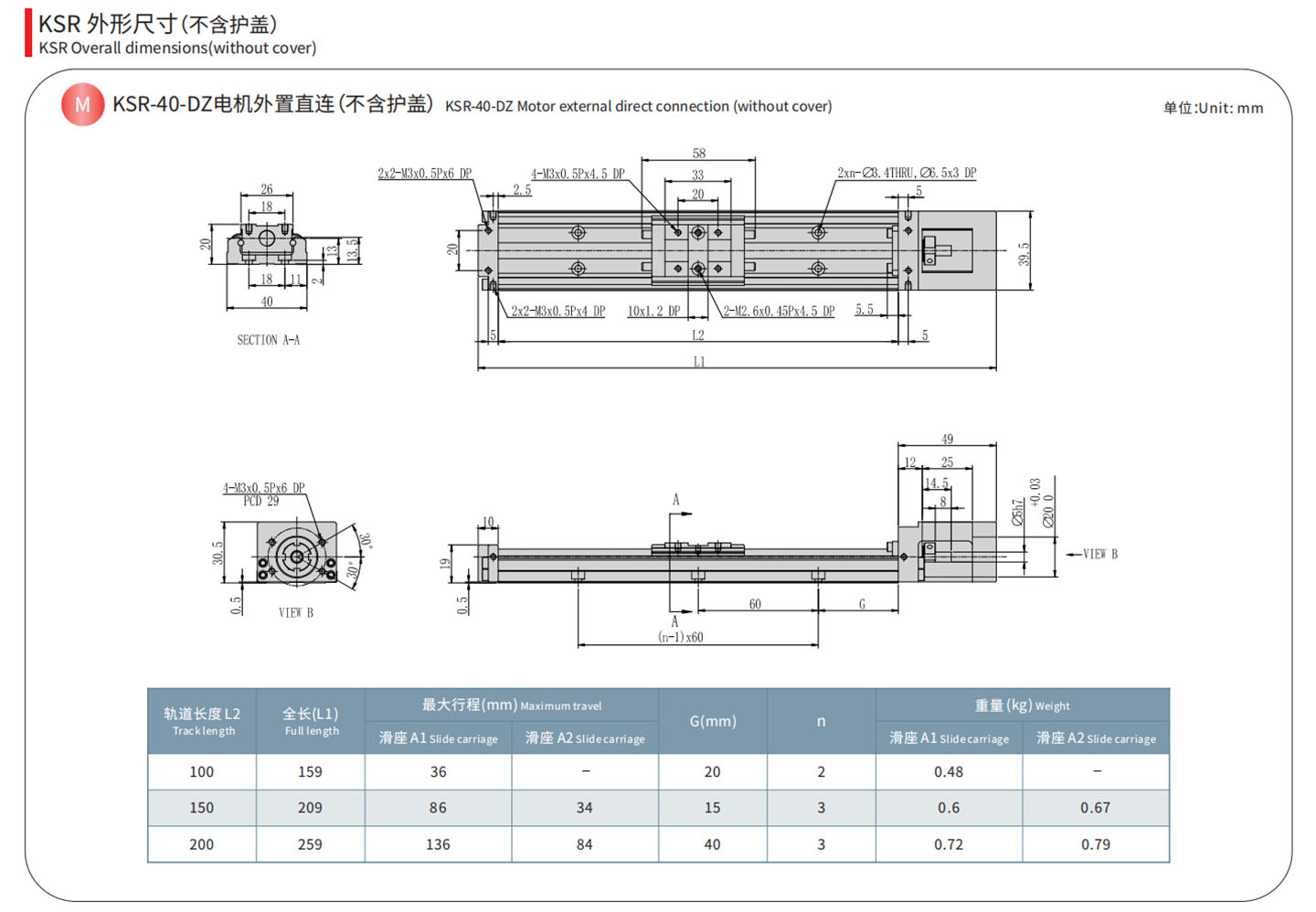
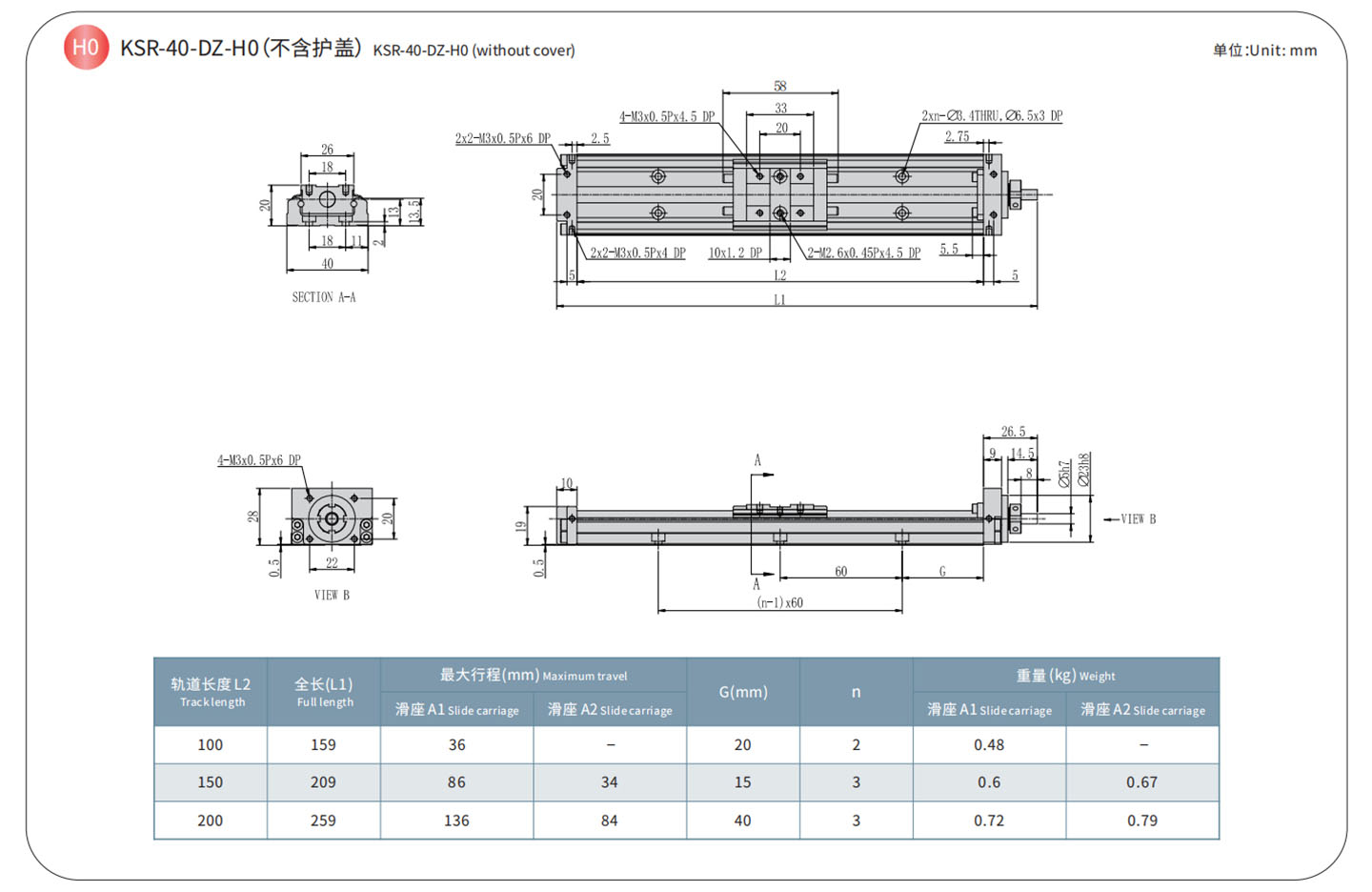
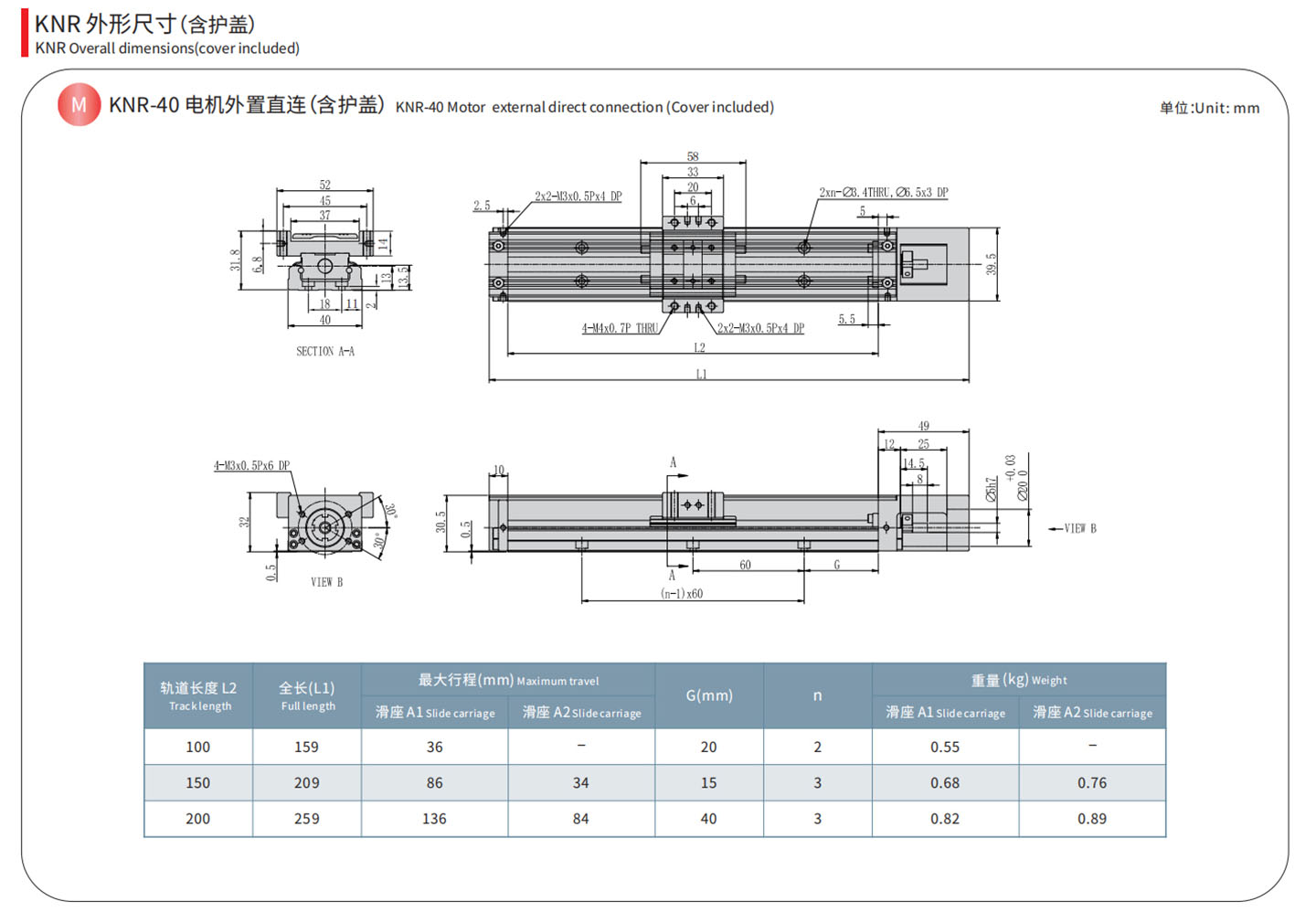
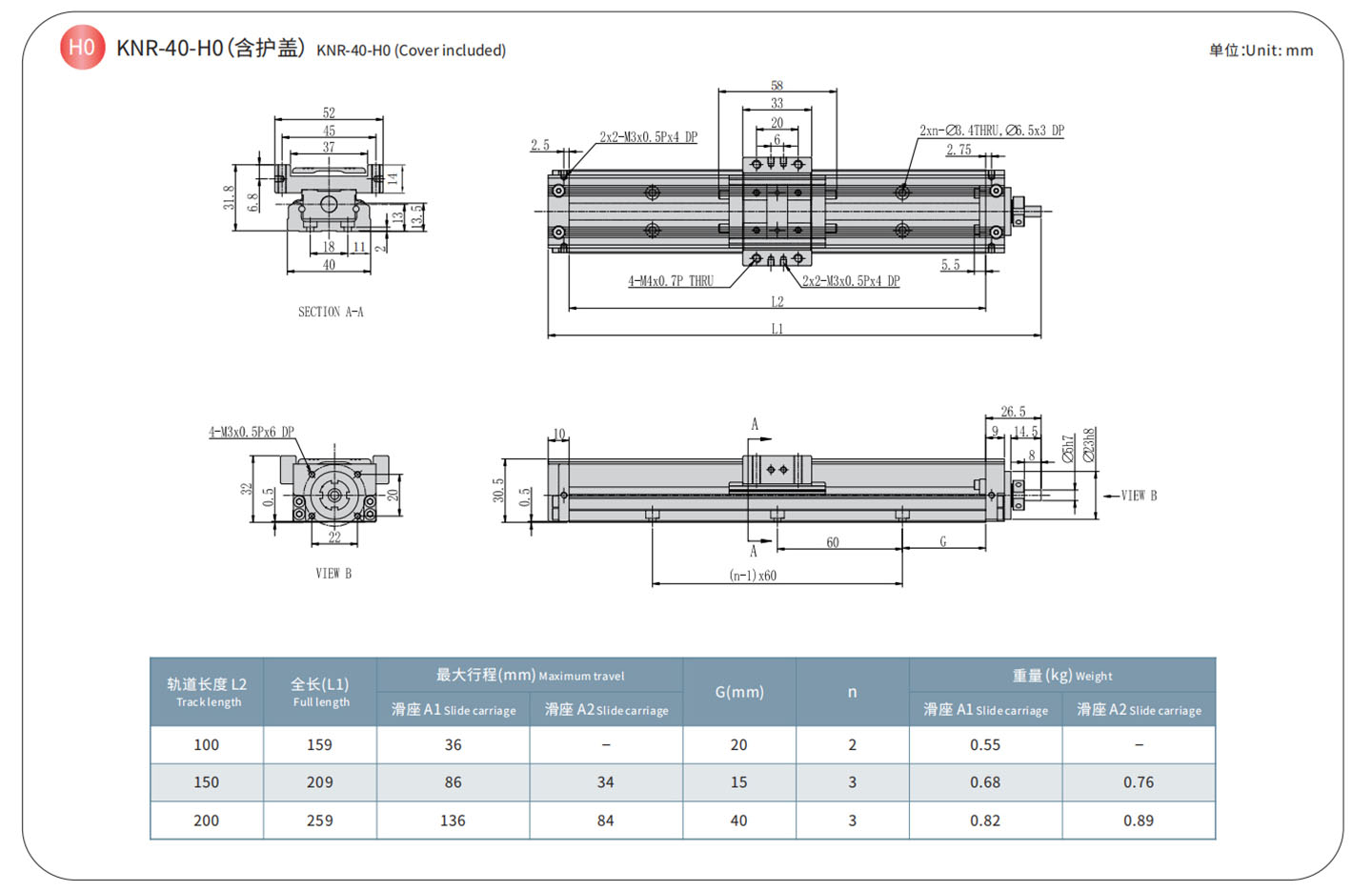
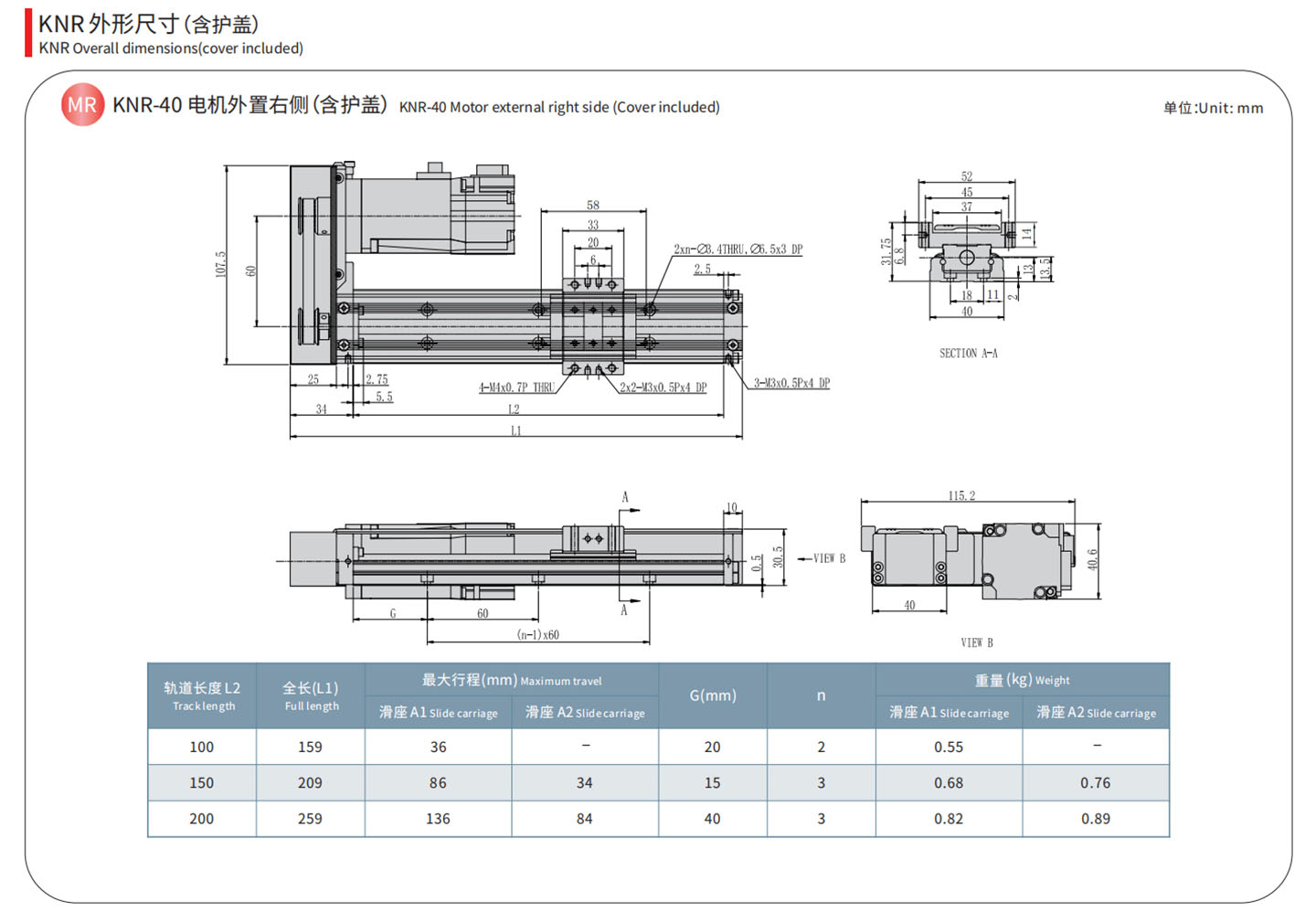
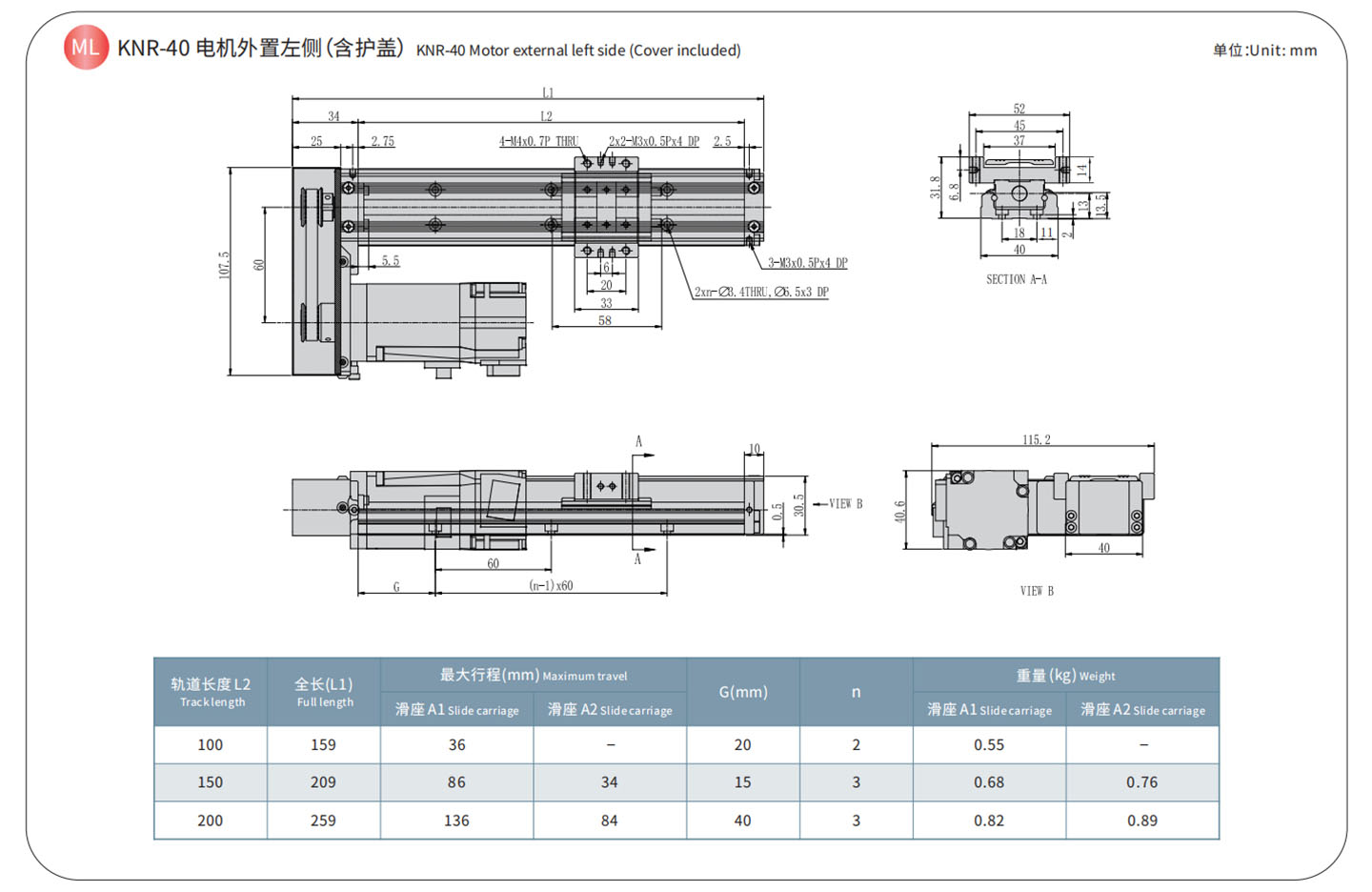
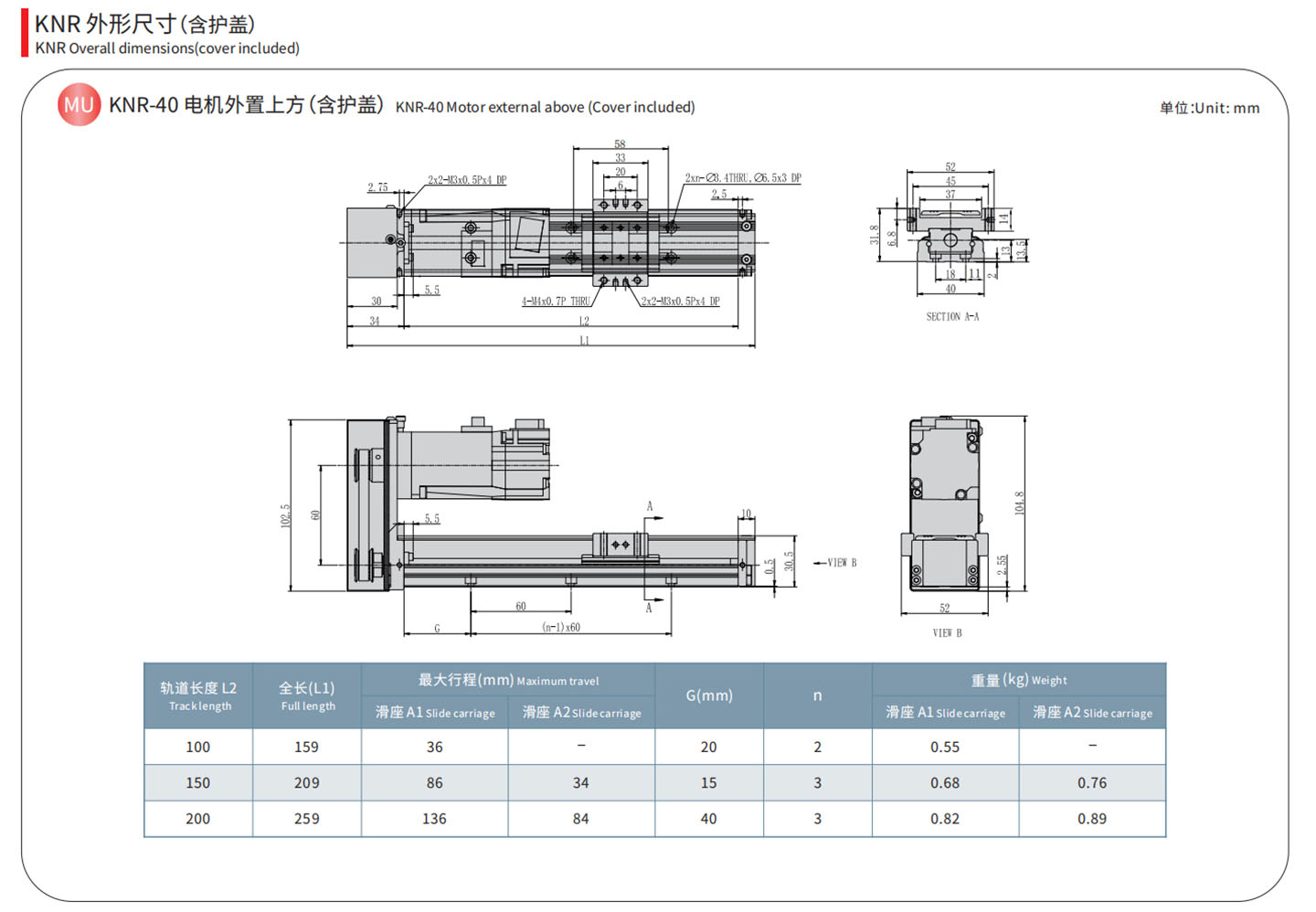
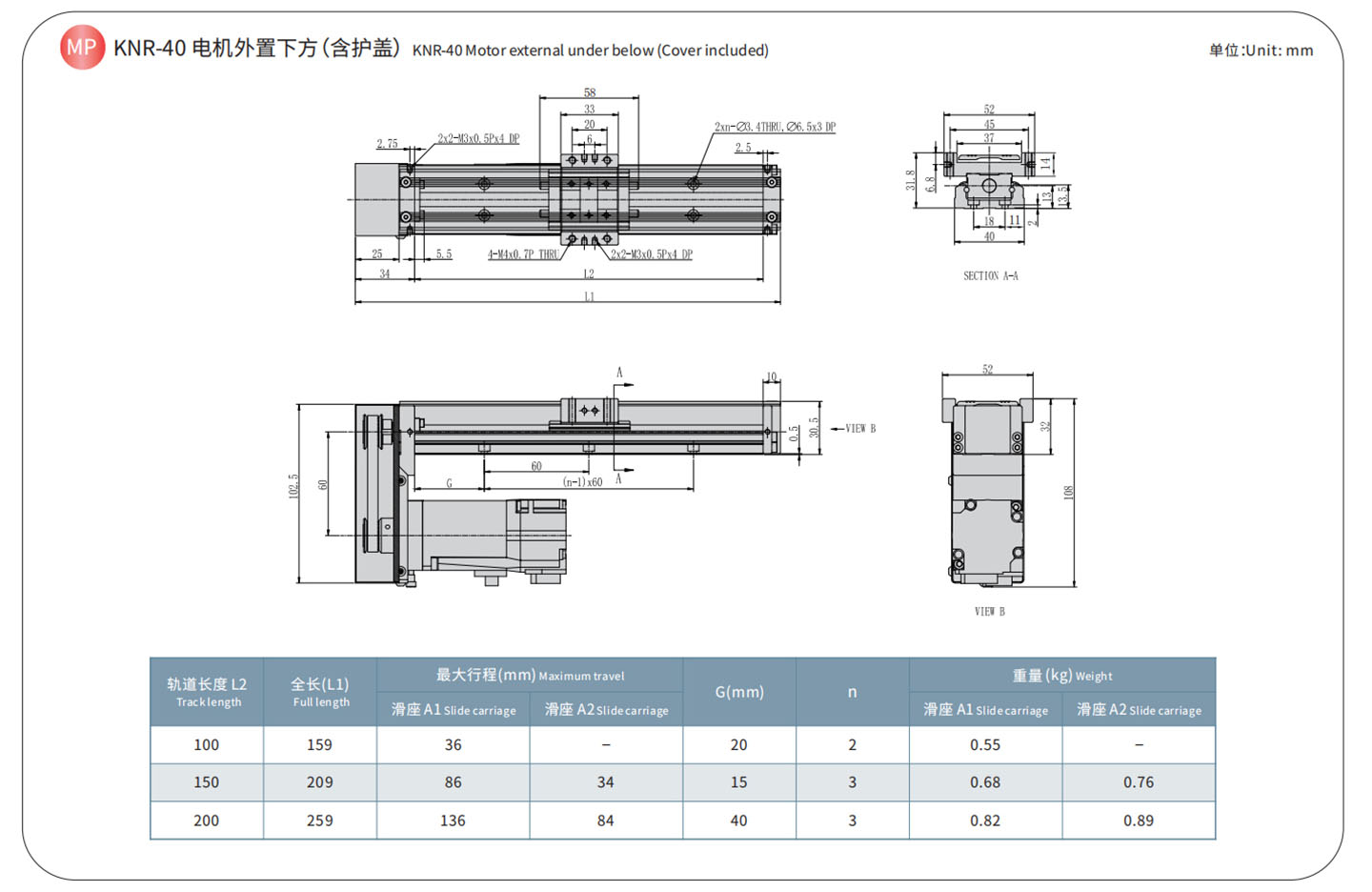
КСР-40 КНР-40

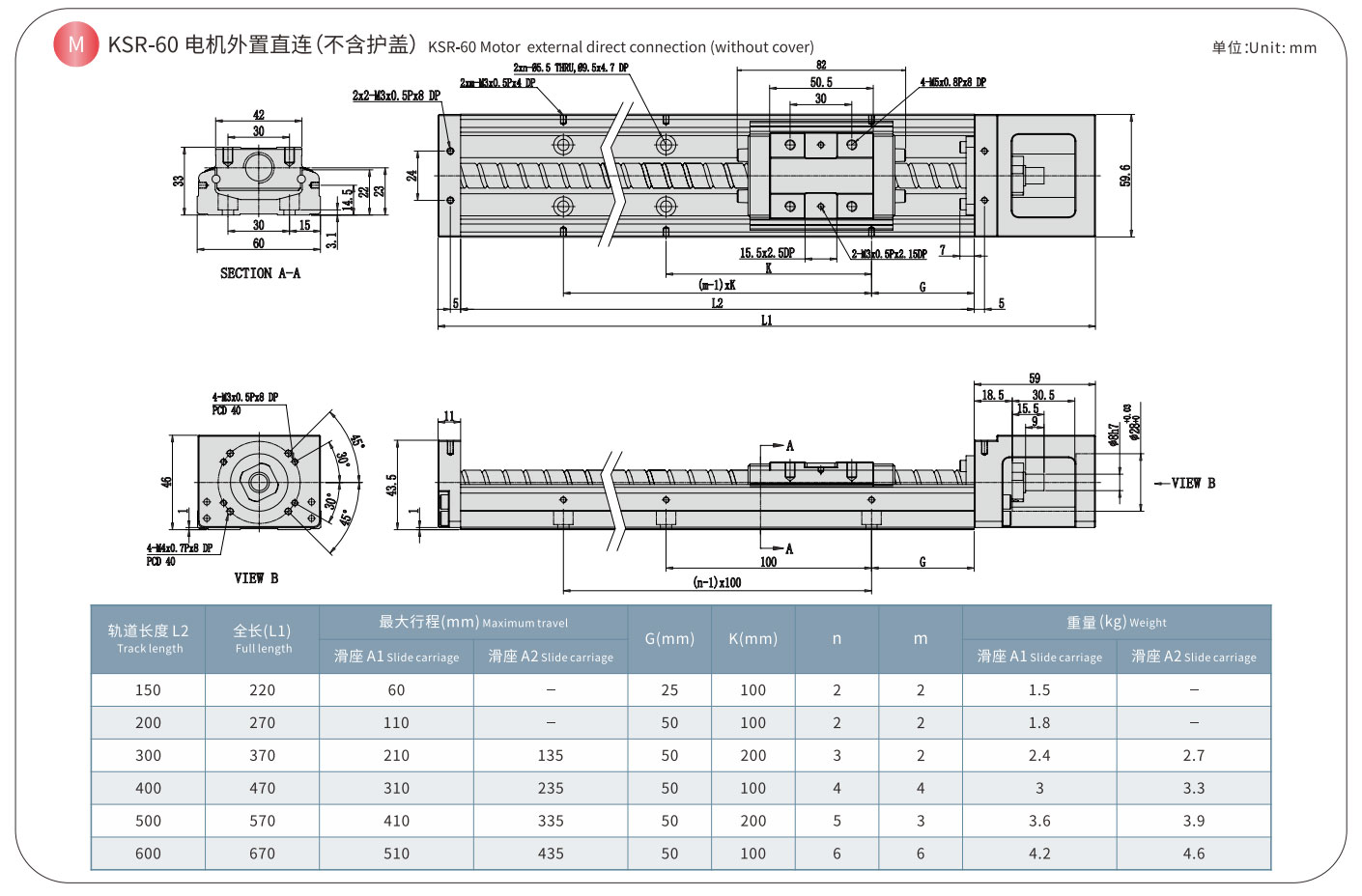
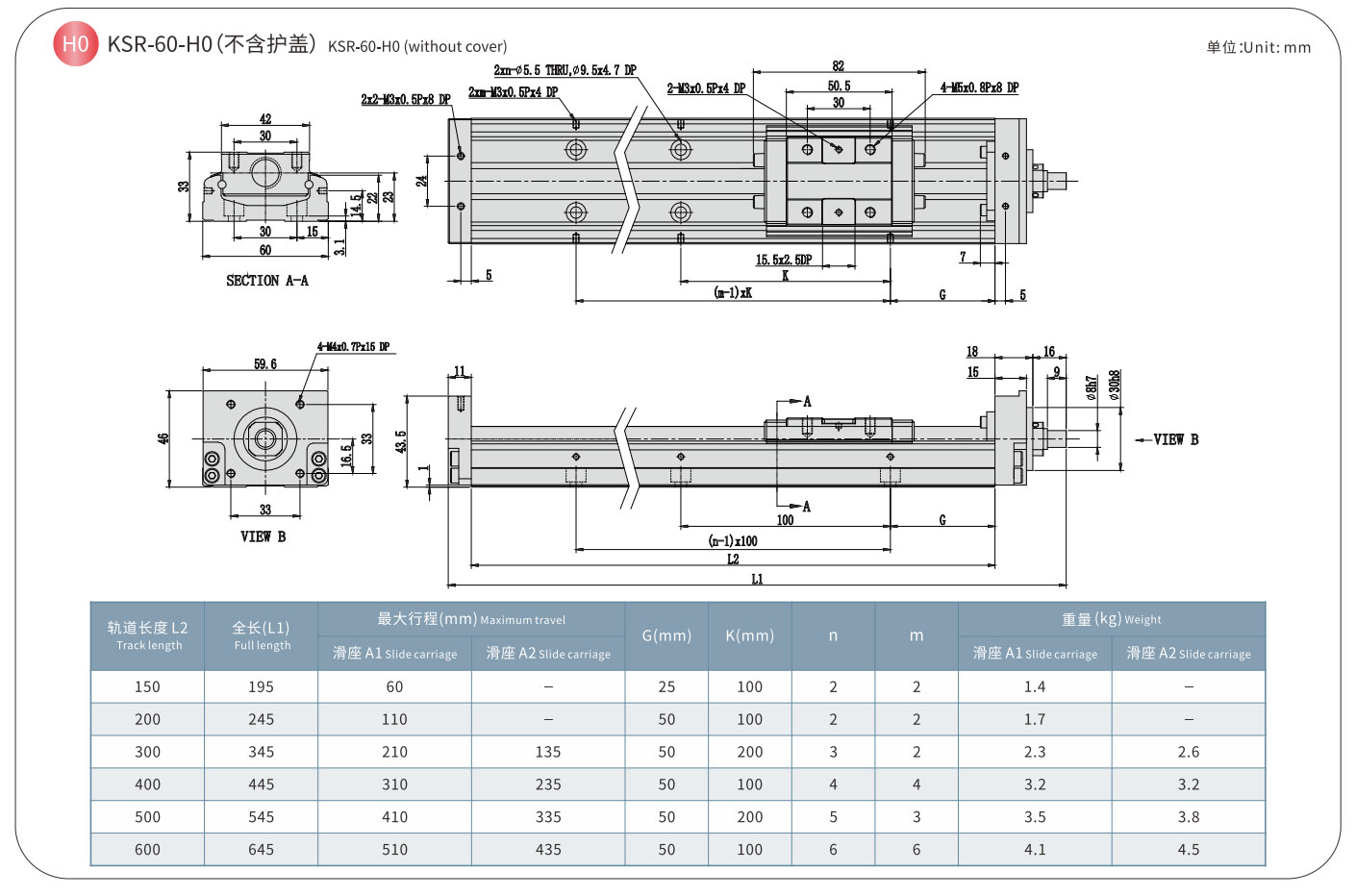
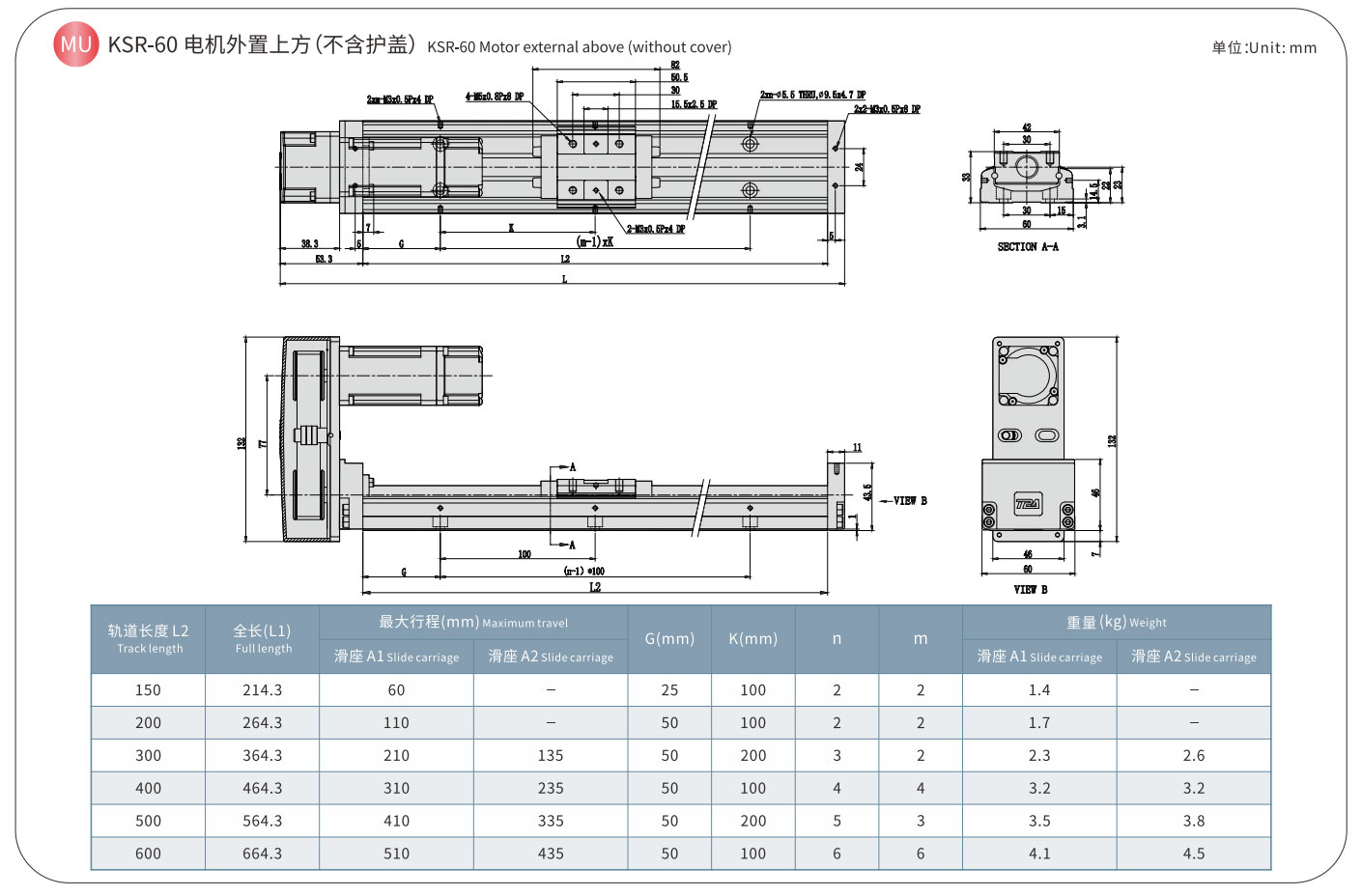
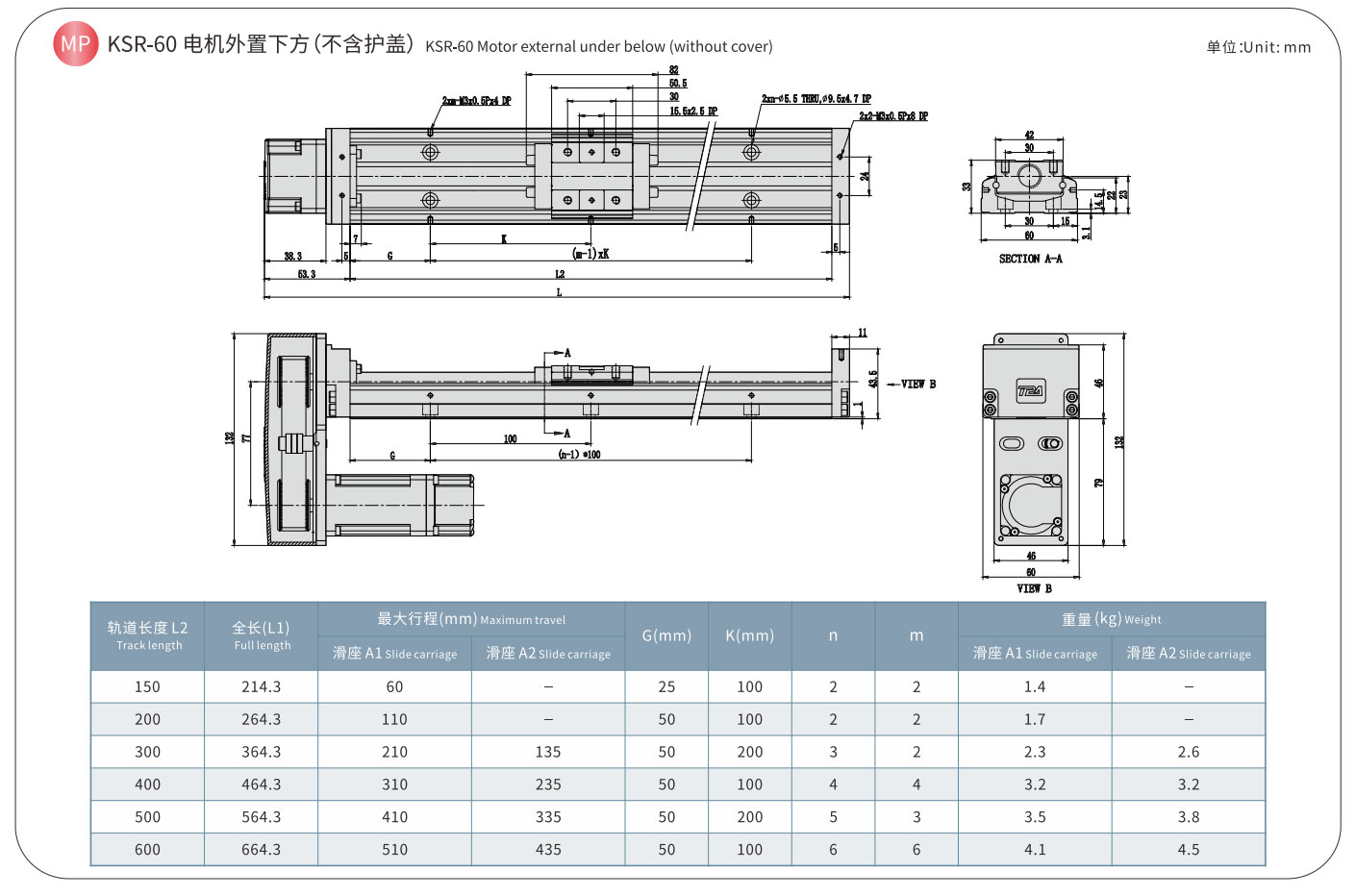
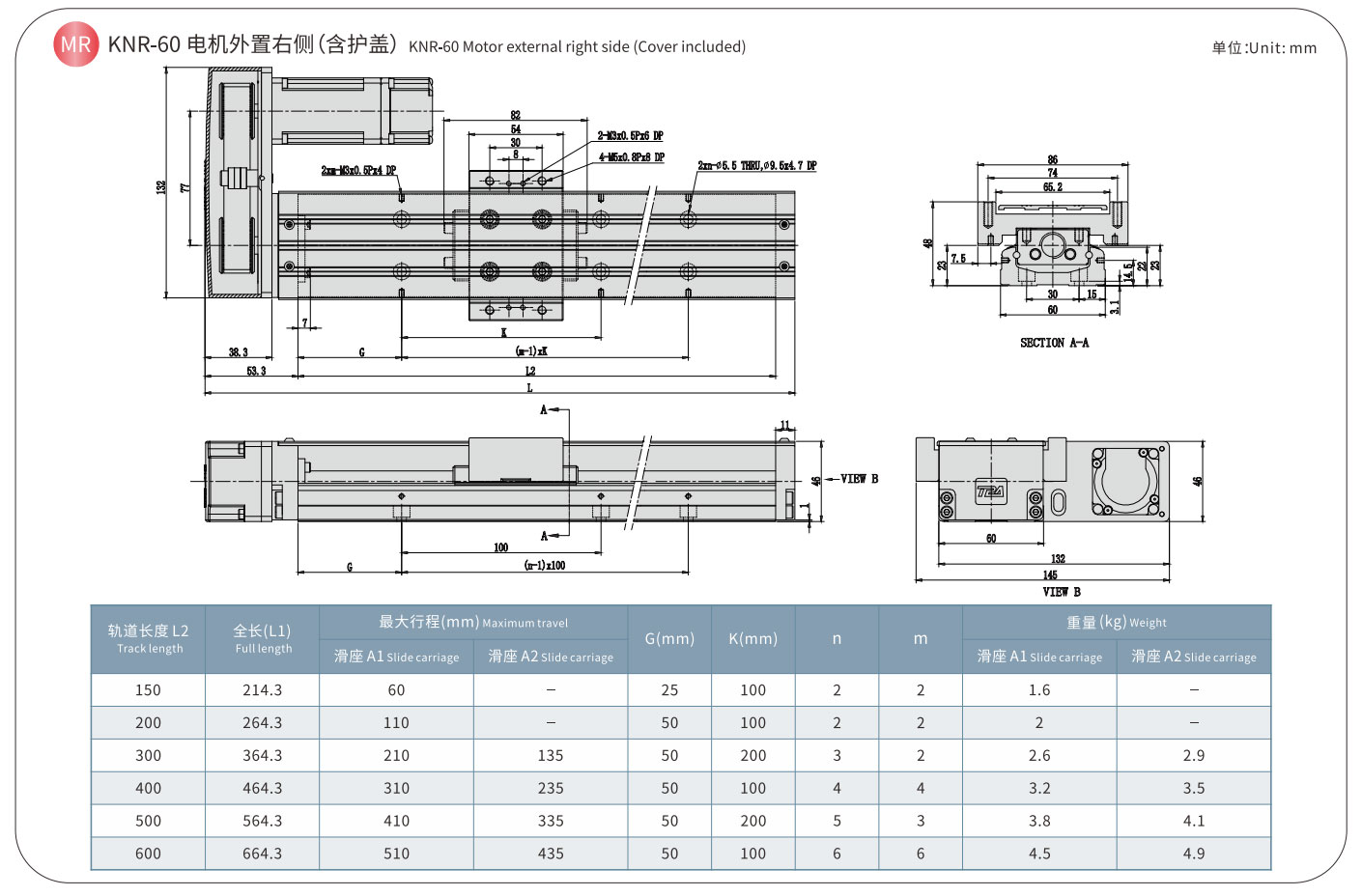
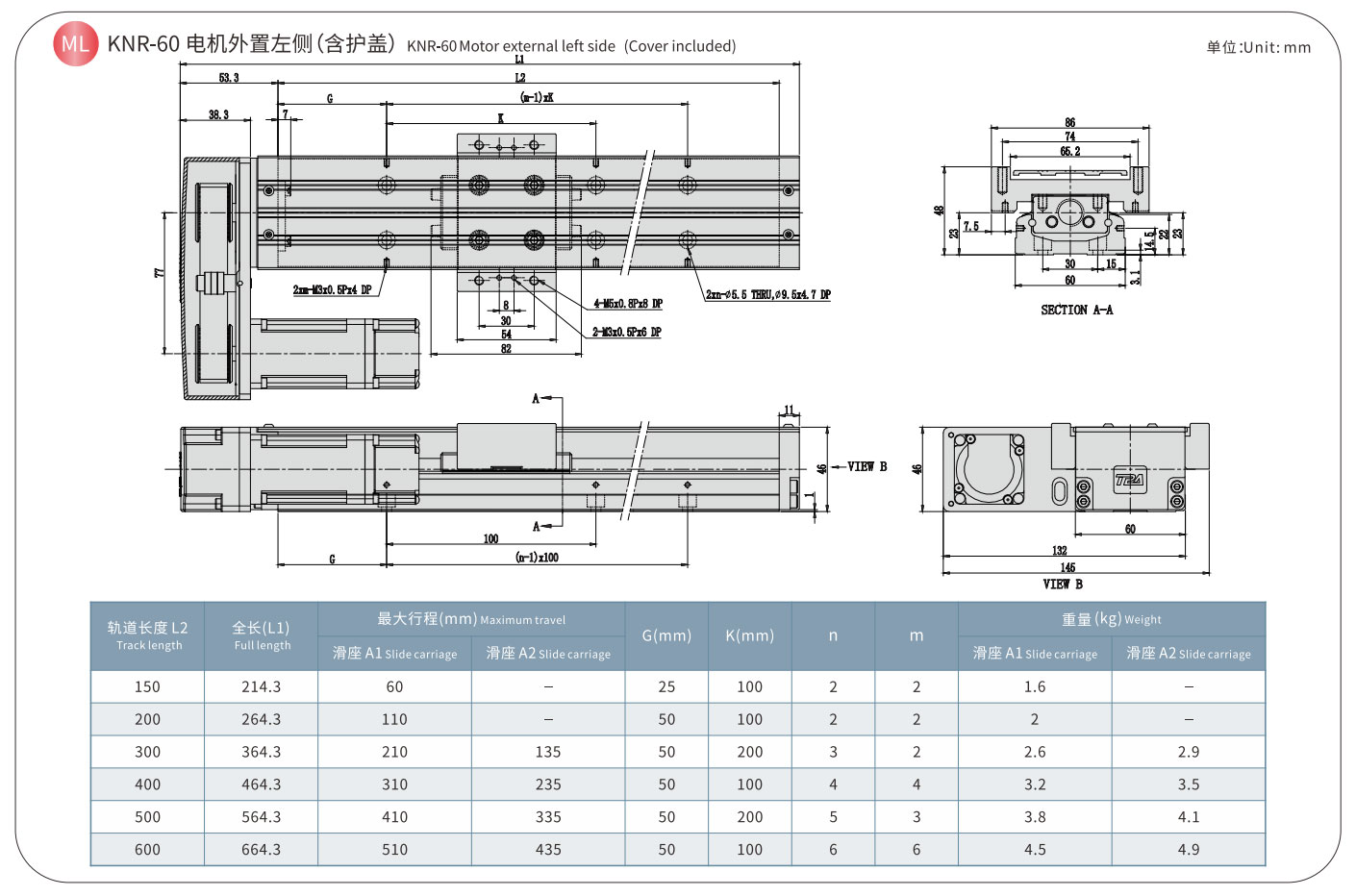
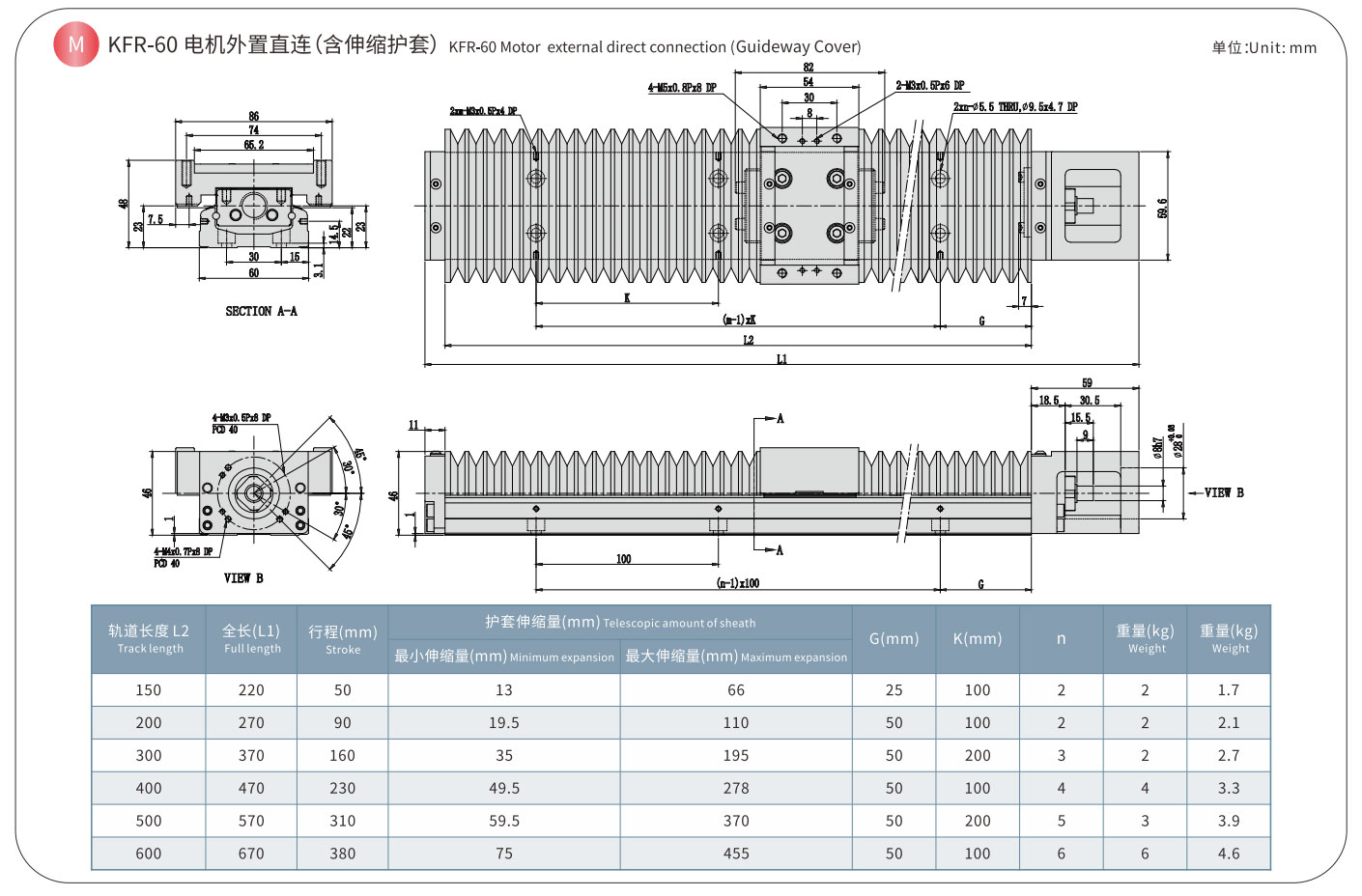
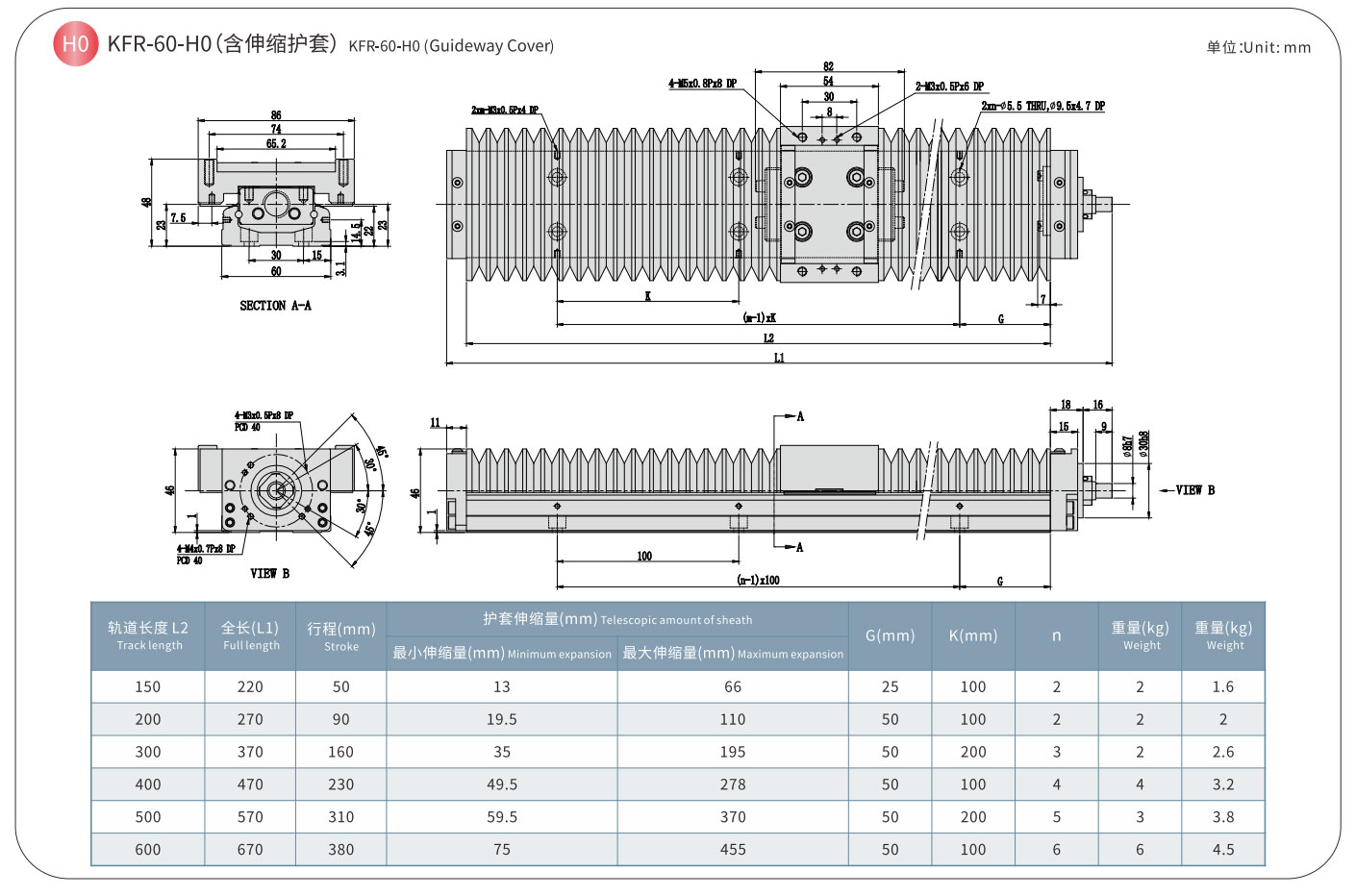
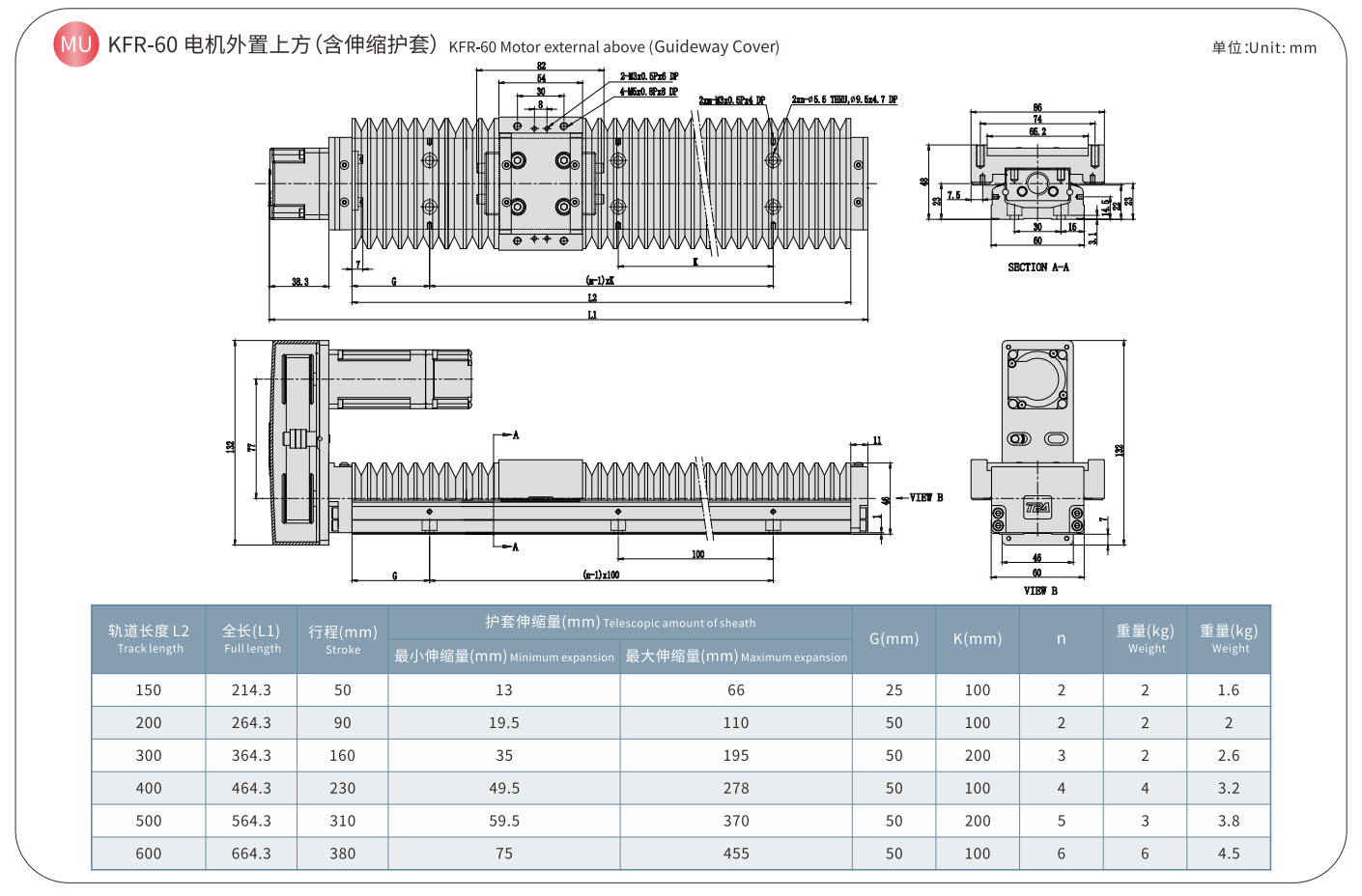
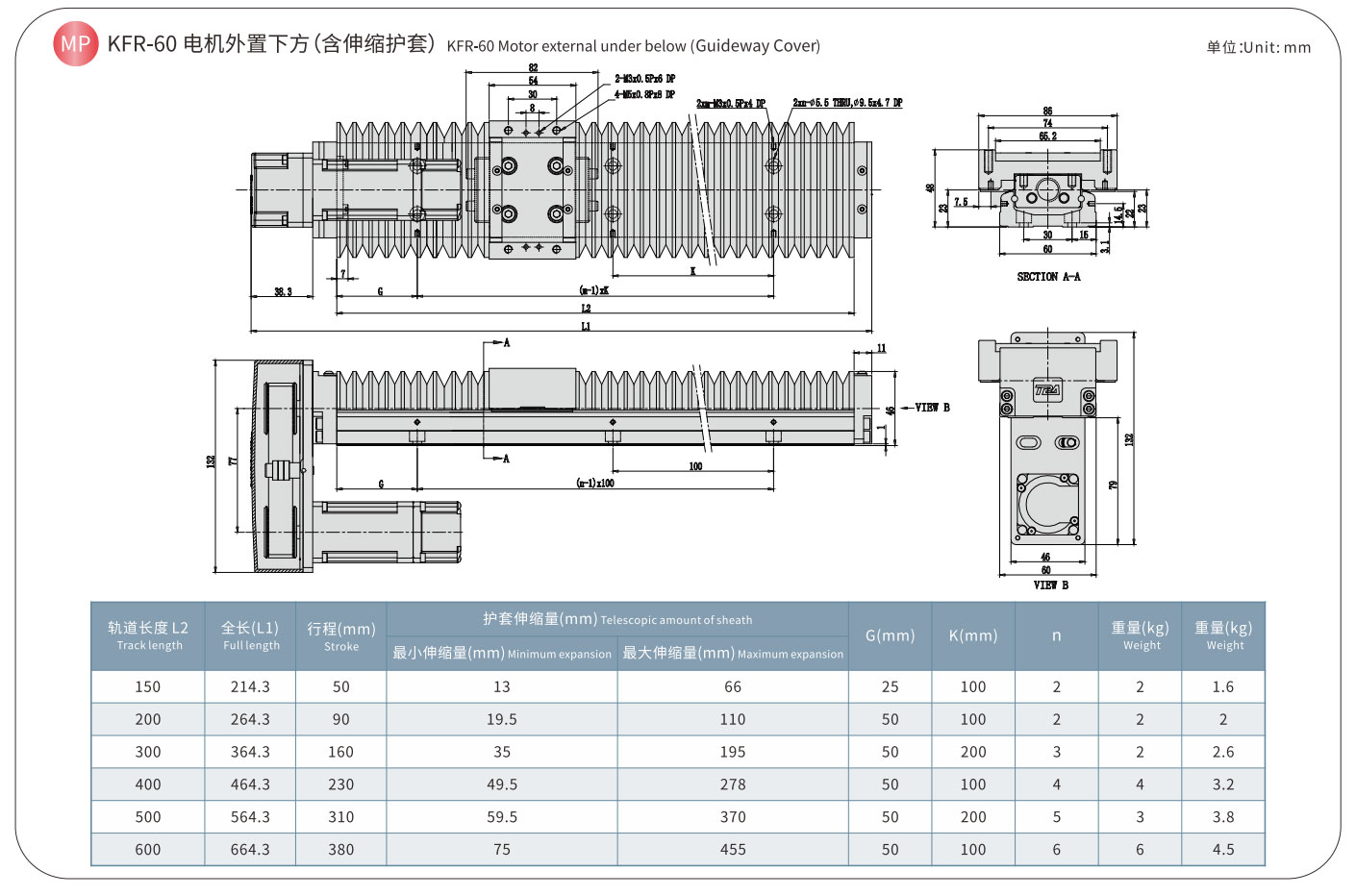
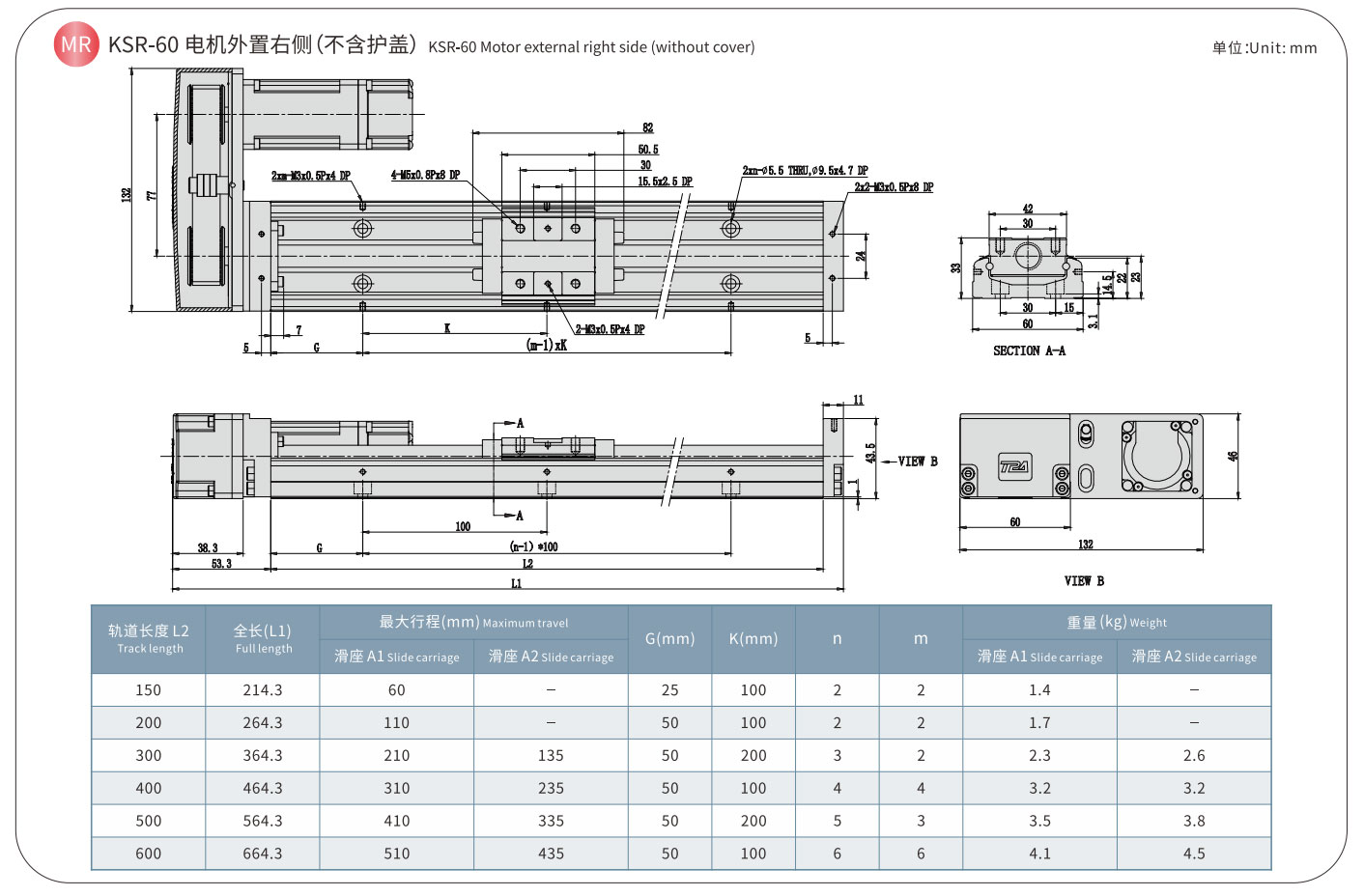
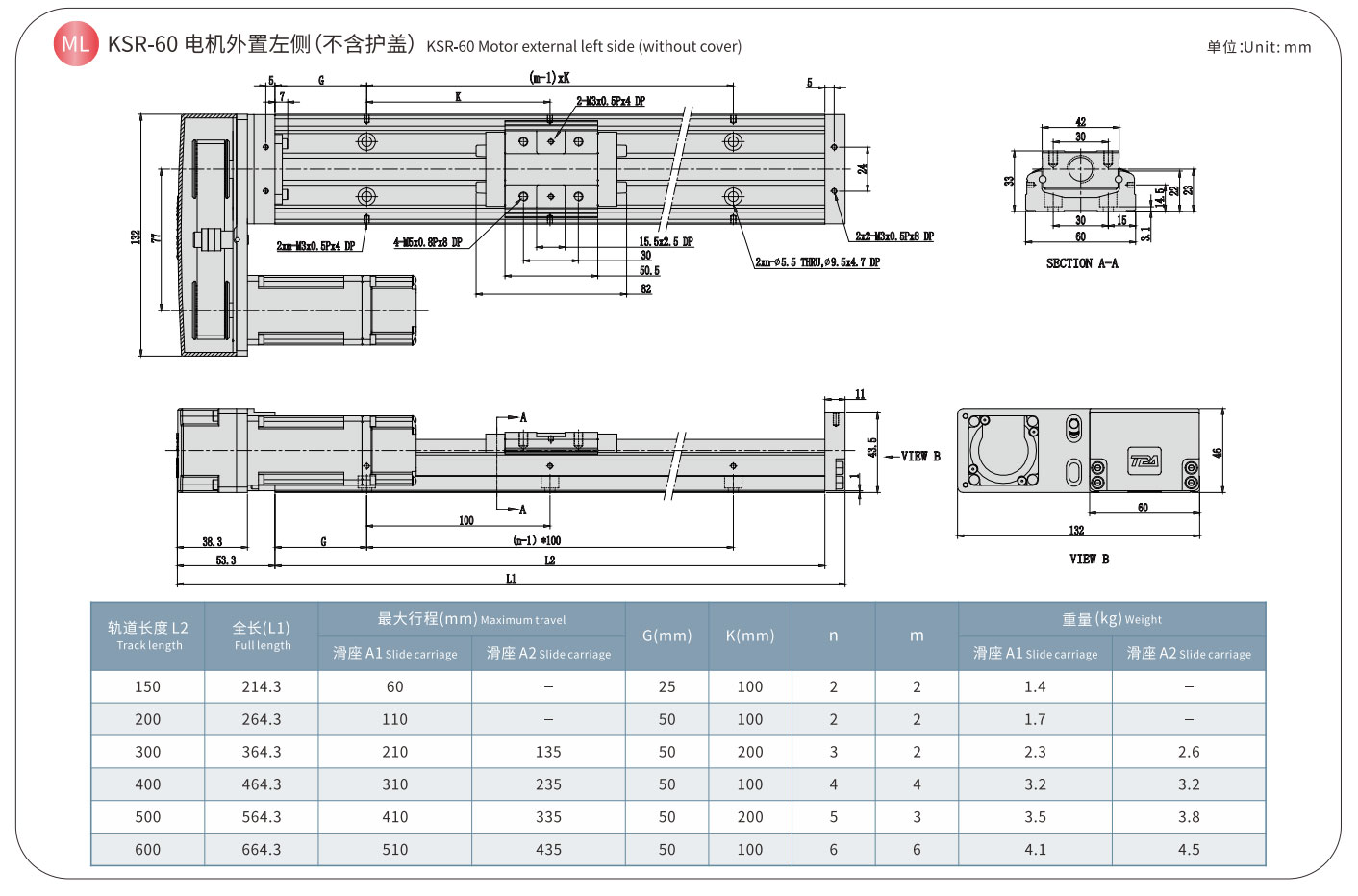
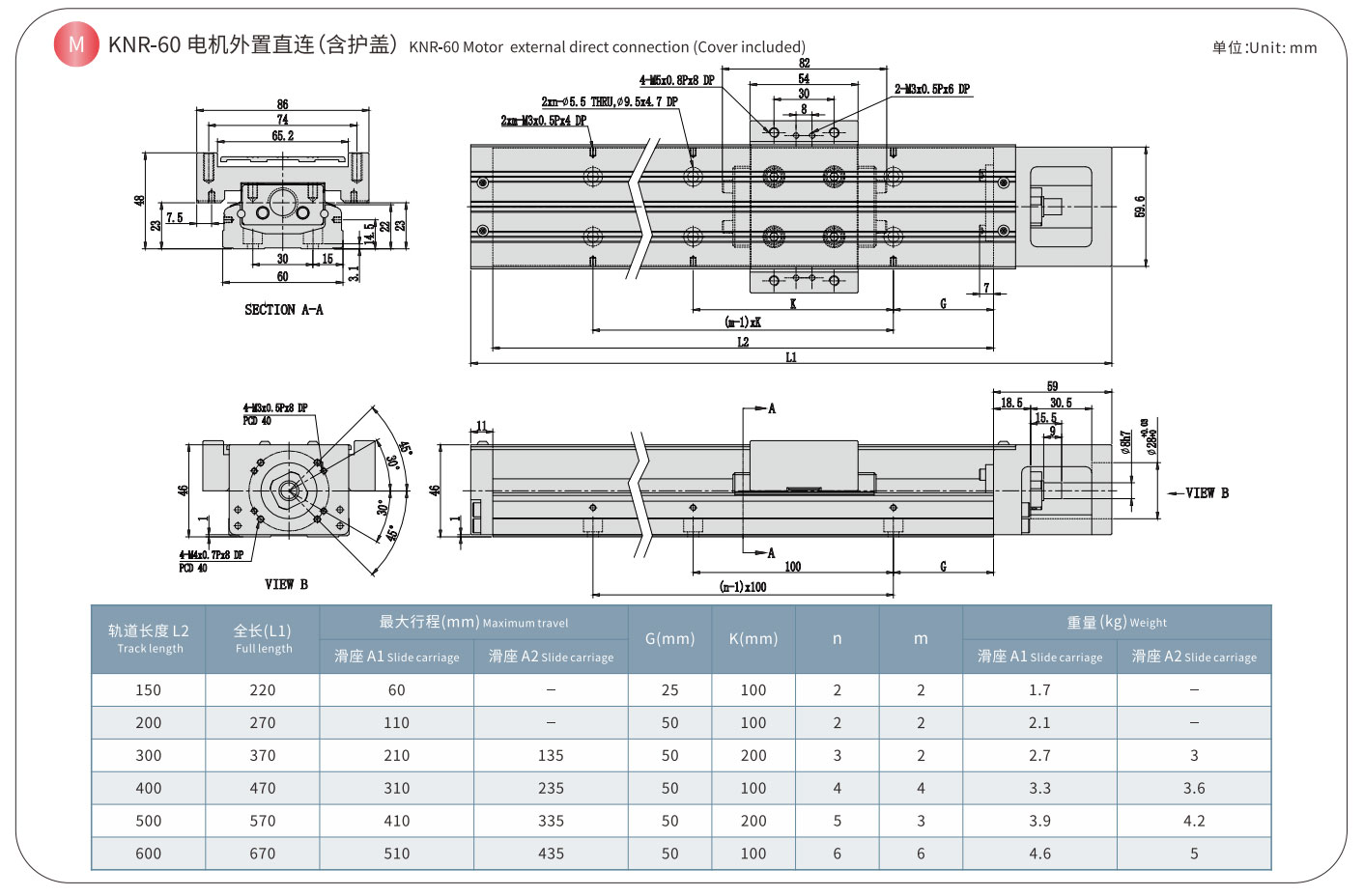
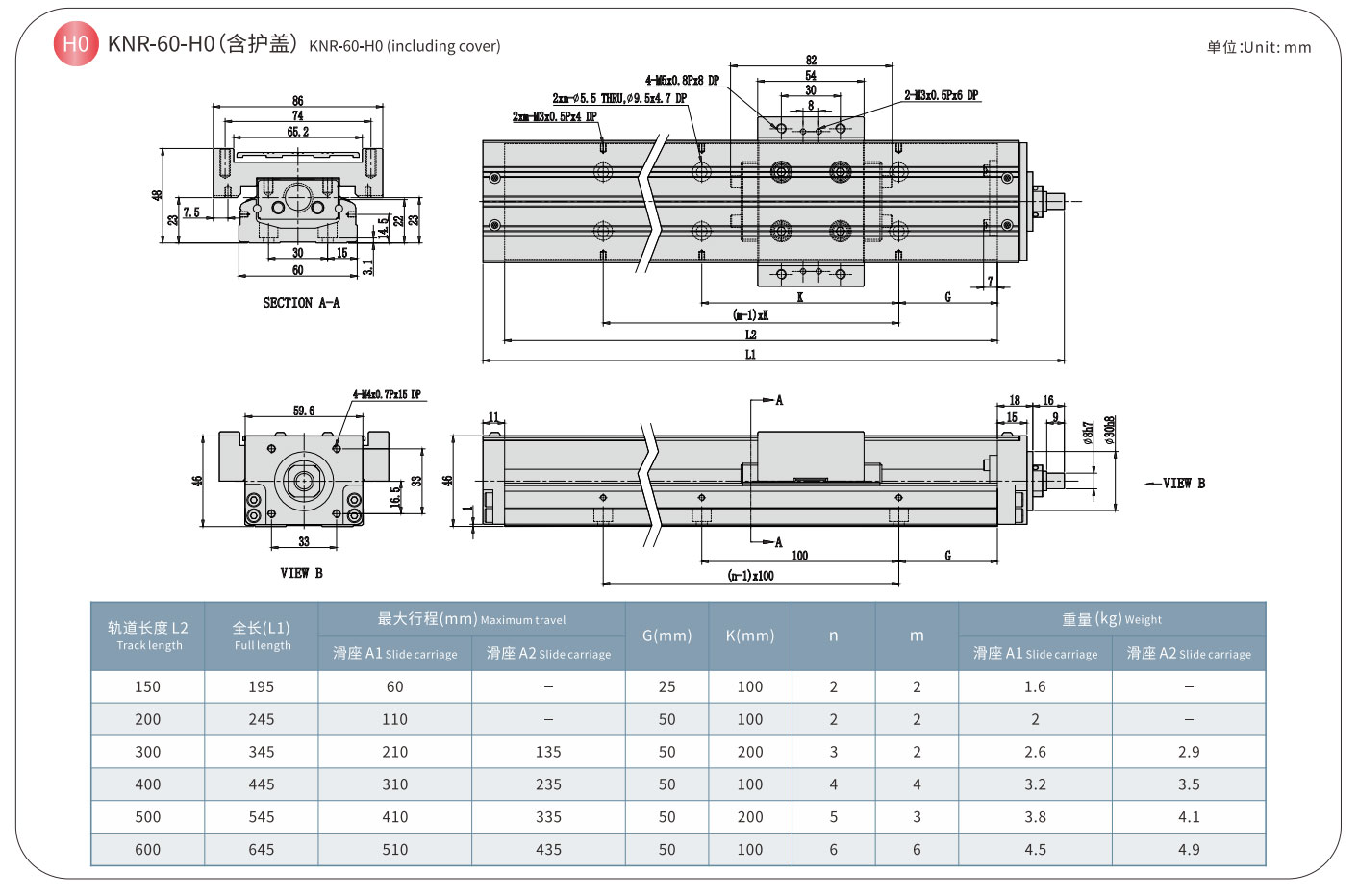
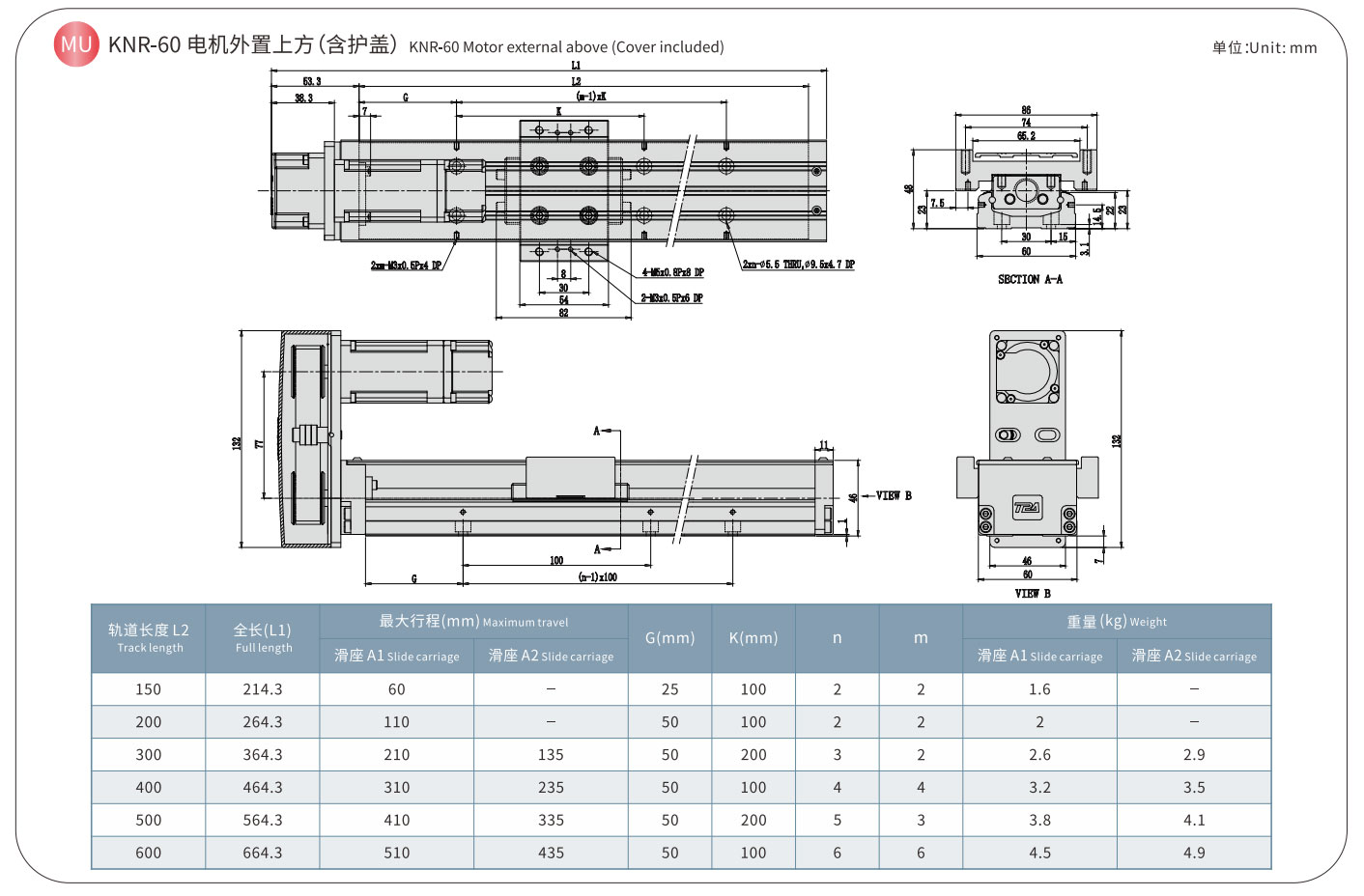
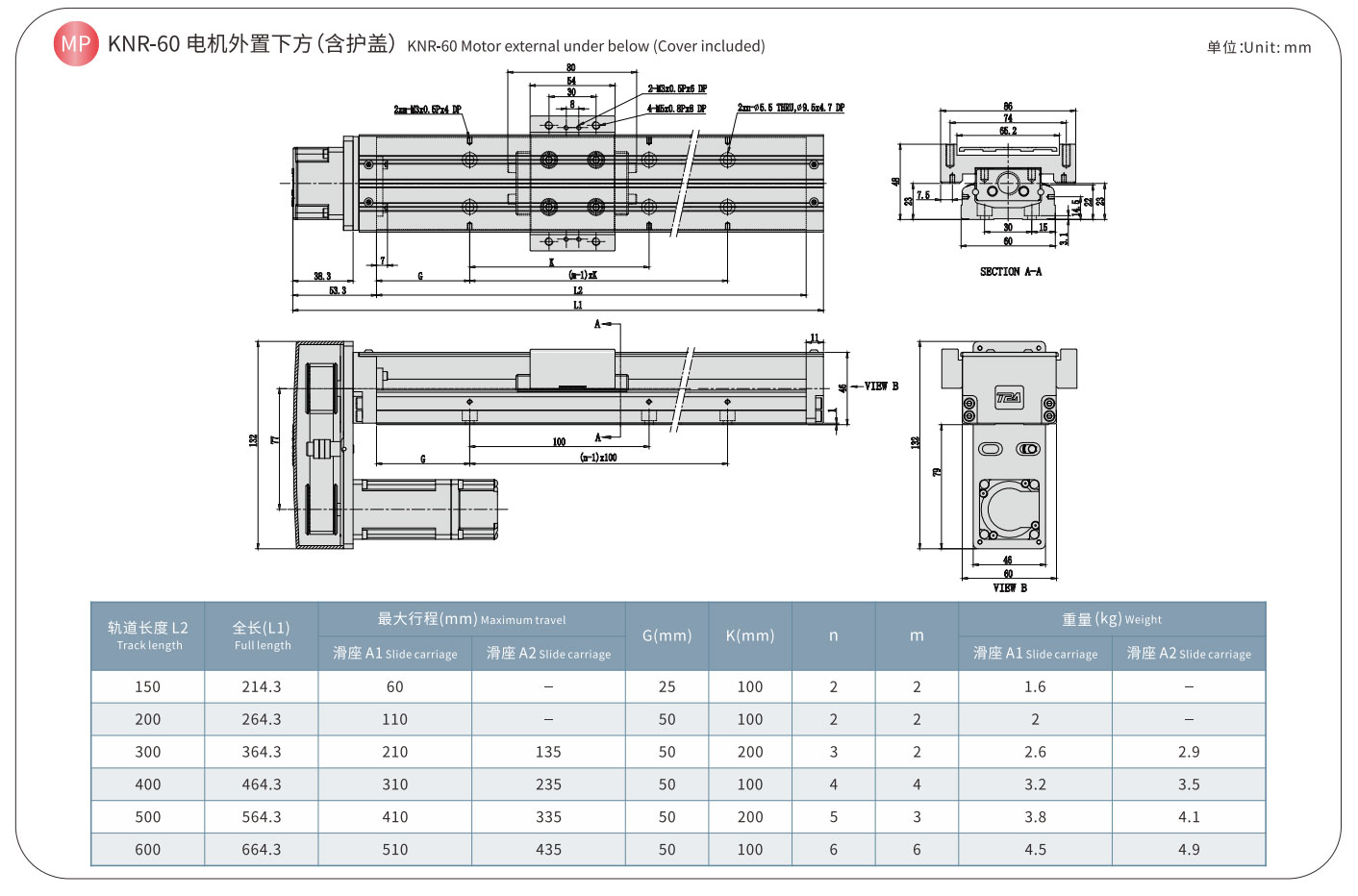
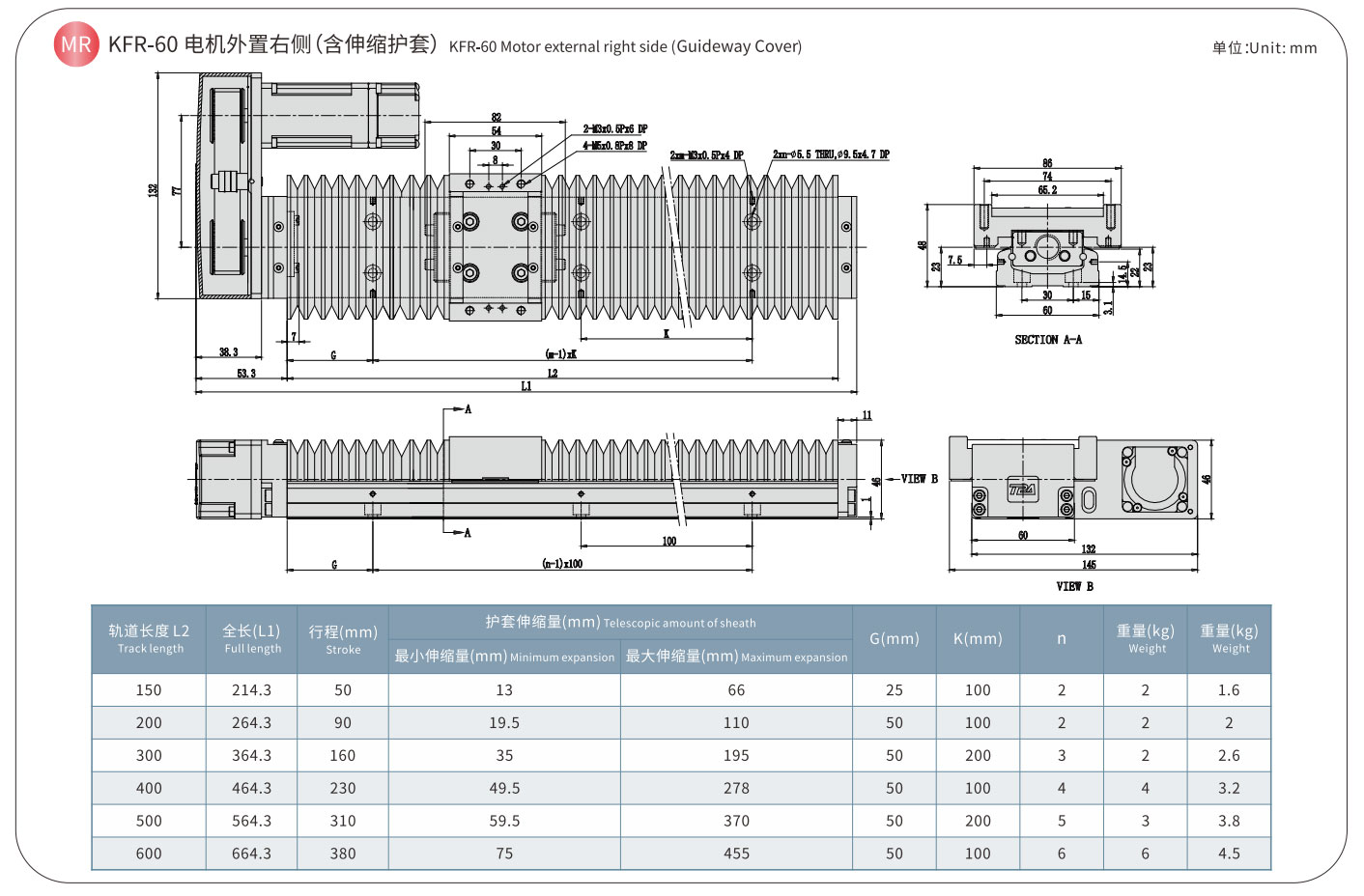
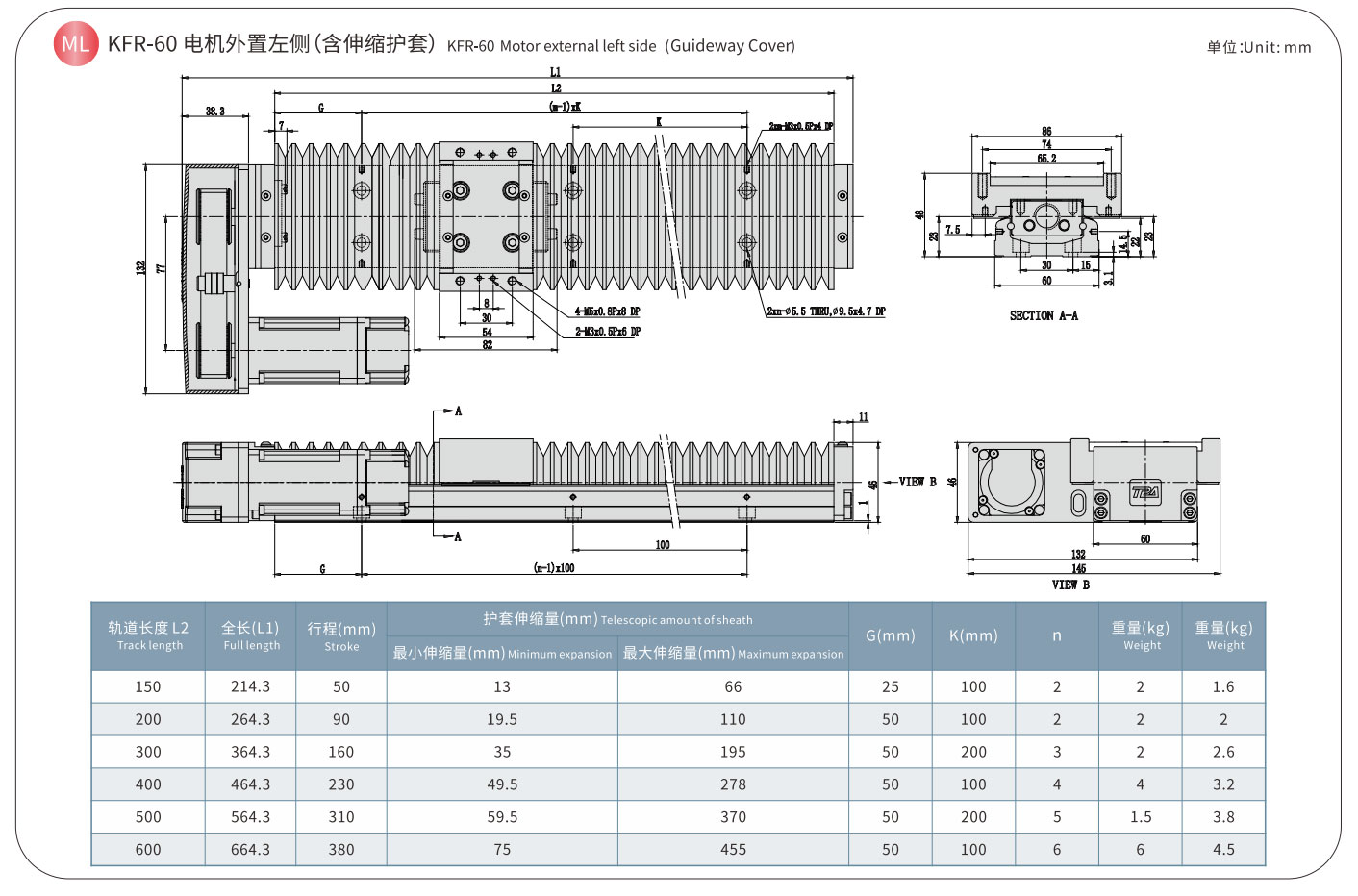
КСР-60 КНР-60 КФР-60

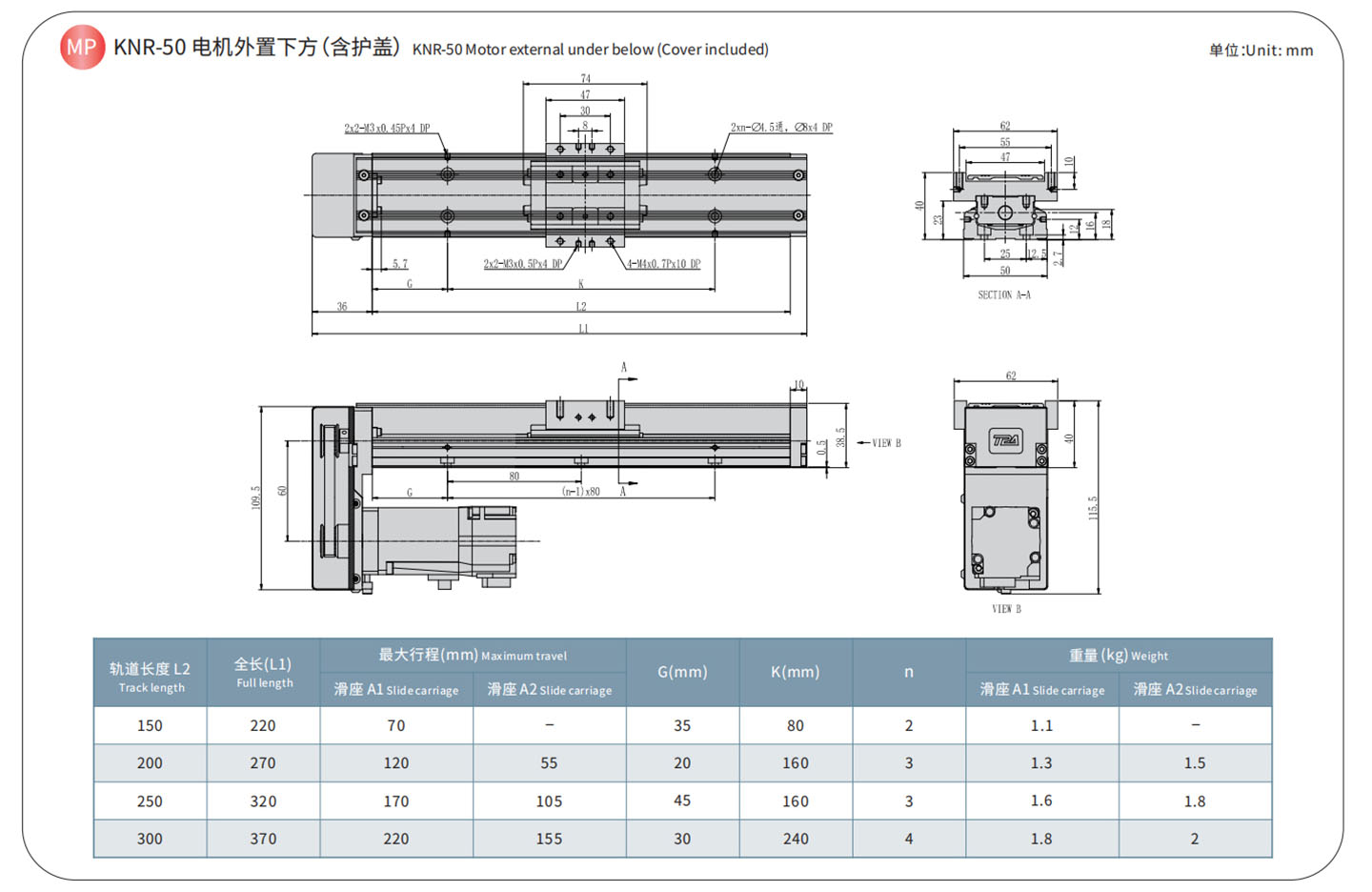
Серыя КСР-КНР-КФР-КЧР
Асаблівасці
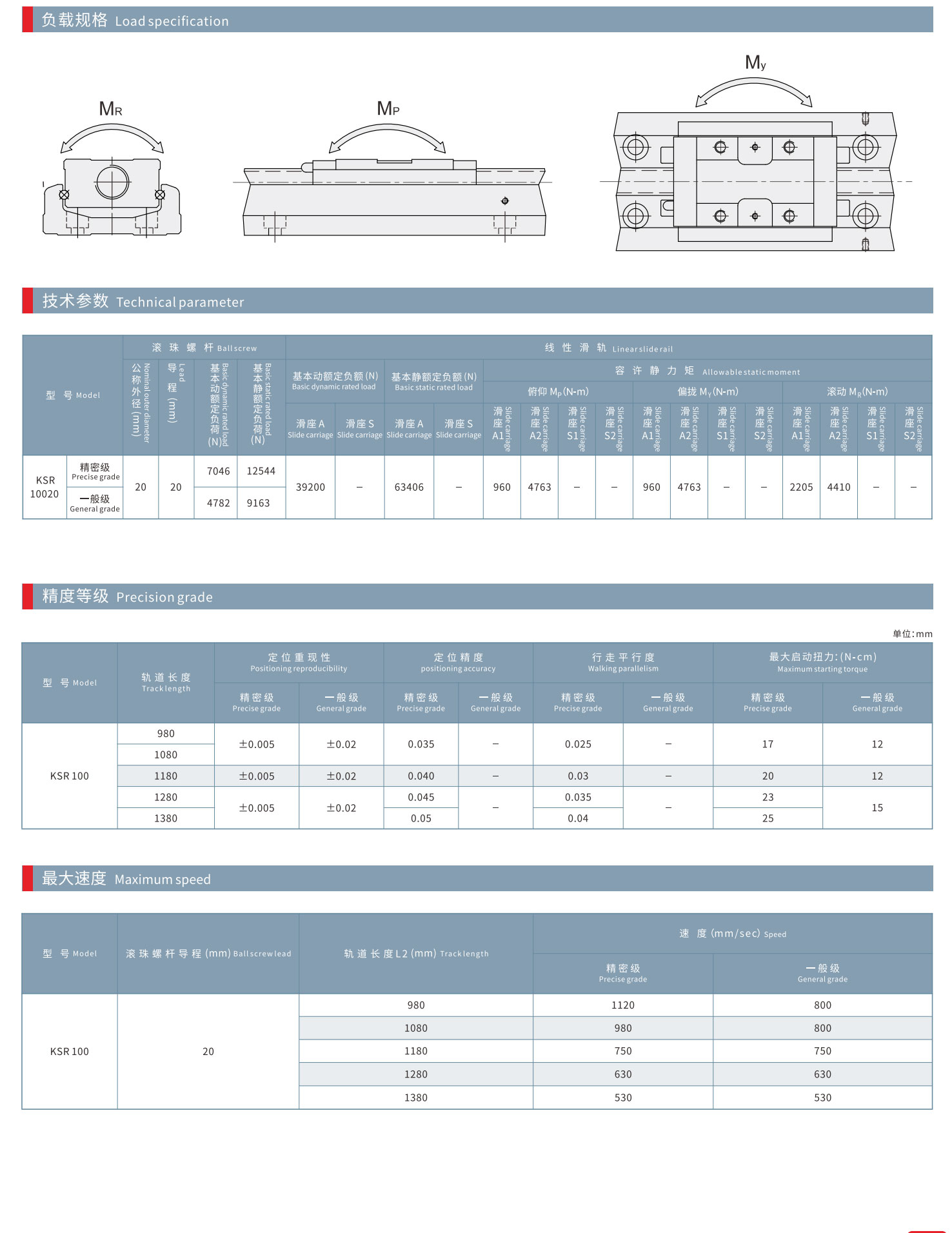
Дакладнасць паўторнага пазіцыянавання: ±0,005 мм
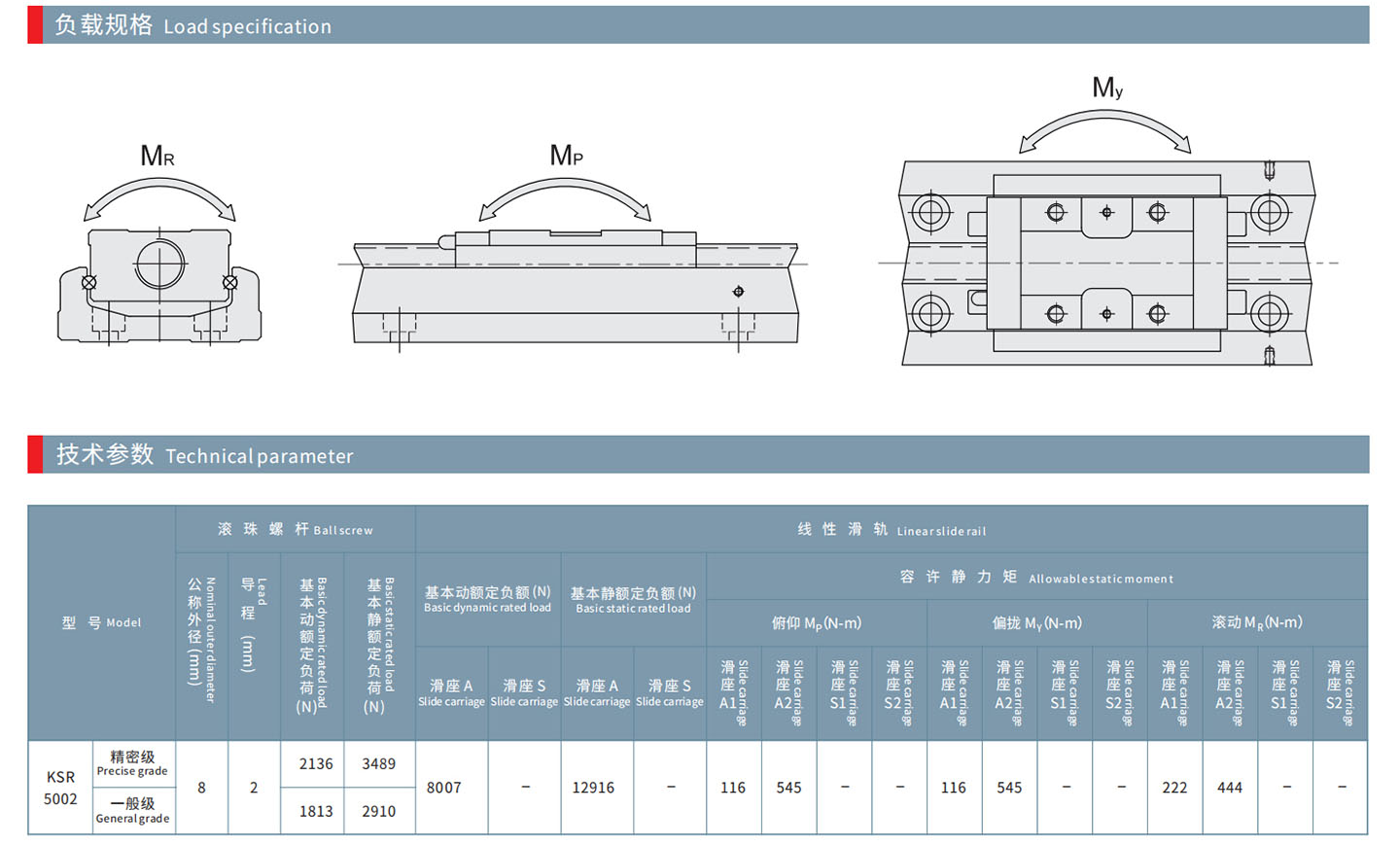
Базавая статычная намінальная нагрузка: 12642N
Базавая дынамічная намінальная нагрузка: 7144N
Ход: 31 – 1128 мм
Максімальная хуткасць: 1000 мм/с
Высокадакладная шарыкавая шруба выкарыстоўваецца ў якасці трансмісійнай структуры, а U-вобразная гусеніца спалучаецца з аптымізаванай канструкцыяй. У якасці арыенціра, каб забяспечыць патрабаванні да дакладнасці і калянасці.
Кантактная паверхня паміж шарыкам і канаўкай пацеркі мае 2-радковы тып зуба Гётэ. Канструкцыя мае характарыстыкі кута кантакту 45 градусаў, што дазваляе сталёваму модулю вытрымліваць чатыры напрамкі. Здольнасць роўнай нагрузкі.
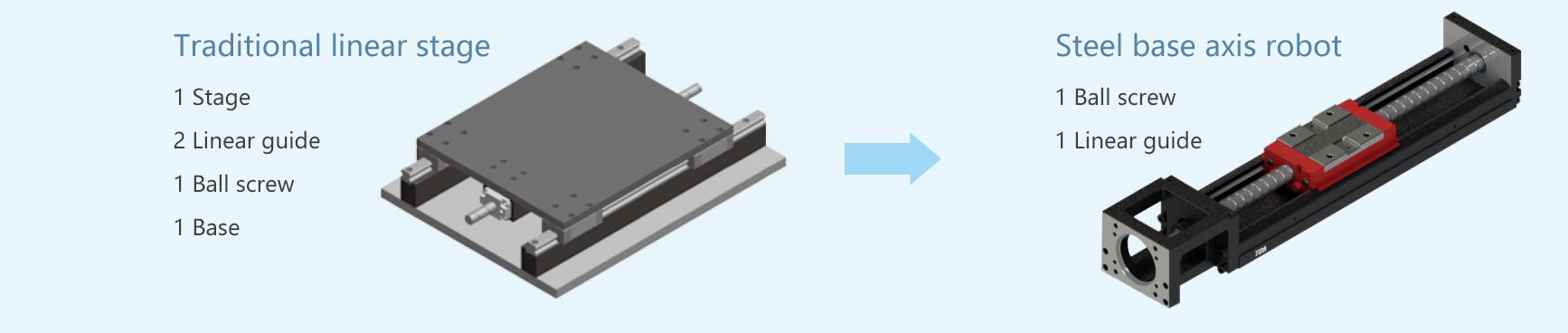
Дзякуючы модульнай канструкцыі сталёвы базавы модуль аб'ядноўвае шарыкавы шруб і U-вобразную рэйку, што можа пазбавіць традыцыйную прывадную платформу ад неабходнасці выбару накіроўвалых і рухаючых кампанентаў, усталёўкі і праверкі, вялікага аб'ёму і займае прастору. Такім чынам, модуль на аснове сталі можа забяспечыць характарыстыкі хуткага выбару, ўстаноўкі, кампактнага памеру, высокай калянасці і гэтак далей, што можа значна скараціць выкарыстанне прасторы і часу кліента.


Больш прадуктаў

Серыя HFR - лазерная рэзка па вось Z

GCRS Series Double Slide Убудаваны рэйкавы лінейны A...

Лінейныя прывады з шарыкавым шрубай серыі HNR з паловай ...

Лінейныя модулі серыі GCR з шарыка-шрубавым прывадам...

Цалкам закрыты лінейны шарыка-шрубавы модуль серыі HCR

Алюмініевая аснова аднавосевага робата серыі KNR-E










